Modelado matemático de un motor de corriente directa de imán permanente
17
MODELADO MATEMÁTICO DE UN MOTOR DE CORRIENTE DIRECTA DE IMÁN PERMANENTE CARLOS ANDRÉS ACHURY B. 2006263243 RICARDO ANDRES GOMEZ S. 2006262642 OMAR ALARCON ORJUELA 2005101834 UNIVERSIDAD SURCOLOMBIANA FACULTA DE INGENIERÍA
-
Upload
carlos-bohorquez -
Category
Documents
-
view
25 -
download
1
Transcript of Modelado matemático de un motor de corriente directa de imán permanente

MODELADO MATEMÁTICO DE UN MOTOR DE CORRIENTE DIRECTA DE IMÁN PERMANENTE
CARLOS ANDRÉS ACHURY B. 2006263243
RICARDO ANDRES GOMEZ S. 2006262642
OMAR ALARCON ORJUELA 2005101834
UNIVERSIDAD SURCOLOMBIANA
FACULTA DE INGENIERÍA
NEIVA-HUILA

OBJETIVOS
Realizar la obtención del modelo matemático de un motor de iman permanente. Implementar un control por ancho de pulso para el motor de iman permanente. diseñar un compensador en adelanto por el método del lugar geométrico de las raíces.

INTRODUCCIÓN
El motor de corriente directa de imán permanente llamado PMDC, es un transductor que convierte energía eléctrica en energía mecánica.
En este trabajo realizaremos paso a paso la obtención del modelo matemático de un motor de imán permanente.
Para esto tenemos que comenzar obteniendo los parámetros básicos de nuestro motor, como lo son: la resistencia de armadura, la constante del motor, el coeficiente de fricción viscosa, la inductancia de la armadura y la inercia del rotor.

OBTENCIÓN DE PARÁMETROS
Para caracterizar a un motor PMDC es necesario obtener los parámetros involucrados, una forma de lograr esto es mediante la realización de experiencias en condiciones de estado estable. Cuando se aplica una tensión constante entre las terminales de un motor PMDC, después de transcurrir el tiempo necesario para que la respuesta transitoria sea nula, se alcanza la respuesta en estado estable.
En los siguientes pasos se describen las experiencias realizadas para obtener la caracterización de un motor PMDC en estado estable.
Ejemplo de un transductor electromecánico.
RESISTENCIA DE LA ARMADURA
La resistencia eléctrica del motor PMDC se puede obtener mediante la medición de las terminales del motor con un multímetro digital. Las medidas se deben realizar para varias posiciones del rotor de manera a controlar que no exista un cambio significativo que dependa de la posición del eje.
Ra=43.9ohm
CONSTANTE DEL MOTOR
Cuando el motor PMDC alcanza el estado estable, la corriente que circula a través del motor se estabiliza y por consiguiente la diferencia de potencial entre los terminales del inductor es cero. La FEM Vm inducida por el motor se3 puede expresar mediante:
Resolviendo Km y reemplazando Vm por la ecuación anterior tenemos que:

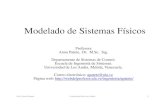
Se deben realizar una tabla de mediciones de por lo menos 10 valores de tensión de entrada midiendo los valores correspondientes:
Datos obtenidos en el laboratorio.
Ve / RPM
VOLTAJE DE ENTRADA (M) RPM3,5 374
4 5064,5 660
5 7705,5 924
6 9906,5 1122
7 12327,5 1320
8 14528,5 1540
9 16729,5 178210 1892

RPM / Vs
3.5 4 4.5 5 5.5 6 6.5 7 7.5 8 8.5 9 9.5 100
200
400
600
800
1000
1200
1400
1600
1800
2000
RPM
RPM VOLTAJE SALIDA (G)374 1,8506 2660 2,8770 3,2924 3,7990 4,2
1122 4,51232 5,11320 5,51452 5,91540 6,51672 71782 7,31892 7,8

Con las mediciones realizadas podemos reemplazar los valores de la ecuación
Y tenemos que:
Km=0.00522
COEFICIENTE DE FRICCIÓN VISCOSA
Cuando el motor PMDC alcanza el estado estable, la velocidad de giro Wn (l) del motor es constante y como además el motor opera sin carga, tenemos la siguiente ecuacion:
Despejando Bm podemos tener la constante viscosa de fricción
200 400 600 800 1000 1200 1400 1600 1800 20000
1
2
3
4
5
6
7
8
9
VOLTAJE SALIDA (G)

Bm=11e-6
INDUCTANCIA DE LA ARMADURA
Una forma de halla la inductancia Lm de un motor PMDC consiste en medir la constante de tiempo T del motor. Si se ajusta el rotor del motor PMDC, se restringe el movimiento de rotación. De esta manera, dado que el rotor no gira, la FEM Vm inducida por el motor es igual a cero.
Otra forma es con el multímetro digital que tiene la opción de medir la inductancia de los motores MPDC
Lm= 59.8e-3
INERCIA DEL ROTOR
A partir de los resultados obtenidos de las experiencias anteriores, la única incógnita que queda por determinar en el modelo del motor es la inercia Jm .
Para determinar Jm se debe medir la corriente instantánea y compararla a la corriente obtenida a partir del modelo del motor.
Jm= 3e-7
DISEÑO DE UN COMPENSADOR EN ADELANTO POR EL MÉTODO DEL LUGAR GEOMÉTRICO DE LAS RAÍCES
La función de transferencia de nuestro motor PMDC es:
W (s)Va(s)
= 0.005222.723E-4 s2+0.122 s+1.197
Los polos en lazo abierto de nuestra ecuación característica son:

S1=-10.03
S2=-437.99
La respuesta del sistema en lazo abierto según Matlab es la siguiente:
Para nuestro sistema tenemos un Wn=0.0722 y un ξ=0.844
Se desea reducir el Ts (Settling time - Tiempo de establecimiento) un 50%. Para ello vamos a diseñar nuestro sistema con Wn=40 y un ξ=0.5.
1. Localizamos el polo dominante en el plano S, es decir las raíces de nuestra ecuación característica con los parámetros deseados, esto es:S^2+40s+1600Polos: S1,S2 = -20±j34.64Polo dominante en el segundo cuadrante del plano s: -20+j34.63

2. Representamos en una sola gráfica en el plano s los polos de nuestro sistema en lazo abierto sin compensar y nuestro sistema deseado.
θ
Como el polo S2 de nuestro sistema sin compensar es 10 veces mayor que el polo S1 y está más alejado del origen, lo ignoramos y sólo tomamos en nuestro sistema el polo: S1=-10.03
POLO DESEADO
-140 -130 -120 -110 -100 -80 -60 -40 -20 -10 0
50
40
30
20
10
JW
σX
X

3. Ahora determinamos el ángulo necesario φque se va a agregar para que la suma total de los ángulos que forman los polos sea igual a 180°. Nuestro compensador de adelanto debe contribuir a este ángulo φ.Luego φ=180−θ donde
θ=¿90+arctan(1034.64
¿
θ = 90+16.10θ = 106.10°
4. Para determinar la localización del cero y el polo de nuestro compensador en adelanto dibujamos una línea horizontal que pase por el punto P, localización deseada para nuestro polo dominante en lazo cerrado. Luego dibujamos una línea que conecta al punto P con el origen. A continuación biseccionamos el ángulo que forman las líneas PA y PO y dibujamos dos líneas PC y PD que forman ángulos de φ /2 con la bisectriz PB. Las intersecciones de PC y PD con el eje real negativo proporcionan la localización necesaria para el polo y el cero de nuestro compensador.
s+ 1αT
s+ 1T
Nuestro compensador queda:
Gc = Kcs+ 1T
s+1αT
= Kc s+20s+140
Ahora hallamos el Kc con la condición de magnitud:
X-140 -130 -120 -110 -100 -80 -60 -40 -20 -10 0
50
40
30
20
10
JW
σ
XA P
C B D
O
φ /2
φ /2

Kcs+20s+40
0.00522
0.000723 s2+0.122 s+1.197 = 1
Kc = 0.000723 s3+0.2232 s2+20.66 s+215.32.384 s+47.69
s=-20+j34.64
Kc = 456.78
Luego nuestro compensador queda:
Gc = 456.78s+20s+140
Y nuestro sistema compensado queda:
2.384 s + 47.69
-------------------------------------------
0.000723 s^3 + 0.2232 s^2 + 20.66 s + 215.3
Respuesta sistema compensado:

Código Matlab:
clear all;close all;clc;Kc=456.78;nump=[0.00522];denp=[0.000723 0.122 1.197];Gp=tf(nump,denp);numc=[1 20];denc=[1 140];Gc=tf(numc,denc);Gc=Gc*Kc;Gs=series(Gc,Gp);Gs=feedback(Gs,1);step(Gs)
Implementación en simulink:

Configuración del compensador en Adelanto con amplificadores operacionales:
R1C1>R2C2

Simulaciones del circuito
Restador

CONCLUSIONES
Como se puede ver, el tiempo de establecimiento se redujo al valor deseado con la implementación del compensador en adelanto.
La técnica de diseño de compensadores por el método del lugar geométrico de las raíces es muy utilizada debido a su simplicidad y a los óptimos resultados que se obtienen.