Nº 35 - Junio 2011 Revista de Teledetección · Juan Carlos JIMÉNEZ MUÑOZ Unidad de Cambio...
117
Nº 35 - Junio 2011 R e v i s t a d e Teledetección REVISTA DE LA ASOCIACIÓN ESPAÑOLA DE TELEDETECCIÓN AET ASOCIACIÓN ESPAÑOLA DE TELEDETECCIÓN
Transcript of Nº 35 - Junio 2011 Revista de Teledetección · Juan Carlos JIMÉNEZ MUÑOZ Unidad de Cambio...

Nº 35 - Junio 2011
R e v i s t a d eTeledetecciónR E V I S TA D E L A A S O C I A C I Ó N E S P A Ñ O L A D E T E L E D E T E C C I Ó N
A E TA S O C I A C I Ó N
E S PA Ñ O L A
D E T E L E D E T E C C I Ó N

SUMARIO
Consejo de Redacción y Junta Directiva de la AET............................................................................................. 1
Editorial ................................................................................................................................................................... 2
Información y Normas para los autores ................................................................................................................ 3
ARTÍCULOS CIENTÍFICOS
• Comparación de la temperatura de la superficie del mar calculada a partir de datos AVHRR y MODIS.C. Robles-González, N. López Gordillo, A. Fernández-Renau, A. García-Sevilla y J. Santana-Suárez....... 5
• Utilización del sensor de imagen Airborne Hyperspectral Scanner (AHS) para la cartografía de bosquesde Sargassum muticum en la Ría de Vigo (Galicia).G. Casal, J. A. Domínguez, N. Sánchez-Carnero y J. Freire ............................................................................ 17
• Evaluación de distintos métodos de medida de la irradiancia atmosférica descendente en el infrarrojo tér-mico.V. García Santos,E. Valor, M. Mira, C. Coll, J. M. Galve y V. Caselles ........................................................... 23
• Efecto de la atmósfera en la resolución óptica de la Z/I Digital Mapping Camera.L. Martínez, M. E. Soler, F. Pérez y R. Arbiol ................................................................................................... 32
• Delimitación de zonas forestales afectadas por vendaval mediante fotogrametría.R. Riera ................................................................................................................................................................ 41
• Airborne soil moisture determination at regional level: a data fusion mission approach for Catalan territory.F. Martín, J. Corbera, J. F. Marchan, A. Camps y A. Aguasca ......................................................................... 47
• Aplicación de técnicas de teledetección y GIS sobre imágenes quickbird para identificar y mapear indi-viduos de peral silvestre (Pyrus bourgeana) en bosque esclerófilo mediterráneo.S. Arenas, J. F. Haeger y D. Jordano.................................................................................................................. 55
• Estimación de la reflectividad superficial mediante datos del sensor aéreo AHS y comparación con elproducto MODIS en la campaña CEFLES2.J. A. Sobrino y B. French .................................................................................................................................... 72
CASOS PRÁCTICOS
• Aplicación de técnicas de teledetección para la gestión y control del pago de ayudas agrícolas en España.J. M. Vidal Serrano.............................................................................................................................................. 80
• A MODIS generated land cover mapping of Honduras: a base-line layout to create a national monitoring center.S. Rivera, J. L. Lowry, A. J. Hernández, R. Douglas Ramsey, R. Lezama y M. Velázquez ............................. 94
• ¿QUIÉN ES QUIÉN?: La Unidad de Observación del Territorio del Instituto Geográfico Nacional ........ 109
• TESIS DOCTORAL: Estimación de parámetros térmicos mediante datos de alta frecuencia temporal: aplicación al sensor MSG2/SEVIRI .................................................................................................................. 112

DirectorJosé Antonio SOBRINODep. de Física de la Terra i Termodinámica. Facultat de Física. Universidad de Valencia. C/ Dr. Moliner, 50.46100 Burjassot (Valencia). Tel.: 96 354 31 15. Fax: 96 354 30 99. [email protected]
SecretarioJuan Carlos JIMÉNEZ MUÑOZUnidad de Cambio Global Dep. de Física de la Terra i Termodinámica. Facultat de Física. Universidad deValencia. C/ Dr. Moliner, 50. 46100 Burjassot (Valencia). Tel.: 96 354 37 81. Fax: 96 354 32 02. [email protected]
Consejo de RedacciónCarlos GARCÍA-SOTO. Instituto Español de Oceanografía (IEO).Pablo J. ZARCO-TEJADA. Instituto de Agricultura Sostenible (IAS)-CSIC. Córdoba.Juan DE LA RIVA. Universidad de Zaragoza. Zaragoza.Vicente CASELLES. Universidad de Valencia. Valencia.Santiago CASTAÑO FERNÁNDEZ. Universidad Complutense. Madrid.Jordi FONT. Institut de Ciéncies del Mar (CSIC). Barcelona.Graciela Isabel METTERNICHT. Universidad de Australia del Sur (Adelaide).Alfredo R. HUETE. Universidad de Arizona.Carlos M. DI BELLA. CIRN-INTA Castelar y Universidad de Buenos Aires. Argentina.
Comité CientíficoFernando CAMACHO. Earth Observation Laboratory Spin-off Universidad de [email protected] DE MIGUEL. Laboratorio de Teledetección INTA. [email protected] KARNIELI. The Remote Sensing Laboratory. Jacob Blaustein Institute for Desert Research. BenGurion Univ. of the Negev. Sede Boker Campus 84990, ISRAEL. [email protected]ín LOBO, Institut de Ciències de la Terra «Jaume Almera». CSIC. [email protected] MORALES. Dpto. de Ciencias Ambientales y Recursos Renovables. Universidad de [email protected] MOYA. LMD-CNRS. Ecole Polytechnique. [email protected]çoise NERRY. LSIIT/TRIO. Louis Pasteur University. [email protected] OLIOSO. INRA-Avignon. [email protected] PLAZA. Dpto. Tecnología Computacional y Comunicaciones. Universidad de [email protected] ROUJEAN. Meteo-France. [email protected] ROYER. Département de géomatique appliquée. Université de [email protected] SHI. Institute for Computational Earth System Science. University of [email protected] VERHOEF. Dept. of Water Resources. ITC. [email protected]úl ZURITA-MILLA. Laboratory of geo-information science and remote sensing. Wageningen [email protected]
Junta DirectivaPresidente: FEDERICO GONZÁLEZ ALONSO. INSTITUTO NACIONAL DE INVESTIGACIÓN YTECNOLOGÍA AGRARIA Y ALIMENTARIA (INIA). Departamento de Protección Forestal. Centro deInvestigación Forestal. Carretera de la Coruña, km 7. 28040 Madrid. Tel.: 91 347 68 28. [email protected]: ABEL CALLE MONTES. UNIVERSIDAD DE VALLADOLID. Laboratorio deTeledetección LATUV. Edificio I+D. Paseo de Belén, 1. 47011Valladolid. Tel.: 98 342 39 52. [email protected]: JUAN JOSÉ PECES MORERA. INSTITUTO GEOGRÁFICO NACIONAL. Servicio deTeledetección. C/ General Ibáñez Íbero, 3. 28003 Madrid. Tel.: 91 597 95 26. [email protected]: CONSUELO GONZALO MARTÍN. UNIVERSIDAD POLITÉCNICA DE MADRIDDepartamento de Arquitectura y Tecnología de Sistemas Informáticos. Campus de MontegancedoBoadilla del Monte. 28660 Madrid. Tel.: 91 336 73 82. [email protected]: SILVIA MERINO DE MIGUEL. UNIVERSIDAD POLITÉCNICA DE MADRID. EscuelaUniversitaria de Ingeniería Técnica Forestal. UD Topografía. Ciudad Universitaria s/n. 28040 Madrid. Tel.: 91 336 76 68. [email protected]: MARÍA DEL CARMEN RECONDO GONZÁLEZ. UNIVERSIDAD DE OVIEDO. Departamento deExplotación y Prospección de Minas. C/ Gonzalo Gutierrez Quirós. 33600 Mieres. Tel.: 98 545 80 [email protected]: SALOMÓN MONTESINOS ARANDA. GEOSYS, SL. Sector Foresta, 23, locales 7 y 8.Tres Cantos. 28760 Madrid. Tel.: 91 279 72 32. Fax: 91 229 83 94. [email protected]
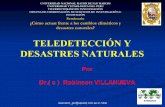
Foto portada: Detalle de la imagen resultado de la clasificación no supervisada cluster k-means. Imagen original (izquierda), y cluster con 20 clases (derecha) donde se aprecia el efecto de la
profundidad en la clasificación, marcado por franjas de diferente coloración de tierra a mar
REVISTA DE TELEDETECCIÓNRevista de la Asociación Española de Teledetección
Depósito Legal: B-9.502.1993ISSN: 1988-8740

Estimados socios y lectores,
En este número 35 de la Revista de Teledetección se publican un total de 8 artículos corres-pondientes a diversas temáticas, entre las que se encuentran la medida de la irradiancia atmosféri-ca descendente en el infrarrojo térmico, la delimitación de zonas forestales afectadas por vendavalmediante fotogrametría, la estimación de la temperatura del mar mediante datos AVHRR y MODIS,la identificación de peral silvestre mediante imágenes Quickbird, el efecto de la atmósfera en la re-solución óptica de una cámara digital aerotransportada, la estimación de la humedad del suelo a ni-vel regional mediante sensores aerotransportados, la estimación de la reflectividad superficial a par-tir de datos del sensor aerotransportado AHS y su comparación con el producto MODIS, y lacartografía de bosques de Sargassum muticum en una ría de Vigo mediante datos AHS.
Este número incluye también la publicación de dos casos prácticos: «aplicación de técnicasde teledetección para la gestión y control del pago de ayudas agrícolas en España» y «A MODISgenerated land cover mapping of Honduras: a base-line layout to create a National MonitoringCenter».
La sección «¿Quién es quién?» corresponde a la Unidad de Observación del Territorio (UOT)del Instituto Geográfico Nacional (IGN), constituida en 2009 unificando en una estructura co-mún los servicios de Teledetección, Fotogrametría, Levantamientos Topográficos, Ocupación delSuelo y Sensores Aerotransportados y Ortoproyección. Entre sus numerosas actividades desta-can los tres Planes Nacionales: PNOA, PNT y SIOSE.
En «Reseñas de Tesis» se incluye una tesis doctoral desarrollada en el seno de la Unidad deCambio Global (UCG) del Laboratorio de Procesado de Imágenes (IPL) perteneciente a la Uni-versidad de Valencia, y dedicada a la estimación de parámetros térmicos mediante datos del sen-sor MSG2/SEVIRI.
Para finalizar, sólo me resta seguir animando a los lectores a enviar sus trabajos a las dife-rentes secciones de la Revista de Teledetección.
José A. SobrinoDirector
Editorial
Asociación Española de Teledetección Revista de Teledetección 35, 2ISSN: 1988-8740

Revista de Teledetección (ISSN: 1988-8740) esuna publicación científico-técnica en la cual sepublican artículos originales de investigación, re-lacionados con las diversas aplicaciones de la Te-ledetección y con su desarrollo metodológico. Ensecciones aparte, se presentan Casos Prácticos quedescriben experiencias prácticas en los que se hautilizado la teledetección para desarrollar pro-yectos de análisis y gestión territorial o para de-sarrollar misiones, sensores o segmentos terres-tres. También, se incluyen recensiones críticas delibros, programas y material docente relacionadocon métodos o aplicaciones de la teledetección,así como resúmenes de tesis doctorales.
Revista de Teledetección es el órgano de expre-sión científica de la Asociación Española de Tele-detección. Se publica ininterrumpidamente desde1993, siendo la publicación de referencia en nues-tro idioma en el ámbito de los desarrollos y aplica-ciones de esta tecnología. Se edita semestralmente.
Los artículos originales de investigación sonsometidos a un proceso de evaluación externa yanónima por pares, por parte de miembros espe-cialistas de la comunidad científica nacional e in-ternacional de teledetección, supervisado y co-ordinado por el Consejo de Redacción. Revistade Teledetección se compromete a comunicar alos autores la aceptación o rechazo de los ma-nuscritos en un plazo de 3 meses.
Revista de Teledetección se encuentra indexa-da en el Catálogo LATINDEX (http://www.la-tindex. unam.mx/) y en las bases de datos ISOCe ICYT (Instituto de Estudios Documentales so-bre Ciencia y Tecnología, IEDCYT-CSIC). A tra-vés del portal de difusión electrónica de revistascientíf icas DIALNET de la Universidad de LaRioja (http://dialnet.unirioja.es/) y del sitio webde la Asociación Española de Teledetección(http://www.aet.org.es/?q=numeros) se puede ac-ceder a los contenidos de la revista, en formato.pdf. Revista de Teledetección forma parte de e-revist@s, una Plataforma Open Access de Re-vistas Científicas Electrónicas españolas y lati-noamericanas (http://www.erevistas.csic.es/). Porúltimo, el sitio web de la Asociación Española deTeledetección (http://www.aet.org.es/) disponede una herramienta de búsqueda que puede apli-
carse a la selección de los contenidos de los nú-meros publicados de la revista.
PRESENTACIÓN DE ORIGINALES
1. ARTÍCULOS
Los artículos deberán ser obligatoriamente ori-ginales e inéditos. Se enviarán en soporte digital(preferentemente Word o compatible). El traba-jo no excederá de 25 páginas (DIN-A4) incluidosresúmenes, figuras, tablas y referencias. Los tra-bajos deberán ir precedidos de resúmenes en es-pañol e inglés, finalizando con las palabras cla-ve. Para facilitar la edición se recomienda escribirlos artículos utilizando la plantilla Word dispo-nible en el siguiente enlace:http://www.aet.org.es/plantillas/plantilla.doc
El Consejo de Redacción seleccionará los ar-tículos en función de su calidad y originalidad.Para desarrollar esta tarea de supervisión, conta-rá con la colaboración de especialistas de la co-munidad científ ica nacional e internacional deteledetección quienes, de forma anónima, infor-marán sobre la conveniencia o no de la publica-ción de los artículos evaluados o, en su caso, so-bre las modificaciones que el autor deberá incluiren el trabajo. La maquetación final del artículose realizará desde la secretaría de la revista, unavez que se haya recibido la versión final del mis-mo, aprobada por el consejo de redacción.
En cualquier caso, es recomendable ajustarsea los siguientes criterios:
• Título en Mayúsculas, centrado. Además deltítulo en español, los autores indicarán el títulodel artículo en inglés.
• A continuación, autores e institución en laque trabajan, dirección y correo electrónico pa-ra el autor principal.
• Resumen / Abstract y palabras clave (mí-nimo de 5).
• Texto principal: los epígrafes principalesirán, sin numerar, en mayúsculas y negritas y lossubepígrafes en minúsculas negritas.
• Las líneas vendrán numeradas correlativa-mente desde el inicio hasta el final del texto.
• Referencias. Tablas. Pies de figura y figu-ras, insertadas en el documento.
Información y normas para los autores
Asociación Española de Teledetección Revista de Teledetección 35, 3-4ISSN: 1988-8740

• Las citas de autor, en el texto, irán en minús-cula (ej. Fernández, 2006 ó Fernández et al., 2005).
• Las tablas y figuras deberán llevar un títuloy estar numeradas consecutivamente. Se indicarásu inserción en el texto con el texto: «Insertar fig.XX». Las figuras pueden insertarse en el texto pa-ra la versión de evaluación, pero se requerirá pos-teriormente remitirlas en ficheros gráficos (tif,jpg), con suficiente resolución (300 ppp o supe-rior). Se debe prestar especial atención a la rotu-lación, para que sean legibles al tamaño final de re-producción. Se pueden incluir figuras en color,aunque conviene considerar que sólo se reprodu-cirán en color para la edición electrónica de la re-vista, mientras serán en blanco y negro para la ver-sión impresa. Las tablas se envierán en unarchivo de Microsoft Excel, evitando insertar fi-guras en ellas.
• Se intentará evitar la inclusión de notas apie de página. En caso necesario, la numeraciónserá correlativa. Se indicarán en el texto comosuperíndices.
Las referencias irán al final del texto del artí-culo y sólo se incluirán las citadas en el texto. Es-tará dispuesta por orden alfabético por el apelli-do del autor o autores, en mayúscula y nombre onombres propios con inicial, seguido de la fecha,título en cursiva, lugar de edición, editorial y nú-mero de páginas (ej: CHUVIECO, E. 2002. Te-ledetección Ambiental, Barcelona, Ariel, 586pags). Los artículos de revista habrán de redac-tarse como sigue: apellidos del autor o autorescon las iniciales de sus nombres propios, fechade edición, título del trabajo, nombre de la revistaen cursiva, número del volumen y/o del fascícu-lo, primera y última página (ej. VENTURINI, V.,RODRÍGUEZ, L. y ISLAM, S. 2007. Metodolo-gía para la estimación de la facción evaporable yla evapotranspiración con productos MODIS. Re-vista de Teledetección. 27: 44-52).
2. PRESENTACIÓN DE CASOSPRÁCTICOS
La revista incluirá una sección que describaexperiencias prácticas en las que se haya utiliza-do la teledetección para desarrollar un proyectode gestión o análisis territorial, desarrollo de mi-siones, sensores, segmentos terrestres, etc. Su ob-jetivo es mostrar ejemplos de cómo la teledetec-ción se emplea en situaciones prácticas.
Estos artículos no se incluirán en el procesode revisión estándar de la revista, sino que seránevaluados por el director de la misma o personaen quien delegue. Seguirán, por lo demás, la mis-ma estructura formal de los artículos, aunque lasreferencias bibliográficas serán más sucintas.
3. CRÍTICAS DE LIBROS O PROGRAMAS
Se incluirán recensiones críticas de libros, pro-gramas o material docente relacionados con mé-todos o aplicaciones de la teledetección, así co-mo resúmenes de tesis doctorales. Se incluirá enlas mismas los datos completos de la obra recen-sionada: ficha bibliográfica del libro, datos de re-ferencia del programa (incluyendo versión, cos-te, dirección de contacto), o de la página webcomentada (incluyendo último acceso), así comolos del autor de la crítica.
Todos los trabajos se enviarán a la siguientedirección: [email protected]
ASOCIACIÓN ESPAÑOLA DE TELEDETECCIÓN
La Asociación Española de Teledetección(AET) se inscribió en el Registro de Asociacio-nes del Ministerio del Interior el 8 de Septiem-bre de 1988 con el número nacional 81537.
Los fines son fomentar, facilitar, aunar y di-fundir los trabajos de investigación interdiscipli-nar en todos los aspectos de la Teledetección enEspaña mediante:
a) Organización de reuniones, periódicas ono, para la exposición y discusión de trabajoscientíficos.
b) Revista, actas, boletines y servicios de in-formación bibliográfica.
c) Organización de cursillos, conferencias ypublicaciones para la difusión de la investigacióncientífica en la relación de la Teledetección.
d) Creación de Grupos temáticos de trabajopara el estudio de problemas concretos.
e) Fomento de las enseñanzas y estímulo dela investigación en relación con las ramas de laciencia vinculadas con Teledetección.
f) Y la ejecución de cualesquiera otros finesen relación con la actividad principal, siempreque sean compatibles con las disposiciones lega-les y con las normas dictadas al efecto por los or-ganismos competentes.
4 Revista de Teledetección (2011) 35, 3-4

Comparación de la temperatura de la superficie del marcalculada a partir de datos AVHRR y MODIS
C. Robles-González*, N. López Gordillo, A. Fernández-Renau, A. García-Sevilla y J. Santana-Suárez
Instituto Nacional de Técnica Aeroespacial. Ctra. de Ajalvir, km 4. 28850 Torrejón de Ardoz
Resumen
Desde 1997, el programa CREPAD (Centro de Recepción, Proceso, Archivo y Distribución de da-tos de Observación de la Tierra) del INTA (Instituto Nacional de Técnica Aeroespacial) facilita gra-tuitamente el acceso a algunos de los productos de observación remota de la Tierra de baja resoluciónmás demandados.
En el marco de este programa se ha realizado una comparación entre la temperatura superficial delmar (TSM) calculada con el software MATIAS (Mar Tierra Atmósfera Software) a partir de datos AVHRR(Advanced Very High Resolution Radiometer) y la calculada con el software SeaDAS (SeaWiFS DataAnalysis System) a partir de datos MODIS (Moderate Resolution Imaging Spectroradiometer) sobre lazona de cobertura de la antena del Centro Espacial de Canarias (CEC). Para ello se han usado todas lasimágenes AVHRR y MODIS de 2008 tomadas con menos de 4 horas de diferencia y en el rango de tem-peratura entre 10°C y 30°C. La comparación de TSM de AVHRR y de MODIS se ha realizado píxel apíxel, de esta comparación obtenemos una imagen diferencia de la que sacamos los datos estadísticos.
Se observó que los resultados menos favorables correspondían a comparaciones con pocos datos yafuera por estar las imágenes muy escoradas, es decir, con ángulos de observación elevados o con mu-chas nubes. Los resultados por tanto se muestran en función del porcentaje de píxeles comparados res-pecto del total. Para aquellas imágenes en las que el porcentaje de píxeles comparados es mayor al30% la diferencia media entre la TSM de AVHRR y de MODIS es de 0,1°C, la desviación típica es de0,5 y la correlación entre las imágenes es de 0.90. En el 61% de los píxeles comparados la diferenciaentre las TSM de ambas imágenes es menor a 0,5°C y en el 82% la diferencia es menor a 0,8°C.
Como en el área de cobertura de la antena hay zonas con muy distintas características en este estu-dio los datos se presentan detallados en unas zonas preestablecidas en CREPAD, estas son denomina-das: África, Alborán, Atlántico, Azores, Canarias, Cantábrico y Mediterráneo.
Palabras clave: TSM, AVHRR, MODIS, CREPAD, ángulo cenital de observación.
Abstract
Inter-comparison of AVHRR and MODIS sea surface temperature
Since 1997, the INTA (National Institute for Aerospace Technology)-CREPAD (Centre for REception,Processing, Archiving and Dissemination of Earth Observation Data) program distributes freely someof the most demanded low-resolution remote sensing products.
In the frame of the CREPAD program a comparison between the SST (Sea Surface Temperature)computed with the MATIAS software from AVHRR data and the SST computed with SeaDAS fromMODIS data has been done and is presented in this paper. Images over the finger print of the CanarySpace Centre (Centro Espacial de Canarias, CEC) acquired in 2008 have been used in this study. Timeacquisition difference between the images to be compared should be lower that 4 hours and thetemperature range should be in between 10°C and 30°C.
In this study less favourable results are observed in images with few pixels compared. These imagesare usually cloudy images or images with the compared area falling in the edge of the image with high
* Autor para la correspondencia: [email protected]: 17-02-10; Aceptado: 04-04-11.
Asociación Española de Teledetección Revista de Teledetección 35, 5-16ISSN: 1988-8740

Introducción
La temperatura de la superf icie del mar(TSM) es un parámetro que juega un papelfundamental en la comprensión de procesostanto oceánicos como atmosféricos (Hough-ton et al., 1990). El conocimiento de la tem-peratura de la superficie del mar es tambiénuna fuente importante de información en losestudios sobre cambio climático (Hutchison etal., 1999; Donlon et al., 2002). Para estudiarlos flujos de energía entre el océano y la at-mósfera y por supuesto también para conocerel balance radiativo global, entre la Tierra y elexterior es imprescindible conocer la tempe-ratura de la superficie del mar. La TSM es tam-bién una importante herramienta para el estu-dio, conservación y explotación de recursosnaturales.
La radiación que llega al sensor provenien-te de la superficie del mar es atenuada por laatmósfera. Por tanto a la hora de calcular laTSM por medio de radiómetros a bordo de sa-télites hay que tener en cuenta este efecto. Va-por de agua, CO2, CH4 o aerosoles son algunosde los componentes atmosféricos que puedeninfluir en la radiación infrarroja que llega a lossatélites. Para corregir dicho efecto se han de-sarrollado varios algoritmos a lo largo de lasúltimas décadas. Anding y Kauth (1970) ob-servaron que la diferencia entre las tempera-turas de brillo en dos bandas del infrarrojo eraproporcional a la cantidad de corrección at-mosférica necesaria. Diferentes algoritmos co-mo los de Walton (1988), McClain et al.(1985), Barton et al. (1989) o Sobrino et al.(1993) entre otros, se han desarrollado desdeentonces para calcular la TSM basándose enesta dependencia lineal. Posteriormente se des-arrollaron algoritmos no lineales (Walton et al.,
1998) para zonas con altas concentraciones devapor de agua o ángulos cenitales grandes.
A partir de medidas obtenidas por radióme-tros a bordo de satélites se puede conocer esteparámetro de forma global y regional. Senso-res como el AVHRR a bordo de los satélitesNOAA y MetOp o el MODIS a bordo de los sa-télites Terra y Aqua han demostrado su granutilidad en este campo.
El proyecto CREPAD lleva desde 1997 cal-culando y proporcionando gratuitamente pro-ductos de observación de la Tierra obtenidos apartir de datos de AVHRR y más tarde de Sea-WIFS y MODIS a usuarios científ icos paraaplicaciones medioambientales. En el caso dela TSM se obtiene a partir de datos AVHRR conun software propio de CREPAD denominadoMATIAS (Mar, Tierra y Atmósfera Software)y que está basado en el algoritmo de McClainet al. (1985).
En un continuo esfuerzo por mantener y ase-gurar una buena calidad de sus productos, enCREPAD se ha validado la TSM calculada apartir de datos AVHRR comparándola tantocon medidas in situ de boyas como realizandouna inter-comparación de las TSM calculadasa partir de datos AVHRR con la TSM derivadade datos MODIS obtenida con el software delibre distribución de la NASA SeaDAS(http://seadas.gsfc.nasa.gov/). Validacionesprevias con datos in situ medidos por boyas dePuertos del Estado y por boyas de la NOAAhan sido realizadas por Robles-González y Fer-nández-Renau (2006). Hay que tener en cuen-ta que en esta validación se compararon datos«bulk» medidos por la boya con datos «skin»que son los que se obtienen a partir de datos desensores remotos. Tanto este estudio comootros estudios previos, por ejemplo Donlon etal. (2002), han demostrado que las diferencias
6 C. Robles-González et al. / Revista de Teledetección (2011) 35, 5-16
satellite zenith angle values. Therefore results have been studied related to the percentage of comparedpixels in each image. Images with more than 30% pixels compared showed a mean SST difference ofabout 0.1°C, the standard deviation was 0.5 and the correlation between AVHRR and MODIS SSTimages was 0.90. The mean SST difference is lower than 0.5°C in 61% of the pixels and lower than0.8% in 82% of the pixels.
The finger print of the CEC covers areas with different behaviour therefore results are shown overpreselected CREPAD areas. Those areas are: Africa, Alborán Sea, Atlantic Ocean, Azores, Canaries,Cantábrico and Mediterranean Sea.
Key words: SST, AVHRR, MODIS , CREPAD, satellite zenith angle.

entre TSMskin y TSMbulk durante el día son sig-nificativas. Por tanto para complementar estavalidación una comparación entre las TSM delos sensores remotos AVHRR y MODIS se hallevado a cabo y se presenta en este artículo.
En la primera parte del artículo se dará unabreve descripción de los dos sensores y de losalgoritmos empleados para calcular la TSM apartir de datos del sensor AVHRR y del sensorMODIS. Posteriormente presentaremos la me-todología de comparación, los resultados y lasconclusiones de este trabajo.
Procesado de datos AVHRR
Características del sensor
El sensor AVHRR/3 a bordo de los satélitesNOAA-17 y 18 es un espectro-radiómetro debanda ancha capaz de medir radiación en 3 ca-nales en el visible e infrarrojo cercano (NIR,Near Infra Red) (0,63, 0,86, 1,6 µm) y otros 3en el infrarrojo térmico (3,74, 11 y 12 µm). So-lo 5 de ellos son adquiridos al mismo tiempo,los canales 3A (1,58-1,64 µm) y 3B (3,55-3,93µm) se alternan de forma que el 3A mide du-rante el día y el 3B durante la noche.
El AVHRR tiene un campo de visión de1,3 × 1,3 miliradianes que dan en la superficieuna resolución espacial en el nadir de1,09 × 1,09 km2 y genera una imagen de 2.048píxeles por línea. El ángulo de visión de cadalínea abarca de –55.4° hasta +55.4° desde elnadir. Cuando este ángulo se mide con respec-to a la normal a la superficie, que incluye lacurvatura de la Tierra puede variar entre ±65°.
Imágenes adquiridas
Hay tres tipos de transmisión de datosAVHRR desde el satélite a Tierra, HRPT (HighResolution Picture Transmission), LAC (LocalArea Coverage) y GAC (Global Area Covera-ge). La transmisión de datos HRPT se realizade forma continua, estos son los datos que sereciben en la Estación Espacial de Canarias yson los que proporciona el programa CREPAD.Los datos LAC se almacenan a bordo y se en-vían a tierra posteriormente. Los datos GAC se
obtienen a partir de los LAC promediando va-lores muestreados.
Actualmente CREPAD genera datos de va-lor añadido derivados del sensor AVHRR a bor-do de los satélites NOAA-17 y NOAA-18 a par-tir del formato L1B ESA-Sharp y dispone deun archivo de datos procesados de los satélitesNOAA-14, 15 y 16. El nivel L1B ESA-Sharpcontiene datos auxiliares y parámetros radio-métricos.
Algoritmos
Uno de los pasos previos a la obtención deproductos es la georreferenciación de las imá-genes. Esta se lleva a cabo siguiendo los proto-colos de georeferenciación de CREPAD. Paraello se utilizan, en primera instancia, datos or-bitales y un conjunto de tie points, dando comoresultado una sub-escena de la imagen que co-rresponde con la zona considerada. Posterior-mente, los datos pasan por dos funciones propiasde IDL, la primera, llamada «Triangulate», quegenera una triangulación del tipo Delaunay y lasegunda denominada «Trigrid» que devuelve unarejilla regular de valores interpolados.
Es necesario también reconocer y eliminarlos píxeles que contengan nubes ya que las nu-bes pueden falsear los resultados. Para elimi-nar los píxeles nubosos, en el marco del pro-grama CREPAD se ha desarrollado unalgoritmo de detección basado en Saunders andKriebel (1998). Este algoritmo se basa en cua-tro tests. En este procedimiento el píxel es con-siderado como nuboso si cualquiera de los 4test da positivo. En este proceso se eliminanlos píxeles más brillantes o más fríos que unvalor límite prefijado, si el cociente entre loscanales 1 y 2 está entre 0,9 y 1,3 o si la homo-geneidad espacial sobre el océano es mayor queun valor límite. En el caso de la temperatura elvalor límite es seleccionado automáticamentey varía dependiendo de la zona y fecha de ad-quisición de la imagen.
Una vez enmascarados los píxeles contami-nados con nubes, MATIAS proporciona datosde TSM basándose en el algoritmo de McClainet al (1985) que usa la siguiente ecuación:
TSM = B11(T11)+B2(T11-T12)++B3(T11-T12)(secθ-1)B4
[1]
Comparación de la temperatura de la superficie del mar calculada a partir de datos... 7

donde T11 y T12 son las temperaturas de brillode los canales 11 y 12 µm en Kelvin; TSM esla temperatura de la superficie del mar en gra-dos centígrados; θ es el ángulo cenital del sa-télite y B1-B4 son coef icientes globales pro-porcionados por la NOAA/NESDIS (NationalEnvironmental Satellite, Data and InformationService) que se pueden encontrar en http://no-aasis.noaa.gov/NOAASIS/ml/sst.html y quese muestran en la Tabla 1.
Procesado de datos MODIS
Características del sensor
MODIS es un instrumento que viaja a bor-do de los satélites TERRA y AQUA de la NA-SA (http://modis.gsfc.nasa.gov/). TERRA via-ja en órbita descendente, cruzando el Ecuadorpor la mañana mientras que AQUA lleva unaórbita ascendente y cruza el Ecuador por latarde.
MODIS es un radiómetro con 36 bandas si-tuadas entre 0,4 µm y 14,4 µm. La resoluciónespacial varia dependiendo de las bandas, dosde ellas tienen una resolución espacial de250 m en el nadir, cinco de 500 m y las 29 res-tantes tienen una resolución de 1 km. MODIStiene un espejo que rota ±55° generando imá-genes de 2.330 km de ancho y proporciona unacobertura total de La Tierra cada uno o dos dí-as. El ángulo cenital de observación medidocon respecto a la normal a la superficie en elpunto de observación varia entre ±65°, al igualque en el caso de AVHRR.
Imágenes adquiridas
Los datos MODIS se procesan a partir delformato L0 utilizando el software SEADAS delibre distribución de la NASA. Este nivel 0 con-tiene datos en bruto recibidos en formato NA-
SA, mientras que el nivel 2 son productos devalor añadido que contienen calibración ra-diométrica y corrección geométrica.
Algoritmos
La descripción del algoritmo usado por SE-ADAS para calcular la TSM viene dada enhttp://oceancolor.gsfc.nasa.gov/DOCS/mo-dis_sst/ . Las ecuaciones usadas son:
Si (T11- T12) ≤ 0.5
TSM = A00+ A01(T11)+ A02(T11- T12)BTSM+A03(T11- T12)(1.0/cosθ-1.0)Si (T11- T12) ≥ 0.9TSM = A10+ A11(T11)+ A12(T11- T12)BTSM+A13(T11- T12)(1.0/cosθ-1.0)
Si 0.5<(T11- T12)<0.9TSMLO = A00+ A01(T11)+ A02(T11- T12)BTSM+A03(T11- T12)(1.0/cosθ-1.0)TSMHI = A10+ A11(T11)+ A12(T11- T12)BTSM+A13(T11- T12)(1.0/cosθ-1.0)T S M = T S M L O + ( ( T 1 1 - T 1 2 ) - 0 . 5 ) / ( 0 . 9 -0.5)(TSMHI-TSMLO)
En este caso las T11 y T12 son en grados cen-tígrados y BTSM es una temperatura base y loscoeficientes Aij son empíricos y pueden variarsegún la fecha y otros parámetros.
Comparación
Se ha realizado la comparación píxel a pí-xel de productos TSM de AVHRR y de MO-DIS. Para esta comparación se han usado ar-chivos de imágenes AVHRR (NOAA17 yNOAA18) y MODIS (AQUA). El periodo deestudio comprende de 01/01/2008 a31/12/2008. Se dispone de una o dos imáge-nes diarias MODIS frente a seis u ocho deAVHRR, por lo que se seleccionan aquellasimágenes de AVHRR que coincidan en fechay área con la de MODIS, eligiendo aquella cu-ya diferencia horaria con el pase de MODISsea el mínimo de entre todas las imágenes en-contradas y nunca superior a 4 horas (IOCCG,2000). Los pases cotejados estarán en la fran-ja horaria de 12:00-16:00 horas. Además seeliminan los píxeles fuera del rango de tem-peratura entre 10°C-30°C.
8 C. Robles-González et al. / Revista de Teledetección (2011) 35, 5-16
Tabla 1. Coeficientes de la ecuación para el cálcu-lo de la TSM
B1 B2 B3 B4
NOAA-17 0,992818 2,49916 0,915103 271,206NOAA-18 1,008410 2,23459 0,736946 276,075

Los productos TSM se generan sistemática-mente sobre unas zonas estándar preestableci-das en CREPAD. Éstas son: África, Alborán,Atlántico, Azores, Canarias, Cantábrico y Me-diterráneo, ver Figura 1. En la Figura 1 semuestra con un círculo amarillo la coberturade la antena del Centro Espacial de Canarias ycon rectángulos de colores las zonas preselec-cionadas por CREPAD. Debido a las diferen-tes características de cada una de estas zonasla comparación se ha hecho independiente-mente en cada una de ellas y por tanto los re-sultados se muestran por zonas. A pesar de es-to también se incluyen los resultados totales dela comparación.
Resultados
Esta comparativa se ha llevado a cabo de dosformas distintas, primero un estudio generalincluyendo todas las imágenes de 2008 quecumplieran los requisitos mencionados en elapartado anterior y el segundo más pormeno-rizado en el que se han seleccionado automá-ticamente imágenes que además de cumplir losrequisitos tuvieran un porcentaje de píxelescomparados mayor al 30%. Los dos procesosse explican a continuación.
En la Figura 2a se presenta la temperaturamedia de las imágenes MODIS en el Eje Xfrente a la de las imágenes AVHRR (Eje Y). Lalínea continua negra representa la línea de ajus-te de los puntos y su ecuación, en este caso elcoeficiente de determinación R2 del ajuste esde 0,947, la línea discontinua es la línea queseguiría el ajuste si este fuera perfecto y semuestra solo como referencia. En este gráficose observa que en algunas de las zonas prese-leccionadas la diferencia de temperaturas en-tre los datos de los sensores AVHRR y MODISes mayor de 1°C y en algunos casos puede lle-gar a casi 8°C. Estudiando estas zonas una auna se vio que casi todos los casos eran imá-genes en las que el área comparable cae en losextremos de la imagen, o imágenes con muchasnubes, siendo el número de píxeles usados enla comparación es muy bajo respecto del totalde píxeles de la zona. Para eliminar estos re-sultados de baja calidad se ha estudiado laTSM, la diferencia de TSM, la desviación tí-
Comparación de la temperatura de la superficie del mar calculada a partir de datos... 9
Figura 1. Zonas preseleccionadas sobre las que CREPAD proporciona imágenes.
y = 0,964x + 0,937R2 = 0,947
8
13
18
23
28
8 13 18 23 28Media MODIS
Med
ia A
VHRR
y = 1,056x – 0,932R2 = 0.983
8
13
18
23
28
8 13 18 23 28Media MODIS
Med
ia A
VHRR
Figura 2. Gráfico de dispersión de puntos en el que se representa la temperatura media de las imágenes MODIS(Eje X) frente a la de las imágenes AVHRR (Eje Y). En la figura a) se presentan todos los puntos mientras que enla figura b) se presentan solo aquellos cuyo porcentaje de píxeles usados en la comparación es mayor al 30%. Lalínea contínua es el ajuste y la línea discontínua es la que daría si el ajuste fuera perfecto.
a) b)

pica y la correlación en función del porcenta-je de píxeles usados en la comparación respectodel total. En la Figura 2b se muestra el mismográfico que el de la Figura 2a pero en este ca-so sólo se han representado las imágenes en lasque el porcentaje de píxeles comparados es su-perior al 30% para eliminar automáticamentelas imágenes de baja calidad. Además, este por-centaje permite un estudio estadístico robustode los resultados al quedar un número suf i-cientes de imágenes sin eliminar. En este casovemos que la dispersión de los puntos es me-nor y que el R2 del ajuste aumenta a 0,983. Es-te porcentaje ha sido seleccionado porque nosparece una cantidad de datos significativa y ra-zonable a la vista de los resultados que semuestran en la Figura 3. En ella se muestran8 gráficas en las que dicho porcentaje se re-presenta en el eje X y en el eje Y se represen-ta la media de las diferencias de la TSM (rom-bo azul), la desviación típica (cuadrado rosa)y la correlación (triángulo amarillo) para cadauna de las 7 zonas preestablecidas (Fig. 3a-g)y otra para el total (Fig. 3h). En ellas se ve quecuanto mayor es el porcentaje de datos com-parados menor es la diferencia de la TSM, me-nor también es la desviación típica mientrasque la correlación aumenta, acercándose a 1.Es decir mejoran los resultados cuando selec-cionamos imágenes con menor número de pí-xeles problemáticos, tales como píxeles nubo-sos o píxeles en los bordes de las nubes. Encambio, en las imágenes con porcentajes de pí-xeles comparados menor a 30% vemos que hay
mucha dispersión, variando los valores de ca-si cero hasta 4 para la desviación típica. Vemostambién que en estos casos la correlación esmuy variable pudiendo llegar a tomar valoresnegativos en algunos casos.
En la Tabla 2 se presentan los resultados dela comparación del año 2008 por zonas en lasque el porcentaje de píxeles comparados es ma-yor a 30%. La columna «Media» presenta losdatos de la diferencia media de TSM al restarlas imágenes. La columna «Desv típica» pre-senta la desviación típica resultante y la co-lumna «Correlación» muestra la relación entrelas imágenes comparadas. Las dos últimas co-lumnas presentan los porcentajes de datos den-tro de un margen de error de ±0,5°C y ±0,8°Crespecto al total de píxeles comparados. La co-lumna N° Img muestra el número de imágenesusadas en la comparación.
En la tabla vemos como los valores mediosvarían entre 0,1°C en la zona de Alborán,Atlántico y Canarias hasta 0,3°C en la zona delMediterráneo. La desviación típica varía entre0,4 y 0,5 y la correlación va desde 0,86 en lazona de Azores hasta 0,93 en el Mediterráneo.
Dos ejemplos de imágenes con alto porcen-taje de datos comparados que han dado exce-lentes resultados se muestran en la Figura 4. Enella se muestra la TSM en la zona del mar Atlán-tico el 6 de marzo de 2008, en la Figura 4a sepresenta la imagen de AVHRR y en la Figura4b la de MODIS. La diferencia horaria entre lospases de NOAA y AQUA es de 44 minutos, ladiferencia de TSM entre los dos sensores es de
10 C. Robles-González et al. / Revista de Teledetección (2011) 35, 5-16
Tabla 2. Estadísticas básicas para la comparación entre TSM obtenida a partir de datos AVHRR y la obte-nida para datos MODIS para las distintas zonas preestablecidas en el Proyecto CREPAD. Sólo se han usa-do las zonas en las que el porcentaje de píxeles comparables es mayor a 30%. En la tabla se muestra la Me-dia, Desviación Típica y la Correlación. Las dos últimas columnas presentan los porcentajes de datos enlos que la diferencia de TSM está dentro de un margen de error de ±0,5°C y ±0,8°C respecto al total de pí-xeles comparados. La columna N° Img muestra el número de imágenes usadas en la comparación
Media Desv típica Correlación 0,50% 0,80% N° Img
África — — — — — —Alborán –0,1 0,5 0,89 69,0 85,4 29Atlántico –0,1 0,5 0,91 60,8 81,3 61Azores –0,4 0,5 0,86 49,7 74,9 35Canarias –0,1 0,4 0,91 72,2 90,3 10Cantábrico –0,2 0,4 0,92 62,2 83,6 14Mediterráneo –0,3 0,4 0,93 63,9 83,0 16
Total –0,1 0,5 0,90 61,0 81,5 165

Comparación de la temperatura de la superficie del mar calculada a partir de datos... 11
África
–10
–8
–6
–4
–2
0
2
4
6
0 5 10 15 20 25 30
Alborán
–5
–4
–3
–2
–1
0
1
2
3
4
0 10 20 30 40 50 60
Atlántico
–3
–2
–1
0
1
2
3
4
0 10 20 30 40 50 60 70 80
Azores
–4
–3
–2
–1
0
1
2
3
4
5
0 10 20 30 40 50 60
Canarias
–8
–6
–4
–2
0
2
4
0 5 10 15 20 25 30 35 40 45
Cantábrico
–3
–2
–1
0
1
2
3
0 10 20 30 40 50 60
Mediterráneo
–8
–6
–4
–2
0
2
4
0 10 20 30 40 50 60 70
TOTAL
10 20 30 40 50 60
–8
–10
–6
–4
–2
0
2
4
6
Media Des Std Correlación
Figura 3. Gráficos de la diferencia media de las temperaturas, la desviación típica y la correlación en funcióndel porcentaje de píxeles usados en la comparación para cada zona: a) África, b) Alborán, c) Atlántico, d) Azo-res, e) Canarias, f) Cantábrico, g) Mediterráneo y h) total.
a) b)
d)
f)
h)
c)
e)
g)

0,1°C, la desviación típica de 0,5, la correla-ción es de 0,92 y el porcentaje de datos com-parados es el 75,3%. Mientras que el la Figura4c y d se ven datos del Mar Cantábrico del 28de septiembre de 2008 también para AVHRR yMODIS respectivamente. En esta comparaciónla diferencia temporal es de 1 minuto, la dife-rencia media de temperaturas es de 0,1°C, conuna desviación típica de 0,3 y la correlación en-tre ambas imágenes de 0,97, en ella el porcen-taje de datos comparados es de 68,3%.
Variación de la TSM con el ángulocenital de observación
Una posible fuente de incertidumbre en losdatos es el ángulo cenital de observación (apartir de ahora lo llamaremos «zensat»). Porello se ha estudiado la dependencia de la TSMcon dicho ángulo. Se han elegido diez imáge-nes de abril y junio de 2008, se han procesadolos pases completos y se han generado imáge-nes de TSM y del zensat. Después estas imá-
12 C. Robles-González et al. / Revista de Teledetección (2011) 35, 5-16
d)
b)a)
c)
Diferencia horaria: 44 minutosDiferencia media de temperatura: –0,1°CDesviación típica: 0,5°CCorrelación: 0,92Porcentaje de datos comparados: 75,29%
Diferencia horaria: 1 minutosDiferencia media de temperatura: 0,081°CDesviación típica: 0,298°CCorrelación: 0,969Porcentaje de datos comparados: 68,26%
Figura 4. Comparación de imágenes con alto porcentaje de píxeles y por tanto pocas nubes. Las figuras a) y b)son imágenes de la zona del Atlántico del 6 de marzo de 2008 de AVHRR y MODIS respectivamente, las c) y d)son de la zona del Cantábrico del 28 de septiembre de 2008 de AVHRR y MODIS respectivamente.

genes se han recortado a la zona de coinciden-cia entre MODIS y AVHRR. En la Figura 5 pre-sentamos resultados del 1 y 4 de abril de 2008ya que son las imágenes con menos nubes enlas que mejor se puede trazar un perfil longi-tudinal con los resultados y estudiar su depen-dencia con zensat. La línea azul oscura pre-senta la TSM de AVHRR, la verde la TSM deMODIS y las líneas rosa y cian presentan elzensat de AVHRR y MODIS, respectivamen-te, referidos al eje secundario. Las zonas sindatos de temperatura se encuentran sobre la su-perficie terrestre o están enmascaradas por te-ner nubes. En el caso de la Figura 5 (a) son da-tos del 1 de abril de 2008, y se presenta unperfil de temperaturas y zensat a 35° 58’ 29”N en una línea que va desde el Atlántico hastael Mediterráneo, pasando por el Estrecho deGibraltar. Las demás gráficas son del 4 de abrilde 2008, la (b) desde el Atlántico hasta el Me-diterráneo a 35° 57’ 29” N, la (c) sobre el MarCantábrico a 44° 1’ 30” N y la (d) en el Medi-
terráneo Norte a 41° 27’ 30” N. En todas ellasvemos que para ángulos menores de alrededorde 50°, las TSMs son similares, dentro de losmárgenes aceptables de error y tienen com-portamientos similares. En cambio, cuando al-guno de los ángulos es mayor de alrededor de50° las líneas de temperatura empiezan a se-pararse (notar que las escalas de temperaturasno son iguales en todos los gráficos). Es decir,las diferencias de temperaturas aumentan pe-ro también se ve un ligero desplazamiento deforma que los máximos y mínimos no coinci-den como se puede observar claramente en lasgráficas de la Figura 5. Este último efecto sepuede explicar por que la georreferenciaciónen los márgenes de las imágenes es complica-da y los píxeles son cada vez más grandes (has-ta 4 km para AVHRR). Estos datos deben sertratados con cuidado.
En la Figura 6 se presentan las diferenciasde temperaturas de los perfiles mostrados enla Figura 5. En este caso las escalas de tempe-
Comparación de la temperatura de la superficie del mar calculada a partir de datos... 13
01/04/2008 Alborán
10
12
14
16
18
20
22
0 200 400 600 800Nº Pixel
TSM
0
10
20
30
40
50
60
7004/04/02008 Cantábrico
10
11
12
13
14
15
16
0 200 400 600 800 1.000 1.200Nº Pixel
TSM
0
10
20
30
40
50
60
70
04/04/2008 Alborán
910111213141516171819
0 200 400 600 800 1.000 1.200Nº Pixel
TSM
–100102030405060708090100
04/04/2008 Mediterráneo
1011121314151617181920
0 200 400 600 800 1.000 1.200Nº Pixel
TSM
01020304050607080
Zen
Sat
Zen
Sat
Zen
Sat
Zen
Sat
TSM AVHRR TSM MODIS Zen Sat AVHRR Zen Sat MODIS
Figura 5. Temperatura superficial del mar (TSM) derivada a partir de datos AVHRR (línea azul oscura) y MO-DIS (línea verde). Las líneas rosa y cian representan los ángulos cenitales de observación (zensat) de los senso-res AVHRR y MODIS respectivamente que están referidos al eje secundario. Las zonas sin datos de temperaturase encuentran sobre la superficie terrestre o están enmascaradas por tener nubes. En la gráfica (a) se presenta unperfil de temperaturas y zensat del 1 de abril de 2008 a 35° 58’ 29” N en una línea que va desde el Atlántico has-ta el Mediterráneo, pasando por el Estrecho de Gibraltar. Las demás gráficas son del 4 de abril de 2008, la (b)desde el Atlántico hasta el Mediterráneo a 35° 57’ 29” N, la (c) sobre el Mar Cantábrico a 44° 1’ 30” N y la (d)en el Mediterráneo Norte a 41° 27’ 30” N.
a)
c) d)
b)

raturas también son distintas entre los gráficosy se representa solo una parte de estos perfi-les, los más limpios de nubes. La línea azul re-presenta la diferencia de temperatura en el ejeY principal, la rosa el ángulo cenital de obser-vación de AVHRR, la verde el de MODIS am-bos referidos al eje Y secundario, y la dos lí-neas discontinuas negras se presentan comoreferencia donde la diferencia entre las imá-genes esta entre ±0.5°. En la Figura 6a se mues-tra la diferencia de TSM para el 1 de abril de2008, a 35° 58’ 29” N y entre –11° 47’ y –2°58’ E. En este caso vemos que para ángulos ce-nitales de observación de MODIS mayores que51° la diferencia de temperatura empieza a au-mentar paulatinamente. En cambio paraAVHRR, estos ángulos se encuentran entre 0°y 50° aproximadamente y posiblemente no in-fluyen en el aumento de la diferencia. La Fi-gura 6b presenta los resultados del 4 de abrilde 2008 sobre una zona del Mar de Alboran a
35° 57’ 29” N y entre –10° 29’ y –2° 59’ E. Enesta gráfica se observa que las diferencias au-mentan cuando el ángulo de observación deAVHRR es mayor que 54°, que correspondecon alrededor de 46° de MODIS. Además apartir de unos 57° de AVHRR (unos 50° deMODIS) la diferencia es mayor a 0,5° en prác-ticamente todos los casos. La Figura 6c mues-tra las diferencias de temperatura del día 4 deabril a una latitud de 44° 1’30 ” N sobre el MarCantábrico, entre –13° 40’ y –1° 35’ E. Estecaso es un poco distinto de los anteriores yaque la diferencia de temperatura aumenta conlos ángulos de observación a partir de los 42°o 44° para AVHRR y para los 32°-35° de MO-DIS. Aún así se ve una clara dependencia delos resultados con los ángulos de observación.En cambio en la Figura 6d, que muestra el per-fil situado en 41° 27’ 30” N y entre 2° 14’ y 6°41’ E, esta dependencia no se observa debidoa que los ángulos de observación en ambos ca-
14 C. Robles-González et al. / Revista de Teledetección (2011) 35, 5-16
01/04/2008 Alborán
–2
–1,5
–1
–0,5
0
0,5
1
1,5
2
294 394 494 594 694 794
Nº Pixel
Dif T
SM
0
10
20
30
40
50
60
70
Zen
Sat
04/04/2008 Alborán
–1
–0,5
0
0,5
1
1,5
2
2,5
240 340 440 540 640
N Pixel
Dif T
SM
0
10
20
30
40
50
60
70
Zen
Sat
04/04/2008 Cantábrico
–1
–0,5
0
0,5
1
1,5
2
0 100 200 300 400 500 600 700 800
Nº Pixel
Dif T
SM
0
10
20
30
40
50
60
70
Zen
Sat
04/04/2008 Mediterráneo
–0,6
–0,4
–0,2
0
0,2
0,4
0,6
0,8
1,000 1,050 1,100 1,150 1,200 1,250
N Pixel
Dif T
SM
051015202530354045
Zen
Sat
Dif TSM Zen Sat AVHRR Zen Sat MODIS
Figura 6. Representa las diferencias de temperaturas de los perfiles mostrados en la Figura 5. Se representa so-lo la parte de estos perfiles que no contienen nubes ni píxeles sobre tierra. La línea azul representa la diferenciade temperatura en el eje Y principal, la rosa el ángulo cenital de observación de AVHRR, la verde el de MODISambos referidos al eje Y secundario. Las dos líneas discontinuas negras se presentan como referencia donde ladiferencia entre las imágenes esta entre ±0,5°. En la Figura (a) se muestra la diferencia de TSM para el 1 de abrilde 2008, a 35° 58’ 29” N y entre –11° 47’ y –2° 58’ E. La (b) presenta los resultados del 4 de abril de 2008 sobreuna zona del Mar de Alboran a 35° 57’ 29” y entre –10° 29’ y –2° 59’ E. La (c) muestra las diferencias de tem-peratura del día 4 de abril a una latitud de 44° 1’ 30” N sobre el Mar Cantábrico, entre –13° 40’ y –1° 35’ E. Y la(d) es también del día 4 de abril de 2008 y muestra el perfil situado en 41° 27’ 30” N y entre 2° 14’ y 6° 41’ E.
b)
d)
a)
c)

sos son menores de 45°. En esta gráfica vemosque los valores de diferencia de temperaturapermanecen dentro de los márgenes aceptablesde incertidumbre en prácticamente toda la grá-fica, solo unos píxeles sueltos lo superan.
Este estudio preliminar de una pequeñamuestra de imágenes parece indicar que lasTSM para zensat elevados es crítica y esos da-tos deben ser tratados con sumo cuidado. Unestudio más a fondo sería necesario para poderconfirmar este resultado. Las principales cau-sas que explicarían el aumento de incertidum-bre en los resultados con el ángulo cenital deobservación son la atmósfera, la emisividad dela superficie y la georreferenciación de los da-tos. Cuanto más grandes son los zensat más ca-mino atmosférico y por tanto cualquier erroren la estimación de parámetros atmosféricostales como el vapor de agua, CO2, CH4 o aero-soles puede provocar una mayor incertidumbreen la estimación de la TSM. En el caso de ladependencia de la emisividad con los zensat,algunos autores como Niclós et al. (2004) ob-servaron que diferencias en la estimación de laemisividad del agua para ángulos de observa-ción de 55° podían provocar errores en la esti-mación de la TSM del orden de ±0,5 K. Por úl-timo, un error en la georreferenciaciónproduciría que los píxeles comparados no fue-ran los mismos.
Conclusiones
Este trabajo muestra los resultados de vali-dar datos de TSM obtenidos por medio del soft-ware MATIAS a partir del sensor satelitalAVHRR con respecto a los obtenidos aplican-do el software SeaDAS a datos MODIS. Paraello se ha calculado la diferencia media de tem-peratura, la desviación típica y el coeficientede correlación. La comparación ha mostradoque para imágenes con más del 30% de los pí-xeles comparados el promedio de la diferenciade temperatura es de –0,1°C, la desviación es0,5 y el coeficiente de correlación 0.90.
La TSM obtenida a partir de datos AVHRRrevela un ajuste favorable con respecto a la deMODIS. También observamos que en generallas medidas de TSM en el primer sensor sonmayores.
En esta validación la diferencia promedioentre pases de ambos satélites es de 32 minu-tos, lo cual lleva a mencionar que la no corre-lación temporal de los datos prácticamente noinfluye en los resultados obtenidos. El 88% delos datos han sido comparados con una dife-rencia entre pases inferior a una hora.
El análisis comparativo de las temperaturasmedidas por ambos sensores muestra que losproductos TSM generados con el software MA-TIAS de CREPAD son buenos, teniendo encuenta que la diferencia media de temperaturacon respecto a MODIS es inferior a 0,1°C. Es-te valor como promedio de las diferencias esfavorable, ya que la precisión en la determina-ción absoluta de la temperatura de AVHRR es-tá estimada en 0,5°C. (IOCCG Report Number5, 2006). Estos resultados posiblemente mejo-rarían si se eliminaran de la estadística aque-llas áreas en las que los ángulos cenitales deobservación sean superiores a unos 55°.
Referencias
ANDING, D. & KAUTH, R. 1970. Estimation ofsea surface temperature from space. Remote Sen-sing of the Environment, 1: 217-220.
BARTON, I. J., ZAVODY, D. M., O’BRIEN, D. M.,CUTTEN, D. R., SAUNDERS, R. W. & LLE-WELLYN-JONES, D. T. 1989. Theoretical algo-rithms for satellite derived sea surface tempera-ture. J. Geophys. Res., 94: 365-3375.
DONLON, C. J., MINNETT, P. J., GENTEMANN,C., NIGHTINGALE, T. J., BARTON, I. J.,WARD, B. & MURRAY, M. J. 2002. Toward Im-proved Validation of Satellite Sea Surface SkinTemperature Measurements for Climate Rese-arch. J. Climate, 15: 353-369.
HOUGHTON, J. T., JENKINS, G. J. & EPHRAUMS,J. J. 1990. Climate Change – The IPCC ScientificAssessment. University of Cambridge, 364 pp.
HUTCHISON, K. D., MARUSA, S., HENDER-SON, J. R., KENLEY, R. C., TOPPING, P. C.,UPLINGER, W. G. & TWOMEY, J. A. 1999.System Design Considerations for the Retrievalof Sea Surface Temperatures in the NPOESS Era.Journal of Atmospheric and Oceanic Technology,16, 107-116.
IOCCG, International Ocean-Colour CoordinatingGroup. 2000. Report number 3. 145.
McCLAIN, E. P., PICHEL, W. G. & WALTON, C.C. 1985. Comparative performance of AVHRR-based Multichannel Sea Surface Temperatures. J.Geophys. Res., 90, No. C6, 11587-11601.
Comparación de la temperatura de la superficie del mar calculada a partir de datos... 15

NICLÓS R., VALOR, E., CASELLES, V., COLL,C., & SANCHEZ, J. M. 2005. In situ angular me-asurements of thermal infrared sea surface emis-sivity – Validation of models. Remote Sensing ofEnvironment, 94: 83-93.
ROBLES-GONZALEZ, C. & FERNANDEZ-RE-NAU, A. 2006. «Review and validation of CRE-PAD productos». Second Recent Advances inQuantitative Remote Sensing. Ed. José A. Sobri-no. Servicio de Publicaciones. Universitat de Va-lencia. Valencia.
SAUNDERS R. W., & KRIEBEL, K. T. 1998. Animproved method for detecting clear sky andcloudy radiances from AVHRR data. Int. J. Re-mote Sensing, vol. 9, No. 1, 123-150.
SOBRINO J. A., LI, Z. L. & STOLL, M. P. 1993. Im-pact of the atmospheric transmittance and total wa-ter vapor content in the algorithms for estimatingsatellite sea surface temperatures. IEEE Transactionson Geoscience and Remote Sensing, 31: 946-952.
WALTON, C.C. 1988. Nonlinear multichannel al-gorithm for estimating sea surface temperaturewith AVHRR satellite data. Journal of AppliedMeteorology, 27: 115-124.
WALTON, C. C., PICHEL, W. G., SAPPER, F. J. &MAY, D. A. 1998. The development and operatio-nal application of nonlinear algorithms for the me-asurement of sea surface temperatures with NO-AA polar-orbiting environmental satellites. Journalof Geophysical Research, 103: 27999-28012.
16 C. Robles-González et al. / Revista de Teledetección (2011) 35, 5-16

Introducción
Al severo impacto ecológico y al coste eco-nómico de las especies de plantas invasoras
(Drake et al., 1989; Mooney y Cleland, 2001;Pimentel et al., 2002) hay que sumar la pérdi-da de diversidad biológica que estas especiesprovocan. (Pimm y Gilpin, 1989; Scott y Will-cove, 1998). El desarrollo de técnicas innova-doras para su cartografiado es fundamental nosolo para entender su comportamiento y rela-
Utilización del sensor de imagen Airborne HyperspectralScanner (AHS) para la cartografía de bosques
de Sargassum muticum en la Ría de Vigo (Galicia)
G. Casal1*, J. A. Domínguez2, N. Sánchez-Carnero1 y J. Freire1
1 Grupo de Recursos Marinos y Pesquerías. Universidad de A Coruña. Campus de A Zapateira, s/n. A Coruña
2 Centro de Estudios Hidrográficos (CEDEX). P.° Bajo de Virgen del Puerto, 3. 28005 Madrid
Resumen
Debido al rápido avance en la Península Ibérica del alga invasora Sargassum muticum, que compi-te con algas autóctonas de elevada importancia ecológica, se han impulsado iniciativas dirigidas a labúsqueda de metodologías que permitan una rápida evaluación y un seguimiento continuo del avancede esta especie. En este contexto se desarrolla el presente estudio que pretende evaluar la utilidad delas imágenes hiperespectrales para la cartografía de S. muticum. Con el fin de validar esta metodolo-gía, en junio de 2008 se realizó un vuelo en la Ría de Vigo (Galicia) con el sensor hiperespectral AHS.Durante esta campaña se llevaron a cabo simultáneamente radiometría de campo y muestreos de ve-getación intermareal e infralitoral, con el fin de obtener información sobre la variabilidad espacial enla cobertura algal que permitiera calibrar los resultados obtenidos mediante teledetección. En este tra-bajo se presentan los resultados de una clasificación cluster-kmeans y Spectral Angle Mapper que hapermitido cartografiar de modo eficiente la distribución de tipos de sustrato (arenoso y rocoso) y delas zonas de cobertura algal. En este momento se continúan realizando nuevas clasificaciones que per-mitan una mejora de los resultados obtenidos hasta el momento.
Palabras clave: hiperespectral, AHS, Sargassum muticum, cartografiado bentónico, zona costera.
AbstractUse of Airborne Hyperspectral Scanner (AHS) for mapping Sargassum muticum forest in Ría de Vigo (Galicia)
The invasive algae Sargassum muticum in the Iberian Peninsula competes with other native algaewith important ecological value. The development of new methodologies are necessary in order to eva-luate and monitor efficiently the spread of the S. muticum. The aim of this project is to validate the useof hyperspectral images to map S. muticum forests. Therefore in June of 2008 an hyperspectral flightwas carried out over the Ría de Vigo (Galicia) with an Airborne Hyperspectral Scanner (AHS). Du-ring this survey, radiometric and algae abundance measures were taken in order to validate the remo-te sensing data. This study presents some preliminary results of cluster k-means and Spectral AngleMapper classifications which has allowed to successfully map sandy and rocky substrates as well asalgae areas. Currently, new classifications are being carried out in order to improve these results.
Key words: hyperspectral, AHS, Sargassum muticum, benthic mapping, coastal zone.
* Autor para la correspondencia: [email protected]: 25-02-10; Aceptado: 11-05-11.
Asociación Española de Teledetección Revista de Teledetección 35, 17-22ISSN: 1988-8740

ciones con el medio sino también para tomardecisiones sobre su control y seguimiento.
La abundancia y distribución de la vegetaciónlitoral ha sido tradicionalmente estimada utili-zando métodos de campo, lo que conlleva un cos-te importante en tiempo y dinero, así como li-mitaciones de cobertura espacial y temporal. Lautilización de imágenes adquiridas con sensoresremotos ofrece una alternativa a los métodos demuestreo tradicionales, permitiendo inventariargrandes extensiones de organismos bentónicosfotosintéticos, a veces de difícil acceso, y reali-zar un seguimiento continuo sin necesidad de untrabajo de campo exhaustivo.
En este trabajo se aborda el estudio de loshábitats bentónicos de la Ría de Vigo utilizan-do imágenes adquiridas con el sensor AHS, co-mo un primer paso para el establecimiento deuna metodología que permita el cartografiadode comunidades algales y, concretamente, deSargassum muticum.
Metodología
Área de estudio
La zona de estudio comprende parte de la Ríade Vigo, definida por la cobertura del vuelo y li-mitada a su vez por las condiciones meteoroló-gicas en el momento de adquisición de las imá-genes. Esta zona comprende desde el límiteexterno de la Ría de Vigo, entre Cangas y Ni-grán, hasta la zona más interna, entre Chapela yPalmás, además de parte de la Ría de Aldán (42°09’ N, 8° 36’ W y 42° 21’ N, 8° 54’ W) (Fig. 1).
Datos de campo
La adquisición de los datos de reflectividaden el campo se realizó tres espectrorradióme-tros: un espectrorradiómetro ASD FieldSpecFR y dos espectrorradiómetros Ocean OpticsUSB 2000, que permitieron obtener registrosde reflectividad de superficies fuera del aguae irradiancia solar dentro del agua a diferentesprofundidades. La toma de datos desde fueradel agua se realizó con el espectrorradiometroASD, fijándolo a la proa de la embarcación pa-ra minimizar la influencia de los reflejos de lamisma (Fig. 2). El dispositivo utilizado permitecontrolar los ángulos de medida así como me-dir la irradiancia solar (Es) una superficie lam-bertiana, concretamente un Spectralon del25%, la radiancia del agua (L sfc) con θ = 40º yla radiancia solar difusa (L sky) con θ’ = 40º. Elcampo de visión (FOV) utilizado fue de 8°, deacuerdo con los protocolos establecidos en es-tudios oceánicos (Fargion y Mueller, 2000). Eltiempo transcurrido en la toma de las medidasde irradiancia solar, radiancia del agua y ra-diancia solar difusa fue inferior a un minuto entodos los puntos de muestreo, lo que aseguraque las variaciones de iluminación fueran mí-nimas.
Las dos f ibras ópticas de los espectrorra-diómetros Ocean Optics USB 2000, utilizadospara la obtención de los perfiles de irradianciade la columna de agua, se fijaron a un soportecon forma de T invertida, de manera que am-bos receptores quedan orientados uno respec-
18 G. Casal et al. / Revista de Teledetección (2011) 35, 17-22
Figura 1. Ría de Vigo (SW Galicia). El recuadro mar-ca la zona de estudio cubierta por el vuelo hiperes-pectral.
Figura 2. Fotografía del soporte fijado a la proa de laembarcación con la f ibra óptica del espectrorradió-metro ASD FieldSpec FR y la superficie lambertianadel 25%.

to al otro con un ángulo de 180°. A los extre-mos de la T se les colocaron plomadas con elfin de obtener una medida perpendicular a lasuperficie del agua (Fig. 3).
Con estos equipos se realizaron medidas sin-crónicas al vuelo hiperespectral. Además, ca-da punto de muestreo fue posicionado medianteGPS, y se tomaron medidas de velocidad deviento, profundidad y visibilidad del fondo. Aesta información se sumaron fotografías y vi-deos tanto de la superficie como submarinos.
En momentos inmediatamente anteriores yposteriores al vuelo, se recogieron medidas de
reflectividad en la zona terrestre tanto de cu-biertas de suelo o vegetación homogéneas, co-mo apoyo al pre-tratamiento de las imágenesAHS, como de diferentes tipos de algas (su-mergidas y descubiertas por la marea en el in-termareal) (Fig. 4), con el fin de construir unalibrería espectral. Estas medidas se realizaroncon el espectrorradiómetro ASD FieldSpec FRy como blanco de referencia se utilizó una su-perficie lambertiana del 99%.
Para la obtención de datos de presencia y den-sidad de las comunidades algales que pudiesenser comparados con las reflectividades medidas,se realizaron muestreos intermareales (en áreasidentificadas previamente con presencia de Sar-gassum muticum) y submareales (en aquellospuntos donde se tomaron medidas de reflectivi-dad de fondo). En ambos casos se estimó laabundancia relativa de los diferentes tipos de al-gas mediante cuadrados de 50 × 50 cm.
Imágenes del sensor AHS
Las imágenes fueron adquiridas entre las8:46 y las 11:21 h del 21 de junio de 2008 me-diante el sensor aerotransportado AHS (Air-borne Hyperespectral Scanner). Este sensor esun escáner lineal de tipo whiskbroom, que re-gistra la radiación procedente de la superficieen 80 bandas espectrales dentro de las venta-nas atmosféricas del visible al infrarrojo tér-mico (entre 0,43 y 12,5 micrómetros). En este
Utilización del sensor de imagen Airborne Hyperspectral Scanner (AHS)... 19
Figura 3. Soporte en forma de T invertida al que se fi-jaron las f ibras ópticas de los espectrorradiómetrosOcean Optics USB 2000. Al soporte se le colocaronplomadas que permitían la toma de medidas perpen-diculares a la superficie del fondo.
Figura 4. Espectro de un alga medido con el espectrorradiómetro ASDFieldSpec FR.
Longitud de onda (nm)
Reflec
tividad
350 450 550 650 750 850 950 1.050 1.150 1.250 1.350 1.450 1.550 1.650 1.750 1.850 1.950 2.050 2.150 2.250 2.350 2.450
1,00
0,90
0,80
0,70
0,60
0,50
0,40
0,30
0,20
0,10
0,00

caso el sensor estaba instalado en una aerona-ve CASA-212-200 del INTA (Instituto Nacio-nal de Técnicas Aeroespaciales) e integradocon un equipo GPS/INS POS-AV 410. El vue-lo se realizó a una altura de 32.00 pies lo quepermitió obtener una resolución espacial de 2,5m. Se realizaron en total 10 pasadas válidas conuna longitud total de 18 km (Fig. 5). A partirde las 11:00 h el área comenzó a cubrirse poruna nubosidad baja, por lo que las imágenescorrespondientes a la zona más externa de la
Ría se encuentran parcialmente cubiertas yafectadas por sun glint.
Análisis de las imágenes
El tratamiento previo de las imágenes fuerealizado por el INTA en 3 fases: a) correccióngeométrica utilizando un MDT de 5 metros detamaño de píxel (SIXPAC, Xunta de Galicia),b) corrección radiométrica, y c) una correcciónatmosférica con ATCOR 4 (Richter, 2004).
Posteriormente, a las imágenes se les aplicóuna máscara terrestre y batimétrica, utilizan-do la isobata de 10 m, con el fin de eliminar lavariabilidad espectral que aportarían a la cla-sif icación dichas zonas. Las zonas afectadaspor sun glint fueron también enmascaradas.
Con el objetivo de evaluar los resultados ob-tenidos con diferentes clasificaciones, se uti-lizó una de las pasadas en la que se conocía lapresencia de Sargassum muticum en grandesextensiones, según observaciones recogidas enla campaña de campo. A la imagen elegida sele aplicó una clasificación no supervisada clus-ter k-means que agrupa los píxeles de la ima-gen en un número predefinido de clases, ba-sándose en la distancia mínima entre ellos.Aunque el objetivo del análisis fue identificarun grupo reducido de clases espectralmente di-
20 G. Casal et al. / Revista de Teledetección (2011) 35, 17-22
Figura 5. Mosaico del vuelo hiperespectral realizadocon el sensor AHS. El mosaico comprende 10 pasadasválidas de 18 km de longitud. En la zona externa de laRía aparecen zonas afectadas por nubosidad y sun glint.
Figura 6. Detalle de la imagen resultado de la clasificación no supervisada cluster k-means. Imagen original (iz-quierda), y cluster con 20 clases (derecha) donde se aprecia el efecto de la profundidad en la clasificación, mar-cado por franjas de diferente coloración de tierra a mar.

ferentes, en muchos casos la variabilidad es-pectral dentro de las clases supera a la varia-bilidad entre las mismas, por lo que el análisisse realizó para 20 y 10 clases. A esta imagentambién se le aplicó una clasificación super-visada Spectral Angle Mapper que calcula lasimilitud entre dos espectros comparando es-pectros desconocidos con otros de referencia,en nuestro caso de estudio, entre los espectrosde la imagen y los medidos en el campo, res-pectivamente. Para esta clasificación se utili-zaron espectros de arena, roca y varias espe-cies de algas, entre ellas, Sargassum muticum.En ambas clasificaciones se emplearon las 20primeras bandas entre 0,4567 y 1,0094 micró-metros.
Resultados y discusión
La clasificación no supervisada no muestrauna separación efectiva de los substratos aun-que sí puede observarse claramente el efectoque la profundidad provoca en la clasificación.Áreas cubiertas por un sustrato homogéneofueron cartografiadas como diferentes sustra-tos, presentando una distribución que sigue laslíneas batimétricas de la zona (Fig. 6). Este re-sultado remarca la necesidad de utilizar la «re-flectividad de fondo» definida por (Mobley,1993) para estudios bentónicos.
El método de clasif icación supervisada(Spectral Angle Mapper) permitió diferenciarlos substratos: roca emergida, arena emergiday alga (Fig. 7). Las extensiones de Sargassummuticum fueron reconocidas por la informa-ción recogida en la campaña de campo en elmomento de adquisición de las imágenes. Enalgunas áreas en las que se conocía la presen-cia de este alga se observó una correlación conobservaciones directas elevada (superior al85% según la matriz de confusión).
Aunque este resultado no es def initivo,pues solo se observó en algunas zonas dondela especie era especialmente densa, nuevosanálisis están siendo dirigidos a la cartogra-fía de esta y otras especies en la zona de es-tudio. Las líneas de investigación a seguir, te-niendo en cuenta estos resultados, consistenen la eliminación del efecto de la profundidady en la aplicación de diferentes métodos declasif icación supervisada a modo de estudiocomparativo, con el f in de establecer cuál deellos proporciona una clasif icación más efec-tiva.
Agradecimientos
Esta investigación ha sido financiada por el Mi-nisterio de Medioambiente y Medio Rural y Ma-rino (SARGAL PROJECT 030/SGTB/2007/1.4),
Utilización del sensor de imagen Airborne Hyperspectral Scanner (AHS)... 21
Figura 7. Detalle de la imagen resultado de la clasificación supervisada (Spectral Angle Mapper). En la imagense diferencian zonas de roca, arena y alga. La clase correspondiente a Sargassum muticum se puede establecerdebido a observaciones directas de la zona y a que esta alga forma grandes extensiones.
Arena emergida
Roca emergida
Sargassum muticum

Secretaria General para el Territorio y la Bio-diversidad, Ministerio de Medio Ambiente yMedio Rural Marino, INCITE (PROJECT07MDS010CT) y por el Fondo Europeo de De-sarrollo Regional (FEDER). Esta investigaciónfue también parcialmente financiada por unabeca pre-doctoral del programa María Barbei-to (Xunta de Galicia) y una beca de investiga-ción de la Diputación de A Coruña.
Referencias
DRAKE, J. A., MONEY, H. A., DI CASTRI, F.,GROVES, R. H., KRUGER, F. J., REJÁMAEK,M. &y WILLIAMSON, M. 1989. Biological In-vasions. A Global Prespective. John Wiley &Sons, Chichester, U.K.
FARGION, G. S. & MUELLER, J. L. (editors).2000. Ocean Optics Proto-cols for Satellite Oce-an Color Sensor Validation, Revision 2,NA-SA/TM-2000-209966.
MOBLEY, C. D., GENTILI, B., GORDON, H. R.,JIN, Z., KATTAWAR, G. W., MOREL, A., REI-NERSMAN, P., STAMMENES, K. & STAVN, R.H. 1993. Comparison of numerical models forcomputing underwater light f ields, Appl. Opt.,32: 7484-7505.
MOONEY, H.A. & CLELAND, E. 2001. The evo-lutionary impact of invasive species. Proceduresof Nat. Acad. Sci., 98(10): 5446-5451.
PIMENTEL, D., LACH, L., ZUNING, R. & MO-RRISON, D. 2002. Environmental and economiccost associated with non-indigenous species inthe United States. Bioscience, 50: 53-65
PIMM, S. L. & GILPIN, M. E. 1989. Theoretical is-sues in conservation biology. In: J. Roughgarden,R. May y S. A. Levin (eds), Perspectivas in Eco-logical Theory, Princeton University Press, Prin-ceton, New Jersey, 287-205.
RICHTER, R. 2004. Atmospheric/Topographic Co-rrection for Airborne Imagery. ATCOR-4 User Gui-de Version 3.1. DLR, Wessling, Germany, 75 pp.
SCOTT, J. M. & WILCOVE, D. S. 1998. Improvingthe future for endangered species. Bioscience.48(8): 579-580.
22 G. Casal et al. / Revista de Teledetección (2011) 35, 17-22

Evaluación de distintos métodos de medida de la irradiancia atmosférica descendente
en el infrarrojo térmico
V. García-Santos*, E. Valor, M. Mira, C. Coll, J. M. Galve y V. CasellesDepartamento de Física de la Tierra y Termodinámica. Universitat de Valencia.
C/ Dr. Moliner, 50. Burjassot. Valencia
Resumen
La medida de la temperatura de la superficie terrestre (TST) a nivel de suelo es necesaria para lavalidación de los productos TST obtenidos mediante teledetección en el infrarrojo térmico (IRT). Enlas campañas de validación, un factor importante a tener en cuenta, es la irradiancia atmosférica des-cendente (Fsky), la cual se ha de medir casi simultáneamente a las medidas de superficie. Fsky es un pa-rámetro clave para eliminar la radiancia, de atmósfera y alrededores, reflejada en la superficie de lamedida sobre ésta. La forma correcta de medir Fsky seria realizando medidas directas del cielo para to-dos los ángulos cenitales y acimutales, integrando luego estas medidas en el hemisferio superior. Co-mo realizar estas medidas resulta un arduo trabajo, consumiendo una gran cantidad de tiempo, resul-ta un método poco útil, debido al continuo cambio de las condiciones atmosféricas durante el procesode medida. En este estudio se comparan varios métodos capaces de determinar, de forma precisa, Fsky
en un corto periodo de tiempo, evaluando así cuál de ellos es el más conveniente. Con este objetivo sellevó a cabo una campaña experimental, usando radiómetros térmicos multiespectrales modelo CI-MEL Electronique CE312, los cuales tiene cuatro bandas espectrales situadas en la el intervalo 8-14μm. Se realizaron medidas directas de Fsky según el método de aproximación difusiva, el cuál estipu-la que Fsky es proporcional a la radiancia, procedente del cielo, medida en un determinado ángulo ce-nital efectivo que se sitúa en torno a los 53°. Otro método implica el uso de un panel de reflectividaddifusa en el IRT. También se incluyeron, para su comparación, valores simulados de Fsky mediante unmodelo de transferencia radiativa utilizando como datos de entrada a éste, radiosondeos realizados enla zona de estudio y perfiles atmosféricos obtenidos del National Center for Environment Prediction.Los resultados muestran una gran similitud entre todas las técnicas propuestas aquí, pudiéndose ex-plicar las posibles diferencias entre éstas en términos de sus errores. No obstante si hubiera que de-cantarse por una de las técnicas, ésta implicaría el uso del panel de reflectividad difusa, pues tiene encuenta la contribución de elementos circundantes como pueden ser, inevitablemente, el experimenta-dor y su instrumental. Además puede ser usado bajo cualquier condición atmosférica, aspecto que ex-cluye al resto de los métodos para el caso de cielos parcialmente cubiertos. Utilizar el panel suponecometer un error promedio de precisión, en términos de radiancia, de ±1,5 mW m–2 sr–1 cm, equiva-lente en términos de temperatura atmosférica de ±1,9 K.
Palabras clave: infrarrojo térmico, irradiancia atmosférica descendente, panel de reflectividad di-fusa, temperatura de la superficie terrestre, radiometría de campo.
Abstract
Evaluation of different methods to measure the atmospheric downwelling irradiance in the thermal infrared
Ground measurements of land surface temperature (LST) are necessary for the validation of LSTproducts derived from thermal infrared (TIR) remote sensing data. In the validation campaigns, oneimportant factor to take into account is the downwelling atmospheric irradiance (Fsky), which has to
* Corresponding author: [email protected]: 02-03-10; Accepted: 14-01-11.
Asociación Española de Teledetección Revista de Teledetección 35, 23-31ISSN: 1988-8740

Introducción
En la medida de temperatura de la superfi-cie terrestre (TST) mediante radiometría en elinfrarrojo térmico (IRT) es necesario tener encuenta la emisividad de la superficie (ε) y lairradiancia atmosférica descendente (Fsky) quese refleja en ella, término (1-ε). Así, la radian-cia procedente de la superficie, Lsurf, viene da-da por:
FskyLsurf = ε B(TST) + 1 – ε) ——— [1]πsiendo B la función de Planck, suponiendo uncomportamiento reflector lambertiano para lasuperficie terrestre. Para obtener la irradianciaatmosférica descendente, es necesario medir laradiancia descendente de los alrededores en to-das las direcciones angulares, L↓(θ,ϕ), siendoθ el ángulo cenital y ϕ el acimutal, e integrardichas contribuciones según la expresión:
Fsky = ∫02π ∫0
2/π L↓(θ,ϕ) cosθ sinθ dθ dϕ [2]
Esto supone una tarea difícil de llevar a ca-bo en el corto espacio de tiempo requerido encampañas de campo, como la medida de tem-peratura in situ mediante radiómetros a nivelde superficie, realizada en unos pocos minu-tos, para su posterior validación con medidasde temperatura tomadas por un sensor a bordo
de satélite coincidentemente a su pasada por lazona de interés (Coll et al., 2005). Como al-ternativa existen diversas técnicas capaces demedir rápidamente la Fsky.
Técnicas de medida directa
Las técnicas de medida directa de Fsky se ba-san en la medida de la radiancia directa proce-dente del cielo. Una de las técnicas más cono-cidas es la llamada aproximación difusiva,propuesta per Kondratyev (1969), necesitán-dose tan solo una medida de la radiancia, rea-lizada al apuntar el radiómetro térmico en unadirección cenital efectivo que se sitúa en tor-no a 53° ± 3°, no obstante este ángulo puedevariar en función del tipo de atmósfera o delcanal espectral de medida (Rubio, 1998). Deesta forma se cumple que:
Fsky ≈ π Lsky(θef) [3]
Una modificación de la aproximación difu-siva de Kondratyev, fue propuesta por Rubio etal. (1997), donde se demuestra que es posibleestimar Fsky a partir de la medida a nadir de laradiancia atmosférica descendente, según laexpresión:
Fsky ≈ γπ Lsky(0°) [4]
24 V. García-Santos et al. / Revista de Teledetección (2011) 35, 23-31
be measured near-simultaneously to the surface temperature measurements. Fsky is a key parameter forremoving the radiance, both of atmosphere and surrounding, reflected at the surface from the radiancemeasured at ground level. Direct measurements of Fsky with a radiometer involve the measurement ofsky radiances from all zenithal and azimuthal directions, and the integration over the upper hemisphere.Such measurements are time-consuming and are not useful because atmospheric conditions may changeduring the measurement process. Several methods to accurately determine Fsky in a short period of timeare analyzed in this paper to evaluate which is the most suitable. With this aim, an experimentalcampaign was carried out using thermal radiometers CIMEL Electronique model CE312, which havefour spectral bands in the 8-14 µm spectral window. One method for the determination of Fsky is theuse of the diffusive approximation, which states that Fsky is proportional to the sky radiance measuredat a given zenithal angle (~54°). Another method implies the use of a TIR diffuse reflectance panel.For comparison, Fsky values were simulated by means of a radiative transfer code using bothradiosounding data measured at the study area, and atmospheric profiles from the National Center forEnvironment Prediction. Results show a great similitude between all the techniques proposed here,the possible difference between them could be explained in terms of their errors. Nevertheless the mostrecommended technique is the diffuse reflectance panel since takes into account the contribution ofsurrounding elements like the experimenter or his instrumental. Moreover the panel could be usedunder any atmospheric condition, aspect which excludes the rest methods in the case of skies partiallycloudy. Using the panel suppose make an average error, in the terms of radiance, of ±1.5 mW m–2 sr–1
cm, equivalent in terms of atmospheric temperature of ±1.9 K.Key words: thermal infrared, downwelling atmospheric irradiance, diffuse reflectance panel, land
surface temperature, field radiometry.

donde γ es una constante que depende del in-tervalo espectral en el que se mide y de las con-diciones atmosféricas, tomando valores de 1,1a 1,7. La hipótesis de Rubio et al. (1997), esmucho más práctica en campo que la aproxi-mación de Kondratyev (1969), porque evita laseñalización exacta del ángulo cenital efecti-vo, siendo más fácil apuntar verticalmente.
Sin embargo, las técnicas de medida directapresentan dos inconvenientes importantes, elprimero es que requieren de un cielo comple-tamente cubierto o completamente despejado,es decir, en condiciones atmosféricas homogé-neas. El segundo es que esta aproximación noconsidera la posible contribución de elementoscircundantes a la superficie en estudio, sino queconsidera únicamente la contribución de la at-mósfera.
Cálculo de valores simulados de Fsky
Una forma alternativa bastante fiable de ob-tener Fsky, es lanzar radiosondeos en la zona deestudio, capaces de proporcionar valores de al-tura geopotencial, humedad relativa, presiónatmosférica y temperatura del aire, necesariospara introducirse en un modelo de transferen-cia radiativa (MTR), como puede ser el mode-lo MODTRAN 4.0 (Berk et al., 1999) usado eneste estudio, ofreciendo valores de la radian-cia atmosférica descendente desde distintos án-gulos cenitales: 0°, 11,6°, 26,1°,40,3°, 53,7°,65°, 70°, 75°, 80°, 85°, 87° y 89°, siendo los 5primeros los ángulo llamados gaussianos (Wany Dozier, 1989) y el resto propuestos por losautores con la finalidad de tener un barrido ce-nital completo de la atmósfera. Estos valoresse integran según la expresión [2] para obtenerel valor simulado de Fsky.
En caso de no disponer de radiosondeos dela zona, existe la posibilidad de obtener los pa-rámetros requeridos por el MTR mediante ladescarga de perfiles atmosféricos, interpoladosespacial y temporalmente a la localización de-seada. En el presente estudio se utilizaron per-files atmosféricos del National Center for En-vironment Prediction (NCEP) (Kalnay et al.,1995), para ello se indicaron en la aplicacióntelemática de LANDSAT a partir de perfiles delNCEP (http://atmcorr.gsfc.nasa.gov/), las co-
ordenadas de la zona deseada y la hora centralde las medidas, obteniendo como resultado losdatos de radiosondeos resultantes del reanáli-sis de modelos atmosféricos cercanos a la zo-na de estudio, junto a datos obtenidos median-te productos de sensores a bordo de satélites enla hora de pasada por la zona de interés.
No obstante, la simulación también presen-ta serios inconvenientes: no siempre se dispo-ne de radiosondeos de la zona (se puede decirque casi exclusivamente se obtienen coinci-diendo en campañas específicas), y los perfi-les atmosféricos NCEP tampoco son siempredel todo fiables, ya que los datos son una pre-dicción de parámetros atmosféricos, obtenidosa partir de datos interpolados espacialmente(tal vez las condiciones son distintas en una zo-na u otra) y temporalmente (los parámetrospueden ser distintos en una hora o en otra).
Panel de reflectividad difusa en el IRT
El panel de reflectividad difusa puede sercatalogado también como un método de medi-da directa, aunque no se apunte directamenteal cielo, sino a una superficie lambertiana, quepermite medir Fsky desde cualquier direcciónangular y bajo cualquier condición atmosféri-ca. Tiene en cuenta, además, la contribuciónradiativa de elementos circundantes, puestoque está situado a la altura de la superficie pro-blema y recibe dicha contribución.
El objetivo del presente estudio es compa-rar las distintas técnicas existentes en radio-metría de campo del IRT para determinar Fsky,evaluando así cuál de ellas es la más recomen-dable. Para ello se diseñó un dispositivo expe-rimental que permite medir Fsky mediante laaproximación difusiva propuesta por Rubio etal. (1997) y mediante el uso de un panel de re-flectividad difusa, caracterizando dicho panelal realizarse un barrido de medidas desde dis-tintas combinaciones de ángulos (θ,ϕ). Tam-bién se incluyeron así mismo los valores de Fsky
calculados mediante simulación en un MTR.Como último comentario decir que todas las
técnicas propuestas previamente, a excepcióndel uso de un panel de reflectividad difusa, hansido comparadas con un valor patrón de Fsky
proporcionado por la expresión [2]. Así por
Evaluación de distintos métodos de medida de la irradiancia atmosférica descendente... 25

ejemplo, la aproximación difusiva propuestapor Rubio et al. (1997), fue extraída a partirde una mediciones del cielo a diferentes án-gulos cenitales y acimutales, realizadas por elpropio autor, y cuyos resultados se pueden en-contrar en Rubio (1998). En el presente tra-bajo lo que se pretende es comparar entre ellas,estas técnicas contrastadas, bajo unas condi-ciones atmosféricas óptimas. Tan solo en el ca-so del panel de reflectividad difusa se preten-de llevar a cabo, una caracterización de éstecon la f inalidad de averiguar cuáles son susmejores condiciones de uso a la hora de me-dir Fsky.
Instrumentación
El radiómetro multiespectral
El radiómetro térmico CIMEL Electroniquemodelo CE312 (Brogniez et al., 2003), es unsensor multiespectral que mide la radianciaemitida por una superficie en la región del IRT,determinando la temperatura radiométrica su-perficial de los cuerpos con una precisión de±0,1 K. Sus filtros permiten medidas en un ca-nal ancho (c1: 8,0-13,3 µm), y tres canales másestrechos (c4: 8,3-9,3 µm; c3: 10,2-11,3 µm;c2:11,5-12,4 µm). Su campo de visión (FOV)es de 10°.
El panel de reflectividad difusa del IRT
En el experimento se utilizó el panel de re-flectividad difusa en el IRT «Infragold Re-flectance Target, IRT-94-100» cuya superficiede oro rugoso, de dimensiones 25,4 × 5,4 cm2,viene caracterizada por un alto valor de re-flectividad en el infrarrojo. Según los canales1 a 4 del radiómetro CE312, sus reflectivida-des son respectivamente 0,923, 0,925, 0,925 y0,918, con un error de ±0,009, Teniendo encuenta las leyes de conservación de la energíay Kirchhoff, éstas corresponden a emisivida-des de 0,077, 0,075, 0,075 y 0,082, respecti-vamente, con un error de ±0,009. Estas emi-sividades sirven, como se verá a posteriori,para corregir la contribución a las medidas delpanel.
Sistema goniométrico
Durante el experimento se utilizó un gonió-metro de hierro pintado de negro, compuestopor un soporte horizontal con brazos extensi-bles formando la base del conjunto. Sobre éstadescansa un semicírculo, de radio 40 cm, divi-dido en grados desde 0° hasta 180°, en interva-los de 5°. Del centro de la base parte un brazogiratorio (de longitud 1,70 cm) que tiene en di-cho punto su eje de giro, de tal modo que al gi-rar se desliza apoyándose sobre el semicírculo.En el extremo superior del brazo se acopla unaabrazadera que sujeta el radiómetro, mante-niéndolo paralelo a la dirección del brazo y mi-rando hacia el panel, lo cual permite realizar undoble recorrido cenital, desde 65° hasta –65° (apartir de 70° cenitales, la elipse proyectada porel FOV del radiómetro se sale del panel mi-diendo parte de suelo de forma no deseada).
Metodología
Condiciones atmosféricas de las medidas
Se decidió realizar las medidas en un día com-pletamente despejado con la finalidad de opti-mizar la hipótesis de considerar Fsky invariabledurante todo el tiempo de medidas, además deser la condición atmosférica exigida para obte-ner Fsky según el método de la aproximación di-fusiva, y también para que la estimación me-diante un MTR y un radiosondeo sean posibles.
La zona elegida para realizar el estudio fue-ron los arrozales de la Marjal en la Albufera deValencia, coordenadas 39° 15’ 53’’ N, 0° 18’15’’ O. Localización cuya finalidad era evitar,en la medida de lo posible, la contribución ra-diativa de elementos circundantes en las me-didas sobre el panel.
Sistemática de medidas experimentales
Para comparar las medidas de Fsky y carac-terizar a su vez el panel, se diseñó un disposi-tivo experimental consistente en f ijar un ra-diómetro sobre el goniómetro, permitiendorealizar medidas angulares de radiancia sobreel panel, desde 0° hasta 65° respecto del nadir,
26 V. García-Santos et al. / Revista de Teledetección (2011) 35, 23-31

en intervalos de 5°. Se realizaron unas 3 me-didas consecutivas para cada ángulo cenital,considerándose a posteriori su valor promedioy su desviación estándar. A su vez, un segun-do radiómetro CE312 se colocó cerca del pa-nel apuntando verticalmente al cielo con el finde medir la radiancia en el nadir, L↓(0°), nece-saria para obtener Fsky según la ec. [4], como γdepende del canal espectral de medida y delcontenido de vapor de agua atmosférico (Gar-cía-Santos et al., 2010), tal como se comentóanteriormente, dicho factor γ toma los si-guientes valores en los canales 1 a 4 del radió-metro utilizado: 1,38, 1,49, 1,61 y 1,40, res-pectivamente. Se puede apreciar un esquemadel dispositivo experimental en la Figura 1.Además, se consideraron dos valores más deFsky, obtenidos al introducir dos perf iles at-mosféricos en un MTR; MODTRAN 4.0 (Berket al., 1999). El primero se obtuvo descargán-dose de la aplicación telemática ofrecida porLANDAST, cuyo link puede encontrarse en elapartado de introducción en el presente docu-mento. Dicha aplicación requiere una previaintroducción de datos suministrados por elusuario: fecha y hora de las medidas, coorde-nadas de la zona de interés, estación del año yespecificar las condiciones de superficie (estaúltima es opcional). Como resultado ofrece unperfil atmosférico fruto del reanálisis de datosobtenidos mediante radiosondeos del NCEPrealizados en zonas circundantes a la de inte-rés. El segundo perfil se obtuvo grcias a un ra-diosondeo realizado en la misma zona de lasmedidas y a la misma hora que éstas. Lo llevoa cabo el Centro de Estudios Ambientales delMediterráneo (CEAM) en una campaña alter-
nativa a la nuestra. Dicho radiosondeo ofrecevalores de: altura geopotencial (desde la su-perficie hasta 16.000 m), presión atmosférica(en mbar), temperatura del aire (en K) y hu-medad relativa (en %).
El proceso de medidas fue llevado a cabo enel transcurso de una hora, concretamente de11:30 a 12:30 a.m., hora local. De este modose obtenían las medidas en el mismo instanteen que se lanzaba, in situ, el radiosondeo.
Para estudiar la variación cenital de la ra-diancia recibida procedente del panel, se usóla siguiente metodología: Desde θ = 0° a θ = 45°se midió a una distancia radiómetro-panel de90 cm a nadir; desde θ = 50° a θ = 65°se redu-jo la distancia a 50 cm con el objetivo de au-mentar la superficie observada del panel y evi-tar la contribución de elementos exteriores.
Resultados y discusión
Resultados experimentales
En la Figura 2 se muestran los valores de ra-diancia hemisférica descendente obtenidos se-gún medidas realizadas con el goniómetro enla Albufera de Valencia sobre el panel directa-mente (L↓
HEM_panel), siendo este valor en cada án-gulo cenital, el promedio de las tres medidasrealizadas consecutivamente en dicho ángulo.El error de precisión asociado a las medidas delpanel es el error cuadrático medio asociado ala desviación estándar de las tres medidas y alerror asociado instrumental del radiómetro. Di-cho error adquiere valores de: ±1,4, ±1,7, ±1,7y ±1,2 mW · m–2 · sr–1 · cm, para los canales 1 a4 del CE312, respectivamente, así como parasu corrección por el efecto de emisividad de és-te (L↓
HEM_ent, ver apartado corrección de emisi-vidad del panel). Además, junto a estos dos va-lores, se añade el valor obtenido por el métodode la aproximación difusiva propuesto por Ru-bio et al. (1997) (L↓
HEM_difusiva), siendo este va-lor el promedio de toda la hora de sesión de me-didas. El error de precisión asociado a estatécnica se obtiene de forma idéntica a la del pa-nel, solo que esta vez la desviación estándar co-rresponde a todas las medidas de la sesión. Losvalores que adquiere este error en los canales 1a 4 del radiómetro son: ±0,2, ±0,3, ±0,2 y ±0,2
Evaluación de distintos métodos de medida de la irradiancia atmosférica descendente... 27
Figura 1. Montaje experimental para las medidas delos métodos directos utilizando un goniómetro.
Radiómetro
Radiómetro
L↓(0°)
Trípode
θ
Goniómetro
Panel dereflectividaddifusa

28 V. García-Santos et al. / Revista de Teledetección (2011) 35, 23-31
mW · m–2 · sr–1 · cm, respectivamente. Tambiénse muestran valores de simulación calculadosal introducir en un MTR perfiles del NCEP, (L↓−
HEM_NCEP), o datos de un radiosondeo lanzado insitu (L↓
HEM_RAD). Los errores de estos dos pará-metros simulados, se obtienen mediante la diferencia entre la radiancia hemisférica obte-nida al introducir previamente el perfil atmos-férico correspondiente y la radiancia obtenidoal introducir nuevamente el perfil, pero modi-ficando dos parámetros de éste: la temperaturadel aire en ±1 K y la humedad relativa en ±10%(Seeman et al. 2006). El valor de dicho error enlos canales 1 a 4 del radiómetro es: ±2, ±4, ±3
y ±2 mW · m–2 · sr–1 · cm, respectivamente. De-cir que L↓
HEM_difusiva , L↓HEM_NCEP y L↓
HEM_RAD, nodependen del ángulo cenital que aparece en eleje de las abscisas, se decidió representar de es-te modo los resultados para una mayor comodi-dad visual a la hora de comparar las diferentestécnicas. Cabe comentar que se representa sólola variación de L?
HEM con el ángulo cenital y nocon el acimutal, porque se comprobó que la di-ferencia promedio entre los valores de L↓
HEM_panel
para un mismo ángulo cenital en sus cuatro aci-muts es del orden de ±1 mW · m–2 · sr–1 · cm, co-rrespondiente a un error en temperatura de ±1 K,y el error promedio de las medidas es alrede-
15
20
25
30
35
40
45
50
0 5 10 15 20 25 30 35 40 45 50 55 60 65
Canal 1 (8,0-13,3 µm)
25
30
35
40
45
50
55
60
65
0 5 10 15 20 25 30 35 40 45 50 55 60 65
10
15
20
25
30
35
40
0 5 10 15 20 25 30 35 40 45 50 55 60 65Ángulo cenital de observación (°)
0
5
10
15
20
25
30
35
40
0 5 10 15 20 25 30 35 40 45 50 55 60 65
Radi
anci
a at
mos
féric
a de
scen
dent
e (m
W m
–2 s
r–1 c
m)
Radi
anci
a at
mos
féric
a de
scen
dent
e (m
W m
–2 s
r–1 c
m)
Radi
anci
a at
mos
féric
a de
scen
dent
e (m
W m
–2 s
r–1 c
m)
Radi
anci
a at
mos
féric
a de
scen
dent
e (m
W m
–2 s
r–1 c
m)
Canal 2 (11,5-12,4 µm)
Canal 3 (10,2-11,3 µm) Canal 4 (8,3-9,3 µm)
Ángulo cenital de observación (°)
Ángulo cenital de observación (°) Ángulo cenital de observación (°)
L↓HEM_entL↓HEM_panel L↓HEM_NCEP L↓HEM_difusiva L↓HEM_RADIO
Figura 2. Resultados experimentales para los cuatro canales del radiómetro CE 312 de la medida de la radianciahemisférica descendente, obtenida según: medida directa del panel (L↓
HEM_panel), la corrección del efecto de emi-sividad de éste (L↓
HEM_ent), el cálculo mediante simulación de perfiles atmosféricos del NCEP (L↓HEM_NCEP), el mé-
todo de la aproximación difusiva (L↓HEM_difusiva) y mediante datos de un radiosondeo hecho en el momento y lugar
de las medidas (L↓HEM_RADIO).

dor de ±2 mW · m–2 · sr–1 · cm, siendo esta va-riación menospreciable. A partir de aquí se con-siderará en cada ángulo cenital, pues, el valorpromedio de radiancia de sus cuatro acimuts.
En los resultados de las gráficas de la Figu-ra 2, se observan valores de Fsky estables y ca-si constantes, en todo el intervalo angular ce-nital 0°-50°, aunque para ángulos grandes(θ > 50°) se produce un efecto narciso del ra-diómetro, el cuál mide su propia contribución.Esto se debe al necesario acercamiento del ra-diómetro hacia el panel por la necesidad de re-ducir la superficie observada por el radióme-tro, evitando así medir superficie no deseada.Como se puede observar el goniómetro contri-buye signif icativamente a las medidas y portanto convendría utilizar uno hecho de un ma-terial menos radiativo en el térmico, como porejemplo, el aluminio pulido al espejo, cuyaemisividad en el IRT está en torno a 0,03 (Ru-bio el al., 1997). En todo caso, las discrepan-cias que todavía se observan entre el uso delpanel y el resto de métodos, son debidas fun-damentalmente por dos motivos. El primeroque el panel tiene en cuenta la contribución delos posibles elementos circundantes (inclu-yendo los experimentadores), factor que no seconsidera en el resto de métodos y que evi-dentemente es solución de posibles fuentes deerror. Y el segundo que el panel posee ciertovalor de emisividad que debe ser tenido encuenta, puesto que en la medida hecha direc-tamente sobre el panel, éste tiene una ciertacontribución que debe ser corregida. Esto severá con más detalle en el siguiente punto.
Corrección de la emisividad del panel
Como se puede observar en las gráficas dela Figura 2, los valores de L↓
HEM_panel distan bas-tante de los valores ofrecidos tanto por la apro-ximación difusiva como por los valores de si-mulación del NCEP y del radiosondeo. Elmotivo radica en la necesidad de eliminar lacontribución radiativa propia del panel, pues-to que tiene una emisividad no nula cuyo efec-to debe tenerse en cuenta (Korb et al. 1996).La radiación procedente del panel responde en-tonces a la ecuación:
L↓HEMpanel,i = εpanel,iBi(Tpanel) + (1 – εpanel,i)L↓
HEMent,i [5]
donde εpanel,i es la emisividad del panel en el ca-nal i del radiómetro, Tpanel es la temperatura ter-mométrica del panel y L↓
HEM_ent,i es el valor dela radiancia que interesa conocer, ya que estácorregida del efecto de la emisividad del panely en ella ya viene integrada la contribución tan-to de la atmósfera como del entorno. Por tanto,si se despeja este parámetro en [5], nos queda:
LHEMpanel,i– εpanel,iBi(Tpanel)
LHEMent,i = ————————————— [6](1 – εpanel,i)
Para obtener correctamente el valor de ra-diancia a partir de la expresión [6] se ha de co-nocer el valor de la temperatura del panel (Tpa-nel) para calcular el término B(Tpanel). Laestimación de esta temperatura se hizo me-diante un termómetro de contacto, con una pre-cisión de ±1 K. Se tomaron medidas de la tem-peratura del panel en cinco puntos distintos dela superficie, realizándose así un muestreo detoda ésta y considerándose el valor promedio.El error en la medida de la temperatura del pa-nel implica una indeterminación en el cálculode L↓
HEM_ent de ±0,12, ±0,14, ±0,13 y ±0,12mW · m–2 · sr–1 · cm para los canales 1 a 4, res-pectivamente, correspondientes a un error en ladeterminación de la temperatura de ±0,2, ±0,2,±0,3 y ±0,3 K. Considerar nula la emisividaddel panel en el momento de tratar los datos ex-perimentales, supone cometer una sobrestima-ción de L↓
HEM_ent para los canales 1 a 4 del ra-diómetro de 9, 18, 12 y 11 mW · m–2 · sr–1,respectivamente. Esto está reflejado en las grá-ficas de la Figura 2, si observamos la diferen-cia entre L↓
HEM_ent y L↓HEM_panel. En términos de
temperatura atmosférica, en este caso, se cometeun error de sobrestimación de 10, 10, 15 y 10 K,para los canales 1 a 4 respectivamente. Una for-ma más intuitiva de apreciar el efecto de me-nospreciar la emisividad del panel, es evaluar ladiferencia en TST obtenida en [1] cuando se sus-tituye en ésta el valor de L↓
HEM corregido por elefecto de emisividad del panel y sin corregir. Ladiferencia de temperatura de la superf icie,ΔT = TSTno_corr – TSTcorr, se puede observar en laFigura 3 para el caso de una superficie de tem-peratura radiométrica de 303 K. Así, por ejem-plo, para el caso de una emisividad de la super-ficie de 0,9 se obtiene una diferencia de ±0,4,±0,5, ±0,5 y ±0,4 K para los canales 1 a 4, res-pectivamente. También se concluye que cuando
Evaluación de distintos métodos de medida de la irradiancia atmosférica descendente... 29

más grande es la emisividad de la superficie,menor es el efecto de emisividad del panel.
Comparación de métodos
A partir de los resultados expuestos en la Fi-gura 2, se puede ver que todos los métodos uti-lizados convergen en valores comparables deL↓
HEM, siendo los valores simulados con perfi-les NCEP los que sufren mayor desviación yque presentan un mayor error; también pre-sentan cierta incongruencia con los valores delpanel los valores obtenidos mediante la apro-ximación difusiva L↓
HEM_difusiva. Las medidas deL↓
HEM del panel, una vez corregidas del efectode emisividad de éste, coinciden con los valo-res ofrecidos con los datos del radiosondeo rea-lizado en la zona (excepto en el canal 2), lo quelleva a la conclusión de que las medidas de Fsky,mediante el uso de un panel de reflectividad di-fusa son más fiables, siempre que se realizenen el intervalo angular cenital 0°-50° y distan-ciando el radiómetro del panel entre 80 y 90cm para evitar el efecto narciso de éste.
Conclusiones
En el presente estudio se ha tratado la deter-minación de un parámetro imprescindible enradiometría de campo en el infrarrojo térmico,la irradiancia atmosférica descendente, Fsky. Se
han valorado los distintos métodos existenteshoy en día para obtenerla, tanto directamentecomo mediante simulaciones en un MTR. Laconclusión a la que se llega es que los métodosde medida directa de Fsky, suponen la mejor ymás rápida alternativa, y concretamente medirlamediante la utilización de un panel de reflecti-vidad difusa es sin duda la mejor de todas ellas.El panel permite, mediante una simple medida,obtener un valor de Fsky de toda la contribuciónhemisférica de la atmósfera que rodea a la su-perficie en estudio, además también tiene encuenta la contribución radiativa de elementoscircundantes, y su utilización no viene limita-da por las condiciones atmosféricas del mo-mento, por lo que puede usarse incluso bajocondiciones de nubosidad parcial y variable.
No obstante, cabe tener en cuenta ciertasprecauciones en el uso del panel. El pequeñovalor de emisividad que posee el panel, añadeuna cierta contribución radiativa a las medidasrealizadas sobre éste. Si no se corrige dichoefecto de emisividad del panel, al determinarla TST de una superficie se estará obteniendoun valor sobreestimado de ésta. Sobreestima-ción que aumenta a medida que disminuye laemisividad del la superf icie de estudio. Va-riando este error de temperatura en 0,4 K porcada disminución del 10% de la emisividad dela superficie. Por lo tanto, se tiene que cono-cer la emisividad del panel en el intervalo es-pectral en el que se mide, y se debe tener uncontrol de la temperatura de éste, para corre-gir el efecto radiativo de la emisividad en lasmedidas originales.
Finalmente, con un panel de característicassimilares al presentado aquí, se puede obtenerel valor de Fsky, realizándose una única medi-da, situando el radiómetro entre 80 y 90 cm,desde cualquier ángulo acimutal. Aunque el án-gulo cenital es independiente, convendría rea-lizar la medida en el intervalo 0°-50°, contro-lando, en todo caso, la temperatura del panelen el momento de las medidas.
Agradecimientos
Este trabajo ha sido financiado por el MI-CINN (becas de V. García y M. Mira y contratode J.M. Galve. Proyectos CGL2007-64666/CLI
30 V. García-Santos et al. / Revista de Teledetección (2011) 35, 23-31
0,0
0,1
0,2
0,3
0,4
0,5
0,90 0,93 0,96 0,99Emisividad de la superficie, ε
ΔT (k
)
Canal 1 Canal 3Canal 2 Canal 4
Figura 3. Diferencia entre la temperatura de brillo de unasuperficie cuando no se corrige el efecto de emisividaddel panel y la temperatura de brillo de la misma superfi-cie cuando se corrige dicho efecto, ΔT = Tno_corr – Tcorr, ,en función del valor de la emisividad para los 4 canalesdel CE312.

y CGL2007-29819-E/CLI cofinanciados confondos FEDER), y por la Conselleria d’Educa-ció de la Generalitat Valenciana (PROME-TEO/2009/086). Los autores desean agradecerla inestimable ayuda del Centro de Estudios Am-bientales del Mediterráneo (CEAM) por facili-tarnos, para el estudio, los datos del radioson-deo realizado en la Albufera de Valencia, en suproyecto TRANSREG (CGL2007-65359/CLI).
Referencias
BERK, A., ANDERSON, G. P., ACHARYA, P. K.,CHETWYND, J. H., BERNSTEIN, L. S., SHET-TLE, E. P., MATTHEW, M. W. & ADLER-GOL-DEN S. M. 1999. MODTRAN 4 user’s manual,Air Force Research Laboratory, Space VehiclesDirectorate, Air Force Materiel Command, Has-com AFB, MA, 95 pp.
BROGNIEZ, G., PIETRAS, C., LEGRAND, M.,DUBUISSON, P. &HAEFFELIN, M. 2003. Ahigh-accuracy multiwavelength radiometer for insitu measurements in the thermal infrared. Part II:Behavior infield experiments, Journal of Atmos-pheric and Oceanic Technology, 20: 1023-1033.
COLL, C., CASELLES, V., GALVE, J. M., VALOR,E., NICLÒS, R., SÁNCHEZ, J. M. & RIVAS, R.2005. Ground measurements for the validation ofland surface temperatures derived from AATSRand MODIS data. Remote Sensing of Environ-ment, 97: 288-300.
KALNAY, E., KANAMITSU, M., KISTLER, R.,COLLINS, W., DEAVEN, D., GANDIN, L., IRE-DELL, M., SAHA, S., WHITE, G., WOOLLEN,J., ZHU, Y., CHELLIAH, M., EBISSUZAKI, W.,HIGGINS, W., JANOWIAK, J., MO, K.C., RO-PELEWSKI, C., WANG, J., LEETMAA, A.,REYNOLDS, R., JENNE, R. & JOSEPH, D.1995. NCEP/NCAR 40 Year Reanalysis Project.Bulletin of the American Meteorological Societypp. 437-471.
KONDRATYEV K. Y., 1969. Radiation in the At-mosphere. New York: Academic Press.
KORB, A.R. , DYBWAD, P., WADSWORTH, W. &SALISBURY, J. W. 1996, Portable Fourier trans-form infrared spectroradiometer for f ield mea-surements of radiance and emissivity, AppliedOptics, 35(10): 679-1692.
RUBIO, E., CASELLES, V. & BADENAS, C. 1997.Emissivity Measurements of Several Soils andVegetation Types in the 8-14 µm Wave Band:Analysis of Two Field Methods. Remote Sensingof Environment, 59: 490-521.
RUBIO, E. 1998. Hacia la optimización de la me-dida de la emisividad y la temperatura en telede-tección. Tesis Doctoral, cap. 2: 42-51.
SEEMANN, S. W., BORBAS, E. E., LI, J., MEN-ZEL, W. P. & GUMLEY, L. E. 2006. MODIS At-mospheric Profile Retrieval Algorithm Theoreti-cal Basis Document. Madison, WI: Univ.Wisconsin-Madison.
WAN, Z. & DOZIER, J. 1989. Land-surface tem-perature measurement from space: Physical prin-ciples and inverse modeling. IEEE Trans. Geos-ci. Remote Sens., 27(3): 268-277.
Evaluación de distintos métodos de medida de la irradiancia atmosférica descendente... 31

Efecto de la atmósfera en la resolución óptica de la Z/I Digital Mapping Camera
L. Martínez*, M. E. Soler, F. Pérez y R. ArbiolÁrea de Teledetección. Institut Cartogràfic de Catalunya. Parc de Monjuïc, s/n. 08038 Barcelona
ResumenEl Institut Cartogràfic de Catalunya (ICC) opera la cámara digital aerotransportada Z/I Digital Map-
ping Camera (DMC) para diversos trabajos cartográficos. Como todo sistema fotográfico de este mis-mo tipo la imagen padece una degradación en su resolución debida al sistema formador y al efecto dela atmósfera, por lo que la medida objetiva de la resolución con la cámara va más allá de la dimensióngeométrica del píxel y el Ground Sampling Distance (GSD). En este trabajo se analiza la fracción depérdida de resolución que causa la atmósfera en función de las condiciones atmosféricas. Para esti-mar la resolución se emplea una reconstrucción de la Función de Dispersión del Borde (Edge SpreadFunction, ESF) para obtener la Función de Dispersión de la Línea (Line Spread Function, LSF), cuyoFull Width at Half Maximum (FWHM) proporciona un valor de resolución en magnitud píxel. Para si-mular la atmosfera se ha aplicado el código de transferencia radiativa Second Simulation of the Sate-llite Signal in the Solar Spectrum (6S) para el que se han considerado variaciones en los modelos deatmósfera, aerosoles y geometrías de iluminación-observación para el rango espectral de la DMC. Lametodología descrita ha sido aplicada a un blanco radiométrico construido como un escalón radio-métrico en las campañas de calibración del ICC en el área de Banyoles (España). Una imagen sintéti-ca del mismo ha sido procesada con la simulación atmosférica y posteriormente analizada para obte-ner la pérdida de resolución debida exclusivamente a la atmósfera. Los resultados de las simulacionesmuestran una elevada dependencia con el tipo y cantidad de aerosol, y también son compatibles conla medida de resolución de la imagen real del blanco tomada por la cámara.
Palabras clave: resolución, función de dispersión de línea, función de dispersión de escalón, at-mósfera, DMC.
AbstractAtmospheric influence on the Z/I Digital Mapping Camera optical resolution
The Institut Cartogràfic de Catalunya (ICC) operates the airborne digital camera Z/I Digital Map-ping Camera (DMC) for cartographic purposes. This imaging system suffers from certain resolutiondegradation due to both the optical system and the atmosphere. Therefore, real resolution of the came-ra is different from purely geometrical pixel size and the Ground Sampling Distance (GSD). In thiswork, camera resolution loss caused by the atmosphere as a function of the atmospheric radiative con-ditions is analysed. The resolution in pixel units is evaluated as the Full Width at Half Maximum (FWHM)of the Line Spread Function (LSF) computed from a reconstruction of the Edge Spread Function (ESF).The Second Simulation of the Satellite Signal in the Solar Spectrum (6S) radiative transfer code is usedto simulate the atmosphere. Atmosphere type, aerosol model and total load, illumination and observa-tion geometries and spectral range are taken into account when computing simulations. The describedmethodology has been applied to an edge radiometric target at ICC test site on Banyoles (Spain) area.A synthetic image of the edge has been processed with the atmospheric simulations and then its reso-lution analysed to obtain the resolution loss caused by the atmosphere. The simulations results show ahigh correlation between resolution loss and aerosol model and total load. The results are also compa-tible with the resolution measures on the real image taken with the camera.
Key words: resolution, Line Spread Function, Edge Spread Function, atmosphere, DMC.
* Autor para la correspondencia: [email protected]: 04-03-10; Aceptado: 10-05-11.
Asociación Española de Teledetección Revista de Teledetección 35, 32-40ISSN: 1988-8740

Introducción
El Institut Cartogràfic de Catalunya dispo-ne de una línea de producción cartográfica to-talmente digital gracias a la incorporación en2004 y 2005 de cámaras fotogramétricas digi-tales. El modelo elegido fue la Digital Map-ping Camera (DMC) desarrollada y comercia-lizada por Zeiss/Intergraph (Z/I). Estascámaras digitales presentan una resolución su-perior para una misma altura de vuelo frente alas analógicas. Por contra, la relación base/al-tura es mejor en el caso analógico, debido a ladiferencia de formato de las imágenes.
El necesario cambio en los parámetros deconfiguración de un vuelo tras la incorpora-ción de estas cámaras al flujo productivo ge-neró la necesidad de disponer de un método pa-ra determinar de forma objetiva la calidad delos vuelos de cada proyecto, más allá de las pu-ras dimensiones geométricas del píxel. La ca-lidad de imagen es compleja de medir pero,cuanta más resolución y menos ruido tenga-mos, más contribuimos a una mejor calidad deimagen. La resolución hace referencia al po-der de un instrumento óptico para separar dosobjetos de una imagen o también el tamaño delmínimo detalle que podrá distinguirse al utili-zar dicho instrumento. Este concepto se des-arrolló inicialmente en el ámbito de la astro-nomía, donde se plantea la necesidad deseparar fuentes puntuales de luz. Para el casoparticular de la fotografía aérea la pérdida deresolución óptica implica una menor capaci-dad de distinguir las transiciones radiométri-cas presentes en la escena fotograf iada. Asípues, un parámetro clave para determinar la ca-lidad de las imágenes de la cámara es la reso-lución óptica efectiva de las imágenes que lointegran, más que el Ground Sampling Dis-tance (GSD) y el tamaño de los píxeles de laimagen proyectados en el suelo.La pérdida odegradación de la resolución se debe tanto alsistema de captación como a la transmisión dela señal electromagnética a través de la atmós-fera. Respecto al sistema de captación, debe te-nerse en consideración el límite ópticodebidoa la difracción, que se calcula mediante el cri-terio de Rayleigh, y la electrónica de adquisi-ción, cuya calidad y nivel de calibración pue-den introducir ruido y artefactos radiométricos
que degraden la resolución de la imagen. Porsu parte, la atmósfera condiciona y altera latransmisión de la radiación solar debido a laabsorción y dispersión causada por gases y ae-rosoles (Kaufmann, 1989). La absorción at-mosférica es el fenómeno responsable de la ate-nuación de los flujos directos de radiancia quealcanzan la cámara para determinadas regio-nes espectrales. En el caso que nos ocupa, loscontrastes radiométricos se ven reducidos de-bido a la absorción atmosférica, puesto que talcomo describe la Ley de Beer-Lambert, la can-tidad de energía transmitida es una fracción dela energía incidente. La dispersión atmosféri-ca se caracteriza principalmente, para la regiónde trabajo de la DMC, por un cambio en la di-rección de propagación de la radiación tal co-mo describen las leyes de Rayleigh y Mie. Es-to implica que parte de la radiación inicial noalcanza el sensor, mientras que sí lo hace ra-diación que ha modificado su camino y por tan-to no procede del objeto fotografiado. Así, ladispersión atmosférica implica que las zonasde contraste radiométrico, aquellas de transi-ción entre objetos de diferente radiometría, sedegradarán haciendo la distinción entre ambosmenos evidente.
La magnitud más extendida para expresar laresolución espacial de un sensor es la MTF(Modulation Transfer Function o también Fun-ción de Transferencia de Modulación). La MTFes un parámetro de calidad óptica objetivo queaporta información sobre el funcionamiento ycalidad de un sistema óptico y describe cómoresuelve ese sistema óptico pares de líneas a ca-da frecuencia. Cualquier objeto puede ser des-compuesto en todas sus frecuencias espacialesy así la MTF permite calcular cómo se atenúanlos contrastes (modulaciones) al formar la ima-gen del objeto en cada frecuencia espacial. Pa-ra la determinación de la MTF se observan conel sistema óptico a estudiar redes de contrasteconstante y frecuencia creciente midiendo elcontraste resultante en las imágenes obtenidas.Con este procedimiento se busca la frecuenciamás alta que el sistema óptico ya no resuelve ypor tanto su límite de resolución. Esta metodo-logía es poco operativa puesto que precisa de laconstrucción de patrones de líneas (como el1951 USAF resolution test chart) del tamañoadecuado a la escala de la imagen.
Efecto de la atmósfera en la resolución óptica de la Z/I Digital Mapping Camera 33

La Función de Dispersión Puntual o PointSpread Function (PSF) describe todas las per-turbaciones que el valor radiométrico de un pi-xel sobre la imagen padece debido a los men-cionados factores ópticos, electrónicos yatmosféricos. La PSF describe la respuesta delsensor a un objeto puntual observado. La rela-ción entre PSF y MTF viene dada a través dela transformada de Fourier, de manera que laMTF es el módulo de la transformada de Fou-rier de la PSF. Como en el caso anterior, exis-te una dificultad práctica para la medición dela PSF por la necesidad de localizar objetos enla imagen cuya radiometría sea la de un im-pulso o un punto suficientemente pequeño ycontrastado con su entorno.
La Función de dispersión de línea o LineSpread Function (LSF) es la respuesta dada porel sistema de captación a una línea observadasobre el terreno. Lógicamente esta última esmuy importante cuando se desea realizar de-tección de bordes en la imagen. En cierto mo-do es equivalente a la PSF en una dimensión,por lo que la LSF es una buena aproximaciónen una dirección de la PSF. Aunque de nuevo lalocalización de una escena con un objeto line-al en la misma es harto compleja sí es posibleemplear una alternativa más plausible. Dichaopción consiste en la reconstrucción en la ima-gen de la Función de Dispersión de Borde o Ed-ge Spread Function (ESF) en un escalón radio-métrico natural o artificial, que debidamenteparametrizada y calculada su derivada nos pro-porcione la LSF, modelizada con una funciónde tipo gaussiano. Llegados a este punto, la me-dida Full With at Half Maximun (FWHM) dela LSF proporciona un valor de resolución enmagnitud píxel (dominio espacial) en la direc-ción perpendicular a la línea. A su vez, si se de-sea trabajar con una caracterización de la reso-lución más afín a los parámetros ópticoshabituales, la transformación directa de Fourierde la LSF proporciona la MTF.
De todos los factores mencionados comoresponsables de la pérdida de resolución de lossensores de teledetección, la atmósfera es elmenos susceptible de ser controlado o calibra-do en laboratorio por motivos obvios. A su vez,la propia dinámica de la atmósfera hace que lasparametrizaciones climatológicas de la mismasean generalmente insuficientes para determi-
nar el comportamiento radiativo exacto de lamisma en el instante de captura de una imageno en el periodo de captura de una pasada com-pleta de imágenes de cámara aerotransportada.Sin embargo, la consideración de las diversascondiciones en las que se puede realizar unaadquisición de teledetección sí puede ser útilpara acotar el impacto que la atmósfera puedatener en las imágenes.
Los códigos de transferencia radiativa per-miten al usuario obtener parámetros atmosfé-ricos (radiancias amosféricas, transmisivida-des, etc.) o también simular la radiancia quemediría un sensor a partir de una serie de da-tos de entrada, como la geometría, la sensibi-lidad espectral del canal, el estado de la at-mósfera, etc. Los códigos de transferenciaradiativa son una herramienta fundamental a lahora de trabajar imágenes de teledetección, yaque permiten realizar la corrección atmosféri-ca, así como simulaciones útiles en el desa-rrollo de algoritmos para obtener parámetrosderivados. Algunos ejemplos de códigos son:MODTRAN, SMAC, 6S.
A continuación se describe un algoritmo ba-sado en la reconstrucción de la Función de Dis-persión del Borde para obtener un valor de re-solución y un procedimiento para simular elefecto de la atmósfera mediante un código detransferencia radiativa sobre un patrón sintéti-co. Posteriormente se analiza el resultado decombinar ambos procedimientos y finalmentese compara con la resolución determinada enla imagen DMC real del patrón.
Material y métodos
Construcción de la Función de dispersión de borde (ESF)
La metodología propuesta para la medida dela resolución de la imagen en magnitud píxel(Soler et al., 2007) es el proceso de una regiónque contiene un contorno o borde observadoen la imagen como un escalón radiométrico,semejante al planteado para satélite por Ryanet al. (2003). En dicho contorno se realiza unajuste mínimo cuadrático sobre la función bi-dimensional del escalón radiométrico, comoen el método propuesto por Blonski (2001) y
34 L. Martínez et al. / Revista de Teledetección (2011) 35, 32-40

Blonski et al. (2002), que se postula como unafunción de tipo sigmoide:
P1f (j,i) = P4 + ———————————1 + eP3(i*cosP5+j*sin(P5–P2)) [1]
Pk ∈ℜ,k = 1,…,5
donde {i,j} son los índices fija y columna dela imagen.
El ajuste mínimo-cuadrático proporciona va-lores para los cinco parámetros y esta función esderivada para obtener la LSF. La medida de laresolución será la anchura-(FWHM) de la LSF.
Simulación del efecto de la atmósfera
La radiancia medida por la cámara L*, pue-de relacionarse con la reflectividad aparenteρ*, como:
πL*ρ* = ———— [2]µsEs
donde:— Es es la irradiancia solar extraterrestre.— µs es el coseno del ángulo cenital solar.
Teniendo en cuenta los fenómenos de inter-acción con la atmósfera descritos y segúnStaenz y Williams (1997), es posible notar laradiancia solar que alcanza la cámara cuandose observa una superficie horizontal como:
ρc ⟨ρe⟩L* = A —————— + B —————— + La [3]
(1 – ⟨ρc⟩S) (1 – ⟨ρe⟩S)
donde:— ρc es la reflectividad corregida de la su-perficie observada.— ⟨ρe⟩ es la reflectividad corregida del entor-no en el que se encuentra la superficie obser-vada (una ventana de píxeles).
— S es el albedo esférico de la atmósfera.— La es la radiancia retrodispersada por la at-mósfera hacia el sensor.— A y B dan cuenta de la radiación directa ydifusa, respectivamente, y de su interaccióncon la atmósfera.
Los parámetros A, B, S y La caracterizan tan-to la geometría de observación e iluminación,como las condiciones atmosféricas considera-das en este trabajo (Tabla 1) mediante el códi-go de transferencia radiativa Second Simula-tion of the Satellite Signal in the SolarSpectrum (6S) descrito en Vermote et al.(1997).
El cálculo de los parámetros A, B, S y La serealiza a partir de las magnitudes Lg o radian-cia que alcanza el sensor desde la superficieobservada, y Lp o radiancia que alcanza el sen-sor desde el entorno de la superficie observa-da y por la atmósfera, que para un medio de re-flectividad uniforme se notan como
ρcLg = A —————— [4]1 – ρc S
ρcLp = B —————— + La [5]1 – ρc S
Ambas magnitudes Lg y Lp pueden obte-nerse mediante códigos de transferencia ra-diativa funcionando en modo directo. Así, laobtención de los valores de A, B, S y La es tri-vial mediante la resolución de sistemas deecuaciones. Los resultados correspondientespara cada conjunto de situación atmosféricay geométrica son guardados en una base dedatos para aplicarlos cuantas veces sea nece-sario.
La Figura 1 muestra el campo de calibraciónradiométrica ICC de Banyoles (España). El 25
Efecto de la atmósfera en la resolución óptica de la Z/I Digital Mapping Camera 35
Tabla 1. Condiciones geométricas y atmosféricas consideradas para la simulación (total, 18.000) median-te el código de transferencia radiativa 6S
Parámetro Rango de valores
Modelo atmósfera Estándar US62, Tropical, Latitudes medias invierno,Latitudes medias verano, Subártica verano y Subárticainvierno
Modelo aerosoles Continental, marítimo y urbanoCantidad de aerosoles (visibilidad en km) 7,5, 15, 30, 60 y 120Ángulo de iluminación (ángulo cenital, cenit = 0°) 0, 30, 45, 60 y 75Ángulo de observación(ángulo cenital, cenit = 0°) 0, 15, 30, 45 y 60Diferencia acimutal iluminación-observación 0, 45, 90, 135, 180, 225, 270 y 315

de junio de 2005 se tomaron imágenes DMCdesde un Cessna Caravan B209, entre las 10 ylas 11 am (UTC) y se realizaron medidas de ra-diometría de campo simultáneas. En la partesuperior del mismo puede observarse la lonablanca que en combinación con el suelo de tie-rra forman el escalón radiométrico objeto deeste estudio.
Empleando la geometría del blanco radio-métrico y a partir de las medidas de reflectivi-dad obtenidas en campo para la lona blanca y
el suelo, se construye una imagen sintética delconjunto a la que se aplica la Ecuación 3 conlos valores obtenidos para cada simulación deA, B, S y La (Fig. 2).
Resultados
La Figura 3 nos muestra el histograma de laresolución (FWHM de la LSF en unidades pí-xel) del blanco radiométrico tipo escalón trasaplicar las simulaciones atmosféricas para ca-nal pancromático. Puesto que no se disponende escalones radiométricos en todas las direc-ciones, no se distingue entre las condicionesalong-track y cross-track para este trabajo. Pue-de observarse una distribución asimétrica devalores de resolución con una extensa cola ha-cia los valores de menor resolución (FWHMmayor). Esta distribución nos indica que la ma-yoría de casos la resolución estará alrededor delas máximas frecuencias del histograma que seubican a valores de alta resolución (FWHMmenor) pero que hay una gran cantidad de ca-sos donde la atmósfera producirá una gran pér-dida de resolución.
La Tabla 2 muestra los estadísticos básicosde la resolución (anchura FWHM de la LSF enunidades píxel) del patrón sintético tras apli-
36 L. Martínez et al. / Revista de Teledetección (2011) 35, 32-40
Figura 1. Fotografía aérea del campo de calibraciónICC en Banyoles (2005). Blanco radiométrico emple-ado en la parte superior izquierda del campo (cubier-ta blanca sobre suelo).
Figura 2. Detalle del escalón radiométrico del blanco radiométrico (a) empleado como ESF. Detalle de la ima-gen sintética del blanco radiométrico (b) empleado como patrón de la resolución.
a)
b)

car a la imagen todas las simulaciones atmos-féricas para el canal pancromático de la DMC,tomando dicho patrón sintético (sin atmósfe-ra) como referencia de resolución unidad, queconfirman las apreciaciones realizadas sobreel histograma de la Figura 3.
Por su parte, la resolución medida en laimagen DMC pancromática sobre el blancoradiométrico y mediante la técnica descrita es3,15 píxeles con GSD de 10cm, tomando di-cho patrón sintético como referencia de reso-lución unidad. Ambos resultados son compa-tibles, puesto que la resolución perdida por elefecto atmosférico es una parte de la pérdidatotal y las condiciones atmosféricas reales es-tán dentro de las consideradas en la simula-
ción. Análisis más detallados de los resulta-dos de pérdida de resolución, muestran quelas variables que más influyen en la pérdidade la misma son el tipo y la cantidad de aero-soles.
A continuación se repite el proceso para ca-da uno de los canales multiespectrales, paraanalizar si las diferencias son signif icativasrespecto al canal pancromático. La Tabla 3muestra los estadísticos básicos de la resolu-ción del patrón sintético tras aplicar a la ima-gen todas las simulaciones atmosféricas paralos canales multiespectrales de la DMC, to-mando dicho patrón sintético como referen-cia de resolución unidad. Como puede obser-varse en dicha tabla existe una elevadadependencia con la longitud de onda, siendomáximo el efecto a longitudes de onda baja(azul).
Este comportamiento de la resolución paralos canales multiespectrales refuerza el análi-sis anterior que relaciona los efectos de la at-mósfera en la resolución con su carácter dis-persivo y por tanto con el tipo y cantidad deaerosoles, dada la dependencia de la dispersiónde la longitud de onda, como muestra las Ta-blas 4 y 5, donde se calculan los estadísticosbásicos de la resolución para cada una de lasatmósferas consideradas, así como cada una de
Efecto de la atmósfera en la resolución óptica de la Z/I Digital Mapping Camera 37
Figura 3. Histograma de la resolución (FWHM de la LSF en unidades píxel) del blanco radiométrico tipo esca-lón tras aplicar las simulaciones atmosféricas para canal pancromático.
25%
20%
15%
10%
5%
0%
Resolución (FWHM de la LSF en unidades píxel)
Resolución (FWHM de la LSF en unidades píxel) para canal pancromático cámara DMC con 10 cm de GSD
1,50
1,75
2,00
2,25
2,50
2,75
3,00
3,25
3,50
3,75
4,00
4,25
4,50
4,75
5,00
5,25
5,50
5,75
6,00
6,25
6,50
6,75
7,00
7,25
7,50
7,75
8,00
8,25
8,50
8,75
9,00
Frec
uenc
ia re
lativ
a
Tabla 2. Estadísticos básicos de la resolución (uni-dades en píxeles y GSD de 10 cm) para el canal pan-cromático de la DMC
Resolución Pancromático
Patrón 1,00Mínima 8,81Máxima 1,35Promedio 2,81Desviación estándar 1,66Percentil Q1 1,62Percentil Q2 2,07Percentil Q3 3,37

las visibilidades atmosféricas utilizadas parala simulación de la atmósfera.
Este hecho es claramente observable en la Fi-gura 4, donde se ha procesado el histograma dela resolución para el caso pancromático para ha-
cer visible la frecuencia obtenida para cada ti-po de atmósfera o para cada visibilidad atmos-férica considerada en las simulaciones. Este fe-nómeno ya es claramente observable para elcanal pancromático, por lo que se confirma que
38 L. Martínez et al. / Revista de Teledetección (2011) 35, 32-40
25%
20%
15%
10%
5%
0%
25%
20%
15%
10%
5%
0%
Resolución (FWHM de la LSF en unidades píxel)
Resolución (FWHM de la LSF en unidades píxel)
Aerosol continental Aerosol marítimo Aerosol urbano
Visibilidad 7,5 km Visibilidad 15 km Visibilidad 30 km Visibilidad 60 km Visibilidad 90 km
1,50
1,75
2,00
2,25
2,50
2,75
3,00
3,25
3,50
3,75
4,00
4,25
4,50
4,75
5,00
5,25
5,50
5,75
6,00
6,25
6,50
6,75
7,00
7,25
7,50
7,75
8,00
8,25
8,50
8,75
9,00
1,50
1,75
2,00
2,25
2,50
2,75
3,00
3,25
3,50
3,75
4,00
4,25
4,50
4,75
5,00
5,25
5,50
5,75
6,00
6,25
6,50
6,75
7,00
7,25
7,50
7,75
8,00
8,25
8,50
8,75
9,00
Frec
uenc
ia re
lativ
a to
tal
Frec
uenc
ia re
lativ
a to
tal
Figura 4. Histograma de la resolución (FWHM de la LSF en unidades píxel) del blanco radiométrico tipo esca-lón tras aplicar las simulaciones atmosféricas para canal pancromático. (a) según el modelo de aerosol conside-rado para las simulaciones atmosféricas (b) según la visibilidad atmosférica considerada para las simulacionesatmosféricas.
Resolución canal pan para diversos modelos de aerosolesa)
b) Resolución canal pan para diversas visibilidades atmosféricas

en alta frecuencia (azul) la influencia del tipo ycantidad de aerosol será claramente apreciable.
Como trabajo futuro se plantea analizar conestos procedimientos imágenes obtenidas deforma síncrona con medidas de concentracio-nes de gases y aerosoles atmosféricos. De es-ta forma se podrán validar los resultados de re-solución de las imágenes con las simulacionesespecíficas para las condiciones atmosféricasde adquisición.
Conclusiones
En este trabajo se ha combinado un métodopara medir la resolución de imágenes de laDMC (FWHM de la LSF en unidades píxel),con la generación de una imagen sintética y laaplicación de múltiples simulaciones atmosfé-ricas. Los resultados de las simulaciones mues-tran una elevada dependencia con el tipo y can-tidad de aerosol, y también son compatibles
Efecto de la atmósfera en la resolución óptica de la Z/I Digital Mapping Camera 39
Tabla 3. Estadísticos básicos de la resolución (unidades en píxeles y GSD de 10 cm)para los canales multiespectrales de la DMC
Resolución Azul Verde RojoInfrarrojopróximo
Patrón 1,00 1,00 1,00 1,00Mínima 13,55 9,03 8,53 8,03Máxima 1,93 1,43 1,26 1,12Promedio 5,34 3,16 2,51 1,97Desviación estándar 3,03 1,83 1,56 1,24Percentil Q1 2,74 1,74 1,46 1,27Percentil Q2 4,79 2,43 1,76 1,47Percentil Q3 7,56 4,14 2,84 2,02
Tabla 4. Estadísticos básicos de la resolución (unidades en píxeles y GSD de 10 cm)para el canal pancromático de la DMC según el modelo de aerosol consideradopara las simulaciones atmosféricas
Resolución pancromáticoAerosol
Continental Marítimo Urbano
Patrón 1,00 1,00 1,00Mínima 7,80 8,81 6,72Máxima 1,42 1,47 1,35Promedio 2,82 3,27 2,33Desviación estándar 1,61 1,94 1,21Percentil Q1 1,64 1,74 1,53Percentil Q2 2,20 2,56 1,88Percentil Q3 3,46 4,27 2,68
Tabla 5. Estadísticos básicos de la resolución (unidades en píxeles y GSD de 10 cm) para el canal pancro-mático de la DMC según la visibilidad atmosférica considerada para las simulaciones atmosféricas
Resolución Visibilidad
pancromático 7,5 km 15 km 30 km 60 km 120 km
Patrón 1,00 1,00 1,00 1,00 1,00Mínima 8,81 6,23 4,14 2,93 2,40Máxima 2,63 1,82 1,52 1,39 1,35Promedio 5,30 3,17 2,17 1,78 1,65Desviación estándar 1,58 1,19 0,67 0,38 0,26Percentil Q1 4,24 2,28 1,72 1,53 1,45Percentil Q2 5,18 2,71 1,89 1,63 1,52Percentil Q3 6,35 4,03 2,52 1,95 1,74

con la medida de resolución de la imagen realdel blanco con la cámara DMC. Como trabajofuturo se propone analizar con estos procedi-mientos imágenes obtenidas de forma síncro-na con medidas de concentraciones de gases yaerosoles atmosféricos.
Agradecimientos
Los autores agradecen al CEDEX (Ministe-rio de Fomento) por su colaboración en las me-didas de campo. Los autores también agrade-cen al Ajuntament de Banyoles por la cesióndel Camp Vell para la instalación de blancosradiométricos.
Referencias
BLONSKI, S. 2001. Spatial Resolution of IKONOSPan. Images: Characterization Based on EdgeResponses. In: 2001 High Spatial ResolutionCommercial Imagery Workshop, 19-22 Marzo,Greenbelt, MD (USA).
BLONSKI, S., PAGNUTTI, M., RYAN, R. E. & ZA-NONI, V. 2002. In-flight edge response measu-rements for high spatial- resolution remote sen-sing systems. In: W. L. Barnes (ed.), Proceedingsof SPIE: Earth Observing Systems VII, 4814:317-326.
RYAN, R., BALDRIDGE, B., SCHOWENGERDT,R. A., CHOI T., HELDER D. L. & BLONSKI, S.2003. Ikonos spatial resolution and image inter-pretability characterization. Remote Sensing ofEnvironment, 88: 37-52.
KAUFMAN, Y. J. 1989. The atmospheric effect onremote sensing and its correction. In: Asrar, G.,editor, Theory and Applications of optical RemoteSensing. Wiley and Sons, New York.
SOLER, M. E., PÉREZ, L.F., PALÀ, V., &ARBIOL,R. 2007. Experiencias en medidas de resoluciónde imagen en el ICC 7a Semana Geomántica. Bar-celona, 20-23 febrero.
STAENZ, K. &WILLIAMS, D. J. 1997. Retrievalof Surface Reflectance from Hyperespectral Da-ta Using a Look-up Table Approach. CanadianJournal of Remote Sensing, 23(4): 354-368.
VERMOTE, E., TANRÉ, D., DEUZÉ, J. L., HER-MAN, M. & MORCRETTE, J. J. 1997. Secondsimulation of the satellite signal in the solar spec-trum, 6S: an overview. Geoscience and RemoteSensing, IEEE Transactions on, 35: 675-686.
40 L. Martínez et al. / Revista de Teledetección (2011) 35, 32-40

Introducción
A finales del mes de enero de 2009, el nor-te de la Península Ibérica y el sur de Francia se
vieron afectados de un modo excepcional porel ciclón extratropical Klaus. Fue principal-mente la mañana del 24 de enero cuando el ven-daval azotó de forma más virulenta a Catalu-ña. En la provincia de Barcelona, la máximapotencia se localizó en las comarcas de Anoia,Alt Penedès y Baix Llobregat, donde se regis-
Delimitación de zonas forestales afectadas por vendavalmediante fotogrametría
R. Riera*Oficina Técnica de Prevención Municipal de Incendios Forestales. Diputación de Barcelona.
C/ Compte d’Urgell, 187. 08036 Barcelona
Resumen
El vendaval que azotó el norte de la Península Ibérica y el sur de Francia en enero de 2009 provocógraves desperfectos en núcleos urbanos, urbanizaciones, zonas agrícolas e industriales y también en ma-sas forestales. Los medios de comunicación difundieron sobre todo los desastrosos efectos en las masasforestales de Las Landas francesas. En Cataluña los daños fueron más localizados que en Las Landas,pero cayeron numerosos pies, sobre todo de coníferas, dejando los bosques intransitables. En el presen-te estudio se muestra la metodología utilizada para cartografiar las zonas con cubierta forestal afectadaen el área más castigada de la provincia de Barcelona: la comarca del Baix Llobregat. Se realizó un vue-lo fotogramétrico de 16.000 ha con una cámara DMC (Digital Mapping Camera), generando imágenesdigitales RGB & CIR de aproximadamente 25 cm de píxel (GSD) y un solapamiento del 60-30%. Estasimágenes fueron restituidas mediante el software Purview, proporcionando visión estereoscópica de lasimágenes, delimitando las zonas de cubierta forestal con árboles abatidos y definiendo el grado de afec-tación según el porcentaje de árboles derribados o partidos. El resultado ha sido una cartografía opera-tiva para los ingenieros forestales, utilizada para la retirada de la madera tumbada en el bosque, dondeademás de la localización se aporta información de la dirección de caída de los árboles.
Palabras clave: fotogrametría, forestal, vendaval, DMC, fotografía aérea.
Abstract
Mapping forest windstorm damaged areas using photogrammetry
The windstorm that hit the Iberian Peninsula and southern France on January 2009 caused severedamage in villages, interface areas, agricultural and industrial areas and also forests. The mass mediahighlighted the impacts on the French Landes forests. In Catalonia, the damages were more localizedbut many pine trees fell leaving the forest impassable. This study describes the methodology used tomap the damaged forest areas on the most affected area in the province of Barcelona: the Baix LlobregatCounty. RGB and CIR digital images with 25 cm pixel (GSD) and an overlap of 60-30%, were obtainedfrom a photogrammetric flight with DMC camera (Digital Mapping Camera) over 16,000 ha. Digitalstereo photogrammetry based on the aerial photographs through Purview software, was used to delineateforest damaged areas and specify impact severity according to the percentage of fallen or broken trees.The resulting operational maps can be used by forest engineers to remove fallen trees because not onlydamage location information is provided, but also tree fall layout.
Key words: photogrammetry, forestry, windstorm, DMC, aerial photography.
* Autor para la correspondencia: [email protected]: 05-03-10; Aceptado: 21-03-11.
Asociación Española de Teledetección Revista de Teledetección 35, 41-46ISSN: 1988-8740

traron rachas máximas de viento de 139 km/hen las Estaciones Meteorológicas Automáticas(EMA) de Òdena y Font-rubí o de 131 km/h enBegues (Servei Meteorològic de Catalunya,2006), con consecuencias devastadoras.
Las rachas de viento máximo fueron muy lo-calizadas así como también sus afectaciones,provocando pérdidas de varios millones de eu-ros. En las zonas urbanas los efectos fueron re-parados con carácter de urgencia por bombe-ros, protección civil, y otras administraciones,restableciéndose rápidamente la normalidad.En las zonas forestales, los daños debían eva-luarse, si no con la misma urgencia, sí con ce-leridad, para empezar cuanto antes los trabajosde retirada de árboles caídos.
Los medios de comunicación se hicieron ecode la destrucción en las masas forestales de LasLandas francesas, donde las primeras estima-ciones apuntaban a más de 300.000 ha arrasa-das de pino marítimo (Pinus pinaster Ait.)(Diariovasco.com, 2008). En el norte peninsu-lar, más concretamente en Galicia, por lo menos 32.500 ha de pino (Pinus radiata) y eu-calipto (Eucalyptus globulus) se vieron seve-ramente afectadas (GIT, 2009), mientras queen Euskadi se hablaba de 350 ha dañadas (Dia-riovasco.com, 2008).
En Cataluña, muchos bosques quedaron sal-picados de árboles aislados caídos. En las zonasmás afectadas los daños se vieron aumentadosa rodales de pinos derribados, mayoritariamen-te de pino carrasco (Pinus halepensis Mill.). Lasdimensiones de los rodales de árboles caídos va-riaban de centenares de metros cuadrados a unaspocas hectáreas (Fig. 1). Las primeras evalua-ciones realizadas por el cuerpo de agentes ru-rales de la Generalitat de Catalunya estimabanen 1.950 las hectáreas dañadas por el vendavalen las comarcas del Vallès Occidental, Anoia,Alt Penedès y Baix Llobregat. La Generalitatdestinó un presupuesto inicial de 7 millones deeuros para la retirada de elementos de riesgo enel medio natural (Generalitat de Catalunya,2010).
Experiencias similares (como las del ciclónGudrun en Suecia en enero de 2005 o los ci-clones Lothar y Martín en el centro y norte deFrancia en diciembre de 1999) han demostra-do que tanto la teledetección, mediante imá-genes ópticas o radar de muy alta resolución
[Very High Resolution (VHR), resolución es-pacial igual o inferior a 1 m], como la foto-grametría, resultan ser métodos efectivos yeconómicos para cartografiar las zonas fores-tales dañadas (Maire y Yésou, 2003; SwedishForest Agency, 2007).
Para el ciclón Klaus (24 de enero) en Fran-cia, se activó el International Charter para laadquisición y entrega de datos espaciales encatástrofes naturales, y se hicieron las prime-ras evaluaciones de los daños con imágenesSPOT 5 (Spot Image, 2008); por el contrario,en Galicia no se utilizaron imágenes de satéli-te ni fotogrametría para el inventario de daños,sino inspecciones aéreas y trabajo de campo(GIT, 2009).
En la provincia de Barcelona se evaluó la re-lación entre medios propios, costes, precisióny rapidez en la disponibilidad de los datos,comparando distintas tecnologías y mediosaplicables. Al tratarse de una situación deemergencia, el criterio principal fue la inme-diata disponibilidad de los datos al menor cos-te posible. La precisión requerida fue ubicarlas zonas con teselas de árboles derribados yestimar el porcentaje de árboles caídos con losmedios de software y personal especializadocon los que cuenta la Oficina Técnica de Pre-vención Municipal de Incendios Forestales(OTPMIF) de la Diputación de Barcelona, enlas zonas dónde los propietarios forestales losolicitaran.
La tecnología LIDAR (Light Detection andRanging) no se consideró adecuada debido altiempo que requiere para el pre-procesamien-
42 R. Riera / Revista de Teledetección (2011) 35, 41-46
Figura 1. Mancha de árboles caídos.

to de los datos; los datos radar se desestimaronya que la OTPMIF no dispone de medios pro-pios para su procesamiento; las imágenes ge-neradas a partir de cámaras ópticas implemen-tadas en UAVs se descartaron por el elevadocoste económico (5 €/ha); y las imágenes óp-ticas de muy alta resolución (VHR) tambiénfueron descartadas por el alto coste económi-co debido a la necesidad de adquirir la totali-dad de la imagen (resultando un coste de0,5 €/ha teniendo en cuenta sólo el área de in-terés) y a la necesidad de realizar trabajo decampo para la comprobación de los resultadosdel proceso de las imágenes. Así pues, sólo lafotogrametría cumplía con la mayoría de re-quisitos (3 semanas inicialmente y 0,28 €/hapara las imágenes) y el objetivo propuesto: car-tografiar las zonas afectadas a escala 1:5.000.
Zona de estudio
Los daños causados por el temporal se dis-tribuyeron de forma irregular y localizada portoda la provincia de Barcelona. Después de unaprimera inspección aérea, se determinó que elBaix Llobregat era la comarca más afectada ycon los daños en la masa forestal más genera-lizados, motivo por el cual se decidió centrarel estudio en dicha comarca.
El 14 de marzo de 2009, el Institut Cartogrà-fic de Catalunya (ICC) realizó dos vuelos conel avión Partenavia P-68 sobre las zonas másafectadas del Baix Llobregat (Fig. 2), obtenien-do dos rectángulos (ED1950 UTM Zona 31N:414008E, 4580876N & 420598E, 4586034N)
diseñados con el fin de optimizar el plan de vue-lo y cubrir la máxima área forestal posible.
El área está localizada a ambos lados del ríoLlobregat, a sólo 10 km de su desembocadura.Por un lado en las Sierras del Ordal y por elotro en la montaña de Collserola. La orografíaes abrupta y cambiante, con un rango de alti-tudes entre 5 y 500 msnm. El paisaje contieneun mosaico de zonas urbanas, urbanizaciones,matorral, campos de cultivo y bosques, en don-de predominan los pinares de pino carrasco(Pinus halepensis Mill.).
Datos
Las imágenes fueron adquiridas con una cá-mara DMC 14, que permite obtener imágenesfotogramétricas digitales mediante un sensorelectrónico. Opera en 5 canales espectrales (pan-cromático, rojo, verde, azul e infrarrojo cerca-no) con 8 objetivos ópticos (4 pancromáticos y4 multiespectrales). Con las imágenes de los 4cabezales pancromáticos de alta resolución sesintetiza una imagen de 13.824 × 7.680 píxelesutilizada para convertir las imágenes multies-pectrales de baja resolución (2.048 × 3.072 pí-xeles) en imágenes de alta resolución median-te el proceso de mejora «pan sharpening». Elproceso se realiza a una resolución radiomé-trica de 12 bits, que es convertida a 8 bits me-diante un proceso de compresión lineal con elf in de disminuir el tamaño de las imágenes(Alamús et al., 2005; Colomer, 2005). En elpresente estudio se dispuso de 157 imágenesen RGB y CIR (Fig. 3) con un solapamientolongitudinal y transversal del 60-30% respec-tivamente, una resolución radiométrica de 8bits y un tamaño de píxel de 25 cm GSD(Ground Sampling Distance), lo que permitetrabajar a una escala mínima de 1:5.000 (Ja-cobsen, 2005) y un error en la precisión verti-cal y horizontal de ± 1 m (I.S.M. InternationalSystemap Corp., 2009).
Metodología y resultados
La identif icación de las teselas de árbolescaídos mediante interpretación visual de lasimágenes en 3D depende de las aptitudes y co-
Delimitación de zonas forestales afectadas por vendaval mediante fotogrametría 43
Figura 2. Localización de los dos vuelos (recuadrosrojos) en la comarca del Baix Llobregat.

nocimientos del operador (Quine y Bell, 1998)y de la resolución espacial de las imágenes(Miller et al., 2000); con 25 cm GSD es sufi-ciente para reconocer las zonas de bosque conárboles derribados o partidos mediante resti-tución fotogramétrica. La visualización es me-jor con imágenes CIR respecto a las RGB, de-bido principalmente al realce de los troncosabatidos respecto a las otras cubiertas, y a quela diferencia entre copas de los árboles y sue-lo es más patente en las CIR. Con las imáge-nes en escala de grises, el operador pierde ca-pacidad para la diferenciación de los troncosabatidos ya que se pueden confundir con el sue-lo. El único motivo por el que se podrían utili-zar imágenes en escala de grises sería para op-timizar el rendimiento del software a la horade procesar y manejar las imágenes, pero la ga-nancia en tiempo no justifica la pérdida de ca-lidad de la imagen.
El software Purview es una estación foto-gramétrica que trabaja en el entorno de ArcGiscon imágenes digitales y elementos de geoda-tabase superpuestos (I.S.M. InternationalSystemap Corp., 2009). Para la orientación delas imágenes, se requieren sus correspondien-tes parámetros de orientación o georreferen-ciación, que se obtienen únicamente del archi-vo de soporte aéreo cinemático, sin necesidadde apoyo fotogramétrico (puntos de campo). Elvuelo se realizó grabando los datos en un sen-
sor IMU; una vez finalizado el cálculo GPS yobtenidas las posiciones del centro de fase dela antena, se integraron los datos con las ob-servaciones inerciales del IMU para obtenerlos ángulos de orientación de las imágenes pa-rametrizados como roll, pitch y heading, obte-niendo omega, phi y kappa por aerotriangula-ción, que junto con las coordenadas centrales(X, Y, Z) de cada fotograma, permite orientary posteriormente rectificar las imágenes en elSIG gracias a tener el mismo sistema de coor-denadas (UTM Zona 31N) y sistema de refe-rencia (ED1950).
Una vez rectificadas las imágenes y con lacartografía de base superpuesta, se procede alreconocimiento de las zonas afectadas y la de-limitación de su perímetro, definiendo el gra-do de afectación según el porcentaje de árbo-les derribados, base legal para la subvenciónextraordinaria para la recuperación del poten-cial forestal de las masas afectadas por neva-das, vendavales y sequía de los años 2008 y2009, de la Generalitat de Catalunya:
— 75-100%.— 50-75%.— 25-50%.— < 25%.Dada la situación de emergencia, en la pri-
mera fase del estudio se inventariaron única-mente aquellas fincas en que el propietario fo-restal lo solicitó, mediante su adscripción a la
44 R. Riera / Revista de Teledetección (2011) 35, 41-46
Figura 3. Imagen DMC de una zona afectada, con árboles abatidos sobre un camino forestal en RGB a) y en CIR (b).
a) b)

Asociación de Propietarios Agroforestales delBaix Llobregat. Posteriormente, la revisión seextendió en zonas circundantes a las fincas aso-ciadas y zonas de mayor afectación.
En la Figura 4 se muestra la cartografía ope-rativa para la saca de la madera, con la locali-zación, el grado de intensidad y la direcciónde caída predominante de los árboles, útil pa-ra la planificación del desembosque de la ma-dera.
En noviembre de 2009, el número de nuevospropietarios asociados a raíz del siniestro eran145, con un total de 3.672 hectáreas forestales,de las que 423 ha fueron afectadas por el ven-daval. En la Tabla 1 se muestra el total de su-perficie afectada según el grado de intensidaden la zona inventariada hasta noviembre de2009. Cabe mencionar que la afectación reales, por lo menos, superior a estas cifras, ya queno se ha restituido la totalidad de la zona de es-tudio.
Discusión
La delimitación de los perímetros de las zo-nas afectadas mediante restitución fotogramé-trica es un proceso mecánico, pero eficiente.Aunque no sea aconsejable para cubrir gran-des superficies dado el alto requerimiento entiempo del proceso, sí lo es para zonas locali-zadas como las fincas asociadas de este traba-jo, a escala 1:5.000.
La visión estereoscópica con 25 cm GSDpermite localizar rodales o teselas de árbolesabatidos, pero no permite identif icar los ár-boles aislados caídos en medio de la masa fo-restal, dónde apenas se ha alterado la Fracciónde Cabida Cubierta (FCC). Previamente a lacontratación del vuelo, se realizaron pruebascon imágenes de 10 cm GSD, pero se descar-taron debido al volumen de almacenamientode las imágenes, que hacía más dificultosa larestitución, y al incremento significativo delcoste de los datos. No se han realizado prue-bas con GSD superiores, pero se puede supo-ner que un aumento en el GSD afectaría ne-gativamente a la identif icación de pequeñosrodales de árboles caídos, pudiéndose identi-f icar solamente aquellas teselas de tamañomás grande.
Si bien la rapidez en la disponibilidad de losdatos se vio frenada por la proximidad de la zo-na de estudio al aeropuerto de Barcelona, he-cho que complicó la obtención de los permisos
Delimitación de zonas forestales afectadas por vendaval mediante fotogrametría 45
Figura 4. Cartografía operativa de una zona afectada sobre ortofotomapa 1:5.000 (ICC).
Tabla 1. Superficie forestal afectada según el gra-do de intensidad
Porcentaje Superficiede afectación (ha)
75-100% 156,1050-75% 140,9425-50% 98,72< 25% 27,01
Total 422,77

para volar y que consecuentemente retardó ladisponibilidad de los datos, las expectativas decoste-precisión de la tecnología utilizada pu-dieron ser verificadas. El procedimiento utili-zado fue de utilidad en la asistencia al objeti-vo de retirada de elementos de riesgo en elmedio natural del Baix Llobregat.
Agradecimientos
El autor agradece el soporte técnico brinda-do por el personal del ICC, y a Cristina Vega(UdL) por los comentarios en la revisión.
Referencias
ALAMÚS, R., KORNUS, W., PALÀ, V., PÉREZ, F.,ARBIOL, R., BONET, R., COSTA, J., HER-NÁNDEZ, J., MARIMON, J., ORTIZ, M. À.,PALMA, E., PLA, M., RACERO, S. & TALAYA,J. 2005. Validation process of the ICC digital ca-mera. ISPRS Workshop «High-Resolution EarthImaging for Geospatial Information», Hannover,Germany, May 17-20 2005.
COLOMER, J.L. 2005. Cámaras fotogramétricasdigitales, altímetros láser y captadores hiperes-pectrales: una nueva generación de sensores aerotransportados para la geoinformación. Insti-tuto Geográfico Agustín Codazzi (IGAC). Co-lombia, agosto 2005.
DIARIOVASCO.COM DIGITAL VASCA, S.L.U.2008. Hemeroteca. http://www.diariovasco.com(último acceso a 30 de enero de 2009).
GENERALITAT DE CATALUNYA, 2010. Acordsde govern del 3 de febrer de 2009. http://www.gencat.cat (último acceso a 31 de marzo de 2010).
GIT FORESTRY CONSULTING. CONSULTORÍAY SERVICIOS DE INGENIERÍA AGROFO-RESTAL, 2009. GIT Forestry Consulting’s Blog.http://www.git-forestry.com (último acceso a 25de mayo de 2009).
I.S.M. INTERNATIONAL SYSTEMAP CORP.2009. Purview. I.S.M. International SystemapCorp, Vancouver BC, Canada.
JACOBSEN, K. 2005. Photogrammetry and geoin-formation trends for large scale mapping. Proce-edings of the 1st Annual Map Middle East Conference on Geospatial information and know-ledge economy, Dubai, UAE.
MAIRE, C. & YÉSOU, H., 2003. Storm Forest Da-mage Mapping Based on VHR InSAR Data. Pro-ceedings of Fringe, 2003. ESA, ESRIN, Italy, De-cember 1-5 2003.
MILLER, D., QUINE, C. & HADLEY, W. 2000. Aninvestigation of the potential of digital photo-grammetry to provide measurements of forestcharacteristics and abiotic damage. Forest Eco-logy and Management, 135: 279-288.
QUINE, C.P. & BELL, P.D.B. 1998. Monitoring ofwindthrow occurrence and progression in spru-ce forests in Britain. Forestry, 71(2): 87-97.
SERVEI METEOROLÒGIC DE CATALUNYA.2006. Dades d’Estacions Meteorolòqiques Au-tomàtiques (EMA). http://www.meteocat.com(último acceso a 20 de mayo de 2009).
SPOT IMAGE S.A. 2008. Images in the news. http:// www.spotimage.fr (último acceso a 25 de mayode 2009).
SWEDISH FOREST AGENCY. 2007. The Stormin Sweden. http://www.svo.se (último acceso a25 de mayo de 2009.
46 R. Riera / Revista de Teledetección (2011) 35, 41-46

Introduction
Changes in climate seem already evident. Inthe Occidental Mediterranean average tempe-ratures have increased during the XX century.
During the second part of the XX century,especially in the middle of 70’s, this trend hasaccelerated, being is some places higher than1.6°C for the 1975-1998 period. In Spain tem-peratures have risen more than 0.4°C in winterand 0.7°C in summer. In Catalonia averagetemperatures during this period have sufferedan increase of 0.88°C, whereas maxima have
Airborne soil moisture determination at regional level:a data fusion mission approach for Catalan territory
F. Martín1*, J. Corbera1, J. F. Marchan1, A. Camps2 and A. Aguasca3
1 Instiuto Cartográfico de Cataluña. Parque de Monjuïc. 08038 Barcelona2 Passive Remote Sensing Group. Campus Nord UPC3 Active Remote Sensing Group. Campus Nord UPC
Abstract
Water cycle is considered to be a key factor in the study of climate change and its associated effectson society. In turn, soil moisture holds an important share of the overall water cycle. Is for this reasonthat at present missions like ESA’s SMOS, and future NASA’s SMAP aim to estimate soil moisture ata global level, offering spatial resolutions of 40 km for SMOS, and 10 km for SMAP. Such resolutionsdo not adequately match at a regional/local levels. At this point the Supporting Centre of the CatalanEarth Observation Program (PCOT), within the structure of the Cartographic Institute of Catalonia(ICC) and with the collaboration of the Remote Sensing Laboratory of the Polytechnic University ofCatalonia (RSLAB UPC), runs the HUMID program to retry the soil moisture at a regional level basedon radiometry and data fusion with VNIR and thermal sensors on board ICC airborne platforms.
Key words: soil moisture, remote sensing, passive microwave, L band, data fusion, VNIR, thermalsensor.
Resumen
Estimación de la humedad del suelo con avión a nivel regional: una aproximación para una misión de fusión de datos en el territorio catalán
El ciclo del agua está considerado como uno de los factores claves en el estudio del cambio climá-tico y sus repercusines en la sociedad. A su vez, la humedad del terreno juega un papel importantedentro del ciclo del agua. Es por ello que en la actualidad se están aplicando recursos en misiones co-mo SMOS de la ESA y la futura SMAP de la NASA, las cuales están centradas en calcular la hume-dad del terreno a nivel global, ofreciendo una resolución espacial de 40 km para el caso de SMOS, yde 10 Km para el de SMAP. Dichas resoluciones no se ajustan suficientemente a escalas a nivel re-gional/local,. En esta situación el Centro de Soporte del Programa Catalán de Observación de la Tie-rra (PCOT), dentro de la estructura del Instituto Cartográfico de Cataluña (ICC), ha puesto en mar-cha con la colaboración de RSLAB UPC, el programa «HUMID» para la recuperación de la humedaddel suelo a nivel regional/local, basado en la radiometría y el data fusión con sensores VNIR y térmi-cos, a bordo de los aviones del ICC.
Palabras clave: humedad del terreno, teledetección, microondas pasivas, banda L, data fusion,VNIR, sensor térmico.
* Corresponding author: [email protected]: 02-07-10; Accepted: 10-05-11.
Asociación Española de Teledetección Revista de Teledetección 35, 47-54ISSN: 1988-8740

increased in 1°C and minima in 0.75°C (Bru-net et al., 2005).
What is more, previsions for the future arenot very optimistic (severe scarcity of fresh wa-ter): it is estimated that during next centurytemperatures will continue to increase (betwe-en 1.4°C and 6°C). At the same time precipi-tations are expected to increase at the humidtropics and at high altitudes, whereas at mid-dle and low altitudes they are expected to drop.This will result in extreme climatic events, suchas droughts, floods, tornados, etc, to occur withhigher frequency and intensity (Philipona etal., A1.GR1 32:L19809;Sigro et al., 2004;Aya-la-Carcedo et al., 2004).
An example of this could be the episode ofdrought suffered in southwest China, which cau-sed economical loses of 952 millions of dollars.The lack of fresh water affects stockbreedingand in special for the agriculture where morethan two million hectares of crops (81.7% of thetotal) were affected by drought producing a fallof more of the 40% in the production of crops.
A better understanding of the water cyclewill improve forecasting these episodes. To doso soil moisture is a key parameter, also veryuseful to improve sensible management of ascarce resource such as water.
For this reason at present the scientific com-munity is dedicating a lot of effort to this to-pic. Fruit of it are the recent SMOS missionlaunched by ESA, and the future SMAP mis-sion which NASA plans to launch in 2013.Both are focused in the retrieval of soil mois-ture (SM) and ocean salinity.
Soil moisture is responsible of water ex-change and energy fluxes between Earth’s sur-face and atmosphere. More specifically, eva-poration, infiltration and runoff are driven bysoil moisture, and in the vadose zone it is incharge of the water absorbed by vegetation.Thus, soil moisture is an important componentin the hydrologic cycle.
SMOS and SMAP missions will offer con-tinuous measurements of soil moisture andocean salinity with a revisit time between 3 and5 days, and a spatial resolution of some 40 kmfor SMOS (Kerr et al., 2001) and 10 km forSMAP (Njoku et al., 2009).
These performance parameters are useful tomodel global circulation, but cannot be used for
local applications. For example, in scenariossuch as Catalonia, where temperatures have in-creased and precipitation has remained cons-tant, making the level of evapotranspiration toincrease, and producing situations of highhydrological stress. In situations like this, ma-king an optimal use of fresh water is crucial fordifferent reasons. The first one is because freshwater is a scarce resource, and the second oneis because a bad use of the fresh water impliesnegative repercussions in the harvests (currentsand future) in terms of quality and quantity.
It is within this context that the SupportingCenter for the Catalan Earth Observation Pro-gram (PCOT), considering the need of acqui-ring specific data for regional applications, hasenvisioned an airborne soil moisture missionprogram: HUMID, supported by the SpanishMinistry of Science and Innovation as the RA-DERO program (PTQ-09-01-00535).
PCOT is conscious that Spain is prone to suf-fer drought episodes. In 2009 they affected al-most 40% of the country, where the major pro-blems were found in Catalonia, Valencia,Murcia, and Andalucia (Mediterranean shore).In these territories water reservoirs stored lessthan 30% of their overall capacity. In Catalonia,for instance, water flowing through rivers de-creased a 5%, and the impact on the GDP hasbeen of 7.7%, according to information suppliesby Environmental Department of Catalonia.
In order to develop HUMID, ICC/PCOT be-nef its from the more than 20 years of expe-rience in aircraft missions of the Institut Car-togràfic de Catalunya (ICC, Official MappingAgency of Catalonia), as well as of the availa-bility of several remote sensing sensors, suchas a «thermal sensor» or «hyperspectral sen-sor», along with a good scientific advisory abo-ard. All this shall allow obtaining soil moistu-re maps with improved spatial resolution andminimized vegetation and roughness impact.
To do so HUMID relies on a «data fusion»approach, combining L-band radiometric me-asurements (under development by an agree-ment between RSLAB-UPC and ICC) with twooptical sensors, the «CASI» (0.75-1.4 µm) and«TASI» (8-11.5 µm), to improve spatial reso-lution and minimize vegetation and roughness-induced errors. Both sensors belong to and areoperated by ICC onboard their airplanes. Fi-
48 F. Martín et al. / Revista de Teledetección (2011) 35, 47-54

gure 1 shows the aircraft that will be employedin the different campaigns as well the radio-meter and it spectrum.
Data fusion approach
The HUMID approach has been planned inorder to obtain the best results with the tech-nology and sensors available to PCOT, disre-garding solutions requiring non-available tech-nology, models and taking into account user’sneeds. PCOT has committed significant effortsto address these latter issues.
Theorical background
HUMID relies on the capability of radio-metry for estimating soil moisture. A radio-meter is a passive microwave sensor, which iscapable of measuring the radiation emitted bythe surveyed surface. All matter emits energyin form of electromagnetic radiation. Theamount of radiation emitted depends, amongother aspects, on the dielectric properties, he-avily determined by water content, since die-lectric constant exhibits a large contrast bet-ween that of liquid water and that of a dry soil.So, whereas the real part of the dielectricconstant of water is approximately 80, the re-al part of the dielectric constant of a dry soilis only around 3-5. A radiometer takes ad-vantage of the fact that moisture, increasingthe soil dielectric constant, decreases its ove-rall emissivity.
The envisioned radiometer will measure atL-band for several reasons, the most importantbeing that this band is the most sensitive tomoisture content at the same time that is lessaffected by the presence of vegetation androughness than higher bands (C or X bands, for
instance) are. At the same time the penetrationdepth at this band is higher (Jackson et al.,1983; Paloscia et al., 1993).
But there are many aspects that must be im-proved. The fact that L-band is more robust tovegetation and roughness effects does notimply that the presence of these elements do-es not affect the measurements taken. What ismore, under certain circumstances they canfully mask the soil moisture signature.
At the same time the coarse spatial resolu-tion offered by the L-band radiometer is otherissue that must be improved.
The model
The limitations mentioned previously pointout that using only the L-band radiometer willnot yield satisfactory enough results. In fact,emissivity (eq) depends on both brightness tem-perature (TB) and surface temperature (Ts):
TB(θi,p) = eq(θi,p)Ts [1]
Therefore is it straightforward that in addi-tion to TB it is necessary to retrieve TS. Thiscan be done by means of a thermal sensor suchas the TASI that ICC owns and operates. Suchan instrument, with its finer spatial resolution,not only will obtain TS but also will improvethe overall spatial resolution of the SM product.
As it has been mentioned before, surfaceroughness and more intensely vegetation dis-turb the measurements taken by the radiome-ter. Thus, it is necessary to take into accountboth effects in our model.
Soil roughness can be accounted modifyingthe Fresnel reflectivity coefficient as follows:
Γs(θ,p) = Γs(θ,p)*exp (–hs) [2]
where hs is an adimensional parameter usuallydetermined empirically, which determines thesoil roughness (hs = 0 for smooth soils, hs = 0.2
Airborne soil moisture determination at regional level: a data fusion mission... 49
Figure 1. a) ICC aircraft, b)Radiometer mounted on ICC aircraft, and c) Spectrum of the radiometer measured.
c)b)a)

for an intermediate case, and hs = 0.4 for ratherrough ones).
The case of the vegetation-covered soil canbe modeled by the so-called τ – ω model, whe-re expression [1] is reformulated taking intoaccount the effect of the vegetation.
Tb(θ,p) = [1 – w(θ,p)] [1 – γ(θ,p)] [1 + Γs(θ,p)γ (θ,p)]TV + [3]
+ [1 + Γs(θ,p)]γ (θ,p)TE ++ Tb
SKY↓(θ)Γs(θ,p)γ (θ,p)2
where w(θ,p) is the albedo and describes thescattering of the soil emissivity by the vegeta-tion (typical values vary between 0.04 and0.13, and at L-band it can be neglected), Γs(θ,p)is the Fresnel reflectivity, TV refers to the tem-perature of the vegetation, and TE is the effec-tive soil temperature (it can be assumed to beequal).
The downwards atmospheric and galacticbrightness temperature Tb
SKY↓(θ) is very smallafter the reflection on the ground and the atte-nuation through the vegetation layer (Pellarinet al., 2003), and consequently will be neglec-ted.
On the other hand γ (θ,p) is referred to as thetransmissivity of the vegetation and can be ex-pressed as:
γ (θ,p) = exp[–τ (θ,p) / cosθ] [4]
where τ (θ,p) is the optical depth, and can beexpressed as (Jackson and Schmugge et al.,1991):
τ = b * VWC [5]
In [5] VWC stands for Vegetation WaterContent, and it can be computed by means ofthe NDVI (Normalized Differential Vegetation
Index), based on the NIR and RED bands. Itcan be measured by means of a hyperspectralsensor such as the CASI, also owned and ope-rated by ICC, as:
NDVI = NIR – RED / NIR + RED [6]
The model explained so far still has a weakpoint: the NDVI parameters are not suitable toaccount for all scenarios. More specifically, inpresence of dense vegetation the NDVI tendsto saturate and its estimation will not be use-ful. An alternative to the NDVI is the NDWI(Normalize Difference Water Index), which ismore sensitive to VWC, in special in situationsof dense vegetation. It is based on the NIR andSWIR bands, instead of the RED and NIRbands used by the NDVI, as:
NDWI = NIR – SWIR / NIR + SWIR [7]
In order to improve soil information withoutthe availability of SWIR bands a complemen-tary approach is needed.
It seems clear that the solution consists inmodifying the design of the radiometer. Equa-tions [2], [3] and [4] are strongly dependent onthe incidence angle and polarization. Thus, in-creasing the incidence angle means that lossesincrease, and thus vegetation effects are morecritical for higher angles than for lower ones.
Figure 2 show the influence of incidence an-gle and polarization (Piles et al., 2010).
Combining equations [2], [3], [4], [5], andtaking into account the empirical relationshipbetween Fresnel reflectivity coeff icient andsoil moisture (Saleh et al., 2006):
log[Γs(θ,p)*] = A(θ,p) log(ws) + B(θ,p) [8]
where Γs(θ,p)* is the soil reflectivity, ws is the
50 F. Martín et al. / Revista de Teledetección (2011) 35, 47-54
Figure 2. Brightness temperature dependence with incidence angle and polarizationfor (a) bare soil and (b) vegetation-covered soil.
a) b)

soil moisture and A(θ,p) and B(θ,p) are coef-ficients in function of the soil type, soil tem-perature, and the configuration of the obser-vation.
And making different assumptions, soilmoisture could be expressed as a function ofincidence angle or polarization (Saleh et al.,2006; Wigneron et al., 2004; Wigneron et al.,2004),
ws = exp{a log[1 – e(θ1,p)] ++ b log[1 – e(θ2,p)] +c}
[9]
ws = exp{a log log[1 – e(θ,p)] ++ b log log[1 – e(θ,p)] +c}
[10]
If using equation [9] it would be a good choi-ce a difference of 30° between both angles ac-cording to a vegetation coverage, where 15°and 45° respectively as for example will bework pretty well (Wigneron et al., 2004). Con-sidering equation (10), an incidence angle of50° would be optimal (Wigneron et al., 2004).
User’s needs
HUMID program, as maintained in the in-troduction, is focused at regional/local scales,with the purpose of covering user’s needs atthis scale at the same time that it can be com-plement to the current satellite missions.
In this sense the products offered by HU-MID have clearly three main objectives: Thefirst one is be a tool to improve manage of freshwater. Efficient use of fresh water is indispen-sable for agriculture, since an inadequate ma-ter supply affects both quantity and quality ofharvest. Crops consume 70% (80% in semia-rid regions) of total fresh water resources. Inthis scenario two issues are fundamental for thegenerated soil maps: The first one is related tothe spatial resolution, since it is necessary toimprove the current spatial resolutions, due tothe high variability that can present soil mois-ture. At the same time it is necessary to ensu-re a robust model, which guarantees the mostreliable results, particularly in presence of ve-getation.
HUMID data fusion approach provides ahigh spatial resolution at the same time that therobustness of the data is ensured. In a first ap-proximation the information provided by the
thermal sensor among with the VNIR sensorallows to obtain a first soil moisture product,by means the tau omega model. This first pro-duct is recovered at the radiometer resolution,which is around of 250 m, insufficient for thegoal here established. Then soil moisture canbe downscaled to the resolution offered by theoptical sensors (around few meters), helpingthe radiometer data to improve the radiometricresolution. So soil moisture maps at few me-ters in a first approach are expected. At the sa-me time HUMID allows a product that canadapted to the requirements of the end user,where he can select the data in which the flightcampaigns takes part or the extension of thearea. In this sense HUMID, flying at 1,000 me-ters and at constant speed of approximately200 km/h it can be cover extended crop areas.
HUMID also proposes other products, suchas hydrological maps, where spatial resolutionbecomes less restrictive than for water mana-gement in agriculture. In this case flights athigh altitude are proposed for cover more ex-tended areas, and making 4/5 flights per yearcan be enough to study the hydrological profi-le of Catalonia.
In sum, products proposed by HUMID shallimprove fresh water management, help inhydrological studies and be an useful tool forforest fire risk assessment
Current status
At present a simulator is under definition tovalidate the performance of the different mo-dels as well the behavior of our sensor. Next aflow chart of the implemented simulator isshown:
Where first is simulated an arbitrary surfa-ce with an initial boundary conditions, and thenis simulated the behavior of this surface interms of emissivity. Finally is analyzed the trendof our radiometer and the soil moisture reco-vered, as well the improvement in the spatial re-solution achieved by means the data fusion
For an initial case is working assuming ther-mal equilibrium and not vegetation conditions.Several simulations show the trend of the ra-diometer as well as the effects of the roughnesson the measures.
Airborne soil moisture determination at regional level: a data fusion mission... 51

As follows is showed a preliminary exampleof the running of the simulator commented pre-viously. It is characterized for simulate an areaof 1,200*1,200, with a soil texture of 2% Sand,66% Silt and 32% Clay. The simulation showedhere, were realized for an altitude of the flight
of 750 m. Figure 3 show the spatial distributionof the soil moisture from the surface generated.
Figure 4 shows the soil moisture that in thecondition previously defined our radiometerwill be capable of retry. It can be appreciatedthe coarse spatial resolution obtained in this
52 F. Martín et al. / Revista de Teledetección (2011) 35, 47-54
Figure 3. Flow Chart of HUMID simulator.

case (200 m), which implies that the level ofaccuracy obtained will not very high. The ave-rage error is around 6% which in general termsis not a bad value.
Figure 5 shows the soil moisture retrievedthen of apply the data fusion approach. In thiscase the spatial resolution is of 20 m, impro-ving thus the spatial resolution in a factor of10. At the same time the accuracy obtained ishigher that in the last case obtaining an avera-ge error less than 2%, being very positive.
Is important to stretch that the results hereshowed are realized for the simples case, is tosaid for a bare and smooth surfaces (if its istrue that surfaces with roughness are tested andthe results obtained has been similar), wherethermal equilibrium were assumed too. Theidea is enlarge these simulators to conditionsof vegetated surfaces to analyze the influencethat has, and the behavior of our models.
Future tasks
First aircraft campaigns are scheduled for fall2010. They will serve to validate the results si-mulated previously. With this purpose three testsites are suggested as a candidate for realize theflights: Banyoles, Mollerusa and Delta de l’Ebre.
Banyoles is a good candidate since ICC hasalready undertaken flight campaigns in thisarea with the CASI sensor, and at the same ti-me satellite imagery is available, so that addi-tional information can be used to perform theSM retrieval.
Mollerusa and Delta de l’Ebre are interes-ting because both house experimental sites ofIRTA (Institut de Recerca i Tecnologia Agroa-limentaria), and thus are instrumented. More-over, UPC (Universitat Politécnica de Cata-lunya) has conducted several aircraftcampaigns flying an L-band radiometer onbo-ard an UAV over Delta de l’Ebre. Therefore,previous SM data are available.
Conclusions
The present paper has introduced the HU-MID program, conceived to address SM issuesassociated to Catalonia such as fresh water ma-nagement improvement.
HUMID has been designed in terms of feasi-bility. To do so, it first detected user’s require-ments, and then dealt with existing limitationssuch as vegetation, roughness, coarse resolu-tion... The solution proposed tries to offer thebest results taking into account these limitingaspects, but also by considering feasible sensorsrun at own airborne platform to be operational.
HUMID products will benefit society by im-proving fresh water distribution, optimizing
Airborne soil moisture determination at regional level: a data fusion mission... 53
Figure 4. a) Initial soil moisture conditions for an ar-bitrary surface simulated, b) Soil moisture retrievedwith the radiometer, c) Soil moisture by data fusionapproach.
a)
b)
c)

crop production, helping weather forecasters,allowing detection of extreme events such asdroughts or floods, or assessing forest fire risks.
At present the algorithm and model defini-tion phase is almost completed, including thedata fusion algorithm, and the first test flightsare scheduled for September 2010, once thetest sites are chosen.
References
AYALA-CARCEDO, F. J. 2004. La realidad delcambio climático en España y sus principales im-pactos ecológicos y socioeconómicos. Revista delAficionado a la Meteorología, 21.
BRUNET, M., JONES, P. D., SIGRO, J., SALADIE,O., AGUILAR, E., MOBERG, A., DELLA-MARTA, P., LISTER, D., WALTHER, A. & LO-PEZ, D. 2005. Spatial and temporal temperaturavariability and change over Spain during 1850-2003.
DOBSON, M. C., ULABY, F. T., HALLIKAINEN,M. T. & EL-REYES, M. A.1985. Microwave die-lectric behavior of wet-soil Part II: Dielectric mi-xing models. IEEE Trans. Geosc. Remote Sen-sing, GE-23:35-46.
ENTEKHABI, B., NJOKU, E. G., O’NEILL, P. E.,KELLOG, K. H., CROW, W. T., EDELSTEIN, W.N., ENTIN, J. K., GOODMAN, S. D., JACKSON,T. J., JOHNSON, J., KIMBALL, J., PIEPMEIER,J. R., KOSTER, R. D., MARTIN, N., MCDO-NAL, K. C., MOGHADDAM, M., MORAN, S.,REICHLEM, R., SHI, J. C., SPENCER, M. W.,THURMAN, S. W., TSANG, L. & VAN ZYL, J.2010. The Soil Moisture Active Passive (SMAP)Mission. Proceedings of the IEEE, 98(5).
JACKSON, T. J. & SCHMUGGE, T. J. 1983. Re-mote Sensing of soil moisture from an aircraftplatform using passive microwave sensors,Hydrological Applications of Remote Sensingand Remote Data Transmission (Proceedings ofthe Hamburg Symposium, August 1983). IAHSPubl, 145.
JACKSON, T. J. & SCHMUGGE, T. J. 1991. Vege-tation effects on the microwave emission of soils,Remote Sens. Environ, 36: 203-212.
KERR, Y. H., WALDTEUFEL, P., WIGNERON, J.P., MARTINUZZI, J. M., FONT, J. & BERGER,M. 2001. Soil moisture retrieval from space: TheSoil Moisture and Ocean Salinity (SMOS) mis-sion, IEEE Trans. Geosci. Remote Sensing, 39:1729-1735.
NJOKU, E. & O’NEILL, P. 2009. The Soil Moistu-re Active and Passive Mission (SMAP): Scienceand Application. IEEE Trans. Geosci. RemoteSensing.
PALOSCIA, S., PAMPALONI, P., CHIARANTINI,L., COPPO, P., GAGLIANI, S. & LUZI, G. 1993.Multifrequency passive microwave remote sen-sing of soil mositure and roughness. Int. J. Re-mote Sensing, 14(3): 467-483.
PELLARIN, T. & CALVET, J. 2003. Influence ofatmospheric properties on L-band microwaveemission. Soil moisture retrieval by a future spa-ce-borne Earth observation mission. ESTEC.
PHILIPONA, R., DURR, B., OHMURA, A. &RUCKSTUHL, C. 2005. Anthropogenic green-house forcing and strong water vapor feedbackincrease temperature in Europe, Geophys. Res.Lett., 32, L19809. doi: 10.1029/2005GL023624.
PILES, M., VALL-LLOSSERA, M., CAMPS, A.,TALONE, M. & MONERRIS, A. 2010. Analysisof a Least-Squares Soil Moisture Retrieval Al-gorithm from L-band Passive Observations. Re-mote Sens, 2: 352-374.
SALEH, K., WIGNERON, J.-P., ROSNAY, P., CAL-VET, J-C. & KERR, Y. 2006. Semi-empirical re-fressions at L-band applied to surface soil mois-ture retrievals over grass. Remote Sensing ofEnvironment, 101: 415-426
SIGRO, F. J. 2004. Variabilidad espacio-temporalde la Temperatura del aire en Cataluña, Tesis dedoctorado. Universitat Rovira i Virgili.
WIGNERON, J.-P., CALVET, J.-C., ROSNAY, P.,KERR, Y., WALDTEUFEL, P., SALEH, K., ES-CORIHUELA, M. J. & KRUSZEWSKI, A. 2004.Soil Moisture Retrievals From Biangular L-BandPassive Microwave Observations. IEEE. Geos-cience and Remote Sensing letters, 1(4), Oct. 2004.
WIGNERON, J.-P., PARDÉ, M., WALDTEUFEL,P., CHANZY, A., KERR, Y., SCHMIDL, S. &SKOU, N. 2004. Characterizing the dependenceof vegetation parameters on crop type, view angle, and polarization at L-band. IEEE Trans.Geosci. Remote Sensing, 42: 416-425. Feb. 2004.
54 F. Martín et al. / Revista de Teledetección (2011) 35, 47-54

Aplicación de técnicas de teledetección y GIS sobre imágenes Quickbird para identificar y mapear
individuos de peral silvestre (Pyrus bourgeana) en bosqueesclerófilo mediterráneo
S. Arenas*, J. F. Haeger y D. JordanoDepartamento de Botánica, Ecología y F. Vegetal. Edificio Celestino Mutis, C-4.
Campus de Rabanales. Universidad de Córdoba. España
Resumen
Recientes avances en resoluciones espacial y espectral de imágenes de satélite, así como técnicasde procesado y transformación, están abriendo nuevas posibilidades de análisis de la vegetación a es-cala muy precisa, con interesantes aplicaciones en la gestión de los recursos naturales. En este traba-jo se presentan los principales resultados de un estudio llevado a cabo en Sierra Morena (Córdoba, Es-paña) que tuvo como objetivo aplicar y evaluar el potencial de las técnicas de teledetección paradiscriminar y mapear individuos de peral silvestre (P. bourgeana) en un bosque mediterráneo dondela dehesa de encinas (Quercus ilex subsp. ballota) es el ecosistema dominante. Se utilizó la alta reso-lución espacial de las imágenes Quickbird (2,4 metros para la imagen Multiespectral y 0,6 para la Pan-cromática) obtenidas durante el verano de 2008. Dado el tamaño y las características de las copas deperal silvestre, se aplicó un método de corrección atmosférica (FLAASH) y 4 métodos diferentes defusión «Pan-Sharpening» (Método de Transformación Wavelet «à trous» ponderado, Método Multi-plicativo de Gram-Schmidt (G-S), Método de transformación al espacio IHS (Intensidad-Saturación-Brillo) y Metodología de fusión de imágenes Multidirección-Multiresolución (MDMR), para deter-minar qué procedimiento proporciona los mejores resultados. Finalmente, se evaluó el potencial delas técnicas de clasificación supervisada (Maximum Likelihood) para discriminar y mapear árboles in-dividuales de peral silvestre dispersos por la dehesa de encinas, proporcionando unos valores de pre-cisión global e índice kappa de 80,42% y 78,1%, respectivamente.
Palabras clave: alta resolución, Quickbird, teledetección, métodos de fusión de imágenes, correc-ción atmosférica, clasificación supervisada, P. bourgeana.
Abstract
Application of remote sensing and GIS techniques on Quickbird imagery to identify and mapping wild pear individuals (Pyrus bougeana) in Mediterranean sclerophyllous forests
Recent advances in spatial and spectral resolutions of satellite imagery as well as in processingtechniques are opening new possibilities of fine scale vegetation analysis with interesting applicationsin natural resources management. Here we present the main results of a study carried out in SierraMorena, Cordoba (southern Spain) aimed to assess the potential of remote sensing techniques todiscriminate and map individual wild pear trees (P. bourgeana) in Mediterranean open woodlanddominated by Quercus ilex subsp. ballota. Satellite imagery of high spatial resolution Quickbird (2.4m MS/0.6 m Pan) obtained during the summer of 2008 were used, generated by multispectral digitalsensors and available for several years in remote sensing applications, allowing detailed observationsof vegetation in wavelength bands in the visible and near infrared . Given the size and features of wildpear tree crowns, we applied an atmospheric correction method (FLAASH) and 6 different fusion «Pan-Sharpening» methods [Wavelet «à trous» weighted Transform, Gram-Schmidt (G-S), Hue-Saturation-
* Autor para la correspondencia: [email protected]: 20-11-10; Aceptado: 27-04-11.
Asociación Española de Teledetección Revista de Teledetección 35, 55-71ISSN: 1998-8740

Introducción
Imágenes de satélite de alta resolución espa-cial (2,4 a 4 m) generadas por sensores digita-les multiespectrales a bordo de satélites comoIKONOS y Quickbird, permiten observacionesdetalladas de recursos naturales en longitudesde onda de las bandas del visible e infrarrojocercano (Everitt et al., 2007). La teledetecciónes muy útil en este sentido ya que permite ob-tener información espacialmente explícita y es-tadísticamente representativa de variables delecosistema (Coppin et al., 2004).
La teledetección a partir de imágenes de sa-télite o fotografías aéreas también ofrece la po-sibilidad de describir algunos aspectos estruc-turales y funcionales de los sistemas ecológicosa diferentes escalas (Cabello y Paruelo, 2008).La resolución espacial de estos sistemas ofre-ce nuevas oportunidades para discriminar uni-dades de vegetación, tipos de bosque o inclu-so individuos de distintas especies en bosquesmixtos, siendo por tanto una importante he-rramienta para la gestión y conservación de labiodiversidad. En este sentido, varios estudioshan demostrado que muchas especies vegeta-les de pastizales tienen diferentes f irmas es-pectrales y se pueden distinguir mediante fo-tografías aéreas en color infrarrojo (Gausmanet al., 1977; Tueller, 1982; Everitt et al., 1987;Anderson et al., 1999; López-Granados et al.,2008, 2010). Por otro lado, imágenes de altaresolución espacial también han permitido laidentificación y mapeo de árboles individua-les o grupos de árboles (Gougeon et al., 1999;Wulder et al., 2000; Culvenor, 2002).
La absorción de energía por los gases, asícomo su dispersión por aerosoles en la atmós-fera puede influir en la respuesta espectral delos objetos y por tanto la energía electromag-nética que es recibida por los sensores (Slater,1980; Chávez, 1988). Muchos algoritmos de co-
rrección atmosférica se han desarrollado paracorregir estos efectos y reducir el ruido at-mosférico, en particular el efecto de la disper-sión atmosférica. Podemos distinguir varias ca-tegorías, substracción de píxel oscuro (pixeldarkness subtraction, DOS) (Chávez, 1975,1989, 1996), conversión de radiancia a reflec-tancia, regresión lineal (Crippen, 1987) o mo-delamiento atmosférico (Slater, 1980; Kneizyset al., 1988; Gilabert et al., 1994; Rahman yDedieu, 1994; Frulla et al., 1995; Vermote etal., 1997). La elección de uno u otro métododepende de la calidad de los datos disponibles.Por ejemplo, los modelos de corrección at-mosférica requieren datos adicionales (presiónatmosférica, temperatura, vapor de agua, ozo-no, tipo de aerosoles, elevación solar, ángulocenital y sensor de ángulo de visión) para la fe-cha de interés. En este caso, se puede aplicarel método Fast Line-of-Sight AtmosphericAnalysis of Spectral Hypercube o FLAASH(ENVI FLAASH, Atmospheric Correction Mo-dule, 2009), basado en MODTRAN4, para re-ducir al mínimo la influencia del ruido atmos-férico en las imágenes resultantes.
Para el caso de imágenes multiespectrales ypancromáticas, la fusión de imágenes es una he-rramienta cuyo principal objetivo es mejorar lacalidad global de la imagen resultante median-te la combinación de la información espectralde la imagen multiespectral con la informaciónespacial de la imagen pancromática, tomandoventaja de su carácter complementario (Vrabel,1996;. Vasantha et al., 2000; Lillo-Saavedra yGonzalo, 2008). Según Varshney (1997) y Li-llo-Saavedra y Gonzalo (2006), el concepto defusión de imágenes se puede ver como la com-binación sinérgica de la información de variossensores o por el mismo sensor en diferentesescenarios (espacial, espectral y temporal).
En el caso de Quickbird, son muchos los tra-bajos publicados en los cuales se han evaluado
56 S. Arenas et al. / Revista de Teledetección (2011) 35, 55-71
Intensity color transformation (HSI) and Multidirection-Multiresolution (MDMR)], to determine whichprocedure provides the best results. Finally we assessed the potential of supervised classif icationtechniques (Maximum Likelihood) to discriminate and map individual wild pear trees scattered overthe Mediterranean open woodland, providing values of overall accuracy and kappa of 80.42% and78.1%, respectively.
Key words: high resolution, Quickbird, remote sensing, fusion methods, atmospheric correction,supervised classification, P. bourgeana.

diferentes métodos para la construcción de imá-genes multiespectrales con alta resolución es-pacial (Alonso et al., 2004; Zhang y Kang,2005; Gonzalo y Lillo-Saavedra, 2007). En laactualidad, se dispone de un gran número demetodologías y algoritmos para la fusión deimágenes, basados en técnicas de análisis mul-tiresolución y en diferentes transformadas, sien-do estas últimas las más utilizadas. Algunos deéstos métodos corresponden a: Transformacio-nes de color (Hue-Saturation-Intensity), Méto-dos estadísticos (Principal Components), Mé-todos numéricos (Brovey, Color NormalicedSpectral Sharpening, Gram-Schmidt SpectralSharpening, Wavelet Fusion), Métodos combi-nados (Ehlers Fusion), entre otros. Algunos sonmuy sencillos desde un punto de vista concep-tual, como las metodologías basadas en la trans-formada de Brovey, el Análisis de Componen-tes Principales o la transformada IHS (Wald,2002), contando esta última con una ampliaaceptación en las áreas de procesamiento deimágenes debido a su simplicidad conceptual.
En cuanto a la evaluación de la calidad deimágenes fusionadas, se dispone de diferentesmétodos e índices de comparación que permi-ten medir la calidad espacial, la calidad es-pectral y/o la calidad global. Algunos ejemplosse incluyen dentro de uno de estos grupos:comparaciones visuales, índices estadísticos(RMSE, Correlación Espectral (Vijayaraj et al.,2004), Correlación Espacial (Zhou et al.,1998), ERGAS (Erreur Relative Globale Adi-mensionnelle de Synthèse) espectral (Wald,2002) y espacial (Lillo-Saavedra y Gonzalo,2006) ó índices globales de calidad como Q4(Alparone, 2004). Wald et al. (1997) tambiénpropone un protocolo para verificar si un pro-ducto fusionado cumple con estas propiedades.Para cada propiedad, primero se lleva a cabouna inspección visual del producto fusionado,comparándolo con el producto original. Estomostraría las principales desventajas de un mé-todo. Estos inconvenientes podrían entoncescuantificarse mediante una evaluación cuanti-tativa de las discrepancias entre el producto fu-sionado y el original.
Los métodos de clasif icación son común-mente utilizados en materia de teledetecciónpara extraer y sintetizar la información de losdatos espectrales y generar clases discretas que
comparten una característica común, tales co-mo agua, suelo, vegetación, entre otras. En elproceso de clasif icación se utilizó un meca-nismo de aprendizaje sobre las característicasespectrales de un grupo de píxeles, para ex-tender la misma información a toda la imagen.En este estudio, se optó por un método de cla-sificación paramétrica supervisada utilizandoel algoritmo de máxima verosimilitud (Maxi-mum Likelihood) (Aldrich, 1997), mediante elcual el usuario elige un grupo de píxeles querepresentan cada una de las clases que se uti-lizan en el proceso de formación de clasifica-ción de imágenes. En este caso hay una elec-ción de las clases de interés a priori. Paracuantificar la exactitud de los mapas resultan-tes con respecto a los mapas verdad-terreno,en teledetección se suele utilizar la matriz deconfusión que determina la precisión de un mé-todo comparando el porcentaje de píxeles cla-sificados de cada clase con las clases verdad-terreno verificadas, indicando posteriormentela evaluación correcta y los errores entre lasclases estudiadas (Congalton, 1991). Por otrolado, el coeficiente Kappa «K» puede medirtambién la exactitud de un mapa, pero de ma-nera más precisa que la matriz de confusión,ya que incluye dentro del cálculo todos los va-lores de la matriz y no solamente sus extremos(Congalton, 1991).
El Género Pyrus, perteneciente a la familiade las Rosáceas, está representado por 20 es-pecies aproximadamente en todo el mundo,tanto en sus formas silvestres, como cultiva-das, dando origen estas últimas a un gran con-junto de variedades y razas. Se distribuye ge-ográficamente de forma muy amplia, teniendorepresentantes tanto en oriente como en occi-dente. Los perales silvestres, entre los que ca-be destacar P. bourgeana como el representan-te más meridional del género en Europa,proporcionan, durante la sequía del verano, va-liosos recursos tróficos en forma de hojas su-culentas y frutos que son consumidos por unagran variedad de aves y mamíferos, desempe-ñando un papel importante en el ecosistema ypor tanto pudiendo considerarse como una es-pecie «clave».
Por lo tanto, los objetivos de este estudiofueron: (1) probar y comparar la aplicabilidadde diferentes métodos de fusión de imágenes
Aplicación de técnicas de teledetección y GIS sobre imágenes quickbird... 57

o «Pan-Sharpening» (Método de Transforma-ción Wavelet «à trous» ponderado (Lillo-Saa-vedra y Gonzalo, 2006), Método Multiplicati-vo de Gram-Schmidt (G-S) (Laben y Brower,2000), Método de transformación al espacioIHS (Intensidad-Saturación-Brillo) (Haydan etal., 1982) y Metodología de fusión de imáge-nes Multidirección-Multiresolución (MDMR)(Gonzalo y Lillo-Saavedra, 2007) sobre imá-genes de satélite Quickbird con el fin de ma-ximizar su resolución espacial y espectral pa-ra su posterior análisis, y (2) evaluar elpotencial de estas técnicas a través de clasifi-cación supervisada (Maximum Likelihood) pa-ra discriminar y mapear perales silvestres (P.bourgeana) en el área de estudio.
Material y métodos
Área de estudio
El área de estudio se localiza en Sierra Mo-rena (37° 53’ 53.53” N y 4° 58’ 49.61” W), en laprovincia de Córdoba (Andalucía, España). Laparcela abarca aproximadamente 230 ha (Fig. 1).
La vegetación que actualmente ocupa el áreade estudio es en general el resultado del ma-nejo de los encinares y alcornocales climáci-cos que antaño cubrían una extensa superficieen Sierra Morena. El factor causal de este ma-nejo ha sido la creciente intervención humanapara la obtención de aprovechamientos gana-deros, cinegéticos y agrícolas, principalmen-te. El ecosistema predominante es la dehesa tí-pica de encinas (Quercus ilex subsp. ballota)dispersas entre pastizales de una alta diversi-dad. Quedan escasos enclaves y de superficie
limitada donde aún se conservan formacionesde bosque mediterráneo prístino o al menos deestructura similar. Son las denominadas «man-chas», «monte alto» o «monte de cabeza» for-madas por arbustos de hoja perenne que perte-necen a varias familias (Cistaceae, Labiatae,Rosaceae, Ericaceae, Anacardiaceae, Aristo-loquiaceae). Una sección del área de estudiola constituye un olivar (Olea europaea) de pro-ducción tradicional, en la actualidad abando-nado. Pese a tener un aprovechamiento gana-dero de ovino en extensivo, y de forma muyrelicta, caprino, el manejo se enfoca princi-palmente al uso cinegético (ciervos y jabalíes).
Especie objeto de estudio
P. bourgaeana (Fig. 2), también conocidocomo «peral silvestre», «piruétano» o «gua-dapero», al que se le han adjudicado varios ho-mo- y heterotipos, fue descrito por primera vezpor Joseph Decaisne (Decne, 1871-1872), sien-do este el nombre aceptado por la comunidadcientífica hasta el momento.
Es un pequeño árbol caducifolio de hasta 10m de altura, con una copa amplia e irregular,espinoso, con una corteza grisácea agrietadalongitudinalmente. Hojas ovadas a orbiculares,de margen generalmente serrulado, con pecí-olos entre 13-40 mm. Esta especie se restringe
58 S. Arenas et al. / Revista de Teledetección (2011) 35, 55-71
Figura 1. Localización de la zona de estudio. Figura 2. Peral silvestre (P. bourgeana).

a la mitad sur de la Península Ibérica y el Nor-te de África (Aldasoro et al., 1996) (Fig. 3).
Los perales silvestres proporcionan valiososrecursos tróficos en forma de hojas suculentasy, más importante, grandes cosechas de frutosdurante la sequía del verano que son consumi-dos por una gran variedad de mamíferos (cier-vo, jabalí, zorro, tejón, gineta, entre otros.), asícomo varias especies de aves (arrendajo, palo-ma torcaz, rabilargo, entre otros). El peral sil-vestre desempeña un papel importante en elecosistema y por tanto podría considerarse co-mo una especie «clave». A pesar de esto, ape-nas se conoce sobre la biología y ecología deeste árbol, con sólo dos artículos publicados enlas últimas décadas (Fedriani et al., 2010). Enel área de estudio los perales comienzan a pro-ducir nuevas hojas a mediados de marzo, per-diendo la mayoría de ellas a principios de ju-nio. Se quedan casi sin hojas durante el veranoa la vez que va aumentando su producción enfrutos. Una descripción completa se puede en-contrar en la Flora Ibérica (1989).
Muestreo y toma de datos
Se construyó un detallado sistema de infor-mación geográfica (SIG) de la parcela de estu-dio con ayuda de softwares específicos (ArcView3.2 y ArcGis 9.3, 2008), sobre fotografía aéreade 0,5 × 0,5 metros (Consejería de Medioam-
biente, Junta de Andalucía, 2004). Se fueron aña-diendo diferentes capas generándose gran volu-men de información de diversos campos. Imá-genes con cuadrículas de 50 m × 50 m e impresasa gran escala, permitieron realizar un muestreoexhaustivo en campo, obteniéndose un censocompleto de los perales silvestres en la parcelade estudio (122 árboles). Cada árbol con un diá-metro de tronco en la base ≥ de 5 cm, se identi-ficó y se le asignó un código único. Mediante unreceptor diferencial de posicionamiento global(Trimble con sistema Pathfinder Pro XRS) se ob-tuvo la posición en el espacio de cada individuo,proporcionando coordenadas sub-métricas. Semidieron sus alturas, así como la copa y el diá-metro de tronco a la altura del pecho. Además,de cada individuo se extrajeron dos cilindros otestigos (cores) de madera usando una barrenaextractora (Haglöf, Suecia).
Imágenes Quickbird
Conocida la fenología de las especies im-plicadas en el estudio, tanto perennes como ca-ducifolias, se realizó una revisión de las imá-genes de Quickbird disponibles de archivo paraescoger una escena adquirida lo más cercanaposible a primavera, época en la que la mayo-ría de las especies se encuentran en su máxi-mo nivel de foliación. Al no existir una imagenacorde con estas condiciones, se escogió unaaproximada, a la espera de adquirir nuevas imá-genes de primavera. Así pues, se obtuvo un pro-ducto BUNDLE (PAN0.6 m + MS2.4 m), de25km2, tomado el 15 de julio de 2008. La ima-gen de tipo multiespectral tiene resolución ra-diométrica de 16 bits, 2,4 m de resolución es-pacial y 4 bandas espectrales (azul, 450-520nm; verde 520-600 nm; rojo, 630-690 nm; in-frarrojo cercano, 760-900 nm). La imagen delcanal pancromático, de resolución radiométri-ca de 16 bits y 0,6 m de resolución espacial,comprende una sola banda espectral en el ran-go de 450-900 nm (Fig. 4).
Corrección atmosférica
Los valores digitales de las imágenes de sa-télite Quickbird de cada píxel en el TOA (Top
Aplicación de técnicas de teledetección y GIS sobre imágenes quickbird... 59
Figura 3. Área de distribución y localización de losrepresentantes del género en Europa.

of Atmosphere) se transformaron a valores deradiancia espectral (W/m2sr). Posteriormentese obtuvieron los valores de radiancia espec-tral media en la parte alta de la atmósfera. Pa-ra este propósito se utilizaron los algoritmosdisponibles en DigitalGlobe, Inc. (2003). Se-guidamente, se transformaron los valores deradiancia a reflectancia aparente con el fin deexpresar los resultados en valores físicos. Es-tos cálculos permiten transformar los valoresoriginales de cada imagen en parámetros físi-cos, permitiendo así que sean comparables enel tiempo, aún bajo condiciones atmosféricasdiferentes (Chuvieco, 1996).
Por último, la reflectancia en superficie seobtuvo con la siguiente expresión,
RPixel,Band = LPixel,Bandd2π/E cosΦ [1]
siendo L Píxel, Banda la radiancia espectral antescalculada, d es la distancia entre la Tierra y elSol en unidades astronómicas, E es la irra-diancia solar espectral y Φ es 90 menos el án-gulo de elevación solar en el momento de la ad-quisición de la imagen.
El software ENVI V4.6 ofrece diferentes mo-delos de corrección atmosférica. Cuando todoslos parámetros climáticos para la imagen estándisponibles (presión, temperatura, vapor deagua, ozono, tipo de aerosoles, elevación solar,ángulo cenital, entre otros.), es posible aplicar
el método Fast Line-of-Sight AtmosphericAnalysis technique of Spectral Hypercube o«FLAASH» (ENVI FLAASH, Atmospheric Co-rrection Module, 2009) que incorpora el códi-go de transferencia de radiación MODTRAN-4. Se basa en códigos y algoritmos probados,únicos para cada imagen, proporcionando re-sultados muy precisos. FLAASH ofrece un altonivel de detalle tanto para las imágenes hipercomo multiespectral que operan en el rango es-pectral de 0,35 a 2,5 micrómetros.
Fusión de imágenes
Para este trabajo, se ha llevado a cabo un es-tudio de los diferentes métodos de fusión im-plementados en ENVI V.4.6 y ImageJFUSION(Laboratorio de Teledetección, UPM, 2007-2008), para escoger aquél que proporcionaselos mejores resultados en cuanto a calidad vi-sual, espectral y espacial. Imágenes multies-pectrales Quickbird (2,4 m) se fusionaron conimágenes pancromáticas (0,6 m) mediante unproceso de «Pan-Sharpening». «Pan-Sharpe-ning» es una técnica de fusión a nivel de píxelque describe un proceso de cambio de un con-junto de imágenes multiespectrales de baja re-solución espacial (gruesa) a imágenes en co-lor de alta resolución espacial (fina), mediante
60 S. Arenas et al. / Revista de Teledetección (2011) 35, 55-71
Figura 4. Composición en falso color infrarrojo (NIRGB) de (a) imagen multiespectral (MS) y (b) imagen pan-cromátrica (PAN).
a) b)

la fusión con una imagen co-georegistrada deresolución espacial f ina en blanco y negro(pancromática) de la misma zona. A continua-ción, se aplicaron los siguientes métodos de fu-sión de imágenes: Método de TransformaciónWavelet «à trous» ponderado, Método Multi-plicativo de Gram-Schmidt (G-S), Método detransformación al espacio IHS (Intensidad-Sa-turación-Brillo) y Metodología de fusión deimágenes Multidirección-Multiresolución(MDMR).
Un factor importante a considerar antes dela fusión de las imágenes es la elección de latécnica de remuestreo. Para este trabajo, he-mos optado por el método de Convolución Cú-bica. Es una técnica de muestreo más rigurosoque considera los 16 píxeles más cercanos (ma-triz de 4 × 4) en la imagen original, que son losmás cercanos al nuevo píxel. Los niveles digi-tales de estos 16 píxeles se sintetizan utilizan-do un cálculo polinomial.
Finalmente, se extrajo una imagen multies-pectral con resolución a escala pancromática(0,60 metros), manteniendo los datos espec-trales originales de longitud de onda media yancho de banda efectivo.
Medidas de la calidad de las imágenesfusionadas
La calidad de las imágenes es extremada-mente dependiente del observador y tambiénde la aplicación temática utilizada, siendo ne-cesarios criterios matemáticos más allá de lamera inspección visual. Wald et al. (1997) es-tablecieron algunas propiedades para las imá-genes fusionadas: 1) cualquier imagen fusio-nada, una vez degradada a su resoluciónoriginal, debe ser lo más similar posible a laimagen original. 2) Cualquier imagen fusiona-da debe ser lo más similar posible a la imagenoriginal que el sensor correspondiente debe ob-servar con la mayor resolución espacial. 3) Elconjunto de imágenes fusionadas multiespec-trales debe ser lo más similar posible al con-junto de imágenes originales multiespectralesque el sensor correspondiente debe observarcon la mayor resolución espacial.
Como ya se ha dicho, existen diferentes for-mas de evaluar la calidad de las imágenes fu-
sionadas: comparaciones visuales, índices es-tadísticos, correlaciones espaciales, entre otros.En este trabajo se han aplicado diferentes pa-rámetros para evaluar tanto la calidad cualita-tiva como la cuantitativa de las imágenes fu-sionadas. Por un lado, se siguió en parte elprotocolo propuesto por Wald et al. (1997), pa-ra evaluar la calidad de los resultados de los di-ferentes métodos. Por otra parte, varios esta-dísticos fueron seleccionados para comparar lacalidad espectral (ERGAS espectral) y espacial(ERGAS espacial) de las imágenes fusionadas.
Los datos utilizados para evaluar los méto-dos de fusión descritos anteriormente, corres-ponden a una escena recortada de la imagenQuickbird original (pancromática y multies-pectral), con las dimensiones de la parcela deestudio (3.200 × 3.700 píxeles).
Para una primera comparación visual entrelas imágenes originales y las imágenes sinteti-zadas, estas imágenes fusionadas fueron de-gradadas a la resolución de la imagen original(798 × 920 píxeles). Por otro lado, la mismacomparación se realizó entre las imágenes demás alta resolución espacial (0,60 cm). Des-pués, se compararon las bandas espectrales decada método de fusión con las bandas espec-trales de la imagen original con una resoluciónde 2,4 cm, utilizando diferentes parámetros es-tadísticos (diferencia entre los valores medios(bias), varianza, desviación estándar y el errorcuadrático medio (RMS). El bias, o sesgo, esla diferencia entre las medias de la imagen ori-ginal y la imagen sintetizada. La diferencia enlas varianzas, es la varianza de la imagen ori-ginal menos la varianza de la imagen sinteti-zada. La desviación estándar de la imagen di-ferencia, así como su valor respecto a la mediade la imagen original. Globalmente indica elnivel de error en cualquier píxel. Idealmente,este debe ser nulo. El error cuadrático medio(RMS, su acrónimo en inglés) es la raíz cua-drada del bias al cuadrado más la desviaciónestándar al cuadrado. Y finalmente, el coefi-ciente de correlación entre la imagen originaly la sintetizada. Esto muestra la similitud a pe-queña escala entre la imagen original y la fu-sionada.
Como un índice que mide la calidad espec-tral de la imagen fusionada, el ERGAS (ErreurRelative Globale Adimensionnelle de Synthè-
Aplicación de técnicas de teledetección y GIS sobre imágenes quickbird... 61

se) (Wald, 2000) fue seleccionado por su usoextensivo. Otro índice introducido para evaluarla calidad espacial de las imágenes fue el índi-ce ERGAS espacial (Lillo-Saavedra y Gonza-lo, 2006). Para ambos casos, definidos por lasecuaciones 2 y 4, respectivamente, mientrasmás bajo sea el valor de ERGAS, mejor es lacalidad de la imagen fusionada (Wald, 2000,2002).
[2]
donde h y l representan las resoluciones espa-ciales de las imágenes PAN y MUL, respecti-vamente, NBandas es el número de bandas de laimagen fusionada, MULTIi es el valor de ra-diancia de la banda ith (i-ésima) de la imagenMULTI y RMSE es definido como:
[3]
donde NP es el número de pixeles de la ima-gen fusionada y FUSi representa la banda ith (i-ésima) de la imagen fusionada.
La definición del ERGAS espacial está ins-pirada en el ERGAS espectral:
[4]
donde PANi es la imagen obtenida al ajustar elhistograma de la imagen PAN original al his-tograma de la banda ith (i-ésima) de la imagenMULTI y RMSEespacial, se define como:
[5]
Además del ERGAS en sus versiones espec-tral y espacial, se ha evaluado también la cali-dad de dichas imágenes mediante el índice deCorrelación Espectral (CC) (Vijayaraj et al.,2004) definido en la ecuación 6 y el índice deZhou (Zhou et al., 1998), el cual da una medi-da de la calidad espacial de la imagen fusio-nada (ecuación 7).
[6]
[7]
Al ser índices basados en la correlación, suvalor ideal es 1.
Regiones de interés (ROIs:entrenamiento y validación)
Seleccionamos 11 regiones de interés, quecorrespondían a distintas unidades de vegeta-ción (pasto, matorral y vegetación de ribera) oalgunas especies individuales en bosques mix-tos (Pyrus, Olea y Quercus). Además, los sue-los desnudos, las sombras y las charcas fueronconsiderados como regiones adicionales. La cla-se «suelo saturado» fue considerada como aqué-llas áreas de la imagen libres de vegetación, quetenían valores de reflectancia muy alta y se in-cluyeron como parte de este estudio. Para la cla-sificación, se utilizó la imagen fusionada quereportó los resultados de mejor calidad espec-tral y espacial. Los datos de estas regiones deinterés sobre esta imagen fueron utilizados pa-ra la clasificación supervisada a través de la fa-se de entrenamiento y verificación.
Proceso de clasificación digitalmediante Maximum Likelihood
Una de las principales preocupaciones en te-ledetección es cuantificar la coincidencia entreel mapa estimado y el mapa verdad-terreno(Castillejo-González et al., 2009). Para evitarcualquier estimación subjetiva, normalmentese utiliza un análisis numérico de la matriz deconfusión, lo que determina la precisión del mé-todo comparando el porcentaje de píxeles cla-sificados de cada clase con la clase verdad-te-rreno verificada, indicando posteriormente laevaluación correcta y los errores entre las cla-ses estudiadas (Congalton, 1991). La matriz deconfusión proporciona la precisión global de laclasificación, que indica el porcentaje de píxe-les clasificados correctamente; por otro lado,la exactitud del productor y el error de omisiónindican la probabilidad de que un píxel clasifi-cado en la realidad, representa esa categoría enla realidad, y la exactitud del usuario y el errorde comisión indican cómo de bien se clasificóel conjunto de píxeles de entrenamiento (Ro-gan et al., 2002). La precisión de la clasifica-
Iz =1
NBandas i=1
NBandas
∑ Corri (PANhigh_pass, FUSihigh_pass)
CC =1
NBandas i=1
NBandas
∑ Corri (MULTIi, FUSi)
RMSE(Bandai) =1
NP k=1
NP
∑(PANi(k) – FUSi(k))2
ERGASespacial = 100h ⎛
⎝⎜
⎞
⎠⎟
i=1
Nbandas
∑l1
Nbandas
RMSEespacial(Bandai)2
(PANi)2
RMSE(Bandai) =1
NP k=1
NP
∑(MULTIi(k) – FUSi(k))2
ERGASespectral = 100h ⎛
⎝⎜
⎞
⎠⎟
i=1
Nbandas
∑l1
Nbandas
RMSEespectral(Bandai)2
(MULTIi)2
62 S. Arenas et al. / Revista de Teledetección (2011) 35, 55-71

ción global indica el éxito general de la clasi-ficación, siendo el valor mínimo estandarizadoy aceptado en un 85%. Los datos que no hayanalcanzado este nivel requerirán ser reclasifica-dos o bien, se deberían fusionar clases (Foody,2002; Castillejo-González et al., 2009).
Por otro lado, y como ya se ha comentado,el coeficiente kappa (K) es otra medida de laexactitud de la clasificación (ecuación 8). Mi-de la diferencia entre el acuerdo mapa-realidadobservado y el que cabría esperar simplemen-te por azar; es decir, intenta delimitar el gradode ajuste debido sólo a la exactitud de la cla-sificación, prescindiendo del causado por fac-tores aleatorios (Congalton, Oderwald y Me-ad, 1983; Hudson y Ramn, 1987; Congalton,1991). De acuerdo con estos últimos autores,el coeficiente kappa puede ser calculado de lasiguiente manera:
[8]
donde N es el número total de píxeles de re-ferencia, Xij es el número de observaciones enla f ila i y columna i, Xi+ son los totales mar-ginales de la f ila i, X+i los totales marginalesde la columna i y r es el número de f ilas en lamatriz.
Los valores máximos y mínimos de kappadependen del contenido de todas las celdas dela matriz de confusión y no sólo de los valoresde la diagonal principal; de modo que si todoslos elementos que se encuentran fuera de la dia-gonal principal fueran iguales a cero, tendría-mos concordancia completa, K = 1. Si todos losvalores de la diagonal principal fueran nulos,estaríamos en un caso de completa discordan-cia, con K = –1. Landis y Koch (1977) sugirie-ron que un coeficiente Kappa de más de 0,8 in-dica claramente que una clasificación dada espoco probable que haya sido obtenida por azar.
Resultados
Evaluación de los métodos de fusión de imágenes
Para evaluar la calidad de los resultados ob-tenidos con los diferentes métodos de fusión,se seleccionó una región de interés correspon-diente a la parcela de estudio, y se extrajeronlos datos para cada banda. Se estudio la simi-litud espacial y espectral entre la imagen ori-ginal y las fusionadas.
Inicialmente, la evaluación de la calidad es-pacial de las imágenes fusionadas se realizómediante análisis visual. La Figura 5 ilustra elresultado del proceso de fusión de imágenes enfalso color infrarrojo.
Visualmente, las imágenes fusionadas sonmuy parecidas y la calidad es satisfactoria. Sinembargo, algunos métodos han generado, porejemplo, un borde difuso en las copas de losárboles (GS y IHS) y en otro caso (Wavelet «àtrous» y MDMR), una mala calidad en la ban-da del IRC.
En cuanto a la calidad espectral de los re-sultados, se ha estudiado la similitud espectralentre la imagen original y la fusionada. La Ta-bla 1 muestra las medias, desviaciones están-dar y coeficiente de calibración de las imáge-nes originales.
En este caso en particular, los factores de ca-libración son muy similares para las bandas PANy MUL. De ello se deduce que la misma tablade operaciones se puede aplicar a cada imageny puedan ser comparadas visualmente.
Para evaluar la calidad espectral y espacialse compararon las bandas espectrales de cadamétodo de fusión con las bandas espectrales dela imagen original a la resolución original (Ta-bla 2), utilizando diferentes parámetros esta-dísticos (diferencia entre los valores medios(sesgo), varianza, desviación estándar y RMS).Estos proporcionan una visión global de la ca-
K =i=1
r
∑N (xii) –i=1
r
∑(xi+* x+i)
i=1
r
∑(xi+* x+i)N2
Aplicación de técnicas de teledetección y GIS sobre imágenes quickbird... 63
Tabla 1. Media, desviación estándar y coeficiente de calibración de la imagenmultiespectral y pancromática en radiancias (W m–2 sr–1 m–1)
Rojo Verde Azul IRC PAN
Media 64 58 55 78 71Desviación Estándar 10 13 22 12 17Coefc. de Calibración 0,01604 0,01438 0,01267 0,01542 0,0644

lidad de un método para sintetizar cada bandaespectral individual.
El sesgo, la varianza y la desviación están-dar y su relación con el valor medio multies-pectral están representados. Lo ideal sería quesus valores fuesen nulos. El coeficiente de co-rrelación fue calculado entre la banda mul-tiespectral y la estimada, y su valor ideal es 1(Tabla 6). Para las bandas 2, 3 y 4 se hizo elmismo análisis, y son recogidas en la Tabla 3,4 y 5, respectivamente.
El método de fusión GS proporcionó los va-lores más bajos para el sesgo, la varianza y elRME en las cuatro bandas. Sin embargo, paralos otros métodos (MDMR, á trous y IHS), la va-riación en los datos es mayor sólo en el caso dela banda 1. Estas diferencias expresan la canti-
dad de información añadida o perdida durante lamejora de la resolución espacial. En términos dedesviación estándar la diferencia más grande seencuentra en la banda 3, siendo en esta bandadonde se acumula el mayor nivel de error en cual-quier píxel en todos los métodos de fusión.
La comparación del coeficiente de correla-ción muestra la similitud en las estructuras depequeño tamaño entre las imágenes originalesy las sintéticas. En este caso, la diferencia esbaja. Sin embargo, el coeficiente de correla-ción entre las bandas de IHS es superior a to-dos los demás métodos.
En resumen, la Tabla 7 muestra los erroresglobales que se calcularon para cada imagensintética según lo propuesto por Munechika etal. (1993) y Wald et al. (1997).
64 S. Arenas et al. / Revista de Teledetección (2011) 35, 55-71
Figura 5. Composiciones en falso color (R = IRC,G = Verde, B = Azul) de la imagen QUICKBIRD de 2008. Zooms sobre (a) Imagen MultiespectralOriginal, (b) Wavelet «á trous», (c) Gram-Schmidt(G-S), (d) Intensidad-Saturación-Brillo (IHS), (e) Multidirección-Multiresolución (MDMR).
b)
d)
a)
c)
e)

Para reforzar este análisis, otros índices co-mo el ERGAS espectral, el ERGAS espacial, elíndice de correlación espectral (CC) y el índi-ce de Zhou, fueron aplicados. La Tabla 8 mues-tra los índices ERGAS, espacial y espectral, asícomo sus promedios y desviaciones estándarpara todos los métodos de fusión.
El método de fusión IHS proporciona los va-lores medios más bajos tanto para el ERGAS es-pectral como para el espacial, siendo el métodode fusión más adecuado de acuerdo a nuestros
resultados. El método de fusión GS proporcio-na un ERGAS espacial más alto que los méto-dos IHS, MDMR y «á trous». En cuanto a losvalores del ERGAS espectral, existe menor va-riación entre los cuatro métodos de fusión.
El Coeficiente de Correlación Espectral (CC)y el índice Zhou espacial, han sido evaluadoscomo otra vía para cuantificar la calidad de lasimágenes. Los valores correspondientes a lasimágenes obtenidas mediante estos cuatro mé-todos de fusión se recogen en la Tabla 9.
Aplicación de técnicas de teledetección y GIS sobre imágenes quickbird... 65
Tabla 2. Estadísticos de las diferencias entre la ima-gen original y la fusionada, en radiancias (W m–2 st–1
m–1) o valor relativo, para la banda B1
MDMR ATROUS IHS GS
Bias 38,06 37,63 4,31 0,19(%) 59 59 7 0,30
Varianza –190 –202 –26 13(%) –196 –209 –27 13
D.S. 8,2 8,2 3 3,5(%) 13 13 5 6
RME 38,9 38,53 5,28 3,55
Tabla 3. Igual que la tabla 2, pero para la banda 2
MDMR ATROUS IHS GS
Bias 42,78 42,52 3,80 0,14(%) 73 73 7 0,24
Varianza 72 66 21 23(%) 40 36 12 13
D.S. 4,6 4,0 4,8 4,6(%) 8 7,00 8 8
RME 43,04 42,72 6,13 4,60
Tabla 4. Igual que la tabla 3, pero para la banda 3
MDMR ATROUS IHS GS
Bias 35,67 35,43 6,72 0,14(%) 65 65 12 0,26
Varianza 303 399 107 63(%) 62 82 22 12
D.S. 10,3 9,5 5,3 7,5(%) 19 17 10 13
RME 37,12 36,68 8,53 7,42
Tabla 5. Igual que la tabla 4 pero para la banda 4
MDMR ATROUS IHS GS
Bias 61,90 61,87 11,54 0,17(%) 80 79 15 0,22
Varianza 74 74 13 6(%) 53 53 9,2 4,6
D.S. 7,5 6,5 9,5 4,2(%) 10 8 12 5
RME 62,36 62,20 14,92 4,21
Tabla 6. Coeficiente de correlación entre las bandas de la imagen original y lasbandas de la imagen fusionada
MDMR ATROUS GS IHS
Original-B1 0,9488 0,9641 0,9397 0,9540Original-B2 0,9564 0,9680 0,9432 0,9552Original-B3 0,9566 0,9696 0,9431 0,9590Original-B4 0,7800 0,8579 0,9421 0,9052
Promedio 0,9104 0,9399 0,9420 0,9434
Tabla 7. Comparación entre errores globales
MDMR ATROUS IHS GS
Error Global 181,456 180,143 34,854 19,767

Nuevamente, los valores obtenidos para elCC y Zhou con el método IHS son más altosque para el resto de métodos.
Proceso de clasificación digitalmediante máxima probabilidad
La Tabla 10 muestra la matriz de error de laimagen de satélite en falso color después de lafusión con el método IHS, mediante la compa-ración de los datos de la clasificación con los
datos del terreno en el área de estudio. La pre-cisión global de la clasificación para la ima-gen de satélite fusionada fue del 80,42%. Laprecisión del productor de las categorías indi-viduales para la imagen de satélite varió entreel 14,34% para la clase Olea y 97,85% para elpasto seco, mientras que la precisión de usua-rio varió del 3,89% para la clase Olea y el100% para suelo y suelo saturado. P. bourgea-na tuvo una precisión de usuario del 37,25% yuna precisión de productor del 39,89. El índi-ce Kappa fue de 0.781 para la imagen de saté-lite fusionada. Esto sugiere que la clasificaciónlogró una precisión del 78,1% mejor que la es-perada por asignación aleatoria de píxeles a lascategorías.
Discusión y conclusiones
Para este estudio, se han comparado 4 mé-todos de fusión [Wavelet «á trous», Gram-
66 S. Arenas et al. / Revista de Teledetección (2011) 35, 55-71
Tabla 9. Comparación entre índices de calidad es-pectral y espacial
CC ZHOUPromedioERGAS
ATROUS 0,90577 0,95085 1,53034GS 0,91033 0,16144 1,93246IHS 0,90361 0,97751 1,28817MDMR 0,87767 0,95766 1,44697
Tabla 8. ERGAS espectral y espacial para los métodos de fusión
ERGAS ERGASPromedio DS
espacial espectral
ATROUS 1,31629 1,74439 1,53034 0,30271GS 2,32855 1,53637 1,93246 0,56015IHS 1,06933 1,50701 1,28817 0,30948MDMR 1,00206 1,89188 1,44697 0,62919
Tabla 10. Matriz de error para la clasificación supervisada en comparación con los datos de terreno parala imagen fusionada en falso color del satélite QuickBird (método IHS) obtenida el 15 de julio de 2008
CategoríaCategoría actual
clasificadaPyrus Olea Quercus
Pasto Pasto Veg. Veg.Suelo
Suelo CapasSombras
Total Usuario
Húmedo Seco Mixta de Ribera Saturado de agua
Pyrus 209 62 99 15 0 130 0 0 0 1 45 561 37,25Olea 100 37 107 71 2 385 30 110 38 40 32 952 3,89Quercus 72 72 1.215 0 0 56 0 0 0 0 8 1.423 85,38Pasto Húmedo 14 10 15 1.339 0 4 93 0 0 0 0 1.475 90,78Pasto Seco 1 0 0 0 1.730 0 0 13 36 0 36 1.816 95,26Veg. Mixta 72 61 280 12 0 1.902 196 0 0 1 31 2.555 74,44Veg. de Ribera 0 10 28 119 0 5 1.259 0 0 0 0 1.421 88,60Suelo 0 0 0 0 0 0 0 1.290 0 0 0 1.290 100,00Suelo Saturado 0 0 0 0 0 0 0 0 1.373 0 0 1.373 100,00Capas de agua 0 3 50 0 0 15 0 0 0 834 155 1.057 78,9Sombras 56 3 53 0 36 27 0 29 1 69 1.175 1.449 81,09
Total 524 258 1.847 1.556 1.768 2.524 1.578 1.442 1.448 945 1.482
Productor 39,89 14,34 65,78 86,05 97,85 75,36 79,78 89,46 94,82 88,25 79,28

Schmidt (G-S), Intensidad-Saturación-Brillo(IHS) y Multidirección-Multiresolución(MDMR)], aplicados sobre imágenes Quick-bird multiespectrales, con el objeto de optimi-zar la calidad de la resolución espectral y es-pacial. El objetivo es mejorar los resultados deuna clasificación supervisada de la imagen fu-sionada para permitir la discriminación y elmapeo individual de P. bourgeana.
Asumiendo que durante el proceso de fusiónhay una leve pérdida de la información espec-tral y espacial, todos los métodos de fusiónaplicados a estas imágenes ofrecen resultadossatisfactorios. En primer lugar, se realizó unainspección visual de las imágenes fusionadas.Para contrastar la información visual, siguien-do el protocolo de Wald (1997) se compararonlas imágenes fusionadas obtenidas para cadamétodo de fusión con la imagen original. Losmétodos basados en la transformada wavelet(à trous) casi siempre ofrecen resultados favo-rables (Ranchin y Wald, 2000). Sin embargo,en este caso, los resultados proporcionados poreste método no lo fueron. Para las cuatro ban-das (B1, B2, B3 y B4) el sesgo y la varianzafueron altos. Sin embargo, el coeficiente de co-rrelación entre las bandas fusionadas y la ban-da original, excepto para la banda 4, resulta-ron ser de los más altos. Por otro lado, losresultados proporcionados por el ERGAS es-pectral y espacial, lo situaron como un méto-do favorable para su aplicación. Además de queel método GS proporcionó resultados muy fa-vorables, ya que sus valores fueron similares alos de la imagen original en la resolución es-pectral, los índices que miden la precisión dela resolución espacial (Zhou) fueron bajos. Es-to puede ser incoherente ya que este métodopudo ser considerado como uno de los méto-dos a aplicar para la clasificación, pero desdeel punto de vista del espacio, se descartó. Elmétodo IHS a menudo produce resultados deaspecto agradable. Por un lado, el sesgo y lavarianza fueron altos. Sin embargo, la desvia-ción estándar de las cuatro bandas no fue muyalta y los coeficientes de correlación entre lasbandas fueron los más altos. Estos datos se vie-ron reforzados por los resultados de los índi-ces ERGAS espacial y Zhou. De los cuatro mé-todos, éste dio valores más consistentes entérminos de resolución espectral y espacial.
Además, ofreció una gran consistencia visualde las imágenes sintetizadas. Los resultadosproporcionados por el método MDMR no fue-ron favorables. Además de presentar una bajacalidad espectral, como reflejaron sus valoresaltos para el bias, la varianza y la desviaciónestándar, la calidad espacial fue reflejada porlos bajos valores de los índices espaciales.
Si un método de fusión busca un equilibrioentre la información espectral y espacial, parael caso de la escena de Quickbird objeto de es-tudio, el método IHS proporcionó la mejor ca-lidad espacial y espectral (Alonso et al., 2004).El método GS se podría haber considerado co-mo posible para ser aplicado en este trabajo,sin embargo sus resultados fueron un poco máspobres de acuerdo a los índices ERGAS espa-cial y espectral, así como para el índice de Zhouespacial. Del mismo modo, el algoritmo «àtrous» y el método MDMR demostraron sertambién alternativas muy eficientes (Gonzaloy Lillo-Saavedra, 2007), pero aunque la cali-dad espacial fue buena, los resultados espec-trales fueron muy bajos.
Por otro lado, los índices utilizados para eva-luar la calidad de las imágenes fusionadas, ade-más de estar muy difundidos, proporcionan ro-bustez en cuanto a los resultados, ya que tienenen cuenta entradas de datos de ambas imáge-nes (MUL y PAN) (Gonzalo y Lillo-Saavedra,2007). Wald (2002) propuso algunos requisi-tos que deben cumplir los índices de calidad:1) Ser independiente de las unidades, y porconsiguiente de los coeficientes de calibraciónde los instrumentos y de sus valores de ganan-cia. 2) Ser independiente del número de ban-das espectrales consideradas. 3) Ser indepen-diente de la relación entre las resolucionesespaciales de las imágenes fuente. Según Gon-zalo y Lillo-Saavedra (2007), no existe el me-jor método de fusión de imágenes, sino la me-jor imagen fusionada. En base a esto, el índicede correlación espectral (CC) y el índice deZhou, presentan baja sensibilidad a las varia-ciones de calidad, no cumpliendo los requisi-tos de Wald. Por otro lado, el RMSE, el ERGASespectral y el espacial, cumplen los requisitosde Wald y, por tanto, su definición en un do-minio común permite su comparación. En ba-se a los resultados obtenidos para este estudio,combinando varios índices de evaluación de la
Aplicación de técnicas de teledetección y GIS sobre imágenes quickbird... 67

calidad de las imágenes fusionadas, podemosconcluir que el índice que midió de forma máseficiente la calidad de las imágenes fue el ER-GAS, tanto espectral, como su versión espacial,ajustándose a lo propuesto por Wald (2002).
Según la escala que a menudo se utiliza pa-ra expresar cualitativamente la fuerza de acuer-do en la clasificación (Landis y Koch, 1977),cuyo valor de Kappa entre 0,61 y 0,80 se con-sidera «sustancial», y asumiendo que el valormínimo estandarizado y aceptado para la pre-cisión de la clasificación global está en un 85%(Foody, 2002), los resultados reportados por elíndice Kappa y la precisión global para la ima-gen analizada (78,18% y 80,42%, respectiva-mente), muestran que es posible discriminarlas categorías seleccionadas en el área de es-tudio (Pyrus, Olea, Quercus, Pasto Seco, Pas-to Húmedo, Vegetación Mixta, Vegetación deRibera, Suelo Desnudo, Suelo Saturado, Char-cas y Sombras). Sin embargo, el hecho de quelos valores del coeficiente kappa o la precisiónglobal fuesen altos, no significa que la preci-sión de productor o usuario fuese la más alta.Thomlinson et al. (1999), expuso que el crite-rio para una categorización exitosa de los usosdel suelo no era sólo el 85% mínimo general,sino también la inclusión de ninguna clase conuna precisión de menos del 70%. De acuerdocon Yu et al. (2006), una precisión de la clasi-ficación general superando el 60% puede con-siderarse satisfactoria cuando la clasificaciónde la vegetación se mapea con más de 13 alian-zas construidas por 52 usos de vegetación. Porlo tanto, aunque no hay una estimación están-dar de precisión, existe un consenso razonablede que una mayor precisión es necesaria (Cas-tillejo-González et al., 2009). Analizando losdatos correspondientes a la precisión de pro-ductor y usuario para la clase Pyrus, se obser-vó que en el caso de la imagen de verano de2008 fusionada, los resultados fueron relativa-mente bajos (39,89% y 37,25%, respectiva-mente). Estos valores de productor y usuariopara peral silvestre se deben principalmente asu confusión con vegetación mixta (matorral),y otras especies de árboles (Olea). La confu-sión con otras clases de vegetación podría de-berse a que durante el verano, la respuesta es-pectral de la vegetación y principalmente losárboles de hoja caduca, como el peral silves-
tre, está muy influenciada por el proceso dedesprendimiento de las hojas y la senescencia,relacionados principalmente con la sequía es-tival. Estos pobres resultados de la clasifica-ción obtenidos para la clase Pyrus, podrían serexplicados, en parte, por la fecha tardía de ad-quisición de la imagen Quickbird disponible(mediados de julio). Lamentablemente, paraesta fecha, en el área de estudio muchos pera-les silvestres ya habían tirado una parte de sushojas. Por lo tanto, creemos que una mejor se-lección de productos de imágenes por fecha,además de perfeccionar o aplicar distintos mé-todos como segmentación de objetos, índicesde vegetación, entre otros, o ampliando la re-solución espectral de las imágenes que se ad-quieran (imágenes hiperespectrales), podríanmejorar significativamente los resultados. Eneste sentido, es posible que el rendimiento glo-bal de un método no se vea reflejado, ya quelos resultados dependen en gran medida del ti-po de paisaje, su diversidad, su heterogeneidad,el tiempo de observación, las propiedades óp-ticas de la atmósfera, el sistema del sensor mis-mo (incluyendo la geometría de visión), el tipode clasificador (supervisado, no supervisado),y el clasificador en sí mismo (Ranchin y Wald,2000).
No obstante, nos gustaría hacer hincapié enla dificultad inherente a la hora de clasificarespecies de árboles individuales a partir deimágenes multiespectrales donde las compli-caciones, tales como coronas de sombra y va-riabilidad de las f irmas espectrales entre losárboles de la misma especie, combinado conun pobre aislamiento de los árboles individua-les, reduce el rendimiento de la clasificacióngeneral, a menos del 50% de clasif icacionescorrectas (Leckie et al., 2005a), e incluso condelimitación manual de las copas, el rendi-miento de la clasif icación sigue siendo bajo(Leckie et al., 2005b; Larsen, 2007). Sin em-bargo, existe una urgencia cada vez mayor en-tre los biólogos dedicados a la conservación,de cuantificar el estatus y requerimientos am-bientales de determinadas especies a escala es-pacial más fina, con el fin de priorizar mejorlos esfuerzos de conservación. Los sensores re-motos pueden ayudar a ampliar el conjunto dedatos de campo existentes a escala regional ymundial.
68 S. Arenas et al. / Revista de Teledetección (2011) 35, 55-71

ReferenciasALDASORO, J. J., AEDO, C. & MUÑOZ GAR-
MENDIA, F. 1996. The genus Pyrus L. (Rosace-ae) in south-west Europe and North Africa. Bo-tanical Journal of the Linnean Society, 121:143-158.
ALDRICH, J. 1997. Fisher and the making of ma-ximum likelihood 1912-1922. Statistic Society,12: 162-176.
ALONSO, R., GUTIERREZ, M. J., FERNANDEZ,S., THOMAS, C., RANCHIN, T. & WALD, L.2004. Evaluation of the Quality of Quickbird Fu-sed Products. «24th EARSeL Symposium «NewStrategies for European Remote Sensing», Du-brovnik, Croatia.
ALPARONE, L., BARONTI, S., GARCELLO, A.& NENCINI, F. 2004. A global measurement ofpan-sharpened multispectral imagery. IEEE, Ge-oscience and Remote Sensing Letters, 1: 313-317.
ANDERSON, G. L., PROSSER, C. W., HAGGAR,S. & FOSTER, B. 1999. Change detection of le-afy spurge infestations using aerial photographyand geographic information systems. Procee-dings of the 17th Biennial Workshop Color AerialPhotography and Videography in Resource As-sessment. Bethesda, American Society of Photo-grammetry and Remote Sensing, pp. 223-230.
ARCGIS 9.3 PACKAGE. 2008. EnvironmentalSystems Research Institute (ESRI).
CABELLO, J. & PARUELO, J. M. 2008. La telede-tección en estudios ecológicos. Ecosistemas,17(3): 1-3.
CASTILLEJO-GONZÁLEZ, I. L., LÓPEZ-GRA-NADOS, F., GARCÍA-FERRER, A., PEÑA-BA-RRAGÁN, J. M., JURADO-EXPÓSITO, M.,SÁNCHEZ DE LA ORDEN, M. & GONZÁLEZ-AUDICANA, M. 2009. Object- and pixel-basedanalysis for mapping crops and their agro-envi-ronmental associated measures using QuickBirdimagery. Computers and Electronics in Agricul-ture, 68: 207-215.
CHAVEZ, P. S. 1975. Atmospheric, solar and MTFcorrections for ERTS digital imagery. Pro-ceedings of the American Society of Photog-rammetry, Fall Technical Meeting Phoenix, AZ,pp. 69.
CHAVEZ, P. S. 1988. An improved dark-object sub-traction technique for atmospheric scattering co-rrection of multispectral data. Remote Sensing ofEnvironment, 24: 459-479.
CHAVEZ, P. S. 1989. Radiometric calibration ofLandsat thematic mapper multispectral images.Photogrammetric Engineering and Remote Sen-sing, 55: 1285-1294.
CHAVEZ, P. S. 1996. Image-based atmospheric co-rrections, revisited and improved. Photogram-metric Engineering and Remote Sensing, 62:1025-1036.
CHUVIECO, E. (Ed. RIALP). 1996. «Fundamen-tos de Teledetección espacial», 3a edición, pp.568 (Madrid).
CONGALTON, R. G., ODERWALD, R. G. & ME-AD, R. A. 1983. Assessing Landsat classificationaccuracy using discrete multivariate analysis sta-tistical techniques. Photogrammetric Enginee-ring & Remote Sensing, 49: 1671-1678.
CONGALTON, R. G. 1991. A review of assessingthe accuracy of classifications of remotely senseddata. Remote Sensing of Environment, 37: 35-46.
COPPIN, P., JONCKHEERE, I., NACKAERTS K.,MUYS, B. & LAMBIN, E. 2004. Digital changedetection methods in ecosystem monitoring: a re-view. International Journal of Remote Sensing,25(9): 1565-1596.
CRIPPEN, R. E. 1987. The regression intersectionmethod of adjusting image data for band ratio-ning. International Journal of Remote Sensing,8: 137-155.
CULVENOR, D. 2002. TIDA: an algorithm for thedelineation of tree crowns in high spatial resolu-tion remotely sensed imagery. Computers andGeosciences, 28: 33-44.
DECAISNE, J. 1871-72. Le Jardin fruitier du Mu-séum, 1(318), pl. 2, Paris.
DIGITALGLOBE, INC. 2003. Radiometric Ra-diance Conversion for QB Data. Technical Note,RS., TN., Radiometric Radiance, 4002. Long-mont, Colorado.
ENVI FLAASH. Atmospheric Correction Module,2009.
ENVI (The Environment for Visualizing Images).V.4.5 (2007)-V.4.6 (2009).
EVERITT, J. H., PETTIT, R. D. & ALANIZ, M. A.1987. Remote sensing of broom snakeweed (Gu-tierrezia sarothrae) and spiny aster (Aster spi-nosus). Weed Science, 35: 295-302.
EVERITT, J. H., YANG, C. & JOHNSON, H. B.2007. Canopy Spectra and Remote Sensing of Ashe Juniper and Associated Vegetation. Envi-ronmental Monitoring and Assessment, 130: 403-413.
FEDRIANI, J. M., WIEGAND, T. & DELIBES, M.2010. Spatial pattern of adult trees and the mam-mal-generated seed rain in the Iberian pear. Eco-graphy, 33(3): 545-555.
FLORA IBERICA. 1989. Plantas vasculares de laPenínsula Ibérica e Islas Baleares. Real JardínBotánico. Consejo Superior de InvestigacionesCientíficas, pp. 436-437.
FOODY, G. M. 2002. Status of land cover classifi-cation accuracy assessment. Remote Sensing ofEnvironment, 80: 185-201.
FRULLA, L., MILOVICH, J. A. & GAGLIARDI-NI, D. A. 1995. Illumination and observation geometry for NOAA-AVHRR images. Inter-national Journal of Remote Sensing, 16(12): 2233-2253.
Aplicación de técnicas de teledetección y GIS sobre imágenes quickbird... 69

GAUSMAN, H. W., MENGES, R. M., ESCOBAR,D. E., EVERITT, J. H. & BOWEN, R. L. 1977.Pubescence affects spectra and imagery of sil-verleaf sunflower (Helianthus argophyllus). We-ed Science, 25: 437-440.
GILABERT, M. A., CONESE, C. & MASELLI, F.1994. An atmospheric correction method for theautomatic retrieval of surface reflectances fromTM images. International Journal of Remote Sen-sing, 15: 2065-2086.
GONZALO, C. & LILLO-SAAVEDRA, M. 2007.Fusión de Imágenes Quickbird Mediante una Re-presentación Conjunta Multirresolución-Multi-dirección. IEEE Latin America Transaction, 5(1):32-35.
GOUGEON, F., LECKIE, D., PARADINE, D. &SCOTT, I. 1999. Individual tree crown speciesrecognition: the Nahmint study. International Fo-rum on Automated Interpretation of High SpatialResolution Digital Imagery for Forestry. PacificForestry Centre, Vic., Canada, pp. 209-223.
HAYDAN, R., DALKE, G. W., HENKEL, J. & BA-RE, J. E. 1982. Applications of the IHS colourtransform to the processing of multisensor dataand image enhancement. International Sympo-sium on Remote Sensing of Arid and Semi-aridLands, Cairo, Egypt, pp. 599-616.
HUDSON, W. D. & RAMM, C. W. 1987. Correctformulation of the Kappa coefficient of agree-ment. Photogrammetric Engineering & RemoteSensin, 53: 421-422.
KNEIZYS, F. X., SHETTLE, E. P., ABREU, L. W.,ANDERSON, G. P., CHETWYND, J. H., GA-LLERY, W. O., SELBY, J. E. A. & CLOUGH, S.A. 1988. Users guide to LOWTRAN 7. Techni-cal Report AFGL-TR-88-0177, Optical/InfraredTechnology Division, U.S. Air Force GeophysicsLaboratory, Hascom Air Force Base, Massa-chusetts.
LABEN, C. A. & BROWER, B. V. 2000. Process forEnhancing the Spatial Resolution of Multispec-tral Imagery Using Pan-Sharpening. US Patent6,011,875.
LANDIS, J. R. & KOCK, G. G. 1977. The measu-rement of observer agreement for categorical da-ta. Biometrics, 33: 159-174.
LARSEN, M. 2007. Single tree species classifica-tion with a hypothetical multi-spectral satelli-te. Remote Sensing of Environment, 110(4): 523-532.
LECKIE, D. G., GOUGEON, F. A., TINIS, S., NEL-SON, T., BURNETT, C. N. & PARADINE, D.2005a. Automated tree recognition in old growthconifer stands with high resolution digital ima-gery. Remote Sensing of Environment, 94: 311-326.
LECKIE, D. G., TINIS, S., NELSON, T., BUR-NETT, C., GOUGEON, F. A. CLONEY, E. & PA-RADINE, D. 2005b. Issues in species classifica-
tion of trees in old growth conifer stands. Cana-dian Journal of Remote Sensing, 31(2): 175-190.
LILLO-SAAVEDRA, M. & GONZALO, C. 2006.Spectral or Spatial Quality for Fused SatelliteImagery? A Trade-Off Solution Using Wavelet àtrous Algorithm. International Journal of Remo-te Sensing, 27(7): 1453-1464.
LILLO-SAAVEDRA, M. & GONZALO, C. 2007.Multispectral Images Fusion by a Joint Multidi-rectional and Multiresolution Representation. In-ternational Journal of Remote Sensing, 28(18):4065-4079.
LILLO-SAAVEDRA, M. & GONZALO, C. 2008.Aplicación de la Metodología de Fusión de Imá-genes Multidirección-Multiresolución. Informa-ción Tecnológica, 19(5): 137-146.
LÓPEZ-GRANADOS, F., PEÑA-BARRAGÁN, J.M., JURADO-EXPÓSITO, M., FRANCISCO-FERNÁNDEZ, M., CAO, R., ALONSO-BE-TANZOS, A. & FONTENLA-ROMERO, O. 2008.Multispectral classification of grass weeds andwheat (Triticum durum) using linear and nonpa-rametric functional discriminant analysis andneural networks. Weed Research, 48: 28-37.
LÓPEZ-GRANADOS, F., GÓMEZ-CASERO, T.,PEÑA-BARRAGÁN, J. M., JURADO-EXPÓSI-TO, M. & GARCÍA-TORRES, L. 2010. Classif-ying irrigated crops as affected by phenologicalstage using discriminant analysis and neural net-works. Journal of the American Society for Hor-ticultural Science, 135: 465-473.
MUNECHIKA, C. K., WARNICK, J. S., SALVAG-GIO, C. & SCHOTT, J. R. 1993. Resolution en-hancement of multispectral image data to im-prove classification accuracy. PhotogrammetricEngineering & Remote Sensing, 59: 67-72.
RAHMAN, H. & DEDIEU, G. 1994. SMAC: sim-plified method for the atmospheric correction ofsatellite measurements in the solar spectrum.Toulouse. International Journal of Remote Sen-sing, pp. 123-143.
RANCHIN, T. & WALD, L. 2000. Fusion of HighSpatial and Spectral Resolution images: The AR-SIS Concept and Its Implementation. Photo-grammetric Engineering and Remote Sensing, 66:49-61.
ROGAN, J., FRANKLIN, J. & ROBERTS, D. A.2002. A comparison of methods for monitoringmultitemporal vegetation change using Thema-tic Mapper imagery. Remote Sensing of Environ-ment, 80: 143-156.
SLATER, P. N. 1980. Remote Sensing, Optics andOptical systems. Addison-Wesley Pub. Co., pp. 575.
THOMLINSON, J. R., BOLSTAD, P. V. & COHEN,W. B. 1999. Coordinating methodologies for sca-ling landcover classifications from site-specificto global: step toward validating global map pro-ducts. Remote Sensing of Environment, 70: 16-28.
70 S. Arenas et al. / Revista de Teledetección (2011) 35, 55-71

TUELLER, P. T. 1982. Remote sensing for rangemanagement. In: C. J. Johannsen & J. L. Sanders(Eds.), Ankeny, IA: Soil Conservation Society ofAmerica, pp. 125-140.
VARSHNEY, P. K. 1997. Multisensor data fusion.Electronics and Communication EngineeringJournal, 9(6): 245-253.
VASANTHA, T., SHYAMALA, R., MARINO, L.,HOWARTH, P. & WOOD, D. 2000. Land CoverMapping: Performance Analysis of Image-FusionMethods. www.GISdevelopment.com.
VERMOTE, E., TANRE, D., DEUZE, J. L., HER-MAN, M. & MORCRETTE, J. J. 1997. Secondsimulation of the satellite signal in the solar spec-trum, 6S: an overview. IEEE Transactions on Ge-oscience and Remote Sensing, 35: 675-686.
VIJAYARAJ, V., O’HARA CH. & YOUNAN, N.2004. Quality Analysis of Pan-Sharpened Ima-ges. Proceedings of the Geosciences and Remo-te Sensing Symposium (IGARSS), Anchorage,Alaska.
VRABEL, J. 1996. Multispectral Imagery BandSharpening Study. Photogrammetric Engineering& Remote Sensing, 62(9): 1075-1083.
WALD, L., RANCHIN, T. & MANGOLINI, M.1997. Fusion of satellite images of different spa-tial resolutions: Assessing the quality of resul-ting images, 63(6): 691-699.
WALD, L. 2000. Quality of high resolution synthe-sized: is there a simple criterion? Proceedings ofthe International Conference on Fusion of EarthData, T. Ranchin and L. Wald (Eds), SEE/URIS-CA, France, pp. 99-105.
WALD, L. 2002. Data Fusion, Def inition and Architectures: Fusion of Image of Different Spa-tial Resolution, Le Presses de l’Ecole des Mines,Paris.
WULDER, M., NIEMANN, O. & GOODE-NOUGH, D. 2000. Local maximum filtering forthe extraction of tree location and basal area fromhigh spatial resolution imagery. Remote Sensingof Environment, 73: 103-114.
YU, Q., GONG, P., CLINTON, N., BIGING, G.,KELLY, M. & SCHIROKAUER, D. 2006. Ob-ject-based detailed vegetation classification withairborne high spatial resolution remote sensingimagery. Photogrammetric Engineering & Re-mote Sensing, 72: 799-811.
ZHANG, W. J. & KANG, J. Y. 2005. Quickbirdpanchromatic and mul-spectral image fusion ba-sed on wavelet packet transformation. Space elec-tronic technology. 2: 48-52. (In Chinese).
ZHOU, J., CIVCO, D. & SILANDER, J. 1998. AWavelet Method to Merge Landsat TM and SPOTPanchromatic Data. International Journal of Re-mote Sensing, 19: 743-757.
Aplicación de técnicas de teledetección y GIS sobre imágenes quickbird... 71

Estimación de la reflectividad superficial mediante datosdel sensor aéreo AHS y comparación con el producto
MODIS en la campaña CEFLES2
J. A. Sobrino* y B. FranchGlobal Change Unit (UCG). Imaging Processing Laboratory (IPL). Parque Científico.
Universitat de Valencia. P.O. Box 22085. 46071 Valencia. Spain
Resumen
En este artículo se evalúa el producto MODIS de reflectividad superficial a través de su comparacióncon datos aéreos. En este sentido se ha desarrollado una metodología para obtener la reflectividad su-perficial y se ha aplicado a datos adquiridos mediante el sensor aerotransportado Airborne Hypers-pectral Scanner (AHS). Se ha comparado la reflectividad superficial obtenida con la estimada por MODIS considerando la equivalencia entre las bandas 8 (centrada en 658 nm) y 15 (centrada en 862 nm)de AHS y las bandas 1 y 2 de MODIS respectivamente. El estudio se ha desarrollado en el contextode la campaña CEFLES2 (CarboEurope, FLEX and Sentinel-2), la cual se desarrolló en Les Landes(Francia) durante tres periodos, abril, junio y septiembre de 2007. Con esta metodología se obtiene lareflectividad superficial de las imágenes AHS con un Root Mean Square Error (RMSE) al compararcon datos in situ de 0,02 en el visible y 0,05 en el infrarrojo cercano. La evaluación del producto MODIS de reflectividad superficial (MOD09GQ) se ha desarrollado comparándolo con la estimación me-diante AHS. Los resultados muestran un RMSE de 0,03 en el visible y 0,08 en el infrarrojo cercano.
Palabras clave: MODIS, reflectividad superficial, espesor óptico de aerosoles, CEFLES2, correc-ción atmosférica, AHS.
Abstract
Evaluation of the MODIS surface reflectance product in the framework of the CEFLES2campaign
In this paper the MODIS surface reflectance product is evaluated through its comparison with air-borne data. In this way it has been developed a methodology to obtain the surface reflectance in theVisible and Near Infrared (VNIR) spectral range and it has been tested over airborne data by proces-sing high-resolution images acquired with the Airborne Hyperspectral Scanner (AHS) sensor. AHSand MODIS surface reflectance images have been compared considering the equivalence between AHSbands Band 8 (centred on 658nm) and Band 15 (centred on 862 nm) and MODIS Band 1 and Band 2respectively. The study has been performed in the framework of the CEFLES2 (CarboEurope, FLEXand Sentinel-2) campaign, which was developed in Les Landes region (France) during three differentperiods, April, June and September, on 2007. With this methodology the surface reflectance can beobtained with a Root Mean Square Error (RMSE) of 0.02 in the red spectral region and around 0.05in the near infrared spectral region in comparison with ground measurements. Regarding the evalua-tion of the MODIS Collection C5 surface reflectance product (MOD09GQ), it has been performed bycomparing with the AHS estimations. The results report a RMSE of 0.03 in the red spectral region and0.08 in the near infrared spectral region.
Key words: MODIS, surface reflectance, aerosol optical thickness, CEFLES2, atmospheric co-rrection, AHS.
* Autor para la correspondencia: [email protected]: 25-01-11; Aceptado: 10-05-11.
Asociación Española de Teledetección Revista de Teledetección 35, 72-79ISSN: 1988-8740

Introducción
El sensor MODerate Resolution ImagingSpectroradiometer (MODIS) a bordo de los sa-télites Terra y Aqua permite una observaciónprácticamente global de la Tierra en una basediaria con una fina resolución espectral y espa-cial. La disponibilidad de productos MODIS hasupuesto un gran avance ya que estos son utili-zados por la comunidad científica con diversasfinalidades como por ejemplo la evaluación dela deforestación (Ferreira et al., 2007), la esti-mación de la evapotranspiración (Mu et al.,2007), estudios sobre la cobertura de nieve (Puet al., 2007), etc.
Recientemente, se ha desarrollado el pro-ducto MODIS de reflectividad superficial Co-llection 5 (C5) de manera que se han mejoradolos algoritmos de corrección atmosférica, in-cluyendo mascara de nubes y aerosoles en com-paración con los algoritmos de los productosCollection 4 (C4). Muchos estudios se han de-sarrollado validando el producto MODIS de ae-rosoles C4 (Chu et al., 2002; Remer et al, 2005;Levy et al., 2005) y C5 (Papadimas et al., 2008)considerando medidas in situ principalmente deAERONET. El producto MODIS de reflectivi-dad superficial C5 también ha sido validado re-cientemente (Vermote et al., 2008). En este con-texto el principal objetivo del presente trabajoes la evaluación de los productos MODIS de re-flectividad superficial y espesor óptico de ae-rosols C5 aprovechando la campaña de medidasCEFLES2.
Con esta finalidad el artículo se estructura enuna primera introducción a la teoría y algorit-mos utilizados. A continuación se desarrolla unasección de metodología en que se describe lacampaña CEFLES2, los datos procesados y elmétodo seguido en la corrección atmosférica.Finalmente se presentan los resultados obteni-dos así como la discusión y las conclusiones.
Teoría y algoritmos
En la corrección atmosférica en el Visible eInfrarrojo Cercano (Visible and Near Infrared,VNIR) se deben tener en cuenta las diversas con-tribuciones de la atmósfera y la superficie a lairradiancia solar. En la Figura 1 se pueden ob-
servar las contribuciones a la señal en el techode la atmósfera que se han tenido en cuenta enel rango espectral del visible y próximo infra-rrojo (Visible and Near Infrared, VNIR). Comose puede observar se consideran cuatro térmi-nos: (1) fotones reflejados por la atmósfera an-tes de llegar a la superficie, (2) fotones trasmi-tidos directamente a la superficie y son reflejadosdirectamente al sensor, (3) fotones dispersadospor la atmósfera antes de llegar a la superficie yson reflejados directamente al sensor y (4) foto-nes que sufren al menos dos interacciones con laatmósfera y una con la superficie.
Teniendo en cuenta estas contribuciones yconsiderando la superficie uniforme y Lam-bertiana (Nicodemus et al., 1977), las ecua-ciones de transferencia radiativa se pueden es-cribir como (Verhoef and Bach, 2003):
Es (s) = τssEs (t) [1]
E– (s) = τsdEs (t) + ρddE+ (s) [2]
Eo (t) = ρsoEs (t) + τdoE+ (s) + τooEo (s) [3]
E+ (s) = ρsup[Es (s) + E– (s)] [4]
donde (s) y (t) indican la irradiancia (E) a ni-vel de la superficie y en el techo de la atmós-fera (Top Of Atmosphere), TOA respectiva-mente, Es es la irradiancia solar, E– es lairradiancia descendente, E+ es la ascendente yEo es la irradiancia medida por el sensor. Ade-más, ρso es la reflectividad bidireccional de lacapa atmosférica, τss es la transmisividad di-recta descendente, τsd es la transmisividad di-fusa en la dirección del sol, τdo es la transmisi-vidad difusa en la dirección de observación, ρdd
es el albedo esférico de la atmósfera, τoo es latransmisividad directa ascendente y ρsurf es lareflectividad superficial.
La ecuación [1] describe la atenuación de laradiación a lo largo de toda la capa atmosféri-ca a través de la transmisividad directa τss, la
Estimación de la reflectividad superficial mediante datos del sensor aéreo AHS... 73
Figura 1. Diferentes contribuciones de la atmósfera yla superficie a la irradiancia solar.
Techoatmósfera
Superficie
Es(t) Es(t) ρso
Es(t) τsd
Es(s) ρsup
Es(s) = Es(t)τssE–(s) ρsup
E+(s) ρdd
E+(s)
E+(t) τoo E+(t) τdo
1
2 3
4

ecuación [2] refleja la generación de un flujodifuso descendente compuesto por un flujo so-lar directo difusamente transmitido y un flujodifuso ascendente de la superficie que es refle-jado en dirección descendente por la atmósfe-ra. Aquí, el termino ρdd es el albedo esférico at-mosférico. La ecuación [3] describe como laradiancia en el techo de la atmósfera es gene-rada a partir de la radiancia directa dispersadaatmosféricamente vía el termino ρso (el cual sepuede considerar como reflectividad bidirec-cional de la capa atmosférica), el flujo ascen-dente difuso que es dispersado en la direcciónde observación vía el término de transmisivi-dad τdo, y la radiancia directamente transmitidadesde el blanco observado vía la transmisivi-dad directa τoo. Finalmente, la ecuación [4] des-cribe la reflexión de la radiancia por una su-perficie Lambertiana.
Considerando la aproximación de que la irra-diancia medida por el sensor a nivel de superfi-cie es igual a la irradiancia ascendente en la su-perficie [Eo (s) = E+ (s)] ya que se considera unasuperficie Lambetiana y escribiendo la ecuaciónen términos de reflectividad, se puede obtenerla expresión (Verhoef and Bach, 2003):
ρTOA – ρsoρsurf = ————————————————— [5](τdo + τoo)(τss + τsd) + ρdd (ρTOA – ρso)
donde los inputs de esta ecuación son la ima-gen medida por es sensor (ρTOA) y los paráme-tros atmosféricos ρso, τss, τsd, τdo, ρdd y τoo.
El objetivo de este artículo es obtener la re-flectividad superficial de la forma más preci-sa posible para poderla comparar con los datosMODIS. En este sentido se ha seguido la me-todología basada en el código de transferenciaradiativa MODTRAN4.3 (Berk et al., 2003)que se detalla en la siguiente sección.
Metodología
Campaña de medidas CEFLES2
CEFLES2 (CarboEurope, FLEX and Senti-nel-2) fue una campaña con multiples objeti-vos y que sacó provecho de la correlación en-tre medidas in situ y medidas con sensoresaerotransportados, realizadas en coordinacióncon CERES (CarboEurope Regional Experi-
ment Strategy). La campaña apoyó el desarro-llo de la misión FLEX la cual fue candidata enel marco Earth Explorer en el momento de realización de la campaña al proporcionar me-didas aéreas de fluorescencia y medidas inten-sivas in situ de procesos a nivel de hoja, y lamisión Sentinel-2 la cual es una misión mul-tiespectral basada en la observación a nivel glo-bal a alta resolución. Las medidas aéreas e insitu tuvieron lugar en la región francesa de LesLandes en abril, junio y septiembre de 2007con la finalidad de registrar diferentes etapasde crecimiento de la vegetación. Las medidasaéreas realizadas consistieron en imágenes deflujo de carbono, de fluorescencia e hiperes-pectrales cubriendo las regiones espectrales delvisible, próximo infrarrojo, infrarrojo de ondacorta y térmico.
El área de estudio donde se desarrolló CE-FLES2 comprendía un rectángulo desde Bur-deos a Toulouse en el sureste de Francia. Nues-tro estudio se centra en un área agrícola cercade Marmande que fue el principal objetivo deFLEX durante las tres campañas y además fuezona donde se realizaron más medidas paraCERES y Sentinel-2. La zona consistió engrandes campos de diferentes cultivos, princi-palmente trigo de invierno y maíz en un terre-no llano al pie del valle Garonne.
Datos aéreos: AHS
Los datos utilizados en este trabajo fueronadquiridos por el sensor Airborne Hyperspec-tral Scanner (AHS) (Sobrino et al., 2008), elcual es un radiómetro aerotransportado de 80bandas desarrollado y creado por SensyTechInc. y actualmente es administrado por el Ins-tituto Nacional de Técnica Aerospacial (INTA).El AHS tiene 63 bandas en el VNIR y SWIR,7 bandas en el rango entre 3 y 5 micrómetrosy 10 bandas en la región entre 8 y 13 micró-metros. Nuestro estudio se centrará en las pri-meras 20 bandas cuya cobertura espectral cu-bre desde unos 400 nm a 1.000 nm.
Los datos utilizados en este trabajo se ad-quirieron en una línea recta de vuelo a dos di-ferentes alturas de 2.865 m (vuelos altos) y1.097m (vuelos bajos) y durante tres fechas di-ferentes, 24 de abril, 30 de junio y 15 de sep-
74 J. A. Sobrino y B. Franch / Revista de Teledetección (2011) 35, 72-79

tiembre de 2007. Las imágenes resultantes tie-nen una resolución espacial de 6m en vuelosaltos y 2 m en vuelos bajos.
Medidas in situ de reflectividad
En el test de la corrección atmosférica de lasimágenes AHS se han considerado dos espec-trorradiómetros ASD FieldSpec Pro. El princi-pal objetivo de estas medidas en la campaña CE-FLES2 fue la obtención de suficientes espectrosrepresentativos de distintos tipos de superficiede la zona de medidas. Para realizar las medidasse siguió el siguiente procedimiento: se selec-cionaron cuatro áreas de medida para cada cam-po considerado, en cada una de estas áreas se mi-dieron 3 puntos intercalando medidas del blancode referencia tanto al inicio como al final.
Los datos de uno de los ASD fueron proce-sados por la Humboldt-Universität en Berlín ylos datos del otro ASD fueron tratados por elgrupo Forschungszentrum Jülich en Alemania.
La Tabla 1 resume todas las medidas in situque se han tenido en cuenta en el estudio sobrela precisión de la estimación de la reflectivi-dad superficial a partir de datos adquiridos porlos sensores aerotransportados.
Estimación de aerosoles y reflectividadsuperficial
Con el objetivo de obtener imágenes de re-flectividad superf icial se ha aplicado la co-rrección atmosférica a las imágenes AHS con-siderando la ecuación [5]. Los parámetrosatmosféricos de los que depende esta ecuaciónhan sido obtenidos utilizando el código detransferencia radiativa MODTRAN4.3. Comonuestro estudio se basa en datos adquiridos porsensores aerotransportados, en el cálculo de ca-da parámetro atmosférico debemos decidir en-
tre considerar toda la atmósfera o sólo la at-mósfera entre la superficie y la altura del sen-sor. En consecuencia, sólo hemos consideradotoda la atmósfera en el cálculo de τss (transmi-sividad directa descendente) y τsd (transmisi-vidad difusa en la dirección solar) y la atmós-fera entre la superficie y el sensor en los demáscasos. En la campaña CEFLES2 los radioson-deos atmosféricos fueron considerados de labase de datos RAOB considerando la zona Bor-deaux/Merignac (http://raob.fsl.noaa.gov).
Para obtener el espesor óptico de aerosoles(AOT) y evaluar el producto MODIS de aeroso-les estos se han estimado a partir de las imáge-nes adquiridas mediante teledetección aplican-do un método propuesto en Guanter et al.(2008). Este se basa en la comparación en la re-gión espectral desde 412 nm a 681 nm entre elespectro de una especie de superficie oscura(dark spectrum) y la radiancia total dispersadaresultante de considerar diferentes valores deAOT. La superficie oscura considerada es el es-pectro resultante de la búsqueda del valor mí-nimo de radiancia en cada banda espectral de laimagen. El valor final de AOT será aquel queimplique la mayor proximidad entre el espectrode la superficie oscura y la radiancia total dis-persada, no permitiendo que la radiancia dis-persada sea mayor que el espectro de la super-ficie oscura en ninguna de las bandas del visible.
Una vez obtenida la reflectividad superfi-cial se ha comparado con los datos in situ rea-lizados en la campaña de manera simultánea alpaso del sensor. Esto se desarrollará en la si-guiente sección.
Resultados
Para evaluar el producto MODIS de reflectivi-dad superficial C5 este se ha comparado con laestimación de reflectividad superficial con imá-genes AHS siguiendo la metodología escrita.Primero, se han estimado los valores de AOTcon las imágenes AHS de la campaña CEFLES2.
En la Figura 2 se he representado un ejem-plo de una imagen adquirida el 24 de abril enque se ha representado la radiancia total dis-persada simulada para diferentes valores deAOT considerando el modelo rural de aeroso-les y el «dark spectrum» obtenido de la imagen.
Estimación de la reflectividad superficial mediante datos del sensor aéreo AHS... 75
Tabla 1. Datos in situ utilizados en el test de la co-rrección atmosférica
Mes Especies
Abr Suelo desnudo TrigoJun Suelo desnudo Maíz GirasolSep Suelo desnudo Maíz Judías Girasol

A partir de esta gráfica se puede asumir queel valor de AOT estimado en el momento enque la imagen fue captada es 0,08. Aunque laradiación total dispersada considerando este va-lor es mayor que el «dark spectrum» en algu-nas bandas del dominio espectral del visible,consideramos este valor como el AOT real. Pa-ra comprobar el efecto de considerar este va-lor en la estimación de reflectividad superfi-cial, se ha invertido la corrección atmosféricapara estimar la radiancia a nivel del sensor quedebería haber medido el mismo. Comparandola simulación con el valor real, el RMSE a tra-vés de la imagen es de 0,002 (W m–2 sr–1 µm–1)para todas las bandas, implicando un error re-lativo entre el 0,008% y 0,003% en radiancias.
En la Tabla 2 se resume los valores de AOTestimados a partir del análisis de todas las imá-genes AHS de la campaña CEFLES2. En estatabla, el error se refiere a la variación tempo-ral de este valor.
Comparando el AOT estimado a partir de lasimágenes y el producto de MODIS de AOT, se
puede observar que en todos los casos el pro-ducto MODIS sobreestima en promedio 0,15 elvalor real de AOT. Esta diferencia es mucho másnotable el 30 de junio, lo cual puede ser debi-do a la presencia de nubes altas y neblina en es-ta fecha. En consecuencia, debido a que MO-DIS tiene una resolución espacial menor queAHS, el pixel de MODIS podría incluir algunanube. Además, la diferencia en altura entre MO-DIS y AHS, podría situar las nubes altas entreambos sensores, incluyéndolas MODIS pero noAHS. La sobreestimación del producto MODISde aerosoles también se ha detectado en ante-riores estudios en que validan este producto condatos medidos in situ con un fotómetro solar,principalmente con datos de AERONET (Levyet al., 2005; Papadimas et al., 2008). Estos es-tudios concluyen que tanto los productos MO-DIS de aerosoles C4 como C5 sobreestiman losvalores de bajo AOT y subestiman los valoresaltos de AOT, aunque los datos de C5 se ajus-ten significantemente mejor a los datos de AE-RONET que los C4 (Papadimas et al., 2008).
Para proceder en la evaluación del productode reflectividad superficial de MODIS, a conti-nuación se ha realizado el test de la correcciónatmosférica con datos in situ para proceder fi-nalmente a la comparación de ambas imágenes.
La Figura 3 muestra la comparación del es-pectro de dos campos, un trigo de invierno y
76 J. A. Sobrino y B. Franch / Revista de Teledetección (2011) 35, 72-79
24 de abril (imagen P04A2)
05
10152025303540
455 482 510 540 569 599 627 658Longitud de onda (nm)
Radi
anci
a [W
/(m2.
sr.μ
m)]
AOT = 0,10 AOT = 0,08AOT = 0,23 AOT = 0,15Dark spectrum
Figura 2. Comparación entre el «dark spectrum» deuna imagen AHS del 24 de abril y la radiancia total dis-persada simulada para diferentes valores de AOT.
Tabla 2. Comparación de los AOT estimados porMODIS y obenidos de las imágenes AHS
Fecha AOT (MODIS) AOT (imagen)
24 abril 0,23 0,08 ± 0,0030 junio 0,43 0,09 ± 0,0115 septiembre 0,13 0,09 ± 0,01
Figura 3. Espectro en el VNIR medido in situ y estimado a partir de una imagen AHS de dos superficies diferentes.
In situAHS
In situAHS
Trigo de invierno Suelo desnudo
1 2 3 4 5 6 7 8 9 1011121314151617181920Bandas AHS
1 2 3 4 5 6 7 8 9 1011121314151617181920Bandas AHS
Refle
ctiv
idad
sup
erfic
ial
Refle
ctiv
idad
sup
erfic
ial
10,90,80,70,60,50,40,30,20,1
0
10,90,80,70,60,50,40,30,20,1
0

un suelo desnudo, medidos a nivel in situ res-pecto al estimado a nivel aéreo.
En esta f igura se observa una buena con-cordancia entre los datos in situ y los datos co-rregidos atmosféricamente. Para realizar el testde la corrección atmosférica pero teniendo encuenta todas las imágenes AHS y periodos demedidas, hemos centrado el análisis en las ban-das utilizadas en la obtención del NDVI, la ban-da 9 (centrada en 687 nm) y la banda 12 (cen-trada en 773 nm). En la Tabla 3 se resume elvalor de RMSE obtenido al comparar los datosin situ con los datos estimados mediante AHSdiferenciando las distintas bandas, fechas ycultivos.
En esta tabla se puede observar que los ma-yores errores se obtienen para la banda 12 y pa-ra vegetación. Este mayor error va ligado al hecho de que en esta región espectral la re-flectividad de la vegetación tiene valores ma-yores. Se observa también que abril es el mescon menores errores. Esto puede ser debido aque en esta fecha se consideran medidas sobresuelos desnudos muy similares y la misma cla-se de vegetación (trigo) que en estas fechas eramuy homogénea. Sin embargo, en junio y sep-tiembre las medidas in situ se centraron sobrediferentes tipos de vegetación (como maíz, gi-rasoles y judías) y suelos desnudos algo dis-tintos (por ejemplo en septiembre se midió enun área quemada). Finalmente, el RMSE me-dio considerando todas las fechas y tipos decultivos es 0,02 en la banda 9 y 0,05 en la ban-da 12.
Una vez obtenida la reflectividad superfi-cial con el sensor aéreo AHS se ha realizadouna comparación entre estos valores y el pro-ducto de reflectividad superficial de MODIS
(Vermote et al., 1999). Este consta de dos ban-das espectrales, la primera cubre la región des-de 620 nm a 670 nm y la segunda cubre la re-gión desde 841 nm a 876 nm. En lacomparación se los diferentes sensores hemosconsiderado la equivalencia entre la primerabanda de MODIS con la banda 8 de AHS (cen-trada en 658 nm) y la segunda banda de MO-DIS con la banda 15 de AHS (centrada en 862nm).
Por otra parte, la resolución espacial de AHSes de 6 m (ya que en la comparación con MODIS sólo se han tenido en cuenta los vue-los altos de AHS) y la resolución espacial deMODIS es 250 m, por lo que para poder com-parar los productos de los distintos sensores seha degradado la resolución de AHS a 250 m.
En la Figura 4 se puede observar un ejem-plo de la diferencia entre las imágenes de re-flectividad de AHS y el producto de MODISpara el día 15 de septiembre.
En la Tabla 4 se muestra el valor del RMSEasí como el Bias obtenidos al comparar el pro-ducto de reflectividad superficial de MODIScon la estimación de la misma de las imágenesAHS e Hyper.
A partir de esta tabla se puede afirmar quela diferencia entre el producto de MODIS y la es-timación de la reflectividad superficial por AHSes menor en la banda 1 que en la banda 2. Estopuede ser debido a que la señal en esta últimabanda es mayor. También se puede remarcar quela principal contribución al RMSE es el Bias yen todos los casos este tiene un valor positivo.Esto indica que el producto de reflectividad su-perficial de MODIS es en la mayoría de los ca-sos mayor que la estimación con imágenes AHSy principalmente debido a un valor constante.Cabe destacar que el producto MODIS de re-flectividad superficial se estima con el códigode transferencia radiativa 6S (Vermote et al.,
Estimación de la reflectividad superficial mediante datos del sensor aéreo AHS... 77
Tabla 3. Valores RMSE al comparar la reflectividadsuperficial estimada por AHS y los datos in situ
Banda 9 Banda 12
24 abril Suelo 0,01 0,03Vegetación 0,00 0,04
30 junio Suelo 0,02 0,01Vegetación 0,01 0,09
15 septiembre Suelo 0,03 0,06Vegetación 0,01 0,09
RMSE medio 0,02 0,05
Tabla 4. Valores del RMSE y Bias al comparar la re-flectividad superficial estimada a partir de AHS conel producto de reflectividad superficial de MODIS
Banda 1 Banda 2
RMSE Bias RMSE Bias
Abr 0,03 0,02 0,06 0,04Jun 0,03 0,02 0,08 0,06Sep 0,03 0,02 0,08 0,08

2006), en cambio, las imágenes AHS han sidocorregidas con el código MODTRAN. En con-secuencia, el hecho de haber tenido valores si-milares, muestra que ambos códigos de trans-ferencia radiativa, en la estimación dereflectividad superficial, proporcionan resulta-dos totalmente comparables.
A partir de estos resultados podemos con-cluir que en el contexto de la campaña CE-FLES2 el producto de reflectividad superficialde MODIS en la banda 1 y 2 es fiable ya queproporciona valores muy similares a la reflec-tividad superficial estimada a partir de senso-res aerotransportados.
Conclusiones
El objetivo de este estudio consistía en eva-luar el producto MODIS de reflectividad super-ficial en el contexto de la campaña CEFLES2.En el estudio, también se ha analizado el pro-ducto MODIS de aerosoles y se ha comprobadoque en todas las fechas este producto sobrees-tima el valor de AOT, siendo el caso de junioel de mayor diferencia respecto al valor real.
Esta sobreestimación también ha sido consta-tada en otros estudios como hemos visto en lasección de resultados. La metodología presen-tada para la estimación de la reflectividad su-perficial en el VNIR presenta al ser aplicada aimágenes AHS un RMSE de 0,02 en el visibley 0,05 en el infrarrojo cercano. Al compararestas imágenes de mayor resolución espacialcon el producto MODIS de reflectividad su-perficial se ha obtenido un RMSE de 0,03 enel visible y 0,08 en el infrarrojo cercano lo queprueba la precisión de este producto MODIS.
Este estudio se ha centrado en una zona agrí-cola. En un trabajo futuro este estudio se apli-cará a una zona urbana al procesar imágenesadquiridas en la campaña DESIREX 2008(Dual-use European Security IR Experiment)la cual se desarrolló en Julio de 2008 en la ciu-dad de Madrid.
Agradecimientos
Los autores agradecen el apoyo en este tra-bajo por una parte del Ministerio de Ciencia yTecnología (TERMASAT, proyecto ESP2005-
78 J. A. Sobrino y B. Franch / Revista de Teledetección (2011) 35, 72-79
Figura 4. Comparación entre la reflectividad superficial estimada de las imágenes AHS y el producto de reflec-tividad superficial de MODIS el 15 de septiembre.

Estimación de la reflectividad superficial mediante datos del sensor aéreo AHS... 79
07724-C05-04; EODIX, proyecto AYA2008-0595-C04-01) y por otra parte de la Unión Eu-ropea (CEFLES2, proyecto 20801/07/I-LG;CEOP-AEGIS, proyecto FP7-ENV-2007-1proposal No. 212921; WATCH, proyecto036946).
Referencias
BERK, A., ANDERSON, G. P., ACHARYA, P. K.,HOKE, M. L., CHETWYND, J. H., BERNS-TEIN, L. S., SHETTLE, E. P., MATTHEW, M.W. & ADLER-GOLDEN, S. M. 2003. MOD-TRAN4 Version 3 Revision 1 Users’s Manual.Tech. rep., Air Force Research Laboratory, Hans-com Air Force Base, MA, USA.
CHU, D. A., KAUFMAN, Y. J., ICHOKU, C., RE-MER, L. A., TANRE, D. & HOLBEN, B. N. 2002.Validation of MODIS aerosol optical depth re-trieval over land. Geophys. Res. Lett., 29: 8007.doi: 10.1029/2001GL013205
FERREIRA, N. C., FERREIRA, L. G., HUETE, A.R. & FERREIRA, M. E. 2007. An operational de-forestation mapping system using MODIS dataand spatial context analysis. International Jour-nal of Remote Sensing, 28(1-2): 47-62.
GUANTER, L., GÓMEZ-CHOVA, L. & MORENO,J. 2008. Coupled retrieval of aerosol optical thick-ness, columnar water vapour and surface reflec-tance maps from ENVISAT/MERIS data overland. Remote Sensing of Environment 112: 2898-2913.
LEVY, R. C., REMER, L. A., MARTINS, J. V. &KAUFMAN, Y. J. 2005. Evaluation of the MO-DIS aerosol retrievals over Ocean and Land du-ring CLAMS. Journal of the atmospheric scien-ces 62: 974-992
MU, Q., HEINSCH, F. A., ZHAO, M. & RUNNING,S.W. 2007. Development of a global evapotrans-piration algorithm based on MODIS and globalmeteorology data. Remote Sensing of the Envi-ronment, 111(4): 519-536.
NICODEMUS, F. E., RICHMOND, J. C., HSIA, J.J., GINSBERG, I. W. & LIMPERIS, T. 1977. Ge-ometrical considerations and nomenclature forreflectance. Tech. rep., National Bureau of Stan-
dards, US Department of Commerce, Washing-ton, DC, USA.
PAPADIMAS C. D., MIHALOPOULOS, N., KA-NAKIDOU, M., KATSOULIS, B. D. & VARDA-VAS, I. 2008. Assessment of the MODIS Co-llections C005 and C004 aerosol optical depthproducts over the Mediterranean basin. Atmos-pheric Chemistry and Physics Discussions, 8:16891-16916
PU, Z. X., XU, L. & SALOMONSON, V. V. 2007.MODIS/Terra observed seasonal variations ofsnow cover over the Tibetan Plateau. Geophysi-cal Research Letters, 34(6), Art. No. L06.
REMER, L. A., KAUFMAN, Y. J., TANRÉ, D.,MATTOO, S., CHU, D. A., MARTINS, J. V., LI,R.-R., ICHOKU, C., LEVY, R. C., KLEIDMAN,R. G., ECK, T. F., VERMOTE, E. & HOLBEN,B. N. 2005. The MODIS Aerosol Algorithm, Pro-ducts and Validation. Journal of the AtmosphericSciences, Special Section, 62: 947-973.
SOBRINO, J. A., JIMÉNEZ-MUÑOZ, J. C., SO-RIA, G., GÓMEZ, M., BARELLA-ORTIZ, A.,ROMAGUERA, M., ZARAGOZA, M., JULIEN,Y., CUENCA, J., ATITAR, M., HIDALGO, V.,FRANCH, B., MATTAR, C. et al. 2008. ThermalRemote Sensing in the Framework of theSEN2FLEX Project: Field Measurements, Air-borne Data and Applications. International Jour-nal of Remote Sensing, 29: 4961-4991.
VERHOEF, W. & BACH, H. 2003. Simulation ofhyperspectral and directional radiance imagesusing coupled biophysical and atmospheric ra-diative transfer models, Remote Sensing of Envi-ronment, 87: 23-41
VERMOTE, E. F., TANRE, D., DEUZE, J. L., HER-MAN, M., MORCRETTE, J. J., KOTCHENOVA,S. Y. & MIURA, T. 2006. Second Simulation ofthe Satellite Signal in the Solar Spectrum (6S),6S User Guide Version 3 (November, 2006),http://www.6s.ltdri.org
VERMOTE, E. F & VERMEULEN, A. 1999. At-mospheric correction atgorithm: spectral reflec-tances (MOD09). Algorithm technical Back-ground Document (MODIS).
VERMOTE, E. F. & KOTCHENOVA, S. 2008. At-mospheric correction for the monitoring of landsurfaces, J. Geophys. Res., 113, D23S90, doi:10.1029/2007JD009662.

Introducción
Aunque el sector agrario español no suponemás de un 4% del Producto Interior Bruto na-cional, recibe, en cifras globales, unos 6 milmillones de euros en diversos conceptos deayuda por parte del Fondo Europeo de Garan-tía Agrícola (FEAGA), órgano dependiente dela Comisión Europea. Esta gran cantidad de di-nero es distribuida a las Comunidades Autó-nomas, que serán las encargadas de hacerlo lle-gar a los 939.877 agricultores solicitantes deayuda de toda España (datos del 2009).
Las ayudas al sector agrícola suponen ungran porcentaje del presupuesto de la Unión
Europea, alrededor del 40% aunque la tenden-cia es a disminuir esta proporción, y por estarazón la Comisión Europea exige una correc-ta gestión y control del gasto de este dinero. Enparticular, considera necesario que los distin-tos Estados miembros se aseguren de que el di-nero llega no sólo al destinatario adecuado, si-no también al que cumple la normativa vigente,es decir, al perceptor legítimo al que están des-tinadas las ayudas. Para lograr esto, ha esta-blecido una serie de requisitos de control quedeben cumplirse para el correcto pago de lasdiferentes líneas de ayuda. La normativa legalque incluye estos requisitos se revisa periódi-camente desde que se establecieron los pilaresde la Política Agrícola Común, en particulardesde el año 1992, y en la actualidad está vi-gente por medio de los Reglamentos (CE)
Caso práctico
Aplicación de técnicas de teledetección para la gestión y control del pago de ayudas agrícolas en España
J. M. Vidal Serrano*Entidad Estatal de Seguros Agrarios (ENESA).
Ministerio de Medio Ambiente y Medio Rural y Marino
ResumenSe relatan de forma somera los trabajos de control asistido por teledetección (CATD) en el ámbito
del pago de ayudas agrícolas en España. Se hace hincapié en el uso de imágenes por satélite de dife-rentes resoluciones y sus productos derivados para la asignación correcta de superficies y parcelasagrícolas susceptibles de ayuda. Finalmente, se ofrecen datos orientativos sobre la importancia de es-tos trabajos a nivel nacional.
Palabras clave: teledetección, ayudas agrícolas, superficies, imágenes satélite, CATD, pago único.
AbstractRemote sensing techniques application for management and control of agricultural aidschemes in Spain
Control with Remote Sensing (CwRS) of agricultural aid schemes in Spain is discussed throughoutthis article. It is stressed the use of satellite images in different resolution and their by-products forthe correct assignment of areas and agricultural parcels eligible for aid. Finally, orientative data on theimportance at national level of these works is given.
Key words: control with remote sensing, agricultural aids, areas, satellite images, CwRS, singlepayment scheme.
* Autor para la correspondencia: [email protected]: 26-07-10; Aceptado: 06-05-11.
Asociación Española de Teledetección Revista de Teledetección 35, 80-93ISSN: 1988-8740

n° 73/2009 del Consejo y 1122/2009 de la Co-misión. Estos reglamentos especifican, entreotras cosas, que los controles que deberán rea-lizarse sobre las solicitudes de ayuda de unacampaña concreta deberán ser tanto adminis-trativos como sobre el terreno.
Los controles administrativos se realizan so-bre la totalidad de las solicitudes de ayuda pre-sentadas; es un proceso programable informá-ticamente que consume relativamente pocosrecursos, tanto en tiempo como en mano deobra. Se realizan a tres niveles: datos del soli-citante, datos de los recintos SIGPAC solicita-dos y derechos de pago único. Su principal fi-nalidad es detectar errores en las declaracionespreviamente a los controles sobre el terreno,de tal modo que en muchos casos el agricultortendrá abierto un plazo en el que podrá modi-ficar su solicitud si el control detectara que es-to fuera necesario.
Los controles sobre el terreno, por el con-trario, se realizan sobre una muestra de las so-licitudes de ayuda que la Comisión Europea es-tablece en un mínimo de un 5% de solicitudes.En España, en el año 2009, se controlaron un5,76% de expedientes (54.637 solicitudes). Laintención de dichos controles es verificar en elcampo que la realidad del terreno se corres-ponde a lo solicitado por el agricultor. Son decarácter definitivo, es decir, los agricultores notienen ya posibilidad de modificar sus solici-tudes de ayuda en caso de error o de irregula-ridad y deberán, en consecuencia, afrontar lassanciones que corresponda.
Los controles sobre el terreno consumentiempo y recursos, ya que suponen el despla-zamiento de personal y equipos (receptoresGPS u otros materiales de medición, ordena-dores portátiles, cámaras digitales) durante unperíodo largo de tiempo, entre 2 y 5 meses.Además deben realizarse en un momento enque puedan evaluarse las condiciones adecua-das del cultivo de que se trate, por lo que ade-más de estar condicionados por los plazos ad-ministrativos, están limitados por laestacionalidad. Por esta razón, y desde el año1992 mencionado anteriormente, el Consejode Europa admite que los Estados miembrospuedan utilizar técnicas de teledetección parallevar a cabo el control sobre el terreno de lasayudas agrícolas. En España dichas técnicasempezaron a utilizarse en 1993.
Organización del controlasistido por teledetección
Tal como puede apreciarse en la Figura 1, enla realización de los Controles Asistidos por Te-ledetección (CATD) hay tres actores principa-les que interactúan entre sí. La Comisión Euro-pea, a través de la Unidad MARS del Centro deInvestigación Conjunta (JRC, http://mars.jrc.it/)elabora el Pliego de Condiciones Técnicas quedeben cumplir los contratistas (sean Estadosmiembros o empresas contratadas por los mis-mos) para la correcta realización del CATD, asícomo otros documentos de trabajo relacionados
Aplicación de técnicas de teledetección para la gestión y control del pago... 81
Figura 1. Organización del Control Asistido por Teledetección en España.

con la materia: normas de ortorrectificación deimágenes satélite, selección de zonas y expe-dientes de la muestra, etc. Adicionalmente ne-gocia con los distintos proveedores la adquisi-ción de imágenes de satélite a un precio fijo.Según datos 2010, para VHR este precio es de22 euros/km2 y para HR es de 3.250 euros porzona, precio único para todos los proveedores.El presupuesto del JRC asume el coste total de7,6 millones de euros (para todo el territorio dela Unión Europea), por lo que las imágenes sonproporcionadas a los Estados miembros gratui-tamente. En España este gasto será de 648.500euros.
El Gobierno de España, a través del Minis-terio de Medio Ambiente, y Medio Rural y Ma-rino, lleva a cabo la financiación, contratacióny seguimiento de los trabajos de la empresa en-cargada de la realización de los mismos (Trag-satec, S.A.). Las Comunidades Autónomas, porsu parte, colaboran en la f inanciación de di-chos trabajos, y además de gestionar los resul-tados finales del control son las responsablesde seleccionar tanto las zonas como los expe-dientes que se vayan a controlar.
Las fases del control pueden resumirse en laTabla 1.
Fases de trabajo
Selección de zonas y muestra de solicitudes
La normativa ofrece dos posibilidades de se-lección de la muestra, tanto para las zonas co-
mo para las solicitudes: de forma aleatoria opor análisis de riesgo. En el caso de la selec-ción de zonas, deberá elegirse si la zona es detipo 1, 2 ó 3 en función del tamaño de la ven-tana o ventanas de control que la ComunidadAutónoma desee tomar (400, 900 ó 2.000 km2).Si la selección de las mismas es por análisis deriesgo, deberán tenerse en cuenta factores co-mo el importe de las ayudas que se han solici-tado, los diferentes regímenes de ayuda solici-tados presentes en la zona, etc. Puedeobservarse en la Figura 2 las diferentes venta-nas que se han seleccionado para la campaña2010. En total, hay 7 zonas tipo 1, 3 de tipo 2y 8 de tipo 3. Las zonas se denominan con uncódigo alfanumérico de cuatro caracteres parafacilitar la gestión del JRC a la hora de con-tratar la adquisición de las imágenes satélitenecesarias.
En el caso de las solicitudes de ayuda, si laselección de expedientes es aleatoria la Co-misión Europea recomienda que se incluyanal menos el 50% de los expedientes que con-tengan un mínimo de un 80% de superf iciedentro de la zona de control (60% en Espa-ña). Si la selección es por análisis de riesgo,de nuevo tendrán que tenerse en cuenta di-ferentes factores tales como la presencia de irregularidades en campañas anteriores,etc. El resultado f inal, invariablemente, es un conjunto de parcelas pertenecientes a di-ferentes agricultores que serán sometidas acontrol.
82 J. M. Vidal Serrano / Revista de Teledetección (2011) 35, 80-93
Tabla 1. Fases de trabajo en el CATD
1. Selección de zonas2. Selección de la muestra de solicitudes3. Trabajos previos a la fotointerpretación
3.1. Acopio de la documentación necesaria3.2. Encuesta de campo
4. Fotointerpretación5. Evaluación para vista rápida de campo6. Vista rápida de campo7. Evaluación para entrega de resultados a la ad-
ministración8. Gestión de los resultados
Fases realizadas por la Administración.Fases realizadas por la Empresa contratista.
Figura 2. Mapa de localización de las zonas de con-trol 2010.

Trabajos previos a lafotointerpretación
Previamente los trabajos de fotointerpreta-ción, debe procederse a recopilar una serie dedocumentaciones.
a) Bases de datos SIGPAC: El Sistema deInformación Geográfica de Parcelas Agrícolas(SIGPAC) es el sistema de referencia obliga-torio para la realización de declaraciones y so-licitudes de ayuda, es decir, todas las parcelasagrícolas deben ser declaradas o solicitadas uti-lizando este sistema de referencia. Por lo tan-to, se recopila toda la información vectorialSIGPAC de las zonas de control.
b) Solicitudes de ayuda: Lógicamente, de-be recopilarse también toda la información pro-porcionada por los agricultores en sus solici-tudes. Esto servirá para asignar correctamentelas parcelas y superficies cultivadas.
´c) Croquis de los agricultores: En el ca-so de que haya parcelas declaradas por más deun agricultor, la legislación española exige quela solicitud de ayuda vaya acompañada del co-rrespondiente croquis que permita la identifi-cación inequívoca de la parcela cultivada porel agricultor declarante. Actualmente la tec-nología permite su recopilación en formato di-gital.
d) Resultados de la Encuesta de Campo:Se lleva a cabo una encuesta a nivel de campo,para cada zona, con el objetivo de conocer larespuesta de cada utilización agrícola en lasimágenes por satélite. Esto permitirá estable-cer un mapa de índices de vegetación. Se hacesobre una muestra de polígonos dentro de lazona de control, con unos criterios orientativos(por ejemplo, expedientes con más de 25 re-cintos SIGPAC declarados, etc.).
e) Normas de Fotointerpretación: Con-juntamente con los resultados de la Encuestade Campo, se recopilan todas las particulari-dades asociadas al terreno de cada zona, de mo-do que la fotointerpretación de los usos del sue-lo sea lo más precisa posible.
f) Calendario de cultivos de la zona.g) Imágenes satélite.Las imágenes tomadas por satélite son fun-
damentales para realizar el CATD. Ellas per-mitirán adquirir el conocimiento espacial ytemporal necesario de la zona de control, que
aportará conocimiento sobre el tipo de vegeta-ción y el estado fenológico de los cultivos so-bre el terreno, así como presencia de otroscompuestos específicos del suelo.
La toma de imágenes se realizará sobre va-rias bandas del espectro visible y a lo largo devarios períodos de tiempo en relación con loscultivos que se controlan, de modo que se po-sea el máximo de información asociada. En to-tal, se toman cuatro imágenes (denominadasXS0, XS1, XS2 y XS3), de las cuales la XS2es VHR, de Muy Alta Resolución, y las demásHR, de Alta Resolución. El momento de tomacoincide con diferentes momentos del desa-rrollo vegetativo de los cultivos (véase Fig. 3).
Adicionalmente se utilizan, como apoyo,imágenes MR, de Media Resolución, que ge-neralmente se obtienen de otras fuentes dis-tintas al JRC, como el Instituto Geográfico Na-cional del Ministerio de Fomento. En la Tabla 2se resumen los satélites más utilizados en Es-paña para el CATD,
Las imágenes se obtienen sin ortorrectif i-car, por lo que es necesario llevar a cabo dichotrabajo en gabinete. Para las imágenes SPOT yestándares Landsat, se realiza una Ortorrecti-ficación, mientras que para las imágenes de lasque no se posee el modelo orbital (IRS LISS eimágenes Landsat no estándares) se utiliza unmodelo polinómico. Para las imágenes Rapi-dEye se emplea un modelo paramétrico (Trans-formación proyectiva de 3 dimensiones). Es-tos procesos se llevan a cabo con el programaERDAS Imagine 9.3.
La toma de puntos de control (GCP) se ha-ce sobre el mosaico de imágenes Spot 5 de ve-
Aplicación de técnicas de teledetección para la gestión y control del pago... 83
Figura 3. Momentos de toma de imágenes para elCATD.

rano de 2005 del PNT (2,5 metros de resolu-ción espacial). Dicha selección se lleva a cabomediante técnicas automáticas de correlaciónque permiten agilizar el proceso de mediciónde GCP dentro de la fase de georreferencia-ción, siendo el número mínimo por imagen su-perior a 20. La precisión obtenida en la geo-rreferenciación viene dada por el errorcuadrático medio (RMSE) de los residuos detodos los GCP medidos, que para todas las es-cenas de media y alta resolución tiene que serinferior a un píxel o su equivalente al terreno.En este proceso se está utilizando el móduloAutosync de ERDAS Imagine que permite laselección y transferencia automática de losGCP, utilizando como imagen de referencia laimagen Spot 5 del PNT. Posteriormente, se re-visan los puntos, tomando nuevos GCP en laszonas que no han tenido buena correlación yeliminando aquellos con errores más altos. ElModelo Digital del Terreno (MDT) empleadoen la ortorrectificación de las imágenes de me-dia resolución procede del proyecto SIGPAC.El paso de malla de este MDT es de 20 metros,con una precisión en Z de 5 metros.
En la fase final del proceso de corrección ge-ométrica se realiza un remuestreo de la imagenque tiene como finalidad colocar los píxeles enla posición geométrica adecuada al sistema decoordenadas de referencia. Este proceso modi-
fica la posición de la malla del ráster, lo queobliga a recalcular los valores que le corres-ponden a cada píxel después de georreferenciar,mediante interpolación. En el proceso de re-muestreo también se define el tamaño de sali-da del píxel que para todas las imágenes de me-dia resolución (SPOT 4, Landsat 5 e IRS LISS)es de 20 metros, mientras que para las imáge-nes con resoluciones mayores se mantiene sutamaño de píxel teórico (10 metros para SPOT5 multiespectral y 5 metros para Rapideye).
Para las imágenes VHR, en el caso de lasimágenes Ikonos, Quickbird, GeoEye-1 yWorldView-2, el proceso de corrección geo-métrica se realiza con el módulo Ortho Engi-ne del programa PCI V10.3.1. El modelo em-pleado es el de «Rational Functions» queutiliza el fichero RPC (Rapid Positioning Ca-pability) suministrado con las imágenes. Estefichero contiene los coeficientes de la funciónque resuelve el modelo matemático de la ima-gen. Estos coeficientes los proporciona el dis-tribuidor de las imágenes y se obtienen a par-tir de las efemérides del satélite.
Los GCP utilizados en la fase de medicióntienen tres procedencias posibles: puntos GPStomados en campo, puntos pertenecientes a labase de datos corporativa y puntos de aero-triangulación. La precisión de los puntos ob-tenidos por GPS es siempre mejor que 0,30 m.
84 J. M. Vidal Serrano / Revista de Teledetección (2011) 35, 80-93
Tabla 2. Sensores utilizados en CATD en España
Satélite SensorResolución Espacial
Resolución MultiespectralResolución
Pan Multiesp.Radiométrica
VHRQUICKBIRD 0,6 m 2,4 m 4 bandas (Azul, Verde, Roja, IRC) 11 bitIKONOS 1 m 4 m 4 bandas (Azul, Verde, Roja, IRC) 11 bitGEOEYE-1 0,41 m 1,65 m 4 bandas (Azul, Verde, Roja, IRC) 11 bitWORLDVIEW-2 (en pruebas) 0,46 m 1,84 m 8 bandas (Azul1, Azul2, Verde,
Amarillo, Rojo1, Rojo2, IRC1, IRC2) 11 bit
HRSPOT 5 Pan/XI 5 m (2,5 m 10 m 4 bandas (Verde, Roja, IRC, IRM) 8 bit
supermode)RAPIDEYE — 5 m 5 bandas (Azul, Verde, Rojo, límite 12-8 bit
Rojo, IRC)MR
SPOT 4 Pan/XI 10 m 20 m 4 bandas (Verde, Roja, IRC, IRM) 8 bitIRS Pan/LISS III 6 m 23 m 4 bandas (Roja, Verde, IRC, IRM) 6 bit/7 bitLANDSAT 5 TM — 30 m 7 bandas (Azul, Verde, Roja, IRC, 8 bit
IRM, Térmico)

en X, Y y Z, mientras que la precisión de losGCP de aerotriangulación, al ser extraídos dediferentes fuentes (vuelos analógicos o digita-les), tienen una precisión que oscila entre 0,25m (vuelo digital, Z = 0,60 m) y 0,60 m (vueloanalógico, Z = 2 m).
El MDT empleado para la corrección de lasimágenes VHR procede del proyecto SIGPACactualizado con los sucesivos lotes del PNOA.En algunas zonas el MDT puede ser aportadopor las Comunidades Autónomas.
En el caso de las imágenes VHR el métodode remuestreo utilizado es bilineal, tal como in-dica el manual del JRC para las imágenes so-bre las que se realizan fusiones y labores de fo-tointerpretación (ver Tabla 3). El tamaño de
píxel de salida, tras el proceso de georreferen-ciación, para las bandas multiespectral y pan-cromática respectivamente, es de 4 y 1 m paraIkonos, de 2,4 y 0,6 m para Quickbird y de 2 y0,5 m para GeoEye-1 y WorldView-2.
Una vez se obtiene la imagen ortorrectifi-cada se procede a elaborar los productos deri-vados que van a utilizarse para el CATD:
— Imagen de fusión: En el proceso de fu-sión se utiliza la banda pancromática VHR ylas multiespectrales (bien de la propia VHRo de una imagen de media-alta resolución) de manera que se obtenga una única imagenque tenga la resolución espacial de la bandapancromática (1 m para Ikonos, 0,6 m paraQuickbird y 0,5 m para GeoEye-1 y World-
Aplicación de técnicas de teledetección para la gestión y control del pago... 85
Tabla 3. Resumen del procedimiento de ortorrectificación de imágenes satélite propuesto por el JRC
Fase Procedimiento Tolerancia aceptable
Modelo orbital
Selección de GCP en HR(SPOT, IRS, Landsat)
Selección de GCP en VHREl proveedor aporta in-formación con un fiche-ro de capacidad de posi-cionamiento rápido (RPC)
Selección de GCP en VHRCon modelo físico o ge-neración de RPC a partirde control terrestre
No se requiere control.
Los GCP deberían quedar bien distri-buidos, por ejemplo uno por cada cel-da de una malla de 4 × 4 que divide laimagen con puntos adicionales lo máscerca posible de la esquina/borde.
La recomendación es utilizar los da-tos proporcionados por el vendedor –podrían utilizarse hasta dos GCP porfotograma o 100-200 km2 aunque se-ría preferible utilizar 4 puntos locali-zados en las esquinas de la imagen.Para las tiras de imagen de Ikonos,añadir como mínimo dos GCP por ca-da 100 km2 adicionales.Para el procesado en bloque de VHR(múltiples fotogramas), los GCP pue-den reducirse hasta a 1 por fotogra-ma si hay suficientes puntos de en-ganche disponibles entre imágenes.
Para ortorrectificación de VHR utili-zando un modelo de sensor físico, serequieren como mínimo 9 GCP, ha-bitualmente por imagen (100 km2).Para EROS B y Formosat-2 los GCPdeberían estar distribuidos equitati-vamente.Para las escenas vectoriales de EROSA este número debería doblarse.Para Formosat-2, la cantidad de GCPdebería ser de 15 por escena.La generación de RPC requiere demuchos GCP: no se recomienda.
Presente en la información de encabezado.
Cantidad de combamiento polinómico(no para VHR): > 15GCP por fotograma u ortorrectificaciónde modelo físico (al menos 9 GCP por fo-tograma): registrar el número en los me-tadatos/Registros de Control de Calidad(RCC)
Mínimo, 2-4 por fotograma, más 2 porcada 100 km2 de tira de imagen.La distribución de GCP no es crítica, pe-ro se prefiere que estén bien distribuidos.Registrar el número en los metada-tos/RCC.Los GCP pueden caer en zonas de sola-pe (esquinas de imagen), pero no es crí-tico.
Se requieren más de 9 GCP (modelo fí-sico) o 16 GCP (generación de RCP) porfotograma. La distribución de GCP de-bería cubrir completamente la Zona deInterés (AOI).Registrar el número en los metada-tos/RCC.

View-2), pero con la resolución espectral delas bandas multiespectrales (azul, verde, ro-jo e infrarrojo cercano y las intermedias pa-ra el caso de WorldView-2). Los métodos defusión empleados varían en función de la in-
formación a integrar. Para fusión de pancro-mática y multiespectral VHR se utiliza el método Pansharp del software de PCI Geo-matics, y para fusión de pancromática VHRy multiespectral HR se utiliza el método
86 J. M. Vidal Serrano / Revista de Teledetección (2011) 35, 80-93
Tabla 3 (cont). Resumen del procedimiento de ortorrectificación de imágenes satélite propuesto por el JRC
Fase Procedimiento Tolerancia aceptable
Control de Errores GCP
Sólo para combamientopolinómico
Resultados de Rectifica-ción
Remuestreo
Control de Precisión Vi-sual
Precisión de la ImagenMáster
HR: Ajustar una polinómica de pri-mer orden a los GCP.VHR: Debería calcularse el residuoen aquellos casos en que esté dispo-nible la redundancia de los GCP; sino es así comprobar puntos indepen-dientes.
Utilizar una polinómica de primer osegundo orden; no debería utilizarseninguna de tercer orden.
Calcular discrepancias de RMSE so-bre 10 puntos de control (si es posi-ble), O BIEN registrar la recta de re-gresión de la suma de cuadrados(RSS), si está disponible.Registrar los residuos de cada GCP ysu RMSE en comparación con el mo-delo ajustado.
Para imágenes que sea poco probableque vayan a ser cuantitativamente cla-sif icadas/analizadas —particular-mente imágenes pancromáticas opansharpened— es apropiada la in-terpolación bilineal o la convolucióncúbica; el tamaño de salida del píxeldebería ser igual aproximadamente altamaño de entrada del píxel.Se puede utilizar el método de veci-no más próximo si está justif icado(por ejemplo, para clasificación), pe-ro el tamaño de salida del píxel de-bería ser 0,5x tamaño de entrada delpíxel.
Superponer datos de mapas digitalessobre la imagen e inspeccionar siste-máticamente.
Medir la precisión de la imagen más-ter utilizando aquellos puntos de con-trol que no se utilizaron como GCPdurante la corrección geométrica.
El residuo máximo no debería superar eltriple del RMSE objetivo.Registrar el número en los metada-tos/RCC.
Registrar el orden polinómico en los me-tadatos/RCC.
Punto de control RMSE < tolerancia dela precisión geométrica.√ RSS < tolerancia de la precisión geo-métrica.RMSE, si se calcula sobre residuos de-bería < 0,5 × tolerancia de la precisióngeométrica: Guardar GCP/residuos en ar-chivo.Registrar el resumen de resultados en losmetadatos/RCC.
Registrar el método de remuestreo y eltamaño de salida del píxel.
Control independiente por parte del su-pervisor.Registrar Aceptado/No Aceptado y fechade inspección de la imagen en el RCC.
Mínimo de 20 puntos de control distri-buidos en una malla regular.Precisión: 3 × RMSE tolerable.Archivar registro fechado de los resulta-dos de control.Registrar los resultados en los metadatose identificar como imagen máster.

Brovey, proporcionado por el software de ERDAS.
— Compuesto en falso color: Para cada unade las imágenes multiespectrales de media yalta resolución y de fusión se genera una com-posición en falso color (RGB) que permite re-saltar el nivel de actividad vegetativa en la zo-na de análisis, lo cual será esencial para la fasede fotointerpretación. En las composiciones enfalso color la actividad vegetativa se relacionacon distintas tonalidades de rojo, ya que se ha-ce corresponder la banda espectral del infra-rrojo cercano con el canal rojo, donde la co-bertura vegetal refleja más radiación, virandohacia el verde conforme desciende el nivel deactividad vegetativa. Estos compuestos en fal-so color, dependiendo del tipo de cultivo y desu estado vegetativo tendrán una respuesta dis-tinta en color e intensidad dentro de la imageny a lo largo del tiempo.
— Generación de la composición del Índi-ce de Vegetación Normalizado (NDVI) de tresfechas: De cada imagen multiespectral se ela-bora un índice de vegetación normalizado(NDVI) correlacionado con la cantidad de bio-masa y pigmentos fotosintéticos existentes encada píxel. Este índice compara el valor de dosbandas, el infrarrojo cercano (NIR) y el rojo
visible (R). Las imágenes de los NDVI de ca-da una de las fechas se componen en dos imá-genes multitemporales, una para la primera fa-se (imágenes XS0, 1 y 2) y otra para la segunda(XS1, 2 y 3). La composición del NDVI se rea-liza de manera que cada canal de color (rojo,verde, azul) se hace corresponder a una de lastres fechas. Según predomine un color u otroen esta imagen se identifican cultivos con di-ferentes ciclos fenológicos. En el caso más sen-cillo, un cultivo aparecerá azul cuando esté ac-tivo sólo en la primera imagen, rojo cuandosólo tenga actividad en la segunda imagen overde cuando éste presente actividad sólo en latercera imagen. Las mezclas de estos coloresindican actividad vegetativa de un cultivo enmás de una imagen.
— Clasificación automatizada: Medianteprocesos informáticos que utilizan, entre otrasfuentes de datos, la información residente enel SIOSE, utilizando algoritmos basándose enlas diferentes respuestas en las bandas del es-pectro de los distintos usos del suelo, y com-parándolos con los datos reales de la zona, seobtiene una imagen que consiste en un mapade usos del suelo donde se le ha aplicado unapaleta de color que identifica un uso y una pre-cisión determinada (75 y 85%).
Aplicación de técnicas de teledetección para la gestión y control del pago... 87
Figura 4. Imágenes satélite y productos derivados utilizados en CATD (las tres imágenes superiores son com-puestos de falso color de HR —primera y segunda— y VHR, la primera inferior es la VHR pancromática, la se-gunda es la imagen NDVI y la tercera es la imagen clasificada).

Fotointerpretación
La fotointerpretación incluye a todos losprocesos necesarios para comprobar que el par-celario se ajusta a la imagen (si esto es nece-sario de comprobar), la subdivisión de usosdentro de los recintos declarados y la asigna-ción de códigos de usos del suelo, que ayuda-rán a determinar si un recinto ha sido declara-do correctamente o no. La subdivisión serealiza a nivel de usos permanentes del terre-no, para luego pasar a otros usos no admisiblespara el pago de ayudas y f inalmente todosaquellos usos admisibles. El fotointérprete tie-ne a su disposición toda la documentación re-copilada en el apartado anterior con el fin deque la asignación de códigos sea lo más preci-sa posible.
Evaluación
El proceso de evaluación consiste en asignarlas diferentes líneas de declaración de las soli-citudes de los agricultores a los recintos que sehan fotointerpretado y comprobar que la su-perficie y uso fotointerpretados se correspon-den con dichas líneas de declaración. Todo ellorealizado mediante la aplicación de fórmulasmatemáticas programables informáticamente.La evaluación puede hacerse en dos fases (una
para visita rápida y otra para entrega de resul-tados a la Administración) o en una sola.
Para comprender mejor en qué consiste elproceso de evaluación, hay que entender al-gunos conceptos relativos a la solicitud deayudas:
— Expediente: se denomina expediente acualquier solicitud única que lleva un núme-ro de registro único y distinguible. Dentro deun expediente pueden controlarse la totalidadde parcelas solicitadas (expediente completo)o sólo una parte de ellas (expediente incom-pleto).
— Línea de declaración: cada recinto SIG-PAC declarado por el agricultor en su solici-tud. Un recinto es una porción de parcela ca-tastral con un único uso continuo del terreno.En la reglamentación comunitaria se corres-pondería a la definición de «parcela de refe-rencia».
— Bloque: clasificación de las diferentesayudas agrícolas que pueden solicitarse. Unalínea de declaración puede contener varios blo-ques, en caso de ser así a cada bloque se le de-nominará como sublínea.
— Grupo: conjunto de sublíneas que soli-citan un mismo bloque de ayuda (estaría cons-tituido por varios recintos).
— Parcela agrícola: igual que en grupo, pe-ro en este caso las sublíneas se correspondencon recintos colindantes entre sí.
88 J. M. Vidal Serrano / Revista de Teledetección (2011) 35, 80-93
Figura 5. Ejemplo de fotointerpretación. Se ha subdividido la porción del recinto en el que se observa actividadvegetativa y se le ha asignado un código (5:1:0:C).

— Subrecinto: subdivisión de un recinto,producto de los trabajos previos de fotointer-pretación.
La evaluación se hace a cuatro niveles: a ni-vel de recinto, a nivel de parcela agrícola, a ni-vel de grupo y a nivel de expediente. Para vi-sita rápida sólo es necesario evaluar a nivel derecinto y de parcela agrícola.
El proceso general de evaluación a nivel derecinto puede resumirse en la figura 6. En elejemplo, el fotointérprete ha subdividido el re-cinto 8:1:0 en dos, tras observar actividad ve-getativa en una parte del mismo, asignando alos subrecintos resultantes los códigos 8:1:0:ay b, respectivamente. El subrecinto 8:1:0:a esmedido en pantalla dando una superf icie de2,12 ha. Ya en el proceso de evaluación, se ob-serva que en la línea de declaración 1 (LD1) elagricultor ha declarado que el recinto 8:1:0 tie-ne 2,12 ha de cebada, para los que ha solicita-do ayudas para el bloque pago único —des-acoplada (sublínea 1) y ayuda por fomento dela rotación— acoplada (sublínea 2). No solici-ta ninguna ayuda más. Adicionalmente, aportaun croquis en el que ha delimitado la porcióndel recinto por la que está solicitando ayuda. Asimple vista puede verse en el croquis que ladelimitación es muy similar a la fotointerpre-
tación, por lo que se considera válido y se asig-na la LD1 al subrecinto 8:1:0:a, asignándoleposteriormente un código de evaluación.
Dentro de cada línea de declaración se eva-lúan todas y cada una de las sublíneas o blo-ques, de modo que una misma línea de decla-ración puede ser evaluada tres veces. La Tabla 4muestra los diferentes bloques de ayuda.
Para la evaluación a nivel de parcela agrí-cola, el proceso seguido es el mismo, con lasalvedad de que es necesario crear una «enti-dad virtual» matemática que unirá los recintoscolindantes declarados dentro del mismo ex-pediente para el mismo grupo de cultivo. Pue-de verse mejor en la Figura 7, donde los recin-tos 1 y 2 colindantes generarían tres parcelasagrícolas diferentes, una para el bloque de pa-go único, otra para el bloque de rotación y otrapara el bloque de ayuda específica (algodón).
Para la evaluación por grupo de cultivo seprocede a asignar las superficies que corres-ponden a cada grupo, en función de lo que sedeclara y lo que realmente se evalúa. Puede sernecesario recurrir a algún tipo de toleranciatécnica. Normalmente esto es así cuando un re-cinto es declarado por varios agricultores y hayvarios usos fotointerpretados, ya que el croquisque es obligatorio presentar no es más que un
Aplicación de técnicas de teledetección para la gestión y control del pago... 89
Figura 6. Proceso de evaluación.

esquema orientativo. La tolerancia de medi-ción viene expresada en función del tamaño delpíxel de la imagen utilizada; para Ikonos, porejemplo, es de 1,25 metros × perímetro del re-cinto. En ningún caso pueden excederse ni lasuperficie que ha declarado el agricultor (si és-te declara 2 ha, no pueden asignársele 2,1) nila superficie que indica el SIGPAC. Además seestablece una limitación máxima de 1 ha de su-perficie de tolerancia.
La evaluación a nivel de expediente se hacepor medio de dos test; uno de conformidad yotro de integridad. El primero determinará siel expediente es aceptado o rechazado, por me-dio de unos criterios de aceptación estableci-dos por el JRC. Como norma general, un ex-pediente se considerará aceptado cuando todos
los grupos de cultivo admisibles para la ayudade ese expediente se consideren aceptados.También se admite un margen de tolerancia de0,1 ha siempre que esta superficie no supere el20% del total, y sin compensaciones entre gru-pos (no se puede asignar la superf icie exce-dente de un grupo a otro).
El test de integridad tiene como objetivo de-terminar si el expediente es válido para sercontrolado por teledetección. Esta validez seestablece en función de dos cosas: la cantidadde líneas de declaración dudosas (la superfi-cie evaluada corresponde a la declarada perono es posible aceptar la línea de declaración)y la cantidad de superficie dudosa. Los crite-rios de aceptación son establecidos de nuevopor el JRC.
90 J. M. Vidal Serrano / Revista de Teledetección (2011) 35, 80-93
Tabla 4. Bloques de ayuda para la evaluación en el CATD
Bloque pago único Bloque pagos por rotación y otros Bloque específicos
Régimen pago únicoPagos desacoplados
Pagos por rotación
– GR cereales.– GR oleag., proteaginosas, lino y cá-
ñamo.– GR leguminosas acogidas a progra-
ma de fomento de la rotación.
Otros grupos
– GR superficie forrajera.– GR barbechos.– GR no subvencionables.
Otros regímenes de ayuda– GR prima a proteaginosas– GR pago específico arroz y semillas
de arroz.– GR frutos de cáscara.– GR patata para fécula.– GR semillas.– GR algodón.– GR tomate pelado entero.– GR tomate, productos elaborados dis-
tintos de pelado entero.– GR remolacha azucarera.– GR calidad leguminosas.– GR tabaco.– GR ayuda complementaria al avellano.
Figura 7. Evaluación por parcela agrícola.

Visita Rápida de Campo
En la visita rápida de campo se van a ver:— Recintos rechazados por uso o por im-
posibilidad de interpretación de ese uso.— Recintos rechazados por superficie (re-
cintos declarados por más de un agricultor).— Recintos dudosos (presencia de nubes,
fuera de imagen, respuestas similares de culti-vos en las imágenes compuestas).
El controlador toma nota del uso de terreno,del estado del cultivo y de los límites de la su-perficie ocupada por cada uso. Para apoyar sutrabajo toma fotografías y vídeos digitales queposteriormente se acompañarán al informe deresultados del expediente. La dirección de to-ma de los mismos también se registra para darmayor fiabilidad. Se anota también la fecha derealización de la inspección, así como se iden-tifica al técnico que la ha realizado.
La documentación de que se dispone para elcontrol está tanto en formato papel (pañoleta1:50.000 superpuesta sobre imágenes SIGPAC,salidas gráficas de la zona de análisis) como enformato digital (PDA con GPS y módem HSDPApara el envío de datos por telefonía 3G). El con-trolador indica constantemente su posición, porlo que es posible hacer un seguimiento comple-to de su actividad y programar las inspeccionesmediante aplicaciones informáticas de gestión.Así mismo, en las zonas donde la cobertura lopermite, remite todos los datos por telefonía mó-vil 3G, los cuales son recogidos por un servicioWeb que integra toda la información en una ba-se de datos central. En caso de no tener cober-tura se utilizan tarjetas de memoria miniSD pa-ra el almacenamiento de datos.
Gestión de Resultados por parte de la Administración
Con el informe final de resultados, que seacompaña de diversos manuales asociados, seaporta la aplicación informática ED@CON,que integra en una única interfaz la capacidadde realizar consultas sobre expedientes, inclu-yendo sus datos de declaración y de SIGPAC,conjuntamente con la visualización de todaslas imágenes disponibles relativas a los mis-mos (ver Fig. 8), incluyendo tanto las imáge-
nes multiespectrales como las fotografías di-gitales y los vídeos tomados en aquellos re-cintos que han presentado problemas.
Esta aplicación está diseñada para propor-cionar el máximo de servicio e información alos gestores de las Comunidades Autónomas,ya que permite la generación de cartas oficia-les (con textos pregenerables y diversos gra-dos de adaptabilidad a medida de las Comuni-dades Autónomas), conjuntamente con fichascompletas de cada expediente, detallando lasincidencias y aportando fotografías de apoyo.En principio la aplicación no maneja datos per-sonales (únicamente referencias de expedien-te), aunque esto también puede ser adaptablesegún las necesidades de la Comunidad Autó-noma gestora. ED@CON, además, permite laexportación de la información a otros forma-tos SIG, por ejemplo SHAPE, para que puedanser utilizados por otras aplicaciones si los ges-tores lo desean.
Resultados
En la Tabla 5 se muestra un resumen de re-sultados de los trabajos de CATD para la cam-paña 2009.
Finalmente, la Tabla 6 muestra un resumende los resultados de los controles en las últimas5 campañas (2005-2009). Puede observarse có-mo los datos objeto de análisis se mantienenaproximadamente constantes. La tendencia esa hacer más zonas de control de menor tamaño;de este modo en 2005 las 10 zonas controladas
Aplicación de técnicas de teledetección para la gestión y control del pago... 91
Figura 8. Aspecto externo de la aplicación [email protected] flechas azules indican la dirección de t oma de lasfotografías.

fueron de tipo 3 (2.000 km2), y en 2009 el nú-mero de zonas ha aumentado a 19, pero sólo 8de ellas son de tipo 3 (véase apartados anterio-res). Así mismo, se tiende a seleccionar expe-dientes con menos superficie para así abarcarmayor número de agricultores. El espectacularaumento de costes a partir del año 2007 se de-be a la introducción reglamentaria del controlde la ayuda acoplada del olivar (ya derogada enla campaña 2010).
El control asistido por teledetección, pues,ahorra tiempo y esfuerzos a la Administración,ya que se controla una gran cantidad de solici-tudes en un período corto de tiempo. Como sehace una fotointerpretación previa, se contro-lan en campo únicamente los expedientes con
irregularidades, lo que acelera a su vez el trá-mite de expedientes que están correctos. LasComunidades Autónomas ven reducida su car-ga de trabajo al disminuir el número de recin-tos que hay que visitar en campo, y así mismoreciben una gran cantidad de información aso-ciada a todos los expedientes controlados, loque facilita enormemente los trabajos de ges-tión administrativa. La contrapartida es que lafotointerpretación previa es susceptible deerrores, sobre todo si no se dispone de una ima-gen de suficiente calidad, lo que puede dar lu-gar a la admisión de expedientes con irregula-ridades que en una visita de campo seríandiagnosticados como inválidos para el pago delas ayudas. No obstante, tanto por parte del JRC
92 J. M. Vidal Serrano / Revista de Teledetección (2011) 35, 80-93
Tabla 5. Resultados CTD 2009
Zonas controladas 191
Superficie total (km2) 21.900Zona útil examinada (km2)2 18.862,23Expedientes seleccionados 30.569Municipios analizados (en paréntesis, polígonos) 564 (6.029)Recintos sigpac declarados dentro de las zonas 383.711Superficie declarada total (km2) 6.109,92Media de recintos por polígono 63,64Media de recintos por expediente 12,55Expedientes aceptados tras el control 40,91%Grupos de cultivo aceptados tras el control 85,08%Coste de los trabajos (euros) 5.113.622,76Coste por expediente (euros)3 167,28
1 En 11 Comunidades Autónomas. 2 La zona útil es la zona que contienelas parcelas declaradas y que por tanto puede ser objeto de control. 3 Unexpediente = un agricultor.
Tabla 6. Resumen de resultados CATD en las campañas 2005-2009
Campaña 2005 2006 2007 2008 2009
Zonas controladas 101 122 153 21 19Auperficie total (km2) 20.000 19.200 22.500 20.400 21.900Zona útil examinada (km2) 16.780,22 16.946,96 19.191,12 19.281,98 18.862,23Expedientes seleccionados 17.344 27.437 37.050 33.369 30.569Municipios analizados 369 (6.126) 385 (5.013) 691 (7.008) 611 (6.690) 564 (6.029)Recintos sigpac declarados dentro de las zonas 429.544 398.264 517.981 410.920 383.711Superficie declarada total (km2) 7.256,12 6.753,10 8.615,15 6.183,10 6.109,92Media de recintos por polígono 70,12 79,45 70,96 61,42 63,64Media de recintos por expediente 24,77 14,52 13,42 12,22 12,55Expedientes aceptados tras el control (%) 41,17 41,70 46,60 50,68 40,91Grupos de cultivo aceptados tras el control (%) 68,09 63,53 65,36 63,60 85,08Coste de los trabajos (euros) 2.693.459,42 3.415.881,58 4.240.022,27 5.535.200,95 5.113.622,76Coste por expediente (euros) 155,29 124,49 114,44 165,87 167,28
Siete Comunidades Autónomas. 2 Ocho Comunidades Autónomas. 3 Once Comunidades Autónomas (mismo nú-mero en 2008 y 2009).

Aplicación de técnicas de teledetección para la gestión y control del pago... 93
como de las Comunidades Autónomas (en par-ticular, Andalucía y Cataluña) se están ha-ciendo estudios y experimentando nuevas téc-nicas (por ejemplo, apoyo con fotografíasaéreas de 20 cm. de resolución) que, de teneréxito, podrán complementar o añadir mejorasa la metodología ya existente.
Referencias
JRC IPSC/G03/P/HKE/hke D(2009)(11047). 2009.Common technical specif ications for the 2010
campaign of remote-sensing control of area-ba-sed subsidies. MARS Unit, Joint Research Cen-tre-ISPRA (Italy).
JRC IPSC/G03/P/HKE/hke D(2007)(8218). 2007.Selection of control zones and risk analysis draftguidance document. MARS Unit, Joint ResearchCentre-SPRA (Italy).
JRC IPSC/G03/P/SKA/ska D(2003)(2402). 2003.Guidelines for best practice and quality checkingof ortho imagery. MARS Unit, Joint ResearchCentre-ISPRA (Italy.
TRAGSATEC, S.A. 2005-2009. Informe Final delos Trabajos de Control Asistido por Teledetec-ción de los Regímenes de Ayudas Agrícolas enEspaña. Publicación anual.

Caso práctico
A MODIS generated land cover mapping of Honduras:a base-line layout to create a national monitoring center
S. Rivera1*, J. L. Lowry1, A. J. Hernández1, R. D. Ramsey1, R. Lezama2 and M. Velázquez2
1 Remote Sensing and GIS Laboratories. Department of Wildland Resources. College of Natural Resources. Utah State University. Logan. Utah 84322-5230. USA
2 Geographic Information Center. Department of Forestry Applied Research. National School of Forest Sciences-ESNACIFOR Siguatepeque. Honduras
Abstract
The Remote Sensing and GIS Laboratory at Utah State University (USU) began the process of es-tablishing a remote sensing national land cover monitoring center in order to monitor land cover anduse in Honduras. A national land cover map derived from MODIS (Moderate Resolution Imaging Spec-trometer) imagery products was developed. We designed a protocol for interpretation and analysis ofMODIS data products that included a Google-Earth on-screen sampling scheme, a field data collec-tion of training samples and a classification tree algorithm. The first land cover map prototypes andalgorithms were developed using a time series of MODIS 2007 and 2008 imagery, elevation data(STRM) and a time series of MODIS’s Enhanced Vegetation Index (EVI). In the model validation, theKappa coefficient was K = 65.1% and the overall model accuracy was 70%. This map will serve as abase line to monitor future land cover changes in Honduras.
Key words: mapping, MODIS, tropics, Google, EVI.
Resumen
Generación de un mapa de cobertura del suelo en Honduras a partir de datos MODIS:una base para el diseño de un centro nacional de seguimiento
El Laboratorio de Teledetección y SIG en la Universidad Estatal de Utah (USU) inició el procesode establecer un centro de monitoreo de detección de la cobertura y uso de la tierra a fin de monito-rear la cubertura en Honduras. Un mapa de la cubertura derivado de MODIS (Espectrómetro de Imá-genes de Resolución Moderada) fue desarrollado. Se diseñó un protocolo para la interpretación y aná-lisis de productos de datos MODIS que incluyó un protocolo de Google-Earth para toma de muestrasen pantalla, una colección de campos de datos de muestras de entrenamiento y una clasificación ba-sada en un algoritmo de árboles de decisión. El primer prototipo de mapas y algoritmos fueron desa-rrollados usando una serie temporal de imágenes MODIS del 2007 y 2008, datos de elevación (STRM)y una serie de tiempo del Índice Mejorado de Vegetación de MODIS (EVI). En la validación del mo-delo, el coeficiente Kappa fue de K = 65,1% y la exactitud global del modelo fue del 70%. Este mapaservirá como línea base para monitorear cambios en la cobertura futura de la tierra en Honduras.
Palabras clave: Mapeo, MODIS, Trópicos, Google, EVI.
* Corresponding author: [email protected]: 11-04-110; Accepted: 10-05-11.
Asociación Española de Teledetección Revista de Teledetección 35, 94-108ISSN: 1988-8740

Introduction
Land resources throughout the world are ra-pidly being depleted, and developing countriesin the tropics are experiencing some of the mostdetrimental effects from rapid land use con-version. Some 10.4 millions of tropical forestswere lost in the last f ive years (FAO, 2005).Central America and Mexico have the secondhighest global deforestation rate (Eggen-McIn-tosh, 1994). All Central American countries areclassified with a high threat to loose their fo-rest resources (Global Forest Watch, 2010). Theglobal Forest Resources Assessment indicatesthat Honduras lost some 186,000 hectares offorest between 2000-2005, the highest annualdeforestation rate in Central America: 2.8%(FAO, 2005). This causes an enormous envi-ronmental disruption and jeopardizes the we-ak economy and the well-being of the country.
Appropriate monitoring is an important stepto determine how much forest resources shouldbe harvested versus what should be conserved.Remote sensing approaches for assessing andmonitoring forest resources provide a cost-ef-fective means by which forest inventories andland use monitoring can be achieved. Variousmethods may be used to map vegetation pat-terns on the landscape, the appropriate methoddepending on the scale and scope of the pro-ject (DeFries et al., 2004). Projects focusingon smaller regions, such as national parks, mayrely on aerial photo interpretation. Mappingvegetation over larger regions has commonlybeen done using digital imagery obtained fromsatellites, and may be referred to as land covermapping.
In 1995 the country of Honduras produceda land cover map with the help of the Germangovernment (COHDEFOR, 1996). This forestresources map contained 8 land cover classes(dense conifer forest, sparse conifer forest,mangrove forest, broadleaf forest, mixed fo-rest, water bodies, neighboring country, non-forestlands) and was produced using a visualinterpretation method of Landsat imagery. Themethodology to produce the map was time-con-suming and not easily replicable, thus makingit a useful product at a single moment in time,but not useful for monitoring purposes. Cu-rrently it is outdated.
Some other attempts have been done in thelast decade. Two land cover maps were deve-loped. In 2001, a land cover map was develo-ped by a World Bank sponsored initiative(PMDN) and another one by the Tropical Agri-cultural Centre for Higher Education and Re-search, CATIE (Ordonez and House, 2002).None of them had a transparent and replicablemethodology and the government was still un-certain about how much area is covered by fo-rest or other lands. In 2005, a forest inventorywas conducted throughout the country. Around300 sampling plots were established systema-tically all over the country. Due to the lack offunding the inventory was not complementedwith the remote sensing assessment and rapidlybecame obsolete (AFE-COHDEFOR, 2006).
Our proposal is to produce a similar land co-ver map with the same 8 land cover classes (andpossibly more) using contemporary MODIS sa-tellite imagery in a fashion that can be done re-latively rapidly and over time-specifically forlong term monitoring purposes. This was notpossible in 1995, and is indeed feasible todaybecause of advancements in image processingtechnology since 1995 and the availability ofMODIS imagery since 2000.
Utah State University, located in Logan,Utah had the responsibility of coordinating thedevelopment of field data collection protocols,mapping methodologies, and coordinating landcover mapping for the region. ESNACIFORwas responsible for field data collection, ima-ge and ancillary data preparation, and land co-ver modeling. The development and refinementof the legend was coordinated by ESNACIFORwith input from managers, government off i-cials and investigators in Honduras. This paperpresents an overview of the methodology usedto create the national land cover dataset, andhighlights several of the issues associated withachieving this product through a coordinatedprocess between the two locations-countries.
The goal of this project was to develop andtransfer a methodology (protocol) using MO-DIS (Moderate Resolution Imaging Spectro-meter) imagery to create a national-level landcover map. Other products, such as a national-level ecosystems map —not described on thispaper—, were derived from the land cover map.It should be emphasized that developing the
A MODIS generated land cover mapping of Honduras: a base-line layout... 95

map was not the sole goal of the project. In ad-dition, the other goal of the project was to trainHonduran scientists in the development of thismap, so that they can continue monitoring na-tional resources in the future.
Objectives
Specific objectives for this project were:1) Develop an image classif ication me-
thodology using MODIS imagery to create anational-level land cover map for the countryof Honduras.
2) Train Honduran scientists in funda-mental knowledge of remote sensing techno-logies, and remote sensing-based mapping.
3) Provide training to the scientists on theGIS methodologies (protocol) developed byUSU for creating the national land cover map.
4) Demonstrate how the protocol can beused for future land resource monitoring aswell as assessment of land cover change bet-ween 2009 and the future.
Project organization
Project study area
Honduras is located in the center of the Cen-tral American isthmus, between 13° and 16° la-
titude North and 83° and 89.5° longitude West(Fig. 1). It has an area of 112,088 square kilo-meters. It is a rich country in terms of naturalresources and has the highest percentage of fo-rest lands among the other Central Americannations (AFE-COHDEFOR, 2006). Approxi-mately 50% of the country is still covered byundisturbed forests (Richards, 1996) which in-clude humid tropical forests, arid or deciduoustropical forests, cloud forests, mangrove we-tlands, and pine forests. Forests in Hondurasare being depleted at an accelerated rate. Thedeforestation rate is currently 80,000 hectaresper year, which is one of the highest defores-tation rates in the hemisphere (Stonich, 1993).
Tropical forests are typically associated withcoastal mountains receiving high amounts ofprecipitation while pine forests are located inthe headwaters of rivers in the mountains ofcentral Honduras. In Honduras, two major ri-ver systems drain the central highlands to boththe Caribbean Sea (eight river basins) and thePacif ic Ocean (two river basins) (Gutiérrez,1992; Laboranti, 1982). The average precipi-tation rate is 2,000 mm per year and this rain-fall produces significant runoff from waters-heds (Hargreaves, 1992).
The country is composed of extremely fra-gile ecosystems. Since it is a narrow strip ofland, rivers run from the continental divide(2,000 meters above sea level) to the lowlands
96 S. Rivera et al. / Revista de Teledetección (2011) 35, 94-108
Figure 1. Location of Honduras, Central America. Siguatepeque is the town where ESNACIFOR is located.

in the Pacif ic and Caribbean coasts in veryshort distances. As a result, rivers are typicallysteep, enclosed in v-shaped valleys, and exhi-bit dendritic drainage patterns. Greater thanhalf of Honduras might experience 300 mm ofrain in 24 hours (Hargreaves, 1992). Soils areformed from metamorphic, volcanic, and se-dimentary parent materials. As a result, eightof the ten world soil orders exist in Honduras.These soils are classified with a high to veryhigh erosion risk. In addition, the terrain inHonduras is characteristically steep with 75%of the territory having slopes greater than 30%(Hargreaves, 1992). Forest cover removal pro-duces an enormous environmental disruption.
Division of responsibilities
Overall project tracking and managementwas conducted by the RS/GIS Lab at Utah Sta-te University. The lab was responsible for de-veloping the methodology and providing trai-ning to ESNACIFOR personnel in the use ofthe aforementioned methodology. ESNACI-FOR provided the appropriate funding for theproject, including salaries, fees, and travel ex-penses for all project participants of both par-ties. ESNACIFOR was also be responsible forproviding access to possible field data from fo-rest management plans from ICF: the Hondu-ran Forest Service.
Project coordination and timeframe
Training workshop and the assessment of theESNACIFOR’s GIS lab capability were con-ducted in spring of 2008. Initial field data co-llection protocols were established by the labat Utah State University. Google sampling da-ta collection primarily occurred at the end of2008 in Honduras. MODIS image processingand classification workshop dedicated to en-sure consistent mapping methods was conduc-ted during the winter of 2009 at Utah State Uni-versity lab. Periodic meetings, teleconferencesand field visits (in Honduras) were conductedin the summer of 2009 to ensure the collabo-rative mapping process. Additional field datato improve the model and for validation was
collected from May through September of2009. Mapping efforts were completed by theend of 2009. Last training session and com-pletion of final products was held at Utah Sta-te University lab in April of 2010. The land co-ver map was completed and delivered to thepublic in May 2010.
Methods
Image selection and preparation
An important part of this project involveddetermining the best image classification ap-proach for the monitoring protocol. The MO-DIS sensor provides an ideal remotely sensedplatform for developing a national-level landcover/resource monitoring program (Mucho-ney et al., 2000; Loveland et al., 2000; Brownet al., 2007). With 500 meter pixel resolutionit is considered a moderate resolution imagingsensor and cannot be used for highly detailedland cover mapping (by comparison the Land-sat sensor offers 30 meter pixel resolution). Ho-wever, MODIS had several key advantages thatmade it highly suitable for this project. With 7spectral bands, MODIS provides adequatespectral resolution to map vegetation. These 7bands approximate the 6 spectral bands offe-red by the Landsat sensor.
1) The MODIS sensor orbits the earth eachday (Vermote, 2008). The daily capture of MO-DIS imagery means MODIS can provide dailyimages of the Earth’s surface, making it idealfor monitoring purposes.
2) In addition to the daily MODIS surfa-ce reflectance product, MODIS provides a sui-te of derived products. One of these productsis the Daily Surface Reflectance Quality Pro-duct which is an 8-day composite of images in-tended to provide the best image pixels for an8-day period (Vermote, 2008). This is helpfulin Honduras where cloud cover presents a sig-nif icant challenge for remote sensing-basedmapping, as the best cloud free pixels are usedin the composite image (Vermote, 2008).
3) The MODIS image scene encompassesthe entire country of Honduras with a singleswath. This is important because other sensors,such as Landsat, would require mosaicking
A MODIS generated land cover mapping of Honduras: a base-line layout... 97

multiple image scenes (approximately 12Landsat scenes are required to cover thecountry of Honduras) from several swaths, im-posing considerable technical challenges.
4) Imagery and products derived fromMODIS are offered without cost from the Uni-ted States Geological Survey (USGS) and be downloaded from the World Wide Web(www.glovis.gov).
Generally, land cover mapping is accom-plished by segmenting the landscape into are-as of relative homogeneity that correspond toland cover classes from an adopted or develo-ped land cover legend. Technical methods topartition the landscape using digital imagery-based methods vary. Unsupervised approachesinvolve computer-assisted delineation of ho-mogeneity in the imagery and ancillary data,followed by the analyst assigning land coverlabels to the homogenous clusters of pixels. Su-pervised approaches utilize representative sam-ples of each land cover class to partition theimagery and ancillary data into clusters of pi-xels representing each land cover class. An im-portant part of mapping involved the use oftraining data for image classification, whethera supervised or unsupervised approached wasused. Sampling can be a time consuming andcostly part of any remote sensing-based landcover mapping project. We determined the bestapproach to collecting sampling data throughthe course of the project. Possible options in-cluded using existing forest plot sampling si-tes (AFE-CODHDEFOR, 2006), collecting ad-ditional sampling plots, and most likely, acombination of both.
Land use classification system
Utah State University conducted some pre-liminary tests using MODIS imagery to crea-te a national-level map of Honduras. These pre-liminary results were presented to thegovernment authorities in spring of 2008. Thepreliminary results were developed through alattice of points that were used to train the clas-sification tree algorithm. These training pointswere labeled by drilling them through the 1995forest resources map. The training samples we-re then imported to the classification tree al-
gorithm and rules were generated to derive theresulting land cover map. The classes that we-re best mapped were: broadleaf forest, man-grove forest, and pine forest.
We decided to use a modified land use clas-sification system used by the International Ge-osphere-Biosphere Programme (IGBP) (Jen-sen 2005). This classif ication system wasselected because it has been used by the Hon-duran government authorities. This classifica-tion system has also been largely used by otherprojects either globally (Friedl et al., 2002; Lo-veland et al., 2000) or in the Central and SouthAmerican Regions (Muchoney et al., 2000; La-tifovica et al., 2000; Brown et al., 2007), dueto its capacity to fit the MODIS resolution.
In the final land use and cover map, 13 clas-ses were delineated (Table 1). Initially eightclasses were assumed to be mapped (Dense andsparse pine forest, broadleaf forest, mixed fo-rest, urban, mangrove forest, water bodies andagriculture farms/pasture), however, throughthe whole process of Google-Earth samplingplus the field visits, five more classes were ad-ded to the classification (Commercial agricul-ture, shrublands, dry forest, savannas, andshrimp farms).
High resolution imagery sampling
Image interpretation was conducted usingLandsat ETM with ArcGIS© and high resolu-tion orthophotography using Google Earth™.Table 1 identifies which classes (10 classes in-itially) that we anticipated that were going tobe identifiable with each method (UNESCO,1983). Training data were obtained from threesources: Existing data, Image Interpretation ofLandsat ETM and Orthophotography, and fieldsamples. Existing data were available form twosources: Forest management plans, and pointdata collected by the FAO (AFE-COHDEFOR,2006). These data were carefully checked tomake sure that they were reliable, and then theywere formatted in preparation for digital ima-ge classification. Formatting was done withina spread-sheet (e.g. Excel).
The sampling approach can be described asa systematic-selective hybrid sampling design.The image interpretation of Landsat ETM in-
98 S. Rivera et al. / Revista de Teledetección (2011) 35, 94-108

A MODIS generated land cover mapping of Honduras: a base-line layout... 99
Tabla 1. Legend used in the land cover mapping of Honduras
Label Symbol Classification System (adapted from IGBP Jensen, 2005
Dense Evergreen Needleleafforest
Sparse Evergreen Needleleafforest
Broadleaf Forest
Mixed Forest
Shrublands
Mangrove
Water Bodies
Agriculture and Pasture
Commercial Agriculture
Urban
Woody Savannas
Dry Forest
Shrimp Farms
BCD
BCR
BLF
BMX
MAT
BMG
LYL
AGP
AGC
URB
SAB
BSE
CAM
Lands dominated by trees with a percent canopy cover >60%and height exceeding 2 meters. Almost all trees remain greenall year. Canopy is never without green foliage.
Lands dominated by trees with a percent canopy cover betwe-en 30-60% and height exceeding 2 meters. Almost all trees re-main green all year. Canopy is never without green foliage.
Lands dominated by trees with a percent canopy cover > 60%and height exceeding 2 meters. Almost all trees remain greenall year. Canopy is never without green foliage.
Lands dominated by trees with a percent canopy cover > 60% andheight exceeding 2 meters. Consists of tree communities with in-terspersed mixtures or mosaics of the other four forest covertypes. None of the forest types exceeds 60% of landscape.
Lands with woody vegetation less than 2 meters tall and withshrub canopy cover is > 60%. The shrub foliage can be eitherevergreen or deciduous.
Lands with a permanent mixture of water and herbaceous orwoody vegetation that cover extensive areas. The vegetation canbe present in either salt, brackish, or fresh water.
Oceans, seas, lakes, reservoirs, and rivers. Can be either freshor salt water bodies
Lands covered with temporary crops followed by harvest and abare soil period (e.g., single and multiple cropping systems. Italso includes natural or planted pasture for livestock.
Land covered by perennial crops such as bananas, pineapple,and oil palm.
Land covered by buildings and other man-made structures. No-te that this class will not be mapped from the AVHRR imagerybut will be developed from the populated places layer that ispart of the Digital Chart of the World.
S Lands with herbaceous and other understory systems, andwith forest canopy cover between 30-60%.The forest coverheight exceeds 2 meters.
Lands dominated by trees with a percent canopy cover > 60%and height exceeding 2 meters. Consists of seasonal broadleaftree communities with an annual cycle of leaf-on and leaf-offperiods.Dominant species are: Simarouba glauca, Switenia humilis, Ca-sia grandis, Mimosa sp., Albizia guachepele, Sterculia apéta-la, Enterolobium cyclocarpum, Karwinskia calderonii, Cre-centia alata, Bursera simaoruba, Leucaena salvadorensis,Tabebuia rosea, Gliricidia sepium, Lysiloma sp., Bombacopsisquinata and Cedrela odorata.
Formerly covered by Mangrove forest and now they are ponds-water bodies dedicated to shrimp production. All sites are lo-cated in the Pacific coast at an elevation below 200 meters abo-ve sea level.

volved the assigning label attribute to eachpoint location on a systematic grid of site are-as. There were 311 site areas on a grid cove-ring the entire country (Fig. 2). Each site arearepresents an area of about 80 km2 (10 km dia-meter). Within each site area the image analystchose the best point location representative ofthe land cover classes in the site area. Betwe-en 10 and 15 point location samples were cho-sen for each site area, and samples were at le-ast 1 sample point apart. The analyst tried toget samples for as many different land coverclasses seen in the site area polygon.
Google-Earth™ data collectionprotocol
Google Earth as a scientif ic and environ-mental visualization tool has been increasinglyused since its launch in 2005 (Sheppard andCizek, 2009). We basically used the same pro-cedure that was used with the interpretation ofOrthophotography in Google Earth™. The si-te area and point location feature classes hadto be converted to .kml format and were usedwith Google Earth™ to interpret higher reso-lution imagery (though perhaps not as up-to-date as the ETM imagery). The best way to useGoogle Earth™ was to add the site area andpoint location .kml f iles to Google Earth™,
and use them as a point of reference. Theanalyst had the option to place the road net-work or other layers in Google Earth© for re-ference. With ArcMap© open on one screen andGoogle Earth™ open on another screen, theanalyst used Google Earth™ to interpret theimagery, but as added the label in ArcMap©.Some 5,616 samples were collected to buildthe training data set.
Ground truth data collection
Training and map validation data were co-llected through ground-based f ield work tosupplement the existing f ield and GoogleEarth™ collected data (5,616 data points). Theground-based field samples were 240 samples,collected by traversing navigable roads in threedifferent a mapping zones (North coast, Southand Western part of the country) and opportu-nistically selecting plots that met criteria of ap-propriate size (500 by 500 mts or 25-hectareminimum) and composition (stand homoge-neity). Field data were collected using ocularestimates of biotic and abiotic land cover com-ponents, including percent cover of dominantclasses. Laptop computers, Landsat imagery,digital orthophotoquads, and GPS devices we-re used for navigation and plot identificationwhenever possible. Each plot was identif ied
100 S. Rivera et al. / Revista de Teledetección (2011) 35, 94-108
Figure 2. Site areas within which point locations were opportunistically chosen to be used as training data. The-se are 311 locations containing more than 5,000 points that were photo interpreted in Google Earth images.
Commercial agricultureExtensive agricultureConifers-denseConifers-sparseBroadleafMangroveMixed forestWaterScrubs-shrubsUrban

with a UTM coordinate using a GPS. Field da-ta were recorded onto paper f ield forms andsubsequently entered into a database.
Predictor layers
Utah State University has considerable ex-perience using a wide variety of image classi-f ication approaches. Most recently we com-pleted a five year project mapping land coverover a large portion of the southwestern Uni-ted States (Lowry et al., 2007) using a classi-fication tree algorithm. Several predicting la-yers were used in the primary classif ication.Spatial data layers used to map land cover in-cluded image-derived and ancillary datasets.Core image-derived datasets included indivi-dual seven bands of MODIS images from 2007and 2008, the Enhanced Vegetation Index(EVI). Ancillary datasets were derived from 30meter digital elevation models (DEM) obtai-ned from the NASA’s STRM (Shuttle Radar To-pography Mission)(http://www2.jpl.nasa.gov/srtm/).
Modeling approaches and procedure
The USU-ESNACIFOR team investigatedseveral avenues for image classif ication. Inparticular we experimented with methods si-milar to those used in previous large landsca-pe mapping efforts such as the 1995 Utah GAPland cover project (Homer et al., 1997). Thecluster-busting method was the first modelingapproach that we used. In this method we vi-sually determined an appropriate number ofclusters. Then we ran an initial map with iso-data, to create a cluster map with maximum li-kelihood classifier using the signature file fromisodata. Then we used this output to subsequentsteps.
The next method was the use of decision treeclassifiers that are well suited for land covermapping. Classification and regression trees(CART) were developed by Breiman et al.(1984) and were quickly recognized as a va-luable tool for discriminating complex rela-tionships among environmental variables(Friedl et al., 2002). Decision trees readily ac-
cept a variety of measurement scales in addi-tion to categorical variables, and have de-monstrated improved accuracies over the useof traditional classifiers (Hansen et al., 1996;Pal and Mather, 2003). Finally, decision treesoftware is readily available, computationallyefficient, and by using a hierarchical approachto define decision rules, is intuitive to a varietyof users.
For our project we incorporated the decisiontree software See5 (RuleQuest Research, 2004)with ERDAS Imagine®. The tool, developed forthe National Land-Cover Dataset 2001 (Homeret al., 2004) project (hereafter «NLCD map-ping tool») provided the ideal solution to ourneed for an efficient integration of the decisiontree software within a spatially explicit mode-ling environment.
Using the NLCD mapping tool, decision treemodels were generated in See5 (RuleQuest Re-search, 2004) with the boosting option, andthen spatially applied in ERDAS Imagine®.Modeling was iterative and subsequent itera-tions tested using different combinations ofpredictor datasets, or additional samples in anattempt to improve the model. An iterative pro-cess of adding/subtracting predictive layersfrom the model produced, finally, a more refi-ned map.
Map validation using Google Earth™
Sample polygons were generated from thefinal land cover map. First, the raster versionof the map was converted to a vector polygondataset. The size of land cover polygons, for allclasses, in the final land cover map was hea-vily skewed toward many small polygons anda few large polygons (i.e. a Poisson distribu-tion). Randomly selecting a set of polygonsfrom such a distribution results in many smallpolygons and very few large polygons (by sim-ple probability given such a distribution). Forour selection process we wanted to randomlyselect polygons that were large enough that anassessment of their accuracy could tell us so-mething about the map at the stand level. Wealso wanted to select polygons that were wi-thin the high resolution portion of GoogleEarth™ Images. In other words, we wanted to
A MODIS generated land cover mapping of Honduras: a base-line layout... 101

identify polygons where land cover could beinterpreted from higher resolution imagery, andwhich were not too small.
To begin, we recognized that all the land co-ver classes do not have the same spatial pattern;which is often a result of their unique ecologi-cal characteristics and abundance on the lands-cape. Some classes may be considered «matrix»communities and are spatially represented bylarge contiguous areas. Other classes are bestdescribed as «patch» communities that are im-bedded within the broader matrix. Based on thenotion of matrix and patch communities (Poia-ni et al., 2000) we divided the mosaic of landcover classes into two groups based on theirproportional abundance on the landscape. Fi-gure 3 shows the division between matrix andpatch classes. Examples of large matrix classesinclude Broadleaf Forest, Dense Pine Forest,and Sparse Pine Forest while examples of patchclasses are Mixed Broadleaf-Pine Forest, DryForest, and Urban Areas.
Candidate polygons for accuracy assessmentwere first selected based on whether they we-re within the high resolution portion of Goo-gle Earth™ Imagery (Fig. 4). Then they wereselected based on size. Matrix classes were se-lected as potential sample polygons if they we-re between 1,000 hectares and 2,000,000 hec-tares in size. Patch classes were selected if theywere larger than 100 hectares, the minimummapping unit for the map. Following these twoselecting rules up to 60 polygons were ran-
domly selected for each land cover class. Ta-ble 1 identifies the number of randomly selec-ted polygons for each class, the total area sam-pled (sum of sample polygons) and the percentof the total map the sampled portion represents.A total of 685 polygons were chosen as sam-ple polygons to be used for accuracy assess-ment. Figure 4 shows the selected polygons(Table 2). The process basically consisted onthe analyst using numeric codes for label as-signment. The Google™ file (.kml) was laterconverted to ArcGIS© file (shapefile).
Results
Land cover map
The most important and identifiable mappedclasses were Broadleaf forest and pine forest(sparse and dense) that cover more than half ofthe country (58.1%) (Table 3, Fig. 5). These fo-rest types are located following the mountainchains that go from west to east and north tosouth in the central part of the country. They aredistributed along this rough topography inwhich 70% of the territory is located over 30%slopes. The broadleaf forest is located along thenorth coast and in a corridor that goes from themiddle to the north-western part of the country,following areas of higher precipitation. Pine fo-rests are located in drier areas in smaller pat-ches scattered all over the central and western
102 S. Rivera et al. / Revista de Teledetección (2011) 35, 94-108
0
2
4
6
8
10
12
14
16
CAM URB BSC LYL BMX BMG SAB AGC MAT BPR BPD AGP BLF
Prop
orpo
cion
del
pai
saje
Clasesde remiendo
Clasesde matriz
Figure 3. Matrix and patch land cover classes based on proportional abundance: basis for the map validation pro-tocol using the Google-Earth sampling scheme.

part of the country. In between these patches,subsistence agriculture and pasture lands areasare found, forming a mosaic of agricultural andforest patches. In bigger patches, agro-com-mercial activities are located in the intermoun-tain larger valleys. These areas are dedicated to
high yield crops such as: bananas, cantaloupes,oil palms, citrics, sugar cane, and pineapples.Mangrove forest was found only in the pacificcoast where most of this coastal ecosystem islocated. Significant areas of mangrove foresthave been cut and inundated to establish shrimp
A MODIS generated land cover mapping of Honduras: a base-line layout... 103
Figure 4. Randomly selected polygons for accuracy assessment and map validation.
Legend
Areas de Alta Resolución en Google EarthPolígonos seleccionados
Final Land Cover Map«All other values»
Gridcode
AGCAGPBPDBPRBLFEMGEMXLYLMATURBSABBSCCAM
Randomly Selected Polygons for Accuracy Assessment
Tabla 2. Randomly selected polygons to be used as reference data for the map validation procedure
Class name CodeNumeric
Type CountSampled area Total area Percent area
code (ha) (ha) sampled
Ag. Farm/Pasture AGP 2 Matrix 60 416,250 3,192,275 13.04Dense Pine Forest BPD 3 Matrix 60 437,375 1,448,275 30.20Sparse Pine Forest BPR 4 Matrix 60 227,600 1,273,625 17.87Broadleaf Forest BLF 5 Matrix 48 475,625 4,226,675 11.25Shrubland MAT 9 Matrix 60 202,375 1,088,825 18.59Ag. Commercial AGC 1 Patch 60 210,275 478,050 43.99Mangrove Forest BMG 6 Patch 60 147,100 192,875 76.27Mixed Conf.-Broadleaf BMX 7 Patch 60 16,475 136,775 12.05Lakes & Lagoons LYL 8 Patch 60 39,875 77,425 51.50Urban Areas URB 10 Patch 23 23,425 25,925 90.36Savannah SAB 11 Patch 41 95,550 218,500 43.73Dry Forest BSC 12 Patch 60 24,575 56,425 43.55Shrimp Farms CAM 13 Patch 10 2,325 3,600 64.58
662 2,318,825 12,419,250 18.67

farm ponds. We were able to identity these lar-ge areas. Dry forest was located in the southernportion of the country and in small areas in thecentral and northern regions where it is known
that precipitation is limited in amount and pe-riod of occurrence, meaning less than 1,000mm/year distributed in 3-4 months. Shrublandswere also located mostly in the western and cen-tral regions and are often seen as areas of tran-sitions where the forest has been cleared and/orburned and most of the cleared areas have re-mained untouched to produce a secondary fo-rest. This is true for most of the cleared and/orburned areas for either pine or broadleaf forest.The urban class identified only when urban set-tlements were larger than 200,000 people. Sma-ller urban centers were hardly captured giventhe spatial resolution and spectral of the MO-DIS signal. The mixed forest was detected inthe transitional zones between the pine forestand broadleaf forest. Due to its foliar compo-sition, its detection was not very accurate. Anexplanation to this is discussed later in this pa-per. Honduras has only 2 important lakes: oneis natural and the other is a man-made waterbody. They both are located in the central partof the country and were accurately mapped. Thelast class detected by the MODIS sensor was
104 S. Rivera et al. / Revista de Teledetección (2011) 35, 94-108
Figure 5. The MODIS imagery-derived map of land use and cover of Honduras, Central America.
Legend
Agro-commercial Lakes and Lagoons
AG. Fam/Pasture Shrublands
Dense Pine Forest Urban
Sparse Pine Forest Savannah
Broadleaf Forest Dry Forest
Mangrove Forest Shrimp Fams
Mixed Forest
Republic of HondurasLand Use and Cover Map - 2009
N
Tabla 3. Areas of land use and cover as a result ofthe land cover mapping of Honduras
Legend (name-code)Area in 2009
km2 %
Commercial agriculture-AGC 4,042 3.63Agriculture pasture-AGP 28,961 25.98Dense pine forest-BPD 13,859 12.43Sparse pine forest-BPR 11,919 10.69Broadleaf forest-BLF 39,037 35.02Mangrove forest-BMG 1,067 0.96Mixed forest-BMX 673 0.60Waters bodies-LYL 689 0.62Shrublands-MAT 8,592 7.71Urban-URB 204 0.18Woody savanna-SAB 2,121 1.90Dry forest-BSC 212 0.19Shrimp farms-CAM 93 0.08
Total 111,468 100.00

the woody savanna. A peculiar ecosystem lo-cated in the northern and eastern portion of thecountry, close to the Caribbean coast. This istypically composed by grass and shrub vegeta-tion accompanied by sparse pine trees. Theseareas are for high precipitation (between 3-4meters per year), giving as a result highly lea-ched soils, and sparse taller vegetation.
Model validation
The model validation has the purpose of me-asuring, as objectively as possible, the accuracyof the map. Usually this is given by providinga quantitative measure of map accuracy (Con-galton and Green, 1999). The accuracy assess-ment was run using the Kappa Tool. The resultsshowed that the Kappa Index was: 0.651258(Standard error of kappa: 0.0055672, Z-Scorefor kappa: 116.981) see Table 4. The Kappa sta-tistic can be interpreted as follows: Values be-low 0.40 would suggest the agreement betwe-en reference data and the mapped data is poorand could occur by chance. Values between 0.40and 0.80 represents moderate agreement andvalues over 0.80 represents strong agreement(Congalton and Green, 1999).
The Kappa statistic for the land cover mapwas in the «moderate agreement» ranging in-dicating the results of the error matrix good.The Z-score for Kappa tells us whether the
agreement between the mapped data and thereference data could occur by chance. A Z-sco-re higher than 1.96 suggests that, at a 95% con-fidence level, the results of the error matrix donot represent chance agreement. The Z-scoresfor both maps are well above 1.96 indicatingthat we can have a high level of confidence inthe error matrix and Kappa statistic.
The error matrix is also very useful to vi-sually and quantitatively see which classes arehighly confused with one another. This is do-ne by examining the numbers in the off-diago-nal cells. The error matrix for the land covermap also tells us that the overall accuracy ofthe map was 70%. However, the error matrix ismost useful for telling us something about theaccuracies of the individual land cover classes.The error matrix provides information on twotypes of error: 1) errors of commission, and 2)errors of omission (Jensen 2005). Errors ofcommission represent reference locations thatwere incorrectly mapped as other mapped clas-ses, and are presented as the percentages at theright of the row totals (Table 4). For example,there were 415 reference samples that «landedon» AGC, but only 352 of those were AGC. The90 samples that were not AGC, but landed onAGC are considered errors of commission.Errors of omission represent locations on themap that were not mapped correctly, and arepresented as the percentages at the bottom ofthe column totals. For example, there were a
A MODIS generated land cover mapping of Honduras: a base-line layout... 105
Tabla 4. Accuracy assessment results of the land cover mapping of Honduras
Class AGC AGP BPD BPR BLF BMG BMX LYL MAT URB SAB BSC CAMRow Rowtotal %
AGC 352 21 0 0 6 1 0 5 21 2 0 0 7 415 85%AGP 0 662 0 7 7 0 0 0 99 10 0 0 0 785 84%BPD 0 15 583 193 7 0 6 0 16 0 0 0 0 820 71%BPR 0 103 31 217 0 0 10 0 24 0 57 0 0 442 49%BLF 0 66 71 8 627 3 0 0 80 0 31 0 0 886 71%BMG 1 23 0 3 0 240 0 10 9 2 10 1 0 299 80%BMX 1 15 13 5 6 2 4 0 13 0 6 0 0 65 6%LYL 4 19 0 0 2 5 0 67 4 0 3 1 1 106 63%MAT 3 128 0 22 0 0 56 4 160 0 0 3 0 376 43%URB 3 0 0 0 0 0 0 3 1 47 0 0 0 54 87%SAB 0 0 0 5 0 1 1 0 0 0 186 0 0 193 96%BSC 3 29 0 0 1 0 0 0 35 1 4 6 0 79 8%CAM 0 0 0 0 0 0 0 5 0 0 0 0 7 12 58%Column total 367 1,081 698 460 656 252 77 94 462 62 297 11 15 4,532Accuracy 96% 61% 84% 47% 96% 95% 5% 71% 35% 76% 63% 55% 47% 70%
Kappa: 0.651258. Standard error of kappa: 0.0055672. Z-Score for kappa: 116.9.

total of 367 AGC reference locations, but only352 (96%) were in locations mapped as AGC.The remaining 4% were mapped as somethingelse and are considered errors of omission.
Examining the error matrices for the map wecan see that some land cover classes were map-ped very well, while others were mapped qui-te poorly. If we consider any class mapped withaccuracy greater than 80% mapped well, wenote that AGC, BPD, BLF, and BMG are allmapped very well. Classes mapped moderatelywell (50%-80%) are AGP, LYL, URB, andSAB. Classes mapped poorly (< 50%) are BPR,BMX, MAT, and CAM. For example in themap, we noted that 56 BMX reference loca-tions were erroneously mapped as MAT. Wecan say that BMX was «confused» with MAT.
Discussion
About the modeling approach
A primary objective of this land cover map-ping project was to develop a transparent me-thodology that was repeatable and could beconsistently and independently applied by theHonduran scientists. The decision tree classi-f ier combined with the Google™-samplingprotocol met this objective well. We found thedecision tree classifier considerably more ti-me-efficient. The decision tree classifiers area more powerful tool for discriminating landcover classes. Our results were very consistedwith other investigations (Lativof ic et al.,2000; Friedl et al., 2002). They are also a veryinterpretable method and explicit method, be-cause their hierarchical decision rules andsplits can be revealed and explained.
About Google Earth™ sampling and validation
Throughout the course of the project we re-cognized the importance of providing a mea-sure of map quality to users of the land covermap. While limitations of time, money and lo-gistics prohibited a formal accuracy assessment(i.e. external validation with probability-basedsample design), we believe the methods we em-
ployed provide useful information to mapusers. Google Earth™ is a readily available to-ol that can be accessible to almost anyone inthe world (Sheppard and Cizek ,2009). The no-velty of this approach allows enormous savingin time and resources and training. We foundvery little references that confirm that this to-ol has been used to collect training samples ina land use classification map. We hope it canbe used in the future.
Examining the error matrices for the map wecan see that some land cover classes were map-ped very well, while others were mapped qui-te poorly. If we consider any class mapped withaccuracy greater than 80% mapped well, wenote that AGC, BPD, BLF, and BMG are allmapped very well. Classes mapped moderatelywell (50%-80%) are AGP, LYL, URB, andSAB. Classes mapped poorly (< 50%) are BPR,BMX, MAT, and CAM. The Google Earth™validation sampling scheme proved to be a verycost-effective procedure. No references werefound on the use of this approach for valida-tion a land map use.
About MODIS Selection
MODIS capability and the classif icationprocedure exceeded the project expected go-als. Initially, 8 classes were set up in such waythat can potentially be discriminated and map-ped. As the project progressed, five (5) moreclasses were added to the classification algo-rithm. MODIS imagery proved to be very af-fordable and successful by identifying and dis-criminating land use classes at the countrylevel. The accuracy assessment of the map wasvery high particularly for the some classes suchas broadleaf forest, mangrove forest and com-mercial agriculture.
We also recognize that MODIS data had so-me limitations, especially at discrimination so-me classes such as: Sparse Pine Forest (BPR),Mixed Forest (BMX), and Shrublands (MAT).This is basically a limitation of the sensor toidentify clearly these classes, which are tran-sitional classes, at a resolution of 500 meters.However, these classes are considered a tran-sition of secondary forest which is constantlygrowing to become primary forest or fully
106 S. Rivera et al. / Revista de Teledetección (2011) 35, 94-108

grown forest. In the case of Shrublands, theywill grow until they become adult trees. Simi-larly, in the mixed forest, trees will mature un-til either conifer or broadleaf species becomedominant. Therefore, we believe that the MO-DIS signal does not work very well at deter-ming different vegetation stages at this resolu-tion. Although it does very well differentiatingfully grown or developed vegetation classesand types. Other researcher found these MO-DIS limitation in the past (Muchoney et al.,2000; Latifovic et al., 2000). Similarly Eggen-McIntosh et al. (1994) found the same obsta-cles using AVHRR imagery.
Summary
MODIS capability and the classif icationprocedure exceeded the project expected go-als. Initially, 8 classes were set up in such waythat can potentially be discriminated and map-ped. As the project progressed, five (5) moreclasses were added to the classification algo-rithm. MODIS imagery proved to be very af-fordable and successful by identifying and dis-criminating land use classes at the countrylevel. The accuracy assessment of the map wasvery high particularly for the some classes suchas broadleaf forest, mangrove forest and com-mercial agriculture.
The Google™ sampling protocol showed ahigh confidence as was used to collect the sam-pling training data. With minor training ses-sions, analysts were able to operate and collectsamples. Despite the tedious work involved inthe sampling collection, very few mistakes we-re made when interpreting the images. Thisprotocol seems very promising as a cost-ef-fective method to collect training samples wi-thout needing costly field visits.
The objective of the accuracy assessment wasto quantitatively measure the accuracy of a MO-DIS derived land cover map product. The ac-curacy assessment described in this documentoutlines a methodology using freely availableimagery through Google Earth™ to interpretreference polygons that were subsequently usedto generate sample locations used in the accu-racy assessment. Thirteen land cover classeswere mapped and their agreement assessed with
an error matrix and Kappa statistics. Overallaccuracy was 70% for the generalized map pro-duct. This is comparable to other large lands-cape mapping efforts (Laba et al., 2002; Lotschet al., 2003). Looking into individual classesthrough the error matrix reveals that some clas-ses were mapped better than others. Fully grownvegetation classes such as AGC, BPD, BLF, andBMG are all mapped very well. Transitional ve-getation classes, such as BMX were very po-orly mapped and is highly confused with MAT,BPD, and BPR.
Acknowledgements
We gratefully acknowledge the financial sup-port of the World Bank and the Government ofHonduras, without which completion of thisproject could not have been possible. We alsowould like to thanks ESNACIFOR officials: As-drubal Calderon, Gabriel Barahona and DanielGaleano. And finally, we would like to recog-nize the vision to develop the land cover mapof Honduras: Mr. Atilio Ortiz who passed awayduring the course of this project. His leaders-hip and initiative made this work possible.
References
AFE-COHDEFOR. 2006. Evaluación Nacional Fo-restal de Honduras 2005-2006. Proyecto Apoyoal Inventario y Evaluación de Bosques y ArbolesTC-HON-3001 (A). Resultados del Inventario deBosques y Arboles 2005-2006. Honduras. Octu-bre 2006. 127 pp.
BREIMAN, L., FRIEDMAN, J. H., OLSHEN, R. A.& STONE, C. J.1984. Classification and Re-gression Trees. Belmont, CA: Wadsworth, Inc.
BROWN, J. C., JKASTENS, J., WARDLOW, B.,JEPSON, W., CAMARGO COUTINHO, A.,VENTURIERI, A., LOMAS, J. & K. PRICE, K.2007. Using MODIS to detect cropping fre-quency variation in mechanized agriculture inAmazonia. Anais XIII Simpósio Brasileiro deSensoriamento Remoto, Florianópolis, Brasil, 21-26 abril 2007, INPE, pp. 99-101.
COHDEFOR. 1996. Plan de acción forestal de lar-go plazo 1996-2015. PLANFOR. Borrador. Uni-dad de Planif icacion Institucional. AFE-COH-DEFOR. Tegucigalpa MDC, Honduras. 127 pp.
CONGALTON, R. G. & GREEN, K. 1999. Assessingthe Accuracy of Remotely Sensed Data: Principlesand Practices. Boca Raton: Lewis Publishers.
A MODIS generated land cover mapping of Honduras: a base-line layout... 107

DEFRIES, R. S., FOLEY, J. A. & ASNER, G. P.2004. Land-use choices: balancing human needsand ecosystem function. Front. Ecol. Environ-ment, 2(5): 249-257.
EGGEN-MCINTOSH, LANNON, S. K. B. & JA-COBS, D. M. 1994. Mapping distributions of cen-tral America and mexico. USDA-USFS. SouthernExperiment Station. New Orleans LA. USA. Pro-ceeding reprint.
FALZARANO, S., THOMAS, K. & LOWRY, J.2005. Using decision tree modeling in GAP analy-sis land cover mapping: Preliminary results fornortheastern Arizona. In: C. van Riper III and D.J.Mattson (Eds.). The Colorado Plateau II: Biophy-sical, Socioeconomic, and Cultural Research. TheUniversity of Arizona Press, Tucson, Arizona.
FAO. 2005. Forest Resources Assessment. FAO. Ro-me, Italy.
FOREST WATCH. 2010. http://www.globalfores-twatch.org/ consulted on Jun 21, 2010.
FRIEDL, M. A., MCIVER, D. K., HODGES, J. C.F., ZHANG, X. Y., MUCHONEY, D., STRAH-LER, A. H., WOODCOCK, C. E., GOPAL, S.,SCHNEIDER, A., COOPER, A., BACCINI, A.,GAO, F. & SCHAAF, C. 2002. Global land covermapping from MODIS: algorithms and early results. Remote Sensing of Environment, 83: 287-302.
GOPAL, S. & WOODCOCK, C, 1994. Theory andmethods for accuracy assessment of thematicmaps using fuzzy sets. Photogrammetric Engi-neering and Remote Sensing, 60(2): 181-188.
GUTIERREZ, L. A. 1992. Diagnostico de las cuen-cas hidrográficas de Honduras. Informe de Con-sultoria: Banco Interamericano de Desarrollo. Te-gucigalpa, Honduras. 124 pp.
HARGREAVES, G. 1992. Hydrometereologic da-ta for Honduran water resources development.USU, Dept. of Biological and Irrigation Engine-ering. Logan, Utah, 77 pp.
JENSEN, J. R. 2005. Introductory digital image pro-cessing: a remote sensing perspective. 3rd. Ed.Pearson-Prentice Hall. 526 pp.
LATIFOVIC, R., ZHU, Z., CIHLAR, J., GIRI, I. &OLTHOF, I. 2000. Land cover mapping of Northand Central America-Global Land Cover. Remo-te Sensing of Environment, 89(2004): 116-127.
LABA, M. L., GREGORY, S., BRADEN, J., OGUR-CAK, D., HILL, R., FEGRAUS, E., FIORC, J. &DEGLORIA, S. D. 2002. Conventional and fuzzyaccuracy assessment of the New York Gap Analy-sis Project land cover map. Remote Sensing ofEnvironment, 82: 443-456.
LOTSCH, A., TIAN, Y., FRIEDL, M. A. & MYNE-NI, R. B. 2003. Land cover mapping in supportof LAI and FPAR retrievals from EOS-MODISand MISR: classification methods and sensitivi-ties to errors. International Journal of RemoteSensing, 24(10): 1997-2016.
LOVELAND, T. R., REED, B. C., BROWN, J. F.,OHLEN, D. O., ZHU, Z., YANG, L. & MER-CHANT, J. W. 2000. Development of a globalland cover characteristics database and IGBPDISCover from 1 km AVHRR data, Internatio-nal Journal of Remote Sensing, 21: 6, 1303-1330.
LOWRY, J., RAMSEY, R. D., THOMAS, K.,SCHRUPP, D., SAJWAJ, R., KIRBY, J., WA-LLER, E., SCHRADER, S., FALZARANO, S.,LANGS, L., MANIS, G., WALLACE, C.,SCHULZ, K., COMER, P., POHS, K., REITH,W., VELASQUEZ, C., WOLK, B., KEPNER, W.,BOYKIN, K., O’BRIEN, L., BRADFORD, D.,THOMPSON, B. & PRIOR MAGEE, J. 2007.Mapping moderate-scale land-cover over very,large geographic areas within a collaborative fra-mework: A case study of the Southwest RegionalGap Analysis Project (SWReGAP). Remote Sen-sing of Environment, 108: 59-73.
MUCHONEY, D., BORAK, J., CHI, H., FRIEDL,M., GOPAL, S., HODGES, J., MORROW, N. &STRAHLER, A. 2000. Application of the MO-DIS global supervised classification model to ve-getation and land cover mapping of Central Ame-rica. International Journal of Remote Sensing,21(6): 1115 -1138.
ORDÓNEZ, T. M. M. & HOUSE, P. 2002. Mapa deEcosistemas Vegetales de Honduras: Manual deConsulta. Proyecto P.A.A.R., Tegucigalpa, Hon-duras.
POIANI, K. A., RICHTER, B. D., ANDERSON, M.G., & RICHTER, H. E. 2000. Biodiversity Con-servation at Multiple Scales: Functional Sites,Landscapes, and Networks. Bioscience, 50(2):133-146.
RICHARDS, M. 1996. Protected areas, people andincentives in the search for sustainable forest con-servation in Honduras. Environmental Conser-vation 23 (3): 207-217.
RULEQUEST RESEARCH. 2004. WWW URL:http://www.rulequest.com/index.html (accessedon June 21, 2010).
SHEPPARD, S. R. J. & CIZEK, P. 2009. The ethicsof Google Earth: Crossing thresholds from spa-tial data to landscape visualization. Journal of En-vironmental Management, 90(2009): 2102-2117.
STONICH, S. C. 1993. I am destroying the land.The political ecology of poverty and environ-mental destruction in Honduras. Westview Press,Boulder, Colorado, 204 pp.
UNESCO. 1973. International Classification andMapping of Vegetation. United Nations Educa-tional, Scientific and Cultural Organization, Pa-ris, France.
VERMOTE, E. F. 2008. MODIS Surface reflectan-ce user’s guide. MODIS land use reflectancescience computing facility. Prepared by E. F. Ver-mote, S. Y. Kotchenova and J. P. Ray. Web site:http://modis-sr.ltdri.org. 26 pp.
108 S. Rivera et al. / Revista de Teledetección (2011) 35, 94-108

La Unidad de Observación del Territorio(UOT) se constituyó en el IGN en 2009, unifi-cando en una estructura común los Serviciosde Teledetección, Fotogrametría, Levanta-mientos Topográficos, Ocupación del Suelo ySensores Aerotransportados y Ortoproyección,todo ello bajo la dirección de Antonio Aroza-rena. A nivel nacional, las variadas actividadesde esta unidad se han englobado en el «PlanNacional de Observación del Territorio»(PNOT), que se estructura en tres Planes Na-cionales:
— Plan Nacional de Ortofotografía Aérea(PNOA): tiene como objetivo la obtención co-ordinada de coberturas del territorio de Espa-ña con vuelos fotogramétricos cada 2/3 añossegún las zonas. A partir de ellos se obtiene unmodelo digital del terreno y ortofotos digita-les en color. El PNOA consta de los subpro-yectos PNOA 25/50 (coberturas con resolu-ciones de 25 cm ó 50 cm de todo el territorio),PNOA 10 (10 cm sólo en las zonas urbanas yla costa), PNOA Lidar (coberturas de todo elterritorio con vuelos Lidar de 0,5 ptos/m2 dedensidad) y PNOA Histórico (escaneado y or-toproyección de vuelos fotogramétricos histó-ricos sobre España).
— Plan Nacional de Teledetección (PNT):coordina la obtención y tratamiento de recu-brimientos compartidos de imágenes de saté-lite sobre nuestro territorio de alta, media y ba-ja resolución, de forma que se adquieran y seprocesen una sola vez y puedan ser utilizadaspor todos los organismos de las distintas ad-ministraciones españolas. La UOT realiza elprocesado de las coberturas de alta y media re-solución del PNT.
— Sistema de Información sobre Ocupa-ción del Suelo en España (SIOSE): creación y
mantenimiento de una base de datos de Ocu-pación del Suelo a escala 1:25.000, con un mo-delo de datos innovador orientado a objetos,actualizada periódicamente.
El responsable de la UOT es Antonio Aro-zarena Villar, su subdirector adjunto es Gui-llermo Villa, y los ingenieros que se encargande los distintos proyectos son:
— PNOA: Jorge Martínez Luceño, JavierHermosilla, Francisco Papí Julián González,José Antonio Montón, Diego Ruiz, Emilio San-tiago, Eduardo González, Magdalena Lequeri-ca, Javier Nistal, Rafael Fernández, Pedro Mu-ñoz, Juan Carlos Ojeda, Carlos García, LidiaMartínez.
— PNT: Juan José Peces, Emilio Dome-nech, José Antonio Tejeiro, Nuria Plaza.
— SIOSE y Corine Land Cover: Nuria Val-cárcel, Mª Ángeles Benito, Julián Delgado, MªElena Caballero, Xalo Fernández .
La unidad cuenta asimismo con un excelen-te equipo de operadores muy experimentados.
El PNOT es un proyecto cooperativo, coor-dinado y cofinanciado entre seis Ministerios(Fomento, Medio Ambiente y Medio Rural yMarino, Defensa, Economía y Hacienda, Inte-rior, Ciencia e Innovación) y todas las Comu-nidades Autónomas. Por este motivo, la ges-tión del mismo requiere una amplia variedadde tareas, tanto técnicas como organizativas:estudio y redacción de Especificaciones Téc-nicas, cronogramas, presupuestos, f inancia-ción, producción, control de calidad, disemi-nación, generación de productos derivados yservicios basados en los datos producidos, ges-tión de convenios y contratos, contactos per-manentes con todos los organismos partici-pantes, organización de reuniones de gruposde trabajo, asambleas y jornadas técnicas; ade-
¿Quién es quién?
La Unidad de Observación del Territorio del InstitutoGeográfico Nacional
Asociación Española de Teledetección Revista de Teledetección 35, 109-111ISSN: 1988-8740

más de una variada actividad de I+D+i, reali-zada en muchos casos en colaboración con uni-versidades, organismos públicos, empresa, fun-daciones, etc. Todos los datos generados en elPNOT se ponen a disposición de las adminis-traciones españolas y el resto de agentes so-ciales.
La UOT colabora en la prestación de infor-mación y servicios de análisis y geoprocesa-miento espacial al grupo de trabajo intermi-nisterial para la elaboración del Inventario deGases de Efecto Invernadero del Conveniomarco de las Naciones Unidas para el CambioClimático (UNFCCC), dentro de la categoríaLand Use. También colabora en el tratamientoy análisis de datos de ocupación del suelo pa-ra la elaboración del Perfil Ambiental de Es-paña y proporcionando datos y apoyo técnicoa otros organismos españoles como el Obser-vatorio de la Sostenibilidad de España, uni-versidades, etc. Por otro lado colabora conotros organismos aportando datos para siste-mas de información tales como el SIU (Siste-ma de Información Urbana), SIA (Sistema deInformación del Agua), SNCZI (Sistema Na-cional de Cartografía de Zonas Inundables),MFE (Mapa Forestal de España), etc. La UOTes responsable también de Iberpix, visor deimágenes y mapas del IGN.
A nivel internacional, el IGN a través de laUOT, es National Reference Center on LandCover, Land Use and Spatial Planning de la red
EIONET ante la Agencia Europea de MedioAmbiente, por delegación del Ministerio deMedio Ambiente. Como tal, coordina la parti-cipación española en el servicio «Pan-EU LandCover Services» de GMES, que incluye:
— CORINE Land Cover: realización y ac-tualización, en cooperación con las Comuni-dades Autónomas y Ministerios, de la base dedatos europea de coberturas y usos del suelo aescala 1:100.000 coordinada por la AgenciaEuropea de Medio Ambiente; en sus edicionesCLC90, CLC2000, CLC2006, CLC2012.
— High Resolution Layers, validación delas coberturas raster que conforman el com-ponente de alta resolución de dichos servicios.
La actualización de ambos conjuntos de da-tos se realiza, en coordinación con las CC.AA.,de modo que a partir de los datos nacionalesSIOSE se elaboren los conjuntos de datos eu-ropeos. Por tanto, se puede definir el PNOT co-mo la aportación española a los Servicios Landde GMES.
Además, la UOT participa en los proyectosFP7 HLANDATA y HELM, y aporta expertosa los siguientes «Thematic Working Group» deINSPIRE: Orthoimagery (Juan José Peces),Elevation (Eduardo González); Land Cover(Nuria Valcárcel) y Land Use (Julián Delgado)que tienen como propósito la elaboración delas «Data Specifications» de Inspire en los te-mas de los Anexos I-II y III. La UOT tambiénparticipa en el Mediterranean Action Plan del
110 Quién es quién / Revista de Teledetección (2011) 35, 109-111
Parte del equipo de la Unidad de Observación del Territorio del IGN: De izquierda a derecha: De pie: Javier Nistal,Jorge Martínez Luceño, Nuria Valcárcel, Francisco Papí, Emilio Domenech, Juan Carlos Ojeda, Xalo Fernández,Pedro Muñoz, José Antonio Tejeiro. Sentados: Guillermo Villa, Antonio Arozarena, Magdalena Lequerica, Mª Án-geles Benito, Eduardo González Cristóbal, Mª Elena Caballero, Julián Delgado, Carlos García González, JuanjoPeces, Nuria Plaza, Javier Hermosilla.

Programa Medioambiental de las NacionesUnidas. También cabe desatacar que AntonioArozarena ha sido entre los años 2009 y 2010presidente de EuroSDR, organización en la quela UOT mantiene una actividad constante, encolaboración con varios organismos y univer-sidades europeos.
Como resumen, podríamos decir que el ma-yor valor que aporta la UOT es su labor de co-
ordinación de estos proyectos a nivel nacionaly europeo, así como su encaje en el resto de te-mas de información geográfica y geoespacialcoordinados por el IGN: IDEE (Infraestructu-ra de Datos Espaciales de España), SistemaCartográfico Nacional, Red Geodésica Nacio-nal y EUREF, etc.; y su relación con organiza-ciones internacionales tales como: ISO/TC211,OGC, CEN/TC287 y otras.
La Unidad de Observación del Territorio del Instituto Geográfico Nacional 111

El uso de datos de Observación de la Tierraobtenidos mediante instrumentos embarcadosen satélites se ha ido generalizando en un nú-mero creciente de disciplinas científicas, co-merciales e industriales. Por ejemplo, se utili-zan imágenes de satélite en la estimación de latemperatura de la superficie terrestre o de mar,la estimación del contenido total de vapor deagua, en estudios de producción primaria delocéano, calidad del agua, control de parámetrosambientales, desertización, incendios foresta-les, control de mareas negras, aplicaciones car-tográficas y por supuesto meteorológicas. Losdatos de satélite son la única fuente de infor-mación disponible, sobre todo en situacionesde emergencia. Por esta razón es indispensablecontar con sistemas de recepción de datos desatélite que garanticen la continuidad en la ob-tención de datos de satélite.
La Estación de Recepción de Datos de Sa-télites del LPI (Laboratorio de Procesado deImágenes) de la Universidad de Valencia per-mitirá asegurar la obtención continua de imá-genes de los satélites MSG2, NOAA, Feng-Yun1 y TERRA/AQUA. La estación semantiene operativa desde junio del 2007.
La presente tesis doctoral aborda el tema deestimación de parámetros térmicos mediante da-tos de alta frecuencia temporal usando imágenesdel sensor SEVIRI del satélite Meteosat Segun-da Generación MSG2 recibidas en la estación derecepción de datos de satélites del LPI.
El parámetro más importante desarrolladoen esta tesis es la temperatura de superficie te-rrestre TST, de hecho se ha elaborado un algo-ritmo de la estimación de la TST usando imá-genes del infrarrojo térmico. La necesidad delconocimiento de la temperatura de la superfi-cie terrestre para estudios medioambientales ypara la administración de los recursos de la Tie-rra ha convertido la estimación de la tempera-tura desde satélite en uno de los temas de in-vestigación más importantes en el campo de laTeledetección en el infrarrojo térmico durantelas últimas dos décadas. Excepto para los com-ponentes de la irradiancia solar, los flujos queintervienen en el balance de energía en la in-terface superficie/atmósfera únicamente pue-den parametrizarse a partir del uso de la tem-peratura de la superficie terrestre. Por lo tanto,el conocimiento de la temperatura resulta degran interés para muchas aplicaciones, comola estimación de los balances de agua y ener-gía, evapotranspiración, inercia térmica, mo-delos de circulación general, efecto inverna-dero, estudios de desertificación, etc.
En esta tesis se estudia en profundidad el te-ma de la estimación de la temperatura TST apartir de los datos proporcionados por el sen-sor SEVIRI, sobre todo en la región espectraldel infrarrojo térmico comprendida entre los 8y los 13 µm. El algoritmo desarrollado en eltrabajo se aplica a imágenes SEVIRI para suposterior validación.
Tesis doctoral
Estimación de parámetros térmicos mediante datos de alta frecuencia temporal:
aplicación al sensor MSG2/SEVIRI
Autor: M. AtitarDirectores: J. A. Sobrio y N. FaissouniLugar: Laboratorio de Procesado de Imágenes. Universitat de ValènciaFecha: Abril de 2011
Asociación Española de Teledetección Revista de Teledetección 35, 112-114ISSN: 1988-8740

Una vez presentada la teoría y desarrolladoel algoritmo necesario para la estimación de laTST, llega el momento de aplicarlo a imágenesde satélite y validarlo. Para ello, previamenteevaluamos su precisión frente a datos medidasin situ. El proceso de validación consiste enuna comparación entre los resultados extraídosde las imágenes de satélite una vez aplicadoslos algoritmos y los resultados obtenidos a par-tir de medidas de campo u otros productos desatélites. De esta forma se considera que lasmedidas de campo o los resultados extraídos apartir de ellas son los más fiables, lo que ha-bitualmente se llama verdad terreno, por lo queresulta de vital importancia disponer de unasmedidas de campo de calidad. En esta tesis, seha validado el algoritmo propuesto resultadoscon datos in situ de la zona de Le Bray, Bur-deos, y además, con los productos MODIS yLANDSAF.los resultados
Una de las aplicaciones del algoritmo de laTST es el ajuste diario de temperaturas medianteun modelo que pueda reproducir la TST diurnay modelar el ciclo diario de temperatura, de es-ta manera, se han reducido las 96 tomas diariasdel MSG2 a 5 parámetros. La reducción de pa-rámetros con el CDT es ventajosa para los es-tudios climatológicos que requieren el trata-miento de series históricas. De lo anteriormenteexpuesto, se concluye que las diferencias entrelas TSTs y el ajuste, por ejemplo, debidas a lapresencia de algunas nubes, pueden considerarsemínimas si el ajuste continúa rápidamente conlas TSTs similares a los que habría llegado sinnubes anteriormente. Cualitativamente, esto sepuede observar, pero a fin de establecer una re-lación cuantitativa entre la cubierta de la nube(tipo y duración) y su efecto sobre la CDT, unanálisis estadístico tiene que ser realizado. Lastemperaturas ajustadas con el modelo para la co-bertura de nubes tienen que ser tratadas con cui-dado ya que no reflejan la verdadera tempera-tura de la superf icie bajo las nubes. Sinembargo, la modelización permite la determi-nación de las temperaturas y, especialmente, laamplitud, que se han observado en el caso decielo sin nubes.
Otros parámetros térmicos estimados en es-te trabajo encontramos la emesividad de la su-perficie terrestre, el vapor de agua y la inerciatérmica.
A modo de resumen, presentamos a conti-nuación las conclusiones más interesantes quepuedan extraerse del trabajo expuesto en la pre-sente memoria:
1. Se ha presentado la plataforma de re-cepción de datos MSG2, así como todas las eta-pas de adquisición, procesamiento y archivo delos datos
2. Se ha desarrollado un algoritmo opera-tivo de tipo Split –Window para la estimaciónde la temperatura de la superficie terrestre apartir de los datos MSG2/SEVIRI, con un errorde 1.3K, bajo ángulos de visión inferiores a 50grados.
3. Se ha llevado a cabo una evaluación delalgoritmo propuesto usando para ello un con-junto de medidas realizadas in situ en una re-gión del sur de Francia (Le Bray-Burdeos) enel marco del proyecto CEFLES2, y se ha eva-luado también con datos de satélite, MODIS yLANDSAF. Los resultados de esta evaluacióncorroboran el error obtenido por las simula-ciones.
4. Se ha presentado un modelo de ajus-te del ciclo diario de temperaturas. El mo-delo funciona bien en zonas homogéneas ysin nubes.
5. Como aplicación del algoritmo pro-puesto, se ha calculado la imagen de inerciatérmica usando un algoritmo operativo de Xuey Cracknell (1995) y el algoritmo propuesto.
6. Se ha mostrado como otra de las posi-bilidades de la aplicación de inercia térmicala predicción de la temperatura mínima de lasuperficie de un día usando los valores de iner-cia térmica, siempre y cuando las condicionesde la superficie (humedad) y la situación at-mosférica (sin nubes y en calma) no seas muydiferentes en ambos días, esta predicción diouna diferencia de 2K en zonas homogéneas co-mo el desierto. Este resultado preliminarmuestra la potencia del MSG2 para la predic-ción de la TST, lo que sin duda es necesario enaplicaciones como la predicción del riesgo deheladas por radiación, en la actualidad esta-mos completando el estudio con nuevas imá-genes.
Para finalizar, debemos reseñar que todo eltrabajo aquí realizado constituye una soluciónal problema de la determinación de la TST y lainercia térmica. Así se ha pretendido mostrar
Estimación de parámetros térmicos mediante datos de alta frecuencia temporal 113

la potencia del modelo propuesto, si bien escierto, que aún queda un trabajo importante pa-ra llevar a cabo. Entre ellas, la de realizar nue-vas experiencias de validación que tengan encuenta zonas heterogéneas y rugosas, y mejo-
rar la estimación de los parámetros del CDT.Además, la posibilidad de la predicción de latemperatura de la superficie, puede ser útil pa-ra aplicaciones como la predicción del riesgode las heladas por radiación.
114 M. Atitar / Revista de Teledetección (2011) 35, 112-114

R e v i s t a d eTeledetecciónR E V I S TA D E L A A S O C I A C I Ó N E S P A Ñ O L A D E T E L E D E T E C C I Ó N
Nº 35 JUNIO 2011
ARTÍCULOS CIENTÍFICOS
Comparación de la temperatura de la superficie del mar calculada a partir de datos AVHRR y MODIS.C. Robles-González, N. López Gordillo, A. Fernández-Renau, A. García-Sevilla y J. Santana-Suárez
Utilización del sensor de imagen Airborne Hyperspectral Scanner (AHS) para la cartografía de bosquesde Sargassum muticum en la Ría de Vigo (Galicia).G. Casal, J. A. Domínguez, N. Sánchez-Carnero y J. Freire
Evaluación de distintos métodos de medida de la irradiancia atmosférica descendente en el infrarrojo tér-mico.V. García Santos,E. Valor, M. Mira, C. Coll, J. M. Galve y V. Caselles
Efecto de la atmósfera en la resolución óptica de la Z/I Digital Mapping Camera.L. Martínez, M. E. Soler, F. Pérez y R. Arbiol
Delimitación de zonas forestales afectadas por vendaval mediante fotogrametría.R. Riera
Airborne soil moisture determination at regional level: a data fusion mission approach for Catalan territory.F. Martín, J. Corbera, J. F. Marchan, A. Camps y A. Aguasca
Aplicación de técnicas de teledetección y GIS sobre imágenes quickbird para identificar y mapear indi-viduos de peral silvestre (Pyrus bourgeana) en bosque esclerófilo mediterráneo.S. Arenas, J. F. Haeger y D. Jordano
Estimación de la reflectividad superficial mediante datos del sensor aéreo AHS y comparación con elproducto MODIS en la campaña CEFLES2.J. A. Sobrino y B. French
CASOS PRÁCTICOS
Aplicación de técnicas de teledetección para la gestión y control del pago de ayudas agrícolas en España.J. M. Vidal Serrano
A MODIS generated land cover mapping of Honduras: a base-line layout to create a national monitoring center.S. Rivera, J. L. Lowry, A. J. Hernández, R. Douglas Ramsey, R. Lezama y M. Velázquez
¿QUIÉN ES QUIÉN?: La Unidad de Observación del Territorio del Instituto Geográfico Nacional
TESIS DOCTORAL: Estimación de parámetros térmicos mediante datos de alta frecuencia temporal: aplicación al sensor MSG2/SEVIRI