Ligado a Ti_Dependencias Sentimentales_Gabriel J Martin_gb83
description

Mecanica II
Tema 3
Punto sujeto a ligaduras
Manuel Ruiz Delgado
7 de marzo de 2011
Movimiento del punto sometido a ligaduras . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2Punto sobre superficie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3Punto sobre superficie: Ecuacion de la energıa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5Punto sobre superficie: otras consideraciones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6Punto sobre curva: Planteamiento general . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7Punto sobre curva: Proyeccion sobre la tangente . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8Punto sobre curva: ecuacion de la energıa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9Pendulo simple: ecuaciones del movimiento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10Pendulo simple: analisis cualitativo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11Pendulo simple: reaccion normal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14Pendulo simple: desprendimiento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15Ley Horaria del Pendulo Simple . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18Periodo del Pendulo Simple. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19Ejercicio: Pendulo simple con rotacion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
1
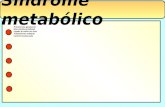
Movimiento del punto sometido a ligaduras
Planteamiento del problema
Punto libre:
3 GDL 3 Ecs 3 Incsx, y, z CM x(t), y(t), z(t)
Punto sometido a 1 ligadura:
• Anadir fuerza y ecuaciones de la ligadura
2 GDL 4 Ecs 4 Incsx, y, z(x,y) CM+Lig x(t), y(t), z(t), N(t)
• Buscar las direcciones de los GDL
2 GDL 2 Ecs 2 incsu, v CMu, CMv u(t), v(t)
Manuel Ruiz - Mecanica II 2 / 23
Punto sobre superficie
Planteamiento general
M
N
F
f(x, y, z)
Superficie lisa:
f(x, y, z) = 0 ↔ N = λ∇f
m r = F(r, r, t) + λ∇f
f(x, y, z) = 0
}
→x(t), y(t), z(t)
λ(t)
4 Ecs, 4 Incs → Sistema cerrado
Superficie rugosa: hay que ver que version del modelo de Coulomb se aplica.
Si inicialmente esta en reposo, se resuelve un problema de estatica para ver si empieza a moverse(|R| > µ |N |) o no (|R| ≤ µ |N |)Si r0 6= 0, se aplica directamente R = −µ|N | r
|r|
Manuel Ruiz - Mecanica II 3 / 23
2
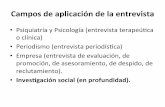
Punto sobre superficie
Proyeccion sobre el plano tangente
M
NF
ru
rv
v=Cte.u=Cte.
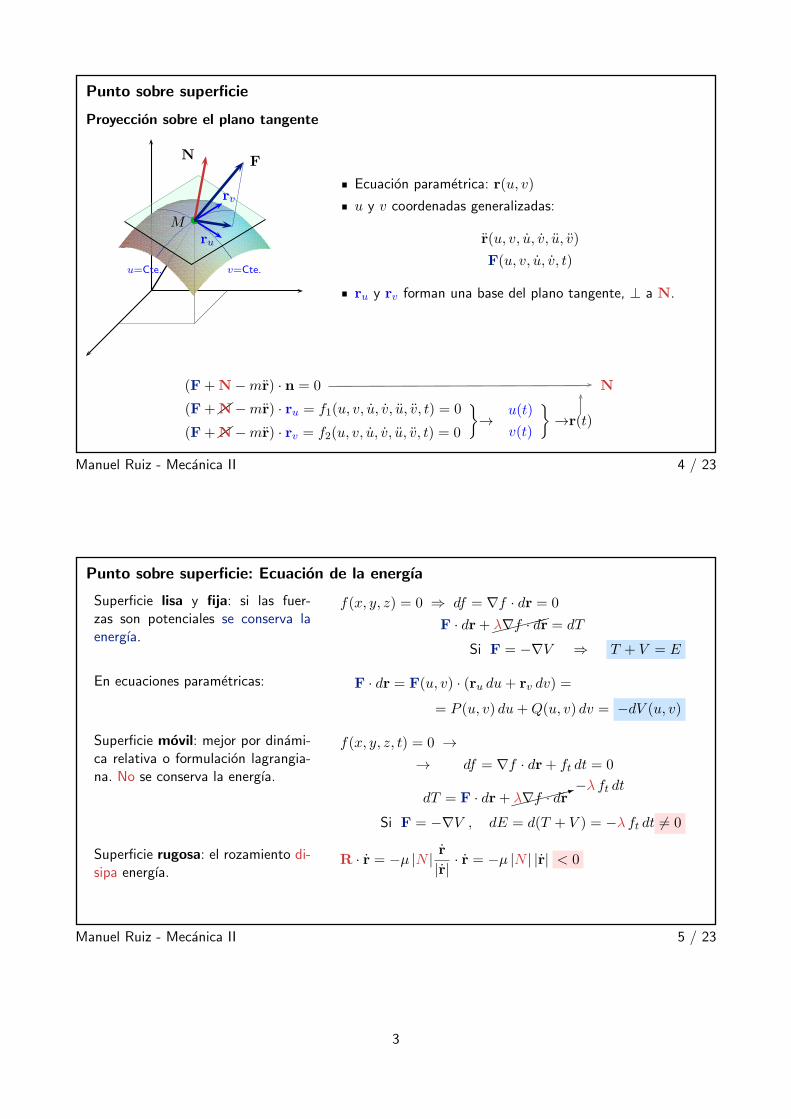
Ecuacion parametrica: r(u, v)
u y v coordenadas generalizadas:
r(u, v, u, v, u, v)
F(u, v, u, v, t)
ru y rv forman una base del plano tangente, ⊥ a N.
(F+N−mr) · n = 0 N
(F+��N−mr) · ru = f1(u, v, u, v, u, v, t) = 0
(F+��N−mr) · rv = f2(u, v, u, v, u, v, t) = 0
}
→u(t)
v(t)
}
→r(t)
Manuel Ruiz - Mecanica II 4 / 23
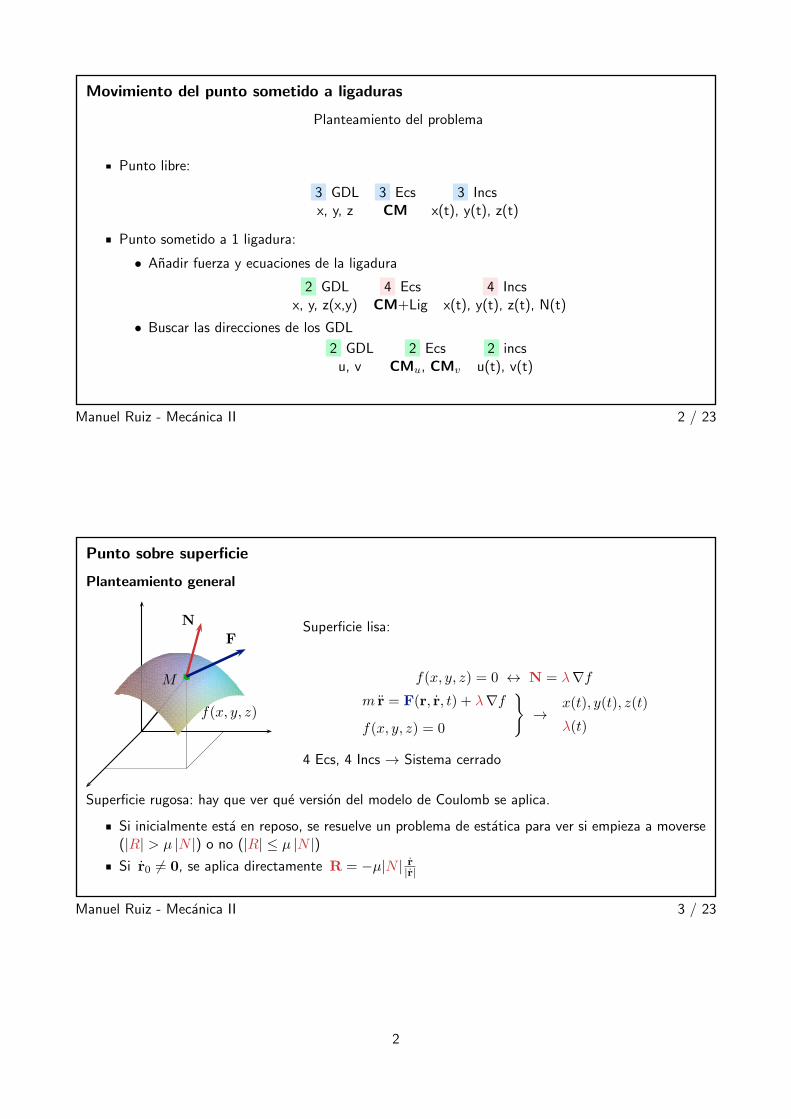
Punto sobre superficie: Ecuacion de la energıa
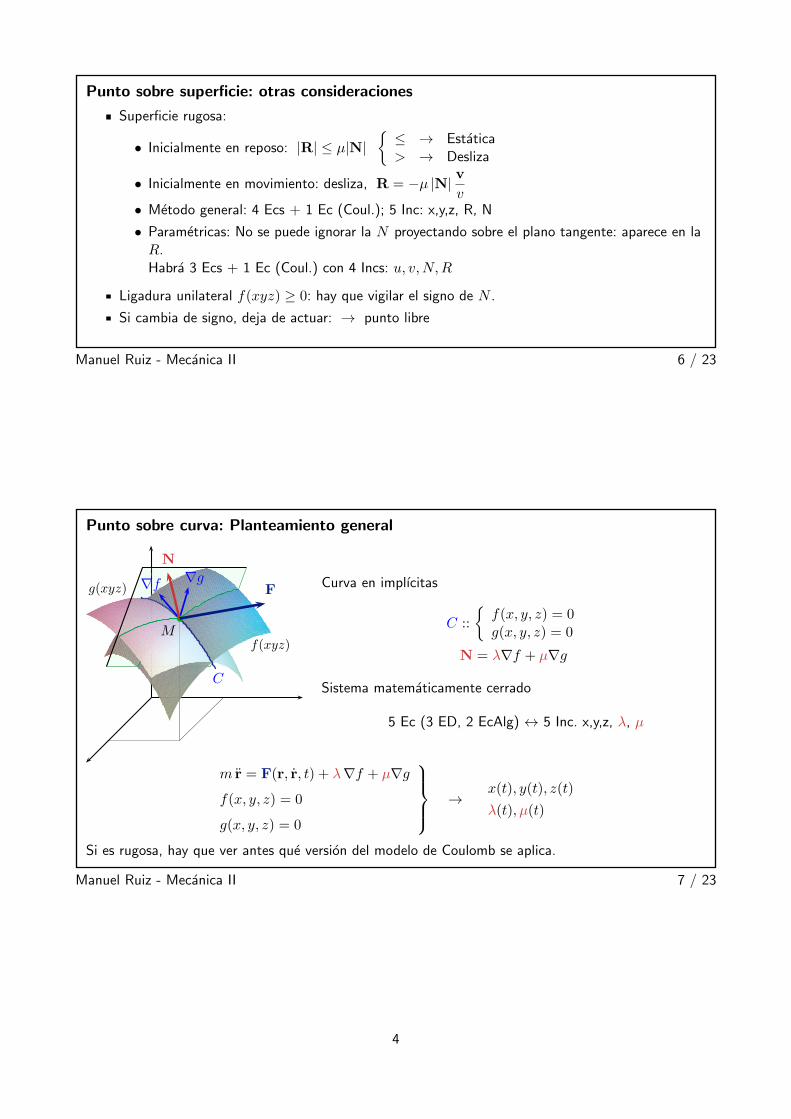
Superficie lisa y fija: si las fuer-zas son potenciales se conserva laenergıa.
f(x, y, z) = 0 ⇒ df = ∇f · dr = 0
F · dr+�����λ∇f · dr = dT
Si F = −∇V ⇒ T + V = E
En ecuaciones parametricas: F · dr = F(u, v) · (ru du+ rv dv) =
= P (u, v) du+Q(u, v) dv = −dV (u, v)
Superficie movil: mejor por dinami-ca relativa o formulacion lagrangia-na. No se conserva la energıa.
f(x, y, z, t) = 0 →→ df = ∇f · dr+ ft dt = 0
dT = F · dr+�����:−λ ft dtλ∇f · dr
Si F = −∇V , dE = d(T + V ) = −λ ft dt 6= 0
Superficie rugosa: el rozamiento di-sipa energıa.
R · r = −µ |N | r|r| · r = −µ |N | |r| < 0
Manuel Ruiz - Mecanica II 5 / 23
3
Punto sobre superficie: otras consideraciones
Superficie rugosa:
• Inicialmente en reposo: |R| ≤ µ|N|{
≤ → Estatica> → Desliza
• Inicialmente en movimiento: desliza, R = −µ |N| vv
• Metodo general: 4 Ecs + 1 Ec (Coul.); 5 Inc: x,y,z, R, N
• Parametricas: No se puede ignorar la N proyectando sobre el plano tangente: aparece en laR.Habra 3 Ecs + 1 Ec (Coul.) con 4 Incs: u, v,N,R
Ligadura unilateral f(xyz) ≥ 0: hay que vigilar el signo de N .
Si cambia de signo, deja de actuar: → punto libre
Manuel Ruiz - Mecanica II 6 / 23
Punto sobre curva: Planteamiento general
M
N
F∇f ∇g
f(xyz)
g(xyz)
C
Curva en implıcitas
C ::
{
f(x, y, z) = 0g(x, y, z) = 0
N = λ∇f + µ∇g
Sistema matematicamente cerrado
5 Ec (3 ED, 2 EcAlg) ↔ 5 Inc. x,y,z, λ, µ
m r = F(r, r, t) + λ∇f + µ∇g
f(x, y, z) = 0
g(x, y, z) = 0
→x(t), y(t), z(t)
λ(t), µ(t)
Si es rugosa, hay que ver antes que version del modelo de Coulomb se aplica.
Manuel Ruiz - Mecanica II 7 / 23
4
Punto sobre curva: Proyeccion sobre la tangente
M
N
F
f(xyz)
g(xyz)
ru(u)
C
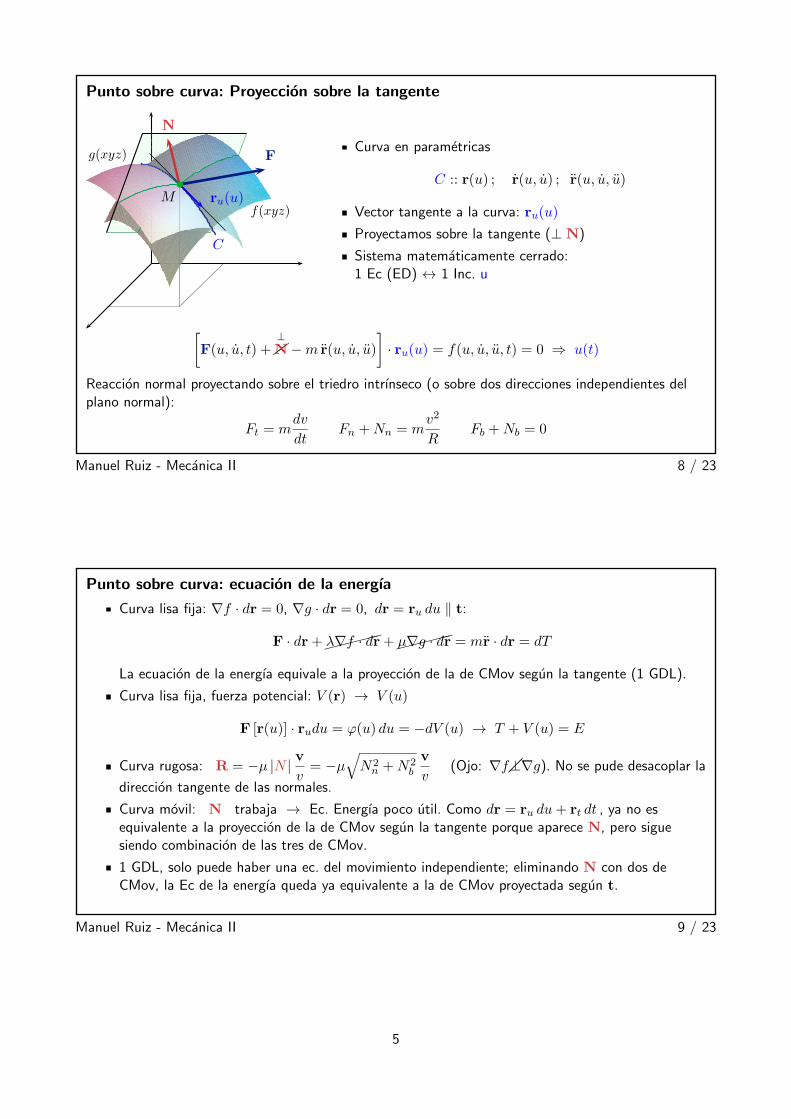
Curva en parametricas
C :: r(u) ; r(u, u) ; r(u, u, u)
Vector tangente a la curva: ru(u)
Proyectamos sobre la tangente (⊥ N)
Sistema matematicamente cerrado:1 Ec (ED) ↔ 1 Inc. u
[
F(u, u, t) +⊥
��N−m r(u, u, u)
]
· ru(u) = f(u, u, u, t) = 0 ⇒ u(t)
Reaccion normal proyectando sobre el triedro intrınseco (o sobre dos direcciones independientes delplano normal):
Ft = mdv
dtFn +Nn = m
v2
RFb +Nb = 0
Manuel Ruiz - Mecanica II 8 / 23
Punto sobre curva: ecuacion de la energıa
Curva lisa fija: ∇f · dr = 0, ∇g · dr = 0, dr = ru du ‖ t:
F · dr+�����λ∇f · dr+�����µ∇g · dr = mr · dr = dT
La ecuacion de la energıa equivale a la proyeccion de la de CMov segun la tangente (1 GDL).
Curva lisa fija, fuerza potencial: V (r) → V (u)
F [r(u)] · rudu = ϕ(u) du = −dV (u) → T + V (u) = E
Curva rugosa: R = −µ |N | vv= −µ
√
N2n +N2
b
v
v(Ojo: ∇f��⊥∇g). No se pude desacoplar la
direccion tangente de las normales.
Curva movil: N trabaja → Ec. Energıa poco util. Como dr = ru du+ rt dt , ya no esequivalente a la proyeccion de la de CMov segun la tangente porque aparece N, pero siguesiendo combinacion de las tres de CMov.
1 GDL, solo puede haber una ec. del movimiento independiente; eliminando N con dos deCMov, la Ec de la energıa queda ya equivalente a la de CMov proyectada segun t.
Manuel Ruiz - Mecanica II 9 / 23
5
Pendulo simple: ecuaciones del movimiento
x
z
mg
N
θ
θ
tn
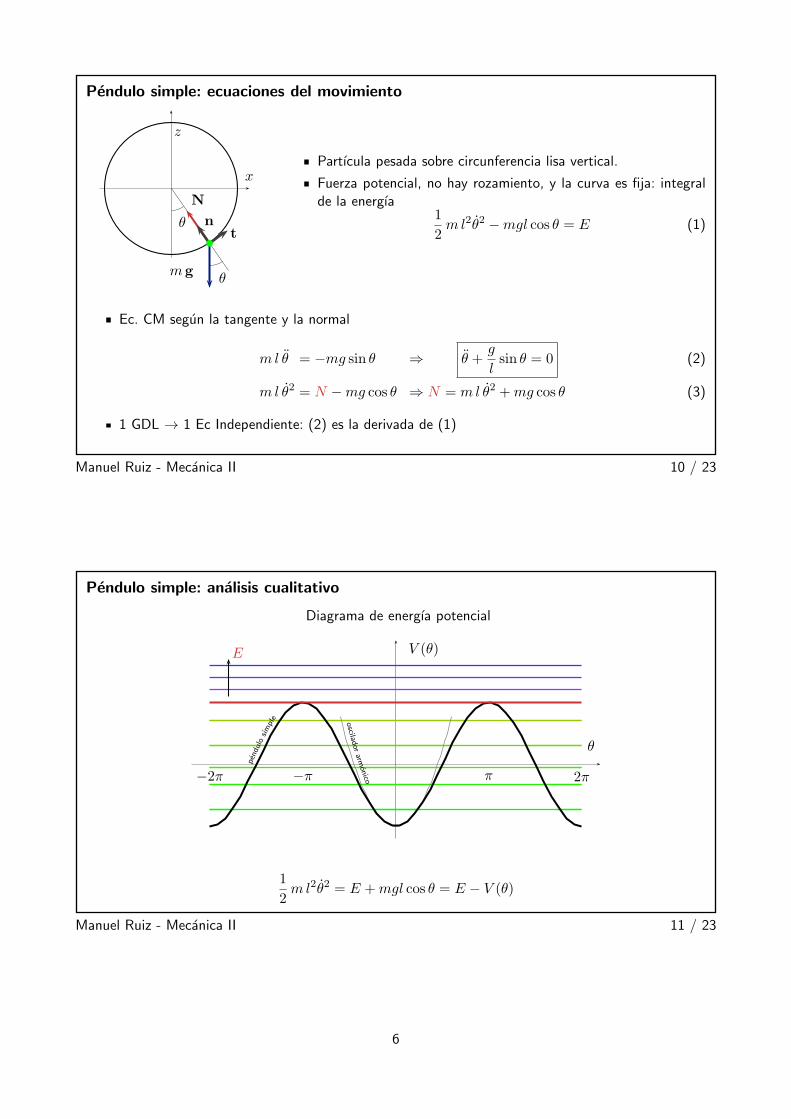
Partıcula pesada sobre circunferencia lisa vertical.
Fuerza potencial, no hay rozamiento, y la curva es fija: integralde la energıa
1
2ml2θ2 −mgl cos θ = E (1)
Ec. CM segun la tangente y la normal
ml θ = −mg sin θ ⇒ θ +g
lsin θ = 0 (2)
ml θ2 = N −mg cos θ ⇒ N = ml θ2 +mg cos θ (3)
1 GDL → 1 Ec Independiente: (2) es la derivada de (1)
Manuel Ruiz - Mecanica II 10 / 23
Pendulo simple: analisis cualitativo
Diagrama de energıa potencial
osciladorarm
onico
pendulo
simple
E
−π π−2π 2π
V (θ)
θ
1
2ml2θ2 = E +mgl cos θ = E − V (θ)
Manuel Ruiz - Mecanica II 11 / 23
6
Pendulo simple: analisis cualitativo
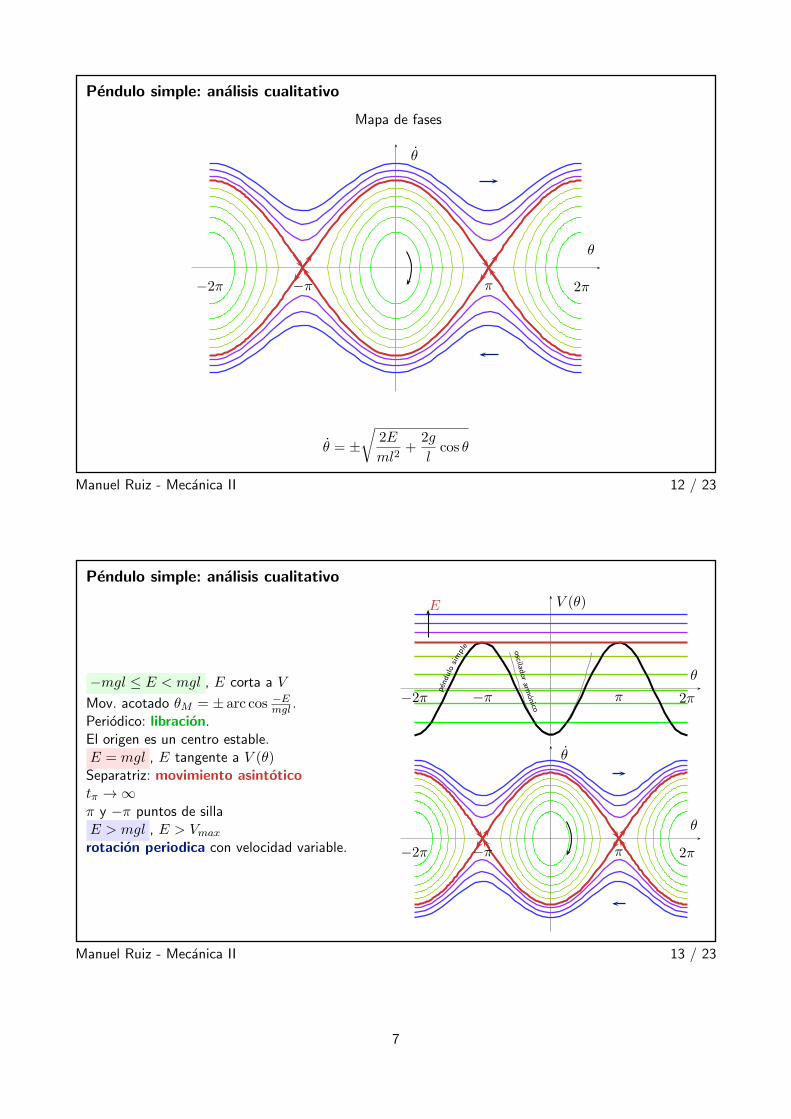
Mapa de fases
−π π−2π 2π
θ
θ
θ = ±√
2E
ml2+
2g
lcos θ
Manuel Ruiz - Mecanica II 12 / 23
Pendulo simple: analisis cualitativo
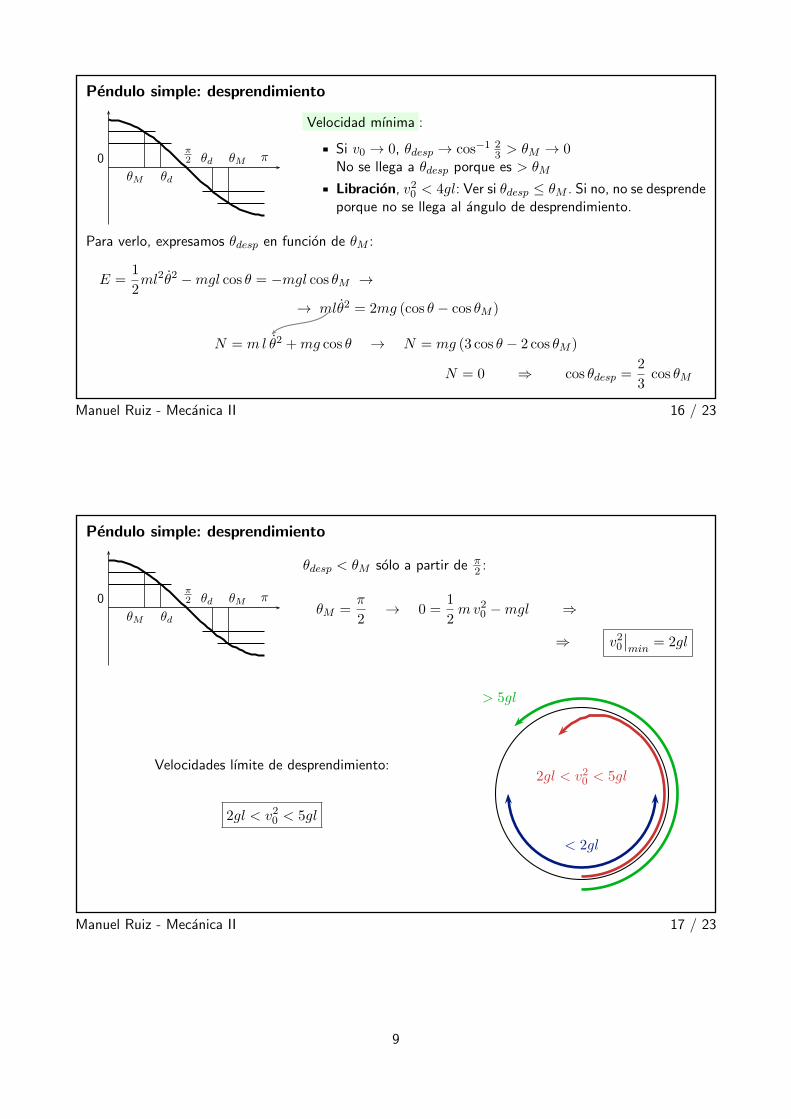
−mgl ≤ E < mgl , E corta a V
Mov. acotado θM = ± arc cos −Emgl
.Periodico: libracion.El origen es un centro estable.E = mgl , E tangente a V (θ)Separatriz: movimiento asintotico
tπ → ∞π y −π puntos de sillaE > mgl , E > Vmax
rotacion periodica con velocidad variable.
osciladorarm
onico
pendulo
simple
E
−π π−2π 2π
V (θ)
θ
−π π−2π 2π
θ
θ
Manuel Ruiz - Mecanica II 13 / 23
7

Pendulo simple: reaccion normal
E =1
2mv20 −mgl =
1
2ml2θ2 −mgl cos θ →
→ mlθ2 = mv20/l + 2mg (cos θ − 1)
N = ml θ2 +mg cos θ → N = mg
(
3 cos θ − 2 +v20
gl
)
Manuel Ruiz - Mecanica II 14 / 23
Pendulo simple: desprendimiento
N = mg
(
3 cos θ − 2 +v20
gl
)
Ligadura unilateral: por dentro de un aro: r ≤ l; N ≥ 0
Se desprende cuando N pasa de + a -:
N = 0 ⇒ 3 cos θdesp = 2− v20
gl
¿Se alcanza? ¿Para que valores de v0 se desprende?
• Velocidad maxima : (asintotico y rotacion)
θdesp = π → −3 = 2− v20
gl⇒ v20
∣
∣
max= 5gl
Si llega a π sin caerse, ya no se cae (movimiento simetrico para θ < 0)
Manuel Ruiz - Mecanica II 15 / 23
8
Pendulo simple: desprendimiento
θM θd
θMθdπ
2 π0
Velocidad mınima :
Si v0 → 0, θdesp → cos−1 2
3> θM → 0
No se llega a θdesp porque es > θM
Libracion, v20< 4gl: Ver si θdesp ≤ θM . Si no, no se desprende
porque no se llega al angulo de desprendimiento.
Para verlo, expresamos θdesp en funcion de θM :
E =1
2ml2θ2 −mgl cos θ = −mgl cos θM →
→ mlθ2 = 2mg (cos θ − cos θM )
N = ml θ2 +mg cos θ → N = mg (3 cos θ − 2 cos θM )
N = 0 ⇒ cos θdesp =2
3cos θM
Manuel Ruiz - Mecanica II 16 / 23
Pendulo simple: desprendimiento
θM θd
θMθdπ
2 π0
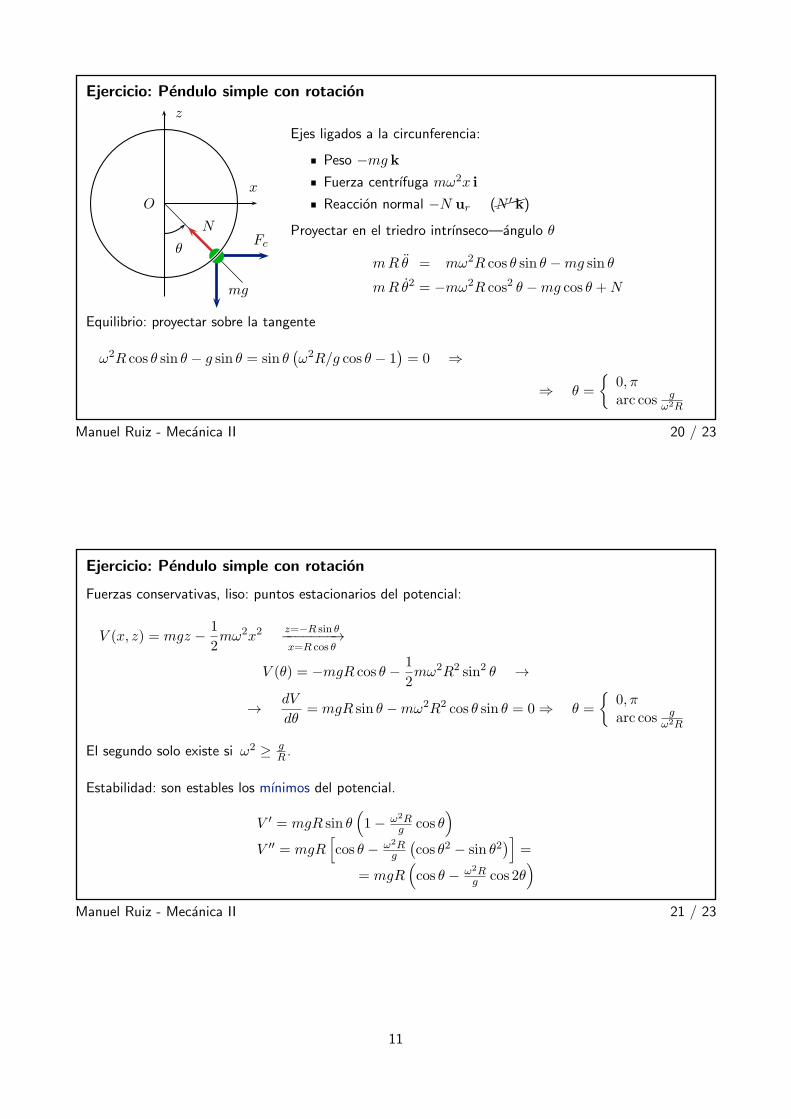
θdesp < θM solo a partir de π2:
θM =π
2→ 0 =
1
2mv20 −mgl ⇒
⇒ v20∣
∣
min= 2gl
Velocidades lımite de desprendimiento:
2gl < v20 < 5gl
< 2gl
> 5gl
2gl < v20< 5gl
Manuel Ruiz - Mecanica II 17 / 23
9

Ley Horaria del Pendulo Simple
πω
θ
t
π
−π
Manuel Ruiz - Mecanica II 18 / 23
Periodo del Pendulo Simple
Libracion Rotacion
Asintotico
0 2√gl
T
2π/ω
v0
Manuel Ruiz - Mecanica II 19 / 23
10
Ejercicio: Pendulo simple con rotacion
θ
x
z
O
mg
Fc
N
Ejes ligados a la circunferencia:
Peso −mg k
Fuerza centrıfuga mω2x i
Reaccion normal −N ur (���N ′ k)
Proyectar en el triedro intrınseco—angulo θ
mR θ = mω2R cos θ sin θ −mg sin θ
mR θ2 = −mω2R cos2 θ −mg cos θ +N
Equilibrio: proyectar sobre la tangente
ω2R cos θ sin θ − g sin θ = sin θ(
ω2R/g cos θ − 1)
= 0 ⇒
⇒ θ =
{
0, πarc cos g
ω2R
Manuel Ruiz - Mecanica II 20 / 23
Ejercicio: Pendulo simple con rotacion
Fuerzas conservativas, liso: puntos estacionarios del potencial:
V (x, z) = mgz − 1
2mω2x2
z=−R sin θ−−−−−−−→x=R cos θ
V (θ) = −mgR cos θ − 1
2mω2R2 sin2 θ →
→ dV
dθ= mgR sin θ −mω2R2 cos θ sin θ = 0 ⇒ θ =
{
0, πarc cos g
ω2R
El segundo solo existe si ω2 ≥ gR.
Estabilidad: son estables los mınimos del potencial.
V ′ = mgR sin θ(
1− ω2Rg
cos θ)
V ′′ = mgR[
cos θ − ω2Rg
(
cos θ2 − sin θ2)
]
=
= mgR(
cos θ − ω2Rg
cos 2θ)
Manuel Ruiz - Mecanica II 21 / 23
11
Ejercicio: Pendulo simple con rotacion
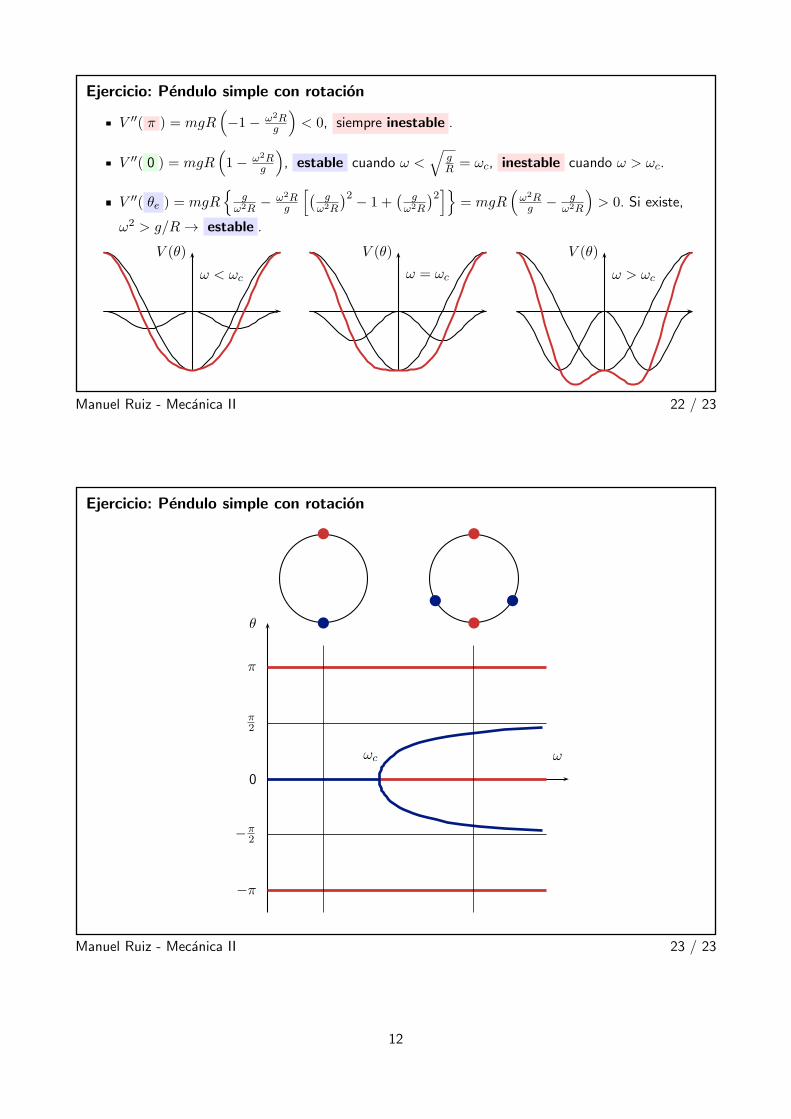
V ′′( π ) = mgR(
−1− ω2Rg
)
< 0, siempre inestable .
V ′′( 0 ) = mgR(
1− ω2Rg
)
, estable cuando ω <√
gR= ωc, inestable cuando ω > ωc.
V ′′( θe ) = mgR{
gω2R
− ω2Rg
[
(
gω2R
)2 − 1 +(
gω2R
)2]}
= mgR(
ω2Rg
− gω2R
)
> 0. Si existe,
ω2 > g/R → estable .
ω < ωc
V (θ)
ω = ωc
V (θ)
ω > ωc
V (θ)
Manuel Ruiz - Mecanica II 22 / 23
Ejercicio: Pendulo simple con rotacion
0
π
−π
π2
−π2
ωωc
θ
Manuel Ruiz - Mecanica II 23 / 23
12