Metodo I.a.v. - Victor Irureta - Atropello
30
ADVERTENCIA Y ACLARACIÓN: El contenido del presente archivo no es autoría de los profesionales de Galton – Investigaciones Criminalísticas. El mismo se trata de una transcripción textual de la exposición realizada por el Ing. Víctor Irureta en el marco del Iº Seminario Internacional de Accidentología Vial realizado en la ciudad de Resistencia – Chaco durante el mes de mayo del año 2.010. METODO I.A.V. INSTITUTO DE ACCIDENTOLOGIA VIAL accidentologí[email protected] ING. VÍCTOR IRURETA I- RECONSTRUCCIÓN DE ACCIDENTES CON PEATONES El problema dista de ser sencillo dada la gran cantidad de variables involucradas, y la escasez de datos objetivos, que como secuelas o indicios quedan luego del accidente. Por ejemplo, raramente se tiene certeza sobre el sitio exacto donde ocurrió el impacto. • SOLUCIONES TEÓRICAS • SOLUCIONES EMPÍRICAS
Transcript of Metodo I.a.v. - Victor Irureta - Atropello

ADVERTENCIA Y ACLARACIÓN: El contenido del presente archivo no es autoría de los profesionales de Galton – Investigaciones Criminalísticas. El mismo se trata de una transcripción textual de la exposición realizada por el Ing. Víctor Irureta
en el marco del Iº Seminario Internacional de Accidentología Vial realizado en la ciudad de Resistencia – Chaco durante el mes de mayo del año 2.010.
METODO I.A.V. INSTITUTO DE ACCIDENTOLOGIA VIAL
accidentologí[email protected]
ING. VÍCTOR IRURETA
I- RECONSTRUCCIÓN DE ACCIDENTES CON PEATONES
El problema dista de ser sencillo dada la gran cantidad de variables involucradas, y la escasez de datos objetivos, que como secuelas o indicios quedan luego del accidente. Por ejemplo, raramente se tiene certeza sobre el sitio exacto donde ocurrió el impacto.
• SOLUCIONES TEÓRICAS
• SOLUCIONES EMPÍRICAS

SOLUCIONES DISPONIBLES: TIRO OBLICUO:
Schmidt y Nagel Stcherbatcheff Frenando 10 a 40 km/h
POSICIÓN FINAL
S
V
osenSgVPα2
.=
HueHVx ..2 −+= μ
Sge ...2 μ=
)..03,0(.2
2
aVIa
VIS +=

1979 Collins John y Angela Searle 1983
Sólo son válidas para trayectorias que se originan al mismo nivel que la posición de reposo, cuando en la realidad raramente se da esta situación.
V
1 h
VP
POSICIÓN FINAL
S
V
DESLIZAMIENTOSZONA DE REBOTES Y
μμ
.54,2.2
.54,2.4
97,797,7
2
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛+⎟⎟
⎠
⎞⎜⎜⎝
⎛±
−
=
Shh
VI
8,0=μ
αμαμ
senSgVP
.cos...2
+=
SgVP ...2max μ=

• Además, requieren la estimación del ángulo de proyección respecto de la horizontal.
• Véase en el gráfico que, para la misma trayectoria es distinta la velocidad, la
altura y distinto el ángulo de proyección. • Tampoco es considerada la incidencia del peso del peatón. La primera objeción fue subsanada por el mismo Searle en un trabajo de 1993 1992 Eubanks y Haight (Unidades británicas) “d” es la distancia del punto de contacto sobre el capot y el de salida del peatón (pies). 1991 Denis Wood • ”Vph” es la velocidad horizontal que el impacto impone al peatón • “Vpv” es la velocidad vertical que el impacto le impone al peatón.
αμαμμ
senhSgVP
.cos)..(..2
++
=
7,0=μ
( )
μ
μαα
4,642
4,64.4
1.161,16
2
ShosenVpe
dhosenVpe
d
VI
−−⎟⎟
⎠
⎞⎜⎜⎝
⎛+
+±⎟⎟
⎠
⎞⎜⎜⎝
⎛+
+−
=
doVphVpv
gVphS pp
p
..1..2
22
μμμ
+⎟⎟⎠
⎞⎜⎜⎝
⎛+=

• “do” es la diferencia de la altura del punto de impacto y el de posición final del cuerpo
II- PRESENTACIÓN DEL MÉTODO I.A.V • Pretende subsanar algunos de los inconvenientes de los métodos
mencionados. • Nuestra metodología es una combinación de la dinámica de la partícula con
adecuación a condiciones reales y datos obtenidos empíricamente. • Permite resolver muchos casos hasta ahora insolubles por carencia de datos,
por ejemplo aquellos en los que solamente es conocida la distancia entre las posiciones finales del rodado embistente y del cuerpo del peatón.
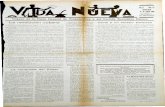
VALIDACIÓN DEL MÉTODO • Excelente correspondencia con datos empíricos, como los presentados por
Appel, Stürtz y Gotzen (influence of impact speed and vehicle parameters on injuries of children and adults in pedestrian accidents
• El mismo estudio que validó a Searle
PROPIOSVALORES
80
70
CAMPODATOS DE
SEARLEVALORES SEGÚN
40 MILLAS/H
30 MILLAS/h
20 MILLAS/h
10 MILLAS/h
60
50
40
30
20
10
DISTANCIA TOTAL DEPROYECCIÓN "S" EN METROS403020100
hg-h=0,2
VIVP
VP
VEL
OC
IDAD
DE
PRO
YEC
CIÓ
N "V
P" Y
DE
IMP
ACTO
"VI"
Km/h
IMPACTO SOBRE EL COSTADO DEL PEATÓN ADULTO

COMENTARIO SOBRE EL MÉTODO • La determinación de la velocidad de proyección, conocida la distancia total de
proyección “S”, es más sencilla con otros métodos, por ejemplo aplicando Searle.
• Hemos desarrollado este camino paralelo para verificar la validez de nuestro
método. • Es aplicable a casos hasta ahora insolubles, como por ejemplo cuando sólo se
conoce la distancia entre posiciones finales del rodado y el cuerpo - que en realidad es el caso más frecuente-,
• Y para todas las trayectorias del cuerpo • Además, el método I.A.V. a diferencia de los anteriores, permite, y requiere,
considerar las características antropomórficas del peatón y su actitud en el momento del impacto, lo que le confiere mayor especificidad.


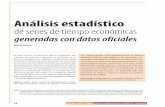
III- DESARROLLO DEL METODO I. A. V. HITOS -ETAPAS
• Para obtener un cuadro general consideraremos “montado sobre capot”, ya
que en esta trayectoria están presentes todas las etapas I- Impacto Hay cambio en la cantidad de movimiento del peatón y el rodado II- El cuerpo alcanza la velocidad del rodado “A” aceleración del cuerpo III- Comienza desaceleración del rodado “B” portación del cuerpo Entre II y III el cuerpo es portado a la velocidad post impacto IV- Separación Etapa “C” movimiento sobre el capot Entre III y IV el cuerpo se desliza sobre el capot V- El cuerpo llega al piso Etapa “D” “vuelo” Entre IV y V el cuerpo del peatón realiza el Tramo aéreo de su proyección, VI- Posición final del cuerpo Etapa “E” “deslizamiento” Entre V y VI el cuerpo se desliza, rueda y rebota Hasta su posición final
VPA
I II III IV V VI
CBA
VI VPI VPI VPI Vr
ED
VPV
VDVx=VD
Vy

DETERMINACIONES • Es conveniente, en la sistematización presentada, para hallar las velocidades
en las diferentes fases /etapas, empezar desde la posición final y retroceder en la secuencia de los hechos.
Etapa E “Deslizamiento”: • A esta etapa y la siguiente (D) –anterior cronológicamente- • Se circunscriben todas las metodologías de cálculo hasta ahora presentadas, • Todos los métodos de cálculo mencionados consideran sólo el fenómeno
desde el momento de la proyección hasta la posición final del cuerpo,
• Entre V y VI transcurre la fase de la trayectoria del peatón, en la cual, luego de
llegar al piso, sigue su movimiento debido a su inercia, agotando su energía cinética en rozamientos, rebotes y rodaduras sobre el mismo.
• Se puede calcular en función del deslizamiento únicamente, ya que los
rebotes son prácticamente inexistentes (coeficiente de restitución de cuerpo sobre piso es despreciable – E=0,005).
• Esto implica que la energía cinética debida al movimiento vertical del cuerpo
cayendo es disipada, en su totalidad, por las deformaciones que sufre el cuerpo.
• las eventuales rodaduras también pueden reemplazarse por deslizamientos,
ya que éstos disipan mayor energía que las rodaduras por unidad de longitud.
Vy
VD
LA
S
LD
V
Vx
V VI

• Wood (910814), tras analizar varios estudios y ensayos propone un valor medio del coeficiente de deslizamiento, que considera fricción, rebotes y rodaduras del peatón de m=0,529 , (muy similar al obtenido por Bratten –890859- m =0,485),
• Desde el momento del “aterrizaje”, no habiendo movimiento vertical, la
energía que provoca el deslizamiento del cuerpo sobre el piso es su energía cinética “ECc”, cuyo valor es:
(1) • Donde “Mc” es la masa del cuerpo y “VD” es la velocidad al inicio del
deslizamiento. • Esta energía cinética se transforma íntegramente en trabajo de rozamiento
durante el recorrido del cuerpo hasta la posición de reposo, (en la que, obviamente, su velocidad será cero).
• El trabajo realizado por el rozamiento, “TR”, a lo largo de la distancia de
deslizamiento “LD” es: (2) • Donde “Pc” es el peso del cuerpo y “m” el coeficiente de rozamiento cuerpo-
piso. • Igualando la energía cinética y el trabajo de rozamiento en que ésta se
convierte: (3) • Como , (4) • Siendo “g” la aceleración de la gravedad, podemos poner (5) • Simplificando y operando resulta:
(6)
2..5,0 VDMcECc =
LDPcTR ..μ=
LDPcVDMc ....5,0 2 μ=
gMcPc .=
LDgMcVDMc .....5,0 2 μ=
LDgVD ...2 μ=

• Esta ecuación nos permite hallar la velocidad a la que se inicia el deslizamiento si se conoce la distancia entre el punto de contacto con el piso y la posición final del cuerpo.
• A veces se cuenta con indicios suficientes como para obtener este dato, como
ser alguna mancha hemática o el inicio de una zona que asemeja a un “barrido” provocada por el deslizamiento sobre un pavimento polvoriento, barroso o húmedo.
• Frecuentemente no es así, por lo que debemos analizar fases previas para
solucionar ésta, especialmente el tramo de proyección aéreo Etapa D “Vuelo”:
• Entre IV y V, el tramo de proyección por el aire, sin mayor error puede
considerarse libre de rozamientos, y puede ser determinado por las ecuaciones de tiro en el vacío
• Esta fase comienza con el cuerpo moviéndose a “VP”, velocidad de
proyección y finaliza con el cuerpo a “Vc”, es decir velocidad de contacto con el piso.
• La proyección horizontal de la velocidad de contacto “Vc”, “Vx” (que es la
misma que la proyección horizontal de la velocidad de proyección “VP”) está relacionada,, con la velocidad de deslizamiento “VD” por la ecuación: (7)
V
LAS
h
VyO
y
VP
ymax x
c
vx
Vy
VI
LDVD
cV
H
VycVDVx .μ=−

El cuerpo llega al piso con “Vc”, que tiene como componentes a “Vx” y “Vyc” según los ejes horizontal y vertical respectivamente
Tras el contacto el cuerpo “rebota” con una velocidad “V1”, que tiene por componentes a “VD” y a “Vy1”. La relación entre “Vyc” y “Vy1” será el coeficiente de restitución “K” (8) • Llamando “P” a la carga vertical, “R” será la resistencia al movimiento
horizontal tal que (9) • Siendo “μ” el coeficiente de rozamiento dinámico entre el cuerpo y el piso. • La variación de la cantidad de movimiento “CM” del cuerpo en el eje
horizontal es: (10) • “Vx” y “VD” son las velocidades horizontales antes y después del impacto con
el piso • Sabemos por la teoría de choques que la variación de la cantidad de
movimiento es igual al Impulso, entonces aplicando esto al movimiento horizontal:
(11) • En la que “ΔT” es la duración del impacto, y “R” la fuerza horizontal actuante
durante el mismo
Vyc
Vx VD
Vc
Vy1V1
VycVyk 1
=
μ=PR
).()( VDVxmvmmvCMh −=Δ=Δ=Δ
TRVDVxm Δ=− .).(

• Análogamente, analizando la variación de la cantidad de movimiento vertical (12) • En la que “Vyc” y “Vy1” son las velocidades verticales antes y después del
impacto, “ΔT” es la duración del impacto, y “P” la fuerza vertical actuante durante el mismo.
• Dividiendo miembro a miembro las ecuaciones (11) y (12) obtenemos: • Por (9) podemos poner • Es decir (13) • De (8) “Vy1” puede asumirse como nula • Entonces; • Por no haber aceleraciones de sentido horizontal, en este movimiento no hay
modificación de la componente horizontal de la velocidad de proyección VP (sólo está sometido a la aceleración de la gravedad).
(14) (15) • “V” es la velocidad del cuerpo y “α” es el ángulo que forma su trayectoria con
la horizontal en cada instante, “α0” es el ángulo de proyección o ángulo inicial.
• Recordar que de (7) : • La aceleración de la gravedad modifica en cada instante la componente de la
velocidad según el eje vertical: (16)
TPVyVcym Δ=− .)1.(
PR
VyVcyVDVx
=−−
1
μ=−−
1VyVcyVDVx
)1.( VyVcyVDVx −=− μ
VcyVDVx .μ=−
oVPVxo αcos.=osenVPVyo α.=
.cos.cos. cteVPVVxVxo o ==== αα
VycVDVx .μ=−
tgsenVPVy .. 0 −= α

• En dirección vertical la aceleración de la gravedad se opone a la elevación del cuerpo, hasta que se detiene verticalmente y luego provocando su caída con movimiento uniformemente acelerado.
• Las ecuaciones que rigen este movimiento son: (17) (18) • Donde “x” es la distancia horizontal del cuerpo al origen en el instante “t”, e
“y” es la distancia vertical al origen o altura del cuerpo en el instante “t” • Como el movimiento tiene un único origen de tiempo, “t” es el mismo en cada
instante para las ecuaciones (17) y (18), por lo que eliminando “t” entre ellas y operando:
(19) • Cuando el cuerpo toca el piso y= - h (“h” es la altura desde donde se proyecta
al cuerpo, respecto del plano de “aterrizaje”, y es donde fijamos el origen de coordenadas), en este instante el cuerpo habrá recorrido horizontalmente la distancia “LA” desde el origen de la proyección (punto de separación del rodado).
• Entonces: Operando y por (14 ) : (21) • La componente vertical de la velocidad de caída puede obtenerse a partir de
las ecuaciones de caída libre: (22) • Donde “H” es la altura desde la cual cae el cuerpo, es decir la altura máxima
desde el piso que alcanza el cuerpo en su trayectoria. • “h” es la altura- medida desde el piso- desde la cual se inicia la proyección
(altura del centro de gravedad del cuerpo en el momento de la proyección)
tVPx .cos. 0α=2
0 ..5,0.. tgtsenVPy −= α
20
2
0 )cos.(..5,0.α
αVP
xgtgxy −=
20
2
0 )cos.(..5.0.α
αVP
LAgLAtgh −=−
)./(..5,0 2 otgLAhLAgVx α+=
)max.(.2..2 YhgHgVyc +==

• “Ymax” es la altura máxima de la trayectoria medida desde la altura de proyección
Para calcular Ymax: • De la ecuación general de tiro vertical: • Cuando el cuerpo llega a su máxima altura la velocidad vertical se anula,
pues el cuerpo va reduciendo su velocidad por acción de la gravedad: • Vymax=0 • Entonces: con lo que, operando Y reemplazando este valor en la (7) • Teniendo en cuenta que • Llamando Podemos poner, (28) (29) • Y, como por (6) • Recordando que “S” (distancia total de proyección) es la suma del tramo
aéreo “LA” y la del de deslizamiento “LD”. S= LA+LD, es decir LD= S-LA
max..2max 2 YgVyoVy −=
max20 2 gYVyo −=
gVyoY
.2max
2
=
).2
.(.2.2
gVyohgVDVx +=− μ
otgVxVyo α=
otgF α=22 ).(..2 VxFhgVDVx +=− μ
LAFhLAgVx
.2.+
=
LDgVD ...2 μ=

• Reemplazando este valor en (6) • O, lo que es lo mismo: (32) Obtención del ángulo de proyección • Para obtener “LA” es necesario conocer “αo”, pero, salvo casos específicos de
proyección horizontal o cabeceo del auto tras portar al peatón, el ángulo de proyección “αo” es esencialmente desconocido.
• La forma más sencilla de determinar “αo” es seguir el criterio de Wood
(8910814) quien ha determinado este valor en función de la diferencia de alturas entre la del centro de gravedad del peatón y altura del borde más alto del frente del rodado con el que impacta el peatón, el que más arriba hemos llamado punto de “segundo contacto”. Diferencia de alturas que llamaremos “I2”
• Wood también menciona diferencias entre el ángulo de proyección en
función de la posición relativa del peatón al ser embestido, distinguiendo
I2
)(..2 LASgVD −= μ
LASgVD −= μ2

entre impacto sobre el costado del peatón y golpeando a éste de frente o de atrás.
• Así, de la figura Nº 3 del trabajo de Wood mencionado obtuvimos las
ecuaciones siguientes: • Para embestimiento de costado: • Para embestimientos de frente o de atrás: • Nótese que cuando “I2” es igual a cero, “F=tgαo” también lo es, es decir que
se trata de proyección horizontal. Etapa C “Movimiento Sobre El Capot”: • Tras alcanzar la velocidad post impacto del rodado (VPI), el cuerpo se mueve
solidariamente con el rodado (velocidad relativa cuerpo-rodado es nula), hasta que el rodado aplica sus frenos.
• En los casos en que el cuerpo es portado por el rodado, ya hallada la
velocidad de proyección “VP”, es posible calcular la velocidad post impacto “VPI”:
• Entre III y IV el cuerpo presenta un movimiento relativo al capot del rodado,
provocado por la aceleración relativa. • El rodado está frenando y la inercia impone al cuerpo seguir avanzando,
avance éste al que se opone el rozamiento entre el cuerpo y el capot.
2.09,1 IF =
2.623,0 IF =

• Esta etapa comienza con el cuerpo animado de “VPI” Velocidad Post Impacto y finaliza con el cuerpo a “VP”, Velocidad de Proyección.
• Fijando el origen de coordenadas al rodado, el movimiento relativo del cuerpo
es hacia delante, con la aceleración “a” con la que el auto frena: (30) • Donde “μa” es el coeficiente de rozamiento neumáticos-piso. • Es decir que el cuerpo sufre una fuerza acelerante respecto al auto “Fa”: (41) • Por otro lado, el rozamiento del cuerpo con el capot (o la parte del rodado
correspondiente) se opone al movimiento relativo con una resistencia “R” tal que:
(42) • Donde “μC ” es el coeficiente de rozamiento cuerpo-rodado, y “Pc” es el
peso del cuerpo. • Según Eubanks (921591), el valor de “μC ” es del orden de 0,29.
Como podemos poner: (43) Comparando la (43) con la forma de la primera Ley de Newton , comprobamos que (44)
• La fuerza resultante sobre el cuerpo será entonces (45) • Obviamente sólo habrá movimiento relativo si F es mayor que R. • Reemplazando (41) y (43) en la (45) y operando: (46)
aga μ.=
agMcaMcFa μ... ==
PcR c .μ=
gMcPc .=
McgR c ..μ=
McacrR .=
gacr c .μ=
RFaFr −=
McgFr ca .).( μμ −=

• Como , entonces: (47) • Donde “ar” es la aceleración relativa resultante. • La (47) demuestra que sólo existirá movimiento relativo si μa es mayor que
μC • La velocidad del cuerpo al finalizar el contacto con el rodado “Vf”, tras
recorrer una distancia de contacto “d”, es la resultante de un movimiento uniformemente acelerado con velocidad inicial “Vi”:
• En este caso, como tratamos el movimiento relativo entre el cuerpo y el
coche la velocidad inicial será Vi=0, • la aceleración será “acr” y “d” la distancia de contacto (la longitud del rodado
durante la cual estuvo en contacto el cuerpo con éste, entonces la velocidad relativa del cuerpo al instante de finalizar el contacto con el rodado Vfr será.
(48) • Como • Recordando que Será: (48.a)
arMcFr .=McFrar /=
gar ca ).( μμ −=
daViVf .2 +=
dacrVfr .=
dacrVfr .=
gar ca ).( μμ −=
dgVfr ca .).( μμ −=

• Con la ecuación general: • Podemos obtener el lapso “t3” en que el cuerpo está en contacto con el
rodado, recordando que en este caso la velocidad inicial relativa es nula: (49) • Este tiempo t3 nos permite determinar la distancia “da” que recorre el auto
respecto del piso, mientras se “despega” el cuerpo, recordando que mientras tanto el auto es desacelerado con aceleración “ ” (40) según:
(50) • Para obtener el valor de la velocidad de salida respecto del piso (VP)
consideramos al cuerpo aisladamente: • El cuerpo aislado tiene una velocidad inicial VPI y empieza a ser frenado
respecto del piso debido al rozamiento del capot y mientras esté en contacto con éste.
• Recordemos que el cuerpo es objeto de dos aceleraciones que se
contraponen, siendo la resultante “ar”, negativa ahora, porque se opone al movimiento del cuerpo
• Operando: (51) • En algunos casos es necesario conocer la velocidad del rodado en el instante
de la separación del cuerpo “VAP”.
=0y
Vi=0Vi
x
III
da
Vi=0
d
Vr
IV
Vfr
tViVfa −
=
acrVfrt /3 =
ga a .μ=2
33 ...5,0. tgtVPIda aμ−=
darVPVPI ..222 =−
dgVPVPI ca .)..(22 μμ −+=

• El lapso en que el cuerpo está en contacto con el auto es, tomando velocidades respecto de piso: (52)
• Operando: (53) • Recordando que el lapso de separación t3 es el mismo, ya sea que tomemos
el origen de coordenadas tanto solidario al piso, como solidario con el rodado, podemos igualar las (49) y (52):
(54) • Como la velocidad de proyección respecto del piso “VP” es, en este caso, igual
a la velocidad del auto en el instante de la proyección “VAP” respecto del piso más la velocidad relativa al auto de proyección “Vfr”.
(55) • Las (48), (51) (54) y (55) forman un sistema de cuatro ecuaciones con cuatro
incógnitas VP- VAP- Vfr- VPI, que permite hallar sus valores. • Cuando el cuerpo no es portado por el rodado, (por ejemplo en proyección
frontal) esta etapa y la siguiente no existen, y puede asumirse que la velocidad post impacto “VPI” es la misma que la velocidad de proyección “VP”
gVAPVPIt
a .3 μ
−=
3.. tgVPIVAP aμ−=
acrVfr
gVAPVPI
a .μ−
=
VfrVAPVP +=
dacrVfr .=
dgVPVPI ca .)..(22 μμ −+=
acrVfr
gVAPVPI
a .μ−
=
VfrVAPVP +=

Etapa B. “Portación del Cuerpo”: • Entre II y III el cuerpo es portado a la velocidad post impacto VPI sobre el
rodado, • Esta etapa implica una distancia indefinida, ya que puede: • No existir, como en el caso de las proyecciones frontales (el centro de
gravedad del cuerpo está a menor altura que el borde superior del capot) • Ser insignificante, cuando el rodado frena inmediatamente tras el impacto. • Tener una duración considerable, cuando el rodado no frena o tarda en
hacerlo. • Al comienzo y al finalizar esta etapa la velocidad del cuerpo será VPI • También su duración será importante si el frenado del automóvil es tal que su
factor de desaceleración neumáticos-piso (μa.g) es menor o igual al del cuerpo-carrocería (μc. g).
• En este caso la etapa comienza con velocidad del cuerpo VPI y finaliza con
una velocidad distinta, usualmente nula, ya que el rodado lleva consigo el cuerpo hasta la detención
• En estas raras ocasiones el cuerpo queda sobre o junto al rodado, • En función de eventuales o circunstanciales evidencias, como ser comienzo
de huellas de frenado, a veces es posible determinar la duración de esta etapa.
• Con nuestra metodología al menos se podrá acotar la distancia mínima
“Dmin” desde el punto en que pudo ser embestido el peatón hasta su punto de reposo, mediante considerar que no hubo traslado significativo a velocidad post impacto, es decir considerando que la etapa “B” no existió.
• Tal que Etapa A. “Aceleración Del Cuerpo”: • Entre I y II el automotor sufre una desaceleración y el cuerpo es acelerado
debido al choque hasta la velocidad del mismo • (S.J. Ashton y G. M. Mackay. Car Design For Pedestrian Injury Minimization -
796057- 7º Conference On Experimental Vehicles, París 1979)
dwdaSD ++=min

• - Eubanks (921591)
• Si “VI” es la velocidad de circulación inicial o velocidad de impacto y “MA” es
la masa del rodado, siendo “Vk” la velocidad del cuerpo y “Mc” su masa, tenemos que la cantidad de movimiento inicial “CMI” será
• Luego del impacto, las masas (cuerpo y rodado) permanecen unidas
formando una masa total “MT”, tal que , • y la velocidad del conjunto será la velocidad post impacto “VPI”. • La cantidad de movimiento instantes después del impacto será • Del principio de Conservación de la Cantidad de Movimiento, las cantidades
de movimiento antes y después del impacto son iguales: CMI=CMPI, entonces resulta:
• De la que podemos despejar (56) • Ecuación con la cual podemos obtener la velocidad de impacto “VI” si
conocemos la velocidad post impacto VPI, dado que usualmente la velocidad del peatón “Vk” en la dirección de la del rodado es nula, o despreciable su efecto en la velocidad del rodado, entonces.
A
IVI
II
VPIVPI
McVkMAVICMI .. +=
McMAMT +=
MTVPICMPI .=
MTVPIMcVkMAVI ... =+
MAMcVkMTVPIVI .. −
=

(57) • Con la cual queda determinada la velocidad de impacto “VI”. Distancia recorrida durante la aceleración • Puede ser necesario, como veremos más adelante, conocer la distancia “dw”
recorrida por el auto entre I y II, es decir entre el primer contacto y el momento en que el cuerpo alcanza la velocidad del rodado,
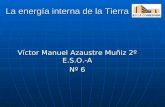
• este dato surge de considerar que cuando la cabeza o el torso contactan con
la estructura del rodado todo el cuerpo ha sido acelerado, y, en base a los resultados de ensayos y estudios como los de Kessler ( Paper Nº 87610), Schneider y Beier (741177), Cavallero-Cesaria y Ramet ((830624) podemos asumir sin error significativo que “dw” es la distancia recorrida por el automóvil equivalente al “wraparound
wraparound
• Es decir “dw” es la distancia medida verticalmente desde el piso hasta el
extremo más adelantado del rodado y desde éste sitio hasta el punto de contacto de la cabeza con la estructura del rodado, contorneando el perfil de la “trompa”.
• El wraparound considera entonces la influencia de la forma del frente, su
punto más saliente y su altura máxima, así como la altura del peatón y el grado de rigidez que tenía su cuerpo en el momento y posición de ser embestido
• Si bien “dw”, así definida, no es una medida exacta, brinda suficiente
aproximación a los fines de este cálculo
PUNTO DECONTACTODE CABEZA
WRAPAROUND
MAMTVPIVI .
=

• El tiempo “t0”que tarda esta etapa puede determinarse a partir de considerar que la velocidad media multiplicada por el tiempo nos da la distancia recorrida en ese lapso
, con lo que: (57.b) • Lapso, que en algunos casos nos servirá para determinar la evitabilidad física
del accidente UNA APLICACIÓN • A modo de ejemplo aplicaremos el método al cálculo de la velocidad de
impacto conocida sólo la distancia entre posiciones finales del rodado y el peatón con ángulo de proyección nulo, para trayectoria Montado Sobre Capot:
• Desde el punto de proyección hasta la posición final del cuerpo, la distancia
es “S”, formada por la suma de “LA” y “LD”, como ya hemos descripto. • “S” también puede ser considerada como formada por la distancia habida
entre las posiciones finales “DF” y la distancia recorrida por el automóvil desde el punto de proyección hasta su posición final “DFA”
• Es decir (30) y : (58) Con lo que (59)
VP=Vx
cVcVy
Vx
VD
DFA DFSEPARACIÓNVPA
LA
S
LD
DEL RODADOPOSICIÓN FINAL POSICIÓN FINAL
DEL CUERPO
2/).(0 VPIVItdw +=
VPIVIdwt+
=.2
0
LDLAS +=
DFDFAS +=
DFDFALDLA +=+

(60) • La distancia de frenado del auto desde la proyección hasta su detención es
“DFA”, que surge de (considerando la energía cinética transformada en rozamiento con el piso): (61)
(62) • Donde “VAP” es la velocidad del auto en el instante de la proyección del
cuerpo • Como la velocidad de proyección respecto del piso “VP” es, en este caso, igual
a la velocidad de auto en el instante de la proyección “VAP” respecto del piso más la velocidad del cuerpo relativa al auto en ese instante “Vfr”.
(55) • de (55): (63) • En este caso (proyección horizontal) (64) y de (48): (72) (73) • “d” es la longitud del rozamiento del cuerpo con la carrocería, “μa” el
coeficiente de rozamiento neumáticos-piso y “μc” es el coeficiente de rozamiento cuerpo carrocería
• La velocidad de deslizamiento “VD” provocará un deslizamiento del cuerpo
sobre el piso por una distancia “LD” tal que (6) • De donde (65)
0=−−+ DFDFALDLA
DFAgVAP a ...2 μ=
agVAPDFA
μ..2
2
=
VfrVAPVP +=
VfrVPVAP −=
VxVP =
dacrVfr .=
dgVfr ca .).( μμ −=
LDgVD ...2 μ=
μ..2
2
gVDLD =

• En este caso (proyección horizontal) (64) • Ya hemos visto que en caso de proyección horizontal la velocidad de
proyección provoca una trayectoria del cuerpo tal que su tramo de vuelo insume una distancia horizontal “LA” tal que de la (21)
(58) • De donde (64) • Reemplazando (64), (65) y (62) en la (60): • Recordando que, en este caso por ser, Vx=VP, reemplazamos en la anterior,
junto con la (63) para obtener: • Es decir: (66) • Recordando que: (28) • Y que en este caso (69) (67)
VxVP =
hLAgVxVP /..5,0 2==
ghVPLA .2.=
0..2..2
..2 22
=−−+ DFg
VAPg
VDVPgh
aμμ
0..2
)(..2
..2 22
=−−
−+ DFg
VfrVPg
VDVPgh
aμμ
0..2)(...822
=−−
−+ DFgVfrVPVDVPhgaμμ
22 ).(..2 VxFhgVDVx +=− μ
00 ==⇔= otgFo αα
hgVxVD ..2μ−=
222 ...2..2..2 μμ hghgVPVPVD +−=

Reemplazando (67) en (66) y desarrollando • Ecuación cuadrática en “VP”, cuya solución es: (68) • Es condición para la solución que “VP” sea positiva • Hallado así el valor de “VP=Vx”, • con la (69 ) obtenemos “VD”, • con la, (64) obtenemos “LA”, • con la (65) “LD”, • con la (63) obtenemos “VAP”, • con “VAP” en la (62) obtenemos “DFA”, • con “DFA” y “DF” en la (58) obtenemos “S”, • Tras el impacto el cuerpo aislado tiene una velocidad inicial “VPI” (Velocidad
Post impacto) y empieza a ser frenado respecto del piso debido al rozamiento del capot, lo que ocurre mientras esté en contacto con éste.
(51)
0..2...2..2.11 22 =−−++⎟⎟
⎠
⎞⎜⎜⎝
⎛− DFgVfrhgVPVfrVP
aaa μμ
μμμ
⎟⎟⎠
⎞⎜⎜⎝
⎛−
⎟⎟⎠
⎞⎜⎜⎝
⎛−−⎟⎟
⎠
⎞⎜⎜⎝
⎛−−±−
=
a
aaaa
DFgVfrhgVfrVfr
VP
μμ
μμ
μμμμ112
..2...2.114.42 2
2
2
hgVPVD ..2μ−=
ghVPLA .2.=
μ..2
2
gVDLD =
VfrVPVAP −=
agVAPDFA
μ..2
2
=
DFDFAS +=
dgVPVPI ca .)..(22 μμ −+=

• Hallada “VPI”, podemos obtener la velocidad de impacto con la (56); • Recordando que “VI” es la velocidad de circulación inicial o velocidad de
impacto y “MA” es la masa del rodado, “Vk” la velocidad del cuerpo y “Mc” su masa.
• Como usualmente la velocidad del cuerpo en la dirección del rodado es
despreciable, la (56) se transforma en (57) • Podemos determinar el punto donde empezó la frenada, con la (50) y (52),
donde “da”, distancia de frenado del auto hasta la proyección del cuerpo. (50) • Siendo t3 : (52) • Es decir que sumando “da” a “S” obtenemos la distancia de la posición final
del cuerpo a la que el rodado empezó la frenada, (“DTF”).
MAMcVkMTVPIVI .. −
=
MAMTVPIVI .
=
2
33 ...5,0. tgtVPIda aμ−=
gVAPVPIt
a .3 μ
−=

IV- CONCLUSIONES: • COMO HEMOS VISTO • CON EL MÉTODO I.A.V. ES POSIBLE DETERMINAR LAS VELOCIDADES • DE IMPACTO • DE PROYECCIÓN • DE CONTACTO CON EL PISO • DISTANCIAS • DE VUELO • DE DESLIZAMIENTO • MÍNIMA DE EMBESTIMIENTO • CONOCIENDO SÓLO LA DISTANCIA ENTRE • POSICIONES FINALES • SE HA DESARROLLADO PARA TODAS LAS POSIBLES TRAYECTORIAS DE
PEATONES. • OBVIAMENTE ES VÁLIDO Y MÁS SIMPLE CUANDO SE TIENEN DATOS
INTERMEDIOS • COMO SER PUNTO DE IMPACTO CONTRA EL PISO, Y/O COMIENZO DE
FRENADA. • ESTOS CASOS TAMBIÉN ESTÁN DESARROLLADOS • TAMBIEN HA PERMITIDO DETERMINAR QUE ES CONDICIÓN NECESARIA PARA QUE EL RODADO NO ARROLLE AL PEATÓN QUE ESTÉ FRENENDO EN EL MOMENTO DEL IMPACTO