Neuronas de Integración y Disparo: Modelos Lineales · mica del modelo (1.1) sujeto a la...
70
Neuronas de Integración y Disparo: Modelos Lineales Humberto Carrillo Calvet 1 Fernando Ongay Larios 2 Miguel Angel Mendoza Reyes 3 23 de Junio de 2011 1 Laboratorio de Dinámica no Lineal, Facultad de Ciencias, UNAM 2 Laboratorio Interdisciplinario de Sistemas Dinámicos, Fa- cultad de Ciencias, UAEM y Laboratorio de Dinámica no Lineal, Facultad de Ciencias, UNAM 3 Universidad Autónoma de la Ciudad de México (UACM)
Transcript of Neuronas de Integración y Disparo: Modelos Lineales · mica del modelo (1.1) sujeto a la...

Neuronas de Integración yDisparo: Modelos Lineales
Humberto Carrillo Calvet 1
Fernando Ongay Larios 2
Miguel Angel Mendoza Reyes3
23 de Junio de 2011
1Laboratorio de Dinámica no Lineal, Facultad de Ciencias,UNAM
2Laboratorio Interdisciplinario de Sistemas Dinámicos, Fa-cultad de Ciencias, UAEM y Laboratorio de Dinámica no Lineal,Facultad de Ciencias, UNAM
3Universidad Autónoma de la Ciudad de México (UACM)
Índice general
Prefacio VII
1. Modelo de Keener - Hoppensteadt y Rinzel 1
1.1. Modelos Lineales . . . . . . . . . . . . . . . . . 31.1.1. Forzamiento constante . . . . . . . . . 61.1.2. El caso cuando � tiende a cero . . . . . 7
2. Análisis de la función de disparos 112.1. Resultados preparatorios . . . . . . . . . . . . 112.2. Teoremas de regularidad . . . . . . . . . . . . 14
3. Estimulación periódica 213.1. El Atractor Periódico . . . . . . . . . . . . . . . 213.2. Topología del Dominio de la Función de Dis-
paros . . . . . . . . . . . . . . . . . . . . . . . . 253.3. Sincronización . . . . . . . . . . . . . . . . . . 363.4. Las Funciones de Fases de Disparos . . . . . 373.5. Teorías de Rotación . . . . . . . . . . . . . . . 41
4. Modelos con Parámetros 434.1. Regiones de regularidad . . . . . . . . . . . . . 434.2. Lenguas de Arnold . . . . . . . . . . . . . . . . 45
5. El modelo KHR 515.1. Condición de Disparos . . . . . . . . . . . . . 52
V
ÍNDICE GENERAL
5.2. Condición de Continuidad . . . . . . . . . . . 535.3. Condición de Inyectividad . . . . . . . . . . . 555.4. Partición del Espacio de Parámetros . . . . . 56
6. Apéndice. La ceroclina y las soluciones de laecuación diferencial 59
VI
Prefacio
Se estudian neuronas de integración y disparo mode-ladas por una ecuación diferencial sujeta a una condiciónde salto. Se pone especial interés en estudiar las propie-dades de la respuesta de estas neuronas a una estimula-ción periódica, la cual queda cifrada en la función de fasesde disparo del sistema, que es una función de la circun-ferencia. Se considera la clase más general de modeloslineales que incluye como caso particular el conocido mo-delo de Keener - Hoppensteadt - Rinzel y se hace un aná-lisis a profundidad de las propiedades cualitativas de lasfunciones de disparo subyacentes. Se demuestran resul-tados que proveen útiles condiciones para determinar laspropiedades de regularidad que se requieren para aplicarla teoría de rotación de Poincaré a las funciones de dis-paro. También se presentan teoremas sobre la topologíadel dominio de las funciones de disparo y varios teoremasde utilidad sobre la existencia y estabilidad de atractoresperiódicos.
VII


Capítulo 1
Modelo de Keener -Hoppensteadt yRinzel
Algunos modelos de osciladores de integración y dis-paro describen en forma aproximada la dinámica de lascélulas nerviosas en términos de una variable de esta-do, v(t), que representa la diferencia de potencial eléctricoa través de la membrana celular, una constante de disi-pación que relaja la diferencia de potenciales a su nivelde reposo, y un estímulo externo SA(t) (por ejemplo, cor-riente aplicada). Cuando v(t) alcanza un umbral de dis-paro VT , la neurona emite un impulso nervioso, el poten-cial es actualizado a cero, y la carga se empieza a acu-mular de nuevo. Esta descripción cualitativa de la activi-dad eléctrica de la membrana de una neurona se conoceen la literatura como Neurona de Integración y Disparo oSpiking Neuron. El proceso descrito es en realidad ubicuoen la naturaleza y se encuentra en otros escenarios co-mo la geofísica, circuitos eléctricos, sistemas mecánicose incluso en la economia y las ciencias sociales. En tér-
1

1. Modelo de Keener - Hoppensteadt y Rinzel
minos generales estos sistemas tienen una variable quese acumula y, bajo ciertas circunstancias, se descargasubitamente, decimos que son sistemas de acumulacióny descarga. Cuando la descarga es instantánea los lla-mamos osciladores de integración y disparo.
La neurona de integración y disparo la estudian Res-cigno, Stein, Purple y Poppele en [22] y Keener, Hoppens-teadt y Rinzel en [16] con el modelo matemático:
dv
dt= � v + S0 + Sm cos (!t+ �) (1.1)
v�t+�= 0 si v (t) = VT (1.2)
donde es la constante de disipación, v es el potencial demembrana, S0 es el estímulo constante aplicado; Sm, ! y �son la amplitud, la frecuencia y la fase, respectivamente,del estímulo periódico aplicado.
Haciendo el cambio de variables
u =v
VT; � =
2�
!; S =
2�S0!VT
;
H =2�Sm!VT
; � =!t+ �
2�;
el modelo toma la siguiente forma simplificada:
du
d�=du
dt
dt
d�=
�1
VT
dv
dt
��2�
!
�=� v2�!VT
+2�S0!VT
+2�Sm!VT
cos (!t+ �)
= ��u+ S +H cos (2��) :
Si v(t) = VT ; entonces u(�) = 1. Por lo tanto, la diná-mica del modelo (1.1) sujeto a la condición de salto (1.2),puede ser analizada por medio del modelo simplificado,pero dinámicamente equivalente, que llamaremos el mo-delo KHR:
_u (�) = ��u (�) + S +H cos (2��) (1.3)
2

1.1 Modelos Lineales
u��+�= 0; si u (�) = 1; (1.4)
donde � es la constante de disipación, S el valor prome-dio del estímulo aplicado, y H su amplitud. El compor-tamiento de este modelo se caracteriza por la presenciade oscilaciones de diente de sierra de la variable de esta-do (ver Figura 1.1).
1.1. Modelos Lineales
Iniciamos en esta sección el estudio formal de unaclase de modelos generales de Osciladores de Integracióny Disparo. Consideremos una variable de estado u gober-nada por la ecuación diferencial lineal
_u(t) = ��u(t) + g(t); (1.5)
y la condición de salto
u(t+) = 0 si u(t) = 1; (1.6)
donde supondremos � > 0 y que la función g es sufi-cientemente diferenciable o analítica para la convenienciadel análisis. La dinámica de este sistema es como sigue:mientras la variable u está entre 0 y 1, su dinámica obe-dece la ecuación diferencial; si la variable alcanza el valorumbral 1, instantáneamente su valor es reseteado a 0. Ca-da vez que esto ocurre decimos que se ha producido undisparo. Los disparos ocurren en tiempos discretos, a losque llamaremos tiempos de disparo, y se dan unicamentesi u alcanza el valor umbral. Típicamente, la gráfica de lavariable de estado u tiene la forma de diente de sierra co-mo las ilustradas en la Figura 1.1 de la sección anterior.
Nos referiremos a ésta clase como Modelos Lineales(ML) de un Oscilador de Integración y Disparo. La funcióng se considera un estímulo o forzamiento del osciladory nos referiremos a ella como el forzamiento del oscila-dor. Este forzamiento puede provenir de manera externa
3

1. Modelo de Keener - Hoppensteadt y Rinzel
o puede ser debido a la contribución de otros osciladoresacoplados en una red. En muchas aplicaciones, el forza-miento es una función periódica, lo cual da al sistemacaracterísticas propias y suscita preguntas nuevas, comosaber cuándo se da una respuesta sincronizada con elforzamiento; volveremos sobre esto más adelante.
Función y sucesiones de tiempos de disparo
Denotamos como u (t; t0; u0) a la solución u(t) de laecuación (1.5) tal que u(t0) = u0: El valor u � 1 es llama-do umbral de disparo y está determinado por la condición(1.6). Decimos que el sistema dispara a partir de la condi-ción inicial � si existe un tiempo t > � tal que u(t; � ; 0) = 1;el mínimo t que cumple eso es llamado el tiempo de dis-paro del sistema a partir de la condición inicial � . Resultanatural y conveniente definir la función de disparos a co-mo
a(�) = m��n ft > � : u(t; � ; 0) = 1g ;definida en el dominio
Da = f� 2 R : 9 t > � : u (t; � ; 0) = 1g :
Las sucesiones de disparos del sistema (1.5) y (1.6) sonlos disparos sucesivos que el sistema va generando a par-tir de cierto tiempo inicial � y están dadas por las itera-ciones de la función de disparos
a : Da � R �! R;
es decir, las sucesiones de tiempos de disparo están de-terminadas mediante la regla:
t0 = �
tn = an(�); (1.7)
para toda n 2 N; tal que an�1(�) 2 Da: El comportamientodel oscilador de Integración y Disparo se manifiesta prin-cipalmente en las sucesiones de tiempo de disparos, por
4
1.1 Modelos Lineales
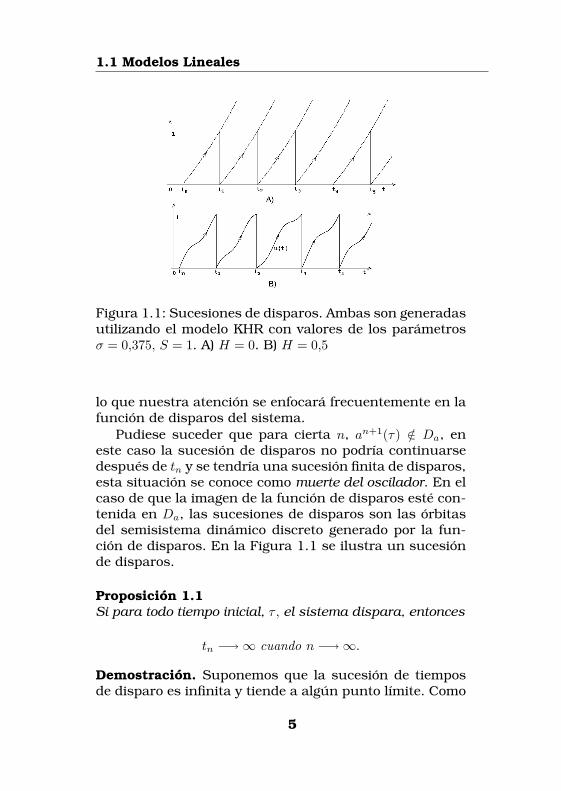
Figura 1.1: Sucesiones de disparos. Ambas son generadasutilizando el modelo KHR con valores de los parámetros� = 0;375; S = 1. A) H = 0. B) H = 0;5
lo que nuestra atención se enfocará frecuentemente en lafunción de disparos del sistema.
Pudiese suceder que para cierta n, an+1(�) =2 Da, eneste caso la sucesión de disparos no podría continuarsedespués de tn y se tendría una sucesión finita de disparos,esta situación se conoce como muerte del oscilador. En elcaso de que la imagen de la función de disparos esté con-tenida en Da, las sucesiones de disparos son las órbitasdel semisistema dinámico discreto generado por la fun-ción de disparos. En la Figura 1.1 se ilustra un sucesiónde disparos.
Proposición 1.1Si para todo tiempo inicial, � ; el sistema dispara, entonces
tn �!1 cuando n �!1:
Demostración. Suponemos que la sucesión de tiemposde disparo es infinita y tiende a algún punto límite. Como
5

1. Modelo de Keener - Hoppensteadt y Rinzel
las curvas integrales son continuas, por el teorema delvalor medio tenemos que en cada intervalo de la forma[tn; tn+1] existe un número �n tal que
_u(�n; tn; 0) =u(tn+1; tn; 0)� u(tn; tn; 0)
tn+1 � tn=
1
tn+1 � tn
Entonces, para cualquier n se tiene
_u(�n; tn; 0) (tn+1 � tn) = 1: (1.8)
Como l��mn!1
(tn+1 � tn) = 0; por (1.8) se tiene
l��mn!1
_u(�n; tn; 0) =1;
lo cual implica que la pendiente de las curvas integralesdada por el lado derecho de la ecuación (1.5) crece arbi-trariamente, pero estas están acotadas por la continuidadde g, lo cual es una contradicción. �
1.1.1. Forzamiento constante
El sistema (1.5) y (1.6) modela un oscilador no forzadosi g(t) � S0 > �. En efecto, puesto que todas las solu-ciones convergen a la solución constante asintóticamenteestable u(t) � S0
� (si � 6= 0), para cualquier tiempo inicialel sistema siempre dispara. En estas circunstancias te-nemos un oscilador con disparos periódicos cada ciertotiempo característico
tn+1 = tn + T0:
Un estímulo constante al oscilador se modela sumandoun valor constante g(t) � S = S0+ I, donde si I es positivoefectivamente se tiene una estimulación, mientras que siI es negativo se estaría inhibiendo al oscilador. Si S > �,se siguen teniendo disparos periódicos de la forma
tn+1 = tn + T (1.9)
6

1.1 Modelos Lineales
donde naturalmente T depende de S y �. Encontrar estadependencia es un sencillo ejercicio, en efecto si la fun-ción g es constante, g(t) � S, podemos hacer la integra-ción de la ecuación diferencial dándonos
S � ��
e�tn+1 = e�t�1 +
S � ��
�o bien
e�tn+1 =
�S
S � �
�e�t:
Con la condición S > � obtenemos
tn+1 = tn + ln
�S
S � �
� 1�
;
T (S; �) = ln
�S
S � �
� 1�
:
Notemos que el periodo T del oscilador no forzado es unafunción decreciente del estímulo S y que
l��mS!�
T =1; l��mS!1
T = 0;
(� fija) o, dicho de otro modo, la frecuencia del osciladoraumenta con el forzamiento y tiende a infinito si el estí-mulo tiende a infinito. Por otro lado, si S < � el sistemanunca dispara y se tiene la total inhibición del oscilador.
1.1.2. El caso cuando � tiende a cero
Cuando g no es una función constante, el sistema estásujeto a una estimulación que cambia en el tiempo. Cuan-do g es periódica y positiva, digamos g(t + 1) = g(t) > 0para toda t, el caso límite de � = 0 merece un poco deatención. Integrando la ecuación diferencial (1.5) y asu-miendo la condición de disparo (1.6) tenemos
1 =
Z a(t)
t
g(s)ds = G (a(t))�G(t)
7

1. Modelo de Keener - Hoppensteadt y Rinzel
Figura 1.2: Modelo geométrico de integración y disparocon curvas umbral y de reposo no constantes.
con G(t) una primitiva de g. Llamemos c = G(t+ 1)�G(t),que es constante por ser g periódica. Como g(t) > 0 paratoda t, tenemos c 6= 0. Definamos ahora la función
h(t) =G(t)
c;
se tiene que h es un difeomorfismo que preserva orien-tación ya que G0(t) = g(t) > 0. Con el cambio de variable� = h(t) tenemos
h (a(t)) =G (a(t))
c=G(t) + 1
c= h(t) +
1
c:
Esto significa que la función de disparos es topológica-mente conjugada a una traslación, es decir, conmuta eldiagrama
R a�! R
# h # h
R �! R
t 7! t+ 1c
Con todo lo absurdo que pudiera parecer el caso � =0, tiene, no obstante, cierta relevancia. El oscilador "noforzado" es de la forma _u = S, con S > 0, por lo que lassoluciones de esta ecuación diferencial son rectas parale-las de pendiente S
u(t) = St+ u0:
8

1.1 Modelos Lineales
Se puede decir en este caso que la variable u se acumula arazón constante. Esta es otra manera común de modelarosciladores de Integración y Disparo a la que llamamosmodelos geométricos; estos modelos han sido estudiadospor otros autores, por ejemplo [11], y en éstos se sueleconsiderar las curvas umbral y de reposo no constante(ver Figura 1.2).
9


Capítulo 2
Análisis de la funciónde disparos
Esta sección generaliza y proporciona las demostracio-nes rigurosas del método de análisis empleado por Kee-ner, Hoppensteadt y Rinzel en [16] al modelo que hemosllamado KHR. El análisis se basa en la observación cuida-dosa de las gráficas de dos funciones, F y G, definidas enel Lema 2.1. Las propiedades de monotonía de estas fun-ciones tienen implicaciones en las propiedades de regu-laridad de la función de disparo.
2.1. Resultados preparatorios
Lema 2.1Sea F (t) es una primitiva de e�t (g (t)� �) y
G (t) = F (t) + e�t: (2.1)
Si u (t; � ; 0) es una solución de la ecuación (1.5), entoncespara todo t y � 2 R se tiene que
G (�) = F (t) + e�t (1� u (t; � ; 0)) :
11

2. Análisis de la función de disparos
Demostración. Por la linealidad de la ecuación, dada cual-quier � ; la solución u (t; � ; 0) está definida para todo t 2 Ry por la ecuación (3.1) sabemos que
u (t; � ; 0) = e��tZ t
�
e�sg (s) ds:
Entonces
e�tu (t; � ; 0) =
Z t
�
e�sg (s) ds:
Luego
e�tu (t; � ; 0)��e�t � e��
�=
Z t
�
e�sg (s) ds�Z t
�
�e�sds
o, equivalentemente,
�e�t (1� u (t; � ; 0))+e�� =Z t
�
e�s (g (s)� �) ds = F (t)�F (�) :
Finalmente
F (�) + e�� = F (t) + e�t (1� u (t; � ; 0)) :
Por lo tanto,
8� ; t 2 R; G (�) = F (t) + e�t (1� u (t; � ; 0)) :
�Supongamos que g (t) es no constante. Entonces tene-
mos el siguiente
Lema 2.2F (t) es estrictamente creciente si y sólo si g (t) � � 8t 2 R:
Demostración. (=)) Si existe t tal que g (t) � � < 0; porcontinuidad existe un intervalo [�1; �2] tal que g (t)� � < 08t 2 [�1; �2] : EntoncesZ �2
�1
e�s (g (s)� �) ds < 0:
((=) Es inmediata. �
12

2.1 Resultados preparatorios
Lema 2.3G (t) es estrictamente creciente si y sólo si g (t) � 0 8t 2 R:
Demostración. Supongamos que G (t) = F (t) + e�t es es-trictamente creciente. Entonces 8�1; �2 2 R; �1 < �2; tene-mos que
G (�2)�G (�1) = (F (�2) + e��2)� (F (�1) + e��1)= F (�2)� F (�1) + e��2 � e��1
=
Z �2
�1
e�s (g (s)� �) ds+Z �2
�1
�e�s =
Z �2
�1
e�sg (s) ds > 0:
Por un razonamiento similar al de la demostración delLema 2.2,
R �2�1e�sg (s) ds > 0 para cualesquiera �1 y �2 si y
sólo si g (t) � 0 8t 2 R: �
Teorema 2.4� 2 Da si y sólo si existe � > � tal que F (�) = G (�) :
Demostración. ((=) Sea � 2 R: Aplicando el Lema 2.1 ent = � tenemos
G (�) = F (�) + e�� (1� u (�; � ; 0))
de donde
F (�) = F (�) + e�� (1� u (�; � ; 0))
y por lo tanto
u (�; � ; 0) = 1 con � > �:
(=)) Por definición u (a(�); � ; 0) = 1, aplicando el Lema2.1 en t = a (�) tenemos que
F (a (�)) = G (�) (2.2)
y el Lema se sigue con � = a (�) : �
13

2. Análisis de la función de disparos
Observación 2.5Por la definición de la función de disparo a, � es el mínimonúmero mayor que � que satisface
F (�) = G (�)
Observación 2.6Para todo � 2 Da; la función de disparos a está determina-da implícitamente por la ecuaciónZ a(�)
�
e�s(g(s)� �)ds = e�� (2.3)
que, como F es una primitiva de e�t (g (t)� �), no es másque otra forma de escribir la ecuación (2.2).
2.2. Teoremas de regularidad
Teorema 2.7Para toda T 2 R y para toda M > 0 existe t > T tal queF (t) > M si y sólo si Da = R:
Demostración. Probaremos primero la necesidad, sea � 2R, entonces existe t > � tal que F (t) > G(�). Como F (�) <G(�), por el teorema del valor intermedio existe � < � < ttal que F (�) = G(�): Por el Teorema 2.4 � 2 Da:
Para probar el recíproco, sean T 2 R, M > 0 y �0 fi-jo. Como Da = R por el Lema 2.4 existe �1 > �0 tal queF (�1) = F (�0) + e
��0 . Procediendo por inducción construi-mos una sucesión �0 < �1 < ::: < �n�1 < �n < ::: tal que
F (�n) = F (�n�1) + e��n�1
para toda n, entonces
F (�n) = F (�0) + e��0 + e��1 + :::+ e��n�1 > F (�0) + ne
��0 ;
por lo tanto existe n tal que F (�m) > M para toda m � n.Por la Proposición 1.1 la sucesión f�ng no está acotada,
14
2.2 Teoremas de regularidad
por lo que podemos tomar n tal que �n > T y, con t = �n,queda demostrada la Proposición. �
La Proposición anterior es una importante caracteri-zación sobre el dominio de la función de disparo de losmodelos MAL. Usaremos esta Proposición para probar lossiguientes teoremas.
Teorema 2.8(Teorema de Continuidad). Supongamos que Da = R: Lafunción de disparo a es continua si y sólo si g (t) � � paratoda t:
Demostración. (=)) Supongamos que g (t) < � para al-guna t 2 R: Por el Lema 2.2, F (t) no es monótona y, porser analítica, F tiene máximos locales aislados.
Observación 2.9Si � 2 R y
� = m�axt<�
G�1(F (�));
entonces existe � > 0 tal que G(t) es estrictamente cre-ciente en [� ; � + �), de otro modo, como G > F , si paraalgún t, con � < t < �, se tiene G(t) < G(�) = F (�) < G(�),existe �, t < � < �, tal que G(�) = F (�), luego � no seríaelemento maximal.
Observación 2.10Por la Proposición 2.7, si Da = R existe �1 2 R con F (�1) >0 y tal que el conjunto
A = ft : t > �1 y F alcanza un máximo local en tg
es no vacio. Sea � = m��nA: Se tiene que � está en la imagende la función de disparos a: En efecto, como l��mt!�1 F (t) =0, entonces G(�) ! 0 si � ! �1, recuérdese además queG(�) > F (�). Sea � tal que G(�) = F (�) y elegimos � comoen la Observación 2.9, tenemos que a(�) � �: Si a(�) < �;entonces, como en � la función F alcanza un máximo lo-cal, existe a(�) < t < � tal que F (t) < F (�) = F (a(�)):
15

2. Análisis de la función de disparos
Por el otro lado, como F (�) < G(�) = F (a(�)); entonces enel intervalo (� ; t) F alcanza un máximo local, pero � erael mínimo mayor que � ; esta contradicción implica que� = a(�):
Sea ahora � como en la Observación 2.9 y tal que Falcanza un máximo local en a(�): Sea � > 0 tal que Ges estrictamente creciente en el intervalo [� ; � + �); sea�1 2 (� ; � + �) y " > 0 tal que F (t) � F (a(�)) para todat 2 (a(�) � "; a(�) + "): Como G(�1) > G(�) entonces, por elLema 2.4
F (a(�1)) = G(�1) > G(�) = F (a(�));
por lo tanto a(�1) =2 (a(�) � "; a(�) + "); luego a no es con-tinua en � : Esto se ilustra en la Figura 2.1 C) con lasgráficas de F y G del modelo KHR.((=) Supongamos que g (t) � � 8t 2 R: Por el Lema 2.2,
F (t) es estrictamente creciente y por lo tanto es inyectiva.Luego F (t) es invertible y como l��mt!�1 F (t) = 0, F (t +e�t) está en la imagen de F para toda t; de donde a (t) =F�1 (F (t) + e�t) es una función monótona y continua. �
Teorema 2.11(Teorema de Inyectividad). Supongamos que Da = R: Lafunción de disparo a es monótona creciente (de hecho es-trictamente monótona) si y sólo si g (t) � 0 para toda t:
Demostración. Supongamos g (t) < 0 para algún t 2 R:Entonces, por el Lema 2.3, G (t) no es inyectiva y de aquíque existan t1; t2 2 R tales que G (t1) = G (t2) : Suponga-mos además que en �1 la función G alcanza un máximolocal. Como G es analítica y Da = R, por la Proposición2.7, G satisface que para toda T 2 R y para toda M > 0existe t > T tal que G(t) > M; podemos tomar
�2 = m��n f� > �1 : G(�) = G(�1)g :
Como F (�) < G(�2) = G(�1) para toda � 2 (�1; �2), en-tonces a(�1) > �2: Pero entonces por la Observación 2.5, y
16

2.2 Teoremas de regularidad
Figura 2.1: Funciones F y G de KHR con � = 0;375; S = 1:A) Para H = 0;5 la función de disparos es un homeomor-fismo. B) Con H = 0;625; tenemos un caso límite en el quela función a de disparos comienza a dejar de ser continua.C) Si H = 0;95; la función de disparos no es continua peroes inyectiva. D) Por último, funciones F y G con � = 0;25;S = 1; H = 4: En este caso la función a de disparos no esni continua ni inyectiva:
como G(�2) = G(�1) = F (a(�1));
a(�2) = a(�1):
Recíprocamente, si a(�1) = a(�2); con �1 6= �2; entoncesG(�1) = F (a(�1)) = F (a(�2)) = G(�2); por lo tanto G no esinyectiva. El Lema 2.3 implica que existe t tal que g (t) < 0.�
Notémos que la continuidad implica la inyectividad delas funciónes de disparos, es decir, si la función de dis-paros es continua entonces es un homeomorfismo. Si lafunción de disparos no es continua puede o no ser in-yectiva, no obstante, en cierto sentido siempre es inyec-tiva, esta observación es hecha en [16], pero es proba-da formalmente en [3]. Notemos primero que la condicióng(t) > 0 para alguna t, entonces es localmente inyectiva,es decir, en una vecindad de t, g es inyectiva.
17

2. Análisis de la función de disparos
Teorema 2.12(Keener, Hoppensteadt y Rinzel, 1981; Brette, 2004) Su-pongamos que la función de disparo no es continua. En-tonces la función de disparos a es estrictamente crecientesobre su imagen.
Demostración. Sea t en la imagen de a: t = a(�). Pordefinición, u(a(�); � ; 0) = 1 y, además, a(�) es el primermomento en el que la solución u(s; � ; 0) alcanza el umbral;por lo tanto la pendiente de la curva solución en el pun-to (a(�); 1) es no negativa (si lo fuese se habría dispara-do antes), y ésta es precisamente �� + g(a(�)). Entoncesg(t) � � > 0.
Si la imagen de la función de disparos es conexa es-to terminaría la demostración por el teorema 2.11, peroprecisamente la discontinuidad de a(t) (que es la hipóte-sis) puede hacer que la imagen no sea conexa (ver, porejemplo, las Figuras 2.1C) y 2.1D)). Pudiera ser entoncesque la imagen de la función de disparos es una unión aje-na de intervalos. Consideremos dos intervalos contiguosI1 y I2, I1 a la izquierda de I2, y sean t el extremo dere-cho de I1 y s el extremo izquierdo de I2. Demostraremos acontinuación que
a(t) < a(s): (2.4)
De la demostración del teorema de continuidad se sigueque la función F alcanza un máximo local en t y s es elsiguiente tiempo en el cual F (s) = F (t) (esto es evidenteexaminando las Figuras 2.1C) y 2.1D)).
Para cualesquiera s y t se verifica (lema (2.1))
u(s; t; 0) = e��s (G(s)�G(t)) :
Supongamos nuevamente que t = a(�). La demostraciónde la desigualdad (2.4) consiste esencialmente en com-parar las soluciones u(r; � ; 0), u(r; t; 0) y u(r; s; 0). Por un
18

2.2 Teoremas de regularidad
lado
u(s; � ; 0) = e��s (G(s)�G(�))= e��s (F (s) + e�s � F (�)� e�� )= e��s (F (t) + e�s � F (�)� e�� )= e��s (F (a(�))� F (�) + e�s � e�� )= e��s (e�� + e�s � e�� )= 1
por (2.3), en otras palabras, la solución que da el disparoen t, a partir de � , vuelve a alcanzar el umbral en s. Co-mo u(t; t; 0) = 0 < 1 = u(t; � ; 0), entonces para toda r > t,u(r; t; 0) < u(r; � ; 0), en particular u(s; t; 0) < u(s; � ; 0) = 1.
Por otro lado, como
G(s)�G(t) = F (s) + e�s � F (t)� e�t
= e�s � e�t > 0;
tenemos que u(s; t; 0) = e��s (G(s)�G(t)) > 0. En resumen
0 < u(s; t; 0) < 1;
lo que significa que, partiendo de t, en el tiempo s el sis-tema no dispara aún, por lo tanto a(t) > s. Además, comou(s; s; 0) = 0, u(r; t; 0) > u(r; s; 0) para toda r > s. Por lotanto tenemos que, para toda r > s,
e��rZ r
t
e��g (�) d� > e��rZ r
s
e��g (�) d�;
es decir Z r
t
e��g (�) d� >
Z r
s
e��g (�) d�;
en particularZ a(t)
t
e��g (�) d� >
Z a(t)
s
e��g (�) d�:
19

2. Análisis de la función de disparos
De donde
1 = u(a(t); t; 0)
= e��a(t)Z a(t)
t
e��g (�) d�
> e��a(t)Z a(t)
s
e��g (�) d�
= u(a(t); s; 0);
que significa que, a partir de s, en el tiempo a(t) el sistemaaún no ha disparado, por lo tanto a(s) > a(t): �
20
Capítulo 3
Estimulaciónperiódica
Como se ha dicho, el caso en el que el oscilador recibeuna estimulación externa que varía periódicamente es derelevancia en las aplicaciones. Ejemplo de ello es el mo-delo KHR mencionado en la introducción. La estimula-ción periódica confiere al sistema ciertas propiedades in-teresantes que analizaremos con detalle. En lo que siguesupondremos que el forzamiento es periódico de periodouno. En este caso tenemos que la ecuación diferencial(1.5) tiene un atractor periódico.
3.1. El Atractor PeriódicoTeorema 3.1Supongamos que el forzamiento g(t) es una función perió-dica de periodo 1. Entonces la ecuación diferencial (1.5)tiene una solución '(t); periódica de período uno, que esglobalmente asintóticamente estable y tiene promedio
'0 =g0�;
21
3. Estimulación periódica
donde g0 =Z 1
0
g (s) ds:
Demostración. Se define el mapeo del período
P (�) = u (1; 0; �) :
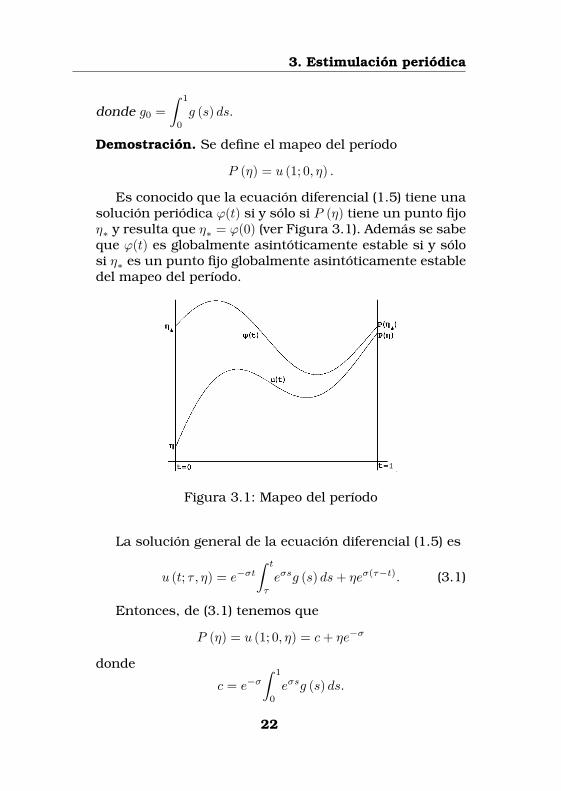
Es conocido que la ecuación diferencial (1.5) tiene unasolución periódica '(t) si y sólo si P (�) tiene un punto fijo�� y resulta que �� = '(0) (ver Figura 3.1). Además se sabeque '(t) es globalmente asintóticamente estable si y sólosi �� es un punto fijo globalmente asintóticamente establedel mapeo del período.
Figura 3.1: Mapeo del período
La solución general de la ecuación diferencial (1.5) es
u (t; � ; �) = e��tZ t
�
e�sg (s) ds+ �e�(��t): (3.1)
Entonces, de (3.1) tenemos que
P (�) = u (1; 0; �) = c+ �e��
donde
c = e��Z 1
0
e�sg (s) ds:
22

3.1 El Atractor Periódico
Por lo tanto P (�) tiene un único punto fijo, ��; dadopor
�� =�c
e�� � 1 :
Por otra parte
dP (�)
d�= e�� < 1 cuando � > 0
y entonces �� es un punto fijo globalmente asintóticamen-te estable del mapeo del período. Entonces la solución pe-riódica
' (t) = u (t; 0; ��) = e��tZ t
0
e�sg (s) ds+ ��e��t
es única (ver la ecuación (3.1)) y es globalmente asintóti-camente estable.
Al expresar el forzamiento g(t) y la solución periódi-ca '(t) de la ecuación diferencial en series de Fourier, setiene
g(t) = g0 +1Xn=1
[an cos(2n�t) + bn sin(2n�t)] (3.2)
'(t) = '0 +
1Xn=1
[�n sin(2n�t) + �n cos(2n�t)] (3.3)
siendo g0 y '0 los valores promedio de g(t) y '(t): Susti-tuyendo los lados derechos de (3.2) y (3.3) en la ecuación(1.5) tenemos que
d'
dt= ��
'0 +
1Xn=1
[�n sin(2n�t) + �n cos(2n�t)]
!
+g0 +1Xn=1
[an cos(2n�t) + bn sin(2n�t)]
Como la derivada de una función periódica es perió-dica pero tiene promedio cero, el desarrollo en series de
23

3. Estimulación periódica
Fourier de la derivada de ' (t) no debe tener término cons-tante. Entonces:
��'0 + g0 = 0;
lo cual implica'0 =
g0�: �
Siendo el atractor periódico asintóticamente estable,naturalmente tiene una enorme influencia sobre las solu-ciones de la ecuación diferencial (1.5) lo cual repercuteen importantes propiedades de la función de disparos.El siguiente resultado explicíta algunas propiedades delatractor periódico.
Teorema 3.2Supongamos que la función g (t) es analítica. Entoncesi) La solución periódica '(t) alcanza sus valores máximosy mínimos sobre la curva u(t) = g(t)
� :ii) El valor promedio de '(t) coincide con el valor promediode g(t)
� :iii) Se tienen las siguientes desigualdades:
m��ng (t)
�� m��n' (t) � m�ax' (t) � m�ax g (t)
�
Si en alguna de ellas se cumple la igualdad, entonces tam-bién se cumple en todas las demás y entonces el forza-miento g (t) y la respuesta ' (t) son constantes y cumplen' (t) � g(t)
� � I:
Demostración. La afirmación i) se sigue del Lema 6.2,inciso 1): La afirmación ii) resulta del Teorema 3.1. Parademostrar iii) vemos que si la igualdad entre el máximo yel mínimo de ' (t) tiene lugar, entonces ' (t) es constantey de la ecuación diferencial (1.5) se sigue que
��' (t) + g (t) = '0 (t) = 0
24

3.2 Topología del Dominio de la Función de Disparos
lo cual implica que g (t) también es constante e igual a�' (t) y supongamos que m��n g(t)� = m��n' (t) = ' (t0). Sig no es constante, entonces por el Lema 6.2, g (t) tieneun punto de inflexión en t, lo que implicaría que g(t)
� noalcanza un mínimo en t0, lo que significa que m��n g(t)� <' (t0) ; por lo tanto g (t) debe de ser constante. �
3.2. Topología del Dominio de la Fun-ción de Disparos
El dominio de a puede ser vacío (Figura 3.2 A)). LasFiguras 3.2 B) y 3.3 A), muestran que también puede serdiscreto. En la Figura 3.2, B) se observa que cualquiercondición inicial en Da produce sucesiones de tiempos dedisparos que tienen, cuando mucho, un sólo elemento.De hecho, las únicas condiciones iniciales para las quepuede haber algún disparo están dadas por los puntosdonde la función periódica asintóticamente estable '(t)es tangente al eje horizontal. En la Figura 3.3, caso B), eldominio de la función a resulta ser la unión de interva-los cerrados. Otra posibilidad es que el Da sea todo R yel sistema dispare desde toda condicion inicial. Los ejem-plos de las Figuras 1.1, 3.2 y 3.3 muestran que Da pue-de ser de los siguientes tipos: R, vacío, discreto, o uniónde intervalos cerrados. A continuación discutiremos lascondiciones que determinan que el dominio de la funciónde disparos sea de cada uno de estos tipos.
Teorema 3.3'(t0) > 1 para algún t0 2 R si y sólo si Da = R:
Demostración (Teorema 3.3). (=)) Sean M = m�ax' (t) ;m = m��n' (t) y por hipótesis M > 1: Sea " = M � 1: En-tonces cualquier curva (t; u (t)) que en el momento t0 distede (t; ' (t)) menos que " tiene componente u (t0) > 1: Porotra parte, como '(t) es un atractor global, dado cualquier
25
3. Estimulación periódica
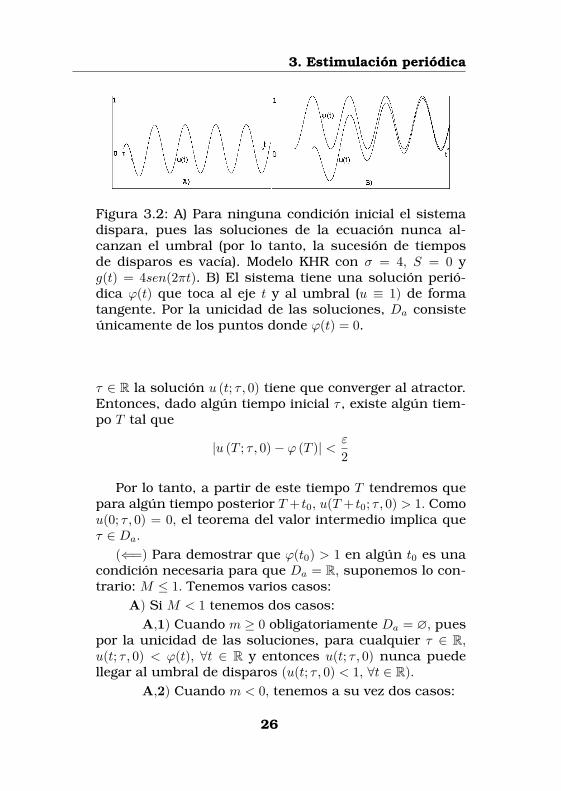
Figura 3.2: A) Para ninguna condición inicial el sistemadispara, pues las soluciones de la ecuación nunca al-canzan el umbral (por lo tanto, la sucesión de tiemposde disparos es vacía). Modelo KHR con � = 4; S = 0 yg(t) = 4sen(2�t). B) El sistema tiene una solución perió-dica '(t) que toca al eje t y al umbral (u � 1) de formatangente. Por la unicidad de las soluciones, Da consisteúnicamente de los puntos donde '(t) = 0.
� 2 R la solución u (t; � ; 0) tiene que converger al atractor.Entonces, dado algún tiempo inicial � , existe algún tiem-po T tal que
ju (T ; � ; 0)� ' (T )j < "
2
Por lo tanto, a partir de este tiempo T tendremos quepara algún tiempo posterior T + t0; u(T + t0; � ; 0) > 1: Comou(0; � ; 0) = 0; el teorema del valor intermedio implica que� 2 Da:((=) Para demostrar que '(t0) > 1 en algún t0 es una
condición necesaria para que Da = R; suponemos lo con-trario: M � 1: Tenemos varios casos:
A) Si M < 1 tenemos dos casos:A;1) Cuando m � 0 obligatoriamente Da = ?; pues
por la unicidad de las soluciones, para cualquier � 2 R;u(t; � ; 0) < '(t); 8t 2 R y entonces u(t; � ; 0) nunca puedellegar al umbral de disparos (u(t; � ; 0) < 1; 8t 2 R):
A;2) Cuando m < 0; tenemos a su vez dos casos:
26

3.2 Topología del Dominio de la Función de Disparos
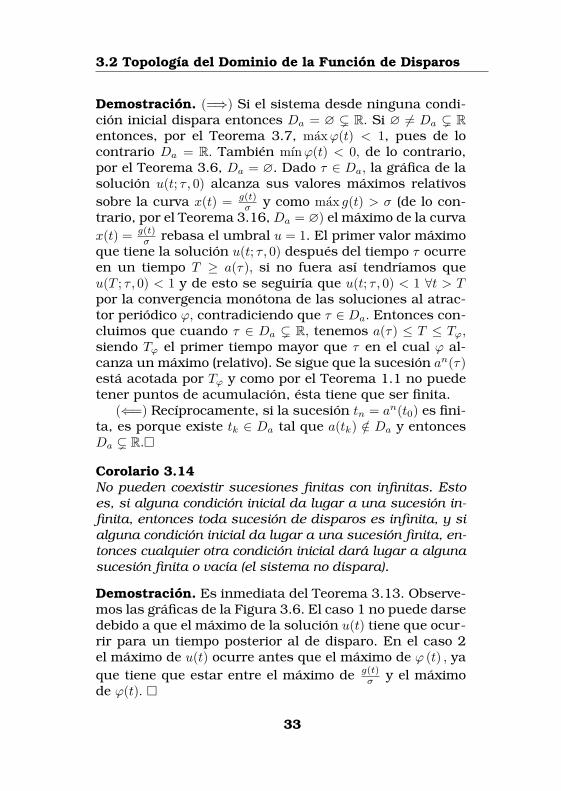
Figura 3.3: Modelo KHR con S = 0;3; H = 4: A) Otra si-tuación en la que el dominio de la función a de disparosresulta ser discreto con � = 1;62: La solución que deter-mina el disparo es tangente en u = 0 y en u = 1. B) Eldominio de la función a resulta ser la unión de intervaloscerrados. Uno de estos se muestra sombreado en el eje det: En este caso � = 1;0853:
A;2;1) Si M = '(t�) � 0; debido a la convergenciamonótona al atractor, 8t � t�
u(t; t�; 0) = (u(t; t�; 0)� '(t)) + '(t) � �M +M = 0
Por lo tanto t� =2 Da:A;2;2) Si M > 0 entonces existen t1 y t2 tales que
'(t1) = '(t2) = 0 y '(t) < 0 8t 2 (t1; t2) : Por la unicidad delas soluciones, si � 2 (t1; t2) tenemos que
u(t; � ; 0) > '(t) 8t 2 R
Siendo '(t) asintóticamente estable, existe �1 tal quesi j�j < �1 entonces
ju(t; t2; �)� '(t)j < 1�M 8t > 0
Por la continuidad de las soluciones respecto a lascondiciones iniciales existe �2 tal que jt2 � � j < �2 implicaque u(t2; � ; 0) < �1:
27
3. Estimulación periódica
Entonces u(t; � ; 0) � '(t) < 1 �M 8t > �; por lo tanto� =2 Da pues u(t; � ; 0) < 1 8t > �:
B) Si M = 1, con argumentos similares a los usadospara probar el inciso A), se demuestra que existen reales� que no están en el dominio de la función de disparos a.�
De los resultados de la sección anterior se sigue que
m�axt2R
'(t) � '0 =g0�
y por lo tanto tenemos que
Corolario 3.4g0 > � es una condición suficiente (pero no necesaria)para que Da = R:
Esta condición es muy útil, ya que puede ser verifica-da sin resolver la ecuación diferencial. Es ilustrada en laFigura 3.4.
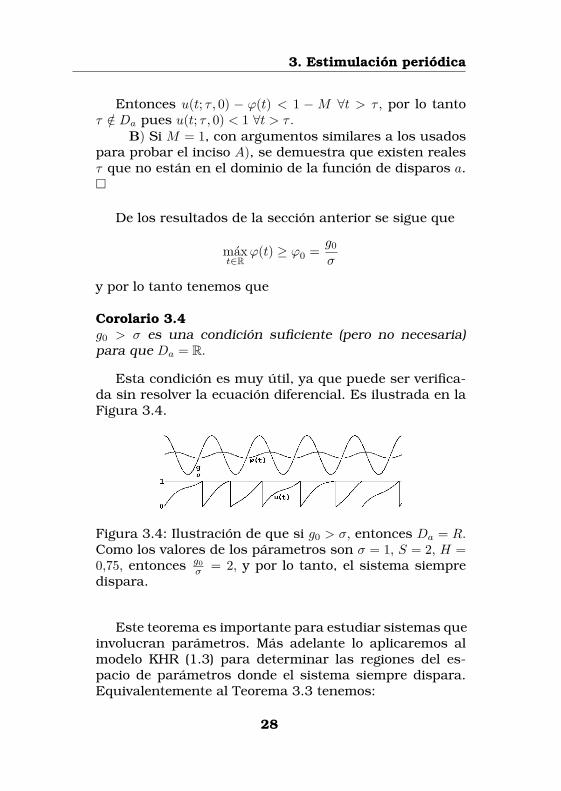
Figura 3.4: Ilustración de que si g0 > �; entonces Da = R:Como los valores de los párametros son � = 1; S = 2; H =0;75; entonces g0
� = 2; y por lo tanto, el sistema siempredispara.
Este teorema es importante para estudiar sistemas queinvolucran parámetros. Más adelante lo aplicaremos almodelo KHR (1.3) para determinar las regiones del es-pacio de parámetros donde el sistema siempre dispara.Equivalentemente al Teorema 3.3 tenemos:
28
3.2 Topología del Dominio de la Función de Disparos
Corolario 3.5Da 6= R si y sólo si m�ax'(t) � 1:
Teorema 3.6Da 6= ? implica que m�ax'(t) > 1 o m��n'(t) � 0:
Demostración. Cuando m�ax'(t) � 1 y m��n'(t) > 0 la uni-cidad de las soluciones implica que, para toda � 2 R;u(t; � ; 0) < 1: Por lo tanto ningún � está en Da: �
El recíproco del Teorema 3.6 es falso (ver Figura 3.5).
Teorema 3.7? 6= Da 6= R implica que m�ax'(t) � 1 y m��n'(t) � 0:
Demostración. Por el Corolario 3.5, m�ax'(t) � 1 es equi-valente a que Da 6= R y por el Teorema 3.6, m��n'(t) � 0 esuna condición necesaria para que Da 6= ?: �
El contraejemplo de la Figura 3.5 también prueba queel recíproco de este Teorema es falso.
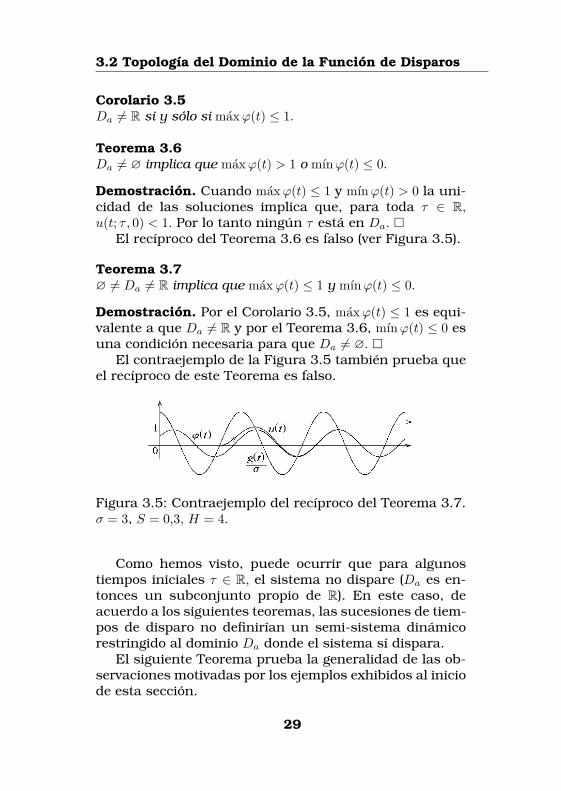
Figura 3.5: Contraejemplo del recíproco del Teorema 3.7.� = 3, S = 0;3; H = 4:
Como hemos visto, puede ocurrir que para algunostiempos iniciales � 2 R; el sistema no dispare (Da es en-tonces un subconjunto propio de R). En este caso, deacuerdo a los siguientes teoremas, las sucesiones de tiem-pos de disparo no definirían un semi-sistema dinámicorestringido al dominio Da donde el sistema sí dispara.
El siguiente Teorema prueba la generalidad de las ob-servaciones motivadas por los ejemplos exhibidos al iniciode esta sección.
29

3. Estimulación periódica
Teorema 3.8Da es cerrado y:i) Da = R óii) Da = ? óiii) Da =
Sn2Z
I + n; donde I es unión finita de intervalos
cerrados.
Demostración. Si Da = R, entonces es cerrado y nohay nada que probar. Supongamos Da 6= R y sea ' elatractor global, por el Teorema 3.3, m�ax' (t) � 1:
Si ' (t) es constante y menor o igual a uno, entoncesninguna solución u (t; � ; 0) puede alcanzar el umbral dedisparos x � 1, ya que no puede intersectar a la soluciónconstante ' (t) : Por lo tanto Da = ?: Supongamos que' (t) no es constante.
Observación 3.9Si � es tal que u (t0; � ; 0) < ' (t0) para alguna t0; si existet1 tal que u (t1; � ; 0) � 1, la función continua h(t) = '(t) �u (t; � ; 0) es tal que h(t0) > 0 y h(t1) � 0 contradiciendo launicidad de las soluciones, por lo tanto, u (t; � ; 0) < 1 paratoda t y, entonces, � =2 Da. Así, si � 2 Da; u (t; � ; 0) � ' (t)para toda t 2 R:
Observación 3.10Sea � 2 Da: Entonces � 2 [a (�)� 1; a (�)] : En efecto, por laProposición 6.3
u (a(�)� 1; � ; 0) > u (a(�); � ; 0) = 1;
de donde si � < a(�) � 1 existe s 2 (� ; a(�) � 1) tal queu (s; � ; 0) = 1 contradiciendo la definición de a(�); por lotanto � � a(�)� 1
Observación 3.11Si Da 6= ? entonces m�ax g
� > 1: Esto se debe a que, si � 2Da entonces u (a (�) ; � ; 0) = 1; de donde esta solución crecede 0 a 1; pero nuevamente debe descender para acercarse
30

3.2 Topología del Dominio de la Función de Disparos
al atractor ' (t) ; lo que implica que tiene un máximo localmayor o igual a 1: Por el Lema 6.2 existe t tal que g(t)
� > 1:
Sea
A =
�t 2 [0; 1] : g (t)
�= 1 y
g
�es decreciente en t
�(ver el Lema 6.2). Por ser g analítica, por la Observación3.9, A es un conjunto finito no vacío, digamos a = ft1; :::; tkg :Todas las soluciones u (�; tj ; 1) alcanzan un máximo lo-cal en el correspondiente tj ; para 1 � j � k; y de en-tre ellas hay una que es la menor, sea v (t) tal solución(u (t; tj ; 1) � v (t) para toda t y para toda j = 1; :::; k) y seat� 2 ft1; :::; tkg tal que v (t�) = 1 y siendo la mayor t con talpropiedad.
Observación 3.12Por la Observación 3.10, si Da 6= ? entonces existe t 2[t� � 1; t�] tal que v (t) = 0:
Continuando con la demostración del Teorema 3.8, te-nemos dos posibilidades:
a) Para toda t < t�; v (t) > 0:b) Existe t < t� tal que v (t) � 0:En el caso a) tenemos Da = ?: En efecto, supongamos
por un momento que Da 6= ? y sea � 2 Da: La soluciónu (t; � ; 0) tiene un máximo mayor o igual a 1 alcanzado enun tiempo mayor o igual a a(�), y después de ese má-ximo debe descender por debajo de la recta x = 1; puesconverge al atractor períodico ': Como todo el descensoocurre en la región por encima de la gráfica de g
� ; es deciru (t; � ; 0) > g(t)
� ; entonces entre a (�) y donde esta soluciónencuentra nuevamente la recta x = 1; se tiene que g
� in-tersecta, en forma descendente, la recta x = 1; digamosen el punto (t0; 1) : Trasladando, si es necesario, la solu-ción u (t; � ; 0) podemos suponer que t0 2 [0; 1]; así tenemosque v (t) � u (t; t0; 1) � u (t; � ; 0) para toda t; por lo tantov (�) � u (� ; � ; 0) = 0. Como t0 � a(�) > � y v (t0) � 1, t0 � t,
31

3. Estimulación periódica
tenemos que � < t� contradiciendo la suposición del casoa).
Es claro que en el caso b) el dominio no es vacío. Seat� � t� tal que u(t; t�; 1) = v(t), es decir, t� es un tiempode disparo por el que pasa la solución v(t). Probaremosque Da es de la forma iii) del Teorema. Para simplificar lanotación, denotaremos por �v (t) a la función v restringidaal intervalo (�1; t�] : Como �v es continua, el conjunto
�v�1 (�1; 0] = ft < t� : v (t) � 0g
es cerrado (en R).Las componentes conexas de �v�1(�1; 0] son intervalos
cerrados (posiblemente degenerados en un punto). Sea
C = ft� � 1 � t < t� : v (t) � 0g= �v�1 (�1; 0] \ [t� � 1; t�] :
C es cerrado, por la Observación 3.12, no vacío y, porser v analítica, por la Observación 3.9, es unión finita deintervalos cerrados. Es claro que C � Da, pues si � 2 C,entonces u(t; � ; 0) � v(t) y por tanto u(t�; � ; 0) � 1:
Si � 2 Da; existe i; entero, tal que el máximo local deu (t; � ; 0) ; justo después de a (�) ; se alcanza en el inter-valo [0; 1] + i de donde la solución u (t; � � i; 0) alcanza unmáximo local en [0; 1]. Por la definición de la solución v;
u (t; � � i; 0) � v (t) ;
de donde v(� � i) � u (� � i; � � i; 0) = 0, por lo tanto � �i 2 �v�1 (�1; 0] : Además, por la Observación 3.10, � � i 2[t� � "� 1; t� � "] ; donde " = 0; 1 o �1: De esto se sigue queDa =
Si2Z[C + i] ; lo cual prueba el Teorema. �
Teorema 3.13Da es un subconjunto propio de R si y sólo si todas lassucesiones de disparo son finitas (el sistema produce sola-mente un número finito de disparos) o vacías (Da es vacíoy el sistema no dispara).
32
3.2 Topología del Dominio de la Función de Disparos
Demostración. (=)) Si el sistema desde ninguna condi-ción inicial dispara entonces Da = ? ( R: Si ? 6= Da ( Rentonces, por el Teorema 3.7, m�ax'(t) < 1, pues de locontrario Da = R: También m��n'(t) < 0; de lo contrario,por el Teorema 3.6, Da = ?. Dado � 2 Da; la gráfica de lasolución u(t; � ; 0) alcanza sus valores máximos relativossobre la curva x(t) = g(t)
� y como m�ax g(t) > � (de lo con-trario, por el Teorema 3.16, Da = ?) el máximo de la curvax(t) = g(t)
� rebasa el umbral u = 1. El primer valor máximoque tiene la solución u(t; � ; 0) después del tiempo � ocurreen un tiempo T � a(�); si no fuera así tendríamos queu(T ; � ; 0) < 1 y de esto se seguiría que u(t; � ; 0) < 1 8t > Tpor la convergencia monótona de las soluciones al atrac-tor periódico '; contradiciendo que � 2 Da: Entonces con-cluimos que cuando � 2 Da ( R; tenemos a(�) � T � T';siendo T' el primer tiempo mayor que � en el cual ' al-canza un máximo (relativo). Se sigue que la sucesión an(�)está acotada por T' y como por el Teorema 1.1 no puedetener puntos de acumulación, ésta tiene que ser finita.((=) Recíprocamente, si la sucesión tn = an(t0) es fini-
ta, es porque existe tk 2 Da tal que a(tk) =2 Da y entoncesDa ( R:�
Corolario 3.14No pueden coexistir sucesiones finitas con infinitas. Estoes, si alguna condición inicial da lugar a una sucesión in-finita, entonces toda sucesión de disparos es infinita, y sialguna condición inicial da lugar a una sucesión finita, en-tonces cualquier otra condición inicial dará lugar a algunasucesión finita o vacía (el sistema no dispara).
Demostración. Es inmediata del Teorema 3.13. Observe-mos las gráficas de la Figura 3.6. El caso 1 no puede darsedebido a que el máximo de la solución u(t) tiene que ocur-rir para un tiempo posterior al de disparo. En el caso 2el máximo de u(t) ocurre antes que el máximo de ' (t) ; yaque tiene que estar entre el máximo de g(t)
� y el máximode '(t): �
33

3. Estimulación periódica
Figura 3.6: Casos del Corolario 3.14.
Los ejemplos, gráficas y teoremas que hemos presen-tado muestran que, para esta clase de osciladores, el do-minio de a es cerrado y pueden darse las posibilidadessiguientes:i) Da es vacío y el sistema nunca dispara.ii) Da es todo R y para toda condición inicial el sistema
produce secuencias de disparos infinitas, que además tien-den a infinito.iii) Da es un subconjunto propio de R (unión de interva-
los cerrados) y el sistema desde algunas condiciones ini-ciales no dispara, y desde las otras sólo puede hacer unnúmero limitado de disparos.
Hemos relacionado la topología del dominio de la fun-ción de disparo a(t) con el atractor periódico '(t), el prob-lema es que para usar estos resultados necesitamos cono-cer esta solución de la ecuación diferencial, cosa no siem-pre posible. En este sentido, es útil tener resultados queno impliquen resolver la ecuación diferencial (1.5), el pri-mer teorema que ofreceremos es un caso particular delTeorema 3.7 (m��n'(t) � 0 implica que m��n g(t) < 0; ver Teo-rema 3.2), pero de acuerdo a lo que hemos dicho, tiene laventaja de ofrecer condiciones (necesarias), directamenteen términos del forzamiento, para garantizar que Da es launión numerable de intervalos cerrados contenidos pro-piamente en R:
Teorema 3.15? 6= Da 6= R implica que m��n g(t) < 0:
34
3.2 Topología del Dominio de la Función de Disparos
Demostración. Supongamos que m��n g (t) � 0: Tenemosvarios casos:
A) Sim�ax g(t)� � 1 entonces por el Teorema 3.2,m�ax' (t) <1 y m��n' (t) > 0: Por la unicidad de las soluciones Da = ?:
B) Si m�ax g(t)� > 1 entonces tenemos dos subcasos:B.1) Si m�ax' (t) > 1; entonces por el Teorema 3.3,
Da = R:B.2) Si m�ax' (t) � 1; es similar al caso A) y en-
tonces Da = ?: �
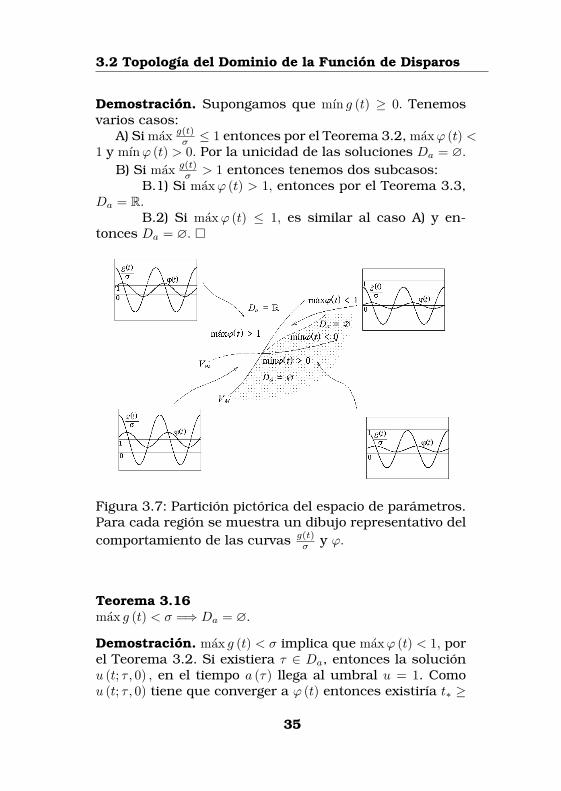
Figura 3.7: Partición pictórica del espacio de parámetros.Para cada región se muestra un dibujo representativo delcomportamiento de las curvas g(t)
� y ':
Teorema 3.16m�ax g (t) < � =) Da = ?:
Demostración. m�ax g (t) < � implica que m�ax' (t) < 1; porel Teorema 3.2. Si existiera � 2 Da, entonces la soluciónu (t; � ; 0) ; en el tiempo a (�) llega al umbral u = 1. Comou (t; � ; 0) tiene que converger a ' (t) entonces existiría t� �
35
3. Estimulación periódica
a (�) tal que _u (t�; � ; 0) = 0 y u (t�; � ; 0) > 1: Del Teorema 3.2tendríamos que g (t�) > �; contradiciendo la hipótesis. �
Lema 3.17Sea f : I �! R una función analítica y sea f�ng1n=1 � Iuna sucesión tal que �n < �n+1 y �n �! ��: Si f (�n) = 08n = 1; 2; :::; entonces f � 0 en I:
Demostración. Probaremos que f (k) (t�) = 0; probandopor inducción que, para cada k 2 Z; existe una suce-sión creciente
��kn1n=1
� I; la cual tiende a ��; tal quef (k) (t�n) = 0:
Para k = 0; esta es justamente la hipótesis del Lema.Supongamos que para k � 0 la hipótesis de inducción escierta. Por el teorema del valor medio, existe un �k+1n con�kn < �
k+1n < �kn+1 tal que
f (k)��kn+1
�� f (k)
��kn�= f (k+1)
��k+1n
� ��kn+1 � �kn
�:
Entonces f (k+1)��k+1n
�= 0 y obviamente �k+1n �! ��:
Por la continuidad de f y de todas sus derivadas, tene-mos que f (k) (t�) = 0 8k = 0; 1; 2; ::: Puesto que f es analíti-ca, esta debe de ser constante e igual a cero. �
Observación 3.18Por el Lema 3.17, g (t) y cualquier solución u (t) de (1.5)no constante tienen un número finito de puntos críticosen cualquier intervalo de longitud uno.
3.3. Sincronización
Interpretamos las sucesiones de tiempo de disparo co-mo las respuesta del oscilador al estímulo g(t). En el casode estimulación periódica un problema importante es larespuesta sincronizada del oscilador con el estímulo. Di-remos que existe una respuesta sincronizada si existen
36

3.4 Las Funciones de Fases de Disparos
enteros positivos p y q y una sucesión de tiempos de dis-paro ftng tales que, para toda n,
tn+q = tn + p:
Puesto en términos de la función de disparos tenemos
aq(tn) = tn + p (3.4)
(el Teorema 3.19, enunciado y probado más adelante, im-plicará que es suficiente que se satisfaga esta condiciónunicamente para t0). Para poder decir que el sistema re-sponde de manera sincronizada al estímulo periódico g(t)la sola existencia de respuestas sincronizadas no es sufi-ciente, se requiere cierta robustez o estabilidad de éstas.El concepto de respuesta sincronizada del sistema seráformalizado en la siguiente sección con la ayuda de lateoría de sistemas dinámicos en la circunferencia.
3.4. Las Funciones de Fases de Dis-paros
Una importante simplificación en el análisis del sis-tema (1.5) y (1.6) resulta al considerar, en lugar de lasucesión de tiempos de disparos, ftng, la sucesión de fa-ses de disparos, fxng; donde xn = tnmod1: Esta no con-tiene toda la información que da la sucesión ftng, peronos permite conocer en qué fases del ciclo del forzamientoocurren los disparos del sistema. Si la sucesión de tiem-pos de disparo está definida para todo n 2 N, la sucesiónde fases de disparo estará bien definida también para to-do n 2 N: La principal información que nos dará la suce-sión de fases de disparo es si el sistema responde de ma-nera sincronizada o no al forzamiento periódico, así co-mo los distintos tipos de sincronía y aperiodicidad quepueden presentarse y las condiciones que los determinan.
En esta sección probaremos que, cuando el sistemadispara desde toda condición inicial, el estudio de las
37

3. Estimulación periódica
propiedades de sincronización de estos sistemas forzadosperiódicamente, se reduce al análisis de un sistema diná-mico en la circunferencia.
Teorema 3.19La función de disparos, a; satisface
Da = Da + 1
donde Da denota el dominio de la función a: Además,
a(t+ 1) = a(t) + 1; 8t 2 Da
Demostración. Es un hecho conocido que si u(t) es solu-ción de (1.5), entonces 8k 2 Z; u(t+k) también es solución.Consideremos � 2 R y observemos que como la soluciónu (t� 1; � ; 0) se anula en t = � + 1; la unicidad de las solu-ciones implica que
u (t� 1; � ; 0) = u (t; � + 1; 0) ; 8t 2 R: (3.5)
Similarmente, tenemos que
u (t+ 1; � ; 0) = u (t; � � 1; 0) ; 8t 2 R: (3.6)
Para demostrar que el dominio de la función a es in-variante bajo la suma de enteros (Da = Da + 1) hay queverificar que
� 2 Da =) � + 1 2 Da (3.7)
� 2 Da =) � � 1 2 Da: (3.8)
Si � 2 Da entonces existe a (�) tal que
u(a (�) ; � ; 0) = 1:
De (3.5) se sigue que
u (a (�) + 1; � + 1; 0) = u (a (�) ; � ; 0) = 1: (3.9)
Entonces � + 1 2 Da y concluimos que la afirmación(3.7) es verdadera. Similarmente usando (3.6) tenemos
38

3.4 Las Funciones de Fases de Disparos
que u (a (�)� 1; � � 1; 0) = 1; entonces � � 1 2 Da y (3.8)resulta también verdadera.
Para demostrar que a(t + 1) = a(t) + 1; por definicióntenemos que a (� + 1) es el mínimo tiempo, mayor que � +1, que cumple que
u (a (� + 1) ; � + 1; 0) = 1: (3.10)
De la ecuación (3.10) inferimos entonces que
a (� + 1) � a (�) + 1:
Por otra parte, de la ecuación (3.5) se sigue que
u (a (� + 1)� 1; � ; 0) = u (a (� + 1) ; � + 1; 0) = 1;
por lo tanto a (�) � a (� + 1) � 1 y entonces a (�) + 1 �a (� + 1) ; lo cual implica que
a (� + 1) = a (�) + 1: �
El caso Da = R es el que interesa para el estudio delfenómeno de la sincronización pues en caso contrario lassecuencias de disparos son finitas (muerte del oscilador,véanse el teorema (3.13) y el corolario (3.14)) o inexisten-tes. Cuando Da = R; el Teorema 3.19 garantiza que lafunción de disparos, a, es un levantamiento de una fun-ción de la circunferencia S1. Si
� : S1 ! S1
es la función de S1 de la cual a es levantamiento, entoncesla sucesión de fases de disparo a partir de una fase inicialx0 está dada por
tnmod1 = xn = �n(x0):
Definición 3.20La función � es llamada la función de fases de disparo.
Así tenemos la siguiente Proposición.
39

3. Estimulación periódica
Proposición 3.21Si para todo tiempo inicial, � ; el sistema dispara, las su-cesiones de fases de disparos son las órbitas de un semi-sistema dinámico en la circunferencia.
De los Teoremas 3.19 y 3.3 se sigue directamente elsiguiente resultado
Proposición 3.22a es el levantamiento de una función de la circunferenciasi y sólo si m�ax'(t) > 1:
La ecuación (3.4)
aq(tn) = tn + p
dice que los tiempos aq(tn) y tn están en fase. Pasando ala función de fases de disparo la ecuación (3.4) se lee
�q(xn) = xn (3.11)
y, por el Teorema 3.19, esta ecuación es válida para to-da n si lo es para cualquiera de ellas, en particular paran = 0. La ecuación (3.11) dice que la sucesión de fasesde disparo fxng es una órbita periódica del semi-sistemadinámico en la circunferencia generado por la función defases de disparo �. Esta observación nos permite hacer lasiguiente definición
Definición 3.23Decimos que el sistema tiene la propiedad de sincroniza-ción o respuesta sincronizada respecto al forzamiento siexiste un abierto de tiempos iniciales, � 2 R, para los cualesla correspondiente sucesión de fases de disparos convergea una sucesión periódica en la circunferencia.
En otras palabras, se tiene respuesta sincronizada siexisten órbitas periódicas asintóticamente estables del se-misistema dinámico en la circunferencia generado por lafunción de fases de disparo.
40

3.5 Teorías de Rotación
3.5. Teorías de Rotación
Si la función de disparos es un homeomorfismo, elnúmero de rotación de Poincaré
�(a) = l��mn!1
an(t)
nmod1 (3.12)
es útil para determinar la existencia de órbitas periódicas[20]. Si este número es un racional p=q, la función tieneórbitas de periodo q; más aún, si la función de fases dedisparo no es una rotación, entonces tiene órbitas perió-dicas atractoras, lo cual hemos definido como tener res-puesta sincronizada por parte del sistema a un estímuloperiódico. Cuando el número de rotación no es racional,entonces todas sus órbitas son aperiódicas y densas entodo el círculo (ergódicas) o en un subconjunto de Can-tor. En este caso no tenemos simcronización del osciladorcon el forzamiento.
Si la función de fases de disparo no es un homeomor-fismo, se requiere generalizar el concepto de número derotación. Cuando la función es continua pero no monó-tona, el límite (3.12) depende del punto donde es calcula-do. Esto nos da un intervalo cerrado números de rotación[14], [17]. Por cada número racional p=q en ese interva-lo existe al menos una órbita periódica de periodo q [19],pero la mayoría de ellas son inestables. Algunos resulta-dos, en su mayoría numéricos, muestran que es posiblela coexistencia de órbitas periódicas atractoras de dife-rente periódo [2], [21], fenómeno conocido como multi-estabilidad; también es posible la existencia de atractorescaóticos y la coexistencia de atractores periódicos y caóti-cos [18]. Es interesante cómo la teoría indica la posibili-dad de tener diferentes sincronizaciones (respuestas sin-cronizadas) dependiendo da la fase inicial, con respectoal forzamiento, de la condición inicial del oscilador. Másaún, cabe la posibilidad de tener osciladores forzados concoexistencia de respuestas sincronizadas con respuestascaóticas. Sin embargo, estas posibilidades quedan exclui-
41

3. Estimulación periódica
das por los Teoremas de continuidad e inyectividad 2.8 y2.11 (cf. comentario después del Teorema 2.11).
Si la función de fases de disparo es monótona pero nocontinua, el número de rotación queda también definidopor un límite análogo a (3.12). En este caso se tiene unavez más que, si � 2 Q, entonces existen órbitas periódi-cas atractoras, y si � =2 Q las órbitas son densas en unconjunto de Cantor [15]. Aquí, como en el caso de homeo-morfismos, número de rotación racional implica sincroni-zación. Esta situación es posible en los MAL, a diferenciadel caso de funciones continuas no monótonas.
Otros modelos de Osciladores de Integracion y Disparomás generales que el MAL tienen la posibilidad de tenerfunciones de disparo continuas y no monótonas, e inclu-sive de tener funciones de disparo que no son ni contin-uas ni monótonas [6]. Hasta donde sabemos, no existeen la literatura una teoría o resultados computacionalespara el caso en que la función de la circunferencia noes ni monótona ni continua, salvo el Teorema 2.12, quese refiere a una clase muy restringida de funciones dedisparo. Algunos experimentos computacionales realiza-dos en el laboratorio de Dinámica no Lineal de la UNAMsugieren la posibilidad de multiestabilidad en clases másamplias de funciones de disparo no continuas ni inyecti-vas.
De acuerdo a los resultados de estas teorías de ro-tación, para estudiar las propiedades de sincronizaciónde un sistema de Integración y Disparo periódicamenteforzado, hacen falta elementos, como los descritos en estetrabajo, que permitan conocer la extensión del dominio ylas propiedades de regularidad (continuidad e inyectivi-dad) de la función de fases de disparo.
42
Capítulo 4
Modelos conParámetros
La ecuación diferencial (1.5) que determina el modelode integración y disparo que estamos estudiando tiene,de entrada, un parámetro, la razón de acumulación �.Comúnmente el forzamiento de un sistema involucra unaserie más de parámetros, �2; :::; �n, lo que nos da una fa-milia de sistemas dependiente de n parámetros
_u(t) = ��u(t) + g(t; �);
junto con la condición de salto
u(t+) = 0 si u(t) = 1;
donde � = (�1; :::; �n) es un vector de parámetros, con �1 =�.
4.1. Regiones de regularidad
El comportamiento dinámico de los sistemas y las pro-piedades de sus funciones de disparos dependen de los
43
4. Modelos con Parámetros
parámetros,de los cuales dependerá también, en el ca-so de estimulación periódica, el atractor periódico: ' ='(t;�): Las ecuaciones m�ax j'(t;�)j = 1 y m��n j'(t;�)j = 0determinarán variedades VM y Vm de codimensión 1 en elespacio de parámetros (ver Figura 3.7). Cada una de es-tas variedades dividirán el espacio de parámetros en dosregiones. Por el Teorema 3.3, de un lado de la variedadVM tendremos la región del espacio de parámetros dondese cumple la condición m�ax j'(t;�)j � 1 y en esta regióntendremos que Da es vacío o la unión numerable de in-tervalos cerrados cuya unión está contenida propiamenteen R: Del Teorema 3.6 se sigue que
m�ax j'(t;�)j � 1 y m��n j'(t;�)j > 0 (4.1)
implica que Da = ?: Entonces tenemos que del lado deVm donde m��n j'(t;�)j > 0 se cumplirá que Da = ?: Comolas condiciones 4.1 no son necesarias para que Da = ?(el recíproco del Teorema 3.6 no es válido) entonces, paragarantizar que ? 6= Da 6= R deben cumplirse las condi-ciones 4.1 más alguna otra condición adicional.
Ejercicio 4.1Un análisis de la Figura 3.5 sugiere una forma en queesta condición podría formularse, discutirla.
Ejercicio 4.2Dar condiciones necesarias y suficientes para que el Dasea discreto.
Así mismo, las condiciones de continuidad (Teorema2.8) e inyectividad (Teorema 2.11) determinan las varie-dades
g (t; �) = �
yg (t; �) = 0;
que dividen el espacio de parámetros en regiones dondela función de disparo es o no continua, o es o no inyecti-vamente, respectivamente.
44

4.2 Lenguas de Arnold
4.2. Lenguas de Arnold
Es sabido que las regiones del espacio de parámetrosdonde los números de rotación de una familia de fun-ciones de la circunferencia son racionales p
q , llamadaslenguas de Arnold, corresponden a sistemas dinámicosque tienen órbitas periódicas atractoras de periodo q. Másfinamente, el cociente p
q , indica la existencia de órbitasde período q que envuelven p veces a la circunferencia.Hablamos entonces de la existencia de atractores periódi-cos de índice (q; p).
Como hemos dicho, la existencia de atractores periódi-cos del semi-sistema dinámico en la circunferencia deter-minado por la función de fases de disparo, es la propiedadde sincronización del oscilador con respecto al forzamien-to. Si la función de fases de disparo tiene atractores deíndice (q; p), decimos que se tiene una sincronización q : pdel sistema, lo que significa que el oscilador produce qdisparos en el tiempo que el estímulo externo realiza pciclos [8].
Es conveniente trazar diagramas de bifurcaciones quedesplieguen las lenguas de Arnold, pero para un oscila-dor definido por la ecuación diferencial 1.5, las funcionesde fases de disparo generalmente resultan inaccesiblesanalíticamente. Esto dificulta el análisis de las propieda-des de sincronización de estos sistemas y obliga a usaruna combinación de métodos analíticos con simulacionesnuméricas para poder hacer una clasificación cualitativade los posibles comportamientos dinámicos.
Las lenguas de Arnold pueden obtenerse computacio-nalmente utilizando el siguiente resultado:
Proposición 4.3Una función � de la circunferencia tiene una órbita periódi-ca de índice (q; p) si y sólo si existen x 2 S1 y m; n enteros
45

4. Modelos con Parámetros
positivos tales que
am (x)� [am (x)] = an (x)� [an (x)] (4.2)
[am (x)]� [an (x)] = p (4.3)
m� n = q (4.4)
con a un levantamiento de �.
Demostración. Si hacemos m = q; n = 0; entonces de lacondición de resonancia
fq (x) = x+ p;
se obtiene
fq (x)� [fq (x)] = x� [x]= x+ p� [fq (x)] ;
de aquí que[fq (x)]� [x] = p:
Por otra parte, si existe x y enteros positivos m;n talesque
fm (x)� [fm (x)] = fn (x)� [fn (x)] ;m� n = q;
[fm (x)]� [fn (x)] = p;
entonces, como m = q + n; se tiene
fm (x) = fn+q (x) = fn (fq (x))
= fn (x)� [fn (x)] + [fm (x)] :
Si definimos
� [fn (x)] + [fm (x)] = p;
y = [fn (x)]
entoncesfq (y) = y + p
46
4.2 Lenguas de Arnold
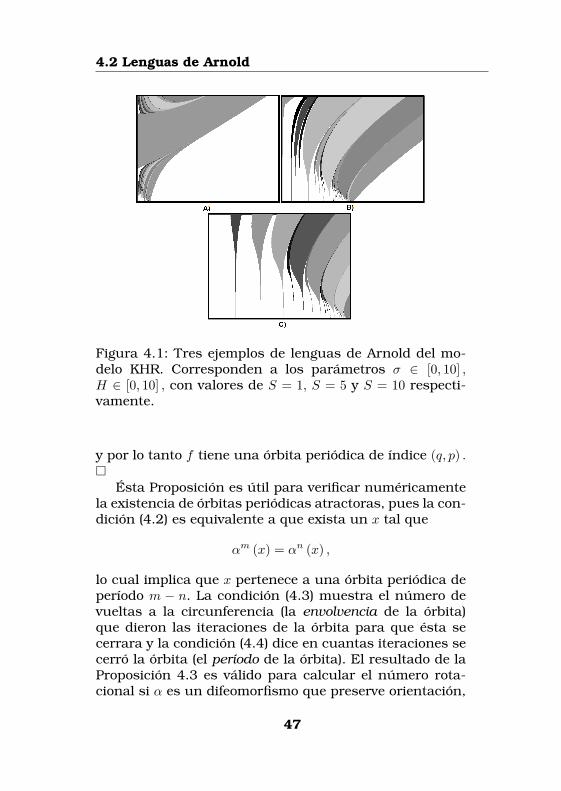
Figura 4.1: Tres ejemplos de lenguas de Arnold del mo-delo KHR. Corresponden a los parámetros � 2 [0; 10] ;H 2 [0; 10] ; con valores de S = 1; S = 5 y S = 10 respecti-vamente.
y por lo tanto f tiene una órbita periódica de índice (q; p) :�
Ésta Proposición es útil para verificar numéricamentela existencia de órbitas periódicas atractoras, pues la con-dición (4.2) es equivalente a que exista un x tal que
�m (x) = �n (x) ;
lo cual implica que x pertenece a una órbita periódica deperíodo m � n. La condición (4.3) muestra el número devueltas a la circunferencia (la envolvencia de la órbita)que dieron las iteraciones de la órbita para que ésta secerrara y la condición (4.4) dice en cuantas iteraciones secerró la órbita (el período de la órbita). El resultado de laProposición 4.3 es válido para calcular el número rota-cional si � es un difeomorfismo que preserve orientación,
47
4. Modelos con Parámetros
pero aún si � no es un homeomorfismo, la existencia delas condiciones de la Proposición nos garantiza la exis-tencia de alguna órbita atractora de índice (q; p).
En base a la Proposición 4.3 el equipo del Laboratoriode Dinámica no Lineal (LDNL) de la UNAM ha diseñadoun algoritmo para el cálculo y despliegue gráfico de laslenguas de Arnold de un MAL. En los diagramas de laFigura 4.1 se muestran diferentes cortes de las lenguasen el espacio de parámetros tridimensional del modeloKHR, la zonas vacias en la parte inferior derecha de lasdos primeras figuras corresponden a regiones donde eldominio de la función de disparos no es todo R, y puedenser cotejadas con la Figura 5.4 del siguiente capítulo.
Las sucesiones de disparos de la Figura 4.2 muestrandiferentes sincronizaciones del oscilador para algunos pa-rámetros elegidos de las lenguas correspondientes. Si nohay sincronización, todas las sucesiones de fases fxng,serán aperiódicas, excepto posiblemente las que tienentiempos iniciales � en un conjunto denso en ninguna parte.La Proposición 2.12 implica que las lenguas son conjun-tos ajenos, lo que significa que no hay multiestabilidad.Sin embargo, para otras familias de funciones en la cir-cunferencia es posible tener multiestabilidad y, en tal ca-so, las lenguas se pueden intersectar (ver [21]).
En [12] se demuestra que, en familias que dependensuavemente de los parámetros, en la región del espacio deparámetros donde las funciones de la circunferencia sondifeomorfismos, el conjunto de parámetros con númerode rotación irracional tiene medida positiva; por otro la-do, en la región donde las funciones no son continuaslas lenguas son densas [3] Por esta razón, en la región dehomeomorfismos, que esta delimitada por las condiciones(5.10), las lenguas de Arnold aparecen como ralas, mien-tras que en la región donde no son continuas éstas sondensas en el espacio de parámetros, como muestran lasimágenes de la Figura 5.4.
48

4.2 Lenguas de Arnold
Figura 4.2: A) Se muestra una sucesión de disparos delmodelo KHR con sincronización (1:1). Los valores de losparámetros son � = 2;929688; S = 2;96875; H = 1: B) Semuestra una sincronización (1:2). Los valores de los pa-rámetros son � = 1;650391; S = 2;921875; H = 1: C) Semuestra una sincronización (2:1). Los valores de los pa-rámetros son � = 0;097656; S = 2; H = 5;015625:
49

Capítulo 5
El modelo KHR
Vamos ahora a aplicar la teoría general desarrolladaen los capítulos anteriores al ejemplo paradigmático delmodelo KHR de neuronas de integración y disparo. Esteejemplo tiene la ventaja de que es posible calcular explíci-tamente el atractor periódico, por lo que resulta ser muyilustrativo de las propiedades generales de los oscilado-res de integración y disparo, de hecho la mayoría de lasfiguras de este trabajo se obtuvieron de este modelo.
Recordemos que el modelo KHR involucra tres pará-metros no negativos, �; S y H. Al resolver la ecuación di-ferencial (1.3) por medio del método de variación de pará-metros, se obtiene la solución general:
u(t) = e��t�S
�e�t (5.1)
+He�t (� cos(2�t) + 2� sin(2�t))
�2 + 4�2+K
�:
Definimos la función
X(t) = � cos(2�t) + 2� sin(2�t):
Entonces, reemplazando X(t) en (5.1), tenemos
u(t) =S
�+
H
�2 + 4�2X(t) +Ke��t: (5.2)
51

5. El modelo KHR
Aplicando la condición inicial u(�) = 0 se tiene:
S
�+
H
�2 + 4�2X(�) +Ke��� = 0:
Por lo tanto
u(t; � ; 0) =S
�+
H
�2 + 4�2X(t) +K0e
��t
con
K0 =
��S�� H
�2 + 4�2X(�)
�e�� :
Esta ecuación diferencial tiene una única solución pe-riódica, '(t); que es globalmente atractora, la cual se hacepatente en la expresión 5.2 al hacer t muy grande. Portanto, la expresión para dicha solución es
'(t) =S
�+
H
�2 + 4�2X(t):
Por medio de la identidad trigonométrica
sin (2�t+ �) = sin (2�t) cos� + sin� cos (2�t)
obtenemos la expresión simplificada
'(t) =S
�+
Hp�2 + 4�2
sin(2�t+ �); (5.3)
dondesin� =
�p�2 + 4�2
:
5.1. Condición de Disparos
De acuerdo con el Teorema 3.3 tenemos la siguientedicotomía: si
m�ax' (t) > 1;
52

5.2 Condición de Continuidad
el sistema dispara una vez que ha sido establecida cual-quier condición inicial (Da = R); mientras que si
m�ax' (t) � 1;
para algunas condiciones, el sistema no dispara o pro-duce secuencias finitas de disparos.
Para el modelo KHR, por la ecuación (5.3)
m�ax' (t) =S
�+
Hp�2 + 4�2
y la condiciónS
�+
Hp�2 + 4�2
= 1 (5.4)
define una superficie contenida en el espacio de paráme-tros. En la ecuación (5.4) podemos despejar a H en tér-minos de S y �:
H(�; S) =
�1� S
�
�p�2 + 4�2: (5.5)
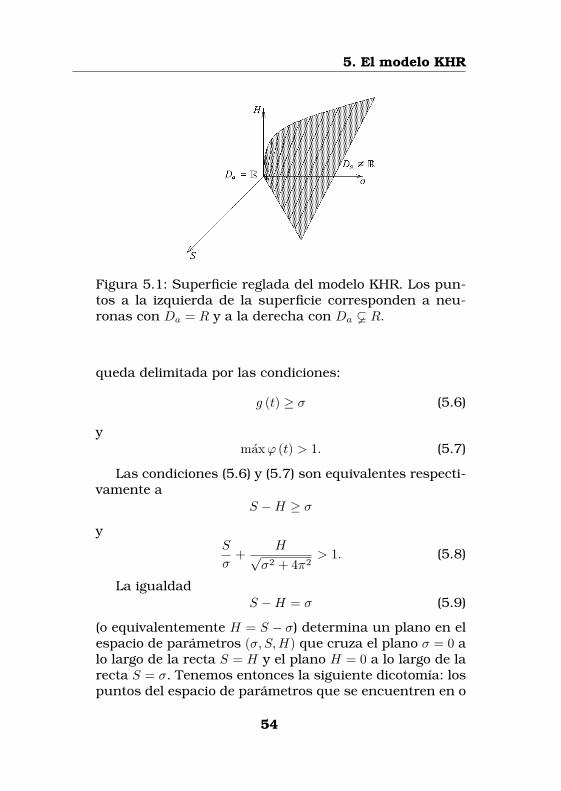
La gráfica de H(�; S) es una superficie reglada: ha-ciendo � = constante en la ecuación (5.5) vemos que Hdepende linealmente de S (ver (5.1)). Cualquier punto delespacio de parámetros (�; S;H) que se encuentre del ladode esta superficie reglada donde m�ax' (t) > 1; determinaun sistema que produce sucesiones de disparos infinitas(Da = R) : Del otro lado de la superficie reglada e inclusosobre ella tenemos que m�ax' (t) � 1 y por lo tanto ten-dremos que el sistema no dispara (Da = ?) o para algunascondiciones no dispara y para otras produce solamenteuna serie finita de disparos.
5.2. Condición de Continuidad
Por el Teorema 2.8, la región del espacio de paráme-tros donde la función de disparos a es continua en todo R
53
5. El modelo KHR
Figura 5.1: Superficie reglada del modelo KHR. Los pun-tos a la izquierda de la superficie corresponden a neu-ronas con Da = R y a la derecha con Da R:
queda delimitada por las condiciones:
g (t) � � (5.6)
ym�ax' (t) > 1: (5.7)
Las condiciones (5.6) y (5.7) son equivalentes respecti-vamente a
S �H � �
yS
�+
Hp�2 + 4�2
> 1: (5.8)
La igualdadS �H = � (5.9)
(o equivalentemente H = S � �) determina un plano en elespacio de parámetros (�; S;H) que cruza el plano � = 0 alo largo de la recta S = H y el plano H = 0 a lo largo de larecta S = �. Tenemos entonces la siguiente dicotomía: lospuntos del espacio de parámetros que se encuentren en o
54
5.3 Condición de Inyectividad
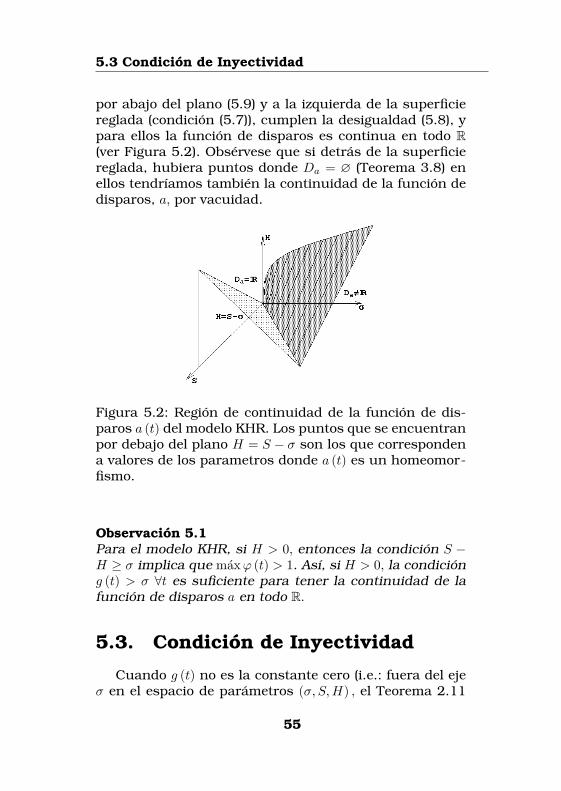
por abajo del plano (5.9) y a la izquierda de la superficiereglada (condición (5.7)), cumplen la desigualdad (5.8), ypara ellos la función de disparos es continua en todo R(ver Figura 5.2). Obsérvese que si detrás de la superficiereglada, hubiera puntos donde Da = ? (Teorema 3.8) enellos tendríamos también la continuidad de la función dedisparos, a; por vacuidad.
Figura 5.2: Región de continuidad de la función de dis-paros a (t) del modelo KHR. Los puntos que se encuentranpor debajo del plano H = S � � son los que correspondena valores de los parametros donde a (t) es un homeomor-fismo.
Observación 5.1Para el modelo KHR, si H > 0; entonces la condición S �H � � implica que m�ax' (t) > 1. Así, si H > 0; la condicióng (t) > � 8t es suficiente para tener la continuidad de lafunción de disparos a en todo R:
5.3. Condición de Inyectividad
Cuando g (t) no es la constante cero (i.e.: fuera del eje� en el espacio de parámetros (�; S;H) ; el Teorema 2.11
55

5. El modelo KHR
garantiza que todos los puntos (�; S;H) del espacio de pa-rámetros para los cuales S � H > 0 y S
� +Hp
�2+4�2> 1;
determinan un sistema con función de disparos a inyec-tiva. Esto nos garantiza que todo punto (�; S;H) que estéa la izquierda de la superficie reglada (m�ax' (t) > 1), y nosobre ella, que cumpla la condición g (t) � 0; determinaun sistema con a inyectiva en todo R. Entonces los pun-tos (�; S;H) que están sobre, o bajo, el plano
S = H
determinan sistemas con a inyectiva (Figura 5.3).
Figura 5.3: Región de inyectividad de la función de dis-paros a (t) del modelo KHR. Los puntos que se encuentranpor debajo del plano H = S son los que corresponden avalores de los parametros donde a (t) es inyectiva.
5.4. Partición del Espacio de Pará-metros
Hasta ahora hemos visto que el espacio puede ser di-vidido en regiones que se encuentran arriba o abajo de
56

5.4 Partición del Espacio de Parámetros
las variedades descritas anteriormente. Estas variedades,al intersectarse, determinan regiones en el espacio de pa-rámetros �, en donde la función de disparos tiene carac-terísticas cualitativamente diferentes.
Figura 5.4: Partición del espacio de parámetros del mode-lo KHR.
En la Figura 5.4 se muestran cinco regiones I, II, III,IV, V determinadas por las superficies determinadas porlas condiciones discutidas anteriormente para el caso delmodelo KHR. En estas regiones el sistema tiene las si-guientes propiedades:
I. a es un homeomorfismo en R:
S
�+
Hp�2 + 4�2
� 1 y S � � � H (5.10)
II: a es discontinua e inyectiva en R:
S
�+
Hp�2 + 4�2
� 1 y S � H
III: a es discontinua y no inyectiva en R:
S
�+
Hp�2 + 4�2
� 1 y S < H
57

5. El modelo KHR
IV: Da es un subconjunto propio de R (vacío o uniónde intervalos).
S
�+
Hp�2 + 4�2
< 1 y S < H
V: Da = ?:
S
�+
Hp�2 + 4�2
< 1 y S � H
58
Capítulo 6
Apéndice. Laceroclina y lassoluciones de laecuación diferencial
En este apéndice presentamos algunas propiedades delas soluciones de la ecuación diferencial (1.5) necesariaspara el análisis de las funciones de disparo.
Recordemos la siguiente definición del cálculo diferen-cial.
Definición 6.1Llamamos un punto crítico de la gráfica de una funciónderivable f : R �! R a un punto (tc; f (tc)) que cumplef 0 (tc) = 0:
Lema 6.2Sea g analítica y no constante y sea u (t; t0; �) la solucióngeneral de la ecuación (1.5) con � > 0: Entonces (ver Figura6.1), se cumplen las siguientes afirmaciones:
59

6. Apéndice. La ceroclina y las soluciones de la ecuacióndiferencial
Figura 6.1: Representación pictórica en A) y en B) de lasposibilidades para los casos del inciso 2.a) y en C) y en D)para los casos del inciso 2.b) del lema 2.5.
1) Los puntos críticos de toda solución u (t; t0; �) ; se encuen-tran sobre la gráfica de la función g(t)
� y recíprocamente,todo punto sobre la gráfica de g(t)
� es un punto crítico dealguna solución de la ecuación (1.5).2:a) g(t)
� es creciente (decreciente) alrededor de tc si y sólo
si u�t; tc;
g(tc)�
�alcanza un mínimo (máximo) local en tc:
2:b) g(t)� tiene un máximo (mínimo) local en tc si y sólo si
u�t; tc;
g(tc)�
�es decreciente (creciente) alrededor de tc y
este es un punto de inflexión de la solución:
Demostración. La afirmación del inciso 1) es válida de-bido a que la curva u = g(t)
� es la ceroclina de la ecuación(1.5). De hecho, si (tc; u (tc)) es un punto crítico de unasolución u (t) ; entonces u0 (tc) = 0; luego
0 = ��u (tc) + g (tc)
es decir
u (tc) =g (tc)
�;
por lo tanto el punto (tc; u (tc)) está en la gráfica de g(t)� :
60

Recíprocamente consideremos la solución u�t; tc;
g(tc)�
�;
entonces
u0�tc; tc;
g (tc)
�
�= ��u
�tc; tc;
g (tc)
�
�+ g (tc)
= ��g (tc)�
+ g (tc)
= 0:
2:a) Observemos primero que si u (t) es solución de laecuación diferencial, entonces u (t) es analítica y, 8k 2 N;k � 1; y 8t 2 R;
u(k) (t) = ��u(k�1) (t) + g(k�1) (t) :
Se sabe que si f : R �! R es analítica y existe t 2 Rtal que f (n) (t) = 0 para todo n � 1; entonces f (t) es cons-tante, por lo tanto, si f (t) es analítica y no es constante,entonces 8t 2 R; 9n 2 N; n � 1 tal que
f (n) (t) 6= 0:
Más aún, supongamos que en un punto particular t0, elmenor natural n para el cual la derivada de orden n esmayor que uno; si n es par, se tiene un mínimo o un má-ximo local, dependiendo de si la derivada es positiva onegativa respectivamente; si n es impar entonces es unpunto de inflexión y la función es creciente o decreciente,nuevamente dependiendo de si la derivada es positiva onegativa, respectivamente.
Supongamos ahora que u (t) = u�t; tc;
g(tc)�
�alcanza un
mínimo (máximo) local en tc: Debemos mostrar que g escreciente (decreciente) en tc. Como u (t) es analítica y noes constante, existe n � 1 tal que
u(k) (tc) = 0; 1 � k < 2n (6.1)
u(2n) (tc) > 0�u(2n) (tc) < 0
�61

6. Apéndice. La ceroclina y las soluciones de la ecuacióndiferencial
Entonces, como u(k) (tc) = ��u(k�1) (tc)+g(k�1) (tc) paratodo k � 1; tenemos
g(k) (tc) = 0; 0 � k < 2n� 1 (6.2)
g(2n�1) (tc) > 0�g(2n�1) (tc) < 0
�Si n > 1, tc es un punto de inflexión de g (t) ; pero, en
cualquier caso, g (t) crece (decrece) alrededor de tc: Su-pongamos ahora que g (t) es creciente (decreciente) alre-dedor de tc; entonces tenemos las condiciones (6.2), lascuales implican (6.1) y estas a su vez implican que la so-lución u
�t; tc;
g(tc)�
�alcanza un mínimo (máximo) local en
tc: La demostración del inciso 2:b) es análoga. �Tenemos también la siguiente importante observación
sobre el comportamiento asintótico de las soluciones
Lema 6.3Si u (t; 0; �1) ; u (t; 0; �2) son soluciones, de la ecuación dife-rencial (1.5) entonces
ju(t; 0; �1)� u (t; 0; �2)j = e��t ju (0; 0; �1)� u(0; 0; �2):j
Demostración. Se sigue de que las soluciones de la ecua-ción diferencial (1.5) son
u (t; 0; �) = e��t�Z t
0
e�sg (s) ds+ �
��
Se sigue de este Lema que todas las soluciones se vanacercando exponencialmente conforme el tiempo avanza.
62
Bibliografía
[1] A. Guzmán. “Dinámica Generada por Homeomorfis-mos del Círculo”. Tesis Profesional. UNAM, 1988.
[2] P.L. Boyland, Bifurcations of Circle Maps: ArnoldTongues, Bistability and Rotation Intervals, Commun.Math. Phys. (1986) 353-381.
[3] R. Brette. Dynamics of one-dimensional spiking neu-ron models. J Math Biol 48(1): 38-56. 2004.
[4] H. Carrillo, Frank C. Hoppensteadt. Unfolding anElectronic Integrate-and-Fire Circuit. Biological Cy-bernetics. Volume 102, Number 1 / January, 2010.
[5] H. Carrillo Calvet, F. Ongay Larios, J. R. Guzmán.Dinámica de las Iteraciones de la Función de Arnold.Aportaciones Matemáticas. XXVI Congreso Nacionalde la Sociedad Matemática Mexicana. 1994.
[6] H. Carrillo, F. Ongay. On the firing map of a gene-ral class of forced integrate and fire neurons, Math.Biosciences, 172 (2001) 33-53.
[7] Humberto Carrillo Calvet, Miguel Angel MendozaReyes y Fernando Ongay Larios. Integrate-and-FireNeurons and Circle Maps. WSEAS Transactions onBiology and Biomedicine, Issue 2, Vol. 1, April 2004,287-293.
63

BIBLIOGRAFÍA
[8] S. Coombes, P. C. Bressloff. Mode-locking andArnold tongues in integrate-and-fire neural oscilla-tors, Physical Review E, Vol 60, 2086-2096. 1999.
[9] I. E. Díaz Bobadilla. “Sistemas Dinámicos en la Cir-cunferencia”. Tesis Profesional. UAEM 1996.
[10] E. Salinas. “Modelación y Simulación de las Oscila-ciones del Potencial Eléctrico de una Neurona”. Tesisde Licenciatura, Facultad de Ciencias, UNAM, 1992.
[11] L. Glass, M. Mackey. “From Clocks to Chaos. TheRithms of Life”. Princeton University Press. 1988.
[12] Herman, M. Measure de Lebesgue et nombre de rota-tion. Lecture Notes in Math, vol 597, Berlin, Springer,1977, pp 271-293
[13] J.R. Guzmán. “Sistemas Dinámicos en la Circunfe-rencia: Aplicaciones a Teoría de Números y Mod-elación de Neuronas”. Tesis de Maestría, Facultad deCiencias, UNAM, 1994.
[14] R. Ito, Rotation Sets are Closed, Math. Proc. Cam-bridge Philos. Soc. 889 (1981) 107-111.
[15] J. P. Keener. Chaotic Behavior in Piecewise Continu-ous Difference Equations. Trans. AMS 26 (1980). pp589-604.
[16] J. P. Keener, F. C. Hoppensteadt, J. Rinzel. Integrate-and-Fire Models of Nerve Membrane Response to Os-cillatory Input. SIAM J. APPL. Math. Vol. 41, No. 3,Diciembre 1981. pp. 503-517.
[17] S. Newhouse, J.Palis, F.Takens, Bifurcations andStability of Families of Diffeomorphisms, Inst. HautesEtudes Sci. Publ. Math. 57 (1983) 5-71.
[18] G.C. Martínez-Meckler, R. Mondragón, R. Pérez,Basin structure invariance of circle maps with bistabledynamics, Phys. Review A 3, 33 (1986) 2143-2145.
64
BIBLIOGRAFÍA
[19] M. Misiurewicz, Periodic Points of Maps of Degree Oneof a Circle, Ergodic Theory Dynamical Sys. 2 (1982)221-227.
[20] Z. Nitecki. Differentiable Dynamics. “An Introduc-tion to the Orbit Structure of Diffeomorphisms”. TheM.I.T. Press. 1971.
[21] R. Pérez, L. Glass. Biestability. Period Doubling Bifur-cations and Chaos in a Periodically Forced Oscillator.Physics Letters 90 A 9: 441-443 (1982).
[22] A. Rescigno, R. B. Stein, R. L. Purple, R. E. Poppele.A Neuronal Model for the Discharge Patterns Producedby Ciclic Inputs. Bulletin of Mathematical Biophysics.Vol. 32, 1970. pp. 337-353.
65