Manual de Metrología
152
CURSO: METROLOGÍA MEDICIÓN, INSTRUMENTACIÓN Y CONTROL Proyectos de Ahorro de Energía de la Facultad de Ingeniería 2007
-
Upload
axxellaxxe -
Category
Documents
-
view
47 -
download
0
description
metrologia
Transcript of Manual de Metrología

CURSO: METROLOGÍAMEDICIÓN, INSTRUMENTACIÓN Y CONTROL
Proyectos de Ahorro de Energía de la Facultad de Ingeniería
2007

MEDICIÓN, INSTRUMENTACIÓN Y CONTROL
1.- INTRODUCCIÓN
El concepto de medir se considera como la comparación del valor de la variable contra un estándar preestablecido. No hay que olvidar que para medir cualquier parámetro dentro de un sistema, se está alterando al mismo, ya que el elemento de medición absorberá energía del mismo. El valor exacto de la variable por lo tanto, no es posible conocerlo y siempre se tendrá un grado de incertidumbre.
La importancia de la instrumentación en las actividades diarias de cualquier industria ha cobrado gran importancia para la optimización de los procesos y tener un mejor uso de los recursos, como es la energía. La gran mayoría de los progresos que se han obtenido en las últimas décadas, tanto en la ciencia como en la tecnología, son debidos indiscutiblemente a que se cuenta con una instrumentación más efectiva.
Actualmente en la mayoría de los procesos industriales no solamente se requiere de aparatos de medición sino también, de sistemas de control automático como ayuda para estabilizar las variables involucradas en los mismos, incrementar la calidad de los productos, disminuir fugas y desperdicios y poder ahorrar vapor y combustibles. Para lograr estos propósitos no es necesario tener una planta con una instrumentación muy elaborada, sino que es suficiente con tenerla inteligentemente instrumentada.
Una planta bien instrumentada reduce costos de fabricación disminuyendo el costo del producto final pero manteniéndolo con un estricto control de calidad, además se aumenta la vida y la seguridad de las mismas.
2.-CONCEPTOS DE MEDICIÓN E INSTRUMENTACIÓN
2. 1 DEFINICIÓN DE PARÁMETROS
Dentro de los sistemas de medición existen varios términos los cuáles es muy conveniente establecer el significado como se entienden en el proceso de medir.
MEDIDOR.- Dispositivo que ejecuta la acción de medir el valor de un parámetro. Las partes generales que componen cualquier sistema de medición son: Sensor –Transductor

Configurador de señal Transmisor Manipulador de señal Lector
Sensor – transductor, es la parte del equipo que toma la señal a medir del proceso de interés y en la mayoría de los casos lo cambia a otra forma de energía, que sea más fácilmente manejable. Actualmente la tendencia es a transformarla a señal eléctrica, debido al gran desarrollo que ha tenido la industria electrónica, lo que ha permitido el desarrollo de medidores más confiables, de menor tamaño y costo, lo que permite aumentar los puntos de medición.
El configurador de la señal es la parte del medidor que filtra, amplifica y pone a la señal en condiciones de ser leída. Para los sistemas eléctricos dichos configuradores se han estandarizado para tener una salida entre 4 a 20 mA y poder transmitirla y en los sistemas neumáticos se tiene el rango de 3 a 15 psi (20.7 a 103.4 kPa)
La etapa de transmisión se utiliza sobre todo, cuando se está realizando una medición remota y el transmisor es el encargada de enviar la señal al tablero de medición o al dispositivo de control.
En la etapa de manipulación la señal es recibida, reconstruida y preparada para enviarse al lector, el cuál puede ser desde una carátula hasta la pantalla de una computadora.
2.2 TRANSDUCTORES
Un transductor es un dispositivo capaz de transformar o convertir un determinado tipo de energía de entrada, en otra diferente de salida. El nombre del transductor ya nos indica cual es la transformación que realiza, aunque no necesariamente la dirección de la misma. Es un dispositivo usado principalmente en las ciencias eléctricas para obtener la información de entornos físicos y conseguir (a partir de esta información) señales o impulsos eléctricos o viceversa.
Elementos Electromecánicos –Electrónicos
Los elementos electromecánicos de presión utilizan un elemento mecánico elástico combinado con un transductor eléctrico que genera la señal eléctrica correspondiente. El elemento mecánico consiste en un tubo Bourdon, espiral, hélice, diafragma, fuelle o una combinación de los mismos que, a través de un sistema de palancas convierte la presión en una fuerza o en un desplazamiento mecánico.
Los elementos electromecánicos de presión se clasifican según el principio de funcionamiento en los siguientes tipos:

Transductores electrónicos de equilibrio de fuerzas: Resistivos. Magnéticos Capacitivos. Piezoeléctricos.
Transductores resistivos
Constituyen, sin duda, uno de los transmisores eléctricos más sencillos. Consisten en un elemento elástico (tubo Bourdon o cápsula) que varia la resistencia óhmica de un potenciómetro en función de la presión. El potenciómetro puede adoptar la forma de un solo hilo continuo o bien estar arrollado a una bobina siguiendo un valor lineal o no de resistencia. Existen varios tipos de potenciómetro según sea el elemento de resistencia: potenciómetros de grafito, de resistencia bobinada, de película metálica y de plástico moldeado. En la figura 1 puede verse un transductor resistivo representativo que consta de un muelle de referencia, el elemento de presión y un potenciómetro de precisión. El muelle de referencia es el corazón del transductor ya que su desviación al comprimirse debe ser únicamente una función de la presión y además debe ser independiente de la temperatura, de la aceleración y de otros factores ambientes externos.
Figura 1 Transductor resistivo
El movimiento del elemento de presión se transmite a un brazo móvil aislado que se apoya sobre el potenciómetro de precisión. Este esta conectado a un circuito de puente de Wheatstone.
Los transductores resistivos son simples y su señal de salida es bastante potente como para proporcionar una corriente de salida suficiente para el funcionamiento de los instrumentos de indicación sin necesidad de amplificación. Sin embargo, son insensibles a pequeños movimientos del contacto del cursor, muy sensibles a vibraciones y presentan una estabilidad pobre en el tiempo.

El intervalo de medida de estos transmisores corresponde al elemento de presión que utilizan (tubo Bordón, fuelle) y varía en general de 0-0,1 a 0-300 kg/cm². La precisión es del orden de 1-2 %
Transductores magnéticos
Se clasifican en dos grupos según el principio de funcionamiento.
a) Transductores de núcleo variable figura 2 en los que el desplazamiento de un núcleo móvil dentro de una bobina aumenta la inductancia de esta en forma casi proporcional a la porción metálica del núcleo contenida dentro de la bobina.
Figura 2 Transductor de núcleo variable.
El devanado de la bobina se alimenta con una corriente alterna y la f.e.m. de autoinducción generada se opone a la f.e.m. de alimentación, de tal modo que al ir penetrando el núcleo móvil dentro de la bobina la corriente presente en el circuito se va reduciendo por aumentar la f.e.m. de autoinducción.
El transformador diferencial estudiado en los transductores electrónicos de equilibrio de fuerzas es también un transductor de inductancia variable, si bien, en lugar de considerar una sola bobina con un núcleo móvil, se trata de tres bobinas en las que la bobina central o primaria es alimentada con una corriente alterna y el flujo magnético generado induce tensiones en las otras dos bobinas, con la particularidad de que si el núcleo esta en el centro, las dos tensiones son iguales y opuestas y si se desplaza a la derecha o a la izquierda, las tensiones son distintas.
Es decir, que el transformador diferencial es más bien un aparato de relación de inductancias.
Los transductores de inductancia variable tienen las siguientes ventajas: no producen rozamiento en la medición, tienen una respuesta lineal, son pequeños y de construcción robusta y no precisan ajustes criticos en el montaie. Su precisión del orden de ± 1 %.

b) Los transductores de inductancia variable figura 3 consisten en un imán permanente o un electroimán que crea un campo magnético dentro del cual se mueve una armadura de material magnético.
El circuito magnético se alimenta con una fuerza magnetomotriz constante, con lo cual al cambiar la posición de la armadura varía la reluctancia y por lo tanto el flujo magnético. Esta variación del flujo da lugar a una corriente inducida en la bobina que es, por tanto, proporcional al grado de desplazamiento de la armadura móvil.
Figura 3 Transductor de inductancia variable
El movimiento de la armadura es pequeño (del orden de un grado como máximo en armaduras giratorias) sin contacto alguno con las partes fijas, por lo cual no existen rozamientos eliminándose la histéresis mecánica típica de otros instrumentos. Los transductores de reluctancia variable presentan una alta sensibilidad a las vibraciones, una estabilidad media en el tiempo y son sensibles a la temperatura. Su precisión es del orden de ± 0,5 %.Ambos tipos de transductores posicionan el núcleo o la armadura móviles con un elemento de presión (tubo Bordón) y utilizan circuitos eléctricos bobinados de puente de inductancias de corriente alterna.
Transductores capacitivos
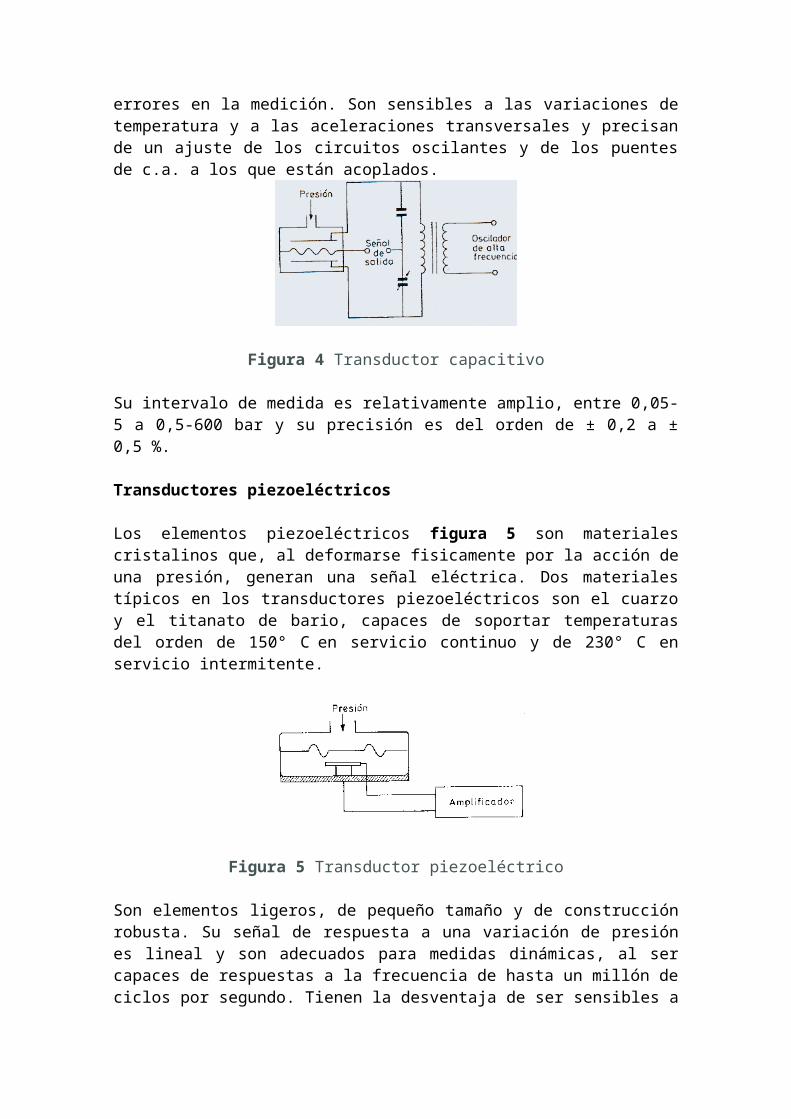
Se basan en la variación de capacidad que se produce en un condensador al desplazarse una de sus placas por la aplicación de presión figura 4. La placa móvil tiene forma de diafragma y se encuentra situada entre dos placas fijas. De este modo se tienen dos condensadores uno de capacidad fija o de referencia y el otro de capacidad variable, que pueden compararse en circuitos oscilantes o bien en circuitos de puente de Wheatstone alimentados con corriente alterna.Los transductores capacitivos se caracterizan por su pequeño tamaño y su construcción robusta, tienen un pequeño desplazamiento volumétrico y son adecuados para medidas estáticas y dinámicas. Su señal de salida es débil por lo que precisan de amplificadores con el riesgo de introducir errores en la medición. Son sensibles a las variaciones de temperatura y a las aceleraciones

transversales y precisan de un ajuste de los circuitos oscilantes y de los puentes de c.a. a los que están acoplados.
Figura 4 Transductor capacitivo
Su intervalo de medida es relativamente amplio, entre 0,05-5 a 0,5-600 bar y su precisión es del orden de ± 0,2 a ± 0,5 %.
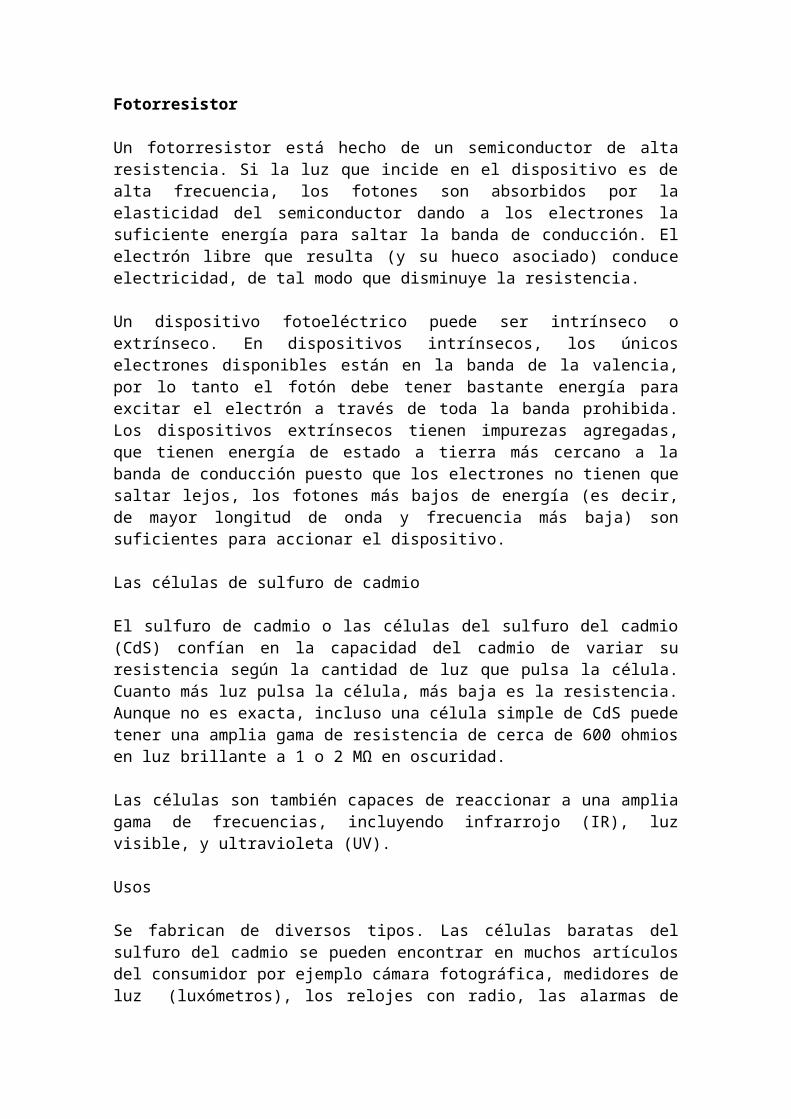
Transductores piezoeléctricos
Los elementos piezoeléctricos figura 5 son materiales cristalinos que, al deformarse fisicamente por la acción de una presión, generan una señal eléctrica. Dos materiales típicos en los transductores piezoeléctricos son el cuarzo y el titanato de bario, capaces de soportar temperaturas del orden de 150° C en servicio continuo y de 230° C en servicio intermitente.
Figura 5 Transductor piezoeléctrico
Son elementos ligeros, de pequeño tamaño y de construcción robusta. Su señal de respuesta a una variación de presión es lineal y son adecuados para medidas dinámicas, al ser capaces de respuestas a la frecuencia de hasta un millón de ciclos por segundo. Tienen la desventaja de ser sensibles a los cambios en la temperatura y de experimentar deriva en el cero y precisar ajuste de impedancias en caso de fuerte choque. Asimismo, su señal de salida es relativamente débil por lo que precisan de amplificadores y acondicionadores de señal que pueden introducir errores en la medición.
En la siguiente tabla pueden verse las características de los elementos electromecánicos descritos.

Otras aplicaciones
InductivosEl principio de funcionamiento de estos transductores consiste en la variación de la inductancia producida por el desplazamiento de un vástago entre el centro de dos bobinas o un transformador diferencial (LVDT). El rango de trabajo va de 1 a 360 mm con linealidades comprendidas entre 0,15 y 0,5%. La señal resultante puede ser normalizada a ±2 Vcc, ±5 Vcc, ±10 Vcc, 0 - 10 Vcc, 0 - 20 mA, 4 - 20 mA o convertida a una señal digital RS 232, RS 485 mediante electrónica integrada o mediante un módulo electrónico externo.Potenciométricos Estos transductores implementados como potenciómetros funcionan como divisores de tensión que modifican su relación en función del desplazamiento que experimenta su cursor (solidario al vástago). El desplazamiento que pueden alcanzar va de 10 a 300 mm con linealidades comprendidas entre ±0,05% y ±1%. Para poder acondicionar la señal proveniente del transductor, disponemos de módulos electrónicos externos que proporcionan señales 0 - 20 mA, 4 - 20 mA y ±10 mA.
Efecto Hall
El efecto Hall consiste en la aparición de un campo eléctrico en un conductor cuando es atravesado por un campo magnético. A este campo eléctrico se le
llama campo Hall. Este efecto fue descubierto en 1879 por el físico estadounidense Edwin Herbert Hall.
Cuando por un material conductor o semiconductor, circula una corriente eléctrica, y estando este mismo material en el seno de un campo magnético, se comprueba que aparece una fuerza magnética en los portadores de carga que los reagrupa dentro del material, esto es, los portadores de carga se desvían y agrupan a un lado del material conductor o semiconductor, apareciendo así un campo eléctrico perpendicular al campo magnético y al propio campo eléctrico generado por la batería (FM). Este campo eléctrico es el denominado campo Hall (EH), y ligado a él aparece la tensión Hall, que se puede medir mediante el voltímetro de la figura.
Efecto Hall
Dibujo explicativoEn el caso de la figura, tenemos una tableta de un material desconocido y queremos saber cuales son sus portadores de carga. Para ello, mediante una batería hacemos circular por la tableta una corriente eléctrica. Una vez hecho esto, introducimos la tableta en el seno de un campo magnético uniforme y perpendicular a la tableta.
Aparecerá entonces una fuerza magnética sobre los portadores de carga, que tenderá a agruparlos a un lado de la tableta, apareciendo de este modo una tensión Hall y un campo eléctrico Hall entre ambos lados de la tableta. Dependiendo de si la lectura del voltímetro es positiva o negativa, y conociendo el sentido del campo magnético y del campo eléctrico originado por la batería,

podemos deducir si los portadores de carga de la tableta de material desconocido son las cargas positivas o las negativas.
La física clásica del efecto Hall Sabemos que un campo magnético actúa sobre las cargas en movimiento (Fuerza de Lorentz).
Una corriente I que atraviesa un material consiste en cargas (electrones) que se desplazan (en sentido contrario a la corriente) con una velocidad que denominaremos v.
Si sumergimos esa corriente de electrones en un campo magnético B, cada uno de los electrones que forman la corriente estará sometidos a la fuerza de Lorenz
Fm = -e.v^B
Donde -e corresponde a la carga de un electrón, v el vector velocidad del electrón y B el vector campo magnético aplicado.
La dirección de la fuerza será perpendicular al plano formado por v y B (ya que es resultado del producto vectorial de ambos) y provocará un desplazamiento de electrones en esa dirección.Como consecuencia tendremos una concentración de cargas negativas sobre uno de los lados del material y un déficit de cargas negativas en el lado opuesto. Esta distribución de cargas genera una diferencia de potencial entre ambos lados, la tensión de Hall VH, y un campo eléctrico EH.
Este campo eléctrico que genera a su vez una fuerza eléctrica sobre los electrones dada por la Ley de Coulomb, Fe = -e . EH, que actúa en la misma dirección que la fuerza de Lorenz pero en sentido contrario a esta. El equilibrio se alcanzará cuando la suma de las dos fuerzas sea nula, de lo cual deducimos que en el equilibrio el valor del campo Hall es:
EH = -v*B.
Aplicación del efecto Hall Los sensores de Efecto Hall permiten medir :
Los campos magnéticos (Teslametros)

La intensidad de corrientes eléctricas (sensores de corriente de Efecto Hall) También permiten la elaboración de sensores o detectores de posición sin contacto, utilizados particularmente en el automóvil, para detectar la posición de un árbol giratorio (caja de cambios, paliers, ...). Encontramos también sensores de efecto Hall bajo las teclas de los teclados de los instrumentos de música modernos (órganos, órganos digitales, sintetizadores) evitando así el desgaste que sufren los contactos eléctricos tradicionales.
SENSORES DE LUZ
Básicamente podemos nombrar tres tipo de sensores
Fotorresistencia Fotodiodo Fototransistor
Fotorresistencia Una fotorresistencia es un componente electrónico cuya resistencia disminuye con el aumento de intensidad de luz incidente. Puede también ser llamado fotorresistor, fotoconductor, célula fotoeléctrica o resistor dependiente de la luz, cuya siglas (LDR) se originan de su nombre en inglés light-dependent resistor.
Fotorresistor
Un fotorresistor está hecho de un semiconductor de alta resistencia. Si la luz que incide en el dispositivo es de alta frecuencia, los fotones son absorbidos por la elasticidad del semiconductor dando a los electrones la suficiente energía para saltar la banda de conducción. El electrón libre que resulta (y su hueco asociado) conduce electricidad, de tal modo que disminuye la resistencia.
Un dispositivo fotoeléctrico puede ser intrínseco o extrínseco. En dispositivos intrínsecos, los únicos electrones disponibles están en la banda de la valencia,

por lo tanto el fotón debe tener bastante energía para excitar el electrón a través de toda la banda prohibida. Los dispositivos extrínsecos tienen impurezas agregadas, que tienen energía de estado a tierra más cercano a la banda de conducción puesto que los electrones no tienen que saltar lejos, los fotones más bajos de energía (es decir, de mayor longitud de onda y frecuencia más baja) son suficientes para accionar el dispositivo.
Las células de sulfuro de cadmio
El sulfuro de cadmio o las células del sulfuro del cadmio (CdS) confían en la capacidad del cadmio de variar su resistencia según la cantidad de luz que pulsa la célula. Cuanto más luz pulsa la célula, más baja es la resistencia. Aunque no es exacta, incluso una célula simple de CdS puede tener una amplia gama de resistencia de cerca de 600 ohmios en luz brillante a 1 o 2 MΩ en oscuridad.
Las células son también capaces de reaccionar a una amplia gama de frecuencias, incluyendo infrarrojo (IR), luz visible, y ultravioleta (UV).
Usos
Se fabrican de diversos tipos. Las células baratas del sulfuro del cadmio se pueden encontrar en muchos artículos del consumidor por ejemplo cámara fotográfica, medidores de luz (luxómetros), los relojes con radio, las alarmas de seguridad y los sistemas de encendido y apagado del alumbrado de calles en función de la luz ambiente. En otro extremo de la escala, los fotoconductores de Ge:Cu son los sensores que funcionan dentro de la gama más baja "radiación infrarroja",
Fototransistor
Se llama fototransistor a un transistor sensible a la luz, normalmente a los infrarrojos. La luz incide sobre la región de base, generando portadores en ella. Esta carga de base lleva el transistor al estado de conducción. El fototransistor es más sensible que el fotodiodo por el efecto de ganancia propio del transistor.
En el mercado se encuentran fototransistores tanto con conexión de base como sin ella y tanto en cápsulas plásticas como metálicas (TO-72, TO-5) provistas de una lente.Se han utilizado en lectores de cinta y tarjetas perforadas, lápices ópticos, etc. Para comunicaciones con fibra óptica se prefiere usar detectores con fotodiodos p-i-n. También se pueden utilizar en la detección de objetos cercanos cuando forman parte de un sensor de proximidad.
Se utilizan ampliamente encapsulados conjuntamente con un LED, formando interruptores ópticos (opto-switch), que detectan la interrupción del haz de luz por un objeto.

Fototransistor
Fotodiodo
Un fotodiodo es un semiconductor construido con una unión PN, sensible a la incidencia de la luz visible o infrarroja. Para que su funcionamiento sea correcto se polariza inversamente, con lo que se producirá una cierta circulación de corriente cuando sea excitado por la luz. Debido a su construcción, los fotodiodos se comportan como células fotovoltaicas, es decir, en ausencia de luz exterior generan una tensión muy pequeña con el positivo en el ánodo y el negativo en el cátodo. Esta corriente presente en ausencia de luz recibe el nombre de corriente de oscuridad.
Símbolo del fotodiodo
Principio de operación
Un foto diodo es una unión P-N o estructura P-I-N. Cuando una luz de suficiente energía llega al diodo, excita un electrón dándole movimiento y crea un hueco con carga positiva. Si la absorción ocurre en la zona de agotamiento de la unión, o a una distancia de difusión de él, estos portadores son retirados de la unión por el campo de la zona de agotamiento, produciendo una fotocorriente.Fotodiodos de avalancha Tienen una estructura similar, pero trabajan con voltajes inversos mayores. Esto permite a los portadores de carga fotogenerados el ser multiplicados en la zona de avalancha del diodo, resultando en una ganancia interna, que incrementa la respuesta del dispositivo.

Fotodiodo
Composición
El material empleado en la composición de un fotodiodo es un factor crítico para definir sus propiedades. Suelen estar compuestos de silicio, sensible a la luz visible (longitud de onda de hasta 1µm); germanio para luz infrarroja (longitud de onda hasta aprox. 1,8 µm ); o de cualquier otro material semiconductor.
Material Longitud de onda (nm)Silicio 190–1100Germanio 800–1700Indio galio arsénico (InGaAs) 800–2600
sulfuro de plomo <1000-3500
2.3.- COMPONENTES DE CONTROL AUTOMÁTICO
Los componentes de los sistemas automáticos de control se subdividen en cuatro grupos:
a) Elementos sensores b) Controles c) Dispositivos controlados d) Dispositivos auxiliares
a) Elementos sensores. Es el elemento que mide el cambio en la variable controlada y produce un efecto proporcional que es utilizado por el control. Por su colocación en el sistema estos elementos se pueden clasificar de la siguiente manera - Cuarto - Inserción - Inmersión - bulbo remoto
y entre los principales, para las variables de interés de los sistemas de acondicionamiento de aire y refrigeración tenemos las siguientes
Temperatura
Elemento bimetálico. Es un elemento compuesto de dos laminillas de metales distintos fundidos juntos, por tener diferente coeficiente de dilatación, al sufrir un cambio de temperatura tenderá a flexionarse. Dependiendo de espacio disponible y del movimiento requerido pueden tener la forma de laminas rectas, en forma de U o en espiral. Estos elementos son utilizados normalmente en termostatos de habitaciones, y en termostatos de inserción e inmersión.
Elemento de tubo y barra. Este consiste de un tubo metálico con alto coeficiente de expansión conteniendo una barra, de bajo coeficiente de expansión, unido al tubo en uno de sus extremos. Al variar la longitud del tubo causara que el extremo libre de la barra se mueva. Este tipo de sensores es comúnmente utilizado en ciertos tipos de termostatos de inmersión e inserción.
Elemento de fuelle sellado. Se le hace vacío a la cámara del fuelle y se rellena de vapor, gas o liquido, a sufrir cambios de temperatura causa cambios en la presión o de volumen en el gas o liquido, lo que resulta en un movimiento del fuelle. Estos elementos se utilizan frecuentemente en termostatos de cuarto. Bajo este mismo principio se puede utilizar como un bulbo remoto usando como medio de transmisión un capilar relleno de liquido.
Elemento resistivo. Están constituidos por alambres conductores que varían su resistividad con la temperatura. Un caso especial de estos son los termistores. Se utilizan para medir las temperaturas en cuartos o se insertan en ductos, tubos o tanques.
Elementos termopar. Se base en el principio de metales disimiles los cuales al estar colocados en dos puntos a diferente temperatura general una diferencia de potencia que es proporcional a la diferencia de temperaturas. Su utilización principal es para altas temperaturas.

Humedad
Elementos Higroscópicos. Son elementos que absorben la humedad cambiando su forma que origina una deflexion mecánica. Estos elementos pueden ser de origen orgánico, como son el cabello humano, la madera, membrana animal, etc., o de materiales artificiales como el nylon.
Elementos eléctricos. Son aquellos elementos que varían alguna propiedad eléctrica, como resistencia o capacitancia, al absorber humedad.
Elementos fotoeléctricos. Cambian la intensidad de un haz de luz al aumentar la humedad en el ambiente.
Presión
Los sensores de presión se pueden dividir en dos grandes rangos.
Presiones normales. Los elementos mas comunes son los deformables del tipo fuelle, tubo de Bourdon y diafragmas. La presión que sensan puede ser manométrica o diferencial de acuerdo a donde se conecten las terminales.
Presiones bajas o vacías. Los elementos mas comunes son las campanas invertidas inmersas en aceite, diafragmas delgados y fuelles con gran rugosidad. Sus usos mas comunes es en ductos y como medidores de presión diferencial.
Flujo
Los elementos mas comunes son los del tipo de obstrucción aunque no tienen muy buena exactitud tienen bajo costo, en sistemas que requieren mas exactitud se suelen utilizar del tipo de desplazamiento positivo y del tipo turbina (anemómetro).
Iluminación
Son del tipo fotosensibles y se tiene las fotoceldas, transductores activos, que se utilizan para el control de la intensidad luminosa y los que se utilizan para el apagado encendido pueden ser elementos fotosensibles al infrarrojo y elementos sensores de campo que detectan movimiento.
Dada su importancia tanto los controles como los dispositivos controlados serán descritos en posteriormente, por lo que pasamos a los auxiliares.
d) Dispositivos Auxiliares. Estos dispositivos son requeridos por la mayoría de los sistemas de control para realizar varias funciones. Estas se pueden dividir en sistemas eléctricos, sistemas neumáticos y dispositivos que son comunes en ambas fuentes de energía.

Para los sistemas eléctricos los mas comunes son:
Transformadores utilizados para suministrar el voltaje de AC requerido, normalmente 220V, 127 V y 24V.
Relevador eléctrico utilizado para operar cargas grandes que no pueden ser manejadas directamente por el control como pueden ser compresoras de refrigeración, ventiladores, bombas, quemadores, etc. También se utilizan para dar retardos o para sistemas de seguridad. En los sistemas electrónicos pueden ser sustituidos en la gran mayoría de los usos por dispositivos de estado sólido del tipo TRIAC.
Potenciómetros se requieren para posicionar manualmente el control proporcional o para ajuste del valor deseado y para retroalimentación.
Interruptores manuales estos pueden ser de dos posiciones o posiciones múltiples, con un polo o de polos múltiples y se utilizan para varias operaciones.
Para los sistemas neumáticos se tienen:
Compresores de aire y accesorios como fuente de aire limpio y seco a la presión requerida, normalmente de 3-15 psi y de 15-45 psig.
Relevador electro-neumático es un dispositivo actuado eléctricamente para maniobrar válvulas y manejar una carga neumática.
Relevador neumático-eléctrico dispositivos actuados por presión de aire para operar un circuito eléctrico.
Relevador neumático es actuado por presión para efectuar diferentes funciones ya sea actuando en dos posiciones o de una manera proporcional.
Relevadores de posición se utilizan para asegurar la posición exacta de una válvula o de una compuerta en respuesta a cambios en la presión del control.
Relevadores interruptores utilizados para operar neumáticamente válvulas de aire para derivar flujos de un circuito a otro o para abrir o cerrar circuitos de aire.
Interruptores neumáticos realizan la misma función que los anteriores pero son operados manualmente.
Como dispositivos comunes en ambas fuentes de energía tenemos:
Controles de pasos para operar un numero de interruptores eléctricos en secuencia por medio de un operador eléctrico o neumático. Se utilizan en el

control de algunos pasos en sistemas de refrigeración o en sistemas de calefacción eléctrica con una operación secuencial.
Controles de potencia usados generalmente para regular la potencia suministrada a calentadores en respuesta a las demandas de controles electrónicos o neumáticos.
Relojes o "timers" utilizados para el encendido y apagado en tiempos predeterminados o para cambios de sistemas de control para operaciones de

3.- PRINCIPIOS DEL CONTROL
3.1 INTRODUCCION:
Los requerimientos actuales en procesos industriales, han generado sistemas tan complejos que para llevar a cabo un buen funcionamiento de ellos, en algunos casos, se ha requerido de ingenieros especializados exclusivamente en los sistemas de control.
El ingeniero de proceso describe como necesita ser controlado el sistema y el especialista en el control se encarga de desarrollar el proyecto hasta su instalación y pruebas. Sin embargo existe una serie de proyectos menores en que el ingeniero de proceso debe de seleccionar, proyectar, instalar, probar y ajustar el sistema de control, por lo que su conocimiento en este tópico debe de tener una cierta profundidad. Los sistemas de control, se utilizan para cuatro funciones diferentes:
Mantener las condiciones de diseño; la función primaria de los sistemas de control es mantener las condiciones de diseño. La capacidad de de los equipos se selecciona de acuerdo a las condiciones de una carga de diseño, pero cuando las condiciones de carga reales son menores que las de diseño, la capacidad esta muy sobrada. El control necesita regular la salida del equipo para ajustarlo a la carga real existente. La carga varía por diferentes razones como son las condiciones ambientales exteriores, fluctuaciones, fugas, cambios de producción o generacion etc.
Reducir las necesidades de trabajo humano; el control reduce la cantidad de mano de obra necesaria para operar y mantener los sistemas, reduciendo la probabilidad de error y disminuyendo costos.
Minimizar el uso de la energía disminuyendo costos; una de las consideraciones más 6importantes en la planeación y operación de los sistemas de control esta basado en su capacidad para racionalizar el uso de la energía, durante todo el tiempo, disminuyendo los costos de operación.
Proteger el equipo manteniendo su operación en niveles seguros; a este tipo de controles se les conoce como controles de seguridad y previenen daños a los equipos o a las personas. Este control normalmente operan como dispositivos limitadores, impidiendo que la cualquier variable del sistema, sobrepasen o bajen de algún valor seguro.
Actualmente el concepto de los sistemas de control es que cada vez tengan menor intervención humana, limitando esta a su arranque, paro, y al ajuste a los valores de control (SET-POINT).
3.2 DEFINICIONES:
A continuación se presentan los términos mas utilizados en los sistemas de control.

SISTEMA DE CONTROL- Los sistemas de control son los dispositivos a través de los cuales podemos mantener el valor de una variable, del sistema o proceso, dentro de un valor o rango de valores requerido. Los componentes básicos de un sistema de control son un sensor, el cual detecta la variable a controlar y a través de un sistema de medición la cuantifica y la envía a un controlador, el cual compara su valor con el valor deseado y si existe una diferencia, manda una señal que opera un actuador que realiza una acción correctiva sobre el sistema, con el fin de que la variable bajo control tienda al valor deseado. En la fig 1 se muestra esquemáticamente el sistema de control básico.
Puntode ajuste(valor deseado)
FIGURA 1
Para el funcionamiento del sistema de control se requiere de una fuente de energía para transmitir las señales, así como, de un agente de control que es el medio regulado por el actuador, que puede ser aire, agua o vapor fluyendo por una válvula o la corriente eléctrica de un motor.
EJEMPLO 3.1Una persona esta leyendo en un cuarto en el cual se tiene un calentador del tipo de radiador de agua caliente, con una válvula manual. La temperatura externa del cuarto baja repentinamente, afectando la temperatura del cuarto por lo que la persona tiene que ajustar la válvula para seguir manteniendo un ambiente confortable para la lectura. Realice un diagrama a bloques del sistema de control y explique la secuencia de la acción del control.
controlador actuador proceso
sensormedidor
Fuente de energía
controlador 4 7
2
6

3Punto 1de ajuste(valor deseado)
FIGURA 3.2
1.- Variable a controlar: la temperatura del aire del cuarto.2.- Sensor: el cuerpo humano dela persona.3.- Control: el cerebro que es en donde se realiza la comparación con la
temperatura del confort.4.- Actuador: la válvula manual.5.- Agente de Control: el agua caliente.6.- Fuente de Energía: la fuerza muscular para mover la válvula.7.- Proceso: el aire del cuarto.
RETROALIMENTACION.- Es la transmisión al control de la información acerca de los resultados de una acción, los cuales se detectan con el sensor.
ECUACION DEL PROCESO.- El propósito de un sistema de control es regular alguna variable dinámica en el proceso, dicha variable, en el caso mas general, depende de muchos otros parámetros del proceso y puede sufrir cambios por diferentes fuentes, por lo que se selecciona uno o más de estas como parámetros bajo control. Esto significa que si la medición de la variable controlada muestra un cambio, entonces cambiamos los parámetros bajo control para corregir dicha desviación. La relación entre el parámetro controlado y los parámetros que la pueden afectar se conoce como la ecuación del proceso, la cual puede ser expresada en forma analítica, en forma tabular o en forma gráfica.
Forma analítica:
X1= f (X2, X3,....Xn)
Forma tabular:

x1 x2 x3 xn
a1 b1 c1 N1
a2 b2 c2 N2
Forma gráfica:
0102030405060708090
a b c d
xyz
INERCIA DEL SISTEMA.- Cuando ocurre algún cambio en la carga del sistema causa un cambio en la variable bajo control, el sistema de control responde para asegurar, después de un tiempo finito que la variable regresa al valor deseado; parte de este tiempo es consumido por el proceso mismo el cual se conoce como inercia del proceso o retardo del proceso. Es claro que no es ventajoso tener sistemas de control mucho mas rápidos que la respuesta del sistema.
AUTOREGULACION.- Una característica de muchos procesos es que la variable de interés tienda a un valor cuando se establecen los parámetros de carga del sistema. Sin embargo existen otros en que esto no ocurre.
3.3 DIAGRAMAS DE CONTROLExisten básicamente dos tipos de diagramas para representar a los sistemas de control, los de bloques y los de componentes .
DIAGRAMAS DE BLOQUES.- Es la representación gráfica del flujo de información dentro de un sistema de control. Esta representación es muy usada en la industria de control y en ella se representa cada parte del sistema por medio de un cuadro o bloque con una variable de entrada y otra de salida y se conectan en cascada con los otros subsistemas de tal manera que la salida de cada bloque es la entrada del siguiente.La función de transferencia de un componente o sistema es la representación matemática idealizada de la relación entre las variables de entrada y de salida del bloque, la cual debe de estar lo suficientemente detallada para cubrir la caracterizaron estática y dinámica del dispositivo para el propósito del estudio del control; en estos estudios los componentes se representan con los bloques con su función de transferencia asociada.

La ganancia de la función de transferencia de un dispositivo es la razón de cambio de la salida con respecto a una entrada bajo condiciones de un estado estable. Si el elemento tiene una respuesta lineal, la ganancia permanecerá constante, pero para muchos componentes que no tienen un comportamiento lineal la ganancia varia en función de la magnitud de la entrada.
ccV desp. T
Figura 3.3
DIAGRAMA DE COMPONENTES. Aunque el diagrama a bloques es muy útil para el entendimiento de un sistema de control, preparar el diagrama de componentes nos lo muestra con todas sus conexiones. En estos diagramas se muestran los componentes y sus interconexiones con el sistema a controlar, representando por líneas punteadas la acción de control.
s.p.
Flujo de agua
T
Figura 3.4
3.4 PARÁMETROS DE LOS SISTEMAS DE CONTROL:
Los principales parámetros de un sistema de control se considera que son:
a)Error. La desviación o error de una variable controlada esta dada por:
E = Cm - Csp
E Error Cm Valor medido de la variable Csp Valor establecido de la variable (Set Point)
proceso
sensor
válvula

Esta expresión expresa el error en un sentido absoluto, sin embargo, en la operación de los controles el error es comparado a su escala total de variación de la variable en forma porcentual.
EpC CC C
C CC C
m min
max min
sp min
max min
100
la cual se reduce a
E C CC C
pm sp
max min
100
Ejemplo 2.- La temperatura en un proceso tiene un rango de 300 K a 400 K y el valor deseado (Set Point) es de 384 K encuentre el error cuando la temperatura es de 379 K
Ep
379 384400 300
100 36%.
Si el error es positivo indica un valor por encima de Set-Point si es negativo será por debajo.
b) Rango de salida. El elemento de control final tiene un efecto mínimo y uno máximo sobre el proceso. El rango de salida del control es la translación de la salida al rango de los posibles valores del elemento final de control (el estándar es de 4-20 mA) que puede ser expresado como un porcentaje de la escala total
PS SS S
p min
max min
100
en donde P es la salida del control como un porciento de la escala totalSp es el valor de la salidaSmin es el parámetro de valor mínimo del controlSmax es el parámetro de valor máximo del control
Ejemplo 3.- Un control con salida estandar de 4-20 mA, utilizado en un sistema de volumen de aire variable, regula la velocidad de un motor entre 140 y 600 rpm, con una dependencia lineal. Calcule la corriente de salida del control cuando el motor gira a 310 rpm y expreselo como un porcentaje de la salida.La relación entre la velocidad y la corriente puede ser expresada como
Sp= mI + S0
Sustituyendo140= 4m + S0
160= 20m + S0
Resolviendo el sistema nos da m= 28.75 rpm/mA y S0 = 25 rpm y resolviendo para 310 rpm nos queda
I mA
310 25
28 759 91
..
expresado en porcentaje queda
P
9 91 420 4
100 36 9%.
.

c) Tiempo muerto. Es el tiempo transcurrido entre el instante en que ocurre la desviación y cuando ocurre la acción correctiva. Esta variable es función tanto del sistema de control como del proceso mismo.
3.5TIPOS DE ACCIÓN DE CONTROL
Los sistemas de control retroalimentados se pueden clasificar por la acción correctiva que el controlador tiene programado ejecutar cuando sensa una desviación entre la variable bajo control y el punto de operación deseado. Dicha clasificación es la siguiente
Respuesta discretaa) Acción en dos posiciones. También se conoce como apagado-encendido (On-Off)|, en este tipo la variable bajo control puede ser posicionado a un valor máximo y a un valor mínimo, realizando una acción de encendido y apagado, por ejemplo arranca y para un motor, abre y cierra una válvula, enciende y apaga una resistencia, etc. En este tipo de controles es importante realizar las siguientes definicionesDiferencial. Se refiere al rango de los valores de la variable controlada en los cuales se ejecuta la acción programada. Existe una diferencia entre la diferencial del control y la diferencial de operación debido a las características dinámicas de los sistemas en los cuales siempre se almacena energía, esto es al llegar a la temperatura deseada se desconecta el calefactor, pero el sistema seguirá incrementando temperatura.
b) Control de dos posiciones anticipado. Es una variación del anterior, frecuentemente utilizado en los termostatos, con el fin de disminuir la diferencial de operación, lo cual se logra mediante una anticipación del control. Normalmente en los termostatos se les coloca un pequeño calentador que enciende con el sistema pero calienta mas rápidamente al sistema que el aire del cuarto, como resultado de esto se alcanza mas rápidamente la temperatura de corte, anticipándose a que lo alcance el aire con lo cual se disminuye el sobrecalentamiento del medio.
c) Acción flotante. En este caso, como en el de dos posiciones, el controlador puede ejecutar solo dos operaciones, moviendo al dispositivo controlado en cualquiera de las dos posiciones, de apertura o de cerrado, normalmente a una velocidad constante. Generalmente se establece una zona neutra, llamada también zona muerta, que permite al dispositivo controlado parar en cualquier posición siempre que la variable bajo control este dentro de la diferencial del control. Cuando la variable controlada sale de la diferencial, el control mueve al dispositivo controlado en la dirección correspondiente. Como ejemplo tenemos una válvula accionada por un servomotor.
Respuesta contínuad) Acción proporcional. En esta acción la intensidad de la señal del control varia en proporción directa de la cantidad de cambio sufrida por la variable

controlada, por lo que el dispositivo controlado se mueve proporcionalmente, tomando una posición fija en un punto relativo al cambio de la variable. Este tipo de acciones da una respuesta mucho mas fina a cambios en la carga, ya que su respuesta es proporcional a las necesidades. Como ejemplo tenemos una válvula reguladora de agua caliente puede ser parcialmente abierta o parcialmente cerrada dependiendo de la intensidad de la señal para incrementar o disminuir el calentamiento.En el control proporcional se utilizan una serie de términos que es necesario definir como son:
Banda proporcional (Rango de variación). Es la cantidad de cambio en la variable controlada requerida para mover el dispositivo controlado de un extremo límite al otro (completamente abierto o completamente cerrado). Este puede ser ajustado dentro de ciertos limites, de acuerdo a los requerimientos de trabajo.
Punto de ajuste (Set PoinT).Es el valor deseado que adquiera la variable bajo control, se conoce también como el valor del control.
Punto de Control (Control Point).Es el valor actual de la variable controlada la cual es mantenida por el sistema de control durante un tiempo dado.
Desviación (Offset).Es la diferencia entre los dos valores anteriores, también llamado corrimiento.
Sensibilidad .Es la relación entre un cambio en el valor de la energía del control a un cambio en la variable controlada; por ejemplo un control neumático con una sensibilidad de 1psi/ F , significa que un cambio de 1 grado Farenheit en la variable controlada ocasionara un cambio en la presión suministrada al dispositivo controlado de 1 psi.
e) Acción Proporcional Integral.- En este caso se combina la acción proporcional con una acción de corrección (reset). Cuando se presenta un desbalance el punto de control cambia automáticamente hacia el punto de ajuste con lo que se disminuye el desbalance.
3.6 REQUERIMIENTOS DE COMPORTAMIENTO DE SISTEMAS DE CONTROL
En términos generales el comportamiento de un sistema de control en aire acondicionado se evalúa normalmente bajo los siguientes valores:
a) Estabilidad del sistema, la cual refleja la ausencia de variaciones periódicas excesivas de la variable controlada.b) Banda proporcional. Es el rango de cambio de la variable controlada.c) Respuesta del sistema. La rapidez del control para corregir cuando existe una perturbación en el sistema.
Desgraciadamente, no siempre es posible contar con el cumplimiento de las tres en su mejor punto, por lo que el nivel del comportamiento para un sistema

debe de ser seleccionado de acuerdo a la aplicación y necesita ser evaluado en términos de control, confort y conservación de energía.
3.7 FUENTES DE ENERGÍA DE LOS SISTEMAS DE CONTROL:
Los sistemas de control se dividen en tres grandes grupos de con su fuente primaria de energía los cuales son:
a) Sistemas Neumaticos.- Los dispositivos controlados se actúan con aire comprimido como fuente de energía, normalmente en rangos de presiones de 3 a 15 psig y de 15 a 35 psig. Se utilizan en instalaciones grandes y requieren de un compresor y tubería, generalmente de cobre o plástico.
b) Sistemas Eléctrico-Electrónicos.- Utilizan energía eléctrica de bajo voltaje o con el voltaje de línea. La energía eléctrica suministrada al dispositivo controlado es regulada por el control, ya sea directamente o por medio de relevadores o transductores electroneumaticos. Si el control tiene el sensor y el elemento transmisor como dispositivos electrónicos el sistema es conocido como eléctrico-electrónico y la transmisión hacia los elementos controlados se realiza por medio de relevadores o por tiristores (SCR, TRIAC).
c) Sistemas Autoenergizados.- Aunque este tipo de sistemas son prácticos en ciertas aplicaciones normalmente no son utilizados en sistemas completos de control. En estos dispositivos se utiliza energía del medio controlado para efectuar las acciones correctivas necesarias; por ejemplo cambios en la temperatura del sensor se convierten en cambios de presión o volumen en un medio cerrado, el cual es transmitido para operar una válvula o una compuerta, otros ejemplos pueden ser el uso de termopares, termopilas o de cristales piezoeléctricos. Un ejemplo de estos sistemas en refrigeración es la válvula termo estática.

4.- INTERPRETACIÓN DE PLANOS DE INSTRUMENTOS
PLANOS DE CONTROL PROCESOS E INSTRUMENTACIÓN
Para elaborar los planos de los sistemas de control de procesos se estandarizan usando un conjunto de símbolos. Normalmente estos planos se refieren como Planos o Diagramas de Tubería e Instrumentación (DTI), aunque se usen en procesos que no tienen tuberías. Estos se realizan conforme a las normas ISA.
Estos planos contienen un diagrama de flujo de todo el proceso, presentando los recursos, los productos del proceso, así como, la instrumentación y las señales que conforman las mallas de control, pudiéndose reconocer la secuencia de cómo opera el proceso y reconocer los circuitos de control individuales.
Líneas de señal de instrumentos
Las señales de instrumentación se muestran dependiendo si son neumáticas con líneas cruzadas y las eléctricas en forma punteada. Las líneas sólidas son las de proceso .
Los símbolos de círculos con dos o tres letras asociadas con los circuitos de control. Así TT es un transductor de temperatura, mientras que CT es un control de temperatura. Cuando al círculo se le agrega un número este identifica el loop de control asociado. Dentro de estos símbolos se coloca la
vapor calentador
YP
RF
CT
TT TF
CF
orificio
Salida de vapor
Salida de recurso
entrada de recurso

información de donde están localizados los elementos, si están en forma local en el proceso o en el cuarto de control dentro o fuera del panel.
Montado localmente
Montado en el cuarto de control en el tablero
Montado en el cuarto de control fuera de tablero
Algunos elementos especiales como válvulas de control o instrumentos en línea, como el medidor de orificio mostrado, tienen símbolos especiales, como los mostrados en la figura, la válvula de control y el medidor de orificio.
La simbología de las letras se muestra en la siguiente tabla:
SÍMBOLO PRIMERA LETRA SEGUNDA LETRAA Análisis AlarnaB QuemadorC Conductividad ControlD DensidadE Voltaje Elemento primarioF FlujoG Vidrio (tubo)H ManoI Corriente eléctrica IndicadorJ PotenciaK Tiempo Estación de controlL Nivel LuzM HumedadO OrificioP Presión PuntoQ CantidadR Radioactividad GrabadorS Velocidad InterruptorT Temperatura TransmisorU Multivariable MultifunciónV Viscosidad VálvulaW Peso BuenoY RelevadorZ Posición Manejador
EJEMPLO
TT


Hoja de datos conforme a ISA-20


5.-CARACTERÍSTICAS DE LOS INSTRUMENTOS
Las principales características operativas que se deben de considerar en cualquier equipo de medición se consideran las siguientes:
EXACTITUD.- Es la desviación de la lectura del medidor con respecto a una entrada conocida. La exactitud de un aparato puede ser corregida después de un tiempo con el proceso conocido como calibración.
PRECISIÓN.- Es la capacidad del medidor de repetir una cierta lectura con una exactitud dada. Mide el nivel de repetibilidad del dispositivo y depende de la fabricación del equipo.
Es la medida de la reproducibilidad de las mediciones, una medida del grado con el cual mediciones sucesivas difieren unas de otras. Para tener una correcta evaluación de la precisión de un instrumento debe considerarse tanto la conformidad como las cifras significativas. Por ejemplo el valor real de una resistencia es 1.384.572 Ω, y se mide con un multímetro el cual indica repetidamente 1.4MΩ. Aquí se tiene conformidad pero existe un error creado por las limitaciones de la escala. El aumento de las cifras significativas incrementa la precisión de la medición.
La conformidad es condición necesaria pero no suficiente en cuanto a precisión. De modo semejante, la precisión es condición necesaria pero no suficiente para la exactitud.
Este parámetro lo proporciona el fabricante y es el que cuantifica la incertidumbre de un valor medido con un aparato bien calibrado y sin errores en el proceso de medición.
CIFRAS SIGNIFICATIVAS.- En los lectores digitales, el número de cifras significativas, como hemos visto, es importante a la hora de cuantificar magnitud y precisión de las mediciones de una variable. Es importante remarcar que, cuando se manejan valores medidos con distintas cifras significativas, suele cometerse el error de escribir el resultado del error absoluto con cifras que carecen de sentido.
SENSIBILIDAD.- Es una relación del cambio de la salida del medidor al cambio del valor de la señal medida. Es el mínimo cambio de la variable que produce un cambio en la salida del equipo.
RESOLUCIÓN.- Es el mínimo valor de la variable de entrada que puede medir un equipo. Normalmente se da en valores de escala total y depende del tamaño del lector.
RESPUESTA A LA FRECUENCIA.- Es la medida de la rapidez con la que el medidor reacciona a cambios en el tiempo de la variable medida.

6.- ERRORES Y ANÁLISIS DE DATOS
6.1 TIPOS DE ERRORESCuando se toman varias lecturas con un medidor, sin que exista una
variación en el parámetro físico que se esta midiendo, estas tienden a producir
una banda de resultados en vez de ser un punto. A esto es a lo que
comúnmente se le conoce como errores en la medición y se les clasifica de
acuerdo a su origen en:
a) Errores en el instrumento o sistemático. b) Errores en la lectura o aleatorios. c) Errores en el método o aplicación, humanos o graves.
Por la forma como se presentan los errores se consideran sistemáticos o aleatorios, englobando en estos últimos a los errores humanos, siendo los primeros los que siempre están presentes para una situación determinada, como puede ser el corrimiento del cero del un lector, mientras que los aleatorios son "accidentales" e independientes del sistema y del proceso y se consideran que siguen las leyes de la probabilidad.
Sistemáticos:Se deben a fallas de los instrumentos, como partes defectuosas o desgastadas, y efectos ambientales sobre el equipo. Un ejemplo típico en el galvanómetro de D’arsonval, se deriva de la fricción de los cojinetes de las partes móviles, deterioro del resorte antagónico, etc. Estos errores pueden evitarse mediante una buena elección del instrumento, aplicación de factores de corrección, o recalibrando los mismos contra un patrón.
Los errores en los instrumentos pueden ser causados por su dudosa calidad, errores en su diseño, selección inapropiada del mismo, falta de mantenimiento, ajuste o calibración. Por esta razón siempre se recomienda verificar el buen funcionamiento de los mismos siguiendo planes bien establecidos de mantenimiento y calibración.
Aleatorios o fortuitos:Se deben a causas diversas y algunas desconocidas y ocurren incluso cuando todos los errores sistemáticos han sido considerados. Para compensar estos errores debe incrementarse el número de lecturas y usar

medios estadísticos para lograr una mejor aproximación del valor real de la variable medida.
Los errores en la lectura son del tipo de paralaje, la respuesta a la frecuencia del lector, reportes con lecturas ilegibles, interpolaciones mentales etc., por lo que es muy conveniente tener un procedimiento de toma de lecturas así como la forma de reportarlas; actualmente se esta popularizando mas los sistemas de lectura automáticos con envío de información directa a computadoras para la realización de su análisis tratando de evitar el error humano en las lecturas, entre otras ventajas.
Graves:Son en gran parte de origen humano, como es la mala toma de lectura de los instrumentos, ajuste incorrecto y aplicación inapropiada, así como equivocaciones en los cálculos. Un error grave típico es el error por efecto de carga o error de inserción en el sistema. Es importante establecer el concepto de carga del sistema, debido al acoplamiento de impedancias entre el sistema a medir y el medidor.
Los errores en el método son los debidos a una mala selección de la colocación del sensor, o que la medición no sea representativa de la variable considerada debido a otras causas del proceso como la estratificación, fugas, mezclas imperfectas, transferencia de calor tiempos de muestreo inapropiados, etc..
6.2 INCERTIDUMBRE EN LA MEDICION:
Se define a la incertidumbre en la medición como el posible valor que puede tener el error y para evaluarlo se realiza un tratamiento estadístico de los datos obtenidos en la medición encontrándose su valor medio y su desviación estándar. De acuerdo a la importancia de la medición se puede tomar como incertidumbre a los valores que se encuentran entre dos y tres veces la desviación estándar, y en el caso de fabricantes de equipo de medición los proporcionan como una característica del instrumento como un porcentaje de la escala total o del valor leído.
El valor del error se expresa comúnmente como:
Error absoluto: Es directamente la diferencia entre el valor medido y el valor verdadero,
Ahora podemos cuestionarnos si el valor verdadero existe. Lo que podemos asegurar es que cuanto más cercano al valor verdadero se quiera llegar, será más el esfuerzo, y por ende, el costo del instrumento utilizado. No existe una regla única e invariante para determinar este error.
Error relativo:

Cuando se requiere comparar dos errores de dos magnitudes medidas muy diferentes, como puede ser temperatura y presión, el error absoluto no es suficiente y se prefiere expresarlo en forma porcentual relativo al valor verdadero. Por lo tanto, se define como:
Debido a la imposibilidad de conocer el valor verdadero, suele a veces utilizarse en su lugar, el valor verdadero convencional (Xvc) el cual puede determinarse con otro instrumento mucho más exacto respecto al utilizado en la medición. En la práctica generalmente con los datos del fabricante, uno puede determinar un error absoluto, entonces para hallar el error relativo, se suele utilizar en el denominador directamente el valor medido (Xm)
Error límite:
Si podemos concluir que Ex es el error absoluto límite (máximo medible), entonces podemos expresar la medición como:
En la mayoría de los instrumentos de indicación, la exactitud está garantizada por un cierto porcentaje de la lectura escala total, también conocido como error límite o de garantía. Este error, para el caso de instrumentos analógicos, está relacionado a la clase del instrumento. De esta manera, el fabricante promete que el error no será mayor que el error límite, pero cabe aclarar que, para lecturas lejos del límite de la escala, el error relativo aumenta.
Como los procedimientos de un sistema de control o para la realización de un balance de masa y energía en los procesos, están basados en datos tomados con una cierta incertidumbre, los resultados así obtenidos tendrán a su vez una incertidumbre. Para valuar ésta se realiza el análisis de propagación de incertidumbre, en la cual para una variable N calculada a partir de las mediciones de u1, u2,...un, cada una con una incertidumbre Δu1, Δu2...Δun se tiene lo siguiente:
Para el cálculo del valor medio de la variable se realiza de acuerdo con su relación funcional
N = f(u1, u2,...un)y su incertidumbre asociada será

Con lo que la variable calculada será N ±ΔN.
Como un ejemplo se tiene el calculo de un flujo de calor en una corriente de aire del cual se tienen los siguientes valores medidos con sus respectivas incertidumbres de medición.
m = 1.2 Kg/s ± 1.5%
Cp = 1.02 Kj/Kg K± 0.5%
T1 = 70 °C± 1% T2 = 250 °C± 1%
El calor será:Q=m*Cp*(T2-T1)
Sustituyendo valores nos queda:
Q = 1.2 * 1.02 * (250 - 70) = 220.32 Kw
y la incertidumbre se evaluará conforme a lo establecido como:
Δm = 0.018 Kg/s Δcp = 0.0051 KJ/Kg K
ΔT2 = 2.5°C ΔT1 = 0.7 °C
Sustituyendo estos valores en la ecuación nos queda:
ΔN =[(183.6x0.018)2 + (216x0.0051)2 + (1.224x2.5)2 + (-1.224x0.7)2]½
ΔN = 4.752 KW
Por lo que nuestro valor calculado es: Q = 220.32 KW ± 4.7152 KW o Q = 220.32 KW ± 2.14 %
Un hecho significativo de las medidas es que el valor ‘verdadero’ de una magnitud medida no es nunca conocido con absoluta certeza. Los fenómenos físicos y las leyes que los describen son estadísticos por

naturaleza. Si bien en la mayoría de los fenómenos macroscópicos las incertidumbres son despreciables, al seguir magnitudes al nivel de calibraciones, se alcanza inevitablemente el límite del ‘ruido’ de fluctuaciones aleatorias. Esta característica intrínseca de las magnitudes físicas requiere entonces estimarse como veremos más adelante. Se debe prestar atención y tener claro la diferencia entre error e incertidumbre. Por ejemplo el resultado de una medición luego de aplicar una corrección (por los errores sistemáticos) puede estar muy cerca del valor de la cantidad, aunque no lo podemos saber, es decir con un error pequeño, aunque puede existir, debido a los métodos e instrumentos utilizados en la medición, una gran incertidumbre.
El Comité Internacional de Pesos y Medidas (CIPM) y el National Institute of Standars and Terminology (NIST) con su nota técnica 1297, coinciden en las siguientes definiciones .La incertidumbre del resultado de una medición generalmente consiste en varios componentes que pueden ser agrupados en dos categorías de acuerdo al método usado para estimar sus valores numéricos:
A.- Aquellos componentes de incertidumbre que son evaluados mediante métodos estadísticos.
B.- Aquellos que son evaluados por otros métodos o juicios científicos tales como resultados previos, conocimiento de propiedades de materiales componentes, especificaciones de fabricantes, reportes de calibraciones, etc.
Estudiaremos a continuación la incertidumbre tipo A.
Incertidumbre estándar (μi):
Representa cada componente de incertidumbre que contribuye a la incertidumbre del resultado de una medición mediante la desviación estándar estimada:
Incertidumbre estándar combinada (μc):
Representa la estimación de la desviación estándar, a través de combinar las incertidumbres estándares μi obtenidas. Comúnmente llamada ley de propagación de incertidumbre o RSS (raíz cuadrada de la suma de los cuadrados).
Para fines prácticos, suele estimarse solo una μi, por lo tanto la estándar coincide con la combinada.

Incertidumbre expandida (U):
Se define a partir de la incertidumbre combinada y el factor de cobertura k.
Este entorno acotado alrededor del valor Y se define como intervalo de confianza el cual tiene un nivel de confianza determinado por la fracción p de la probabilidad asociada al factor de cobertura k (ver tabla 1.2).
Por ejemplo, si k = 2.58, se tiene un nivel de confianza del 99%.
6.3 ANÁLISIS ESTADÍSTICO DE DATOS
El análisis estadístico de datos de mediciones es una práctica común ya que permite obtener una determinación analítica de la incertidumbre del resultado final (ver punto 1.8), esto es, una vez hallados y acotados los errores sistemáticos puede obtenerse un valor que caracterice a los errores restantes (aleatorios o fortuitos). Cabe aclarar que el tratamiento estadístico de datos no puede eliminar tendencias fijas contenidas en las mediciones, como por ejemplo, la que puede derivar de un error sistemático. Para realizar el análisis y aplicar los métodos estadísticos mencionados, es necesario contar con un gran número de mediciones, o sea contar con una población de datos, y además los errores sistemáticos deben ser pequeños en comparación con los errores residuales (o aleatorios). Como ejemplo, en la siguiente tabla se muestran 50 mediciones de voltaje.

Luego con estos datos pueden hallarse los siguientes índices: Media aritmética: También llamada promedio:
Desviación de la media: Es el alejamiento de una lectura dada de la media aritmética:
Cada una de las desviaciones puede ser positiva o negativa. Nótese que la
Desviación promedio: Es una indicación de la precisión de los instrumentos:
Desviación estándar: Es la raíz media cuadrática de las desviaciones. Es muy utilizada en el análisis estadístico de errores. Para un número finito n de datos:
La desviación estándar tiene la ventaja de tener las mismas unidades que la variable medida.
Varianza: También llamada desviación cuadrática media:
Distribución normal de errores: Esta distribución, muchas veces da una buena descripción de muchos resultados en mediciones que están afectadas de errores. Las medidas repetidas y realizadas con gran cuidado siguen en muchos casos esta particular distribución. El contorno de la misma es una curva con forma de campana llamada campana de Gauss.

Para un punto cualquiera de esta curva, la función distribución de probabilidad será:
Esta distribución normal o gaussiana de error es la base del estudio analítico de los efectos aleatorios.
Todas las observaciones incluyen pequeños efectos de distorsión, llamados errores aleatorios.
Los errores aleatorios pueden ser positivos o negativos.
Hay igual probabilidad de errores aleatorios positivos o negativos.
El área total bajo la distribución normal entre los límites -∞, y +∞ representa el número entero de observaciones. Ahora el área sombreada entre ±σ incluye alrededor del 68% de todos los casos.
Error probable:
En el gráfico anterior se define
como error probable, esto es, se tiene igual probabilidad (50%) de que alguna observación/medición tenga un error aleatorio≤. El coeficiente que multiplica a la desviación estándar se define como factor de cobertura k.

Distribución t-Student: Fue desarrollada por el inglés William Gosset, y permite validar conclusiones estadísticas a partir de pequeñas cantidades de datos (n<25). Puede considerarse como una aproximación a la distribución normal, de hecho para una población de datos mayor a 30 la diferencia entre ambas es despreciable.
En aplicaciones prácticas, suele reemplazarse el factor de cobertura k por la letra t como coeficiente de Student.
En la tabla 1.3, se pueden observar los valores de la constante t correspondientes al coeficiente de Student para diferentes números de mediciones y niveles de confianza. Por ejemplo para 20 mediciones con un nivel de confianza del 90%, se tiene un t de Student de 2.093 que difiere del factor de cobertura para ese mismo nivel de confianza (k = 1.9600).
Relación test de Incertidumbre (TUR):

Se define como el cociente entre la incertidumbre especificada de un instrumento a testear y la incertidumbre del instrumento calibrador.
Ejemplo:
Se tiene un multímetro digital con un rango de 10Vdc con la siguiente especificación: ± 20ppm de la lectura + 1.6ppm del rango, por lo tanto, para una medición de 10Vdc, su resultado será: 10V±216μV.
Por otro lado se tiene el calibrador que entrega los 10Vdc al multímetro anterior que, en el rango de 11Vdc, tiene la siguiente especificación: ± 5ppm de la salida ±4μV. Entonces el resultado es: 10V±54μV.
Si el nivel de confianza es el mismo para ambos instrumentos (por Ej. 99%), vale decir que:
el cual es un valor aceptable para estándares de calibración, esto es, puede realizarse la calibración del multímetro con ese calibrador. Cabe aclarar que, cuando el instrumento y calibrador son especificados con niveles de confianza diferentes (≠k) basados ambos en distribuciones normales, entonces debe aplicarse la siguiente corrección:
7.- MEDICIONES DE PARÁMETROS ENERGÉTICOS
7.1 CRITERIOS DE SELECCIÓN DE MEDIDORES
Los ajustes que son necesarios realizar para la correcta operación de los sistemas, así como para el desarrollo de nuevos diseños y equipos, dependen fundamentalmente de la información proporcionada por la instrumentación, por lo que la selección de ella requiere de un análisis cuidadoso.
Los principales aspectos que se deben considerar son: el tipo de variable a medir, la exactitud requerida, el intervalo y rapidez en la varia el parámetro bajo medición, las condiciones físicas y ambientales en donde se va a instalar el medidor, el tipo de lector que requiere el proceso así como el factor económico.
En algunos casos es conveniente definir si el medidor debe quedar instalado permanentemente o si es posible utilizar medidores portátiles para tomar información en diferentes puntos de las líneas. También conviene considerar la complejidad de su operación y mantenimiento y los factores de presentación del equipo.

Algunas de las variables más comunes que se requieren cuantificar en la mayoría de los sistemas bajo diagnóstico energético son:
Temperatura de flujos Temperatura de equiposVelocidades de flujoNiveles de líquidosHumedad del airePresión de flujosPresión de equiposCaudalesVelocidad angular de las maquinasPotencial eléctricoIntensidad de corriente eléctricaFactor de potenciaFrecuenciaIntensidad lumínicaPotencia eléctrica demandada Energía consumida por los sistemasDistorsión de armónicas
7.2 MEDICIONES ELÉCTRICAS
IntroducciónAntes de analizar los medidores haremos algunas definiciones de parámetros eléctricos.
Potencia activa, aparente y reactiva. Factor de potencia.
Se conoce como carga eléctrica a la potencia demandada por un dispositivo o aparato, o al conjunto de ellos, conectados a un sistema. Desde el punto de vista del suministro eléctrico existen dos tipos de cargas:
Cargas resistivas.- como son los calentadores u hornos de resistencias y las lámparas incandescentes. Este tipo de cargas solo consumen corriente activa y cuando son alimentados por corriente alterna, la corriente se encuentra en fase con el voltaje.
Cargas reactivas.- como son los motores, transformadores, máquinas soldadoras y lámparas de descarga. Estas consumen corriente activa y reactiva y en ellos la corriente está desfasada del voltaje.

El producto de la corriente total por el voltaje de suministro, en los sistemas de corriente alterna, constituye lo que se conoce como la potencia aparente medida en kVA.
Como las cargas reactivas son los equipos inductivos, poseen bobinas, a través de las cuales circulan dos componentes distintos de potencia eléctrica.-La que realiza el trabajo útil conocida como potencia útil, medida en kW y registrada por los wattmetros, en la cual la corriente se encuentra en fase con el voltaje y que es aproximadamente proporcional a la cantidad de combustible utilizado en la central de generación eléctrica.
-La que representa a la corriente necesaria para generar el campo magnético necesario para el funcionamiento del dispositivo, esta se mide en kVAr ( kilo volt-ampere reactivos). Esta componente no efectúa trabajo útil, pero ocasiona calentamiento en los generadores, transformadores y líneas de transmisión por lo que constituye una pérdida de energía. Esta componente se conoce como corriente de vacío y está retrasada con respecto al voltaje de suministro.
La potencia activa y reactiva están desfasadas 900 y la potencia aparente es la suma vectorial de ambas, quedando el triángulo de potencias como se muestra en la fig. 1.
FIGURA 7.1.
Por lo que para las cargas reactivas la potencia aparente es siempre mayor que la potencia realmente suministrada.El coeficiente entre la potencia activa y la aparente se le conoce como factor de potencia, el cual indica el grado de aprovechamiento de las instalaciones eléctricas.
La relación entre potencias es
Para sistemas trifásicos la potencia activa es
fp= potenciaactivapotenciaaparente
kVA= kW + kVAr2 2
Potenciaactiva = 3VI cos
KVA
KVAR
KW

y para un sistema monofásico es
De la figura se puede ver que cuanto mayor sea la potencia reactiva será mayor el ángulo y por consiguiente más bajo el factor de potencia lo que implica el riesgo de tener pérdidas excesivas y sobrecargas en los equipos y en los conductores. Por esta razón las compañías suministradoras penalizan los bajos factores de potencia. Para ilustrar esto veamos el siguiente ejemplo
Supongamos que se demandan para un motor 180 kW con un factor de potencia de 0.65
La empresa suministradora para que su cliente pueda disponer de los 180 kW debe producir 277 kVA, los equipos y las líneas deberán estar provistos para conducir esta potencia aparente. Si el factor de potencia fuera 0.9 la empresa debe de producir y transportar solamente 200 kVA.
Las pérdidas de transmisión son debidas a que al tener un bajo factor de potencia implica una mayor corriente para una potencia activa dada; al tenerse mayor corriente se incrementan las pérdidas por efecto Joule que son I2R.
La corriente magnetizante ocupa parte de la sección del conductor que podría ser aprovechada para el paso de corriente útil. Esto es igualmente válido para las líneas de suministro de la compañía eléctrica como para cada usuario en su establecimiento.
Los equipos eléctricos se construyen para determinados valores de voltaje y corriente, de aquí que se da como característica su potencia aparente, ya que su potencia real que se puede obtener de ellos depende del factor de potencia de la carga que se les conecte.
Para corregir el factor de potencia el procedimiento mas económico para la mayoría de las instalaciones es mediante la utilización de baterías de capacitores. Las principales ventajas de estos sistemas están en la ausencia de partes móviles, fidelidad de funcionamiento, baja necesidad de mantenimiento y facilidad de la instalación; como inconveniente tienen que son muy sensibles a los incrementos de voltaje y de temperatura.
Cualquier carga reactiva atrasa 900 la corriente con respecto al voltaje, mientras que el capacitor la adelanta en un ángulo igual, por lo que unas tenderán a anular a las otras dando como resultado una disminución del ángulo de desfasamiento, lo que implica un aumento en el factor de potencia de la instalación.
Si no se cuentan con elementos de medición para determinar el factor de potencia actual se puede determinar conforme la siguiente ecuación
Potenciaactiva =VI cos
Paparente=Pactiva
=1800.65
= 277kVAcos

FACTOR DE CARGA
Un parámetro útil para determinar el efecto relativo de la demanda máxima sobre la facturación eléctrica y que ayuda a evaluar la oportunidad de reducción de demanda es el factor de carga de la planta.
El factor de carga se define como el cociente entre la demanda media y la demanda máxima medida, y se puede explicar como una medida de aprovechamiento de la capacidad instalada.
Puede calcularse este factor para cada período mensual o promediando al año.El factor de carga para cada caso está dado por:
Factor de carga = Consumo de kWh en el periodo fracturado
(demanda maxima) (No. horas del periodo de fact.)
Es deseable alcanzar el más alto factor de carga posible para que el costo promedio de la energía pueda ser reducido. El factor de carga se puede incrementar, ya sea, aumentando el consumo a demanda constante o reduciendo la demanda a consumo constante.
Un factor de carga bajo en una planta puede usarse como indicativo de la posibilidad de controlar la demanda. El factor de carga ideal de 1.0 es imposible de alcanzar, pero mientras más alto es el factor de carga, mejor es la utilización de la capacidad instalada de la planta y menor es el costo promedio de la energía.
Para una planta que opere un sólo turno, el factor de carga está limitado a alrededor de 0.25 a 0.3, para dos turnos de operación el máximo factor de carga puede ser de 0.55 a 0.60 mientras que para una operación de 3 turnos se pueden alcanzar factores tan altos como 0.85 a 0.90.
IDENTIFICACIÓN DE CARGAS
Para conocer que cargas componen la demanda máxima, se deben identificar dos tipos de cargas eléctricas. La primera es la causada por el equipo instalado, como se describió anteriormente, el cual afecta de manera importante los picos de demanda y debe ser el primer objetivo para controlar la demanda. Las lecturas de watthorímetros se deben de recopilar para ayudar a identificar las máquinas culpables y cuantificar su contribución al pico de demanda.
La segunda categoría de cargas representa las quo no contribuyen significativamente al pico de demanda, pero pueden apagarse con muy poco efecto negativo sobre el proceso. El equipo seleccionado para el control de cargas principalmente incluye equipos que nos son de operación continua,
cos =kWh
kWh + kVArh2 2

cargas auxiliares no esenciales, o equipos que operan bajo controles termostáticos donde el gradiente térmico no es crítico.
Ejemplos de estas cargas son:
Calentadores de aire. Equipos de oficina Calentadores de agua Hornos de inducción. Cámaras frías de almacenaje. Ventiladores. Secadores. Cargadores de baterías. Equipo de bombeo en algunos casos. Molinos, quebradoras.
Mediciones
Los principales parámetros eléctricos que se miden son los mostrados en la siguiente tabla
TABLA 1
VARIABLE UNIDADCorriente Amperes (A)Potencial Volts (V)Potencia Watts (W)Energía Watts-hora (Wh)
Factor de potencia %
Equipos básicos de medición (analógicos y digitales)
CORRIENTE ELÉCTRICA
El flujo de cargas eléctricas se cuantifica en amperes, el cual se mide con el medidor conocido como amperímetro, de los cuales existen muchos tipos diferentes. El más usado para medir corriente alterna en sistemas ya instalados es el conocido como medidor de gancho, el cual se muestra en la figura 2.6. Este es un instrumento portátil que nos da la lectura directa de la corriente que esta fluyendo por el conductor en donde se conecta. Su principio de operación es por medio de un transformador de corriente, el cual tiene la particularidad de poderse abrir por medio de un mecanismo de resorte y colocarse alrededor del cable sobre el que se quiere hacer la medición, haciendo el papel del secundario y sobre de este se mide la corriente. La corriente medida es proporcional a la que circula por el primario, conociéndose la relación de transformación ya que el primario tiene una sola vuelta. Es obvio que este tipo

de medidor es exclusivo de corriente alterna. Cuando se usa este medidor solamente se debe de poner, dentro del gancho, un solo conductor del circuito,
Para puntos donde se considera importante contar con un monitoreo de corriente, se utilizan medidores fijos conectados en serie con la carga donde se mide el paso de corriente. Actualmente los hay con lectores analógicos o digitales.
Galvanómetro D’Arsonval
El físico francés Arsène D’Arsonval junto a Marcel Deprez mejoraron el galvanómetro en 1881. En lugar de una aguja imantada que se mueve cuándo circulan flujos eléctricos por un alambre enrollado, el galvanómetro D’Arsonval dispuso de un imán fijo y un serpentín móvil. Al conectar una aguja indicadora al serpentín, ésta se movía sobre una escala adecuadamente calibrada. Si se coloca una bobina de tal manera que pueda girar libremente y la situamos dentro de un imán, la corriente que fluye por ella forma polos magnéticos en sus extremos. De esta forma se convertirá en un electroimán. Este efecto provoca un movimiento rotativo en la bobina en el sentido de las agujas del reloj. Si la intensidad del campo magnético del imán es fija, la fuerza de rotación depende de la intensidad del campo magnético producido por la corriente en la bobina.Cabe destacar que el galvanómetro D'Arsonval es la base de la mayoría de los galvanómetros modernos.
MULTIMETRO.
El amperímetro, el voltímetro, y el ohmetro utilizan el galvanómetro D’Arsonval. La diferencia entre los 3 es el circuito utilizado con el movimiento básico. Es por lo tanto obvio que se puede diseñar un instrumento para realizar las tres funciones de medición; este dispositivo, tiene un interruptor de función que selecciona el circuito apropiado al galvanómetro D’Arsonval y es llamado comúnmente multímetro o medidor-volt-ohm-miliampere (VOM).
Uno de los instrumentos de propósitos más versátiles, capaz de medir voltajes de cd y ca, corriente y resistencia, es el multímetro electrónico de estado sólido o VOM. Aunque los detalles del circuito varían de un instrumento a otro, un multímetro electrónico generalmente contiene los siguientes elementos:
Amplificador de cd de puente – equilibrado y medidor indicador.Atenuador de entrada o interruptor de RANGO, para limitar la magnitud del voltaje de entrada al voltaje deseado.
Sección de rectificación para convertir el voltaje de ca de entrada en voltaje de cd proporcional.
Batería interna y un circuito adicional para proporcionar la capacidad para medir resistencias.

Interruptor de FUNCIÓN, para seleccionar las distintas funciones de medición del instrumento.
Además el instrumento suele incluir una fuente de alimentación para su operación con la línea de ca y, en la mayoría de los casos, una batería para operarlo como instrumento portátil de prueba.
Los multímetros analógicos son instrumentos de laboratorio y de campo muy útiles y versátiles, capaces de medir voltaje (en cd y ca), corriente, resistencia, ganancia de transistor, caída de voltaje en los diodos, capacitancia e impedancia. Se les llama por lo general multimeters (en inglés se les llama VOM, volt ohm miliammeters).
En últimas fechas se han ampliado y mejorado las posibilidades de funcionamiento de esos medidores se ha aumentado en forma considerable sus posibilidades y su exactitud. Además, mediante el empleo de amplificadores de entrada con transistores de efecto de campo (FET) para mediciones de voltaje cd, sus impedancias rebasan con frecuencia a los 100 MΩ. Por ultimo la escala del óhmetro ya no se ha de llevar a cero para compensar los cambios internos del voltaje de batería o los cambios de escala. Las mediciones de voltaje se pueden efectuar sobre el rango de 0.4 mV hasta 1000 V con exactitudes de 0.1 por ciento. Las mediciones de corriente se pueden llevar a cabo desde 0.1 μA hasta 10 A con exactitudes de 0.2 por ciento. Se miden resistencias tan altas como 40 MΩ con exactitud de 1 por ciento. (Se debe notar que al hacer mediciones de resistencias tan altas, nunca se debe tocar la punta de medición con los dedos debido a que la resistencia de la piel es solo algunos miles de ohms, y esto puede originar errores serios en la medición.) Las mediciones de resistencia menores tienen una exactitud de 0.2 por ciento.
Los multímetros digitales han tomado el lugar de los multímetros con movimientos de D'Arsonval por dos razones principales: mejor exactitud y eliminación de errores de lectura. Sin embargo con frecuencia se agrega una escala analógica en la escala digital para dar una indicación visual de entradas que varían con el tiempo. La posibilidad de observar la indicación del medidor en forma analógica es muy importante cuando se estén localizando fallas en

sistemas de instrumentación, por ejemplo, la rapidez con que cambia una variable, al igual que su magnitud, pueden dar indicaciones valiosas en muchas situaciones de localización de problemas.
Multímetros Digitales.
La mayoría de los multímetros digitales se fabrican tomando como base ya sea un convertidor A / D de doble rampa o de voltaje a frecuencia, con ajuste de rango. Para dar flexibilidad para medir voltajes en rangos dinámicos más amplios con la suficiente resolución, se emplea un divisor de voltaje para escalar el voltaje de entrada. Para lograr la medición de voltajes de ca, se incluye un rectificador en el diseño del medidor. Como las exactitudes de los rectificadores no son tan altas como las de los circuitos de medición de voltaje de cd, las exactitudes general de los instrumentos de medición de ca es menor que cuando se miden voltajes de cd (las exactitudes para voltajes de ca van desde + 1.012 hasta + 1 por ciento + 1 digito). Las corrientes se miden haciendo que el voltímetro digital determine la caída de voltaje a través de una resistencia de valor conocido y exacto.
Aunque el valor de una resistencia se puede especificar con mucha exactitud, hay cierto error adicional debido al cambio de resistencia como función del efecto de calentamiento de la corriente que pasa a través de ella.
Además, se debe tener cuidado al emplear la función de medición de corriente. No se debe permitir que pase demasiada corriente a través de la resistencia. Las exactitudes típicas de las mediciones de corriente de cd van desde + 0.03 hasta + 2 por ciento de la lectura + 1 dígito, mientras que para corriente alterna son de + 0.05 a + 2 por ciento + 1 dígito.
El voltímetro digital se convierte en óhmetro cuando se incluye en él una fuente muy exacta de corriente. Esta fuente circula corriente a través de la resistencia que se mide y el resto de los circuitos del vóltmetro digital monitorea la caída de voltaje resultante a través del electo. La fuente de corriente es exacta sólo para voltajes menores que el voltaje de escala completa del vóltmetro digital. Si la resistencia que se mide es demasiado grande, la corriente de prueba de la fuente de poder disminuirá. Las exactitudes de los voltímetros digitales multiusos que se emplean apara medir la resistencia van desde + 0.002 por ciento de la lectura + 1 dígito hasta + 1 por ciento de la lectura + 1 dígito.
Muchos multímetros digitales son instrumentos portátiles de baterías. Algunos se diseñan con robustez para permitirles soportar los rigores de las mediciones de campo. Otros poseen características tales como operación de sintonización automática de rango (lo cual significa que el medidor ajusta de manera automática sus circuitos de medición para el rango de voltaje, corriente o resistencia), compatibilidad con salida decimal codificada binaria o IEEE-488, y medición de conductancia y aun de temperatura. Galvanómetro.

Básicamente, todos los instrumentos que requieran de un medio de interpretación de características físicas usan un galvanómetro. Este lo diseño el francés Arsen d’Arsonval en 1882 y lo llamó así en honor del científico italiano Galvini. En esencia, el medidor es un dispositivo que consta de un imán permanente y una bobina móvil. Galvanómetro D’Arsonval de bobina móvil funciona con base en el efecto electromagnético F=NBiL. En su forma más sencilla, el medidor de bobina móvil consta de una bobina de alambre muy fino devanado sobre marco de aluminio ligero. Un imán permanente rodea a la bobina y el marco de aluminio está montado sobre pivotes que posibilitan que gire libremente, junto con la bobina, entre los polos del imán permanente. Cuando hay corriente en la bobina, ésta se magnetiza y su polaridad es tal que el campo del imán permanente la repele. Esto hace que el marco de la bobina gire sobre el pivote y cuánto lo haga depende de la cantidad de corriente que circule por la bobina. Así, al calibrar la aguja sobre el marco de la bobina y referirla a una escala calibrada en unidades de corriente, puede medirse la cantidad de corriente que circula a través del instrumento.
Figura 1. Galvanómetro D’ Arsonval de bobina móvil
Galvanómetro de hierro móvil.
Cuando dos barras del mismo material se colocan paralelas y se introducen en un campo magnético, ambas se imantarán con las mismas polaridades, lo que origina que entre ellas se produzca una fuerza de repulsión. Este fenómeno se aplica a esta variación del galvanómetro.
Existen tres tipos que usan este principio:
Galvanómetro de paleta radial

Galvanómetro de alabes
concéntricos
Galvanómetro de émbolo.
Galvanómetro de paleta radial
Como veremos en la figura 2, los medidores de paleta radial son piezas rectangulares que fueron introducidas como núcleo en una bobina. Una de las paletas está fija y la otra puede girar libremente mediante un dispositivo; además, a la paleta libre se le coloca la aguja marcadora de la magnitud proporcional a su movimiento, lo que ocasiona la repulsión con la que está fija.
Figura 2. Galvanómetro de paleta radial.
Galvanómetro de alabes concéntricos.
El funcionamiento del medidor de alabes concéntricos es similar al de paletas, salvo la concentricidad de los alabes (Fig. 3).Estos tendrán una mayor captación de campo magnético. Uno de ellos, el exterior, será fijo, y el del centro, móvil y contará con la aguja indicadora.

Figura 3. Galvanómetro de alabes concéntricos.
Galvanómetro de émbolo.
El otro tipo de émbolo móvil consiste en un núcleo móvil de hierro que esta colocado, en su inicio, dentro de una bobina fija; en su extremo exterior se coloca la aguja indicadora. Cuando por la bobina circula corriente se forma el campo magnético y atrae al émbolo, la fuerza de atracción será proporcional a la corriente que produce el campo (Fig. 4).
Figura 4 Galvanómetro de émbolo.
El medidor que combina ambas formas (electromagnéticas y la térmica), es el “termopar”. Como el medidor térmico, el termopar alcanza una temperatura

que depende de la cantidad de corriente que fluye. El alambre calienta a la unión del termopar, el cual origina una pequeña tensión c-c que impulsará una corriente por la bobina haciendo que se deflexione.
Figura 5 Medidor de termopar. Componentes de los galvanómetros.
Todos los tipos de galvanómetros contienen básicamente todos estos elementos (Figura 6):
Imán permanente o imán temporal. Bobina móviles. Aguja indicadora. Escala en unidades según tipos de lecturas. Pivotes. Cojinetes. Resortes. Pernos de retención. Tornillo de ajuste cero. Mecanismo de amortiguamiento.
Imanes.
Uno de los efectos más familiares y más usados de la corriente eléctrica es su facultad de producir la fuerza que llamamos magnetismo. Esta fuerza es la que posibilita la operación de motores, generadores, instrumentos de medida eléctricos, equipos de comunicación, etcétera.

Figura 6 Partes del galvanómetro.
Aplicación de los galvanómetros: Amperímetro.
El amperímetro es una aplicación natural del galvanómetro. Normalmente la bobina del galvanómetro se construye con alambre muy delgado y hasta un máximo de vueltas, lo que origina sus limitaciones.
Los amperímetros se dividen por su capacidad de medición en:
Amperímetro (amperes).Miliamperímetros (milésimas de amperes).Micro amperímetros (millonésimas de amperes). Pero aun dentro de cualquiera de estas capacidades tendrán limitaciones debido al método con que se construye. Por lo que es necesario ampliar su rango de operación y respuesta.

Existirá una corriente máxima que podrá circular por él sin destruirse.
Esta corriente se denomina corriente de fondo de escala, de plena escala o máxima permisible ya que es la que lleva la aguja al extremo de la escala.
La bobina y las terminales de conexión presentan una resistencia eléctrica muy baja (pero no cero).
El error típico es de aproximadamente 1 % del valor a fondo escala.
Colocación en un circuito.
Un amperímetro siempre se coloca en serie en el circuito.
Error de inserción o efecto de carga.
Es una consecuencia de la existencia de una resistencia propia del instrumento distinta de cero. Es un error que se agrega al error propio del instrumento y al de lectura y depende de las condiciones de medición.
Amperímetro ideal
Aquel que posee resistencia interna cero.

Ampliación de la escala de medición .
Una resistencia derivada o “shunt” permite desviar parte de la corriente a medir. El instrumento mide solo una porción de la corriente total, siempre menor a su corriente máxima permisible. Derivación De Ayrton.
La escala de corriente del amperímetro cd se puede extender mediante varias resistencias de derivaciones, seleccionadas por un interruptor de rango. Tal medidor se llama amperímetro multirango. El circuito tiene tres derivaciones, que se pueden colocar en paralelo con el movimiento para dar cuatro escalas de corrientes diferentes. El interruptor S es de multiposición, del tipo que hace conexión antes-de-desconectar, de manera que el movimiento no se vea afectado cuando el circuito se queda sin protección, sin derivación, al cambio de rango.
La derivación universal de Ayrton elimina las posibilidades de tener el medidor sin ninguna derivación en el circuito. Esta ventaja se obtiene a expensas de llegar a tener una resistencia total del medidor ligeramente mayor. La derivación de Ayrton da una excelente oportunidad para aplicar la teoría de los circuitos básicos a circuito práctico.

Precauciones
No conectar un amperímetro a través de una fuente de fem. Ya que por su baja resistencia circularía una corriente dañina muy alta que puede destruir el delicado movimiento. Siempre se conecta el amperímetro en serie con una carga capaz de emitir corriente.Obsérvese la polaridad correcta. La polaridad inversa causa que el medidor se deflecte contra el mecanismo de tope y esto podría dañar la aguja.
Cuando se utiliza un medidor multirango, primero se usa la escala de corriente más alta; luego se disminuye la escala de corriente hasta obtener la deflexión adecuada. Para incrementar la exactitud de la medición, se emplea una escala que dé una lectura tan cercana a la escala completa tanto como sea posible.
Voltímetro.POTENCIAL ELÉCTRICO
Es una medida de la fuerza empleada para mover las cargas en una corriente eléctrica, las unidades en que se mide es el volt y para medirlo se utiliza el medidor denominado vóltmetro y las puntas del mismo se deben de conectar en paralelo con la carga a medir. El medidor internamente consta de un medidor de corriente en serie con una resistencia conocida, la cual debe de ser muy grande.
FIGURA 2.6

Al sensar la corriente se tiene la caída de potencial por la resistencia y como el sistema se encuentra conectado en paralelo al circuito que se quiere medir, los voltajes serán iguales. Actualmente en el mercado los hay portátiles y fijos, según sea la necesidad así como de diferentes calidades y con lectores analógicos o digitales.
Existe un equipo, denominado comúnmente como multímetro, el cual tiene la flexibilidad de en un solo equipo reunir diferentes mediciones eléctricas como el potencial, la corriente y la resistencia. Este equipo es muy usado sobre todo como equipo portátil ya que también es relativamente barato.
Un medidor básico, o sea un galvanómetro, es útil también para medir voltajes, ya que la bobina tiene una resistencia fija y por lo tanto cuando fluye corriente a través de la bobina ocurre una caída de tensión en esta resistencia. Según la ecuación de ohm, la caída de tensión será proporcional a la corriente que fluye a través de la bobina.

El valor de la resistencia multiplicadora necesaria para la escala de voltaje se calcula con base a la Fig. de arriba., donde:
Im = corriente de deflexión a plena escala del movimiento.Rm = resistencia interna del movimiento.Rs = resistencia multiplicadora.V = voltaje a plena escala del instrumento. Para el circuito:
V = Im (Rs + Rm)
Al despejar Rs, se tiene
Rs = V – Im Rm = V – Rm
Im Im
Por lo general la resistencia multiplicadora se monta dentro de la caja del voltímetro para escalas moderadas hasta 500 V. para voltajes mas altos, la resistencia multiplicadora se puede montar afuera del gabinete sobre un par de postes blindados con el fin de evitar el calor excesivo del interior.

Voltímetro de rango múltiple.
La suma de varias resistencias multiplicadoras, junto con un interruptor de rango, provee al instrumento de varias escalas de trabajo. La Fig. inferior izquierda, muestra un voltímetro multirango con un interruptor de tres posiciones y tres resistencias multiplicadoras, para las escalas de voltaje respectivamente.

Precauciones.
Obsérvese la polaridad correcta; ya que si es incorrecta origina que el medidor deflecte contra el mecanismo de tope y esto puede dañar la aguja.Conéctese el voltímetro del circuito a través del circuito o componente cuyo voltaje se va a medir.Cuando emplee un voltímetro de escala múltiple, hay que utilizar la escala de mayor voltaje y posteriormente disminuirla hasta tener una lectura lo más cercana a la parte superior de la escala.Considere el efecto de carga. Este se puede minimizar seleccionando la escala de voltaje más alta como sea posible. La exactitud disminuye si la indicación esta en el extremo inferior de la escala. Óhmetro.
El óhmetro es un dispositivo de medición muy importante, ya que ayuda a localizar circuitos abiertos o cortocircuitos midiendo la resistencia del componente o circuito bajo prueba.Básicamente, el óhmetro contiene una fuente de baja corriente (galvanómetro) continua, una fuente de baja tensión y baja potencia de cc, resistores limitadores de corriente, todos conectados en serie, y una resistencia variable para compensar el decaimiento de la fuente; esta resistencia es la que se denomina control de ajuste a cero ohms.

POTENCIA ELÉCTRICA
Para determinar directamente la cantidad de potencia demandada por un equipo o una carga eléctrica se utiliza el dispositivo denominado wattmetro. Este equipo es una combinación de los dos anteriores, pero midiendo simultáneamente la corriente y el voltaje.
El wattmetro consiste de tres terminales tipo caimán, un transductor de corriente tipo gancho y un lector. Cada cable se conecta al sistema polifásico bajo medición. La potencia del circuito se lee directamente del instrumento. También su lectura puede ser analógica o digital y existen algunos con graficador para la medición dinámica.

FIGURA 2.7
La forma de conexión varía según sea la conexión del sistema siendo algunas las siguientes
Potencia activa sin neutro, carga balanceada y tres fases. Los “caimanes”, que son las terminales de voltaje, se conectan en secuencia arbitraria a cada terminal; el gancho se conecta en la misma fase que el caimán que tenga su misma marca (comúnmente número o letra). El instrumento indica directamente la potencia activa en las tres fases. Para las cargas sin neutro se utiliza el mismo procedimiento anterior pero un de los caimanes no se conecta.
Potencia activa con neutro y carga desbalanceada. Se conecta el caimán marcado como 1 con su gancho respectivo, a una de las tres fases y el caimán 2 al neutro. El instrumento mide la potencia de una sola fase, el proceso se repite para las fases siguientes y al final los valores medidos se suman.
Potencia activa de una sola fase. Se utiliza el procedimiento descrito en el punto anterior
Potencia activa sin neutro, carga desbalanceada, trifásica. Se mide igual que en los puntos anteriores y no se usa un caimán.
Pueden existir otros tipos de arreglos, aunque los mencionados son los más comunes.
FACTOR DE POTENCIA
Para la medición del factor de potencia se utiliza el equipo denominado factorímetro, el cuál es muy similar al wattmetro con su caimán marcado. El caimán marcado y el gancho se conectan a una de las tres fases, los otros dos caimanes se conectan en las otras fases siguiendo el orden. Si el instrumento esta mal conectado, la aguja o la flecha, según sea el caso, indicarán en

sentido contrario; si esto sucede habrá que cambiar los caimanes 2 y 3. Cuando las fases están desbalanceadas es necesario medir el factor de potencia en cada una de ellas, en cuyo caso el factor de potencia del sistema se promedia en relación a las corrientes de las fases conforme a la siguiente formula
fpA xfp A xfp A xfp
A A At
( ) ( ) ( )1 1 2 2 3 3
1 2 3
En donde fpt es el factor de potencia total, fp1, fp2 i fp3 es el factor de potencia de cada una de las fases y A1, A2 y A3 es la corriente también en cada fase.
ENERGÍA ELÉCTRICA
El medidor utilizado para cuantificar la cantidad de energía eléctrica que consume un equipo o un sistema, se conoce con el nombre de watthorímetro. Este instrumento responde a la cantidad de corriente y voltaje que se transporta al sistema para hacerlo operar. La energía eléctrica se describe como la cantidad de potencia usada durante un tiempo determinado. La unidad más usada para esta medición es el kilowatthora kWh.Este equipo sensa el valor del voltaje y la corriente aplicados y mide el tiempo transcurrido en que son usados, multiplica esas cantidades y las graba, normalmente, en lectores circulares, de los cuales se tienen cinco. Los medidores están permanentemente conectados en la entrada de cualquier sistema eléctrico y normalmente son los que usan las empresas surtidoras del servicio para evaluar los costos.
En los sistemas que se tienen sin tarifa horaria, el medidor consta de cinco lectores circulares, como se muestra en la figura 2.8. Para determinar el valor de kWh indicados, se lee con el primer lector, el del lado izquierdo, el cual girará en el sentido de las manecillas del reloj y representa el valor más significativo de la lectura total. El segundo lector mostrará la siguiente cifra significativa y gira en el sentido inverso de las manecillas del reloj y así sucesivamente. El tercero y quinto giran también el sentido de las manecillas mientras que el cuarto lo hace en sentido contrario.
FIGURA 2.8

Una lectura única del watthorímetro no tiene sentido si se ve como una solamente, ya que al ser un medidor acumulativo los consumos se evalúan por diferencias entre dos lecturas, al inicio y final de un período considerado.El principio de operación es el mismo del motor ya que la corriente y el voltaje producen un campo electromagnético, produciendo la rotación de un disco de aluminio, cuya velocidad esta directamente relacionada con el consumo de la cantidad de potencia. Un tren de engranes manejado por el movimiento del disco mueve las agujas indicadoras de los lectores.Actualmente existen medidores de energía del tipo electrónico en los que no se tienen partes móviles. Aunque el principio es el mismo el producto del voltaje por la corriente se hace electrónicamente y el tiempo se evalúa por pulsos generados. Estos medidores se utilizan por las empresas suministradoras de energía en los sistemas que tienen contratadas tarifas horarias, ya que paralelamente el equipo tiene un sistema de reloj en tiempo real y graba en las horas en que ocurren los consumos.
ANALIZADORES DE REDES
Existe en el mercado un instrumento capaz de obtener toda la información de los parámetros eléctricos de manera instantánea, denominado analizador de redes, con la ventaja de que contienen un sistema de adquisición y grabación de la información (data logger), por lo que tienen la posibilidad de imprimir los datos medidos para su registro contínuo en períodos preestablecidos ya que son programables y pueden ser usado para los siguientes registros La carga general de la planta a lo largo de un día o un período mayor, para
determinar el perfil de la demanda e identificar la magnitud y el momento del pico de la demanda. Para llevar a cabo esta medición es conveniente

conectarlos en la salida del secundario del o los transformadores principales. Es conveniente tener en cuenta que normalmente este equipo es para medición en bajo voltaje, hasta 600 V, por lo que en algunos casos será necesario la utilización de transformadores (donas) de voltaje.
La carga general durante la noche de una área o departamento para observar el comportamiento de las cargas a lo largo del tiempo.
Los ciclos de los sistemas de refrigeración o sistemas de acondicionamiento de aire con la hora del día y condiciones del exterior.
Los ciclos de operación de un compresor, dando una indicación de la carga en la planta para determinar si es posible trabajar con dos o más compresores.
Los ciclos de bombeo. En general la entrada en operación de cargas eléctricas importantes, ya
sean motrices. De calentamiento, de iluminación u otros usos que tenga la energía eléctrica.
FIGURA 2.9

Amplificadores Operacionales
INTRODUCCIÓN
El concepto original del AO (amplificador operacional) procede del campo de los computadores analógicos, en los que comenzaron a usarse técnicas operacionales en una época tan temprana como en los años 40. El nombre de amplificador operacional deriva del concepto de un amplificador dc (amplificador acoplado en continua) con una entrada diferencial y ganancia extremadamente alta, cuyas características de operación estaban determinadas por los elementos de realimentación utilizados. Cambiando los tipos y disposición de los elementos de realimentación, podían implementarse diferentes operaciones analógicas; en gran medida, las características globales del circuito estaban determinadas solo por estos elementos de realimentación. De esta forma, el mismo amplificador era capaz de realizar diversas operaciones, y el desarrollo gradual de los amplificadores operacionales dio lugar al surgimiento de una nueva era en los conceptos de diseñó de circuitos.Los primeros amplificadores operacionales usaban el componente básico de su tiempo: la válvula de vacío. El uso generalizado de los AO no comenzó realmente hasta los años 60, cuando empezaron a aplicarse las técnicas de estado sólido al diseño de circuitos amplificadores operacionales, fabricándose módulos que realizaban la circuiteria interna del amplificador operacional mediante el diseño discreto de estado sólido. Entonces, a mediados de los 60, se introdujeron los primeros amplificadores operacionales de circuito integrado. En unos pocos años los amplificadores operacionales se convirtieron en una herramienta estándar de diseño, abarcando aplicaciones mucho más allá del ámbito original de los computadores analógicos.
INTRODUCCIÓN A LOS AMPLIFICADORES OPERACIONALES

Si existe un elemento estrella en los sistemas electrónicos analógicos ese elemento es sin duda el amplificador operacional. Con él podremos amplificar señales, atenuarlas, filtrarlas, etc. Los sistemas de control analógico encuentran en el amplificador operacional un elemento de conmutación sumamente simple e incluso años atrás fue empleado para el diseño de computadoras analógicas (de ahí el nombre de operacionales).El conocimiento a nivel básico del amplificador operacional proporciona al diseñador una herramienta de valor incalculable. Partir del amplificador operacional sin siquiera conocer el funcionamiento del transistor podría parecer un error. Esta consideración pierde importancia si tenemos en cuenta que en la actualidad el transistor como componente discreto ha quedado relegado a usos muy puntuales, siendo su coste similar al de un amplificador operacional. Ante esta situación, la respuesta correcta es disponer en primer lugar de los conocimientos necesarios para operar con amplificadores operacionales y posteriormente abordar la teoría clásica de transistor, por ser esta última más compleja.
EL MODELO IDEAL
Un amplificador operacional es un dispositivo electrónico activo siendo capaz de ofrecer una tensión de salida en función de una tensión de entrada. Vamos a considerar única y exclusivamente el amplificador operacional ideal, que aun no existiendo en la vida real, es una aproximación muy precisa y perfectamente válida para el análisis de sistemas reales. Un amplificador operacional presenta cinco patillas. Dos de ellas son las entradas del dispositivo; la primera de ellas llamada entrada inversora se halla indicada en los esquemas con un signo menos, la otra denominada entrada no inversora se indica mediante un signo más. Otro de las patillas del amplificador operacional corresponde a la salida del dispositivo mientras que las dos restantes corresponden a la alimentación requerida por el dispositivo (±Vcc).Una vez nos hemos familiarizado con las patillas podemos pasar a indicar las características de un amplificador operacional. Debido a que en ningún momento entraremos en el diseño interno del circuito deben ser asumidas. Recordamos una vez más que son características teóricas, si bien las reales se aproximan a las teóricas:
· Ancho de banda infinito (podemos trabajar con señales de cualquier frecuencia).· Tiempo de conmutación nulo· Ganancia de tensión infinita.· Impedancia de entrada infinita. · Impedancia de salida nula. · Corrientes de polarización nulas.· Tensión de desplazamiento nula (si bien no es estrictamente cierto, diremos que la diferencia de potencial entre las entradas inversora y no inversora nula). · Margen dinámico ±Vcc (la tensión de salida puede a nivel teórico alcanzar el valor de la tensión de alimentación, en la práctica se aproxima pero no puede ser igual ya que se producen saturaciones en el dispositivo).

AMPLIFICADOR INVERSOR
La configuración más sencilla es la inversora. Dada una señal analógica (por ejemplo de audio) el amplificador inversor constituye el modo más simple de amplificar o atenuar la señal (en el ejemplo propuesto modificar el volumen de la señal). Se comenzará por la configuración más adecuada para nuestros propósitos:
el modo amplificador inversor. Hemos afirmado anteriormente que la impedancia de entrada del dispositivo es infinita, por lo cual no circulará corriente en el interior del amplificador operacional y las resistencias R1 y R2 estarán dispuestas en serie. Por encontrarse estas resistencias dispuestas en serie la corriente que atravesará ambas será la misma, podemos afirmar por tanto:
A continuación se va a demostrar como Va es nula. Si tenemos en cuenta que la ganancia de tensión de un amplificador operacional debe atender a la relación salida/entrada:
Al ser una de las características del ampop la ganancia en tensión infinita podemos intuir que la única solución válida es disponer a la entrada del ampop de una tensión nula.
Al llegar a este punto se destaca que no debe confundirse la entrada del ampop constituida por las patas inversora y no inversora con la entrada de la etapa amplificadora inversora.Se llega a la conclusión de que la diferencia de potencial en la entrada del operacional debe ser nula. Puesto que en el circuito la pata no inversora se halla conectada a tierra el valor de Va será nulo o de lo contrario la diferencia de tensión en la entrada del ampop no sería nula.

Al analizar a continuación el resultado obtenido se puede ver claramente que la tensión de salida es proporcional a la tensión de entrada, siendo el factor de proporcionalidad una constante que definimos con las resistencias R1 y R2. Se acaba de diseñar el primer amplificador, ya que este simple amplificador operacional puede atenuar o amplificar las señales aplicadas a su entrada. El nombre de inversor viene dado por el signo negativo presente en la fórmula. Es decir, el montaje invierte la fase de la señal; este detalle no puede pasarse por alto para señales que requieran cuidar su fase.
Finalmente debemos destacar la presencia de la resistencia R3, cuya misión no es sino la de compensar los posibles efectos no deseados debidos a imperfecciones en el funcionamiento de los amplificadores operacionales reales. En concreto busca disminuir el efecto nocivo de unas intensidades de polarización residuales presentes en las entradas del ampop (lo que conlleva una impedancia de entrada elevada pero no infinita). Antes de continuar con las siguientes configuraciones es de suma importancia comprender completamente el amplificador inversor.
AMPLIFICADOR NO INVERSOR
Este circuito presenta como característica más destacable su capacidad para mantener la fase de la señal. El análisis se realiza de forma análoga al anterior.
Se ha razonado que la diferencia de tensión en las patillas de entrada del amplificador operacional ha de ser nula, por lo que la tensión presente en la patilla inversora será la misma que la presente en la no-inversora. Por hallarse las resistencias R1 y R2 en serie, la corriente que las atravesará será la misma y conocida, ya que sabemos el valor de R1 y las tensiones en sus extremos (Vin y 0):
Resulta sencillo despejar de esta expresión la ganancia:

Se puede apreciar como no existe signo negativo en la expresión (no se invierte la señal), siendo además la ganancia siempre superior a la unidad. Este circuito no permite por consiguiente atenuar señales.Se hará una puntualización con respecto a la conveniencia de uso del inversor / no inversor. La inversión de fase no resulta significativa en el tratamiento de señales alternas, ya que dichas señales varían entre semiciclos positivos y negativos. Un amplificador inversor aplicado a una señal alterna tiene como resultado una simple inversión de fase. Sin embargo en señales de continua el resultado es bien distinto. Si deseamos duplicar una tensión continua e introducimos a la entrada de un amplificador inversor 2V a la salida tendremos - 4V (negativos), lo cual puede ser un inconveniente en determinadas aplicaciones. La elección de una etapa u otra depende por consiguiente de las condiciones concretas de diseño.
AMPLIFICADOR MEZCLADOR O SUMADOR
Esencialmente no es mas que un amplificador en configuración inversora. Difiere de este último en la red resistiva empleada en sustitución de la resistencia R1 utilizada en el ejemplo de configuración inversora.
El desarrollo matemático es el mismo. Debido a la ganancia de tensión infinita del amplificador para que la tensión de salida sea un número finito la tensión de entrada debe ser nula. Puesto que una de las patillas (la no-inversora en este caso) se encuentra conectada a tierra a través de la resistencia Re, la otra patilla (patilla inversora) debe presentar también este valor.Debido a la impedancia de entrada infinita del amplificador, la suma de intensidades que atraviesen las resistencias R1,R2,...Rn será igual a la intensidad que atraviese la resistencia Rs (según la primera ley de Kirchhoff). Por tanto podemos afirmar que:
Despejando la tensión de salida:
Al llegar a este punto se debe particularizar la presente configuración para obtener un sumador. Si se afirma la igualdad entre las resistencias

R1=R2=...=Rn y además se hace que este valor coincida con el de la resistencia Ro se obtiene una tensión de salida igual a la suma algebraica de tensiones de entrada (con la correspondiente inversión de fase). Nótese la importancia de esta particularización para la comprensión de los antiguos calculadores analógicos:
CIRCUITO SEGUIDOR
Esta sencilla configuración ofrece una tensión de salida igual a la tensión de entrada, no produciéndose ganancia alguna.
El montaje se emplea fundamentalmente como adaptador de impedancias, ya que no consume corriente en su entrada (impedancia de entrada infinita) ofreciendo señal en su salida (impedancia de salida nula).Vout =VinSu nombre está dado por el hecho de que la señal de salida es igual a la de entrada, es decir, sigue a la de entrada.
AMPLIFICADOR CON ALIMENTACIÓN ASIMÉTRICA
Hasta ahora las configuraciones operaban con tensión simétrica ±Vcc. La configuración que a continuación pasamos a describir presenta la ventaja de operar con una tensión única. Para que este montaje funcione es necesario aplicar la mitad de la tensión de alimentación a la entrada no inversora del amplificador (creando una tierra virtual para la etapa equivalente a la mitad de la tensión de alimentación). Esto se consigue mediante las resistencias R1.
Puesto que la entrada del amplificador presenta una impedancia infinita, las dos resistencias R1 y R2 se hayan dispuestas en serie y por ellas circulará la

misma intensidad. Si llamamos Va a la tensión aplicada a la entrada no inversora del amplificador:
Por tanto conocemos las tensiones en los extremos de la resistencia R3 y por la ley de Ohm la intensidad que atravesará dicha resistencia. Por encontrarse R3 y R4 en serie la intensidad que circula por R4 será la misma que la que circula por R3, de donde podemos obtener el valor de Vout.
No se puede concluir la explicación de esta configuración sin mencionar los capacitores (de valor elevado para que no influyan en las señales alternas) situados a la entrada y a la salida del circuito. Tanto a la entrada como a la salida aparece en la señal una componente de continua de la mitad de la tensión de alimentación. Los capacitores evitan el paso de dicha componente (ya que un capacitor es un circuito abierto para una señal continua). Por tanto, puesto que de los dos sumandos el segundo de ellos es una señal continua y como ya hemos dicho es eliminada por los capacitores el valor de la tensión de salida corresponde únicamente al primero de los términos calculados:
Debido a los mencionados capacitores de desacoplo esta configuración puede usarse únicamente con señales alternas.
AMPLIFICADOR DIFERENCIAL
Este circuito presenta como característica notable la amplificación de la diferencia entre las dos tensiones de entrada. Presenta el inconveniente de que la impedancia de entrada del amplificador disminuye sensiblemente y además las dos resistencias R1 y las dos R2 deben ser exactamente iguales.
Puesto que sabemos que las tensiones de las patillas inversora y no inversora deben ser iguales, podemos afirmar que tanto las resistencias R1 y R2

superiores como las R1 y R2 inferiores se encuentran en serie. Planteando las ecuaciones:
De estas dos igualdades (donde Va es la tensión de entrada tanto en la patilla no inversora como en la inversora) podemos obtener la tensión de salida en función de los valores R1, R2 y las tensiones de entrada Para ello despejamos lo valores Va de ambas expresiones obteniendo:
Igualando ambas expresiones resulta trivial obtener la expresión final de la tensión de salida:
Como se puede ver esta configuración amplifica o atenúa la diferencia existente en las dos entradas V2 y V1.
TACÓMETRO
Un tacómetro (Del griego, tachos = velocidad y metron = medida) es un dispositivo para medir la velocidad de giro de un eje, normalmente la velocidad de giro del motor, se mide en Revoluciones por minuto (RPM).
Características y usos del tacómetro
El personal de ingeniería y mantenimiento de una planta, continuamente enfrenta una variedad de exigencias como las de las maquinarias cada vez más complejas, presupuestos de mantenimiento cada vez más limitados, mayor disponibilidad de maquinaria y mejor productividad y rentabilidad.
Se han desarrollado técnicas efectivas para el monitoreo y mantenimiento de la
maquinaria de forma rápida y confiables, que ponen todo en manos de la
instrumentación para evitar grandes costos y poder hacer un mantenimiento
predictivo según los datos obtenidos de estas prácticas.

Los sistemas confiables para monitoreo y diagnóstico de maquinaria, provistos de señales de entrada de mediciones correctas, son muy apreciadas por su valor. Para medir la velocidad, por ejemplo, se cuenta con diversos equipos, entre los que destacan los tacómetros.
El tacómetro es un dispositivo que mide revoluciones por minuto (RPM) del rotor de un motor o una turbina, velocidad de superficies y extensiones lineares. Son utilizados para llevar un registro de las velocidades del elemento que tengamos en estudio, que nos permita saber si está trabajando de forma adecuada. Con este tipo de instrumentos evitaríamos que se detenga la maquinaria, pudiendo hacer un mantenimiento en el momento adecuado. También se pueden emplear para conocer distancias recorridas por ruedas engranes o bandas.
Existen dos tipos de tacómetros muy utilizados: el tacómetro óptico y el tacómetro de contacto.
El tacómetro óptico mide con precisión la velocidad rotatoria (RPM) usando una haz de luz visible, puede ser usado hasta una distancia de 8 m en un elemento rotatorio. La construcción robusta, portabilidad y características notables del tacómetro óptico, lo hacen la opción ideal para el departamento de mantenimiento, operadores de máquinas y varias otras aplicaciones en maquinarias.
El tacómetro de contacto mide con precisión la velocidad rotatoria y de superficies. La medición de contacto se lleva a cabo por medio de un adaptador mecánico con cabeza o con rueda de medición.
Este tipo de instrumentos son óptimos para establecer las revoluciones de máquinas, piezas e instalaciones giratorias (por ejemplo: cintas transportadoras, motores y mecanismos accionados por correas, entre otros).

Además los dos tipos de tacómetros tienen la característica que al medir las revoluciones y velocidades, las graban directamente con el software para posteriormente hacer una valoración en la computadora.
La importancia de estos equipos radica en que cuando medimos las velocidades en RPM estamos controlando la velocidad adecuada de los equipos, esto permite una operación continua en el equipo, evitando así los paros innecesarios que repercutirían en grandes costos.
Aplicación en un automóvil
Velocímetro y tacómetro
El cuadro de instrumentos de un automóvil se completa con el velocímetro y en alguno de los casos con el tacómetro o cuentarrevoluciones. En los vehículos actuales es muy utilizado un sensor óptico de velocidad para comandar el velocímetro, que sustituye al clásico sistema de tambor magnético y aguja. Este sensor se monta frente a una rueda perforada que recibe movimiento por medio de un cable flexible que lo toma de la caja de cambios. El led del sensor óptico proyecta su luz sobre un fototransistor cuando coincide cada ventana de la rueda perforada, haciendo conducir al fototransistor, cuya señal se lleva a un circuito electrónico de control, el cual comanda la desviación de la aguja del velocímetro. En otros casos, se utiliza un pequeño generador del efecto Hall instalado en el mismo cable flexible del velocímetro para esta función.
En el mismo sistema del velocímetro y aprovechando un sistema de arrastre, suele disponerse un sistema cuentakilómetros, constituido por una serie de engranajes que dan movimiento a un tambor, cuyas cifras van saltando paulatinamente, indicando los kilómetros que van recorriéndose. En algunas ocasiones se dispone en el mismo mecanismo un cuentakilómetros parcial, que puede ser puesto a cero por el conductor.
El tacómetro de un vehículo suele ser del tipo electrónico que posee mayor precisión. En primer lugar, la tensión de alimentación esta establecida por el diodo Zener (Z). Por otra parte, en el circuito base del transistor (T) se dispone un sistema de diferenciación que homogeneiza la magnitud de los impulsos que alcanzan la base del transistor desde el ruptor. Estos impulsos, una vez amplificados, se aplican desde su colector a un rectificador formado por los diodos (D), a través del capacitor (C), con lo cual, la indicación del microamperímetro (M) esta en función exclusivamente del numero de impulsos por unidad de tiempo que llegan a la base del transistor.

MEDICIONES DE ILUMINANCIA EN INTERIORES.
Las mediciones de iluminancia deben hacerse aproximadamente a 76 centímetros del piso con la superficie del detector colocado horizontalmente. El área debe ser dividida en su interior en porciones rectangulares. Tomando lecturas en cada porción y promediándolas al final según sea el caso. La luz del día debe ser excluida de las mediciones de iluminancia, tomando las lecturas en la noche o con cubiertas que la obstruyan.
La iluminancia promedio se calcula dependiendo de las características y disposición geométrica de las luminarias. Para ello se han definido 6 diferentes formas localización de las luminarias en un área geométricamente regular, estableciendo la colocación de los puntos donde se tomaran las lecturas de iluminancia. A continuación se define cada uno de ellos.
Área regular con luminarias espaciadas simétricamente en 2 o más filas.
1. Se toman las lecturas puntuales r-1, r-2, r-3 y r-4 en una porción cuadrada formada por 4 luminarias colocados en los vértices de la porción dentro del área. Repetir la lectura en una porción similar ubicada aproximadamente en el centro del área, estas serán r-5, r-6, r-7, y r-8. El promedio de las 8 lecturas corresponderá a R en la formula. Como se muestra en la figura 1.

Fig. 1. Luminarias espaciadas simétricamente en dos o más filas (lecturas centrales).
2. Se consideran dos porciones más de forma rectangular colocados en los extremos del área y de forma horizontal con dos luminarias en su interior. De éstas, se toman las lecturas puntuales q-1 y q-2 para una de las porciones y q-3, q-4 para la otra porción. El promedio de estas 4 lecturas será Q en la formula.
Fig. 2. Luminarias espaciadas simétricamente en dos o más filas (lecturas en extremos).
3. Otras dos porciones son tomadas en cuenta de forma rectangular igual a la anterior pero colocadas de forma vertical en los extremos derecho e

izquierdo del área. Se toman dos lecturas t-1, t-2 para una porción y t-2, t3 para la otra. El promedio de las 4 lecturas será T en la formula.
Fig. 3. Luminarias espaciadas simétricamente en dos o más filas (lecturas en extremos
restantes).
4. Dos porciones pequeñas y cuadradas ubicadas en las esquinas superior izquierda e inferior derecha respectivamente se consideran para obtener una medición puntual en cada una de esta, resultando p-1 y p-2. El promedio de estas dos es P en la fórmula.
Fig. 4. Luminarias espaciadas simétricamente en dos o más filas (lecturas en esquinas).
Finalmente la iluminancia promedio estará dada por la formula:
Iluminancia promedio: = R(N-1)(M-1)+Q(N-1)+T(M-1)+P

NM N = número de luminarias por fila.M = número de filas.
En la figura 5 se observa la colocación recomendada del luxómetro para realizar el total de las lecturas.
Fig. 5 Luminarias espaciadas simétricamente en dos o más filas.
Área regular con luminaria única colocada simétricamente en el centro.
1. La porción única de forma cuadrada en cuyo centro se sitúa la fuente luminosa se divide en 4 partes, se toman las lecturas puntuales en el centro de cada parte; p-1, p-2, p-3, p-4. El promedio de iluminancia es el promedio de las cuatro mediciones tomadas P.

Fig.6 Luminaria única colocada en el centro.
Área regular con una sola fila de luminarias individuales.
1. Se toman 8 lecturas puntuales que van desde q-1 hasta q-8 en 4 porciones del área. Dos porciones en cada lado de la fila de luminarias. Tomando dos lecturas, una en el centro y otra en el extremo de cada porción. El promedio de las 8 lecturas será Q en la formula.
Fig. 7
Luminarias individuales en una sola fila (lecturas centrales.)
2. Se ubican otras dos porciones rectangulares en los extremos del área, una en una esquina superior y la otra en la esquina inferior opuesta. En el centro de cada porción se toma una lectura puntual. El promedio de estas dos lecturas será P en la ecuación.
Fig. 8 Luminarias individuales en una sola fila (lecturas en
esquinas).
3. Determinar el promedio de la iluminancia en el área usando la siguiente ecuación:
Iluminancia promedio: Q(N-1) + P

NDonde N = número de luminarias.Finalmente se muestra la colocación sugerida del luxómetro en todas las lecturas que deben ser tomadas en la figura 9.
Fig. 9 Luminarias individuales en una sola fila.
Área regular con dos o más filas continuas de luminarias.
1. Tomar lecturas puntuales desde r-1 hasta r-4 aproximadamente cerca del centro del área, casi de forma aleatoria. El promedio de las cuatro lecturas será R en la ecuación.

Fig. 10 Luminarias en arreglo de filas continuas (lecturas centrales).
2. En dos porciones que se ubicaran en dos de los extremos del área, en una sección intermedia, entre de la luminaria y el muro que limite el área se tomaran dos mediciones, una en el centro de cada porción; q-1, q-2. El promedio de estas dos será Q en la ecuación.
Fig. 11 Luminarias en arreglo de filas continuas (lecturas laterales).
3. Se toman 4 lecturas que van desde t-1 hasta t-4 en dos porciones de los extremos del
4. recinto, cada porción se
5. encuentra entre los luminarias y el muro que limita al recinto. Tomado dos lecturas por cada porción (una en el centro y otra a la mitad de uno de los lados), se promedian las 4 lecturas dando como resultado T en la ecuación correspondiente.

Fig. 12 Luminarias en arreglo de filas continuas (lecturas laterales restantes).
6. Se identifican dos porciones que se ubicaran en dos de las esquinas opuestas del recinto, que se toman dos lecturas puntuales, una en el centro de cada porción. El promedio de estas dos lecturas será P en la ecuación.
Fig. 13 Luminarias en arreglo de filas continuas (lecturas en esquinas opuestas).
7. Determinar el promedio de iluminancia en el área usando la siguiente formula;
Promedio de iluminancia = RN(M-1)+QN+T(M-1)+P M(N+1)
Donde N = número de luminarias por fila. M = número de filas.
La localización final de todas las lecturas que deben ser tomadas se ve en la figura 14.

Fig. 14 Luminarias en arreglos de filas continuas.

Área regular con una sola fila de luminarias continuas.
1. Se toman 6 lecturas de medición desde q-1 hasta q-6. Estas lecturas se ubican al dividir la longitud de la fila de luminarias en 4 partes, dos lecturas se harán a la mitad de la fila (una en cada lado) dos en un extremo a ¼ de la longitud de la fila y los otros dos en el otro extremo a la misma distancia. El promedio de las 6 lecturas será Q en la ecuación.
Fig. 15 Luminaria continua de una sola fila (lecturas centrales).
2. Se ubican dos porciones en dos de las esquinas opuestas del área ó recinto. Las porciones medirán en largo y ancho la longitud que va del extremo de la fila de luminarias a cada uno de los muros que limita el área. El promedio de las dos lecturas será P en la ecuación.
Fig. 16 Luminaria continua de una sola fila (lecturas en esquinas).
3. Determinar el promedio de iluminancia en el área usando la siguiente fórmula:

Iluminancia promedio = QN + P N+1Donde N = número de luminarias.
La localización del total de lecturas que tienen que tomarse se muestran en la figura 17.
Fig. 17. Luminaria continua de una sola fila.

Área regular con paneles modulares luminosos.
1. Se toman 4 lecturas puntuales desde r-1 hasta r-4 que se situaran de forma aleatoria en la parte central del área o recinto. El promedio de estas lecturas será R en la ecuación.
2. Se toman 2 lecturas puntuales; q-1 y q-2, que se localizaran a una distancia de 0.6 metros (2 ft) de los lados más largo del área o recinto, una medición por cada lado largo con una distribución aleatoria. El promedio de las 2 lecturas será Q en la fórmula.
3. Se toman 2 lecturas puntuales; t-1 y t-2, situados a una distancia de 0.6 metros (2 ft) de los lados mas cortos del área o recinto, una medición por cada lado corto con una distribución aleatoria. El promedio de las 2 lecturas será T en la formula.

4. Se toman 2 lecturas puntuales; p-1 y p-2, que se localizaran en las esquinas opuestas diagonalmente en área ó recinto a 0.6 metros (2 ft.) de cada muro. El promedio de las 2 lecturas será P en la fórmula.
5. Determinar el promedio de iluminancia en el área por la siguiente fórmula.
Iluminancia promedio = R(L-8)(W-8)+8Q(L-8)+8T(W-8)+64P WL
Donde: W = número de luminarias por fila. L = número de filas.
Fig.18 Luminarias en base a paneles modulares uniformes.

7.3 MEDICIONES MECÁNICAS
MEDICION DE PRESIÓN
IntroducciónEl control de la presión en los procesos industriales da condiciones de operación seguras. Cualquier recipiente o tubería posee cierta presión máxima de operación y de seguridad, variando este, de acuerdo con el material y la construcción. Las presiones excesivas no solo pueden provocar la destrucción del equipo, si no también puede provocar la destrucción del equipo adyacente y ponen al personal en situaciones peligrosas, particularmente cuando están implícitas, fluidos inflamables o corrosivos. Para tales aplicaciones, las lecturas absolutas de gran precisión con frecuencia son tan importantes como lo es la seguridad extrema.Por otro lado, la presión puede llegar a tener efectos directos o indirectos en el valor de las variables del proceso (como la composición de una mezcla en el proceso de destilación). En tales casos, su valor absoluto medio o controlado con precisión de gran importancia ya que afectaría la pureza de los productos poniéndolos fuera de especificación.
La presión puede definirse como una fuerza por unidad de área o superficie, en donde para la mayoría de los casos se mide directamente por su equilibrio directamente con otra fuerza, conocidas que puede ser la de una columna liquida un resorte, un embolo cargado con un peso o un diafragma cargado con un resorte o cualquier otro elemento que puede sufrir una deformación cualitativa cuando se le aplica la presión.
Los principales medidores de presión se clasifican en:
Manómetros para rangos entre 0 y 200 mm c a Elementos deformables para cualquier rango
Para realizar la medición de presión en flujos de aire los mas utilizados son los manómetro de tubos en U y los inclinados, utilizados para mejorar la sensibilidad del medidor. La presión total del flujo tendrá sus componentes de presión dinámica y presión estática.
La medición de la presión estática, que actúa de una manera uniforme en cualquier dirección, se hará conectando un tubo flexible a un orificio practicado a una pared del conducto, y conectando el mismo a una de las ramas de un manómetro, dejando la otra libre comunicada a la atmósfera, por lo que el instrumento indicara la presión en el ducto relativa a la atmosférica.
La medición de la presión total se realiza mediante una sonda o tubo, colocado contra la corriente de aire, el cual se conecta a una de las ramas del manómetro y la otra la referimos a la atmósfera.
La medición de la presión en los circuitos de agua normalmente se realiza con los del tipo de deformación; entre los mas comunes de este tipo tenemos:
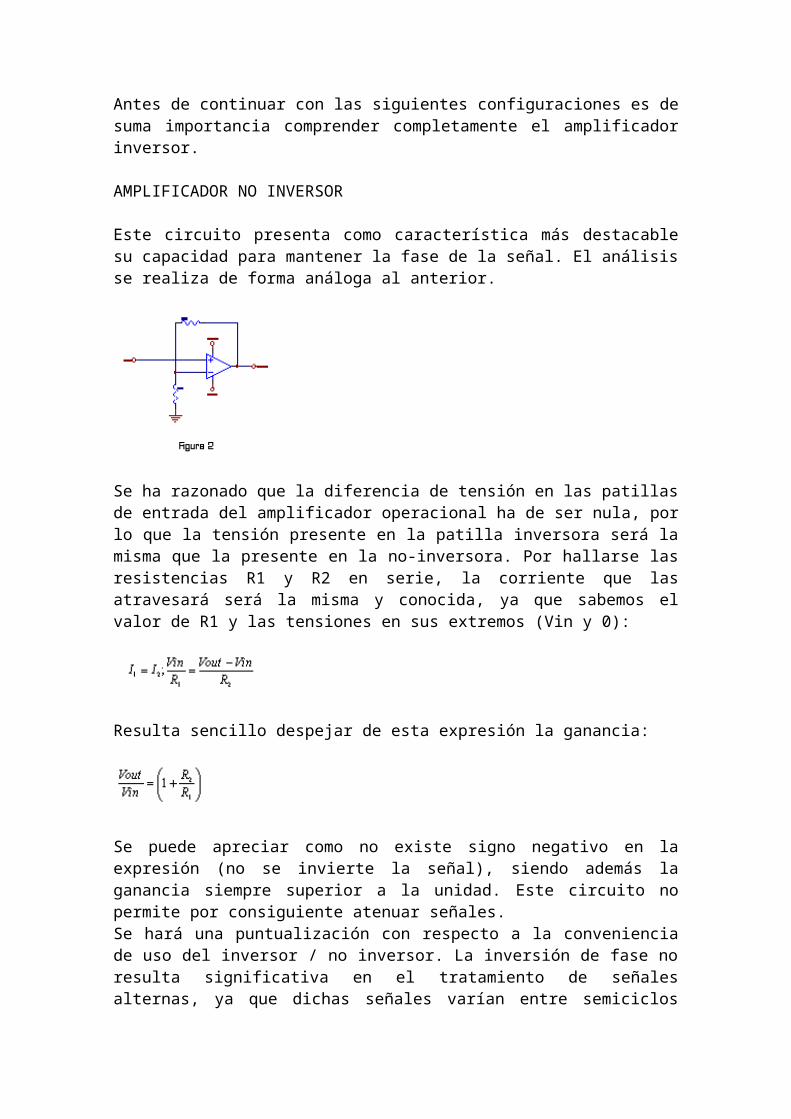
Tubo de Bordón Diafragma Fuelle Cristal piezoeléctrico
La deformación de los tres primeros se puede sensar, cuando se requiere transducir la señal de presión a una señal eléctrica, con los medidores de resistencia eléctrica variable llamados galgas extensométricas (strain gauge).
Aunque es importante contar con medidores fijos en los equipos principales, para detectar su presión diferencial, es conveniente disponer en las líneas válvulas para conexión de manómetros en las líneas secundarias.
Las mediciones de presión en las líneas de refrigerante se realizan igual que en las de agua.
Sensores de presión
La presión no es una cantidad fundamental y necesita ser derivada de la fuerza y el área que a su vez son derivadas de la masa, longitud y tiempo, que son unidades fundamentales.
Los principales métodos de medición se basan en: la comparación con una fuerza o peso conocido sobre áreas calibradas, la deflexión de un elemento elástico sometido a una presión desconocida, la cual puede ser medida por medios mecánicos o eléctricos, y las diferentes técnicas para medir vacío.
Para comprobar la efectividad de medición del Manómetro Bourdon, el dispositivo utilizado se llama Probador de peso muerto:. Esta formado por un cilindro vertical, un pistón cilíndrico con libertad de movimiento vertical, una plataforma para colocar pesos, una manguera flexible que comunica la presión al manómetro.
Figura 5

Manómetros
Consiste en un tubo, generalmente de vidrio, doblado en forma de "U", el cual contiene un líquido que se nivelará en ambas ramas del tubo al estar expuestas a la presión atmosférica. Al aplicarse una presión a una de las piernas, la altura de la columna del líquido se ajustará en cada rama y la diferencia de alturas multiplicada por la densidad del líquido, será una medida de la presión aplicada.Existen algunas variantes con el mismo principio de operación como son el tipo columna, la inclinación o el micromanómetro (Fig.6).
FIGURA 6
Tubo de Bordón
Consiste de un tubo formado con sección elíptica doblado en forma de "C" de bronce fosforado o cobre. Uno de los extremos es sellado y el otro es la toma de presión. Al pasar hacia el interior del tubo tiende a deformarlo, como el efecto que sucede en un “espantasuegras”. El cambio de forma del tubo de Bordón se convierte en un movimiento mecánico que puede ser transmitido por el sistema de engranes hacia el movimiento de un puntero o traducido a una señal eléctrica. Este tipo de medidor se coloca normalmente cerca del punto de medición. Existen algunas variantes como las mostradas en la Fig. 7

Diafragma
Al aplicar presión a un diafragma se origina una deformación proporcional a la misma. La deformación del diafragma se puede convertir a señales neumáticas o eléctricas ó a través de barras hacer la medición mecánica. El material del diafragma se selecciona de acuerdo con el fluido en que se necesite la medición y son más sensibles que los Bordón.
Galgas extensiométricas (strain gauges)
Son medidores de deformación del tipo de resistencia eléctrica que sensan esfuerzos de tensión, compresión o torsión en los que el cambio de valor de la resistencia son proporcionales a la presión aplicada a los elementos de deflexión. Normalmente requieren compensación por cambios de temperatura y se utilizan cuando las condiciones ambientales son estables.
FIGURA 7
Cristal piezoeléctrico
Algunos cristales tienen la propiedad de producir una diferencia de potencia al sufrir una deformación. El cristal normalmente se coloca en las cámaras sensoras de presión, cuando tienen una deformación, debido a la presión aplicada, el esfuerzo inducido al dispositivo incrementa el voltaje generado

entre los electrodos del cristal, de esta manera la diferencia de potencial medida será proporcional a la presión.Estos dispositivos son muy utilizados por su buena sensibilidad y porque necesitan un mínimo de instrumentos de apoyo.
Medidor de vacío
Para la medición de presiones de vacío se pueden utilizar los elementos elásticos hasta 10-3 Torr. Para altos vacíos existen algunos medidores específicos como el medidor Mc Leod, el tubo Pirani y las celdas de ionización.
Figura 8

MEDICION DE PRESIÓN DE NIVEL
IntroduccionUna calidad de producto constante, la seguridad de la planta, eficiencia económica... todos estos aspectos son importantes en cualquier punto de medición de nivel.
En el interior de depósitos, silos o contenedores móviles es habitual que se tomen medidas de nivel de líquidos, pastas, sólidos o gases licuados. Las aplicaciones abarcan unas condiciones de trabajo que van desde -200 °C hasta +400 °C y desde -1 bar hasta +500 bar. Los ejemplos abarcan todos los sectores industriales, mundiales desde las industrias química, petroquímica y energética hasta las industrias farmacéutica, alimentaria y medioambiental. El amplio campo de principios de medición disponibles permiten hallar la solución ideal con facilidad. Sin embargo, ningún principio de medición es apto para todas las aplicaciones. Por ello, es necesario seleccionar sistemas de medición que resulten fiables bajo las condiciones de trabajo de cada aplicación en particular y, a su vez, que cumplan las expectativas económicas futuras.
Detección de nivel límite
Las tareas esenciales consisten en evitar que los depósitos se llenen más de lo conveniente o queden demasiado vacíos, y que las bombas funcionen en seco. En la detección del nivel límite, son muy importantes un funcionamiento seguro y un elevado nivel de repetibilidad.
Entendiendo por nivel la distancia existente entre una línea de referencia y la superficie del fluido, generalmente dicha línea de referencia se toma como fondo del recipiente.tenemos:
Métodos de medición.
El nivel es la variable que puede en teoria ser medida mas fácilmente, pero existen otros factores, tales como viscosidad del fluido, tipo de medición deseada, presión, si el recipiente esta o no presurizado, que traen como consecuencias que existan varios métodos y tipos de instrumentos medidores del nivel. El medidor de nivel seleccionado dependerá de nuestras necesidades o condiciones de operación.
Los métodos utilizados para la medición del nivel de líquidos, básicamente pueden ser clasificados en: Métodos de medición directa y método de medición indirecta.
Métodos de medición directa:
VarillaConsiste en una varilla o regla graduada, de la longitud conveniente para introducirla dentro del depósito. La determinación del nivel se efectúa por lectura directa de la longitud mojada por el líquido. En el momento de la lectura

el tanque debe estar abierto a presión atmosférica. Se utiliza generalmente en tanques de fuel oil o gasolina.
Figura 9 Medidor de sonda
Aforación.Es el método de medir nivel por medio de cintas. El instrumento esta compuesto por tres partes principales que son: el carrete, la cinta graduada y un peso o plomada.
La plomada sirve para que se mantenga la cinta tensa al penetrar en el líquido. Para medir el nivel se deja que la cinta baje lentamente hasta que la plomada toque el fondo del recipiente. Unas ves que la plomada toca el fondo se empieza a recoger la cinta con el carrete, hasta que aparezca la parte donde el líquido ha dejado la marca que indica su nivel.
Vidrio de nivelOtra forma simple y quizás la mas común de medir el nivel, es por medio del indicador de cristal. Estos tipos de indicadores sirven para varias aplicaciones y se pueden utilizar tanto para recipientes abiertos como para cerrados.El indicador consiste de un tubo de vidrio, en el caso del indicador de bajas presiones y de un vidrio plano en el caso del indicador para altas presiones, montadas entre dos válvulas, las cuales se utilizan para sacar de servicio el indicador sin necesidad de parar el proceso.
Flotador-boyaLos instrumentos que utilizan un flotador-boya no dependen de la presión estática para medir el nivel de líquidos. De todos modos la presión estática debe tomarse en cuenta al proyectar el flotador; ya que siendo este hueco, ha de construirse lo suficientemente robusto como para soportarla sin deformarse.
El flotador se suspende de una cinta sometida a leve tensión. Conforme aquel se desplaza arriba o abajo, siguiendo el nivel del líquido, arrastra la cinta la cual hace girar una rueda catalina. La figura 10, muestra un transmisor de nivel de liquido que acoplado a un captador como el descrito convierte la posición de

flotador en impulsos eléctricos. Los pulsos representan la información de nivel y se transmiten a estaciones de control remotas, para su lectura.
Figura 10 Esquema de un transmisor de nivel de líquidos.
Métodos de medición indirecta:
Desplazamiento.Estos tipos de instrumentos se utilizan generalmente para llevar la medición a sitios remotos o para el control de nivel, aunque también pueden utilizarse como un indicador directo. Están compuestos principalmente por un desplazador, una palanca y un tubo de torsión.
La figura 11 muestra los componentes básicos de uno de estos medidores. Como podemos observar, el objetivo principal de estos componentes, es convertir el movimiento vertical del desplazador en un movimiento circular del tubo de torsión.
Figura 11

Presión hidrostática.Al estudiar el objetivo referente a presión, deducimos un formula por la cual se estableció que la presión en cualquier punto debajo de la superficie del liquido, depende solamente de la profundidad a la cual se encuentre el punto en cuestión y el peso especifico del liquido, es decir, que . Como se recordara, esta presión es conocida como presión hidrostática.
Existen varios tipos de medidores de nivel que trabajan y operan bajo este principio, de los cuales los más comunes son:
Figura 12 Medidor de nivel mediante Presión Hidrostática
Sistema básico o Manómetro.Entre los medidores de nivel actuados por presión hidrostática, el sistema básico o manómetro es el más sencillo. Consta solamente de un manómetro y en el caso de que el líquido cuyo nivel se desea medir, sea corrosivo o viscoso, es necesario, además del manómetro, un equipo de sello con la finalidad de aislar el instrumento de dicho fluido.
El manómetro puede ser uno convencional, con la diferencia de que la escala en lugar de ser graduada en unidades de presión, es graduada en unidades de nivel.
Método de diafragma-cajaLa figura 13 muestra una caja de diafragma Foxboro. Esta caja se sumerge en el líquido que se va a medir, y un capilar lleno de aire se extiende desde ella hasta el instrumento. La deflexión del diafragma, que se produce por la altura del líquido, provoca que el aire que contiene el capilar se comprima. El instrumento que recibe el aire del capilar responde indicando la altura del liquido que esta ejerciendo presión en el diafragma. La caja se construye en dos secciones, entre estas esta colocado el diafragma de caucho, o de una composición sintética resistente al aceite.

Figura 13 Diafragma-caja medidor de nivel de líquidos(Cortesía de Foxboro Co.).
Método de presión diferencialPara la medición de niveles en tanques al vació o bajo presión pueden utilizarse los instrumentos de medición del flujo por métodos de presión diferencial. La única diferencia es que el instrumento dará una lectura inversa; es decir, cuando señale caudal cero en medidas de flujo, se leerá nivel máximo en medidas de nivel. Deben tomarse precauciones para obtener la correspondiente respuesta del instrumento. Por ejemplo, es posible utilizar medidores de rango compuesto. Como estos instrumentos están diseñados para permitir el flujo en ambas direcciones, es posible utilizarlos para mediciones de nivel de líquido, teniendo la posición de cero en el interior de la grafica, moviéndose la pluma hacia su borde con el aumento de nivel.
El principio de funcionamiento se basa en aplicarle al instrumento la presión existente en la superficie del liquido en ambas conexiones con la finalidad de anularla y que la presión detectada, sea la presión hidrostática, la cual como se ha visto, la podemos representar en unidades de nivel.
Método de presión relativa.Las mediciones de nivel que se basan en la presión que ejerce un líquido por su altura, implican que la densidad sea constante. El instrumento se debe calibrar para una densidad específica y cualquier cambio en ella trae consigo errores de medición. El método más simple para medir el nivel de un líquido en un recipiente abierto, es conectar un medidor de presión por debajo del nivel mas bajo que se va a considerar. Este nivel es, entonces, el de referencia y la presión estática indicada por el medidor es una medida de la altura de la columna del líquido sobre el medidor, y por lo tanto del nivel del líquido. El medidor de presión, cuando se usa para mediciones de nivel de líquidos, se calibra en unidades de presión, en unidades de nivel de líquido correspondientes a la gravedad específica del líquido, o en unidades volumétricas calculadas según las dimensiones del recipiente. También se puede calibrar de 0 a 100, lo que permite lecturas en términos de tanto por ciento de nivel máximo. Para que el medidor lea cero cuando el liquido esta en su nivel mínimo, a través del elemento accionador debe haber una línea horizontal aproximadamente al mismo nivel que la línea de centros de la toma

de la tubería de mínimo nivel. En el medidor se pueden usar tornillos de ajuste a cero para compensar pequeñas diferencias.
Para controlar el límite, el medidor de presión puede ser un controlador, o puede estar ligado a un interruptor de presión. Cuando no se requiere una indicación de nivel, este último es suficiente.
Método de trampa de aireCuando no se puede usar un diafragma, se puede instalar una caja sin este. Esto requiere que el líquido se encuentre libre de sólidos, que pueden obstruir el capilar. El líquido, mientras sube en la caja comprime el aire del capilar y el instrumento da la respuesta correspondiente.
Método de equilibrio de presión de aireEste método se prefiere, normalmente, al de caja de diafragma si se dispone de aire o liquido para purga, aunque se puede aceptar un bombeo manual. Se puede aplicar ya sea desde lo alto del depósito o de las paredes laterales.
Otros métodos
RadiactivoEl sistema de medición por rayos gamma consiste en un emisor de rayos gamma montado verticalmente en un lado del tanque y con un contador Geiger que transforma la radiación gamma recibida en una señal eléctrica de corriente continua. Como la transmisión de rayos es inversamente proporcional a la masa del liquido en el tanque, la radiación captada por el receptor es inversamente proporcional al nivel del liquido ya que el material absorbe parte de la energía emitida. Los rayos emitidos por la fuente son similares a los Rayos X, pero de longitud de onda más corta.
Las paredes del tanque absorben parte de la radiación y al detector llega sólo un pequeño porcentaje. Los detectores son, en general, tubos Geiger (otros medidores emplean detectores de cámara iónica).

Figura 14 Método radiactivo para la medición de nivel
El instrumento dispone de compensación de temperatura, de linealización de la señal de salida, y de reajuste de la perdida de actividad de la fuente de radiación, extremo éste último tener en cuenta para conservar la misma precisión de la puesta en marcha.
Como desventajas en su aplicación figuran el blindaje de la fuente y el cumplimiento de las leyes sobre protección de radiación. La precisión en la medida es de ± 0,5 % a ± 0,2 %, y el instrumento puede emplearse para todo tipo de líquidos ya que no está en contacto con el proceso. Su lectura viene influida por el aire o por los gases disueltos en él liquido. El sistema se emplea en caso de medida de nivel en tanques de acceso difícil o peligroso. Es ventajoso cuando existen presiones elevadas en el interior del tanque que impiden el empleo de otros sistemas de medición. Hay que señalar que el sistema es caro y que la instalación no debe ofrecer peligro alguno de contaminación radioactiva siendo necesario señalar debidamente las áreas donde están instalados los instrumentos y de realizar inspecciones periódicas de seguridad.
UltrasónicoSe basa en la emisión de un impulso ultrasónico a una superficie reflectante y la recepción del eco del mismo en un receptor. El retardo en la captación del eco depende del nivel del tanque.
Los sensores trabajan a una frecuencia de unos 20 K Hertz. Estas ondas atraviesan con cierto amortiguamiento o reflexión el medio ambiente de gases o vapores y se reflejan en la superficie del sólido o del liquido.
Transductor ultrasónico de nivel.

En la figura se observa la disposición de montaje de los detectores que se utilizan en los casos de alarmas o de indicación continua del nivel. En las aplicaciones de alarma de nivel los sensores vibran a una frecuencia de resonancia determinada, que se amortigua cuando él liquido se moja. En el segundo caso de indicación continua de nivel, la fuente ultrasónica genera impulsos que son detectados por el receptor una vez que ha transcurrido el tiempo correspondiente de ida y vuelta de la onda a la superficie del sólido o del liquido. El sensor emisor dispone de un oscilador excitador para enviar un impulso ultrasónico a la superficie del fluido y el sensor receptor recibe esta señal reflejada enviando una señal función del tiempo transcurrido, y por lo tanto del nivel, a un oscilógrafo o a un indicador. La precisión de estos instrumentos es de ±1 a 3 %. Son adecuados para todos los tipos de tanques y de líquidos o fangos pudiendo construirse a prueba de explosión. Presentan el inconveniente de ser sensibles a la densidad de los fluidos y de dar señales erróneas cuando la superficie del nivel del liquido no es nítida como es el caso de un liquido que forme espuma, ya que se producen falsos ecos de los ultrasonidos.
La utilización de computadoras permite, a través de un programa, almacenar el perfil ultrasónico del nivel, y así tener en cuenta las características particulares de la superficie del liquido, tal como la espuma, con lo cual se mejora la precisión de la medida. Por otro lado, el computador facilita la conversión del nivel a volumen del tanque para usos de inventarios, y además, proporciona características de autocomprobación del instrumento.
RadarLa actual tecnología de radar para la medición de nivel de tanques supera a la tradicional de medidores de tipo mecánico, tanto en lo que hace a confiabilidad y seguridad como a precisión . Sin embargo, para obtener los mismos beneficios cuando se los utiliza en tanques de flujos a dos fases o en gases presurizados, deben ser tenidas en cuenta ciertas consideraciones especiales de instalación y diseño. Los medidores de nivel por radar no ven normalmente afectada su medición por los vapores existentes en los tanques, ya que la densidad de los mismos es normalmente baja. Sin embargo, esto no es así en los tanques presurizados a dos fases, donde la atmósfera existente sobre el líquido contiene vapores que reducirán la velocidad de la señal del radar y consecuentemente, afectarán la medición. Para poder lograr mediciones de precisión adecuada, será necesario realizar corrección por la influencia del vapor. Para poder realizarla, es imprescindible conocer la temperatura y la presión real de ese vapor.

MEDICIONES TÉRMICAS
Sensores de temperatura
La temperatura es una de las variables que más comúnmente se requiere medir y controlar. Los principales criterios para la selección del sensor son el intervalo y la aplicación específica. En la tabla 2.1 se presenta una guía de los principales dispositivos comerciales de acuerdo al intervalo de temperaturas requerido.
TABLA DE TERMOPARES
Tipo Intervalo(0C) Columna de cristal - 50 a 600Bimetálicos - 40 a 500Rellenos de líquido - 250 a 750Semiconductor - 100 a 100Resistivo - 250 a 1000Termopar - 250 a 2000Pirómetro - 20 a 4000
Para realizar la medición de temperatura en los flujos de aire se mide en un punto que se considera representativo de la temperatura de una sección o volumen determinado, por lo que si se requiere conocer en un volumen grande es conveniente proceder a la subdivisión de la sección recta de la corriente o el volumen del ambiente en porciones pequeñas en las cuales los puntos de medición si son representativos.
Cuando la medición se realiza en una corriente de aire es necesario considerar, si se tienen velocidades mayores de 10 m/s, el efecto de la transformación de la energía cinética en térmica, al chocar contra el medidor,

lo que se traduce en una elevación de la temperatura sensada por el instrumento y la cual se evalúa, según la referencia 4, de acuerdo a:
Te = 4.84 (v/100)2 [°C] en donde v es la velocidad del aire en m/s.
Para realizar la medición de la temperatura de bulbo húmedo se envuelve en un tejido de algodón (muselina) que se embebe en agua destilada, se hace circular una corriente de aire a unos 3.5 m/s con lo que se produce un enfriamiento evaporativo del bulbo del termómetro el cual detecta una temperatura que termodinámicamente se demuestra coincide con la temperatura húmeda del aire.
Para la medición de la temperatura en el agua es necesario prever la instalación de unos tubos ciegos, llamados termopozos, en las líneas de flujo de agua, tratando de evitar que se produzcan perturbaciones importantes en el mismo. Es recomendable llenarlos de algún fluido de buena conductividad térmica con el fin de mejorar la transferencia de calor entre el agua y el termómetro que se sumergirá en estos líquidos. Al hacer la lectura conviene esperar un tiempo razonable para esperar que se estabilice el flujo de energía.
También se recomienda la utilización de sensores de contacto, del tipo de termopar o termistor, que permiten realizar lecturas fáciles y rápidas en puntos de la tubería donde no existen termopozos. Para la utilización de estos sensores es recomendable que se hagan en tuberías que están aisladas térmicamente y en las que la temperatura de la pared es representativa de la que lleva el agua.
Termopar
El transductor más utilizado para medir temperatura es el termopar debido a su amplio rango de medición así como por su construcción que soporta varios ambientes adversos. Su principio de operación se basa en el efecto Seebeck para dos metales disímiles, los cuales al unirse en dos puntas colocadas a diferentes temperaturas generan una diferencia de potencial proporcional a la diferencia de temperaturas. La punta de medición, llamada punta caliente, se coloca en donde se desea conocer la temperatura y la otra punta, llamada punta fría, se coloca a una temperatura de referencia conocida, la cual en los medidores modernos es sustituida por un equivalente eléctrico, del tipo puente de Wheastone, en serie con la punta de medición, la cual compensa las variaciones de temperatura ambiente que es tomada como referencia (Figura 2.1 )
Existen comercialmente varias combinaciones de metales disímiles dependiendo de las condiciones donde se necesita la medición así como de los diferentes intervalos. En la tabla 2.2 se presentan las combinaciones más comunes, así como sus intervalos y sensibilidades.

FIGURA 2.1
Las presentaciones más comunes son en forma de alambres con aislantes cerámicos, en los cuales la punta caliente puede ser expuesta directamente al medio a medir o puede ser protegida por un tubo o pozo de medición o de los tipo compacto en donde los conductores son protegidos dentro de un encamisado que se rellena de un óxido metálico, como magnesia, formando una unidad compacta.
Para el encamisado se utilizan tubos de acero inoxidable hasta una temperatura de 7000C, tubos de inconel hasta 1100 0C y para temperaturas mayores se recomiendan tubos de cerámica.
La calibración de la punta termopar se debe hacer periódicamente ya que los cambios químicos en la aleación pueden afectar la exactitud.
Termómetros resistivos
Estos dispositivos operan con el principio de cambio de resistividad eléctrica de los materiales con cambio de temperatura; normalmente tienen una mejor resolución y repetibilidad que los termopares.
TABLA DE SENSIBILIDAD
Tipo + Elementos - mv/0C Intervalo (0C)
J Fierro Constantan 0.04 - 250 a 100K Cromel Alumel 0.03 - 250 a 1400R y S Pt-Rh Platino 0.01 0 a 1500T Cobre Constantan 0.04 - 250 a 400C Tungsteno Rhenio 0.02 0 a 2000

Los sensores se fabrican de algunas aleaciones metálicas o de material semiconductor; los metálicos tienen coeficiente positivo de variación (aumento de resistividad al aumentar la temperatura) y los más utilizados son el cobre hasta 1500C, el níquel hasta 3000C, el platino hasta 8000C con muy buena respuesta y el tungsteno para altas temperaturas. Por otro lado los semiconductores normalmente tienen coeficiente negativo de variación y su utilización es en bajas temperaturas.
Para la medición, se requiere utilizar un acondicionador de señal para cambiar las variaciones de resistencia eléctrica a variaciones de voltaje y realizar las lecturas correspondientes. En algunos casos se requiere de linealizadores para tener una salida proporcional.
Un caso especial de los sensores resistivos son los denominados termistores, que se caracterizan por tener coeficiente negativo de variación (aunque actualmente ya se fabrican con coeficiente positivo de variación) y son fabricados en pastillas sintetizadas de óxidos metálicos como níquel, fierro y titanio. Las ventajas que tienen es para rangos bajos de temperatura, hasta 2000C, tienen una mejor sensibilidad y su exactitud no depende de la distancia a la que se encuentren del medidor. Con estos dispositivos se llegan a tener exactitudes hasta de 0.30C y su principal desventaja es su baja linealidad.
Expansión de líquidos
El principio de operación es el de la expansión volumétrica de los fluidos al aumentar la temperatura. Los principales líquidos utilizados son el alcohol y el mercurio. Existen básicamente dos tipos, el primero de los cuales consiste en un bulbo que contiene el líquido y está conectado a un tubo capilar, al calentarse el líquido se expande dentro del capilar alcanzando una cierta altura la cual, previamente calibrada, indica la temperatura del bulbo. Sus aplicaciones son versátiles por su lectura directa y bajo costo, aunque es para rangos bajos.
En el otro tipo se tiene el bulbo y el capilar llenos del fluido utilizado y sellado; el capilar se conecta a un actuador espiral (puede ser del tipo Bourdon) y éste a un mecanismo indicador. Al calentarse el fluido aumenta la presión del capilar el cual acciona la espiral y el indicador, previamente calibrado dará la lectura de temperatura. Con este sistema pueden obtenerse temperaturas hasta de 1000C y ser usados en contacto con líquidos corrosivos.
Termómetros Bimetálicos
Se basa en la diferencia de coeficiente de expansión térmica de los metales. Se colocan dos metales, uno con una coeficiente alto de dilatación y el otro con un coeficiente bajo, formando el elemento bimetálico, con uno de los extremos del elemento sujeto y el otro extremo libre se flexionará cuando se caliente el

elemento. Si el dispositivo se encuentra enrollado tenderá a desenrollarse al aumentar la temperatura, lo cual puede mover un mecanismo indicador en una carátula. La principal desventaja es que su mecanismo de respuesta es bajo.
Pirómetros de Radiación
En este tipo de medidores el sensor no se encuentra en contacto físico con el medio a medir, sino que se basa en la emisión electromagnética (EM) de cualquier cuerpo, la cual, para todo el espectro de frecuencias que emite, tiene una variación directamente proporcional a la cuarta potencia de su temperatura. En la práctica es virtualmente imposible construir un detector que responda a todas las longitudes de onda del espectro, sin embargo se sabe que la mayor parte de la emisión térmica se encuentra entre las bandas del espectro visible y el infrarrojo, por lo que teniendo un sistema que capte la energía en ese espectro se tiene una buena aproximación de la energía total radiada.
Dentro de estos pirómetros se tiene el conocido con el nombre de "pirómetro de radiación total" ya que trabaja en el espectro visible y el infrarrojo. En estos dispositivos los rayos emitidos, por el cuerpo que se mide la temperatura, son enfocados con la ayuda de un sistema de lentes y espejos hacia un elemento sensor de temperatura, el cual normalmente consiste en una serie de microtermopares colocados en un disco de platino pintado de negro. La radiación es absorbida por el disco el cual se calienta y provoca que la termopila genere una diferencia de potencial, con lo cual tenemos la medición. La ventaja de este detector es que responde a la luz visible y el infrarrojo con muy poca dependencia de la longitud de onda.
Otra versión popular de los pirómetros de la radiación es el que es sensitivo al infrarrojo en el cual los lentes son de silicón o germanio para enfocar la radiación infrarroja al detector respectivo. Estos dispositivos se manejan manualmente apuntando hacia el punto de medición y tienen apariencia de "pistola".
Con estos tipos de medidores se pueden medir hasta 3 5000C alcanzando exactitudes de ± 0.50C. Para tener una buena exactitud se requiere el valor de la emitancia del cuerpo a medir, aplicada como factor de escala, ya que el emisor no es un cuerpo negro ideal.

Pirómetro Óptico
Es utilizado para medir temperaturas de cuerpos calientes, como los billetes de aceros, las flamas, etc. La medición está basada en la emisión de ancho de banda del espectro visible. La medición se realiza por comparación de la luz emitida por una fuente conocida como la de una lámpara incandescente, con la emitida por el cuerpo caliente. La intensidad de la fuente conocida se puede ajustar hasta igualar la emisión a la del cuerpo medido (se dice que el filamento desaparece). La corriente eléctrica suministrada a la lámpara incandescente es proporcional a la temperatura.
Normalmente se utiliza una pantalla monocromática para asegurar que la igualación se realiza en una longitud de onda particular. El límite inferior de medición es de aproximadamente 6200C.
Medidores de flujo
La medición de los flujos de los fluidos en una planta industrial es vital para su operación eficiente.
Los medidores de flujo normalmente se dividen en tres categorías:

1. Medidores de obstrucción 2. Medidores de desplazamiento positivo3. Medidores especiales
Para la medición de la velocidad de aire que pasa por una batería de enfriamiento o de calefacción, filtros , rejas de extracción, toma de aire exterior y en general en aquellos puntos con secciones relativamente grandes en donde la distribución del aire tienda a ser uniforme y donde pueda accederse fácilmente, es recomendable la utilización de anemómetros de paletas o de tazas, los cuales son de desplazamiento positivo. En el caso de los conductos de distribución de aire lo mas adecuado es utilizar el tubo o sonda de Pitot que es del tipo de obstrucción, aunque no perturba fuertemente al flujo, pudiendo llegar con relativa facilidad a todos los puntos del flujo. Al realizar la medición se debe recordar que el flujo a través de un conducto no es nunca perfectamente uniforme por lo cual es necesario hacer varias lecturas en diferentes puntos del plano considerado. El procedimiento recomendable, según la referencia 5, es dividir la sección del conducto en varias partes de con la misma área para lo que se sugieren las siguientes reglas:-Para un conducto rectangular, se divide su sección en un mínimo de 16 partes rectangulares con la misma área y en el punto medio de cada uno se coloca la sonda.-Para conductos circulares se recomienda realizar lecturas a lo largo de dos diámetros perpendiculares en 10 puntos distintos. La posición de dichos puntos es tal que la sección de las distintas coronas es siempre la misma por lo que se propone la distribución mostrada en la figura siguiente. Cabe aclarar que el Pitot mide presión dinámica en un punto, por lo que al calcular los promedios se hacen después de haber obtenido la velocidad, ya que al seguir una ley cuadrática es erróneo sacar primero el promedio de presiones.Para llevar a cabo esta conversión recuerde que Pdin = g v2 / 2g Por lo que de acuerdo al valor de presión medido con la sonda se tiene que v = 4.43 r P /g [v] = [m/s] y [P]= [mm c a]Como normalmente a las temperaturas a las que trabajan los equipos el valor de g para el aire es de 1.22 Kg/m2 la ecuación se simplifica a v = 4 r P Sin embargo si la T del aire baja de 0°C o se eleva mucho esta relación simplificada ya no es valida.
La medición de caudal en las líneas de agua se realiza normalmente utilizando medidores del tipo obstrucción principalmente del tipo venturi y orificio calibrado, sin embargo también son muy usados los del tipo turbina y actualmente también se utilizan medidores electromagnéticos de flujo.
La medición de caudal tiene el inconveniente de que siempre introduce una perdida de carga en las líneas por lo que muchos de los flujos es preferible obtenerlos por medios indirectos conociendo la caída de presión en la tubería y conociendo las curvas de operación de las bombas.

Actualmente existe en el mercado los medidores basados en el principio de ultrasonido con los cuales no se introduce ninguna perturbación al fluido, pero sin embargo tienen el inconveniente de tener un alto costo.
Medidores de obstrucción
En estos dispositivos se coloca una obstrucción al fluido y se mide la caída de presión que ocasiona. La presión diferencial se relaciona entonces al flujo a través de la ecuación de Bernulli que da la siguiente relación entre el flujo y la presión diferencial por medio de la expresión:
Q C A g Pd 2
donde:
Q = flujo volumétrico Cd = coeficiente de descarga A = sección del elemento g = aceleración de la gravedad ΔP = presión diferencial
Esta relación es válida para flujos turbulentos; cuando se tienen flujos laminares se utilizan otras relaciones.
Los medidores de obstrucción más comunes son:
Placa de orificio: es una placa delgada con un orificio, generalmente concéntrico, que se coloca en la tubería. La relación entre el diámetro del orificio al diámetro del tubo varía entre 0.25 y 0.8; sus coeficientes de descarga son bajos, aproximadamente 0.6 y las pérdidas de carga son entre el 60 y el 70% de la diferencial, por lo que las pérdidas de energía son considerables y no debe quedar cerca de codos u otro tipo de conexiones. Sin embargo son ampliamente utilizados por su sencillez.
Tubo de Venturi: consiste en una sección cónica convergente de entrada, una garganta cilíndrica y una sección cónica divergente, más larga a la salida. Las tomas de presión se colocan antes de la sección convergente y en la garganta. La relación del diámetro de la garganta al diámetro de la tubería debe de estar entre 0.25 y 0.75 y las pérdidas de carga son bajas, aproximadamente el 10% de la presión diferencial, maneja mayores volúmenes y es más exacto que la placa de orificio (Figura 2.4).

FIGURA 2.4
Sus principales desventajas son su alto costo, su instalación y su escasa flexibilidad para cambios grandes de flujo por lo que no se recomiendan en tubería menor de 15 cm.
Tobera de flujo: es similar al vénturi ya que tiene una reducción gradual de área a la entrada, sin embargo no tiene cono de salida (tobera convergente), las relaciones de diámetros está entre 0.25 y 0.75 y es más resistente a la erosión de partículas sólidas, normalmente se utilizan en flujos de alta velocidad en donde es importante no tener altas caídas de presión. Las tomas de presión se localizan a la distancia de un diámetro aguas arriba y a medio diámetro aguas abajo. Ocupa menos espacio que el venturi y es más barato, aunque más caro que la placa de orificio y también tiene poca flexibilidad.
Tubos de Flujo: consiste en un tubo del mismo diámetro que la tubería con dos tomas de presión; la primera, llamada toma de impacto localizada aguas arriba y la toma de succión localizada aguas abajo a una distancia de dos diámetros. Tiene muy baja pérdida de carga, del 2% al 5% y se puede usar solamente en fluidos limpios.
Tubo de Pitot: este dispositivo mide la velocidad puntual del fluido. El arreglo consiste en una toma de la presión estática localizada en la dirección normal al flujo y en una toma de presión dinámica localizada en la línea del flujo. La presión diferencial de las dos tomas es proporcional a la velocidad del fluido.
Se utiliza generalmente para la medición de aire en ductos; no tiene pérdidas de presión y es barato y fácil de instalar aunque no es muy exacto y no se puede usar con partículas en suspensión.
Área Variable; rotámetros: mantienen constante la presión diferencial pero varían la sección transversal para diferentes flujos. Básicamente consisten en un tubo vertical calibrado con sección interna variable con un flotador que se mueve libremente dentro del tubo; el fluido a medir entra por abajo del tubo y sale por arriba; a medida que varía el flujo el flotador sube o baja variando el

ánulo entre él y la pared del tubo. Cuando el flotador se mantiene en equilibrio igualando las fuerzas del flujo con el peso del flotador, se efectúa la lectura. La calibración del tubo se realiza de tal manera que la variación es lineal con la posición del flotador.
Con este dispositivo se pueden alcanzar exactitudes de 0.5% y pueden ser utilizados para bajos flujos pero en aplicaciones de baja temperatura; su costo es relativamente bajo y es muy simple de operar.
Medidores de desplazamiento positivo
Estos medidores separan el flujo dentro de pequeños volúmenes de líquido, los cuales se conocen exactamente y la suma de esos incrementos da una medida del volumen total que pasa por el instrumento por lo que es un medidor global. Son los del tipo de medidores domésticos de agua, las mediciones de gasolina, etc. Su exactitud alcanza hasta 0.1% y son fáciles de instalar y tienen poca caída de presión y se utilizan en líquidos en donde la presión de la línea es mayor que la presión de vapor del componente más volátil del fluido medido
Medidores especiales
Existen una serie de medidores de flujo cuyo principio de funcionamiento no cae dentro de los anteriormente mencionados como son los de tipo turbina, los medidores electromagnéticos de flujo, anemómetros de hilo y de película caliente, anemómetro Láser, etc., cuya aplicación es específica y limitada para ciertos problemas.
Analizadores de gases
En los procesos donde se tiene combustión el monitoreo contínuo de los productos gaseosos es de gran importancia para asegurar una alta eficiencia. Existen en el mercado analizadores de diferentes tipos, a continuación describimos brevemente los principales.
Método de absorción química
Es el método tradicional del tipo Orsat en el cual una muestra de los gases se pasa a través de una serie de soluciones químicas que absorben un gas en especial como son el Hidróxido Potásico para CO2 , ácido piragólico para O2 y el cloruro cuproso para el CO midiéndose la variación del volumen después de pasar por cada componente. Este tipo de monitoreo no es continuo y necesita la operación manual teniendo una buena exactitud.
Método de conductividad térmica

La conductividad térmica de una gas es función de su composición por lo que se puede tener una medición de la conductividad térmica para conocer el contenido de algún compuesto. Se utiliza básicamente para la medición de CO2
pero es muy inexacto en presencia de vapor de agua, por lo que se recomienda secar el gas antes de tomar la medición.
Termomagnetismo
Se utiliza para la medición de contenido de O2 basándose en que éste es paramagnético por lo que es atraído hacia un campo magnético en donde al calentarse disminuye sus propiedades magnéticas formando una corriente de oxígeno que afecta el equilibrio térmico que se mide con resistencias eléctricas. Los rangos varían desde 1 a 100% en volumen de O2
Celdas Electroquímicas
Estos sensores detectan el potencial eléctrico generado como respuesta a la presencia de sólidos ionizados disueltos en un flujo, en este grupo se incluyen los probadores de pH los de conductividad y los ion-selectivos. Su principio de operación se basa en la ecuación de Nernst cuya constante tiene un valor de 60mV por década de cambio en la actividad de un ion monovalente
E = E0 + (F/n) log (ac + s, a, c, + ...) [volts]
E = potencial entre el electrodo sensor y el de referencia E0 = potencial del electrodo de referencia F = factor de Nernst (60 mV) N = carga iónica (monovalente, bivalente, etc.) a = actividad iónica c = concentración
s = sensibilidad del electrodo para interferir iones (para pH el electrodo será sensible a iones de hidrógeno libre)
Analizador Infrarrojo
Se basa en la comparación de la absorción de la energía en el infrarrojo del flujo muestreado con la de una celda de referencia y se detecta por la deflexión de un diafragma que separa las celdas de la muestra y de referencia que a su vez se traduce a una variación capacitiva dentro de un circuito eléctrico.
Existen otros tipos de analizadores como son las reacciones químico-luminiscentes, los amperométricos y para laboratorio los cromatrógrafos de gases y la ionización de la flama.
En la tabla 2.3 se muestran los principales analizadores así como los compuestos que se detectan con ellos.
TABLA2.3
Compuesto AnalizadorCO2 CO, O2 Orsat

CO, Sox ,NHx InfrarrojoO2 Termomagnético, Amperométrico
CO2 Conductividad térmicaHC Ionización de flamaNOx Químico-luminiscentesH2S Celda electroquímica
Actualmente para una buena administración de la energía en una planta se tiene la tendendencia de tomar las principales señales involucradas en el proceso y concentrarlas para la toma de decisiones, que normalmente se hace automáticamente con señales de control. Para el proceso de automatización, comparación y retroalimentación de control se utiliza normalmente una computadora, por lo que los transductores con salida eléctrica han tenido un gran desarrollo.

BIBLIOGRAFÍA.
DOEBELIN,E.O.OMeasurement System Application and DesignNew YorkMcGraw-Hill,1997
HOLMAN, JackMétodos experimentales para ingenieros3а. EdiciónAlfa-Omega EditoresMéxico, D.F. 1996
Richard S FIGLIOLA y Donald E BEASLEYMediciones mecánicas, teoría y diseñoMéxicoAlfa omega, 2003
Soisson HaroldInstrumentación industrial.MéxicoLimusa Noriega 1990

APÉNDICENORMAS