
Modelado del generador eólico y de los convertidores HVDC...
24
CAPÍTULO 3 Modelado del generador eólico y de los convertidores HVDC - VSC El sistema de control es una parte importante del sistema de transmisión HVDC- VSC. Existe una gran variedad de posibilidades en lo que se refiere a técnicas de control. Cada convertidor que conforma el enlace HVDC se puede controlar de manera independiente, y puede incorporar un sistema de control que cumpla un objetivo concreto, de entre los más importantes [34] [35]: 1. Control de la potencia activa y reactiva. 2. Control de la tensión en el enlace DC. 3. Control de frecuencias. 4. Control de la tensión AC a la entrada del convertidor. Por otra parte, los controles del convertidor VSC se pueden utilizar también para prestar servicios auxiliares, tales como, por ejemplo, mejorar la dinámica de las redes en corriente alterna. Es este proyecto se desarrollarán los cuatro tipos de control enumerados en el párrafo anterior. La elección de éstos tiene como objetivo, por un lado, asegurar un apoyo de potencia activa y reactiva al sistema de AC, que aumenta la capacidad de transferencia de potencia del sistema en funcionamiento normal, y mantiene la estabilidad de éste durante las perturbaciones. Por otro lado, además de la transferencia de potencia activa a través del enlace de DC, se busca mantener la tensión del sistema en valores normales a través de control de tensión DC y AC. En este capítulo se procede a describir los dos componentes fundamentales del sistema que componen el esquema eléctrico de un parque eólico marítimo. Estos dos componentes son el modelo del generador creado para simular el parque eólico marítimo, y el convertidor VSC que compone el enlace DC que transporta la energía de la planta de generación hacia el PCC en tierra firme.
Transcript of Modelado del generador eólico y de los convertidores HVDC...
CAPÍTULO 3
Modelado del generador eólico y de los convertidores HVDC - VSC
El sistema de control es una parte importante del sistema de transmisión HVDC-VSC. Existe una gran variedad de posibilidades en lo que se refiere a técnicas de control. Cada convertidor que conforma el enlace HVDC se puede controlar de manera independiente, y puede incorporar un sistema de control que cumpla un objetivo concreto, de entre los más importantes [34] [35]:
1. Control de la potencia activa y reactiva.
2. Control de la tensión en el enlace DC.
3. Control de frecuencias.
4. Control de la tensión AC a la entrada del convertidor.
Por otra parte, los controles del convertidor VSC se pueden utilizar también para prestar servicios auxiliares, tales como, por ejemplo, mejorar la dinámica de las redes en corriente alterna.
Es este proyecto se desarrollarán los cuatro tipos de control enumerados en el párrafo anterior. La elección de éstos tiene como objetivo, por un lado, asegurar un apoyo de potencia activa y reactiva al sistema de AC, que aumenta la capacidad de transferencia de potencia del sistema en funcionamiento normal, y mantiene la estabilidad de éste durante las perturbaciones.
Por otro lado, además de la transferencia de potencia activa a través del enlace de DC, se busca mantener la tensión del sistema en valores normales a través de control de tensión DC y AC.
En este capítulo se procede a describir los dos componentes fundamentales del sistema que componen el esquema eléctrico de un parque eólico marítimo. Estos dos componentes son el modelo del generador creado para simular el parque eólico marítimo, y el convertidor VSC que compone el enlace DC que transporta la energía de la planta de generación hacia el PCC en tierra firme.
30 CAPÍTULO 3. Modelado del generador eólico y de los convertidores HVDC - VSC
3.1. Sistema de estudio
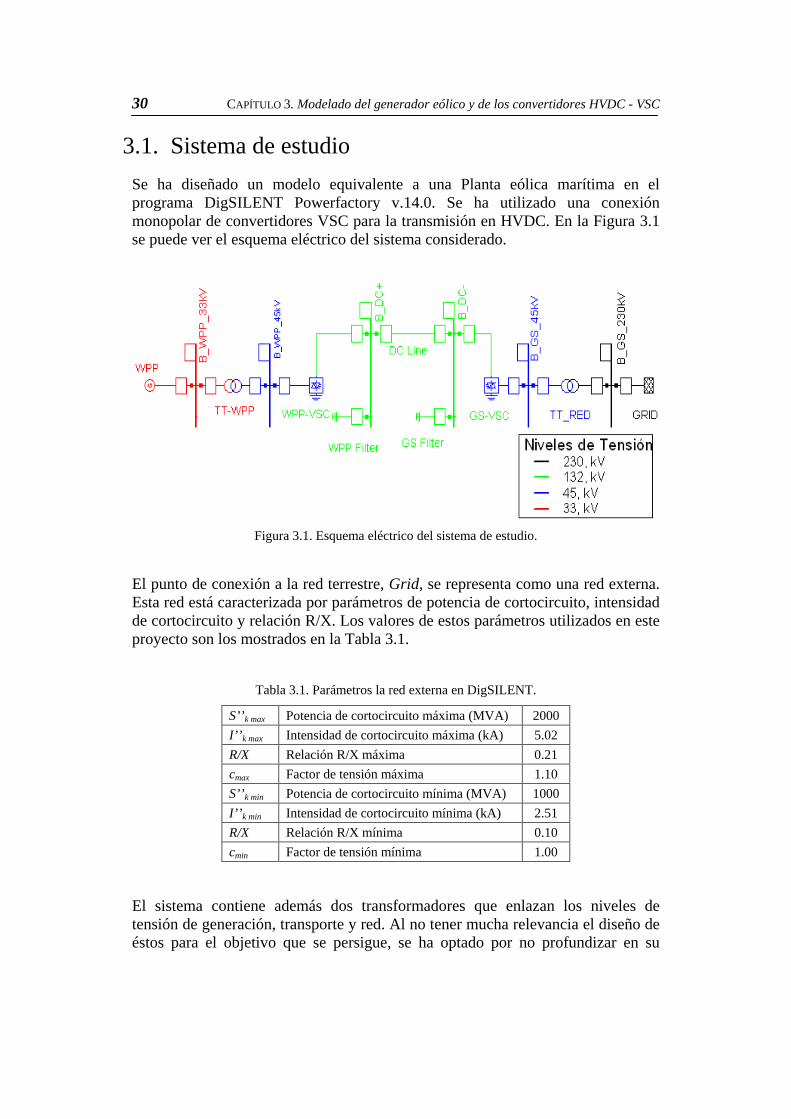
Se ha diseñado un modelo equivalente a una Planta eólica marítima en el programa DigSILENT Powerfactory v.14.0. Se ha utilizado una conexión monopolar de convertidores VSC para la transmisión en HVDC. En la Figura 3.1 se puede ver el esquema eléctrico del sistema considerado.
Figura 3.1. Esquema eléctrico del sistema de estudio.
El punto de conexión a la red terrestre, Grid, se representa como una red externa. Esta red está caracterizada por parámetros de potencia de cortocircuito, intensidad de cortocircuito y relación R/X. Los valores de estos parámetros utilizados en este proyecto son los mostrados en la Tabla 3.1.
Tabla 3.1. Parámetros la red externa en DigSILENT.
S’’k max Potencia de cortocircuito máxima (MVA) 2000
I’’ k max Intensidad de cortocircuito máxima (kA) 5.02
R/X Relación R/X máxima 0.21
cmax Factor de tensión máxima 1.10
S’’k min Potencia de cortocircuito mínima (MVA) 1000
I’’ k min Intensidad de cortocircuito mínima (kA) 2.51
R/X Relación R/X mínima 0.10
cmin Factor de tensión mínima 1.00
El sistema contiene además dos transformadores que enlazan los niveles de tensión de generación, transporte y red. Al no tener mucha relevancia el diseño de éstos para el objetivo que se persigue, se ha optado por no profundizar en su
CAPÍTULO 3. Modelado del generador eólico y de los convertidores HVDC - VSC 31
modelado. En la Tabla 3.2 se presentan las características de estos transformadores.
Tabla 3.2. Parámetros de los transformadores en DigSILENT.
Transformador WPP (WPP-TT)
Snom Potencia nominal (MVA) 180
U 1/ U 2 Relación de transformación (kV/kV) 45/33
εcc Tensión de cortocircuito (%) 6
X/R Relación X/R 20
Transformador GS (GS-TT)
Snom Potencia nominal (MVA) 180
U 1/ U 2 Relación de transformación (kV/kV) 230/45
εcc Tensión de cortocircuito (%) 10
X/R Relación X/R 20
3.2. Modelo de Generador
Como se puede deducir en el capítulo 1, un parque eólico marítimo tiene numerosas ventajas, entre ellas el mayor potencial eólico y mayor espacio disponible. Por tal situación, sería favorable a emplear grandes turbinas eólicas en el parque para poder maximizar la energía captada del viento.
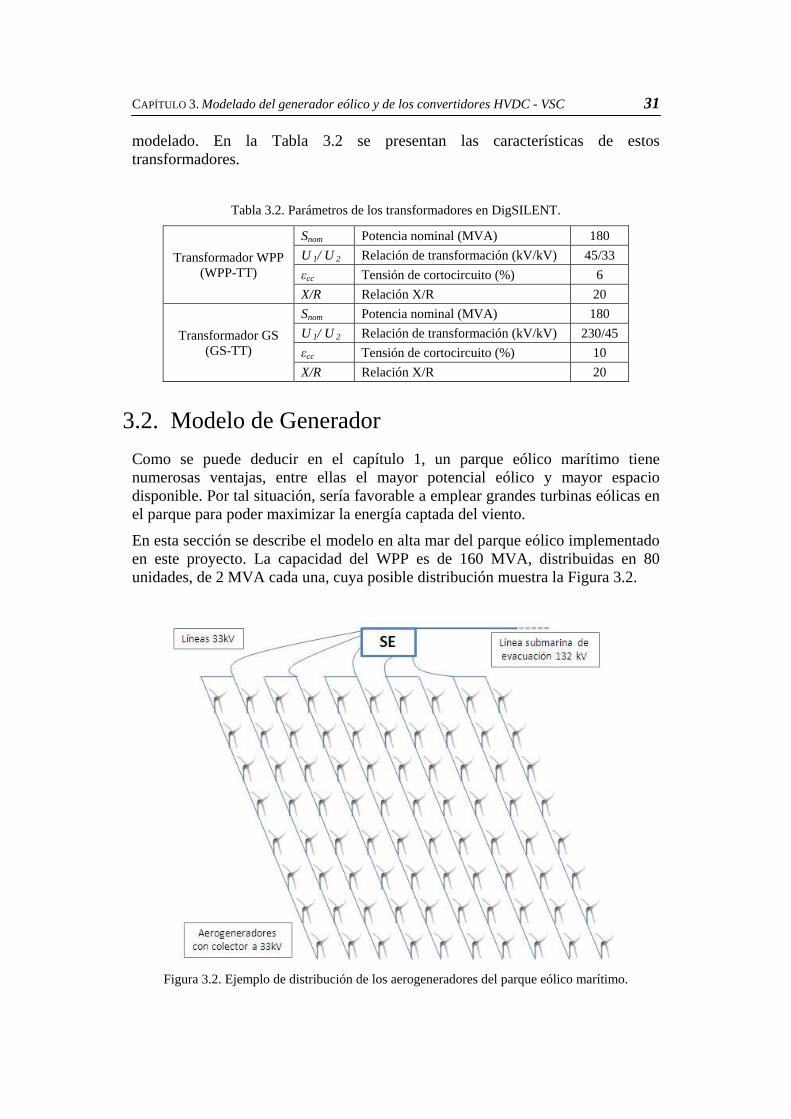
En esta sección se describe el modelo en alta mar del parque eólico implementado en este proyecto. La capacidad del WPP es de 160 MVA, distribuidas en 80 unidades, de 2 MVA cada una, cuya posible distribución muestra la Figura 3.2.
Figura 3.2. Ejemplo de distribución de los aerogeneradores del parque eólico marítimo.
32
Los aerogeneradoreseólico por su posición Se consideranque el modelo reducido tiene en cuenta la respuesta idéntica de WT idénticosse agrupan en unudo colector a un nivel de tensión de 33Figura 3.
Para un modelo reducido de una planta eólica marítima, la capacidad total y la potencia activa que la caracteriza se rige por las siguientes ecuaciones:
Finalmente, se puede aplicar este modelo simplificado siempre y cuando las diferencias entre los puntos de operación de cada WT no son muy grandes. Si existiera tal diferencia, pero la velocidad del viento sigue un patrón estable, se podría
Las características de cada generador se pueden ver en la
32
Los aerogeneradoreseólico por su posición Se consideranque el modelo reducido tiene en cuenta la respuesta idéntica de WT idénticosse agrupan en unudo colector a un nivel de tensión de 33Figura 3.3.
Para un modelo reducido de una planta eólica marítima, la capacidad total y la potencia activa que la caracteriza se rige por las siguientes ecuaciones:
Finalmente, se puede aplicar este modelo simplificado siempre y cuando las diferencias entre los puntos de operación de cada WT no son muy grandes. Si existiera tal diferencia, pero la velocidad del viento sigue un patrón estable, se podría adoptar esta aproximación.
Las características de cada generador se pueden ver en la
CAPÍTULO 3
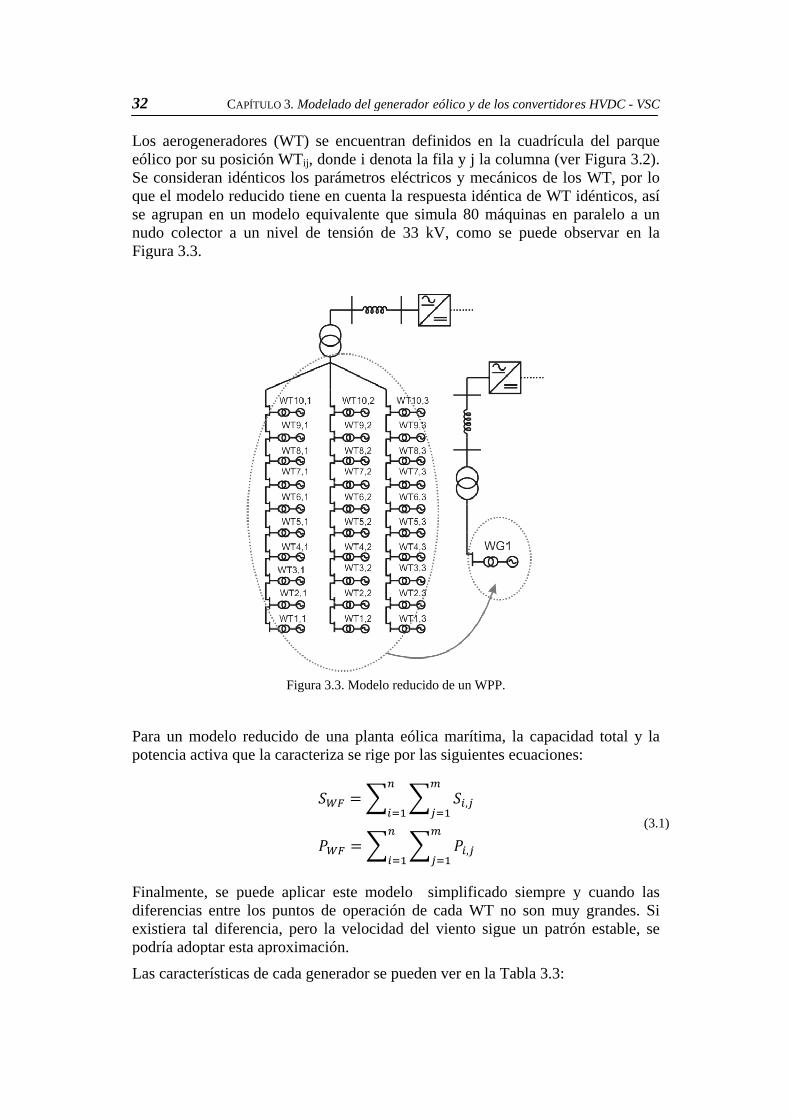
Los aerogeneradores (WT) eólico por su posición WTSe consideran idénticos los parámetros eléctricos y mecánicos de los WT, por lo que el modelo reducido tiene en cuenta la respuesta idéntica de WT idénticosse agrupan en un modelo equivalente que simula 80 máquinas en paralelo a un nudo colector a un nivel de tensión de 33
Para un modelo reducido de una planta eólica marítima, la capacidad total y la potencia activa que la caracteriza se rige por las siguientes ecuaciones:
Finalmente, se puede aplicar este modelo simplificado siempre y cuando las diferencias entre los puntos de operación de cada WT no son muy grandes. Si existiera tal diferencia, pero la velocidad del viento sigue un patrón estable, se
adoptar esta aproximación.
Las características de cada generador se pueden ver en la
3. Modelado del generador
(WT) se encuentran WTij, donde i denota la fila y j la columna (ver
idénticos los parámetros eléctricos y mecánicos de los WT, por lo que el modelo reducido tiene en cuenta la respuesta idéntica de WT idénticos
n modelo equivalente que simula 80 máquinas en paralelo a un nudo colector a un nivel de tensión de 33
Figura 3.3. Modelo reducido de un WPP.
Para un modelo reducido de una planta eólica marítima, la capacidad total y la potencia activa que la caracteriza se rige por las siguientes ecuaciones:
Finalmente, se puede aplicar este modelo simplificado siempre y cuando las diferencias entre los puntos de operación de cada WT no son muy grandes. Si existiera tal diferencia, pero la velocidad del viento sigue un patrón estable, se
adoptar esta aproximación.
Las características de cada generador se pueden ver en la
del generador
se encuentran definidos en la cuadrícula del parque , donde i denota la fila y j la columna (ver
idénticos los parámetros eléctricos y mecánicos de los WT, por lo que el modelo reducido tiene en cuenta la respuesta idéntica de WT idénticos
n modelo equivalente que simula 80 máquinas en paralelo a un nudo colector a un nivel de tensión de 33 kV, como se puede observar en la
. Modelo reducido de un WPP.
Para un modelo reducido de una planta eólica marítima, la capacidad total y la potencia activa que la caracteriza se rige por las siguientes ecuaciones:
Finalmente, se puede aplicar este modelo simplificado siempre y cuando las diferencias entre los puntos de operación de cada WT no son muy grandes. Si existiera tal diferencia, pero la velocidad del viento sigue un patrón estable, se
Las características de cada generador se pueden ver en la
del generador eólico y de los
definidos en la cuadrícula del parque , donde i denota la fila y j la columna (ver
idénticos los parámetros eléctricos y mecánicos de los WT, por lo que el modelo reducido tiene en cuenta la respuesta idéntica de WT idénticos
n modelo equivalente que simula 80 máquinas en paralelo a un kV, como se puede observar en la
. Modelo reducido de un WPP.
Para un modelo reducido de una planta eólica marítima, la capacidad total y la potencia activa que la caracteriza se rige por las siguientes ecuaciones:
,
,
Finalmente, se puede aplicar este modelo simplificado siempre y cuando las diferencias entre los puntos de operación de cada WT no son muy grandes. Si existiera tal diferencia, pero la velocidad del viento sigue un patrón estable, se
Las características de cada generador se pueden ver en la Tabla 3.
los convertidor
definidos en la cuadrícula del parque , donde i denota la fila y j la columna (ver
idénticos los parámetros eléctricos y mecánicos de los WT, por lo que el modelo reducido tiene en cuenta la respuesta idéntica de WT idénticos
n modelo equivalente que simula 80 máquinas en paralelo a un kV, como se puede observar en la
. Modelo reducido de un WPP.
Para un modelo reducido de una planta eólica marítima, la capacidad total y la potencia activa que la caracteriza se rige por las siguientes ecuaciones:
Finalmente, se puede aplicar este modelo simplificado siempre y cuando las diferencias entre los puntos de operación de cada WT no son muy grandes. Si existiera tal diferencia, pero la velocidad del viento sigue un patrón estable, se
Tabla 3.3:
convertidores HVDC - VSC
definidos en la cuadrícula del parque , donde i denota la fila y j la columna (ver Figura 3.2
idénticos los parámetros eléctricos y mecánicos de los WT, por lo que el modelo reducido tiene en cuenta la respuesta idéntica de WT idénticos, así
n modelo equivalente que simula 80 máquinas en paralelo a un kV, como se puede observar en la
Para un modelo reducido de una planta eólica marítima, la capacidad total y la potencia activa que la caracteriza se rige por las siguientes ecuaciones:
Finalmente, se puede aplicar este modelo simplificado siempre y cuando las diferencias entre los puntos de operación de cada WT no son muy grandes. Si existiera tal diferencia, pero la velocidad del viento sigue un patrón estable, se
VSC
definidos en la cuadrícula del parque 2).
idénticos los parámetros eléctricos y mecánicos de los WT, por lo , así
n modelo equivalente que simula 80 máquinas en paralelo a un kV, como se puede observar en la
Para un modelo reducido de una planta eólica marítima, la capacidad total y la
(3.1)
Finalmente, se puede aplicar este modelo simplificado siempre y cuando las diferencias entre los puntos de operación de cada WT no son muy grandes. Si existiera tal diferencia, pero la velocidad del viento sigue un patrón estable, se
CAPÍTULO 3. Modelado del generador eólico y de los convertidores HVDC - VSC 33
Tabla 3.3. Características del generador eólico de estudio.
Nwt Número de turbinas 80
Swt Potencia nominal (MVA) 2
Vwt Tensión nominal (kV) 0.66
Vcn Tensión del colector (kV) 33
f.p. Factor de potencia 0.85
xd Reactancia síncrona (p.u.) 1.50
xq Reactancia síncrona (p.u.) 1.50
xd’ Reactancia transitoria (p.u.) 0.25
xd’’ Reactancia subtransitoria (p.u.) 0.17
rs Resistencia del estator (p.u.) 0.0001
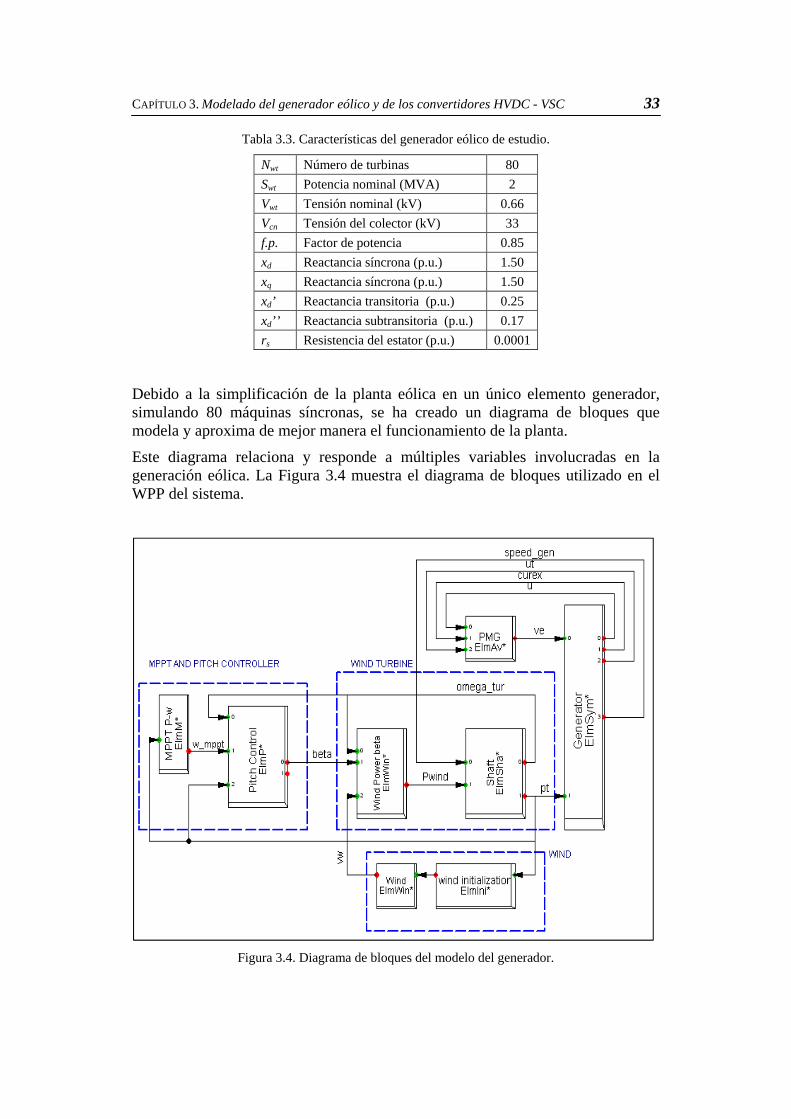
Debido a la simplificación de la planta eólica en un único elemento generador, simulando 80 máquinas síncronas, se ha creado un diagrama de bloques que modela y aproxima de mejor manera el funcionamiento de la planta.
Este diagrama relaciona y responde a múltiples variables involucradas en la generación eólica. La Figura 3.4 muestra el diagrama de bloques utilizado en el WPP del sistema.
Figura 3.4. Diagrama de bloques del modelo del generador.
34 CAPÍTULO 3. Modelado del generador eólico y de los convertidores HVDC - VSC
El bloque PMG corresponde a un regulador de tensión automático que actúa sobre el circuito de excitación del generador. El resto de bloques corresponde al gobernador de la turbina. El conjunto WIND establece los valores de velocidad de viento en el que va a trabajar la planta eólica, según la potencia de la turbina en cada momento.
El conjunto MPPT-PITCH CONTROLLER corresponde al servomecanismo que determina el ángulo de palas del aerogenerador necesario para la extracción óptima de energía eólica.
Por último, el conjunto WIND TURBINE es el modelo dinámico de la turbina eólica. A continuación se describen los elementos más importantes.
3.2.1. Regulador de Tensión Automático - AVR
La función básica de un regulador automático de tensión (AVR) es la de alimentar al circuito de excitación de tal manera que mantiene constante la tensión de salida del generador dentro de ciertos rangos de frecuencia y carga. El bloque correspondiente al AVR en la figura anterior corresponde al bloque llamado PMG. El resto de bloques corresponde al controlador o del generador.
3.2.2. Seguimiento de Punto de Máxima Potencia - MPPT P-ω
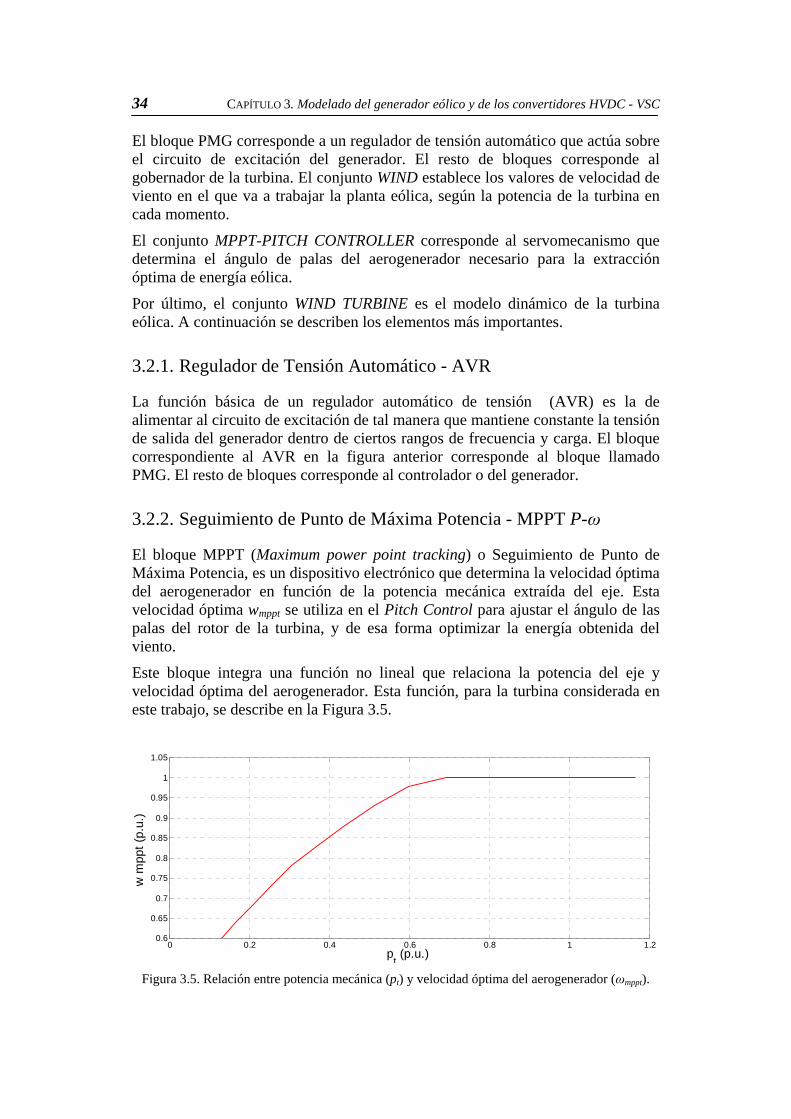
El bloque MPPT (Maximum power point tracking) o Seguimiento de Punto de Máxima Potencia, es un dispositivo electrónico que determina la velocidad óptima del aerogenerador en función de la potencia mecánica extraída del eje. Esta velocidad óptima wmppt se utiliza en el Pitch Control para ajustar el ángulo de las palas del rotor de la turbina, y de esa forma optimizar la energía obtenida del viento.
Este bloque integra una función no lineal que relaciona la potencia del eje y velocidad óptima del aerogenerador. Esta función, para la turbina considerada en este trabajo, se describe en la Figura 3.5.
Figura 3.5. Relación entre potencia mecánica (pt) y velocidad óptima del aerogenerador (ωmppt).
0 0.2 0.4 0.6 0.8 1 1.20.6
0.65
0.7
0.75
0.8
0.85
0.9
0.95
1
1.05
pt (p.u.)
w m
ppt
(p.u
.)
CAPÍTULO 3. Modelado del generador eólico y de los convertidores HVDC - VSC 35
Como se puede observar, esta función presenta una saturación para valores de pt mayores de 0.7 p.u., en la que la velocidad óptima de funcionamiento corresponde a la velocidad nominal de la turbina. Es una curva cuya forma asemeja a la curva potencia-velocidad de viento de un aerogenerador.
3.2.3. Control de ángulo de paso (pitch control)
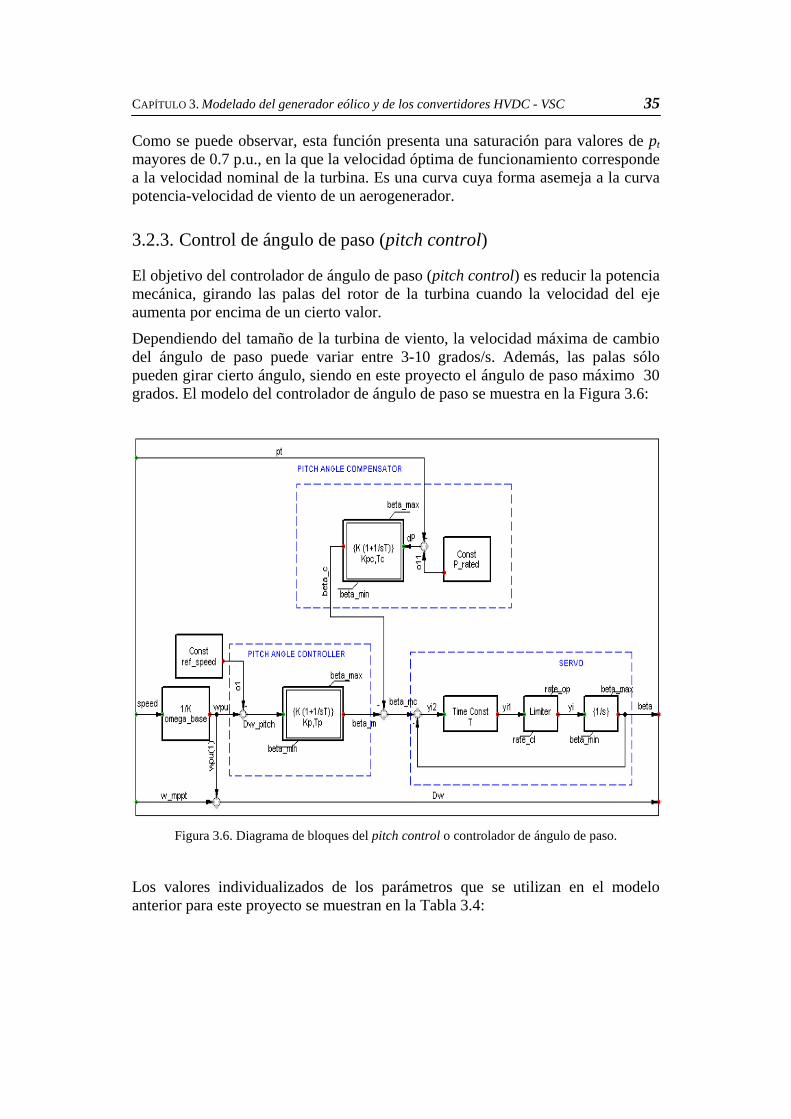
El objetivo del controlador de ángulo de paso (pitch control) es reducir la potencia mecánica, girando las palas del rotor de la turbina cuando la velocidad del eje aumenta por encima de un cierto valor.
Dependiendo del tamaño de la turbina de viento, la velocidad máxima de cambio del ángulo de paso puede variar entre 3-10 grados/s. Además, las palas sólo pueden girar cierto ángulo, siendo en este proyecto el ángulo de paso máximo 30 grados. El modelo del controlador de ángulo de paso se muestra en la Figura 3.6:
Figura 3.6. Diagrama de bloques del pitch control o controlador de ángulo de paso.
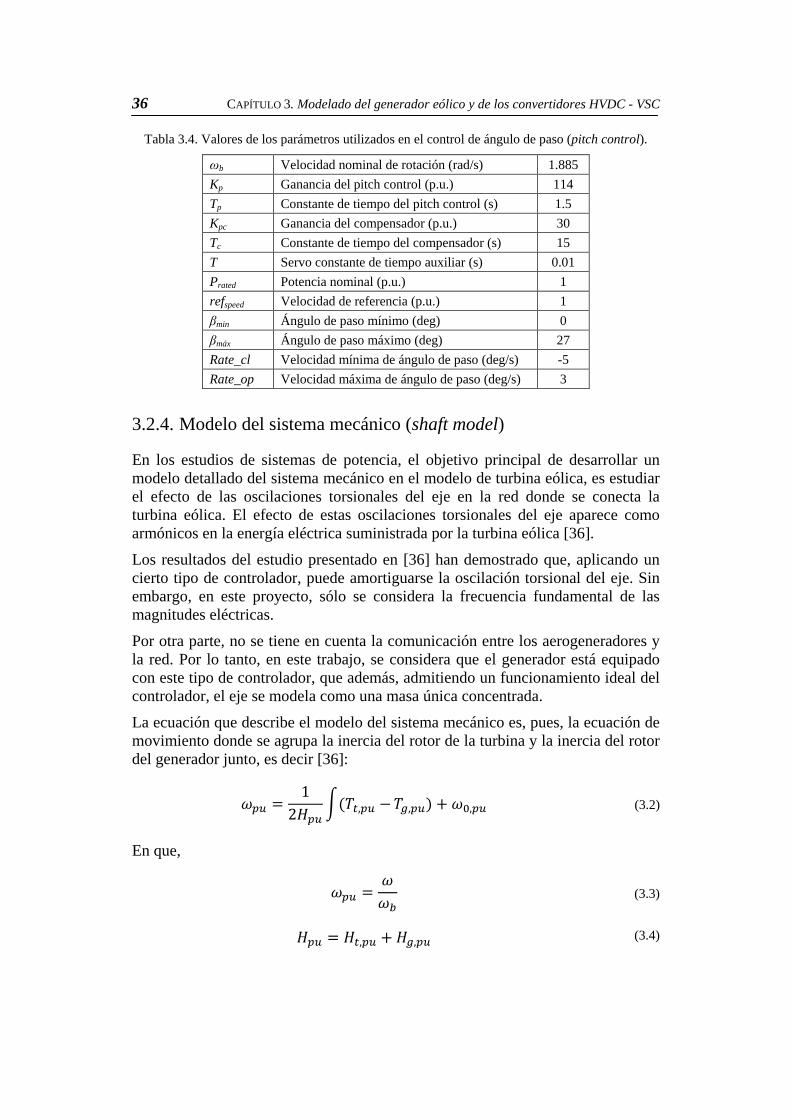
Los valores individualizados de los parámetros que se utilizan en el modelo anterior para este proyecto se muestran en la Tabla 3.4:
36 CAPÍTULO 3. Modelado del generador eólico y de los convertidores HVDC - VSC
Tabla 3.4. Valores de los parámetros utilizados en el control de ángulo de paso (pitch control).
ωb Velocidad nominal de rotación (rad/s) 1.885
Kp Ganancia del pitch control (p.u.) 114
Tp Constante de tiempo del pitch control (s) 1.5
Kpc Ganancia del compensador (p.u.) 30
Tc Constante de tiempo del compensador (s) 15
T Servo constante de tiempo auxiliar (s) 0.01
Prated Potencia nominal (p.u.) 1
refspeed Velocidad de referencia (p.u.) 1
βmin Ángulo de paso mínimo (deg) 0
βmáx Ángulo de paso máximo (deg) 27
Rate_cl Velocidad mínima de ángulo de paso (deg/s) -5
Rate_op Velocidad máxima de ángulo de paso (deg/s) 3
3.2.4. Modelo del sistema mecánico (shaft model)
En los estudios de sistemas de potencia, el objetivo principal de desarrollar un modelo detallado del sistema mecánico en el modelo de turbina eólica, es estudiar el efecto de las oscilaciones torsionales del eje en la red donde se conecta la turbina eólica. El efecto de estas oscilaciones torsionales del eje aparece como armónicos en la energía eléctrica suministrada por la turbina eólica [36].
Los resultados del estudio presentado en [36] han demostrado que, aplicando un cierto tipo de controlador, puede amortiguarse la oscilación torsional del eje. Sin embargo, en este proyecto, sólo se considera la frecuencia fundamental de las magnitudes eléctricas.
Por otra parte, no se tiene en cuenta la comunicación entre los aerogeneradores y la red. Por lo tanto, en este trabajo, se considera que el generador está equipado con este tipo de controlador, que además, admitiendo un funcionamiento ideal del controlador, el eje se modela como una masa única concentrada.
La ecuación que describe el modelo del sistema mecánico es, pues, la ecuación de movimiento donde se agrupa la inercia del rotor de la turbina y la inercia del rotor del generador junto, es decir [36]:
12(, −,) + , (3.2)
En que,
=
(3.3)
= , + , (3.4)
CAPÍTULO 3. Modelado del generador eólico y de los convertidores HVDC - VSC 37
, =
(3.5)
=
(3.6)
, =
(3.7)
=
(3.8)
, =
(3.9)
Donde es la velocidad unitaria de rotación del eje [p.u.], la velocidad nominal de rotación del eje [rad/s], , la velocidad unitaria inicial de rotación del eje [p.u.], la velocidad inicial del eje [rad/s], la constante de inercia total del rotor de la turbina y del generador [s], ,es la constante de inercia del roto de la turbina [s], , la constante de inercia del rotor del generador, ,es el par mecánico unitario del rotor de la turbina [p.u.], el par mecánico del rotor de la turbina [Nm], es la potencia nominal de la turbina [VA], , el par eléctrico unitario del rotor del generador [p.u.], es el par eléctrico del rotor del generador [Nm] y la potencia eléctrica de la turbina eólica [W].
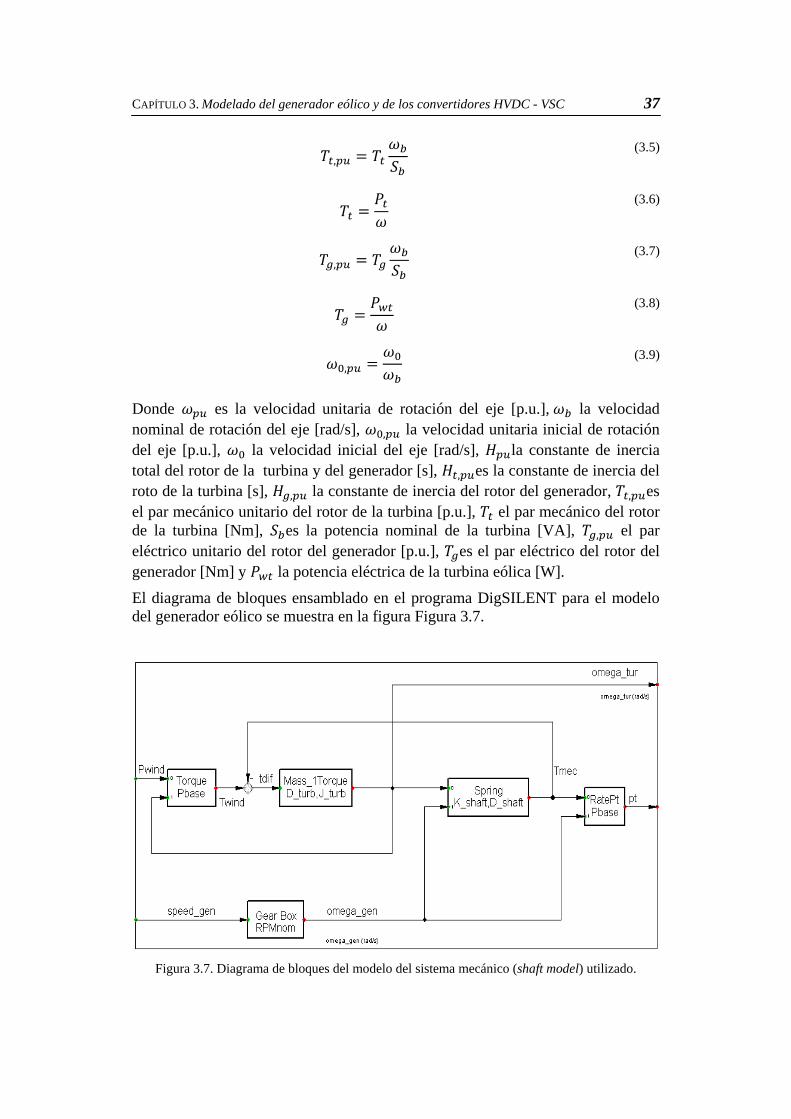
El diagrama de bloques ensamblado en el programa DigSILENT para el modelo del generador eólico se muestra en la figura Figura 3.7.
Figura 3.7. Diagrama de bloques del modelo del sistema mecánico (shaft model) utilizado.
38 CAPÍTULO 3. Modelado del generador eólico y de los convertidores HVDC - VSC
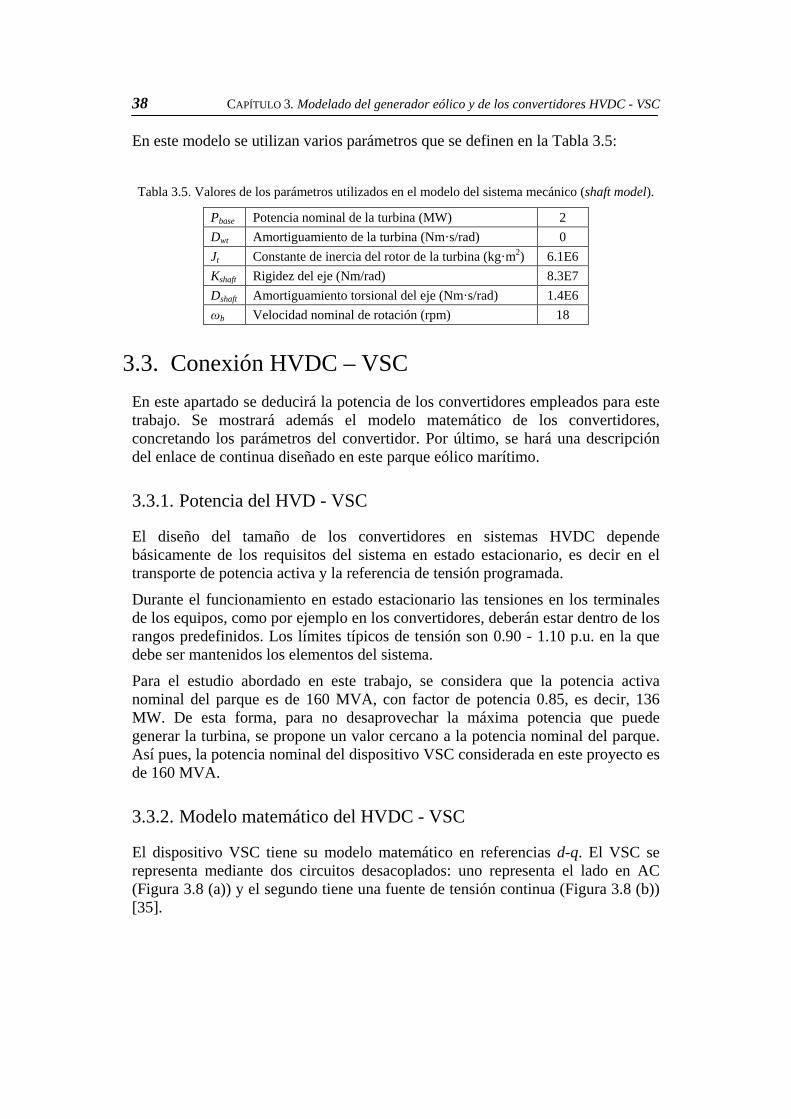
En este modelo se utilizan varios parámetros que se definen en la Tabla 3.5:
Tabla 3.5. Valores de los parámetros utilizados en el modelo del sistema mecánico (shaft model).
Pbase Potencia nominal de la turbina (MW) 2
Dwt Amortiguamiento de la turbina (Nm·s/rad) 0
Jt Constante de inercia del rotor de la turbina (kg·m2) 6.1E6
Kshaft Rigidez del eje (Nm/rad) 8.3E7
Dshaft Amortiguamiento torsional del eje (Nm·s/rad) 1.4E6
ωb Velocidad nominal de rotación (rpm) 18
3.3. Conexión HVDC – VSC
En este apartado se deducirá la potencia de los convertidores empleados para este trabajo. Se mostrará además el modelo matemático de los convertidores, concretando los parámetros del convertidor. Por último, se hará una descripción del enlace de continua diseñado en este parque eólico marítimo.
3.3.1. Potencia del HVD - VSC
El diseño del tamaño de los convertidores en sistemas HVDC depende básicamente de los requisitos del sistema en estado estacionario, es decir en el transporte de potencia activa y la referencia de tensión programada.
Durante el funcionamiento en estado estacionario las tensiones en los terminales de los equipos, como por ejemplo en los convertidores, deberán estar dentro de los rangos predefinidos. Los límites típicos de tensión son 0.90 - 1.10 p.u. en la que debe ser mantenidos los elementos del sistema.
Para el estudio abordado en este trabajo, se considera que la potencia activa nominal del parque es de 160 MVA, con factor de potencia 0.85, es decir, 136 MW. De esta forma, para no desaprovechar la máxima potencia que puede generar la turbina, se propone un valor cercano a la potencia nominal del parque. Así pues, la potencia nominal del dispositivo VSC considerada en este proyecto es de 160 MVA.
3.3.2. Modelo matemático del HVDC - VSC
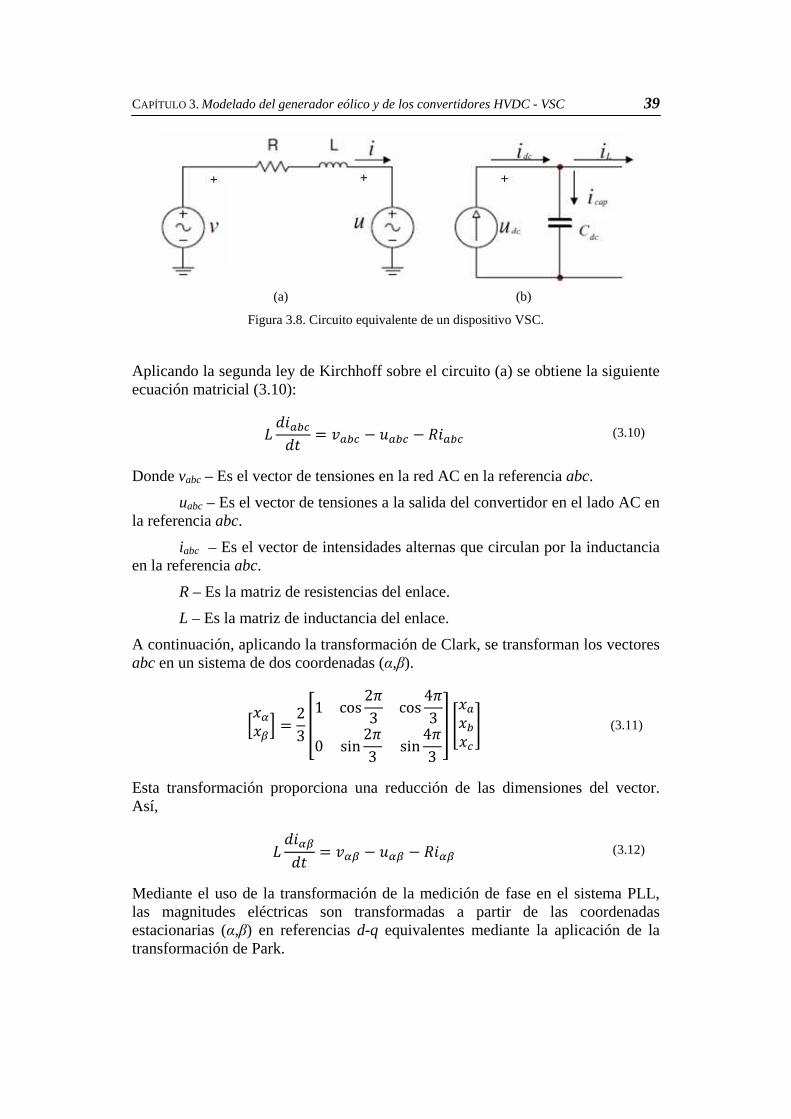
El dispositivo VSC tiene su modelo matemático en referencias d-q. El VSC se representa mediante dos circuitos desacoplados: uno representa el lado en AC (Figura 3.8 (a)) y el segundo tiene una fuente de tensión continua (Figura 3.8 (b)) [35].
CAPÍTULO 3. Modelado del generador eólico y de los convertidores HVDC - VSC 39
(a) (b)
Figura 3.8. Circuito equivalente de un dispositivo VSC.
Aplicando la segunda ley de Kirchhoff sobre el circuito (a) se obtiene la siguiente ecuación matricial (3.10):
!"#$!% &#$ − '#$ − ("#$ (3.10)
Donde vabc – Es el vector de tensiones en la red AC en la referencia abc.
uabc – Es el vector de tensiones a la salida del convertidor en el lado AC en la referencia abc.
iabc – Es el vector de intensidades alternas que circulan por la inductancia en la referencia abc.
R – Es la matriz de resistencias del enlace.
L – Es la matriz de inductancia del enlace.
A continuación, aplicando la transformación de Clark, se transforman los vectores abc en un sistema de dos coordenadas (α,β).
)*+*,- 23 /1 cos 233 cos 4330 sin 233 sin 433 8 9*#**$: (3.11)
Esta transformación proporciona una reducción de las dimensiones del vector. Así,
!"+,!% &+, − '+, − ("+, (3.12)
Mediante el uso de la transformación de la medición de fase en el sistema PLL, las magnitudes eléctricas son transformadas a partir de las coordenadas estacionarias (α,β) en referencias d-q equivalentes mediante la aplicación de la transformación de Park.
40 CAPÍTULO 3. Modelado del generador eólico y de los convertidores HVDC - VSC
)*;*<- ) cos = sin =− sin = cos =- )*+*,- (3.13)
Por lo que la ecuación queda de la siguiente manera:
!";<!% &;< − ';< − (( + > )";< (3.14)
El término jωLidq se introduce debido a la rotación del sistema de referencia, siendo ω la frecuencia a la que opera el sistema AC. Este término genera un acoplamiento cruzado entre los ejes d y q, en las ecuaciones:
!";!% &; − '; − ("; + > "<
!"<!% &< − '< − ("< − > ";
(3.15)
Estas ecuaciones muestran la relación entre las tensiones de los convertidores y las intensidades de salida en referencias d-q.
Por otro lado, aplicando la primera ley de Kirchhoff en el circuito de la Figura 3.8(b) se tiene que:
?;$ !';$!% ";$ − "@ (3.16)
Donde idc – Intensidad DC de salida del convertidor
iL – Intensidad que circula por el enlace DC
Cdc – Capacidad de la línea DC
Así, el modelo del HVDC-VSC se compone de las ecuaciones (3.15) y (3.16).
Además de las ecuaciones que forman el modelo del VSC, se puede profundizar en las relaciones entre potencias en la referencias d-q, para comprender mejor el control de potencia activa y reactiva utilizando las magnitudes d-q.
La potencia trifásica instantánea es la suma de la potencia instantánea de cada fase. De esta manera:
A(%) &#(%)"#(%) + &(%)"(%) + &$(%)"$(%) (3.17)
Transformando esta ecuación en el sistema estacionario (α,β) se obtiene la siguiente ecuación:
A(%) 32 (&+"+ + &,",) + 3&" (3.18)

CAPÍTULO 3. Modelado del generador eólico y de los convertidores HVDC - VSC 41
La potencia activa es independiente del sistema de coordenadas. Así, la ecuación anterior puede expresarse en los ejes d-q como:
A(%) 32 (&;"; + &<"<) + 3&" (3.19)
En condiciones equilibradas, la componente homopolar es nula. Por lo tanto la potencia activa instantánea queda de la siguiente forma:
A(%) 32 (&;"; + &<"<) (3.20)
Por otro lado, se puede calcular la potencia reactiva instantánea a partir de la expresión de la potencia aparente como:
B(%) 32'"∗ A(%) + >D(%) (3.21)
La parte imaginaria de la ecuación representa la potencia reactiva. Así,
D(%) EF G32'"∗H 32 (&<"; − &;"<) (3.22)
Adaptando la tensión del eje d con la tensión del sistema se obtiene,
&; &;&< 0 (3.23)
Por lo que queda simplificadas las ecuaciones de la potencia activa y reactiva:
A 32&;";D −32&;"< (3.24)
En las ecuaciones (3.24) se observa que la potencia activa es dependiente de la intensidad en el eje d y la potencia reactiva de la intensidad del eje q. Por lo tanto, la potencia activa y reactiva se encuentran desacopladas, de esta manera es posible un control independiente de las intensidades id e iq.
Por último, para completar, la ecuación de la potencia en el lado DC del VSC es la siguiente:
;$ &;$";$ (3.25)
3.3.3. Parámetros del convertidor HVDC - VSC
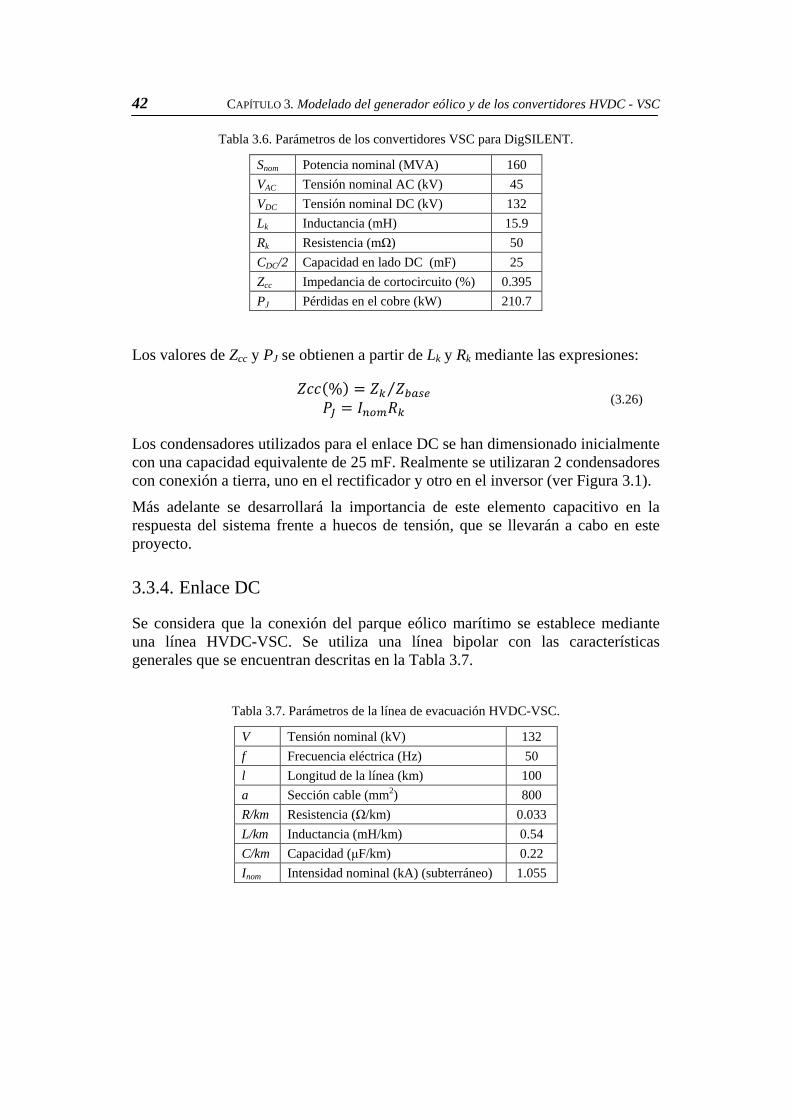
Las especificaciones de diseño de un convertidor VSC utilizadas en este proyecto son las que se relacionan en la Tabla 3.6.
42 CAPÍTULO 3. Modelado del generador eólico y de los convertidores HVDC - VSC
Tabla 3.6. Parámetros de los convertidores VSC para DigSILENT.
Snom Potencia nominal (MVA) 160
VAC Tensión nominal AC (kV) 45
VDC Tensión nominal DC (kV) 132
Lk Inductancia (mH) 15.9
Rk Resistencia (mΩ) 50
CDC/2 Capacidad en lado DC (mF) 25
Zcc Impedancia de cortocircuito (%) 0.395
PJ Pérdidas en el cobre (kW) 210.7
Los valores de Zcc y PJ se obtienen a partir de Lk y Rk mediante las expresiones: JKK(%) JM J#NO⁄Q ER (M (3.26)
Los condensadores utilizados para el enlace DC se han dimensionado inicialmente con una capacidad equivalente de 25 mF. Realmente se utilizaran 2 condensadores con conexión a tierra, uno en el rectificador y otro en el inversor (ver Figura 3.1).
Más adelante se desarrollará la importancia de este elemento capacitivo en la respuesta del sistema frente a huecos de tensión, que se llevarán a cabo en este proyecto.
3.3.4. Enlace DC
Se considera que la conexión del parque eólico marítimo se establece mediante una línea HVDC-VSC. Se utiliza una línea bipolar con las características generales que se encuentran descritas en la Tabla 3.7.
Tabla 3.7. Parámetros de la línea de evacuación HVDC-VSC.
V Tensión nominal (kV) 132
f Frecuencia eléctrica (Hz) 50
l Longitud de la línea (km) 100
a Sección cable (mm2) 800
R/km Resistencia (Ω/km) 0.033
L/km Inductancia (mH/km) 0.54
C/km Capacidad (µF/km) 0.22
Inom Intensidad nominal (kA) (subterráneo) 1.055
CAPÍTULO 3. Modelado del generador eólico y de los convertidores HVDC - VSC 43
3.4. Control del convertidor HVDC – VSC
En este apartado, se describen las técnicas de control más empleadas en el convertidor HVDC-VSC. El control externo del convertidor, establece, a partir de las medidas de parámetros eléctricos, una respuesta dirigida a corregir los desvíos de éstos con respecto a su valor de referencia. Esta respuesta corresponde a la entrada del control interno del convertidor HVDC-VSC.
3.4.1. Control Interno del HVDC - VSC
El control de un convertidor VSC puede realizarse mediante dos bucles en cascada: control interno y externo. El bucle de control interno necesita ser más rápido que el resto de controles externos para, de esa forma, asegurar la estabilidad del sistema de control [35].
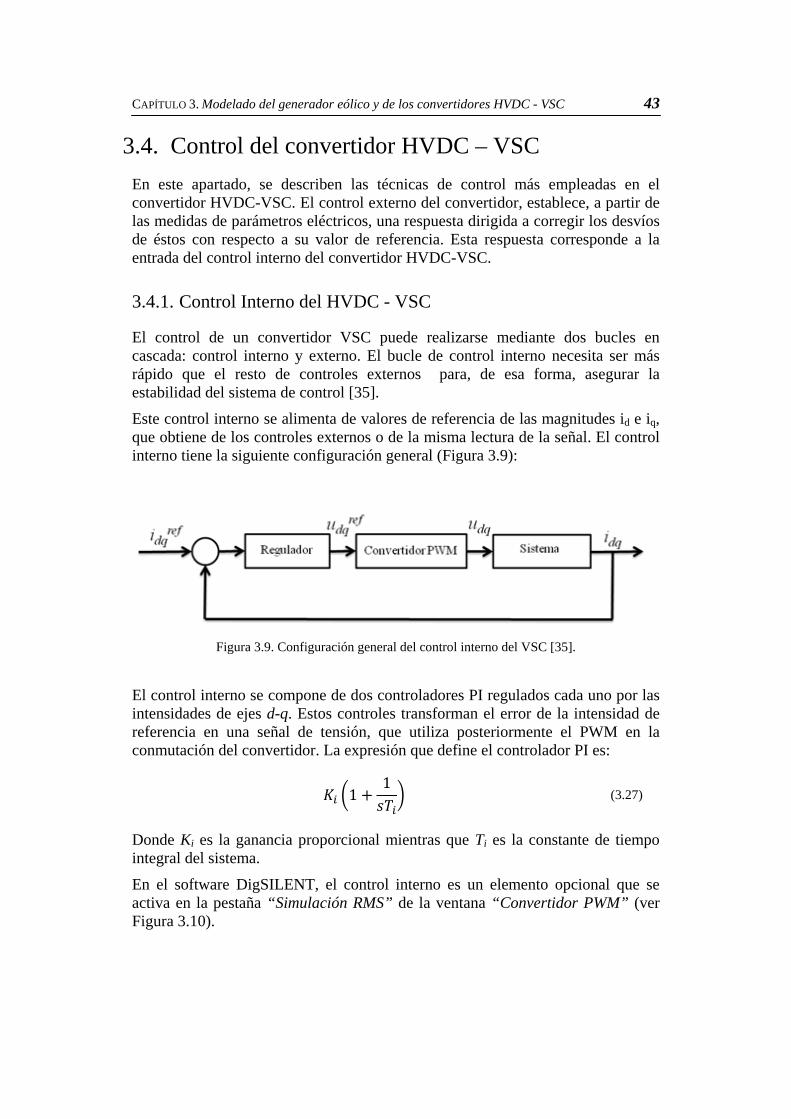
Este control interno se alimenta de valores de referencia de las magnitudes id e iq, que obtiene de los controles externos o de la misma lectura de la señal. El control interno tiene la siguiente configuración general (Figura 3.9):
Figura 3.9. Configuración general del control interno del VSC [35].
El control interno se compone de dos controladores PI regulados cada uno por las intensidades de ejes d-q. Estos controles transforman el error de la intensidad de referencia en una señal de tensión, que utiliza posteriormente el PWM en la conmutación del convertidor. La expresión que define el controlador PI es:
S G1 + 1BH (3.27)
Donde Ki es la ganancia proporcional mientras que Ti es la constante de tiempo integral del sistema.
En el software DigSILENT, el control interno es un elemento opcional que se activa en la pestaña “Simulación RMS” de la ventana “Convertidor PWM” (ver Figura 3.10).

44 CAPÍTULO 3. Modelado del generador eólico y de los convertidores HVDC - VSC
Figura 3.10. Modo de activación del control interno del convertidor VSC en DigSILENT.
Si los parámetros del controlador interno se ajustan todos a cero (Kp=0, Tp=0 s, Kq=0, Tq=0), es decir, se desactiva, las intensidades de salida del convertidor id e iq se igualan a las variables de entrada id_ref e iq_ref. Por lo tanto, el convertidor PWM comienza a funcionar como una fuente de intensidad [37].
3.4.1.1. Ecuación de transferencia del sistema
En la ecuación (3.15) se evidencia el acoplamiento cruzado del término j·ω·L·idq en el sistema AC del modelo de convertidor. Desde el punto de vista del control, este término se considera una perturbación en cada eje.
Para eliminar el acoplamiento cruzado, y por tanto, la perturbación, se añaden los términos del acoplamiento vd y L·iq en el controlador del eje d, y vq y L·id en el controlador del eje q [38].
Con los términos de compensación utilizados para el desacoplamiento, la entrada del convertidor del controlador es ahora:
';TOU −V";TOU − ";W(S(1 + 1B)) + "< + &;
'<TOU −V"<TOU − "<W(S<(1 + 1B)) − "; + &<
(3.28)
Siendo la salida:
G−V";TOU(B) − ";W(S G1 + 1BH) + "< + &;H G 11 + #BH ';(B) G−V"<TOU(B) − "<W(S< G1 + 1BH) + "; + &<H G 11 + #BH '<(B) (3.29)
CAPÍTULO 3. Modelado del generador eólico y de los convertidores HVDC - VSC 45
El convertidor se asume como transformador un ideal que tiene tan sólo un retardo de tiempo en su entrada. Por lo tanto, podemos suponer que la entrada del convertidor es la misma que la salida excepto el retardo de tiempo.
Sustituyendo la ecuación (3.15) en la ecuación (3.29) resulta la siguiente expresión en el dominio del tiempo.
'; !";!% + (";
'< !"<!% + ("<
(3.30)
Así, como demuestra la ecuación (3.30), se elimina el acoplamiento cruzado, y hace posible la independencia de los controles de los componentes de intensidad d y q.
La transformada de Laplace de la ecuación (3.30) corresponde a:
";<(B) 1( + B ';<(B) (3.31)
Por lo que la función de transferencia del sistema será:
X 1 B + ( (3.32)
Así, queda por tanto demostrada la independencia de los dos controladores internos de ejes d y q, siendo el sistema de primer orden.
Esta función de transferencia se utilizará en el apartado siguiente para sintonizar el control interno de los controladores del convertidor VSC del sistema.
3.4.1.2. Diseño del Control Interno del HVDC - VSC
El diseño del control de corriente interno sigue el procedimiento llamado en [39] “Técnica Óptima” en el que se representa la instalación a controlar como una impedancia equivalente de la red y el transformador.
Dado que los convertidores tienen los mismos valores de potencia nominal, niveles de tensión y especificaciones internas, se puede deducir que los parámetros equivalentes serán iguales, y por lo tanto, las mismas ganancias proporcional e integral del controlador PI en ambos.
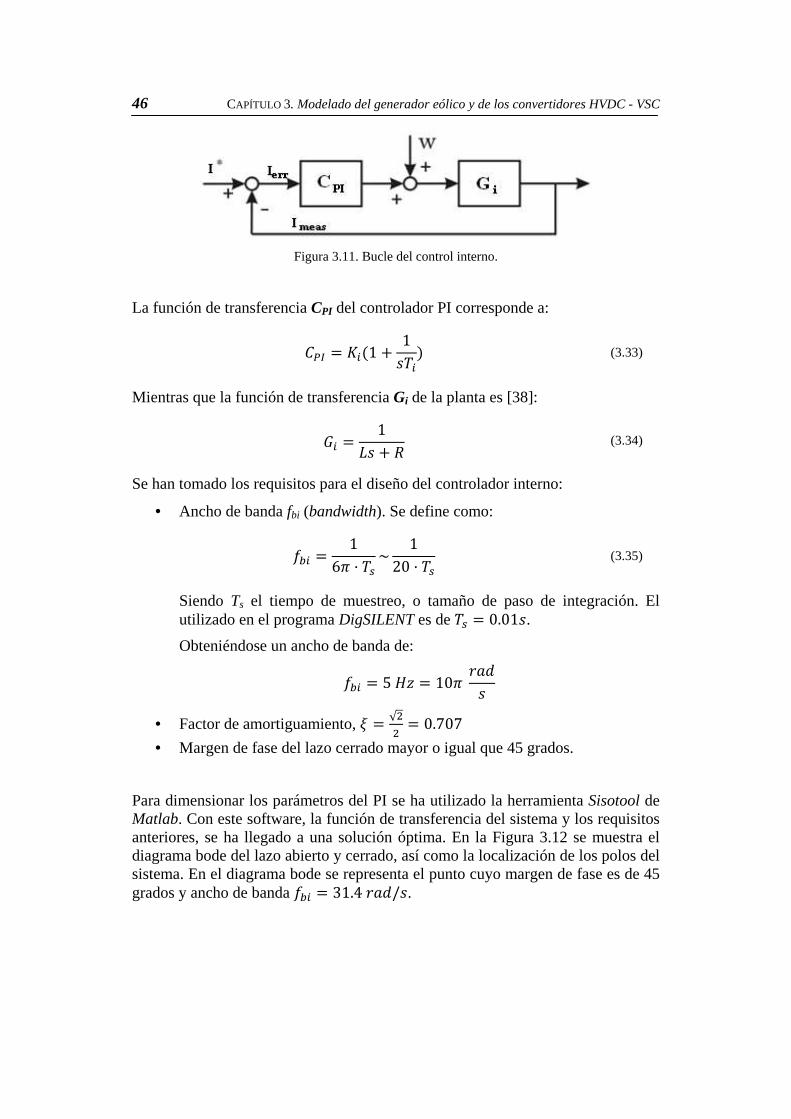
Para ambos convertidores, WPP-VSC y GS-VSC, el sistema a controlar se representa como en la Figura 3.11. La señal de entrada, I* , corresponde a la intensidad proveniente de los controladores externos, Imeas es la señal de salida del control interno y ω una perturbación.
46 CAPÍTULO 3. Modelado del generador eólico y de los convertidores HVDC - VSC
Figura 3.11. Bucle del control interno.
La función de transferencia CPI del controlador PI corresponde a:
?YZ S(1 + 1B) (3.33)
Mientras que la función de transferencia Gi de la planta es [38]:
X 1 B + ( (3.34)
Se han tomado los requisitos para el diseño del controlador interno:
• Ancho de banda fbi (bandwidth). Se define como:
[ 163 · N ~ 120 · N (3.35)
Siendo Ts el tiempo de muestreo, o tamaño de paso de integración. El utilizado en el programa DigSILENT es de N 0.01B. Obteniéndose un ancho de banda de:
[ 5a 103 bc!B
• Factor de amortiguamiento, d √ff 0.707
• Margen de fase del lazo cerrado mayor o igual que 45 grados.
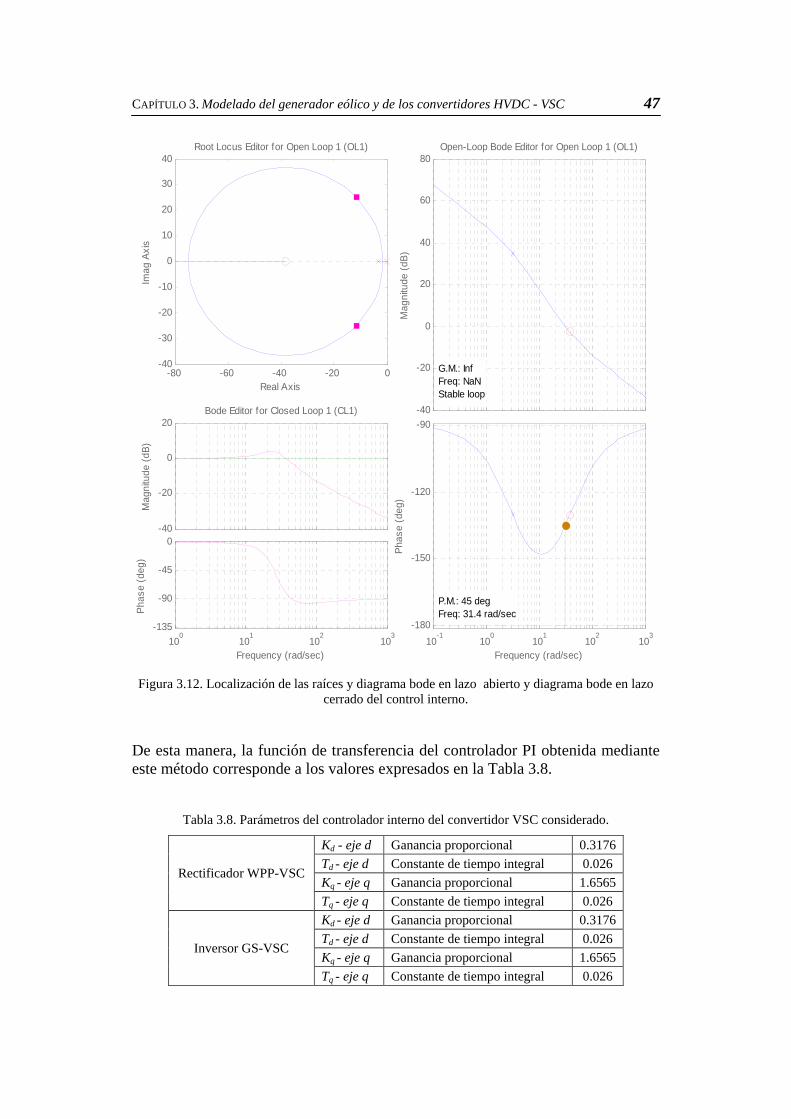
Para dimensionar los parámetros del PI se ha utilizado la herramienta Sisotool de Matlab. Con este software, la función de transferencia del sistema y los requisitos anteriores, se ha llegado a una solución óptima. En la Figura 3.12 se muestra el diagrama bode del lazo abierto y cerrado, así como la localización de los polos del sistema. En el diagrama bode se representa el punto cuyo margen de fase es de 45 grados y ancho de banda [ 31.4bc!/B.
CAPÍTULO 3. Modelado del generador eólico y de los convertidores HVDC - VSC 47
Figura 3.12. Localización de las raíces y diagrama bode en lazo abierto y diagrama bode en lazo
cerrado del control interno.
De esta manera, la función de transferencia del controlador PI obtenida mediante este método corresponde a los valores expresados en la Tabla 3.8.
Tabla 3.8. Parámetros del controlador interno del convertidor VSC considerado.
Rectificador WPP-VSC
Kd - eje d Ganancia proporcional 0.3176
Td - eje d Constante de tiempo integral 0.026
Kq - eje q Ganancia proporcional 1.6565
Tq - eje q Constante de tiempo integral 0.026
Inversor GS-VSC
Kd - eje d Ganancia proporcional 0.3176
Td - eje d Constante de tiempo integral 0.026
Kq - eje q Ganancia proporcional 1.6565
Tq - eje q Constante de tiempo integral 0.026
100
101
102
103
-135
-90
-45
0
Frequency (rad/sec)
Pha
se (
deg)
-40
-20
0
20Bode Editor for Closed Loop 1 (CL1)
Mag
nitu
de (
dB)
10-1
100
101
102
103
-180
-150
-120
-90
P.M.: 45 degFreq: 31.4 rad/sec
Frequency (rad/sec)
Pha
se (
deg)
-40
-20
0
20
40
60
80
G.M.: InfFreq: NaNStable loop
Open-Loop Bode Editor for Open Loop 1 (OL1)
Mag
nitu
de (
dB)
-80 -60 -40 -20 0-40
-30
-20
-10
0
10
20
30
40Root Locus Editor for Open Loop 1 (OL1)
Real Axis
Imag
Axi
s
48 CAPÍTULO 3. Modelado del generador eólico y de los convertidores HVDC - VSC
3.4.2. Control Externo del convertidor HVDC - VSC
Además del control interno de un convertidor HVDC-VSC, se pueden realizar diferentes controles que realicen operaciones y tareas específicas que más nos interesen. Entre las operaciones más comunes están el control de potencia activa-reactiva, control de tensión DC y control de frecuencia. Todos estos controles se centran en reducir o eliminar el error de señales con respecto al estado estacionario [35]. Este error se determina a partir de las medidas de las señales de salida del dispositivo y señales de referencia, produciendo las magnitudes de intensidad en eje d-q de referencias que utilizará el control interno del dispositivo para actuar.
Las parejas de control que suelen utilizarse en los convertidores VSC, según la componente de la intensidad con la que trabaja, se muestra en la Tabla 3.9.
Tabla 3.9. Parejas de control utilizadas en los convertidores VSC [24].
id iq
Potencia activa P Potencia reactiva Q
Frecuencia F Ángulo de tensión φ
Tensión VDC Tensión VAC
3.4.2.1. Control de potencia activa - P
El control P está compuesto por un controlador PI. El objetivo del control es regular la potencia activa que intercambia el sistema con la red [34] [35].
El principio de funcionamiento del control de potencia se resume en la siguiente ecuación:
O;;# TOUOTO$# (3.36)
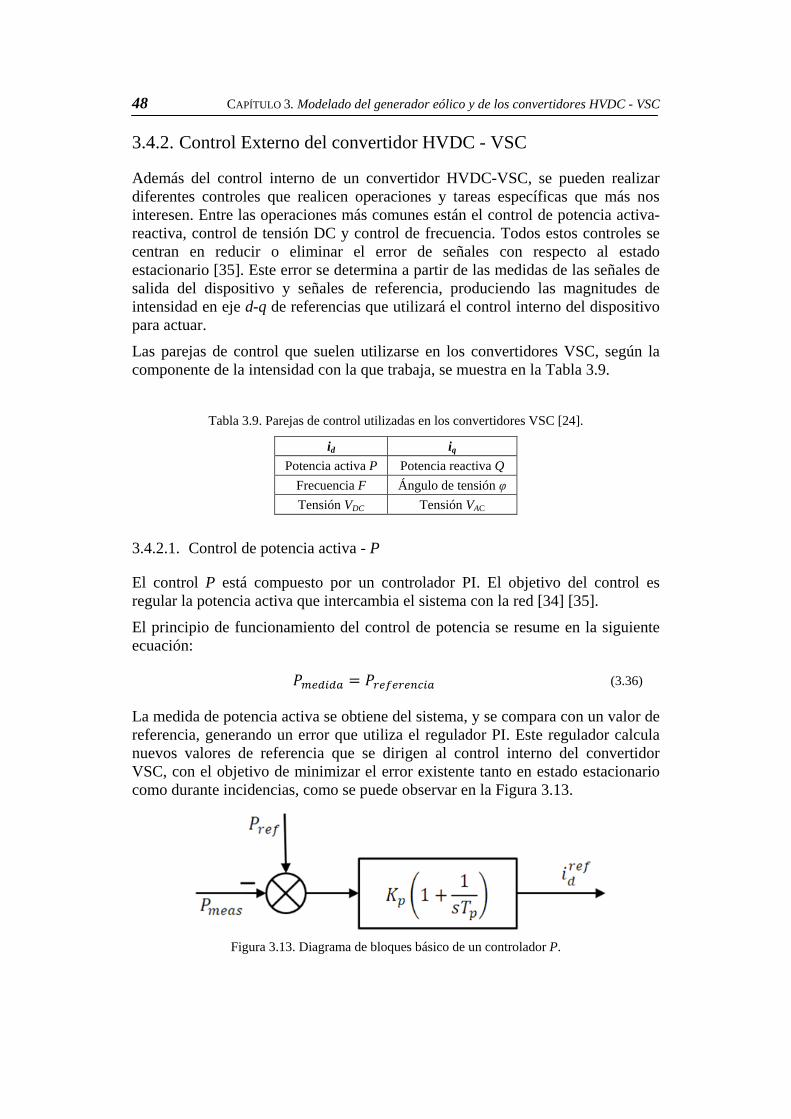
La medida de potencia activa se obtiene del sistema, y se compara con un valor de referencia, generando un error que utiliza el regulador PI. Este regulador calcula nuevos valores de referencia que se dirigen al control interno del convertidor VSC, con el objetivo de minimizar el error existente tanto en estado estacionario como durante incidencias, como se puede observar en la Figura 3.13.
Figura 3.13. Diagrama de bloques básico de un controlador P.
CAPÍTULO 3. Modelado del generador eólico y de los convertidores HVDC - VSC 49
3.4.2.2. Control de tensión - VDC
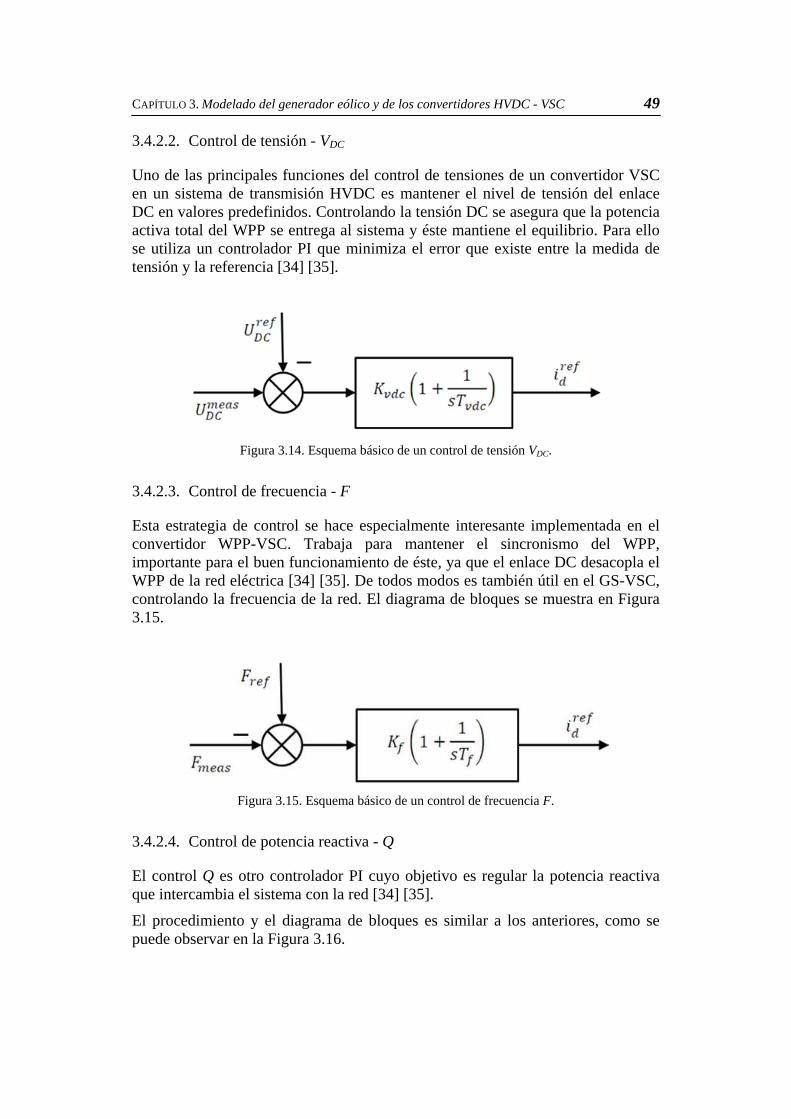
Uno de las principales funciones del control de tensiones de un convertidor VSC en un sistema de transmisión HVDC es mantener el nivel de tensión del enlace DC en valores predefinidos. Controlando la tensión DC se asegura que la potencia activa total del WPP se entrega al sistema y éste mantiene el equilibrio. Para ello se utiliza un controlador PI que minimiza el error que existe entre la medida de tensión y la referencia [34] [35].
Figura 3.14. Esquema básico de un control de tensión VDC.
3.4.2.3. Control de frecuencia - F
Esta estrategia de control se hace especialmente interesante implementada en el convertidor WPP-VSC. Trabaja para mantener el sincronismo del WPP, importante para el buen funcionamiento de éste, ya que el enlace DC desacopla el WPP de la red eléctrica [34] [35]. De todos modos es también útil en el GS-VSC, controlando la frecuencia de la red. El diagrama de bloques se muestra en Figura 3.15.
Figura 3.15. Esquema básico de un control de frecuencia F.
3.4.2.4. Control de potencia reactiva - Q
El control Q es otro controlador PI cuyo objetivo es regular la potencia reactiva que intercambia el sistema con la red [34] [35].
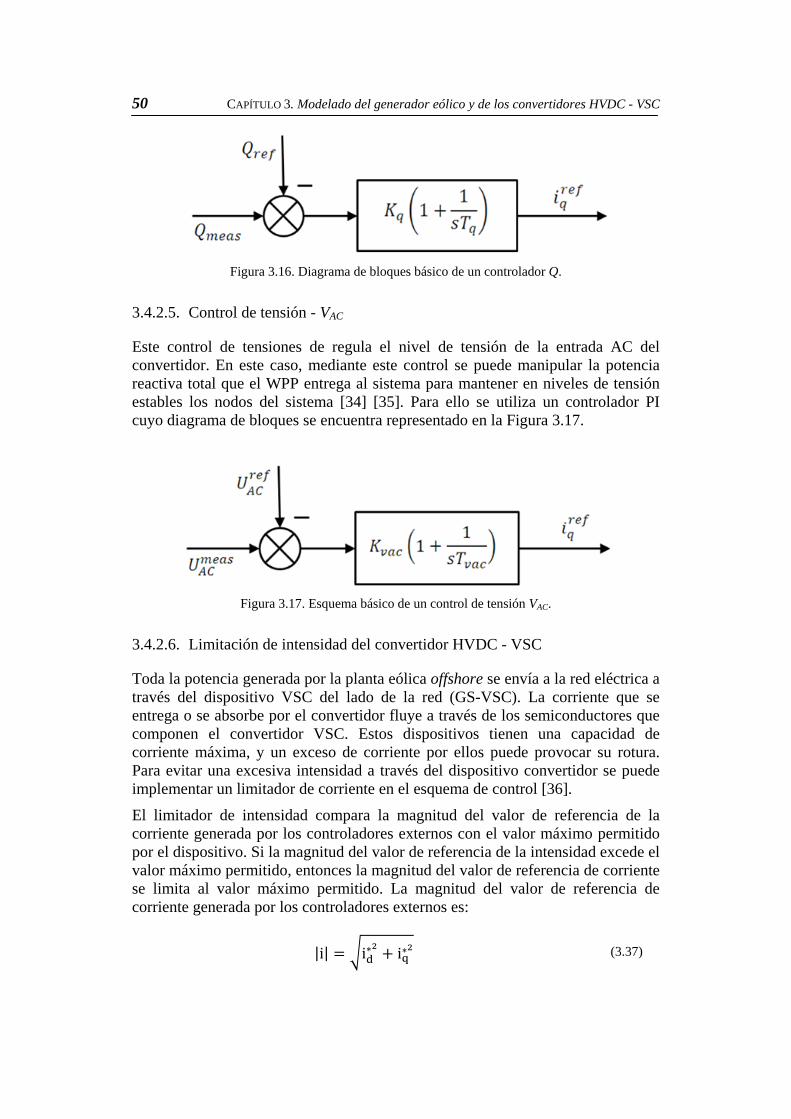
El procedimiento y el diagrama de bloques es similar a los anteriores, como se puede observar en la Figura 3.16.
50 CAPÍTULO 3. Modelado del generador eólico y de los convertidores HVDC - VSC
Figura 3.16. Diagrama de bloques básico de un controlador Q.
3.4.2.5. Control de tensión - VAC
Este control de tensiones de regula el nivel de tensión de la entrada AC del convertidor. En este caso, mediante este control se puede manipular la potencia reactiva total que el WPP entrega al sistema para mantener en niveles de tensión estables los nodos del sistema [34] [35]. Para ello se utiliza un controlador PI cuyo diagrama de bloques se encuentra representado en la Figura 3.17.
Figura 3.17. Esquema básico de un control de tensión VAC.
3.4.2.6. Limitación de intensidad del convertidor HVDC - VSC
Toda la potencia generada por la planta eólica offshore se envía a la red eléctrica a través del dispositivo VSC del lado de la red (GS-VSC). La corriente que se entrega o se absorbe por el convertidor fluye a través de los semiconductores que componen el convertidor VSC. Estos dispositivos tienen una capacidad de corriente máxima, y un exceso de corriente por ellos puede provocar su rotura. Para evitar una excesiva intensidad a través del dispositivo convertidor se puede implementar un limitador de corriente en el esquema de control [36].
El limitador de intensidad compara la magnitud del valor de referencia de la corriente generada por los controladores externos con el valor máximo permitido por el dispositivo. Si la magnitud del valor de referencia de la intensidad excede el valor máximo permitido, entonces la magnitud del valor de referencia de corriente se limita al valor máximo permitido. La magnitud del valor de referencia de corriente generada por los controladores externos es:
|i| jik∗l + im∗l (3.37)

CAPÍTULO 3. Modelado del generador eólico y de los convertidores HVDC - VSC 51
Donde |i| es el valor de la magnitud de corriente de referencia en [pu], id* es el
valor de referencia de la corriente del eje-d [pu], que controla la potencia activa, y iq
* la del eje-q [pu], que controla la potencia reactiva.
Existen tres opciones de limitación que puede ser aplicada en el limitador de corriente en el caso de exceder la intensidad máxima permitida [35]:
• Dar prioridad a ";∗ , por lo tanto prioridad al control de potencia activa (Figura 3.18 (a)). Esta estrategia se utiliza, por ejemplo, cuando el convertidor está conectado a una red fuerte para producir más energía.
• Dar prioridad a "<∗ , por lo tanto prioridad al control de potencia reactiva (Figura 3.18 (b)). Se decide el uso de esta opción cuando el convertidor está conectado a una red débil o se utiliza para suministrar una planta industrial.
• Mantener la proporción en ambas intensidades (Figura 3.18 (c)).
(a) (b) (c)
Figura 3.18. Estrategias de limitación de corriente.
En este trabajo, se recurre a la primera opción, debido a que la red a la que está conectado el sistema es fuerte, siendo el objetivo de la planta la producción de energía (Figura 3.18 (a)).

52 CAPÍTULO 3. Modelado del generador eólico y de los convertidores HVDC - VSC


















