Mathema tica FS-321 · Gradiente, Divergencia, Rotacional, Laplaciano: Estos comandos si dependen...
9
Mathematica FS-321 Ajustes de Datos, Análisis Vectorial y Sistemas de Coordenadas. Elaborada por:Miguel Ángel Serrano
Transcript of Mathema tica FS-321 · Gradiente, Divergencia, Rotacional, Laplaciano: Estos comandos si dependen...
Slide 1 of 5
Mathematica FS-321
Ajustes de Datos, Análisis
Vectorial y Sistemas de
Coordenadas.
Elaborada por:Miguel Ángel Serrano

Slide 2 of5 Objetivos:
Una vez familiarizado con operaciones básicas en el programa Mathematica se quiere que
el estudiante maneje:
Ajustes de datos, es de importancia debido a que en el transcurso del laboratorio usaremos
esta herramienta computacional para tratar los datos experimentales que se tomen.
Análisis Vectorial, de esta manera se podra trabajar con los campos eléctricos y magnéticos
que se encuentran al principio del curso.
Realizar cambios entre los sistemas de coordenadas en los cuales trabajan en el curso.
2 Ajuste_y_Coordenadas.nb

Slide 3 of5
Ajustes de Datos
Usualmente al hacer la toma de datos de un experimento, estos vienen en pares de datos,
a partir de la teoría que describe los datos nosotros podemos relacionarlos a travez de una
función, ya sea lineal, exponencial, senoidal, etc. En esta sección aprenderemos a manipu-
lar dichos datos con el uso del programa.
Ajuste Lineal:
En un experimento destinado a medir la velocidad del sonido en aire (el sónido producido
tenía una frecuecia de 3400 Hz). En dicho experimento se media la distancia desde el
parlante hasta el punto donde se produce una figura de Lissajous en un osciloscopio digi-
tal.
Los datos tomados siguen la siguiente ecuación lineal:
d=n*l
Tomamos n (el número de figura producida) como coordenada x, d (la distancia donde se
produce) como coordenada y. Se hará un ajuste lineal para determinar la pendiente (que
equivale a la longitud de onda) para posteriormente calcular la velocidad del sonido en
aire.
datos = 881, 10<, 82, 19.8<, 83, 30<, 84, 40<, 85, 50.4<,
86, 61.3<, 87, 71.2<, 88, 82.3<, 89, 91<, 810, 102.3<, 811, 109.2<<;
A = ListPlot@datosD
2 4 6 8 10
20
40
60
80
100
Ajuste = LinearModelFit@datos, n, nD
FittedModelB -0.103636 + 10.1309 nF
Clear@fD; f@n_D = 10.131 ∗ n − 0.104;
Ajuste_y_Coordenadas.nb 3

B = Plot@f@nD, 8n, 0, 11<D
2 4 6 8 10
20
40
60
80
100
Los gráficos anteriores se mirarian mejor si estuvieran unidos para, ademas seria bueno
que fueran de distintos colores para poder comparar de mejor manera.
Al representar cantidades físicas estos gráficos se ven incompletos, debemos titular los
nombres de los ejes, ademas de poner las unidades respectivas.
G = Plot@f@nD, 8n, 0, 11<, PlotStyle → RedD;
Show@A, G, AxesLabel → 8"n", "dHcmL"<D
2 4 6 8 10
n
20
40
60
80
100
dHcmL
Finalmente podemos encontrar la velocidad del sonido multiplicando v=l*f
v = 10.1131 ∗ 10^H−2L ∗ 3400
343.845
Dado que la longitud de onda es un dato experimental, es necesario encontrar su incer-
tidumbre. Esto se puede hacer usando el programa, pero es exclusivo del comando Linear-
ModelFit.
Mathematica nos puede proporcionar la incertidumbre relativa, y basta con un despeje
para poder calcular la incertidumbre absoluta.
∆λ = 10.131 ∗ Ajuste@"CoefficientOfVariation"D
0.162738
Esto significa que el valor medido de l es:
l=10.1 ±0.2 cm
Y propagando el error para encontrar la incertidumbre de la velocidad:
v=343 ±6 m/s
4 Ajuste_y_Coordenadas.nb

Esto significa que el valor medido de l es:
l=10.1 ±0.2 cm
Y propagando el error para encontrar la incertidumbre de la velocidad:
v=343 ±6 m/s
Ajustes no lineales:
Los comportamientos de femómenos físicos no siempre se pueden modelar como una
función lineal. Sin embargo, si nosotros sabemos el modelo que sigue el fenómeno físico,
podemos utilizar el programa para encontrar dicho ajuste con el comando FindFit.
Ejemplo: Suponga que tenemos un objeto a 500m del suelo y lo lanzamos verticalmente
hacia abajo, una persona toma mediciones de distancia y tiempo para el objeto. A partir de
estos datos queremos encontrar la velocidad inicial, y aceleración efectiva (no usaremos la
aceleración debido a la gravedad para no despreciar la resistencia del aire).
Sabemos que los datos de posición y distancia siguen la siguiente ecuación:
Y=Y0-V0*t-(a*t^2)/2
dat2 = 880, 500<, 82, 481<, 84, 443<, 86, 388<, 88, 302<, 810, 204<, 812, 71<<;
G1 = ListPlot@dat2D
2 4 6 8 10 12
100
200
300
400
500
FindFit@dat2, 500 − V0 ∗ t − 0.5 ∗ a ∗ t^2, 8V0, a<, tD
8V0 → 2.66574, a → 5.476<
G2 = Plot@500 − 2.67 ∗ t − 0.5 ∗ 5.48 ∗ t^2, 8t, 0, 12<, PlotStyle → RedD
2 4 6 8 10 12
100
200
300
400
500
Ajuste_y_Coordenadas.nb 5
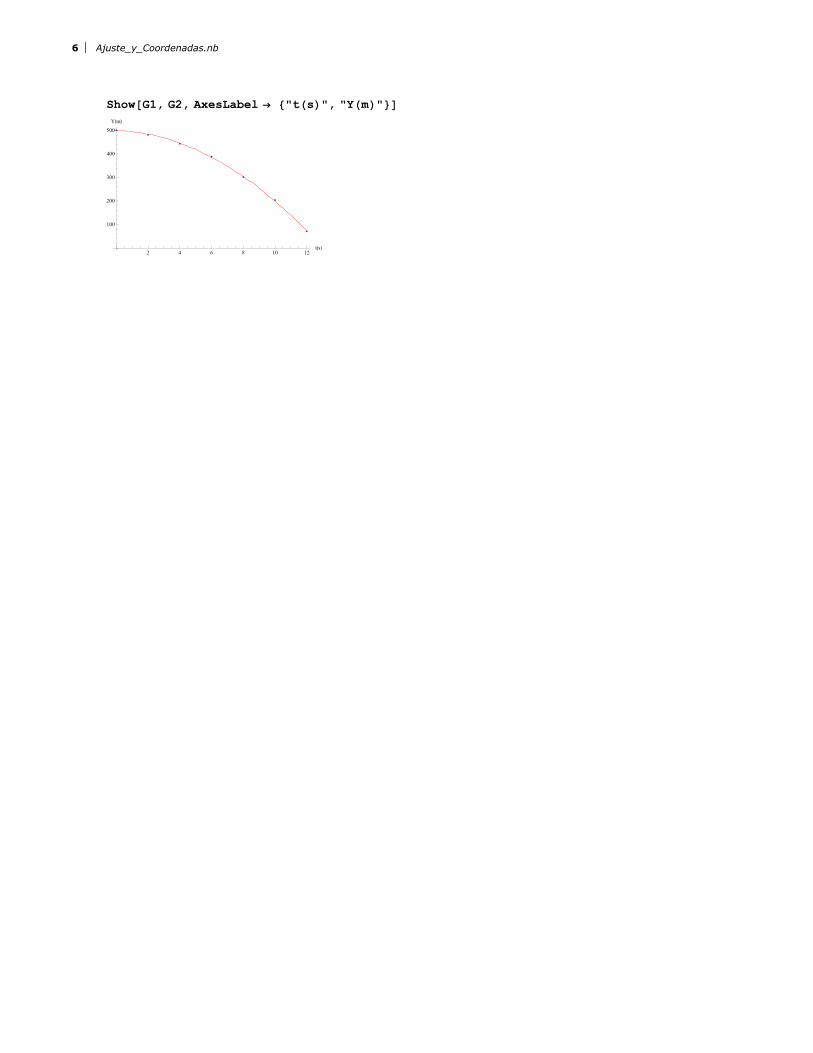
Show@G1, G2, AxesLabel → 8"tHsL", "YHmL"<D
2 4 6 8 10 12
tHsL
100
200
300
400
500
YHmL
6 Ajuste_y_Coordenadas.nb

Slide 4 of5
Análisis Vectorial
Las cantidades que utilizamos en la clase no solo se limitan a funciones(o campos
escalares), tambien podemos tener vectores (y vampos vectoriales). A continuación como
definir vectores y algunas de las operaciones tanto básicas como avanzadas
Se tienen los siguientes campos escalares:
R1= x*y^2*z^3
R2=(x-y*z)/(y*x-z^2)
y los siguientes campos vectoriales:
S1=(y*z,x-z^2,2*y-x/z)
S2=(x*y*z, x-y-z, z*x^2)
S3=(2*zCos[f], r^2+z^2, r*Tan[f])
S4=(Cos[f]*Sin[q], r^3*Tan[q], r*Sin[q]*Sin[2*f] )
R1 = x ∗ y^2 ∗ z^3;
R2 = Hx − y ∗ zL ê Hy ∗ x − z^2L;
S1 = 8y ∗ z, x − z^2, 2 ∗ y − x ê z<;
S2 = 8x ∗ y ∗ z, x − y − z, z ∗ x^2<;
S3 = 82 ∗ z ∗ Cos@φD, ρ^2 + z^2, ρ ∗ Tan@φD<;
S4 = 8Cos@φD ∗ Sin@θD, r^3 ∗ Tan@θD, r ∗ Sin@θD ∗ Sin@2 ∗ φD <;
Producto punto y producto cruz (no depende del sistema de coordenadas):
Dot@S1, S2D
Dot@S2, S1D
x2 K2 y −
x
z
O z + x y2
z2
+ Hx − y − zL Ix − z2M
x2 K2 y −
x
z
O z + x y2
z2
+ Hx − y − zL Ix − z2M
Dot@S1, S3D
Ix − z2M Iz
2
+ ρ2M + 2 y z
2
Cos@φD + K2 y −
x
z
O ρ Tan@φD
Cross@S1, S2D
Cross@S2, S1D
:−x − 2 x y + 2 y2
+
x2
z
−
x y
z
+ x3
z + 2 y z − x2
z3
,
−x2
y + 2 x y2
z − x2
y z2
, x y z − x2
y z − y2
z − y z2
+ x y z3>
:x + 2 x y − 2 y2
−
x2
z
+
x y
z
− x3
z − 2 y z + x2
z3
,
x2
y − 2 x y2
z + x2
y z2
, −x y z + x2
y z + y2
z + y z2
− x y z3>
Gradiente, Divergencia, Rotacional, Laplaciano:
Estos comandos si dependen del sistema de coordenadas por lo cual no se pueden utilizar
como los comandos anteriores.
Ajuste_y_Coordenadas.nb 7

Gradiente, Divergencia, Rotacional, Laplaciano:
Estos comandos si dependen del sistema de coordenadas por lo cual no se pueden utilizar
como los comandos anteriores.
Grad@R1, 8x, y, z<, "Cartesian"D
9y2
z3
, 2 x y z3
, 3 x y2
z2=
Grad@R2, 8x, y, z<, "Cartesian"D
:−
y Hx − y zL
Ix y − z2M
2
+
1
x y − z2
, −
x Hx − y zL
Ix y − z2M
2
−
z
x y − z2
,
2 z Hx − y zL
Ix y − z2M
2
−
y
x y − z2
>
Div@S1, 8x, y, z<, "Cartesian"D
x
z2
Div@S3, 8ρ, φ, z<, "Cylindrical"D
2 z Cos@φD
ρ
Curl@S4, 8r, θ, φ<, "Spherical"D
:2 Cos@θD Sin@2 φD, −Sin@θD Sin@2 φD +
1
r
Csc@θD I−Sin@θD Sin@φD − r Sin@θD2
Sin@2 φDM,
3 r2
Tan@θD −
Cos@θD Cos@φD − r3
Tan@θD
r
>
Gráficos:
V = 9 ∗ 10^H−3L ∗ 1 ê HSqrt@x^2 + y^2DL;
Electrico = −Grad@V, 8x, y<, "Cartesian"D;
Gr1 = ContourPlot@V, 8x, −10, 10<, 8y, −10, 10<D;
Gr2 = StreamPlot@Electrico, 8x, −10, 10<, 8y, −10, 10<D;
Show@Gr1, Gr2D
-10 -5 0 5 10
-10
-5
0
5
10
8 Ajuste_y_Coordenadas.nb

Slide 5 of5
Sistemas de Coordenadas:
Hasta ahora nosotros hemos definido directamente los vectores, pero en la problemas
encontrados muchas veces nos toca convertir de un sistema de coordenadas a otro. Mathe-
matica tiene una función para hacer dichos cambios directamente.
EJEMPLOS:
Cambie los siguientes campos vectoriales a los demas sistemas coordenados.
T1 = 8Hy^2 − x^2L, x ∗ y ∗ z, Hx^2 − z^2L<; T2 = 8z ∗ Sin@φD, −ρ ∗ Cos@φD, 2 ∗ ρ ∗ z<;
T1 en cilindricas:
FullSimplify@TransformedField@"Cartesian" → "Cylindrical", T1, 8x, y, z< → 8ρ, φ, Z<DD
:ρ2
Cos@φD I−Cos@φD2
+ H1 + ZL Sin@φD2M,
1
2
ρ2 HZ + H2 + ZL Cos@2 φDL Sin@φD, −Z
2
+ ρ2
Cos@φD2>
T1 en esféricas:
FullSimplify@TransformedField@"Cartesian" → "Spherical", T1, 8x, y, z< → 8r, θ, φ<DD
:r2 I−Cos@θD3
− Cos@φD Cos@2 φD Sin@θD3
+ Cos@θD Cos@φD Sin@θD2 ICos@φD + r Sin@θD Sin@φD2MM,
r2
Sin@θD
−Cos@φD2
Sin@θD2
−
1
4
HCos@φD + Cos@3 φDL Sin@2 θD + Cos@θD2 I1 + r Cos@φD Sin@θD Sin@φD2M ,
r2
Sin@θD2
Sin@φD IH1 + r Cos@θDL Cos@φD2
− Sin@φD2M>
T2 en cartesianas:
FullSimplify@TransformedField@"Cylindrical" → "Cartesian", T2, 8ρ, φ, z< → 8x, y, zeta<DD
:x y
1
x2
+ y2
+
zeta
x2
+ y2
, −
x2
x2
+ y2
+
y2
zeta
x2
+ y2
, 2 x2
+ y2
zeta>
T2 en esféricas:
FullSimplify@TransformedField@"Cylindrical" → "Spherical", T2, 8ρ, φ, z< → 8r, θ, Φ<DD
9r Cos@θD Sin@θD H2 r Cos@θD + Sin@ΦDL,
r Cos@θD I−2 r Sin@θD2
+ Cos@θD Sin@ΦDM, −r Cos@ΦD Sin@θD=
Ajuste_y_Coordenadas.nb 9