Metodos de programación No lineal
19
Republica Bolivariana de Venezuela Ministerio del Poder Popular para la Educación Universitaria Politécnico Santiago Mariño Extensión Maracaibo Optimización de Sistemas y Funciones Métodos de Programación No Lineal Explicados en MAPLE 14 y WINQSB Integrantes: Kimberly Montilla Hannerre Serrano Julio, 2015
-
Upload
hannerreser -
Category
Engineering
-
view
30 -
download
3
Transcript of Metodos de programación No lineal
Republica Bolivariana de Venezuela
Ministerio del Poder Popular para la Educación Universitaria
Politécnico Santiago Mariño
Extensión Maracaibo
Optimización de Sistemas y Funciones
Métodos de Programación No Lineal
Explicados en MAPLE 14 y WINQSB
Integrantes: Kimberly Montilla
Hannerre Serrano
Julio, 2015
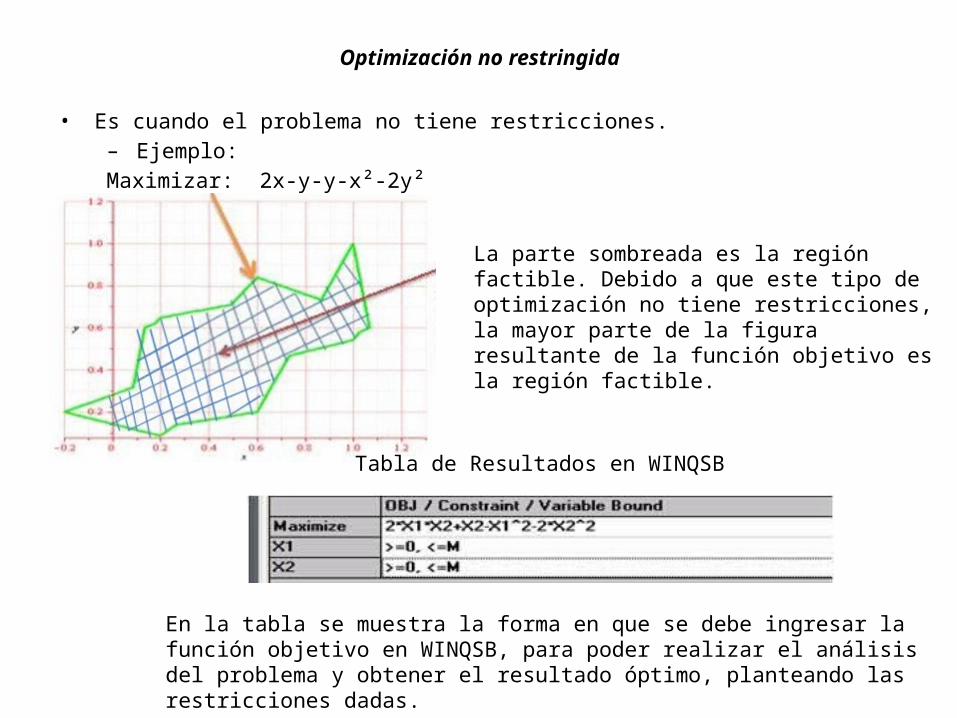
Optimización no restringida
• Es cuando el problema no tiene restricciones. – Ejemplo:
Maximizar: 2x-y-y-x²-2y²
La parte sombreada es la región factible. Debido a que este tipo de optimización no tiene restricciones, la mayor parte de la figura resultante de la función objetivo es la región factible.
Tabla de Resultados en WINQSB
En la tabla se muestra la forma en que se debe ingresar la función objetivo en WINQSB, para poder realizar el análisis del problema y obtener el resultado óptimo, planteando las restricciones dadas.
Optimización no restringida
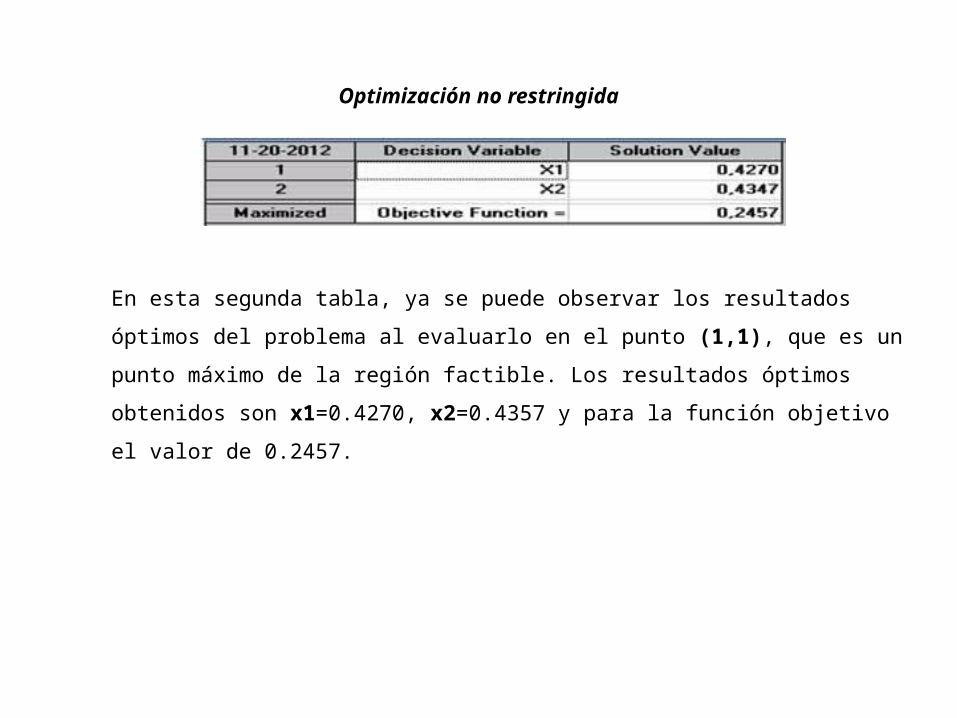
En esta segunda tabla, ya se puede observar los resultados óptimos del problema al
evaluarlo en el punto (1,1), que es un punto máximo de la región factible. Los
resultados óptimos obtenidos son x1=0.4270, x2=0.4357 y para la función objetivo el
valor de 0.2457.
Optimización restringida linealmente
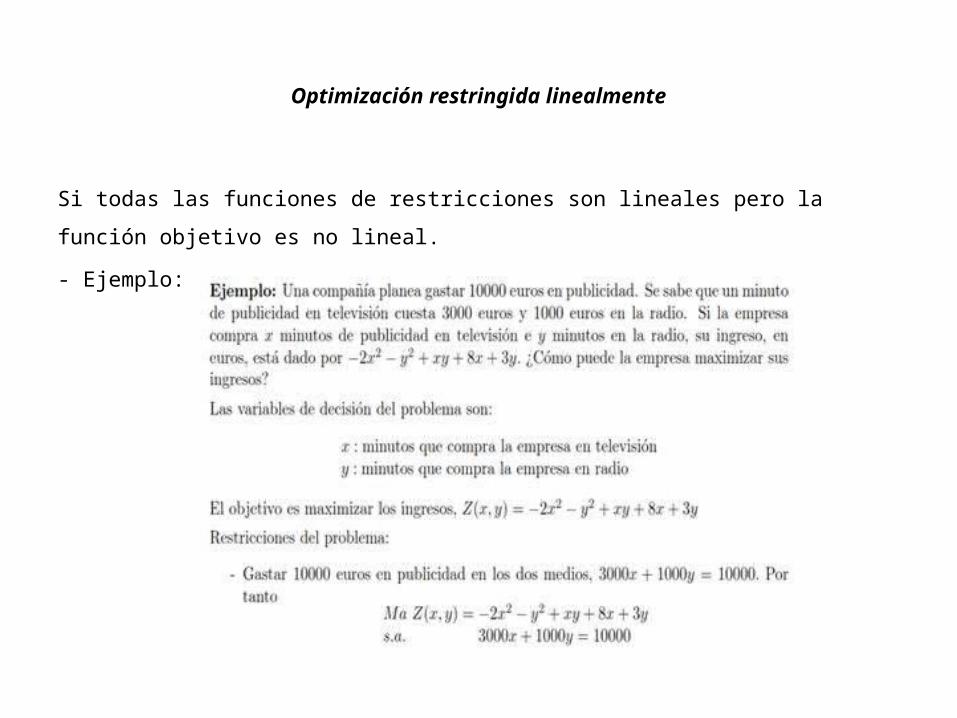
Si todas las funciones de restricciones son lineales pero la función objetivo es no lineal.
- Ejemplo:
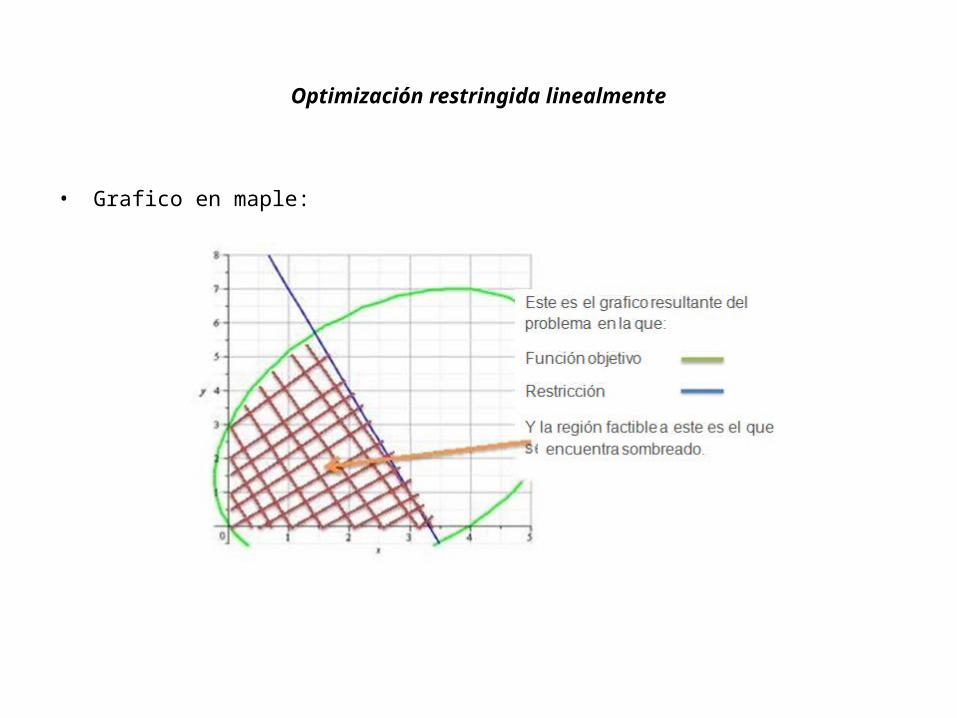
• Grafico en maple:
Optimización restringida linealmente
Optimización restringida linealmente
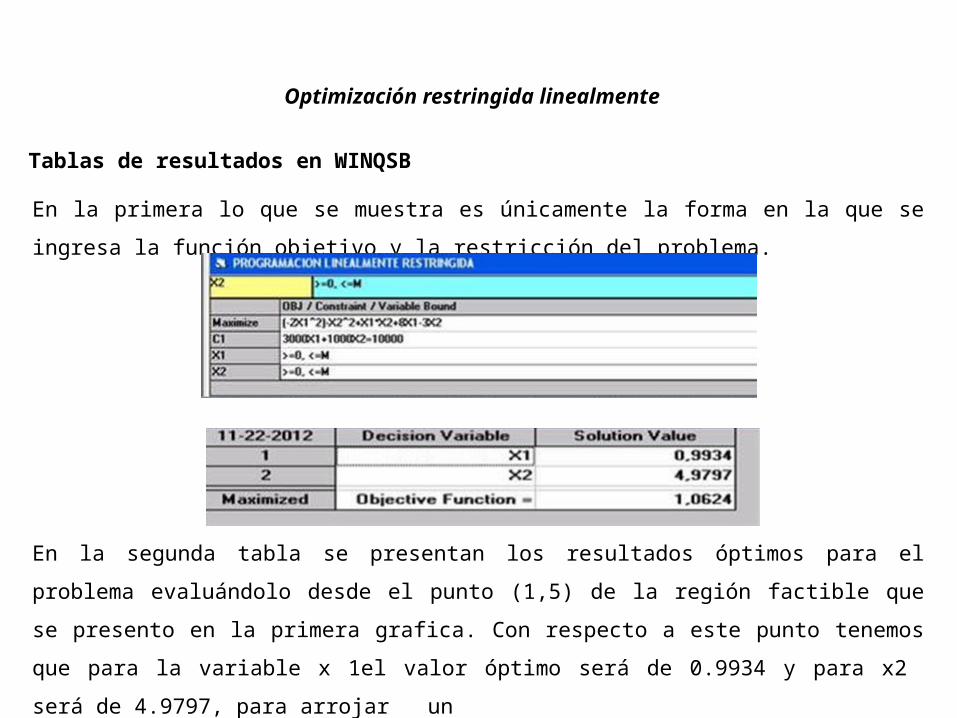
Tablas de resultados en WINQSB
En la primera lo que se muestra es únicamente la forma en la que se ingresa la función
objetivo y la restricción del problema.
En la segunda tabla se presentan los resultados óptimos para el problema evaluándolo desde
el punto (1,5) de la región factible que se presento en la primera grafica. Con respecto a este
punto tenemos que para la variable x 1el valor óptimo será de 0.9934 y para x2 será de
4.9797, para arrojar un
resultado óptimo de la función objetivo de 1.0624.
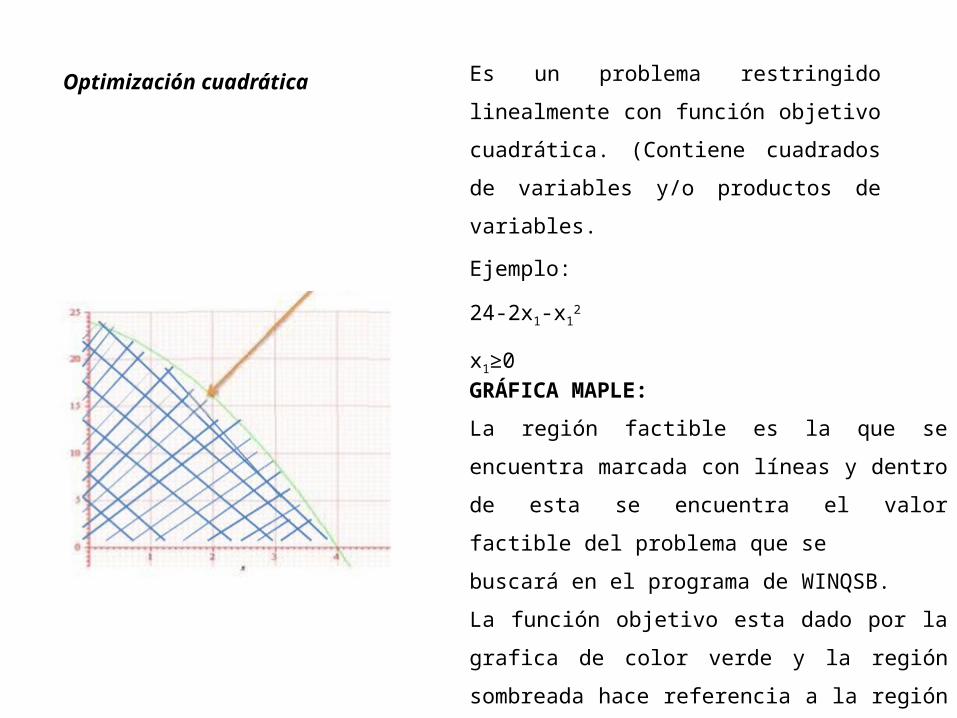
Optimización cuadrática Es un problema restringido linealmente con
función objetivo cuadrática. (Contiene
cuadrados de variables y/o productos de
variables.
Ejemplo:
24-2x1-x12
x1≥0
GRÁFICA MAPLE:
La región factible es la que se encuentra marcada
con líneas y dentro de esta se encuentra el valor
factible del problema que se
buscará en el programa de WINQSB.
La función objetivo esta dado por la grafica de
color verde y la región sombreada hace referencia
a la región factible del problema.
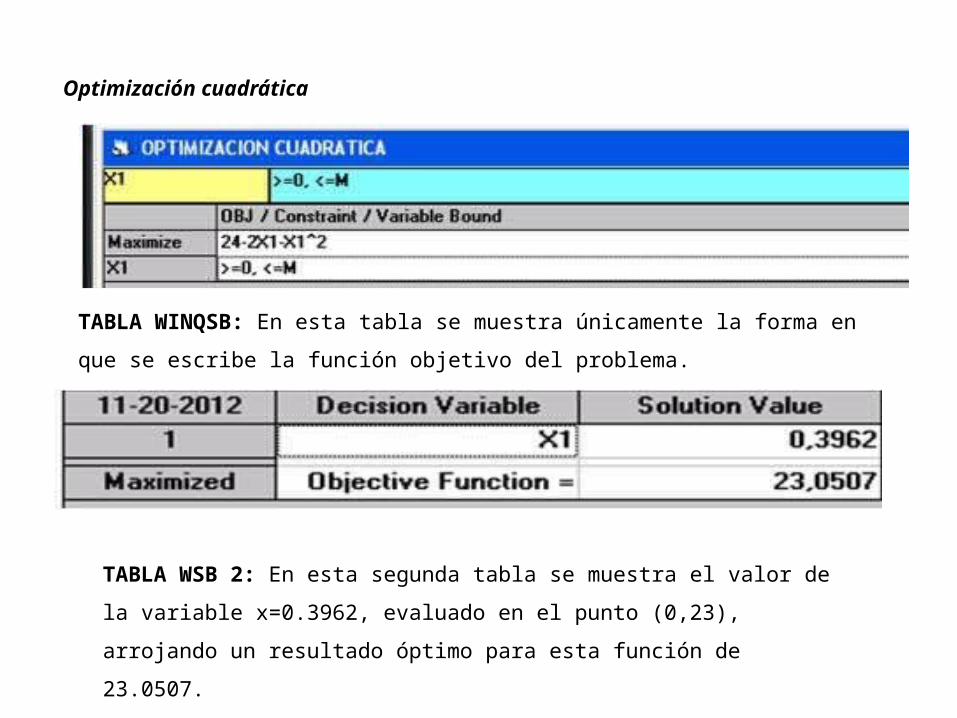
Optimización cuadrática
TABLA WINQSB: En esta tabla se muestra únicamente la forma en que se escribe
la función objetivo del problema.
TABLA WSB 2: En esta segunda tabla se muestra el valor de la variable
x=0.3962, evaluado en el punto (0,23), arrojando un resultado óptimo para
esta función de 23.0507.
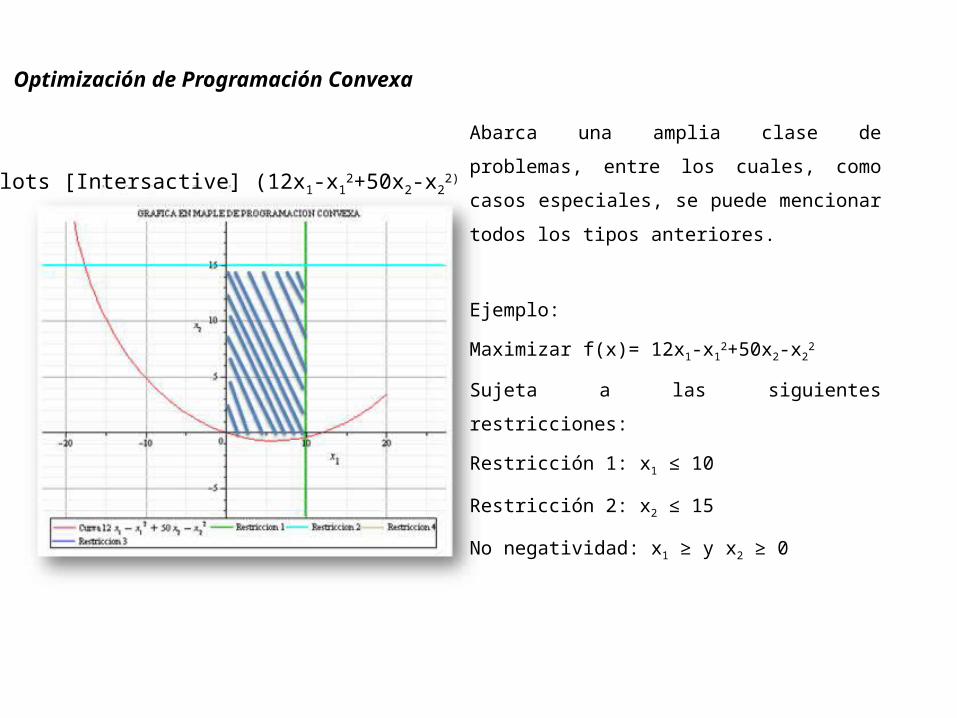
Optimización de Programación Convexa
Abarca una amplia clase de problemas,
entre los cuales, como casos especiales,
se puede mencionar todos los tipos
anteriores.
Ejemplo:
Maximizar f(x)= 12x1-x12+50x2-x2
2
Sujeta a las siguientes restricciones:
Restricción 1: x1 ≤ 10
Restricción 2: x2 ≤ 15
No negatividad: x1 ≥ y x2 ≥ 0
Plots [Intersactive] (12x1-x12+50x2-x2
2)
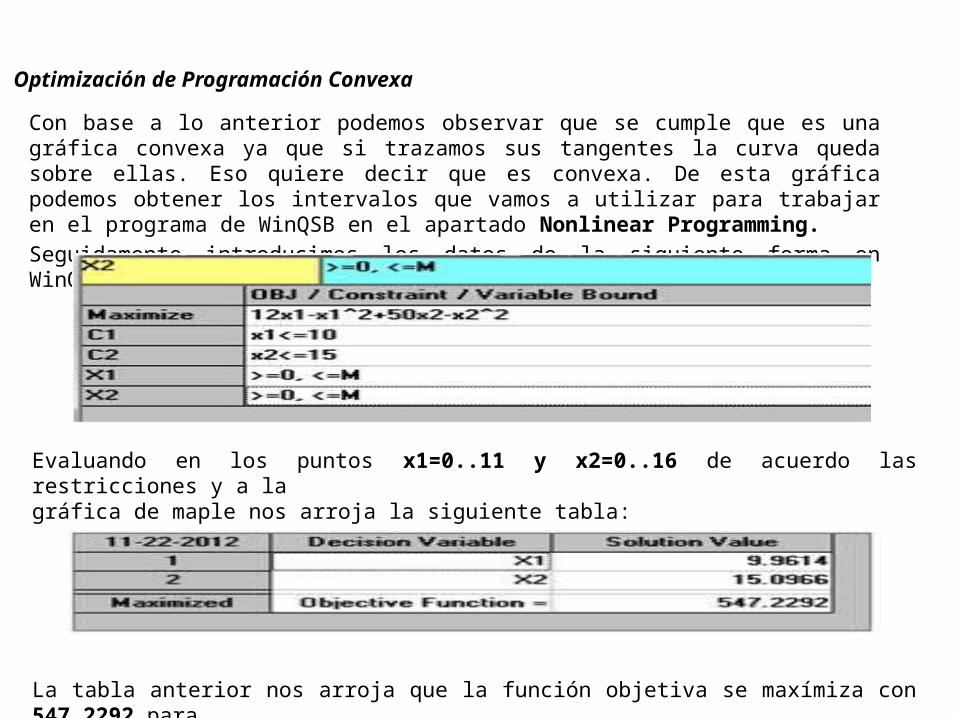
Optimización de Programación Convexa
Con base a lo anterior podemos observar que se cumple que es una gráfica convexa ya que si trazamos sus tangentes la curva queda sobre ellas. Eso quiere decir que es convexa. De esta gráfica podemos obtener los intervalos que vamos a utilizar para trabajar en el programa de WinQSB en el apartado Nonlinear Programming.
Seguidamente introducimos los datos de la siguiente forma en WinQSB:
Evaluando en los puntos x1=0..11 y x2=0..16 de acuerdo las restricciones y a lagráfica de maple nos arroja la siguiente tabla:
La tabla anterior nos arroja que la función objetiva se maxímiza con 547.2292 paralos valores de x1 y x2 mostrados en la tabla anterior.
Optimización de Programación Separable
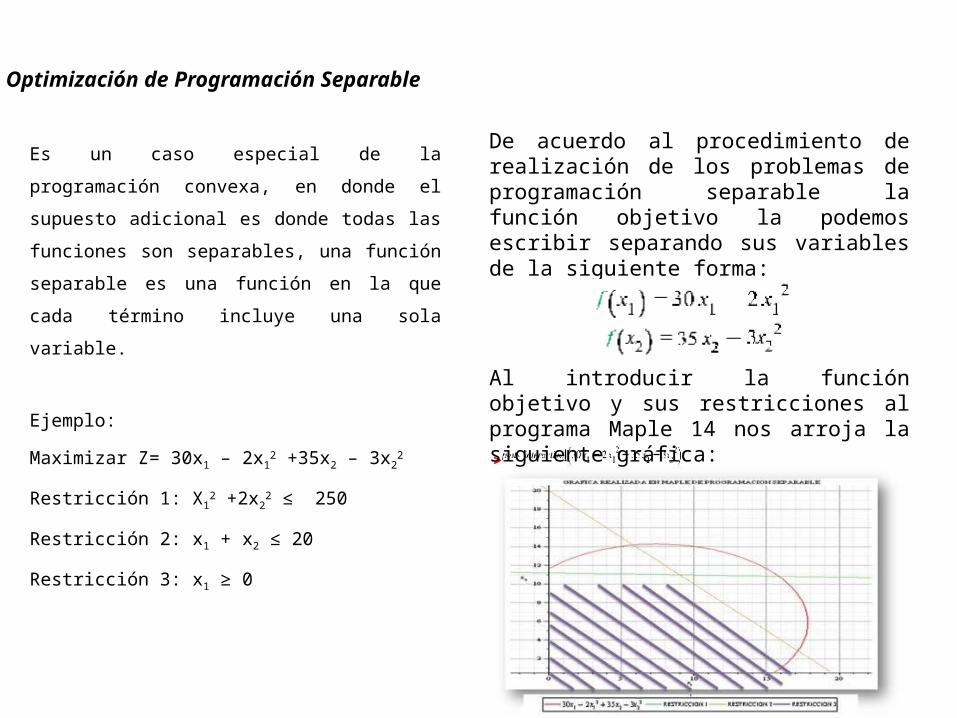
Es un caso especial de la programación
convexa, en donde el supuesto adicional es
donde todas las funciones son separables,
una función separable es una función en la
que cada término incluye una sola variable.
Ejemplo:
Maximizar Z= 30x1 – 2x12 +35x2 – 3x2
2
Restricción 1: X12 +2x2
2 ≤ 250
Restricción 2: x1 + x2 ≤ 20
Restricción 3: x1 ≥ 0
>
De acuerdo al procedimiento de realización de los problemas de programación separable la función objetivo la podemos escribir separando sus variables de la siguiente forma:
Al introducir la función objetivo y sus restricciones al programa Maple 14 nos arroja la siguiente gráfica:
Optimización de Programación Separable
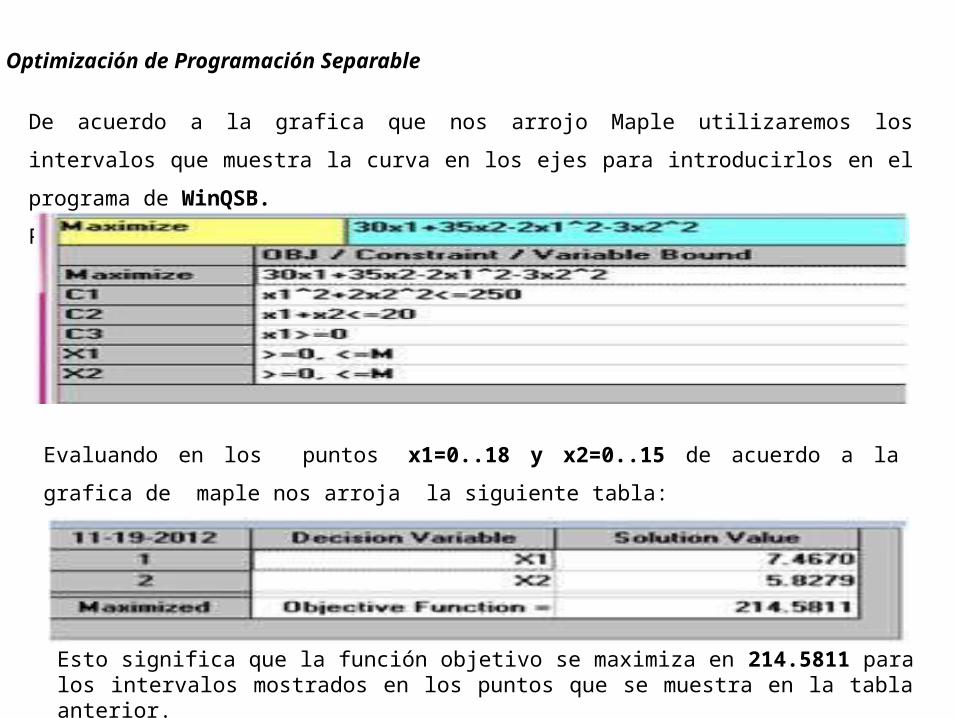
De acuerdo a la grafica que nos arrojo Maple utilizaremos los intervalos que muestra la curva
en los ejes para introducirlos en el programa de WinQSB.
Primeramente introducimos la función objetivo y las restricciones:
Evaluando en los puntos x1=0..18 y x2=0..15 de acuerdo a la grafica de maple nos
arroja la siguiente tabla:
Esto significa que la función objetivo se maximiza en 214.5811 para los intervalos mostrados en los puntos que se muestra en la tabla anterior.
Optimización de Programación No Convexa
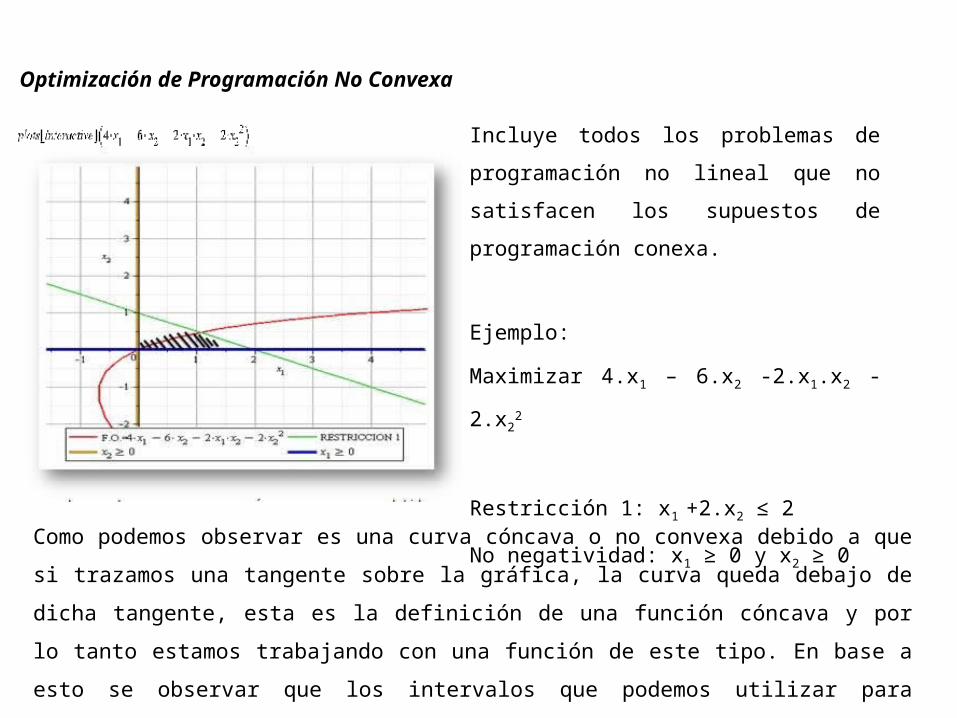
Incluye todos los problemas de
programación no lineal que no satisfacen
los supuestos de programación conexa.
Ejemplo:
Maximizar 4.x1 – 6.x2 -2.x1.x2 -2.x22
Restricción 1: x1 +2.x2 ≤ 2
No negatividad: x1 ≥ 0 y x2 ≥ 0
Como podemos observar es una curva cóncava o no convexa debido a que si trazamos una
tangente sobre la gráfica, la curva queda debajo de dicha tangente, esta es la definición de
una función cóncava y por lo tanto estamos trabajando con una función de este tipo. En base
a esto se observar que los intervalos que podemos utilizar para trabajar en WinQSB son:
x1=0..2 y x2=0..1.
Optimización de Programación No Convexa
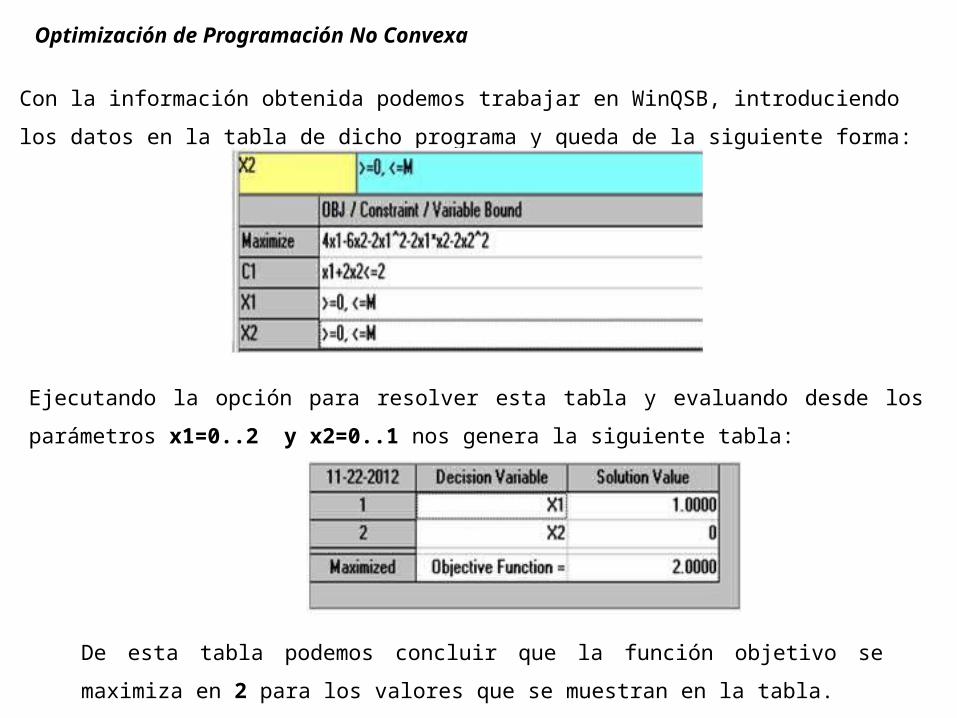
Con la información obtenida podemos trabajar en WinQSB, introduciendo los datos en la tabla
de dicho programa y queda de la siguiente forma:
Ejecutando la opción para resolver esta tabla y evaluando desde los parámetros x1=0..2 y
x2=0..1 nos genera la siguiente tabla:
De esta tabla podemos concluir que la función objetivo se maximiza en 2 para los
valores que se muestran en la tabla.
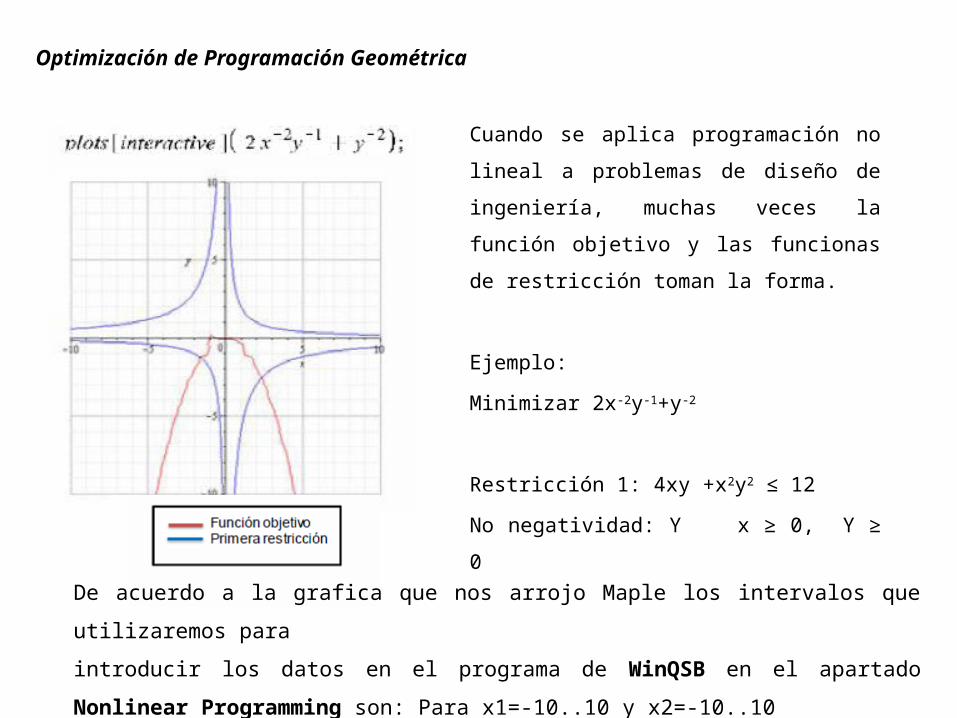
Optimización de Programación Geométrica
Cuando se aplica programación no lineal a
problemas de diseño de ingeniería,
muchas veces la función objetivo y las
funcionas de restricción toman la forma.
Ejemplo:
Minimizar 2x-2y-1+y-2
Restricción 1: 4xy +x2y2 ≤ 12
No negatividad: Y x ≥ 0, Y ≥ 0
De acuerdo a la grafica que nos arrojo Maple los intervalos que utilizaremos para
introducir los datos en el programa de WinQSB en el apartado Nonlinear Programming
son: Para x1=-10..10 y x2=-10..10
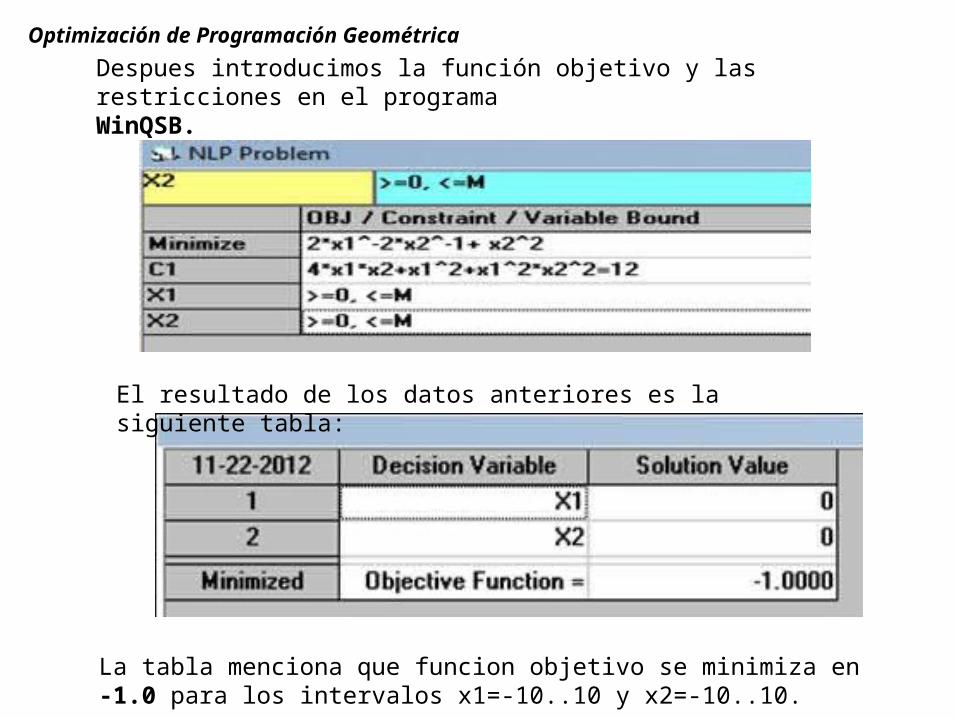
Optimización de Programación Geométrica
Despues introducimos la función objetivo y las restricciones en el programaWinQSB.
El resultado de los datos anteriores es la siguiente tabla:
La tabla menciona que funcion objetivo se minimiza en -1.0 para los intervalos x1=-10..10 y x2=-10..10.
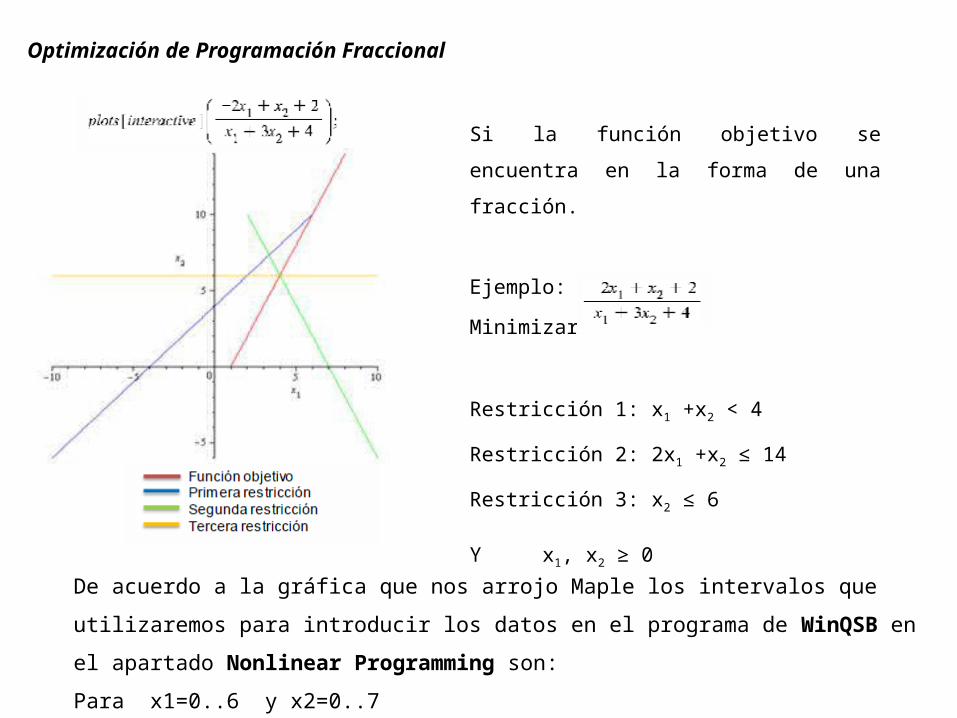
Optimización de Programación Fraccional
Si la función objetivo se encuentra en la
forma de una fracción.
Ejemplo:
Minimizar
Restricción 1: x1 +x2 < 4
Restricción 2: 2x1 +x2 ≤ 14
Restricción 3: x2 ≤ 6
Y x1, x2 ≥ 0
De acuerdo a la gráfica que nos arrojo Maple los intervalos que utilizaremos para
introducir los datos en el programa de WinQSB en el apartado Nonlinear Programming
son:
Para x1=0..6 y x2=0..7
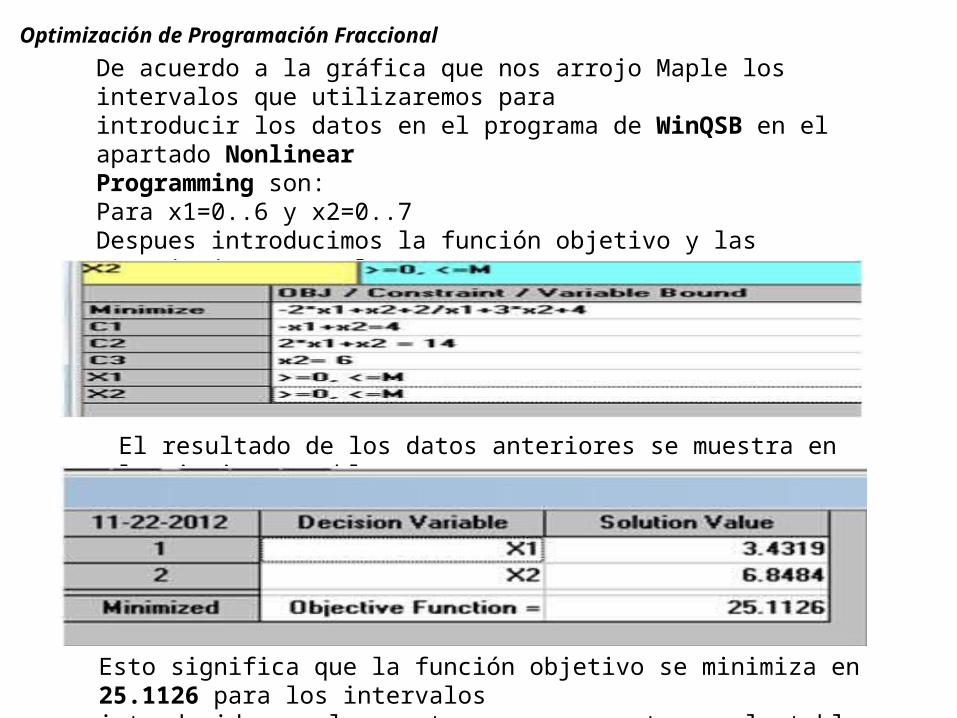
Optimización de Programación Fraccional
De acuerdo a la gráfica que nos arrojo Maple los intervalos que utilizaremos paraintroducir los datos en el programa de WinQSB en el apartado NonlinearProgramming son:Para x1=0..6 y x2=0..7Despues introducimos la función objetivo y las restricciones en el programaWinQSB:
El resultado de los datos anteriores se muestra en la siguiente tabla:
Esto significa que la función objetivo se minimiza en 25.1126 para los intervalosintroducidos en los puntos que se muestra en la tabla anterior.
Referencias
• Luis (2012), Ejercicios de programación no lineal. Instituto Tecnológico superior de Felipe Carrillo Puerto.