Modelo detallado de un parque...
24
39 4. Modelo detallado de un parque eólico 4.1 Introducción En este capítulo se realizará un análisis de todos los elementos que componen un parque eólico. Para ello, se definirán las expresiones matemáticas que describen su comportamiento dinámico, y que serán la base para su posterior modelado mediante Matlab/Simulink. Se prestará mención especial a los componentes del aerogenerador, tratando se profundizar en su fundamento físico. Sí bien, en el desarrollo del proyecto, se decidió cambiar los elementos de red modelados mediante bloques Simulink por bloques de Simpower, en aras de mejorar los resultados y el tiempo de simulación. En la Fig. 4.1.1 se muestra el esquema simplificado de un parque eólico en el que se representan sus elementos fundamentales. Estos se pueden enumerar como sigue: • Aerogeneradores • Líneas de Alta, Media y Baja Tensión. • Transformadores • Bancos de compensación • Red eléctrica de conexión CAPÍTULO
Transcript of Modelo detallado de un parque...
39
4.
Modelo detallado de un parque eólico
4.1 Introducción
En este capítulo se realizará un análisis de todos los elementos que componen un parque eólico. Para ello, se definirán las expresiones matemáticas que describen su comportamiento dinámico, y que serán la base para su posterior modelado mediante Matlab/Simulink. Se prestará mención especial a los componentes del aerogenerador, tratando se profundizar en su fundamento físico. Sí bien, en el desarrollo del proyecto, se decidió cambiar los elementos de red modelados mediante bloques Simulink por bloques de Simpower, en aras de mejorar los resultados y el tiempo de simulación.
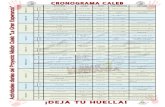
En la Fig. 4.1.1 se muestra el esquema simplificado de un parque eólico en el que se representan sus elementos fundamentales. Estos se pueden enumerar como sigue:
• Aerogeneradores
• Líneas de Alta, Media y Baja Tensión.
• Transformadores
• Bancos de compensación
• Red eléctrica de conexión
CAPÍTULO
CAPÍTULO 4. Modelo detallado de un parque eólico
40
Fig. 4.1.1. Elementos de un parque eólico
Además, se estudiará como modelar la interacción que se produce entre el viento y las turbinas, que se manifiesta con una disminución en la velocidad de este, afectando el rendimiento del parque.
4.2 Modelo del aerogenerador
4.2.1 Descripción de un aerogenerador
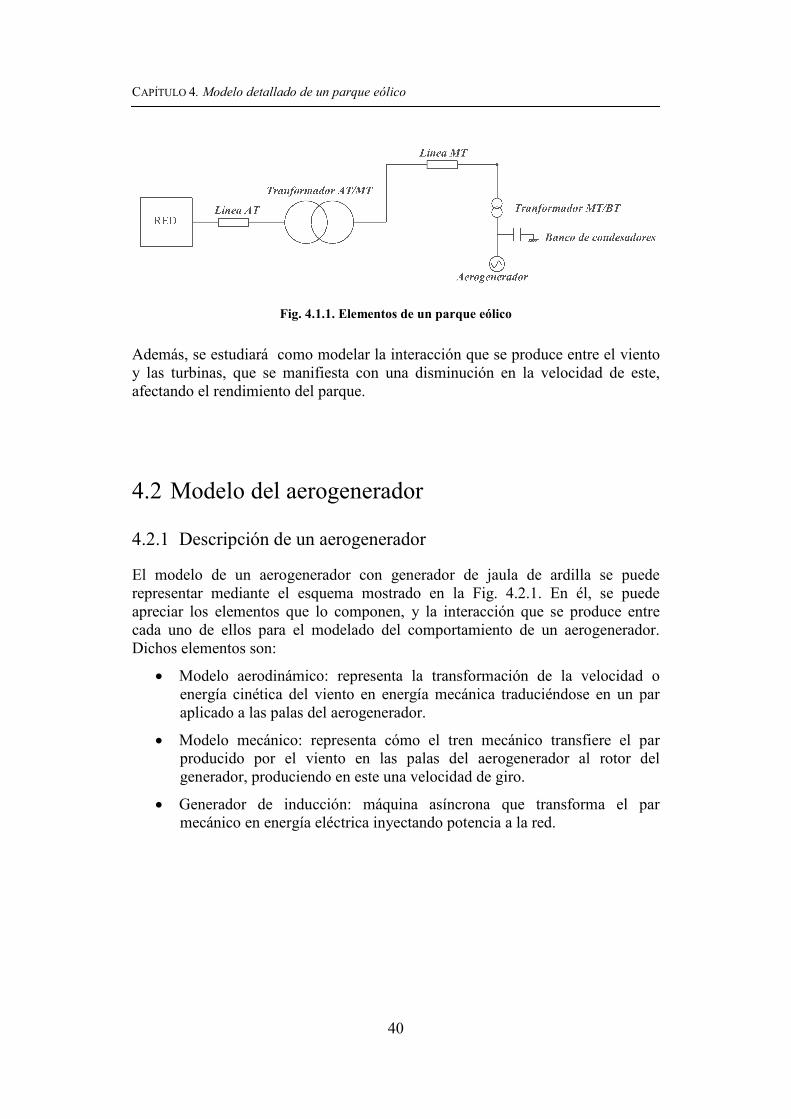
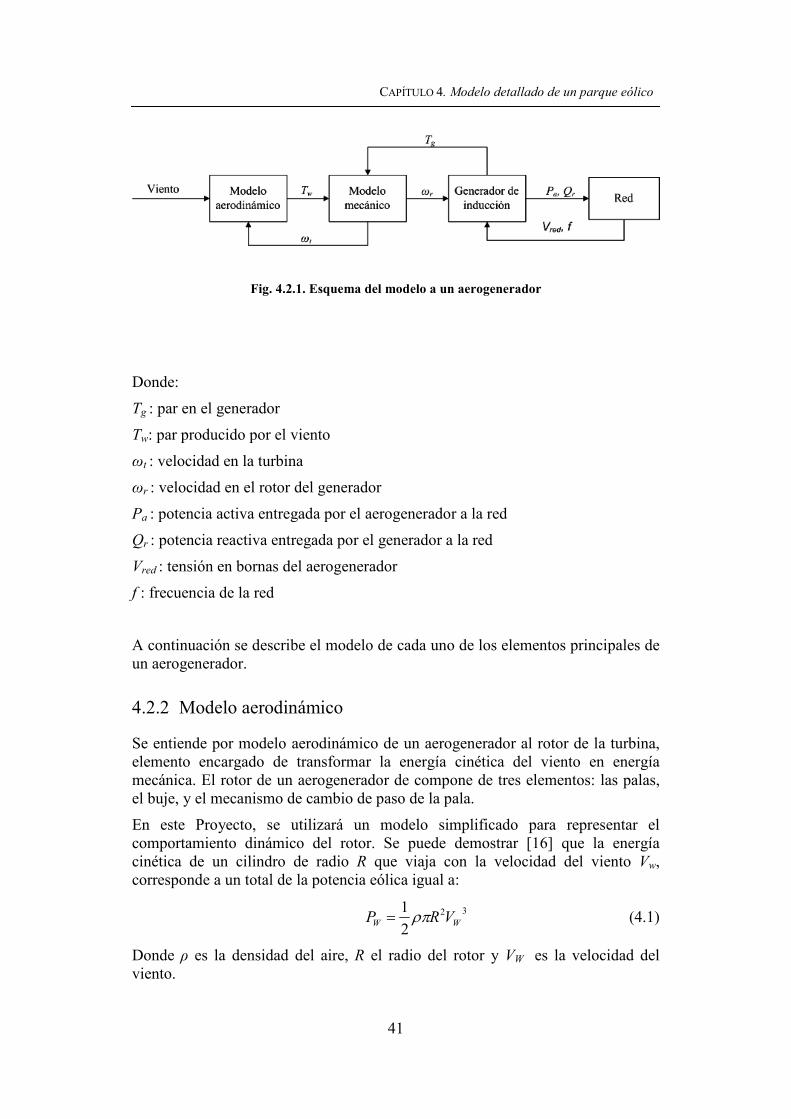
El modelo de un aerogenerador con generador de jaula de ardilla se puede representar mediante el esquema mostrado en la Fig. 4.2.1. En él, se puede apreciar los elementos que lo componen, y la interacción que se produce entre cada uno de ellos para el modelado del comportamiento de un aerogenerador. Dichos elementos son:
• Modelo aerodinámico: representa la transformación de la velocidad o energía cinética del viento en energía mecánica traduciéndose en un par aplicado a las palas del aerogenerador.
• Modelo mecánico: representa cómo el tren mecánico transfiere el par producido por el viento en las palas del aerogenerador al rotor del generador, produciendo en este una velocidad de giro.
• Generador de inducción: máquina asíncrona que transforma el par mecánico en energía eléctrica inyectando potencia a la red.
CAPÍTULO 4. Modelo detallado de un parque eólico
41
Fig. 4.2.1. Esquema del modelo a un aerogenerador
Donde:
Tg : par en el generador
Tw: par producido por el viento
ωt : velocidad en la turbina
ωr : velocidad en el rotor del generador
Pa : potencia activa entregada por el aerogenerador a la red
Qr : potencia reactiva entregada por el generador a la red
Vred : tensión en bornas del aerogenerador
f : frecuencia de la red
A continuación se describe el modelo de cada uno de los elementos principales de un aerogenerador.
4.2.2 Modelo aerodinámico
Se entiende por modelo aerodinámico de un aerogenerador al rotor de la turbina, elemento encargado de transformar la energía cinética del viento en energía mecánica. El rotor de un aerogenerador de compone de tres elementos: las palas, el buje, y el mecanismo de cambio de paso de la pala.
En este Proyecto, se utilizará un modelo simplificado para representar el comportamiento dinámico del rotor. Se puede demostrar [16] que la energía cinética de un cilindro de radio R que viaja con la velocidad del viento Vw, corresponde a un total de la potencia eólica igual a:
32
2
1WW VRP ρπ= (4.1)
Donde ρ es la densidad del aire, R el radio del rotor y VW es la velocidad del viento.

CAPÍTULO 4. Modelo detallado de un parque eólico
42
Para representar la fracción de potencia que la turbina es capaz de transformar en energía mecánica se utiliza el coeficiente de potencia CP, coeficiente que representa la fracción de energía procedente del viento que es aprovechada por la turbina. Así pues, se puede determinar la potencia mecánica del aerogenerador mediante la siguiente expresión:
( ) 32
2
1WPmec V,CRP βλρπ= (4.2)
Donde β es el ángulo de paso de la pala y λ el coeficiente de velocidad específica.
El ángulo de pala β, según se muestra en la Fig. 4.2.2, se define como el ángulo que existe entre el plano de rotación y la línea de cuerda de la pala.
Fig. 4.2.2. Ángulo de paso de pala
El coeficiente de velocidad específica λ, es el cociente entre la velocidad tangencial de la punta de la pala u y la velocidad de viento V:
V
u=λ (4.3)
La curva CP (λ,β) puede obtenerse mediante la expresión (4.4) según de demuestra en [16].
( ) λβλ
βλ λ643
21
5
ceccc
c,C i
c
i
P +
−−=
−
(4.4)
De donde λi se obtiene de la expresión (4.5):
CAPÍTULO 4. Modelo detallado de un parque eólico
43
1
0350
080
13 +
−+
=ββλ
λ.
.i (4.5)
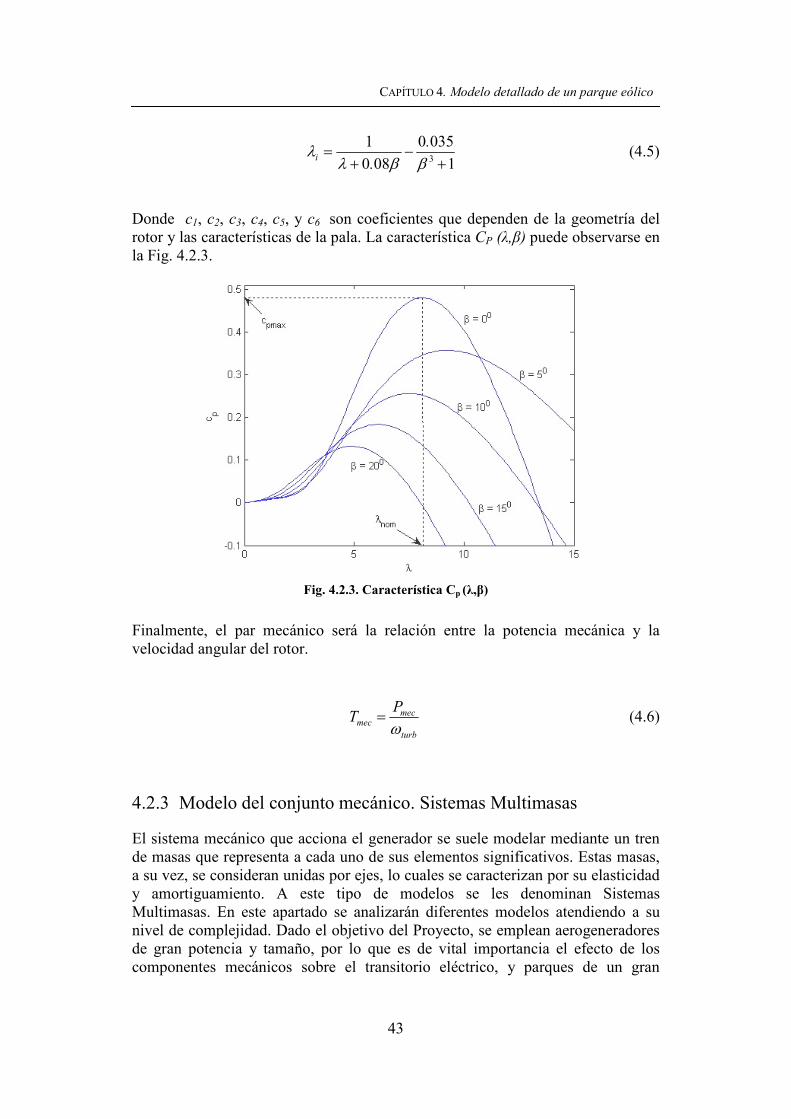
Donde c1, c2, c3, c4, c5, y c6 son coeficientes que dependen de la geometría del rotor y las características de la pala. La característica CP (λ,β) puede observarse en la Fig. 4.2.3.
Fig. 4.2.3. Característica Cp (λ,β)
Finalmente, el par mecánico será la relación entre la potencia mecánica y la velocidad angular del rotor.
turb
mecmec
PT
ω= (4.6)
4.2.3 Modelo del conjunto mecánico. Sistemas Multimasas
El sistema mecánico que acciona el generador se suele modelar mediante un tren de masas que representa a cada uno de sus elementos significativos. Estas masas, a su vez, se consideran unidas por ejes, lo cuales se caracterizan por su elasticidad y amortiguamiento. A este tipo de modelos se les denominan Sistemas Multimasas. En este apartado se analizarán diferentes modelos atendiendo a su nivel de complejidad. Dado el objetivo del Proyecto, se emplean aerogeneradores de gran potencia y tamaño, por lo que es de vital importancia el efecto de los componentes mecánicos sobre el transitorio eléctrico, y parques de un gran
CAPÍTULO 4. Modelo detallado de un parque eólico
44
número de aerogeneradores, siendo muy importante el tiempo de simulación. Por tanto es fundamental llegar a un compromiso entre tiempo de simulación e información en los transitorios. En el Capitulo 5, se realizarán diversas simulaciones con el fin de determinar el sistema multimasas óptimo a emplear en el estudio del parque agregado.
Modelo de seis masas
El sistema de seis masas (6-masas) representado en la Fig. 4.2.4, es el más sofisticado considerado, ya que tiene en cuenta todos sus elementos de forma independiente:
• Las tres palas, caracterizadas por sus inercias y amortiguamientos propios (HB1, HB2, HB3, DB1, DB2, DB3)
• Buje, del mismo modo modelado por (HH, DH )
• Caja multiplicadora (HGB, DGB)
• Rotor del generador (HG, DG)
A su vez, los ejes y uniones entre elementos adyacentes, se modelan por medio de sus constantes de elasticidad y factor de amortiguamiento.
• Unión entre palas y buje (KB1H, KB2H, KB3H, DB1H, DB2H, DB3H)
• Eje de baja velocidad, une buje y caja multiplicadora (KLS, DLS)
• Eje de alta velocidad, une caja multiplicadora y generador (KHS, DHS)
Donde la variable de entrada sería el par producido por el viento TW, proveniente del modelo aerodinámico explicado en el apartado 4.2.2, y la variable de salida sería el par aplicado al rotor del generador TG .

CAPÍTULO 4. Modelo detallado de un parque eólico
45
Fig. 4.2.4. Modelo de seis masas
No se entrará a analizar matemáticamente dicho modelo, ya que en 0 se demuestra que el par de torsión independiente de cada una de las palas no tiene una influencia significativa sobre los comportamientos del sistema en los transitorios. Por ello, el sistema de seis masas puede ser sustituido por un modelo de cuatro masas.
Modelo de cuatro masas
Debido a que el plegado de la pala se produce a cierta distancia de la articulación, esta se puede dividir entre dos partes según de muestra en la Fig. 4.2.5, una flexible y otra rígida con sus dos inercias correspondientes.

CAPÍTULO 4. Modelo detallado de un parque eólico
46
Fig. 4.2.5 División de las palas según su rigidez
Atendiendo a esta observación, se pueden concentrar las tres palas en una sola masa, pasando su parte más rígida a formar conjunto junto con el buje, según se muestra en la
Fig. 4.2.6.
Fig. 4.2.6 Modelo de cuatro masas
En el modelo de cuatro masas mostrado en la
Fig. 4.2.6 se puede apreciar cómo se concentra toda la masa de la parte más flexible de las tres palas en una sola masa caracterizada por sus constantes de inercia HB y amortiguamiento DB. Dicho modelo se representa mediante las siguientes ecuaciones diferenciales (4.7), en las que todos sus parámetros y variables se expresan en p.u respecto al eje de alta velocidad:

CAPÍTULO 4. Modelo detallado de un parque eólico
47
( )[ ]
( )[ ] ( )[ ]
( )[ ]
( )[ ] ( )[ ]
( )[ ]
( )
( )
( )GGBoHS
GBBHoLS
HBoBH
GGGGGBHSHSHSG
G
GBGBGGBHSHSHSGBBHLSLSLSGB
GB
BHBHGBBHLSLSLSWBH
BH
HHGBGHLSLSLSHBBHBHBHH
H
BBHBBHBHBHWB
B
dt
d
dt
d
dt
d
TDDKdt
dH
DDKDKdt
dH
DDKTdt
dH
DDKDKdt
dH
DDKTdt
dH
ωωωθ
ωωωθ
ωωωθ
ωωωθω
ωωωθωωθω
ωωωθω
ωωωθωωθω
ωωωθω
−=
−=
−=
−−−+=
−−+−−+=
−−+−=
−−+−−+=
−−+−=
2
2
2
2
2
(4.7)
Donde ωB, ωH, ωGB y ωG son las velocidades de rotación de las palas, buje, multiplicadora y generador respectivamente. La velocidad sincrónica se representa por ωo y los ángulos de torsión son, entre las palas y el buje θBH, en el eje de baja velocidad θLS, y θBH en el eje de alta velocidad.
Modelo de tres masas
El modelo de cuatro masas visto anteriormente puede ser reducido a un modelo de tres masas, agrupando las masas adyacentes mediante la suma de sus inercias Para ello, existen dos posibilidades:
• Modelo de tres masas tipo I (3 masas I)
Dicho modelo se obtiene sumando la inercia del buje y la de las palas, concentrando estos dos componentes como una sola masa, resultado un conjunto que viene caracterizado por su inercia HBH y factor de amortiguamiento DBH. El conjunto de masas resultante se puede observar en la Fig. 4.2.7.

CAPÍTULO 4. Modelo detallado de un parque eólico
48
Fig. 4.2.7 Modelo de tres masas I
Y se modela matemáticamente mediante las ecuaciones (4.8)
( )[ ]
( )[ ] ( )[ ]
( )[ ]
( )
( )GGBoHS
GBBHoLS
GGGGGBHSHSHSG
G
GBGBGGBHSHSHSGBBHLSLSLSGB
GB
BHBHGBBHLSLSLSWBH
BH
dt
d
dt
d
TDDKdt
dH
DDKDKdt
dH
DDKTdt
dH
ωωωθ
ωωωθ
ωωωθω
ωωωθωωθω
ωωωθω
−=
−=
−−−+=
−−+−−+=
−−+−=
2
2
2
(4.8)
Donde ωBH es la velocidad de rotación del conjunto formado por las palas y el buje.
• Modelo de tres masas tipo II (3 masas II)
En este caso, se concentra en una sola masa la caja multiplicadora y el rotor del generador, siendo sus parámetros característicos la inercia del conjunto HGBG y su factor de amortiguamiento DGBG.

CAPÍTULO 4. Modelo detallado de un parque eólico
49
Fig. 4.2.8 Modelo de tres masas II
Siendo las ecuaciones diferenciales que representan el comportamiento del sistema:
( )[ ]
( )[ ] ( )[ ]
( )[ ]
( )
( )GBGHoLS
HBoBH
GGBGGBGGBGHLSLSLSGBG
GBG
HHGBGHLSLSLSHBBHBHBHH
H
BBHBBHBHBHWB
B
dt
d
dt
d
TDDKdt
dH
DDKDKdt
dH
DDKTdt
dH
ωωωθ
ωωωθ
ωωωθω
ωωωθωωθω
ωωωθω
−=
−=
−−−+=
−−+−−+=
−−+−=
2
2
2
(4.9)
Siendo ωGBG es la velocidad de rotación en el conjunto formado por la caja multiplicadora y el generador. A su vez, θBH representa el ángulo de torsión entre las palas y el buje.
Modelo de dos masas
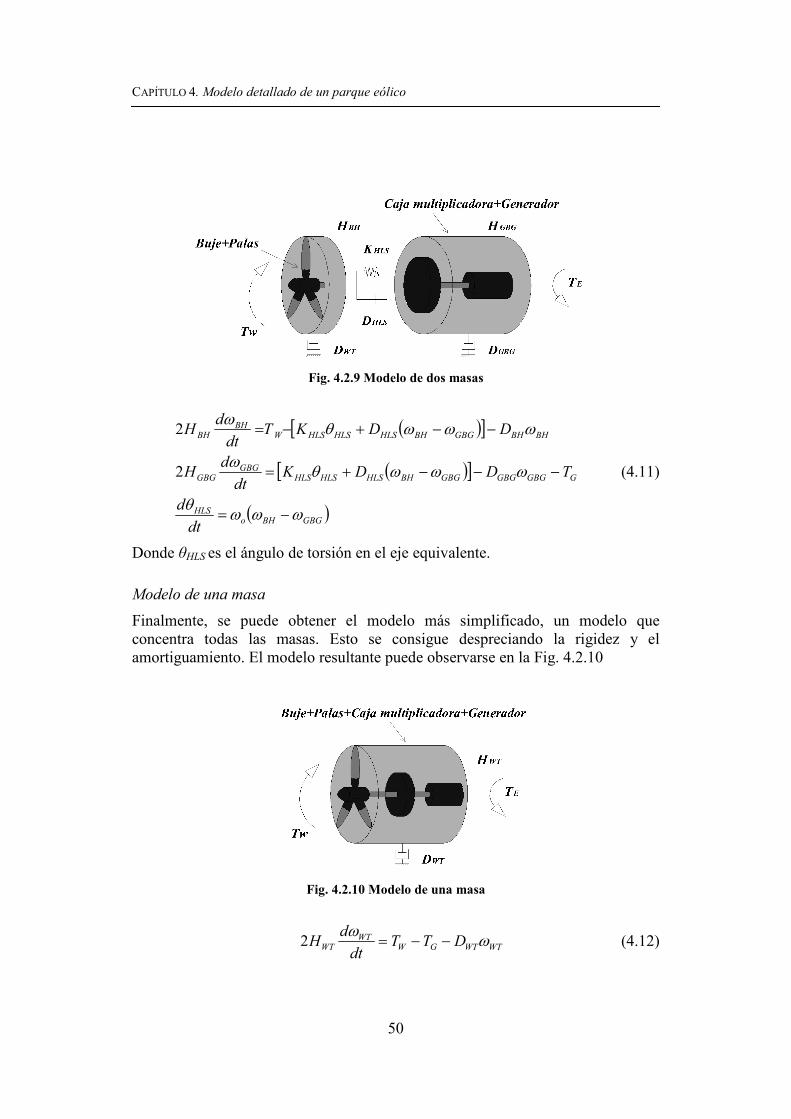
El modelo de tres masas tipo I puede simplificarse en un modelo de dos masas (Fig. 4.2.9), concentrando la caja multiplicadora y el generador. De este modo se obtiene un conjunto cuya inercia es HGBG. En [26] se demuestra que la constante de elasticidad equivalente en eje KHLS, se puede determinar según (4.10). Análogamente, se obtiene el amortiguamiento equivalente LHLS.
12 1−
+=
lsHS
GB
HLSKK
5K (4.10)
CAPÍTULO 4. Modelo detallado de un parque eólico
50
Fig. 4.2.9 Modelo de dos masas
( )[ ]
( )[ ]
( )GBGBHoHLS
GGBGGBGGBGBHHLSHLSHLSGBG
GBG
BHBHGBGBHHLSHLSHLSWBH
BH
dt
d
TDDKdt
dH
DDKTdt
dH
ωωωθ
ωωωθω
ωωωθω
−=
−−−+=
−−+−=
2
2
(4.11)
Donde θHLS es el ángulo de torsión en el eje equivalente.
Modelo de una masa
Finalmente, se puede obtener el modelo más simplificado, un modelo que concentra todas las masas. Esto se consigue despreciando la rigidez y el amortiguamiento. El modelo resultante puede observarse en la Fig. 4.2.10
Fig. 4.2.10 Modelo de una masa
WTWTGWWT
WT DTTdt
dH ω
ω−−=2 (4.12)

CAPÍTULO 4. Modelo detallado de un parque eólico
51
En esta última expresión, HWT, DWT y ωWT representan la inercia, el factor de amortiguamiento y es la velocidad de rotación del conjunto total.
4.2.4 Modelo del generador de inducción
En este apartado se explicará el modelo de la máquina asíncrona general. A partir de este modelo, puede caracterizarse el generador de inducción que se utilizará para el análisis de parques agregados.
En las máquinas asíncronas trifásicas, los devanados del estator deben estar conectados a la red, mientras los del rotor podrán estar cortocircuitados, en el caso de que sea del tipo jaula de ardilla, o conectados a un circuito externo a través de anillos rozantes.
En la máquina de inducción, al igual que ocurre con la síncrona, los devanados son alimentados por una carga trifásica, produciéndose un campo magnético giratorio cuya velocidad de giro se la denomina velocidad de sincronismo, y se determina según la siguiente expresión:
p
fn s
s
60= (4.13)
Donde fs es la frecuencia de la red de alimentación, p el número de pares de polos de la máquina, y ns la velocidad de sincronismo expresada en revoluciones por minuto.
Cuando el rotor gira a una velocidad diferente a la velocidad de sincronismo, en los devanados del rotor se inducen tensiones cuya frecuencia depende de la velocidad relativa de los dos campos. De este modo, la máquina asíncrona se caracteriza por la diferencia relativa entre la velocidad del rotor nr y la velocidad de sincronismo ns. A esta característica se la denomina deslizamiento s.
s
rs
n
nns
−= (4.14)
La corriente en cada uno de los devanados del rotor es igual al cociente entre la tensión inducida a la frecuencia fr y la impedancia del hilo. Dicha corriente interactúa con el campo creado por el estator produciéndose un par que acelera el rotor en la dirección de giro del campo estatórico.
Es posible diferenciar tres modos de funcionamiento en la máquina asíncrona:
• En vacio, con el rotor girando a una velocidad muy próxima a la de sincronismo.
• Funcionamiento motor. En este caso se aplica una carga a una máquina funcionando en vacío, aumentando el deslizamiento y disminuyendo la velocidad de giro del rotor.

CAPÍTULO 4. Modelo detallado de un parque eólico
52
• Funcionamiento generador. Este funcionamiento se logra haciendo girar al rotor a una velocidad superior a la de sincronismo, de modo que las polaridades de las tensiones inducidas en el rotor cambian y el sentido del par resultante es opuesto a la dirección del movimiento.
El generador de inducción empleado en este Proyecto es el modelo de 5º orden. A continuación, se explicarán las ecuaciones que representan este modelo.
El análisis matemático puede hacerse a partir del esquema representado en la Fig. 4.2.11, donde el estator y rotor se representan por tres devanados cada uno, separados 120º y conectados entre sí. La conexión en este caso se ha realizado en estrella.
Fig. 4.2.11 Devanados en la máquina de inducción
En la Fig. 4.2.4, θ representa el ángulo en el que la fase A del rotor adelanta a la fase a del estator en la dirección de rotación. Considerando constantes el deslizameinto s y la velocidad de giro del rotor ωr (rad/s), θ puede calcularse según :
( )ωωθ str −== 1 (4.15)
Si se desprecian la saturación, histéresis y corrientes inducidas, y se considera una distribución puramente sinusoidal de flujo, las tensiones en cada una de las fases del estator se pueden escribir como sigue:

CAPÍTULO 4. Modelo detallado de un parque eólico
53
dt
diRu
dt
diRu
dt
diRu
CCrC
bbsb
aasa
φ
φ
φ
+=
+=
+=
(4.16)
Análogamente, en (4.17) se expresan las tensiones en el rotor:
dt
diRu
dt
diRu
dt
diRu
CCrC
BBrB
AArA
φ
φ
φ
+=
+=
+=
(4.17)
Donde ϕ representa el flujo correspondiente a cada fase. El sentido positivo de la intensidad es el mostrado en la Fig. 4.2.11 que se corresponde con el convenio de signos motor.
En este tipo de estudios, es habitual despreciar el efecto de las ranuras y considerar que el rotor tiene forma cilíndrica. Gracias a esta simplificación, el ángulo sólo influye en la inductancia mutua entre el rotor y el estator, tal y como se demuestra en [26].
Según [26], el flujo en el estator se puede definir como la suma del flujo debido a la intensidad que circula por la fase a del estator, el producido la intensidad que circula por las fases b y c del estator y el generado por las corrientes que circulan por cada una de las fases del rotor [26], resultando la siguiente expresión para la fase a:
( ) ( )
−+
+++++=3
2
3
2 πθ
πθθφ cosicosicosiLiiLiL CBAaAcbabaaaa (4.18)
Laa : inductancia del devanado del estator
Lab : inductancia mutua entre devanados del estator
LaA: inductancia mutua entre los devanados de rotor y estator
Por analogía, el flujo en la fase A del rotor sería

CAPÍTULO 4. Modelo detallado de un parque eólico
54
( ) ( )
−+
+++++=3
2
3
2 πθ
πθθφ cosicosicosiLiiLiL cbaaACBABAAAA (4.19)
Para el resto de los devanados, se obtienen expresiones análogas.
Teniendo en cuenta que en situaciones equilibradas la corriente en el neutro es nula:
0
0
=++
=++
CBA
cba
iii
iii (4.20)
Y definiendo Lrr y Lss como sigue:
ABAAss
abaarr
LLL
LLL
−=
−= (4.21)
Las ecuaciones de flujo se reducen a (3.27) y (3.28) para el estator y rotor respectivamente.
( )
−+
+++=3
2
3
2 πθ
πθθφ cosicosicosiLiL CBAaAassa (4.22)
( )
−+
+++=3
2
3
2 πθ
πθθφ cosicosicosiLiL cbaaAArrA (4.23)
Transformada de Park
Las ecuaciones descritas en el apartado anterior, (4.22) y (4.23), pueden ser simplificadas según [28] mediante la transformación de las variables de fase a un sistema de ejes giratorios, siendo d y q cada uno de estos ejes. Tras dicha transformación, resultan los esquemas equivalentes monofásicos que se muestra en las Fig. 4.2.12 y Fig. 4.2.13
Fig. 4.2.12. Circuito equivalente monofásico del generador en el eje q

CAPÍTULO 4. Modelo detallado de un parque eólico
55
Resolviendo las ecuaciones de mallas, las tensiones en el primario Vqs y secundario V’qr se representan según (4.24)
( ) drr
qr
qrrqr
ds
qs
qssqs
'dt
'd'i'R'V
dt
diRV
ωφωωφ
ωφφ
−++=
++= (4.24)
Donde:
mlrr
mlss
qsmqrrqr
qrmqssqs
L'L'L
LLL
iL'i'L'
'iLiL
+=
+=
+=
+=
φ
φ
Análogamente para el eje d:
Fig. 4.2.13. Circuito equivalente monofásico del generador en el eje d
Al igual que en el caso anterior, se resuelven las ecuaciones del circuito, expresándose las tensiones en primario Vds y secundario V’dr:
( ) qrrdr
drrdr
qsds
dssds
'dt
'd'i'R'V
dt
diRV
ωφωωφ
ωφφ
−−+=
−+= (4.25)

CAPÍTULO 4. Modelo detallado de un parque eólico
56
Donde:
mlrr
mlss
qsmqrrqr
drmdssds
L'L'L
LLL
iL'i'L'
'iLiL
+=
+=
+=
+=
φ
φ
(4.26)
De este modo (4.29) y (4.30) junto con la ecuación mecánica (4.27) forman un conjunto de cinco ecuaciones, que representan el comportamiento de la máquina asíncrona:
( )dsqsqsdse iipT φφ −=2
3 (4.27)
El par Te calculado en (4.24) no es más que el proporcionado por el conjunto mecánico descrito en el apartado 4.2.3.
Particularizando para el caso de un generador de inducción de jaula de ardilla, las tensiones en el estator el rotor deben ser nulas, ya que el circuito rotórico estará cortocircuitado, por lo que el modelo de quinto orden quedaría caracterizado por las cinco ecuaciones (4.28)
( )
( )
( )dsqsqsdse
qrrdr
drrdr
drr
qr
qrrqr
qsds
dssds
ds
qs
qssqs
iipT
'dt
'd'i'R'V
'dt
'd'i'R'V
dt
diRV
dt
diRV
φφ
ωφωωφ
ωφωωφ
ωφφ
ωφφ
−=
−−+==
−++==
−+=
++=
2
3
0
0 (4.28)
Con estas ecuaciones se ha modelado en Simulink el comportamiento de un aerogenerador. No obstante, para el análisis final, de utiliza el modelo de la máquina asíncrona de Simpower. Este posee dos posibles entradas, par y velocidad de giro. Si se configura con la segunda, este modelo simula una máquina asíncrona que estaría acomplada al modelo de masas que se haya elaborado con Simulink, con lo que se puede conectar al resto de la red, modelada con Simpower.

CAPÍTULO 4. Modelo detallado de un parque eólico
57
4.3 Modelo del punto de conexión del parque
La red de eléctrica se modela como una fuente de tensión trifásica con tensión y frecuencia constantes conectada con una reactancia. Con el fin de simular huecos de tensión en la red, se modelarán caídas de tensión en el valor eficaz de la fuente con un tiempo de duración determinado. Se emplea una fuente programable de tensión de Simpower, con el fin de simular los eventos deseados, seguidamente conectado con un bloque de bobinas para modelar la impedancia de cortocircuito de la red.
4.4 Modelo de las líneas
4.4.1 Tipo de líneas empleadas en el modelo
Como paso previo, se citan las simplificaciones más habituales que se suelen realizar en las líneas eléctricas:
• Línea aérea corta. Se puede despreciar la capacidad del conductor. En el caso de Muy Alta Tensión, la resistencia es muy inferior a la impedancia y también puede despreciarse.
• Líneas de baja tensión. Si su longitud no es muy grande, es habitual despreciar la capacidad.
• La conductancia puede despreciarse en cualquier caso.
A continuación se explicará cada uno de los modelos de línea de mayor a menor complejidad.
4.4.2 Modelo de parámetros distribuidos
En la Fig 4.4.1 se muestra el esquema equivalente de un cable de longitud x∆

CAPÍTULO 4. Modelo detallado de un parque eólico
58
Fig 4.4.1. Modelo dinámico de línea eléctrica de parámetros distribuidos
Donde
R1: resistencia lineal
L1: inductancia lineal
Ct: capacidad transversal
Gt: conductancia transversal
En este circuito equivalente, los parámetros de operación en estado estacionario sinusoidal se pueden definir como sigue:
• Impedancia característica:
ci
C
tt
C eZCjG
LjRZ
ϕ
ωω
=++
= 11 (4.29)
• Constante de propagación
( )( ) βαωωγ jCjGLjR tt +=++= 11 (4.30)
Donde α es la constante de atenuación y β es la constante de fase. La parte real α corresponde a la atenuación de la amplitud de la componente directa e inversa para la tensión y la corriente.
En el caso de estudio, se considerarán líneas sin distorsiones, quedando un modelo para la línea caracterizado con los siguientes parámetros:

CAPÍTULO 4. Modelo detallado de un parque eólico
59
=d
L
CR t
eatenuador 1
1
2 (4.31)
Donde d es la longitud de la línea
01 ==C
;C
LZ
t
C ϕ (4.32)
4.4.3 Modelo de parámetros concentrados
En este caso se concentran los parámetros aplicados a una longitud determinada construyendo el modelo en pi de la línea, según se muestra en la Fig. 4.4.1
Fig. 4.4.1. Modelo de línea eléctrica de parámetros concentrados
Siendo:
( )( )l)jBG'Y
ljXR'Z
+=
+=
Donde:
l es la longitud de la línea (km)
R es la resistencia (Ω/km)
X=ωL es la reactancia (Ω/km)
G es la conductancia (S/km)
B= ωL es la susceptancia (S/km)
CAPÍTULO 4. Modelo detallado de un parque eólico
60
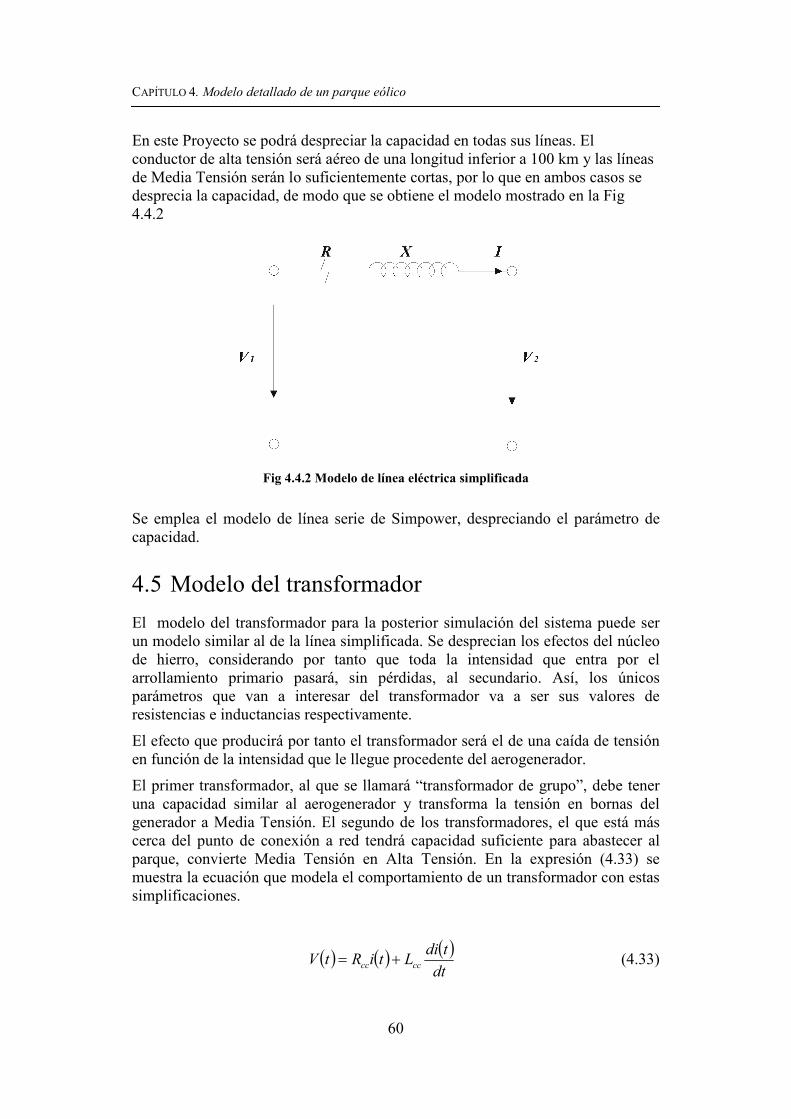
En este Proyecto se podrá despreciar la capacidad en todas sus líneas. El conductor de alta tensión será aéreo de una longitud inferior a 100 km y las líneas de Media Tensión serán lo suficientemente cortas, por lo que en ambos casos se desprecia la capacidad, de modo que se obtiene el modelo mostrado en la Fig 4.4.2
Fig 4.4.2 Modelo de línea eléctrica simplificada
Se emplea el modelo de línea serie de Simpower, despreciando el parámetro de capacidad.
4.5 Modelo del transformador
El modelo del transformador para la posterior simulación del sistema puede ser un modelo similar al de la línea simplificada. Se desprecian los efectos del núcleo de hierro, considerando por tanto que toda la intensidad que entra por el arrollamiento primario pasará, sin pérdidas, al secundario. Así, los únicos parámetros que van a interesar del transformador va a ser sus valores de resistencias e inductancias respectivamente.
El efecto que producirá por tanto el transformador será el de una caída de tensión en función de la intensidad que le llegue procedente del aerogenerador.
El primer transformador, al que se llamará “transformador de grupo”, debe tener una capacidad similar al aerogenerador y transforma la tensión en bornas del generador a Media Tensión. El segundo de los transformadores, el que está más cerca del punto de conexión a red tendrá capacidad suficiente para abastecer al parque, convierte Media Tensión en Alta Tensión. En la expresión (4.33) se muestra la ecuación que modela el comportamiento de un transformador con estas simplificaciones.
( ) ( ) ( )dt
tdiLtiRtV cccc += (4.33)

CAPÍTULO 4. Modelo detallado de un parque eólico
61
Al igual que en los casos anteriores, se emplea el modelo del transformador de Simpower, despreciando la rama de magnetización para ser lo más fiel posible a las simplificaciones hechas.
4.6 Modelo del condensador
En los parques eólicos es necesaria la inclusión de condensadores para la compensación de potencia reactiva. Estos deben generar prácticamente toda la reactiva que el aerogenerador consuma, con el fin de que los factores de potencia de la instalación global se aproximen a la unidad en la medida de lo posible.
El comportamiento del condensador se rige por medio de la siguiente ecuación dinámica:
( )dt
tdVCi c
c = (4.34)
En [29] se emplea un modelo más real. Se considerarán las resistencias e inductancias del banco de condensadores, según se representa en la Fig. 4.6.1.
Fig. 4.6.1. Condensador trifásico para la compensación de reactiva
( ) ( )( ) 12 ++
==sRCLCs
sC
sV
sIsG (4.35)

CAPÍTULO 4. Modelo detallado de un parque eólico
62
En este Proyecto, se empleará banco de condensadores en bornas de los aerogeneradores. En el Capítulo 7 se emulará un sistema de control que aumente el número de condensadores activos según la potencia desarrollada.