Manual NXT 2.0
41
Colegio Nacional Nicolas Esguerra Edificamos Futuro Lego mindstorms Manual De Usuario NXT 2.0 Parte 1 de 4 Brian Stiven Camelo Noy Andres Borja Sanabria Códigos: 03 & 04 Profesor: John Caraballo
-
Upload
borjacamelo903 -
Category
Documents
-
view
1.152 -
download
0
Transcript of Manual NXT 2.0
Colegio Nacional Nicolas Esguerra
Edificamos Futuro
Lego mindstorms Manual De Usuario NXT 2.0
Parte 1 de 4
Brian Stiven Camelo Noy
Andres Borja Sanabria
Códigos: 03 & 04
Profesor:
John Caraballo
Esta es una guía sobre el uso de LEGO MINDSTORMS
EDUCATIONS que es una generación robótica que
permite desarrollar habilidades básicas de las ciencias,
las matemáticas y la tecnología utilizando muy buena
tecnología.

Estos son los tres pasos a seguir para construir el robot;
construirlo, programarlo y ponerlo a prueba para
asegurarnos de que las piezas y la programación
funcionan correctamente.
EL LADRILLO
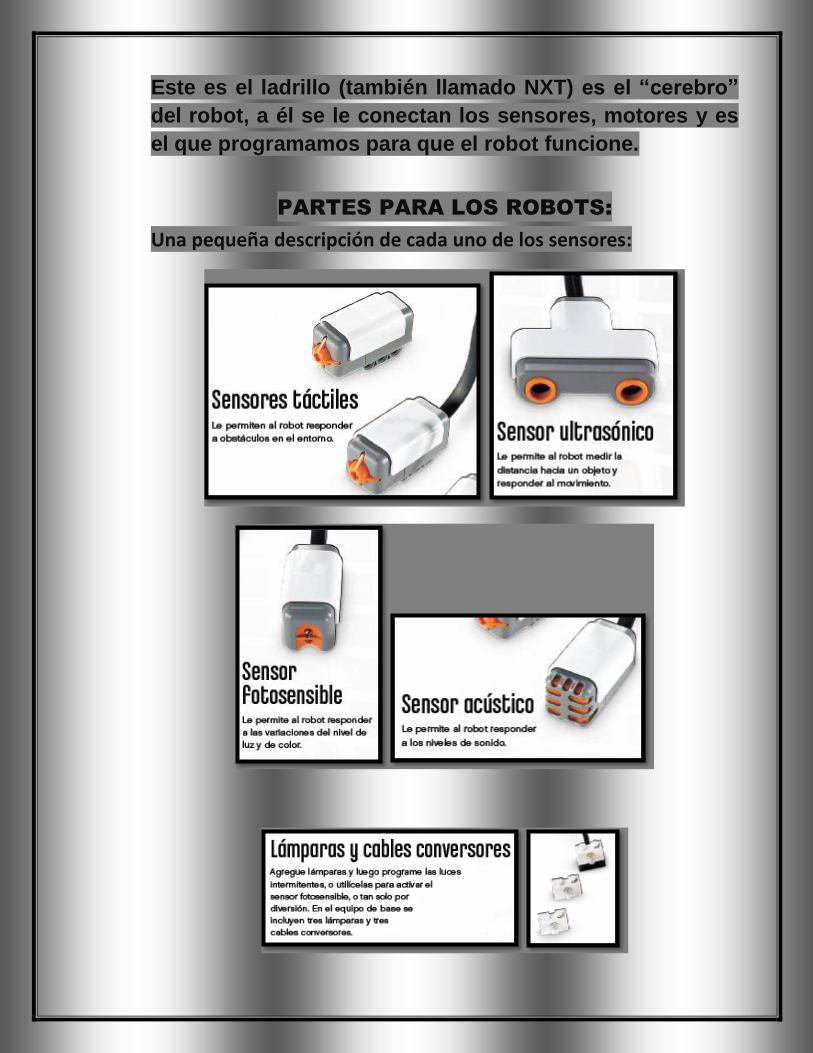
Este es el ladrillo (también llamado NXT) es el “cerebro”
del robot, a él se le conectan los sensores, motores y es
el que programamos para que el robot funcione.
PARTES PARA LOS ROBOTS:
Una pequeña descripción de cada uno de los sensores:
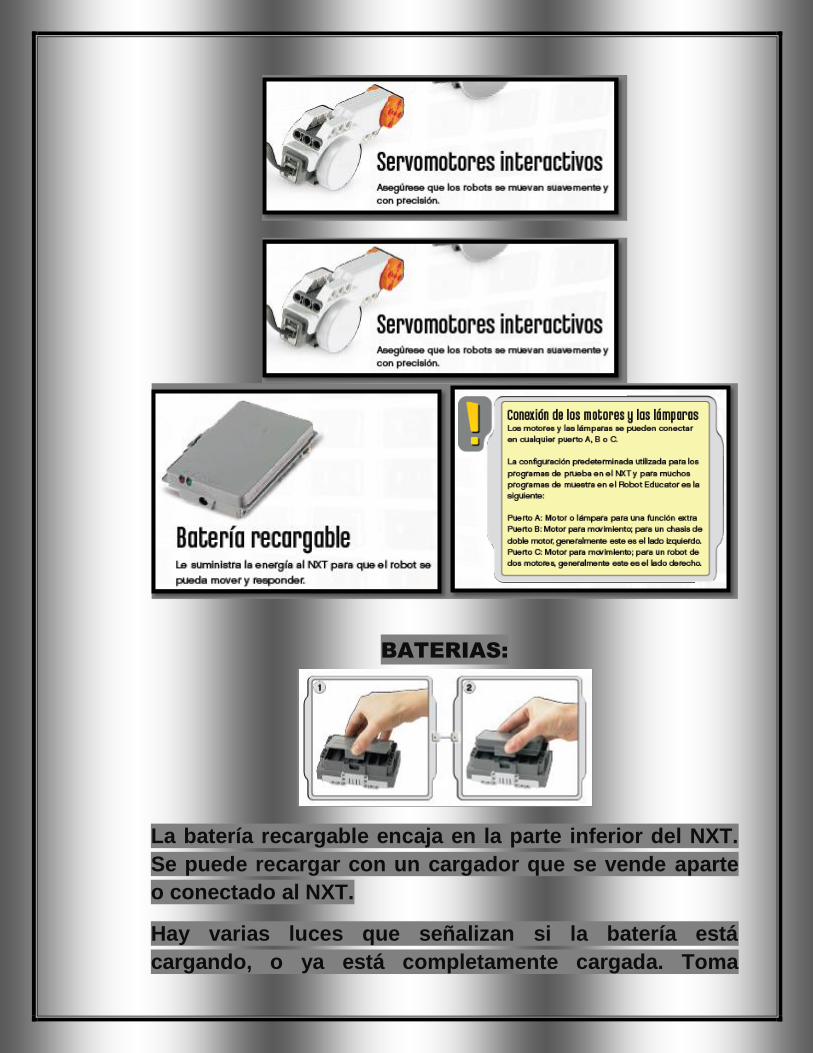
BATERIAS:
La batería recargable encaja en la parte inferior del NXT.
Se puede recargar con un cargador que se vende aparte
o conectado al NXT.
Hay varias luces que señalizan si la batería está
cargando, o ya está completamente cargada. Toma
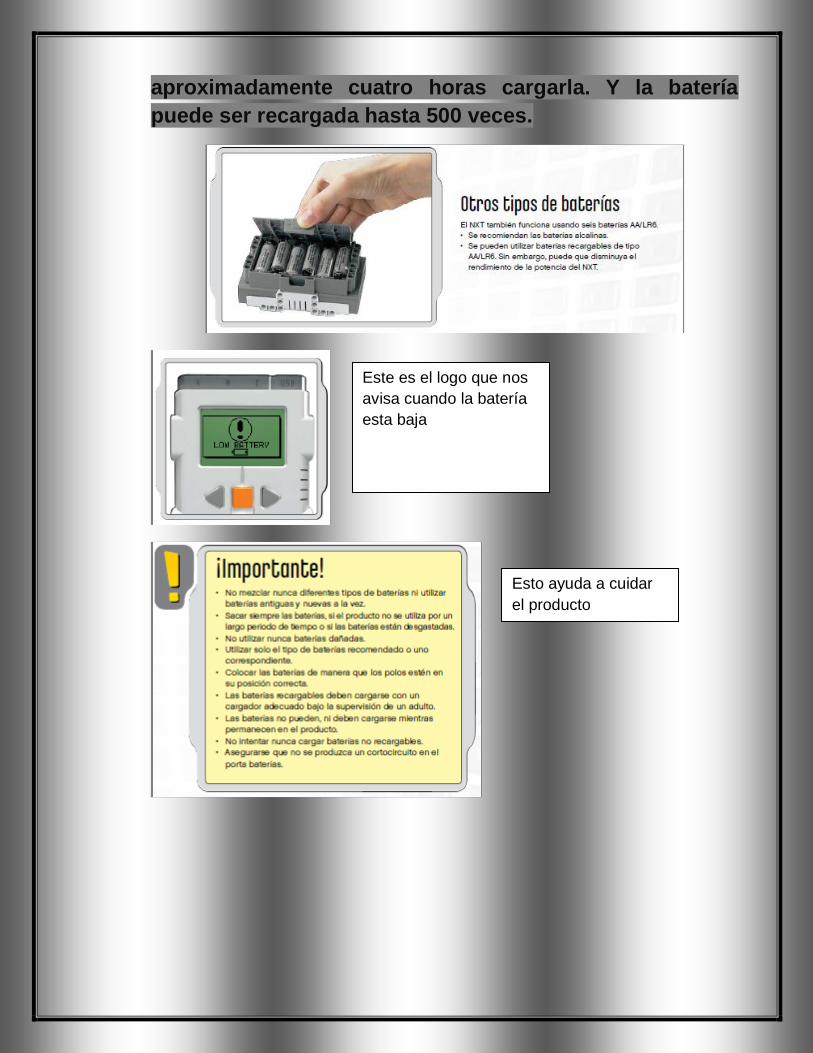
aproximadamente cuatro horas cargarla. Y la batería
puede ser recargada hasta 500 veces.
Esto ayuda a cuidar
el producto
Este es el logo que nos
avisa cuando la batería
esta baja
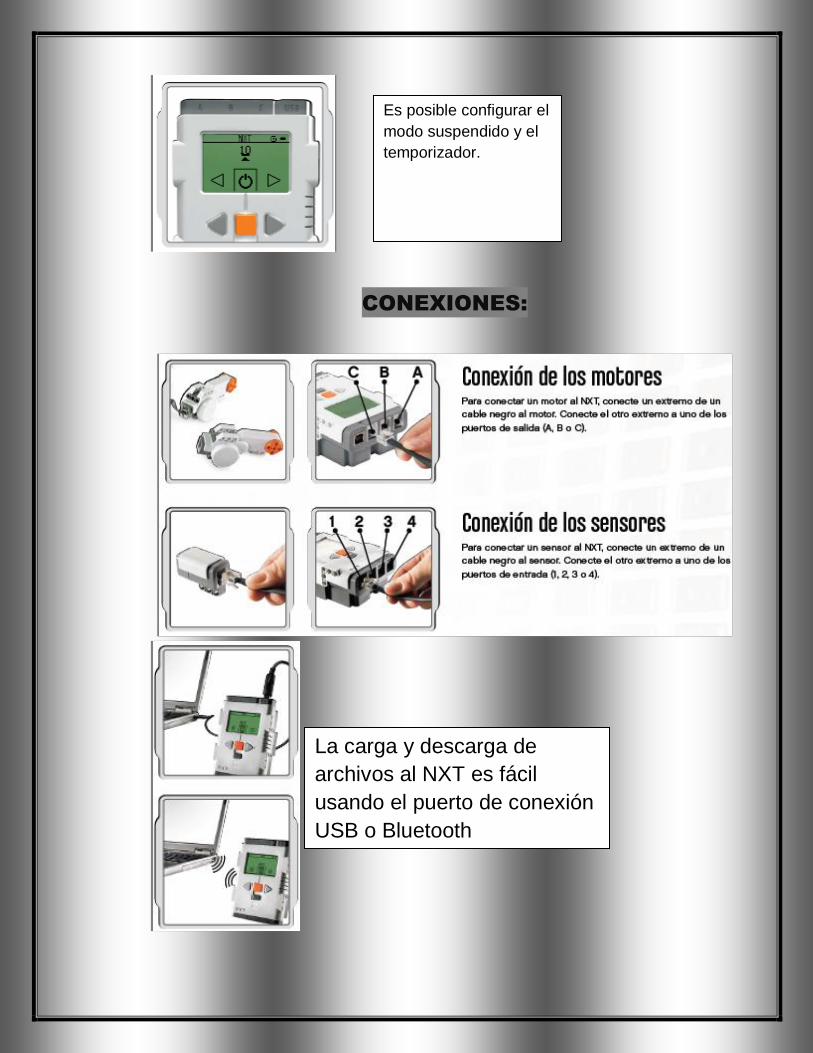
CONEXIONES:
La carga y descarga de
archivos al NXT es fácil
usando el puerto de conexión
USB o Bluetooth
Es posible configurar el
modo suspendido y el
temporizador.
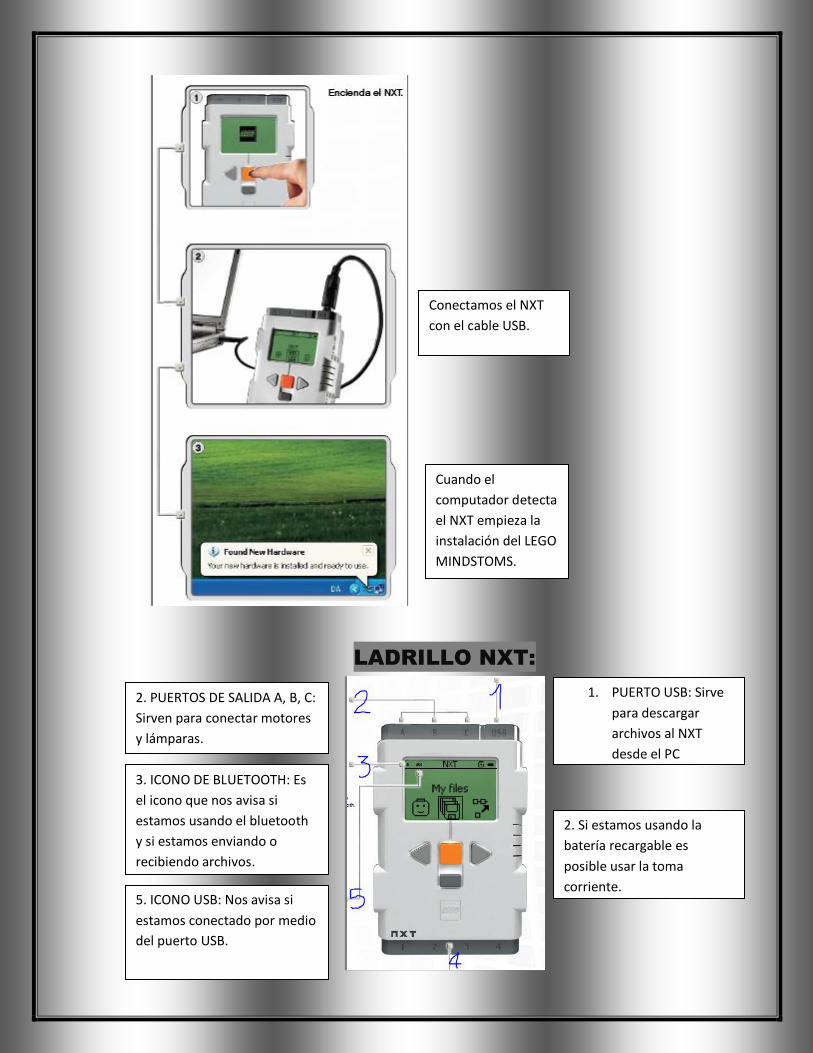
LADRILLO NXT:
Conectamos el NXT
con el cable USB.
Cuando el
computador detecta
el NXT empieza la
instalación del LEGO
MINDSTOMS.
1. PUERTO USB: Sirve
para descargar
archivos al NXT
desde el PC
2. PUERTOS DE SALIDA A, B, C:
Sirven para conectar motores
y lámparas.
3. ICONO DE BLUETOOTH: Es
el icono que nos avisa si
estamos usando el bluetooth
y si estamos enviando o
recibiendo archivos.
5. ICONO USB: Nos avisa si
estamos conectado por medio
del puerto USB.
2. Si estamos usando la
batería recargable es
posible usar la toma
corriente.
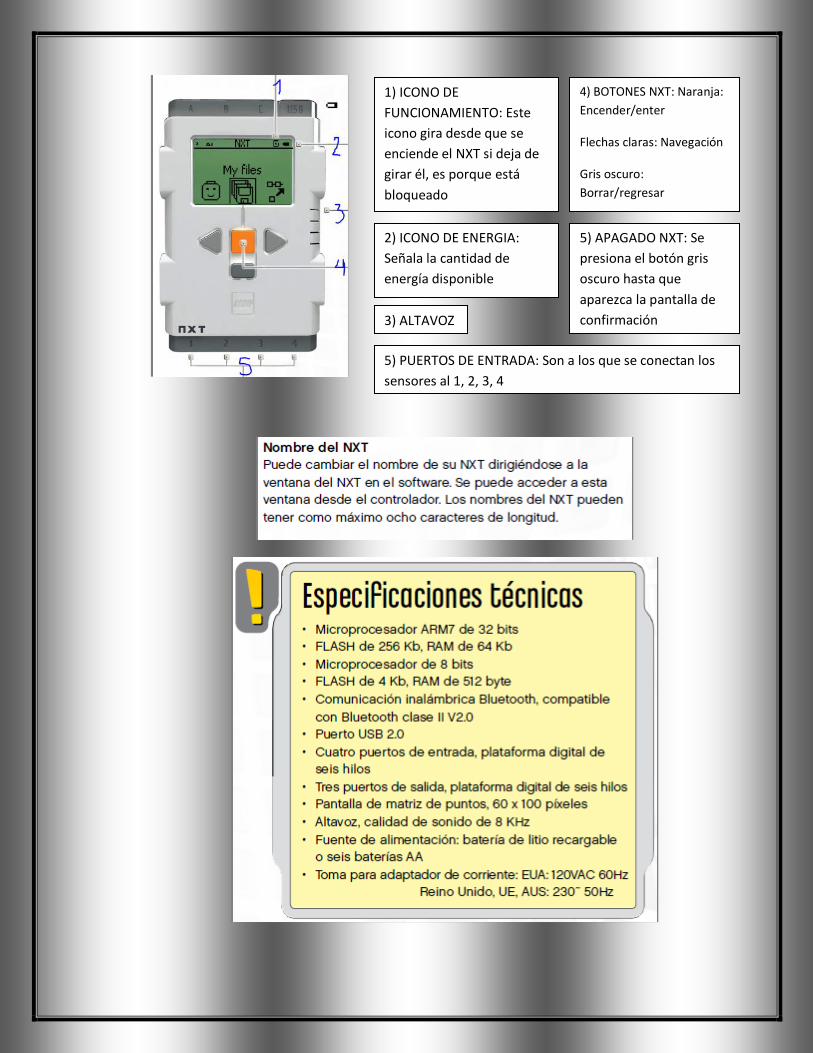
1) ICONO DE
FUNCIONAMIENTO: Este
icono gira desde que se
enciende el NXT si deja de
girar él, es porque está
bloqueado
2) ICONO DE ENERGIA:
Señala la cantidad de
energía disponible
3) ALTAVOZ
4) BOTONES NXT: Naranja:
Encender/enter
Flechas claras: Navegación
Gris oscuro:
Borrar/regresar
5) APAGADO NXT: Se
presiona el botón gris
oscuro hasta que
aparezca la pantalla de
confirmación
5) PUERTOS DE ENTRADA: Son a los que se conectan los
sensores al 1, 2, 3, 4
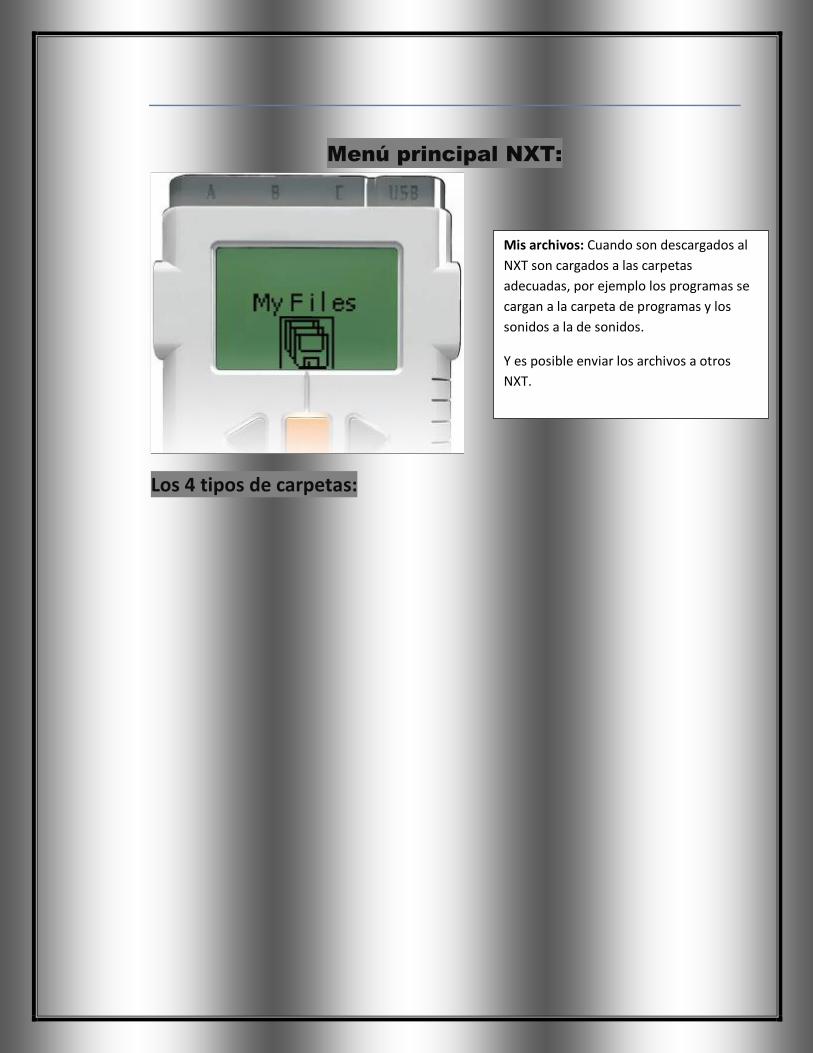
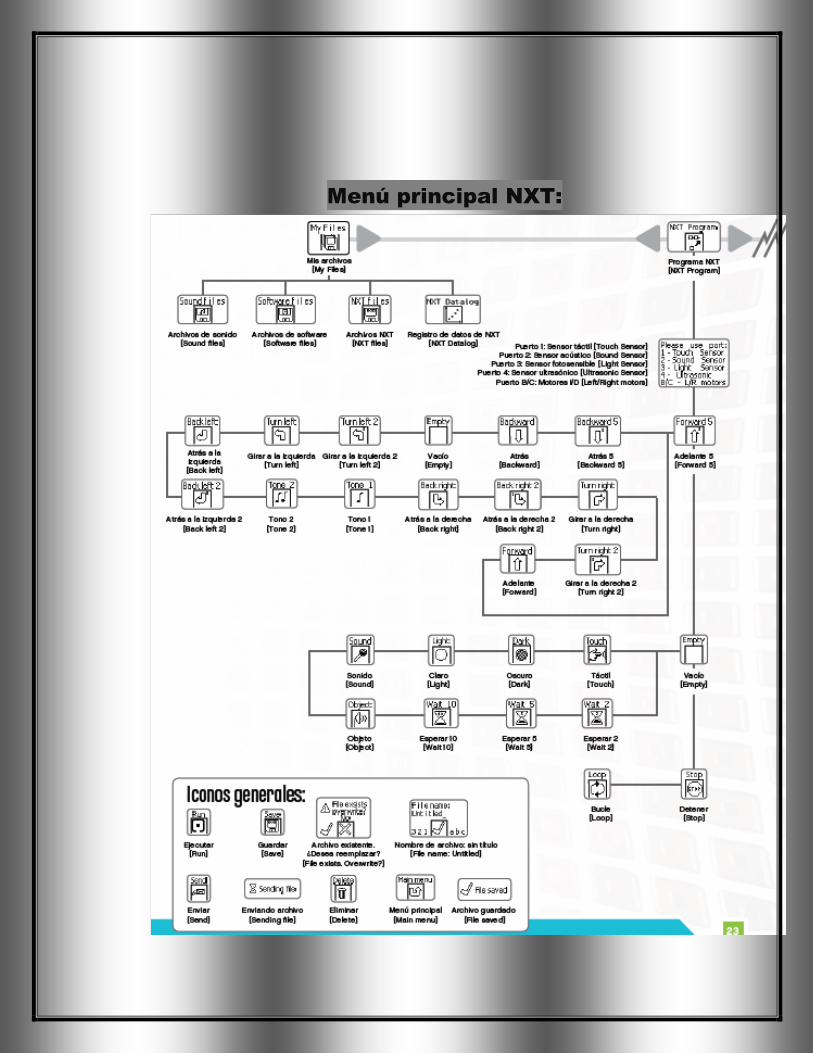
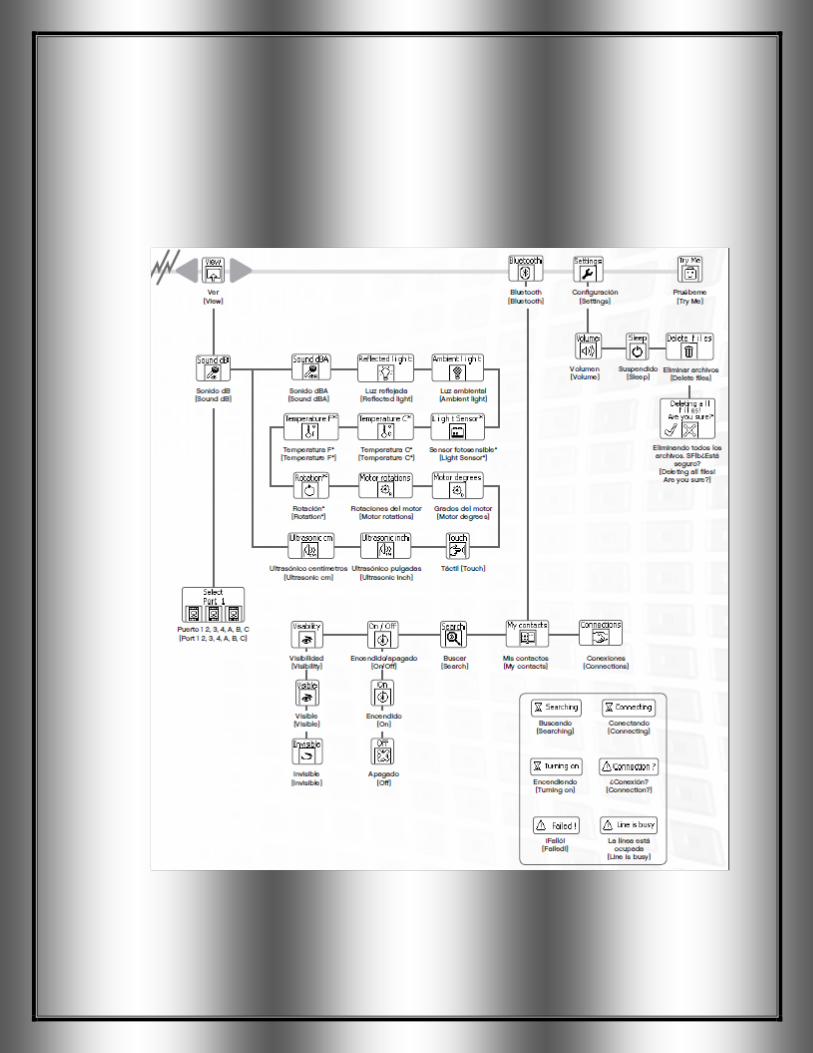
Menú principal NXT:
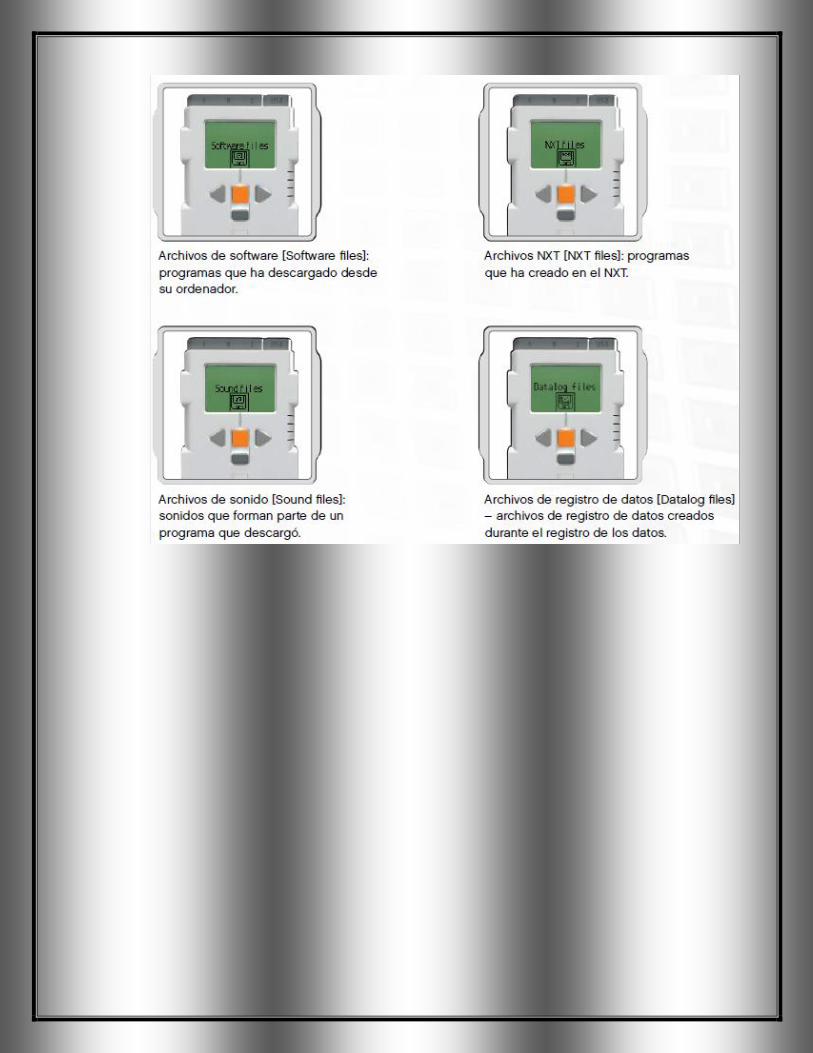
Los 4 tipos de carpetas:
Mis archivos: Cuando son descargados al
NXT son cargados a las carpetas
adecuadas, por ejemplo los programas se
cargan a la carpeta de programas y los
sonidos a la de sonidos.
Y es posible enviar los archivos a otros
NXT.
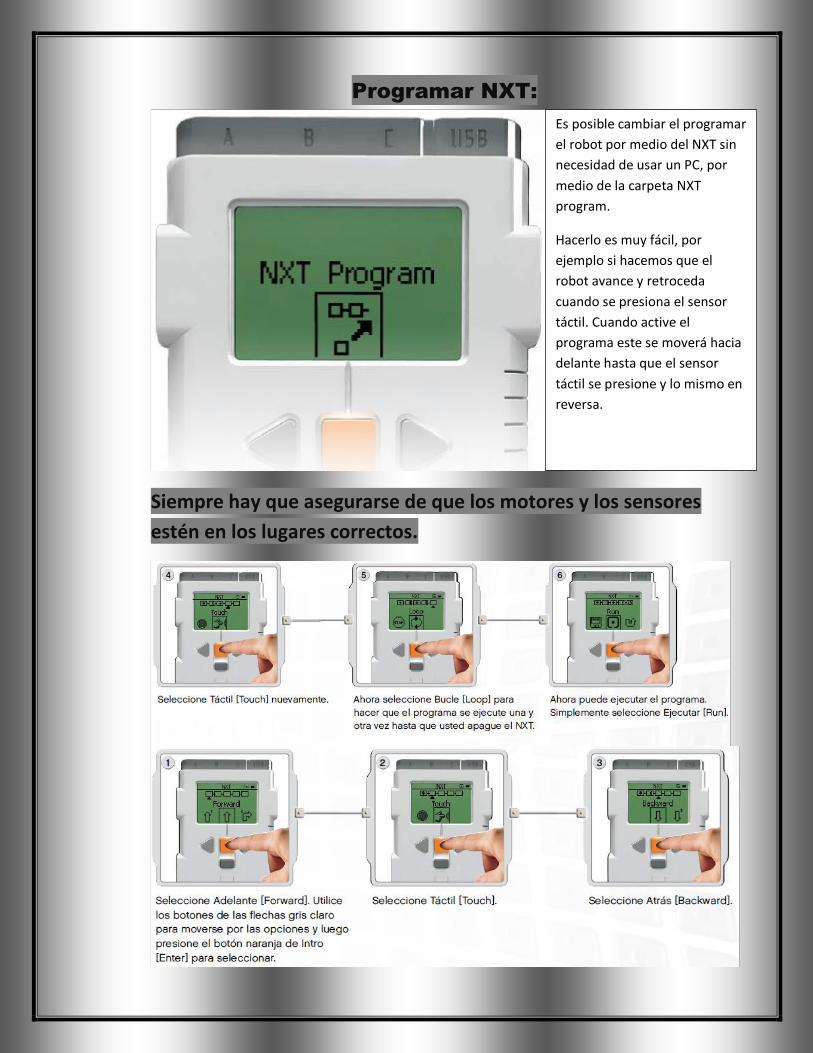
Programar NXT:
Siempre hay que asegurarse de que los motores y los sensores
estén en los lugares correctos.
Es posible cambiar el programar
el robot por medio del NXT sin
necesidad de usar un PC, por
medio de la carpeta NXT
program.
Hacerlo es muy fácil, por
ejemplo si hacemos que el
robot avance y retroceda
cuando se presiona el sensor
táctil. Cuando active el
programa este se moverá hacia
delante hasta que el sensor
táctil se presione y lo mismo en
reversa.
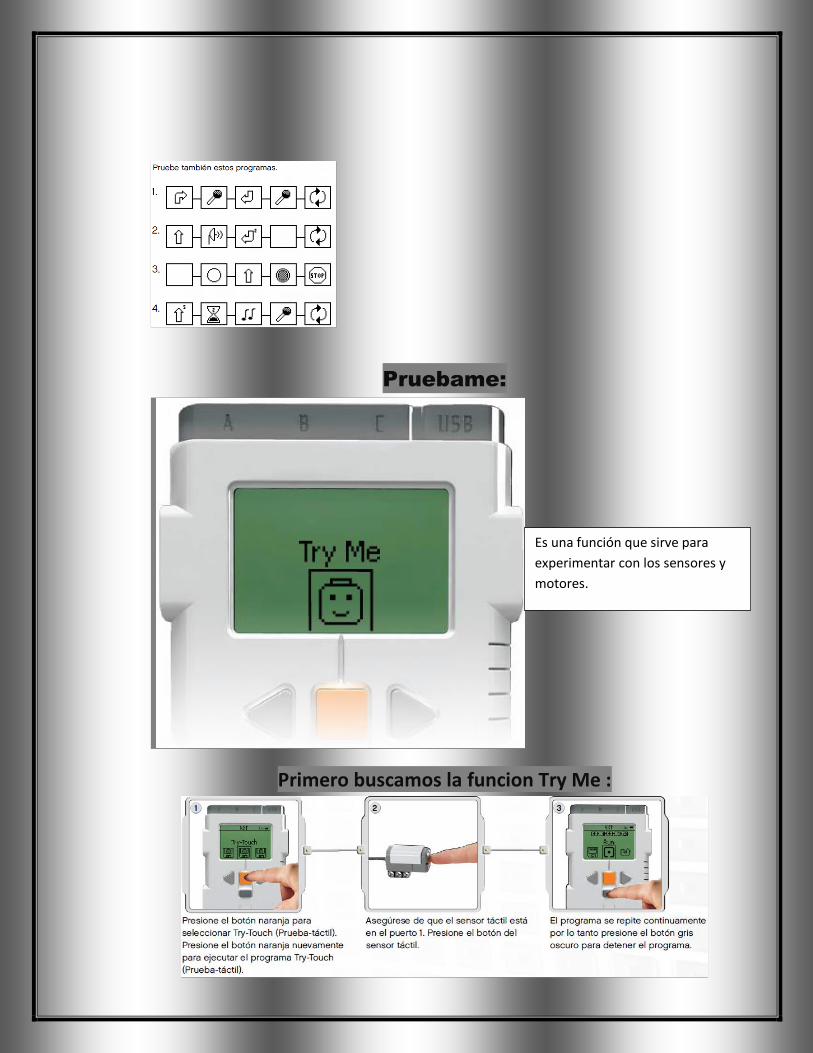
Pruebame:
Primero buscamos la funcion Try Me :
Es una función que sirve para
experimentar con los sensores y
motores.
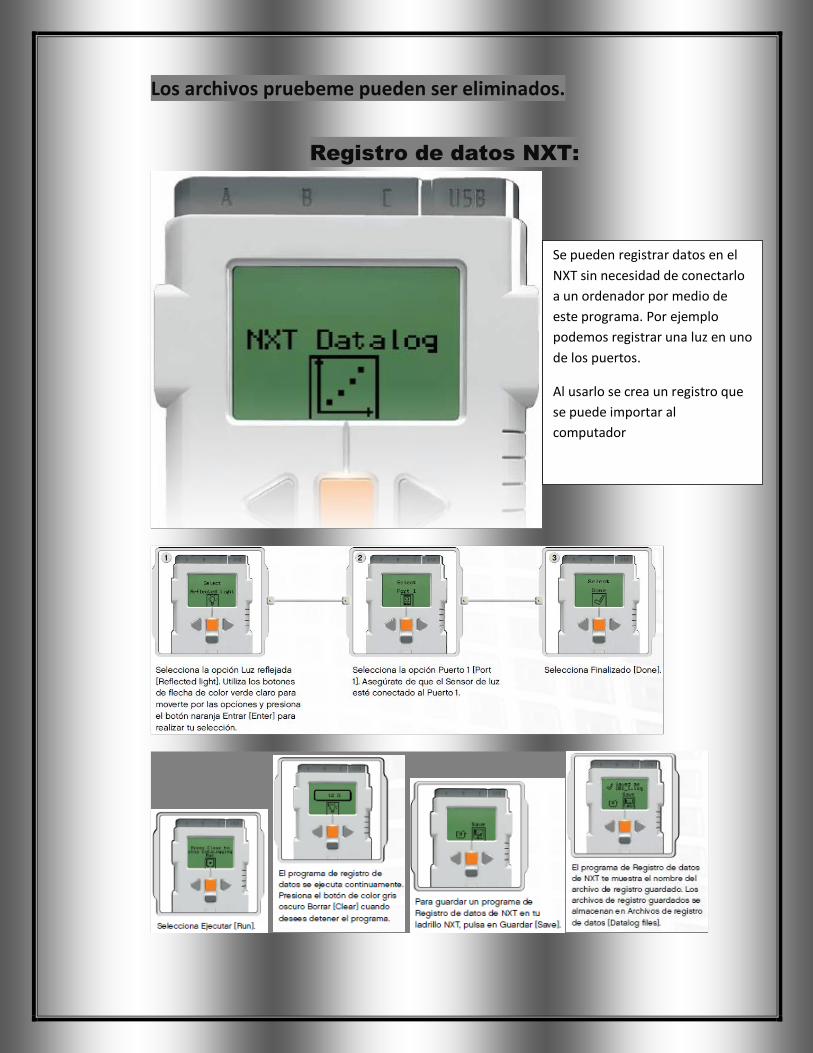
Los archivos pruebeme pueden ser eliminados.
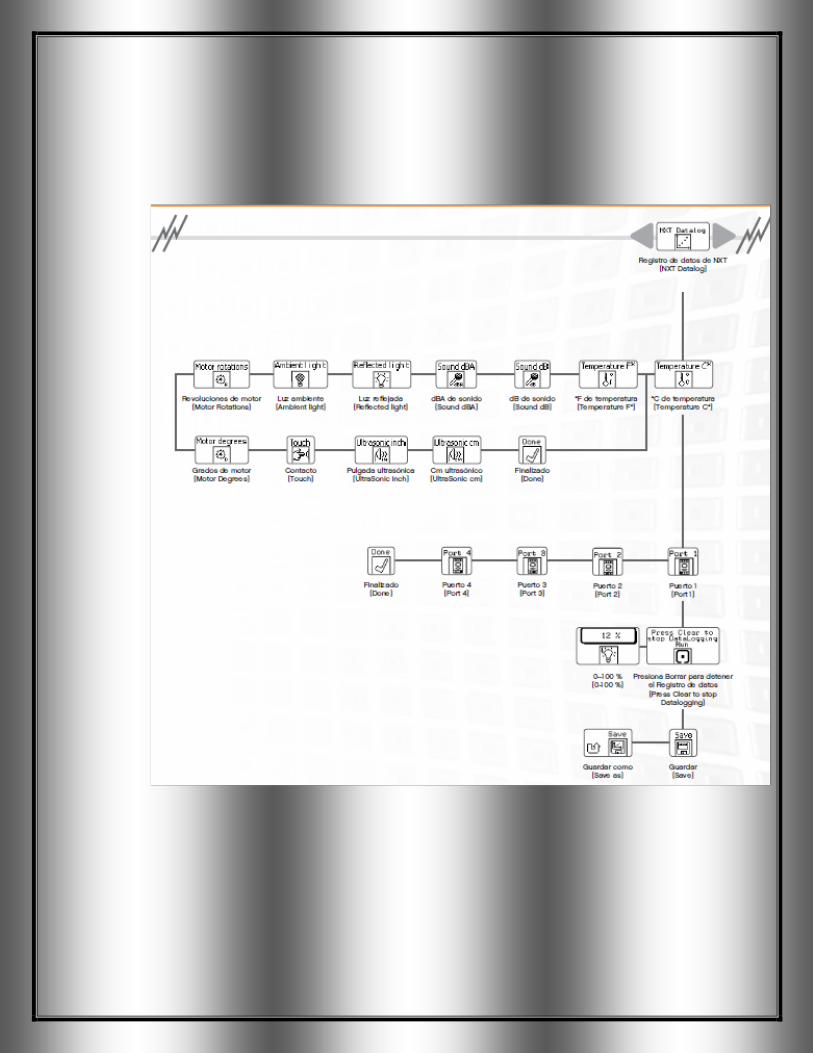
Registro de datos NXT:
Se pueden registrar datos en el
NXT sin necesidad de conectarlo
a un ordenador por medio de
este programa. Por ejemplo
podemos registrar una luz en uno
de los puertos.
Al usarlo se crea un registro que
se puede importar al
computador
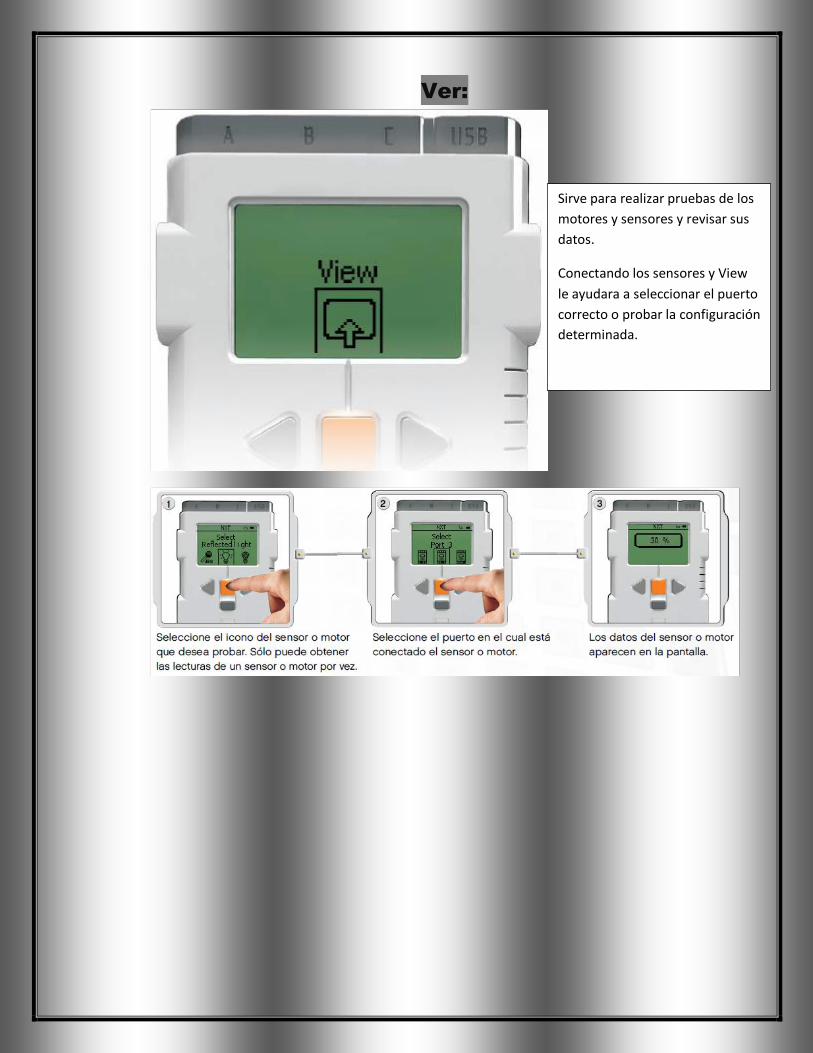
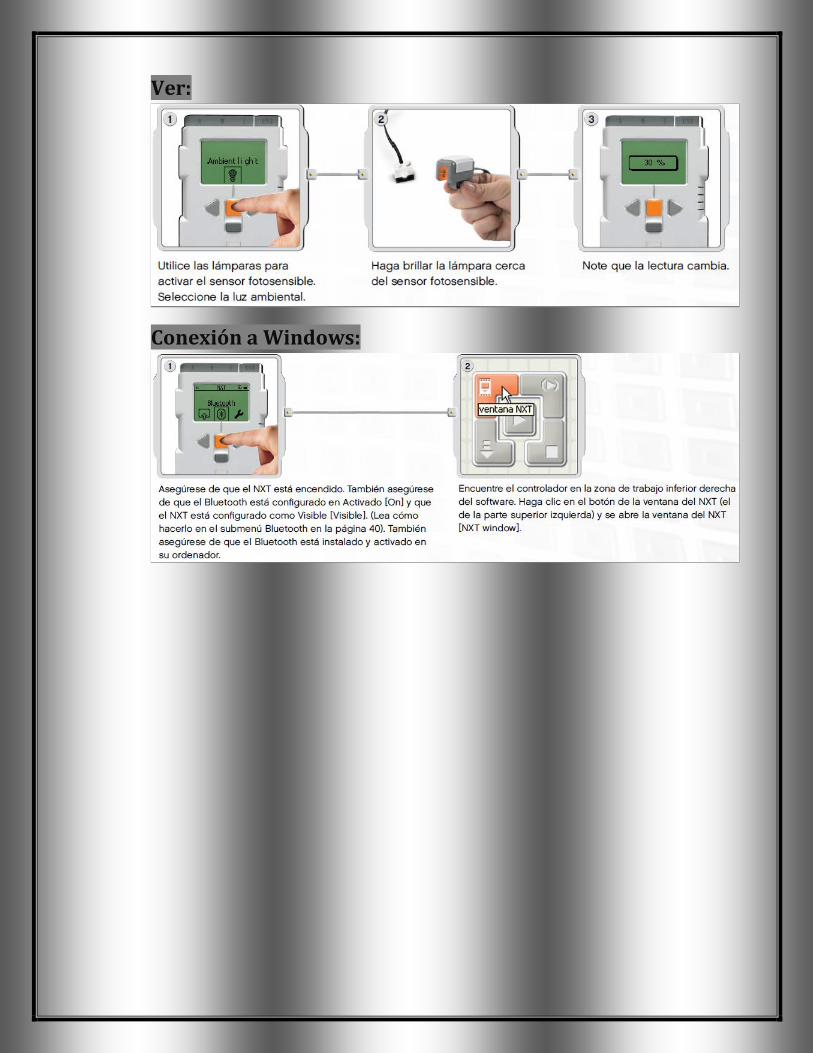
Ver:
Sirve para realizar pruebas de los
motores y sensores y revisar sus
datos.
Conectando los sensores y View
le ayudara a seleccionar el puerto
correcto o probar la configuración
determinada.
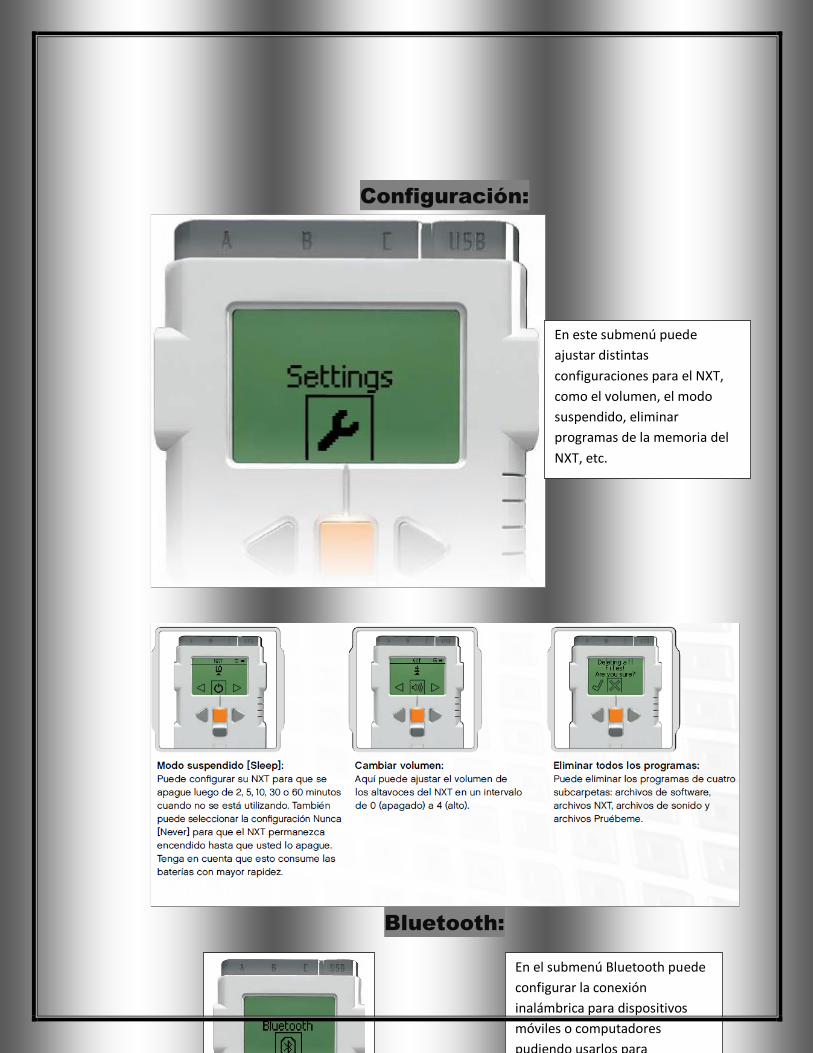
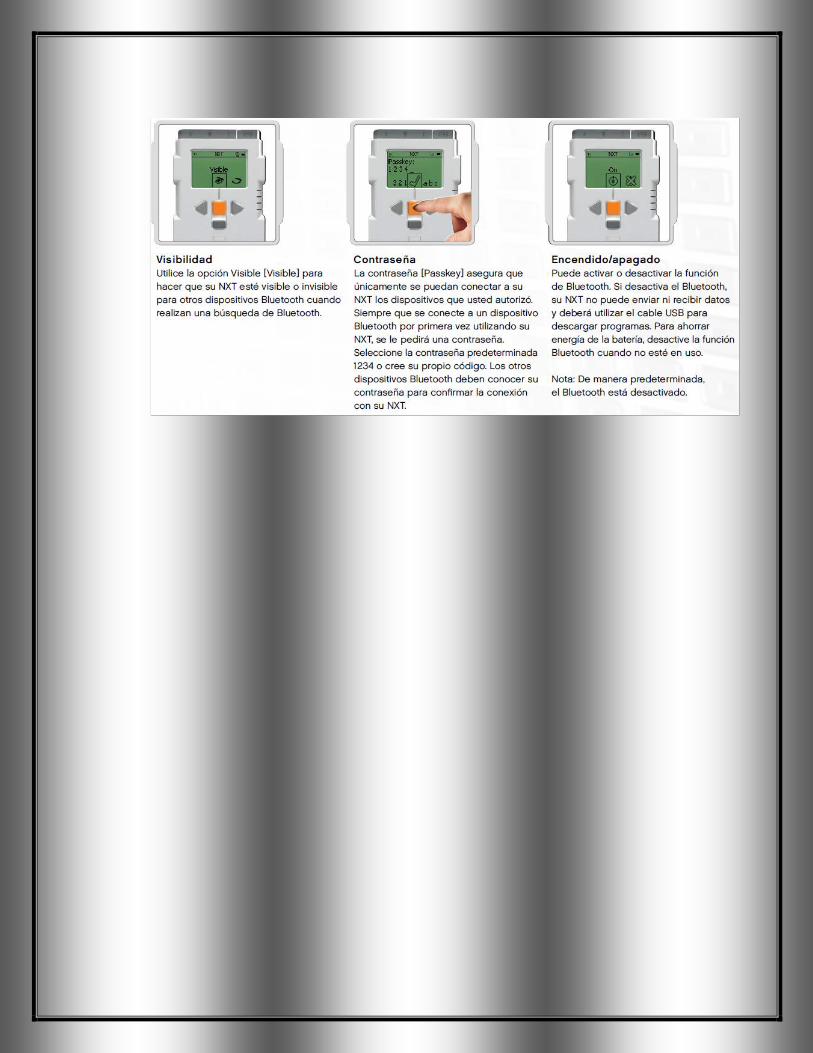
Configuración:
Bluetooth:
En este submenú puede
ajustar distintas
configuraciones para el NXT,
como el volumen, el modo
suspendido, eliminar
programas de la memoria del
NXT, etc.
En el submenú Bluetooth puede
configurar la conexión
inalámbrica para dispositivos
móviles o computadores
pudiendo usarlos para
Menú principal NXT:
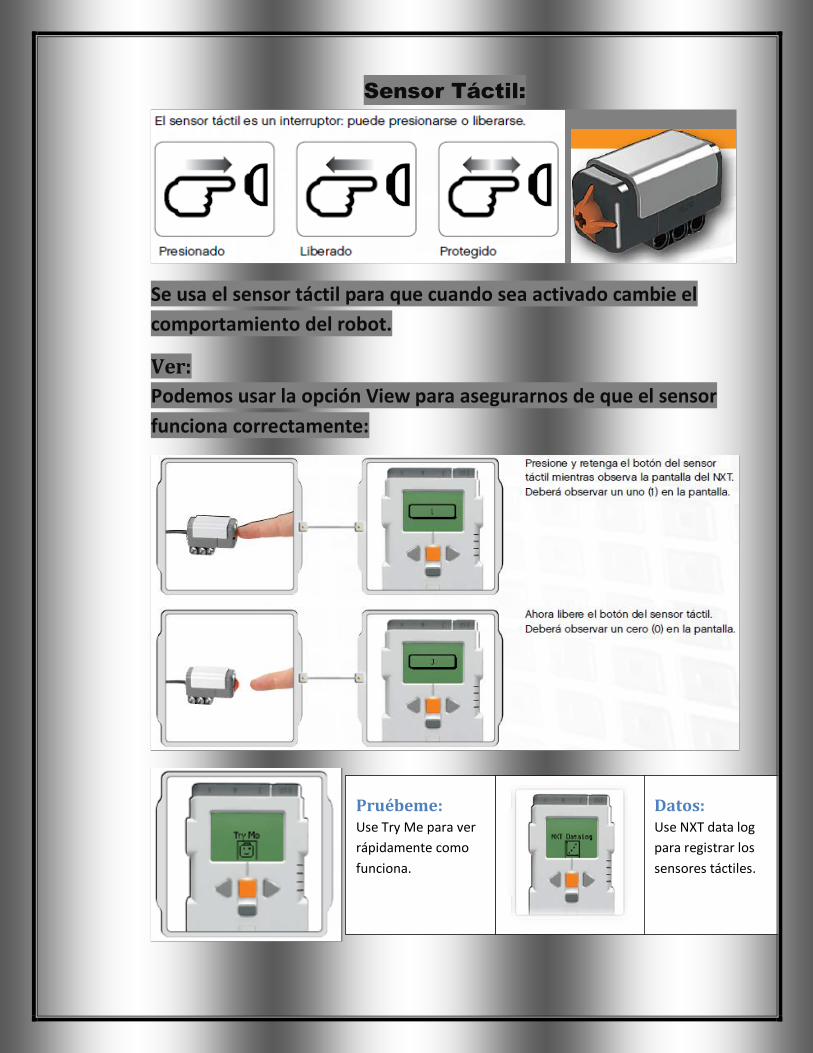
Sensor Táctil:
Se usa el sensor táctil para que cuando sea activado cambie el
comportamiento del robot.
Ver:
Podemos usar la opción View para asegurarnos de que el sensor
funciona correctamente:
Pruébeme: Use Try Me para ver
rápidamente como
funciona.
Datos: Use NXT data log
para registrar los
sensores táctiles.

Sensor acústico:
Programa NXT: Use NXT program para
crear programas sin
necesidad de un
computador.
El sensor acústico detecta todo tipo de sonidos, desde los
que escuchamos claramente (dBA) y los que no
escuchamos (dB) que son muy altos o muy bajos para el
oído humano.
El sensor mide los niveles acústicos por medio de
porcentajes siendo 10% a 30% una conversación normal
o música a un volumen normal y más de 30% gritos o
música muy alta.
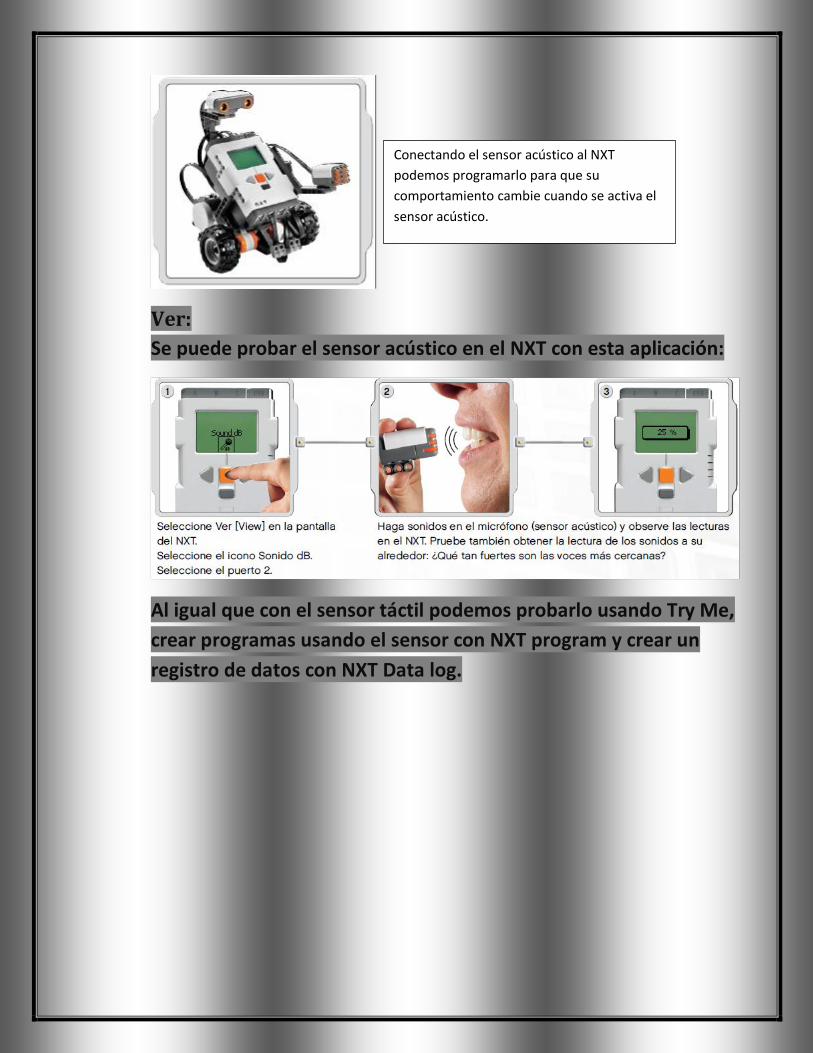
Ver:
Se puede probar el sensor acústico en el NXT con esta aplicación:
Al igual que con el sensor táctil podemos probarlo usando Try Me,
crear programas usando el sensor con NXT program y crear un
registro de datos con NXT Data log.
Conectando el sensor acústico al NXT
podemos programarlo para que su
comportamiento cambie cuando se activa el
sensor acústico.
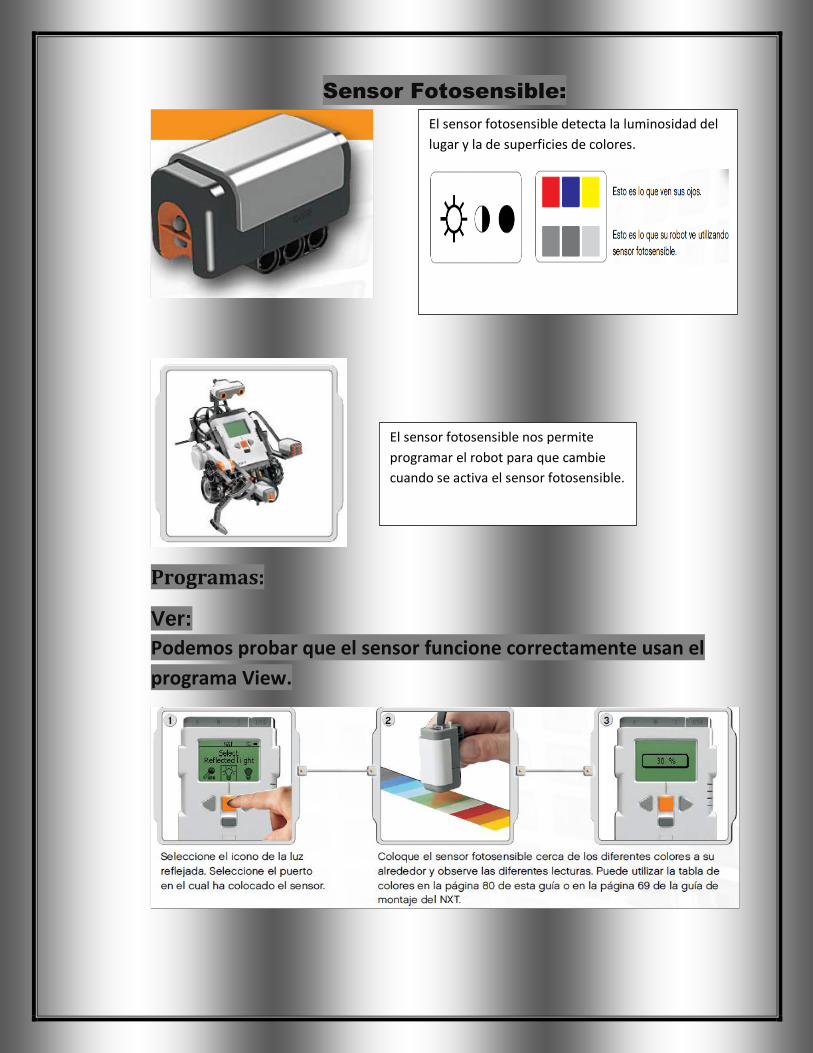
Sensor Fotosensible:
Programas:
Ver:
Podemos probar que el sensor funcione correctamente usan el
programa View.
El sensor fotosensible detecta la luminosidad del
lugar y la de superficies de colores.
El sensor fotosensible nos permite
programar el robot para que cambie
cuando se activa el sensor fotosensible.
Detectar luz ambiental:
Al detectar luz ambiental obtenemos una lectura más completa de
lo que hay enfrente.
Otras opciones son usar los programas Try Me, NXT program y
NXT data log; de los cuales ya se han explicado sus funciones.
Sensor Ultrasónico:
El sensor detecta los objetos midiéndolo en centímetros y
pulgadas. Mide fácilmente objetos duros y grandes, pero se le
dificulta más con objetos suaves como telas, pequeños o
curvados.
El sensor ultrasónico permite al robot
medir distancias entre objetos, detectar
movimiento y así evitar los objetos.
El sensor hace lo mismo que las orejas de
un murciélago: mide la distancia calculando
el tiempo que tarda en llegar y regresar
una onda de sonido.
Ver:
Se puede probar la distancia que el sensor mide usando View.
Usa también los otros programas como Try Me, NXT program y
NXT data log.
Servemotor Interactivo:
Programe el robot para que mida
distancias y así cambie cuando el
sensor se activa.
Los servemotores son los que se
encargan de darle movimiento al
robot.
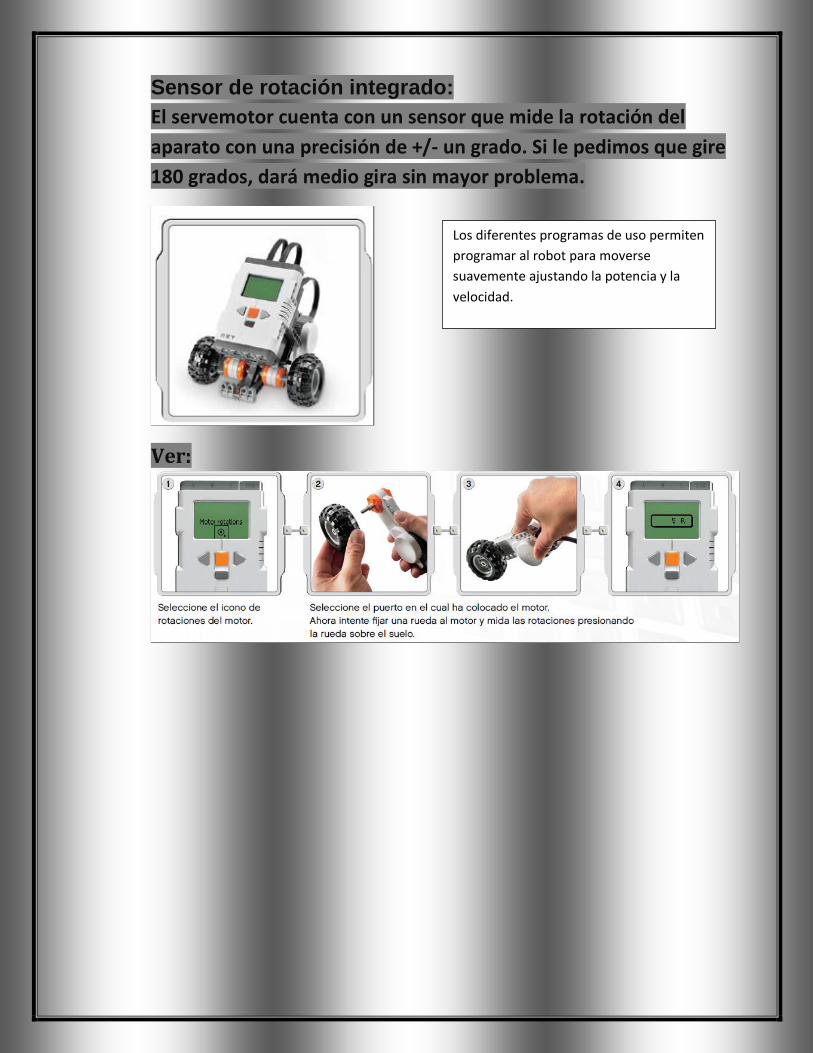
Sensor de rotación integrado:
El servemotor cuenta con un sensor que mide la rotación del
aparato con una precisión de +/- un grado. Si le pedimos que gire
180 grados, dará medio gira sin mayor problema.
Ver:
Los diferentes programas de uso permiten
programar al robot para moverse
suavemente ajustando la potencia y la
velocidad.
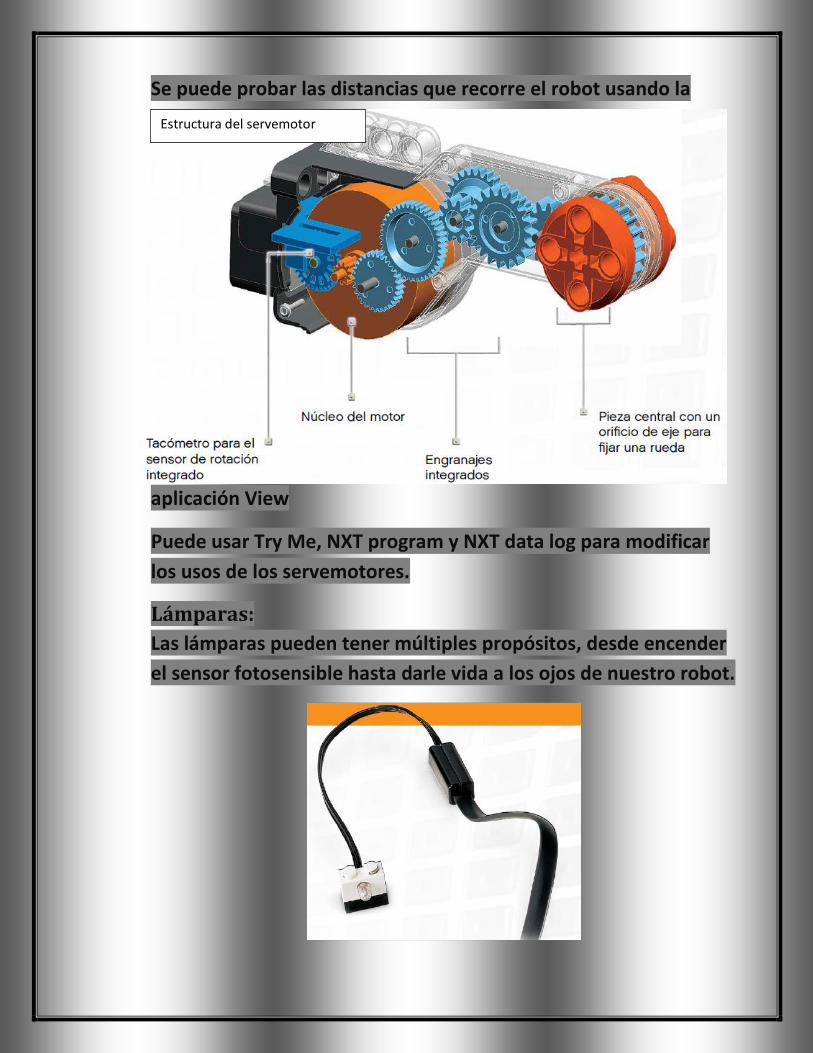
Se puede probar las distancias que recorre el robot usando la
aplicación View
Puede usar Try Me, NXT program y NXT data log para modificar
los usos de los servemotores.
Lámparas:
Las lámparas pueden tener múltiples propósitos, desde encender
el sensor fotosensible hasta darle vida a los ojos de nuestro robot.
Estructura del servemotor
Ver:
Conexión a Windows:
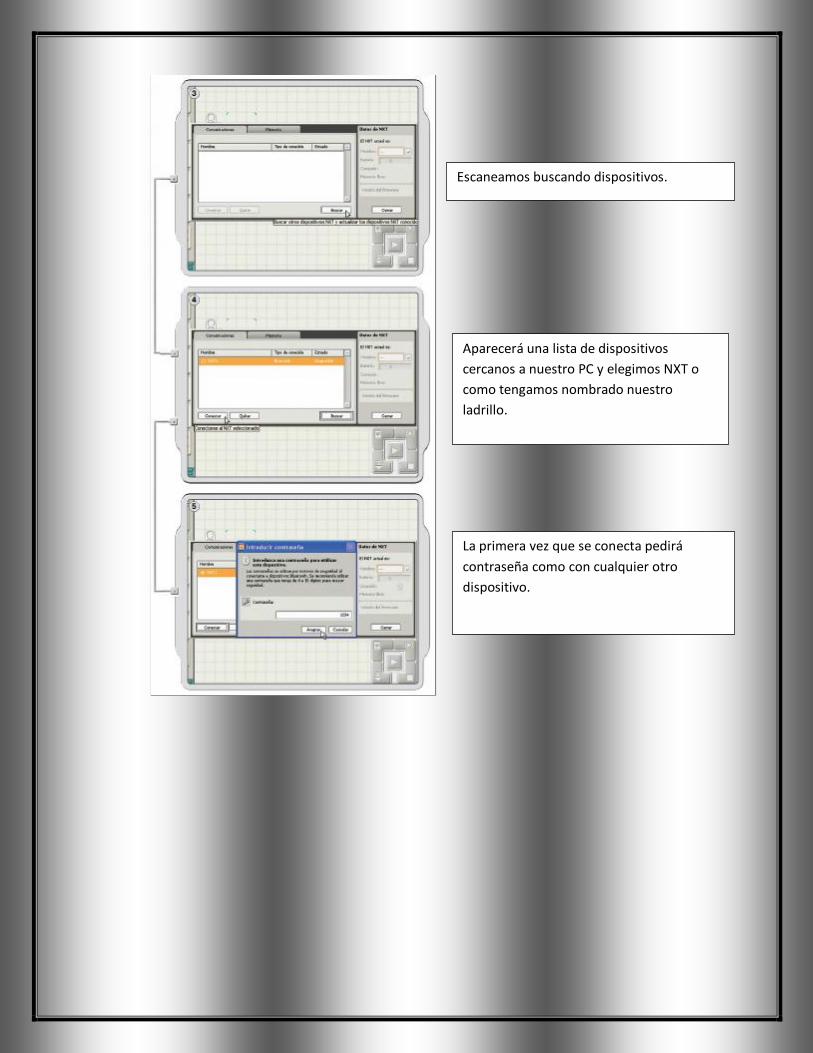
Escaneamos buscando dispositivos.
Aparecerá una lista de dispositivos
cercanos a nuestro PC y elegimos NXT o
como tengamos nombrado nuestro
ladrillo.
La primera vez que se conecta pedirá
contraseña como con cualquier otro
dispositivo.
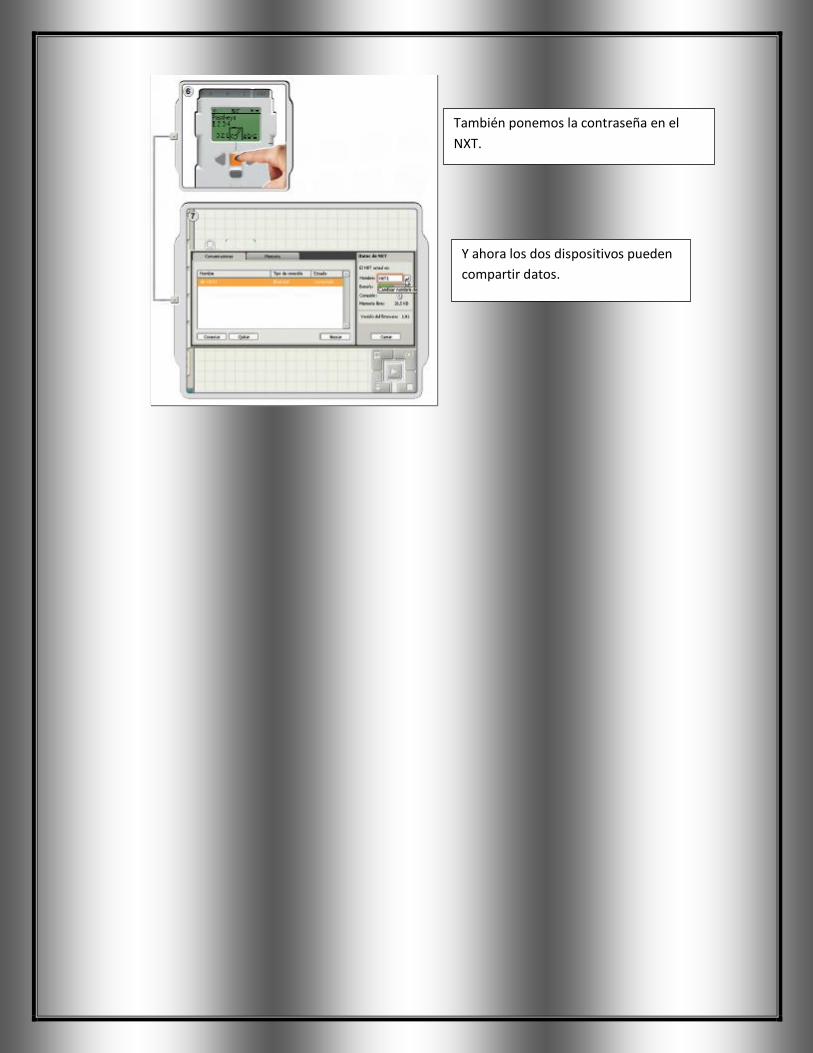
También ponemos la contraseña en el
NXT.
Y ahora los dos dispositivos pueden
compartir datos.
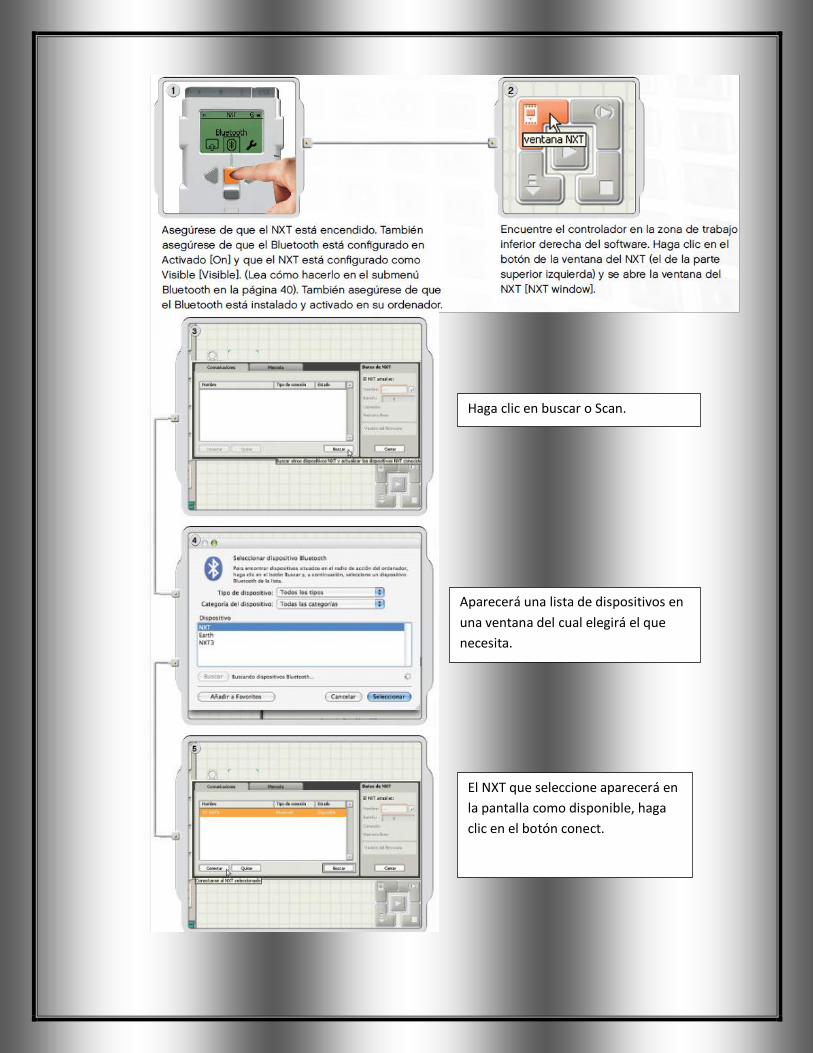
Haga clic en buscar o Scan.
Aparecerá una lista de dispositivos en
una ventana del cual elegirá el que
necesita.
El NXT que seleccione aparecerá en
la pantalla como disponible, haga
clic en el botón conect.
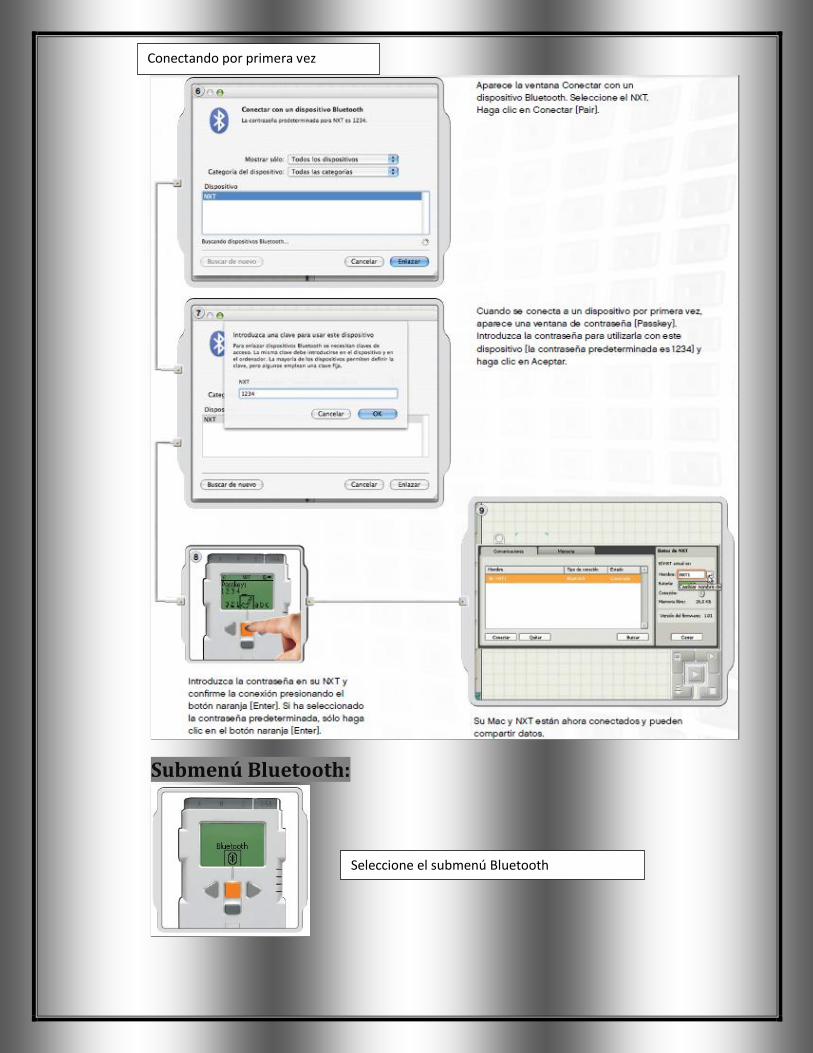
Submenú Bluetooth:
Conectando por primera vez
Seleccione el submenú Bluetooth
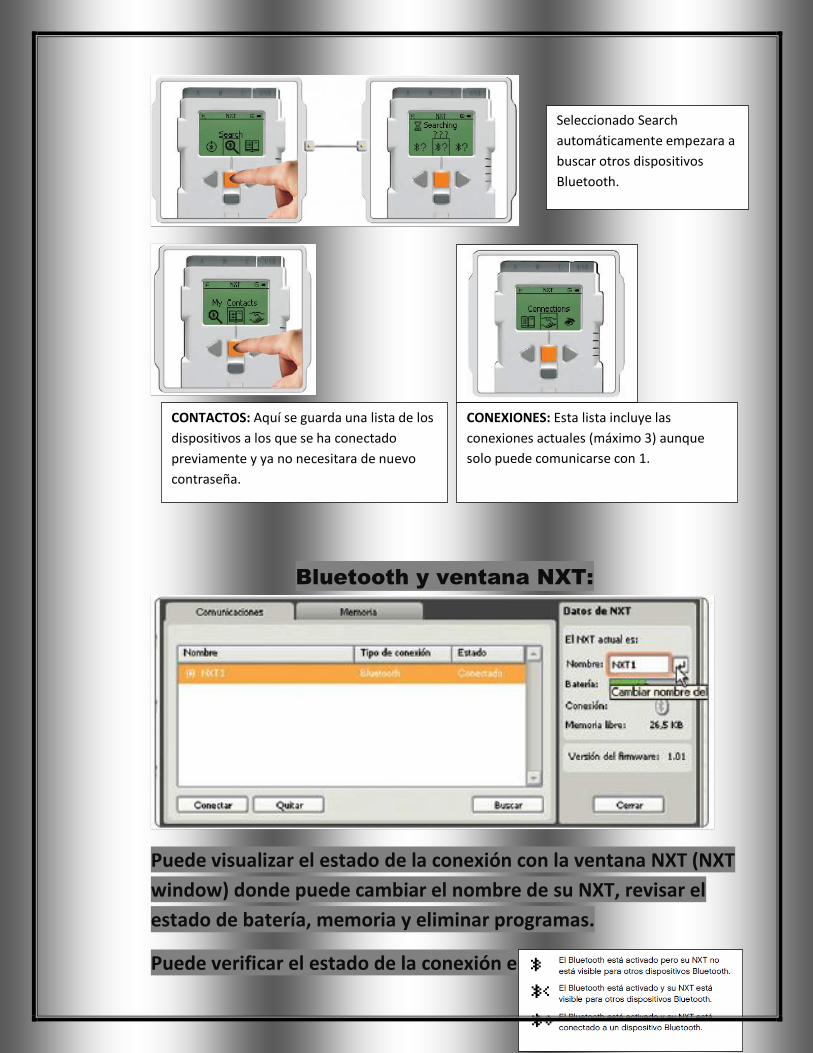
Bluetooth y ventana NXT:
Puede visualizar el estado de la conexión con la ventana NXT (NXT
window) donde puede cambiar el nombre de su NXT, revisar el
estado de batería, memoria y eliminar programas.
Puede verificar el estado de la conexión en el NXT:
Seleccionado Search
automáticamente empezara a
buscar otros dispositivos
Bluetooth.
CONTACTOS: Aquí se guarda una lista de los
dispositivos a los que se ha conectado
previamente y ya no necesitara de nuevo
contraseña.
CONEXIONES: Esta lista incluye las
conexiones actuales (máximo 3) aunque
solo puede comunicarse con 1.
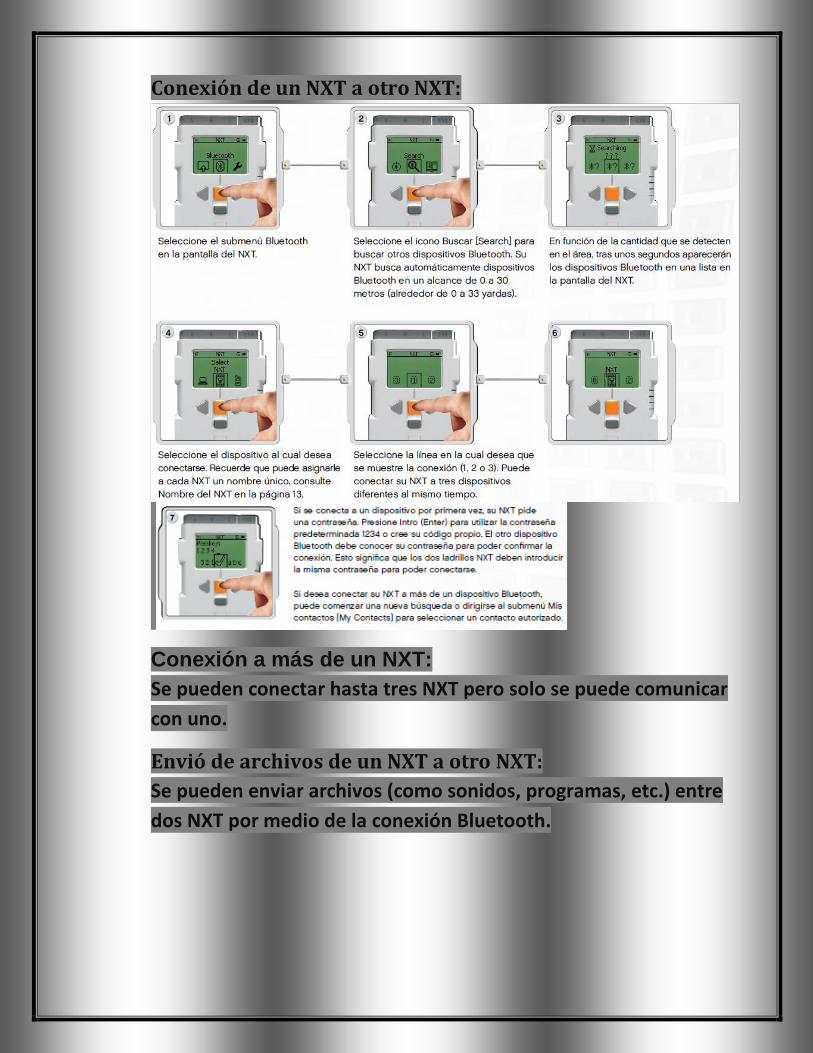
Conexión de un NXT a otro NXT:
Conexión a más de un NXT:
Se pueden conectar hasta tres NXT pero solo se puede comunicar
con uno.
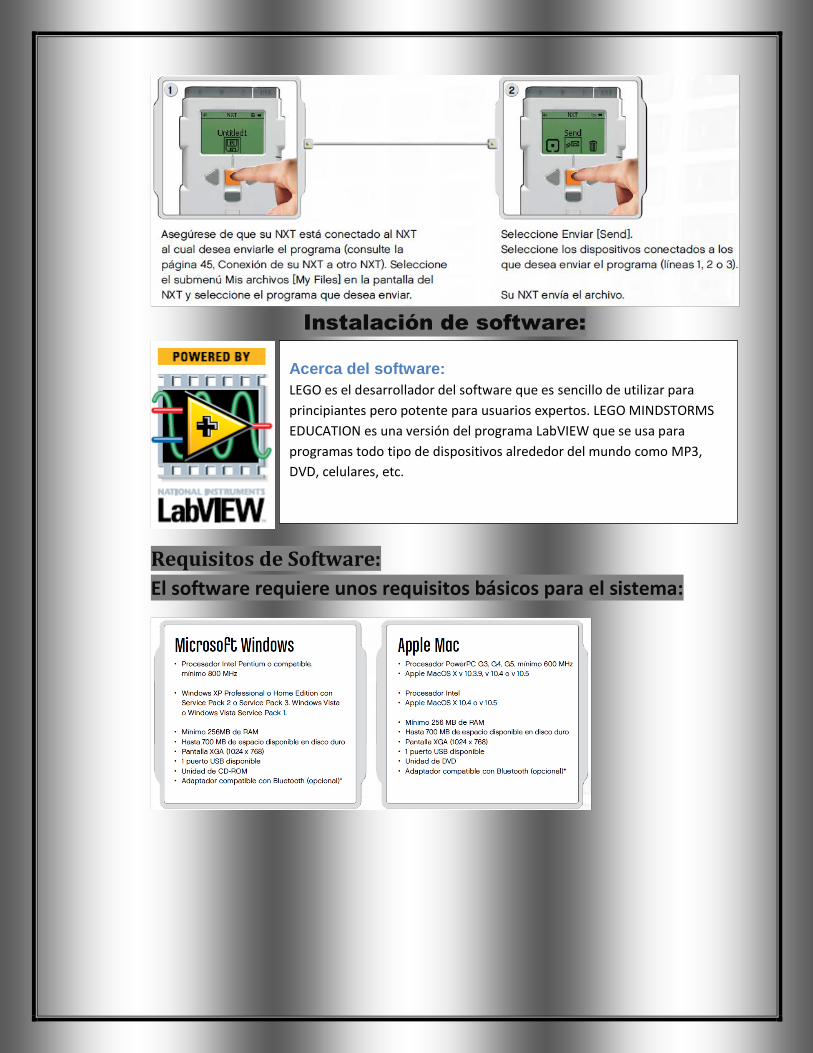
Envió de archivos de un NXT a otro NXT:
Se pueden enviar archivos (como sonidos, programas, etc.) entre
dos NXT por medio de la conexión Bluetooth.
Instalación de software:
Requisitos de Software:
El software requiere unos requisitos básicos para el sistema:
Acerca del software:
LEGO es el desarrollador del software que es sencillo de utilizar para
principiantes pero potente para usuarios expertos. LEGO MINDSTORMS
EDUCATION es una versión del programa LabVIEW que se usa para
programas todo tipo de dispositivos alrededor del mundo como MP3,
DVD, celulares, etc.
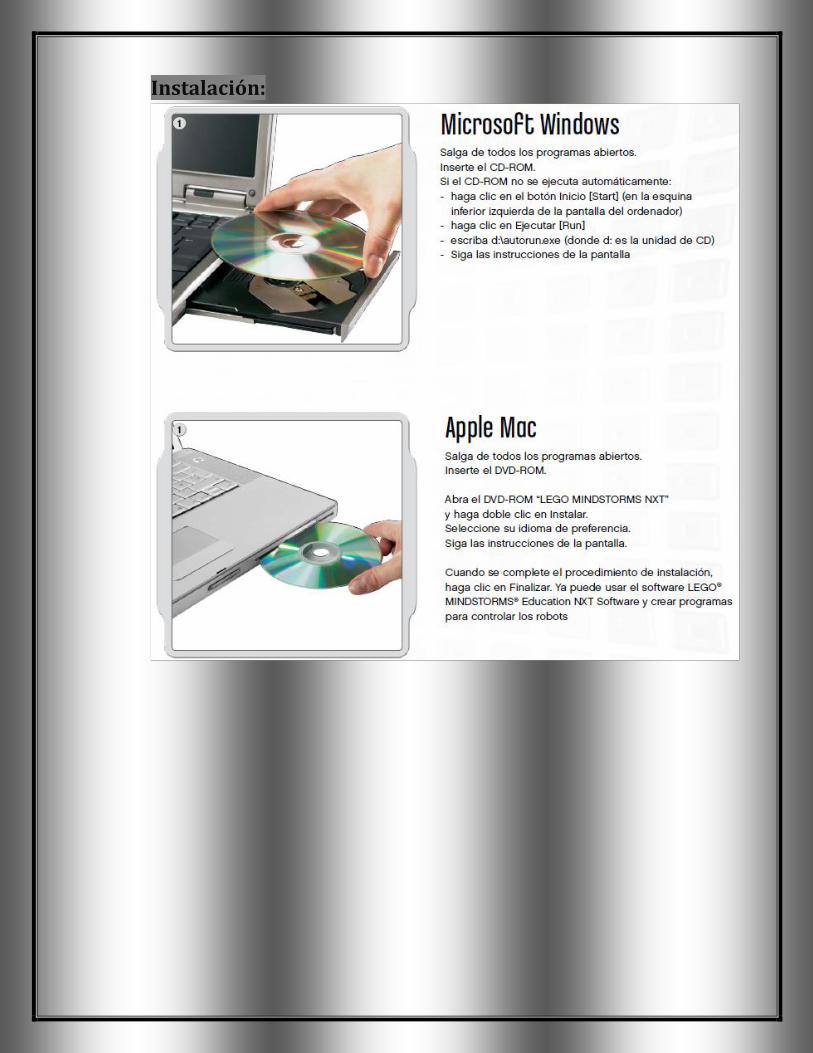
Instalación:
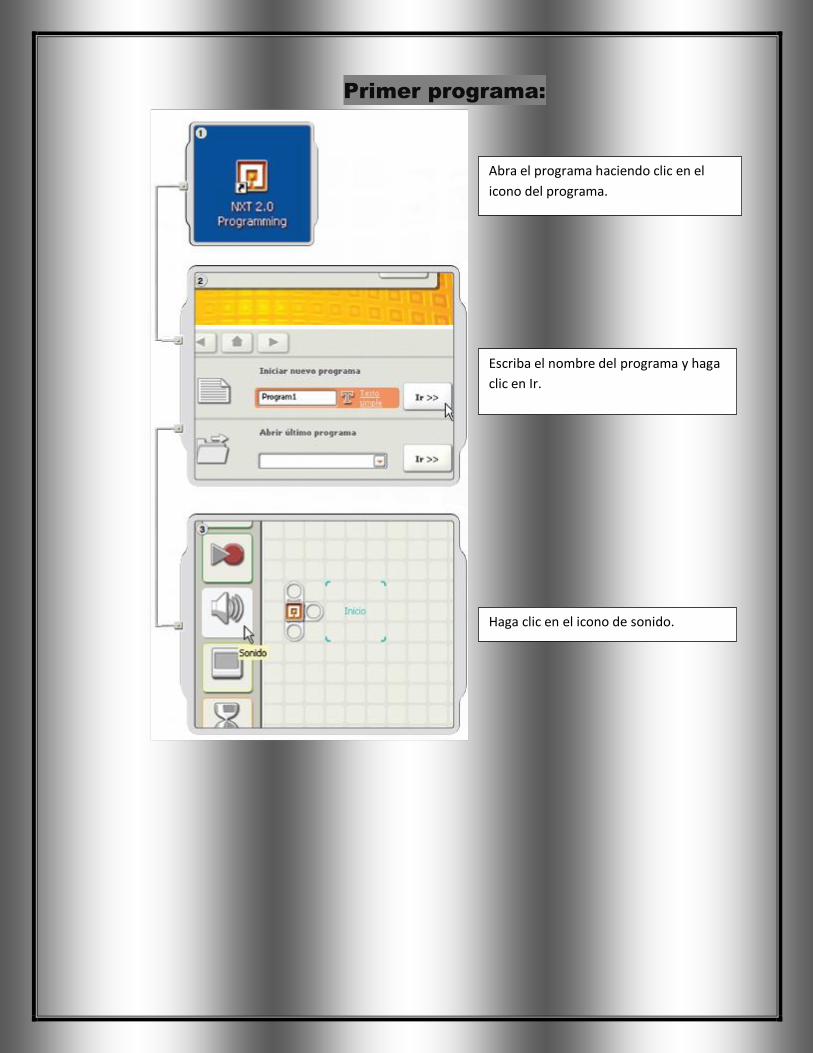
Primer programa:
Abra el programa haciendo clic en el
icono del programa.
Escriba el nombre del programa y haga
clic en Ir.
Haga clic en el icono de sonido.
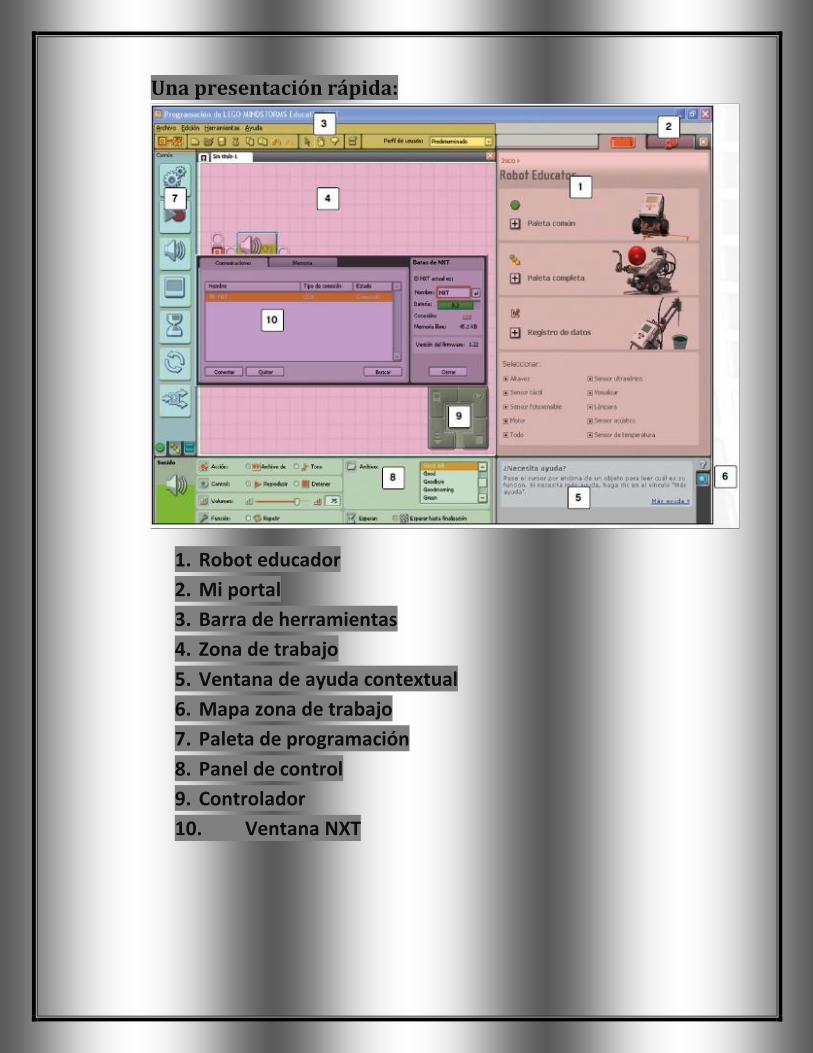
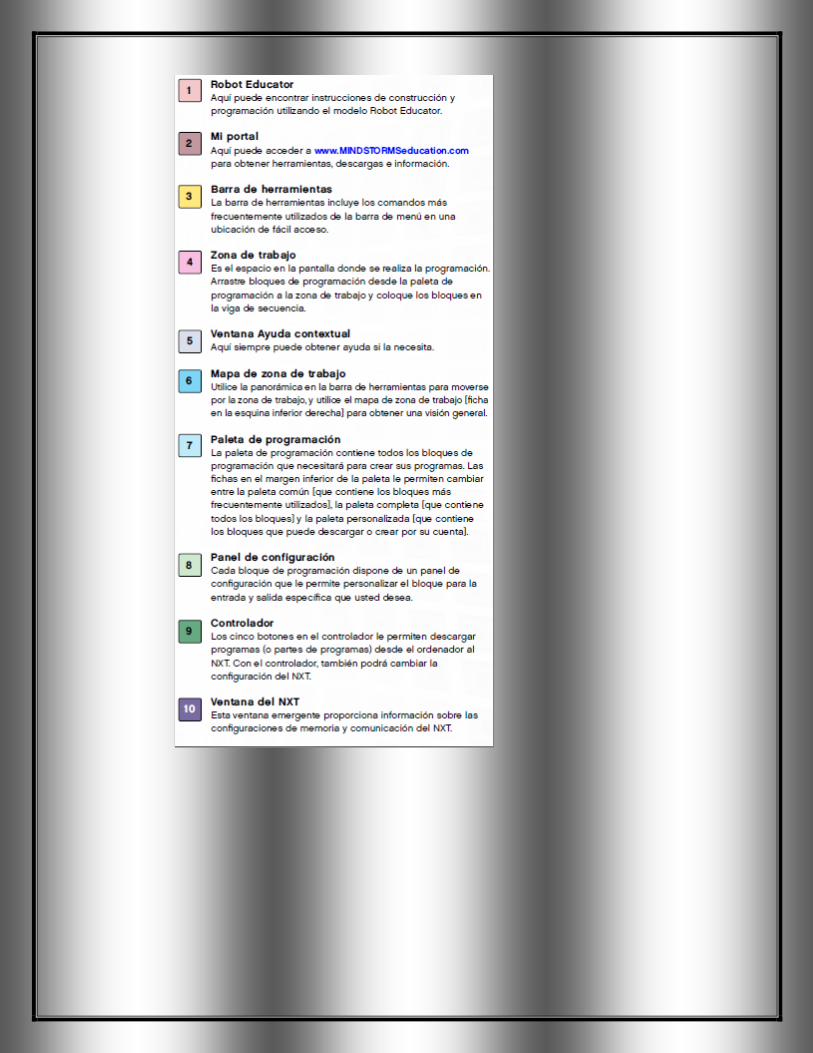
Una presentación rápida:
1. Robot educador
2. Mi portal
3. Barra de herramientas
4. Zona de trabajo
5. Ventana de ayuda contextual
6. Mapa zona de trabajo
7. Paleta de programación
8. Panel de control
9. Controlador
10. Ventana NXT