MODELOS MATEMÁTICOS DE SISTEMAS FÍSICOS
15
TEMA N° 2. MODELOS MATEMÁTICOS DE SISTEMAS FÍSICOS. 1.- Conceptos. Un modelo matemático de un sistema dinámico se define como un conjunto de ecuaciones que representan la dinámica del sistema con precisión o, al menos, bastante bien. Un sistema puede representarse en muchas formas diferentes, por lo que puede tener numerosos modelos matemáticos, dependiendo de cada perspectiva. La dinámica de muchos sistemas, ya sean mecánicos, eléctricos, térmicos, económicos, biológicos, etc., se describe en términos de ecuaciones diferenciales. Dichas ecuaciones diferenciales se obtienen a partir de leyes físicas que gobiernan un sistema determinado, como las leyes de Newton para sistemas mecánicos y las leyes de Kirchhoff para sistemas eléctricos. Debemos siempre recordar que obtener un modelo matemático razonable es la parte más importante de todo el análisis. Al obtener un modelo matemático razonablemente simplificado, a menudo resulta necesario ignorar ciertas propiedades físicas inherentes al sistema. En general, cuando se soluciona un problema nuevo, es conveniente desarrollar primero un modelo simplificado para obtener una idea general de la solución. A continuación se desarrolla un modelo matemático más completo y se usa para un análisis con más pormenores. Un sistema se denomina lineal si se aplica el principio de superposición. Este principio establece que la respuesta producida por la aplicación simultánea de dos funciones de entradas diferentes es la suma de las dos respuestas individuales. Por tanto, para el sistema lineal, la respuesta a varias entradas se calcula tratando una entrada a la vez y sumando los resultados. Un sistema es no lineal si no se aplica el principio de superposición. Por tanto, para un sistema no lineal la respuesta a dos entradas no puede calcularse tratando cada una a la vez y sumando los resultados. Aunque muchas relaciones físicas se representan a menudo mediante ecuaciones lineales, en la mayor parte de los casos las relaciones reales no son verdaderamente lineales. De hecho, un estudio cuidadoso de los sistemas físicos revela que incluso los llamados “sistemas lineales” sólo lo son en rangos de operación limitados. En la práctica, muchos sistemas electromecánicos, hidráulicos, neumáticos, etc., involucran relaciones no lineales entre las variables. Por ejemplo, la salida de un componente puede saturarse para señales de entrada grandes. Puede haber una zona muerta que afecte las señales pequeñas. (La zona muerta de un componente es un rango pequeño de variaciones de entrada ante las cuales el componente es insensible). Puede ocurrir una no linealidad de la ley cuadrática en algunos componentes, etc. (Ver Fig. 1).
-
Upload
oswaldo2000 -
Category
Documents
-
view
28 -
download
0
Transcript of MODELOS MATEMÁTICOS DE SISTEMAS FÍSICOS

TEMA N° 2. MODELOS MATEMÁTICOS DE SISTEMAS FÍSICOS.
1.- Conceptos.
Un modelo matemático de un sistema dinámico se define como un conjunto de ecuaciones
que representan la dinámica del sistema con precisión o, al menos, bastante bien. Un sistema puede
representarse en muchas formas diferentes, por lo que puede tener numerosos modelos matemáticos,
dependiendo de cada perspectiva.
La dinámica de muchos sistemas, ya sean mecánicos, eléctricos, térmicos, económicos,
biológicos, etc., se describe en términos de ecuaciones diferenciales. Dichas ecuaciones
diferenciales se obtienen a partir de leyes físicas que gobiernan un sistema determinado, como las
leyes de Newton para sistemas mecánicos y las leyes de Kirchhoff para sistemas eléctricos.
Debemos siempre recordar que obtener un modelo matemático razonable es la parte más importante
de todo el análisis.
Al obtener un modelo matemático razonablemente simplificado, a menudo resulta necesario
ignorar ciertas propiedades físicas inherentes al sistema. En general, cuando se soluciona un
problema nuevo, es conveniente desarrollar primero un modelo simplificado para obtener una idea
general de la solución. A continuación se desarrolla un modelo matemático más completo y se usa
para un análisis con más pormenores.
Un sistema se denomina lineal si se aplica el principio de superposición. Este principio
establece que la respuesta producida por la aplicación simultánea de dos funciones de entradas
diferentes es la suma de las dos respuestas individuales. Por tanto, para el sistema lineal, la respuesta
a varias entradas se calcula tratando una entrada a la vez y sumando los resultados.
Un sistema es no lineal si no se aplica el principio de superposición. Por tanto, para un
sistema no lineal la respuesta a dos entradas no puede calcularse tratando cada una a la vez y
sumando los resultados.
Aunque muchas relaciones físicas se representan a menudo mediante ecuaciones lineales, en
la mayor parte de los casos las relaciones reales no son verdaderamente lineales. De hecho, un
estudio cuidadoso de los sistemas físicos revela que incluso los llamados “sistemas lineales” sólo lo
son en rangos de operación limitados. En la práctica, muchos sistemas electromecánicos,
hidráulicos, neumáticos, etc., involucran relaciones no lineales entre las variables. Por ejemplo, la
salida de un componente puede saturarse para señales de entrada grandes. Puede haber una zona
muerta que afecte las señales pequeñas. (La zona muerta de un componente es un rango pequeño de
variaciones de entrada ante las cuales el componente es insensible). Puede ocurrir una no linealidad
de la ley cuadrática en algunos componentes, etc. (Ver Fig. 1).

Fig. 1. Curvas características para diversas no linealidades.
Para comprender y controlar sistemas complejos, hay que obtener modelos matemáticos
cuantitativos de ellos. Por tanto, es necesario analizar las relaciones entre las variables del sistema y
obtener un modelo matemático. Como los sistemas considerados son de naturaleza dinámica, las
ecuaciones descriptivas son generalmente ecuaciones diferenciales. Además, si estas ecuaciones
pueden linealizarse, entonces se puede utilizar la transformada de Laplace para simplificar el
método de solución.
En resumen, el tratamiento de los problemas de sistemas dinámicos puede establecerse como
sigue:
1. Definir el sistema y sus componentes.
2. Formular el modelo matemático y enumerar las suposiciones necesarias.
3. Escribir las ecuaciones diferenciales que describan el modelo.
4. Resolver las ecuaciones para las variables de salida deseadas.
5. Examinar las soluciones y las hipótesis.
6. Si es necesario, volver a analizar o diseñar el sistema.
2.- Ecuaciones diferenciales de los sistemas físicos.
Las ecuaciones diferenciales que describen el funcionamiento dinámico de un sistema físico
se obtienen utilizando las leyes físicas del proceso. Este método se aplica igualmente a sistemas
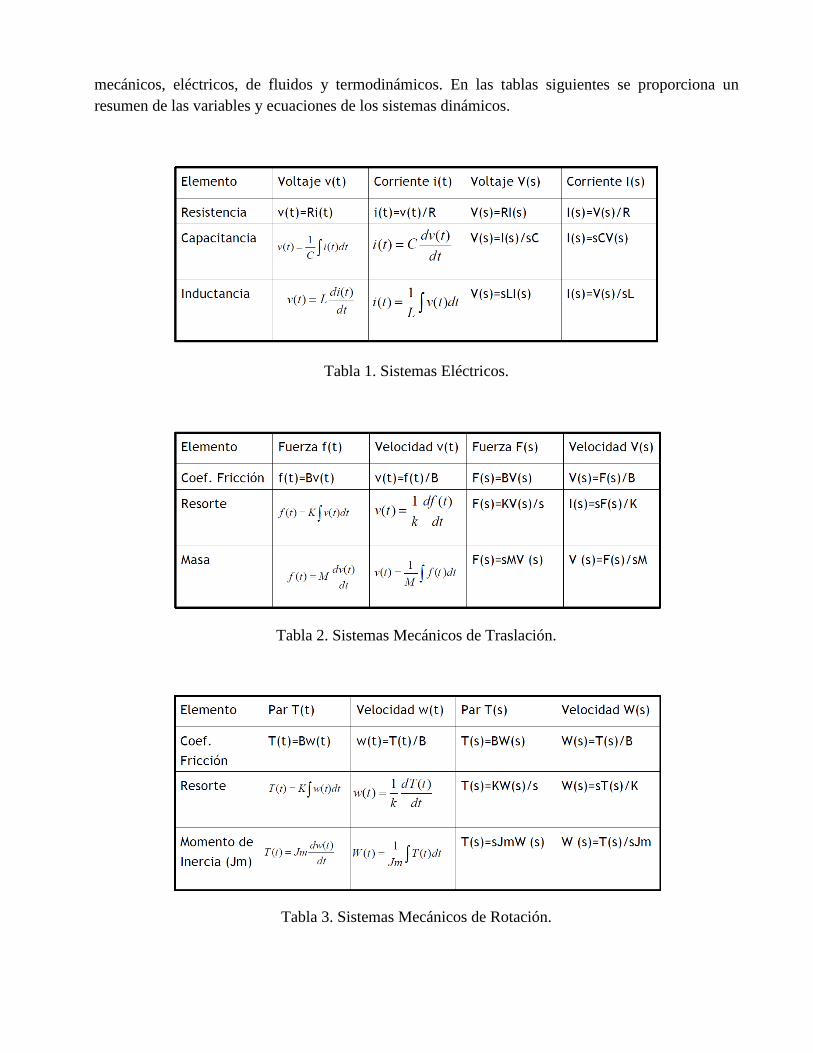
mecánicos, eléctricos, de fluidos y termodinámicos. En las tablas siguientes se proporciona un
resumen de las variables y ecuaciones de los sistemas dinámicos.
Tabla 1. Sistemas Eléctricos.
Tabla 2. Sistemas Mecánicos de Traslación.
Tabla 3. Sistemas Mecánicos de Rotación.

Tabla 4. Sistemas Hidráulicos.
Ejemplos.
1) El sencillo sistema mecánico amortiguador-resorte-masa que se muestra en la Figura 2(a) se
describe por la segunda ley de movimiento de Newton. (Este sistema podría representar, por
ejemplo, un amortiguador de automóvil). En la Fig. 2(b) se muestra el diagrama de cuerpo libre de
la masa M. En este ejemplo resorte-masa-amortiguador, se modela la fricción de la pared como un
rozamiento viscoso; esto es, la fuerza de fricción es linealmente proporcional a la velocidad de la
masa.
Fig. 2. a) Sistema resorte-masa-amortiguador; b) Diagrama de cuerpo libre.
Para los sistemas mecánicos de traslación, la segunda ley de Newton establece que:

en donde M es una masa, a es la aceleración de la masa y , es la suma de las fuerzas que actúan
sobre la masa.
Si se suman las fuerzas que actúan sobre M y se utiliza la segunda ley de Newton se obtiene:
donde k es la constante de un resorte ideal y b es la constante de fricción.
Reordenando la ecuación anterior, tenemos:
La ecuación anterior es una ecuación diferencial lineal, de segundo orden y de coeficientes
constantes. La solución de la ecuación diferencial que describe el proceso puede obtenerse por
métodos clásicos, tales como el uso de factores de integración y el método de coeficientes
indeterminados. Por ejemplo, cuando la masa se desplaza inicialmente una distancia y(t) = y(0) y
luego se suelta, la respuesta dinámica de un sistema subamortiguado se representa por una ecuación
de la forma:
En la Fig. 3, se puede observar una gráfica que representa la respuesta del sistema.
Fig. 3. Gráfica que representa la ecuación .
0
t
y(t
)

2) Veamos ahora el circuito RLC mostrado en la Fig. 4.
Fig. 4. Circuito RLC.
Utilizando la ley de la corriente de Kirchhoff, tenemos que:
Sustituyendo por las ecuaciones respectivas, obtenemos:
La solución para esta ecuación es similar a la encontrada en el ejemplo anterior y para
demostrarlo basta sustituir en la ecuación 1:
Entonces tenemos:
Inmediatamente se observa la equivalencia entre las ecuaciones 2 y 3, donde la velocidad v(t)
y el voltaje v(t) son variables equivalentes, generalmente conocidas como variables análogas, y los
sistemas son sistemas análogos. Por tanto, la solución para la ecuación 2 (circuito RLC) es
semejante a la de la ecuación 1 (sistema resorte-masa-amortiguador).
3.- Aproximaciones lineales de sistemas físicos.
En general, para un sistema lineal puede determinarse una condición necesaria en función
de una excitación x(t) y una respuesta y(t). Cuando el sistema en reposo está sujeto a una excitación
x1(t), proporciona una respuesta y1(t). Además, cuando el sistema está sometido a una excitación

x2(t), proporciona una respuesta correspondiente y2(t). Para que un sistema sea lineal, es necesario
que la excitación x1(t) + x2(t) dé como resultado una respuesta y1+ y2(t). Esto generalmente se
conoce como el principio de la superposición. Es decir,
Además, es necesario que en un sistema lineal se conserve la magnitud del factor de escala.
Considérese otra vez un sistema con una entrada x(t) que da como resultado una salida y(t).
Entonces es necesario que la respuesta de un sistema lineal a una entrada x(t) multiplicada por una
constante sea igual a la respuesta de la entrada multiplicada por la misma constante, de forma que
la salida sea igual a y(t). Esto se denomina la propiedad de homogeneidad. Es decir,
La linealidad de muchos elementos mecánicos y eléctricos puede suponerse en un rango
razonablemente grande de las variables. Este no suele ser el caso para elementos térmicos y de
fluidos, los cuales frecuentemente tienen un carácter no lineal. Sin embargo, afortunadamente suele
ser posible linealizar elementos no lineales suponiendo condiciones de pequeña señal.
Para linealizar adecuadamente una función cualquiera, podemos emplear el siguiente
procedimiento. Supongamos que,
donde g(x(t)) indica que y(t) es una función de x(t). El punto de operación normal se designa por x0.
Como la función es continua en el rango de interés, puede utilizarse un desarrollo en serie de
Taylor en el punto de operación. Entonces se tiene,
La pendiente en el punto de operación,
es una buena aproximación a la curva en un intervalo pequeño de (x – x0). Entonces, como una
aproximación razonable puede utilizarse la ecuación:

donde m es la pendiente en el punto de operación.
Ejemplo 3. Oscilador de péndulo.
Considérese el oscilador de péndulo que se muestra en la Figura 5(a).
Fig. 5. a) Oscilador de péndulo, b) Gráfica de la relación entre T y θ.
El par sobre la masa es:
T = MgLsenθ
donde g es la constante de gravedad. La condición de equilibrio para la masa es θ0=0°. La relación
no lineal entre T y θ se muestra gráficamente en la Figura 5(b). La primera derivada calculada en el
equilibrio proporciona la aproximación lineal, que es:
donde T0 = 0. Entonces se tiene
T = MgL(cos0°)(θ - 0°), es decir
T = MgLθ
Esta aproximación es razonablemente precisa para

4.- La transformada de Laplace.
La capacidad de obtener aproximaciones lineales de sistemas físicos permite al analista
considerar el uso de la transformación de Laplace. El método de la transformada de Laplace
sustituye por ecuaciones algebraicas, de resolución relativamente más fácil, las ecuaciones
diferenciales, cuya resolución son más difíciles. La solución para la respuesta temporal se obtiene
mediante las siguientes operaciones:
l. Obtener las ecuaciones diferenciales.
2. Obtener la transformación de Laplace de las ecuaciones diferenciales.
3. Resolver la transformada algebraica resultante para la variable de interés.
Las señales que son físicamente realizables siempre tienen una transformada de Laplace. La
transformación de Laplace para una función del tiempo, f(t), es:
La transformada inversa de Laplace se escribe como:
Las integrales de transformación se han usado para deducir tablas de transformadas de
Laplace que se suelen emplear para la gran mayoría de los problemas. En la Tabla 5 se dan algunos
pares importantes de transformadas de Laplace.

Tabla 5. Pares de transformada de Laplace.

Ejemplo 4. Respuesta en el tiempo del circuito RLC.
Con el objeto de ilustrar la utilidad de la transformación de Laplace y los pasos necesitados
en el análisis de sistemas, considérese de nuevo el sistema RLC descrito por la Ecuación 2.
Se desea obtener la respuesta, v, como una función del tiempo. La transformada de Laplace
de la Ecuación 2 es:
Si suponemos que alimentamos al circuito con una entrada de un impulso unitario δ(t) y que
las condiciones iniciales para el voltaje en el condensador son cero, tenemos:
r(t) = δ(t) R(s) = 1
v(0) = 0
luego, se tiene:
Despejando V(s), se obtiene:
La ecuación anterior se puede expresar como:
Donde las raíces s1 y s2, vienen dadas por:
s1 =
s2 =
luego expandiendo la ecuación 3 en fracciones parciales, tenemos:
Donde

Luego:
Finalmente aplicando la transformada inversa de Laplace, tenemos:
Ejemplo 5. Circuito RC.
Sea el circuito RC mostrado en la Fig. 6.
Fig. 6. Circuito RC.
Planteando la ecuación diferencial que representa el sistema, tenemos:
Aplicando la transformada de Laplace:
Suponiendo que v1 es una entrada escalón unitario, tenemos:

v1(t) = 1
luego:
Despejando I(s):
Luego aplicando la transformada inversa, obtenemos:
Ejemplo 6. Motor de Corriente Continua (CC).
El Motor CC convierte energía eléctrica en forma de corriente continua en energía mecánica
rotacional. Una gran parte del par generado en el rotor (inducido) del motor está disponible para
mover una carga externa (Ver Fig. 7).
Fig. 7. Diagrama esquemático de un Motor de CC.
La función de transferencia del Motor de CC se establecerá para una aproximación lineal de
un motor real y se despreciarán los efectos de segundo orden, como la histéresis y la caída de
tensión en las escobillas. El voltaje de entrada se puede aplicar a los terminales de excitación del

campo o a los del inducido. El flujo en el espacio de aire del motor es proporcional a la corriente de
excitación del campo, siempre que no esté saturado, de modo que
Se supone que el par desarrollado por el motor está relacionado linealmente con y con la
corriente del inducido como sigue:
Según la ecuación anterior, es evidente que para tener un elemento lineal debe mantenerse
una corriente constante, mientras que la otra es la corriente de entrada. El motor de cc controlado
por inducido utiliza la corriente del inducido ia como la variable de control, mientras la corriente de
campo if, se mantiene constante. Luego, aplicando la transformada de laplace, el par en el motor es:
donde if (t)= If es una corriente de campo constante y Km se define como la constante del motor.
La corriente del inducido se relaciona con el voltaje de entrada aplicado al inducido por:
donde Vb(s) es el voltaje de la fuerza contraelectromotriz proporcional a la velocidad del motor. Por
tanto, se tiene:
Despejando de la ecuación 5, la corriente del inducido, tenemos:
El par motor Tm(s) es igual al par proporcionado a la carga. Esta relación puede expresarse como:
donde TL(s) es el par de carga y Td(s) es el par de perturbación, que no suele tenerse en cuenta.
Luego:
El par de carga para una inercia de rotación como la que se muestra en la Figura 7 se escribe como:
ecuación 5
ecuación 4
ecuación 6
ecuación 7

Usando las ecuaciones 4, 5, 6, 7 y 8, o el diagrama de bloques mostrado en la Fig. 8, y
haciendo Td(s)=0, se obtiene la función de transferencia:
Fig. 8. Diagrama de bloques de un Motor de CC, controlado por inducido.
ecuación 8
ecuación 9