
MICROPROCESADORES -...
133
Transcript of MICROPROCESADORES -...

"I think there is a world market for maybe five computers."
- Thomas Watson, president of IBM, 1943.
"There is no reason anyone would want a computer in their home."
- Ken Olsen, founder of Digital Equipment Corporation,
1977.
Contenido del cursoObjetivo: Familiarizarse con los microprocesadores de manera que éstos puedan ser utilizados como unidades de control y procesamiento. El curso comprende la elaboraciónde un proyecto en alguna área de las mencionadas.
TEMARIO
1.- Arquitectura de los microprocesadores
2.- Definición de un sistema mínimo
3.- Métodos de direccionamiento
4.- Registro de instrucciones y técnicas de programación en lenguaje ensamblador de un microprocesador específico
5.- Sistema de interrupción.
6.- Diseño de interfaces de E/S
7.- Acceso directo a la memoria.

Sistemas con microprocesadoresTarjetas madre comerciales - $500.00 pesos
Microcontroladores de 32 bits – $4 – $8 dólares
Contenido del cursoObjetivo: Familiarizarse con los microprocesadores de manera que éstos puedan ser utilizados como unidades de control y procesamiento. El curso comprende la elaboraciónde un proyecto en alguna área de las mencionadas.
TEMARIO
1.- Arquitectura básica de los microprocesadores
2.- Descripción de los componentes de una microcomputadora
3.- Componentes del microprocesador en VHDL
4.- Características de microprocesadores modernos
Características de microprocesadores modernosAlgunas características .
1.- PIPELINING – Rodriguez F. 5.- Floating Point Unit - Naranjo
2.- MULTI-THREADING (multi-hilo) – R.F. 6.- Multicore - Saucedo
3.- Multimedia capabilities: 3DNow, 7.- Cache Memory - MonteroMMX, SSE, SSE2, SSE3 - Montenegro
4.- DYNAMIC FRECUENCY SCALINGDYNAMIC VOLTAGE SCALING – Naranjo

Microprocesadores comercialesLista de fabricantes originales de familias de CPUs.
AMD ARMCyrix Digital Equipment CorporationIDT IntelIntersil MIPS TechnologiesMOS Technology MotorolaNational Semiconductor NECNexGen RCARise Technology SigneticsSun Microsystems Texas InstrumentsTransmeta USSRVIA Western Design CenterWestern Electric Zilog
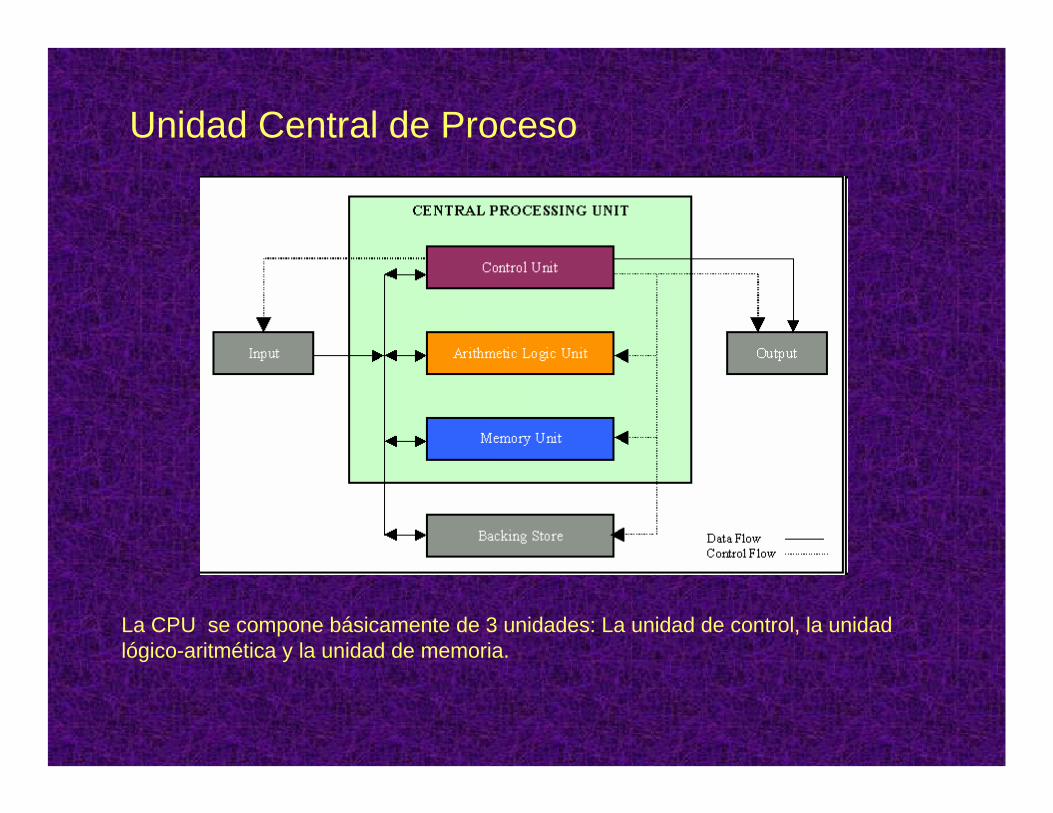
Unidad Central de Proceso
La CPU se compone básicamente de 3 unidades: La unidad de control, la unidadlógico-aritmética y la unidad de memoria.
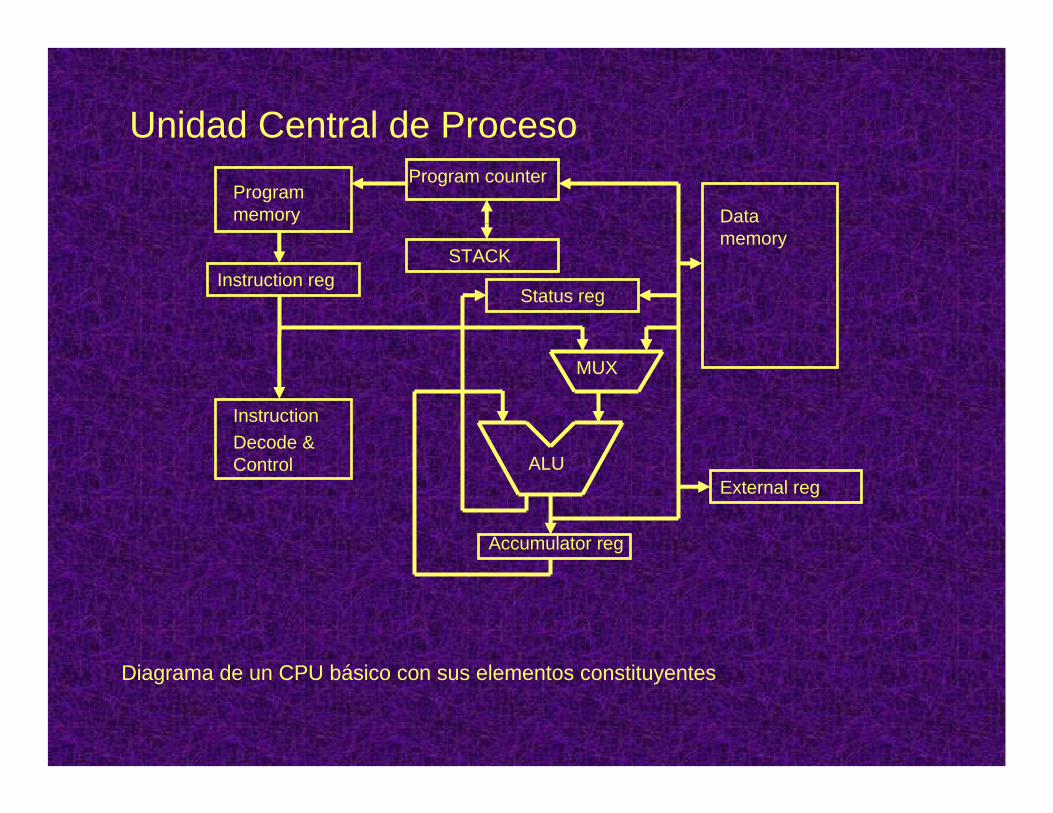
Unidad Central de Proceso
Diagrama de un CPU básico con sus elementos constituyentes
ALU
Program memory Data
memory
InstructionDecode & Control
Instruction regSTACK
Program counter
Status reg
MUX
Accumulator reg
External reg
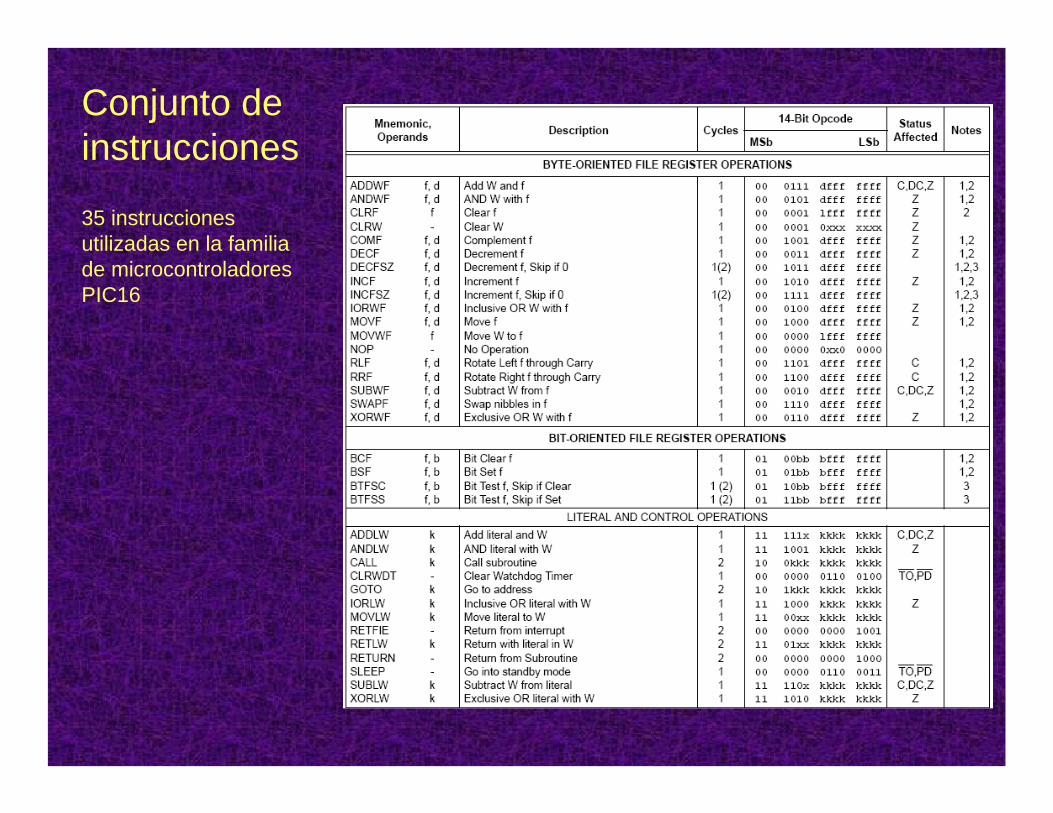
Conjunto de instrucciones
35 instrucciones utilizadas en la familia de microcontroladores PIC16
Unidad de controlLa unidad de control dirige todo el sistema para llevar a cabo las instrucciones de programa almacenadas.
La unidad de control se debe comunicar con la memoria principal y con la ALU.
La unidad de control utiliza las instrucciones contenidas en el Registro de Instrucción para decidir que circuitos necesitan ser activados.
La unidad de control coordina las actividades de las otras dos unidades así como los periféricos y dispositivos de almacenamiento.
La unidad de control instruye a la ALU sobre que operaciones aritméticas o lógicas se realizarán.
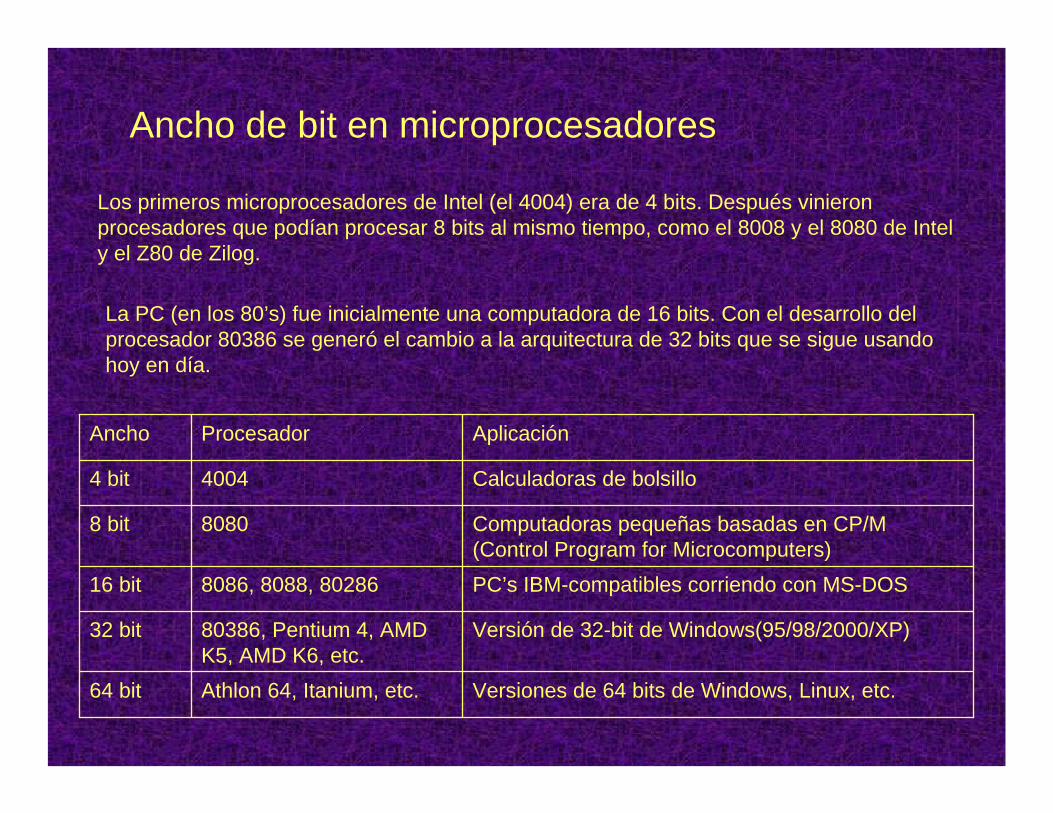
Los primeros microprocesadores de Intel (el 4004) era de 4 bits. Después vinieronprocesadores que podían procesar 8 bits al mismo tiempo, como el 8008 y el 8080 de Intel y el Z80 de Zilog.
La PC (en los 80’s) fue inicialmente una computadora de 16 bits. Con el desarrollo del procesador 80386 se generó el cambio a la arquitectura de 32 bits que se sigue usando hoy en día.
Ancho de bit en microprocesadores
Versiones de 64 bits de Windows, Linux, etc.Athlon 64, Itanium, etc.64 bit
Versión de 32-bit de Windows(95/98/2000/XP)80386, Pentium 4, AMD K5, AMD K6, etc.
32 bit
PC’s IBM-compatibles corriendo con MS-DOS8086, 8088, 8028616 bit
Computadoras pequeñas basadas en CP/M (Control Program for Microcomputers)
80808 bit
Calculadoras de bolsillo40044 bit
AplicaciónProcesadorAncho

John von Neumann, matemático de origen hungaro, desarrolló un modelobásico para las computadoras que aún se sigue usando.
Él dividió el hardware de la computadora en 5 grupos primarios* CPU * Entrada * Almacenamiento permanente * Salida * Almacenamiento de trabajo
El modelo von Newmann
CPU
BUSES
CONTROLADORES
ALMACENAMIENTO DE TRABAJOSD-RAMDDR-RAMRambus
ALMACENAMIENTO PERMANENTEDisco duroCD-ROMUSB-Drive
ENTRADATeclado, ratónScannerCámara digital
ENTRADA / SALIDAModem, ISDNTarjeta de sonidoTarjeta de video
SALIDAPantallaImpresora
COMPUTADORA ACTUAL
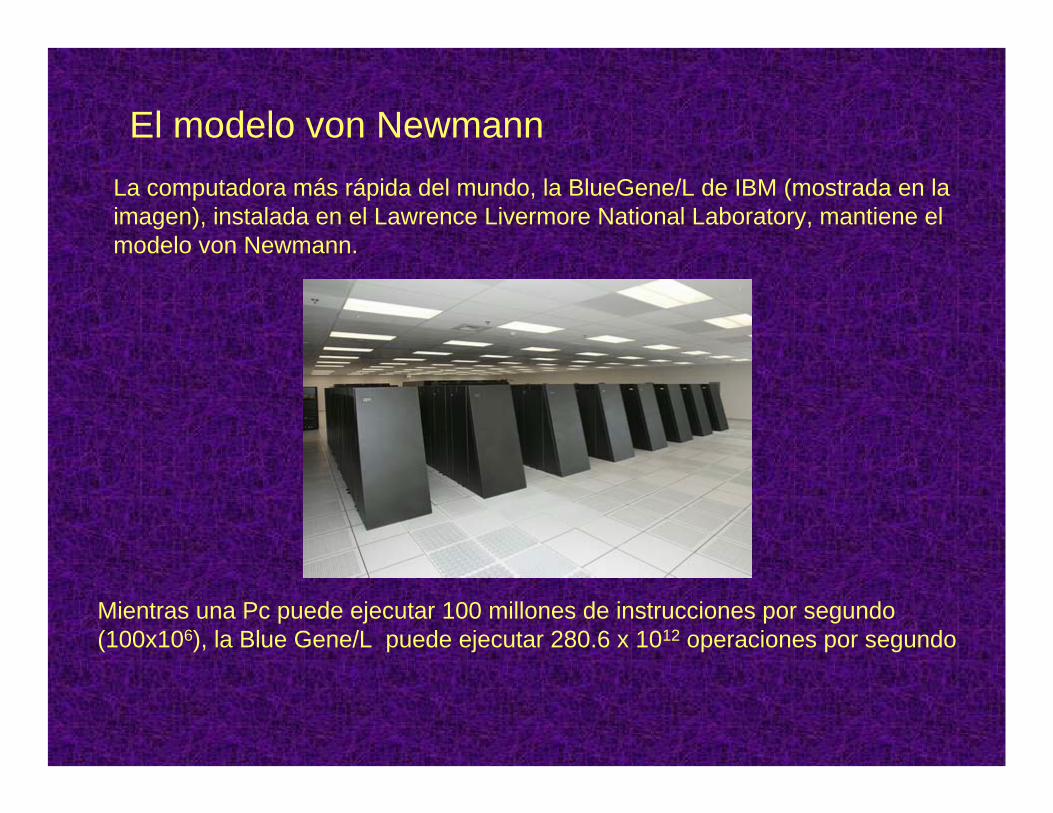
La computadora más rápida del mundo, la BlueGene/L de IBM (mostrada en la imagen), instalada en el Lawrence Livermore National Laboratory, mantiene el modelo von Newmann.
Mientras una Pc puede ejecutar 100 millones de instrucciones por segundo (100x106), la Blue Gene/L puede ejecutar 280.6 x 1012 operaciones por segundo
El modelo von Newmann
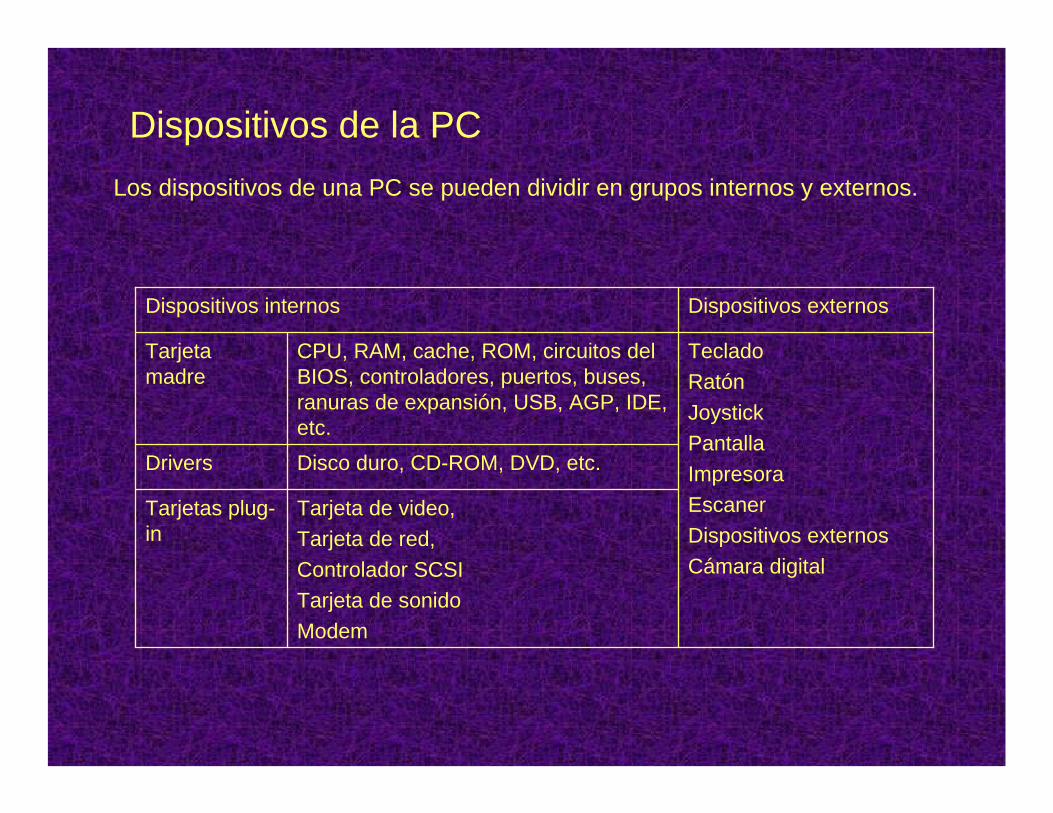
Los dispositivos de una PC se pueden dividir en grupos internos y externos.
Dispositivos de la PC
Tarjeta de video,Tarjeta de red,Controlador SCSITarjeta de sonidoModem
Tarjetas plug-in
Disco duro, CD-ROM, DVD, etc.Drivers
TecladoRatónJoystickPantallaImpresoraEscanerDispositivos externosCámara digital
CPU, RAM, cache, ROM, circuitos del BIOS, controladores, puertos, buses, ranuras de expansión, USB, AGP, IDE, etc.
Tarjeta madre
Dispositivos externosDispositivos internos
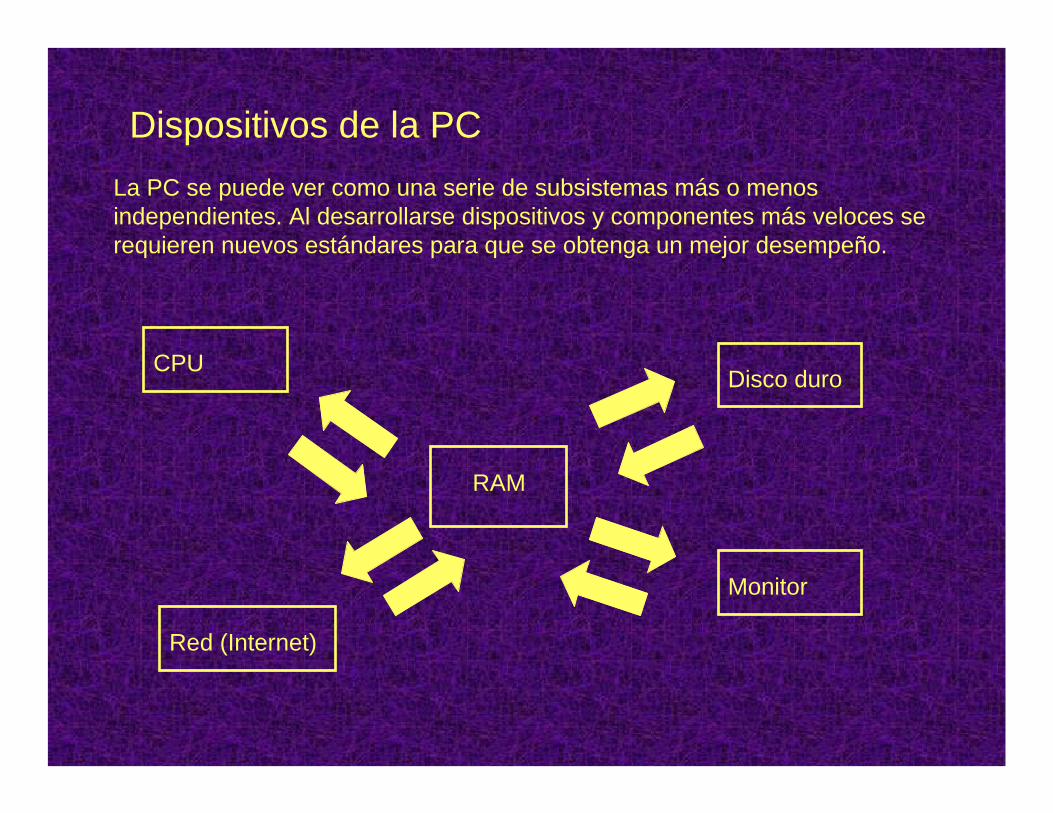
La PC se puede ver como una serie de subsistemas más o menosindependientes. Al desarrollarse dispositivos y componentes más veloces se requieren nuevos estándares para que se obtenga un mejor desempeño.
Dispositivos de la PC
RAM
Disco duro
Monitor
CPU
Red (Internet)
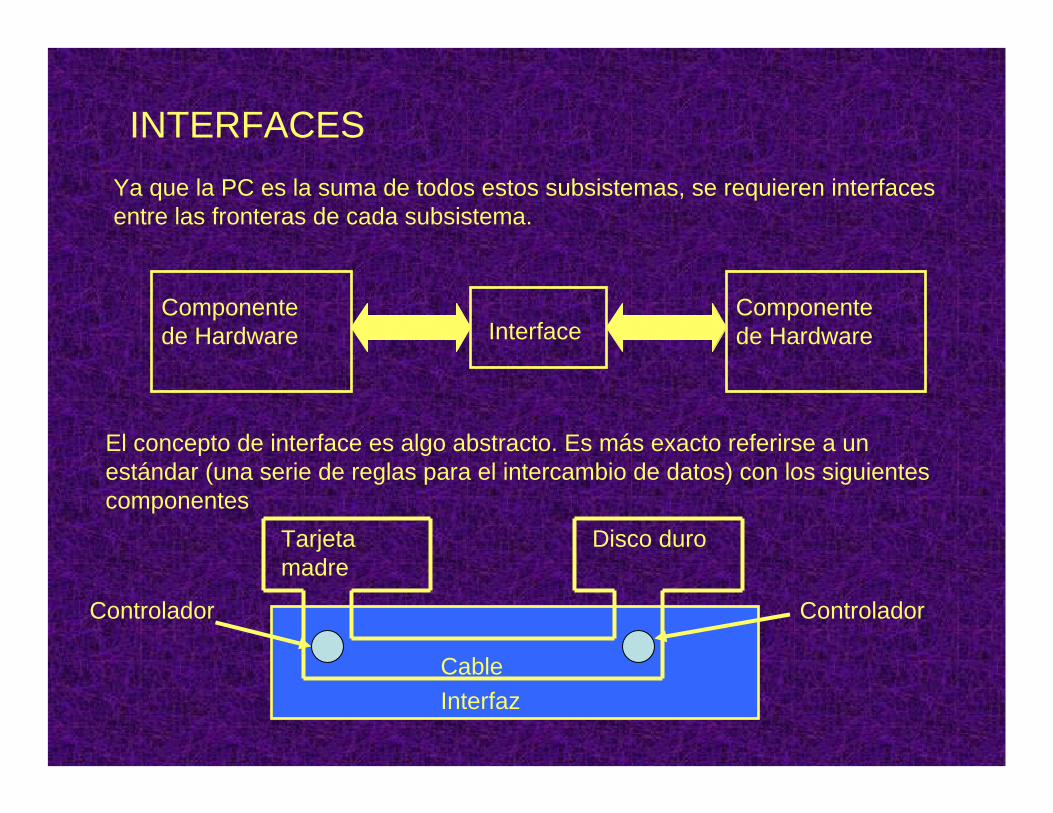
Ya que la PC es la suma de todos estos subsistemas, se requieren interfaces entre las fronteras de cada subsistema.
INTERFACES
Componente de Hardware
Componente de HardwareInterface
El concepto de interface es algo abstracto. Es más exacto referirse a un estándar (una serie de reglas para el intercambio de datos) con los siguientes componentes
Tarjeta madre
Disco duro
CableInterfaz
ControladorControlador
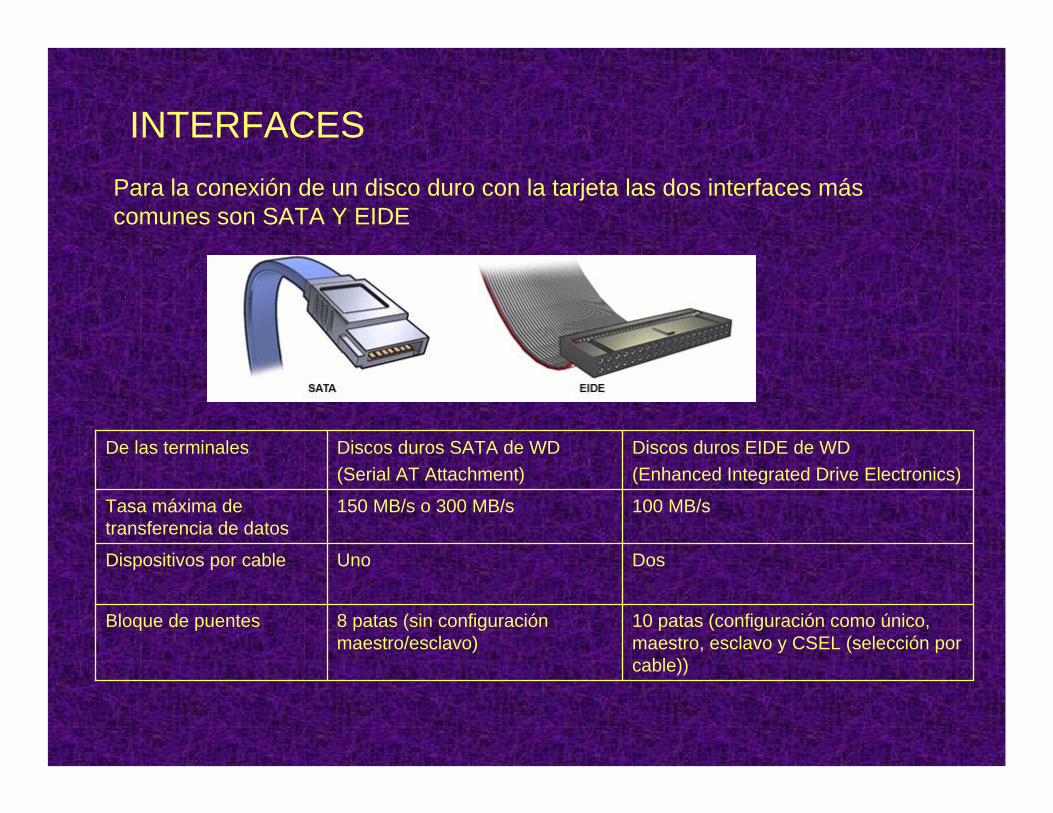
Para la conexión de un disco duro con la tarjeta las dos interfaces máscomunes son SATA Y EIDE
INTERFACES
10 patas (configuración como único, maestro, esclavo y CSEL (selección por cable))
8 patas (sin configuración maestro/esclavo)
Bloque de puentes
Uno
150 MB/s o 300 MB/s
Discos duros SATA de WD(Serial AT Attachment)
DosDispositivos por cable
100 MB/sTasa máxima de transferencia de datos
Discos duros EIDE de WD(Enhanced Integrated Drive Electronics)
De las terminales

Para un disco duro como el de la imagen se requiere circuitería para su manejoy para la interfaz:
INTERFACES
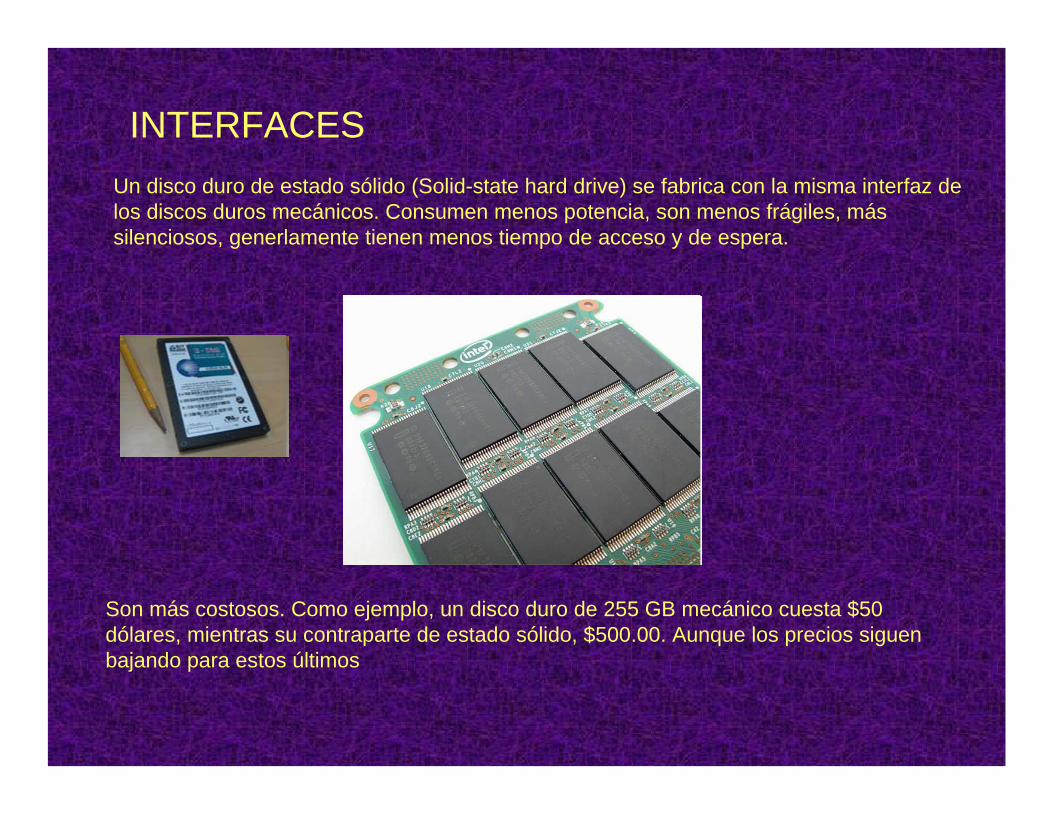
Un disco duro de estado sólido (Solid-state hard drive) se fabrica con la misma interfaz de los discos duros mecánicos. Consumen menos potencia, son menos frágiles, más silenciosos, generlamente tienen menos tiempo de acceso y de espera.
INTERFACES
Son más costosos. Como ejemplo, un disco duro de 255 GB mecánico cuesta $50 dólares, mientras su contraparte de estado sólido, $500.00. Aunque los precios siguen bajando para estos últimos

La tarjeta madre es el componente más importante de una PC. Se puede entender como la unidad central de todo el sistema que forma una PC.
TARJETA MADRE
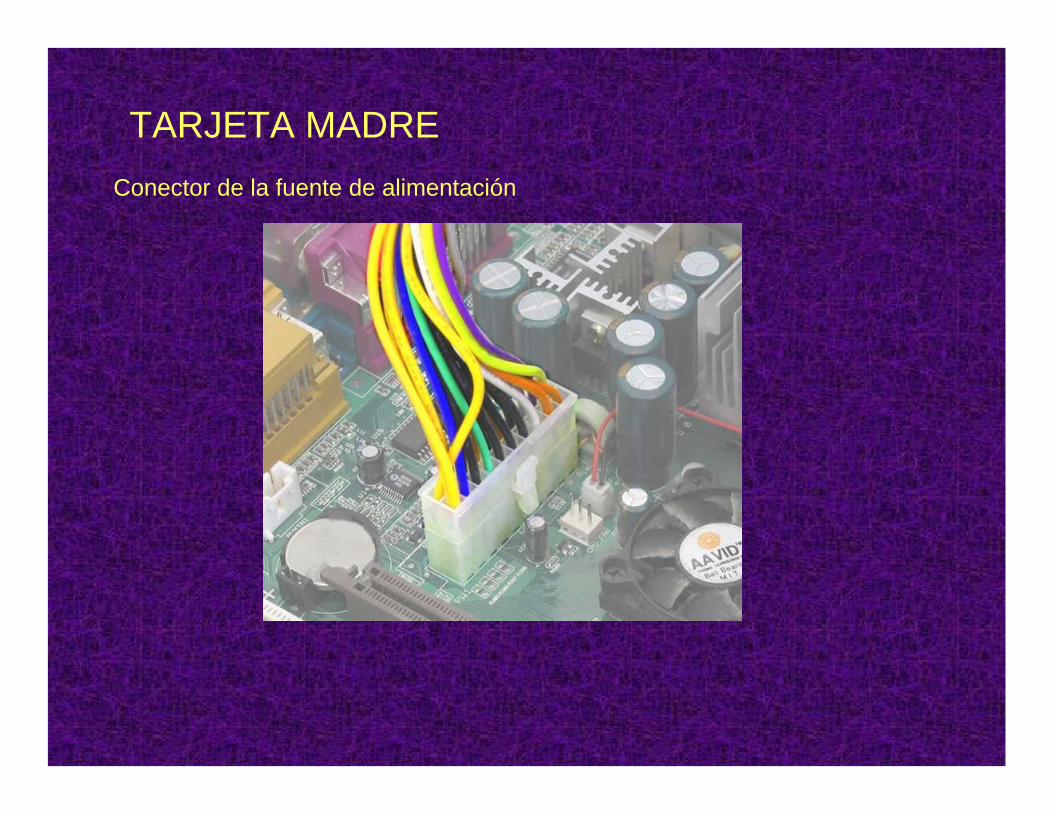
Conector de la fuente de alimentación
TARJETA MADRE
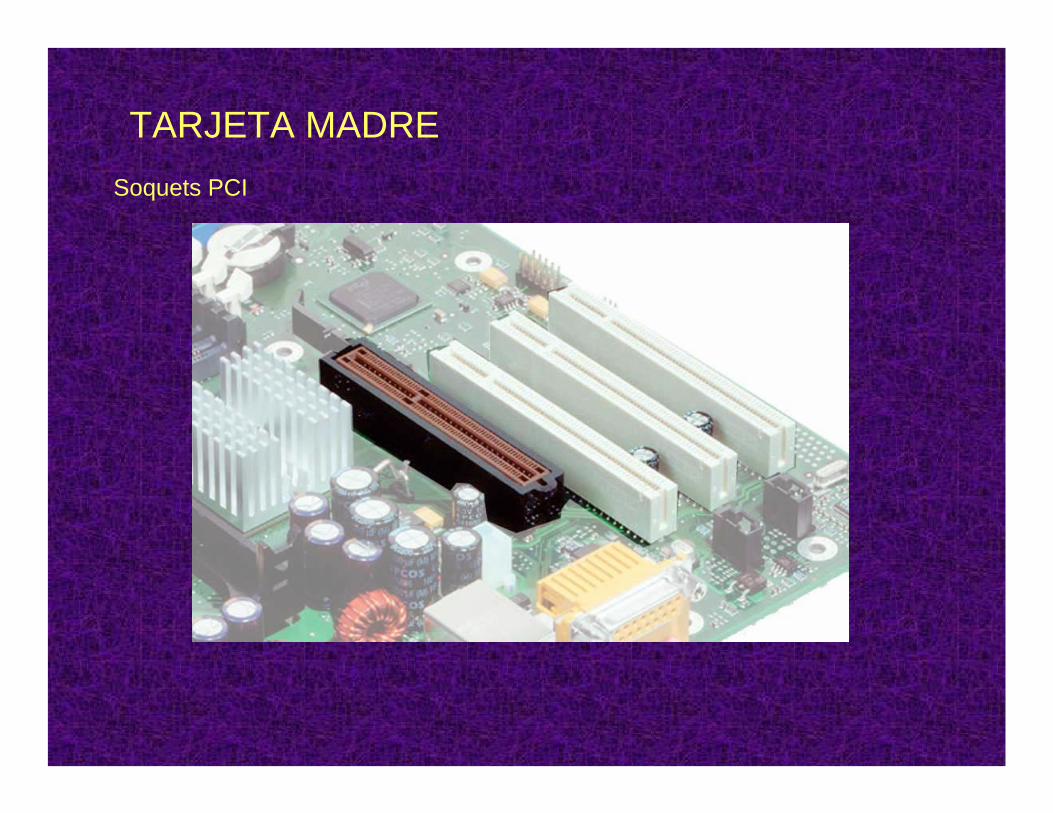
Soquets PCI
TARJETA MADRE

Puertos de conexión
TARJETA MADRE
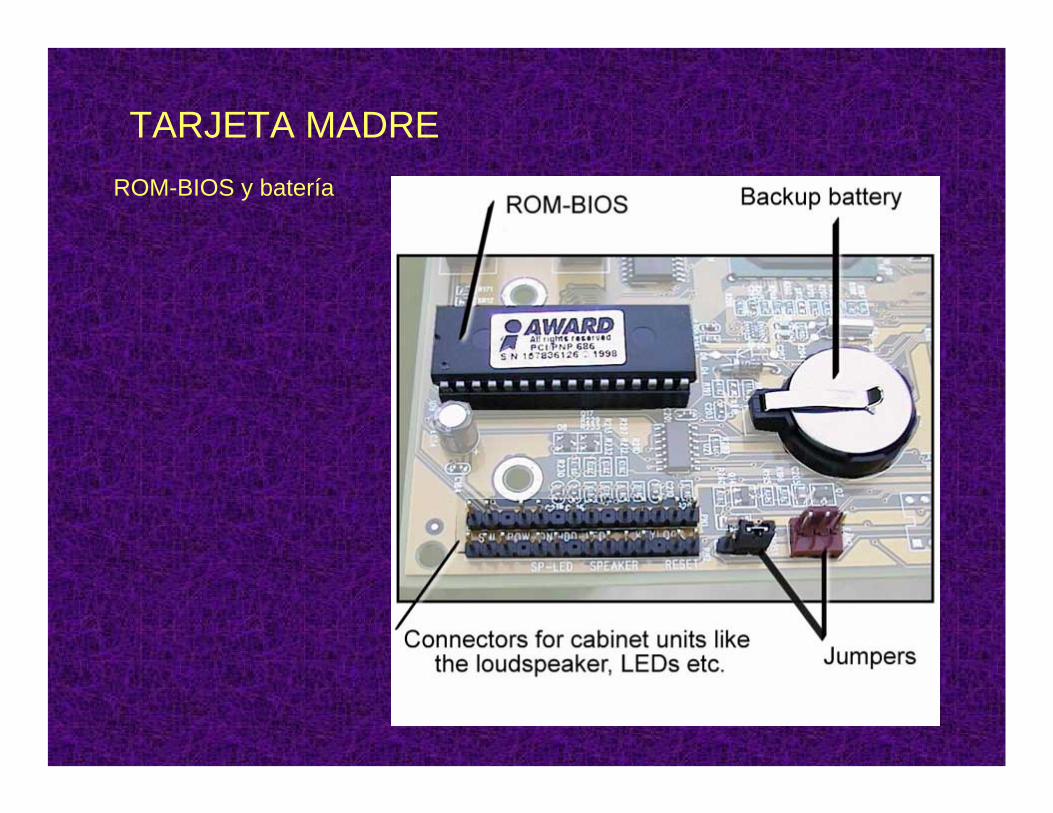
ROM-BIOS y batería
TARJETA MADRE
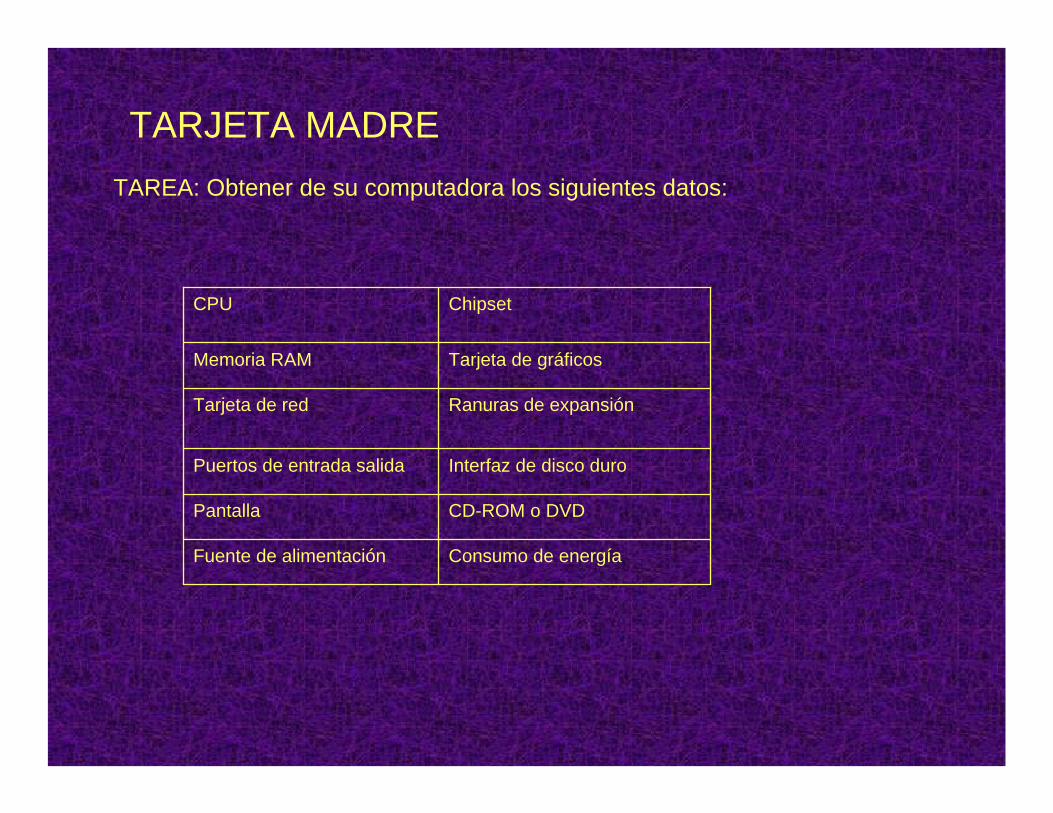
TAREA: Obtener de su computadora los siguientes datos:
TARJETA MADRE
Consumo de energíaFuente de alimentación
CD-ROM o DVDPantalla
Interfaz de disco duroPuertos de entrada salida
Ranuras de expansión
Tarjeta de gráficos
Chipset
Tarjeta de red
Memoria RAM
CPU
El CPU (Central Processing Unit) realiza todo el procesamiento de datos. Lleva a cabo cálculos y movimiento de datos.
Como procesa los datos depende del programa. El programa puede ser una hoja de datos, un procesador de textos, un video o un juego: para el CPU no hay diferencia ya que de hecho no entiende lo que el programa hace, sólo sigue órdenes (comandos o instrucciones) contenidas dentro del programa. Estas órdenes pueden ser, por ejemplo, agregar dos números o enviar una serie de datos a la tarjeta de video.
EL CPU

Cuando se hace clic en el ícono de un programa, esto es lo que pasa:
* El programa, que está guardado en el disco duro, se transfiere a la memoria RAM.
* El CPU, utilizando un circuito llamado controlador de memoria, llama los datos del programa de la memoria RAM.
* Los datos, ahora dentro del CPU, son procesados.
* Lo que pasa después dependerá del programa. El CPU puede continuar cargando y ejecutando el programa o puede hacer algo diferente con los datos procesados, como desplegarlos en la pantalla.
EL CPU
En el pasado, el CPU controlaba la transferencia de datos entre el disco duro y la memoria RAM. Ya que el disco duro es más lento que la RAM, esto hacía lento al sistema. Este método es llamado PIO (Processor I/O). Actualmente la transferencia de datos entre el disco duro y la memoria RAM se lleva a cabo sin el CPU, haciendo el sistema más rápido. Este método es llamado ‘bus mastering’ o DMA (Direct Memory Access).
Mientras más veloz es el CPU se dice que la PC es más veloz.
Hay tres formas para mejorar el desempeño de una PC:
• Frecuencias de reloj más altas.
• Mayor ancho de bus
• Optimizando el nucleo del procesador y otros componentes para maximizar la cantidad de trabajo que es hecha por cada ciclo de reloj.
EL CPU
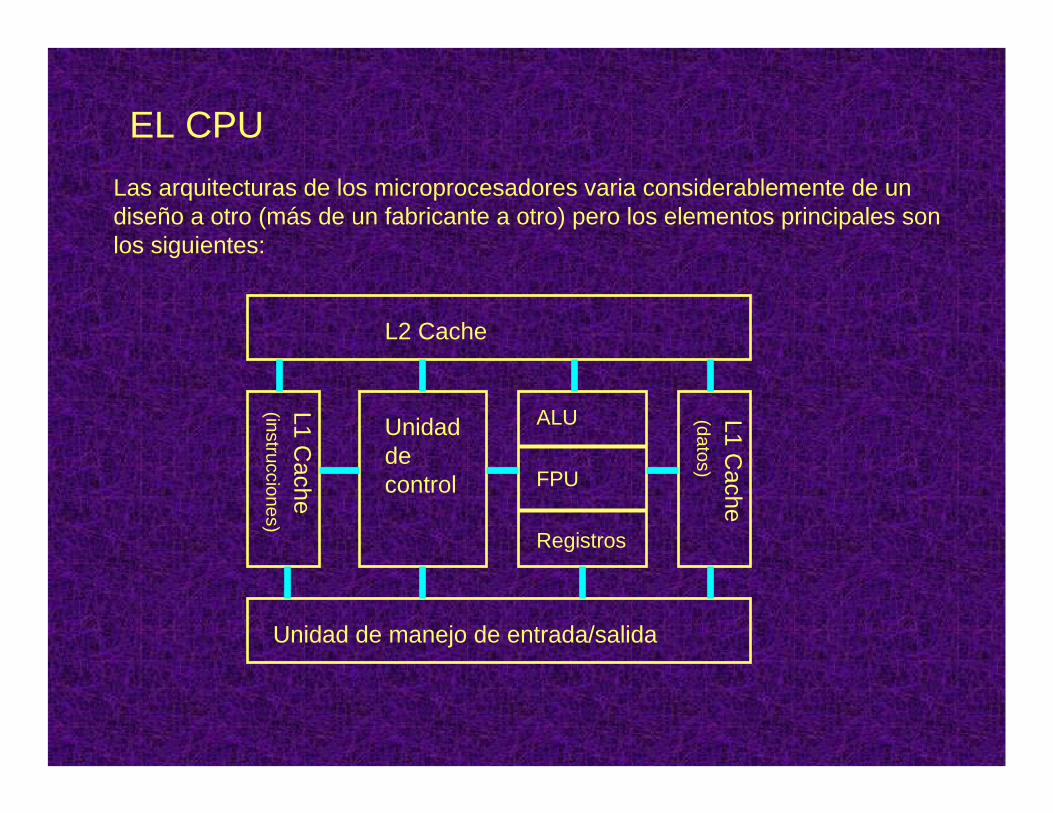
Las arquitecturas de los microprocesadores varia considerablemente de un diseño a otro (más de un fabricante a otro) pero los elementos principales son los siguientes:
EL CPU
L2 Cache
Unidad de control
L1 Cache
(instrucciones)
L1 Cache
(datos)
ALU
FPU
Registros
Unidad de manejo de entrada/salida
Unidad de control: enlaza los datos de entrada, los decodifica y los envía a la unidad de ejecución.Sus componentes son los siguientes:
Secuenciador: sincroniza la ejecución de instrucciones con la velocidad de reloj. También envía señales de control.
Contador ordinal: contiene la dirección de la instrucción que está ejecutándose.Registro de instrucción: contiene la siguiente instrucción.
Unidad de instrucción: provee el control del flujo de instrucciones a la unidad de ejecución.
Unidad de ejecución: realiza las tareas asignadas por la unidad de instrucción. Se compone de los siguientes elementos:
ALUFloating Point UnitStatus registerAccumulator Register
EL CPU
Unidad de manejo de bus: Maneja el flujo de información entrante y saliente y las interfaces respectivas.
Level 1 Cache (L1 Cache) Se accesa rápidamente. El tiempo de acceso es cercano al de los registros internos.
Primera parte: Contiene instrucciones de la RAM que han sido decodificadas.Segunda parte: Contiene datos de la RAM y datos usados recientemente durante
las operaciones del procesador.
Level 2 Cache (L2 Cache) Es una memoria intermediaria entre el procesador, la cacheinterna y la RAM. Tiene un acceso más rápido que la RAM pero más lento que la L1 cache.
Level 3 Cache (L3 Cache) Se encuentra en la tarjeta madre.
EL CPU
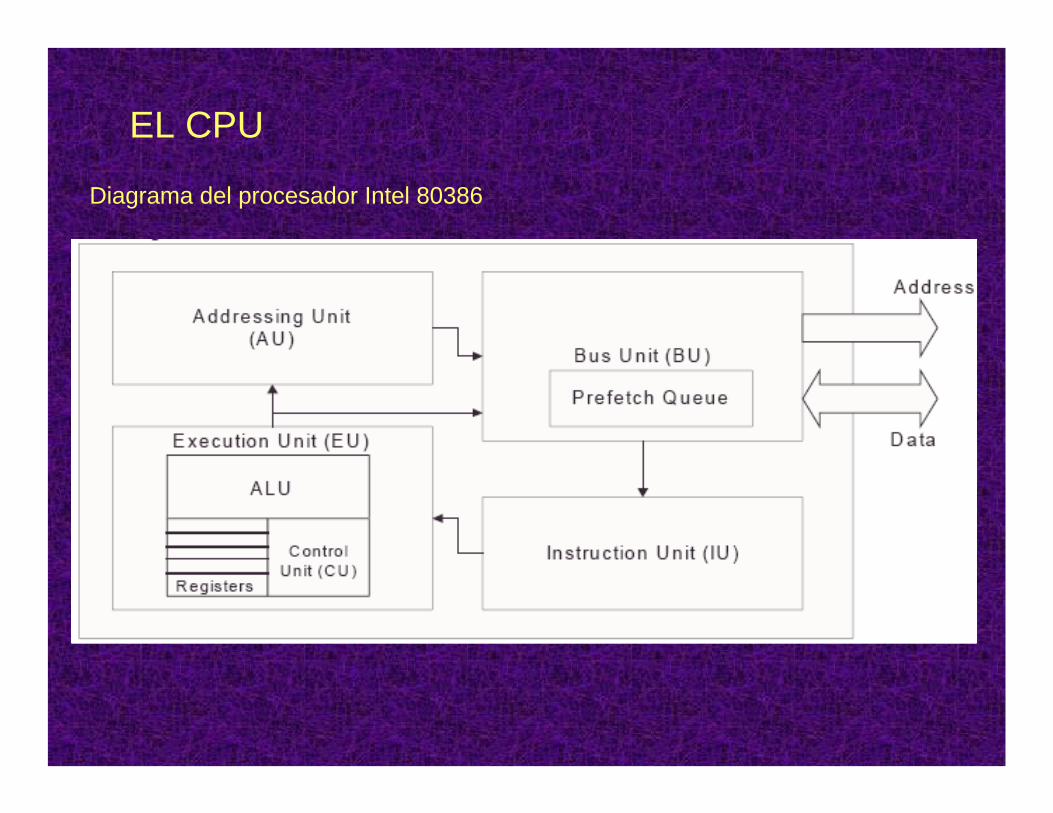
Diagrama del procesador Intel 80386
EL CPU
PIPELINING – Esta tecnología permite acelerar la ejecución de instrucciones mediante la colocación de secuencias en paralelo.
La ejecución de una instrucción por un procesador de 5 pasos es la siguiente:
FETCH – Toma la instrucción del cache
DECODE – Decodifica la instrucción y revisa los operandos
EXECUTE – Ejecuta la instrucción
MEMORY – Accede a la memoria y escribe o lee datos de esta.
WRITE BACK – Graba el valor calculado en un registro.
EL CPU
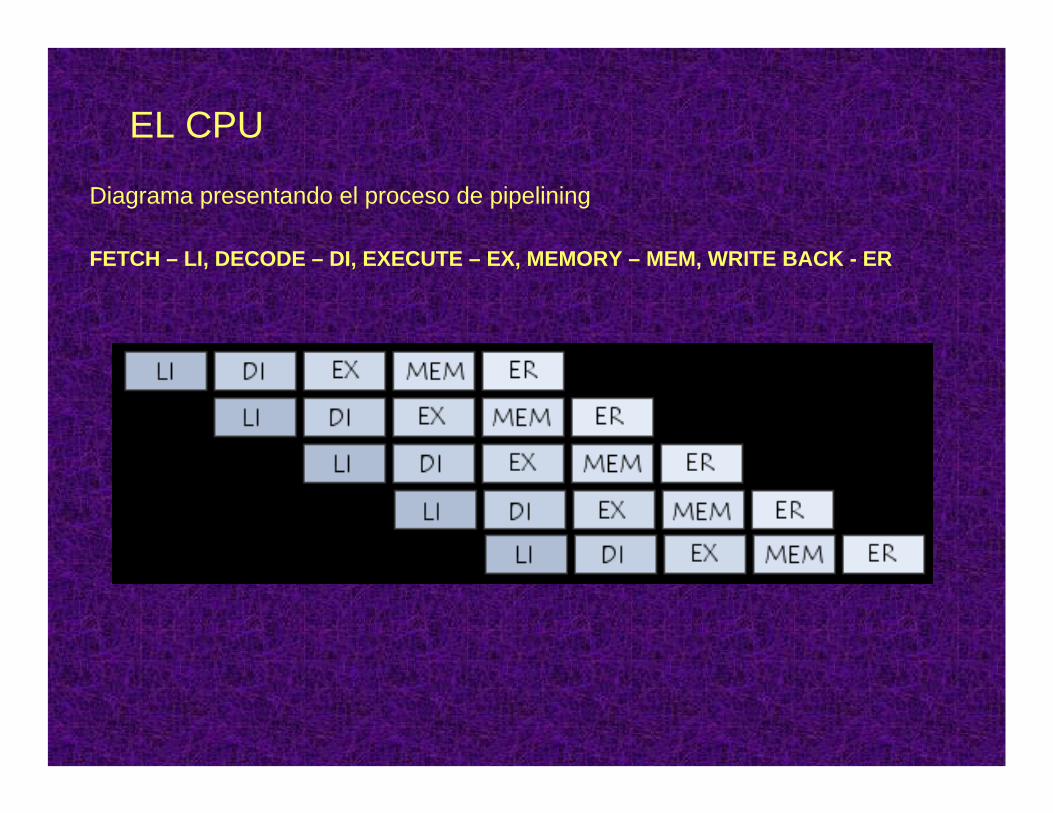
Diagrama presentando el proceso de pipelining
FETCH – LI, DECODE – DI, EXECUTE – EX, MEMORY – MEM, WRITE BACK - ER
EL CPU
En el mercado de PC’s las marcas dominantes son AMD e Intel
EL CPU

El Intel 80486
EL CPU
El Phenom de AMD
EL CPU
Procesadores actuales de la familia K8 de AMD
Familia K8 Familia K10Opteron Opteron
Athlon 64 Phenom
Sempron
Turion
EL CPU
MULTI-THREADING (multi-hilo)
El tipo más simple de multi-hilo es aquel en que un hilo corre hasta que queda bloqueado, lo cual va a crear un paro largo en el procesador. Este paro puede deberse a que el dato requerido no se encuentra en la memoria cache, por lo que el acceso a la memoria RAM requerirá posiblemente cientos de ciclos de reloj del CPU. En lugar de esperar por dicho dato, un procesador ‘threaded’cambiará a otro hilo que esté listo para correr. Solamente cuando el dato del hilo previo está listo, dicho hilo estará en la lista de espera de hilos listos para ser ejecutados.
EL CPU
FLOATING POINT UNIT
Para realizar operacions de punto flotante, un procesador tiene 3 opciones:
* emular una unidad de punto flotante (mediante una librería)
* tener una unidad de punto flotante agregada en la circuitería.
* tener una unidad de punto flotante integrada
EL CPU
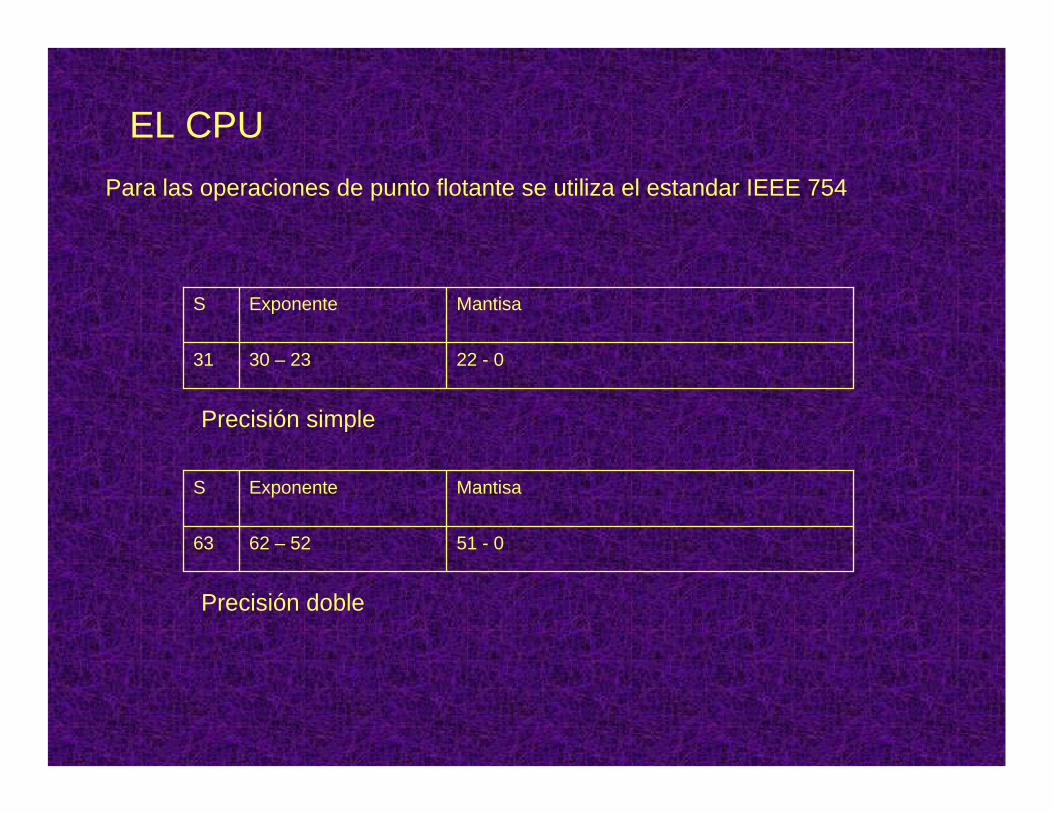
Para las operaciones de punto flotante se utiliza el estandar IEEE 754
EL CPU
30 – 23
Exponente
22 - 0
Mantisa
31
S
Precisión simple
62 – 52
Exponente
51 - 0
Mantisa
63
S
Precisión doble
DYNAMIC FRECUENCY SCALING
También conocida como CPU throttling es una técnica donde un procesador se hace correr a una frecuencia menor a la máxima para conservar energía.
EL CPU
DYNAMIC VOLTAGE SCALING
También conocida como CPU throttling es una técnica donde un procesador se hace correr a una frecuencia menor a la máxima para conservar energía.
BENCHMARK RESULT FOR DELL PRECISION 690
Servidor con 2 Procesadores Xeon (doble núcleo) a 3.00 GHz
EL CPU
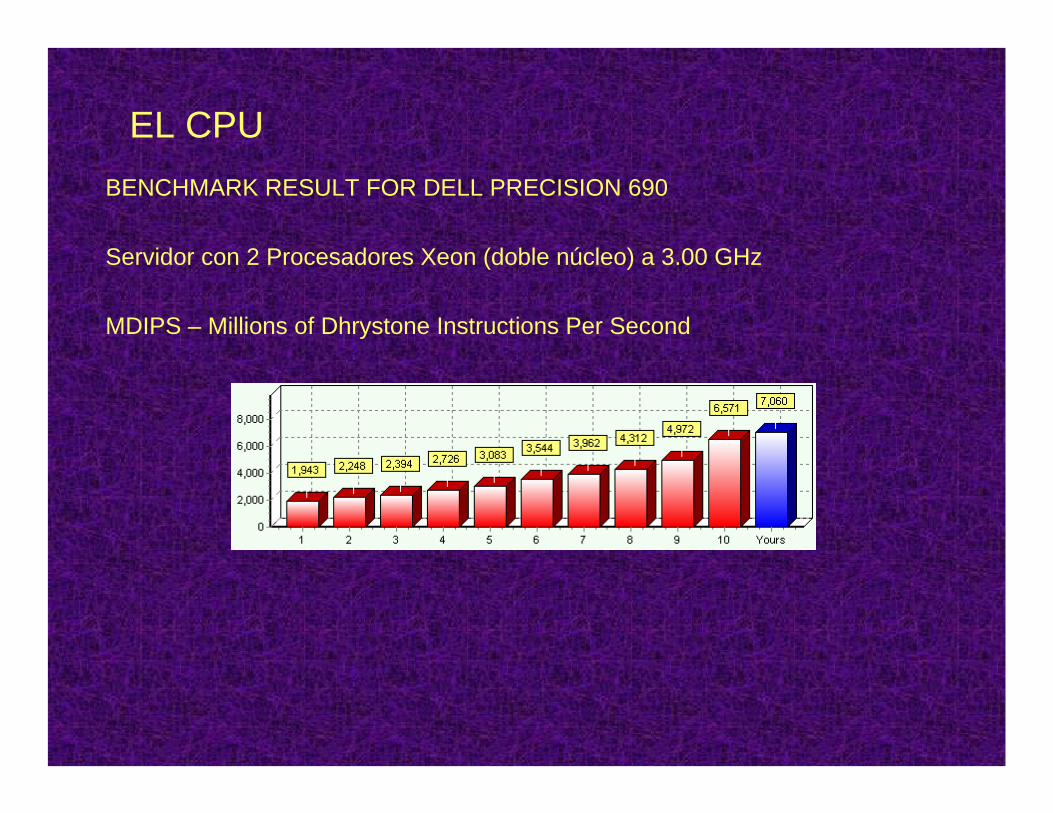
BENCHMARK RESULT FOR DELL PRECISION 690
Servidor con 2 Procesadores Xeon (doble núcleo) a 3.00 GHz
MDIPS – Millions of Dhrystone Instructions Per Second
EL CPU
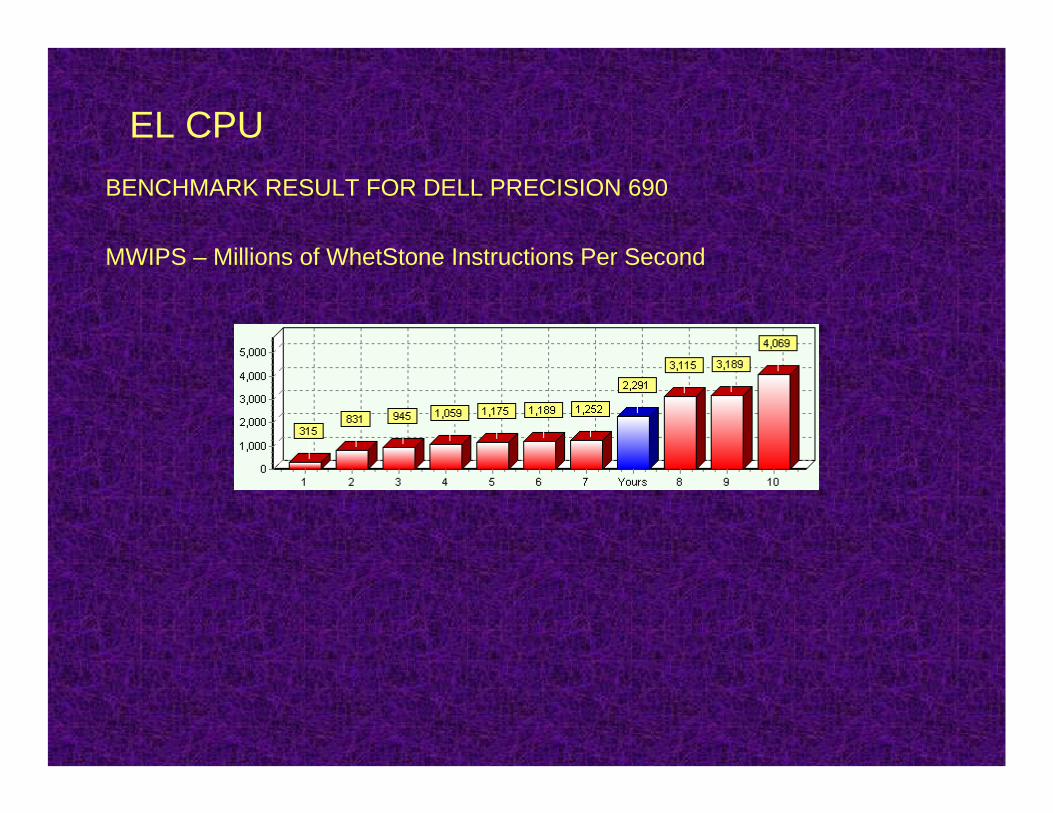
BENCHMARK RESULT FOR DELL PRECISION 690
MWIPS – Millions of WhetStone Instructions Per Second
EL CPU
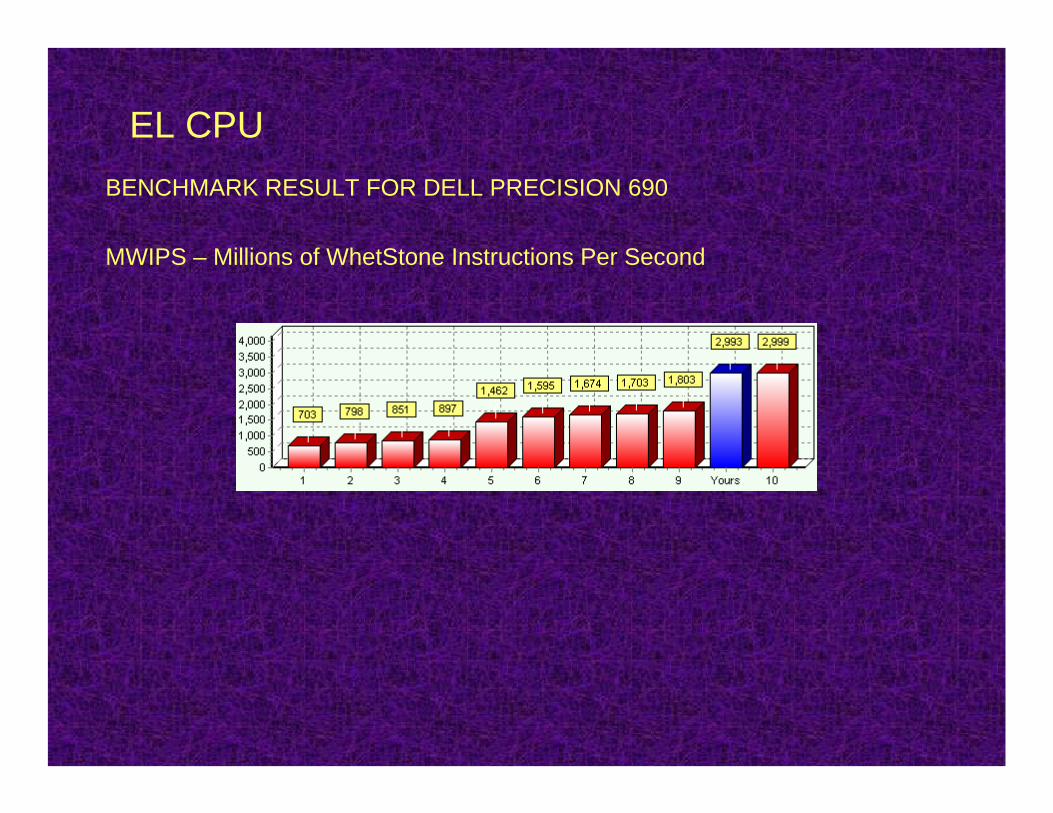
BENCHMARK RESULT FOR DELL PRECISION 690
MWIPS – Millions of WhetStone Instructions Per Second
EL CPU

DEL PRECISION 690
EL CPU
18x2x2048 KiB95 W1.25-1.4 V
MultL2-CacheTDPVoltaje
Dual-Core Xeon 5050
CPU
Mayo 2006
AÑO (intr.)
3000 MHz
Frecuencia de reloj
667 MT/s
Front Side Bus
6
Gen
I kibibyte = 210 bytes = 1,024 bytes
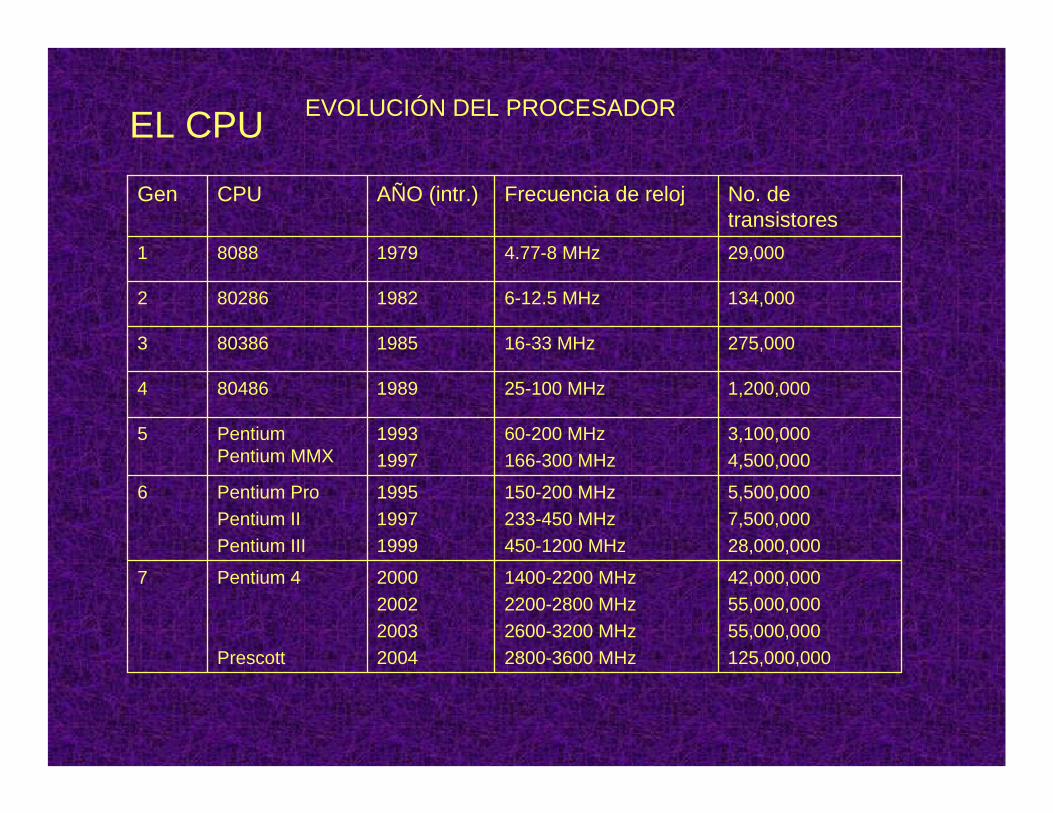
EVOLUCIÓN DEL PROCESADOREL CPU
42,000,00055,000,00055,000,000125,000,000
1400-2200 MHz2200-2800 MHz2600-3200 MHz2800-3600 MHz
2000200220032004
Pentium 4
Prescott
7
5,500,0007,500,00028,000,000
150-200 MHz233-450 MHz450-1200 MHz
199519971999
Pentium ProPentium IIPentium III
6
3,100,0004,500,000
60-200 MHz166-300 MHz
19931997
Pentium Pentium MMX
5
1,200,00025-100 MHz1989804864
275,00016-33 MHz1985803863
134,0006-12.5 MHz1982802862
8088
CPU
1979
AÑO (intr.)
4.77-8 MHz
Frecuencia de reloj
29,000
No. de transistores
1
Gen
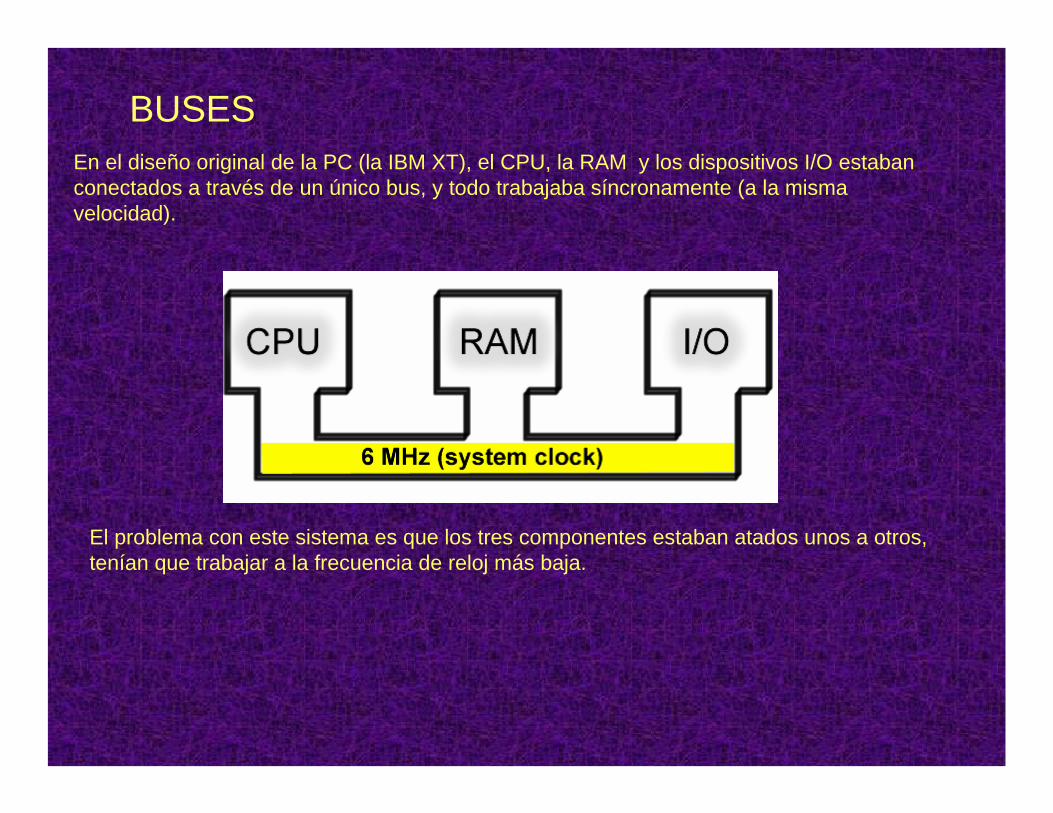
En el diseño original de la PC (la IBM XT), el CPU, la RAM y los dispositivos I/O estaban conectados a través de un único bus, y todo trabajaba síncronamente (a la misma velocidad).
BUSES
El problema con este sistema es que los tres componentes estaban atados unos a otros, tenían que trabajar a la frecuencia de reloj más baja.
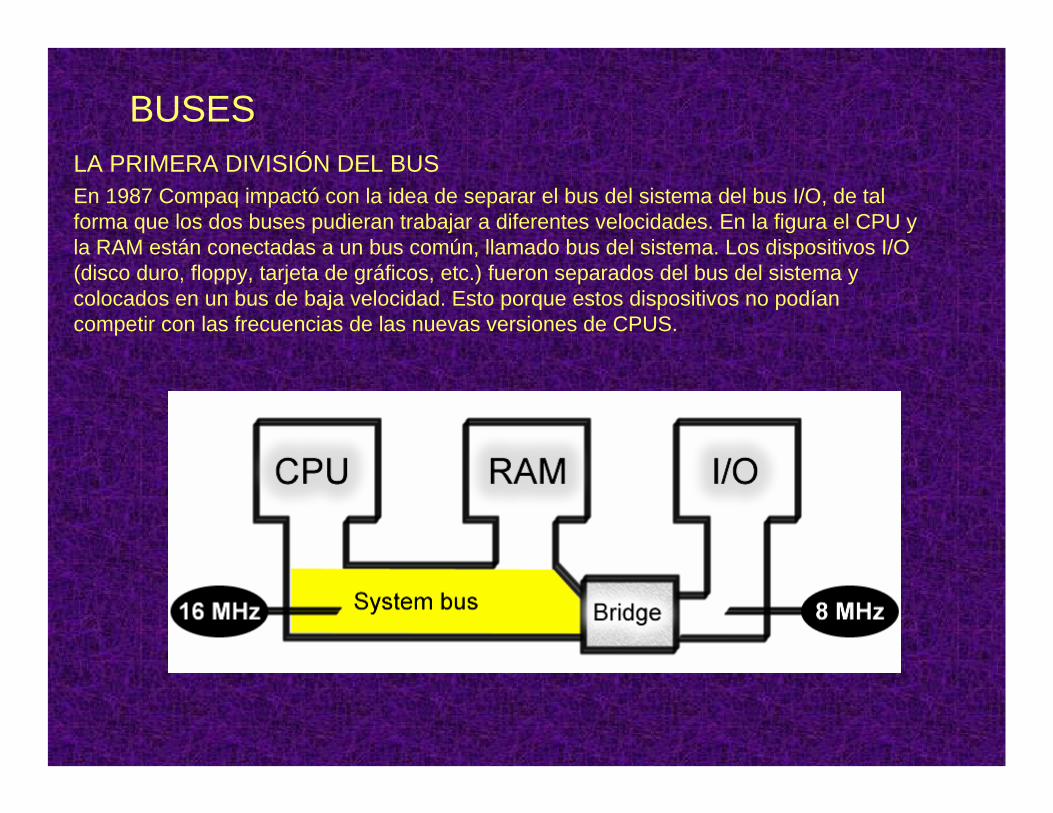
LA PRIMERA DIVISIÓN DEL BUSEn 1987 Compaq impactó con la idea de separar el bus del sistema del bus I/O, de tal forma que los dos buses pudieran trabajar a diferentes velocidades. En la figura el CPU y la RAM están conectadas a un bus común, llamado bus del sistema. Los dispositivos I/O (disco duro, floppy, tarjeta de gráficos, etc.) fueron separados del bus del sistema y colocados en un bus de baja velocidad. Esto porque estos dispositivos no podían competir con las frecuencias de las nuevas versiones de CPUS.
BUSES
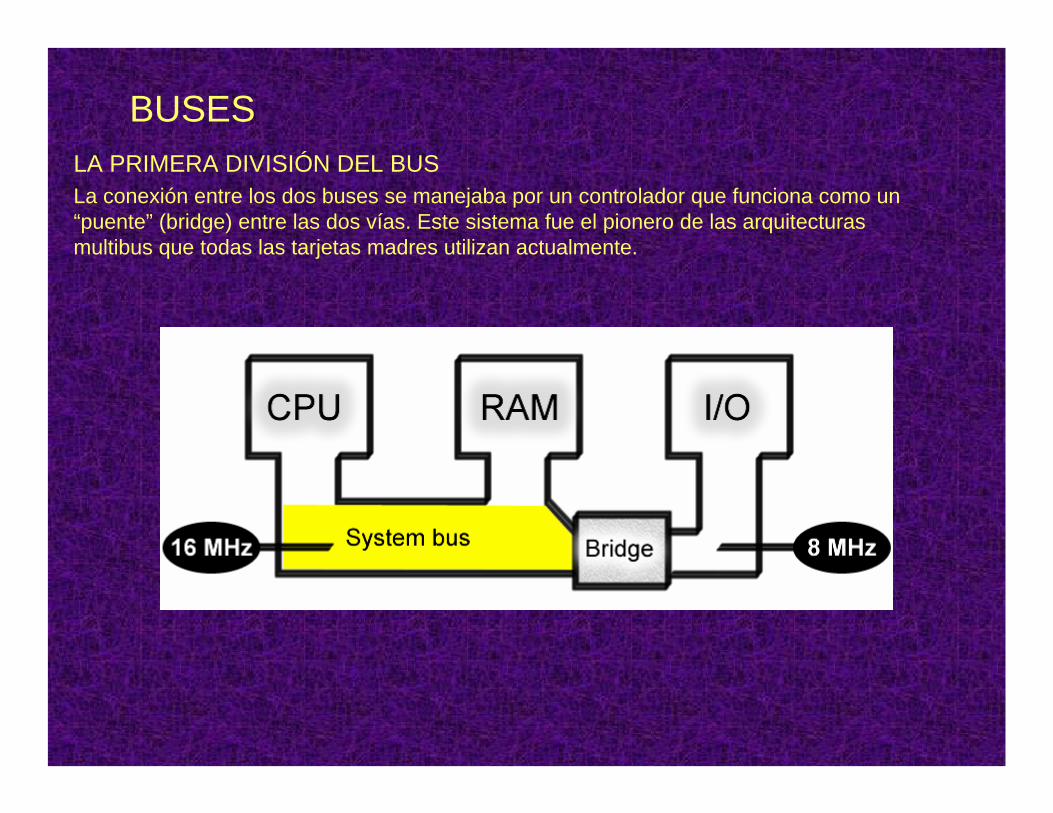
LA PRIMERA DIVISIÓN DEL BUSLa conexión entre los dos buses se manejaba por un controlador que funciona como un “puente” (bridge) entre las dos vías. Este sistema fue el pionero de las arquitecturas multibus que todas las tarjetas madres utilizan actualmente.
BUSES
MULTIPLICACIÓN POR DOS DEL RELOJCon la introducción del 80486, la frecuencia de reloj del CPU se podía incrementar tanto que la RAM no podía soportarla. Por lo tanto Intel comenzó a utilizar la multiplicación x2 de la señal de reloj.
La RAM disponible en ese tiempo no podía trabajar a los 66MHz que podía trabajar un 80486. La solución fue proporcionar al CPU dos velocidades de trabajo.
Una frecuencia de reloj externa
Una frecuencia de reloj interna
Dentro del procesador, la frecuencia de reloj del bus del sistema se multiplica por un factor de 2, duplicando la frecuencia de trabajo.
BUSES
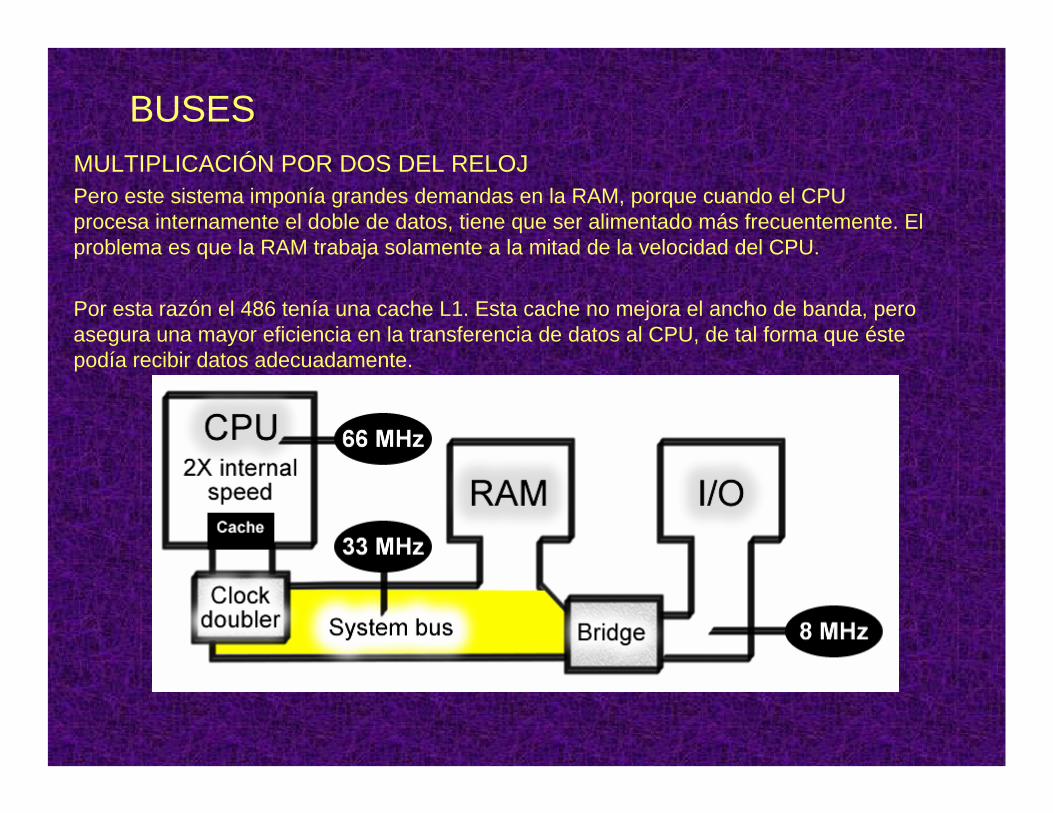
MULTIPLICACIÓN POR DOS DEL RELOJPero este sistema imponía grandes demandas en la RAM, porque cuando el CPU procesa internamente el doble de datos, tiene que ser alimentado más frecuentemente. El problema es que la RAM trabaja solamente a la mitad de la velocidad del CPU.
Por esta razón el 486 tenía una cache L1. Esta cache no mejora el ancho de banda, pero asegura una mayor eficiencia en la transferencia de datos al CPU, de tal forma que éste podía recibir datos adecuadamente.
BUSES
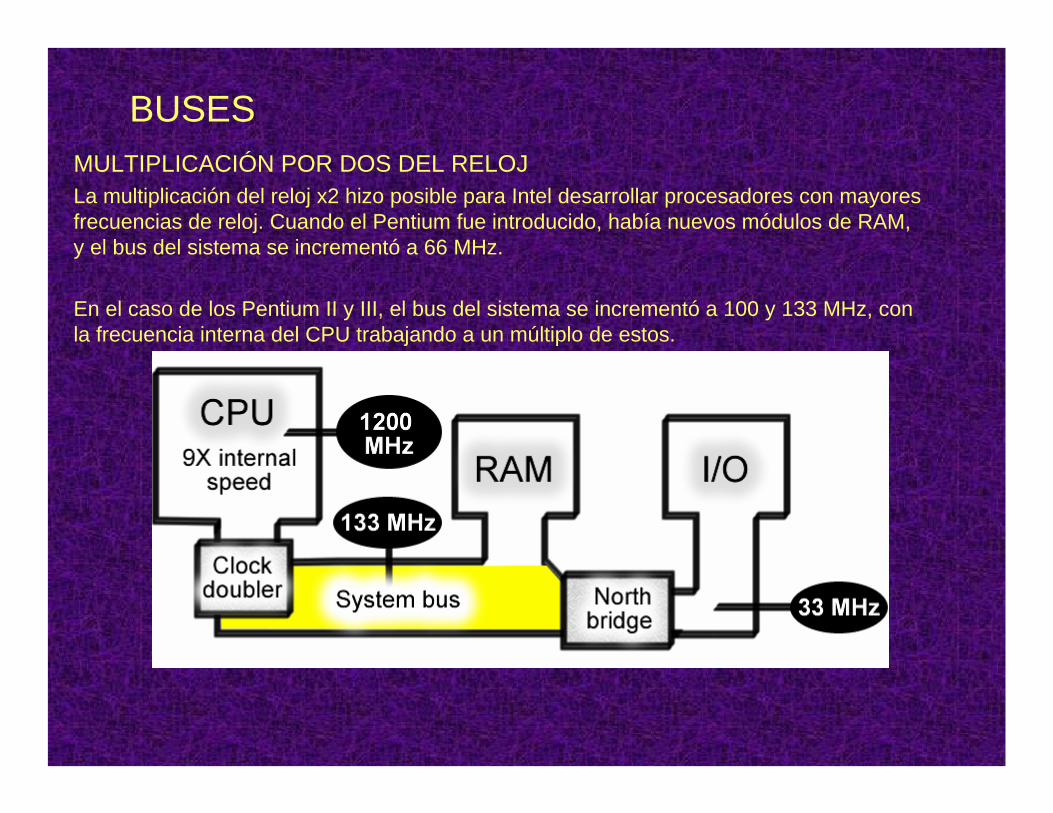
MULTIPLICACIÓN POR DOS DEL RELOJLa multiplicación del reloj x2 hizo posible para Intel desarrollar procesadores con mayores frecuencias de reloj. Cuando el Pentium fue introducido, había nuevos módulos de RAM, y el bus del sistema se incrementó a 66 MHz.
En el caso de los Pentium II y III, el bus del sistema se incrementó a 100 y 133 MHz, con la frecuencia interna del CPU trabajando a un múltiplo de estos.
BUSES
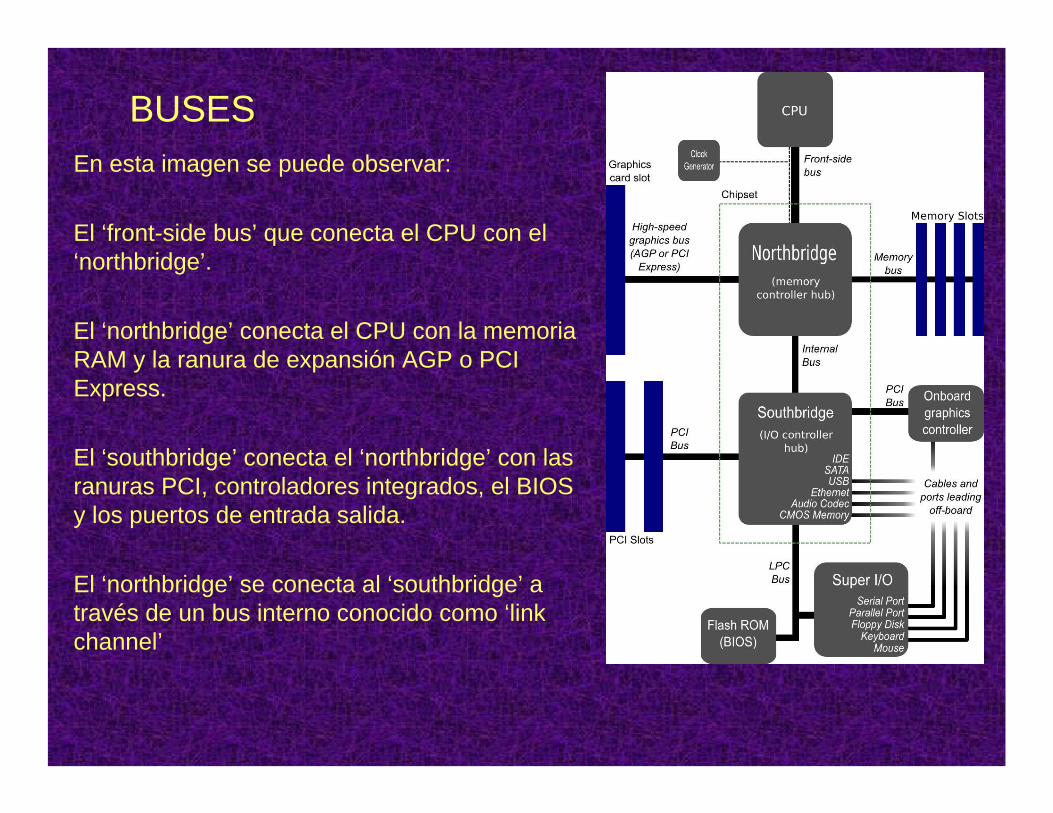
En esta imagen se puede observar:
El ‘front-side bus’ que conecta el CPU con el ‘northbridge’.
El ‘northbridge’ conecta el CPU con la memoria RAM y la ranura de expansión AGP o PCI Express.
El ‘southbridge’ conecta el ‘northbridge’ con las ranuras PCI, controladores integrados, el BIOS y los puertos de entrada salida.
El ‘northbridge’ se conecta al ‘southbridge’ a través de un bus interno conocido como ‘link channel’
BUSES
El ancho de banda del Front Side Bus (FSB) que transmite datos entre el CPU y el ‘north bridge’ se obtiene de multiplicar el ancho del bus, la frecuencia de reloj y el número de datos transferidos por ciclos de reloj.
Por ejemplo: un FSB de 32-bit (4 byte) de ancho, con una frecuencia de operación de 200 MHz y ejecuta 4 transferencias por ciclo de reloj tiene un acho de banda de:
(4 byte)(200MHz)(4) = 3200 megabytes por segundo (MB/s)
La frecuencia a la cual un procesador trabaja se determina mediante la aplicación de un multiplicador de reloj a la frecuencia del FSB. Por ejemplo, un procesador trabajando a 3200 MHz puede estar utilizando un FSB a 400 MHz. Esto significa que hay un multiplicador interno de 8.
BUSES
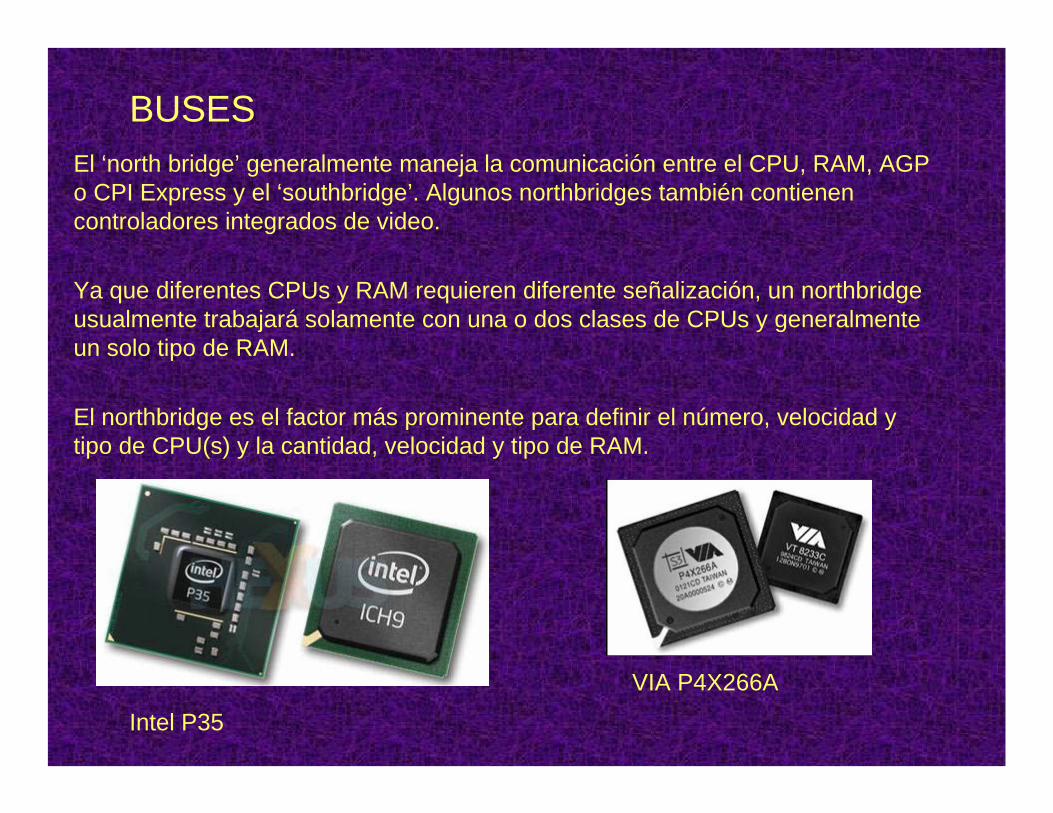
El ‘north bridge’ generalmente maneja la comunicación entre el CPU, RAM, AGP o CPI Express y el ‘southbridge’. Algunos northbridges también contienen controladores integrados de video.
Ya que diferentes CPUs y RAM requieren diferente señalización, un northbridgeusualmente trabajará solamente con una o dos clases de CPUs y generalmente un solo tipo de RAM.
El northbridge es el factor más prominente para definir el número, velocidad y tipo de CPU(s) y la cantidad, velocidad y tipo de RAM.
BUSES
VIA P4X266A
Intel P35
El ‘south bridge’ usualmente maneja los componentes más lentos de la computadora. Estos generalmente incluyen:
Bus PCI
Bus ISA o Bridge LPC: éste último conecta dispositivos de bajo ancho de banda como puertos serial y paralelo, teclado, mouse, controlador de floppy disk.
Bus SPI: generalmente usado para firmware (e.g. BIOS)
SMBus: se usa para comunicarse con otros dispositivos en la computadora (sensores de temperatura, controladores de ventiladores)
Controlador DMA: este controlador permite dispositvos ISA o LPC acceso directo a la memoria principal sin necesidad de ayuda del CPU.
Controladores IDE (SATA o PATA)
BUSES
Las memorias RAM (Random Access Memory) actuales generalmente guardan los bits de datos en los estados de flip-flops, como en una SRAM (static RAM), o como cargas en capacitores (o compuertas de transistores), como en una DRAM (dynamicRAM), EPROM, EEPROM y FLASH.
SRAM (Static RAM)DRAM (Dynamic RAM)
FPM (Fast Page Mode DRAM)EDO RAM (Extended Data Out DRAM)BEDO RAM (Burst Extended Data Out RAM)SDRAM (Synchronous DRAM)
DDR SDRAM (Double Data Rate SDRAM)DDR2 SDRAMDDR3 SDRAM
SISTEMA DE MEMORIA
Fabricantes de memoria RAM Ventas anuales
Cypress Semiconductor $1.1 mil millonesFreescale Semiconductor $5.8 mil millonesFujitsu $52 mil millonesHynix Semiconductor $8.2 mil millonesIntegrated Device Technology $805 millonesKingston Technology Co $3.8 mil millonesLenovo Group $14.6 mil millonesMaxwell Technologies $54 millonesMicron Technology $5.1 mil millonesMosaid $57 millonesNEC Corp $45 mil millonesSamsung $65.2 mil millones
SISTEMA DE MEMORIA
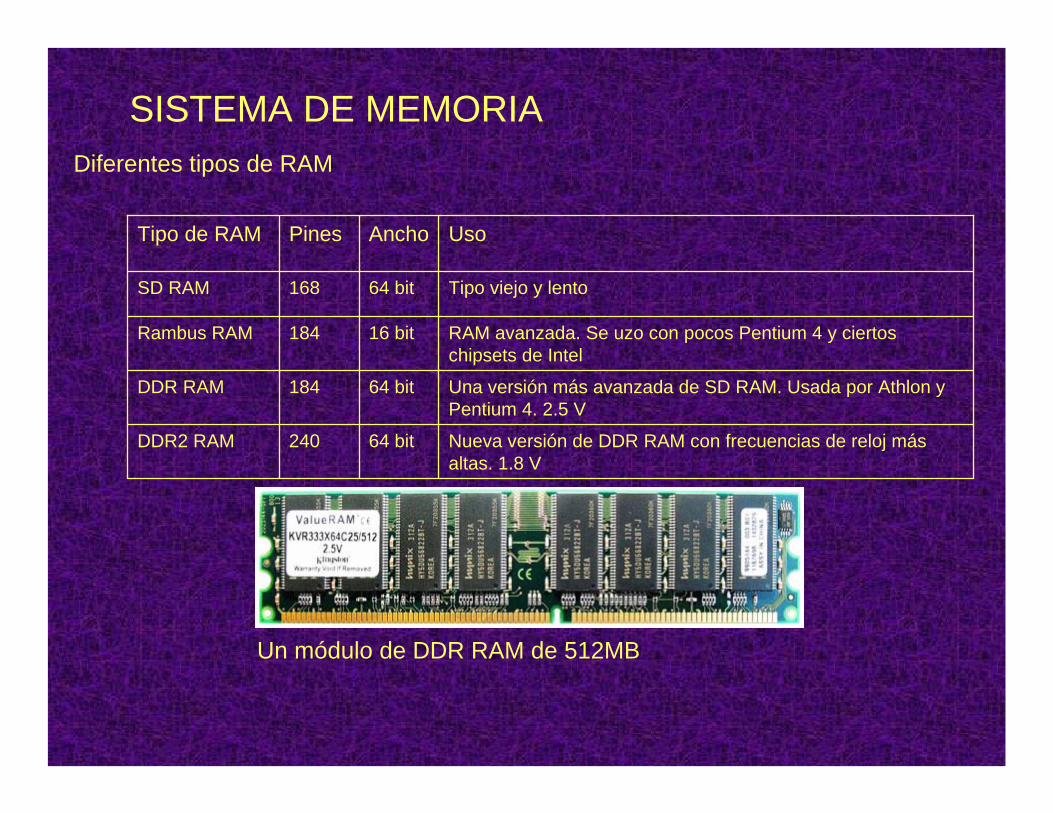
Diferentes tipos de RAM
SISTEMA DE MEMORIA
Nueva versión de DDR RAM con frecuencias de reloj más altas. 1.8 V
64 bit240DDR2 RAM
Una versión más avanzada de SD RAM. Usada por Athlon y Pentium 4. 2.5 V
64 bit184DDR RAM
RAM avanzada. Se uzo con pocos Pentium 4 y ciertos chipsets de Intel
16 bit184Rambus RAM
SD RAM
Tipo de RAM
168
Pines
64 bit
Ancho
Tipo viejo y lento
Uso
Un módulo de DDR RAM de 512MB

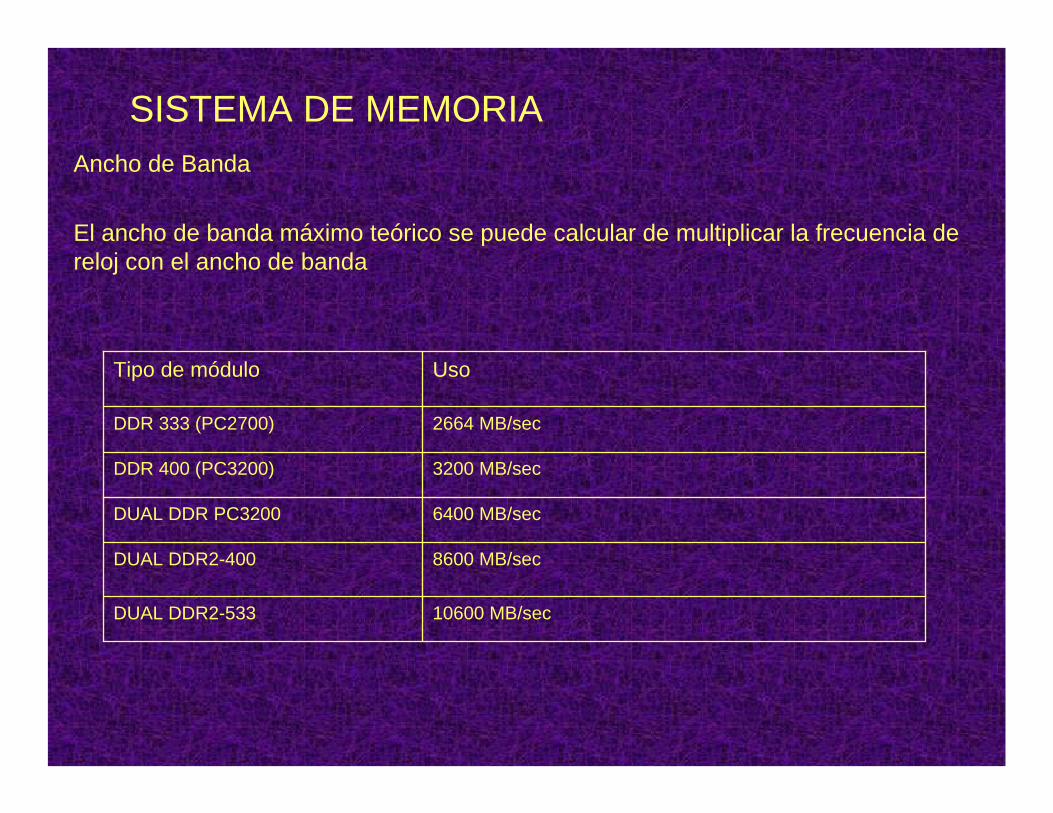
Ancho de Banda
El ancho de banda máximo teórico se puede calcular de multiplicar la frecuencia de reloj con el ancho de banda
SISTEMA DE MEMORIA
2128 MB/secDDR 266 (PC2100)
3200 MB/secRambus, Dual PC800
1064 MB/secRambus, PC800
1064 MB/secSD RAM, PC133
SD RAM, PC100
Tipo de módulo
800 MB/sec
Uso
Ancho de Banda
El ancho de banda máximo teórico se puede calcular de multiplicar la frecuencia de reloj con el ancho de banda
SISTEMA DE MEMORIA
10600 MB/secDUAL DDR2-533
8600 MB/secDUAL DDR2-400
6400 MB/secDUAL DDR PC3200
3200 MB/secDDR 400 (PC3200)
DDR 333 (PC2700)
Tipo de módulo
2664 MB/sec
Uso

EVOLUCIÓN DEL PROCESADOREL CPU
0.09 micronesPentium 4 “Prescot”2004-2005
0.18/0.13 micronesPentium 42000-2003
10 micrones40041971
0.25/0.18/0.13 micronesPentium III1999
0.28/0.25 micronesPentium II1997
0.8/0.5/0.35 micronesPentium1993
1.0/0.8 micrones804861989
1 micrón803861985
1.5 micrones802861982
8088
CPU
3 micrones
Tecnología (ancho de guía)
1979
Year
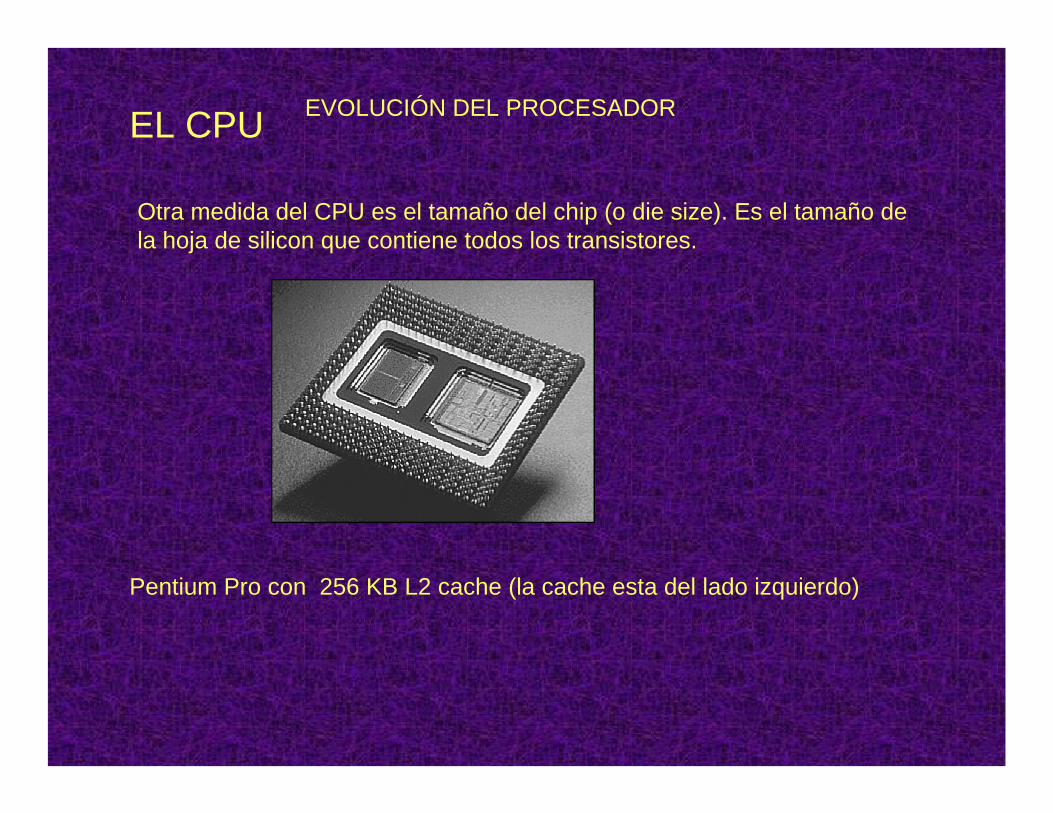
EVOLUCIÓN DEL PROCESADOREL CPU
Otra medida del CPU es el tamaño del chip (o die size). Es el tamaño de la hoja de silicon que contiene todos los transistores.
Pentium Pro con 256 KB L2 cache (la cache esta del lado izquierdo)

EVOLUCIÓN DEL PROCESADOREL CPU
55 x1061450.13Pentium 4
42 x106217 mm20.18Pentium 4
38 x106128 mm20.18Athlon XP
28 x10680 mm20.13Pentium III
28 x106106 mm20.18Pentium III
22 x106184 mm20.18Athlon
7.5 x106131 mm20.25Pentium II
4.5 x106140 mm20.28Pentium MMX
Pentium
CPU
0.8
Ancho de guía
294 mm2
Tamaño de chip
3.1 x106
No. de transistores
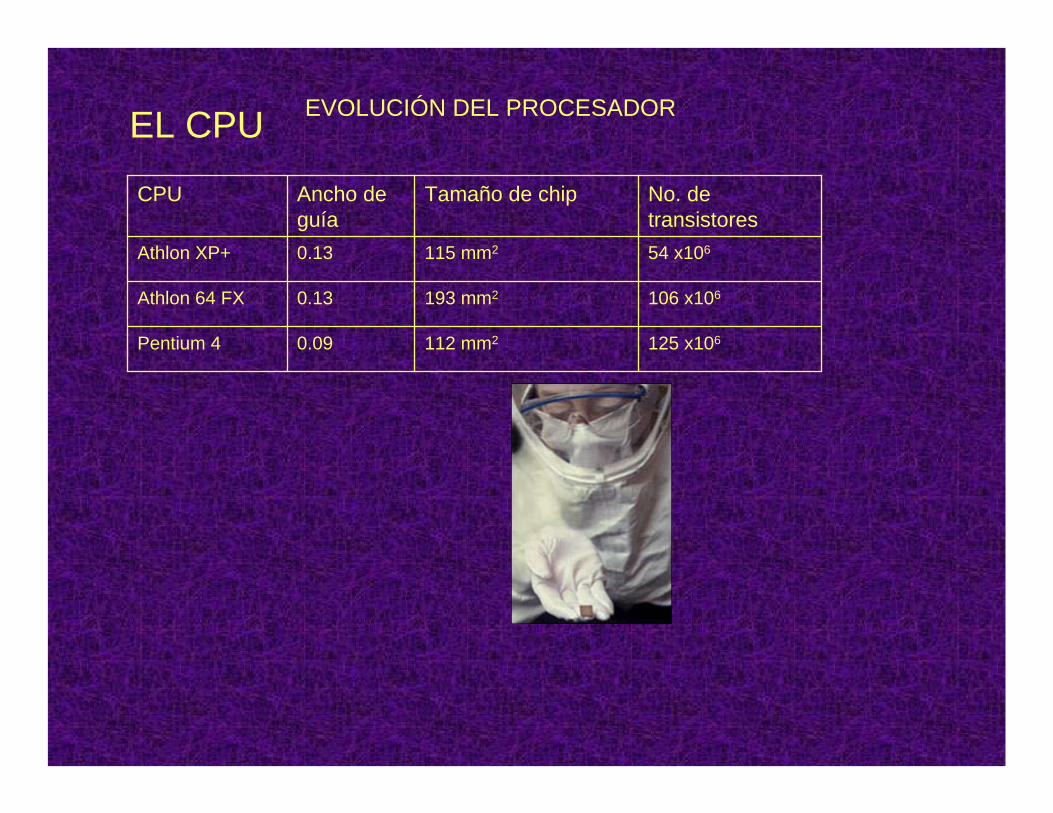
EVOLUCIÓN DEL PROCESADOREL CPU
125 x106112 mm20.09Pentium 4
106 x106193 mm20.13Athlon 64 FX
Athlon XP+
CPU
0.13
Ancho de guía
115 mm2
Tamaño de chip
54 x106
No. de transistores
EVOLUCIÓN DEL PROCESADOREL CPU
Los microprocesadores se fabrican mediante planchas (wafers) como la de la figura y que contiene cientos de núcleos de procesadores.
Un ténico de Intel sostiene una plancha.
EVOLUCIÓN DEL PROCESADOREL CPU
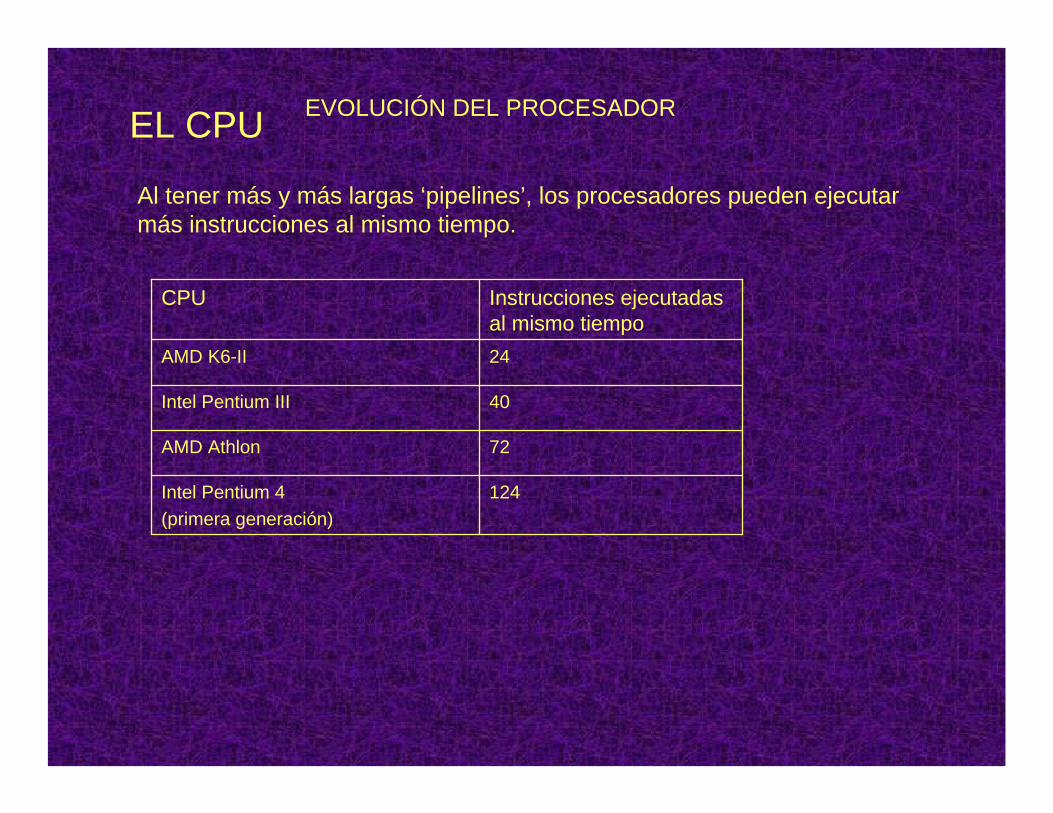
Al tener más y más largas ‘pipelines’, los procesadores pueden ejecutar más instrucciones al mismo tiempo.
124Intel Pentium 4(primera generación)
72AMD Athlon
40Intel Pentium III
AMD K6-II
CPU
24
Instrucciones ejecutadas al mismo tiempo

EVOLUCIÓN DEL PROCESADOREL CPU
Largo de la ‘pipe’.
>5000 MHz31Pentium 4 -Prescott
>3000 MHz20Pentium 4
>3000 MHz12/17Athlon 64
2500 MHz10/15Athlon XP
12
7
4
5
Número de secciones de la pipeline
1400 MHzPentium II y III
1000 MHzMotorola G4e
500 MHzMotorola G4
Pentium
CPU
300 MHz
Frecuencia máxima de reloj
UNIDAD DE PUNTO FLOTANTE
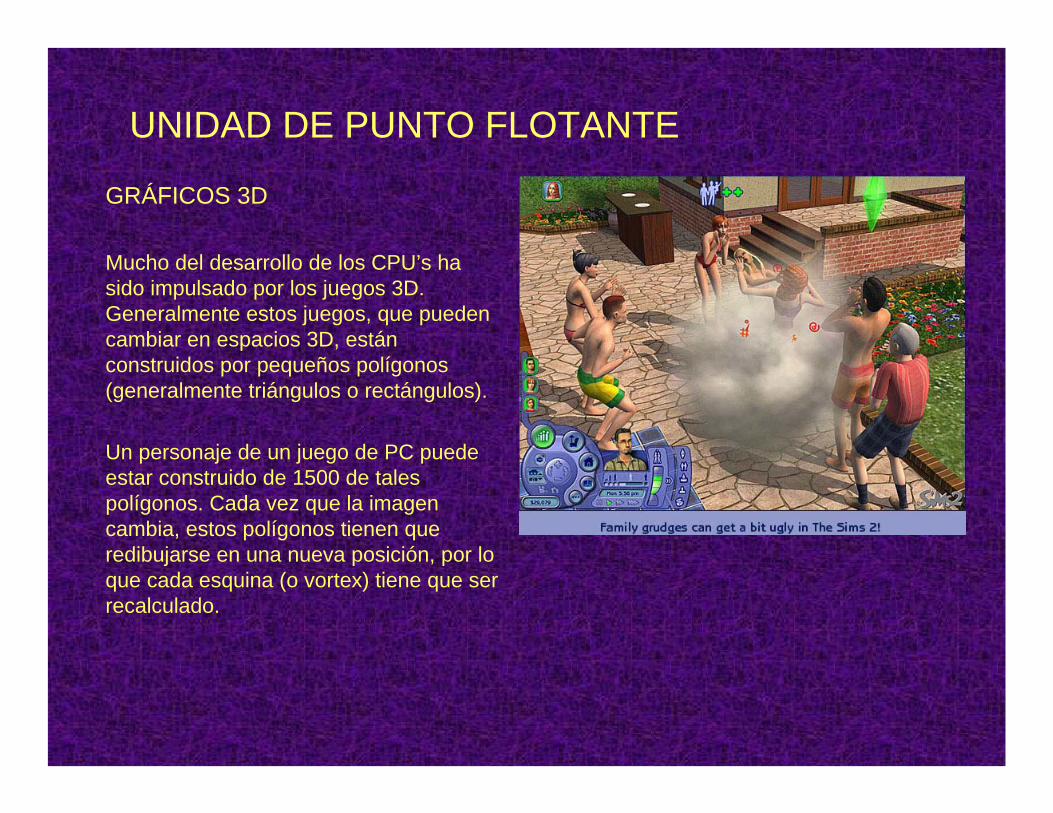
GRÁFICOS 3D
Mucho del desarrollo de los CPU’s ha sido impulsado por los juegos 3D. Generalmente estos juegos, que pueden cambiar en espacios 3D, están construidos por pequeños polígonos (generalmente triángulos o rectángulos).
Un personaje de un juego de PC puede estar construido de 1500 de tales polígonos. Cada vez que la imagen cambia, estos polígonos tienen que redibujarse en una nueva posición, por lo que cada esquina (o vortex) tiene que ser recalculado.
UNIDAD DE PUNTO FLOTANTE
GRÁFICOS 3D
Para darnos una idea de la carga que esto implica, para un dibujo hecho de, por ejemplo, 1,000 polígonos, se tienen que realizar hasta 84,000 multiplicaciones de pares de números de punto flotante de 32 bits.
Para poder optimizar esta carga de trabajo hay varias opciones:

UNIDAD DE PUNTO FLOTANTE
GRÁFICOS 3D
CPUs más rápidos.
Mejoras a la FPU del CPU, usando más ‘pipelines’ y otras formas de aceleración.
Nuevas instrucciones para calculos 3D más eficientes.

UNIDAD DE PUNTO FLOTANTE
GRÁFICOS 3D
•Instrucciones MMX
•3DNow!
•SSE
•SSE2 y SSE3
Siguiente tema
Instrucciones MMX
• Fue la primer iniciativa (MMX por multimedia extension)
• Fue integrada con el procesador Pentium MMX en 1997
• Las ediciones anteriores de los Pentium tenian 2 tipos de registros: uno para enteros de 32-bit y otro para números decimales de 80-bit
• MMX es una extensión del conjunto de instrucciones existentes (IA32). Son 57 instrucciones nuevas que requieren nuevos programas para ser explotadas.
• Tuvo éxito limitado. Su debilidad fue que los programas tenían que trabajar con MMX o con la UPF y no con los dos al mismo tiempo, ya que los sets de instrucciones compartian los mismos registros
3DNow!
• AMD introdujo este set de instrucciones en el verano de 1998
• Son 21 SIMD (Single Instruction Multiple Data)
• Fue un gran éxito. Estas instrucciones se integraron rápidamente en Windows, en varios juegos (y otros programas) y en los controladores de fabricantes de hardware
SSE• Fue introducido en enero 1999 en el Pentium III
• Es más poderoso que 3DNow. Los cambios que se hicieron en el CPU son:
• 8 registros de 128-bit nuevos, que pueden contener 4 números de 32-bit al mismo tiempo.
• 50 instrucciones SIMD nuevas, lo que hizo posible realizar cálculos avanzados de varios números de punto flotante con sólo una instrucción.
• 12 instrucciones New Media diseñadas, por ejemplo, para la codificación y decodificación de corrientes de video MPEG-2
• 8 instrucciones nuevas Streaming Memory, para mejorar la interacción entre la cache L2 y la RAM
SSE2 y SS3• Con el Pentium 4 se extendió SSE para usar técnicas más avanzadas
• Contiene 144 instrucciones nuevas, incluidas operaciones de enteros de 128-bit SIMD y de punto flotante de doble precisión de 128-bit SIMD
• SS2 puede reducir el número de instrucciones requeridas para llevar a cabo una tarea. Intel menciona las áreas de video, reconocimiento del habla, procesamiento de imágenes/fotos, encriptamiento y programas financieron/científicos, como los que más se beneficiarán. Estos programas se tienen que reescribir para explotar las nuevas instrucciones.
DATOS PARA EL MONITORLas pantallas nos muestran una representación gráfica del software que se carga y está activo en el CPU. Pero la pantalla tiene que ser alimentada condatos para poder mostrar una imagen. Estos datos vienen de la tarjeta de video, que es un controlador.
Las pantallas pueden ser analógicas (los monitores en proceso de extinción CRT) o digitales, como las pantallas LCD modernas. En cualquier caso, la pantalla tiene que ser controlada por la PC (el CPU). El control de la pantalla tiene lugar cuando se utiliza una tarjeta de video.
Las tarjetas de video vienen en dos formas:
•Como una tarjeta plug-in
•Como chips integrados en la tarjeta madre.

DATOS PARA EL MONITORTradicionalmente las tarjetas de video estaban conectadas como un dispositivo I/O (bus ISA – 8MB/S 16bit). A final de los 90 ya se conectaban a través del bus PCI, que tiene un ancho de banda máximo de 133 MB/S (32bit). Esto generó un cuello de botella para aplicaciones que demandaban grandes cantidades de datos para el monitor, como los video juegos.

DATOS PARA EL MONITORSe cambió el canal para video al desarrollar el puerto AGP (Accelerated Graphics Port). Este puerto se localiza cerca del chip ‘north bridge’

DATOS PARA EL MONITORSe cambió el canal para video al desarrollar el puerto AGP (Accelerated Graphics Port). Este puerto se localiza cerca del chip ‘north bridge’

DATOS PARA EL MONITOREsta nueva arquitectura da acceso óptimo a la RAM, por lo tanto al ancho de banda requerido por los video juegos
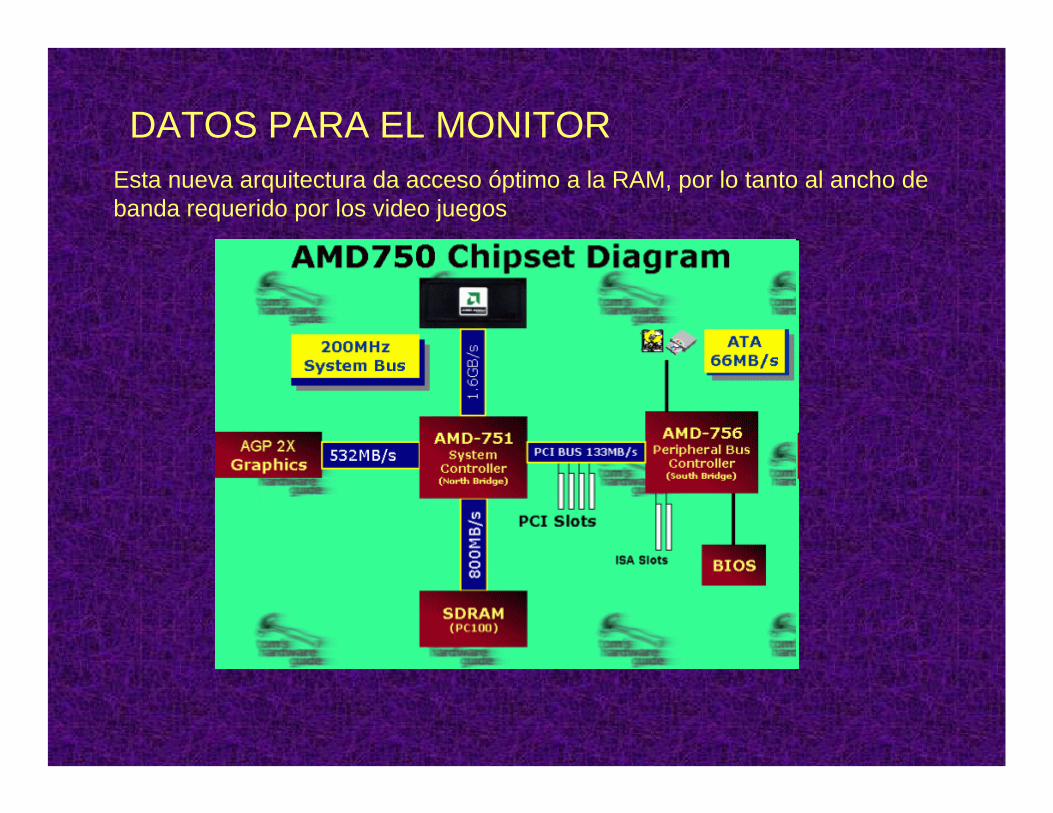
DATOS PARA EL MONITOREsta nueva arquitectura da acceso óptimo a la RAM, por lo tanto al ancho de banda requerido por los video juegos
DATOS PARA EL MONITORY se encuentran tarjetas como la NVIDIA Quadro FX 5500G PCI-e Video Card con un costo aproximado de $3000.00 dólares.
Características:Procesador gráfico NVIDIA Quadro FX 5500Interfaz PCI Express x16Memoria de video de 1GBResolución máxima 3840x2400 /24Hz2 salidas DVI-I-29 pin2 RJ-452 adaptadores DVI-VGA incluidos
DATOS PARA EL MONITORDetalles técnicos del bus AGP
Una estructura de bus desarrollada alrededor del bus PCI de doble frecuencia
La capacidad de utilizar la RAM de la tarjeta madre como chache de textura
La cache de textura se utiliza en los video juegos, entonces, teniendo acceso a la RAM de la tarjeta madre, menos RAM se requiere en las tarjetas.
El bus AGP es realmente una versión de 64-bit del bus PCI.
La primera versión del AGP fue la 1X, con un ancho de banda de 254 MB/S. Rápidamente salió un nuevo modo, llamado 2X, con 508 MB/S.
Después salieron el 4X y 8X, que son los estándares actuales. Estos involucran el duplicado de la frecuencia, entonces 2 o 4 paquetes de datos se envían en cada pulso de reloj. De esta forma se han alcanzado 2,032 MB/S.
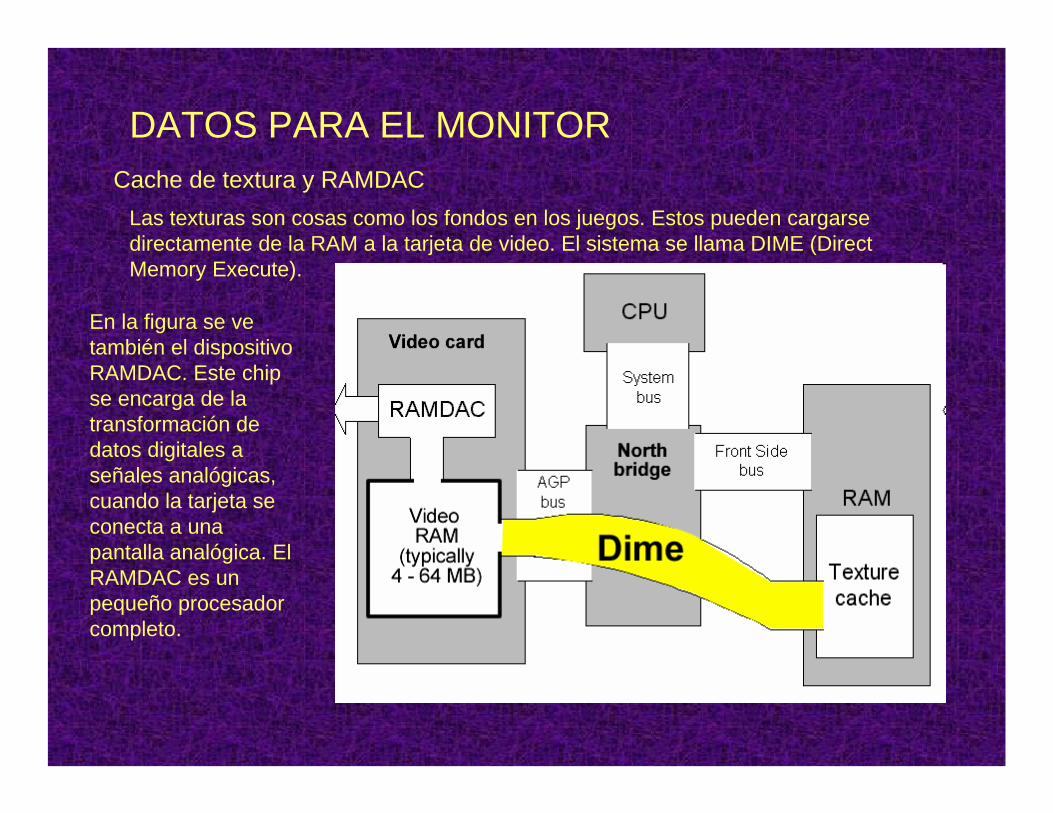
DATOS PARA EL MONITORCache de textura y RAMDAC
Las texturas son cosas como los fondos en los juegos. Estos pueden cargarse directamente de la RAM a la tarjeta de video. El sistema se llama DIME (Direct Memory Execute).
En la figura se ve también el dispositivo RAMDAC. Este chip se encarga de la transformación de datos digitales a señales analógicas, cuando la tarjeta se conecta a una pantalla analógica. El RAMDAC es un pequeño procesador completo.
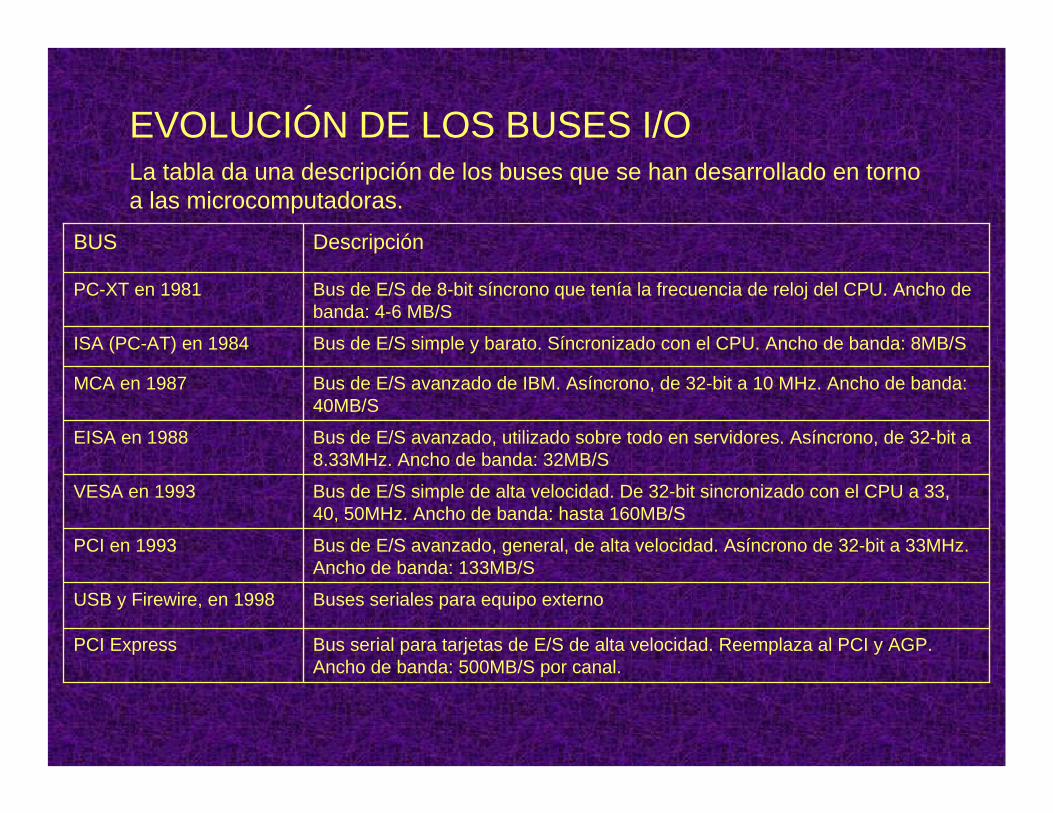
EVOLUCIÓN DE LOS BUSES I/OLa tabla da una descripción de los buses que se han desarrollado en torno a las microcomputadoras.
Bus serial para tarjetas de E/S de alta velocidad. Reemplaza al PCI y AGP. Ancho de banda: 500MB/S por canal.
PCI Express
Buses seriales para equipo externoUSB y Firewire, en 1998
Bus de E/S avanzado, general, de alta velocidad. Asíncrono de 32-bit a 33MHz. Ancho de banda: 133MB/S
PCI en 1993
Bus de E/S simple de alta velocidad. De 32-bit sincronizado con el CPU a 33, 40, 50MHz. Ancho de banda: hasta 160MB/S
VESA en 1993
Bus de E/S avanzado, utilizado sobre todo en servidores. Asíncrono, de 32-bit a 8.33MHz. Ancho de banda: 32MB/S
EISA en 1988
Bus de E/S avanzado de IBM. Asíncrono, de 32-bit a 10 MHz. Ancho de banda: 40MB/S
MCA en 1987
Bus de E/S simple y barato. Síncronizado con el CPU. Ancho de banda: 8MB/SISA (PC-AT) en 1984
PC-XT en 1981
BUS
Bus de E/S de 8-bit síncrono que tenía la frecuencia de reloj del CPU. Ancho de banda: 4-6 MB/S
Descripción
EVOLUCIÓN DE LOS BUSES I/OBUS PCI
Fue desarrollado por Intel. Puede ser utilizado con procesadores de 32 y 64-bit.
Tiene un buffer que opera entre el CPU y los dispositivos periféricos (una especie de cache).
Tiene incluido el estandar Plug and Play. Esto significa que todas las tarjetas PCI son autoconfigurables. Las especificaciones para Plug and Play fueron desarrolladas por Intel y Microsoft entre otros y la idea era que uno pudiera instalar un adaptador e inmediatamente trabajara.
Para trabajar todos los componentes involucrados (adaptador, tarjeta madre y Windows) tienen que ser compatibles con Plug and Play.

EVOLUCIÓN DE LOS BUSES I/OESCD
En conexión con Plug and Play está el sistema ESCD (Extended System Configuration Data). Es un área de datos pequeña que se guarda en el almacenamiento del CMOS de la tarjeta madre.
El ESCD se utiliza para guardar información de la configuración. Esto para que la tarjeta madre no tenga que volver a realizar todo el proceso de Plug and Play en cada inicio.
Este sistema permite al usuario cambiar manualmente una IRQ o DMA para un adaptador en particular.
EVOLUCIÓN DE LOS BUSES I/ODesarrollo del PCI Express
Las compañías más importantes (Intel, IBM, Apple, etc.) formaron el PCI Special Interest Group (www.pcisig.com) para estandarizar y coordinar el nuevo bus PCI Express. Este bus es el sucesor del bus PCI. Es un nuevo tipo de bus de E/S que utiliza una conexión serial.
Este nuevo bus será extremadamente escalable, ya que trabaja con un gran número de canales (X1, X2, X16, etc.) cada uno con un ancho de banda de alrededor de 250MB/S en ambas direcciones, simultaneamente.
EVOLUCIÓN DE LOS BUSES I/ODesarrollo del PCI Express
El estandar planea el uso de tarjetas plug-in y dispositivos en varias categoría, con diferentes anchos de banda y consumo de potencia. Una tarjeta X16, por ejemplo, tendrá un total de ancho de banda de 8GB/S.
PCI Express está basado en una arquitectura serial, haciendo posible el desarrollo de dispositivos económicos y pequeños con pocos pines. El nuevo bus de E/S podra co-existir inicialmente con la interfaz PCI, pero el objetivo es que PCI Express reemplace tanto al PCI como al AGP.

EVOLUCIÓN DE LOS BUSES I/ODesarrollo del PCI Express
En la imagen se ven dos ranuras PCI Express de color negro. La de la izquierda es para tarjetas de gráficos 16X. La de la derecha es una ranura pequeña 1X. Entre ambas están 2 ranuras PCI.

EVOLUCIÓN DE LOS BUSES I/ODesarrollo del PCI Express
En la figura se ven tres conexiones PCI Express. Cada línea de conexión contiene 2 pares de cables, un o para enviar y otro para recibir.
Los paquetes de información se transmiten a una razón de 1 bit por cada ciclo.
EVOLUCIÓN DE LOS BUSES I/ODesarrollo del PCI Express
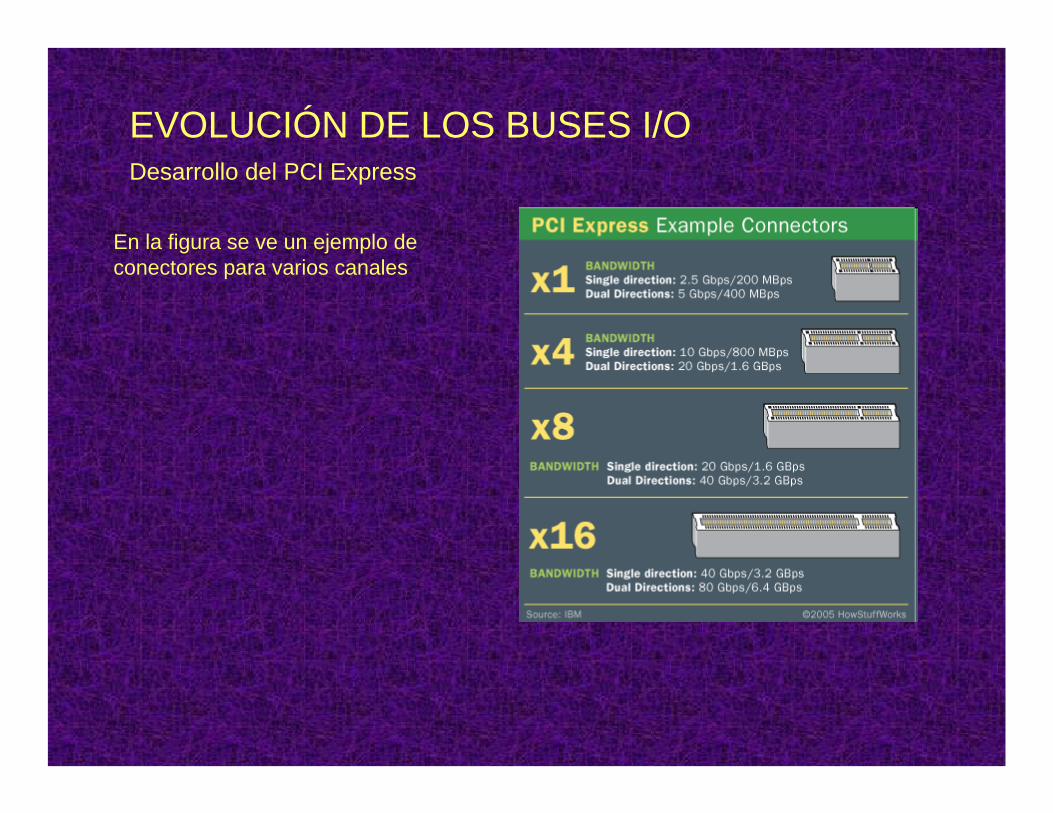
En la figura se ve un ejemplo de conectores para varios canales
EVOLUCIÓN DE LOS BUSES I/ODesarrollo del PCI Express
Ejemplo de una tarjeta PCI Express 1X para 2 puertos SATA II.
EVOLUCIÓN DE LOS BUSES I/ODesarrollo del PCI Express
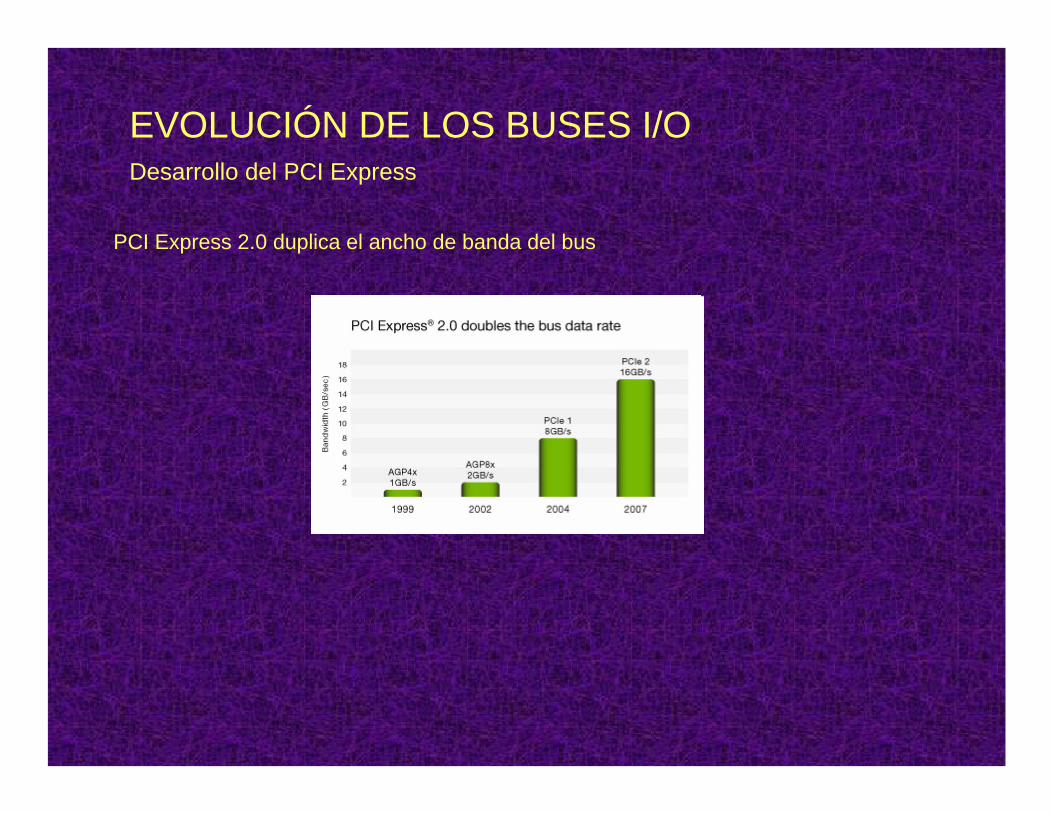
PCI Express 2.0 duplica el ancho de banda del bus
BUSES DE E/S E IRQ’SLos buses de E/S están diseñados para mover datos. Los datos se transfieren de un dispositivo de E/S a otro y de los dispositivos de E/S al CPU y la RAM.
A nivel físico, el bus PCI consiste de un determinado número de líneas paralelas en la tarjeta madre. Estas líneas se utilizan para:
• Líneas de datos, cada una puede mover un bit a la vez.
• Líneas de dirección, que indican hacía donde deben enviarse los datos.
• Líneas para señal de reloj, IRQ’S DMA, potencia, etc.
BUSES DE E/S E IRQ’S
Interrupciones de hardware
Para manejar el tráfico en los buses de E/S se utiliza un sistema llamado IRQ (de Interrupt Request – Solicitud de Interrupción)
Las interrupciones son uno de los fundamentos de la arquitectura de la PC. Hay dos tipos:
Interrupciones de software: se utilizan para llamar un gran número de rutinas del BIOS.
Interrupciones de hardware: Son las utilizadas por los dispositivos de E/S
BUSES DE E/S E IRQ’S
Interrupciones de hardware
Una señal de interrupción se puede entender como un timbre de puerta utilizado por varios adaptadores PCI y otros dispositivos.
Al activar una señal IRQ solicitan atención del CPU. Esto permite interrumpir al CPU de su trabajo presente.
Cuando el CPU registra una señal de interrupción, sabe que el dispositivo quiere solicitar o enviar datos, o a terminado de hacerlo.
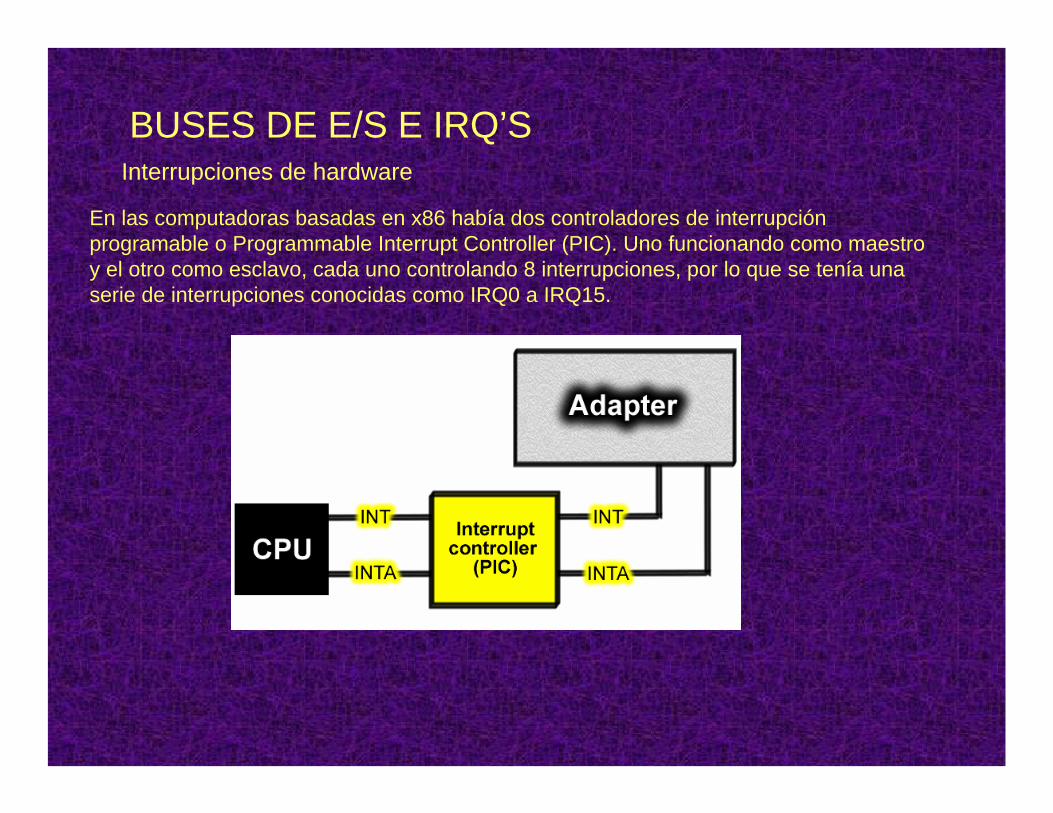
BUSES DE E/S E IRQ’SInterrupciones de hardware
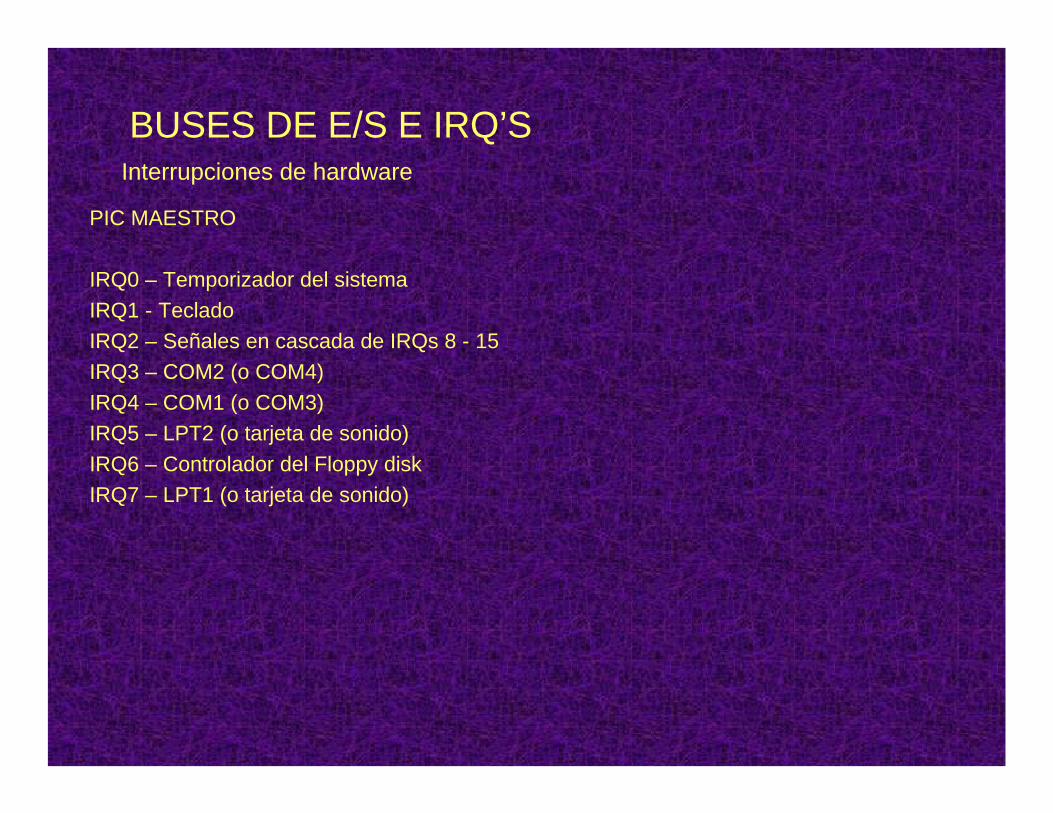
En las computadoras basadas en x86 había dos controladores de interrupción programable o Programmable Interrupt Controller (PIC). Uno funcionando como maestro y el otro como esclavo, cada uno controlando 8 interrupciones, por lo que se tenía una serie de interrupciones conocidas como IRQ0 a IRQ15.
BUSES DE E/S E IRQ’SInterrupciones de hardware
PIC MAESTRO
IRQ0 – Temporizador del sistemaIRQ1 - TecladoIRQ2 – Señales en cascada de IRQs 8 - 15IRQ3 – COM2 (o COM4)IRQ4 – COM1 (o COM3)IRQ5 – LPT2 (o tarjeta de sonido)IRQ6 – Controlador del Floppy diskIRQ7 – LPT1 (o tarjeta de sonido)
BUSES DE E/S E IRQ’SInterrupciones de hardware
PIC MAESTRO
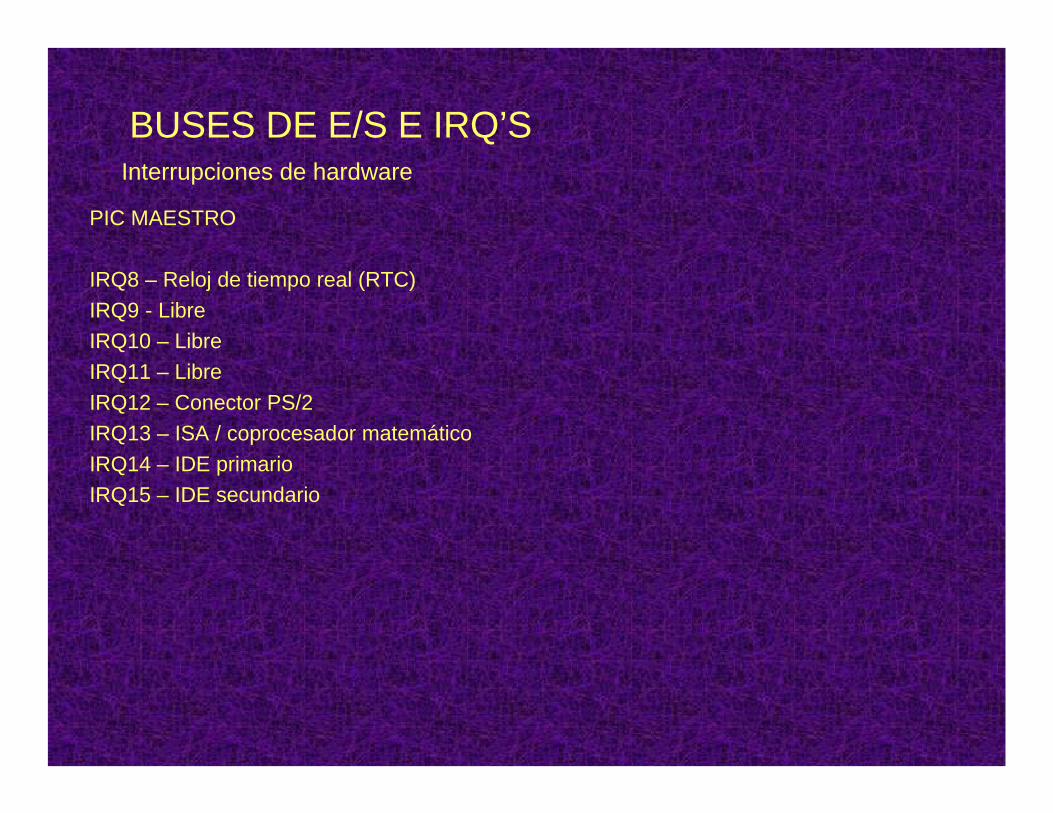
IRQ8 – Reloj de tiempo real (RTC)IRQ9 - LibreIRQ10 – LibreIRQ11 – LibreIRQ12 – Conector PS/2 IRQ13 – ISA / coprocesador matemáticoIRQ14 – IDE primarioIRQ15 – IDE secundario
BUSES DE E/S E IRQ’SInterrupciones de hardware
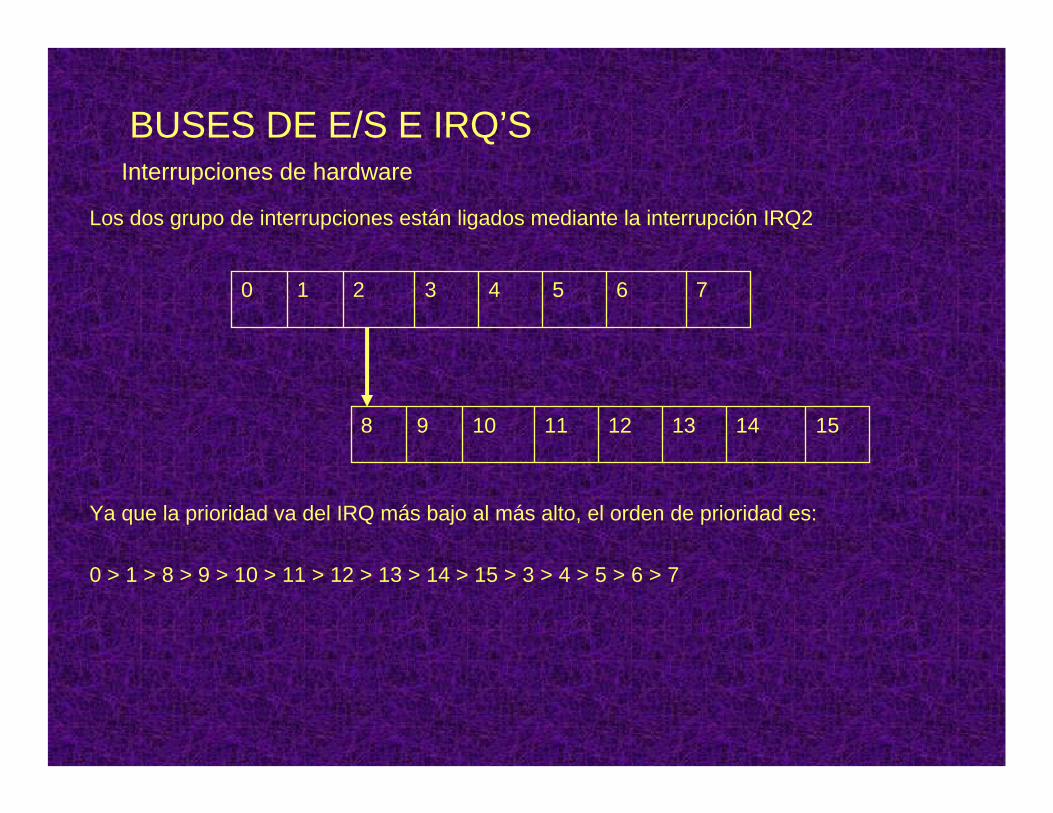
Los dos grupo de interrupciones están ligados mediante la interrupción IRQ2
4320 1 5 6 7
1211108 9 13 14 15
Ya que la prioridad va del IRQ más bajo al más alto, el orden de prioridad es:
0 > 1 > 8 > 9 > 10 > 11 > 12 > 13 > 14 > 15 > 3 > 4 > 5 > 6 > 7
BUSES DE E/S E IRQ’SIRQ’s compartidos
Con el progreso de las computadoras, hubo necesidad de más IRQ’s. Como el sistema de IRQ’s es parte fundamental de la arquitectura de las computadoras, para agregar más IRQ’s se hubieran tenido que cambiar las instrucciones del CPU y los sistemas operativos. Y las nuevas PC’s no hubieran podido correr programas anteriores.
Para mantener la compatibilidad se utilizó una estrategia diferente: utilizar IRQ’s compartidos. Y el sistema trabaja.
En los sistemas actuales los dos PIC’s están integrados en un solo controlador llamado:Advanced Programmable Interrupt Controller.
BUSES DE E/S E IRQ’SDMA y el manejo del bus
DMA (Direct Memory Access) es un sistema en la tarjeta madre que permite a un adaptador transferir datos a la RAM – sin requerir intervención del CPU.
Este chip controlador (Intel 8237, generalmente integrado en el south bridge) permite mover datos hacia y de la RAM, via el bus de E/S.
La tarjeta madre tiene un número de canales DMA, cada uno con un número asignado. En los dispositivos ISA, cada uno podía solicitar un canal DMA.
En el bus PCI no hay canales DMA directos. En su lugar se utiliza ‘bus mastering’. Es un sistema similar, donde funciones especiales del controlador permiten a los adaptadores controlar el bus.

BUSES DE E/S E IRQ’SDMA y el manejo del bus
Con este sistema la PC es realmente multitarea. Esto es, puede manejar varias tareas al mismo tiempo.
BUSES DE E/S E IRQ’SMapeo de memoria E/S
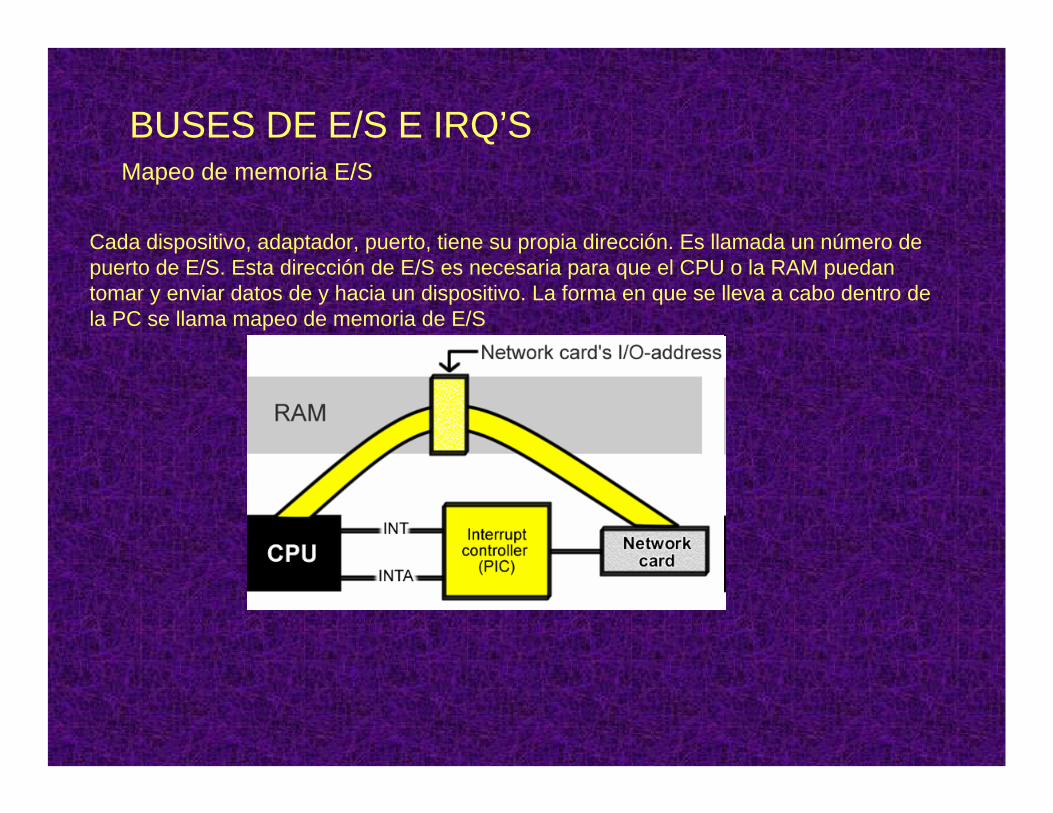
Cada dispositivo, adaptador, puerto, tiene su propia dirección. Es llamada un número de puerto de E/S. Esta dirección de E/S es necesaria para que el CPU o la RAM puedan tomar y enviar datos de y hacia un dispositivo. La forma en que se lleva a cabo dentro de la PC se llama mapeo de memoria de E/S
BUSES DE E/S E IRQ’SMapeo de memoria E/S
Cuando se quiere enviar datos, por ejemplo a la tarjeta de sonido, esto se lleva a cabo a través de uno o más puertos de E/S. Estos puertos están localizados en la RAM.
Así, cuando se quieren enviar datos a la tarjeta de sonido, estos se envían a un área particular de la RAM. Entonces la tarjeta de sonido está lista para tomar los datos desde el mismo lugar, tan pronto como reciba la señal del controlador de interrupciones.
BUSES DE E/S E IRQ’SMapeo de memoria E/S
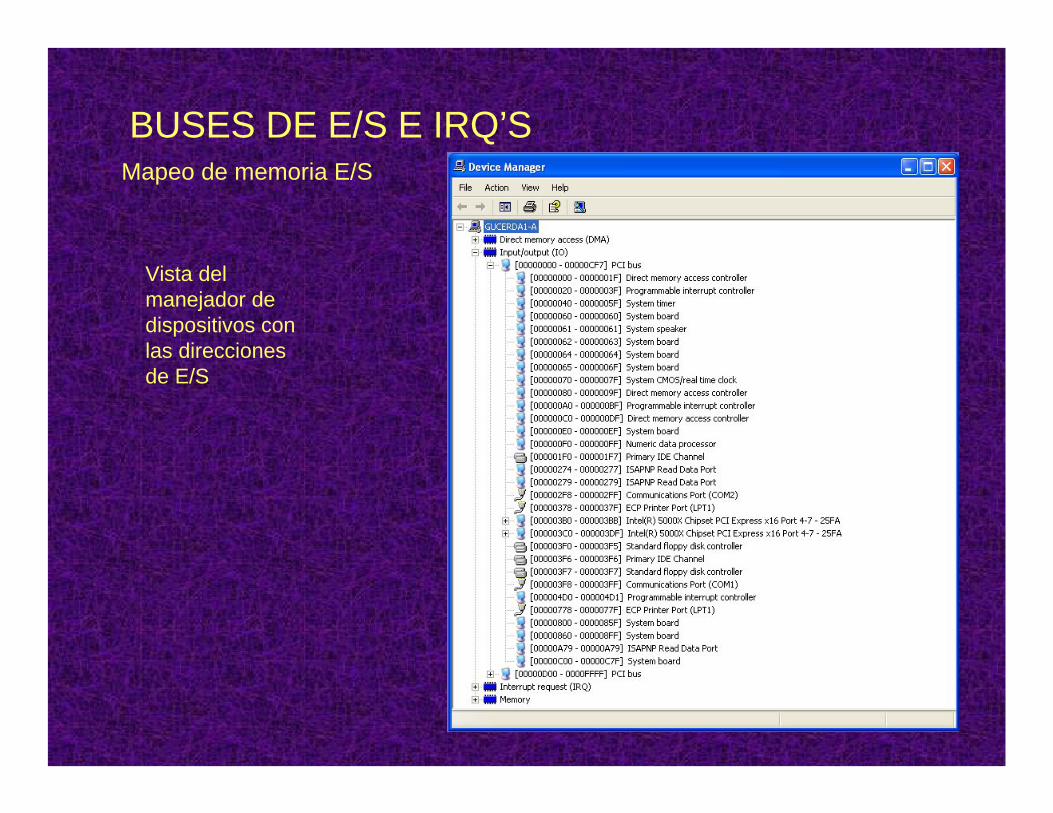
Vista del manejador de dispositivos con las direcciones de E/S
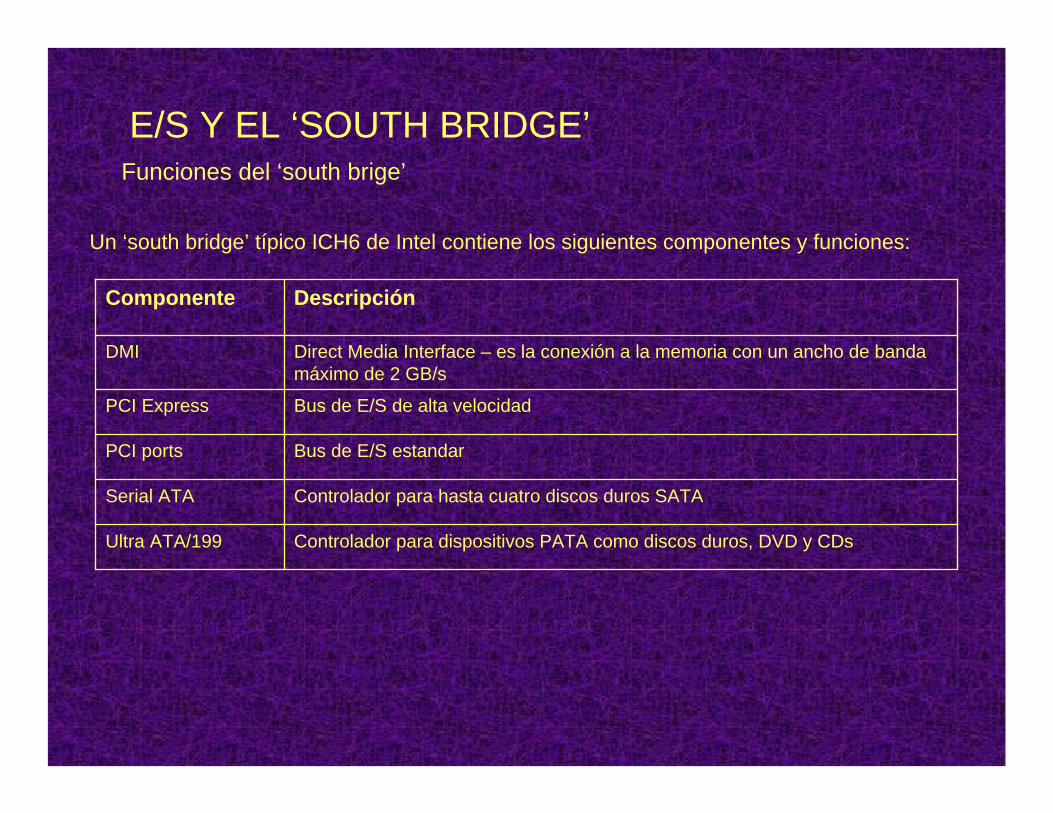
E/S Y EL ‘SOUTH BRIDGE’Funciones del ‘south brige’
Un ‘south bridge’ típico ICH6 de Intel contiene los siguientes componentes y funciones:
Controlador para dispositivos PATA como discos duros, DVD y CDsUltra ATA/199
Controlador para hasta cuatro discos duros SATASerial ATA
Bus de E/S estandarPCI ports
Bus de E/S de alta velocidadPCI Express
DMI
Componente
Direct Media Interface – es la conexión a la memoria con un ancho de banda máximo de 2 GB/s
Descripción
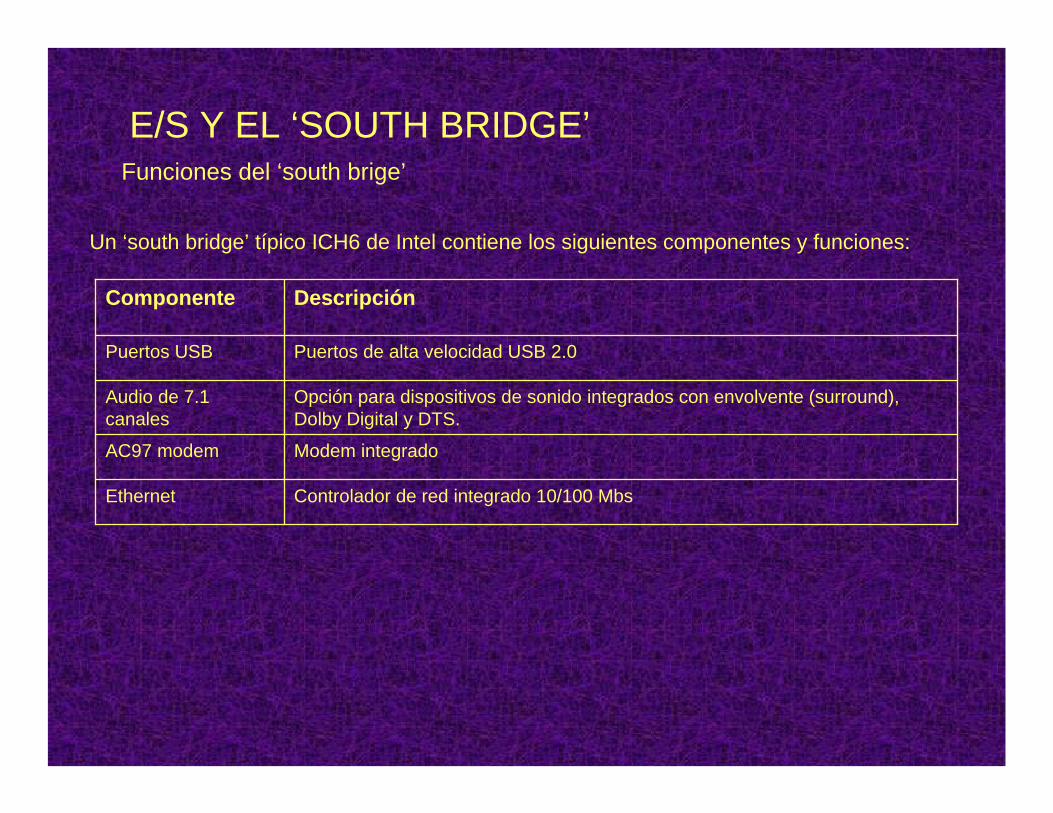
E/S Y EL ‘SOUTH BRIDGE’Funciones del ‘south brige’
Un ‘south bridge’ típico ICH6 de Intel contiene los siguientes componentes y funciones:
Controlador de red integrado 10/100 MbsEthernet
Modem integradoAC97 modem
Opción para dispositivos de sonido integrados con envolvente (surround), Dolby Digital y DTS.
Audio de 7.1 canales
Puertos USB
Componente
Puertos de alta velocidad USB 2.0
Descripción

E/S Y EL ‘SOUTH BRIDGE’Funciones del ‘south brige’
Un ‘south bridge’ típico ICH6 de Intel contiene los siguientes componentes y funciones:
Agrega los dos componentes anterioresICH6RW
Agrega un controlador LAN inalámbricoICH6W
Agrega funcionalidad RAID básicaICH6R
ICH6
Versión del chip
Ya definidos
Componente o función agregada
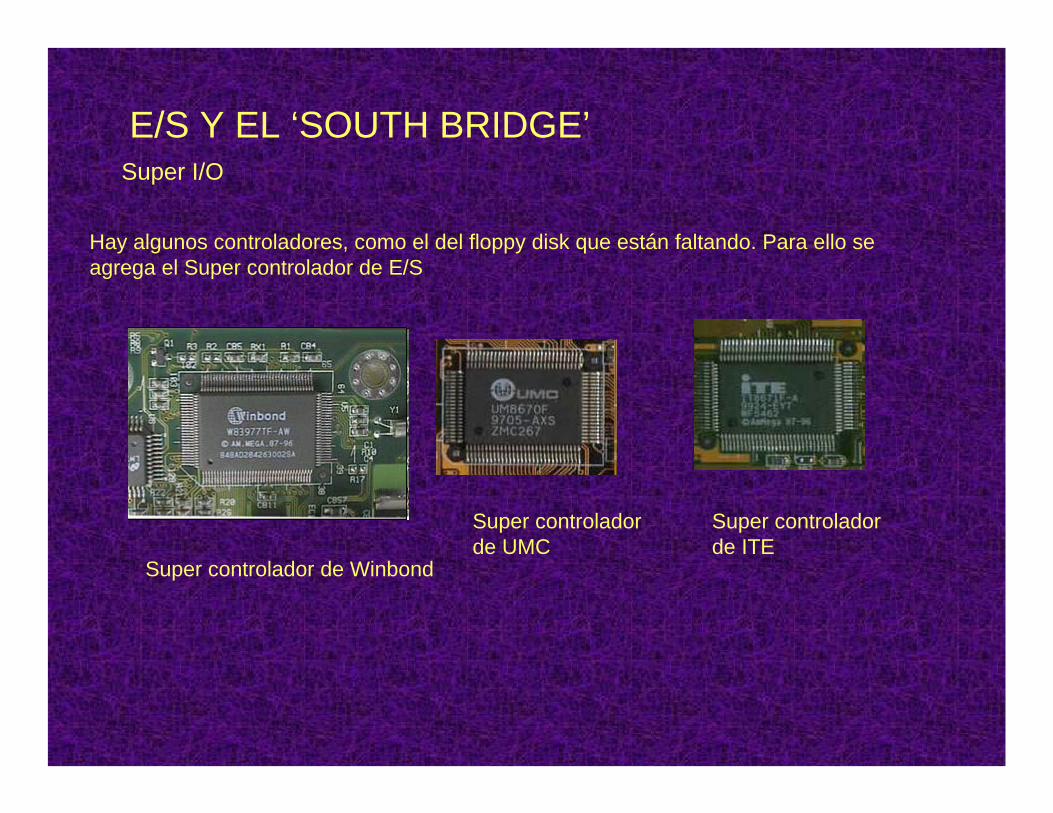
E/S Y EL ‘SOUTH BRIDGE’Super I/O
Hay algunos controladores, como el del floppy disk que están faltando. Para ello se agrega el Super controlador de E/S
Super controlador de Winbond
Super controlador de UMC
Super controlador de ITE

E/S Y EL ‘SOUTH BRIDGE’Super I/OLos principales fabricantes de super controladores son:
UMC_8663 UMC_8669 UMC
VA83C671 VIA686 VT1211 VT8231 VIA
W83627F W83627HF W83627SF W83637HF W83637SF Winbond
FDC37B72X FDC37B78X SMC37C931 SMC37C93X SMC37C93XPM SMC
SIS6801 SIS950 SIS
NS307 NS308 NS309 NS317 NS_338 NS351 National Semi Conductor
ITE8661 ITE8661RF ITE8679 ITE8680 ITE8681 ITE
GS82C803B PRIME3C Lucky Goldstar
ALI
Fabricante
M1543 M1543C M1535D Ali5113
Modelos

E/S Y EL ‘SOUTH BRIDGE’Super I/OLos principales fabricantes de super controladores son:
UMC_8663 UMC_8669 UMC
VA83C671 VIA686 VT1211 VT8231 VIA
W83627F W83627HF W83627SF W83637HF W83637SF Winbond
FDC37B72X FDC37B78X SMC37C931 SMC37C93X SMC37C93XPM SMC
SIS6801 SIS950 SIS
NS307 NS308 NS309 NS317 NS_338 NS351 National Semi Conductor
ITE8661 ITE8661RF ITE8679 ITE8680 ITE8681 ITE
GS82C803B PRIME3C Lucky Goldstar
ALI
Fabricante
M1543 M1543C M1535D Ali5113
Modelos
E/S Y EL ‘SOUTH BRIDGE’Super I/OEstos chips se encuentran generalmente en la parte inferior de la tarjeta madre bajo las ranuras de expansión PCI y son ligeramente más grandes que la uña del dedo pulgar.
Como ejemplo, el super controlador de SMSC LPC47M10x tiene las siguientes características:
Operación a 3.3 V Controlador de tecladoInterfaz LPC Puertos SerialesControl del ventilador Puerto de infrarojoInterfaz de puerto de juegos dual Puertos paralelosSoporte MIDI MPU-401 Puerto PS/2Controlador de Floppy Disk
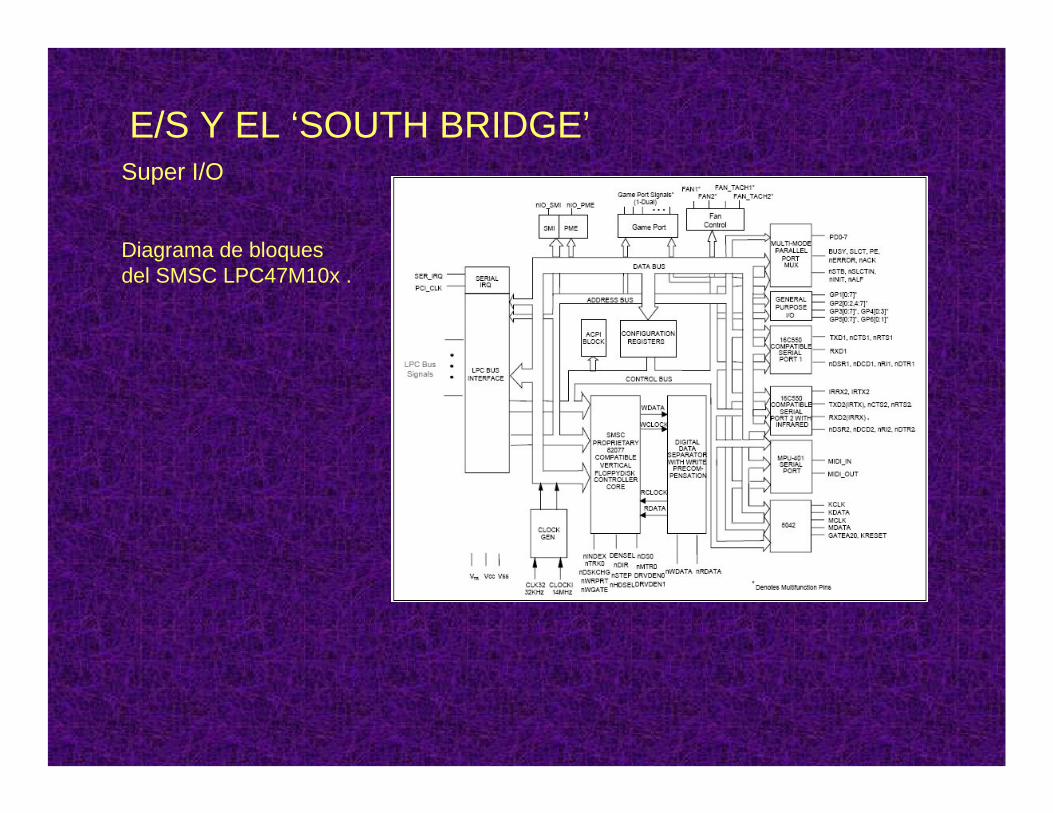
E/S Y EL ‘SOUTH BRIDGE’Super I/O
Diagrama de bloques del SMSC LPC47M10x .
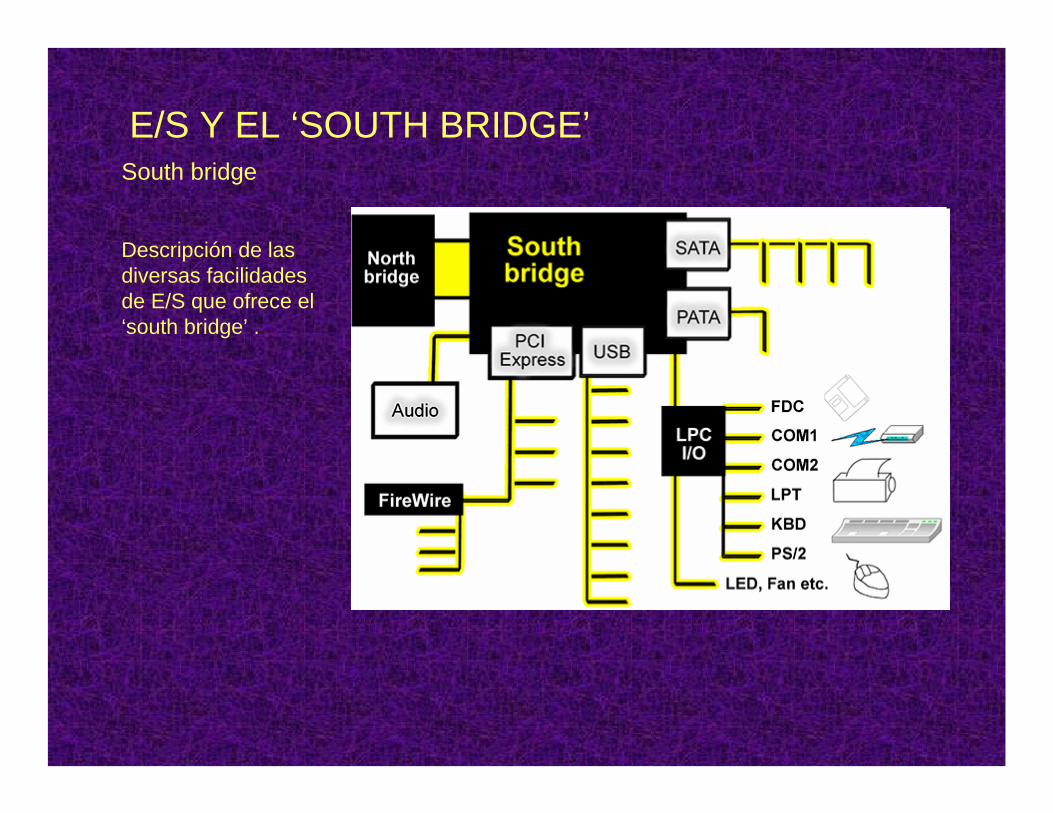
E/S Y EL ‘SOUTH BRIDGE’South bridge
Descripción de las diversas facilidades de E/S que ofrece el ‘south bridge’ .

E/S Y EL ‘SOUTH BRIDGE’Los puertos paralelo y serial
Los puertos paralelo y serial están incluidos en el sistema de E/S. Su controlador estálocalizado en el super controlador de E/S.
Las PC’s generalmente vienen con uno (o dos) puertos seriales (generalmente DB9) y un puerto paralelo (DB25).
Estos puertos generalmente se nombran COM1, COM2 y LPT.
Actualmente se utilizan menos ya que el bus USB está tomando su lugar. Se están migrando los dispositivos para adaptarse al nuevo bus.
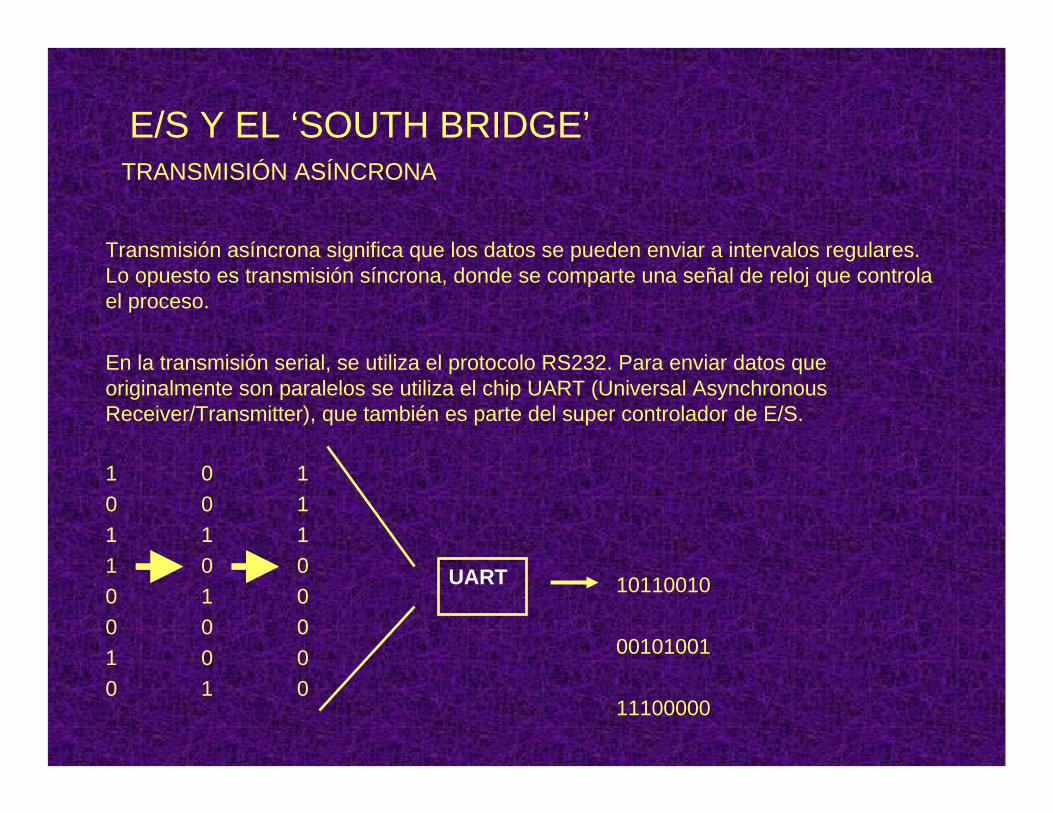
E/S Y EL ‘SOUTH BRIDGE’TRANSMISIÓN ASÍNCRONA
Transmisión asíncrona significa que los datos se pueden enviar a intervalos regulares. Lo opuesto es transmisión síncrona, donde se comparte una señal de reloj que controla el proceso.
En la transmisión serial, se utiliza el protocolo RS232. Para enviar datos que originalmente son paralelos se utiliza el chip UART (Universal Asynchronous Receiver/Transmitter), que también es parte del super controlador de E/S.
UART
1 0 10 0 11 1 11 0 00 1 00 0 01 0 00 1 0
10110010
00101001
11100000

E/S Y EL ‘SOUTH BRIDGE’SCSI
SCSI (Small Computer System Interface) es un bus viejo pero avanzado de E/S que se ha utilizado especialmente para discos duros, CD-ROMs, escáners y unidades de cinta.
Se ha utilizado sobre todo en computadoras de alto desempeño, como servidores o estaciones de trabajo.
Hay varios estándares SCSI
El bus SCSI puede transferir hasta 160 MB/s.
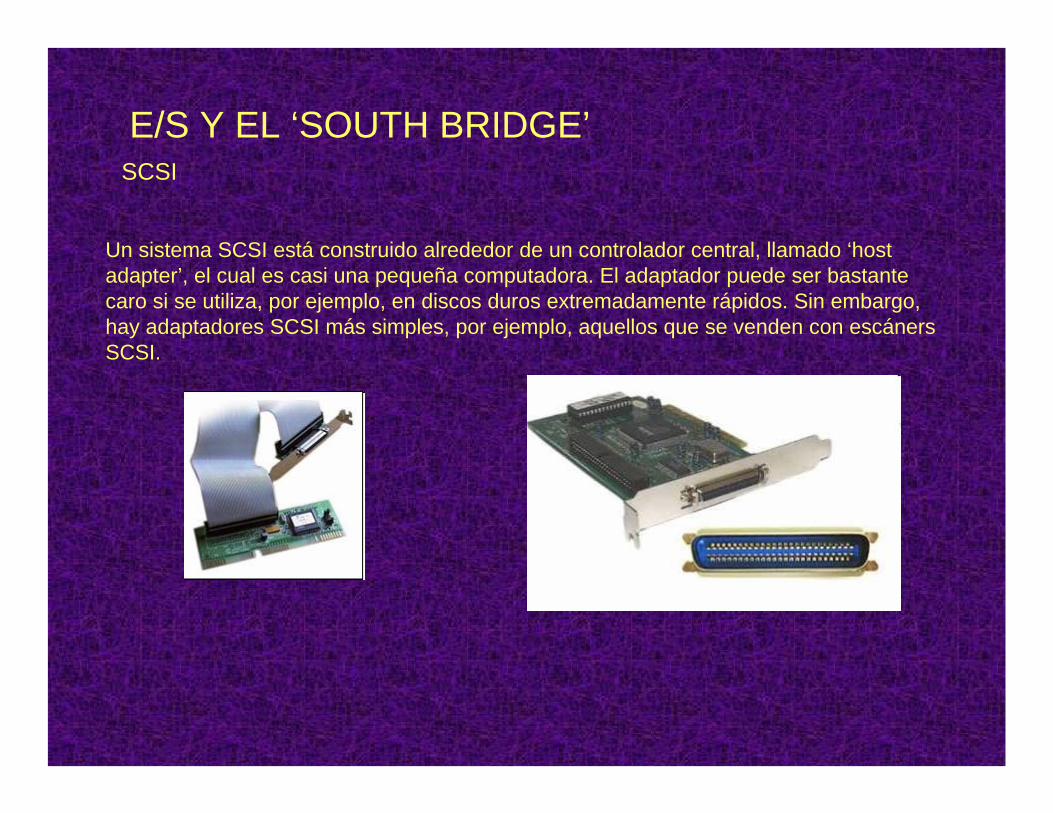
E/S Y EL ‘SOUTH BRIDGE’SCSI
Un sistema SCSI está construido alrededor de un controlador central, llamado ‘host adapter’, el cual es casi una pequeña computadora. El adaptador puede ser bastante caro si se utiliza, por ejemplo, en discos duros extremadamente rápidos. Sin embargo, hay adaptadores SCSI más simples, por ejemplo, aquellos que se venden con escáners SCSI.
E/S Y EL ‘SOUTH BRIDGE’SCSI
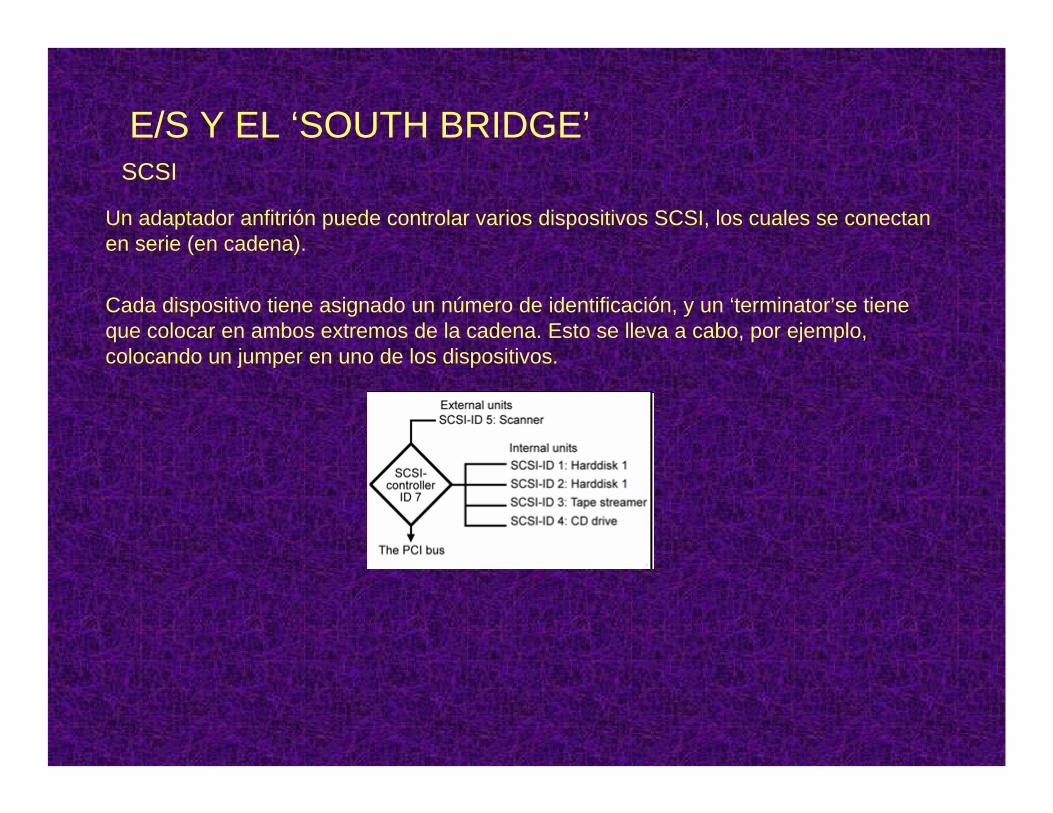
Un adaptador anfitrión puede controlar varios dispositivos SCSI, los cuales se conectan en serie (en cadena).
Cada dispositivo tiene asignado un número de identificación, y un ‘terminator’se tiene que colocar en ambos extremos de la cadena. Esto se lleva a cabo, por ejemplo, colocando un jumper en uno de los dispositivos.

E/S Y EL ‘SOUTH BRIDGE’SCSI
Hay una gran diversidad de conectores SCSI por lo que se encuentran en el mercado diversidad de
E/S Y EL ‘SOUTH BRIDGE’RAID (Redundant Array of Inexpensive Disks)
Es una tecnología que conecta variso discos duros para formar un sistema avanzado de corrección de errores, el cual se utiliza en servidores.
El sistema es virtualmente una extensión del estándar SCSI y se utilizó por primera vez en 1987. Desde entonces, sistemas RAID basados en ATA se han desarrollado los cuales utilizan una configuración equivalente con los discos ATA o SATA, mucho más baratos.
Con una cadena de discos RAID se obtienen dos ventajas:
Mayor seguridad. Los datos estan en varios discos. Si un disco falla, los otros discos contienen los mismos datos.
Transferencia de datos más rápida. El controlador RAID escribe y lee de varios discos al mismo tiempo. Esto significa que la velocidad de transferencia se puede duplicar o triplicar.
E/S Y EL ‘SOUTH BRIDGE’RAID (Redundant Array of Inexpensive Disks)
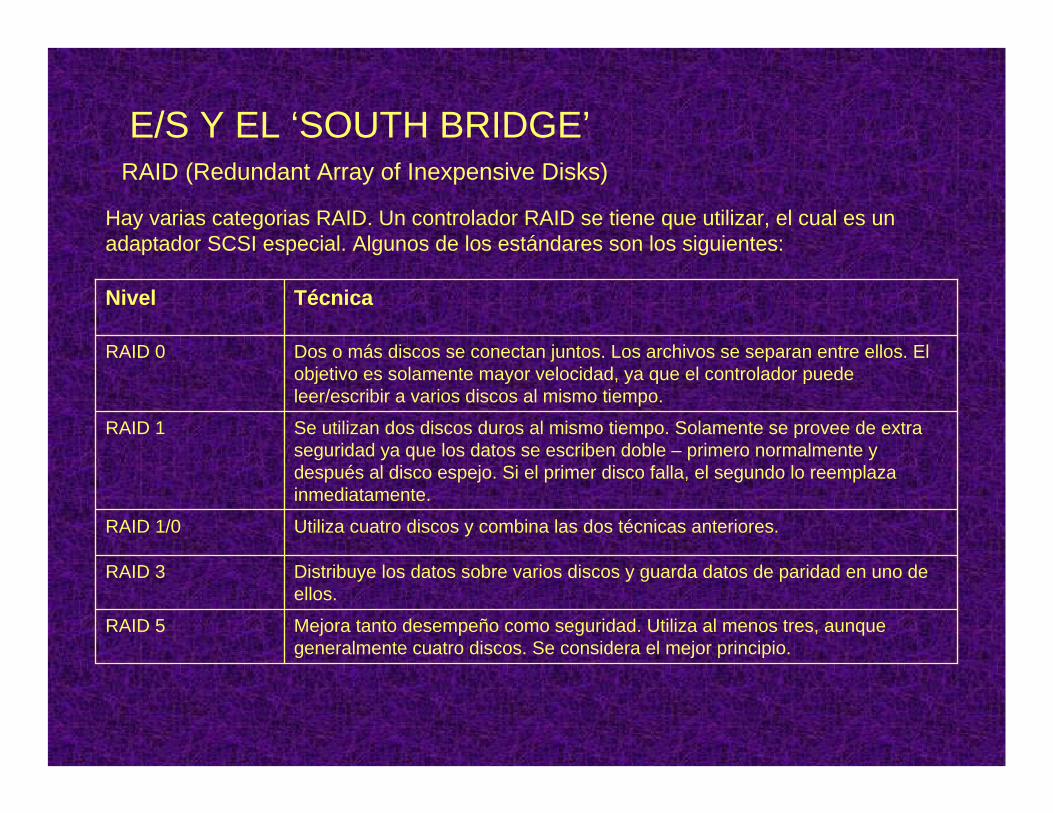
Hay varias categorias RAID. Un controlador RAID se tiene que utilizar, el cual es un adaptador SCSI especial. Algunos de los estándares son los siguientes:
Mejora tanto desempeño como seguridad. Utiliza al menos tres, aunque generalmente cuatro discos. Se considera el mejor principio.
RAID 5
Distribuye los datos sobre varios discos y guarda datos de paridad en uno de ellos.
RAID 3
Utiliza cuatro discos y combina las dos técnicas anteriores.RAID 1/0
Se utilizan dos discos duros al mismo tiempo. Solamente se provee de extra seguridad ya que los datos se escriben doble – primero normalmente y después al disco espejo. Si el primer disco falla, el segundo lo reemplaza inmediatamente.
RAID 1
RAID 0
Nivel
Dos o más discos se conectan juntos. Los archivos se separan entre ellos. El objetivo es solamente mayor velocidad, ya que el controlador puede leer/escribir a varios discos al mismo tiempo.
Técnica
E/S Y EL ‘SOUTH BRIDGE’IEEE 1394 - FireWire
Es una interfaz tipo SCSI, llamada IEEE1394. El estándar es una extensión del estándar SCSI. Es un bus serial de alta velocidad con una transferencia máxima de 400 Mbit por segundo.
Se pueden conectar y desconectar de la computadora sin tener que reiniciar la PC. Tal como el USB.
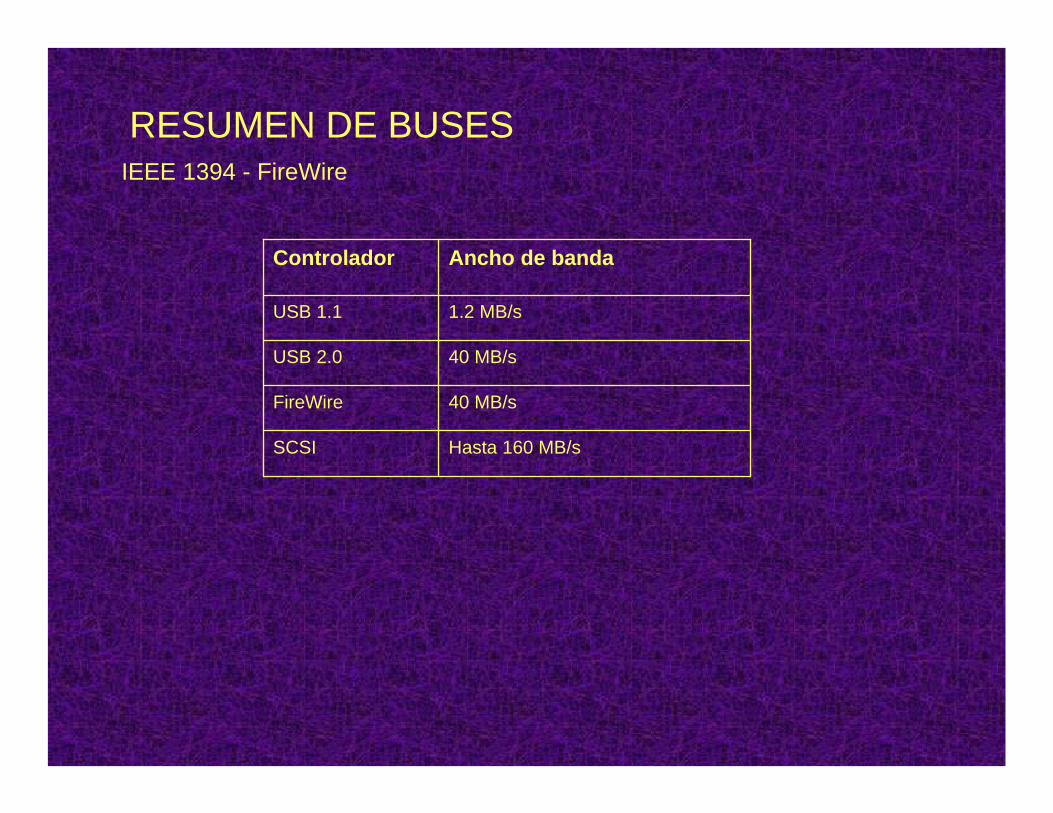
RESUMEN DE BUSESIEEE 1394 - FireWire
Hasta 160 MB/sSCSI
40 MB/sFireWire
40 MB/sUSB 2.0
USB 1.1
Controlador
1.2 MB/s
Ancho de banda
DISCOS DUROS, ATA Y SATAHistoria del disco duro
En 1957 IBM introdujo el primer almacenamiento de disco fijo. Era enorme con 50 discos de 24 pulgadas de diametro (61 cm). Este disco duro pionero tenía una capacidad de 5MB. Rentarlo costaba $35,000 dólares al año.
Uno de los modelos de IBM se le llamó 3030 y esto en USA llevó a que se le nombrara Winchester disk (por el popular rifle Winchester 3030).
La primera computadora con disco duro fue la RAMAC de IBM, que se utilizó durante los juegos olímpicos de 1960 para calcular los resultados de las pruebas.
En 1962 se desarrollaron ‘disk packs’ removibles –un antecedente del floppy disk.
En 1964 fue introducido el algoritmo CRC. Este proveía mayor seguridad al comprobar y comparar datos antes y después de escribirlos al disco.
DISCOS DUROS, ATA Y SATAHistoria del disco duro
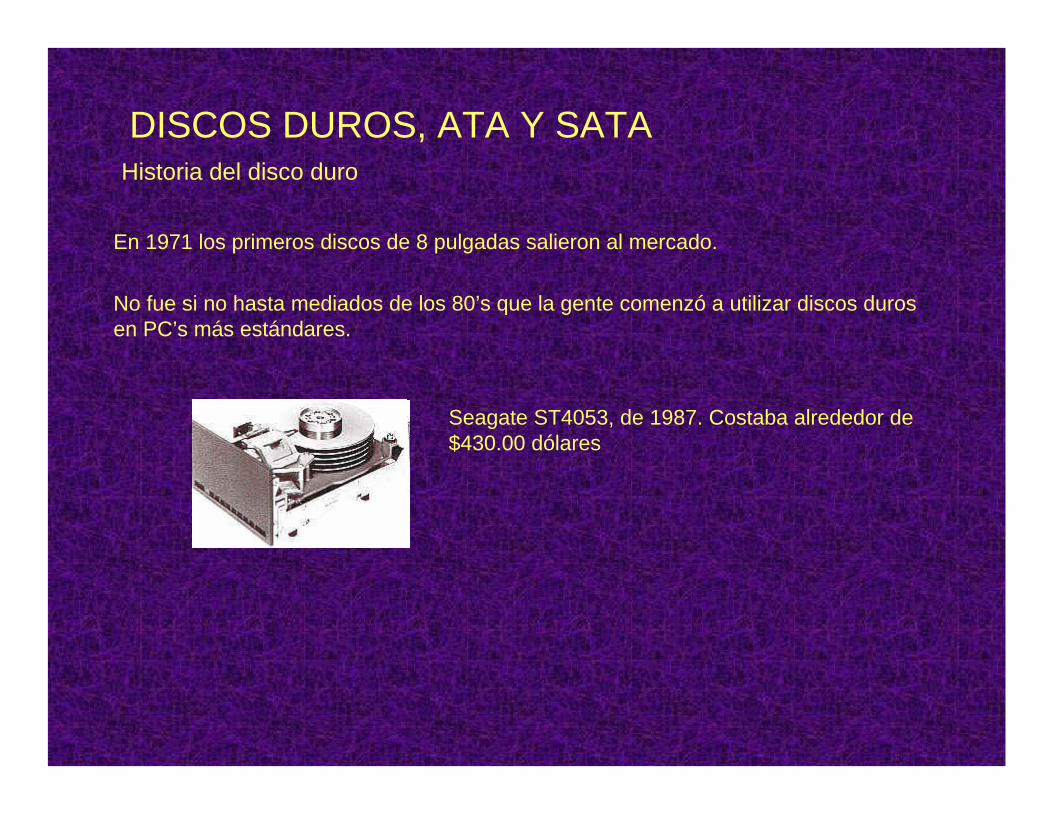
En 1971 los primeros discos de 8 pulgadas salieron al mercado.
No fue si no hasta mediados de los 80’s que la gente comenzó a utilizar discos duros en PC’s más estándares.
Seagate ST4053, de 1987. Costaba alrededor de $430.00 dólares
DISCOS DUROS, ATA Y SATAHistoria del disco duro
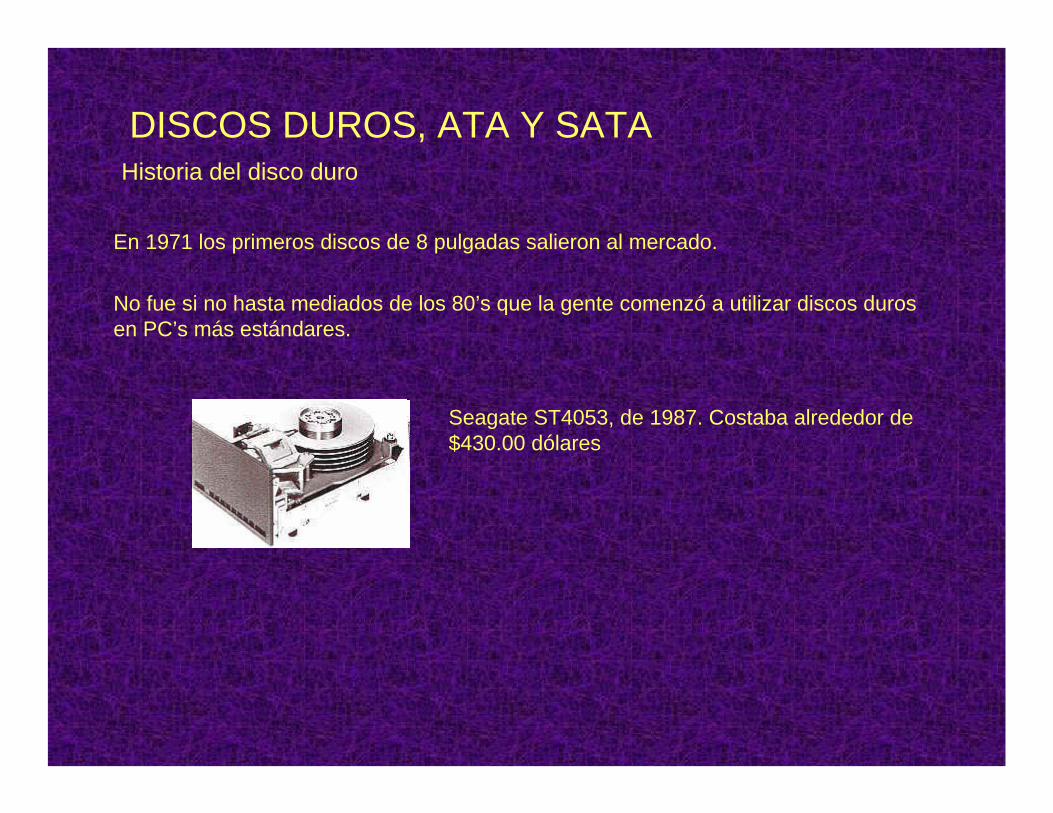
En 1971 los primeros discos de 8 pulgadas salieron al mercado.
No fue si no hasta mediados de los 80’s que la gente comenzó a utilizar discos duros en PC’s más estándares.
Seagate ST4053, de 1987. Costaba alrededor de $430.00 dólares