NOCIONES DE MATLAB -...
30
Manual de Prácticas Fundamentos de Control Secretaría/División: División de Ingeniería Eléctrica Área/Departamento: Control y Robótica N° de práctica: 1 Tema: Nociones de Matlab Nombre completo del alumno Firma N° de brigada: Fecha de elaboración: Grupo: Elaborado por: Revisado por: Autorizado por: Vigente desde: Profesor 1 Ing. Benjamín Ramírez Hernández Dr. Paul Rolando Maya Ortiz 28 de noviembre de 2015 NOCIONES DE MATLAB
Transcript of NOCIONES DE MATLAB -...
Manual de Prácticas
Fundamentos de Control Secretaría/División:DivisióndeIngenieríaEléctrica Área/Departamento:ControlyRobótica
N° de práctica: 1
Tema: Nociones de Matlab
Nombre completo del alumno Firma
N° de brigada: Fecha de elaboración: Grupo:
Elaborado por: Revisado por: Autorizado por: Vigente desde:
Profesor 1
Ing. Benjamín Ramírez Hernández
Dr. Paul Rolando Maya Ortiz
28 de noviembre de 2015
NOCIONES DE MATLAB
Manual de Prácticas Fundamentos de Control
Secretaría/División:DivisióndeIngenieríaEléctrica Área/Departamento:ControlyRobótica
2
1. Seguridadenlaejecución
PeligrooFuentedeenergía Riesgoasociado
Descargas eléctricas Daño al equipo
CONTENIDO
I. Objetivo II. Antecedentes III. Material y Equipo IV. Desarrollo de la Práctica IV.1 Introducción IV.2 Estructura de los Datos en MatLab IV.3 Polinomios y Funciones de Transferencia IV.4 Representaciones Gráficas V. Hoja de Resultados
Manual de Prácticas Fundamentos de Control
Secretaría/División:DivisióndeIngenieríaEléctrica Área/Departamento:ControlyRobótica
3
I. Objetivo
Al finalizar la práctica el estudiante utilizará los comandos básicos de MATLAB para el manejo de funciones de transferencia, para graficar funciones así como para el análisis de sistemas de control.
II. Antecedentes
El estudiante deberá contar con conocimientos matemáticos relativos a los cursos de Álgebra, Ecuaciones Diferenciales, conocer el manejo matemático de los sistemas lineales invariantes en el tiempo así como las bases de la solución numérica de problemas matemáticos. Deberá contar con conocimientos básicos de programación en algún lenguaje de alto nivel. Se recomienda que cuente con una computadora con la versión R2007a de MATLAB.
III. Material y Equipo
Computadora PC y software MatLab versión R2007a.
IV. Desarrollo de la Práctica
I Actividad 1
IV.1 Introducción
MATLAB es una herramienta de simulación y cálculo matemático de tipo numérico (básicamente matricial) que puede utilizarse para resolver modelos que representansistemas dinámicos. La capacidad de cálculo de MATLAB se basa en sus múltiples funciones (comandos). En esta práctica se mostrará la utilidad de algunas de ellas.
Manual de Prácticas Fundamentos de Control
Secretaría/División:DivisióndeIngenieríaEléctrica Área/Departamento:ControlyRobótica
4
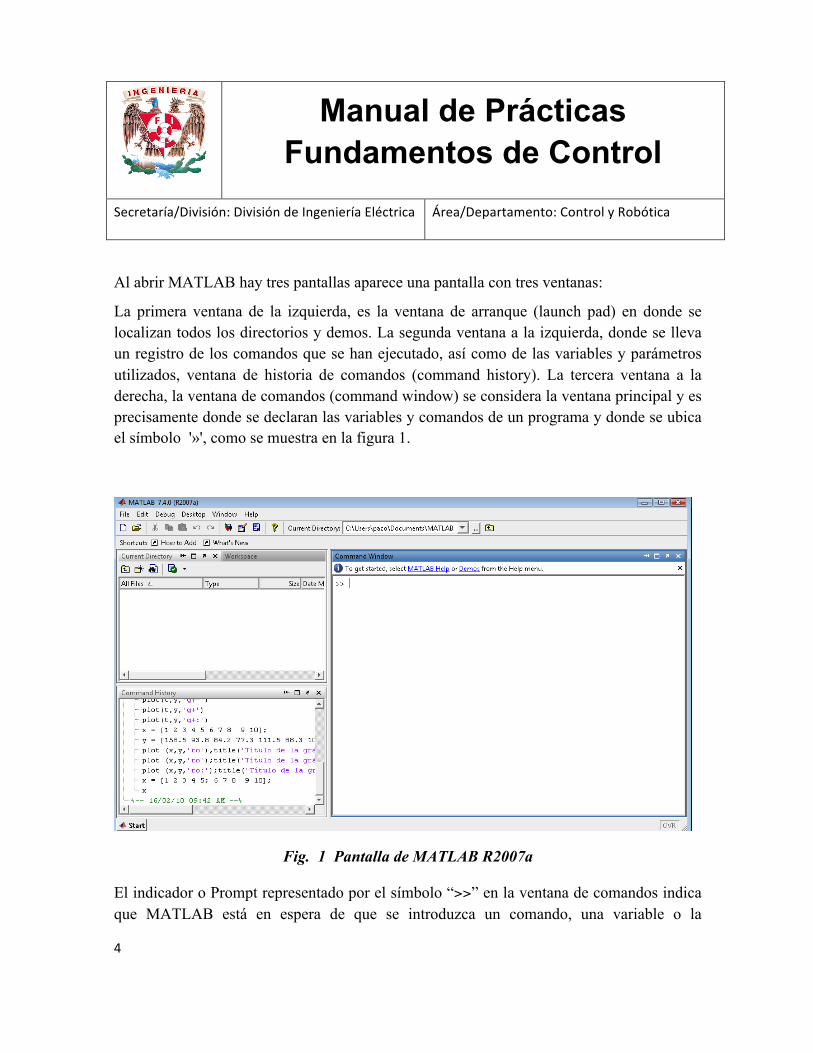
Al abrir MATLAB hay tres pantallas aparece una pantalla con tres ventanas:
La primera ventana de la izquierda, es la ventana de arranque (launch pad) en donde se localizan todos los directorios y demos. La segunda ventana a la izquierda, donde se lleva un registro de los comandos que se han ejecutado, así como de las variables y parámetros utilizados, ventana de historia de comandos (command history). La tercera ventana a la derecha, la ventana de comandos (command window) se considera la ventana principal y es precisamente donde se declaran las variables y comandos de un programa y donde se ubica el símbolo '»', como se muestra en la figura 1.
Fig. 1 Pantalla de MATLAB R2007a
El indicador o Prompt representado por el símbolo “>>” en la ventana de comandos indica que MATLAB está en espera de que se introduzca un comando, una variable o la
Manual de Prácticas Fundamentos de Control
Secretaría/División:DivisióndeIngenieríaEléctrica Área/Departamento:ControlyRobótica
5
asignación de un parámetro. Para salir de MATLAB cuando sea pertinente use los comandos quit o exit.
La sintaxis general de MATLAB es la siguiente
[salidal,salida2, ... ] = nombre de comando (entradal, entrada2,...);
donde las variables de salida se encierran entre paréntesis cuadrados (corchetes) y las de entrada entre paréntesis normales. Para una sola salida los corchetes son opcionales. Si no hubiera al final de la sentencia un punto y coma, el programa nos mostraría el resultado recogido en cada una de las salidas.
El programa MATLAB hace diferencia entre mayúsculas y minúsculas.
Las variables generadas durante una sesión se van almacenando en el "espacio de trabajo" del propio programa. Si se saliera de éste sin salvarlas previamente las variables se perderían. Para guardarlas se utiliza el comando "save + nombre-archivo". Por ejemplo:
» save prac_00
MatLab automáticamente agrega la extensión *.mat. Para recuperar los resultados de una sesión anterior se teclea el comando:
» load prac_00
y coloca su contenido en el "espacio de trabajo". Para consultar el contenido del "espacio de trabajo" se teclea el comando:
» who ("whos" proporciona información adicional a cada variable)
Si se desea borrar alguna de las variables del "espacio de trabajo" se utilizará:
» clear variable 1
Manual de Prácticas Fundamentos de Control
Secretaría/División:DivisióndeIngenieríaEléctrica Área/Departamento:ControlyRobótica
6
Si sólo se teclea » clear se borrarían todas las variables existentes.
Para consultar los archivos que están contenidos en el "directorio de trabajo" desde el cual se inicia la sesión de MATLAB ( c:>matlab\trabajo ) se usa el comando:
» d i r
I I A c t i v i d a d 2
IV.2 Estructura de los Datos en MatLab
INGRESO DE DATOS
La forma de ingresar los datos, puede ser de alguno de los tipos siguientes: Un escalar, un vector o una matriz.
Un sólo dato, por ejemplo A=8.7 es un escalar.
Si una matriz tiene una sola renglón (escribiendo los caracteres separados por comas o espacios) o una sola columna (escribiendo los caracteres separados por punto y coma), entonces se ingresó un vector; conocidos como un vector renglón o un vector columna.
B=[12.56 36.47]
MATRIZ
Manual de Prácticas Fundamentos de Control
Secretaría/División:DivisióndeIngenieríaEléctrica Área/Departamento:ControlyRobótica
7
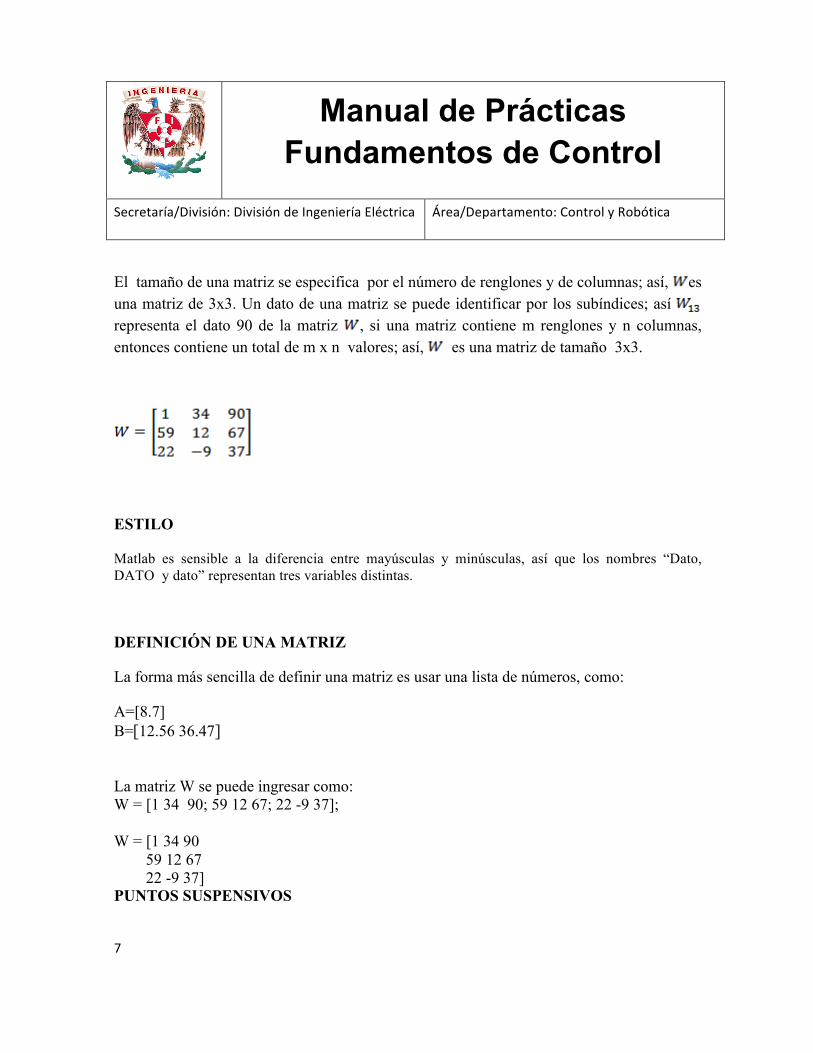
El tamaño de una matriz se especifica por el número de renglones y de columnas; así, es una matriz de 3x3. Un dato de una matriz se puede identificar por los subíndices; así representa el dato 90 de la matriz , si una matriz contiene m renglones y n columnas, entonces contiene un total de m x n valores; así, es una matriz de tamaño 3x3.
ESTILO Matlab es sensible a la diferencia entre mayúsculas y minúsculas, así que los nombres “Dato, DATO y dato” representan tres variables distintas.
DEFINICIÓN DE UNA MATRIZ
La forma más sencilla de definir una matriz es usar una lista de números, como:
A=[8.7] B=[12.56 36.47] La matriz W se puede ingresar como: W = [1 34 90; 59 12 67; 22 -9 37]; W = [1 34 90 59 12 67 22 -9 37] PUNTOS SUSPENSIVOS
Manual de Prácticas Fundamentos de Control
Secretaría/División:DivisióndeIngenieríaEléctrica Área/Departamento:ControlyRobótica
8
Si hay demasiados números en un renglón de una matriz para que quepan en una línea, podemos continuar la instrucción en la siguiente línea, pero se requiere una coma y tres puntos al final de la línea para indicar que la renglón debe continuar.
Ejemplo:
H=[-2,0,-3,4,-3,-4,5,0,0,2,1,1,1,3,4,-0.2]
Que también se puede escribir como:
H = [-2,0,-3,4,-3,-4,...
5,0,0,2,1,1,1,3,4,-0.2]
MATLAB también permite definir una matriz que ya se definió:
Ejemplo:
B =[1.5,4.1]
D = [-4,B] este comando equivale a
D = [-4,1.5,4.1]
También podemos modificar los valores de una matriz o agregar valores adicionales usando una referencia a un lugar específico. Por ejemplo:
D(3) = 6 ;Cambia el tercer valor de la matriz D del valor 4.1 por 6, para quedar como:
D = [-4,1.5,6]
Así también logramos extender una matriz definiendo nuevos elementos.
Manual de Prácticas Fundamentos de Control
Secretaría/División:DivisióndeIngenieríaEléctrica Área/Departamento:ControlyRobótica
9
Si ejecutamos el siguiente comando
D(4)=2.5; La matriz D tendrá cuatro valores en lugar de tres, así D se verá como
D=[-4,1.5,6,2.5];
Escriba las siguientes sentencias:
1.- B=[2;4;6;10] % Lo que define un vector columna.
2.- C=[5,3,5;6,2,–3] % Lo que define una matriz de 2x3.
3.- E=[3,5,10,0;0,0,...
0,3;3,9,9,8] % La coma y tres puntos para
continuar la línea.
4.- T=[4,24,9]
Q=[T,0,T] % Intercala el valor de 0 entre los dos vectores.
5.- V=[C(2,1);B] % De la matriz C selecciona el valor de y lo
agrega al vector B.
6.- A(2,1)=-3 % Crea una matriz A y le asigna el Valor de -3
al elemento .
El OPERADOR DE DOS PUNTOS
Manual de Prácticas Fundamentos de Control
Secretaría/División:DivisióndeIngenieríaEléctrica Área/Departamento:ControlyRobótica
10
Es útil para generar matrices nuevas.
Si se usa el operador dos puntos para separar dos enteros, el operador de dos puntos generara todos los enteros entre los dos enteros especificados.
n=1:10 % Este operador es especialmente útil para generar
los índices de tiempo de una señal en tiempo discreto.
También se usa el operador dos puntos para separar tres números, el operador de dos puntos generará valores entre el primer número y el tercero, usando el segundo número como incremento:
t=0.0:0.5:6.0 % Este operador es especialmente útil para generar los
índices de tiempo continuo o un dominio de una
función analógica.
El incremento también puede ser negativo
r =15:-1:0
FUNCIONES ESPECIALES PARA GENERAR MATRICES NUEVAS.
Manual de Prácticas Fundamentos de Control
Secretaría/División:DivisióndeIngenieríaEléctrica Área/Departamento:ControlyRobótica
11
El comando size devuelve dos argumentos escalares que representan el número de renglones y el número de columnas, podemos usar size para generar una matriz de ceros que tenga el mismo tamaño que la otra matriz ejemplo:
W=[4,3,2;4,6,3];
F=zeros(size(W))
El comando ones genera una matriz que solo contiene unos.
C= [1, 2, 3; 4, 2, 5];
D = ones(size(C))
OPERACIONES CON ESCALARES, VECTORES Y MATRICES:
Ingrese el enunciado de asignación siguiente;
a=3;
b=[2,6,4];
c=[4,10,2];
los vectores y matrices pueden multiplicarse por un escalar:
Manual de Prácticas Fundamentos de Control
Secretaría/División:DivisióndeIngenieríaEléctrica Área/Departamento:ControlyRobótica
12
a*b
ans es el nombre dado a un resultado cuando el usuario no le asigna un nombre.
Un escalar puede sumarse a un vector o matriz:
a+c
La suma de un escalar a un vector o matriz sólo añade el escalar a cada elemento del vector o matriz la resta se define de manera similar:
a-b
Los vectores y matrices se suman (o restan) como lo hacemos en matemáticas, esto es, los dos vectores o matrices deben tener la misma forma para sumarse o restarse a menos que uno de ellos sea un matriz de 1*1, un escalar, como lo vimos antes :
b+c c-b Los vectores y las matrices se multiplican de acuerdo a las reglas del álgebra matricial:
b*c
Este resultado ilustra un error común en Matlab. Las matrices deben ser conformables para ser multiplicadas utilizando el operador *. La premultiplicación de un vector renglón de 1x3 como c por un vector renglón de 1x3 como b no está definida. Sin embargo si c se transpusiera a un vector columna 3x1, se definiría la multiplicación. La transposición se efectúa con el operador ' (apostrofe).
c'
b*c'
este es el producto bcT.
OPERACIONES ELEMENTO POR ELEMENTO:
Manual de Prácticas Fundamentos de Control
Secretaría/División:DivisióndeIngenieríaEléctrica Área/Departamento:ControlyRobótica
13
A menudo es muy útil multiplicar dos vectores o matrices de la misma forma, elemento por elemento en vez de utilizar las reglas usuales de la multiplicación de matrices. Ese tipo de multiplicación se denomina multiplicación del arreglo en Matlab y se lleva a cabo utilizando el operador .*
Las operaciones elemento por elemento, u operaciones de arreglos, no sólo se aplican a operaciones entre dos matrices del mismo tamaño, si no también a operaciones entre un escalar y un no escalar.
Así pruebe las instrucciones de cada uno de los siguientes juegos:
A=[4,3,2,4,6];
C=3.*A
G=A./5
Las vectores resultantes C y G tendrán el mismo tamaño que A.
A fin de ilustrar las operaciones de arreglos para vectores, considere los dos siguientes vectores renglón:
B=[-6,3,-2,4,6];
Calculemos el producto de arreglos de A y B usando las siguientes instrucciones:
L=A.*B
El comando de división de arreglos,
F=A./B
Asimismo la exponenciación de arreglos también es una operación elemento por elemento ejemplos;
Manual de Prácticas Fundamentos de Control
Secretaría/División:DivisióndeIngenieríaEléctrica Área/Departamento:ControlyRobótica
14
Z=A.^2
M=A.^B
También podemos usar una base escalar con un exponente vector
como;
P=3.^A
Los ejemplos anteriores utilizaron vectores, pero las mismas reglas se aplican a matrices con renglones y columnas, como lo podrás constatar declarando la matriz 'd' ejecutando las operaciones indicadas:
d=[1:6;-1:-1:-6];
f=d.*6
w=d.^2
IV.3 Polinomios y Funciones de Transferencia
MatLab representa a los polinomios como si fueran vectores, los cuales contienen los coeficientes del polinomio ordenados de la mayor a la menor potencia. Por ejemplo, para el polinomio, 3 22 3 4s s s+ + + se debe crear el vector.
» p = [ 1 2 3 4 ] ;
Las raíces de la ecuación algebraica que se obtiene al igual el polinomio a cero se pueden obtener utilizando la instrucción:
» roots(p)
si se cuenta con las raíces se puede formar el vector que representa al polinomio en MatLab mediante la instrucción poly( ● ), por ejemplo:
» p2 poly([-l -2])
Manual de Prácticas Fundamentos de Control
Secretaría/División:DivisióndeIngenieríaEléctrica Área/Departamento:ControlyRobótica
15
Para evaluar el polinomio en un punto se utiliza la instrucción:
» ps=polyval(p,s)
donde p es el vector que representa al polinomio en MatLab y s es el punto en el cual se desea evaluar. Puede evaluarse al polinomio en un conjunto de valores si s se define como un vector.
Para la multiplicación de polinomios se maneja la instrucción:
» c =conv([l 1],[12])
y para la división:
» d = deconv([l 3 2],[1 1])
Para que MatLab presente en forma de fracción se utiliza
» printsys(num, den)
Actividad 3
IV.4 Representaciones Gráficas
GRAFICA x-y:
Manual de Prácticas Fundamentos de Control
Secretaría/División:DivisióndeIngenieríaEléctrica Área/Departamento:ControlyRobótica
16
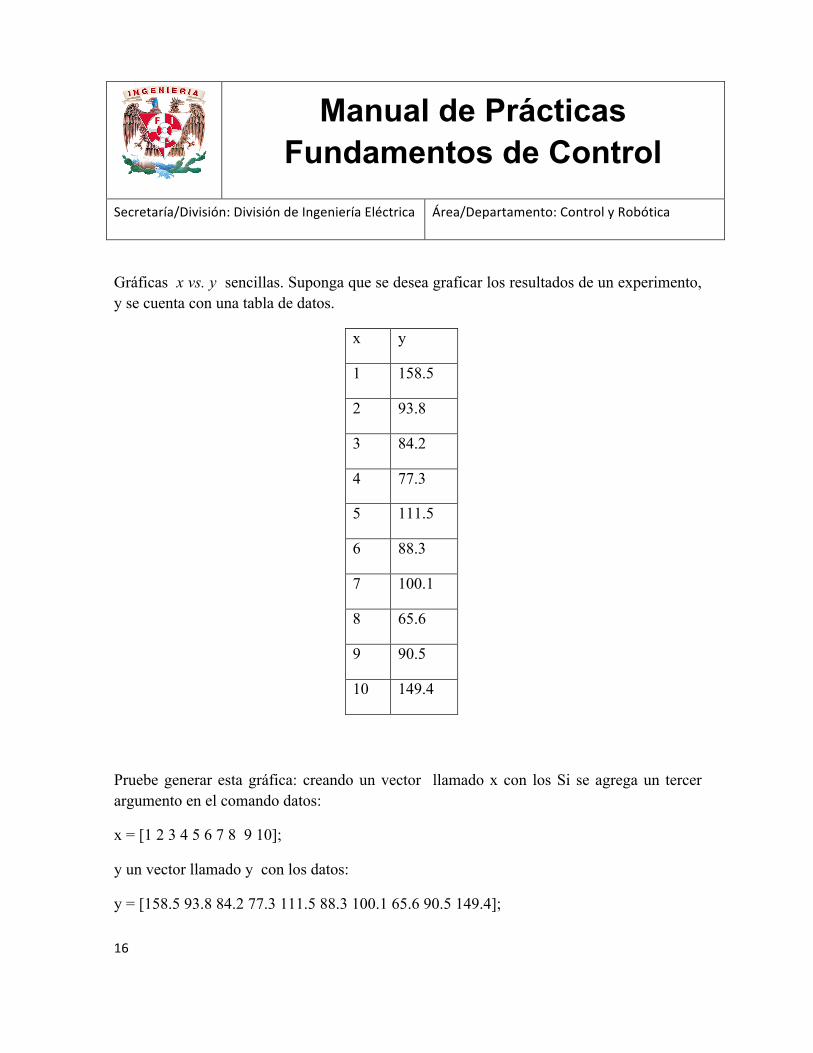
Gráficas x vs. y sencillas. Suponga que se desea graficar los resultados de un experimento, y se cuenta con una tabla de datos.
x y
1 158.5
2 93.8
3 84.2
4 77.3
5 111.5
6 88.3
7 100.1
8 65.6
9 90.5
10 149.4
Pruebe generar esta gráfica: creando un vector llamado x con los Si se agrega un tercer argumento en el comando datos:
x = [1 2 3 4 5 6 7 8 9 10];
y un vector llamado y con los datos:
y = [158.5 93.8 84.2 77.3 111.5 88.3 100.1 65.6 90.5 149.4];
Manual de Prácticas Fundamentos de Control
Secretaría/División:DivisióndeIngenieríaEléctrica Área/Departamento:ControlyRobótica
17
plot (x, y)
Se genera automáticamente la gráfica.
También es posible dibujar una retícula sobre la gráfica mediante el uso del comando:
grid
Varias instrucciones para el análisis de sistemas generan automáticamente gráficas. Un último aspecto que será importante en la obtención de representaciones gráficas es la forma de incluir textos en ellas, las principales instrucciones que pueden utilizarse son
• title escribe un título en la parte superior para nombrar a la gráfica.
• xlabel permite escribir un nombre al eje x de la gráfica.
• ylabel permite escribir un nombre para el eje y de la gráfica.
• legend indica lo que representa cada curva de la gráfica.
Se pueden incluir un Título de la gráfica y etiquetas para los ejes coordenados, de la forma siguiente:
title('Titulo de la grafica')
xlabel('Variable independiente')
ylabel('Variable dependiente')
plot éste define el color y el estilo de la gráfica. Es una cadena la que determina el color de la línea, estilo de la misma y los símbolos (si los hay) utilizado para los puntos de marca, por tanto intente dar elegancia a su grafica anterior agregando al comando plot:
plot(x,y,'ro');grid
Manual de Prácticas Fundamentos de Control
Secretaría/División:DivisióndeIngenieríaEléctrica Área/Departamento:ControlyRobótica
18
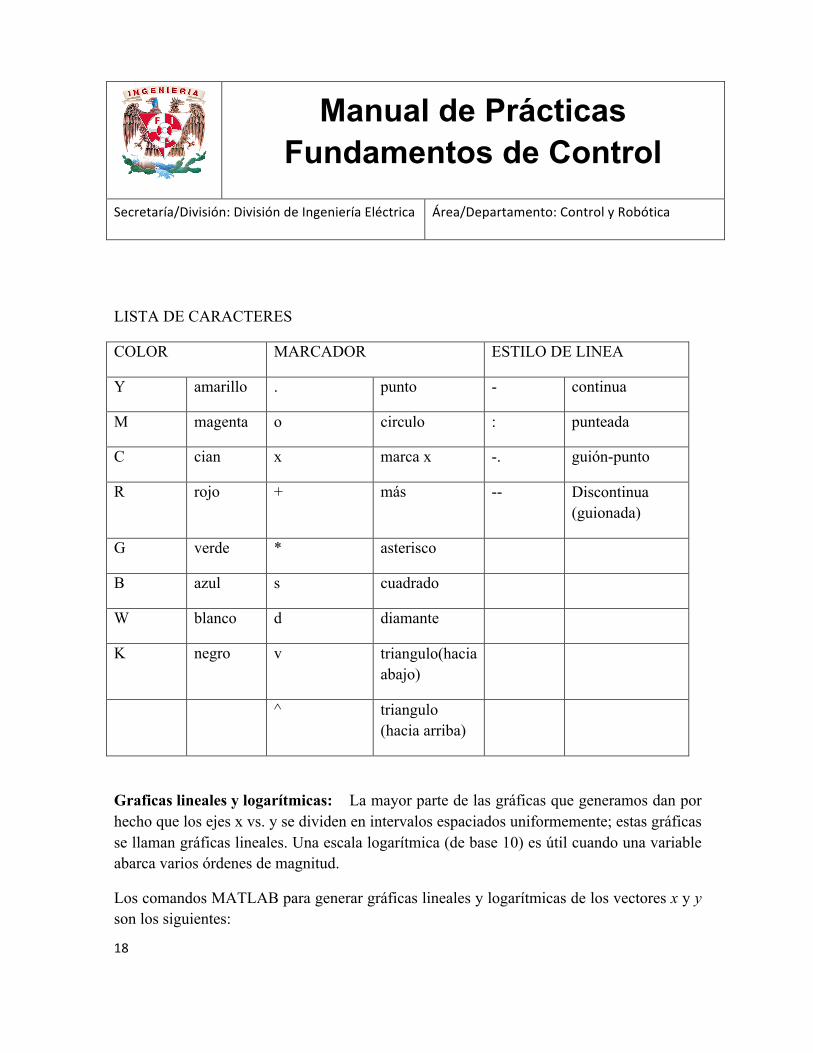
LISTA DE CARACTERES
COLOR MARCADOR ESTILO DE LINEA
Y amarillo . punto - continua
M magenta o circulo : punteada
C cian x marca x -. guión-punto
R rojo + más -- Discontinua (guionada)
G verde * asterisco
B azul s cuadrado
W blanco d diamante
K negro v triangulo(hacia abajo)
^ triangulo (hacia arriba)
Graficas lineales y logarítmicas: La mayor parte de las gráficas que generamos dan por hecho que los ejes x vs. y se dividen en intervalos espaciados uniformemente; estas gráficas se llaman gráficas lineales. Una escala logarítmica (de base 10) es útil cuando una variable abarca varios órdenes de magnitud.
Los comandos MATLAB para generar gráficas lineales y logarítmicas de los vectores x y y son los siguientes:
Manual de Prácticas Fundamentos de Control
Secretaría/División:DivisióndeIngenieríaEléctrica Área/Departamento:ControlyRobótica
19
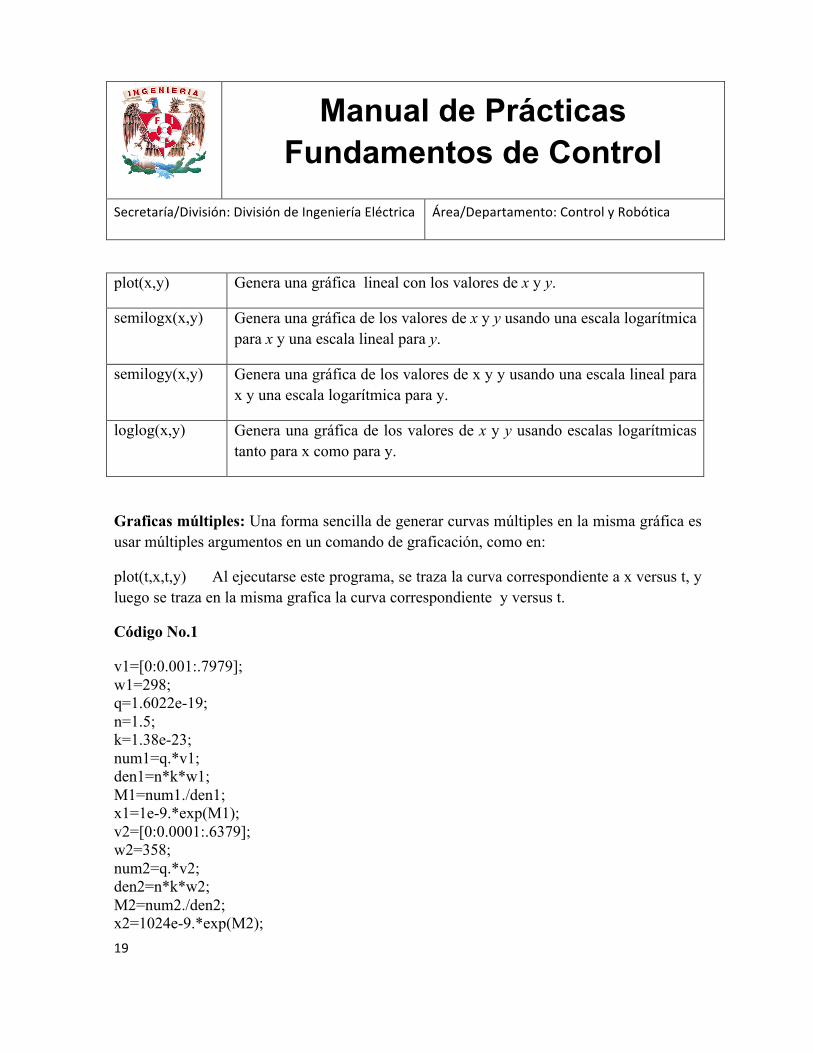
plot(x,y) Genera una gráfica lineal con los valores de x y y.
semilogx(x,y) Genera una gráfica de los valores de x y y usando una escala logarítmica para x y una escala lineal para y.
semilogy(x,y) Genera una gráfica de los valores de x y y usando una escala lineal para x y una escala logarítmica para y.
loglog(x,y) Genera una gráfica de los valores de x y y usando escalas logarítmicas tanto para x como para y.
Graficas múltiples: Una forma sencilla de generar curvas múltiples en la misma gráfica es usar múltiples argumentos en un comando de graficación, como en:
plot(t,x,t,y) Al ejecutarse este programa, se traza la curva correspondiente a x versus t, y luego se traza en la misma grafica la curva correspondiente y versus t.
Código No.1
v1=[0:0.001:.7979]; w1=298; q=1.6022e-19; n=1.5; k=1.38e-23; num1=q.*v1; den1=n*k*w1; M1=num1./den1; x1=1e-9.*exp(M1); v2=[0:0.0001:.6379]; w2=358; num2=q.*v2; den2=n*k*w2; M2=num2./den2; x2=1024e-9.*exp(M2);
Manual de Prácticas Fundamentos de Control
Secretaría/División:DivisióndeIngenieríaEléctrica Área/Departamento:ControlyRobótica
20
plot(v1,x1,'b',v2,x2,'r');title('Ecuación del diodo'); legend('TEMPERATURA 298 K', 'TEMPERATURA 358 K');grid
Subgráficas: El comando subplot permite dividir la pantalla de gráficos en ventanas. Las posibles divisiones pueden ser dos ventanas o cuatro ventanas o incluso 8 ventanas en una hoja.. Los argumentos del comando subplot son tres enteros: (m, n, p). Los dígitos m y n especifican que la ventana de gráficos se divida en una retícula de m por n ventanas más pequeñas, y el digito p especifica la p-ésima ventana para la gráfica actual (donde se ubica esta grafica) . Las ventanas se numeran de izquierda a derecha y de arriba abajo.
Por ejemplo el siguiente comando subplot(2,1,1);plot(x,y) especifica que la ventana de gráficos se divida en una grafica superior y una inferior ( dos líneas de graficas en una columna ) y que la grafica actual plot(x,y) se coloque en la ventana superior ver código No. 2.
El siguiente juego de instrucciones genera cuatro graficas que ilustran la función del comando subplot empleando escalas lineales y logarítmica.
Código No. 2
t=[0:0.001:1]; f=2; w=2*pi*f; x=((1/2).*(1+cos(2*w.*t))); subplot(2,2,1);plot(t,x,'r','linewidth',2);grid subplot(2,2,2);semilogx(t,x,'b','linewidth',2);grid subplot(2,2,3);semilogy(t,x,'r','linewidth',2);grid
Manual de Prácticas Fundamentos de Control
Secretaría/División:DivisióndeIngenieríaEléctrica Área/Departamento:ControlyRobótica
21
subplot(2,2,4);loglog(t,x,'b','linewidth',2);grid
Código No. 3
t=[-6*pi:0.001:6*pi]; w1=2/3; w2=1/2; w3=1/3; x1=2.*sin(w1.*t); x2=3.*sin(w2.*t); x3=4.*sin(w3.*t); plot(t,x1,'b',t,x2,'r',t,x3,'k','linewidth',2);title('Cada senoidal completa un numero entero de ciclos');gris
V. Hoja de Resultados
Nombre: _______________________________
Incluya los resultados que se obtienen al correr los códigos 1, 2 y 3.
Manual de Prácticas Fundamentos de Control
Secretaría/División: División de Ingeniería Eléctrica
Área/Departamento: Control y Robotica
N° de práctica: 1 Tema Correspondiente: Uso y manejo de Simulink de Matlab
Nombre completo del alumno Firma
N° de brigada: Fecha de elaboración: Grupo:
Elaborado por: Revisado por: Autorizado por: Vigente desde:
Nociones de Simulink de
Matlab
Manual de Prácticas Fundamentos de Control
Secretaría/División: Ingeniería Eléctrica
Área/Departamento: Control y Robótica
2
1. Seguridad en la ejecución
Peligro o Fuente de
energía Riesgo asociado
1 Corriente Alterna Electrocución
2. Objetivos de aprendizaje
I. Objetivos generales: Iniciar al alumno en el manejo y uso de “Simulink” como una herramienta de Matlab y que sirva para el análisis de sistemas dinámicos.
II. Objetivos específicos:
a) El alumno se iniciará en el manejo y uso de la caja de herramientas de “Simulink”
de “Matlab”, para el análisis de sistemas dinámicos.
b) El estudiante aprenderá mediante un ejemplo sencillo la aplicación y uso de la herramienta Simulink de Matlab para la simulación de circuitos por bloques.
3. Introducción
En las diferentes áreas de la ingeniería, la simulación de sistemas y procesos se ha convertido en una herramienta indispensable, tanto para el análisis como para el diseño de sistemas. En la mayoría de los casos, el proceso de simulación reduce el tiempo de diseño y permite anticipar el comportamiento de sistemas y procesos antes de su construcción, reduciendo, por ende, el costo de desarrollo y evitando posibles desperdicios. Dichos sistemas de simulación se construyen, en muchos casos, con programas de cómputo, donde éstos realizan gran cantidad de cálculos numéricos. El área de control automático no es la excepción y en ésta se hace un uso intensivo de simuladores y de programas de cálculo
Profesor 1 Ing. Benjamín Ramírez Hernández
Dr. Paul Rolando Maya Ortiz
28 de noviembre de 2015
Manual de Prácticas Fundamentos de Control
Secretaría/División: Ingeniería Eléctrica
Área/Departamento: Control y Robótica
3
numérico. De la gran variedad de programas, que pueden hacer simulaciones y cálculo numérico intensivo, en el mercado se ha elegido a “Matlab” con varias de sus cajas de herramientas, para las actividades de análisis y diseño de sistemas de control, debido al uso tan extendido del mismo y al desempeño mostrado en muchas áreas de ingeniería y ciencia. Por lo que, además de los análisis teóricos en la enseñanza del control automático, será necesario mostrar al alumno el manejo adecuado de “Matlab” con el fin de complementar su formación en lo que respecta a las soluciones numéricas y de simulación. Simulink es un programa que funciona en el ambiente de Matlab, dicho programa cuenta con una interfaz gráfica de usuario que permite la construcción de sistemas por medio de diagramas de bloques o íconos. Simulink es una herramienta fácil de utilizar, debido a que cuenta con librerías de elementos de sistemas, donde podemos encontrar: elementos de entrada (fuentes de señales), elementos de salida (graficadores), bloques que representan a los sistemas (boques de funciones de transferencia, o variables de estado), además de bloques o íconos de unión. Para todos los elementos mencionados anteriormente es posible ajustar los parámetros de los mismos, con la intención de ajustarse al sistema bajo prueba tales como son: tiempo de inicio, tiempo de paro, método de solución de ecuaciones diferenciales, etc. En resumen, Simulink es una herramienta poderosa para el análisis de sistemas dinámicos. Por lo que, resulta indispensable para el estudio del control automático. Cabe hacer mención que existen programas de software con licencia libre que permiten la misma utilización y funcionamiento similar de Matlab y que siguen un similar protocolo de funcionamiento tales como Scilab como el programa similar a Matlab y Scicoslab en el entorno Simulink que pueden emplear el similar formato de utilización de Matlab o de Simulink. La página de descarga de dichos programas se encuentra en: http://www.scilab.org para Scilab y http://www.scicoslab.org/ para Scicoslab similar a Simulink. Aspectos notables de Matlab
• Matlab es un sistema interactivo que realiza cálculos numéricos, • Con Matlab se pueden hacer cálculos muy complejos con sólo algunos comandos. • Matlab es un conjunto de programas que interactúan de manera eficaz para producir
soluciones confiables. • Matlab está compuesto de un gran número de algoritmos verificados y confiables. • Matlab, realizará por nosotros una gran cantidad de cálculos, permitiéndonos
utilizar de manera más eficaz nuestro tiempo. • Simulink es un programa (“toolbox”) que funciona bajo el ambiente de Matlab.
Manual de Prácticas Fundamentos de Control
Secretaría/División: Ingeniería Eléctrica
Área/Departamento: Control y Robótica
4
• Simulink contiene un ambiente de programación gráfica
3. Material y Equipo
A) Una PC con Matlab Versión mínima 5.3 instalado con las caja de herramientas “simulink””.
4. Desarrollo
I. Actividad 1
En las versiones de Matlab para Windows, para iniciar el programa haga un doble clic sobre el icono del programa. Aparecerá, entonces, la pantalla del espacio de trabajo de Matlab, donde podrá introducir comandos. La línea de comando aparecerá como “>>”
El modelo a construir corresponde con el circuito mostrado en la Fig.1
Manual de Prácticas Fundamentos de Control
Secretaría/División: Ingeniería Eléctrica
Área/Departamento: Control y Robótica
5
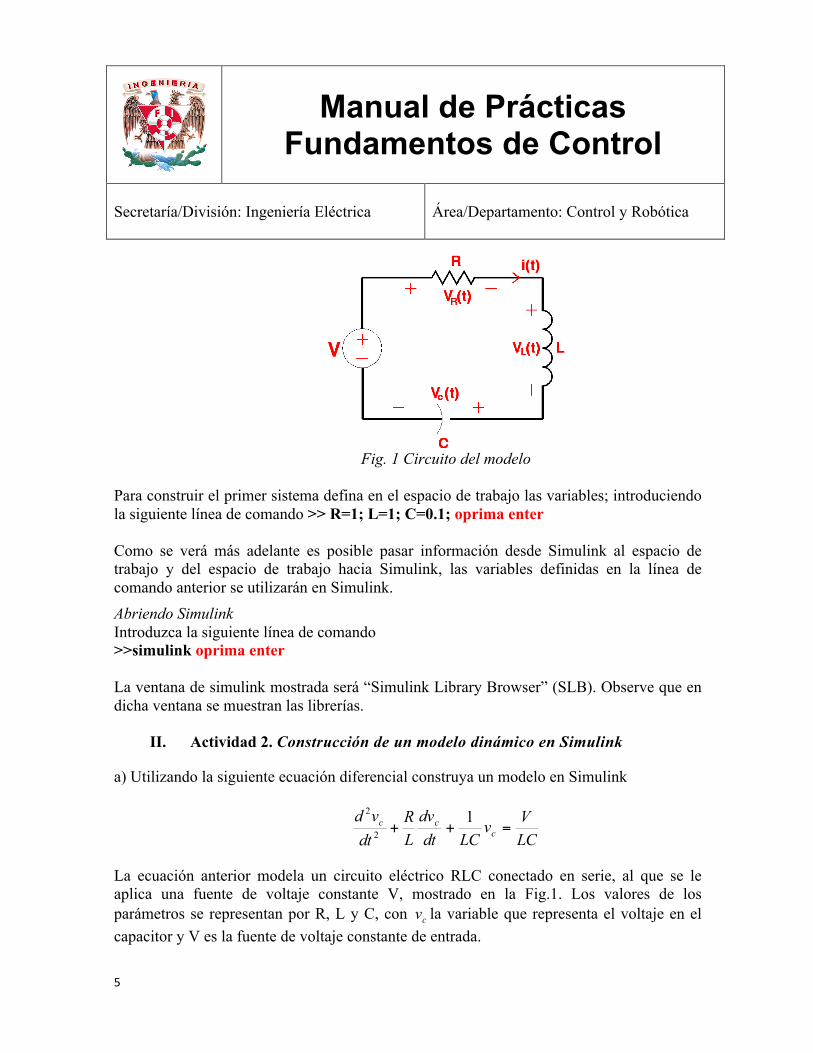
Fig. 1 Circuito del modelo
Para construir el primer sistema defina en el espacio de trabajo las variables; introduciendo la siguiente línea de comando >> R=1; L=1; C=0.1; oprima enter
Como se verá más adelante es posible pasar información desde Simulink al espacio de trabajo y del espacio de trabajo hacia Simulink, las variables definidas en la línea de comando anterior se utilizarán en Simulink. Abriendo Simulink Introduzca la siguiente línea de comando >>simulink oprima enter La ventana de simulink mostrada será “Simulink Library Browser” (SLB). Observe que en dicha ventana se muestran las librerías.
II. Actividad 2. Construcción de un modelo dinámico en Simulink
a) Utilizando la siguiente ecuación diferencial construya un modelo en Simulink
LCVv
LCdtdv
LR
dtvd
ccc =++
12
2
La ecuación anterior modela un circuito eléctrico RLC conectado en serie, al que se le aplica una fuente de voltaje constante V, mostrado en la Fig.1. Los valores de los parámetros se representan por R, L y C, con cv la variable que representa el voltaje en el capacitor y V es la fuente de voltaje constante de entrada.
Manual de Prácticas Fundamentos de Control
Secretaría/División: Ingeniería Eléctrica
Área/Departamento: Control y Robótica
6
Para iniciar la construcción del modelo en Simulink, despejemos la derivada de mayor orden
LCVv
LCdtdv
LR
dtvd
ccc +−−=
12
2
Del modelo anterior se observa que es necesario integrar dos veces para obtener el voltaje en el capacitor, es necesario hacer: dos restas, una suma y tres multiplicaciones por un escalar (ganancias). Por lo que, necesitamos: bloques de suma (o resta), de integración y de ganancia.
Dentro de la interface de Simulink Library Browser (SLB) seleccione el menú desplegable “File” elija “new”, se abrirá una ventana en blanco donde se construirá el modelo. Traiga a primer plano la nueva ventana y la de SLB. Dé un clic en el recuadro a la izquierda de la caja de herramientas de Simulink, deberán abrirse todas la librerías.
III. Actividad 3: Construcción utilizando bloques simples.
Introduciendo los bloques
Seleccione la opción “Sources” y de ésta elija “constant” ubicando el ratón y oprimiendo el botón izquierdo sin soltarlo arrastre dicho bloque hasta la ventana del archivo nuevo, suelte el botón del ratón, para dejar el bloque. Seleccione la opción “Sinks” y elija “Scope”, arrástrelo a la ventana de archivo nuevo, suelte el botón del ratón, para dejar el bloque. Este bloque permitirá observar la gráfica de salida del sistema. Seleccione la opción “Continuous” y elija “Integrator”, arrástrelo a la ventana de archivo nuevo suelte el botón del ratón, para dejar el bloque. Seleccione la opción “Math” y elija “Sum”, arrástrelo a la ventana de archivo nuevo suelte el botón del ratón, para dejar el bloque.
Seleccione la opción “Math” y elija “Gain”, arrástrelo a la ventana de archivo nuevo suelte el botón del ratón, para dejar el bloque.
Manual de Prácticas Fundamentos de Control
Secretaría/División: Ingeniería Eléctrica
Área/Departamento: Control y Robótica
7
Conectando los bloques
Para duplicar los bloques en la ventana de nuevo archivo, seleccione, haciendo clic en el bloque con el botón izquierdo del ratón, (se habilitarán unos cuadros de selección en las esquinas del bloque) ubique el ratón, nuevamente en el bloque y arrástrelo, oprimiendo el botón derecho del ratón, al lugar donde desea ubicarlo, suelte el botón del ratón, para dejar el bloque. Para hacer la conexión entre dos bloques ubique el apuntador del ratón a la salida (entrada), éste cambiará su forma a una cruz, cuando cambie oprima el botón izquierdo del ratón y manteniéndolo oprimido arrastre la línea generada hasta la entrada (salida). Para deshacer la conexión seleccione dicha conexión con el apuntador del ratón, haga clic con el botón izquierdo, y cuando aparezcan los recuadros de selección, oprima la tecla suprimir del teclado, la línea deberá desaparecer. Duplique el bloque de integración (siguiendo el procedimiento anterior), póngalos en línea horizontal, conecte la salida de un bloque de integración con la entrada del segundo. La salida del segundo integrador será el voltaje en el capacitor y la entrada al primer bloque de integración es la segunda derivada del voltaje en el capacitor. Por tanto, a la entrada debemos conectar el lado derecho de la ecuación:
LCVv
LCdtdv
LR
dtvd
ccc +−−=
12
2
.
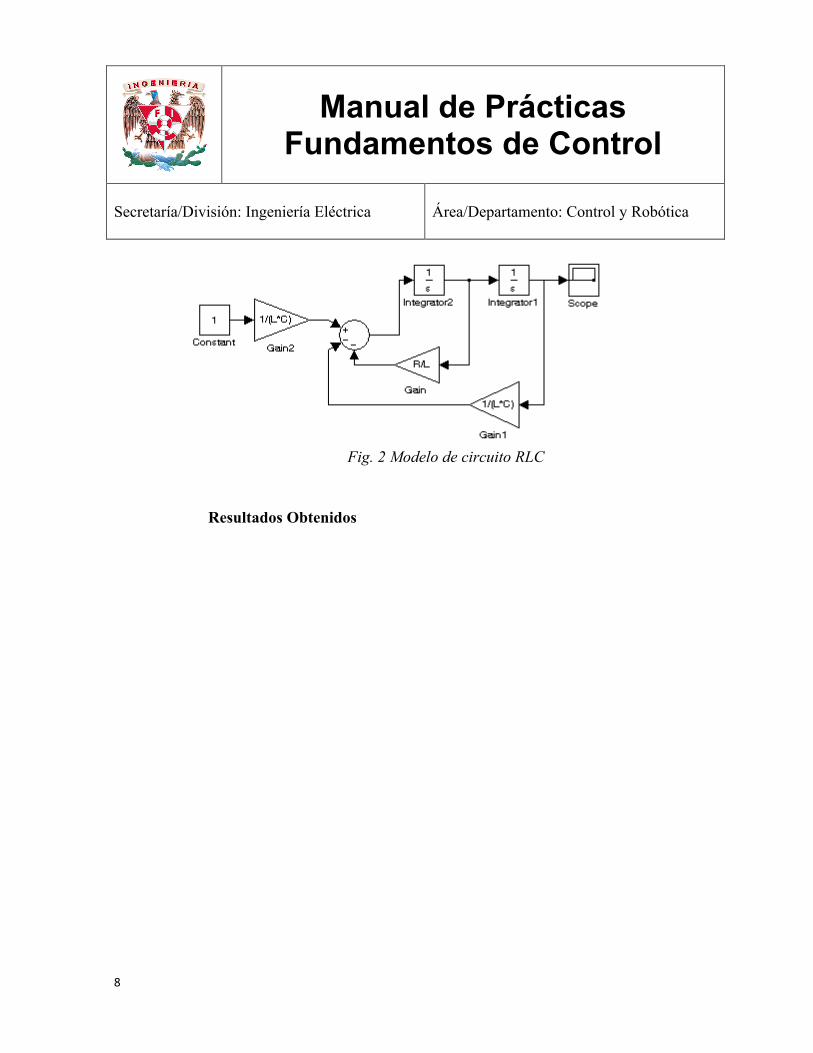
El modelo queda como se muestra en la Fig.2. Las ganancias (que deben estar definidas como “Element-wise gain”) se editan dando doble clic con el botón izquierdo e introduciendo los términos adecuados.
Manual de Prácticas Fundamentos de Control
Secretaría/División: Ingeniería Eléctrica
Área/Departamento: Control y Robótica
8
Fig. 2 Modelo de circuito RLC
Resultados Obtenidos
Manual de Prácticas Fundamentos de Control
Secretaría/División: Ingeniería Eléctrica
Área/Departamento: Control y Robótica
9
5. Conclusiones
6. Bibliografía KUO, Benjamín C Sistemas de Control Automático México Prentice Hall 7ª Edición 1996 Nice, Norman S Sistemas de Control Para Ingeniería México Compañía Editorial Continental 1ª Reimpresión 2004 Ogata, Katsuhiko Ingeniería de control moderna México Pearson, 2001







![[Tutorial Matlab]](https://static.fdocuments.ec/doc/165x107/55cf855c550346484b8d3100/tutorial-matlab-55d4769ad1d3a.jpg)