
Modelarea și predicția piețelor financiare utilizând ...
46
UNIVERSITATEA DIN CRAIOVA FACULTATEA DE ECONOMIE ȘI ADMINISTRAREA AFACERILOR Școala Doctorală de Științe Economice Domeniul: Cibernetică și Statistică Florentina-Mihaela APIPIE Modelarea și predicția piețelor financiare utilizând tehnici de inteligență computațională - Rezumatul tezei de doctorat - Conducător de doctorat: Prof. univ. dr. Vasile GEORGESCU Craiova 2019
Transcript of Modelarea și predicția piețelor financiare utilizând ...
UNIVERSITATEA DIN CRAIOVA FACULTATEA DE ECONOMIE ȘI ADMINISTRAREA AFACERILOR
Școala Doctorală de Științe Economice
Domeniul: Cibernetică și Statistică
Florentina-Mihaela APIPIE
Modelarea și predicția piețelor financiare
utilizând tehnici de inteligență computațională
- Rezumatul tezei de doctorat -
Conducător de doctorat:
Prof. univ. dr. Vasile GEORGESCU
Craiova
2019
2
Rezumat
Cercetarea are drept scop principal identificarea și testarea unui set de meta-euristici
multi-obiectiv pentru problema de optimizare a portofoliilor, inclusiv în cazul utilizării unor
restricții complexe. Astfel, în vederea îndeplinirii scopului, capitolele 1 și 2 prezintă
principale noțiuni teoretice privind problema de optimizare a portofoliilor, descriu noțiunile
teoretice privind lucrul cu meta-euristici și enunță posibile meta-euristici multi-obiectiv
aplicabile problemei de optimizare a portofoliilor.
Capitolele 3, 4 și 5 sunt dedicate cercetării aplicative. Capitolul 3 descrie 6 meta-
euristici multi-obiectiv seletate pentru studiul aplicativ privind optimizarea portofoliilor și
definește 9 metrici de performanță, utilizate pentru compararea performanțelor meta-
euristicilor multi-obiectiv. Capitolul 4 este un studiu aplicativ care prevede testarea și
compararea performanțelor a 6 meta-euristici multi-obiectiv utilizate pentru aproximarea
frontului Pareto pentru un portofoliu de 20 de acțiuni listate la Bursa de Valori București.
Meta-euristicile utilizate în cercetarea aplicativă sunt: SPEA 2, NSGA II, MOPSO, MOEA/D-
DRA, CMOPSO și ANSGA III. Capitolul 5 este, de asemenea, un studiu aplicativ care are ca
scop evaluarea algoritmilor evolutivi multi-obiectiv (MOEA) privind sarcina de optimizare a
portofoliului, luând în considerare diferite resticții nestandard.
Cuvinte cheie
• Meta-euristici
• Optimizarea portofoliului
• Optimizare muti-obiectiv
• Front Pareto
• Maximizarea randamentelor
• Minimizarea riscurilor
• Metrici de performanță
• SPEA 2
• NSGA II
• MOPSO
• MOEA/D-DRA
• CMOPSO
• ANSGA III
3
CUPRINS TEZĂ
INTRODUCERE..................................................................................................................... 13
CAPITOLUL 1. Teoria portofoliilor de active financiare .................................................. 23
1.1. Piața financiară: aspecte introductive ......................................................................... 23
1.1.1. Considerații de ordin general .................................................................................. 24
1.1.2. Structura generală a piețelor financiare .................................................................. 27
1.1.3. Participanții pe piața financiară .............................................................................. 29
1.2. Selecția și managementul portofoliului de acțiuni ......................................................... 30
1.2.1. Elemente de calcul și noțiuni introductive .............................................................. 31
1.2.2. Definirea problemei de optimizare ......................................................................... 34
1.3. Modelul fundamental de selecție a portofoliului ........................................................... 36
1.3.1. Modelul Markowitz ................................................................................................ 36
1.3.2. Raportul Sharpe ...................................................................................................... 39
1.3.3. Alte abordări privind cuantificarea riscului ............................................................ 40
1.3.3.1. Abaterea medie absolută .................................................................................. 40
1.3.3.2. Diferența medie Gini........................................................................................ 41
1.3.3.3. Valarea la risc .................................................................................................. 41
1.3.3.4. Valoarea la risc condiționată ............................................................................ 42
1.4. Dreapta fundamentală a pieței de capital – CML .......................................................... 42
1.5. Modelul CAPM - „Capital Asset Pricing Model” ......................................................... 44
CAPITOLUL 2. Metode moderne de optimizare ................................................................ 49
2.1. Condiții de optimalitate în programarea neliniară ......................................................... 49
2.1.1. Condiții de optimalitate în cazul fără restricții ....................................................... 49
2.1.1.2. Condiții de ordinul II ....................................................................................... 49
2.1.2. Condiții de optimalitate în cazul cu restricții .......................................................... 50
2.1.2.1. Metoda multiplicatorilor lui Lagrange ............................................................. 50
2.1.2.2. Condițiile Karush – Kuhn – Tucker ................................................................. 51
2.1.3. Convexitatea ........................................................................................................... 52
2.1.3.1. Condițiile de ordinul I sunt suficiente .............................................................. 52
2.1.3.2. Punctul de minim local este punct de minim global ........................................ 53
2.1.3.3. Punctul de maxim la limita zonei fezabile ....................................................... 54
2.2. Optimizarea multi-obiectiv ............................................................................................ 54 2.2.1. Soluții Pareto ........................................................................................................... 55
2.2.2. Calculul frontului Pareto ......................................................................................... 56
2.3. Metode moderne de optimizare: meta-euristici .......................................................... 57
2.3.1. Concepte introductive ............................................................................................. 57
2.3.2. Clasificarea meta-euristicilor .................................................................................. 60
2.3.3. Hibridizarea meta-euristicilor: concept și clasificare ............................................. 62
2.3.3.1. Hibridizarea meta-euristică cu meta-euristica ................................................. 62
2.3.3.2. Hibridizarea meta-euristicilor cu metode exacte ............................................. 64
2.3.3.3. Observații privind clasificarea metodelor hibride ............................................ 66
2.4. Meta-euristici identificate pentru problema de optimizare a portofoliilor ..................... 66
2.5. Restricții nestandard și funcții de penalizare ................................................................. 69
2.5.1. Restricții nestandard utilizare în optimizarea portofoliilor ..................................... 69
2.5.1.1. Restricții privind costurile de tranzacționare ................................................... 69
2.5.1.2. Restricții Tracking Error .................................................................................. 70
2.5.1.3. Restricții prag de cumpărare ............................................................................ 70
2.5.1.4. Restricții privind cifra de afaceri ..................................................................... 70
2.5.1.5. Restricții de cardinalitate ................................................................................. 71
2.5.1.6. Restricții de diversificare ................................................................................. 71
2.5.1.7. Restriții de tip pre-atribuire .............................................................................. 71

4
2.5.1.8. Restricții privind efectul de levier.................................................................... 71
2.5.1.9. Portofoliul 130-30 ............................................................................................ 72
2.5.2. Funcții de penalizare utilizare în optimizarea portofoliilor .................................... 72
2.5.2.1. Penalizări statice .............................................................................................. 74
2.5.2.2. Penalizări dinamice .......................................................................................... 75
2.5.2.3. Penalizări inspirate din procesul de călire al metalului ................................... 76
2.5.2.4. Penalizări de tip adaptiv ................................................................................... 78
2.5.2.5. Penalizări de tip co-evolutiv ............................................................................ 80
CAPITOLUL 3. Descrierea meta-euristicilor multi-obiectiv de optimizare utilizate în
cercetarea aplicativă ............................................................................................................... 83
3.1. Aspecte introductive ...................................................................................................... 83
3.2. Descrierea meta-euristicilor multi-obiectiv utilizate în cercetarea aplicativă ................ 88
3.2.1. SPEA 2 .................................................................................................................... 91
3.2.2. NSGA II .................................................................................................................. 94
3.2.3. MOPSO ................................................................................................................... 98
3.2.4. MOEA/D-DRA ..................................................................................................... 100
3.2.5. CMOPSO .............................................................................................................. 102
3.2.6. ANSGA III ............................................................................................................ 106
3.3. Descrierea metricilor de performanță utilizate pentru compararea rezultatelor obținute
de meta-euristicile multi-obiectiv ....................................................................................... 113
CAPITOLUL 4. Analiza comparativă utilizând 6 meta-euristici multi-obiectiv pentru a
aproxima frontiera eficientă ................................................................................................ 117
4.1. Comparații între Frontul Pareto adevarat și Frontul Pareto aproximat prin meta-euristici
multi-obiectiv ...................................................................................................................... 123
4.2. Portofoliul Mean-Variance: Frontiera eficientă ........................................................... 127
4.3. Rezultate sumare privind Frontul Pareto ..................................................................... 131
4.4. Nivelul de risc, rentabilitatea și structura portofoliilor optime .................................... 133
4.5. Timpul de execuție și metrici de performanță ............................................................. 155
4.6. Observații și concluzii.................................................................................................. 162
Capitolul 5. Exemple de optimizare a portofoliilor cu restricții nestandard ................. 165
5.1. Restricții de buget ........................................................................................................ 168
5.2. Restricții privind costurile de tranzacție ...................................................................... 169
5.3. Restricții privind cifra de afaceri ................................................................................. 170
5.4. Restricții tip Tracking-Error ........................................................................................ 172
5.5. Restricții tip portofoliu 130-30 .................................................................................... 173
5.6. Restricții privind efectul de levier................................................................................ 174
5.7. Observații și concluzii.................................................................................................. 176
Concluzii și propuneri .......................................................................................................... 177
Bibliografie ............................................................................................................................ 189
5
INTRODUCERE
Într-o economie, resursele financiare evoluează ciclic. Un aspect foarte important este
transformarea economiilor în investiții. Fiecare afacere are nevoie de fonduri pentru a începe
și pentru a funcționa pe termen lung. Aceste fonduri vor fi puse la dispoziția investitorilor prin
diferite funcții ale pieței financiare, care joacă un rol cheie în stimularea creșterii economice.
O modalitate accesibilă de investiție este investiția în titluri financiare, de obicei
tranzacționate pe bursele de valori. Pentru investitori este o adevărată provocare să găsească
titlul financiar sau portofoliul format din mai multe titluri care să le aducă un câștig mare și să
fie cât mai puţin riscant posibil. Dilema fundamentală a investiţiilor în active financiare este
alegerea dintre obținerea unei rentabilități sigure, dar scăzute, sau asumarea unui risc
compensat de o rentabilitate preconizată mai mare. Contrar a ceea ce s-ar putea imagina,
obiectivul unei persoane care se confruntă cu o decizie de investiție nu este strict acela de a
maximiza randamentul preconizat al investițiilor sale. Obiectivul său ar trebui să fie (1)
maximizarea rentabilității preconizate pentru un anumit nivel de risc sau (2) minimizarea
riscului pentru un nivel de rentabilitate dorit. Prin urmare, combinația risc-rentabilitate este
baza tuturor deciziilor de investiții.
Pasul fundamental în teoria selecției portofoliului a fost făcut de Markowitz în anul
1952 prin introducerea modelului de selecție a portofoliului, cunoscut astăzi ca teoria
modernă a portofoliului.
Conceptul de optimizare a portofoliului stă la bază satisfacerii criteriului de
rentabilitate – risc. Markowitz este cel care introduce noțiunea de risc ca o componentă de
aceeași importanță ca cea a rentabilităţii, propunând dispersia ca măsura a riscului. Astfel, un
portofoliu este considerat a fi optim dacă nu există un alt portofoliu cu aceeași rentabilitate şi
un risc mai mic, sau cu acelasi risc şi o rentabilitate mai mare. Această graniță este cunoscută
sub denumirea de frontieră eficientă sau front Pareto.
Din punct de vedere matematic, frontiera eficientă poate fi determinată prin
minimizarea riscului simultan cu maximizarea rentabilităţii. Astfel problema de optimizare a
portofoliului aparține familiei de probleme multi-obiectiv. Deoarece frontieră eficientă
conține în mod normal un număr infinit de puncte, este de asemenea utilă o aproximare a
acestui front, făcută cu suficientă acurateţe, care să conțină un număr finit de soluții
optime. Aceste soluții trebuie să fie cât mai apropiate posibil de frontul exact (adevăratul front
Pareto) și, în plus, să prezinte o distribuție uniformă. Dacă una dintre aceste două proprietăți
nu este îndeplinită, aproximarea obținută poate să nu fie utilă pentru factorul de decizie.
Pe baza teoriei lui Markowitz, Sharpe, Lintner și Mossin au dezvoltat în anii '60 un
model (Capital Asset Pricing Model - CAPM), care conduce, în anumite ipoteze, la relația de
echilibru dintre rentabilitatea preconizată a oricărui activ financiar și riscul său. Zece ani mai
târziu, la sfârșitul anilor '70, Ross a dezvoltat un model multifactorial alternativ numit APT
(Arbitrage Pricing Theory). Modelul Markowitz, CAPM și APT constituie astfel nucleul dur
al teoriei clasice a portofoliilor.
Începuturile meta-euristicilor se regăsesc în anii 1980. Acestea reprezintă un set de
algoritmi care permit găsirea celei mai rapide și eficiente soluții pentru o gamă largă de
probleme de optimizare complexe, pentru care metodele convenționale sunt limitate sau chiar
ineficiente. Meta-euristicile își propun să găsească optimul global G, evitând astfel pericolul
de a cădea în capcana unui optim local L.
O meta-euristică poate fi adaptată la diferite tipuri de probleme. Una dintre provocările
proiectării meta-euristicilor este de a facilita alegerea metodei și a setărilor parametrilor
pentru a se potrivi unei anumite probleme.
Meta-euristicile lucrează iterativ și sunt organizate în jurul a trei concepte:
diversificare (explorare globală), intensificare (exploatare locală) și stocare (învățare).
Având în vedere că problema de optimizare a portofoliilor este definită ca o problemă
de optimizare multi-obiectiv, de-a lungul anilor s-au dezvoltat tehnici moderne de rezolvare a
6
problemelor de optimizare multi-obiectiv (MOP). Utilizarea algoritmilor evolutivi (EA)
pentru rezolvarea MOP s-a dovedit de un interes deosebit, atât teoretic, cât și practic. Aceasta
a condus la algoritmi evolutivi multi-obiectiv (MOEA).
În prezența mai multor restricții, problema optimizării portofoliului devine foarte
complicată și trebuie identificată o soluție eficientă. Mai mult decât atât, algoritmii evolutivi
multi-obiectiv MOEA existenți nu pot fi utilizați direct pentru a rezolva problema de
optimizare a portofoliului cu restricții nestandarde, deoarece sunt o serie de probleme de
configurare legate de aplicarea MOEAs pentru soluționarea problemei de optimizare a
portofoliului cu restricții. Implementarea cu succes a problemei de optimizare a portofoliului
cu restricții necesită testarea de noi abordări algoritmice și tehnice.
Scopul cercetării va fi de a identifica și testa meta-euristici multi-obiectiv pentru
optimizarea portofoliilor, inclusiv în cazul introducerii unor restricţii mai complexe.
Contribuții proprii
Contribuţiile aduse pe parcursul programului de cercetare asociat acestei teze se
subsumează scopului generic de a utiliza tehnici de inteligenţă computaţională pentru
modelarea şi predicţia pieţelor financiare. Mai specific, am avut drept obiectiv explorarea,
implementarea şi testarea unor meta-euristici de optimizare multiobiectiv inspirate din natură
(din categoria algoritmilor evolutivi si a celor bazaţi pe inteligenţa colectivă – swarm
intelligence) cu aplicaţii în optimizarea portofoliilor. Abordarea noastră diferă de abordarea
tradiţională sub multe aspecte:
1. Deşi modelul lui Markowitz de selecţie a portofoliilor este in esenţă o problemă de
programare bi-obiectiv (maximizarea randamentului aşteptat, simultan cu minimizarea
riscului), în abordarea tradiţională se utilizează în mod repetat un algoritm de
optimizare mono-obiectiv de programare convexă (mai precis, de programare
pătratică) prin care se minimizează riscul (definit de o formă pătratică) pentru un şir de
nivele succesive ale randamentului aşteptat. Practic, al doilea obiectiv (maximizarea
randamentului aşteptat) este tratat ca o restricţie în cadrul problemei de optimizare
mono-obiectiv. Se determină astfel un număr limitat de soluţii situate pe frontiera
eficientă (frontul Pareto), fără a face apel la tehnici de optimizare multi-obiectiv.
Această abordare tradiţională simplificatoare poate recurge astfel la tehnici clasice de
optimizare de tip gradient, despre care se ştie însă că nu garantează atingerea
optimului global, existând riscul de a fi prinse în capcana unui optim local. In contrast
cu abordarea tradiţională, în această teză se recurge explicit doar la algoritmi de
optimizare multi-obiectiv, definiţi de o serie de meta-euristici inspirate din natură.
Aceştia sunt capabili să găseasă direct soluţii multi-obiectiv sub forma fronturilor
Pareto. In plus, prin natura lor, meta-euristicile respective sunt intrinsec proiectate să
exploreze spaţiul soluţiilor în cautarea optimului glabal, operând în acest sens cu
populaţii de soluţii şi strategii evolutive de imbunătăţire a acestora.
2. Abordarea clasică bazată pe algoritmi de optimizare de tip gradient nu se poate aplica
decât cel mult unor probleme de programare convexă (cel mai frecvent, limitându-se
la subclasa problemelor de programare pătratică). Din acest motiv, utilizarea lor este
restrânsă fortuit la modelul de optimizare clasic al lui Markovitz, sau variante ale
acestuia, în cadrul cărora funcţia obiectiv este pătratică, dar toate restricţiile sunt
liniare şi în plus variabilele sunt cu valori reale. Introducerea unor variabile cu valori
intregi ar transforma spaţiul soluţiilor într-o reţea discretă de puncte, deci într-o
mulţime neconvexă, problemă inabordabilă prin algoritmii uzuali, gen programare
pătratică. Problemele de optimizare a portofoliilor presupun insă de multe ori restricţii
ce conţin variabile intregi (de exemplu, tranzacţionarea activelor in loturi, ce
reprezintă numere întregi). Prin contrast, meta-euristicile multi-obiectiv utilizate în
această teză nu suferă de astfel de limitări, fiind capabile să rezolve inclusiv probleme
de optimizare neconvexe, respectiv să opereze cu variabile intregi, dacă anumite
7
adaptări sunt făcute în designul metaeuristicii (spre exemplu, se utilizează operatori
genetici adecvaţi optimizării în numere întregi, respectiv se utilizează funcţii de
penalizare pentru a integra restricţii neliniare, etc.).
3. Observaţiile de la punctul precedent cu privire la potenţialul superior al meta-
euristicilor în soluţionarea unor probleme de optimizare multiobiectiv mult mai
complexe, incluzând diverse tipuri de restricţii neliniare, ne-au deschis posibilitatea de
a aborda probleme de optimizare a portofoliilor ce nu se limitează la modelul clasic de
tip Markowitz. Astfel, dacă restricţiile standard din modelul Markowitz sunt de tip
liniar, utilizarea funcţiilor de penalizare în cadrul meta-euristicilor multi-obiectiv ne
dau posibilitatea de a construi modele mult mai realiste, prin intregrarea de restricţii
precum: restricții privind costurile de tranzacționare; restricții de tip Tracking Error;
restricții de tip prag de cumpărare; restricții privind cifra de afaceri; restricții de
cardinalitate; restricții de diversificare; etc.
4. Rezolvarea tuturor acestor probleme neconvenţionale nu era posibilă din postura de
utilizatori ai unui software pre-existent, ci ne-a pus in situaţia de a dezvolta propriile
noastre programe, la nivel de cod sursă. In condiţiile utilizării unor funcţii obiectiv şi
unor restricţii specifice, diferite de la o problemă la alta, meta-euristicile trebuiau
adaptate şi personalizate pentru fiecare tip de problemă în parte. Spre exemplu,
funcţiile de penalizare se definesc în raport cu forma particulară a restricţiilor şi au
rolul de a integra restricţiile în funcţia obiectiv prin extinderea corespunzătoare a
acesteia. O astfel de personalizare a algoritmului nu se poate face decât la nivel de
cod sursă. Adaptarea şi personalizarea algoritmilor s-a făcut utilizând mediul de
programare MATLAB.
Diseminarea rezultatelor activității de cercetare
Diseminarea rezultatelor activității de cercetare s-a făcut prin publicare a 14 articole:
• 1 lucrare publicată într-o revistă ISI
• 5 lucrări publicate în reviste cotate CNCSIS B+
• 1 lucrare publicată într-o revistă OpenAccess, și indexată PubMed
• 1 lucrare prezentată într-o conferință internațională cu participare în străinătate
• 6 lucrări prezentate în conferințe internaționale cu participare în țară
8
CAPITOLUL 1. TEORIA PORTOFOLIILOR DE ACTIVE FINANCIARE
1.1. Piața financiară: aspecte introductive
Noţiunea de piață financiară descrie orice piață în care se realizează tranzacționarea de
valori mobiliare, inclusiv acțiuni, obligațiuni, valute și instrumente derivate. Piața financiară
este locul de întâlnire al ofertei și cererii de active financiare în care investitorii intervin atunci
când iau decizia de a cumpara sau de a vinde diferite active financiare.
1.1.1. Considerații de ordin general
În 1965, economistul american E. Fama a definit pentru prima dată conceptul de „piață
eficientă”, bazându-se pe caracterul aleatoriu al prețurilor acțiunilor. Lucrările sale în
domeniul eficienței piețelor au devenit clasice.
Cu o generație în urmă, ipoteza piețelor eficiente a a fost acceptată pe scară largă de
către lumea academică financiară. În general, se credea că piețele de valori mobiliare erau
extrem de eficiente în reflectarea informațiilor despre acțiuni individuale și despre piața de
valori în ansamblu. Opinia acceptată a fost că, atunci când apar informații, știrile se
răspândesc foarte repede și sunt încorporate fără întârziere în prețurile titlurilor. Astfel, nici o
analiză tehnică (ce reprezintă studiul prețurilor stocurilor anterioare, în încercarea de a prezice
prețurile viitoare), nici măcar analiza fundamentală (care este analiza informațiilor financiare,
cum ar fi câștigurile companiei, valorile activelor, etc., pentru a ajuta investitorii să selecteze
„stocurile subevaluate”) nu ar permite unui investitor să obțină profituri mai mari decât cele
care ar putea fi obținute prin deținerea unui portofoliu de acțiuni individuale selectate
aleatoriu cu riscuri comparabile. Astfel va fi imposibil pentru un investitor să găsească un titlu
financiar care să depășească rata de rentabilitate medie a piaței.
Există mai multe modele alternative de echilibru pe piețele financiare. Modelul de
bază este Capital Asset Pricing Model – CAPM. În acest model, nivelul riscului unei investiții
este măsurat prin corelația dintre rata de rentabilitate a acesteia și rata de rentabilitate a unui
portofoliu special care conține toate titlurile disponibile în piață. Dintre alternativele la
modelul CAPM ce au fost propuse pentru a descrie echilibrul pe piețele financiare remarcăm
modelul multifactorial dezvoltat de Ross la sfârșitul anilor '70, numit APT (Arbitrage Pricing
Theory).
1.1.2. Structura generală a piețelor financiare
Structura generală a piețelor financiare este data de următoarele tipuri de clasificare:
- Piața datoriilor și capitalurilor proprii
- Piețele primare și secundare
- Piețele monetare și de capital
1.1.3. Participanții pe piața financiară
Participanți pe piața financiară interesați de tranzacții sunt, în principal: societăți
comerciale, Guvernul, instituțiile din sectorul public, intermediarii și nu în ultimul rând
persoanele fizice. Printre aceștia se numără și emitenții de titluri financiare, cum sunt:
societăți comerciale pe acțiuni, Guvernul prin emiterea de obligațiuni și garanții de stat,
instituțiile din sectorul public prin emiterea de obligațiuni sau bilete de trezorerie.
Un rol important în piața financiară îl dețin intermediarii financiari. Aceștia sunt
motorul pieței care fac să crească volumul de tranzacții pe piață.
Intermediarii financiari se încadrează în trei categorii:
1. Instituții depozitare (bănci). Aceste instituții includ băncile comerciale, asociații de
economii și împrumuturi, bănci de economii mutuale și uniuni de credit.
9
2. Instituții contractuale de economii. Acestea sunt intermediari financiari care
colectează fonduri la intervale periodice de timp, pe bază de contract: companiile
de asigurări și fondurile de pensii.
3. Intermediarii de investiții. Această categorie de intermediari financiari includ
instituțiile financiare, fondurile mutuale și fondurile mutuale de pe piața monetară.
1.2. Selecția și managementul portofoliului de acțiuni
Selecția portofoliului implică găsirea unei modalități optime de a distribui un anumit
buget pe un set de active disponibile pe piață.
Construirea unui portofoliu eficient necesită parcurgerea următoarelor etape:
a) identificarea profilului de câștig – risc pentru fiecare combinație posibilă de titluri ce
pot forma un portofoliu;
b) identificarea combinației de titluri riscante cu dispersie minima (măsură a riscului) în
funcție de gradul de aversiune al fiecărui investitor față de risc;
c) stabilirea portofoliului complet prin combinarea portofoliului de risc minim cu titluri
fără risc pe care investitorul intenționează să le includă în portofoliul său.
Un investitor trebuie să aleagă o combinație de titluri într-un cadru incert. Selecția
titlurilor depinde și de modul de gestiune a portofoliului, astfel investitorul poate alege între
următoarele două obiective principale:
• Gestionarea pasivă a portofoliului. Scopul principal este de a reproduce cât mai bine
un indice financiar.
• Gestionarea activă a portofoliului. Dacă piața financiară nu este eficientă, pot exista
alocări mai bune de active, decât cele componente într-un indice financiar.
1.2.1. Elemente de calcul și noțiuni introductive
Printre noțiunile introductive relevante se numără: rentabilitatea așteptată a
portofoliului și riscul portofoliului.
1.2.2. Definirea problemei de optimizare
Teoria modernă a portofoliilor este un subiect care a generat numeroase cercetări în
ultimii aproximativ șaptezeci de ani, mai ales că Henry Markowitz (Markowitz, 1952) a
revoluționat peisajul financiar cu modelul Mean-Variance. Aceasta constă în definirea unui
portofoliu eficient. Portofoliu eficient este acela care are un nivel minim de risc pentru o
rentabilitate prevăzută sau, în mod echivalent, o rentabilitate sperată maximă pentru un
anumit nivel de risc acceptat.
O problemă de optimizare multi-obiectiv (MOP) poate fi definită sub forma:
𝑴𝑶𝑷 = {𝒎𝒊𝒏𝑭(𝒙) = (𝒇𝟏(𝒙), 𝒇𝟐(𝒙), … , 𝒇𝒏(𝒙))
𝒔𝒖𝒃𝒋𝒆𝒄𝒕 𝒕𝒐 𝒙 ∈ 𝑺}
(1.16.)
unde n (cu n ≥ 2) este numărul de obiective, 𝑥 = (𝑥1, 𝑥2, … , 𝑥𝑘) este vectorul variabilelor de
decizie. Spațiul de căutare S reprezintă spațiul de decizie al MOP sau setul de soluții
fezabile. Spațiul căruia îi aparține vectorul obiectivelor este numit spațiul
obiectivelor. Setul Y = F (S) reprezintă punctele fezabile din spațiul obiectivelor. 𝐹(𝑥) =(𝑓1(𝑥), 𝑓2(𝑥), … , 𝑓𝑛(𝑥)) este vectorul obiectivelor care trebuie optimizate și 𝑦 = 𝐹(𝑥) =(𝑦1, 𝑦2, … , 𝑦𝑛) este un punct în spațiul obiectivelor, cu 𝑦𝑖 = 𝑓𝑖(𝑥).
Cel mai adesea, în cazul MOP cu obiective contradictorii, nu există o singură soluție
care să poată fi considerată cea mai bună, ci un set de alternative care reprezintă cele mai
bune compromisuri între toate obiectivele.
10
Metodele de optimizare multi-obiectiv se bazează pe concepte importante precum
dominarea, optimizarea Pareto, setul optim Pareto sau frontul Pareto. Obținerea frontului
Pareto al unui MOP este scopul principal al optimizării multi-obiectiv.
1.3. Modelul fundamental de selecție a portofoliului
1.3.1. Modelul Markowitz
În 1952, Harry Markowitz a introdus teoria portofoliilor în articolul „Portfolio
Selection” publicat în Journal of Finance. Datorită contribuțiilor aduse teoriei portofoliilor,
Markowitz câștigă premiul Nobel în 1990.
Modelul Markowitz a fost propus ca o problemă de optimizare cu un singur obiectiv.
Astfel se disting două abordări. În prima abordare, funcția obiectiv este considerată
rentabilitatea așteptată (formă liniară) care va fi maximizată, în timp ce riscul este definit ca
restricție. Contrar, a doua abordare propune să se minimizeze riscul (definit de o formă
pătratică) pentru un şir de niveluri succesive ale randamentului aşteptat (definit ca o
restricție). În ambele cazuri, problema de optimizare se va rula succesiv pentru a genera un
număr finit de portofolii optime.
Apariția unor tehnici de optimizare multi-obiectiv a creat posibilitatea de a trata
problema de optimizare a portofoliilor ca o problemă bi-obiectiv. Astfel, cele două obiective,
maximizarea rentabilității așteptate și minimizarea riscul pot fi optimizate simultan. Din
această perspectivă, problema fundamentală de selecție a portofoliului poate fi formulată după
cum urmează (Pai, 2017):
𝑴𝒂𝒙 (∑ 𝒘𝒊𝝁𝒊
𝑵
𝒊=𝟏
) (1.27.)
𝑴𝒊𝒏 (√∑ ∑ 𝒘𝒊𝒘𝒋𝝈𝒊𝒋𝒋𝒊 ) , cu restricțiile standard (1.28.)
∑ 𝒘𝒊 = 𝟏
𝑵
𝒊=𝟏
(1.29.)
𝟎 ≤ 𝒘𝒊 ≤ 𝟏 (1.30.)
unde: N este numărul de titluri, 𝑤𝑖 este ponderea individuală a titlului i, μi este rentabilitatea
așteptată a titlului i, 𝜎𝑖𝑗 este covarianța dintre rentabilitatea titlurilor i și j;
Setul de soluții optime ale modelului Markowitz constituie frontiera eficientă a
problemei de selecție a portofoliului. Aceasta este, de obicei, reprezentată ca o curbă în plan,
unde ordonata este rentabilitatea așteptată a portofoliului și abscisa este abaterea standard.
Acestea sunt portofoliile în care rentabilitatea nu poate crește fără a crește și riscul sau riscul
nu poate scădea fără a scădea și rentabilitatea.
1.3.2. Raportul Sharpe
Câțiva ani mai târziu, profesorii James Tobin (Yale) și William Sharpe (Stanford)
aduc contribuții majore modelului Markowitz. În baza propunerilor făcute câștigă premiul
Nobel.
Raportul Sharpe este:
(𝝁𝒊 − 𝑹𝒇)
𝝈 (1.31.)
unde: 𝜇𝑖 este rata de rentabilitate medie a unei investiții i, Rf este cea mai bună rată de
rentabilitate disponibilă a unui titlu fără risc, iar σ este abaterea standard a lui 𝜇𝑖.

11
Raportul Sharpe este folosit pe scară largă pentru a calcula rentabilitatea ajustată la
risc, chiar dacă are dezavantajele sale, și anume, dacă rentabilitatea așteptată nu urmează o
distribuție normală, sau portofoliile posedă riscuri neliniare.
1.3.3. Alte abordări privind cuantificarea riscului
1.3.3.1. Abaterea medie absolută
1.3.3.2. Diferența medie Gini
1.3.3.3. Valarea la risc
1.3.3.4. Valoarea la Risc Condiționată
1.4. Dreapta fundamentală a pieței de capital – CML
Într-o piață de capital în echilibru, toate portofoliile optime sunt agregate într-un
singur portofoliu de piață, notat m și oferta este egală cu cererea pentru fiecare activ. După
agregarea tuturor posibilităților de selectare ale investitorilor, portofoliul pieței conține fiecare
titlu tranzacționabil, în proporție 𝒘𝒊.
Presupunând că există așteptări omogene, toți investitorii se confruntă cu aceeași
frontieră eficientă și că frontiera eficientă constă în combinații liniare de 𝑟𝑓 și m. Această
frontieră liniară eficientă este denumită dreapta fundamental a piaței de capital (CML).
Ecuația dreptei CML este:
𝑬(𝒓𝒑) = [𝑬(𝒓𝒎) − 𝒓𝒇
𝝈𝒎] 𝝈𝒑 (1.42.)
unde 𝑬(𝒓𝒑) și 𝝈𝒑 sunt rentabilitatea așteptată și abaterea standard a oricărui portofoliu
eficient p.
1.5. Modelul CAPM - „Capital Asset Pricing Model”
În selectarea titlurilor individuale, se observă că investitorii nu sunt, în special,
preocupați de riscul total al activului, σ. Riscul total al unui activ se împarte în componenta
sistematică și componenta nesistemică. Porțiunea nesistematică a riscului total poate fi ușor
diversificată deținând un portofoliu de titluri. Riscul sistematic nu este atât de ușor de
diminuat. Riscul sistematic afectează toate titlurile de pe piață și este nediversificabil. Prin
urmare, teoria portofoliului sugerează că numai riscul nediversificabil (sau sistematic) poate fi
prevăzut.
CAPM („Capital Asset Pricing Model”) este o relație în care rata de rentabilitate
preconizată a celui de-al i titlu este o funcție liniară a riscului sistematic al acelui titlu,
reprezentat de 𝜷𝒊.
Implicațiile CAPM sunt rezumate succint într-o singură ecuație:
𝑬(𝒓𝒊) = 𝒓𝒇 + [𝑬(𝒓𝒎) − 𝒓𝒇]𝜷𝒊 (1.43.)
unde 𝜷𝒊 – este variabila independentă care reprezintă riscul sistematic al titlului i; 𝑬(𝒓𝒊)
este rata de rentabilitate preconizată a titlului i, variabila dependentă; 𝒓𝒇 – este rata de
rentabilitate a activului fără risc; 𝑬(𝒓𝒎) − 𝒓𝒇 este prima de risc de piață

12
CAPITOLUL 2. METODE MODERNE DE OPTIMIZARE
2.1. Condiții de optimalitate în programarea neliniară
2.1.1. Condiții de optimalitate în cazul fără restricții
2.1.1.1. Condiții de ordinul I
Proprietățile funcție f continuă și derivabilă, luând în considerare un punct x∗ minim,
prin intermediul definiției derivatei, sunt sintetic prezentate în continuare.
𝒇′(𝒙∗) = 𝐥𝐢𝐦𝒙→𝒙∗
𝒇(𝒙) − 𝒇(𝒙∗)
𝒙 − 𝒙∗ (2.1)
2.1.1.2. Condiții de ordinul II
Se presupune că funcția f este de două ori continuu derivabilă. Poate fi folosită
teorema lui Taylor (Hendrix and Boglárka, 2010). Având un punct 𝑥∗ cu 𝑓′(𝑥∗) = 0, atunci:
𝒇(𝒙) = 𝒇(𝒙∗) +𝟏
𝟐𝒇′′(𝝃)(𝒙 − 𝒙∗)𝟐 (2.3)
2.1.2. Condiții de optimalitate în cazul cu restricții
Multe nume sunt conectate la enunțurile matematice cu privire la optimalitate atunci
când există restricții. Condiții cunoscute sunt așa-numitele condiții Karush – Kuhn – Tucker
(condiții KKT). J. L. Lagrange a studiat întrebările de optimizare supuse restricțiilor egalitate
în 1813. În 1939, W. Karush a prezentat în teza sa, condiții care ar trebui să fie valabile pentru
un punct optim cu restricții de egalitate. Independent F. John a prezentat câteva condiții de
optimalitate pentru o problemă specifică în 1948. În cele din urmă, condițiile de prim ordin au
devenit într-adevăr cunoscute după o prezentare dată de H.W. Kuhn și A.W. Tucker la un
simpozion în 1950.
2.1.2.1. Metoda multiplicatorilor lui Lagrange
A fost dezvoltată pentru restricții egalitate ℎ𝑖(𝑥) = 0, dar poate fi aplicată și pentru
restricții inegalitate ℎ𝑖(𝑥) ≤ 0.
În formularea problemei de optimizare cu restricții egalitate:
( )( ) restrictie model - n1,i 0
obiectiv functia - E xxf n
==
xh
Opt
i
Stabilirea punctelor staţionare a funcţiei f(x) este echivalentă cu stabilirea punctelor
staţionare a unei noi funcţii, fără restricții, definită astfel:
( ) ( ) ( ),,...,,,,...,,1
2121 ==
+m
j
jj
def
nn xhxfxxxL (2.5)
unde 𝑓(𝑥) este funcția obiectiv care trebuie minimizată, iar j se numesc multiplicatori
Lagrange. Restricțiile ℎ𝑖(𝑥) sunt adăugate la funcția obiectiv cu multiplicatori Lagrange, iar
aceasta poate fi interpretată ca funcție cu variabile duble. Cea mai importantă proprietate a
acestei funcții este că, în anumite condiții, se poate arăta că pentru orice punct de minim 𝑥∗,
există o soluție dublă 𝜆∗ astfel încât (𝑥∗, 𝜆∗) să fie un punct șa de 𝐿(𝑥, 𝜆):
𝒙∗, 𝝀∗ este soluția 𝐦𝐢𝐧𝒙
𝐦𝐚𝐱𝝀
𝑳(𝒙, 𝝀) (2.6)
unde 𝑥∗este punct de minim pentru L ( 𝜆∗ constant) și 𝜆∗ este punct de maxim.

13
2.1.2.2. Condițiile Karush – Kuhn – Tucker
Teorema 2.3. Condițiile Karush – Kuhn – Tucker. Dacă 𝑥∗ este punct de minim al
funcției neliniare f, atunci există un număr 𝜆∗ astfel încât :
−𝛁𝒇(𝒙∗) = ∑ 𝝀𝒊∗ 𝛁𝒉𝒊(𝒙∗)
𝝀𝒊∗ 𝒉𝒊(𝒙∗) = 𝟎 complementaritate
𝝀𝒊∗ ≥ 𝟎 pentru restricțiile 𝒉𝒊(𝒙) ≤ 𝟎
(2.8)
Această teoremă ne arată că direcția de optimizare (−∇𝑓(𝑥∗) într-o problemă de
minimizare și ∇𝑓(𝑥∗) într-o problemă de maximizare) în optim este o combinație între
gradienții restricțiilor active.
2.1.3. Convexitatea
Rezolvarea unei probleme de programare neliniară (dacă este o problemă de optimizare
convexă) se bazează, în principal, pe trei proprietăți enunțate astfel:
1. Dacă f și ℎ𝑖 (restricții) sunt funcții derivabile, un punct KKT (și un punct staționar)
este, de asemenea, un punct de minim. Rezultă că, condițiile KKT sunt suficiente
pentru optimalitate.
2. Dacă este găsit un punct de minim, acesta este, de asemenea, un punct de minim
global.
3. Dacă un punct de maxim este identificat la limita regiunii fezabile, acest punct este un
punct de extrem.
Noțiunea de convexitate nu este direct legată de derivabilitate. Este adecvată pentru
proprietatea 1.
2.2. Optimizarea multi-obiectiv
Putem formula o problemă de optimizare multi-obiectiv după cum urmează:
𝐦𝐢𝐧 𝒇(𝒙) = [
𝒇𝟏(𝒙𝟏, 𝒙𝟐, … , 𝒙𝒏)
𝒇𝟐(𝒙𝟏, 𝒙𝟐, … , 𝒙𝒏)⋮
𝒇𝒍(𝒙𝟏, 𝒙𝟐, … , 𝒙𝒏)
] (2.18)
cu 𝑥 ∈ Ω
unde 𝑓: ℝ𝑛 → ℝ𝑙 și Ω ⊂ ℝ𝑛. De exemplu setul de restricții Ω poate avea forma:
𝛀 = {𝒙: 𝒉(𝒙) = 𝟎, 𝒈(𝒙) ≤ 𝟎} (2.19)
unde ℎ: ℝ𝑛 → ℝ𝑚, 𝑔 ∶ ℝ𝑛 → ℝ𝑝, 𝑚 ≤ 𝑛.
De regulă, există trei tipuri de probleme de optimizare multi-obiectiv: se maximizează
toate funcțiile obiectiv, se minimizează toate funcțiile obiectiv și a treia categorie – se
minimizează anumite funcți obiectiv și se maximizeză restul.
2.2.1. Soluții Pareto
Problemele de optimizare multi-obiectiv, presupun găsirea celor mai bune
compromisuri. Un punct optim al unei probleme de optimizare multi-obiectiv este denumit
soluție Pareto.
2.2.2. Calculul frontului Pareto
Pentru a determina frontul Pareto, sunt comparate două câte două soluții iar soluția
dominată este eliminată din setul de candidați. Astfel, frontul Pareto este format din soluții
nedominate.
14
2.3.Metode moderne de optimizare: meta-euristici
2.3.1. Concepte introductive
Începuturile meta-euristicilor se regăsesc în anii 1980. Acestea reprezintă un set de
algoritmi care permit găsirea celei mai rapide și eficiente soluții pentru o gamă largă de
probleme de optimizare complexe, pentru care metodele convenționale sunt limitate sau chiar
ineficiente. Meta-euristicile își propun să găsească optimul global G fără ca soluția să se
oprească într-un optim local L.
Meta-euristicile lucrează iterativ și sunt organizate în jurul a trei concepte:
diversificarea (explorarea), intensificarea (exploatarea) și stocare (învățare). Diversificarea
sau explorarea este procesul care direcționează procedura de colectare a informațiilor despre
problema de optimizare. Cea mai simplă strategie de diversificare este reluarea periodică a
procesului de căutare dintr-o soluție generată aleator sau alegerea în mod judicios a setului de
soluții admisibile într-o regiune care nu a fost încă acoperită. Pe de altă parte, intensificarea
sau exploatarea utilizează informațiile deja colectate pentru a explora în detaliu zonele
considerate promițătoare în spațiul de căutare. Punerea în aplicare constă, cel mai adesea, în
extinderea temporară a vecinătății soluției actuale. În ceea ce privește stocarea, este suportul
învățării care permite algoritmului să ia în considerare doar zonele în care este posibil să se
găsească optimul global, evitând astfel optimul local.
2.3.2. Clasificarea meta-euristicilor
Meta-euristicile pot fi divers clasificate. În literatura de specialitate există mai multe
abordări privind clasificarea meta-euristicilor, sintetizate în continuare:
1. O primă abordare este în funcţie de originea algoritmilor: algoritmi inspirați din
fenomene naturale și algoritmi inspirați din fenomene ne-naturale.
2. A doua abordare este în funcţie de structura algoritmului (Yang, 2014), astfel:
algoritm cu structură deterministă, algoritm cu structură stochastică și algoritm cu
structură mixtă.
3. A treia abordare priveşte tehnica de căutare în spatial soluţiilor: metode iterative și
metode bazate pe gradient.
4. A patra abordare priveşte cantitatea de soluţii explorate (Talbi, 2009): soluţie
individuală și soluţie bazată pe o populaţie.
5. Luând în considerare modul de manipulare a soluțiilor, există trei abordări
fundamentale meta-euristice: metoda de căutare locală, abordarea constructivă și
abordarea bazată pe populație.
Cu toate acestea, combinarea ideilor din aceste abordări fundamentale diferite conduce
în mod constant la noi metode, numite meta-euristici hibride.
2.3.3. Hibridizarea meta-euristicilor: concept și clasificare
Hibridizarea constă în combinarea caracteristicilor a două metode diferite pentru a
folosi avantajele ambelor metode (Talbi, 2002). Originile algoritmilor meta-euristice hibride
se întorc la lucrările lui Glover (Glover, 1977), J. J. Grefenstette (Grefenstette, 1987) și
Mühlenbein și colab. (Mühlenbein et al., 1988). Hibridizarea meta-euristică poate fi împărțită
în două părți majore: hibridizarea meta-euristică cu meta-euristică și hibridizarea meta-
euristică cu metode exacte.
2.3.3.1. Hibridizarea meta-euristică cu meta-euristica
Conform taxonomiei propuse în hibridizarea meta-euristică cu meta-euristică, implică
două clasificări principale: o clasificare ierarhică și o clasificare pe orizontală.
15
A. Clasificarea ierarhică a metaheuristicilor. Această clasificare este caracterizată de
nivelul și metoda de hibridizare. Hibridizarea poate fi de nivel scăzut sau de nivel
înalt. Fiecare nivel de hibridizare generează două tipuri de cooperare, și anume: modul
releu și modul co-evolutiv. Combinația dintre moduri și niveluri oferă patru clase de
hibridizări: hibridizare de tip releu de nivel scăzut, hibridizare co-evolutivă de nivel
scăzut, hibridizare de tip releu de nivel înalt și hibridizare co-evolutivă de nivel înalt.
B. Clasificarea pe orizontală a meta-euristicilor ține seama de: tipul de metode
hibridizate, domeniul lor de aplicare și natura sarcinilor lor. În funcție de tipul de
hibridizare, există metode hibride omogene și metodele hibride heterogene. Pentru a
stabili domeniul de aplicare al meta-euristicilor hibride trebuie să distinge între două
clase majore de hibridizare, și anume: hibridizări globale și hibridizări parțiale. În
funcție de problema de interes, Talbi distinge două tipuri de hibridizare, hibridizare
generală și hibridizare specializată.
2.3.3.2. Hibridizarea meta-euristicilor cu metode exacte
Hibridizarea meta-euristicilor cu metode exacte este mai puțin obișnuită decât
hibridizarea meta-euristicilor cu meta-euristici, deoarece majoritatea cercetătorilor au
considerat că acest lucru este ineficient. În ultima vreme, această hibridizare a meta-
euristicilor cu meta-euristici începe să se răspândească și un număr mare de articole au fost
publicate despre acest subiect. În (Talbi, 2002), Talbi și-a generalizat taxonomia cu metodele
exacte, astfel încât clasificarea ierarhică să fie aplicabilă acestui tip de hibridizare. Astfel se
identifică: clasa hibrizilor de tip releu, de nivel scăzut (LRH), Clasa hibrizilor co-
evoluționiști, de nivel scăzut (teamwork) (LTH) și hibrizii co-evoluționiști, de nivel înalt
(HTH).
2.3.3.3. Observații privind clasificarea metodelor hibride
Taxonomia propusă de Talbi este cea mai largă; acest lucru regrupează hibridizări de
diferite tipuri, cum ar fi meta-euristici cu meta-euristici și meta-euristici cu metode exacte,
ceea ce face ușor includerea unor noi modele de hibridizare. Clasificarea propusă de Stützle și
Dumitrescu analizează hibridizarea metodelor exacte cu meta-euristici, dar cazurile studiate
utilizează numai meta-euristici de căutare locală. Clasificarea propusă de Puchinger este mai
amplă decât cea din urmă, având în vedere că include toate tipurile de meta-euristice, în ciuda
orientării sale către hibridizarea meta-euristicilor și a metodelor exacte. Strategia Puchinger
este la fel ca cea propusă de Talbi și ambele clasificări urmează aceleași clase de hibridizare.
Pentru a integra un algoritm într-un alt algoritm, Talbi aplică hibridizarea de nivel inferior
(releu sau co-evolutiv), în timp ce Puchinger aplică hibridizarea integrativă. Pentru executarea
secvențială a metodelor, Talbi a optat pentru hibridizarea de tip releu de nivel înalt, în timp ce
Puchinger pentru hibridizarea secvențială colaborativă. Talbi își aprofundează cercetarea prin
studierea naturii diferiților algoritmi cum ar fi: omogen / heterogen, global / local, general /
specializat.
2.4. Meta-euristici identificate pentru problema de optimizare a portofoliilor
Din clasa meta-euristicilor se remarcă algoritmi adaptați pentru optimizarea
portofoliilor, care este o problemă de optimizare bi-obiectiv. În literatura de specialitate,
principalele tipuri de algoritmi testați și pe problema de optimizare a portofoliilor sunt:
Vector Evaluation Genetic Algoritm (VEGA), Multiple Objective GA (MOGA), Niched
Pareto GA (NPGA, NPGA2), Nondominated Sorting GA (NSGA, NSGA-II), Speed-
constrained Multiobjective particle swarm optimization (SMPSO), Strength Pareto
Evolutionary Algorithm (SPEA, SPEA2), Pareto Archived Evolution Strategy (PAES), Pareto
Enveloped Based Selection Algorithm (PESA, PESA II), The Multiobjective Evolutionary
Algorithm based on Decomposition (MOEA/D)

16
2.5. Restricții nestandard și funcții de penalizare
2.5.1. Restricții nestandard utilizare în optimizarea portofoliilor
2.5.1.1. Restricții privind costurile de tranzacționare
2.5.1.2. Restricții Tracking Error
2.5.1.3. Restricții prag de cumpărare
2.5.1.4. Restricții privind cifra de afaceri
2.5.1.5. Restricții de cardinalitate
2.5.1.6. Restricții de diversificare
2.5.1.7. Restriții de tip pre-atribuire
2.5.1.8. Restricții privind efectul de levier
2.5.1.9. Portofoliul 130-30.
2.5.2. Funcții de penalizare utilizare în optimizarea portofoliilor
Funcțiile de penalizare au fost inițial propuse de (Courant, 1943) și ulterior extinse de
(Carroll, 1961) și (Fiacco and McCormick, 1966). Ideea care stă la baza acestei metode este
de a transforma o problemă de optimizare cu restricți într-una fără restricți, adăugând (sau
scăzând) o anumită valoare la / din funcția obiectiv, bazată pe tipul de restricție prezentă într-
o anumită soluție.
În optimizarea clasică, sunt considerate două tipuri de funcții de penalizare: funcții de
penalizare exterioară și funcții de penalizare interioară. Cea mai frecventă metodă folosită în
metodele moderne de optimizare, în special, în cazul algoritmii evolutivi, este penalizarea
exterioară. Formularea generală a funcției de penalizare exterioară este:
𝝓(𝒙) = 𝒇(𝒙) ± [∑ 𝒓𝒊 × 𝑮𝒊
𝒏
𝒊=𝟏
+ ∑ 𝒄𝒋 × 𝑳𝒋
𝒑
𝒋=𝟏
] (2.41.)
unde φ (x) este noua funcție obiectiv (extinsă) care trebuie optimizată, 𝐺𝑖 și 𝐿𝑗 sunt funcții ale
restricțiilor 𝑔𝑖(𝑥) și ℎ𝑗(𝑥) , respectiv, și 𝑟𝑖 și 𝑐𝑗 sunt constante pozitive, numite în mod
normal „factori de penalizare”.
Cea mai comună formă de 𝐺𝑖 și 𝐿𝑗 este:
𝑮𝒊 = 𝒎𝒂𝒙[𝟎, 𝒈𝒊(𝒙)]𝜷
(2.42.)
𝑳𝒋 = |𝒉𝒋(𝒙)|𝜸
(2.43.)
unde β and γ sunt, în mod normal, 1 sau 2.
Ca și tehnici de penalizare putem enunța:
2.5.2.1. Penalizări statice
2.5.2.2. Penalizări dinamice
2.5.2.3. Penalizări inspirate din procesul de călire al metalului
2.5.2.4. Penalizări de tip adaptiv
2.5.2.5. Penalizări de tip co-evolutiv

17
CAPITOLUL 3. DESCRIEREA META-EURISTICILOR MULTI-
OBIECTIV DE OPTIMIZARE UTILIZATE ÎN CERCETAREA
APLICATIVĂ
3.1. Aspecte introductive
3.2. Descrierea meta-euristicilor multi-obiectiv utilizate în cercetarea aplicativă
Pentru scopul experimentului din ultima parte a tezei, am selectat 6 meta-euristici de
optimizare multi-obiectiv care aparțin a patru clase diferite (clasele SPEA, NSGA, MOPSO,
și MOEA / D) pentru testarea și compararea rezultatelor obținute prin utilizarea metricilor de
performanță, enunțate în paragrafele ce urmează.
3.2.1. SPEA 2
SPEA 2 este dezvoltat de Zitzler și colaboratorii pornind de la performanțele obținute
de predecesorul său SPEA (Zitzler and Thiele, 1998) dar și datorită slăbiciunilor potențiale
înregistrate de acesta. SPEA 2 a fost îmbunătățit prin introducerea unei strategii de alocare
fitness adecvată, a unei tehnici de estimare a densității și a unei metode performante de
trunchiere a arhivei. Spre deosebire de versiunea anterioară SPEA, în algoritmul SPEA 2,
dimensiunea arhivei este bine stabilită (fixă), metoda alternativă de trunchere nu pierde soluții
periferice, iar în procesul de selecție-încrucișare participă numai membrii arhivei.
1. Alocarea fitness în SPEA 2
Fitness F(i) pentru fiecare individ i (atât pentru cei care fac parte din soluțiile
dominante cât și dominate) propus de (Zitzler et al., 2001) se calculează astfel:
𝑭(𝒊) = 𝑹(𝒊) + 𝑫(𝒊) (3.14.)
unde: R (i) - este valoarea fitness brută; D (i) - este densitatea
Valoarea fitness brută R(i) a unui individ i este determinată în funcție de rezistența
dominatorilor săi atât în arhivă, cât și în populație. De menționat că fitness-ul trebuie
minimizat în această situație.
Densitatea D(i) în orice punct este inversul distanței față de cel mai apropiat vecin k:
𝑫(𝒊) = 𝟏
𝝈𝒊𝒌 + 𝟐
(3.15.)
unde: 𝜎𝑖𝑘 - este distanța dorită; la numitor se adaugă 2 pentru a avea siguranța că valoarea sa
este mai mare decât zero și că D(i) <1; k = √𝑁 + �̅�
2. Selecția mediului
Îmbunătățirile aduse operației de actualizare a arhivei în SPEA2 sunt: numărul de
indivizi conținuți în arhivă este constant în timp și metoda de trunchiere împiedică eliminarea
soluțiilor periferice.
În timpul selecției mediului, prima etapă este copierea tuturor indivizilor nedominați,
adică a celor cu o densitate mai mică decât 1, din arhivă și populație în arhiva generației
următoare, astfel:
�̅�𝒕+𝟏 = { 𝒊 | 𝒊𝝐𝑷𝒕 + �̅�𝒕 ∧ 𝑭(𝒊) < 𝟏} (3.16.)
Dacă frontul nedominat se potrivește exact în arhivă (|�̅�t+1| = �̅�), etapa de selecție a
mediului este finalizată. Altfel:

18
- arhiva este prea mică (|�̅�t+1| < �̅�): cei mai buni �̅� - |�̅�t+1| indivizi dominați din arhiva
anterioară și populație sunt copiați în noua arhivă. Se poate implementa prin sortarea
multisetului Pt + �̅�t în funcție de valorile fitness și prin copierea primilor �̅� - |�̅�t+1|
indivizii i cu F(i) ≥ 1 din lista rezultată ordonată în �̅�t+1.
- arhiva este prea mare (|�̅�t+1|> �̅�): când dimensiunea setului actual nedominat (multi)
depășește �̅�, se invocată o procedură de trunchiere a arhivei care elimină iterativ
indivizii din �̅�t+1 până când |�̅�t+1| = �̅�. La fiecare iterație, individul i este ales pentru
eliminare, din care i ≤d j pentru toți 𝑗 ∈ �̅�𝑡+1 cu:
𝒊 ≤𝒅 𝒋 ∶⇔ ∀ 𝟎 < 𝒌 < |�̅�𝒕+𝟏| ∶ 𝝈𝒊𝒌 = 𝝈𝒋
𝒌 ∨
∃ 𝟎 < 𝒌 < |�̅�𝒕+𝟏| ∶ [(∀ 𝟎 < 𝒍 < 𝒌 ∶ 𝝈𝒊𝒍 = 𝝈𝒋
𝒍) ∧ 𝝈𝒊𝒌 < 𝝈𝒋
𝒌] (3.17.)
unde 𝜎𝑖𝑘 indică distanța lui i față de cel mai apropiat k vecin al său în �̅�𝑡+1.
3.2.2. NSGA II
NSGA II a fost propus de (Deb et al., 2002) în baza necesității de corectare a
principalelor critici aduse algoritmului genetic de sortare a soluțiilor nedominate (NSGA)
propus de (Srinivas and Deb, 1995), unul dintre primii astfel de algoritmi evolutivi.
Principalele critici ale abordării NSGA au fost: complexitate de calcul ridicată a sortării
nedominative, lipsa elitismului și specificarea parametrului de partajare 𝜎𝑠ℎ𝑎𝑟𝑒.
Îmbunătățirile aduse o dată cu propunerea algoritmului NSGA II sunt legate de
accelerarea procesului de sortare a soluțiilor nedominate și de conservarea diversității.
Accelerarea procesului de sortare a soluțiilor nedominate
Algoritmul NSGA II presupune calcularea, în primul rând, pentru fiecare soluție, a
două entități (necesită O(MN2)): număr de dominare 𝑛𝑝 care reprezintă numărul de soluții
care domină soluția p și 𝑆𝑝 reprezintă setul de soluții dominate de soluția p.
Toate soluțiile din primul front nedominat vor avea numărul de dominare 𝑛𝑝 = 0.
După, pentru fiecare soluție p cu 𝑛𝑝 = 0, analizăm fiecare membru (q) al setului său 𝑆𝑝 și
reducem numărul de dominare cu unu. În acest sens, dacă pentru orice membru q numărul de
dominare devine zero, îl plasăm într-o listă separată Q. Acești membri aparțin celui de-al
doilea front nedominat. Procedura se continuată cu fiecare membru al Q până la identificarea
tuturor fronturilor.
Conservarea diversității
NSGA original utilizează funcția de partajare, care s-a dovedit că menține sustenabil
diversitatea într-o populație, cu setarea adecvată a parametrilor asociați. Această metodă
implică un parametru de partajare 𝜎𝑠ℎ𝑎𝑟𝑒, care stabilește gradul de partajare dorit într-o
problemă. Parametrul 𝜎𝑠ℎ𝑎𝑟𝑒 reprezintă cea mai mare distanță în cadrul căreia orice două
soluții împărtășesc capacitatea de adecvare (fitness). Acest parametru este de obicei setat de
utilizator. Există două dificultăți în ceea ce privește funcția de partajare:
1) Performanța metodei funcției de partajare în menținerea diversității soluțiilor
depinde de valoare aleasă pentru parametrul 𝜎𝑠ℎ𝑎𝑟𝑒
2) Complexitatea generală a funcției de partajare este O(N2), deoarece fiecare soluție
trebuie comparată cu toate celelalte soluții din populație.
Datorită acestor două dificultăți în NSGA-II este înlocuită funcția de partajare cu o
abordare comparativă „crowding”, care elimină ambele dificultăți într-o oarecare măsură.
Abordare „crowding” nu necesită un parametru definit de utilizator pentru menținerea
diversității în rândul membrilor populației și are o complexitate de calcul mai bună.
19
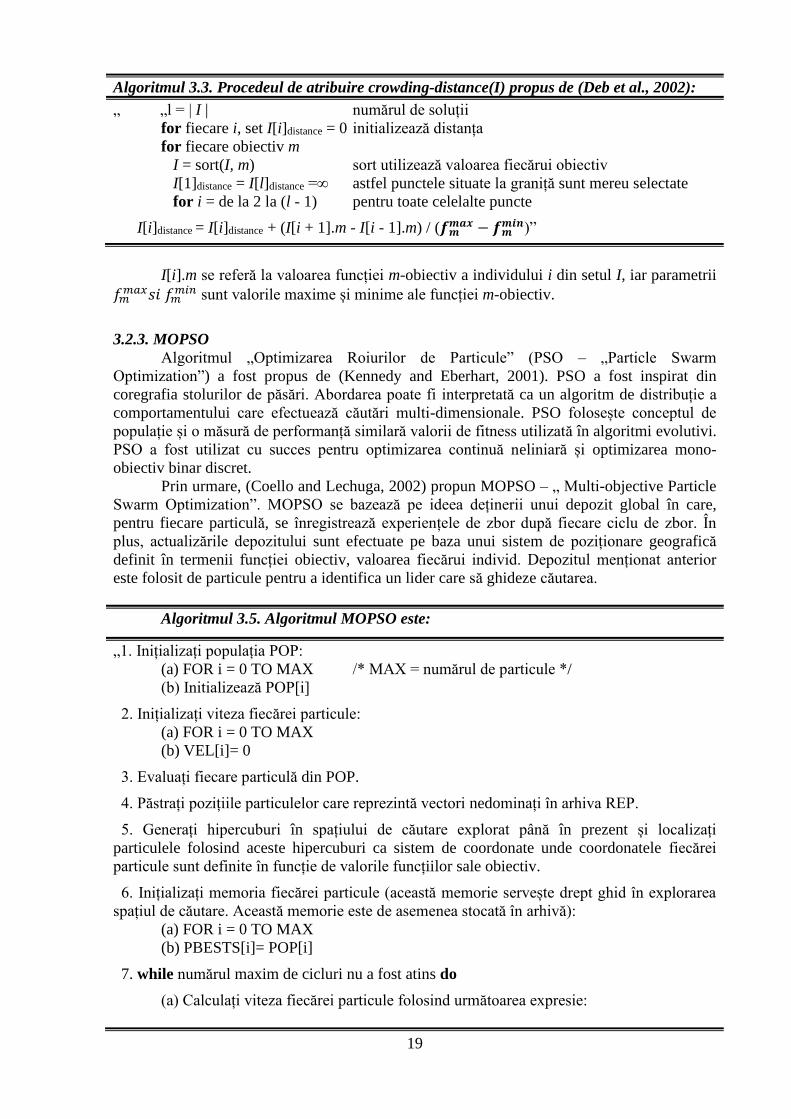
Algoritmul 3.3. Procedeul de atribuire crowding-distance(I) propus de (Deb et al., 2002):
„ „l = | I | numărul de soluții
for fiecare i, set I[i]distance = 0 initializează distanța
for fiecare obiectiv m
I = sort(I, m) sort utilizează valoarea fiecărui obiectiv
I[1]distance = I[l]distance =∞ astfel punctele situate la graniță sunt mereu selectate
for i = de la 2 la (l - 1) pentru toate celelalte puncte
I[i]distance = I[i]distance + (I[i + 1].m - I[i - 1].m) / (𝒇𝒎𝒎𝒂𝒙 − 𝒇𝒎
𝒎𝒊𝒏)”
I[i].m se referă la valoarea funcției m-obiectiv a individului i din setul I, iar parametrii
𝑓𝑚𝑚𝑎𝑥𝑠𝑖 𝑓𝑚
𝑚𝑖𝑛 sunt valorile maxime și minime ale funcției m-obiectiv.
3.2.3. MOPSO
Algoritmul „Optimizarea Roiurilor de Particule” (PSO – „Particle Swarm
Optimization”) a fost propus de (Kennedy and Eberhart, 2001). PSO a fost inspirat din
coregrafia stolurilor de păsări. Abordarea poate fi interpretată ca un algoritm de distribuție a
comportamentului care efectuează căutări multi-dimensionale. PSO folosește conceptul de
populație și o măsură de performanță similară valorii de fitness utilizată în algoritmi evolutivi.
PSO a fost utilizat cu succes pentru optimizarea continuă neliniară și optimizarea mono-
obiectiv binar discret.
Prin urmare, (Coello and Lechuga, 2002) propun MOPSO – „ Multi-objective Particle
Swarm Optimization”. MOPSO se bazează pe ideea deținerii unui depozit global în care,
pentru fiecare particulă, se înregistrează experiențele de zbor după fiecare ciclu de zbor. În
plus, actualizările depozitului sunt efectuate pe baza unui sistem de poziționare geografică
definit în termenii funcției obiectiv, valoarea fiecărui individ. Depozitul menționat anterior
este folosit de particule pentru a identifica un lider care să ghideze căutarea.
Algoritmul 3.5. Algoritmul MOPSO este:
„1. Inițializați populația POP:
(a) FOR i = 0 TO MAX /* MAX = numărul de particule */
(b) Initializează POP[i]
2. Inițializați viteza fiecărei particule:
(a) FOR i = 0 TO MAX
(b) VEL[i]= 0
3. Evaluați fiecare particulă din POP.
4. Păstrați pozițiile particulelor care reprezintă vectori nedominați în arhiva REP.
5. Generați hipercuburi în spațiului de căutare explorat până în prezent și localizați
particulele folosind aceste hipercuburi ca sistem de coordonate unde coordonatele fiecărei
particule sunt definite în funcție de valorile funcțiilor sale obiectiv.
6. Inițializați memoria fiecărei particule (această memorie servește drept ghid în explorarea
spațiul de căutare. Această memorie este de asemenea stocată în arhivă):
(a) FOR i = 0 TO MAX
(b) PBESTS[i]= POP[i]
7. while numărul maxim de cicluri nu a fost atins do
(a) Calculați viteza fiecărei particule folosind următoarea expresie:

20
VEL[i]= W*VEL[i] + R1 (PBESTS[i] - POP[i]) + R2 (REP[h]- POP[i])
unde W (inertia ponderilor) ia valoarea 0.4; R1 și R2 sunt numere aleatorii în
intervalul [0..1]; PBESTS[i] este cea mai bună poziție pe care o are particula i;
REP[h] este valoare care este luată din depozit; indexul h este selectat în felul
următor: - hipercuburile care conțin mai mult de o particulă au un fitness egal cu
rezultatul împărțirii oricărui număr x > 1 cu numărul de particule pe care le conțin.
Aceasta vizează reducerea capacității acestor hipercuburi care conțin mai multe
particule și poate fi văzută ca o formă de partajare de fitness. După, se aplică
selecția tip ruletă folosind aceste valori de fitness pentru a selecta hypercubul din
care se extrage particula corespunzătoare. Odată ce hypercubul a fost selectat, se
alege, în mod aleator, o particulă din interiorul hipercubului. POP [i] este valoarea
curentă a particulei i.
(b) Calculați noile poziții ale particulelor prin adaugarea vitezei produsă în etapa
anterioară: POP[i]= POP[i]+ VEL[i]
(c) Mențineți particulele în spațiul de căutare în cazul în care acestea depășesc limitele
sale (evitați generarea de soluții care nu se află pe un spațiu valid de căutare).
(d) Evaluați fiecare particulă din POP.
(e) Actualizați conținutul REP împreună cu reprezentarea geografică a particulelor în
hipercuburi.
(f) Atunci când poziția actuală a particulei este mai bună decât poziția memorată,
poziția particulelor este actualizată folosind: PBESTS[i] = POP[i] 8. end while”
3.2.4. MOEA/D-DRA
Fie 𝜆1, … , 𝜆𝑁 un set de vectori de ponderi uniform răspândiți și 𝒛∗ punctul de referință.
Problema aproximării frontului Pareto poate fi descompusă în N subproblemele de optimizare
scalare. Funcția obiectiv a subproblemei j-a este:
𝒈𝒕𝒆(𝒙|𝝀𝒋, 𝒛∗) = 𝒎𝒂𝒙𝟏≤𝒊≤𝒎
{𝝀𝒊𝒋|𝒇𝒊(𝒙) − 𝒛𝒊
∗|} (3.20.)
unde 𝜆j = (𝜆1j, 𝜆2
j, … , 𝜆𝑚
j)
𝑇 , și j = 1, . . . , N.
In MOEA/D cu alocare dinamică a resurselor (MOEA/D - DRA), versiunea MOEA/D
propusă în (Zhang et al., 2009), este definită si calculată o utilitate 𝜋𝑖 pentru fiecare
subproblemă i. Eforturile de calcul sunt distribuite acestor subprobleme pe baza utilităților lor.
Algoritmul 3.6. MOEA/D-DRA propus de (Zhang et al., 2009):
„Input: • MOP (1);
• criteriul de stop;
• N: numărul de subprobleme considerate in MOEA/D;
• o răspândire uniformă a N vectori de ponderi: λ1, ..., λN;
• T: numărul de vectori de ponderi in vecinătatea fiecărui vector de ponderi.
Output: {𝒙𝟏, … , 𝒙𝑵} și {F (𝒙𝟏), ..., F (𝒙𝑵)}
Pasul 1 Initializarea
Pasul 1.1 Calculează distanțele euclidiene dintre oricare doi vectori de ponderi și apoi
se găsesc cei mai apropiați T vectorii de ponderi pentru fiecare vector de ponderi.
Pentru fiecare i = 1, ..., N, setul B(i) = {i1, ..., iT} unde λi1, ..., λiT sunt T cei mai
apropiați vectorii de ponderi de λi.
Pasul 1.2 Generează o populatie initială 𝒙𝟏, … , 𝒙𝑵 prin eșantionarea aleatoare

21
uniformă în spațiul de căutare.
Pasul 1.3 Initializează z = (z1, ..., zm)T prin setare 𝒛𝒊 = 𝐦𝐢𝐧 {𝐟𝐢(𝒙𝟏), 𝐟𝐢(𝒙𝟐), … , 𝐟𝐢(𝒙𝑵)}
Pasul 1.4 Set gen = 0 și πi = 1 pentru toți i = 1, ..., N.
Pasul 2 Selectarea subproblemelor pentru căutare: indicii subproblemelor ale căror
obiective sunt mono-obiectivele MOP sunt fi selectate pentru a forma I inițial. Prin utilizarea
selecției tip 10-turneu bazată pe πi, se selectează alți 𝑵
𝟓− 𝒎 indici și se adaugă la I.
Pasul 3 Pentru fiecare i ∈ I, execută:
Pasul 3.1 Selectarea zonei de încrucișare / actualizarea rangului: În mod aleator,
uniform, se generează un număr rand în intervalul (0, 1). Atunci:
𝑷 = {𝑩(𝒊) 𝒅𝒂𝒄𝒂 𝒓𝒂𝒏𝒅 < 𝜹,
{𝟏, … , 𝑵} 𝒂𝒍𝒕𝒇𝒆𝒍 (3.21.)
Pasul 3.2 Reproducție: Fie r1 = i și selectează aleator doi indecși r2 și r3 din P, și după
se generează soluția �̅� din xr1, xr2 și xr3 prin operatorul DE, și după se aplică un
operator de mutație lui �̅� cu probabilitatea pm de a genera o nouă soluție y.
Pasul 3.3 Repară: Dacă un element al y este în afara limitelor lui Ω, valoarea sa este
resetată, astfel încât să rezulte o valoare aleasă aleator în interiorul limitei.
Pasul 3.4 Actualizează z: Pentru fiecare j = 1, ..., m, dacă 𝒛𝒋 > 𝐟𝐢(𝒚), atunci setează
𝒛𝒋 = 𝐟𝐢(𝒚).
Pasul 3.5 Actualizează soluțiile: Fie c = 0 și apoi execută:
(1) If c = nr sau P este gol, go to Step 4. Altfel alege un index j în mod aleator
din P.
(2) If 𝒈(𝒚|𝝀𝒋, 𝒛) ≤ 𝒈(𝒙𝒋|𝝀𝒋, 𝒛), atunci setează 𝒙𝒋 = 𝒚, 𝑭𝑽𝒋 = 𝑭(𝒚) și 𝒄 = 𝒄 +𝟏.
(3) Șterge j din P și go to (1).
Pasul 4 Criteriul de stop. Dacă criteriul de stop este satisfăcut, then stop si output
{𝒙𝟏, … , 𝒙𝑵}și {F {F (𝒙𝟏), ..., F (𝒙𝑵)}.
Pasul 5 𝒈𝒆𝒏 = 𝒈𝒆𝒏 + 𝟏
If gen este multiplu de 50, atunci calculați △𝒊, descreșterea relativă a obiectivului
pentru fiecare subproblemă i în ultimele 50 de generații, actualizați
𝝅𝒊 = {
𝟏 𝒅𝒂𝒄ă △𝒊> 𝟎, 𝟎𝟎𝟏
(𝟎, 𝟗𝟓 + 𝟎, 𝟎𝟓△𝒊
𝟎, 𝟎𝟎𝟏) 𝝅𝒊 𝒂𝒍𝒕𝒇𝒆𝒍
(3.22.)
End if
go to Step 2 . ”
La pasul 5, descreșterea relativă este definită ca:
𝒗𝒂𝒍𝒐𝒂𝒓𝒆𝒂 𝒇𝒖𝒏𝒄𝒕𝒊𝒆𝒊 𝒂𝒏𝒕𝒆𝒓𝒊𝒐𝒂𝒓ă − 𝒗𝒂𝒍𝒐𝒂𝒓𝒆𝒂 𝒇𝒖𝒏𝒄𝒕𝒊𝒆𝒊 𝒑𝒓𝒆𝒛𝒆𝒏𝒕ă
𝒗𝒂𝒍𝒐𝒂𝒓𝒆𝒂 𝒇𝒖𝒏𝒄𝒕𝒊𝒆𝒊 𝒂𝒏𝒕𝒆𝒓𝒊𝒐𝒂𝒓ă (3.23.)
În operatorul DE utilizat la pasul 3.2., fiecare element �̅�𝑘 în �̅� = (�̅�1, … , �̅�𝑛)𝑇 este
generat astfel:
�̅�𝒌 = {𝒙𝒌
𝒓𝟏 + 𝑭(𝒙𝒌𝒓𝟐 − 𝒙𝒌
𝒓𝟑) 𝒄𝒖 𝒑𝒓𝒐𝒃𝒂𝒃𝒊𝒍𝒊𝒕𝒂𝒕𝒆𝒂 𝑪𝑹
𝒙𝒌𝒓𝟏 𝒄𝒖 𝒑𝒓𝒐𝒃𝒂𝒃𝒊𝒍𝒊𝒕𝒂𝒕𝒆𝒂 𝟏 − 𝑪𝑹
(3.24.)

22
unde CR și F sunt doi parametrii de control.
Operatorul de mutație de la pasul 3.2 generează
𝒚𝒌 = {�̅�𝒌 + 𝝈𝒌(𝒃𝒌 − 𝒂𝒌) 𝒄𝒖 𝒑𝒓𝒐𝒃𝒂𝒃𝒊𝒍𝒊𝒕𝒂𝒕𝒆𝒂 𝒑𝒎
�̅�𝒌 𝒄𝒖 𝒑𝒓𝒐𝒃𝒂𝒃𝒊𝒍𝒊𝒕𝒂𝒕𝒆𝒂 𝟏 − 𝒑𝒎 (3.25.)
cu
𝝈𝒌 = {(𝟐 ∗ 𝒓𝒂𝒏𝒅)
𝟏𝜼+𝟏 − 𝟏 𝒅𝒂𝒄ă 𝒓𝒂𝒏𝒅 < 𝟎, 𝟓
𝟏 − (𝟐 − 𝟐 ∗ 𝒓𝒂𝒏𝒅)𝟏
𝜼+𝟏 𝒂𝒍𝒕𝒇𝒆𝒍
(3.26.)
unde rand este un număr uniform aleator din intevalul [0 , 1]. Indicele de distribuție 𝜂 și rata
de mutație 𝑝𝑚 sunt doi parametri de control. 𝑎𝑘 și 𝑏𝑘 sunt limitele inferioară și superioară ale
variabilei de deciziei k.
”
3.2.5. CMOPSO
Algoritmul CMOPSO („A Competitive Mechanism Based Multi-objective Particle
Swarm Optimizer with Fast Convergence”) propus de Xingyi Zhang et. al. în 2017 (Zhang et
al., 2017) are un cadru simplu și constă din două componente principale: strategia de învățare
bazată pe mecanisme competitive și strategia de selecție a mediului. Strategia de selecție a
mediului este adoptată așa cum este prezentat în algoritmul SPEA2.
CSO – „Competitive swarm optimizer”
Pentru dezvoltarea CMOPSO, autorii folosesc algoritmul CSO. În CSO, particulele
sunt actualizate printr-un mecanism de concurență în detrimentul utilizării celor mai bune
particule global și local, astfel îmbunătățind substanțial diversitatea roiului pentru a evita
convergența prematură.
Se presupune că există N particule în roiul P(t), unde t este indicele de generare.
Fiecare particulă are o poziție n-dimensional, 𝑋𝑖(𝑡) = (𝑥𝑖,1(𝑡), 𝑥𝑖,2(𝑡), … , 𝑥𝑖,𝑛(𝑡)) și vectorul
vitezei n-dimensional, 𝑉𝑖(𝑡) = (𝑣𝑖,1(𝑡), 𝑣𝑖,2(𝑡), … , 𝑣𝑖,𝑛(𝑡)). În runda k a competiției în
generația t, pozițiile și vitezele câștigătorului (w) și celui care pierde (l) sunt notate cu
𝑋𝑤,𝑘(𝑡), 𝑋𝑙,𝑘(𝑡), 𝑉𝑤,𝑘(𝑡), respectiv 𝑉𝑙,𝑘(𝑡), k (t), unde k = 1, 2, ..., N/2. În consecință, după
cea de-a k competiție, viteza învinsului va fi actualizată folosind strategia de învățare
următoarea:
𝑽𝒍,𝒌(𝒕 + 𝟏) = 𝑹𝟏(𝒌, 𝒕)𝑽𝒍,𝒌 + 𝑹𝟐(𝒌, 𝒕) (𝑿𝒘,𝒌(𝒕) − 𝑿𝒍,𝒌(𝒕))
+ 𝝋𝑹𝟑(𝒌, 𝒕) (�̅�𝒌(𝒕) − 𝑿𝒍,𝒌(𝒕)) (3.27.)
Poziția învinsului va fi actualizată pe baza noii viteze:
𝑿𝒍,𝒌(𝒕 + 𝟏) = 𝑿𝒍,𝒌(𝒕) + 𝑽𝒍,𝒌(𝒕 + 𝟏) (3.28.)
unde 𝑅1(𝑘, 𝑡), 𝑅2(𝑘, 𝑡), 𝑅3(𝑘, 𝑡) sunt numere aleatoare generate uniform în intervalul [0, 1],
�̅�𝑘(𝑡) este poziția medie a tuturor particulelor în roi și 𝜑 este un parametru de controlul al
influenței lui �̅�𝑘(𝑡).
Strategia de învățare bazată pe mecanismul competiției
Strategia de învățare bazată pe mecanismul de competiție constă în trei componente:
selecția particulelor elită, concurența pe perechi și învățarea particulelor.
Setul de particule elită este utilizat pentru a furniza particule candidat care să intre în
competițiile pe perechi pentru a ghida procesul de căutarea. Particulele elită mențin un
23
echilibru bun între convergență și diversitate. Acestea sunt selectate pe baza clasamentului de
nedominanță și crowding-distance așa cum au fost adoptate în NSGA II.
Sortarea nedominată este prima dată aplicată pe roiul P pentru a obține fronturile
𝐹1, 𝐹2, … , 𝐹𝑘, unde k este indicele maxim al fronturilor. Numărul minim t se găsește astfel
încât |𝐹1 ∪ 𝐹2 ∪ … ∪ 𝐹𝑡| ≥ 𝛾, unde 𝛾 este numărul de particule elită care trebuie selectate. În
final, toate particulele aparținând 𝐹1 ∪ 𝐹2 ∪ … ∪ 𝐹𝑡−1 sunt selectate ca particule elită, iar
particulele rămase sunt selectate în funcție de crowding-distance a fiecărei particule din 𝐹𝑡.
După crearea setului de particule elită, se realizează competiții pe perechi între
particulele din set, iar câștigătorii vor fi folosiți pentru a ghida direcțiile de mișcare ale
particulelor din roiul actual.
Odată ce câștigătorul este determinat, poziția și viteza particulei p pot fi actualizate
prin cunoștiințele câștigătorului. Fie 𝑣𝑖 și 𝑝𝑖 viteza și poziția particulei I în roi, 1 < I <N.
Viteza actualizată 𝑣𝑖′ și poziția 𝑝𝑖
′ a particulei I sunt calculate prin următoarele ecuații (cum
este prezentat în algoritmul CSO):
- pentru a actualiza viteza particulei pi folosim formula următoare:
vi′ = R1vi + R2(pw – pi) (3.29.)
- pentru a actualiza poziția particulei pi folosim formula următoare:
pi′ = pi + vi′ (3.30.)
3.2.6. ANSGA III
ANSGA III este o extindere a NSGA III propusă de (Jain and Deb, 2013). Algoritmul
este considerat un NSGA III adaptativ care identifică puncte de referință nefolositoare și, în
mod adaptiv, șterge și include puncte de referință noi, pe lângă punctele de referință furnizate.
Acesta a fost propus pentru a rezolva probleme de optimizare cu mai mult de patru obiective,
cu restricții generice.
Modificările făcute algoritmului NSGA III pentru a trata generic restricții egalitatea
și/sau inegalitate sunt legate de operatorul de selecție pe bază de elitism și de crearea
populației de descendenți.
1. Modificarea operatorului de selecție pe bază de elitism
Pentru probleme fără restricții, valorile funcției obiectiv sunt luate în considerare
numai pentru verificarea dominației între două soluții. Dar, în prezența restricțiilor, (Jain and
Deb, 2013) folosește principiul de restricție - dominare adoptat în NSGA-II (Deb et al.,
2002).
Soluția 𝑥(1) domină altă soluție 𝑥(2), dacă oricare dintre condițiile următoare este
adevărată:
1) Dacă 𝑥(1) este fezabilă și 𝑥(2) este nefezabilă;
2) Dacă 𝑥(1) și 𝑥(2) sunt nefezabile dar 𝑥(1) are valoarea de încălcare a restricției mai
mică;
3) Dacă 𝑥(1) și 𝑥(2) sunt fezabile dar 𝑥(1) domină 𝑥(2) cu principiul de dominare
uzual.
Pentru a calcula valoarea de încălcare a restricției (𝐶𝑉(𝑥)) a soluției x, Jain și Deb
sugerează să fie normalizate toate restricțiile prin împărțirea funcțiilor restricțiilor la constanta
prezentă (pentru 𝑔𝑗(𝑥) ≥ 𝑏𝑗, funcția restricției normalizată devine �̅�𝑗(𝑥) =𝑔𝑗(𝑥)
𝑏𝑗− 1 ≥ 0, și,
în mod similar, ℎ̅𝑘(𝑥) poate fi normalizată) și utilizând următoarea măsură:
𝑪𝑽(𝒙) = ∑⟨�̅�𝒋(𝒙)⟩
𝑱
𝒋=𝟏
+ ∑|�̅�𝒌(𝒙)|
𝑲
𝒌=𝟏
(3.34.)
24
unde operatorul paranteză ⟨𝛼⟩ reprezintă negativul lui α, dacă α <0 și zero, în caz contrar.
2. Modificarea procesului de creare a populației de descendenți
Algoritmul NSGA-III propune utilizarea unei populații de mărime (N) aproape egală
cu numărul punctelor de referință (H). Parametrul H este derivat dintr-o valoare
combinatorială ((𝑀+𝑝−1)𝑝
) pentru un p dat. Dimensiunea populației este recomandat a fi cel
mai mic multiplu de patru, mai mare decât H. Astfel, fiecare membru al populației este
probabil asociat cu un punct de referință diferit, iar la final să existe cel puțin o soluție optim-
Pareto asociată cu fiecare punct de referință. Având în vedere rezultatul așteptat „un membru
la un punct de referință”, nu se aplică o selecție suplimentară de tip turneu („tournament
selection”) asupra populației de părinți Pt pentru a crea populația de urmași Qt. Cu toate
acestea, în prezența unor soluții nefezabile în populație, este nevoie de folosirea operatorului
de selecție de tip turneu, în special pentru a accentua o soluție fezabilă față de o soluție
nefezabile și o soluție cu CV mic față de o soluție cu CV mare.
În acest scop, sunt selectați doi membri din Pt la întâmplare și se aplică o selecție
binară de tip turneu pentru a selecta o soluție mai bună.
3.3. Descrierea metricilor de performanță utilizate pentru compararea rezultatelor
obținute de meta-euristicile multi-obiectiv
În contextul optimizării multi-obiectiv, nu este posibil să găsim sau să enumerăm toate
elementele frontului Pareto. Prin urmare, pentru a rezolva o problemă multi-obiectiv, trebuie
să căutăm cea mai bună reprezentare discretă a frontului Pareto. Evaluarea calității unei
aproximări a frontului Pareto nu este simplă. Pentru a compara algoritmi de optimizare multi-
obiectiv, alegerea unor metrici de performanță este crucială. Astfel, putem enunța următoarele
metrici: hipervolumul (HV), distanța de generație (GD), distanța de generație inversată (IGD),
distanța Hausdorff medie (Δ p), metrica de distribuire ( Δ ), metrica de spațiere ( S ) și
convergența a două seturi (C).
25
CAPITOLUL 4. ANALIZA COMPARATIVĂ UTILIZÂND 6 META-
EURISTICI MILTI-OBIECTIV PENTRU A APROXIMA FRONTIERA
EFICIENTĂ
Șase meta-euristici multi-obiectiv sunt testate pe un portofoliu de 20 de acțiuni listate
la Bursa de Valori București. Performanțele celor 6 algoritmi sunt comparate cu ajutorul a 9
metricilor de performanță.
Datele utilizate sunt prețurile de închidere zilnice ale acțiunilor enunțate mai sus
pentru perioada cuprinsă între 4 ianuarie 2012 și 14 decembrie 2018.
Pentru o mai bună acuratețe a rezultatelor, cotațiile zilnice ale acțiunilor utilizate, din
perioada 4 ianuarie 2012 - 14 decembrie 2018, au fost sincronizate ținându-se seama de data
de tranzacționare. În același timp, este de menționat că, rentabilitățile zilnice ale acțiunilor
sunt obținute pe baza prețul zilnic de închidere și nu includ alte costuri.
Cele 20 de acțiuni au fost selectate în funcție de cea mai bună volatilitatea pe piață.
Chiar și cu această condiție, portofoliul format din cele 20 de acțiuni selectate este divers.
Portofoliul cuprinde acțiuni din domeniul: bancar, fondurilor de investiții, rafinăriilor,
energetic, industrial și farmaceutic.
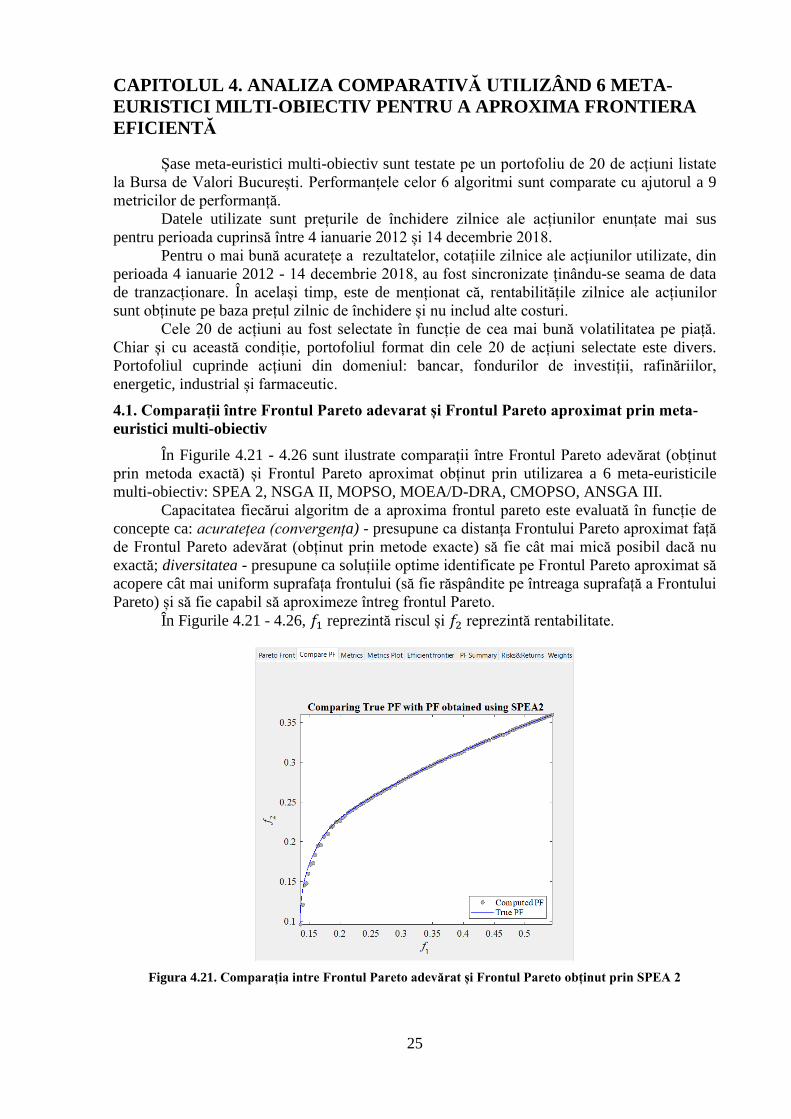
4.1. Comparații între Frontul Pareto adevarat și Frontul Pareto aproximat prin meta-
euristici multi-obiectiv
În Figurile 4.21 - 4.26 sunt ilustrate comparații între Frontul Pareto adevărat (obținut
prin metoda exactă) și Frontul Pareto aproximat obținut prin utilizarea a 6 meta-euristicile
multi-obiectiv: SPEA 2, NSGA II, MOPSO, MOEA/D-DRA, CMOPSO, ANSGA III.
Capacitatea fiecărui algoritm de a aproxima frontul pareto este evaluată în funcție de
concepte ca: acuratețea (convergența) - presupune ca distanța Frontului Pareto aproximat față
de Frontul Pareto adevărat (obținut prin metode exacte) să fie cât mai mică posibil dacă nu
exactă; diversitatea - presupune ca soluțiile optime identificate pe Frontul Pareto aproximat să
acopere cât mai uniform suprafața frontului (să fie răspândite pe întreaga suprafață a Frontului
Pareto) și să fie capabil să aproximeze întreg frontul Pareto.
În Figurile 4.21 - 4.26, 𝑓1 reprezintă riscul și 𝑓2 reprezintă rentabilitate.
Figura 4.21. Comparația intre Frontul Pareto adevărat și Frontul Pareto obținut prin SPEA 2
26
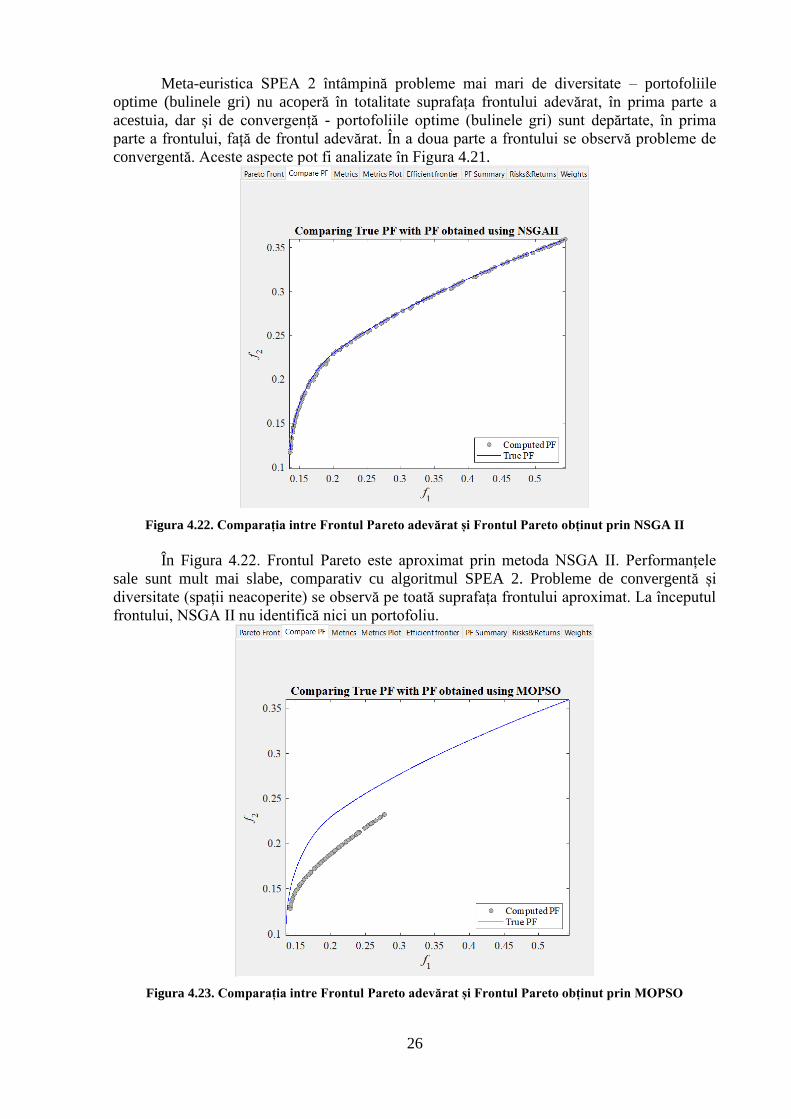
Meta-euristica SPEA 2 întâmpină probleme mai mari de diversitate – portofoliile
optime (bulinele gri) nu acoperă în totalitate suprafața frontului adevărat, în prima parte a
acestuia, dar și de convergență - portofoliile optime (bulinele gri) sunt depărtate, în prima
parte a frontului, față de frontul adevărat. În a doua parte a frontului se observă probleme de
convergentă. Aceste aspecte pot fi analizate în Figura 4.21.
Figura 4.22. Comparația intre Frontul Pareto adevărat și Frontul Pareto obținut prin NSGA II
În Figura 4.22. Frontul Pareto este aproximat prin metoda NSGA II. Performanțele
sale sunt mult mai slabe, comparativ cu algoritmul SPEA 2. Probleme de convergentă și
diversitate (spații neacoperite) se observă pe toată suprafața frontului aproximat. La începutul
frontului, NSGA II nu identifică nici un portofoliu.
Figura 4.23. Comparația intre Frontul Pareto adevărat și Frontul Pareto obținut prin MOPSO
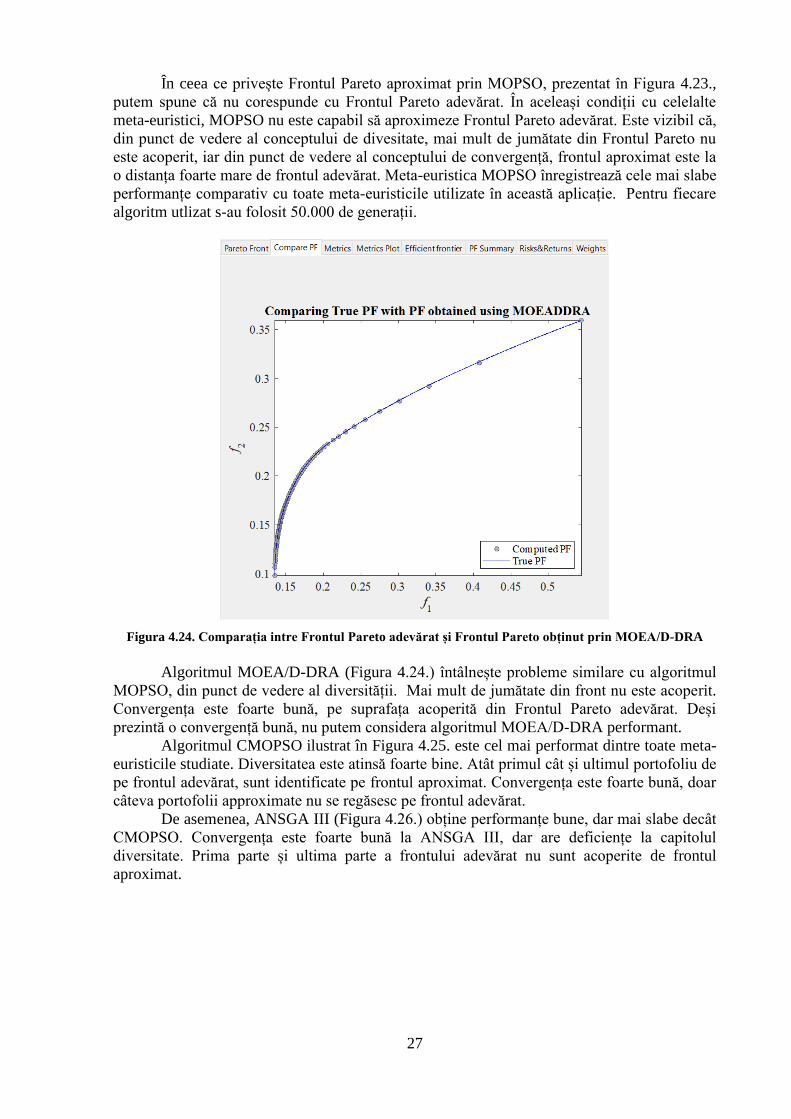
27
În ceea ce privește Frontul Pareto aproximat prin MOPSO, prezentat în Figura 4.23.,
putem spune că nu corespunde cu Frontul Pareto adevărat. În aceleași condiții cu celelalte
meta-euristici, MOPSO nu este capabil să aproximeze Frontul Pareto adevărat. Este vizibil că,
din punct de vedere al conceptului de divesitate, mai mult de jumătate din Frontul Pareto nu
este acoperit, iar din punct de vedere al conceptului de convergență, frontul aproximat este la
o distanța foarte mare de frontul adevărat. Meta-euristica MOPSO înregistrează cele mai slabe
performanțe comparativ cu toate meta-euristicile utilizate în această aplicație. Pentru fiecare
algoritm utlizat s-au folosit 50.000 de generații.
Figura 4.24. Comparația intre Frontul Pareto adevărat și Frontul Pareto obținut prin MOEA/D-DRA
Algoritmul MOEA/D-DRA (Figura 4.24.) întâlnește probleme similare cu algoritmul
MOPSO, din punct de vedere al diversității. Mai mult de jumătate din front nu este acoperit.
Convergența este foarte bună, pe suprafața acoperită din Frontul Pareto adevărat. Deși
prezintă o convergență bună, nu putem considera algoritmul MOEA/D-DRA performant.
Algoritmul CMOPSO ilustrat în Figura 4.25. este cel mai performat dintre toate meta-
euristicile studiate. Diversitatea este atinsă foarte bine. Atât primul cât și ultimul portofoliu de
pe frontul adevărat, sunt identificate pe frontul aproximat. Convergența este foarte bună, doar
câteva portofolii approximate nu se regăsesc pe frontul adevărat.
De asemenea, ANSGA III (Figura 4.26.) obține performanțe bune, dar mai slabe decât
CMOPSO. Convergența este foarte bună la ANSGA III, dar are deficiențe la capitolul
diversitate. Prima parte și ultima parte a frontului adevărat nu sunt acoperite de frontul
aproximat.
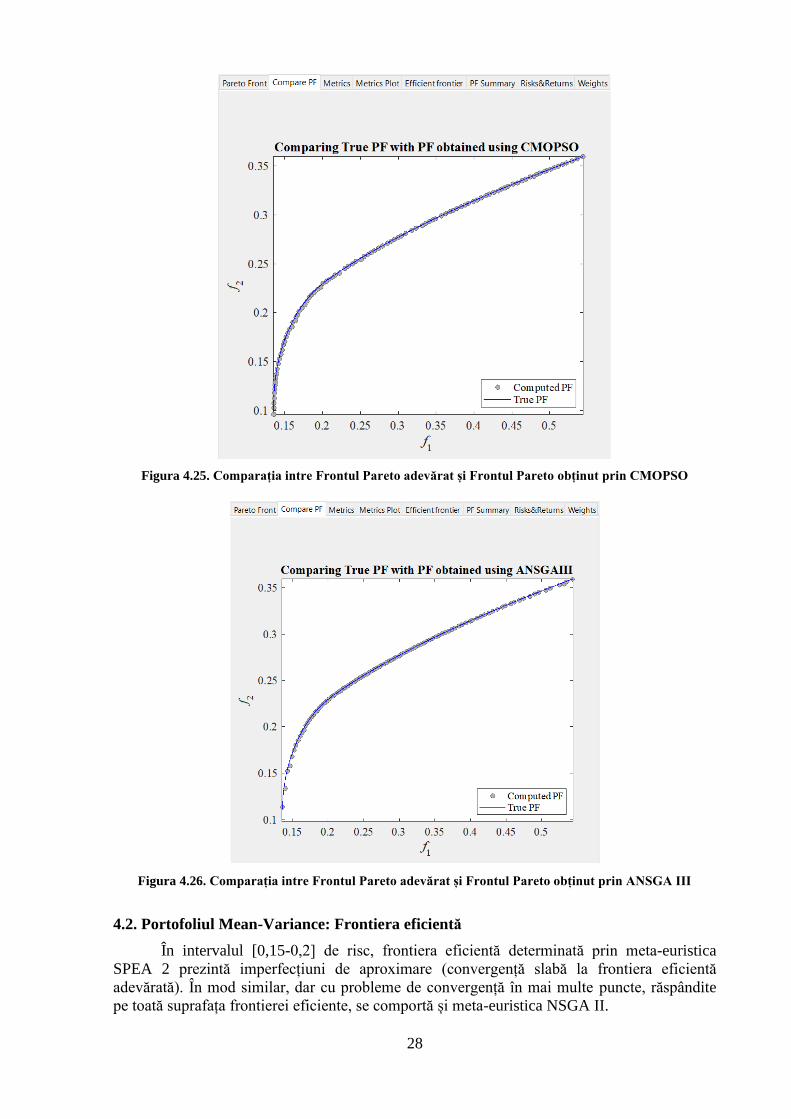
28
Figura 4.25. Comparația intre Frontul Pareto adevărat și Frontul Pareto obținut prin CMOPSO
Figura 4.26. Comparația intre Frontul Pareto adevărat și Frontul Pareto obținut prin ANSGA III
4.2. Portofoliul Mean-Variance: Frontiera eficientă
În intervalul [0,15-0,2] de risc, frontiera eficientă determinată prin meta-euristica
SPEA 2 prezintă imperfecțiuni de aproximare (convergență slabă la frontiera eficientă
adevărată). În mod similar, dar cu probleme de convergență în mai multe puncte, răspândite
pe toată suprafața frontierei eficiente, se comportă și meta-euristica NSGA II.
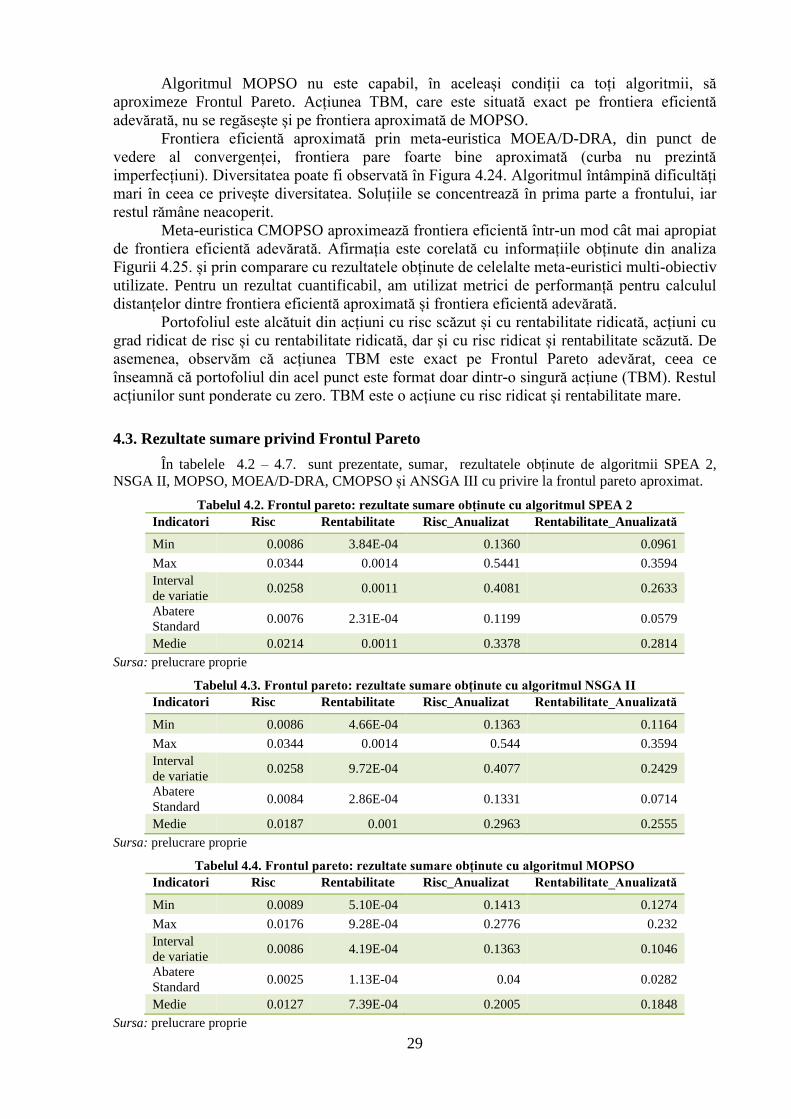
29
Algoritmul MOPSO nu este capabil, în aceleași condiții ca toți algoritmii, să
aproximeze Frontul Pareto. Acțiunea TBM, care este situată exact pe frontiera eficientă
adevărată, nu se regăsește și pe frontiera aproximată de MOPSO.
Frontiera eficientă aproximată prin meta-euristica MOEA/D-DRA, din punct de
vedere al convergenței, frontiera pare foarte bine aproximată (curba nu prezintă
imperfecțiuni). Diversitatea poate fi observată în Figura 4.24. Algoritmul întâmpină dificultăți
mari în ceea ce privește diversitatea. Soluțiile se concentrează în prima parte a frontului, iar
restul rămâne neacoperit.
Meta-euristica CMOPSO aproximează frontiera eficientă într-un mod cât mai apropiat
de frontiera eficientă adevărată. Afirmația este corelată cu informațiile obținute din analiza
Figurii 4.25. și prin comparare cu rezultatele obținute de celelalte meta-euristici multi-obiectiv
utilizate. Pentru un rezultat cuantificabil, am utilizat metrici de performanță pentru calculul
distanțelor dintre frontiera eficientă aproximată și frontiera eficientă adevărată.
Portofoliul este alcătuit din acțiuni cu risc scăzut și cu rentabilitate ridicată, acțiuni cu
grad ridicat de risc și cu rentabilitate ridicată, dar și cu risc ridicat și rentabilitate scăzută. De
asemenea, observăm că acțiunea TBM este exact pe Frontul Pareto adevărat, ceea ce
înseamnă că portofoliul din acel punct este format doar dintr-o singură acțiune (TBM). Restul
acțiunilor sunt ponderate cu zero. TBM este o acțiune cu risc ridicat și rentabilitate mare.
4.3. Rezultate sumare privind Frontul Pareto
În tabelele 4.2 – 4.7. sunt prezentate, sumar, rezultatele obținute de algoritmii SPEA 2,
NSGA II, MOPSO, MOEA/D-DRA, CMOPSO și ANSGA III cu privire la frontul pareto aproximat.
Tabelul 4.2. Frontul pareto: rezultate sumare obținute cu algoritmul SPEA 2
Indicatori Risc Rentabilitate Risc_Anualizat Rentabilitate_Anualizată
Min 0.0086 3.84E-04 0.1360 0.0961
Max 0.0344 0.0014 0.5441 0.3594
Interval
de variatie 0.0258 0.0011 0.4081 0.2633
Abatere
Standard 0.0076 2.31E-04 0.1199 0.0579
Medie 0.0214 0.0011 0.3378 0.2814
Sursa: prelucrare proprie
Tabelul 4.3. Frontul pareto: rezultate sumare obținute cu algoritmul NSGA II
Indicatori Risc Rentabilitate Risc_Anualizat Rentabilitate_Anualizată
Min 0.0086 4.66E-04 0.1363 0.1164
Max 0.0344 0.0014 0.544 0.3594
Interval
de variatie 0.0258 9.72E-04 0.4077 0.2429
Abatere
Standard 0.0084 2.86E-04 0.1331 0.0714
Medie 0.0187 0.001 0.2963 0.2555
Sursa: prelucrare proprie
Tabelul 4.4. Frontul pareto: rezultate sumare obținute cu algoritmul MOPSO
Indicatori Risc Rentabilitate Risc_Anualizat Rentabilitate_Anualizată
Min 0.0089 5.10E-04 0.1413 0.1274
Max 0.0176 9.28E-04 0.2776 0.232
Interval
de variatie 0.0086 4.19E-04 0.1363 0.1046
Abatere
Standard 0.0025 1.13E-04 0.04 0.0282
Medie 0.0127 7.39E-04 0.2005 0.1848
Sursa: prelucrare proprie
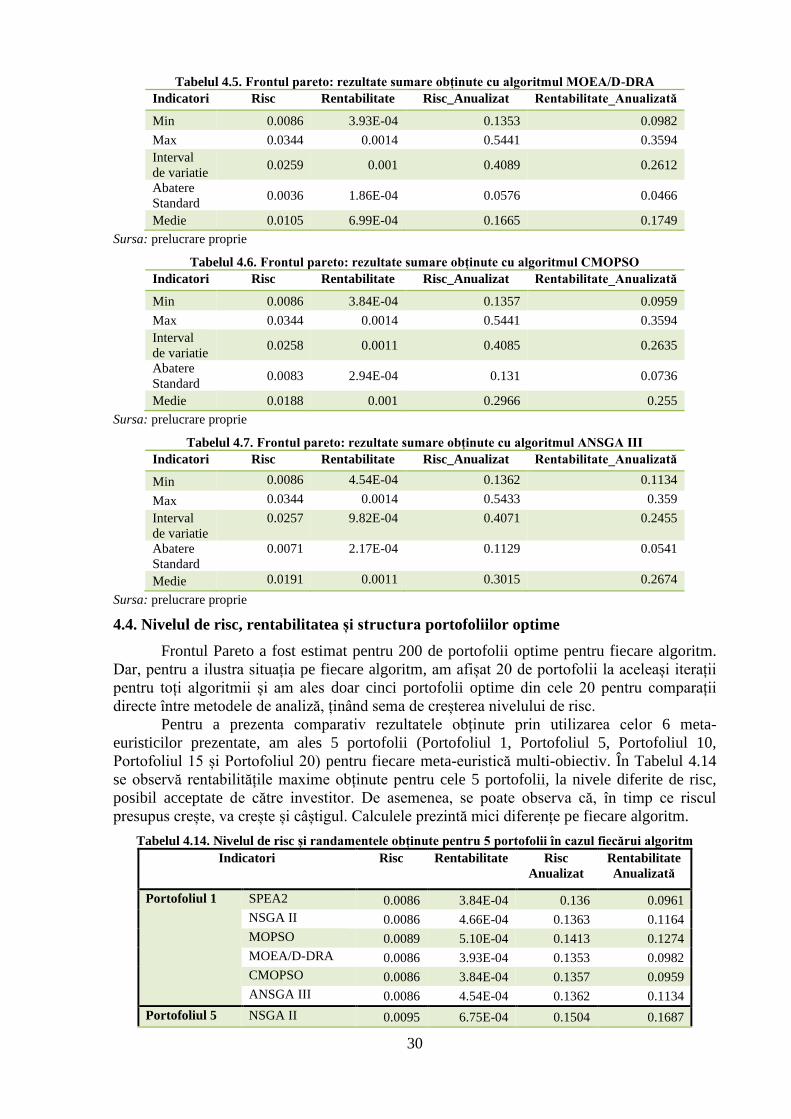
30
Tabelul 4.5. Frontul pareto: rezultate sumare obținute cu algoritmul MOEA/D-DRA
Indicatori Risc Rentabilitate Risc_Anualizat Rentabilitate_Anualizată
Min 0.0086 3.93E-04 0.1353 0.0982
Max 0.0344 0.0014 0.5441 0.3594
Interval
de variatie 0.0259 0.001 0.4089 0.2612
Abatere
Standard 0.0036 1.86E-04 0.0576 0.0466
Medie 0.0105 6.99E-04 0.1665 0.1749
Sursa: prelucrare proprie
Tabelul 4.6. Frontul pareto: rezultate sumare obținute cu algoritmul CMOPSO
Indicatori Risc Rentabilitate Risc_Anualizat Rentabilitate_Anualizată
Min 0.0086 3.84E-04 0.1357 0.0959
Max 0.0344 0.0014 0.5441 0.3594
Interval
de variatie 0.0258 0.0011 0.4085 0.2635
Abatere
Standard 0.0083 2.94E-04 0.131 0.0736
Medie 0.0188 0.001 0.2966 0.255
Sursa: prelucrare proprie
Tabelul 4.7. Frontul pareto: rezultate sumare obținute cu algoritmul ANSGA III
Indicatori Risc Rentabilitate Risc_Anualizat Rentabilitate_Anualizată
Min 0.0086 4.54E-04 0.1362 0.1134
Max 0.0344 0.0014 0.5433 0.359
Interval
de variatie
0.0257 9.82E-04 0.4071 0.2455
Abatere
Standard
0.0071 2.17E-04 0.1129 0.0541
Medie 0.0191 0.0011 0.3015 0.2674
Sursa: prelucrare proprie
4.4. Nivelul de risc, rentabilitatea și structura portofoliilor optime
Frontul Pareto a fost estimat pentru 200 de portofolii optime pentru fiecare algoritm.
Dar, pentru a ilustra situația pe fiecare algoritm, am afișat 20 de portofolii la aceleași iterații
pentru toți algoritmii și am ales doar cinci portofolii optime din cele 20 pentru comparații
directe între metodele de analiză, ținând sema de creșterea nivelului de risc.
Pentru a prezenta comparativ rezultatele obținute prin utilizarea celor 6 meta-
euristicilor prezentate, am ales 5 portofolii (Portofoliul 1, Portofoliul 5, Portofoliul 10,
Portofoliul 15 și Portofoliul 20) pentru fiecare meta-euristică multi-obiectiv. În Tabelul 4.14
se observă rentabilitățile maxime obținute pentru cele 5 portofolii, la nivele diferite de risc,
posibil acceptate de către investitor. De asemenea, se poate observa că, în timp ce riscul
presupus crește, va crește și câștigul. Calculele prezintă mici diferențe pe fiecare algoritm.
Tabelul 4.14. Nivelul de risc și randamentele obținute pentru 5 portofolii în cazul fiecărui algoritm
Indicatori Risc Rentabilitate Risc
Anualizat
Rentabilitate
Anualizată
Portofoliul 1 SPEA2 0.0086 3.84E-04 0.136 0.0961
NSGA II 0.0086 4.66E-04 0.1363 0.1164
MOPSO 0.0089 5.10E-04 0.1413 0.1274
MOEA/D-DRA 0.0086 3.93E-04 0.1353 0.0982
CMOPSO 0.0086 3.84E-04 0.1357 0.0959
ANSGA III 0.0086 4.54E-04 0.1362 0.1134
Portofoliul 5 NSGA II 0.0095 6.75E-04 0.1504 0.1687
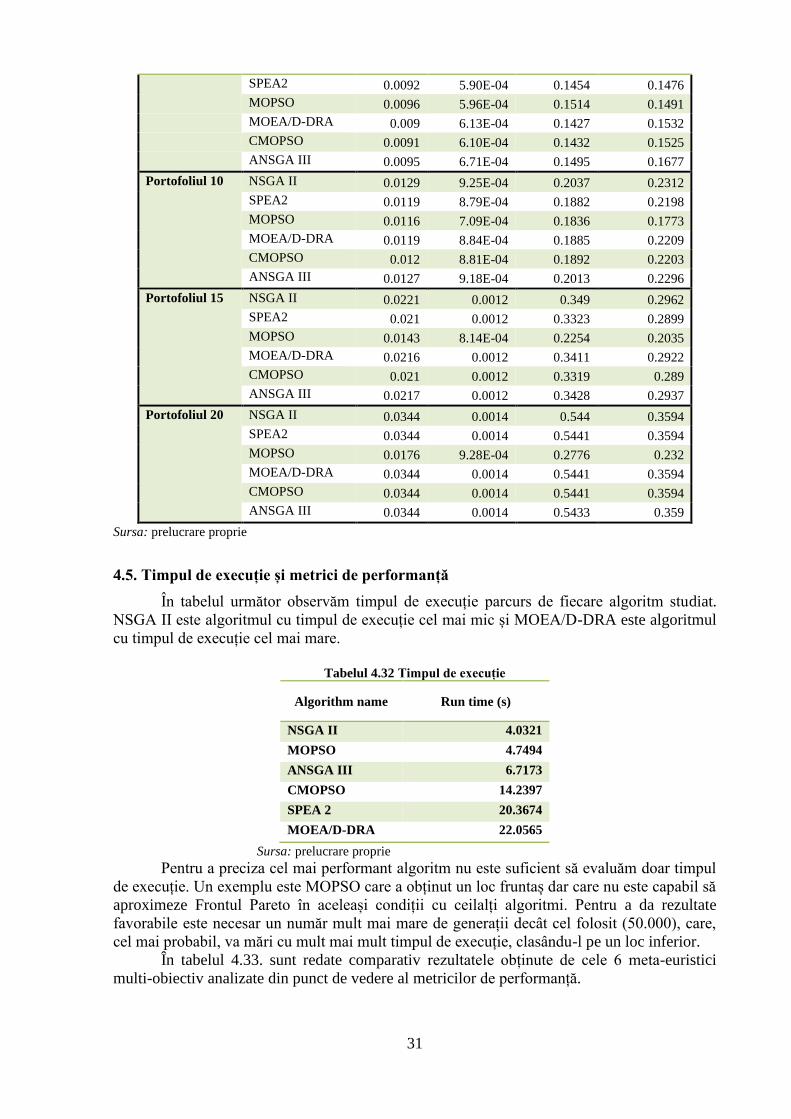
31
SPEA2 0.0092 5.90E-04 0.1454 0.1476
MOPSO 0.0096 5.96E-04 0.1514 0.1491
MOEA/D-DRA 0.009 6.13E-04 0.1427 0.1532
CMOPSO 0.0091 6.10E-04 0.1432 0.1525
ANSGA III 0.0095 6.71E-04 0.1495 0.1677
Portofoliul 10 NSGA II 0.0129 9.25E-04 0.2037 0.2312
SPEA2 0.0119 8.79E-04 0.1882 0.2198
MOPSO 0.0116 7.09E-04 0.1836 0.1773
MOEA/D-DRA 0.0119 8.84E-04 0.1885 0.2209
CMOPSO 0.012 8.81E-04 0.1892 0.2203
ANSGA III 0.0127 9.18E-04 0.2013 0.2296
Portofoliul 15 NSGA II 0.0221 0.0012 0.349 0.2962
SPEA2 0.021 0.0012 0.3323 0.2899
MOPSO 0.0143 8.14E-04 0.2254 0.2035
MOEA/D-DRA 0.0216 0.0012 0.3411 0.2922
CMOPSO 0.021 0.0012 0.3319 0.289
ANSGA III 0.0217 0.0012 0.3428 0.2937
Portofoliul 20 NSGA II 0.0344 0.0014 0.544 0.3594
SPEA2 0.0344 0.0014 0.5441 0.3594
MOPSO 0.0176 9.28E-04 0.2776 0.232
MOEA/D-DRA 0.0344 0.0014 0.5441 0.3594
CMOPSO 0.0344 0.0014 0.5441 0.3594
ANSGA III 0.0344 0.0014 0.5433 0.359
Sursa: prelucrare proprie
4.5. Timpul de execuție și metrici de performanță
În tabelul următor observăm timpul de execuție parcurs de fiecare algoritm studiat.
NSGA II este algoritmul cu timpul de execuție cel mai mic și MOEA/D-DRA este algoritmul
cu timpul de execuție cel mai mare.
Tabelul 4.32 Timpul de execuție
Algorithm name Run time (s)
NSGA II 4.0321
MOPSO 4.7494
ANSGA III 6.7173
CMOPSO 14.2397
SPEA 2 20.3674
MOEA/D-DRA 22.0565
Sursa: prelucrare proprie
Pentru a preciza cel mai performant algoritm nu este suficient să evaluăm doar timpul
de execuție. Un exemplu este MOPSO care a obținut un loc fruntaș dar care nu este capabil să
aproximeze Frontul Pareto în aceleași condiții cu ceilalți algoritmi. Pentru a da rezultate
favorabile este necesar un număr mult mai mare de generații decât cel folosit (50.000), care,
cel mai probabil, va mări cu mult mai mult timpul de execuție, clasându-l pe un loc inferior.
În tabelul 4.33. sunt redate comparativ rezultatele obținute de cele 6 meta-euristici
multi-obiectiv analizate din punct de vedere al metricilor de performanță.
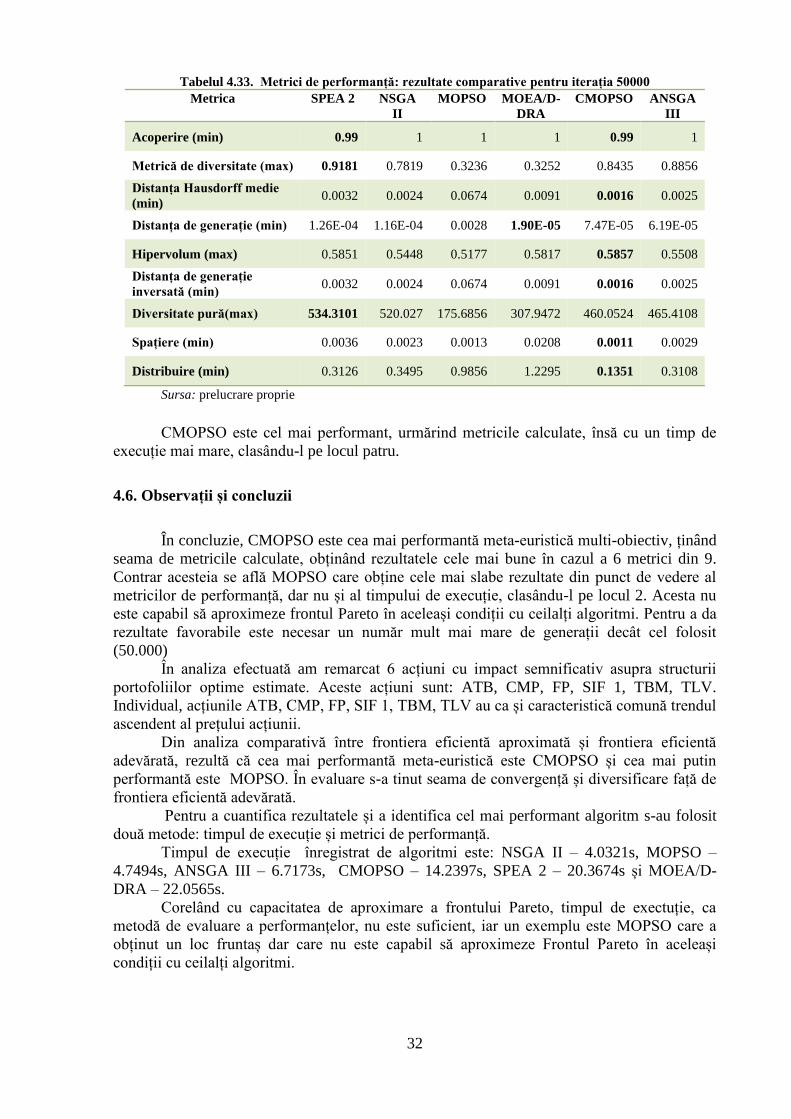
32
Tabelul 4.33. Metrici de performanță: rezultate comparative pentru iterația 50000
Metrica SPEA 2 NSGA
II
MOPSO MOEA/D-
DRA
CMOPSO ANSGA
III
Acoperire (min) 0.99 1 1 1 0.99 1
Metrică de diversitate (max) 0.9181 0.7819 0.3236 0.3252 0.8435 0.8856
Distanța Hausdorff medie
(min) 0.0032 0.0024 0.0674 0.0091 0.0016 0.0025
Distanța de generație (min) 1.26E-04 1.16E-04 0.0028 1.90E-05 7.47E-05 6.19E-05
Hipervolum (max) 0.5851 0.5448 0.5177 0.5817 0.5857 0.5508
Distanța de generație
inversată (min) 0.0032 0.0024 0.0674 0.0091 0.0016 0.0025
Diversitate pură(max) 534.3101 520.027 175.6856 307.9472 460.0524 465.4108
Spațiere (min) 0.0036 0.0023 0.0013 0.0208 0.0011 0.0029
Distribuire (min) 0.3126 0.3495 0.9856 1.2295 0.1351 0.3108
Sursa: prelucrare proprie
CMOPSO este cel mai performant, urmărind metricile calculate, însă cu un timp de
execuție mai mare, clasându-l pe locul patru.
4.6. Observații și concluzii
În concluzie, CMOPSO este cea mai performantă meta-euristică multi-obiectiv, ținând
seama de metricile calculate, obținând rezultatele cele mai bune în cazul a 6 metrici din 9.
Contrar acesteia se află MOPSO care obține cele mai slabe rezultate din punct de vedere al
metricilor de performanță, dar nu și al timpului de execuție, clasându-l pe locul 2. Acesta nu
este capabil să aproximeze frontul Pareto în aceleași condiții cu ceilalți algoritmi. Pentru a da
rezultate favorabile este necesar un număr mult mai mare de generații decât cel folosit
(50.000)
În analiza efectuată am remarcat 6 acțiuni cu impact semnificativ asupra structurii
portofoliilor optime estimate. Aceste acțiuni sunt: ATB, CMP, FP, SIF 1, TBM, TLV.
Individual, acțiunile ATB, CMP, FP, SIF 1, TBM, TLV au ca și caracteristică comună trendul
ascendent al prețului acțiunii.
Din analiza comparativă între frontiera eficientă aproximată și frontiera eficientă
adevărată, rezultă că cea mai performantă meta-euristică este CMOPSO și cea mai putin
performantă este MOPSO. În evaluare s-a tinut seama de convergență și diversificare față de
frontiera eficientă adevărată.
Pentru a cuantifica rezultatele și a identifica cel mai performant algoritm s-au folosit
două metode: timpul de execuție și metrici de performanță.
Timpul de execuție înregistrat de algoritmi este: NSGA II – 4.0321s, MOPSO –
4.7494s, ANSGA III – 6.7173s, CMOPSO – 14.2397s, SPEA 2 – 20.3674s și MOEA/D-
DRA – 22.0565s.
Corelând cu capacitatea de aproximare a frontului Pareto, timpul de exectuție, ca
metodă de evaluare a performanțelor, nu este suficient, iar un exemplu este MOPSO care a
obținut un loc fruntaș dar care nu este capabil să aproximeze Frontul Pareto în aceleași
condiții cu ceilalți algoritmi.
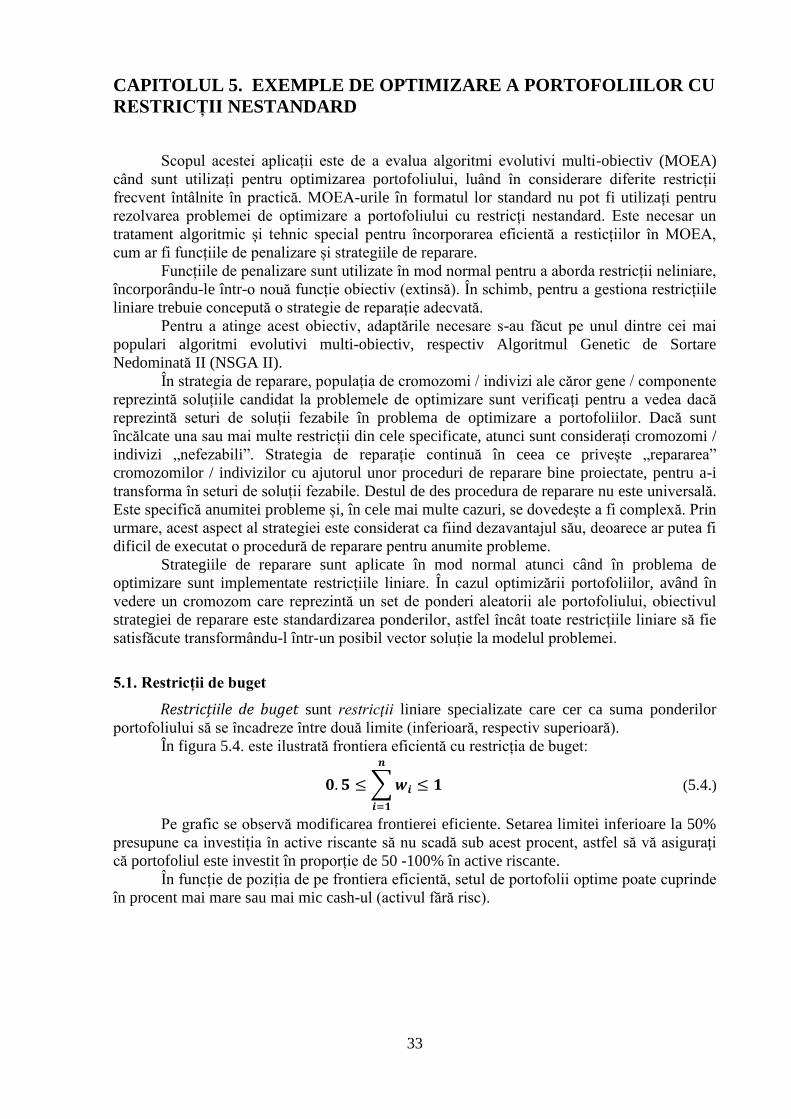
33
CAPITOLUL 5. EXEMPLE DE OPTIMIZARE A PORTOFOLIILOR CU
RESTRICȚII NESTANDARD
Scopul acestei aplicații este de a evalua algoritmi evolutivi multi-obiectiv (MOEA)
când sunt utilizați pentru optimizarea portofoliului, luând în considerare diferite restricții
frecvent întâlnite în practică. MOEA-urile în formatul lor standard nu pot fi utilizați pentru
rezolvarea problemei de optimizare a portofoliului cu restricți nestandard. Este necesar un
tratament algoritmic și tehnic special pentru încorporarea eficientă a resticțiilor în MOEA,
cum ar fi funcțiile de penalizare și strategiile de reparare.
Funcțiile de penalizare sunt utilizate în mod normal pentru a aborda restricții neliniare,
încorporându-le într-o nouă funcție obiectiv (extinsă). În schimb, pentru a gestiona restricțiile
liniare trebuie concepută o strategie de reparație adecvată.
Pentru a atinge acest obiectiv, adaptările necesare s-au făcut pe unul dintre cei mai
populari algoritmi evolutivi multi-obiectiv, respectiv Algoritmul Genetic de Sortare
Nedominată II (NSGA II).
În strategia de reparare, populația de cromozomi / indivizi ale căror gene / componente
reprezintă soluțiile candidat la problemele de optimizare sunt verificați pentru a vedea dacă
reprezintă seturi de soluții fezabile în problema de optimizare a portofoliilor. Dacă sunt
încălcate una sau mai multe restricții din cele specificate, atunci sunt considerați cromozomi /
indivizi „nefezabili”. Strategia de reparație continuă în ceea ce privește „repararea”
cromozomilor / indivizilor cu ajutorul unor proceduri de reparare bine proiectate, pentru a-i
transforma în seturi de soluții fezabile. Destul de des procedura de reparare nu este universală.
Este specifică anumitei probleme și, în cele mai multe cazuri, se dovedește a fi complexă. Prin
urmare, acest aspect al strategiei este considerat ca fiind dezavantajul său, deoarece ar putea fi
dificil de executat o procedură de reparare pentru anumite probleme.
Strategiile de reparare sunt aplicate în mod normal atunci când în problema de
optimizare sunt implementate restricțiile liniare. În cazul optimizării portofoliilor, având în
vedere un cromozom care reprezintă un set de ponderi aleatorii ale portofoliului, obiectivul
strategiei de reparare este standardizarea ponderilor, astfel încât toate restricțiile liniare să fie
satisfăcute transformându-l într-un posibil vector soluție la modelul problemei.
5.1. Restricții de buget
Restricțiile de buget sunt restricţii liniare specializate care cer ca suma ponderilor
portofoliului să se încadreze între două limite (inferioară, respectiv superioară).
În figura 5.4. este ilustrată frontiera eficientă cu restricția de buget:
𝟎. 𝟓 ≤ ∑ 𝒘𝒊
𝒏
𝒊=𝟏
≤ 𝟏 (5.4.)
Pe grafic se observă modificarea frontierei eficiente. Setarea limitei inferioare la 50%
presupune ca investiția în active riscante să nu scadă sub acest procent, astfel să vă asigurați
că portofoliul este investit în proporție de 50 -100% în active riscante.
În funcție de poziția de pe frontiera eficientă, setul de portofolii optime poate cuprinde
în procent mai mare sau mai mic cash-ul (activul fără risc).
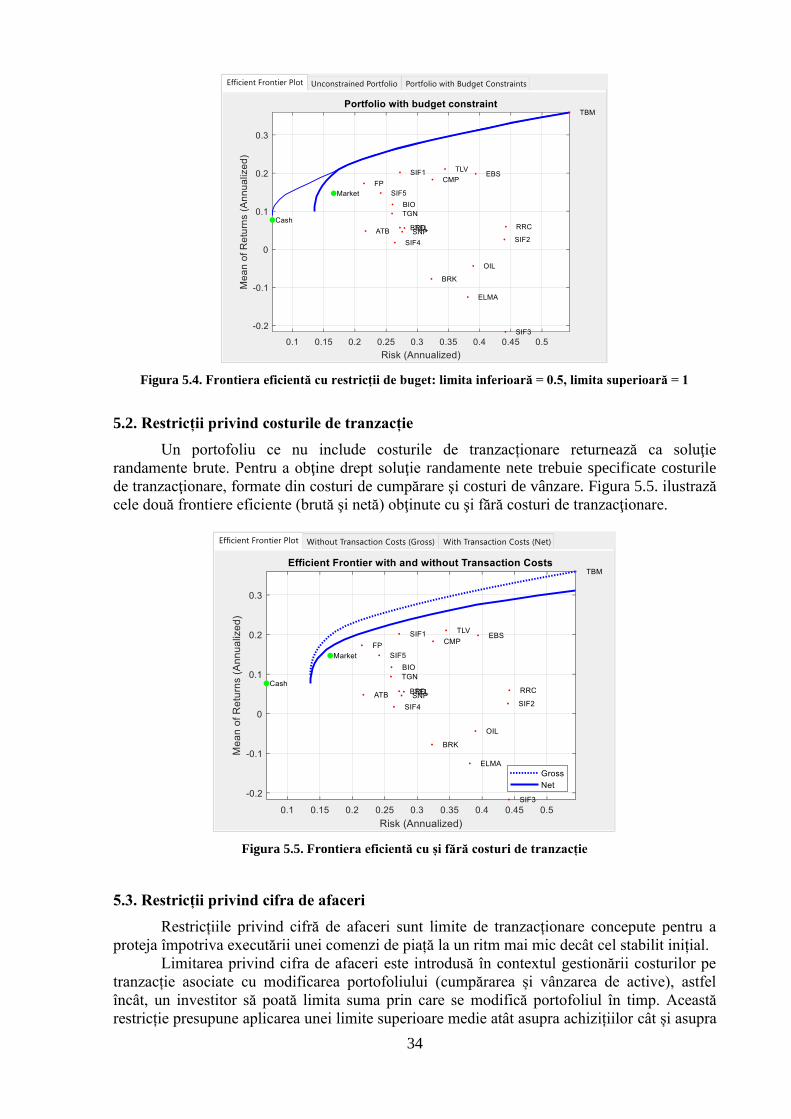
34
Figura 5.4. Frontiera eficientă cu restricții de buget: limita inferioară = 0.5, limita superioară = 1
5.2. Restricții privind costurile de tranzacție
Un portofoliu ce nu include costurile de tranzacționare returnează ca soluţie
randamente brute. Pentru a obţine drept soluţie randamente nete trebuie specificate costurile
de tranzacţionare, formate din costuri de cumpărare şi costuri de vânzare. Figura 5.5. ilustrază
cele două frontiere eficiente (brută şi netă) obţinute cu şi fără costuri de tranzacţionare.
Figura 5.5. Frontiera eficientă cu și fără costuri de tranzacție
5.3. Restricții privind cifra de afaceri
Restricțiile privind cifră de afaceri sunt limite de tranzacționare concepute pentru a
proteja împotriva executării unei comenzi de piață la un ritm mai mic decât cel stabilit inițial.
Limitarea privind cifra de afaceri este introdusă în contextul gestionării costurilor pe
tranzacție asociate cu modificarea portofoliului (cumpărarea și vânzarea de active), astfel
încât, un investitor să poată limita suma prin care se modifică portofoliul în timp. Această
restricție presupune aplicarea unei limite superioare medie atât asupra achizițiilor cât și asupra
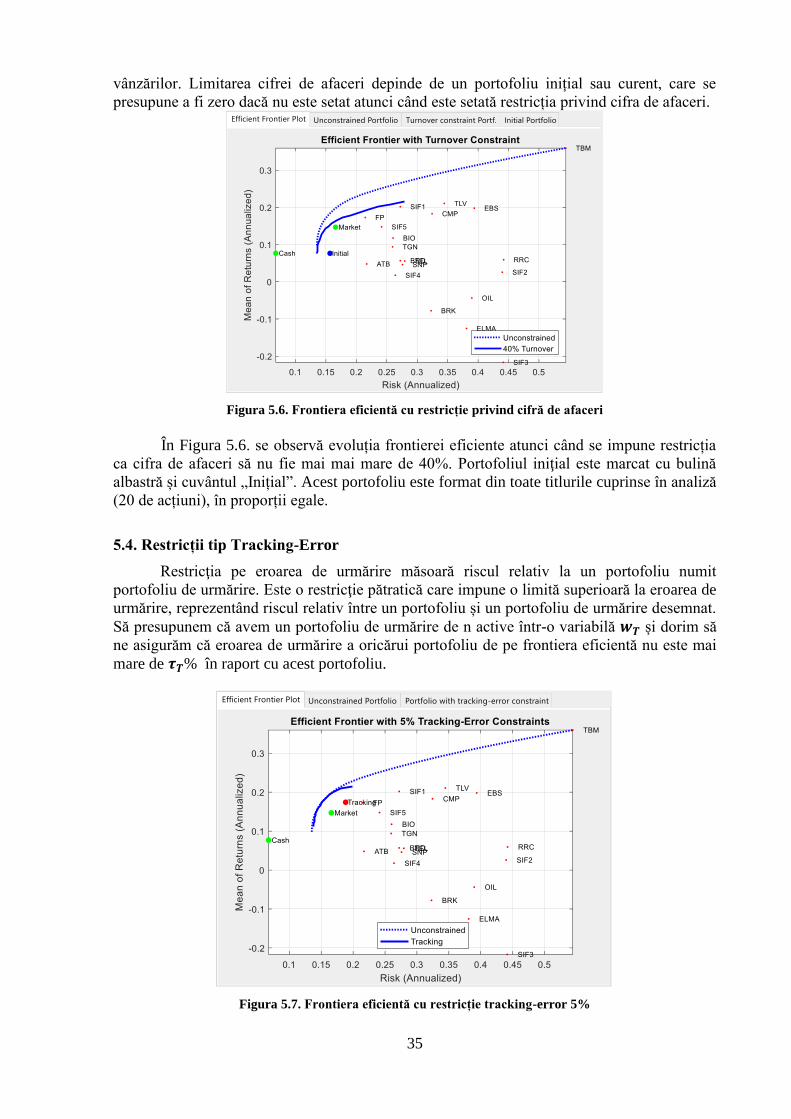
35
vânzărilor. Limitarea cifrei de afaceri depinde de un portofoliu inițial sau curent, care se
presupune a fi zero dacă nu este setat atunci când este setată restricția privind cifra de afaceri.
Figura 5.6. Frontiera eficientă cu restricție privind cifră de afaceri
În Figura 5.6. se observă evoluția frontierei eficiente atunci când se impune restricția
ca cifra de afaceri să nu fie mai mai mare de 40%. Portofoliul iniţial este marcat cu bulină
albastră și cuvântul „Inițial”. Acest portofoliu este format din toate titlurile cuprinse în analiză
(20 de acțiuni), în proporții egale.
5.4. Restricții tip Tracking-Error
Restricţia pe eroarea de urmărire măsoară riscul relativ la un portofoliu numit
portofoliu de urmărire. Este o restricţie pătratică care impune o limită superioară la eroarea de
urmărire, reprezentând riscul relativ între un portofoliu și un portofoliu de urmărire desemnat.
Să presupunem că avem un portofoliu de urmărire de n active într-o variabilă 𝒘𝑻 și dorim să
ne asigurăm că eroarea de urmărire a oricărui portofoliu de pe frontiera eficientă nu este mai
mare de 𝝉𝑻% în raport cu acest portofoliu.
Figura 5.7. Frontiera eficientă cu restricție tracking-error 5%
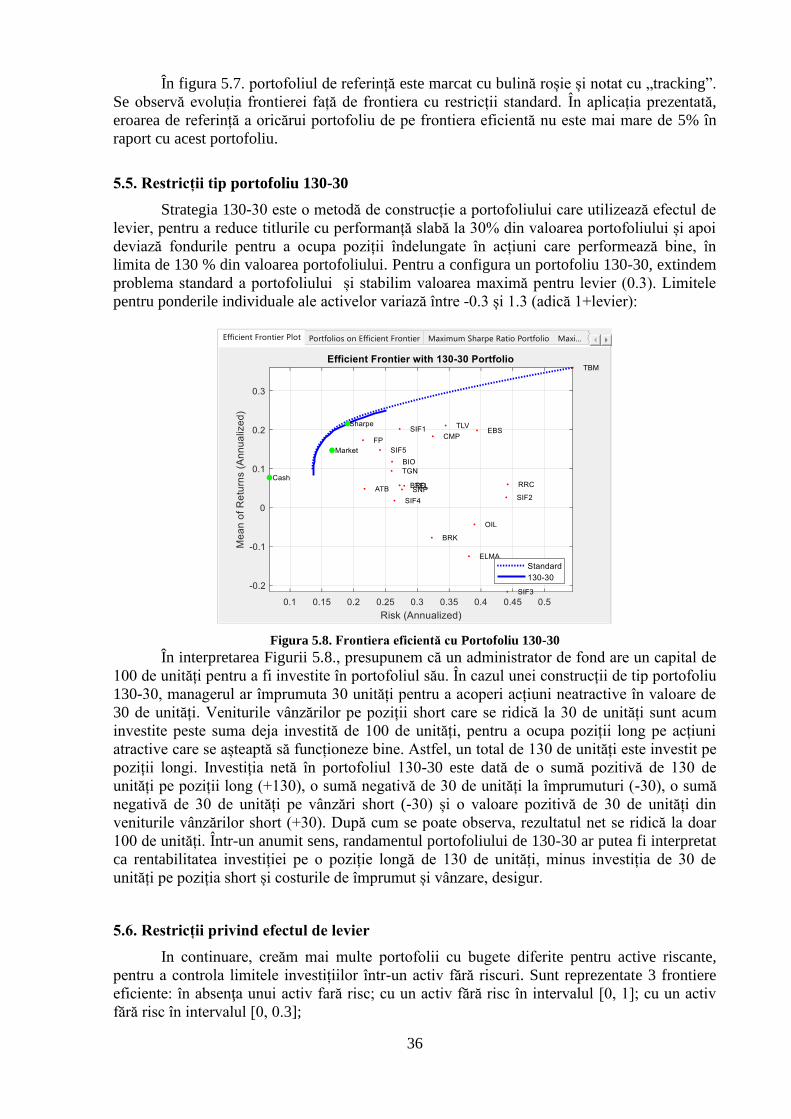
36
În figura 5.7. portofoliul de referință este marcat cu bulină roșie și notat cu „tracking”.
Se observă evoluția frontierei față de frontiera cu restricții standard. În aplicația prezentată,
eroarea de referință a oricărui portofoliu de pe frontiera eficientă nu este mai mare de 5% în
raport cu acest portofoliu.
5.5. Restricții tip portofoliu 130-30
Strategia 130-30 este o metodă de construcție a portofoliului care utilizează efectul de
levier, pentru a reduce titlurile cu performanță slabă la 30% din valoarea portofoliului și apoi
deviază fondurile pentru a ocupa poziții îndelungate în acțiuni care performează bine, în
limita de 130 % din valoarea portofoliului. Pentru a configura un portofoliu 130-30, extindem
problema standard a portofoliului și stabilim valoarea maximă pentru levier (0.3). Limitele
pentru ponderile individuale ale activelor variază între -0.3 și 1.3 (adică 1+levier):
Figura 5.8. Frontiera eficientă cu Portofoliu 130-30
În interpretarea Figurii 5.8., presupunem că un administrator de fond are un capital de
100 de unități pentru a fi investite în portofoliul său. În cazul unei construcții de tip portofoliu
130-30, managerul ar împrumuta 30 unități pentru a acoperi acțiuni neatractive în valoare de
30 de unități. Veniturile vânzărilor pe poziții short care se ridică la 30 de unități sunt acum
investite peste suma deja investită de 100 de unități, pentru a ocupa poziții long pe acțiuni
atractive care se așteaptă să funcționeze bine. Astfel, un total de 130 de unități este investit pe
poziții longi. Investiția netă în portofoliul 130-30 este dată de o sumă pozitivă de 130 de
unități pe poziții long (+130), o sumă negativă de 30 de unități la împrumuturi (-30), o sumă
negativă de 30 de unități pe vânzări short (-30) și o valoare pozitivă de 30 de unități din
veniturile vânzărilor short (+30). După cum se poate observa, rezultatul net se ridică la doar
100 de unități. Într-un anumit sens, randamentul portofoliului de 130-30 ar putea fi interpretat
ca rentabilitatea investiției pe o poziție longă de 130 de unități, minus investiția de 30 de
unități pe poziția short și costurile de împrumut și vânzare, desigur.
5.6. Restricții privind efectul de levier
In continuare, creăm mai multe portofolii cu bugete diferite pentru active riscante,
pentru a controla limitele investițiilor într-un activ fără riscuri. Sunt reprezentate 3 frontiere
eficiente: în absenţa unui activ fară risc; cu un activ fără risc în intervalul [0, 1]; cu un activ
fără risc în intervalul [0, 0.3];
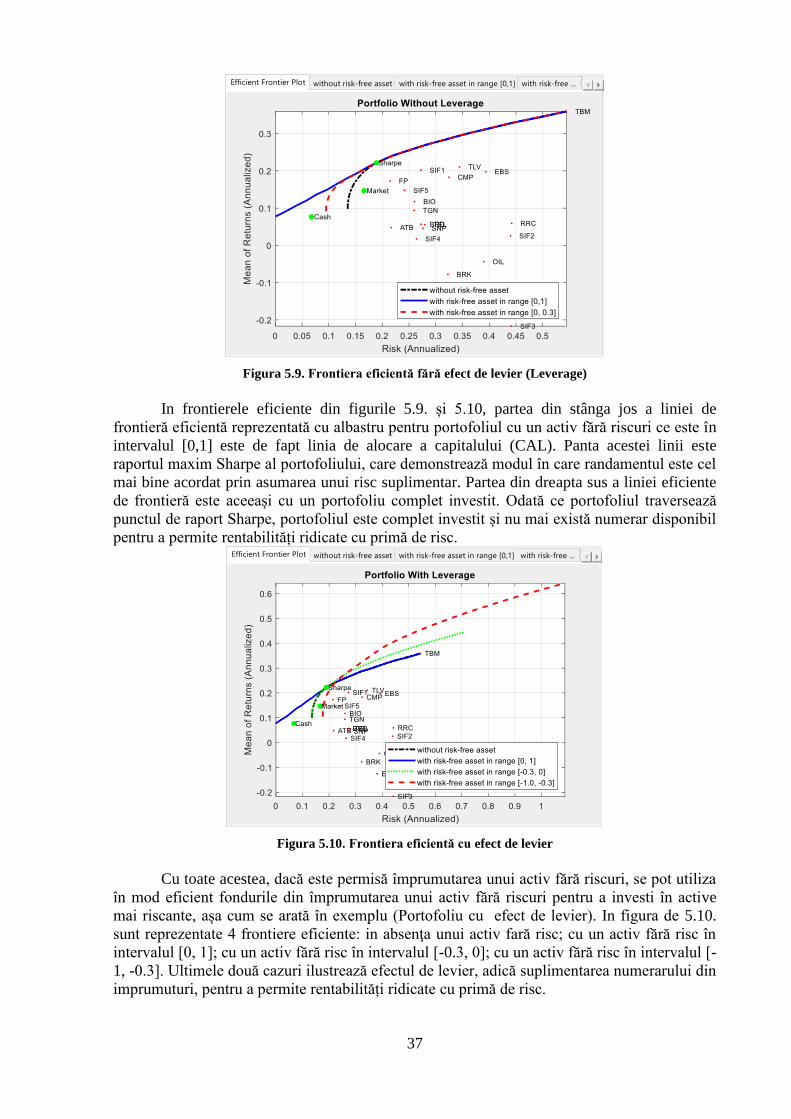
37
Figura 5.9. Frontiera eficientă fără efect de levier (Leverage)
In frontierele eficiente din figurile 5.9. și 5.10, partea din stânga jos a liniei de
frontieră eficientă reprezentată cu albastru pentru portofoliul cu un activ fără riscuri ce este în
intervalul [0,1] este de fapt linia de alocare a capitalului (CAL). Panta acestei linii este
raportul maxim Sharpe al portofoliului, care demonstrează modul în care randamentul este cel
mai bine acordat prin asumarea unui risc suplimentar. Partea din dreapta sus a liniei eficiente
de frontieră este aceeași cu un portofoliu complet investit. Odată ce portofoliul traversează
punctul de raport Sharpe, portofoliul este complet investit și nu mai există numerar disponibil
pentru a permite rentabilități ridicate cu primă de risc.
Figura 5.10. Frontiera eficientă cu efect de levier
Cu toate acestea, dacă este permisă împrumutarea unui activ fără riscuri, se pot utiliza
în mod eficient fondurile din împrumutarea unui activ fără riscuri pentru a investi în active
mai riscante, așa cum se arată în exemplu (Portofoliu cu efect de levier). In figura de 5.10.
sunt reprezentate 4 frontiere eficiente: in absenţa unui activ fară risc; cu un activ fără risc în
intervalul [0, 1]; cu un activ fără risc în intervalul [-0.3, 0]; cu un activ fără risc în intervalul [-
1, -0.3]. Ultimele două cazuri ilustrează efectul de levier, adică suplimentarea numerarului din
imprumuturi, pentru a permite rentabilități ridicate cu primă de risc.
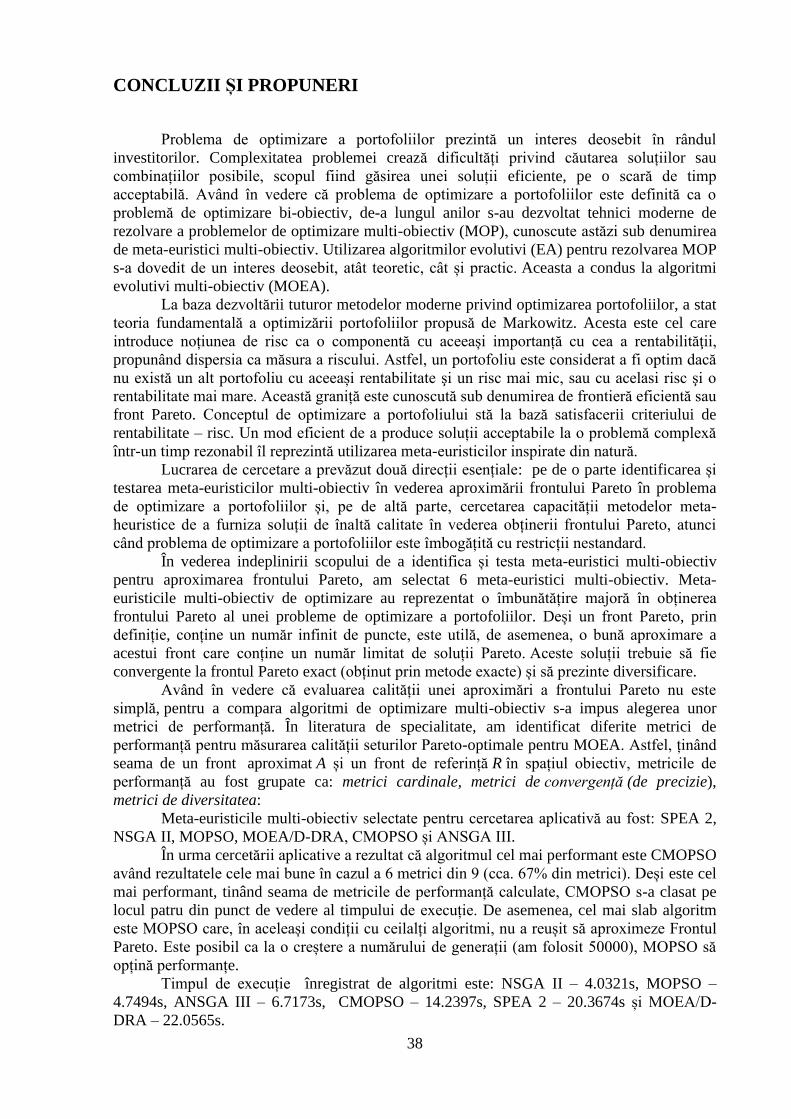
38
CONCLUZII ȘI PROPUNERI
Problema de optimizare a portofoliilor prezintă un interes deosebit în rândul
investitorilor. Complexitatea problemei crează dificultăți privind căutarea soluțiilor sau
combinațiilor posibile, scopul fiind găsirea unei soluții eficiente, pe o scară de timp
acceptabilă. Având în vedere că problema de optimizare a portofoliilor este definită ca o
problemă de optimizare bi-obiectiv, de-a lungul anilor s-au dezvoltat tehnici moderne de
rezolvare a problemelor de optimizare multi-obiectiv (MOP), cunoscute astăzi sub denumirea
de meta-euristici multi-obiectiv. Utilizarea algoritmilor evolutivi (EA) pentru rezolvarea MOP
s-a dovedit de un interes deosebit, atât teoretic, cât și practic. Aceasta a condus la algoritmi
evolutivi multi-obiectiv (MOEA).
La baza dezvoltării tuturor metodelor moderne privind optimizarea portofoliilor, a stat
teoria fundamentală a optimizării portofoliilor propusă de Markowitz. Acesta este cel care
introduce noțiunea de risc ca o componentă cu aceeași importanță cu cea a rentabilităţii,
propunând dispersia ca măsura a riscului. Astfel, un portofoliu este considerat a fi optim dacă
nu există un alt portofoliu cu aceeași rentabilitate şi un risc mai mic, sau cu acelasi risc şi o
rentabilitate mai mare. Această graniță este cunoscută sub denumirea de frontieră eficientă sau
front Pareto. Conceptul de optimizare a portofoliului stă la bază satisfacerii criteriului de
rentabilitate – risc. Un mod eficient de a produce soluții acceptabile la o problemă complexă
într-un timp rezonabil îl reprezintă utilizarea meta-euristicilor inspirate din natură.
Lucrarea de cercetare a prevăzut două direcții esențiale: pe de o parte identificarea și
testarea meta-euristicilor multi-obiectiv în vederea aproximării frontului Pareto în problema
de optimizare a portofoliilor și, pe de altă parte, cercetarea capacității metodelor meta-
heuristice de a furniza soluții de înaltă calitate în vederea obținerii frontului Pareto, atunci
când problema de optimizare a portofoliilor este îmbogățită cu restricții nestandard.
În vederea indeplinirii scopului de a identifica și testa meta-euristici multi-obiectiv
pentru aproximarea frontului Pareto, am selectat 6 meta-euristici multi-obiectiv. Meta-
euristicile multi-obiectiv de optimizare au reprezentat o îmbunătățire majoră în obținerea
frontului Pareto al unei probleme de optimizare a portofoliilor. Deși un front Pareto, prin
definiție, conține un număr infinit de puncte, este utilă, de asemenea, o bună aproximare a
acestui front care conține un număr limitat de soluții Pareto. Aceste soluții trebuie să fie
convergente la frontul Pareto exact (obținut prin metode exacte) și să prezinte diversificare.
Având în vedere că evaluarea calității unei aproximări a frontului Pareto nu este
simplă, pentru a compara algoritmi de optimizare multi-obiectiv s-a impus alegerea unor
metrici de performanță. În literatura de specialitate, am identificat diferite metrici de
performanță pentru măsurarea calității seturilor Pareto-optimale pentru MOEA. Astfel, ținând
seama de un front aproximat A și un front de referință R în spațiul obiectiv, metricile de
performanță au fost grupate ca: metrici cardinale, metrici de convergență (de precizie),
metrici de diversitatea:
Meta-euristicile multi-obiectiv selectate pentru cercetarea aplicativă au fost: SPEA 2,
NSGA II, MOPSO, MOEA/D-DRA, CMOPSO și ANSGA III.
În urma cercetării aplicative a rezultat că algoritmul cel mai performant este CMOPSO
având rezultatele cele mai bune în cazul a 6 metrici din 9 (cca. 67% din metrici). Deși este cel
mai performant, tinând seama de metricile de performanță calculate, CMOPSO s-a clasat pe
locul patru din punct de vedere al timpului de execuție. De asemenea, cel mai slab algoritm
este MOPSO care, în aceleași condiții cu ceilalți algoritmi, nu a reușit să aproximeze Frontul
Pareto. Este posibil ca la o creștere a numărului de generații (am folosit 50000), MOPSO să
opțină performanțe.
Timpul de execuție înregistrat de algoritmi este: NSGA II – 4.0321s, MOPSO –
4.7494s, ANSGA III – 6.7173s, CMOPSO – 14.2397s, SPEA 2 – 20.3674s și MOEA/D-
DRA – 22.0565s.
39
În analiza efectuată am remarcat 6 acțiuni cu impact semnificativ asupra structurii
portofoliilor optime estimate. Aceste acțiuni sunt: ATB, CMP, FP, SIF 1, TBM, TLV.
Individual, acțiunile ATB, CMP, FP, SIF 1, TBM, TLV au ca și caracteristică comună trendul
ascendent al prețului acțiunii.
Din analiza comparativă între frontiera eficientă aproximată și frontiera eficientă
adevărată, rezultă că cea mai performantă meta-euristică este CMOPSO și cea mai putin
performantă este MOPSO. În evaluare s-a tinut seama de convergența și diversificarea față de
frontiera eficientă adevărată. Această concluzie a fost confirmată și de rezultatele obținute în
urma calculului metricilor de performanță.
În ceea ce privește cercetarea capacității metodelor meta-euristice de a furniza soluții
de înaltă calitate în vederea obținerii frontului Pareto, atunci când problema de optimizare a
portofoliilor este îmbogățită cu restricții nestandard, a fost selectat pentru testare algoritmul
NSGA II. Algoritmul NSGA II este capabil să aproximeze frontiera eficientă în problema de
optimizare a portofoliilor atunci când sunt implementate următoarele tipuri de restricții
nestandard: restricții de buget, restricții privind costuri de tranzacționare, restricții privind
cifra de afaceri, restricții tip tracking error, restricții tip portofoliu 130-30 și restricții privind
efectul de levier. Restricțiile de buget sunt restricţii liniare specializate care cer ca suma
ponderilor portofoliului să se încadreze între două limite (inferioară, respectiv superioară). În
aplicație, setarea limitei inferioare la 50% presupune ca investiția în active riscante să nu
scadă sub acest procent, astfel portofoliul este investit în proporție de 50 -100% în active
riscante. Restricțiile privind costurile de tranzacționare (necesită specificarea costurilor de
tranzacţionare) returnează ca soluţie randamente nete. Restricțiile privind cifra de afaceri sunt
introduse în contextul gestionării costurilor pe tranzacție asociate cu modificarea portofoliului
(cumpărarea și vânzarea de active), astfel încât, un investitor să poată limita suma prin care se
modifică portofoliul în timp (limita superioară de 40% asupra achizițiilor și vânzărilor). Spre
deosebire de acestea, restricţia pe eroarea de urmărire este o restricţie pătratică care impune o
limită superioară la eroarea de urmărire, reprezentând riscul relativ între un portofoliu și un
portofoliu de urmărire desemnat. În încheiere, strategia 130-30 este o metodă de construcție a
portofoliului care utilizează efectul de levier, pentru a reduce titlurile cu performanță slabă la
30% din valoarea portofoliului și apoi deviază fondurile pentru a ocupa poziții long în acțiuni
care performează bine, în limita de 130 % din valoarea portofoliului. Astfel, portofoliu 130-30
este un portofoliu de lungă durată care se preconizează că va produce rentabilități mai mari,
pentru că, în mod normal, este de așteptat să sporească expunerea la investiții și să asigure
protecția pieței în același timp. Pentru a configura un portofoliu 130-30, extindem problema
standard a portofoliului și stabilim valoarea maximă pentru levier (0.3). Limitele pentru
ponderile individuale ale activelor variază între -0.3 și 1.3 (adică 1+levier)
Dezvoltări ulterioare
Ca dezvoltări ulterioare ne propunem extinderea gamei de meta-euristicile multi-
obiectiv pentru lucrul cu restricții nestandard în problema de optimizare a portofoliilor,
precum și utilizarea meta-euristicilor multi-obiectiv în alte aplicații financiare.
40
BIBLIOGRAFIE
ABBATTISTA, F., ABBATTISTA, N. & CAPONETTI, L. Year. An evolutionary and
cooperative agents model for optimization. In: Proceedings of 1995 IEEE
International Conference on Evolutionary Computation, 1995. IEEE, 668-671.
APPLEGATE, D., BIXBY, R., COOK, W. & CHVÁTAL, V. 1998. On the solution of
traveling salesman problems. Documenta Mathematica, Extra Volume ICM III, 11.
APPLEGATE, D. & COOK, W. 1991. A computational study of the job-shop scheduling
problem. ORSA Journal on computing, 3, 149-156.
AUGERAT, P., BELENGUER, J.-M., BENAVENT, E., CORBÉRAN, A. & NADDEF, D.
1998. Separating capacity constraints in the CVRP using tabu search. European
Journal of operational research, 106, 546-557.
AZIMI, Z. N. 2005. Hybrid heuristics for examination timetabling problem. Applied
Mathematics and Computation, 163, 705-733.
BAKER, J. E. Year. Adaptive selection methods for genetic algorithms. In: Proceedings of
an International Conference on Genetic Algorithms and their applications, 1985.
Hillsdale, New Jersey, 101-111.
BEN HADJ-ALOUANE, A. & BEAN, J. C. 1997. A genetic algorithm for the multiple-
choice integer program. Operations Research, 45, 92-101.
BENT, R. & VAN HENTENRYCK, P. 2004. A two-stage hybrid local search for the vehicle
routing problem with time windows. Transportation Science, 38, 515-530.
BENTLEY, P. J. & WAKEFIELD, J. P. 1998. Finding acceptable solutions in the pareto-
optimal range using multiobjective genetic algorithms. Soft computing in engineering
design and manufacturing. Springer.
BEST, M. J. 2010. Portfolio optimization, CRC Press.
BEYER, H.-G. & SCHWEFEL, H.-P. 2002. Evolution strategies–A comprehensive
introduction. Natural computing, 1, 3-52.
BLUM, C. & ROLI, A. 2003. Metaheuristics in combinatorial optimization: Overview and
conceptual comparison. ACM computing surveys (CSUR), 35, 268-308.
BRADFIELD, J. 2007. Introduction to the economics of financial markets, Oxford University
Press.
BRANKE, J., SCHECKENBACH, B., STEIN, M., DEB, K. & SCHMECK, H. 2009.
Portfolio optimization with an envelope-based multi-objective evolutionary algorithm.
European Journal of operational research, 199, 684-693.
BRÉLAZ, D. 1979. New methods to color the vertices of a graph. Communications of the
ACM, 22, 251-256.
BURKE, E. K., COWLING, P. I. & KEUTHEN, R. Year. Effective local and guided variable
neighbourhood search methods for the asymmetric travelling salesman problem. In:
Workshops on Applications of Evolutionary Computation, 2001. Springer, 203-212.
CARLSON, S. E. & SHONKWILER, R. Year. Annealing a genetic algorithm over
constraints. In: SMC'98 Conference Proceedings. 1998 IEEE International
Conference on Systems, Man, and Cybernetics (Cat. No. 98CH36218), 1998. IEEE,
3931-3936.
CARROLL, C. W. 1961. The created response surface technique for optimizing nonlinear,
restrained systems. Operations Research, 9, 169-184.
CHABRIER, A., DANNA, E. & LE PAPE, C. 2002. Coopération entre génération de
colonnes sans cycle et recherche locale appliquée au routage de véhicules. Huitiemes
Journées Nationales sur la résolution de Problemes NP-Complets JNPC’2002.
CHEN, S., TALUKDAR, S. & SADEH, N. Year. Job-shop-scheduling by a team of
asynchronous agents. In: IJCAI-93 Workshop on Knowledge-Based Production,
Scheduling and Control, 1993. 34.
41
CHENG, R. & JIN, Y. 2014. A competitive swarm optimizer for large scale optimization.
IEEE transactions on cybernetics, 45, 191-204.
CHIAM, S., TAN, K. & AL MAMUM, A. 2008. Evolutionary multi-objective portfolio
optimization in practical context. International Journal of Automation and Computing,
5, 67-80.
CHONG, E. K. & ZAK, S. H. 2013. An introduction to optimization, John Wiley & Sons.
CHU, P. C. & BEASLEY, J. E. 1998. A genetic algorithm for the multidimensional knapsack
problem. Journal of heuristics, 4, 63-86.
COELLO, C. A. C. 2000. Use of a self-adaptive penalty approach for engineering
optimization problems. Computers in Industry, 41, 113-127.
COELLO, C. A. C. 2002. Theoretical and numerical constraint-handling techniques used with
evolutionary algorithms: a survey of the state of the art. Computer methods in applied
mechanics and engineering, 191, 1245-1287.
COELLO, C. C. & LECHUGA, M. S. Year. MOPSO: A proposal for multiple objective
particle swarm optimization. In: Proceedings of the 2002 Congress on Evolutionary
Computation. CEC'02 (Cat. No. 02TH8600), 2002. IEEE, 1051-1056.
COIT, D. W. & SMITH, A. E. 1996. Penalty guided genetic search for reliability design
optimization. Computers & industrial engineering, 30, 895-904.
COIT, D. W., SMITH, A. E. & TATE, D. M. 1996. Adaptive penalty methods for genetic
optimization of constrained combinatorial problems. INFORMS Journal on
Computing, 8, 173-182.
CONGRAM, R. K., POTTS, C. N. & VAN DE VELDE, S. L. 2002. An iterated dynasearch
algorithm for the single-machine total weighted tardiness scheduling problem.
INFORMS Journal on Computing, 14, 52-67.
CORNE, D. W., JERRAM, N. R., KNOWLES, J. D. & OATES, M. J. Year. PESA-II:
Region-based selection in evolutionary multiobjective optimization. In: Proceedings
of the 3rd Annual Conference on Genetic and Evolutionary Computation, 2001.
Morgan Kaufmann Publishers Inc., 283-290.
CORNE, D. W., KNOWLES, J. D. & OATES, M. J. Year. The Pareto envelope-based
selection algorithm for multiobjective optimization. In: International conference on
parallel problem solving from nature, 2000. Springer, 839-848.
COTTA, C. & TROYA, J. M. 2003. Embedding branch and bound within evolutionary
algorithms. Applied Intelligence, 18, 137-153.
COURANT, R. 1943. Variational methods for the solution of problems of equilibrium and
vibrations. Bulletin of the American Mathematical Society, 49, 23.
DASGUPTA, D. & MICHALEWICZ, Z. 2013. Evolutionary algorithms in engineering
applications, Springer Science & Business Media.
DE FALCO, I., DEL BALIO, R. & TARANTINO, E. 1997. An analysis of parallel heuristics
for task allocation in multicomputers. Computing, 59, 259-275.
DE FALCO, I., DEL BALIO, R., TARANTINO, E. & VACCARO, R. Year. Improving
search by incorporating evolution principles in parallel tabu search. In: Proceedings
of the First IEEE Conference on Evolutionary Computation. IEEE World Congress on
Computational Intelligence, 1994. IEEE, 823-828.
DE SOUZA, P. S. 1993. Asynchronous organizations for multi-algorithm problems.
DEB, K. 1999. Multi-objective genetic algorithms: Problem difficulties and construction of
test problems. Evolutionary computation, 7, 205-230.
DEB, K. & JAIN, H. 2013. An evolutionary many-objective optimization algorithm using
reference-point-based nondominated sorting approach, part I: solving problems with
box constraints. IEEE transactions on evolutionary computation, 18, 577-601.
DEB, K., PRATAP, A., AGARWAL, S. & MEYARIVAN, T. 2002. A fast and elitist
multiobjective genetic algorithm: NSGA-II. IEEE transactions on evolutionary
computation, 6, 182-197.
42
DORIGO, M., MANIEZZO, V. & COLORNI, A. 1996. The ant system: optimization by a
colony of cooperating agents. IEEE Transactions on Systems, man, and cybernetics,
Part B: Cybernetics, 26, 29-41.
DUMITRESCU, I. & STÜTZLE, T. Year. Combinations of local search and exact algorithms.
In: Workshops on Applications of Evolutionary Computation, 2003. Springer, 211-
223.
EIBEN, Á., RAUÉ, P.-E. & RUTTKAY, Z. 1994. GA-easy and GA-hard constraint
satisfaction problems. Constraint Processing. Springer.
EIBEN, A. & RUTTKAY, Z. Year. Self-adaptivity for constraint satisfaction: Learning
penalty functions. In: Proceedings of IEEE international conference on evolutionary
computation, 1996. IEEE, 258-261.
EIBEN, A. & VAN DER HAUW, J. Year. Adaptive penalties for evolutionary graph
coloring. In: European Conference on Artificial Evolution, 1997. Springer, 95-106.
EIBEN, A. E., VAN DER HAUW, J. K. & VAN HEMERT, J. I. 1998. Graph coloring with
adaptive evolutionary algorithms. Journal of heuristics, 4, 25-46.
ERICKSON, M., MAYER, A. & HORN, J. Year. The niched pareto genetic algorithm 2
applied to the design of groundwater remediation systems. In: International
Conference on Evolutionary Multi-Criterion Optimization, 2001. Springer, 681-695.
FALKENAUER, E. 1994. A new representation and operators for genetic algorithms applied
to grouping problems. Evolutionary computation, 2, 123-144.
FELTL, H. & RAIDL, G. R. Year. An improved hybrid genetic algorithm for the generalized
assignment problem. In: Proceedings of the 2004 ACM symposium on Applied
computing, 2004. ACM, 990-995.
FEO, T. A. & RESENDE, M. G. 1995. Greedy randomized adaptive search procedures.
Journal of global optimization, 6, 109-133.
FIACCO, A. V. & MCCORMICK, G. P. 1966. Extensions of SUMT for nonlinear
programming: equality constraints and extrapolation. Management science, 12, 816-
828.
FLEURENT, C. & FERLAND, J. A. 1994. Genetic hybrids for the quadratic assignment
problem. Quadratic assignment and related problems, 16, 173-187.
FONSECA, C. M. & FLEMING, P. J. Year. Genetic Algorithms for Multiobjective
Optimization: FormulationDiscussion and Generalization. In: Icga, 1993. Citeseer,
416-423.
FONSECA, C. M. & FLEMING, P. J. 1995a. Multiobjective genetic algorithms made easy:
selection sharing and mating restriction.
FONSECA, C. M. & FLEMING, P. J. 1995b. Multiobjective optimization and multiple
constraint handling with evolutionary algorithms II: Application example. Research
Report 565, 27.
FRANCIS, J. C. & KIM, D. 2013. Modern Portfolio Theory: Foundations, Analysis and New
Developments + Website, John Wiley & Sons.
FRENCH, A. P., ROBINSON, A. C. & WILSON, J. M. 2001. Using a hybrid genetic-
algorithm/branch and bound approach to solve feasibility and optimization integer
programming problems. Journal of heuristics, 7, 551-564.
FUJITA, K., HIROKAWA, N., AKAGI, S., KITAMURA, S. & YOKOHATA, H. 1998.
Multi-objective optimal design of automotive engine using genetic algorithm. ASME
Design Engineering Technical Conferences. Atlanta, Georgia.
GAMBARDELLA, L. M., TAILLARD, É. D. & DORIGO, M. 1999. Ant colonies for the
quadratic assignment problem. Journal of the operational research society, 50, 167-
176.
GASPERO, L. D., TOLLO, G. D., ROLI, A. & SCHAERF, A. 2011. Hybrid metaheuristics
for constrained portfolio selection problems. Quantitative Finance, 11, 1473-1487.
43
GEN, M. & CHENG, R. Year. A survey of penalty techniques in genetic algorithms. In:
Proceedings of IEEE International Conference on Evolutionary Computation, 1996.
IEEE, 804-809.
GLOVER, F. 1977. Heuristics for integer programming using surrogate constraints. Decision
sciences, 8, 156-166.
GLOVER, F. W. & KOCHENBERGER, G. A. 2006. Handbook of metaheuristics, Springer
Science & Business Media.
GOLDBERG, D. E. & HOLLAND, J. H. 1988. Genetic algorithms and machine learning.
Machine learning, 3, 95-99.
GOLDBERG, D. E. & RICHARDSON, J. Year. Genetic algorithms with sharing for
multimodal function optimization. In: Genetic algorithms and their applications:
Proceedings of the Second International Conference on Genetic Algorithms, 1987.
Hillsdale, NJ: Lawrence Erlbaum, 41-49.
GREFENSTETTE, J. J. 1987. Incorporating Problem-specific Knowledge into Genetic
Algorithms, Genetic Algorithms and Simulated Annealing. Davis (Pitman, London
and Morgan Kaufmann Publishers, Inc., 1987), 42-60.
HAJELA, P. & LIN, C.-Y. 1992. Genetic search strategies in multicriterion optimal design.
Structural optimization, 4, 99-107.
HAMMAMI, M. & GHÉDIRA, K. Year. Cooperation between Simulated Annealing, Tabu
Search, X-over operator and Kernighan and Lin Heuristic for the K-Graph Partitioning
Problem. In: MlC2005, The 6th Metaheuristics International Conference, 2005. 480-
485.
HENDRIX, E. M. & BOGLÁRKA, G. 2010. Introduction to nonlinear and global
optimization, Springer.
HOFFMEISTER, F. & SPRAVE, J. Year. Problem-independent handling of constraints by
use of metric penalty functions. In: Fifth Annual Conference on Evolutionary
Programming, 1996 California. MIT Press, 6.
HOLLAND, J. H. 1992. Adaptation in natural and artificial systems: an introductory analysis
with applications to biology, control, and artificial intelligence, MIT press.
HOMAIFAR, A., QI, C. X. & LAI, S. H. 1994. Constrained optimization via genetic
algorithms. Simulation, 62, 242-253.
ISHIBUCHI, H. & MURATA, T. 1998. A multi-objective genetic local search algorithm and
its application to flowshop scheduling. IEEE Transactions on Systems, Man, and
Cybernetics, Part C (Applications and Reviews), 28, 392-403.
JAHUIRA, C. A. R. & VARGAS, E. C. Year. Hybrid genetic algorithm with exact techniques
applied to TSP. In: Second international workshop on Intelligent systems design and
application, 2002. Dynamic Publishers, Inc., 119-124.
JAIN, H. & DEB, K. 2013. An evolutionary many-objective optimization algorithm using
reference-point based nondominated sorting approach, part II: handling constraints
and extending to an adaptive approach. IEEE transactions on evolutionary
computation, 18, 602-622.
JOINES, J. A. & HOUCK, C. R. Year. On the use of non-stationary penalty functions to solve
nonlinear constrained optimization problems with GA's. In: Proceedings of the First
IEEE Conference on Evolutionary Computation. IEEE World Congress on
Computational Intelligence, 1994. IEEE, 579-584.
KAZARLIS, S. & PETRIDIS, V. Year. Varying fitness functions in genetic algorithms:
Studying the rate of increase of the dynamic penalty terms. In: International
conference on parallel problem solving from nature, 1998. Springer, 211-220.
KENNEDY, J. & EBERHART, R. C. 2001. Swarm intelligence, San Francisco, California,
Morgan Kaufmann Publishers.
KHICHANE, M., ALBERT, P. & SOLNON, C. 2008. Programmation par contraintes avec
des fourmis. Journees Francophones de Programmation par contraintes.
44
KIRKPATRICK, S., GELATT, C. D. & VECCHI, M. P. 1983. Optimization by simulated
annealing. science, 220, 671-680.
KLAU, G. W., LJUBIĆ, I., MOSER, A., MUTZEL, P., NEUNER, P., PFERSCHY, U.,
RAIDL, G. & WEISKIRCHER, R. Year. Combining a memetic algorithm with
integer programming to solve the prize-collecting Steiner tree problem. In: Genetic
and Evolutionary Computation Conference, 2004. Springer, 1304-1315.
KNOWLES, J. D. & CORNE, D. W. 2000. Approximating the nondominated front using the
Pareto archived evolution strategy. Evolutionary computation, 8, 149-172.
KOSTIKAS, K. & FRAGAKIS, C. Year. Genetic programming applied to mixed integer
programming. In: European Conference on Genetic Programming, 2004. Springer,
113-124.
KOZA, J. R. 1992. Genetic programming: on the programming of computers by means of
natural selection, MIT press.
KOZA, J. R. & ANDRE, D. 1995. Parallel genetic programming on a network of transputers,
Citeseer.
KRUEGER, M. 1994. Méthode d'analyse d'algorithmes d'optimisation stochastiques à l'aide
d'algorithmes génétiques.
LIEFOOGHE, A. 2009. Métaheuristiques pour l'optimisation multiobjectif: Approches
coopératives, prise en compte de l'incertitude et application en logistique.
LIN, F.-T., KAO, C.-Y. & HSU, C.-C. Year. Incorporating genetic algorithms into simulated
annealing. In: Proceedings. International Symposium on Artificial Intelligence, 1991.
290-297.
LIN, Q., LI, J., DU, Z., CHEN, J. & MING, Z. 2015. A novel multi-objective particle swarm
optimization with multiple search strategies. European Journal of operational
research, 247, 732-744.
MANSINI, R., OGRYCZAK, W. O., SPERANZA, M. G. & SOCIETIES, E. T. A. O. E. O.
R. 2015. Linear and mixed integer programming for portfolio optimization, Springer.
MARKOWITZ, H. 1952. Portfolio selection. The journal of finance, 7, 77-91.
MARTIN, O. C. & OTTO, S. W. 1996. Combining simulated annealing with local search
heuristics. Annals of Operations Research, 63, 57-75.
MAULDIN, M. L. Year. Maintaining Diversity in Genetic Search. In: AAAI-84 Proceedings,
1984. 247-250.
MCKENDALL JR, A. R. & SHANG, J. 2006. Hybrid ant systems for the dynamic facility
layout problem. Computers & operations research, 33, 790-803.
MICHALEWICZ, Z. Year. Genetic algorithms, numerical optimization, and constraints. In:
Proceedings of the sixth international conference on genetic algorithms, 1995.
Citeseer, 151-158.
MICHALEWICZ, Z. 2013. Genetic algorithms+ data structures= evolution programs,
Springer Science & Business Media.
MICHALEWICZ, Z. & ATTIA, N. Year. Evolutionary optimization of constrained problems.
In: Proceedings of the 3rd annual conference on evolutionary programming, 1994.
World Scientific, 98-108.
MIETTINEN, K. 2012. Nonlinear multiobjective optimization, Springer Science & Business
Media.
MISHKIN, F. S. & EAKINS, S. G. 2012. Financial markets and institutions, Pearson
Education Inc.
MORALES, A. K. & QUEZADA, C. V. Year. A universal eclectic genetic algorithm for
constrained optimization. In: Proceedings of the 6th European congress on intelligent
techniques and soft computing, 1998. 518-522.
MÜHLENBEIN, H., GORGES-SCHLEUTER, M. & KRÄMER, O. 1988. Evolution
algorithms in combinatorial optimization. Parallel computing, 7, 65-85.
45
NEBRO, A. J., DURILLO, J. J., GARCIA-NIETO, J., COELLO, C. C., LUNA, F. & ALBA,
E. Year. SMPSO: A new PSO-based metaheuristic for multi-objective optimization.
In: 2009 IEEE Symposium on Computational Intelligence in Multi-Criteria Decision-
Making (MCDM), 2009. IEEE, 66-73.
PAI, G. V. 2017. Metaheuristics for Portfolio Optimization: An Introduction using MATLAB,
John Wiley & Sons.
PALPANT, M., ARTIGUES, C. & MICHELON, P. 2004. LSSPER: Solving the resource-
constrained project scheduling problem with large neighbourhood search. Annals of
Operations Research, 131, 237-257.
PESSAN, C., BOUQUARD, J.-L. & NÉRON, E. Year. Genetic branch-and-bound or exact
genetic algorithm? In: International Conference on Artificial Evolution (Evolution
Artificielle), 2007. Springer, 136-147.
PORTMANN, M.-C., VIGNIER, A., DARDILHAC, D. & DEZALAY, D. 1998. Branch and
bound crossed with GA to solve hybrid flowshops. European Journal of operational
research, 107, 389-400.
PRIGENT, J.-L. 2007. Portfolio optimization and performance analysis, CRC Press.
PUCHINGER, J. & RAIDL, G. R. Year. Combining metaheuristics and exact algorithms in
combinatorial optimization: A survey and classification. In: International Work-
Conference on the Interplay Between Natural and Artificial Computation, 2005.
Springer, 41-53.
RAIDL, G. R. Year. An improved genetic algorithm for the multiconstrained 0-1 knapsack
problem. In: 1998 IEEE International Conference on Evolutionary Computation
Proceedings. IEEE World Congress on Computational Intelligence (Cat. No.
98TH8360), 1998. IEEE, 207-211.
RAO, S. S. 2009. Engineering optimization: theory and practice, John Wiley & Sons.
REY HORN, J., NAFPLIOTIS, N. & GOLDBERG, D. E. Year. A niched Pareto genetic
algorithm for multiobjective optimization. In: Proceedings of the first IEEE
conference on evolutionary computation, IEEE world congress on computational
intelligence, 1994. Citeseer, 82-87.
RICHARDSON, J. T., PALMER, M. R., LIEPINS, G. E. & HILLIARD, M. R. Year. Some
guidelines for genetic algorithms with penalty functions. In: Proceedings of the 3rd
international conference on genetic algorithms, 1989. Morgan Kaufmann Publishers
Inc., 191-197.
SCHAFFER, J. D. Year. Multiple objective optimization with vector evaluated genetic
algorithms. In: Proceedings of the First International Conference on Genetic
Algorithms and Their Applications, 1985, 1985. Lawrence Erlbaum Associates. Inc.,
Publishers.
SCHAFFER, J. D. & GREFENSTETTE, J. J. Year. Multi-Objective Learning via Genetic
Algorithms. In: Ijcai, 1985. 593-595.
SHAHOOKAR, K. & MAZUMDER, P. 1990. A genetic approach to standard cell placement
using meta-genetic parameter optimization. IEEE Transactions on Computer-Aided
Design of Integrated Circuits and Systems, 9, 500-511.
SIERRA, M. R. & COELLO, C. A. C. Year. Improving PSO-based multi-objective
optimization using crowding, mutation and∈-dominance. In: International conference
on evolutionary multi-criterion optimization, 2005. Springer, 505-519.
SMITH, A. E. & COIT, D. W. 1995. Penalty functions. Handbook of Evolutionary
Computation. Oxford University Press.
SMITH, A. E. & TATE, D. M. Year. Genetic optimization using a penalty function. In: Proc.
Fifth Int. Conf. on Genetic Algorithms, 1993. 499-505.
SRINIVAS, N. & DEB, K. 1995. Muiltiobjective function optimization using nondominated
sorting in genetic algorithms. Evolutionary computation, 2, 221-248.
46
STEIN, M., BRANKE, J. & SCHMECK, H. 2005. Portfolio selection: How to integrate
complex constraints. Institute for Applied Informatics and Formal Description
Methods. University of Karlsruhe (TH), June, 1.
STÜTZLE, T. & HOOS, H. 1999. The max-min ant system and local search for combinatorial
optimization problems. Meta-heuristics. Springer.
SUH, J. Y. & VAN GUCHT, D. 1987. Incorporating lleuristic Information into Genetic
Search. JJ Grefen.
TAILLARD, É. 1993. Parallel iterative search methods for vehicle routing problems.
Networks, 23, 661-673.
TAILLARD, É. D. & VOSS, S. 2002. POPMUSIC—Partial optimization metaheuristic under
special intensification conditions. Essays and surveys in metaheuristics. Springer.
TALBI, E.-G. 2002. A taxonomy of hybrid metaheuristics. Journal of heuristics, 8, 541-564.
TALBI, E.-G. 2009. Metaheuristics: from design to implementation, John Wiley & Sons.
TALBI, E. 1999. Metaheuristics for multiobjective combinatorial optimization: state of the
art. Technical Report, LIFL, University of Science and Technology of Lille, France,
15-2000.
TALBI, E., MUNTEAN, T. & SAMARANDACHE, I. 1994. Hybridation des algorithmes
génétiques avec la recherche tabou. Evolution Artificielle (EA'94).
TALUKDAR, S., BAERENTZEN, L., GOVE, A. & DE SOUZA, P. 1998. Asynchronous
teams: Cooperation schemes for autonomous agents. Journal of heuristics, 4, 295-321.
TANESE, R. Year. Parallel genetic algorithm for a hypercube. In: Genetic algorithms and
their applications: proceedings of the second International Conference on Genetic
Algorithms: July 28-31, 1987 at the Massachusetts Institute of Technology,
Cambridge, MA, 1987. Hillsdale, NJ: L. Erlhaum Associates, 1987.
TSEN, C. K. 1995. Solving train scheduling problems using A-teams, Engineering Design
Research Centre, Carnegie Mellon University.
VOIGT, H.-M., BORN, J. & SANTIBÁNEZ-KOREF, I. Year. Modelling and simulation of
distributed evolutionary search processes for function optimization. In: International
Conference on Parallel Problem Solving from Nature, 1990. Springer, 373-380.
WOODRUFF, D. L. 1999. A chunking based selection strategy for integrating metaheuristics
with branch and bound. Metaheuristics: Advances and Trends in Local Search
Paradigms for Optimization. Kluwer Academic Publisher.
WOODSIDE-ORIAKHI, M., LUCAS, C. & BEASLEY, J. E. 2013. Portfolio rebalancing
with an investment horizon and transaction costs. Omega, 41, 406-420.
YANG, X.-S. 2014. Nature-inspired optimization algorithms, Elsevier.
YOKOTA, T., GEN, M., IDA, K. & TAGUCHI, T. 1996. Optimal design of system
reliability by an improved genetic algorithm. Electronics and Communications in
Japan (Part III: Fundamental Electronic Science), 79, 41-51.
ZHANG, Q. & LI, H. 2007. MOEA/D: A multiobjective evolutionary algorithm based on
decomposition. IEEE transactions on evolutionary computation, 11, 712-731.
ZHANG, Q., LIU, W. & LI, H. Year. The performance of a new version of MOEA/D on
CEC09 unconstrained MOP test instances. In: 2009 IEEE congress on evolutionary
computation, 2009. IEEE, 203-208.
ZHANG, X., ZHENG, X., CHENG, R., QIU, J. & JIN, Y. 2017. A competitive mechanism
based multi-objective particle swarm optimizer with fast convergence. Information
Sciences, 427, 63-76.
ZITZLER, E., LAUMANNS, M. & THIELE, L. Year. Improving the strength Pareto
evolutionary algorithm. In: Proceedings of the Fifth Conference on Evolutionary
Methods for Design, Optimization and Control with Applications to Industrial
Problems, 2001. 95-100.


















