Moisés Villena Muñoz 5 - Aula Abierta de Matemáticas · Moisés Villena Muñoz Cap. 5 Sistemas...
29
Moisés Villena Muñoz Cap. 5 Sistemas de Ecuaciones Diferenciales y en Diferencias. 1 5 5.1 INTRODUCCIÓN. 5.2 ECUACIONES DIFERENCIALES SIMULTÁNEAS. 5.3 ECUACIONES EN DIFERENCIAS SIMULTÁNEAS. 5.4 ANÁLISIS CUALITATIVO PARA LA ESTABILIDAD DINÁMICA. DIAGRAMA DE FASE DE DOS VARIABLES. 5.5 LINEALIZACIÓN DE SISTEMAS DE ECUACIONES DIFERENCIALES NO LINEALES Objetivos: Se pretende que el estudiante: • Encuentre soluciones de Sistemas de Ecuaciones Diferenciales y Sistemas de Ecuaciones en Diferencias. • Determine Estabilidad dinámica cualitativamente para sistemas de Ecuaciones Diferenciales empleando un diagrama de fase de dos variables. • Linealice Sistemas de Ecuaciones diferenciales no lineales.
Transcript of Moisés Villena Muñoz 5 - Aula Abierta de Matemáticas · Moisés Villena Muñoz Cap. 5 Sistemas...

Moisés Villena Muñoz Cap. 5 Sistemas de Ecuaciones Diferenciales y en Diferencias.
1
5.1
5
5.1 INTRODUCCIÓN. 5.2 ECUACIONES DIFERENCIALES SIMULTÁNEAS. 5.3 ECUACIONES EN DIFERENCIAS
SIMULTÁNEAS. 5.4 ANÁLISIS CUALITATIVO PARA LA
ESTABILIDAD DINÁMICA. DIAGRAMA DE FASE DE DOS VARIABLES.
5.5 LINEALIZACIÓN DE SISTEMAS DE ECUACIONES DIFERENCIALES NO LINEALES
Objetivos: Se pretende que el estudiante:
• Encuentre soluciones de Sistemas de Ecuaciones Diferenciales y Sistemas de Ecuaciones en Diferencias.
• Determine Estabilidad dinámica cualitativamente para sistemas de Ecuaciones Diferenciales empleando un diagrama de fase de dos variables.
• Linealice Sistemas de Ecuaciones diferenciales no lineales.

Moisés Villena Muñoz Cap. 5 Sistemas de Ecuaciones Diferenciales y en Diferencias.
2
5.1 INTRODUCCION Hasta ahora se han dado las técnicas para encontrar soluciones de ecuaciones diferenciales y en diferencias, hallar la trayectoria )(ty o ty era el problema. Supóngase ahora que existe la situación de que en un mismo problema existen dos incógnitas, dos trayectorias )(tx y )(ty en tiempo continuo o tx y ty en tiempo discreto, a determinar. Suponga además, que se tiene dos ecuaciones diferenciales o dos ecuaciones en diferencias para resolver el problema. Los procedimientos para su tratamiento se indicarán a continuación.
5.2 ECUACIONES DIFERENCIALES SIMULTÁNEAS Suponga que se tiene dos ecuaciones diferenciales que involucra dos
variables dependientes )(tx y )(ty :
⎩⎨⎧
=+++=+++
)()()()´()´()()()()´()´(
222212221
112111211
tgtybtxbtyatxatgtybtxbtyatxa
Su representación matricial sería:
⎥⎦
⎤⎢⎣
⎡=⎥
⎦
⎤⎢⎣
⎡⎥⎦
⎤⎢⎣
⎡+⎥
⎦
⎤⎢⎣
⎡⎥⎦
⎤⎢⎣
⎡)()(
)()(
)´()´(
2
1
2221
1211
2221
1211
tgtg
tytx
bbbb
tytx
aaaa
Si llamamos:
⎥⎦
⎤⎢⎣
⎡=
2221
1211
aaaa
A , ⎥⎦
⎤⎢⎣
⎡=
)´()´(
)´(tytx
tY , ⎥⎦
⎤⎢⎣
⎡=
2221
1211
bbbb
B , ⎥⎦
⎤⎢⎣
⎡=
)()(
)(tytx
tY y ⎥⎦
⎤⎢⎣
⎡=
)()(
)(2
1
tgtg
tG
Tenemos )()()´( tGtBYtAY =+ un sistema lineal cuya solución general es la suma de una solución complementaria y una solución particular. Es decir:
⎥⎦
⎤⎢⎣
⎡++
=⎥⎦
⎤⎢⎣
⎡=+=
)()()()(
)()(
)()()(tytytxtx
tytx
tYtYtYPC
PCPC
Primero, la solución complementaria )(tYC satisface el sistema
homogéneo 0)()´( =+ tBYtAY CC y es de la forma ⎥⎦
⎤⎢⎣
⎡=⎥
⎦
⎤⎢⎣
⎡=
rt
rt
C
CC ek
ektytx
tY´)(
)()(
1
1
Entonces ⎥⎦
⎤⎢⎣
⎡=
rt
rt
C rekrek
tY´
)´(1
1
Ahora reemplazando y simplificando tenemos:

Moisés Villena Muñoz Cap. 5 Sistemas de Ecuaciones Diferenciales y en Diferencias.
3
[ ]
[ ] ⎥⎦
⎤⎢⎣
⎡=⎥
⎦
⎤⎢⎣
⎡+
⎥⎦
⎤⎢⎣
⎡=⎥
⎦
⎤⎢⎣
⎡+
⎥⎦
⎤⎢⎣
⎡=⎥
⎦
⎤⎢⎣
⎡+⎥
⎦
⎤⎢⎣
⎡
⎥⎦
⎤⎢⎣
⎡=⎥
⎦
⎤⎢⎣
⎡+⎥
⎦
⎤⎢⎣
⎡
=+
00
´
00
´
00
´´
00
´´
0)()´(
1
1
1
1
1
1
1
1
1
1
1
1
rt
rt
rt
rt
rt
rt
rt
rt
rt
rt
rt
CC
ekk
BAr
ekek
BAr
ekek
Bekek
Ar
ekek
Brekrek
A
tBYtAY
La última expresión es un sistema homogéneo que debe tener soluciones no triviales. Para lo cual 0=+ BAr . ¿Por qué?.
De la ecuación auxiliar 0=+ BAr se obtiene el o los valores de " r ", que igual que anteriormente, pueden darse tres casos.
CASO I. 1r y 2r reales y diferentes, en tal caso:
⎥⎦
⎤⎢⎣
⎡
+
+=⎥
⎦
⎤⎢⎣
⎡=
trtr
trtr
C
CC ekek
ekektytx
tY21
21
´´)()(
)(21
21
CASO II . rrr == 21 reales e iguales, en tal caso:
⎥⎦
⎤⎢⎣
⎡
+
+=⎥
⎦
⎤⎢⎣
⎡=
rtrt
rtrt
C
CC tekek
tekektytx
tY´´)(
)()(
21
21
CASO III . irr μ±λ=21 , complejas conjugadas, en tal caso:
[ ][ ]⎥⎦
⎤⎢⎣
⎡
μ+μ
μ+μ=⎥
⎦
⎤⎢⎣
⎡=
λ
λ
tktketktke
tytx
tYt
t
C
CC ´cossen´
cossen)()(
)(21
21
Luego habrá que determinar la relación entre 1k y ´1k y la relación entre 2k
y ´2k resolviendo los sistemas simultáneo [ ] ⎥⎦
⎤⎢⎣
⎡+
´1
11 k
kBAr y [ ] ⎥
⎦
⎤⎢⎣
⎡+
´2
22 k
kBAr .
Segundo, la Solución Particular )(tYP satisface el sistema no homogéneo )()()´( tGtBYtAY PP =+ y depende de )(tG .

Moisés Villena Muñoz Cap. 5 Sistemas de Ecuaciones Diferenciales y en Diferencias.
4
Supongamos que ⎥⎦
⎤⎢⎣
⎡=
2
1)(cc
tG ; es decir, los términos independientes son
constantes, entonces ⎥⎦
⎤⎢⎣
⎡=
2
1)(AA
tYP y ⎥⎦
⎤⎢⎣
⎡=
00
)´(tYP .
Reemplazando y simplificando tenemos:
⎥⎦
⎤⎢⎣
⎡=⎥
⎦
⎤⎢⎣
⎡+⎥
⎦
⎤⎢⎣
⎡
=+
2
1
2
1
00
)()()´(
cc
AA
BA
tGtBYtAY PP
Las constantes 1A y 2A se las determinan resolviendo el sistema simultáneo:
⎥⎦
⎤⎢⎣
⎡=⎥
⎦
⎤⎢⎣
⎡
2
1
2
1
cc
AA
B
Ejemplo
Hallar )(tx y )(ty para el sistema⎩⎨⎧
=++=+++
61)(4)()´(77)(5)(2)´(2)´(
tytxtytytxtytx
SOLUCIÓN: Primero, determinamos la solución complementaria )(tYC .
En este caso ⎥⎦
⎤⎢⎣
⎡=
1021
A , ⎥⎦
⎤⎢⎣
⎡=
4152
B y ⎥⎦
⎤⎢⎣
⎡=
6177
C
Entonces la ecuación auxiliar sería:
0
4152
1021
det
0
=⎥⎥⎦
⎤
⎢⎢⎣
⎡⎟⎟⎠
⎞⎜⎜⎝
⎛+⎟⎟
⎠
⎞⎜⎜⎝
⎛
=+
r
BAr
Resolviendo se obtiene:
( )( ) ( )
( )( )13013
034
05286
05242
041522
04152
1021
det
2
2
−=∨−==++=++
=−−++
=+−++
=+++
=⎥⎥⎦
⎤
⎢⎢⎣
⎡⎟⎟⎠
⎞⎜⎜⎝
⎛+⎟⎟
⎠
⎞⎜⎜⎝
⎛
rrrrrr
rrr
rrrrrr
r

Moisés Villena Muñoz Cap. 5 Sistemas de Ecuaciones Diferenciales y en Diferencias.
5
Entonces ⎥⎥⎦
⎤
⎢⎢⎣
⎡
+
+=⎥
⎦
⎤⎢⎣
⎡=
−−
−−
tt
tt
C
CC
ekek
ekektytx
tY´´)(
)()(
23
1
23
1
Ahora debemos establecer la relación entre las constantes.
En la ecuación [ ] ⎥⎦
⎤⎢⎣
⎡=⎥
⎦
⎤⎢⎣
⎡+
00
´1
11 k
kBAr reemplazando A , B y 31 −=r resulta:
( )
⎥⎦
⎤⎢⎣
⎡=⎥
⎦
⎤⎢⎣
⎡⎥⎦
⎤⎢⎣
⎡ −−
⎥⎦
⎤⎢⎣
⎡=⎥
⎦
⎤⎢⎣
⎡⎥⎦
⎤⎢⎣
⎡+−+−+−
⎥⎦
⎤⎢⎣
⎡=⎥
⎦
⎤⎢⎣
⎡⎥⎦
⎤⎢⎣
⎡+++
−
00
´1111
001
´4)3(153223
00
´41522
1
1
31
1
1
1
kk
ekk
ekk
rrr
t
rt
Se origina el sistema ⎩⎨⎧
=+=−−
0´0´
11
11
kkkk
que da como solución 11´ kk −=
Por otro lado si 12 −=r tenemos en [ ] ⎥⎦
⎤⎢⎣
⎡+
´2
22 k
kBAr
( )
⎥⎦
⎤⎢⎣
⎡=⎥
⎦
⎤⎢⎣
⎡⎥⎦
⎤⎢⎣
⎡
⎥⎦
⎤⎢⎣
⎡=⎥
⎦
⎤⎢⎣
⎡⎥⎦
⎤⎢⎣
⎡+−+−+−
00
´3131
00
´4)1(151221
2
2
2
2
kk
kk
El sistema ahora sería ⎩⎨⎧
=+=+
0´30´3
22
22
kkkk
con solución 231
2´ kk −=
Por tanto:
⎥⎥⎦
⎤
⎢⎢⎣
⎡
−−
+=⎥
⎦
⎤⎢⎣
⎡=
−−
−−
tt
tt
C
CC
ekek
ekektytx
tY23
131
23
1
)()(
)(
Segundo, la Solución Particular ⎥⎦
⎤⎢⎣
⎡=
2
1)(AA
tYP se la obtiene resolviendo el sistema
⎩⎨⎧
=+=+
⎥⎦
⎤⎢⎣
⎡=⎥
⎦
⎤⎢⎣
⎡⎥⎦
⎤⎢⎣
⎡
=⎥⎦
⎤⎢⎣
⎡
6147752
6177
4152
21
21
2
1
2
1
AAAA
AA
CAA
B
tenemos 11 =A y 152 =A . Entonces ⎥⎦
⎤⎢⎣
⎡=
151
)(tYP

Moisés Villena Muñoz Cap. 5 Sistemas de Ecuaciones Diferenciales y en Diferencias.
6
Finalmente: ⎥⎥⎦
⎤
⎢⎢⎣
⎡
+−−
++=⎥
⎦
⎤⎢⎣
⎡=+=
−−
−−
15
1)()(
)()()(23
131
23
1tt
tt
PCekek
ekektytx
tYtYtY
Ejercicios Propuestos 5.1 Resolver los siguientes sistemas de ecuaciones diferenciales:
1. ⎩⎨⎧
=+++−=−−36)(6)()`(60)(12)()`(
tytxtytytxtx
; 4)0(13)0( =∧= yx
2. ⎩⎨⎧
=+−+=+−
9)(2)()`(10)(3)(2)`(
tytxtytytxtx
; 5)0(8)0( =∧= yx
3. ⎩⎨⎧
++−=+−=
42`32`
yxyyxx
5.3 ECUACIONES EN DIFERENCIAS SIMULTÁNEAS Suponga que se tiene dos ecuaciones en diferencias que involucra dos
variables dependientes tx y ty
⎩⎨⎧
=+++=+++
++
++
ttttt
ttttt
gybxbyaxagybxbyaxa
22221122121
11211112111
Su representación matricial sería:
⎥⎦
⎤⎢⎣
⎡=⎥
⎦
⎤⎢⎣
⎡⎥⎦
⎤⎢⎣
⎡+⎥
⎦
⎤⎢⎣
⎡⎥⎦
⎤⎢⎣
⎡
+
+
t
t
t
t
t
t
gg
yx
bbbb
yx
aaaa
2
1
2221
1211
1
1
2221
1211
Si llamamos:
⎥⎦
⎤⎢⎣
⎡=
2221
1211
aaaa
A , ⎥⎦
⎤⎢⎣
⎡=
+
++
1
11
t
tt y
xY , ⎥
⎦
⎤⎢⎣
⎡=
2221
1211
bbbb
B , ⎥⎦
⎤⎢⎣
⎡=
t
tt y
xY y ⎥
⎦
⎤⎢⎣
⎡=
t
tt g
gG
2
1
Tenemos ttt GBYAY =++1 un sistema lineal cuya solución general es la suma de una solución complementaria y una solución particular. Es decir:
⎥⎦
⎤⎢⎣
⎡
+
+=⎥
⎦
⎤⎢⎣
⎡=+=
Pt
Ct
Pt
Ct
t
tPt
Ctt yy
xxyx
YYY
Primero, la solución complementaria CtY satisface el sistema homogéneo
01 =++C
tC
t BYAY y es de la forma ( )( ) ⎥
⎥⎦
⎤
⎢⎢⎣
⎡=⎥
⎦
⎤⎢⎣
⎡=
t
t
Ct
CtC
trk
rkyx
Y´1
1

Moisés Villena Muñoz Cap. 5 Sistemas de Ecuaciones Diferenciales y en Diferencias.
7
Entonces ( )( ) ⎥
⎥⎦
⎤
⎢⎢⎣
⎡=
+
+
+ 11
11
1´ t
t
Ct
rk
rkY
Ahora reemplazando y simplificando tenemos:
( )( )
( )( )
( )( )
( )( )
[ ] ( )( )
[ ] ( ) ⎥⎦
⎤⎢⎣
⎡=⎥
⎦
⎤⎢⎣
⎡+
⎥⎦
⎤⎢⎣
⎡=
⎥⎥⎦
⎤
⎢⎢⎣
⎡+
⎥⎦
⎤⎢⎣
⎡=
⎥⎥⎦
⎤
⎢⎢⎣
⎡+
⎥⎥⎦
⎤
⎢⎢⎣
⎡
⎥⎦
⎤⎢⎣
⎡=
⎥⎥⎦
⎤
⎢⎢⎣
⎡+
⎥⎥⎦
⎤
⎢⎢⎣
⎡
=+
+
+
+
00
´
00
´
00
´´
00
´´
0
1
1
1
1
1
1
1
1
1
11
1
11
1
t
t
t
t
t
t
t
t
t
t
t
Ct
Ct
rkk
BAr
rk
rkBAr
rk
rkB
rk
rkAr
rk
rkB
rk
rkA
BYAY
La última expresión es un sistema homogéneo que debe tener soluciones no triviales. De manera análoga a los sistemas de ecuaciones diferenciales tenemos ahora la ecuación auxiliar 0=+ BAr de donde se obtiene el o los valores de " r ". De aquí también pueden resultar 3 casos:
CASO I. 1r y 2r reales y diferentes, en tal caso:
( ) ( )( ) ( ) ⎥
⎥⎦
⎤
⎢⎢⎣
⎡
+
+=⎥
⎦
⎤⎢⎣
⎡=
tt
tt
Ct
CtC
trkrk
rkrkyx
Y2211
2211
´´
CASO II . rrr == 21 reales e iguales, en tal caso:
( ) ( )( ) ( ) ⎥
⎥⎦
⎤
⎢⎢⎣
⎡
+
+=⎥
⎦
⎤⎢⎣
⎡=
tt
tt
Ct
CtC
trtkrk
rtkrkyx
Y´´ 21
21
CASO III . irr μ±λ=21 , complejas conjugadas, en tal caso:
( ) [ ]( ) [ ]⎥
⎥⎦
⎤
⎢⎢⎣
⎡
θ+θ
θ+θ=⎥
⎦
⎤⎢⎣
⎡=
tktkR
tktkRyx
Yt
t
Ct
CtC
t´cossen´
cossen
21
21
Donde 22 μ+λ=R y μλ=θ arctg

Moisés Villena Muñoz Cap. 5 Sistemas de Ecuaciones Diferenciales y en Diferencias.
8
Luego habrá que determinar la relación entre 1k y ´1k y la relación entre 2k
y ´2k resolviendo los sistemas simultáneo [ ] ⎥⎦
⎤⎢⎣
⎡+
´1
11 k
kBAr y [ ] ⎥
⎦
⎤⎢⎣
⎡+
´2
22 k
kBAr .
Segundo, la Solución Particular PtY satisface el sistema no homogéneo
tP
tP
t GBYAY =++1 y depende de tG .
Supongamos que ⎥⎦
⎤⎢⎣
⎡=
2
1
cc
Gt entonces ⎥⎦
⎤⎢⎣
⎡=
2
1
AA
Y Pt y ⎥
⎦
⎤⎢⎣
⎡=+
2
11 A
AY P
t .
Reemplazando y simplificando tenemos:
⎥⎦
⎤⎢⎣
⎡=⎥
⎦
⎤⎢⎣
⎡+⎥
⎦
⎤⎢⎣
⎡
=++
2
1
2
1
2
1
1
cc
AA
BAA
A
GBYAY tP
tP
t
Las constantes 1A y 2A se las determinan resolviendo el sistema simultáneo:
( ) ⎥⎦
⎤⎢⎣
⎡=⎥
⎦
⎤⎢⎣
⎡+
2
1
2
1
cc
AA
BA
Ejemplo
Hallar tx y ty para el sistema⎩⎨⎧
=−+=++
+
+
922242
1
1
ttt
ttt
yxyyxx
; 910 00 =∧= yx
SOLUCIÓN:
Primero, determinamos la solución complementaria CtY .
En este caso ⎥⎦
⎤⎢⎣
⎡=
1001
A , ⎥⎦
⎤⎢⎣
⎡−
=2221
B y ⎥⎦
⎤⎢⎣
⎡=
924
C
Entonces l a ecuación auxiliar sería:
0
2221
1001
det
0
=⎥⎥⎦
⎤
⎢⎢⎣
⎡⎟⎟⎠
⎞⎜⎜⎝
⎛−
+⎟⎟⎠
⎞⎜⎜⎝
⎛
=+
r
BAr
Resolviendo se obtiene:

Moisés Villena Muñoz Cap. 5 Sistemas de Ecuaciones Diferenciales y en Diferencias.
9
( )( )
( )( )23
02306
042
0421
022
21
02221
1001
det
2
2
−=∨==+−
=−−
=−−−
=−−+
=−
+
=⎥⎥⎦
⎤
⎢⎢⎣
⎡⎟⎟⎠
⎞⎜⎜⎝
⎛−
+⎟⎟⎠
⎞⎜⎜⎝
⎛
rrrr
rr
rr
rrr
r
r
Entonces ( ) ( )( ) ( ) ⎥
⎥⎦
⎤
⎢⎢⎣
⎡
−+
−+=
⎥⎥⎦
⎤
⎢⎢⎣
⎡=
tt
tt
Ct
CtC
tkk
kk
y
xY
2´3´
23
21
21
Ahora debemos establecer la relación entre las constantes.
En la ecuación [ ] ⎥⎦
⎤⎢⎣
⎡=⎥
⎦
⎤⎢⎣
⎡+
00
´1
11 k
kBAr reemplazando A , B y 31 =r resulta:
⎥⎦
⎤⎢⎣
⎡=⎥
⎦
⎤⎢⎣
⎡⎥⎦
⎤⎢⎣
⎡
⎥⎦
⎤⎢⎣
⎡=⎥
⎦
⎤⎢⎣
⎡⎥⎦
⎤⎢⎣
⎡−
+
⎥⎦
⎤⎢⎣
⎡=⎥
⎦
⎤⎢⎣
⎡⎥⎦
⎤⎢⎣
⎡−
+
00
´1224
001
´2.32213
00
´2221
1
1
1
1
1
1
1
1
kk
rkk
kk
rr
t
Se origina el sistema ⎩⎨⎧
=+=+
0´20´24
11
11
kkkk
que da como solución 11 2´ kk −=
Por otro lado si 22 −=r tenemos
⎥⎦
⎤⎢⎣
⎡=⎥
⎦
⎤⎢⎣
⎡⎥⎦
⎤⎢⎣
⎡−
−
⎥⎦
⎤⎢⎣
⎡=⎥
⎦
⎤⎢⎣
⎡⎥⎦
⎤⎢⎣
⎡−−
+−
⎥⎦
⎤⎢⎣
⎡=⎥
⎦
⎤⎢⎣
⎡⎥⎦
⎤⎢⎣
⎡−
+
00
´4221
00
´2.22212
00
´2221
2
2
2
2
2
2
2
2
kk
kk
kk
rr
El sistema ahora sería ⎩⎨⎧
=−=+−
0´420´2
22
22
kkkk
con solución 221
2´ kk =
Por tanto:
( ) ( )( ) ( ) ⎥
⎥⎦
⎤
⎢⎢⎣
⎡
−+−
−+=
⎥⎥⎦
⎤
⎢⎢⎣
⎡=
tt
tt
Ct
CtC
tkk
kk
y
xY
232
23
221
1
21
Segundo, la Solución Particular ⎥⎦
⎤⎢⎣
⎡=
2
1
AA
Y Pt se la obtiene resolviendo el sistema

Moisés Villena Muñoz Cap. 5 Sistemas de Ecuaciones Diferenciales y en Diferencias.
10
( )
⎩⎨⎧
=−=+
⎥⎦
⎤⎢⎣
⎡=⎥
⎦
⎤⎢⎣
⎡⎥⎦
⎤⎢⎣
⎡−
⎥⎦
⎤⎢⎣
⎡=⎥
⎦
⎤⎢⎣
⎡+
922422
924
1222
21
21
2
1
2
1
2
1
AAAA
AA
cc
AA
BA
tenemos 71 =A y 52 =A . Entonces ⎥⎦
⎤⎢⎣
⎡=
57
)(tYP
Por tanto : ( ) ( )( ) ( ) ⎥
⎥⎦
⎤
⎢⎢⎣
⎡
+−+−
+−+=⎥
⎦
⎤⎢⎣
⎡=+=
5232
723
221
1
21tt
tt
t
tPt
Ctt
kk
kkyx
YYY
Y con las condiciones iniciales 910 00 =∧= yx
( ) ( )( ) ( )
⎩⎨⎧
=+−=+
⎪⎩
⎪⎨⎧
=+−
=+
⎪⎩
⎪⎨⎧
=++−
=++
⎥⎦
⎤⎢⎣
⎡=
⎥⎥⎦
⎤
⎢⎢⎣
⎡
+−+−
+−+=⎥
⎦
⎤⎢⎣
⎡
843
42
3
952
107
910
5232
723
21
21
221
1
21
221
1
21
022
101
02
01
0
0
kkkk
kk
kk
kk
kk
kk
kkyx
Se obtiene 11 −=k y 42 =k
Finalmente: ( ) ( )( ) ( ) ⎥
⎥⎦
⎤
⎢⎢⎣
⎡
+−+
+−+−=⎥
⎦
⎤⎢⎣
⎡=
52232
7243tt
tt
t
tt y
xY
Ejercicios propuestos 5.2 Encuentre las soluciones de los siguientes sistemas de ecuaciones en diferencias:
1) ⎪⎩
⎪⎨⎧
=−+
−=−−
++
+
217
61
11
31
1 1
ttt
ttt
yyx
yxx; 45 00 =∧= yx
2) ⎩⎨⎧
=++=++
+
+
453635
1
1
ttt
ttt
yxyyxx
; 11 00 −=∧= yx
3) ⎩⎨⎧
=−+=++
+
+
1022162
1
1
ttt
ttt
yxyyxx
; 9,10 00 == yx
4) ⎩⎨⎧
++=++=
+
+
3222
1
1
ttt
tttyxyyxx
; 1,2 00 == yx
Moisés Villena Muñoz Cap. 5 Sistemas de Ecuaciones Diferenciales y en Diferencias.
11
5.4 ANÁLISIS CUALITATIVO PARA LA ESTABILIDAD DINÁMICA.
DIAGRAMA DE FASE DE DOS VARIABLES. Se trata ahora de plantear, como en las ocasiones anteriores, un análisis
cualitativo para determinar la estabilidad dinámica de las trayectorias. Debemos definir ahora diagrama de fase de dos variables.
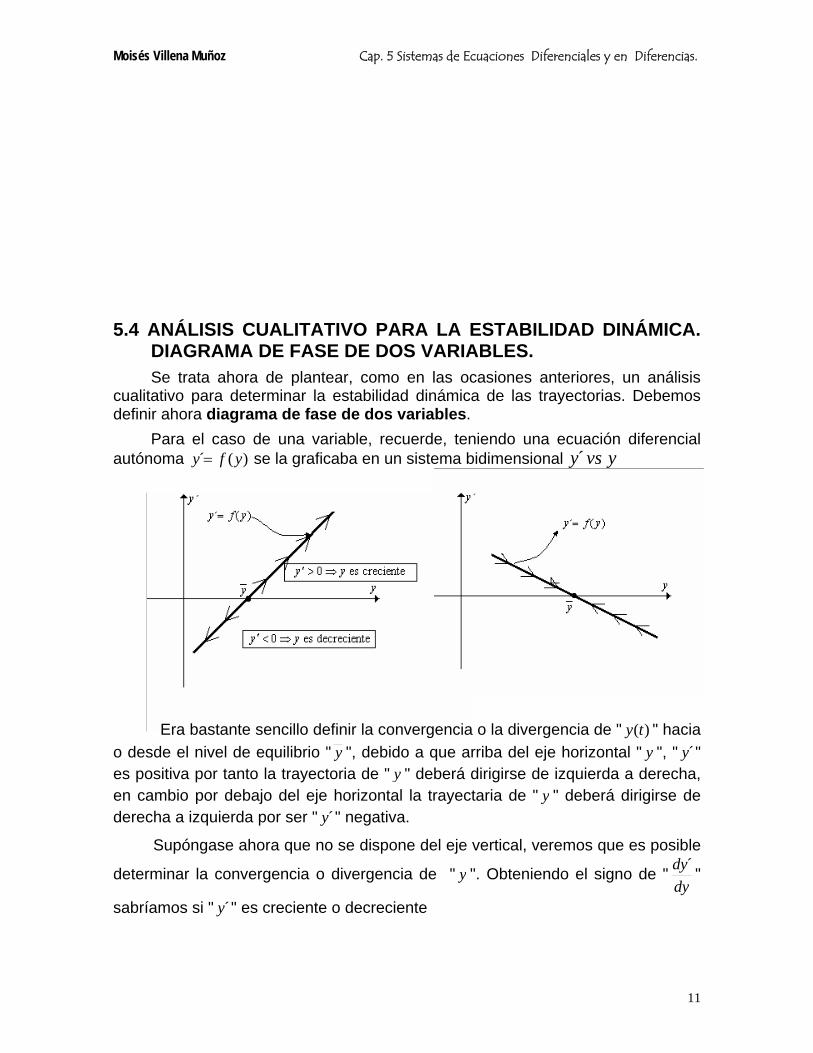
Para el caso de una variable, recuerde, teniendo una ecuación diferencial autónoma )(´ yfy = se la graficaba en un sistema bidimensional yvsy´
Era bastante sencillo definir la convergencia o la divergencia de " )(ty " hacia o desde el nivel de equilibrio " y ", debido a que arriba del eje horizontal " y ", " ´y " es positiva por tanto la trayectoria de " y " deberá dirigirse de izquierda a derecha, en cambio por debajo del eje horizontal la trayectaria de " y " deberá dirigirse de derecha a izquierda por ser " ´y " negativa.
Supóngase ahora que no se dispone del eje vertical, veremos que es posible
determinar la convergencia o divergencia de " y ". Obteniendo el signo de "dydy´ "
sabríamos si " ´y " es creciente o decreciente
Moisés Villena Muñoz Cap. 5 Sistemas de Ecuaciones Diferenciales y en Diferencias.
12
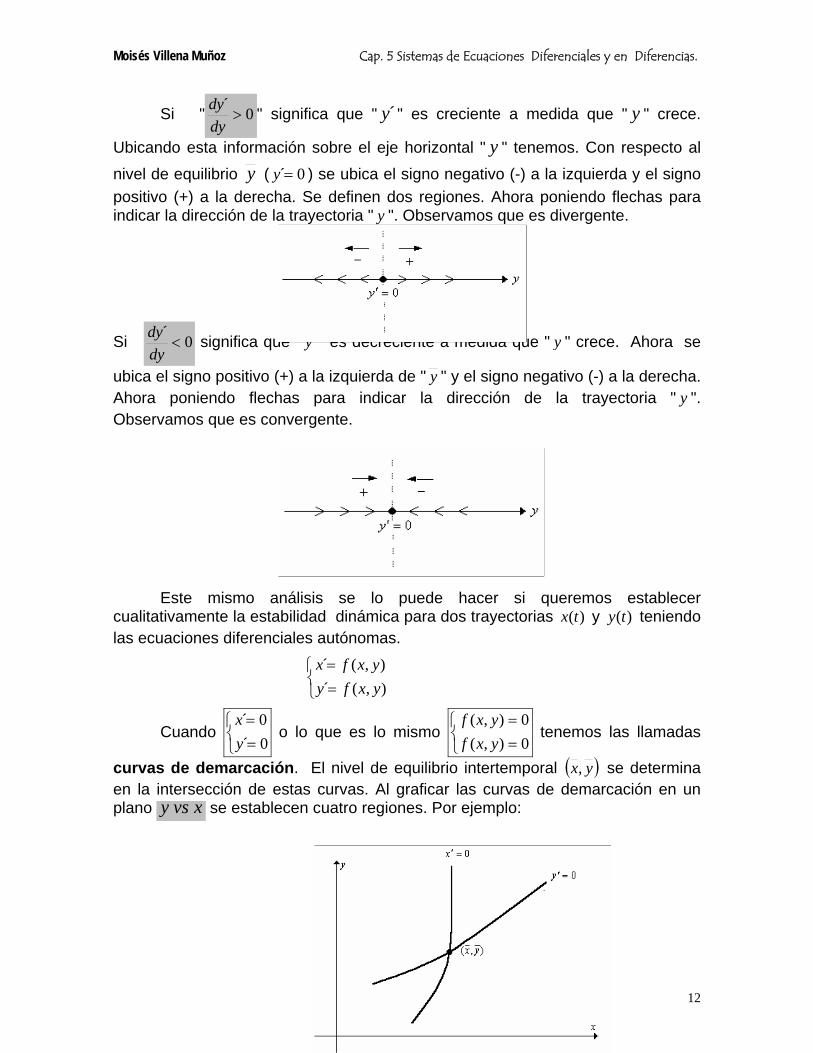
Si " 0´>
dydy " significa que " ´y " es creciente a medida que " y " crece.
Ubicando esta información sobre el eje horizontal " y " tenemos. Con respecto al
nivel de equilibrio y ( 0´=y ) se ubica el signo negativo (-) a la izquierda y el signo positivo (+) a la derecha. Se definen dos regiones. Ahora poniendo flechas para indicar la dirección de la trayectoria " y ". Observamos que es divergente.
Si 0´<
dydy significa que " ´y " es decreciente a medida que " y " crece. Ahora se
ubica el signo positivo (+) a la izquierda de " y " y el signo negativo (-) a la derecha. Ahora poniendo flechas para indicar la dirección de la trayectoria " y ". Observamos que es convergente.
Este mismo análisis se lo puede hacer si queremos establecer cualitativamente la estabilidad dinámica para dos trayectorias )(tx y )(ty teniendo las ecuaciones diferenciales autónomas.
⎩⎨⎧
==
),(´),(´
yxfyyxfx
Cuando ⎩⎨⎧
==
0´0´
yx
o lo que es lo mismo ⎩⎨⎧
==
0),(0),(
yxfyxf
tenemos las llamadas
curvas de demarcación. El nivel de equilibrio intertemporal ( )yx, se determina en la intersección de estas curvas. Al graficar las curvas de demarcación en un plano xvsy se establecen cuatro regiones. Por ejemplo:

Moisés Villena Muñoz Cap. 5 Sistemas de Ecuaciones Diferenciales y en Diferencias.
13
Luego será cuestión de determinar los signos de las derivadas ( )xx∂∂ ´ y
( )yy∂∂ ´ , empleando las ecuaciones diferenciales
⎩⎨⎧
==
),(´),(´
yxfyyxfx
, para ubicar los signos
a un lado y a otro lado de las respectivas curvas de demarcación. En cada una de las cuatro regiones se concluirá sobre el comportamiento
de las trayectorias )(tx y )(ty dibujando flechas que indiquen la dirección de cada trayectoria.
Por ejemplo, si ( ) 0´<
∂∂
xx significa que ´x es decreciente con respecto a x ,
por tanto ubicamos el signo positivo (+) a la izquierda de la curva 0´=x y el signo negativo (-) a su derecha. Y si ( )
0´<
∂∂
xy significa que ´y también es
decreciente con respecto a y , por tanto ubicamos el signo positivo (+) por debajo de la curva 0´=y y el signo negativo (-) arriba. Observe la figura.
Observando las flechas en cada región, se concluye que las trayectorias
)(tx y )(ty convergen al nivel de equilibrio ( )yx, . Este tipo de comportamiento se lo llama NODO CONVERGENTE.

Moisés Villena Muñoz Cap. 5 Sistemas de Ecuaciones Diferenciales y en Diferencias.
14
Por otro lado, si ( ) 0>′∂
xx significa que ´x es creciente con respecto a x ,
por tanto ubicamos el signo negativo (-) a la izquierda de la curva 0´=x y el
signo positivo (+) a su derecha. Y si ( ) 0>∂′∂
yy significa que ´y también es
creciente con respecto a y , por tanto ubicamos el signo negativo (-) por debajo de la curva 0´=y y el signo positivo (+) arriba.
Observando las flechas en cada región, se concluye que las trayectorias )(tx y )(ty divergen del nivel de equilibrio ( )yx, . A este comportamiento se lo
llama NODO DIVERGENTE. Ahora suponga que las curvas de demarcación son las que se muestran a
continuación y que ( ) 0>′∂
xx entonces ´x es creciente con respecto a x , por tanto
ubicamos el signo negativo (-) a la izquierda de 0´=x y el signo positivo (+) a
su derecha. Y suponga que ( )0<
∂′∂
yy entonces ´y es decreciente con respecto a
y , por tanto ubicamos el signo positivo (+) por debajo de la curva 0´=y y el signo negativo (-) arriba.

Moisés Villena Muñoz Cap. 5 Sistemas de Ecuaciones Diferenciales y en Diferencias.
15
Observando las flechas en cada región, se concluye que las trayectorias
)(tx y )(ty no son estables dinámicamente. Este comportamiento se lo llama PUNTO DE SILLA.
Ahora suponga que las curvas de demarcación son las que se muestran a
continuación y que ( ) 0<′∂
xx
entonces ´x es decreciente con respecto a x , por
tanto ubicamos el signo positivo (+) a la izquierda de la curva 0´=x y el signo
negativo (-) a su derecha, Suponga además que ( ) 0<∂′∂
yy
entonces ´y también
es decreciente con respecto a y , por tanto ubicamos el signo positivo (+) por debajo de la curva 0´=y y el signo negativo (-) arriba. 0´=x
Observando las flechas en cada región, se concluye que las trayectorias
)(tx y )(ty son estables dinámicamente; debido a que al atravesar cada región, tangente horizontalmente a 0´=y y tangente verticalmente a 0´=x , hacen posible la convergencia . En este caso, a este comportamiento se lo llama FOCO CONVERGENTE.
Moisés Villena Muñoz Cap. 5 Sistemas de Ecuaciones Diferenciales y en Diferencias.
16
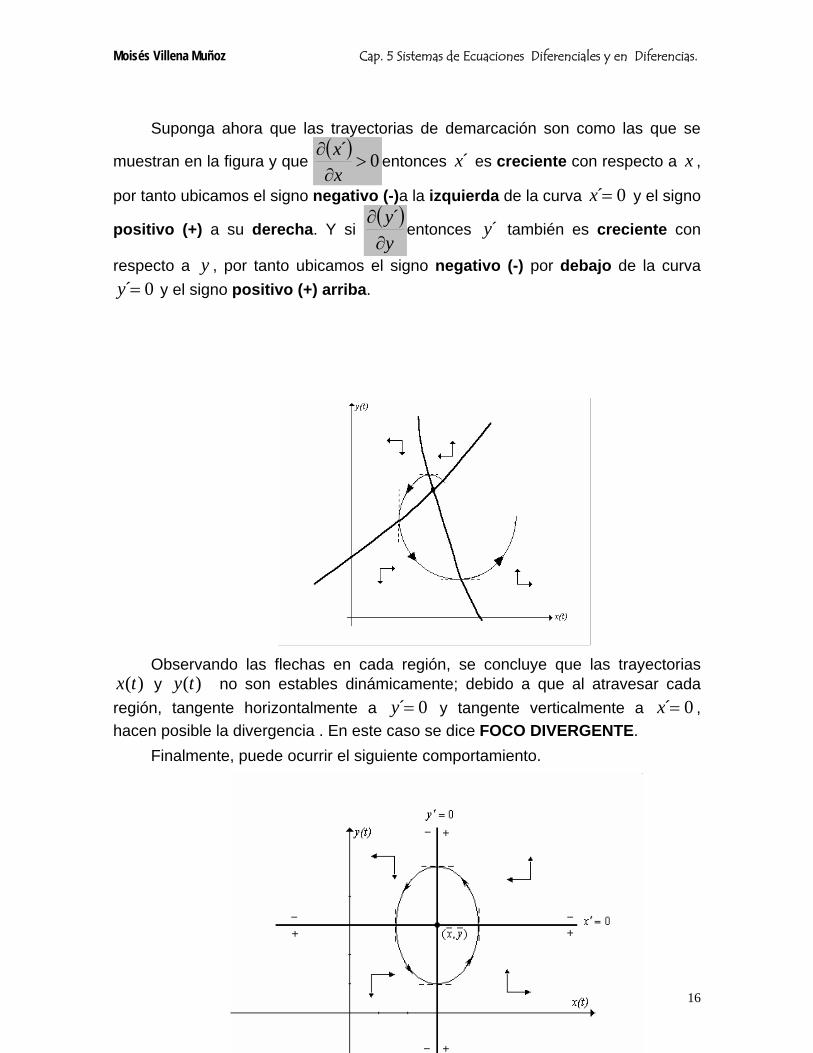
Suponga ahora que las trayectorias de demarcación son como las que se
muestran en la figura y que ( ) 0´
>∂∂
xx
entonces ´x es creciente con respecto a x ,
por tanto ubicamos el signo negativo (-)a la izquierda de la curva 0´=x y el signo
positivo (+) a su derecha. Y si ( )yy∂∂ ´
entonces ´y también es creciente con
respecto a y , por tanto ubicamos el signo negativo (-) por debajo de la curva 0´=y y el signo positivo (+) arriba.
Observando las flechas en cada región, se concluye que las trayectorias )(tx y )(ty no son estables dinámicamente; debido a que al atravesar cada
región, tangente horizontalmente a 0´=y y tangente verticalmente a 0´=x , hacen posible la divergencia . En este caso se dice FOCO DIVERGENTE.
Finalmente, puede ocurrir el siguiente comportamiento.
Moisés Villena Muñoz Cap. 5 Sistemas de Ecuaciones Diferenciales y en Diferencias.
17
A este caso se lo llama VORTICE.
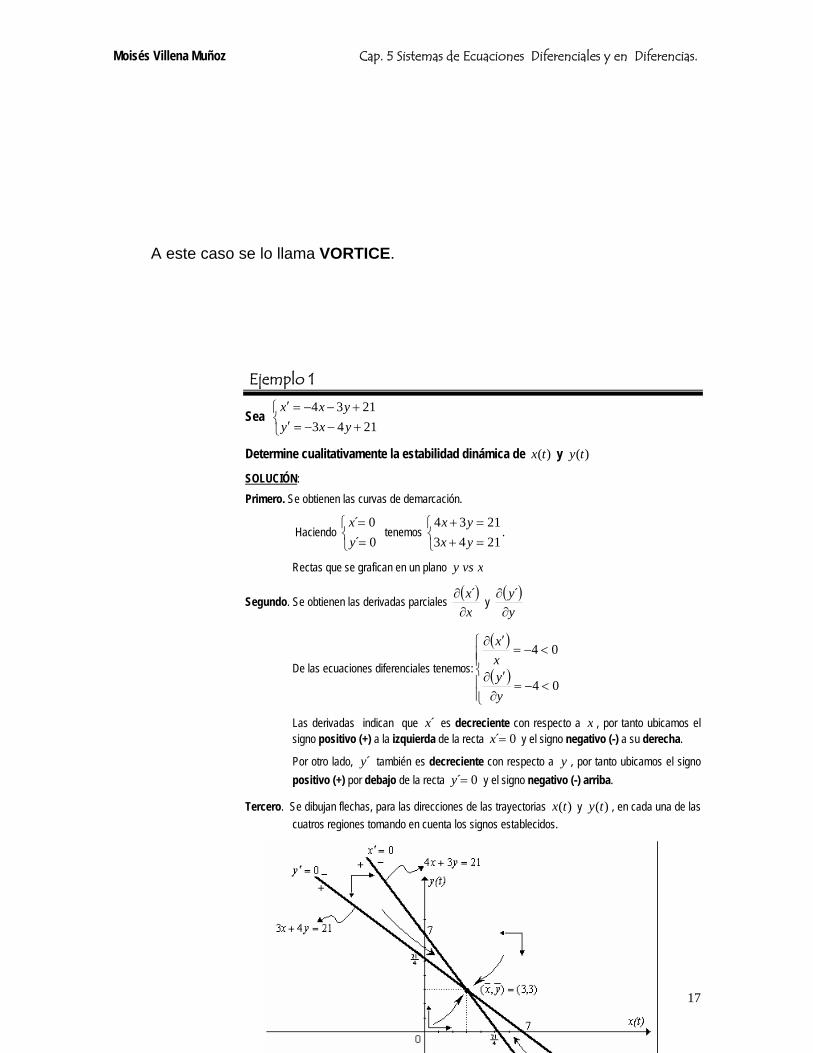
Ejemplo 1
Sea ⎩⎨⎧
+−−=′+−−=′
21432134
yxyyxx
Determine cualitativamente la estabilidad dinámica de )(tx y )(ty
SOLUCIÓN: Primero. Se obtienen las curvas de demarcación.
Haciendo ⎩⎨⎧
==
0´0´
yx
tenemos ⎩⎨⎧
=+=+
21432134
yxyx
.
Rectas que se grafican en un plano xvsy
Segundo. Se obtienen las derivadas parciales ( )xx∂∂ ´
y ( )yy∂∂ ´
De las ecuaciones diferenciales tenemos:
( )
( )⎪⎪⎩
⎪⎪⎨
⎧
<−=∂′∂
<−=′∂
04
04
yyxx
Las derivadas indican que ´x es decreciente con respecto a x , por tanto ubicamos el signo positivo (+) a la izquierda de la recta 0´=x y el signo negativo (-) a su derecha.
Por otro lado, ´y también es decreciente con respecto a y , por tanto ubicamos el signo positivo (+) por debajo de la recta 0´=y y el signo negativo (-) arriba.
Tercero. Se dibujan flechas, para las direcciones de las trayectorias )(tx y )(ty , en cada una de las cuatros regiones tomando en cuenta los signos establecidos.

Moisés Villena Muñoz Cap. 5 Sistemas de Ecuaciones Diferenciales y en Diferencias.
18
Observando las flechas en cada región, se concluye que las trayectorias )(tx y )(ty convergen al
nivel de equilibrio ( ) ( )3,3, =yx . En este caso se dice NODO CONVERGENTE.
NOTA: Realice el análisis cuantitivo y verifique que 71 −=r y 12 −=r son raíces reales, diferentes y negativas.
Ejemplo 2
Sea ⎩⎨⎧
−+−=′−−=′
343334
yxyyxx
Determine cualitativamente la estabilidad dinámica de )(tx y )(ty
SOLUCIÓN:
Primero. Haciendo ⎩⎨⎧
==
0´0´
yx
tenemos ⎩⎨⎧
=+−=−
343334
yxyx
.
Rectas de demarcación que se grafican en un plano xvsy
Segundo. De las ecuaciones diferenciales tenemos:
( )
( )⎪⎪⎩
⎪⎪⎨
⎧
>+=∂′∂
>+=′∂
04
04
yyxx
Las derivadas indican que ´x es creciente con respecto a x , por tanto ubicamos el signo negativo (-) a la izquierda de la recta 0´=x y el signo positivo (+) a su derecha.
Por otro lado, ´y también es creciente con respecto a y , por tanto ubicamos el signo negativo (-) por debajo de la recta 0´=y y el signo positivo (+) arriba.
Tercero. Se dibujan flechas, para las direcciones de las trayectorias )(tx y )(ty , en cada una de las cuatros regiones tomando en cuenta los signos establecidos.

Moisés Villena Muñoz Cap. 5 Sistemas de Ecuaciones Diferenciales y en Diferencias.
19
Observando las flechas en cada región, se concluye que las trayectorias )(tx y )(ty divergen del
nivel de equilibrio ( ) ( )3,3, =yx . En este caso se dice NODO DIVERGENTE.
NOTA: Realice el análisis cuantitivo y verifique que 71 =r y 12 =r son raíces reales, diferentes y positivas.
Ejemplo 3
Sea ⎩⎨⎧
+−=′+−=′
921032
yxyyxx
Determine cualitativamente la estabilidad dinámica de )(tx y )(ty
SOLUCIÓN:
Primero. Haciendo ⎩⎨⎧
==
0´0´
yx
tenemos ⎩⎨⎧
−=−−=−
921032
yxyx
.
Rectas de demarcación que se grafican en un plano xvsy
Segundo. De las ecuaciones diferenciales tenemos:
( )
( )⎪⎪⎩
⎪⎪⎨
⎧
<−=∂′∂
>+=′∂
02
02
yyxx
Las derivadas indican que ´x es creciente con respecto a x , por tanto ubicamos el signo negativo (-) a la izquierda de la recta 0´=x y el signo positivo (+) a su derecha.
Por otro lado, ´y es decreciente con respecto a y , por tanto ubicamos el signo positivo (+) por debajo de la recta 0´=y y el signo negativo (-) arriba.
Tercero. Se dibujan flechas, para las direcciones de las trayectorias )(tx y )(ty , en cada una de las cuatros regiones tomando en cuenta los signos establecidos.

Moisés Villena Muñoz Cap. 5 Sistemas de Ecuaciones Diferenciales y en Diferencias.
20
Observando las flechas en cada región, se concluye que las trayectorias )(tx y )(ty no son estables dinámicamente. En este caso se dice PUNTO DE SILLA.
NOTA: Realice el análisis cuantitivo y verifique que 11 =r y 12 −=r son raíces reales, diferentes y de signo contrario.
Ejemplo 4
Sea ⎩⎨⎧
+−=′+−−=′
6431734
yxyyxx
Determine cualitativamente la estabilidad dinámica de )(tx y )(ty
SOLUCIÓN:
Primero. Haciendo ⎩⎨⎧
==
0´0´
yx
tenemos ⎩⎨⎧
=+−=+−−0643
01734yxyx
.
Rectas de demarcación que se grafican en un plano xvsy
Segundo. De las ecuaciones diferenciales tenemos:
( )
( )⎪⎪⎩
⎪⎪⎨
⎧
<−=∂′∂
<−=′∂
04
04
yyxx
Las derivadas indican que ´x es decreciente con respecto a x , por tanto ubicamos el signo positivo (+) a la izquierda de la recta 0´=x y el signo negativo (-) a su derecha.
Por otro lado, ´y también es decreciente con respecto a y , por tanto ubicamos el signo positivo (+) por debajo de la recta 0´=y y el signo negativo (-) arriba.
Tercero. Se dibujan flechas, para las direcciones de las trayectorias )(tx y )(ty , en cada una de las cuatros regiones tomando en cuenta los signos establecidos.

Moisés Villena Muñoz Cap. 5 Sistemas de Ecuaciones Diferenciales y en Diferencias.
21
Observando las flechas en cada región, se concluye que las trayectorias )(tx y )(ty son estables dinámicamente; debido a que al atravesar cada región, tangente horizontalmente a 0´=y y tangente verticalmente a 0´=x , hacen posible la convergencia . En este caso se dice FOCO CONVERGENTE.
NOTA: Realice el análisis cuantitivo y verifique que ir 341 +−= y ir 342 −−= son raíces complejas conjugadas con parte real negativa.
Ejemplo 5
Sea ⎩⎨⎧
−+=′−−=′
1743634
yxyyxx
Determine cualitativamente la estabilidad dinámica de )(tx y )(ty
SOLUCIÓN:
Primero. Haciendo ⎩⎨⎧
==
0´0´
yx
tenemos ⎩⎨⎧
=−+=−−
017430634
yxyx
.
Rectas de demarcación que se grafican en un plano xvsy
Segundo. De las ecuaciones diferenciales tenemos:
( )
( )⎪⎪⎩
⎪⎪⎨
⎧
>=∂′∂
>=′∂
04
04
yyxx
Las derivadas indican que ´x es creciente con respecto a x , por tanto ubicamos el signo negativo (-)a la izquierda de la recta 0´=x y el signo positivo (+) a su derecha.
Por otro lado, ´y también es creciente con respecto a y , por tanto ubicamos el signo negativo (-) por debajo de la recta 0´=y y el signo positivo (+) arriba.
Tercero. Se dibujan flechas, para las direcciones de las trayectorias )(tx y )(ty , en cada una de las cuatros regiones tomando en cuenta los signos establecidos.
Moisés Villena Muñoz Cap. 5 Sistemas de Ecuaciones Diferenciales y en Diferencias.
22
Observando las flechas en cada región, se concluye que las trayectorias )(tx y )(ty no son estables dinámicamente; debido a que al atravesar cada región, tangente horizontalmente a 0´=y y tangente verticalmente a 0´=x , hacen posible la divergencia . En este caso se dice FOCO DIVERGENTE.
NOTA: Realice el análisis cuantitivo y verifique que ir 341 += y ir 342 −= son raíces complejas conjugadas con parte real positiva.
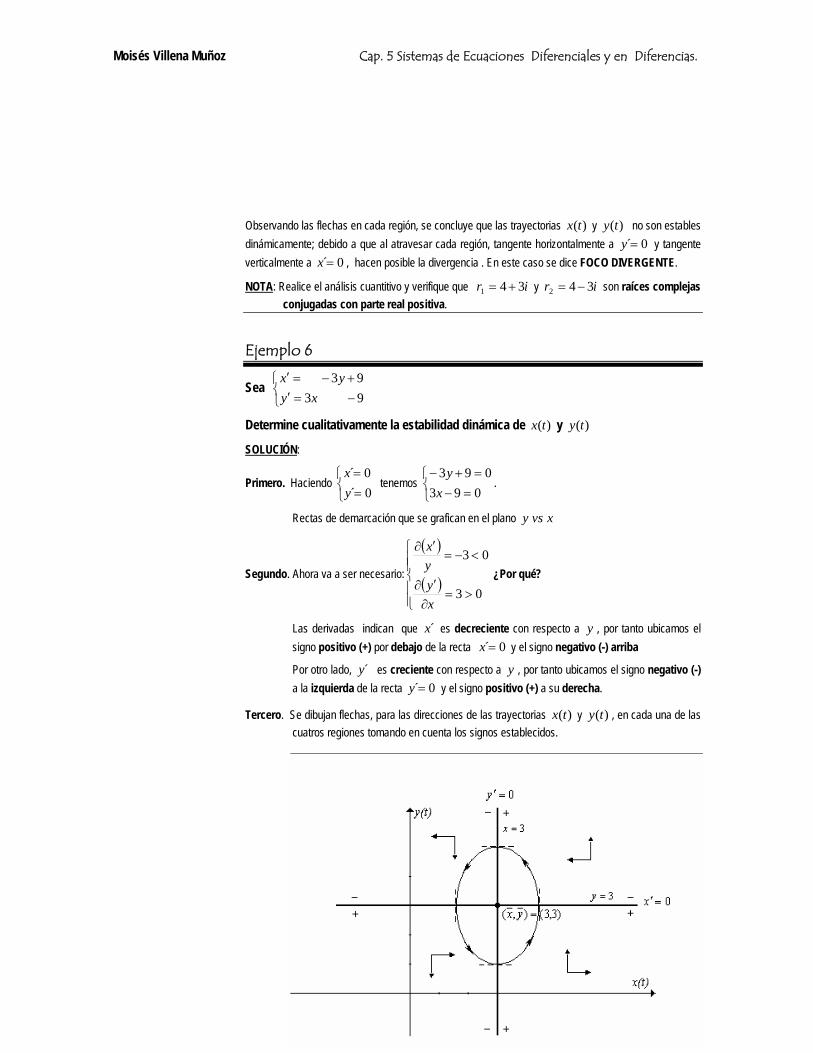
Ejemplo 6
Sea ⎩⎨⎧
−=′+−=′
9393
xyyx
Determine cualitativamente la estabilidad dinámica de )(tx y )(ty
SOLUCIÓN:
Primero. Haciendo ⎩⎨⎧
==
0´0´
yx
tenemos ⎩⎨⎧
=−=+−093
093x
y.
Rectas de demarcación que se grafican en el plano xvsy
Segundo. Ahora va a ser necesario:
( )
( )⎪⎪⎩
⎪⎪⎨
⎧
>=∂′∂
<−=′∂
03
03
xyyx
¿Por qué?
Las derivadas indican que ´x es decreciente con respecto a y , por tanto ubicamos el signo positivo (+) por debajo de la recta 0´=x y el signo negativo (-) arriba
Por otro lado, ´y es creciente con respecto a y , por tanto ubicamos el signo negativo (-) a la izquierda de la recta 0´=y y el signo positivo (+) a su derecha.
Tercero. Se dibujan flechas, para las direcciones de las trayectorias )(tx y )(ty , en cada una de las cuatros regiones tomando en cuenta los signos establecidos.

Moisés Villena Muñoz Cap. 5 Sistemas de Ecuaciones Diferenciales y en Diferencias.
23
Observando las flechas en cada región, se concluye que las trayectorias )(tx y )(ty no son estables dinámicamente; debido a que al atravesar cada región, tangente horizontalmente a 0´=y y tangente verticalmente a 0´=x , hacen posible esta no convergencia. En este caso se dice que es VORTICE.
NOTA: Realice el análisis cuantitivo y verifique que ir 301 += y ir 302 −= son raíces complejas conjugadas con parte real igual a cero.
Ejemplo 7
Sea ⎩⎨⎧
+−=′+−=′
9393
yyxx
Determine cualitativamente la estabilidad dinámica de )(tx y )(ty
SOLUCIÓN: Primero. Se obtienen las curvas de demarcación.
Haciendo ⎩⎨⎧
==
0´0´
yx
tenemos ⎩⎨⎧
=+−=+−
093093
yx
.
Rectas que se grafican en un plano xvsy
Segundo. De las ecuaciones diferenciales tenemos:
( )
( )⎪⎪⎩
⎪⎪⎨
⎧
<−=∂′∂
<−=′∂
03
03
yyxx
Las derivadas indican que ´x es decreciente con respecto a x , por tanto ubicamos el signo positivo (+) a la izquierda de la recta 0´=x y el signo negativo (-) a su derecha.
Por otro lado, ´y también es decreciente con respecto a y , por tanto ubicamos el signo positivo (+) por debajo de la recta 0´=y y el signo negativo (-) arriba.
Tercero. Se dibujan las flechas, para las direcciones de las trayectorias )(tx y )(ty , en cada una de las cuatros regiones tomando en cuenta los signos establecidos.

Moisés Villena Muñoz Cap. 5 Sistemas de Ecuaciones Diferenciales y en Diferencias.
24
Observando las flechas en cada región, se concluye que las trayectorias )(tx y )(ty convergen al
nivel de equilibrio ( ) ( )3,3, =yx . En este tenemos NODO CONVERGENTE.
NOTA: Realice el análisis cuantitivo y verifique que 31 −=r y 32 −=r son raíces reales, iguales y negativas.
Ejemplo 8
Sea ⎩⎨⎧
−=′−=′
9393
yyxx
Determine cualitativamente la estabilidad dinámica de )(tx y )(ty
SOLUCIÓN:
Primero. Haciendo ⎩⎨⎧
==
0´0´
yx
tenemos ⎩⎨⎧
=−=−
093093
yx
.
Rectas de demarcación que se grafican en un plano xvsy
Segundo. De las ecuaciones diferenciales tenemos:
( )
( )⎪⎪⎩
⎪⎪⎨
⎧
>+=∂′∂
>+=′∂
03
03
yyxx
Las derivadas indican que ´x es creciente con respecto a x , por tanto ubicamos el signo negativo (-) a la izquierda de la recta 0´=x y el signo positivo (+) a su derecha.
Por otro lado, ´y también es creciente con respecto a y , por tanto ubicamos el signo negativo (-) por debajo de la recta 0´=y y el signo positivo (+) arriba.
Tercero. Se dibujan las flechas, para las direcciones de las trayectorias )(tx y )(ty , en cada una de las cuatros regiones tomando en cuenta los signos establecidos.
Moisés Villena Muñoz Cap. 5 Sistemas de Ecuaciones Diferenciales y en Diferencias.
25
Observando las flechas en cada región, se concluye que las trayectorias )(tx y )(ty divergen del
nivel de equilibrio ( ) ( )3,3, =yx . En este caso tenemos un NODO DIVERGENTE.
NOTA: Realice el análisis cuantitivo y verifique que 31 =r y 32 =r son raíces reales, iguales y positivas.
Ejercicios Propuestos 5.3 1. Sea el sistema de ecuaciones diferenciales:
⎩⎨⎧
=−++=++
9)(2)(2)`(24)(2)()`(
tytxtytytxtx
9)0(10)0( =∧= yx
a) Encuentre las soluciones b) Haga el diagrama de fase en 2 variables y determine el tipo de trayectoria.
2. Haga un análisis cualitativo empleando diagramas de fase para determinar la estabilidad dinámica, para:
a. ⎩⎨⎧
+−=+−−=92`
1032`yxy
yxx c.
⎩⎨⎧
+=+=9`103`
xyyx
b. ⎩⎨⎧
++=+−=92`1032`
yxyyxx
d. ⎩⎨⎧
+−=+−=92`1032`
yxyyxx

Moisés Villena Muñoz Cap. 5 Sistemas de Ecuaciones Diferenciales y en Diferencias.
26
5.5 LINEALIZACIÓN DE SISTEMAS DE ECUACIONES DIFERENCIALES NO LINEALES 5.5.1 Polinomio de Taylor para funciones de dos
variables. Sea ),( yxf una función dos veces diferenciable. El Polinomio de Taylor en
la vecindad del punto ),( 00 yx es:
[ ] [ ]
[ ] [ ][ ] [ ] nyxyxyx
yxyx
Ryyy
fyyxxyxfxx
xf
yyyfxx
xfyxfyxf
++⎥⎥⎦
⎤
⎢⎢⎣
⎡−
∂∂
+−−∂∂
∂+−
∂∂
+−∂∂
+−∂∂
+=
20
),(2
2
00),(
22
0),(
2
2
0),(
0),(
00
000000
0000
!21
),(),(
Ejemplo
Sea xyeyxf =),( . Hallar el polinomio de Taylor de segundo orden en la vecindad de )0,0(
SOLUCIÓN: Para aplicar el desarrollo de polinomio, hallamos primero:
0)0()0,0( 0 == ef
( ) xx yeyexx
f=
∂∂
=∂∂
entonces ( )
00 0
0,0
==∂∂ exf
( ) xx eyeyy
f=
∂∂
=∂∂
entonces ( )
10
0,0
==∂∂ eyf
( ) xx yeyexx
f=
∂∂
=∂∂
2
2
entonces ( )
00 0
0,02
2
==∂∂
ex
f
( ) 02
2
=∂∂
=∂∂ xe
yyf
entonces ( )
00,0
=∂∂yf

Moisés Villena Muñoz Cap. 5 Sistemas de Ecuaciones Diferenciales y en Diferencias.
27
( ) xx eyeyyx
f=
∂∂
=∂∂
∂ 2
entonces ( )
10
0,0
==∂∂ exf
Ahora, reemplazando
[ ] [ ] [ ] [ ][ ] [ ][ ]
xyy
yyxxyxye x
21
0000100!2
101000 22
+=
−+−−+−+−+−+=
5.5.2 SISTEMAS DE ECUACIONES DIFERENCIALES NO LINEALES
Suponga ahora que tenemos un sistema de ecuaciones diferenciales no
lineales de la forma ⎩⎨⎧
==
),(´),(´
yxgyyxfx
. Para determinar las características de sus
soluciones )(tx y )(ty podemos linealizar el sistema, hallando el polinomio de Taylor de primer orden en la vecindad de punto de equilibrio ),( yx tanto para
),( yxf como para ),( yxg , y luego proceder de la misma manera que en los casos anteriores.
Ejemplo
Sea ⎪⎩
⎪⎨⎧
=
−=x
x
yey
ex
´
1´. Analice cuantitativamente y cualitativamente la estabilidad dinámica.
SOLUCIÓN: Primero, linealizamos el sistema.
Hallando el punto de equilibrio tenemos:
( ) 11
1
1
),(),(
=−
=−
=−
=
ye
yee
yee
yxgyxf
x
xx
Xx
Por inspección, )0,0(),( =yx
Hallando el polinomio de Taylor de primer orden para 1),( −= xeyxf en la vecindad de
)0,0(),( =yx
Para [ ] [ ]00)0,0(),()0,0()0,0(
−∂∂
+−∂∂
+≈ yyfx
xffyxf tenemos:
01)0,0( 0 =−= ef

Moisés Villena Muñoz Cap. 5 Sistemas de Ecuaciones Diferenciales y en Diferencias.
28
( ) xx eexx
f=−
∂∂
=∂∂
1 entonces ( )
10
0,0
==∂∂ exf
( ) 01 =−∂∂
=∂∂ xe
yyf
entonces ( )
00,0
=∂∂yf
Por tanto
[ ] [ ]
xe
yxex
x
≈−
−+−+≈−
1
000101
El polinomio de Taylor de primer orden para xyeyxg =),( en la vecindad de
)0,0(),( =yx es [ ] [ ]
yye
yxyex
x
≈
+−+−+≈ 01000 (vea el ejemplo anterior)
Entonces el sistema linealizado sería ⎩⎨⎧
==
yyxx
´´
Cuantitativamente, tenemos:
Las raíces de la ecuación característica 010
01=
−−
rr
Son 121 == rr por tanto es un nodo inestable
Cualitativamente, analizando el diagrama de fase se concluye en lo mismo.
Ejercicios propuestos 5.4 Linealizar los sistemas dados, hallar su solución y determinar su estabilidad dinámica haciendo un análisis cuantitativo y un análisis cualitativo.
1) ⎩⎨⎧
−=−=yy
yxx1`
` 2
; 0, ≥yx 3) ( )⎪⎩
⎪⎨⎧
+=
++=2
23
1`
3`
yxy
yyxxx; 0, ≥yx
2) ⎩⎨⎧
−=
+=
yxy
yxx2`
2`; 0, ≥yx

Moisés Villena Muñoz Cap. 5 Sistemas de Ecuaciones Diferenciales y en Diferencias.
29
Misceláneos
1. Sea el sistema 0,0;2´
10´2
2≥≥
⎪⎩
⎪⎨⎧
+−=
+−−=yx
yxy
yxx
a) Linealice el sistema y encuentre )(tx y )(ty b) Realice un análisis cualitativo, diagrama de fase de dos variables, para la estabilidad
dinámica de )(tx y )(ty . Indique el tipo de equilibrio. c) Verifique cuantitativamente para el sistema linealizado.
2. Linealice el sistema. Encuentre las soluciones y determine el tipo la estabilidad dinámica:
⎩⎨⎧
−=
−=
yxyxyx
28´
12´2