Modulos Completos de Bernardo Arenas
243
INTRODUCCION BERNARDO ARENAS GAVIRIA Universidad de Antioquia Instituto de Física 2012
-
Upload
daniel-ordonez -
Category
Documents
-
view
861 -
download
188
description
Notas de clase de fisica mecanica con bernardo arenas, docente de la universidad de antioquia.
Transcript of Modulos Completos de Bernardo Arenas

INTRODUCCION
BERNARDO ARENAS GAVIRIAUniversidad de Antioquia
Instituto de Física
2012


Índice general
0. Introducción 10.1. Cantidades físicas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
0.1.1. Análisis dimensional . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10.1.2. Unidades . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
0.2. Vectores . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30.2.1. Cantidades escalares . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40.2.2. Cantidades vectoriales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40.2.3. Notación vectorial . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40.2.4. Representación de un vector . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40.2.5. Dirección de un vector . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40.2.6. Vectores iguales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50.2.7. Vectores iguales y opuestos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50.2.8. Vectores unitarios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50.2.9. Suma o composición de vectores . . . . . . . . . . . . . . . . . . . . . . . . . . 50.2.10. Suma de vectores por el método gráfico . . . . . . . . . . . . . . . . . . . . . . 50.2.11. Componentes rectangulares de un vector . . . . . . . . . . . . . . . . . . . . . 60.2.12. Suma de vectores por componentes rectangulares . . . . . . . . . . . . . . . . 90.2.13. Producto entre vectores . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 100.2.14. Producto escalar o producto punto entre vectores . . . . . . . . . . . . . . . . 110.2.15. Producto vectorial o producto cruz entre vectores . . . . . . . . . . . . . . . . 120.2.16. Derivadas con vectores . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
0.3. Coordenadas polares . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 150.4. Pautas generales en la solución de problemas . . . . . . . . . . . . . . . . . . . . . . . 160.5. ENUNCIADOS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
3


Capıtulo 0Introducción
COMPETENCIASEn esta introducción se busca que el estudiante
Manipule adecuadamente las herramientasmatemáticas que son indispensables en lafísica.
Infiera la importancia del análisis dimen-sional y de las unidades en la física.
Obtenga las relaciones numéricas entre losdiferentes sistemas de unidades que se em-plean en la física.
Distinga entre una cantidad escalar y unacantidad vectorial.
Utilice correctamente la notación vectorial.
Analice las diferentes operaciones con vec-tores.
Obtenga las relaciones matemáticas entrecoordenadas rectangulares y coordenadaspolares.
0.1. Cantidades físicas
0.1.1. Análisis dimensional
Los conceptos, leyes y principios de la física,se expresan mediante expresiones matemáticasque contienen diferentes tipos de cantidadesdenominadas cantidades físicas. Desde el pun-to de vista dimensional, estas cantidades físi-cas se clasifican en dos grupos: fundamentales y
derivadas. Una cantidad fundamental se define co-mo aquella que no es posible expresar en fun-ción de ninguna otra; en cambio una cantidadderivada se define como aquella que se expre-sa en función de una o varias cantidades fun-damentales. En física se reconocen cuatro can-tidades fundamentales, a partir de las cuales esposible expresar cualquier otra cantidad física.Estas son: la longitud cuya dimensión es L, lamasa cuya dimensión es M, el tiempo cuya di-mensión es T y la carga eléctrica cuya dimensiónes C.
En lo que sigue, la dimensión de una canti-dad física se expresa encerrando la cantidad físi-ca entre corchetes. Por ejemplo si A es un área,su dimensión se expresa en la forma [A].
En el área de la mecánica, sólo es necesarioconsiderar las tres primeras cantidades funda-mentales, esto es, L, M y T, ya que se tratarántemas en los cuales no interviene la carga eléc-trica. Por ello, se hace referencia únicamente alas que son de interés en los temas a tratar cuan-do se analiza el movimiento de los cuerpos.
Cualquier otra cantidad física se encuentradentro del grupo de las denominadas canti-dades derivadas, tales como: área (A) con di-mensión [A] = L2, volumen (V) con dimensión[V] = L3, densidad (ρ) con dimensión [ρ] =ML−3, fuerza (F) con dimensión [F] = MLT−2,velocidad (v) con dimensión [v] = LT−1, etc.
0.1.2. Unidades
A cada una de las cantidades fundamentales sele asigna una unidad patrón, dependiendo del

2 CAPÍTULO 0. INTRODUCCIÓN
sistema de unidades a emplear. Existen tres sis-temas de unidades: El Sistema Internacional (SI),el Sistema Gaussiano y el Sistema Inglés (SU).
El sistema de unidades más utilizado en la ac-tualidad y que será empleado en la mayoría delos casos, es el SI. En este sistema de unidadesla dimensión L se expresa en metros (m), la di-mensión M se expresa en kilogramos (kg) y ladimensión T se expresa en segundos (s).
El sistema gaussiano es un sistema derivadodel anterior y en el cual las unidades de las di-mensiones L, M, T son, respectivamente, el cen-tímetro (cm), el gramo (g) y el segundo (s).
Los factores de conversión, entre los sistemasde unidades SI y gaussiano, están dados por:
1 m ≡ 102 cm y 1 kg ≡ 103 g.
El sistema de unidades SU es de poco uso en laactualidad. En este sistema las cantidades fun-damentales son la fuerza con dimensión F, lalongitud con dimensión L y el tiempo con di-mensión T y sus unidades patrón son, respec-tivamente, la libra (lb), el pié (p) y el segundo(s). Otra unidad utilizada en este sistema es lapulgada (in o pul), cuya relación con el pié es
1 p ≡ 12 in.
Las relaciones entre las unidades del sistema SIy el sistema SU son:
1 lb ≡ 4.448 N y 1 p ≡ 0.3048 m.
Como se verá, en el desarrollo de los diferentestemas del curso, un buen manejo de las dimen-siones y sus respectivas unidades, tanto de lascantidades fundamentales como derivadas, per-mitirá detectar posibles errores cometidos en loscálculos matemáticos que se llevan a cabo en elanálisis de situaciones físicas.
En la tabla 1 se muestran las cantidadesfísicas que serán utilizadas en los temas atratar en este curso. Se incluyen sus corres-pondientes dimensiones y las unidades res-pectivas en el sistema SI, con el fin de iradquiriendo familiaridad desde ahora con ellas.
Tabla 1. Cantidades físicas, dimensiones y unidades
Cantidadfísica
SímboloDimen-sión
Unidad
Longitud x, y, z L mMasa M, m M kg
Tiempo t T sPosición r L mDespla-zamiento
∆r L m
Velocidad v L/T m/sAceleración a L/T2 m/s2
Velocidadangular
ω 1/T 1/s
Aceleraciónangular
α 1/T2 1/s2
Momentolineal
p, P ML/T kg m/s
Fuerza F, f ML/T2 kg m/s2
Momentoangular
L ML2/T kg m2/s
Torque τ, M ML2/T2 kg m2/s2
Trabajo W ML2/T2 kg m2/s2
Energía E ML2/T2 kg m2/s2
Potencia P ML2/T3 kg m2/s3
Presión p M/LT2 kg/m s2
Algunas de ellas reciben los siguientes nombres
Fuerza: 1 kg m s−2 ≡ 1 N (Newton).
Trabajo y energía: 1kg m2 s−2 ≡ 1 J (Julio).
Potencia: 1 kg m2 s−3 ≡ 1 W (Vatio).
Presión: 1 N m−2 ≡ 1 Pa (Pascal).
Ejemplo 1Determine las dimensiones y unidades,en cada uno de los sistemas ante-riores, de k1, k2, k3 en la expresións = k1t2 − k2t + k3, sabiendo que s es unalongitud (L) y t es un tiempo (T).

0.2. VECTORES 3
SoluciónSi s es una longitud, cada uno de los tér-minos de esta expresión debe tener dimen-siones de longitud, es decir, para el primertérmino[
k1t2]= [k1]
[t2]= [k1] T2 = L,
así[k1] =
LT2 = LT−2,
por consiguiente, sus unidades son: m s−2
en el sistema SI, cm s−2 en el sistema gau-ssiano y en el sistema inglés p s−2, por loque de acuerdo con la tabla 1, k1 corres-ponde a una aceleración.
Para el segundo término
[k2t] = [k2] [t] = [k2] T = L,
de donde
[k2] =LT= LT−1,
en este caso las unidades son: m s−1 en elsistema SI, cm s−1 en el sistema gaussianoy p s−1 en el sistema inglés, o sea que k2corresponde a una velocidad.
Para el tercer término
[k3] = L,
donde finalmente, las unidades de k3 son:m en el sistema SI, cm en el sistema gau-ssiano y p en el sistema inglés, ya que sólotiene dimensiones de longitud.
Ejercicio 1Halle las dimensiones y unidades, enlos tres sistemas, de la constante G queaparece en la expresión
F = Gm1 m2
r2 ,
donde F es una fuerza, r es una longitud ytanto m1 como m2 son masas.
Ejercicio 2Teniendo en cuenta las dimensionesobtenidas para G en el ejercicio 1, deter-mine a qué cantidad física corresponde gen la expresión
g = Gmr2 .
Ejercicio 3Encuentre las dimensiones y unidades encada una de las siguientes expresiones (a)√
gR, (b) mgR, (c) mvR[cos
( vtR)+ 1
]y
(d) 12 mv2 + mgR(1 − cos θ). Donde g es
una aceleración, R es una longitud, m esuna masa, v es una velocidad y t es untiempo. En cada caso, diga a cuál cantidadfísica corresponde cada expresión.
Ejemplo 2La densidad de una sustancia esρ = 4.5 g cm−3. Exprese esta densi-dad en el sistema SI de unidades.
SoluciónUtilizando factores unitarios se tiene
ρ = 4.5 g cm−3
= 4.5 g cm−3 × 1 kg103 g
× 106 cm3
1 m3 ,
así, luego de efectuar y simplificar se ob-tiene
ρ = 4.5 × 103kg m−3.
Ejercicio 4Exprese en unidades SI y en unidadesgaussianas: (a) 50 km h−1. (b) 3.03 ×103 p s−2. (c) 300 p lb s−1.
0.2. Vectores
La física es una ciencia natural que tiene co-mo objetivo explicar los fenómenos físicos queocurren en la naturaleza, tal como el movimien-to de los cuerpos.
Para poder explicar estos fenómenos sedispone de modelos físicos, los cuales están sus-tentados por leyes comprobadas experimental-mente y que se expresan en forma de ecuacionesmatemáticas. Es decir, se toma la matemáticacomo el medio más adecuado para explicar losfenómenos de la naturaleza que están directa-mente relacionados con la física, en otras pala-bras, la matemática es el lenguaje de la física.
Por ello, es necesario utilizar el álgebra, latrigonometría, la geometría euclidiana, la geo-metría vectorial y el cálculo, ya que mediante

4 CAPÍTULO 0. INTRODUCCIÓN
estas ramas de la matemática, es posible lle-var a cabo procedimientos matemáticos adecua-dos con las cantidades físicas a utilizar, paraun buen entendimiento de los fenómenos físi-cos involucrados.
Lo anterior lleva a una clasificación de lascantidades físicas, dependiendo de la forma co-mo se expresan. De este modo, se clasifican encantidades escalares y cantidades vectoriales.
0.2.1. Cantidades escalares
Son aquellas cantidades físicas que quedancompletamente determinadas por su magni-tud y su unidad respectiva. Las cantidadesescalares se operan de acuerdo con las reglas dela aritmética, el álgebra y el cálculo. Cantidadesfísicas de este tipo son el área (A), el volumen(V), la masa (m), el tiempo (t), el trabajo (W),la potencia (P), el momento de inercia (I), lapresión (p), la energía (E), la temperatura (T), laentropía (S ), etc.
Ejemplos: A = 10 cm2, V = 3 m3, m = 5 kg,t = 3 s.
0.2.2. Cantidades vectoriales
Son aquellas cantidades físicas que para sucompleta determinación, se requiere añadir unadirección además de su magnitud y su unidadrespectiva. A diferencia de las cantidades es-calares, las cantidades vectoriales se operan deacuerdo con las reglas de la geometría vectorial.Cantidades físicas de este tipo son la velocidad(v), la aceleración (a ), la velocidad angular ( ω),la aceleración angular (α ), el momento lineal (p), la fuerza (F ), el torque (τ ), el momento angu-lar (L ), etc.
0.2.3. Notación vectorial
Como se ha podido observar, las cantidades es-calares y las cantidades vectoriales, se deno-tan de manera diferente con el fin de distinguirunas de otras. En textos impresos, generalmentese utiliza letra negrilla para representar los vec-tores; por ejemplo, la fuerza se expresa como F y
en otros casos como F. Igualmente, la magnituddel vector A se representa como |A| = |A| = A,que corresponde a un escalar.
En los temas que se tratarán de acá en ade-lante, es indispensable distinguir claramenteentre una cantidad escalar y una cantidad vec-torial.
0.2.4. Representación de un vector
Un vector se representa gráficamente medianteuna flecha cuya longitud, utilizando una escalaadecuada, corresponde a la magnitud del vec-tor. Igualmente, la dirección del vector está da-da por el sentido de la flecha, como se ilustraen la figura 1 para los vectores A, B, C y D, quetienen direcciones diferentes.
AB
C
D
Figura 1: Representación de un vector.
0.2.5. Dirección de un vector
Por definición, a un vector se le debe asignar,además de su magnitud, una dirección. Paraque la dirección del vector quede completa-mente determinada, es necesario definir una di-rección de referencia, respecto a la cual se mideel ángulo que forma el vector considerado. En lafigura 2 se muestra la dirección de los vectoresde la figura 1, donde se ha tomado la horizontalcomo la dirección de referencia.
Matemáticamente, los vectores de la figura 2,se expresan en la forma:
A = A 45o
D =D 45o
B = B
C = C

0.2. VECTORES 5
A B
CD
45o
0o
90o
45o
Figura 2: Dirección de un vector.
0.2.6. Vectores iguales
Los vectores A y B son iguales si tienen la mis-ma magnitud y la misma dirección, como seilustra en la figura 3. Matemáticamente, lo an-terior se expresa en la forma A = B.
A B
q q
Figura 3: Vectores iguales.
0.2.7. Vectores iguales y opuestos
Dos vectores A y B son iguales y opuestos sitienen la misma magnitud pero sentidos opues-tos, como se ilustra en la figura 4. Por lo quematemáticamente A = −B.
A
B
q
q
Figura 4: Vectores iguales y opuestos.
0.2.8. Vectores unitarios
Un vector unitario es aquel cuya magnitud esigual a la unidad. Por ello, como en la figura 5,se define el vector unitario λ, que es paralelo alvector A, en la forma
λ ≡ AA
,
donde A es la magnitud del vector A.
A
l
x
y
z
Figura 5: Vector unitario paralelo al vector A
De este modo, el vector A se puede expresaren la forma A = λA, lo cual indica que un vec-tor unitario es adimensional, esto es, no tiene di-mensiones.
Para trabajar operacionalmente con vectores,a cada uno de los ejes coordenados se le asociaun vector unitario, como se ilustra en la figura6 donde al eje x se le asocia el vector unitarioi, al eje y el vector unitario j y al eje z el vectorunitario k.
x
y
z
Oi
jk
Figura 6: Vectores unitarios en coordenadas rectan-gulares.
0.2.9. Suma o composición de vectores
Los vectores se pueden sumar gráfica y analíti-camente, como se describe a continuación. Estaoperación vectorial es de utilidad, por ejemplo,cuando se trata de hallar la fuerza neta o fuerzaresultante que actúa sobre un cuerpo. En este ymuchos otros casos, es necesario sumar variosvectores con el fin de obtener el vector suma ovector resultante.
0.2.10. Suma de vectores por el métodográfico
Dentro de este método existen dos maneras dehacerlo, por el método del polígono y el métododel paralelogramo.

6 CAPÍTULO 0. INTRODUCCIÓN
Cuando se trata de sumar dos vectores, sepuede utilizar el método del triángulo o elmétodo del paralelogramo, en la forma que semuestra en las figuras 7 y 8, donde se ilustragráficamente la suma de los vectores A y B.
A
B
S=A+B
A
B
BA
S=B+A
Figura 7: Método del triángulo.
En el caso del método del triángulo, se tomauno de los vectores y donde éste termina setraslada el otro vector, de este modo, el vec-tor suma está dado por el vector que va des-de donde empieza el primer vector hasta dondetermina el segundo, como se ilustra en la figura7.
Al observar la figura 7, se encuentra que A +B = B + A, lo cual indica que la suma de vec-tores es conmutativa.
En el método del paralelogramo, se trasladanlos dos vectores a un punto común, se comple-ta el paralelogramo cuyos lados opuestos tienenvalores iguales a la magnitud del vector corres-pondiente. El vector suma está dado por la dia-gonal que parte del punto común a los dos vec-tores, como se muestra en la figura 8.
Cuando se trata de sumar más de dos vec-tores, se hace una generalización del método deltriángulo y en este caso se habla del método delpolígono, el cual se ilustra en la figura 9, para lasuma de los vectores A, B, C y D.
Igual que para dos vectores, sigue siendo vá-lida la conmutatividad en la suma de vectores,esto es, A + B + C + D = D + C + B + A =A + D + B + C.
Cuando se suman vectores gráficamente, al
A
B
S=A+B
A
B
Figura 8: Método del paralelogramo.
A
B
S=A+D+B+C
A
B C
D
D
C
Figura 9: Método del polígono.
trasladarlos, no se debe cambiar ni la magnitudni la dirección de ninguno de ellos, pues si estoocurre se encontraría un vector suma diferenteal buscado.
0.2.11. Componentes rectangulares de unvector
En la sección 0.2.12, se considera el métodoanalítico que permite sumar vectores. En dichométodo se emplea el concepto de componentesrectangulares de un vector.
Con ayuda de los vectores unitarios asocia-dos a los ejes coordenados, siempre es posibleexpresar un vector en componentes rectangula-res, como se ilustra en la figura 10, para el vectorA.
En este caso se ha aplicado el método gráficopara la suma de vectores, con la condición quelos vectores componentes son perpendicularesentre sí, esto es, el vector A expresado en com-

0.2. VECTORES 7
x
y
z
OAxi
Ay j
Azk A
Figura 10: Componentes rectangulares de un vector.
ponentes rectangulares está dado por
A = Axi + Ayj + Azk,
donde las componentes rectangulares Ax, Ayy Az pueden ser positivas o negativas, depen-diendo de la orientación del vector respecto alos sentidos positivos de los ejes rectangula-res. En el caso de la figura 10, las tres compo-nentes son positivas. La magnitud del vector Aestá relacionada con la magnitud de sus compo-nentes rectangulares, por medio de la expresión
A2 = A2x + A2
y + A2z .
Para expresar la dirección de un vector en el es-pacio tridimensional, se utilizan los ángulos queel vector en consideración forma con cada unode los ejes coordenados.En el caso de la figura10, el vector A forma los ángulos θx, θy y θz, conlos ejes x, y y z, respectivamente. De este modo,las respectivas componentes del vector A, se ob-tienen mediante las expresiones Ax = A cos θx,Ay = A cos θy y Az = A cos θz. Así
A = A(cos θx i + cos θy j + cos θzk),
donde el vector unitario paralelo al vector A, es-tá dado por
λ = cos θx i + cos θy j + cos θzk,
expresado en función de los cosenos directorescos θx, cos θy y cos θz.
Igualmente, como la magnitud del vector λ esla unidad, se satisface la igualdad
cos2θx + cos2θy + cos2θz = 1,
esto es, la suma de los cuadrados de los cosenosdirectores es igual a la unidad.
En el caso de dos dimensiones, se procede deforma idéntica, solo que únicamente aparecendos componentes rectangulares, como se mues-tra en la figura 11, para el vector A.
x
y
O Axi
Ay jA
q
b
Figura 11: Componentes rectangulares de un vector.
En este caso, aplicando de nuevo el métodográfico para la suma de vectores, se tiene que elvector A expresado en componentes rectangu-lares está dado por
A = Axi + Ayj,
donde igualmente las componentes rectangula-res Ax y Ay pueden ser positivas o negativas,dependiendo de la orientación del vector res-pecto al sentido positivo de los ejes de coorde-nadas, esto es, del cuadrante donde se encuen-tre el vector. En la figura 11, las componentesson positivas.
En el caso particular de un vector en dos di-mensiones, como sus componentes rectangula-res son perpendiculares, el teorema de Pitágo-ras permite relacionar la magnitud del vectorcon la magnitud de sus componentes rectangu-lares, mediante la expresión
A2 = A2x + A2
y ,
donde, conociendo las magnitudes de dos deellas, es posible conocer la magnitud de la otra.
Por otro lado, una vez que se conocen lasmagnitudes de las tres cantidades, la direccióndel vector A se obtiene utilizando cualquiera delas definiciones de las funciones trigonométri-cas, aunque es costumbre emplear la función

8 CAPÍTULO 0. INTRODUCCIÓN
trigonométrica tangente, esto es,
tan θ =Ay
Ax, θ = tan−1 Ay
Ax,
ótan β =
Ax
Ay, β = tan−1 Ax
Ay.
De acuerdo con lo anterior, en la figura 11 sepuede tomar como referencia el eje x o el ejey De este modo, el vector A de la figura 11,matemáticamente se expresa en la forma
A = A q
A = A b
Ejemplo 3Encuentre las componentes rectangularesdel vector unitario paralelo a la línea AB,apuntando en el sentido de A hacia B.
x
y
z
O
600 mm
510m
m320 mm
A
B
SoluciónSea λ un vector unitario paralelo al vector−→AB, esto es
λ =
−→ABAB
.
De acuerdo con la siguiente figura, el vec-tor
−→AB tiene las componentes rectangula-
res
−→AB = (− 0.6i + 0.32j − 0.51k)m,
donde su magnitud está dada por
AB =√
0.62 + 0.322 + 0.512 m= 0.85 m.
Por consiguiente el vector unitario para-lelo al vector
−→AB, expresado en compo-
nentes rectangulares, está dado por
λ =(− 0.6 i + 0.32 j − 0.51 k)m
0.85m,
= −0.71 i + 0.38 j − 0.6 k.
x
y
z
O
600 mm
510m
m320 mm
A
B
l
O sea que las componentes rectangularesdel vector unitario son
λx = −0.71, λy = +0.38, λz = −0.6.
Ejercicio 5En el ejemplo 3, encuentre las compo-nentes rectangulares del vector unitarioparalelo a la línea BA, apuntando en elsentido de B hacia A. Compare su resul-tado con el obtenido en el ejemplo 3.
Ejemplo 4Con ayuda del método gráfico, halle elvector suma de los vectores mostrados enla figura.
A
B
q
SoluciónTeniendo en cuenta el método del trián-gulo, la magnitud y dirección del vectorsuma se obtiene como sigue.
A
B
q
S=A+B
a b
c
De la figura se cumple la igualdad
(ac)2 = (ab)2 + (bc)2, (1)
donde
ac = S, ab = A + B cos θ, bc = B sen θ.(2)
Reemplazando las expresiones de laecuación (2) en la ecuación (1), se obtiene
S2 = (A + B cos θ)2 + (B sen θ)2
= A2 + B2 + 2AB cos θ,

0.2. VECTORES 9
donde mediante esta expresión, conocidacomo la ley del coseno, es posible conocerla magnitud del vector suma.
Para hallar la dirección del vectorsuma, con ayuda de la figura, se procedecomo sigue.
A
B
q
S
a b
c
b
gd
e
cb = S sen β = B sen θ,S
sen θ=
Bsen β
,
(3)
ed = A sen β = B sen γ,A
sen γ=
Bsen β
.
(4)Por las ecuaciones (3) y (4), se encuen-
traS
sen θ=
Asen γ
=B
sen β.
Expresión conocida como la ley delseno, y mediante la cual es posible ha-llar el ángulo β, conociendo los valoresde B, θ y S.
Ejercicio 6Halle la magnitud y dirección del vec-tor suma, de los vectores mostrados en lafigura.
B=15 u57
o A=23 u
0.2.12. Suma de vectores por compo-nentes rectangulares
Para sumar dos o más vectores por compo-nentes rectangulares, primero se expresa cadauno de los vectores en sus componentes rec-tangulares y luego se suman, por separado, lascomponentes rectangulares paralelas a cada ejecoordenado, es decir, al sumar los vectores A, B,C y D, se procede así
i) Se obtienen las componentes rectangularesde cada vector, como se ilustra gráficamente enla figura 12.
x
y
O Axi
Ay jA
B
C
DBxi
By j Dxi
Dyj
Figura 12: Componentes rectangulares de cada vec-tor.
A = Ax i + Ay j,B = Bx i + By j,C = Cy j,D = Dx i + Dy j,
donde,
- las componentes del vector A son positivas,ya que el vector se encuentra en el primercuadrante (Ax > 0, Ay > 0),
- la componente horizontal del vector B esnegativa, mientras que su componente ver-tical es positiva por estar ubicado el vectoren el segundo cuadrante (Bx < 0, By > 0),
- el vector C solo tiene componente verticalla cual es negativa por apuntar en sentidoopuesto a la dirección tomada como positi-va para el eje y (Cy < 0),
- la componente horizontal del vector D espositiva y su componente vertical negativa,ya que el vector se encuentra en el cuartocuadrante (Dx > 0, Dy < 0).
ii) Componentes rectangulares del vectorsuma
Sx = Ax + Bx + Dx,Sy = Ay + By + Cy + Dy.

10 CAPÍTULO 0. INTRODUCCIÓN
De este modo, el vector suma en componentesrectangulares, está dado por
S = Sxi + Syj.
iii) Magnitud del vector suma
x
y
O Sxi
Sy jS
q
b
Figura 13: Vector suma de varios vectores.
Como las componentes del vector suma sonperpendiculares entre sí, de nuevo se utiliza elteorema de Pitágoras, esto es
S2 = S2x + S2
y
iv) Dirección del vector suma
tan θ =SySx
, θ = tan−1 SySx
,
tan β = SxSy
, β = tan−1 SxSy
dependiendo del eje que se tome como referen-cia, como se muestra en la figura 13.
Ejemplo 5Halle el vector suma o vector resultante,de los cuatro vectores mostrados en lafigura.
x
y
O
37o
D = 7 u
A=
20 u
25o
B = 15 u
29oC = 30 u
SoluciónLuego de considerar las componentes rec-tangulares de cada vector, se encuentra
que las componentes rectangulares delvector suma son
Sx = 5.77u y Sy = −17.75u.
De este modo, el vector suma expresadoen componentes rectangulares está dadopor
S = (5.77i − 17.75j)u.
Finalmente, luego de hallar la magni-tud y dirección de este vector, se obtiene
S = 18.66 u 71.99o
Gráficamente se tiene
x
y
O 71.99o
18.66 u
-17.75 u
5.77 u
Ejercicio 7Encuentre los siguientes vectores, utilizan-do los cuatro vectores de la gráfica. (a)V1 = A − (B − C) + D, (b) V2 = −(A −B) + C − D, (c) V3 = A + D − (2C − B) y(d) V4 = −A − B − C − D.
x
y
O
37o
D = 7 u
A=
20 u
25o
B = 15 u
29oC = 30 u
0.2.13. Producto entre vectores
En física se definen cantidades, tales como eltrabajo realizado por una fuerza, el momen-to angular de un cuerpo o el torque de una

0.2. VECTORES 11
fuerza, en función del producto entre dos vec-tores. Pero se debe tener cuidado al definirlas yaque existen dos tipos de producto, uno de ellosse conoce como producto escalar o producto puntoentre dos vectores y el otro como producto vecto-rial o producto cruz entre dos vectores, los cualestienen propiedades o características diferentescomo se muestra en lo que sigue.
0.2.14. Producto escalar o producto puntoentre vectores
El producto escalar entre dos vectores, será degran utilidad en la definición matemática delconcepto de trabajo.
Se consideran los vectores A y B que formanentre sí un ángulo θ, como se ilustra en la figura14. El producto escalar entre estos dos vectores,que se representa como A · B, está definido por
A · B ≡ AB cos θ,
o sea que el producto escalar entre los vectoresA y B es igual al producto de sus magnitudespor el coseno del ángulo que forman.
A
q
B
Figura 14: Producto escalar de dos vectores.
De acuerdo con esta definición, se tiene que elproducto punto entre dos vectores es un escalarque cumple la condición
A · B = AB cos θ,B · A = BA cos θ,
lo cual indica que el producto escalar satisfacela propiedad de conmutatividad.
Partiendo de esta definición, es posible ob-tener otras dos definiciones para el productoescalar, teniendo en cuenta la figura 15, comosigue.
En la figura 15(a), la proyección del vector Asobre el vector B está dada por A cos θ, lo cual
A
q
B
A
q
BA cos q
B cos q
(a) (b)
Figura 15: Proyección de un vector sobre el otro.
permite expresar la definición de producto es-calar en la forma
A · B ≡ (A cos θ)B,
esto es, el producto escalar de los vectores A yB también se puede definir como el producto dela componente del vector A paralela a B por lamagnitud de B.
Análogamente, al considerar la figura 15(b),la proyección del vector B sobre el vector A es-tá dada por B cos θ, por lo que la definición deproducto escalar se puede escribir en la forma
A · B ≡ A(B cos θ),
o sea, el producto escalar de los vectores A y Bigualmente se puede definir como el productode la magnitud del vector A por la componentedel vector B paralela al vector A.
Como consecuencia de la definición del pro-ducto escalar entre los vectores A y B, se ob-tienen las siguientes conclusiones
- Cuando los vectores son paralelos el pro-ducto punto es máximo, ya que en este casoel coseno adquiere su máximo valor.
- Cuando los vectores son antiparalelos elproducto punto es mínimo, ya que en estecaso el coseno adquiere su mínimo valor.
- Cuando los vectores son perpendiculares elproducto punto es nulo.
En síntesis, el producto punto entre los vectoresA y B adquiere valores comprendidos entre elintervalo −AB ≤ A · B ≤ +AB.
Teniendo en cuenta lo anterior, para los vec-tores unitarios i, j y k, que son linealmente in-dependientes por ser perpendiculares entre sí,
12 CAPÍTULO 0. INTRODUCCIÓN
se satisfacen las siguientes igualdades
i · i = j · j = k · k=1,
i · j = j · i = j · k = k · j = k · i = i · k = 0.
Por consiguiente, el producto escalar de los vec-tores A y B, teniendo en cuenta sus compo-nentes rectangulares, también se puede expre-sar en la forma
A · B = AxBx + AyBy + AzBz.
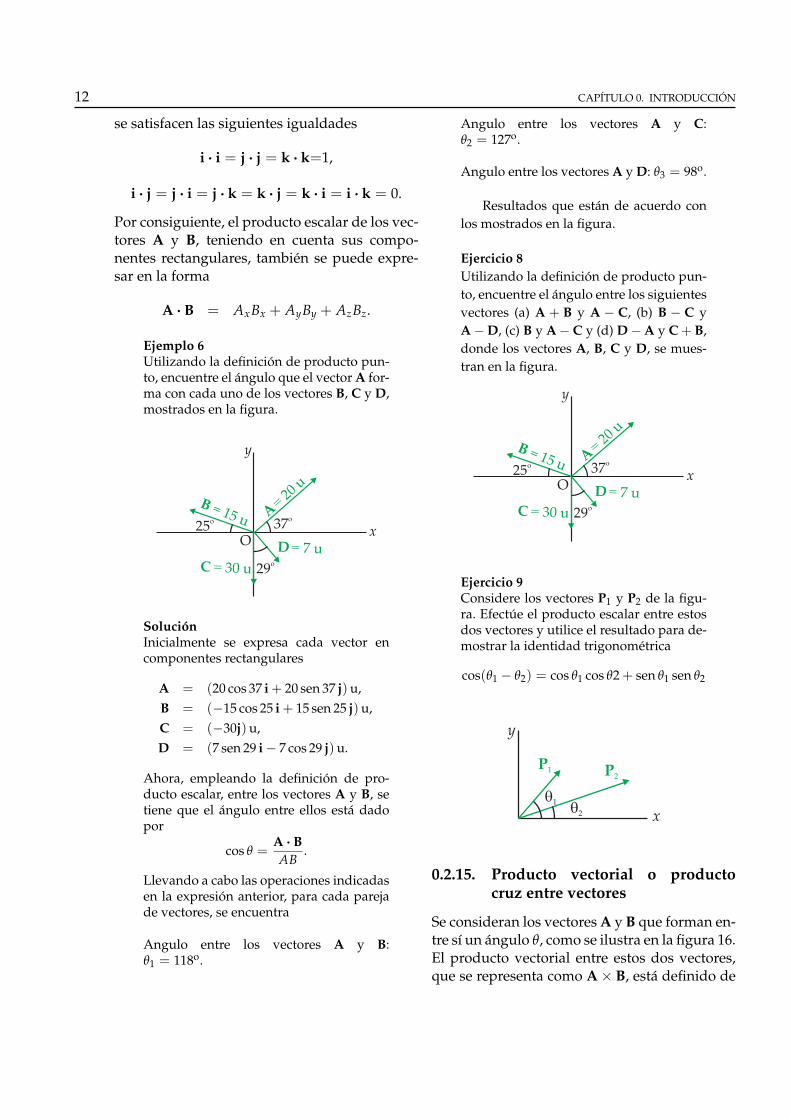
Ejemplo 6Utilizando la definición de producto pun-to, encuentre el ángulo que el vector A for-ma con cada uno de los vectores B, C y D,mostrados en la figura.
x
y
O
37o
D = 7 u
A=
20 u
25o
B = 15 u
29oC = 30 u
SoluciónInicialmente se expresa cada vector encomponentes rectangulares
A = (20 cos 37 i + 20 sen 37 j)u,B = (−15 cos 25 i + 15 sen 25 j)u,C = (−30j)u,D = (7 sen 29 i − 7 cos 29 j)u.
Ahora, empleando la definición de pro-ducto escalar, entre los vectores A y B, setiene que el ángulo entre ellos está dadopor
cos θ =A · BAB
.
Llevando a cabo las operaciones indicadasen la expresión anterior, para cada parejade vectores, se encuentra
Angulo entre los vectores A y B:θ1 = 118o.
Angulo entre los vectores A y C:θ2 = 127o.
Angulo entre los vectores A y D: θ3 = 98o.
Resultados que están de acuerdo conlos mostrados en la figura.
Ejercicio 8Utilizando la definición de producto pun-to, encuentre el ángulo entre los siguientesvectores (a) A + B y A − C, (b) B − C yA − D, (c) B y A − C y (d) D − A y C + B,donde los vectores A, B, C y D, se mues-tran en la figura.
x
y
O
37o
D = 7 u
A=
20 u
25o
B = 15 u
29oC = 30 u
Ejercicio 9Considere los vectores P1 y P2 de la figu-ra. Efectúe el producto escalar entre estosdos vectores y utilice el resultado para de-mostrar la identidad trigonométrica
cos(θ1 − θ2) = cos θ1 cos θ2 + sen θ1 sen θ2
P1 P
2
q1
q2
y
x
0.2.15. Producto vectorial o productocruz entre vectores
Se consideran los vectores A y B que forman en-tre sí un ángulo θ, como se ilustra en la figura 16.El producto vectorial entre estos dos vectores,que se representa como A × B, está definido de

0.2. VECTORES 13
tal forma que es igual a otro vector C perpendi-cular tanto al vector A como al vector B, esto es,el vector C = A × B es un vector perpendicularal plano formado por los vectores A y B, dondesu magnitud está dada por
|C| = |A × B|= AB sen θ,
A
qB
C = A Bx
Figura 16: Producto vectorial entre vectores.
o sea, la magnitud del producto vectorial en-tre los vectores A y B es igual al producto de susmagnitudes por el seno del ángulo que forman.
Por otro lado, como consecuencia de la defini-ción del producto vectorial entre los vectores Ay B, se tienen las siguientes conclusiones
- Cuando los vectores son paralelos la mag-nitud del producto cruz es nula, ya que eneste caso el seno adquiere el valor cero.
- Cuando los vectores son antiparalelos lamagnitud del producto cruz es nula, ya queen este caso el seno adquiere el valor cero.
- Cuando los vectores son perpendiculares,la magnitud del producto cruz es máxima,ya que el seno adquiere su máximo valor,esto es AB.
- Cuando los vectores son perpendiculares,formando entre sí un ángulo de 270o, lamagnitud del producto cruz es mínima, yaque el seno adquiere su mínimo valor, estoes −AB.
En síntesis, el producto cruz entre los vectoresA y B adquiere valores comprendidos entre elintervalo −AB ≤ |A × B| ≤ +AB.
Teniendo en cuenta lo anterior, para los vec-tores unitarios i, j y k, que son linealmente in-dependientes por ser perpendiculares entre sí,
se satisfacen las siguientes igualdades
i × i = j × j = k × k = 0,
i × j = k, j × i = −k, j × k = i,k × j = −i, k × i = j, i × k = −j
Por consiguiente, el producto vectorial de losvectores A y B, teniendo en cuenta sus compo-nentes rectangulares, también se puede expre-sar en la forma
C = A × B= (Axi + Ayj + Azk)× (Bxi + Byj + Bzk).
ConC = Cxi + Cyj + Czk,
se encuentra que
Cx = AyBz − AzBy,
Cy = AzBx − AxBz,
Cz = AxBy − AyBx.
El resultado anterior también se puede obteneral resolver el determinante
A × B =
∣∣∣∣∣∣i j kAx Ay AzBx By Bz
∣∣∣∣∣∣El producto vectorial entre vectores se utilizarápara definir, respecto a un punto determinado,el vector torque de una fuerza y el vectormomento angular de un cuerpo.
Ejemplo 7Considere los vectores P1 y P2 de la figu-ra. Efectúe el producto vectorial entre es-tos dos vectores y utilice el resultado parademostrar la identidad trigonométrica
sen(θ1 − θ2) = sen θ1 cos θ2 − cos θ1 sen θ2
SoluciónPara hallar el producto vectorial de estosdos vectores, primero se debe expresar ca-da uno de ellos en componentes rectangu-lares, esto es
P1 = P1xi + P1yj= P1 cos θ1i + P1 sen θ1j,
P2 = P2xi + P2yj= P2 cos θ2i + P2 sen θ2j.

14 CAPÍTULO 0. INTRODUCCIÓN
P1 P
2
q1
q2
y
x
Por consiguiente, el producto vectorial delos vectores dados, que de acuerdo con laregla de la mano derecha apunta en la di-rección negativa del eje z, está dado por
P1 ×P2 = −P1P2(senθ1 cos θ2 − sen θ2 cos θ1)k,
por lo que su magnitud es
|P1 × P2| = P1P2(senθ1 cos θ2 − sen θ2 cos θ1).(1)
Por otro lado, considerando la definiciónde producto vectorial, se tiene que la mag-nitud también está dada por
|P1 × P2| = P1P2sen(θ1 − θ2). (2)
Finalmente, igualando las ecuaciones (1) y(2), se obtiene
sen(θ1 − θ2) = (senθ1 cos θ2 − sen θ2 cos θ1).
Ejemplo 8Utilizando la definición de producto cruz,encuentre el ángulo que el vector A for-ma con cada uno de los vectores B, C y D,mostrados en la figura.
x
y
O
37o
D = 7 u
A=
20 u
25o
B = 15 u
29oC = 30 u
SoluciónInicialmente se expresa cada vector encomponentes rectangulares
A = (20 cos 37 i + 20 sen 37 j)u,B = (−15 cos 25 i + 15 sen 25 j)u,C = (−30 j)u,D = (7 sen 29 i − 7 cos 29 j)u.
Ahora, empleando la definición de pro-ducto vectorial, entre los vectores A y B,se encuentra que el ángulo entre ellos estádado por
sen θ =|A × B|
AB.
Llevando a cabo las operaciones indicadasen la expresión anterior, para cada parejade vectores, se encuentraAngulo entre los vectores A y B: θ1 = 62o,que es el suplemento de θ1 = 118o.Angulo entre los vectores A y C: θ2 = 53o,que es el suplemento de θ1 = 127o.Angulo entre los vectores A y D: θ3 = 82o,que es el suplemento de θ1 = 98o.Resultados que concuerdan con losobtenidos en el ejemplo 6, utilizando ladefinición de producto escalar.
Ejercicio 10Encuentre, empleando la definición deproducto vectorial, el ángulo entre lossiguientes vectores (a) A + B y A − C, (b)B−C y A−D, (c) B y A−C y (d) D−A yC + B, donde los vectores A, B, C y D, sonlos mostrados en la figura. Compare conlos resultados obtenidos en el ejercicio 8.
x
y
O
37o
D = 7 u
A=
20 u
25o
B = 15 u
29oC = 30 u
0.2.16. Derivadas con vectores
En diferentes situaciones se hace necesarioderivar un vector, bien sea respecto a una delas coordenadas o respecto al tiempo, es decir,respecto a una cantidad escalar. Esta operaciónse emplea al definir cantidades físicas tales co-mo los vectores velocidad (v), aceleración (a),fuerza (F) y torque de una fuerza respecto a un

0.3. COORDENADAS POLARES 15
punto (τ). En lo que sigue, t es un escalar res-pecto al cual se tomarán las derivadas de unvector o de un producto de vectores.
Si el vector A está dado en componentes rec-tangulares por A = Axi+ Ayj+ Azk, su deriva-da respecto al escalar t, viene dada por
dAdt
=ddt
(Axi + Ayj + Azk),
=dAx
dti +
dAy
dtj +
dAz
dtk,
donde se ha tenido en cuenta que los vectoresunitarios i , j y k tienen magnitud y direcciónconstantes, es decir
didt
=djdt
=dkdt
= 0.
En algunas situaciones se hace necesario deter-minar la derivada de un producto escalar o deun producto vectorial. En este caso, se aplicanlas mismas reglas del cálculo para la derivadade un producto.
Así, la derivada del escalar A = B · C, estádada por
dAdt
=ddt
(B · C)
=dBdt
· C + B · dCdt
.
De igual manera, la derivada del vector D =P × Q, es
dDdt
=ddt
(P × Q)
=dPdt
× Q + P × dQdt
.
En este caso se debe tener presente que elproducto cruz no es conmutativo, mientras queel producto punto sí lo es.
Ejemplo 9Derivar los siguientes vectores respecto alescalar t. (a) A(t) = 3t2i + 2tj + 8k. (b)r(t) = [Acos(ωt)] i + [Asen(ωt)] j, dondeω es una constante.
Solución(a)
dA(t)dt
= 6ti + 2j.
(b)
dr(t)dt
= [−Aω sen(ωt)] i + [Aω cos(ωt)] j
= Aω{[− sen(ωt)] i + [cos(ωt)] j}.
Ejercicio 11Halle la segunda derivada de los vec-tores dados en el ejemplo 9. Encuentre unarelación entre el vector r(t) y su segundaderivada.
0.3. Coordenadas polares
Hasta este momento se han empleado coorde-nadas rectangulares para el trabajo con vec-tores. Como se verá más adelante, se presentansituaciones físicas en las que es más adecuadoemplear otro sistema de coordenadas conocidocomo coordenadas polares r θ, en las que un pun-to del plano xy, con coordenadas rectangulares(x, y), se expresa en la forma (r, θ) donde r esla longitud de la recta que va del origen al pun-to en consideración y θ es el ángulo que la rectaforma con respecto a un eje de referencia, medi-do en sentido antihorario, como se ilustra en lafigura 17.
q
( , )r q
r
Figura 17: Coordenadas polares.
Mediante el sistema de coordenadas rectan-gulares, es posible encontrar una relación en-tre ambos sistemas de coordenadas, teniendo encuenta la figura 18.
q
( , )r q
r
x
y
( , )x y
Figura 18: Coordenadas polares y coordenadas rec-tangulares.

16 CAPÍTULO 0. INTRODUCCIÓN
De la figura 18 se tiene
x = r cos θ y y = r sen θ.
Ejemplo 10Las coordenadas cartesianas de dospuntos en el plano xy, están dadas por(2.0, − 4.0)m y (− 3, 0, 3.0)m. Determine(a) La distancia entre estos puntos. (b) Suscoordenadas polares.
Solución(a) Para determinar la distancia entre lospuntos A y B, se consideran los vectoresr1 y r2, cuyas componentes rectangularesestán dadas por
x (m)
y (m)
(2.00, -4.00)
(-3.00, 3.00)
O
A
B
r1
r2
q1
q2
D
r1 = (2i− 4j)m y r2 = (− 3i+ 3j)m.
Ahora, la diferencia entre los vectores r1 yr2 es igual al vector D, esto es
D = r1 − r2
= (5i − 7j)m.
De este modo, la distancia entre los pun-tos A y B, corresponde a la magnitud delvector diferencia, es decir
D =√
52 + 72 ≈ 8.6 m.
(b) Coordenadas polares de cada puntoPara el punto A sus coordenadas po-
lares son (r1 ,θ1), cuyos valores están da-dos por
r1 =√
22 + 42
= 4.47 m,
θ1 = 360 − tan−1 42
= 296.57o.
Para el punto B las coordenadas polaresson (r2 ,θ2), con valores
r2 =√
32 + 32
= 4.24 m,
θ2 = 180 − tan−1 33
= 135o.
Ejercicio 12Dos puntos en el plano tienen coordena-das polares (2.5 m, 30.0o) y (3.8 m, 120.0o).Determine (a) Las coordenadas carte-sianas de estos puntos. (b) La distancia en-tre ellos.
0.4. Pautas generales en la solu-ción de problemas
Los diferentes temas que se tratan en un cursode física, corresponden a situaciones que se pre-sentan en la naturaleza, tal como el movimientode los cuerpos. Estos temas se analizan primerode una manera general y luego se aplican losconceptos involucrados en el análisis y soluciónde situaciones físicas particulares, más conoci-dos como problemas. A continuación, se consi-deran las pautas generales que se deben seguiren la solución de problemas.
1. Mientras no se entienda con toda claridadla situación física planteada en un proble-ma particular, no es posible llegar a unasolución que tenga sentido físico real. Porello es indispensable leer detenida y cuida-dosamente el enunciado propuesto. No en-tender el enunciado es quizá el origen demuchas salidas en falso, que pueden llevara soluciones sin ningún significado.
2. Una vez que se ha logrado cumplir el pa-so anterior, es posible trazar un diagramao esquema de la situación planteada en elenunciado. Con esto se logra una mejor vi-sualización del caso que se describe.
3. Con ayuda del diagrama anterior, general-mente, se escriben las cantidades dadas ylas cantidades conocidas. Igualmente, se

0.5. ENUNCIADOS 17
debe estar seguro de cuáles cantidadesdebe determinar, es decir, cuáles son las in-cógnitas del problema.
4. En la solución de un problema, por lo gene-ral, sólo se aplican pocos principios o con-ceptos físicos. En esta etapa es indispen-sable analizar cuáles principios o concep-tos se deben emplear, teniendo en cuenta larelación entre las cantidades a determinary las cantidades conocidas.
5. Teniendo en cuenta que la matemática esel lenguaje de la física, se expresan losprincipios o conceptos en función de lascantidades físicas que intervienen en elproblema particular. En esta parte se debetener mucho cuidado de utilizar expre-siones matemáticas que sean válidas en lasituación que se está tratando. Tenga pre-sente que algunas expresiones no son devalidez general, sino que sólo son aplica-bles en ciertos casos. Como algunas vecesse obtienen varias ecuaciones simultáneasque es necesario resolver, se debe contar elnúmero de ecuaciones y de incógnitas conel fin de saber si es posible obtener unasolución en función de las cantidades cono-cidas o no. En cada caso particular, utiliceel método más adecuado que le permita re-solver de la forma más sencilla posible, elsistema de ecuaciones simultáneas.
6. Hasta donde sea posible, trabaje en for-ma literal, es decir, utilice los símbolos delas cantidades físicas conocidas en lugarde hacer los reemplazos numéricos desdeun comienzo. Así es posible expresar lite-ralmente las incógnitas en función de lascantidades dadas en el enunciado, y de es-ta forma se tiene la posibilidad de hacerun análisis físico y dimensional de los re-sultados obtenidos, permitiendo detectarposibles errores. Espere hasta el final parareemplazar los valores numéricos con susrespectivas unidades. Es importante incluirunidades, porque la respuesta se debe ex-presar en función de ellas y porque se ten-drá una comprobación adicional al simpli-
ficar las unidades en forma adecuada.
7. Cuando se obtengan respuestas numéri-cas, es necesario hacer un análisis de ellasrespondiendo a la pregunta ¿tiene senti-do físico el valor encontrado? Por ejem-plo, si se encuentra que la velocidad de unauto es mayor que la velocidad de la luz(3 × 108 m · s−1), o que un cuerpo, tal co-mo un balón, tiene una masa igual a la dela tierra (5.98 × 1024 kg) o a la de un elec-trón (9.1 × 10−31 kg), es porque existe unerror en la solución del problema, ya queson respuestas o resultados que no están deacuerdo con la realidad.
8. Por último, se deben utilizar "todas" lascomprobaciones posibles de los resultados.
0.5. ENUNCIADOS
1. Considere las cantidades físicas masa (M),longitud (L), fuerza (F) y tiempo (T). Digacuál de ellas no es una cantidad física fun-damental en el sistema (a) internacional deunidades y (b) inglés de unidades.
2. Al analizar una situación física, se obtieneun resultado tal que el numerador tiene lasunidades kg · m2 · s−1 y el denominadorkg ·m2 · s−2. ¿Qué cantidad física se obtuvofinalmente?
3. Justificando su respuesta, diga si cada unade las afirmaciones anteriores es correc-ta o incorrecta: (a) Sólo se pueden sumarcantidades físicas que tengan las mismasunidades. (b) Dos cantidades físicas sepueden multiplicar o dividir, si y sólo si,tienen las mismas dimensiones.
4. Cierta región, la rapidez del sonido en elaire es 335 m · s−1. Halle, en km · h−1, larapidez de un avión que se mueve con unarapidez igual al doble de la velocidad delsonido en dicha región.
5. Un deportista tiene una estatura de 5.8 py 9.9 pul. Halle su estatura en el sistema

18 CAPÍTULO 0. INTRODUCCIÓN
internacional de unidades y en el sistemagaussiano.
6. La separación entre dos de los soportes delpuente Golden Gate, en San Francisco Cali-fornia, es de 4200 p. Exprese esta distanciakm.
7. Un cilindro circular recto tiene un diámetrode 7.1 pul y una altura de 1.9 p. Halle el áreade la base y su volumen, en el sistema inter-nacional de unidades.
8. En las ecuaciones siguientes, x se da en m,t en s, v en m · s−1 y a en m · s−2. Teniendoen cuenta estas unidades, determine las di-mensiones de las cantidades: (a) v2/x, (b)√
x/a y (c) at2/2.
9. En la expresión x = Ae−ωt, x es una lon-gitud, A es una longitud máxima y t es untiempo . ¿Cuáles son las dimensiones de ω?
10. Un objeto de cierta masa, que está sujetoal extremo de una cuerda, describe una cir-cunferencia. La fuerza ejercida por la cuer-da tiene las dimensiones ML/T−2 y de-pende tanto de la masa del cuerpo, comode su rapidez y del radio de la circunfer-encia que describe. ¿Cuál combinación deestas últimas tres cantidades, genera las di-mensiones de la fuerza?
11. Muestre que el momento lineal tiene las di-mensiones del producto de una fuerza porel tiempo.
12. Cuando un cuerpo se mueve en el aire, segenera una fuerza de fricción que es pro-porcional al área superficial A del cuerpoy a su rapidez al cuadrado v2, es decir,Ff = CAV2. Obtenga las dimensiones de laconstante C.
13. En el sistema internacional de unidades lafuerza se da en N. Halle las dimensiones yunidades, en dicho sistema, de la constantede gravitación universal G, que apareceen la ley de gravitación de Newton F =Gm1m2/r2
14. Simplifique cada una de las siguientes ex-presiones vectoriales: (a) 3(A − 2B) + C −4(6B − C) = 0, (b) P = 4[3(2A − 3B +C)− (5A − C) + 8B], (c) 8A − 7B − 4(3B +6A) = 0.
15. Responda cada una de las siguientes pre-guntas. (a) Los vectores A y B tienen igualmagnitud. ¿Es posible que su suma seacero? Explique. (b) Los vectores P y Qtienen magnitudes diferentes. ¿Es posibleque su suma sea nula? Explique. (c) Losvectores A, B y C tienen igual magnitud.¿La suma entre ellos puede ser cero? Ex-plique. (d) Los vectores P, Q y R tienendiferente magnitud. ¿La suma entre ellospuede ser cero? Explique.
(e) El vector M tiene una magnitud de 4unidades y el vector N de 3 unidades. Có-mo se deben combinar estos vectores paraque se obtenga un vector resultante conmagnitud de: (i) 1 unidad, (ii) 5 unidades,(iii) 7 unidades y (iv) Cualquier magnitudentre 1 y 7 unidades.
16. La magnitud y dirección respecto a la ho-rizontal, de los vectores A, B y C, estándadas respectivamente por 50 unidades y45o, 75 unidades y 210o, 100 unidades y330o. Determine la magnitud y direcciónde: (a) A − B + C. (b) A + B − C, (c) el vec-tor D, si A + B − C + D = 0 y (d) el vectorD si A − B − C − D = 0
17. Se tienen los vectores P y Q que formanentre sí un ángulo θ y cuya resultante osuma es el vector S. (a) Utilizando el méto-do del paralelogramo y la trigonometría,obtenga la magnitud y dirección del vec-tor S, en función de P, Q y el ángulo φ queforma con la horizontal. (b) Resuelva el nu-meral anterior utilizando componentes rec-tangulares. (c) Compruebe sus resultados siθ = 0o, 90o, 180o.
18. Sobre un punto, que se encuentra sobreuna circunferencia, se aplica un vector de103 unidades que apunta hacia el centroy otro de 3 × 103 unidades que apunta

0.5. ENUNCIADOS 19
q
P
Qx
y
horizontalmente hacia la derecha. (a) Uti-lizando el método del paralelogramo y latrigonometría, obtenga la magnitud y di-rección del vector suma, en función delángulo θ. (b) Resuelva el numeral ante-rior, utilizando componentes rectangula-res. (c) Compruebe sus resultados si θ =0o, 90o, 180o.
x
y
q
10 u3 3 10 ux
3
19. Un barco en alta mar recibe dos señalesdesde los transmisores A y B que se en-cuentran separados 100 km y uno al sur delotro. El localizador de direcciones del bar-co detecta que A está 30o al sur del este yque B se encuentra al este. (a) Encuentre laseparación entre el barco y cada transmisorde señales. (b) Exprese en componentes rec-tangulares los vectores que unen al barcocon cada transmisor. (c) Utilizando los vec-tores anteriores, obtenga el vector que uneal transmisor A con el transmisor B.¿Cuáloperación entre vector realizó en este caso?
20. (a) Encuentre un vector unitario paralelo alvector M = −i + 2j + k. (b) Halle la com-ponente del vector M = −i + 2j + k en ladirección del vector N = 4i + 3j.
21. La magnitud de la suma de dos vectores yla magnitud de su diferencia son iguales.Demuestre que los dos vectores son per-pendiculares.
22. Los vectores A y B, que se encuentran enplano xy, forman con el eje x los ángulosrespectivos θ1 y θ2. (a) Exprese cada vector
en sus componentes rectangulares. (b) Me-diante el producto punto, demuestre quecos(θ1 − θ2) = cos θ1 cos θ2 + sen θ1 sen θ2
23. Dos vectores, de magnitudes P y Q, formanentre sí un ángulo β cuando se colocan apartir del mismo origen. Mediante compo-nentes rectangulares, halle la magnitud delvector suma de estos dos vectores. ¿Quénombre recibe el resultado obtenido?
24. La figura muestra dos conjuntos de ejescoordenados y sus vectores unitarios aso-ciados. (a) Demuestre que i′ = cosφi +senφj, j′ = −senφi + cosφj. b) Use elresultado del numeral anterior para de-mostrar que las componentes rectangularesdel vector A en ambos sistemas de coor-denadas, se relacionan mediante las expre-siones Ax
′= Axcosφ + Aysenφ, Ay
′=
−Axsenφ + Aycosφ.
x
y
O i
i'
jj'
j
x'
y'
25. Demostrar que si la suma y la diferencia dedos vectores, son perpendiculares, los vec-tores tienen magnitudes iguales.
26. Dos vectores tienen la misma magnitud Vy forman entre sí un ángulo θ. Demostrar:(a) Que la suma tiene una magnitud S =2V cos(θ/2), (b) Que la diferencia tiene unamagnitud D = 2V sen(θ/2) .
27. La figura muestra el sistema fijo de coor-denadas xy, con sus vectores unitarios aso-ciados i y j. Adicionalmente, se tienen losvectores unitarios rotantes a y b. Considereel instante en el cual el vector unitario a for-ma un ángulo θ con la horizontal. (a) Exp-rese los vectores unitarios a y b en compo-nentes rectangulares. (b) De acuerdo con elenunciado, ¿qué diferencia se presenta en-tre las parejas de vectores unitarios i y j cona y b? Explique. (c) Encuentre la derivada
20 CAPÍTULO 0. INTRODUCCIÓN
de cada vector unitario respecto al tiempo.Dar sus respuestas completamente simpli-ficadas. ¿Qué puede concluir de sus resul-tados? Explique.
x
y
O i
j
q
a
b
28. Obtenga la magnitud y dirección del vec-tor suma resultante entre los vectores A =−6i + j − 3k unidades y B = 4i − 5j + 7kunidades.
29. Se tienen los vectores P = 3i − 4j + 3kunidades y Q = −3i + 5j − 6k unidades.(a) Halle la magnitud y dirección del pro-ducto cruz entre los vectores P y Q. (b) En-cuentre el ángulo entre los vectores P y Q.
30. En el punto A, sobre el eje x, se aplican losvectores M y N cada uno de magnitud 100unidades. (a) Halle la magnitud y direccióndel vector S = M+N. (b) Encuentre el pro-ducto escalar entre M y N. ¿Qué ángulo for-man estos vectores? (c) Encuentre el pro-ducto vectorial entre M y N. ¿Qué ánguloforman estos vectores?
x
y
4 m
7 m
3 m
z
A
B
CM
N
31. (a) ¿Qué ángulo forman los vectores A y B,sabiendo que su producto punto es −AB?(b) La magnitud de cada uno de los vec-tores A y B es 5.6 m y forman entre sí unángulo de 58o. Halle el valor del productopunto entre estos vectores.
32. Determine tanto el producto punto entrelos vectores P y Q, como el ángulo com-prendido entre ellos, si (a) P = −6i + 3j,
Q = 2i − 4j, (b) P = −5i − 5j, Q = −4i +2j, (c) P = −4i − 6j, Q = −6i + 4j.
Bibliografía
- Física (Séptima edición), Volumen 1, R. A.Serway, J. W. Jewett, Jr. Cengage LearningEditores S.A., 2009.
- Física para la ciencia y la tecnología (Quintaedición), Volumen 1, Paul A. Tipkler, GeneMosca Editorial Reverté, 2005.
- Física Universitaria, Volumen I, R. L. Reese.Thomson, 2002.
- Ingeniería Mecánica: ESTATICA, Arthur P.Boresi. Richard J. Schmidt, Thomson, 2001.
- Física, vol. I (Mecánica), M. Alonso yE. Finn. Fondo Educativo Interamericano,S.A., 1976.
- Física Universitaria Volumen 1 (Undécimaedición), F. W. Sears, M. W. Zemansky, H.D. Young y R. A. Freedman. Pearson Edu-cación, 2004.
- Mecánica Vectorial para Ingenieros, Estática, F.P. Beer y E. R. Johnston, Jr. McGraw-Hill,1998.

MOMENTO LINEAL, ENERGIA CINETICA Y SUCONSERVACION
BERNARDO ARENAS GAVIRIAUniversidad de Antioquia
Instituto de Física
2012

Índice general
1. Momento lineal, energía cinética y su conservación 11.1. Introducción . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11.2. Sistemas de referencia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11.3. Concepto de partícula . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31.4. Vector posición (r) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41.5. Vector desplazamiento (∆r) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41.6. Vector velocidad (v) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
1.6.1. Vector velocidad media (v) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51.6.2. Vector velocidad instantánea (v) . . . . . . . . . . . . . . . . . . . . . . . . . . 71.6.3. Movimiento rectilíneo uniforme (MRU) . . . . . . . . . . . . . . . . . . . . . . 10
1.7. Momento lineal o cantidad de movimiento (p) . . . . . . . . . . . . . . . . . . . . . . 111.7.1. Conservación del momento lineal en una dimensión . . . . . . . . . . . . . . 12
1.8. Movimiento en un plano . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 141.8.1. Vector posición en dos dimensiones (r) . . . . . . . . . . . . . . . . . . . . . . 141.8.2. Vector desplazamiento en dos dimensiones (∆r) . . . . . . . . . . . . . . . . . 151.8.3. Vector velocidad en dos dimensiones (v) . . . . . . . . . . . . . . . . . . . . . 161.8.4. Vector velocidad media en dos dimensiones (v) . . . . . . . . . . . . . . . . . 161.8.5. Vector velocidad instantánea en dos dimensiones (v) . . . . . . . . . . . . . . 18
1.9. Momento lineal o cantidad de movimiento en dos dimensiones (p) . . . . . . . . . . 191.9.1. Conservación del momento lineal en dos dimensiones . . . . . . . . . . . . . 201.9.2. Concepto de impulso (I) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
1.10. Concepto de energía cinética Ek . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 221.11. Colisiones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 231.12. ENUNCIADOS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
3
Capıtulo 1Momento lineal, energía cinética y suconservación
CompetenciasEn esta unidad se busca que el estudiante
Infiera el concepto de sistema de referenciay el concepto de partícula.
Defina conceptual y matemáticamente losconceptos de vector posición, vector des-plazamiento y vector velocidad.
Opere adecuadamente con las cantidadesfísicas vector posición, vector desplaza-miento, vector velocidad y el escalar masa.
Identifique y defina el concepto de vectormomento lineal.
Infiera el concepto de sistema.
Distinga entre sistema aislado y sistema noaislado.
Analice y aplique el principio de conser-vación del vector momento lineal total deun sistema aislado.
Defina y analice el concepto del escalarenergía cinética, relacionándolo con el con-cepto del vector momento lineal.
Defina el concepto de colisión.
Distinga entre choque y colisión.
Analice diferentes tipos de colisiones.
Distinga entre colisión elástica y colisióninelástica.
CONCEPTOS BASICOS DE LA UNIDADEn esta unidad, se definirán los siguientes con-ceptos: Sistema de referencia, partícula, vectorposición (r), vector desplazamiento (∆r), vectorvelocidad (v), masa (m), vector momento lineal(p), sistema, sistema aislado y energía cinética(Ek).
1.1. Introducción
El concepto de momento lineal o cantidad demovimiento, es de gran importancia en la física,ya que se presentan muchas situaciones realesen las que el momento lineal total de un sistemase conserva, tanto a nivel microscópico como anivel macroscópico. Esto da lugar al principiode conservación del momento lineal, que porser una regla que no tiene excepción, se aplicaen diferentes áreas de la física.
1.2. Sistemas de referencia
La frase traer el cuerpo A que se encuentra a unadistancia de 2 m , es una frase incompleta, yaque como se ilustra en la figura 1.1, puede habermuchos cuerpos con una separación de 2 m. Es-to lleva a la pregunta: ¿2 m a partir de qué o res-pecto a quién? Lo anterior muestra la necesidad

2 CAPÍTULO 1. MOMENTO LINEAL, ENERGÍA CINÉTICA Y SU CONSERVACIÓN
de especificar un punto u observador de refe-rencia respecto al cual se miden los 2 m. Por elloes más correcto decir: "Traer el cuerpo A que seencuentra a una distancia de 2 m respecto al ob-servador B".
2 m
2 m 2 m2 m
Figura 1.1: Cuerpos separados entre sí por una dis-tancia de 2 m.
La frase anterior, aunque es menos ambigua,tampoco está completa ya que hay un conjuntomuy grande de puntos ubicados a una distan-cia de 2 m respecto al observador B. Al unir esteconjunto de puntos se obtiene una esfera de ra-dio 2 m (espacio tridimensional), y una circun-ferencia de radio 2 m (espacio bidimensional)como se muestra en la figura 1.2 para el caso dedos dimensiones.
B
Figura 1.2: Cuerpos a una distancia de 2 m respectoa B.
Para definir con toda claridad la posición delcuerpo, se puede hacer la afirmación: Traer elcuerpo A que se encuentra a una distancia de 2 mrespecto a un observador B, de tal manera que la rec-ta que une a B con A coincide con el eje x, toma-do horizontalmente. Esto equivale a decir que seha adicionado un sistema de coordenadas uni-dimensional al observador B, como se muestraen la figura 1.3, donde lo que realmente se hadefinido es un sistema de referencia, que con-siste en un observador al que se le ha asignado
o ligado un sistema de coordenadas en una di-mensión.
Bx (m)
A
2O
Figura 1.3: Posición de A respecto a B.
Por lo anterior, se puede concluir que paraconocer con certeza la posición de un cuerpo,es indispensable definir un sistema de referen-cia, ya que de lo contrario no tendría sentidola ubicación del cuerpo en consideración. Comose indica más adelante, para dar una descrip-ción completa del movimiento de un cuerpo, sedebe disponer de un cronómetro o reloj con elfin de poder conocer los instantes de tiempo enlos que ocupa las diferentes posiciones sobre eleje x.
Lo discutido anteriormente sólo es válidopara el observador B, ya que si se cambia de ob-servador, o lo que es equivalente, de sistema dereferencia, necesariamente la posición del cuer-po sería completamente diferente.
De esta forma, el movimiento de un cuerpopuede definirse como un cambio continuo desu posición respecto a otro cuerpo, es decir, elmovimiento de un cuerpo dado sólo puede ex-presarse en función de un sistema de referen-cia. Además, el movimiento del cuerpo A, res-pecto al cuerpo B, puede ser muy diferente almovimiento del cuerpo A respecto a otro cuer-po C.
MovimientoA
CBx
O
Figura 1.4: A y C se mueven respecto a B.
Suponga que un auto y su conductor, en re-poso entre sí, se mueven sobre una pista rectahacia la derecha. Esta situación real, se mode-lará de tal forma que en la figura 1.4, el conduc-tor es el cuerpo A, el auto el cuerpo C y un postefijo al lado de la vía es el cuerpo B.
1.3. CONCEPTO DE PARTÍCULA 3
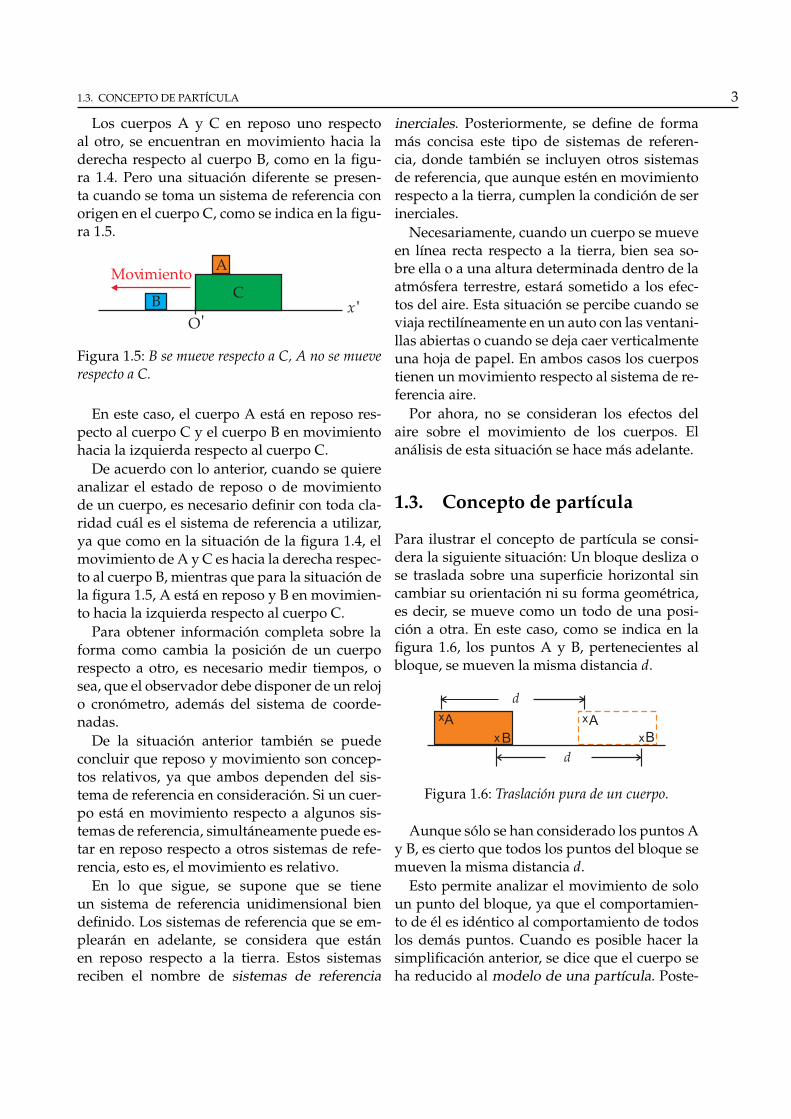
Los cuerpos A y C en reposo uno respectoal otro, se encuentran en movimiento hacia laderecha respecto al cuerpo B, como en la figu-ra 1.4. Pero una situación diferente se presen-ta cuando se toma un sistema de referencia conorigen en el cuerpo C, como se indica en la figu-ra 1.5.
MovimientoA
C
O '
Bx '
Figura 1.5: B se mueve respecto a C, A no se mueverespecto a C.
En este caso, el cuerpo A está en reposo res-pecto al cuerpo C y el cuerpo B en movimientohacia la izquierda respecto al cuerpo C.
De acuerdo con lo anterior, cuando se quiereanalizar el estado de reposo o de movimientode un cuerpo, es necesario definir con toda cla-ridad cuál es el sistema de referencia a utilizar,ya que como en la situación de la figura 1.4, elmovimiento de A y C es hacia la derecha respec-to al cuerpo B, mientras que para la situación dela figura 1.5, A está en reposo y B en movimien-to hacia la izquierda respecto al cuerpo C.
Para obtener información completa sobre laforma como cambia la posición de un cuerporespecto a otro, es necesario medir tiempos, osea, que el observador debe disponer de un relojo cronómetro, además del sistema de coorde-nadas.
De la situación anterior también se puedeconcluir que reposo y movimiento son concep-tos relativos, ya que ambos dependen del sis-tema de referencia en consideración. Si un cuer-po está en movimiento respecto a algunos sis-temas de referencia, simultáneamente puede es-tar en reposo respecto a otros sistemas de refe-rencia, esto es, el movimiento es relativo.
En lo que sigue, se supone que se tieneun sistema de referencia unidimensional biendefinido. Los sistemas de referencia que se em-plearán en adelante, se considera que estánen reposo respecto a la tierra. Estos sistemasreciben el nombre de sistemas de referencia
inerciales. Posteriormente, se define de formamás concisa este tipo de sistemas de referen-cia, donde también se incluyen otros sistemasde referencia, que aunque estén en movimientorespecto a la tierra, cumplen la condición de serinerciales.
Necesariamente, cuando un cuerpo se mueveen línea recta respecto a la tierra, bien sea so-bre ella o a una altura determinada dentro de laatmósfera terrestre, estará sometido a los efec-tos del aire. Esta situación se percibe cuando seviaja rectilíneamente en un auto con las ventani-llas abiertas o cuando se deja caer verticalmenteuna hoja de papel. En ambos casos los cuerpostienen un movimiento respecto al sistema de re-ferencia aire.
Por ahora, no se consideran los efectos delaire sobre el movimiento de los cuerpos. Elanálisis de esta situación se hace más adelante.
1.3. Concepto de partícula
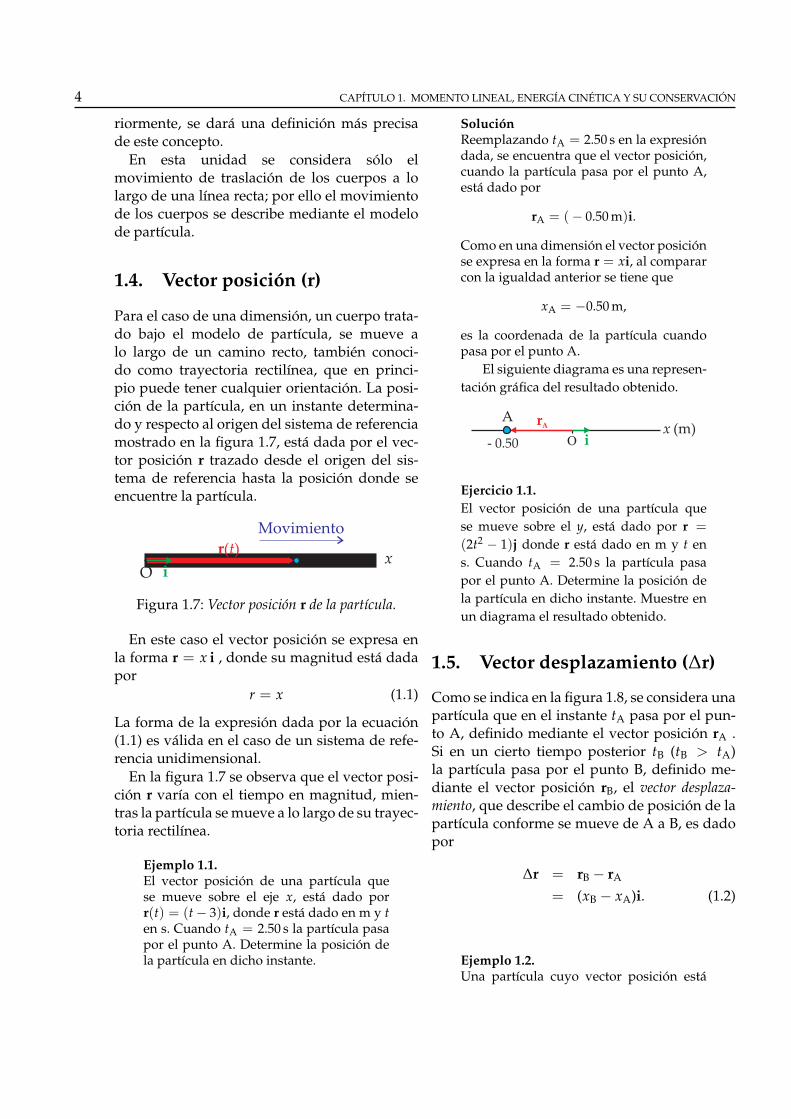
Para ilustrar el concepto de partícula se consi-dera la siguiente situación: Un bloque desliza ose traslada sobre una superficie horizontal sincambiar su orientación ni su forma geométrica,es decir, se mueve como un todo de una posi-ción a otra. En este caso, como se indica en lafigura 1.6, los puntos A y B, pertenecientes albloque, se mueven la misma distancia d.
A
B
x
x
A
B
x
x
d
d
Figura 1.6: Traslación pura de un cuerpo.
Aunque sólo se han considerado los puntos Ay B, es cierto que todos los puntos del bloque semueven la misma distancia d.
Esto permite analizar el movimiento de soloun punto del bloque, ya que el comportamien-to de él es idéntico al comportamiento de todoslos demás puntos. Cuando es posible hacer lasimplificación anterior, se dice que el cuerpo seha reducido al modelo de una partícula. Poste-
4 CAPÍTULO 1. MOMENTO LINEAL, ENERGÍA CINÉTICA Y SU CONSERVACIÓN
riormente, se dará una definición más precisade este concepto.
En esta unidad se considera sólo elmovimiento de traslación de los cuerpos a lolargo de una línea recta; por ello el movimientode los cuerpos se describe mediante el modelode partícula.
1.4. Vector posición (r)
Para el caso de una dimensión, un cuerpo trata-do bajo el modelo de partícula, se mueve alo largo de un camino recto, también conoci-do como trayectoria rectilínea, que en princi-pio puede tener cualquier orientación. La posi-ción de la partícula, en un instante determina-do y respecto al origen del sistema de referenciamostrado en la figura 1.7, está dada por el vec-tor posición r trazado desde el origen del sis-tema de referencia hasta la posición donde seencuentre la partícula.
x
O i
r( )t
Movimiento
Figura 1.7: Vector posición r de la partícula.
En este caso el vector posición se expresa enla forma r = x i , donde su magnitud está dadapor
r = x (1.1)
La forma de la expresión dada por la ecuación(1.1) es válida en el caso de un sistema de refe-rencia unidimensional.
En la figura 1.7 se observa que el vector posi-ción r varía con el tiempo en magnitud, mien-tras la partícula se mueve a lo largo de su trayec-toria rectilínea.
Ejemplo 1.1.El vector posición de una partícula quese mueve sobre el eje x, está dado porr(t) = (t − 3)i, donde r está dado en m y ten s. Cuando tA = 2.50 s la partícula pasapor el punto A. Determine la posición dela partícula en dicho instante.
SoluciónReemplazando tA = 2.50 s en la expresióndada, se encuentra que el vector posición,cuando la partícula pasa por el punto A,está dado por
rA = (− 0.50 m)i.
Como en una dimensión el vector posiciónse expresa en la forma r = xi, al compararcon la igualdad anterior se tiene que
xA = −0.50 m,
es la coordenada de la partícula cuandopasa por el punto A.
El siguiente diagrama es una represen-tación gráfica del resultado obtenido.
Ax (m)
i
rA
- 0.50 O
Ejercicio 1.1.El vector posición de una partícula quese mueve sobre el y, está dado por r =
(2t2 − 1)j donde r está dado en m y t ens. Cuando tA = 2.50 s la partícula pasapor el punto A. Determine la posición dela partícula en dicho instante. Muestre enun diagrama el resultado obtenido.
1.5. Vector desplazamiento (∆r)
Como se indica en la figura 1.8, se considera unapartícula que en el instante tA pasa por el pun-to A, definido mediante el vector posición rA .Si en un cierto tiempo posterior tB (tB > tA)la partícula pasa por el punto B, definido me-diante el vector posición rB, el vector desplaza-miento, que describe el cambio de posición de lapartícula conforme se mueve de A a B, es dadopor
∆r = rB − rA
= (xB − xA)i. (1.2)
Ejemplo 1.2.Una partícula cuyo vector posición está

1.6. VECTOR VELOCIDAD (V) 5
x
O i A BDr
rB
rA
Figura 1.8: Vector desplazamiento ∆r entre A y B.
dado por r(t) = (t − 3)i se encuentraen el punto A en tA = 2.50 s. Si en eltiempo tB = 4.00 s pasa por el punto B,calcule la magnitud y dirección del vectordesplazamiento entre A y B.
SoluciónAl reemplazar tA = 2.50 s y tB = 4.00 sen la expresión dada, se encuentra que losvectores posición de la partícula, en com-ponentes rectangulares, respectivamenteestán dados por
rA = (− 0.50 m)i,rB = (1.00 m)i.
Ahora, utilizando la ecuación (1.2),para este caso se tiene que el vector des-plazamiento, entre A y B, en componentesrectangulares está dado por
∆r = (1.50 m)i.
Por consiguiente, las magnitud del vectordesplazamiento está dada por
∆r = 1.5 m,
En el diagrama siguiente se muestra,el vector desplazamiento.
x(m)
Or
Ar
B
Dr i= (1.5 m)
-0.5 1.0
Ejercicio 1.2.Una partícula cuyo vector posición estádado por r = (2t2 − 1)j , donde r está dadoen m y t en s, se encuentra en el punto Cen tC = 2.50 s . Si en el tiempo tD = 4.00 spasa por el punto D, calcule el vector des-plazamiento de la partícula entre C y D.
1.6. Vector velocidad (v)
Cuando la posición de una partícula respecto aun observador, cambia al transcurrir el tiempo,
se dice que la partícula ha adquirido una veloci-dad respecto a dicho observador. En general, lavelocidad de una partícula se define como larapidez con la cual cambia el vector posición dela partícula al transcurrir el tiempo.
1.6.1. Vector velocidad media (v)
De acuerdo con la figura 1.9, se considera unapartícula que en el instante tA pasa por el pun-to A, determinado por el vector posición rA. Sien un tiempo posterior tB (tB > tA) la partículapasa por el punto B, determinado por el vectorposición rB, la velocidad media de la partícula du-rante el intervalo de tiempo ∆t = tB − tA , sedefine como el desplazamiento dividido entreel intervalo de tiempo correspondiente, es decir
v ≡ ∆r∆t
=rB − rA
tB − tA
=(xB − xA)i
tB − tA
= vxi.
(1.3)
x
O A BDr
rB
rA
v
Figura 1.9: Vector velocidad media entre A y B.
Dimensiones y unidades del vector velocidadmediaDe acuerdo con la ecuación (1.3), las dimen-siones del vector velocidad media y en generalde la velocidad, son LT−1 . Por consiguiente, lasunidades son m s−1 en el sistema SI, cm s−1 enel sistema gaussiano, p s−1 en el sistema Inglés;y en general, cualquier unidad de longituddividida por una unidad de tiempo, tal comokm h−1 ó mi h−1.
La definición (1.3) muestra que la velocidadmedia, v , es un vector ya que se obtiene al di-vidir el vector desplazamiento ∆r entre el inter-valo de tiempo ∆t, o sea que la velocidad mediaincluye tanto magnitud como dirección. Donde

6 CAPÍTULO 1. MOMENTO LINEAL, ENERGÍA CINÉTICA Y SU CONSERVACIÓN
su magnitud está dada por |∆r/∆t| y su direc-ción por la del vector desplazamiento ∆r. Estacantidad es una velocidad media, ya que la ex-presión no dice cómo fue el movimiento entre Ay B, pues el movimiento pudo haber sido con-tinuo o variable.
La siguiente es una situación en la que el vec-tor velocidad media es nulo. En la figura 1.10,un auto parte del punto A y pasando por elpunto B regresa al punto A, luego de un tiem-po ∆t . En este caso, la velocidad media es ceroya que el desplazamiento de la partícula es cero,aunque la distancia recorrida es diferente decero.
x
O A B
rBA
-rBA
Figura 1.10: Vector desplazamiento nulo.
Ejemplo 1.3.Una partícula cuyo vector posición estádado por r(t) = (t − 3)i, se encuentra enel punto A en tA = 2.50 s. Si en el tiempotB = 4.00 s pasa por el punto B, determinela magnitud y dirección de la velocidadmedia entre A y B.
SoluciónObteniendo el vector desplazamiento ∆ry sabiendo que ∆t = 1.5 s, mediante laecuación (1.3), se encuentra que la veloci-dad media en componentes rectangularesestá dada por
v = (1.00 m · s−1)i.
En este caso se encuentra que la magnituddel vector velocidad media es
v = 1.00 m · s−1
Se observa que el vector desplaza-miento y el vector velocidad media sonparalelos, como se esperaba.
Ejercicio 1.3.Una partícula cuyo vector posición estádado por r(t) = (t − 3)j, con r en m y t en
s, se encuentra en el punto C en el instantetC. Si en el tiempo tD pasa por el punto D,demuestre que la velocidad media cuandola partícula pasa del punto C al punto D,está dada por v = (1 m · s−1)j.
Ejercicio 1.4.Una partícula cuyo vector posición estádado por r = (2t2 − 1)i, se encuentra enel punto A en tA = 2.50 s. Si en el tiempotB = 4.00 s pasa por el punto B, calcule elvector desplazamiento entre A y B.
Ejemplo 1.4.La velocidad media cuando una partículapasa del punto A al punto B, está dada porv = −(tB + tA)i . Obtenga la magnitud dela velocidad media, cuando la partícula semueve durante los intervalos de tiempomostrados en la tercera columna de latabla 1.1.
SoluciónEn la tabla 1.1 se muestran los valoresobtenidos para la magnitud (v) del vectorvelocidad media, en diferentes intervalosde tiempo (∆t) con tB = 3.0 s.Tabla 1.1
tA(s) tB(s) ∆t(s) v(m/s)
2.980000 3.0 0.020000 5.9800002.990000 3.0 0.010000 5.9900002.995000 3.0 0.005000 5.9950002.998000 3.0 0.002000 5.9980002.999000 3.0 0.001000 5.9990002.999500 3.0 0.000500 5.9995002.999800 3.0 0.000200 5.9998002.999900 3.0 0.000100 5.9999002.999990 3.0 0.000010 5.9999902.999995 3.0 0.000005 5.999995
Pregunta¿Qué puede concluir al observar los valo-res de las dos últimas columnas de la tabla1.1?
Ejercicio 1.5.Para una partícula, el vector posición enfunción del tiempo está dado por r =

1.6. VECTOR VELOCIDAD (V) 7
(2t2 − 1)i , donde r está dado en m y t en s.a) Si la partícula pasa por el punto C en elinstante tC y por el punto D en el instan-te tD, halle el vector velocidad media. b)Obtenga la magnitud de la velocidad me-dia, cuando la partícula se mueve durantelos intervalos de tiempo mostrados en latercera columna de la tabla 1.1.
1.6.2. Vector velocidad instantánea (v)
La velocidad instantánea de una partícula,es la velocidad de ella en un instante dadocualquiera. O también, la velocidad en un instanterespecto a determinado sistema de referencia, que enel caso de una dimensión puede variar sólo en mag-nitud, mientras el sentido de movimiento no cambie.
Para el movimiento de una partícula, repre-sentado en la figura 1.11, ¿cómo se puede deter-minar su velocidad en el punto A?
x
O i A BB´B´´
Dr´´´rA
rB
B´´´
Dr´´ Dr´
Dr
Figura 1.11: Vector velocidad instantánea.
Al considerar las posiciones intermedias de lapartícula en t2, t,
2, t,,2, t,,,
2 , determinadas por losvectores posición r2, r,
2, r,,2, r,,,
2 , se observa que losvectores desplazamiento ∆r, ∆r,, ∆r,,, ∆r,,,, cam-bian en magnitud.
Igualmente, los intervalos de tiempo corres-pondientes ∆t = t2 − t1, ∆t, = t,
2 − t1, ∆t,, =t,,2 − t1, ∆t,,, = t,,,
2 − t1, cada vez se hacen máspequeños.
Si se continúa este proceso haciendo que B seaproxime aún más al punto A, el vector despla-zamiento se hace cada vez más pequeño hastaque tiende a un valor límite. Este valor límite de∆r/∆t se conoce como velocidad instantánea en elpunto A, o sea, la velocidad de la partícula en elinstante de tiempo tA .
Si ∆r es el desplazamiento finito en un pe-queño intervalo de tiempo ∆t , a partir de untiempo to, la velocidad en un tiempo posterior
t , es el valor al que tiende ∆r/∆t cuando tanto∆r como ∆t, tienden a cero, es decir,
v = lım∆t→0
∆r∆t
. (1.4)
La ecuación (1.4) no es más que la definición dederivada, esto es
v =drdt
. (1.5)
De la ecuación (1.5), se concluye que la ve-locidad instantánea es tangente a la trayecto-ria seguida por la partícula, ya que el despla-zamiento infinitesimal dr es paralelo a ella. Lamagnitud de la velocidad se llama rapidez y esigual a
v = |v| =∣∣∣∣drdt
∣∣∣∣ . (1.6)
Como r = xi , se tiene que
v =drdt
=dxdt
i
= vxi= vi.
De acuerdo con la definición del vector velocidadinstantánea, se tiene que sus dimensiones y unidadesson las mismas del vector velocidad media.
En adelante, siempre que se hable de veloci-dad, se hace referencia a la velocidad instantá-nea.
Como, en este caso, la trayectoria rectilínea dela partícula coincide con el eje de coordenadasx, la velocidad es un vector cuya magnitud estádada por la ecuación (1.6) y cuya dirección coin-cide con la del movimiento. Así, la velocidad vestará dirigida en el sentido del vector unitarioi si dx
/dt > 0 y en el sentido opuesto de i si
dx/
dt < 0. O sea, el signo de dx/
dt indica elsentido de movimiento, como se muestra en lafigura 1.12.
En síntesis, de acuerdo con lo anterior, setiene que el signo de la velocidad está dado porel sistema de referencia empleado.
Partiendo de la definición del vector veloci-dad, es posible conocer el vector posición de

8 CAPÍTULO 1. MOMENTO LINEAL, ENERGÍA CINÉTICA Y SU CONSERVACIÓN
O
O
i
ix
x
Movimiento
Movimiento
v > 0
v < 0
v
v
A
A
Figura 1.12: El signo de v indica el sentido demovimiento.
una partícula si se conoce la forma como varíael vector velocidad con el tiempo.
Mediante la ecuación (1.5) y sabiendo que enel instante to la partícula se encuentra en la posi-ción ro, se encuentra que la posición en el ins-tante t está dada por
r = ro +
t∫to
v(t)dt. (1.7)
Mientras no se conozca la forma como varía elvector velocidad (v(t)) con el tiempo, no es posi-ble resolver la integral de la ecuación (1.7).
Para movimiento a lo largo del eje x, estoes en una dimensión, la expresión dada por laecuación (1.7) adquiere la forma
x = xo +
t∫to
v(t)dt, (1.8)
que como se sabe, es posible resolver la integralsi se conoce la forma funcional de v(t).
Un caso particular se presenta cuando el vec-tor velocidad permanece constante en magni-tud y dirección. Cuando ello ocurre, las ecua-ciones (1.7) y (1.8), respectivamente, se transfor-man en
r = ro + v(t − to), (1.9)
x = xo + v(t − to), (1.10)
Las ecuaciones (1.9) y (1.10) corresponden a unmovimiento conocido como movimiento rectilí-neo uniforme, ya que al no cambiar la dirección
de la velocidad, la trayectoria es rectilínea y alno cambiar la magnitud de la velocidad su rapi-dez es constante.
Ejemplo 1.5.El vector posición de una partícula que semueve a lo largo del eje x, está dado porr(t) = −(t2 − 15)i, donde r está dado enm y t en s. Determine la velocidad de lapartícula t = 3 s.
SoluciónEmpleando la ecuación (1.5) se tiene que lavelocidad en cualquier instante de tiempot está dada por
v = −2ti.
Reemplazando t = 3 s en la expresiónpara v, se tiene que el vector velocidad es-tá dado por
v = −(6 m · s−1)i.
PreguntaCompare este resultado con los valores dela velocidad media mostrados en la tabla1.1 del ejemplo 1.4. ¿Qué puede concluir?
Ejercicio 1.6.El vector posición de una partícula que semueve sobre el eje y, está dado por r =
(2t2 − 1)j donde r está dado en m y t en s.Determine la velocidad de la partícula enel instante t = 3 s . Compare el resultadocon lo obtenido en el ejercicio 1.4.
Ejemplo 1.6.Si la velocidad de una partícula está dadapor v = −2ti, halle el vector posición dela partícula en el instante de tiempo t,sabiendo que partió de una posición en lacual ro = (15 m)i en to = 0.
SoluciónReemplazando los vectores ro y v en laecuación (1.8), se encuentra que al inte-grar, evaluar y simplificar, el vector posi-ción de partícula está dado por
r = −(t2 − 15)i,
De este resultado, se puede concluir quesi se conoce el vector posición de una
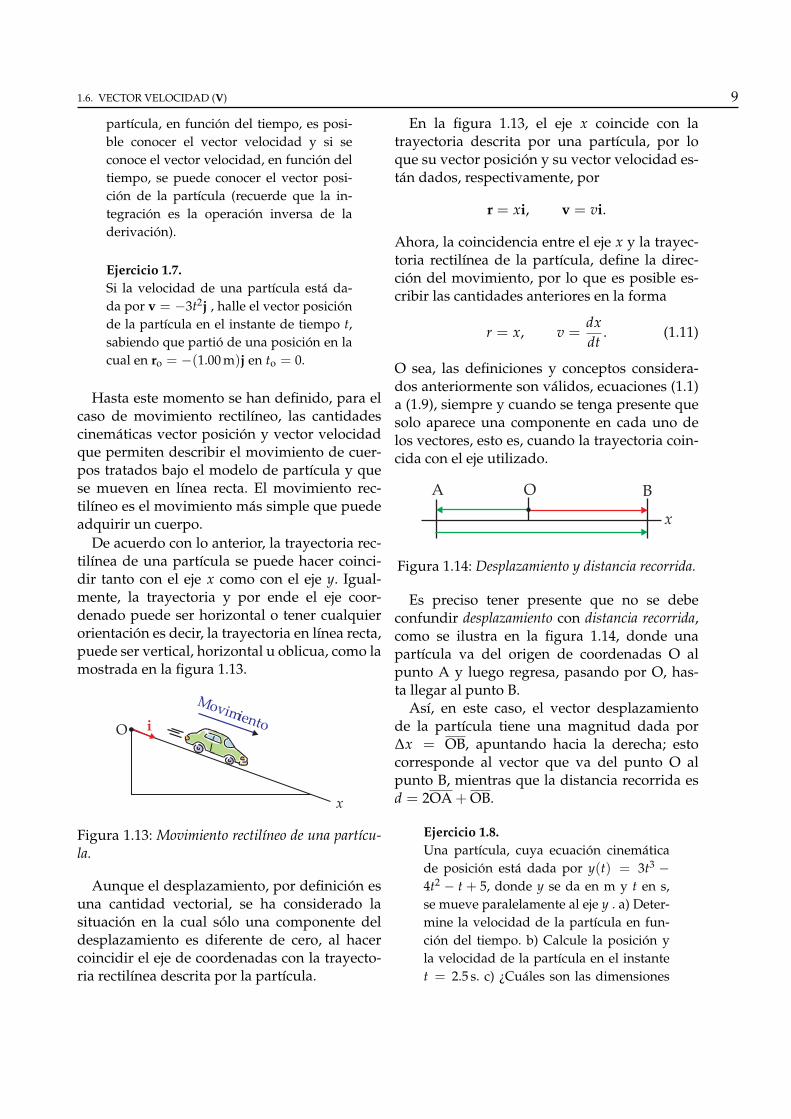
1.6. VECTOR VELOCIDAD (V) 9
partícula, en función del tiempo, es posi-ble conocer el vector velocidad y si seconoce el vector velocidad, en función deltiempo, se puede conocer el vector posi-ción de la partícula (recuerde que la in-tegración es la operación inversa de laderivación).
Ejercicio 1.7.Si la velocidad de una partícula está da-da por v = −3t2j , halle el vector posiciónde la partícula en el instante de tiempo t,sabiendo que partió de una posición en lacual en ro = −(1.00 m)j en to = 0.
Hasta este momento se han definido, para elcaso de movimiento rectilíneo, las cantidadescinemáticas vector posición y vector velocidadque permiten describir el movimiento de cuer-pos tratados bajo el modelo de partícula y quese mueven en línea recta. El movimiento rec-tilíneo es el movimiento más simple que puedeadquirir un cuerpo.
De acuerdo con lo anterior, la trayectoria rec-tilínea de una partícula se puede hacer coinci-dir tanto con el eje x como con el eje y. Igual-mente, la trayectoria y por ende el eje coor-denado puede ser horizontal o tener cualquierorientación es decir, la trayectoria en línea recta,puede ser vertical, horizontal u oblicua, como lamostrada en la figura 1.13.
MovimientoiO
x
Figura 1.13: Movimiento rectilíneo de una partícu-la.
Aunque el desplazamiento, por definición esuna cantidad vectorial, se ha considerado lasituación en la cual sólo una componente deldesplazamiento es diferente de cero, al hacercoincidir el eje de coordenadas con la trayecto-ria rectilínea descrita por la partícula.
En la figura 1.13, el eje x coincide con latrayectoria descrita por una partícula, por loque su vector posición y su vector velocidad es-tán dados, respectivamente, por
r = xi, v = vi.
Ahora, la coincidencia entre el eje x y la trayec-toria rectilínea de la partícula, define la direc-ción del movimiento, por lo que es posible es-cribir las cantidades anteriores en la forma
r = x, v =dxdt
. (1.11)
O sea, las definiciones y conceptos considera-dos anteriormente son válidos, ecuaciones (1.1)a (1.9), siempre y cuando se tenga presente quesolo aparece una componente en cada uno delos vectores, esto es, cuando la trayectoria coin-cida con el eje utilizado.
A BO
x
Figura 1.14: Desplazamiento y distancia recorrida.
Es preciso tener presente que no se debeconfundir desplazamiento con distancia recorrida,como se ilustra en la figura 1.14, donde unapartícula va del origen de coordenadas O alpunto A y luego regresa, pasando por O, has-ta llegar al punto B.
Así, en este caso, el vector desplazamientode la partícula tiene una magnitud dada por∆x = OB, apuntando hacia la derecha; estocorresponde al vector que va del punto O alpunto B, mientras que la distancia recorrida esd = 2OA + OB.
Ejercicio 1.8.Una partícula, cuya ecuación cinemáticade posición está dada por y(t) = 3t3 −4t2 − t + 5, donde y se da en m y t en s,se mueve paralelamente al eje y . a) Deter-mine la velocidad de la partícula en fun-ción del tiempo. b) Calcule la posición yla velocidad de la partícula en el instantet = 2.5 s. c) ¿Cuáles son las dimensiones

10 CAPÍTULO 1. MOMENTO LINEAL, ENERGÍA CINÉTICA Y SU CONSERVACIÓN
de los coeficientes numéricos, en cada unode los términos de las ecuaciones cinemá-ticas de posición y velocidad?
Ejercicio 1.9.Determine, en función del tiempo, la posi-ción de una partícula que se mueve a lolargo del eje z, sabiendo que su ecuacióncinemática de velocidad está dada por v =
9t2 − 8t − 1, con zo = 5 m en to = 0. Com-pare su resultado con la expresión paray(t) dada en el ejercicio 1.8.
1.6.3. Movimiento rectilíneo uniforme(MRU)
En esta sección se analiza con mayor detalleel caso de un movimiento con velocidad cons-tante, es decir, v = Constante. Esta situaciónocurre, por ejemplo, cuando la aguja del ve-locímetro de un auto no cambia de posiciónmientras el auto está en movimiento por una víarecta. De este modo, la ecuación (1.10),
x = xo + v(t − to), (1.12)
es la ecuación cinemática de posición para estemovimiento, denominado movimiento rectilíneouniforme (MRU).
En muchos casos, es posible tomar to = 0.
x
x
xo
to
t
tO
Figura 1.15: Gráfica de la posición en función deltiempo para un MRU.
De acuerdo con la geometría analítica, laecuación (1.12) corresponde a la ecuación deuna línea recta, donde su pendiente es la mag-nitud de la velocidad del movimiento.
En las figuras 1.15 y 1.16 se muestran las gráfi-cas de posición y velocidad en función del tiem-
v
v
to
ttO
Area = Dx
Figura 1.16: Gráfica de la velocidad en función deltiempo para un MRU.
po, para el caso de una partícula con movimien-to rectilíneo uniforme.
En la figura 1.15 se tiene que la pendiente dela gráfica de posición en función del tiempo estádada por
Pendiente =x − xo
t − to= v. (1.13)
Al comparar las ecuaciones.(1.12) y (1.13) se en-cuentra que realmente la pendiente de la rectacorresponde a la velocidad de una partícula conmovimiento rectilíneo uniforme.
Ejercicio 1.10.Utilizando la figura 1.16, demuestre quepara el intervalo de tiempo ∆t = t −to, el área sombreada es igual al despla-zamiento ∆x de una partícula que tienemovimiento rectilíneo uniforme.
Ejemplo 1.7.Un auto A y y una moto B se muevencon velocidades vA y vB, sobre una pistarecta, en carriles paralelos y con sentidosopuestos. Inicialmente, los móviles estánseparados una distancia d. a) Haga undiagrama ilustrativo de la situaciónplanteada, donde se muestre el sistemade referencia a emplear. b) Teniendo encuenta el sistema de referencia elegido,plantee las ecuaciones cinemáticas deposición para cada móvil. c) Determine eltiempo que demoran los móviles en pasaruno frente al otro. d) Halle el valor de lacantidad obtenida en el numeral anterior,si vA = 216 km · h−1, vB = 40 m · s−1 yd = 50 m

1.7. MOMENTO LINEAL O CANTIDAD DE MOVIMIENTO (P) 11
Solucióna) Diagrama ilustrativo de la situaciónplanteada, en el cual se muestra el sistemade referencia a emplear.
Movimiento
O
Movimiento
A
d
x
B
b) De acuerdo con el enunciado, lascantidades d, vA y vB son dadas ylos móviles se mueven con velocidadesconstantes, por lo que cada uno tienemovimiento rectilíneo uniforme. Así, lasecuaciones cinemáticas de posición tienenla forma general dada por la ecuación(1.12), con to = 0, xoA = 0 y xoB = d.
Respecto al sistema de referenciamostrado en el diagrama y con origen enO, las ecuaciones cinemáticas de posiciónpara el auto A y para la moto B, respecti-vamente, adquieren la forma
xA = vAt. (1)
xB = d − vBt. (2)
c) Cuando un vehículo pasa frente al otrola posición es la misma, por lo que lasecuaciones (1) y (2) son iguales, teniendoen cuenta que a partir de la situación ini-cial, el tiempo que demoran los móviles enencontrarse es el mismo.
Por lo tanto, luego de igualar las ecua-ciones (1) y (2), y simplificar, se encuentraque el tiempo que demoran en encontrarseestá dado por
t =d
vA + vB. (3)
d) Al reemplazar en la ecuación (3) losvalores vA = 216 km · h−1 ≡ 60 m · s−1,vB = 40 m · s−1 y d = 50 m, se tiene
t =50 m
60 m · s−1 + 40 m · s−1
= 0.5 s,
que es el tiempo que los móviles demoranen pasar uno frente al otro.
Ejercicio 1.11.Dos autos A y B se mueven con veloci-dades vA y vB (vA > vB), sobre una pista
recta, en carriles paralelos y en el mismosentido. Inicialmente, los autos están se-parados una distancia d. a) Haga un dia-grama ilustrativo de la situación plantea-da, donde se muestre el sistema de refe-rencia a emplear. b) Teniendo en cuentael sistema de referencia elegido, plantee laecuación cinemática de posición para cadaauto. c) Determine el tiempo que demo-ran los autos en pasar uno frente al otro.d) Halle el valor de la cantidad obtenidaen el numeral anterior, si vA = 60 m · s−1,vB = 144 km · h−1 y d = 50 m, e) ¿Qué sepuede afirmar respecto al tiempo, cuandolas velocidades de los autos son iguales?
1.7. Momento lineal o cantidad demovimiento (p)
En esta sección se analiza la expresiónmatemática que relaciona los conceptos demasa y velocidad con el concepto de momentolineal o cantidad de movimiento, en el casode una dimensión. Por ello, es necesario hacerreferencia a las cantidades dinámicas masa ymomento lineal que son el punto de partida dela mayoría de los conceptos que se tratarán enadelante.
La física dispone de una cantidad escalarque es característica o propia de cada cuerpo yla cual permite conectar la cinemática de unapartícula con la dinámica de una partícula; es-ta propiedad de los cuerpos es su masa. En loque sigue, no se hace una definición operacionalde la masa, sino que en su lugar se emplea elconcepto intuitivo que de ella se tiene, esto es,lo que marca una balanza cuando un cuerpo secoloca sobre ella.
La masa de un cuerpo, que se representa me-diante los símbolos M o m, es una cantidad fun-damental cuya dimensión es M. De acuerdo conesta dimensión, las unidades respectivas son: elkilogramo (kg) en el sistema de unidades SI, y elgramo (g) en el sistema gaussiano de unidades.En el sistema inglés la unidad de masa es elslug, que se definirá más adelante.
La equivalencia entre estas unidades está da-

12 CAPÍTULO 1. MOMENTO LINEAL, ENERGÍA CINÉTICA Y SU CONSERVACIÓN
da por la identidad: 1kg ≡ 103g.Una vez que se han considerado los concep-
tos de vector velocidad y del escalar masa, laprimera cantidad dinámica a definir, es el vectormomento lineal o cantidad de movimiento, que esde gran importancia en la física ya que permiteobtener mayor información que la que permiteobtener el vector velocidad.
O
pm
x
Figura 1.17: Momento lineal de una partícula.
Cuando una partícula de masa m, posee unavelocidad v respecto a determinado observador,se dice que su vector momento lineal, respectoa dicho observador, está dado por
p ≡ mv= mvi, (1.14)
De acuerdo con la definición dada por laecuación (1.14), se tiene que el momento lineales una cantidad vectorial que apunta en la mis-ma dirección del vector velocidad, como se ilus-tra en la figura 1.17.
Además, como la velocidad depende del sis-tema de referencia, entonces el momento linealtambién depende del sistema de referencia.Igualmente, como la velocidad es paralela a latrayectoria descrita por la partícula, el momen-to lineal también es paralelo a la trayectoria quela partícula describe.
Dimensiones y unidades del vector momentolinealDe acuerdo con la definición de momento lineal,se tiene que sus dimensiones son iguales a la di-mensión de masa por la dimensión de veloci-dad, es decir [p] = [m][v] = MLT−1 . Por lotanto, las unidades en los respectivos sistemasestán dadas por: kg · m · s−1 en el sistema SI deunidades, g · cm · s−1 en el sistema gaussiano deunidades y como se verá más adelante, lb · s enel sistema inglés de unidades.
En el ejemplo 1.8, se muestra que el momentolineal permite obtener mayor información quela velocidad.
Ejemplo 1.8.El camión de masa M y el auto de masa mde la figura 1.18 (M > m), se mueven conigual velocidad v respecto al sistema dereferencia mostrado. ¿Cuál es más difícilllevar al estado de reposo?
SoluciónLa experiencia muestra que el camión, conmayor momento lineal, es más difícil dellevar al estado de reposo. Lo anterior in-dica que aunque cinemáticamente no exis-te diferencia alguna entre el estado de losdos autos, velocidades iguales, dinámica-mente se presenta una diferencia comoconsecuencia de la diferencia en sus mo-mentos lineales.
x
v
v
O
mM
Figura 1.18: Cuerpos con igual velocidad y diferentemomento lineal.
1.7.1. Conservación del momento linealen una dimensión
Aunque solo se consideran dos casos particula-res, el principio de conservación del momentolineal tiene validez general, sin importar elnúmero de partículas que intervengan en unsistema. Este principio es de gran utilidad enla física, tanto desde el punto de vista teóricocomo experimental. En los dos casos que seconsideran a continuación, se recurre a losresultados que muestra el experimento, cuandoeste se lleva a cabo.
1. Como primer experimento se considera lasituación en la que a una partícula, de masa my en movimiento rectilíneo, se le impide inte-ractuar con cualquier otra, como se ilustra enla figura 1.19. Al no interactuar la partícula conninguna otra, el resultado que se obtiene es quesu estado de movimiento no es alterado, es-to es, su velocidad permanecerá constante, o

1.7. MOMENTO LINEAL O CANTIDAD DE MOVIMIENTO (P) 13
lo que es igual, su momento lineal debe per-manecer constante. Lo anterior se puede expre-sar matemáticamente en la forma
p = mv = mvi = Constante o sea ∆p = 0
vm
x
Figura 1.19: Conservación del momento lineal deuna partícula aislada.
2. En el segundo experimento, como se indi-ca en la figura 1.20, se aíslan, del resto del uni-verso, dos partículas con masas constantes m1y m2. Decir que se aíslan del resto del universo,equivale a afirmar que sólo se permiten sus in-teracciones mutuas. A un sistema como este sele llama sistema aislado.
v1
m1
v2
m2
t
t´ >t
v1´
m1
v2´
m2
x
x
Figura 1.20: Momento lineal de dos partículas ais-ladas.
Cuando a las partículas se les permite in-teractuar entre sí, se encuentra que sus mo-mentos lineales individuales pueden cambiar altranscurrir el tiempo. Por otro lado, el momen-to lineal total del sistema formado por las dos
partículas, en cualquier instante, está dado porla suma de los momentos lineales de las partícu-las. De acuerdo con lo anterior, en el instante tel momento lineal del sistema aislado, está dadopor
P = p1 + p2
= m1v1 + m2v2
= m1v1i + m2v2i, (1.15)
y en el instante posterior t′ por
P′ = p′1 + p′
2
= m1v′1 + m2v′
2
= m1v′1i + m2v′2i. (1.16)
Cuando se realiza este experimento, se encuen-tra que independientemente de los valores det y t′, el momento lineal total del sistema per-manece constante, o sea,
P = P′
Pi = P′i (1.17)
Para el caso unidimensional, se puede enun-ciar el principio de conservación del momen-to lineal, en la forma: El momento lineal total delsistema aislado formado por las dos partículas, per-manece constante.
Para la situación de interés, se tiene queel momento lineal ganado (o perdido) poruna partícula, es perdido (o ganado) por laotra partícula; así, al reemplazar las ecuaciones(1.15) y (1.16) en la ecuación (1.17) se tiene
p1 + p2 = p′1 + p′
2
= Constantep1i + p2i = p′1i + p′2i
= Constante,
o lo que es igual
∆p1 = −∆p2
∆p1i = −∆p2i, (1.18)
de donde, el momento lineal que gana unapartícula es igual al momento lineal que pierdela otra.
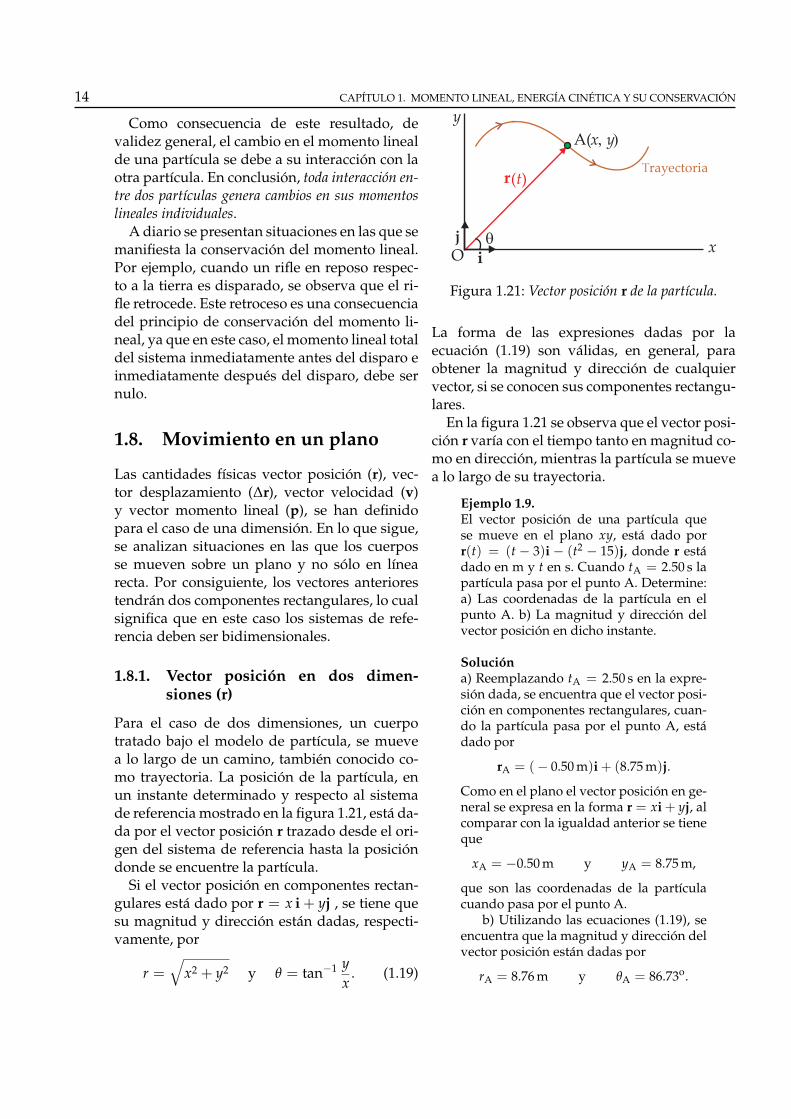
14 CAPÍTULO 1. MOMENTO LINEAL, ENERGÍA CINÉTICA Y SU CONSERVACIÓN
Como consecuencia de este resultado, devalidez general, el cambio en el momento linealde una partícula se debe a su interacción con laotra partícula. En conclusión, toda interacción en-tre dos partículas genera cambios en sus momentoslineales individuales.
A diario se presentan situaciones en las que semanifiesta la conservación del momento lineal.Por ejemplo, cuando un rifle en reposo respec-to a la tierra es disparado, se observa que el ri-fle retrocede. Este retroceso es una consecuenciadel principio de conservación del momento li-neal, ya que en este caso, el momento lineal totaldel sistema inmediatamente antes del disparo einmediatamente después del disparo, debe sernulo.
1.8. Movimiento en un plano
Las cantidades físicas vector posición (r), vec-tor desplazamiento (∆r), vector velocidad (v)y vector momento lineal (p), se han definidopara el caso de una dimensión. En lo que sigue,se analizan situaciones en las que los cuerposse mueven sobre un plano y no sólo en línearecta. Por consiguiente, los vectores anteriorestendrán dos componentes rectangulares, lo cualsignifica que en este caso los sistemas de refe-rencia deben ser bidimensionales.
1.8.1. Vector posición en dos dimen-siones (r)
Para el caso de dos dimensiones, un cuerpotratado bajo el modelo de partícula, se muevea lo largo de un camino, también conocido co-mo trayectoria. La posición de la partícula, enun instante determinado y respecto al sistemade referencia mostrado en la figura 1.21, está da-da por el vector posición r trazado desde el ori-gen del sistema de referencia hasta la posicióndonde se encuentre la partícula.
Si el vector posición en componentes rectan-gulares está dado por r = x i + yj , se tiene quesu magnitud y dirección están dadas, respecti-vamente, por
r =√
x2 + y2 y θ = tan−1 yx
. (1.19)
x
y
O i
j
r( )t
A( , )x y
Trayectoria
q
Figura 1.21: Vector posición r de la partícula.
La forma de las expresiones dadas por laecuación (1.19) son válidas, en general, paraobtener la magnitud y dirección de cualquiervector, si se conocen sus componentes rectangu-lares.
En la figura 1.21 se observa que el vector posi-ción r varía con el tiempo tanto en magnitud co-mo en dirección, mientras la partícula se muevea lo largo de su trayectoria.
Ejemplo 1.9.El vector posición de una partícula quese mueve en el plano xy, está dado porr(t) = (t − 3)i − (t2 − 15)j, donde r estádado en m y t en s. Cuando tA = 2.50 s lapartícula pasa por el punto A. Determine:a) Las coordenadas de la partícula en elpunto A. b) La magnitud y dirección delvector posición en dicho instante.
Solucióna) Reemplazando tA = 2.50 s en la expre-sión dada, se encuentra que el vector posi-ción en componentes rectangulares, cuan-do la partícula pasa por el punto A, estádado por
rA = (− 0.50 m)i + (8.75 m)j.
Como en el plano el vector posición en ge-neral se expresa en la forma r = xi + yj, alcomparar con la igualdad anterior se tieneque
xA = −0.50 m y yA = 8.75 m,
que son las coordenadas de la partículacuando pasa por el punto A.
b) Utilizando las ecuaciones (1.19), seencuentra que la magnitud y dirección delvector posición están dadas por
rA = 8.76 m y θA = 86.73o.
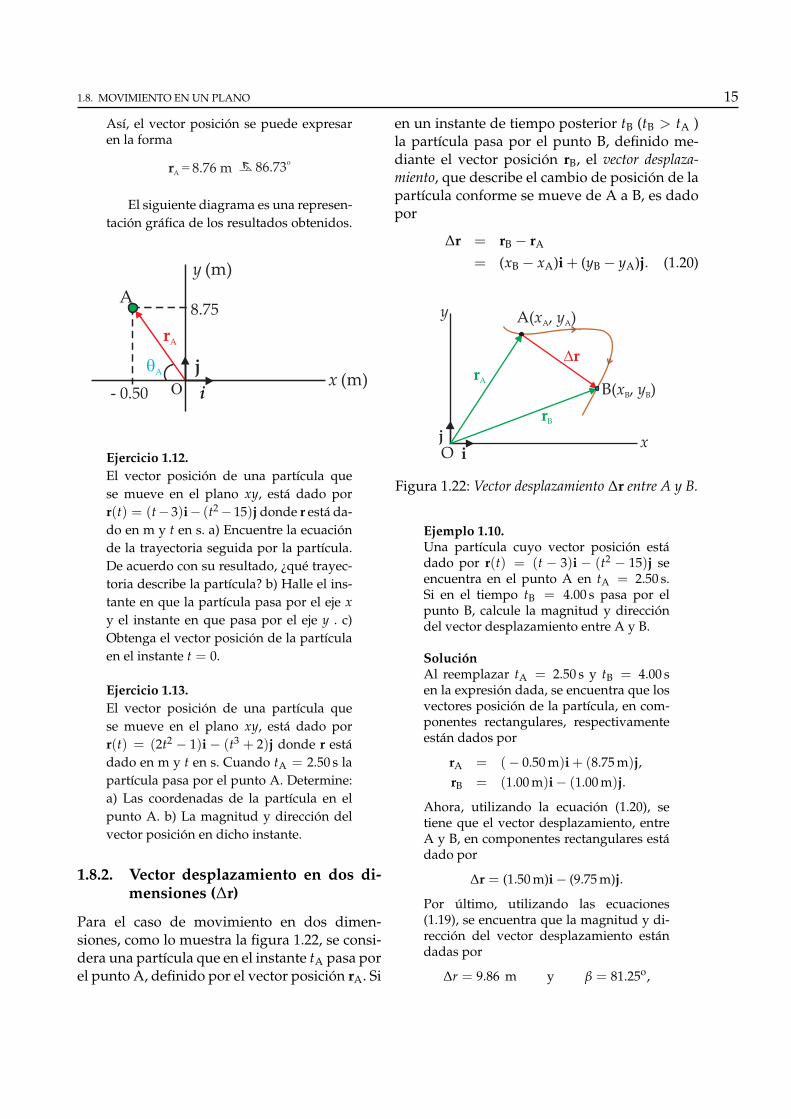
1.8. MOVIMIENTO EN UN PLANO 15
Así, el vector posición se puede expresaren la forma
rA
= 8.76 m 86.73o
El siguiente diagrama es una represen-tación gráfica de los resultados obtenidos.
A
x (m)
y (m)
i
j
rA
8.75
- 0.50 O
qA
Ejercicio 1.12.El vector posición de una partícula quese mueve en el plano xy, está dado porr(t) = (t− 3)i− (t2 − 15)j donde r está da-do en m y t en s. a) Encuentre la ecuaciónde la trayectoria seguida por la partícula.De acuerdo con su resultado, ¿qué trayec-toria describe la partícula? b) Halle el ins-tante en que la partícula pasa por el eje xy el instante en que pasa por el eje y . c)Obtenga el vector posición de la partículaen el instante t = 0.
Ejercicio 1.13.El vector posición de una partícula quese mueve en el plano xy, está dado porr(t) = (2t2 − 1)i − (t3 + 2)j donde r estádado en m y t en s. Cuando tA = 2.50 s lapartícula pasa por el punto A. Determine:a) Las coordenadas de la partícula en elpunto A. b) La magnitud y dirección delvector posición en dicho instante.
1.8.2. Vector desplazamiento en dos di-mensiones (∆r)
Para el caso de movimiento en dos dimen-siones, como lo muestra la figura 1.22, se consi-dera una partícula que en el instante tA pasa porel punto A, definido por el vector posición rA. Si
en un instante de tiempo posterior tB (tB > tA )la partícula pasa por el punto B, definido me-diante el vector posición rB, el vector desplaza-miento, que describe el cambio de posición de lapartícula conforme se mueve de A a B, es dadopor
∆r = rB − rA
= (xB − xA)i + (yB − yA)j. (1.20)
x
y
O ij
A( , )x yA A
B( , )x yB B
Dr
rB
rA
Figura 1.22: Vector desplazamiento ∆r entre A y B.
Ejemplo 1.10.Una partícula cuyo vector posición estádado por r(t) = (t − 3)i − (t2 − 15)j seencuentra en el punto A en tA = 2.50 s.Si en el tiempo tB = 4.00 s pasa por elpunto B, calcule la magnitud y direccióndel vector desplazamiento entre A y B.
SoluciónAl reemplazar tA = 2.50 s y tB = 4.00 sen la expresión dada, se encuentra que losvectores posición de la partícula, en com-ponentes rectangulares, respectivamenteestán dados por
rA = (− 0.50 m)i + (8.75 m)j,rB = (1.00 m)i − (1.00 m)j.
Ahora, utilizando la ecuación (1.20), setiene que el vector desplazamiento, entreA y B, en componentes rectangulares estádado por
∆r = (1.50 m)i − (9.75 m)j.
Por último, utilizando las ecuaciones(1.19), se encuentra que la magnitud y di-rección del vector desplazamiento estándadas por
∆r = 9.86 m y β = 81.25o,

16 CAPÍTULO 1. MOMENTO LINEAL, ENERGÍA CINÉTICA Y SU CONSERVACIÓN
Es decir
rA
= 9.86 m 81.25o
En el diagrama siguiente se muestra,tanto el vector desplazamiento como el án-gulo que forma con la horizontal.
x
y
O
b
rA
rB
D r
Ejercicio 1.14.Una partícula cuyo vector posición estádado por r(t) = (2t2 − 1)i − (t3 + 2)j,donde r está dado en m y t en s, se en-cuentra en el punto A en tA = 2.50 s. Si enel tiempo tB = 4.00 s pasa por el punto B,calcule la magnitud y dirección del vectordesplazamiento entre A y B.
1.8.3. Vector velocidad en dos dimen-siones (v)
Igual que en el caso de movimiento rectilíneo,cuando la posición de una partícula cambia conel tiempo, la partícula ha adquirido una veloci-dad. En general, la velocidad de una partículase define como la rapidez con la cual cambia laposición con el tiempo.
1.8.4. Vector velocidad media en dos di-mensiones (v)
Para el caso de movimiento en el plano y deacuerdo con la figura 1.23, se considera unapartícula que en el instante tA pasa por el pun-to A, determinado por el vector posición rA. Sien un tiempo posterior tB (tB > tA ) la partículapasa por el punto B, determinado por el vectorposición rB, la velocidad media durante el inter-valo de tiempo ∆t = tB − tA , se define como el
vector desplazamiento dividido entre el inter-valo de tiempo correspondiente, es decir
v ≡ ∆r∆t
=rB − rA
tB − tA
=(xB − xA)i + (yB − yA)j
tB − tA
= vxi + vyj.
(1.21)
x
y
O i
j
A( , )x yA A
B( , )x yB B
v
rA
rB
D r
Figura 1.23: Vector velocidad media entre A y B.
Dimensiones y unidades del vector velocidadmediaDe acuerdo con la ecuación (1.21), las dimen-siones del vector velocidad media y en generalde la velocidad, son LT−1 . Por consiguiente, lasunidades son m · s−1 en el sistema SI, cm · s−1
en el sistema gaussiano, p · s−1 en el sistemaInglés; y en general, cualquier unidad de lon-gitud dividida por una unidad de tiempo, talcomo km · h−1.
La definición (1.21) muestra que la velocidadmedia, v , es un vector ya que se obtiene al di-vidir el vector ∆r entre el escalar ∆t, por lo tan-to, la velocidad media incluye tanto magnitudcomo dirección. Donde su magnitud está dadapor |∆r/∆t| y su dirección por la del vector des-plazamiento ∆r. Esta cantidad es una velocidadmedia, ya que la expresión no dice cómo fue elmovimiento entre A y B. La trayectoria pudohaber sido curva o recta, el movimiento pudohaber sido continuo o variable.
La siguiente es una situación en la que elvector velocidad media es nulo. La figura 1.24,muestra la trayectoria de un auto que parte delpunto A y pasando por el punto B regresa alpunto A, luego de un tiempo ∆t. En este caso, la

1.8. MOVIMIENTO EN UN PLANO 17
velocidad media es cero pues el desplazamien-to de la partícula es cero, aunque la distanciarecorrida es diferente de cero, ya que correspon-de a la longitud de la trayectoria cerrada segui-da por la partícula.
x
y
O
A
B
Figura 1.24: Vector desplazamiento nulo.
Ejemplo 1.11.El vector posición de una partícu-la en movimiento está dado porr(t) = (t − 3)i − (t2 − 15)j, se encuen-tra en el punto A en tA = 2.50 s. Si en eltiempo tB = 4.00 s pasa por el punto B,determine la magnitud y dirección de lavelocidad media entre A y B.
SoluciónObteniendo el vector desplazamiento ∆ry sabiendo que ∆t = 1.5 s, utilizando laecuación (1.21), se encuentra que la veloci-dad media en componentes rectangularesestá dada por
v = (1.00 m · s−1)i − (6.5 m · s−1)j. (1)
Mediante las ecuaciones (1.19) y para estecaso, se encuentra que la magnitud y di-rección del vector velocidad media, estándadas por
v = 6.58 m · s−1 y β= 81.25o
o sea que es la misma dirección del vector
v = 6.58 m s-1
81.25o
desplazamiento ∆r , como se esperaba.
Ejercicio 1.15.Una partícula cuyo vector posición estádado por r(t) = (t − 3)i − (t2 − 15)j, se en-cuentra en el punto A en el instante tA. Si
en el tiempo tB pasa por el punto B, de-muestre que la velocidad media cuando lapartícula pasa del punto A al punto B, estádada por v = i − (tB + tA)j.
Ejercicio 1.16.Una partícula cuyo vector posición estádado por r(t) = (2t2 − 1)i − (t3 + 2)j, seencuentra en el punto A en tA = 2.50 s. Sien el tiempo tB = 4.00 s pasa por el puntoB, calcule la magnitud y dirección del vec-tor desplazamiento entre A y B y del vec-tor velocidad media en dicho intervalo.
Ejemplo 1.12.La velocidad media cuando una partículapasa del punto A al punto B, está dadapor v = i − (tB + tA)j . Obtenga la mag-nitud y dirección de la velocidad media,cuando la partícula se mueve durantelos intervalos de tiempo mostrados en latercera columna de la tabla 1.2.
SoluciónEn la tabla 1.2 se muestran los valoresobtenidos para la magnitud (v) y ladirección (θ) del vector velocidad media,en diferentes intervalos de tiempo (∆t)con tB = 3.0 s.
Tabla 1.2
tA(s) tB(s) ∆t(s) v(m/s) θ(o)
2.980000 3.0 0.020000 6.060000 80.500002.990000 3.0 0.010000 6.070000 80.520002.995000 3.0 0.005000 6.078000 80.530002.998000 3.0 0.002000 6.081000 80.534002.999000 3.0 0.001000 6.082000 80.536002.999500 3.0 0.000500 6.082300 80.536902.999800 3.0 0.000200 6.082600 80.537402.999900 3.0 0.000100 6.082700 80.537502.999990 3.0 0.000010 6.082750 80.537662.999995 3.0 0.000005 6.082758 80.53767
Pregunta¿Qué puede concluir al observar los valo-res de las tres últimas columnas de la tabla1.2

18 CAPÍTULO 1. MOMENTO LINEAL, ENERGÍA CINÉTICA Y SU CONSERVACIÓN
Ejercicio 1.17.Para una partícula, el vector posición enfunción del tiempo está dado por r(t) =
(2t2 − 1)i − (t3 + 2)j , donde r está dadoen m y t en s. a) Si la partícula pasa por elpunto A en el instante tA y por el puntoB en el instante tB , halle el vector veloci-dad media en sus componentes rectangu-lares. b) Obtenga la magnitud y direcciónde la velocidad media, cuando la partículase mueve durante los intervalos de tiem-po mostrados en la tercera columna de latabla 1.2.
1.8.5. Vector velocidad instantánea endos dimensiones (v)
La velocidad instantánea, es la velocidad deuna partícula en un instante dado cualquiera.O también, la velocidad, respecto a determinado sis-tema de referencia, que puede variar bien sea porquecambia sólo su magnitud ó sólo su dirección ó si-multáneamente cambian tanto su magnitud como sudirección.
Para el movimiento de una partícula, repre-sentado en la figura 1.25, ¿cómo se puede deter-minar su velocidad en el punto A?
x
y
O i
j
A
B
v
B '
B ''Dr''
Dr'
Drr
A
rB
Figura 1.25: Vector velocidad instantánea.
Al considerar las posiciones intermedias dela partícula en t,
2, t,,2, t,,,
2 , determinadas por losvectores posición r,
2, r,,2, r,,,
2 , se observa que losvectores desplazamiento ∆r,, ∆r,,, ∆r,,,, cambiantanto en magnitud como en dirección, o sea quela velocidad media varía tanto en magnitud co-mo en dirección al tener en cuenta los puntosentre A y B.
Igualmente, los intervalos de tiempo corres-pondientes ∆t = t2 − t1, ∆t, = t,
2 − t1, ∆t,, =t,,2 − t1, ∆t,,, = t,,,
2 − t1, cada vez se hacen máspequeños.
Si se continúa este proceso haciendo que B seaproxime al punto A, el vector desplazamientose hace cada vez más pequeño hasta que tiendea un valor y a una dirección límite, que corres-ponde a la de la tangente a la trayectoria dela partícula en el punto A. Este valor límite de∆r/∆t se conoce como velocidad instantánea en elpunto A, o sea, la velocidad de la partícula en elinstante de tiempo tA .
Si ∆r es el desplazamiento finito en un pe-queño intervalo de tiempo finito ∆t, a partir deun tiempo to, la velocidad en un tiempo poste-rior t, es el valor al que tiende ∆r/∆t cuandotanto ∆r como ∆t, tienden a cero, es decir,
v = lım∆t→0
∆r∆t
. (1.22)
La ecuación (1.22) no es más que la definiciónde derivada, esto es
v =drdt
. (1.23)
De la ecuación (1.23), se concluye que la ve-locidad instantánea es tangente a la trayecto-ria seguida por la partícula, ya que el desplaza-miento infinitesimal dr es tangente a la trayecto-ria. La magnitud de la velocidad se llama rapi-dez y es igual a
v = |v| =∣∣∣∣drdt
∣∣∣∣ .
Como r = xi + yj, se tiene que en componentesrectangulares
v =drdt
=dxdt
i +dydt
j
= vxi + vyj.
Si en la figura 1.26, se conocen las componentesrectangulares, se tiene que su magnitud y direc-ción están dadas por
v =√
v2x + v2
y y θ = tan−1 vy
vx.

1.9. MOMENTO LINEAL O CANTIDAD DE MOVIMIENTO EN DOS DIMENSIONES (P) 19
De acuerdo con la definición del vector velocidad ins-tantánea, se tiene que sus dimensiones y unidadesson las mismas del vector velocidad media.
En adelante, siempre que se hable de veloci-dad, se hace referencia a la velocidad instantá-nea.
x
y
O i
j
r( )t
q
vy
vx
v
Figura 1.26: Componentes rectangulares del vectorvelocidad.
Partiendo de la definición del vector veloci-dad, es posible conocer el vector posición deuna partícula si se conoce la forma como varíael vector velocidad con el tiempo.
Teniendo en cuenta que en el instante detiempo to la partícula se encuentra en la posi-ción ro, mediante la ecuación (1.23) se encuentraque que la posición de la partícula en el instantet está dada por
r = ro +
t∫to
v(t)dt. (1.24)
Lo que se ha hecho es, partiendo de la formadiferencial de la ecuación (1.23), obtener la for-ma integral dada por la ecuación (1.24). Mien-tras no se conozca la forma como varía el vectorvelocidad (v(t)) con el tiempo, no es posible re-solver la integral de la ecuación (1.24).
Ejemplo 1.13.El vector posición de una partícula quese mueve en el plano xy, está dado porr(t) = (t − 3)i − (t2 − 15)j, donde r estádado en m y t en s. Determine la velocidadde la partícula, en el instante t = 3 s.
Solucióna) Empleando la ecuación (1.23) se tiene
que la velocidad en cualquier instante detiempo t está dada por
v = i − 2tj.
Reemplazando t = 3 s en la expresiónpara v, se tiene que el vector velocidad encomponentes rectangulares está dado por
v = (1 m · s−1)i − (6 m · s−1)j. (1)
Así que su magnitud y dirección estándadas respectivamente por
v = 6.08 m · s−1 y θ = 80.54o,
es decir
v = 6.083 m.s-1
80.54o
Ejercicio 1.18.El vector posición de una partícula que semueve en el plano xy, está dado por r(t) =(2t2 − 1)i − (t3 + 2)j donde r está dado enm y t en s. Determine la velocidad de lapartícula, en el instante t = 3 s . Compareel resultado con lo obtenido en el ejercicio1.12.
1.9. Momento lineal o cantidad demovimiento en dos dimen-siones (p)
En esta sección, de nuevo se hace referencia alas cantidades dinámicas masa y momento linealque son el punto de partida de la mayoría de losconceptos que se tratarán en adelante.
Como se sabe, la física dispone de una can-tidad escalar que es característica o propia decada cuerpo como es su masa. Recuerde que nose hace una definición operacional de la masa,sino que en su lugar se emplea el concepto in-tuitivo que de ella se tiene, esto es, lo que marcauna balanza cuando un cuerpo se coloca sobreella.
Igualmente, se debe tener presente que lamasa de un cuerpo es una cantidad fundamen-tal cuya dimensión es M y que de acuerdo conesta dimensión, las unidades respectivas son: el

20 CAPÍTULO 1. MOMENTO LINEAL, ENERGÍA CINÉTICA Y SU CONSERVACIÓN
kilogramo (kg) en el sistema de unidades SI, y elgramo (g) en el sistema gaussiano de unidades.
En el caso de dos dimensiones, la primeracantidad dinámica a definir, es el vector momen-to lineal o vector cantidad de movimiento, de granimportancia en la física pues permite obtenermás información que el vector velocidad.
O
p
m
y
x
Figura 1.27: Momento lineal de una partícula.
Una partícula de masa m que posee una ve-locidad v respecto a determinado observador,tiene, respecto a dicho observador, un momentolineal dado por
p ≡ mv. (1.25)
De acuerdo con la definición dada por laecuación (1.25), se tiene que el momento lineales una cantidad vectorial que apunta en la mis-ma dirección del vector velocidad, como se ilus-tra en la figura 1.27.
Además, como la velocidad depende del sis-tema de referencia, entonces el momento linealtambién depende del sistema de referencia.Igualmente, como la velocidad es tangente a latrayectoria descrita por la partícula, el momen-to lineal también es tangente a la trayectoriaque la partícula describe.
Dimensiones y unidades del vector momentolinealDe acuerdo con la definición de momento lineal,se tiene que sus dimensiones son iguales a la di-mensión de masa por la dimensión de veloci-dad, es decir [p] = [m][v] = MLT−1 . Por lotanto, las unidades en los respectivos sistemasestán dadas por: kg · m · s−1 en el sistema SI deunidades, g · cm · s−1 en el sistema gaussiano de
unidades y como se verá posteriormente lb · sen el sistema inglés de unidades.
Ejemplo 1.14.Si el momento lineal de una partícula demasa 600 g, está dado por p = 0.6i − 1.2tj,halle el vector posición de la partículaen el instante de tiempo t, sabiendoque partió de una posición en la cualro = −(3.0 m)i + (15 m)j cuando to = 0.
SoluciónUtilizando la definición del vector mo-mento lineal, se encuentra que en compo-nentes rectangulares el vector velocidadestá dado por
v = i − 2tj (1).
Al reemplazar los vectores ro y v en laecuación (1.24), se encuentra que al inte-grar, evaluar y simplificar, el vector posi-ción de partícula está dado por
r = (t − 3)i − (t2 − 15)j,
que es el mismo vector posición conside-rado en el ejemplo 1.1. De este resulta-do, se puede concluir que si se conoce elvector posición de una partícula, en fun-ción del tiempo, es posible conocer el vec-tor momento lineal y si se conoce el vec-tor momento lineal, en función del tiem-po, se puede conocer el vector posición dela partícula (recuerde que la integración esla operación inversa de la derivación).
Ejercicio 1.19.Si el momento lineal de una partícula conmasa 400g está dado por p = 1.6ti− 1.2t2j,halle el vector posición de la partícula enel instante de tiempo t, sabiendo que par-tió de una posición en la cual en ro =
−(1.00 m)i − (2.00 m)j en to = 0. Com-pare su resultado con el vector posicióndado en el ejercicio 1.17.
1.9.1. Conservación del momento linealen dos dimensiones
Como se indicó antes, aunque solo se consi-deran dos casos particulares, el principio de

1.9. MOMENTO LINEAL O CANTIDAD DE MOVIMIENTO EN DOS DIMENSIONES (P) 21
conservación del momento lineal tiene validezgeneral, sin importar el número de partículasque intervienen en un sistema. Este principioes de gran utilidad en la física, tanto desde unpunto de vista teórico como experimental. Enlos dos casos que se consideran a continuación,se recurre a los resultados que muestra elexperimento, cuando este se lleva a cabo.
1. En el primer experimento se considera lasituación en la que a una partícula, de masam y con movimiento en el plano, se le impideinteractuar con cualquier otra, como se ilustraen la figura 1.28. Al no interactuar la partícu-la con ninguna otra, el resultado que se obtienees que su estado de movimiento no es alterado,esto es, su velocidad permanecerá constante, olo que es igual, su momento lineal debe per-manecer constante. Lo anterior se puede expre-sar matemáticamente en la forma
p = mv = Constante o sea ∆p = 0
v
m
Figura 1.28: Conservación del momento lineal deuna partícula aislada.
2. En el segundo experimento, como se indi-ca en la figura 1.29, se aíslan, del resto del uni-verso, dos partículas con masas constantes m1 ym2 y que se mueven en un plano. Decir que seaíslan del resto del universo, equivale a afirmarque sólo se permiten sus interacciones mutuas.A un sistema como este se le llama sistema aisla-do.
Una vez que se le permite a las partículas in-teractuar entre sí, se encuentra que sus momen-tos lineales individuales cambian al transcurrirel tiempo. Adicionalmente, el momento linealtotal del sistema formado por las dos partícu-las, en cualquier instante, está dado por la sumade los momentos lineales de las partículas. De
v1
m1
v2
m2
t
t>t'm
1
m2
v1'
v2'
Figura 1.29: Momento lineal de dos partículas ais-ladas.
acuerdo con lo anterior, en el instante t el mo-mento lineal del sistema aislado, está dado por
P = p1 + p2
= m1v1 + m2v2, (1.26)
y en el instante posterior t′ por
P′ = p′1 + p′
2
= m1v′1 + m2v′
2. (1.27)
El experimento muestra, que independiente-mente de los valores de t y t′, el momento linealtotal del sistema aislado permanece constante, osea,
P = P′ (1.28)
Como la ecuación (1.28) es válida independien-temente del número de partículas que con-forman el sistema, se enuncia el principio deconservación del momento lineal, en la forma:El momento lineal total de un sistema aislado departículas, permanece constante.
De este modo, el momento lineal ganado(perdido) por una partícula, es perdido (gana-do) por el resto del sistema.
Para la situación que interesa en este mo-mento, se tiene que el momento lineal ganado(o perdido) por una de las partículas, es per-dido (o ganado) por la otra partícula. Así, alreemplazar las ecuaciones (1.26) y (1.27) en la

22 CAPÍTULO 1. MOMENTO LINEAL, ENERGÍA CINÉTICA Y SU CONSERVACIÓN
ecuación (1.28) se tiene
p1 + p2 = p′1 + p′
2
= Constante,
o lo que es igual
∆p1 = −∆p2, (1.29)
de donde, el momento lineal que gana unapartícula es igual y de sentido opuesto al mo-mento lineal que pierde la otra.
El resultado anterior tiene validez general ypermite afirmar que el momento lineal de unapartícula cambia cuando interactúa con otra uotras partículas. En conclusión, toda interacciónentre partículas genera cambios en sus momentoslineales individuales.
A menudo ocurren situaciones en las que semanifiesta claramente la conservación del mo-mento lineal en dos dimensiones. Un ejemplo,claro de conservación del momento lineal endos dimensiones, se presenta cuando una mo-to choca contra un camión. Es evidente que elcamión prácticamente no cambia su trayectoria,en cambio la moto generalmente termina en unlugar relativamente alejado de donde ocurrió elchoque.
1.9.2. Concepto de impulso (I)
El impulso es una cantidad física que se de-fine en función del momento lineal, en la forma
∆p = p − po,≡ I, (1.30)
donde la ecuación (1.30) lo define como elcambio en el vector momento lineal. De acuerdocon esta definición, las dimensiones y unidadesde impulso son las mismas de momento lineal.De este modo, por definición, el impulso no de-pende explícitamente de la masa m ni de la ve-locidad inicial vo de la partícula, ya que sóloimporta el cambio en el momento lineal de lapartícula.
El impulso es una cantidad física queadquiere importancia cuando se presenta ungran cambio en el momento lineal de una
partícula pero durante un pequeño intervalo detiempo. Por ejemplo, cuando el bate le da a unapelota de béisbol o cuando se le pega con el paloa una pelota de golf.
1.10. Concepto de energía cinéticaEk
Otra cantidad física de importancia en la físi-ca es la energía cinética de una partícula. Estacantidad es un escalar, que se puede expresaren función de la magnitud del vector velocidado de la magnitud del vector momento lineal.
Como se vio anteriormente, el momento li-neal de una partícula en movimiento cambiacon el tiempo mientras esta interactúa con otrapartícula. Se supone que el momento lineal dela partícula sufre un cambio dp durante un in-tervalo de tiempo dt en el cual la partícula se hadesplazado un dr.
Derivando respecto al tiempo, a ambos ladosde la ecuación (1.25), se tiene
dpdt
= mdvdt
. (1.31)
Multiplicando escalarmente, a ambos lados dela ecuación (1.31), por el desplazamiento dr, esposible obtener la igualdad
1m
p · dp = mv · dv. (1.32)
Como se muestra en la figura 1.30, se consideraque la partícula se mueve desde una posición Adonde la rapidez es vA y la magnitud del mo-mento lineal pA, hasta una posición B donde larapidez es vB y la magnitud de su momento li-neal pB. Mediante la ecuación (1.32) y luego deintegrar y evaluar, se llega a
p2B
2 m− p2
A2 m
=12
mv2B − 1
2mv2
A
∆(p2
2 m) = ∆(
12
mv2). (1.33)
La ecuación (1.33) muestra que el cambio enla cantidad ∆( p2
2 m ) es igual al cambio en la can-tidad ∆( 1
2 mv2), mostrando con ello que ambas

1.11. COLISIONES 23
x
y
O
BA
m
m
vA
vB
pA
pB
Figura 1.30: Movimiento de m entre A y B
expresiones se refieren a la misma cantidad físi-ca conocida como energía cinética, es decir, laenergía cinética se define matemáticamente por
Ek ≡ p2
2 m≡ 1
2mv2. (1.34)
Como lo muestra la ecuación (1.34) la energíacinética es una cantidad escalar ya que dependebien sea de la magnitud del vector momentolineal o de la rapidez de la partícula, es de-cir, es independiente de la dirección en que semueve la partícula. O sea, la definición de ener-gía cinética no tiene en cuenta el hecho que elsistema de referencia sea unidimensional o bidi-mensional.
Como la energía cinética es una cantidad físi-ca que depende, bien sea de la magnitud de lavelocidad ó de la magnitud del momento lineal,entonces depende del sistema de referencia yaque la velocidad, igual que el momento lineal,depende de él. Por otro lado, al ser la energíacinética una función de la rapidez o de la mag-nitud del momento lineal, es una energía quese le asocia a los cuerpos como consecuenciade su movimiento. Un cuerpo en reposo respec-to a determinado observador, no tiene energíacinética respecto al sistema de referencia asocia-do, aunque puede ser diferente de cero respectoa otros observadores, es decir, la energía cinéticaes una cantidad relativa.
En el caso particular de un movimiento rec-tilíneo uniforme, esto es, cuando una partícu-la se mueve con velocidad constante, el cambioen la energía cinética es nulo, es decir, ∆Ek =0, lo que indica que la energía cinética per-manece constante durante su movimiento. Estasituación se ilustra en la figura 1.31
Dimensiones y unidades de energía cinéticaDe acuerdo con las ecuaciones (1.33) y (1.34),
x
O
v = Constante
Figura 1.31: Cuerpo con movimiento rectilíneo uni-forme.
las dimensiones de energía cinética son ML2T−2
por lo que su unidad en el sistema interna-cional de unidades es el kg · m2 · s−2, unidadconocida como Joule, en el sistema gaussianode unidades es el g · cm2 · s−2 unidad conocidacomo ergio y en el sistema inglés de unidadeslb · p. Es decir
1kg · m2 · s−2 ≡ 1J(Joule)
1g · cm2 · s−2 ≡ 1 (ergio)
En mecánica cuántica y particularmente físi-ca nuclear, se encuentra que las unidadesdefinidas anteriormente para trabajo y energíason muy grandes, por ello, a nivel microscópicose utiliza otra unidad más pequeña de energíallamada electronvoltio (eV) y cuya relación conla unidad SI es
1 eV ≡ 1 .602 × 10−19 J.
Un múltiplo de esta unidad bastante utilizadoes el MeV, cuya relación es 1 MeV ≡ 106 eV.
1.11. Colisiones
Se habla de una colisión, cuando ocurre una in-teracción entre dos o más partículas, en un inter-valo corto de tiempo, en una región limitada delespacio y donde las fuerzas entre los cuerpos in-teractuantes son muy intensas. Esta definiciónindica que las partículas interactuantes formanun sistema aislado.
En toda colisión, la interacción entre laspartículas altera su movimiento, ya que gene-ralmente se presenta un intercambio de mo-mento lineal y de energía. Lo anterior, no sig-nifica necesariamente que las partículas hayanestado en contacto físico. En general, se quiere

24 CAPÍTULO 1. MOMENTO LINEAL, ENERGÍA CINÉTICA Y SU CONSERVACIÓN
indicar que ha ocurrido una interacción cuandolas partículas estaban próximas como se mues-tra en la región encerrada de la figura 1.32 parael caso de dos partículas. Cuando se presentacontacto físico entre las partículas, se acostum-bra denominar la colisión como un choque, estoocurre por ejemplo entre dos bolas de billar oentre dos autos.
En muchos casos, los cuerpos antes de unchoque son diferentes a los cuerpos después delchoque. En una reacción química, por ejemplo,el átomo A choca con la molécula BC, apare-ciendo luego del choque la molécula AB y elátomo C, esto es A + BC ↔ AB + C. En el ca-so de un disparo, antes de la colisión se tieneun cuerpo formado por el arma y el proyectil yluego del disparo se tienen dos cuerpos, el ar-ma y el proyectil. En el enganche de vagones deun tren, antes del choque se tienen dos cuerpos,cada uno de los vagones, y luego del choque setiene un cuerpo formado por los dos vagonesenganchados.
Se dice que ocurre una dispersión, cuando enun choque o colisión los cuerpos iniciales sonlos mismos cuerpos finales.
Región decolisión
m1
m1'
m2
m2'
v1
v2v2'
v1'
Figura 1.32: Colisión entre dos partículas.
Como un resultado del experimento y sabien-do que en un choque se tiene un sistema aislado,puesto que únicamente actúan fuerzas internasque afectan el estado de cada cuerpo, se puedeafirmar, el momento lineal total de un sistema esigual antes y después de una colisión. Matemática-mente y para el caso de dos partículas se tiene
p1 + p2 = p,1 + p,
2, (1.35)
donde p1 y p2 son los momentos lineales decada una de las partículas antes de la colisión,
p,1 y p,
2 los momentos lineales de cada una delas partículas después de la colisión.
Comúnmente, la ecuación (1.35) se escribe enla forma
m1v1 + m2v2 = m,1v,
1 + m,2v,
2 ,
siendo m1, m2 las masas de las partículas antesde la colisión y m,
1, m,2 las masas después de la
colisión.En general, uno de los objetivos al analizar
una colisión es poder relacionar las velocidadesde las partículas antes y después que esta ocu-rra. Para el caso de una colisión en dos di-mensiones y entre dos partículas, si se cono-cen las velocidades antes de la colisión se tienencuatro incógnitas, correspondientes a las com-ponentes de las velocidades de cada partículaen las dos dimensiones; pero como la conser-vación del momento lineal sólo proporciona dosecuaciones, una en cada dirección, es necesarioobtener más información y para ello se recurrea la conservación de la energía.
Como en una colisión el sistema de cuer-pos interactuantes conforman un sistema ais-lado, significa que no intervienen fuerzas ex-ternas al sistema. Por ello, la energía mecánicamacroscópica del sistema se conserva y en estecaso solo aparece en forma de energía cinética.
Para considerar la conservación de la energía,se define el factor de colisión Q en la forma
Q ≡ E′k − Ek,
donde Ek y E,k son, respectivamente, las ener-
gías cinéticas totales del sistema antes y des-pués de la colisión.
Para el caso de dos partículas que colisionan,el factor de colisión adquiere la forma
Q = ( 12 m,
1v,21 + 1
2 m,2v,2
2 )
−( 12 m1v2
1 +12 m2v2
2). (1.36)
Dependiendo del valor en el factor de colisión,puede ocurrir
i) Que la colisión sea elástica, esto se presentacuando Q = 0, por lo que en este caso nohay cambio en la energía cinética del sis-tema, o sea, E
′k = Ek. De acuerdo con lo

1.11. COLISIONES 25
anterior, en toda colisión elástica se conservatanto la energía cinética total del sistema, comoel momento lineal total del sistema.
ii) Que la colisión sea inelástica, ello se pre-senta cuando Q = 0 y en esta situación,la energía cinética aumenta si Q > 0 odisminuye si Q < 0 . En el primer ca-so, las partículas al colisionar desprendenparte de su energía interna y en el segun-do absorben parte de la energía mecánicaintercambiada en la colisión. En este casoes válido afirmar en una colisión inelástica nose conserva la energía cinética total del sistema,pero sí se conserva el momento lineal total delsistema.
De las dos definiciones anteriores se concluyeque en toda colisión se conserva el momento li-neal total del sistema.
Si después del choque sólo aparece unapartícula, se dice que se tiene una colisión com-pletamente inelástica o plástica. Debe quedar claroque toda colisión completamente inelástica esuna colisión inelástica, pero una colisión ine-lástica no tiene que ser una colisión completa-mente inelástica.
El parámetro de impacto b, es una cantidad quepermite saber si una colisión ocurre en una odos dimensiones. Este parámetro está dado porla distancia de separación b entre la línea demovimiento de la partícula incidente y la líneaparalela que pasa por la otra partícula, como semuestra en la figura 1.33.
bm
1
m2
m1
m2
v1
v1'
v2= 0
v2'
j
Figura 1.33: Parámetro de impacto.
De este modo, el parámetro de impacto es ladistancia por la cual una colisión deja de ser
frontal. Una colisión frontal, o en una dimen-sión, corresponde a b = 0 y valores mayores quecero para b, indican que la colisión es oblicua, oen dos dimensiones.
Ejemplo 1.15.Como se muestra en la figura, un auto demasa m1 y que se mueve con velocidad v1hacia la derecha, choca frontalmente conotro auto de masa m2 que se encuentra enreposo sobre la misma vía. Analice la co-lisión de los autos si esta es a) comple-tamente inelástica, b) elástica. c) Sabien-do que m1 = 300 g, m2 = 700 g y v1 =10 m · s−1, halle los valores de las canti-dades obtenidas en los numerales anterio-res.
v1
v2= 0
2
m2m
1
SoluciónComo en toda colisión, el momento linealtotal del sistema formado por los dos au-tos se conserva en el choque. De este mo-do, la ecuación (1.35) adquiere la forma
m1v1 = m1v,1 + m2v,
2, (1)
donde se ha tomado como positivo el sen-tido inicial de movimiento para el auto demasa m1.
Por otro lado, por la conservación dela energía, la ecuación (1.36) para el factorde colisión, se transforma en
Q =(
12 m1v,
12 + 1
2 m2v,2
2)− 1
2 m1v21. (2)
a) Cuando la colisión es completamenteinelástica, después del choque aparece só-lo una partícula de masa m1 + m2 con ve-locidad v,
1 = v,2 = V.
Así, mediante la ecuación (1) se en-cuentra que la velocidad final del sistematiene la forma
V =m1
m1 + m2v1. (3)
Por consiguiente, independientemente dela relación entre las masas m1 y m2, des-pués de la colisión plástica, la velocidaddel sistema es menor y apunta en el mismosentido que la velocidad con la cual incideel auto de masa m1.

26 CAPÍTULO 1. MOMENTO LINEAL, ENERGÍA CINÉTICA Y SU CONSERVACIÓN
Igualmente, para el factor de colisión,la ecuación (2) permite llegar a
Q = − m1m2
2(m1 + m2)v2
1. (4)
En esta colisión los autos se deforman, osea que parte de la energía cinética del sis-tema se transforma en energía interna yaque Q < 0, sin tener en cuenta cual au-to tiene masa mayor. En síntesis la colisiónes inelástica.
b) Si la colisión es elástica, la energíacinética total del sistema se conserva en elchoque, por lo que el factor de colisión esnulo y las ecuaciones (1) y (2) se puedenescribir, respectivamente, en la forma
m1(v,1 − v1) = −m2v,
2, (5)
m1(v,1 − v1)(v
,1 + v1) = −m2v,
22. (6)
Dividiendo las ecuaciones (5) y (6) se ob-tiene
v,1 + v1 = v,
2. (7)
Finalmente, por medio de las ecuaciones(5) y (7) y luego de simplificar, se encuen-tra que las velocidades de los autos des-pués del choque están dadas por
v,1 =
m1 − m2
m1 + m2v1
v,2 =
2m1
m1 + m2v1. (8)
En esta colisión, la velocidad del bloquem2 tiene el mismo sentido que la velocidadde incidencia de m1. En cambio, el senti-do de movimiento de m1 después de lacolisión, depende de la relación entre lasmasas de los bloques, esto es, si m1 > m2el bloque de masa m1 se mueve en el mis-mo sentido que m2; si m1 < m2 el bloquede masa m1 rebota en el choque movién-dose en sentido opuesto a m2, y si m1 = m2el bloque de masa m1 queda en reposodespués de la colisión.
c) Reemplazando valores, con m1 =0.3 kg, m2 = 0.7 kg, se tiene- Para la colisión completamente inelásti-ca, por las ecuaciones (3) y (4), se encuen-tra
V = 3.0 m · s−1,Q = −10.5 J.
- Para la colisión elástica, la ecuación (8)lleva a los valores
v,1 = −4.0ms−1,
v,2 = 6.0ms−1.
El signo menos en la velocidad de m1, sig-nifica que este bloque rebota en el choquepor cumplirse la relación m1 < m2.
Ejercicio 1.20.Como se muestra en la figura, un autode masa m1 y con velocidad v1 hacia laderecha, choca frontalmente con un se-gundo auto de masa m2 que inicialmentese mueve hacia la izquierda con velocidadv2 = −v1. Analice la colisión de los au-tos si esta es a) completamente inelástica,b) elástica. c) Sabiendo que m1 = 300 g,m2 = 700 g y v1 = 10 m · s−1, halle losvalores de las cantidades obtenidas en losnumerales anteriores.
v1 v
2
2
m2m
1
Ejemplo 1.16.El cuerpo de la figura de masa m1 y veloci-dad v1, tiene una colisión oblicua con elcuerpo de masa m2 inicialmente en reposo.a) Determine la magnitud de la veloci-dad de los bloques inmediatamente des-pués del choque, si las masas después dela colisión se mueven en las direccionesmostradas. b) Resolver para m1 = 0.2kg,m2 = 0.3kg, v1 = 15.0ms−1, φ1 = 30o yφ=40o. ¿Es la colisión elástica o inelástica?
j2
m1
m2
m1
m2
v1
v1'
v2= 0
v2'
x
y
j1
Solucióna) Como el momento lineal total de las

1.12. ENUNCIADOS 27
dos partículas se conserva en la colisión,la ecuación (1.35) adquiere la forma
m1v1 = m1v,1 + m2v,
2.
Descomponiendo las velocidades en suscomponentes rectangulares, se obtienepara las direcciones x y y, respectiva-mente, las expresiones
m1v1 = m1v,1cosφ1 + m2v,
2cosφ2, (1)
0 = −m1v,1senφ1 + m2v,
2senφ2. (2)
Resolviendo las ecuaciones (1) y (2), se ob-tiene
v,1 =
senφ2
sen(φ1 + φ2)v1,
v,2 =
m1
m2
senφ1
sen(φ1 + φ2)v1.
De estos resultados se tiene que para va-lores fijos de φ1 y φ2, la velocidad de m1después del choque es independiente dela masa de los cuerpos, mientras que param2 la velocidad sí depende de la relaciónentre las masas de los cuerpos.
b) Reemplazando valores se encuentraque la magnitud de las velocidades son
v,1 = 10.3ms−1,
v,2 = 5.3ms−1.
Al calcular el factor de colisión, se encuen-tra que la colisión es inelástica ya que Q =
−7.7J. De este modo, parte de la energíamecánica se transforma en energía internade las partículas.
1.12. ENUNCIADOS
1. La fuerza neta F que actúa sobre unapartícula, debido a las fuerzas F1 y F2 apli-cadas simultáneamente sobre ella, está di-rigida horizontalmente hacia la derecha,como se muestra en la figura. La magnitudde la fuerza F1 es 10 N. a) Utilizando la figu-ra, muestre gráficamente que los tres vec-tores han sido trazados correctamente. b)Determine las magnitudes de los vectoresfuerza F y F2. Resolverlo por dos métodosdiferentes.
y
x45
o
F1
F
F2
2. Sobre la partícula de la figura, actúan lasfuerzas F1 y F2, con magnitudes respecti-vas de 800 N y 500 N. Encuentre a) las com-ponentes rectangulares de las fuerzas F1 yF2, b) los ángulos que cada fuerza formacon cada uno de los ejes de coordenadas,c) el ángulo entre las fuerzas F1 y F2 y d)la magnitud y dirección de la fuerza netaque actúa sobre la partícula debido a lasdos fuerzas aplicadas.
xy
z
70o
40o
30o25
o
F1
F2
3. Un auto que se mueve en línea recta ha-cia la izquierda, pasa por las ciudades con-secutivas A, B y C, regresando luego ala ciudad B. En un diagrama que incluyael sistema de referencia, muestre el vec-tor desplazamiento del auto y expréselomatemáticamente en función de su respec-tiva componente.
4. Un auto está 16 m al Este de la señal dePARE en el instante de tiempo ti , y 37 mal Oeste de la señal al tiempo tf. Si la señales el origen de coordenadas y el eje x apun-ta hacia el este. Determine: (a) xi , (b) xf, (c)ri, (d) rf y (e) ∆r.
5. Un ciclista se movió en línea recta durantecierto intervalo de tiempo y de tal formaque el vector desplazamiento es paralelo alvector unitario i. ¿De lo anterior es posibleconcluir que el ciclista sólo se desplazó enel mismo sentido del vector unitario i? Ex-plique.
6. Las gráficas de la figura muestran lavariación de la posición x en función del

28 CAPÍTULO 1. MOMENTO LINEAL, ENERGÍA CINÉTICA Y SU CONSERVACIÓN
tiempo t, para un atleta que se mueveen línea recta. Describa el movimiento delatleta y llévelo a cabo con la punta de sulápiz.
x
t
x
t
x
t
7. La gráfica de la figura muestra la forma co-mo cambia la posición de una hormiga enfunción del tiempo, cuando se mueve a lolargo de una trayectoria rectilínea. (a) Traceel vector desplazamiento en la gráfica y ex-préselo matemáticamente. (b) Obtenga lagráfica de la forma como varía la veloci-dad de la hormiga en función del tiempo.(c) Utilizando la gráfica anterior, encuentrela magnitud del desplazamiento durante elmovimiento y compare su resultado con elhallado en el numeral (a).
x (cm)
t (s)
10
-10
20
-20
1 2 3 4 5
8. En la gráfica se indica el cambio de la rapi-dez v en función del tiempo (t), para un au-to que se mueve sobre una autopista recta.Obtenga la gráfica de la posición en fun-ción del tiempo para el auto, suponiendoque pasó por el origen en t = 0.
9. La ecuación cinemática de posición, parauna bicicleta que se mueve sobre el eje x, es-tá dada por la expresión x(t) = −14t + 74, donde x se da en m y t en s. (a) ¿Cuál esla posición inicial de la bicicleta? (b) ¿Cuáles el momento lineal de la bicicleta, en fun-ción del tiempo, si esta tiene una masa de10.5 kg? De acuerdo con el resultado, ¿qué
v (m s )-1
t (s)
30
60
1 2 3 4 5-30
-60
movimiento tiene la bicicleta? ¿Por qué? (c)Haga un diagrama que ilustre la situación,teniendo en cuenta las respuestas de los nu-merales anteriores. (d) Haga una gráfica dela posición de la bicicleta en función deltiempo, desde t = 0 s a t = 6 s. (e) Hagauna gráfica de la velocidad de la bicicle-ta en función del tiempo, desde t = 0 s at = 6 s.
10. Un auto A se mueve hacia la derechapor una pista recta y con una rapidez80 km · h−1. El conductor del auto A obser-va otro auto B que se encuentra 50 m de-lante de él sobre un carril paralelo. Supon-ga que el auto B se mueve en el mismo sen-tido que el auto A con una velocidad demagnitud 60 km · h−1. (a) Halle la posiciónen la cual un auto pasa frente al otro. (b)Encuentre el momento lineal de cada autosi cada uno tiene una masa de 103kg. Re-suelva la misma situación para el caso en elcual un auto se mueve hacia el otro.
11. ¿Será posible encontrar una situación físi-ca, de un cuerpo en movimiento, en la queel momento lineal no sea paralelo a la ve-locidad? Explique.
12. Un niño tira un juguete para que su pe-rro, de masa 8 kg, lo recoja. El perro em-prende la carrera en busca del juguete, quese encuentra a 9 m de distancia, y lo trae devuelta. El viaje le toma 4.3 s . (a) ¿Cuál esel desplazamiento del perro? (b) ¿Cuál esla distancia total que recorrió el perro? (c)¿Cuál es el momento lineal medio del pe-rro?
13. La magnitud del momento lineal de un

1.12. ENUNCIADOS 29
auto con movimiento rectilíneo, varía conla magnitud de la velocidad en la formamostrada en la figura. ¿Cuál es el significa-do físico de la pendiente de la recta? Halleel valor numérico correspondiente.
16v ( 10 m s )x
-1
p
( 10 kg m s )x4 -1
1 3 5 7
48
112
80
14. Un camión y su carga, con una masa de2 × 104 kg, se mueve en línea recta conuna rapidez de 1 km · h−1. ¿Con qué rapi-dez tendrá que correr usted para adquirirla misma magnitud de la cantidad demovimiento del camión? Utilice su propiamasa. Exprese su resultado en km · h−1 yen m · s−1.
15. Una bala de 30 g tiene una velocidad hori-zontal de magnitud 100 m · s−1. ¿Con quérapidez tendrá que correr usted para al-canzar la magnitud de la cantidad demovimiento de la bala? Utilice su propiamasa. Exprese su resultado en km · h−1 yen m · s−1.
16. La partícula α es un núcleo de helio con unamasa de 6.88 × 10−27kg, la cual es emitidaen una desintegración radiactiva del 238
92 U.Una partícula α tiene una rapidez de 1.4 ×107m · s−1. Esta es una rapidez pequeñacomparada con la de la luz (3× 108m · s−1).(a) ¿Cuál es la magnitud de la cantidad demovimiento de la partícula α? (b) ¿Cuál esla magnitud de la velocidad de una masade 1 g con la misma magnitud de la can-tidad de movimiento de la partícula α? (c)¿Cuánto tiempo demora la masa de 1 g enrecorrer 1 m con esta rapidez? Exprese suresultado en años.
17. ¿Con qué rapidez debe correr usted para al-canzar la misma magnitud de la cantidad
de movimiento que un auto de 103kg demasa que se desplaza a 1 km · h−1?
18. La figura muestra la forma como varía laposición x de una partícula en función deltiempo t, mientras esta se mueve en línearecta. La masa de la partícula es 400 g. (a)¿El momento lineal de la partícula es ceroen algún instante? Explique. (b) ¿Es cons-tante el momento lineal de la partícula? Ex-plique. (c) ¿Cuál es el momento lineal dela partícula en el instante t = 0 s (d) ¿Cuáles su momento lineal en el instante t = 3 s(e) ¿En qué instante la partícula pasa por elorigen? ¿Cuál es su momento lineal en eseinstante?
x (m)
t (s)
1
-1
2
-2
1 2 3 4 5
19. Un auto de masa 1.2 × 103kg se desplazacon una velocidad horizontal de magnitud100 km · h−1 en dirección Suroeste. El sis-tema de coordenadas se toma de tal formaque el eje x apunta hacia el Este y el eje y ha-cia el Norte. (a) ¿Cuál es el momento linealdel auto? (b) ¿Cuáles son las componentesrectangulares de la cantidad de movimien-to?
20. Una granada explota en dos fragmentos deigual masa. Si un fragmento sale disparadoen la dirección oeste, ¿en que dirección semueve el otro fragmento? ¿Por qué?
21. Un auto de 103kg que se desplaza hacia laizquierda sobre una pista recta, choca con-tra un camión estacionado de 4× 103kg. In-mediatamente después de la colisión, el au-to queda en reposo, mientras que el camiónse desplaza con una rapidez de 2 m · s−1.(a) Halle la velocidad del auto inmediata-mente antes de la colisión. (b) En el choque,¿se conserva el momento lineal del auto?Explique.

30 CAPÍTULO 1. MOMENTO LINEAL, ENERGÍA CINÉTICA Y SU CONSERVACIÓN
22. Una bola de masa 4 kg y velocidad1.2 m · s−1, choca frontalmente con otra bo-la de masa 5 kg moviéndose a 0.6 m · s−1 enel mismo sentido. Si la velocidad de la bolade 4 kg después del choque es 0.54 m · s−1,encuentre el cambio en el momento linealde cada bola. ¿Qué puede concluir de losresultados obtenidos?
23. Repita la situación anterior, suponiendoque la bola de 5 kg se mueve en sentidoopuesto antes del choque y con una veloci-dad de 1.13 m · s−1 luego del choque.
24. En los dos enunciados anteriores, supon-ga que las bolas quedan pegadas en elchoque. (a) Encuentre la velocidad de lasbolas inmediatamente después del choque.(b) Halle el cambio en el momento lineal decada bola en el choque. ¿Qué puede con-cluir de los resultados obtenidos?
25. Un bloque se lanza sobre una superficie ho-rizontal, de tal manera que este mueve enlínea recta. ¿Se conserva el momento linealdel bloque? Explique.
26. Un ciclista y su bicicleta, de masa 102kg, semueven en el plano xy de tal manera quelas ecuaciones cinemáticas de posición es-tán dadas por x = −30t − 6 y y = 60t − 9,donde x, y se dan en m y t en s. (a) Obtengala ecuación de la trayectoria seguida por elsistema ciclista-bicicleta. (b) Exprese el vec-tor momento lineal del sistema en sus com-ponentes rectangulares, cuando t = 15 s.Halle la magnitud y dirección del momentolineal del sistema en t = 15 s. (c) Encuentrela energía cinética del sistema en t = 15 s.
27. La energía cinética de un auto varía con elcuadrado de su rapidez en la forma mostra-da en la figura. ¿Cuál es el significado físicode la pendiente de la recta? Halle el valornumérico de la masa del auto.
28. La velocidad de un bloque de 2 kg es v1 =(3i − 3j)m · s−1 en el instante t = 3 s. Pos-teriormente, cuando t = 6 s, la velocidades v2 = (8i + 4j)m · s−1. (a) Halle el cam-bio en la velocidad del bloque. (b) Calcule
v2( 10 m s )
2 2 -2x
Ek
( 10 J)x3
2 4 6 8 91
5
20
45
el cambio en el momento lineal del bloque.(c)Encuentre el cambio en la energía cinéti-ca del bloque.
29. Dos deslizadores de masas m1 y m2 semueven, respectivamente, con velocidadesv1 y v2 sobre un riel de aire y en sen-tidos opuestos. Los deslizadores chocanelásticamente. (a) Halle la velocidad de losdeslizadores después del choque. (b) Ana-lice el resultado en los siguientes casos par-ticulares: (i) m1 = m2, (ii) m2 = 2m1, (iii)v2 = 0 y m1 = m2, (iv) v2 = 0 y m2 =2m1. En cada caso, ilustre gráficamente lasituación luego del choque. Para cada unade las situaciones consideradas en el nu-meral (b), halle (c) el cambio en el momentolineal de cada deslizador y (d) el cambio enla energía cinética de cada deslizador.
30. Dos autos de igual masa m se mueven so-bre el mismo carril y en el mismo sentido,con velocidades v1 y v2. Luego del choquelos autos quedan pegados. (a) ¿Bajo quécondición chocan los autos? Explique. (b)Halle la velocidad de los autos inmediata-mente después del choque. (c) Determine sila colisión es elástica o inelástica.
31. Una bola de billar que se mueve horizontal-mente hacia la derecha, choca con otra bolaque se encuentra en reposo. Luego de la co-lisión, ¿cuál situación de las mostradas es lacorrecta? Explique su respuesta.
32. Un auto de masa m se mueve en el senti-do Norte-Sur con una velocidad de mag-nitud 40 km · h−1, mientras que otro au-to de masa 2m se mueve en el sentido

1.12. ENUNCIADOS 31
(i) (ii)
(iii) (iv)
Oeste-Este con una velocidad de magni-tud 30 km · h−1. Los dos autos chocan enel cruce entre las dos avenidas sobre lascuales se mueven, de tal forma que quedanenganchados moviéndose en una direcciónque forma un ángulo de 34o con la horizon-tal. (a) Haga un diagrama ilustrativo de lasituación planteada, tanto inmediatamenteantes como inmediatamente después delchoque. (b) Obtenga, en componentes rec-tangulares, la velocidad de los autos in-mediatamente después del choque. (c) En-cuentre el factor de colisión. ¿Parte de estaenergía cómo aparece luego de la colisión?(d) ¿Qué nombre recibe esta colisión? Ex-plique.
33. Una bola de billar de masa m1 se muevehorizontalmente hacia la derecha con unavelocidad v1, cuando choca elásticamentecon otra bola de masa m2, inicialmente enreposo. Luego de la colisión, las veloci-dades de las bolas forman entre sí un án-gulo de 90o. (a) Haga un diagrama ilus-trativo donde se muestre la situación tan-to inmediatamente antes como inmediata-mente después del choque. (b) Encuentrela relación entre las masas de las bolas debillar.
34. Con el fin de probar la resistencia delos materiales que conforman su estruc-tura, a dos autos de igual masa se lespermite chocar, desplazándose en sentidosopuestos con movimiento rectilíneo uni-forme. Suponga que los autos quedan en-ganchados en el choque y que adquierenvelocidades constantes de 60 m · s−1 y80 m · s−1 cuando la separación entre el-los es 100 m. (a) Halle la posición donde
chocan los autos. (b) Encuentre la veloci-dad de los autos inmediatamente despuésdel choque. (c) Si luego del choque los au-tos se desplazan con movimiento rectilíneouniforme, determine su posición a los 5 s deeste haber ocurrido.

MOMENTO LINEAL, FUERZA Y ENERGIA MECANICA
BERNARDO ARENAS GAVIRIAUniversidad de Antioquia
Instituto de Física
2012


Índice general
2. Momento lineal, fuerza y energía mecánica 12.1. Introducción . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12.2. Aceleración de una partícula . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
2.2.1. Vector aceleración (a) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22.2.2. Vector aceleración media (a) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22.2.3. Vector aceleración instantánea (a) . . . . . . . . . . . . . . . . . . . . . . . . . 32.2.4. Aceleración en el movimiento rectilíneo . . . . . . . . . . . . . . . . . . . . . . 42.2.5. Movimiento rectilíneo acelerado . . . . . . . . . . . . . . . . . . . . . . . . . . 42.2.6. Movimiento rectilíneo desacelerado o retardado . . . . . . . . . . . . . . . . . 42.2.7. Movimiento rectilíneo uniformemente acelerado (MRUA) . . . . . . . . . . . 5
2.3. Cambio en el momento lineal y leyes de Newton . . . . . . . . . . . . . . . . . . . . . 72.3.1. Diagrama de cuerpo libre . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 112.3.2. Fuerza neta, total o resultante de un sistema de fuerzas concurrentes . . . . . 142.3.3. Resultante de un sistema de fuerzas utilizando componentes rectangulares . 142.3.4. Movimiento vertical de los cuerpos . . . . . . . . . . . . . . . . . . . . . . . . 212.3.5. Movimiento en un plano vertical debido a la interacción con la tierra . . . . . 232.3.6. Fuerza elástica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
2.4. Fuerza trabajo y energía . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 292.4.1. Fuerza, desplazamiento y trabajo . . . . . . . . . . . . . . . . . . . . . . . . . . 302.4.2. Trabajo y potencia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 332.4.3. Fuerza, trabajo y energía cinética (∆Ek) . . . . . . . . . . . . . . . . . . . . . . 352.4.4. Casos particulares del teorema del trabajo y la energía . . . . . . . . . . . . . 35
2.5. Trabajo, fuerza conservativa y energía potencial . . . . . . . . . . . . . . . . . . . . . 382.5.1. Trabajo realizado por una fuerza constante . . . . . . . . . . . . . . . . . . . . 382.5.2. Trabajo realizado por el peso de un cuerpo . . . . . . . . . . . . . . . . . . . . 382.5.3. Trabajo realizado por la fuerza elástica de un resorte . . . . . . . . . . . . . . 382.5.4. Fuerza conservativa y energía potencial . . . . . . . . . . . . . . . . . . . . . . 39
2.6. Conservación de la energía para una partícula . . . . . . . . . . . . . . . . . . . . . . 402.7. Derivada direccional, energía potencial y sistema conservativo . . . . . . . . . . . . . 432.8. Curvas de energía potencial . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 452.9. Fuerza de fricción entre superficies en contacto . . . . . . . . . . . . . . . . . . . . . . 47
2.9.1. Fuerza de fricción en fluidos . . . . . . . . . . . . . . . . . . . . . . . . . . . . 542.10. Fuerza de fricción y sistema no conservativo . . . . . . . . . . . . . . . . . . . . . . . 562.11. ENUNCIADOS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
3


Capıtulo 2Momento lineal, fuerza y energíamecánica
CompetenciasEn esta unidad se busca que el estudiante
Defina, conceptual y matemáticamente, elvector aceleración de una partícula.
Distinga entre movimiento rectilíneo acele-rado y movimiento rectilíneo desacelerado.
Identifique y analice el movimiento rectilí-neo uniformemente acelerado.
Infiera la relación entre interacción y cam-bio en el momento lineal.
Enuncie, analice y aplique las leyes deNewton.
Analice situaciones físicas utilizando lasleyes de Newton.
Obtenga diagramas de cuerpo libre, en elcaso de partículas.
Analice el movimiento de caída libre y elmovimiento parabólico.
Defina, conceptual y matemáticamente, eltrabajo realizado por una fuerza.
Obtenga y aplique el teorema del trabajo yla energía.
Enuncie y aplique la ley de Hooke.
Identifique la relación entre fuerza conser-vativa, energía potencial y derivada direc-cional.
Distinga entre fuerza conservativa y fuerzano conservativa.
Analice el efecto de la fuerza de fricción so-bre el movimiento de los cuerpos.
Distinga entre sistema conservativo y sis-tema no conservativo.
Enuncie y aplique la ley de conservación dela energía.
Analice situaciones físicas empleando losconceptos de trabajo y energía.
CONCEPTOS BASICOSEn esta unidad, se definirán y analizarán lossiguientes conceptos: Vector aceleración (a),Vector fuerza (F), peso (W), diagrama de cuerpolibre, trabajo (W), teorema del Trabajo y la Ener-gía, sistema conservativo, energía potencial Ep,fuerza elástica, fuerza central, sistema no con-servativo y energía total E.
2.1. Introducción
Cuando se analiza el estado de reposo o demovimiento de un cuerpo, es posible hacerlopor dos caminos o métodos diferentes, en unoellos se utilizan las leyes de Newton y en el
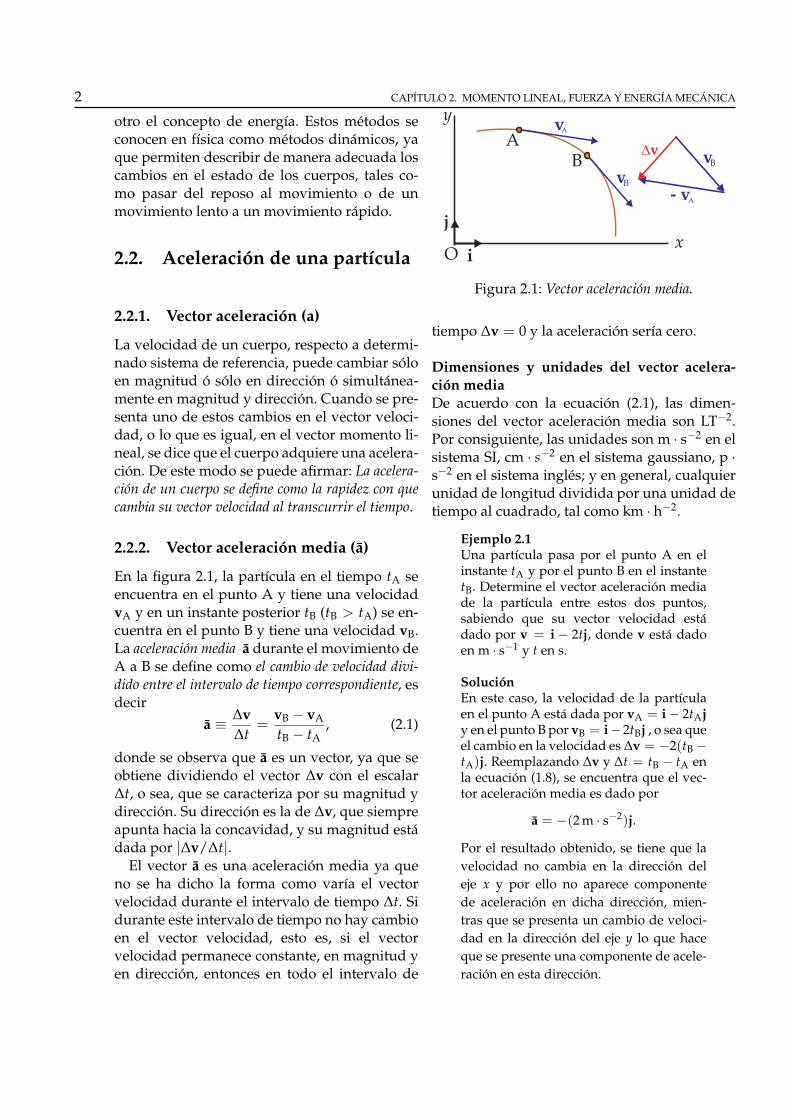
2 CAPÍTULO 2. MOMENTO LINEAL, FUERZA Y ENERGÍA MECÁNICA
otro el concepto de energía. Estos métodos seconocen en física como métodos dinámicos, yaque permiten describir de manera adecuada loscambios en el estado de los cuerpos, tales co-mo pasar del reposo al movimiento o de unmovimiento lento a un movimiento rápido.
2.2. Aceleración de una partícula
2.2.1. Vector aceleración (a)
La velocidad de un cuerpo, respecto a determi-nado sistema de referencia, puede cambiar sóloen magnitud ó sólo en dirección ó simultánea-mente en magnitud y dirección. Cuando se pre-senta uno de estos cambios en el vector veloci-dad, o lo que es igual, en el vector momento li-neal, se dice que el cuerpo adquiere una acelera-ción. De este modo se puede afirmar: La acelera-ción de un cuerpo se define como la rapidez con quecambia su vector velocidad al transcurrir el tiempo.
2.2.2. Vector aceleración media (a)
En la figura 2.1, la partícula en el tiempo tA seencuentra en el punto A y tiene una velocidadvA y en un instante posterior tB (tB > tA) se en-cuentra en el punto B y tiene una velocidad vB.La aceleración media a durante el movimiento deA a B se define como el cambio de velocidad divi-dido entre el intervalo de tiempo correspondiente, esdecir
a ≡ ∆v∆t
=vB − vA
tB − tA, (2.1)
donde se observa que a es un vector, ya que seobtiene dividiendo el vector ∆v con el escalar∆t, o sea, que se caracteriza por su magnitud ydirección. Su dirección es la de ∆v, que siempreapunta hacia la concavidad, y su magnitud estádada por |∆v/∆t|.
El vector a es una aceleración media ya queno se ha dicho la forma como varía el vectorvelocidad durante el intervalo de tiempo ∆t. Sidurante este intervalo de tiempo no hay cambioen el vector velocidad, esto es, si el vectorvelocidad permanece constante, en magnitud yen dirección, entonces en todo el intervalo de
x
y
O i
j
A
B
vB
Dv
vA
vB
- vA
Figura 2.1: Vector aceleración media.
tiempo ∆v = 0 y la aceleración sería cero.
Dimensiones y unidades del vector acelera-ción mediaDe acuerdo con la ecuación (2.1), las dimen-siones del vector aceleración media son LT−2.Por consiguiente, las unidades son m · s−2 en elsistema SI, cm · s−2 en el sistema gaussiano, p ·s−2 en el sistema inglés; y en general, cualquierunidad de longitud dividida por una unidad detiempo al cuadrado, tal como km · h−2.
Ejemplo 2.1Una partícula pasa por el punto A en elinstante tA y por el punto B en el instantetB. Determine el vector aceleración mediade la partícula entre estos dos puntos,sabiendo que su vector velocidad estádado por v = i − 2tj, donde v está dadoen m · s−1 y t en s.
SoluciónEn este caso, la velocidad de la partículaen el punto A está dada por vA = i − 2tAjy en el punto B por vB = i− 2tBj , o sea queel cambio en la velocidad es ∆v = −2(tB −tA)j. Reemplazando ∆v y ∆t = tB − tA enla ecuación (1.8), se encuentra que el vec-tor aceleración media es dado por
a = −(2 m · s−2)j.
Por el resultado obtenido, se tiene que lavelocidad no cambia en la dirección deleje x y por ello no aparece componentede aceleración en dicha dirección, mien-tras que se presenta un cambio de veloci-dad en la dirección del eje y lo que haceque se presente una componente de acele-ración en esta dirección.

2.2. ACELERACIÓN DE UNA PARTÍCULA 3
Ejercicio 2.1Una partícula, de masa 500 g, pasa por elpunto A en el instante tA y por el pun-to B en el instante tB. Determine el vec-tor aceleración media de la partícula entreestos dos puntos, sabiendo que su vectormomento lineal está dado por p = 2ti −1.5t2j, donde p está dado en kg · m · s−1 yt en s.
2.2.3. Vector aceleración instantánea (a)
Si una partícula se mueve de tal manera quesu aceleración media, medida en varios inter-valos de tiempo diferentes no resulta constante,se dice que se tiene una aceleración variable. Laaceleración puede variar bien sea en magnitud,en dirección o simultáneamente en magnitud ydirección. En tales casos, se trata de determinarla aceleración de la partícula en un instante da-do cualquiera, llamada aceleración instantánea ay definida por
a = lım∆t→0
∆v∆t
=dvdt
=d2rdt2 . (2.2)
Si el vector velocidad en componentes rectan-gulares está dado por v = vxi + vyj, entonces elvector aceleración se expresa en la forma
a =dvx
dti +
dvy
dtj = axi + ayj. (2.3)
De este modo su magnitud y dirección estándadas, respectivamente, por
a =√
a2x + a2
y y θ = tan−1 ax
ay.
Como se muestra en la figura 2.2, el vectoraceleración siempre apunta hacia la concavidadde la trayectoria y en general no es tangente niperpendicular a ella.
Las dimensiones y unidades del vector aceleracióninstantánea, o simplemente aceleración, son lasmismas que las del vector aceleración media.
x
y
i
jO
a
axi
ayj
q
Figura 2.2: Componentes rectangulares del vectoraceleración.
De la definición de aceleración, ecuación(2.2), se encuentra que
v = vo +
t∫to
a(t)dt. (2.4)
Esta integral se puede resolver sólo si se conocela forma como varía la aceleración con el tiem-po.
En el caso particular que el vector acelera-ción permanezca constante, en magnitud y di-rección, entonces
v = vo + a(t − to). (2.5)
Reemplazando la ecuación (2.5) en la ecuación(1.7), luego de integrar y evaluar se llega a
r = ro + vo(t − to) +12 a(t − to)
2. (2.6)
Expresión que únicamente es válida si el vec-tor aceleración permanece constante mientras lapartícula está en movimiento.
Ejemplo 2.2Halle la aceleración de una partículaen función del tiempo, cuya velocidadrespecto a determinado sistema de refe-rencia, está dada por v = i − 2tj.
SoluciónDerivando la expresión anterior respectoal tiempo, se encuentra que la aceleraciónestá dada por
a = (− 2 m s−2)j.
Este resultado muestra que la aceleraciónde la partícula es una constante a lo largo

4 CAPÍTULO 2. MOMENTO LINEAL, FUERZA Y ENERGÍA MECÁNICA
de la dirección y, lo que se esperaba yaque coinciden la aceleración media (ejem-plo 2.1) y la aceleración instantánea.
Ejercicio 2.2Halle la aceleración, en función del tiem-po, de una partícula de masa 500 g y cuyovector momento lineal está dada por p =
2ti − 1.5t2j.
Ejemplo 2.3Halle, en función del tiempo t , la veloci-dad de una partícula cuya aceleraciónestá dada por a = ( − 2 m s−2)j, sivo = (1.0 m s−1)i en to = 0.
SoluciónLuego de reemplazar a y vo en la ecuación(2.4), al integrar y evaluar se llega a la ex-presión
v = i − 2tj,
que es un resultado idéntico a la expresióndada en el ejemplo 2.2, como se esperaba.
Ejercicio 2.3Halle, en función del tiempo t , el momen-to lineal de una partícula de masa 500 g ycuya aceleración está dada por a = 4i −6tj, si vo = 0 en to = 0. Compare con laexpresión dada para v en el ejercicio 2.1
En el caso de una partícula que tengamovimiento rectilíneo, la aceleración tendrá só-lo una componente si se hace coincidir la trayec-toria con un eje, bien sea el eje x o el eje y. Encaso contrario, la aceleración tendrá dos com-ponentes rectangulares.
2.2.4. Aceleración en el movimiento rec-tilíneo
De acuerdo con la definición de aceleración ypara el caso de movimiento rectilíneo, con el ejede coordenadas coincidente con la trayectoria,un cuerpo posee aceleración si cambia la mag-nitud de la velocidad con el tiempo, es decir, siv = v (t). Teniendo en cuenta la definición deaceleración, esta corresponde a un vector cuyamagnitud está dada por
a =dvdt
, (2.7)
y cuya dirección coincide con la del movimien-to o con la opuesta, dependiendo de si la mag-nitud de la velocidad aumenta o disminuye conel tiempo. Igual que para la velocidad, el signode la aceleración lo da el sistema de referencia.
2.2.5. Movimiento rectilíneo acelerado
Si la magnitud de la velocidad aumenta con eltiempo, se tiene movimiento rectilíneo acelera-do, y en este caso la velocidad y la aceleracióntienen el mismo sentido, como se ilustra en lafigura 2.3. Esta situación se presenta, por ejemp-lo, cuando en un auto se aplica el pedal del acel-erador.
O
O
i
ix
x
v > 0
v < 0
v
v
a
a
a < 0
a > 0
Figura 2.3: Movimiento rectilíneo acelerado.
En síntesis, un cuerpo tiene movimiento rec-tilíneo acelerado, cuando tanto la velocidad co-mo la aceleración tienen el mismo signo.
2.2.6. Movimiento rectilíneo desacelera-do o retardado
Cuando la magnitud de la velocidad disminu-ye con el tiempo, se tiene movimiento rectilí-neo desacelerado o retardado, es decir, cuan-do la velocidad y la aceleración tienen sentidosopuestos, como se muestra en la figura 2.4. Es-ta situación se presenta, por ejemplo, cuando enun auto se aplican los frenos.
En síntesis, un cuerpo tiene movimiento rec-tilíneo desacelerado o retardado, cuando la ve-locidad y la aceleración tienen signos opuestos.
Para movimiento en una dimensión, laecuación (2.7) se puede escribir en forma inte-gral y es posible resolverla si se conoce la forma

2.2. ACELERACIÓN DE UNA PARTÍCULA 5
O
O
i
ix
x
v > 0
v < 0
v
v
a
a
a > 0
a < 0
Figura 2.4: Movimiento rectilíneo retardado.
funcional de a(t).
v = vo +
t∫to
a(t)dt. (2.8)
Ejercicio 2.4Determine, en función del tiempo, la ve-locidad de una partícula que se mueve alo largo del eje x, si la ecuación cinemáticade aceleración está dada por a = 18t − 8,con vo = −1 m s−1 en to = 0.
2.2.7. Movimiento rectilíneo uniforme-mente acelerado (MRUA)
Este es un movimiento en el cual la magnitudde la aceleración permanece constante, es de-cir, a(t) = a = Constante. De este modo, laecuación (2.8) toma la forma
v = vo + a(t − to), (2.9)
que corresponde a la ecuación cinemática de ve-locidad para el movimiento rectilíneo uniformementeacelerado (MRUA).
La ecuación (2.9) corresponde a la ecuaciónde una línea recta, donde su pendiente es lamagnitud de la aceleración del movimiento. Enlas figuras 2.5 y 2.6 se muestran las gráficas develocidad y aceleración en función del tiempo,para el caso de movimiento rectilíneo uniforme-mente acelerado.
De la figura 2.5, se tiene que la pendiente de lagráfica de velocidad en función del tiempo estádada por:
Pendiente =v − vo
t − to= a. (2.10)
v
v
vo
to
tt
O
Area = Dx
Figura 2.5: Gráfica de la velocidad en función deltiempo para un MRUA.
Al comparar la ecuación (2.10) con la ecuación(2.9), se encuentra que la pendiente de la rec-ta corresponde a la aceleración de una partículacon movimiento rectilíneo uniformemente ace-lerado.
a
a
to
t
tO
Area = Dv
Figura 2.6: Gráfica de la aceleración en función deltiempo para un MRUA.
La ecuación cinemática de posición de unapartícula con movimiento rectilíneo uniforme-mente acelerado, se obtiene al sustituir laecuación (2.9) en la ecuación (1.8), donde al in-tegrar y evaluar se llega a la expresión
x = xo + vo(t − to) +12 a(t − to)
2, (2.11)
expresión que sólo es válida si la magnitud dela aceleración permanece constante.
Cuando se grafica la posición de una partícu-la con movimiento rectilíneo uniformementeacelerado, en función del tiempo, se obtiene unaparábola cuya concavidad depende del signo dela aceleración. En la figura 2.7 se muestra la grá-fica en el caso de una aceleración positiva.
La pendiente de la recta tangente en un pun-to, tal como A en la figura 2.7, corresponde a la

6 CAPÍTULO 2. MOMENTO LINEAL, FUERZA Y ENERGÍA MECÁNICA
x
x
xA
xo
Ot
ot
A tt
A
Figura 2.7: Gráfica de la posición en función deltiempo para un MRUA.
velocidad de una partícula cuando pasa por laposición xA . En forma matemática
vA =dxdt
| x=xA .
Ejercicio 2.5.Demuestre que el área sombreada, en lagráfica de la figura 2.6, es igual al cambioen la velocidad ∆v de una partícula en elintervalo de tiempo ∆t = t − to, cuandose tiene movimiento rectilíneo uniforme-mente acelerado.
Ejercicio 2.6.Demuestre que el área sombreada, en lagráfica de la figura 2.5, es igual al des-plazamiento ∆x de una partícula en elintervalo de tiempo ∆t = t − to, cuan-do tiene movimiento rectilíneo uniforme-mente acelerado.
Ejemplo 2.4.Un autobús viaja con una rapidez de60 km · h−1 a lo largo de una pista rec-ta. El conductor del autobús ve unacamioneta que se mueve delante deél a una distancia de 30 m y con unavelocidad de 13.89 m · s−1. El conductordel autobús aplica los frenos a los 2 s dehaber observado la camioneta, generandouna aceleración de 50 cm · s−2. a) Hagaun diagrama ilustrativo de la situaciónplateada, incluyendo el sistema de refe-rencia a emplear. b) Plantee las ecuacionescinemáticas de posición y velocidad querigen el movimiento del autobús y dela camioneta. c) ¿El autobús alcanza la
camioneta? ¿Por qué? d) Calcule el tiempoen que se detiene el autobús. e) Calcule laposición del autobús y de la camioneta enel instante que se detiene el autobús.
Solucióna) Diagrama ilustrativo de la situaciónplateada
MovimientoMovimiento
O B 30x(m)
CA
En el diagrama se considera la situacióninicial de los móviles, y se toma el ori-gen de coordenadas del sistema de refe-rencia en la posición donde el conductordel autobús ve la camioneta. El punto B esla posición de la camioneta en el instanteque el autobús aplica los frenos. De acuer-do con el enunciado, las cantidades dadasson voA = 60 km · h−1 ≡ 16.67 m · s−1,xoC = 30 m, vC = 13.89 m · s−1, tA = 2 sy a = −50 cm · s−2 ≡ −0.5 m · s−2.
b) Ecuaciones cinemáticas de posicióny velocidad para el autobús y para lacamioneta:
Antes de aplicar los frenos, el autobústiene movimiento rectilíneo uniforme en-tre O y B. Así la ecuación (1.8), con to = 0y xo = 0 adquiere la forma
x′A = 16.67t. (1)
A partir del punto B, en el autobús seaplican los frenos y este adquiere unmovimiento rectilíneo uniformemente re-tardado, por lo que la ecuación (2.11) setransforma en
xA = xB + 16.67(t − 2)− 12 0.5(t − 2)2.
(2)En cambio, la camioneta se mueve conmovimiento rectilíneo uniforme a partirde xoC = 30 m, por lo que la ecuación (1.8)se puede escribir como
xC = 30 + 13.89t. (3)
Ahora, reemplazando tA = 2 s en laecuación (1), se tiene que la posición delautobús cuando aplica los frenos es
xB = 33.34 m. (4)

2.3. CAMBIO EN EL MOMENTO LINEAL Y LEYES DE NEWTON 7
O sea que al reemplazar la ecuación (4) enla ecuación (2), se tiene
xA = 33.34 + 16.67(t − 2)− 12 0.5(t − 2)2.
(5)vA = 16.67 − 0.5(t − 2). (6)
En las expresiones (3), (5) y (6), t es el tiem-po medido a partir de la situación inicialdel autobús y de la camioneta, mostradaen la figura.
c) Si el autobús y la camioneta se en-cuentran, su posición debe ser la misma.Por lo tanto, al igualar las ecuaciones (3) y(5), se llega a una expresión cuadrática ent, cuya solución es
t = 7.56 ±√−66.85,
que corresponde a soluciones físicamenteno aceptables, ya que se obtiene un tiempoimaginario que no tiene significado den-tro del marco de la física clásica. Lo ante-rior, permite concluir que el autobús y lacamioneta no se encuentran.
d) Para hallar el tiempo que tarda elautobús en detenerse, la ecuación (6) seiguala a cero, lo que lleva al resultado
t = 35.34 s.
e) La posición de los móviles cuando sedetiene el autobús, se encuentra reem-plazando la ecuación (7) en las ecuaciones(3) y (5). De este modo se obtiene
xA = 311.23 m y xC = 520.87 m.
El resultado anterior muestra que cuandoel autobús se detiene, la camioneta se en-cuentra 209.64, m delante de él. Esto sig-nifica que el autobús, mientras se encuen-tra en movimiento, está atrás de l camione-ta y por consiguiente no es posible que seencuentren como se concluyó en el numer-al c).
Ejercicio 2.7.Un auto viaja a 16.67 m · s−1 a lo largo deuna pista recta. El conductor del auto veun camión que viaja delante de él a unadistancia de 5 m y con una velocidad de40 km · h−1. El conductor del auto aplicalos frenos a los 0.5 s de haber observado
el camión, generando una aceleración de50 cm · s−2. a) Haga un diagrama ilustrati-vo de la situación plateada, incluyendo elsistema de referencia a emplear. b) Planteelas ecuaciones cinemáticas de posición yvelocidad que rigen el movimiento del au-to y del camión. c) ¿El auto alcanza alcamión? ¿Por qué? d) Calcule el tiempo enque se detiene el auto. e) Calcule la posi-ción del auto y del camión en el instanteque se detiene el auto. f) Analice comple-tamente los resultados obtenidos.
2.3. Cambio en el momento linealy leyes de Newton
En esta sección, se obtendrá la forma matemáti-ca de las leyes que rigen el cambio en el esta-do de reposo o de movimiento de un cuerpo.A partir de estas leyes y con ayuda de los con-ceptos vistos hasta ahora para una partícula, esposible llegar a conocer la forma como varía laposición de una partícula con el tiempo [r(t)],es decir, es posible resolver completamente elproblema dinámico de una partícula.
De acuerdo con la situación considerada enel primer experimento de la sección 1.9.1, elcuerpo permanecerá con movimiento rectilíneouniforme, momento lineal constante, mientrasningún otro cuerpo interactúe con él, o lo quees igual, mientras ningún otro cuerpo lo obli-gue a cambiar dicho estado. La experiencia tam-bién muestra que un cuerpo permanece en re-poso sobre una superficie, hasta que llegue otrocuerpo y lo obligue a moverse. En cualquierade los dos casos, esto significa que su momentolineal no cambia o lo que es igual que su ace-leración es nula, ya que al no cambiar su mo-mento lineal, no cambia su velocidad. Cuandose presenta una de estas dos situaciones, (re-poso o MRU) se dice que el cuerpo se encuentraen equilibrio mecánico y se habla de equilibrio es-tático si el cuerpo está en reposo, y de equilibriodinámico o cinético si el cuerpo tiene movimientorectilíneo uniforme.
También puede ocurrir que un cuerpo, inte-ractuando con varios cuerpos simultáneamente,

8 CAPÍTULO 2. MOMENTO LINEAL, FUERZA Y ENERGÍA MECÁNICA
permanezca en estado de equilibrio. En este ca-so, se presenta una situación en la cual las in-teracciones se anulan entre sí, en otras pala-bras, el efecto de todas las interacciones es nu-lo. Por ejemplo, una lámpara suspendida deltecho mediante una cuerda, se encuentra en es-tado de equilibrio estático, aunque interactúa si-multáneamente con la cuerda y la tierra. Igual-mente, en el caso de un auto que se mueve so-bre una superficie con MRU, está en equilibriodinámico ó cinético, aunque simultáneamenteestá interactuando con la tierra, con el piso y conel aire.
En lenguaje matemático, cualquiera de losdos estados considerados anteriormente, re-poso y MRU, se pueden expresar en la forma
v = 0 v = Constante, es decir a = 0.
O lo que es igual
p = 0 p = Constante, es decir a = 0.
Esta es la forma matemática de expresar laPrimera ley de Newton, también conocida comola ley de inercia, que en palabras se puede enun-ciar en la forma:
Todo cuerpo permanecerá en un estado de equi-librio mecánico, mientras no interactúe con ningúnotro cuerpo o al interactuar con otros cuerpos la in-teracción neta es nula.
Como el movimiento de un cuerpo dependedel observador, o lo que es igual del sistema dereferencia correspondiente, esta ley es práctica-mente un enunciado relativo a sistemas de re-ferencia, ya que al enunciarla hay que especi-ficar respecto a cuál sistema de referencia lapartícula se encuentra en estado de reposo ode movimiento rectilíneo uniforme. Para que uncuerpo pueda estar en reposo o tener MRU, elsistema de referencia debe ser tal que su ace-leración sea cero. A un sistema de este tipo sele conoce como sistema de referencia inercial y alobservador ligado a dicho sistema de referenciase le conoce como observador inercial. El concep-to de sistema de referencia inercial es de muchautilidad, ya que uno de los modelos que se dis-cutirá para resolver el problema dinámico deuna partícula, solo es válido respecto a este tipode sistemas de referencia.
Se acostumbra definir un sistema de referen-cia inercial, como aquel que se encuentra enreposo o con movimiento rectilíneo uniformerespecto a la tierra, ya que esta se toma apro-ximadamente como un sistema de referenciainercial, pues estrictamente no lo es. Comoconsecuencia de esta definición, se tiene quetodo sistema de referencia en reposo o con unmovimiento rectilíneo uniforme, respecto a unsistema de referencia inercial, también es unsistema de referencia inercial.
En síntesis: La ley de inercia únicamentees válida respecto a sistemas de referenciainerciales.
Pregunta :¿Por qué se afirma que la tierra realmenteno es un sistema de referencia inercial,aunque aproximadamente sí lo es?
A los sistemas de referencia con aceleracióndiferente de cero o momento lineal variable, seles conoce como sistemas de referencia aceleradoso sistemas de referencia no inerciales. Respectoa estos sistemas, no tienen validez las leyesNewton.
A continuación se consideran situaciones co-munes, en las que se manifiesta la ley de inercia.
1. En la figura 2.8, se muestra un cuerpo enreposo respecto a una superficie horizontal.
O
v= 0y
x
Figura 2.8: Cuerpo en reposo sobre una superficiehorizontal.
Como el cuerpo está en reposo respecto alpiso, su momento lineal respecto al piso es cero.Necesariamente, el cuerpo permanecerá en re-poso mientras ningún otro cuerpo interactúe

2.3. CAMBIO EN EL MOMENTO LINEAL Y LEYES DE NEWTON 9
con él, obligándolo a cambiar de estado, es de-cir, obligándolo a moverse sobre la superficie.
Si el cuerpo corresponde a un auto con suspasajeros, cuando este arranca, los pasajerosse mueven hacia el espaldar de la silla, ya quepor la ley de inercia, cuando acelera el auto, lospasajeros tienden a continuar en el estado develocidad cero, esto es, en reposo.
2. En la figura 2.9, se tiene un cuerpo sobreuna superficie horizontal lisa y con movimientorectilíneo uniforme, respecto a dicha superficie.
O
v=constantey
x
Figura 2.9: Cuerpo en movimiento sobre una super-ficie horizontal.
En este caso, el cuerpo continúa moviéndosecon el mismo momento lineal o la misma ve-locidad, mientras no interactúe con ningún otrocuerpo.
Si el cuerpo corresponde a un auto con suspasajeros, cuando este acelera, la ley de inerciase manifiesta cuando el cuerpo aprisiona el es-paldar de la silla, debido a la rapidez menor quese tenía en el instante de acelerar.
Por otro lado, cuando frena ocurre lo con-trario debido a la ley de inercia, ya que lospasajeros tienen un movimiento involuntarioen el sentido de movimiento, debido a lavelocidad mayor que se tenía en el instante defrenar.
3. Para no caer de narices al piso, ¿qué debehacer una persona cuando se baja de un autobúsen movimiento?
Si una persona desciende de un autobús enmovimiento, en el instante que tiene contactocon el pavimento, debe correr en el mismo sen-tido del auto para no caer al piso. Esto se debehacer, ya que por la ley de inercia la personacontinúa con la velocidad que tenía en el ins-
tante de bajarse. Cuando una persona no llevaa cabo esta acción, lo más seguro es que cae denarices al piso.
Pregunta :Suponga que se encuentra en el interiorde un ascensor. ¿Qué se percibe cuandoel ascensor, arranca ascendiendo y arran-ca descendiendo? Explique sus respuestasa la luz de la Primera ley de Newton.
La primera ley de Newton o ley de inercia tam-bién se relaciona con el concepto de masa. Paraello, se consideran los cuerpos de masas M ym (M > m), mostrados en las figuras 2.10 y 2.11.
- Cuando los dos cuerpos se encuentran en re-poso, respecto a un observador inercial fijo alpiso, ¿a cuál es más difícil cambiarle su estadode reposo?
y
x
v = 0 v = 0
Mm
Figura 2.10: Cuerpos en reposo.
La experiencia muestra que es más difícilcambiar el estado del cuerpo que tiene mayormasa. De este modo, el cuerpo de masa M pre-senta más oposición o resistencia a cambiar deestado, en otras palabras, el cuerpo de masa Mtiene mayor tendencia a continuar en reposo. Enconclusión, el cuerpo de masa M tiene mayorinercia que el cuerpo de masa m.
Actividad :Trate de mover una silla vacía y luegouna silla con una persona sentada en ella.¿Nota la diferencia?
- Si los dos cuerpos se mueven con igual veloci-dad respecto a un sistema de referencia fijo alpiso, ¿cuál es más difícil llevar al estado de re-poso?
Igual que en el caso anterior, el cuerpo demasa M tiene una mayor tendencia a continuar

10 CAPÍTULO 2. MOMENTO LINEAL, FUERZA Y ENERGÍA MECÁNICA
y
x
v
Mm
v
Figura 2.11: Cuerpos en movimiento.
con movimiento rectilíneo uniforme, es decir,que este cuerpo posee mayor inercia.
De estos dos casos, se puede inferir que lamasa es una medida de la inercia de los cuerpos.Esto es, la masa es una medida de la resistenciaque presentan los cuerpos al cambio de estadoy presenta mayor inercia o resistencia el cuerpoque tiene mayor masa. En este sentido, como seanaliza en el tema de la gravitación universal,hay distinción entre los conceptos de masa iner-cial y masa gravitacional.Para la situación considerada en la figura 1.20,las partículas interactúan durante un intervalode tiempo ∆t = t′ − t. Al dividir la ecuación(1.18) por ∆t, se tiene
∆p1
∆t= −∆p2
∆t. (2.12)
Si, además, se hace que ∆t → 0, la ecuación(2.12) se puede escribir en la forma
lım∆t→0
∆p1
∆t= − lım
∆t→0
∆p2
∆t,
y por definición de derivada se obtiene
dp1
dt= −dp2
dt. (2.13)
La ecuación (2.13) muestra que las variacionesrespecto al tiempo, del momento lineal de lasdos partículas, son iguales y opuestas.
La fuerza que actúa sobre la partícula 1, de-bido a su interacción con la partícula 2, se de-fine como el cambio con respecto al tiempo delvector momento lineal de la partícula 1, esto es,la fuerza que actúa sobre la partícula 1 es
F1 =dp1
dt. (2.14)
La ecuación (2.14), es la forma matemática deexpresar la interacción de la partícula 2 sobre lapartícula 1, y se conoce como la segunda ley deNewton, ley de fuerza ó ecuación de movimiento.
Como m1 es la masa de la partícula 1, su mo-mento lineal es p1 = m1v1 y la ecuación (2.14)se transforma en
F1 =ddt
(m1v1). (2.15)
Si la masa m1 es constante, la ecuación (2.15) seconvierte en
F1 = m1dv1
dt= m1a1. (2.16)
Para el caso particular de masa constante, la se-gunda ley de Newton queda dada entonces porla ecuación (2.16).
Generalmente, la segunda ley de Newton serefiere al caso de una partícula sobre la que ac-túan varias fuerzas simultáneamente, siendo Fla fuerza neta, total ó resultante de las fuerzasaplicadas. Además, cada fuerza representa lainteracción de la partícula con otra.
Así, cuando el momento lineal de unapartícula cambia con el tiempo, es porque so-bre la partícula actúa una fuerza neta diferen-te de cero. En adelante, la interacción ó accióndel medio ambiente sobre una partícula se rep-resenta matemáticamente mediante el conceptode fuerza ( F ).
A la recta infinita sobre la que actúa unafuerza se le denomina línea de acción de la fuerza.
Dimensiones y unidades fuerzaDe acuerdo con la definición del vector fuerza,se tiene que sus dimensiones corresponden alcociente de las dimensiones del vector momen-to lineal con la dimensión de tiempo, es de-cir [F] = [dp] [dt]−1 = MLT−2. Por ello, lasunidades correspondientes son kg · m · s−2 en elsistema internacional de unidades, donde se de-fine el Newton en la forma 1 kg · m · s−2 ≡ 1 N.En el sistema gaussiano la unidad es g · cm · s−2
donde se utiliza la definición 1 g · cm · s−2 ≡1 dina. En el sistema inglés la unidad es la lb ysu relación con el sistema de unidades SI estádada por 1 lb ≡ 4.448 N.

2.3. CAMBIO EN EL MOMENTO LINEAL Y LEYES DE NEWTON 11
Otra unidad que es utilizada algunas veceses el kilogramo fuerza, definido como 1 kgf ≡9.8 N.
La relación entre la unidad de fuerza en el sis-tema SI y el sistema gaussiano está dada por1 N ≡ 105 dinas.
De las ecuaciones (2.13) y (2.14) se tiene que
F1 = −F2 (2.17)
La ecuación (2.17), es la forma matemática deexpresar la tercera ley de Newton y se puedeenunciar en la formaLa fuerza que ejerce la partícula 1 sobre la partícula2 es igual en magnitud pero opuesta en dirección a lafuerza que la partícula 2 ejerce sobre la partícula 1.
F1
F2
1
2
Figura 2.12: Par acción-reacción.
Es costumbre decir que F1 y F2 forman un paracción-reacción.
Las dos fuerzas que conforman un par acción-reacción, como el mostrado en la figura 2.12,cumple simultáneamente las siguientes condi-ciones
1. Aparecen simultáneamente.
2. Nunca actúan sobre el mismo cuerpo, sinouna sobre cada uno de los cuerpos.
3. Intervienen mientras los cuerpos interac-túan.
4. Tienen la misma línea de acción.
Las condiciones anteriores, permiten concluirque, en el universo no existen fuerzas aisladas,sino que siempre aparecen por parejas (pares acción-reacción), o sea, un cuerpo no puede autoacelerarse.
La ley de acción y reacción se manifiestaen muchas situaciones comunes. Por ejemplo,cuando con el pié se le da a una piedra, si la
fuerza que se ejerce sobre ella es la acción, en-tonces la reacción corresponde a la fuerza quela piedra ejerce sobre el pié y es la responsabledel dolor que puede presentarse una vez queesta situación ocurre. ¿Por qué se le hecha laculpa a la piedra, si ella solo responde a laacción que ejercemos sobre ella?
2.3.1. Diagrama de cuerpo libre
En esta unidad se han considerado las causaspor las que cambia el estado de reposo ó demovimiento de un cuerpo, cuando este interac-túa con otros cuerpos.
Para su estudio, se dispone de los conceptosdescritos y analizados hasta este momento enel curso. Sólo se ha considerado el movimientode traslación de los cuerpos, o sea, que estos sepueden tratar bajo el modelo de partícula.
Ahora, cuando se va a analizar el compor-tamiento dinámico de un cuerpo, lo primeroque se hace es llevar a cabo los siguientes pasos:
Definir un sistema, que generalmente estáformado por varios cuerpos.
Elegir, del sistema, el cuerpo al cual sele va a analizar el estado de reposo o demovimiento, es decir, el cuerpo o partícula deinterés.
Delimitar el medio ambiente o alrededores, for-mado por el resto del sistema, o sea, porlos cuerpos cercanos que interactúan con elcuerpo de interés.
Para aclarar los pasos anteriores, se conside-ran las siguientes situaciones
1. Sistema cuerpo-tierra: Proyectil que se lanzadesde el punto A con una velocidad queforma un ángulo no nulo con la horizontal.
Para el sistema de la figura 2.13, tomandoel proyectil como cuerpo o partícula de in-terés, los alrededores lo conforman el aire yla tierra.
2. Sistema masa-resorte: Bloque sujeto a un re-sorte y en movimiento sobre una superficie

12 CAPÍTULO 2. MOMENTO LINEAL, FUERZA Y ENERGÍA MECÁNICA
A
vo
Tierra
q
Figura 2.13: Proyectil lanzado desde el punto A.
plana. Para el sistema de la figura 2.14.a ó2.14.b, si el bloque se toma como cuerpo opartícula de interés, los alrededores lo con-formarán el resorte, la superficie plana, elaire y la tierra.
(a)
(b)
Movimiento
Movimiento
Figura 2.14: Bloque sujeto a un resorte sobre unasuperficie a) horizontal, b) inclinada.
3. Sistema satélite-tierra: Satélite que rotaalrededor de la tierra. En el sistema de lafigura 2.15, el cuerpo o partícula de interéspuede ser el satélite, o sea que el medio am-biente corresponde a la tierra.
En los tres casos anteriores, se observa que losalrededores sólo incluyen el medio o los cuer-pos más cercanos al cuerpo de interés, ya quelos efectos de los cuerpos más alejados general-mente son insignificantes. De este modo, en es-tas situaciones o en cualquier otra, lo que sebusca es analizar la forma como es afectadoel movimiento de traslación del cuerpo de in-terés por los alrededores. Así, el movimientodel cuerpo queda determinado por la acción delmedio ambiente sobre él.
T
v
S
Figura 2.15: Satélite que rota alrededor de la tierra.
Para poder llevar a cabo lo anterior, es nece-sario hacer lo que se conoce como diagrama decuerpo libre (DCL), que consiste en tomar el cuer-po de interés y reemplazar la interacción de élcon cada cuerpo de sus alrededores por el vec-tor fuerza correspondiente.
A continuación se muestran los diagramas decuerpo libre para cada uno de los casos anterio-res.
1. Sistema cuerpo-tierra: En la figura 2.16, semuestra el diagrama de cuerpo libre para elproyectil, en varias posiciones de su trayec-toria, donde sólo se considera una fuerzaya que se ha considerado la interacción delproyectil únicamente con la tierra.
A
Tierra
Mg
MgMg
Mg
Mg
Mg
Figura 2.16: Proyectil lanzado desde el punto A.
Acá se tiene el caso de un cuerpo de masaM, que se mueve sometido a la fuerza quele ejerce la tierra, por lo que está sometidoa una aceleración conocida como la acele-ración de la gravedad g, con un valor ex-perimental de 9.8 m · s−2 en el sistema deunidades SI y 32.2 p · s−2 en el sistema in-glés. Por consiguiente, la fuerza que la tie-rra ejerce sobre dicho cuerpo, comúnmente

2.3. CAMBIO EN EL MOMENTO LINEAL Y LEYES DE NEWTON 13
llamada peso, está dada por
F = W = mg
El peso es una propiedad característica detodo cuerpo, independientemente que seencuentre en reposo o en movimiento, res-pecto a un observador inercial, como seilustra en la figura 2.17.
O
O
(a)
(b)
m
m
Movimiento
W g= M
W g= M
v = 0
y
x
y
x
Figura 2.17: Peso de un cuerpo: a) en reposo b) enmovimiento.
2. Sistema masa-resorte: En la figura 2.18 setiene el diagrama de cuerpo libre para elbloque, donde la fuerza Fe conocida comofuerza elástica, se debe a la interacción delbloque con el resorte, la fuerza Mg definidacomo el peso del cuerpo, debido a su inter-acción con la tierra y la fuerza N conocidacomo normal, es la fuerza que la superficieejerce perpendicularmente sobre el cuerpo.A la última fuerza se le conoce como nor-mal, ya que siempre es perpendicular a lasuperficie que la genera. En este diagramade cuerpo libre no se han tenido en cuentalos efectos del aire, que se estudiarán pos-teriormente.
Más adelante se considera con mayor de-talle la fuerza que ejerce un resorte cuandointeractúa con un cuerpo.
3. Sistema Satélite-Tierra: El diagrama de cuer-po libre, teniendo en cuenta que el Satélite
(a)
(b)
Movimiento
Movimiento
Mg
Fe
N
Mg
Fe
N
Figura 2.18: Bloque sujeto a un resorte sobre unasuperficie a) horizontal, b) inclinada.
que rota alrededor de la Tierra es el cuerpode interés, se muestra en la figura 2.19. Eneste caso, el medio ambiente corresponde ala Tierra.
T
S F
Figura 2.19: Satélite que rota alrededor de la Tierra.
La línea de acción de la fuerza que ejercela Tierra sobre el Satélite, pasa por el cen-tro de la tierra, independientemente de laposición del Satélite en su trayectoria.
Como se verá en lo que sigue, el objetivo úl-timo de la dinámica es poder predecir, en unproblema mecánico específico, cómo se seguirámoviendo una partícula cuando sus alrede-dores y condiciones iniciales se conocen. Unavez realizado lo anterior, se dice que se ha re-suelto completamente el problema dinámico, loque matemáticamente equivale a conocer la for-ma como varía el vector posición con el tiempo,es decir, conocer la forma explícita de r(t).

14 CAPÍTULO 2. MOMENTO LINEAL, FUERZA Y ENERGÍA MECÁNICA
Pregunta : ¿La figura 2.17 corresponde aldiagrama de cuerpo libre para el cuerpode masa M? Explique.
2.3.2. Fuerza neta, total o resultante deun sistema de fuerzas concurrentes
Debido a la interacción con otros cuerpos, alcuerpo de la figura 2.20 se le aplican variasfuerzas en el punto A, es decir, las fuerzas sonconcurrentes. Es posible reemplazar este sis-tema de fuerzas por una sola fuerza, llamadaresultante, que produce el mismo efecto quelas fuerzas concurrentes simultáneamente apli-cadas.
A A
F4
A
F
F3
F2
F1
Figura 2.20: Fuerzas concurrentes sobre un cuerpo.
Matemáticamente se opera de acuerdo con lasreglas de la geometría vectorial, ya que en estecaso se cumple el principio de superposición,que afirma: La resultante de un sistema de fuerzasaplicadas a un cuerpo, es igual a la suma vectorial detodas las fuerzas simultáneamente aplicadas al cuer-po. Esta es la operación inversa a la descomposi-ción de fuerzas. esto es
F = F1 + F2 + F3 + . . .= ∑ Fi
=dpdt
2.3.3. Resultante de un sistema defuerzas utilizando componentesrectangulares
Suponiendo que sobre la partícula de la figura2.21, actúan varias fuerzas necesariamente con-
currentes, se tiene
F = F1 + F2 + F3 + . . .
=dpdt
= ∑ Fi
= ∑ (Fxii + Fyij + Fzik)
= (∑ Fxi)i + (∑ Fyi)j + (∑ Fzi)k.
A
F
F4
F3
F2
F1
A
x
y
x
yFy j
Fx i
z z
FZ k
Figura 2.21: Resultante de varias fuerzas.
Como en general se tiene que la resultante es-tá dada por
F = Fxi + Fyj + Fzk,
igualando componentes, por ser los vectoresunitarios i, j y k linealmente independientes, seencuentra que
Fx = ∑ Fxi ,
Fy = ∑ Fyi .
Fz = ∑ Fzi .
En el caso de dos dimensiones, si se cono-cen las componentes de cada fuerza coplanar, lamagnitud de la resultante se obtiene mediantela aplicación del teorema de Pitágoras
F =√
F2x + F2
y
y para su dirección, se acostumbra emplearla definición de la función trigonométrica tan-gente
tanθ =Fy
Fx
Para analizar el caso de tres dimensiones, seconsidera la figura 2.22, en la que F es la re-sultante de un sistema de fuerzas espaciales,la cual tiene componentes en tres dimensionespara el caso más general. En la figura 2.22 se ha
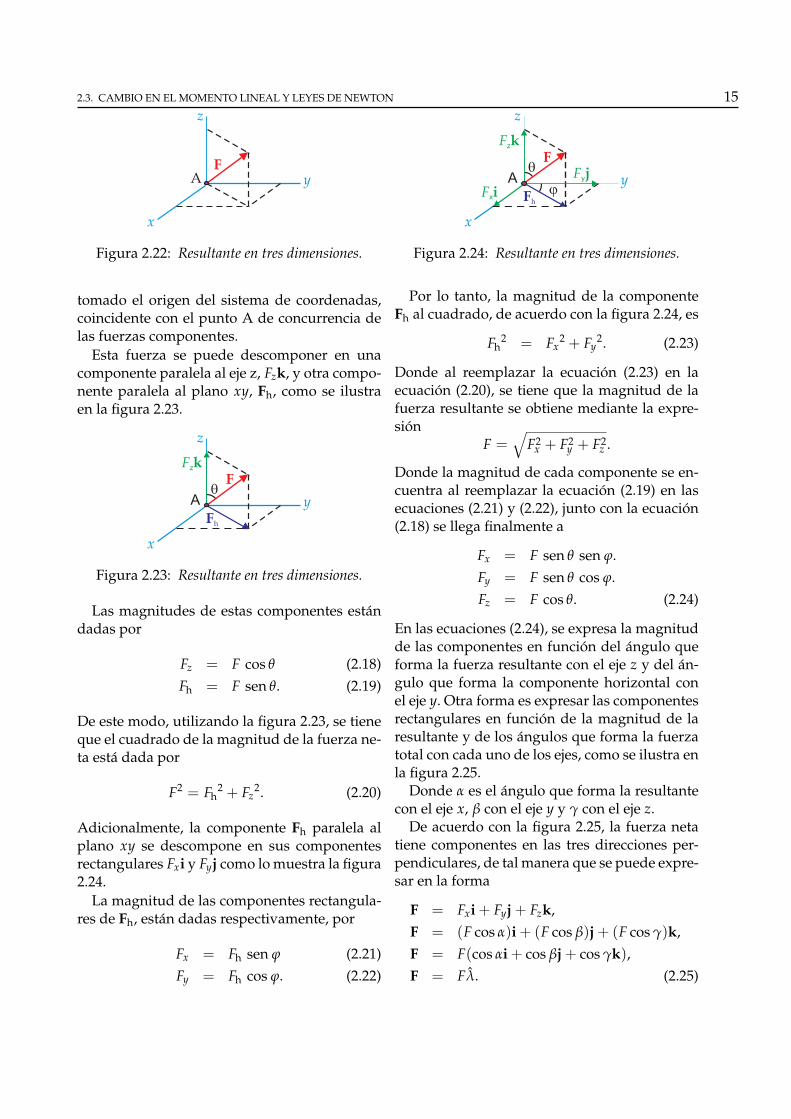
2.3. CAMBIO EN EL MOMENTO LINEAL Y LEYES DE NEWTON 15
A
F
x
y
z
Figura 2.22: Resultante en tres dimensiones.
tomado el origen del sistema de coordenadas,coincidente con el punto A de concurrencia delas fuerzas componentes.
Esta fuerza se puede descomponer en unacomponente paralela al eje z, Fzk, y otra compo-nente paralela al plano xy, Fh, como se ilustraen la figura 2.23.
A
F
x
y
z
Fzk
Fh
q
Figura 2.23: Resultante en tres dimensiones.
Las magnitudes de estas componentes estándadas por
Fz = F cos θ (2.18)Fh = F sen θ. (2.19)
De este modo, utilizando la figura 2.23, se tieneque el cuadrado de la magnitud de la fuerza ne-ta está dada por
F2 = Fh2 + Fz
2. (2.20)
Adicionalmente, la componente Fh paralela alplano xy se descompone en sus componentesrectangulares Fxi y Fyj como lo muestra la figura2.24.
La magnitud de las componentes rectangula-res de Fh, están dadas respectivamente, por
Fx = Fh sen φ (2.21)Fy = Fh cos φ. (2.22)
A
F
x
y
z
Fzk
Fh
q
jFxi
Fyj
Figura 2.24: Resultante en tres dimensiones.
Por lo tanto, la magnitud de la componenteFh al cuadrado, de acuerdo con la figura 2.24, es
Fh2 = Fx
2 + Fy2. (2.23)
Donde al reemplazar la ecuación (2.23) en laecuación (2.20), se tiene que la magnitud de lafuerza resultante se obtiene mediante la expre-sión
F =√
F2x + F2
y + F2z .
Donde la magnitud de cada componente se en-cuentra al reemplazar la ecuación (2.19) en lasecuaciones (2.21) y (2.22), junto con la ecuación(2.18) se llega finalmente a
Fx = F sen θ sen φ.Fy = F sen θ cos φ.Fz = F cos θ. (2.24)
En las ecuaciones (2.24), se expresa la magnitudde las componentes en función del ángulo queforma la fuerza resultante con el eje z y del án-gulo que forma la componente horizontal conel eje y. Otra forma es expresar las componentesrectangulares en función de la magnitud de laresultante y de los ángulos que forma la fuerzatotal con cada uno de los ejes, como se ilustra enla figura 2.25.
Donde α es el ángulo que forma la resultantecon el eje x, β con el eje y y γ con el eje z.
De acuerdo con la figura 2.25, la fuerza netatiene componentes en las tres direcciones per-pendiculares, de tal manera que se puede expre-sar en la forma
F = Fxi + Fyj + Fzk,F = (F cos α)i + (F cos β)j + (F cos γ)k,F = F(cos αi + cos βj + cos γk),F = Fλ. (2.25)

16 CAPÍTULO 2. MOMENTO LINEAL, FUERZA Y ENERGÍA MECÁNICA
A
F
x
y
z
a bg
Figura 2.25: Angulos que forma la resultante concada eje.
Teniendo en cuenta la figura 2.26, en la ecuación(2.25) se ha expresado la fuerza resultante enfunción del ángulo que forma el vector con ca-da eje de coordenadas y se ha definido el vectorunitario λ, que en componentes rectangularesqueda expresado por
A
F
x
y
z
a b
g
l
Figura 2.26: Vector unitario paralelo a la fuerza re-sultante.
λ = (cos α)i + (cos β)j + (cos γ)k,. (2.26)
Ahora, como λ tiene magnitud 1 por ser unvector unitario, se satisface la relación
1 = λx2 + λy
2 + λz2. (2.27)
Teniendo en cuenta las ecuaciones (2.26) y(2.27), se tiene que los ángulos que forma lafuerza resultante con los ejes coordenados noson independientes, sino que cumplen la condi-ción
cos2 α + cos2 β + cos2 γ = 1. (2.28)
En las ecuaciones (2.25), (2.26) y (2.28), los tér-minos cos α, cos β y cos γ, se conocen comocosenos directores de la fuerza neta F, los cualespermiten conocer sus componentes rectangula-res, de acuerdo con la ecuación (2.25).
Es importante hacer énfasis en el hecho quela fuerza resultante, fuerza neta o fuerza total F,es físicamente equivalente a las fuerzas F1, F2,F3 y F4 aplicadas simultáneamente al cuerpo dela figura 2.20.Pautas generales a seguir en la soluciónde situaciones físicas, relacionadas con ladinámica de una partícula Hasta este momen-to, en esta unidad se han definido y analizadolos conceptos: de aceleración como consecuen-cia del cambio en la velocidad, de fuerza comocausa del cambio en el momento lineal, de dia-grama de cuerpo libre donde se consideran to-das las interacciones del cuerpo de interés conotros cuerpos y de fuerza resultante como lasuma vectorial de todas las fuerzas que actúansobre un cuerpo. Estos conceptos constituyen elprimer método que permite resolver completa-mente el problema dinámico de una partícula,donde se deben tener en cuenta las siguientespautas en la solución de diferentes situacionesfísicas a resolver.
1. Tener claridad sobre la situación plantea-da en el enunciado, identificando las can-tidades dadas, las cantidades conocidas ylas incógnitas a obtener.
2. Si no es dado, hacer un diagrama ilustrati-vo de la situación física que se ha plantea-do, y en el cual se muestren las condicionesfísicas del problema. A este diagrama se leconoce como diagrama espacial.
3. Elegir el cuerpo de interés y hacer un dia-grama que muestre todas las fuerzas queactúen sobre él, esto es, hacer el diagramade cuerpo libre.
4. Elegir un sistema de referencia adecuadoque facilite la solución del problema, en lu-gar de generar complejidad.
5. De acuerdo con el sistema de referen-cia elegido, plantear las ecuaciones demovimiento que garanticen la situaciónplanteada.
6. Resolver el sistema de ecuaciones si-multáneas encontrado, con el fin de obte-

2.3. CAMBIO EN EL MOMENTO LINEAL Y LEYES DE NEWTON 17
ner la información solicitada. De ser posi-ble, resolverlo en forma literal, ya que es-to permite hacer un análisis del resultadoy permite verificar si las dimensiones soncorrectas.
7. Dar los resultados numéricos, con lasunidades adecuadas.
Ejemplo 2.5.Sobre una partícula de masa 3.0 kg, actúancuatro fuerzas como se indica en la figu-ra. a) Calcular la fuerza neta o resultanteque actúa sobre la partícula. b) Calcularla aceleración de la partícula. c) Escribirlas ecuaciones cinemáticas de posición yvelocidad, si la partícula parte del origencon velocidad inicial cero. d) Obtener laecuación de la trayectoria seguida por lapartícula.
F 4= 50 N
F2= 5 N F
1= 10 N
x
y
37o
30o
50o
20o
F3=100 N
SoluciónEste es un caso en el cual se da directa-mente el diagrama de cuerpo libre, es de-cir, no se muestran los cuerpos que con-forman los alrededores, sino sus interac-ciones con la partícula de interés.
a) En el caso de dos dimensiones, lafuerza neta o resultante F = F1 +F2 +F3 +F4, se obtiene hallando sus componentesrectangulares Fx y Fy, teniendo en cuentael sistema de referencia mostrado.
De este modo, la componente en x dela resultante, adquiere el valor
Fx =+→∑ Fix
= −41.53 N.
Igualmente, la componente en y de la re-sultante, está dada por
Fy = + ↑ ∑ Fiy
= −114.6 N.
Lo cual permite expresar la fuerza netaen componentes las rectangulares
F = (− 41.53i − 114.6j)N
Por lo que su magnitud está dada porF = 121.89 N y su dirección, mostrada enla figura siguiente, por θ = 70.08o.
x
y
q
F
Fx i
Fy j
De este modo
F = 121.89 N 70.08o
b) De acuerdo con la forma de la segun-da ley de Newton para masa constante,F = ma, la ecuación de movimiento parala partícula considerada, está dada por
(− 41.53i − 114.6j)N = (3.0 kg)a.
Así, la aceleración en componentes rectan-gulares es
a = (− 13.83i − 38.2j)m s−2,
con magnitud a = 40.63 m s−2 y direcciónθ = 70.08o, como se esperaba, ya que laaceleración es paralela a la fuerza resul-tante. O sea
a = 40.63 ms-2
70.08o
c) De acuerdo con el enunciado y el resul-tado anterior, las condiciones iniciales es-tán dadas por ax = −13.83 m s−2, ay =
−38.2 m s−2, vxo = 0, vyo = 0 y to = 0.Ahora, como ax y ay son constantes, se
tienen componentes de movimiento uni-formemente acelerado a lo largo de ca-da uno de los ejes de coordenadas. Así,las ecuaciones cinemáticas de posición yvelocidad que rigen el movimiento de lapartícula, adquieren la forma siguiente:
Componente de movimiento en x
x = −6.9t2, vx = −13.8t.

18 CAPÍTULO 2. MOMENTO LINEAL, FUERZA Y ENERGÍA MECÁNICA
Componente de movimiento en y
y = −19.1t2, vy = −38.2t.
d) Utilizando las ecuaciones cinemá-ticas de posición, se encuentra que laecuación de la trayectoria seguida por lapartícula tiene la forma
y = 2.8x,
que corresponde a la ecuación de una línearecta, con pendiente 2.8 es decir, forma unángulo θ = 70.09o con la horizontal, comose muestra en la siguiente figura.
x
y
70.08o
Trayectoria
Mediante este ejemplo se ha podidomostrar que con el objetivo de la dinámicase ha cumplido, ya que fue posible obtenerla trayectoria seguida por la partícula, consólo conocer las fuerzas que actúan sobreella y las condiciones iniciales impuestas.
Ejercicio 2.8.Sobre una partícula de masa 3.0 kg, actúancinco fuerzas como se indica en la figurasiguiente. a) Calcule la fuerza adicional F5que se aplica a la partícula, para que la re-sultante de las fuerzas sea horizontal, conmagnitud 50 N y dirigida horizontalmentehacia la derecha. b) Calcule la aceleracióncorrespondiente de la partícula. c) Escribalas ecuaciones cinemáticas de posición yvelocidad, si la partícula parte del origencon una velocidad de 10.0 m s−1, dirigidaen la dirección positiva del eje y. d) Obten-ga la ecuación de la trayectoria seguidapor la partícula y trace una gráfica de ella.
Ejemplo 2.6.Desde la base de un plano inclinado yliso, que forma un ángulo de 30o con lahorizontal, se lanza un bloque de masa500 g con una velocidad paralela al plano
F4=50 N
F2
= 5 N F1= 10 N
x
y
53o
60o
40o
70o
F3=100 N
F5
inclinado y de magnitud 15.0 m s−1. a)Haga el diagrama de cuerpo libre parael bloque y plantee las ecuaciones demovimiento. b) Determine la aceleracióndel bloque. c) Halle la fuerza que la su-perficie ejerce sobre el bloque. d) Planteelas ecuaciones cinemáticas de posición yvelocidad, que rigen el movimiento delbloque. e) ¿Cuánto tiempo asciende elbloque por el plano inclinado? f) ¿Hastaqué altura, respecto a la base del planoinclinado, asciende el bloque?
SoluciónDe acuerdo con el enunciado, las can-tidades dadas son m = 500 g ≡ 0.5 kg,θ = 30o y vo = 15.0 m s−1, con la cantidadconocida g = 9.8 m s−2.
a) Diagrama de cuerpo libre: Sobre el bloqueactúa la normal N debido a su interaccióncon la superficie; y el peso mg debido a suinteracción con la tierra.
q
N
mg
Movim
iento
La ecuación de movimiento en ladirección paralela al plano inclinado,adquiere la forma
+ ↗ ∑ Fix = max, −mg senθ = max.(1)
Adicionalmente, la ecuación demovimiento en la dirección perpendicularal plano inclinado adquiere la forma
+ ↖ ∑ Fiy = 0, N − mg cosθ = 0, (2)

2.3. CAMBIO EN EL MOMENTO LINEAL Y LEYES DE NEWTON 19
ya que en dicha dirección no haymovimiento.b) Como sólo hay movimiento en la direc-ción paralela al eje x, se tiene que la acele-ración del bloque es a = ax, así, mediantela ecuación (1)se encuentra que la acelera-ción de la partícula es
a = −g senθ,
cuyo valor es
a = −4.9 m s−2.
c) Empleando la ecuación (2), corres-pondiente a la ecuación de movimiento enla dirección paralela al eje y, se encuentraque la fuerza ejercida por la superficie so-bre el bloque es
N = mg cosθ,
encontrándose el valor
N = 4.24 N.
d) De acuerdo con el sistema de referen-cia mostrado en la figura, el bloque semueve sobre el eje x con una aceleraciónde −4.9 m s−2.
q
Movim
iento xy
De este modo, las ecuaciones cinemá-ticas de posición y velocidad, están dadaspor
x = 15t − 2.45t2 y v = 15 − 4.9t
e) Como el bloque tiene un movimien-to rectilíneo uniformemente retardado, lle-ga un momento en el cual su velocidadse hace cero. De este nodo, mediante laecuación cinemática de velocidad, se en-cuentra que en ese instante
t = 3.06 s.
f) Reemplazando t = 3.06 s en la ecuacióncinemática de posición, se encuentra queel máximo desplazamiento sobre el plano
inclinado es xmáx = 22.96 m, así, mediantela figura anterior se encuentra que la al-tura máxima alcanzada por el cuerpo es
h = 11.48 m.
En este caso ha sido posible resolvercompletamente el problema dinámi-co del bloque, sabiendo con que otroscuerpos interactúa y cuáles son lascondiciones iniciales.
Ejercicio 2.9.Un bloque, de masa 500 g, parte del re-poso y se mueve sobre un plano incli-nado liso que forma un ángulo de 30o
con la horizontal. El bloque inicia sumovimiento desde una altura de 9.0 m res-pecto a la base de plano inclinado. a) Ha-ga el diagrama de cuerpo libre para elbloque. b) Determine la aceleración delbloque. c) Plantee las ecuaciones cinemá-ticas de posición y velocidad, que rigen elmovimiento del bloque. d) ¿Cuánto tiem-po tarda el bloque en llegar a la base delplano inclinado? e) ¿Cuál es la velocidaddel bloque cuando llega a la base del planoinclinado?
Ejemplo 2.7.Como se muestra en la figura, dos bloquesunidos son empujados por una personasobre una superficie horizontal, como seilustra en la figura. La fuerza F representala interacción entre la persona y el bloque1. Analice los pares acción que se presen-tan, debido a la interacción de los bloquescon otros cuerpos.
1 2F
SoluciónPara hacer referencia a los pares acción-reacción que se tienen en este caso, seconsideran los diagramas de cuerpo libremostrados en la siguiente figura.
En la figura (i) se tiene el diagrama decuerpo libre para el sistema formado porlos dos cuerpos, mientras que las figuras(ii) y (iii) corresponde, respectivamente, a
20 CAPÍTULO 2. MOMENTO LINEAL, FUERZA Y ENERGÍA MECÁNICA
1 2F
W1 W2
N1 N2
1
W1
N1
Fc
2
W2
N2
Fc
,
F
(i) (ii)
(iii)
los diagramas de cuerpo libre de los blo-ques 1 y 2.
En lo que sigue, se supone que cadauna de las fuerzas que aparecen en los dia-gramas de cuerpo libre corresponden a laacción.
La reacción de la fuerza F, actúa sobrela persona que interactúa sobre el bloque.La reacción de las normales N1 y N2, ac-túan sobre el piso que es quien las ejercesobre los bloques. La reacción de los pe-sos W1 y W2, actúa sobre la tierra ya queella es la que ejerce dichas fuerzas. En eldiagrama de cuerpo libre del sistema for-mado por los dos bloques, no aparecen lasfuerzas de contacto, esto es, la fuerza queun bloque ejerce sobre el otro ya corres-ponde a fuerzas internas al sistema con-siderado, mientras que en los diagramasde cuerpo libre de cada cuerpo por separa-do estas sí aparecen por tomar el carácterde fuerza externa ejercida a cada bloque.De este modo, si Fc es la acción que actúasobre 1, la reacción es F,
c que actúa sobre 2.Debe quedar claro que en cualquier
diagrama de cuerpo libre las fuerzas queaparecen son las fuerzas externas que ac-túen sobre el cuerpo o sistema que se de-see analizar.
Ejemplo 2.8.La torre de la figura se sostiene mediantetres cables sujetos en la parte superior, co-mo se indica. La tensión en el cable AB es500 N, la tensión en el cable AC es 800 N, latensión en el cable AD es 103 N y la distan-cia OD es 7 m.(a) Halle las componentesrectangulares de cada una de las fuerzas.(b) Encuentre la fuerza neta que actúa so-bre la torre en el extremo A.Solución(a) Para determinar las componentes dela tensión en cada una de las cuerdas, se
x
y
zA
B
C
D
17 m
2 m
1 m
3.5 m3 m
35o
O
definen los vectores unitarios λAB, λAC yλAD, paralelos respectivamente a las ten-siones TAB, TAC y TAD, como se ilustra enla figura.
x
y
zA
B
C
D
17 m
2 m
1 m
3.5 m3 m
35o
TAB
TAC
TAD
lC
l D
O
De acuerdo con la figura, las coordena-das de los extremos de cada cuerda estándadas por A(0, 0, 17 m), B(−1 m, 2 m, 0),C(−3 m,−3.5 m, 0) y D(5.73 m, 4.01 m, 0)
Teniendo en cuenta las coordenadasanteriores, se encuentra que los vectoresunitarios en componentes rectangularesestán dados por
λAB = −0.06i + 0.12j − 0.99k,λAC = −0.17i − 0.2j − 0.97k,λAD = 0.31i + 0.22j − 0.92k.
Como TAB = TABλAB, TAC = TACλAC yTAD = TADλAD, las componentes rectan-gulares de las tensiones en cada una de lascuerdas, están dadas por
TAB = (−30i + 60j − 495k)N,TAC = (−136i − 160j − 776k)N,TAD = (310i + 220j − 920k)N.
(b) Teniendo en cuenta las componentesrectangulares en cada cuerda, las compo-nentes rectangulares de la fuerza neta, to-tal o resultante que actúa en el extremo Ade la torre, son
F = (144i + 120j − 2191k)N.

2.3. CAMBIO EN EL MOMENTO LINEAL Y LEYES DE NEWTON 21
De este modo, su magnitud y dirección es-tán dadas por
F = 2199 N, θx = 86.25o, θy = 86.87o, θz = 175.11o.
2.3.4. Movimiento vertical de los cuerpos
Este movimiento, más conocido como caída li-bre, se presenta cuando un cuerpo se mueveen el vacío, sometido únicamente a su interac-ción con la tierra. En esta sección se despre-cian los efectos que pueda tener el aire sobreel movimiento de los cuerpos, lo que equivalea suponer que se mueven en el vacío. Este esun ejemplo muy importante de movimiento rec-tilíneo uniformemente acelerado, y se presentacuando los cuerpos caen libremente bajo la ac-ción de la gravedad. La figura 2.27 muestra queen este caso sólo actúa el peso del cuerpo, porlo que el cuerpo adquiere un MRUA, ya que elcuerpo se mueve en línea recta, sometido a laaceleración de la gravedad que se toma cons-tante.
Tierra
mg
Figura 2.27: Diagrama de cuerpo libre.
La aceleración con la cual se mueven libre-mente los cuerpos a lo largo de la vertical, sedebe a la acción de la tierra sobre los ellos y co-mo ya se sabe, se denomina aceleración de lagravedad, así que es un vector dirigido siemprehacia abajo en la dirección vertical y se repre-senta por el símbolo g.
El signo de g y por ende de la fuerza, inde-pendientemente del sentido de movimiento delcuerpo a lo largo de la vertical, depende del sen-tido que se tome como positivo para el eje ver-tical, que generalmente se hace coincidir con el
TierraO
y
a j= + g
O
y
a j= - g
Tierra
Figura 2.28: El signo de la aceleración depende delsistema de referencia.
eje y. Así, g = ±gj, es decir, el signo es positivocuando el eje y se toma positivo verticalmentehacia abajo y negativo cuando el eje y se tomapositivo verticalmente hacia arriba. En síntesis,el signo depende del sistema de referencia comose indica en las figuras 2.28.
En la figura 2.29, se indican los dos sentidosde movimiento que puede presentar un cuer-po, cuando se mueve verticalmente sometido ala aceleración de la gravedad. En este caso, elcuerpo A tiene movimiento rectilíneo uniforme-mente retardado ya que el sentido del vectorvelocidad se opone al sentido del vector ace-leración de la gravedad; en su lugar, el cuerpoB tiene movimiento rectilíneo uniformementeacelerado ya que el sentido del vector velocidadcoincide con el sentido del vector aceleración dela gravedad.
a g=Movimiento Movimiento
Tierra
A
B
Figura 2.29: Movimiento vertical acelerado y de-sacelerado.
En conclusión, cuando un cuerpo se mueveverticalmente hacia arriba, el movimiento es re-tardado y cuando un cuerpo se suelta o se lanzaverticalmente hacia abajo, el movimiento es ace-lerado, independiente del sistema de referencia.
El valor de la aceleración de la gravedad gvaría de un lugar a otro de la superficie terres-

22 CAPÍTULO 2. MOMENTO LINEAL, FUERZA Y ENERGÍA MECÁNICA
tre, debido a los cambios de altura respecto alnivel del mar. El máximo valor de la aceleraciónde la gravedad se encuentra sobre la superficiede la tierra, ya que esta disminuye cuando nosalejamos de ella o cuando nos acercamos al cen-tro de la tierra. El valor máximo es cercano ag = 9.8 m s−2 en el sistema de unidades SI óg = 32.2 p s−2 en el sistema inglés de unidades.El valor de g es el mismo para todos los cuerposque caen y se toma independiente de la altura,mientras no se alejen mucho de la superficie te-rrestre ya que como se expresó antes su valordisminuye a medida que la distancia sobre lasuperficie terrestre o bajo ella, menos masa queatrae aumenta. La aceleración de la gravedad enMedellín es del orden de 9.7658 m s−2, que es unvalor cercano al tomado como referencia.
Ejemplo 2.9.Desde la superficie de la tierra se lanzauna piedra verticalmente hacia arriba conuna velocidad de 54 km h−1. A los 0.7 sde lanzada la piedra, se deja caer un pe-queño bloque de madera desde una al-tura de 10 m, respecto a la superficie dela tierra. Los cuerpos se mueven sobretrayectorias paralelas. a) Haga un diagra-ma ilustrativo de la situación planteada,donde se muestre el sistema de referenciaa emplear y el diagrama de cuerpo librepara cada cuerpo. b) Plante la ecuación demovimiento para cada cuerpo y encuen-tre su aceleración. c) Teniendo en cuentael sistema de referencia elegido, planteelas ecuaciones cinemáticas de posición yvelocidad que rigen el movimiento de lapiedra y del bloque. d) Calcule el tiem-po que demoran los cuerpos en pasar unofrente al otro. e) En el instante que elbloque llega al piso, ¿dónde se encuen-tra la piedra? ¿Asciende o desciende lapiedra?SoluciónDe acuerdo con el enunciado, las canti-dades dadas son voP = 54 km h−1 ≡15 m s−1, to = 0.7 s y yob = 10 m, dondela cantidad dada es g = −9.8 m s−2.
a) Diagrama ilustrativo de la situaciónplanteada y diagrama de cuerpo libre
En el diagrama se ha tomado el origende coordenadas del sistema de referencia,en la superficie de la tierra. Igualmente se
y (m)
10
O Tierra
vob= 0
15 m s -1m1g
m2g
muestra la posición inicial de la piedra yla posición del bloque en ese instante. Aldespreciar los efectos del aire, la única in-teracción de la piedra y el bloque es con latierra que genera el peso en cada caso.
b) Ecuaciones de movimiento o formade la segunda ley de Newton para cadacuerpo.
Para m1
+ ↑ ∑ Fiy = m1a; −m1g = m1a1 (1)
Para m2
+ ↑ ∑ Fiy = m2a; −m2g = m2a2 (2)
De la ecuación (1) ó (2), se encuentraque la aceleración de cada cuerpo es
a1 = a2 = −g. (3)
La ecuación (3) muestra que para amboscuerpos la aceleración es negativa debidoal sistema de referencia. Lo anterior indi-ca que la piedra adquiere un movimien-to rectilíneo uniformemente desacelera-do, mientras que el bloque de maderaadquiere un movimiento rectilíneo uni-formemente acelerado.
c) De acuerdo con el sistema de refe-rencia mostrado, las ecuaciones cinemáti-cas de posición y velocidad para la piedray el bloque son Para la piedra
yp = 15t − 12 9.8t2, (4)
vp = 15 − 9.8t. (5)
Para el bloque de madera
yb = 10 − 12 9.8(t − 0.7)2, (6)
vb = −9.8(t − 0.7). (7)
d) Cuando la piedra y el bloque se encuen-tran frente a frente, la posición vertical es

2.3. CAMBIO EN EL MOMENTO LINEAL Y LEYES DE NEWTON 23
la misma, es decir, las ecuaciones (4) y (6)son iguales. Al igualar y llevar a cabo elprocedimiento, se encuentra que el tiem-po que tardan en encontrarse es
t = 0.93s.
e) Cuando el bloque llega al piso, se tieneque yb = 0 , por lo que mediante laecuación (6) se encuentra que el tiempo decaída del bloque es
t = 2.13 s. (8)
Para determinar la posición de la piedraen ese instante, se remplaza la ecuación (8)en la ecuación (4) obteniéndose el valor
yp = 9.72 m.
Para saber si la piedra asciende o descien-de en ese instante, se remplaza la ecuación(8) en la ecuación (5), encontrándose el va-lor
vp = −5.87 m s−1.
Como el signo de la velocidad es negativo,de acuerdo con el sistema de referencia, setiene que la piedra está descendiendo.
Ejercicio 2.10.Desde la superficie de la tierra se lanzauna piedra verticalmente hacia arriba conuna velocidad de 54 km h−1. En el instan-te que se lanza la piedra, se deja caer unpequeño bloque de madera desde una al-tura de 10 m , respecto a la superficie dela tierra. Los cuerpos se mueven sobretrayectorias paralelas. a) Haga un diagra-ma ilustrativo de la situación planteada,donde se muestre el sistema de referen-cia a emplear y el diagrama de cuerpo li-bre para cada cuerpo. b) Plantee las ecua-ciones de movimiento para cada cuerpoy obtenga la aceleración de ellos. c) Te-niendo en cuenta el sistema de referenciaelegido, plantee las ecuaciones cinemáti-cas de posición y velocidad que rigen elmovimiento de la piedra y del bloque. d)Calcule el tiempo que demoran los cuer-pos en pasar uno frente al otro. e) En el ins-tante que el bloque llega al piso, ¿dónde seencuentra la piedra? ¿Asciende o descien-de la piedra?
2.3.5. Movimiento en un plano verticaldebido a la interacción con la tierra
En esta sección se considera el movimiento deuna partícula en el plano, utilizando las coor-denadas rectangulares x, y. Posteriormente seanaliza el movimiento de una manera más ge-neral empleando las coordenadas polares r y θ.Este es un caso de movimiento, en el cual lapartícula está interactuando con la tierra, es de-cir, está sometida a una fuerza que es constan-te en magnitud y dirección. Por consiguiente lafuerza y por lo tanto la aceleración, sólo tienencomponente en una dirección. En la vida real sepresenta este movimiento cuando se patea unbalón de fútbol, cuando se golpea un balón devoleibol, cuando se lanza una pelota de béisbol,cuando se dispara un proyectil, o en general,cuando se lanza o dispara un cuerpo con unavelocidad que forma un ángulo α con la hori-zontal diferente de 0o ó 90o es decir, siempre quese cumple la condición 0o < α < 90o. Se pre-senta una situación particular para α = 0o, estoes, cuando el cuerpo se lanza horizontalmentedesde una altura determinada respecto a la su-perficie terrestre. Cuando un cuerpo adquieretal movimiento, en todo instante está someti-do a la aceleración de la gravedad, que como sesabe, su magnitud y dirección permanecen con-stantes.
En el análisis que sigue, se supone que el aireno tiene ningún efecto sobre el movimiento delos cuerpos, o sea, se considera el movimientocomo si fuera en el vacío, considerando única-mente la interacción con la tierra.
Se supone que una partícula se lanza desde elpunto A, con una velocidad vo que forma un án-gulo α con la horizontal, como se muestra en lafigura 2.30. En este movimiento, es posible des-componer la velocidad inicial en componenteshorizontal y vertical, lo que permite hacer elanálisis utilizando coordenadas rectangulares.
Al considerar sólo la interacción entre el cuer-po y la tierra, en el diagrama de cuerpo librede la figura 2.30 aparece el peso como únicafuerza actuante. En este caso, la ecuación demovimiento a lo largo de la vertical adquiere la

24 CAPÍTULO 2. MOMENTO LINEAL, FUERZA Y ENERGÍA MECÁNICA
i
j
y
mg
Ayo
xo
vo
TierraO
a
x
Figura 2.30: Movimiento parabólico con origen enla tierra.
forma
+ ↑ ∑ Fiy = m a,−m g = m a. (2.29)
De acuerdo con la ecuación (2.29), se tiene que
a = −g.
que corresponde a la aceleración de lagravedad, como era lo esperado.
De acuerdo con el sistema de referencia elegi-do, el eje x se hace coincidir con la superficie dela tierra. Además, el tiempo se empieza a medirdesde el instante que es lanzado el cuerpo, esdecir, to = 0.
Considerando la figura 2.30, las condicionesiniciales en componentes rectangulares, estándadas por
ro = xoi + yoj.
vo = vocosαi + vo sen αj. (2.30)
a = −gj.
Ahora, la posición del cuerpo, en cualquier ins-tante, está dada por
r = xi + yj. (2.31)
Reemplazando las ecuaciones (2.30) y (2.31) enla ecuación
r = ro + vo(t − to) +12
a(t − to)2,
que es válida cuando el vector aceleración esconstante, se encuentra
xi+ yj = (xo + vocosαt)i+(yo + vo sen αt− 12 gt2)j.
(2.32)
Como los vectores unitarios i y j son lineal-mente independientes, entonces al igualar com-ponentes en la ecuación (2.32), se encuentra quelas ecuaciones cinemáticas de posición para estemovimiento, en las direcciones horizontal y ver-tical, respectivamente están dadas por
x = xo + vocosαt. (2.33)
y = yo + vo sen αt − 12 gt2. (2.34)
Al derivar las ecuaciones (2.33) y (2.34) respectoal tiempo, se encuentra que las ecuaciones cine-máticas de velocidad, en sus componentes hori-zontal y vertical para este caso, están dadas por
vx = vocosα. (2.35)
vy = vosenα − gt. (2.36)
Finalmente, al derivar las ecuaciones (2.35) y(2.36) respecto al tiempo, se encuentra que lascomponentes de aceleración son
ax = 0 y ay = −g.
En conclusión, las ecuaciones (2.33) a (2.36)rigen el movimiento en las direcciones horizon-tal y vertical, donde en la horizontal se tieneuna componente de movimiento con velocidadconstante y en la vertical una componente demovimiento con aceleración constante. Median-te dichas expresiones es posible obtener toda lainformación sobre el movimiento de la partícu-la, hasta el instante que llega a la superficie dela tierra.
De acuerdo con lo anterior, es posible inter-pretar este movimiento como una superposi-ción de un movimiento uniforme en la direc-ción horizontal y un movimiento uniforme-mente acelerado en la dirección vertical.
Con el fin de simplificar y obtener más infor-mación sobre el movimiento de la partícula, seconsidera el caso en el cual se toma el origen decoordenadas en el punto de lanzamiento A, co-mo se muestra en la figura 2.31.
En este caso, xo = 0 y yo = 0, por lo que lasecuaciones (2.33) y (2.34) se transforman en
x = vocosαt. (2.37)

2.3. CAMBIO EN EL MOMENTO LINEAL Y LEYES DE NEWTON 25y
a jg=-
A
vo
Tierra
O
a
x
-h
i
j
Figura 2.31: Movimiento parabólico con origen enel punto de lanzamiento.
y = vosenαt − 12 gt2. (2.38)
Para hallar la ecuación de la trayectoria segui-da por la partícula, se despeja el tiempo t dela ecuación (2.37) y se reemplaza en la ecuación(2.38), obteniéndose la ecuación cuadrática en lacoordenada x
y = tanαx − gsec2α
2v2o
x2, (2.39)
que corresponde a la ecuación de una parábo-la de la forma y = ax − bx2 donde a y bson constantes. Esta es la razón por la cuala este movimiento se le denomina movimientoparabólico, aunque también se le conoce comomovimiento de proyectiles ya que estos descri-ben generalmente esta trayectoria.
Como la componente vertical de la velocidadse hace cero en la altura máxima alcanzada porla partícula, mediante la ecuación (2.36), se en-cuentra que el tiempo que demora en alcanzarlaestá dado por
t =vosenα
g. (2.40)
Reemplazando la ecuación (2.40) en la ecuación(2.38) se obtiene la altura máxima alcanzada porla partícula, respecto al punto de lanzamiento,es decir
ymax =(vosenα)
2g
2
. (2.41)
De este modo, la altura máxima respecto a la su-perficie de la tierra, está dada por
Hmax =(vosenα)
2g
2
+ h. (2.42)
Para determinar el tiempo que la partículademora en cruzar el eje x, se hace y = 0 en laecuación (2.38), permitiendo llegar a las expre-siones
t = 0 y t = 2vosenα
g. (2.43)
La posición horizontal de la partícula, cuandollega al eje x, se encuentra al reemplazar el tiem-po dado por la ecuación (2.43) en la ecuación(2.37), obteniéndose
xmax =v2
og
sen2α. (2.44)
De acuerdo con la ecuación (2.44), el máximovalor que puede adquirir el alcance se obtienecuando sen2α = 1 , es decir, para 2α = 90o óα = 45o.
Cuando el cuerpo llega a la superficie de latierra y = −h, por lo que al reemplazar en laecuación (2.38) y luego de simplificar, se llegaa una ecuación cuadrática en el tiempo t, cuyassoluciones están dadas por
t =vosenα
g
[1 ±
√1 + 2gh
/(vosenα)2
],
(2.45)donde el radicando es una cantidad mayor queuno. Así, solo se tiene un valor real para eltiempo, es decir, un valor con significado físi-co, cuando se toma el signo positivo que ante-cede al radical. Lo anterior, está de acuerdo conla situación planteada ya que el cuerpo, luegode ser lanzado, sólo se encuentra en la superfi-cie de la tierra una vez.
Los resultados obtenidos en esta sección, sonválidos cuando se cumplen las siguientes condi-ciones:
El alcance debe ser suficientemente pe-queño, para que se pueda despreciar la cur-vatura de la tierra, y de este modo poderconsiderar la superficie de la tierra comoplana.
La altura máxima debe ser suficiente-mente pequeña, para poder despreciar lavariación de la gravedad con la altura

26 CAPÍTULO 2. MOMENTO LINEAL, FUERZA Y ENERGÍA MECÁNICA
La magnitud de la velocidad inicial delproyectil debe ser suficientemente pe-queña, para poder despreciar los efectosdel aire. Como se verá posteriormente, losefectos del aire sobre el movimiento de loscuerpos, se hacen significativos entre ma-yor sea la magnitud de la velocidad. Enla figura 2.32 se muestra la diferencia enla trayectoria de una partícula, cuando semueve en el vacío y cuando se mueve enun medio como el aire.
y
a jg=-
vo
O
a
xVacíoAire
Figura 2.32: Movimiento en el aire y en el vacío.
Ejemplo 2.10.En un partido de fútbol, un defensa pateael balón desde el piso, con una velocidadde 25.0 m s−1 formando un ángulo de 30o
con la horizontal. En el instante que saleel balón, un delantero que se encuentraa 60 m del defensa, corre hacia el balóny lo recibe en la cabeza a una altura de2 m. a) Haga un diagrama ilustrativo dela situación planteada donde se muestre elsistema de referencia a emplear. b) Tenien-do en cuenta el sistema de referencia elegi-do, planteee las ecuaciones cinemáticas deposición y velocidad para el balón y parael delantero. c) Calcule la posición hori-zontal del balón cuando da en la cabezadel delantero. d) Halle la velocidad del de-lantero, suponiendo que corre a velocidadconstante.
Solucióna) De acuerdo con el diagrama ilustrati-vo del problema, el origen de coordena-das del sistema de referencia, se toma enel punto donde es pateado el balón; igual-mente se muestra la posición final tantodel balón como del delantero.
Teniendo en cuenta el enunciado, lascantidades dadas son, para el balón vo =
25.0 m s−1, xo = yo = 0, to = 0 , α =30o, yA = 2.0 m. Para el delantero xod =60.0 m , y como cantidad conocida g =−9.8 m s−2.Solucióna) Diagrama ilustrativo de la situaciónplanteada
ya jg=-
vo
O
a
x
A( , )x yA A
xodxA
b) De acuerdo con el sistema de re-ferencia mostrado en la figura, las ecua-ciones cinemáticas de posición y veloci-dad, están dadas por
Para el balón
xb = 25.0 cos30 t, (1)
vxb = 25.0 cos30,
yb = 25.0 sen 30 t − 12 9.8 t2, (2)
vyb = 25.0 sen30 − 9.8 t.
Para el delantero
xd = 60.0 + vdt, (3)
vd = Constante.
c) Para calcular la posición horizontal delbalón, cuando da en la cabeza del de-lantero, es necesario calcular primero eltiempo que demora en llegar a dicha posi-ción, tanto el balón como el delantero.
Para ello, se reemplaza yA = 2.0 men la ecuación (2). Así, se obtiene unaecuación cuadrática en el tiempo, cuyassoluciones son
t1 = 0.2 s y t2 = 2.4 s.
En principio estos valores reales de tiempotienen significado físico, ya que el balónpasa dos veces por la posición en la cualy = 2.0 m. Ahora, reemplazando estos va-lores de tiempo en la ecuación (1), se en-cuentra que las posiciones horizontales co-rrespondientes, están dadas por
xb1 = 4.3 m y xb2 = 52.0 m.

2.3. CAMBIO EN EL MOMENTO LINEAL Y LEYES DE NEWTON 27
d) Como en el instante que el balón da enla cabeza, la posición horizontal del de-lantero es la misma del balón, entoncesla ecuación (3), para los dos valores de laposición, da las siguientes velocidades deldelantero
vd1 = −278.5 m s−1 y vd2 = −3.3 m s−1.
Los resultados anteriores, muestran queen ambos casos el delantero debe correrhacia la izquierda, ya que las velocidadesson negativas, es decir, se debe mover en elsentido negativo del eje x. Por otro lado, elvalor de velocidad vd1 = −278.5 m s−1, enel caso real no se debe considerar, puestoque hasta el momento en condiciones nor-males no ha sido posible que un atle-ta alcance esta velocidad tan alta. En loscien metros planos la velocidad alcanza-da es del orden de 10 m s−1. Por consi-guiente, la velocidad del delantero debeser −3.3 m s−1, lo que indica que el balónya ha pasado por la altura máxima cuandose encuentran balón y delantero.
Ejercicio 2.11.En un partido de fútbol, un defensa pateael balón desde el piso, con una velocidadde 25.0 m s−1 formando un ángulo de 30o
con la horizontal. En el instante que saleel balón, un delantero que se encuentraa 45 m del defensa, corre hacia el balóny lo recibe en la cabeza a una altura de2.0 m. a) Haga un diagrama ilustrativo dela situación planteada donde se muestre elsistema de referencia a emplear. b) Tenien-do en cuenta el sistema de referencia elegi-do, plantear las ecuaciones cinemáticas deposición y velocidad para el balón y parael delantero. c) Calcular la posición hori-zontal del balón cuando da en la cabezadel delantero. d) Hallar la velocidad deldelantero, suponiendo que corre a veloci-dad constante.
Ejemplo 2.11.El observador A, que viaja en la platafor-ma de un móvil con movimiento rectilí-neo uniforme respecto al piso, lanza unapartícula verticalmente hacia arriba. El ob-servador A está en reposo respecto almóvil y el observador B está en reposorespecto a la tierra. ¿Cuál es la trayecto-ria seguida por la partícula? Despreciar losefectos del aire.
SoluciónEsta pregunta sólo se puede responder,cuando se haya definido con exactitudquien está analizando el movimiento. Eneste caso, se debe especificar si es el obser-vador A o el observador B quien respondela pregunta anterior.
A
Respecto al observador A, la respuestaes que la partícula describe una trayecto-ria rectilínea y vertical, ya que la veloci-dad horizontal del observador es la mis-ma velocidad horizontal de la partícula, esdecir, para el observador A la partícula notiene componente horizontal de la veloci-dad. De acuerdo con esto, la partícula re-gresa de nuevo a la mano del observadorA como se ilustra en la figura.
vB
B
En su lugar, para el observador B, lapartícula tiene tanto una componente ho-rizontal como vertical de velocidad, y deeste modo la partícula describe una trayec-toria parabólica, ya que respecto a la tierrala partícula regresa a una posición diferen-te como se muestra en la figura.
Ejercicio 2.12.Desde un avión que vuela horizontal-mente a una velocidad de 200kmh−1, sedeja caer un cuerpo. Un observador en tie-rra, quiere correr de tal manera que su ve-locidad le permita mantener el cuerpo porencima de su cabeza, para de este modo,poderlo recibir en su mano. Explique si es

28 CAPÍTULO 2. MOMENTO LINEAL, FUERZA Y ENERGÍA MECÁNICA
posible esta situación, considerando que elobservador en tierra se mueve en línea rec-ta.
2.3.6. Fuerza elástica
Si como se muestra en la figura 2.33, se estiraun resorte a partir del punto O, de modo que suextremo se mueva hasta una posición x, la expe-riencia muestra que el resorte ejerce una fuerzasobre el bloque al que está sujeto y cuyo valor,con buena aproximación está dado por
Fe = −kx,
donde k es una constante llamada constante elás-tica del resorte, cuyo valor depende de la formadel resorte, de la longitud del resorte y del ma-terial que esté hecho el resorte. Esta es la ley defuerza para resortes reales y se conoce como laley de Hooke, que se satisface si el resorte no seestira más allá de cierto límite. El sentido de lafuerza siempre se opone al sentido en que se de-formó el resorte. Para el sistema de referencia dela figura 2.33, cuando se estira el resorte, x > 0 yF es negativo; cuando se comprime x < 0 y F espositiva. Esto lleva a que la fuerza ejercida porel resorte sea una fuerza restauradora en el senti-do de que siempre está dirigida hacia el origen,es decir, tiende siempre a llevar el cuerpo a laposición de no estiramiento. En la ley de Hookese puede considerar que k es la magnitud de lafuerza por unidad de deformación; así, los re-sortes muy duros tienen valores grandes de k.Este es otro caso de fuerza variable, ya que de-pende de la deformación del resorte.
m
Ox
x
O
m
Fe
x
Figura 2.33: Fuerza elástica de un resorte.
Si el cuerpo se suelta, desde la posición x de
la figura 2.33, por la segunda ley de Newton
+→∑ Fx = ma−Fe = ma
con Fe = kx se tiene
ma = −kx,
así quea = −
(k/
m)
x,
de este modo, la aceleración es variable y opues-ta a la deformación del resorte. Este resultado escaracterístico del movimiento periódico llama-do Movimiento Armónico Simple (MAS), que seráanalizado en unidad 5.
Ejemplo 2.12.Como se indica en la figura, mediante unbloque de masa m se comprime un resortede constante k y luego se suelta. Supongaque el bloque está adherido al resorte.a)Haga el diagrama de cuerpo libre parael bloque. b) Plantee las ecuaciones querigen el movimiento del bloque. c) De-termine la aceleración del bloque y hallelas posiciones en las cuales ésta adquierela máxima y mínima magnitud. d) Deter-mine la velocidad de la partícula, respec-to a la posición x, y halle las posicionesdonde su magnitud adquiere los valoresmáximo y mínimo. e) Determine, en fun-ción del tiempo, la posición de la partículay analice dicha solución
m
x
O
Fe
-xo
xo
Solucióna) Diagrama de cuerpo libre para el bloque
Fe
mg
N Movimiento
x
-xo O

2.4. FUERZA TRABAJO Y ENERGÍA 29
b) Ecuaciones de movimiento para elbloque
+→∑ Fix = ma; − kx = ma, (1)
+ ↑ ∑ Fiy = 0, N − mg = 0. (2)
El signo menos en la ecuación (1) se jus-tifica, teniendo en cuenta que mientras elbloque se encuentra a la izquierda de O, xes negativo y la fuerza elástica es positiva.c) De la ecuación (1) se encuentra que laaceleración está dada por
a = − km
x, (3)
donde el sentido de la deformación esopuesto a la aceleración del bloque.De la ecuación (3) se concluye- La aceleración es máxima cuando x esmáxima, es decir, cuando x = ±xo ya quecomo no hay fricción, el máximo desplaza-miento corresponde a la deformación ini-cial que sufre el resorte, y se obtiene en losextremos de la trayectoria.- La aceleración es mínima en magnitud,cuando la deformación del resorte es nula,es decir, en x = 0, que corresponde a laposición donde la fuerza elástica es cero, osea cuando el bloque pasa la posición deequilibrio.d) Mediante la ecuación (3) y utilizando ladefinición de aceleración, por integraciónse encuentra que la velocidad del bloquees
v = ±√
km(−x2 + x2
o). (4)
La ecuación (4) permite concluir- La velocidad se hace máxima cuandox2
o − x2 es máxima, o sea cuando x = 0 quecorresponde a la posición de equilibrio.- La velocidad se hace cero cuando x2
o −x2 = 0, así x = ±xo que coincide con losextremos de la trayectoria.e) Con ayuda de la ecuación (4) y em-pleando la definición de velocidad, por in-tegración se encuentra que la posición dela partícula en función del tiempo, está da-da por
x = xo cos(ωt), (5)
donde se define ω ≡√
k/m como la fre-cuencia angular de oscilación.
La ecuación (5) indica que la posiciónde la partícula depende periódicamente
del tiempo, esto es, el bloque tiene unmovimiento que se repite continuamente,entre las posiciones extremas x = ±xo,siempre y cuando se puedan despreciarlos efectos debidos a la fricción.
En síntesis, en los puntos de la trayec-toria donde la aceleración se hace máxima,la velocidad adquiere su mínimo valor ydonde la aceleración se hace mínima la ve-locidad se hace máxima.
2.4. Fuerza trabajo y energía
El problema fundamental de la dinámica deuna partícula, es poder predecir su posiciónen función del tiempo t, sabiendo con cuálespartículas interactúa, además de conocer lascondiciones iniciales a las que está sometida.De acuerdo con las secciones anteriores, el pro-cedimiento que se debe llevar a cabo es el si-guiente: se determina la fuerza neta F, que ac-túa sobre la partícula de masa m y median-te la segunda ley de Newton para masa cons-tante F = ma, se encuentra la aceleración dela partícula. Luego, utilizando la definición deaceleración a = dv/dt, se obtiene la velocidadde la partícula en función del tiempo v(t). Final-mente, por medio de la definición de velocidadv = dr/dt, se resuelve el problema fundamen-tal de la dinámica al poder determinar la posi-ción del cuerpo en función del tiempo r(t).
En lo que sigue, se trata la dinámica de unapartícula desde otro punto de vista, lo quepermitirá resolver de nuevo y completamenteel problema de la dinámica de una partícula.Necesariamente, para definir los nuevos con-ceptos, se debe partir de las leyes de Newtonya que son el soporte de la dinámica de unapartícula. Por otro lado, se observa que la no-tación de estas cantidades físicas, correspondea cantidades escalares, lo que generalmente evi-ta el uso de cantidades vectoriales en los proce-dimientos matemáticos. En síntesis, para su es-tudio ya se dispone de los conceptos cinemáti-cos y dinámicos descritos y analizados hastaeste momento. Igual que en la cinemática y enla dinámica sólo se considera el movimientode traslación de los cuerpos, o sea, que estos

30 CAPÍTULO 2. MOMENTO LINEAL, FUERZA Y ENERGÍA MECÁNICA
se pueden seguir tratando bajo el modelo departícula.
Igual que hasta ahora, cuando se analiza elcomportamiento dinámico de un cuerpo, se lle-van a cabo los mismos pasos, esto es:
Definir el sistema, que generalmente estáformado por varios cuerpos.
Elegir, del sistema, el cuerpo al cual se le vaa analizar el movimiento, es decir, el cuerpoo partícula de interés.
Delimitar el medio ambiente o alrededores, for-mado por el resto del sistema, o sea, porlos cuerpos cercanos que interactúan con elcuerpo de interés.
En principio, en cuanto a la forma funcional dela fuerza, matemáticamente, se pueden conside-rar dos casos
1. Que la fuerza sea función del tiempo, es de-cir, F(t).
2. Que la fuerza sea función de la posición, es-to es F(r).
Pero como se verá más adelante, la forma fun-cional de la fuerza con la posición es la de ma-yor interés, ya que este es el tipo de fuerzas quegeneralmente se presentan en la naturaleza.
2.4.1. Fuerza, desplazamiento y trabajo
Se considera una partícula de masa m sobre laque actúa una fuerza F. Si en un tiempo dt lapartícula sufre un desplazamiento dr debido ala acción de la fuerza, el trabajo realizado porella durante tal desplazamiento, se define por
dW ≡ F · dr. (2.46)
Si se toma |dr| = dS, mediante la definición deproducto escalar, la ecuación (2.46) adquiere laforma dW = F cosθ dS.
De la figura 2.34, se observa que FT = Fcosθes la componente de la fuerza a lo largo de latangente a la trayectoria seguida por la partícu-la. De este modo,
dW = FTdS. (2.47)
qm
FT
dr
F
FN
Figura 2.34: Trabajo realizado por F en un dt.
De acuerdo con la ecuación (2.47), se concluyeque la componente de la fuerza normal a latrayectoria seguida por la partícula, no realizatrabajo. Así, las fuerzas perpendiculares al des-plazamiento de una partícula no realizan traba-jo. Esta situación se presenta siempre con la nor-mal (N) y con el peso (W) en el caso de un cuer-po que se mueve sobre una superficie horizon-tal. Igualmente, ocurre con la fuerza centrípetacuando un cuerpo se mueve sobre una trayecto-ria circular, como se analizará en la unidad 3.
Generalmente, interesa determinar el traba-jo total realizado por la fuerza F, cuando lapartícula se mueve desde un punto A hastaun punto B de su trayectoria, como en el casomostrado en la figura 2.35. Como el trabajo to-tal corresponde a la suma de los trabajos infini-tesimales entre los dos puntos considerados, lasumatoria se transforma en una integral por loque las ecuaciones (2.46) y (2.47) adquieren laforma
W =
B∫A
F · dr
=
B∫A
FTdS. (2.48)
Casos particulares de la ecuación (2.48)
1. Una partícula con movimiento rectilíneo,está sometida a la acción de una fuerzaconstante F que forma un ángulo θ conla trayectoria, como se ilustra en la figu-ra 2.36. En este caso, mediante la ecuación

2.4. FUERZA TRABAJO Y ENERGÍA 31
A
B
FN
FFT
Figura 2.35: Trabajo realizado por F entre A y B.
(2.48), se encuentra que el trabajo realizadopor la fuerza entre las posiciones A y B estádado por
W = Fcosθ(xB−xA).
A Bx
q
Movimiento
O
F F
Figura 2.36: Trabajo realizado por F no paralela aldesplazamiento.
2. Cuando la partícula tiene movimiento rec-tilíneo, pero la fuerza constante F es para-lela al desplazamiento, el trabajo realizadopor ella entre las posiciones A y B de lafigura 2.37 es
W = F(xB−xA).
A Bx
Movimiento
O
F F
Figura 2.37: Trabajo realizado por F paralela al des-plazamiento.
Dimensiones y unidades trabajoTeniendo en cuenta la definición de trabajo, da-da por la ecuación (2.46), se tiene que sus di-mensiones son [W] = ML2T−2. De este mo-do, la unidad en el sistema internacional deunidades es kg m2 s−2, en el sistema gaussiano
de unidades g cm2 s−2 y en el sistema ingléslb p.
Es costumbre designar estas unidades con lossiguientes nombres: 1 J ≡ 1 kg m2 s−2 en el sis-tema SI, 1 ergio ≡ 1 g cm2 s−2 en el sistemagaussiano. Por consiguiente, la relación entreestas unidades es 1 J ≡ 107 ergios.
Interpretación geométrica de la ecuación (2.48)
Cuando se conoce la gráfica de la forma comovaría la componente tangencial de la fuerza conel desplazamiento de la partícula, es posible in-terpretar la ecuación (2.48) de la siguiente ma-nera. Si esta componente de la fuerza varía enla forma mostrada en la figura 2.38, el área delpequeño rectángulo, dA = FTdS, es igual al tra-bajo infinitesimal realizado por la fuerza corres-pondiente durante el desplazamiento dS. Aho-ra, el área total bajo la curva entre las posicionesA y B, es igual a la suma de las áreas de to-dos los pequeños rectángulos dibujados entredichos puntos; pero como las áreas son infinite-simales, la suma se transforma en una integraly así el área total corresponde a la integral dadapor la ecuación (2.48). En conclusión, el trabajototal realizado por la fuerza entre las posicionesA y B es igual al área total bajo la curva.
FT
FT
dSA BS
Figura 2.38: Variación de FT en función de S.
El análisis anterior, se puede expresar

32 CAPÍTULO 2. MOMENTO LINEAL, FUERZA Y ENERGÍA MECÁNICA
matemáticamente en la forma
Area bajo la curva = W
=
B∫A
F · dr
=
B∫A
FTdS.
Trabajo de una fuerza en componentes rectan-gulares
En tres dimensiones y en componentes rectan-gulares, la fuerza que actúa sobre una partícu-la se expresa en la forma F = Fxi + Fyj + Fzk;de manera similar, el vector desplazamiento es-tá dado por dr = dxi + dyj + dzk. Así, al efec-tuar el producto escalar entre estos dos vectores,se encuentra que el trabajo total realizado por lafuerza entre los puntos A y B es dado por
W =
B∫A
(Fxdx + Fydy + Fzdz). (2.49)
Si la fuerza F y el vector desplazamiento drse encuentran, por ejemplo, en el plano xy, laecuación (2.49) se transforma en
W =
B∫A
(Fxdx + Fydy).
Trabajo realizado por la fuerza resultante
Si en la ecuación (2.48), la fuerza F correspon-de a la fuerza resultante o neta de todas lasfuerzas que actúan sobre la partícula, esto essi F = ∑ Fi = F1 + F2 + F3 + · · · , el trabajoneto o total realizado sobre la partícula por lafuerza resultante, para llevarla desde la posi-ción A hasta la posición B de la figura 2.39, seobtiene mediante la expresión
W =
B∫A
(F1 · dr + F2 · dr + F3 · dr + · · · )
=
B∫A
F · dr.
A
B
A
B
F
F1
F2
F3 F
4
Figura 2.39: Trabajo realizado por la resultante.
Por consiguiente, el trabajo realizado por lafuerza resultante es igual a la suma de los tra-bajos realizados por cada una de las fuerzas queactúan sobre la partícula.
Ejemplo 2.13.Un bloque de masa m, asciende sobre lasuperficie del plano inclinado de la figura,cuando se somete a la acción de la fuerzaF paralela al plano inclinado y de la fuerzahorizontal F′. La magnitud de cada una delas fuerzas aplicadas es 2mg. Cuando elbloque ha ascendido una altura h, deter-mine a) El trabajo realizado por la fuerzaresultante. b) El trabajo neto realizado so-bre el bloque, considerando por separadocada una de las fuerzas que actúan sobreel bloque. c) El valor del trabajo total sim = 500 g y h = 0.5 m, para diferentes va-lores del ángulo θ.
h
F
m
q
F´
Solucióna) De acuerdo con el diagrama de cuer-
po libre mostrado en la siguiente figu-ra, la componente de la fuerza neta en ladirección paralela al desplazamiento delbloque, es constante y está dada por
F// = mg(2 − senθ − 2cosθ),
donde se ha tomado el sentido demovimiento como positivo. Así, el trabajorealizado sobre el bloque, al tener un des-plazamiento de magnitud h/senθ es
W = mgh(2cscθ − 1 − 2cotθ).

2.4. FUERZA TRABAJO Y ENERGÍA 33
h
N F
F´
mgq
b) El trabajo realizado por cada fuerza es
WF = 2mghcscθ,WN = 0,
ya que la normal es una fuerza perpendic-ular al desplazamiento.
Wmg = −mgh,WF′ = −2mghcotθ.
Se observa que la única fuerza que realizatrabajo positivo es la fuerza aplicada F, yaque esta actúa en el sentido del desplaza-miento.
Sumando los trabajos anteriores, se en-cuentra que el trabajo neto, total o resul-tante, realizado por las fuerzas que actúansobre el bloque está dado por
W = mgh(2cscθ − 1 − 2cotθ),
que es idéntico al obtenido en el numeralanterior.c) Reemplazando valores se obtiene la si-guiente tabla
θ(o) W(J)
10 −2.02
30 −1.14
45 −0.42
60 +0.38
75 +1.31
De acuerdo con estos resultados, se tieneque el trabajo neto realizado sobre elbloque, es negativo hasta cierto ángu-lo de inclinación θ, esto es, mientras la
fuerza neta se opone al desplazamientodel bloque. A partir de este ángulo crítico,la fuerza neta apunta en el mismo sentidodel desplazamiento, por lo que el trabajoes positivo. Lo anterior, es consecuencia dela variación en la componente paralela alplano inclinado, tanto del peso como de lafuerza F′.
Ejercicio 2.12.Halle el valor del ángulo θ, para el cualel trabajo neto realizado sobre el bloquedel ejemplo 2.13 es nulo. ¿Qué se puedeafirmar del trabajo neto realizado sobre elbloque, para valores mayores y menores alobtenido? Explique
2.4.2. Trabajo y potencia
Como se observa en la definición dada por laecuación (2.46), el trabajo es una cantidad es-calar que no depende del tiempo. Por esta razónen la práctica y particularmente en la industria,no interesa el trabajo total que pueda realizaruna máquina sino la rapidez con la cual estahace trabajo.
La potencia es una cantidad escalar que tieneen cuenta este hecho y se define como la rapidezcon la cual se realiza trabajo. Matemáticamente,la potencia media en un intervalo de tiempo t,se define por
P ≡ Wt
,
y la potencia instantánea en un instante de tiem-po t, está dada por
P ≡ dWdt
. (2.50)
En el caso particular que la potencia sea cons-tante, la potencia media es igual a la potenciainstantánea.
Mediante las ecuaciones (2.46) y (2.50), la po-tencia instantánea se puede expresar en funcióndel vector velocidad, en la forma
P = F · drdt
= F · v.

34 CAPÍTULO 2. MOMENTO LINEAL, FUERZA Y ENERGÍA MECÁNICA
Dimensiones y unidades de potenciaDe acuerdo con su definición, las dimensionesde potencia son [P] = ML2T−3. Es costumbreemplear, en este caso, la unidad del sistema in-ternacional de unidades kg m2 s−3. Se define elvatio mediante la relación 1 w ≡ 1 kg m2 s−3.Por comodidad, se emplean el kilovatio (Kw)y el megavatio (Mw), dados por 1 Kw ≡ 103 wy 1 Mw ≡ 106 w, respectivamente. Otra unidadque no es de mucho uso en la ciencia, aunquesí lo es en los casos prácticos, es el caballo vapor(hp), que se relaciona con la unidad SI mediantela expresión 1 hp ≡ 746 w.
Mediante la definición de potencia es posibleobtener otra unidad de trabajo, que es bastanteempleada en el caso de las hidroeléctricas, a es-ta unidad se le conoce como el Kilovatio-horay su relación con la unidad SI es 1 Kw − h ≡3.6 × 106 J. La liquidación de energía eléctricafacturada por las Empresas Públicas, se hace deacuerdo con el número de Kilovatios-hora con-sumidos por mes.
Ejemplo 2.14.Como se indica en la figura, un bloque
de masa M asciende con velocidad cons-tante v por una colina que forma un ángu-lo θ con la horizontal. El bloque está unidoa un motor mediante una cuerda que pasapor una polea y sometido a la fuerza F′
de magnitud igual a la magnitud del pe-so del cuerpo. Determine, para diferentesvalores del del ángulo θ, la potencia de-sarrollada por el motor, si M = 600g yv = 5m · s−1.
M
q
F´
SoluciónDiagrama de cuerpo libre para el
bloqueComo el bloque se encuentra en equi-
librio dinámico, la componente de lafuerza neta paralela al plano inclinado, esnula. Así que la fuerza F ejercida por el
N F
F´
Mgq
motor tiene magnitud
F = Mg(senθ + cosθ).
donde se ha tomado como positivo el sen-tido de movimiento.
De esta forma, la potencia desarrolladapor el motor es
P = Mgv(senθ + cosθ).
En la siguiente tabla, se muestran los valo-res de la potencia, para diferentes valoresdel ángulo θ.
θ(o) P (w)
0 29.4
15 36.01
30 40.16
45 41.58
60 40.16
75 36.01
90 29.4
De la tabla se puede concluir que la poten-cia aumenta hasta un valor máximo, a par-tir del cual decrece hasta el valor de 29.4 w.
Ejercicio 2.13. Encuentre el valor del án-gulo para el cual la potencia desarrolladapor el motor del ejemplo 2.14 es máxima.
Ejercicio 2.14. Como se indica en la figura,un bloque de masa M asciende con veloci-dad constante v por una colina que forma

2.4. FUERZA TRABAJO Y ENERGÍA 35
un ángulo θ con la horizontal. El bloqueestá unido a un motor mediante una cuer-da que pasa por una polea y las superficiesen contacto son lisas. Determine, en fun-ción del ángulo θ, la potencia desarrolladapor el motor. Compare el resultado con elobtenido en el ejemplo 2.14.
M
q
2.4.3. Fuerza, trabajo y energía cinética(∆Ek)
Se considera el movimiento de un cuerpo demasa m, sobre el que actúa una fuerza neta F.
Escribiendo la segunda ley de Newton en laforma
F = mdvdt
,
y reemplazando en la ecuación (2.48), se en-cuentra que el trabajo realizado sobre la partícu-la por la fuerza neta, entre la posición A y laposición B de la figura 2.40, es dado por
W = mB∫
A
dvdt
· dr
= mvB∫
vA
v · dv. (2.51)
x
y
O
BA
m
mF
vA
vB
Figura 2.40: Movimiento de m entre A y B sometidaa F.
Luego de resolver y evaluar la segunda inte-gral de la ecuación (2.51), se obtiene
W = 12 mv2
B − 12 mv2
A. (2.52)
La cantidad escalar 12 mv2, que depende de la
magnitud de la velocidad, mas no de su direc-ción, fue definida en la unidad anterior como laenergía cinética Ek de la partícula, es decir
Ek ≡ 12 mv2
= 12 mv · v
=p2
2m, (2.53)
donde se ha utilizado la definición de momentolineal.
Teniendo en cuenta las ecuaciones (2.52) y(2.53), el trabajo realizado sobre la partícula porla fuerza neta F, independientemente del tipode fuerza, está dado por
W = EkB − EkA
= ∆Ek. (2.54)
De la ecuación (2.54), se puede concluir que lavariación de la energía cinética de una partículasiempre es igual al trabajo realizado por la fuerzaneta que actúa sobre ella durante el movimiento.Como la energía cinética es una cantidad físicaque depende de la magnitud de la velocidad,entonces debe depender del sistema de referen-cia ya que la velocidad depende de él. Igual-mente, al ser la energía cinética una función dela magnitud de la velocidad, es una energía quese le asocia a la partícula como consecuencia desu movimiento. Las ecuaciones (2.52) y (2.54),expresan lo que en física se conoce como el teo-rema del trabajo y la energía.
El teorema del trabajo y la energía (TTE)permite analizar en muchos casos situacionesfísicas que pueden ser analizadas igualmentepor métodos dinámicos. Debe quedar claro quepara su aplicación, es necesario hallar el trabajorealizado por todas las fuerzas que actúan sobreel cuerpo, mientras este pasa de una posición aotra.
2.4.4. Casos particulares del teorema deltrabajo y la energía
1. Si la velocidad de una partícula permanececonstante en magnitud y dirección, como en lafigura 2.41, el cambio en la energía cinética es
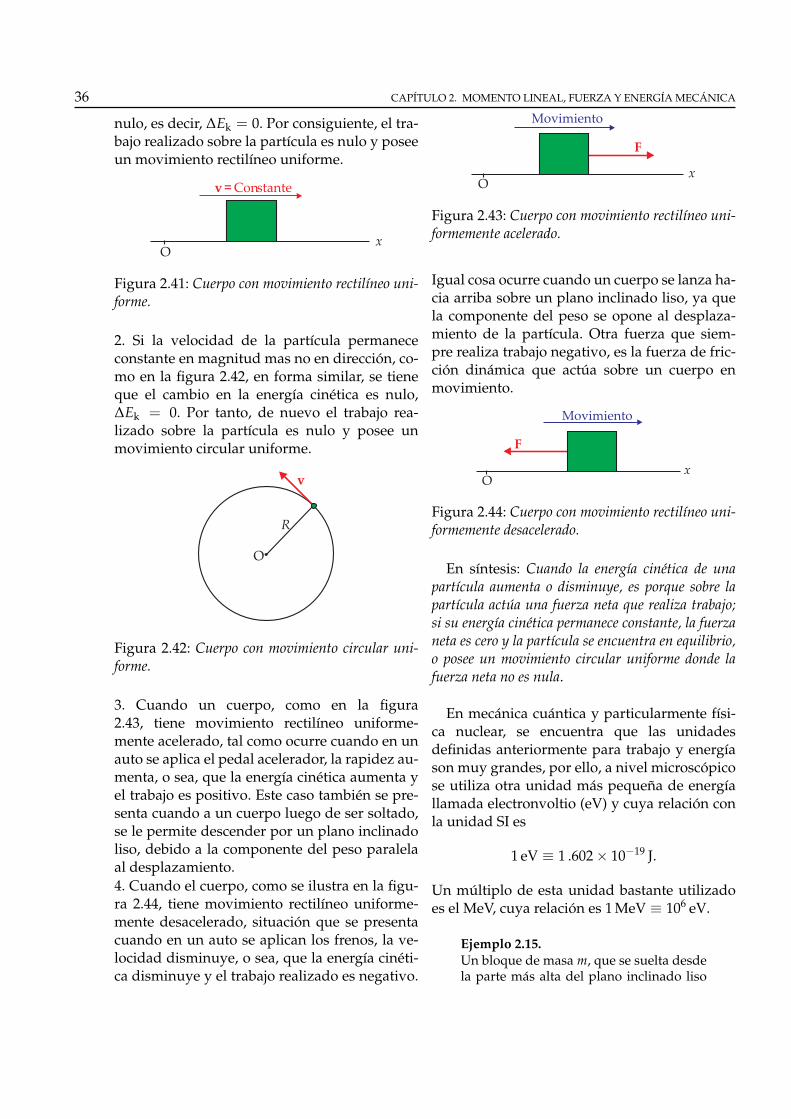
36 CAPÍTULO 2. MOMENTO LINEAL, FUERZA Y ENERGÍA MECÁNICA
nulo, es decir, ∆Ek = 0. Por consiguiente, el tra-bajo realizado sobre la partícula es nulo y poseeun movimiento rectilíneo uniforme.
x
O
v = Constante
Figura 2.41: Cuerpo con movimiento rectilíneo uni-forme.
2. Si la velocidad de la partícula permanececonstante en magnitud mas no en dirección, co-mo en la figura 2.42, en forma similar, se tieneque el cambio en la energía cinética es nulo,∆Ek = 0. Por tanto, de nuevo el trabajo rea-lizado sobre la partícula es nulo y posee unmovimiento circular uniforme.
O
R
v
Figura 2.42: Cuerpo con movimiento circular uni-forme.
3. Cuando un cuerpo, como en la figura2.43, tiene movimiento rectilíneo uniforme-mente acelerado, tal como ocurre cuando en unauto se aplica el pedal acelerador, la rapidez au-menta, o sea, que la energía cinética aumenta yel trabajo es positivo. Este caso también se pre-senta cuando a un cuerpo luego de ser soltado,se le permite descender por un plano inclinadoliso, debido a la componente del peso paralelaal desplazamiento.4. Cuando el cuerpo, como se ilustra en la figu-ra 2.44, tiene movimiento rectilíneo uniforme-mente desacelerado, situación que se presentacuando en un auto se aplican los frenos, la ve-locidad disminuye, o sea, que la energía cinéti-ca disminuye y el trabajo realizado es negativo.
x
O
Movimiento
F
Figura 2.43: Cuerpo con movimiento rectilíneo uni-formemente acelerado.
Igual cosa ocurre cuando un cuerpo se lanza ha-cia arriba sobre un plano inclinado liso, ya quela componente del peso se opone al desplaza-miento de la partícula. Otra fuerza que siem-pre realiza trabajo negativo, es la fuerza de fric-ción dinámica que actúa sobre un cuerpo enmovimiento.
x
O
Movimiento
F
Figura 2.44: Cuerpo con movimiento rectilíneo uni-formemente desacelerado.
En síntesis: Cuando la energía cinética de unapartícula aumenta o disminuye, es porque sobre lapartícula actúa una fuerza neta que realiza trabajo;si su energía cinética permanece constante, la fuerzaneta es cero y la partícula se encuentra en equilibrio,o posee un movimiento circular uniforme donde lafuerza neta no es nula.
En mecánica cuántica y particularmente físi-ca nuclear, se encuentra que las unidadesdefinidas anteriormente para trabajo y energíason muy grandes, por ello, a nivel microscópicose utiliza otra unidad más pequeña de energíallamada electronvoltio (eV) y cuya relación conla unidad SI es
1 eV ≡ 1 .602 × 10−19 J.
Un múltiplo de esta unidad bastante utilizadoes el MeV, cuya relación es 1 MeV ≡ 106 eV.
Ejemplo 2.15.Un bloque de masa m, que se suelta desdela parte más alta del plano inclinado liso

2.4. FUERZA TRABAJO Y ENERGÍA 37
de la figura, se le aplica la fuerza horizon-tal F de magnitud mg. Determine la veloci-dad del bloque, en el instante que llega ala base del plano inclinado.
h
m
q
F
Solución
Diagrama de cuerpo libre para el bloque
h
N
F
mg
q
A
B
a) Mediante el teorema del trabajo y laenergía, se encuentra que
W = 12 mv2
B, (1)
donde el trabajo total realizado sobre elbloque, cuando se mueve entre las posi-ciones A y B, es
W = mgh(1−cotθ). (2)
Reemplazando la ecuación (2) en laecuación (1), se obtiene para la velocidaddel bloque en el punto B
vB =√
2gh(1−cotθ). (3)
En la tabla siguiente, se indica la forma co-mo varía la rapidez de la partícula en fun-ción del ángulo θ, con h = 1.7 m. NO sig-nifica que la velocidad no tiene significado
físico.
θ(o) v(m) · s−1
30 NO
45 0
60 3.75
75 4.94
80 5.24
89 5.72
Se observa que para valores de θ menoresque el el ángulo crítico de 45o, la veloci-dad no tiene significado físico, mientrasque para valores mayores que este ángulomínimo, la rapidez aumenta al aumentarθ.
Ejercicio 2.14.Un bloque de masa m, se suelta desde laparte más alta del plano inclinado de lafigura. Suponiendo que las superficies encontacto son lisas, determine a) La veloci-dad del bloque, en el instante que llega ala base del plano inclinado. b) ¿Existe al-gún ángulo mínimo, a partir del cual tienesignificado físico la velocidad? Explique.Compare los resultados con los del ejem-plo 2.15.
h
m
q

38 CAPÍTULO 2. MOMENTO LINEAL, FUERZA Y ENERGÍA MECÁNICA
2.5. Trabajo, fuerza conservativa yenergía potencial
En esta sección se define un tipo muy im-portante de fuerzas que se presentan en lanaturaleza, como son las fuerzas conservati-vas. Adicionalmente, se encuentra una relaciónmatemática entre fuerza conservativa y la ener-gía potencial.
2.5.1. Trabajo realizado por una fuerzaconstante
Como se ilustra en la figura 2.45, se considerauna partícula de masa m sometida a la acción deuna fuerza F constante en magnitud y dirección.
x
y
O
A
B
(a)
(b)
(c)
rA
rB
F
Figura 2.45: Trabajo realizado por una fuerza cons-tante.
Para este caso la ecuación (2.48) se transformaen
W = F ·B∫
A
dr
= F · rB − F · rA. (2.55)
La ecuación (2.55), indica que el trabajo reali-zado por una fuerza constante es independientede la trayectoria seguida por la partícula, ya quesólo depende de las posiciones inicial y final. Deeste resultado se puede concluir que para las di-ferentes trayectorias mostradas en la figura 2.45,el trabajo realizado por la fuerza constante es elmismo, es decir, W(a) = W(b) = W(c).
2.5.2. Trabajo realizado por el peso de uncuerpo
Aunque este es un ejemplo de fuerza constan-te, para alturas cercanas a la superficie de latierra, el trabajo realizado por ella es de granimportancia en muchas situaciones físicas. Parael caso mostrado en la figura 2.46, las compo-nentes rectangulares del peso mg y de los vec-tores posición rA y rB, están dadas por mg =−mgj, rA = xAi + yAj y rB = xBi + yBj. Reem-plazando estas expresiones y efectuando los res-pectivos productos escalares, la ecuación (2.55)se transforma en
W = mgyA − mgyB
= −∆(mgy). (2.56)
y
O x
y yA B-
A
B
mg
xA
yA
xB
yB
i
j
Figura 2.46: Trabajo realizado por el peso.
La ecuación (2.56) muestra, en este caso y co-mo es de esperar, que el trabajo realizado porel peso de la partícula es independiente de latrayectoria seguida por ella, pues depende sólode las posiciones inicial y final, en otras pala-bras, depende de la diferencia de alturas entrelas posiciones A y B.
2.5.3. Trabajo realizado por la fuerzaelástica de un resorte
Como se vio en la sección 2.3.6, este es un ejem-plo de fuerza variable que también posee granimportancia en la física. Se considera el sistemade la figura 2.47, que consiste en un cuerpo demasa m adherido a un resorte de constante elás-tica k y que puede moverse sobre una superfi-cie horizontal lisa. En esta situación, las compo-nentes rectangulares de la fuerza variable F y

2.5. TRABAJO, FUERZA CONSERVATIVA Y ENERGÍA POTENCIAL 39
del vector desplazamiento dr , están dadas porF = −kxi y dr = dxi. Para determinar el tra-bajo realizado por la fuerza elástica del resorte,al llevar el cuerpo de la posición xA a la posi-ción xB, se reemplazan la fuerza y el vector des-plazamiento en la ecuación (2.48), obteniéndoseluego de integrar y evaluar, la expresión
W = 12 kx2
A − 12 kx2
B
= −∆( 12 kx2). (2.57)
m
m
O
O
xA
x
x
xB
F
Figura 2.47: Trabajo realizado por la fuerza elásticade un resorte.
Aunque la fuerza es variable, el resultadoobtenido en la ecuación (2.57) indica que denuevo el trabajo realizado por la fuerza elásti-ca no depende de la trayectoria sino de las posi-ciones inicial y final.
2.5.4. Fuerza conservativa y energía po-tencial
Los dos casos anteriores, trabajo realizado porel peso de un cuerpo y trabajo realizado por lafuerza elástica, son dos ejemplos de un grupode fuerzas que se presentan en la naturaleza yque se llaman fuerzas conservativas.
De forma general y matemáticamente, se de-fine una fuerza conservativa F(r) = F(x,y,z)de manera que el trabajo realizado por ella sepuede expresar como la diferencia de los va-lores inicial y final de una cantidad escalarEp(x,y,z), llamada energía potencial, es decir,la fuerza F(r) = F(x,y,z), es conservativa si
cumple la condición
W =
B∫A
F · dr
≡ EpA(x, y, z)− EpB(x, y, z)= −∆Ep(x, y, z). (2.58)
En conclusión, la ecuación (2.58) sólo es vá-lida si la fuerza considerada es conservativa;además, muestra que la cantidad Ep(x,y,z) esfunción de las coordenadas x, y, z.
Al comparar las ecuaciones (2.56) y (2.57) conla ecuación (2.58), se observa que el trabajo rea-lizado por el peso y el trabajo realizado por lafuerza elástica de un resorte satisfacen la defini-ción de fuerza conservativa. Por consiguiente,se puede asignar una función de energía po-tencial a un sistema cuerpo-tierra y a un sistemamasa-resorte. De este modo, la energía potencialgravitacional asociada al sistema cuerpo-tierraqueda definida por
Ep(y) ≡ mgy,
y la energía potencial elástica asociada al sis-tema masa-resorte por
Ep(x) ≡ 12 kx2.
Teniendo en cuenta estas dos definiciones, eltrabajo realizado por la fuerza gravitacional sepuede expresar en la forma
W = EpA(y)−EpB(y)≡ mgyA − mgyB
= −∆Ep ,
y el trabajo realizado por la fuerza elástica en laforma
W = EpA(x)−EpB(x)
= 12 kx2
A − 12 kx2
B
= −∆Ep(x).
Se presenta una diferencia cuando el trabajo deuna fuerza se expresa en función de la ener-gía cinética y en función de la energía poten-cial. En el primer caso la expresión a utilizar

40 CAPÍTULO 2. MOMENTO LINEAL, FUERZA Y ENERGÍA MECÁNICA
es W = ∆Ek, y es válida independientementede la fuerza que actúe sobre la partícula; en elsegundo caso la expresión es W = −∆Ep, devalidez únicamente si la fuerza que actúa sobrela partícula es conservativa.
En sistemas donde se deba emplear el con-cepto de energía potencial, primero se debedefinir lo que se conoce como el nivel cero deenergía potencial, que corresponde a una posi-ción arbitraria, dependiendo de la fuerza con-servativa que se esté considerando y de lasituación física particular.
Para un sistema cuerpo-tierra, el nivel cero deenergía potencial gravitacional coincide con elorigen de coordenadas, ya que en este caso ladependencia es lineal con la coordenada verti-cal. Para el caso de un sistema masa-resorte, elnivel cero de energía potencial elástica se tomaen la posición donde la fuerza elástica se hacecero, es decir, en la posición donde el resorte noha sufrido estiramiento alguno.
Cuando se trata de un sistema satélite-tierra,la función de energía potencial asociada al sis-tema es inversamente proporcional a la distan-cia r entre el satélite y la tierra, esto es, tiene laforma funcional Ep ∝ 1/r. Es por ello que el ni-vel cero de energía potencial para este sistemase toma en el infinito, ya que allí la energía po-tencial se hace cero.
A
(1)B
(2)
Figura 2.48: Trabajo realizado en una trayectoriacerrada.
Debido a las características de las fuerzas con-servativas, se tiene otra forma de saber si unafuerza F es conservativa o no. Para ello se con-sidera una partícula, que sometida a la fuerzaF, se desplaza de la posición A a la posición Bpor la trayectoria (1) y luego de la posición B ala posición A por la trayectoria (2) de la figura
2.48. En forma matemática, si la fuerza que ac-túa sobre la partícula es conservativa, se debecumplir la condición
W =
B∫A
F · dr +A∫
B
F · dr
=∮
F · dr
= 0. (2.59)
donde la integral, con un círculo en el centro,significa que se integra a través de la trayectoriacerrada ABA.
La ecuación (2.59) permite saber si una fuerzadada es conservativa o no, es decir, es otradefinición de fuerza conservativa. En el caso dela fuerza de fricción, se encuentra que el traba-jo realizado por ella es diferente de cero ya quedepende de la trayectoria; esta es la razón por lacual no se incluye dentro del grupo de fuerzasconservativas.
Cuando se analiza un cuerpo o sistema sobreel cual sólo actúan fuerzas conservativas, se diceque el sistema es conservativo.
2.6. Conservación de la energíapara una partícula
Sobre la partícula de la figura 2.49, de masa m,simultáneamente actúan varias fuerzas. De estemodo, su resultante F realiza un trabajo W entrelos puntos A y B de la trayectoria, dado por
W = ∆Ek, (2.60)
con ∆Ek = EkB − EkA. Ahora, si todas fuerzasson conservativas, su resultante es conservati-va, el sistema es conservativo y el trabajo reali-zado por la resultante es
W = −∆Ep, (2.61)
donde ∆Ep = EpB − EpA.Como las ecuaciones (2.60) y (2.61) se refieren
al trabajo realizado por la misma fuerza, se sa-tisface la igualdad
EkB + EpB = EkA + EpA,

2.6. CONSERVACIÓN DE LA ENERGÍA PARA UNA PARTÍCULA 41
B
A m
F
Figura 2.49: Fuerza conservativa actuando sobre m.
donde se define la energía mecánica total, o sim-plemente energía total, en la forma
E ≡ Ek + Ep = 12 mv2 + Ep(x,y,z).
EA = EB.
Como en la situación que se está analizando lospuntos A y B son arbitrarios, se tiene que laenergía total de una partícula permanece cons-tante si todas las fuerzas a las que está sometidason conservativas.
Matemáticamente, para fuerzas conservati-vas
E = 12 mv2 + Ep(x,y,z)
= Constante. (2.62)
La ecuación (2.62) permite definir una fuerzaconservativa, como aquella que permite conser-vación de la energía, de ahí su nombre.
Casos particulares de la ecuación (2.62):
1. Para un cuerpo en caída libre, sistemacuerpo-tierra de la figura 2.50, la energía to-tal se conserva por ser la fuerza gravitacio-nal conservativa. Matemáticamente, se ex-presa en la forma
E = 12 mv2 + mgy
= Constante.
En este caso, cuando el cuerpo desciendela energía potencial se transforma en ener-gía cinética, y cuando asciende la energíacinética se transforma en energía potencial.
y
O
y
Tierra
m
Ep = 0
v
Figura 2.50: Sistema cuerpo-tierra.
O sea, mientras el cuerpo se mueve ver-ticalmente hay una transformación de untipo de energía en otro.
2. Para el sistema masa-resorte de la figura2.51, con movimiento sobre una superficielisa, la energía total también se conserva yaque la fuerza elástica de un resorte es con-servativa. Matemáticamente,
E = 12 mv2 + 1
2 kx2
= Constante.
k
m
xx
Ep = 0
v
Figura 2.51: Sistema masa-resorte.
En esta situación, el cuerpo adquiere unmovimiento que se repite a intervalosiguales de tiempo o de vaivén, tal que laenergía permanece constante, o sea, quedurante el movimiento de la partícula setiene una transformación de energía cinéti-ca a potencial y viceversa.
Ejemplo 2.16.Mediante el pequeño bloque de masa m,un resorte de constante k sufre una de-formación d, como se muestra en la figu-ra. Una vez que el bloque es dejado en li-bertad, se mueve sobre la superficie hori-zontal hasta el punto A, a partir del cualasciende por un plano inclinado. El bloque

42 CAPÍTULO 2. MOMENTO LINEAL, FUERZA Y ENERGÍA MECÁNICA
no está adherido al resorte y las superfi-cies son lisas. a)Halle la rapidez del bloquecuando pasa por el punto A. b) Encuentreel desplazamiento máximo del bloque so-bre el plano inclinado. c) Halle el valor delas cantidades obtenidas en los numeralesanteriores si k = 100Nm−1, m = 5g, d =2cm y θ = 35o.
m
OEpg= 0q
A
k
B
h
Solucióna) En el trayecto horizontal actúan, la nor-mal que no realiza trabajo, el peso quetampoco realiza trabajo y la fuerza elásti-ca del resorte que es conservativa y actúahasta el punto O. Así, el sistema es conser-vativo, esto es, se conserva la energía delsistema cuando se mueve sobre la superfi-cie horizontal. Matemáticamente
12 mv2
A = 12 kd2.
De este modo, cuando pasa por el punto Atiene una rapidez
vA =
√km
d.
Por lo tanto, entre mayor sea la deforma-ción inicial del resorte la rapidez en A esmayor, ya que existe una proporcionali-dad directa entre la velocidad y la defor-mación.
b) Entre A y B sólo la componente delpeso mg sen θ realiza un trabajo negativosobre el bloque, ya que se opone a su des-plazamiento.
N
mg
qA
B
Movim
iento
Ep=0
Como el sistema sigue siendo conser-vativo, con vB = 0
mgSsenθ = 12 kd2,
donde S es el máximo desplazamiento delbloque sobre el plano inclinado; así
S =kd2
2mgsenθ.
De este resultado se tiene que para una de-formación fija del resorte, a mayor ángulode inclinación menor es el desplazamientodel bloque sobre el plano inclinado. Aho-ra, para un ángulo de inclinación fijo, en-tre mayor sea la deformación inicial delresorte mayor es el desplaza-miento delbloque sobre el plano inclinado.
c) Reemplazando los valores dados, seencuentra que la rapidez cuando pasa porel punto A y el máximo desplazamientosobre el plano inclinado son, respectiva-mente
vA = 2.8 ms−1,S = 0.7 m,
Pregunta¿Entre qué puntos la velocidad del bloquees la misma que en A? ¿Por qué?
Ejercicio 2.15.Comprobar que las dimensiones yunidades de las cantidades obtenidas enel ejemplo 3.5, son correctas.
Ejercicio 2.16.Un pequeño bloque de masa m se sueltasobre un plano inclinado liso, desde unaaltura h respecto a su base. Luego de lle-gar a la base del plano inclinado, el bloquedesliza sobre un superficie horizontal lisahasta que se encuentra con un resorte deconstante elástica k. a) Halle la rapidez delbloque cuando pasa por el punto A. b)Encuentre la máxima deformación del re-sorte. c) Determine el valor de las canti-dades obtenidas en los numerales anterio-res si k = 100 N m−1, m = 5 g, h = 5 cm yθ = 35o.
m
OEpg= 0q
A
k
B
h

2.7. DERIVADA DIRECCIONAL, ENERGÍA POTENCIAL Y SISTEMA CONSERVATIVO 43
2.7. Derivada direccional, energíapotencial y sistema conserva-tivo
En esta sección se determina otra relación im-portante entre una fuerza conservativa y suenergía potencial asociada. Para ello se conside-ra la fuerza conservativa F que actúa sobre lapartícula, de la figura 2.54.
(Conservativa)dr qF
Figura 2.52: La fuerza conservativa F y dr formanun ángulo θ.
Teniendo en cuenta la definición de trabajodada por la ecuación (2.46) y la definición defuerza conservativa dada por la ecuación (2.58),el trabajo realizado por la fuerza conservativaen un intervalo de tiempo dt se puede expresaren la forma
dW = F cos θdS= −dEp.
Ahora, a partir de la figura 2.54, se obtiene
FT = F cos θ
= −dEp
dS.
De este modo, cuando se conoce la forma fun-cional de la energía potencial con la coordenadaS, esto es, Ep(S), es posible determinar la com-ponente de la fuerza en la dirección del despla-zamiento, correspondiente a esta coordenada.Esto es, la componente de la fuerza en una di-rección determinada, es igual a menos la deriva-da de la energía potencial con respecto a la coor-denada en esa dirección; por ello a esta derivadase le conoce como derivada direccional de la ener-gía potencial Ep(S).
En este punto se debe hacer una distinciónen lo referente a la derivada, ya que la ener-gía potencial asociada a una fuerza conservati-va puede ser función de una, dos ó tres coor-denadas, dependiendo que el movimiento ocu-rra en una, dos ó tres dimensiones, es decir,depende del sistema que se esté analizando.Así, mientras en el movimiento de caída librela energía potencial depende sólo de la coorde-nada vertical, en el caso del movimiento de latierra alrededor del sol depende de dos coor-denadas, y en general, para movimiento en tresdimensiones puede depender de tres coordena-das, tales como x, y, z.
En el caso simple de movimiento en una di-mensión, donde Ep = Ep(x), es posible obte-ner la fuerza conservativa que actúa sobre lapartícula paralelamente al eje x, mediante la ex-presión
Fx = −dEp(x)
dx,
donde se emplea el concepto matemático dederivada total, al utilizar el operador diferenciald/
dx. En dos dimensiones, por ejemplo paramovimiento en el plano xy, la energía poten-cial asociada a la respectiva fuerza conservati-va puede ser de la forma Ep = Ep(x,y), dondesimultáneamente aparecen las variables x y y.Así, mediante el concepto de derivada direccionales posible determinar las componentes de lafuerza en las direcciones x y y. Para ello se em-plea el concepto de derivada parcial, que permitederivar la función respecto a una de las varia-bles y tomar la otra variable como si fuera unaconstante. En este caso se utiliza el símbolo ∂en lugar de la letra d para una dimensión. Deeste modo, las componentes rectangulares de lafuerza conservativa están dadas por
Fx = −∂E(x,y)∂x
con y = Constante,
Fy = −∂E(x,y)∂y
con x = Constante.
Aunque se ha tratado la forma funcional de laenergía potencial en coordenadas rectangulares,lo anterior también es válido para el caso de

44 CAPÍTULO 2. MOMENTO LINEAL, FUERZA Y ENERGÍA MECÁNICA
coordenadas polares, como se muestra poste-riormente.
Cuando se trata el movimiento de unapartícula en tres dimensiones, la energía poten-cial en coordenadas rectangulares tiene la for-ma funcional Ep = Ep(x,y,z). Por consiguiente,al generalizar se tiene que las componentes rec-tangulares de la fuerza conservativa correspon-diente están dadas por
Fx = −∂Ep(x,y,z)
∂x, con y y z constantes,
Fy = −∂Ep(x,y,z)
∂y, con x y z constantes,
Fz = −∂Ep(x,y,z)
∂z, con x y y constantes,
donde de nuevo se ha empleado el concepto dederivada parcial. A diferencia del caso de dosdimensiones, cuando se deriva respecto a unavariable se toman las otras dos variables comosi fueran constantes.
Continuando con el concepto de derivada di-reccional, al tener en cuenta las relaciones an-teriores, la fuerza conservativa en componentesrectangulares se expresa en la forma
F = −∂Ep(x,y,z)
∂xi −
∂Ep(x,y,z)∂y
j −∂Ep(x,y,z)
∂zk,
o equivalentemente
F = −(
∂
∂xi +
∂
∂yj +
∂
∂zk)
Ep(x,y,z),
donde se define el operador nabla como
∇ ≡ ∂
∂xi +
∂
∂yj +
∂
∂zk.
O sea,
F = −grad Ep
= −∇Ep.
Así, la fuerza es igual a menos el gradiente de laenergía potencial. En general, al aplicar el ope-rador nabla a un escalar se obtiene un vector, ya la operación correspondiente se le conoce co-mo gradiente. Por otro lado, este resultado es
de validez general independiente del sistema decoordenadas que se esté empleando, solo que laforma del operador es diferente para cada sis-tema.
Casos particulares1. En el caso gravitacional, como se muestra enla figura 2.55, la energía potencial gravitacionalestá dada por Ep(y) = mgy, entonces
Fy = −dEp(y)
dy= −mg,
que corresponde al negativo de la magnitud delpeso de la partícula, donde el signo menos in-dica que esta fuerza apunta en sentido verticalhacia abajo, como es de esperarse.
y
xOTierra
Movimientomg
Figura 2.53: Fuerza gravitacional.
Como ocurre en el caso general, la fuerzagravitacional es perpendicular a las superficiesdonde la energía potencial es constante y que seconocen como superficies equipotenciales o deigual potencial.
En la figura 2.55, la superficie de la tierra esuna superficie equipotencial, igual que las su-perficies paralelas a la superficie terrestre, y lafuerza es perpendicular a dichas superficies.2. Para un sistema masa-resorte, la función deenergía potencial asociada a la partícula de lafigura 2.56, está dada por Ep(x) = 1
2 kx2, en-tonces la fuerza elástica correspondiente estádada por
Fx = −dEp(x)
dx= −kx,
que no es mas que la ley de Hooke.

2.8. CURVAS DE ENERGÍA POTENCIAL 45
O
x
m
k
Figura 2.54: Fuerza elástica de un resorte.
2.8. Curvas de energía potencial
En muchas situaciones físicas, para sistemasconservativos, es posible conocer gráficamentela forma como varía la energía potencial conlas coordenadas. Su conocimiento es de granimportancia ya que permite obtener informa-ción cualitativa sobre el comportamiento delsistema, incluyendo los tipos de movimientoque se pueden presentar. Primero se analiza elcaso particular de un sistema masa-resorte yluego se hace un análisis más general.
1. Sistema masa-resorte. Para el caso de un cuerposometido a la fuerza elástica de un resorte, sis-tema conocido como oscilador armónico, la figura2.52 muestra la variación de la energía poten-cial en función de la coordenada x. Esto es, sesupone que el cuerpo se mueve sobre una su-perficie horizontal lisa que se hace coincidir conel eje de coordenadas.
Energía
E (Energía total)
x+xA
-xA
EP
EK
O
P
Figura 2.55: Variación de la energía potencial elás-tica.
Si se considera un punto sobre la curva, talcomo P en la figura 2.52, la conservación de laenergía exige que E = Ek + Ep = Constante, yaque la fuerza elástica es conservativa.
En la región de las x positivas, la energía po-tencial aumenta a medida que x aumenta y lacurva es creciente, o sea que la pendiente es po-
sitiva, por lo tanto,
dEp(x)dx
> 0,
y por la relación entre fuerza conservativa yenergía potencial se tiene que
F = −dEp(x)
dx< 0.
Así, el signo menos indica que la fuerza apuntahacia la izquierda, es decir, hacia la posición deequilibrio. Esto se representa en la figura 2.52,mediante la flecha horizontal dirigida hacia laizquierda.
Por otro lado, en la región de las x negativas,la energía potencial disminuye a medida que xaumenta y la curva es decreciente, o sea que lapendiente es negativa, de este modo,
dEp(x)dx
< 0,
y por la relación entre fuerza conservativa yenergía potencial se tiene que
F = −dEp(x)
dx> 0,
en este caso, como la pendiente es negativa, elsigno menos indica que la fuerza apunta haciala derecha, es decir, apunta de nuevo hacia laposición de equilibrio. Esto se representa en lafigura 2.52, mediante la flecha horizontal dirigi-da hacia la derecha.
Este análisis cualitativo, muestra que lafuerza ejercida por el resorte corresponde a unafuerza restauradora, ya que siempre tiende a lle-var el cuerpo hacia la posición de equilibrio. Poresta razón, a una distribución de energía poten-cial como la mostrada en la figura 2.52, se le lla-ma pozo de potencial ya que la partícula está obli-gada a permanecer entre las posiciones −xA y+xA.
En la posición particular x = 0, centro delpozo de potencial, la pendiente de la recta tan-gente a la curva es nula, esto es
dEp(x)dx
= 0.

46 CAPÍTULO 2. MOMENTO LINEAL, FUERZA Y ENERGÍA MECÁNICA
Por consiguiente,
F = −dEp(x)
dx= 0.
lo que indica que la fuerza neta es cero, o seaque el cuerpo se encuentra instantáneamenteen equilibrio. Por esta razón se le denominaposición de equilibrio. En este caso, si el cuerpose desplaza un poco de dicha posición, lafuerza restauradora tiende a mantenerlo en esaposición; es por ello que este es un punto deequilibrio estable.
2. Sistema conservativo en general. En la figura2.53, se muestra de manera general, la formacomo varía la energía potencial para un cuerposometido a una fuerza conservativa y que poseemovimiento rectilíneo a lo largo del eje x.
x
Energía
E xP( )
E1
E2
E3
E4
xo x1
Eo
x2x1' x3
Figura 2.56: Variación general de la energía poten-cial, Ep(x) .
Como la energía cinética es una cantidad po-sitiva, la ley de conservación de la energía exigeque la energía total de la partícula debe ser ma-yor que la energía potencial, esto es
E − Ep(x) = Ek ≥ 0.
Si esta relación no se satisface, llevaría a unavelocidad imaginaria que no tiene significadofísico. A las regiones donde se presenta estasituación, se les conoce como regiones clásica-mente prohibidas.
Así, para que la relación se pueda satisfacer,es necesario que
E ≥ Ep(x). (2.63)
En la figura 2.53, la ecuación (2.63) se satisfacepara energías totales mayores que Eo, esto es, laenergía mínima de la partícula con significadofísico es Eo, pues para energías menores la ener-gía potencial sería mayor que la energía total.
Cuando la partícula adquiere la energía to-tal Eo, toda su energía es potencial y su energíacinética es nula, es decir, la partícula se encuen-tra en reposo en xo si E = Eo.
Para una energía mayor que Eo, tal comoE1 en la figura 2.53, la partícula sólo se puedemover entre las posiciones x1 y x,
1 ya que úni-camente entre estos dos puntos se cumple lacondición impuesta por la ecuación (2.63). Deeste modo, si la partícula parte de la posiciónxo, su velocidad disminuye al acercarse a x1 óx,
1, donde la partícula se detiene instantánea-mente y es obligada a cambiar el sentido demovimiento. Estas dos posiciones extremas seconocen como puntos de retorno del movimientoy la partícula con energía E1 se comporta comoen el caso de un sistema masa-resorte, esto es,se encuentra en un pozo de potencial.
Para la energía mayor E2, en la figura 2.53se presentan cuatro puntos de retorno, o sea, lapartícula puede oscilar en cualquiera de los dospozos de potencial, con la condición de que sise encuentra en un pozo no puede pasar al otro.¿Por qué?
Para la energía E3, se tienen dos puntos de re-torno y mientras la partícula esté en movimien-to entre ellos, la energía cinética aumenta si laenergía potencial disminuye y viceversa.
Para una energía E4 sólo hay un puntode retorno. Si la partícula inicialmente tienemovimiento en el sentido negativo de las x, sedetiene en el punto de retorno y luego adquieremovimiento en el sentido positivo de las x, au-mentando su velocidad al disminuir la energíapotencial y la disminuirá al aumentar la energíapotencial.
Como se analizó antes, en xo la energía po-tencial es mínima, por lo que la pendiente de larecta tangente a la curva es cero y por ende lafuerza es cero. Si la partícula se encuentra ini-cialmente en reposo en xo, permanecerá en eseestado mientras no se incremente su energía to-tal. De este modo, si la partícula se mueve lige-

2.9. FUERZA DE FRICCIÓN ENTRE SUPERFICIES EN CONTACTO 47
ramente en cualquier sentido, esta tiende a re-gresar y oscilará respecto a la posición de equi-librio. A la posición xo , se le conoce como unaposición de equilibrio estable.
Por otro lado, en x2, la energía potencial sehace máxima, o sea, la pendiente de la recta tan-gente a la curva es cero y de nuevo la fuerza escero. Si la partícula está inicialmente en reposoen este punto, permanecerá en reposo; pero si lapartícula se mueve a partir de esta posición, porpequeño que sea el desplazamiento, la fuerzatiende a alejarla aún más de la posición de equi-librio; por ello a esta posición se le denomina deequilibrio inestable.
En la vecindad de x3, la energía potencial esconstante y por tanto la pendiente de la rectatangente a la curva es cero o sea que la fuerzanuevamente es cero. Aquí se tiene un intervalode equilibrio indiferente y la partícula se quedarádonde se le coloque, al no actuar ninguna otrafuerza sobre ella.
En síntesis, si se conoce la forma como varíala energía potencial con la posición, en la regióndonde se mueve un cuerpo, es posible ob-tener mucha información cualitativa sobre sumovimiento.
Igual que en el caso del oscilador armónico, sila curva crece con el incremento de x, la fuerzaestá dirigida hacia la izquierda, es decir, es ne-gativa, y si la curva decrece con el incrementode x, la fuerza estará dirigida hacia la derecha,o sea que es positiva. El sentido de la fuerza estáindicado en la figura 2.53 por medio de vectoreshorizontales.
2.9. Fuerza de fricción entre su-perficies en contacto
Es práctica común, la situación que se represen-ta en la figura 2.58, cuando se lanza un cuerpode masa m sobre una superficie horizontal ru-gosa, con velocidad inicial vo. Como resultado,se tiene que en un tiempo t posterior el cuerpose detiene. Cinemáticamente, lo anterior indicaque mientras el cuerpo desliza experimenta unaaceleración que se opone al movimiento, ya quela magnitud de la velocidad disminuye hasta el
valor cero.
O
x
vO v = 0a
to= 0 t >0
m m
Figura 2.57: Movimiento desacelerado debido a lafricción.
Ahora, de acuerdo con la segunda ley deNewton, esto indica que la superficie ejerce so-bre el bloque una fuerza en sentido opuesto almovimiento; a esta fuerza se le conoce comofuerza de fricción o de rozamiento por deslizamien-to, también denominado rozamiento seco ya quese supone que las superficies en contacto no es-tán lubricadas. Igualmente, por la tercera ley deNewton, la superficie del cuerpo también ejerceuna fuerza de rozamiento sobre la superficie enla cual se mueve, y es igual en magnitud perocon sentido opuesto.
La fuerza que actúa sobre el bloque, se oponeal movimiento de traslación y nunca lo ayu-da como se ilustra en la figura 2.58. En la vidadiaria, sin estas fuerzas no sería posible: cami-nar, sostener un lápiz en la mano, el transportecon ruedas, es decir, es una fuerza indispensa-ble aunque en muchos casos es necesario evi-tarla al máximo, por ejemplo en las máquinasindustriales, donde es necesario lubricar sus su-perficies para evitar el desgaste.
Ff
mg
N
Movimiento
Figura 2.58: Fuerza de fricción, opuesta almovimiento.
En lo que sigue, no se considera la fuerza re-sistiva o de fricción que sobre el cuerpo pre-
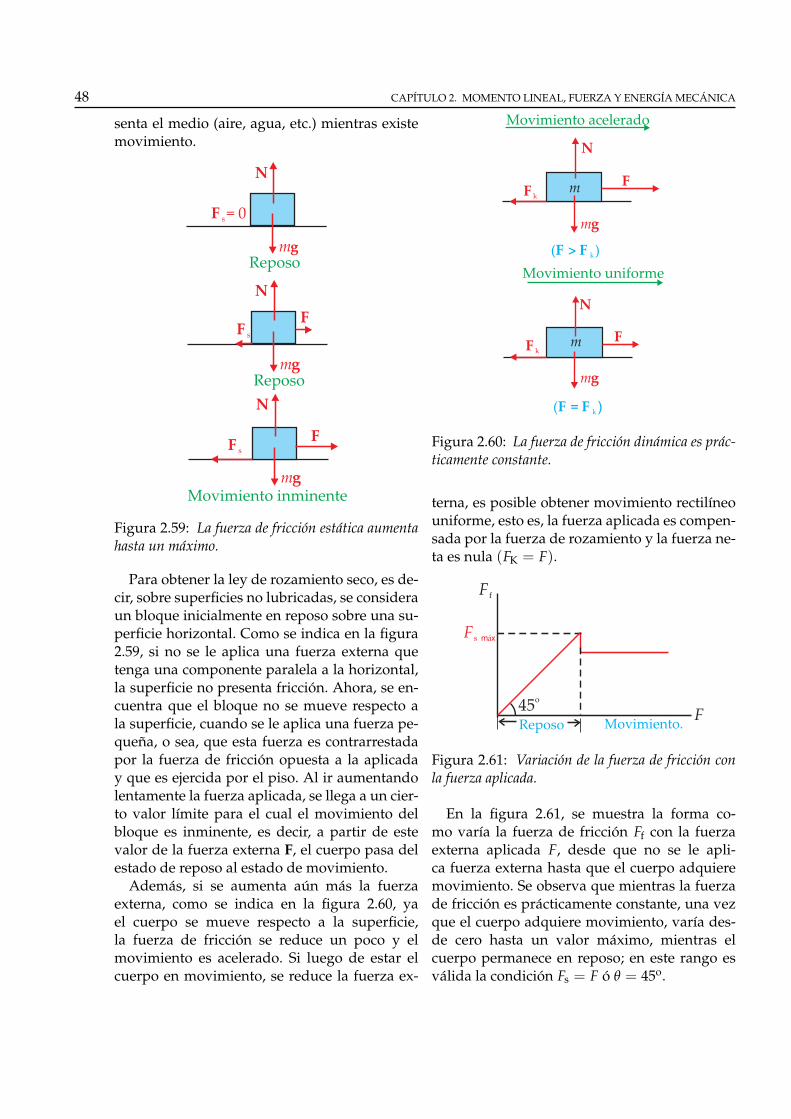
48 CAPÍTULO 2. MOMENTO LINEAL, FUERZA Y ENERGÍA MECÁNICA
senta el medio (aire, agua, etc.) mientras existemovimiento.
F s = 0
N
mg
F s
mg
N
F s
mg
N
F
F
Reposo
Reposo
Movimiento inminente
Figura 2.59: La fuerza de fricción estática aumentahasta un máximo.
Para obtener la ley de rozamiento seco, es de-cir, sobre superficies no lubricadas, se consideraun bloque inicialmente en reposo sobre una su-perficie horizontal. Como se indica en la figura2.59, si no se le aplica una fuerza externa quetenga una componente paralela a la horizontal,la superficie no presenta fricción. Ahora, se en-cuentra que el bloque no se mueve respecto ala superficie, cuando se le aplica una fuerza pe-queña, o sea, que esta fuerza es contrarrestadapor la fuerza de fricción opuesta a la aplicaday que es ejercida por el piso. Al ir aumentandolentamente la fuerza aplicada, se llega a un cier-to valor límite para el cual el movimiento delbloque es inminente, es decir, a partir de estevalor de la fuerza externa F, el cuerpo pasa delestado de reposo al estado de movimiento.
Además, si se aumenta aún más la fuerzaexterna, como se indica en la figura 2.60, yael cuerpo se mueve respecto a la superficie,la fuerza de fricción se reduce un poco y elmovimiento es acelerado. Si luego de estar elcuerpo en movimiento, se reduce la fuerza ex-
F k
mg
N
F
Movimiento acelerado
m
( )F > F k
F k
mg
N
F
Movimiento uniforme
( )F = F k
m
Figura 2.60: La fuerza de fricción dinámica es prác-ticamente constante.
terna, es posible obtener movimiento rectilíneouniforme, esto es, la fuerza aplicada es compen-sada por la fuerza de rozamiento y la fuerza ne-ta es nula (FK = F).
Reposo Movimiento.
F f
F
Fs máx
45o
Figura 2.61: Variación de la fuerza de fricción conla fuerza aplicada.
En la figura 2.61, se muestra la forma co-mo varía la fuerza de fricción Ff con la fuerzaexterna aplicada F, desde que no se le apli-ca fuerza externa hasta que el cuerpo adquieremovimiento. Se observa que mientras la fuerzade fricción es prácticamente constante, una vezque el cuerpo adquiere movimiento, varía des-de cero hasta un valor máximo, mientras elcuerpo permanece en reposo; en este rango esválida la condición Fs = F ó θ = 45o.

2.9. FUERZA DE FRICCIÓN ENTRE SUPERFICIES EN CONTACTO 49
La fuerza de fricción que obra entre superfi-cies que se encuentran en reposo una respecto ala otra, se llama fuerza de rozamiento estático, Fs,encontrándose experimentalmente que
Fs ≤ µsN. (2.64)
La fuerza de fricción estática máxima, se obtienecuando
Fs,máx = µsN, (2.65)
y corresponde a la mínima fuerza necesariapara que se inicie el movimiento de una super-ficie respecto a la otra.
En las ecuaciones (2.64) y (2.65) µs es el coefi-ciente de rozamiento estático y N es la magnitudde la normal.
Por otro lado, la fuerza de rozamiento queobra entre superficies en movimiento relativo,se llama fuerza de rozamiento cinético o dinámico,Fk, y experimentalmente se encuentra que
Fk = µkN, (2.66)
con µK coeficiente de rozamiento cinético o dinámi-co.
El experimento también muestra que lafuerza de fricción es independiente tanto delárea de contacto como de la velocidad.
De acuerdo con las expresiones (2.64) y (2.66),los valores de los coeficientes de fricción de-penden de la naturaleza de las dos superficiesen contacto, es decir, son una propiedad derelación entre superficies. Las ecuaciones (2.65)y (2.66), indican que la relación entre los coe-ficientes de fricción estático y cinético es de laforma
µs > µk,
ya que en ambos casos N es la magnitud de lanormal.
En la tabla 2.1, se muestran los coeficientesde fricción estático y dinámico para algunassuperficies. Se observa que estos coeficientesdependen del material de las superficies que seencuentren en contacto, por ello se dice que sonuna propiedad de relación entre superficies.Igualmente, se aprecia que el coeficiente defricción estático es mayor que el coeficiente de
fricción dinámico, como se encontró anterior-mente.
Tabla 2.1 Coeficientes de fricción
Superficies µs µk
Acero - acero 0.74 0.57Aluminio - acero 0.61 0.47
Cobre - acero 0.53 0.36Madera - madera 0.25 − 0.50 0.20
Vidrio - vidrio 0.94 0.40Metal - metal (lubricado) 0.15 0.06
Hielo - hielo 0.10 0.03Caucho - concreto seco 1.20 0.85
Caucho - concreto húmedo 0.80 0.60
¿Es el rozamiento un mal necesario? En la vi-da cotidiana la fuerza de fricción se manifiestade formas diversas; si no se presentara, muchosfenómenos comunes ocurrirían de manera dife-rente.
En un día lluvioso, cuando se camina so-bre superficies poco ásperas, por ejemplo so-bre piso vitrificado, muchas veces cuesta trabajoevitar las caídas; hasta movimientos cómicos, sedeben hacer para evitarlas. Esto permite recono-cer que, comúnmente, las superficies por las quese camina poseen una propiedad importante, lafricción, gracias a la cual se puede conservar elequilibrio sin mucho esfuerzo. Situaciones simi-lares a las anteriores se presentan, cuando seviaja en bicicleta sobre asfalto mojado ó cuan-do un auto frena sobre piso pantanoso. De estaforma se hace necesario que la superficie pre-sente fricción para evitar los accidentes y con-gestiones ya que el rozamiento permite explicaren parte por qué en días lluviosos el tráfico esbastante complicado en las grandes ciudades.
Aunque en los casos anteriores es indispen-sable la fuerza de fricción, en otras situacionesno lo es, como en las máquinas industrialesdonde los ingenieros procuran evitarla al má-ximo, para prevenir un desgaste rápido de laspiezas.
O sea que aunque en algunos casos, la fricciónno es deseable, en la mayoría de situaciones esindispensable, ya que da la posibilidad de cami-

50 CAPÍTULO 2. MOMENTO LINEAL, FUERZA Y ENERGÍA MECÁNICA
nar, de estar sentados, de trabajar y estudiar sinel temor que los libros o que el escritorio resbale,o que el lápiz se escurra entre los dedos.
Si el rozamiento no existiera, los cuerpos conel tamaño de una gran piedra, o un pequeñograno de arena, es decir, independiente de susdimensiones, no podrían apoyarse unos sobreotros, todos empezarían a resbalar; de igual ma-nera la tierra sería una esfera sin rugosidades,igual que una gota de agua. Similarmente, sinfricción, los clavos y tornillos se saldrían de lasparedes, no sería posible sujetar cuerpos con lasmanos.
En síntesis la fricción es un fenómeno nece-sario en la mayoría de las actividades diarias delhombre, aunque en algunos casos es un mal quese debe evitar al máximo.
Ejemplo 2.17.Un bloque de masa m, se encuentra enreposo sobre un plano inclinado que for-ma un ángulo θ con la horizontal, comose muestra en la figura. a) Si el coeficientede fricción entre las superficies en contac-to es µ, determine el ángulo θ a partir delcual el cuerpo inicia su movimiento. b) Siµ = 0.1, 0.3, 0.5 y 0.6, hallar los valorescorrespondientes de θ.
q
m
SoluciónDiagrama de cuerpo libre para el bloque,donde Fs es la fuerza de fricción estáticapuesto que el bloque está en reposo.
q
mg
NFs
Ecuaciones que garantizan el estadode reposo para el bloque
+ ↗ ∑ Fx = 0; Fs − mg senθ = 0 (1)
↖ +∑ Fy = 0; N − mg cosθ = 0, (2)
Fs ≤ µsN. (3)
a) De la ecuación (1) se tiene que la fuerzade fricción está dada por
Fs = mg senθ, (4)
o sea que el ángulo θ, para el cual elmovimiento del bloque es inminente, seobtiene si esta fuerza de fricción se hacemáxima. Ahora de la ecuación (3), estacondición se satisface cuando
Fs,máx = µsN mín. (5)
De este modo, mediante las ecuaciones (2),(4) y (5), se llega a la expresión
θmáx = tan−1µs. (6)
b) Mediante la ecuación (6) se obtienen losvalores de θmáx, mostrados en la siguientetabla para los diferentes valores de µ.
µs 0.1 0.3 0.5 0.6θmáx(
o) 5.7 16.7 26.6 31
Al comparar los valores de µs y θmáx, sepuede concluir que a mayor valor de µs
mayor es el ángulo a partir del cual elmovimiento del bloque es inminente.
Ejercicio 2.17.Un bloque, de masa m, se sostiene sobreuna pared vertical mediante una fuerzahorizontal F , como se indica en la figura.El coeficiente de fricción entre las superfi-cies en contacto es µs. a) Haga el diagra-ma de cuerpo libre para bloque. b) Planteelas ecuaciones que garantizan el estado delbloque. c) De los términos que aparecen enla ecuación (2.64), ¿cuáles son constantesen este caso? d) Determine la magnitudde la fuerza F, cuando el movimiento delbloque es inminente. ¿Cómo es la magni-tud de la fuerza obtenida?
Ejemplo 2.18.Un bloque de masa m, asciende sobre la

2.9. FUERZA DE FRICCIÓN ENTRE SUPERFICIES EN CONTACTO 51
F m
superficie del plano inclinado de la figura,debido a la acción de la fuerza F. El coe-ficiente de fricción entre las superficies encontacto es µ y la magnitud de la fuerzaaplicada es 2mg. Cuando el bloque ha as-cendido una altura h, determine a) El tra-bajo realizado por la fuerza resultante. b)El trabajo neto realizado sobre el bloque,considerando por separado cada una delas fuerzas. c) El valor del trabajo total sim = 500 g, h = 0.5 m y µ = 0.3, para dife-rentes valores del ángulo θ.
h
F
m
q
F´
Solucióna) De acuerdo con el diagrama de cuer-
po libre mostrado en la siguiente figura, lacomponente de la fuerza neta paralela aldesplazamiento del bloque, es constante yestá dada por
Fx = mg(2 − senθ − µcosθ),
donde se ha tomado el sentido demovimiento como positivo. Así, el traba-jo realizado sobre el bloque al desplazarsela distancia h/senθ es
W = mgh(2cscθ − 1 − µcotθ).
h
N F
F´
mgq
b) El trabajo realizado por cada fuerza es
WF = 2mghcscθ,WN = 0,
ya que es una fuerza perpendicular al des-plazamiento.
Wmg = −mgh,WFk = −µmghcotθ.
Se observa que la única fuerza que realizatrabajo positivo es la fuerza aplicada, yaque esta actúa en el sentido del desplaza-miento.
Sumando los trabajos anteriores, se en-cuentra que el trabajo neto, total o resul-tante, realizado por las fuerzas que actúansobre el bloque está dado por
W = mgh(2cscθ − 1 − µcotθ),
que es idéntico al obtenido en el numeralanterior.c) Reemplazando valores se obtiene la si-guiente tabla
θ(o) W(J)
10 21.6
30 6.08
45 3.74
60 2.78
75 2.43
De acuerdo con estos resultados, se tieneque el trabajo neto disminuye a medidaque la inclinación del plano se incremen-ta. ¿Por qué?
Ejercicio 2.18.Halle el valor de θ, para el cual el trabajorealizado sobre el bloque del ejemplo 2.18es mínimo.
Ejemplo 2.19. Como se indica en la figura,un bloque de masa M asciende con veloci-dad constante v por una colina que forma

52 CAPÍTULO 2. MOMENTO LINEAL, FUERZA Y ENERGÍA MECÁNICA
un ángulo θ con la horizontal. El bloqueestá unido a un motor mediante una cuer-da que pasa por una polea y el coeficientede fricción entre las superficies en contac-to es µ . Determine, en función del ánguloθ, la potencia desarrollada por el motor.
M
q
F´
SoluciónDiagrama de cuerpo libre para el
bloque
N F
F´
Mgq
Como el bloque se encuentra en equi-librio dinámico, la fuerza F ejercida por elmotor tiene magnitud
F = Mg(senθ + µcosθ).
De esta forma, la potencia desarrolladapor el motor es
P = Mgv(senθ + µcosθ).
En la siguiente tabla, se muestran los valo-res del término entre paréntesis, para dife-rentes valores del ángulo θ y del coeficien-te de fricción µ.
θ(o) 0 15 30 45 60 75 90
µ
0.2 0.2 0.45 0.67 0.85 0.97 1.02 1.0
0.4 0.4 0.64 0.85 0.99 1.07 1.07 1.0
0.6 0.6 0.84 1.02 1.13 1.17 1.12 1.0
0.8 0.8 1.03 1.19 1.27 1.27 1.17 1.0
De la tabla 2.3 se pueden obtener dos con-clusiones
a) Se observa que para un valor dadode µ, la potencia aumenta hasta unvalor máximo, a partir del cual de-crece hasta un valor que tiende a launidad.
b) Adicionalmente, para un valor da-do del ángulo θ, la potencia aumentacontinuamente con el aumento en elcoeficiente de fricción
Ejemplo 2.20. Un bloque de masa m, sesuelta desde la parte más alta del plano in-clinado de la figura. El coeficiente de fric-ción entre las superficies en contacto es µ.Determine a) La velocidad del bloque, enel instante que llega a la base del plano in-clinado. b) El ángulo mínimo a partir delcual tiene significado físico la velocidad.
h
m
q
F
SoluciónDiagrama de cuerpo libre para el bloque
h
N
F
mg
q
A
B
a) Por el teorema del trabajo y la ener-gía, se tiene
W = 12 mv2
B, (1)
donde el trabajo total realizado sobre elbloque, cuando se mueve entre las posi-ciones A y B, es
W = mgh(1−µcotθ). (2)
Reemplazando la ecuación (2) en laecuación (1), se obtiene para la velocidad

2.9. FUERZA DE FRICCIÓN ENTRE SUPERFICIES EN CONTACTO 53
del bloque en el punto B
vB =√
2gh(1−µcotθ). (3)
En la tabla siguiente, se indica la formacomo varía el término entre paréntesis dela ecuación (3), donde NO significa que lavelocidad no tiene significado físico.
θ(o) 10 15 30 45 60 90
µ
0.2 NO 0.25 0.65 0.80 0.88 1.0
0.4 NO NO 0.31 0.60 0.77 1.0
0.6 NO NO NO 0.40 0.65 1.0
0.8 NO NO NO 0.20 0.54 1.0
1.0 NO NO NO 0 0.42 1.0
Se observa que para velocidades con sig-nificado físico, si el ángulo es fijo menores la velocidad del bloque a medida queaumenta el coeficiente de fricción, es de-cir, entre más ásperas sean las superficies.Ahora, para un coeficiente de fricción fijo,a mayor ángulo mayor es la velocidad delbloque en el punto B
b) Para que la velocidad tenga signifi-cado físico, de acuerdo con la ecuación (3),se debe satisfacer la condición
tanθ ≥ µ. (4)
Así, el ángulo mínimo a partir del cual lavelocidad tiene significado físico, se ob-tiene al tomar la igualdad en la ecuación(4), esto es
θmín = tan−1µ. (5)
En la tabla, se muestran los valores deθ mín correspondiente a los valores delcoeficiente de fricción considerados en la
tabla anterior.
µ θmín(o)
0.2 11.3
0.4 21.8
0.6 31.0
0.8 38.7
1.0 45.0
Se concluye entonces que entre másásperas sean las superficies en contacto,mayor es el ángulo a partir del cual elbloque inicia el movimiento.
Ejemplo 2.21.Desde la base de un plano inclinado, queforma un ángulo de 30o con la horizontal,se lanza un bloque de masa 500 g, con unavelocidad de 15.0 m s−1. El coeficiente defricción entre las superficies en contactoes 0.2. a) Dibuje todas las fuerzas queactúan sobre el bloque. b) Determine laaceleración del bloque. c) Halle la fuerzaque la superficie ejerce sobre el bloque.d) Plantee las ecuaciones cinemáticasde posición y velocidad, que rigen elmovimiento del bloque. e) Encuentreel tiempo durante el cual asciende elbloque por el plano inclinado. f) Obtenga,respecto a la base del plano inclinado, laaltura máxima alcanzada por el bloque.
SoluciónDe acuerdo con el enunciado, las canti-dades dadas son θ = 30o, m = 500 g ≡0.5 kg,, µ = 0.2, vo = 15.0 m s−1 y la canti-dad conocida g = 9.8 m s−2.a) Diagrama de cuerpo libre para elbloque, donde Fk es la fuerza de friccióndinámica ya que el bloque se encuentra enmovimiento.b) Ecuaciones de movimiento para elbloque.
+ ↗ ∑ Fx = ma; − mg senθ − Fk = ma.(1)

54 CAPÍTULO 2. MOMENTO LINEAL, FUERZA Y ENERGÍA MECÁNICA
q
mg
N
Fk
Movimiento
↖ +∑ Fy = 0; N − mg cosθ = 0. (2)
DondeFk = µN. (3)
Mediante las ecuaciones (1), (2) y (3), seencuentra que la aceleración está dada por
a = −g (senθ + µ cosθ),
donde al reemplazar los valores corres-pondientes se obtiene
a = −6.6 m s−2,
que es un valor mayor al obtenido en elejemplo 2.5 y menor que la aceleración dela gravedad como se esperaba.c) Por la ecuación (2), se tiene que la fuerzanormal tiene igual valor que cuando no sepresenta fricción, esto es
N = mg cosθ.
d) De acuerdo con el sistema de referenciaelegido, el bloque asciende paralelamenteal eje x con una aceleración de −6.6 m s−2.Así las ecuaciones cinemáticas de posicióny velocidad son
x = 15t − 3.3t2, y v = 15 − 6.6t.
e) Como el bloque asciende conmovimiento rectilíneo uniformementeretardado, llega un momento en el cualsu velocidad se hace cero. Mediante laecuación cinemática de velocidad, endicho instante t = 2.27 s, que es un tiempomenor al encontrado cuando no hayfricción.f) Reemplazando t = 2.27 s en la ecuacióncinemática de posición, se encuentra queel máximo desplazamiento sobre el planoinclinado es xmáx = 17.05 m. Así, de lafigura anterior se encuentra que la al-tura máxima alcanzada por el bloque es
8.53 m,correspondiendo a un valor menorque el obtenido cuando no se presenta fric-ción.
Ejercicio 2.19.Desde la base de un plano inclinado, queforma un ángulo de 30o con la horizon-tal, se lanza un bloque de masa 0.5 kg,con una velocidad de 15.0 m s−1. El coe-ficiente de fricción entre las superficiesen contacto es 0.15. a) Dibuje todas lasfuerzas que actúan sobre el bloque. b) De-termine la aceleración del bloque. c) Hallela fuerza que la superficie ejerce sobre elbloque. d) Plantee las ecuaciones cinemá-ticas de posición y velocidad, que rigen elmovimiento del bloque. e) ¿Cuánto tiem-po asciende el bloque por el plano inclina-do? f) ¿Hasta qué altura, respecto a la basedel plano inclinado, asciende el bloque?Compare los resultados con los obtenidoscuando no se presenta fricción.
2.9.1. Fuerza de fricción en fluidos
Los fluidos presentan dos tipos de fuerza comoson el empuje y la fuerza resistiva o de fricciónque actúan sobre los cuerpos que se muevenen su interior. En esta sección sólo se analiza elefecto de la fuerza resistiva que presentan losfluidos a los cuerpos en movimiento. Como seilustra en la figura 2.62, cuando un cuerpo semueve en un fluido (líquido o gas) y las veloci-dades no son muy grandes, aproximadamen-te se puede obtener que la fuerza de fricciónes proporcional a la velocidad pero con sentidoopuesto, es decir
Ff = −Kηv, (2.67)
donde K es el coeficiente de fricción que dependede la forma del cuerpo. En el caso de un cuerpoesférico de radio R, este coeficiente de friccióntiene la forma
K = 6πR,
expresión conocida como ley de Stokes.η es el coeficiente de viscosidad que depende de
la fricción entre las diferentes capas del fluido,
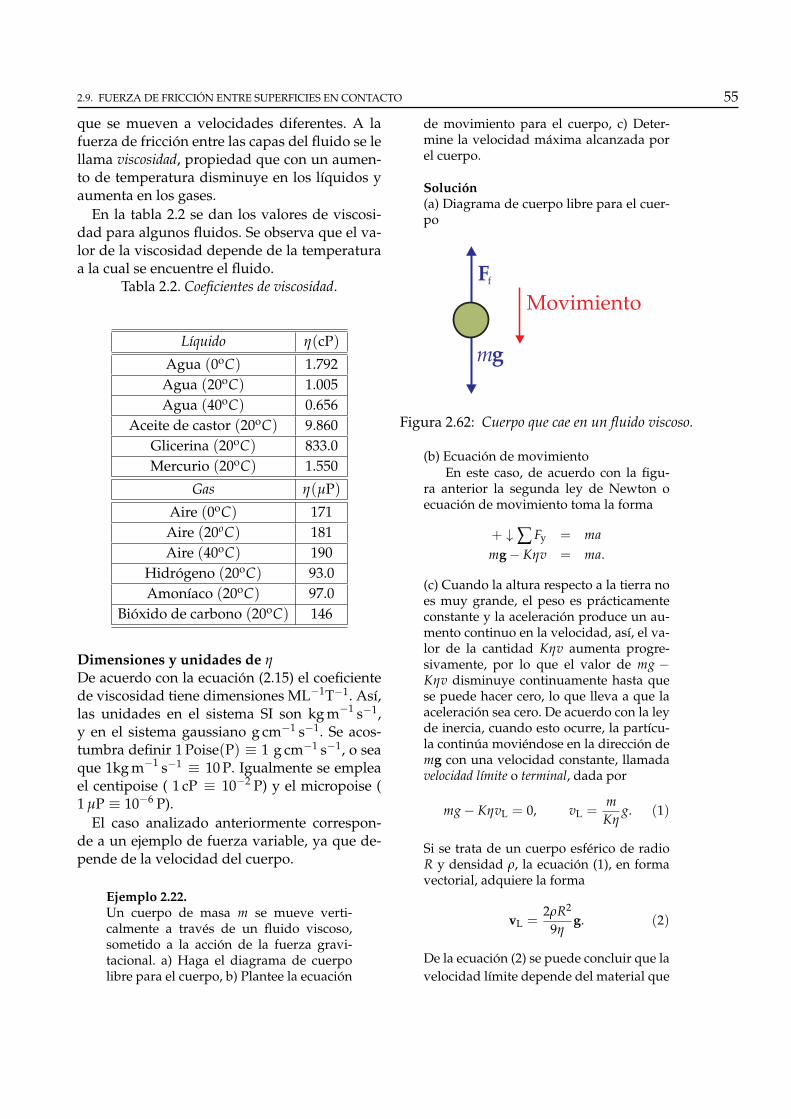
2.9. FUERZA DE FRICCIÓN ENTRE SUPERFICIES EN CONTACTO 55
que se mueven a velocidades diferentes. A lafuerza de fricción entre las capas del fluido se lellama viscosidad, propiedad que con un aumen-to de temperatura disminuye en los líquidos yaumenta en los gases.
En la tabla 2.2 se dan los valores de viscosi-dad para algunos fluidos. Se observa que el va-lor de la viscosidad depende de la temperaturaa la cual se encuentre el fluido.
Tabla 2.2. Coeficientes de viscosidad.
Líquido η(cP)
Agua (0oC) 1.792Agua (20oC) 1.005Agua (40oC) 0.656
Aceite de castor (20oC) 9.860Glicerina (20oC) 833.0Mercurio (20oC) 1.550
Gas η(µP)
Aire (0oC) 171Aire (20oC) 181Aire (40oC) 190
Hidrógeno (20oC) 93.0Amoníaco (20oC) 97.0
Bióxido de carbono (20oC) 146
Dimensiones y unidades de ηDe acuerdo con la ecuación (2.15) el coeficientede viscosidad tiene dimensiones ML−1T−1. Así,las unidades en el sistema SI son kg m−1 s−1,y en el sistema gaussiano g cm−1 s−1. Se acos-tumbra definir 1 Poise(P) ≡ 1 g cm−1 s−1, o seaque 1kg m−1 s−1 ≡ 10 P. Igualmente se empleael centipoise ( 1 cP ≡ 10−2 P) y el micropoise (1 µP ≡ 10−6 P).
El caso analizado anteriormente correspon-de a un ejemplo de fuerza variable, ya que de-pende de la velocidad del cuerpo.
Ejemplo 2.22.Un cuerpo de masa m se mueve verti-calmente a través de un fluido viscoso,sometido a la acción de la fuerza gravi-tacional. a) Haga el diagrama de cuerpolibre para el cuerpo, b) Plantee la ecuación
de movimiento para el cuerpo, c) Deter-mine la velocidad máxima alcanzada porel cuerpo.
Solución(a) Diagrama de cuerpo libre para el cuer-po
mg
Ff
Movimiento
Figura 2.62: Cuerpo que cae en un fluido viscoso.
(b) Ecuación de movimientoEn este caso, de acuerdo con la figu-
ra anterior la segunda ley de Newton oecuación de movimiento toma la forma
+ ↓ ∑ Fy = mamg − Kηv = ma.
(c) Cuando la altura respecto a la tierra noes muy grande, el peso es prácticamenteconstante y la aceleración produce un au-mento continuo en la velocidad, así, el va-lor de la cantidad Kηv aumenta progre-sivamente, por lo que el valor de mg −Kηv disminuye continuamente hasta quese puede hacer cero, lo que lleva a que laaceleración sea cero. De acuerdo con la leyde inercia, cuando esto ocurre, la partícu-la continúa moviéndose en la dirección demg con una velocidad constante, llamadavelocidad límite o terminal, dada por
mg − KηvL = 0, vL =mKη
g. (1)
Si se trata de un cuerpo esférico de radioR y densidad ρ, la ecuación (1), en formavectorial, adquiere la forma
vL =2ρR2
9ηg. (2)
De la ecuación (2) se puede concluir que lavelocidad límite depende del material que

56 CAPÍTULO 2. MOMENTO LINEAL, FUERZA Y ENERGÍA MECÁNICA
está hecho el cuerpo (ρ), depende de la for-ma y tamaño del cuerpo (R2) además dedepender del fluido en el cual el cuerpo semueve (η), en otras palabras, la velocidaddepende de las propiedades físicas del sis-tema.
2.10. Fuerza de fricción y sistemano conservativo
Se considera una partícula sometida a la acciónde varias fuerzas simultáneamente aplicadas. Sial evaluar el trabajo realizado por estas fuerzasen una trayectoria cerrada, se encuentra que esdiferente de cero, se tiene que al menos hay unafuerza que no permite que la energía se con-serve, es decir, la energía mecánica se disipa yde manera no recuperable. A las fuerzas de estetipo se les conoce como fuerzas no conservativas.
La experiencia muestra que cuando se lanzaun cuerpo sobre una superficie horizontal ru-gosa, el cuerpo pierde toda su energía mecánicaque se transforma en calor y hace que las super-ficies en contacto se calienten. Por ello, la fuerzade fricción es una fuerza no conservativa.
En general, si sobre una partícula actúan si-multáneamente fuerzas conservativas y no con-servativas se tiene que el trabajo total, realizadopor todas las fuerzas, es dado por
WT = Wc + Wnc ,
donde Wc es el trabajo realizado por las fuerzasconservativas y Wnc el efectuado por las fuerzasno conservativas. Además, como siempre esválido que el trabajo total, realizado por todaslas fuerzas, está dado por WT = ∆Ek, y para elcaso de las fuerzas conservativas está dado porWc = −∆Ep, se tiene que el trabajo realizadopor las fuerzas no conservativas se puede ex-presar en la forma
Wnc = ∆Ek + ∆Ep
= EB − EA = ∆E. (2.68)
Cuando se determina el trabajo realizado porla fuerza de fricción, este es negativo, o sea, laenergía total disminuye. Así, la ecuación (2.68)
da la pérdida de energía total, debida a lasfuerzas no conservativas. En cualquier caso,donde se presenten fuerzas no conservativas,representa una transformación de energía. En elcaso de la fuerza de fricción, la energía mecáni-ca se transforma en energía calórica.
Ejemplo 2.23.Una partícula de masa m se suelta desdeel punto A del carril mostrado en la figu-ra. Analizar el comportamiento energéticode la partícula mientras se encuentra enmovimiento sobre el carril, cuando a) Nose considera la fricción. b) Se presenta fric-ción entre las superficies en contacto.
A
B CEp = 0
Solucióna) Entre A y B las fuerzas que actúan sonel peso y la normal. La normal no realizatrabajo por ser perpendicular al desplaza-miento y el peso, que es una fuerza conser-vativa, realiza trabajo. De este modo, entreA y B el sistema es conservativo, es decir,la energía total de la partícula se conserva.De acuerdo con esto, mientras la partícu-la desciende la energía potencial gravita-cional se transforma en energía cinética. Apartir del punto B, ni la normal ni el pesorealizan trabajo, o sea que el sistema siguesiendo conservativo, de tal forma que elcuerpo se mueve con velocidad constan-te para garantizar que la energía total seconserve en esta parte de la trayectoria.
b) Cuando se presenta fricción en-tre las superficies en contacto, el sistemaya no es conservativo en ninguno de lostramos de la figura. En este caso, mientrasdesciende entre A y B, disminuye la ener-gía potencial transformándose parte deella en energía cinética y el resto disipán-dose en forma de calor, lo que conlle-va a una disminución de la energía total.Igualmente, a partir de B, donde sólo setiene energía cinética, la energía continúadisipándose en calor hasta que la partícu-la alcanza un estado de reposo. En sínte-sis, toda la energía mecánica que tenía la

2.11. ENUNCIADOS 57
partícula inicialmente, se disipa completa-mente en calor.
Ejemplo 2.24.Mediante el pequeño bloque de masa m,un resorte de constante k sufre una de-formación d, como se muestra en la figu-ra. Una vez que el bloque es dejado en li-bertad, se mueve sobre la superficie hori-zontal hasta el punto A, a partir del cualasciende por un plano inclinado. El bloqueno está adherido al resorte, suponga queel coeficiente de fricción entre las superfi-cies en contacto es µ y que la distancia OAes 2d. a)Halle la rapidez del bloque cuan-do pasa por el punto A. b) Encuentre eldesplazamiento máximo del bloque sobreel plano inclinado. c) Halle el valor de lascantidades obtenidas en los numerales an-teriores si k = 100Nm−1, m = 5g, d = 2cmy θ = 35o y µ = 0.4.
m
OEpg= 0
q
A
kd
B
Solucióna) En el trayecto horizontal, a diferenciadel ejemplo 3.5, el sistema no es conser-vativo ya que se presenta fricción sobre elbloque y la no conservación de la energíaexige que para este caso
−3µmgd = 12 mv2
A − 12 kd2,
de donde se encuentra que la rapidez en elpunto A es
vA =
√km
d2 − 6µgd.
Al comparar este resultado con elobtenido en el ejemplo 3.5, se tiene eltérmino adicional −6µgd, que reduce larapidez como consecuencia de la fricciónque actúa sobre el bloque. Además, se pre-senta una restricción respecto a la rapidez,y es que sólo son posibles magnitudes develocidad reales si se cumple la condición
kdm
≥ 6µg.
b) En el trayecto AB, el sistema sigue sien-do no conservativo, lo que permite encon-trar que el máximo desplazamiento sobre
el plano inclinado es
S =kd2 − 6µmgd
2mg(senθ + µcosθ),
donde aparece el mismo término adicionaldebido a la fricción. En este caso, el despla-zamiento tiene significado físico si el tér-mino del numerador es positivo.
c) Reemplazando valores se tiene quela rapidez y el máximo desplazamiento,respectivamente, están dados por
vA = 2.7 m s−1,S = 0.4 m.
2.11. ENUNCIADOS
1. La fuerza neta F que actúa sobre unapartícula, debido a las fuerzas F1 y F2 apli-cadas simultáneamente sobre ella, está di-rigida horizontalmente hacia la derecha,como se muestra en la figura. La magni-tud de la fuerza F1 es 10 N. (a) Utilizan-do la figura, muestre gráficamente que lostres vectores han sido trazados correcta-mente. (b) Determine las magnitudes de losvectores fuerza F y F2. Resolverlo por dosmétodos diferentes.
y
x45
o
F1
F
F2
2. Sobre la partícula de la figura, actúan lasfuerzas F1 y F2, con magnitudes respectivasde 800 N y 500 N. Encuentre (a) las com-ponentes rectangulares de las fuerzas F1 yF2, (b) los ángulos que cada fuerza formacon cada uno de los ejes de coordenadas,(c) el ángulo entre las fuerzas F1 y F2 y (d)la magnitud y dirección de la fuerza netaque actúa sobre la partícula debido a lasdos fuerzas aplicadas.
Los numerales 3. y 4. se refieren ala siguiente información. Las gráficasmostradas, corresponden a la forma como

58 CAPÍTULO 2. MOMENTO LINEAL, FUERZA Y ENERGÍA MECÁNICA
xy
z
70o
40o
30o25
o
F1
F2
puede variar la posición (x), la velocidad(v) o la aceleración (a) de un cuerpo en fun-ción del tiempo.
t
v
tto
v
vo
t
x
tto
x
t
a
tto
a
t
v
tto
v
t
x
tto
x
xo
t
a
tto
a
ao
(a) (b)
(c) (d)
(e) (f)
3. ¿Cuál pareja de gráficas corresponde a unMRU? Explique.
4. ¿Cuál pareja de gráficas corresponde a unMRUA? Explique.
5. ¿Cuáles gráficas permiten conocer el des-plazamiento de un cuerpo? Explique
6. ¿Cuáles gráficas permiten conocer la ve-locidad del cuerpo? Explique.
7. ¿Cuáles gráficas permiten conocer el cam-bio en la velocidad del cuerpo? Explique.
8. La aceleración de una partícula de masa7 kg, que se mueve en una trayectoria rec-tilínea, está dada por a = 3t − 2, donde ase da en m s−2 y t en s. (a) Halle la veloci-dad y la posición de la partícula, en fun-ción del tiempo, sabiendo que en t = 0, lapartícula pasa por el origen con una rapi-dez de 10m s‘−1. (b) Encuentre la posición,la velocidad y la aceleración de los partícu-la en los instantes t = 0.5 s y t = 1.5 s. (c)¿Qué movimiento tiene la partícula en los
instantes considerados en el numeral ante-rior? (d) Haga las gráficas de posición, ve-locidad y aceleración, en función del tiem-po.
9. Un auto A se mueve hacia la derechapor una pista recta y con una rapi-dez 80 km h−1. El conductor del auto Aadquiere una aceleración de 3 m s−2 cuan-do observa otro auto B que se encuentra50 m delante de él sobre un carril parale-lo. Suponga que el auto B se mueve en elmismo sentido que el auto A con una ve-locidad de magnitud 60 km h−1. (a) Hallela posición en la cual un auto pasa frenteal otro. (b) Encuentre el momento lineal decada auto si cada uno tiene una masa de103kg. Resuelva la misma situación para elcaso en el cual cada auto se mueve hacia elotro.
10. ¿Será posible encontrar una situación físi-ca, de un cuerpo en movimiento, en la queel momento lineal sea paralelo a la acelera-ción? Explique.
11. El cuerpo A se lanza verticalmente haciaarriba desde una altura de 5 m respecto a latierra, con una rapidez de 10 m s−1. A los 2 sse lanza el cuerpo B desde la tierra con unavelocidad de magnitud 20 m s−1. (a) ¿Ba-jo qué modelo se debe tratar cada cuerpo?¿Qué fuerza actúa sobre cada cuerpo unavez que es lanzado? (b) Determine el ins-tante en que un cuerpo pasa frente al otro.(c) Halle la posición donde un cuerpo pasafrente al otro. (d) ¿Cuál llega primero a tie-rra? (e) ¿Dónde se encuentra un cuerpo, enel instante que el otro llega primero a tie-rra? (f) En el instante anterior, ¿el cuerpoen movimiento asciende o desciende?
12. La velocidad de una partícula que semueve en el plano xy, está dada por la ex-presión v(t) = (−2 + 3t)i + 4j, donde v seda en m s−1 y t en s. (a) Halle, en funcióndel tiempo, el vector posición y el vectoraceleración de la partícula. (b) Encuentre elvector posición y la velocidad de la partícu-

2.11. ENUNCIADOS 59
la en el instante t = 2.5 s. (c) ¿La partícu-la cruza los ejes coordenados? (d) Obtengala ecuación de la trayectoria seguida por lapartícula. (e) Dibuje la trayectoria seguidapor la partícula.
13. La magnitud de la fuerza neta que actúasobre un auto con movimiento rectilíneo,varía con la magnitud de la aceleración enla forma mostrada en la figura. ¿Cuál es elsignificado físico de la pendiente de la rec-ta? Halle el valor numérico correspondien-te.
16a (m s )
-2
2 4 6 8
48
112
80
F (N)
14. Un camión y su carga, con una masa de2 × 104 kg, se mueve horizontalmente ha-cia la derecha con un momento lineal demagnitud 2.5× 105 kg m s−1, cuando obser-va que el semáforo cambia a rojo. El tiem-po de reacción del conductor es 6.5 s y elcamión frena generando una fuerza netasobre él de 1.2× 105 N. Encuentre la distan-cia a la que se encuentra el semáforo, si elcamión se detiene exactamente en él.
15. Cuando sobre el bloque de masa M seaplica la fuerza horizontal F, los bloquesdescienden sobre el plano inclinado y lisocon momento lineal constante. (a) ¿Bajoqué modelo de cuerpo se debe tratar ca-da bloque? ¿Por qué? ¿Qué movimientoadquieren los bloques una vez que se apli-ca la fuerza F? ¿Por qué? (b) Haga el dia-grama de cuerpo libre para cada bloque yplantee las ecuaciones dinámicas que rigensu movimiento. (c) Halle la fuerza F quees necesario aplicar al sistema y la fuerzade contacto entre los bloques. (d) Encuen-tre el tiempo que tardan los bloques en lle-gar al punto B sabiendo que la rapidez es
v y que partieron del punto A que se en-cuentra a una altura h respecto a la basedel plano inclinado. (e) Halle la fuerza quela superficie del plano inclinado ejerce so-bre cada bloque. (f) Calcule el valor de lascantidades obtenidas en los numerales an-teriores si θ = 28o, M = 2 kg, m = 700 g,h = 950 cm y v = 3 m · s−1.
A
B
hMm
F
16. Dos cajas con masas m y M se encuen-tran en contacto sobre una superficie ho-rizontal lisa. Como se ilustra en la figu-ra, cuando sobre la caja más grande seaplica una fuerza F que forma un ángu-lo θ con la horizontal, las cajas parten delreposo. (a) ¿Bajo qué modelo de cuerpose debe tratar cada caja? ¿Por qué? ¿Quémovimiento adquieren las cajas una vezque se aplica la fuerza F? ¿Por qué? (b) Ha-ga el diagrama de cuerpo libre para cadacaja y plantee las ecuaciones dinámicas querigen su movimiento. (c) Halle la acelera-ción del sistema y la fuerza de contacto en-tre los bloques. d) Encuentre el tiempo quetardan los bloques en sufrir un desplaza-miento de magnitud d y la respectiva ve-locidad. (e) Halle la fuerza que la super-ficie del plano horizontal ejerce sobre ca-da bloque. (f) Calcule el valor de las canti-dades obtenidas en los numerales anterio-res si M = 10 kg, m = 25 kg y d = 980 cm yθ = 32o.
M
F
mq
17. Como se muestra en la figura, los bloquesde masa m y 3m están conectados median-te una cuerda que pasa por una polea fija

60 CAPÍTULO 2. MOMENTO LINEAL, FUERZA Y ENERGÍA MECÁNICA
y por una polea móvil. (a) Si el bloque demasa m sufre un desplazamiento de mag-nitud d, ¿cuál es la magnitud del desplaza-miento del bloque de masa 3m? Explique.¿Qué se puede afirmar entonces sobre lamagnitud de la aceleración de los bloques?Explique. (b) En cada caso, haga el dia-grama de cuerpo libre para cada uno delos cuerpos de interés y plantee las ecua-ciones dinámicas que rigen el estado de ca-da cuerpo. (c) Encuentre la aceleración delos bloques. ¿El resultado encontrado estáde acuerdo con lo esperado? Explique. (d)Halle la tensión en la cuerda. ¿El resultadoobtenido está de acuerdo con lo esperado?Explique.(e) Resuelva para m = 700 g.
m
3m
m
3m
18. Los bloques, de masas m1 y m2, estánunidos mediante una cuerda que pasa poruna polea ideal como se ilustra en la figu-ra. El sistema parte del reposo y el bloquede masa m1 se mueve sobre el plano in-clinado liso que forma un ángulo θ con lahorizontal. (a) ¿Bajo qué modelo de cuer-po se debe tratar cada bloque? ¿Por qué?Haga el diagrama de cuerpo libre para ca-da bloque. (b) ¿Qué movimiento adquierecada bloque? ¿Por qué? Plantee las ecua-ciones de movimiento para cada bloque.(c) Halle la aceleración de los bloques yla tensión en la cuerda. ¿Los resultadosobtenidos están de acuerdo con lo esper-ado? Explique. (d) ¿Bajo qué condiciónmatemática el bloque de masa m1 descien-de sobre el plano inclinado? y ¿bajo quécondición el bloque de masa m2 desciendeverticalmente? Explique cada respuesta. (e)Resolver para m1 = 800 g, m2 = 500 g, si (i)θ = 32o y (ii) θ = 40o.
19. Una pelota se lanza desde una altura res-
m1
m2
q
pecto a la Tierra de 90 cm y con una ve-locidad de 90 kmh−1, formando un ángu-lo de 33o con la horizontal. (a) ¿Bajo quémodelo de cuerpo se debe tratar la pelota?¿Qué fuerza actúa sobre el cuerpo durantesu movimiento? ¿Cuál es la aceleración delcuerpo? (b) Determine el instante en el cualla pelota pasa por una altura de 9.5 m res-pecto a la tierra. ¿Qué puede concluir desu resultado? Explique. (c)¿Cuál es la posi-ción horizontal de la pelota en ese instan-te? (d) Halle la velocidad de la pelota en elinstante anterior. ¿La pelota asciende o des-ciende en dicho instante? (e) Resuelva losnumerales (b) a (d) en el momento que lapelota pasa por una altura de 50 cm respec-to a la tierra. (f) Encuentre el máximo des-plazamiento horizontal de la pelota.
20. Desde la parte alta de un árbol, un cazadorque se encuentra a una altura 2h respectoa la tierra, apunta directamente a un blan-co que se encuentra a una altura h respectoa la Tierra y a una distancia horizontal d.En el instante que sale el proyectil con unavelocidad vo, formando un ángulo θ con lahorizontal, el blanco se deja caer. (a) De-termine si el proyectil da en el blanco. (b)Halle la rapidez mínima necesaria para queel proyectil le de al blanco.
21. Los bloques de la figura se mantienen enla posición mostrada, mediante la cuerdaque los une y el resorte estirado de cons-tante k sujeto al bloque de masa m1. Elotro extremo del resorte está sujeto a unapared en la parte inferior del plano incli-nado. (a) Haga el diagrama de cuerpo li-bre para cada bloque. (b) Plantee las ecua-ciones que garantizan el estado de cadabloque. (c) Encuentre la magnitud de la ten-sión en la cuerda. ¿El resultado obtenidoestá de acuerdo con lo esperado? Explique.

2.11. ENUNCIADOS 61
(d) Halle la deformación del resorte. ¿Quécondición matemática debe satisfacer el án-gulo θ para que el resultado tenga significa-do físico? Explique. (e) Resuelva para m1 =700 g, m2 = 300 g, θ = 11o. Resuelva lasituación cuando el resorte se encuentracomprimido.
m1
m2
q
22. Un cuerpo, de masa m = 950 g, asciendepor un plano inclinado un ángulo θ = 25o,cuando se somete a una fuerza horizon-tal F1 de magnitud 20 N y a una fuerzaopuesta al desplazamiento F2 de magnitud10 N. Para un desplazamiento s = 750 cm,encuentre (a) el trabajo realizado sobre elcuerpo, por cada una de las fuerzas que ac-túan sobre él y (b) el trabajo neto realiza-do sobre el cuerpo, utilizando dos métodosdiferentes. (c) Halle el máximo desplaza-miento del cuerpo sobre el plano inclinado,si fue lanzado con una velocidad paralelaal plano de magnitud 12 m s−1. (d) Si ya noactúan las fuerzas F1 y F2, resuelva el nu-meral (c) por tres métodos diferentes.
23. Como se ilustra en la figura, un cuerpo, demasa m = 150 g y que se suelta del puntoA, se mueve sobre una superficie circularde radio 44 cm. El cuerpo se somete a unafuerza horizontal F1 de magnitud 30 N ya una fuerza opuesta al desplazamiento F2de magnitud 15 N. Encuentre (a) el trabajorealizado sobre el cuerpo, por cada una delas fuerzas que actúan sobre él, cuando semueve de A a B y de A a C, (b) el trabajoneto realizado sobre el cuerpo, utilizandodos métodos diferentes, cuando se muevede A a B y de A a C. (c) Halle la rapidez delcuerpo en el punto B y en el punto C.
24. Como se ilustra en la figura, un cuerpo,de masa m y que se suelta del punto A,se mueve sobre una superficie circular deradio R. El cuerpo se somete a una fuerza
mA
B
OC
R
constante F que forma un ángulo β con lahorizontal. (a) Encuentre el trabajo reali-zado por cada una de las fuerzas que ac-túan sobre el cuerpo, cuando se mueve deA a B y de A a C. (b) ¿El trabajo realiza-do por cada una de estas fuerzas dependede la trayectoria seguida por el cuerpo? Ex-plique.
mA
B
OC
R
25. El bloque de masa m se sujeta a un re-sorte que genera una deformación yA ensu posición de equilibrio. El bloque se des-plaza de su posición de equilibrio hastauna posición donde su deformación es yB.(a) Encuentre el trabajo realizado por ca-da una de las fuerzas que actúan sobreel bloque. (b) ¿El trabajo de cada una dedichas fuerzas depende de la trayectoria?Explique. (c) ¿Qué tipo de fuerza se tiene yqué se le puede asociar a cada una de ellas?Explique.
m
m
y
O
yA
yB
hTierra
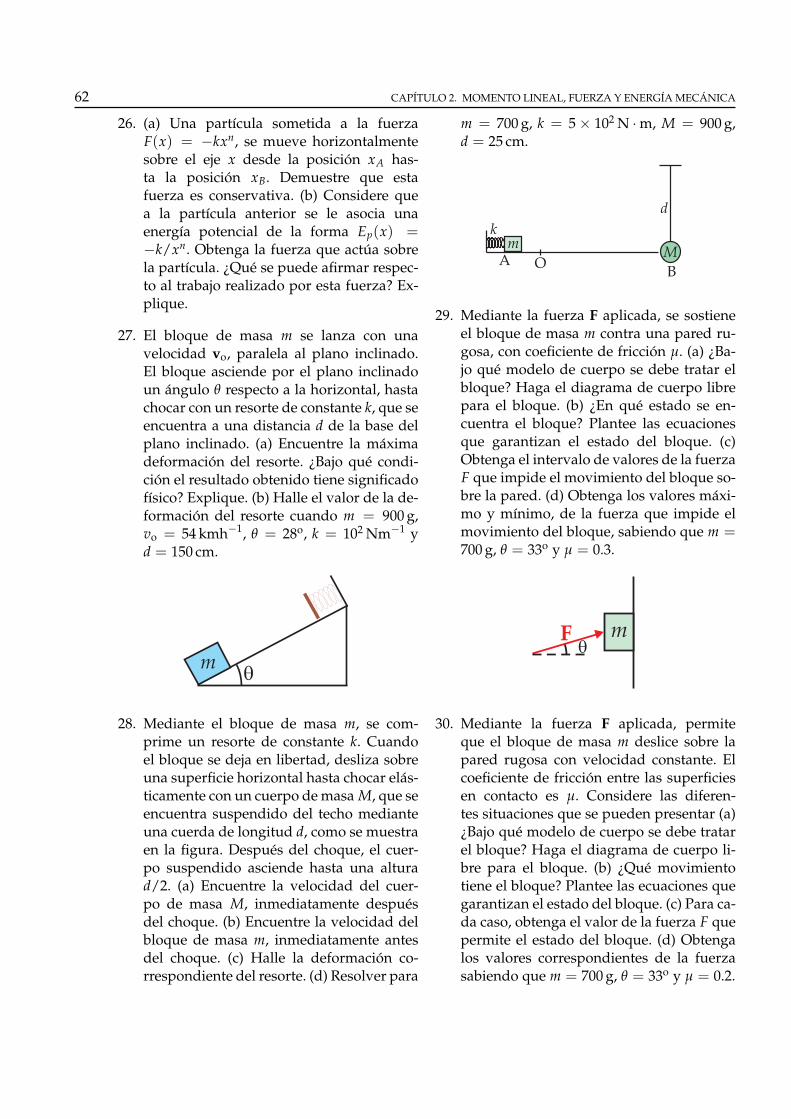
62 CAPÍTULO 2. MOMENTO LINEAL, FUERZA Y ENERGÍA MECÁNICA
26. (a) Una partícula sometida a la fuerzaF(x) = −kxn, se mueve horizontalmentesobre el eje x desde la posición xA has-ta la posición xB. Demuestre que estafuerza es conservativa. (b) Considere quea la partícula anterior se le asocia unaenergía potencial de la forma Ep(x) =−k/xn. Obtenga la fuerza que actúa sobrela partícula. ¿Qué se puede afirmar respec-to al trabajo realizado por esta fuerza? Ex-plique.
27. El bloque de masa m se lanza con unavelocidad vo, paralela al plano inclinado.El bloque asciende por el plano inclinadoun ángulo θ respecto a la horizontal, hastachocar con un resorte de constante k, que seencuentra a una distancia d de la base delplano inclinado. (a) Encuentre la máximadeformación del resorte. ¿Bajo qué condi-ción el resultado obtenido tiene significadofísico? Explique. (b) Halle el valor de la de-formación del resorte cuando m = 900 g,vo = 54 kmh−1, θ = 28o, k = 102 Nm−1 yd = 150 cm.
mq
28. Mediante el bloque de masa m, se com-prime un resorte de constante k. Cuandoel bloque se deja en libertad, desliza sobreuna superficie horizontal hasta chocar elás-ticamente con un cuerpo de masa M, que seencuentra suspendido del techo medianteuna cuerda de longitud d, como se muestraen la figura. Después del choque, el cuer-po suspendido asciende hasta una alturad/2. (a) Encuentre la velocidad del cuer-po de masa M, inmediatamente despuésdel choque. (b) Encuentre la velocidad delbloque de masa m, inmediatamente antesdel choque. (c) Halle la deformación co-rrespondiente del resorte. (d) Resolver para
m = 700 g, k = 5 × 102 N · m, M = 900 g,d = 25 cm.
Mm
d
A
k
BO
29. Mediante la fuerza F aplicada, se sostieneel bloque de masa m contra una pared ru-gosa, con coeficiente de fricción µ. (a) ¿Ba-jo qué modelo de cuerpo se debe tratar elbloque? Haga el diagrama de cuerpo librepara el bloque. (b) ¿En qué estado se en-cuentra el bloque? Plantee las ecuacionesque garantizan el estado del bloque. (c)Obtenga el intervalo de valores de la fuerzaF que impide el movimiento del bloque so-bre la pared. (d) Obtenga los valores máxi-mo y mínimo, de la fuerza que impide elmovimiento del bloque, sabiendo que m =700 g, θ = 33o y µ = 0.3.
qF m
30. Mediante la fuerza F aplicada, permiteque el bloque de masa m deslice sobre lapared rugosa con velocidad constante. Elcoeficiente de fricción entre las superficiesen contacto es µ. Considere las diferen-tes situaciones que se pueden presentar (a)¿Bajo qué modelo de cuerpo se debe tratarel bloque? Haga el diagrama de cuerpo li-bre para el bloque. (b) ¿Qué movimientotiene el bloque? Plantee las ecuaciones quegarantizan el estado del bloque. (c) Para ca-da caso, obtenga el valor de la fuerza F quepermite el estado del bloque. (d) Obtengalos valores correspondientes de la fuerzasabiendo que m = 700 g, θ = 33o y µ = 0.2.
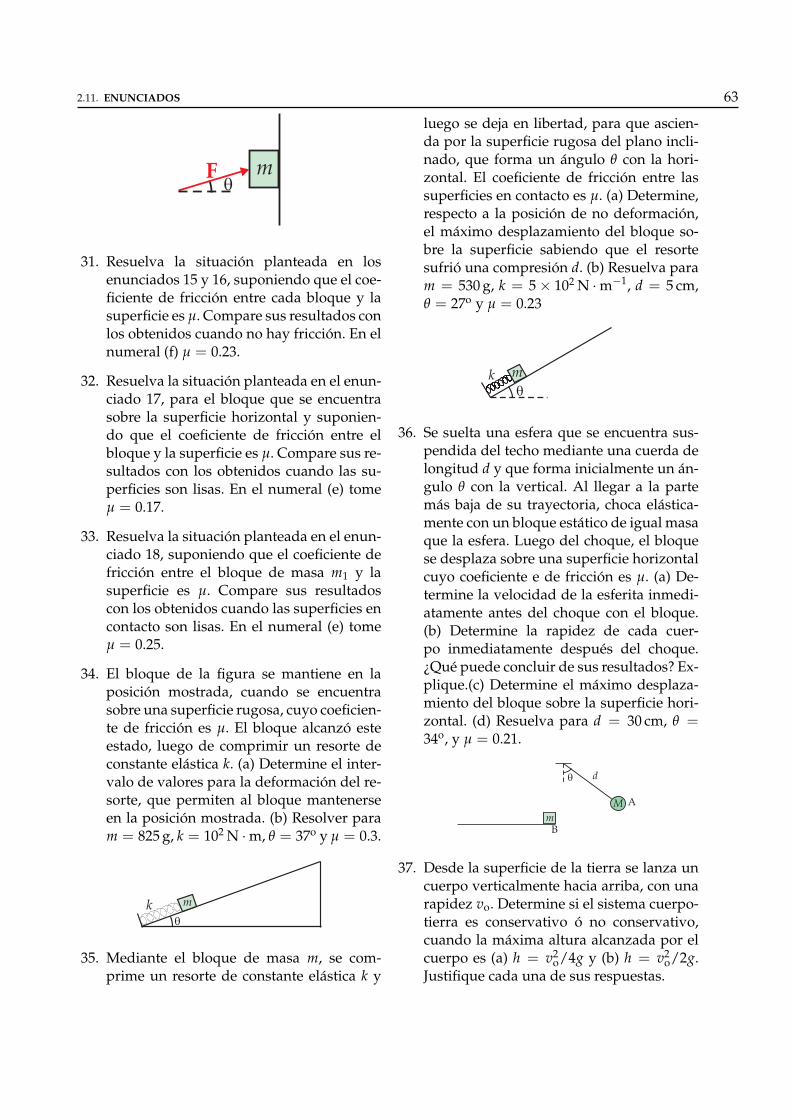
2.11. ENUNCIADOS 63
qF m
31. Resuelva la situación planteada en losenunciados 15 y 16, suponiendo que el coe-ficiente de fricción entre cada bloque y lasuperficie es µ. Compare sus resultados conlos obtenidos cuando no hay fricción. En elnumeral (f) µ = 0.23.
32. Resuelva la situación planteada en el enun-ciado 17, para el bloque que se encuentrasobre la superficie horizontal y suponien-do que el coeficiente de fricción entre elbloque y la superficie es µ. Compare sus re-sultados con los obtenidos cuando las su-perficies son lisas. En el numeral (e) tomeµ = 0.17.
33. Resuelva la situación planteada en el enun-ciado 18, suponiendo que el coeficiente defricción entre el bloque de masa m1 y lasuperficie es µ. Compare sus resultadoscon los obtenidos cuando las superficies encontacto son lisas. En el numeral (e) tomeµ = 0.25.
34. El bloque de la figura se mantiene en laposición mostrada, cuando se encuentrasobre una superficie rugosa, cuyo coeficien-te de fricción es µ. El bloque alcanzó esteestado, luego de comprimir un resorte deconstante elástica k. (a) Determine el inter-valo de valores para la deformación del re-sorte, que permiten al bloque mantenerseen la posición mostrada. (b) Resolver param = 825 g, k = 102 N · m, θ = 37o y µ = 0.3.
m
q
k
35. Mediante el bloque de masa m, se com-prime un resorte de constante elástica k y
luego se deja en libertad, para que ascien-da por la superficie rugosa del plano incli-nado, que forma un ángulo θ con la hori-zontal. El coeficiente de fricción entre lassuperficies en contacto es µ. (a) Determine,respecto a la posición de no deformación,el máximo desplazamiento del bloque so-bre la superficie sabiendo que el resortesufrió una compresión d. (b) Resuelva param = 530 g, k = 5 × 102 N · m−1, d = 5 cm,θ = 27o y µ = 0.23
k m
q
36. Se suelta una esfera que se encuentra sus-pendida del techo mediante una cuerda delongitud d y que forma inicialmente un án-gulo θ con la vertical. Al llegar a la partemás baja de su trayectoria, choca elástica-mente con un bloque estático de igual masaque la esfera. Luego del choque, el bloquese desplaza sobre una superficie horizontalcuyo coeficiente e de fricción es µ. (a) De-termine la velocidad de la esferita inmedi-atamente antes del choque con el bloque.(b) Determine la rapidez de cada cuer-po inmediatamente después del choque.¿Qué puede concluir de sus resultados? Ex-plique.(c) Determine el máximo desplaza-miento del bloque sobre la superficie hori-zontal. (d) Resuelva para d = 30 cm, θ =34o, y µ = 0.21.
M
m
d
A
q
B
37. Desde la superficie de la tierra se lanza uncuerpo verticalmente hacia arriba, con unarapidez vo. Determine si el sistema cuerpo-tierra es conservativo ó no conservativo,cuando la máxima altura alcanzada por elcuerpo es (a) h = v2
o/4g y (b) h = v2o/2g.
Justifique cada una de sus respuestas.

64 CAPÍTULO 2. MOMENTO LINEAL, FUERZA Y ENERGÍA MECÁNICA
38. Cuando el pequeño bloque se suelta en elpunto A, desliza sobre la superficie circu-lar de radio R, pasando por el punto B. De-termine si es posible que el bloque alcanceel punto C, sabiendo que cuando pasa porel punto B su rapidez está dada por vB =√
gR.
R
mA
B
C
39. La esferita del péndulo simple de la figu-ra, con masa m, se suelta cuando la cuerdade longitud l es horizontal. En la parte másbaja de su trayectoria, la esfera choca elás-ticamente con un bloque estático de masaM. Luego del choque, el sistema se mueveuna distancia d sobre una mesa horizontalcon coeficiente de fricción µ, hasta salir deella y llegar al piso que se encuentra a unadistancia vertical h. (a) Encuentre la veloci-dad de la esfera inmediatamente antes delchoque. (b) Halle la velocidad de los cuer-pos inmediatamente después del choque.Analice los resultados para m = M, m > My m < M. En cada caso, ¿qué movimien-to adquiere cada cuerpo luego del choque?Explique. (c) Sabiendo que m = 250 g, l =0.5 m, M = 0.5 kg, d = 65 cm y µ = 0.15,obtenga la velocidad con la cual el sistemasale de la mesa. Resolver este numeral pordos métodos. (d) Si adicionalmente h =85 cm, encuentre la rapidez con la cual lle-ga el sistema al piso. Resolver este numeralpor tres métodos.
A
B C
h
M
m
d
l
40. Resuelva el enunciado 27 asumiendo que elcoeficiente de fricción entre las superficies
en contacto es µ. Para el numeral (b) tomeµ = 0.3.
41. Un proyectil de masa m que se lanza des-de el punto A, debe dar en un blanco ubi-cado en el punto B, que se encuentra auna altura h respecto al punto de lanza-miento. El proyectil se lanza con una ve-locidad de magnitud
√2gh/ sen θ, donde
θ es el ángulo que forma con la horizon-tal. En el punto B, el proyectil choca elás-ticamente con un bloque estático de masaM. Luego del choque, el sistema se mueveuna distancia d sobre la superficie horizon-tal con coeficiente de fricción µ, hasta en-trar en contacto con un resorte de constantek. (a)Teniendo en cuenta el sistema de refe-rencia empleado y las ecuaciones cinemá-ticas de posición y velocidad, halle la ve-locidad del proyectil inmediatamente antesde chocar con el bloque. ¿Qué puede con-cluir de su resultado? ¿Por qué? (b) Luegode analizar el choque, encuentre la veloci-dad de los cuerpos inmediatamente des-pués del choque. Analice sus resultadospara m = M, m > M y m < M. En cada ca-so, ¿qué movimiento adquieren los cuerposluego del choque? Explique. (c) Encuentrela máxima deformación del resorte sabien-do que m = 700 g, h = 75 cm, θ = 33o, M =0.3 kg, d = 55 cm, µ = 0.31 y k = 102 N · m.Resolver este numeral por tres métodos di-ferentes.
A
B
C
k
h
M
m
d
42. Un proyectil de masa m que se lanza des-de el punto A, debe dar en un blanco ubi-cado en el punto B, que se encuentra auna altura h respecto al punto de lanza-miento. El proyectil se lanza con una ve-locidad de magnitud
√2gh/ sen θ, donde
θ es el ángulo que forma con la horizon-

2.11. ENUNCIADOS 65
tal. En el punto B, el proyectil choca plás-ticamente con un bloque estático de masaM. Luego del choque, el sistema se mueveuna distancia d sobre la superficie hori-zontal con coeficiente de fricción µ, has-ta entrar en contacto con un resorte deconstante k. (a)Teniendo en cuenta el sis-tema de referencia empleado y las ecua-ciones cinemáticas de posición y velocidad,halle la velocidad del proyectil inmediata-mente antes de chocar con el bloque. ¿Quépuede concluir de su resultado? ¿Por qué?(b) Luego de analizar el choque, encuen-tre la velocidad de los cuerpos inmediata-mente después del choque. Analice sus re-sultados para m = M, m > M y m < M.¿Qué movimiento adquieren los cuerposluego del choque? Explique. (c) Encuentrela máxima deformación del resorte sabien-do que m = 700 g, h = 75 cm, θ = 33o,M = 0.3 kg, d = 55 cm, µ = 0.31 y k =102 N · m. Resolver este numeral por tresmétodos diferentes. (d) Obtenga una expre-sión para la energía ganada o perdida en elchoque. Analice completamente su resulta-do y obtenga su valor utilizando los datosanteriores.
A
B
C
k
h
M
m
d
43. La esferita del péndulo simple de la figu-ra, con masa m, se suelta cuando la cuer-da de longitud l es horizontal. En la partemás baja de su trayectoria, la esfera chocacon un bloque estático de masa M. Luegodel choque, el sistema se mueve una dis-tancia d sobre una mesa horizontal con coe-ficiente de fricción µ, hasta salir de ella yllegar al piso que se encuentra a una dis-tancia vertical h. (a) Encuentre la veloci-dad de la esfera inmediatamente antes delchoque. (b) Halle la velocidad del bloquede masa M inmediatamente después del
choque, sabiendo que la esferita rebota conuna rapidez igual a la mitad de la rapidezde incidencia. Analice los resultados param = M, m > M y m < M. En cada ca-so, ¿qué movimiento adquiere cada cuer-po luego del choque? Explique. (c) Obten-ga una expresión para la velocidad con lacual el sistema sale de la mesa. Resolvereste numeral por dos métodos. Halle su va-lor, sabiendo que m = 250 g, l = 0.5 m,M = 0.5 kg, d = 65 cm y µ = 0.15. (d) En-cuentre una expresión para la rapidez conla cual el sistema llega al piso. Resolver estenumeral por tres métodos. Calcule su valorcon los datos del numeral anterior y sabi-endo que h = 85 cm. e) Obtenga una expre-sión para la energía ganada o perdida en elchoque. Analice completamente su resulta-do y obtenga su valor utilizando los datosanteriores.
A
B C
h
M
m
d
l

MOMENTO ANGULAR Y SU CONSERVACION
BERNARDO ARENAS GAVIRIAUniversidad de Antioquia
Instituto de Física
2012


Índice general
3. Momento angular y su conservación 13.1. Introducción . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23.2. Movimiento curvilíneo, leyes de Newton y energía . . . . . . . . . . . . . . . . . . . . 2
3.2.1. Vector posición en el movimiento curvilíneo . . . . . . . . . . . . . . . . . . . 23.2.2. Vector velocidad en el movimiento curvilíneo . . . . . . . . . . . . . . . . . . 33.2.3. Vector aceleración en el movimiento curvilíneo . . . . . . . . . . . . . . . . . . 4
3.3. Dinámica del movimiento curvilíneo . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73.4. Movimento circular . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
3.4.1. Vector posición (r) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83.4.2. Vector velocidad (v) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83.4.3. Vector aceleración (a) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93.4.4. Movimiento circular uniforme . . . . . . . . . . . . . . . . . . . . . . . . . . . 93.4.5. Movimiento circular uniformemente acelerado . . . . . . . . . . . . . . . . . . 113.4.6. Vector velocidad angular y vector aceleración angular . . . . . . . . . . . . . 123.4.7. Dinámica del movimiento circular . . . . . . . . . . . . . . . . . . . . . . . . . 14
3.5. Vector momento angular de una partícula . . . . . . . . . . . . . . . . . . . . . . . . . 163.5.1. Variación del vector momento angular con el tiempo . . . . . . . . . . . . . . 183.5.2. Conservación del momento angular y fuerzas centrales . . . . . . . . . . . . . 183.5.3. Concepto de cuerpo rígido . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
3.6. Vector momento angular de un cuerpo rígido . . . . . . . . . . . . . . . . . . . . . . . 213.7. Momento de inercia de un cuerpo rígido . . . . . . . . . . . . . . . . . . . . . . . . . . 23
3.7.1. Ejes principales de inercia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 253.7.2. Ejes principales de inercia en un cuerpo esférico . . . . . . . . . . . . . . . . . 253.7.3. Ejes principales de inercia en un cuerpo cilíndrico . . . . . . . . . . . . . . . . 253.7.4. Ejes principales de inercia en un cuerpo rectangular . . . . . . . . . . . . . . . 25
3.8. Teorema de Steiner o de los ejes paralelos . . . . . . . . . . . . . . . . . . . . . . . . . 253.8.1. Radio de giro de un cuerpo rígido . . . . . . . . . . . . . . . . . . . . . . . . . 263.8.2. Conservación del vector momento angular en un cuerpo rígido . . . . . . . . 27
3.9. ENUNCIADOS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
3


Capıtulo 3Momento angular y su conservación
CompetenciasEn esta unidad se busca que el estudiante
Defina los vectores unitarios radial ytransversal y exprese el vector velocidad ensus componentes radial y transversal.
Defina e interprete correctamente los con-ceptos de velocidad radial y velocidadtransversal.
Defina los vectores unitarios tangencial ynormal y exprese el vector aceleración ensus componentes tangencial y normal.
Defina e interprete correctamente las com-ponentes tangencial y normal del vectoraceleración.
Exprese el vector fuerza en sus compo-nentes tangencial y normal.
Defina e interprete correctamente las com-ponentes tangencial y normal del vectorfuerza.
Describa las características de unmovimiento circular.
Defina los conceptos de vector velocidadangular y de vector aceleración angular.
Defina y analice el movimientos circularuniforme y el movimiento circular uni-formemente acelerado. .
Aplique las leyes de Newton en elmovimiento curvilíneo, particularmente enel movimiento circular.
Defina el concepto de vector momento an-gular y analice su variación con el tiempo.
Analice situaciones en las que se conservael vector momento angular.
Defina el concepto de fuerza central.
Defina el concepto de cuerpo rígido.
Infiera la diferencia entre el modelo departícula y el modelo de cuerpo rígido.
Obtenga el momento angular de un cuerporígido.
Defina el concepto de momento de inercia.
Infiera la relación entre masa y momentode inercia.
Defina un eje principal de inercia.
Enuncie y aplique adecuadamente el Teo-rema de Steiner.
Aplique la conservación del momento an-gular en el caso un cuerpo rígido.
CONCEPTOS BASICOSSe definirán los conceptos de velocidad radial(vr), velocidad transversal (vθ), aceleración tan-gencial (aT), aceleración normal (aN), fuerza tan-gencial (FT), fuerza normal (FN), vector veloci-dad angular (ω), vector aceleración angular (α),vector momento angular ( L) y momento deinercia (I).

2 CAPÍTULO 3. MOMENTO ANGULAR Y SU CONSERVACIÓN
3.1. Introducción
En la primera parte de la unidad se hace unanálisis de partículas que se mueven a lo largode trayectorias curvilíneas, aplicando los con-cepto analizados en las unidades anteriores. Enesta unidad se redefinen los conceptos de vectorposición (r), vector velocidad (v) y vector ace-leración (a), empleando coordenadas polares,para llegar a las causas que generan los cambiosen el estado de reposo o de movimiento de loscuerpos. Posteriormente, se define el vector mo-mento angular o cantidad de movimiento angu-lar, ya que esta es una cantidad física de muchointerés, puesto que en la naturaleza se presen-tan muchas situaciones físicas en las que el vec-tor momento angular se conserva, cuando uncuerpo describe una trayectoria curvilínea. Es-to da lugar al principio de conservación del mo-mento angular, que se aplica en diferentes áreasde la física. Es de mucha utilidad en el análi-sis de fuerzas centrales, como se verá posteri-ormente en el caso del movimiento de la tier-ra alrededor del sol. Finalmente, se define elconcepto del escalar, momento de inercia, quedesempeña en rotación el mismo papel que lamasa en traslación.
3.2. Movimiento curvilíneo, leyesde Newton y energía
En esta sección se analizan los efectos que sepresentan cuando ocurren cambios en la magni-tud y en la dirección, tanto del vector posicióncomo del vector velocidad de una partícula quese mueve en una trayectoria curvilínea. Para lle-var a cabo esta tarea se utilizan coordenadas po-lares.
Igual que en el caso de coordenadas rectan-gulares, se definen dos vectores unitarios per-pendiculares entre sí ur y uθ , que cumplen lassiguientes condiciones:
ur, en todo instante, es paralelo al vectorposición r y se le denomina vector unitarioradial.
uθ , en todo instante, es perpendicular al
vector posición r y se le denomina vectorunitario transversal.
Ahora, de acuerdo con la definición de estosvectores unitarios, mientras una partícula des-cribe una trayectoria curvilínea, la dirección delvector posición cambia con el tiempo, es decir,que la dirección, mas no su magnitud, de losvectores unitarios ur y uθ cambia con el tiempo.
A
vr
uru
qj
i
q
x
y
q
Figura 3.1: Vectores unitarios radial y transversal.
Con el fin de hacer más simple el trabajomatemático, se expresan los vectores ur y uθ
en función de los vectores unitarios i y j cuyasdirecciones permanecen constantes, cuando elsistema de coordenadas rectangulares no rotamientras la partícula está en movimiento. De lafigura 3.1, se tiene que los vectores unitarios ury uθ en componentes rectangulares están dadospor
ur = cosθi + senθj, (3.1)
uθ = −senθi + cosθj, (3.2)
donde θ se expresa en radianes.
3.2.1. Vector posición en el movimientocurvilíneo
De acuerdo con la definición del vector uni-tario ur y de la figura 3.1, se tiene que el vectorposición, cuando la partícula pasa por el puntoA, se puede expresar en la forma
r = rur, (3.3)
donde, en general, cambian tanto su magnitudcomo su dirección mientras la partícula describela trayectoria curvilínea.

3.2. MOVIMIENTO CURVILÍNEO, LEYES DE NEWTON Y ENERGÍA 3
3.2.2. Vector velocidad en el movimientocurvilíneo
En esta sección se muestra que un cambio en lamagnitud del vector posición ó un cambio en sudirección, genera una componente en la veloci-dad.
De acuerdo con la figura 3.1, la velocidad dela partícula en el punto A, está dada por ladefinición usual v = dr/dt, donde al reem-plazar la ecuación (3.3), adquiere la forma
v =drdt
=ddt
(rur). (3.4)
Derivando la ecuación (3.3) respecto al tiempo,teniendo en cuenta que ur varía en dirección portratarse de una trayectoria curvilínea, se tiene
v =drdt
ur + rdur
dt. (3.5)
Derivando la ecuación (3.1) respecto al tiempo ycomparando el resultado con la ecuación (3.2),se encuentra que
dur
dt=
dθ
dtuθ , (3.6)
donde se observa que la derivada respecto altiempo del vector unitario en la dirección radial,es un vector paralelo al vector unitario en la di-rección transversal, es decir, es un vector per-pendicular al vector posición.
Luego de reemplazar la ecuación (3.6) en laecuación (3.5), se obtiene
v =drdt
ur + rdθ
dtuθ . (3.7)
Como resultado del procedimiento llevado acabo, en la ecuación (3.7) aparecen dos compo-nentes de la velocidad, una en la dirección ra-dial y otra en la dirección transversal.
La componente de la velocidad en direcciónradial, solo aparece cuando cambia con el tiem-po la magnitud del vector posición y se le deno-mina velocidad radial, es decir
vr ≡drdt
. (3.8)
En cambio, la componente de velocidad en la di-rección transversal, solo aparece cuando cambia
con el tiempo la dirección del vector posición yse le denomina velocidad transversal, o sea
vθ ≡ rdθ
dt. (3.9)
j
ix
y
r ( )t
vvq qu
vr ru
Figura 3.2: Componentes radial y transversal delvector velocidad.
Mediante las definiciones dadas por las ecua-ciones (3.8) y (3.9), la ecuación (3.7) se puede es-cribir en la forma
v = vrur + vθuθ . (3.10)
Ahora, como las componentes radial y transver-sal de la velocidad son perpendiculares, comose muestra en la figura 3.2, se cumple
v =√
v2r + v2
θ .
Ejemplo 3.1.Una partícula se mueve en el plano xy detal forma que su posición está dada por laexpresión r = 2ti + 4t2j donde r está da-do en p (pies) y t en s. Determine a) Laecuación de la trayectoria seguida por lapartícula. b) Las coordenadas polares co-rrespondientes, en función del tiempo. c)Las componentes radial y transversal de lavelocidad, en función del tiempoSolucióna) De acuerdo con la expresión dada parael vector posición de la partícula, se tieneque sus coordenadas rectangulares estándadas por x = 2t y y = 4t2. Mediante estasecuaciones paramétricas se encuentra quela trayectoria seguida por la partícula estádada por
y = x2.
En la figura anterior se muestra la trayec-toria parabólica seguida por la partícula.
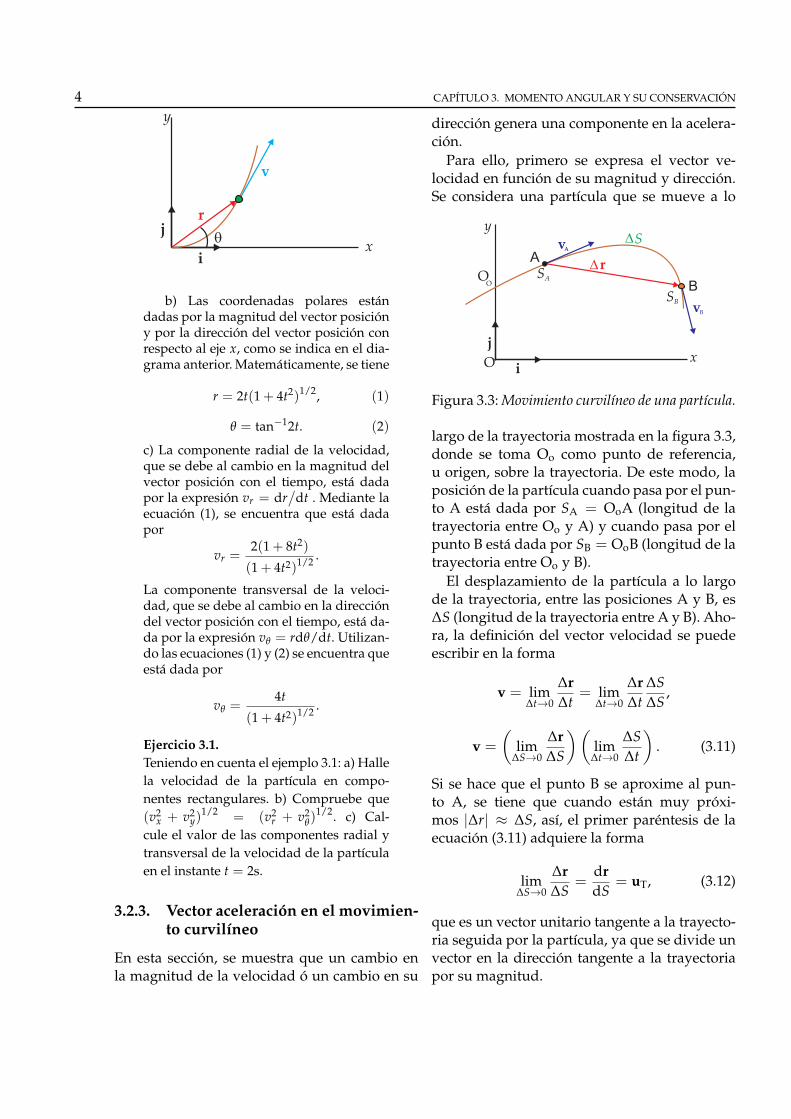
4 CAPÍTULO 3. MOMENTO ANGULAR Y SU CONSERVACIÓN
j
ix
y
v
r
q
b) Las coordenadas polares estándadas por la magnitud del vector posicióny por la dirección del vector posición conrespecto al eje x, como se indica en el dia-grama anterior. Matemáticamente, se tiene
r = 2t(1 + 4t2)1/2, (1)
θ = tan−12t. (2)
c) La componente radial de la velocidad,que se debe al cambio en la magnitud delvector posición con el tiempo, está dadapor la expresión vr = dr
/dt . Mediante la
ecuación (1), se encuentra que está dadapor
vr =2(1 + 8t2)
(1 + 4t2)1/2 .
La componente transversal de la veloci-dad, que se debe al cambio en la direccióndel vector posición con el tiempo, está da-da por la expresión vθ = rdθ/dt. Utilizan-do las ecuaciones (1) y (2) se encuentra queestá dada por
vθ =4t
(1 + 4t2)1/2 .
Ejercicio 3.1.Teniendo en cuenta el ejemplo 3.1: a) Hallela velocidad de la partícula en compo-nentes rectangulares. b) Compruebe que(v2
x + v2y)
1/2 = (v2r + v2
θ)1/2. c) Cal-
cule el valor de las componentes radial ytransversal de la velocidad de la partículaen el instante t = 2s.
3.2.3. Vector aceleración en el movimien-to curvilíneo
En esta sección, se muestra que un cambio enla magnitud de la velocidad ó un cambio en su
dirección genera una componente en la acelera-ción.
Para ello, primero se expresa el vector ve-locidad en función de su magnitud y dirección.Se considera una partícula que se mueve a lo
j
ix
y
vA
vB
Dr
DS
O
B
A
SA
SB
OO
Figura 3.3: Movimiento curvilíneo de una partícula.
largo de la trayectoria mostrada en la figura 3.3,donde se toma Oo como punto de referencia,u origen, sobre la trayectoria. De este modo, laposición de la partícula cuando pasa por el pun-to A está dada por SA = OoA (longitud de latrayectoria entre Oo y A) y cuando pasa por elpunto B está dada por SB = OoB (longitud de latrayectoria entre Oo y B).
El desplazamiento de la partícula a lo largode la trayectoria, entre las posiciones A y B, es∆S (longitud de la trayectoria entre A y B). Aho-ra, la definición del vector velocidad se puedeescribir en la forma
v = lim∆t→0
∆r∆t
= lim∆t→0
∆r∆t
∆S∆S
,
v =
(lim
∆S→0
∆r∆S
)(lim
∆t→0
∆S∆t
). (3.11)
Si se hace que el punto B se aproxime al pun-to A, se tiene que cuando están muy próxi-mos |∆r| ≈ ∆S, así, el primer paréntesis de laecuación (3.11) adquiere la forma
lim∆S→0
∆r∆S
=drdS
= uT, (3.12)
que es un vector unitario tangente a la trayecto-ria seguida por la partícula, ya que se divide unvector en la dirección tangente a la trayectoriapor su magnitud.
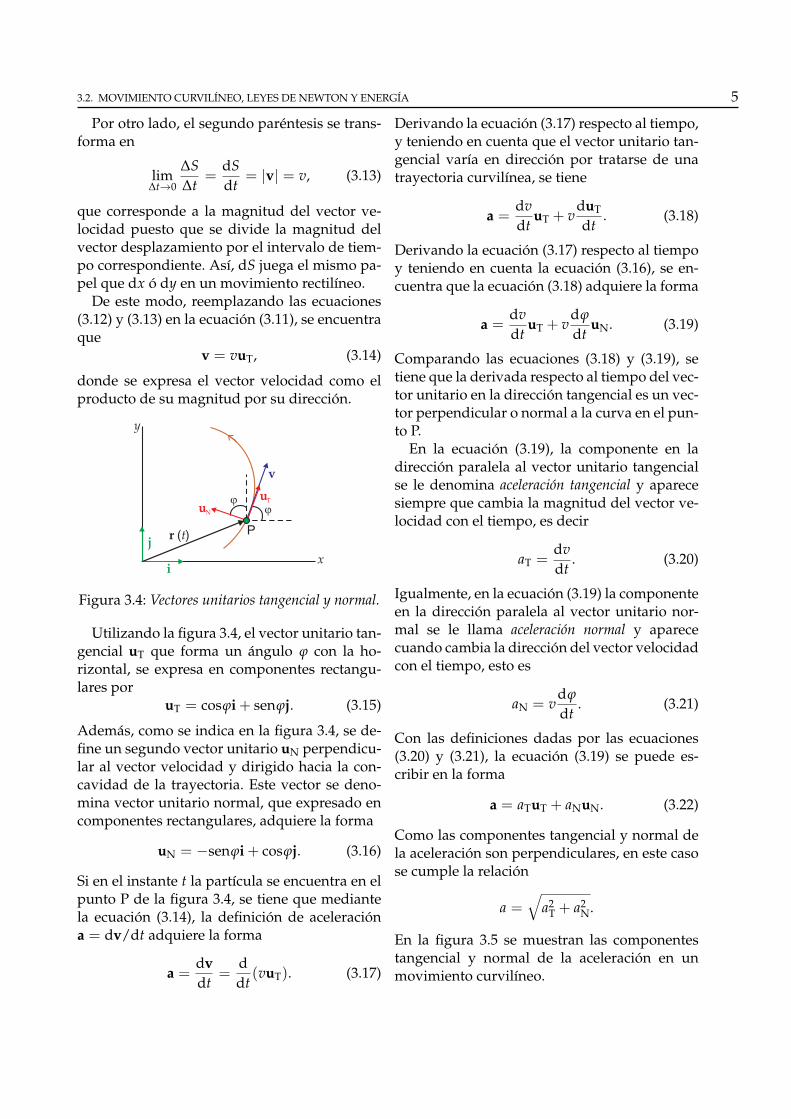
3.2. MOVIMIENTO CURVILÍNEO, LEYES DE NEWTON Y ENERGÍA 5
Por otro lado, el segundo paréntesis se trans-forma en
lim∆t→0
∆S∆t
=dSdt
= |v| = v, (3.13)
que corresponde a la magnitud del vector ve-locidad puesto que se divide la magnitud delvector desplazamiento por el intervalo de tiem-po correspondiente. Así, dS juega el mismo pa-pel que dx ó dy en un movimiento rectilíneo.
De este modo, reemplazando las ecuaciones(3.12) y (3.13) en la ecuación (3.11), se encuentraque
v = vuT, (3.14)
donde se expresa el vector velocidad como elproducto de su magnitud por su dirección.
j
ix
y
r ( )t
v
uT
uN
jj
P
Figura 3.4: Vectores unitarios tangencial y normal.
Utilizando la figura 3.4, el vector unitario tan-gencial uT que forma un ángulo φ con la ho-rizontal, se expresa en componentes rectangu-lares por
uT = cosφi + senφj. (3.15)
Además, como se indica en la figura 3.4, se de-fine un segundo vector unitario uN perpendicu-lar al vector velocidad y dirigido hacia la con-cavidad de la trayectoria. Este vector se deno-mina vector unitario normal, que expresado encomponentes rectangulares, adquiere la forma
uN = −senφi + cosφj. (3.16)
Si en el instante t la partícula se encuentra en elpunto P de la figura 3.4, se tiene que mediantela ecuación (3.14), la definición de aceleracióna = dv/dt adquiere la forma
a =dvdt
=ddt
(vuT). (3.17)
Derivando la ecuación (3.17) respecto al tiempo,y teniendo en cuenta que el vector unitario tan-gencial varía en dirección por tratarse de unatrayectoria curvilínea, se tiene
a =dvdt
uT + vduT
dt. (3.18)
Derivando la ecuación (3.17) respecto al tiempoy teniendo en cuenta la ecuación (3.16), se en-cuentra que la ecuación (3.18) adquiere la forma
a =dvdt
uT + vdφ
dtuN. (3.19)
Comparando las ecuaciones (3.18) y (3.19), setiene que la derivada respecto al tiempo del vec-tor unitario en la dirección tangencial es un vec-tor perpendicular o normal a la curva en el pun-to P.
En la ecuación (3.19), la componente en ladirección paralela al vector unitario tangencialse le denomina aceleración tangencial y aparecesiempre que cambia la magnitud del vector ve-locidad con el tiempo, es decir
aT =dvdt
. (3.20)
Igualmente, en la ecuación (3.19) la componenteen la dirección paralela al vector unitario nor-mal se le llama aceleración normal y aparececuando cambia la dirección del vector velocidadcon el tiempo, esto es
aN = vdφ
dt. (3.21)
Con las definiciones dadas por las ecuaciones(3.20) y (3.21), la ecuación (3.19) se puede es-cribir en la forma
a = aTuT + aNuN. (3.22)
Como las componentes tangencial y normal dela aceleración son perpendiculares, en este casose cumple la relación
a =√
a2T + a2
N.
En la figura 3.5 se muestran las componentestangencial y normal de la aceleración en unmovimiento curvilíneo.

6 CAPÍTULO 3. MOMENTO ANGULAR Y SU CONSERVACIÓN
j
ix
y
r ( )t
aa
T Tu
aN Nu
Figura 3.5: Componentes tangencial y normal delvector aceleración.
Hay otra forma de expresar la ecuación (3.21)para la componente normal de la aceleración.En la figura 3.6, se considera un pequeño des-plazamiento de la partícula a lo largo de latrayectoria, donde dS = PP′ es el pequeño ar-co que recorre la partícula al moverse desde elpunto P al punto P’ en un pequeño intervalo detiempo dt.
La figura 3.6, las perpendiculares a las rectastangentes en los puntos P y P’, se cortan en elpunto C llamado centro de curvatura.
Escribiendo el término dφ/
dt en la forma
dφ
dt=
dφ
dSdSdt
= vdφ
dS, (3.23)
donde se ha utilizado la ecuación (3.13).Definiendo el radio de curvatura por ρ = CP,
en la figura 3.6, se tiene
dS = ρdφ odφ
dS=
1ρ
(3.24)
.
j
ix
y
C
P
P'dS
r
dj
j
j j+d
j
Figura 3.6: Radio de curvatura en el momentocurvilíneo.
Reemplazando la ecuación (3.24) en laecuación (3.23), se obtiene
dϕ
dt=
vρ
(3.25)
Así, al reemplazar la ecuación (3.25) en laecuación (3.21) se encuentra que la aceleraciónnormal se puede expresar en la forma
aN =v2
ρ. (3.26)
De este modo, mediante la ecuación (3.26), laecuación (3.19) adquiere la forma
a =dvdt
uT +v2
ρuN. (3.27)
Ejemplo 3.2.Una partícula se mueve en el plano xy detal forma que su posición está dada por laexpresión r = 2ti + 4t2j donde r está dadoen p (pies) y t en s. Determine las compo-nentes tangencial y normal de la acelera-ción.SoluciónDerivando respecto al tiempo el vectorposición de la partícula, se encuentra quela magnitud y dirección de la velocidad es-tán dadas por
v = 2(1 + 16t2)1/2, (1)
φ = tan−14t. (2)
La componente tangencial de la acelera-ción, que se debe al cambio en la magni-tud de la velocidad con el tiempo, está da-da por . Mediante la ecuación (1) se llega aaT = dv
/dt
aT =32t
(1 + 16t2)1/2 .
La componente normal de la aceleración,que se debe al cambio con el tiempo en ladirección de la velocidad, está dada poraN = vdφ
/dt. Con ayuda de las ecua-
ciones (1) y (2) se encuentra que está dadapor
aN =8
(1 + 16t2)1/2 .

3.3. DINÁMICA DEL MOVIMIENTO CURVILÍNEO 7
Ejercicio 3.2.Una partícula se mueve en el plano detal forma que su posición está dada porla expresión r = 2ti + 4t2j donde r estádado en p (pies) y t en s. a) Determinela aceleración de la partícula en compo-nentes rectangulares. b) Compruebe que(a2
x + a2y)
1/2 = (a2T + a2
N)1/2. c) Calcule
los valores de las componentes tangencialy normal de la aceleración en el instantet = 2s. d) Determine el radio de curvatu-ra en función del tiempo y su valor en elinstante t = 2s.
3.3. Dinámica del movimientocurvilíneo
Cuando la fuerza F y la velocidad v forman unángulo diferente a 0o ó 180o, es decir, v y a for-man un ángulo diferente a 0o ó 180o, la partícu-la describe una trayectoria curvilínea, donde laaceleración aN se debe al cambio en la direcciónde la velocidad y aT al cambio en la magnitudde la velocidad, como se analizó anteriormente.
Para una masa m, constante, la segunda leyde Newton, en este caso, tiene la forma
F = ma. (3.28)
De acuerdo con la ecuación (3.28), la fuerza yla aceleración son paralelas, por ello, la fuerzatambién debe tener componentes tangencial ynormal igual que la aceleración, como se indicaen la figura 3.7.
F
F uN N
F uT T
m
Figura 3.7: Componentes tangencial y normal deuna fuerza.
Sabiendo que la aceleración se puede expre-sar en la forma
a =dvdt
uT +v2
ρuN,
la ecuación (3.28) se transforma en
F = m (aTuT + aNuN) . (3.29)
De este modo, se tiene que
FT = maT = mdvdt
,
corresponde a la componente de la fuerza en ladirección tangente a la trayectoria y es la res-ponsable (causante) del cambio en la magnitud dela velocidad, por ello, a esta componente se le lla-ma fuerza tangencial.
Igualmente,
FN =mv2
ρ,
corresponde a la componente de la fuerzaen la dirección normal, apuntando siemprehacia el centro de curvatura de la trayectoriay es la responsable (causante) del cambio en ladirección de la velocidad. A esta componente se ledenomina fuerza normal o centrípeta.
Casos particulares de la ecuación (3.29)
1. Si sobre una partícula, FN = 0 y FT = 0,no hay cambio en la dirección de la veloci-dad. Por tanto, el movimiento es rectilíneoacelerado, ya que FT genera un cambio enla magnitud de la velocidad. Si en este caso,FT es constante, se tiene movimiento rectilí-neo uniformemente acelerado (MRUA)
2. Si sobre una partícula, FN = 0 y FT = 0,no cambia la dirección ni la magnitud dela velocidad, por lo que el cuerpo tienemovimiento rectilíneo uniforme (MRU), ose encuentra en reposo.
3. Si sobre una partícula, FN = 0 y FT = 0,no hay cambio en la magnitud de la veloci-dad, sólo cambia su dirección como en elmovimiento circular uniforme, que se ana-liza en lo que sigue.

8 CAPÍTULO 3. MOMENTO ANGULAR Y SU CONSERVACIÓN
3.4. Movimento circular
En esta sección se analiza un caso particular demovimiento curvilíneo en un plano, como es elmovimiento circular. En este caso, la trayectoriaseguida por una partícula es una circunferenciade radio R, dada por la expresión
x2 + y2 = R2,
donde se ha tomado el origen de coordenadascoincidente con el centro de la trayectoria, comose indica en la figura 3.8.
Ox
y
R
Figura 3.8: Trayectoria en el movimiento circular.
3.4.1. Vector posición (r)
Este movimiento se caracteriza por tener unvector posición en el cual su magnitud per-manece constante, es decir, la ecuación (3.3) setransforma en
r = Rur,
Ox
y
r
u
=R
r
Figura 3.9: Vector posición en el movimiento circu-lar.
o sea, como se muestra en la figura 3.9, elvector posición únicamente cambia en direcciónmientras la partícula está en movimiento.
3.4.2. Vector velocidad (v)
Como la magnitud del vector posición es igualal radio de la circunferencia descrita por lapartícula, se tiene que el primer término de laecuación (3.10) se hace cero, donde al utilizar laecuación (3.9) adquiere la forma
v = Rdθ
dtuθ . (3.30)
Ox
y
r
u
=R
r
Figura 3.10: Vector posición en el movimiento cir-cular.
O sea, como se muestra en la figura 3.10, elvector posición únicamente cambia en direcciónmientras la partícula está en movimiento.
Velocidad angular (ω)
La velocidad angular se define por
ω ≡ dθ
dt, (3.31)
que tiene dimensión T−1, y unidad rad s−1.Mediante la definición dada por la ecuación
(3.31), la ecuación (3.30), para la velocidad, sepuede escribir como
v = Rωuθ . (3.32)
En conclusión, en el movimiento circular, solose tiene componente de velocidad en la direc-ción transversal, mientras que no se tiene com-ponente en la dirección radial. Ahora, como eneste tipo de movimiento, el vector posición esperpendicular tanto el vector unitario transver-sal como al vector unitario tangencial, entoncesse cumple que
uθ = ±uT,

3.4. MOVIMENTO CIRCULAR 9
Ox
y
vr
u
=R
r
uq
uT
Figura 3.11: Vector velocidad en el movimiento cir-cular.
como es de esperarse, ya que en todomovimiento circular, el vector velocidad siem-pre es tangente a la trayectoria seguida por unapartícula, como se muestra en la figura 3.11,donde uθ = −uT.
3.4.3. Vector aceleración (a)
Cuando una partícula describe una trayectoriacircular, su vector aceleración se obtiene reem-plazando, en la ecuación (3.27), el radio de cur-vatura ρ por el radio R de la circunferenciaseguida por la partícula, es decir,
a =dvdt
uT +v2
RuN. (3.33)
Además, al reemplazar la magnitud de la ve-locidad, de acuerdo con la ecuación (3.32), elvector aceleración dado por la ecuación (3.33),se transforma en
a = Rdω
dtuT + ω2RuN. (3.34)
Acceleración angular(α)
La aceleración angular se define por
α ≡ dω
dt, (3.35)
que tiene dimensión T−2, y unidad rad s−2. Me-diante la ecuación (3.35), la ecuación (3.34) sepuede escribir como
a = RαuT + ω2RuN, (3.36)
expresión que solo es válida en un movimientocircular.
En síntesis, en un movimiento circular ge-neralmente se tiene una componente de acele-ración tangencial y una componente de acele-ración normal o centrípeta dadas, respectiva-mente, por
aT =dvdt
= Rα, (3.37)
aN =v2
R= ω2R. (3.38)
En la figura 3.12, se muestran las componentes
O
aT
aN
a
R
Figura 3.12: Vector aceleración en el movimientocircular.
tangencial y normal de la aceleración.
3.4.4. Movimiento circular uniforme
Un tipo de movimiento circular se presenta,cuando tanto la magnitud de la velocidad co-mo la magnitud de la aceleración permanecenconstantes, es decir, cuando solo cambia la di-rección del vector velocidad y por ende ladirección del vector aceleración. Cuando estasituación se presenta, se tiene un movimiento cir-cular uniforme (MCU).
En otras palabras, una partícula tienemovimiento circular uniforme, cuando suaceleración angular es cero. Así, la aceleraciónúnicamente tiene componente en la direcciónnormal, debido al cambio en la dirección delvector velocidad.
De acuerdo con lo anterior, la ecuación (3.36)se convierte en
a =v2
RuN = ω2RuN. (3.39)
Igualmente, este tipo de movimiento se carac-teriza porque los vectores aceleración y veloci-

10 CAPÍTULO 3. MOMENTO ANGULAR Y SU CONSERVACIÓN
O
v
a
Figura 3.13: Vectores velocidad y aceleración en elMCU.
dad son perpendiculares entre sí, como se ilus-tra en la figura 3.13.
Una partícula sometida a un movimiento cir-cular uniforme, posee un movimiento que serepite a intervalos iguales de tiempo, o sea, queel movimiento es periódico.
Si la partícula, con movimiento circular uni-forme, realiza n vueltas en un tiempo t, se de-fine el período P, o tiempo que tarda en dar unavuelta completa, por
P =tn
. (3.40)
Además, la partícula tiene una frecuencia ν,o número de vueltas por unidad de tiempo,definida por
ν =nt
. (3.41)
Comparando las ecuaciones (3.40) y (3.41), seencuentra que la frecuencia es el inverso delperíodo, o sea
ν =1P
. (3.42)
Por la ecuación (3.42), se tiene que la dimensiónde frecuencia es T−1, es decir, su unidad es s−1
que se acostumbra definir como
1s−1 ≡ 1Hz,
símbolo que proviene de la palabra Hertz.La frecuencia también se expresa en revolu-
ciones por minuto o rpm, donde
1rpm ≡ 160
Hz.
Si en el tiempo to, una partícula con MCU tieneuna posición angular θ, mediante la ecuación
(3.31), se encuentra que su posición angular enel instante de tiempo t, está dada por
θ = θo +
t∫to
ω(t)dt, (3.43)
pero como en este caso la velocidad angulares una constante del movimiento, la ecuación(3.43) se transforma en
θ = θo + ω(t − to), (3.44)
donde ω es una constante del movimiento y θ seexpresa en radianes. Esta ecuación correspondea la ecuación cinemática de posición angular enun movimiento circular uniforme.
Si en el tiempo to = 0, una partícula conmovimiento circular uniforme tiene la posiciónangular θo = 0, cuando da una vuelta se tieneque el tiempo y la posición angular, respectiva-mente, son t = P y 2π. Reemplazando estos tér-minos en la ecuación (3.44), se obtiene
ω =2π
P, (3.45)
o teniendo en cuenta la ecuación (3.42)
ω = 2πν. (3.46)
No sobra aclarar que las ecuaciones (3.45) y(3.46), únicamente son válidas para el caso departículas con movimiento circular uniforme.
Ejemplo 3.3.Una piedra, sujeta al extremo de una cuer-da, se hace girar de tal manera que des-cribe una circunferencia de radio 30 cm yen un plano horizontal. La posición angu-lar de la piedra está dada por θ (t) = 3t,donde θ está dado en rad y t en s. Calcu-lar: a) La velocidad angular de la piedra.b) La velocidad de la piedra. c) El tiempoque demora la piedra en dar una vuelta. d)El número de vueltas que da la piedra enla unidad de tiempo. e) La aceleración dela piedra.SoluciónDe acuerdo con el enunciado, R =30 cm ≡ 0.3 m y θ(t) = 3t son cantidadesdadas.
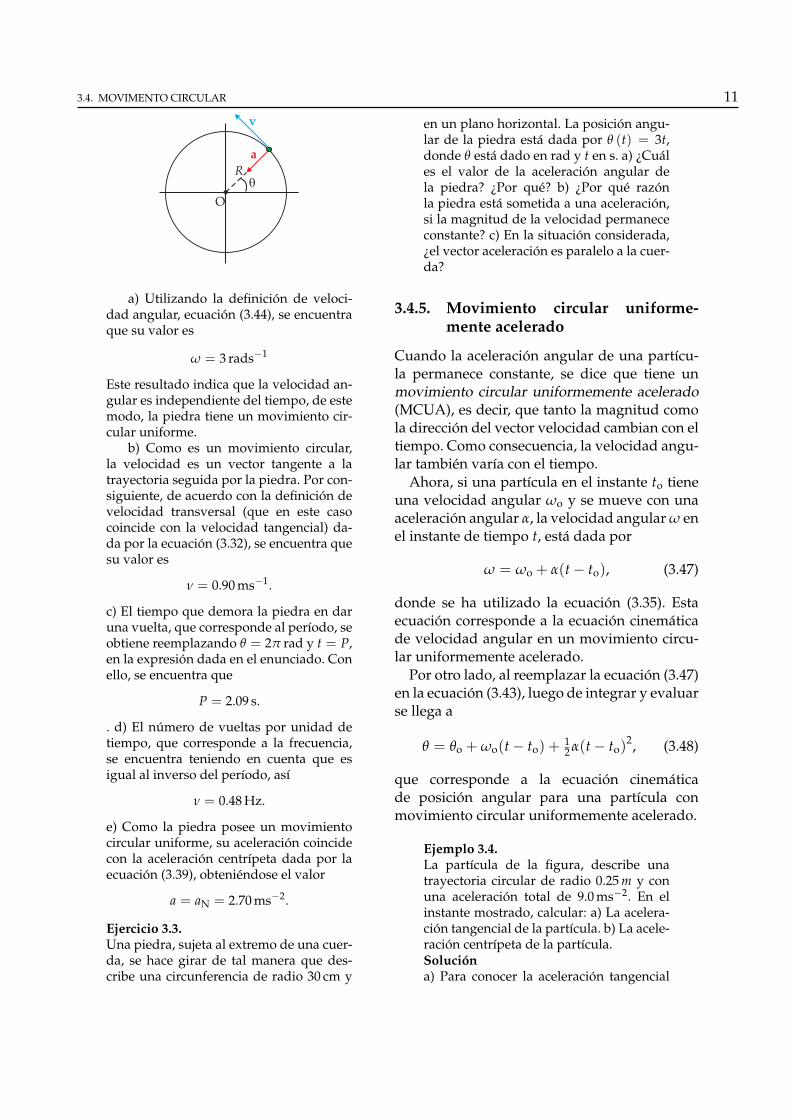
3.4. MOVIMENTO CIRCULAR 11
O
v
a
q
R
a) Utilizando la definición de veloci-dad angular, ecuación (3.44), se encuentraque su valor es
ω = 3 rads−1
Este resultado indica que la velocidad an-gular es independiente del tiempo, de estemodo, la piedra tiene un movimiento cir-cular uniforme.
b) Como es un movimiento circular,la velocidad es un vector tangente a latrayectoria seguida por la piedra. Por con-siguiente, de acuerdo con la definición develocidad transversal (que en este casocoincide con la velocidad tangencial) da-da por la ecuación (3.32), se encuentra quesu valor es
ν = 0.90 ms−1.
c) El tiempo que demora la piedra en daruna vuelta, que corresponde al período, seobtiene reemplazando θ = 2π rad y t = P,en la expresión dada en el enunciado. Conello, se encuentra que
P = 2.09 s.
. d) El número de vueltas por unidad detiempo, que corresponde a la frecuencia,se encuentra teniendo en cuenta que esigual al inverso del período, así
ν = 0.48 Hz.
e) Como la piedra posee un movimientocircular uniforme, su aceleración coincidecon la aceleración centrípeta dada por laecuación (3.39), obteniéndose el valor
a = aN = 2.70 ms−2.
Ejercicio 3.3.Una piedra, sujeta al extremo de una cuer-da, se hace girar de tal manera que des-cribe una circunferencia de radio 30 cm y
en un plano horizontal. La posición angu-lar de la piedra está dada por θ (t) = 3t,donde θ está dado en rad y t en s. a) ¿Cuáles el valor de la aceleración angular dela piedra? ¿Por qué? b) ¿Por qué razónla piedra está sometida a una aceleración,si la magnitud de la velocidad permanececonstante? c) En la situación considerada,¿el vector aceleración es paralelo a la cuer-da?
3.4.5. Movimiento circular uniforme-mente acelerado
Cuando la aceleración angular de una partícu-la permanece constante, se dice que tiene unmovimiento circular uniformemente acelerado(MCUA), es decir, que tanto la magnitud comola dirección del vector velocidad cambian con eltiempo. Como consecuencia, la velocidad angu-lar también varía con el tiempo.
Ahora, si una partícula en el instante to tieneuna velocidad angular ωo y se mueve con unaaceleración angular α, la velocidad angular ω enel instante de tiempo t, está dada por
ω = ωo + α(t − to), (3.47)
donde se ha utilizado la ecuación (3.35). Estaecuación corresponde a la ecuación cinemáticade velocidad angular en un movimiento circu-lar uniformemente acelerado.
Por otro lado, al reemplazar la ecuación (3.47)en la ecuación (3.43), luego de integrar y evaluarse llega a
θ = θo + ωo(t − to) +12 α(t − to)
2, (3.48)
que corresponde a la ecuación cinemáticade posición angular para una partícula conmovimiento circular uniformemente acelerado.
Ejemplo 3.4.La partícula de la figura, describe unatrayectoria circular de radio 0.25 m y conuna aceleración total de 9.0 ms−2. En elinstante mostrado, calcular: a) La acelera-ción tangencial de la partícula. b) La acele-ración centrípeta de la partícula.Solucióna) Para conocer la aceleración tangencial

12 CAPÍTULO 3. MOMENTO ANGULAR Y SU CONSERVACIÓN
v
a30
O
0.25
mde la partícula, se halla la componente dela aceleración total que es paralela a la ve-locidad, es decir
aT = 9.0 ms−2sen30 = 4.5 ms−2.
b) De igual manera, la aceleración cen-trípeta de la partícula corresponde a lacomponente de la aceleración en la direc-ción radial, o sea
aN = 9.0ms−2cos30 = 7.79ms−2.
Ejercicio 3.4.Calcule la velocidad de la partícula, parael instante mostrado en la figura del ejem-plo 3.4.
3.4.6. Vector velocidad angular y vectoraceleración angular
En esta sección, se define la velocidad angulary la aceleración angular como cantidades vecto-riales, es decir, cantidades que tienen magnitudy dirección.
x
y
z
r
v
w
O
R
g
Figura 3.14: Velocidad angular como vector.
Se define el vector velocidad angular, comoun vector perpendicular al plano en el cual semueve la partícula, cuyo sentido está dado por
la regla de la mano derecha, y que gira sobre símismo en el sentido que se mueve la partícula.
Por la ecuación (3.32), se tiene que la magni-tud del vector velocidad está dada por
v = ωR, (3.49)
pero de la figura 3.14, se tiene que
R = rsenγ, (3.50)
por lo que al reemplazar la ecuación (3.50) en laecuación (3.49), se obtiene
v = ωrsenγ, (3.51)
donde γ es el ángulo entre el vector velocidadangular ω y el vector posición r.
Ahora, por definición de producto cruz o vec-torial, es posible escribir la ecuación (3.51) en laforma vectorial
v = ω × r, (3.52)
expresión válida solo para movimiento circu-lar. Como resultado se tiene que el vector ve-locidad es perpendicular tanto al vector veloci-dad angular como al vector posición, siendo es-ta condición de validez general.
De acuerdo con la ecuación (3.35), si la veloci-dad angular es un vector, también los es la ace-leración angular, es decir
α ≡ dω
dt. (3.53)
Derivando la ecuación (3.52) respecto al tiempo,y teniendo en cuenta la ecuación (3.53), se en-cuentra que el vector aceleración está dado por
a = α× r+ω×v = α× r+ω× (ω× r). (3.54)
En el caso de una partícula con movimien-to circular uniforme, donde la aceleración sólotiene componente en la dirección centrípeta, laecuación (3.54) se transforma en
a = ω × v = ω × (ω × r).
Como se muestra en la figura 3.15, el produc-to vectorial ω × v apunta hacia el centro de lacircunferencia y su magnitud está dada por
a = ω2R,
ya que los vectores velocidad angular y veloci-dad son perpendiculares.

3.4. MOVIMENTO CIRCULAR 13
x
y
z
r
v
a
w
O
g
Figura 3.15: Vectores velocidad y aceleración en elMCU.
Ejemplo 3.5.Las coordenadas de una partícula enmovimiento, en función del tiempo, estándadas por x = Asen(ωt) y y = Acos(ωt).Determine a) La trayectoria seguida por lapartícula. b) La magnitud de la velocidadde la partícula en cualquier instante. c)Las componentes tangencial y normal dela aceleración de la partícula, en cualquierinstante. d) El sentido de movimiento dela partícula.
Solucióna) De acuerdo con el enunciado, el vec-tor posición de la partícula en función deltiempo, está dado por
r = A[sen(ωt)i + cos(ωt)j].
Por lo que al aplicar el teorema de Pitágo-ras, se encuentra que su magnitud es
r = A.
O sea, que la magnitud del vector posi-ción de la partícula es constante mientrasla partícula se mueve. De este modo, lapartícula describe una trayectoria circularde radio R = A.
b) Empleando la definición de veloci-dad, se encuentra que está dada por
v = ωA[cos(ωt)i − sen(ωt)j],
por lo que su magnitud es
v = ωA.
es decir, que la partícula se mueve de talforma que la magnitud de su velocidadpermanece constante, en otras palabras,tiene un movimiento circular uniforme.
c) Como la magnitud de la velocidades independiente del tiempo, la compo-nente tangencial de la aceleración es cero(aT = dv
/dt), pues es una consecuencia
del cambio en la magnitud de la veloci-dad.
La componente normal o centrípeta dela aceleración, que proviene del cambio enla dirección del vector velocidad, en estecaso coincide con la aceleración total de lapartícula, es decir
a = −ω2 A[sen(ωt)i + cos(ωt)j] = −ω2r,
por lo que su magnitud está dada por
aN = a = ω2 A.
Como se esperaba, la magnitud de la ace-leración de la partícula permanece cons-tante.
d) Para determinar el sentido demovimiento de la partícula en la trayecto-ria circular, se considera el punto P de lasiguiente figura. Cuando la partícula pasa
R=A
P
?
?
ax
y
O
por el punto P sus coordenadas son x = Ay y = 0, o sea que
sen(ωt) = 1 cos(ωt) = 0.
Como en ambos casos se cumple que ωt =π/2, al reemplazar este valor en la ex-presión para la velocidad, se obtiene v =−ωAj , lo cual indica que la partícula semueve en una trayectoria circular de radioA, con movimiento circular uniforme y ensentido horario.
Ejercicio 3.5.Las coordenadas de una partícula enmovimiento, en función del tiempo, estándadas por x = Asen(ωt) y y = Acos(ωt).a) ¿Cuál es la posición inicial de la partícu-la si to = 0 ? ¿Cuál es la posición corres-

14 CAPÍTULO 3. MOMENTO ANGULAR Y SU CONSERVACIÓN
pondiente de la partícula en la gráfica an-terior? b) Determine la relación matemáti-ca entre el vector posición y el vector acele-ración, en cualquier instante. ¿Qué ángu-lo forman estos dos vectores? ¿Por qué? c)Compruebe que se satisface la expresiónaN = v2/R. d) ¿Cuál es la aceleración an-gular de la partícula? ¿Por qué?
3.4.7. Dinámica del movimiento circular
Cuando una partícula de masa m, describe unatrayectoria circular donde ρ = R y v = ωR, lascomponentes tangencial y normal de la fuerzaadquieren la forma
FT = (mαR)uT y FN = (mω2R)uN,
que no son fuerzas aplicadas sino que corres-ponden, respectivamente, a las componentestangencial y normal de la fuerza resultante.
En el caso de movimiento circular uniforme,sólo se tiene cambio en la dirección de la veloci-dad, es decir, F = FNuN.
x
y
z
O
F v
r
m
w
Figura 3.16: Vectores v, ω y F en un MCU.
En forma vectorial, para movimiento circu-lar uniforme, y de acuerdo con la figura 3.16 setiene
a = ω × v,
o sea, que la segunda ley de Newton adquierela forma
F = ma = mω × v = ω × (mv) = ω × p.
Ejemplo 3.6.El péndulo simple consiste en una partícu-la de masa m, suspendida de una cuerda
de longitud S, como se ilustra en la figura.Suponga que la partícula se suelta desdeuna posición tal que la cuerda forma unángulo θo con la vertical, como se muestraen la figura siguiente. a) Dibuje las fuerzasque actúan sobre la partícula. b) Planteelas ecuaciones de movimiento. c) Deter-mine para la partícula, en función de θ, laaceleración angular, la velocidad angulary la tensión en la cuerda. d) Determine co-mo es la magnitud de las cantidades ante-riores en los extremos de la trayectoria yen su centro.
qo S
m
O
Solucióna) Diagrama de cuerpo libre para lapartícula Sobre la partícula, en la posición
mg
q
TS
Movimiento
general θ, las fuerzas que actúan son el pe-so y la tensión que ejerce la cuerda sobreella.b) La ecuación de movimiento en la direc-ción radial o centrípeta, tomando el senti-do de la tensión como positivo, es
T − mg cosθ = mω2S, (1)
y en la dirección tangencial, tomando co-mo positivo el sentido del movimientosupuesto en la figura, es
mg senθ = mαS. (2)
c) De la ecuación (2), la aceleración angu-

3.4. MOVIMENTO CIRCULAR 15
lar de la partícula está dada por
α =gS
senθ. (3)
teniendo en cuenta la definición de acele-ración angular, la ecuación (3) se transfor-ma en
dω
dt=
gS
senθ, (4)
donde se tienen las variables ω, t y θ. Conel fin de resolver la ecuación (4) se hacenecesario eliminar la variable tiempo, yaque interesa obtener ω(θ). Multiplicandoa ambos lados de la ecuación (4) por dθ, sellega a la expresión
−ωdω =gS
senθ dθ, (5)
el signo menos en la ecuación aparece yaque en la situación de la figura, a medidaque transcurre el tiempo el ángulo θ dis-minuye.
Integrando la ecuación (5) entre loslímites ω = 0 cuando θ = θo y ω en laposición angular θ, se obtiene
ω =
√2gS(cos θ − cosθo), (6)
mediante las ecuaciones (1) y (6), se llega a
T = mg [3 cosθ − 2 cosθo] . (7)
d) De las ecuaciones (3), (6) y (7) se obtienepara los extremos A y B, donde θ = θo
α =gS
senθo,
ω = 0,
T = mg cosθo.
qo S
B
qo
A
C
Ahora, en el centro de la trayectoria Ccon θ = 0
α = 0
ω =
√2gS
(1 − cosθo),
T = mg(3 − 2 cosθo).
De estos resultados, entre las posiciones By C se tiene que al soltar la partícula desdeel punto B, la aceleración angular dismi-nuye desde un valor máximo hasta cero,mientras que la velocidad angular aumen-ta desde cero hasta un valor máximo y latensión aumenta entre estos dos puntos.Entre las posiciones C y A se presentancambios opuestos en estas cantidades. Enconclusión, donde la aceleración es máxi-ma (extremos de la trayectoria), la veloci-dad angular es mínima (cero) y vicever-sa. Igualmente, se observa que la tensiónadquiere su máximo valor en el centro dela trayectoria y el mínimo en los extremos.
Ejercicio 3.6.a) Analizar los resultados del problemaanterior suponiendo que θo = π/2 b) ¿Porqué razón en el punto C, la tensión en lacuerda no es igual al peso de la partícula?
Ejemplo 3.7.Un pequeño cuerpo de masa m, que partedel punto A de la figura, desliza sobre latrayectoria circular de radio R. Suponerque la magnitud de la fuerza de fricción Fkes constante, con valor un décimo del pe-so del cuerpo. a) Determine el trabajo netorealizado sobre el pequeño cuerpo, cuan-do pasa por el punto B. b) Si m = 500 g,R = 20 cm, para β = 45o, 90o, 135o, 180o,hallar el valor de la cantidad obtenida enel numeral anterior.
C
B
A D
b
mR
SoluciónComo consecuencia de la ecuación (2.48),

16 CAPÍTULO 3. MOMENTO ANGULAR Y SU CONSERVACIÓN
el trabajo realizado por una fuerza está da-da por
W =
B∫A
FcosθdS
=
B∫A
FTdS,
pero en una trayectoria circular y paraun desplazamiento angular infinitesimaldS = Rdθ, se tiene
W = RB∫
A
Fcosθdθ = RB∫
A
FTdθ. (1)
a) De acuerdo con el diagrama de cuer-po libre del pequeño cuerpo, de las tresfuerzas que actúan, sólo realizan trabajo elpeso y la fuerza de fricción dinámica.
Fk
mg
Nq
q
Para la posición genérica de la figuraanterior, luego de integrar y evaluar, se en-cuentra que
Wmg = mgRsenβ, (2)
WFk = − 110
mgRβ. (3)
Por consiguiente, el trabajo total es
W = mgR(senβ − β
10).
b) Reemplazando valores, con m =500 g ≡ 0.5 kg y R = 20 cm ≡ 0.2 m se
tiene
β(o) W(J)
45 0.62
90 0.83
135 0.46
180 −0.31
De acuerdo con los resultados obtenidos,cuando β = 45o, el trabajo es positivo loque indica que es mayor el trabajo rea-lizado por el peso, que el realizado porla fuerza de fricción dinámica, igual quepara 90o y 135o . En cambio, para β =
180o, el trabajo neto realizado por el pesoes nulo a diferencia del trabajo realizadopor la fuerza de fricción que es diferentede cero y negativo.
3.5. Vector momento angular deuna partícula
Para una partícula con masa m y momento li-neal p, el vector momento angular L respecto alpunto O de la figura 3.17, se define en la forma
L ≡ r × p = mr × v (3.55)
O
L
r pm
Figura 3.17: Momento angular de una partícularespecto al punto O.
De acuerdo con la definición de momento an-gular dada por la ecuación (3.55), se tiene que elmomento angular L es un vector perpendicularal plano formado por el vector posición r y elvector velocidad v.
Teniendo en cuenta la definición de productovectorial o producto cruz, el momento angular

3.5. VECTOR MOMENTO ANGULAR DE UNA PARTÍCULA 17
de la partícula se puede obtener mediante el de-terminante
L = r × p =
∣∣∣∣∣∣i j kx y zpx py pz
∣∣∣∣∣∣ (3.56)
Luego de resolver el determinante dado por laecuación (3.56), se encuentra que las compo-nentes rectangulares del momento angular de lapartícula, están dadas por
Lx = ypz − zpy,Ly = zpx − xpz,Lz = xpy − ypx.
Si la partícula se mueve en plano xy, se tienez = 0 y pz = 0, por lo que las componentes delmomento angular Lx = Ly = 0 y sólo hay com-ponente de momento angular en la dirección z,es decir
L = Lzk= (xpy−ypx)k,
o en forma escalar
L = Lz
= xpy−ypx.
Dimensiones y unidades de momento angularDe acuerdo con la definición dada por laecuación (3.55), el momento angular tiene di-mensiones de ML2T−1. De este modo, la unidaden el sistema SI está dada por kg · m2 · s−1 y enel sistema gaussiano por g · cm2 · s−1.
En general, el vector momento angular es unacantidad física que cambia en magnitud y di-rección mientras la partícula se encuentra enmovimiento curvilíneo. En el caso particular deun movimiento circular, se pueden presentar lassiguientes situaciones, en lo que respecta a la di-rección:
1. Que el punto de referencia O, se encuentresobre el eje z pero fuera del plano en el cual semueve la partícula, como se ilustra en la figura3.18.
En este caso, el vector momento angular Lvaría en dirección ya que el plano formado por
z
O
L
r
m
v
w
Figura 3.18: Dirección variable del momento angu-lar L.
el vector posición r y el vector velocidad v, cam-bia su orientación mientras la partícula describela trayectoria circular.
2. Si el punto de referencia O como se mues-tra en la figura 3.19, se encuentra sobre el ejez y en el plano de movimiento de la partícu-la, la dirección del vector momento angular Les invariante, ya que en este caso es un vectorperpendicular al plano de movimiento, pues elvector posición r y el vector velocidad v estánen el mismo plano.
En este caso de movimiento circular con O enel centro del círculo, el vector posición r es per-pendicular al vector velocidad v y sus magni-tudes están relacionadas mediante la expresiónv = ωr, donde r es el radio de la trayectoria cir-cular. Así, la magnitud del momento angular es
L = mrv = mr2ω.
z
O
L
w
m
rv
Figura 3.19: Dirección invariante del momento an-gular L.
Como el vector momento angular L y el vec-tor velocidad angular ω, son vectores paralelos,

18 CAPÍTULO 3. MOMENTO ANGULAR Y SU CONSERVACIÓN
en forma vectorial se tiene que
L = (mr2)ω.
En el caso más general de un movimientocurvilíneo cualquiera y recordando que el vec-tor velocidad, en coordenadas polares, está da-do por v = vθuθ + vrur, se tiene que el momentoangular también se puede expresar en la forma
L = mr × (vθuθ + vrur) = mvθr × uθ ,
donde el segundo producto, a la derecha de laprimera igualdad, se hace cero ya que el vectorposición r es paralelo al vector unitario radialur. Por consiguiente, su magnitud en este casoes
L = mrvθ = mr2 dθ
dt.
3.5.1. Variación del vector momento an-gular con el tiempo
Ahora se considera la variación del vector mo-mento angular con el tiempo. Derivando laecuación (3.55) con respecto al tiempo se tiene
dLdt
= r × dpdt
+drdt
× p
= r × F, (3.57)
donde el segundo producto a la derecha de laprimera igualdad es cero, ya que el vector ve-locidad v es paralelo al vector momento linealp, mientras que el segundo producto correspon-de a la forma matemática de la segunda ley deNewton. De este modo, la variación del mo-mento angular con el tiempo está relacionadacon la fuerza neta que actúa sobre la partícula,mediante la ecuación (3.57).
La ecuación (3.57) es fundamental cuando seanaliza el movimiento de rotación, con la condi-ción que los vectores L y r × F sean evaluadosrespecto al mismo punto. Esta expresión desem-peña en el movimiento rotación, el mismo papelque la segunda ley de Newton en el movimien-to de traslación.
3.5.2. Conservación del momento angu-lar y fuerzas centrales
Si en la ecuación (3.57), el producto vectorial en-tre el vector posición r y la fuerza resultante F escero, se tiene que el vector momento angular esuna constante del movimiento. Por lo tanto, setiene que el momento angular de una partícu-la es constante si el producto vectorial r × F escero. Esta situación se presenta en los dos casossiguientes.
1. Si la fuerza neta sobre la partícula es cero,se tiene una partícula libre o en equilibrio, es de-cir, r × F = 0 y la condición L = Constante sesatisface.
O
m
qTrayectoria
v
r
d
Figura 3.20: Momento angular en el movimientorectilíneo.
En la figura 3.20, se considera una partículade masa m con movimiento rectilíneo uniformey con el origen de coordenadas ubicado en O.Por lo tanto
L = m r × v,
ó en magnitud
L = mrv senθ.
Como muestra la figura 3.20, d = r senθ, por loque
L = mvd
con m, v y d son constantes, el vector momentoangular es constante en magnitud y dirección yaque es un vector que entra perpendicularmenteal plano de la hoja mientras la partícula se en-cuentre en movimiento sobre la trayectoria rec-tilínea.
2. Igualmente, el producto vectorial entre elvector posición r y la fuerza F se hace cero, si
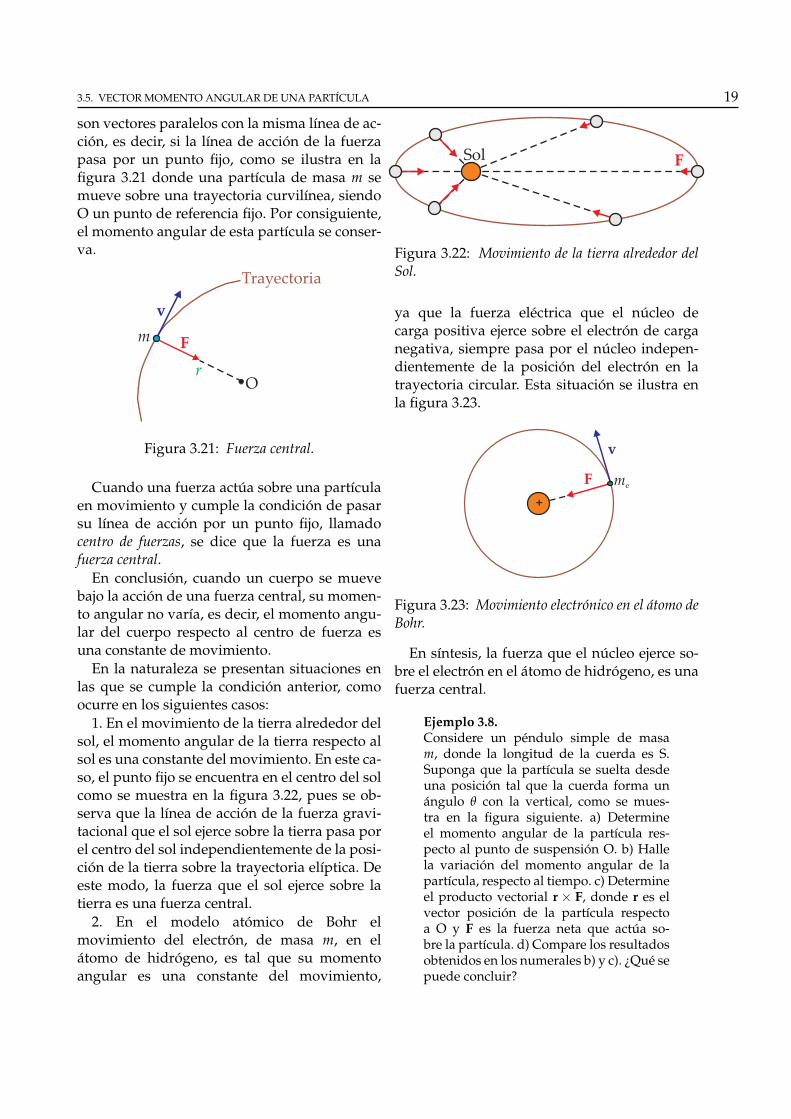
3.5. VECTOR MOMENTO ANGULAR DE UNA PARTÍCULA 19
son vectores paralelos con la misma línea de ac-ción, es decir, si la línea de acción de la fuerzapasa por un punto fijo, como se ilustra en lafigura 3.21 donde una partícula de masa m semueve sobre una trayectoria curvilínea, siendoO un punto de referencia fijo. Por consiguiente,el momento angular de esta partícula se conser-va.
m
O
F
r
v
Trayectoria
Figura 3.21: Fuerza central.
Cuando una fuerza actúa sobre una partículaen movimiento y cumple la condición de pasarsu línea de acción por un punto fijo, llamadocentro de fuerzas, se dice que la fuerza es unafuerza central.
En conclusión, cuando un cuerpo se muevebajo la acción de una fuerza central, su momen-to angular no varía, es decir, el momento angu-lar del cuerpo respecto al centro de fuerza esuna constante de movimiento.
En la naturaleza se presentan situaciones enlas que se cumple la condición anterior, comoocurre en los siguientes casos:
1. En el movimiento de la tierra alrededor delsol, el momento angular de la tierra respecto alsol es una constante del movimiento. En este ca-so, el punto fijo se encuentra en el centro del solcomo se muestra en la figura 3.22, pues se ob-serva que la línea de acción de la fuerza gravi-tacional que el sol ejerce sobre la tierra pasa porel centro del sol independientemente de la posi-ción de la tierra sobre la trayectoria elíptica. Deeste modo, la fuerza que el sol ejerce sobre latierra es una fuerza central.
2. En el modelo atómico de Bohr elmovimiento del electrón, de masa m, en elátomo de hidrógeno, es tal que su momentoangular es una constante del movimiento,
Sol F
Figura 3.22: Movimiento de la tierra alrededor delSol.
ya que la fuerza eléctrica que el núcleo decarga positiva ejerce sobre el electrón de carganegativa, siempre pasa por el núcleo indepen-dientemente de la posición del electrón en latrayectoria circular. Esta situación se ilustra enla figura 3.23.
+
F
v
me
Figura 3.23: Movimiento electrónico en el átomo deBohr.
En síntesis, la fuerza que el núcleo ejerce so-bre el electrón en el átomo de hidrógeno, es unafuerza central.
Ejemplo 3.8.Considere un péndulo simple de masam, donde la longitud de la cuerda es S.Suponga que la partícula se suelta desdeuna posición tal que la cuerda forma unángulo θ con la vertical, como se mues-tra en la figura siguiente. a) Determineel momento angular de la partícula res-pecto al punto de suspensión O. b) Hallela variación del momento angular de lapartícula, respecto al tiempo. c) Determineel producto vectorial r × F, donde r es elvector posición de la partícula respectoa O y F es la fuerza neta que actúa so-bre la partícula. d) Compare los resultadosobtenidos en los numerales b) y c). ¿Qué sepuede concluir?

20 CAPÍTULO 3. MOMENTO ANGULAR Y SU CONSERVACIÓN
qo S
m
O
Solucióna) Por la ecuación (3.55) y teniendo encuenta que el vector posición r = Sur esperpendicular a la velocidad se tiene queel momento angular es un vector de mag-nitud
L = mSv, (1)
que incide perpendicularmente al planode la hoja, para la situación mostrada enla siguiente figura.
mg
q
TS
Movimiento
Tomando la ecuación
ω =
√2gS(cosθ − cosθo),
obtenida anteriormente, con v = ωS, setiene para la velocidad de la partícula
v =√
2gS(cosθ − cosθo). (2)
Reemplazando la ecuación (2) en laecuación (1), la magnitud del momentoangular de la partícula respecto al puntode suspensión O, es
L = mS√
2gS(cosθ − cosθo). (3)
Si se toma el eje z entrando perpendicular-mente al plano de la hoja, en forma vecto-rial la ecuación (3) se transforma en
L = mS√
2gS(cosθ − cosθo)k. (4)
b) Derivando la ecuación (4) respecto altiempo donde la única variable es el ángu-lo θ, y empleando la definición de veloci-dad angular se llega a
dLdt
= −(mgS senθ)k, (5)
o sea, es un vector que sale perpendicular-mente del plano de la hoja.
c) Como r = Sur y F = mg + TuN, aldescomponer el peso en las componentesradial y transversal con uθ = −uT y uN =−ur, se tiene para el producto vectorial
r × F = −(mgS senθ)k. (6)
Al comparar las ecuaciones (5) y (6), setiene que se cumple la relación
dLdt
= r × F,
resultado coincidente con la ecuación (3.3)y que tiene validez general.
PreguntaDe acuerdo con el resultado obtenido en elnumeral d) del ejemplo 3.8, ¿se conservael momento angular de la partícula? Justi-fique su respuesta.
Es de particular importancia tanto el concep-to de momento angular como su conservación,en el caso de cuerpos que se tratan bajo el mo-delo de cuerpo rígido. Por ello, en lo que siguese considera el concepto de cuerpo rígido, rela-cionándolo directamente con el movimiento derotación.
3.5.3. Concepto de cuerpo rígido
En las unidades anteriores se ha analizado lamecánica de los cuerpos que se pueden tratarbajo el modelo de partícula; esto ha sido posi-ble ya que solo interesaba considerar el efectode las fuerzas en lo que se refiere al movimientode traslación.
En adición, se debe considerar otro tipo demovimiento que tienden a imprimir las fuerzassobre los cuerpos, como es el movimiento derotación, lo que hace que el modelo de partículano sea válido, pues en su lugar el modelo útil

3.6. VECTOR MOMENTO ANGULAR DE UN CUERPO RÍGIDO 21
es el de cuerpo rígido que se definirá en lo quesigue.
Un cuerpo rígido, es un caso particular deun sistema de muchas partículas (del orden de1023 partículas por cm3). Estas partículas debencumplir la condición de que la separación en-tre cualquier pareja de ellas siempre permanececonstante mientras el cuerpo se mueve, sin im-portar el tipo de fuerzas que actúen sobre él.Esta definición permite afirmar que un cuerporígido no se deforma bajo ninguna interaccióncon otros cuerpos.
i
j
m
n
rmn
rij
Figura 3.24: Cuerpo rígido.
De acuerdo con la definición de cuerpo rígi-do, en la figura 3.24 se hace necesario que lasmagnitudes rij y rmn no cambien, condición quese debe cumplir para cualquier par de partícu-las que lo conformen.
3.6. Vector momento angular deun cuerpo rígido
De acuerdo con la ecuación (3.55), el momentoangular Li de una partícula i que describe unatrayectoria curvilínea con velocidad vi, está da-do por
Li = miri × vi, (3.58)
donde mi es la masa de la partícula y ri es su vec-tor posición respecto al origen de coordenadas.
En el caso de un cuerpo rígido, cuando ro-ta alrededor de un eje determinado, esta defini-ción sigue siendo válida para cualquier partícu-la del cuerpo. Además, si los momentos an-gulares de todas las partículas del cuerpo seevalúan respecto al mismo punto, el momento
angular total del cuerpo rígido está dado por
L = ∑ miri × vi
= ∑ Li. (3.59)
Primero se considera el caso de la figura 3.25,en el cual se tienen n partículas que forman unalámina rígida muy delgada, de espesor despre-ciable, con forma irregular y cuya distribuciónde masa también es irregular. La lámina giracon velocidad angular ω, en su propio plano,alrededor de un eje fijo perpendicular a ellay cuyo origen O también se encuentra en eseplano.
w
mi
z
Li
Ov
i
ri
Figura 3.25: Momento angular de una lámina res-pecto al punto O.
De las partículas que conforman la lámina, seconsidera la partícula genérica i, que describeuna trayectoria circular de radio ri = Ri con ve-locidad vi = ω × ri. Como la velocidad angulares paralela al eje de rotación, esto es perpendi-cular a ri, la magnitud de la velocidad es
vi = ωri. (3.60)
Ahora, como ri es perpendicular a vi, de acuer-do con la ecuación (3.58) la magnitud del mo-mento angular, está dada por
Li = mirivi. (3.61)
Reemplazando la ecuación (3.60) en la ecuación(3.61), se encuentra
Li = mir2i ω, (3.62)
que corresponde a una relación entre las mag-nitudes de los vectores Li y ω; lo cual permiteescribir la ecuación (3.62) en la forma vectorial,
Li = (mir2i )ω. (3.63)
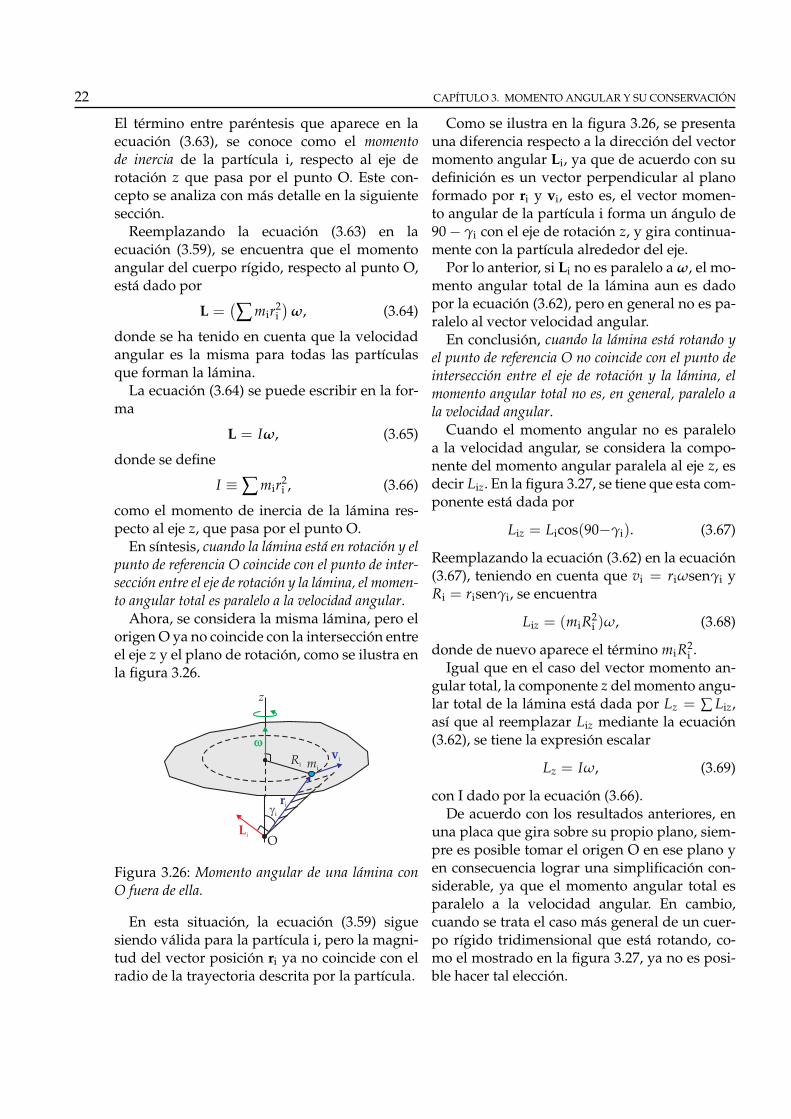
22 CAPÍTULO 3. MOMENTO ANGULAR Y SU CONSERVACIÓN
El término entre paréntesis que aparece en laecuación (3.63), se conoce como el momentode inercia de la partícula i, respecto al eje derotación z que pasa por el punto O. Este con-cepto se analiza con más detalle en la siguientesección.
Reemplazando la ecuación (3.63) en laecuación (3.59), se encuentra que el momentoangular del cuerpo rígido, respecto al punto O,está dado por
L =(∑ mir2
i)
ω, (3.64)
donde se ha tenido en cuenta que la velocidadangular es la misma para todas las partículasque forman la lámina.
La ecuación (3.64) se puede escribir en la for-ma
L = Iω, (3.65)
donde se define
I ≡ ∑ mir2i , (3.66)
como el momento de inercia de la lámina res-pecto al eje z, que pasa por el punto O.
En síntesis, cuando la lámina está en rotación y elpunto de referencia O coincide con el punto de inter-sección entre el eje de rotación y la lámina, el momen-to angular total es paralelo a la velocidad angular.
Ahora, se considera la misma lámina, pero elorigen O ya no coincide con la intersección entreel eje z y el plano de rotación, como se ilustra enla figura 3.26.
O
w
mi
z
gi
Ri
vi
ri
Li
Figura 3.26: Momento angular de una lámina conO fuera de ella.
En esta situación, la ecuación (3.59) siguesiendo válida para la partícula i, pero la magni-tud del vector posición ri ya no coincide con elradio de la trayectoria descrita por la partícula.
Como se ilustra en la figura 3.26, se presentauna diferencia respecto a la dirección del vectormomento angular Li, ya que de acuerdo con sudefinición es un vector perpendicular al planoformado por ri y vi, esto es, el vector momen-to angular de la partícula i forma un ángulo de90 − γi con el eje de rotación z, y gira continua-mente con la partícula alrededor del eje.
Por lo anterior, si Li no es paralelo a ω, el mo-mento angular total de la lámina aun es dadopor la ecuación (3.62), pero en general no es pa-ralelo al vector velocidad angular.
En conclusión, cuando la lámina está rotando yel punto de referencia O no coincide con el punto deintersección entre el eje de rotación y la lámina, elmomento angular total no es, en general, paralelo ala velocidad angular.
Cuando el momento angular no es paraleloa la velocidad angular, se considera la compo-nente del momento angular paralela al eje z, esdecir Liz. En la figura 3.27, se tiene que esta com-ponente está dada por
Liz = Licos(90−γi). (3.67)
Reemplazando la ecuación (3.62) en la ecuación(3.67), teniendo en cuenta que vi = riωsenγi yRi = risenγi, se encuentra
Liz = (miR2i )ω, (3.68)
donde de nuevo aparece el término miR2i .
Igual que en el caso del vector momento an-gular total, la componente z del momento angu-lar total de la lámina está dada por Lz = ∑ Liz,así que al reemplazar Liz mediante la ecuación(3.62), se tiene la expresión escalar
Lz = Iω, (3.69)
con I dado por la ecuación (3.66).De acuerdo con los resultados anteriores, en
una placa que gira sobre su propio plano, siem-pre es posible tomar el origen O en ese plano yen consecuencia lograr una simplificación con-siderable, ya que el momento angular total esparalelo a la velocidad angular. En cambio,cuando se trata el caso más general de un cuer-po rígido tridimensional que está rotando, co-mo el mostrado en la figura 3.27, ya no es posi-ble hacer tal elección.
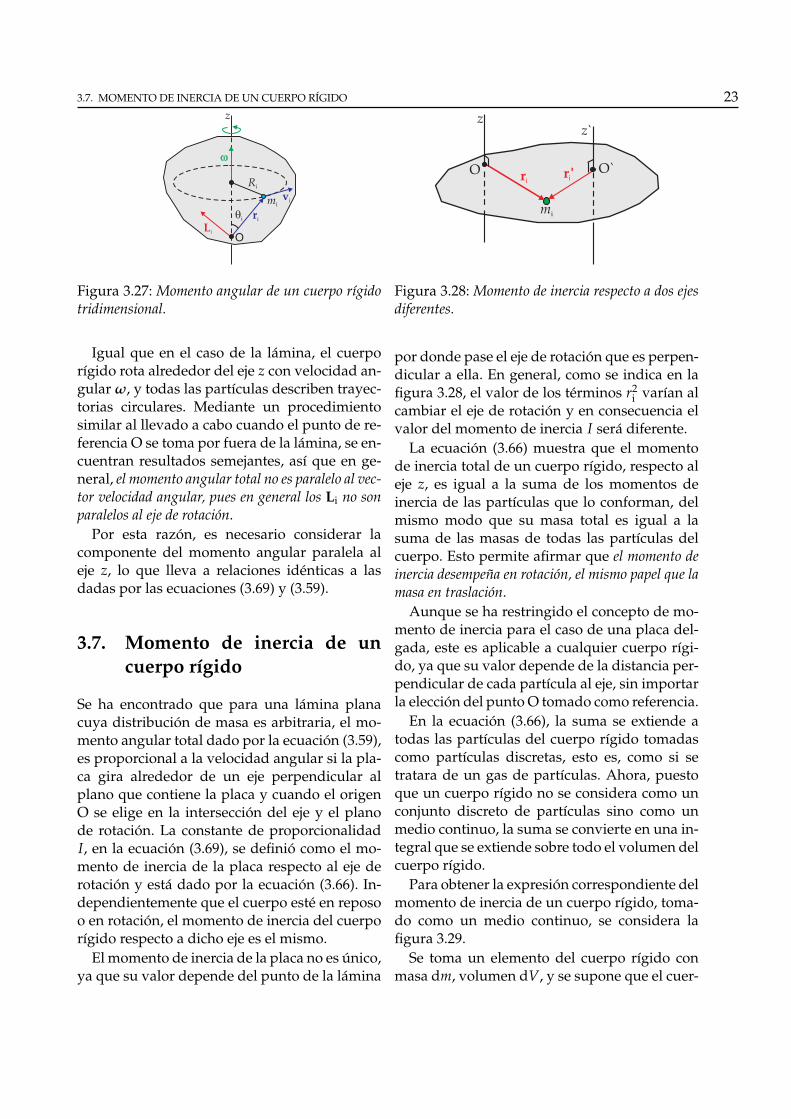
3.7. MOMENTO DE INERCIA DE UN CUERPO RÍGIDO 23z
w
Ri
mi
O
qi
Li
vi
ri
Figura 3.27: Momento angular de un cuerpo rígidotridimensional.
Igual que en el caso de la lámina, el cuerporígido rota alrededor del eje z con velocidad an-gular ω, y todas las partículas describen trayec-torias circulares. Mediante un procedimientosimilar al llevado a cabo cuando el punto de re-ferencia O se toma por fuera de la lámina, se en-cuentran resultados semejantes, así que en ge-neral, el momento angular total no es paralelo al vec-tor velocidad angular, pues en general los Li no sonparalelos al eje de rotación.
Por esta razón, es necesario considerar lacomponente del momento angular paralela aleje z, lo que lleva a relaciones idénticas a lasdadas por las ecuaciones (3.69) y (3.59).
3.7. Momento de inercia de uncuerpo rígido
Se ha encontrado que para una lámina planacuya distribución de masa es arbitraria, el mo-mento angular total dado por la ecuación (3.59),es proporcional a la velocidad angular si la pla-ca gira alrededor de un eje perpendicular alplano que contiene la placa y cuando el origenO se elige en la intersección del eje y el planode rotación. La constante de proporcionalidadI, en la ecuación (3.69), se definió como el mo-mento de inercia de la placa respecto al eje derotación y está dado por la ecuación (3.66). In-dependientemente que el cuerpo esté en reposoo en rotación, el momento de inercia del cuerporígido respecto a dicho eje es el mismo.
El momento de inercia de la placa no es único,ya que su valor depende del punto de la lámina
z
z`
mi
O O`r
i'r
i
Figura 3.28: Momento de inercia respecto a dos ejesdiferentes.
por donde pase el eje de rotación que es perpen-dicular a ella. En general, como se indica en lafigura 3.28, el valor de los términos r2
i varían alcambiar el eje de rotación y en consecuencia elvalor del momento de inercia I será diferente.
La ecuación (3.66) muestra que el momentode inercia total de un cuerpo rígido, respecto aleje z, es igual a la suma de los momentos deinercia de las partículas que lo conforman, delmismo modo que su masa total es igual a lasuma de las masas de todas las partículas delcuerpo. Esto permite afirmar que el momento deinercia desempeña en rotación, el mismo papel que lamasa en traslación.
Aunque se ha restringido el concepto de mo-mento de inercia para el caso de una placa del-gada, este es aplicable a cualquier cuerpo rígi-do, ya que su valor depende de la distancia per-pendicular de cada partícula al eje, sin importarla elección del punto O tomado como referencia.
En la ecuación (3.66), la suma se extiende atodas las partículas del cuerpo rígido tomadascomo partículas discretas, esto es, como si setratara de un gas de partículas. Ahora, puestoque un cuerpo rígido no se considera como unconjunto discreto de partículas sino como unmedio continuo, la suma se convierte en una in-tegral que se extiende sobre todo el volumen delcuerpo rígido.
Para obtener la expresión correspondiente delmomento de inercia de un cuerpo rígido, toma-do como un medio continuo, se considera lafigura 3.29.
Se toma un elemento del cuerpo rígido conmasa dm, volumen dV, y se supone que el cuer-

24 CAPÍTULO 3. MOMENTO ANGULAR Y SU CONSERVACIÓN
d = dm Vr
R
R
x
x
y
y
z
z
r
Figura 3.29: Momento de inercia de un cuerpo rígi-do.
po tiene una densidad de masa ρ. Teniendo encuenta que la densidad se define como la masapor unidad de volumen, estas cantidades estánrelacionadas por
dm = ρdV.
Ahora, si en la ecuación (3.66) se reemplaza lamasa m por dm, la distancia ri por R y la sumapor una integral, esta se transforma en
I =∫
ρR2dV. (3.70)
Por otro lado, si la masa del cuerpo está dis-tribuida uniformemente, la densidad ρ puedesalir de la integral y la ecuación (3.70) se con-vierte en
I = ρ∫
R2dV, (3.71)
lo que permite una simplificación, ya que elproblema se reduce a resolver una integral quecontiene sólo un factor geométrico, que es elmismo para todos los cuerpos de igual formay tamaño.Dimensiones y unidades de momento de iner-ciaDe acuerdo con la ecuación (3.66) ó (3.70), las di-mensiones de momento de inercia son ML2, porlo tanto, la unidad en el sistema internacionalde unidades está dada por kg m2 y en el sistemagaussiano de unidades por g cm2.
Ejemplo 3.9.Un cilindro homogéneo y hueco, de masaM, tiene radios interior y exterior dados
respectivamente por R1 y R2. Halle el mo-mento de inercia del cilindro, respecto a sueje de simetría.SoluciónComo se muestra en la figura, el cascarón
dr r R1
R2
c
h
cilíndrico de radio r y espesor dr tiene unvolumen infinitesimal dado por
dV = 2πrhdr. (1)
Reemplazando la ecuación (1) en laecuación (3.71), con R = r, se tiene
Ic = 2πρhR2∫
R1
r3dr,
donde ρ es la densidad del material con elcual se ha construido el cilindro. Así luegode integrar y evaluar, se encuentra
Ic =12 πρh(R4
2−R41). (2)
Además, como M es la masa del cilindrose cumple la relación
ρ =MV
=M
π(R22 − R2
1)h. (3)
Llevando la ecuación (3) a la ecuación (2),y luego de simplificar, se obtiene para elmomento de inercia del cilindro hueco, laexpresión
Ic = M 12 (R2
1 + R22),
de este modo, el radio de giro del cilindrohueco está dado por la expresión
K2c = 1
2 (R21 + R2
2)

3.8. TEOREMA DE STEINER O DE LOS EJES PARALELOS 25
3.7.1. Ejes principales de inercia
Para todo cuerpo, sin importar su forma, haypor lo menos tres direcciones perpendicularesentre sí, respecto a las cuales el momento angu-lar es paralelo al eje de rotación y es válida laecuación (3.65). Estos ejes se llaman ejes princi-pales de inercia, y cuando el cuerpo rígido pre-senta simetrías, estos ejes coinciden con algúneje de simetría.
3.7.2. Ejes principales de inercia en uncuerpo esférico
En un cuerpo esférico o con simetría esférica,cualquier eje que pase por su centro es un ejeprincipal de inercia. En la figura 3.30, los ejesxo,yo,zo son tres ejes principales de inercia.
xo
zo
yo
Figura 3.30: Ejes principales de inercia en un cuerpoesférico.
Así, en una esfera existen infinitos ejes princi-pales de inercia.
3.7.3. Ejes principales de inercia en uncuerpo cilíndrico
Para un cuerpo cilíndrico o con simetría cilín-drica, el eje del cilindro y cualquier eje que seaperpendicular a él, es un eje principal de iner-cia. En la figura 3.31, los ejes xo,yo,zo son tresejes principales de inercia.
3.7.4. Ejes principales de inercia en uncuerpo rectangular
Un bloque rectangular tiene tres ejes principalesde inercia que son perpendiculares a las caras ypasan a través del centro del bloque. En la figura
xo
zo
yo
Figura 3.31: Ejes principales de inercia en un cuerpocilíndrico.
3.32, los ejes xo,yo,zo corresponden a los tres ejesprincipales de inercia de un cuerpo rígido conesta simetría.
xo
yo
zo
Figura 3.32: Ejes principales de inercia en un cuerporectangular.
En síntesis, se define un eje principal de iner-cia como aquel para el cual el momento angu-lar es paralelo a la velocidad angular, que siem-pre se encuentra a lo largo del eje de rotación.Así, para un eje principal de inercia se cumplela ecuación (3.65), donde I es el momento deinercia respecto al eje principal de inercia co-rrespondiente.
Cuando un cuerpo rígido gira alrededor deun eje que no es principal, es válida la ecuación(3.69), donde I es de nuevo el momento de iner-cia respecto al eje que no es principal.
3.8. Teorema de Steiner o de losejes paralelos
Generalmente se conoce el momento de inerciade un cuerpo rígido respecto a un eje que pasapor su centro de masa; pero en muchos casos,

26 CAPÍTULO 3. MOMENTO ANGULAR Y SU CONSERVACIÓN
para analizar el movimiento de rotación de uncuerpo rígido, es necesario conocer el momentode inercia respecto a un eje paralelo que no pasapor el centro de masa. El teorema de Steiner o delos ejes paralelos, es una herramienta que permitellevar a cabo esta transformación.
Si en la figura 3.33 se conoce el momento deinercia I, respecto al eje zc que pasa por el centrode masa del cuerpo rígido, el momento de iner-cia I respecto al eje z paralelo a zc, el teorema deSteiner establece la relación
I = Ic + Ma2,
donde M es la masa del cuerpo rígido y a es laseparación entre los dos ejes paralelos.
zz
c
a
M C.M.
Figura 3.33: Teorema de Steiner o de los ejes parale-los.
3.8.1. Radio de giro de un cuerpo rígido
Es una cantidad física, definida de tal modo quese cumpla la relación
I = MK2,
K =
√I
M, (3.72)
donde I es el momento de inercia del cuerporígido respecto a determinado eje y M su masa.
Físicamente, el radio de giro representa ladistancia medida desde el eje, a la cual sepuede concentrar la masa del cuerpo sin va-riar su momento de inercia. El radio de girose puede determinar completamente por geo-metría para cuerpos homogéneos. Es una can-tidad que se puede evaluar fácilmente con ayu-da de la ecuación (3.71). Conocido el radio de
giro, mediante la ecuación (3.72), es posible de-terminar el momento de inercia respectivo. Enla práctica, es posible conocer la forma del radiode giro mediante la tabla 3.1, donde se da K2,evaluado respecto a un eje específico en cuerposcon diferentes simetrías.
Ejemplo 3.10.Como se muestra en la figura, una varilladelgada de masa M y longitud 4R, se colo-ca sobre un cilindro de masa 2M y radioR. Además, en los extremos de la varillase colocan dos masas muy pequeñas cadauna de masa M/2. Halle el momento deinercia del sistema, respecto a un eje pa-ralelo al eje del cilindro y que pasa por elpunto de contacto entre el cilindro y la va-rilla.
2R
P2R
c
2M
M/2 M/2
1 2
R
SoluciónEl momento de inercia del sistema, IsP, es-tá dado por la suma de los momentos deinercia de cada cuerpo, todos evaluadosrespecto al eje que pasa por el punto P. Es-to es
Isp = Icp + Ivp + I1p + I2p. (1)
Por el teorema de Steiner, el momento deinercia del cilindro, respecto a un eje quepasa por el punto de contacto P es
Icp = Icc + 2MR2 = 3MR2, (2)
donde Icc = 12 2MR2, es el momento de
inercia del cilindro respecto a un eje quepasa por el centro de masa, de acuerdo conla tabla 3.1.
Como el punto de contacto P coincidecon el centro de la varilla, de acuerdo conla información de la tabla 3.1, el momentode inercia de la varilla respecto al eje quepasa por P es
Ivp = 43 MR2. (3)

3.8. TEOREMA DE STEINER O DE LOS EJES PARALELOS 27
Además, como las pequeñas masas se en-cuentran en posiciones simétricas, respec-to al punto P, sus momentos de inercia res-pecto al eje que pasa por P, son iguales, es-to es
I1p = I2p = 2MR2
Reemplazando las ecuaciones (2), (3) y (4)en (1) se encuentra que el momento deinercia del sistema, respecto a un eje pa-ralelo al eje del cilindro y que pasa por elpunto P, está dado por
Isp = 253 MR2.
Ejercicio 3.7.Para el sistema considerado en el ejem-plo (3.10), encuentre el momento de iner-cia respecto a un eje coincidente con el ejedel cilindro.
3.8.2. Conservación del vector momentoangular en un cuerpo rígido
Aunque la expresión
dLdt
= r × F, (3.73)
se obtuvo para el caso de una partícula conmovimiento curvilíneo, también es válida en elcaso de un sistema de partículas, si se interpretaa L como el momento angular total del sistemade partículas y r × F como el producto vectorialentre el vector posición r y la fuerza neta que ac-túa sobre el sistema de partículas. Es decir, si secumplen simultáneamente las expresiones
L = ∑i
Li,
r × F = ∑i
ri × Fi,
donde ambas cantidades físicas se deben eva-luar respecto al mismo punto.
Como el cuerpo rígido es un caso especial deun sistema de partículas, la ecuación (3.73) esaplicable en este caso y es la ecuación básicapara analizar el movimiento de rotación de uncuerpo rígido, esto es, la ecuación (3.73) desem-peña en rotación el mismo papel que la segun-da ley de Newton en traslación. Por esta razón,
se le conoce como la ecuación de movimientopara la rotación de un cuerpo rígido. Se suponeque el cuerpo rígido de la figura 3.34, tiene unmovimiento de rotación alrededor del eje z con-siderado como eje principal de inercia; además,se toma el origen como un punto fijo en el ejeque corresponde a un sistema de referencia norotante o inercial.
O
w
L
z (Eje principal de inercia)
Figura 3.34: Rotación alrededor de un eje principalde inercia.
Como el eje de rotación z es un eje princi-pal de inercia, se cumple la ecuación (3.66), yla ecuación (3.73) se transforma en
d(Iω)
dt= r × F, (3.74)
donde el producto cruz r × F se debe a lasfuerzas externas que actúan sobre el cuerpo rígi-do y el cual se evalúa respecto al punto fijo O,sobre el eje principal.
Ahora, si el eje está fijo en el cuerpo rígido, setiene que el momento de inercia es constante yla ecuación (3.74) adquiere la forma
Iα = r × F, (3.75)
donde se ha empleado la definición de acele-ración angular. La ecuación (3.75), válida enrotación, es equivalente, en traslación a la se-gunda ley de Newton para masa constante.
Si el producto vectorial r × F debido a todaslas fuerzas externas que actúan sobre el cuerporígido, es nulo, por la ecuación (3.75) se cumplela condición
Iω = Constante, (3.76)
que corresponde a la conservación del vectormomento angular.

28 CAPÍTULO 3. MOMENTO ANGULAR Y SU CONSERVACIÓN
Un ejemplo de esta situación, se presentacuando un patinador rota alrededor del eje desu cuerpo, donde las fuerzas que actúan sobre élson el peso y la normal que ejerce el piso, cuyaslíneas de acción coinciden con el eje de rotación.En este caso, el producto cruz r × F del peso yla normal respecto a un punto ubicado sobre eleje es nulo y el momento angular del patinadores constante respecto a dicho punto. Esto lleva aque aumente la velocidad angular del patinadorcuando cierra los brazos, pues el momento deinercia disminuye.
PreguntaPor qué disminuye el momento de iner-cia del patinador al cerrar los brazos? Ex-plique. .
En síntesis, cuando el producto vectorial r× Fes nulo, si el momento de inercia del cuerporígido aumenta (disminuye) la velocidad angu-lar disminuye (aumenta) para garantizar que laecuación (3.76) se satisfaga.
Por otro lado, si adicionalmente el momen-to de inercia del cuerpo rígido permanece cons-tante, la ecuación (3.76) indica que la velocidadangular también permanece constante. Así, uncuerpo rígido que rota alrededor de un eje principal,fijo en el cuerpo, lo hace con velocidad angular cons-tante cuando el producto cruz r × F es cero. Esteenunciado, en rotación, equivale a la primeraley de Newton en traslación.
Como se verá en la próxima unidad, el con-cepto de momento angular es de vital importan-cia en el estudio del movimiento de rotación delos cuerpos.
3.9. ENUNCIADOS
1. En el punto A de la figura, se encuentraubicado un camarógrafo, que le sigue elmovimiento a un auto cuando este descri-be una trayectoria circular de radio R y conuna rapidez v, en sentido antihorario. (a)Halle la rapidez angular con la cual debegirar la cámara, a fin de que esta se man-tenga en la dirección del auto. (b) Halle elvalor de la cantidad obtenida en el numeral
anterior, cuando v = 25 m · s−1 y R = 30 m.
qA
r
B
C
R
v
R
2. Un auto se mueve en línea recta como seilustra en la figura. (a) Obtenga una expre-sión para la velocidad en sus componentesradial y transversal. (b) Halle la magnitudde la velocidad de la partícula. Analice elresultado obtenido. (c) Resuelva para ω =12 rad · s−1, b = 10 m y θ = 38o
rb
v
q
A
B
3. El vector posición de una partícula está da-do por la expresión r(t) = −A sen(ωt)i +A cos(ωt)j, donde A y ω son constantes.(a) Encuentre la trayectoria seguida por lapartícula. ¿Qué puede concluir de su re-sultado? Explique. (b) Halle la rapidez dela partícula en función del tiempo. ¿Quétipo de movimiento tiene la partícula? Ex-plique. (c) Obtenga una expresión que rela-cione el vector aceleración con el vectorposición. ¿Qué concluye de su resultado?¿Por qué? (d) Determine el sentido demovimiento de la partícula sobre su trayec-toria. (e) Resuelva los numerales anteriores,sabiendo que el vector posición está dadopor r(t) = A cos(ωt)i − B sen(ωt)j, dondeA, B y ω son constantes.
4. Un auto se mueve sobre una pista circu-lar de radio 5 m, de tal forma que su rapi-dez se incrementa uniformemente a razón
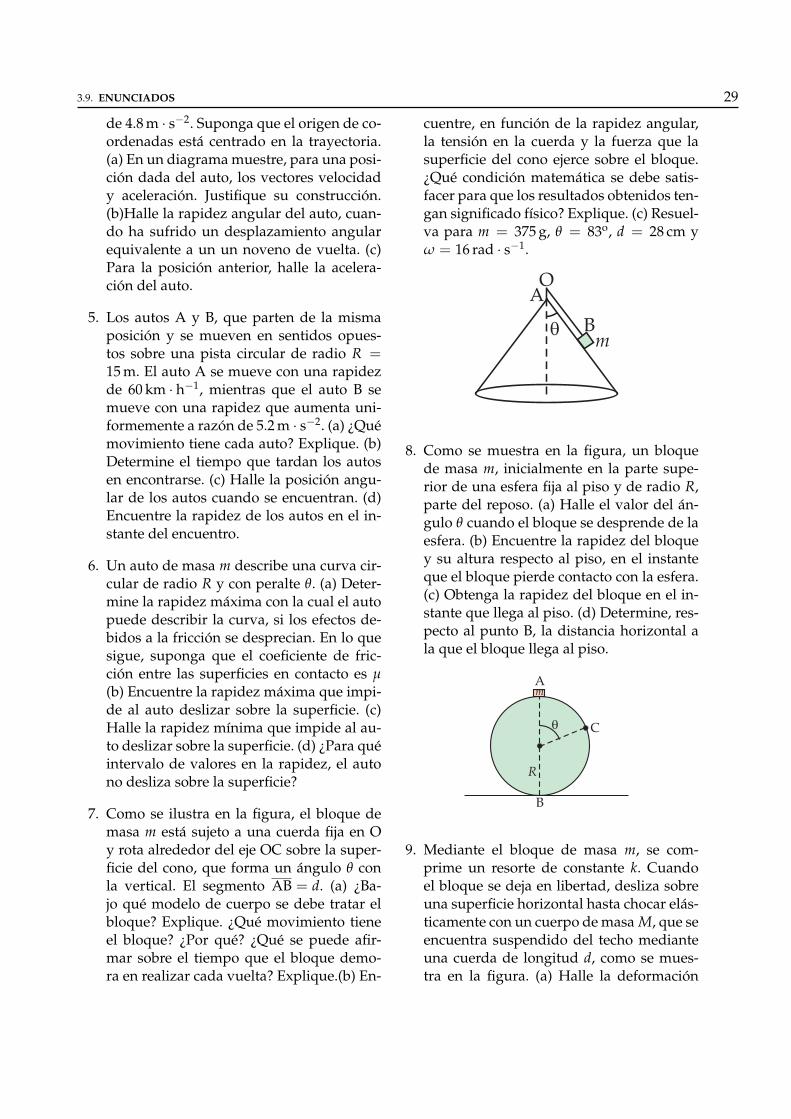
3.9. ENUNCIADOS 29
de 4.8 m · s−2. Suponga que el origen de co-ordenadas está centrado en la trayectoria.(a) En un diagrama muestre, para una posi-ción dada del auto, los vectores velocidady aceleración. Justifique su construcción.(b)Halle la rapidez angular del auto, cuan-do ha sufrido un desplazamiento angularequivalente a un un noveno de vuelta. (c)Para la posición anterior, halle la acelera-ción del auto.
5. Los autos A y B, que parten de la mismaposición y se mueven en sentidos opues-tos sobre una pista circular de radio R =15 m. El auto A se mueve con una rapidezde 60 km · h−1, mientras que el auto B semueve con una rapidez que aumenta uni-formemente a razón de 5.2 m · s−2. (a) ¿Quémovimiento tiene cada auto? Explique. (b)Determine el tiempo que tardan los autosen encontrarse. (c) Halle la posición angu-lar de los autos cuando se encuentran. (d)Encuentre la rapidez de los autos en el in-stante del encuentro.
6. Un auto de masa m describe una curva cir-cular de radio R y con peralte θ. (a) Deter-mine la rapidez máxima con la cual el autopuede describir la curva, si los efectos de-bidos a la fricción se desprecian. En lo quesigue, suponga que el coeficiente de fric-ción entre las superficies en contacto es µ(b) Encuentre la rapidez máxima que impi-de al auto deslizar sobre la superficie. (c)Halle la rapidez mínima que impide al au-to deslizar sobre la superficie. (d) ¿Para quéintervalo de valores en la rapidez, el autono desliza sobre la superficie?
7. Como se ilustra en la figura, el bloque demasa m está sujeto a una cuerda fija en Oy rota alrededor del eje OC sobre la super-ficie del cono, que forma un ángulo θ conla vertical. El segmento AB = d. (a) ¿Ba-jo qué modelo de cuerpo se debe tratar elbloque? Explique. ¿Qué movimiento tieneel bloque? ¿Por qué? ¿Qué se puede afir-mar sobre el tiempo que el bloque demo-ra en realizar cada vuelta? Explique.(b) En-
cuentre, en función de la rapidez angular,la tensión en la cuerda y la fuerza que lasuperficie del cono ejerce sobre el bloque.¿Qué condición matemática se debe satis-facer para que los resultados obtenidos ten-gan significado físico? Explique. (c) Resuel-va para m = 375 g, θ = 83o, d = 28 cm yω = 16 rad · s−1.
m
OA
Bq
8. Como se muestra en la figura, un bloquede masa m, inicialmente en la parte supe-rior de una esfera fija al piso y de radio R,parte del reposo. (a) Halle el valor del án-gulo θ cuando el bloque se desprende de laesfera. (b) Encuentre la rapidez del bloquey su altura respecto al piso, en el instanteque el bloque pierde contacto con la esfera.(c) Obtenga la rapidez del bloque en el in-stante que llega al piso. (d) Determine, res-pecto al punto B, la distancia horizontal ala que el bloque llega al piso.
m
R
q
A
B
C
9. Mediante el bloque de masa m, se com-prime un resorte de constante k. Cuandoel bloque se deja en libertad, desliza sobreuna superficie horizontal hasta chocar elás-ticamente con un cuerpo de masa M, que seencuentra suspendido del techo medianteuna cuerda de longitud d, como se mues-tra en la figura. (a) Halle la deformación

30 CAPÍTULO 3. MOMENTO ANGULAR Y SU CONSERVACIÓN
mínima del resorte, que permite al cuer-po de masa M describir una circunferen-cia completa. (b)Resolver para m = 700 g,k = 5 × 102 N · m, M = 900 g, d = 25 cm.
Mm
d
A
k
BO
10. Como se ilustra en la figura, una personaque está de pié sobre la base de un cilindroy pegada a la pared, gira adherida al cilin-dro con una rapidez angular, tal que cuan-do se quita el piso del cilindro, la personano desliza sobre la pared. Una vez que em-pieza a disminuir la rapidez de rotación delcilindro, se llega a un valor por debajo delcual la persona se mueve sobre la pared.El coeficiente de fricción entre la personay la pared es µ y el radio del cilindro esR. (a) Halle la rapidez angular mínima queimpide el movimiento de la persona so-bre la pared. (b) Resuelva para µ = 0.27 yR = 90 cm
w
R
11. El péndulo simple mostrado en la figu-ra, tiene masa m. (a) Haga el diagrama decuerpo libre para una posición arbitrariade la esferita. (b) ¿Cómo es la magnitudde la tensión en la cuerda, comparada conla magnitud del peso, cuando la partículapasa por el punto más bajo de la trayec-toria? Explique. (c) Utilizando el diagra-ma de cuerpo libre, obtenga gráficamente
la fuerza neta que actúa sobre la partícu-la. ¿La fuerza neta es una fuerza central?Explique. (d) ¿El momento angular de laesferita se conserva respecto a algún pun-to? Justifique su respuesta de dos manerasdiferentes.
O
m
12. El péndulo cónico de la figura, tiene masam. (a) Para una posición arbitraria, hagael diagrama de cuerpo libre para la esferi-ta. (b) ¿Qué movimiento tiene la partícu-la? Explique. (c) Apoyado en el diagra-ma de cuerpo libre, obtenga gráficamentela fuerza total que actúa sobre la esferi-ta. ¿La fuerza total es una fuerza central?Explique. (d) ¿El momento angular de laesferita se conserva respecto algún pun-to? Justifique su respuesta de dos manerasdiferentes.
O
m
C
13. Un auto, de masa m, se mueve sobre unapista circular de radio R. Determine si elmomento angular del auto se conserva res-pecto a algún punto de la trayectoria, cuan-do: (a) se supone que la curva no tiene per-alte, y (b) la curva tiene un peralte θ. Anal-ice cada una de sus respuestas.
14. En cada uno de los vértices de un triánguloequilátero de lado d, se tienen las partículasde masa m, 2m y 3m. Halle el momento de

3.9. ENUNCIADOS 31
inercia del sistema y el radio de giro, res-pecto a un eje perpendicular al triángulo yque pasa por (a) cada uno de sus vértices y(b) el punto medio de cada uno de sus la-dos.
15. Como se ilustra en la figura, sobre un arode masa M y radio R, se adhieren simétri-camente tres partículas cada una de masam. Halle el momento de inercia del sistema,respecto a un eje que pasa por (a) el centrodel aro y (b) una de las partículas. En ca-da caso, ¿el momento de inercia del sistemadepende de la posición de las partículas so-bre el aro? Explique.
R
16. El disco, de radio R y masa m, gira con ve-locidad angular ωo, hasta que cae sobre éluna placa cuadrada de igual masa m y dearista a, que inicialmente se encontraba enreposo. Los dos cuerpos se encuentran so-bre el mismo eje y sus centros coinciden.Debido a la fricción entre las superficies,los cuerpos se mueven como si estuvieranpegados. (a) Halle la velocidad angular delsistema, luego que la placa rectangular caesobre el disco. (b) Resuelva para R = 98 cm,ωo = 12.3 rad · s−1, a = 49 cm y a = 49 cm.
R
w
R
wo
17. El sistema disco-bloque, mostrado en lafigura, rota con velocidad angular ωo, de-bido a la fricción entre sus superficies. El
pequeño bloque tiene masa m y se encuen-tra inicialmente a una distancia r1 del eje derotación, mientras que el disco tiene masaM y radio R. (a) Encuentre la velocidad an-gular del sistema disco-bloque, si la distan-cia del bloque al eje se reduce a r2, me-diante una cuerda atada al bloque y quepasa por el centro del disco. (b) Encuentrela relación entre las velocidades angulares,cuando r1 = 1
2 R, r2 = 14 R y m = 2
3 M. (c)Resuelva para ωo = 9.7 rad · s−1.
w
r1
R

MOMENTO ANGULAR, MOMENTO DE UNA FUERZA YENERGIA
BERNARDO ARENAS GAVIRIAUniversidad de Antioquia
Instituto de Física
2012


Índice general
4. Momento angular y momento de una fuerza 14.1. Introducción . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
4.1.1. Movimiento de traslación pura . . . . . . . . . . . . . . . . . . . . . . . . . . . 24.1.2. Movimiento de rotación pura . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24.1.3. Movimiento combinado de traslación y rotación . . . . . . . . . . . . . . . . . 2
4.2. Momento de una fuerza respecto a un punto . . . . . . . . . . . . . . . . . . . . . . . 34.3. Momento de un par de fuerzas o cupla . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
4.3.1. Efectos de traslación de un par de fuerzas . . . . . . . . . . . . . . . . . . . . . 84.3.2. Efectos de rotación de un par de fuerzas . . . . . . . . . . . . . . . . . . . . . . 8
4.4. Descomposición de una fuerza en un sistema fuerza par . . . . . . . . . . . . . . . . 94.5. Resultante de un sistema de fuerzas aplicadas a un cuerpo rígido . . . . . . . . . . . 11
4.5.1. Resultante de un sistema de fuerzas concurrentes . . . . . . . . . . . . . . . . 124.5.2. Resultante de un sistema de fuerzas coplanares . . . . . . . . . . . . . . . . . 134.5.3. Resultante de un sistema de fuerzas paralelas . . . . . . . . . . . . . . . . . . 14
4.6. Llave de torsión . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 164.7. Ecuación de movimiento para la rotación de un cuerpo rígido . . . . . . . . . . . . . 18
4.7.1. Rotación de un cuerpo rígido alrededor de un eje principal de inercia . . . . . 184.7.2. Rotación de un cuerpo rígido alrededor de un eje no principal de inercia . . . 194.7.3. Movimiento combinado de traslación y rotación de un cuerpo rígido . . . . . 22
4.8. Energía en un cuerpo rígido . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 244.8.1. Energía cinética de un cuerpo rígido . . . . . . . . . . . . . . . . . . . . . . . . 244.8.2. Energía cinética traslacional de un cuerpo rígido . . . . . . . . . . . . . . . . . 254.8.3. Energía cinética rotacional de un cuerpo rígido . . . . . . . . . . . . . . . . . . 254.8.4. Energía cinética total de un cuerpo rígido . . . . . . . . . . . . . . . . . . . . . 264.8.5. Energía total de un cuerpo rígido . . . . . . . . . . . . . . . . . . . . . . . . . . 28
4.9. Movimiento por rodadura de un cuerpo rígido . . . . . . . . . . . . . . . . . . . . . . 304.10. ENUNCIADOS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
3

Capıtulo 4Momento angular y momento de unafuerza
CompetenciasEn esta unidad se busca que el estudiante
Infiera la diferencia entre movimientotraslacional y movimiento rotacional.
Defina y aplique el concepto de momentode una fuerza respecto a un punto.
Aplique el principio de transmisibilidad.
Defina un par de fuerzas o cupla y analicelos efectos que este sistema genera sobre uncuerpo rígido.
Identifique el momento de un par defuerzas como un vector libre.
Defina un sistema fuerza par aplicado a uncuerpo rígido y analice los efectos que ge-nera sobre el cuerpo.
Reemplace una fuerza por un sistemafuerza par equivalente.
Obtenga la fuerza resultante de un sistemade fuerzas aplicado a un cuerpo rígido.
Obtenga la fuerza neta equivalente enel caso de fuerzas concurrentes, fuerzascoplanares y de fuerzas paralelas.
Defina el centro de masa de un cuerpo rígi-do.
Obtenga defina el concepto de llave de tor-sión.
Obtenga la ecuación de movimiento para larotación de un cuerpo rígido.
Analice el movimiento combinado detraslación y rotación de un cuerpo rígido.
Obtenga la energía cinética rotacional y laenergía cinética total de un cuerpo rígido.
Obtenga la energía total de un cuerpo rígi-do.
Analice situaciones utilizando el conceptode energía total.
CONCEPTOS BASICOSEn esta sección, se definirá el concepto vectormomento de una fuerza (M), par de fuerzas ocupla, relación entre el vector momento angulary el vector momento de una fuerza, movimien-to de rotación pura, movimiento combinado detraslación y rotación, energía de un cuerpo rígi-do y rodadura.
4.1. Introducción
Hasta ahora se ha analizado la dinámica de loscuerpos que se pueden tratar bajo el modelo departícula; esto ha sido posible ya que solo in-teresaba considerar el efecto de las fuerzas en loque se refiere al movimiento de traslación.
En esta unidad se busca considerar con de-talle, otro tipo de movimiento que tienden a im-primir las fuerzas sobre los cuerpos, lo que hace
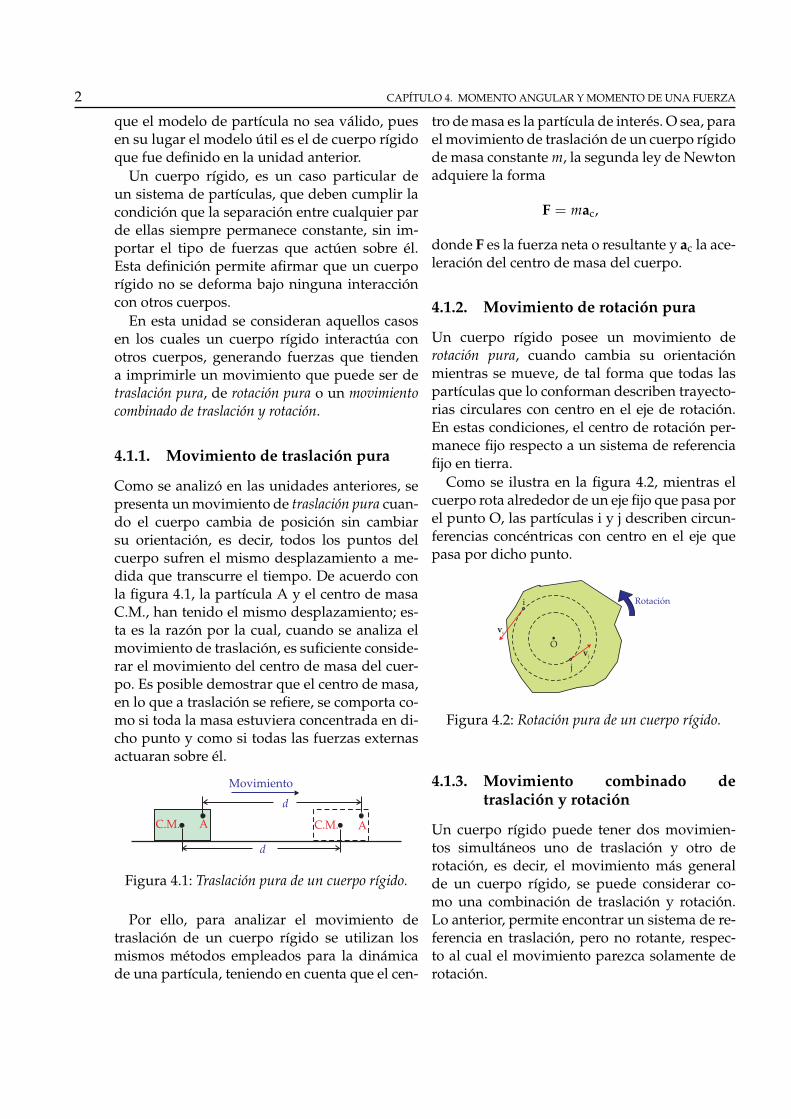
2 CAPÍTULO 4. MOMENTO ANGULAR Y MOMENTO DE UNA FUERZA
que el modelo de partícula no sea válido, puesen su lugar el modelo útil es el de cuerpo rígidoque fue definido en la unidad anterior.
Un cuerpo rígido, es un caso particular deun sistema de partículas, que deben cumplir lacondición que la separación entre cualquier parde ellas siempre permanece constante, sin im-portar el tipo de fuerzas que actúen sobre él.Esta definición permite afirmar que un cuerporígido no se deforma bajo ninguna interaccióncon otros cuerpos.
En esta unidad se consideran aquellos casosen los cuales un cuerpo rígido interactúa conotros cuerpos, generando fuerzas que tiendena imprimirle un movimiento que puede ser detraslación pura, de rotación pura o un movimientocombinado de traslación y rotación.
4.1.1. Movimiento de traslación pura
Como se analizó en las unidades anteriores, sepresenta un movimiento de traslación pura cuan-do el cuerpo cambia de posición sin cambiarsu orientación, es decir, todos los puntos delcuerpo sufren el mismo desplazamiento a me-dida que transcurre el tiempo. De acuerdo conla figura 4.1, la partícula A y el centro de masaC.M., han tenido el mismo desplazamiento; es-ta es la razón por la cual, cuando se analiza elmovimiento de traslación, es suficiente conside-rar el movimiento del centro de masa del cuer-po. Es posible demostrar que el centro de masa,en lo que a traslación se refiere, se comporta co-mo si toda la masa estuviera concentrada en di-cho punto y como si todas las fuerzas externasactuaran sobre él.
C.M.A AC.M.
d
d
Movimiento
Figura 4.1: Traslación pura de un cuerpo rígido.
Por ello, para analizar el movimiento detraslación de un cuerpo rígido se utilizan losmismos métodos empleados para la dinámicade una partícula, teniendo en cuenta que el cen-
tro de masa es la partícula de interés. O sea, parael movimiento de traslación de un cuerpo rígidode masa constante m, la segunda ley de Newtonadquiere la forma
F = mac,
donde F es la fuerza neta o resultante y ac la ace-leración del centro de masa del cuerpo.
4.1.2. Movimiento de rotación pura
Un cuerpo rígido posee un movimiento derotación pura, cuando cambia su orientaciónmientras se mueve, de tal forma que todas laspartículas que lo conforman describen trayecto-rias circulares con centro en el eje de rotación.En estas condiciones, el centro de rotación per-manece fijo respecto a un sistema de referenciafijo en tierra.
Como se ilustra en la figura 4.2, mientras elcuerpo rota alrededor de un eje fijo que pasa porel punto O, las partículas i y j describen circun-ferencias concéntricas con centro en el eje quepasa por dicho punto.
Rotación
vi
vj
O
i
j
Figura 4.2: Rotación pura de un cuerpo rígido.
4.1.3. Movimiento combinado detraslación y rotación
Un cuerpo rígido puede tener dos movimien-tos simultáneos uno de traslación y otro derotación, es decir, el movimiento más generalde un cuerpo rígido, se puede considerar co-mo una combinación de traslación y rotación.Lo anterior, permite encontrar un sistema de re-ferencia en traslación, pero no rotante, respec-to al cual el movimiento parezca solamente derotación.

4.2. MOMENTO DE UNA FUERZA RESPECTO A UN PUNTO 3
Como se observa en la figura 4.3, elmovimiento del cuerpo al pasar de la posición(1) a la posición (2), se puede considerar comouna traslación del centro de masa y una rotaciónalrededor de un eje que pasa a través del cen-tro de masa. Este movimiento combinado, ge-nera diferentes desplazamientos a las diferentespartículas que conforman el cuerpo rígido. Así,el desplazamiento del centro de masa es dife-rente al desplazamiento de la partícula A y engeneral se presenta esta situación para todas laspartículas del cuerpo.
A
C.M. AC.M.
C.M.
A
d1
d2
Movimiento
(1)(2)
Figura 4.3: Movimiento de traslación y rotación.
4.2. Momento de una fuerza res-pecto a un punto
Como es sabido, una fuerza F que actúa so-bre un cuerpo rígido se puede descomponer ensus componentes rectangulares Fx, Fy y Fz, quemiden la tendencia de la fuerza a desplazar elcuerpo en las direcciones x, y y z, respectiva-mente.
También se sabe que si a un cuerpo rígido sele aplica una fuerza, esta tiende, en general, aimprimirle tanto un movimiento de traslacióncomo de rotación, alrededor de un eje que pasapor un punto del cuerpo rígido, tal como O enla figura 4.4.
En esta unidad interesa considerar primero,el efecto de rotación que las fuerzas tienden aimprimirle a los cuerpos rígidos alrededor deun eje que pasa por un punto. La tendencia deuna fuerza F a imprimirle un movimiento derotación a un cuerpo rígido alrededor de unpunto, se mide mediante el concepto de momen-to de una fuerza. En otras palabras, el momentode una fuerza es una medida de la cantidad de
A
b
O
q
r
F
Mo
Figura 4.4: Momento de la fuerza F respecto al pun-to O.
rotación que una fuerza tiende a imprimirle aun cuerpo rígido, respecto a un punto.
Para definir esta cantidad física, se considerala fuerza F que actúa sobre el cuerpo rígido de lafigura 4.4. Necesariamente, el efecto de rotacióndel cuerpo rígido alrededor de un eje que pasapor el punto O, depende de la magnitud, direc-ción y punto de aplicación de la fuerza. Adicional-mente, la posición del punto de aplicación A, seestablece en forma conveniente por medio delvector posición r que une el punto de referenciao centro de rotación O con el punto de aplicaciónA.
Se define el momento M de la fuerza F, res-pecto al punto O, como el producto cruz o vec-torial de los vectores r y F en ese orden, es decir,
Mo ≡ r × F. (4.1)
De acuerdo con la definición de producto vecto-rial ó producto cruz, el momento de fuerza Moes perpendicular al plano formado por el vectorposición r y el vector fuerza F , o lo que es igual,el momento de una fuerza es perpendicular tan-to al vector posición r como al vector fuerza F.Por otro lado, el sentido de Mo está definido porel sentido de rotación que alinearía a r con F. Enel caso de la figura 4.4, sería en el sentido demovimiento de las manecillas del reloj para unobservador no rotante situado en O. Este sen-tido coincide con el sentido de rotación de untornillo de rosca derecha.
Otra forma de obtener el sentido de rotación,en el caso de rotación en un plano, es median-te la regla de la mano derecha, que consiste enlo siguiente: se coloca la mano abierta paralela-mente al vector posición y luego se cierra en elsentido del ángulo menor formado por los vec-tores r y F. Procediendo de esta forma, el pulgar

4 CAPÍTULO 4. MOMENTO ANGULAR Y MOMENTO DE UNA FUERZA
apunta en el sentido de Mo, que para el caso dela figura 4.4 apunta perpendicularmente haciala hoja.
Como en tres dimensiones el vector posiciónestá dado en componentes rectangulares porr = xi + yj + zk y el vector fuerza por F =Fxi+ Fyj+ Fzk, se puede determinar el momen-to de la fuerza, respecto a un eje que pasa por elpunto O, mediante el determinante
Mo = r × F =
∣∣∣∣∣∣i j kx y zFx Fy Fz
∣∣∣∣∣∣Resolviendo el determinante se obtiene
Mo = (yFz−zFy)i + (zFx−xFz)j + (xFy−yFx)k
O
q
Ar
FM
o
Figura 4.5: Posiciones relativas de r, F y Mo.
En la figura 4.5, se muestran las direccionesrelativas de los vectores r, F y Mo, donde se ob-serva la condición de perpendicularidad entreel plano formado por los vectores r y F con elvector Mo.
Expresando el momento de la fuerza F enla forma Mo = Mxi + Myj + Mzk, las compo-nentes rectangulares Mx,My y Mz miden la ten-dencia de la fuerza a imprimir al cuerpo rígidoun movimiento de rotación alrededor de los ejesx, y y z, respectivamente.
En el caso particular que r y F se encuentrenen el plano xy, como en la figura 4.6, se tienez = 0 y Fz = 0, por lo que el momento de lafuerza queda expresado por
Mo = (xFy−yFx)k, (4.2)
cuya magnitud está dada por Mo = xFy − yFx ycorresponde a un vector paralelo al eje z.
Sabiendo que en la figura 4.4, θ es el ángu-lo menor entre el vector posición r y la línea deacción de la fuerza F, por definición de produc-to vectorial, ecuación (4.1), la magnitud del mo-mento de la fuerza está dada por
M = rFsenθ = F(rsenθ). (4.3)
x
y
z
Mo
A
O
r
F
Figura 4.6: Dirección de M con r y F en el plano xy.
En la figura 4.4 se observa que b = rsenθ, o seaque la ecuación (4.3) se transforma en
M = Fb, (4.4)
donde b es la distancia perpendicular desde Ohasta la línea de acción de la fuerza F y seconoce como el brazo de palanca o brazo de lafuerza.
De la ecuación (4.4), se puede concluir que laefectividad en la rotación que tiende a impri-mir la fuerza F sobre el cuerpo rígido, aumen-ta con el aumento del brazo b. Un ejemplo deesto se presenta cuando se trata de abrir o ce-rrar una puerta, ya que entre más lejos de las bi-sagras se aplique la fuerza con mayor facilidadesta adquiere movimiento de rotación.
En síntesis, de lo anterior se puede afirmar:El momento de una fuerza mide la tendencia de lafuerza F a hacer rotar o girar al cuerpo alrededor deun eje fijo dirigido a lo largo de M.
Igualmente se nota en la figura 4.4, que lafuerza F se puede desplazar a lo largo de sulínea de acción sin cambiar el momento de lafuerza, hecho conocido como el principio detransmisibilidad. En otras palabras, los efectosfísicos de traslación y rotación no varían enabsoluto cuando se lleva a cabo esta operación.Ello permite afirmar que no se tiene un puntode aplicación, sino una línea de aplicación, así,la expresión M = xFy−yFx para el caso de dosdimensiones, corresponde a la ecuación de lalínea de acción de la fuerza cuyo momento dela fuerza es M, siendo x y y arbitrarios.
Dimensiones y unidades del momento de unafuerzaDe acuerdo con la ecuación (4.4), se tiene quela dimensión del momento de una fuerza es-

4.2. MOMENTO DE UNA FUERZA RESPECTO A UN PUNTO 5
tá dada por la dimensión de fuerza multiplica-da por la dimensión de brazo, es decir, [F][b]que es la forma como se acostumbra expresarla,para no confundirla con las dimensiones de tra-bajo y energía. Por consiguiente, la unidad delmomento de una fuerza en el sistema interna-cional de unidades es N · m; en el sistema gaus-siano dina · cm y en el sistema inglés lb · p. Otraunidad que se emplea en algunos casos es elkilogramo-fuerza por metro, representado porkgf · m.
En el caso particular de dos dimensiones, escomún emplear la expresión M = Fb que só-lo permite obtener la magnitud del momentode una fuerza. Pero como en dos dimensionesel cuerpo rígido puede rotar en dos sentidos,es necesario tener una convención de signos.De acuerdo con la figura 4.7, el momento de lafuerza se toma positivo cuando el cuerpo rígi-do rota en sentido contrario a las manecillas delreloj y negativo al rotar en el mismo sentido delas manecillas del reloj.
A
b
O
A
b
O
+_
F
F
r
r
Mo
Mo
Figura 4.7: Convención de signos para M.
Ejemplo 4.1.La varilla AB de la figura tiene longitudL y está sometida a la fuerza horizontal F.Utilizando la ecuación (4.1), determine elmomento de la fuerza respecto al extremoA y respecto al punto medio C. Comparelos resultados obtenidos.SoluciónRespecto al punto A, las componentesrectangulares del vector posición y de lafuerza están dadas, respectivamente, por
rA = L(cos β i + sen β j)F = F i.
Efectuando el producto vectorial entre es-tos vectores, se encuentra que el momento
A
C
F
bx
yB
de la fuerza respecto al punto A es
MA = −(FLsenβ)k. (1)
Operando en forma similar, con
rc = 12 L(cosβ i + sen β j)
F = F i,
el momento de la fuerza respecto al puntomedio C, está dado por
MC = − 12 (FLsenβ)k. (2)
De acuerdo con las ecuaciones (1) y (2), setiene
i) En ambos casos el momento de lafuerza es un vector que entra per-pendicularmente al plano de la hoja,esto es, apunta en el sentido negati-vo del eje z. De este modo, la fuerzatiende a generar una rotación sobrela varilla en sentido horario.
ii) Para una orientación fija de la vari-lla, es mayor la cantidad de rotaciónque tiende a imprimir la fuerza res-pecto al punto A, al compararla conla rotación que tiende a imprimir res-pecto al punto C.
iii) En los dos casos, aunque con diferen-tes valores, la máxima rotación se ob-tiene para β = 90o, es decir, cuandola fuerza aplicada es perpendicular ala varilla.
Ejercicio 4.1.La varilla AB de la figura tiene longitud Ly está sometida a la fuerza vertical F. Uti-lizando la ecuación (4.1), determine el mo-mento de la fuerza respecto al extremo A yrespecto al punto medio C, si la fuerza es-tá dirigida a) hacia arriba, b) hacia abajo.Compare los resultados obtenidos.

6 CAPÍTULO 4. MOMENTO ANGULAR Y MOMENTO DE UNA FUERZA
A
C
F
bx
yB
Ejemplo 4.2.La varilla AB de la figura tiene longitudL y está sometida a la fuerza horizontal F.Utilizando la ecuación (4.4), determine elmomento de la fuerza respecto al extremoA y respecto al punto medio C. Comparelos resultados obtenidos.
A
C
F
q
B
SoluciónDe acuerdo con la figura, la magnitud delmomento de la fuerza F, respecto al ex-tremo A, donde el brazo de la fuerza esbA = Lsenβ, está dado por
MA = F(Lsenβ). (1)
A
C
F
b
B
bA
bC
b
Igualmente, con bC = 12 Lsenβ, el mo-
mento respecto al punto medio de la vari-lla es
MC = F( 12 Lsenβ). (2)
Mediante la regla de la mano derecha, seencuentra que la rotación en ambos casos
coincide con el sentido de rotación de lasmanecillas del reloj, como se encontró enel ejemplo 4.1.
Al comparar las ecuaciones (1) y (2), seobserva que entre mayor sea el brazo de lafuerza, mayor es la rotación que la fuerzatiende a imprimir sobre la varilla, o sea,MA > MC.
Ejercicio 4.2.La varilla AB de la figura tiene longitud Ly está sometida a la fuerza vertical F. Uti-lizando la ecuación (4.4), determine el mo-mento de la fuerza respecto al extremo A yrespecto al punto medio C, si la fuerza es-tá dirigida a) hacia arriba, b) hacia abajo.Compare los resultados obtenidos.
A
C
F
b
B
Ejemplo 4.3.La varilla AB de la figura tiene longitudL y está sometida a la fuerza horizontalF. Halle el momento de la fuerza respec-to al extremo A y respecto al punto medioC, descomponiendo la fuerza en una com-ponente paralela a la varilla y una com-ponente perpendicular a ella. Compare losresultados obtenidos.
A
C
F
b
B
Solución
En este caso, como lo muestra la figu-ra, la línea de acción de la componente

4.2. MOMENTO DE UNA FUERZA RESPECTO A UN PUNTO 7
A
C
B F
F//
F
b
b
paralela F cos β, pasa por los puntos A yC, esto es, su brazo es cero y por consi-guiente dicha componente no tiende a ge-nerar rotación sobre la varilla. Por otro la-do, el brazo de la componente perpendi-cular, F sen β, coincide con la longitud dela varilla para el punto A y con la mitadde la longitud de la varilla para el puntomedio C. Así, mediante la ecuación (4.4),se obtiene
MA = F(Lsenβ)
MC = F( 12 Lsenβ),
con rotación de la varilla en el sentidode las manecillas del reloj. Estos resulta-dos son idénticos a los encontrados en losejemplos 4.1 y 4.2.
Ejercicio 4.3.La varilla AB de la figura tiene longitud Ly está sometida a la fuerza vertical F. En-cuentre el momento de la fuerza respectoal extremo A y respecto al punto medio C,descomponiendo la fuerza en una compo-nente paralela a la varilla y una compo-nente perpendicular a ella, si la fuerza es-tá dirigida a) hacia arriba, b) hacia abajo.Compare los resultados obtenidos.
A
C
F
b
B
Ejemplo 4.4.La torre de la figura se sostiene mediante
tres cables sujetos en la parte superior, co-mo se indica. La tensión en el cable AB es500 N, la tensión en el cable AC es 800 N yla tensión en el cable AD es 103 N. El puntoD se encuentra a 7 (m) del origen de coor-denadas. Halle el momento que cada cuer-da ejerce sobre el piso, respecto al origende coordenadas.
x
y
zA
B
C
D
17 m
2 m
1 m
3.5 m
3 m
35o
SoluciónPara determinar las componentes de latensión en cada una de las cuerdas, se de-finen los vectores unitarios λBA, λCA yλDA, paralelos respectivamente a las ten-siones TBA, TCA y TDA, como se ilustra enla figura.
x
y
zA
BC
D
17 m
2 m
1 m
3.5 m
3 m
35o
TBA
TCA
TDA
lBA
lCA
lDA
De acuerdo con la figura, las coordena-das de los extremos de cada cuerda estándadas por A(0, 0, 17 m), B(−1 m, 2, 0),C(−3 m,−3.5 m, 0) y D(5.73 m, 4.01 m, 0)
Teniendo en cuenta las coordenadasanteriores, se encuentra que los vectoresunitarios en componentes rectangularesestán dados por
λBA = 0.06i − 0.12j + 0.99k,λCA = 0.17i + 0.2j + 0.97k,λDA = −0.31i − 0.22j + 0.92k.
Como TBA = TBAλBA, TCA = TCAλCA yTDA = TDAλDA, las componentes rectan-gulares de las tensiones en cada una de las

8 CAPÍTULO 4. MOMENTO ANGULAR Y MOMENTO DE UNA FUERZA
cuerdas, están dadas por
TBA = (30i − 60j + 495k)N,TCA = (136i + 160j + 776k)N,TDA = (−310i − 220j + 920k)N.
Igualmente, los vectores posición del pun-to de aplicación de cada tensión respectoal origen de coordenadas, están dados encomponentes rectangulares por
rOB = (−i + 2j)m,rOC = (−3i − 3.5j)m,rOD = (5.73i + 4.02j)m.
Teniendo en cuenta las componentes rec-tangulares de la tensión en cada cuerday sus respectivos vectores posición, se en-cuentra que el momento que cada cuerdaejerce sobre el piso, respecto al origen decoordenadas, está dado respectivamentepor
M1 = rOB × TBA
= (990i + 495j)N · m,M2 = rOC × TCA
= (−2716i + 2328j − 4k)N · m,M3 = rOD × TDA
= (3698.4i − 5271.6j − 50.50k)N · m.
4.3. Momento de un par defuerzas o cupla
En la figura 4.8, las fuerzas F1 y F2 forman unpar de fuerzas o cupla si cumplen simultánea-mente las tres condiciones siguientes
A
B
F2
F1
Figura 4.8: Par de fuerzas o cupla.
i) Las fuerzas son de igual magnitud, esto es,F1 = F2.
ii) Sus líneas de acción son paralelas, pero nosuperpuestas.
iii) Los sentidos de las fuerzas son opuestos, esdecir, F1 = −F2.
4.3.1. Efectos de traslación de un par defuerzas
Ya que F1 + F2 = F1 + (−F1) = 0, la suma oresultante de las dos fuerzas es cero, así, un parde fuerzas no tiende a generar ningún efecto detraslación cuando se aplica a un cuerpo rígido.
4.3.2. Efectos de rotación de un par defuerzas
Para considerar los efectos de rotación, es nece-sario determinar el momento total o resultantede las dos fuerzas cuando actúan sobre el cuer-po rígido. Para ello se considera el par defuerzas de la figura 4.9.
A
b
B
q
-F
FO
r
rA
rB
Figura 4.9: Momento de un par de fuerzas o cupla.
La suma vectorial de los momentos de lasfuerzas F y −F, respecto al punto arbitrario O,está dada por
M = rA × F + rB × (−F)= (rA − rB)× F. (4.5)
Si en la ecuación (4.5) se hace la definición r ≡rA − rB, siendo r el brazo de palanca del par, setiene
M = r × F, (4.6)
donde M es llamado el momento del par y es unvector perpendicular al plano que contiene lasdos fuerzas y cuya magnitud es
M = rFsenθ = Fb,

4.4. DESCOMPOSICIÓN DE UNA FUERZA EN UN SISTEMA FUERZA PAR 9
donde b es la distancia perpendicular entre laslíneas de acción de las dos fuerzas, como lomuestra la figura 4.9.
El resultado dado por la ecuación (4.6), mues-tra que M no depende del punto de referen-cia O, es decir, que el momento de un par defuerzas o cupla es un vector libre, ya que r esindependiente del centro de momentos O.
En algunos casos, dos pares de fuerzas tienenmomentos iguales en magnitud y dirección;cuando esto ocurre, se dice que los dos paresson equivalentes ya que tienden a generar losmismos efectos de rotación al actuar, por sepa-rado, sobre un cuerpo rígido. Esta situación seilustra en la figura 4.10, donde F1b1 = F2b2.
b1 b
2
-F1
F1
F2
-F2
Figura 4.10: Pares equivalentes.
4.4. Descomposición de unafuerza en un sistema fuerzapar
En el cuerpo rígido mostrado en la figura 4.11,se desea trasladar el punto de aplicación de lafuerza F del punto A al punto O, sin cambiar losefectos tanto de traslación como de rotación so-bre el cuerpo rígido. De acuerdo con el principiode transmisibilidad, se sabe que si la fuerza sedesliza a lo largo de su línea de acción, no cam-bian los efectos de traslación ni de rotación; perosi se desplaza al punto O, por fuera de su líneade acción, se modifican los efectos de rotaciónsobre el cuerpo rígido, aunque los efectos detraslación permanecen inalterados, ya que no secambia la magnitud de la fuerza.
Para que los efectos de rotación sobre el cuer-po rígido no cambien, al llevar a cabo la ope-ración anterior, se procede de la forma siguien-te. En el punto O se aplican las fuerzas F y −F
A
O
A
O
F
F
F
-F
rr
Figura 4.11: Sistema fuerza-par.
que no modifican ninguna acción sobre el cuer-po rígido, ya que su resultante es cero y el mo-mento neto de ellas respecto a O es nulo.
De este modo, la fuerza F aplicada en el pun-to A y −F aplicada en el punto O, forman unpar cuyo momento es M = r × F, o sea, se halogrado encontrar una fuerza F aplicada en Oy un par de momento M aplicado en el mismopunto. En esta disposición, conocida como sis-tema fuerza-par, F responde por los mismos efec-tos de traslación y el par de momento M por losmismos efectos de rotación, que tiende a impri-mir la fuerza única F aplicada inicialmente en elpunto A.
Si como en la figura 4.11, el vector posiciónr y la fuerza F aplicada en A, se encuentran enel plano de la hoja, el sistema fuerza-par se re-presenta en la forma mostrada en la figura 4.12,donde M es el momento del par correspondien-te.
A
O
A
O
F
Frr
Mo
Figura 4.12: Sistema fuerza-par en un plano.
De lo anterior, se puede afirmar: Cualquierfuerza F que actúe sobre un cuerpo rígido, se puededesplazar a un punto arbitrario O, siempre que seagregue un par de momento igual al momento de Frespecto al punto O.
El par tiende a imprimir al cuerpo rígido losmismos efectos de rotación respecto a O que lafuerza F tendía a generar antes de trasladarla a

10 CAPÍTULO 4. MOMENTO ANGULAR Y MOMENTO DE UNA FUERZA
dicho punto, es decir, que la fuerza única aplica-da en A y el sistema fuerza-par correspondien-te, son físicamente equivalentes.
Cuando actúan varias fuerzas sobre el cuer-po rígido, concurrentes o no, se lleva a cabo laoperación anterior con cada una de las fuerzas,obteniéndose un par resultante y un sistemade fuerzas concurrentes aplicadas en O, que sepuede reemplazar por una fuerza única o resul-tante. Así, se obtiene un sistema fuerza-par for-mado por la fuerza neta F y el par resultante M,dados respectivamente por
F = F1 + F2 + F3 + · · ·= ∑
iFi,
M = M1 + M2 + M3 + · · ·= ∑
iMi.
En conclusión: Siempre es posible reemplazarcualquier sistema de fuerzas por un sistema fuerza-par, de tal forma que la fuerza se escoge igual a F parala equivalencia traslacional y el par con momentoigual a M, se escoge para la equivalencia rotacional.
Como se verá posteriormente, cuando seanalice el movimiento combinado de traslacióny rotación de un cuerpo rígido, se tratarán porseparado los efectos de traslación y rotación, es-to es, las fuerzas aplicadas se reemplazarán porun sistema fuerzas-par equivalente.
Ejemplo 4.5.La varilla AB de la figura tiene longitudL y está sometida a la fuerza horizontalF.Reemplazar la fuerza horizontal, por unsistema fuerza-par aplicado a) En el ex-tremo A. b) En el punto medio C.
A
C
F
q
B
Solucióna) Para que no cambien los efectos de
traslación que la fuerza tiende a imprimirsobre la varilla, la fuerza aplicada en Adebe ser la misma, esto es
F = Fi.
Por otro lado, los efectos de rotación nocambian si en A se aplica un par equiva-lente, igual al momento de la fuerza apli-cada en B y evaluado respecto al punto A,o sea
MA = −(FLsenθ)kEn la figura se muestra el sistema fuerza-par equivalente, aplicado en el extremo Ade la varilla.
A
C
B
FqMA
b) En el punto C la fuerza aplicadadebe ser la misma que en caso anterior,pero el par debe tener un momento, res-pecto al punto C, igual a
MC = − 12 (FLsenθ)k
En este caso, el sistema fuerza-par equiva-lente en el punto medio de la varilla, semuestra en la figura.
A
C
B
F
q
MA
De los dos resultados anteriores se ob-serva que el momento del par es diferen-te al tomar distintos puntos. Esto debe serasí ya que la fuerza tiende a imprimir dife-rentes efectos de rotación respecto a pun-tos distintos. Sin embargo, independiente-mente del punto donde se aplique el sis-tema fuerza-par equivalente, los efectos de

4.5. RESULTANTE DE UN SISTEMA DE FUERZAS APLICADAS A UN CUERPO RÍGIDO 11
traslación no cambian siempre y cuandono se cambien la magnitud ni la direcciónde la fuerza dada.
Ejercicio 4.4.Resolver el ejemplo 4.5, suponiendo que lafuerza aplicada en el extremo B es verticaly dirigida: a) Hacia arriba. b) Hacia abajo.
Ejemplo 4.6.La escuadra de la figura, que es un trián-gulo equilátero de lado d, está sometidaa fuerzas en sus tres vértices y a los dospares M y 2M. Las magnitudes de lasfuerzas están dadas por
P1 = P, P2 = 2P, P3 = 23 P y P4 = 1
2 P.
Reemplazar el sistema de fuerzas y los dospares, por un sistema fuerza-par equiva-lente aplicado en el vértice A.
A
C
B
P1
M
P3
P4
2M
P2
x
y
D
SoluciónTeniendo en cuenta que las fuerzas P1 yP2 forman ángulos de 60o con la direcciónpositiva del eje x, ya que el triángulo esequilátero, la fuerza resultante equivalen-te al sistema de fuerzas, está dada en com-ponentes rectangulares por
F = P(0.83i + 0.37j).
Utilizando el teorema de Pitágoras y ladefinición de la función tangente, se en-cuentra que en magnitud y dirección lafuerza resultante está dada por
F = 0.91P∠24o.
Calculando los momentos de las fuerzasrespecto al punto A y sumando los paresM y 2M, teniendo en cuenta su respectivosigno, para el par resultante se obtiene
MA = (M − 0.87Pd)k.
El sistema fuerza-par, formado por F yMA, se muestra en la figura siguiente,y responde por los mismos efectos detraslación y rotación que las fuerzas ylos dos pares simultáneamente aplicados,tienden a imprimir sobre la escuadra. Enla figura se supone que M > 0.87Pd, encaso contrario, el sentido de rotación esopuesto.
A C
B
F
24o
MA
Ejercicio 4.5.Reemplace el sistema de fuerzas y losdos pares del ejemplo 4.6, por un sistemafuerza-par aplicado a) En el punto B. b) Enel punto C.
4.5. Resultante de un sistema defuerzas aplicadas a un cuerporígido
Si sobre un cuerpo rígido actúan variasfuerzas, aplicadas en diferentes puntos, es nece-sario considerar por separado los efectos detraslación y de rotación.
Los efectos de traslación sobre el cuerpo,quedan determinados por el vector suma o re-sultante de las fuerzas, es decir,
F = F1 + F2 + F3 + · · · = ∑ Fi, (4.7)
donde se opera en la misma forma que para unapartícula sometida a varias fuerzas concurren-tes.
De forma similar, los efectos de rotación sobreel cuerpo rígido, están determinados por el vec-tor suma de los momentos de las fuerzas, eva-luados respecto al mismo punto de referencia,

12 CAPÍTULO 4. MOMENTO ANGULAR Y MOMENTO DE UNA FUERZA
es decir
M = M1 + M2 + M3 + · · · = ∑ Mi (4.8)
Pero ¿qué se puede decir respecto al punto deaplicación de la fuerza resultante? Como res-puesta se tiene que no siempre es posible reem-plazar este sistema de fuerzas por una fuerzaúnica que sea equivalente, ya que sólo es posi-ble hacerlo cuando F y M, obtenidos mediantelas ecuaciones (4.7) y (4.8) sean perpendiculares,ya que sólo de esta manera se satisface la expre-sión M = r × F que permite determinar el vec-tor posición r, que da el punto de aplicación dela fuerza F respecto al centro de rotación.
Si la condición anterior se satisface (M per-pendicular a F), la fuerza F así aplicada esequivalente al sistema, tanto en lo referente arotación como a traslación. Sin embargo, esto nosiempre es posible ya que en muchos casos F yM no son perpendiculares.
En general, un sistema de fuerzas no concu-rrentes que actúan sobre un cuerpo rígido, nosiempre es posible reducirlo a una fuerza únicaque sea equivalente.
Sin embargo, hay tres casos en los que siem-pre es posible reemplazar un sistema de fuerzaspor una fuerza única que es completamenteequivalente al sistema dado, pues en ellos sesatisface la condición de perpendicularidad en-tre F y M.
4.5.1. Resultante de un sistema defuerzas concurrentes
Se considera el caso de varias fuerzas concu-rrentes actuando sobre un cuerpo rígido y queestán aplicadas en el punto A, como se muestraen la figura 4.13.
A
O
A
O
F1
F2
F3
F4
F
rr
Figura 4.13: Sistema de fuerzas concurrentes.
El momento de la fuerza resultante F, respec-to al punto O, está dado por
M = r × F (4.9)
donde la resultante del sistema de fuerzas apli-cadas al cuerpo rígido, se encuentra mediante laexpresión
F = F1 + F2 + F3 + · · · = ∑ Fi
En este caso, el vector posición r es común alpunto de aplicación de todas las fuerzas, respec-to al centro de rotación O.
De este modo, la ecuación (4.9) adquiere laforma
F = F1 + F2 + F3 + · · · = ∑ Fi
donde se ha aplicando la propiedad distributivadel producto vectorial respecto a la suma, y deeste modo el momento total de las fuerzas apli-cadas al cuerpo rígido, respecto al punto O, esperpendicular a la fuerza neta F. Así,
M = M1 + M2 + M3 + · · · = ∑ Mi.
En conclusión, el momento con respecto al pun-to O de la resultante de varias fuerzas concu-rrentes, es igual a la suma de los momentos delas distintas fuerzas aplicadas, respecto al mis-mo punto O. Enunciado conocido como el teo-rema de Varignon.
En el caso particular que todas las fuerzasconcurrentes sean coplanares y que O se en-cuentre en el mismo plano, cada uno de los mo-mentos de fuerza tiene la misma dirección per-pendicular al plano, igual que el momento re-sultante.
Como un resultado general, se tiene queun sistema de fuerzas concurrentes siempre sepuede reemplazar por una sola fuerza, su resul-tante, la que es completamente equivalente alsistema en lo que respecta a efectos de traslacióny rotación, como se ilustra en la figura 4.13.
Ejemplo 4.7.Reemplazar el sistema de fuerzas que ac-túan en el extremo B de la varilla, por unafuerza única equivalente.
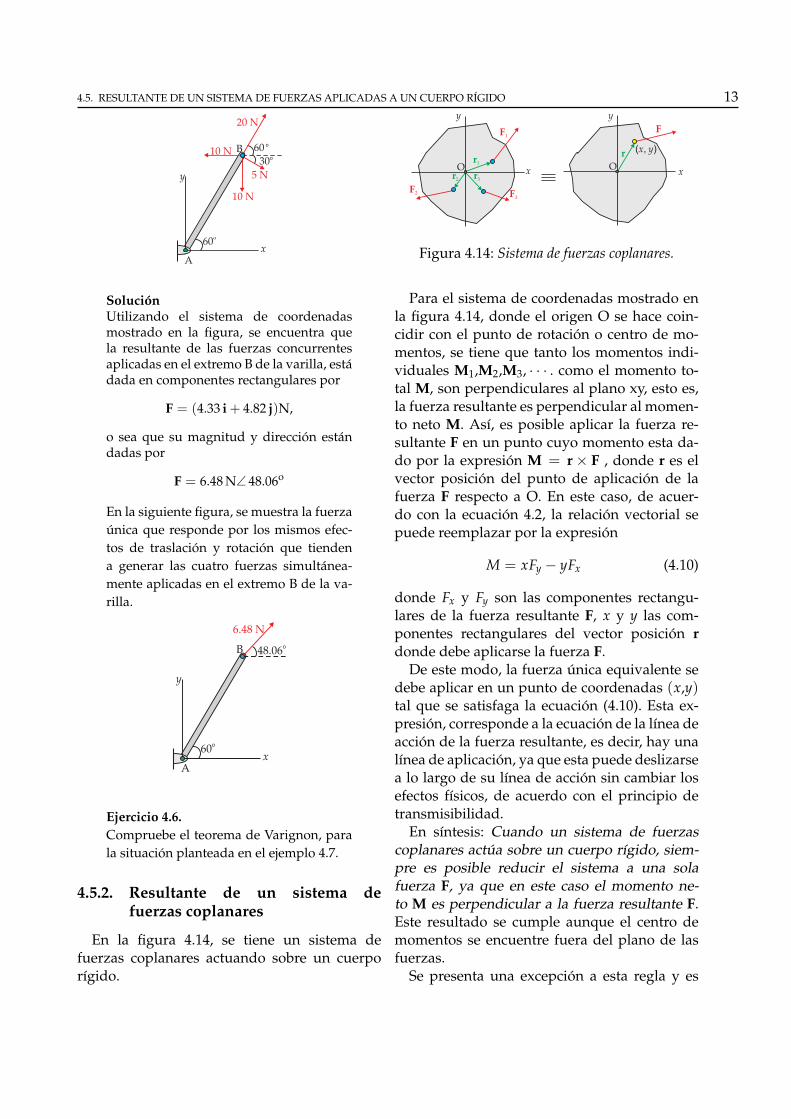
4.5. RESULTANTE DE UN SISTEMA DE FUERZAS APLICADAS A UN CUERPO RÍGIDO 13
A
B
x
y
60o
60o
10 N
10 N
5 N
20 N
30o
SoluciónUtilizando el sistema de coordenadasmostrado en la figura, se encuentra quela resultante de las fuerzas concurrentesaplicadas en el extremo B de la varilla, estádada en componentes rectangulares por
F = (4.33 i + 4.82 j)N,
o sea que su magnitud y dirección estándadas por
F = 6.48 N∠ 48.06o
En la siguiente figura, se muestra la fuerzaúnica que responde por los mismos efec-tos de traslación y rotación que tiendena generar las cuatro fuerzas simultánea-mente aplicadas en el extremo B de la va-rilla.
A
B
x
y
60o
6.48 N
48.06o
Ejercicio 4.6.Compruebe el teorema de Varignon, parala situación planteada en el ejemplo 4.7.
4.5.2. Resultante de un sistema defuerzas coplanares
En la figura 4.14, se tiene un sistema defuerzas coplanares actuando sobre un cuerporígido.
O
y
xO
y
x
( , )x y
F2
F1
F3
F
rr
1
r2
r3
Figura 4.14: Sistema de fuerzas coplanares.
Para el sistema de coordenadas mostrado enla figura 4.14, donde el origen O se hace coin-cidir con el punto de rotación o centro de mo-mentos, se tiene que tanto los momentos indi-viduales M1,M2,M3, · · · . como el momento to-tal M, son perpendiculares al plano xy, esto es,la fuerza resultante es perpendicular al momen-to neto M. Así, es posible aplicar la fuerza re-sultante F en un punto cuyo momento esta da-do por la expresión M = r × F , donde r es elvector posición del punto de aplicación de lafuerza F respecto a O. En este caso, de acuer-do con la ecuación 4.2, la relación vectorial sepuede reemplazar por la expresión
M = xFy − yFx (4.10)
donde Fx y Fy son las componentes rectangu-lares de la fuerza resultante F, x y y las com-ponentes rectangulares del vector posición rdonde debe aplicarse la fuerza F.
De este modo, la fuerza única equivalente sedebe aplicar en un punto de coordenadas (x,y)tal que se satisfaga la ecuación (4.10). Esta ex-presión, corresponde a la ecuación de la línea deacción de la fuerza resultante, es decir, hay unalínea de aplicación, ya que esta puede deslizarsea lo largo de su línea de acción sin cambiar losefectos físicos, de acuerdo con el principio detransmisibilidad.
En síntesis: Cuando un sistema de fuerzascoplanares actúa sobre un cuerpo rígido, siem-pre es posible reducir el sistema a una solafuerza F, ya que en este caso el momento ne-to M es perpendicular a la fuerza resultante F.Este resultado se cumple aunque el centro demomentos se encuentre fuera del plano de lasfuerzas.
Se presenta una excepción a esta regla y es

14 CAPÍTULO 4. MOMENTO ANGULAR Y MOMENTO DE UNA FUERZA
cuando F = 0 y M = 0, pues en este caso el sis-tema corresponde a un par de fuerzas o cupla,que sólo tiende a imprimir efectos de rotación.
Ejemplo 4.8.Determine, sobre el lado AC y sobre la al-tura BD, el punto de corte de la línea de ac-ción de la fuerza única que es equivalenteal sistema fuerza par obtenido en ejemplo4.6.SoluciónDe acuerdo con la ecuación (4.10), laecuación de la línea de acción de la fuerzaúnica equivalente, adquiere la forma
M − 0.87Pd = 0.37Px − 0.83Py
Respecto al sistema de referencia utilizadoen el ejemplo 4.6, sobre la recta AC y = 0,así, la línea de acción de la resultante cortael eje x en
x = 2.7M − 0.87Pd
PPor otro lado, la altura BD pasa por x =d/2, así que la línea de acción de la resul-tante corta la vertical en
y = 1.2(1.06Pd − M)
p.
Ejercicio 4.7.Determinar el punto de corte, sobre el ejex y sobre el eje y, de la línea de acciónde la fuerza única correspondiente al sis-tema fuerza par obtenido en cada uno delos puntos del ejercicio 4.6.
4.5.3. Resultante de un sistema defuerzas paralelas
En la figura 4.15, se tiene un sistema defuerzas paralelas actuando sobre un cuerporígido, esto es, sus líneas de acción son parale-las y pueden o no estar orientadas en el mismosentido.
Para el análisis que sigue y para mayor clari-dad, se toma como referencia el vector unitariou, el cual permite expresar la fuerza resultanteen la forma vectorial
F = F1 + F2 + F3 + F4 · · · (4.11)= (−F1 + F2 + F3 − F4 + · · · )u=
(∑ Fi
)u,
O
F1
F2
F3
F4
u
Figura 4.15: Sistema de fuerzas paralelas.
así, la fuerza resultante es paralela al vector uni-tario u, y su magnitud es
F = −F1 + F2 + F3 − F4 + · · · = ∑ Fi.
M = r1 × F1 + r2 × F2 + r3 × F3 + · · ·(4.12)= ∑ ri × Fi.
Ahora, con Fi = Fiu, la ecuación (4.12) se trans-forma en
M = ∑ ri × Fiu =(∑ riFi
)× u. (4.13)
La ecuación (4.13) muestra que el momento re-sultante M es perpendicular al vector unitariou, así, por la ecuación (4.11), también es perpen-dicular a la fuerza resultante F.
Por lo tanto, en el caso de fuerzas paralelassiempre es posible reemplazar el sistema de fuerzaspor una fuerza única equivalente, que respondepor los mismos efectos de traslación y rotación,que las fuerzas paralelas simultáneamente apli-cadas, tienden a imprimirle al cuerpo rígido.
De este modo, la fuerza equivalente F se debeaplicar en una posición rc, tal que
M = rc × F = rc(∑ Fi
)× u (4.14)
donde se ha tenido en cuenta la ecuación (4.11).Las ecuaciones (4.13) y (4.14) se satisfacen
únicamente si se cumple que
rc(∑ Fi
)= ∑ (riFi).
De esta forma, respecto a O, el vector posicióndel punto donde se debe aplicar la fuerza únicaF está dado por
rc =∑ riFi
∑ Fi=
−r1F1 + r2F2 + r3F3 − · · ·−F1 + F2 + F3 − F4 + · · · . (4.15)

4.5. RESULTANTE DE UN SISTEMA DE FUERZAS APLICADAS A UN CUERPO RÍGIDO 15
Expresando los vectores de la ecuación (4.15) encomponentes rectangulares, se encuentra quelas coordenadas del punto de aplicación de lafuerza, para que los efectos sobre el cuerpo rígi-do no cambien, están dadas por
xc =∑ xiFi
∑ Fi, yc =
∑ yiFi
∑ Fi, zc =
∑ ziFi
∑ Fi(4.16)
Un ejemplo de esta situación se presenta enel caso del peso de un cuerpo, donde cadapartícula, por tener masa, posee un peso y to-dos ellos corresponden a fuerzas paralelas. Elpunto donde se debe aplicar la fuerza resultanteo peso del cuerpo, no es más que el centro demasa del cuerpo. En la figura 4.16 se muestraesta situación.
C.M.
W
Figura 4.16: Sistema de fuerzas paralelas.
Ejemplo 4.9.Una barra uniforme de longitud L y masam, se somete al sistema de fuerzas para-lelas mostrado en la figura. La magnitudde la fuerza P es mg/2 y además AB =BC = CD = L/4, a)Reemplace las cuatrofuerzas por un sistema fuerza par aplicadoen el extremo A. b) Determine el punto deaplicación de la fuerza única equivalente.Solución
A
B
C
D
P
P/22 /3P
mgx
y
q
a) La fuerza neta equivalente al sistema defuerzas paralelas al eje y es
F = − 512 mgj.
Luego de calcular los momentos de lasfuerzas respecto al punto A, se encuentraque el momento del par resultante está da-do por
MA = − 548 mgLcosθk.
El sistema fuerza par equivalente aplicadoen el extremo A, se muestra en la figurasiguiente.
A
B
C
D
F
qM
A
b)Mediante las ecuaciones (4.16), seencuentra que las coordenadas del puntode aplicación de la fuerza única equivalen-te están dadas por
xB = 14 Lcosθ y yB = 1
4 Lsenθ
Como se muestra en la siguiente figura, lafuerza resultante debe aplicarse en el pun-to B.
A
B
C
D
F
x
y
q
En la tabla siguiente se muestra el va-lor de los coeficientes de L, en xc y xc, paradiferentes valores del ángulo θ.
θ 0 30 45 60 90cos θ
4 0.25 0.22 0.18 0.12 0.00sen θ
4 0.00 0.12 0.18 0.22 0.25
Se observa que al aumentar la inclinaciónde la barra, la coordenada xc disminuye

16 CAPÍTULO 4. MOMENTO ANGULAR Y MOMENTO DE UNA FUERZA
mientras que la coordenada yc aumenta,pero con la fuerza F actuando siempre so-bre el punto B.
Ejercicio 4.8.Resuelva el ejemplo 4.9, tomando el ori-gen de coordenadas a) En el punto C. b) Enel punto D.Compare los resultados, con elobtenido en el ejemplo 4.9.
4.6. Llave de torsión
Como un resultado general, se tiene que todosistema de fuerzas en el espacio, que actúe sobreun cuerpo, se puede reemplazar por un sistemafuerza par equivalente, que genera tanto efectosde traslación como efectos de rotación, o por unpar, que sólo genera efectos de rotación.
En las secciones anteriores se analizaron lostres casos en los cuales es posible reemplazar unsistema de fuerzas por una fuerza única equi-valente al sistema de fuerzas. Un sistema defuerzas en el espacio se puede reemplazar poruna fuerza única equivalente sólo cuando lafuerza neta F que actúa sobre el cuerpo y el mo-mento neto M son perpendiculares.
En el caso particular, que la fuerza neta F yel momento neto M no sean perpendiculares,el sistema fuerza par equivalente formado porestas dos cantidades, se puede reemplazar poruna llave de torsión. Esta situación se ilustra enla figura 4.17
F
Mo
o
Figura 4.17: Sistema fuerza par no perpendiculares.
Para obtener la llave de torsión correspon-diente al sistema fuerza par de la figura,primero se descompone el momento del par re-sultante, en una componente paralela a la líneade acción de la fuerza resultante F y en otracomponente perpendicular a la línea de acción
de la resultante F, como se ilustra en la figura4.18. O sea
M = M1 + M2.
F
o
M1
M2
Figura 4.18: Para paralelo y perpendicular a F.
Una vez se lleva a cabo esta descomposición,se aplica el sistema fuerza par formado por lafuerza neta F y por el par M1, en un punto Adonde la fuerza neta genere el mismo momentoM2 respecto al punto O.
F
o
M1
A
Figura 4.19: Llave de torsión formada por F y M.
Al sistema formado por la fuerza neta F y porel par M1, se le conoce como una llave de tor-sión, donde ambos vectores actúan en la mismadirección, como se muestra en la figura 4.19. Elnombre se debe a que la acción simultánea deempujar y torcer, es semejante a la acción gene-rada por una llave de torsión o a la broca en untaladro, donde se ejerce una fuerza y un par ac-tuando sobre la línea de acción de dicha fuerza.
A la línea de acción de la fuerza neta F, se leconoce como el eje de torsión y a la relación p =M1/F, como paso de torsión.
Ejemplo 4.10.Sobre el cubo de la figura, de lado 100 mm,actúan cinco fuerzas paralelas a sus res-pectivas aristas. a) Reemplace el sistemade fuerzas por un sistema fuerza par apli-cado en el punto O. b) Determine el ángu-lo que forman la fuerza neta y el par re-
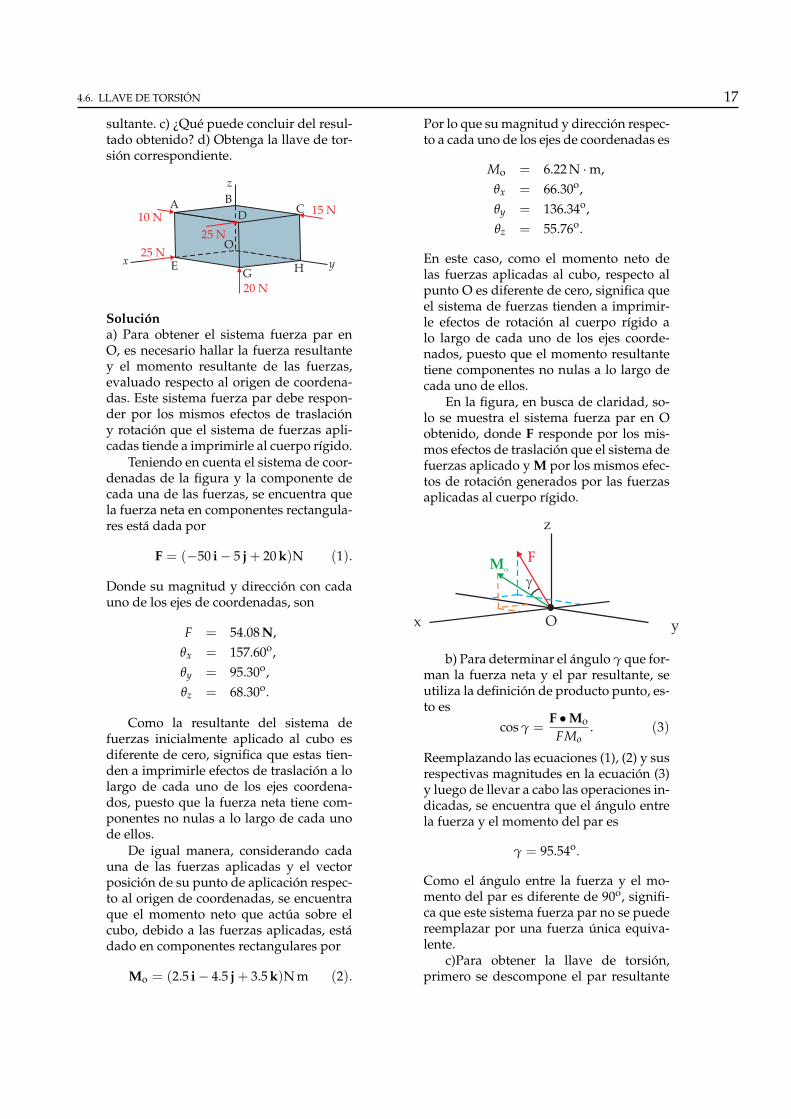
4.6. LLAVE DE TORSIÓN 17
sultante. c) ¿Qué puede concluir del resul-tado obtenido? d) Obtenga la llave de tor-sión correspondiente.
x y
z
AB
C
H
D
GE
O
10 N15 N
20 N
25 N
25 N
Solucióna) Para obtener el sistema fuerza par enO, es necesario hallar la fuerza resultantey el momento resultante de las fuerzas,evaluado respecto al origen de coordena-das. Este sistema fuerza par debe respon-der por los mismos efectos de traslacióny rotación que el sistema de fuerzas apli-cadas tiende a imprimirle al cuerpo rígido.
Teniendo en cuenta el sistema de coor-denadas de la figura y la componente decada una de las fuerzas, se encuentra quela fuerza neta en componentes rectangula-res está dada por
F = (−50 i − 5 j + 20 k)N (1).
Donde su magnitud y dirección con cadauno de los ejes de coordenadas, son
F = 54.08 N,θx = 157.60o,θy = 95.30o,θz = 68.30o.
Como la resultante del sistema defuerzas inicialmente aplicado al cubo esdiferente de cero, significa que estas tien-den a imprimirle efectos de traslación a lolargo de cada uno de los ejes coordena-dos, puesto que la fuerza neta tiene com-ponentes no nulas a lo largo de cada unode ellos.
De igual manera, considerando cadauna de las fuerzas aplicadas y el vectorposición de su punto de aplicación respec-to al origen de coordenadas, se encuentraque el momento neto que actúa sobre elcubo, debido a las fuerzas aplicadas, estádado en componentes rectangulares por
Mo = (2.5 i − 4.5 j + 3.5 k)N m (2).
Por lo que su magnitud y dirección respec-to a cada uno de los ejes de coordenadas es
Mo = 6.22 N · m,θx = 66.30o,θy = 136.34o,θz = 55.76o.
En este caso, como el momento neto delas fuerzas aplicadas al cubo, respecto alpunto O es diferente de cero, significa queel sistema de fuerzas tienden a imprimir-le efectos de rotación al cuerpo rígido alo largo de cada uno de los ejes coorde-nados, puesto que el momento resultantetiene componentes no nulas a lo largo decada uno de ellos.
En la figura, en busca de claridad, so-lo se muestra el sistema fuerza par en Oobtenido, donde F responde por los mis-mos efectos de traslación que el sistema defuerzas aplicado y M por los mismos efec-tos de rotación generados por las fuerzasaplicadas al cuerpo rígido.
x y
z
O
g
FMo
b) Para determinar el ángulo γ que for-man la fuerza neta y el par resultante, seutiliza la definición de producto punto, es-to es
cos γ =F • Mo
FMo. (3)
Reemplazando las ecuaciones (1), (2) y susrespectivas magnitudes en la ecuación (3)y luego de llevar a cabo las operaciones in-dicadas, se encuentra que el ángulo entrela fuerza y el momento del par es
γ = 95.54o.
Como el ángulo entre la fuerza y el mo-mento del par es diferente de 90o, signifi-ca que este sistema fuerza par no se puedereemplazar por una fuerza única equiva-lente.
c)Para obtener la llave de torsión,primero se descompone el par resultante

18 CAPÍTULO 4. MOMENTO ANGULAR Y MOMENTO DE UNA FUERZA
en una componente paralela y en unacomponente perpendicular a la fuerza ne-ta. De este modo, el paso de torsión estádado por
p =F • Mo
F2 = −0.01.
Por consiguiente, la llave de torsión estáformada por la fuerza resultante F y por elpar con componentes rectangulares
M1 = pF ≡ (0.5i + 0.05j − 0.2k).
4.7. Ecuación de movimiento parala rotación de un cuerpo rígi-do
Se sabe que el momento angular de un cuerporígido respecto a un punto está dado por
dLdt
= r × F, (4.17)
donde r es el vector posición que va desde elcentro de momentos hasta el punto donde estáaplicada la fuerza F. Por otro lado, teniendo encuenta la definición de momento de una fuerzarespecto a un punto, la ecuación (4.17) adquierela forma
dLdt
= M, (4.18)
conL = ∑
iLi,
yM = ∑
iMi,
donde estas cantidades se evalúan respecto almismo punto.
La ecuación (4.18) corresponde a la ecuaciónbásica para analizar el movimiento de rotaciónde un cuerpo rígido, esto es, la ecuación (4.18)desempeña en rotación el mismo papel que lasegunda ley de Newton en traslación. Por estarazón, se le conoce como la ecuación de movimien-to para la rotación de un cuerpo rígido.
4.7.1. Rotación de un cuerpo rígidoalrededor de un eje principal deinercia
Se supone que el cuerpo rígido de la figura4.20, tiene un movimiento de rotación alrededordel eje z considerado como eje principal de iner-cia. Además, se toma el origen como un puntofijo en el eje que corresponde a un sistema dereferencia no rotante o inercial.
O
w
L
z (Eje principal de inercia)
Figura 4.20: Rotación alrededor de un eje principalde inercia.
Como el eje de rotación z es un eje principalde inercia, se cumple la ecuación L = Iω, y laecuación (4.18) se transforma en
d(Iω)
dt= M, (4.19)
donde M es el momento total generado por lasfuerzas externas y evaluado respecto al puntofijo O, sobre el eje principal de inercia.
Ahora, si el eje está fijo en el cuerpo rígido, setiene que el momento de inercia es constante yla ecuación (4.19) adquiere la forma
Iα = M, (4.20)
expresión en la que se ha empleado la definiciónde aceleración angular. La ecuación (4.20), váli-da en rotación, es equivalente en traslación a lasegunda ley de Newton para masa constante.
Si el momento total de todas las fuerzas exter-nas que actúan sobre el cuerpo rígido, es nulo,de acuerdo con la ecuación (4.19) se cumple lacondición
Iω = Constante (4.21)
que corresponde a la conservación del momen-to angular, como se analizó en la unidad ante-rior.
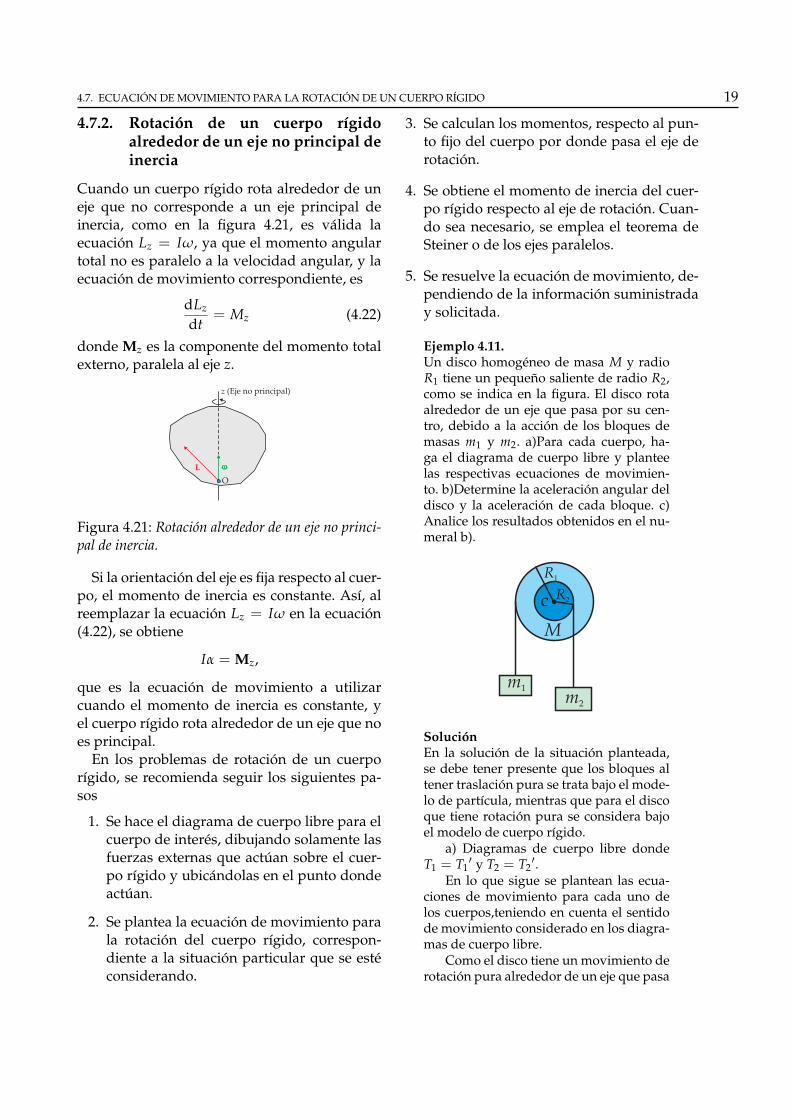
4.7. ECUACIÓN DE MOVIMIENTO PARA LA ROTACIÓN DE UN CUERPO RÍGIDO 19
4.7.2. Rotación de un cuerpo rígidoalrededor de un eje no principal deinercia
Cuando un cuerpo rígido rota alrededor de uneje que no corresponde a un eje principal deinercia, como en la figura 4.21, es válida laecuación Lz = Iω, ya que el momento angulartotal no es paralelo a la velocidad angular, y laecuación de movimiento correspondiente, es
dLz
dt= Mz (4.22)
donde Mz es la componente del momento totalexterno, paralela al eje z.
O
wL
z (Eje no principal)
Figura 4.21: Rotación alrededor de un eje no princi-pal de inercia.
Si la orientación del eje es fija respecto al cuer-po, el momento de inercia es constante. Así, alreemplazar la ecuación Lz = Iω en la ecuación(4.22), se obtiene
Iα = Mz,
que es la ecuación de movimiento a utilizarcuando el momento de inercia es constante, yel cuerpo rígido rota alrededor de un eje que noes principal.
En los problemas de rotación de un cuerporígido, se recomienda seguir los siguientes pa-sos
1. Se hace el diagrama de cuerpo libre para elcuerpo de interés, dibujando solamente lasfuerzas externas que actúan sobre el cuer-po rígido y ubicándolas en el punto dondeactúan.
2. Se plantea la ecuación de movimiento parala rotación del cuerpo rígido, correspon-diente a la situación particular que se estéconsiderando.
3. Se calculan los momentos, respecto al pun-to fijo del cuerpo por donde pasa el eje derotación.
4. Se obtiene el momento de inercia del cuer-po rígido respecto al eje de rotación. Cuan-do sea necesario, se emplea el teorema deSteiner o de los ejes paralelos.
5. Se resuelve la ecuación de movimiento, de-pendiendo de la información suministraday solicitada.
Ejemplo 4.11.Un disco homogéneo de masa M y radioR1 tiene un pequeño saliente de radio R2,como se indica en la figura. El disco rotaalrededor de un eje que pasa por su cen-tro, debido a la acción de los bloques demasas m1 y m2. a)Para cada cuerpo, ha-ga el diagrama de cuerpo libre y planteelas respectivas ecuaciones de movimien-to. b)Determine la aceleración angular deldisco y la aceleración de cada bloque. c)Analice los resultados obtenidos en el nu-meral b).
c
M
m1
m2
R1
R2
SoluciónEn la solución de la situación planteada,se debe tener presente que los bloques altener traslación pura se trata bajo el mode-lo de partícula, mientras que para el discoque tiene rotación pura se considera bajoel modelo de cuerpo rígido.
a) Diagramas de cuerpo libre dondeT1 = T1
′ y T2 = T2′.
En lo que sigue se plantean las ecua-ciones de movimiento para cada uno delos cuerpos,teniendo en cuenta el sentidode movimiento considerado en los diagra-mas de cuerpo libre.
Como el disco tiene un movimiento derotación pura alrededor de un eje que pasa

20 CAPÍTULO 4. MOMENTO ANGULAR Y MOMENTO DE UNA FUERZA
c
M
m1
m2
R1
R2
Movimiento
MovimientoMovimiento
Feje
Mg
T1´
T1
T2
T2´
m1gm2g
por el centro C, su ecuación de movimien-to tiene la forma general
� ∑ Mc =αIc,
y teniendo en cuenta el diagrama de cuer-po libre, se convierte en
−T1R1 + T2R2 = 12 MR2
1α, (1)
donde se ha tomado el sentido horario co-mo positivo y de acuerdo con la tabla deradios de giro de la unidad 3, se ha toma-do Ic =
12 MR2
1.Para el bloque de masa m1, que tiene
un movimiento vertical de traslación purahacia arriba, su ecuación de movimiento,está dada por
+ ↑ ∑ Fv = m1a1,
T1 − m1g = m1a1. (2)
Finalmente, para el bloque de masa m2que tiene un movimiento vertical detraslación pura hacia abajo, la ecuación demovimiento correspondiente es
+ ↓ ∑ Fv = m2a2,
m2g − T2 = m2a2. (3)
b) Como la aceleración de m2 es igual a laaceleración tangencial en el borde del pe-queño saliente y la aceleración de m1 esigual a la aceleración tangencial en el bor-de externo del disco se satisfacen las ex-presiones
a1 = αR1, (4)
a2 = αR2. (5)
Reemplazando la ecuación (4) en laecuación (2) y la (5) en la (3), se encuen-tra, que la aceleración angular del disco y
la aceleración de los bloques, respectiva-mente, están dadas por
α =m2R2 − m1R1
R21(
12 M + m1) + m2R2
2g, (6)
a1 =R1(m2R2 − m1R1)
R21(
12 M + m1) + m2R2
2g, (7)
a2 =R2(m2R2 − m1R1)
R21(
12 M + m1) + m2R2
2g. (8)
c) Teniendo en cuenta que cada una de laspartículas que forman el disco, adquierenun movimiento circular uniforme cuandola aceleración angular se hace cero, es de-cir, α = 0, por la ecuación (6), se tiene queesta condición se satisface si el numeradorse hace cero, lo que lleva a la relación
m1
m2=
R2
R1. (9)
En la ecuación (9) se observa que existeuna relación inversa entre las masas de losbloques y los radios R1 y R2. Ahora, deacuerdo con el enunciado R2 < R1, asíR2/R1 < 1 o sea m1/m2 < 1 o lo que esigual m1 < m2 si la velocidad angular deldisco es constante. Igualmente se observa,al comparar las ecuaciones (7) y (8) con laecuación (9), que si el disco rota con ve-locidad angular constante, los bloques setrasladan con velocidad constante.
PreguntaPara el caso de velocidad angularconstante, ¿la magnitud de la veloci-dad de los bloques del ejemplo ante-rior es la misma? ¿Por qué?
Ejercicio 4.9.Para el enunciado del ejemplo 4.11, deter-mine la tensión en cada una de las cuerdas.
Ejercicio 4.10.Resuelva la situación del ejemplo 4.11suponiendo que los bloques están unidosmediante la misma cuerda y que esta pasapor el borde del disco de radio R1. Re-cuerde que el disco se comporta como unapolea real.
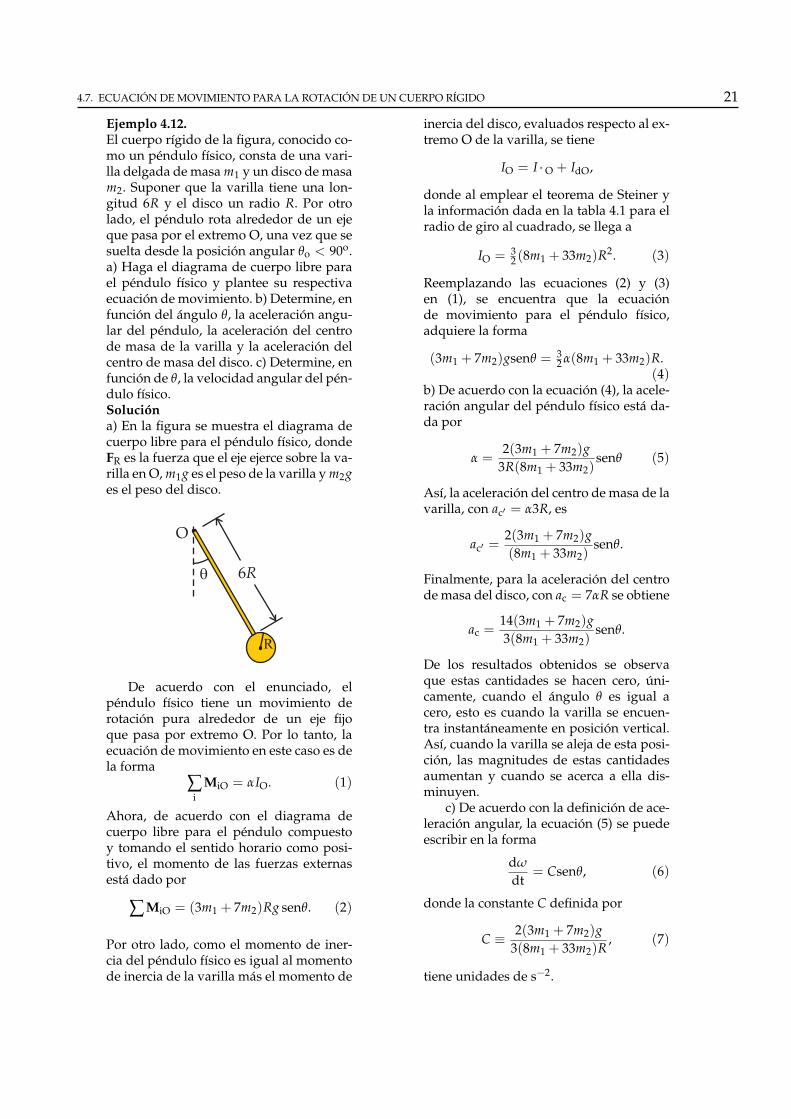
4.7. ECUACIÓN DE MOVIMIENTO PARA LA ROTACIÓN DE UN CUERPO RÍGIDO 21
Ejemplo 4.12.El cuerpo rígido de la figura, conocido co-mo un péndulo físico, consta de una vari-lla delgada de masa m1 y un disco de masam2. Suponer que la varilla tiene una lon-gitud 6R y el disco un radio R. Por otrolado, el péndulo rota alrededor de un ejeque pasa por el extremo O, una vez que sesuelta desde la posición angular θo < 90o.a) Haga el diagrama de cuerpo libre parael péndulo físico y plantee su respectivaecuación de movimiento. b) Determine, enfunción del ángulo θ, la aceleración angu-lar del péndulo, la aceleración del centrode masa de la varilla y la aceleración delcentro de masa del disco. c) Determine, enfunción de θ, la velocidad angular del pén-dulo físico.Solucióna) En la figura se muestra el diagrama decuerpo libre para el péndulo físico, dondeFR es la fuerza que el eje ejerce sobre la va-rilla en O, m1g es el peso de la varilla y m2ges el peso del disco.
R
6Rq
O
De acuerdo con el enunciado, elpéndulo físico tiene un movimiento derotación pura alrededor de un eje fijoque pasa por extremo O. Por lo tanto, laecuación de movimiento en este caso es dela forma
∑i
MiO = αIO. (1)
Ahora, de acuerdo con el diagrama decuerpo libre para el péndulo compuestoy tomando el sentido horario como posi-tivo, el momento de las fuerzas externasestá dado por
∑ MiO = (3m1 + 7m2)Rg senθ. (2)
Por otro lado, como el momento de iner-cia del péndulo físico es igual al momentode inercia de la varilla más el momento de
inercia del disco, evaluados respecto al ex-tremo O de la varilla, se tiene
IO = I ˚ O + IdO,
donde al emplear el teorema de Steiner yla información dada en la tabla 4.1 para elradio de giro al cuadrado, se llega a
IO = 32 (8m1 + 33m2)R2. (3)
Reemplazando las ecuaciones (2) y (3)en (1), se encuentra que la ecuaciónde movimiento para el péndulo físico,adquiere la forma
(3m1 + 7m2)gsenθ = 32 α(8m1 + 33m2)R.
(4)b) De acuerdo con la ecuación (4), la acele-ración angular del péndulo físico está da-da por
α =2(3m1 + 7m2)g
3R(8m1 + 33m2)senθ (5)
Así, la aceleración del centro de masa de lavarilla, con ac′ = α3R, es
ac′ =2(3m1 + 7m2)g(8m1 + 33m2)
senθ.
Finalmente, para la aceleración del centrode masa del disco, con ac = 7αR se obtiene
ac =14(3m1 + 7m2)g3(8m1 + 33m2)
senθ.
De los resultados obtenidos se observaque estas cantidades se hacen cero, úni-camente, cuando el ángulo θ es igual acero, esto es cuando la varilla se encuen-tra instantáneamente en posición vertical.Así, cuando la varilla se aleja de esta posi-ción, las magnitudes de estas cantidadesaumentan y cuando se acerca a ella dis-minuyen.
c) De acuerdo con la definición de ace-leración angular, la ecuación (5) se puedeescribir en la forma
dω
dt= Csenθ, (6)
donde la constante C definida por
C ≡ 2(3m1 + 7m2)g3(8m1 + 33m2)R
, (7)
tiene unidades de s−2.

22 CAPÍTULO 4. MOMENTO ANGULAR Y MOMENTO DE UNA FUERZA
Si en la ecuación (6) se multiplica a am-bos lados por dθ, se obtiene
ω∫0
ωdω = −Cθ∫
θ0
senθdθ,
el signo menos se debe tener en cuenta,ya que cuando el péndulo se suelta desdela posición inicial, el ángulo θ disminuyecon el tiempo. Luego de integrar y evaluarse encuentra que la velocidad angular delpéndulo físico está dado por
ω =√
2C(cosθ−cosθ0). (8)
De acuerdo con la ecuación (8), el máxi-mo valor de la velocidad angular se pre-senta en el instante que el péndulo está enposición vertical. Así, cuando θ disminuyela velocidad angular aumenta y cuando θ
aumenta la velocidad angular disminuye.
PreguntaEn la ecuación (8) ¿Qué condición sedebe cumplir entre el ángulo θ y el án-gulo θo? ¿Por qué?
Ejercicio 4.11.Resuelva el ejemplo 4.12,suponiendo queel péndulo físico está constituido sólo poruna varilla delgada de longitud 8R. Com-pare los resultados, con los obtenidos en elejemplo 4.12.
4.7.3. Movimiento combinado detraslación y rotación de un cuerporígido
Cuando el movimiento de un cuerpo rígido, estal que su centro de masa tiene movimiento detraslación respecto a un sistema de referenciainercial y un movimiento de rotación alrede-dor de un eje que pasa por el centro de masa,es necesario analizar los dos movimientos porseparado, es decir, considerar el sistema fuerzapar que actúa sobre el cuerpo rígido debido alsistema de fuerzas externas que actúan. Estasituación se muestra en la figura 4.22.
Si el eje de rotación no está fijo respecto aun sistema de referencia inercial, como ocurre
w
O
x
y
z
vc
zc
C.M.
Figura 4.22: Rotación y traslación de un cuerpo rígi-do.
cuando un cuerpo rueda por un plano inclina-do, para analizar el movimiento de traslacióndel cuerpo se emplea la segunda ley de Newtony se tiene en cuenta que el centro de masa, en loreferente a traslación, se comporta como si todala masa estuviera concentrada en dicho punto.De este modo, la ecuación de movimiento parala traslación del centro de masa del cuerpo rígi-do se expresa en la forma
F = m ac,
donde F es la fuerza neta debida a las fuerzasexternas que actúan sobre el cuerpo rígido, msu masa y ac la aceleración del centro masa.
Para el movimiento de rotación, se debe cal-cular el momento angular y el momento totaldebido a las fuerzas externas, respecto al cen-tro de masa del cuerpo. O sea, la ecuación demovimiento para la rotación del cuerpo rígidoalrededor de un eje que pasa por el centro demasa está dada por
dLc
dt= Mc. (4.23)
Si a la vez, como ocurre generalmente, larotación es alrededor de un eje principal quepasa por el centro de masa, se tiene
Icω = Lc. (4.24)
Ahora, si el momento de inercia es constan-te, eje fijo en el cuerpo, entonces mediante lasecuaciones (4.23) y (4.24), se encuentra que laecuación de movimiento correspondiente es
Icα = Mc,
donde se ha empleado la definición de acelera-ción angular.

4.7. ECUACIÓN DE MOVIMIENTO PARA LA ROTACIÓN DE UN CUERPO RÍGIDO 23
Si para un cuerpo el momento total respectoal centro de masa es cero, la velocidad angulares constante y el momento angular se conserva.Esta situación ocurre cuando la única fuerza ex-terna aplicada a un cuerpo rígido homogéneo essu peso.
Debido a la complejidad que se presenta,cuando se analiza este tipo de movimiento entres dimensiones, se restringe el movimientoa dos dimensiones y con cuerpos homogéneosque presentan alto grado de simetría, tales co-mo esferas, cilindros o aros. Se consideran cuer-pos homogéneos, con el fin de garantizar que elcentro de masa del cuerpo coincida con su cen-tro geométrico
Cuando un cuerpo rígido tiene movimientocombinado de traslación y rotación sobre unasuperficie, se dice que el cuerpo rueda, y en estecaso se debe tener presente si rueda deslizandoo sin deslizar.
Si un cuerpo rígido homogéneo, rueda ydesliza, la fuerza de fricción es cinética, es-to es, se cumple la relación Fk = µkN.
Si el cuerpo rígido homogéneo, rueda sindeslizar, la fuerza de fricción es estática yla relación válida es Fs ≤ µsN.
Otra forma de entender lo anterior, es con-siderando la velocidad del punto de contactodel cuerpo rígido con la superficie sobre la cualrueda. Si el cuerpo rueda y desliza, la velocidaddel punto de contacto, con respecto a la superfi-cie es diferente de cero; pero si el cuerpo rueday no desliza, la velocidad del punto de contacto,con respecto a la superficie, es igual a cero.
Las expresiones, vc = ωR y ac = αR, sólotienen validez si el cuerpo rígido con alto gradode simetría, es homogéneo y rueda sin deslizar.
Cuando en un caso particular, no se sabe si elcuerpo rígido rueda deslizando ó sin deslizar,primero se debe suponer que no hay desliza-miento. En el caso que la fuerza de fricción cal-culada, sea menor o igual a µsN, la suposiciónes correcta; pero si la fuerza de fricción obteni-da, es mayor que µsN, la suposición es incorrec-ta y el cuerpo rueda deslizando.
En problemas donde se presente movimien-to combinado de traslación y rotación, ademásde los pasos que se siguen para la rotación pu-ra de un cuerpo rígido, alrededor de un eje quepasa por su centro de masa, se debe incluir laecuación de movimiento correspondiente a latraslación del centro de masa.
Ejemplo 4.13.Un cascarón esférico homogéneo, de radioR y masa M, rueda sin deslizar por la su-perficie de un plano inclinado que formaun ángulo θ con la horizontal. Determinela aceleración de la esfera, su aceleraciónangular y la fuerza de fricción entre la es-fera y la superficie del plano inclinado.
R
M
q
SoluciónEn la figura siguiente se muestra el diagra-ma de cuerpo libre para el cascarón esféri-co, donde Mg es el peso del cascarón, Nla fuerza que la superficie ejerce sobre elcascarón y Fs la fuerza de fricción estáticaentre el cascarón y la superficie.
Mgq
N
Fs
c
Teniendo en cuenta que el cascaróntiene un movimiento combinado detraslación del centro de masa y derotación alrededor de un eje que pasapor el centro de masa,las ecuaciones demovimiento para este cuerpo rígido, estándadas como sigue.
24 CAPÍTULO 4. MOMENTO ANGULAR Y MOMENTO DE UNA FUERZA
Ecuaciones de movimiento para latraslación del centro de masa. En la direc-ción paralela al plano inclinado
+ ↘ ∑i
F// = Mac,
Mgsenθ − Fs = Mac, (1)
En la dirección perpendicular al plano in-clinado
+ ↗ ∑i
F⊥ = 0,
N − Mgcosθ = 0. (2)
Ecuación de movimiento para la rotaciónalrededor de un eje que pasa por el centrode masa del cascarón
� ∑i
Mc = Icα,
FsR = 23 MR2α, (3)
donde se ha utilizado la información dadapor la tabla 4.1, para un cascarón.
De la ecuación (3), se tiene que lafuerza de fricción es la responsable de larotación del cascarón alrededor del eje quepasa por el centro de masa. Ahora, elimi-nando la fuerza de fricción Fs, mediantelas ecuaciones (1) y (3), se encuentra que laaceleración del cascarón, que correspondea la aceleración de su centro de masa, estádada por
ac =35 gsenθ, (4)
donde se ha empleado la expresión
ac = αR, (5)
ya que el cascarón es homogéneo y ruedasin deslizar.
Ahora, igualando las ecuaciones (4) y(5), para la aceleración angular del cas-carón se obtiene
α = 35
gsenθ
R. (6)
Finalmente, por las ecuaciones (3) y (6), lafuerza de fricción estática que actúa sobreel cascarón esférico, está dada por
Fs =25 Mgsenθ. (7)
De acuerdo con los resultados obtenidos,se puede concluir
1. Por la ecuación (4), la aceleracióndel cascarón sólo depende del án-gulo de inclinación θ y su magni-tud es menor que la aceleración de lagravedad, como es de esperarse, yaque no es una caída libre.
2. Para la aceleración angular del cas-carón, de acuerdo con la ecuación(6), se tiene que su magnitud de-pende, tanto del ángulo de incli-nación θ, como del tamaño del cas-carón al depender del radio R.
3. En lo referente a la fuerza de fric-ción estática, la ecuación (7) mues-tra que su magnitud depende de lamasa del cascarón M y del ángulo deinclinación θ.
Ejercicio 4.12.Resuelva el ejemplo 4.13, si el cascarón es-férico se reemplaza por a) Una esfera ma-ciza. b) Un disco o cilindro. c) Un aro.Suponga en cada caso que la masa es My el radio es R. Compare los resultados,con los obtenidos en el ejemplo 4.13. Sise sueltan simultáneamente desde la mis-ma altura,¿cuál llega primero a la base delplano inclinado? Explique.
4.8. Energía en un cuerpo rígido
En esta sección se consideran los tipos de ener-gía que puede poseer un cuerpo rígido cuan-do está en movimiento. Como se mostrará, lostipos de energía que tenga el cuerpo rígido, de-pende del tipo de movimiento que este tenga.
4.8.1. Energía cinética de un cuerpo rígi-do
En la unidad de trabajo y energía, se encontróque a una partícula de masa m, con velocidad vrespecto a un sistema de referencia determina-do, se le asocia una energía cinética dada por
Ek = 12 mv2.
De esta forma, para un cuerpo rígido, que es uncaso particular de un sistema de partículas, la
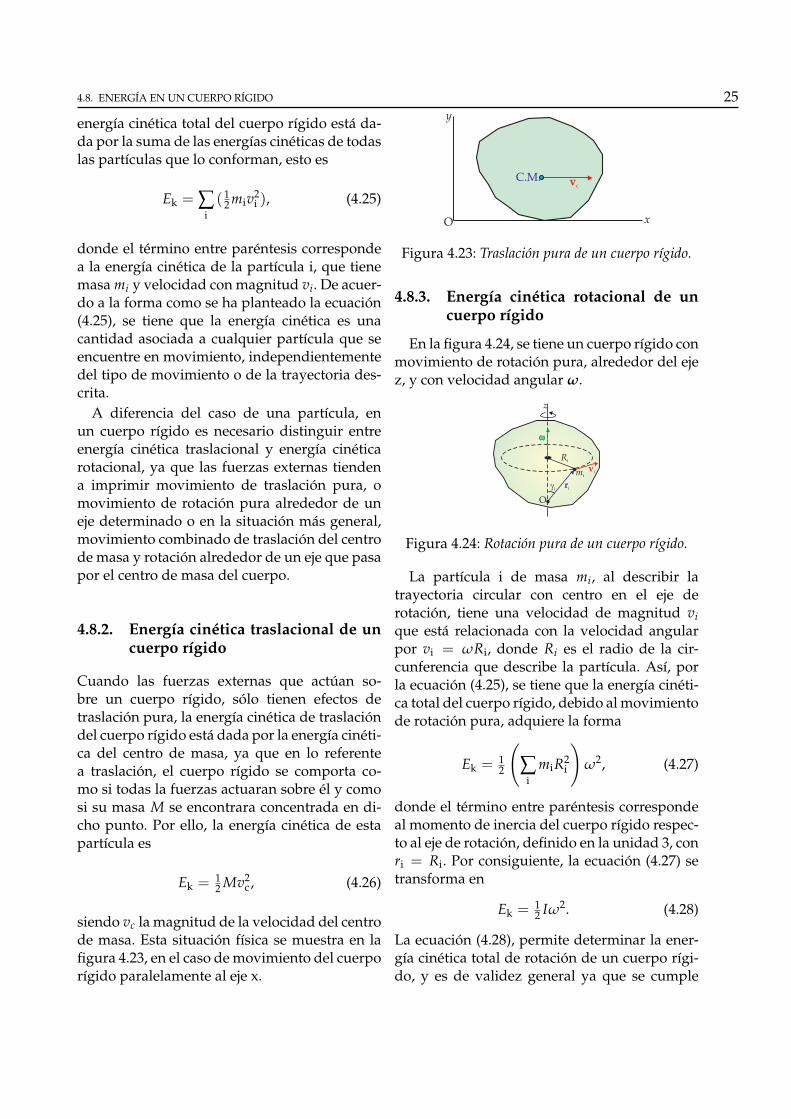
4.8. ENERGÍA EN UN CUERPO RÍGIDO 25
energía cinética total del cuerpo rígido está da-da por la suma de las energías cinéticas de todaslas partículas que lo conforman, esto es
Ek = ∑i( 1
2 miv2i ), (4.25)
donde el término entre paréntesis correspondea la energía cinética de la partícula i, que tienemasa mi y velocidad con magnitud vi. De acuer-do a la forma como se ha planteado la ecuación(4.25), se tiene que la energía cinética es unacantidad asociada a cualquier partícula que seencuentre en movimiento, independientementedel tipo de movimiento o de la trayectoria des-crita.
A diferencia del caso de una partícula, enun cuerpo rígido es necesario distinguir entreenergía cinética traslacional y energía cinéticarotacional, ya que las fuerzas externas tiendena imprimir movimiento de traslación pura, omovimiento de rotación pura alrededor de uneje determinado o en la situación más general,movimiento combinado de traslación del centrode masa y rotación alrededor de un eje que pasapor el centro de masa del cuerpo.
4.8.2. Energía cinética traslacional de uncuerpo rígido
Cuando las fuerzas externas que actúan so-bre un cuerpo rígido, sólo tienen efectos detraslación pura, la energía cinética de traslacióndel cuerpo rígido está dada por la energía cinéti-ca del centro de masa, ya que en lo referentea traslación, el cuerpo rígido se comporta co-mo si todas la fuerzas actuaran sobre él y comosi su masa M se encontrara concentrada en di-cho punto. Por ello, la energía cinética de estapartícula es
Ek = 12 Mv2
c , (4.26)
siendo vc la magnitud de la velocidad del centrode masa. Esta situación física se muestra en lafigura 4.23, en el caso de movimiento del cuerporígido paralelamente al eje x.
O x
y
vc
C.M.
Figura 4.23: Traslación pura de un cuerpo rígido.
4.8.3. Energía cinética rotacional de uncuerpo rígido
En la figura 4.24, se tiene un cuerpo rígido conmovimiento de rotación pura, alrededor del ejez, y con velocidad angular ω.
z
Ri
mi
O
gi
w
ri
vi
Figura 4.24: Rotación pura de un cuerpo rígido.
La partícula i de masa mi, al describir latrayectoria circular con centro en el eje derotación, tiene una velocidad de magnitud vique está relacionada con la velocidad angularpor vi = ωRi, donde Ri es el radio de la cir-cunferencia que describe la partícula. Así, porla ecuación (4.25), se tiene que la energía cinéti-ca total del cuerpo rígido, debido al movimientode rotación pura, adquiere la forma
Ek = 12
(∑
imiR2
i
)ω2, (4.27)
donde el término entre paréntesis correspondeal momento de inercia del cuerpo rígido respec-to al eje de rotación, definido en la unidad 3, conri = Ri. Por consiguiente, la ecuación (4.27) setransforma en
Ek = 12 Iω2. (4.28)
La ecuación (4.28), permite determinar la ener-gía cinética total de rotación de un cuerpo rígi-do, y es de validez general ya que se cumple

26 CAPÍTULO 4. MOMENTO ANGULAR Y MOMENTO DE UNA FUERZA
respecto a cualquier eje de rotación. Además,de nuevo se observa que el momento de iner-cia desempeña en rotación, el mismo papel quela masa en traslación.
Cuando el cuerpo rígido rota alrededor de uneje principal de inercia, la ecuación (4.28) se con-vierte en
Ek = 12 Iω2,
expresión que sólo es válida si el cuerpo rígidorota alrededor de un eje principal de inercia.
4.8.4. Energía cinética total de un cuerporígido
Cuando un cuerpo rígido posee un movimien-to combinado de traslación y rotación, se debeconsiderar por separado la energía cinéticatraslacional y la energía cinética rotacional.Ahora, si el eje de rotación pasa por el centrode masa y al mismo tiempo el centro de masatiene un movimiento de traslación respecto a unsistema de referencia inercial, como en la figura4.25, la energía cinética total del cuerpo rígido,utilizando las ecuaciones (4.26) y (4.28), está da-da por
Ek = 12 mv2
c +12 Icω2, (4.29)
donde el primer término a la derecha de laigualdad, es la energía cinética de traslación delcentro de masa y el segundo término, la ener-gía cinética de rotación respecto a un eje quepasa por el centro de masa. La cantidad Ic, enla ecuación (4.29), es el momento de inercia delcuerpo rígido respecto al eje que pasa a travésdel centro de masa.
O x
y
M
zc
C.M.
w
vc
Figura 4.25: Movimiento combinado de rotación ytraslación de un cuerpo rígido.
Lo anterior tiene sentido, ya que en un cuerporígido el centro de masa está fijo en el cuerpo y
el único movimiento que el cuerpo puede tenerrespecto a su centro de masa es de rotación.
Ejemplo 4.14.Sabiendo que el sistema del ejemplo 4.11parte del reposo, determine su energíacinética total función del tiempo.SoluciónDe acuerdo con la situación planteada ycomo lo muestra la figura, el disco tieneun movimiento de rotación pura y los blo-ques movimiento de traslación pura.
c
M
m1
m2
R1
R2
Por esta razón, para determinar laenergía cinética total del sistema, es nece-sario incluir, además de la energía cinéticade rotación del disco,la energía cinética detraslación de cada bloque, esto es
Ek = 12 Icω2 + 1
2 m1v21 +
12 m2v2
2, (1)
donde los tres términos a la derecha de laecuación (1) son, respectivamente, la ener-gía cinética de rotación del disco, la ener-gía cinética de traslación de m1 y la energíacinética de traslación de m2.
Por otro lado, la velocidad de cadabloque está relacionada con la velocidadangular del disco por
v1 = ωR1 y v2 = ωR2. (2)
Reemplazando las ecuaciones (2) en laecuación (1), se obtiene para la energíacinética total del sistema, en función de lavelocidad angular del disco, la expresión
Ek = 12 [(
12 M + m1)R2
1 + m2R22]ω
2. (3)
Los resultados del ejemplo 4.10 muestranque el disco rota con aceleración angu-lar constante, esto es, su velocidad angu-lar varía con el tiempo, igual que la ener-gía cinética del sistema, de acuerdo con laecuación (3).

4.8. ENERGÍA EN UN CUERPO RÍGIDO 27
Utilizando tanto la expresión obtenidapara la aceleración angular en el ejemplo4.10 como la definición de aceleración an-gular, y teniendo en cuenta que el sistemaparte del reposo, se encuentra que la ve-locidad angular depende del tiempo en laforma
ω =(m2R2 − m1R1)g
R21(
12 M + m1) + m2R2
2t. (4)
De este modo, por las ecuaciones (3) y (4),la energía cinética del sistema, en funcióndel tiempo, está dada por
Ek = 12
(m2R2 − m1R1)2g2
R21(
12 M + m1) + m2R2
2t2. (5)
La ecuación (5), además de mostrar que laenergía cinética del sistema es positiva, in-dica que esta aumenta con el tiempo mien-tras exista movimiento.
Ejercicio 4.13.Sabiendo que el sistema del ejercicio 4.10parte del reposo, determine su energíacinética total función del tiempo. Com-pare los resultados con los obtenidos en elejemplo 4.14.
Ejemplo 4.15.Determine, en función del ángulo θ, laenergía cinética del péndulo físico consi-derado en ejemplo 4.12.Solución
R
6Rq
O
En este caso, el péndulo físico tiene unmovimiento de rotación pura alrededor deun eje que pasa por el extremo O, esto es,sólo posee energía cinética rotacional dadapor
Ek = 12 IOω2. (1)
Ahora, de acuerdo con el ejemplo 4.10,se tiene
IO = 32 (8m1 + 33m2)R2, (2)
ω =√
2C(cosθ−cosθ0), (3)
con
C ≡ 2(3m1 + 7m2)g3(8m1 + 33m2)R
. (4)
Luego de reemplazar las ecuaciones (2) y(3) en la ecuación (1), se encuentra que laenergía cinética de rotación del péndulofísico es
Ek = gR(3m1 + 7m2)(cosθ − cosθo). (5)
Por la ecuación (5) se tiene que la energíacinética de rotación se hace instantánea-mente cero, cuando el péndulo físico lle-ga a los extremos de la trayectoria, esto es,donde θ = θo. Por otro lado, adquiere sumáximo valor en el instante que el péndu-lo está en posición vertical, o sea, cuandoθ = 0.
Ejercicio 4.14.Obtenga, en función del ángulo θ, la ener-gía cinética del péndulo físico del ejer-cicio 4.11. Compare su resultado con elobtenido en el ejemplo 4.15.
Ejemplo 4.16.Para el cascarón del ejemplo 4.13, deter-mine qué fracción de la energía cinética to-tal es traslacional y qué fracción es rota-cional, una vez que se inicia el movimien-to.SoluciónComo el cascarón tiene un movimientode rodadura, el centro de masa tiene unmovimiento de traslación y simultánea-mente rota alrededor de un eje que pasapor el centro de masa. Así, en un instantedeterminado, la energía cinética total delcascarón está dada por
Ek = 12 Mv2
c +12 Icω2. (1)
Ahora, como el cascarón rueda sindeslizar, la velocidad del centro de masaestá relacionada con la velocidad angularpor
v = ωR. (2)

28 CAPÍTULO 4. MOMENTO ANGULAR Y MOMENTO DE UNA FUERZA
RM
q
wv
c
Reemplazando la ecuación (2) en laecuación (1), con
Ic =23 MR2,
se obtiene
Ek = 56 MR2ω2. (3)
Mediante las ecuaciones (1), (2) y (3), lafracción de la energía cinética total que esenergía cinética traslacional, está dada por
EkTEk
= 0.6,
y la fracción que es energía cinética rota-cional es
EkREk
= 0.4.
De acuerdo con estos resultados, el 60 %de la energía cinética total es traslacionaly el 40 % rotacional, independientementedel tamaño, la masa y la velocidad angulardel cascarón.
Ejercicio 4.15.Resuelva el ejemplo 4.16, si el cascarón es-férico se reemplaza por a) Una esfera ma-ciza. b) Un disco o cilindro. c) Un aro.Suponga, en cada caso, que la masa es M yel radio es R. Compare los resultados, conlos obtenidos en el ejemplo 4.16.
4.8.5. Energía total de un cuerpo rígido
Teniendo en cuenta la definición de cuerporígido, la distancia entre cualquier pareja departículas no cambia durante el movimiento.Por ello, se puede suponer que la energía po-tencial propia o interna permanece constante,lo que permite no considerarla cuando se anali-za el intercambio de energía del cuerpo con susalrededores.
En concordancia con el teorema del trabajo yla energía, que es válido para el caso de un cuer-po rígido, se tiene
Wext = ∆Ek
= Ek − Eko, (4.30)
donde Wext es el trabajo realizado por todas lasfuerzas externas que actúan sobre el cuerpo rígi-do.
Ahora, si sobre el cuerpo rígido actúan si-multáneamente fuerzas externas conservativasy no conservativas, el trabajo total se puede ex-presar como
Wext = Wc + Wnc, (4.31)
siendo Wc el trabajo realizado por las fuerzasexternas conservativas y Wnc el trabajo de lasfuerzas externas no conservativas. Teniendo encuenta que Wc = −∆Ep y con ayuda de laecuación (4.30), es posible demostrar que laecuación (4.31) se convierte en
Wnc = (Ek + Ep)− (Eko + Epo)
= ∆E, (4.32)
con E correspondiendo a la energía total delcuerpo rígido y Ep a la energía potencial aso-ciada con las fuerzas externas conservativas. Laecuación (4.32), igual que en el caso de unapartícula, muestra que la energía total de uncuerpo rígido no se conserva cuando sobre él ac-túan simultáneamente fuerzas externas conser-vativas y no conservativas, esto es, el sistema esno conservativo. La ecuación (4.32) se emplea,por ejemplo, cuando sobre un cuerpo rígido ac-túan simultáneamente la fuerza gravitacional yla fuerza de fricción dinámica.
En el caso particular que sobre el cuerpo sóloactúen fuerzas externas conservativas, el traba-jo realizado por las fuerzas no conservativas esnulo, y la ecuación (4.32) se transforma en
(Ek + Ep)− (Eko + Epo) = ∆E= 0
que expresa la conservación de la energía.Así, cuando sobre el cuerpo únicamente actúan

4.8. ENERGÍA EN UN CUERPO RÍGIDO 29
fuerzas externas conservativas, la energía totalmecánica permanece constante, es decir, el sis-tema es conservativo.
De los resultados anteriores se puede afirmarque son idénticos a los obtenidos para el caso deuna partícula; la diferencia radica en el hechoque para un cuerpo rígido sólo se deben teneren cuenta las fuerzas externas, ya que tambiénse presentan fuerzas internas en este tipo de sis-tema.
Matemáticamente, la conservación de la ener-gía total se expresa en la forma
E = Ek + Ep
= 12 Mv2
c +12 Icω2 + Ep
= Constante.
En el caso particular de un cuerpo rígido quecae por acción de la gravedad y a la vez rotaalrededor de un eje que pasa por su centro demasa, como se ilustra en la figura 4.26, la ley deconservación de la energía adquiere la forma
y
x
yc
OTierra
C.M.
MEje de rotación
vc
E( = 0)p
w
Figura 4.26: Cuerpo rígido que desciende rotando.
E = 12 Mv2
c +12 Icω2 + Mgyc
= Constante,
donde yc es la altura del centro de masa, res-pecto al nivel cero de energía potencial gravita-cional.
Es importante notar en este punto que cuan-do un cuerpo rígido rueda sin deslizar sobreuna superficie horizontal rugosa, actúa la fuerzade fricción estática Fs. Esta fuerza de fricción norealiza trabajo, ya que la velocidad del punto decontacto vP, respecto a la superficie, es cero. Es
decir, para un desplazamiento infinitesimal
dW = Fs · dr
= Fs · drdtdt
= Fs · vPdt= 0.
Por lo tanto, si sobre un sistema actúansimultáneamente fuerzas conservativas y lafuerza de fricción estática, el sistema es conser-vativo.
Ejemplo 4.17.El cascarón esférico del ejemplo 4.13, partedel reposo desde una altura h como semuestra en la figura. Determine la veloci-dad angular y la velocidad del cascarón,cuando éste llega a la base del plano incli-nado.
R
M
q
h
Ep= 0
SoluciónDiagrama de cuerpo libre para el cascarón.
De acuerdo con el diagrama espacial,sobre el cascarón actúan las siguientesfuerzas
La normal N, que por ser perpen-dicular al desplazamiento del centrode masa, no realiza trabajo.El peso mg, que realiza trabajo y esuna fuerza conservativa.La fuerza de fricción estática Fs, queno realiza trabajo ya que el cascarónrueda sin deslizar.
Mgq
N
Fs
c
De este modo, el sistema es conserva-tivo porque la única fuerza que realiza tra-bajo es conservativa. En otras palabras, la
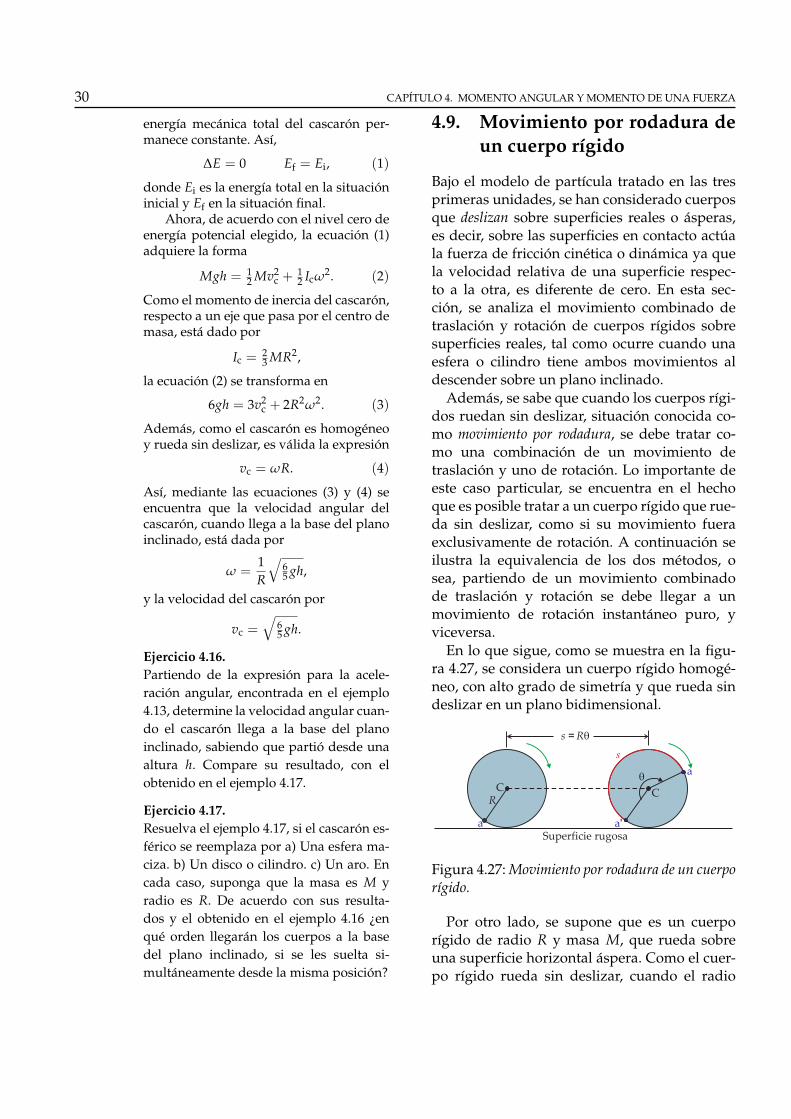
30 CAPÍTULO 4. MOMENTO ANGULAR Y MOMENTO DE UNA FUERZA
energía mecánica total del cascarón per-manece constante. Así,
∆E = 0 Ef = Ei, (1)
donde Ei es la energía total en la situacióninicial y Ef en la situación final.
Ahora, de acuerdo con el nivel cero deenergía potencial elegido, la ecuación (1)adquiere la forma
Mgh = 12 Mv2
c +12 Icω2. (2)
Como el momento de inercia del cascarón,respecto a un eje que pasa por el centro demasa, está dado por
Ic =23 MR2,
la ecuación (2) se transforma en
6gh = 3v2c + 2R2ω2. (3)
Además, como el cascarón es homogéneoy rueda sin deslizar, es válida la expresión
vc = ωR. (4)
Así, mediante las ecuaciones (3) y (4) seencuentra que la velocidad angular delcascarón, cuando llega a la base del planoinclinado, está dada por
ω =1R
√65 gh,
y la velocidad del cascarón por
vc =√
65 gh.
Ejercicio 4.16.Partiendo de la expresión para la acele-ración angular, encontrada en el ejemplo4.13, determine la velocidad angular cuan-do el cascarón llega a la base del planoinclinado, sabiendo que partió desde unaaltura h. Compare su resultado, con elobtenido en el ejemplo 4.17.
Ejercicio 4.17.Resuelva el ejemplo 4.17, si el cascarón es-férico se reemplaza por a) Una esfera ma-ciza. b) Un disco o cilindro. c) Un aro. Encada caso, suponga que la masa es M yradio es R. De acuerdo con sus resulta-dos y el obtenido en el ejemplo 4.16 ¿enqué orden llegarán los cuerpos a la basedel plano inclinado, si se les suelta si-multáneamente desde la misma posición?
4.9. Movimiento por rodadura deun cuerpo rígido
Bajo el modelo de partícula tratado en las tresprimeras unidades, se han considerado cuerposque deslizan sobre superficies reales o ásperas,es decir, sobre las superficies en contacto actúala fuerza de fricción cinética o dinámica ya quela velocidad relativa de una superficie respec-to a la otra, es diferente de cero. En esta sec-ción, se analiza el movimiento combinado detraslación y rotación de cuerpos rígidos sobresuperficies reales, tal como ocurre cuando unaesfera o cilindro tiene ambos movimientos aldescender sobre un plano inclinado.
Además, se sabe que cuando los cuerpos rígi-dos ruedan sin deslizar, situación conocida co-mo movimiento por rodadura, se debe tratar co-mo una combinación de un movimiento detraslación y uno de rotación. Lo importante deeste caso particular, se encuentra en el hechoque es posible tratar a un cuerpo rígido que rue-da sin deslizar, como si su movimiento fueraexclusivamente de rotación. A continuación seilustra la equivalencia de los dos métodos, osea, partiendo de un movimiento combinadode traslación y rotación se debe llegar a unmovimiento de rotación instantáneo puro, yviceversa.
En lo que sigue, como se muestra en la figu-ra 4.27, se considera un cuerpo rígido homogé-neo, con alto grado de simetría y que rueda sindeslizar en un plano bidimensional.
C C
Superficie rugosa
s R= q
s
q
R
a'
a
a
Figura 4.27: Movimiento por rodadura de un cuerporígido.
Por otro lado, se supone que es un cuerporígido de radio R y masa M, que rueda sobreuna superficie horizontal áspera. Como el cuer-po rígido rueda sin deslizar, cuando el radio

4.9. MOVIMIENTO POR RODADURA DE UN CUERPO RÍGIDO 31
barre un ángulo θ, el centro de masa C se des-plaza horizontalmente una distancia s = Rθ,como lo muestra la figura 4.27. Por lo tanto, lamagnitud de la velocidad del centro de masa,para el movimiento puro por rodadura, está da-da por
vc =dsdt
= Rdθ
dt= Rω, (4.33)
y la magnitud de la aceleración del centro demasa, por
ac =dvc
dt
= Rdω
dt= Rα. (4.34)
Las ecuaciones (4.33) y (4.34) muestran que elcuerpo rígido se comporta como si rotara ins-tantáneamente alrededor de un eje que pasa porel punto de contacto del cuerpo con la super-ficie sobre la cual rueda sin deslizar. Se hablade rotación instantánea ya que el punto de con-tacto cambia continuamente mientras el cuerporueda. En otras palabras, se consideró inicial-mente un movimiento combinado de traslacióny rotación, y se ha llegado a un movimiento derotación instantánea pura.
Para ilustrar un poco más el resultado ante-rior, en la figura 4.28 se muestran las veloci-dades lineales de diversos puntos del cilindroque rueda. Como consecuencia del movimien-to de rotación instantánea pura, la velocidad li-neal de cualquiera de los puntos señalados, seencuentra en una dirección perpendicular a larecta que va de ese punto al punto de contactocon la superficie. En cualquier instante, el puntode contacto P está en reposo instantáneo respec-to a la superficie, ya que no se presenta desliza-miento entre las superficies. Por esta razón, eleje que pasa por el punto de contacto P, que esperpendicular a la hoja, se le conoce como ejeinstantáneo de rotación.
Partículas del cuerpo rígido, tales como Q yQ’, tienen componentes horizontal y vertical de
vP= 0P
P'
C
Q
Q'
v vP' c= 2
vc
vQ
vQ'
Figura 4.28: Rotación alrededor de un eje instantá-neo que pasa por P.
la velocidad; sin embargo, los puntos P, P’ y elcentro de masa C, son únicos y tienen un interésespecial. Por definición, el centro de masa delcilindro se mueve con velocidad vc = Rω, entanto que el punto de contacto P tiene velocidadcero. Entonces, se concluye que el punto P’ debetener una velocidad vP = 2vc = 2Rω, dado quetodos los puntos del cuerpo tienen la misma ve-locidad angular y la distancia PP’ es dos vecesla distancia PC.
Ahora se lleva a cabo el procedimiento inver-so, considerando la energía cinética del cuerporígido. Para rotación instantánea pura, la ener-gía cinética total del cuerpo rígido que rueda sindeslizar, está dada por
Ek = 12 IPω2, (4.35)
siendo IP el momento de inercia del cuerpo rígi-do respecto al eje instantáneo que pasa por elpunto de contacto P.
De acuerdo con el teorema de Steiner, el mo-mento de inercia del cuerpo rígido respecto aun eje que pasa por el punto de contacto P, estádado por
IP = Ic + MR2, (4.36)
donde Ic es el momento de inercia del cuerporespecto a un eje que pasa por el centro de masa,M es la masa del cuerpo y R la separación entrelos ejes, coincidente con el radio.
Reemplazando la ecuación (4.36) en laecuación (4.35) y utilizando la relación vc = Rω,finalmente se encuentra que la energía cinéticatotal del cuerpo es
Ek = 12 Icω2 + 1
2 Mv2c . (4.37)

32 CAPÍTULO 4. MOMENTO ANGULAR Y MOMENTO DE UNA FUERZA
En la ecuación (4.37), se observa que el primertérmino de la derecha corresponde a la energíacinética de rotación del cuerpo, respecto a uneje que pasa por su centro de masa, y el segun-do término corresponde a la energía cinética detraslación del centro de masa.
Por lo anterior, se tiene nuevamente que losefectos combinados de traslación del centro demasa y de rotación alrededor de un eje que pasapor el centro de masa, son equivalentes a unarotación instantánea pura con la misma veloci-dad angular con respecto a un eje que pasa porel punto de contacto de un cuerpo que va ro-dando sin deslizar.
Ejemplo 4.18.Resolver el ejemplo 4.13, considerando eleje instantáneo de rotación.
R
M
q
P
SoluciónEn el diagrama de cuerpo libre, se obser-va que las líneas de acción de la normal Ny de la fuerza de fricción estática Fs, estánaplicadas en el punto de contacto del cas-carón con la superficie sobre la cual ruedasin deslizar.
mgq
N
Fs
c
P
Ahora, como el cascarón rueda sindeslizar, este se comporta como si instan-táneamente rotara alrededor de un eje quepasa por el punto de contacto P. De estemodo, la ecuación de movimiento para larotación instantánea pura, es de la forma
� ∑i
MP = IPα. (1)
Por otro lado, como el peso mg es la úni-ca fuerza que genera rotación respecto al
punto P, la ecuación (1), con IP = Ic +MR2, se transforma en
gsenθ = 53 Rα, (2)
donde se ha tomado el sentido horario co-mo positivo y se cumple la expresión Ic =23 MR2.
Por consiguiente, de la ecuación (2) setiene que la aceleración del cascarón es
α = 35
gsenθ
R,
y la aceleración del centro de masa, conac = αR, es
ac =35 gsenθ.
Estos resultados, al ser idénticos a losobtenidos en el ejemplo 4.13, muestranque realmente el cascarón se comporta co-mo si rotara instantáneamente respecto aleje que pasa por el punto de contacto P.
Para determinar la fuerza de fricciónes necesario recurrir al método utilizadoen el ejemplo 4.13, ya que este método nopermite obtenerla.
Ejercicio 4.18.Resuelva el ejemplo 4.18, si el cascarón es-férico se cambia por a) Una esfera maciza.b) Un cilindro o disco. c) Un aro. En ca-da caso, suponga que la masa es M y elradio es R. Compare lo resultados con losobtenidos en el ejemplo 4.18.
Ejemplo 4.19.Determine, en función de la velocidad an-gular, la energía cinética total del cascarónesférico del ejemplo 4.13, considerando eleje instantáneo de rotación.
mgq
N
Fs
c
P
SoluciónPara rotación instantánea pura, la energía

4.9. MOVIMIENTO POR RODADURA DE UN CUERPO RÍGIDO 33
cinética total del cascarón se obtiene me-diante la expresión
Ek = 12 IPω2, (1)
donde el momento de inercia del cascarón,respecto al eje instantáneo de rotación, es
IP = 23 MR2 + MR2. (2)
Reemplazando la ecuación (2) en laecuación (1), se obtiene
Ek = 56 MR2ω2,
resultado idéntico al encontrado en elejemplo 4.15, para la energía cinética totaldel cascarón.
Ejercicio 4.19.Resuelva el ejemplo 4.19, si se cambia elcascarón esférico por a) Una esfera ma-ciza. b) Un cilindro o disco. c) Un aro. Encada caso, suponga que la masa es M y elradio es R. Compare los resultados con elobtenido en el ejemplo 4.19.
Ejemplo 4.20.Una rueda acanalada o 2o-yo", de masa My radio R, desciende sin deslizar sobre uncarril inclinado un ángulo θ respecto a lahorizontal. La rueda está apoyada sobresu eje de radio r. Despreciando el momen-to de inercia del eje, determine a) La acele-ración del centro de masa de la rueda y suaceleración angular. b) La fuerza fricciónque actúa sobre el eje. Resuelva el proble-ma por dos métodos diferentes.
R
M
q
P
rc
SoluciónDiagrama de cuerpo libre, donde lasfuerzas que actúan sobre la rueda son lanormal N, el peso mg y la fuerza de fric-ción estática Fs.
Método 1: Movimiento combinado detraslación y rotación
R
M
q
P
cr
Mg
Fs
N
De acuerdo con el diagrama de cuerpolibre, las ecuaciones de movimiento, en ladirección paralela al plano inclinado
↙ +∑i
F// = Mac,
en la dirección perpendicular al plano in-clinado
↖ +∑i
F⊥ = 0,
∑i
Mc = Icα,
adquieren la forma
Mgsenθ − Fs = Mac, (1)
N − mgcosθ = 0, (2)
Fsr = 12 MR2α. (3)
a) Mediante las ecuaciones (1) y (3), conac = αr, se encuentra que la aceleraciónde la rueda está dada por
ac =2r2gsenθ
R2 + 2r2 . (4)
Si la ecuación (4) se escribe en la forma
ac =gsenθR2
2r2 + 1,
se tiene que para un ángulo de inclinaciónconstante, entre mayor sea el radio del ejede la rueda, la aceleración del centro demasa se hace mayor, obteniéndose el má-ximo valor en el caso que R = r, donde laaceleración sería
ac =23 gsenθ.
Por medio de la ecuación (4), con ac = αr,se tiene que la aceleración angular de larueda es
α =2rgsenθ
R2 + 2r2 . (5)

34 CAPÍTULO 4. MOMENTO ANGULAR Y MOMENTO DE UNA FUERZA
b) Mediante las ecuaciones (1) y (4) o (3) y(5), se encuentra que la fuerza de fricciónestá dada por
Fs =MgR2senθ
R2 + 2r2 .
Se observa que para una inclinación cons-tante, la fuerza de fricción disminuye alincrementar el radio del eje de la rueda,adquiriendo su máximo valor, cuando eleje coincide con el borde exterior de la rue-da, en cuyo caso
Fs =13 Mgsenθ.
Método 2: Eje instantáneo de rotación.a) En el diagrama de cuerpo libre, se
observa que la normal y la fuerza de fric-ción estática están aplicadas en el punto decontacto P. Esto hace que el peso Mg seala única fuerza que genera rotación instan-tánea pura, alrededor del eje que pasa porP. Así, la ecuación de movimiento es de laforma
∑i
MP = IPα. (6)
Ahora, al tomar el sentido antihorario co-mo positivo y empleando el teorema deSteiner con Ic = 1
2 MR2, la ecuación (6)adquiere la forma
grsenθ = ( 12 R2 + r2)α.
Así, la aceleración del centro de masa, conac = αr y por la ecuación (6), está dada por
ac =2r2gsenθ
R2 + 2r2 ,
y la aceleración angular por
α =2rgsenθ
R2 + 2r2 ,
que son resultados idénticos a los encon-trados en el método anterior.
b) Para determinar la fuerza de fric-ción, se debe emplear la ecuación demovimiento para la traslación del centrode masa, ya que por este método no esposible.
4.10. ENUNCIADOS
1. Considere el disco mostrado en la figu-ra. Cuando el disco tiene (a) Traslaciónpura, (b) rotación pura y (c) movimientocombinado de traslación y rotación, res-ponda las siguientes preguntas: ¿Bajo quémodelo de cuerpo se debe tratar el dis-co? Explique. ¿Qué trayectoria describenlas partículas que lo conforman? Explique.¿Dichas trayectorias tienen algo en común?
C
2. La varilla de la figura tiene longitud d. (a)Halle el momento de la fuerza F aplicadaen el punto A, respecto al punto B y res-pecto al punto C. (b) Halle el momento dela fuerza F aplicada en el punto B, respectoal punto A y respecto al punto C. (c) Halleel momento de la fuerza F aplicada en C,respecto al punto A y respecto al punto B.¿Qué conclusiones puede obtener al com-parar los resultados anteriores? Explique.
C
A
B
b
g F
C
A
B
bC
A
B
gF
C
A
B
b
gF
(a) (b) (c)
3. La varilla de la figura tiene longitud d. (a)Reemplace la fuerza F, aplicada en A, porun sistema fuerza par aplicado en B y unsistema fuerza par aplicado en C. (b) Reem-place la fuerza F, aplicada en B, por sistemafuerza fuerza par aplicado en A y por unsistema fuerza par aplicado en C. (c) Reem-place la fuerza F, aplicada en C, por sistema

4.10. ENUNCIADOS 35
fuerza fuerza par aplicado en A y por unsistema fuerza par aplicado en B.
C
A
B
b
g F
C
A
B
bC
A
B
gF
C
A
B
b
gF
(a) (b) (c)
4. La torre de la figura se sostiene mediantetres cables sujetos en la parte superior, co-mo se indica. La tensión en el cable AB es450 N, la tensión en el cable AC es 850 N, latensión en el cable AD es 900 N y la distan-cia OD es 7 m.(a) Exprese cada una de lasfuerzas en sus componentes rectangulares.(b) Encuentre el momento neto que actúasobre la torre en el extremo A.
x
y
zA
B
C
D
17 m
2 m
1 m
3.5 m3 m
35o
O

MOVIMIENTO OSCILATORIO
BERNARDO ARENAS GAVIRIAUniversidad de Antioquia
Instituto de Física
2012


Índice general
5. Movimiento oscilatorio 15.1. Introducción . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25.2. Cinemática del Movimiento Armónico Simple (MAS) . . . . . . . . . . . . . . . . . . 2
5.2.1. Posición en el MAS lineal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25.2.2. Velocidad en el MAS lineal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35.2.3. Relación entre la velocidad, la amplitud y la posición en un MAS lineal . . . 35.2.4. Aceleración en el MAS lineal . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
5.3. Dinámica del Movimiento Armónico Simple lineal . . . . . . . . . . . . . . . . . . . . 45.3.1. Oscilador armónico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
5.4. Cinemática del Movimiento Armónico Simple Angular . . . . . . . . . . . . . . . . . 65.5. Dinámica del Movimiento Armónico Simple Angular . . . . . . . . . . . . . . . . . . 6
5.5.1. Péndulo simple . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75.5.2. Péndulo compuesto ó físico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85.5.3. Péndulo de torsión . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
5.6. Energía en el movimiento armónico simple lineal . . . . . . . . . . . . . . . . . . . . 105.6.1. Energía cinética en el movimiento armónico simple lineal . . . . . . . . . . . 105.6.2. Energía potencial en el movimiento armónico simple . . . . . . . . . . . . . . 105.6.3. Energía total en el movimiento armónico simple . . . . . . . . . . . . . . . . . 115.6.4. Gráficas de energía en el movimiento armónico simple . . . . . . . . . . . . . 11
5.7. Energía en el movimiento armónico simple angular . . . . . . . . . . . . . . . . . . . 115.7.1. Superposición de dos movimientos armónicos simples . . . . . . . . . . . . . 11
3


Capıtulo 5Movimiento oscilatorio
Competencias.En esta unidad se busca que el estudiante:
Aplique los conceptos analizados en lasunidades anteriores, para el caso demovimientos que se repiten en el tiempo.
Distinga entre movimiento oscilatorio,movimiento periódico y movimientoarmónico simple (MAS).
Obtenga las ecuaciones cinemáticas deposición, velocidad y aceleración, para unapartícula con MAS.
Identifique y defina los conceptos de am-plitud, frecuencia angular, fase, fase inicialy elongación.
Obtenga la relación entre la velocidad y laamplitud en un MAS.
Obtenga la relación entre la aceleración yla posición de una partícula animada deMAS.
Obtenga y analice la forma diferencial dela segunda ley de Newton, válida en todoMAS.
Obtenga la frecuencia angular para el os-cilador armónico, el péndulo simple, elpéndulo compuesto y el péndulo de tor-sión.
Identifique las propiedades internas y ex-ternas que generan la frecuencia angular encada uno de los casos anteriores, cuando setiene MAS.
Obtenga las expresiones para la energíacinética, la energía potencial y la energía to-tal en un MAS.
Analice gráficas de energía potencial en elcaso de un MAS.
Analice la superposición de movimientosarmónicos simples.
Identifique las condiciones bajo las cualesla superposición de dos MAS perpendicu-lares, genera un movimiento elíptico o unmovimiento circular.
Analice diferentes situaciones en las cualesse presenta MAS.
CONCEPTOS BASICOSEn esta unidad, se analizan movimientos que serepiten cada que transcurre determinado inter-valo de tiempo, esto es, movimientos periódi-cos. Particularmente se considera el movimien-to armónico simple, que se presenta en diferen-tes casos y de manera aproximada en la natu-raleza. Se analizan situaciones en las cuales loscuerpos pueden ser tratados bien bajo el mo-delo de partícula o bien bajo el modelo cuer-po rígido, dependiendo del tipo de movimientoadquirido por el cuerpo. Algo muy importantetiene que ver con el hecho que en esta unidad seaplican los conceptos vistos en las unidades an-teriores, es decir, debe entenderse la unidad deoscilaciones como una aplicación de los concep-tos mecánicos analizados en las unidades ante-riores.

2 CAPÍTULO 5. MOVIMIENTO OSCILATORIO
5.1. Introducción
Hasta ahora se han analizado y definido losconceptos, cinemáticos y dinámicos, necesariospara estudiar el movimiento de cuerpos trata-dos bajo el modelo de partícula y bajo el mode-lo de cuerpo rígido. En esta unidad se analizael movimiento periódico de cuerpos, es decir,movimientos que se repiten cada que transcurreun intervalo de tiempo determinado. Como ca-so especial se estudia el movimiento armónicosimple (MAS).
5.2. Cinemática del MovimientoArmónico Simple (MAS)
En la naturaleza se presentan movimientos quese repiten, conocidos como movimientos oscila-torios o vibratorios. El movimiento de un pén-dulo simple, el movimiento de un cuerpo sujetoa un resorte y el movimiento de los átomos enun cristal son algunos ejemplos de este tipo demovimiento.
Si el movimiento se repite cada que tran-scurre determinado intervalo de tiempo, se diceque es periódico y a este tiempo se le define co-mo el período del movimiento, que correspondeal inverso de la cantidad física conocida como lafrecuencia del movimiento.
Un movimiento oscilatorio de interés en lafísica y que es periódico, se conoce comomovimiento armónico simple y se acostumbradenominarlo como un MAS.
De acuerdo con lo anterior, el MAS queadquiere una partícula es un movimiento perió-dico, esto es, un movimiento que se repite cadaque transcurre determinado intervalo de tiem-po, que como fue definido antes, se llama perío-do del movimiento. Como se analizará posteri-ormente, todo MAS es periódico, pero no todomovimiento periódico es MAS.
5.2.1. Posición en el MAS lineal
Como el MAS es un movimiento periódico, laecuación cinemática de posición, x(t), debe res-ponder por dicha periodicidad, es decir, debe
ser una función periódica en el tiempo. Paraque se cumpla lo anterior, la función debe sersenoidal o cosenoidal, cuya única diferencia esuna fase de π/2. De este modo,
x(t) = A sen(ωt + φ)
x(t) = A cos(ωt + φ), (5.1)
donde la posición x de la partícula respecto alorigen de coordenadas, se conoce como la elon-gación; el máximo valor de la elongación comola amplitud A; el término ωt + φ como la fase,la cantidad ω como la frecuencia angular delmovimiento y la fase inicial como φ, esto es, enel instante t = 0. En la figura 5.1 se muestra lamáxima elongación de un cuerpo que se muevesobre una recta con MAS, respecto al origen decoordenadas, esto es, xmáx = ±A.
O
x
-A +A
Movimiento
Figura 5.1: MAS alrededor del origen O.
Las ecuaciones (5.1), por la forma que se ex-presan, son periódicas en el tiempo como seilustra en las figura 5.2, para el caso de un MAS,donde se ha tomado la función seno con fase ini-cial nula (φ = 0), esto es, cuando el cuerpo partedel origen de coordenadas.
x
+A
-A
Ot
Figura 5.2: Variación temporal de la posición en unMAS.
Si P es el período de una partícula animadade MAS, la frecuencia angular del movimientoestá definida por
ω =2π
P= 2πν, (5.2)

5.2. CINEMÁTICA DEL MOVIMIENTO ARMÓNICO SIMPLE (MAS) 3
donde se ha utilizado la definición de frecuenciacomo el inverso del período.
5.2.2. Velocidad en el MAS lineal
Utilizando la definición de velocidad dada porla ecuación (1.11) y las ecuaciones (5.1), se en-cuentra que la velocidad de una partícula conMAS, está dada por una de las expresiones
v(t) = ωAcos(ωt + φ)
v(t) = −ωAsen(ωt + φ). (5.3)
De acuerdo con las ecuaciones (5.3), se tieneque la rapidez es máxima cuando la funcióntrigonométrica, respectiva, adquiere su máximovalor, de este modo, el máximo está dado por
vmáx = ±ωA (5.4)
La figura 5.3 muestra la forma como varía lavelocidad con el tiempo, tomando la primerade las ecuaciones (5.3), para una partícula queposee un MAS.
v
+ Aw
Ot
-wA
Figura 5.3: Variación temporal de la velocidad en unMAS.
Al comparar las figuras 5.2 y 5.3, se ve clara-mente que en el instante que la elongaciónadquiere su máximo valor, la velocidad es nula,y cuando la elongación adquiere su valor cerola velocidad adquiere su máximo valor.
Ejercicio 5.1.Obtenga las gráficas de la segunda de lasecuaciones (5.1) y (5.3). Compárelas con lafigura 5.1 y la figura 5.3, respectivamente.¿Qué puede concluir?
Ejemplo 5.1.Suponga que el movimiento de la agu-ja de una máquina de coser es un MAS.
El extremo inferior de la aguja de unamáquina de coser, pasa por la posiciónde mínima elongación con una rapidez de3 ms−1. La máxima elongación tiene unvalor de 5 mm. (a) Encuentre la frecuenciay el período del movimiento de la aguja.(b) Escriba la ecuación cinemática de posi-ción y de velocidad para el movimiento dela aguja.Solución(a) Como se conoce la rapidez máxima al-canzada por la aguja y la amplitud de sumovimiento, mediante la ecuación 5.4, seencuentra que la frecuencia angular de laaguja tiene el valor
ω = 600 rads−1.
Con este valor de la frecuencia angular, esposible encontrar para la frecuencia y parael período, los valores respectivos dadospor
ν = 95.49 Hz,P = 10.47 × 10−3 s.
(b) Utilizando la información anterior, lasecuaciones cinemáticas de posición y ve-locidad para la aguja, adquieren la forma
x(t) = 5 × 10−3 sen(600 t),v(t) = 3 cos(600t),
donde se ha asumido que el extremo infe-rior de la aguja parte del origen, es decir,que su fase inicial es cero.
Ejercicio 5.2.Resuelva la situación anterior, utilizandopara la posición, la función trigonométricacoseno. Compare los resultados.
5.2.3. Relación entre la velocidad, la am-plitud y la posición en un MAS li-neal
Partiendo de cualquiera de las ecuaciones(5.1) y empleando la identidad trigonométricasen2θ + cos2θ = 1, es posible obtener la expre-sión
v2 = (A2 − x2)ω2. (5.5)
La ecuación (5.5), de nuevo permite afirmar
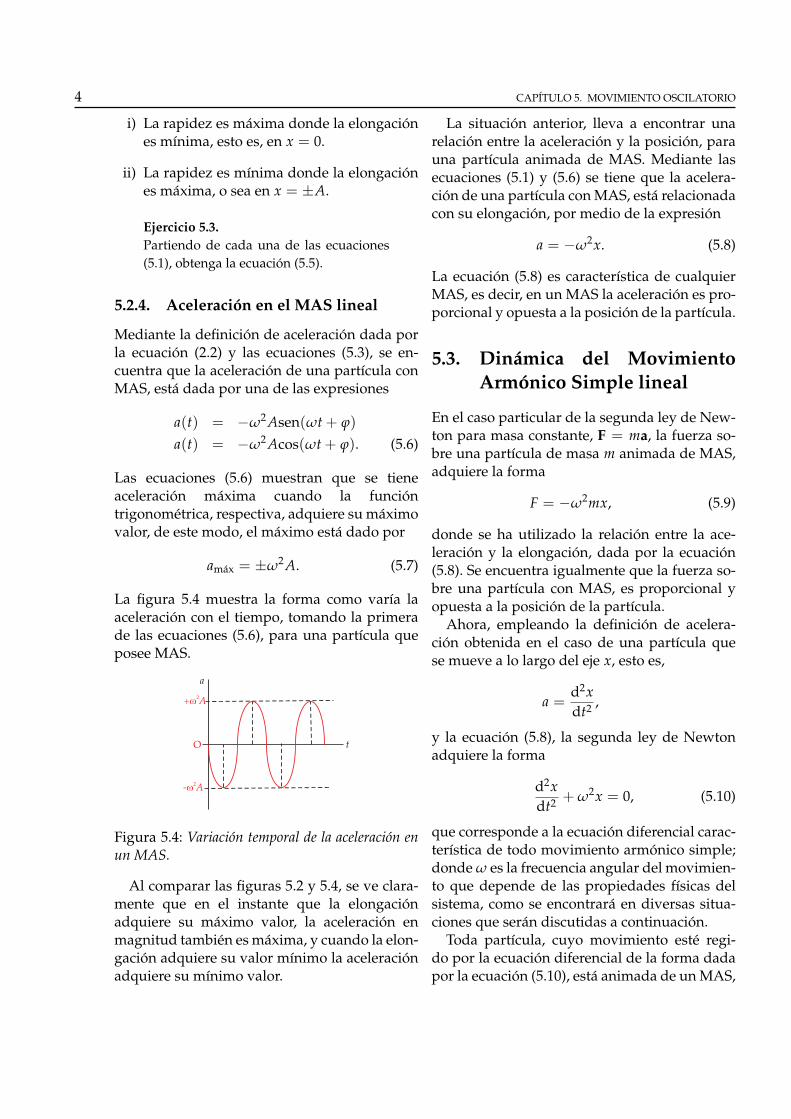
4 CAPÍTULO 5. MOVIMIENTO OSCILATORIO
i) La rapidez es máxima donde la elongaciónes mínima, esto es, en x = 0.
ii) La rapidez es mínima donde la elongaciónes máxima, o sea en x = ±A.
Ejercicio 5.3.Partiendo de cada una de las ecuaciones(5.1), obtenga la ecuación (5.5).
5.2.4. Aceleración en el MAS lineal
Mediante la definición de aceleración dada porla ecuación (2.2) y las ecuaciones (5.3), se en-cuentra que la aceleración de una partícula conMAS, está dada por una de las expresiones
a(t) = −ω2Asen(ωt + φ)
a(t) = −ω2Acos(ωt + φ). (5.6)
Las ecuaciones (5.6) muestran que se tieneaceleración máxima cuando la funcióntrigonométrica, respectiva, adquiere su máximovalor, de este modo, el máximo está dado por
amáx = ±ω2 A. (5.7)
La figura 5.4 muestra la forma como varía laaceleración con el tiempo, tomando la primerade las ecuaciones (5.6), para una partícula queposee MAS.
a
- Aw2
O t
+w2
A
Figura 5.4: Variación temporal de la aceleración enun MAS.
Al comparar las figuras 5.2 y 5.4, se ve clara-mente que en el instante que la elongaciónadquiere su máximo valor, la aceleración enmagnitud también es máxima, y cuando la elon-gación adquiere su valor mínimo la aceleraciónadquiere su mínimo valor.
La situación anterior, lleva a encontrar unarelación entre la aceleración y la posición, parauna partícula animada de MAS. Mediante lasecuaciones (5.1) y (5.6) se tiene que la acelera-ción de una partícula con MAS, está relacionadacon su elongación, por medio de la expresión
a = −ω2x. (5.8)
La ecuación (5.8) es característica de cualquierMAS, es decir, en un MAS la aceleración es pro-porcional y opuesta a la posición de la partícula.
5.3. Dinámica del MovimientoArmónico Simple lineal
En el caso particular de la segunda ley de New-ton para masa constante, F = ma, la fuerza so-bre una partícula de masa m animada de MAS,adquiere la forma
F = −ω2mx, (5.9)
donde se ha utilizado la relación entre la ace-leración y la elongación, dada por la ecuación(5.8). Se encuentra igualmente que la fuerza so-bre una partícula con MAS, es proporcional yopuesta a la posición de la partícula.
Ahora, empleando la definición de acelera-ción obtenida en el caso de una partícula quese mueve a lo largo del eje x, esto es,
a =d2xdt2 ,
y la ecuación (5.8), la segunda ley de Newtonadquiere la forma
d2xdt2 + ω2x = 0, (5.10)
que corresponde a la ecuación diferencial carac-terística de todo movimiento armónico simple;donde ω es la frecuencia angular del movimien-to que depende de las propiedades físicas delsistema, como se encontrará en diversas situa-ciones que serán discutidas a continuación.
Toda partícula, cuyo movimiento esté regi-do por la ecuación diferencial de la forma dadapor la ecuación (5.10), está animada de un MAS,
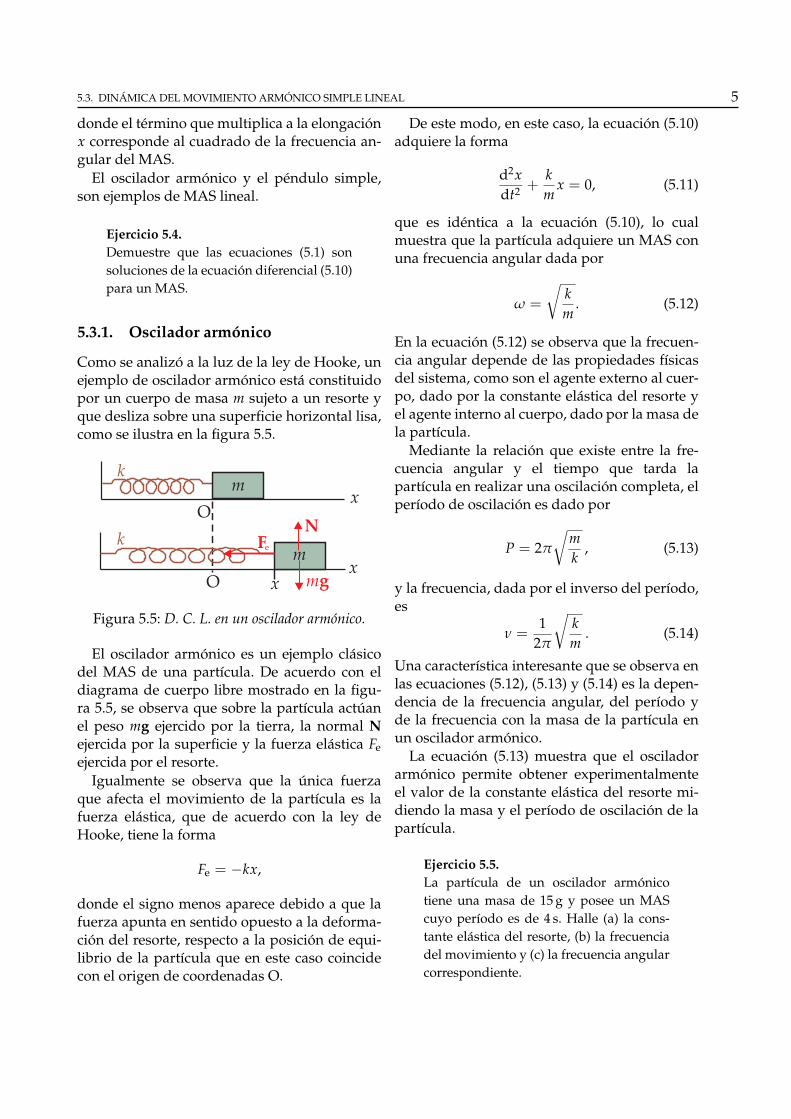
5.3. DINÁMICA DEL MOVIMIENTO ARMÓNICO SIMPLE LINEAL 5
donde el término que multiplica a la elongaciónx corresponde al cuadrado de la frecuencia an-gular del MAS.
El oscilador armónico y el péndulo simple,son ejemplos de MAS lineal.
Ejercicio 5.4.Demuestre que las ecuaciones (5.1) sonsoluciones de la ecuación diferencial (5.10)para un MAS.
5.3.1. Oscilador armónico
Como se analizó a la luz de la ley de Hooke, unejemplo de oscilador armónico está constituidopor un cuerpo de masa m sujeto a un resorte yque desliza sobre una superficie horizontal lisa,como se ilustra en la figura 5.5.
m
Ox
xO
mFe
x
k
kN
mg
Figura 5.5: D. C. L. en un oscilador armónico.
El oscilador armónico es un ejemplo clásicodel MAS de una partícula. De acuerdo con eldiagrama de cuerpo libre mostrado en la figu-ra 5.5, se observa que sobre la partícula actúanel peso mg ejercido por la tierra, la normal Nejercida por la superficie y la fuerza elástica Feejercida por el resorte.
Igualmente se observa que la única fuerzaque afecta el movimiento de la partícula es lafuerza elástica, que de acuerdo con la ley deHooke, tiene la forma
Fe = −kx,
donde el signo menos aparece debido a que lafuerza apunta en sentido opuesto a la deforma-ción del resorte, respecto a la posición de equi-librio de la partícula que en este caso coincidecon el origen de coordenadas O.
De este modo, en este caso, la ecuación (5.10)adquiere la forma
d2xdt2 +
km
x = 0, (5.11)
que es idéntica a la ecuación (5.10), lo cualmuestra que la partícula adquiere un MAS conuna frecuencia angular dada por
ω =
√km
. (5.12)
En la ecuación (5.12) se observa que la frecuen-cia angular depende de las propiedades físicasdel sistema, como son el agente externo al cuer-po, dado por la constante elástica del resorte yel agente interno al cuerpo, dado por la masa dela partícula.
Mediante la relación que existe entre la fre-cuencia angular y el tiempo que tarda lapartícula en realizar una oscilación completa, elperíodo de oscilación es dado por
P = 2π
√mk
, (5.13)
y la frecuencia, dada por el inverso del período,es
ν =1
2π
√km
. (5.14)
Una característica interesante que se observa enlas ecuaciones (5.12), (5.13) y (5.14) es la depen-dencia de la frecuencia angular, del período yde la frecuencia con la masa de la partícula enun oscilador armónico.
La ecuación (5.13) muestra que el osciladorarmónico permite obtener experimentalmenteel valor de la constante elástica del resorte mi-diendo la masa y el período de oscilación de lapartícula.
Ejercicio 5.5.La partícula de un oscilador armónicotiene una masa de 15 g y posee un MAScuyo período es de 4 s. Halle (a) la cons-tante elástica del resorte, (b) la frecuenciadel movimiento y (c) la frecuencia angularcorrespondiente.
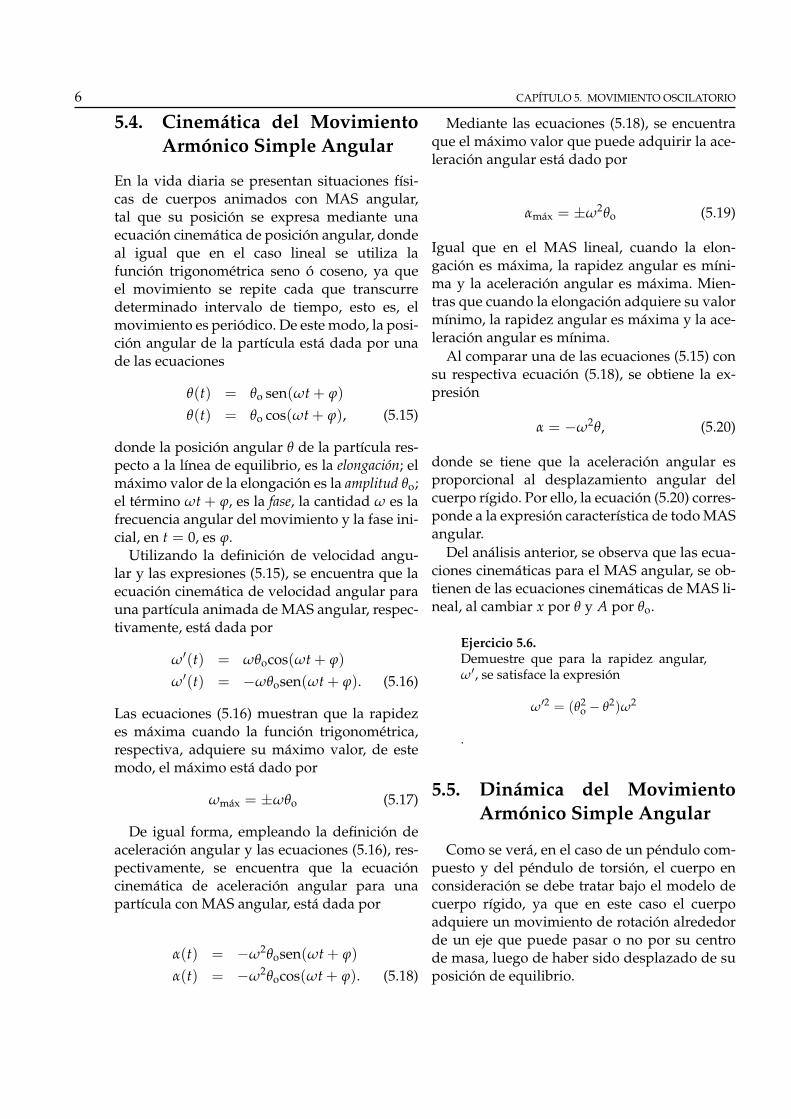
6 CAPÍTULO 5. MOVIMIENTO OSCILATORIO
5.4. Cinemática del MovimientoArmónico Simple Angular
En la vida diaria se presentan situaciones físi-cas de cuerpos animados con MAS angular,tal que su posición se expresa mediante unaecuación cinemática de posición angular, dondeal igual que en el caso lineal se utiliza lafunción trigonométrica seno ó coseno, ya queel movimiento se repite cada que transcurredeterminado intervalo de tiempo, esto es, elmovimiento es periódico. De este modo, la posi-ción angular de la partícula está dada por unade las ecuaciones
θ(t) = θo sen(ωt + φ)
θ(t) = θo cos(ωt + φ), (5.15)
donde la posición angular θ de la partícula res-pecto a la línea de equilibrio, es la elongación; elmáximo valor de la elongación es la amplitud θo;el término ωt + φ, es la fase, la cantidad ω es lafrecuencia angular del movimiento y la fase ini-cial, en t = 0, es φ.
Utilizando la definición de velocidad angu-lar y las expresiones (5.15), se encuentra que laecuación cinemática de velocidad angular parauna partícula animada de MAS angular, respec-tivamente, está dada por
ω′(t) = ωθocos(ωt + φ)
ω′(t) = −ωθosen(ωt + φ). (5.16)
Las ecuaciones (5.16) muestran que la rapidezes máxima cuando la función trigonométrica,respectiva, adquiere su máximo valor, de estemodo, el máximo está dado por
ωmáx = ±ωθo (5.17)
De igual forma, empleando la definición deaceleración angular y las ecuaciones (5.16), res-pectivamente, se encuentra que la ecuacióncinemática de aceleración angular para unapartícula con MAS angular, está dada por
α(t) = −ω2θosen(ωt + φ)
α(t) = −ω2θocos(ωt + φ). (5.18)
Mediante las ecuaciones (5.18), se encuentraque el máximo valor que puede adquirir la ace-leración angular está dado por
αmáx = ±ω2θo (5.19)
Igual que en el MAS lineal, cuando la elon-gación es máxima, la rapidez angular es míni-ma y la aceleración angular es máxima. Mien-tras que cuando la elongación adquiere su valormínimo, la rapidez angular es máxima y la ace-leración angular es mínima.
Al comparar una de las ecuaciones (5.15) consu respectiva ecuación (5.18), se obtiene la ex-presión
α = −ω2θ, (5.20)
donde se tiene que la aceleración angular esproporcional al desplazamiento angular delcuerpo rígido. Por ello, la ecuación (5.20) corres-ponde a la expresión característica de todo MASangular.
Del análisis anterior, se observa que las ecua-ciones cinemáticas para el MAS angular, se ob-tienen de las ecuaciones cinemáticas de MAS li-neal, al cambiar x por θ y A por θo.
Ejercicio 5.6.Demuestre que para la rapidez angular,ω′, se satisface la expresión
ω′2 = (θ2o − θ2)ω2
.
5.5. Dinámica del MovimientoArmónico Simple Angular
Como se verá, en el caso de un péndulo com-puesto y del péndulo de torsión, el cuerpo enconsideración se debe tratar bajo el modelo decuerpo rígido, ya que en este caso el cuerpoadquiere un movimiento de rotación alrededorde un eje que puede pasar o no por su centrode masa, luego de haber sido desplazado de suposición de equilibrio.

5.5. DINÁMICA DEL MOVIMIENTO ARMÓNICO SIMPLE ANGULAR 7
Como el momento de una fuerza respecto aun punto A está dado por
MA = IAα, (5.21)
al tener en cuenta la ecuación (5.20), se puedeexpresar en la forma
MA = −ω2 IAθ, (5.22)
La ecuación (5.22) muestra que en todo MASangular, el momento de la fuerza respecto alpunto A es proporcional y con sentido opuestoal desplazamiento angular.
Ahora, teniendo en cuenta la definición deaceleración angular y las ecuaciones (5.21) y(5.22), se encuentra que la ecuación diferencialcaracterística de todo MAS angular, tiene la for-ma
d2θ
dt2 + ω2θ = 0, (5.23)
donde ω es la frecuencia angular del MAS an-gular y la cual depende de propiedades físicasdel sistema en estudio, como se encontrará pos-teriormente.
Ejercicio 5.7.Demuestre que las ecuaciones (5.15) sonsoluciones de la ecuación (5.23) para unMAS angular.
5.5.1. Péndulo simple
El péndulo simple proporciona un ejemplo deMAS de una partícula, siempre y cuando la am-plitud del movimiento sea pequeña. En este ca-so la coordenada correspondiente es el ángulo θque la cuerda forma con la vertical. De acuerdocon el diagrama de cuerpo libre mostrado en lafigura 5.6, se observa que sobre la partícula ac-túan el peso mg ejercido por la tierra y la tensiónT ejercida por la cuerda.
Igualmente, se observa que el peso de lapartícula genera un momento respecto al pun-to de suspensión O, por lo que la ecuación demovimiento en esta dirección adquiere la forma
−(mg sen θ)l = ml2α,
mg
q
Tl
q
O
Figura 5.6: D. C. L. en un péndulo simple.
donde el signo menos aparece debido a queeste momento genera rotación de la partícula,en sentido opuesto al desplazamiento angularde la partícula, respecto a la posición de equi-librio, que en este caso coincide con la vertical.
De este modo, simplificando y empleando ladefinición de aceleración angular, la ecuaciónde movimiento adquiere la forma
d2θ
dt2 +gl
sen θ = 0, (5.24)
donde aparecen las variables θ y sen θ, por loque en general el movimiento de esta partículano es un MAS ya que no satisface la ecuacióndiferencial de movimiento (5.23). A pesar de es-to,cuando la amplitud de las oscilaciones es pe-queña, el ángulo que forma la cuerda con la ver-tical es pequeño y es válida la aproximación
sen θ ≈ θ. (5.25)
Así, mediante la ecuación (5.25), la ecuación(5.24) adquiere la forma
d2θ
dt2 +gl
θ = 0, (5.26)
que es idéntica a la ecuación (5.10) cuando secambia θ por x, lo cual muestra que cuandola amplitud de las oscilaciones es pequeña lapartícula adquiere un MAS con una frecuenciaangular dada por
ω =
√gl
. (5.27)
En la ecuación (5.27) se observa que la frecuen-cia angular depende de la aceleración de lagravedad, que es un agente externo al péndulo

8 CAPÍTULO 5. MOVIMIENTO OSCILATORIO
simple, y de una propiedad del péndulo simplecomo es la longitud l de la cuerda a la que estásujeta la partícula, que es el agente interno.
Mediante la relación que existe entre la fre-cuencia angular y el tiempo que tarda lapartícula en realizar una oscilación completa, elperíodo de oscilación es dado por
P = 2π
√lg
, (5.28)
y la frecuencia, dada por el inverso del período,es
ν =1
2π
√gl
. (5.29)
La característica interesante que se observa enlas ecuaciones (5.27), (5.28) y (5.29) es la inde-pendencia con la masa de la partícula, en el casode un péndulo simple.
Mediante la ecuación (5.28) es posible encon-trar experimentalmente y de una forma senci-lla, el valor de la aceleración de la gravedad mi-diendo la longitud de la cuerda y el período deoscilación de la partícula.
5.5.2. Péndulo compuesto ó físico
A diferencia del péndulo simple, el péndulo físi-co corresponde a un cuerpo rígido que oscilacon MAS, siempre y cuando la amplitud de laoscilación sea pequeña. Un péndulo compuestoes un cuerpo rígido que oscila alrededor de uneje horizontal fijo, debido a su interacción conla tierra. En la figura 5.7 se muestra el diagramade cuerpo libre de un péndulo compuesto, quepuede girar libremente alrededor de un eje fijoque pasa por el punto O. La fuerza que ejerceel eje sobre el cuerpo rígido, garantiza que elpéndulo físico tenga un movimiento de rotaciónpura alrededor de un eje que pasa por O, es de-cir, la fuerza neta es nula.
En este caso, como el peso del cuerpo es quiengenera el movimiento de rotación, el momentodel peso respecto al punto O es
MO = −mgd sen θ,
donde el signo menos se debe a que la fuerzagenera un momento en sentido opuesto al des-plazamiento angular del cuerpo respecto a su
Feje
mg
qd
O
C
Figura 5.7: D. C. L. en un péndulo físico.
posición de equilibrio, la cual es coincidente conla vertical, y d sen θ es el brazo del peso, respec-to al punto O.
Por consiguiente, utilizando la definición deaceleración angular, y la ecuación de movimien-to para la rotación de un cuerpo rígido, se ob-tiene la ecuación diferencial
d2θ
dt2 +mgdIO
sen θ = 0, (5.30)
donde de nuevo aparecen las variables θ y sen θ,lo cual indica que en general el movimiento deeste cuerpo rígido no es un MAS ya que nosatisface la ecuación diferencial de movimiento(5.23). Pero si se consideran amplitudes de os-cilación pequeñas, el ángulo que forma el seg-mento OC de la figura 5.7 con la vertical es pe-queño y es válida la aproximación
sen θ ≈ θ. (5.31)
Así, mediante la ecuación (5.31), la ecuación(5.30) adquiere la forma
d2θ
dt2 +gd
KO2 θ = 0, (5.32)
donde se ha utilizado la relación entre el mo-mento de inercia I y el radio de giro al cuadradoK2. La ecuación (5.32) es idéntica a la ecuación(5.10) al intercambiar θ por x, lo cual muestraque para pequeñas amplitudes de oscilación, elpéndulo físico adquiere un MAS con una fre-cuencia angular dada por
ω =
√gd
KO2 . (5.33)

5.5. DINÁMICA DEL MOVIMIENTO ARMÓNICO SIMPLE ANGULAR 9
De acuerdo con la ecuación (5.33), la frecuenciaangular depende del agente externo aceleraciónde la gravedad, y de los agentes internos longi-tud d y radio de giro del cuerpo rígido respectoal eje de rotación, es decir, que la frecuencia an-gular depende de la forma del cuerpo.
Mediante la relación que existe entre la fre-cuencia angular y el tiempo que tarda lapartícula en realizar una oscilación completa, elperíodo de oscilación es dado por
P = 2π
√KO
2
gd, (5.34)
y la frecuencia, dada por el inverso del período,esto es
ν =1
2π
√gdK2
O. (5.35)
En el caso del péndulo compuesto la caracte-rística interesante que muestran las ecuaciones(5.33), (5.34) y (5.35) es la independencia con lamasa del cuerpo rígido, en la frecuencia angu-lar, el período y la frecuencia del MAS.
Empleando la ecuación (5.34), experimental-mente se puede encontrar el valor de la acele-ración de la gravedad, conociendo la forma delcuerpo y midiendo el período de oscilación delcuerpo rígido.
5.5.3. Péndulo de torsión
El péndulo de torsión permite considerar otrocaso de MAS en un cuerpo rígido. Un péndulode torsión no es mas que un cuerpo rígido sus-pendido verticalmente de un alambre sujeto alcentro de masa C del cuerpo y fijo en O, comose indica en la figura 5.8.
Cuando el cuerpo rígido se rota un ángulo θpequeño, respecto a la orientación de equilibrioCA sobre un plano horizontal y en determina-do sentido, el alambre se tuerce generando unpar a su alrededor con un momento en sentidoopuesto dado por
M = −κθ, (5.36)
donde κ es una constante que depende de laspropiedades físicas y geométricas del alambre
O
C
q
AM
Figura 5.8: Péndulo de torsión rotado.
y se conoce como el coeficiente de torsión delalambre.
Ahora, si se emplea la definición de acelera-ción angular,y la ecuación de movimiento parala rotación de un cuerpo rígido alrededor de uneje que pasa por su centro de masa, se llega a laecuación diferencial
d2θ
dt2 +κ
ICθ = 0, (5.37)
donde aparece la variable θ en los dos térmi-nos de la ecuación, es decir, el cuerpo rígidoadquiere un MAS, donde la ecuación diferencialcorrespondiente es
d2θ
dt2 +κ
mKC2 θ = 0, (5.38)
donde se ha utilizado la relación entre el mo-mento de inercia I y el radio de giro al cuadradoK2.
Al comparar la ecuación (5.10) con laecuación (5.38), se tiene que el cuerpo rígidoadquiere un MAS con una frecuencia angulardada por
ω =
√κ
mKC2 . (5.39)
En la ecuación (5.39) la frecuencia angular de-pende del agente externo coeficiente de torsióndel alambre y de los agentes internos masa yradio de giro del cuerpo rígido respecto a uneje que pasa por su centro de masa, es decir,de la forma geométrica del cuerpo y de suspropiedades físicas.
Mediante la relación que existe entre la fre-cuencia angular y el tiempo que tarda la

10 CAPÍTULO 5. MOVIMIENTO OSCILATORIO
partícula en realizar una oscilación completa, elperíodo de oscilación es dado por
P = 2π
√mKC
2
κ, (5.40)
y la frecuencia, dada por el inverso del período,esto es
ν =1
2π
√mKC
2
κ. (5.41)
En el caso del péndulo de torsión la caracte-rística interesante que muestran las ecuaciones(5.39), (5.40) y (5.41) es la dependencia con lamasa del cuerpo rígido, en la frecuencia angu-lar, el período y la frecuencia del MAS, a difer-encia de los dos casos anteriores.
La ecuación (5.40) muestra que entre mayorsea la masa del cuerpo rígido ó menor sea elcoeficiente de torsión del alambre, mayor es elperíodo de oscilación. Igualmente se ve que elperíodo de oscilación depende de la geometríadel cuerpo rígido, al depender del radio de giro.
Utilizando la expresión (5.40) es posible de-terminar, de manera experimental, el coeficientede torsión del alambre conociendo la forma delcuerpo rígido, su masa y midiendo su períodode oscilación.
5.6. Energía en el movimiento ar-mónico simple lineal
Un cuerpo animado de un MAS, tiene una ener-gía total no nula como consecuencia de su ener-gía cinética y su energía potencial. La energíacinética es de tipo traslacional si el cuerpo só-lo tiene movimiento de traslación, ó es de tiporotacional si el cuerpo posee movimiento única-mente de rotación. Adicionalmente, la energíapotencial se le asocia a las fuerzas conservati-vas, como lo es el peso en el caso de los péndu-los simple y compuesto, la fuerza elástica en elcaso de un oscilador armónico sobre una super-ficie horizontal y la fuerza de torsión en el casode un péndulo de torsión.
5.6.1. Energía cinética en el movimientoarmónico simple lineal
Debido a su movimiento, la energía cinética deun cuerpo con MAS, viene dada por
Ek =12
m(ωA)2 cos2(ωt + φ), (5.42)
donde se ha utilizado la definición de energíacinética y la primera de las ecuaciones (5.3).
Partiendo de la ecuación (5.42), es posible de-mostrar que la energía cinética del cuerpo sepuede expresar en la forma
Ek =12
mω2(A2 − x2). (5.43)
En la ecuación (5.43), se observa que a medidaque el cuerpo se mueve su energía cinética varíaadquiriendo su valor mínimo en los extremosde la trayectoria, x = ±A, y su valor máximocuando pasa por la posición de equilibrio x = 0.
5.6.2. Energía potencial en el movimien-to armónico simple
De acuerdo con el concepto de derivada direc-cional, se tiene que la fuerza conservativa F(x)que actúa sobre una partícula, está relaciona-da con la energía potencial asociada Ep(x), me-diante la expresión
F(x) = −dEp(x)
dx. (5.44)
Ahora, teniendo en cuenta la ecuación (5.9), seencuentra que la función de energía potencialpara una partícula con MAS, está dada por
Ep(x) =12
ω2mx2,
=12
m(ωA)2 sen2(ωt + φ), (5.45)
donde se ha tomado el nivel cero de energía po-tencial en la posición de equilibrio, esto es, enx = 0. La ecuación (5.45) muestra que la energíapotencial en un MAS, varía mientras el cuerpose mueve, adquiriendo su máximo valor cuan-do se tiene la máxima elongación y su valormínimo en la posición de equilibrio.

5.7. ENERGÍA EN EL MOVIMIENTO ARMÓNICO SIMPLE ANGULAR 11
Mediante la primera de las ecuaciones (5.1),es posible que la ecuación (5.45) adquiera la for-ma
Ep(v) =12
m(v2max − v2), (5.46)
donde se observa que la energía potencial esmínima cuando la rapidez es máxima y máxi-ma cuando la rapidez es mínima.
5.6.3. Energía total en el movimiento ar-mónico simple
En el caso de un cuerpo animado de un MAS, setiene un sistema conservativo, es decir, aunquetanto la energía cinética como la energía poten-cial varíen mientras ocurre el movimiento, laenergía total debe permanecer constante.
De nuevo, la energía total del cuerpo es lasuma de su energía cinética y su energía po-tencial. De este modo, mediante las ecuaciones(5.33) y (5.36), se llega a
E =12
m(ωA)2, (5.47)
que de acuerdo con la ecuación (5.34), co-rresponde a la máxima energía cinética queadquiere la partícula. Por otro lado, la ecuación(5.38) confirma que realmente la energía totaldel cuerpo es una constante, ya que la frecuen-cia angular ω y la amplitud A son constantesdel movimiento.
5.6.4. Gráficas de energía en elmovimiento armónico simple
Toda la información analizada anteriormente,respecto a la energía en el MAS, se resume enla figura 5.9, donde se tienen las gráficas de laenergía cinética, la energía potencial y la energíatotal de un cuerpo animado con MAS en fun-ción de la coordenada x.
En la figura (5.9) se observa que en los ex-tremos de la trayectoria la energía potencialadquiere el máximo valor y la energía cinéticaes nula, mientras que en la posición de equilib-rio la energía cinética adquiere el máximo valory la energía potencial es nula.
Energía
E (Energía total)
x+xA-xA O
Figura 5.9: Curvas de energía cinética, potencial ytotal de un cuerpo con MAS.
Lo anterior está de acuerdo con el hecho quea medida que aumenta la energía potencial, dis-minuye la energía cinética, con el fin de garan-tizar la constancia en la energía total.
5.7. Energía en el movimiento ar-mónico simple angular
En el caso de un cuerpo rígido en rotación,con MAS angular, la energía cinética está dadapor la energía cinética rotacional, que de acuer-do a la unidad 4, está dada por Ek = 1
2 IAω2,suponiendo que la rotación se presenta alrede-dor de un eje que pasa por el punto A.
Por otro lado, si el centro de masa sufre des-plazamientos verticales respecto a la superficiede la tierra, la energía potencial asociada es lamisma que para el caso de la energía potencialde una partícula animada de MAS lineal.
De este modo, la energía total del cuerpo rígi-do en movimiento, esta dada por la expresión,
E = Ek + Ep ≡ 12
IAω2 + mgy
5.7.1. Superposición de dos movimien-tos armónicos simples
Una situación interesante se presenta cuando sesuperponen simultáneamente dos movimientosarmónicos simples. Como se verá, la trayecto-ria del movimiento resultante depende de lascondiciones de cada uno de los movimientos re-sultantes.

12 CAPÍTULO 5. MOVIMIENTO OSCILATORIO
Superposición de dos movimientos armónicossimples perpendiculares con igual frecuenciae igual amplitud
Se considera un sistema de coordenadas rect-angulares xy, tal que sobre cada eje se tiene unMAS. Se supone que sobre el eje x y el eje y larespectiva ecuación cinemática de posición estádada por
x = A cos(ωt + φ),y = A sen(ωt + φ). (5.48)
Al sumar los cuadrados de cada una de las com-ponentes dadas por la ecuación (5.39) y simpli-ficar, se encuentra que el movimiento resultantetiene como ecuación de la trayectoria, la expre-sión
x2 + y2 = A2. (5.49)
La forma de la ecuación (5.40) indica que latrayectoria que describe la partícula es circular,de radio A y centrada en el origen.
Igualmente, obteniendo las componentes enx y en y de la velocidad de la partícula, se en-cuentra que la magnitud es
v = ωA. (5.50)
De este modo, por la ecuación (5.41) se tieneque una partícula sometida a estas condiciones,adquiere un movimiento circular uniforme yaque su rapidez es constante.
Cuando la amplitud de estos dos movimien-tos perpendiculares es diferente, es posible de-mostrar que la partícula describe una trayecto-ria elíptica.
El caso inverso también es válido, o sea, cuan-do una partícula describe una trayectoria circu-lar de radio A con rapidez constante, la proyec-ción o sombra de la partícula sobre cada unode los ejes posee un movimiento armónico sim-ple. Por lo tanto, mientras la partícula describeuna trayectoria circular con velocidad angularde magnitud ω, la sombra tiene un MAS de fre-cuencia angular ω.
Como se ilustra en la figura 5.10, mien-tras la partícula describe la trayectoria circularmoviéndose de A a B en sentido antihorario, lasombra con MAS se mueve sobre el eje x desde
x
y
AB
Figura 5.10: MCU de una partícula y MAS de susombra sobre cada eje.
A hasta B, y a medida que la partícula se muevesobre la trayectoria circular desde B hasta A, lasombra lo hace sobre el eje x de B hasta A.
De forma similar, como se ilustra en la figu-ra 5.11, la sombra o proyección del movimientocircular uniforme de la partícula sobre el eje y,también adquiere un MAS.
x
y
C
D
Figura 5.11: MCU de una partícula y MAS de susombra sobre cada eje.
A medida que la partícula se mueve sobre latrayectoria circular entre C y D, la sombra conMAS se mueve sobre ele eje y de C a D y mien-tras la partícula se mueve sobre la circunferen-cia de D a C, la sombra lo hace de D a C sobre eleje y.
En síntesis, una partícula adquiere unmovimiento circular uniforme, cuando si-multáneamente se somete a dos movimientosarmónicos simples perpendiculares entre sí, deigual amplitud, de igual frecuencia angular eigual fase inicial.
Ejercicio 5.6.

5.7. ENERGÍA EN EL MOVIMIENTO ARMÓNICO SIMPLE ANGULAR 13
Demuestre, que cuando una partícula sesomete simultáneamente a dos MAS per-pendiculares, de igual frecuencia angular,igual fase inicial, pero diferente amplitud,la partícula describe una trayectoria elípti-ca.

ESTATICA DE PARTICULAS Y CUERPOS RIGIDOS
BERNARDO ARENAS GAVIRIAUniversidad de Antioquia
Instituto de Física
2012


Índice general
6. Estática de partículas y cuerpos rígidos 16.1. Introducción . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16.2. Equilibrio de un cuerpo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
6.2.1. Estática de una partícula en dos y tres dimensiones . . . . . . . . . . . . . . . 26.2.2. Equilibrio de un cuerpo rígido . . . . . . . . . . . . . . . . . . . . . . . . . . . 56.2.3. Equilibrio de un cuerpo rígido sometido sólo a dos fuerzas . . . . . . . . . . . 56.2.4. Equilibrio de un cuerpo rígido sometido sólo a tres fuerzas . . . . . . . . . . . 5
6.3. Estructuras en equilibrio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 96.3.1. Análisis de una armadura . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 116.3.2. Armadura simple o estáticamente determinada . . . . . . . . . . . . . . . . . 13
6.4. Fuerzas en vigas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 166.4.1. Vigas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
3


Capıtulo 6Estática de partículas y cuerpos rígidos
Competencias.En esta unidad se busca que el estudiante:
Analice las condiciones bajo las cuales, unapartícula o un cuerpo rígido, se encuentraen equilibrio estático, tanto en dos como entres dimensiones.
Analice las condiciones que se satisfacencuando un cuerpo rígido está en equilibrio,sometido a la acción sólo de dos fuerzas ósólo de tres fuerzas.
Aplique las condiciones de equilibrio acuerpos rígidos formados por varios cuer-pos rígidos.
Distinga entre fuerza externa y fuerza in-terna.
Distinga entre armadura, armazón ymáquina.
Defina y analice el concepto de armadurasimple.
Utilice el método de los nodos y el métodode las secciones, en el análisis de una ar-madura.
Obtenga, analítica y gráficamente, la formacomo varía la fuerza cortante y el momentode flexión en el interior de una viga.
CONCEPTOS BASICOSEn esta unidad, se analizan las condiciones bajolas cuales un cuerpo, tratado bajo el modelo de
partícula o bajo el modelo cuerpo rígido, se en-cuentra en equilibrio, particularmente en equili-brio estático. Se estudian diferentes estructurasy los métodos que permiten obtener informa-ción sobre las fuerzas que se ejercen las diferen-tes partes de ella.
6.1. Introducción
Hasta ahora se ha analizado la dinámica de loscuerpos que se pueden tratar, bien bajo el mo-delo de partícula o bien bajo el modelo cuerporígido. Para ello se ha tenido en cuenta el hechoque las fuerzas tienden a imprimir tanto efectosde traslación como de rotación sobre los cuer-pos.
En esta unidad, se analiza con cierto detalle,casos en los cuales un cuerpo se encuentra enestado de reposo.
Igualmente, se consideran casos en loscuales un cuerpo interactúa con otros cuerpos,generando fuerzas que mantienen el cuerpo oestructura en reposo, esto es, las fuerzas que ac-túan no tienden a imprimir ningún efecto sobreel cuerpo rígido, es decir, sobre el cuerpo actúaun sistema fuerza par nulo.
6.2. Equilibrio de un cuerpo
En la unidad 4 se encontró que siempre es posi-ble reemplazar un sistema de fuerzas, actuandosobre un cuerpo rígido, por un sistema fuerzapar aplicado en un punto arbitrario y que es
2 CAPÍTULO 6. ESTÁTICA DE PARTÍCULAS Y CUERPOS RÍGIDOS
completamente equivalente en lo referente atraslación y rotación. En el caso particular que lafuerza y el par sean cero, el sistema de fuerzasexternas forma un sistema equivalente fuerza-par nulo, es decir, no tienden a imprimir ningúnefecto de traslación ni de rotación sobre el cuer-po rígido. Cuando esto ocurre, se dice que elcuerpo rígido se encuentra en equilibrio, biensea estático o dinámico.
Lo dicho anteriormente, se puede expresar enforma matemática como se describe en lo quesigue.
Que la fuerza del sistema fuerza par, no tien-da a imprimir efectos de traslación, significaque la fuerza neta sobre el cuerpo sea nula, estoes
F = ∑i
Fi
= 0, (6.1)
o en componentes rectangulares, la ecuación(6.1) lleva a las expresiones
∑ Fx = 0,
∑ Fy = 0, (6.2)
∑ Fz = 0.
Que el par del sistema fuerza-par, no tienda aimprimir efectos de rotación, quiere decir que elmomento neto sobre el cuerpo sea nulo, es decir
M = ∑i
Mi
= 0. (6.3)
Igualmente, al descomponer la ecuación (6.3) encomponentes rectangulares, se obtienen las ex-presiones
∑ Mx = 0,
∑ My = 0, (6.4)
∑ Mz = 0.
En el caso particular que las fuerzas actúen so-bre un plano, por ejemplo en el plano xy, sedispone de las expresiones
∑ Fx = 0,
∑ Fy = 0, (6.5)
∑ Mz = 0.
En el caso de fuerzas coplanares, las ecuacionesde equilibrio (6.5) no son las únicas tres condi-ciones a utilizar. También es posible utilizar dosecuaciones de momentos, evaluados respectoa dos puntos y una de las dos primeras ex-presiones de la ecuación (6.5). Igualmente, sepueden emplear tres ecuaciones de momentosevaluados respecto a tres puntos no colineales.
La única condición a tener presente, es la uti-lización de sólo tres condiciones de equilibrioen el caso coplanar, ya que si se utilizan cuatrocondiciones de equilibrio, por ejemplo, una deellas es combinación lineal de las otras tres.
Las condiciones de equilibrio anteriormenteconsideradas son de validez general, y particu-larmente las referentes a la suma de momentosde las fuerzas se satisfacen respecto a cualquierpunto, siempre y cuando el cuerpo rígido estéen equilibrio.
Para el caso de una partícula en equilibrio,estático o dinámico, la fuerza neta es nula yse satisfacen las ecuaciones (6.1) o (6.2) para elcaso de fuerzas en tres dimensiones y las dosprimeras expresiones de las ecuaciones (6.5) enel caso de dos dimensiones.
Cuando el cuerpo rígido se encuentra en unestado de equilibrio, estático o dinámico, lafuerza neta es nula y el momento neto es nulo,o sea, sobre el cuerpo rígido actúa un sistemafuerza par nulo.
6.2.1. Estática de una partícula en dos ytres dimensiones
Para un cuerpo considerado bajo el modelo departícula, como se expresó anteriormente, lafuerza neta o resultante de las fuerzas que ac-túan sobre ella debido a la interacción con otroscuerpos, es nula si esta se encuentra en reposo.De este modo es aplicable la ecuación (6.1), te-niendo presente si se trata de una situación endos o tres dimensiones.
Ejemplo 6.1.Un bloque de masa m se sostiene medianteuna cuerda que pasa por una polea idealmóvil, como se ilustra en la figura. a) Hagael diagrama de cuerpo libre para el bloquey para la polea. b) Plantee las ecuaciones

6.2. EQUILIBRIO DE UN CUERPO 3
que garantizan el estado del bloque y dela polea. c) Halle la tensión en las cuerdas.d) Evalúe para d = 450 mm, h = 15 cm ym = 15 kg.
m
h
d d
Solucióna) Diagramas de cuerpo libre. En este casose tienen dos partículas en equilibrio es-tático, sometidas a fuerzas en una y dosdimensiones, como se ilustra en la figura.
m
h
d d
mg
T1T
2
T3
T3’
b) Ecuaciones que garantizan el estadode equilibrio estático para ambos cuerpos.
Para el bloque
↑ +∑ Fv = 0,
T3 −mg = 0, (1)
Para la polea ideal, esto es de masa des-preciable
+→∑ Fh = 0,
T1 cos θ − T2 cos θ = 0, (2)
↑ +∑ Fv = 0,
T1 sen θ + T2 sen θ −mg = 0. (3)
Donde en las ecuaciones (2) y (3) y deacuerdo con la figura, se tiene
sen θ =h√
h2 + d2, (4)
cos θ =d√
h2 + d2. (5)
Resolviendo el sistema de ecuaciones an-teriores, donde se tiene igual número deecuaciones que de incógnitas, se llega a losresultados
T1 = T2 =
√d2 + h2
2hmg, (6)
T3 = mg. (7)
d) Finalmente, al reemplazar los valoresdados en las ecuaciones (6) y (7), se ob-tiene
T1 = T2 = 232.43 N,
T3 = 147 N.
Ejemplo 6.2.La figura muestra dos fuerzas que actúanen el origen de coordenadas. a) Obten-ga las componentes rectangulares de cadauna de las fuerzas. b) Encuentre el ángu-lo que cada fuerza forma con cada uno delos ejes coordenados. c) Si estas fuerzas ac-túan sobre una partícula, determine si estase encuentra en equilibrio.
x
y
z
O
450 N700 N
50o
65o 25
o
35o
Solucióna) Teniendo en cuenta la información da-da y la descomposición de fuerzas mostra-da en la figura, se tiene que la fuerza F1de magnitud 700 N expresada en compo-nentes rectangulares, está dada por
x
y
z
O
450 N700 N
50o
65o 25
o
35o
Fh
Fy
Fz
Fx
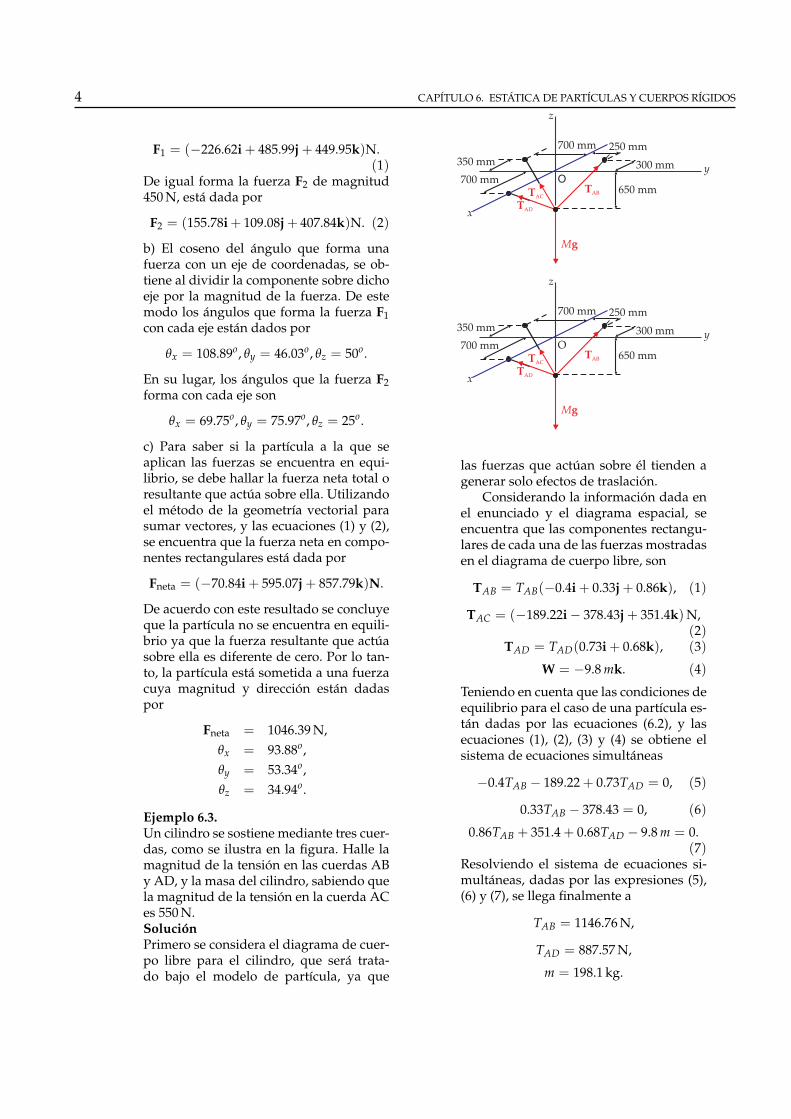
4 CAPÍTULO 6. ESTÁTICA DE PARTÍCULAS Y CUERPOS RÍGIDOS
F1 = (−226.62i + 485.99j + 449.95k)N.(1)
De igual forma la fuerza F2 de magnitud450 N, está dada por
F2 = (155.78i+ 109.08j+ 407.84k)N. (2)
b) El coseno del ángulo que forma unafuerza con un eje de coordenadas, se ob-tiene al dividir la componente sobre dichoeje por la magnitud de la fuerza. De estemodo los ángulos que forma la fuerza F1con cada eje están dados por
θx = 108.89o, θy = 46.03o, θz = 50o.
En su lugar, los ángulos que la fuerza F2forma con cada eje son
θx = 69.75o, θy = 75.97o, θz = 25o.
c) Para saber si la partícula a la que seaplican las fuerzas se encuentra en equi-librio, se debe hallar la fuerza neta total oresultante que actúa sobre ella. Utilizandoel método de la geometría vectorial parasumar vectores, y las ecuaciones (1) y (2),se encuentra que la fuerza neta en compo-nentes rectangulares está dada por
Fneta = (−70.84i + 595.07j + 857.79k)N.
De acuerdo con este resultado se concluyeque la partícula no se encuentra en equili-brio ya que la fuerza resultante que actúasobre ella es diferente de cero. Por lo tan-to, la partícula está sometida a una fuerzacuya magnitud y dirección están dadaspor
Fneta = 1046.39 N,θx = 93.88o,θy = 53.34o,θz = 34.94o.
Ejemplo 6.3.Un cilindro se sostiene mediante tres cuer-das, como se ilustra en la figura. Halle lamagnitud de la tensión en las cuerdas ABy AD, y la masa del cilindro, sabiendo quela magnitud de la tensión en la cuerda ACes 550 N.SoluciónPrimero se considera el diagrama de cuer-po libre para el cilindro, que será trata-do bajo el modelo de partícula, ya que
O
x
y
z
300 mm
250 mm
650 mm
700 mm
700 mm
350 mm
TABT
AC
TAD
Mg
O
x
y
z
300 mm
250 mm
650 mm
700 mm
700 mm
350 mm
TABT
AC
TAD
Mg
las fuerzas que actúan sobre él tienden agenerar solo efectos de traslación.
Considerando la información dada enel enunciado y el diagrama espacial, seencuentra que las componentes rectangu-lares de cada una de las fuerzas mostradasen el diagrama de cuerpo libre, son
TAB = TAB(−0.4i + 0.33j + 0.86k), (1)
TAC = (−189.22i− 378.43j + 351.4k)N,(2)
TAD = TAD(0.73i + 0.68k), (3)
W = −9.8 mk. (4)
Teniendo en cuenta que las condiciones deequilibrio para el caso de una partícula es-tán dadas por las ecuaciones (6.2), y lasecuaciones (1), (2), (3) y (4) se obtiene elsistema de ecuaciones simultáneas
−0.4TAB − 189.22 + 0.73TAD = 0, (5)
0.33TAB − 378.43 = 0, (6)
0.86TAB + 351.4 + 0.68TAD − 9.8 m = 0.(7)
Resolviendo el sistema de ecuaciones si-multáneas, dadas por las expresiones (5),(6) y (7), se llega finalmente a
TAB = 1146.76 N,
TAD = 887.57 N,
m = 198.1 kg.

6.2. EQUILIBRIO DE UN CUERPO 5
6.2.2. Equilibrio de un cuerpo rígido
Cuando un cuerpo rígido se encuentra en equi-librio estático o dinámico, el sistema fuerza parneto, debido a las fuerzas externas que actúansobre él, es nulo. Lo anterior significa que si setiene un sistema de fuerzas en tres dimensiones,son válidas las expresiones (6.1) ó (6.2) y (6.3)ó (6.4). Para el caso de fuerzas en dos dimen-siones, son de validez las expresiones (6.5).
6.2.3. Equilibrio de un cuerpo rígidosometido sólo a dos fuerzas
Si un cuerpo rígido está en equilibrio, someti-do únicamente a la acción de dos fuerzas, elmomento total de las dos fuerzas respecto acualquier punto es nulo. Así, al considerar lospuntos de aplicación de las fuerzas F1 y F2 en lafigura 6.1(a), se tiene
∑ MA = 0,
condición que se satisface siempre y cuando lalínea de acción de la fuerza F2 pase por el puntoA como se ilustra en la figura 6.1(b).
A
B
A
B
A
BF1
F2
BF1
F1
F2 F2
(a) (b) (c)
Figura 6.1: Cuerpo rígido en equilibrio, sometido só-lo a dos fuerzas.
Igualmente, respecto al punto B también sedebe cumplir la condición
∑ MB = 0,
por lo que en este caso, la línea de acción de F1debe pasar por el punto B como lo muestra lafigura 6.1(c).
Por otro lado, como se presenta equilibrio detraslación, esto es
∑ F = 0,
se debe cumplir que F1 = −F2. En síntesis, si uncuerpo rígido sometido a la acción de dos fuerzas sehaya en equilibrio, las dos fuerzas deben tener igualmagnitud, la misma línea de acción y sentidos opues-tos.
6.2.4. Equilibrio de un cuerpo rígidosometido sólo a tres fuerzas
Igual que en el caso anterior, si el cuerpo rígi-do está en equilibrio sometido solamente a laacción de tres fuerzas, figura 6.2(a), se cumplela condición ∑ M = 0, donde los momentos sonevaluados respecto al mismo punto.
A
B
A
BD
C
A
B
F3
F1
F2C
DC
(a) (b) (c)
F1 F1
F2 F2
F3
F3
Figura 6.2: Cuerpo rígido sometido sólo a tresfuerzas.
Como en la figura 6.2(b) las líneas de acciónde F1 y F2 se cortan en el punto D, entonces∑ MD = 0, por lo que la línea de acción de F3también debe pasar por D para garantizar elequilibrio, como se muestra en la figura 6.1(c).Si las líneas de acción de las tres fuerzas no secortan, deben ser paralelas.
Así, las tres fuerzas deben ser tales que sus líneasde acción sean concurrentes, o se corten en algúnpunto, para garantizar que el cuerpo rígido se en-cuentre equilibrio. De lo contrario, son paralelas laslíneas de acción de las tres fuerzas.
Ejemplo 6.4.La varilla AB, de longitud L y masa M,permanece en la posición mostrada. Si lapared es lisa y la superficie horizontal esrugosa, determine a) Las reacciones en losextremos de la varilla. b) La fuerza de fric-ción estática, si el movimiento de la varillaes inminente y el coeficiente de fricción enel extremo A es µ. c) Los valores de las can-tidades obtenidas en los numerales anteri-ores, para M = 3 kg, θ = 25o y µ = 0.25.SoluciónTeniendo en cuenta los dos apoyos enlos extremos de la varilla, el diagrama decuerpo libre es como se ilustra en la figura.
En el extremo B sólo actúa la normalB que la pared lisa ejerce sobre la varilla,mientras que en el extremo A actúan, lafuerza Ax debida a la fricción estática en-tre la varilla y la superficie horizontal y lanormal Ay ejercida por el piso. Por otro la-do, el peso de la varilla actúa en su centro

6 CAPÍTULO 6. ESTÁTICA DE PARTÍCULAS Y CUERPOS RÍGIDOS
A
B
q
A
B
q
B
Ax
Ay
Mg
de masa, coincidente con el centro geomé-trico si es homogénea como se supone eneste caso.
Ecuaciones de movimiento.Como la varilla permanece en la posi-
ción mostrada, quiere decir que estáen equilibrio estático, esto es, se debencumplir simultáneamente las siguientescondiciones
+→∑ Fx = 0,
Ax − B = 0, (1)
+ ↑∑ Fy = 0,
Ay −Mg = 0, (2)
y tomando el sentido antihorario comopositivo
∑ MA = 0
− 12 MgLcosθ + BLsenθ = 0. (3)
a) Mediante las ecuaciones (1), (2) y (3),se encuentra que las reacciones en los ex-tremos de la varilla están dadas por
B = 12 Mgcotθ ←
A = 12 Mgcscθ
√1 + 3sen2θ ∠ tan−1(2tanθ).
(5)b) En general, entre la fuerza de fricciónestática y la normal de la superficie secumple la relación
Fs ≤ µN. (6)
Ahora, como el movimiento es inminente,la ecuación (6) adquiere la forma
Fs = µN. (7)
Por las ecuaciones (1), (2) y (7), con Ax =Fs y Ay = N, la fuerza de fricción estáticaes
Ax = µMg. (8)
c) Reemplazando valores en las ecua-ciones (4), (5) y (8), se obtiene
B = 31.52 N← .A = 43.11 N ∠ 43o.Fs = 7.35 N→ .
Ejercicio 6.1.Resuelva el ejemplo 6.4 teniendo en cuen-ta que sobre la varilla actúan tres fuerzas.
Ejercicio 6.2.Analice la situación que se presenta, cuan-do en el ejemplo 6.4 se supone que el pisoes liso y la pared es rugosa.
Ejemplo 6.5.La varilla AB de longitud L y masa M,conectada a una articulación en el extremoA, está unida a un bloque de masa m, me-diante una cuerda que pasa por una poleaideal fija. La superficie horizontal es lisa.Determine a) La masa mínima del bloque,que permite levantar la varilla del piso. b)Las componentes rectangulares de la reac-ción en A y la tensión en la cuerda. c) Lamasa mínima m, la reacción en A y la ten-sión en la cuerda, para M = 2kg y θ = 40o.
m
L
A
B
C
q
SoluciónDe acuerdo con el diagrama espacial, eltriángulo ABC es isósceles. De ahí que elángulo que forma la cuerda con la hori-zontal es
β = 90− 12 θ. (1)

6.2. EQUILIBRIO DE UN CUERPO 7
El diagrama de cuerpo libre, para elbloque y para la varilla, teniendo en cuen-ta el apoyo y las conexiones del sistema, esel mostrado en la figura.
m
L
A
B
C
qmg
T
B
Ah
Av
T`
Utilizando la información contenidaen los diagramas de cuerpo libre, las ecua-ciones de equilibrio estático, están dadascomo sigue.
Para el bloque
+ ↑∑ Fh = 0,
T−mg = 0. (2)
Para la varilla
+→∑ Fv = 0,
Ah − Tcosβ = 0, (3)
+ ↑∑ Fv = 0,
B + Tsenβ−Mg + Av = 0, (4)
y tomando el sentido antihorario comopositivo
∑ MA = 0,
12 MgLcosθ − BLcosθ − TLsenβ = 0. (5)
a) Para determinar la masa mínima m, seconsidera el instante en el cual la varilla vaa despegar del piso, esto es, en el momentoque la normal B se hace cero. Así, median-te las ecuaciones (1), (2) y (5), se llega a laexpresión
m = 12 Mcosθsec 1
2 θ. (6)
b) Con ayuda de las ecuaciones (1), (2), (3),(4) y (6), se encuentra que las componentesrectangulares de la reacción en A, estándadas por
Ah = 12 Mgcosθtan 1
2 θ, (7)
Av = 12 Mg(2− cosθ). (8)
Reemplazando la ecuación (6) en laecuación (2), la tensión en la cuerda es
T = 12 Mgcosθsec 1
2 θ. (9)
c) Por la ecuación (6), la masa mínimatiene el valor
m = 0.82 kg.
Reemplazando valores en las ecuaciones(7) y (8), es posible encontrar que la reac-ción en A es
A = 12.4 N ∠ 77.27o.
Finalmente, por la ecuación (9), la tensiónen la cuerda está dada por
T = 7.99 N ∠ 70o,
donde la dirección corresponde al ánguloβ mostrado en el diagrama de cuerpo li-bre.
Ejercicio 6.3.El disco de masa M y radio R, está unido aun bloque de masa m, mediante una cuer-da que pasa por una polea ideal fija. Deter-mine a) La masa mínima m que le permiteal disco subir escalón de altura 1
2 R. b) Lascomponentes rectangulares de la reacciónen A y la tensión en la cuerda. c) La masamínima m, la reacción en la esquina A yla tensión en la cuerda, para M = 1.5 kg yR = 20 cm.
A
B
R/2
R
M
m
Ejercicio 6.4.Como se ilustra en la figura, una esferadescansa sobre dos superficies que formanentre sí un ángulo θ. a) ¿Qué condicióndeben cumplir las líneas de acción de lasfuerzas que actúan sobre la esfera? Justi-fique su respuesta. b) ¿La condición ante-rior depende del valor del ángulo θ? ¿Porqué?

8 CAPÍTULO 6. ESTÁTICA DE PARTÍCULAS Y CUERPOS RÍGIDOS
q
Ejemplo 6.6.La barra de la figura de masa 20 kg y lon-gitud 5 m, se mantiene en la posición indi-cada mediante una articulación de rótulaen el extremo A, la cuerda BC, y la cuerdaBD. La barra se encuentra en el plano yz.Encuentre a) la tensión en cada cuerda, yb) la reacción en el extremo A.
A
B
C
D
3 m
3.5 m
2.5 m
2 m
1.5 m
xy
z
SoluciónDe acuerdo con el diagrama espacial y lainformación dada en el enunciado, el dia-grama de cuerpo libre para la barra es co-mo se muestra en la figura.
A
B
C
D
3 m
3.5 m
2.5 m
2 m
1.5 m
xy
z
196 NA
x
Az
Ay
TBC
TBD
Teniendo en cuenta el diagrama decuerpo libre para la barra, se encuentraque las fuerzas en componentes rectangu-lares están dadas por
TBC = TBC(−0.35i− 0.93j + 0.12k),
TBD = TBD(0.52i− 0.83j− 0.21k),
W = −(196 N)k,
A = Axi + Ayj + Azk.
Como la barra se encuentra en equilibrioestático, sobre ella actúa un sistema fuerzapar nulo.
De este modo, las ecuaciones quegarantizan el equilibrio traslacional,adquieren la forma
∑ Fx = 0,
−0.35 TBC + 0.52 TBD + Ax = 0, (1)
∑ Fy = 0,
−0.93 TBC − 0.83 TBD + Ay = 0, (2)
∑ Fz = 0,
0.12 TBC − 0.21 TBD − 196 + Az = 0, (3).
∑ MO = 0,
3.27TBC + 1.65TBD − 392 = 0, (4)
−1.05TBC + 1.56TBD = 0, (5)
1.4TBC − 2.08TBD = 0. (6)
Como se dispone de seis ecuaciones y haycinco incógnitas, el problema tiene solu-ción numérica.
a) Utilizando las ecuaciones (5) y (4),se encuentra que la magnitud de la tensiónen cada cuerda, está dada por
TBC = 89.49 N, (7)
TBD = 60.23 N. (8)
b) Reemplazando las ecuaciones (7) y (8)en las ecuaciones (1), (2) y (3), se encuen-tra que las componentes de reacción en elextremo A, tienen los valores
Ax ≈ 0, (9)
Ay = 133.22 N, (10)
Az = 197.91 N. (11)
Las ecuaciones (9), (10) y (11) indican quela reacción en A es paralela al plano yz, yaque la componente de reacción en x es nu-la. De este modo, la magnitud de la reac-ción en el extremo A de la barra, es
A = 238.57 N. (12)
Finalmente, mediante las ecuaciones (10)y (12), es posible demostrar que el ángu-lo que forma la reacción en A con el eje y,tiene el valor
θy = 56.05o.

6.3. ESTRUCTURAS EN EQUILIBRIO 9
Ejercicio 6.5.El dispositivo de la figura, conocido comogrúa, permite levantar ó sostener cuerposde gran masa M. La grúa está conectadaen el extremo B mediante una articulación,y el brazo BC de longitud L = 3 m tieneuna masa m = 100 kg y hace un ángu-lo de 45o con la horizontal. El cable CAforma un ángulo de 30o con la horizontaly puede soportar una tensión máxima de10 kN. Encuentre la masa máxima que sepuede levantar, bajo las condiciones indi-cadas.
30o 45
o
M
A B
C
L/12
Ejercicio 6.6.La plataforma rectangular de la figura esuniforme, tiene una masa de 200 kg, mide2.56 m de longitud y 1.2 m de ancho. En Ay B la plataforma está conectada mediantebisagras y sostenida por un cable fijo a lasesquinas C y D que pasa por un ganchosin fricción E. Suponiendo que la bisagraen A no experimenta ninguna fuerza axial,determine a) la tensión en el cable, b) lasreacciones en A y B.
AB
C
D
1.2 m
0.72 m
1.8 m
1.84 m
0.24 m
0.24 m
x
y
z
E
6.3. Estructuras en equilibrio
En la primera parte de esta unidad se analizaronsituaciones en las cuales intervenía un sólocuerpo, sobre el cual actúan fuerzas ejercidaspor otros cuerpos, es decir, sobre él se ejercenúnicamente fuerzas externas. En lo que sigue, seanalizan cuerpos rígidos formados a su vez por
varios cuerpos rígidos, unidos entre sí por di-ferentes tipos de conexiones y conocidos comoestructuras. Particularmente, se consideran es-tructuras en equilibrio. En el análisis de estruc-turas es necesario tener muy clara la diferenciaentre una fuerza externa, la cual es ejercida porotro cuerpo ajeno a la estructura, y fuerza in-terna, que es ejercida por una parte de la estruc-tura sobre otra. Dentro de las estructuras se con-sideran aquellas conocidas como armaduras yde las cuales se analizan dos métodos que per-miten determinar las fuerzas en cada uno delos componentes de la armadura, denominadosmétodo de los nodos y método de las secciones.Finalmente se estudian fuerzas en vigas y cablesen reposo.
Una escalera de tijera es un buen ejemplo deuna estructura. Esta situación se analiza en elejemplo 6.7
Ejemplo 6.7.La escalera de tijera mostrada en la figura,fue construida mediante dos escalerillascada una de masa M y longitud L. Las es-calerillas están conectadas mediante unabisagra en el extremo C y se mantienenunidas por medio de un miembro hori-zontal de longitud L/2, sujeto a los pun-tos medios de las dos escalerillas. a) Hallela reacción sobre la escalera en los puntosde apoyo A y B. b) Encuentre la fuerzasde reacción en los extremos del miem-bro horizontal. De acuerdo con el resulta-do obtenido, ¿el miembro horizontal estásometido a tensión o compresión? c) De-termine las componentes de reacción en elextremo C, debido a la acción de una esca-lerilla sobre la otra.
L LL/2
A B
C
SoluciónComo la escalera se encuentra en equili-brio estático, cada uno de los cuerpos rígi-dos que la componen, también se encuen-tra en reposo. Por ello, es posible y nece-sario, tener en cuenta la escalera como un

10 CAPÍTULO 6. ESTÁTICA DE PARTÍCULAS Y CUERPOS RÍGIDOS
todo y cada una de las partes que la con-forman. Por tal razón, primero se hace eldiagrama de cuerpo libre para la escaleracompleta y para cada una de las escaleri-llas.
L LL/2
Mg Mg
NA N
B
A B
C
L L
Mg Mg
NA N
B
Cx Cx’
Cy Cy’
T ’1 T
2T
1T
2’
En los diagramas de cuerpo libre, seobserva que en la escalera completa úni-camente aparecen los pesos de cada esca-lerilla y las reacciones en los apoyos A yB, por ser las fuerzas externas que actúansobre ella. No aparecen las fuerzas de reac-ción en el extremo C ni las fuerzas genera-das por el miembro horizontal, ya que sonfuerzas internas para la escalera completa,mas no para cada una de las escalerillas.
Ahora se plantean las ecuaciones deequilibrio estático, necesarias para obtenerel valor de las cantidades pedidas en elenunciado.
Ecuaciones de equilibrio para la es-calera completa
∑ MA = 0,
NBL−MgL2(1+ cos 60)−Mg
L2
cos 60 = 0.
(1) ∑ MB = 0,
MgL2(1+ cos 60)+ Mg
L2
cos 60−NAL = 0.
(2)+ ↑∑ Fy = 0,
NA + NA −Mg−Mg = 0. (3)
Ecuaciones de equilibrio para la escalerillaizquierda
∑ MC = 0,
MgL2
cos 60−T1L2
sen 60−NAL cos 60 = 0,
(4)+→∑ Fx = 0,
Cx − T1 = 0, (5)
+ ↑∑ Fy = 0,
NA −Mg + Cy = 0. (6)
a) Mediante las ecuaciones (1) y (2), se en-cuentra que las reacciones en los apoyos Ay B de la escalera, están dados por
NA = NB = Mg. (7)
b) Fuerza de reacción que actúa en los ex-tremos del miembro horizontal. De acuer-do con la tercera ley de Newton, se debetener en cuenta que si T1 es la fuerza queel miembro ejerce sobre la escalerilla, T′1es la fuerza que la escalerilla ejerce sobreel miembro horizontal. De acuerdo con loanterior y empleando las ecuaciones (4) y(7), se obtiene
T1 = T′1 = −0.58Mg. (8)
El signo menos significa que en los dia-gramas de cuerpo libre las fuerzas T1 yT′1 tienen sentidos opuestos. Por lo tanto,la fuerza T′1 actúa hacia la izquierda sobreel miembro horizontal y como este se en-cuentra estático, la fuerza T′2 actúa hacia laderecha, indicando con esto que el miem-bro horizontal está sometido a tensión, yaque las fuerzas que actúan sobre él tiendenincrementar su longitud.
c) Las reacciones Cx y Cy, debido a laconexión que existe entre las dos escale-rillas, se obtienen con ayuda de las ecua-ciones (5), (6), (7) y (8), encontrando que
Cx = −0.58Mg,
Cy = 0.
El signo menos en la componente Cx, indi-ca que el sentido de la fuerza correspondi-ente es opuesto al mostrado en el diagra-ma de cuerpo libre.
Teniendo en cuenta la forma como se constru-yen las diferentes estructuras, es posible distin-guir entre tres tipos de ellas, como se describeen lo que sigue.

6.3. ESTRUCTURAS EN EQUILIBRIO 11
Armadura
Es una estructura fija y estable, formada porelementos rectos unidos en sus extremos pormedio de pasadores. Se construyen para sopor-tar cargas y de tal forma que en cada extremoactúa una fuerza cuya línea de acción es par-alela al elemento mismo, es decir, es una fuerzalongitudinal. Las dos fuerzas en los extremosdeben cumplir la condición de ser opuestas yde igual magnitud, para garantizar el equilibrioestático. Armaduras para puentes, armaduraspara torres de energía y armaduras para techos,son ejemplos de este tipo de estructuras.
Armazón
Igual que una armadura, es una estructura fi-ja y estable, formada por elementos rectos. Seconstruyen para soportar cargas y a diferenciade una armadura, en los extremos pueden ac-tuar dos ó más fuerzas cuyas líneas de acciónno tienen que ser paralelas al elemento. De estemodo, la única diferencia con la armadura, sepresenta debido a que hay elementos de fuerzamúltiple. La escalera de tijera, es un ejemplo dearmazón.
Máquina
A diferencia de las estructuras anteriores, unamáquina tiene partes móviles, se construye paratransmitir y cambiar fuerzas, y tiene por lomenos un elemento de fuerza múltiple. Un ali-cate, una llave de contención o una retroex-cavadora, son ejemplos de máquinas.
6.3.1. Análisis de una armadura
Como fue definida antes, una armadura estáconstituida por varios elementos rectos de dosfuerzas y es una estructura estable, utilizadatanto en puentes y como en edificios.
Los diferentes elementos que conforman unaarmadura, se conectan en sus extremos o nodos(nudos) por medio de pasadores. Cuando todoslos elementos de una armadura se encuentranen el mismo plano, se habla de una armadura
plana, a diferencia de una armadura en el espa-cio, en la cual los elementos se encuentran endiferentes planos.
Las armaduras se construyen del modo indi-cado, buscando que las fuerzas o cargas sobrelos diferentes elementos se concentren en losnodos, esto es, en los extremos de los elemen-tos. Aunque generalmente se desprecia el pe-so de los elementos de una armadura frente alas cargas que esta soporta, cuando este no seadespreciable, su peso se supone que actúa sobrelos nodos, la mitad en cada nodo. Se debe tenerclaro que el peso es una fuerza externa que ac-túa sobre la armadura completa, mientras quelas fuerzas sobre cada elemento, correspondena fuerzas internas en la armadura completa.
Como las fuerzas sobre un miembro de unaarmadura, actúan en los extremos y son longi-tudinales, estos pueden estar sometidos a ten-sión o compresión. Es decir, si las fuerzas tratande estirar o incrementar la longitud del elemen-to, se dice que está sometido a tensión; de otromodo, si las fuerzas tienden a comprimir o re-ducir la longitud del miembro, se dice que estásometido a compresión. Las dos situaciones semuestran en le figura 6.3
Tensión
Compresión
Figura 6.3: Miembro sometido a tensión o compre-sión.
En las figuras 6.4, se muestran diversas ar-maduras con los nombres asociados a cada unade ellas y que son empleadas en estructuraspara techos.
Igualmente, en las figuras 6.5 se tienen ar-maduras que se utilizan en estructuras parapuentes, cada una con el nombre asignado.
Con el fin simplificar el análisis de una ar-madura real, se hacen las siguientes aproxima-ciones, las cuales permiten considerarla comouna armadura ideal.
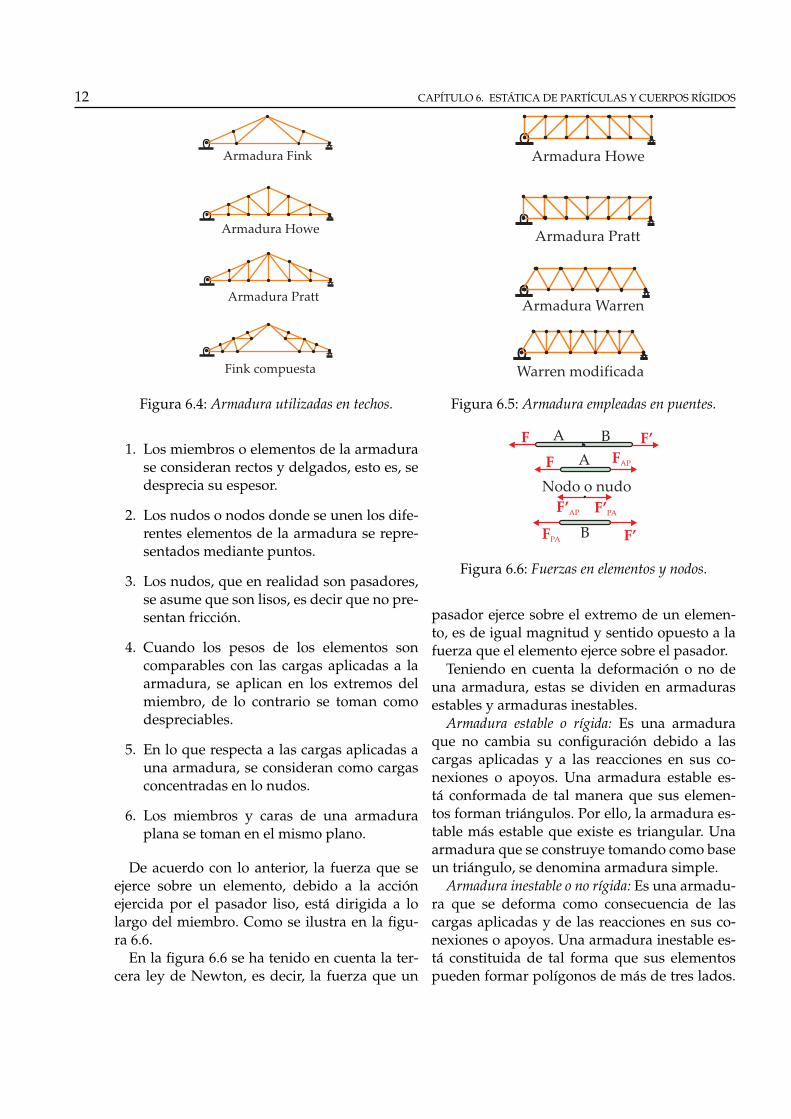
12 CAPÍTULO 6. ESTÁTICA DE PARTÍCULAS Y CUERPOS RÍGIDOS
Armadura Fink
Armadura Howe
Armadura Pratt
Fink compuesta
Figura 6.4: Armadura utilizadas en techos.
1. Los miembros o elementos de la armadurase consideran rectos y delgados, esto es, sedesprecia su espesor.
2. Los nudos o nodos donde se unen los dife-rentes elementos de la armadura se repre-sentados mediante puntos.
3. Los nudos, que en realidad son pasadores,se asume que son lisos, es decir que no pre-sentan fricción.
4. Cuando los pesos de los elementos soncomparables con las cargas aplicadas a laarmadura, se aplican en los extremos delmiembro, de lo contrario se toman comodespreciables.
5. En lo que respecta a las cargas aplicadas auna armadura, se consideran como cargasconcentradas en lo nudos.
6. Los miembros y caras de una armaduraplana se toman en el mismo plano.
De acuerdo con lo anterior, la fuerza que seejerce sobre un elemento, debido a la acciónejercida por el pasador liso, está dirigida a lolargo del miembro. Como se ilustra en la figu-ra 6.6.
En la figura 6.6 se ha tenido en cuenta la ter-cera ley de Newton, es decir, la fuerza que un
Armadura Howe
Armadura Pratt
Armadura Warren
Warren modificada
Figura 6.5: Armadura empleadas en puentes.
A B
A
B
Nodo o nudo
F F’
FAPF
F’AP F’
PA
F’FPA
Figura 6.6: Fuerzas en elementos y nodos.
pasador ejerce sobre el extremo de un elemen-to, es de igual magnitud y sentido opuesto a lafuerza que el elemento ejerce sobre el pasador.
Teniendo en cuenta la deformación o no deuna armadura, estas se dividen en armadurasestables y armaduras inestables.
Armadura estable o rígida: Es una armaduraque no cambia su configuración debido a lascargas aplicadas y a las reacciones en sus co-nexiones o apoyos. Una armadura estable es-tá conformada de tal manera que sus elemen-tos forman triángulos. Por ello, la armadura es-table más estable que existe es triangular. Unaarmadura que se construye tomando como baseun triángulo, se denomina armadura simple.
Armadura inestable o no rígida: Es una armadu-ra que se deforma como consecuencia de lascargas aplicadas y de las reacciones en sus co-nexiones o apoyos. Una armadura inestable es-tá constituida de tal forma que sus elementospueden formar polígonos de más de tres lados.

6.3. ESTRUCTURAS EN EQUILIBRIO 13
Por ello, la armadura inestable más sencilla co-rresponde a una armadura rectangular.
6.3.2. Armadura simple o estáticamentedeterminada
Una armadura es simple cuando en ella sepueden determinar todas las incógnitas aplican-do, las condiciones que garantizan su equilibrio.
Para una armadura simple, construida con melementos, apoyada o conectada de tal formaque actúan r reacciones y con un total de j no-dos, se satisface la expresión
m + r = 2j. (6.6)
Lo anterior es posible comprobarlo con cada delas armaduras simples mostradas en las figuras6.4 y 6.5.
El térmico de la izquierda, m + r, en laecuación (6.6), corresponde al número total deincógnitas a determinar en una armadura yel término a de la derecha, 2j, es el númerode ecuaciones linealmente independientes, quepermiten resolver completamente una armadu-ra.
En el caso de no poder determinar todas lasincógnitas mediante condiciones de equilibrio,se dice que la armadura es estáticamente inde-terminada. Cuando esta situación se presentaes necesario hacer una análisis de las deforma-ciones que se presentan en los miembros de laarmadura. Lo anterior indica que el número deincógnitas es mayor que el número máximo deecuaciones de equilibrio linealmente indepen-dientes, es decir, (m + r > 2j).
Para hallar las fuerzas que actúan sobre losmiembros o elementos de una armadura, sedispone del método de los nodos que permiteconocer las fuerzas en todos los elementos de laarmadura y el método de las sesiones mediante elcual es posible encontrar las fuerzas que actúanen algunos miembros de la armadura.
Independiente del método a emplear, cuandose hace el análisis de una armadura, por inspec-ción se deben encontrar los miembros o elemen-tos de fuerza cero o nula, ya que esto puede sim-plificar en buena medida los procedimientos in-volucrados.
Método de los nodos
El método de los nudos o nodos, está basado enel equilibrio de una partícula, ya que el puntode unión de varios elementos de la armadura seencuentra estático, cuando la armadura está enreposo.
Lo anterior indica que por cada nodo sedispone de dos ecuaciones de equilibrio lineal-mente independientes. Por lo tanto, si en la ar-madura hay un total de j nodos, para resolver-la completamente, es necesario resolver 2j ecua-ciones linealmente independientes.
En el método de los nodos o nudos para re-solver completamente una armadura, se debenseguir los pasos que a continuación se de-scriben.
1. Primero se debe tener mucha claridad so-bre el diagrama espacial de la armaduraa analizar, identificando por inspección siexisten miembros de fuerza cero.
2. El paso siguiente tiene que ver con la rea-lización del diagrama de cuerpo libre de laarmadura completa, que permite hallar lasreacciones generadas por las conexiones yapoyos.
3. Luego se eligen los nodos más adecuadosy se hace el diagrama de cuerpo libre paracada uno de ellos.
4. En este paso se plantean las ecuaciones deequilibrio estático para la armadura com-pleta y para cada nodo.
5. Finalmente, se resuelve el sistema de ecua-ciones obtenido, hasta encontrar tanto lasfuerzas externas como internas, determi-nando si cada uno de los miembros de laarmadura se encuentra en tensión o com-presión.
Ejemplo 6.8.Mediante un rodillo, la armadura paratecho de la figura, está apoyada en A a unasuperficie horizontal y conectada a una ar-ticulación en D. En el nodo C se aplica unacarga de 100 N. a) Encuentre las fuerzasde reacción debidas a agentes externos. b)

14 CAPÍTULO 6. ESTÁTICA DE PARTÍCULAS Y CUERPOS RÍGIDOS
Halle las fuerzas en todos los miembros dela armadura. c) Determine, para cada ele-mento de la armadura, si está sometido atensión o compresión.
A
B
C D30o
30o
100 N
SoluciónDe acuerdo con los pasos a seguir, primerose deben hacer los diagramas de cuerpolibre de la armadura completa y de cadauno de los nodos, como se muestra en lafigura siguiente.
A
B
C D30
o
30o
100 NA
Dh
Dv
A
B
C D30
o
30o
100 NA
Dh
Dv
Armadura completa
Para cada nodo
En este caso no se tienen elementos defuerza cero.
Teniendo en cuenta los diagramas decuerpo libre, las ecuaciones que garanti-zan el estado de reposo de la armaduracompleta, tienen la forma
∑ MA = 0,
DvL− 100L2= 0. (1)
∑ MD = 0,
100L2− AL = 0. (2)
+→∑ Fx = 0,
Dh = 0. (3)
Donde AC = CD = L/2.De forma similar y utilizando los dia-
gramas de cuerpo libre para cada uno delos nodos, las ecuaciones que garantizanel equilibrio estático para cada nodo, estándadas por
Nodo A
+→∑ Fx = 0,
TAC − TAB cos 30 = 0. (4)
+ ↑∑ Fy = 0,
A− TAB sen 30 = 0. (5)
Nodo C+→∑ Fx = 0,
TCD − TAC = 0. (6)
+ ↑∑ Fy = 0,
TBC − 100 = 0. (7)
Nodo D+→∑ Fx = 0,
Dh + TBD cos 30− TCD = 0. (8)
a) Fuerzas de reacción en la conexión y enel apoyo.
Por las ecuaciones (1), (2) y (3), se en-cuentra que las componentes de reacciónen A y en D, están dadas por
Dv = 50 N, Dv = 0 y A = 50 N.
b)Fuerzas en los miembros de la armadu-ra.
Mediante las ecuaciones (4), (5), (6), (7)y (8), permiten saber que los valores de lasfuerzas en cada miembro son
TAB = TBC = TBD = 100 N,
TAC = TCD = 86.60 N.
c) Para saber si cada elemento está someti-do a tensión o compresión, es necesariotener en cuenta la tercera de Newton, yaque en los diagramas de cuerpo libre seconsideran las fuerzas que los elementosejercen sobre los nodos y nos interesan lasfuerzas que los nodos ejercen sobre los ele-mentos. Teniendo en cuenta lo anterior,los miembros AB y BD están sometidosa compresión, mientras que los elementosAC, BC y CD están sometidos a tensión.

6.3. ESTRUCTURAS EN EQUILIBRIO 15
Método de las secciones
A diferencia del método de los nudos, el méto-do de las secciones está basado en el equilibriode un cuerpo rígido de una porción de la ar-madura, ya que si armadura completa está enequilibrio, parte de ella también lo está.
En este caso, se dispone entonces de seis ecua-ciones simultáneas linealmente independientes.Tres de ellas asociadas a la armadura comple-ta y de las cuales es posible conocer las reac-ciones en los apoyos y conexiones y las otrastres que surgen al imponer las condiciones deequilibrio a la porción de la armadura, y me-diante las cuales es posible conocer las fuerzaslongitudinales que actúan como máximo en treselementos de la armadura.
Si no es necesario conocer las fuerzas que ac-túan sobre todos los miembros de una armadu-ra, sino sobre algunos de ellos, el método másadecuado es el de las secciones, y los pasos aseguir son
1. Inicialmente hay que tener mucha claridadsobre el diagrama espacial de la armaduraa analizar, identificando por inspección siexisten miembros de fuerza cero.
2. Luego se obtiene el diagrama de cuerpo li-bre de la armadura completa, mediante elcual es posible hallar las reacciones genera-das por las conexiones y apoyos.
3. A continuación se elige la porción de la ar-madura que incluya los miembros de in-terés y se hace el diagrama de cuerpo librecorrespondiente. En la porción se debe in-cluir como mínimo un elemento completo.
4. De acuerdo con los dos diagramas de cuer-po libre, se plantean las ecuaciones de equi-librio estático para la armadura completa ypara la porción de interés.
5. Por último, se resuelve el sistema de seisecuaciones simultáneas, encontrando tantolas fuerzas externas como internas, deter-minando si en cada uno de los miembrosde interés se encuentra en tensión o com-presión.
Ejemplo 6.9.La armadura de la figura está conectadaa una pared mediante una articulación yapoyada en ella mediante un rodillo. a)Halle las componentes de reacción en lospuntos D y E. b) Determine las fuerzas enlos miembros CD, BD y BE. c) Teniendoen cuenta los resultados del numeral an-terior, diga si los miembros CD, BD y BEse encuentran sometidos a tensión o com-presión.
A
B
C D
5 kNE4
3
4 m
4 m4 m
SoluciónDe acuerdo con la conexión y el apoyo dela armadura, el diagrama de cuerpo librepara la armadura completa, tiene la formamostrada en la figura.
A
B
C D
5 kNE4
3
4 m
4 m4 m
Dx
Dy
E
Tomando la porción izquierda de la ar-madura ABC, el diagrama de cuerpo librecorrespondiente es el mostrado en la figu-ra.
A
B
C
5 kN4
3
4 m
4 m4 m
TCD
TBD
TBE
D
Las ecuaciones de equilibrio para la ar-madura completa, están dadas por
∑ MD = 0,
535
4 + 545
8− E4 = 0. (1)
∑ ME = 0,

16 CAPÍTULO 6. ESTÁTICA DE PARTÍCULAS Y CUERPOS RÍGIDOS
545
8− Dx4 = 0. (2)
+ ↑∑ Fy = 0,
Dy − 545= 0. (3)
Para la porción izquierda de la armadu-ra, se tienen las siguientes ecuaciones deequilibrio.
∑ MD = 0,
535
4 + 545
8− TBE4 = 0. (4)
545
4− TCD4 = 0. (5)
+ ↑∑ Fy = 0,
TBD
√2
2− 5
45= 0. (6)
a) Componentes de reacción en D y E.Empleando las ecuaciones (1), (2) y (3),
se encuentra que
E = 11 kN, Dx = 8 kN y Dy = 4 kN,
donde el signo menos significa que lacomponente de reacción horizontal en D,tiene sentido opuesto al tomado en el dia-grama de cuerpo libre.
b) Las fuerzas longitudinales sobre losmiembros CD, BD y BE se obtienen me-diante las ecuaciones (4), (5) y (6), llegandoa
TCD = 4 kN, TBD = 5.66 kN y TBE = 11 kN.
c) De acuerdo con los resultados del nu-meral anterior, los sentidos consideradospara las fuerzas sobre los tres elementosen la porción de la armadura, son los ver-daderos. Por lo tanto, al utilizar la terceraley de Newton se llega a concluir: los ele-mentos BD y CD están sometidos a tensióny el elemento BE a compresión.
Ejercicio 6.7.Resuelva la situación planteada en elejemplo 6.10, tomando la porción derechade la armadura.
Ejercicio 6.8.Determine las fuerzas en los miembrosAB, BC y AC de la armadura consideradaen el ejemplo 6.10.
6.4. Fuerzas en vigas
En las secciones anteriores se han analizadosituaciones de partículas y cuerpos rígidos enequilibrio, particularmente armaduras simples.En los métodos estudiados ha sido posible de-terminar las fuerzas externas que actúan so-bre el cuerpo rígido, debido al tipo de conex-ión o apoyo que le permite estar es reposo. Enel caso de una armadura simple, se analizarondos métodos que hacen posible determinar lasfuerzas que mantienen unidos los elemento deella.
En la primera parte de esta sección, se estu-dian las fuerzas en vigas, esto es, se consideranlas fuerzas que mantienen unido un elementodeterminado de una estructura.
En la segunda parte de la sección, se analizanlos efectos generados por fuerzas concentradasy distribuidas en cables.
6.4.1. Vigas
Una viga se define como una elemento delga-do y prismático, que puede ser recto o curvo,y se construye de tal forma que soporta cargasa lo largo de su longitud, que tienden a generardeflexiones transversales. Las vigas son de utili-dad en estructuras tales como puentes, edificiosy aviones.
Las vigas pueden soportar fuerzas concen-tradas, fuerzas distribuidas y pares a lo largode su longitud. Hasta este momento, a los cuer-pos se les ha aplicado fuerzas que actúan enun punto, es decir, fuerzas concentradas. A unaviga también se le pueden aplicar fuerzas queestán distribuidas sobre varios puntos de el-la, o sea, fuerzas distribuidas. En la figura 6.7se muestra una viga sobre la cual actúan, si-multáneamente, dos fuerzas concentradas de10 N y 25 N; dos pares de 50 N ·m y 120 N ·m;y una fuerza uniformemente distribuida dis-tribuida de 15 N ·m−1
Cuando actúa una fuerza distribuida sobreuna viga, es posible reemplazarla por unafuerza concentrada equivalente, aplicándola enel punto adecuado. A la viga de la figura 6.8 sele aplica una fuerza distribuida de 35 N ·m−1,

6.4. FUERZAS EN VIGAS 17
10 N
25 N50 N m 120 N m
15 N m-1
Figura 6.7: Viga sometida a dos fuerzas concen-tradas, una fuerza distribuida y dos pares.
que actúa sobre una longitud de 2 m.
35 N m-1
2 m
Figura 6.8: Viga sometida a una fuerza distribuida.
En este caso, la fuerza concentrada equiva-lente tiene una magnitud de 35 N ·m−1× 2 m =70 N y su punto de aplicación se encuentra a1 m del extremo derecho, como se ilustra en lafigura 6.9. Si la fuerza no está uniformementedistribuida sobre la viga, el punto de aplicaciónde la fuerza concentrada equivalente, se debecalcular utilizando los métodos empleados enel análisis de centroides y centros de gravedad,que no corresponde a los temas de este curso.
70 N
1 m
Figura 6.9: Fuerza concentrada equivalente.
Las vigas pueden estar apoyadas o conec-tadas por medio de articulaciones, pasadores orodillos. Igual que en el caso de una armadura,una viga está estáticamente determinada cuan-do el número máximo de incógnitas, debido alas reacciones en los apoyos o conexiones, estres.
PreguntaUna viga está conectada: (a) A dos artic-ulaciones, (b) a dos patines y una articu-lación y (c) tres patines. Para cada caso, ¿la
viga es estáticamente determinada ó es-táticamente indeterminada? Explique.
Se tiene una viga en voladizo cuando soloestá conectada o empotrada en uno de sus ex-tremos, es decir, cuando se le impide cualquiertipo de movimiento a dicho extremo. Tambiénse habla de una viga con voladizo, cuando noestá conectada o apoyada en uno o los dos ex-tremos.
Una viga simple es aquella que esta apoya-da por medio de un rodillo en uno de sus ex-tremos y conectada a una articulación en el otro,es decir, cuando es estáticamente determinada,ya que el número de reacciones debido a losapoyos o conexiones es igual al número de in-cógnitas.
En lo que sigue y como lo permite la físi-ca, se consideran vigas estáticamente determi-nadas, esto es, cuando las condiciones de equi-librio son suficientes para determinar las reac-ciones desconocidas, en otras palabras, cuandoel número de ecuaciones coincide con el númerode incógnitas. Cuando aparecen más incógni-tas que ecuaciones, es necesario recurrir a losmétodos de resistencia de materiales, con el finimponer nuevas condiciones que permitan elanálisis completo de la viga.
Primero se considera un elemento recto dedos fuerzas, sometido a tensión en sus ex-tremos, como se muestra en la figura 6.10.
F
FF
-F
-F-F
A
A
B
BC C
C
Figura 6.10: Elemento sometido a tensión.
En la figura 6.10 se asume que el miembro ABse encuentra estático, sometido a tensión porlas fuerzas F y −F. Si se lleva a cabo un cortehipotético de dicho miembro en C, se tienen lasporciones AC y CB que también deben estar enequilibrio estático. Por ello, si CB ejerce la fuerzaF sobre AC, por la tercera ley de Newton setiene que AC ejerce la fuerza −F sobre CB. Loanterior indica que estas fuerzas internas son las
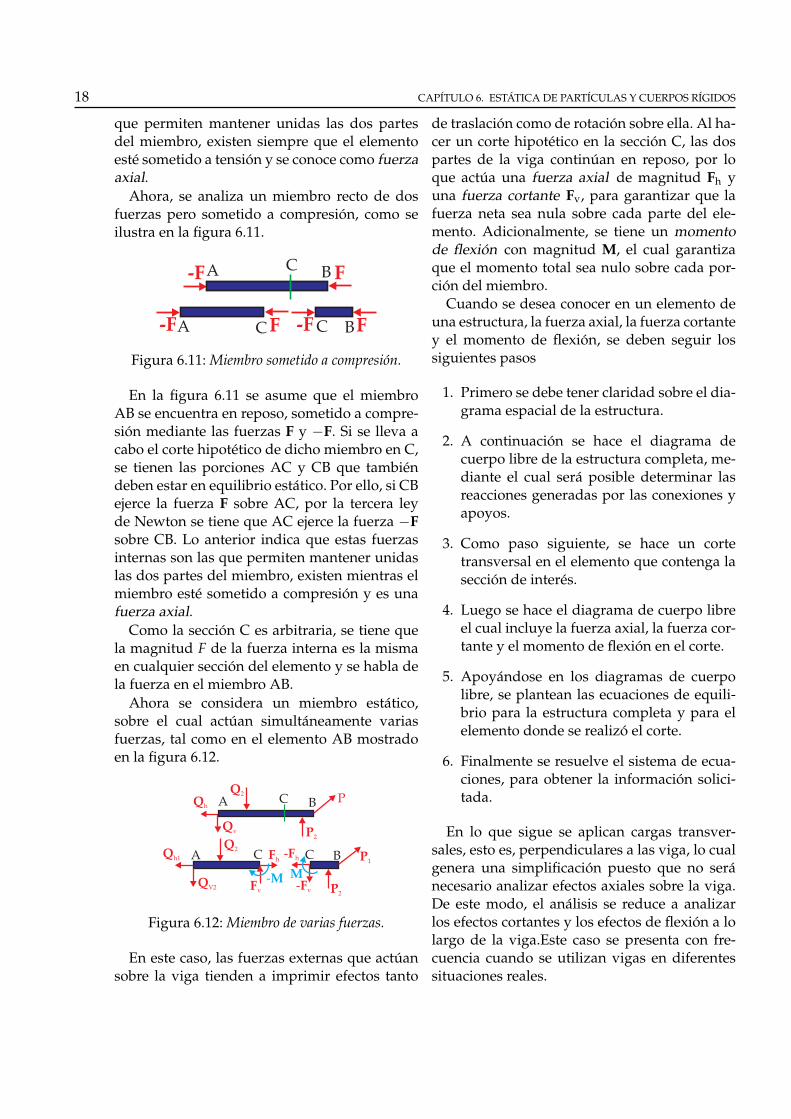
18 CAPÍTULO 6. ESTÁTICA DE PARTÍCULAS Y CUERPOS RÍGIDOS
que permiten mantener unidas las dos partesdel miembro, existen siempre que el elementoesté sometido a tensión y se conoce como fuerzaaxial.
Ahora, se analiza un miembro recto de dosfuerzas pero sometido a compresión, como seilustra en la figura 6.11.
F
FF
-F
-F-F
A
A
B
BC C
C
Figura 6.11: Miembro sometido a compresión.
En la figura 6.11 se asume que el miembroAB se encuentra en reposo, sometido a compre-sión mediante las fuerzas F y −F. Si se lleva acabo el corte hipotético de dicho miembro en C,se tienen las porciones AC y CB que tambiéndeben estar en equilibrio estático. Por ello, si CBejerce la fuerza F sobre AC, por la tercera leyde Newton se tiene que AC ejerce la fuerza −Fsobre CB. Lo anterior indica que estas fuerzasinternas son las que permiten mantener unidaslas dos partes del miembro, existen mientras elmiembro esté sometido a compresión y es unafuerza axial.
Como la sección C es arbitraria, se tiene quela magnitud F de la fuerza interna es la mismaen cualquier sección del elemento y se habla dela fuerza en el miembro AB.
Ahora se considera un miembro estático,sobre el cual actúan simultáneamente variasfuerzas, tal como en el elemento AB mostradoen la figura 6.12.
Fh
A
A
B
BC C
C PQh
Qv
P1
Qh1
Fv
-Fv
-Fh
M-MP
2
Q2
P2
Q2
QV2
Figura 6.12: Miembro de varias fuerzas.
En este caso, las fuerzas externas que actúansobre la viga tienden a imprimir efectos tanto
de traslación como de rotación sobre ella. Al ha-cer un corte hipotético en la sección C, las dospartes de la viga continúan en reposo, por loque actúa una fuerza axial de magnitud Fh yuna fuerza cortante Fv, para garantizar que lafuerza neta sea nula sobre cada parte del ele-mento. Adicionalmente, se tiene un momentode flexión con magnitud M, el cual garantizaque el momento total sea nulo sobre cada por-ción del miembro.
Cuando se desea conocer en un elemento deuna estructura, la fuerza axial, la fuerza cortantey el momento de flexión, se deben seguir lossiguientes pasos
1. Primero se debe tener claridad sobre el dia-grama espacial de la estructura.
2. A continuación se hace el diagrama decuerpo libre de la estructura completa, me-diante el cual será posible determinar lasreacciones generadas por las conexiones yapoyos.
3. Como paso siguiente, se hace un cortetransversal en el elemento que contenga lasección de interés.
4. Luego se hace el diagrama de cuerpo libreel cual incluye la fuerza axial, la fuerza cor-tante y el momento de flexión en el corte.
5. Apoyándose en los diagramas de cuerpolibre, se plantean las ecuaciones de equili-brio para la estructura completa y para elelemento donde se realizó el corte.
6. Finalmente se resuelve el sistema de ecua-ciones, para obtener la información solici-tada.
En lo que sigue se aplican cargas transver-sales, esto es, perpendiculares a las viga, lo cualgenera una simplificación puesto que no seránecesario analizar efectos axiales sobre la viga.De este modo, el análisis se reduce a analizarlos efectos cortantes y los efectos de flexión a lolargo de la viga.Este caso se presenta con fre-cuencia cuando se utilizan vigas en diferentessituaciones reales.

6.4. FUERZAS EN VIGAS 19
Es costumbre utilizar la convención que acontinuación se describe, para el análisis de vi-gas.
En el caso más general, se considera una vigasimple conectada tanto a una articulación, comoa un patín y sometida a cargas transversales ypares a lo largo de su longitud.
C
V
V´M
M´
(a)
(b)
(c)
(d)
Figura 6.13: Fuerza cortante y momento de flexión.
Luego de hacer un corte C en la viga de lafigura 6.13(a), puede ocurrir que las fuerzas ex-ternas, reacciones y cargas, tiendan a desplazarla porción izquierda de la viga verticalmentehacia arriba, respecto a la porción derecha, co-mo se ilustra en la figura 6.13(b). Esto hace quela fuerza cortante que la porción derecha ejercesobre la porción izquierda, esté dirigida verti-calmente hacia abajo. Ahora, por la tercera leyde Newton sobre la porción derecha la fuerzacortante está dirigida verticalmente hacia arri-ba como se muestra en la figura 6.13(d).
Igualmente, puede ocurrir que las fuerzas ex-ternas y los pares, tiendan a flexionar la viga co-mo en la figura 6.13(c). En este caso sobre la vigaactuaría un par con efectos de rotación en sen-tido horario sobre la porción izquierda y otroen sentido antihorario sobre la porción derecha.Por esta razón, en el corte C se tendría un mo-mento flexionante con efectos de rotación, ensentido antihorario sobre la porción izquierda yun momento flexionante con efectos de rotaciónen sentido horario sobre la porción derecha dela viga, como se ilustra en la figura 6.13(d).
Lo anterior, se tomará como convención paradibujar la fuerza cortante y el momento de flex-ión en las porciones izquierda y derecha en elcorte de una viga.
Es posible demostrar que entre la fuerza cor-tante y el momento de flexión se satisface la ex-
presión
V =dMdx
, que permite comprobar si los resultadosobtenidos para cada corte de la viga son los cor-rectos.
Ejemplo 6.10.Sobre la barra de la figura, que está arti-culada en el extremo A y apoyada en elextremo B mediante un rodillo, se aplicanla carga y el par mostrados. a) Halle lascomponentes de reacción en cada uno delos extremos de la barra. b) Encuentre lafuerza axial, la fuerza cortante y el mo-mento de flexión en el corte realizado enel punto C.
A BC
0.5 m 0.5 m1 m
20 kN
1.5 N m
SoluciónPrimero se hacen los diagramas de cuerpolibre para la barra y para cada porción dela barra luego del corte.
A B
0.5 m 0.5 m1 m
20 kN
1.5 N m
A M1
Ax
Ay
Ay
B
A
1.5 m
20 kN
Ay
x
x V1
M2
V2
Ecuaciones de equilibrio estáticoBarra completa
+→∑ Fx = 0,
Ax = 0. (1)
∑ MA = 0,
B2− 20× 103(1.5)− 1.5 = 0. (2)
∑ MB = 0,
20× 103(0.5)− Ay2− 1.5 = 0. (3)
Porción izquierda AC
+→∑ Fx = 0,

20 CAPÍTULO 6. ESTÁTICA DE PARTÍCULAS Y CUERPOS RÍGIDOS
Ax − Fh = 0. (4)
+ ↑∑ Fy = 0,
Ay − Fv = 0. (5)
∑ MA = 0,
M− Fv0.5 = 0. (6)
a) Componentes de reacción en los ex-tremos A y B Mediante las ecuaciones (1),(2) y (3), se encuentra
Ax = 0. (7)
B = 15 kN. (8)
Ay = 5 kN. (9)
b) Utilizando los resultados dados por lasecuaciones (7), (8) y (9), en las ecuaciones(4), (5) y (6), se llega a
Fh = 0.
Fv = 5 kN.
M = 2.5 kN ·m.