Neuro fuzzy control, general concepts
27
Control NeuroBorroso ITBA - 31.58 Proyectos Mecatrónicos
-
Upload
santiago-lopez -
Category
Documents
-
view
251 -
download
0
description
General concepts of neuro-fuzzy control, benefits, algorithms
Transcript of Neuro fuzzy control, general concepts
ControlNeuroBorroso
ITBA - 31.58 Proyectos Mecatrónicos

Combinación Neuronal y Borrosa
REDES NEURONALES:
�Se entrenan a sí mismas por aprendizaje a partir de conjuntos de datos !!, pero ….
El conocimiento está implícito, oculto.
ITBA - 31.58 Proyectos Mecatrónicos
�El conocimiento está implícito, oculto.
LOGICA BORROSA
�El conocimiento es explícito!!, pero ….
�No se pueden entrenar con datos. Todo debe ser explícito.

Combinación Neuronal y Borrosa
Las REDES NEURONALES pueden aprender de los datos, y las soluciones con LÓGICA BORROSA son fáciles de verificar y optimizar
ITBA - 31.58 Proyectos Mecatrónicos
optimizar
Control Neuronal + Borroso:
CONTROL NEUROBORROSO
Redes Neuronales enControl Borroso
APRENDIZAJE:
�No Supervisado
Identificación de variables lingüisticas, conjuntos borrosos y estructuras en datos
ITBA - 31.58 Proyectos Mecatrónicos
conjuntos borrosos y estructuras en datos
�Supervisado
Modificación de reglas y de Funciones de Pertenencia
Pedro
Nota adhesiva
neural network training

Redes Neuronales - Aprendizaje
Parámetros comunes a los procedimientos de aprendizaje supervisado:
�Tasa o Velocidad de Aprendizaje
Procedimiento de actualización
ITBA - 31.58 Proyectos Mecatrónicos
�Procedimiento de actualización
�Neuronas “triunfantes”
�Criterio de Terminación
�Secuencia de uso de muestras

Redes Neuronales - Aprendizaje
�Tasa o Velocidad de Aprendizaje- Es el parámetro de entrenamiento global
- El valor de este parámetro define el largo del “paso” de aprendizaje
ITBA - 31.58 Proyectos Mecatrónicos
del “paso” de aprendizaje

Redes Neuronales - Aprendizaje
�Procedimiento de Actualización- Las Tasas de Aprendizaje uniformes no son
siempre adecuadas
- Alternativas:
ITBA - 31.58 Proyectos Mecatrónicos
- Alternativas:
* Ajuste individual de tasa
* Tasa de aprendizaje aleatoria (para evitar mínimos locales)
Redes Neuronales - Aprendizaje
�Neuronas “triunfantes”- Cambios de pesos simultáneos pueden
incrementar el error en muestras anteriores
- La actualización de las “mejores neuronas”
ITBA - 31.58 Proyectos Mecatrónicos
- La actualización de las “mejores neuronas” protege al aprendizaje anterior
- Actualización de una sola neurona “triunfadora”=> Aprendizaje Competitivo
Pedro
Nota adhesiva
those more efficient in providing the right solution

Redes Neuronales - Aprendizaje
�Criterio de Terminación- Todo proceso iterativo necesita un criterio
de terminación
- Alternativas:
ITBA - 31.58 Proyectos Mecatrónicos
- Alternativas:
* Número de Iteraciones
* Error promedio acotado
* Error máximo acotado
* Combinación de los anteriores
Redes Neuronales - Aprendizaje
�Secuencia de uso de muestras- La elección y secuencia de las muestras del
conjunto afecta el proceso de aprendizaje
- Alternativa:
ITBA - 31.58 Proyectos Mecatrónicos
- Alternativa:
* Acceso Secuencial
* Acceso Aleatorio
Pedro
Nota adhesiva
inputs
Redes Neuronales - Aprendizaje
Parámetros comunes a los procedimientos de aprendizaje supervisado:
�Tasa o Velocidad de Aprendizaje
�Procedimiento de actualización
ITBA - 31.58 Proyectos Mecatrónicos
�Procedimiento de actualización
�Neuronas “triunfantes”
�Criterio de Terminación
�Secuencia de uso de muestras

Ejemplo de Diseño Neuroborroso:Controlador de Temperatura
�Error de Temperatura (ET)=Tfinal - Tactual
�Se dispone de un Conjunto de Datos deMuestrasobtenido de la realidad
ITBA - 31.58 Proyectos Mecatrónicos
PLANTA(Calentador,
Recinto)
CONTROLADORBorroso
Temp
Ciclo de Trabajo (%)TE ; dTE/dt
Muestrasobtenido de la realidad

Control Neuro Borroso;¿Cuándo debería ser usado?
� Si no puede fácilmente formularse un modelo matemático adecuado del problema.
� Si existen alinealidades, limitaciones de tiempo o parámetros múltiples.
ITBA - 31.58 Proyectos Mecatrónicos
tiempo o parámetros múltiples.
� Si se tiene un conocimiento apriori del problema (experto) o si puede ser adquirido durante el proceso de diseño.
�Si se tiene un Conjunto Completo de Datos de Muestrasdel problema

Control Neuro Borroso;
Metodología de Diseño
ITBA - 31.58 Proyectos Mecatrónicos
Metodología de Diseño

Control NeuroBorroso;Problema
- Para un controlador borroso se necesita un “buen” experto
- Para un controlador neuroborroso se necesita un “buen” Conjunto de Datos
ITBA - 31.58 Proyectos Mecatrónicos
necesita un “buen” Conjunto de Datos
�¿Que sucede si tiene Datos Redundantes?�¿Qué sucede si tiene Datos Inconsistentes?

Control NeuroBorroso;Problema
�¿Datos Redundantes?Consecuencia:
- Se incrementa el tiempo de entrenamiento para lograr la convergencia
ITBA - 31.58 Proyectos Mecatrónicos
lograr la convergencia
- La performance del sistema en los casos inusuales será baja
�SOLUCIÓN:
- Agrupación de muestras (“Clustering”)
Pedro
Nota adhesiva
keeping the redundant data

Control NeuroBorroso;Problema
�¿Datos en Conflicto, Inconsistentes?Consecuencia:
- El proceso de aprendizaje promedia entre inconsistencias para minimizar el error total.
ITBA - 31.58 Proyectos Mecatrónicos
inconsistencias para minimizar el error total.
- Con inconsistencias grandes el resultado es pobre.
� SOLUCIÓN:
- Remoción de inconsistencias durante el proceso de “Clustering”

Control NeuroBorroso;Metodología de Diseño
Procedimiento:
�Definición del Sistema:variables lingüísticas, reglas
�Optimización “Off-Line”: análisis
ITBA - 31.58 Proyectos Mecatrónicos
�Optimización “Off-Line”: análisis interactivo con datos o modelo
�Optimización “On-Line”:análisis interactivo en la planta
� Implementación:generación de código de uP/uC utilizado en el controlador

Control Neuro Borroso;Definición del Sistema - Estructura
�Preprocesamiento de Datos
� “Borroneado:”
- Elección de Variables Lingüísticas
- Elección de Conjuntos Borrosos
ITBA - 31.58 Proyectos Mecatrónicos
- Elección de Conjuntos Borrosos
- Definición de Conjuntos de Pertenencia
� Inferencia Borrosa:
- Elección de Reglas no modificables
- Elección de Reglas sujetas a aprendizaje

Control Neuro Borroso;Definición del Sistema - Estructura
� “Desborroneado:”
- Elección de Variables Lingüísticas
- Elección de Conjuntos Borrosos
ITBA - 31.58 Proyectos Mecatrónicos
- Elección de Método (CoM, MoM, CoG)

Control NeuroBorroso;Metodología de Diseño
Procedimiento:
� Definición del Sistema:variables lingüísticas, reglas
�Optimización “Off-Line”: análisis
ITBA - 31.58 Proyectos Mecatrónicos
�Optimización “Off-Line”: análisis interactivo con datos o modelo
�Optimización “On-Line”:análisis interactivo en la planta
� Implementación:generación de código de uP/uC utilizado en el controlador

Control NeuroBorroso;Optimización
�Aprendizaje sobre Reglas: hasta obtener un subconjunto de reglas de DoS razonable
�Aprendizaje sobre Variables de Entrada (y/o salida):hasta obtener Errores Máximo
ITBA - 31.58 Proyectos Mecatrónicos
(y/o salida):hasta obtener Errores Máximo y Promedio adecuados
�Reintento con otros métodos de aprendizaje (en caso de resultados inadecuados)
Pedro
Nota adhesiva
training the system with the weight of the rules (Dos). This must be done when there is no expert rules
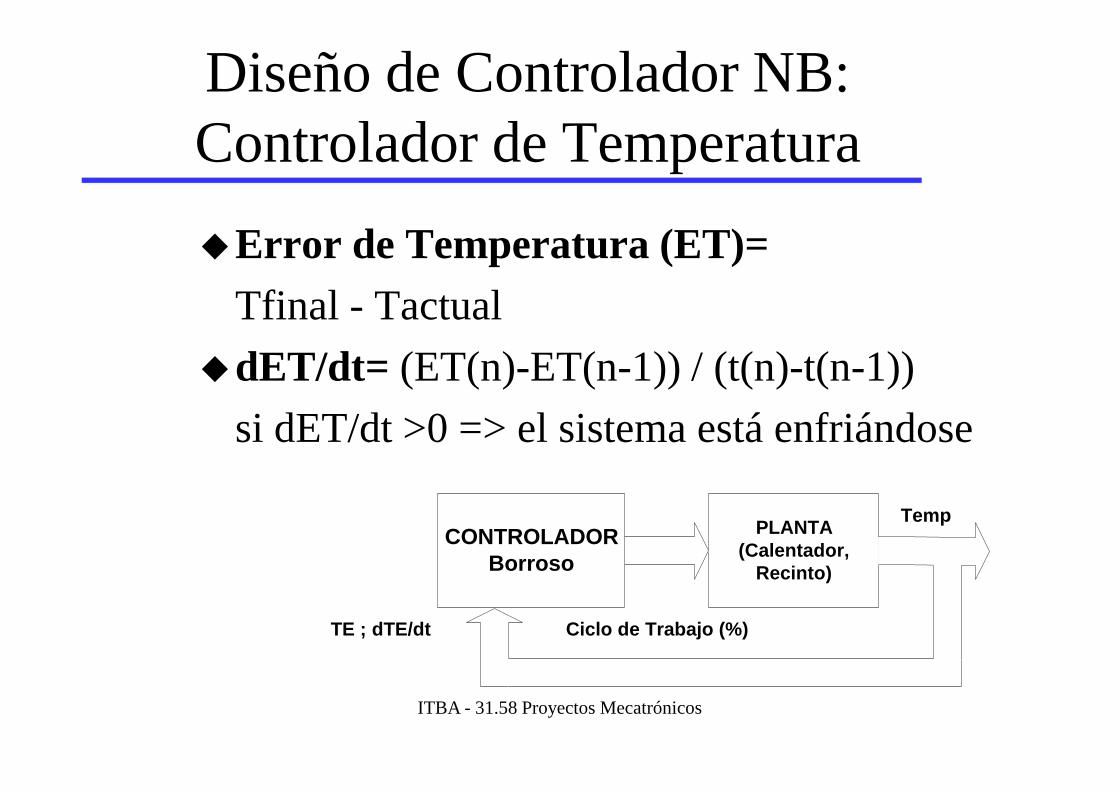
Diseño de Controlador NB:Controlador de Temperatura
�Error de Temperatura (ET)=Tfinal - Tactual
�dET/dt= (ET(n)-ET(n-1)) / (t(n)-t(n-1))
ITBA - 31.58 Proyectos Mecatrónicos
PLANTA(Calentador,
Recinto)
CONTROLADORBorroso
Temp
Ciclo de Trabajo (%)TE ; dTE/dt
si dET/dt >0 => el sistema está enfriándose
Control Neuro-Borroso;Metodología de Diseño
IMPORTANTE:
�Cuando se tienen DATOS RELEVANTES OBTENIDOS DE LA EXPERIENCIA, los mismos SON “SAGRADOS” (no se
ITBA - 31.58 Proyectos Mecatrónicos
mismos SON “SAGRADOS” (no se cambian), y el SISTEMA se debe AFINAR MODIFICANDO LAS REGLAS NO EXPERTAS, y las FUNCIONES DE PERTENENCIA.
Pedro
Nota adhesiva
the expert rule is removed form training

Controladores Neuro Borrosos;
ITBA - 31.58 Proyectos Mecatrónicos
Resumen
Controladores Neuro Borrosos�Un sistema de CONTROL NEUROBORROSO
puede APROXIMAR cualquier SISTEMA ALINEAL MULTIVARIABLE.
�El CONTROLADOR NEUROBORROSO
ITBA - 31.58 Proyectos Mecatrónicos
�El CONTROLADOR NEUROBORROSO TENDRÁ una REPRESENTACIÓN LINGÜÍSTICA en vez de matemática.
�La EXPERIENCIA HUMANA y los DATOS EXPERIMENTALES pueden ser usados directamente para el diseño del sistema.

Controladores Neuro Borrosos
�Los DATOS TÍPICOS pueden usarse PARA producir un SISTEMA BORROSO (ej.: con la herramienta FuzzyTECH)
�Los DATOS de la REALIDAD pueden ser
ITBA - 31.58 Proyectos Mecatrónicos
�Los DATOS de la REALIDAD pueden ser TRANSFORMADOS EN TÍPICOS USANDO técnicas de AGRUPAMIENTO (“Clustering”)











![[Consulta] Lógica Fuzzy](https://static.fdocuments.ec/doc/165x107/55cf932c550346f57b9c6530/consulta-logica-fuzzy.jpg)