Los conjuntos numéricos IN, Z, Q y IR · Álgebra y Geometría Analítica Curso de ambientación...
29
Álgebra y Geometría Analítica Curso de ambientación 2013 1 Los conjuntos numéricos IN, Z, Q y IR El conjunto IN de los números naturales es aquel que contiene los números que nos sirven para contar o bien para ordenar elementos, haciendo abuso de notación podemos decir que: IN = { 0, 1, 2, 3, ... }, en ocasiones el cero es excluido del conjunto IN, pero eso es sólo una convención que se debe establecer de antemano, nosotros consideraremos al cero como número natural. El conjunto Z de los números enteros contiene a los números naturales (los que suelen denominarse enteros positivos) y a sus opuestos (los que se denominan enteros negativos), si hacemos abuso de notación se puede decir que: Z = { .., -2, -1, 0 , 1, 2, 3, ... } . Para todo número entero existe su opuesto único inclusive para el cero, que es opuesto de si mismo. Otra característica de este conjunto es que siempre es posible determinar el antecesor y el sucesor de cualquier entero, además entre dos consecutivos no existe ningún otro entero. Si incorporamos al conjunto de los enteros los números fraccionarios (decimales o no) se determina el conjunto Q de los números racionales, ya no es posible enumerar los elementos de Q, ni haciendo abuso de notación, entre dos números racionales existen infinitos racionales, lo que nos indica que no se puede conocer el antecesor ni el sucesor de ninguno de ellos. Se dice entonces que Q es un conjunto denso. Si a este conjunto Q de los números racionales unimos el conjunto de los números irracionales (por ejemplo las raíces no exactas como 2 , o los números π, e, entre otros) queda determinado el conjunto de los números reales IR. Este conjunto IR de los números reales también es denso y además completo, lo que permite, definiendo una escala, establecer una biyección entre él y una recta denominada entonces recta numérica. En ella es posible representar a los infinitos números reales por medio de sus infinitos puntos. Si consideramos partes o subconjuntos de los conjuntos numéricos que hemos nombrado tendríamos por ejemplo, el conjunto A expresado por comprensión: A = { x / x ∈ IN ∧ x < 5 } el que puede darse por extensión como A = { 0, 1, 2, 3, 4 } B = { x / x ∈ IR ∧ x < 5 } en este caso es imposible nombrar los infinitos elementos de B, ni abusando de notaciones ya que no es factible nombrar dos reales consecutivos. Entre dos cualesquiera de ellos hay infinitos números reales por más próximos que nos parezcan. De aquí surge el concepto de intervalo real: como una parte o subconjunto del conjunto IR, si retomamos el ejemplo de B, puede darse como el conjunto que contiene a los infinitos reales menores a 5 , B = ] - ∞ , 5 [ que denota como un intervalo abierto de números reales. Si los representamos en la recta numérica: A 0 1 2 3 4 B 5 Veamos otros ejemplos: A = { x / x ∈ IN ∧ 2 ≤ x < 5 } o bien A = { 2, 3, 4 } , es posible nombrar todos sus elementos. o
Transcript of Los conjuntos numéricos IN, Z, Q y IR · Álgebra y Geometría Analítica Curso de ambientación...

Álgebra y Geometría Analítica Curso de ambientación 2013
1
Los conjuntos numéricos IN, Z, Q y IR El conjunto IN de los números naturales es aquel que contiene los números que nos sirven para contar o bien para ordenar elementos, haciendo abuso de notación podemos decir que: IN = { 0, 1, 2, 3, ... }, en ocasiones el cero es excluido del conjunto IN, pero eso es sólo una convención que se debe establecer de antemano, nosotros consideraremos al cero como número natural. El conjunto Z de los números enteros contiene a los números naturales (los que suelen denominarse enteros positivos) y a sus opuestos (los que se denominan enteros negativos), si hacemos abuso de notación se puede decir que: Z = { .., -2, -1, 0 , 1, 2, 3, ... } . Para todo número entero existe su opuesto único inclusive para el cero, que es opuesto de si mismo. Otra característica de este conjunto es que siempre es posible determinar el antecesor y el sucesor de cualquier entero, además entre dos consecutivos no existe ningún otro entero. Si incorporamos al conjunto de los enteros los números fraccionarios (decimales o no) se determina el conjunto Q de los números racionales, ya no es posible enumerar los elementos de Q, ni haciendo abuso de notación, entre dos números racionales existen infinitos racionales, lo que nos indica que no se puede conocer el antecesor ni el sucesor de ninguno de ellos. Se dice entonces que Q es un conjunto denso. Si a este conjunto Q de los números racionales unimos el conjunto de los números irracionales (por ejemplo las raíces no exactas como 2 , o los números π, e, entre otros) queda determinado el conjunto de los números reales IR. Este conjunto IR de los números reales también es denso y además completo, lo que permite, definiendo una escala, establecer una biyección entre él y una recta denominada entonces recta numérica. En ella es posible representar a los infinitos números reales por medio de sus infinitos puntos. Si consideramos partes o subconjuntos de los conjuntos numéricos que hemos nombrado tendríamos por ejemplo, el conjunto A expresado por comprensión:
A = { x / x ∈ IN ∧ x < 5 } el que puede darse por extensión como A = { 0, 1, 2, 3, 4 } B = { x / x ∈ IR ∧ x < 5 } en este caso es imposible nombrar los infinitos elementos de B, ni abusando de notaciones ya que no es factible nombrar dos reales consecutivos. Entre dos cualesquiera de ellos hay infinitos números reales por más próximos que nos parezcan. De aquí surge el concepto de intervalo real: como una parte o subconjunto del conjunto IR, si retomamos el ejemplo de B, puede darse como el conjunto que contiene a los infinitos reales menores a 5 , B = ] - ∞ , 5 [ que denota como un intervalo abierto de números reales.
Si los representamos en la recta numérica:
A 0 1 2 3 4 B 5 Veamos otros ejemplos: A = { x / x ∈ IN ∧ 2 ≤ x < 5 } o bien A = { 2, 3, 4 } , es posible nombrar todos sus elementos.
o

Álgebra y Geometría Analítica Curso de ambientación 2013
2
B = { x / x ∈ IR ∧ 2 ≤ x < 5 } es el intervalo real que contiene a los infinitos números reales desde 2, inclusive, hasta 5, sin él, lo que se anota así: B = [ 2, 5 [ , intervalo real cerrado en 2 y abierto en 5. Si los representamos en la recta numérica: A 2 3 4
B M = { x / x ∈ Z ∧ - 3 ≤ x ≤ 6 } o bien M = { -3, -2, -1, 0, 1, 2, 3, 4, 5, 6 }, se pueden nombrar todos los elementos de M. P = { x / x ∈ IR ∧ - 3 ≤ x ≤ 6 } intervalo que contiene a los infinito reales desde –3 hasta 6, inclusive ellos, o bien anotarlo P = [ -3, 6 ] , intervalo cerrado de –3 a 6
En la recta numérica se pueden representar:
M -3 -2 -1 0 1 2 3 4 5 6 P
-3 6 Vemos como el hecho de nombrar a los intervalos como abiertos o cerrados está relacionado con que el elemento pertenezca o no al subconjunto, si decimos por ejemplo “x < 5”, 5 no pertenece al conjunto, en este caso lo denominamos intervalo abierto en 5, pero si decimos x ≥ 2, 2 si pertenece al conjunto, lo denominamos intervalo cerrado en 2. La notación que utilizaremos para designar los intervalos reales en general es corchete invertido cuando el intervalo es abierto en alguno de sus extremos y corchete cuando el intervalo es cerrado en alguno de sus extremos. En el primer ejemplo se incorporó también un signo “ ∞ “ : infinito, no es un número real, es sólo un signo que permite extender la recta numérica, si decimos - ∞ , infinitamente a la izquierda, nos referimos a los infinitos reales menores a uno dado, si decimos + ∞, infinitamente a la derecha, hacemos referencia a los infinitos reales mayores a uno dado. Se han nombrado también conceptos como la pertenencia, relación que puede establecerse entre elemento y conjunto y que se designa simbólicamente con ∈, su negación se designa ∉ indicando la no pertenencia. Otro concepto nombrado es el de subconjunto o parte, recordemos que esta relación se establece entre dos conjuntos, y resulta que uno está incluido, es parte o subconjunto de otro si todos sus elementos son también elementos de este segundo conjunto, se designa en símbolos por ⊂ y su negación ⊄ que indica la no inclusión.
º2 5

Álgebra y Geometría Analítica Curso de ambientación 2013
3
Operaciones y cálculos en IR
Potenciación: Definición: Sea a un número real, y n un número entero positivo
1. a n = a . a . a .........a , n veces
2. a 1 = a , a 0 =1 si a ≠ 0 , 0n = 0 si n > 0
3. a n + 1 = a n . a , si a ≠ 0 4. a - n = na
1 , si a ≠ 0
Regla de signos:
• Si el exponente es par, el resultado siempre tiene signo positivo. • Si el exponente es impar, el resultado mantiene el signo de la base. Propiedades: a) Producto de potencias de igual base: a m . a n = a m + n b) Cociente de potencias de igual base: a m : a n = a m - n c) Potencia de otra potencia: (a m) n = a m . n d) Distributiva de la potencia respecto de la multiplicación: ( a . b) m = a m . b m e) Distributiva de la potencia respecto de la división: ( a : b) m = a m : b m
Radicación: Definición:
Dado un número real a, el número real b es su raíz enésima si se verifica que la potencia enésima de b es a: b = n a ⇔ bn = a Condicionamiento de la radicación en IR:
1) si a > 0 y n es par, entonces existen dos números reales b y b’ que verifican la condición dada, siendo b’ el opuesto de b: n a = b n a = -b
2) si a < 0 y n es par, no existe ningún número real que sea la raíz enésima de a: n a ∉ IR
3) si n es impar, cualquiera sea a, existe un único real b que es su raíz enésima: n a = b Propiedades: a) Raíz enésima de un producto: nnn b.ab.a =
b) Raíz enésima de un cociente: nnn b:ab:a = , con b ≠ 0
c) Raíz de otra raíz: m.nn m aa =

Álgebra y Geometría Analítica Curso de ambientación 2013
4
d) Raíces equivalentes: m.n m.pn p aa = , siendo p de IN* Potencias con exponente fraccionario:
Toda raíz se puede escribir como potencia de índice fraccionario: mn
m n aa =
De manera análoga: p n
pn
pn
a1
a1a =⎟
⎠⎞
⎜⎝⎛=
−
, siendo p no nulo
Logaritmación: Definición:
Dados un número real positivo a, y un real positivo b distinto de 1 , existe un único número real x que verifica que: bx = a, dicho real x recibe el nombre de logaritmo de a en base b.
abxalog xb =⇔=
Cuando la base b del logaritmo es 10, se denomina logaritmo decimal y se omite el subíndice en la notación: log a = x El logaritmo que tiene como base al número real e se denomina logaritmo natural o neperiano y de anota: ln a = x Propiedades:
a) blog 1 = 0 y blog b = 1 , siendo b cualquier base b) Logaritmo de un producto: blog ( m . n ) = blog m + blog n c) Logaritmo de un cociente: blog ( m : n ) = blog m - blog n d) Logaritmo de una potencia: blog mp = p . blog m
e) blog m = pb mlog p , siendo p no nulo
f) blog a = alnbln
1⋅ , siendo el ln aquel logaritmo cuya base es el número e

Álgebra y Geometría Analítica Curso de ambientación 2013
5
Relaciones y Funciones
Conjunto Producto: Dados dos conjuntos A y B se llama conjunto producto o producto cartesiano de A x B al conjunto que consta de todos los pares ordenados cuyas primeras componentes pertenecen a A y las segundas componentes a B.
A x B = { (x, y) / x ∈ A ∧ y ∈ B } Es posible que A = B en cuyo caso ambas componentes de los pares pertenecen a A:
A x A = { (x, y) / x ∈ A ∧ y ∈ A } Ejemplo 1 : A = { x / x ∈ Z ∧ -2 ≤ x < 1 } B = { x / x ∈ Z ∧ | x | ≤ 1 }
A x B = { (-2, -1), (-2, 0), (-2, 1), (-1,-1), (-1, 0), (-1, 1), (0,-1), (0, 0), (0, 1) }
A x A = { (-2,-2), (-2,-1), (-2, 0), (-1,-2), (-1,-1), (-1, 0), (0,-2), (0,-1), (0, 0) } En general A x B ≠ B x A , lo comprobamos con el ejemplo anterior:
B x A = { (-1,-2), (-1,-1), (-1, 0), (0,-2), (0,-1), (0, 0), (1,-2), (1,-1), (1, 0) } Ejemplo 2: En este caso analicemos conjuntos no numéricos en el cual A = {a, e, i , o, u } y B = { m, n, o} A x B = {(a, m), (e, m), (i, m), (o, m), (u, m), (a, n), (e, n), (i, n), (o, n), (u, n), (a, o), (e, o), (i, o), (o, o), (u, o)}
B x B = {(m, m), (m, n), (m, o), (n, m), (n, n), (n, o), (o, m), (o, n), (o, o)}
Es fácilmente comprobable en este caso también que A x B ≠ B x A Relación: Relación de A en B es cualquier subconjunto del conjunto producto A x B. Por lo tanto también es un conjunto de pares ordenados.
R = { (x, y) / ( x ∈ A ∧ y ∈ B ) ∧ x R y} Se anota x R y o bien ( x, y) ∈ R En el ejemplo 1 anterior de A y B, son relaciones de A en B, entre otras, las siguientes: R1 = { (-2,-1), (-2,1) , (-1, 1), (0, 0)} R2 = { (0, 0) } R3 = { (-2, 0), (-1, 0), (0, 0) } En el ejemplo 2 anterior se tienen, entre otras, por ejemplo las siguientes relaciones: R1 = {(a, m), (i, n), (u, o)} R2 = {(a, o), (e, o), (i, o), (o, o), (u, o)} Las relaciones se pueden representar en diagramas como los mostrados a continuación considerando el ejemplo 2:

Álgebra y Geometría Analítica Curso de ambientación 2013
6
Nota: Cuando los conjuntos involucrados en una relación son numéricos, se puede recurrir a representaciones en ejes cartesianos, como las mostradas más adelante. Función: Una función de A en B es una relación que cumple con las condiciones de existencia y unicidad, las que pueden sintetizarse diciendo que para todo elemento de A existe un único elemento de B con el cual se relaciona.
Retomemos las relaciones ejemplificadas anteriormente. En el ejemplo 1:
R1 = { (-2,-1), (-2,1) , (-1, 1), (0, 0) } Esta relación no es una función ya que no cumple con la condición de unicidad, porque el elemento –2 de A esta relacionado con dos elementos de B, el –1 y el 1.
R2 = { (0, 0)} Esta relación tampoco es una función ya que no cumple con la condición de existencia, porque hay elementos de A que no se relacionan con ningún elemento de B.
R3 = { (-2, 0), (-1, 0), (0, 1) } Esta relación si es una función ya que cumple ambas condiciones, todo elemento de A se relaciona con uno único de B. En el ejemplo 2:
R1 = {(a, m), (i, n), (u, o)} Esta relación no es una función ya que no cumple con la condición de existencia, porque hay elementos de A que no se relacionan con ningún elemento de B.
R2 = {(a, o), (e, o), (i, o), (o, o), (u, o)} Esta relación si es una función ya que cumple ambas condiciones, todo elemento de A se relaciona con uno único en B. Es importante cuando nombramos funciones decir en qué conjuntos está definida ya que por ejemplo una relación:
x R y ⇔ y = x : 3
a e i o u a e i o u
o n m
o n m
R1R2

Álgebra y Geometría Analítica Curso de ambientación 2013
7
Definida de Z en Z no es función, no cumple con la condición de existencia, por ejemplo para el entero 2 no existe ningún entero con el cual se relacione a través de la fórmula dada. En cambio si está definida de IR en IR sí es función, ya que para todo real existe otro único real que se obtiene dividiendo por 3. En general el esquema funcional que se utiliza para funciones numéricas es el siguiente: f : A → B tal que x → f (x) = y Las funciones numéricas pueden representarse en un par de ejes cartesianos ortogonales, quede bien claro que esa gráfica es sólo una representación de la función, ya que una función es un conjunto de pares ordenados que cumple ciertas condiciones ya enunciadas. Dominio e imagen de una función: Sea una función f : A → B x → f (x) = y Se llama dominio de la función (Dom (f) ) al conjunto que contiene a las primeras componentes de los pares ordenados de la relación, y que coincide en una función con el conjunto de partida. Se llama imagen de la función ( Im (f) ) al conjunto que contiene a las segundas componentes de los pares ordenados en cuestión, y está incluido en el conjunto de llegada. Ejemplo 1: A = { x / x ∈ Z ∧ -2 ≤ x < 1 } B = { x / x ∈ Z ∧ | x | ≤ 1 }
f = { (-2, 0), (-1, 0), (0, 1) } Dom (f) = A y Im (f) = {0, 1} Ejemplo 2: Sea f: A → B tal que f (x) = x + 2 siendo A = {1, 2, 3,} y B = {x / x ∈ IN ∧ x < 10}
f = {(1, 3), (2, 4), (3, 5)} por lo cual el Dom (f) = A y la Im (f) = {3, 4, 5} Ejemplo 3: Sea f : IR → IR dada por f(x) = x2
El conjunto dominio es Dom (f) = IR y el conjunto imagen es Im (f) = IR+ . Ejemplo 4: Sea f : IR → IR tal que f (x) = x3
En este caso el Dom (f) = Im (f)= IR Representaciones de una función: Una función puede representarse de varias maneras, por ejemplo a través del conjunto de los pares ordenados que la componen, de una tabla, de un diagrama, de una matriz o de un gráfico en ejes cartesianos. Retomemos los ejemplos del punto anterior: Ejemplo 1: La siguiente tabla de doble entrada representa los tres pares que componen la función

Álgebra y Geometría Analítica Curso de ambientación 2013
8
-1 0 1
-2 •
-1 •
0 • Ejemplo 2: El siguiente diagrama representa la función dada en este ejemplo 2, se lo llama diagrama de Venn- Euler de flechas. 1 * * 0 * 1 * 2 2 * *3 * 4 3 * *5 A * 6 *7 *8 *9 B En el tercer y cuarto ejemplos tenemos funciones definidas en el conjunto de los números reales, se puede representar por medio de una gráfica en ejes cartesianos, a continuación vemos la tabla de valores asociada y la gráfica:
X Y ‐2 4 ‐1 1 0 0 1 1 2 4 3 9 4 16
X Y
‐2 ‐8 ‐1 ‐1 0 0 1 1 2 8 3 27 4 64
X
X

Álgebra y Geometría Analítica Curso de ambientación 2013
9
Veamos ahora un nuevo ejemplo, la función f definida en el conjunto Z de los números enteros tal que f (x) = x + 1. En este caso debemos tener cuidado ya que la gráfica en ejes cartesianos no será una recta continua, solamente tendremos puntos alineados:
X Y ‐2 ‐1 ‐1 0 0 1 1 2 2 3 3 4 4 5
Vemos que también se ha construido la tabla asociada a la gráfica y observamos representados los puntos y no la recta que los contiene es debido a que esta función está definida en Z y no en IR.
X

Álgebra y Geometría Analítica Curso de ambientación 2013
10
ECUACIONES, INECUACIONES Y SISTEMAS Ecuaciones de primer grado con una incógnita
Sea f una función real, polinómica de grado 1, la expresión f(x) = 0 se llama ecuación entera de grado 1 o de primer grado con una incógnita asociada a f. Ejemplo: Dada la función polinómica f(x) = 3x – 4 su ecuación asociada es 3x –4 = 0 Resolver una ecuación de primer grado es hallar el valor que debe tomar la variable x para que su imagen por la función f sea 0, este valor de x se denomina raíz de la función, o bien raíz de la ecuación asociada. En el ejemplo anterior es: x = 4/3 es la raíz de la función ya que f(4/3) = 0 Gráficamente la raíz de la ecuación de 1° grado representa la abscisa del punto de intersección entre la gráfica de la función f y el eje x. f (x) = 3x – 4 = 0 la raíz es x = 4/3
x y y 0 -4 . . . . . .
2 2 - - 4/3 0 -
-
Ecuaciones equivalentes Dos ecuaciones se llaman equivalentes si tienen la misma solución. Ej: 2x –3 = 0 y -x + 3/2 = 0 son equivalentes por que la raíz de ambas es x = 3/2 Propiedades a) Si a ambos miembros de una ecuación se le suma un mismo polinomio T con respecto a la
variable, se obtiene una ecuación equivalente a la dada. Ej: 3x – 1 = 0 su raíz es x= 1/3
Sumando T(x) = x + 2 a ambos miembros se obtiene: 4x + 1 = x + 2 cuya raíz es x= 1/3 Nota: Esta propiedad también es válida si sustituimos un mismo polinomio T en ambos miembros.
b) Si ambos miembros de una ecuación se multiplica por una misma constante k ≠ 0 y real, se obtiene una ecuación equivalente a la dada.
34 x
.

Álgebra y Geometría Analítica Curso de ambientación 2013
11
Ej: 3x-1 = 0 cuya raíz e x = 1/3 Multiplicando ambos miembros por k = -2 se obtiene
- 6x + 2 = 0 cuya raíz es x = 1/3 Resolución de una ecuación de primer grado Resolvemos la ecuación de 1º grado: 4 x - 5 = 0 sumando a ambos miembros el opuesto aditivo de 5 nos queda: 4 x – 5 + 5 = 0 + 5 4x = 5 multiplicando ambos miembros por el inverso multiplicativo de 4 nos queda: 4 x . ¼ = 5 . ¼ ⇒ x = 5/4 que es la raíz de la ecuación Inecuaciones: Dada una función polinómica de grado uno f(x) = ax + b, puede interesarnos conocer cuáles son los valores de x para los que el valor de la función es mayor o menor (mayor o igual o menor o igual) a un cierto valor. Es decir: f (x) = ax +b > c o f(x) = ax + b < c f (x) = ax +b ≥ c o f(x) = ax + b ≥ c Estas desigualdades se llaman inecuaciones polinómicas de primer grado. Resolver una inecuación es encontrar los valores que debe tomar la x para que se verifique la desigualdad. Para poder resolver una inecuación debemos conocer las siguientes propiedades. Propiedades de las desigualdades a) Si en ambos miembros de una desigualdad sumamos o restamos un mismo número real,
se obtiene otra desigualdad del mismo sentido En símbolos: a < b ⇒ a ± c < b ± c Ej: 3 < 8 ⇒ 3 + 2 < 8 + 2 1 > -3 ⇒ 1 - 4 > -3 - 4
b) Si en ambos miembros de una desigualdad multiplicamos o dividimos por un mismo número real positivo, se obtiene otra desigualdad del mismo sentido. En símbolos: a < b ⇒ a.c < b.c si c > 0 a < b ⇒ a : c < b : c si c > 0 Ej: 11 > 9 ⇒ 11 . 4 > 9 . 4 4 < 10 ⇒ 4 / 2 < 10 / 2
c) Si en ambos miembros de una desigualdad multiplicamos o dividimos por un mismo número real negativo, se obtiene otra desigualdad de distinto sentido. En símbolos: a < b ⇒ a.c > b.c si c < 0 a < b ⇒ a : c > b : c si c < 0 Ej: 4 < 12 ⇒ 4 / ( -2) > 12 / ( -2)
Forma de resolución

Álgebra y Geometría Analítica Curso de ambientación 2013
12
1) 2x-3 > 0 sumamos en ambos miembros + 3: 2x – 3 + 3 > 0 + 3 2x > 3 multiplicamos ambos miembros por ½ 2x . ½ > 3 . ½ x > 3/2 Hemos obtenido el conjunto solución: S = {x : x ∈ IR , x > 3/2 } Otra forma de expresar el conjunto solución es usando la notación de intervalo: S = ] 3/2 , ∞ [
2) – 2x + 5 ≥ 6 restamos 5 en ambos miembros: -2x + 5 – 5 ≥ 6 – 5 -2x ≥ 1 dividimos por ( -2) ambos miembros:
-2x / ( -2) ≤ 1 / ( -2) x ≤ - 1 / 2
Observe que al dividir por un número negativo se invierte la desigualdad Hemos obtenido el conjunto solución: S = {x : x ∈ R , x ≤ - 1 / 2 }= ] - ∞ , - 1 / 2 [
SISTEMAS DE ECUACIONES LINEALES
Ecuaciones Lineales con dos incógnitas: Ya hemos visto que si f es una función polinómica de grado 1, entonces la expresión f(x) = 0 es la ecuación de 1° grado asociada. De igual modo si g es una función polinómica de dos variables de grado 1 del tipo ax+by+c, entonces la expresión g((x,y))= 0 es la ecuación asociada con dos incógnitas. Por ejemplo: g((x,y)) = 4x –3y es la función polinómica de dos variables
4x – 3y = 0 es la ecuación asociada con dos incógnitas La solución de esta ecuación es el conjunto de pares (x,y) que verifican la igualdad. En el ejemplo: El par (x,y) = ( 1 , 4 /3 ) es una solución El par (x,y) = ( 3, 4 ) es otra solución En realidad vemos que puede haber infinitas soluciones. Para calcular las soluciones es conveniente despejar una de las variables de la ecuación y obtener los distintos valores de la otra. Ejemplo: Hallar algunas soluciones para la ecuación 3y – 2x = 7 Despejamos la variable “y” de la ecuación y = (2x+7) / 3 Si tomamos una tabla de valores, vemos algunas posibles soluciones: x y
0 7/3 1 3 2 11/3 3 13/3
Si representamos gráficamente en un par de ejes cartesianos el conjunto solución obtenemos una recta.

Álgebra y Geometría Analítica Curso de ambientación 2013
13
También puede presentarse el caso en que interese resolver una ecuación lineal con dos incógnitas como el siguiente: f((x, y )) = c, es decir: ax + by = c El conjunto solución es el conjunto de pares ordenados (x, y) que pertenecen a la recta:
y = b
axc − con b no nulo.
Sistemas de ecuaciones lineales con dos incógnitas El conjunto de dos ecuaciones f((x, y)) = c1 y g((x, y)) = c2 se llama sistema de ecuaciones lineales con dos incógnitas.
Ejemplo: 2x – y = 1
x + y = 0
Resolver un sistema de dos ecuaciones lineales con dos incógnitas significa hallar el conjunto formado por todos los pares (x, y) que son solución común a ambas ecuaciones . Este conjunto se llama conjunto solución del sistema. Es decir: si S 1 es el conjunto solución de f((x, y)) = c1 y S 2 es el conjunto solución de g((x,y)) = c2, entonces el conjunto solución del sistema es S = S 1 ∩ S 2
Cada una de las ecuaciones del sistema representa una recta en el plano IR x IR, es posible entonces representarlo a partir de las dos rectas. Según las posiciones relativas de ellas, dos rectas en el plano pueden ser secantes (un único punto en común), ser paralelas disjuntas (ningún punto en común) o ser paralelas coincidentes (todos los puntos de la recta son comunes). Analicemos las distintas posibilidades de solución:
Sistema compatible: es un sistema que tiene solución, es decir que existen puntos comunes a ambas rectas.
Puede ocurrir que: • sólo hay un punto en común, las rectas son secantes, en ese caso se dice que el sistema
es compatible determinado. El conjunto solución está formado por un sólo par ordenado de reales.
• hay infinitos puntos en común, las rectas son paralelas coincidentes, en este caso se dice que el sistema es compatible indeterminado. El conjunto solución está formado por infinitos pares ordenados de reales, las dos ecuaciones representan a la misma recta.
Sistema incompatible: significa que es un sistema que no tiene solución, es decir no hay puntos comunes. Las dos ecuaciones representan rectas paralelas disjuntas. El conjunto solución es el conjunto vacio. Representemos gráficamente sistemas de ecuaciones lineales con dos incógnitas:
1) 2x – y = 0
x + y = 9
a) despejamos la y de cada ecuación:
y = 2x recta A
y = 9 – x recta B

Álgebra y Geometría Analítica Curso de ambientación 2013
14
b) tomamos una tabla de valores para cada ecuación: x y = 2x x y = 9 - x -1 -2 -1 10 1 2 1 8 3 6 3 6 4 8 4 5
c) representamos en un sistema de ejes cartesianos a las dos rectas:
El conjunto solución es S = ⎨( 3 , 6 ) ,por lo tanto se trata de un sistema compatible determinado.
2) x – y = 3
2x – 2y = 6
a) despejar la y de cada ecuación: y= x – 3 (A) y = x – 3 (B) b) tomar tabla de valores para cada recta
x y = x –3 A B
0 –3 1 –2 2 –1 4 2 En este caso las rectas son paralelas coincidentes por lo tanto tiene infinitos puntos en común. El conjunto solución es S = A = B, por lo tanto es un sistema compatible indeterminado.
3) x - y = 3
2x – 2y = -4
a) despejar la y de cada ecuación: y = x-3 (A) y = x+2 (B) b) tomar tabla de valores:
A
B
Álgebra y Geometría Analítica Curso de ambientación 2013
15
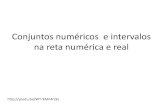
x y = x – 3 x y = x + 2 -1 - 4 -1 1 0 - 3 0 2 2 - 1 2 4
Las rectas son paralelas disjuntas, no hay puntos comunes, el conjunto solución es el conjunto vacío y el sistema es incompatible.
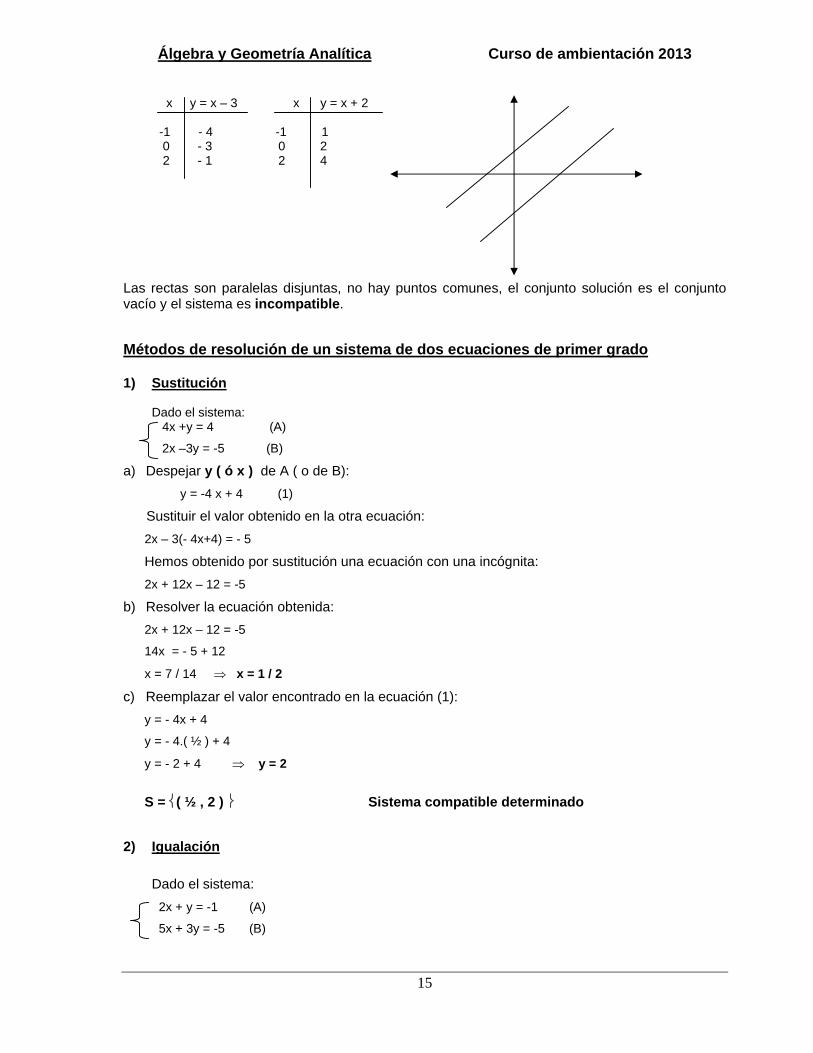
Métodos de resolución de un sistema de dos ecuaciones de primer grado 1) Sustitución
Dado el sistema: 4x +y = 4 (A)
2x –3y = -5 (B)
a) Despejar y ( ó x ) de A ( o de B): y = -4 x + 4 (1)
Sustituir el valor obtenido en la otra ecuación: 2x – 3(- 4x+4) = - 5
Hemos obtenido por sustitución una ecuación con una incógnita: 2x + 12x – 12 = -5
b) Resolver la ecuación obtenida: 2x + 12x – 12 = -5
14x = - 5 + 12
x = 7 / 14 ⇒ x = 1 / 2
c) Reemplazar el valor encontrado en la ecuación (1): y = - 4x + 4
y = - 4.( ½ ) + 4
y = - 2 + 4 ⇒ y = 2
S = ⎨( ½ , 2 ) ⎬ Sistema compatible determinado
2) Igualación
Dado el sistema: 2x + y = -1 (A)
5x + 3y = -5 (B)

Álgebra y Geometría Analítica Curso de ambientación 2013
16
a) Despejar x ( ó y ) de ambas ecuaciones: de A x = ( -1 – y ) / 2 (1)
de B x = ( - 5 - 3y ) / 5 (2)
b) Igualar las ecuaciones obtenidas: ( -1 – y ) / 2 = ( -5 - 3y ) / 5
Hemos obtenido por igualación una ecuación con una incógnita.
c) Resolver la ecuación obtenida: 5.( - 1 – y ) = 2.( -5 - 3y)
- 5 – 5y = - 10 - 6y
- 5y + 6y = - 10 + 5 ⇒ y = - 5
d) Reemplazamos el valor obtenido en la ecuación
en (1) x = ( -1 – ( -5 ) / 2 ⇒ x = 4 / 2 ⇒ x = 2
en (2) x = ( - 5 - 3.( - 5) ) / 5 ⇒ x = 10 / 5 ⇒ x = 2
Luego : S = {( 2 - 5) } Sistema compatible determinado
Nota: Existen otros métodos de resolución, por ejemplo suma y resta, y determinantes. Pero en este curso sólo revisaremos los métodos de sustitución e igualación.

Álgebra y Geometría Analítica Curso de ambientación 2013
17
TRIÁNGULO Se denomina triángulo “abc” a la región del plano obtenida por la intersección de tres semiplanos. Semiplano de borde Rab que contiene al punto c, semiplano de borde Rbc que contiene al punto a y semiplano de borde Rca que contiene al punto b. En esta región podemos señalar tres puntos que se denominan vértices del triángulo: a, b, c. Los segmentos que comprenden esos puntos que se denominan lados ab; bc; ca. Y los ángulos interiores que quedan determinados, a los cuales se los puede designar con la misma letra que se señalan los vértices respectivos. Es importante recordar que la suma de los ángulos interiores de un triángulo es igual a 180º, dato muy útil en el momento de resolver algunos problemas. Sistemas de medición de ángulos: Si bien los ángulos pueden medirse en distintos sistemas, nos interesa el sistema sexagesimal y el sistema radial, y el modo de pasar de uno a otro. Seguramente ya los conoces a ambos, recordemos algunas equivalencias:
Grados sexagesimales Radianes 90º π / 2
180º π 270º 3π / 2 360º 2 π
Es suficiente con establecer una regla de tres simple para expresar una medida angular dada en un sistema, en el otro. Según la amplitud de los ángulos interiores se puede clasificar a los triángulos como obtusángulos, aquellos que poseen un ángulo interior que mide más de 90º, acutángulo es aquel cuyos tres ángulos exteriores miden menos de 90º, en esta oportunidad queremos destacar aquel que posee un ángulo recto, es decir un ángulo que mide exactamente 90º, que recibe el nombre de triángulo rectángulo:
a
c
b

Álgebra y Geometría Analítica Curso de ambientación 2013
18
En un triángulo rectángulo a los lados que subyacen al ángulo recto se los denomina catetos, al otro lado restante, opuesto al mencionado ángulo recto, hipotenusa. Teorema de Pitágoras: El cuadrado de la medida de la hipotenusa es igual a la suma de los cuadrados de las medidas de los catetos. Se puede demostrar. En referencia a la figura presentada: Si A denominamos a la medida de la hipotenusa, B y C a las medidas de los catetos ac y ab respectivamente, podemos expresar el teorema como sigue:
A2 = B2 + C2
Razones trigonométricas: Es posible establecer determinadas relaciones entre las medidas de los lados de un triángulo rectángulo, se las suele denominar razones trigonométricas. En esta figura que representa un triángulo rectángulo podemos observar que la hipotenusa se corresponde con el lado bc. Los ángulos interiores b y c son agudos, es decir miden menos de 90º. Pongamos atención ahora al ángulo interior c, respecto de él, el lado ab es opuesto y a su medida la designamos B y el lado ca es adyacente y a su medida la designamos C, además como ya dijimos la medida de la hipotenusa la designamos A , con estas consideraciones podemos establecer razones trigonométricas: En este triángulo rectángulo:
sen (c) = AB
El seno del ángulo c es el cociente entre la medida del lado opuesto y la medida de la hipotenusa
a
b
c
a
b
c

Álgebra y Geometría Analítica Curso de ambientación 2013
19
cos (c) = AC
El coseno del ángulo c es el cociente entre la medida del lado adyacente y la medida de la hipotenusa
tg (c) = CB
La tangente del ángulo c es el cociente entre la medida del lado opuesto y la medida del lado adyacente. Podemos destacar que el seno, el coseno y la tangente de un ángulo son números reales. Si ahora ponemos atención al ángulo interior b, respecto de él podemos decir que el lado opuesto es ac, cuya medida designamos como C, el ángulo adyacente es ba, cuya medida hemos designado como B, la hipotenusa sigue siendo bc, cuya medida designamos como A. Entones podemos establecer otras razones trigonométricas de manera similar: En este triángulo rectángulo:
sen (b) = AC
El seno del ángulo b es el cociente entre la medida del lado opuesto y la medida de la hipotenusa
cos (b) = AB
El coseno del ángulo b es el cociente entre la medida del lado adyacente y la medida de la hipotenusa
tg (b) = BC
La tangente del ángulo b es el cociente entre la medida del lado opuesto y la medida del lado adyacente. Podemos también establecer relaciones entre estas razones por ejemplo:
sen (c) = AB = cos (b)
cos (c) = AC = sen (b)
tg (c) = CB = [ tg (b) ]-1
Siempre que tengamos un triángulo rectángulo podemos establecer las razones trigonométricas, debemos establecer bien respecto de qué ángulo estamos indicándolas. Estas razones nos permiten calcular algún elemento que sea desconocido de un triángulo rectángulo y de esta forma resolver algunos problemas.

Álgebra y Geometría Analítica Curso de ambientación 2013
20
Introducción al estudio de Funciones trigonométricas: Ángulos orientados: Se llaman ángulos orientados aquellos a los cuales se les ha considerado un sentido de giro, el que puede ser positivo (contra de las agujas de un reloj) o en sentido negativo (coincidiendo con el de las agujas de un reloj). Un mismo ángulo se puede considerar medido en sentido positivo por ejemplo + 60º y en sentido negativo – 300º + - Funciones trigonométricas: Para definirlas recurriremos a una circunferencia centrada en un par de ejes cartesianos ortogonales, cuyo radio es una unidad. p (x, y) 1 En ella marcamos un ángulo cualquiera medido en sentido positivo. El lado del ángulo intersecta a la circunferencia en un único punto p = (x, y) Observemos la gráfica: Y y p (x, y) x X

Álgebra y Geometría Analítica Curso de ambientación 2013
21
Denominaremos al ánguloα, en este caso en el primer cuadrante, medido en sentido positivo desde el eje de abscisas, marcamos el punto p = (x, y) y sus coordenadas, ya dijimos que es el punto de intersección entre el lado del ángulo y la circunferencia trigonométrica. Definimos entonces:
cos α es la abscisa x del punto p
sen α es la ordenada y del punto p Ubicamos ahora un único punto p2 que se obtiene intersectando la prolongación del lado del ángulo con la recta T, paralela la eje Y , y tangente a la circunferencia en (1, 0), sus coordenadas son p2 = (1, y’). Y p2 = (1, y’) X T Se define entonces:
tg α es la ordenada y’ del punto p2 Ubicamos un único punto p3 de coordenadas (x”, 1) que se obtiene intersectando la prolongación del lado del ángulo α con la recta C, paralela al eje X y tangente a la circunferencia en (0, 1). Y C p3 = (x”, 1) x” X Se define entonces:
cotg α es la abscisa indicada x” del punto p3

Álgebra y Geometría Analítica Curso de ambientación 2013
22
Trazamos ahora una recta R perpendicular al lado del ángulo α en el punto p y tangente a la circunferencia en ese mismo punto, ésta intersecta a los ejes X e Y en puntos únicos que denominaremos p4 y p5, cuyas coordenadas son : p4 = (x’”, 0) y p5 = (0, y’”) . Y p5 = (0, y’”) p4 = ( x’”, 0 ) X R Se define entonces:
sec α es la abscisa del punto p4
cosec α es la ordenada del punto p5 Ahora vamos a definir las funciones, es decir relaciones que verifican las condiciones de existencia y unicidad respecto a lo mencionado anteriormente. Analicemos el caso de seno y coseno del ángulo, para cada ángulo siempre va a existir ese punto p de intersección del lado con la circunferencia, por lo tanto siempre van a existir sus coordenadas reales ( x, y ) únicas para dicho punto, en consecuencia se define:
sen : IR → IR cos : IR → IR α → sen α α → cos α Si analizamos tangente y cotangente la situación es diferente, veamos primero la recta T, cuando el ángulo mida π / 2 , 3π / 2, etc., el lado del ángulo va a ser paralelo a la recta T, lo que imposibilita hallar el punto de intersección de ambos. Si consideramos la recta C sucede lo mismo para ángulos que midan π , 2π , etc., entonces para definirlas como funciones necesitamos modificar el dominio, ya que debe cumplirse la unicidad y la existencia: tg : D → IR cotg : D’ → R α → tg α α → cotg α Siendo:
D = { x / x ∈ IR ∧ x ≠ (2n + 1).2π
, n ∈ Z }
D’ = { x / x ∈ IR ∧ x ≠ n.π , n ∈ Z } En el caso de la secante y la cosecante, hay que trazar una recta R perpendicular al lado del ángulo y tangente a la circunferencia en p, cuando el ángulo mida π / 2 , 3π / 2, etc., no es posible hallar el punto de intersección con el eje X p4, cuando el ángulo mida π , 2π , etc., no es posible hallar el punto de intersección con el eje Y p5, en consecuencia:

Álgebra y Geometría Analítica Curso de ambientación 2013
23
sec : D → IR cosec : D’ → IR α → sec α α → cosec α Siendo los conjuntos D y D’ los definidos con anterioridad. Relaciones fundamentales: Se pueden establecer entre las imágenes de las funciones trigonométricas:
sen2 x + cos2 x = 1 tg x = xcosxsen
cotg x = xsenxcos
sec x = xcos
1 cotg x =
xtg1
cosec x = xsen
1
A partir de estas identidades fundamentales es posible hacer demostraciones de otras más complejas y obtener expresiones de una función respecto de cualquier otra.
Intervalos de variabilidad de las funciones trigonométricas: -1 ≤ cos x ≤ 1 -1 ≤ sen x ≤ 1 -∞ < tg x < + ∞
[ -1, 1 ] [ -1, 1 ] ( -∞ , +∞ ) - ∞ < sec x ≤ -1 ∨ 1 ≤ sec x < + ∞ ( - ∞ , -1 ] ∪ [ 1 , + ∞ ) - ∞ < cosec x ≤ -1 ∨ 1 ≤ cosec x < + ∞ ( - ∞ , -1 ] ∪ [ 1 , + ∞ )

Álgebra y Geometría Analítica Curso de ambientación 2013
24
Relación entre las imágenes por las funciones trigonométricas: 1. De ángulos congruentes:
Dos ángulos orientados se dicen congruentes si sus medidas difieren en un múltiplo entero de 2π α’ = α + 2 k π ( k ∈ Z)
La imagen por una función trigonométrica para los ángulos congruentes es la misma: sen α = sen ( α + 2 k π ) cos α = cos ( α + 2 k π ) tg α = tg ( α + 2 k π )
sec α = sec ( α + 2 k π ) cosec α = cosec ( α + 2 k π ) ctg α = ctg ( α + 2 k π )
2. De ángulos opuestos:
Dos ángulos orientados se dicen opuestos si la suma de sus medidas es cero. α + ( - α ) = 0
La relación entre las imágenes por una función trigonométrica para los ángulos opuestos es la siguiente: sen α = - sen ( - α ) cos α = cos ( - α ) tg α = - tg ( - α )
sec α = sec ( - α ) cosec α = - cosec ( - α ) ctg α = - ctg ( - α )
3. Ángulos que difieren en π:
Dos ángulos orientados se dice que difieren en π si la resta de sus medidas es π. α’ - α = π ⇒ α’ = α + π
La relación entre las imágenes por una función trigonométrica es la siguiente: sen α = - sen ( α + π ) cos α = - cos ( α + π ) tg α = tg ( α + π )
sec α = - sec ( α + π ) cosec α = - cosec ( α + π ) ctg α = ctg ( α + π )
4. Ángulos suplementarios:
Dos ángulos orientados se dicen suplementarios si la suma de sus medidas es π. α’ + α = π ⇒ α’ = π - α
La relación entre las imágenes por una función trigonométrica para los ángulos suplementarios es la siguiente: sen α = sen ( π - α ) cos α = - cos ( π - α ) tg α = - tg ( π - α )
sec α = - sec ( π - α ) cosec α = cosec ( π - α ) ctg α = - ctg ( π - α )
5. Ángulos complementarios:
Dos ángulos orientados se dicen complementarios si la suma de sus medidas es 2π
α’ + α = 2π
⇒ α’ = 2π
- α
La relación entre las imágenes por una función trigonométrica para los ángulos complementarios es la siguiente:
sen α = cos (2π
- α ) cos α = sen (2π
- α ) tg α = cotg (2π
- α )
sec α = cosec (2π
- α ) cosec α = sec ( 2π
- α ) ctg α = tg ( 2π
- α )

Trigonometría
25
Teoremas del seno y coseno de la suma de las medidas de dos ángulos: Se puede demostrar que:
1) sen (a + b) = sen a . cos b + cos a . sen b
2) cos (a + b) = cos a . cos b - sen a . sen b
Las funciones trigonométricas de la suma y diferencia de las medidas de dos ángulos: Identidades:
De las fórmulas que acabamos de ver para el seno y coseno de la suma de dos amplitudes angulares y de las identidades fundamentales se pueden deducir otras (todas demostrables) que pueden servirte en el momento de resolver algunos problemas, como por ejemplo:
1) sen ( a - b ) = sen a . cos b - cos a . sen b
2) cos ( a - b ) = cos a . cos b + sen a . sen b
3) tg ( a - b ) = b tg. a tg 1
b tg a tg+
−
4) sen ( 2 x ) = 2 . sen x . cos x
5) cos ( 2 x ) = cos 2 x - sen 2 x
6) tg ( 2 x ) = x tg- 1
x tg2 2
7) cos ⎟⎠⎞
⎜⎝⎛
2x =
2 xcos 1 +
±
8) sen ⎟⎠⎞
⎜⎝⎛
2x =
2 xcos 1 −
±
9) tg ⎟⎠⎞
⎜⎝⎛
2x = xcos 1
xcos - 1 +
±
10) sen a + sen b = 2 . sen ⎟⎠⎞
⎜⎝⎛ +
2b a . cos ⎟
⎠⎞
⎜⎝⎛
2b - a
11) cos a + cos b = 2 . cos ⎟⎠⎞
⎜⎝⎛ +
2b a . cos ⎟
⎠⎞
⎜⎝⎛
2b - a
12) tg a + tg b = sen (a + b) . sec a . sec b

Álgebra y Geometría Analítica Curso de ambientación 2013
- 26 -
Los siguientes teoremas, también poseen demostración y son aplicables en numerosos problemas.
• Teorema del seno: En todo triángulo existe proporcionalidad entre la medida de los lados y el seno del ángulo opuesto al mismo. b
C β hA A C
sen B sen
A sen γβα
==
α γ
a hB c B
• Teorema del coseno: En todo triángulo el cuadrado de la medida de uno de los lados es igual a la suma de los
cuadrados de las medidas de los otros dos, menos el doble producto de los mismos por el
coseno del ángulo comprendido entre ellos.
b
C β A A2 = B2 + C2 - 2.B.C. cos α
hB B2 = A2 + C2 - 2.A.C. cos β
α γ C2 = A2 + C2 - 2.A.C. cos γ
a c
B
B1 B2

Álgebra y Geometría Analítica Curso de ambientación 2013
- 27 -
Anexo Demostraciones: TEOREMAS DEL SENO Y COSENO DE LA SUMA DE LAS MEDIDAS DE DOS ÁNGULOS:
sen ( a + b ) = | op || rp | =
| op || mp | | rm | + =
| op || mp |
| op || rm |
+ = | np || np | .
| op || mp |
| on || on | .
| op || rm |
+ =
= | op || np | .
| np || mp |
| op || on | .
| on || rm |
+ = sen a . cos b + cos a . sen b ( | rm | = | ns | )
cos ( a + b ) = | op || or | =
| op || rs | | os | − =
| op || rs |
| op || os |
− = | np || np | .
| op || rs |
| on || on | .
| op || os |
− =
= | op || np | .
| np || rs |
| op || on | .
| on || os |
− = cos a . cos b - sen a . sen b ( | mn | = | rs | )
p pr ⊥ os pn ⊥ on a m n a + b
b a
o r s

Álgebra y Geometría Analítica Curso de ambientación 2013
- 28 -
Teorema del seno: En todo triángulo existe proporcionalidad entre la medida de los lados y el seno del ángulo opuesto al mismo. b
C β hA A C
sen B sen
A sen γβα
==
α γ
a hB c B
Trazamos en el triángulo abc una de las alturas, por ejemplo hB , quedan determinados dos triángulos rectángulos en los cuales resulta que:
sen α = ChB y sen γ =
AhB
despejando en ambos hB resulta: hB = sen α . C y hB = sen γ . A
por lo tanto: sen α . C = sen γ . A
de donde: C
sen A
sen γα=
Del mismo modo, si trazamos la altura sobre el lado bc anotada hA , quedan determinados dos triángulos rectángulos, en los cuales:
sen β = ChA y sen γ =
BhA
despejando en ambos hA resulta: hA = sen β . C y hA = sen γ . B
por lo tanto: sen β . C = sen γ . B
de donde: C
sen B
sen γβ=
Observando ambas expresiones resulta: C
sen B sen
A sen γβα
==
Teorema del coseno: En todo triángulo el cuadrado de la medida de uno de los lados es igual a la suma de los cuadrados de las
medidas de los otros dos, menos el doble producto de los mismos por el coseno del ángulo comprendido
entre ellos.
b
C β A A2 = B2 + C2 - 2.B.C. cos α
hB B2 = A2 + C2 - 2.A.C. cos β
α γ C2 = A2 + C2 - 2.A.C. cos γ
a c
B B1 B2

Álgebra y Geometría Analítica Curso de ambientación 2013
- 29 -
Trazamos una de las alturas del triángulo, por ejemplo hB , el lado ac queda dividido en dos, cuyas medidas están indicadas por B1 y B2, hemos determinados dos triángulos rectángulos en uno de los cuales aplicando Teorema de Pitágoras resulta:
hB2 = A2 - B2
2 , pero a su vez B2 = B - B1 por lo tanto hB2 = A2 - (B - B1)2
,
además hB = sen α . C y B1 = cos α . C
entonces sustituyendo resulta:
sen2 α . C2 = A2 - ( B - cos α . C )2 , desarrollando el cuadrado sería:
sen2 α . C2 = A2 - B2 + 2 cos α . B . C - cos2 α . C2
sen2 α . C2 + cos2 α . C2 = A2 - B2 + 2 cos α . B . C
(sen2 α . + cos2 α ) . C2 = A2 - B2 + 2 cos α . B . C
De aquí: A2 = B2 + C2 - 2 . B . C . cos α
De la misma manera se demuestra para los otros dos lados.