mecanismos
24
mecanismos
-
Upload
silver-alex -
Category
Documents
-
view
51 -
download
4
Transcript of mecanismos
mecanismos




► Coordenadas independientes: Conjunto de coordenadas independientes (ci): conjunto
mínimo de coordenadas generalizadas necesario y suficiente para describir la configuración del sistema mecánico.
La dimensión de estos conjuntos es una característica del sistema y se denomina número de coordenadas independientes.
► Grados de libertad: Conjunto de grados de libertad (gl): conjunto mínimo de
velocidades generalizadas necesario y suficiente para describir la distribución de velocidades del sistema.
► En número de gl y el de ci no tienen porque coincidir, si bien en la mayoría de los mecanismos lo hacen.

• Los GDL de un ensamble de eslabones predicen por completo su carácter. Hay sólo tres posibilidades:1) GDL positivo: Se tendrá un mecanismo, y los eslabones tendrán movimiento relativo.2) GDL = 0: Se tendrá una estructura, y ningún movimiento es posible.3) GDL negativo: Se tendrá una estructura precargada, por lo que ningún movimiento es posible y algunos esfuerzos pueden también estar presentes en el momento del ensamble.

MOVILIDAD
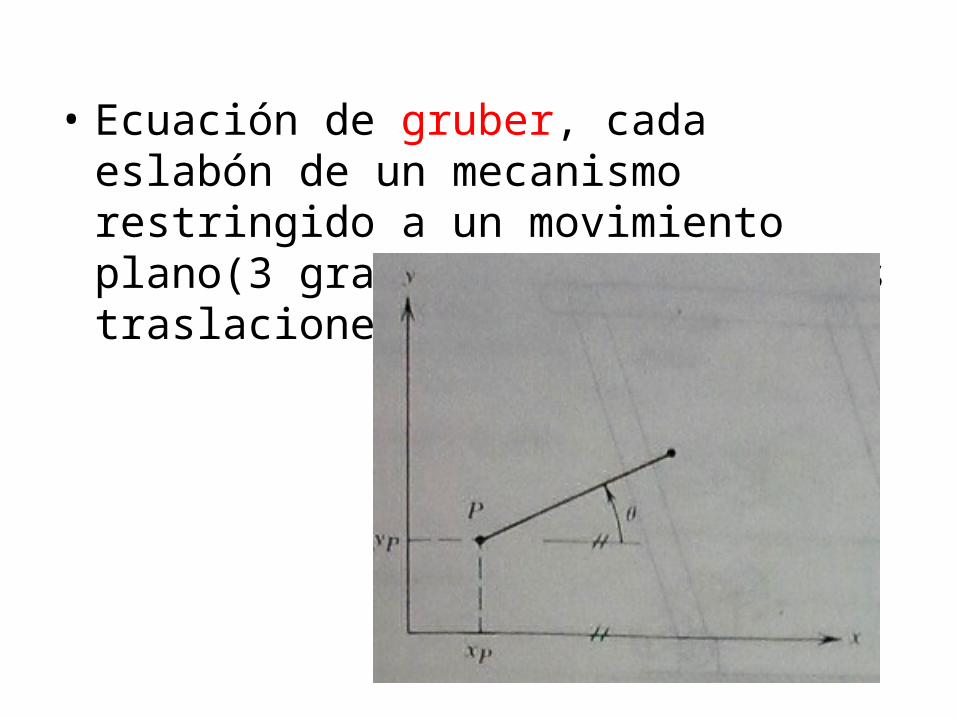
• Ecuación de gruber, cada eslabón de un mecanismo restringido a un movimiento plano(3 grados de libertad: dos traslaciones y una rotación).

• En el espacio.- cada eslabón tendrá seis grados de libertad(tras traslaciones y tres rotaciones)
• A un eslabón de un mecanismo espacial se le quitaran sus seis grados de libertad debido a que se encuentra fijo al piso o base.

Ecuación kutzbach• La movilidad total de un sistema de n eslabones espaciales
interconectados esta dada por:
•M = 6(n-1) - 5f1 - 4f2 - 3f3 - 2f4 - f5
M=movilidad o numero de grados de libertad
N=numero total de eslabones, incluyendo el piso o base
f1 = numero de uniones de un grado de libertad
f2 = numero de uniones de dos grados de libertad
f3 = numero de uniones de tres grados de libertad
f4 = numero de uniones de cuatro grados de libertad
f5 = numero de uniones de cinco grados de libertad

Tipos de uniones o articulaciones

• Esta ecuación debe usarse como auxiliar, no como regla que define la movilidad, existen mecanismos útiles conocidos para los cuales no funciona.

ejemplo• Mecanismo de 4 barras articuladas (como si
fuera dispositivo espacial)
• Su movilidad será…• M=6(4-1)-5(4)=-2

• Obviamente es incorrecto, el problema es que todas las uniones tienen la misma orientación, como resultado no todas ellas son capaces de eliminar cinco grados de libertad
• ahora eliminaremos la unión del punto B y aplicaremos la formula…

• Entonces tendremos que la movilidad del mecanismo es:
• M = 6 (4 – 1) - (5) 3 = 3

• El ejemplo anterior permite ver una situación en que la ecuación de Kutzbach puede fallar en predecir la movilidad, a saber, desafortunadamente, no existe un conjunto de reglas que pueden emplearse para predecir todas las situaciones especiales que pueden surgir.

La junta de hooke
• Esta junta se emplea para conectar dos flechas, y es conocida como junta universal, es un ejemplo de mecanismo esferico, su mayor aplicaciones
se encuentra en el campo automotriz

ejemplo• Mecanismo de revoluta – esférico – esférico -
de revoluta (RSSR), aplicando la ecuación• M=6(4-1)-5(2)-3(2)=2
Este resultado es correcto, pero engañoso.
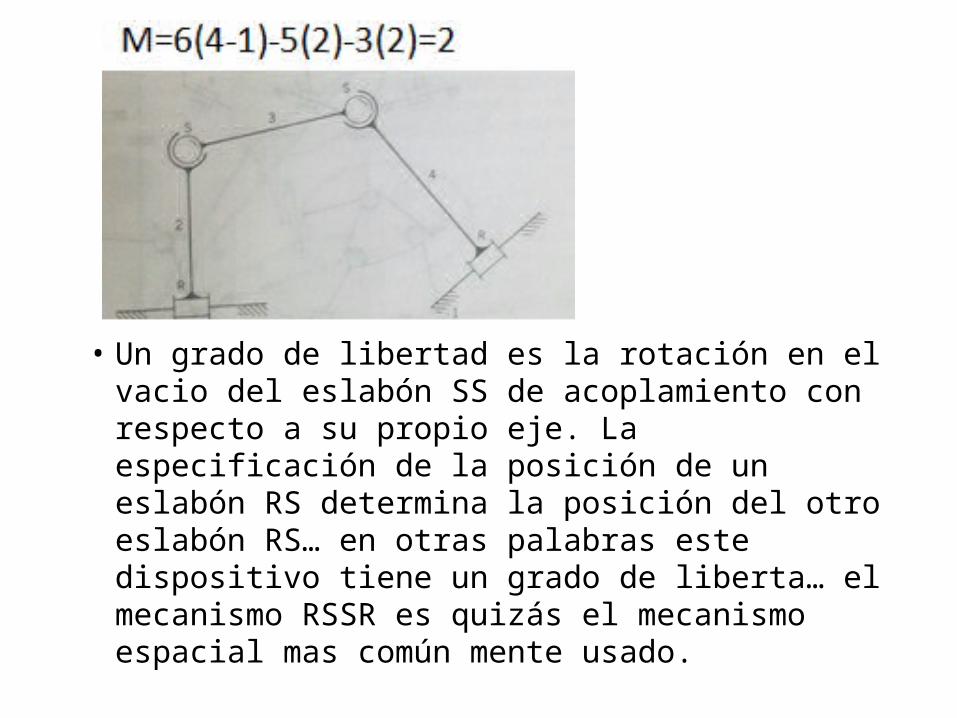
• Un grado de libertad es la rotación en el vacio del eslabón SS de acoplamiento con respecto a su propio eje. La especificación de la posición de un eslabón RS determina la posición del otro eslabón RS… en otras palabras este dispositivo tiene un grado de liberta… el mecanismo RSSR es quizás el mecanismo espacial mas común mente usado.

ejemplo• Determine la movilidad del mecanismo RSSC.
• M=6(4-1)-5(1)-4(1)-3(2)=3

• Otros mecanismos espaciales de eslabones articulados mejor conocidos y mas estudiados