
Libro de Ayuda - Analisis Estructural
500
CAPITULO 1 ANALISIS ESTRUCTURAL _____________________________________________________________________________________________ PRATO, MASSA -1- Capítulo 1 Introducción al análisis de estructuras de barras 1.1- Conceptos generales Se entiende por análisis estructural al estudio y determinación de tensiones, deformaciones y reacciones, que ocurren en una estructura al ser sometida a acciones exteriores que pueden ser: cargas, efectos térmicos, movimiento de apoyos, deformaciones impuestas, etc. El análisis estructural provee los fundamentos sólidos para producir buenos diseños estructurales, al ocuparse de establecer la relación entre causas y efectos. El desarrollo del proyecto de una estructura, proceso que se conoce como “diseño estructural”, se apoya en normas y preceptos que surgen del análisis estructural, así como también en reglas prácticas y empíricas que dependen fuertemente de la modalidad o carácter del proyectista. El análisis estructural propende a dar soluciones únicas y precisas. Por otro lado, el diseño estructural está influenciado por aspectos prácticos y subjetivos que hacen que dos diseños igualmente correctos o válidos puedan ser muy distintos entre sí. En este curso se estudia la formulación y resolución de problema s estáticos y dinámicos pa ra estructura s de barras , en general, en ré gimen elástico . Se presentan lo s métodos generale s para abordar cualq uier tipo de estructura, indicá ndose modalida des corrientes de estos métodos para la resolució n de tipos particulares de configuraciones estructurales.
-
Upload
grovercondori -
Category
Documents
-
view
705 -
download
4
Transcript of Libro de Ayuda - Analisis Estructural
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 1/500
CAPITULO 1 ANALISIS ESTRUCTURAL
_____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -1-
Capítulo 1 Introducción al análisis de estructuras de barras
1.1- Conceptos generales
Se entiende por análisis estructural al estudio y determinación de tensiones,
deformaciones y reacciones, que ocurren en una estructura al ser sometida a acciones exteriores
que pueden ser: cargas, efectos térmicos, movimiento de apoyos, deformaciones impuestas, etc.
El análisis estructural provee los fundamentos sólidos para producir buenos diseños
estructurales, al ocuparse de establecer la relación entre causas y efectos.
El desarrollo del proyecto de una estructura, proceso que se conoce como “diseño
estructural”, se apoya en normas y preceptos que surgen del análisis estructural, así como
también en reglas prácticas y empíricas que dependen fuertemente de la modalidad o carácter
del proyectista.
El análisis estructural propende a dar soluciones únicas y precisas. Por otro lado, el diseño
estructural está influenciado por aspectos prácticos y subjetivos que hacen que dos diseños
igualmente correctos o válidos puedan ser muy distintos entre sí.
En este curso se estudia la formulación y resolución de problemas estáticos y
dinámicos para estructuras de barras, en general, en régimen elástico. Se presentan los
métodos generales para abordar cualquier tipo de estructura, indicándose modalidades
corrientes de estos métodos para la resolución de tipos particulares de configuraciones
estructurales.
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 2/500
CAPITULO 1 ANALISIS ESTRUCTURAL
_____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -2-
1.2- Tipos de estructuras de barras y modelos de análisis
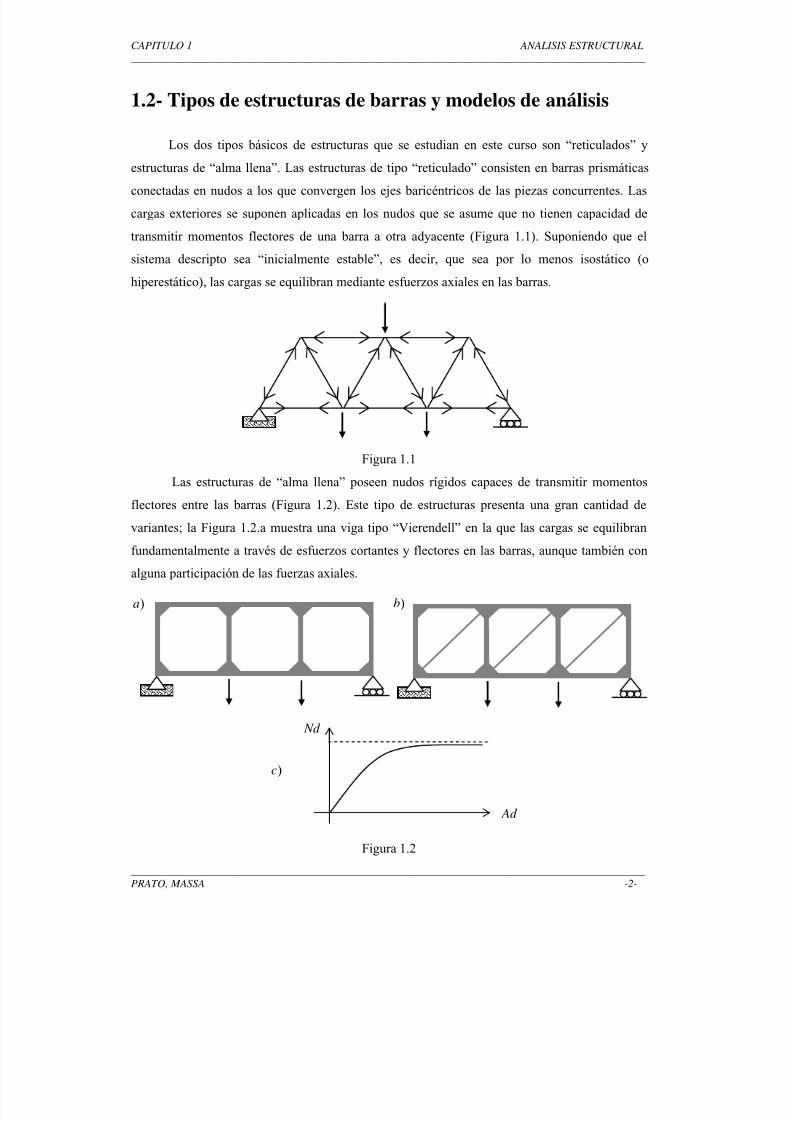
Los dos tipos básicos de estructuras que se estudian en este curso son “reticulados” y
estructuras de “alma llena”. Las estructuras de tipo “reticulado” consisten en barras prismáticas
conectadas en nudos a los que convergen los ejes baricéntricos de las piezas concurrentes. Las
cargas exteriores se suponen aplicadas en los nudos que se asume que no tienen capacidad de
transmitir momentos flectores de una barra a otra adyacente (Figura 1.1). Suponiendo que el
sistema descripto sea “inicialmente estable”, es decir, que sea por lo menos isostático (o
hiperestático), las cargas se equilibran mediante esfuerzos axiales en las barras.
Figura 1.1
Las estructuras de “alma llena” poseen nudos rígidos capaces de transmitir momentos
flectores entre las barras (Figura 1.2). Este tipo de estructuras presenta una gran cantidad de
variantes; la Figura 1.2.a muestra una viga tipo “Vierendell” en la que las cargas se equilibran
fundamentalmente a través de esfuerzos cortantes y flectores en las barras, aunque también con
alguna participación de las fuerzas axiales.
Figura 1.2
)a )b
Nd
Ad
)c
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 3/500
CAPITULO 1 ANALISIS ESTRUCTURAL
_____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -3-
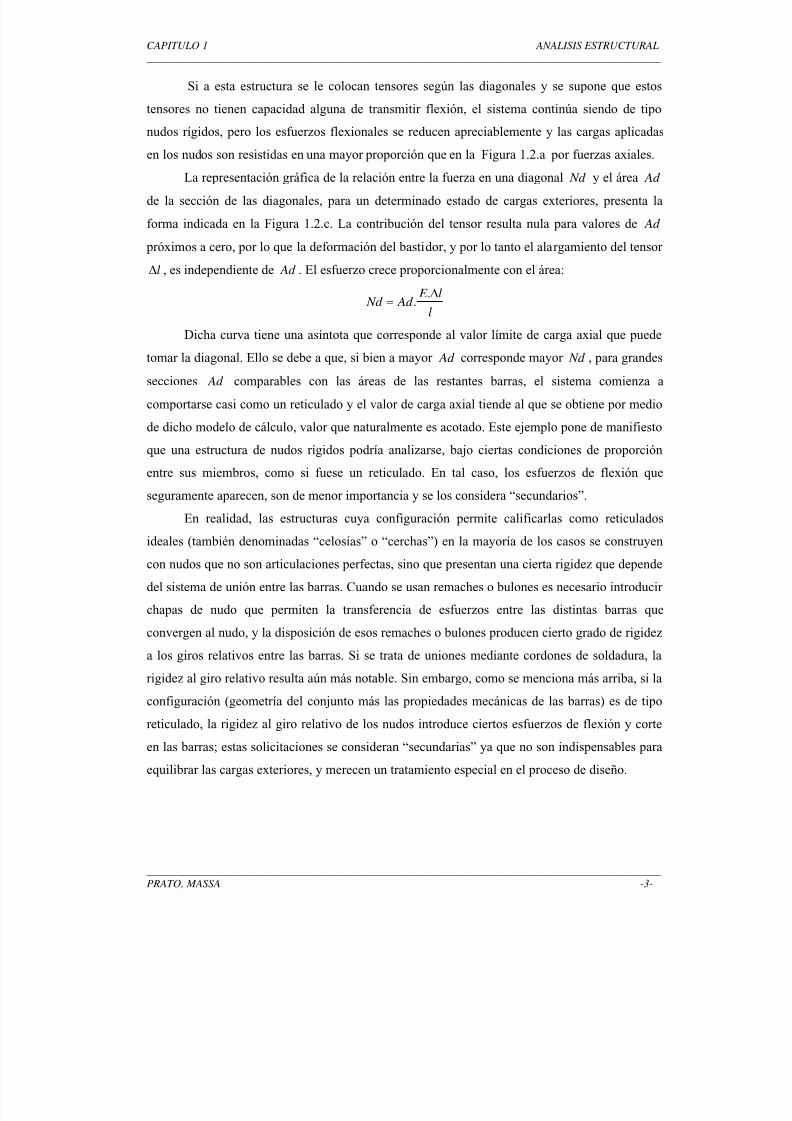
Si a esta estructura se le colocan tensores según las diagonales y se supone que estos
tensores no tienen capacidad alguna de transmitir flexión, el sistema continúa siendo de tipo
nudos rígidos, pero los esfuerzos flexionales se reducen apreciablemente y las cargas aplicadas
en los nudos son resistidas en una mayor proporción que en la Figura 1.2.a por fuerzas axiales.
La representación gráfica de la relación entre la fuerza en una diagonal Nd y el área Ad
de la sección de las diagonales, para un determinado estado de cargas exteriores, presenta la
forma indicada en la Figura 1.2.c. La contribución del tensor resulta nula para valores de Ad
próximos a cero, por lo que la deformación del bastidor, y por lo tanto el alargamiento del tensor
l∆ , es independiente de Ad . El esfuerzo crece proporcionalmente con el área:
..
∆=
E l Nd Ad
l
Dicha curva tiene una asíntota que corresponde al valor límite de carga axial que puede
tomar la diagonal. Ello se debe a que, si bien a mayor Ad corresponde mayor Nd , para grandes
secciones Ad comparables con las áreas de las restantes barras, el sistema comienza a
comportarse casi como un reticulado y el valor de carga axial tiende al que se obtiene por medio
de dicho modelo de cálculo, valor que naturalmente es acotado. Este ejemplo pone de manifiesto
que una estructura de nudos rígidos podría analizarse, bajo ciertas condiciones de proporción
entre sus miembros, como si fuese un reticulado. En tal caso, los esfuerzos de flexión que
seguramente aparecen, son de menor importancia y se los considera “secundarios”.
En realidad, las estructuras cuya configuración permite calificarlas como reticulados
ideales (también denominadas “celosías” o “cerchas”) en la mayoría de los casos se construyen
con nudos que no son articulaciones perfectas, sino que presentan una cierta rigidez que depende
del sistema de unión entre las barras. Cuando se usan remaches o bulones es necesario introducir
chapas de nudo que permiten la transferencia de esfuerzos entre las distintas barras que
convergen al nudo, y la disposición de esos remaches o bulones producen cierto grado de rigidez
a los giros relativos entre las barras. Si se trata de uniones mediante cordones de soldadura, la
rigidez al giro relativo resulta aún más notable. Sin embargo, como se menciona más arriba, si la
configuración (geometría del conjunto más las propiedades mecánicas de las barras) es de tipo
reticulado, la rigidez al giro relativo de los nudos introduce ciertos esfuerzos de flexión y corte
en las barras; estas solicitaciones se consideran “secundarias” ya que no son indispensables para
equilibrar las cargas exteriores, y merecen un tratamiento especial en el proceso de diseño.
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 4/500
CAPITULO 1 ANALISIS ESTRUCTURAL
_____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -4-
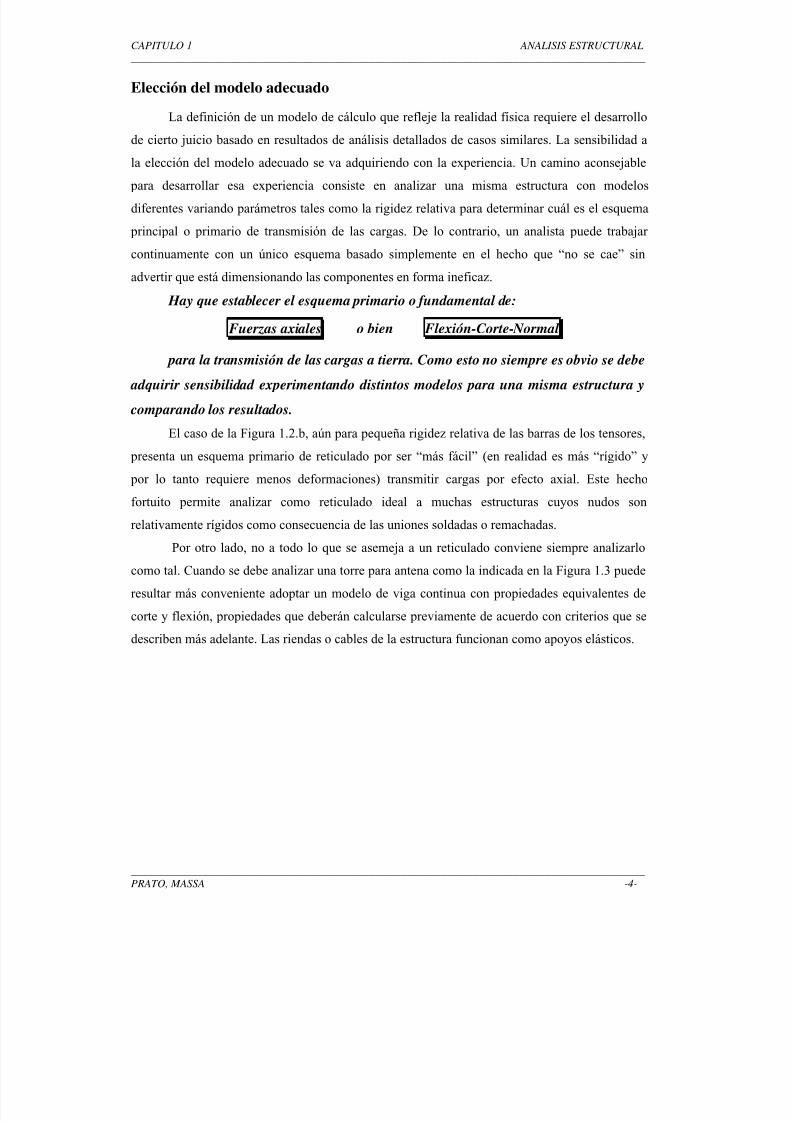
Elección del modelo adecuado
La definición de un modelo de cálculo que refleje la realidad física requiere el desarrollo
de cierto juicio basado en resultados de análisis detallados de casos similares. La sensibilidad a
la elección del modelo adecuado se va adquiriendo con la experiencia. Un camino aconsejable
para desarrollar esa experiencia consiste en analizar una misma estructura con modelos
diferentes variando parámetros tales como la rigidez relativa para determinar cuál es el esquema
principal o primario de transmisión de las cargas. De lo contrario, un analista puede trabajar
continuamente con un único esquema basado simplemente en el hecho que “no se cae” sin
advertir que está dimensionando las componentes en forma ineficaz.
Hay que establecer el esquema primario o fundamental de:
Fuerzas axiales o bien Flexión-Corte-Normal
para la transmisión de las cargas a tierra. Como esto no siempre es obvio se debe
adquirir sensibilidad experimentando distintos modelos para una misma estructura y
comparando los resultados.
El caso de la Figura 1.2.b, aún para pequeña rigidez relativa de las barras de los tensores,
presenta un esquema primario de reticulado por ser “más fácil” (en realidad es más “rígido” y
por lo tanto requiere menos deformaciones) transmitir cargas por efecto axial. Este hecho
fortuito permite analizar como reticulado ideal a muchas estructuras cuyos nudos son
relativamente rígidos como consecuencia de las uniones soldadas o remachadas.
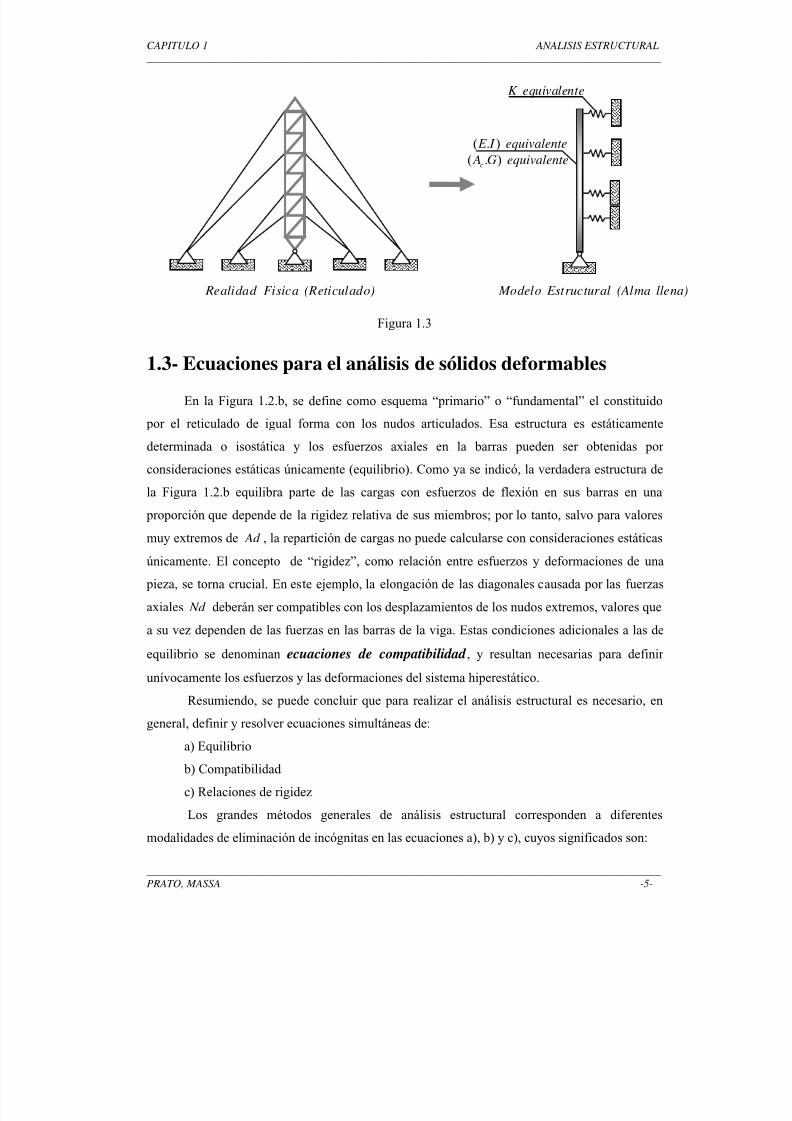
Por otro lado, no a todo lo que se asemeja a un reticulado conviene siempre analizarlo
como tal. Cuando se debe analizar una torre para antena como la indicada en la Figura 1.3 puede
resultar más conveniente adoptar un modelo de viga continua con propiedades equivalentes de
corte y flexión, propiedades que deberán calcularse previamente de acuerdo con criterios que se
describen más adelante. Las riendas o cables de la estructura funcionan como apoyos elásticos.
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 5/500
CAPITULO 1 ANALISIS ESTRUCTURAL
_____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -5-
Figura 1.3
1.3- Ecuaciones para el análisis de sólidos deformables
En la Figura 1.2.b, se define como esquema “primario” o “fundamental” el constituido
por el reticulado de igual forma con los nudos articulados. Esa estructura es estáticamente
determinada o isostática y los esfuerzos axiales en la barras pueden ser obtenidas por
consideraciones estáticas únicamente (equilibrio). Como ya se indicó, la verdadera estructura de
la Figura 1.2.b equilibra parte de las cargas con esfuerzos de flexión en sus barras en una
proporción que depende de la rigidez relativa de sus miembros; por lo tanto, salvo para valores
muy extremos de Ad , la repartición de cargas no puede calcularse con consideraciones estáticas
únicamente. El concepto de “rigidez”, como relación entre esfuerzos y deformaciones de una
pieza, se torna crucial. En este ejemplo, la elongación de las diagonales causada por las fuerzas
axiales Nd deberán ser compatibles con los desplazamientos de los nudos extremos, valores que
a su vez dependen de las fuerzas en las barras de la viga. Estas condiciones adicionales a las de
equilibrio se denominan ecuaciones de compatibilidad , y resultan necesarias para definir
unívocamente los esfuerzos y las deformaciones del sistema hiperestático.
Resumiendo, se puede concluir que para realizar el análisis estructural es necesario, en
general, definir y resolver ecuaciones simultáneas de:
a) Equilibrio
b) Compatibilidad
c) Relaciones de rigidez
Los grandes métodos generales de análisis estructural corresponden a diferentes
modalidades de eliminación de incógnitas en las ecuaciones a), b) y c), cuyos significados son:
Realidad Fisica (Reticulado) Modelo Estructural (Alma llena)
K equivalente
( . ) E I equivalente
( . )c A G equivalente
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 6/500
CAPITULO 1 ANALISIS ESTRUCTURAL
_____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -6-
a) Se refiere a la suma de fuerzas y la suma de momentos iguales a cero.
b) Establecen condiciones de congruencia geométrica y se las conoce también como
relaciones cinemáticas.
c) Se refieren a las propiedades constitutivas del material que relacionan los esfuerzos
(axial, flector, corte o torsión) con las respectivas deformaciones específicas (axial, curvatura
flexional, distorsión al corte, y ángulo unitario de torsión).
Nótese que las condiciones de compatibilidad son independientes tanto del tipo de
material como de las secciones de las barras (ambas determinan la rigidez). Por ejemplo, en el
caso de la Figura 1.2.b establecen que los extremos de los tensores permanecen unidos a los
nudos de la columna en que se insertan.
1.4- Grado de hiperestaticidad
Para un modelo isostático es posible determinar todas las fuerzas (internas y externas)
utilizando únicamente ecuaciones de equilibrio, aunque es corriente que por norma de diseño las
estructuras tengan que cumplir ciertas condiciones de máxima deformación. La práctica corriente
limita la flecha (por ejemplo a 1/500 o 1/800 de la luz según el caso y tipo de estructura) de
modo que para resolver completamente el problema se debe recurrir a los tres tipos de
ecuaciones ya mencionados, aún para las estructuras isostáticas.El concepto de grado de hiperestaticidad es el aspecto central para la formulación del
Método de las Fuerzas que se desarrolla en el primer tercio del curso; posteriormente se estudia
el método de los desplazamientos, donde el concepto de hiperestaticidad se torna irrelevante
desde el punto de vista del análisis estructural. De todos modos, más allá de la importancia
relativa de la hiperestaticidad , o “redundancia estructural” para el desarrollo del método de
análisis estructural, debe destacarse que la redundancia estructural es de fundamental
importancia para el diseño de las estructuras, que deriva de la existencia de caminos alternativos
para equilibrar las cargas aplicadas en el caso de falla o deterioro en algunas de sus
componentes. En este tipo de fallas se enmarcan la formación de rótulas plásticas imprevistas,
asentamiento de las fundaciones, u otros defectos o situaciones imprevistas en el
comportamiento de una estructura. De no existir redundancia, la estabilidad del conjunto
depende del funcionamiento correcto de todas las componentes y no hay margen para fallas
locales. Por lo tanto, se debe tener presente que la redundancia estructural es reconocida como
uno de los aspectos más significativos al momento de diseñar una estructura y establecer los
márgenes de seguridad frente a los distintos tipos de solicitaciones.
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 7/500
CAPITULO 1 ANALISIS ESTRUCTURAL
_____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -7-
En el Método de las Fuerzas, las dimensiones del sistema de ecuaciones que se plantea y
resuelve para hallar la distribución de esfuerzos es igual al grado de hiperestaticidad .
Por lo tanto, el grado de hiperestaticidad determina el volumen del esfuerzo de cálculo
necesario para hallar la solución, de allí su importancia operativa en el análisis estructural.Al margen de estas cuestiones computacionales, se insiste que las estructuras isostáticas
tienen un único mecanismo o esquema para equilibrar las cargas, mientras que en las
hiperestáticas, si falla un mecanismo, pueden en ciertas condiciones comenzar a trabajar de una
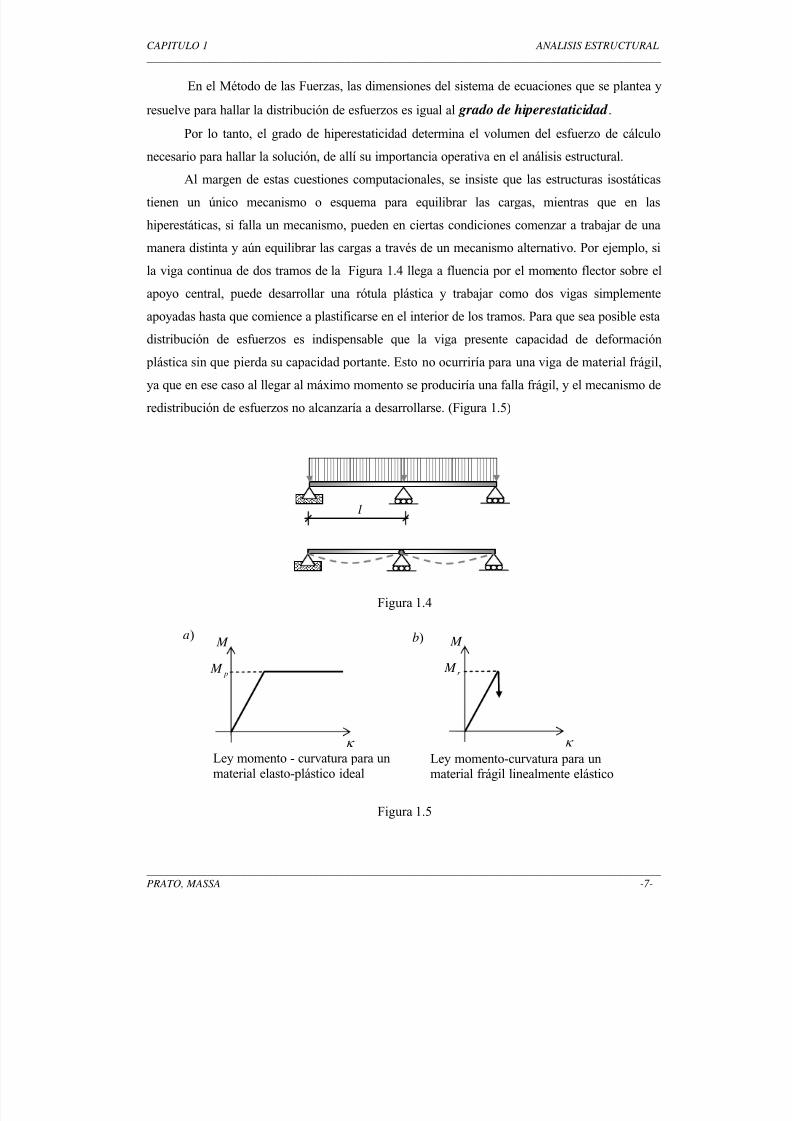
manera distinta y aún equilibrar las cargas a través de un mecanismo alternativo. Por ejemplo, si
la viga continua de dos tramos de la Figura 1.4 llega a fluencia por el momento flector sobre el
apoyo central, puede desarrollar una rótula plástica y trabajar como dos vigas simplemente
apoyadas hasta que comience a plastificarse en el interior de los tramos. Para que sea posible esta
distribución de esfuerzos es indispensable que la viga presente capacidad de deformación
plástica sin que pierda su capacidad portante. Esto no ocurriría para una viga de material frágil,
ya que en ese caso al llegar al máximo momento se produciría una falla frágil, y el mecanismo de
redistribución de esfuerzos no alcanzaría a desarrollarse. (Figura 1.5)
Figura 1.4
Figura 1.5
)a M
κ
p M
Ley momento - curvatura para un
material elasto-plástico ideal
M
κ
r M
)b
Ley momento-curvatura para un
material frágil linealmente elástico
l
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 8/500
CAPITULO 1 ANALISIS ESTRUCTURAL
_____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -8-
1.5- Vigas prismáticas de eje recto (ecuación de la elástica)
Las barras prismáticas son aquellas que tienen una sección transversal constante a lo largo
de su desarrollo y su eje longitudinal es recto. El caso de una viga de sección continuamentevariable puede ser aproximado por tramos rectos de sección constante.
Sea una pieza prismática sometida a acciones de corte, flexión, axial y torsional descripta
a través de las variables ( )Q x , ( ) M x , ( ) N x y ( )t
M x donde x es la variable independiente sobre
el eje de la pieza.
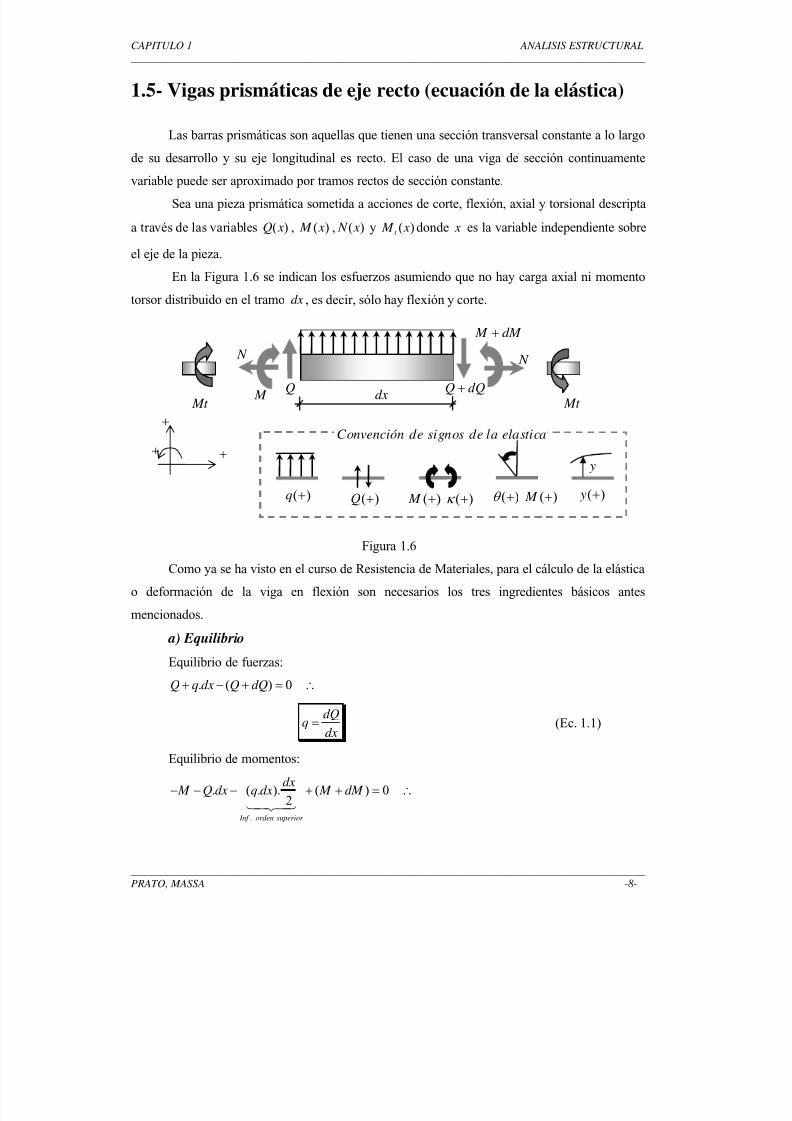
En la Figura 1.6 se indican los esfuerzos asumiendo que no hay carga axial ni momento
torsor distribuido en el tramo dx , es decir, sólo hay flexión y corte.
Figura 1.6
Como ya se ha visto en el curso de Resistencia de Materiales, para el cálculo de la elástica
o deformación de la viga en flexión son necesarios los tres ingredientes básicos antes
mencionados.
a) Equilibrio
Equilibrio de fuerzas:
. ( ) 0Q q dx Q dQ+ − + = ∴
dQq
dx= (Ec. 1.1)
Equilibrio de momentos:
.
. ( . ). ( ) 02
Inf orden superior
dx M Q dx q dx M dM − − − + + =
14243
∴
dxQ Q dQ+
M Mt
N
M dM +
N
Mt
+
++Convención de signos de la elastica
( )q + ( )Q + ( ) ( ) M κ + + ( ) ( ) M θ + +
y
( ) y +
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 9/500
CAPITULO 1 ANALISIS ESTRUCTURAL
_____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -9-
dM Q
dx= (Ec. 1.2)
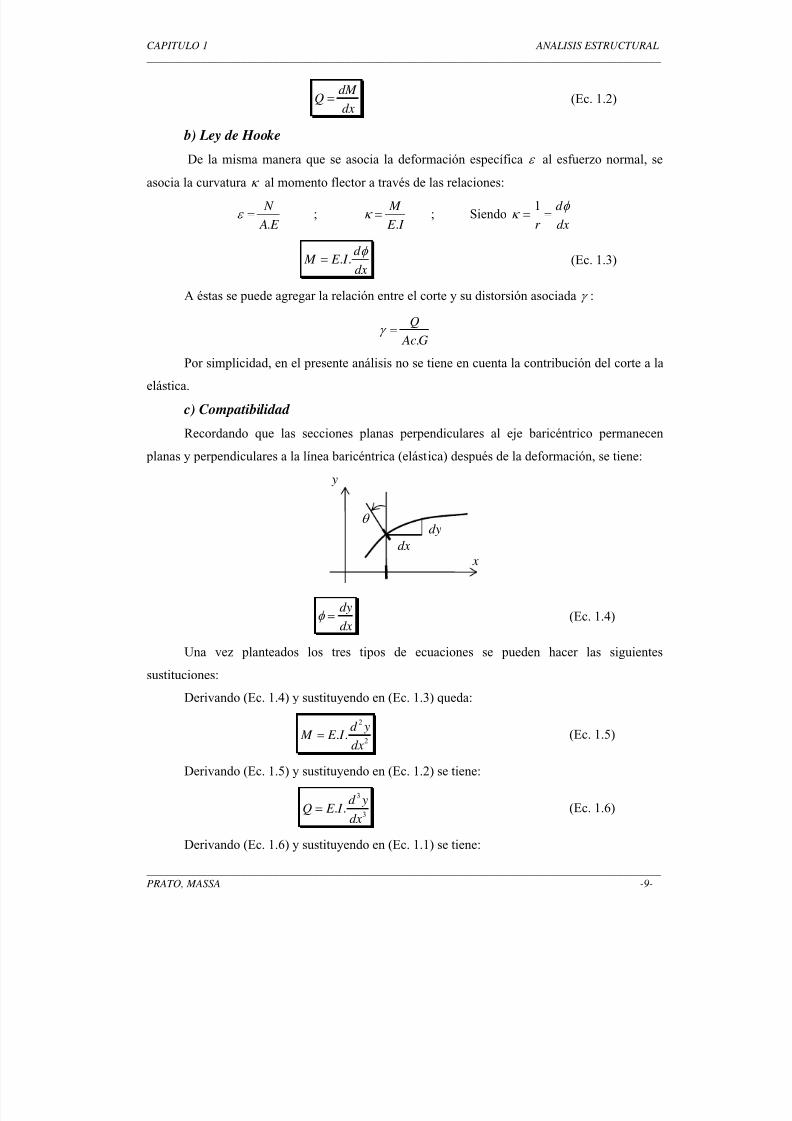
b) Ley de Hooke
De la misma manera que se asocia la deformación específica ε al esfuerzo normal, seasocia la curvatura κ al momento flector a través de las relaciones:
.
N
A E ε = ;
.
M
E I κ = ; Siendo
1 d
r dx
φ κ = =
. .d
M E I dx
φ = (Ec. 1.3)
A éstas se puede agregar la relación entre el corte y su distorsión asociada γ :
.Q
Ac Gγ =
Por simplicidad, en el presente análisis no se tiene en cuenta la contribución del corte a la
elástica.
c) Compatibilidad
Recordando que las secciones planas perpendiculares al eje baricéntrico permanecen
planas y perpendiculares a la línea baricéntrica (elástica) después de la deformación, se tiene:
dy
dxφ = (Ec. 1.4)
Una vez planteados los tres tipos de ecuaciones se pueden hacer las siguientes
sustituciones:
Derivando (Ec. 1.4) y sustituyendo en (Ec. 1.3) queda:
2
2. .
d y M E I
dx= (Ec. 1.5)
Derivando (Ec. 1.5) y sustituyendo en (Ec. 1.2) se tiene:
3
3
. .d y
Q E I dx
=
(Ec. 1.6)
Derivando (Ec. 1.6) y sustituyendo en (Ec. 1.1) se tiene:
y
x
θ dy
dx

5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 10/500
CAPITULO 1 ANALISIS ESTRUCTURAL
_____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -10-
4
4. .
d yq E I
dx= (Ec. 1.7)
La (Ec. 1.7) se designa habitualmente “ecuación diferencial de la elástica”. Resulta
conveniente destacar que la ecuación de la elástica es una ecuación de equilibrio donde la
incógnita que es el desplazamiento “y” se expresa como función de la carga “ q ”.
Asimismo, se debe notar que no es lo mismo resolver (Ec. 1.7) que (Ec. 1.1). La ecuación
(Ec. 1.7) no puede resolver el equilibrio sin considerar la deformación mientras que (Ec. 1.1) es
sólo una de las ecuaciones diferenciales de la viga.
Debe tenerse presente que al utilizar (Ec. 1.7) da lo mismo que la viga sea isostática o
hiperestática porque este planteo es equivalente a estar resolviendo el problema por el Método de
Rigidez (nota: el Método de Rigidez, también llamado Método de los Desplazamientos se
estudia en detalle más adelante)
Ejemplo:
Figura 1.7
Solución Homogénea:
2 3
0 0 1 2 3. . .Y C C x C x C x= + + +
Solución Particular:
Se propone una solución tal que derivando cuatro veces dé una constante.
4. p p
Y C x=
Resulta fácil obtener de la ecuación (Ec. 1.7) la relación entre pC y q :
24. . p
qC
E I =
2 3 4
0 0 1 2 3. . . .24. .
p
qY Y Y C C x C x C x x
E I = + = + + + +
Para calcular las cuatro constantes es necesario aplicar las cuatro condiciones de borde:
l
A
B
x
q cte=
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 11/500
CAPITULO 1 ANALISIS ESTRUCTURAL
_____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -11-
En A:
(0) 0Y =
(0) (0) 0dY
dxφ = =
En B:
( ) 0Y l =
2
2( ) ( ) 0
.
d Y M l l
dx E I = =
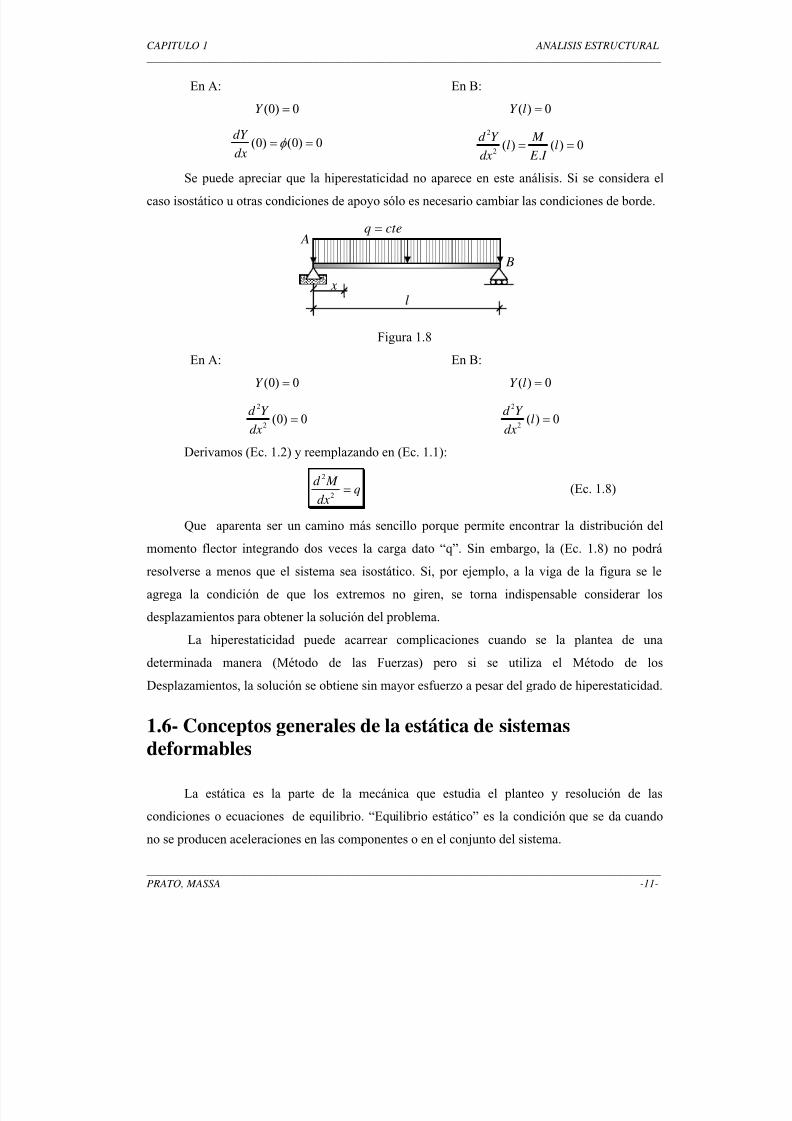
Se puede apreciar que la hiperestaticidad no aparece en este análisis. Si se considera el
caso isostático u otras condiciones de apoyo sólo es necesario cambiar las condiciones de borde.
Figura 1.8
En A:
(0) 0Y =
2
2(0) 0
d Y
dx=
En B:
( ) 0Y l =
2
2( ) 0
d Y l
dx=
Derivamos (Ec. 1.2) y reemplazando en (Ec. 1.1):
2
2
d M qdx = (Ec. 1.8)
Que aparenta ser un camino más sencillo porque permite encontrar la distribución del
momento flector integrando dos veces la carga dato “q”. Sin embargo, la (Ec. 1.8) no podrá
resolverse a menos que el sistema sea isostático. Si, por ejemplo, a la viga de la figura se le
agrega la condición de que los extremos no giren, se torna indispensable considerar los
desplazamientos para obtener la solución del problema.
La hiperestaticidad puede acarrear complicaciones cuando se la plantea de una
determinada manera (Método de las Fuerzas) pero si se utiliza el Método de los
Desplazamientos, la solución se obtiene sin mayor esfuerzo a pesar del grado de hiperestaticidad.
1.6- Conceptos generales de la estática de sistemasdeformables
La estática es la parte de la mecánica que estudia el planteo y resolución de las
condiciones o ecuaciones de equilibrio. “Equilibrio estático” es la condición que se da cuando
no se producen aceleraciones en las componentes o en el conjunto del sistema.
l
A
B
x
q cte=
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 12/500
CAPITULO 1 ANALISIS ESTRUCTURAL
_____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -12-
Considérese en primer lugar configuraciones estructurales que en sus condiciones de
servicio sufren deformaciones “pequeñas”. La “pequeñez” de las deformaciones será precisada
cuantitativamente más adelante; por el momento será suficiente con aclarar que la forma de la
estructura en su conjunto o algunas de sus componentes no cambia apreciablemente de forma al
actuar las cargas exteriores.
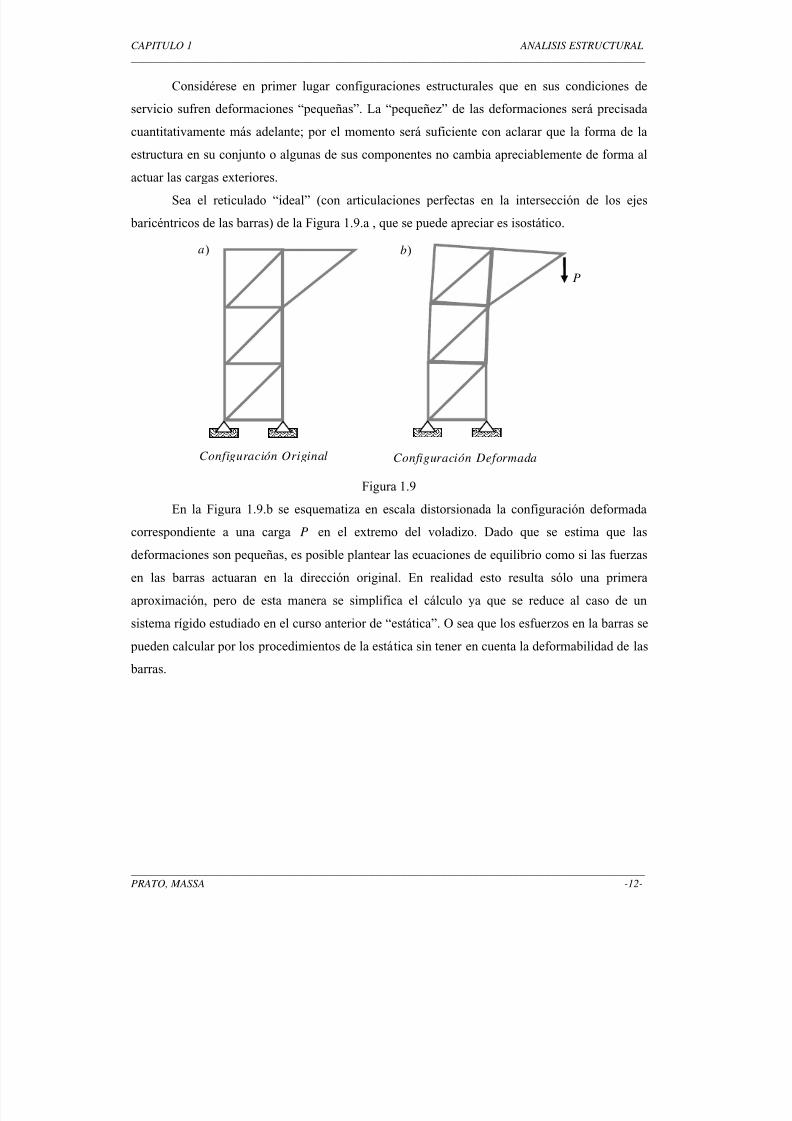
Sea el reticulado “ideal” (con articulaciones perfectas en la intersección de los ejes
baricéntricos de las barras) de la Figura 1.9.a , que se puede apreciar es isostático.
Figura 1.9En la Figura 1.9.b se esquematiza en escala distorsionada la configuración deformada
correspondiente a una carga P en el extremo del voladizo. Dado que se estima que las
deformaciones son pequeñas, es posible plantear las ecuaciones de equilibrio como si las fuerzas
en las barras actuaran en la dirección original. En realidad esto resulta sólo una primera
aproximación, pero de esta manera se simplifica el cálculo ya que se reduce al caso de un
sistema rígido estudiado en el curso anterior de “estática”. O sea que los esfuerzos en la barras se
pueden calcular por los procedimientos de la estática sin tener en cuenta la deformabilidad de las
barras.
Configuración Original
P
Configuración Deformada
)a )b
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 13/500
CAPITULO 1 ANALISIS ESTRUCTURAL
_____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -13-
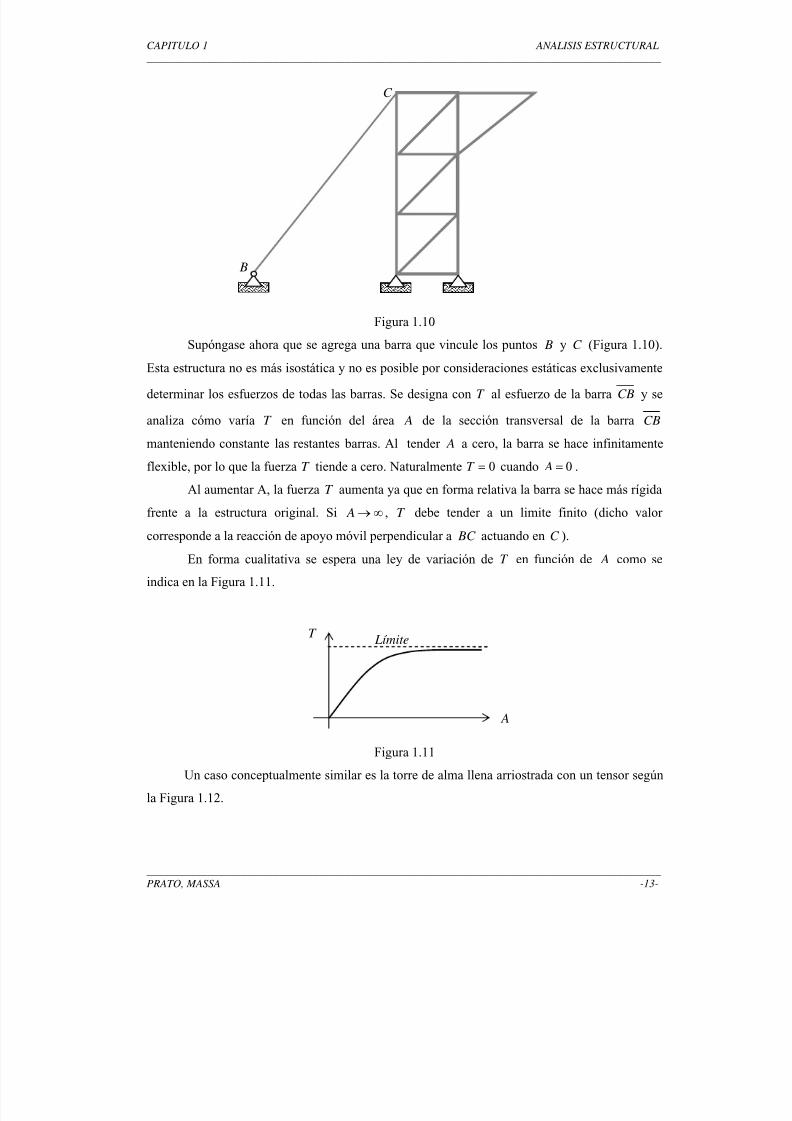
Figura 1.10Supóngase ahora que se agrega una barra que vincule los puntos B y C (Figura 1.10).
Esta estructura no es más isostática y no es posible por consideraciones estáticas exclusivamente
determinar los esfuerzos de todas las barras. Se designa con T al esfuerzo de la barra CB y se
analiza cómo varía T en función del área A de la sección transversal de la barra CB
manteniendo constante las restantes barras. Al tender A a cero, la barra se hace infinitamente
flexible, por lo que la fuerza T tiende a cero. Naturalmente 0T = cuando 0 A = .
Al aumentar A, la fuerza T aumenta ya que en forma relativa la barra se hace más rígida
frente a la estructura original. Si A → ∞ , T debe tender a un limite finito (dicho valor
corresponde a la reacción de apoyo móvil perpendicular a BC actuando en C ).
En forma cualitativa se espera una ley de variación de T en función de A como se
indica en la Figura 1.11.
Figura 1.11
Un caso conceptualmente similar es la torre de alma llena arriostrada con un tensor según
la Figura 1.12.
T
A
Límite
C
B
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 14/500
CAPITULO 1 ANALISIS ESTRUCTURAL
_____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -14-
Figura 1.12
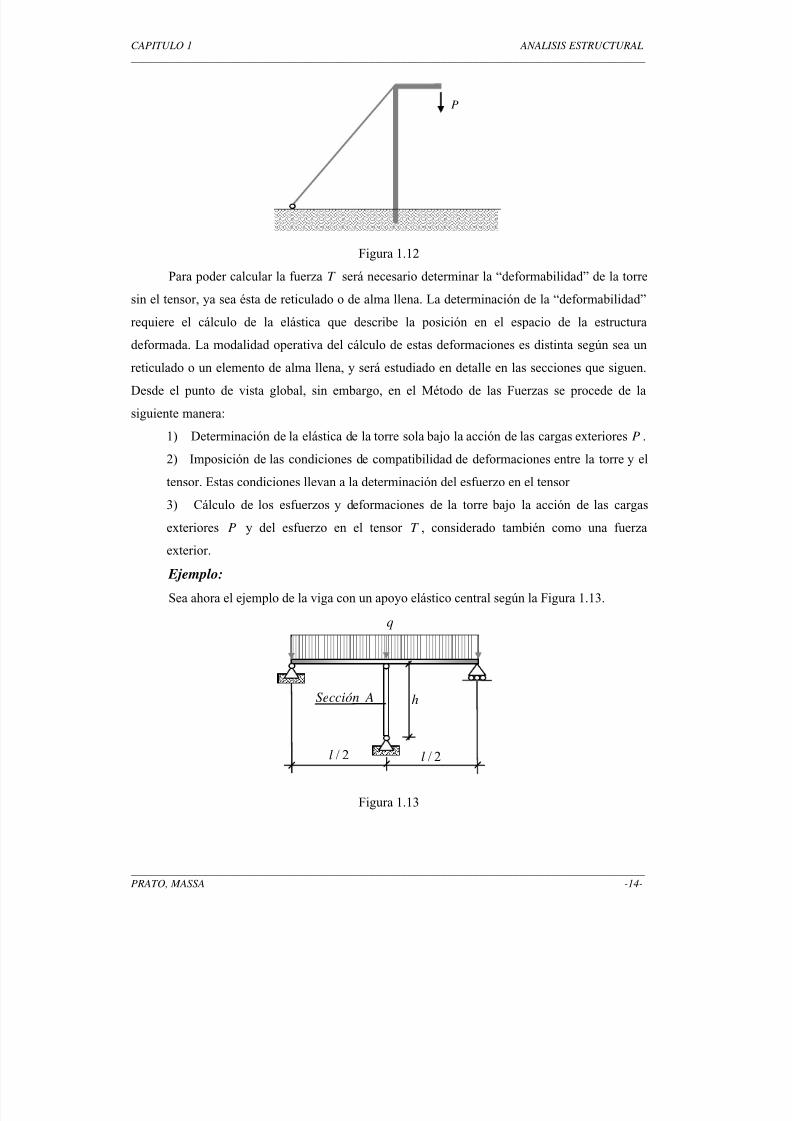
Para poder calcular la fuerza T será necesario determinar la “deformabilidad” de la torre
sin el tensor, ya sea ésta de reticulado o de alma llena. La determinación de la “deformabilidad”
requiere el cálculo de la elástica que describe la posición en el espacio de la estructuradeformada. La modalidad operativa del cálculo de estas deformaciones es distinta según sea un
reticulado o un elemento de alma llena, y será estudiado en detalle en las secciones que siguen.
Desde el punto de vista global, sin embargo, en el Método de las Fuerzas se procede de la
siguiente manera:
1) Determinación de la elástica de la torre sola bajo la acción de las cargas exteriores P .
2) Imposición de las condiciones de compatibilidad de deformaciones entre la torre y el
tensor. Estas condiciones llevan a la determinación del esfuerzo en el tensor
3) Cálculo de los esfuerzos y deformaciones de la torre bajo la acción de las cargas
exteriores P y del esfuerzo en el tensor T , considerado también como una fuerza
exterior.
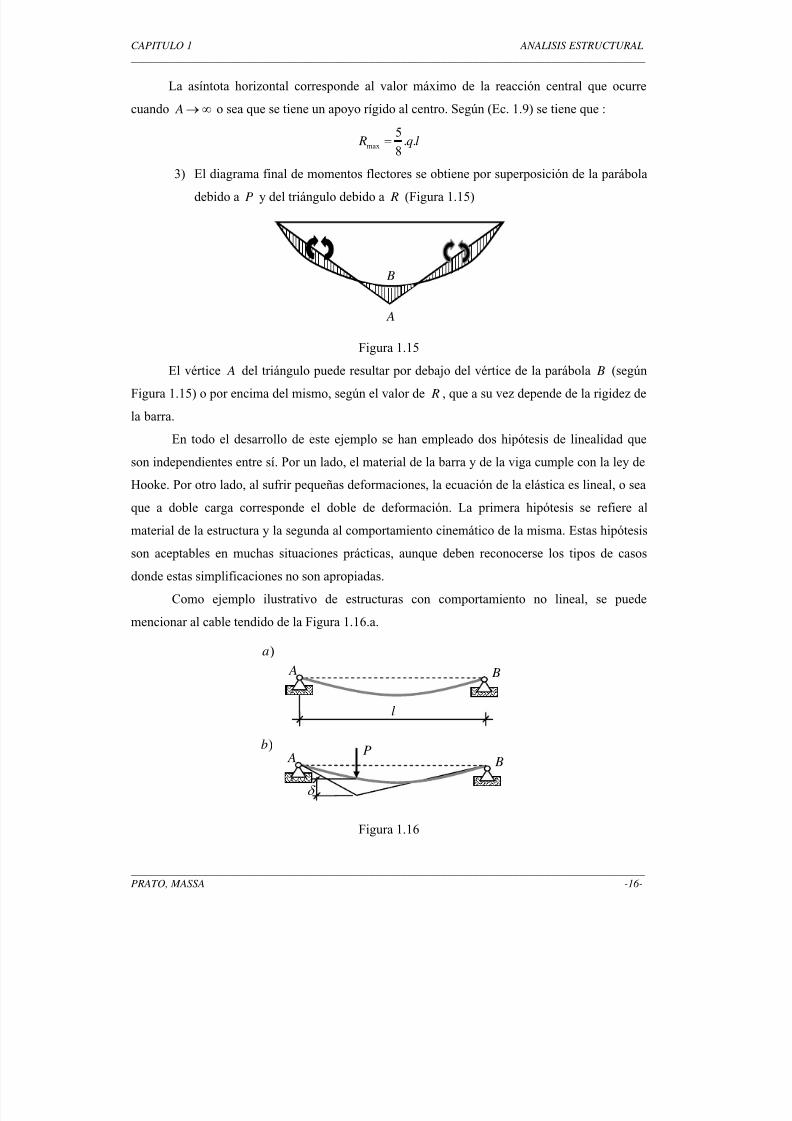
Ejemplo:
Sea ahora el ejemplo de la viga con un apoyo elástico central según la Figura 1.13.
Figura 1.13
/ 2l
q
/ 2l
hSección A
P

5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 15/500
CAPITULO 1 ANALISIS ESTRUCTURAL
_____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -15-
Interesa conocer el diagrama de momentos flectores de la viga y el esfuerzo axial en la
barra de apoyo. Se supondrá que el módulo elástico de la viga y de la columna es E en ambas
componentes. De acuerdo a lo indicado antes, la determinación de la fuerza de reacción R que
se genera en la barra central requiere los siguientes pasos:
1) Determinar la elástica de la viga sola, o sea, simplemente apoyada en los extremos.
Por integración de la ecuación de la elástica se sabe que la flecha al centro 0δ es:
4
0
5 .
384 .
q l
E I δ =
2) Para establecer la condición de compatibilidad entre la viga y la barra debe
reconocerse que esta última genera una fuerza concentrada R . Para ello se calcula el
efecto que R− tiene sobre la barra y el que R+ tiene sobre la viga.
La viga bajo la acción de R , se deforma con una flecha central 1δ , según la ecuación de
la elástica dada por:
3
1
1 .
48 .
R l
E I δ = − (hacia arriba)
La barra bajo R− se deforma: 2
.
.
R h
A E δ =
La condición de compatibilidad establece que debe existir continuidad de desplazamiento
vertical en la unión de la viga y de la barra. Por eso:
0 1 2δ δ δ + = ∴4 35 . 1 . .
384 . 48 . .
q l R l R h
E I E I A E − =
4
3
5 .
384
48.
q l
I Rl h
I A
=
+ (Ec. 1.9)
Nótese que R es independiente de E , cuando E es uniforme para toda la estructura. Sise mantiene I constante, la ley de variación de R es función de A está dada por la (Ec. 1.9) y
tiene el aspecto indicado en la Figura 1.14.
Figura 1.14
R
A
max R
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 16/500
CAPITULO 1 ANALISIS ESTRUCTURAL
_____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -16-
La asíntota horizontal corresponde al valor máximo de la reacción central que ocurre
cuando A → ∞ o sea que se tiene un apoyo rígido al centro. Según (Ec. 1.9) se tiene que :
max
5. .
8 R q l=
3) El diagrama final de momentos flectores se obtiene por superposición de la parábola
debido a P y del triángulo debido a R (Figura 1.15)
Figura 1.15
El vértice A del triángulo puede resultar por debajo del vértice de la parábola B (según
Figura 1.15) o por encima del mismo, según el valor de R , que a su vez depende de la rigidez de
la barra.
En todo el desarrollo de este ejemplo se han empleado dos hipótesis de linealidad que
son independientes entre sí. Por un lado, el material de la barra y de la viga cumple con la ley de
Hooke. Por otro lado, al sufrir pequeñas deformaciones, la ecuación de la elástica es lineal, o seaque a doble carga corresponde el doble de deformación. La primera hipótesis se refiere al
material de la estructura y la segunda al comportamiento cinemático de la misma. Estas hipótesis
son aceptables en muchas situaciones prácticas, aunque deben reconocerse los tipos de casos
donde estas simplificaciones no son apropiadas.
Como ejemplo ilustrativo de estructuras con comportamiento no lineal, se puede
mencionar al cable tendido de la Figura 1.16.a.
Figura 1.16
)a
)b
l
B A
δ
P B A
A
B
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 17/500
CAPITULO 1 ANALISIS ESTRUCTURAL
_____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -17-
Su forma corresponde a la curva funicular del peso propio del cable y que pasa por puntos
de apoyo. Al aplicar una carga concentrada P el cable cambia apreciablemente de forma (Figura
1.16.b) y aún cuando sea de material linealmente elástico, el comportamiento de la estructura
será no lineal, es decir que la relación entre la flecha δ y la magnitud de la carga no es lineal,
por efectos cinemáticos. Se dice que la estructura posee “no linealidad geométrica”.
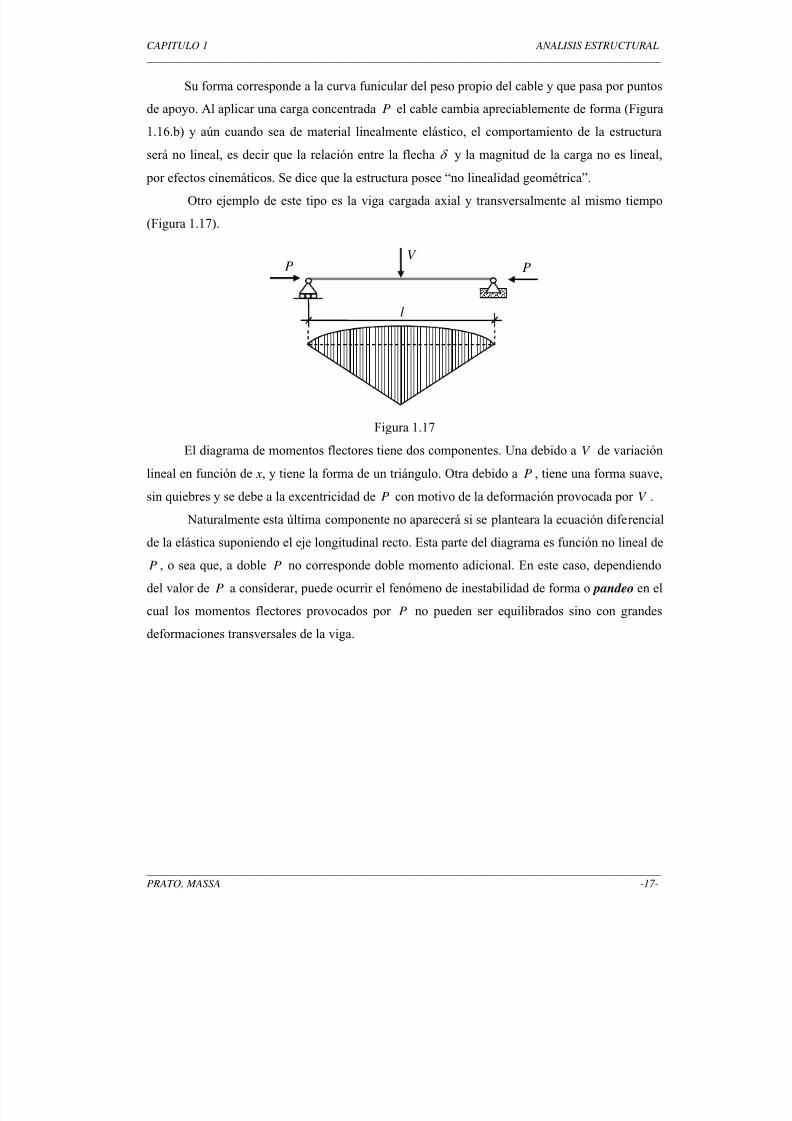
Otro ejemplo de este tipo es la viga cargada axial y transversalmente al mismo tiempo
(Figura 1.17).
Figura 1.17
El diagrama de momentos flectores tiene dos componentes. Una debido a V de variación
lineal en función de x, y tiene la forma de un triángulo. Otra debido a P , tiene una forma suave,
sin quiebres y se debe a la excentricidad de P con motivo de la deformación provocada por V .
Naturalmente esta última componente no aparecerá si se planteara la ecuación diferencial
de la elástica suponiendo el eje longitudinal recto. Esta parte del diagrama es función no lineal de
P , o sea que, a doble P no corresponde doble momento adicional. En este caso, dependiendo
del valor de P a considerar, puede ocurrir el fenómeno de inestabilidad de forma o pandeo en el
cual los momentos flectores provocados por P no pueden ser equilibrados sino con grandes
deformaciones transversales de la viga.
l
PV
P
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 18/500
CAPITULO 1 ANALISIS ESTRUCTURAL
_____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -18-
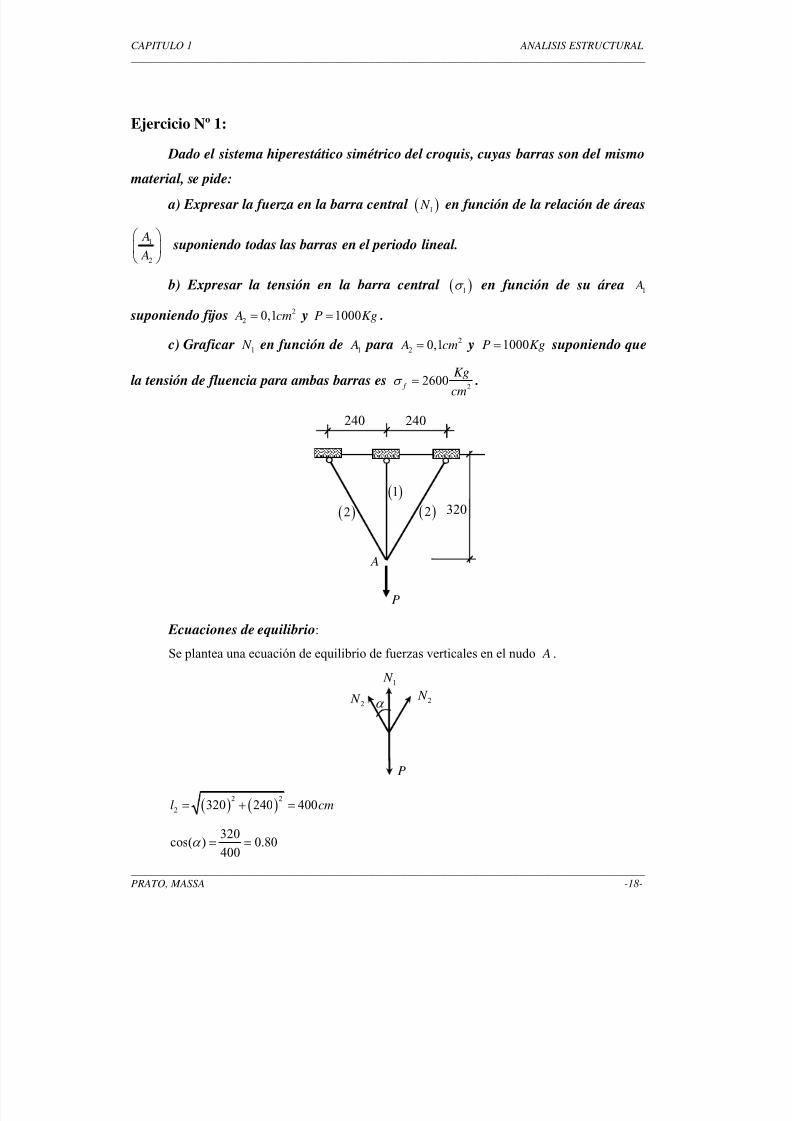
Ejercicio Nº 1:
Dado el sistema hiperestático simétrico del croquis, cuyas barras son del mismo
material, se pide:
a) Expresar la fuerza en la barra central ( )1 N en función de la relación de áreas
1
2
A
A
⎛ ⎞⎜ ⎟⎝ ⎠
suponiendo todas las barras en el periodo lineal.
b) Expresar la tensión en la barra central ( )1σ en función de su área
1 A
suponiendo fijos 2
20,1 A cm= y 1000P Kg= .
c) Graficar 1 N en función de 1 A para 2
2 0,1 A cm= y 1000P Kg= suponiendo que
la tensión de fluencia para ambas barras es2
2600 f
Kg
cmσ = .
Ecuaciones de equilibrio:
Se plantea una ecuación de equilibrio de fuerzas verticales en el nudo A .
( ) ( )2 2
2 320 240 400l cm= + =
320cos( ) 0.80
400α = =
2 N
P
2 N 1 N
α
240 240
320( )1
( )2
( )2
A
P
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 19/500
CAPITULO 1 ANALISIS ESTRUCTURAL
_____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -19-
1 2 20,80. 0,80. 0V F N N N P= + + − =∑
Ecuación de equilibrio:
1 21,60. N N P+ = (Ec. 1.10)
Ecuaciones de compatibilidad:
Se plantea una condición geométrica que establece que el desplazamiento de los extremos
A de las barras ( )2 y ( )1 son iguales.
Aceptando la hipótesis de pequeñas deformaciones se obtiene el alargamiento de las
barras ( )2 proyectando el desplazamiento A sobre la dirección original de las barras:
2 .cos( )l α ∆ = ∆ (Ec. 1.11)
Para barra ( )1 :
1l∆ = ∆ (Ec. 1.12)
Para barra ( )2 :
2 0,80.l∆ = ∆ (Ec. 1.13)
Ecuación de compatibilidad:
2 10,80.l l∆ = ∆ (Ec. 1.14)
Nótese que (Ec. 1.10) y (Ec. 1.14) son válidas aunque alguna barra entre en fluencia y
sólo se basan en la hipótesis de deformaciones pequeñas que permitió formular: 1º) La ecuación
de equilibrio (Ec. 1.10) en el sistema indeformado y 2º) la ecuación cinemática (Ec. 1.11).
Ecuaciones constitutivas:
Son las ecuaciones que definen el comportamiento del material, es decir la relación
E σ − . Se supondrá un material elasto-plástico con el siguiente diagrama:
Ecuaciones constitutivas:
.. ...... 2600
2600. ...
ii
ii
A E l
l N
A en luencia
σ ⎧
∆ <
⎪= ⎨⎪
(Ec. 1.15)
σ
ε
2600
α
22600 f
Kg
cmσ =
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 20/500
CAPITULO 1 ANALISIS ESTRUCTURAL
_____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -20-
(Ec. 1.16)
a) Suponiendo todas las barras en el período lineal se puede despejar 1l∆ y 2l∆ a partir
de (Ec. 1.15) y llevarlas a (Ec. 1.14). Luego despejando2 N en función de
1 N , que llevado a (Ec.
1.10) permite finalmente despejar 1 N .
1
1 2
1,0241
/
P N
A A
=+
(Ec. 1.17)
Estos resultados son válidos si 1 2600σ < y 2 2600σ < .
Nótese que para llegar a (Ec. 1.17) se deben utilizar necesariamente ecuaciones
constitutivas, ecuaciones de equilibrio y ecuaciones de compatibilidad.
b) Haciendo 2 0,10 A = en (Ec. 1.17) y dividiendo por 1 A , se tiene:
11
1
1
1
1000
0,1024. 1
N
A A
A
σ = =⎛ ⎞
+⎜ ⎟⎝ ⎠
( )1
1
1000
0,1024 Aσ =
+ (Ec. 1.18)
En (Ec. 1.18) se puede apreciar que si 1 0 A → , 1 2
100097650,1024
Kg
cmσ → ≈ lo que
demuestra que para valores pequeños de 1 A la barra central entra en fluencia. Haciendo
1 22600
Kg
cmσ = en (Ec. 1.18) permite despejar el área mínima para la cual no hay fluencia.
2
1
10002600
0,1024
Kg
A cm<
+ ∴ 2
10.28 A cm>
Por lo tanto la expresión (Ec. 1.17) debe limitarse:
(Ec. 1.19)1
1
1
1
2600..................0 0.28
1000..... 0.28
0,1024
A
A A
σ
≤ ≤⎧⎪
= ⎨≥⎪ +⎩
(Ec. 1.20)
c) Según (Ec. 1.19) la fuerza que toma la barra central es muy pequeña si el área 1 A
tiende a cero o es muy pequeña ( 1 12600. N A= cuando 2
1 0.28 A cm< ) y en tal caso debe
considerarse la posibilidad de que las barras ( )2 también entren en fluencia.
La máxima fuerza 2 N resulta:
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 21/500
CAPITULO 1 ANALISIS ESTRUCTURAL
_____________________________________________________________________________________________
_____________________________________________________________________________________________
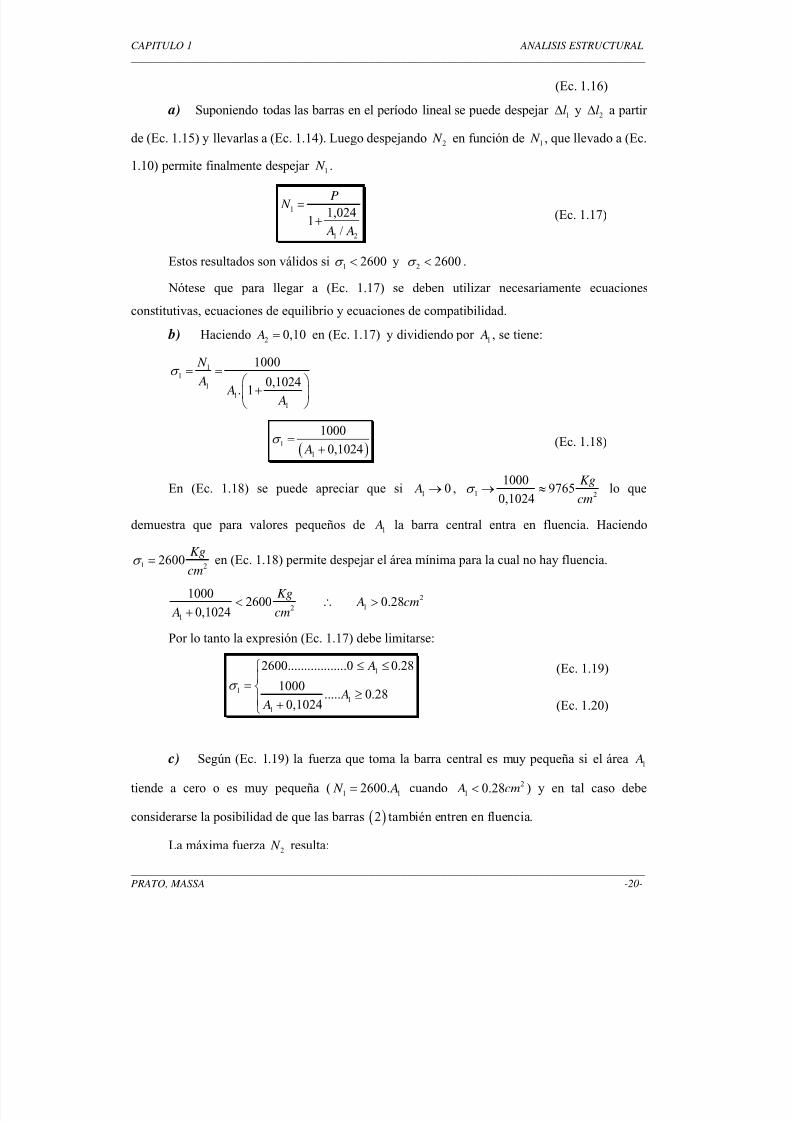
PRATO, MASSA -21-
( )2 max0,10.2600 260 N Kg= =
Valor que llevado a (Ec. 1.10):
( ) ( )1 2min max1,60. 1000 N N Kg+ =
De donde:
( )1 min584 N Kg=
Como se sabe que:
1 12600. N A=
( ) 2
1 min0.225 A cm= (Ec. 1.21)
1 A 0 0,10 0,225 0,25 0,282 0,50 1,00 2,00 10,00
1σ 2600 2600 2600 1660 907 476 99
1 N 584 650 734 830 907 951 990
2σ 2600 2188 1664 1062 581 304 63
2 N 260 219 166 106 58 30 6,30
( ) I
144424443
( ) II
144424443
( ) III
14444444244444443
( ) I
1000
( ) : Zona I No hay equilibrio
2
1 A cm⎡ ⎤⎣ ⎦
800
600
400
200
[ ]1 N Kg
0,20 0,40 0,60 0,80 1,00 1,20
0,225 0,282
( ) II ( ) III
( )(1) :
:(2):
Barra Fluencia Zona II
Barra Elástica
⎧⎪⎨⎪⎩
( ) : Zona III Todas las barras elásticas
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 22/500
CAPITULO 1 ANALISIS ESTRUCTURAL
_____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -22-
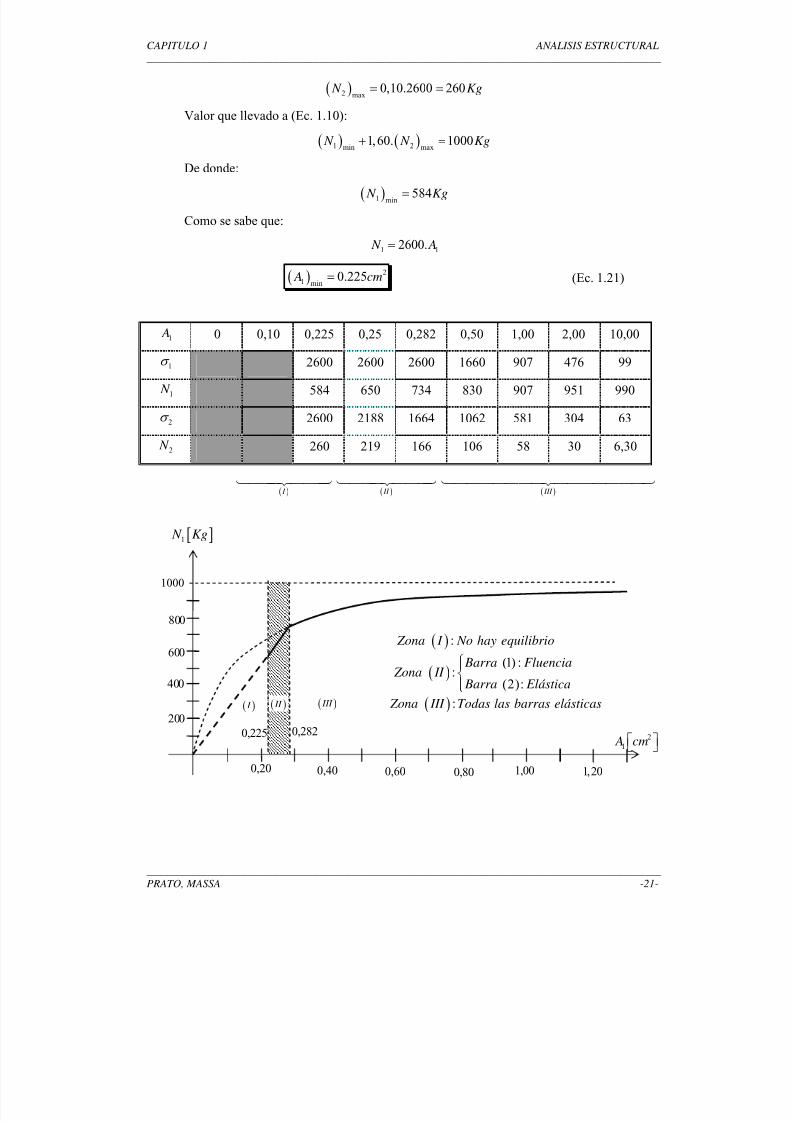
Ejercicio Nº 2:
Dado el sistema simétrico del ejercicio anterior cuyas barras tienen igual sección
2
1 2 0,10 A A cm= = y el mismo material 2
2600 f
Kg
cm
σ = . Se pide:
a) Determinar la máxima carga portanteu
P .
b) Determinar la carga que produce la primera fluencia.
c) Graficar la relación P − ∆ y calcular la rigidez de los distintos tramos.
d) Determinar si existe alguna relación entre las áreas 1 A y 2 A de modo que las
barras ( )2 y ( )1 entren simultáneamente en fluencia.
a) La carga última se obtiene cuando entran en fluencia todas las barras. La fuerza en
cada barra se obtiene a partir del área y la tensión de fluencia f σ .
12600.0,10 260 N Kg= =
2 2600.0,10 260 N Kg= =
Llevando a (Ec. 1.10):
(260) 1,60.(260)u
P+ =
676u
P Kg= (Ec. 1.22)
b) Haciendo 1
2
1 A
A= en (Ec. 1.17) resulta:
1 0,494.1 1, 024
P N P= =
+
(Ec. 1.23)
Valor que llevando a (Ec. 1.10):
σ
ε
2600
α
22600
f
Kg
cmσ =
62
2,10 10 Kg E xcm
=
240 240
320
( )1
( )2 ( )2
A
P
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 23/500
CAPITULO 1 ANALISIS ESTRUCTURAL
_____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -23-
2 0,3162. N P= (Ec. 1.24)
Como las áreas son iguales, la barra central tiene mayor tensión y es la primera en entrar
en fluencia.
11
1
4,94. 2600 4,94. f
N P P A
σ σ = = ⇒ = =
526,24 f
P Kg= (Ec. 1.25)
c) Durante el período lineal elástico el desplazamiento se puede obtener indistintamente
a partir de (Ec. 1.12) o (Ec. 1.13) calculando los alargamientos de las barras a partir de la ley de
Hooke (Ec. 1.15).
De (Ec. 1.12):
11 6 6
.320 (0, 494. ).320
0,10.2,10 10 0,10.2,10 10
N Pl
x x∆ = ∆ = =
0,000753.P∆ = (Ec. 1.26)
La (Ec. 1.26) es válida mientras las barras ( )2 y ( )1 se comportan linealmente. A partir
de la definición de rigidez K , en el período lineal:
.0,000753.
P PP K U K U P
= ∴ = =
1328Kg
K cm
= (Ec. 1.27)
Cuando la carga es mayor que f
P , (Ec. 1.12) y (Ec. 1.13) mantiene validez, pero 1l∆ no
puede calcularse en la hipótesis lineal (ley de Hooke). Utilizando la (Ec. 1.13), y la ley de Hooke
que sigue válida para las barras ( )2 (hasta que dichas barras entren también en fluencia y se
produzca el colapso del sistema):
2 226
.4000,00238.
0,80 0,80.(0,10.2,10 10 )
l N N
x
∆∆ = = =
2 N se calcula teniendo en cuenta que 1 1. 2600.0,10 260 f
N cte A Kgσ = = = = mientras
dura la fluencia. Empleando (Ec. 1.10) que mantiene validez a pesar de la fluencia, se tiene:
2 2
260(260) 1,60.
1,60
P N P N
−+ = ∴ =
2600,00238.
1,60
P −⎛ ⎞∆ = ⎜ ⎟
⎝ ⎠
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 24/500
CAPITULO 1 ANALISIS ESTRUCTURAL
_____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -24-
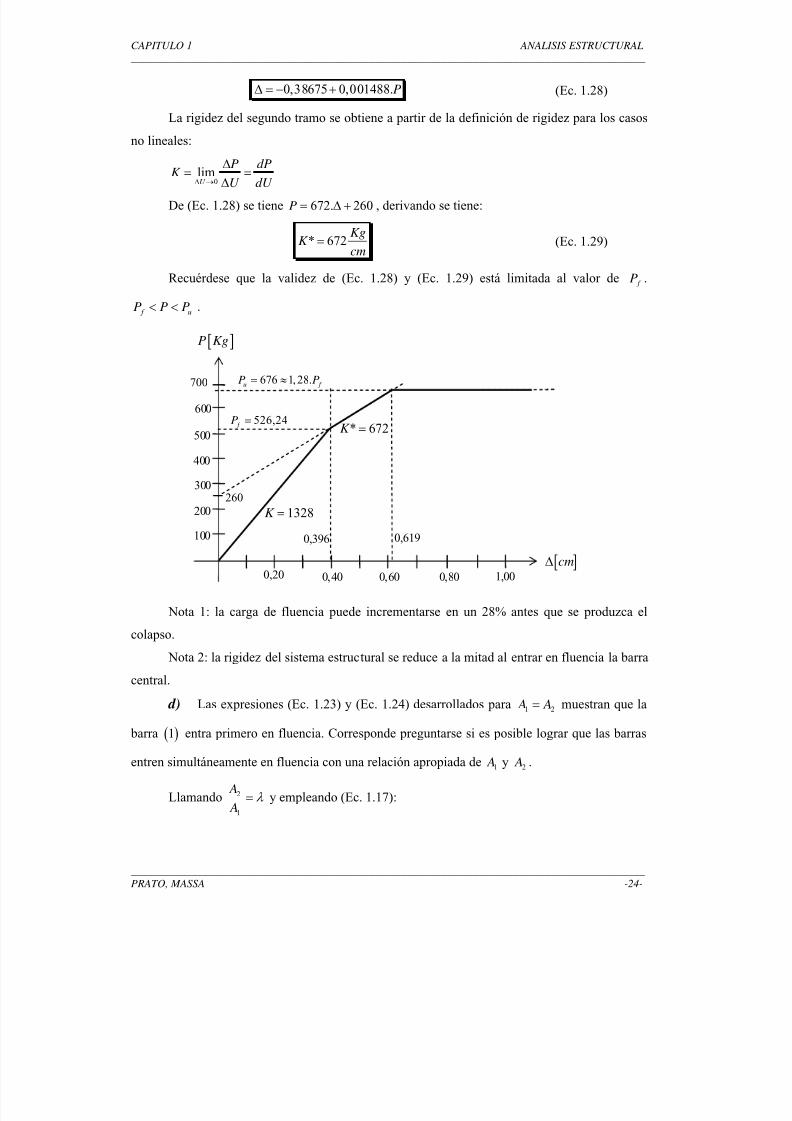
0,38675 0,001488.P∆ = − + (Ec. 1.28)
La rigidez del segundo tramo se obtiene a partir de la definición de rigidez para los casos
no lineales:
0limU
P dPK U dU ∆ →
∆= =∆
De (Ec. 1.28) se tiene 672. 260P = ∆ + , derivando se tiene:
* 672Kg
K cm
= (Ec. 1.29)
Recuérdese que la validez de (Ec. 1.28) y (Ec. 1.29) está limitada al valor de f P .
f uP P P< < .
Nota 1: la carga de fluencia puede incrementarse en un 28% antes que se produzca el
colapso.
Nota 2: la rigidez del sistema estructural se reduce a la mitad al entrar en fluencia la barra
central.
d) Las expresiones (Ec. 1.23) y (Ec. 1.24) desarrollados para1 2 A A= muestran que la
barra ( )1 entra primero en fluencia. Corresponde preguntarse si es posible lograr que las barras
entren simultáneamente en fluencia con una relación apropiada de 1 A y 2 A .
Llamando 2
1
A
Aλ = y empleando (Ec. 1.17):
676 1,28.u f P P= ≈
* 672K =
[ ]cm∆
600
500
400
200
[ ]P Kg
0,20 0,40 0,60 0,80
0,396 0,619
700
300
100
1,00
526,24 f
P =
260
1328K =
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 25/500
CAPITULO 1 ANALISIS ESTRUCTURAL
_____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -25-
11 1,024.
P N
λ =
+ (Ec. 1.30)
Llevando (Ec. 1.30) a (Ec. 1.10) permite despejar:
12
1,60
P N N
−
=
2
0,64.
1 1,024. N
λ
λ =
+ (Ec. 1.31)
Si se pretende que:
1 2 2 21 2
1 2 1 1
N N A N
A A A N σ σ = ∴ = ∴ =
0,64.λ λ ∴ =
¡¡¡ !!! No hay solución
Alternativa: Por la ley de Hooke, tenemos . E σ ε =
11 1
1 2
122 2
2
.320 320
0,64!!!0,80.
.320 400
l E
l
l E
l
ε σ σ
σ ε σ
⎫∆ ∆= = ∴ = ∆ ⎪
⎪=⎬
∆ ∆ ⎪= = ∴ = ∆⎪⎭
2 10,64.σ σ = !!!!
Conclusión:
Si todas las barras están en el periodo lineal, la tensión en la barra ( )1 es mayor
que en las barras ( )2 independientemente del valor de las áreas.

5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 26/500
CAPITULO 1 ANALISIS ESTRUCTURAL
_____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -26-
Ejercicio Nº 3
Determinar el diagrama que relaciona el valor de la carga P y el
desplazamiento de su punto de aplicación en la viga de la Fig.(c). Se supone que el
material se comporta elasto-plásticamente según la Fig.(a) y que la sección tiene un
diagrama momento-curvatura indicado en la Fig.(b).
Este ejemplo supone que al entrar en fluencia las fibras externas, entra en fluencia toda la
sección, vale decir que el modulo plástico de la sección p
W es igual al modulo elástico.
( )3512
80,63 / 2 6,35
p
I W W cm
h= = =
Para perfiles doble T la relación 1,10 p
W
W ≈ . Tomando el factor de forma igual a la unidad
se busca simplificar el cálculo y lo que es más importante, poner de manifiesto que las
estructuras hiperestáticas pueden, en general, desarrollar formas alternativas de equilibrar la
carga después de entrar en fluencia.
Para determinar la carga de fluencia f
P debemos determinar donde ocurre el máximo M
en el periodo elástico y su valor en función de P . Siendo este un problema hiperestático no es
posible determinar directamente el diagrama de M (momentos flectores).
150
P
150 300
A B
C
4512Sección doble T I cm=
12,70
.( )Fig c
σ
ε
2600 22600
f
Kg
cmσ =
.( )Fig a
M
K
f p M M =
.( )Fig b

5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 27/500
CAPITULO 1 ANALISIS ESTRUCTURAL
_____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -27-
Solución del problema hiperestático:
De las tres reacciones verticales sólo se pueden calcular dos empleando ecuaciones de
equilibrio estático. Nótese que si se conociera por ejemplo la reacción B
R la determinación de
las restantes reacciones y los esfuerzos internos resulta un simple problema de estática.
Durante el periodo elástico vale el principio de superposición y por lo tanto el efecto
simultaneo de P y B
R es igual a la suma de los efectos por separado.
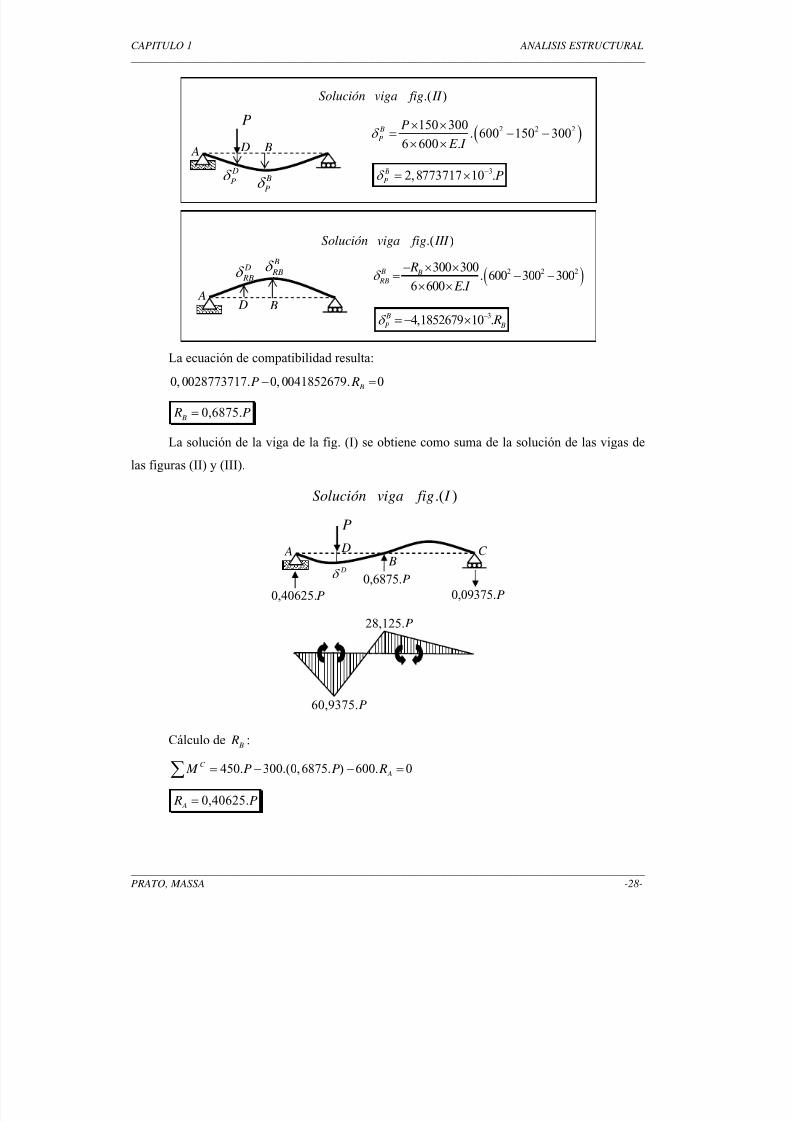
Las vigas isostáticas de las figuras (II) y (III), pueden resolverse totalmente llegando a la
ecuación de la elástica. Mientras que la viga hiperestática de la fig. (I) debe cumplir una
condición cinemática extra, además de las ecuaciones de equilibrio estático. Dicha condición
establece que el desplazamiento del punto B debe ser nulo.
Descomponiendo dicho desplazamiento como la suma de los desplazamientos de las vigas
de las figuras (II) y (III), se obtiene la llamada “Ecuación de compatibilidad”:
0 B B
P RBδ δ + = (Ec. 1.32)
Nótese que esta ecuación no es una ecuación de equilibrio y que a partir de ella se puede
determinar B
R .
Para hallar los desplazamientos se recurre al resultado conocido de la elástica:
1δ
P
A B
a b
2δ x z
( )2 2 21
. . .( ) . . .6. . . 6. . .
AP a b l b P b x l b x x a
l E I l E I θ δ += = − − <
( )2 2 2
2
. . .( ) . ..
6. . . 6. . . B
P a b l a P a zl a z z b
l E I l E I θ δ
+= = − − <
TABLA
B R
= +P
A
.( ) fig II
BC
B
Pδ
P
A C
.( ) fig III
B
RBδ
A C
B R
.( ) fig I
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 28/500
CAPITULO 1 ANALISIS ESTRUCTURAL
_____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -28-
La ecuación de compatibilidad resulta:
0, 0028773717. 0, 0041852679. 0 B
P R− =
0,6875. B
R P=
La solución de la viga de la fig. (I) se obtiene como suma de la solución de las vigas de
las figuras (II) y (III).
Cálculo de B
R :
450. 300.(0,6875. ) 600. 0C
A M P P R= − − =∑
0,40625. A R P=
0,6875.P
P
A B
C
.( )Solución viga fig I
0,40625.P 0,09375.P
D
Dδ
60,9375.P
28,125.P
D
RBδ
A B
B
RBδ
D
.( )Solución viga fig III
3
4,1852679 10 .
B
P B Rδ
−= − ×
( )2 2 2300 300. 600 300 300
6 600 .
B B RB
R
E I δ
− × ×= − −
× ×
.( )Solución viga fig II
32,8773717 10 . B
P Pδ −= × D
Pδ
P
A B
B
Pδ
D( )2 2 2150 300
. 600 150 3006 600 .
B
P
P
E I δ
× ×= − −
× ×
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 29/500
CAPITULO 1 ANALISIS ESTRUCTURAL
_____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -29-
Cálculo de Dδ :
( )2 2 2150 450. 600 150 450
6 600 .
D
P
P
E I δ
× ×= − −
× ×
( )2 2 2300 150
. 600 800 1506 600 .
D B RB
R
E I δ × ×
= − −× ×
D D D
P RBδ δ δ = +
0,0003760202. D
Pδ =
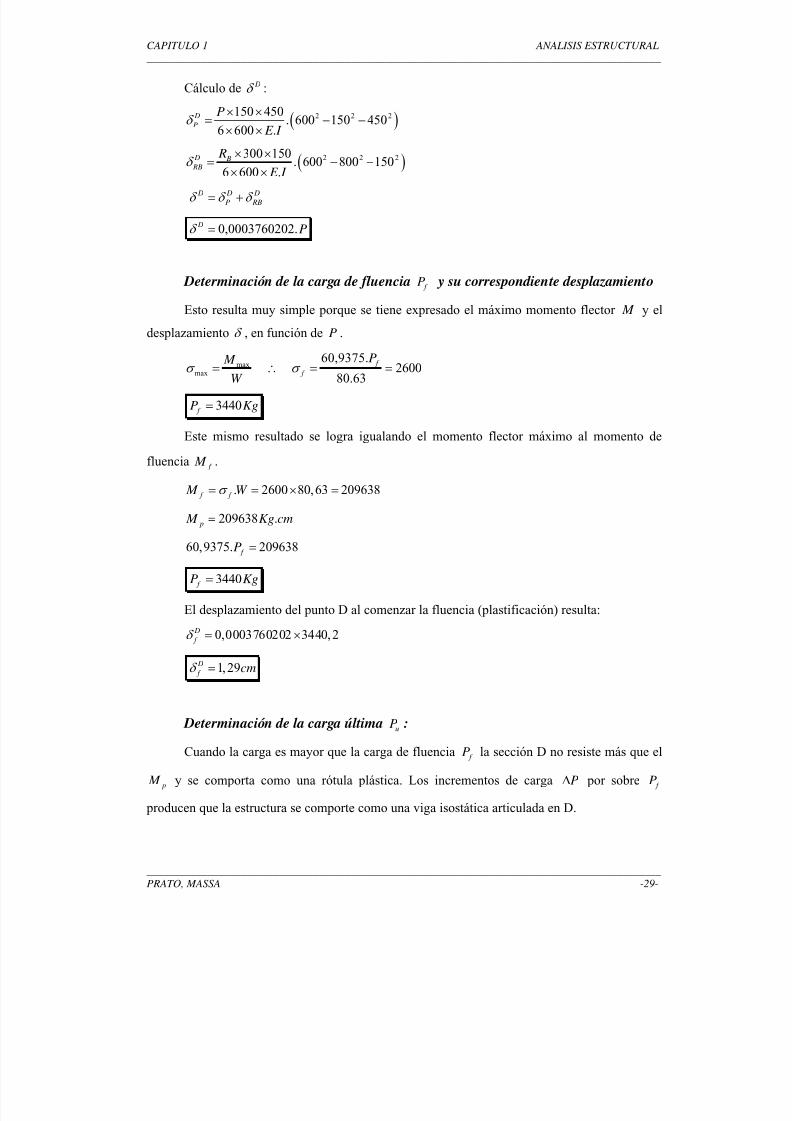
Determinación de la carga de fluencia f P y su correspondiente desplazamiento
Esto resulta muy simple porque se tiene expresado el máximo momento flector M y el
desplazamiento δ , en función de P .
maxmax
60,9375.2600
80.63
f
f
P M
W σ σ = ∴ = =
3440 f P Kg=
Este mismo resultado se logra igualando el momento flector máximo al momento de
fluencia f M .
. 2600 80,63 209638 f f M W σ = = × =
209638 . p M Kg cm=
60,9375. 209638 f
P =
3440 f P Kg=
El desplazamiento del punto D al comenzar la fluencia (plastificación) resulta:
0,0003760202 3440,2 D
f δ = ×
1,29 D
f cmδ =
Determinación de la carga últimauP :
Cuando la carga es mayor que la carga de fluencia f P la sección D no resiste más que el
p M y se comporta como una rótula plástica. Los incrementos de carga P∆ por sobre f P
producen que la estructura se comporte como una viga isostática articulada en D.
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 30/500
CAPITULO 1 ANALISIS ESTRUCTURAL
_____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -30-
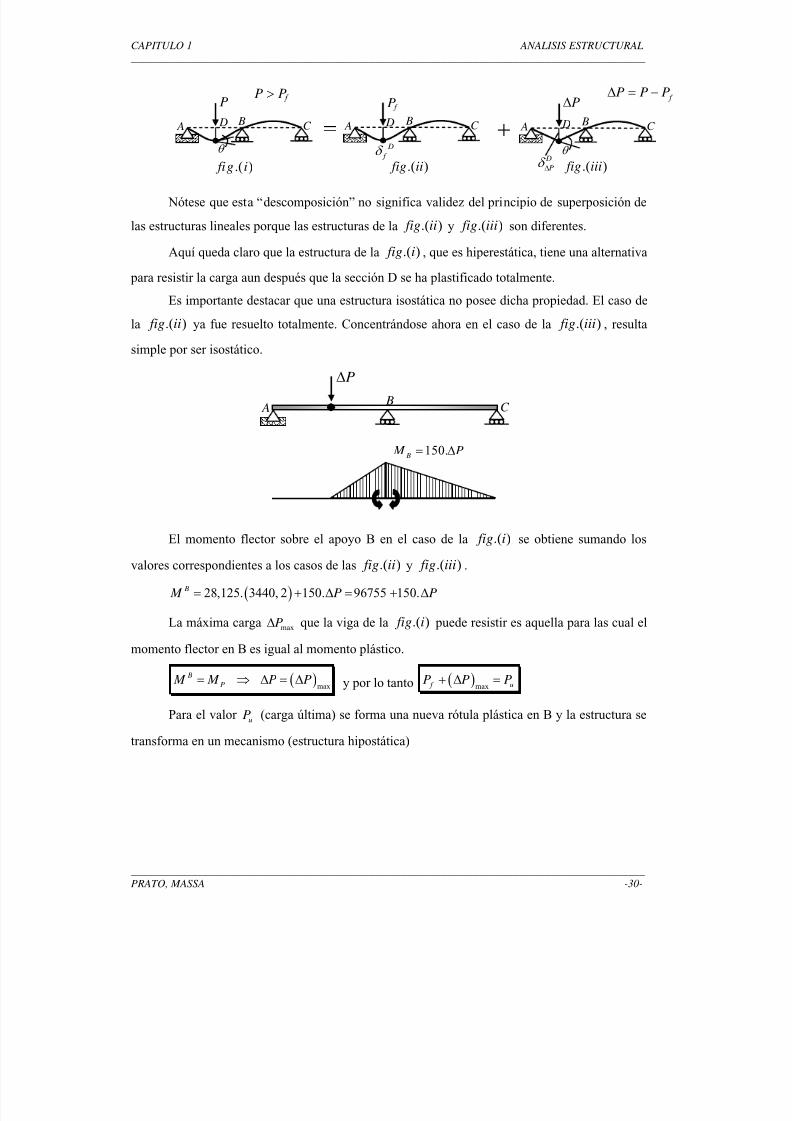
Nótese que esta “descomposición” no significa validez del principio de superposición de
las estructuras lineales porque las estructuras de la .( ) fig ii y .( ) fig iii son diferentes.
Aquí queda claro que la estructura de la .( ) fig i , que es hiperestática, tiene una alternativa
para resistir la carga aun después que la sección D se ha plastificado totalmente.
Es importante destacar que una estructura isostática no posee dicha propiedad. El caso de
la .( ) fig ii ya fue resuelto totalmente. Concentrándose ahora en el caso de la .( ) fig iii , resulta
simple por ser isostático.
El momento flector sobre el apoyo B en el caso de la .( ) fig i se obtiene sumando los
valores correspondientes a los casos de las .( ) fig ii y .( ) fig iii .
( )28,125. 3440, 2 150. 96755 150. B M P P= + ∆ = + ∆
La máxima carga maxP∆ que la viga de la .( ) fig i puede resistir es aquella para las cual el
momento flector en B es igual al momento plástico.
( )max
B
P M M P P= ⇒ ∆ = ∆ y por lo tanto ( )max f u
P P P+ ∆ =
Para el valoruP (carga última) se forma una nueva rótula plástica en B y la estructura se
transforma en un mecanismo (estructura hipostática)
P∆
A C B
150. B
M P= ∆
= +P
A B C
D
f δ θ
P P>P
A B C
D
Pδ ∆
P∆
A B C
θ
f P P P∆ = −
.( ) fig i .( ) fig ii .( ) fig iii
D D D
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 31/500
CAPITULO 1 ANALISIS ESTRUCTURAL
_____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -31-
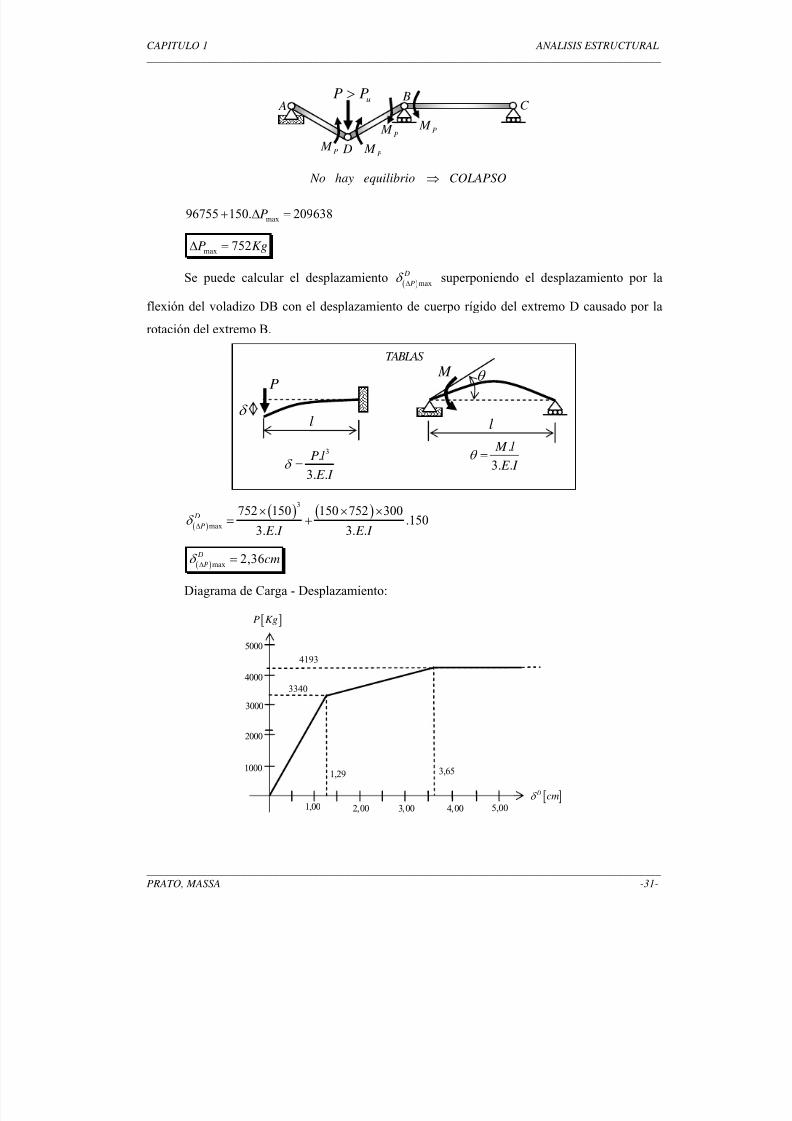
max96755 150. 209638P+ ∆ =
max 752P Kg∆ =
Se puede calcular el desplazamiento ( )max
D
Pδ
∆superponiendo el desplazamiento por la
flexión del voladizo DB con el desplazamiento de cuerpo rígido del extremo D causado por la
rotación del extremo B.
( )
( ) ( )3
max
752 150 150 752 300.150
3. . 3. .
D
P E I E I
δ ∆
× × ×= +
( )max2,36 D
Pcmδ
∆ =
Diagrama de Carga - Desplazamiento:
4193
[ ] Dcmδ
5000
4000
2000
[ ]P Kg
1,00 2,00 3,00 4,00
1,29 3,65
3000
1000
5,00
3340
δ
P
l
3.
3. .
P l
E I δ =
TABLAS
.
3. .
M l
E I θ =
M θ
l
uP P> A C
B
P M
D
P M
P M P
M
No hay equilibrio COLAPSO⇒
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 32/500
CAPITULO 1 ANALISIS ESTRUCTURAL
_____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -32-
( )max
3440 752u f
P P P= + ∆ = +
4193u
P Kg=
( )max
1, 29 2, 36 D D D
Pu Pf P
δ δ δ ∆
= + = +
3.65 D
Pu cmδ =
Nótese que durante el primer tramo elástico la rigidez resulta:2
3440,22660
1,2936
Kg
cm=
Al formarse la rotula plástica en D se reduce a:2
752,54318
2,3621
Kg
cm=
Mientras que al formarse la segunda rotula plástica la rigidez se hace cero.
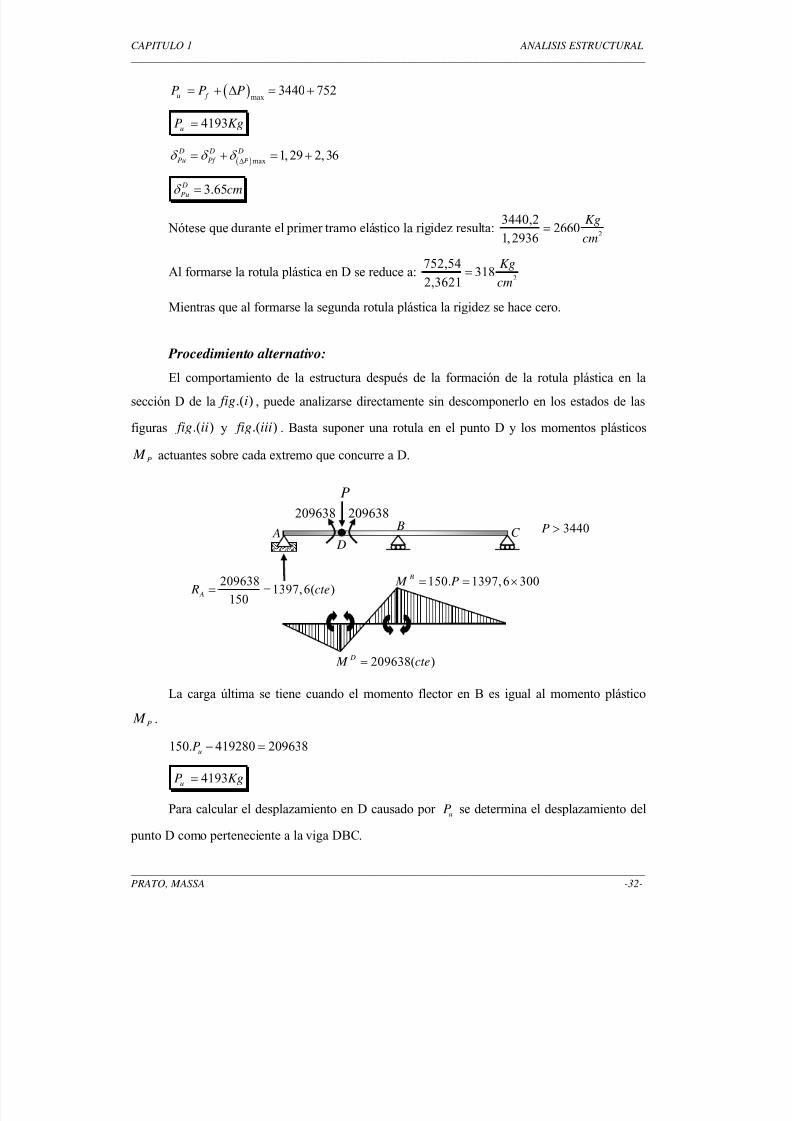
Procedimiento alternativo:
El comportamiento de la estructura después de la formación de la rotula plástica en la
sección D de la .( ) fig i , puede analizarse directamente sin descomponerlo en los estados de las
figuras .( ) fig ii y .( ) fig iii . Basta suponer una rotula en el punto D y los momentos plásticos
P M actuantes sobre cada extremo que concurre a D.
La carga última se tiene cuando el momento flector en B es igual al momento plástico
P M .
150. 419280 209638uP − =
4193u
P Kg=
Para calcular el desplazamiento en D causado poru
P se determina el desplazamiento del
punto D como perteneciente a la viga DBC.
P
A C B
150. 1397,6 300 B
M P= = ×
209638209638
D
3440P >
2096381397,6( )
150 A R cte= =
209638( ) D M cte=
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 33/500
CAPITULO 1 ANALISIS ESTRUCTURAL
_____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -33-
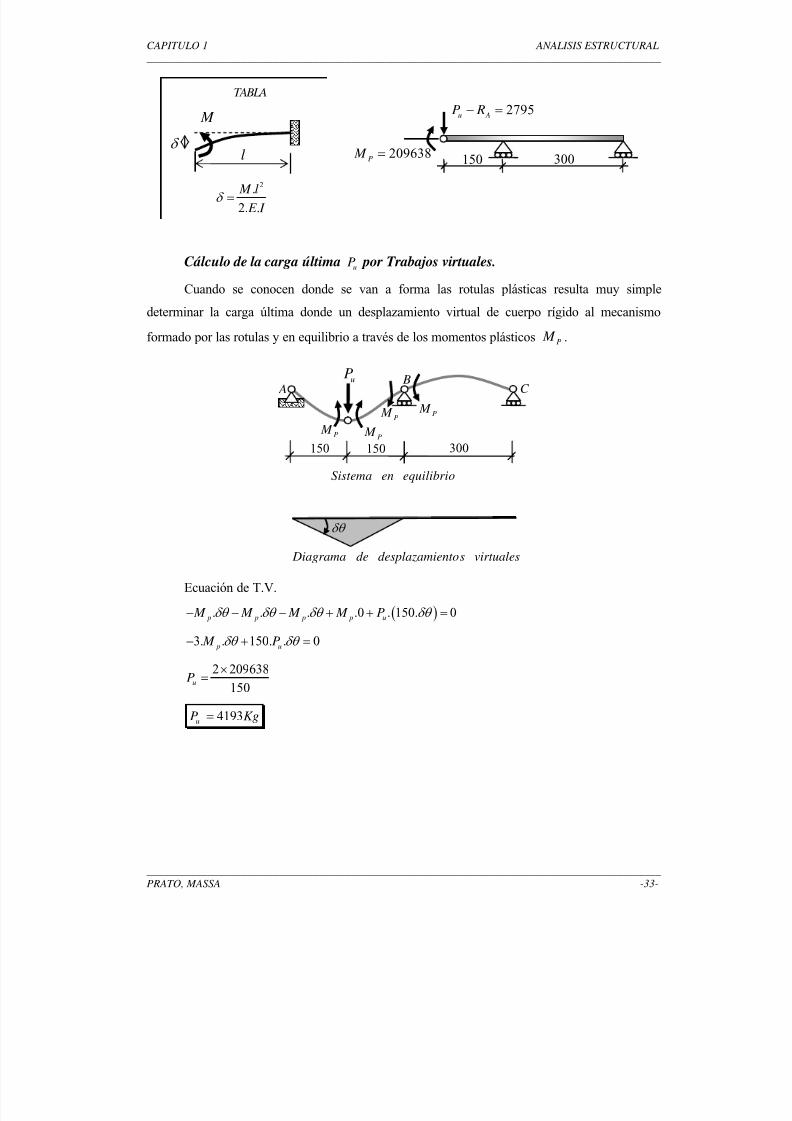
Cálculo de la carga últimauP por Trabajos virtuales.
Cuando se conocen donde se van a forma las rotulas plásticas resulta muy simple
determinar la carga última donde un desplazamiento virtual de cuerpo rígido al mecanismo
formado por las rotulas y en equilibrio a través de los momentos plásticos P M .
Ecuación de T.V.
( ). . . .0 . 150. 0 p p p p u M M M M Pδθ δθ δθ δθ − − − + + =
3. . 150. . 0 p u
M Pδθ δθ − + =
2 209638
150uP
×=
4193uP Kg=
uP A C
B
P M
P M
P M P
M
Sistema en equilibrio
150 150 300
δθ
Diagrama de desplazamientos virtuales
150
2795u A
P R− =
300209638
P M =
δ
M
l
2.
2. .
M l
E I δ =
TABLA
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 34/500
CAPITULO 2 ENERGIA INTERNA DE DEFORMACION
_____________________________________________________________________________________________
PRATO, MASSA
Capítulo 2 Energía interna de deformación
2.1- Energía interna de deformación en sólidos elásticos
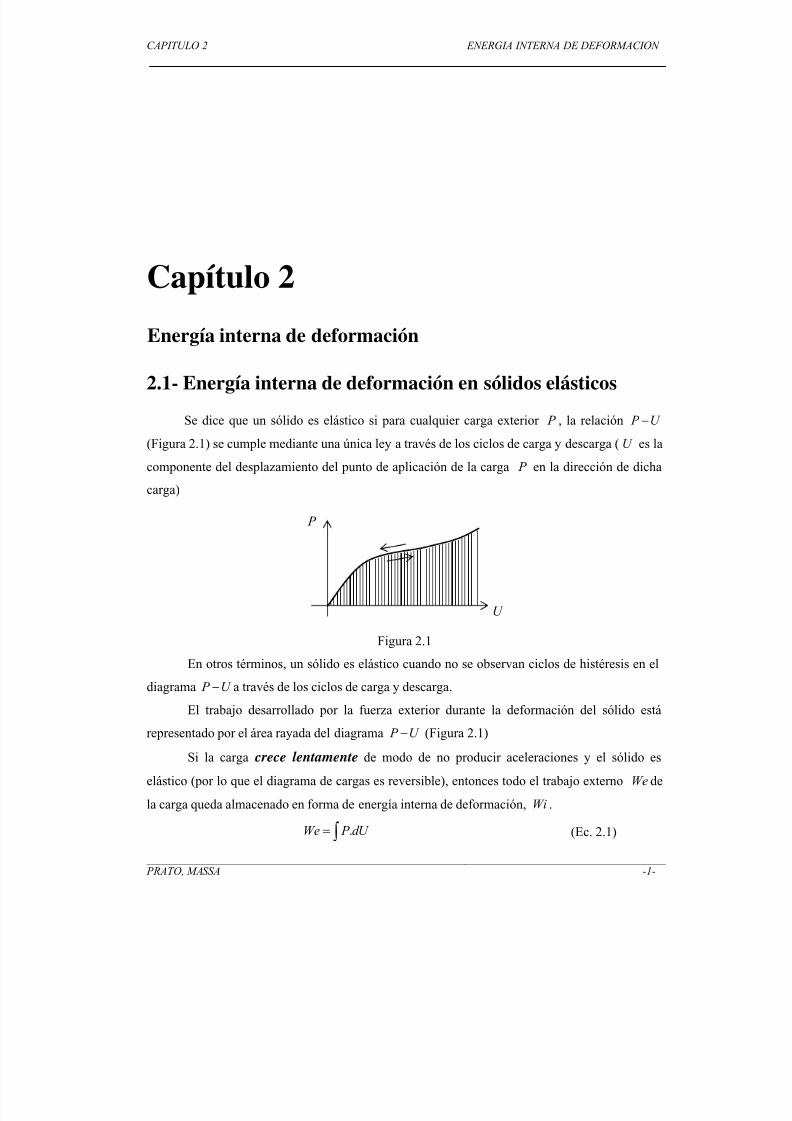
Se dice que un sólido es elástico si para cualquier carga exterior P , la relación P U −
(Figura 2.1) se cumple mediante una única ley a través de los ciclos de carga y descarga (U es la
componente del desplazamiento del punto de aplicación de la carga P en la dirección de dicha
carga)
Figura 2.1
En otros términos, un sólido es elástico cuando no se observan ciclos de histéresis en el
diagrama P U − a través de los ciclos de carga y descarga.
El trabajo desarrollado por la fuerza exterior durante la deformación del sólido está
representado por el área rayada del diagrama P U − (Figura 2.1)
Si la carga crece lentamente de modo de no producir aceleraciones y el sólido es
elástico (por lo que el diagrama de cargas es reversible), entonces todo el trabajo externo We de
la carga queda almacenado en forma de energía interna de deformación, Wi .
.= ∫ We P dU (Ec. 2.1)
P
U

5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 35/500
CAPITULO 2 ENERGIA INTERNA DE DEFORMACION
_____________________________________________________________________________________________
PRATO, MASSA
Wi We= (Ec. 2.2)
Cuando se trata de sólidos elásticos, el trabajo de las fuerzas exteriores es por
definición igual a la energía interna de deformación.
La energía elástica acumulada en el cuerpo deformado se restituye cuando el sólidorecupera su forma primitiva. Por lo tanto, Wi es energía potencial elástica de deformación.
Cuando un sólido es elástico y el diagrama P U − es una línea recta (Figura 2.2) se dice
que es un sólido linealmente elástico.
Figura 2.2
Para el caso de un resorte de rigidez K constante resulta:
. P K U = (Ec. 2.3)
que corresponde al gráfico de la Figura 2.2, donde la recta tiene pendiente K .
Llevando la ecuación (Ec. 2.3) a (Ec. 2.1) tenemos según (Ec. 2.2):
( )1
21
0
1. . . .
2= = =∫
U
Wi We K U dU K U (Ec. 2.4)
valor que coincide con el área rayada del triángulo de la Figura 2.2.
Introduciendo la ecuación (Ec. 2.3) a (Ec. 2.4) se tiene:
211
.2
P Wi
K = (Ec. 2.5)
1 1
1. .
2We P U = (Ec. 2.6)
Tanto (Ec. 2.4) como (Ec. 2.5) son expresiones numéricamente iguales para sólidos
linealmente elásticos, pero se debe destacar que en (Ec. 2.4) Wi es función de las deformaciones
y en (Ec. 2.5) de los esfuerzos.
A continuación se analiza el caso en que la carga aplicada en el extremo del resorte (de
rigidez constante) se aplica en forma repentina en vez de realizarse gradualmente.
P
U
1 P
1U
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 36/500
CAPITULO 2 ENERGIA INTERNA DE DEFORMACION
_____________________________________________________________________________________________
PRATO, MASSA
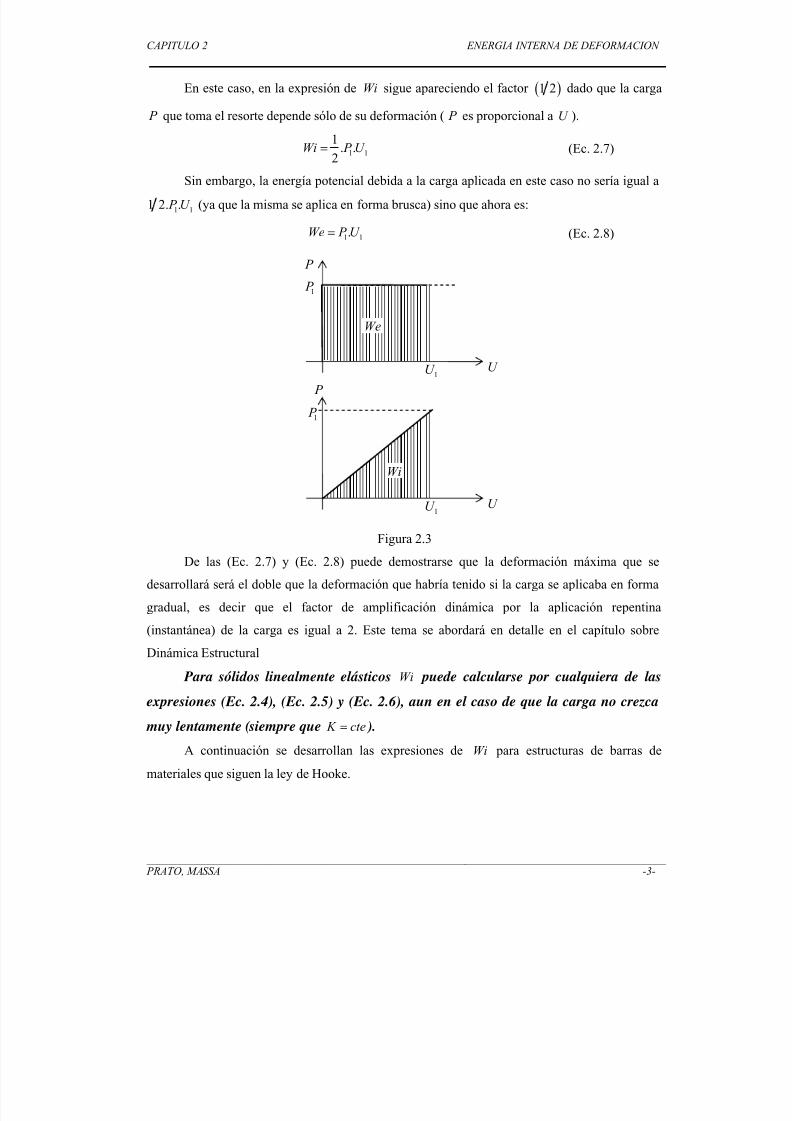
En este caso, en la expresión de Wi sigue apareciendo el factor ( )1 2 dado que la carga
P que toma el resorte depende sólo de su deformación ( P es proporcional a U ).
1 1
1. .
2
=Wi P U (Ec. 2.7)
Sin embargo, la energía potencial debida a la carga aplicada en este caso no sería igual a
1 11 2. . P U (ya que la misma se aplica en forma brusca) sino que ahora es:
1 1.=We P U (Ec. 2.8)
Figura 2.3
De las (Ec. 2.7) y (Ec. 2.8) puede demostrarse que la deformación máxima que se
desarrollará será el doble que la deformación que habría tenido si la carga se aplicaba en forma
gradual, es decir que el factor de amplificación dinámica por la aplicación repentina
(instantánea) de la carga es igual a 2. Este tema se abordará en detalle en el capítulo sobre
Dinámica Estructural Para sólidos linealmente elásticos Wi puede calcularse por cualquiera de las
expresiones (Ec. 2.4), (Ec. 2.5) y (Ec. 2.6), aun en el caso de que la carga no crezca
muy lentamente (siempre que K cte= ).
A continuación se desarrollan las expresiones de Wi para estructuras de barras de
materiales que siguen la ley de Hooke.
P
U
1 P
1U
We
P
U
1 P
1U
Wi
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 37/500
CAPITULO 2 ENERGIA INTERNA DE DEFORMACION
_____________________________________________________________________________________________
PRATO, MASSA
2.2- Cálculo de la energía interna de deformación
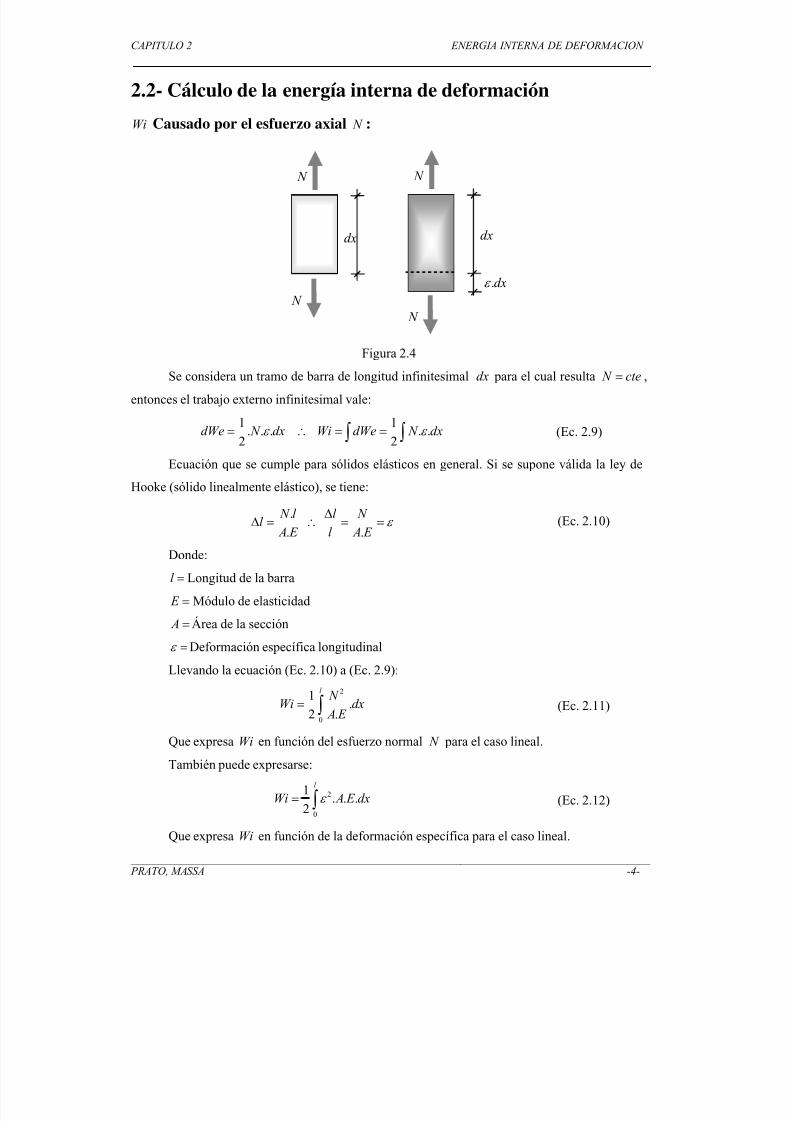
Wi Causado por el esfuerzo axial N :
Figura 2.4
Se considera un tramo de barra de longitud infinitesimal dx para el cual resulta N cte= ,
entonces el trabajo externo infinitesimal vale:
1 1. . . . .
2 2dWe N dx Wi dWe N dxε ε = ∴ = =∫ ∫ (Ec. 2.9)
Ecuación que se cumple para sólidos elásticos en general. Si se supone válida la ley de
Hooke (sólido linealmente elástico), se tiene:.
. .
N l l N l
A E l A E ε
∆∆ = ∴ = = (Ec. 2.10)
Donde:
l = Longitud de la barra
E = Módulo de elasticidad
A = Área de la sección
ε =
Deformación específica longitudinalLlevando la ecuación (Ec. 2.10) a (Ec. 2.9):
2
0
1.
2 .
l N
Wi dx A E
= ∫ (Ec. 2.11)
Que expresa Wi en función del esfuerzo normal N para el caso lineal.
También puede expresarse:
2
0
1. . .
2
l
Wi A E dxε = ∫ (Ec. 2.12)
Que expresa Wi en función de la deformación específica para el caso lineal.
dx
N
N
dx
N
N
.dxε
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 38/500
CAPITULO 2 ENERGIA INTERNA DE DEFORMACION
_____________________________________________________________________________________________
PRATO, MASSA
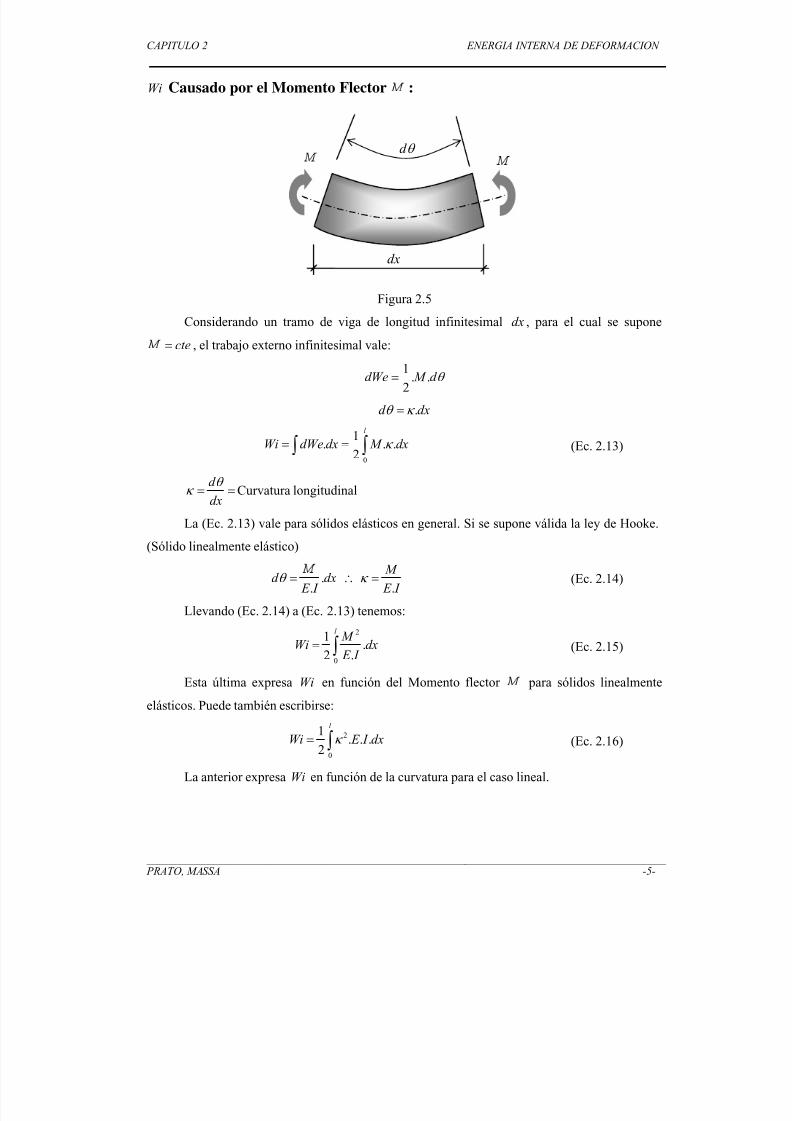
Wi Causado por el Momento Flector :
Figura 2.5
Considerando un tramo de viga de longitud infinitesimal dx , para el cual se suponecte= , el trabajo externo infinitesimal vale:
1. .
2dWe M d θ =
.d dxθ κ =
0
1. . .
2κ = =∫ ∫
l
Wi dWe dx M dx (Ec. 2.13)
d
dx
θ κ = = Curvatura longitudinal
La (Ec. 2.13) vale para sólidos elásticos en general. Si se supone válida la ley de Hooke.
(Sólido linealmente elástico)
.. .
M d dx
E I E I θ κ = ∴ = (Ec. 2.14)
Llevando (Ec. 2.14) a (Ec. 2.13) tenemos:
2
0
1.
2 .
l M
Wi dx E I
=
∫
(Ec. 2.15)
Esta última expresa Wi en función del Momento flector para sólidos linealmente
elásticos. Puede también escribirse:
2
0
1. . .
2
l
Wi E I dxκ = ∫ (Ec. 2.16)
La anterior expresa Wi en función de la curvatura para el caso lineal.
d θ
dx
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 39/500
CAPITULO 2 ENERGIA INTERNA DE DEFORMACION
_____________________________________________________________________________________________
PRATO, MASSA
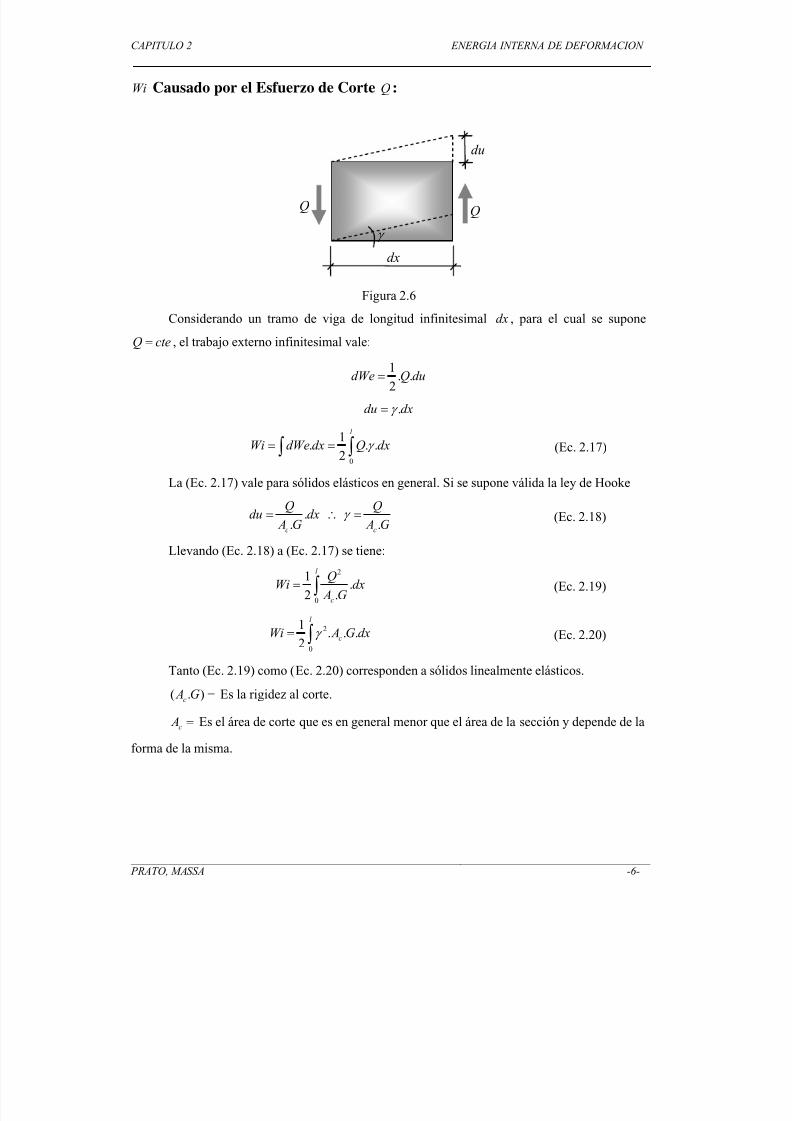
Wi Causado por el Esfuerzo de Corte Q :
Figura 2.6
Considerando un tramo de viga de longitud infinitesimal dx , para el cual se supone
Q cte= , el trabajo externo infinitesimal vale:
1. .
2dWe Q du=
.du dxγ =
0
1. . .
2γ = =∫ ∫
l
Wi dWe dx Q dx (Ec. 2.17)
La (Ec. 2.17) vale para sólidos elásticos en general. Si se supone válida la ley de Hooke
.. .c c
Q Qdu dx
A G A Gγ = ∴ = (Ec. 2.18)
Llevando (Ec. 2.18) a (Ec. 2.17) se tiene:
2
0
1.
2 .
l
c
QWi dx
A G= ∫ (Ec. 2.19)
2
0
1. . .
2
l
cWi A G dxγ = ∫ (Ec. 2.20)
Tanto (Ec. 2.19) como (Ec. 2.20) corresponden a sólidos linealmente elásticos.
( . )c A G = Es la rigidez al corte.
c A = Es el área de corte que es en general menor que el área de la sección y depende de la
forma de la misma.
Q
du
Q
γ
dx
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 40/500
CAPITULO 2 ENERGIA INTERNA DE DEFORMACION
_____________________________________________________________________________________________
PRATO, MASSA
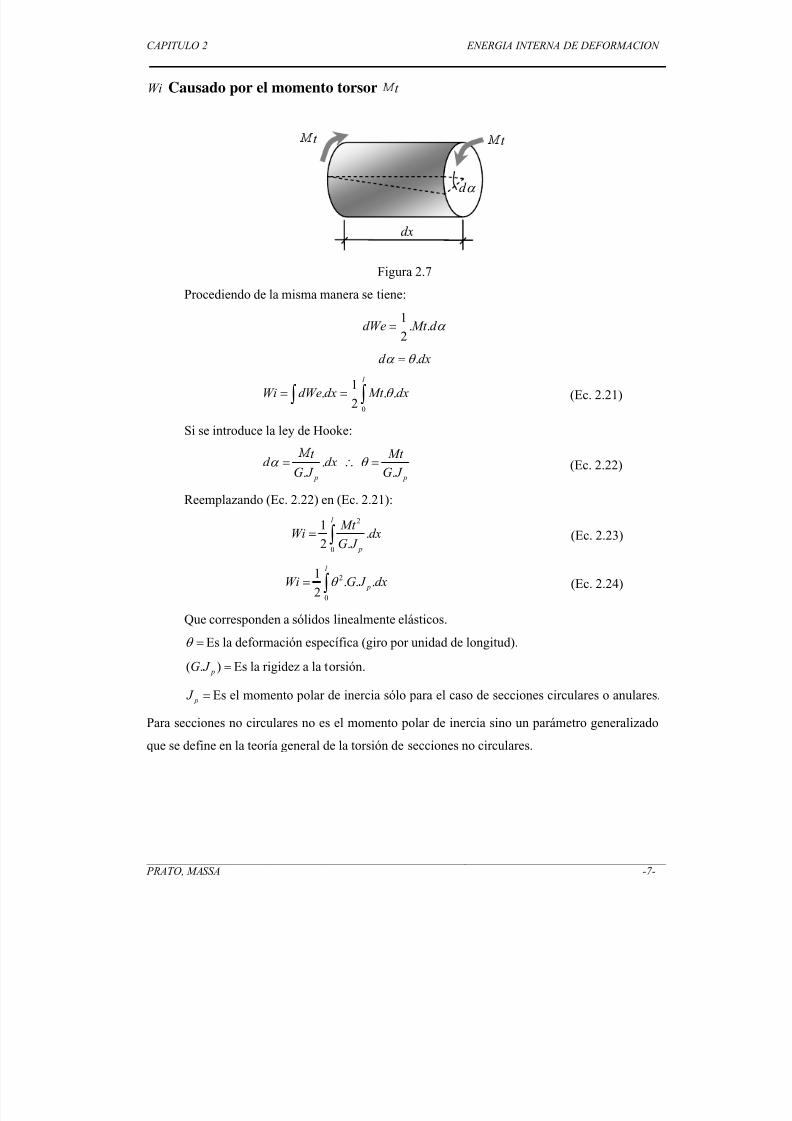
Wi Causado por el momento torsor t
Figura 2.7
Procediendo de la misma manera se tiene:
1. .2dWe Mt d α =
.d dxα θ =
0
1. . .
2θ = =∫ ∫
l
Wi dWe dx Mt dx (Ec. 2.21)
Si se introduce la ley de Hooke:
.. . p p
t Mt d dx
G J G J α θ = ∴ = (Ec. 2.22)
Reemplazando (Ec. 2.22) en (Ec. 2.21):
2
0
1.
2 .
l
p
Mt Wi dx
G J = ∫ (Ec. 2.23)
2
0
1. . .
2
l
pWi G J dxθ = ∫ (Ec. 2.24)
Que corresponden a sólidos linealmente elásticos.
θ = Es la deformación específica (giro por unidad de longitud).
( . ) pG J = Es la rigidez a la torsión.
p J = Es el momento polar de inercia sólo para el caso de secciones circulares o anulares.
Para secciones no circulares no es el momento polar de inercia sino un parámetro generalizado
que se define en la teoría general de la torsión de secciones no circulares.
t
dx
d α
t
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 41/500
CAPITULO 2 ENERGIA INTERNA DE DEFORMACION
_____________________________________________________________________________________________
PRATO, MASSA
Wi Para el caso de solicitaciones combinadas
Debe notarse que para cada tipo de solicitación corresponde un tipo de deformación
independiente. Así, ε depende exclusivamente de N , κ depende exclusivamente de , etc.;
aún en el caso que las solicitaciones sean simultáneas. Por lo tanto, la energía total para este casose obtiene como la suma de los distintos términos:
2 2 2 2
0 0 0 0
1 1 1 1. . . .
2 . 2 . 2 . 2 .
l l l l
p c
M Mt N QWi dx dx dx dx
E I G J A E A G= + + +∫ ∫ ∫ ∫ (Ec. 2.25)
2 2 2 2
0 0 0 0
1 1 1 1. . . . . . . . . . . .
2 2 2 2
l l l l
p cWi E I dx G J dx A E dx A G dxκ θ ε γ = + + +∫ ∫ ∫ ∫ (Ec. 2.26)
Según se puede apreciar en (Ec. 2.25) y (Ec. 2.26), Wi es una función cuadrática en
los esfuerzos o en las deformaciones específicas y por lo tanto resulta:
0Wi ≥ (Ec. 2.27)
Obsérvese que si se duplica la carga, la energía Wi se hace 4 veces mayor. Por esta razón,
no es correcto sumar la energía correspondiente a una carga i P con la energía correspondiente a
otra j P calculadas independientemente; se requiere determinar primero los esfuerzos totales
como superposición de esfuerzos debidos a las distintas cargas y recién calcular la energía
interna que es una función cuadrática de las cargas.En las expresiones (Ec. 2.25) y (Ec. 2.26) debe considerarse para la flexión dos términos
correspondientes a los momentos flectores respecto a los dos ejes principales de inercia, para los
cuales las deformaciones (curvaturas) son independientes. Lo mismo ocurre con el esfuerzo de
corte que debe considerarse según las direcciones de los dos ejes principales de inercia.
Notar que se cumple:0
. . 0l
i j E d dx =∫ cuando i j≠
Donde:
i E = Es un esfuerzo determinado, como ser: , , , . N M Q Mt
jd = Es la distorsión asociada al esfuerzo j E .

5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 42/500
CAPITULO 2 ENERGIA INTERNA DE DEFORMACION
_____________________________________________________________________________________________
PRATO, MASSA
2.3- Aplicaciones del postulado Wi We=
1- Calcular la flecha δ en la viga simplemente apoyada de la Figura 2.8cargada en el centro del tramo.
Figura 2.8
1. .
2We P Wiδ = =
2 2
0 0
1 1 1. . . .
2 2 . 2 .
l l
c
M Q P dx dx
E I A Gδ = +∫ ∫ (Ec. 2.28)
Se desprecia la energía de deformación por corte frente a la de flexión. Esto equivale a
despreciar la deformación por corte frente a la deformación por flexión (suele ser menor del 1%).
( ) .2
P x x=
Por simetría, la energía en toda la viga es dos veces la energía correspondiente a la mitad.
/ 2 / 2 2 2 2 3 2 3
20 0
1 1 . 1 1 .. . . 2. . . . .
2 2 2 . . 2 2. . 3 2 48. .
l l P x P x P l
P dx E I E I E I
δ ⎡ ⎤ ⎡ ⎤
= = =⎢ ⎥ ⎢ ⎥⎣ ⎦⎣ ⎦
∫
Finalmente:
3.
48. .
P l
E I
δ = (Ec. 2.29)
El postulado de igualdad entre We y Wi permite calcular el desplazamiento del punto de
aplicación de la única fuerza actuante. (Ver el primer miembro de (Ec. 2.28)).
l x
P
( ) x
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 43/500
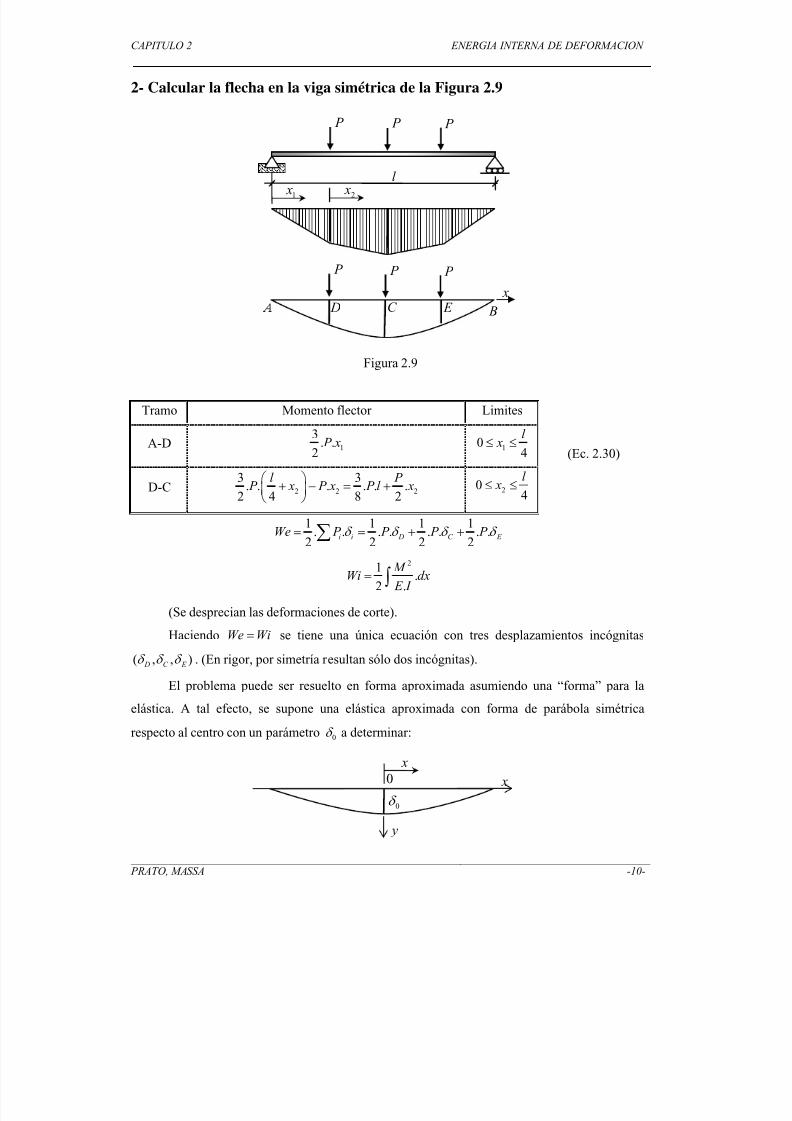
CAPITULO 2 ENERGIA INTERNA DE DEFORMACION
_____________________________________________________________________________________________
PRATO, MASSA
2- Calcular la flecha en la viga simétrica de la Figura 2.9
Figura 2.9
Tramo Momento flector Limites
A-D 1
3. .
2 P x 10
4
l x≤ ≤
D-C 2 2 2
3 3
. . . . . .2 4 8 2
l P
P x P x P l x
⎛ ⎞
+ − = +⎜ ⎟⎝ ⎠ 20 4
l
x≤ ≤
(Ec. 2.30)
1 1 1 1. . . . . . . .
2 2 2 2i i D C E We P P P P δ δ δ δ = = + +∑
21.
2 .
M Wi dx
E I = ∫
(Se desprecian las deformaciones de corte).
Haciendo We Wi= se tiene una única ecuación con tres desplazamientos incógnitas
( , , ) D C E δ δ δ . (En rigor, por simetría resultan sólo dos incógnitas).
El problema puede ser resuelto en forma aproximada asumiendo una “forma” para la
elástica. A tal efecto, se supone una elástica aproximada con forma de parábola simétrica
respecto al centro con un parámetro 0δ a determinar:
x
x
y
0
0δ
l
1 x
P P P
2 x
P P P
x
A BC D E
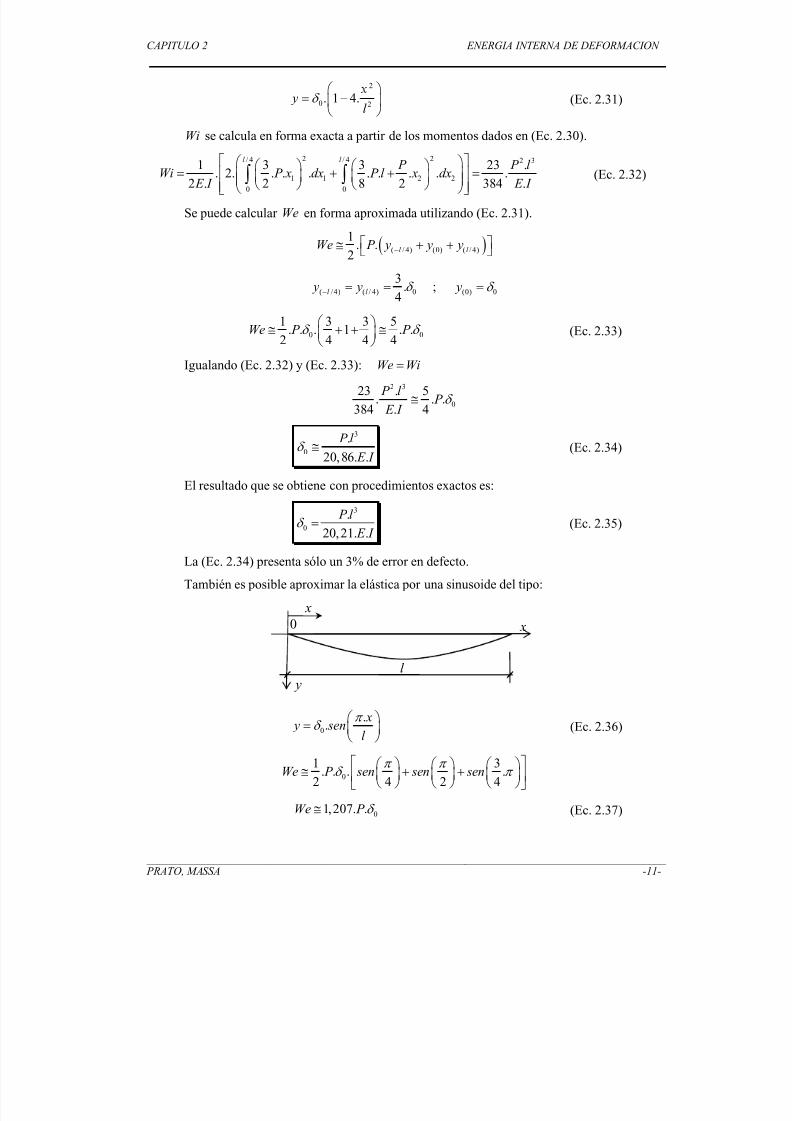
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 44/500
CAPITULO 2 ENERGIA INTERNA DE DEFORMACION
_____________________________________________________________________________________________
PRATO, MASSA
2
0 2. 1 4. y
l δ
⎛ ⎞= −⎜ ⎟
⎝ ⎠ (Ec. 2.31)
Wi se calcula en forma exacta a partir de los momentos dados en (Ec. 2.30).
2 2 / 4 / 4 2 3
1 1 2 2
0 0
1 3 3 23 .. 2. . . . . . . . .2 . 2 8 2 384 .
l l P P l Wi P x dx P l x dx E I E I
⎡ ⎤⎛ ⎞⎛ ⎞ ⎛ ⎞= + + =⎢ ⎥⎜ ⎟⎜ ⎟ ⎜ ⎟⎜ ⎟⎝ ⎠ ⎝ ⎠⎢ ⎥⎝ ⎠⎣ ⎦∫ ∫ (Ec. 2.32)
Se puede calcular We en forma aproximada utilizando (Ec. 2.31).
( )( / 4) (0) ( / 4)
1. .
2 l l We P y y y−⎡ ⎤≅ + +⎣ ⎦
( /4) ( / 4) 0
3.
4l l y y δ − = = ; (0) 0 y δ =
0 01 3 3 5. . . 1 . .2 4 4 4We P P δ δ ⎛ ⎞≅ + + ≅⎜ ⎟⎝ ⎠
(Ec. 2.33)
Igualando (Ec. 2.32) y (Ec. 2.33): We Wi=
2 3
0
23 . 5. . .
384 . 4
P l P
E I δ ≅
3
0
.
20,86. .
P l
E I δ ≅ (Ec. 2.34)
El resultado que se obtiene con procedimientos exactos es:3
0
.
20,21. .
P l
E I δ = (Ec. 2.35)
La (Ec. 2.34) presenta sólo un 3% de error en defecto.
También es posible aproximar la elástica por una sinusoide del tipo:
0
..
x y sen
l
π δ
⎛ ⎞= ⎜ ⎟
⎝ ⎠ (Ec. 2.36)
0
1 3. . . .
2 4 2 4We P sen sen sen
π π δ π
⎡ ⎤⎛ ⎞ ⎛ ⎞ ⎛ ⎞≅ + +⎜ ⎟ ⎜ ⎟ ⎜ ⎟⎢ ⎥
⎝ ⎠ ⎝ ⎠ ⎝ ⎠⎣ ⎦
0
1,207. .We P δ ≅ (Ec. 2.37)
x
x
y
0
l
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 45/500
CAPITULO 2 ENERGIA INTERNA DE DEFORMACION
_____________________________________________________________________________________________
PRATO, MASSA
La energía interna se determina en forma exacta en (Ec. 2.32) mientras que (Ec. 2.37) es
una aproximación del trabajo externo basada en (Ec. 2.36). Igualando We con Wi tenemos:
2 3
0
23 .. 1,207. .
384 .
P l P
E I δ ≅
3
0
.
20,15. .
P l
E I δ ≅ (Ec. 2.38)
Este resultado presenta un error en exceso del 0.3%.
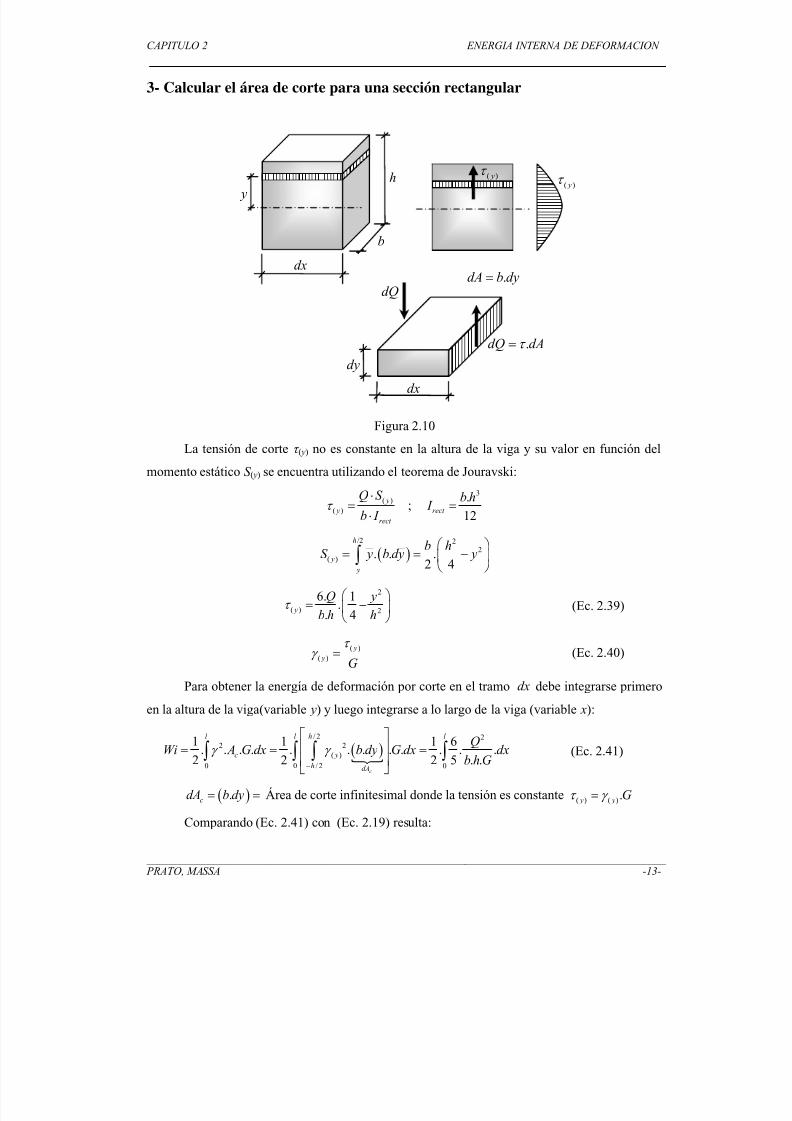
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 46/500
CAPITULO 2 ENERGIA INTERNA DE DEFORMACION
_____________________________________________________________________________________________
PRATO, MASSA
3- Calcular el área de corte para una sección rectangular
Figura 2.10
La tensión de corte τ ( y) no es constante en la altura de la viga y su valor en función del
momento estático S ( y) se encuentra utilizando el teorema de Jouravski:
( )( )
y
y
rect
Q S
b I τ
⋅=
⋅;
3.12rect
b h I =
( ) /2 2
2( ) . . .
2 4
h
y
y
b hS y b dy y
⎛ ⎞= = −⎜ ⎟
⎝ ⎠∫
2
( ) 2
6. 1.
. 4 y
Q y
b h hτ
⎛ ⎞= −⎜ ⎟
⎝ ⎠ (Ec. 2.39)
( )( )
y
yG
τ
γ = (Ec. 2.40)
Para obtener la energía de deformación por corte en el tramo dx debe integrarse primero
en la altura de la viga(variable y) y luego integrarse a lo largo de la viga (variable x):
( )
/ 2 22 2
( )
0 0 / 2 0
1 1 1 6. . . . . . . . . . . .
2 2 2 5 . .c
l l h l
c y
h dA
QWi A G dx b dy G dx dx
b h Gγ γ
−
⎡ ⎤⎢ ⎥= = =⎢ ⎥⎣ ⎦
∫ ∫ ∫ ∫ (Ec. 2.41)
( ).cdA b dy= = Área de corte infinitesimal donde la tensión es constante ( ) ( ). y y Gτ γ =
Comparando (Ec. 2.41) con (Ec. 2.19) resulta:
dx
y
b
h
dQ
.dQ dAτ =
dx
dy
.dA b dy=
( ) yτ ( ) yτ
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 47/500
CAPITULO 2 ENERGIA INTERNA DE DEFORMACION
_____________________________________________________________________________________________
PRATO, MASSA
2 26.
5 . . .c
Q Q
b h G A G=
5.
6c A A= (Ec. 2.42)
Conclusión:
En lugar de considerar la tensión de corte variable a lo largo de la altura de la
viga según la expresión (Ec. 2.39) se puede considerar una tensión constante mτ
actuando sobre el área de corte c A a los efectos del cálculo de la elástica incluyendo las
deformaciones por corte de una viga de sección rectangular:
5. .
6
m
c
Q Q
Ab h
τ = = (Ec. 2.43)

5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 48/500
CAPITULO 2 ENERGIA INTERNA DE DEFORMACION
_____________________________________________________________________________________________
PRATO, MASSA
4- Área de corte para una viga reticulada
En casos de estructuras livianas del tipo de la Figura 2.11 que se construyen con hierros
redondos soldados con frecuencia no conviene tratarlas como reticulado por el elevado número
de barras sino como una barra de alma llena con propiedades equivalentes.
Figura 2.11
Donde:
A = Área de cordón ; m A = Área de montante ; d A = Área de diagonal
Se busca una viga de alma llena equivalente que tenga igual deformación por flexión y
corte que la viga reticulada. El momento de inercia se calcula por el teorema de Steiner. Se
puede despreciar los momentos de inercia de las barras respecto a su propio eje.
224. . .
2
h I A A h
⎛ ⎞= =⎜ ⎟
⎝ ⎠ (Ec. 2.44)
La determinación del área de corte c A de la viga equivalente requiere el cálculo de la
energía de deformación por corte. Para un tramo de viga de longitud “ a ” se tiene:
Figura 2.12
a
A
d Am A
2
h
2
Q
m F
a
α
d F

5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 49/500
CAPITULO 2 ENERGIA INTERNA DE DEFORMACION
_____________________________________________________________________________________________
PRATO, MASSA
El sistema de apoyos deslizantes sólo permite deformaciones por corte. Se considera la
mitad del corte actuando sobre cada una de las caras del reticulado.
2m
Q F = ;
2. ( )d
Q F
sen α = (Ec. 2.45)
El corte se traduce en fuerzas axiales en las diagonales y en los montantes cuyos valores
están dados por (Ec. 2.45).
La energía de deformación es:
2 2( ) ( )1 12. . .
2 2. .
d m
d m
d m
F F Wi
E E A A
l l
⎡ ⎤⎛ ⎞ ⎛ ⎞⎢ ⎥⎜ ⎟ ⎜ ⎟⎢ ⎥⎜ ⎟ ⎜ ⎟= +⎢ ⎥⎜ ⎟ ⎜ ⎟
⎜ ⎟ ⎜ ⎟⎢ ⎥⎝ ⎠ ⎝ ⎠⎣ ⎦
(Ec. 2.46)
El coeficiente 2 en (Ec. 2.46) resulta de considerar las dos caras verticales del reticulado.Se ha considerado sólo un montante ya que existe uno por módulo que se repite (el montante de
la izquierda se lo considera perteneciente al modulo anterior). Introduciendo (Ec. 2.45) en (Ec.
2.46):
2
2
1. .
2 2. . ( ) 2.d m
d m
l l QWi
E A sen Aα
⎡ ⎤⎛ ⎞= +⎢ ⎥⎜ ⎟
⎝ ⎠⎣ ⎦ (Ec. 2.47)
En el caso de una viga de alma llena la energía de deformación por corte está dada por
(Ec. 2.19). Integrando en un tramo de longitud “ a ”:21
. .2 .c
QWi a
A G= (Ec. 2.48)
Igualando (Ec. 2.47) y (Ec. 2.48) y observando que:
cos( )d l a α =
. tan( )ml h a α = =
2
1.
1 tan( )2. . ( ).cos( ) 2.
c
d m
E A
G
A sen A
α
α α
⎛ ⎞⎜ ⎟⎜ ⎟=⎜ ⎟+⎜ ⎟⎝ ⎠
(Ec. 2.49)
Este valor puede ser del orden del 10% del área de la sección transversal (4. ) A por lo que
las deformaciones por corte no resultan siempre despreciables frente a las deformaciones por
flexión y deben tenerse en cuenta en los cálculos. Para resolver problemas hiperestáticos es
necesario calcular deformaciones y esas deformaciones deben considerar los esfuerzos de corte a
través del área de corte c A .
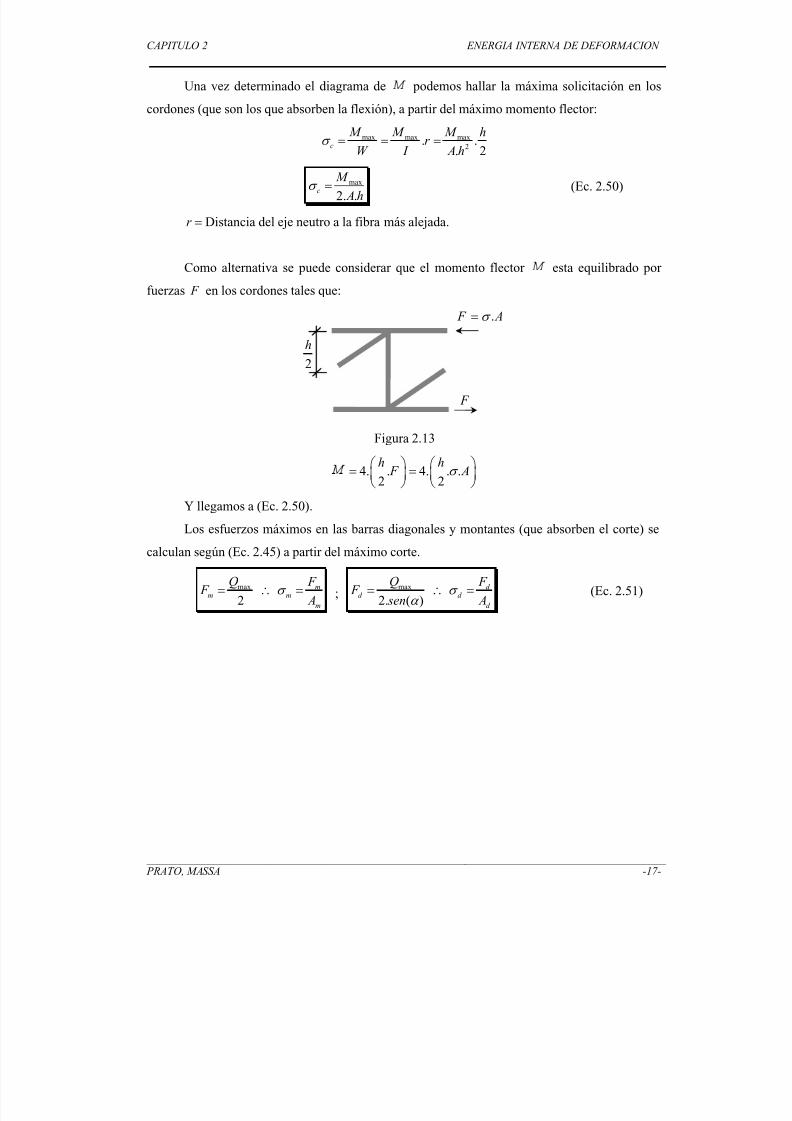
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 50/500
CAPITULO 2 ENERGIA INTERNA DE DEFORMACION
_____________________________________________________________________________________________
PRATO, MASSA
Una vez determinado el diagrama de podemos hallar la máxima solicitación en los
cordones (que son los que absorben la flexión), a partir del máximo momento flector:
max max max2
. .. 2c
M M M hr
W I A hσ = = =
max
2. .c
M
A hσ = (Ec. 2.50)
r = Distancia del eje neutro a la fibra más alejada.
Como alternativa se puede considerar que el momento flector esta equilibrado por
fuerzas F en los cordones tales que:
Figura 2.13
4. . 4. . .2 2
h h F Aσ
⎛ ⎞ ⎛ ⎞= =⎜ ⎟ ⎜ ⎟
⎝ ⎠ ⎝ ⎠
Y llegamos a (Ec. 2.50).
Los esfuerzos máximos en las barras diagonales y montantes (que absorben el corte) se
calculan según (Ec. 2.45) a partir del máximo corte.
max
2m
m m
m
Q F F
Aσ = ∴ = ;
max
2. ( )d
d d
d
Q F F
sen Aσ
α = ∴ = (Ec. 2.51)
. F Aσ =
F
2
h
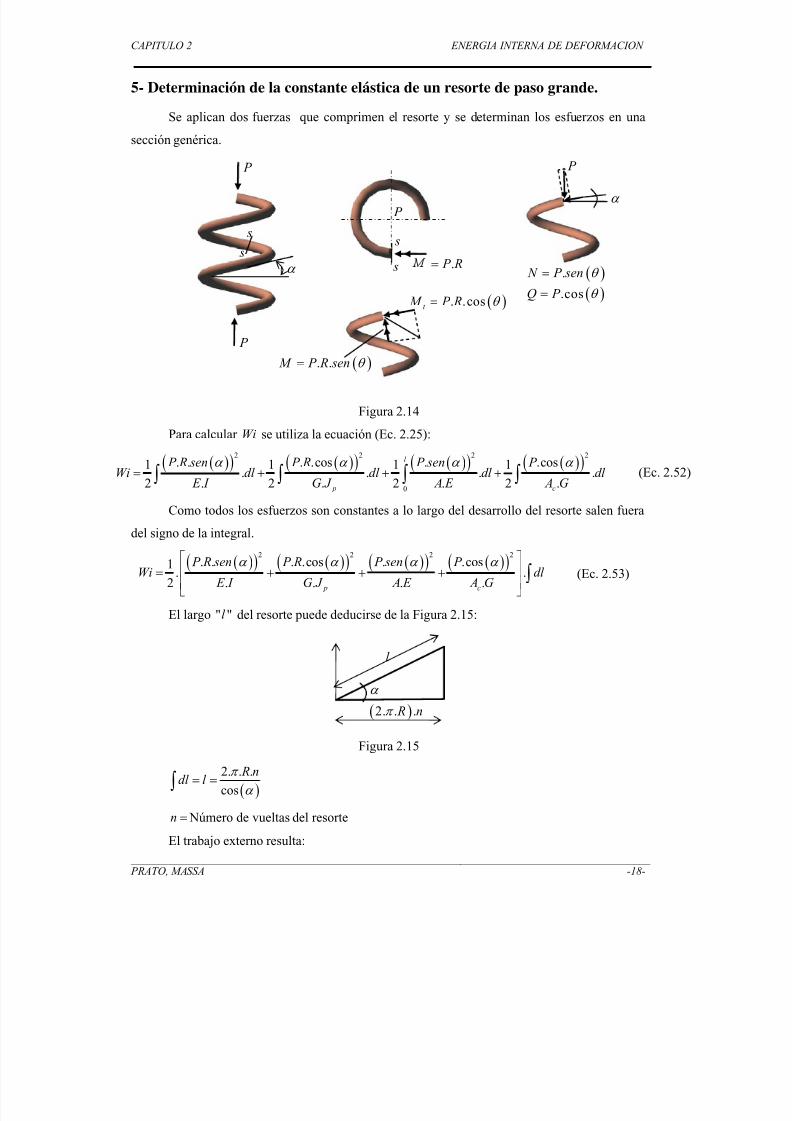
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 51/500
CAPITULO 2 ENERGIA INTERNA DE DEFORMACION
_____________________________________________________________________________________________
PRATO, MASSA
5- Determinación de la constante elástica de un resorte de paso grande.
Se aplican dos fuerzas que comprimen el resorte y se determinan los esfuerzos en una
sección genérica.
Figura 2.14
Para calcular Wi se utiliza la ecuación (Ec. 2.25):
( )( ) ( )( ) ( )( ) ( )( )2 2 2 2
0
. . . .cos . .cos1 1 1 1. . . .
2 . 2 . 2 . 2 .
l
p c
P R sen P R P sen P Wi dl dl dl dl
E I G J A E A G
α α α α = + + +∫ ∫ ∫ ∫ (Ec. 2.52)
Como todos los esfuerzos son constantes a lo largo del desarrollo del resorte salen fuera
del signo de la integral.
( )( ) ( )( ) ( )( ) ( )( )2 2 2 2
. . . .cos . .cos1. .
2 . . . . p c
P R sen P R P sen P Wi dl
E I G J A E A G
α α α α ⎡ ⎤⎢ ⎥= + + +⎢ ⎥⎣ ⎦
∫ (Ec. 2.53)
El largo " "l del resorte puede deducirse de la Figura 2.15:
Figura 2.15
( )2. . .
cos
R ndl l
π
α = =∫
n = Número de vueltas del resorteEl trabajo externo resulta:
α
l
( )2. . . R nπ
P
P
s
α
s
P
s
s . P R=
( ). .M P R sen θ =
( ). .cost M P R θ =
( ). N P sen θ =
( ).cosQ P θ =
α
P
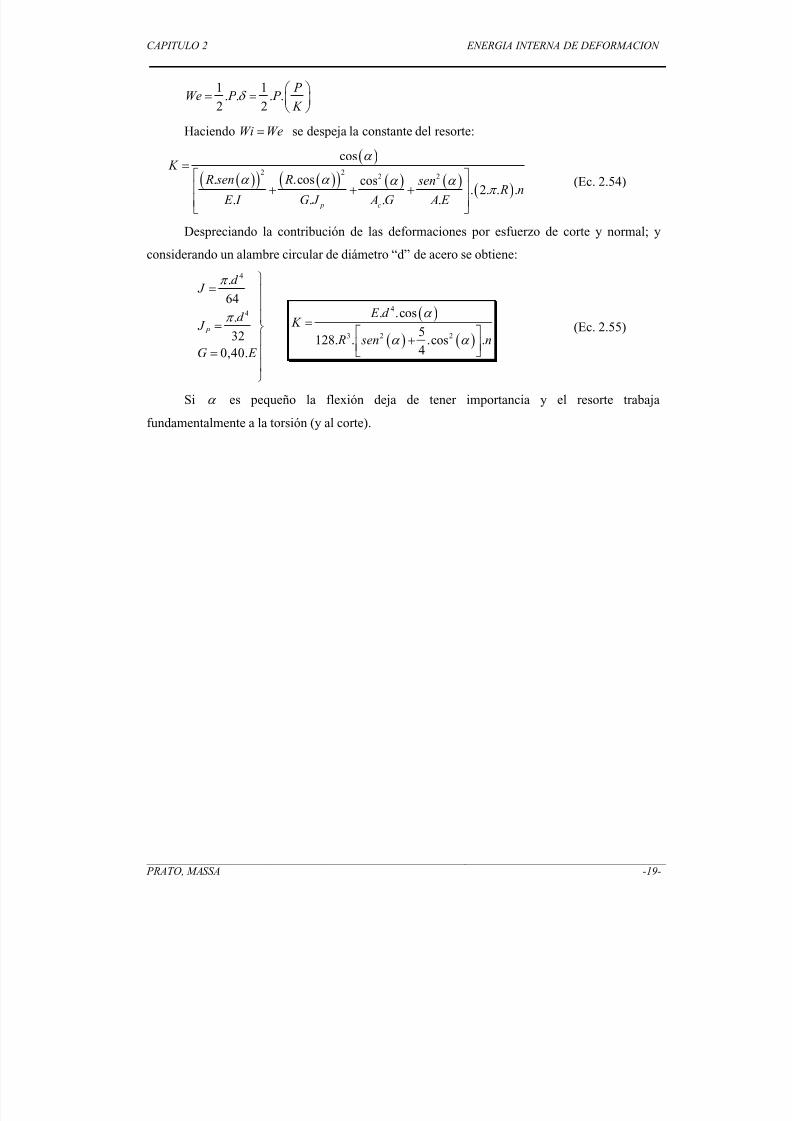
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 52/500
CAPITULO 2 ENERGIA INTERNA DE DEFORMACION
_____________________________________________________________________________________________
PRATO, MASSA
1 1. . . .
2 2
P We P P
K δ
⎛ ⎞= = ⎜ ⎟
⎝ ⎠
Haciendo Wi We= se despeja la constante del resorte:
( )( )( ) ( )( ) ( ) ( )
( )
2 2 2 2
cos
. .cos cos. 2. . .
. . . . p c
K R sen R sen
R n E I G J A G A E
α
α α α α π
= ⎡ ⎤⎢ ⎥+ + +⎢ ⎥⎣ ⎦
(Ec. 2.54)
Despreciando la contribución de las deformaciones por esfuerzo de corte y normal; y
considerando un alambre circular de diámetro “d” de acero se obtiene:
4
4
.
64
.
320,40.
P
d J
d J
G E
π
π
⎫= ⎪
⎪⎪
= ⎬⎪= ⎪
⎪⎭
( )
( ) ( )
4
3 2 2
. .cos
5128. . .cos .4
E d
K R sen n
α
α α = ⎡ ⎤+⎢ ⎥⎣ ⎦
(Ec. 2.55)
Si α es pequeño la flexión deja de tener importancia y el resorte trabaja
fundamentalmente a la torsión (y al corte).
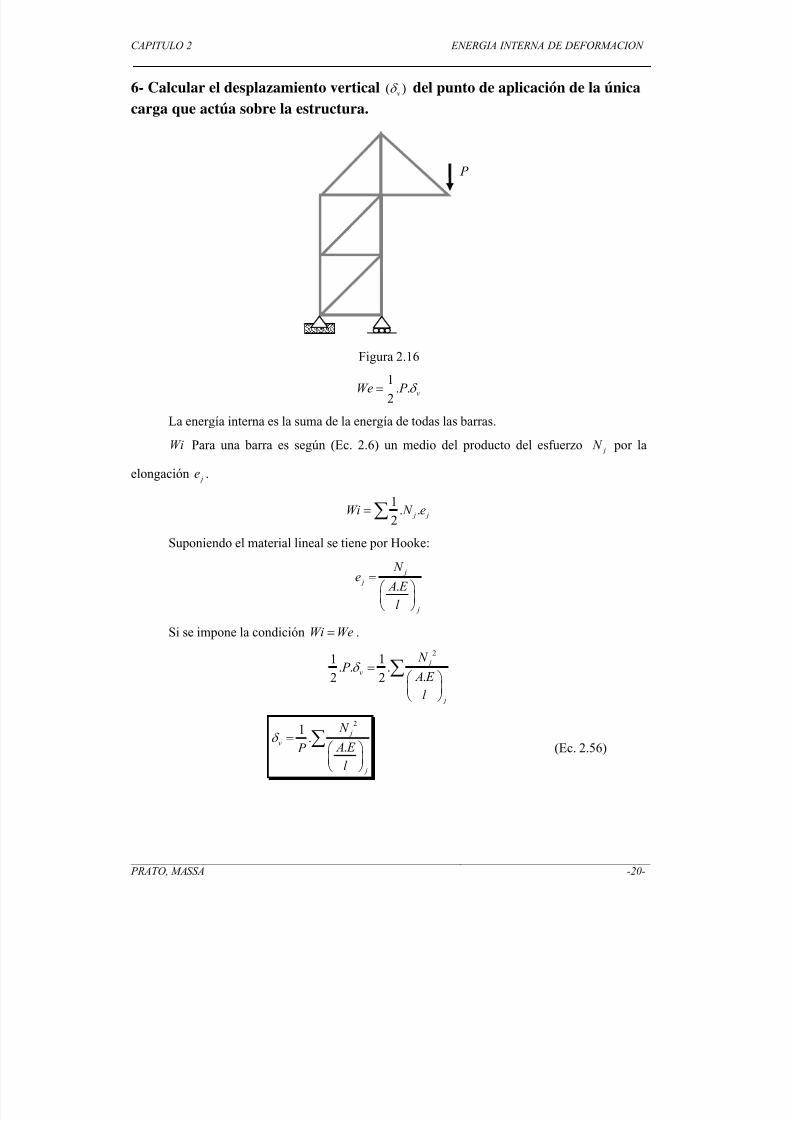
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 53/500
CAPITULO 2 ENERGIA INTERNA DE DEFORMACION
_____________________________________________________________________________________________
PRATO, MASSA
6- Calcular el desplazamiento vertical ( )vδ del punto de aplicación de la únicacarga que actúa sobre la estructura.
Figura 2.16
1. .
2 vWe P δ =
La energía interna es la suma de la energía de todas las barras.
Wi Para una barra es según (Ec. 2.6) un medio del producto del esfuerzo j N por la
elongación je .
1. .
2 j jWi N e= ∑
Suponiendo el material lineal se tiene por Hooke:
. j
j
j
N e
A E
l
=⎛ ⎞⎜ ⎟⎝ ⎠
Si se impone la condición Wi We= .
21 1. . ..2 2
j
v
j
N P
A E
l
δ =⎛ ⎞⎜ ⎟⎝ ⎠
∑
21
..
j
v
j
N
A E P
l
δ =⎛ ⎞⎜ ⎟⎝ ⎠
∑ (Ec. 2.56)
P
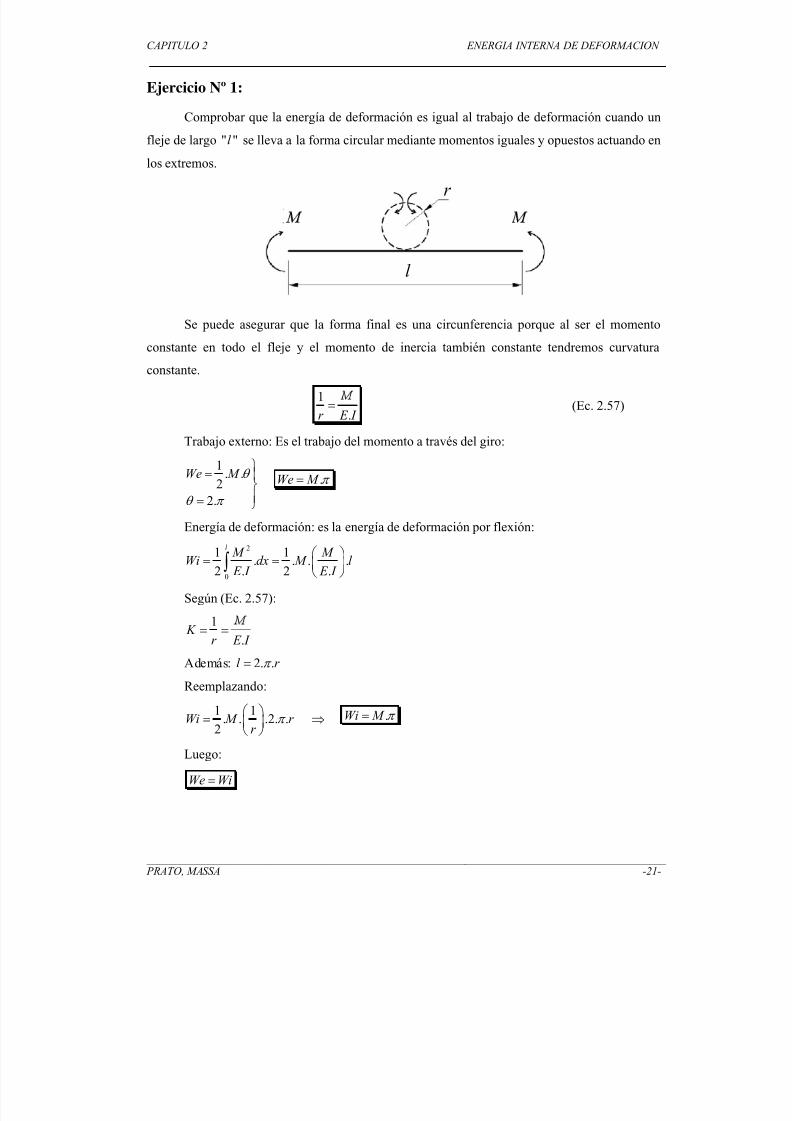
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 54/500
CAPITULO 2 ENERGIA INTERNA DE DEFORMACION
_____________________________________________________________________________________________
PRATO, MASSA
Ejercicio Nº 1:
Comprobar que la energía de deformación es igual al trabajo de deformación cuando un
fleje de largo " "l se lleva a la forma circular mediante momentos iguales y opuestos actuando en
los extremos.
Se puede asegurar que la forma final es una circunferencia porque al ser el momentoconstante en todo el fleje y el momento de inercia también constante tendremos curvatura
constante.
1
.r E I = (Ec. 2.57)
Trabajo externo: Es el trabajo del momento a través del giro:
1. .
22.
We M θ
θ π
⎫= ⎪
⎬⎪= ⎭
.We M π =
Energía de deformación: es la energía de deformación por flexión:
2
0
1 1. . . .
2 . 2 .
l M M
Wi dx M l E I E I
⎛ ⎞= = ⎜ ⎟
⎝ ⎠∫
Según (Ec. 2.57):
1
. K
r E I = =
Además: 2. .l r π =
Reemplazando:
1 1. . .2. .
2Wi M r
r π
⎛ ⎞= ⎜ ⎟
⎝ ⎠ ⇒ .Wi M π =
Luego:
We Wi=
l
r
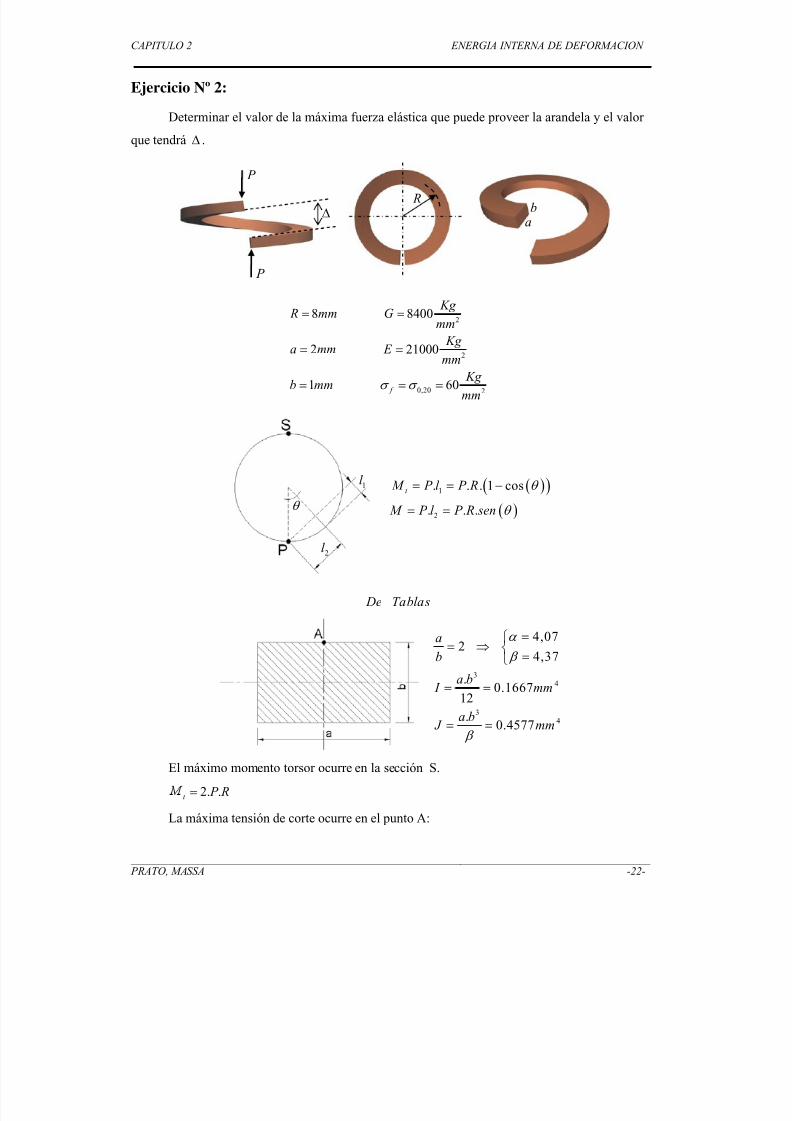
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 55/500
CAPITULO 2 ENERGIA INTERNA DE DEFORMACION
_____________________________________________________________________________________________
PRATO, MASSA
Ejercicio Nº 2:
Determinar el valor de la máxima fuerza elástica que puede proveer la arandela y el valor
que tendrá ∆ .
2
2
0,20 2
8 8400
2 21000
1 60 f
Kg R mm G
mm Kg
a mm E mm
Kg b mm
mmσ σ
= =
= =
= = =
El máximo momento torsor ocurre en la sección S.
2. .t P R=
La máxima tensión de corte ocurre en el punto A:
34
34
4,072
4,37.
0.166712.
0.4577
a
b
a b I mm
a b J mm
α
β
β
=⎧= ⇒
⎨ =⎩
= =
= =
De Tablas
1l
2l
θ ( )( )1. . . 1 cost M P l P R θ = = −
( )2. . .M P l P R sen θ = =
R
P
P
∆ab

5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 56/500
CAPITULO 2 ENERGIA INTERNA DE DEFORMACION
_____________________________________________________________________________________________
PRATO, MASSA
max 2 2
2 8. 4,07 32,60.
. 2 1t M P
P a b
τ α × ×
= = × =×
max
1. 30
2 f f τ τ σ = = =
Trabajo externo:
1. .
2We P = ∆
0,92 P Kg =
Energía de deformación:
2 21 1. .
2 . 2 .t
Torsión Flexión
M M Wi Wt Wf dx dx
G J E I = + = +∫ ∫
( ) ( ) ( ) ( )2. 2 3 2 3 2 3
2.2
00
. . 1 .. . . . 0 .cos . 0,1945 .
2. . 2. . 2 2 .
P R P R P RWf sen d sen flex
E I E I E I
π π π
θ θ θ θ = = − = =⎡ ⎤⎣ ⎦∫
( ) ( )( ) ( )2. 2 3 2 3
2
0
. 1 .. 1 cos 2.cos . .3. . 0,5312
2. . 2 .
P R P RWt d torsión
G J G J
π
θ θ θ π = + − = =∫
1.0, 92. 0,1945 0, 5312
2We Wi= ⇒ ∆ = +
1,58mm∆ =
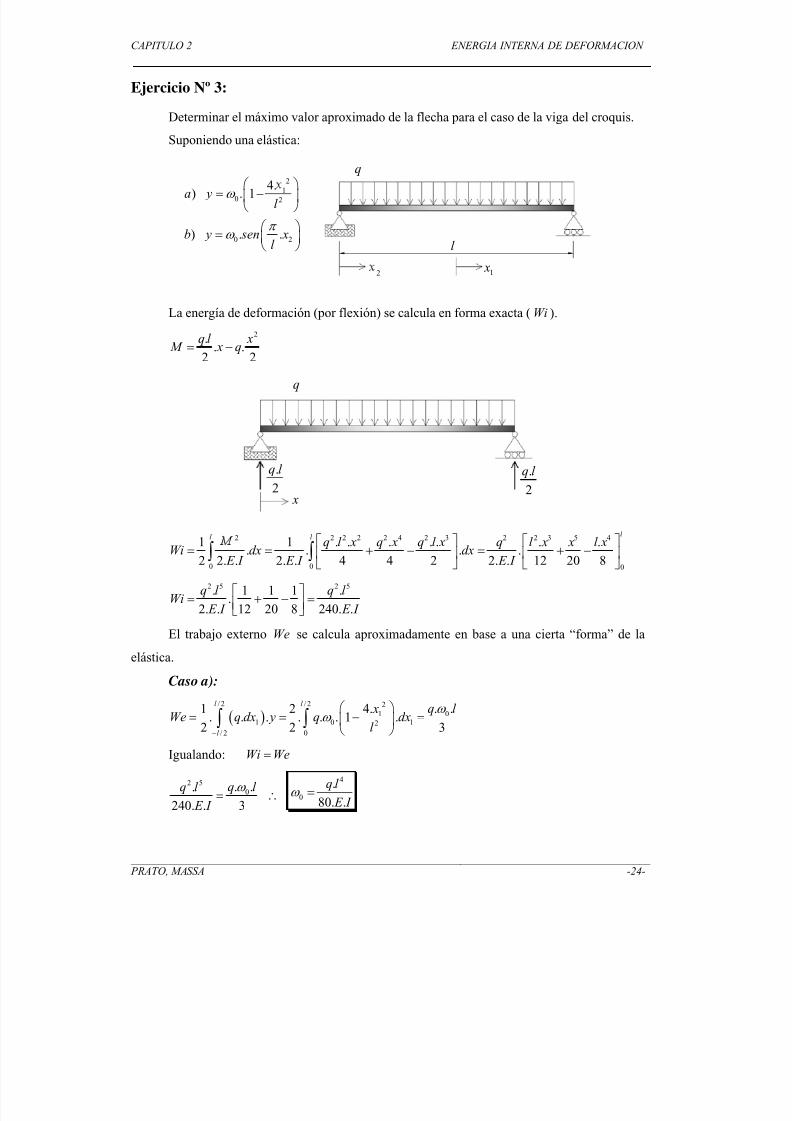
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 57/500
CAPITULO 2 ENERGIA INTERNA DE DEFORMACION
_____________________________________________________________________________________________
PRATO, MASSA
Ejercicio Nº 3:
Determinar el máximo valor aproximado de la flecha para el caso de la viga del croquis.
Suponiendo una elástica:
La energía de deformación (por flexión) se calcula en forma exacta (Wi ).
2.. .
2 2
q l xM x q= −
2 2 2 2 2 4 2 3 2 2 3 5 4
0 0 0
1 1 . . . . . . .. . . .
2 2. . 2. . 4 4 2 2. . 12 20 8
l l l q l x q x q l x q l x x l x
Wi dx dx E I E I E I
⎡ ⎤ ⎡ ⎤= = + − = + −⎢ ⎥ ⎢ ⎥
⎣ ⎦ ⎣ ⎦∫ ∫
2 5 2 5. 1 1 1 ..
2. . 12 20 8 240. .
q l q l Wi
E I E I
⎡ ⎤= + − =⎢ ⎥⎣ ⎦
El trabajo externo We se calcula aproximadamente en base a una cierta “forma” de la
elástica.
Caso a):
( ) / 2 / 2 2
011 0 12
/ 2 0
. .4.1 2. . . . . . 1 .
2 2 3
l l
l
q l xWe q dx y q dx
l
ω ω
−
⎛ ⎞= = − =⎜ ⎟
⎝ ⎠∫ ∫
Igualando: Wi We=
2 50. ..
240. . 3
q l q l
E I
ω = ∴
4
0
.
80. .
q l
E I ω =
q
.
2
q l .
2
q l
x
q
2 1 x
l
21
0 2
0 2
4.) . 1
) . .
a yl
b y sen xl
ω
π ω
⎛ ⎞= −⎜ ⎟
⎝ ⎠
⎛ ⎞= ⎜ ⎟
⎝ ⎠
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 58/500
CAPITULO 2 ENERGIA INTERNA DE DEFORMACION
_____________________________________________________________________________________________
PRATO, MASSA
Caso b):
( ) / 2 / 2
02 0 2 2 0
/ 2 0
. .1 2. . . . . . . . 0,3183. . .
2 2
l l
l
q l We q dx y q sen x dx q l
l
ω π ω ω
π −
⎛ ⎞= = = =⎜ ⎟
⎝ ⎠∫ ∫
Igualando: Wi We= 2 5
0. ..
240. .
q l q l
E I
ω
π = ∴
4
0
..
240 .
q l
E I
π ω =
Nota: el valor exacto de la flecha es:4
0
5 ..
384 .
q l
E I ω =
Caso a), error: 3,99 % ; Caso b), error: 0,53 %
Nótese que la elástica propuesta es simétrica y cumple con las condiciones de contorno.

5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 59/500
CAPITULO 2 ENERGIA INTERNA DE DEFORMACION
_____________________________________________________________________________________________
PRATO, MASSA
Ejercicio Nº 4:
Determinar cuanto se puede incrementar la distancia " "a sin superar la tensión de
fluencia2
45 f
Kg
mmσ = .
Se adopta un radio medio m R .
1 21. 14,78
2 2 2m
h h R R mm
⎛ ⎞= + + =⎜ ⎟
⎝ ⎠
El momento de inercia I θ
:
3340
180
2.. 1, 57 1, 93.
3,512 12
hb h b I
hθ
θ
π
=⎧⎛ ⎞= = + ⇒ ⎨⎜ ⎟ =⎝ ⎠ ⎩
La tensión debida a la flexión compuesta es:
( )( ) ( )( )2
. . 1 cos .cos
. .
6
m P R P
b h b hθ
θ θ σ
− −= +
P
θ
( )( )( )
. . 1 cos.cos
f m N P R N P
θ θ
= −= −
2h
P
a
P
α
1h
R
b1
22
2
13,50 15,00
3,50 40º
2,00 21000
2,00 8400
R mm a mm
h mm
Kg h mm E
mm Kg
b mm Gmm
α
= =
= =
= =
= =
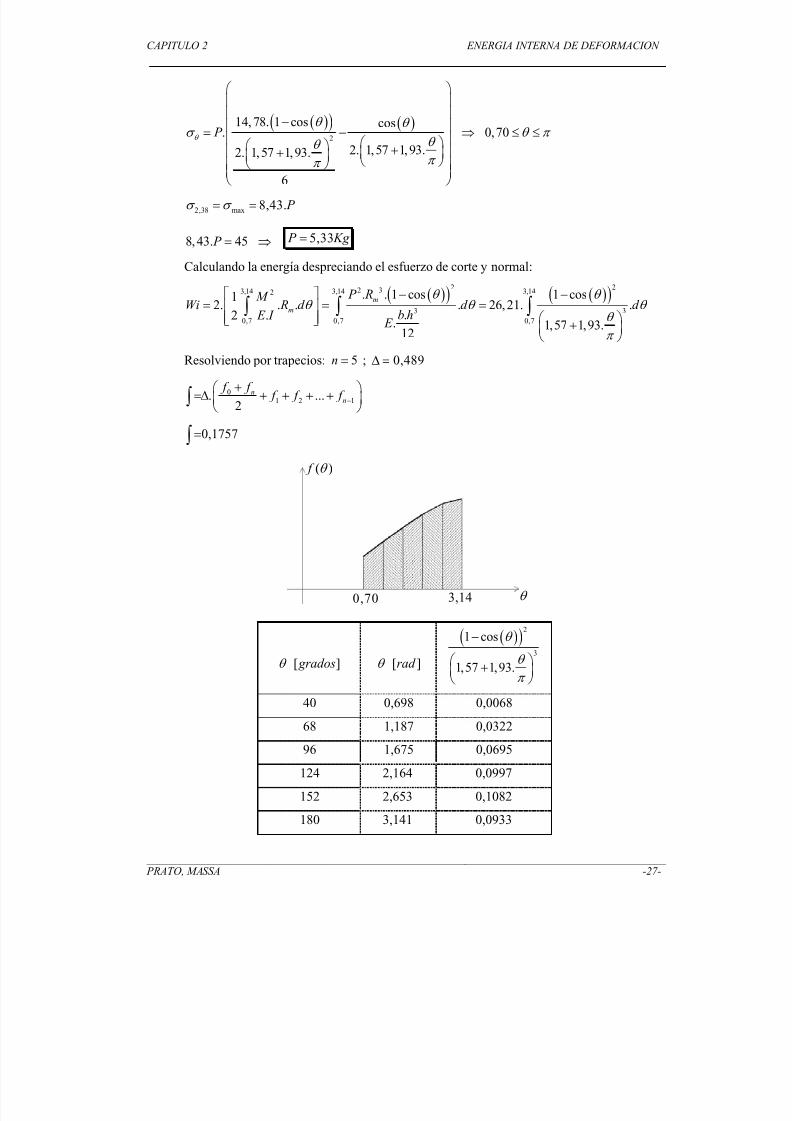
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 60/500
CAPITULO 2 ENERGIA INTERNA DE DEFORMACION
_____________________________________________________________________________________________
PRATO, MASSA
( )( ) ( )2
14, 78. 1 cos cos. 0,70
2. 1,57 1,93.2. 1,57 1,93.
6
P θ
θ θ σ θ π
θ θ
π π
⎛ ⎞⎜ ⎟⎜ ⎟
−⎜ ⎟= − ⇒ ≤ ≤⎜ ⎟⎛ ⎞⎛ ⎞ +⎜ ⎟+ ⎜ ⎟⎜ ⎟⎝ ⎠⎝ ⎠⎜ ⎟⎜ ⎟
⎝ ⎠
2,38 max 8,43. P σ σ = =
8, 43. 45 P = ⇒ 5,33 P Kg =
Calculando la energía despreciando el esfuerzo de corte y normal:
( )( ) ( )( )2 22 33,14 3,14 3,142
3 30,7 0,7 0,7
. . 1 cos 1 cos12. . . . 26,21. .
.2 .
. 1,57 1,93.12
m
m
P RM Wi R d d d
b h E I
E
θ θ θ θ θ
θ
π
⎡ ⎤ − −= = =⎢ ⎥
⎛ ⎞⎢ ⎥⎣ ⎦+⎜ ⎟⎝ ⎠
∫ ∫ ∫
Resolviendo por trapecios: 5n = ; 0,489∆ =
01 2 1. ...
2n
n
f f f f f −
+⎛ ⎞=∆ + + + +⎜ ⎟
⎝ ⎠∫
0,1757=∫
[ ] gradosθ [ ]rad θ
( )( )2
3
1 cos
1,57 1,93.
θ
θ
π
−
⎛ ⎞+⎜ ⎟⎝ ⎠
40 0,698 0,0068
68 1,187 0,0322
96 1,675 0,0695
124 2,164 0,0997
152 2,653 0,1082
180 3,141 0,0933
( ) f θ
θ 0,70 3,14
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 61/500
CAPITULO 2 ENERGIA INTERNA DE DEFORMACION
_____________________________________________________________________________________________
PRATO, MASSA
4,60Wi =
El trabajo externo:
0 0
1. . 2,66.
2We P δ δ = =
We Wi=
02,66. 4,60δ = ⇒ 0 1,70mmδ =
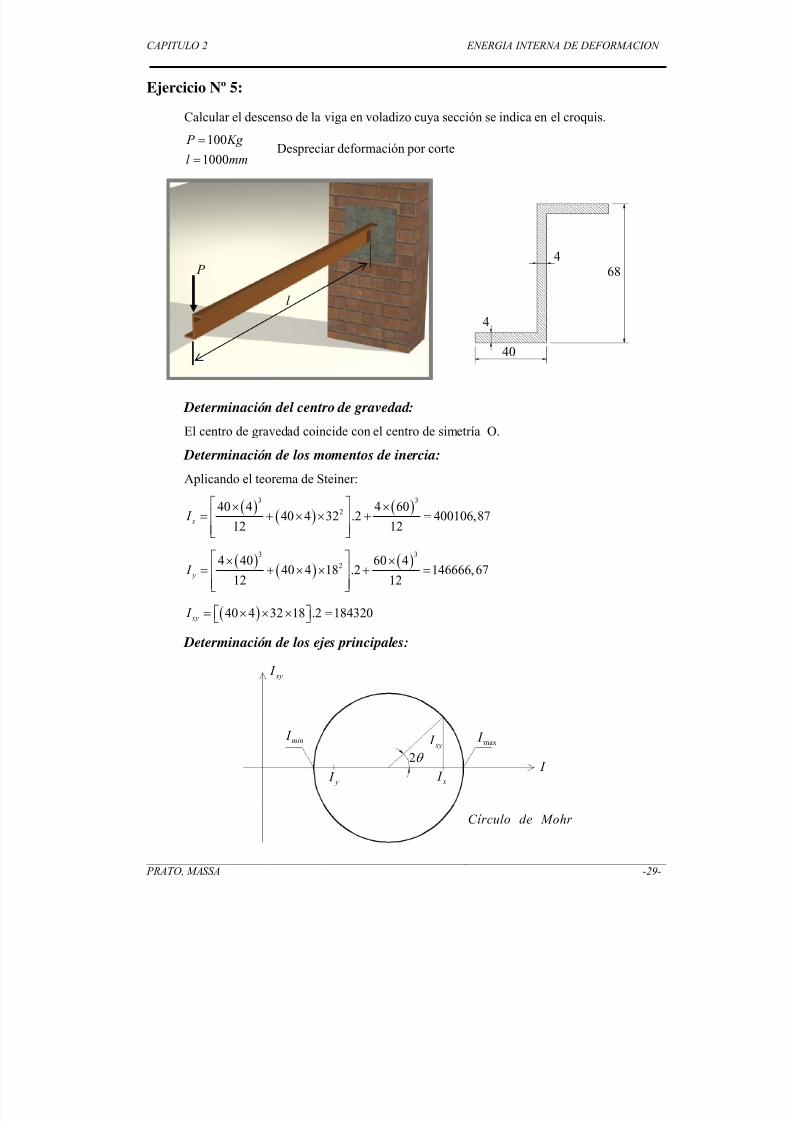
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 62/500
CAPITULO 2 ENERGIA INTERNA DE DEFORMACION
_____________________________________________________________________________________________
PRATO, MASSA
Ejercicio Nº 5:
Calcular el descenso de la viga en voladizo cuya sección se indica en el croquis.
100
1000
P Kg
l mm
=
=
Despreciar deformación por corte
Determinación del centro de gravedad:
El centro de gravedad coincide con el centro de simetría O.
Determinación de los momentos de inercia:
Aplicando el teorema de Steiner:
( )( )
( )3 3
240 4 4 6040 4 32 .2 400106,87
12 12 x I ⎡ ⎤× ×
= + × × + =⎢ ⎥⎢ ⎥⎣ ⎦
( )( )
( )3 3
24 40 60 440 4 18 .2 146666,67
12 12 y I ⎡ ⎤× ×
= + × × + =⎢ ⎥⎢ ⎥⎣ ⎦
( )40 4 32 18 .2 184320 xy I = × × × =⎡ ⎤⎣ ⎦
Determinación de los ejes principales:
min I
2θ
max I xy I
x I y I
xy I
I
Círculo de Mohr
P
l
4
440
68
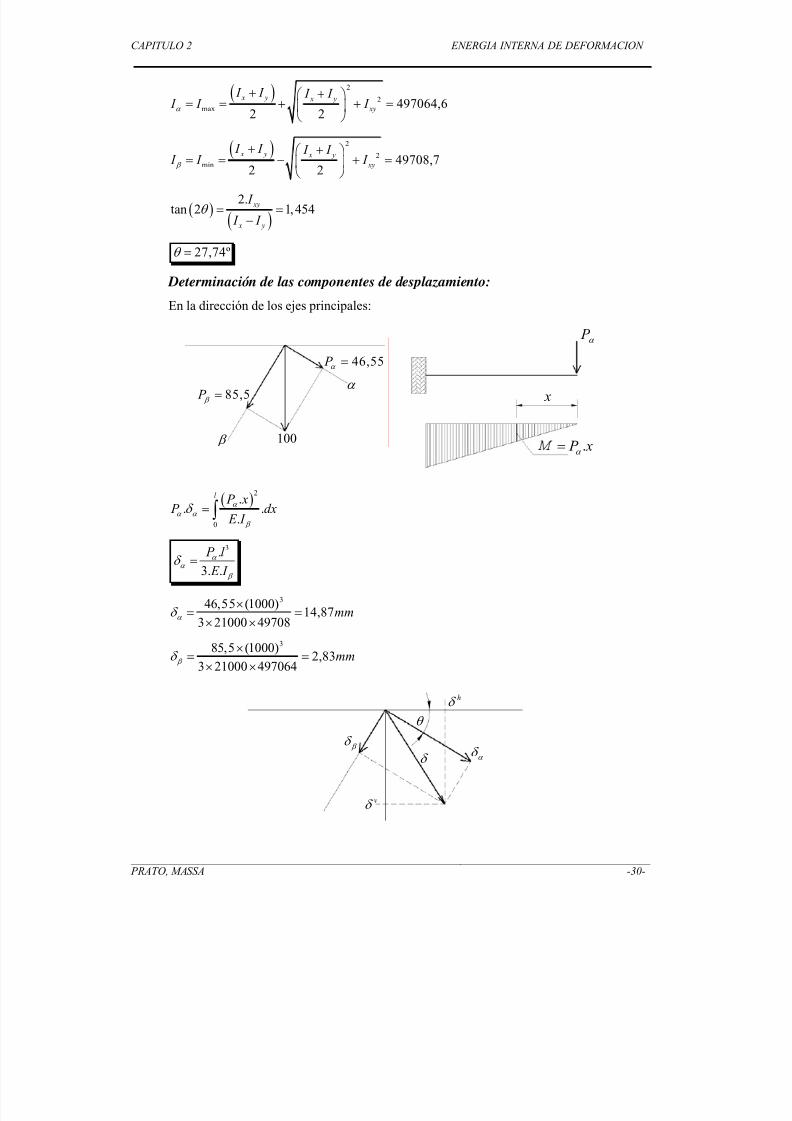
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 63/500
CAPITULO 2 ENERGIA INTERNA DE DEFORMACION
_____________________________________________________________________________________________
PRATO, MASSA
( ) 2
2max 497064,6
2 2 x y x y
xy
I I I I I I I α
+ +⎛ ⎞= = + + =⎜ ⎟
⎝ ⎠
( ) 2
2
min 49708,72 2
x y x y
xy
I I I I
I I I β
+ +⎛ ⎞
= = − + =⎜ ⎟⎝ ⎠
( )( )
2.tan 2 1,454 xy
x y
I
I I θ = =
−
27,74ºθ =
Determinación de las componentes de desplazamiento:
En la dirección de los ejes principales:
( )2
0
.. .
.
l P x P dx
E I
α
α α
β
δ = ∫
3.
3. .
P l
E I
α α
β
δ =
346,55 (1000)14,87
3 21000 49708mm
α δ
×= =
× ×
3
85,5 (1000) 2,833 21000 497064mm β δ
×= =× ×
hδ
vδ
β δ
α δ δ
θ
P α
x
. P xα
=
46,55 P α =
85,5 P β =
β
α
100
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 64/500
CAPITULO 2 ENERGIA INTERNA DE DEFORMACION
_____________________________________________________________________________________________
PRATO, MASSA
( ) ( ).cos .h senα β δ δ θ δ θ = −
( ) ( ). .cosv senα β
δ δ θ δ θ = −
9,40
v
mmδ = ⇓
11,80
h
mmδ = ⇒
Nota: la carga vertical produce un desplazamiento que no es vertical.
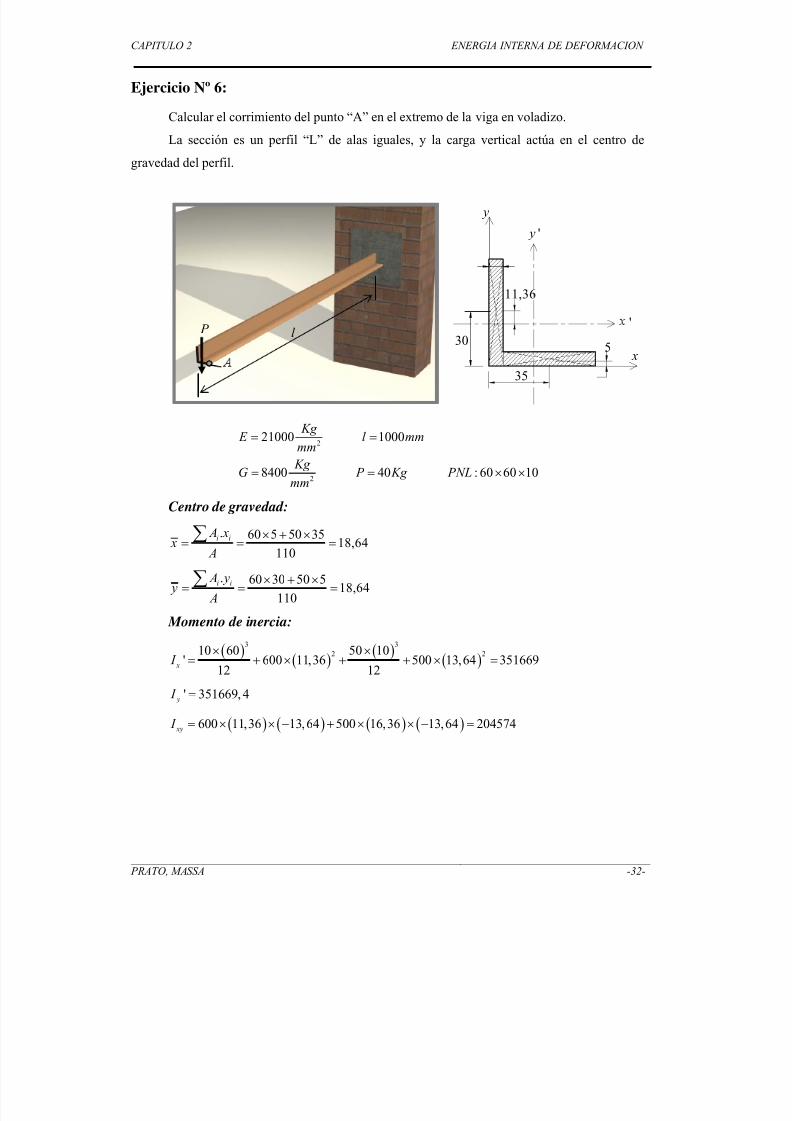
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 65/500
CAPITULO 2 ENERGIA INTERNA DE DEFORMACION
_____________________________________________________________________________________________
PRATO, MASSA
Ejercicio Nº 6:
Calcular el corrimiento del punto “A” en el extremo de la viga en voladizo.
La sección es un perfil “L” de alas iguales, y la carga vertical actúa en el centro de
gravedad del perfil.
2
2
21000 1000
8400 40 : 60 60 10
Kg E l mm
mm
Kg G P Kg PNL
mm
= =
= = × ×
Centro de gravedad:
. 60 5 50 3518,64
110i i A x
x A
× + ×= = =
∑
. 60 30 50 518,64
110i i A y
y A
× + ×= = =
∑
Momento de inercia:
( ) ( ) ( ) ( )3 3
2 210 60 50 10' 600 11,36 500 13,64 35166912 12 x I × ×= + × + + × =
' 351669, 4 y I =
( ) ( ) ( ) ( )600 11,36 13,64 500 16,36 13,64 204574 xy I = × × − + × × − =
P l
y
' y
'
x5
35
30
11,36
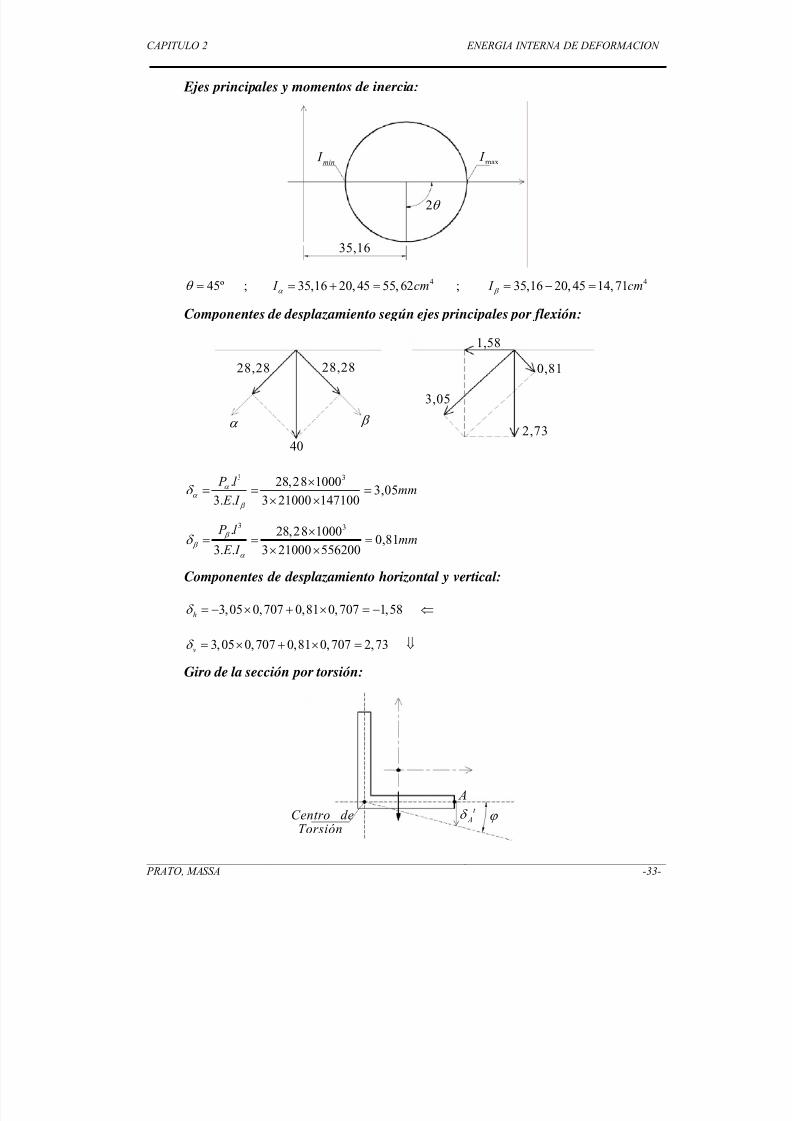
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 66/500
CAPITULO 2 ENERGIA INTERNA DE DEFORMACION
_____________________________________________________________________________________________
PRATO, MASSA
Ejes principales y momentos de inercia:
45ºθ = ; 435,16 20, 45 55, 62 I cmα = + = ; 435,16 20, 45 14, 71 I cm β = − =
Componentes de desplazamiento según ejes principales por flexión:
3 3. 28,28 10003,053. . 3 21000 147100
P l mm E I
α α
β δ
×= = =× ×
3 3. 28,28 10000,81
3. . 3 21000 556200
P l mm
E I
β
β
α
δ ×
= = =× ×
Componentes de desplazamiento horizontal y vertical:
3,05 0,707 0,81 0,707 1,58hδ = − × + × = − ⇐
3,05 0,707 0,81 0,707 2,73v
δ = × + × = ⇓
Giro de la sección por torsión:
Centro de
A
ϕ Torsión
t
δ
28,2828,28
40
α β
1,58
0,81
2,73
3,05
max I
35,16
2θ
min I
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 67/500
CAPITULO 2 ENERGIA INTERNA DE DEFORMACION
_____________________________________________________________________________________________
PRATO, MASSA
( ) ( )3 33. 60 10 60 10
. 545,6 100036666 0,001773 3 3 . 8400 3666640 13, 64 545, 6
i it
t
l t M l J
G J M
ϕ
⎫× ××⎪= = + =
= = =⎬×⎪= × = ⎭
∑
Descenso del punto A por el giro por torsión:
. 0,00177 55 0,097t
A r δ ϕ = = × = ⇓
Desplazamiento vertical total:
2,73 0,097 2,83 A t
v v Aδ δ δ = + = + = ⇓
2,83 A
vδ = ⇓ 1,58 A
hδ = ⇐
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 68/500
CAPITULO 3 PRINCIPIO DE TRABAJOS VIRTUALES _____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA
Capítulo 3 Trabajos Virtuales
3.1- Principio de los trabajos virtuales
En el curso de estática se ha utilizado el Principio de los Trabajos Virtuales (P.T.V) como una
forma alternativa de plantear ecuaciones de equilibrio y determinar el valor de alguna fuerza o
solicitación incógnita. También se lo aplicó al estudio de líneas de influencia de reacciones o
solicitaciones en sistemas isostáticos.
“Es condición necesaria y suficiente para que un sistema esté en equilibrio que el
trabajo virtual sea nulo para cualquier desplazamiento vitrual”.
Este principio, que aparentemente no agrega información desconocida, resulta no obstante, muy
útil por sus importantes aplicaciones.
Definiciones:
Desplazamiento virtual: es todo desplazamiento compatible con sus vínculos externos y con
las condiciones de continuidad internas del sistema estructural. Ejemplos se ilustran en la Figura
3.1.

5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 69/500
CAPITULO 3 PRINCIPIO DE TRABAJOS VIRTUALES _____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA
Figura 3.1
Resulta fundamental tener presente que los desplazamientos virtuales se aplican a las fuerzas
internas y externan que actúan en un sistema pero no al material que lo constituyen. Por lo tanto,
para generar un desplazamiento virtual no hay que vencer la rigidez o elasticidad del material, y
por lo tanto un desplazamiento virtual no está asociado a ninguna fuerza o conjunto de fuerzas
que lo produzcan.
Notación:
:δ Como prefijo de una variable significa que se trata de un valor virtual de la variable cuyo
nombre figura después de esa letra.
:eW δ Es el trabajo virtual de las fuerzas exteriores.
:δ iW Es el trabajo virtual de las fuerzas interiores.
El concepto de fuerza interna es el siguiente:
Considérese una pieza traccionada sometida a la carga exterior P. Imagínese al cuerpo como
constituido de diversas secciones planas sobre las que se ejercen las acciones transmitidas por los
bloques de material entre secciones; esas acciones son las fuerzas internas.
δ
δ
δ
2uδ
1uδ

5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 70/500
CAPITULO 3 PRINCIPIO DE TRABAJOS VIRTUALES _____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA
Al aplicar el Principio de Trabajos Virtuales al conjunto de todas las secciones es necesario
considerar las fuerzas externas y las fuerzas internas reales que actúan sobre el sistema.
Si se designa con juδ al desplazamiento virtual de la sección “j” se tiene:
( )1 1 2 21
. . . 0
e
i
n
i j j j
W
W
P u P u F u
δ
δ
δ δ δ =
+ + =∑14424431442443
(Ec. 3.1)
Figura 3.2
En la sumatoria se tiene dos valores de i F para cada una de las secciones excepto para la
secciones extremas (en total son 2(n-1) fuerzas internas i F , donde n es el número total de
secciones consideradas incluyendo las secciones extremas).
La sumatoria puede reagruparse de la siguiente manera
( ) ( )1
111
. .n
i i j i j j j j
W F u F uδ δ δ −
++=
⎡ ⎤= +
⎣ ⎦∑
Si no actúan fuerzas exteriores en los bloques resulta:
( ) ( ) 1i i j j F F
+= −
Además se puede dividir y multiplicar por ∆ sin alterar el valor de la sumatoria.
( ) ( ) ( )( )
( )( )
1 1
11 1
. . . .n n
k i j j i j k k
j k k
u F u u F x
xδ δ δ
− −
+= =
∆⎡ ⎤− = ∆⎣ ⎦ ∆
∑ ∑
Nótese que al reagrupar la sumatoriai
W δ
que estaba expresado en función de los
desplazamientos virtuales absolutos de las secciones queda expresado en función de los
juδ
i F
1 P
2
P
i F
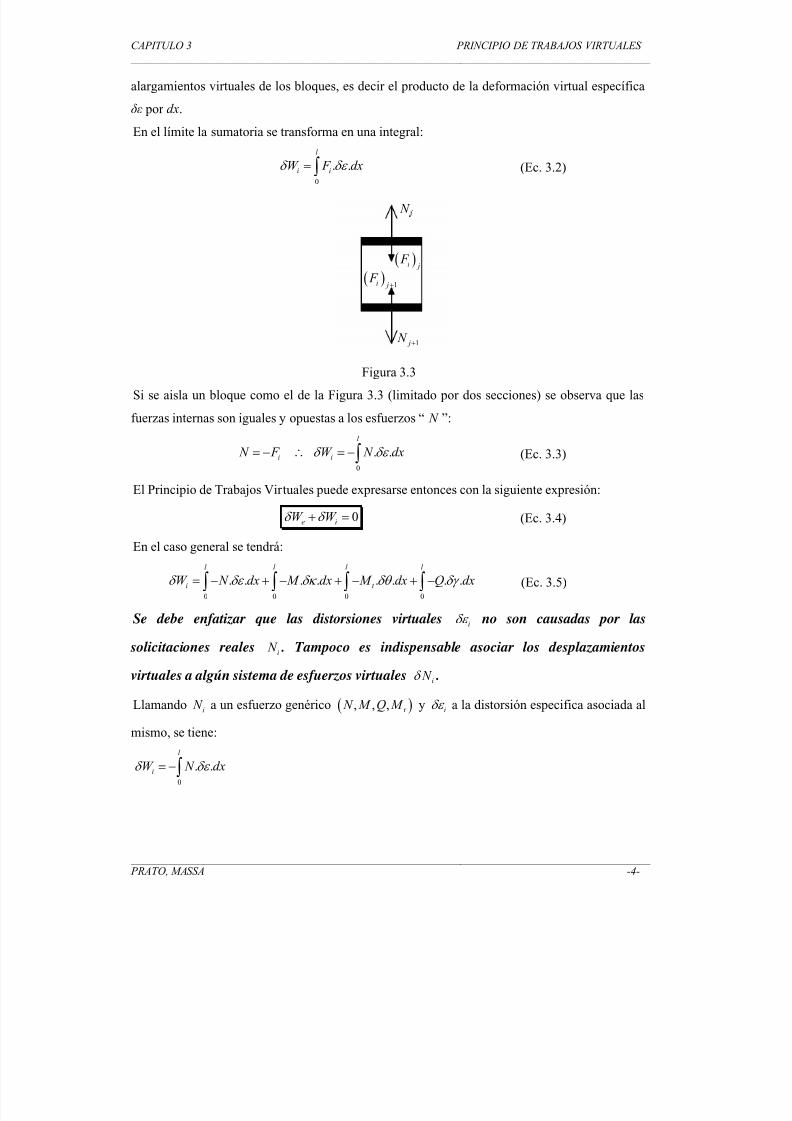
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 71/500
CAPITULO 3 PRINCIPIO DE TRABAJOS VIRTUALES _____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA
alargamientos virtuales de los bloques, es decir el producto de la deformación virtual específica
δε por dx.
En el límite la sumatoria se transforma en una integral:
0. .
l
i iW F dxδ δε = ∫ (Ec. 3.2)
Figura 3.3
Si se aisla un bloque como el de la Figura 3.3 (limitado por dos secciones) se observa que las
fuerzas internas son iguales y opuestas a los esfuerzos “ N ”:
i N F = − ∴ 0
. .l
iW N dxδ δε = −∫ (Ec. 3.3)
El Principio de Trabajos Virtuales puede expresarse entonces con la siguiente expresión:
0e iW W δ δ + = (Ec. 3.4)
En el caso general se tendrá:
0 0 0 0
. . . . . . . .l l l l
i t W N dx M dx M dx Q dxδ δε δκ δθ δγ = − + − + − + −∫ ∫ ∫ ∫ (Ec. 3.5)
Se debe enfatizar que las distorsiones virtuales iδε no son causadas por las
solicitaciones reales i N . Tampoco es indispensable asociar los desplazamientosvirtuales a algún sistema de esfuerzos virtuales i N δ .
Llamando i N a un esfuerzo genérico ( ), , , t N M Q M y
iδε a la distorsión especifica asociada al
mismo, se tiene:
0
. .l
iW N dxδ δε = −∫
( )i j F
( ) 1i j F
+
1 j N +
N

5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 72/500
CAPITULO 3 PRINCIPIO DE TRABAJOS VIRTUALES _____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA
. . .δ δε =∑ ∑∫ i i P u N dx (Ec. 3.6)
En el caso de fuerzas distribuidas, el primer miembro contendrá integrales.
Observaciones:
Se debe destacar que (Ec. 3.6) es totalmente general y vale para cualquier material ya
que las distorsiones virtualesi
δε son completamente arbitrarias. No es necesario
asociar a las deformaciones virtuales un sistema de cargas o esfuerzos internos. La
expresión (Ec. 3.6) es válida tanto para desplazamientos virtuales pequeños como
grandes; siempre que para grandes desplazamientos se tenga en cuenta que el
equilibrio se establece en el sistema deformado y se calculan correctamente losi
N .
La expresión (Ec. 3.6) equivale a decir que “para todo sistema en equilibrio el trabajo virtual de
las fuerzas es igual al trabajo virtual interno”. Téngase presente que la expresión (Ec. 3.6) se
obtuvo generalizando el concepto de trabajo virtual de fuerzas actuando sobre partículas que
resulta independiente del concepto de energía interna asociada a un medio continuo elástico.
Es conveniente destacar que en el caso de energía interna las deformaciones ε son causadas por
los esfuerzos N , mientras que en trabajos virtuales las deformaciones son arbitrarias y no estáasociadas necesariamente a fuerzas u otras causas. Debe notarse que en las expresiones del
trabajo virtual no figura el valor1
2como en el caso de energía interna porque el desplazamiento
virtual (y por lo tantoi
ε yi
uδ ) ocurre después que las fuerzasi
P ya estaban actuando, y
consecuentementei N ya tienen su valor final.
Verificación del Principio de Trabajos Virtuales
Sea el caso de una viga simplemente apoyada cuya única carga externa es un momento
B aplicado en el extremo “B”.

5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 73/500
CAPITULO 3 PRINCIPIO DE TRABAJOS VIRTUALES _____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA
Figura 3.4
Se impone arbitrariamente un desplazamiento virtual a partir de la posición deformada de la viga
en la forma:
0
..
x y sen
l
π δ δ
⎛ ⎞= ⎜ ⎟
⎝ ⎠ (Ec. 3.7)
( )0
.. .cos
d y
dx l l
δ π π δθ δ
⎛ ⎞= = ⎜ ⎟
⎝ ⎠
0. B x l l
π δθ δθ δ
== = −
( ) 0. . .e i i BW P u M l
π δ δ δ
⎛ ⎞= = −⎜ ⎟
⎝ ⎠∑
0. .e BW M l
π δ δ = − (Ec. 3.8)
La curvatura virtual se obtiene derivando dos veces la elástica virtual:
( )2 2
02 2
.. .
d y sen
dx l l
δ π π δκ δ
⎛ ⎞= = − ⎜ ⎟
⎝ ⎠ (Ec. 3.9)
( )( )
0 0
( ). ( ). .l l
i xW M x d M x dxδ δθ δκ = − = −∫ ∫
B
. x B
xM M
l =
yδ
yδ
+
++
Convención de signos de la elastica
( )q + ( )Q + ( ) ( )M κ + + ( ) ( )M θ + +
y
( ) y +
.dQ q dx= .dM Q dx= .d dxθ κ = .dy dxθ =
dy
dxθ =
d
dx
θ κ =
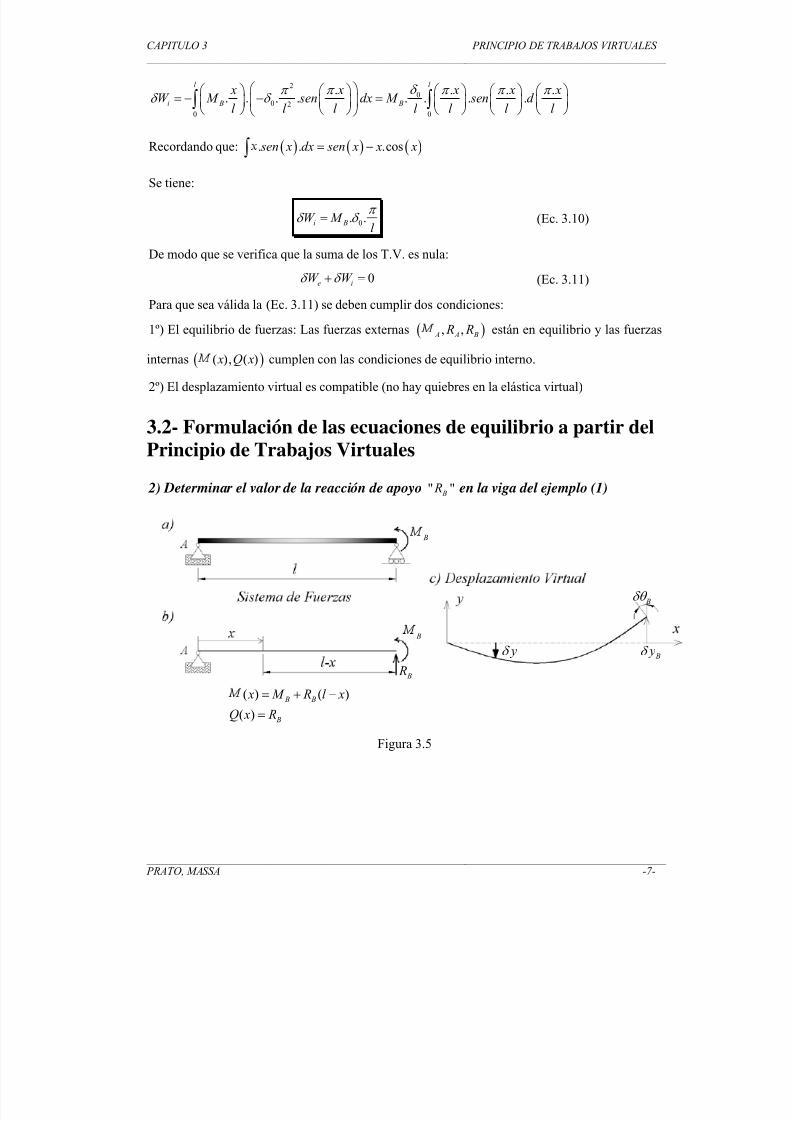
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 74/500
CAPITULO 3 PRINCIPIO DE TRABAJOS VIRTUALES _____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA
20
0 20 0
. . . .. . . . . . . .
l l
i B B
x x x x xW M sen dx M sen d
l l l l l l l
δ π π π π π δ δ
⎛ ⎞⎛ ⎞ ⎛ ⎞ ⎛ ⎞ ⎛ ⎞ ⎛ ⎞= − − =⎜ ⎟⎜ ⎟ ⎜ ⎟ ⎜ ⎟ ⎜ ⎟ ⎜ ⎟
⎝ ⎠ ⎝ ⎠ ⎝ ⎠ ⎝ ⎠ ⎝ ⎠⎝ ⎠∫ ∫
Recordando que: ( ) ( ) ( ). . .cos sen x dx sen x x x= −∫
Se tiene:
0. .i BW M l
π δ δ = (Ec. 3.10)
De modo que se verifica que la suma de los T.V. es nula:
0e iW W δ δ + = (Ec. 3.11)
Para que sea válida la (Ec. 3.11) se deben cumplir dos condiciones:
1º) El equilibrio de fuerzas: Las fuerzas externas ( ), , A A B R R están en equilibrio y las fuerzas
internas ( )( ), ( ) x Q x cumplen con las condiciones de equilibrio interno.
2º) El desplazamiento virtual es compatible (no hay quiebres en la elástica virtual)
3.2- Formulación de las ecuaciones de equilibrio a partir delPrincipio de Trabajos Virtuales
2) Determinar el valor de la reacción de apoyo " " B R en la viga del ejemplo (1)
Figura 3.5
B
B
B R
( ) ( )
( ) B B
B
x M R l x
Q x R
= + −
=
Bδθ
B yδ yδ

5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 75/500
CAPITULO 3 PRINCIPIO DE TRABAJOS VIRTUALES _____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA
Se introduce un desplazamiento virtual de la forma:
2 y x xδ = − (Ec. 3.12)
2( ) B y y l l l δ δ = = −
( ) 2. 1d y
dx
δ δθ = = −
( ) ( )2
22
d d y
dx dx
δθ δ δκ = = =
Nótese que la curvatura virtual es constante, mientras que la curvatura real, causada por el
real es en general variable.
( )
.
x
E I κ =
. . .e i i B B B BW P u R y M δ δ δ δθ = = +∑
( ) ( )2. . 2. 1e B BW R l l M l δ = − + −
( ) ( )0 0
. . . . 2 .δ δκ = − = − + −⎡ ⎤⎣ ⎦∫ ∫ l l
i B BW M dx M R l x dx
Si se supone que el sistema de fuerzas de la Figura 3.5.b está en equilibrio, como el
desplazamiento virtual es compatible se puede aplicar la ecuación (Ec. 3.11) de T.V.
( )2
2 2. . .2. . . . .(2) 02 B B B B B B B
We
Wi
l R l R l M l M M l R l R
δ
δ
⎧ ⎫⎡ ⎤⎪ ⎪− + − + − + − =⎨ ⎬⎢ ⎥
⎪ ⎪⎣ ⎦⎩ ⎭14444424444431444442444443
. 0− − = B B R l (Ec. 3.13)
Se llega así a la ecuación de equilibrio de momentos respecto al punto “A”, de donde se puede
despejar la fuerza incógnita B B R
l = − (el signo “–“ indica que la reacción tiene el signo
opuesto al adoptado en el planteo del problema).
Conviene destacar que en los dos ejemplos anteriores no se ha despreciado el trabajo virtual
de las fuerzas internas de corte, simplemente se ha definido un desplazamiento virtual que no
implica distorsiones de corte.
Es interesante notar que como la viga es isostática, se puede llegar a la expresión (Ec. 3.13)
utilizando un desplazamiento virtual de cuerpo rígido como en el curso de Estática.

5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 76/500
CAPITULO 3 PRINCIPIO DE TRABAJOS VIRTUALES _____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA
Por ejemplo:
Figura 3.6
. y xδ α = ;dy
dxδθ α = = ; . B y l δ α = ; 0δκ =
Como la curvatura es nula para este desplazamiento virtual, no hay trabajo interno 0δ ≡iW y la
ecuación de T.V. es:
. . . 0 0 B B
WiWe
M R l δ
δ
α α + + =1442443
3) Sea la viga hiperestática de la Figura 3.7 que tiene cuatro incógnitas y cuya única
carga externa es un momento en el punto B.
Figura 3.7
Dando el mismo desplazamiento virtual del ejemplo (2) se llega a:
. 0 A B BM R l − − = (Ec. 3.14)
Se tiene entonces una sola ecuación con dos incógnitas ( ), A B R .
Como el P.T.V. vale para cualquier desplazamiento virtual podría pensarse que dando al sistema
en equilibrio Figura 3.4.b (fuerzas externas e internas), otros desplazamientos virtuales, se podría
formular el número suficiente de ecuaciones para resolver el problema.
Esto no es posible ya que el P.T.V. vale para cualquier desplazamiento virtual del sistema en
equilibrio, pero siempre se llega a una ecuación de equilibrio. Como el número máximo de
ecuaciones independientes de equilibrio (para un cuerpo en el plano es tres), este procedimientono permite resolver por sí mismo el problema hiperestático.
B
B R
B
V R
H
A R
A
α
B
B R
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 77/500
CAPITULO 3 PRINCIPIO DE TRABAJOS VIRTUALES _____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA
3.3 Distintas formas de utilizar el principio de trabajosvirtuales
Hasta aquí se ha utilizado el P.T.V. para formular ecuaciones de equilibrio, pero este modo deaplicar el P.T.V., muy útil en el curso de Estática, resulta poco interesante al estudiar cuerpos
deformables y problemas hiperestáticos.
El P.T.V. relaciona tres aspectos:
I) Fuerzas en Equilibrio
II) Desplazamientos virtuales
III) Suma de T.V. igual a cero
Siempre que se cumplan dos de estos tres aspectos, el restante se cumple también.
En el ejemplo (1), se vio que partiendo de I) fuerzas en equilibrio, II) desplazamientos
compatibles, se puede verificar que . . 0T V =∑ [(Ec. 3.11)]
En los ejemplos (2) y (3) se vio que partiendo de un sistema de fuerzas, al dar II) un
desplazamiento virtual compatible, y III) anular la sumatoria de los T.V. se llega a I) un sistema
de fuerzas en equilibrio ((Ec. 3.13) y (Ec. 3.14))
Se tratará ahora una tercera forma de utilizar el P.T.V. que resulta sumamente útil en este curso
para su aplicación en cuerpos deformables.Si a la ecuación de T.V. ( ). . 0T V =∑ se le agregan las condiciones de equilibrio, se
puede obtener de la ecuación de T.V. un desplazamiento desconocido.
Este procedimiento es simplemente una aplicación práctica del P.T.V. que establece que las
fuerzas están en equilibrio, y a partir de esa condición se obtiene el desplazamiento buscado..
3.4 Cálculo de desplazamientos por aplicación del principio
de T.V.
4) Calcular el giro Bθ en el extremo “B” de la viga simplemente apoyada de la Figura
3.8 con carga uniforme " "q .

5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 78/500
CAPITULO 3 PRINCIPIO DE TRABAJOS VIRTUALES _____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA
Figura 3.8
Se concentra la atención en un sistema auxiliar (B) (Figura 3.9) que tiene como única carga
externa un momento en el extremo “B” de la viga de valor unitario 1 BM = .
Figura 3.91) El sistema auxiliar (B) está en equilibrio (porque los esfuerzos y Q se han determinado
de modo de satisfacer equilibrio).
2) Se impone un desplazamiento virtual al sistema auxiliar (B) que es el desplazamiento del
sistema real. Este desplazamiento es compatible con los vínculos por lo que estos no realizan
trabajo, y además es compatible con la continuidad interna de la viga.
Se adoptan como deformaciones virtuales las correspondientes al sistema real, que dependen de
los esfuerzos internos a través de las ecuaciones constitutivas del material supuesto lineal y
elástico.
Bθ
δ
Q
1( ) . x x
l =
1
l
1
Bθ
2.( ) . .
2 2
q l xM x x q= −
.( ) .
2
q l Q x q x= −

5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 79/500
CAPITULO 3 PRINCIPIO DE TRABAJOS VIRTUALES _____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA
Para materiales linealmente elásticos (que responden a la ley de Hooke) se tiene:
. E I δκ = ;
.c
Q
A Gδγ = (Ec. 3.15)
3) Planteando la ecuación de T.V. :
e iW W δ δ = −
0 0
1. . . . .. .
l l
B
c
M Qdx Q dx
E I A Gθ
⎛ ⎞⎛ ⎞= + ⎜ ⎟⎜ ⎟
⎝ ⎠ ⎝ ⎠∫ ∫ (Ec. 3.16)
Como los valores del segundo miembro son conocidos, se puede determinar la única incógnita
“ Bθ ”.
2
0 0
. .. . .
1 12 2 2. . . . .. .
l l
B
c
q l x q l x q q x
dx dxl E I l A G
θ
⎛ ⎞ ⎛ ⎞− −⎜ ⎟ ⎜ ⎟
⎛ ⎞ ⎛ ⎞= +⎜ ⎟ ⎜ ⎟⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠⎜ ⎟ ⎜ ⎟⎜ ⎟ ⎝ ⎠⎝ ⎠
∫ ∫ (Ec. 3.17)
Debe considerarse la conveniencia de utilizar un estado auxiliar con una única carga externa, de
modo que se evalúe una única incógnita.
Resulta fundamental que el sistema sea isostático porque de esa manera se puede garantizar
equilibrio simplemente calculando los esfuerzos y con las ecuaciones de la estática.
En esta forma de aplicar el P.T.V., en lugar de proponer una elástica y luego derivar para
obtener las distorsiones ( ), , ,δκ δε δθ δγ , se propone como elástica virtual para el estado auxiliar
(b), a la elástica real del sistema (a), y se calculan las deformaciones virtuales por expresiones
del tipo (Ec. 3.15).
Este último ejemplo se ilustra con un ejemplo práctico. Para calcular una componente del
desplazamiento de un punto se procede de la siguiente manera:
1) Se determinan los diagramas de esfuerzos internos para el estado de cargas reales.
2) Se define un estado auxiliar en una estructura igual a la dada pero con una única carga
unitaria colocada en el punto cuyo desplazamiento se busca, aplicada en la dirección de la
componente deseada del mismo.
3) Se determinan los esfuerzos internos para el estado auxiliar.
4) Se calcula el desplazamiento por la expresión:
. . . . . . . .. . . .
t t
c p
M M Q N dx Q dx M dx N dx
E I A G G I A E δ
⎛ ⎞⎛ ⎞⎛ ⎞ ⎛ ⎞= + + +⎜ ⎟⎜ ⎟⎜ ⎟ ⎜ ⎟⎜ ⎟⎝ ⎠ ⎝ ⎠⎝ ⎠ ⎝ ⎠
∫ ∫ ∫ ∫ (Ec. 3.18)
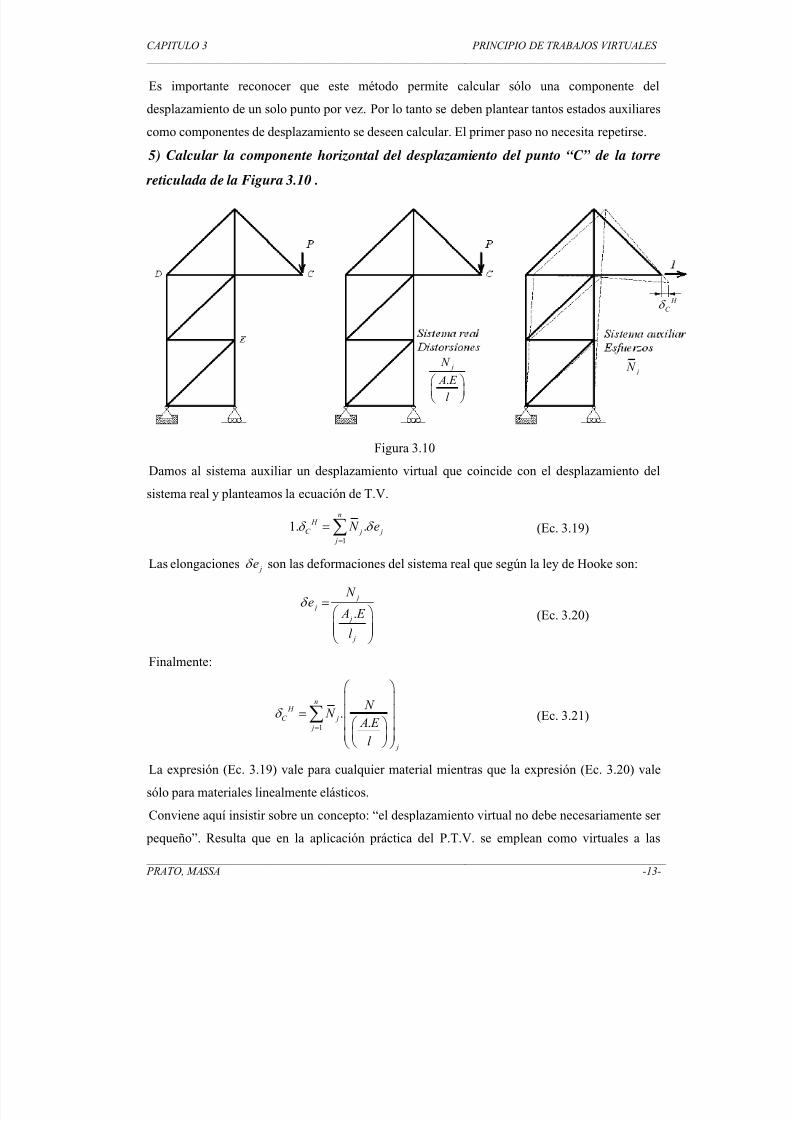
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 80/500
CAPITULO 3 PRINCIPIO DE TRABAJOS VIRTUALES _____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA
Es importante reconocer que este método permite calcular sólo una componente del
desplazamiento de un solo punto por vez. Por lo tanto se deben plantear tantos estados auxiliares
como componentes de desplazamiento se deseen calcular. El primer paso no necesita repetirse.
5) Calcular la componente horizontal del desplazamiento del punto “C” de la torre
reticulada de la Figura 3.10 .
Figura 3.10
Damos al sistema auxiliar un desplazamiento virtual que coincide con el desplazamiento del
sistema real y planteamos la ecuación de T.V.
1
1. .n
H
C j j
j
N eδ δ =
= ∑ (Ec. 3.19)
Las elongaciones jeδ son las deformaciones del sistema real que según la ley de Hooke son:
. j
j
j
j
N e
A E
l
δ =⎛ ⎞⎜ ⎟⎜ ⎟⎝ ⎠
(Ec. 3.20)
Finalmente:
1
..
n H
C j
j
j
N N
A E
l
δ =
⎛ ⎞⎜ ⎟⎜ ⎟=
⎛ ⎞⎜ ⎟⎜ ⎟⎜ ⎟⎝ ⎠⎝ ⎠
∑ (Ec. 3.21)
La expresión (Ec. 3.19) vale para cualquier material mientras que la expresión (Ec. 3.20) vale
sólo para materiales linealmente elásticos.
Conviene aquí insistir sobre un concepto: “el desplazamiento virtual no debe necesariamente serpequeño”. Resulta que en la aplicación práctica del P.T.V. se emplean como virtuales a las
. j N
A E
l
⎛ ⎞⎜ ⎟⎝ ⎠
j N
H
C δ
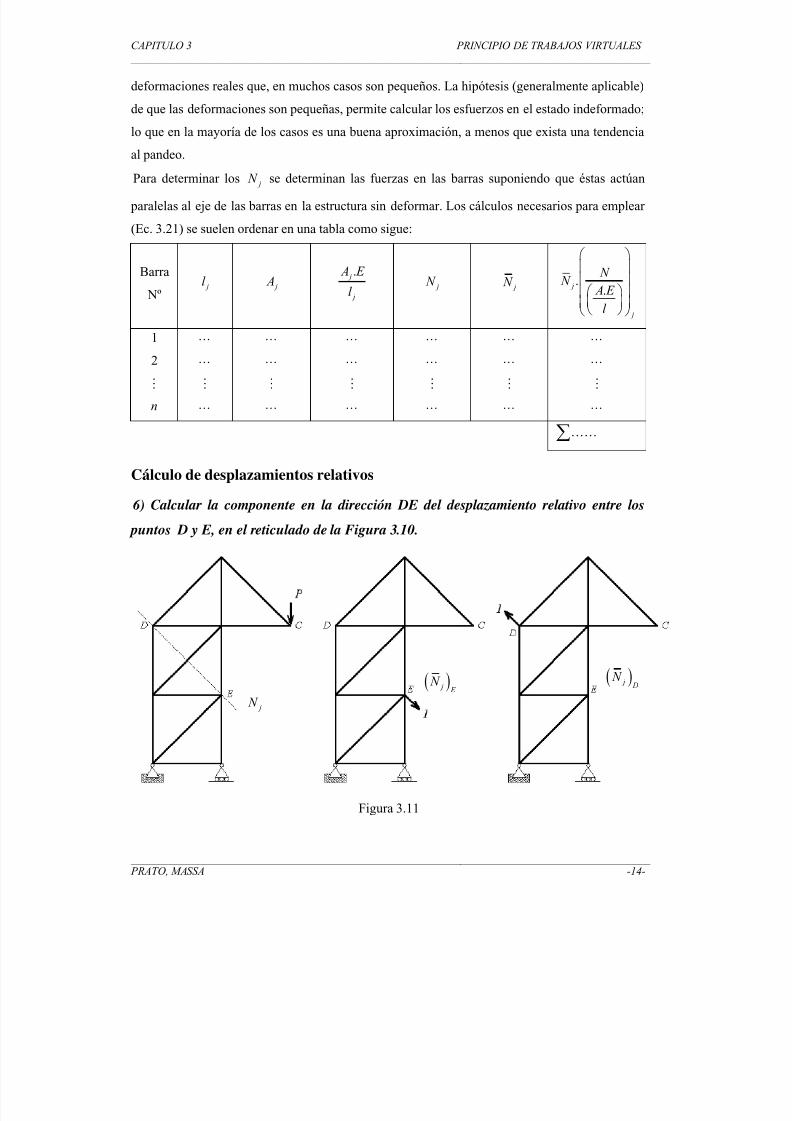
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 81/500
CAPITULO 3 PRINCIPIO DE TRABAJOS VIRTUALES _____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA
deformaciones reales que, en muchos casos son pequeños. La hipótesis (generalmente aplicable)
de que las deformaciones son pequeñas, permite calcular los esfuerzos en el estado indeformado;
lo que en la mayoría de los casos es una buena aproximación, a menos que exista una tendencia
al pandeo.
Para determinar los j N se determinan las fuerzas en las barras suponiendo que éstas actúan
paralelas al eje de las barras en la estructura sin deformar. Los cálculos necesarios para emplear
(Ec. 3.21) se suelen ordenar en una tabla como sigue:
Barra
Nº jl j A
. j
j
A E
l j N
j N .. j
j
N N
A E
l
⎛ ⎞⎜ ⎟⎜ ⎟
⎛ ⎞⎜ ⎟⎜ ⎟⎜ ⎟⎝ ⎠⎝ ⎠
1
2
M
n
L
L
M
L
L
L
M
L
L
L
M
L
L
L
M
L
L
L
M
L
L
L
M
L
∑KK
Cálculo de desplazamientos relativos
6) Calcular la componente en la dirección DE del desplazamiento relativo entre los
puntos D y E, en el reticulado de la Figura 3.10.
Figura 3.11
( ) j E N ( ) j D
N
j N
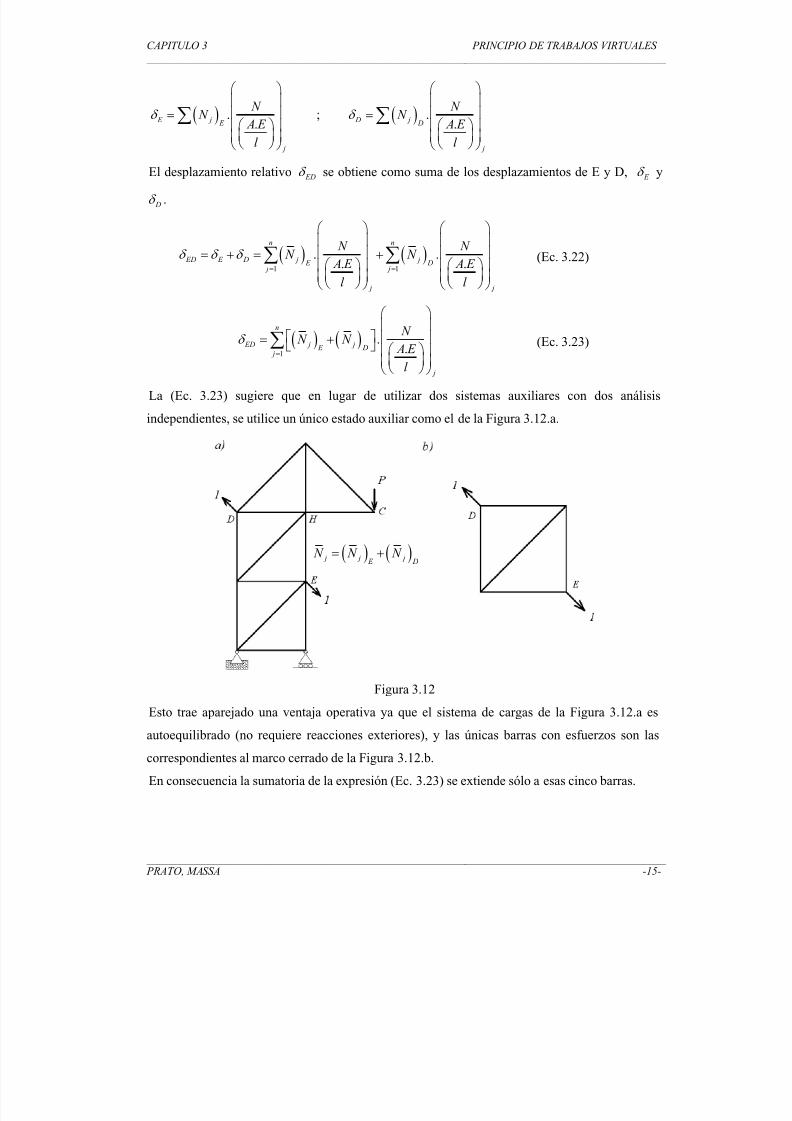
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 82/500
CAPITULO 3 PRINCIPIO DE TRABAJOS VIRTUALES _____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA
( ) .. E j E
j
N N
A E
l
δ
⎛ ⎞⎜ ⎟⎜ ⎟=
⎛ ⎞⎜ ⎟⎜ ⎟⎜ ⎟⎝ ⎠⎝ ⎠
∑ ; ( ) .. D j D
j
N N
A E
l
δ
⎛ ⎞⎜ ⎟⎜ ⎟=
⎛ ⎞⎜ ⎟⎜ ⎟⎜ ⎟⎝ ⎠⎝ ⎠
∑
El desplazamiento relativo EDδ se obtiene como suma de los desplazamientos de E y D, E δ y
Dδ .
( ) ( )1 1
. .. .
n n
ED E D j j E D j j
j j
N N N N
A E A E
l l
δ δ δ = =
⎛ ⎞ ⎛ ⎞⎜ ⎟ ⎜ ⎟⎜ ⎟ ⎜ ⎟= + = +
⎛ ⎞ ⎛ ⎞⎜ ⎟ ⎜ ⎟⎜ ⎟ ⎜ ⎟⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠⎝ ⎠ ⎝ ⎠
∑ ∑ (Ec. 3.22)
( ) ( )1
..
n
ED j j E D j
j
N N N
A E
l
δ =
⎛ ⎞
⎜ ⎟⎡ ⎤ ⎜ ⎟= +⎣ ⎦ ⎛ ⎞⎜ ⎟⎜ ⎟⎜ ⎟⎝ ⎠⎝ ⎠
∑ (Ec. 3.23)
La (Ec. 3.23) sugiere que en lugar de utilizar dos sistemas auxiliares con dos análisis
independientes, se utilice un único estado auxiliar como el de la Figura 3.12.a.
Figura 3.12
Esto trae aparejado una ventaja operativa ya que el sistema de cargas de la Figura 3.12.a es
autoequilibrado (no requiere reacciones exteriores), y las únicas barras con esfuerzos son las
correspondientes al marco cerrado de la Figura 3.12.b.
En consecuencia la sumatoria de la expresión (Ec. 3.23) se extiende sólo a esas cinco barras.
( ) ( ) j j j E D N N N = +
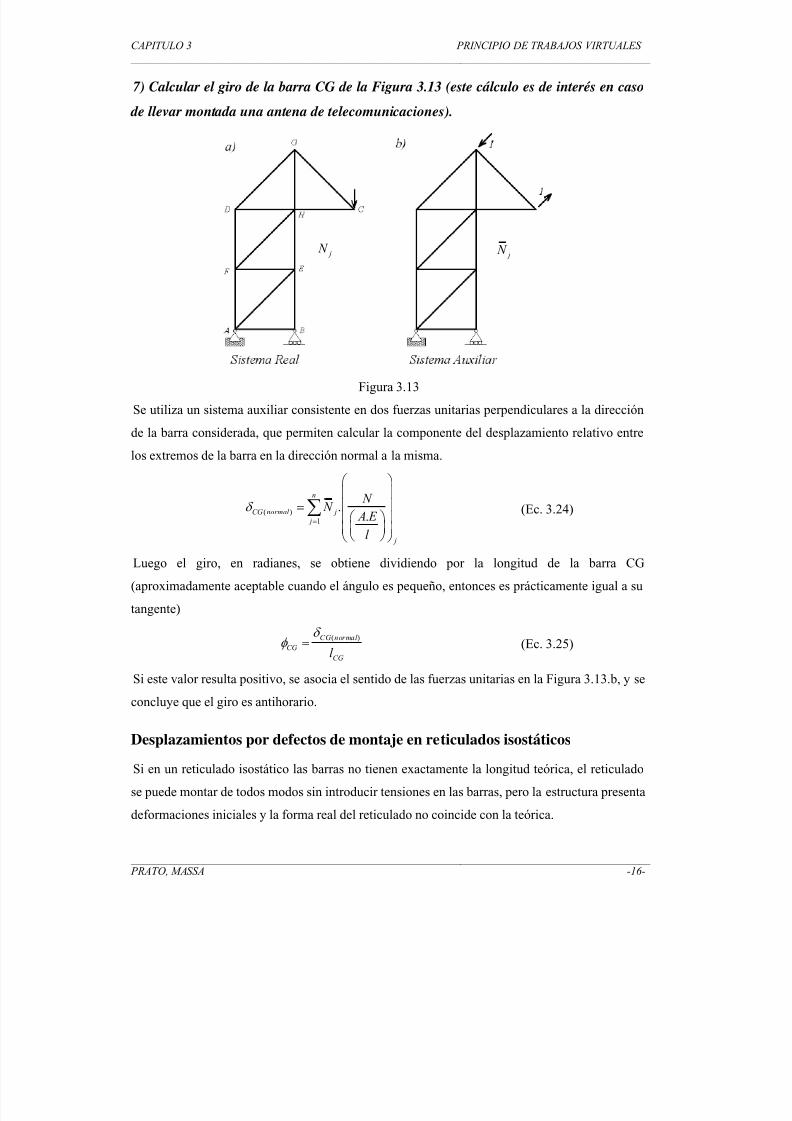
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 83/500
CAPITULO 3 PRINCIPIO DE TRABAJOS VIRTUALES _____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA
7) Calcular el giro de la barra CG de la Figura 3.13 (este cálculo es de interés en caso
de llevar montada una antena de telecomunicaciones).
Figura 3.13
Se utiliza un sistema auxiliar consistente en dos fuerzas unitarias perpendiculares a la dirección
de la barra considerada, que permiten calcular la componente del desplazamiento relativo entre
los extremos de la barra en la dirección normal a la misma.
( )1
..
n
CG normal j
j
j
N N
A E
l
δ =
⎛ ⎞⎜ ⎟⎜ ⎟=
⎛ ⎞⎜ ⎟⎜ ⎟⎜ ⎟⎝ ⎠⎝ ⎠
∑ (Ec. 3.24)
Luego el giro, en radianes, se obtiene dividiendo por la longitud de la barra CG
(aproximadamente aceptable cuando el ángulo es pequeño, entonces es prácticamente igual a su
tangente)
( )CG normal
CG
CGl
δ φ = (Ec. 3.25)
Si este valor resulta positivo, se asocia el sentido de las fuerzas unitarias en la Figura 3.13.b, y se
concluye que el giro es antihorario.
Desplazamientos por defectos de montaje en reticulados isostáticos
Si en un reticulado isostático las barras no tienen exactamente la longitud teórica, el reticulado
se puede montar de todos modos sin introducir tensiones en las barras, pero la estructura presenta
deformaciones iniciales y la forma real del reticulado no coincide con la teórica.
j N j N
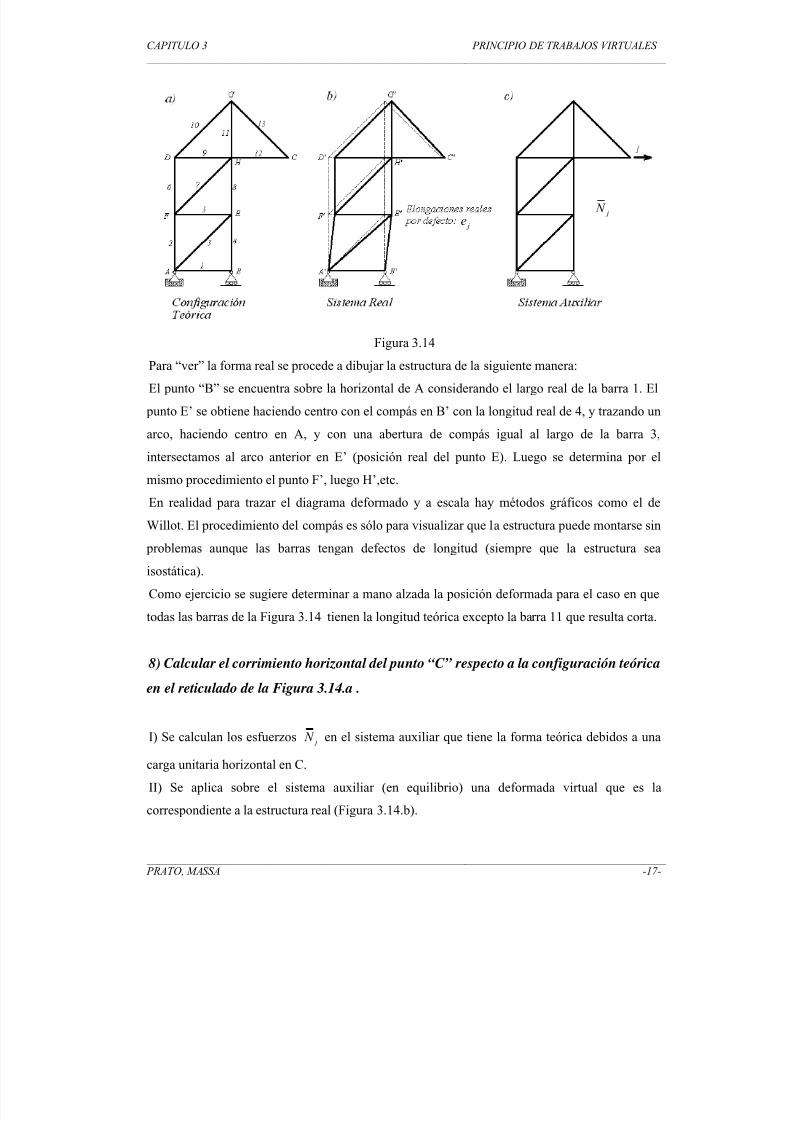
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 84/500
CAPITULO 3 PRINCIPIO DE TRABAJOS VIRTUALES _____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA
Figura 3.14
Para “ver” la forma real se procede a dibujar la estructura de la siguiente manera:
El punto “B” se encuentra sobre la horizontal de A considerando el largo real de la barra 1. El
punto E’ se obtiene haciendo centro con el compás en B’ con la longitud real de 4, y trazando un
arco, haciendo centro en A, y con una abertura de compás igual al largo de la barra 3,
intersectamos al arco anterior en E’ (posición real del punto E). Luego se determina por el
mismo procedimiento el punto F’, luego H’,etc.
En realidad para trazar el diagrama deformado y a escala hay métodos gráficos como el de
Willot. El procedimiento del compás es sólo para visualizar que la estructura puede montarse sin
problemas aunque las barras tengan defectos de longitud (siempre que la estructura sea
isostática).
Como ejercicio se sugiere determinar a mano alzada la posición deformada para el caso en que
todas las barras de la Figura 3.14 tienen la longitud teórica excepto la barra 11 que resulta corta.
8) Calcular el corrimiento horizontal del punto “C” respecto a la configuración teórica
en el reticulado de la Figura 3.14.a .
I) Se calculan los esfuerzos j N en el sistema auxiliar que tiene la forma teórica debidos a una
carga unitaria horizontal en C.
II) Se aplica sobre el sistema auxiliar (en equilibrio) una deformada virtual que es la
correspondiente a la estructura real (Figura 3.14.b).
je
j N
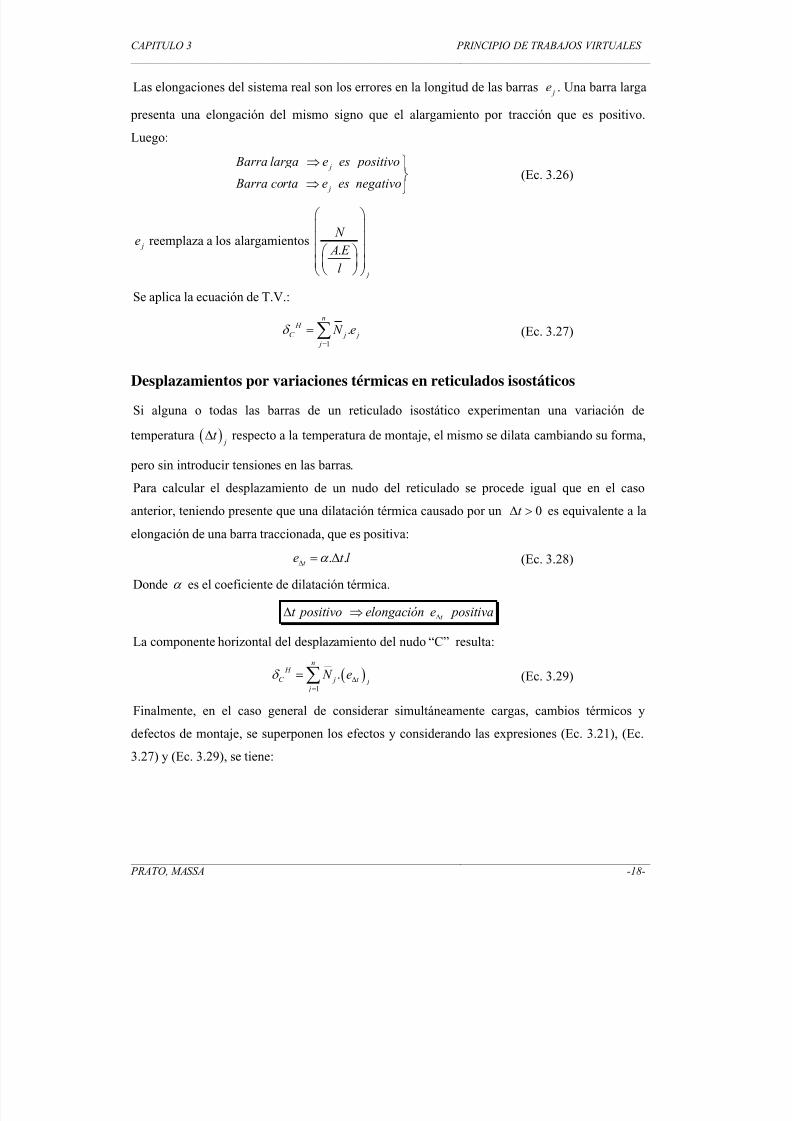
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 85/500
CAPITULO 3 PRINCIPIO DE TRABAJOS VIRTUALES _____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA
Las elongaciones del sistema real son los errores en la longitud de las barras je . Una barra larga
presenta una elongación del mismo signo que el alargamiento por tracción que es positivo.
Luego:
j
j
Barra larga e es positivo
Barra corta e es negativo⇒ ⎫⎪⎬⇒ ⎪⎭
(Ec. 3.26)
je reemplaza a los alargamientos.
j
N
A E
l
⎛ ⎞⎜ ⎟⎜ ⎟
⎛ ⎞⎜ ⎟⎜ ⎟⎜ ⎟⎝ ⎠⎝ ⎠
Se aplica la ecuación de T.V.:
1.
n
H C j j
j
N eδ =
= ∑ (Ec. 3.27)
Desplazamientos por variaciones térmicas en reticulados isostáticos
Si alguna o todas las barras de un reticulado isostático experimentan una variación de
temperatura ( ) j
t ∆ respecto a la temperatura de montaje, el mismo se dilata cambiando su forma,
pero sin introducir tensiones en las barras.
Para calcular el desplazamiento de un nudo del reticulado se procede igual que en el casoanterior, teniendo presente que una dilatación térmica causado por un 0t ∆ > es equivalente a la
elongación de una barra traccionada, que es positiva:
. .t e t l α ∆ = ∆ (Ec. 3.28)
Donde α es el coeficiente de dilatación térmica.
t t positivo elongación e positiva∆∆ ⇒
La componente horizontal del desplazamiento del nudo “C” resulta:
( )1
.n
H
C j t j j
N eδ ∆=
= ∑ (Ec. 3.29)
Finalmente, en el caso general de considerar simultáneamente cargas, cambios térmicos y
defectos de montaje, se superponen los efectos y considerando las expresiones (Ec. 3.21), (Ec.
3.27) y (Ec. 3.29), se tiene:
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 86/500
CAPITULO 3 PRINCIPIO DE TRABAJOS VIRTUALES _____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA
1
. . ..
n H
C j
j
j
N N e t l
A E
l
δ α =
⎛ ⎞⎜ ⎟⎜ ⎟= + + ∆
⎛ ⎞⎜ ⎟⎜ ⎟⎜ ⎟⎝ ⎠⎝ ⎠
∑ (Ec. 3.30)
Recuérdese que j N corresponde al sistema auxiliar de la carga unitaria mientras que el
paréntesis contiene las elongaciones virtuales que son las de la estructura real.
Desplazamientos por variaciones térmicas en sistemas isostáticos de almallena
Se supone que el cambio de temperatura es pequeño, de modo que no cambian las propiedades
del material, y que la variación de temperatura en altura de la viga es lineal.
La dilatación térmica que sufren las fibras superiores e inferiores de un tramo de viga de
longitud dx es según la ecuación (Ec. 3.28):
Figura 3.15
La sección plana CD se ha desplazado una distancia dl hasta la posición D’C’ y luego ha rotadoun ángulo d θ para llegar a la posición final C’’D’’.
. . . .2
s im
t t dl dx t dxα α
∆ + ∆= = ∆
La deformación específica por cambio de temperatura resulta:
.t mt ε α = ∆ (Ec. 3.31)
El ángulo girado se puede aproximar por la tangente:
( ). . . .''' '' '' '' . . s i
s i
t dx t dx D D DD CC d t t dx
h h h h
α α α θ
∆ − ∆−= = = = ∆ − ∆
st ∆
it ∆dx
2
hh
'' . . s DD t dxα = ∆
'' . .iCC t dxα = ∆
d θ
. .it dxα ∆
. . st dxα ∆
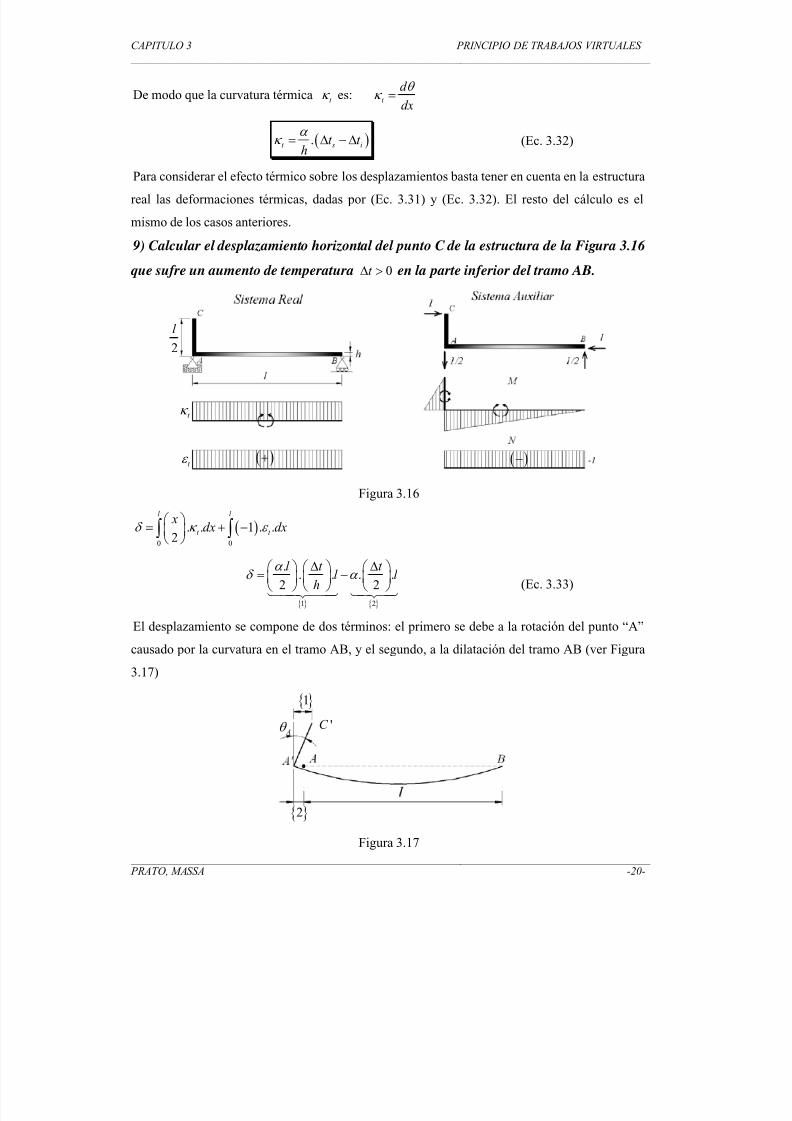
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 87/500
CAPITULO 3 PRINCIPIO DE TRABAJOS VIRTUALES _____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA
De modo que la curvatura térmica t κ es: t
d
dx
θ κ =
( ).t s it t h
α κ = ∆ − ∆ (Ec. 3.32)
Para considerar el efecto térmico sobre los desplazamientos basta tener en cuenta en la estructura
real las deformaciones térmicas, dadas por (Ec. 3.31) y (Ec. 3.32). El resto del cálculo es el
mismo de los casos anteriores.
9) Calcular el desplazamiento horizontal del punto C de la estructura de la Figura 3.16
que sufre un aumento de temperatura 0t ∆ > en la parte inferior del tramo AB.
Figura 3.16
( )0 0
. . 1 . .2
l l
t t
xdx dxδ κ ε
⎛ ⎞= + −⎜ ⎟
⎝ ⎠∫ ∫
1 2
.. . . .
2 2
l t t l l
h
α δ α
∆ ∆⎛ ⎞ ⎛ ⎞ ⎛ ⎞= −⎜ ⎟ ⎜ ⎟ ⎜ ⎟
⎝ ⎠ ⎝ ⎠ ⎝ ⎠1442443 14243
(Ec. 3.33)
El desplazamiento se compone de dos términos: el primero se debe a la rotación del punto “A”
causado por la curvatura en el tramo AB, y el segundo, a la dilatación del tramo AB (ver Figura3.17)
Figura 3.17
Aθ
1
2
'C
2l
t κ
t ε ( )+ ( )−
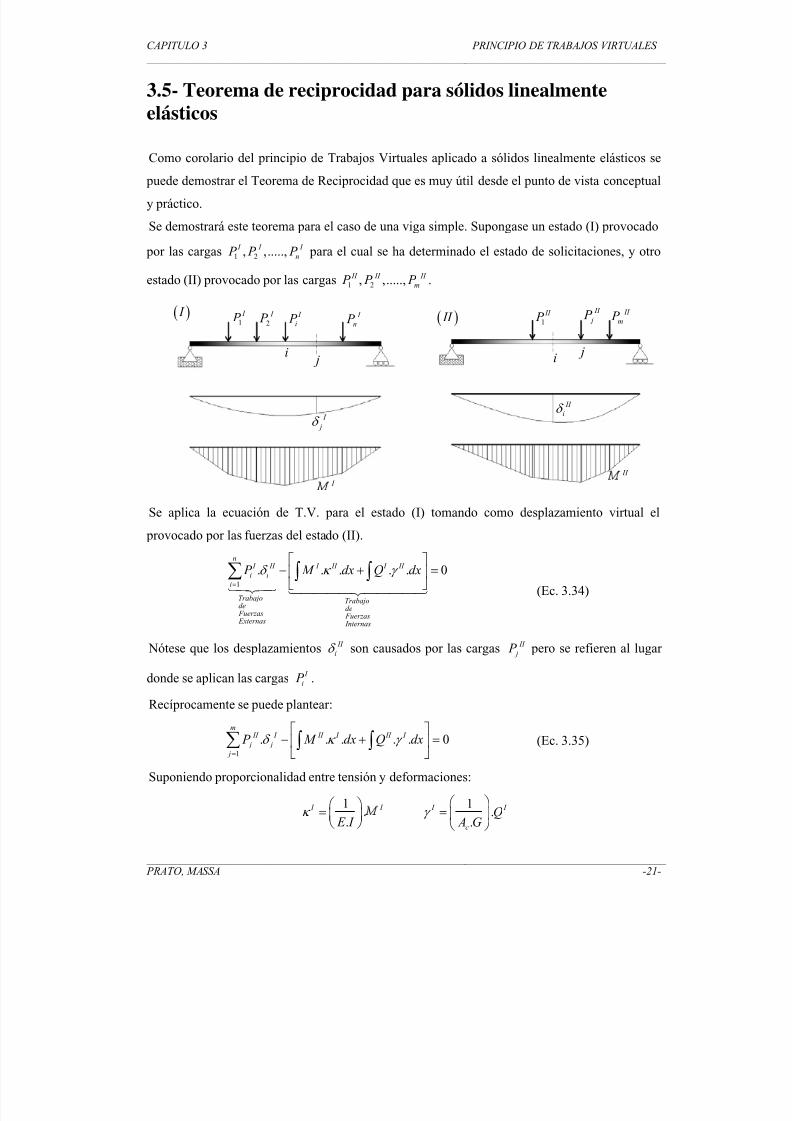
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 88/500
CAPITULO 3 PRINCIPIO DE TRABAJOS VIRTUALES _____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA
3.5- Teorema de reciprocidad para sólidos linealmenteelásticos
Como corolario del principio de Trabajos Virtuales aplicado a sólidos linealmente elásticos sepuede demostrar el Teorema de Reciprocidad que es muy útil desde el punto de vista conceptual
y práctico.
Se demostrará este teorema para el caso de una viga simple. Supongase un estado (I) provocado
por las cargas 1 2, ,....., I I I
n P P P para el cual se ha determinado el estado de solicitaciones, y otro
estado (II) provocado por las cargas 1 2, ,....., II II II
m P P P .
Se aplica la ecuación de T.V. para el estado (I) tomando como desplazamiento virtual el
provocado por las fuerzas del estado (II).
1
. . . . . 0n
I II I II I II
i i
i
Trabajo Trabajode de Fuerzas Fuerzas Externas Internas
P M dx Q dxδ κ γ =
⎡ ⎤− + =⎢ ⎥
⎣ ⎦∑ ∫ ∫ 14243 14444244443
(Ec. 3.34)
Nótese que los desplazamientos
II
iδ son causados por las cargas
II
j P pero se refieren al lugardonde se aplican las cargas I
i P .
Recíprocamente se puede plantear:
1
. . . . . 0m
II I II I II I
j j
j
P M dx Q dxδ κ γ =
⎡ ⎤− + =⎢ ⎥
⎣ ⎦∑ ∫ ∫ (Ec. 3.35)
Suponiendo proporcionalidad entre tensión y deformaciones:
1
..
I I
E I κ
⎛ ⎞
= ⎜ ⎟⎝ ⎠
1
..
I I
c Q A Gγ
⎛ ⎞
= ⎜ ⎟⎝ ⎠
( ) I ( ) II 1
I P 2
I P I
i
P I
n
P
i j
I
jδ
I
1 II P
II
j P II
m P
i j
II
iδ
II

5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 89/500
CAPITULO 3 PRINCIPIO DE TRABAJOS VIRTUALES _____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA
1.
. II II
E I κ
⎛ ⎞= ⎜ ⎟
⎝ ⎠
1.
. II II
c
Q A G
γ ⎛ ⎞
= ⎜ ⎟⎝ ⎠
Reemplazando estas expresiones en (Ec. 3.34) y (Ec. 3.35), y restando miembro a miembro se
tiene:
1 1
. . 0n m
I II II I
i i j j
i j
P P δ δ = =
− =∑ ∑
Por lo tanto:
1 1
. .n m
I II II I
i i j j
i j
P P δ δ = =
=∑ ∑ (Ec. 3.36)
El teorema de reciprocidad se sintetiza en la expresión (Ec. 3.36) que expresa que el trabajo de
las fuerzas del estado (I) a través de los desplazamientos de sus puntos de aplicación en el estado(II), es igual al trabajo de las fuerzas del estado (II) a través de los desplazamientos en el estado
(I). Este resultado puede generalizarse. Designando K N a una solicitación ( ), , , ,t M Q N etc y
K ξ a su deformación específica asociada ( ), , , ,etcκ θ γ ε las expresiones (Ec. 3.34) y (Ec. 3.35)
quedan:
1
. . . 0n
I II I II
i i K K
i K
P N dxδ ξ =
− =∑ ∑∫ (Ec. 3.37)
1
. . . 0n
II I II I
j j K K
j K
P N dxδ ξ =
− =∑ ∑∫ (Ec. 3.38)
Las condiciones de linealidad expresan: . I I
K K K N ξ α = ; . II II
K K K N ξ α =
Por lo tanto:
1 1
. .n m
I II II I
i i j j
i j
P P δ δ = =
=∑ ∑
Es importante destacar que el teorema de reciprocidad vale sólo para sólidos lineales mientras que el principio de Trabajos Virtuales vale aun en el caso No Lineal. En el
caso No Lineal (Ec. 3.37) mantiene vigencia pero II
K ξ puede ser bastante complicado.
Entre las aplicaciones del teorema de reciprocidad para sólidos linealmente elásticos se destacan
dos:
1) Probar la simetría de la Matriz de Flexibilidad en el método de las fuerzas y de la
matriz de Rigidez en el método de los desplazamientos.
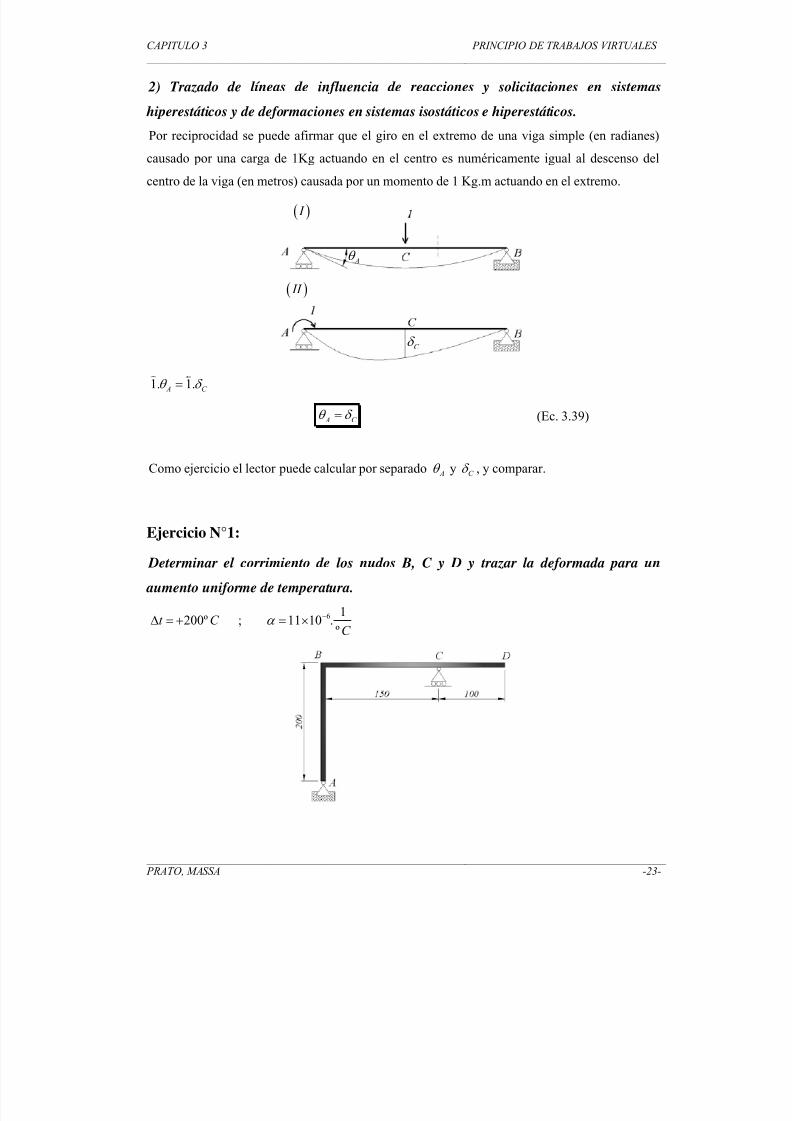
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 90/500
CAPITULO 3 PRINCIPIO DE TRABAJOS VIRTUALES _____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA
2) Trazado de líneas de influencia de reacciones y solicitaciones en sistemas
hiperestáticos y de deformaciones en sistemas isostáticos e hiperestáticos.
Por reciprocidad se puede afirmar que el giro en el extremo de una viga simple (en radianes)
causado por una carga de 1Kg actuando en el centro es numéricamente igual al descenso delcentro de la viga (en metros) causada por un momento de 1 Kg.m actuando en el extremo.
1. 1. A C θ δ =s )
A C θ δ = (Ec. 3.39)
Como ejercicio el lector puede calcular por separado Aθ y C δ , y comparar.
Ejercicio N°1:
Determinar el corrimiento de los nudos B, C y D y trazar la deformada para un
aumento uniforme de temperatura.
200ºt C ∆ = + ; 6 111 10 .
º C α −= ×
Aθ
C δ
( ) I
( ) II
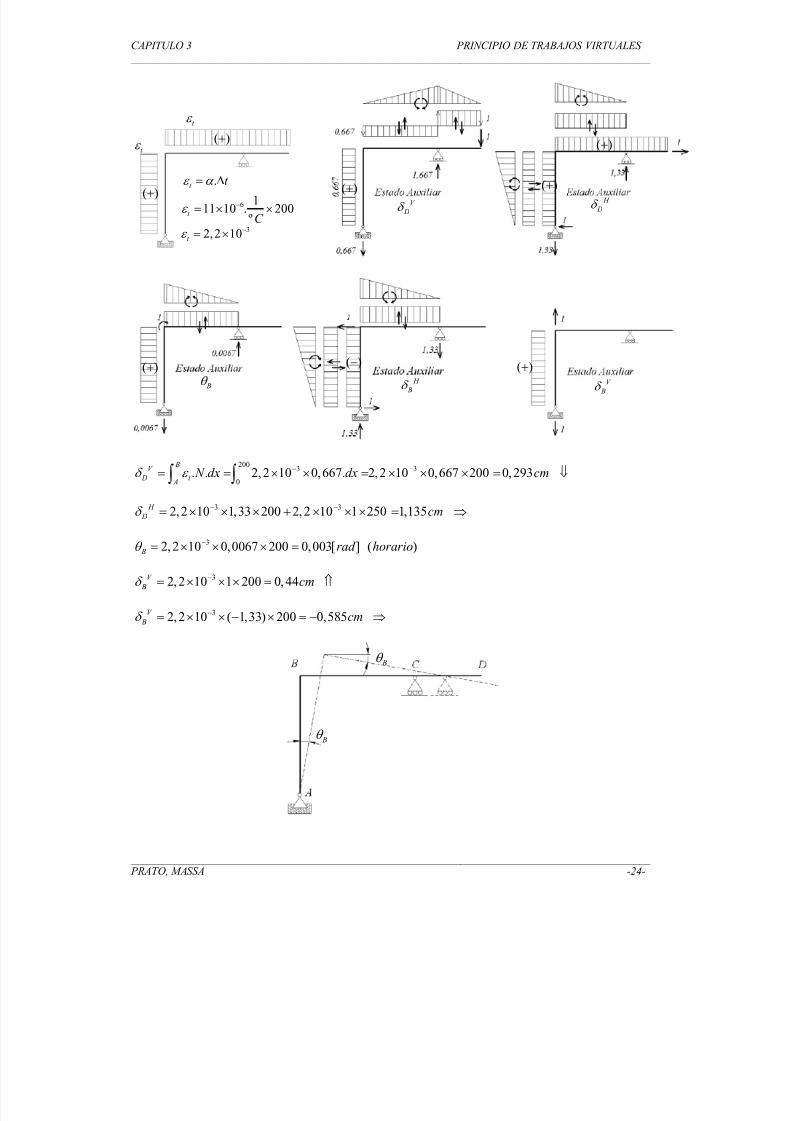
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 91/500
CAPITULO 3 PRINCIPIO DE TRABAJOS VIRTUALES _____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA
200 3 3
0. . 2, 2 10 0,667. 2,2 10 0,667 200 0,293
BV
D t A
N dx dx cmδ ε − −= = × × = × × × = ⇓∫ ∫
3 32,2 10 1,33 200 2,2 10 1 250 1,135 H
D cmδ − −= × × × + × × × = ⇒
32,2 10 0,0067 200 0,003[ ] ( ) B rad horarioθ −= × × × =
32,2 10 1 200 0,44V
B cmδ −= × × × = ⇑
32,2 10 ( 1,33) 200 0,585V
B cmδ −= × × − × = − ⇒
Bθ
Bθ
t ε
( )+
.t t ε α = ∆
6 111 10 . 200
ºt C
ε −= × ×
32,2 10t ε −= ×
( )+
t ε
V
Dδ
( )+ H
Dδ
( )+
( )+
Bθ H
Bδ V
Bδ
( )+ ( )− ( )+
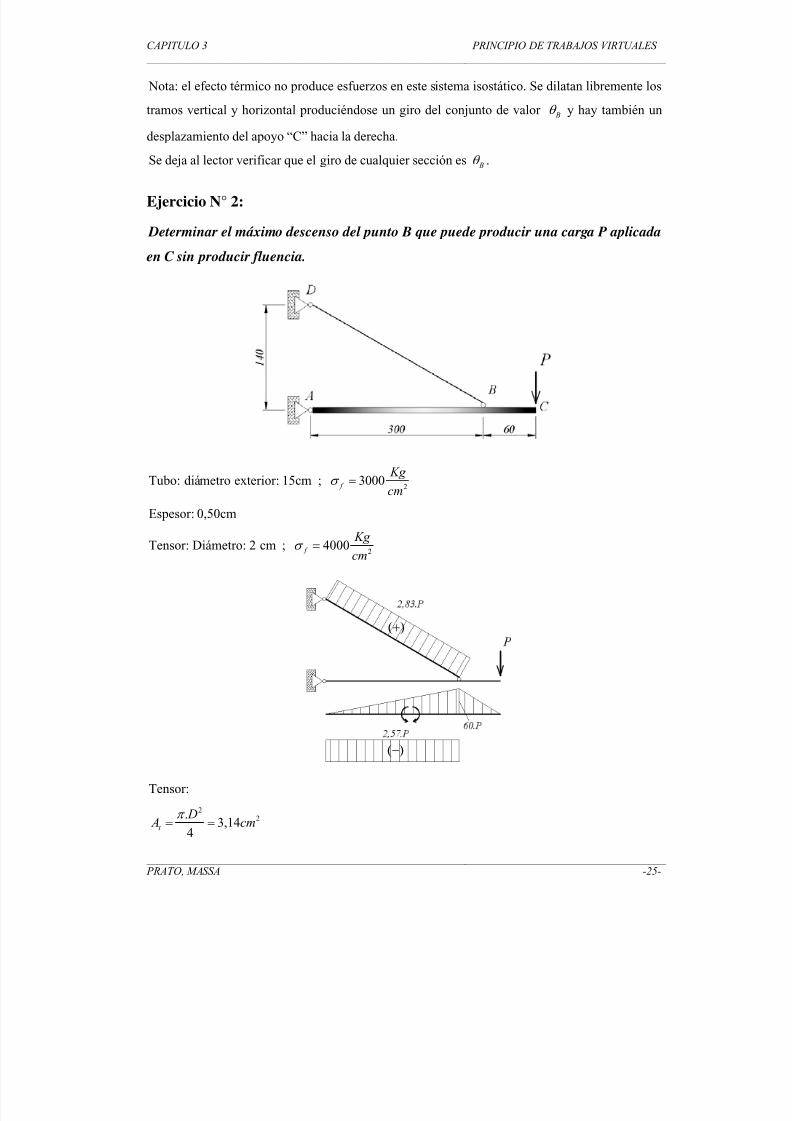
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 92/500
CAPITULO 3 PRINCIPIO DE TRABAJOS VIRTUALES _____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA
Nota: el efecto térmico no produce esfuerzos en este sistema isostático. Se dilatan libremente los
tramos vertical y horizontal produciéndose un giro del conjunto de valor Bθ y hay también un
desplazamiento del apoyo “C” hacia la derecha.
Se deja al lector verificar que el giro de cualquier sección es Bθ .
Ejercicio N° 2:
Determinar el máximo descenso del punto B que puede producir una carga P aplicada
en C sin producir fluencia.
Tubo: diámetro exterior: 15cm ;2
3000 f
Kg
cmσ =
Espesor: 0,50cm
Tensor: Diámetro: 2 cm ;2
4000 f
Kg
cmσ =
Tensor:
2
2. 3,144t D A cmπ = =
( )+
( )−
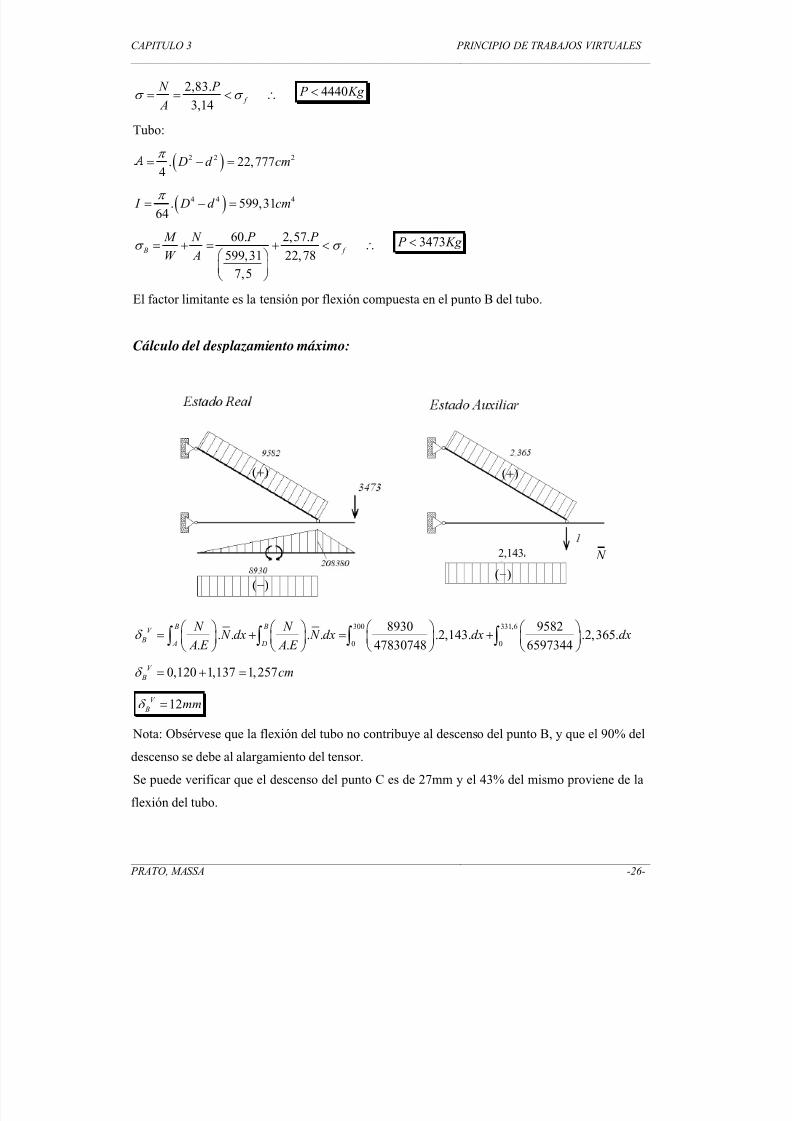
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 93/500
CAPITULO 3 PRINCIPIO DE TRABAJOS VIRTUALES _____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA
2,83.
3,14 f
N P
Aσ σ = = < ∴ 4440 P Kg <
Tubo:
( )2 2 2
. 22,7774 D d cmπ
= − =
( )4 4 4. 599,3164
I D d cmπ
= − =
60. 2,57.
599,31 22,787,5
B f
M N P P
W Aσ σ = + = + < ∴
⎛ ⎞⎜ ⎟⎝ ⎠
3473 P Kg <
El factor limitante es la tensión por flexión compuesta en el punto B del tubo.
Cálculo del desplazamiento máximo:
300 331,6
0 0
8930 9582. . . . .2,143. .2,365.
. . 47830748 6597344
B BV
B A D
N N N dx N dx dx dx
A E A E δ
⎛ ⎞ ⎛ ⎞ ⎛ ⎞ ⎛ ⎞= + = +⎜ ⎟ ⎜ ⎟ ⎜ ⎟ ⎜ ⎟
⎝ ⎠ ⎝ ⎠ ⎝ ⎠ ⎝ ⎠∫ ∫ ∫ ∫
0,120 1,137 1,257V
B cmδ = + =
12V
B mmδ =
Nota: Obsérvese que la flexión del tubo no contribuye al descenso del punto B, y que el 90% del
descenso se debe al alargamiento del tensor.
Se puede verificar que el descenso del punto C es de 27mm y el 43% del mismo proviene de la
flexión del tubo.
( )+
( )−
( )+
( )−
2,143 N
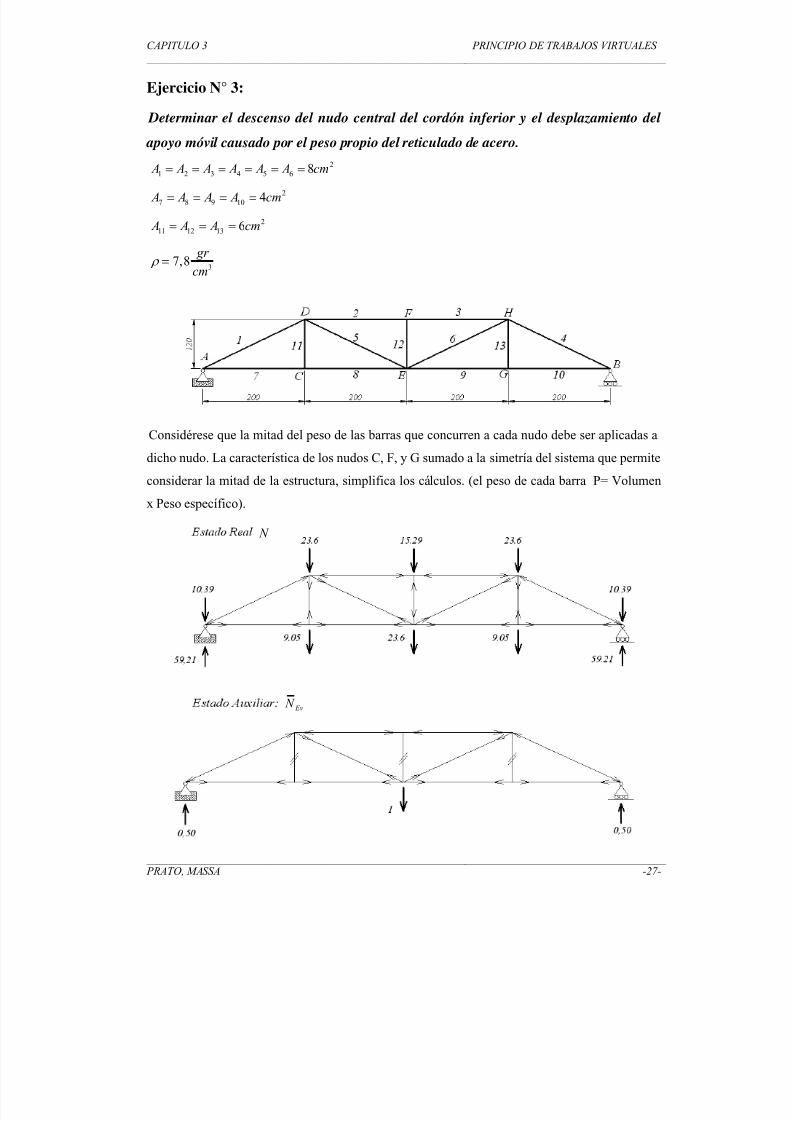
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 94/500
CAPITULO 3 PRINCIPIO DE TRABAJOS VIRTUALES _____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA
Ejercicio N° 3:
Determinar el descenso del nudo central del cordón inferior y el desplazamiento del
apoyo móvil causado por el peso propio del reticulado de acero.
21 2 3 4 5 6 8 A A A A A A cm= = = = = =
27 8 9 10 4 A A A A cm= = = =
211 12 13 6 A A A cm= = =
37,8
gr
cm ρ =
Considérese que la mitad del peso de las barras que concurren a cada nudo debe ser aplicadas a
dicho nudo. La característica de los nudos C, F, y G sumado a la simetría del sistema que permite
considerar la mitad de la estructura, simplifica los cálculos. (el peso de cada barra P= Volumen
x Peso específico).
Ev N
N
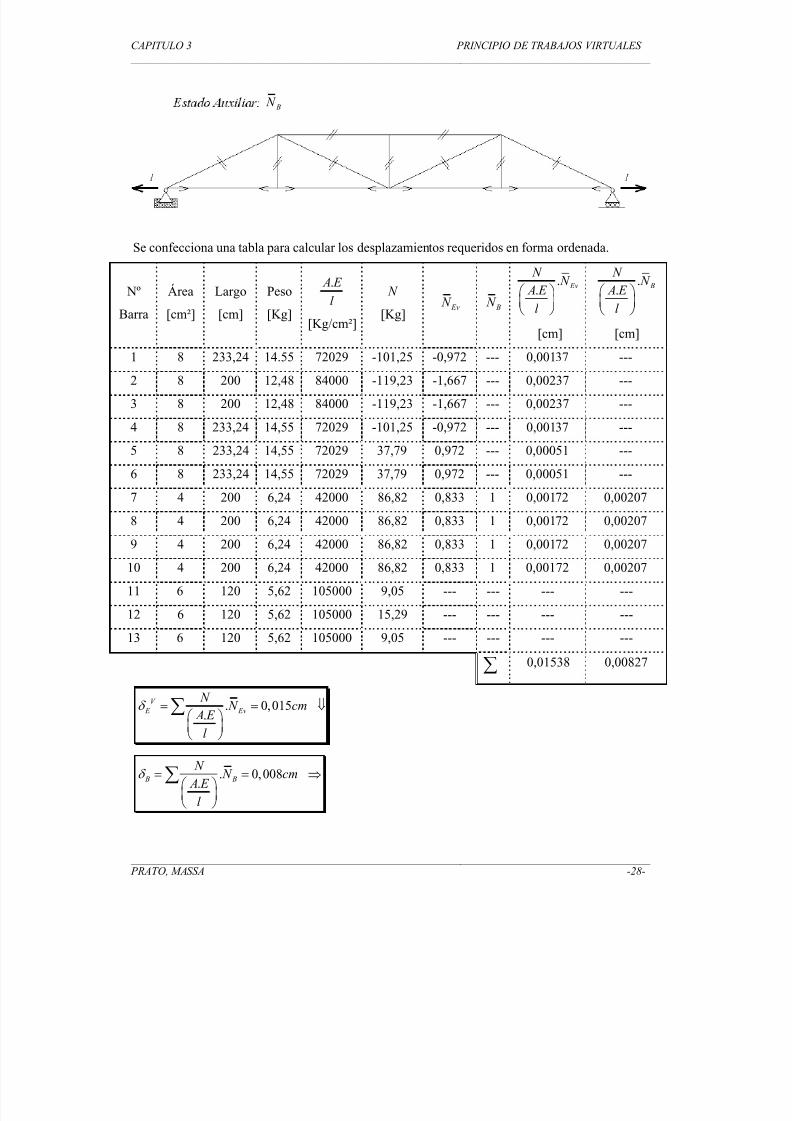
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 95/500
CAPITULO 3 PRINCIPIO DE TRABAJOS VIRTUALES _____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA
Se confecciona una tabla para calcular los desplazamientos requeridos en forma ordenada.
Nº
Barra
Área
[cm²]
Largo
[cm]
Peso
[Kg]
. A E
l
[Kg/cm²]
N
[Kg] Ev N B N
.. Ev
N N
A E
l
⎛ ⎞⎜ ⎟⎝ ⎠
[cm]
.. B
N N
A E
l
⎛ ⎞⎜ ⎟⎝ ⎠
[cm]
1 8 233,24 14.55 72029 -101,25 -0,972 --- 0,00137 ---
2 8 200 12,48 84000 -119,23 -1,667 --- 0,00237 ---
3 8 200 12,48 84000 -119,23 -1,667 --- 0,00237 ---
4 8 233,24 14,55 72029 -101,25 -0,972 --- 0,00137 ---
5 8 233,24 14,55 72029 37,79 0,972 --- 0,00051 ---
6 8 233,24 14,55 72029 37,79 0,972 --- 0,00051 ---
7 4 200 6,24 42000 86,82 0,833 1 0,00172 0,00207
8 4 200 6,24 42000 86,82 0,833 1 0,00172 0,00207
9 4 200 6,24 42000 86,82 0,833 1 0,00172 0,00207
10 4 200 6,24 42000 86,82 0,833 1 0,00172 0,00207
11 6 120 5,62 105000 9,05 --- --- --- ---
12 6 120 5,62 105000 15,29 --- --- --- ---
13 6 120 5,62 105000 9,05 --- --- --- ---
∑ 0,01538 0,00827
. 0,015.
V
E Ev
N N cm
A E
l
δ = = ⇓⎛ ⎞⎜ ⎟⎝ ⎠
∑
. 0,008. B B
N N cm
A E
l
δ = = ⇒⎛ ⎞⎜ ⎟⎝ ⎠
∑
B N
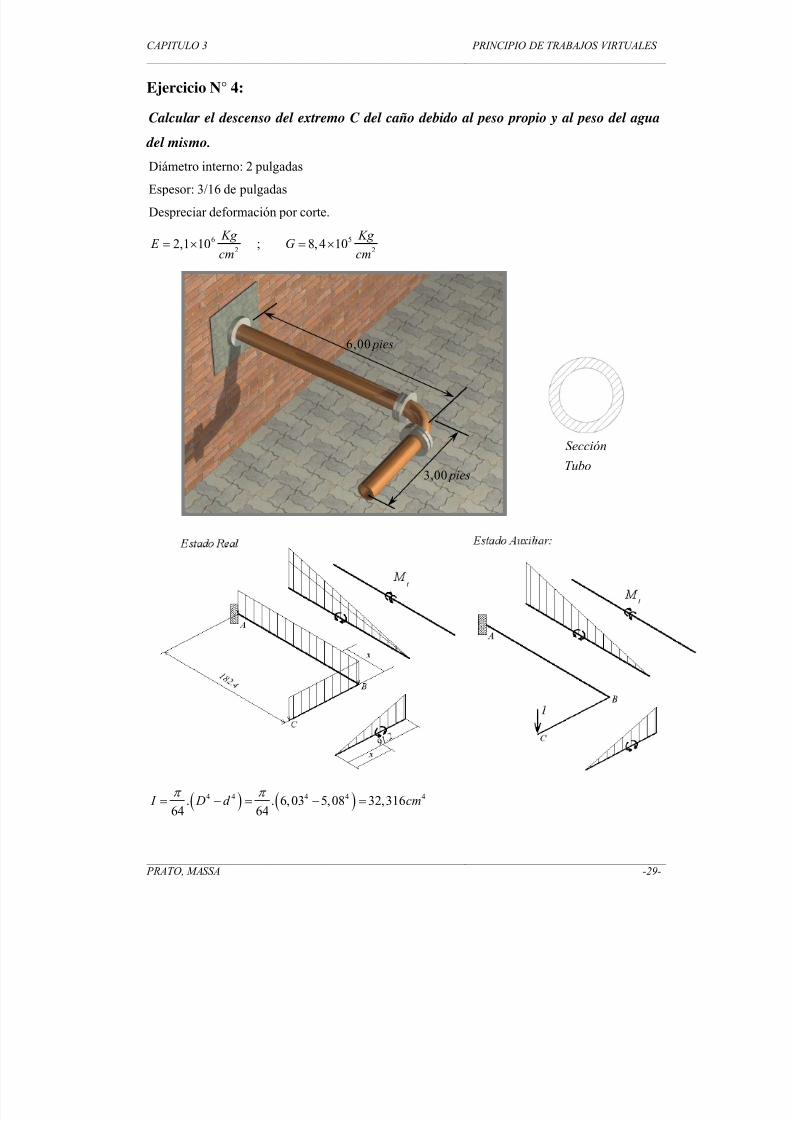
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 96/500
CAPITULO 3 PRINCIPIO DE TRABAJOS VIRTUALES _____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA
Ejercicio N° 4:
Calcular el descenso del extremo C del caño debido al peso propio y al peso del agua
del mismo.
Diámetro interno: 2 pulgadas
Espesor: 3/16 de pulgadas
Despreciar deformación por corte.
62
2,1 10 Kg
E cm
= × ; 52
8,4 10 Kg
Gcm
= ×
( ) ( )4 4 4 4 4. . 6,03 5,08 32,316
64 64
I D d cmπ π
= − = − =
t
t
6,00 pies
3,00 pies
Sección
Tubo
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 97/500
CAPITULO 3 PRINCIPIO DE TRABAJOS VIRTUALES _____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA
( )4 4 4. 64,63232
J D d cmπ
= − =
Peso total por cada centímetro del caño:
( ) ( )2 2 2 2 3
. . 1 . . 6,03 5,08 1 .7,8 10 0,06474 4c
Kg
q V D d cm
π π
ρ ρ −⎡ ⎤ ⎡ ⎤
= = − × = − × × =⎢ ⎥ ⎢ ⎥⎣ ⎦ ⎣ ⎦
2 2 3. . 1 . .5,08 1 .1 10 0,02034 4a
Kg q V d
cm
π π ρ ρ −⎡ ⎤ ⎡ ⎤
= = × = × × =⎢ ⎥ ⎢ ⎥⎣ ⎦ ⎣ ⎦
0, 0647 0, 0203 0, 085c a
Kg q q q
cm= + = + =
( )
l
cm
( ).
Rigidez
E I
( ). Kg cm
Contrib. al
desplazamiento
Flexión en AB 182,4 67863600 27,8. 0, 0425. x x+ 1. 0,40579
Flexión en CB 91,2 67863600 20,0425. x 1. 0,01083
Torsión en AB 182,4 54290880 353,5 91,2 0,10831
∑ 0,52493
2 2182,4 91,2 182,4
0 0 0
7,8. 0,0425. 0,0425. 353,5.1. . .1. . .91,2.
67863600 67863600 54290880
x x x x dx x dx dxδ
⎛ ⎞ ⎛ ⎞+ ⎛ ⎞= + +⎜ ⎟ ⎜ ⎟ ⎜ ⎟
⎝ ⎠⎝ ⎠ ⎝ ⎠∫ ∫ ∫
0,52cmδ =
Ejercicio N° 5:
Sabiendo que la carga vertical en C produce un desplazamiento vertical y horizontal
delmismo, determinar si existe una dirección α , para la cual el desplazamiento tiene la
misma dirección de la carga aplicada (considerar sólo deformaciones por flexión)
4600 I cm= ; 62
2,1 10 Kg
E cm
= ×

5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 98/500
CAPITULO 3 PRINCIPIO DE TRABAJOS VIRTUALES _____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA
1) Determinar los desplazamientos de C debidos a las componentes de P.
200 300
0 0. .200. . .200. 0,0116.. .
v v v
vv P x P x dx dx P E I E I
δ = + =∫ ∫
300
0
.200. . 0,00714.
.
hv
hv
P x dx P
E I δ = =∫
300
0
..200. 0, 00714.
.
hh
vh
P xdx P
E I δ = =∫
300
0
.. . 0,00714.
.
hh
hh
P x x dx P
E I δ = =∫
El vector desplazamiento del punto C es:
hvδ
vvδ
v P
. E I κ =
.200vM P =
1v
2v
hhδ
vhδ
h P
α

5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 99/500
CAPITULO 3 PRINCIPIO DE TRABAJOS VIRTUALES _____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA
0,0071. 0, 0071.
0,0071. 0, 0116.
h v h
h v v
P P
P P
δ
δ
⎡ ⎤ ⎡ ⎤=⎢ ⎥ ⎢ ⎥
⎣ ⎦ ⎣ ⎦
El desplazamiento debe ser múltiplo de P r
:
0,0071 0,0071 . .0,0071 0,0116
h h
v v
P P
P P λ ⎡ ⎤ ⎡ ⎤⎡ ⎤ =⎢ ⎥ ⎢ ⎥⎢ ⎥
⎣ ⎦ ⎣ ⎦ ⎣ ⎦
.U P λ =
Resulta un sistema homogéneo de la forma:
0,0071 0,0071. 0
0, 0071 0, 0116
h
v
P
P
λ
λ
− ⎡ ⎤⎡ ⎤=⎢ ⎥⎢ ⎥−⎣ ⎦ ⎣ ⎦
Esta ecuación admite solución distinta de la trivial si el determinante se anula:
0,0071 0,0071det 00, 0071 0, 0116
λ
λ
−⎡ ⎤ =⎢ ⎥−⎣ ⎦
2 0, 01874. 0, 0000318 0λ λ − + =
1 0,01682λ = ; 2 0,001915λ = (Máxima flexibilidad)
Para 1λ la primera ecuación resulta:
0,00968. 0,00714. 0h v P P − + =
( )
0,7376
tan
h
v
h
v
P
P
P
P α
⎫= ⎪⎪⎬⎪=⎪⎭
1 36,4ºα =
Para 2λ : 2 53,6ºα = −
Existen dos soluciones:
Nota 1: se trata de un problema de vectores propios de la matriz de flexibilidad. Dichos vectores
propios son ortogonales.Nota 2: si se aplica una carga vertical sobre la estructura rotada 33,4° en sentido horario, el
desplazamiento horizontal es nulo.

5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 100/500
CAPITULO 3 PRINCIPIO DE TRABAJOS VIRTUALES _____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA
Ejercicio N° 6:
a) Calcular el desplazamiento del punto central del tramo de la viga que tiene una
carga P en el extremo C y sufre una disminución de la temperatura t ∆ en la parte
inferior del tramo AB.
b) Determinar la incidencia que tendría un apoyo elástico de constante K colocado en
el apoyo B.
a) Despreciando las deformaciones por corte frente a las producidas por flexión:
2.
0 0
0,50. 0,50.. . . .0,50. . . . .. . . 2
l l l V
D t t t l
M P P x
dx x x dx x l dx E I E I E I δ κ κ κ
− −⎛ ⎞ ⎛ ⎞ ⎛ ⎞ ⎛ ⎞
= + = − + − −⎜ ⎟ ⎜ ⎟ ⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠ ⎝ ⎠ ⎝ ⎠∫ ∫ ∫
( ) 0,50. . x P x=
. E I κ =
.t
t
h
α κ
∆=
Tramo AD
Tramo DB
0,50. x=
0,50. 1.( )2
xM x x l l = − − = −
0t ∆ <

5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 101/500
CAPITULO 3 PRINCIPIO DE TRABAJOS VIRTUALES _____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA
3 2..
. 2V
D t
P l l
E I δ κ = − −
Se puede llegar al mismo resultado calculando por separado el desplazamiento producido por la
carga y el producido por la variación térmica y luego superponiendo los resultados.
b) Para tener en cuenta el apoyo elástico basta con agregar la energía almacenada en el resorte
durante el desplazamiento virtual en el estado inicial.
* . ..
V V V B D D D B
R N N R
A E K
l
δ δ δ = + = +⎛ ⎞⎜ ⎟⎝ ⎠
Nótese que el asentamientob
b
R
K δ = permite un giro de cuerpo rígido a la viga y el punto central
tendría un descenso1
.2bδ por estar en el centro del tramo. Justamente se tiene que
1
2b R = .
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 102/500
CAPITULO 4 METODO DE LAS FUERZAS
_____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -1-
Capítulo 4 Método de las Fuerzas
4.1- Introducción
Los procedimientos de Análisis Estructural pueden clasificarse en dos grandes métodos
esencialmente diferentes:
a) Método de las Fuerzas b) Método de Rigidez (o de los Desplazamientos)
También existen métodos mixtos en los que las incógnitas son simultáneamente fuerzas y
desplazamientos, pero no serán tratados en este curso.
En muchos casos de aplicación corriente, el Método de las Fuerzas conduce a un sistema
de ecuaciones con un número menor de incógnitas que el de Rigidez y por eso en el pasado se lo
prefería para cálculos manuales. En la actualidad, la mayoría de los programas de computadora
se basan en el Método de Rigidez por ser más sistemático y, por ende, más fácil de programar.El Análisis Estructural basado en el Método de Rigidez se estudiará detalladamente más
adelante en el desarrollo del temario.
Sistemas hiperestáticos
En el curso de Estática se tratan problemas que involucran estructuras isostáticas, en los
cuales las fuerzas incógnitas se pueden obtener a partir de ecuaciones de equilibrio estático.
El Capítulo 3 se dedicó al cálculo de desplazamientos en sistemas isostáticos a través del
Principio de Trabajos Virtuales. En ese caso, la secuencia usada consistió en calcular primero las
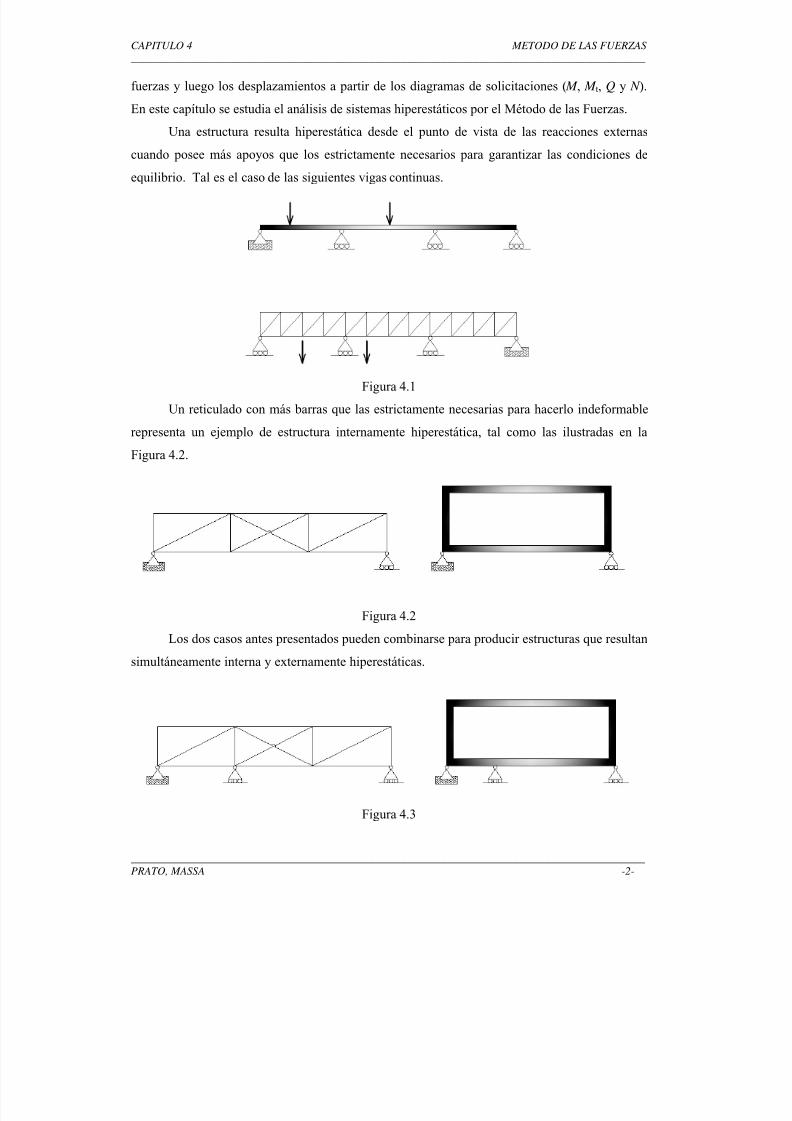
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 103/500
CAPITULO 4 METODO DE LAS FUERZAS
_____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -2-
fuerzas y luego los desplazamientos a partir de los diagramas de solicitaciones ( M , M t, Q y N ).
En este capítulo se estudia el análisis de sistemas hiperestáticos por el Método de las Fuerzas.
Una estructura resulta hiperestática desde el punto de vista de las reacciones externas
cuando posee más apoyos que los estrictamente necesarios para garantizar las condiciones de
equilibrio. Tal es el caso de las siguientes vigas continuas.
Figura 4.1
Un reticulado con más barras que las estrictamente necesarias para hacerlo indeformable
representa un ejemplo de estructura internamente hiperestática, tal como las ilustradas en la
Figura 4.2.
Figura 4.2
Los dos casos antes presentados pueden combinarse para producir estructuras que resultan
simultáneamente interna y externamente hiperestáticas.
Figura 4.3
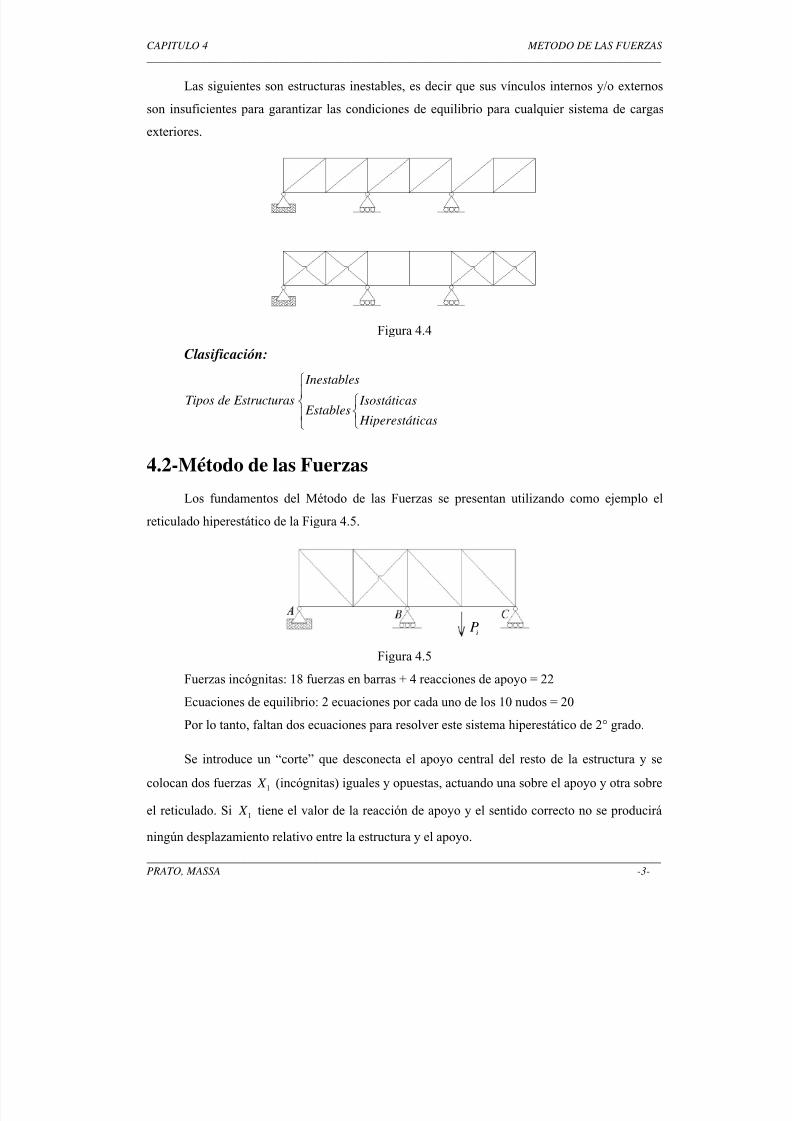
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 104/500
CAPITULO 4 METODO DE LAS FUERZAS
_____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -3-
Las siguientes son estructuras inestables, es decir que sus vínculos internos y/o externos
son insuficientes para garantizar las condiciones de equilibrio para cualquier sistema de cargas
exteriores.
Figura 4.4
Clasificación:
Inestables
Tipos de Estructuras Isostáticas Estables
Hiperestáticas
⎧⎪
⎧⎨⎨⎪⎩⎩
4.2-Método de las Fuerzas
Los fundamentos del Método de las Fuerzas se presentan utilizando como ejemplo el
reticulado hiperestático de la Figura 4.5.
Figura 4.5
Fuerzas incógnitas: 18 fuerzas en barras + 4 reacciones de apoyo = 22
Ecuaciones de equilibrio: 2 ecuaciones por cada uno de los 10 nudos = 20
Por lo tanto, faltan dos ecuaciones para resolver este sistema hiperestático de 2° grado.
Se introduce un “corte” que desconecta el apoyo central del resto de la estructura y se
colocan dos fuerzas 1 X (incógnitas) iguales y opuestas, actuando una sobre el apoyo y otra sobre
el reticulado. Si 1 X tiene el valor de la reacción de apoyo y el sentido correcto no se produciráningún desplazamiento relativo entre la estructura y el apoyo.
iP
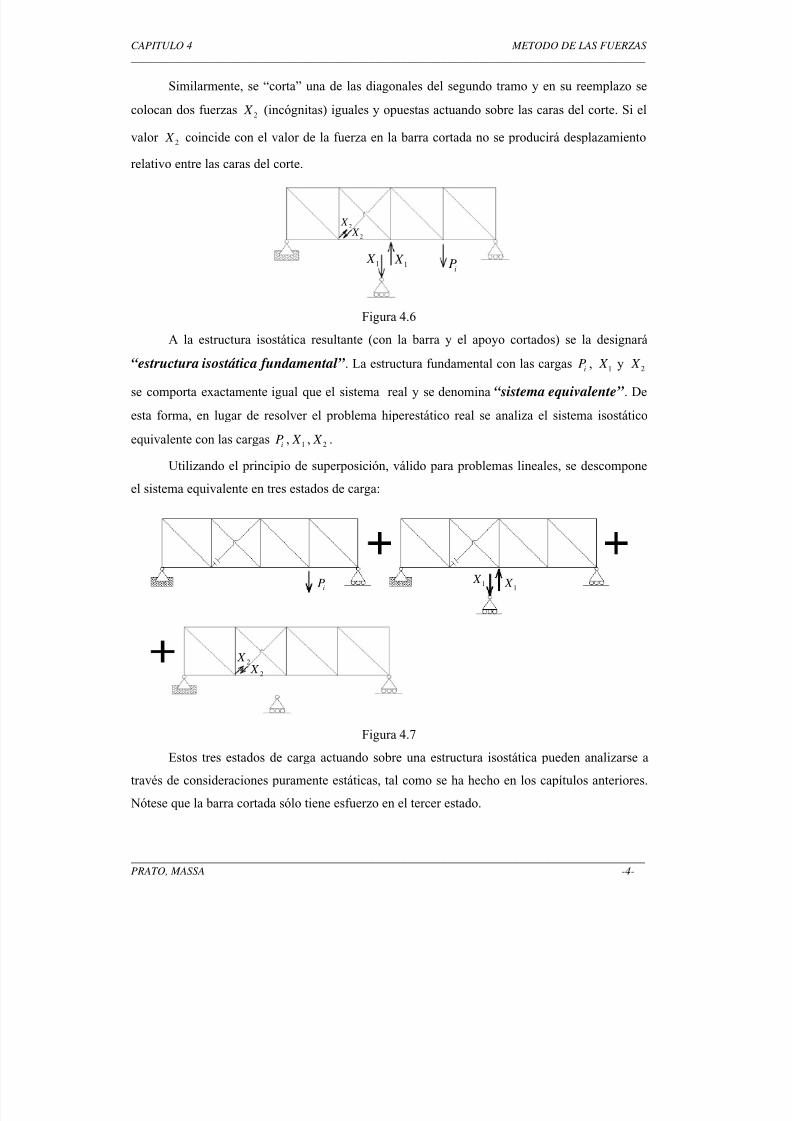
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 105/500
CAPITULO 4 METODO DE LAS FUERZAS
_____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -4-
Similarmente, se “corta” una de las diagonales del segundo tramo y en su reemplazo se
colocan dos fuerzas 2 X (incógnitas) iguales y opuestas actuando sobre las caras del corte. Si el
valor 2 X coincide con el valor de la fuerza en la barra cortada no se producirá desplazamiento
relativo entre las caras del corte.
Figura 4.6
A la estructura isostática resultante (con la barra y el apoyo cortados) se la designará
“estructura isostática fundamental” . La estructura fundamental con las cargasi
P , 1 X y 2 X
se comporta exactamente igual que el sistema real y se denomina “sistema equivalente” . De
esta forma, en lugar de resolver el problema hiperestático real se analiza el sistema isostático
equivalente con las cargasi
P ,1 X ,
2 X .
Utilizando el principio de superposición, válido para problemas lineales, se descompone
el sistema equivalente en tres estados de carga:
Figura 4.7
Estos tres estados de carga actuando sobre una estructura isostática pueden analizarse a
través de consideraciones puramente estáticas, tal como se ha hecho en los capítulos anteriores.
Nótese que la barra cortada sólo tiene esfuerzo en el tercer estado.
iP 1 X
1 X
2 X 2 X
iP1 X
2 X 2 X
1 X
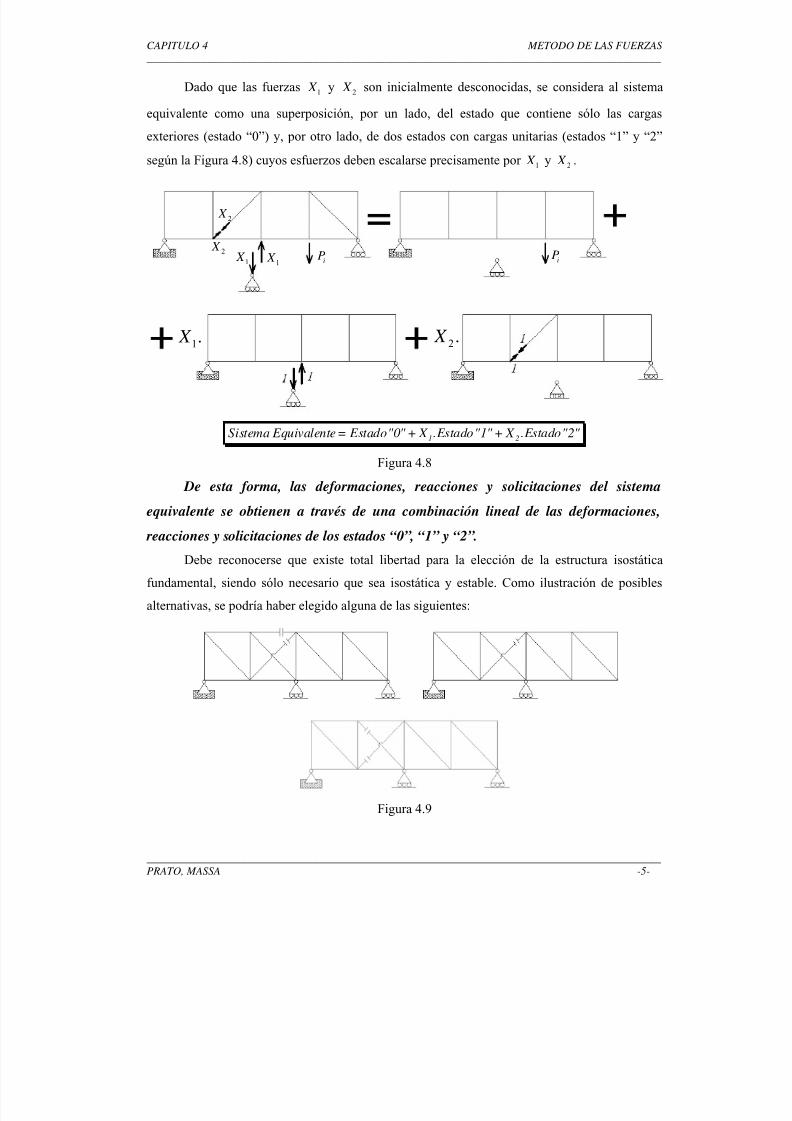
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 106/500
CAPITULO 4 METODO DE LAS FUERZAS
_____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -5-
Dado que las fuerzas 1 X y 2 X son inicialmente desconocidas, se considera al sistema
equivalente como una superposición, por un lado, del estado que contiene sólo las cargas
exteriores (estado “0”) y, por otro lado, de dos estados con cargas unitarias (estados “1” y “2”
según la Figura 4.8) cuyos esfuerzos deben escalarse precisamente por 1 X y 2 X .
1 2Sistema Equivalente= Estado "0" + X .Estado "1" + X .Estado "2"
Figura 4.8
De esta forma, las deformaciones, reacciones y solicitaciones del sistemaequivalente se obtienen a través de una combinación lineal de las deformaciones,
reacciones y solicitaciones de los estados “0”, “1” y “2”.
Debe reconocerse que existe total libertad para la elección de la estructura isostática
fundamental, siendo sólo necesario que sea isostática y estable. Como ilustración de posibles
alternativas, se podría haber elegido alguna de las siguientes:
Figura 4.9
iP
1 X 1
X
2 X
2 X
iP
1. X 2. X
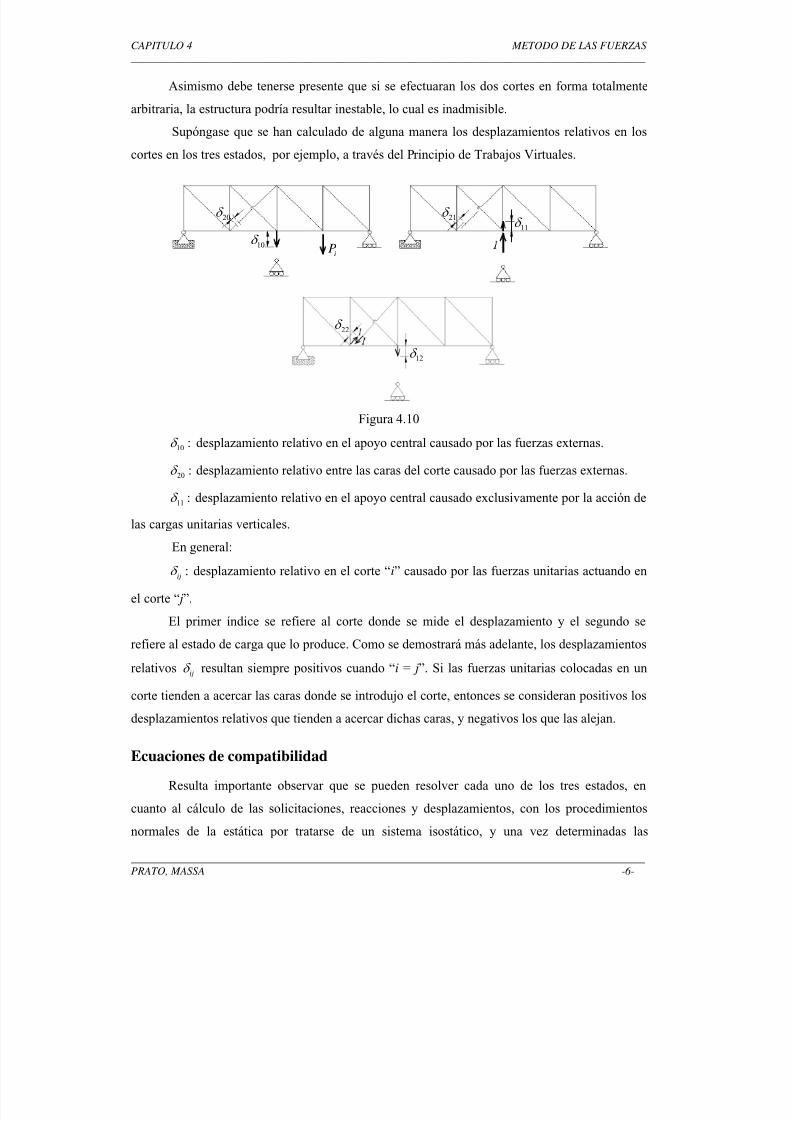
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 107/500
CAPITULO 4 METODO DE LAS FUERZAS
_____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -6-
Asimismo debe tenerse presente que si se efectuaran los dos cortes en forma totalmente
arbitraria, la estructura podría resultar inestable, lo cual es inadmisible.
Supóngase que se han calculado de alguna manera los desplazamientos relativos en los
cortes en los tres estados, por ejemplo, a través del Principio de Trabajos Virtuales.
Figura 4.10
10 :δ desplazamiento relativo en el apoyo central causado por las fuerzas externas.
20 :δ desplazamiento relativo entre las caras del corte causado por las fuerzas externas.
11 :δ desplazamiento relativo en el apoyo central causado exclusivamente por la acción de
las cargas unitarias verticales.
En general:
:ij
δ desplazamiento relativo en el corte “i” causado por las fuerzas unitarias actuando en
el corte “ j”.
El primer índice se refiere al corte donde se mide el desplazamiento y el segundo se
refiere al estado de carga que lo produce. Como se demostrará más adelante, los desplazamientos
relativosij
δ resultan siempre positivos cuando “i = j”. Si las fuerzas unitarias colocadas en un
corte tienden a acercar las caras donde se introdujo el corte, entonces se consideran positivos los
desplazamientos relativos que tienden a acercar dichas caras, y negativos los que las alejan.
Ecuaciones de compatibilidad
Resulta importante observar que se pueden resolver cada uno de los tres estados, en
cuanto al cálculo de las solicitaciones, reacciones y desplazamientos, con los procedimientos
normales de la estática por tratarse de un sistema isostático, y una vez determinadas las
10δ
20δ
iP
21δ 11δ
22δ
12δ
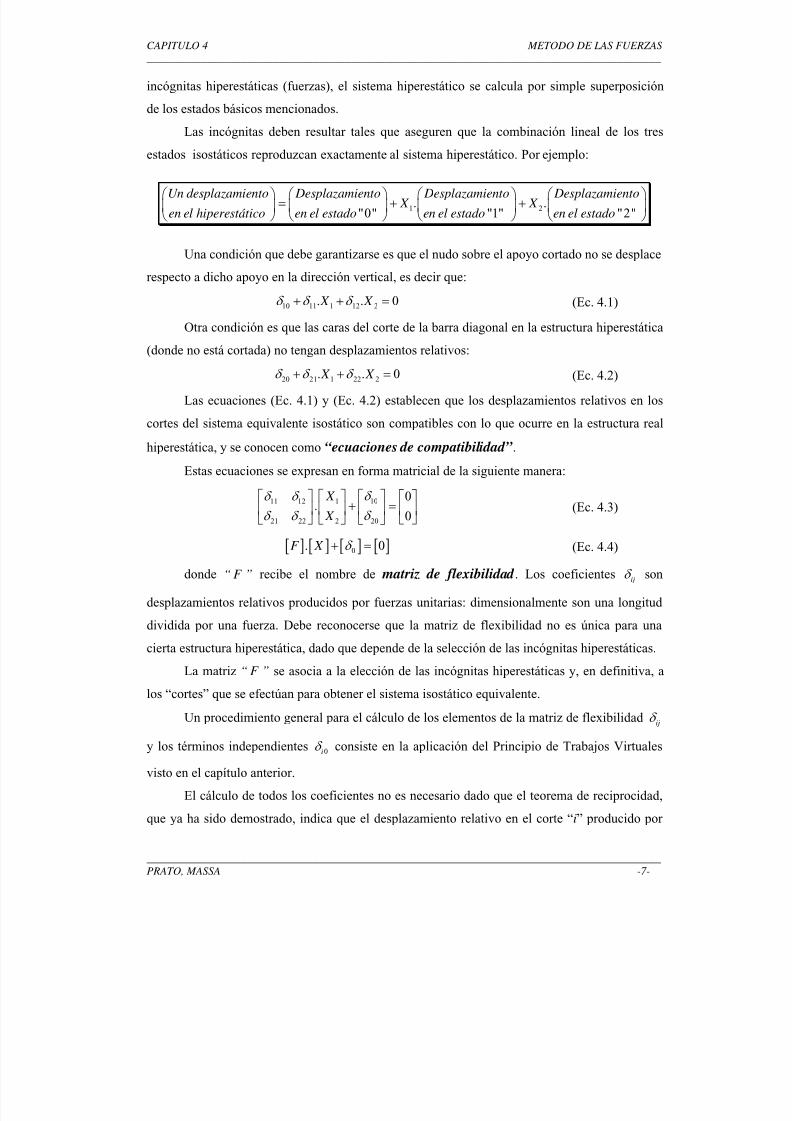
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 108/500
CAPITULO 4 METODO DE LAS FUERZAS
_____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -7-
incógnitas hiperestáticas (fuerzas), el sistema hiperestático se calcula por simple superposición
de los estados básicos mencionados.
Las incógnitas deben resultar tales que aseguren que la combinación lineal de los tres
estados isostáticos reproduzcan exactamente al sistema hiperestático. Por ejemplo:
1 2. ."0" "1" "2"
Un desplazamiento Desplazamiento Desplazamiento Desplazamiento X X
en el hiperestático en el estado en el estado en el estado
⎛ ⎞ ⎛ ⎞ ⎛ ⎞ ⎛ ⎞= + +⎜ ⎟ ⎜ ⎟ ⎜ ⎟ ⎜ ⎟
⎝ ⎠ ⎝ ⎠ ⎝ ⎠ ⎝ ⎠
Una condición que debe garantizarse es que el nudo sobre el apoyo cortado no se desplace
respecto a dicho apoyo en la dirección vertical, es decir que:
10 11 1 12 2. . 0 X X δ δ δ + + = (Ec. 4.1)
Otra condición es que las caras del corte de la barra diagonal en la estructura hiperestática
(donde no está cortada) no tengan desplazamientos relativos:
20 21 1 22 2. . 0 X X δ δ δ + + = (Ec. 4.2)
Las ecuaciones (Ec. 4.1) y (Ec. 4.2) establecen que los desplazamientos relativos en los
cortes del sistema equivalente isostático son compatibles con lo que ocurre en la estructura real
hiperestática, y se conocen como “ecuaciones de compatibilidad” .
Estas ecuaciones se expresan en forma matricial de la siguiente manera:
1011 12 1
2021 22 2
0.
0
X
X
δ δ δ
δ δ δ
⎡ ⎤⎡ ⎤ ⎡ ⎤ ⎡ ⎤+ =⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥
⎣ ⎦⎣ ⎦ ⎣ ⎦ ⎣ ⎦ (Ec. 4.3)
[ ] [ ] [ ] [ ]0. 0F X δ + = (Ec. 4.4)
donde “ F ” recibe el nombre de matriz de flexibilidad . Los coeficientesij
δ son
desplazamientos relativos producidos por fuerzas unitarias: dimensionalmente son una longitud
dividida por una fuerza. Debe reconocerse que la matriz de flexibilidad no es única para una
cierta estructura hiperestática, dado que depende de la selección de las incógnitas hiperestáticas.La matriz “ F ” se asocia a la elección de las incógnitas hiperestáticas y, en definitiva, a
los “cortes” que se efectúan para obtener el sistema isostático equivalente.
Un procedimiento general para el cálculo de los elementos de la matriz de flexibilidadij
δ
y los términos independientes0i
δ consiste en la aplicación del Principio de Trabajos Virtuales
visto en el capítulo anterior.
El cálculo de todos los coeficientes no es necesario dado que el teorema de reciprocidad,
que ya ha sido demostrado, indica que el desplazamiento relativo en el corte “i” producido por
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 109/500
CAPITULO 4 METODO DE LAS FUERZAS
_____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -8-
cargas unitarias en el corte “ j” es igual al desplazamiento relativo en el corte “ j” producido por
cargas unitarias en el corte “i”, y por lo tanto la matriz de flexibilidad F es siempre simétrica.
Vale decir: ij jiδ δ =
Además puede comprobarse con las expresiones de trabajos virtuales que todos los
elementos de la diagonal principal de F son “positivos”.
De una manera formal, puede decirse que las 2 ecuaciones de compatibilidad sumadas a
las 20 ecuaciones de equilibrio de fuerzas (dos ecuaciones de proyección por cada nudo)
permiten el cálculo de las 22 incógnitas.
Forma práctica de operar con el Método de las Fuerzas:
1) Se obtiene una estructura isostática fundamental efectuando los cortes necesarios de
acuerdo al grado de hiperestaticidad (esta estructura fundamental debe resultar estable).
2) Se resuelven los estados auxiliares (determinando las solicitaciones).
3) Se calculan los coeficientes de la matriz de flexibilidadij
δ junto con los términos
independientes 0iδ por trabajos virtuales, utilizando los diagramas de las solicitaciones y
aprovechando la condición de simetría.
4) Se resuelven las ecuaciones de compatibilidad (Ec. 4.4) y luego se obtiene la
“solución” como combinación lineal de los estados isostáticos auxiliares ya resueltos.
1 2. ."0" "1" "2"
Solución Problema Solución Solución Solución X X
hiperestático estado estado estado
⎛ ⎞ ⎛ ⎞ ⎛ ⎞ ⎛ ⎞= + +⎜ ⎟ ⎜ ⎟ ⎜ ⎟ ⎜ ⎟
⎝ ⎠ ⎝ ⎠ ⎝ ⎠ ⎝ ⎠
La solución puede expresarse como un vector que contiene las reacciones de apoyo, las
solicitaciones y los desplazamientos. La aplicación del Método de la Fuerzas requiere el cálculo
en primera instancia de "fuerzas", mientras que los desplazamientos se calculan a posteriori en
los puntos específicos de interés. Naturalmente, la superposición lineal también resulta válida
para los desplazamientos asociados a los distintos estados básicos considerados.
4.3- Efectos térmicos y defectos constructivos
Para ilustrar la aplicación del Método de las Fuerzas para efectos térmicos y defectos de
fabricación o montaje, se continúa analizando el reticulado de 18 barras de la Figura 4.5:

5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 110/500
CAPITULO 4 METODO DE LAS FUERZAS
_____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -9-
Figura 4.11
Los esfuerzos en las barras para los tres estados se designan 0 1 2, , N N N , respectivamente.
Los desplazamientos relativos se calculan por trabajos virtuales, siendo los siguientes los que
constituyen el término independiente del sistema de ecuaciones de compatibilidad:
180
10 1
1
. / k k
N N
AE lδ
=
⎛ ⎞= ⎜ ⎟
⎝ ⎠∑ ;
180
20 2
1
. / k k
N N
AE lδ
=
⎛ ⎞= ⎜ ⎟
⎝ ⎠∑ (Ec. 4.5)
Los elementos de la matriz de flexibilidad son:
111 1.
/ k
N N
AE lδ
⎛ ⎞= ⎜ ⎟
⎝ ⎠∑ ; 2
12 21 1. / k
N N
AE lδ δ
⎛ ⎞= = ⎜ ⎟
⎝ ⎠∑ ; 2
22 2. / k
N N
AE lδ
⎛ ⎞= ⎜ ⎟
⎝ ⎠∑ (Ec. 4.6)
Supóngase que interesa determinar los efectos que se producen en la estructura por
variaciones térmicas t ∆ respecto a la temperatura de montaje. El cambio de temperatura sólo
modifica el estado “0”; vale decir, un nuevo estado de carga no modifica la matriz de flexibilidad
ya desarrollada en el apartado anterior.
( )( )10 1
1
. . .n
k k
N t lδ α =
= ∆∑ ; ( )( )20 2
1
. . .n
k k
N t lδ α =
= ∆∑ (Ec. 4.7)
La sumatoria para calcular 10δ se extiende rigurosamente a todas las barras; en esta
sumatoria, algunos términos pueden resultar nulos en correspondencia con las barras en las que
los esfuerzos 1 N son cero o no tienen cambio de temperatura.
Si se consideran errores dimensionales de montaje "e" en cada una de las barras, los
términos independientes resultan:
iP
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 111/500
CAPITULO 4 METODO DE LAS FUERZAS
_____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -10-
( )10 1
1
.n
k k
N eδ =
= ∑ ; ( )20 2
1
.n
k k
N eδ =
= ∑ (Ec. 4.8)
Los signos deben garantizar consistencia: la barra cuya longitud en el estado "0" es mayor
que la longitud teórica posee signo positivo de “e”.
0 Barra traccionada N positivo
Aumento de temperatura t positivo
Barra "larga" "e" positivo
⇒
⇒ ∆
⇒
Conclusión:
Las variaciones térmicas y los errores constructivos constituyen estados de carga
que no requieren cambiar la matriz de flexibilidad. Una vez calculados los términos de
carga 0iδ , las incógnitas hiperestáticas se calculan en la forma habitual resolviendo las
ecuaciones de compatibilidad, y la solución completa se obtiene por superposición.
4.4- Cálculo de desplazamientos en sistemas hiperestáticos
Supóngase que interesa calcular el desplazamiento vertical del nudo en el centro del
primer tramo (punto D) debido a un estado de carga compuesto por cargas exteriores, variaciones
térmicas y defectos constructivos.Se procede en dos etapas:
(I) Se resuelve el problema hiperestático. La matriz de flexibilidad es la misma que se
utilizó en las secciones anteriores mientras que los términos independientes son:
180
10 1
1
. . . / k k
N N t l e
AE lδ α
=
⎡ ⎤⎛ ⎞= + ∆ +⎜ ⎟⎢ ⎥
⎝ ⎠⎣ ⎦∑ ;
180
20 2
1
. . . / k k
N N t l e
AE lδ α
=
⎡ ⎤⎛ ⎞= + ∆ +⎜ ⎟⎢ ⎥
⎝ ⎠⎣ ⎦∑ (Ec. 4.9)
Una vez resueltas las ecuaciones de compatibilidad y calculadas las incógnitas
hiperestáticas 1 X y 2 X , se obtiene por simple superposición el esfuerzo en todas las barras del
sistema equivalente, y en consecuencia del sistema hiperestático.
0 1 1 2 2. . f
N N X N X N = + + (Ec. 4.10)
(II) Se calcula por trabajos virtuales el desplazamiento del punto que interesa en el
sistema isostático equivalente según el procedimiento descripto en el capítulo anterior: se
aplica una fuerza unitaria en el punto D del sistema auxiliar en la dirección que interesa el
desplazamiento como se ilustra en la Figura 4.12, designándose D
N al esfuerzo en las barras.
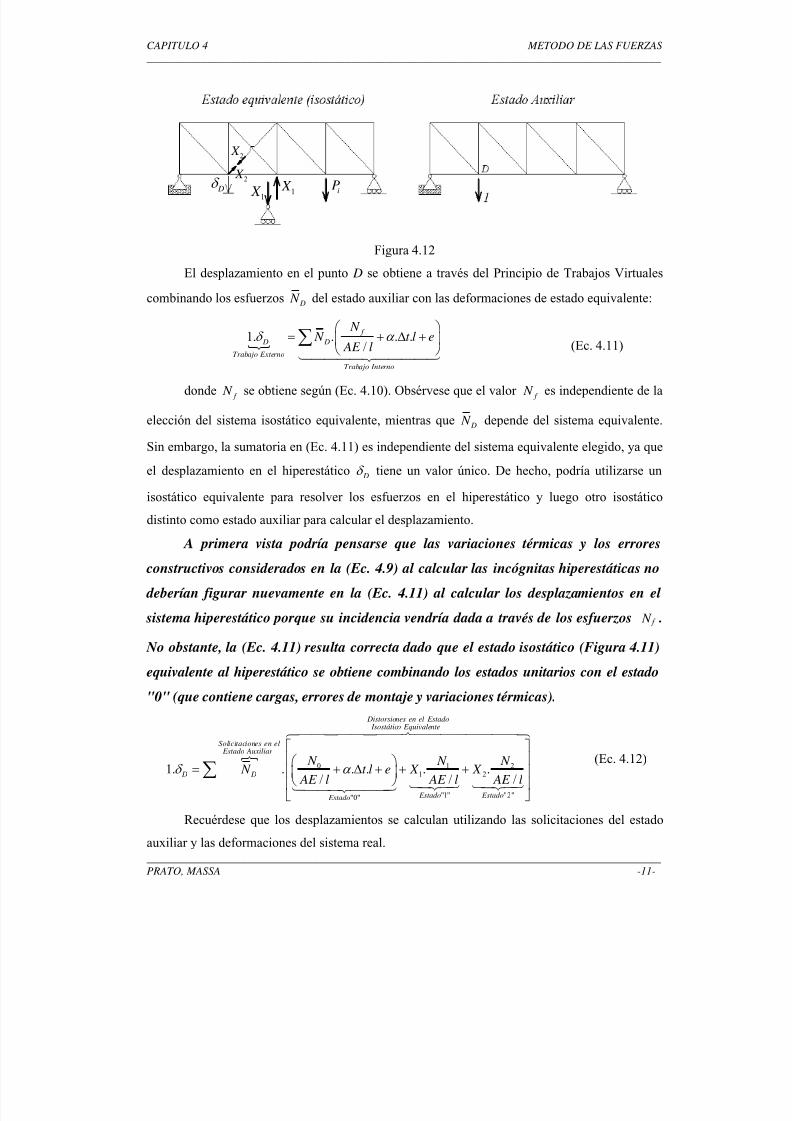
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 112/500
CAPITULO 4 METODO DE LAS FUERZAS
_____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -11-
Figura 4.12
El desplazamiento en el punto D se obtiene a través del Principio de Trabajos Virtuales
combinando los esfuerzos D N del estado auxiliar con las deformaciones de estado equivalente:
1. . . . /
f
D D
Trabajo Externo
Trabajo Interno
N N t l e AE l
δ α ⎛ ⎞= + ∆ +⎜ ⎟⎝ ⎠
∑
(Ec. 4.11)
donde f
N se obtiene según (Ec. 4.10). Obsérvese que el valor f
N es independiente de la
elección del sistema isostático equivalente, mientras que D N depende del sistema equivalente.
Sin embargo, la sumatoria en (Ec. 4.11) es independiente del sistema equivalente elegido, ya que
el desplazamiento en el hiperestático D
δ tiene un valor único. De hecho, podría utilizarse un
isostático equivalente para resolver los esfuerzos en el hiperestático y luego otro isostático
distinto como estado auxiliar para calcular el desplazamiento.
A primera vista podría pensarse que las variaciones térmicas y los errores
constructivos considerados en la (Ec. 4.9) al calcular las incógnitas hiperestáticas no
deberían figurar nuevamente en la (Ec. 4.11) al calcular los desplazamientos en el
sistema hiperestático porque su incidencia vendría dada a través de los esfuerzos N .
No obstante, la (Ec. 4.11) resulta correcta dado que el estado isostático (Figura 4.11)equivalente al hiperestático se obtiene combinando los estados unitarios con el estado
"0" (que contiene cargas, errores de montaje y variaciones térmicas).
0 1 21 2
"1" "2""0"
1. . . . . . / / /
Distorsiones en el Estado Isostático Equivalente
Solicitaciones en el Estado Auxiliar
D D
Estado Estado Estado
N N N N t l e X X
AE l AE l AE lδ α
⎡ ⎤⎢ ⎥⎛ ⎞
= + ∆ + + +⎢ ⎥⎜ ⎟⎝ ⎠⎢ ⎥
⎣ ⎦
∑
(Ec. 4.12)
Recuérdese que los desplazamientos se calculan utilizando las solicitaciones del estado
auxiliar y las deformaciones del sistema real.
iP D
δ 1 X
2 X
1 X 2
X
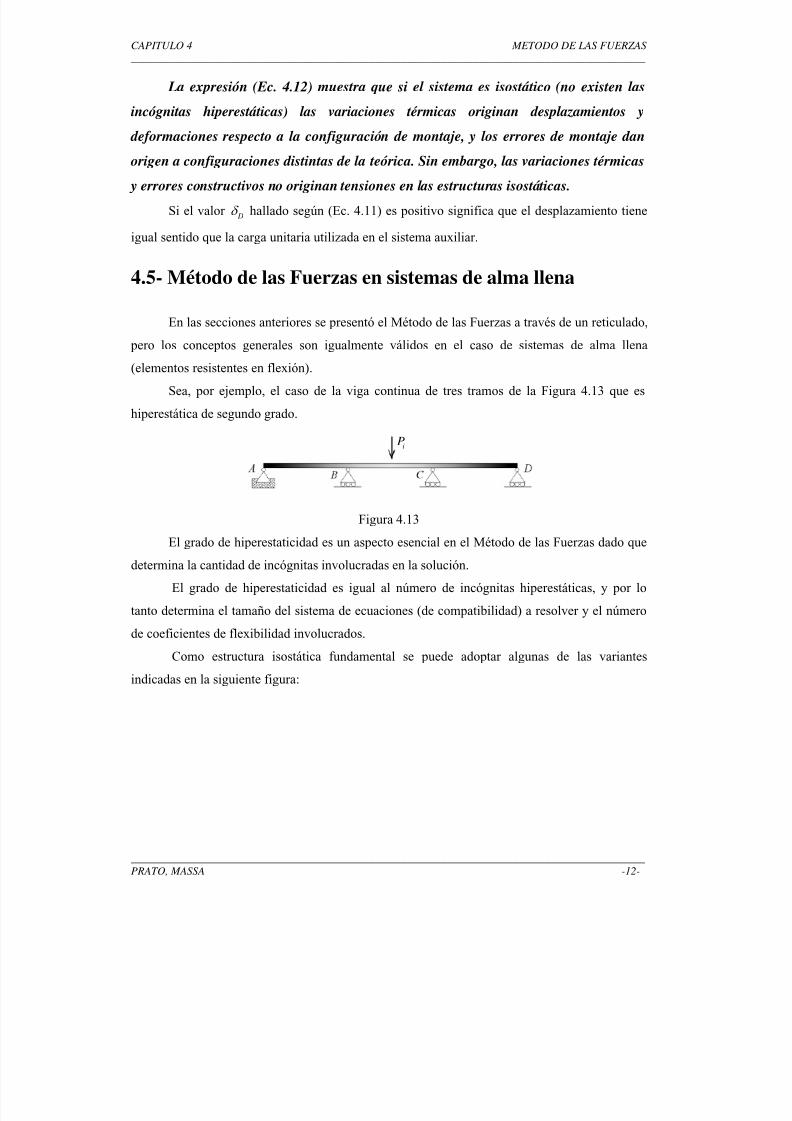
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 113/500
CAPITULO 4 METODO DE LAS FUERZAS
_____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -12-
La expresión (Ec. 4.12) muestra que si el sistema es isostático (no existen las
incógnitas hiperestáticas) las variaciones térmicas originan desplazamientos y
deformaciones respecto a la configuración de montaje, y los errores de montaje dan
origen a configuraciones distintas de la teórica. Sin embargo, las variaciones térmicas
y errores constructivos no originan tensiones en las estructuras isostáticas.
Si el valor D
δ hallado según (Ec. 4.11) es positivo significa que el desplazamiento tiene
igual sentido que la carga unitaria utilizada en el sistema auxiliar.
4.5- Método de las Fuerzas en sistemas de alma llena
En las secciones anteriores se presentó el Método de las Fuerzas a través de un reticulado,pero los conceptos generales son igualmente válidos en el caso de sistemas de alma llena
(elementos resistentes en flexión).
Sea, por ejemplo, el caso de la viga continua de tres tramos de la Figura 4.13 que es
hiperestática de segundo grado.
Figura 4.13
El grado de hiperestaticidad es un aspecto esencial en el Método de las Fuerzas dado que
determina la cantidad de incógnitas involucradas en la solución.
El grado de hiperestaticidad es igual al número de incógnitas hiperestáticas, y por lo
tanto determina el tamaño del sistema de ecuaciones (de compatibilidad) a resolver y el número
de coeficientes de flexibilidad involucrados.
Como estructura isostática fundamental se puede adoptar algunas de las variantes
indicadas en la siguiente figura:
iP

5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 114/500
CAPITULO 4 METODO DE LAS FUERZAS
_____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -13-
Figura 4.14Adoptándose como isostática fundamental una viga Gerber, como en los casos e) y f ) de
la Figura 4.14, se está eligiendo como incógnita hiperestática al momento flector en los puntos
donde se colocaron las articulaciones.
En el caso )g las ecuaciones de compatibilidad deben expresar que el punto B (sobre el
apoyo) tiene desplazamiento vertical nulo y que el giro relativo entre los extremos que concurren
a la articulación B es nulo.
El caso )h resulta tal vez el menos intuitivo. Se eligió como incógnitas hiperestáticas a la
reacción de apoyo C y al esfuerzo de corte en la sección donde se colocaron las bielas paralelas.
Debe reconocerse que la Figura 4.14 no agota todas las posibilidades. En las secciones
siguientes se verá que el caso )e resulta el más adecuado para analizar vigas continuas.
Otro caso hiperestático típico lo constituyen los marcos cerrados como el mostrado en la
Figura 4.15. Las solicitaciones no pueden determinarse sólo por consideraciones de equilibrio,
por lo que se adopta como estructura isostática fundamental el marco al cual se le practica un
corte en el punto C .
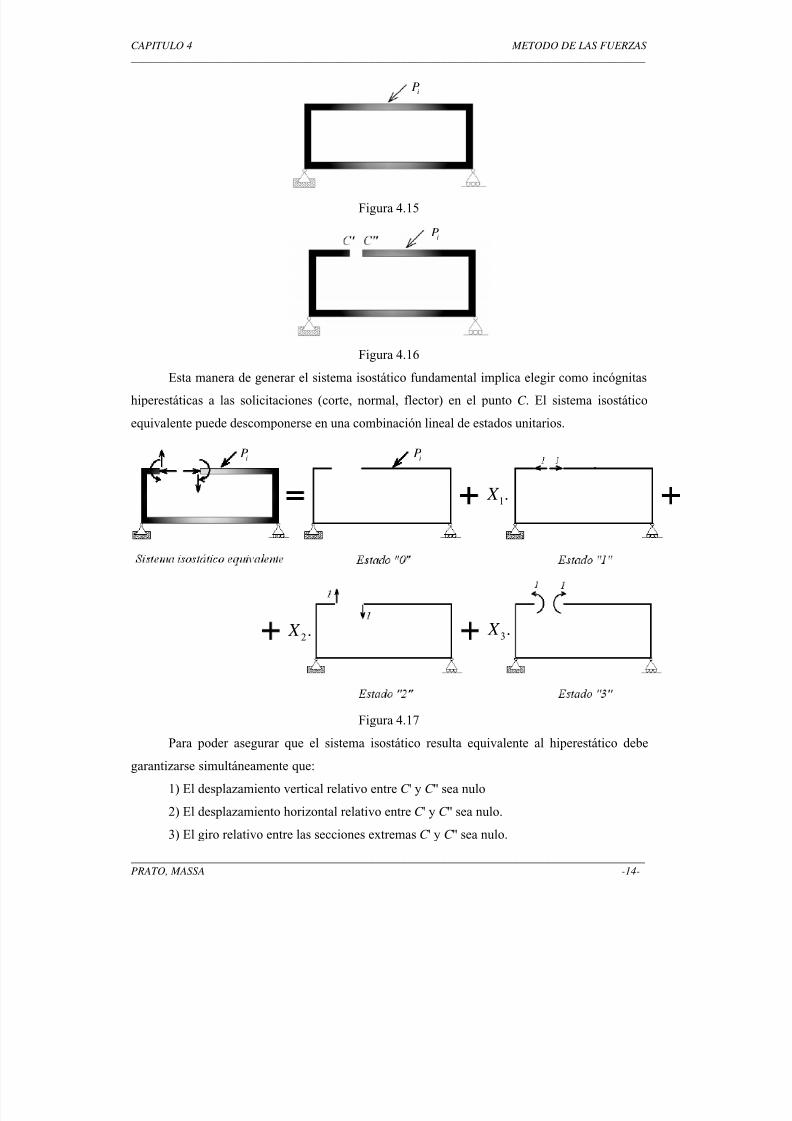
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 115/500
CAPITULO 4 METODO DE LAS FUERZAS
_____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -14-
Figura 4.15
Figura 4.16
Esta manera de generar el sistema isostático fundamental implica elegir como incógnitas
hiperestáticas a las solicitaciones (corte, normal, flector) en el punto C . El sistema isostático
equivalente puede descomponerse en una combinación lineal de estados unitarios.
Figura 4.17
Para poder asegurar que el sistema isostático resulta equivalente al hiperestático debe
garantizarse simultáneamente que:
1) El desplazamiento vertical relativo entre C ' y C '' sea nulo
2) El desplazamiento horizontal relativo entre C ' y C '' sea nulo.3) El giro relativo entre las secciones extremas C ' y C '' sea nulo.
iP iP
1. X
2. X 3. X
iP
iP

5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 116/500
CAPITULO 4 METODO DE LAS FUERZAS
_____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -15-
Este conjunto de tres condiciones de continuidad de la elástica constituyen las ecuaciones
de compatibilidad que permiten determinar el valor de las incógnitas hiperestáticas.
10 1 11 2 12 3 13
20 1 21 2 22 3 23
30 1 31 2 32 3 33
. . . 0
. . . 0
. . . 0
X X X
X X X
X X X
δ δ δ δ
δ δ δ δ
δ δ δ δ
+ + + = ⎫⎪
+ + + = ⎬⎪+ + + = ⎭
(Ec. 4.13)
donde, por ejemplo, 30δ es el giro relativo entre las secciones C ' y C '' causado por las
cargas datos del problema (estado "0") que se calcula utilizando trabajos virtuales:
0 0 030 3 3 3. . . . . .
. . .c
M Q N M dx Q dx N dx
E I A G A E δ
⎛ ⎞⎛ ⎞ ⎛ ⎞= + +⎜ ⎟⎜ ⎟ ⎜ ⎟
⎝ ⎠ ⎝ ⎠⎝ ⎠∫ ∫ ∫ (Ec. 4.14)
Los subíndices en las solicitaciones indican el estado de carga que los define, y la integral
se supone extendida a todos los tramos del marco.
De la misma manera, 12δ es el desplazamiento horizontal relativo entre los extremos C ' y
C '' causado por el estado de carga "2" que se calcula usando trabajos virtuales:
2 2 212 1 1 1. . . . . .
. . .c
M Q N M dx Q dx N dx
E I A G A E δ
⎛ ⎞⎛ ⎞ ⎛ ⎞= + +⎜ ⎟⎜ ⎟ ⎜ ⎟
⎝ ⎠ ⎝ ⎠⎝ ⎠∫ ∫ ∫ (Ec. 4.15)
Recuérdese que intervienen las solicitaciones del sistema auxiliar y las distorsiones
( ), ,κ γ ε del estado en el cual se requiere el cálculo del desplazamiento.
La resolución analítica de las integrales en las expresiones (Ec. 4.14) y (Ec. 4.15) para el
cálculo de los valores ijδ requiere expresar las solicitaciones analíticamente en función de x.
También puede utilizarse los diagramas y usar tablas que proveen el valor explícito de la
integral por tramos para casos habituales. Por ejemplo, el caso “triángulo-trapecio” produce:
Figura 4.18
( )1 2
1. . . 2.
6s i k k +
1( ) . x
M x is
=
( )2 1 2 1( ) . x
M x k k k s
= + −
1k 2k x
s
1k
2k
i
s
s
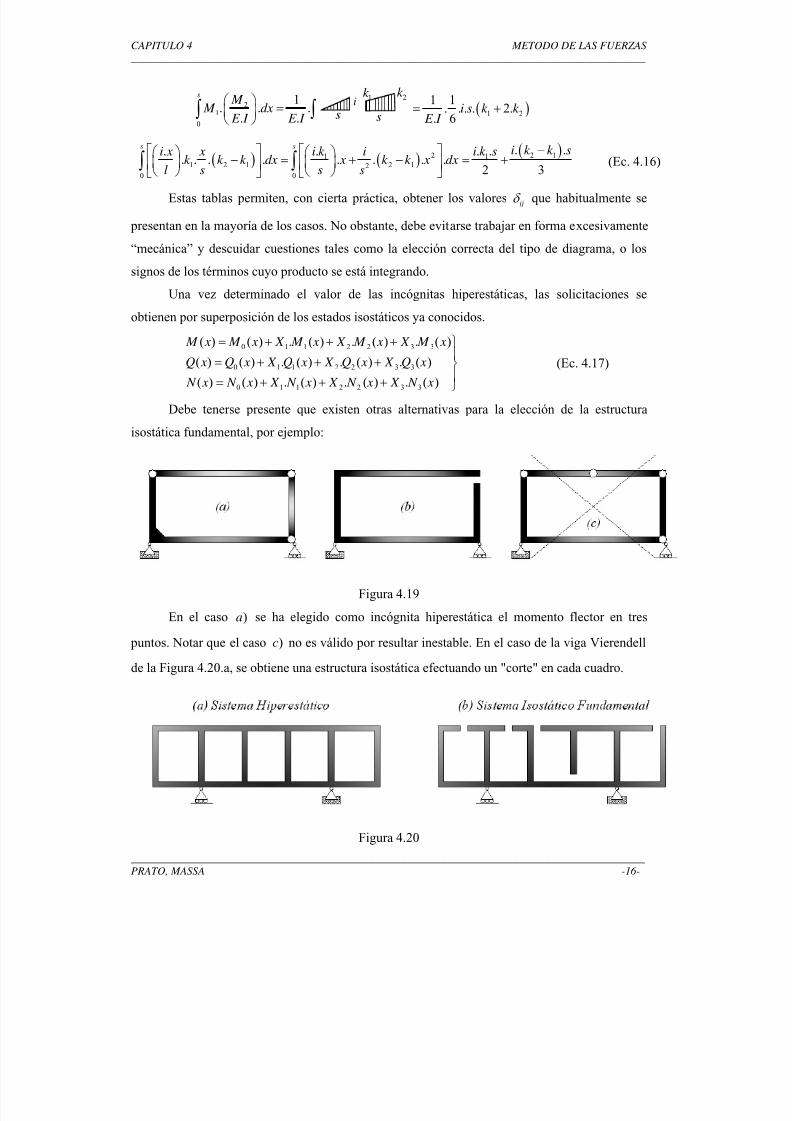
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 117/500
CAPITULO 4 METODO DE LAS FUERZAS
_____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -16-
( ) ( )( )2 121 1
1 2 1 2 12
0 0
. .. . ..
. . . . . . . . 2 3
s s i k k si k i k si x x i
k k k dx x k k x dxl s s s
−⎡ ⎤⎡ ⎤ ⎛ ⎞⎛ ⎞
− = + − = +⎜ ⎟ ⎜ ⎟⎢ ⎥⎢ ⎥⎝ ⎠ ⎝ ⎠⎣ ⎦ ⎣ ⎦∫ ∫ (Ec. 4.16)
Estas tablas permiten, con cierta práctica, obtener los valores ijδ que habitualmente se
presentan en la mayoría de los casos. No obstante, debe evitarse trabajar en forma excesivamente
“mecánica” y descuidar cuestiones tales como la elección correcta del tipo de diagrama, o los
signos de los términos cuyo producto se está integrando.
Una vez determinado el valor de las incógnitas hiperestáticas, las solicitaciones se
obtienen por superposición de los estados isostáticos ya conocidos.
0 1 1 2 2 3 3
0 1 1 2 2 3 3
0 1 1 2 2 3 3
( ) ( ) . ( ) . ( ) . ( )
( ) ( ) . ( ) . ( ) . ( )
( ) ( ) . ( ) . ( ) . ( )
M x M x X M x X M x X M x
Q x Q x X Q x X Q x X Q x
N x N x X N x X N x X N x
= + + + ⎫⎪
= + + + ⎬⎪= + + + ⎭
(Ec. 4.17)
Debe tenerse presente que existen otras alternativas para la elección de la estructura
isostática fundamental, por ejemplo:
Figura 4.19
En el caso )a se ha elegido como incógnita hiperestática el momento flector en tres
puntos. Notar que el caso )c no es válido por resultar inestable. En el caso de la viga Vierendell
de la Figura 4.20.a, se obtiene una estructura isostática efectuando un "corte" en cada cuadro.
Figura 4.20
i
s2
1
0
1. . .
. .
s M
M dx E I E I
⎛ ⎞=⎜ ⎟
⎝ ⎠∫ ∫ s
1k 2k
( )1 2
1 1. . . . 2.
. 6i s k k
E I = +
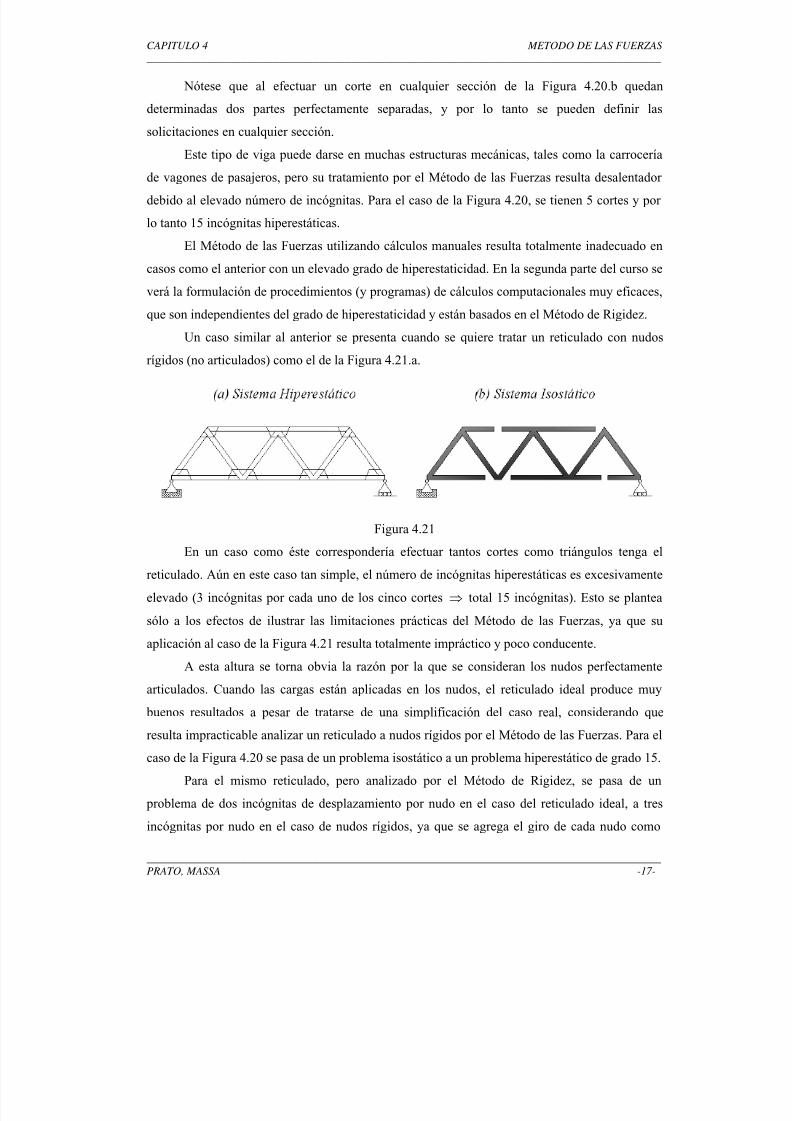
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 118/500
CAPITULO 4 METODO DE LAS FUERZAS
_____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -17-
Nótese que al efectuar un corte en cualquier sección de la Figura 4.20.b quedan
determinadas dos partes perfectamente separadas, y por lo tanto se pueden definir las
solicitaciones en cualquier sección.
Este tipo de viga puede darse en muchas estructuras mecánicas, tales como la carrocería
de vagones de pasajeros, pero su tratamiento por el Método de las Fuerzas resulta desalentador
debido al elevado número de incógnitas. Para el caso de la Figura 4.20, se tienen 5 cortes y por
lo tanto 15 incógnitas hiperestáticas.
El Método de las Fuerzas utilizando cálculos manuales resulta totalmente inadecuado en
casos como el anterior con un elevado grado de hiperestaticidad. En la segunda parte del curso se
verá la formulación de procedimientos (y programas) de cálculos computacionales muy eficaces,
que son independientes del grado de hiperestaticidad y están basados en el Método de Rigidez.
Un caso similar al anterior se presenta cuando se quiere tratar un reticulado con nudos
rígidos (no articulados) como el de la Figura 4.21.a.
Figura 4.21
En un caso como éste correspondería efectuar tantos cortes como triángulos tenga el
reticulado. Aún en este caso tan simple, el número de incógnitas hiperestáticas es excesivamente
elevado (3 incógnitas por cada uno de los cinco cortes ⇒ total 15 incógnitas). Esto se plantea
sólo a los efectos de ilustrar las limitaciones prácticas del Método de las Fuerzas, ya que su
aplicación al caso de la Figura 4.21 resulta totalmente impráctico y poco conducente.
A esta altura se torna obvia la razón por la que se consideran los nudos perfectamente
articulados. Cuando las cargas están aplicadas en los nudos, el reticulado ideal produce muy
buenos resultados a pesar de tratarse de una simplificación del caso real, considerando que
resulta impracticable analizar un reticulado a nudos rígidos por el Método de las Fuerzas. Para el
caso de la Figura 4.20 se pasa de un problema isostático a un problema hiperestático de grado 15.
Para el mismo reticulado, pero analizado por el Método de Rigidez, se pasa de un
problema de dos incógnitas de desplazamiento por nudo en el caso del reticulado ideal, a tres
incógnitas por nudo en el caso de nudos rígidos, ya que se agrega el giro de cada nudo como
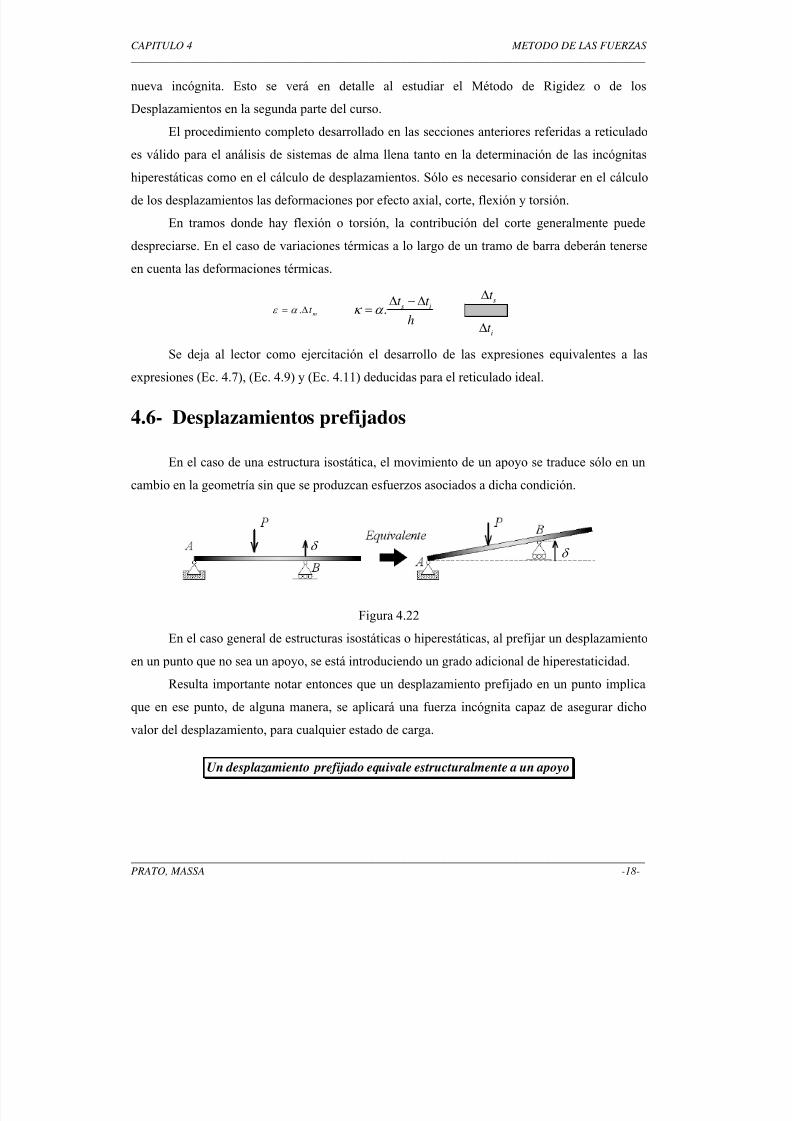
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 119/500
CAPITULO 4 METODO DE LAS FUERZAS
_____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -18-
nueva incógnita. Esto se verá en detalle al estudiar el Método de Rigidez o de los
Desplazamientos en la segunda parte del curso.
El procedimiento completo desarrollado en las secciones anteriores referidas a reticulado
es válido para el análisis de sistemas de alma llena tanto en la determinación de las incógnitas
hiperestáticas como en el cálculo de desplazamientos. Sólo es necesario considerar en el cálculo
de los desplazamientos las deformaciones por efecto axial, corte, flexión y torsión.
En tramos donde hay flexión o torsión, la contribución del corte generalmente puede
despreciarse. En el caso de variaciones térmicas a lo largo de un tramo de barra deberán tenerse
en cuenta las deformaciones térmicas.
Se deja al lector como ejercitación el desarrollo de las expresiones equivalentes a las
expresiones (Ec. 4.7), (Ec. 4.9) y (Ec. 4.11) deducidas para el reticulado ideal.
4.6- Desplazamientos prefijados
En el caso de una estructura isostática, el movimiento de un apoyo se traduce sólo en un
cambio en la geometría sin que se produzcan esfuerzos asociados a dicha condición.
Figura 4.22
En el caso general de estructuras isostáticas o hiperestáticas, al prefijar un desplazamiento
en un punto que no sea un apoyo, se está introduciendo un grado adicional de hiperestaticidad.
Resulta importante notar entonces que un desplazamiento prefijado en un punto implica
que en ese punto, de alguna manera, se aplicará una fuerza incógnita capaz de asegurar dicho
valor del desplazamiento, para cualquier estado de carga.
Un desplazamiento prefijado equivale estructuralmente a un apoyo
δ δ
st ∆
it ∆
. s it t
h
κ α ∆ − ∆
=.m
t ε α = ∆
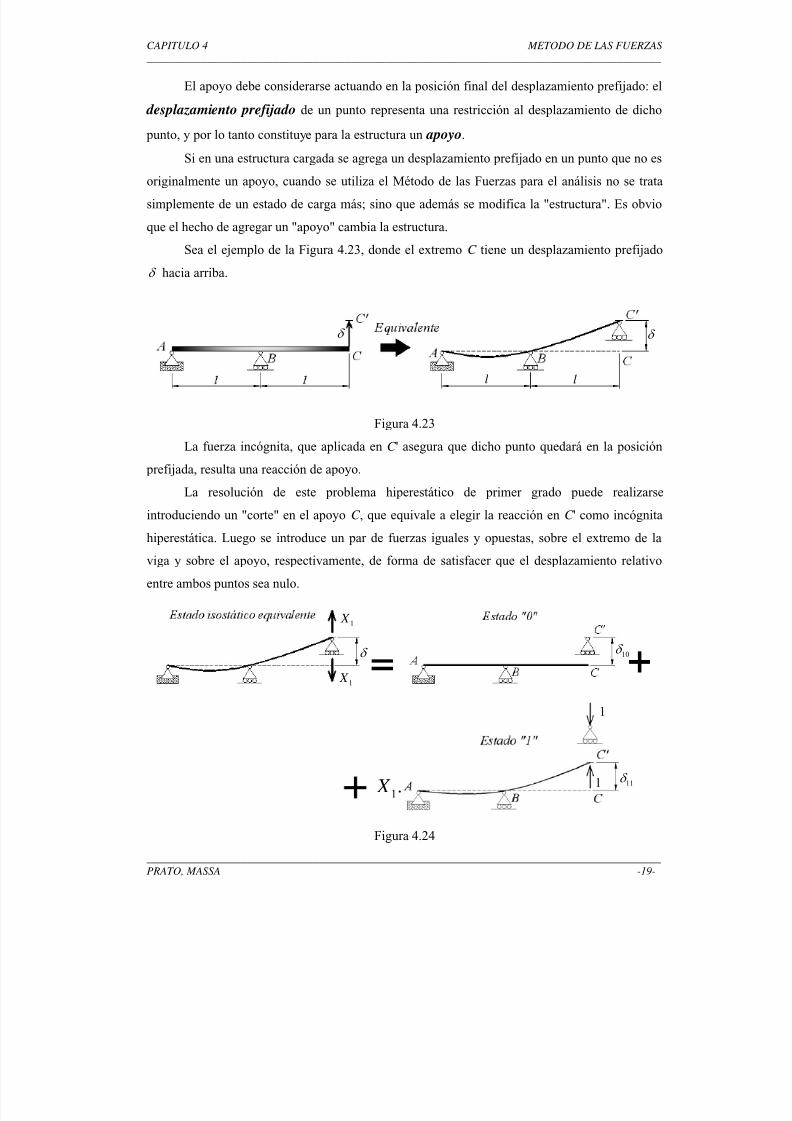
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 120/500
CAPITULO 4 METODO DE LAS FUERZAS
_____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -19-
El apoyo debe considerarse actuando en la posición final del desplazamiento prefijado: el
desplazamiento prefijado de un punto representa una restricción al desplazamiento de dicho
punto, y por lo tanto constituye para la estructura un apoyo.
Si en una estructura cargada se agrega un desplazamiento prefijado en un punto que no esoriginalmente un apoyo, cuando se utiliza el Método de las Fuerzas para el análisis no se trata
simplemente de un estado de carga más; sino que además se modifica la "estructura". Es obvio
que el hecho de agregar un "apoyo" cambia la estructura.
Sea el ejemplo de la Figura 4.23, donde el extremo C tiene un desplazamiento prefijado
δ hacia arriba.
Figura 4.23
La fuerza incógnita, que aplicada en C ' asegura que dicho punto quedará en la posición
prefijada, resulta una reacción de apoyo.
La resolución de este problema hiperestático de primer grado puede realizarse
introduciendo un "corte" en el apoyo C , que equivale a elegir la reacción en C ' como incógnita
hiperestática. Luego se introduce un par de fuerzas iguales y opuestas, sobre el extremo de la
viga y sobre el apoyo, respectivamente, de forma de satisfacer que el desplazamiento relativo
entre ambos puntos sea nulo.
Figura 4.24
δ
1 X
1
1
1 X
10δ
1. X 11δ
δ δ
l l

5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 121/500
CAPITULO 4 METODO DE LAS FUERZAS
_____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -20-
Nótese que en el sistema isostático equivalente, el "corte" no se aprecia por la acción
restitutiva de la fuerza 1 X aplicada sobre la viga que garantiza el desplazamiento impuesto sobre
la estructura. En el estado "0", la estructura permanece recta mientras que el apoyo C pasa a la
posición C '. El sentido (arbitrariamente elegido) que se asigna a las fuerzas unitarias en el estado"1" es tal que la fuerza aplicada en la viga tiende a subir el extremo C hacia C ', mientras que en
el estado "0" el apoyo se ha movido en dirección contraria a la fuerza aplicada sobre éste.
El valor absoluto de 10δ es igual a δ y el signo surge de comparar el sentido del
desplazamiento del apoyo en el estado "0" con el sentido de la fuerza unitaria aplicada
sobre el apoyo en el estado "1".
Por lo tanto, el signo de 10δ resulta en este caso negativo. En el estado "1" el valor de 11δ
siempre resulta positivo (recuérdese que todos los elementos de la diagonal de la matriz de
flexibilidad son positivos). Planteando la ecuación de compatibilidad se obtiene:
1010 1 11 1
11
. 0 X X δ
δ δ δ
+ = ⇒ = −
Recordando que10
δ es negativo y que11
δ es positivo, resulta que la incógnita1
X es
positiva, es decir que posee el sentido supuesto. Nótese que la estructura isostática elegida no es
la única posible; por ejemplo, se podría "cortar" el apoyo B para obtener:
Figura 4.25
10δ resulta igual a la mitad de δ (para luces iguales) con valor negativo, dado que el
apoyo B no se mueve, y el desplazamiento de la viga en este punto para el estado "0" tiene el
signo contrario a la fuerza aplicada en el estado "1".
δ
10δ
. B R 11δ
δ
102
δ δ = −
B R
B R
δ
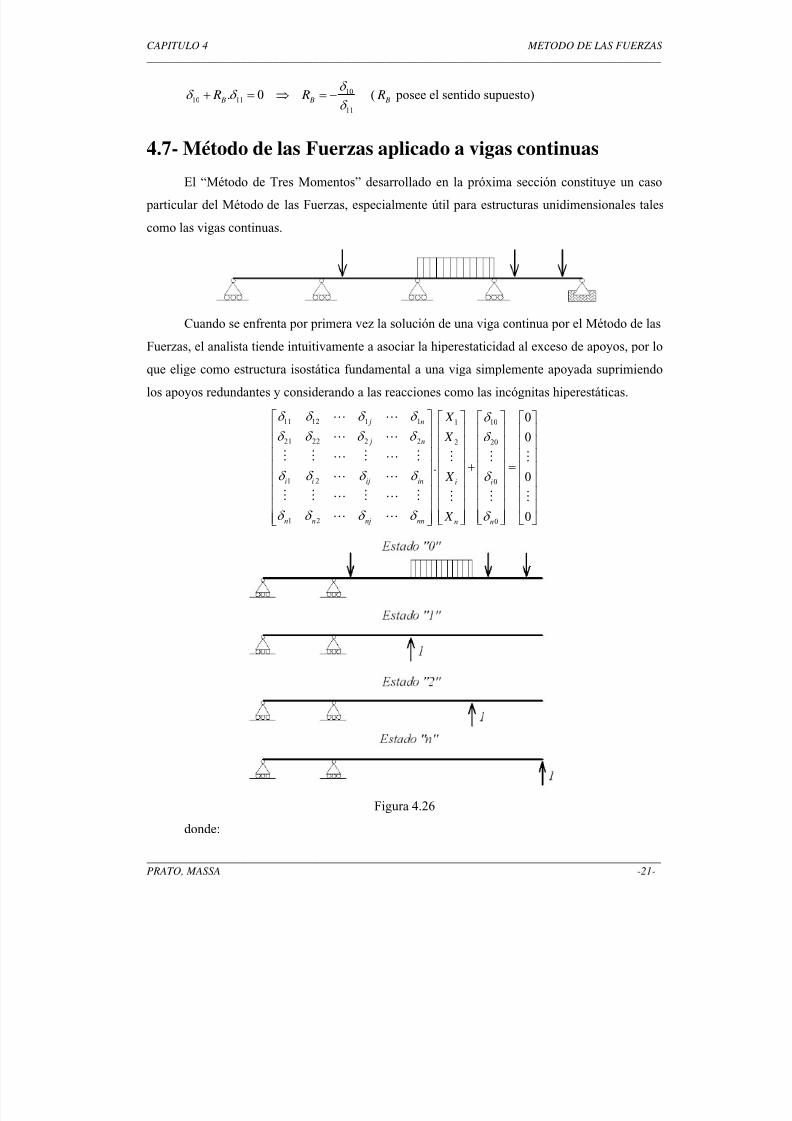
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 122/500
CAPITULO 4 METODO DE LAS FUERZAS
_____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -21-
1010 11
11
. 0 B B
R Rδ
δ δ δ
+ = ⇒ = − ( B
R posee el sentido supuesto)
4.7- Método de las Fuerzas aplicado a vigas continuas
El “Método de Tres Momentos” desarrollado en la próxima sección constituye un caso
particular del Método de las Fuerzas, especialmente útil para estructuras unidimensionales tales
como las vigas continuas.
Cuando se enfrenta por primera vez la solución de una viga continua por el Método de lasFuerzas, el analista tiende intuitivamente a asociar la hiperestaticidad al exceso de apoyos, por lo
que elige como estructura isostática fundamental a una viga simplemente apoyada suprimiendo
los apoyos redundantes y considerando a las reacciones como las incógnitas hiperestáticas.
11 12 1 1 1 10
21 22 2 2 2 20
1 2 0
1 2 0
0
0
.0
0
j n
j n
i i ij in i i
n n nj nn n n
X
X
X
X
δ δ δ δ δ
δ δ δ δ δ
δ δ δ δ δ
δ δ δ δ δ
⎡ ⎤ ⎡ ⎤ ⎡ ⎤ ⎡ ⎤⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥
+ =⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥
⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎣ ⎦⎣ ⎦ ⎣ ⎦⎣ ⎦
Figura 4.26
donde:
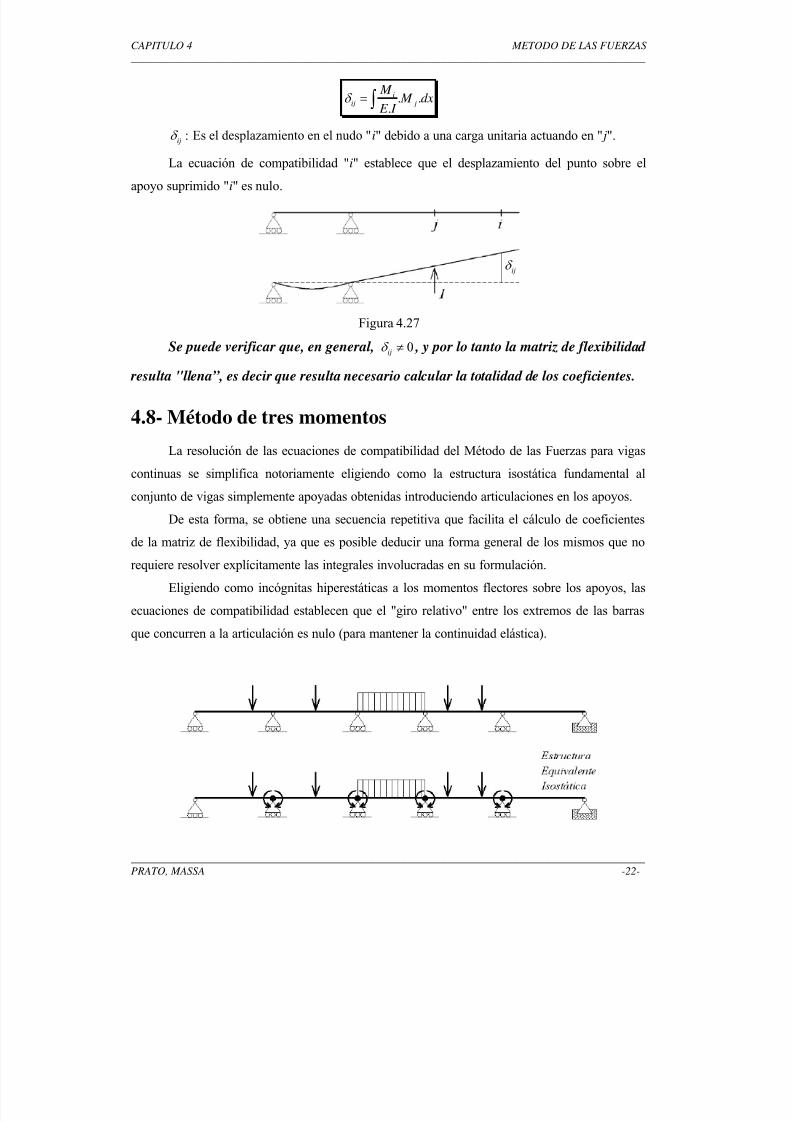
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 123/500
CAPITULO 4 METODO DE LAS FUERZAS
_____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -22-
. ..
iij j
M M dx
E I δ = ∫
:ij
δ Es el desplazamiento en el nudo "i" debido a una carga unitaria actuando en " j".
La ecuación de compatibilidad "i" establece que el desplazamiento del punto sobre el
apoyo suprimido "i" es nulo.
Figura 4.27
Se puede verificar que, en general, 0ij
δ ≠ , y por lo tanto la matriz de flexibilidad
resulta "llena”, es decir que resulta necesario calcular la totalidad de los coeficientes.
4.8- Método de tres momentos
La resolución de las ecuaciones de compatibilidad del Método de las Fuerzas para vigas
continuas se simplifica notoriamente eligiendo como la estructura isostática fundamental al
conjunto de vigas simplemente apoyadas obtenidas introduciendo articulaciones en los apoyos.
De esta forma, se obtiene una secuencia repetitiva que facilita el cálculo de coeficientes
de la matriz de flexibilidad, ya que es posible deducir una forma general de los mismos que no
requiere resolver explícitamente las integrales involucradas en su formulación.
Eligiendo como incógnitas hiperestáticas a los momentos flectores sobre los apoyos, las
ecuaciones de compatibilidad establecen que el "giro relativo" entre los extremos de las barras
que concurren a la articulación es nulo (para mantener la continuidad elástica).
ijδ

5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 124/500
CAPITULO 4 METODO DE LAS FUERZAS
_____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -23-
Figura 4.28
Observando los dos últimos diagramas de momentosi
M y j
M puede apreciarse que:
0ij
δ ≠ si y solo si
1
1
i
j i
i
−⎧⎪
= ⎨⎪ +⎩
Si " j" es distinto de (i+1), (i), (i−1); luegoij
δ resulta nulo (de aquí viene la designación de
Tres Momentos). En consecuencia, la matriz de flexibilidad posee como máximo 3 coeficientes
no nulos por cada fila, lo que produce una matriz de tipo “bandeada” con importantes ventajas
numéricas en la resolución de las ecuaciones de compatibilidad.
Figura 4.29
Los únicos elementos no nulos se encuentran sobre la diagonal principal y sus dos
diagonales contiguas. La matriz de flexibilidad F resulta una matriz tridiagonal.
A continuación se verá que los tres coeficientes no nulos de cada fila de la matriz de
flexibilidad pueden calcularse fácilmente a través de una "expresión genérica" para cada uno de
ellos.
0 M
i M
j M
( 1)i iδ − iiδ ( 1)i iδ +

5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 125/500
CAPITULO 4 METODO DE LAS FUERZAS
_____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -24-
Figura 4.30
:ii
δ Es el giro relativo entre los extremos de las barras que concurren a la articulación "i",
causado por los momentos unitarios colocados en dichos extremos de barra.
:ij
δ Es el giro relativo entre los extremos de las barras que concurren a la articulación "i",
causado por los momentos unitarios colocados en los extremos de las barras que concurren a la
articulación " j".
2 2
0 0
1 1. . . 1 .
. .
i d l l
ii
i i d d
x xdx dx
E I l E I lδ
⎛ ⎞ ⎛ ⎞= + −⎜ ⎟ ⎜ ⎟
⎝ ⎠ ⎝ ⎠∫ ∫ ⇒
3. . 3. .
i d ii
i d
l l
E I E I δ = +
,( 1)
0
1. 1 . .
.
d l
i i
d d d
x xdx
E I l lδ +
⎛ ⎞ ⎛ ⎞= −⎜ ⎟ ⎜ ⎟
⎝ ⎠ ⎝ ⎠∫ ⇒ ,( 1)
6. .
d i i
d
l
E I δ + =
,( 1)
0
1. . 1 .
.
il
i i
i i i
x xdx
E I l lδ −
⎛ ⎞ ⎛ ⎞= −⎜ ⎟ ⎜ ⎟
⎝ ⎠ ⎝ ⎠∫ ⇒ ,( 1)
6. .
ii i
i
l
E I δ − =
La matriz de flexibilidad no necesita deducirse mediante integrales en cada caso.
Sólo basta con aplicar las expresiones genéricas arriba indicadas en la Figura 4.29.
Los términos independientes se obtienen integrando a lo largo de toda la viga.
00
0 0 0
. . ( ) ( ).
i d l ll
i i i d
M M dx
E I δ θ θ = = + = +∫ ∫ ∫
i M sólo es distinto de cero en dos tramos, de modo que la integral se reduce a estos
dos tramos. Los valoresi
θ yd
θ son giros de los extremos de dos vigas simplemente apoyadas
que se encuentran tabulados para los casos habituales. La utilidad de las tablas se amplía cuando
un estado complejo de carga se considera como una superposición de estados simples.
i M
il
1i M −
1i M +
d l
i
x M
l=
1
d
x M
l
⎛ ⎞= −⎜ ⎟
⎝ ⎠
1i
x M
l= −
d
x M
l=
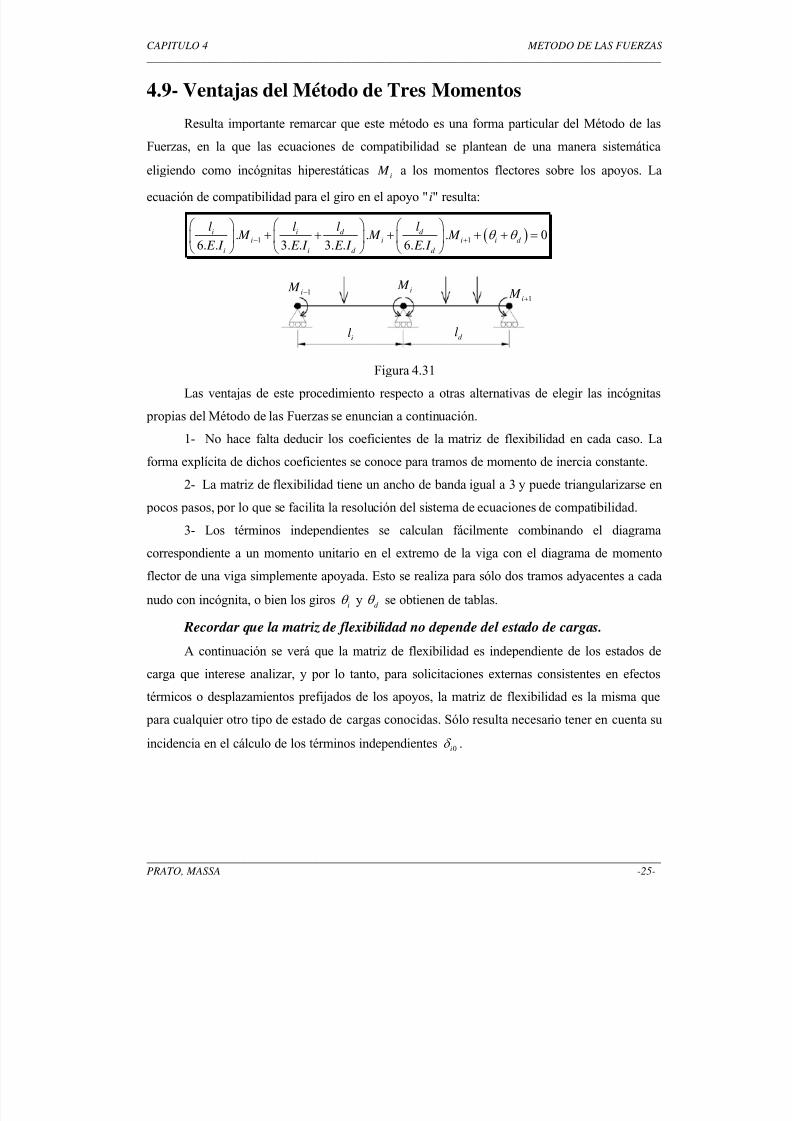
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 126/500
CAPITULO 4 METODO DE LAS FUERZAS
_____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -25-
4.9- Ventajas del Método de Tres Momentos
Resulta importante remarcar que este método es una forma particular del Método de las
Fuerzas, en la que las ecuaciones de compatibilidad se plantean de una manera sistemática
eligiendo como incógnitas hiperestáticasi
M a los momentos flectores sobre los apoyos. La
ecuación de compatibilidad para el giro en el apoyo "i" resulta:
( )1 1. . . 06. . 3. . 3. . 6. .
i i d d i i i i d
i i d d
l l l l M M M
E I E I E I E I θ θ − +
⎛ ⎞ ⎛ ⎞ ⎛ ⎞+ + + + + =⎜ ⎟ ⎜ ⎟ ⎜ ⎟
⎝ ⎠ ⎝ ⎠ ⎝ ⎠
Figura 4.31
Las ventajas de este procedimiento respecto a otras alternativas de elegir las incógnitas
propias del Método de las Fuerzas se enuncian a continuación.
1- No hace falta deducir los coeficientes de la matriz de flexibilidad en cada caso. La
forma explícita de dichos coeficientes se conoce para tramos de momento de inercia constante.
2- La matriz de flexibilidad tiene un ancho de banda igual a 3 y puede triangularizarse enpocos pasos, por lo que se facilita la resolución del sistema de ecuaciones de compatibilidad.
3- Los términos independientes se calculan fácilmente combinando el diagrama
correspondiente a un momento unitario en el extremo de la viga con el diagrama de momento
flector de una viga simplemente apoyada. Esto se realiza para sólo dos tramos adyacentes a cada
nudo con incógnita, o bien los girosi
θ yd
θ se obtienen de tablas.
Recordar que la matriz de flexibilidad no depende del estado de cargas.
A continuación se verá que la matriz de flexibilidad es independiente de los estados de
carga que interese analizar, y por lo tanto, para solicitaciones externas consistentes en efectos
térmicos o desplazamientos prefijados de los apoyos, la matriz de flexibilidad es la misma que
para cualquier otro tipo de estado de cargas conocidas. Sólo resulta necesario tener en cuenta su
incidencia en el cálculo de los términos independientes 0iδ .
1i M −
il
i M 1i M +
d l
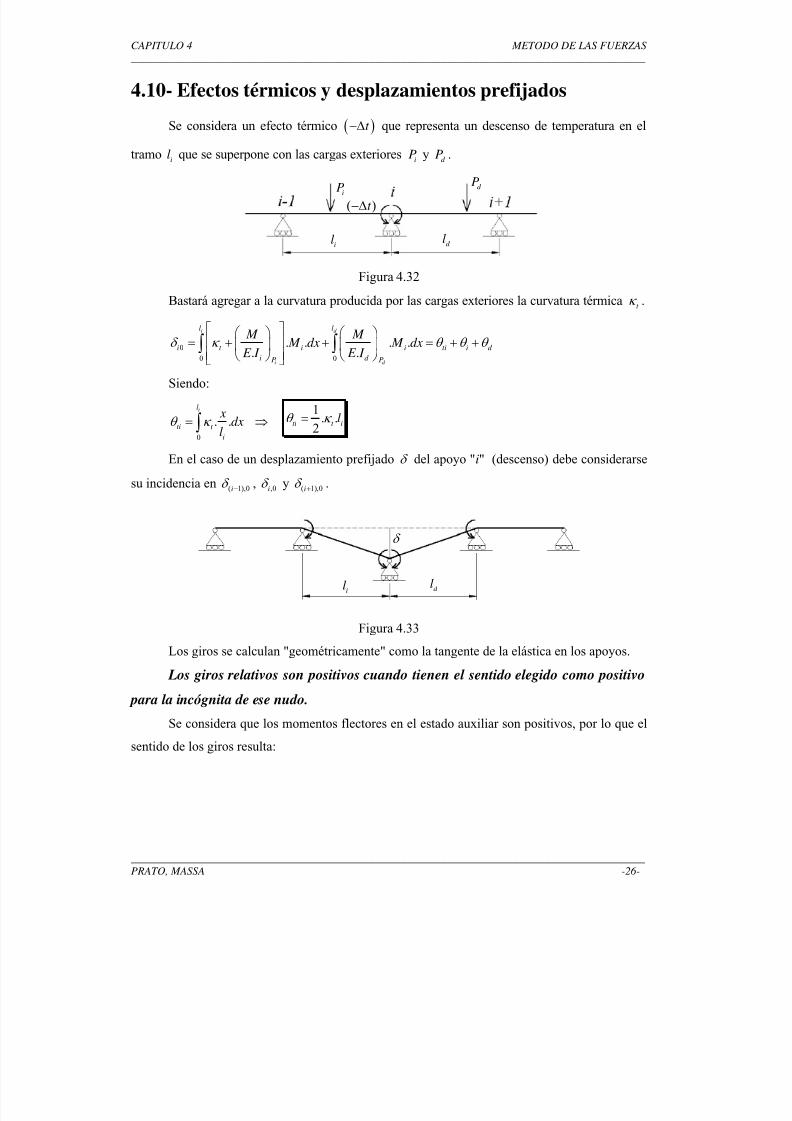
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 127/500
CAPITULO 4 METODO DE LAS FUERZAS
_____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -26-
4.10- Efectos térmicos y desplazamientos prefijados
Se considera un efecto térmico ( )t −∆ que representa un descenso de temperatura en el
tramoi
l que se superpone con las cargas exterioresi
P y d
P .
Figura 4.32
Bastará agregar a la curvatura producida por las cargas exteriores la curvatura térmicat
κ .
0
0 0
. . . .. .
i d
i d
l l
i t i i ti i d
i d P P
M M M dx M dx
E I E I δ κ θ θ θ
⎡ ⎤⎛ ⎞ ⎛ ⎞⎢ ⎥= + + = + +⎜ ⎟ ⎜ ⎟⎢ ⎥⎝ ⎠ ⎝ ⎠⎣ ⎦
∫ ∫
Siendo:
0
. .il
ti t
i
xdx
lθ κ = ⇒∫
1. .
2ti t i
lθ κ =
En el caso de un desplazamiento prefijado δ del apoyo "i" (descenso) debe considerarse
su incidencia en ( 1),0iδ − , ,0iδ y ( 1),0iδ + .
Figura 4.33
Los giros se calculan "geométricamente" como la tangente de la elástica en los apoyos.
Los giros relativos son positivos cuando tienen el sentido elegido como positivo
para la incógnita de ese nudo.
Se considera que los momentos flectores en el estado auxiliar son positivos, por lo que el
sentido de los giros resulta:
il
δ
d l
il
iP
d l
d P
( )t −∆

5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 128/500
CAPITULO 4 METODO DE LAS FUERZAS
_____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -27-
Figura 4.34
Por lo tanto, en este caso, los giros producidos por el descenso de apoyo en la estructura
isostática son contrarios al sentido de giro de los momentos indicados en los nudos que se
adoptan como positivos para el nudo "i", pero del mismo signo para los nudos "i–1" e "i+1"
Observando la Figura 4.33 se tiene:
( 1),0i
ilδ δ − = + ,0i
i d l lδ δ δ
⎛ ⎞= − −⎜ ⎟
⎝ ⎠ ( 1),0i
d lδ δ + = +
Observación final: Mover un apoyo en una cantidad prefijada no implica un
cambio de la estructura, sino simplemente la introducción de un estado de carga más
que no afecta a la matriz de flexibilidad.
4.11- Cálculo de reacciones y trazado de diagramas:
Repitiendo un esquema similar a las Figura 4.31 y Figura 4.32 se tiene:
Figura 4.35
1 1i i i ii Pi Pd
i i d d
M M M M R R R
l l l l
− +⎛ ⎞ ⎛ ⎞
= + − + + −⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠
Los momentos1i
M − ,i
M y1i
M + llevarán el signo que resulta de resolver el
sistema de ecuaciones de compatibilidad.
El trazado del diagrama de momentos flectores requiere la superposición de los diagramas
0 M multiplicados por las incógnitas hiperestáticasi
M (con su signo). A veces resulta más
il
iP
d l
d P1i M − 1i M +i M
( )iθ + ( )
d θ +
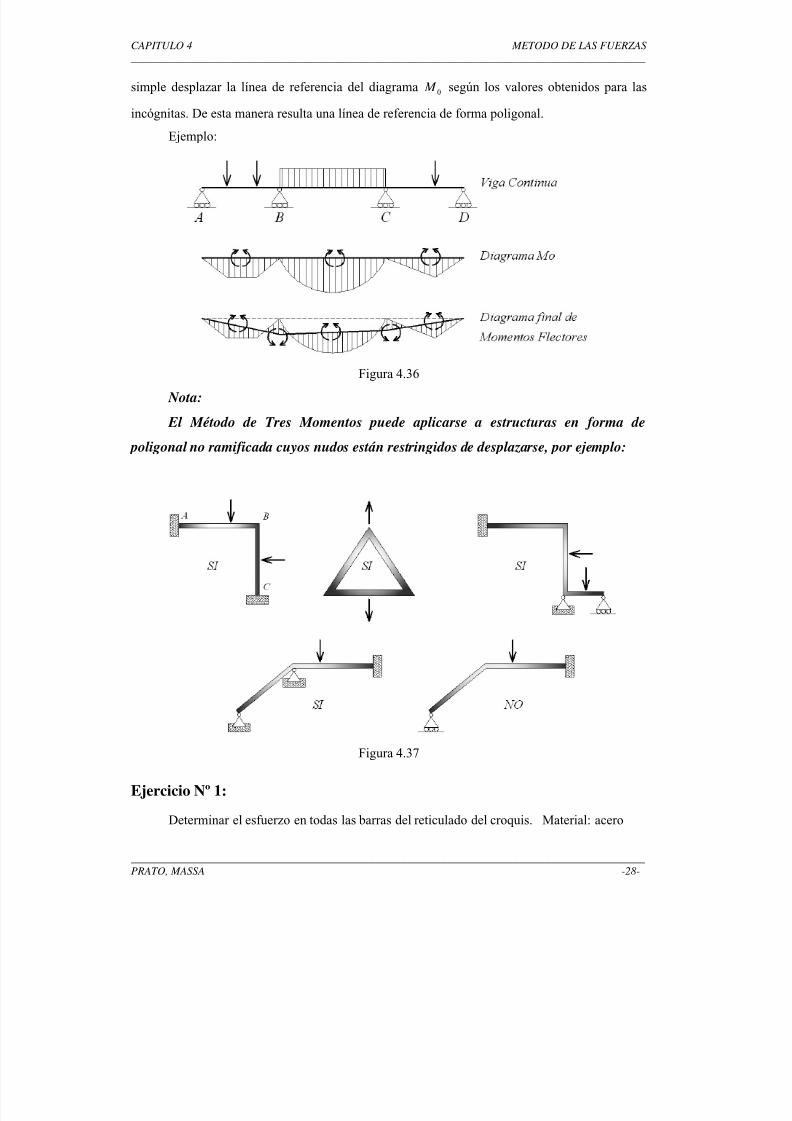
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 129/500
CAPITULO 4 METODO DE LAS FUERZAS
_____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -28-
simple desplazar la línea de referencia del diagrama 0 M según los valores obtenidos para las
incógnitas. De esta manera resulta una línea de referencia de forma poligonal.
Ejemplo:
Figura 4.36
Nota:
El Método de Tres Momentos puede aplicarse a estructuras en forma de
poligonal no ramificada cuyos nudos están restringidos de desplazarse, por ejemplo:
Figura 4.37
Ejercicio Nº 1:
Determinar el esfuerzo en todas las barras del reticulado del croquis. Material: acero
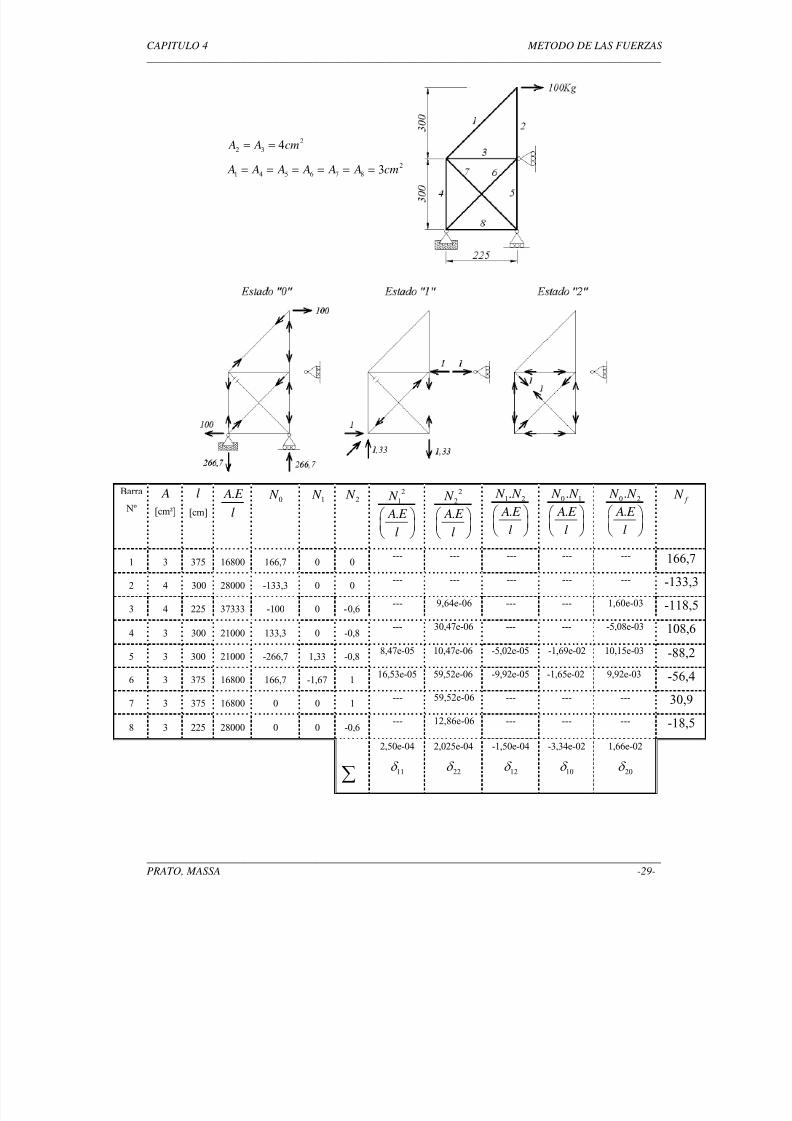
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 130/500
CAPITULO 4 METODO DE LAS FUERZAS
_____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -29-
Barra
Nº
A
[cm²]
l
[cm]
. A E
l
0 N 1 N 2 N 21
.
N
A E
l
⎛ ⎞⎜ ⎟⎝ ⎠
22
.
N
A E
l
⎛ ⎞⎜ ⎟⎝ ⎠
1 2.
.
N N
A E
l
⎛ ⎞⎜ ⎟⎝ ⎠
0 1.
.
N N
A E
l
⎛ ⎞⎜ ⎟⎝ ⎠
0 2.
.
N N
A E
l
⎛ ⎞⎜ ⎟⎝ ⎠
f N
1 3 375 16800 166,7 0 0--- --- --- --- --- 166,7
2 4 300 28000 -133,3 0 0--- --- --- --- --- -133,3
3 4 225 37333 -100 0 -0,6--- 9,64e-06 --- --- 1,60e-03 -118,5
4 3 300 21000 133,3 0 -0,8--- 30,47e-06 --- --- -5,08e-03 108,6
5 3 300 21000 -266,7 1,33 -0,8 8,47e-05 10,47e-06 -5,02e-05 -1,69e-02 10,15e-03 -88,2
6 3 375 16800 166,7 -1,67 116,53e-05 59,52e-06 -9,92e-05 -1,65e-02 9,92e-03 -56,4
7 3 375 16800 0 0 1--- 59,52e-06 --- --- --- 30,9
8 3 225 28000 0 0 -0,6--- 12,86e-06 --- --- --- -18,5
∑
2,50e-04
11δ
2,025e-04
22δ
-1,50e-04
12δ
-3,34e-02
10δ
1,66e-02
20δ
2
2 34 A A cm= =
2
1 4 5 6 7 83 A A A A A A cm= = = = = =
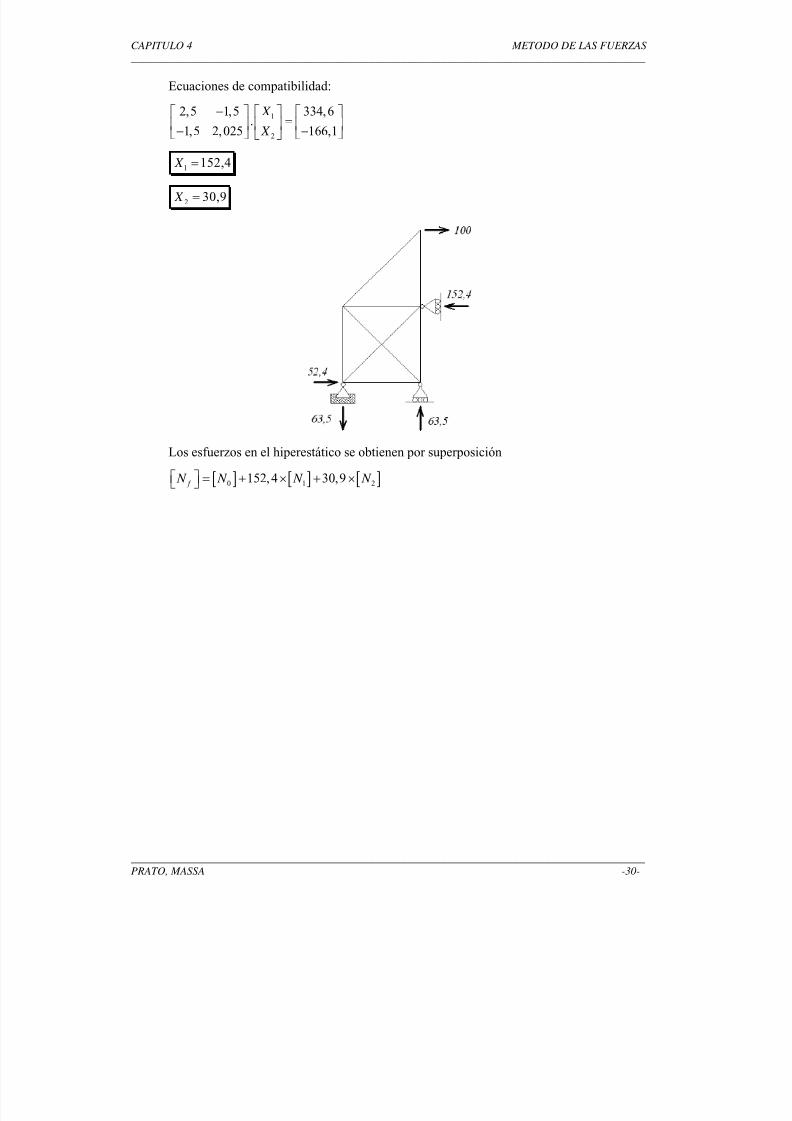
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 131/500
CAPITULO 4 METODO DE LAS FUERZAS
_____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -30-
Ecuaciones de compatibilidad:
1
2
2,5 1,5 334,6.
1,5 2,025 166,1
X
X
− ⎡ ⎤⎡ ⎤ ⎡ ⎤=⎢ ⎥⎢ ⎥ ⎢ ⎥− −⎣ ⎦ ⎣ ⎦⎣ ⎦
1 152,4 X =
2 30,9 X =
Los esfuerzos en el hiperestático se obtienen por superposición
[ ] [ ] [ ]0 1 2152,4 30,9 f N N N N ⎡ ⎤ = + × + ×⎣ ⎦
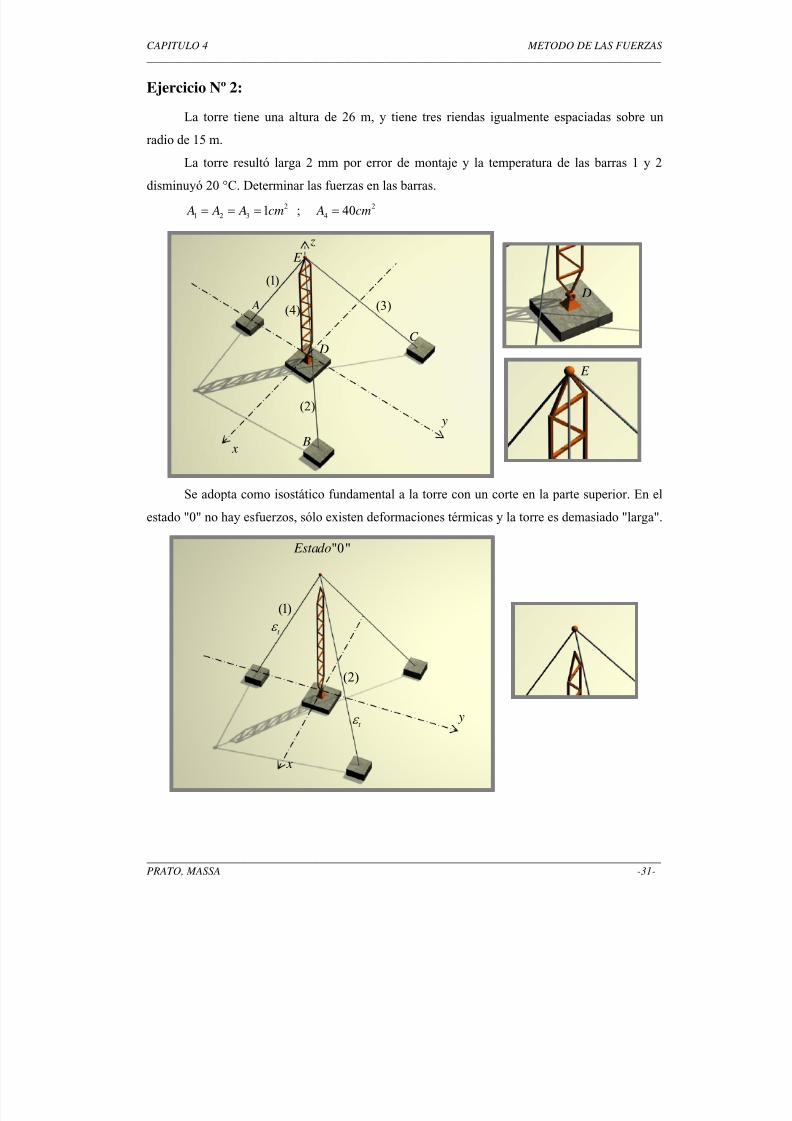
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 132/500
CAPITULO 4 METODO DE LAS FUERZAS
_____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -31-
Ejercicio Nº 2:
La torre tiene una altura de 26 m, y tiene tres riendas igualmente espaciadas sobre un
radio de 15 m.
La torre resultó larga 2 mm por error de montaje y la temperatura de las barras 1 y 2
disminuyó 20 °C. Determinar las fuerzas en las barras.
2
1 2 3 1 A A A cm= = = ; 2
4 40 A cm=
Se adopta como isostático fundamental a la torre con un corte en la parte superior. En el
estado "0" no hay esfuerzos, sólo existen deformaciones térmicas y la torre es demasiado "larga".
t ε
x
y
(1)
(2)
t ε
"0" Estado
z
A
B
C D
E
x
y
(1)
(2)
(3)(4)
D
E
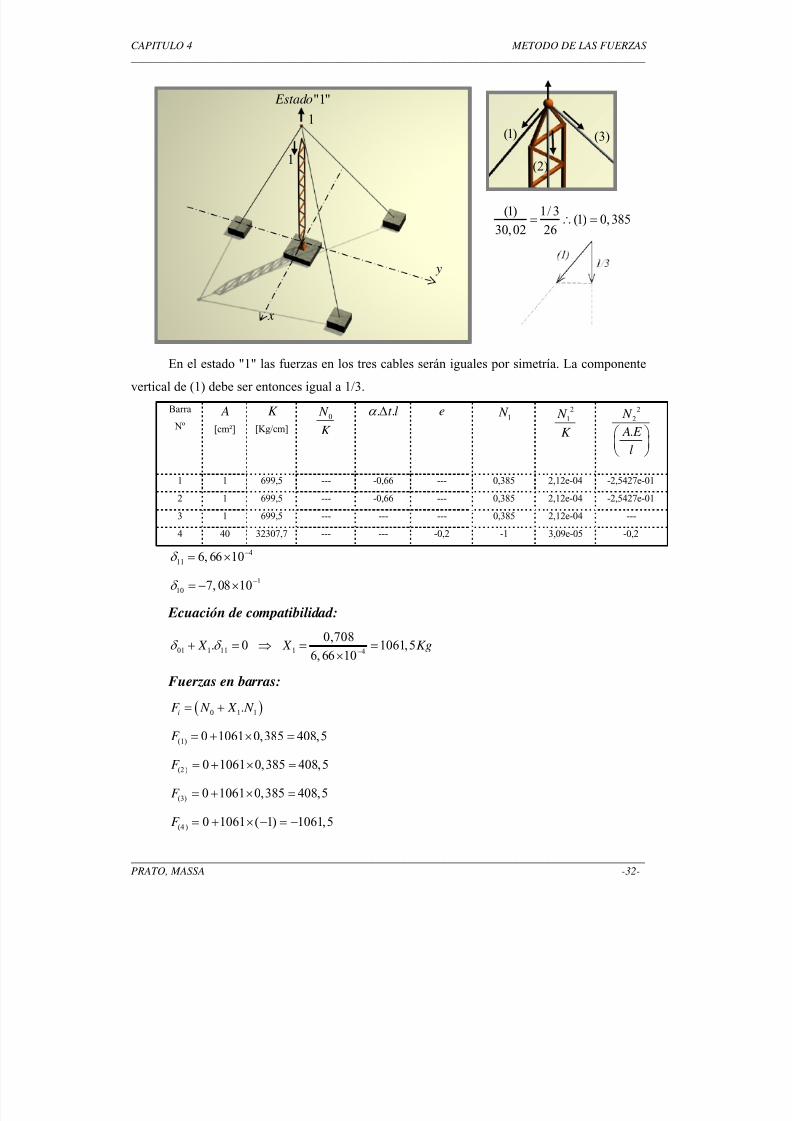
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 133/500
CAPITULO 4 METODO DE LAS FUERZAS
_____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -32-
En el estado "1" las fuerzas en los tres cables serán iguales por simetría. La componente
vertical de (1) debe ser entonces igual a 1/3.
Barra
Nº
A
[cm²]
K
[Kg/cm]
0 N
K
. .t lα ∆ e 1 N 2
1 N
K
2
2
.
N
A E
l
⎛ ⎞⎜ ⎟⎝ ⎠
1 1 699,5 --- -0,66 --- 0,385 2,12e-04 -2,5427e-01
2 1 699,5 --- -0,66 --- 0,385 2,12e-04 -2,5427e-01
3 1 699,5 --- --- --- 0,385 2,12e-04 ---
4 40 32307,7 --- --- -0,2 -1 3,09e-05 -0,2
4
11 6, 66 10δ −= ×
1
10 7, 08 10δ −= − ×
Ecuación de compatibilidad:
01 1 11 1 4
0,708. 0 1061,5
6, 66 10 X X Kgδ δ
−
+ = ⇒ = =×
Fuerzas en barras:
( )0 1 1.iF N X N = +
(1) 0 1061 0,385 408,5F = + × =
(2 ) 0 1061 0,385 408,5F = + × =
(3) 0 1061 0,385 408,5F = + × =
(4 ) 0 1061 ( 1) 1061,5F = + × − = −
x
y
1
"1" Estado
1
(1) 1/ 3(1) 0, 385
30,02 26= ∴ =
(1) (3)
(2)
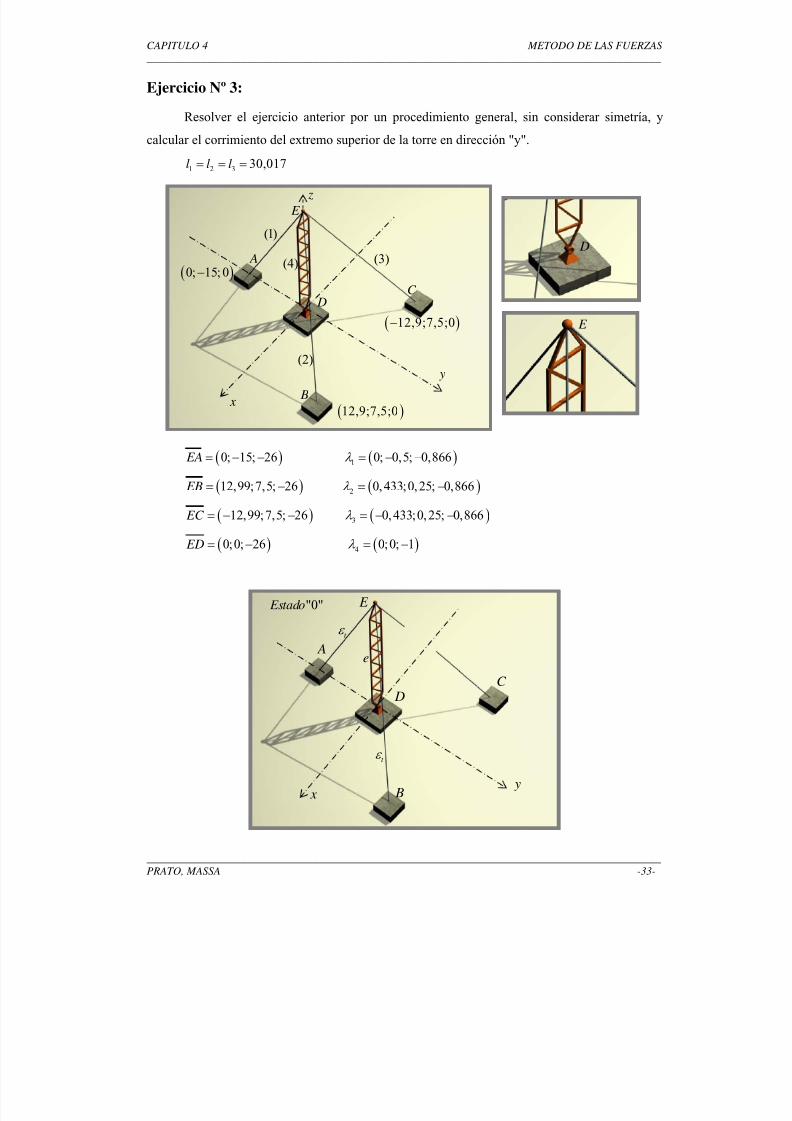
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 134/500
CAPITULO 4 METODO DE LAS FUERZAS
_____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -33-
Ejercicio Nº 3:
Resolver el ejercicio anterior por un procedimiento general, sin considerar simetría, y
calcular el corrimiento del extremo superior de la torre en dirección "y".
1 2 3 30,017l l l= = =
( ) ( )
( ) ( )( ) ( )
( ) ( )
1
2
3
4
0; 15; 26 0; 0,5; 0,866
12,99;7,5; 26 0,433;0,25; 0,866
12,99;7,5; 26 0,433;0,25; 0,866
0;0; 26 0;0; 1
EA
EB
EC
ED
λ
λ
λ
λ
= − − = − −
= − = −= − − = − −
= − = −
t ε
"0" Estado
A
B
C D
E
x y
t ε
e
D
E
z
A
B
C D
E
x
y
(1)
(2)
(3)(4)( )0; 15; 0−
( )12,9;7,5;0
( )12,9;7,5;0−
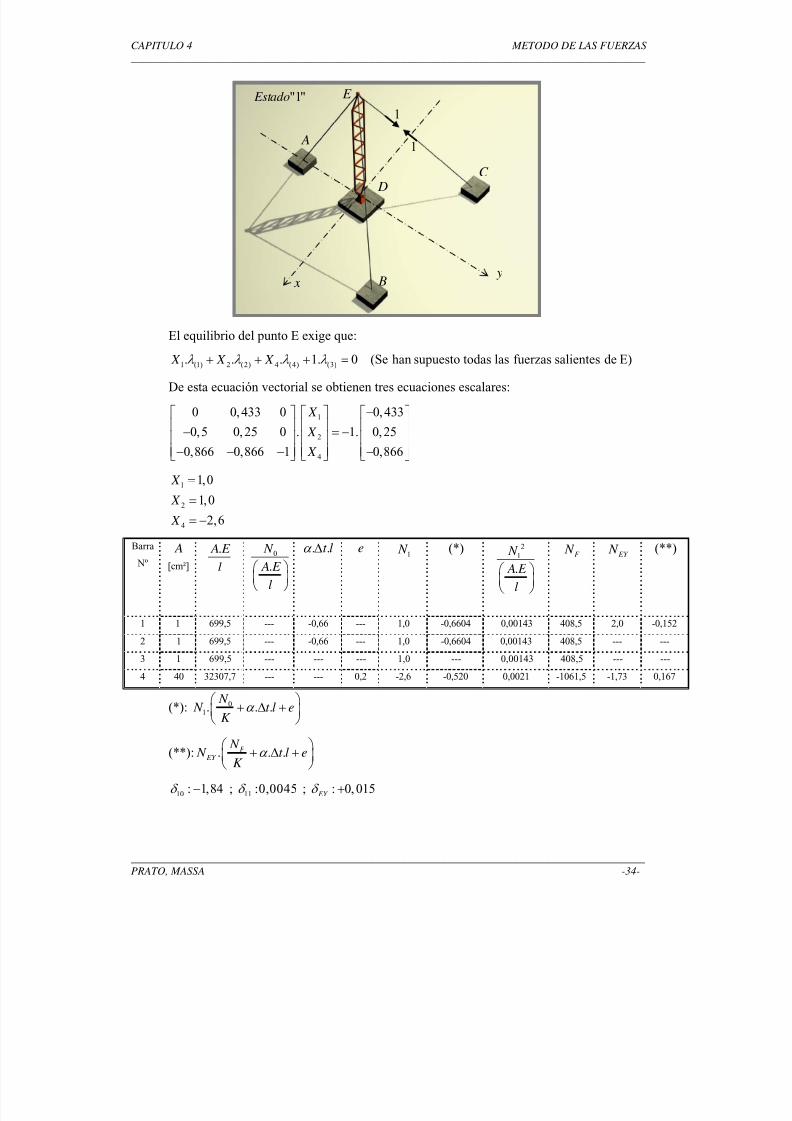
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 135/500
CAPITULO 4 METODO DE LAS FUERZAS
_____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -34-
El equilibrio del punto E exige que:
1 (1) 2 (2) 4 (4) (3). . . 1. 0 X X X λ λ λ λ + + + = (Se han supuesto todas las fuerzas salientes de E)
De esta ecuación vectorial se obtienen tres ecuaciones escalares:
1
2
4
0 0,433 0 0,433
0,5 0,25 0 . 1. 0,25
0,866 0,866 1 0,866
X
X
X
−⎡ ⎤ ⎡ ⎤ ⎡ ⎤⎢ ⎥ ⎢ ⎥ ⎢ ⎥− = −⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥− − − −⎣ ⎦ ⎣ ⎦ ⎣ ⎦
1
2
4
1,0
1,0
2,6
X
X
X
=
=
= −
Barra
Nº
A
[cm²]
. A E
l
0
.
N
A E
l
⎛ ⎞⎜ ⎟⎝ ⎠
. .t lα ∆ e 1 N (*) 2
1
.
N
A E
l
⎛ ⎞⎜ ⎟⎝ ⎠
F N EY N (**)
1 1 699,5 --- -0,66 --- 1,0 -0,6604 0,00143 408,5 2,0 -0,152
2 1 699,5 --- -0,66 --- 1,0 -0,6604 0,00143 408,5 --- ---
3 1 699,5 --- --- --- 1,0 --- 0,00143 408,5 --- ---
4 40 32307,7 --- --- 0,2 -2,6 -0,520 0,0021 -1061,5 -1,73 0,167
(*): 01. . .
N N t l e
K α
⎛ ⎞+ ∆ +⎜ ⎟
⎝ ⎠
(**): . . .F EY
N N t l e
K α
⎛ ⎞+ ∆ +⎜ ⎟
⎝ ⎠
10 : 1,84δ − ; 11 :0,0045δ ; : 0, 015 EY
δ +
1
"1" Estado
A
B
C D
E
x y
1

5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 136/500
CAPITULO 4 METODO DE LAS FUERZAS
_____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -35-
Ecuación de compatibilidad:
0101 1 11 1
11
1,84. 0 408,5
0,0045 X X
δ δ δ
δ + = ⇒ = − = − =
Estado auxiliar:
1
2
4
0 0,433 0 0
0,5 0,25 0 . 1. 1
0,866 0,866 1 0
X
X
X
⎡ ⎤ ⎡ ⎤ ⎡ ⎤⎢ ⎥ ⎢ ⎥ ⎢ ⎥− = −⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥− − −⎣ ⎦ ⎣ ⎦ ⎣ ⎦
1
2
4
2,0
0,0
1,73
X
X
X
=
=
= −
:0,015Y
E δ
Ejercicio Nº 4:
La parte inferior del segundo tramo de la viga continua de dos tramos sufre un aumentode temperatura t ∆ .
Se pide resolver el problema hiperestático y trazar los diagramas de solicitaciones.
t ∆
(1)
A
B
C D
E
x y
(2)
(4)(3)
1
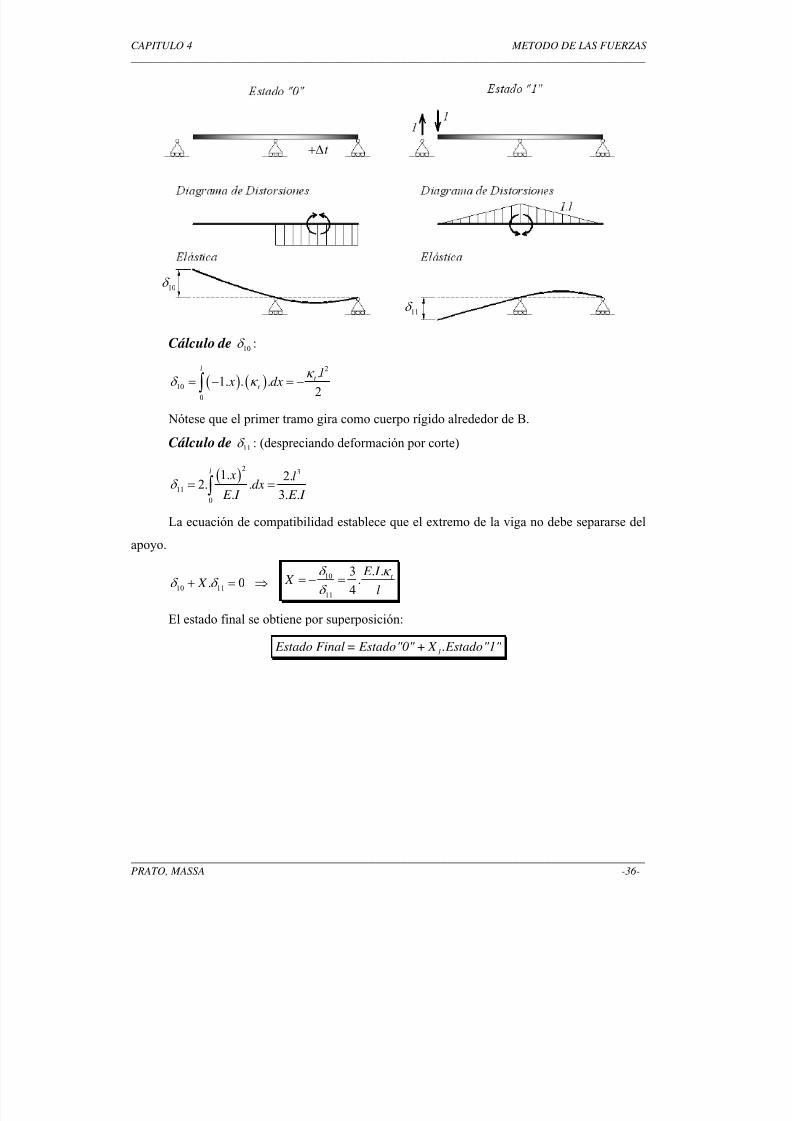
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 137/500
CAPITULO 4 METODO DE LAS FUERZAS
_____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -36-
Cálculo de 10δ :
( ) ( )2
10
0
.1. . .
2
l
t t
l x dx
κ δ κ = − = −∫
Nótese que el primer tramo gira como cuerpo rígido alrededor de B.
Cálculo de 11
δ : (despreciando deformación por corte)
( )2 3
110
1. 2.
2. .. 3. .
l x l
dx E I E I δ = =
∫
La ecuación de compatibilidad establece que el extremo de la viga no debe separarse del
apoyo.
10 11. 0 X δ δ + = ⇒10
11
. .3.
4
t E I
X l
δ κ
δ = − =
El estado final se obtiene por superposición:
1 Estado Final = Estado "0" + X .Estado "1"
t +∆
10δ
11δ

5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 138/500
CAPITULO 4 METODO DE LAS FUERZAS
_____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -37-
Ejercicio Nº 5:
Durante el montaje del resorte " AB " fue necesario comprimirlo 2 cm entre las vigas
para colocarlo. Se pide:
a) Corrimiento del punto A
b) Diagramas de , , f
M Q N .
Datos:
4
1 1
4
2 2
2,4 3,8 60
0,98 3,0 100
Kg I cm h cm K
cm
I cm h cm P Kg
= = =
= = =
50ºt C ∆ =
10ºt C ∆ =
1.
4t
κ
3.
4t
κ
t κ
3. . .
4t E I κ
t ∆
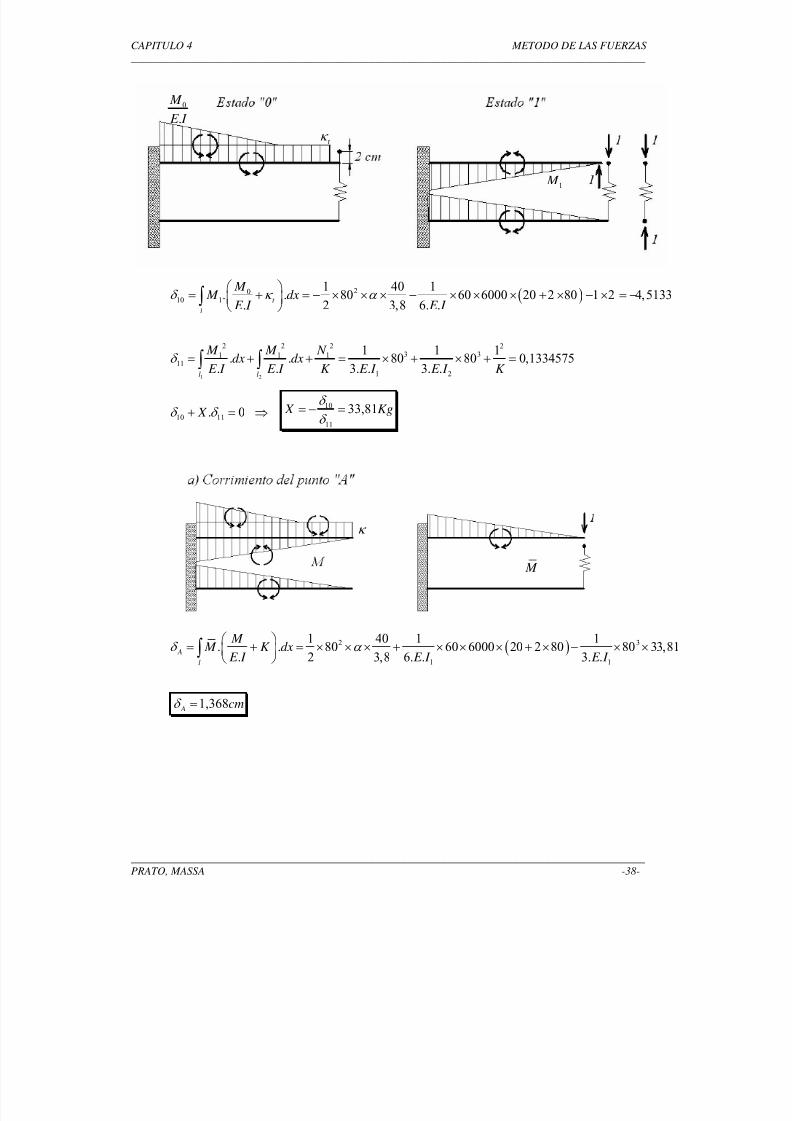
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 139/500
CAPITULO 4 METODO DE LAS FUERZAS
_____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -38-
( )2010 1
1 40 1. . 80 60 6000 20 2 80 1 2 4,5133
. 2 3,8 6. .t
l
M M dx
E I E I δ κ α
⎛ ⎞= + = − × × × − × × × + × − × = −⎜ ⎟
⎝ ⎠∫
1 2
2 2 2 23 31 1 1
11
1 2
1 1 1. . 80 80 0,1334575
. . 3. . 3. .l l
M M N dx dx
E I E I K E I E I K δ = + + = × + × + =∫ ∫
10 11. 0 X δ δ + = ⇒10
11
33,81 X Kgδ
δ = − =
( )
2 3
1 1
1 40 1 1
. . 80 60 6000 20 2 80 80 33,81. 2 3,8 6. . 3. . Al
M
M K dx E I E I E I δ α
⎛ ⎞= + = × × × + × × × + × − × ×
⎜ ⎟⎝ ⎠∫
1,368 A cmδ =
M
κ
1 M
0
.
M
E I
t κ
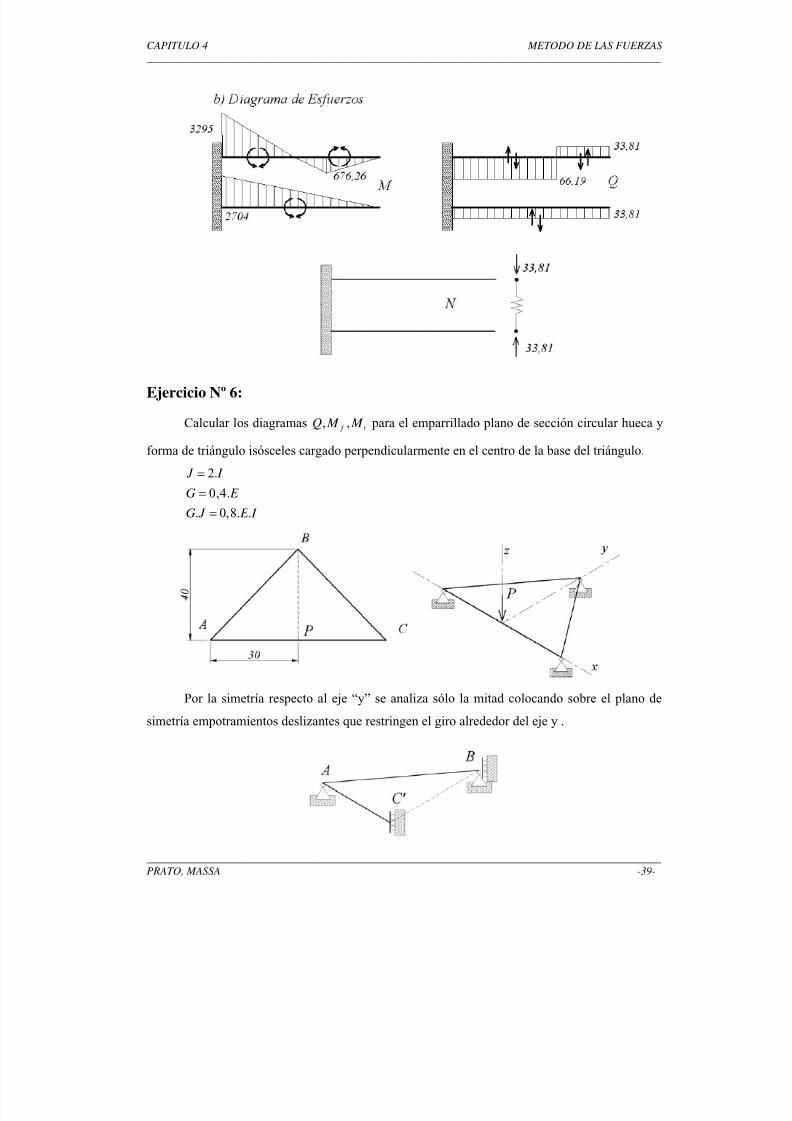
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 140/500
CAPITULO 4 METODO DE LAS FUERZAS
_____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -39-
Ejercicio Nº 6:
Calcular los diagramas , , f t Q M M para el emparrillado plano de sección circular hueca y
forma de triángulo isósceles cargado perpendicularmente en el centro de la base del triángulo.
2.
0,4.
. 0,8. .
J I
G E
G J E I
=
==
Por la simetría respecto al eje “y” se analiza sólo la mitad colocando sobre el plano de
simetría empotramientos deslizantes que restringen el giro alrededor del eje y .

5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 141/500
CAPITULO 4 METODO DE LAS FUERZAS
_____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -40-
Se trata de un cuerpo plano con cuatro condiciones de apoyo. Se elige como incógnita
hiperestática el momento flector (momento alrededor del eje y) en el punto de aplicación de la
carga.
( ) ( ) ( )2 2 2
11
1 1 1 88.30. 1 .50. 0,6 .50. 0,8
. . . .
Flexión en AC Flexión en AB Torsión en AB
E I E I G J E I δ = + + =
( ) ( ) ( ) ( ) ( ) ( )10
1 1 1 1095..30. 1 . 15. .50. 0,6 . 9. .50. 0,8 . 12.
. . . .
Flexión en AC Flexión en AB Torsión en AB
PP P P
E I E I G J E I δ = + + = +
Se plantea la ecuación de compatibilidad: el giro en C alrededor del eje y es nulo.
10 11. 0 X δ δ + = ⇒1095.
.
88.
P
E I X
E I
= − 12,44. X P=
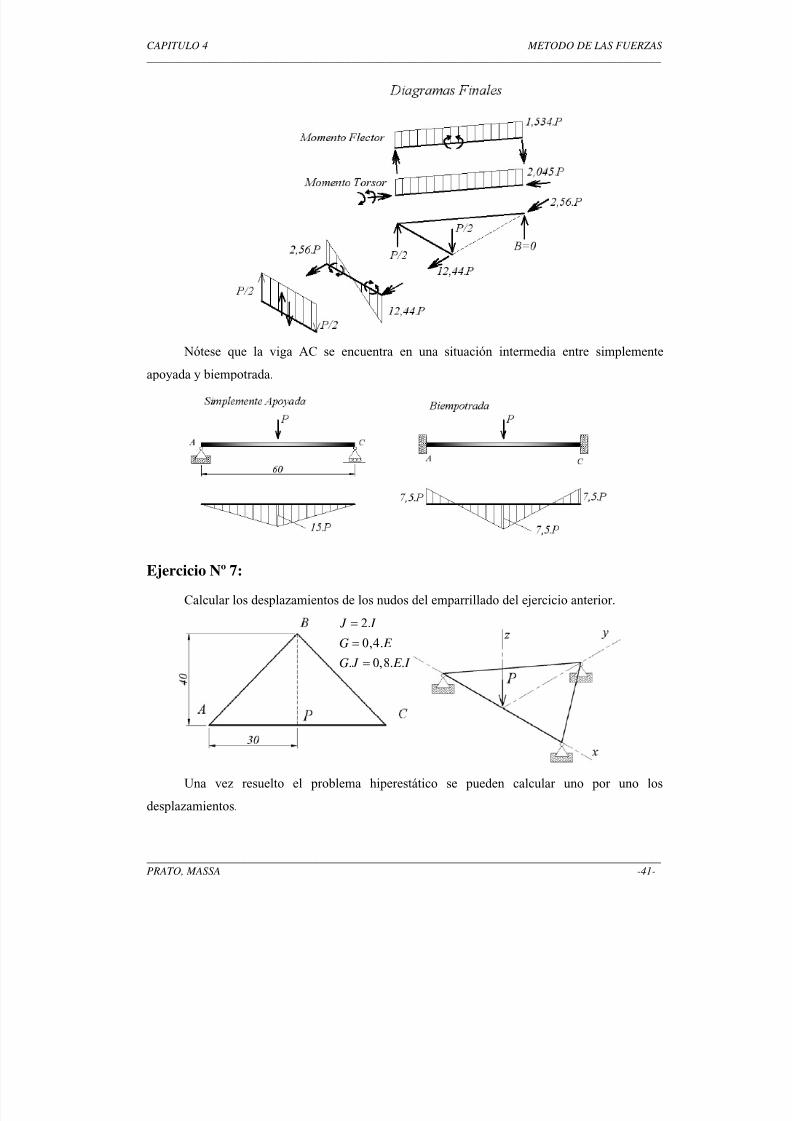
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 142/500
CAPITULO 4 METODO DE LAS FUERZAS
_____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -41-
Nótese que la viga AC se encuentra en una situación intermedia entre simplemente
apoyada y biempotrada.
Ejercicio Nº 7:
Calcular los desplazamientos de los nudos del emparrillado del ejercicio anterior.
Una vez resuelto el problema hiperestático se pueden calcular uno por uno los
desplazamientos.
2.
0,4.
. 0,8. .
J I
G E
G J E I
=
=
=
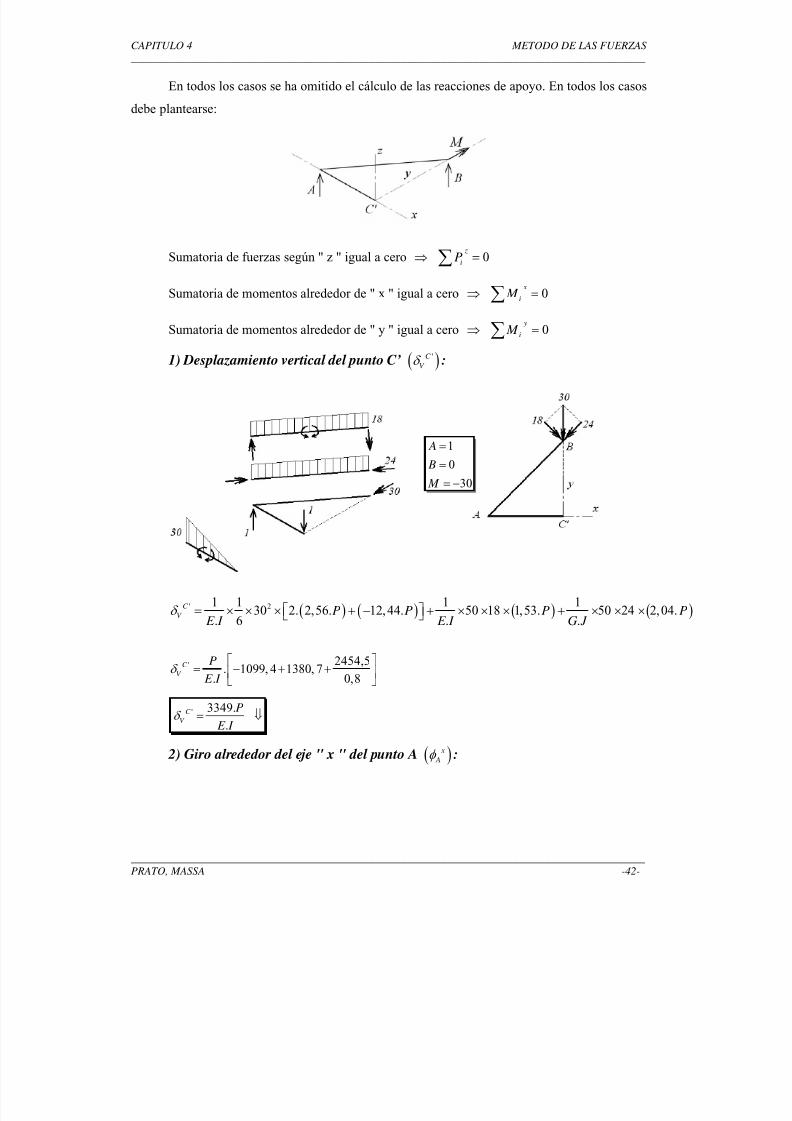
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 143/500
CAPITULO 4 METODO DE LAS FUERZAS
_____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -42-
En todos los casos se ha omitido el cálculo de las reacciones de apoyo. En todos los casos
debe plantearse:
Sumatoria de fuerzas según " z " igual a cero 0 z
iP⇒ =∑
Sumatoria de momentos alrededor de " x " igual a cero 0 x
i M ⇒ =∑
Sumatoria de momentos alrededor de " y " igual a cero 0 yi M ⇒ =∑
1) Desplazamiento vertical del punto C’ ( )'C
V δ :
( ) ( ) ( ) ( )' 21 1 1 130 2. 2,56. 12,44. 50 18 1,53. 50 24 2,04.
. 6 . .
C
V P P P P E I E I G J
δ = × × × + − + × × × + × × ×⎡ ⎤⎣ ⎦
' 2454,5. 1099, 4 1380, 7
. 0,8
C
V
P
E I δ
⎡ ⎤= − + +⎢ ⎥
⎣ ⎦
' 3349.
.
C
V
P
E I δ = ⇓
2) Giro alrededor del eje " x " del punto A ( ) x
Aφ :
1
0
30
A
B
M
=
=
= −
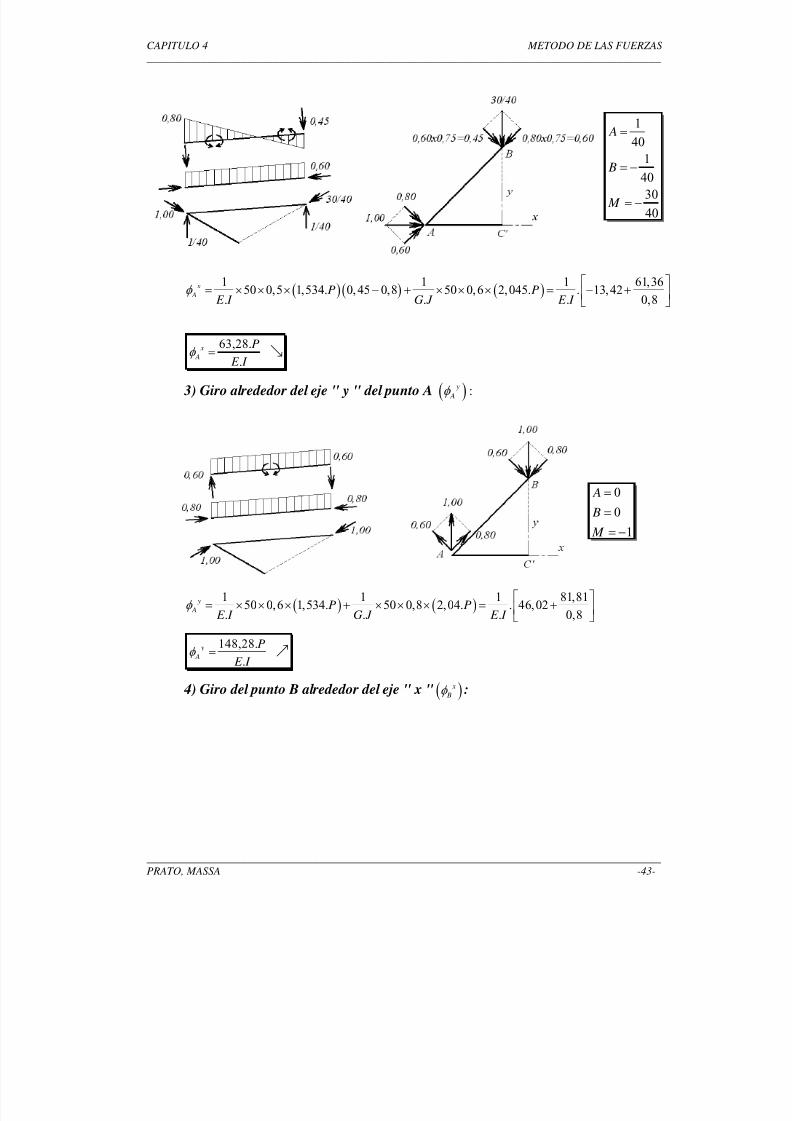
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 144/500
CAPITULO 4 METODO DE LAS FUERZAS
_____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -43-
( ) ( ) ( )1 1 1 61,36
50 0,5 1,534. 0, 45 0,8 50 0,6 2,045. . 13,42. . . 0,8
x
A P P E I G J E I
φ ⎡ ⎤
= × × × − + × × × = − +⎢ ⎥⎣ ⎦
63, 28.
.
x
A
P
E I φ =
3) Giro alrededor del eje " y " del punto A ( ) y
Aφ :
( ) ( )1 1 1 81,81
50 0,6 1,534. 50 0,8 2,04. . 46,02. . . 0,8
y
A P P E I G J E I
φ ⎡ ⎤
= × × × + × × × = +⎢ ⎥⎣ ⎦
148,28.
.
y
A
P
E I φ =
4) Giro del punto B alrededor del eje " x " ( ) x
Bφ :
0
0
1
A
B
M
==
= −
1
40
140
30
40
A
B
M
=
= −
= −
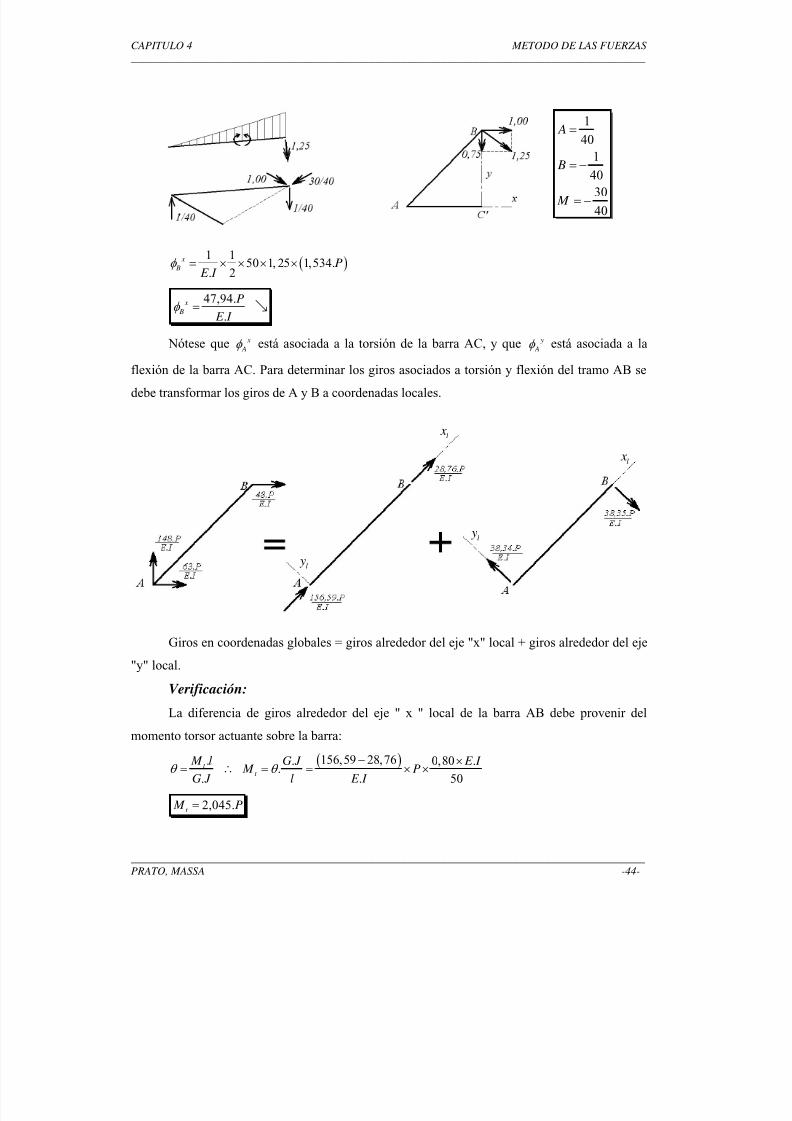
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 145/500
CAPITULO 4 METODO DE LAS FUERZAS
_____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -44-
( )1 1
50 1, 25 1, 534.. 2
x
BP
E I φ = × × × ×
47,94.
.
x
B
P
E I φ =
Nótese que x
Aφ está asociada a la torsión de la barra AC, y que y
Aφ está asociada a la
flexión de la barra AC. Para determinar los giros asociados a torsión y flexión del tramo AB se
debe transformar los giros de A y B a coordenadas locales.
Giros en coordenadas globales = giros alrededor del eje "x" local + giros alrededor del eje
"y" local.
Verificación:
La diferencia de giros alrededor del eje " x " local de la barra AB debe provenir del
momento torsor actuante sobre la barra:
.
.
t M l
G J θ = ∴
( )156,59 28,76. 0,80 ..
. 50t
G J E I M P
l E I θ
− ×= = × ×
2,045.t
M P=
l x
l y
l y
l x
1
40
140
30
40
A
B
M
=
= −
= −

5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 146/500
CAPITULO 4 METODO DE LAS FUERZAS
_____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -45-
No habiendo desplazamientos verticales de los extremos A y B, ni cargas exteriores en el
interior del tramo, resulta simple determinar los momentos actuantes en los extremos de la barra
por un análisis similar al método de tres momentos (recordar que se consideran giros positivos
cuando coinciden con el sentido del momento aplicado).
3. . 6. ..
6. . 3. .
A A
B B
l l M E I E I
l l M
E I E I
θ
θ
⎡ ⎤ ⎡ ⎤ ⎡ ⎤⎢ ⎥ ⎢ ⎥ ⎢ ⎥=⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎣ ⎦ ⎣ ⎦⎢ ⎥⎣ ⎦
∴
4. . 2. .
.2. . 4. .
A A
B B
E I E I M l l
E I E I M
l l
θ
θ
⎡ ⎤⎡ ⎤ ⎡ ⎤−⎢ ⎥⎢ ⎥ ⎢ ⎥= ⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥−⎢ ⎥ ⎢ ⎥⎣ ⎦ ⎣ ⎦⎢ ⎥⎣ ⎦
Despejados A
M y B
M pueden ser puestos en función de los giros extremos, adoptando
una convención única: giros y momentos antihorarios son positivos.
4. . 2. .. .
A A B
E I E I M
l lθ θ = +
2. . 4. .. .
B A B
E I E I M
l lθ θ = +
1,53.1,53.
A
B
M P
M P
= −
=
Nota: las fuerzas actuantes en los extremos de barra pueden determinarse una por una
cuando se conocen los desplazamientos de los extremos de barra. Está forma operativa que
consiste en calcular primero los desplazamientos y luego las fuerzas, es la que corresponde al
“Método de los desplazamientos” o Método de Rigidez. Se sugiere al lector determinar las
fuerzas de extremo de la barra AC (superponer a las fuerzas de extremo causadas por los giros en
A y C las reacciones debidas a la carga P actuando en el centro)
Ejercicio Nº 8:
a) Calcular la rigidez del aro
b) Calcular el aumento de diámetro vertical para una carga horizontal P.
(Considerar solo flexión)
B M A M

5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 147/500
CAPITULO 4 METODO DE LAS FUERZAS
_____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -46-
El sistema admite dos ejes de simetría y puede analizarse sólo un cuarto del aro
imponiendo condiciones de apoyo adecuadas.
Es necesario colocar empotramientos deslizantes sobre los ejes de simetría. Cada
empotramiento deslizante restringe dos grados de libertad. El problema es hiperestático de
primer grado. Se adopta como incógnita hiperestática el momento en la parte superior.
( ) / 2
2
11
0
1 1. 1 . . . .
. . 2 R d R
E I E I
π π
δ θ = =∫
Fundamental
.veces X
θ
( )( ). . 1 cos2
P M R θ = −
( ).cos2
P N θ = (-)

5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 148/500
CAPITULO 4 METODO DE LAS FUERZAS
_____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -47-
( ) / 2
2
10
0
1 1. . . 1 cos .1. . . . . 1
. 2 . 2 2
P P R R d R
E I E I
π π
δ θ θ ⎛ ⎞ ⎛ ⎞
= − = −⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠
∫
10
11
1 1. .
2 X P R
δ
δ π
⎛ ⎞= − = − −⎜ ⎟
⎝ ⎠
0,18169. . X P R=
a) Rigidez (poriW ):
( ) / 2
2
0
1. . . 0,3183 0,5.cos . . .4
2. .iW P R R d
E I
π
θ θ ⎡ ⎤
= − +⎡ ⎤⎢ ⎥⎣ ⎦⎣ ⎦
∫
2 21 .
. 0,14878.2 .
i
P RW
E I
⎛ ⎞= ⎜ ⎟
⎝ ⎠
;2
1.
2i
PW
K =
3.
0,149..
h
P R
E I δ =
3
.6,7214.
E I K
R=
b)vδ por trabajos virtuales:
( )( ) / 2
3
0
1. . . 0,3183 0,5.cos . . .4
. 2v
senP R d
E I
π θ δ θ θ
⎡ ⎤⎛ ⎞= − +⎢ ⎥⎜ ⎟
⎢ ⎥⎝ ⎠⎣ ⎦∫
θ 1. ( )
2 M R sen θ =
( ). . 0,1817 0,5. 1 cos M P R θ = − −⎡ ⎤
⎣ ⎦
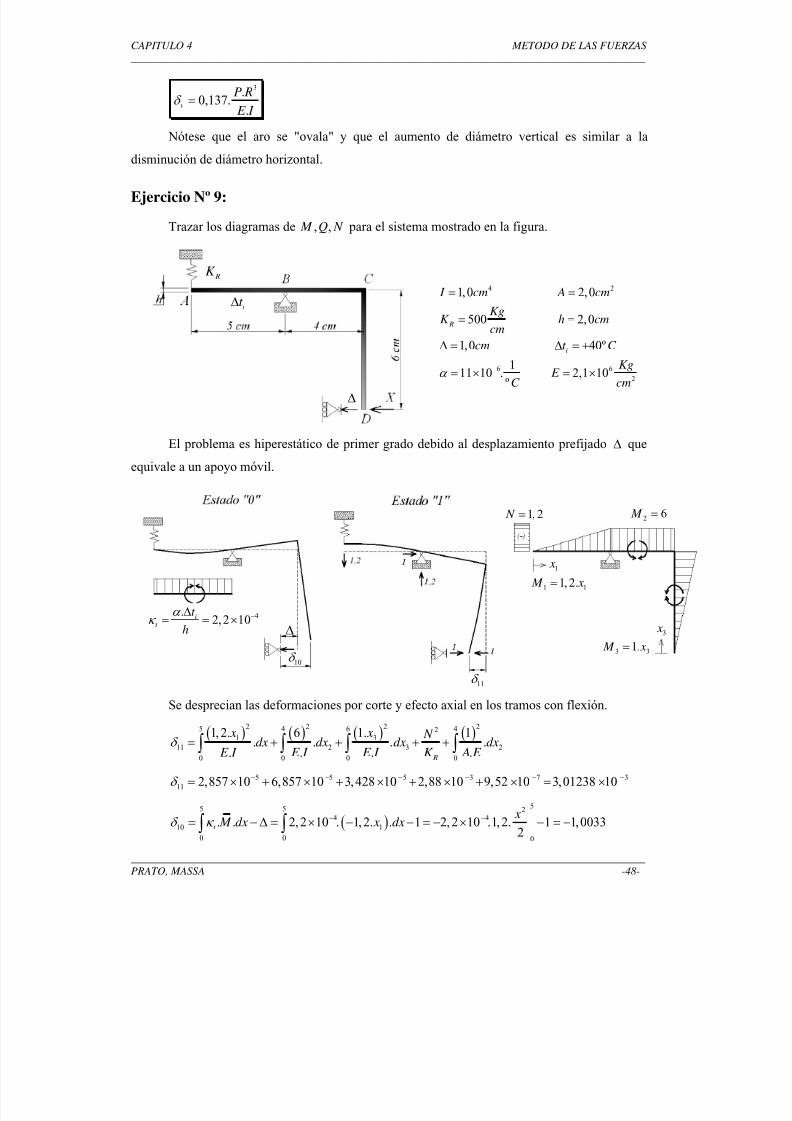
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 149/500
CAPITULO 4 METODO DE LAS FUERZAS
_____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -48-
3.0,137.
.v
P R
E I δ =
Nótese que el aro se "ovala" y que el aumento de diámetro vertical es similar a la
disminución de diámetro horizontal.
Ejercicio Nº 9:
Trazar los diagramas de , , M Q N para el sistema mostrado en la figura.
El problema es hiperestático de primer grado debido al desplazamiento prefijado ∆ que
equivale a un apoyo móvil.
Se desprecian las deformaciones por corte y efecto axial en los tramos con flexión.
( ) ( ) ( ) ( )2 2 2 25 4 6 42
1 3
11 2 3 2
0 0 0 0
1, 2. 6 1. 1. . . .
. . . . R
x x N dx dx dx dx
E I E I E I K A E δ = + + + +∫ ∫ ∫ ∫
5 5 5 3 7 3
11 2,857 10 6,857 10 3,428 10 2,88 10 9,52 10 3,01238 10δ − − − − − −= × + × + × + × + × = ×
( )
55 5 2
4 410 1
0 0 0
. . 2, 2 10 . 1, 2. . 1 2, 2 10 .1, 2. 1 1,00332
t x M dx x dxδ κ − −= − ∆ = × − − = − × − = −∫ ∫
∆4.
2,2 10it
t
h
α κ −∆
= = ×
10δ
11δ
1, 2 N =
1 x
3 x
1 11, 2. M x=
2 6 M =
3 31. M x=
RK
it ∆
∆
4 2
6 6
2
1,0 2,0
500 2,0
1,0 40º
111 10 . 2,1 10
º
R
i
I cm A cm
KgK h cm
cmcm t C
Kg E
C cmα
−
= =
= =
∆ = ∆ = +
= × = ×
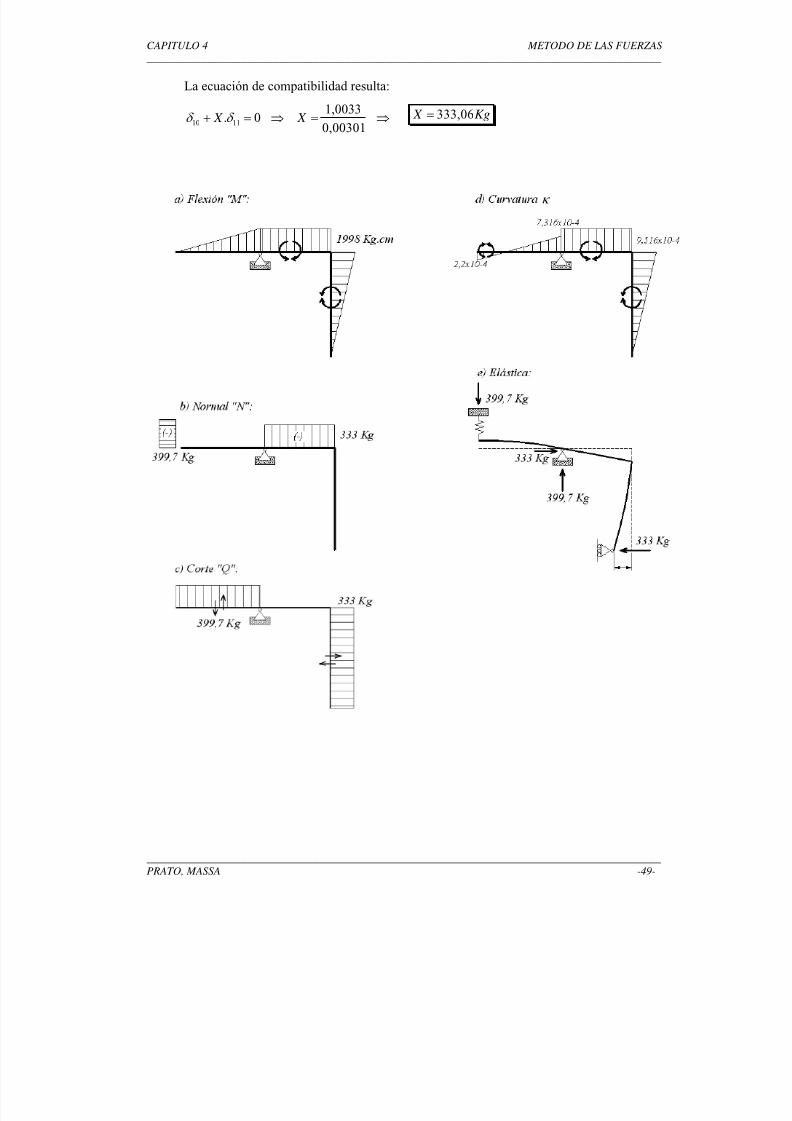
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 150/500
CAPITULO 4 METODO DE LAS FUERZAS
_____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -49-
La ecuación de compatibilidad resulta:
10 11. 0 X δ δ + = ⇒1,0033
0,00301 X = ⇒ 333,06 X Kg=
κ
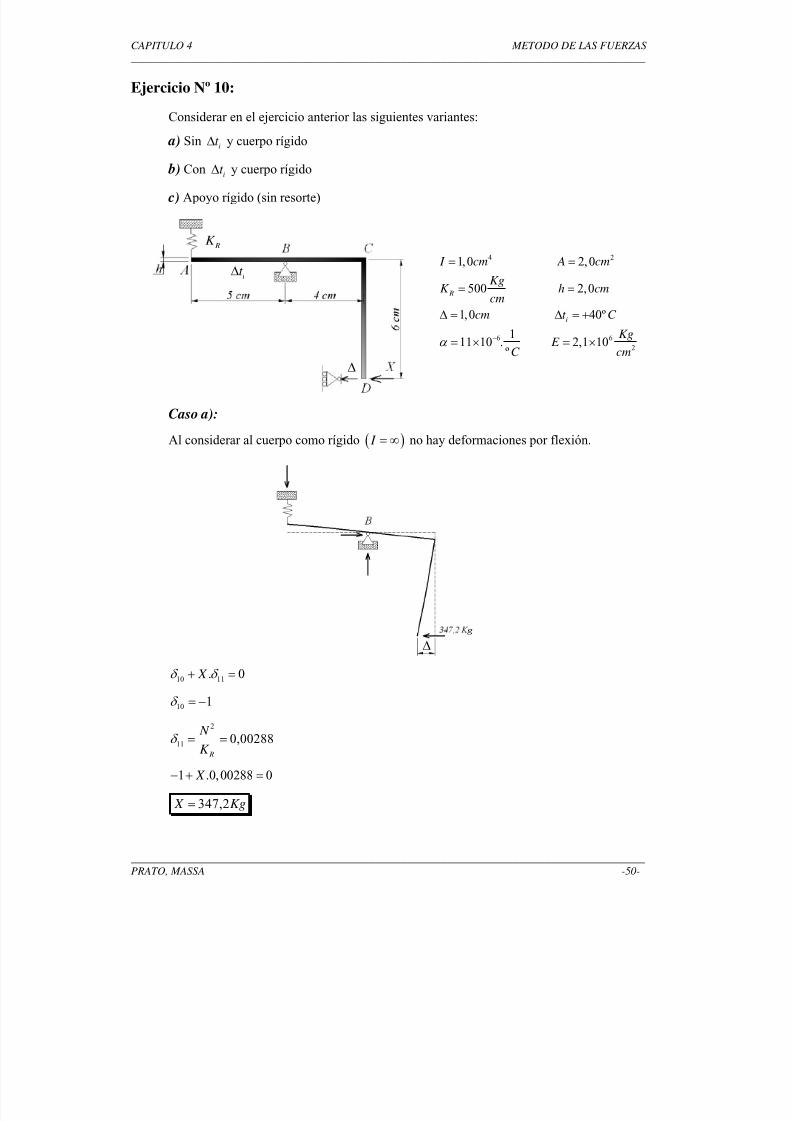
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 151/500
CAPITULO 4 METODO DE LAS FUERZAS
_____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -50-
Ejercicio Nº 10:
Considerar en el ejercicio anterior las siguientes variantes:
a) Sin it ∆ y cuerpo rígido
b) Con it ∆ y cuerpo rígido
c) Apoyo rígido (sin resorte)
Caso a):
Al considerar al cuerpo como rígido ( ) I = ∞ no hay deformaciones por flexión.
10 11. 0 X δ δ + =
101δ = −
2
110,00288
R
N
K δ = =
1 .0,00288 0 X − + =
347,2 X Kg=
∆
RK
it ∆
∆
4 2
6 6
2
1,0 2,0
500 2,0
1,0 40º
111 10 . 2,1 10
º
R
i
I cm A cm
KgK h cm
cm
cm t C
Kg E
C cmα −
= =
= =
∆ = ∆ = +
= × = ×
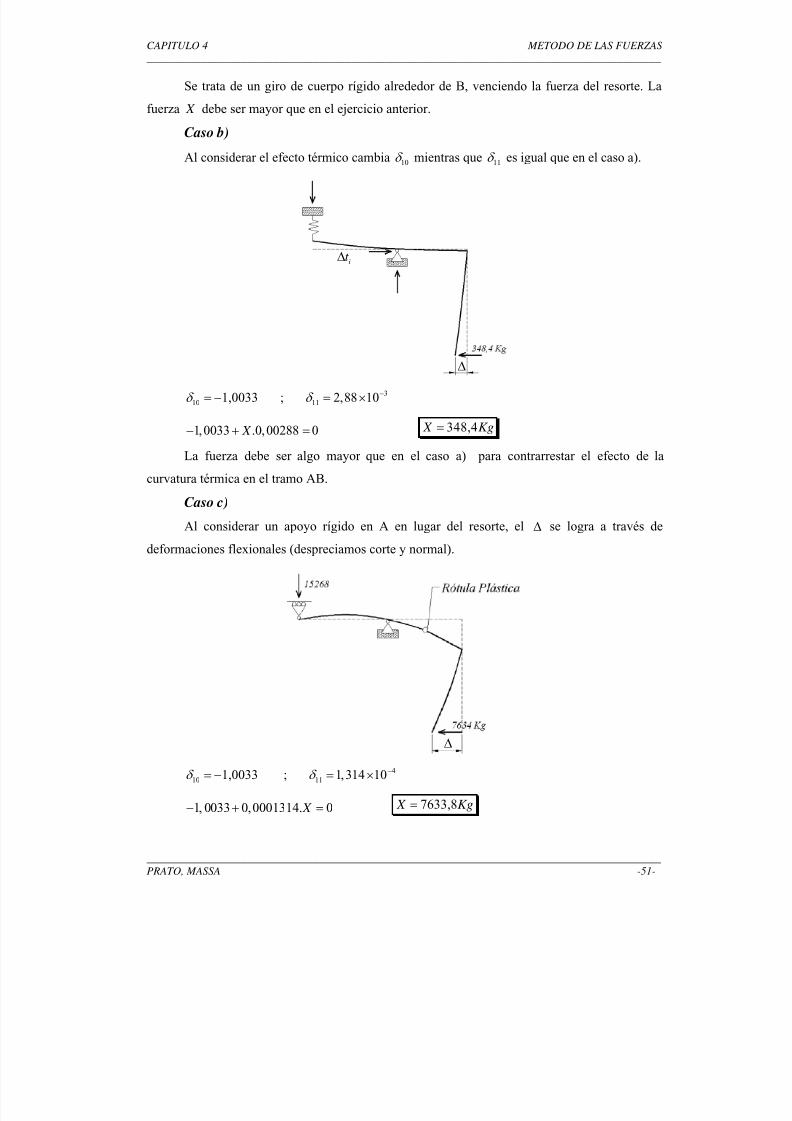
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 152/500
CAPITULO 4 METODO DE LAS FUERZAS
_____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -51-
Se trata de un giro de cuerpo rígido alrededor de B, venciendo la fuerza del resorte. La
fuerza X debe ser mayor que en el ejercicio anterior.
Caso b)
Al considerar el efecto térmico cambia 10δ mientras que 11δ es igual que en el caso a).
101,0033δ = − ; 3
112,88 10δ −= ×
1,0033 .0,00288 0 X − + = 348,4 X Kg=
La fuerza debe ser algo mayor que en el caso a) para contrarrestar el efecto de la
curvatura térmica en el tramo AB.
Caso c)
Al considerar un apoyo rígido en A en lugar del resorte, el ∆ se logra a través de
deformaciones flexionales (despreciamos corte y normal).
101,0033δ = − ; 4
111,314 10δ −= ×
1, 0033 0,0001314. 0 X − + = 7633,8 X Kg=
∆
∆
it ∆

5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 153/500
CAPITULO 4 METODO DE LAS FUERZAS
_____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -52-
La fuerza resulta mucho mayor que en los casos anteriores porque ya no ocurre giro de
cuerpo rígido permitido por el acortamiento del resorte.
El desplazamiento ∆ se lograría primordialmente a través del efecto acumulado de la
curvatura.
Observación:
Suponiendo una tensión de fluencia2
3000 f
Kg
cmσ = vemos que:
.63000
1/1
f
f
M X
W σ = ∴ =
500,0 f
X Kg=
Vale decir que: se lograría el 1,0cm∆ = a través del giro alrededor de una o varias rotulas
plásticas que se producirán en el tramo BC.
Ejercicio Nº 11:
Resolver la parte a) del ejercicio anterior en forma exacta empleando la teoría de segundo
orden (plantear el equilibrio en el sistema deformado)
La solución considerando el ángulo como rígido consiste en una rotación de cuerpo rígido
alrededor del apoyo B.
416,64
500arctan
5 5
lθ
⎛ ⎞⎜ ⎟∆⎛ ⎞ ⎝ ⎠= =⎜ ⎟
⎝ ⎠; 9,4617ºθ =
RK
it ∆
∆
4 2
6 6
2
1,0 2,0
500 2,0
1,0 40º
111 10 . 2,1 10
º
R
i
I cm A cm
KgK h cm
cm
cm t C
Kg E
C cmα −
= =
= =
∆ = ∆ = +
= × = ×
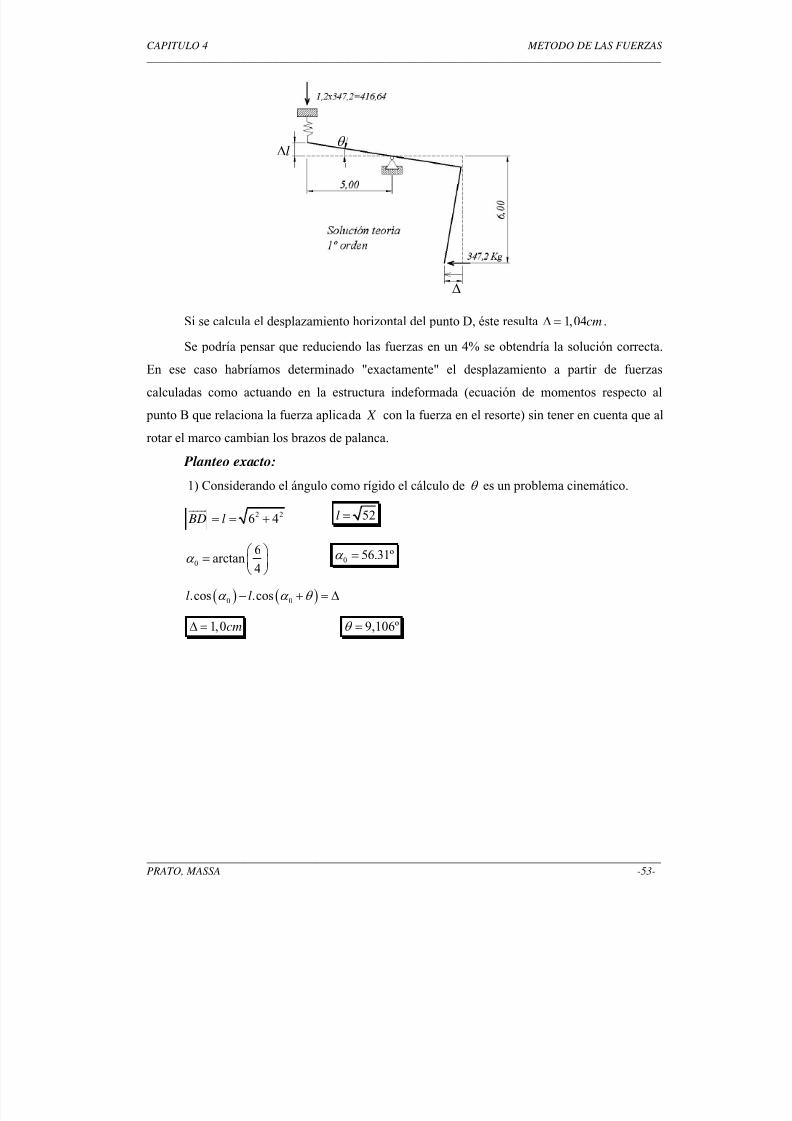
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 154/500
CAPITULO 4 METODO DE LAS FUERZAS
_____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -53-
Si se calcula el desplazamiento horizontal del punto D, éste resulta 1,04cm∆ = .Se podría pensar que reduciendo las fuerzas en un 4% se obtendría la solución correcta.
En ese caso habríamos determinado "exactamente" el desplazamiento a partir de fuerzas
calculadas como actuando en la estructura indeformada (ecuación de momentos respecto al
punto B que relaciona la fuerza aplicada X con la fuerza en el resorte) sin tener en cuenta que al
rotar el marco cambian los brazos de palanca.
Planteo exacto:
1) Considerando el ángulo como rígido el cálculo de θ es un problema cinemático.
2 26 4 BD l= = +
52l =
0
6arctan
4α
⎛ ⎞= ⎜ ⎟
⎝ ⎠ 0
56.31ºα =
( ) ( )0 0.cos .cosl lα α θ − + = ∆
1,0cm∆ = 9,106ºθ =
θ l∆
∆
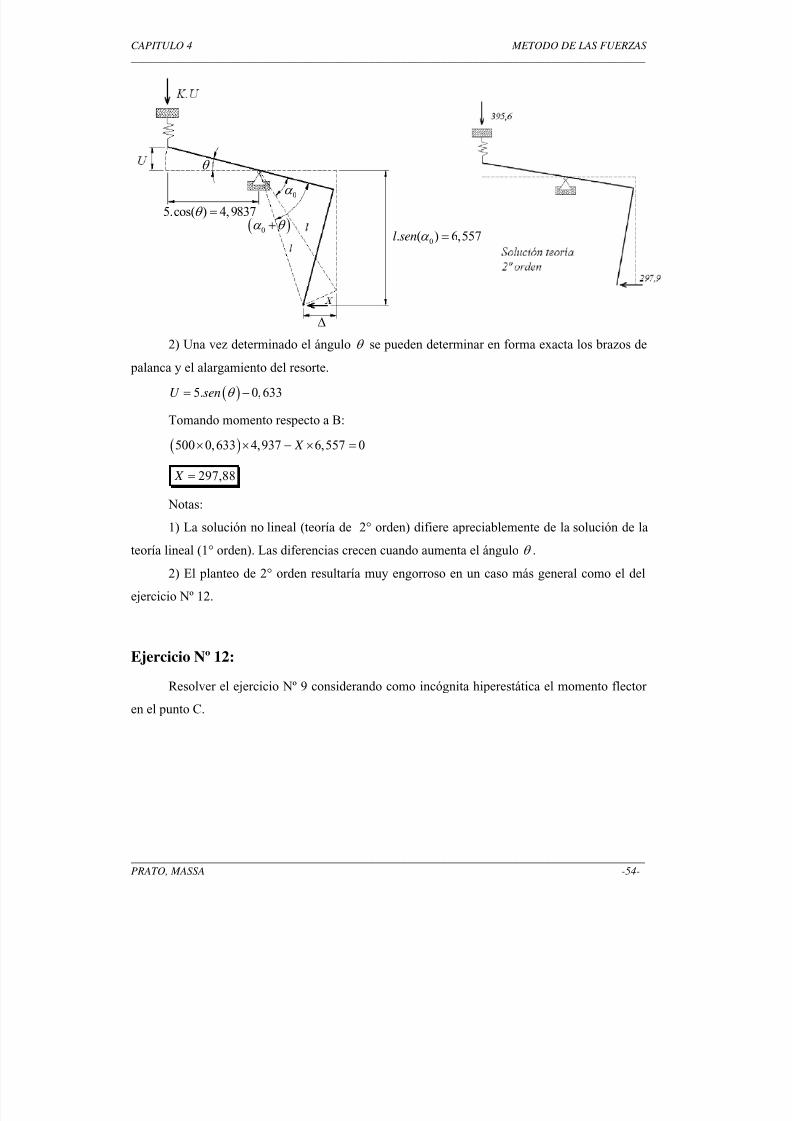
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 155/500
CAPITULO 4 METODO DE LAS FUERZAS
_____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -54-
2) Una vez determinado el ángulo θ se pueden determinar en forma exacta los brazos de
palanca y el alargamiento del resorte.
( )5. 0,633U sen θ = −
Tomando momento respecto a B:
( )500 0,633 4,937 6,557 0 X × × − × =
297,88 X =
Notas:
1) La solución no lineal (teoría de 2° orden) difiere apreciablemente de la solución de la
teoría lineal (1° orden). Las diferencias crecen cuando aumenta el ángulo θ .
2) El planteo de 2° orden resultaría muy engorroso en un caso más general como el del
ejercicio Nº 12.
Ejercicio Nº 12:
Resolver el ejercicio Nº 9 considerando como incógnita hiperestática el momento flector
en el punto C.
θ
0α
∆
( )0α θ +0. ( ) 6,557l sen α =
5.cos( ) 4,9837θ =
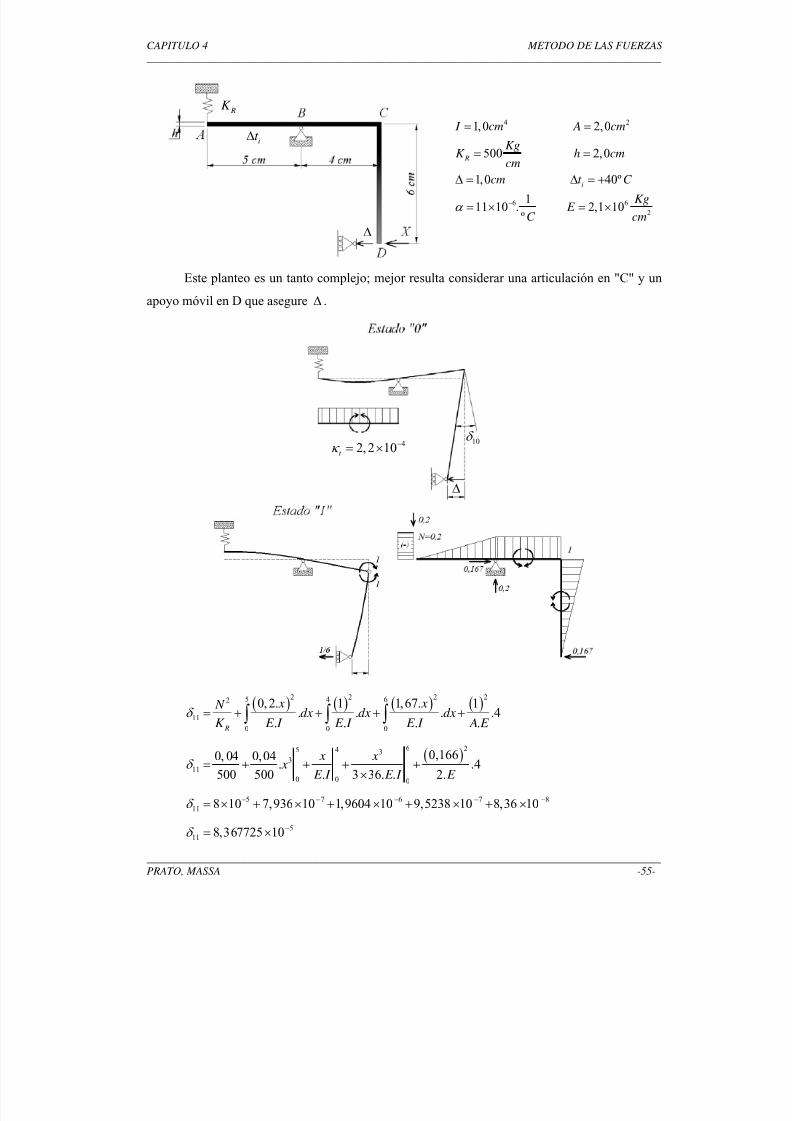
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 156/500
CAPITULO 4 METODO DE LAS FUERZAS
_____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -55-
Este planteo es un tanto complejo; mejor resulta considerar una articulación en "C" y un
apoyo móvil en D que asegure ∆ .
( ) ( ) ( ) ( )2 2 2 25 4 62
11
0 0 0
0, 2. 1 1,67. 1. . . .4
. . . . R
x x N dx dx dx
K E I E I E I A E δ = + + + +∫ ∫ ∫
( )6 25 4 3
3
11
0 0 0
0,1660,04 0,04. .4
500 500 . 3 36. . 2.
x x x
E I E I E δ = + + + +
×
5 7 6 7 8
11 8 10 7,936 10 1,9604 10 9,5238 10 8,36 10δ − − − − −= × + × + × + × + ×
5
11 8,367725 10δ −= ×
42, 2 10t
κ −= ×10δ
∆
RK
it ∆
∆
4 2
6 6
2
1,0 2,0
500 2,0
1,0 40º
111 10 . 2,1 10
º
R
i
I cm A cm
KgK h cm
cmcm t C
Kg E
C cmα −
= =
= =
∆ = ∆ = +
= × = ×
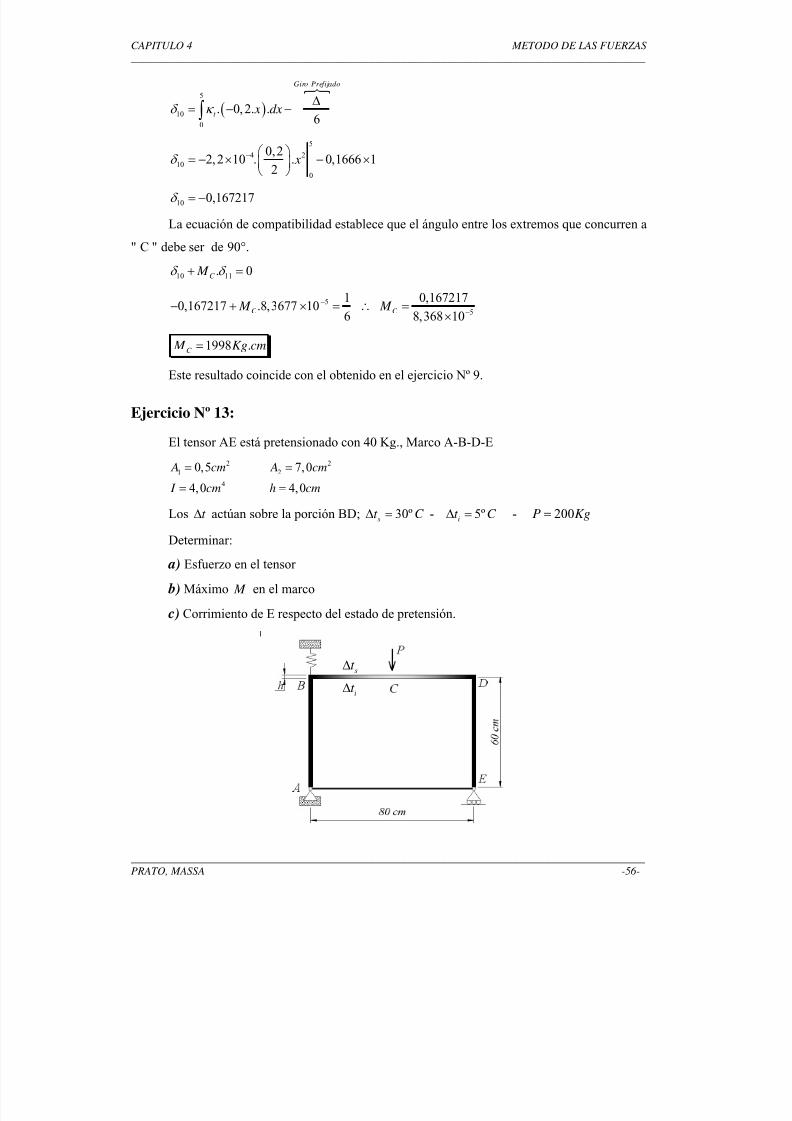
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 157/500
CAPITULO 4 METODO DE LAS FUERZAS
_____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -56-
( )
5
10
0
. 0, 2. .6
Giro Prefijado
t x dxδ κ ∆
= − −∫
5
4 2
10
0
0,2
2, 2 10 . . 0,1666 12 xδ − ⎛ ⎞
= − × − ×⎜ ⎟⎝ ⎠
10 0,167217δ = −
La ecuación de compatibilidad establece que el ángulo entre los extremos que concurren a
" C " debe ser de 90°.
10 11. 0C M δ δ + =
5
5
1 0,1672170,167217 .8,3677 10
6 8,368 10C C M M
−
−− + × = ∴ =
×
1998 .C M Kg cm=
Este resultado coincide con el obtenido en el ejercicio Nº 9.
Ejercicio Nº 13:
El tensor AE está pretensionado con 40 Kg., Marco A-B-D-E
2 2
1 2
4
0,5 7,0
4,0 4,0
A cm A cm
I cm h cm
= =
= =
Los t ∆ actúan sobre la porción BD; 30ºst C ∆ = - 5ºit C ∆ = - 200P Kg=
Determinar:
a) Esfuerzo en el tensor
b) Máximo M en el marco
c) Corrimiento de E respecto del estado de pretensión.
it ∆
st ∆
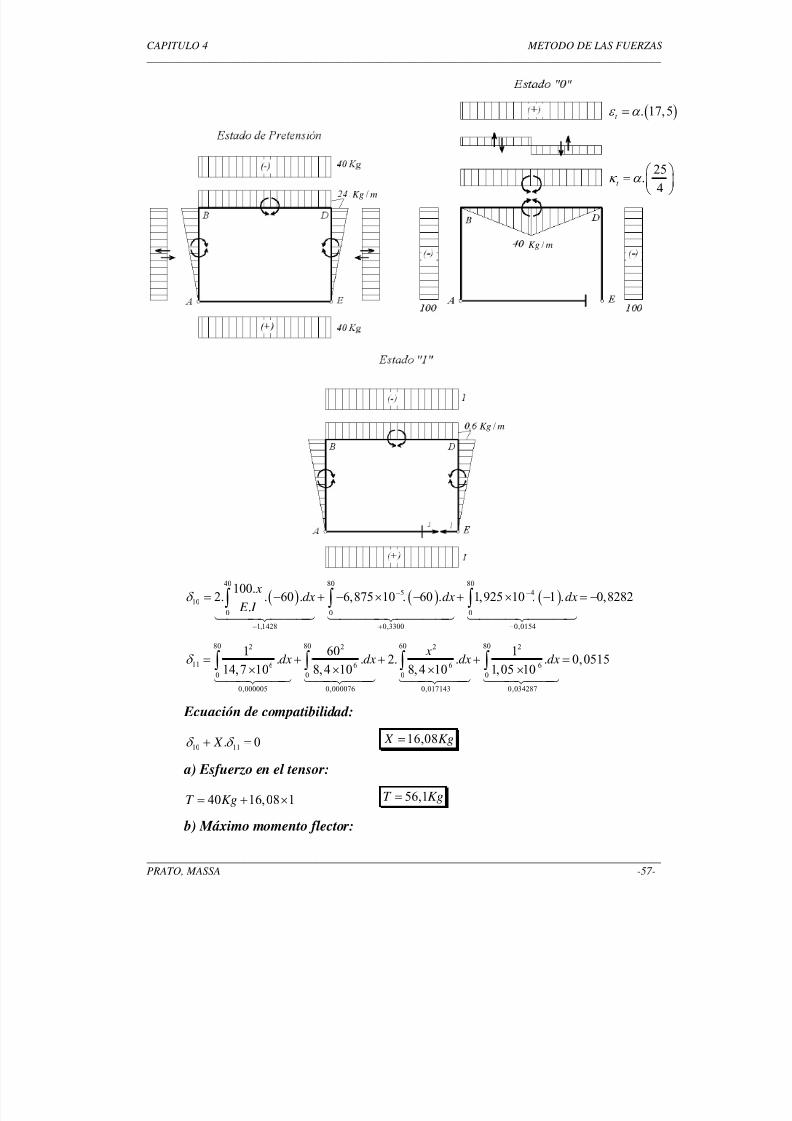
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 158/500
CAPITULO 4 METODO DE LAS FUERZAS
_____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -57-
( ) ( ) ( )40 80 80
5 4
10
0 0 0
1,1428 0,3300 0,0154
100.2. . 60 . 6,875 10 . 60 . 1,925 10 . 1 . 0,8282
.
xdx dx dx
E I δ − −
− + −
= − + − × − + × − = −∫ ∫ ∫
80 80 60 802 2 2 2
11 6 6 6 6
0 0 0 0
0,000005 0,000076 0,017143 0,034287
1 60 1. . 2. . . 0,051514,7 10 8, 4 10 8, 4 10 1,05 10
xdx dx dx dxδ = + + + =× × × ×∫ ∫ ∫ ∫
Ecuación de compatibilidad:
10 11. 0 X δ δ + = 16,08 X Kg=
a) Esfuerzo en el tensor:
40 16,08 1T Kg= + × 56,1T Kg=
b) Máximo momento flector:
/ Kg m
( ). 17,5t ε α =
25.
4t
κ α ⎛ ⎞= ⎜ ⎟⎝ ⎠ / Kg m
/ Kg m
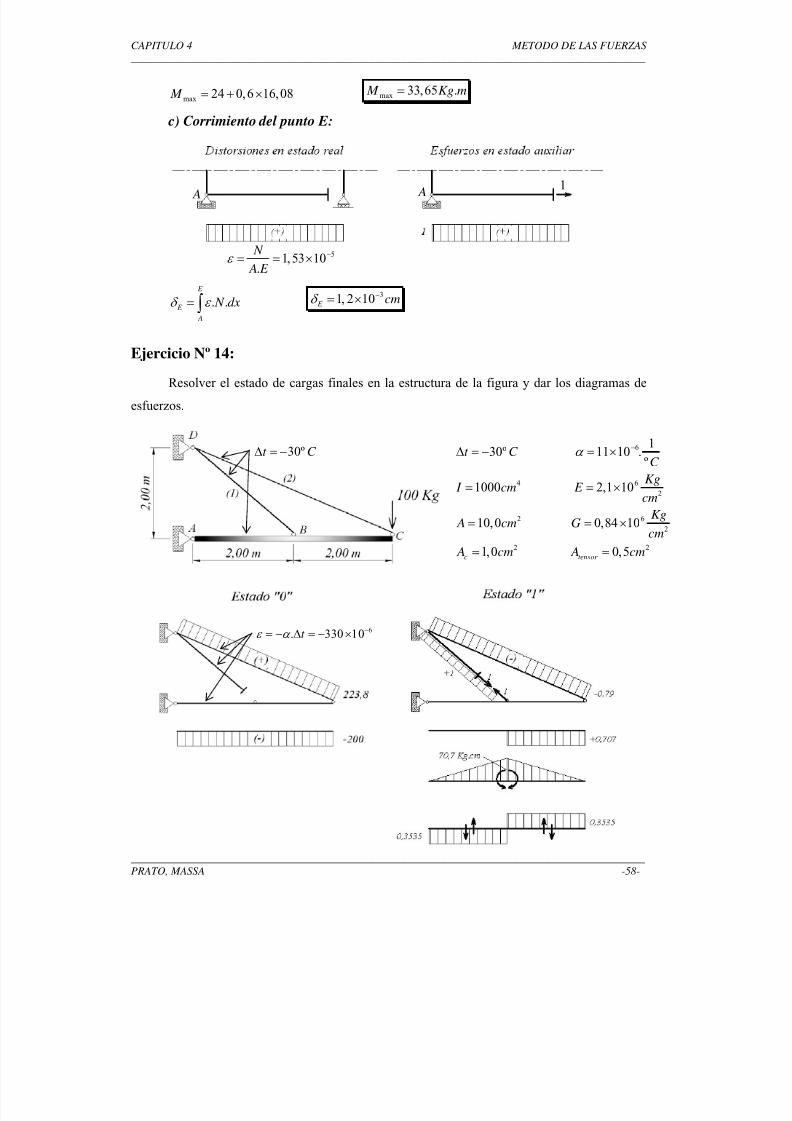
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 159/500
CAPITULO 4 METODO DE LAS FUERZAS
_____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -58-
max24 0,6 16,08 M = + × max 33,65 . M Kg m=
c) Corrimiento del punto E:
. .
E
E
A
N dxδ ε = ∫ 3
1, 2 10 E cmδ −= ×
Ejercicio Nº 14:
Resolver el estado de cargas finales en la estructura de la figura y dar los diagramas de
esfuerzos.
6. 330 10t ε α −= − ∆ = − ×
30ºt C ∆ = − 6
4 6
2
2 6
2
2 2
130º 11 10 .
º
1000 2,1 10
10,0 0,84 10
1,0 0,5c tensor
t C C
Kg
I cm E cm
Kg A cm G
cm
A cm A cm
α −∆ = − = ×
= = ×
= = ×
= =
51, 53 10.
N
A E ε −= = ×
1 A A

5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 160/500
CAPITULO 4 METODO DE LAS FUERZAS
_____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -59-
2 2 2
11
1 0 0
.. .
. . .
i il lni i
i c
N l M Qdx dx
A E E I A Gδ
=
= + +∑ ∫ ∫
3 3 6 3 5
11 0,269 10 0,266 10 4,76 10 0,317 10 5,95 10
Tensores Normal Momento Flector Corte
δ − − − − −= × + × + × + × + ×
4
119,1677 10δ −= ×
001
1
.. . .
.
n
i
i i
N lt l N
A E δ α
=
⎛ ⎞= + ∆⎜ ⎟
⎝ ⎠∑
( )( ) ( ) ( )6 6
01 6
223,6 447,2330 10 447,2 . 0,790 330 10 282,8 . 1
0,5 2,1 10δ − −
−
⎛ ⎞×⎜ ⎟= − × × − − × × −⎜ ⎟× ×⎝ ⎠
( ) ( )6 2 2 2
6
200 200
330 10 200 . 0,707 4,1352 10 9,3324 10 4,80 1010 2,1 10
− − − −⎛ ⎞×
⎜ ⎟− + × × = × − × − ×⎜ ⎟× ×⎝ ⎠
2
019,9981 10δ −= − ×
11 01. 0 X δ δ + = ∴ 01
11
X δ
δ = −
109,06 X Kg=
Ejercicio Nº 15:
Se pide trazar los diagramas de momento flector y corte.
Mediante la fuerza F se eleva el punto "E" 0,4 cm. El t ∆ actúa en toda la viga.
15,0 0,8 500Kg
h cm b cm K cm
= = =
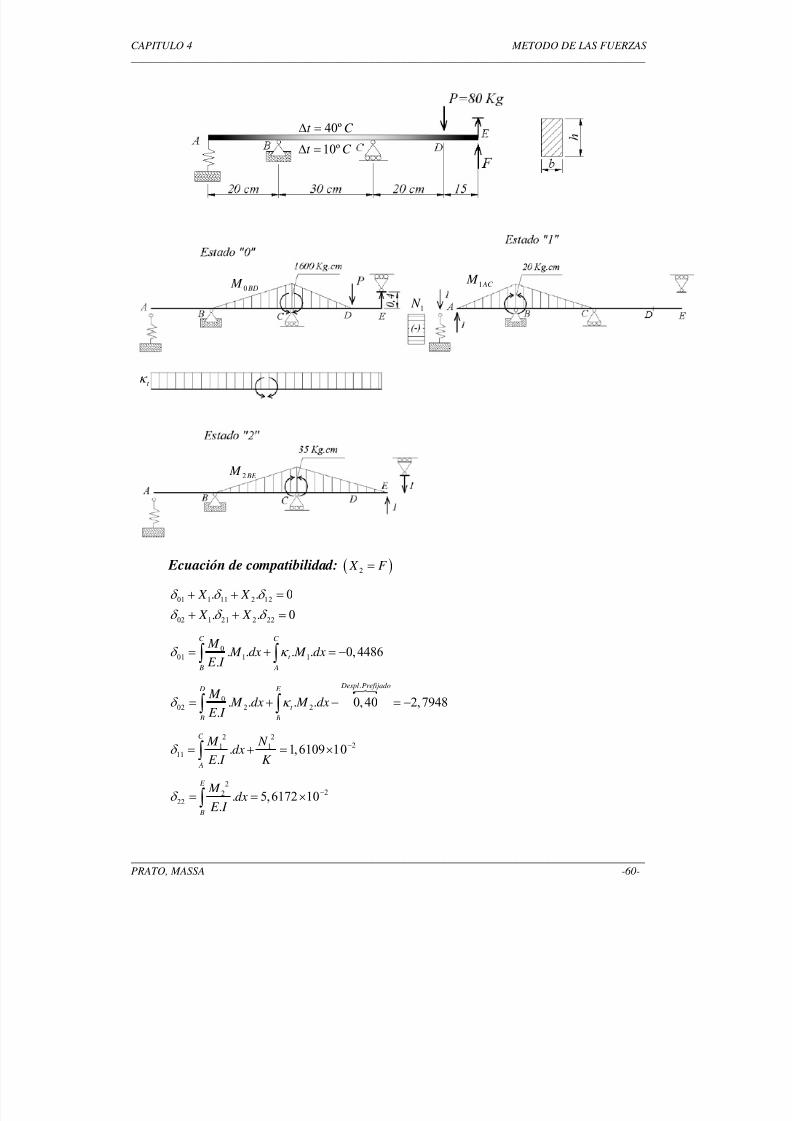
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 161/500
CAPITULO 4 METODO DE LAS FUERZAS
_____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -60-
Ecuación de compatibilidad: ( )2 X F =
01 1 11 2 12
02 1 21 2 22
. . 0
. . 0
X X
X X
δ δ δ
δ δ δ
+ + =
+ + =
001 1 1. . . . 0, 4486.
C C
t
B A
M
M dx M dx E I δ κ = + = −∫ ∫
.
002 2 2. . . . 0,40 2,7948
.
Despl Prefijado D E
t
B B
M M dx M dx
E I δ κ = + − = −∫ ∫
2 221 1
11 . 1,6109 10.
C
A
M N dx
E I K δ −= + = ×∫
222
22 . 5,6172 10.
E
B
M dx
E I δ −= = ×∫
0 BD M 1 AC M
1 N
2 BE M
t κ
40ºt C ∆ =
10ºt C ∆ =
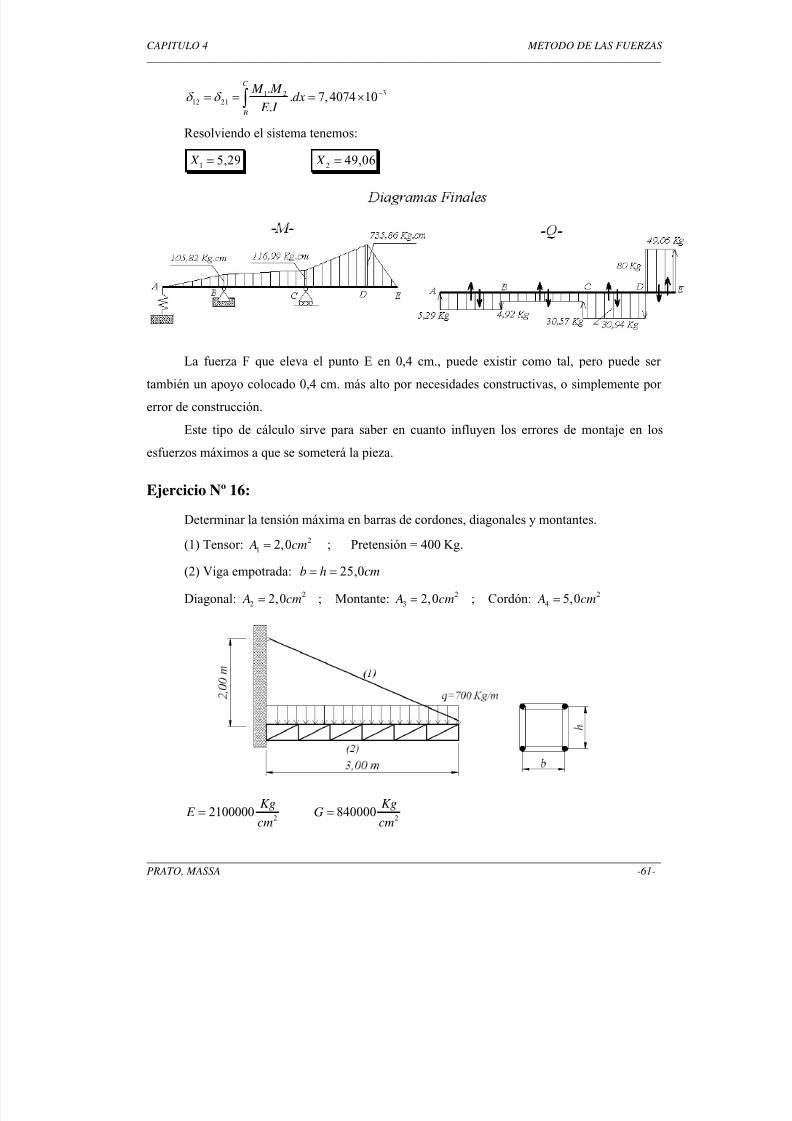
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 162/500
CAPITULO 4 METODO DE LAS FUERZAS
_____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -61-
31 212 21
.. 7,4074 10
.
C
B
M M dx
E I δ δ −= = = ×∫
Resolviendo el sistema tenemos:
1 5,29 X = 2 49,06 X =
La fuerza F que eleva el punto E en 0,4 cm., puede existir como tal, pero puede ser
también un apoyo colocado 0,4 cm. más alto por necesidades constructivas, o simplemente por
error de construcción.
Este tipo de cálculo sirve para saber en cuanto influyen los errores de montaje en los
esfuerzos máximos a que se someterá la pieza.
Ejercicio Nº 16:
Determinar la tensión máxima en barras de cordones, diagonales y montantes.
(1) Tensor: 2
1 2,0 A cm= ; Pretensión = 400 Kg.
(2) Viga empotrada: 25,0b h cm= =
Diagonal:2
2 2,0 A cm= ; Montante:2
3 2,0 A cm= ; Cordón:2
4 5,0 A cm=
22100000
Kg
E cm= 2840000
Kg
G cm=
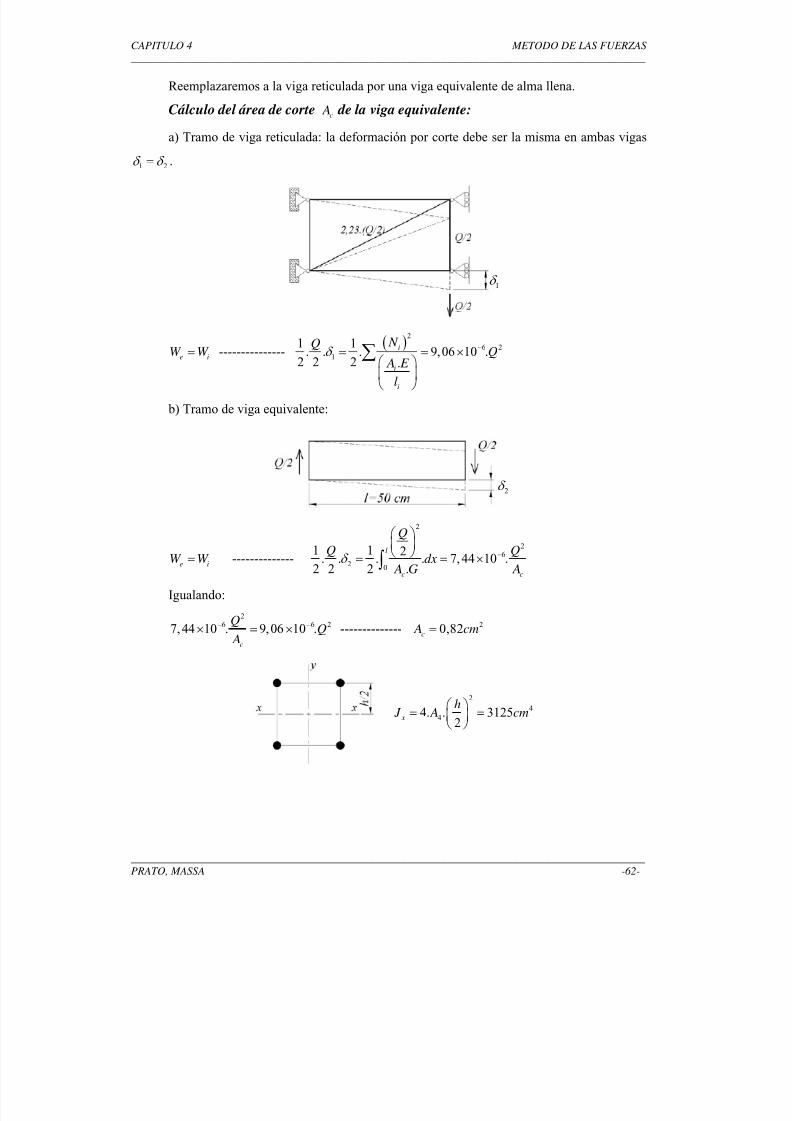
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 163/500
CAPITULO 4 METODO DE LAS FUERZAS
_____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -62-
Reemplazaremos a la viga reticulada por una viga equivalente de alma llena.
Cálculo del área de cortec A de la viga equivalente:
a) Tramo de viga reticulada: la deformación por corte debe ser la misma en ambas vigas
1 2δ δ = .
e iW W = ---------------
( )2
6 2
1
1 1. . . 9,06 10 .
2 2 2 .
i
i
i
N QQ
A E
l
δ −= = ×⎛ ⎞⎜ ⎟⎝ ⎠
∑
b) Tramo de viga equivalente:
e iW W = --------------
2
26
20
1 1 2. . . . 7,44 10 .
2 2 2 .
l
c c
Q
Q Qdx
A G Aδ −
⎛ ⎞⎜ ⎟⎝ ⎠= = ×∫
Igualando:
26 6 2
7,44 10 . 9,06 10 .c
A
− −× = × --------------2
0,82c
A cm=
2
4
44. . 31252
x
h J A cm
⎛ ⎞= =⎜ ⎟
⎝ ⎠
2δ
1δ
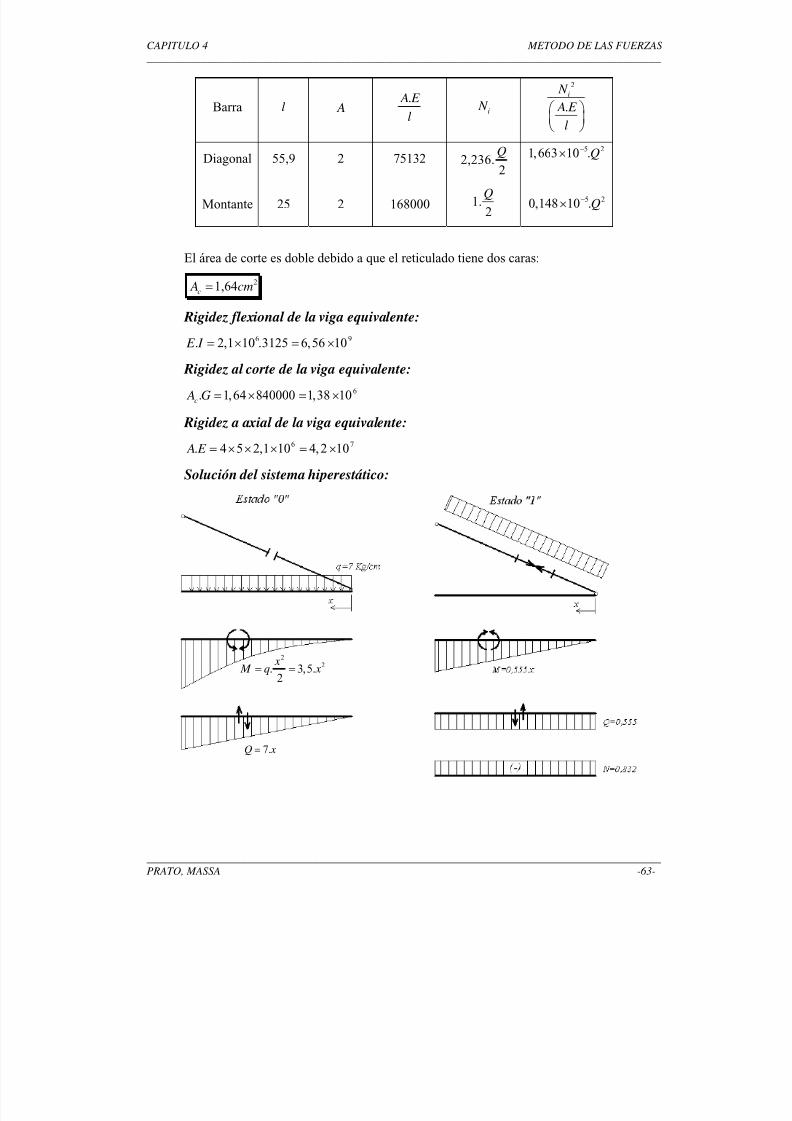
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 164/500
CAPITULO 4 METODO DE LAS FUERZAS
_____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -63-
Barra l A . A E
l i
N
2
.i N
A E
l
⎛ ⎞⎜ ⎟⎝ ⎠
Diagonal
Montante
55,9
25
2
2
75132
168000
2,236. 2
Q
1.2
Q
5 21,663 10 .Q−×
5 20,148 10 .Q−×
El área de corte es doble debido a que el reticulado tiene dos caras:
21,64
c A cm=
Rigidez flexional de la viga equivalente:
6 9. 2,1 10 .3125 6,56 10 E I = × = ×
Rigidez al corte de la viga equivalente:
6. 1,64 840000 1,38 10c
A G = × = ×
Rigidez a axial de la viga equivalente:
6 7. 4 5 2,1 10 4,2 10 A E = × × × = ×
Solución del sistema hiperestático:
22. 3,5.
2
x M q x= =
7.Q x=
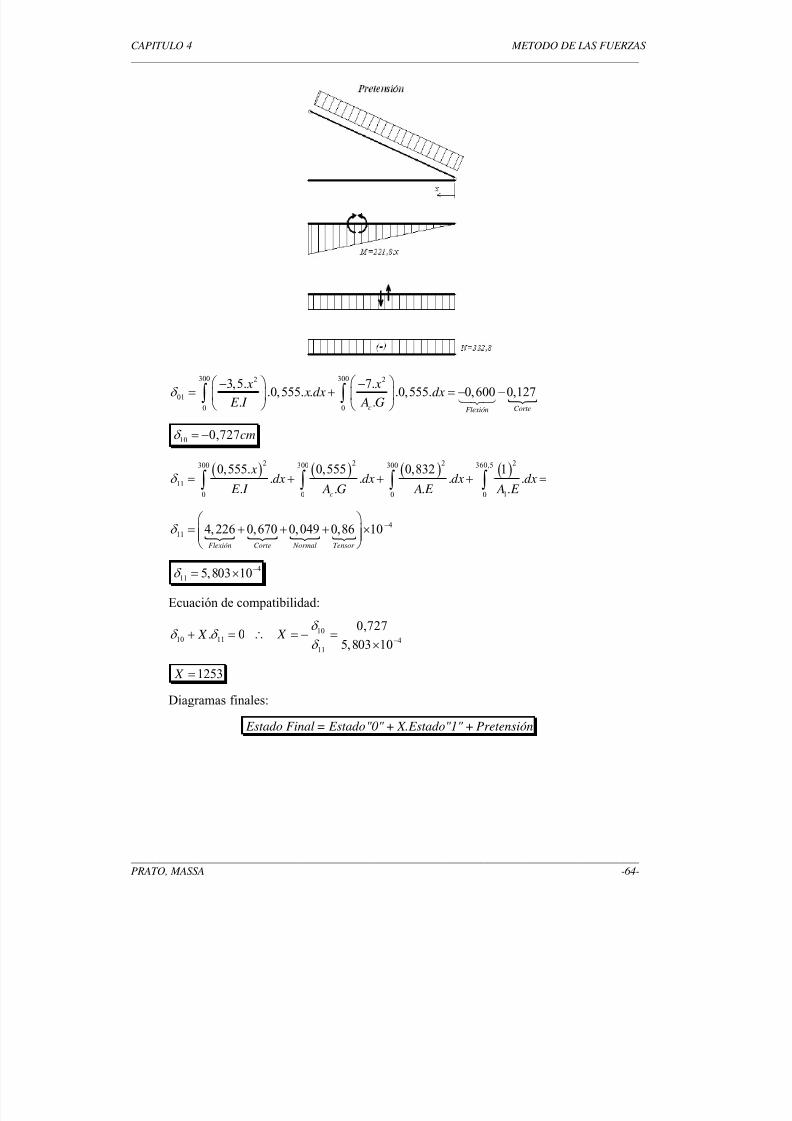
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 165/500
CAPITULO 4 METODO DE LAS FUERZAS
_____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -64-
300 3002 2
01
0 0
3,5. 7..0,555. . .0,555. 0,600 0,127
. .c CorteFlexión
x x x dx dx
E I A Gδ
⎛ ⎞⎛ ⎞− −= + = − −⎜ ⎟⎜ ⎟
⎝ ⎠ ⎝ ⎠∫ ∫
10 0,727cmδ = −
( ) ( ) ( ) ( )2 2 2 2360,5300 300 300
11
10 0 0 0
0,555. 0,555 0,832 1. . . .
. . . .c
xdx dx dx dx
E I A G A E A E
δ = + + + =∫ ∫ ∫ ∫
4
114, 226 0,670 0,049 0,86 10
Flexión Corte Normal Tensor
δ −⎛ ⎞
= + + + ×⎜ ⎟⎜ ⎟⎝ ⎠
4
11 5,803 10δ −= ×
Ecuación de compatibilidad:
10 11. 0 X δ δ + = ∴ 10
4
11
0,727
5,803 10 X
δ
δ −= − =
×
1253 X =
Diagramas finales:
Estado Final = Estado "0" + X.Estado"1"+ Pretensión
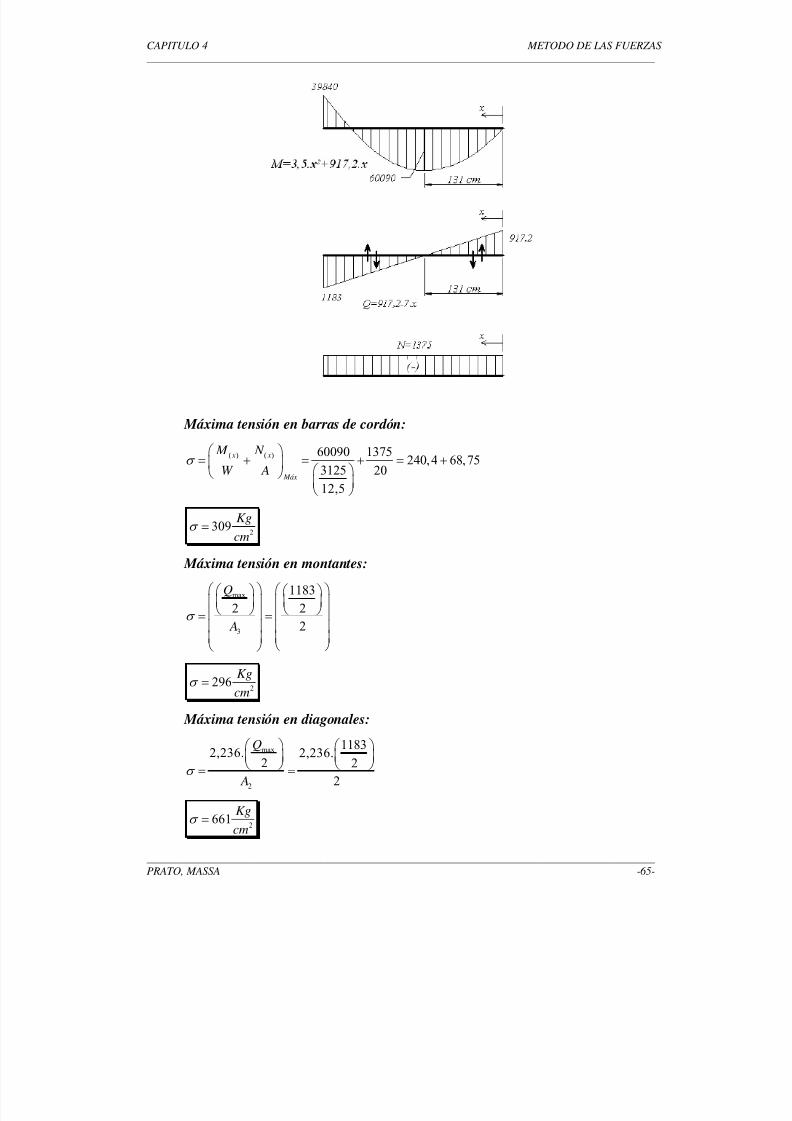
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 166/500
CAPITULO 4 METODO DE LAS FUERZAS
_____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -65-
Máxima tensión en barras de cordón:
( ) ( ) 60090 1375240,4 68,75
3125 20
12,5
x x
Máx
M N
W Aσ
⎛ ⎞= + = + = +⎜ ⎟
⎛ ⎞⎝ ⎠⎜ ⎟⎝ ⎠
2309
Kg
cmσ =
Máxima tensión en montantes:
max
3
1183
2 2
2
Q
Aσ
⎛ ⎞ ⎛ ⎞⎛ ⎞ ⎛ ⎞⎜ ⎟ ⎜ ⎟⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠⎜ ⎟ ⎜ ⎟= =
⎜ ⎟ ⎜ ⎟⎜ ⎟⎜ ⎟⎝ ⎠⎝ ⎠
2296
Kg
cmσ =
Máxima tensión en diagonales:
max
2
11832,236. 2,236.
2 2
2
Q
Aσ
⎛ ⎞ ⎛ ⎞⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠= =
2661 Kgcm
σ =
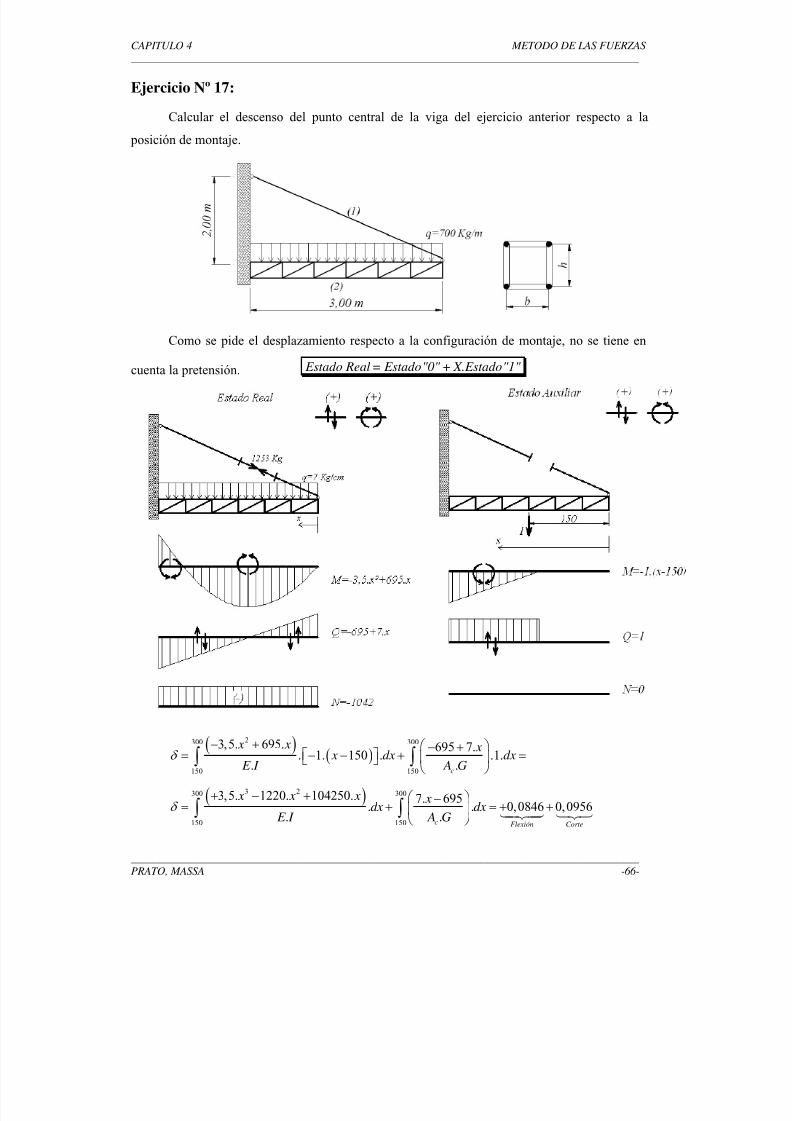
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 167/500
CAPITULO 4 METODO DE LAS FUERZAS
_____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -66-
Ejercicio Nº 17:
Calcular el descenso del punto central de la viga del ejercicio anterior respecto a la
posición de montaje.
Como se pide el desplazamiento respecto a la configuración de montaje, no se tiene en
cuenta la pretensión. Estado Real = Estado "0"+ X.Estado "1"
( )( )
2300 300
150 150
3,5. 695. 695 7.. 1. 150 . .1.
. .c
x x x x dx dx
E I A Gδ
− + ⎛ ⎞− += − − + =⎡ ⎤ ⎜ ⎟⎣ ⎦
⎝ ⎠∫ ∫
( )3 2300 300
150 150
3,5. 1220. 104250. 7. 695. . 0,0846 0,0956
. .c Flexión Corte
x x x xdx dx
E I A G
δ + − + ⎛ ⎞−
= + = + +⎜ ⎟⎝ ⎠∫ ∫
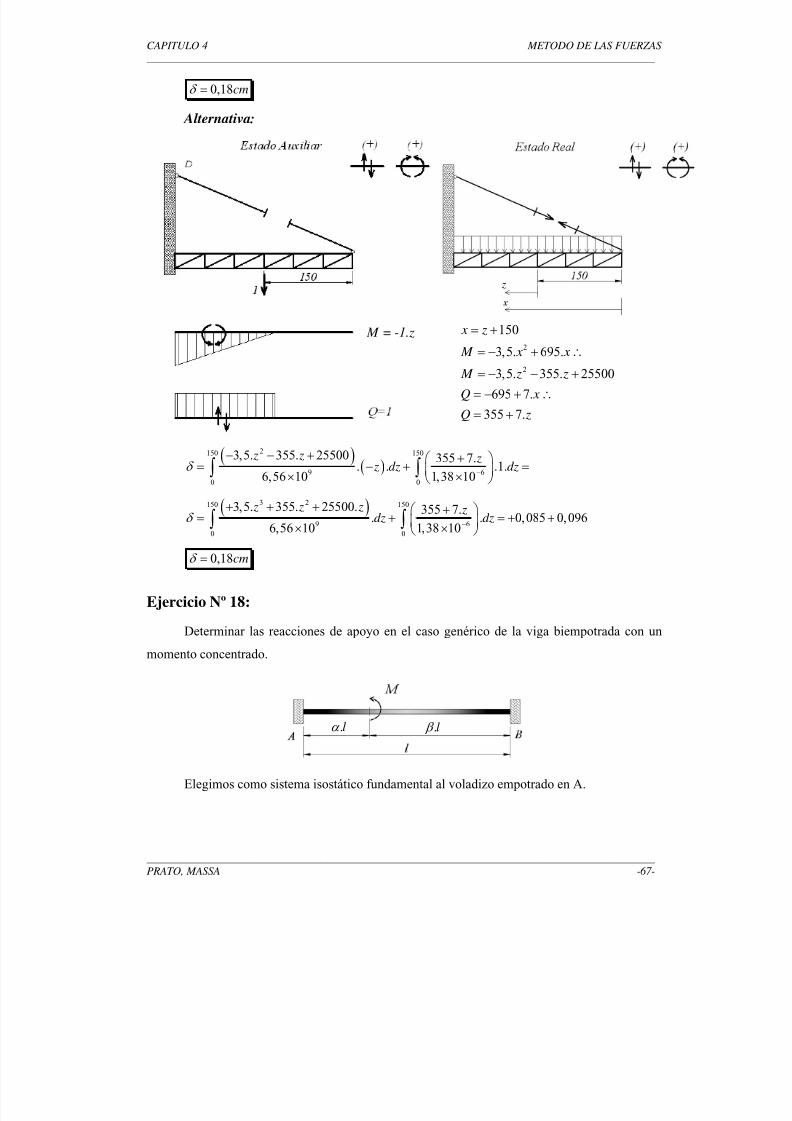
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 168/500
CAPITULO 4 METODO DE LAS FUERZAS
_____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -67-
0,18cmδ =
Alternativa:
( )( )
2150 150
9 6
0 0
3,5. 355. 25500 355 7.. . .1.
6,56 10 1,38 10
z z z z dz dzδ
−
− − + +⎛ ⎞= − + =⎜ ⎟× ×⎝ ⎠
∫ ∫
( )3 2150 150
9 6
0 0
3,5. 355. 25500. 355 7.. . 0,085 0,096
6,56 10 1,38 10
z z z zdz dzδ
−
+ + + +⎛ ⎞= + = + +⎜ ⎟× ×⎝ ⎠
∫ ∫
0,18cmδ =
Ejercicio Nº 18:
Determinar las reacciones de apoyo en el caso genérico de la viga biempotrada con un
momento concentrado.
Elegimos como sistema isostático fundamental al voladizo empotrado en A.
.lα .l β
2
2
150
3,5. 695.
3,5. 355. 25500
695 7.
355 7.
x z
M x x
M z z
Q x
Q z
= += − + ∴
= − − +
= − + ∴
= +
M = -1.z
z

5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 169/500
CAPITULO 4 METODO DE LAS FUERZAS
_____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -68-
10 . ..
M l E I
δ α = ; 20
.. . .
. 2
M l ll E I
β δ α
+⎛ ⎞= ⎜ ⎟
⎝ ⎠;
( )2
11
1 .
.
l
E I δ = ; 12
1 1. ..
2 .
l l
E I δ =
22 1 . ... 3
l l l E I
δ =
Las ecuaciones de compatibilidad garantizan que el extremo no rota ni se desplaza.
10 1 11 2 12
20 1 21 2 22
. . 0
. . 0
X X
X X
δ δ δ
δ δ δ
+ + =
+ + =
2
2 3
. . .1.. 2. .
..
. . .
. 22. . 3. .
B
B
M l l M l E I E I E I
M l ll ll R E I E I E I
α
β α
⎡ ⎤⎡ ⎤⎡ ⎤ −⎢ ⎥⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥ =⎢ ⎥ +⎛ ⎞⎢ ⎥⎢ ⎥ −⎢ ⎥ ⎜ ⎟⎣ ⎦
⎢ ⎥⎢ ⎥ ⎝ ⎠⎣ ⎦ ⎣ ⎦
Resolviendo el sistema resultan los siguientes valores para las incógnitas hiperestáticas
( ). 3. 1 . B M M α β = − 6. . . B
M R
lα β = −
Por superposición de los Estados "0" más B
M veces el estado "1" más B
R veces el estado
"2", se obtienen las reacciones en A.
( ). 3. 1 1 . A M M α β = + −⎡ ⎤⎣ ⎦ 6. . . B
M
R lα β =
.lα
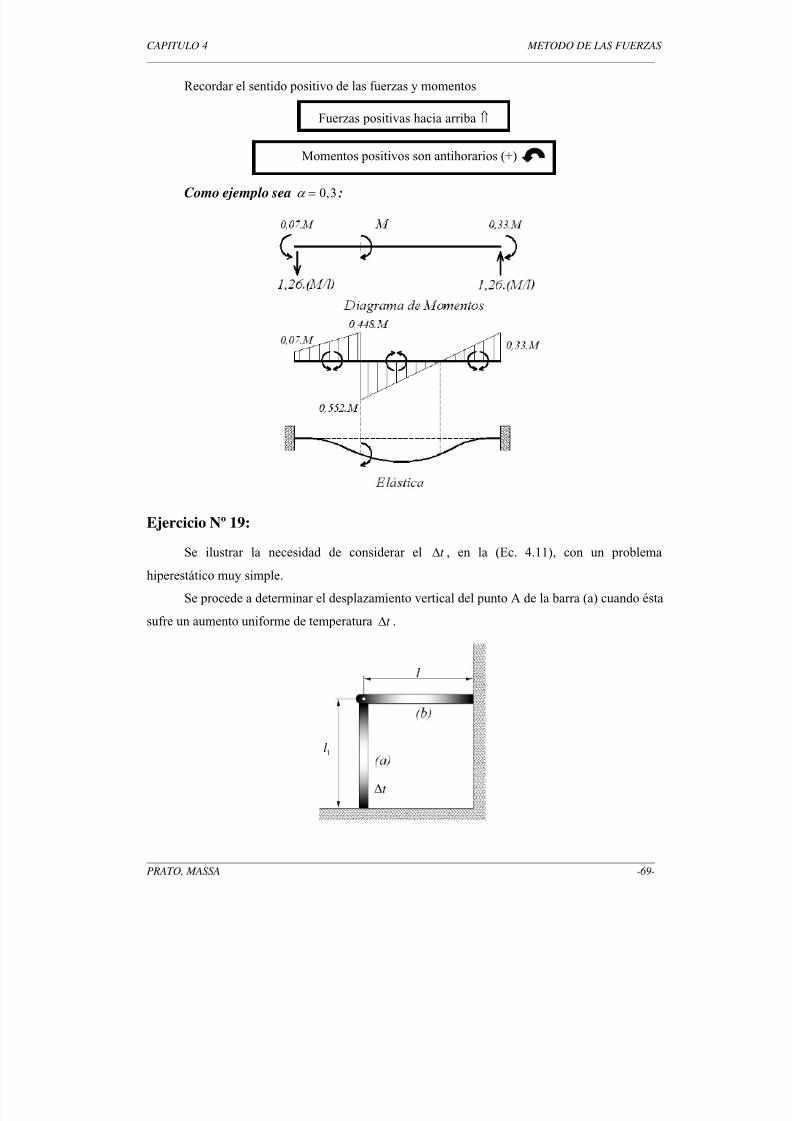
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 170/500
CAPITULO 4 METODO DE LAS FUERZAS
_____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -69-
Recordar el sentido positivo de las fuerzas y momentos
Como ejemplo sea 0,3α = :
Ejercicio Nº 19:
Se ilustrar la necesidad de considerar el t ∆ , en la (Ec. 4.11), con un problema
hiperestático muy simple.
Se procede a determinar el desplazamiento vertical del punto A de la barra (a) cuando ésta
sufre un aumento uniforme de temperatura t ∆ .
t ∆
1l
Momentos positivos son antihorarios (+)
Fuerzas positivas hacia arriba ⇑
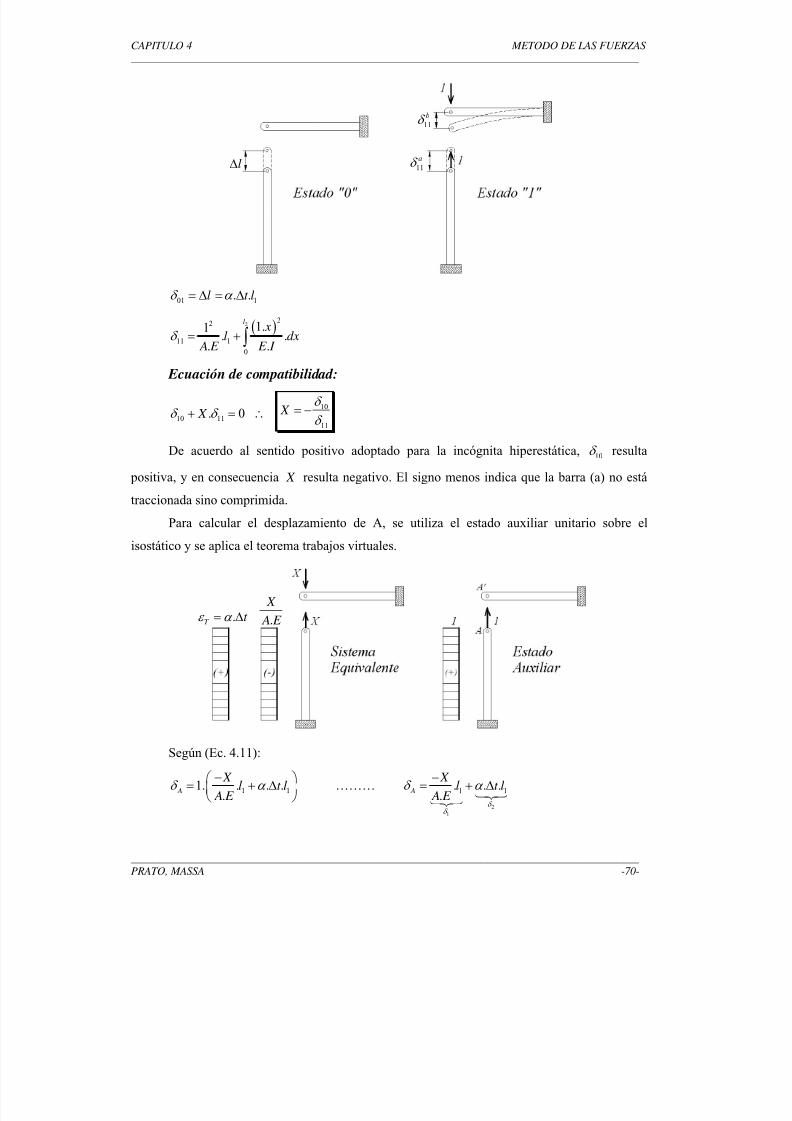
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 171/500
CAPITULO 4 METODO DE LAS FUERZAS
_____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -70-
01 1. .l t lδ α = ∆ = ∆
( )2
2
2
11 1
0
1.1 . .. .
l
xl dx A E E I
δ = + ∫
Ecuación de compatibilidad:
10 11. 0 X δ δ + = ∴10
11
X δ
δ = −
De acuerdo al sentido positivo adoptado para la incógnita hiperestática, 10δ resulta
positiva, y en consecuencia X resulta negativo. El signo menos indica que la barra (a) no está
traccionada sino comprimida.
Para calcular el desplazamiento de A, se utiliza el estado auxiliar unitario sobre el
isostático y se aplica el teorema trabajos virtuales.
Según (Ec. 4.11):
1 11. . . ..
A
X l t l
A E δ α
−⎛ ⎞= + ∆⎜ ⎟
⎝ ⎠………
2
1
1 1. . ..
A
X l t l
A E δ
δ
δ α −
= + ∆
.
X
A E .T t ε α = ∆
l∆ 11
a
δ
11
bδ

5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 172/500
CAPITULO 4 METODO DE LAS FUERZAS
_____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -71-
El desplazamiento en el hiperestático se compone de dos términos: un descenso1δ debido
a las solicitaciones, y un ascenso2δ por dilatación térmica (libre). Cabe destacar que el
desplazamiento A
δ es idéntico a' A
δ , condición dada por la ecuación de compatibilidad que
asegura un desplazamiento relativo nulo entre A y A'. Podemos llegar al mismo resultado
colocando la fuerza unitaria en A', y utilizando el mismo sistema equivalente.
El estado auxiliar correspondiente será:
( )2
'
0
.1. . .
.
l
A
X x x dx
E I δ
⎛ ⎞= ⎜ ⎟
⎝ ⎠∫
3
2' .
3. . A
l X
E I δ =
Se deja como ejercicio para el lector verificar que ' A Aδ δ =
Ejercicio Nº 20:
La unión abulonada fue forzada debido a los defectos de montaje que se indican en la
figura. Se pide determinar los diagramas de , M Q y N .
θ
δ
4 4
1 2
2 2
1 2
1 2
100 1,0 2,5
0,08 0,7 0,9
1,0 3,0 4,0
P Kg I cm I cm
rad A cm A cm
cm h cm h cm
θ
δ
= = =
= = =
= = =
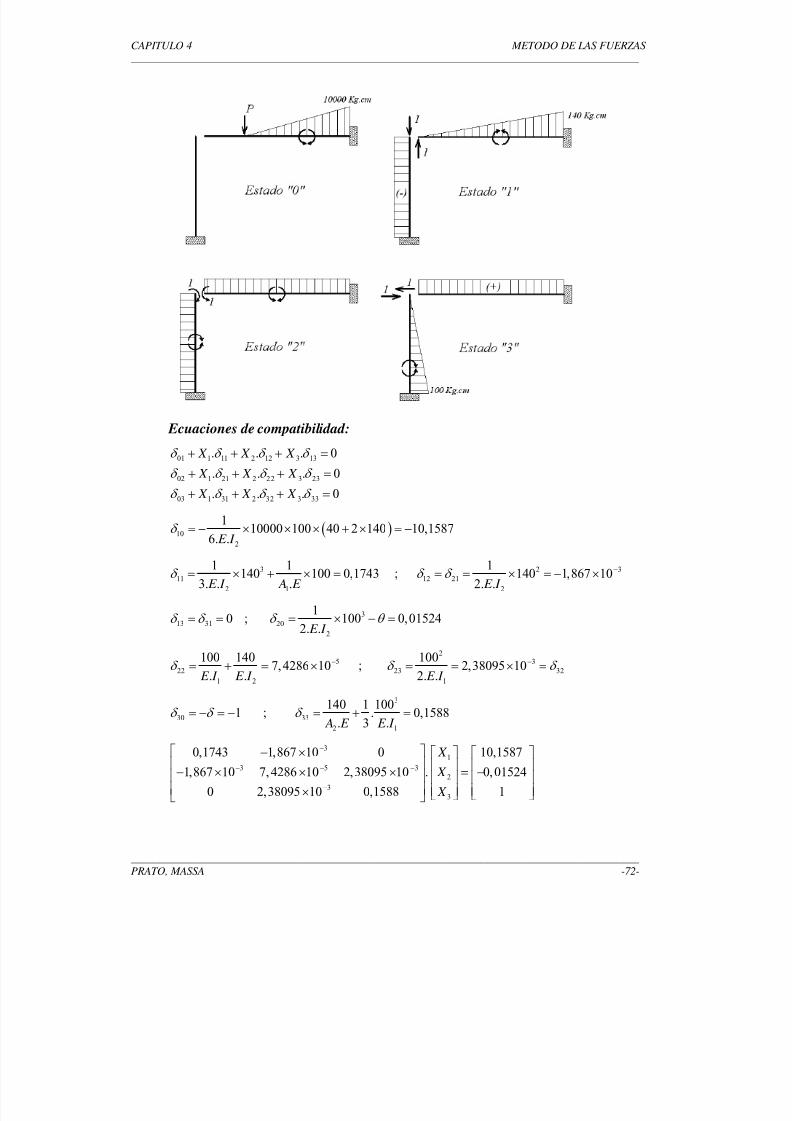
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 173/500
CAPITULO 4 METODO DE LAS FUERZAS
_____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -72-
Ecuaciones de compatibilidad:
01 1 11 2 12 3 13
02 1 21 2 22 3 23
03 1 31 2 32 3 33
. . . 0
. . . 0
. . . 0
X X X
X X X
X X X
δ δ δ δ
δ δ δ δ
δ δ δ δ
+ + + =
+ + + =
+ + + =
( )10
2
110000 100 40 2 140 10,1587
6. . E I δ = − × × × + × = −
3
11
2 1
1 1140 100 0,1743
3. . . E I A E δ = × + × = ; 2 3
12 21
2
1140 1,867 10
2. . E I δ δ −= = × = − ×
13 310δ δ = = ; 3
20
2
1100 0,01524
2. . E I δ θ = × − =
5
22
1 2
100 1407,4286 10
. . E I E I δ −= + = × ;
23
23 32
1
1002,38095 10
2. . E I δ δ −= = × =
301δ δ = − = − ;
3
33
2 1
140 1 100. 0,1588
. 3 . A E E I δ = + =
3
1
3 5 3
2
3
3
0,1743 1,867 10 0 10,1587
1,867 10 7,4286 10 2,38095 10 . 0,01524
0 2,38095 10 0,1588 1
X
X
X
−
− − −
−
⎡ ⎤− × ⎡ ⎤ ⎡ ⎤⎢ ⎥ ⎢ ⎥ ⎢ ⎥− × × × = −⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥× ⎣ ⎦ ⎣ ⎦⎣ ⎦
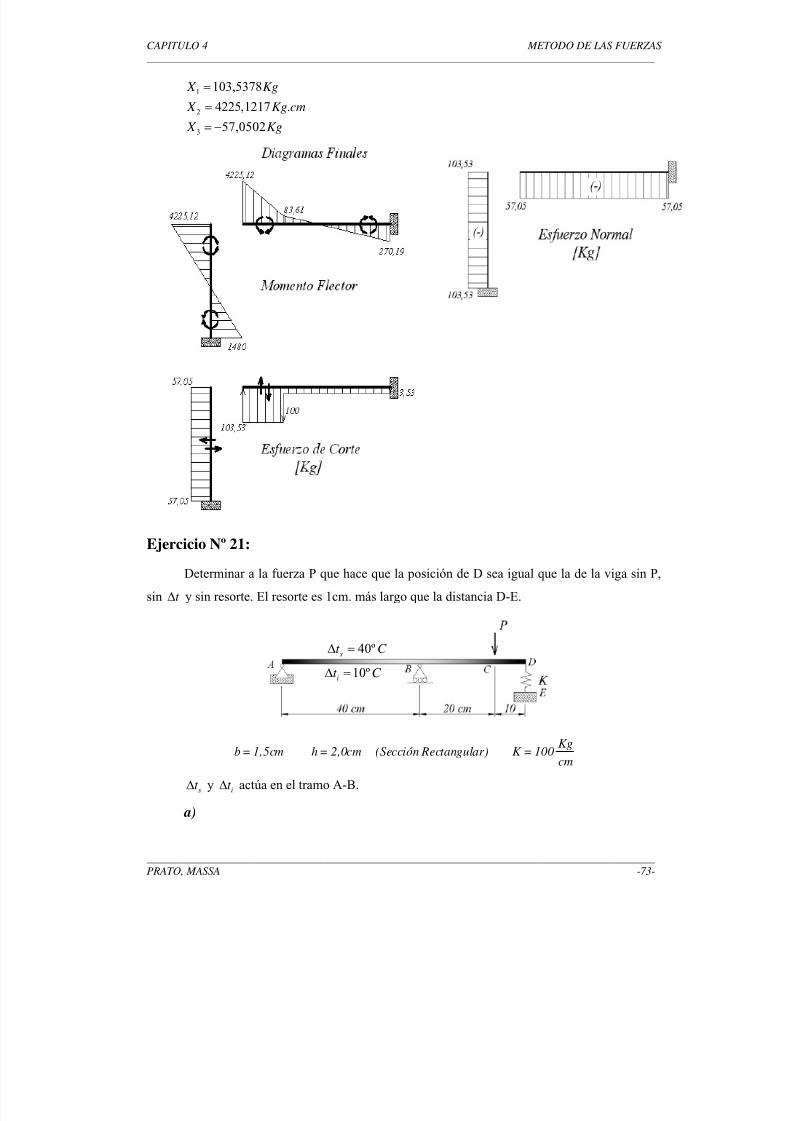
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 174/500
CAPITULO 4 METODO DE LAS FUERZAS
_____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -73-
1
2
3
103,5378
4225,1217 .
57,0502
X Kg
X Kg cm
X Kg
=
=
= −
Ejercicio Nº 21:
Determinar a la fuerza P que hace que la posición de D sea igual que la de la viga sin P,
sin t ∆ y sin resorte. El resorte es 1cm. más largo que la distancia D-E.
Kgb = 1,5cm h = 2,0cm (Sección Rectangular) K = 100
cm
st ∆ yit ∆ actúa en el tramo A-B.
a)
40ºst C ∆ =10º
it C ∆ =

5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 175/500
CAPITULO 4 METODO DE LAS FUERZAS
_____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -74-
10 11. 0 X δ δ + =
( ) ( )
30
01 1 1. . . . 1 6,0317 10 . 1,099.
C B
t A A
Error Montaje
M
M dx M dx P E I δ κ
−⎛ ⎞= + + − = − × −
⎜ ⎟⎝ ⎠∫ ∫
2 2
1 111 . 0,01 0,01 0,02
.
D
A
M N dx
E I K δ = + = + =∫
36,0317462 10 . 1,099 100 0,02 0P−− × − + × =
149,38P Kg=
La fuerza del resorte X es conocida 100 X Kg=
b)
Si 100 X Kg= es conocida y condición final 0δ = se puede plantear:
01 11. ' 0 X δ δ + =
Donde: 01δ no cambia y
( )2
1
11' . 0,01.
D
AD
A
M dx
E I δ = =∫
36,0317462 10 . 0,099 100 0,01 0P−− × − + × =
149,38P Kg=
Observar que el resorte no interviene en el cálculo.
c)
( ).t s it t
h
α κ = ∆ − ∆
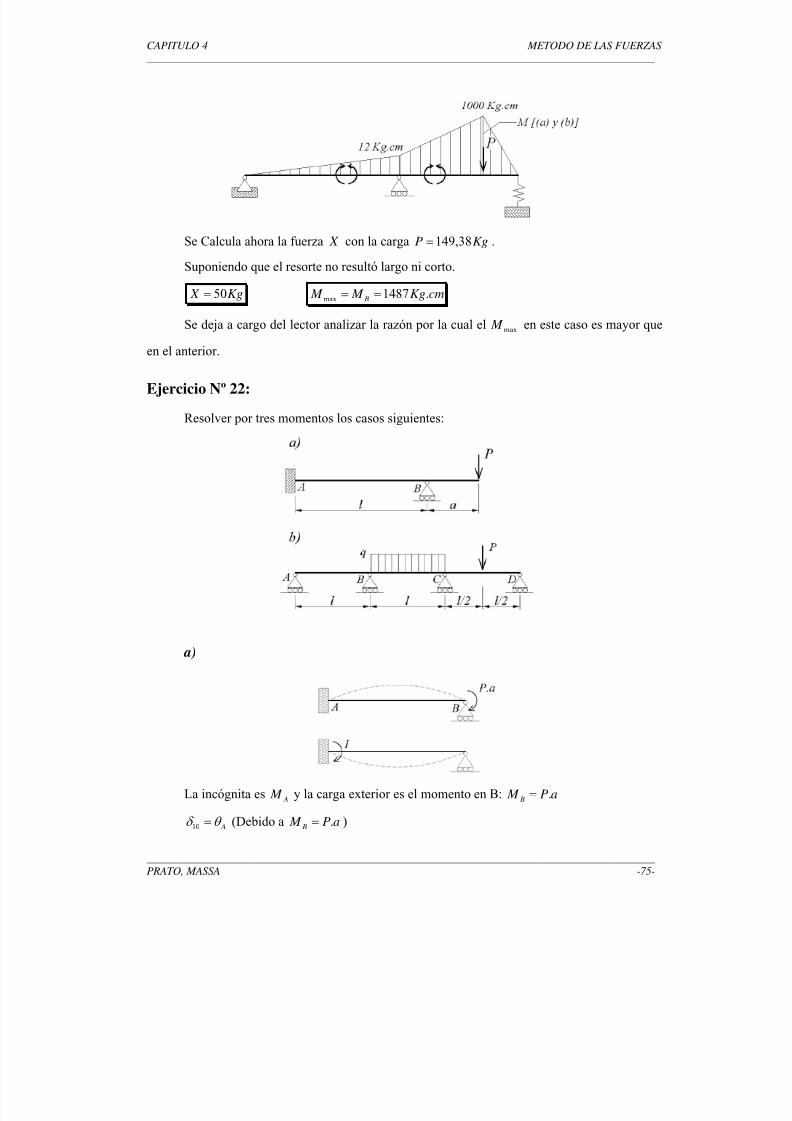
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 176/500
CAPITULO 4 METODO DE LAS FUERZAS
_____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -75-
Se Calcula ahora la fuerza X con la carga 149,38P Kg= .
Suponiendo que el resorte no resultó largo ni corto.
50 X Kg= max 1487 . B M M Kg cm= =
Se deja a cargo del lector analizar la razón por la cual el max M en este caso es mayor que
en el anterior.
Ejercicio Nº 22:
Resolver por tres momentos los casos siguientes:
a)
La incógnita es A M y la carga exterior es el momento en B: . B M P a=
10 Aδ θ = (Debido a . B M P a= )

5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 177/500
CAPITULO 4 METODO DE LAS FUERZAS
_____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -76-
. . .
6. . 6. . A
l M l P a
E I E I θ = − = −
El momento en B produce en A un giro antihorario que es de signo opuesto al sentido
horario adoptado por la incógnita A M .
La ecuación de compatibilidad es:
[ ]. .
. 03. . 6. .
A
l l P a M
E I E I
⎡ ⎤ ⎡ ⎤+ − =⎢ ⎥ ⎢ ⎥⎣ ⎦ ⎣ ⎦
.
2 A
P a M = , es decir que A M resulta positivo.
b)
De tablas:
3.
24. . Bd
q l
E I θ =
3.
24. .Ci
q l
E I θ =
2.
16. .Cd
P l
E I θ =
3
10
.
24. .
q l
E I δ =
3 2
20
. .
24. . 16. .
q l P l
E I E I δ = +
El sistema de ecuaciones de compatibilidad será:
( ) M +
.
2
P a
3 ..
2
P a
l
3 ..
2
P a
l
.
2
P a
3 ..2
P a
l3
. 1 .2
aP
l
⎛ ⎞+⎜ ⎟
⎝ ⎠
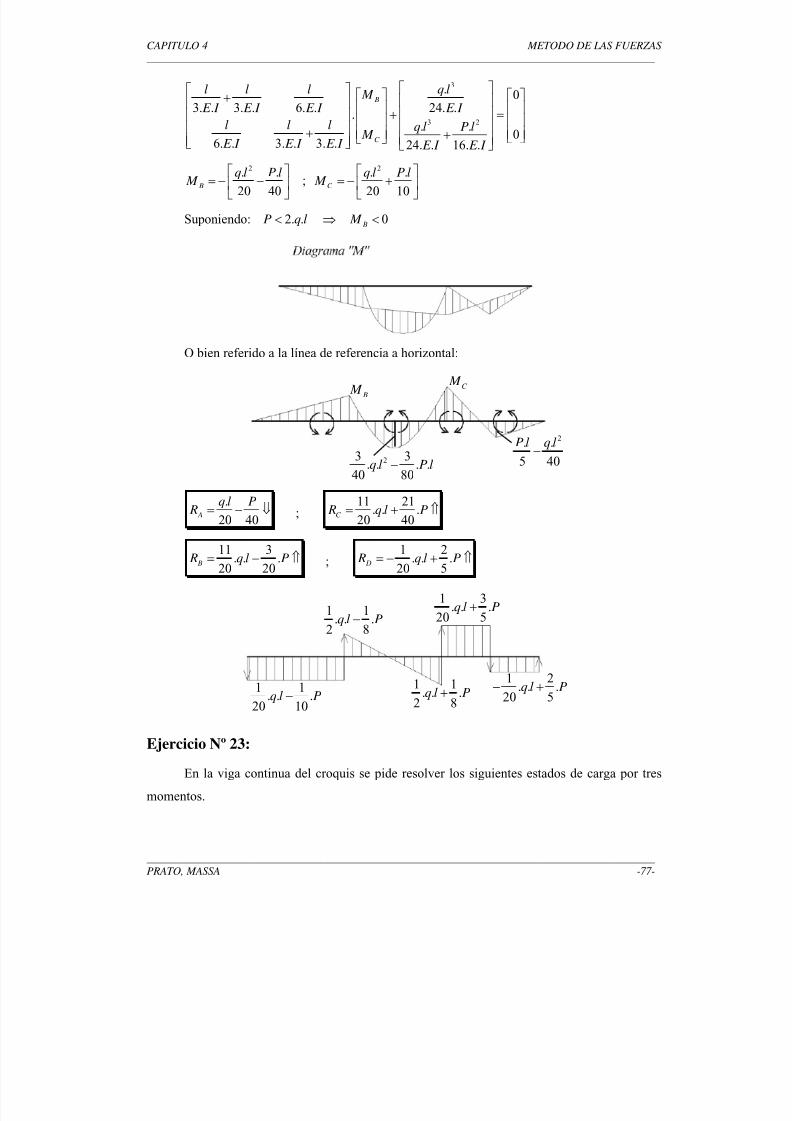
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 178/500
CAPITULO 4 METODO DE LAS FUERZAS
_____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -77-
3
3 2
. 03. . 3. . 6. . 24. .
.. .
06. . 3. . 3. . 24. . 16. .
B
C
l l l q l M E I E I E I E I
l l l q l P l M
E I E I E I E I E I
⎡ ⎤⎡ ⎤ ⎡ ⎤ ⎡ ⎤+ ⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥+ =⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥⎢ ⎥+ ⎢ ⎥ ⎢ ⎥+ ⎣ ⎦⎣ ⎦ ⎢ ⎥⎢ ⎥⎣ ⎦ ⎣ ⎦
2. .
20 40 B
q l P l M
⎡ ⎤= − −⎢ ⎥
⎣ ⎦;
2. .
20 10C
q l P l M
⎡ ⎤= − +⎢ ⎥
⎣ ⎦
Suponiendo: 2. . 0 B
P q l M < ⇒ <
O bien referido a la línea de referencia a horizontal:
.
20 40 A
q l P R = − ⇓ ;
11 21. . .
20 40C R q l P= + ⇑
11 3. . .
20 20 B R q l P= − ⇑ ;
1 2. . .
20 5 D R q l P= − + ⇑
Ejercicio Nº 23:
En la viga continua del croquis se pide resolver los siguientes estados de carga por tres
momentos.
1 1. . .
20 10q l P−
1 1. . .
2 8q l P−
1 1. . .
2 8q l P+
1 3. . .
20 5q l P+
1 2. . .
20 5q l P− +
23 3. . . .
40 80q l P l−
2. .
5 40
P l q l−
B M C
M
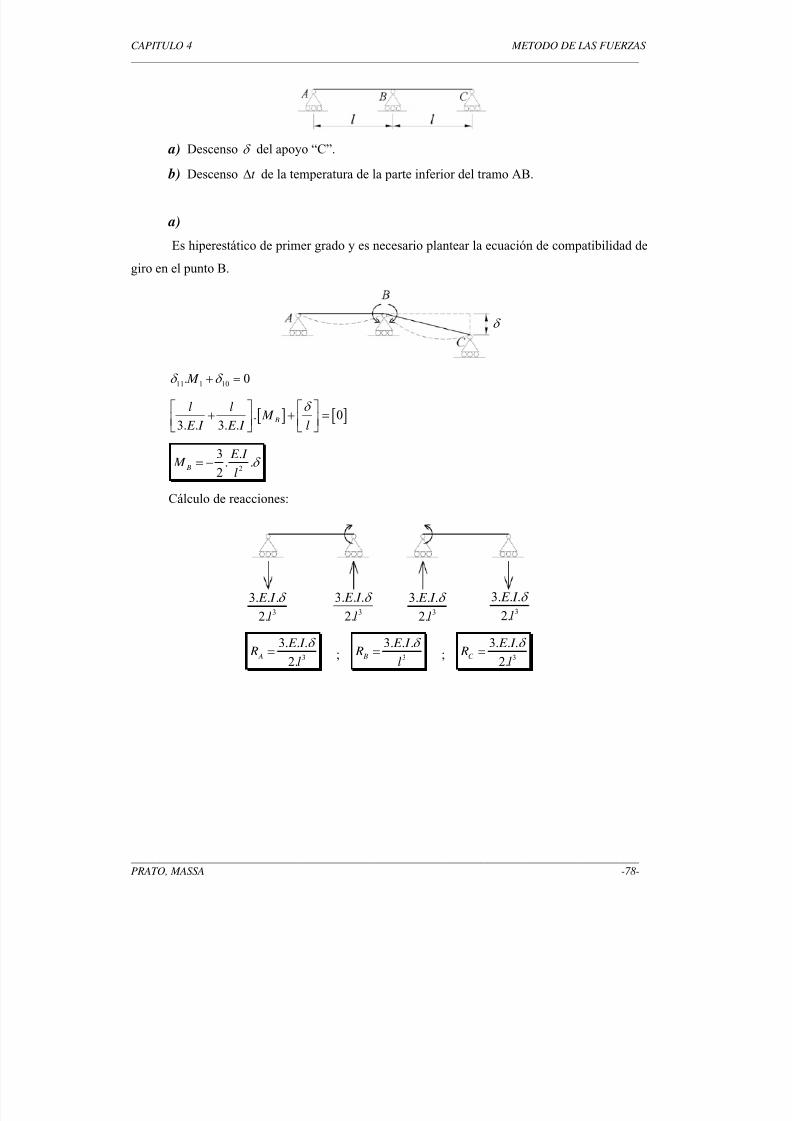
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 179/500
CAPITULO 4 METODO DE LAS FUERZAS
_____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -78-
a) Descenso δ del apoyo “C”.
b) Descenso t ∆ de la temperatura de la parte inferior del tramo AB.
a)
Es hiperestático de primer grado y es necesario plantear la ecuación de compatibilidad de
giro en el punto B.
11 1 10. 0 M δ δ + =
[ ] [ ]. 03. . 3. .
B
l l M
E I E I l
δ ⎡ ⎤ ⎡ ⎤+ + =⎢ ⎥ ⎢ ⎥⎣ ⎦ ⎣ ⎦
2
3 .. .
2 B
E I M
lδ = −
Cálculo de reacciones:
3
3. . .
2. A
E I
R l
δ
= ; 3
3. . . B
E I
R l
δ
= ; 3
3. . .
2.C
E I
R l
δ
=
3
3. . .
2.
E I
l
δ 3
3. . .
2.
E I
l
δ 3
3. . .
2.
E I
l
δ 3
3. . .
2.
E I
l
δ
δ
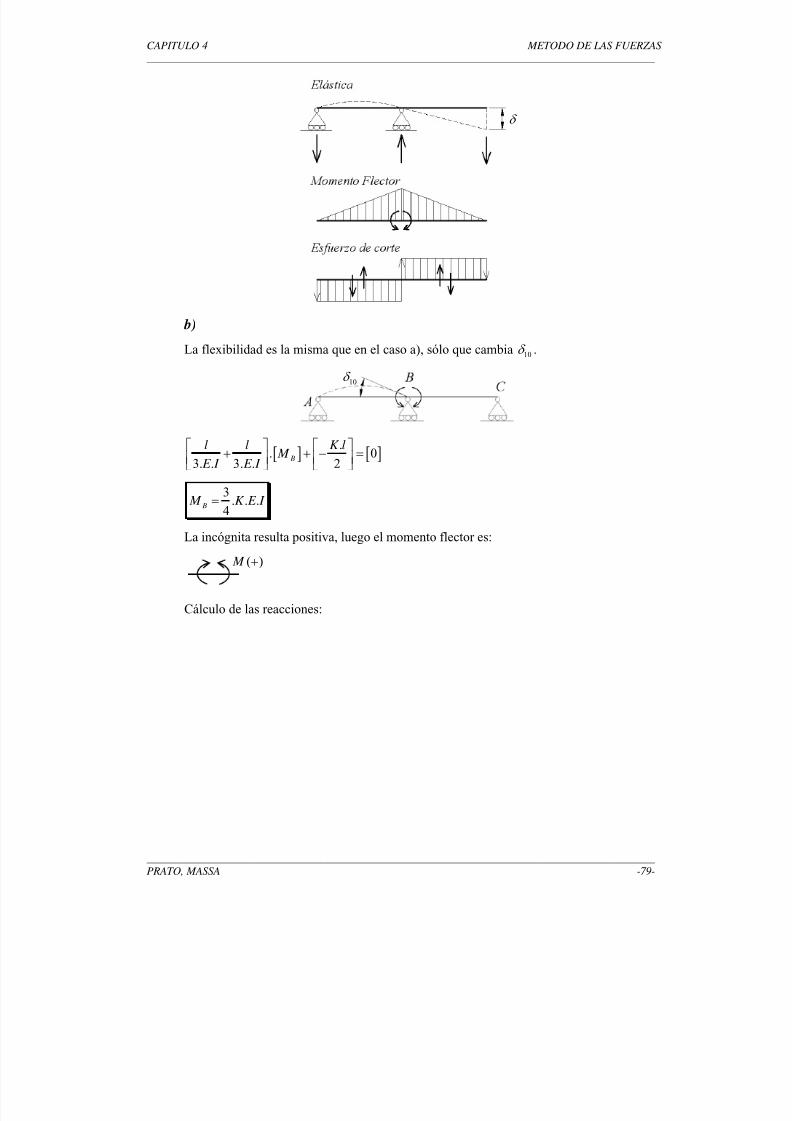
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 180/500
CAPITULO 4 METODO DE LAS FUERZAS
_____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -79-
b)
La flexibilidad es la misma que en el caso a), sólo que cambia10
δ .
[ ] [ ].
. 03. . 3. . 2
B
l l K l M
E I E I
⎡ ⎤ ⎡ ⎤+ + − =⎢ ⎥ ⎢ ⎥⎣ ⎦ ⎣ ⎦
3 . . .4
B M K E I =
La incógnita resulta positiva, luego el momento flector es:
Cálculo de las reacciones:
( ) M +
10δ
δ
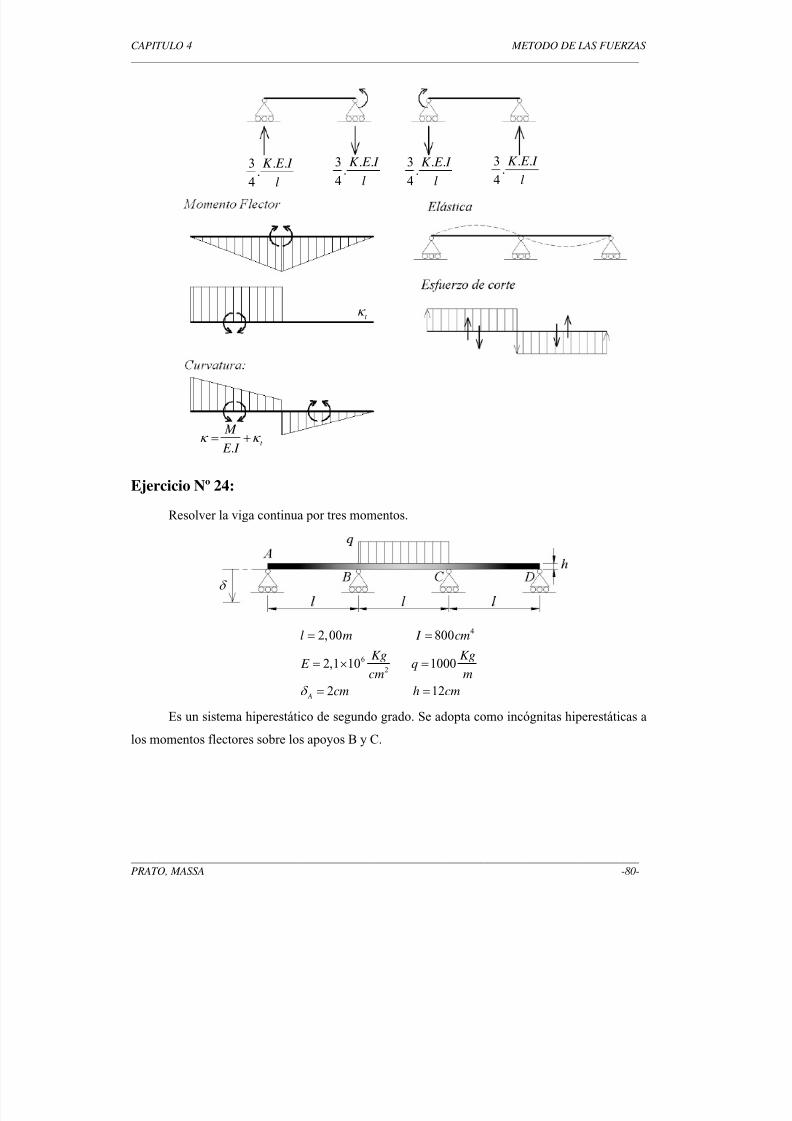
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 181/500
CAPITULO 4 METODO DE LAS FUERZAS
_____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -80-
Ejercicio Nº 24:
Resolver la viga continua por tres momentos.
4
6
2
2,00 800
2,1 10 1000
2 12 A
l m I cm
Kg Kg E qcm m
cm h cmδ
= =
= × =
= =
Es un sistema hiperestático de segundo grado. Se adopta como incógnitas hiperestáticas a
los momentos flectores sobre los apoyos B y C.
δ
3 . ..4
K E I l
3 . ..4
K E I l
3 . ..4
K E I l
3 . ..4
K E I l
t κ
.t
M
E I κ κ = +
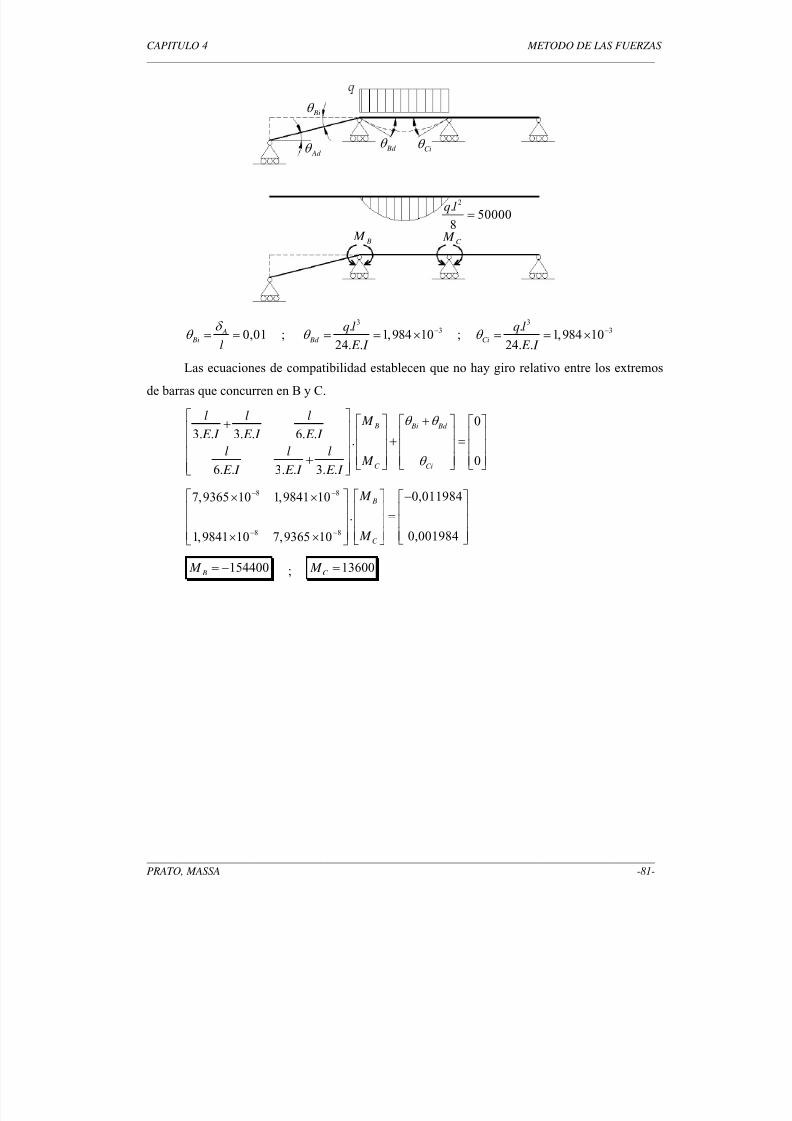
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 182/500
CAPITULO 4 METODO DE LAS FUERZAS
_____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -81-
0,01 A Bi
lδ θ = = ;
33. 1,984 10
24. . Bd
q l E I
θ −= = × ;3
3. 1,984 1024. .
Ciq l E I
θ −= = ×
Las ecuaciones de compatibilidad establecen que no hay giro relativo entre los extremos
de barras que concurren en B y C.
03. . 3. . 6. .
.
06. . 3. . 3. .
B Bi Bd
C Ci
l l l M E I E I E I
l l l M
E I E I E I
θ θ
θ
⎡ ⎤ +⎡ ⎤ ⎡ ⎤ ⎡ ⎤+⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥+ =⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥+ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎣ ⎦⎣ ⎦⎣ ⎦⎢ ⎥⎣ ⎦
8 8
8 8
0,0119847,9365 10 1,9841 10
.
0,0019841,9841 10 7,9365 10
B
C
M
M
− −
− −
−⎡ ⎤ ⎡ ⎤× × ⎡ ⎤⎢ ⎥ ⎢ ⎥ ⎢ ⎥=⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥× × ⎣ ⎦⎣ ⎦⎣ ⎦
154400 B
M = − ; 13600C
M =
Ad θ
Biθ
Bd θ Ciθ
2.50000
8
q l=
B M C M
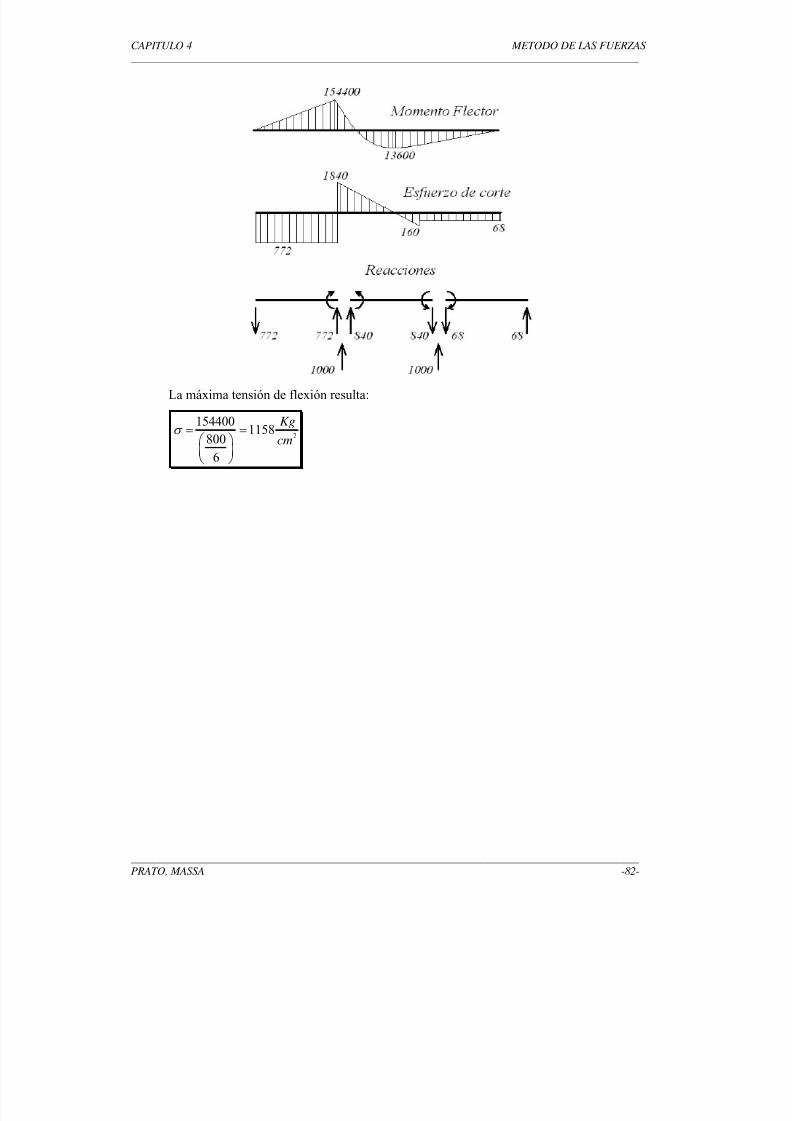
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 183/500
CAPITULO 4 METODO DE LAS FUERZAS
_____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -82-
La máxima tensión de flexión resulta:
2
1544001158
800
6
Kg
cmσ = =
⎛ ⎞⎜ ⎟⎝ ⎠
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 184/500
CAPITULO 5 PRINCIPIOS DE MINIMA ENERGIA POTENCIAL
____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -1-
Capítulo 5 Energía Complementaria
5.1- Principio de Mínima Energía Potencial Complementaria
Se define como energía potencial complementaria *π para sistemas elásticos a la
expresión:
( )* * .i i iW R U π = −∑ (Ec. 5.1)
*:π Es una función cuyas variables son fuerzas (o tensiones)
*:i
W Es la energía de deformación complementaria función de fuerzas (o tensiones).
:i
U Son desplazamientos conocidos yi
R son fuerzas desconocidas aplicadas en los
puntos cuyo desplazamiento es conocido.
A continuación se analiza el significado de cada uno de los términos que conforman la
E.P.C.
Recuérdese que un sistema se dice elástico si la curva de descarga coincide con la curva
de carga (Figura 5.1) de modo que al retirar la carga no quedan deformaciones permanentes ni
se ha disipado energía.

5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 185/500
CAPITULO 5 PRINCIPIOS DE MINIMA ENERGIA POTENCIAL
____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -2-
Figura 5.1
Ciertos materiales que se comportan como elásticos para pequeñas velocidades de carga
pueden comportarse como elásticos pero viscosos, es decir que para variaciones relativamente
“rápidas” de la carga exhiben un ciclo de histéresis.
La energía de deformación complementaria corresponde al área de la región sombreada
de la Figura 5.2. La denominación de energía complementaria resulta obvia por ser el
complemento respecto de la energía interna de deformación, cuya suma es igual al área del
rectángulo .P e .
Figura 5.2
Aunque el principio de mínima energía potencial complementaria (P.M.E.P.C.) que se
enuncia a continuación es válido para sistemas elásticos en general (lineales o no lineales) en el
presente contexto se utilizará únicamente en sistemas linealmente elásticos. Para sistemas
lineales *i
W es numéricamente igual ai
W pero el asterisco indica que *i
W está en función de
fuerzas o solicitaciones, y no en función de los desplazamientos o deformaciones como es el
caso dei
W .
iW
*iW
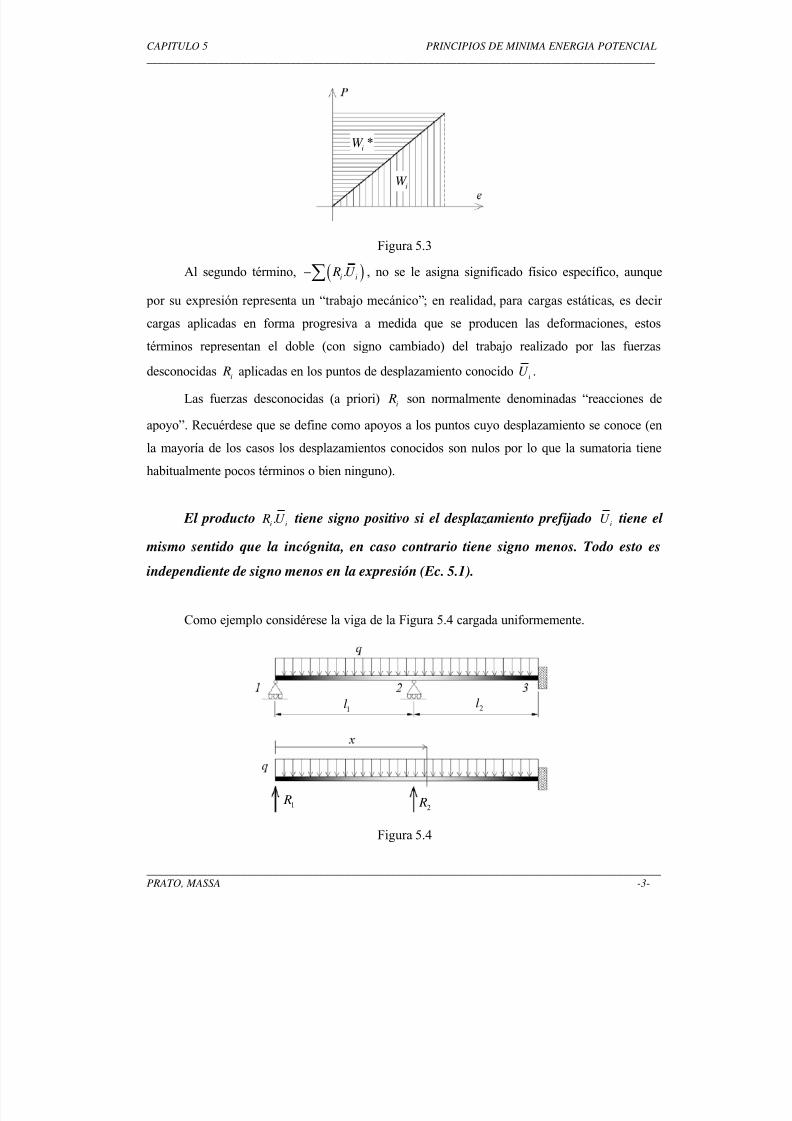
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 186/500
CAPITULO 5 PRINCIPIOS DE MINIMA ENERGIA POTENCIAL
____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -3-
Figura 5.3
Al segundo término, ( ).i i
R U −∑ , no se le asigna significado físico específico, aunque
por su expresión representa un “trabajo mecánico”; en realidad, para cargas estáticas, es decir
cargas aplicadas en forma progresiva a medida que se producen las deformaciones, estostérminos representan el doble (con signo cambiado) del trabajo realizado por las fuerzas
desconocidasi
R aplicadas en los puntos de desplazamiento conocidoi
U .
Las fuerzas desconocidas (a priori)i
R son normalmente denominadas “reacciones de
apoyo”. Recuérdese que se define como apoyos a los puntos cuyo desplazamiento se conoce (en
la mayoría de los casos los desplazamientos conocidos son nulos por lo que la sumatoria tiene
habitualmente pocos términos o bien ninguno).
El producto .i i
R U tiene signo positivo si el desplazamiento prefijadoi
U tiene el
mismo sentido que la incógnita, en caso contrario tiene signo menos. Todo esto es
independiente de signo menos en la expresión (Ec. 5.1).
Como ejemplo considérese la viga de la Figura 5.4 cargada uniformemente.
Figura 5.4
1l 2l
1 R2 R
iW
*i
W

5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 187/500
CAPITULO 5 PRINCIPIOS DE MINIMA ENERGIA POTENCIAL
____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -4-
Momento flector en una sección genérica x
2
1
.( ) .
2
q x M x R x= −
10 x l≤ ≤
( )2
1 2 1.( ) . .2
q x M x R x R x l= − + − 1 1 2l x l l≤ ≤ +
(Ec. 5.2)
La energía de deformación por flexión (despreciamos la energía de deformación por
corte) es:
1 2 2
0
* .2. .
l l
i i
M W W dx
E I
+
= = ∫ (Ec. 5.3)
Por ser nulos los desplazamientos en todos los apoyos, se tiene que:* *
iW π = (Ec. 5.4)
Según la (Ec. 5.2) el momento flector M es una función lineal en las variables 1 2, R R . La
expresión (Ec. 5.3) ilustra que la energía de deformación complementaria es una función
cuadrática en las variables1 2, R R .
Debe reconocerse que las variables de la función *i
W y consecuentemente *π según
(Ec. 5.4), son 1 2, R R , mientras que “ x” es una variable auxiliar para realizar la integración en (Ec.
5.3).
Si en un tramo además de la carga distribuida "q" hay una carga concentrada P, para
calcular la energía interna (o la complementaria) de ambas cargas es necesario en primer término
calcular el momento flector total: ( ), P qP q M M M = +
Figura 5.5
Está claro entonces que:
( ) [ ]
2 22
, P qP q M M M ⎡ ⎤ ⎡ ⎤≠ +
⎣ ⎦⎣ ⎦ (Ec. 5.5)
1 R 2 R

5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 188/500
CAPITULO 5 PRINCIPIOS DE MINIMA ENERGIA POTENCIAL
____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -5-
O sea que para calcular la energía interna total de “P” y de “q” hay que calcular primero
el momento flector total M(x) y luego evaluar la integra de la (Ec. 5.3):
2
1
.( ) .
2
q x M x R x= −
0 x a< <
( )2
1
.( ) . .
2
q x M x R x P x a= − − −
10 x l< <
( ) ( )2
1 2 1
.( ) . . .
2
q x M x R x P x a R x l= − − − + −
1 1 2l x l l< < +
(Ec. 5.6)
La integral de la (Ec. 5.3) se evalúa sobre tres intervalos de la variable “ x”.
Si se tiene una viga como en la Figura 5.6 con un apoyo elástico y un desplazamiento
prefijado δ , se debe considerar al resorte como parte del sistema elástico agregando la energía
correspondiente:
Figura 5.6
( )1 222
2
0* .2. . 2.
l l
i
R M
W dx E I K
+
= +∫ (Ec. 5.7)
Luego la energía potencial complementaria es:
( )1 222
2
1
20
* . .2. . 2.
l l R M
dx R E I K
π δ
+
= + −∫ (Ec. 5.8)
Esta expresión pone nuevamente en evidencia que *π es una función cuadrática en las
variables 1 R y 2 R .
1 R
2 R
δ
δ
2l1l
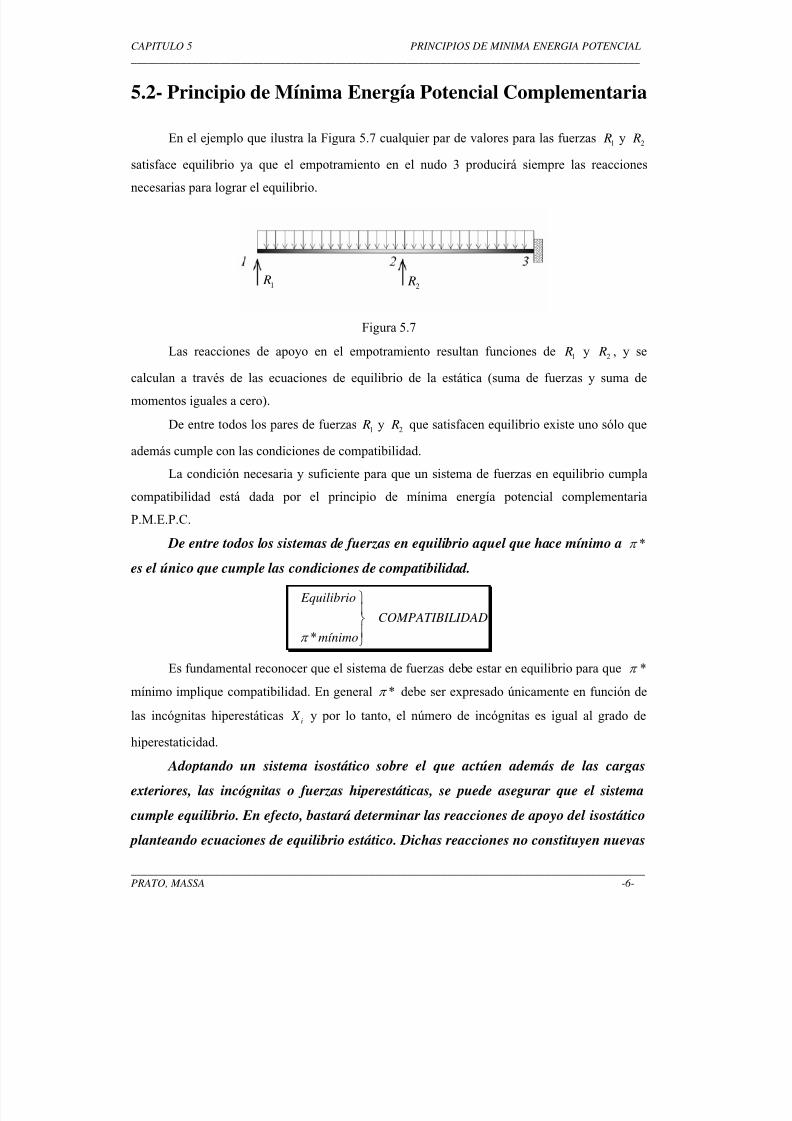
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 189/500
CAPITULO 5 PRINCIPIOS DE MINIMA ENERGIA POTENCIAL
____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -6-
5.2- Principio de Mínima Energía Potencial Complementaria
En el ejemplo que ilustra la Figura 5.7 cualquier par de valores para las fuerzas 1 R y 2 R
satisface equilibrio ya que el empotramiento en el nudo 3 producirá siempre las reacciones
necesarias para lograr el equilibrio.
Figura 5.7
Las reacciones de apoyo en el empotramiento resultan funciones de1 R y
2 R , y se
calculan a través de las ecuaciones de equilibrio de la estática (suma de fuerzas y suma de
momentos iguales a cero).
De entre todos los pares de fuerzas 1 R y 2 R que satisfacen equilibrio existe uno sólo que
además cumple con las condiciones de compatibilidad.
La condición necesaria y suficiente para que un sistema de fuerzas en equilibrio cumpla
compatibilidad está dada por el principio de mínima energía potencial complementaria
P.M.E.P.C.
De entre todos los sistemas de fuerzas en equilibrio aquel que hace mínimo a *π
es el único que cumple las condiciones de compatibilidad.
*
Equilibrio
COMPATIBILIDAD
mínimoπ
⎫⎪⎬⎪⎭
Es fundamental reconocer que el sistema de fuerzas debe estar en equilibrio para que *π
mínimo implique compatibilidad. En general *π debe ser expresado únicamente en función de
las incógnitas hiperestáticasi
X y por lo tanto, el número de incógnitas es igual al grado de
hiperestaticidad.
Adoptando un sistema isostático sobre el que actúen además de las cargas
exteriores, las incógnitas o fuerzas hiperestáticas, se puede asegurar que el sistema
cumple equilibrio. En efecto, bastará determinar las reacciones de apoyo del isostático
planteando ecuaciones de equilibrio estático. Dichas reacciones no constituyen nuevas
1 R2 R

5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 190/500
CAPITULO 5 PRINCIPIOS DE MINIMA ENERGIA POTENCIAL
____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -7-
variables del problema ya que pueden expresarse en función de las incógnitas
hiperestáticas.
Si se consideran más incógnitas independientes que las estrictamente necesarias la
condición de mínimo puede lograrse sin respetar el equilibrio y el resultado no tiene sentido. En
general *π presenta términos cuadráticos en las variablesi
X provenientes de *i
W y términos
lineales provenientes de ( ).i i
R U −∑ .
Las condiciones para que la función *π pase por un mínimo son:
1
*0
X
π ∂=
∂;
2
*0
X
π ∂=
∂; ……. ;
*0
n X
π ∂=
∂ (Ec. 5.9)
La (Ec. 5.9) es por lo tanto un sistema de ecuaciones lineales que permite determinar los
valores de las fuerzas incógnitasi
X .
Volviendo al ejemplo de la viga de la Figura 5.7 y recordando que existe equilibrio para
cualquier par de fuerzas 1 2, R R se puede representar *π como función de las variables 1 R y 2 R .
*π Tiene la forma de un paraboloide de eje vertical.
Figura 5.8
El valor mínimo de *π , vale decir 0 *π , no tiene ningún significado físico ni utilidad
práctica específica, razón por la cual normalmente que es necesario calcular su valor numérico.
Lo que realmente interesa es el punto para el cual se produce el mínimo ( )0 0
1 2, R R , ya que
corresponde al valor de las fuerzas que cumplen las condiciones compatibilidad (además de las
de equilibrio).
El Principio de Mínima Energía Potencial Complementaria (P.M.E.P.C.) tiene un campode aplicación más amplio en la teoría de las estructuras que la que se analiza en el presente curso,
( )0 0
1 2, R R
0
1 R
0
2 R
1 R
2 R*π
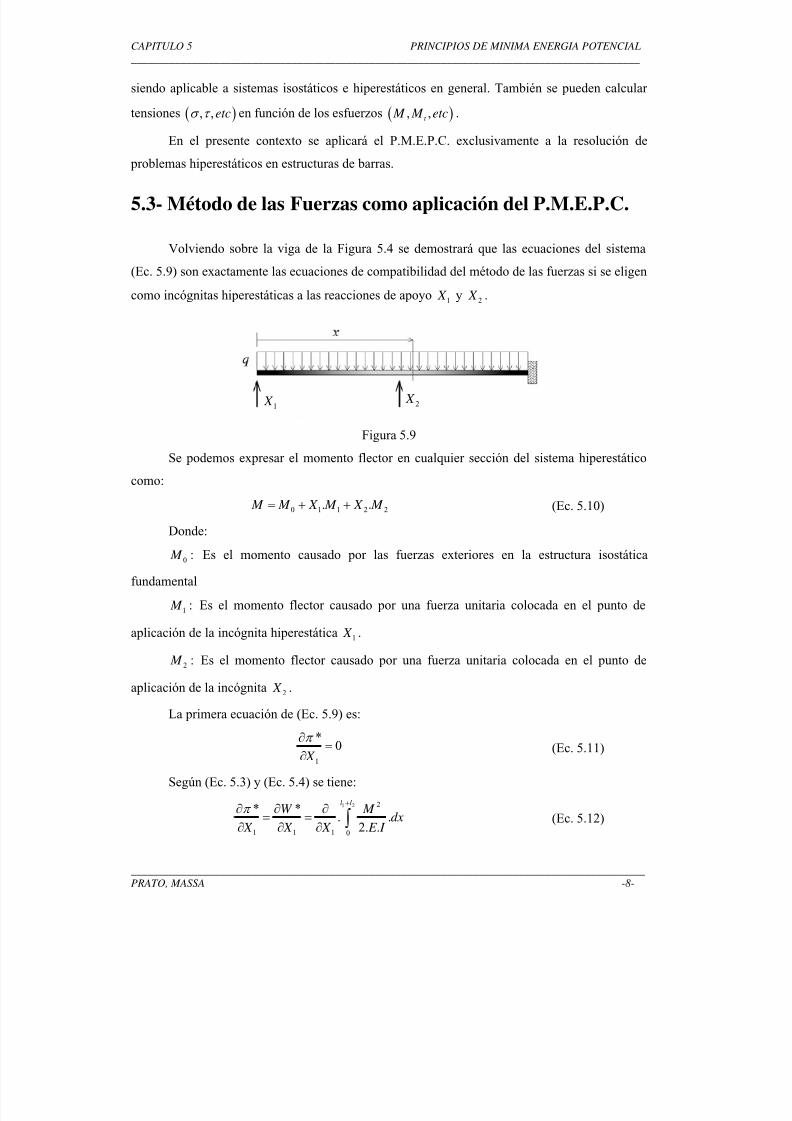
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 191/500
CAPITULO 5 PRINCIPIOS DE MINIMA ENERGIA POTENCIAL
____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -8-
siendo aplicable a sistemas isostáticos e hiperestáticos en general. También se pueden calcular
tensiones ( ), ,etcσ τ en función de los esfuerzos ( ), ,t M M etc .
En el presente contexto se aplicará el P.M.E.P.C. exclusivamente a la resolución de
problemas hiperestáticos en estructuras de barras.
5.3- Método de las Fuerzas como aplicación del P.M.E.P.C.
Volviendo sobre la viga de la Figura 5.4 se demostrará que las ecuaciones del sistema
(Ec. 5.9) son exactamente las ecuaciones de compatibilidad del método de las fuerzas si se eligen
como incógnitas hiperestáticas a las reacciones de apoyo 1 X y 2 X .
Figura 5.9
Se podemos expresar el momento flector en cualquier sección del sistema hiperestático
como:
0 1 1 2 2. . M M X M X M = + + (Ec. 5.10)
Donde:
0 : M Es el momento causado por las fuerzas exteriores en la estructura isostática
fundamental
1 : M Es el momento flector causado por una fuerza unitaria colocada en el punto de
aplicación de la incógnita hiperestática1 X .
2 : M Es el momento flector causado por una fuerza unitaria colocada en el punto de
aplicación de la incógnita 2 X .
La primera ecuación de (Ec. 5.9) es:
1
*0
X
π ∂=
∂ (Ec. 5.11)
Según (Ec. 5.3) y (Ec. 5.4) se tiene:
1 2 2
1 1 1 0
* *. .2. .
l lW M
dx X X X E I
π +
∂ ∂ ∂= =∂ ∂ ∂ ∫ (Ec. 5.12)
1 X 2 X

5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 192/500
CAPITULO 5 PRINCIPIOS DE MINIMA ENERGIA POTENCIAL
____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -9-
Introduciendo la derivada parcial dentro del signo integral y aplicando la regla de la
cadena, se tiene:
1 2 1 2
1
1 10 0
*. . . .
. .
l l l l M M M
dx M dx
X E I X E I
π + +
∂ ∂= =
∂ ∂∫ ∫ (Ec. 5.13)
Ya que según (Ec. 5.10): 1
1
M M
X
∂=
∂
Reemplazando en (Ec. 5.13) el momento M según (Ec. 5.10) y recordando (Ec. 5.11) se
obtiene:
0 1 1 2 21
. .. . 0
.
M X M X M M dx
E I
+ +=∫ (Ec. 5.14)
0 1 21 1 1 2 1. . . . . . . . 0
. . .+ + =∫ ∫ ∫ M M M M dx X M dx X M dx
E I E I E I
O sea:
01 1 11 2 12. . 0 X X δ δ δ + + = (Ec. 5.15)
Que es la ecuación de compatibilidad correspondiente al "corte" donde actúa la incógnita
hiperestática1
X .
Conclusión:
Las condiciones de *π mínimo representan directamente las ecuaciones de
compatibilidad del Método de las Fuerzas.
Vale decir que el P.M.E.P.C. provee una forma alternativa de plantear las ecuaciones de
compatibilidad.
La expresión (Ec. 5.10) se consideró sólo para ilustrar que la aplicación del P.M.E.P.C. a
un problema hiperestático puede conducir a las ecuaciones de compatibilidad de deformaciones.
Para aplicar el P.M.E.P.C. a una viga o pórtico se puede omitir el planteo de los estados "0", "1",
"2", etc. que es imprescindible en el caso de aplicar trabajos virtuales. Se puede plantear
directamente el momento flector en cada tramo, tal como se hizo en las (Ec. 5.2) y (Ec. 5.6), para
luego calcular:
*.
i i
W M M dx
X X
∂ ∂=
∂ ∂∫ (Ec. 5.16)
Este procedimiento resulta más simple que calcular primero la integral para 2 M y luego
derivar. Si en algún tramo se anula el términoi
M
X
∂
∂ , la integral en ese tramo también se anula.
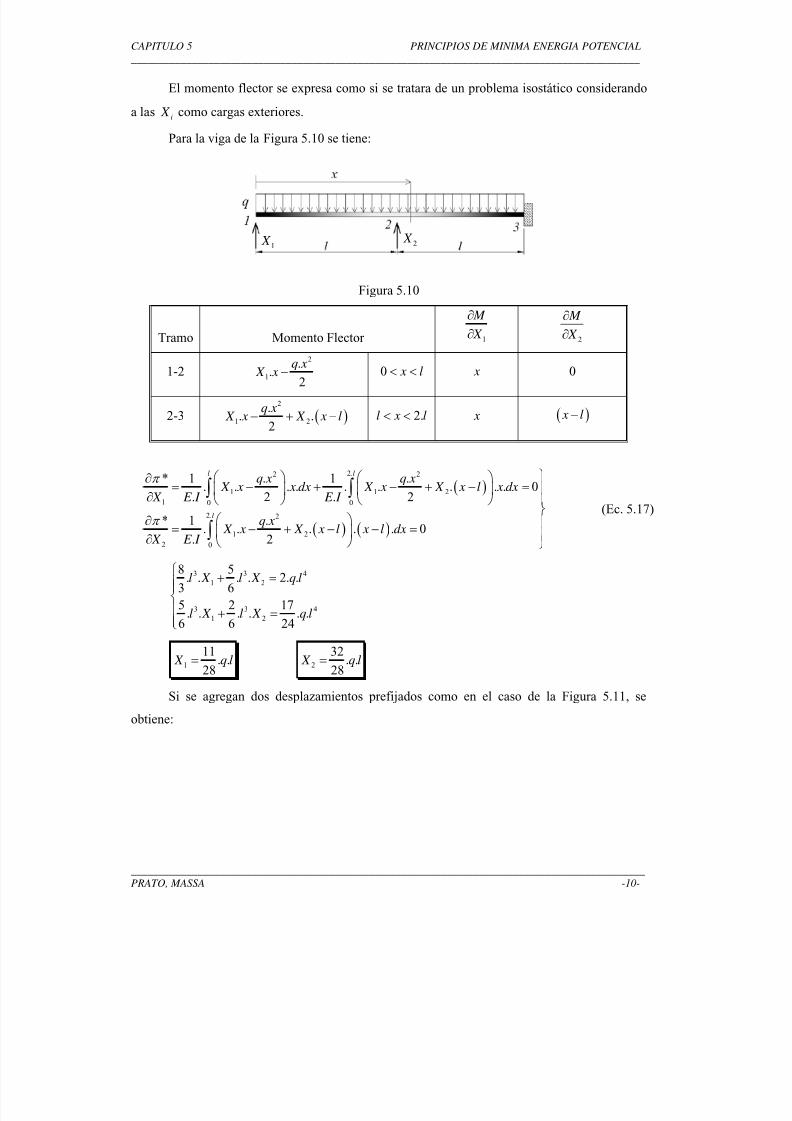
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 193/500
CAPITULO 5 PRINCIPIOS DE MINIMA ENERGIA POTENCIAL
____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -10-
El momento flector se expresa como si se tratara de un problema isostático considerando
a lasi
X como cargas exteriores.
Para la viga de la Figura 5.10 se tiene:
Figura 5.10
Tramo Momento Flector 1
M
X
∂
∂ 2
M
X
∂
∂
1-22
1
..
2
q x X x − 0 x l< < x 0
2-3 ( )2
1 2
.. .
2
q x X x X x l− + − 2.l x l< < x ( ) x l−
( )
( ) ( )
2.2 2
1 1 2
1 0 0
2. 2
1 2
2 0
* 1 . 1 .
. . . . . . . . . 0. 2 . 2
* 1 .. . . . . 0
. 2
l l
l
q x q x
X x x dx X x X x l x dx X E I E I
q x X x X x l x l dx
X E I
π
π
⎫⎛ ⎞ ⎛ ⎞∂
= − + − + − = ⎪⎜ ⎟ ⎜ ⎟∂ ⎝ ⎠ ⎝ ⎠ ⎪⎬
⎛ ⎞∂ ⎪= − + − − =⎜ ⎟ ⎪∂ ⎝ ⎠ ⎭
∫ ∫
∫
(Ec. 5.17)
3 3 4
1 2
3 3 4
1 2
8 5. . . . 2. .
3 6
5 2 17. . . . . .
6 6 24
l X l X q l
l X l X q l
⎧+ =⎪⎪
⎨⎪ + =⎪⎩
111 . .28
X q l= 232 . .28
X q l=
Si se agregan dos desplazamientos prefijados como en el caso de la Figura 5.11, se
obtiene:
1 X 2 X

5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 194/500
CAPITULO 5 PRINCIPIOS DE MINIMA ENERGIA POTENCIAL
____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -11-
Figura 5.11
[ ]" "1 1 2 2* . .igual que en el caso anterior
iW U X U X π ⎡ ⎤= − − +⎣ ⎦ (Ec. 5.18)
Las condiciones de mínimo son:
" " 1
1
" "2
2
*0
*0
igual que en el caso anterior
igual que en el caso anterior
W U
X
W U
X
⎧⎡ ⎤∂+ =⎪⎢ ⎥∂⎪⎣ ⎦
⎨⎡ ⎤∂⎪ − =⎢ ⎥⎪ ∂⎣ ⎦⎩
(Ec. 5.19)
Recuérdese que en (Ec. 5.19) 1U y 2U son los módulos de los desplazamientos
prefijados. El sentido de los mismos se tuvo en cuenta al plantear el segundo término del
segundo miembro de (Ec. 5.18). (Sii
U tiene igual sentido quei
X el producto .i i
U X es
positivo).
Analícese ahora qué ocurre si se consideran como incógnitas hiperestáticas a los
momentos flectores sobre los apoyos como en método de tres momentos.
Figura 5.12
Expresando todo en función de las nuevas incógnitas 1 X y 2 X , comenzando por las
reacciones de apoyo 1 R y 2 R :
1 X
1 X
1U 2U
1 R2 R
il
d l
2 X
1 X
1 X
2
i R2
d R1 R3 R
2 X
1 X 2 X
1U 2U

5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 195/500
CAPITULO 5 PRINCIPIOS DE MINIMA ENERGIA POTENCIAL
____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -12-
( )1 1. . . 02
ii i
l R l X q l− − = ⇒ 1 1
. 1.
2
i
i
q l R X
l= +
( )2 1. . . 0
2
i ii i
l R l X q l+ − =
( )2 1 2. . . 02
d d d d
l R l X X q l+ − − =
2 2 2
i d R R R= + ⇒ 2 1 2
1 1 1. . .
2
i d
i d d
l l R q X X
l l l
⎛ ⎞ ⎛ ⎞+⎛ ⎞= + − − +⎜ ⎟ ⎜ ⎟⎜ ⎟
⎝ ⎠ ⎝ ⎠ ⎝ ⎠
[ ]2
1 1 2 2* . . .2. .
M dx R U R U
E I π = − − +∫
2
1 1 1 2 2
1 1 1 1* . . . . . . . .
2. . 2 2
i i d
i i d d
l l l M dx q X U q X X U
E I l l l lπ
⎡ ⎤⎧ ⎫⎧ ⎫ ⎛ ⎞ ⎛ ⎞+⎪ ⎪⎛ ⎞= − − + + + − − +⎢ ⎥⎨ ⎬ ⎨ ⎬⎜ ⎟ ⎜ ⎟⎜ ⎟⎝ ⎠⎪ ⎪⎢ ⎥⎩ ⎭ ⎝ ⎠ ⎝ ⎠⎩ ⎭⎣ ⎦
∫
El momento en la estructura hiperestática como superposición de los estados isostáticos
"0", "1" y "2" será:
0 1 1 2 2. . M M X M X M = + +
Los términos del segundo miembro de esta expresión difieren de (Ec. 5.10) porque la
estructura fundamental ha cambiado. Se trata de dos vigas simplemente apoyadas y los estados
auxiliares corresponden a momentos unitarios sobre los apoyos.
Aplicando ahora la condición de mínimo tenemos:
31 21
1
( )
*. . 0
.i i d
a
U U U M M dx
X E I l l l
π ∂= + + + =
∂ ∫ 1442443
22
2
( )
*. . 0
.d
b
U M M dx
X E I l
π ⎛ ⎞∂= + − =⎜ ⎟
∂ ⎝ ⎠∫
14243
Los términos ( )a y ( )b provienen de derivar ( ).i i
R U −∑ .
0 1 21 1 1 2 1
0 1 22 1 2 2 2
. . ( ) . . . . . . 0. . .
. . ( ) . . . . . . 0. . .
M M M M dx a X M dx X M dx
E I E I E I
M M M M dx b X M dx X M dx
E I E I E I
⎫+ + + = ⎪
⎪⎬⎪+ + + = ⎪⎭
∫ ∫ ∫
∫ ∫ ∫ (Ec. 5.20)
Nuevamente las expresiones de la (Ec. 5.20) deducidas del P.M.E.P.C. coinciden
exactamente con las ecuaciones de tres momentos. Los términos ( )a y ( )b coinciden con los
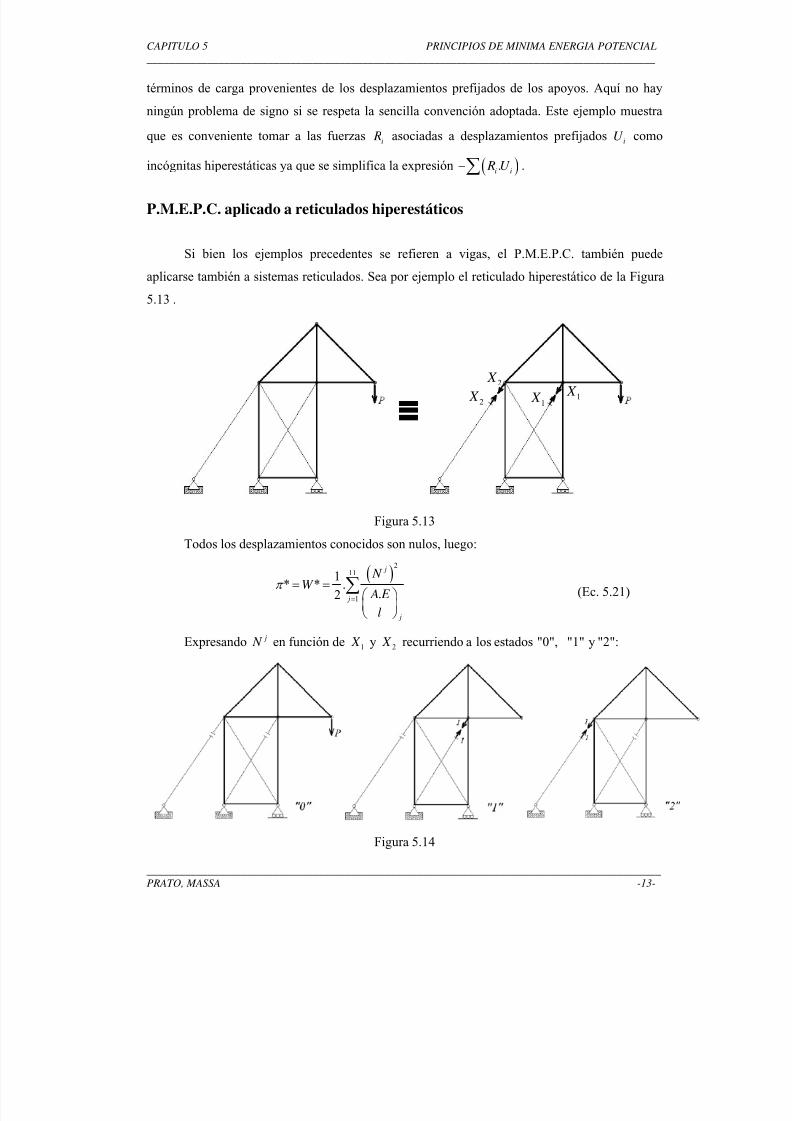
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 196/500
CAPITULO 5 PRINCIPIOS DE MINIMA ENERGIA POTENCIAL
____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -13-
términos de carga provenientes de los desplazamientos prefijados de los apoyos. Aquí no hay
ningún problema de signo si se respeta la sencilla convención adoptada. Este ejemplo muestra
que es conveniente tomar a las fuerzasi
R asociadas a desplazamientos prefijados iU como
incógnitas hiperestáticas ya que se simplifica la expresión ( ).i i R U −∑ .
P.M.E.P.C. aplicado a reticulados hiperestáticos
Si bien los ejemplos precedentes se refieren a vigas, el P.M.E.P.C. también puede
aplicarse también a sistemas reticulados. Sea por ejemplo el reticulado hiperestático de la Figura
5.13 .
Figura 5.13
Todos los desplazamientos conocidos son nulos, luego:
( )2
11
1
1* * .
.2
j
j
j
N W
A E
l
π
=
= =⎛ ⎞⎜ ⎟⎝ ⎠
∑ (Ec. 5.21)
Expresando j N en función de 1 X y 2 X recurriendo a los estados "0", "1" y "2":
Figura 5.14
1 X 2
X 2
X
1 X
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 197/500
CAPITULO 5 PRINCIPIOS DE MINIMA ENERGIA POTENCIAL
____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -14-
Resulta:
0 1 1 2 2. . j j j j N N X N X N = + + (Ec. 5.22)
Se plantea ahora la condición de mínimo *π igualando a cero las derivadas parciales de
*π con respecto a cada una de las incógnitas i X .
Como ejemplo se desarrolla la primera de las ecuaciones de compatibilidad:
( )2
11 11
1 11 1 1
* 1. . . 0
. .2
j j j
j j
j j
N N N
A E A E X X X
l l
π
= =
∂∂ ∂= = =
∂ ∂ ∂⎛ ⎞ ⎛ ⎞⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠
∑ ∑ (Ec. 5.23)
Introduciendo (Ec. 5.22) en (Ec. 5.23) se obtiene:
11 11 110 1 2
1 1 1 2 1
1 1 1
. . . . . 0. . .
j j j
j j j
j j j
N N N N X N X N A E A E A E
l l l= = =
⎛ ⎞ ⎛ ⎞ ⎛ ⎞
⎜ ⎟ ⎜ ⎟ ⎜ ⎟+ + =⎜ ⎟ ⎜ ⎟ ⎜ ⎟⎜ ⎟ ⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠ ⎝ ⎠
∑ ∑ ∑ (Ec. 5.24)
Aquí no existe ninguna diferencia operativa con el método de las fuerzas aplicando
trabajos virtuales.
5.4- Teorema de Castigliano (1875)
Partiendo de la expresión de la energía potencial complementaria:
( )* * .i i i
W R U π = −∑
Las condiciones de mínimo exigen que:
*0i
i
i
W U
R
∂− =
∂
De donde:
*i
i
W U
R
∂=
∂ (Ec. 5.25)
La (Ec. 5.25) expresa el Teorema de Castigliano:
La derivada parcial de la energía potencial complementaria expresada en
función de las fuerzas externas respecto a una de estas fuerzas, es igual al
desplazamiento de su punto de aplicación, medido en la dirección y sentido de la
fuerza.
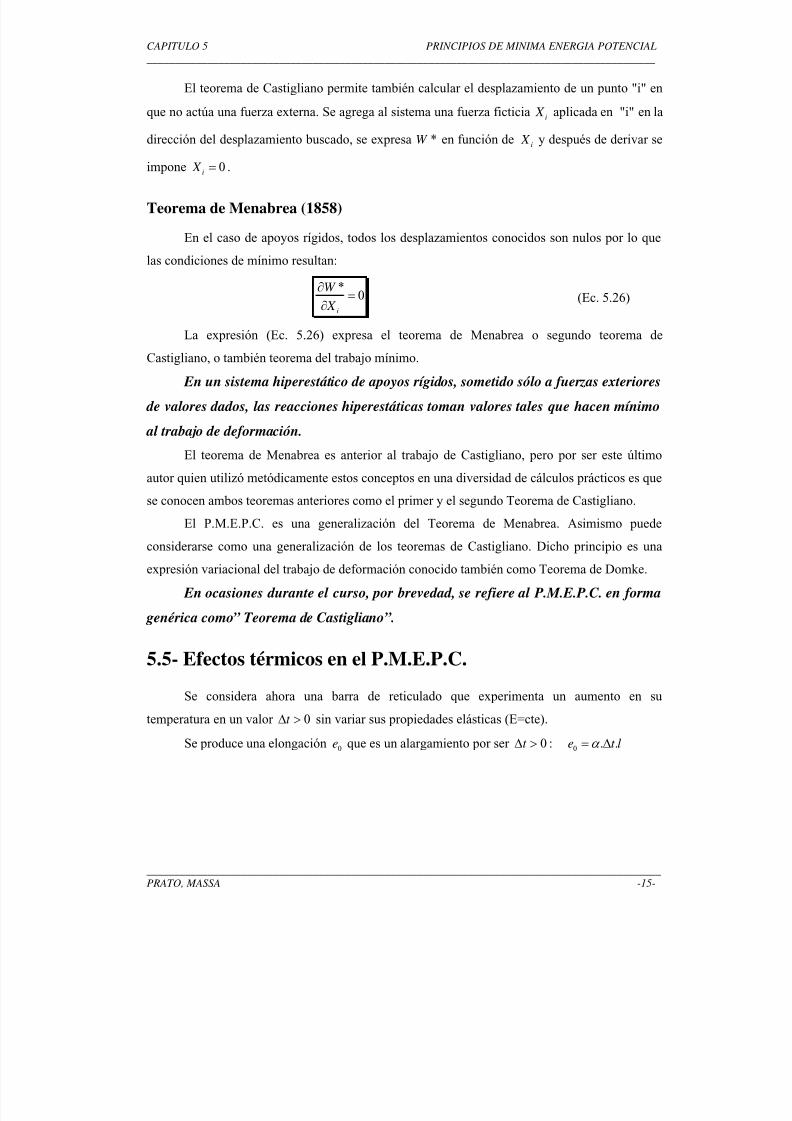
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 198/500
CAPITULO 5 PRINCIPIOS DE MINIMA ENERGIA POTENCIAL
____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -15-
El teorema de Castigliano permite también calcular el desplazamiento de un punto "i" en
que no actúa una fuerza externa. Se agrega al sistema una fuerza ficticiai
X aplicada en "i" en la
dirección del desplazamiento buscado, se expresa *W en función dei
X y después de derivar se
impone 0i X = .
Teorema de Menabrea (1858)
En el caso de apoyos rígidos, todos los desplazamientos conocidos son nulos por lo que
las condiciones de mínimo resultan:
*0
i
W
X
∂=
∂ (Ec. 5.26)
La expresión (Ec. 5.26) expresa el teorema de Menabrea o segundo teorema de
Castigliano, o también teorema del trabajo mínimo.
En un sistema hiperestático de apoyos rígidos, sometido sólo a fuerzas exteriores
de valores dados, las reacciones hiperestáticas toman valores tales que hacen mínimo
al trabajo de deformación.
El teorema de Menabrea es anterior al trabajo de Castigliano, pero por ser este último
autor quien utilizó metódicamente estos conceptos en una diversidad de cálculos prácticos es que
se conocen ambos teoremas anteriores como el primer y el segundo Teorema de Castigliano.
El P.M.E.P.C. es una generalización del Teorema de Menabrea. Asimismo puede
considerarse como una generalización de los teoremas de Castigliano. Dicho principio es una
expresión variacional del trabajo de deformación conocido también como Teorema de Domke.
En ocasiones durante el curso, por brevedad, se refiere al P.M.E.P.C. en forma
genérica como” Teorema de Castigliano”.
5.5- Efectos térmicos en el P.M.E.P.C.
Se considera ahora una barra de reticulado que experimenta un aumento en su
temperatura en un valor 0t ∆ > sin variar sus propiedades elásticas (E=cte).
Se produce una elongación 0e que es un alargamiento por ser 0t ∆ > : 0 . .e t lα = ∆

5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 199/500
CAPITULO 5 PRINCIPIOS DE MINIMA ENERGIA POTENCIAL
____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -16-
Figura 5.15
La recta del diagrama N e− se corre hacia la derecha como se muestra en la Figura 5.15.
La energía complementaria de deformación *iW está representada por el área del trapecio
OABD, que se compone de un triángulo AEB y un rectángulo OAED, por lo que resulta:
2
0
1* . .
2
N W N e
K = + (Ec. 5.27)
Para el caso 0t ∆ < el diagrama se corre hacia la izquierda y la energía de deformación
complementaria *i
W corresponde al área rayada de la Figura 5.16.
Figura 5.16
Nótese que la zona a izquierda del eje " N " corresponde a valores negativos de *i
W .
Para este caso sigue siendo válida la expresión (Ec. 5.27) si se tiene en cuenta que0e resulta
negativo para 0t ∆ < .
Se puede observar que tanto en la Figura 5.15 como en la Figura 5.16 la energía interna
de deformacióni
W está representada por el área del triángulo ABC.
Una manera de comprobar la validez de la (Ec. 5.27) en la siguiente:
N
K
0e
( ).
tan A E
K l
α = =( )+
α
( )−
N K 0e
( ).
tan A E
K lα = =*i
W
α
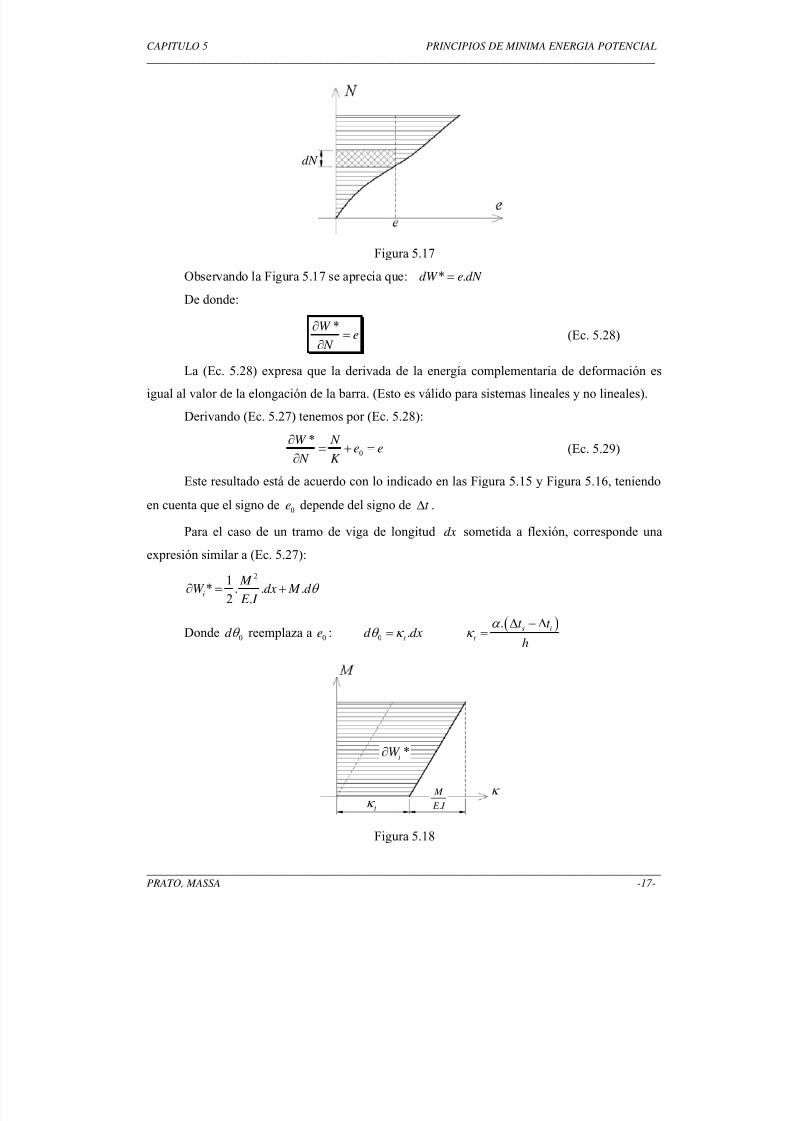
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 200/500
CAPITULO 5 PRINCIPIOS DE MINIMA ENERGIA POTENCIAL
____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -17-
Figura 5.17
Observando la Figura 5.17 se aprecia que: * .dW e dN =
De donde:
*W e N
∂ =∂
(Ec. 5.28)
La (Ec. 5.28) expresa que la derivada de la energía complementaria de deformación es
igual al valor de la elongación de la barra. (Esto es válido para sistemas lineales y no lineales).
Derivando (Ec. 5.27) tenemos por (Ec. 5.28):
0
*W N e e
N K
∂= + =
∂ (Ec. 5.29)
Este resultado está de acuerdo con lo indicado en las Figura 5.15 y Figura 5.16, teniendo
en cuenta que el signo de 0e depende del signo de t ∆ .
Para el caso de un tramo de viga de longitud dx sometida a flexión, corresponde una
expresión similar a (Ec. 5.27):
21
* . . .2 .
i
M W dx M d
E I θ ∂ = +
Donde 0d θ reemplaza a 0e : 0 .t
d dxθ κ = ( ).
s i
t
t t
h
α κ
∆ − ∆=
Figura 5.18
*iW ∂
t κ .
M
E I
κ
dN
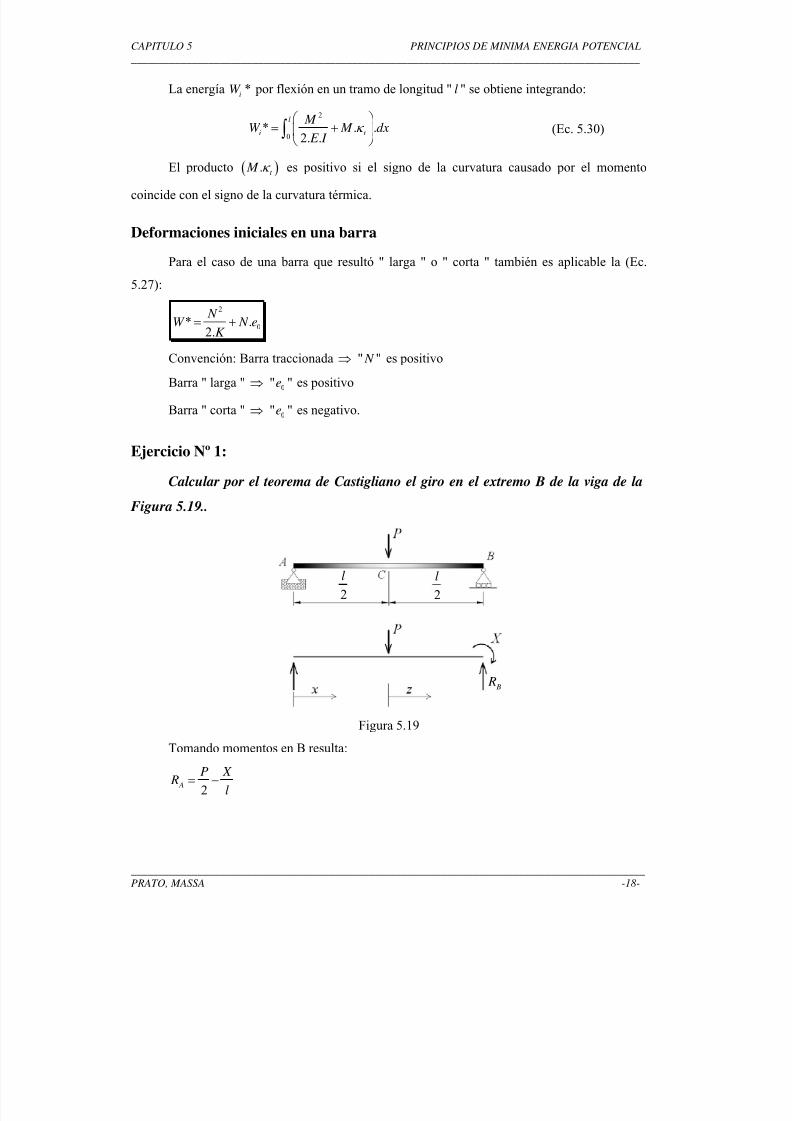
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 201/500
CAPITULO 5 PRINCIPIOS DE MINIMA ENERGIA POTENCIAL
____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -18-
La energía *i
W por flexión en un tramo de longitud " l " se obtiene integrando:
2
0* . .
2. .
l
i t
M W M dx
E I κ
⎛ ⎞= +⎜ ⎟
⎝ ⎠∫ (Ec. 5.30)
El producto ( ). t M κ es positivo si el signo de la curvatura causado por el momento
coincide con el signo de la curvatura térmica.
Deformaciones iniciales en una barra
Para el caso de una barra que resultó " larga " o " corta " también es aplicable la (Ec.
5.27):
2
0* .2.
N
W N eK = +
Convención: Barra traccionada ⇒ " " N es positivo
Barra " larga " ⇒ 0" "e es positivo
Barra " corta " ⇒ 0" "e es negativo.
Ejercicio Nº 1:
Calcular por el teorema de Castigliano el giro en el extremo B de la viga de la
Figura 5.19..
Figura 5.19
Tomando momentos en B resulta:
2 A
P X R
l= −
2
l
2
l
B R
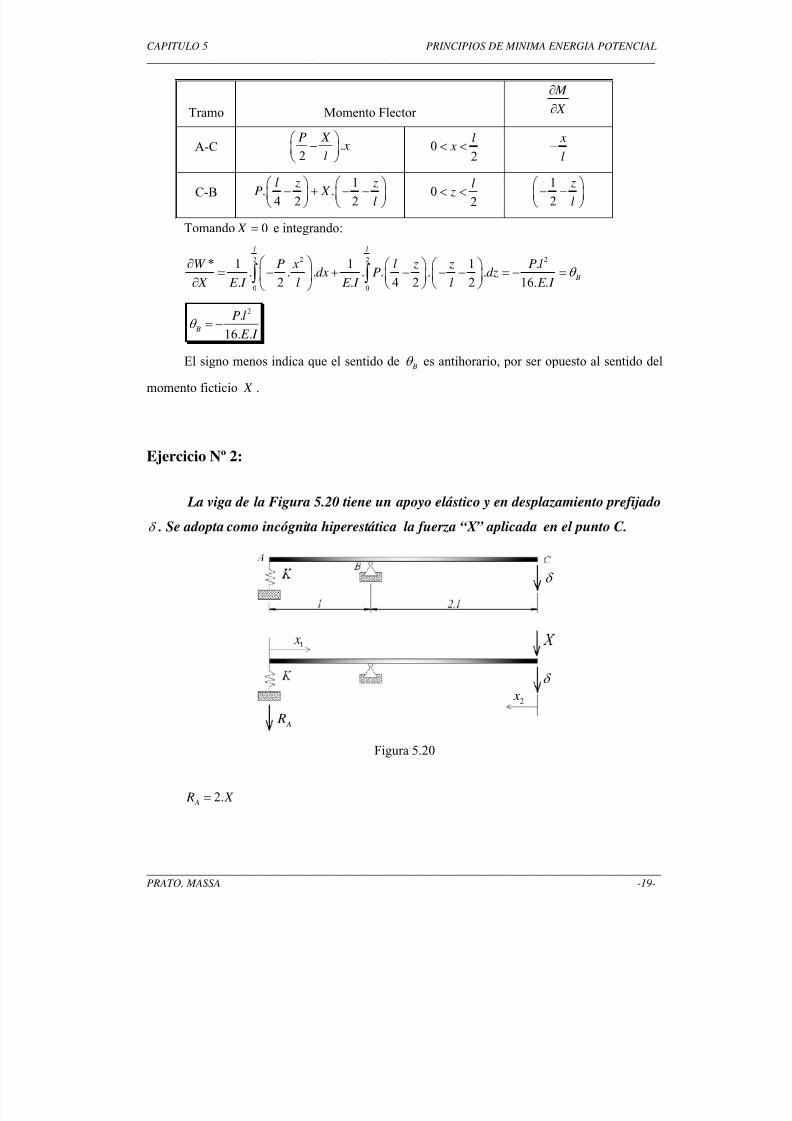
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 202/500
CAPITULO 5 PRINCIPIOS DE MINIMA ENERGIA POTENCIAL
____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -19-
Tramo Momento Flector
M
X
∂
∂
A-C .2
P X x
l
⎛ ⎞−⎜ ⎟
⎝ ⎠
0
2
l x< <
x
l
−
C-B1
. .4 2 2
l z zP X
l
⎛ ⎞ ⎛ ⎞− + − −⎜ ⎟ ⎜ ⎟
⎝ ⎠ ⎝ ⎠ 0
2
l z< <
1
2
z
l
⎛ ⎞− −⎜ ⎟
⎝ ⎠
Tomando 0 X = e integrando:
2 22 2
0 0
* 1 1 1 .. . . . . . .
. 2 . 4 2 2 16. .
l l
B
W P x l z z P ldx P dz
X E I l E I l E I θ
⎛ ⎞∂ ⎛ ⎞ ⎛ ⎞= − + − − − = − =⎜ ⎟ ⎜ ⎟ ⎜ ⎟∂ ⎝ ⎠ ⎝ ⎠⎝ ⎠
∫ ∫
2.
16. . B
P l
E I θ = −
El signo menos indica que el sentido de Bθ es antihorario, por ser opuesto al sentido del
momento ficticio X .
Ejercicio Nº 2:
La viga de la Figura 5.20 tiene un apoyo elástico y en desplazamiento prefijado
δ . Se adopta como incógnita hiperestática la fuerza “X” aplicada en el punto C.
Figura 5.20
2. A
R X =
δ
1 x
2 x
A R
δ

5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 203/500
CAPITULO 5 PRINCIPIOS DE MINIMA ENERGIA POTENCIAL
____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -20-
Tramo Momento Flector
M
X
∂
∂
A-B 12. . X x 10 x l< < 12. x
C-B 2. X x 20 2. x l< < 2 x
22
* . .2. . 2.
A R M
dx X E I K
π δ = + −∫
2
1 21 1 2 2
0 0
2. . .* 4..2. . . . 0
. .
l l X x X x X
x dx x dx X E I E I K
π δ
∂= + + − =
∂ ∫ ∫
34. 4
. 0.
l
X E I K δ
⎛ ⎞+ − =
⎜ ⎟⎝ ⎠
34. 4
.
X l
E I K
δ =
⎛ ⎞+⎜ ⎟
⎝ ⎠
(Ec. 5.31)
Las dos incógnitas A
R y X son:
3
..
8.
3
E I X
l
δ =
0 A
R = (Ec. 5.32)
No hay equilibrio. La condición de mínimo se logra no teniendo energía en el resorte ni
en el tramo AB de la viga. El resultado (Ec. 5.32) sería correcto en el caso de tener un
empotramiento en el punto B que asegure el equilibrio.
Figura 5.21
δ
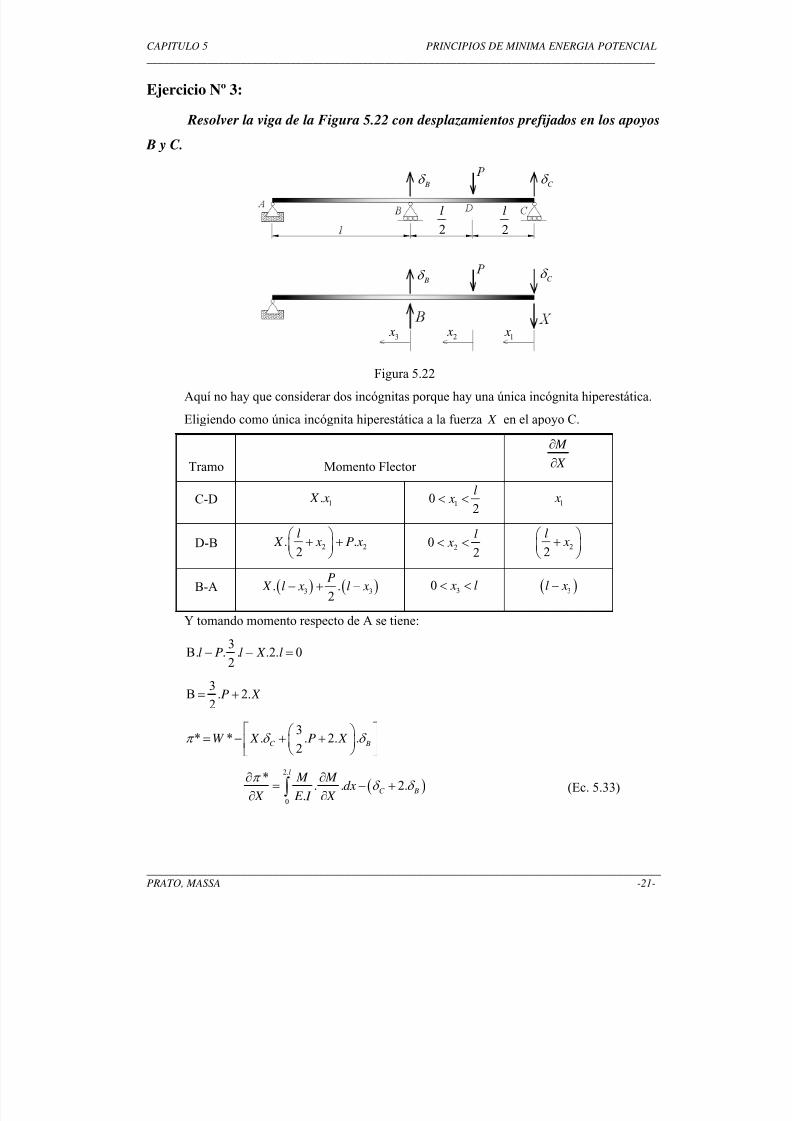
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 204/500
CAPITULO 5 PRINCIPIOS DE MINIMA ENERGIA POTENCIAL
____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -21-
Ejercicio Nº 3:
Resolver la viga de la Figura 5.22 con desplazamientos prefijados en los apoyos
B y C.
Figura 5.22
Aquí no hay que considerar dos incógnitas porque hay una única incógnita hiperestática.
Eligiendo como única incógnita hiperestática a la fuerza X en el apoyo C.
Tramo Momento Flector
M
X
∂
∂
C-D 1. X x 10
2l x< < 1 x
D-B 2 2. .2
l X x P x
⎛ ⎞+ +⎜ ⎟
⎝ ⎠
202
l x< < 2
2
l x
⎛ ⎞+⎜ ⎟
⎝ ⎠
B-A ( ) ( )3 3. .2
P X l x l x− + − 30 x l< < ( )3l x−
Y tomando momento respecto de A se tiene:
3B. . . .2. 02l P l X l− − =
3B . 2.
2P X = +
3* * . . 2. .
2C B
W X P X π δ δ ⎡ ⎤⎛ ⎞
= − + +⎜ ⎟⎢ ⎥⎝ ⎠⎣ ⎦
( )2.
0
*. . 2.
.
l
C B
M M dx
X E I X
π δ δ
∂ ∂= − +
∂ ∂∫ (Ec. 5.33)
2
l
2
l
Bδ C
δ
1 x2 x3 x
Bδ C
δ
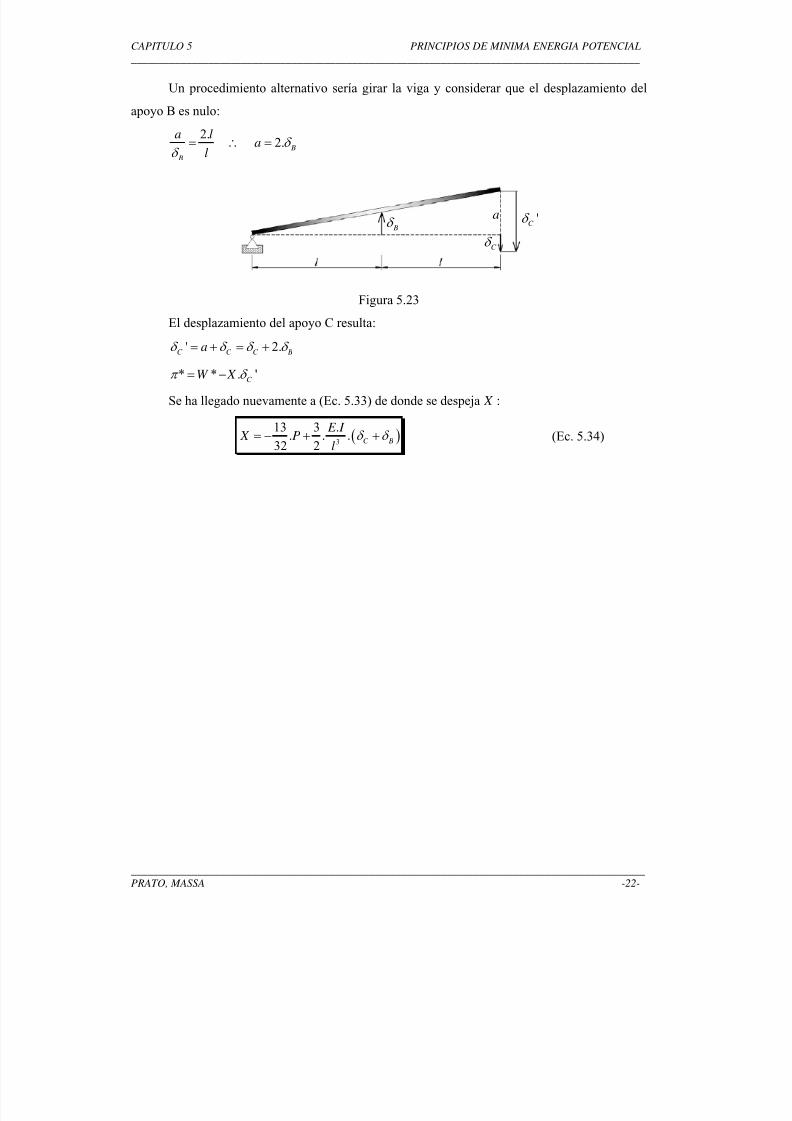
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 205/500
CAPITULO 5 PRINCIPIOS DE MINIMA ENERGIA POTENCIAL
____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -22-
Un procedimiento alternativo sería girar la viga y considerar que el desplazamiento del
apoyo B es nulo:
2.
B
a l
lδ = ∴ 2.
Ba δ =
Figura 5.23
El desplazamiento del apoyo C resulta:
' 2.C C C B
aδ δ δ δ = + = +
* * . 'C
W X π δ = −
Se ha llegado nuevamente a (Ec. 5.33) de donde se despeja X :
( )3
13 3 .. . .
32 2C B
E I X P
lδ δ = − + + (Ec. 5.34)
a B
δ
C δ
'C
δ
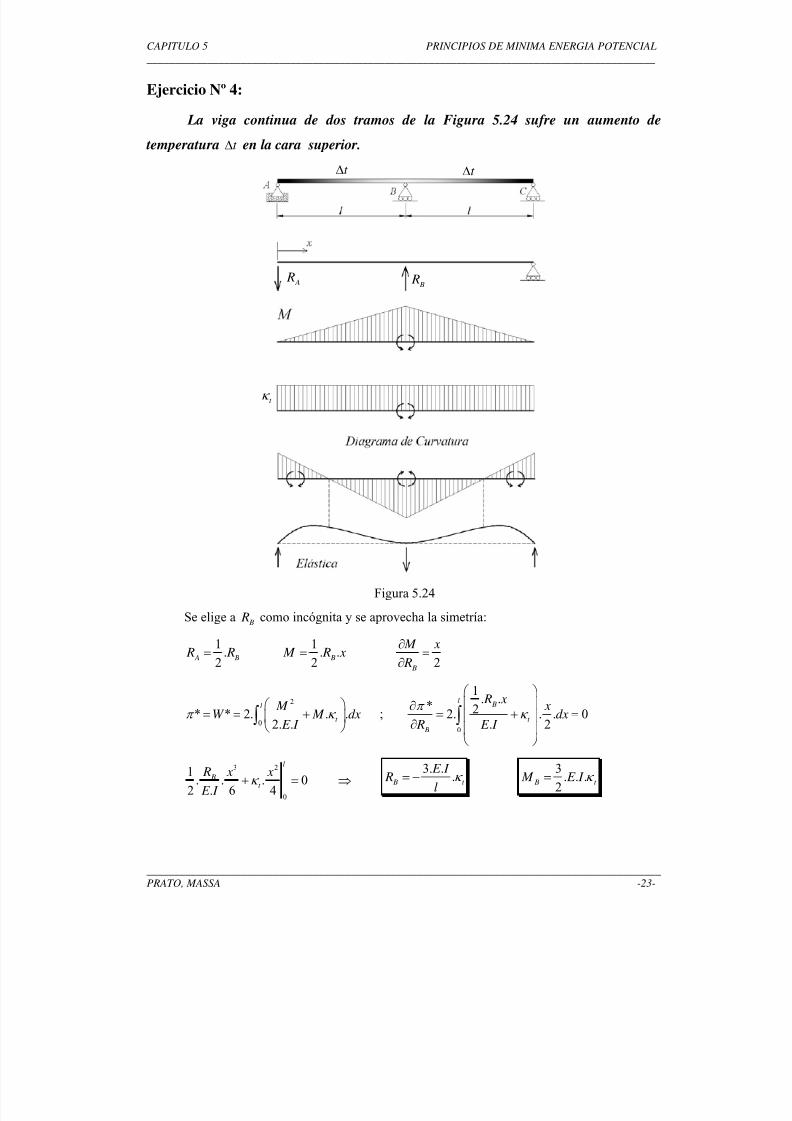
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 206/500
CAPITULO 5 PRINCIPIOS DE MINIMA ENERGIA POTENCIAL
____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -23-
Ejercicio Nº 4:
La viga continua de dos tramos de la Figura 5.24 sufre un aumento de
temperatura t ∆ en la cara superior.
Figura 5.24
Se elige a B
R como incógnita y se aprovecha la simetría:
1.2
A B R R= 1
. .2 B M R x= 2
B
M x
R
∂
=∂
2
0* * 2. . .
2. .
l
t
M W M dx
E I π κ
⎛ ⎞= = +⎜ ⎟
⎝ ⎠∫ ;
0
1. .
* 22. . . 0. 2
l B
t
B
R x x
dx R E I
π κ
⎛ ⎞⎜ ⎟∂
= + =⎜ ⎟∂ ⎜ ⎟
⎝ ⎠
∫
3 2
0
1. . . 0
2 . 6 4
l
Bt
R x x
E I κ + = ⇒
3. ..
B t
E I R
lκ = −
3. . .
2 B t
M E I κ =
t ∆ t ∆
A R B
R
t κ
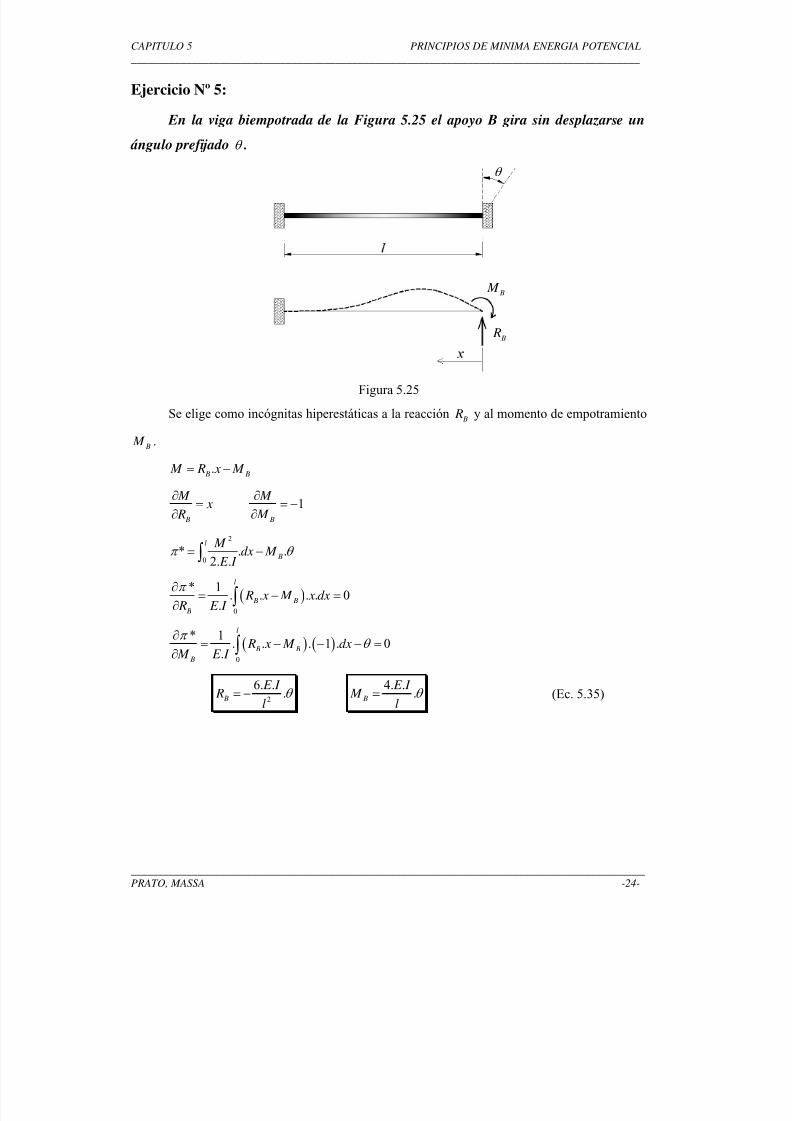
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 207/500
CAPITULO 5 PRINCIPIOS DE MINIMA ENERGIA POTENCIAL
____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -24-
Ejercicio Nº 5:
En la viga biempotrada de la Figura 5.25 el apoyo B gira sin desplazarse un
ángulo prefijado θ .
Figura 5.25
Se elige como incógnitas hiperestáticas a la reacción B
R y al momento de empotramiento
B M .
. B B
M R x M = −
B
M x
R
∂ =∂
1 B
M
M
∂ = −∂
2
0* . .
2. .
l
B
M dx M
E I π θ = −∫
( )0
* 1. . . . 0
.
l
B B
B
R x M x dx R E I
π ∂= − =
∂ ∫
( ) ( )0
* 1. . . 1 . 0
.
l
B B
B
R x M dx M E I
π θ
∂= − − − =
∂ ∫
2
6. ..
B
E I R
lθ = −
4. ..
B
E I M
lθ = (Ec. 5.35)
θ
B M
B R
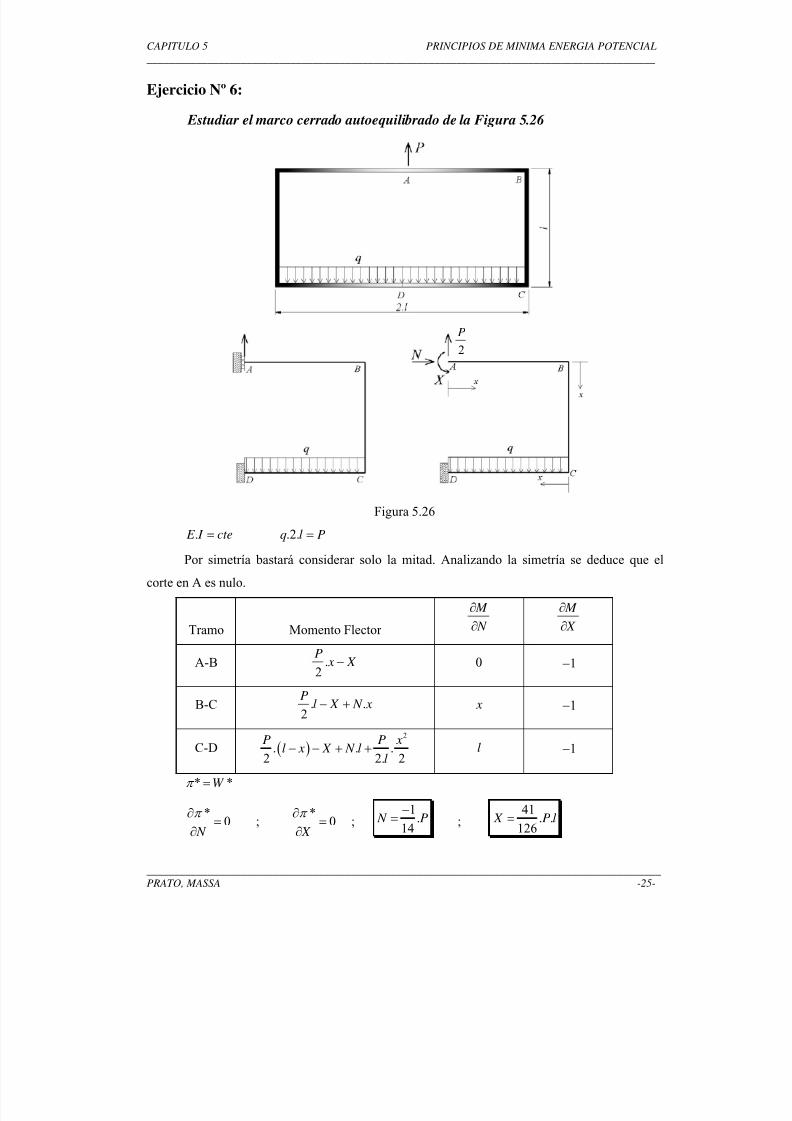
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 208/500
CAPITULO 5 PRINCIPIOS DE MINIMA ENERGIA POTENCIAL
____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -25-
Ejercicio Nº 6:
Estudiar el marco cerrado autoequilibrado de la Figura 5.26
Figura 5.26
. E I cte= .2.q l P=
Por simetría bastará considerar solo la mitad. Analizando la simetría se deduce que el
corte en A es nulo.
Tramo Momento Flector
M
N
∂
∂
M
X
∂
∂
A-B .2P x X − 0 1−
B-C . .2
Pl X N x− + x 1−
C-D ( )2
. . .2 2. 2
P P xl x X N l
l− − + + l 1−
* *W π =
* 0 N π ∂ =∂
; * 0 X π ∂ =∂
;1
.14
N P−
= ;41
. .126
X P l=
2
P
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 209/500
CAPITULO 6 ANALISIS ESTRUCTURAL
_____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -1-
Capítulo 6 Estados de carga, Combinaciones de carga,
Estados especiales de carga.
6.1- Estados básicos de carga
En este capítulo se analizan en primer lugar la definición de los distintos estados básicos
de carga que se considerarán en el diseño o verificación de la estructura, y en segunda instancia
las combinaciones de dichos estados de carga conformando lo que habitualmente se denominan
"Combinaciones de Cargas".
Se define como Estado Básico de Carga sobre una estructura al conjunto de todas las
cargas de igual naturaleza física que deben ser consideradas. Entre los estados de carga básicos
se incluye, por ejemplo, a las Cargas Gravitatorias (peso propio de la estructura y de los
elementos no estructurales), a las Cargas Útiles o Sobrecargas, Cargas de Viento, Cargas de
Sismo, Cargas o Efectos térmicos, Desplazamientos de Apoyos, y otras cargas específicas quepuede ser necesario tener en cuenta según la estructura, tales como Cargas de Frenado en los
puentes, Cargas de Muchedumbre en estadios y edificios públicos, etc.
Un Estado Básico de Carga se caracteriza por incluir todas las fuerzas exteriores de igual
naturaleza. Si bien es habitual aplicar el Principio de Superposición de los Efectos para el cálculo
de esfuerzos y deformaciones de estructuras de comportamiento lineal elástico, es necesario
tener en cuenta que a los efectos de definir la “Capacidad Resistente” de la estructura los Estados
Básicos de Carga deben ser “Combinados”, o sea sumados algebraicamente, teniendo en cuentala posibilidad que varios estados de carga básicos actúen simultáneamente.
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 210/500
CAPITULO 6 ANALISIS ESTRUCTURAL
_____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -2-
Los aspectos a tener en cuenta al analizar los estados de carga básicos son los siguientes:
1) Naturaleza física de las cargas
En función este criterio, las cargas pueden ser clasificadas en dos tipos:
- Cargas Principales, y
- Cargas Secundarias.
Las cargas gravitatorias (peso propio de la estructura y de los elementos no estructurales)
provienen de un potencial que es el Campo Gravitatorio. Estas cargas son tales que su intensidad
y dirección no dependen de las deformaciones que sufra la estructura para resistirlas. La cargas
de este tipo constituyen lo que a veces de denominan “Cargas Principales”.
Por otro lado están los estados básicos de carga que corresponden a deformaciones
impuestas (efectos térmicos, retracción de fragüe, cambios de humedad), a desplazamientos
impuestos (asentamientos diferenciales entre apoyos), o a esfuerzos de compatibilidad de
deformaciones. Este tipo de cargas se caracteriza en que los esfuerzos que ellas producen se
anulan si el sistema entra en fluencia o pierde rigidez. Estas cargas se denominan a veces
“Cargas Secundarias”. Está claro que si el sistema entra en fluencia por las cargas secundarias
el sistema no colapsa, mientras que el colapso sobreviene si las cargas principales superan las
necesarias para llegar a la fluencia.
2) Frecuencia de ocurrencia de las cargas
En función de este criterio, las cargas pueden ser clasificadas en:
- Cargas permanentes
- Cargas inusuales
- Cargas extremas
Las cargas gravitatorias, o las cargas de flujo inducidas por una corriente de agua sobre
una pila de puente pueden son consideradas cargas “Permanentes”.
Por el contrario, las cargas de viento de diseño no son permanentes, ya que su
probabilidad de ocurrencia es relativamente baja, al menos con los valores de velocidad de
viento típicamente adoptados para diseño. Si bien estas cargas pueden ser supuestas como cargas
provenientes de un potencial (es decir que no dependen de las deformaciones de la estructura), se
distinguen de aquellas (permanentes) en que su valor es en general muy variable en el tiempo y
la intensidad de diseño ocurre con períodos de recurrencia del orden de 20 a 50 años. Las cargas
de viento suelen ser consideradas como eventos “Inusuales”.
Las acciones sísmicas de diseño corresponden a eventos cuyo período de recurrencia es
de 200 a 400 años, y por lo tanto son consideradas cargas de tipo “Extremo”. Además de ladiferencia en los períodos de recurrencia del viento y del sismo, las acciones sísmicas no son
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 211/500
CAPITULO 6 ANALISIS ESTRUCTURAL
_____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -3-
estrictamente fuerzas exteriores sino desplazamientos impuestos por el movimiento de las
fundaciones. Estos movimientos son dinámicos, es decir ocurren con una amplitud y variación
en función del tiempo que deben ser definidos no sólo por la amplitud sino también por el
“contenido de frecuencias” del sismo.
3) Incertidumbres
Las incertidumbres en los valores de las cargas son tenidas en cuenta en el diseño a través
de los factores de carga.
Las incertidumbres en los valores de las cargas gravitatorias dependen de la variabilidad
de la densidad de los materiales (hormigones entre 2.25 y 2.40 t/m3) y de las dimensiones
geométricas. Estas variabilidades dependen de la calidad de la construcción y están normalmente
consideradas por los Reglamentos de Diseño asignando a cada tipo de carga un Factor de Carga
por el cual se debe multiplicar el valor nominal o teórico de la carga (y sus efectos, es decir sus
desplazamientos, esfuerzos internos y reacciones).
Los factores de carga suelen tomar valores próximos a la unidad, a veces mayores que 1 y
otras veces menores, según la combinación de carga considerada, y según la naturaleza e
incertidumbre de la carga. Por ejemplo, al peso propio de una estructura suele aplicársele un
factor de carga de entre 1,15 y 1,40. Los efectos térmicos (como estado básico de carga) suelen
estar afectados de un factor de carga próximo o igual a 1. A las cargas útiles de un puente
(vehículos carreteros y ferroviarios) suele asignárseles un factor de carga mayor que el peso
propio, por ejemplo 1,50, debido a la mayor variabilidad de dichas cargas.
Estos factores de carga forman parte de lo que tradicionalmente se designa como
“Coeficientes de Seguridad”. Los factores de carga dan una idea del margen de seguridad que se
adopta respecto a los valores nominales de las cargas. Sin embargo, los factores de carga son
sólo una parte de los Coeficientes de Seguridad.
6.2- Combinaciones de cargaLa Tabla 6.1 contiene los factores de carga adoptados en las combinaciones de carga para
diseño del Puente Principal de la Conexión Rosario-Victoria sobre el Río Paraná. El título de
esta tabla indica que los factores de carga dados corresponden a las distintas combinaciones de
carga a considerar en la “Verificación a Rotura” de las distintas partes de la estructura. El Estado
de Rotura se define como el estado de máxima resistencia o de agotamiento de la sección o
parte considerada, y suele también ser designado como Estado Límite Último.
Los estados de carga básicos están definidos como filas de la tabla, mientras que las
combinaciones de carga se indican, junto a los factores de carga, en las columnas de la tabla. Si
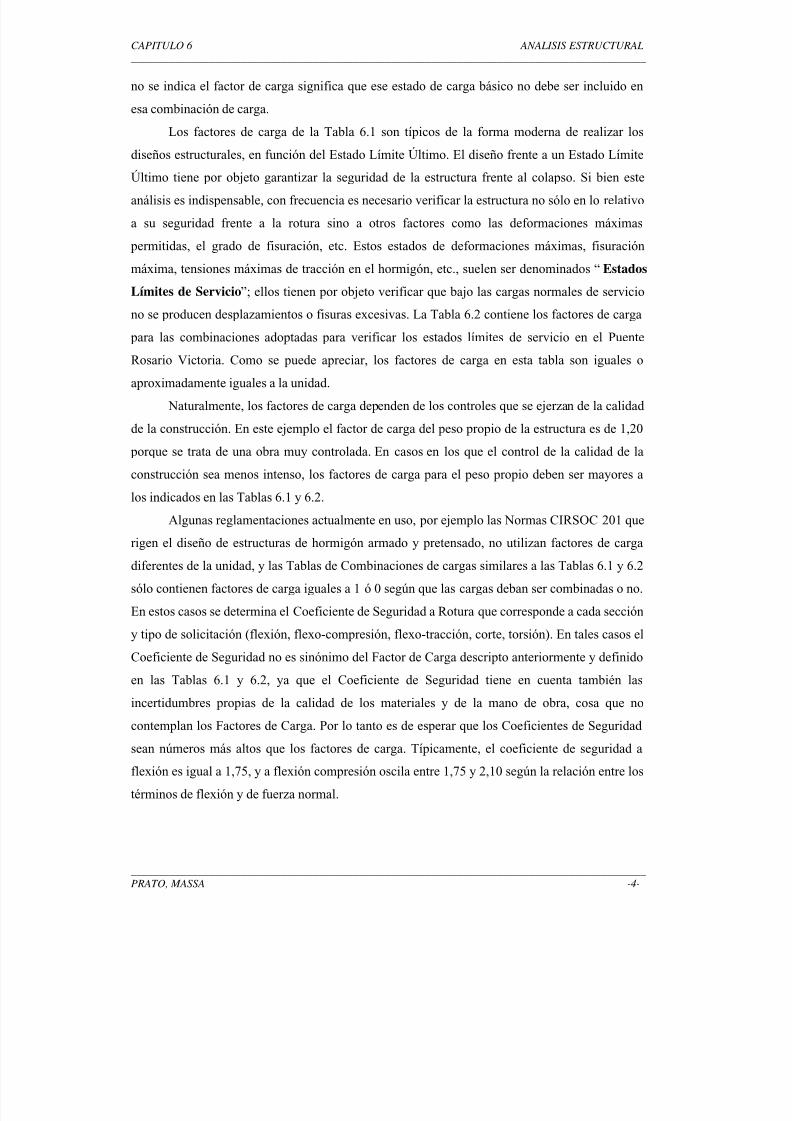
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 212/500
CAPITULO 6 ANALISIS ESTRUCTURAL
_____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -4-
no se indica el factor de carga significa que ese estado de carga básico no debe ser incluido en
esa combinación de carga.
Los factores de carga de la Tabla 6.1 son típicos de la forma moderna de realizar los
diseños estructurales, en función del Estado Límite Último. El diseño frente a un Estado Límite
Último tiene por objeto garantizar la seguridad de la estructura frente al colapso. Si bien este
análisis es indispensable, con frecuencia es necesario verificar la estructura no sólo en lo relativo
a su seguridad frente a la rotura sino a otros factores como las deformaciones máximas
permitidas, el grado de fisuración, etc. Estos estados de deformaciones máximas, fisuración
máxima, tensiones máximas de tracción en el hormigón, etc., suelen ser denominados “Estados
Límites de Servicio”; ellos tienen por objeto verificar que bajo las cargas normales de servicio
no se producen desplazamientos o fisuras excesivas. La Tabla 6.2 contiene los factores de carga
para las combinaciones adoptadas para verificar los estados límites de servicio en el Puente
Rosario Victoria. Como se puede apreciar, los factores de carga en esta tabla son iguales o
aproximadamente iguales a la unidad.
Naturalmente, los factores de carga dependen de los controles que se ejerzan de la calidad
de la construcción. En este ejemplo el factor de carga del peso propio de la estructura es de 1,20
porque se trata de una obra muy controlada. En casos en los que el control de la calidad de la
construcción sea menos intenso, los factores de carga para el peso propio deben ser mayores a
los indicados en las Tablas 6.1 y 6.2.
Algunas reglamentaciones actualmente en uso, por ejemplo las Normas CIRSOC 201 que
rigen el diseño de estructuras de hormigón armado y pretensado, no utilizan factores de carga
diferentes de la unidad, y las Tablas de Combinaciones de cargas similares a las Tablas 6.1 y 6.2
sólo contienen factores de carga iguales a 1 ó 0 según que las cargas deban ser combinadas o no.
En estos casos se determina el Coeficiente de Seguridad a Rotura que corresponde a cada sección
y tipo de solicitación (flexión, flexo-compresión, flexo-tracción, corte, torsión). En tales casos el
Coeficiente de Seguridad no es sinónimo del Factor de Carga descripto anteriormente y definido
en las Tablas 6.1 y 6.2, ya que el Coeficiente de Seguridad tiene en cuenta también las
incertidumbres propias de la calidad de los materiales y de la mano de obra, cosa que no
contemplan los Factores de Carga. Por lo tanto es de esperar que los Coeficientes de Seguridad
sean números más altos que los factores de carga. Típicamente, el coeficiente de seguridad a
flexión es igual a 1,75, y a flexión compresión oscila entre 1,75 y 2,10 según la relación entre los
términos de flexión y de fuerza normal.
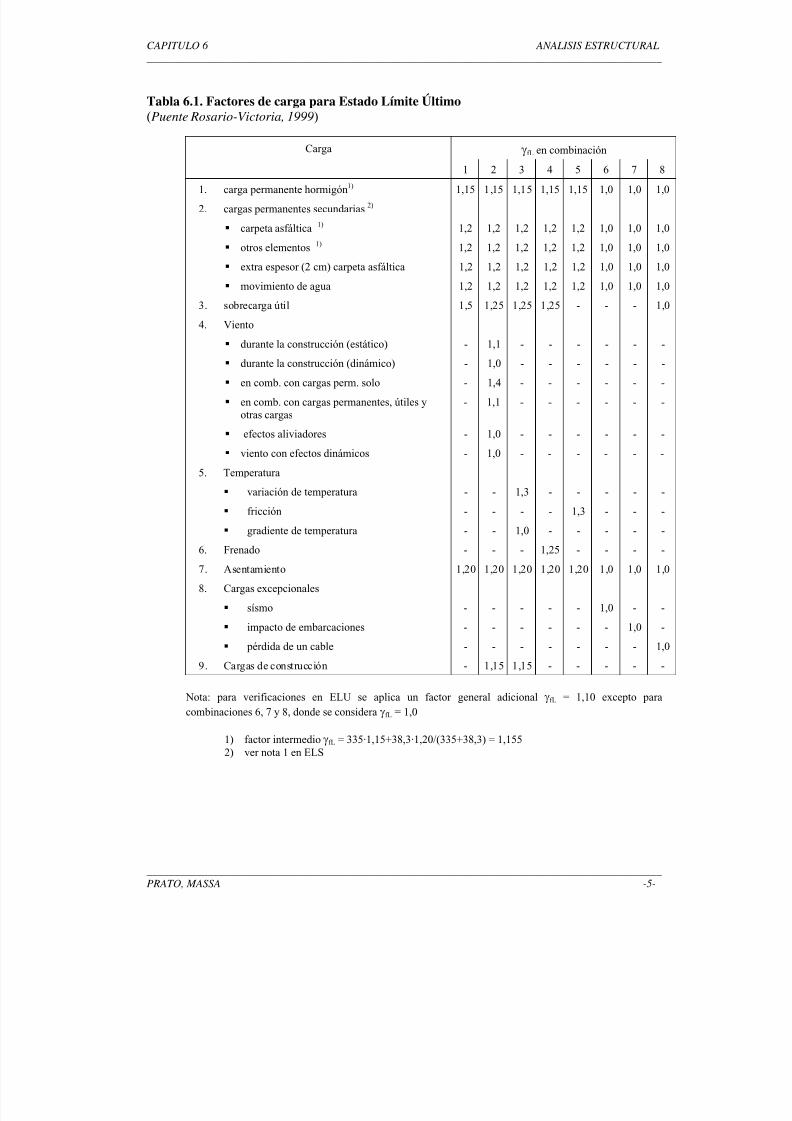
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 213/500
CAPITULO 6 ANALISIS ESTRUCTURAL
_____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -5-
Tabla 6.1. Factores de carga para Estado Límite Último(Puente Rosario-Victoria, 1999)
Carga γfL en combinación
1 2 3 4 5 6 7 8
1. carga permanente hormigón1) 1,15 1,15 1,15 1,15 1,15 1,0 1,0 1,0
2. cargas permanentes secundarias 2)
carpeta asfáltica 1) 1,2 1,2 1,2 1,2 1,2 1,0 1,0 1,0
otros elementos 1) 1,2 1,2 1,2 1,2 1,2 1,0 1,0 1,0
extra espesor (2 cm) carpeta asfáltica 1,2 1,2 1,2 1,2 1,2 1,0 1,0 1,0
movimiento de agua 1,2 1,2 1,2 1,2 1,2 1,0 1,0 1,0
3. sobrecarga útil 1,5 1,25 1,25 1,25 - - - 1,0
4. Viento durante la construcción (estático) - 1,1 - - - - - -
durante la construcción (dinámico) - 1,0 - - - - - -
en comb. con cargas perm. solo - 1,4 - - - - - -
en comb. con cargas permanentes, útiles yotras cargas
- 1,1 - - - - - -
efectos aliviadores - 1,0 - - - - - -
viento con efectos dinámicos - 1,0 - - - - - -
5. Temperatura
variación de temperatura - - 1,3 - - - - - fricción - - - - 1,3 - - -
gradiente de temperatura - - 1,0 - - - - -
6. Frenado - - - 1,25 - - - -
7. Asentamiento 1,20 1,20 1,20 1,20 1,20 1,0 1,0 1,0
8. Cargas excepcionales
sísmo - - - - - 1,0 - -
impacto de embarcaciones - - - - - - 1,0 -
pérdida de un cable - - - - - - - 1,0
9. Cargas de construcción - 1,15 1,15 - - - - -
Nota: para verificaciones en ELU se aplica un factor general adicional γfL = 1,10 excepto paracombinaciones 6, 7 y 8, donde se considera γfL = 1,0
1) factor intermedio γfL = 335·1,15+38,3·1,20/(335+38,3) = 1,1552) ver nota 1 en ELS
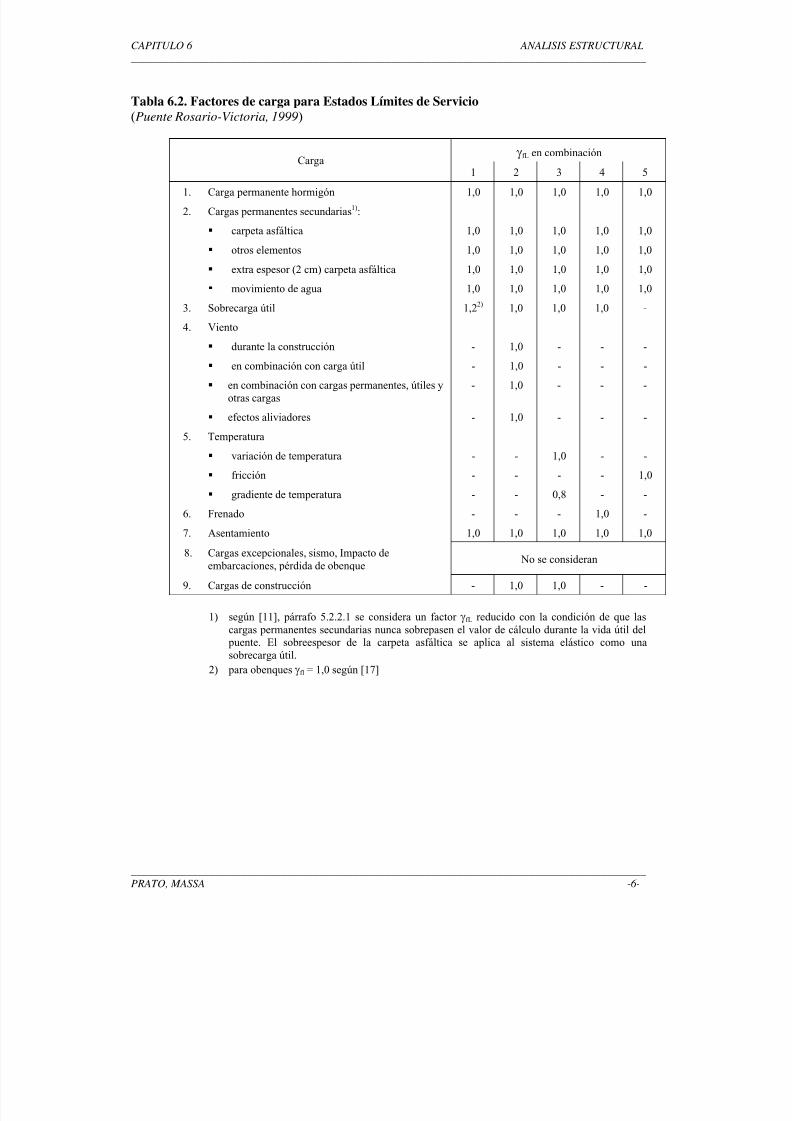
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 214/500
CAPITULO 6 ANALISIS ESTRUCTURAL
_____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -6-
Tabla 6.2. Factores de carga para Estados Límites de Servicio(Puente Rosario-Victoria, 1999)
γfL en combinación
Carga 1 2 3 4 5
1. Carga permanente hormigón 1,0 1,0 1,0 1,0 1,0
2. Cargas permanentes secundarias1):
carpeta asfáltica 1,0 1,0 1,0 1,0 1,0
otros elementos 1,0 1,0 1,0 1,0 1,0
extra espesor (2 cm) carpeta asfáltica 1,0 1,0 1,0 1,0 1,0
movimiento de agua 1,0 1,0 1,0 1,0 1,0
3. Sobrecarga útil 1,22) 1,0 1,0 1,0 -
4. Viento durante la construcción - 1,0 - - -
en combinación con carga útil - 1,0 - - -
en combinación con cargas permanentes, útiles yotras cargas
- 1,0 - - -
efectos aliviadores - 1,0 - - -
5. Temperatura
variación de temperatura - - 1,0 - -
fricción - - - - 1,0
gradiente de temperatura - - 0,8 - -
6. Frenado - - - 1,0 -
7. Asentamiento 1,0 1,0 1,0 1,0 1,0
8. Cargas excepcionales, sismo, Impacto deembarcaciones, pérdida de obenque
No se consideran
9. Cargas de construcción - 1,0 1,0 - -
1) según [11], párrafo 5.2.2.1 se considera un factor γfL reducido con la condición de que lascargas permanentes secundarias nunca sobrepasen el valor de cálculo durante la vida útil delpuente. El sobreespesor de la carpeta asfáltica se aplica al sistema elástico como una
sobrecarga útil.2) para obenques γfl = 1,0 según [17]
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 215/500
CAPITULO 6 ANALISIS ESTRUCTURAL
_____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -7-
6.3- Esfuerzos y deformaciones en vigas con cablespostensados
6.3.1. IntroducciónLa determinación de los esfuerzos y deformaciones en vigas y pórticos debidas a fuerzas
en cables postensados es un aspecto de especial importancia en el diseño de estructuras de
hormigón armado postensadas.
A diferencia de lo que ocurre con cargas que provienen de un campo potencial (peso
propio, acciones gravitatorias) las cargas sobre la estructura de hormigón generadas por la fuerza
axial en cables postensados son autoequilibradas; es decir, no requieren para su equilibrio de
reacciones exteriores. A pesar que no requieren reacciones para garantizar el equilibrio delsistema, en el caso que la estructura sea hiperestática pueden generarse reacciones para cumplir
con las condiciones de compatibilidad en los vínculos.
Los esfuerzos y deformaciones provocados por la fuerza axial en cables postensados
constituyen una clase especial de estados de carga en una estructura. Este tipo de solicitaciones
se analiza a veces estableciendo una analogía con los esfuerzos y deformaciones por acciones
térmicas, pero esta comparación debe hacerse con cuidado ya que las acciones térmicas no
producen esfuerzos si la estructura es isostática, mientras que las fuerzas de postensado producensolicitaciones distintas de cero en todos los casos, cualquiera sea la condición de sustentación o
de hiperestaticidad de la estructura.
Para comprender la mecánica involucrada en la determinación de los esfuerzos en las
estructuras de hormigón debidos al postensado en cables, es necesario tener en cuenta las
condiciones de equilibrio de un cable como se ilustra en la Figura 6.1.
Figura 6.1. Posición de un cable dentro de una viga de hormigón.
La ecuación diferencial del equilibrio del cable surge de plantear la ecuación de equilibrio
de fuerzas en la dirección normal al eje del cable. La premisa básica en esta formulación es que
el cable no tiene rigidez flexional apreciable, por lo cual los momentos flectores en el cable son
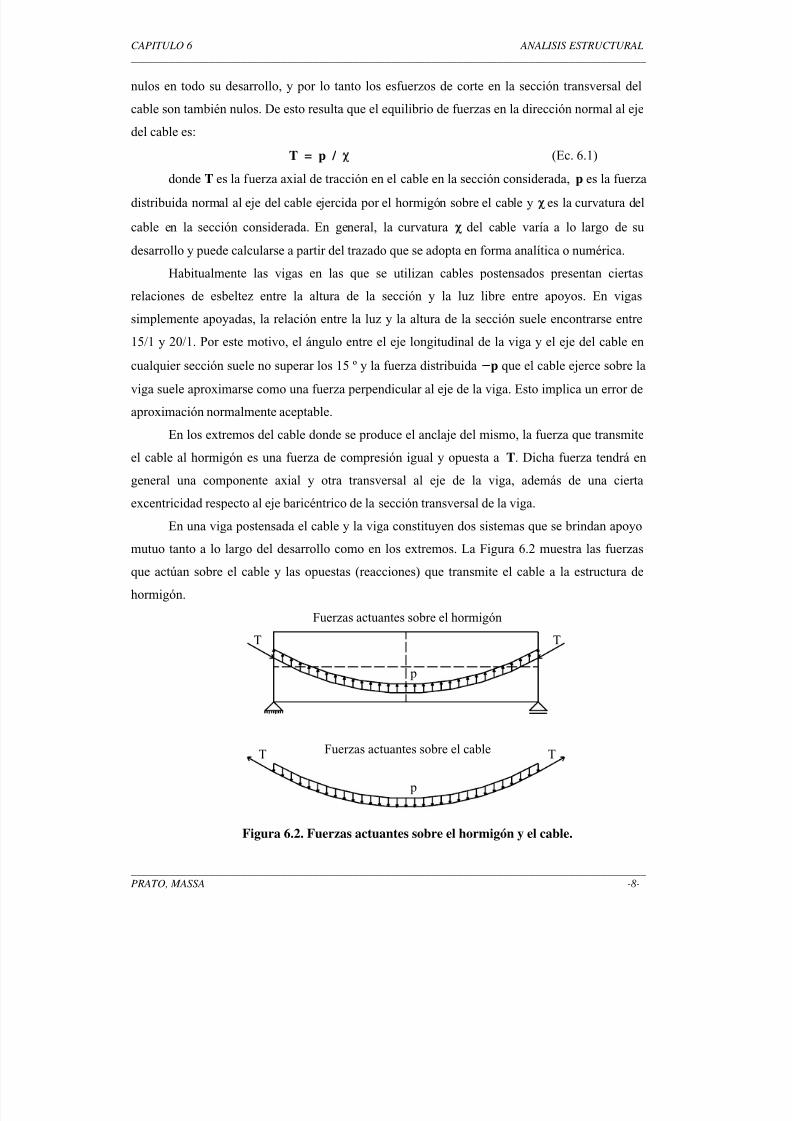
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 216/500
CAPITULO 6 ANALISIS ESTRUCTURAL
_____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -8-
nulos en todo su desarrollo, y por lo tanto los esfuerzos de corte en la sección transversal del
cable son también nulos. De esto resulta que el equilibrio de fuerzas en la dirección normal al eje
del cable es:
T = p / χ (Ec. 6.1)
donde T es la fuerza axial de tracción en el cable en la sección considerada, p es la fuerza
distribuida normal al eje del cable ejercida por el hormigón sobre el cable y χ es la curvatura del
cable en la sección considerada. En general, la curvatura χ del cable varía a lo largo de su
desarrollo y puede calcularse a partir del trazado que se adopta en forma analítica o numérica.
Habitualmente las vigas en las que se utilizan cables postensados presentan ciertas
relaciones de esbeltez entre la altura de la sección y la luz libre entre apoyos. En vigas
simplemente apoyadas, la relación entre la luz y la altura de la sección suele encontrarse entre
15/1 y 20/1. Por este motivo, el ángulo entre el eje longitudinal de la viga y el eje del cable en
cualquier sección suele no superar los 15 º y la fuerza distribuida −p que el cable ejerce sobre la
viga suele aproximarse como una fuerza perpendicular al eje de la viga. Esto implica un error de
aproximación normalmente aceptable.
En los extremos del cable donde se produce el anclaje del mismo, la fuerza que transmite
el cable al hormigón es una fuerza de compresión igual y opuesta a T. Dicha fuerza tendrá en
general una componente axial y otra transversal al eje de la viga, además de una cierta
excentricidad respecto al eje baricéntrico de la sección transversal de la viga.
En una viga postensada el cable y la viga constituyen dos sistemas que se brindan apoyo
mutuo tanto a lo largo del desarrollo como en los extremos. La Figura 6.2 muestra las fuerzas
que actúan sobre el cable y las opuestas (reacciones) que transmite el cable a la estructura de
hormigón.
p
p
TT
T TFuerzas actuantes sobre el cable
Fuerzas actuantes sobre el hormigón
Figura 6.2. Fuerzas actuantes sobre el hormigón y el cable.
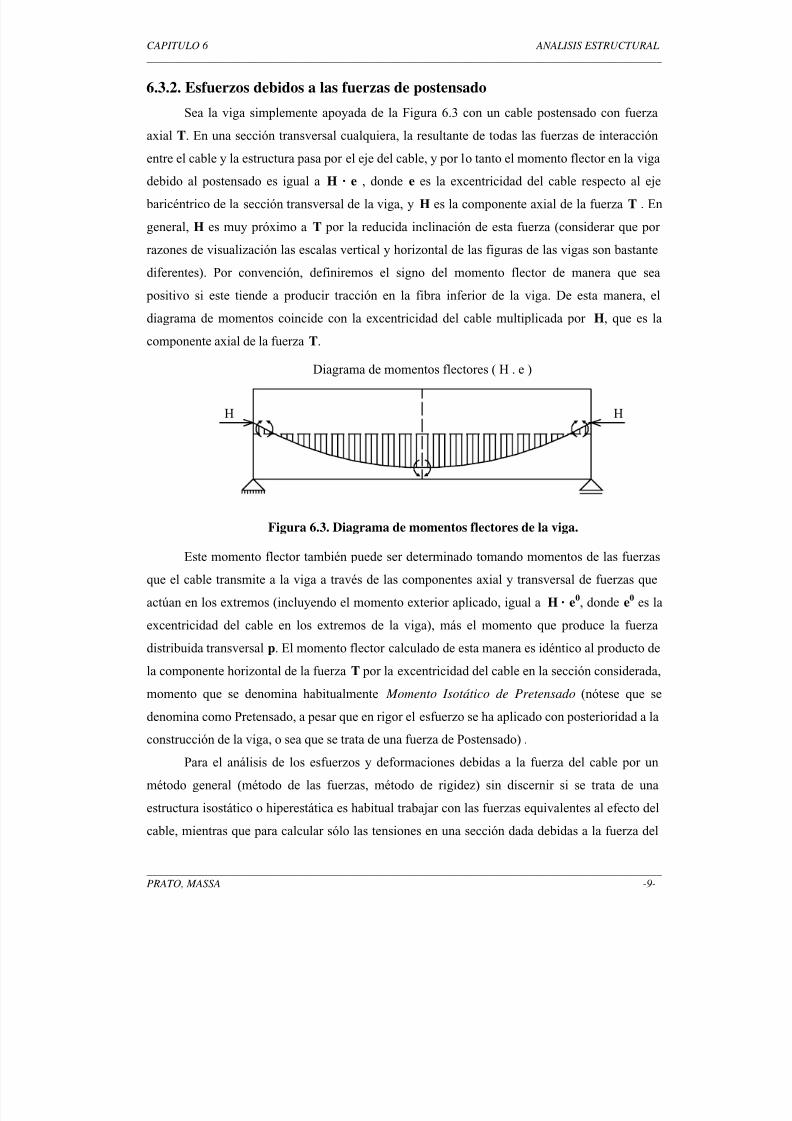
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 217/500
CAPITULO 6 ANALISIS ESTRUCTURAL
_____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -9-
6.3.2. Esfuerzos debidos a las fuerzas de postensado
Sea la viga simplemente apoyada de la Figura 6.3 con un cable postensado con fuerza
axial T. En una sección transversal cualquiera, la resultante de todas las fuerzas de interacción
entre el cable y la estructura pasa por el eje del cable, y por lo tanto el momento flector en la vigadebido al postensado es igual a H · e , donde e es la excentricidad del cable respecto al eje
baricéntrico de la sección transversal de la viga, y H es la componente axial de la fuerza T . En
general, H es muy próximo a T por la reducida inclinación de esta fuerza (considerar que por
razones de visualización las escalas vertical y horizontal de las figuras de las vigas son bastante
diferentes). Por convención, definiremos el signo del momento flector de manera que sea
positivo si este tiende a producir tracción en la fibra inferior de la viga. De esta manera, el
diagrama de momentos coincide con la excentricidad del cable multiplicada por H, que es la
componente axial de la fuerza T.
HH
Diagrama de momentos flectores ( H . e )
Figura 6.3. Diagrama de momentos flectores de la viga.
Este momento flector también puede ser determinado tomando momentos de las fuerzas
que el cable transmite a la viga a través de las componentes axial y transversal de fuerzas que
actúan en los extremos (incluyendo el momento exterior aplicado, igual a H · e0, donde e0 es la
excentricidad del cable en los extremos de la viga), más el momento que produce la fuerza
distribuida transversal p. El momento flector calculado de esta manera es idéntico al producto dela componente horizontal de la fuerza T por la excentricidad del cable en la sección considerada,
momento que se denomina habitualmente Momento Isotático de Pretensado (nótese que se
denomina como Pretensado, a pesar que en rigor el esfuerzo se ha aplicado con posterioridad a la
construcción de la viga, o sea que se trata de una fuerza de Postensado) .
Para el análisis de los esfuerzos y deformaciones debidas a la fuerza del cable por un
método general (método de las fuerzas, método de rigidez) sin discernir si se trata de una
estructura isostático o hiperestática es habitual trabajar con las fuerzas equivalentes al efecto del
cable, mientras que para calcular sólo las tensiones en una sección dada debidas a la fuerza del
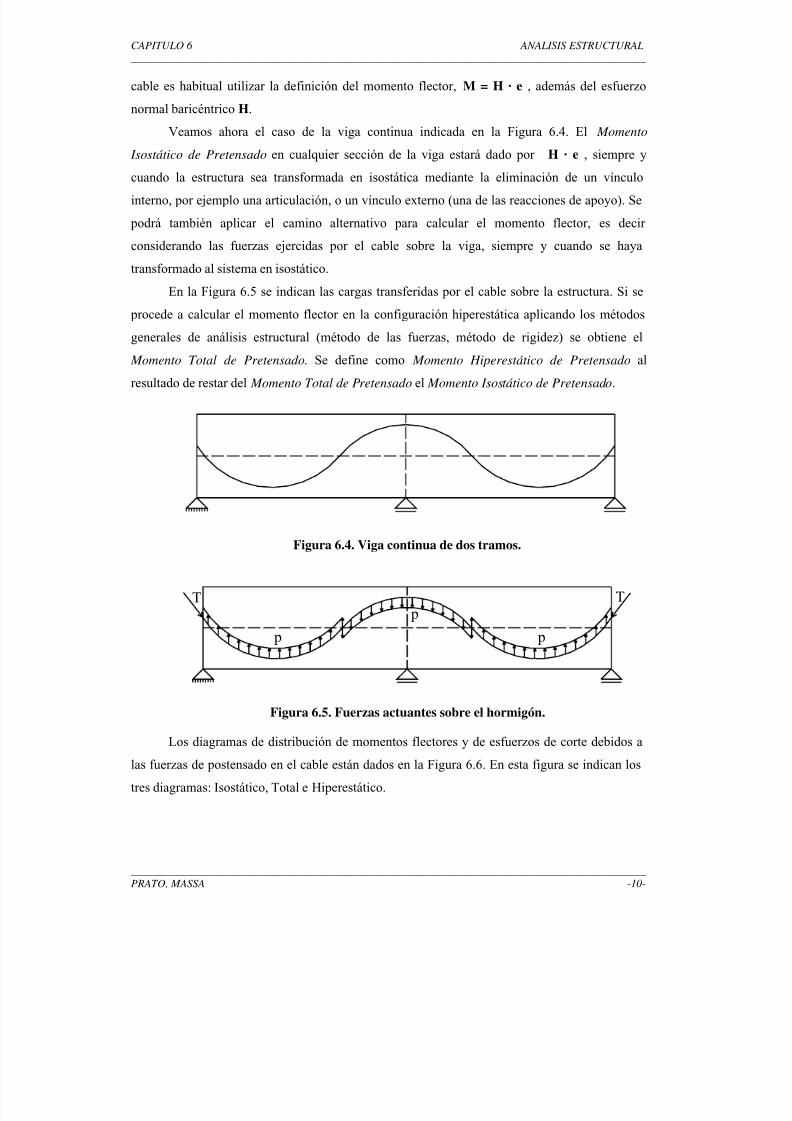
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 218/500
CAPITULO 6 ANALISIS ESTRUCTURAL
_____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -10-
cable es habitual utilizar la definición del momento flector, M = H · e , además del esfuerzo
normal baricéntrico H.
Veamos ahora el caso de la viga continua indicada en la Figura 6.4. El Momento
Isostático de Pretensado en cualquier sección de la viga estará dado por H · e , siempre y
cuando la estructura sea transformada en isostática mediante la eliminación de un vínculo
interno, por ejemplo una articulación, o un vínculo externo (una de las reacciones de apoyo). Se
podrá también aplicar el camino alternativo para calcular el momento flector, es decir
considerando las fuerzas ejercidas por el cable sobre la viga, siempre y cuando se haya
transformado al sistema en isostático.
En la Figura 6.5 se indican las cargas transferidas por el cable sobre la estructura. Si se
procede a calcular el momento flector en la configuración hiperestática aplicando los métodos
generales de análisis estructural (método de las fuerzas, método de rigidez) se obtiene el
Momento Total de Pretensado. Se define como Momento Hiperestático de Pretensado al
resultado de restar del Momento Total de Pretensado el Momento Isostático de Pretensado.
Figura 6.4. Viga continua de dos tramos.
T T
pp
p
Figura 6.5. Fuerzas actuantes sobre el hormigón.
Los diagramas de distribución de momentos flectores y de esfuerzos de corte debidos a
las fuerzas de postensado en el cable están dados en la Figura 6.6. En esta figura se indican los
tres diagramas: Isostático, Total e Hiperestático.
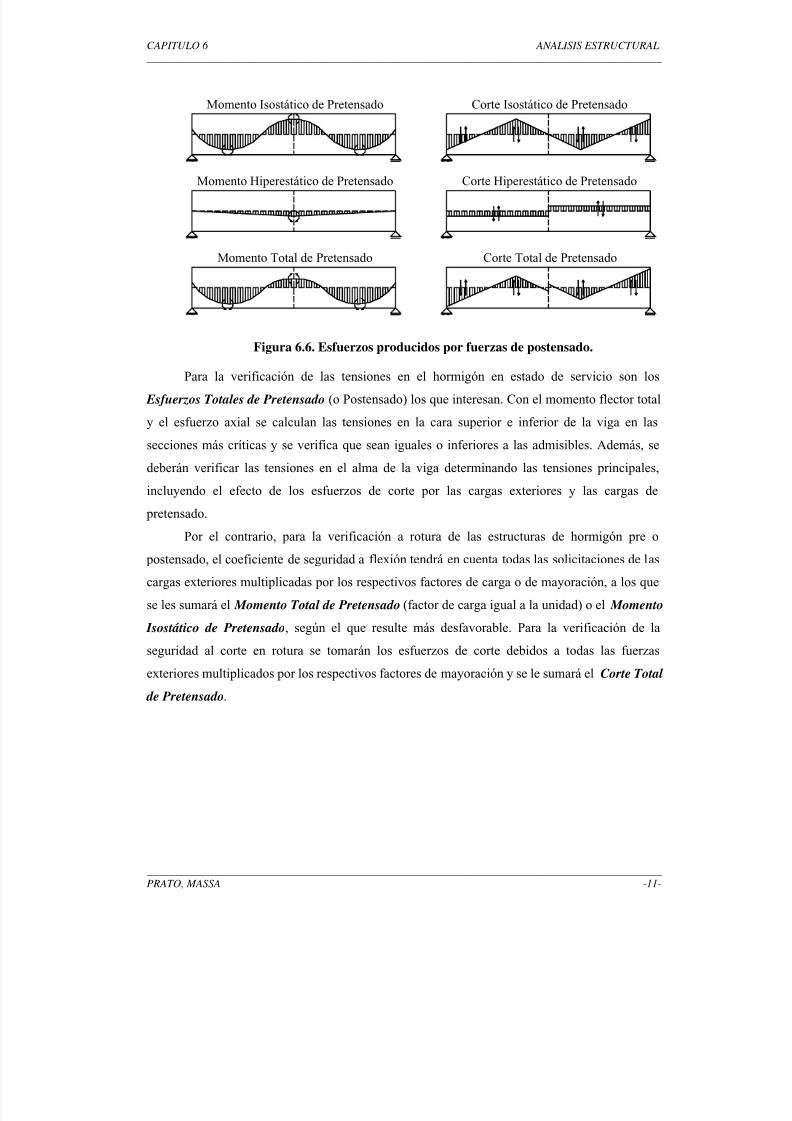
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 219/500
CAPITULO 6 ANALISIS ESTRUCTURAL
_____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -11-
Momento Hiperestático de Pretensado
Momento Isostático de Pretensado
Momento Total de Pretensado Corte Total de Pretensado
Corte Hiperestático de Pretensado
Corte Isostático de Pretensado
Figura 6.6. Esfuerzos producidos por fuerzas de postensado.
Para la verificación de las tensiones en el hormigón en estado de servicio son los
Esfuerzos Totales de Pretensado (o Postensado) los que interesan. Con el momento flector total
y el esfuerzo axial se calculan las tensiones en la cara superior e inferior de la viga en las
secciones más críticas y se verifica que sean iguales o inferiores a las admisibles. Además, se
deberán verificar las tensiones en el alma de la viga determinando las tensiones principales,
incluyendo el efecto de los esfuerzos de corte por las cargas exteriores y las cargas depretensado.
Por el contrario, para la verificación a rotura de las estructuras de hormigón pre o
postensado, el coeficiente de seguridad a flexión tendrá en cuenta todas las solicitaciones de las
cargas exteriores multiplicadas por los respectivos factores de carga o de mayoración, a los que
se les sumará el Momento Total de Pretensado (factor de carga igual a la unidad) o el Momento
Isostático de Pretensado, según el que resulte más desfavorable. Para la verificación de la
seguridad al corte en rotura se tomarán los esfuerzos de corte debidos a todas las fuerzasexteriores multiplicados por los respectivos factores de mayoración y se le sumará el Corte Total
de Pretensado.
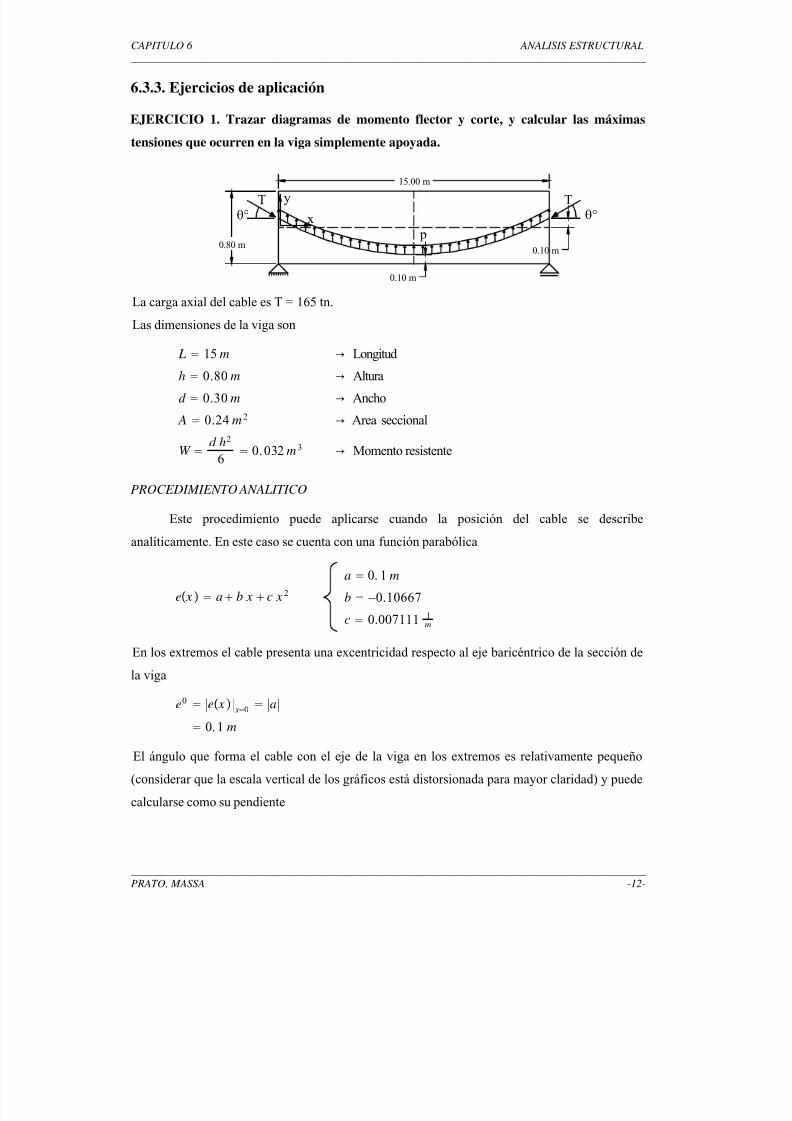
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 220/500
CAPITULO 6 ANALISIS ESTRUCTURAL
_____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -12-
6.3.3. Ejercicios de aplicación
EJERCICIO 1. Trazar diagramas de momento flector y corte, y calcular las máximas
tensiones que ocurren en la viga simplemente apoyada.
p
TTθ°θ°
15.00 m
0.80 m0.10 m
0.10 m
y
x
La carga axial del cable es T = 165 tn.
Las dimensiones de la viga son
L 15 m → Longitud
h 0.80 m → Altura
d 0.30 m → Ancho
A 0.24 m2→ Area seccional
W d h2
6 0.032 m3
→ Momento resistente
PROCEDIMIENTO ANALITICO
Este procedimiento puede aplicarse cuando la posición del cable se describe
analíticamente. En este caso se cuenta con una función parabólica
e x a b x c x 2
a 0.1 m
b −0.10667
c 0.007111 1m
En los extremos el cable presenta una excentricidad respecto al eje baricéntrico de la sección dela viga
e0 |e x| x0 |a|
0.1 m
El ángulo que forma el cable con el eje de la viga en los extremos es relativamente pequeño
(considerar que la escala vertical de los gráficos está distorsionada para mayor claridad) y puede
calcularse como su pendiente
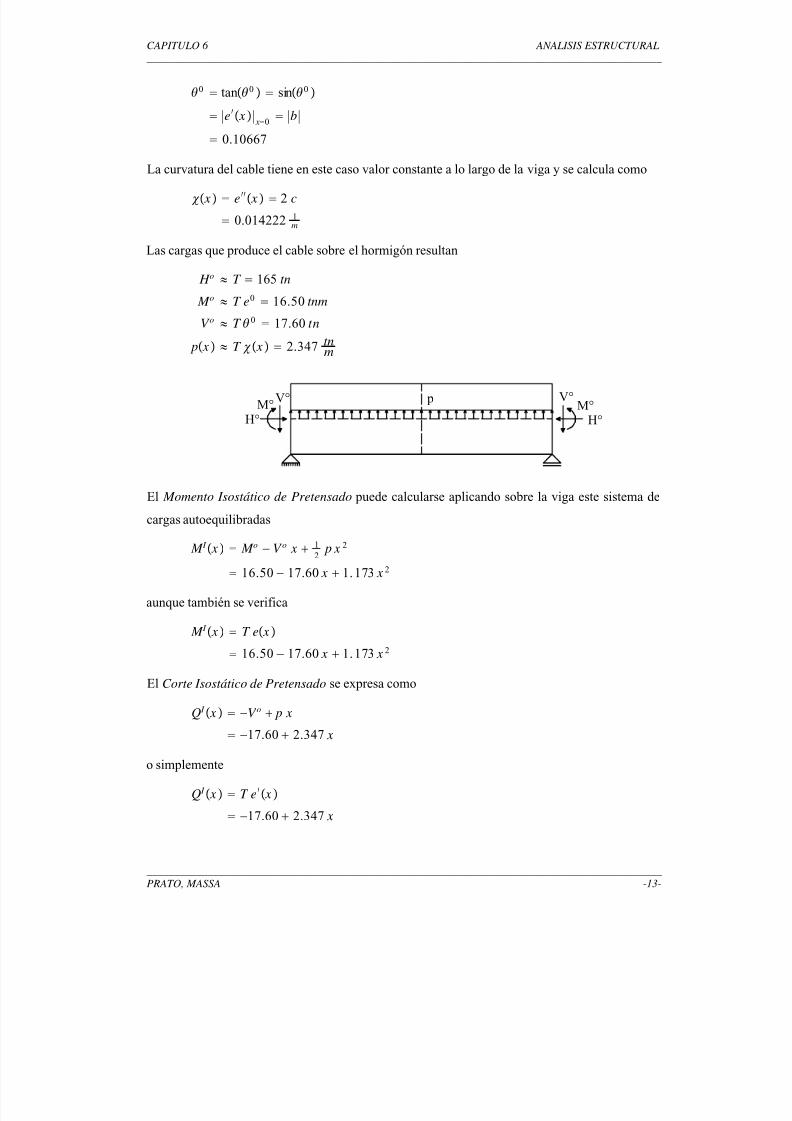
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 221/500
CAPITULO 6 ANALISIS ESTRUCTURAL
_____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -13-
0 tan0 sin0
|e′ x| x0
|b|
0.10667
La curvatura del cable tiene en este caso valor constante a lo largo de la viga y se calcula como
x e′′ x 2 c
0.014222 1m
Las cargas que produce el cable sobre el hormigón resultan
H o ≈ T 165 tn
M o ≈ T e0 16.50 tnm
V o≈
T 0
17.60 tn
p x ≈ T x 2.347 tnm
pM°
H°
V°M°
V°
H°
El Momento Isostático de Pretensado puede calcularse aplicando sobre la viga este sistema de
cargas autoequilibradas
M I x M o − V o x 1
2p x 2
16.50 − 17.60 x 1.173 x 2
aunque también se verifica
M I x T e x
16.50 − 17.60 x 1.173 x 2
El Corte Isostático de Pretensado se expresa como
Q I x −V o p x
−17.60 2.347 x
o simplemente
Q I x T e′ x
−17.60 2.347 x

5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 222/500
CAPITULO 6 ANALISIS ESTRUCTURAL
_____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -14-
Mom ento Isostático de Pretensado
49.50 tnm
Corte Isostático de Pretensado
16.50 tnm16.50 tnm
17.60 tn
17.60 tn
Las tensiones que se calculan a continuación corresponden sólo a las cargas de postensado en el
estado de servicio. Las máximas tensiones de compresión ocurren en la sección central
maxC −
M max
W −
H o
A
−1547 tn
m2− 687 tn
m2
−2234 tn
m2
al igual que las máximas tensiones de tracción
maxT
M max
W −
H o
A
1547 tnm2
− 687 tnm2
860 tn
m2
Las máximas tensiones cortantes se encuentran en las secciones de los extremos
max 32
Qmax
d h
32
17.600.30 0.80
110 tn
m2
PROCEDIMIENTO NUMERICO
Comunmente la posición del cable se describe en forma discreta para coordenadas
equidistantes de la viga (primeras 2 columnas de Tabla 6.3). La geometría del cable puede
entonces asumirse como una poligonal con cargas concentradas ( P i ) actuando sobre el
hormigón en nudos con una separación Δ x .

5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 223/500
CAPITULO 6 ANALISIS ESTRUCTURAL
_____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -15-
T T TT T
T
Pi-1
Pi
Pi+1
TnP
∆x ∆x
La pendiente del cable (3ra columna) se calcula para nudos intermedios como
i1
2 ei1
− ei
Δ x
Las cargas sobre el hormigón a través de la vaina (4ta columna) se obtienen como la diferenciaentre las proyecciones verticales de la fuerza del cable a ambos lados del nudo considerado
P i T i
1
2 − T i− 1
2
El Corte Isostático de Pretensado (5ta columna) se calcula para nudos intermedios como el
producto entre la carga y la pendiente del cable
Q I
i1
2 T i1
2
mientras que el Momento Isostático de Pretensado (6ta columna) resulta de multiplicar la cargay la excentricidad del cable
M I i
T ei
Los diagramas de esfuerzos resultan aproximadamente idénticos a los obtenidos con el
procedimiento analítico. Las tensiones máximas se calculan en forma análoga una vez
identificadas las secciones críticas. Notar que realizando el cociente entre P i y Δ x se obtiene
la carga uniformemente distribuida antes utilizada.
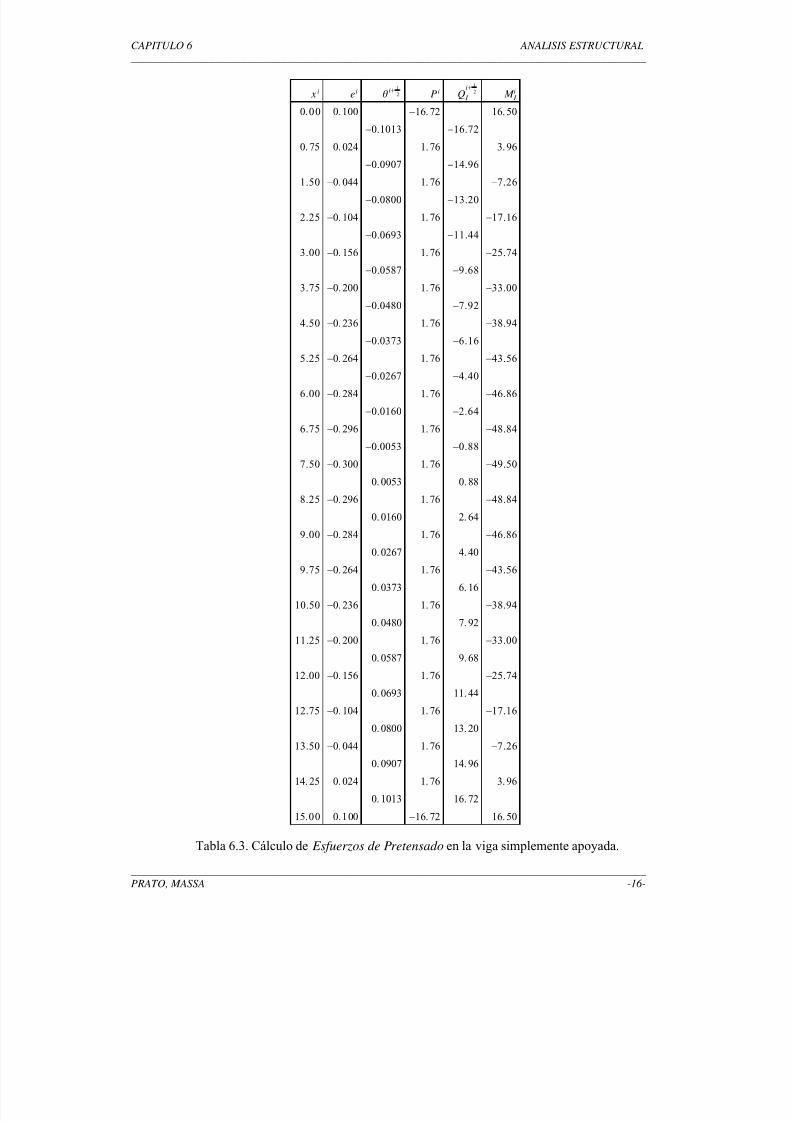
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 224/500
CAPITULO 6 ANALISIS ESTRUCTURAL
_____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -16-
x i ei i1
2 P i Q I
i1
2 M I i
0.00 0.100 −16.72 16.50
−0.1013 −16.72
0. 75 0.024 1.76 3.96
−0.0907 −14.96
1.50 −0.044 1.76 −7.26
−0.0800 −13.20
2.25 −0.104 1.76 −17.16
−0.0693 −11.44
3.00 −0.156 1.76 −25.74
−0.0587 −9.68
3.75 −0.200 1.76 −33.00
−0.0480 −7.92
4.50 −0.236 1.76 −38.94−0.0373 −6.16
5.25 −0.264 1.76 −43.56
−0.0267 −4.40
6.00 −0.284 1.76 −46.86
−0.0160 −2.64
6.75 −0.296 1.76 −48.84
−0.0053 −0.88
7.50 −0.300 1.76 −49.50
0. 0053 0. 88
8.25 −0.296 1.76 −48.84
0. 0160 2. 64
9.00 −0.284 1.76 −46.86
0. 0267 4. 40
9.75 −0.264 1.76 −43.56
0. 0373 6. 16
10.50 −0.236 1.76 −38.94
0. 0480 7. 92
11.25 −0.200 1.76 −33.00
0. 0587 9. 68
12.00 −0.156 1.76 −25.74
0. 0693 11. 44
12.75 −0.104 1.76 −17.16
0. 0800 13. 20
13.50 −0.044 1.76 −7.26
0. 0907 14. 96
14. 25 0.024 1.76 3.96
0. 1013 16. 72
15.00 0.100 −16.72 16.50
Tabla 6.3. Cálculo de Esfuerzos de Pretensado en la viga simplemente apoyada.
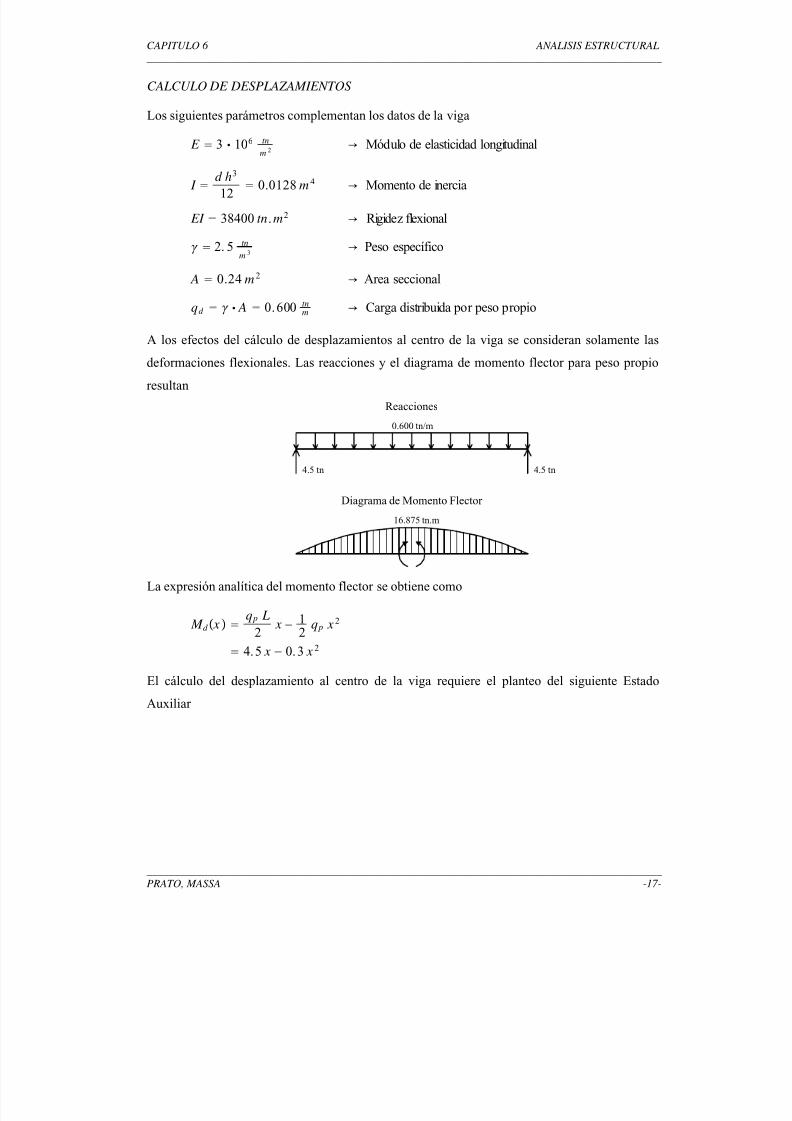
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 225/500
CAPITULO 6 ANALISIS ESTRUCTURAL
_____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -17-
CALCULO DE DESPLAZAMIENTOS
Los siguientes parámetros complementan los datos de la viga
E 3 106 tn
m 2 → Módulo de elasticidad longitudinal
I d h3
12 0.0128 m4
→ Momento de inercia
EI 38400 tn. m2→ Rigidez flexional
2.5 tn
m 3→ Peso específico
A 0.24 m2→ Area seccional
qd A 0.600 tnm → Carga distribuida por peso propio
A los efectos del cálculo de desplazamientos al centro de la viga se consideran solamente las
deformaciones flexionales. Las reacciones y el diagrama de momento flector para peso propio
resultan
0.600 tn/m
4.5 tn 4.5 tn
Reacciones
Diagrama de Momento Flector
16.875 tn.m
La expresión analítica del momento flector se obtiene como
M d x q p L
2x − 1
2q p x 2
4.5 x − 0.3 x2
El cálculo del desplazamiento al centro de la viga requiere el planteo del siguiente Estado
Auxiliar

5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 226/500
CAPITULO 6 ANALISIS ESTRUCTURAL
_____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -18-
1 tn
0.5 tn 0.5 tn
Reacciones
Diagrama de Momento Flector
3.75 tnm
El momento flector puede expresarse analíticamente como
M x
−0.5 x para 0 x 7.5
−3.75 0.5 x − 7.5 para 7.5 x 15
La flecha producida por el peso propio resulta entonces
d 2
EI
0
7.5
M d x M x dx
2
EI
0
7.5
4.5 x − 0.3 x 2 −0.5 x dx
1
EI
0
7.5
−4.5 x 2 0.3 x 3 dx
1
EI −4.5 x 3
3 0.3 x 4
4 0
7.5
−0.0103 m
La expresión analítica del momento flector para el caso del efecto de postensado se reescribe a
continuación
M p x 16.50 − 17.60 x 1.173 x 2
La contraflecha producida por el cable de postensado se obtiene como
p 2
EI
0
7.5
M p x M x dx
2
EI
0
7.5
16.50 − 17.60 x 1.173 x 2 −0.5 x dx
1
EI
0
7.5
−16.50 x 17.60 x 2 − 1.173 x 3 dx
1
EI −16.50 x 2
2 17.60 x 3
3− 1.173 x 4
4 0
7.5
0.0282 m

5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 227/500
CAPITULO 6 ANALISIS ESTRUCTURAL
_____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -19-
De esta forma el desplazamiento total al centro de la viga resulta
d p
−0.0103 m 0.0282 m
0.0179 m La fuerza necesaria en el cable para compensar el desplazamiento producido por el peso propio
en el centro de la viga se calcula como se indica a continuación. La expresión analítica del
momento flector producido por una fuerza genérica T del cable de postensado es la siguiente
M pT x T e x
T 0.1 − 0.10667 x 0.007111 x 2
La contraflecha producida por la fuerza T se calcula como
pT
2
EI
0
7.5 M p
T x M x dx
2
EI T
0
7.50.1 − 0.10667 x 0.007111 x 2 −0.5 x dx
T
EI
0
7.5−0.1 x 0.10667 x 2 − 0.007111 x 3 dx
T
EI −0.1 x 2
2 0.10667 x 3
3− 0.007111 x 4
4 0
7.5
0.0001709 T
Si se impone la condición que el desplazamiento total sea nulo
d pT 0
− 0.0103 0.0001709 T 0
se obtiene la fuerza de postensado necesaria para contrarrestar la flecha producida por el peso
propio
T 0.01030.0001709
60.27 tn
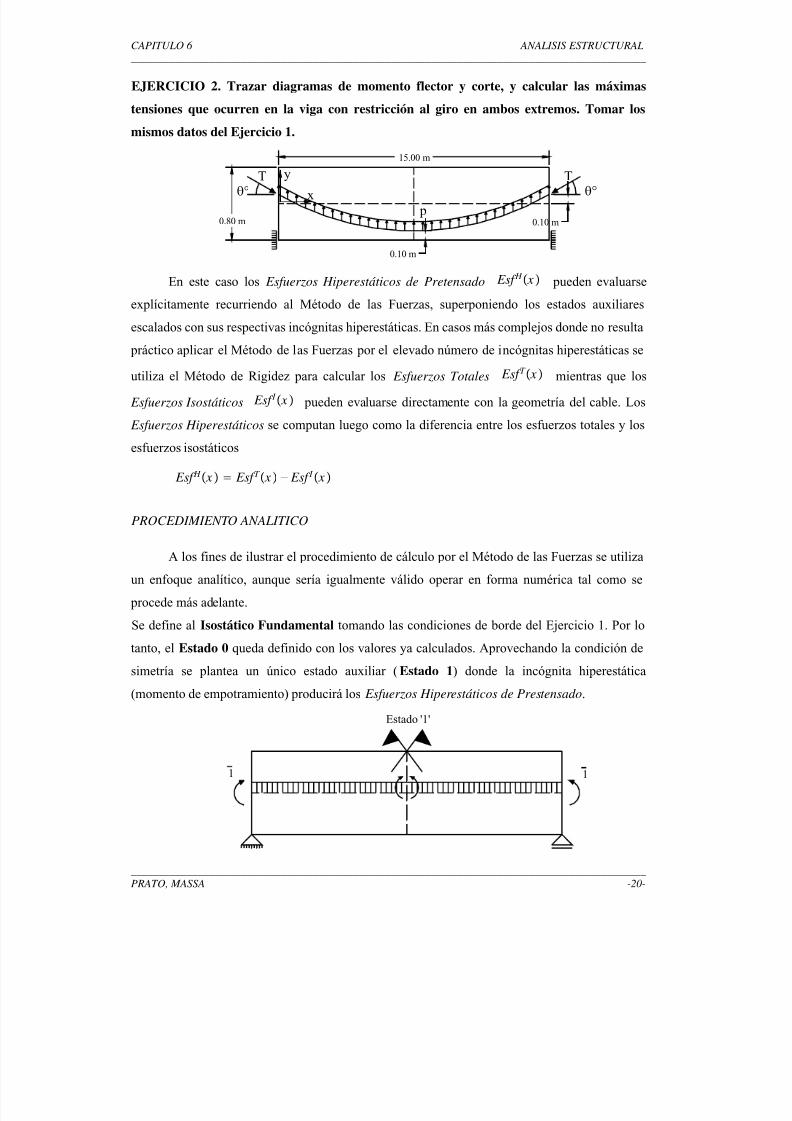
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 228/500
CAPITULO 6 ANALISIS ESTRUCTURAL
_____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -20-
EJERCICIO 2. Trazar diagramas de momento flector y corte, y calcular las máximas
tensiones que ocurren en la viga con restricción al giro en ambos extremos. Tomar los
mismos datos del Ejercicio 1.
p
TTθ°θ°
15.00 m
0.80 m 0.10 m
0.10 m
y
x
En este caso los Esfuerzos Hiperestáticos de Pretensado Esf H x pueden evaluarse
explícitamente recurriendo al Método de las Fuerzas, superponiendo los estados auxiliares
escalados con sus respectivas incógnitas hiperestáticas. En casos más complejos donde no resultapráctico aplicar el Método de las Fuerzas por el elevado número de incógnitas hiperestáticas se
utiliza el Método de Rigidez para calcular los Esfuerzos Totales Esf T x mientras que los
Esfuerzos Isostáticos Esf I x pueden evaluarse directamente con la geometría del cable. Los
Esfuerzos Hiperestáticos se computan luego como la diferencia entre los esfuerzos totales y los
esfuerzos isostáticos
Esf H x Esf T x − Esf I x
PROCEDIMIENTO ANALITICO
A los fines de ilustrar el procedimiento de cálculo por el Método de las Fuerzas se utiliza
un enfoque analítico, aunque sería igualmente válido operar en forma numérica tal como se
procede más adelante.
Se define al Isostático Fundamental tomando las condiciones de borde del Ejercicio 1. Por lo
tanto, el Estado 0 queda definido con los valores ya calculados. Aprovechando la condición desimetría se plantea un único estado auxiliar (Estado 1) donde la incógnita hiperestática
(momento de empotramiento) producirá los Esfuerzos Hiperestáticos de Prestensado.
11
Estado '1'
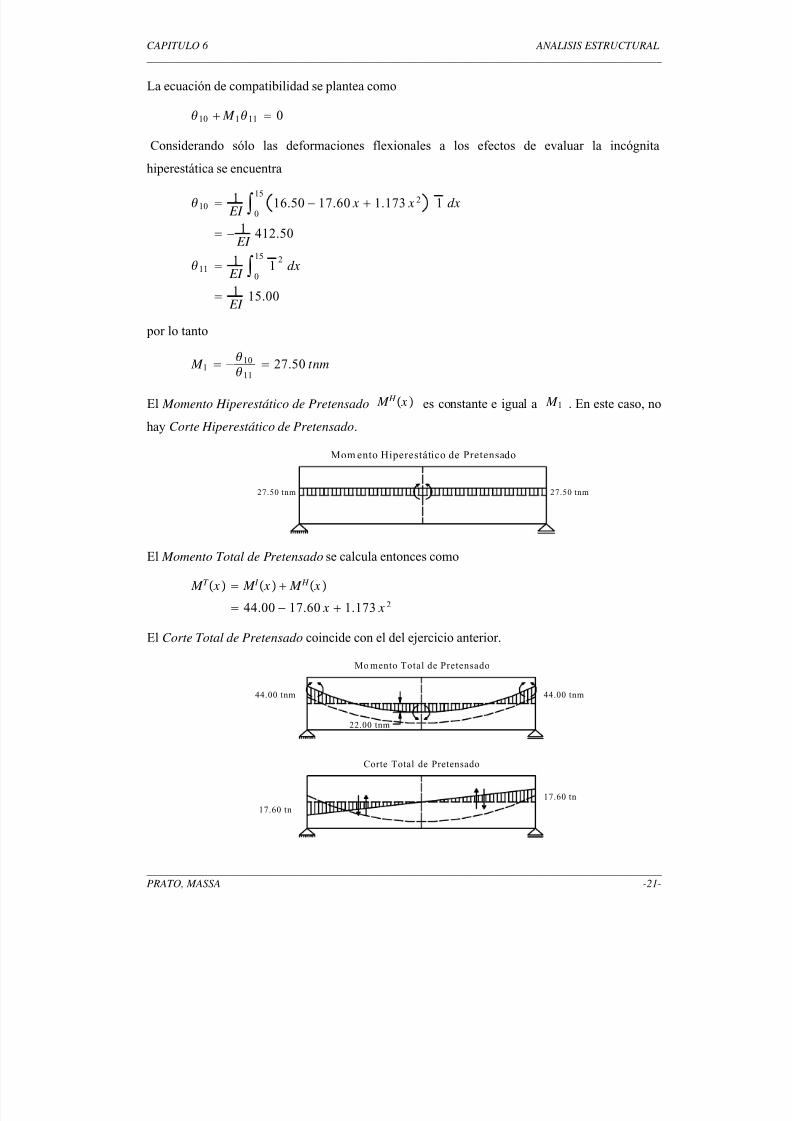
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 229/500
CAPITULO 6 ANALISIS ESTRUCTURAL
_____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -21-
La ecuación de compatibilidad se plantea como
10 M 111 0
Considerando sólo las deformaciones flexionales a los efectos de evaluar la incógnita
hiperestática se encuentra
10 1
EI
0
1516.50 − 17.60 x 1.173 x 2 1 dx
− 1 EI
412.50
11 1
EI
0
151
2dx
1
EI 15.00
por lo tanto
M 1 −10
11 27.50 tnm
El Momento Hiperestático de Pretensado M H x es constante e igual a M 1 . En este caso, no
hay Corte Hiperestático de Pretensado.
27.50 tnm
Mom ento Hiperestático de Pretensado
27.50 tnm
El Momento Total de Pretensado se calcula entonces como
M T x M I x M H x
44.00 − 17.60 x 1.173 x 2
El Corte Total de Pretensado coincide con el del ejercicio anterior.
Mom ento Total de Pretensado
22.00 tnm
Corte Total de Pretensado
44.00 tnm44.00 tnm
17.60 tn
17.60 tn

5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 230/500
CAPITULO 6 ANALISIS ESTRUCTURAL
_____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -22-
Las máximas tensiones de compresión ocurren en las secciones extremas
maxC −
M max
W −
H o
A
−1375 tn
m
2− 687 tn
m
2
−2062 tn
m2
al igual que las máximas tensiones de tracción
maxT
M max
W −
H o
A
1375 tn
m2− 687 tn
m2
688 tn
m2
Las máximas tensiones cortantes se producen también en las secciones extremas
max 32
Qmax
d h
32
17.600.30 0.80
110 tn
m2
PROCEDIMIENTO NUMERICO
El Método de Rigidez que se estudiará más adelante recurre habitualmente a
procedimientos numéricos que se adaptan naturalmente al esquema de discretización con fuerzasen los nudos propio de este método.
Aplicando las cargas concentradas calculadas en el Ejercicio 1 a la viga con las presentes
condiciones de borde se obtienen los Esfuerzos Totales de Pretensado (7ma y 8va columna de
Tabla 2). Debido a la fina discretización necesaria se realizan las operaciones utilizando un
programa de cálculo computacional (SAP2000).
Los Esfuerzos Hiperestáticos (9na y 10ma columna) se obtienen descontando los
esfuerzos isostáticos a los totales. Se observa que el Corte Hiperestático resulta nulo al igual queel obtenido con el procedimiento analítico, y el Momento Hiperestático es también constante y
ligeramente inferior debido a efectos de discretización.
Los diagramas presentan iguales características a los obtenidos con el método anterior,
mientras que las tensiones máximas casi no difieren a las ya calculadas.
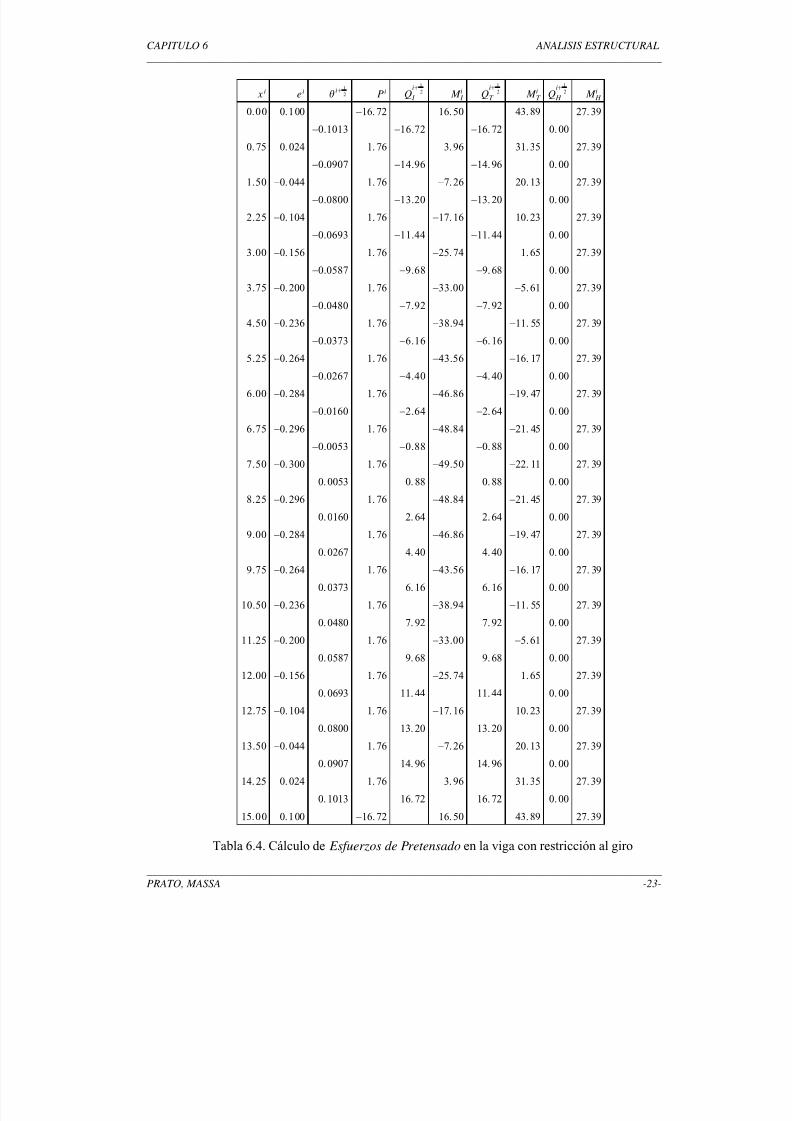
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 231/500
CAPITULO 6 ANALISIS ESTRUCTURAL
_____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -23-
x i e i i1
2 Pi Q I
i1
2 M I i QT
i1
2 M T i Q H
i1
2 M H i
0.00 0.100 −16. 72 16.50 43.89 27. 39
−0.1013 −16.72 −16.72 0.00
0.75 0.024 1. 76 3.96 31.35 27. 39
−0.0907 −14.96 −14.96 0.00
1.50 −0.044 1. 76 −7.26 20.13 27. 39
−0.0800 −13.20 −13.20 0.00
2.25 −0.104 1. 76 −17.16 10.23 27. 39
−0.0693 −11.44 −11.44 0.00
3.00 −0.156 1. 76 −25.74 1.65 27.39
−0.0587 −9.68 −9.68 0.00
3.75 −0.200 1. 76 −33.00 −5.61 27.39
−0.0480 −7.92 −7.92 0.00
4.50 −0.236 1. 76 −38.94 −11. 55 27. 39−0.0373 −6.16 −6.16 0.00
5.25 −0.264 1.76 −43.56 −16. 17 27. 39
−0.0267 −4.40 −4.40 0.00
6.00 −0. 284 1.76 −46.86 −19. 47 27. 39
−0.0160 −2.64 −2.64 0.00
6.75 −0.296 1. 76 −48.84 −21. 45 27. 39
−0.0053 −0.88 −0.88 0.00
7.50 −0.300 1. 76 −49.50 −22. 11 27. 39
0.0053 0. 88 0.88 0.00
8.25 −0.296 1. 76 −48.84 −21. 45 27. 39
0.0160 2. 64 2.64 0.00
9.00 −0.284 1. 76 −46.86 −19. 47 27. 39
0.0267 4. 40 4.40 0.00
9.75 −0.264 1. 76 −43.56 −16. 17 27. 39
0.0373 6. 16 6.16 0.00
10.50 −0.236 1. 76 −38.94 −11. 55 27. 39
0.0480 7. 92 7.92 0.00
11.25 −0.200 1. 76 −33.00 −5.61 27.39
0.0587 9. 68 9.68 0.00
12.00 −0.156 1. 76 −25.74 1.65 27.39
0.0693 11. 44 11.44 0.00
12.75 −0.104 1. 76 −17.16 10.23 27.39
0.0800 13. 20 13.20 0.00
13.50 −0.044 1.76 −7.26 20.13 27.39
0.0907 14. 96 14.96 0.00
14.25 0.024 1. 76 3.96 31.35 27.39
0.1013 16. 72 16.72 0.00
15.00 0.100 −16.72 16.50 43.89 27.39
Tabla 6.4. Cálculo de Esfuerzos de Pretensado en la viga con restricción al giro
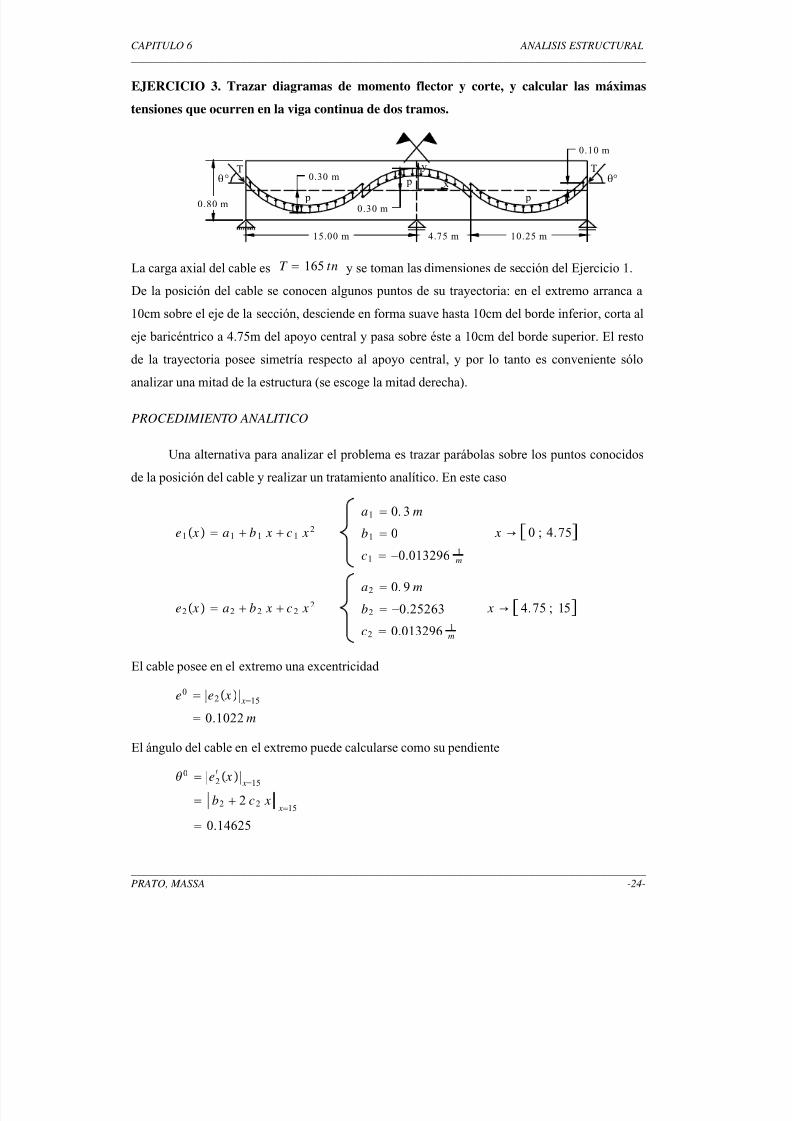
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 232/500
CAPITULO 6 ANALISIS ESTRUCTURAL
_____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -24-
EJERCICIO 3. Trazar diagramas de momento flector y corte, y calcular las máximas
tensiones que ocurren en la viga continua de dos tramos.
T T
pp
p
y
xθ°θ°
15.00 m 4.75 m
0.80 m
0.10 m
10.25 m
0.30 m
0.30 m
La carga axial del cable es
T 165 tn y se toman las dimensiones de sección del Ejercicio 1.
De la posición del cable se conocen algunos puntos de su trayectoria: en el extremo arranca a
10cm sobre el eje de la sección, desciende en forma suave hasta 10cm del borde inferior, corta al
eje baricéntrico a 4.75m del apoyo central y pasa sobre éste a 10cm del borde superior. El resto
de la trayectoria posee simetría respecto al apoyo central, y por lo tanto es conveniente sólo
analizar una mitad de la estructura (se escoge la mitad derecha).
PROCEDIMIENTO ANALITICO
Una alternativa para analizar el problema es trazar parábolas sobre los puntos conocidos
de la posición del cable y realizar un tratamiento analítico. En este caso
e1 x a1 b1 x c1 x 2
a1 0.3 m
b1 0
c1 −0.013296 1m
x → 0 ; 4.75
e2 x a2 b2 x c2 x 2
a2 0.9 m
b2 −0.25263
c2 0.013296 1m
x → 4.75 ; 15
El cable posee en el extremo una excentricidad
e0 |e2 x| x15
0.1022 m
El ángulo del cable en el extremo puede calcularse como su pendiente
0 |e2
′ x| x15
b2 2 c2 x x15
0.14625

5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 233/500
CAPITULO 6 ANALISIS ESTRUCTURAL
_____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -25-
La curvatura del cable se calcula como
1 x 2 c1 −0.026592 1m x → 0 ; 4.75
2 x 2 c2 0.026592 1m x → 4.75 ; 15
Las cargas actuantes sobre el hormigón resultan
H o ≈ T 165 tn
M o ≈ T e0 16.85 tnm
V o ≈ T 0 24.133 tn
p1 x T 1 x −4.388 tnm x → 0 ; 4.75
p2 x T 2 x 4.388 tnm x → 4.75 ; 15
y
xV°
M°H°
V°M°
H°
p p
p
Los Esfuerzos Isostáticos de Pretensado (Estado 0) se obtienen resolviendo la viga con este
sistema de cargas y removiendo cualquiera de los apoyos, ya que las fuerzas de postensado son
autoequilibradas y no generan reacciones en los apoyos remanentes.El Momento Isostático de Pretensado debe calcularse por tramos.
M I x T e x
49.50 − 2.194 x 2 x → 0 ; 4.75
148. 50 − 41.68 x 2.194 x 2 x → 4.75 ; 15
Alternativamente,
para x → 0 ; 4.75
M I x M o − V o 15 − x p 10.25 5.125 4.75 − x − 124.75 − x2
49. 50 − 2. 194 x 2
para x → 4.75 ; 15
M I x M o − V o 15 − x 12
p 15 − x2
148.50−
41.68 x 2.194 x2
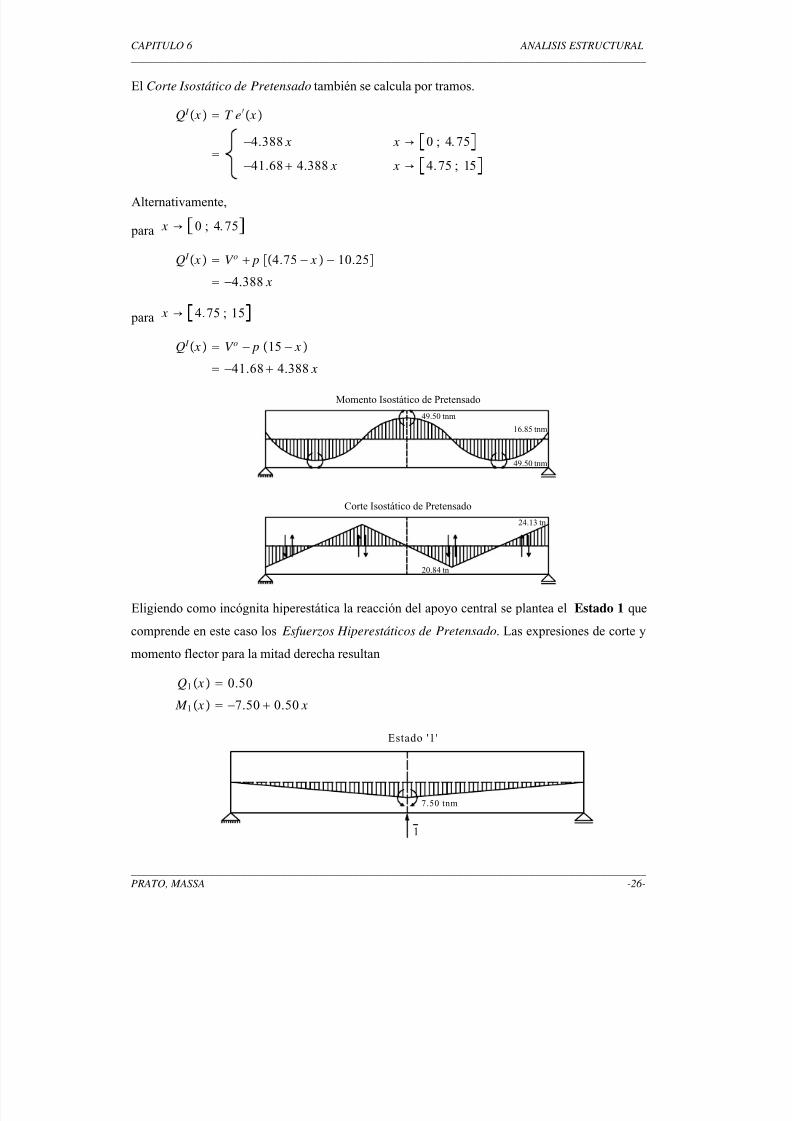
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 234/500
CAPITULO 6 ANALISIS ESTRUCTURAL
_____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -26-
El Corte Isostático de Pretensado también se calcula por tramos.
Q I x T e′ x
−4.388 x x → 0 ; 4.75
−41.68 4.388 x x → 4.75 ; 15
Alternativamente,
para x → 0 ; 4.75
Q I x V o p 4.75 − x − 10.25
−4.388 x
para x → 4.75 ; 15
Q I x V o − p 15 − x
−41.68 4.388 x
Momento Isostático de Pretensado
Corte Isostático de Pretensado
49.50 tnm
49.50 tnm
16.85 tnm
20.84 tn
24.13 tn
Eligiendo como incógnita hiperestática la reacción del apoyo central se plantea el Estado 1 que
comprende en este caso los Esfuerzos Hiperestáticos de Pretensado. Las expresiones de corte y
momento flector para la mitad derecha resultan
Q1 x 0.50
M 1 x −7.50 0.50 x
Estado '1'
1
7.50 tnm
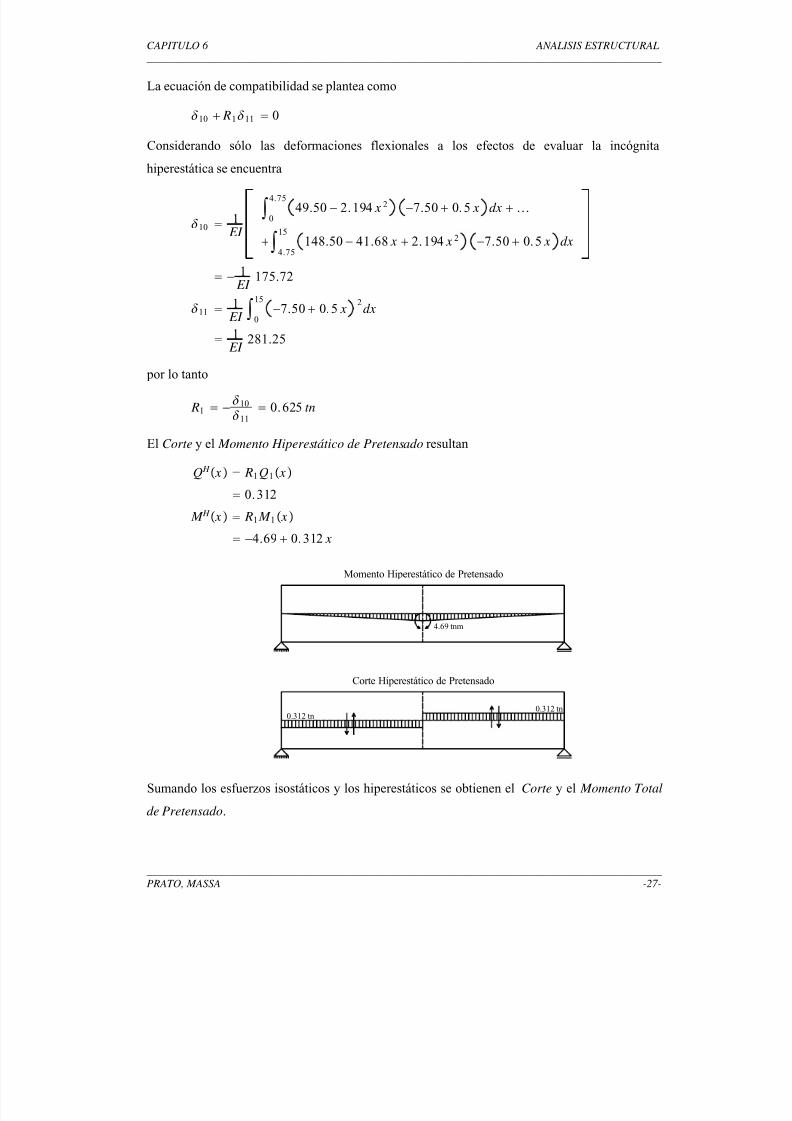
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 235/500
CAPITULO 6 ANALISIS ESTRUCTURAL
_____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -27-
La ecuación de compatibilidad se plantea como
10 R111 0
Considerando sólo las deformaciones flexionales a los efectos de evaluar la incógnita
hiperestática se encuentra
10 1
EI
0
4.75
49.50 − 2.194 x 2 −7.50 0.5 x dx …
4.75
15
148.50 − 41.68 x 2.194 x 2 −7.50 0.5 x dx
− 1 EI
175.72
11 1
EI
0
15
−7.50 0.5 x2
dx
1
EI 281.25
por lo tanto
R1 −10
11 0.625 tn
El Corte y el Momento Hiperestático de Pretensado resultan
Q H x R1 Q1 x
0.312
M H x R1 M 1 x
−4.69 0.312 x
Momento Hiperestático de Pretensado
Corte Hiperestático de Pretensado
0.312 tn0.312 tn
4.69 tnm
Sumando los esfuerzos isostáticos y los hiperestáticos se obtienen el Corte y el Momento Total
de Pretensado.
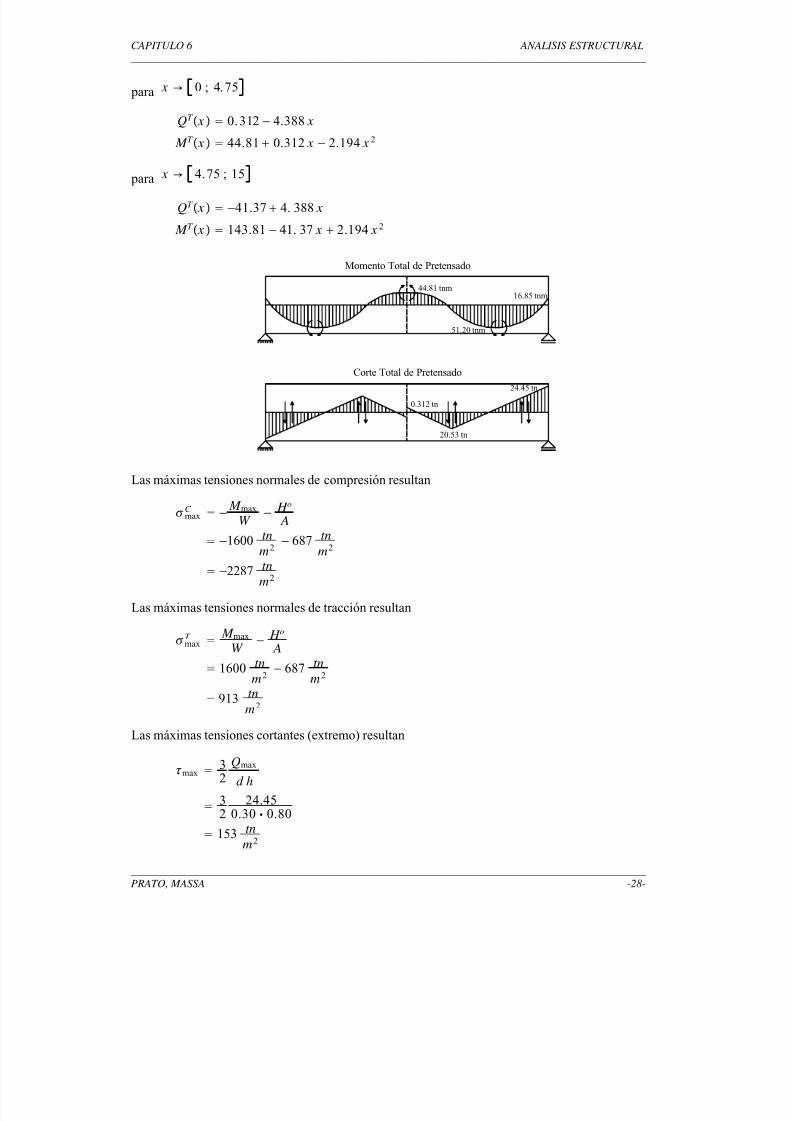
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 236/500
CAPITULO 6 ANALISIS ESTRUCTURAL
_____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -28-
para x → 0 ; 4.75
QT x 0.312 − 4.388 x
M T x 44.81 0.312 x − 2.194 x 2
para x → 4.75 ; 15
QT x −41.37 4. 388 x
M T x 143.81 − 41. 37 x 2.194 x 2
Momento Total de Pretensado
Corte Total de Pretensado
20.53 tn
44.81 tnm16.85 tnm
51.20 tnm
0.312 tn
24.45 tn
Las máximas tensiones normales de compresión resultan
maxC −
M max
W −
H o
A
−1600 tn
m2− 687 tn
m2
−2287 tn
m2
Las máximas tensiones normales de tracción resultan
maxT
M max
W
−H o
A 1600 tn
m2− 687 tn
m2
913 tn
m2
Las máximas tensiones cortantes (extremo) resultan
max 32
Qmax
d h
3
2
24.45
0.30 0.80 153 tn
m2
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 237/500
CAPITULO 6 ANALISIS ESTRUCTURAL
_____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -29-
PROCEDIMIENTO NUMERICO
La posición del cable se describe en forma discreta para nudos separados Δ x 0.75m .
En primer término, se calculan la pendiente entre nudos y las cargas concentradas aplicadas en
los nudos. Luego se computan los Esfuerzos Isostáticosen función de la pendiente (Corte) y laexcentricidad (Momento) del cable, mientras que los Esfuerzos Totales de Pretensado se
obtienen utilizando alguna implementación computacional del Método de Rigidez.
Los Esfuerzos Hiperestáticos resultan de descontar los esfuerzos isostáticos a los totales.
Se observa que el Corte Hiperestático es constante y el Momento Hiperestático varía
linealmente. Para comparar los resultados con los obtenidos con el Método de las Fuerzas deben
valuarse las expresiones analíticas de momento en las coordenadas de los nudos y las fórmulas
de corte en coordenadas intermedias. Por tal motivo, no es estrictamente posible conseguir losvalores de corte en los extremos para ser comparados con los calculados analíticamente. Sin
embargo, para una adecuada discretización esta cuestión no resulta relevante.
Los diagramas presentan iguales características a los obtenidos con el método anterior,
mientras que las tensiones máximas casi no difieren a las ya calculadas.
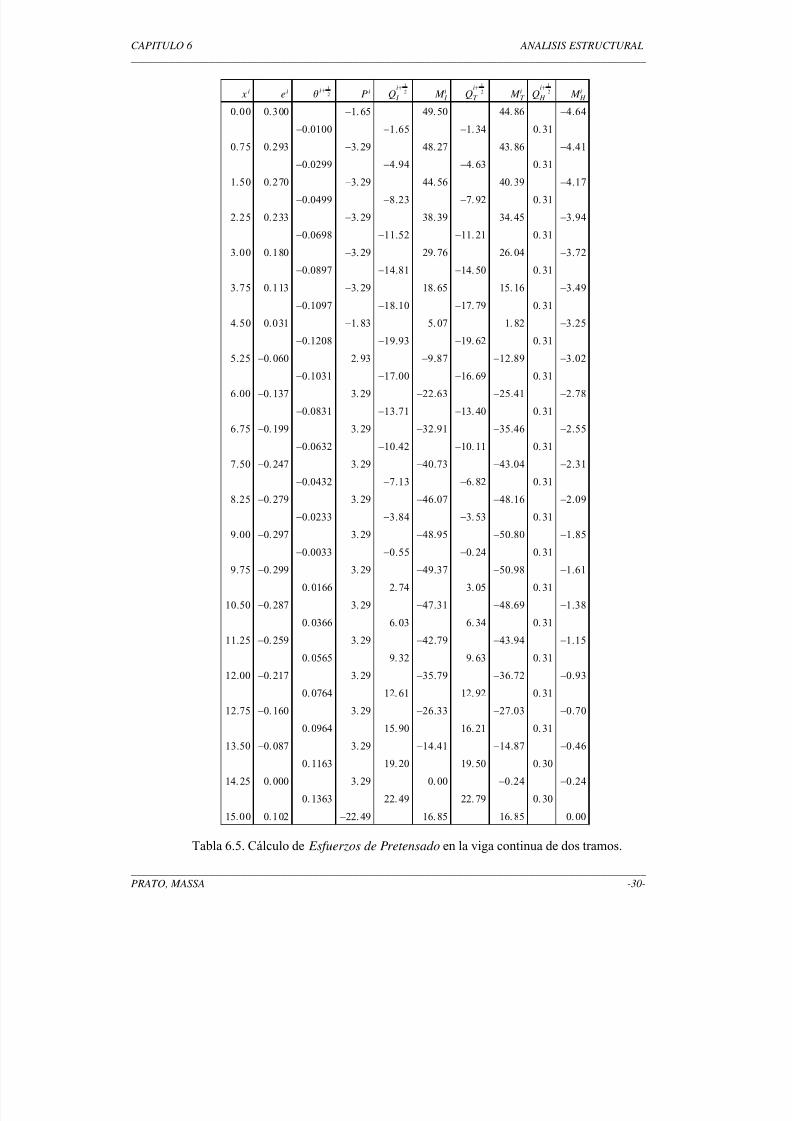
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 238/500
CAPITULO 6 ANALISIS ESTRUCTURAL
_____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -30-
x i e i i1
2 P i Q I
i1
2 M I i QT
i1
2 M T i Q H
i1
2 M H i
0.00 0.300 −1. 65 49.50 44. 86 −4.64
−0.0100 −1.65 −1.34 0.31
0.75 0.293 −3. 29 48.27 43. 86 −4.41
−0.0299 −4.94 −4.63 0.31
1.50 0.270 −3. 29 44.56 40. 39 −4.17
−0.0499 −8.23 −7.92 0.31
2.25 0.233 −3. 29 38.39 34. 45 −3.94
−0.0698 −11.52 −11.21 0.31
3.00 0.180 −3. 29 29.76 26. 04 −3.72
−0.0897 −14.81 −14.50 0.31
3.75 0.113 −3. 29 18.65 15. 16 −3.49
−0.1097 −18.10 −17.79 0. 31
4.50 0.031 −1. 83 5.07 1. 82 −3.25−0.1208 −19.93 −19.62 0. 31
5.25 −0.060 2. 93 −9.87 −12.89 −3.02
−0.1031 −17.00 −16.69 0. 31
6.00 −0.137 3.29 −22.63 −25.41 −2.78
−0.0831 −13.71 −13.40 0.31
6.75 −0.199 3. 29 −32.91 −35.46 −2.55
−0.0632 −10.42 −10.11 0.31
7.50 −0.247 3. 29 −40.73 −43.04 −2.31
−0.0432 −7.13 −6.82 0.31
8.25 −0.279 3. 29 −46.07 −48.16 −2.09
−0.0233 −3.84 −3.53 0.31
9.00 −0.297 3. 29 −48.95 −50.80 −1.85
−0.0033 −0.55 −0.24 0. 31
9.75 −0.299 3. 29 −49.37 −50.98 −1.61
0.0166 2.74 3.05 0. 31
10.50 −0.287 3. 29 −47.31 −48.69 −1.38
0.0366 6.03 6.34 0. 31
11.25 −0.259 3. 29 −42.79 −43.94 −1.15
0.0565 9.32 9.63 0. 31
12.00 −0.217 3. 29 −35.79 −36.72 −0.93
0.0764 12.61 12.92 0.31
12.75 −0.160 3. 29 −26.33 −27.03 −0.70
0.0964 15.90 16.21 0.31
13.50 −0.087 3. 29 −14.41 −14.87 −0.46
0.1163 19.20 19.50 0.30
14.25 0.000 3. 29 0.00 −0.24 −0.24
0.1363 22.49 22.79 0.30
15.00 0.102 −22. 49 16.85 16. 85 0.00
Tabla 6.5. Cálculo de Esfuerzos de Pretensado en la viga continua de dos tramos.
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 239/500
CAPITULO 6 ANALISIS ESTRUCTURAL
_____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -31-
6.4- Líneas de Influencia
6.4.1. Introducción
El concepto de la línea de influencia es útil para establecer las condiciones más
desfavorables de solicitación en estructuras que presentan un comportamiento lineal y soportan
cargas móviles, por ejemplo: puentes.
Una carga móvil produce distintos efectos como ser: reacciones, esfuerzos internos
M f , M t , N , Q , desplazamientos, etc. El efecto considerado en cada caso se designa incógnita X .
En el caso lineal es suficiente determinar el valor de i x de la misma para una carga unitaria
1 x actuando en la posición genérica definida por la coordenada x .
El valor de la incógnita producida por una carga móvil P actuando en x es:
X x P i x (Ec. 6.2)
donde:
X x : valor de la incógnita X producido por la carga P acutuando en x .
i x : coeficiente de influencia que depende de la coordenada x .
Se denomina línea de influencia de una incógnita X al diagrama cuyas ordenadas x
en una cierta escala representan al coeficiente de influencia definido en la Ec. (6.2). La línea deinfluencia es una representación gráfica de la influencia variable i x según la posición de la
carga P.
En el curso de Estática se estudian las líneas de influencia para reacciones y esfuerzos
internos en estructuras isostáticas. Aplicando el pricipio de Trabajos Virtuales se puede
demostrar que el diagrama de desplazamientos verticales es igual a la línea de influencia en una
cierta escala.
En el presente capítulo se extiende el concepto de líneas de influencia al caso deestructuras deformables, en general hiperestáticas. Se comienza determinando las líneas de
influencia de desplazamientos y giros, y se continúa con las líneas de influencia de esfuerzos
internos y reacciones en sistemas hiperestáticos.
6.4.2. Líneas de Influencia como aplicación del Teorema de Reciprocidad
En el curso de Estática se aplicó el principio de T.V. para determinar las líneas de
influencia de sistemas isostáticos. En esta sección se desarrolla un planteo similar aplicando el
teorema de reciprocidad, visto en la sección 3.5 del capítulo 3, para:
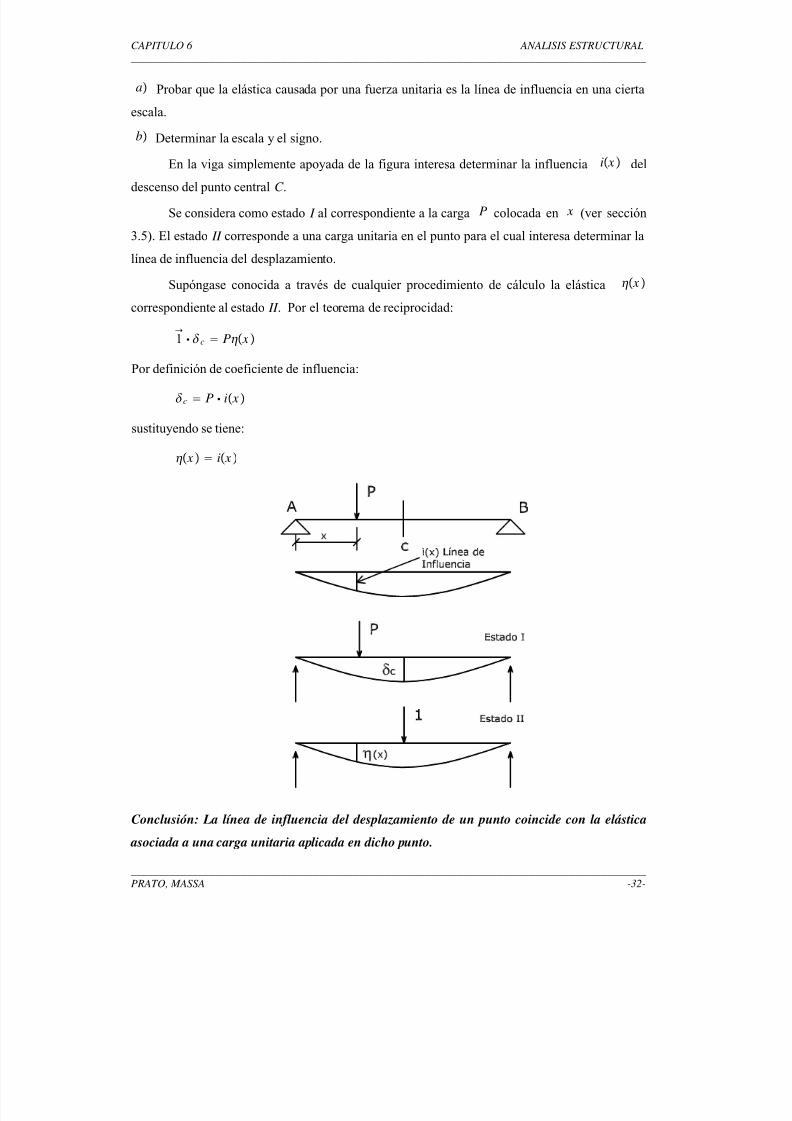
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 240/500
CAPITULO 6 ANALISIS ESTRUCTURAL
_____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -32-
a Probar que la elástica causada por una fuerza unitaria es la línea de influencia en una cierta
escala.
b Determinar la escala y el signo.
En la viga simplemente apoyada de la figura interesa determinar la influencia i x deldescenso del punto central C .
Se considera como estado I al correspondiente a la carga P colocada en x (ver sección
3.5). El estado II corresponde a una carga unitaria en el punto para el cual interesa determinar la
línea de influencia del desplazamiento.
Supóngase conocida a través de cualquier procedimiento de cálculo la elástica x
correspondiente al estado II . Por el teorema de reciprocidad:
1 c P x
Por definición de coeficiente de influencia:
c P i x
sustituyendo se tiene:
x i x
Conclusión: La línea de influencia del desplazamiento de un punto coincide con la elástica
asociada a una carga unitaria aplicada en dicho punto.

5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 241/500
CAPITULO 6 ANALISIS ESTRUCTURAL
_____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -33-
6.4.3. Líneas de influencia en sistemas hiperestáticos
A los efectos de ilustrar el desarrollo de la línea de influencia del momento flector en un
sistema hiperestático se considera la viga continua de tres tramos indicada en la figura en la cual
se determinará la línea de influencia del momento flector en el centro del tramo de la izquierda.Para ello, se introduce una articulación en la sección en la que se desea la línea de influencia del
momento.
Para aplicar el teorema de reciprocidad se definen dos estados de carga, designados como
I y II que se indican en esta figura. El estado I consiste en una carga unitaria aplicada en lasección x y el estado II en dos momentos unitarios iguales y opuestos aplicados en la
articulación introducida.
Por reciprocidad se tiene:
( ) ( ) ( )η θ θ ⋅ = ⋅ + I I
c i d P x x M (Ec. 6.3)
Por otro lado, el giro relativo nulo de las barras que concurren a la articulación para la
estructura original se garantiza a través de la siguiente ecuación de compatibilidad de giros:
M c i II
d II i
I d
I 0 (Ec. 6.4)
es decir:
M c −
i I
d I
i II d
II
(Ec. 6.5)
donde M c es el momento flector en la sección donde se introduce la articulación debido a la
carga unitaria P x 1 . Utilizando (6.3), la ecuación (6.5) toma la siguiente forma:
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 242/500
CAPITULO 6 ANALISIS ESTRUCTURAL
_____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -34-
M c −
P x
M c
x
i II
d II
(Ec. 6.6)
y como P x 1 y M c 1 se obtiene finalmente:
M c −
x
i II
d II
(Ec. 6.7)
En conclusión, la línea de influencia del momento flector M c es igual a la elástica de la
viga x producida por el momento M c 1 aplicado a ambos lados de la articulación
introducida en la sección de interés. El término i II
d II es un factor de escala.
Desde el punto de vista operativo sólo es necesario determinar la elástica x del
estado II , ya que las deformaciones correspondientes al estado I se eliminan directamente alaplicar la ecuación de compatibilidad (6.4).
6.4.4. Otras formas de obtener las Líneas de Influencia
La propia definición del coeficiente de influencia proporciona una forma simple de
calcularlo. Recordando la expresión (6.2):
X x P i x
se observa que para una carga unitaria P el coeficiente de influencia es igual al valor de la
incógnita. Por lo tanto, la colocación de una carga unitaria P = 1 en una posición genérica x
permite obtener el valor de la incógnita por cualquier método ( trabajos virtuales, tres momentos,
Castigliano, etc ).
El método de la elástica ( reciprocidad ) tiene gran importancia conceptual ya que permite
anticipar sin ningún cálculo y en forma aproximada donde debe actuar una carga para producir la
máxima influencia. Sin embargo, la utilización de programas computacionales de cálculo
permite la automatización del cálculo de las líneas de influencia. En el caso de un reticulado para
el que resulta necesario trazar una línea de influencia para cada barra, se puede utilizar un
programa para determinar el esfuerzo en todas las barras para varias posiciones de la carga móvil
y finalmente seleccionar la máxima solicitación en cada barra. En el caso de una viga continua,
el programa puede calcular el momento flector y el corte en el centro de cada tramo y sobre los
apoyos para varias posiciones de la carga, y luego determinar los valores máximos de las
solicitaciones en los puntos prefijados listándolos con los resultados finales. El cálculo manual
de las líneas de influencia requiere un trazado para cada incógnita de interés mientras que un
programa de cálculo puede proporcionar simultáneamente todas las incógnitas prefijadas.
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 243/500
CAPITULO 7 INTRODUCCION AL METODO DE RIGIDEZ
____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -1-
Capítulo 7 Introducción al Método de Rigidez
7.1- Generalidades
El diseño estructural lleva implícito determinar las proporciones de los elementos y la
configuración de conjunto que permitan resistir económica y eficientemente las condiciones de
carga posibles durante la vida útil de las estructuras. El aspecto central de esta función es el
cálculo de la distribución de fuerzas (internas o esfuerzos, y externas o reacciones) sobre las
estructuras, y las deformaciones (desplazamientos, giros, curvaturas, deformaciones específicas)
de las mismas. En este capítulo se presenta el planteo general de análisis de estructuras de barras
prismáticas por el Método de los Desplazamientos, también conocido como Método de Rigidez.
Existe una amplia gama de estructuras que pueden representarse satisfactoriamente, a los
fines de su análisis, por un modelo de elementos de barras; tal es el caso de: edificios de diversos
tipos, parte de aviones y de barcos, torres, etc.El criterio de diseño que se aplica en la mayoría de los casos es que se requiere
comportamiento elástico de la estructura bajo la acción de las cargas de ocurrencia normal, pero
para cargas extremas es habitual aceptar que la estructura sufra deformaciones permanentes,
siempre y cuando no se afecte su capacidad de soportar las cargas permanentes a que se
encuentra sometida. El comportamiento de cualquier tipo de estructura de barras, placas,
cáscaras o sólidos puede ser representado por medio de ecuaciones diferenciales al nivel de
un elemento o barra. Sin embargo, a nivel del sistema de barras que conforman una estructura,resulta posible utilizar las soluciones analíticas de las ecuaciones diferenciales de la barra para
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 244/500
CAPITULO 7 INTRODUCCION AL METODO DE RIGIDEZ
____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -2-
formular el problema en términos algebraicos sin pérdida de precisión respecto a las hipótesis
habituales de la teoría de vigas.
A partir de dichas soluciones bien conocidas es posible obtener relaciones entre las
fuerzas y los desplazamientos de los extremos de cada barra y combinarlas con las ecuaciones de
equilibrio y compatibilidad de los nudos para obtener un sistema de ecuaciones algebraicas
que describe el comportamiento de la estructura.
En los casos de elementos estructurales que no encuadran en una definición básicamente
unidimensional del problema (a lo largo del eje de la barra), es decir en caso de elementos
bidimensionales o tridimensionales el problema es más complicado porque raramente existen
soluciones exactas para las ecuaciones diferenciales en derivadas parciales que las gobiernan.
Una manera práctica de obtener soluciones numéricas en tales casos es la aplicación del
método de elementos finitos. El concepto básico de este método es que el continuo (toda la
estructura) puede modelarse analíticamente subdividiéndolo en regiones (elementos finitos) cuyo
comportamiento puede describirse por una serie de funciones, propuestas de antemano, que
aproximan los desplazamientos y/o las tensiones en dichas regiones. Este planteo también
conduce a un sistema de ecuaciones algebraicas, pero estas ecuaciones introducen
aproximaciones de tipo numérico que no son necesarias en las estructuras de barras prismáticas.
Todo miembro o elemento de una estructura de barras puede ser considerado un caso
particular, relativamente simple, dentro del concepto de elementos finitos, sólo que dado que se
dispone de la solución analítica de las ecuaciones que rigen en comportamiento individual de las
mismas, no requieren aproximaciones numéricas adicionales a las propias de la teoría de vigas.
7.2- Tipos de estructuras
Una estructura está formada por elementos conectados entre sí que pueden agruparse en
conjuntos de una, dos o tres dimensiones. En realidad, todo elemento tiene largo, ancho yespesor, pero si el ancho y el espesor son pequeños respecto a la longitud puede considerarse al
elemento como unidimensional (barra). En el caso de placas y cáscaras, el espesor es pequeño
respecto al largo y al ancho por lo que pueden considerarse como elementos bidimensionales.
Si el espesor, el largo y el ancho poseen el mismo orden de magnitud, deberá considerarse
al elemento como tridimensional. La definición del carácter unidimensional, bidimensional o
tridimensional del conjunto depende del criterio de quien tiene la responsabilidad de efectuar el
análisis estructural, y será analizado en más detalle en los capítulos siguientes.
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 245/500
CAPITULO 7 INTRODUCCION AL METODO DE RIGIDEZ
____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -3-
A fin de su estudio puede ser de utilidad clasificar las estructuras de barras según su
configuración de la siguiente manera:
Reticulado Plano Nudos Articulados
Reticulado Espacial
Pórtico PlanoPlanas
Emparrillado Plano Nudos Rígidos
Espaciales Pórtico Espacial
⎧⎨⎩
⎧ ⎧⎨⎪⎩⎨
⎪⎩
7.3- Objeto del análisis estructural
El análisis estructural es un conjunto de herramientas del diseño para la determinación de
los desplazamientos, deformaciones, esfuerzos internos y reacciones exteriores de la estructura.Una vez determinados los desplazamientos se procede a calcular las tensiones a partir de las
relaciones cinemáticas entre desplazamientos y deformaciones específicas, y las relaciones
constitutivas del material, y finalmente evaluar los márgenes de seguridad respecto a la fluencia,
pandeo o rotura del material.
El análisis estructural se realiza sobre una estructura pre-dimensionada que está definida a
través de su configuración geométrica y dimensiones, y a través de las características de los
materiales. También supone ya definidas las acciones a considerar, tales como cargas de diversa
naturaleza, defectos de montaje, variaciones de temperatura, etc.
El cálculo de tensiones puede indicar la necesidad de introducir modificaciones más o
menos importantes en la estructura original. En esos casos se debe repetir el análisis, después de
adecuar las dimensiones originales, generando un segundo ciclo de análisis.
El proceso de análisis y diseño de una estructura puede esquematizarse de la siguiente
manera:
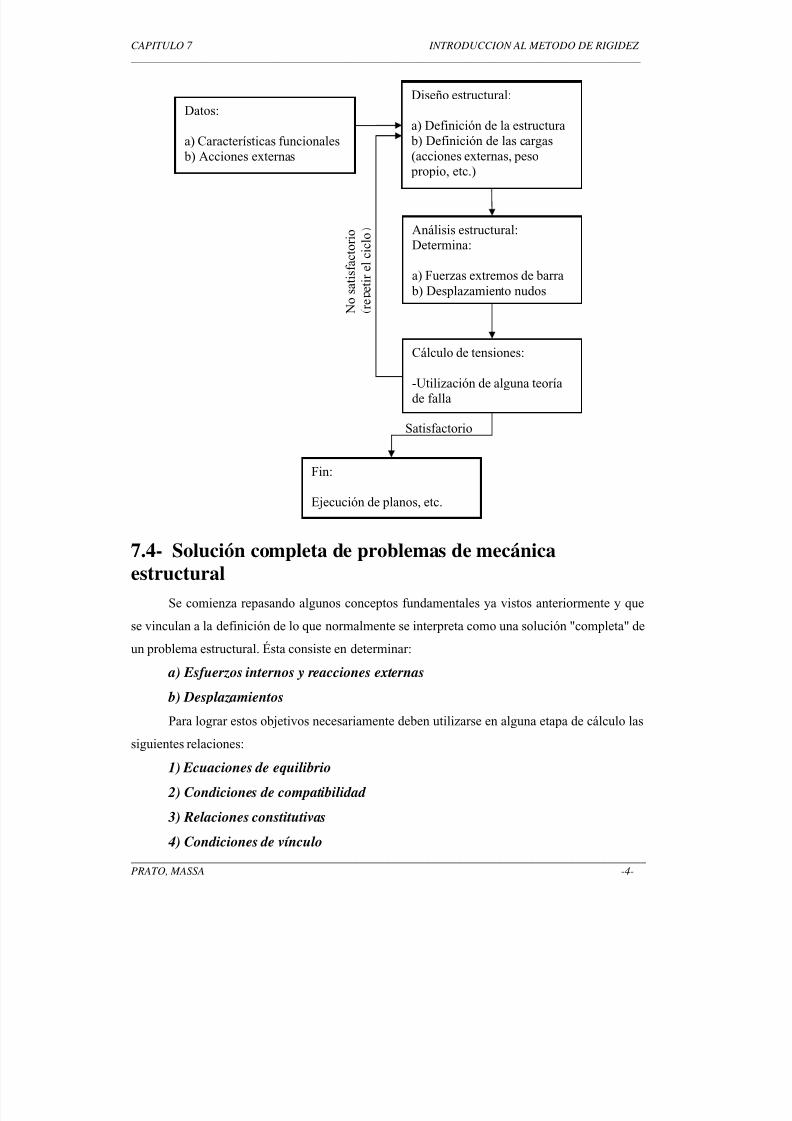
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 246/500
CAPITULO 7 INTRODUCCION AL METODO DE RIGIDEZ
____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -4-
7.4- Solución completa de problemas de mecánicaestructural
Se comienza repasando algunos conceptos fundamentales ya vistos anteriormente y que
se vinculan a la definición de lo que normalmente se interpreta como una solución "completa" de
un problema estructural. Ésta consiste en determinar: a) Esfuerzos internos y reacciones externas
b) Desplazamientos
Para lograr estos objetivos necesariamente deben utilizarse en alguna etapa de cálculo las
siguientes relaciones:
1) Ecuaciones de equilibrio
2) Condiciones de compatibilidad
3) Relaciones constitutivas
4) Condiciones de vínculo
Datos:
a) Características funcionales
b) Acciones externas
Diseño estructural:
a) Definición de la estructurab) Definición de las cargas
(acciones externas, pesopropio, etc.)
Análisis estructural:Determina:
a) Fuerzas extremos de barrab) Desplazamiento nudos
Cálculo de tensiones:
-Utilización de alguna teoríade falla
Fin:
Ejecución de planos, etc.
N o s a t i s f a c t o r i o
r e
e t i r e l c i c l o
Satisfactorio
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 247/500
CAPITULO 7 INTRODUCCION AL METODO DE RIGIDEZ
____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -5-
Sustituyendo grupos de estas ecuaciones en las restantes es posible llegar a un sistema de
ecuaciones que satisfacen los cuatro tipos de relaciones enunciadas pero cuyas incógnitas pueden
ser exclusivamente fuerzas o desplazamientos. Según sea el orden en que se sustituyan unas
ecuaciones en otras y las incógnitas que se adoptan se obtienen las ecuaciones propias del
método de las fuerzas o las del método de los desplazamientos.
Para finalizar este capítulo de introducción se describen las características fundamentales
de ambos métodos a través de un ejercicio que muestra la forma de operar en cada uno de esos
procedimientos de análisis.
7.5- Análisis compartivo de los dos métodos de análisisestructural
Método de las fuerzas
I) En primera instancia se plantean y se resuelven las ecuaciones de compatibilidad cuyas
incógnitas son fuerzas (incógnitas hiperestáticas). Por esta manera de encarar el problema
también se lo conoce como método de compatibilidad o método de flexibilidad.
El número de ecuaciones está asociado al grado de indeterminación estática.
II) En una segunda etapa de cálculo se calcular los desplazamientos en los distintos
puntos de la estructura, aunque este es un subproducto que no siempre se requiere cuando seselecciona este método de análisis.
Método de rigidez
I) En primera instancia se plantean y resuelven ecuaciones de equilibrio cuyas incógnitas
son desplazamientos; también se lo conoce como método de equilibrio o método de los
desplazamientos .
El número de ecuaciones está asociado al grado de indeterminación geométrica, que esigual al número de “grados de libertad” necesarios para definir la configuración deformada de la
estructura.
II) En una segunda etapa del cálculo se procede a determinar en forma sucesiva los
esfuerzos en los distintos puntos de la estructura.
7.6- Ejemplo de aplicación de los dos métodos
Se propone resolver el problema hiperestático simétrico de la Figura 7.1.
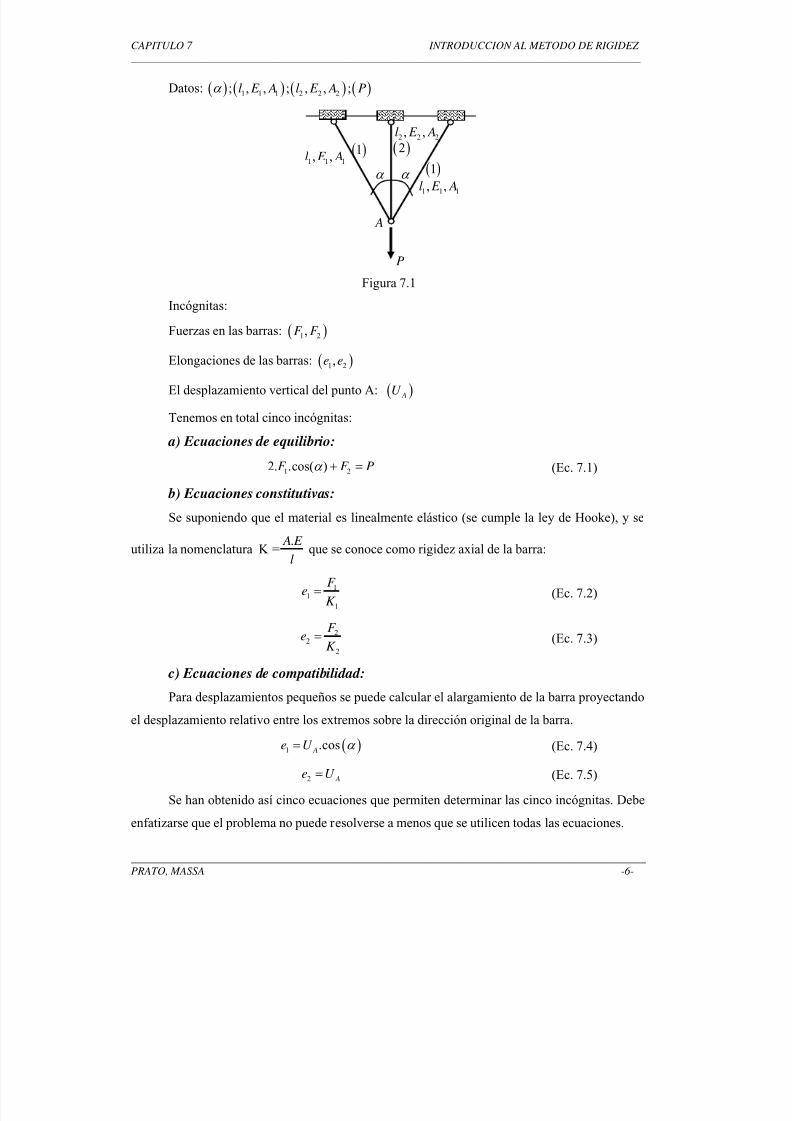
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 248/500
CAPITULO 7 INTRODUCCION AL METODO DE RIGIDEZ
____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -6-
Datos: ( ) ( ) ( ) ( )1 1 1 2 2 2; , , ; , , ;l E A l E A Pα
Figura 7.1
Incógnitas:
Fuerzas en las barras: ( )1 2,F F
Elongaciones de las barras: ( )1 2,e e
El desplazamiento vertical del punto A: ( ) AU
Tenemos en total cinco incógnitas:
a) Ecuaciones de equilibrio:
1 22. .cos( )F F Pα + = (Ec. 7.1)
b) Ecuaciones constitutivas:
Se suponiendo que el material es linealmente elástico (se cumple la ley de Hooke), y se
utiliza la nomenclatura K =. A E
lque se conoce como rigidez axial de la barra:
11
1
F e
K = (Ec. 7.2)
22
2
F e
K = (Ec. 7.3)
c) Ecuaciones de compatibilidad:
Para desplazamientos pequeños se puede calcular el alargamiento de la barra proyectando
el desplazamiento relativo entre los extremos sobre la dirección original de la barra.
( )1 .cos A
e U α = (Ec. 7.4)
2 Ae U = (Ec. 7.5)
Se han obtenido así cinco ecuaciones que permiten determinar las cinco incógnitas. Debe
enfatizarse que el problema no puede resolverse a menos que se utilicen todas las ecuaciones.
( )1 ( )2
A
P
1 1 1, ,l E A
2 2 2, ,l E A
( )1
1 1 1, ,l E Aα α
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 249/500
CAPITULO 7 INTRODUCCION AL METODO DE RIGIDEZ
____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -7-
Método de las fuerzas
De las ecuaciones (Ec. 7.4) y (Ec. 7.5) se llega a una sola ecuación de compatibilidad
donde no figura el desplazamiento AU como incógnita.
( )1
2 cos
ee
α
= (Ec. 7.6)
Sustituyendo (Ec. 7.2) y (Ec. 7.3) en (Ec. 7.6) se tiene:
( )1 2
1 2.cos
F F
K K α
= (Ec. 7.7)
Despejando 2F de (Ec. 7.1) y sustituyendo en (Ec. 7.7) resulta:
( )( )11
1 2
2. .cos
.cos
P F F
K K
α
α
−
= (Ec. 7.8)
Ésta es una ecuación de compatibilidad geométrica donde ambos miembros son
dimensionalmente longitudes. Se trata de una versión de la (Ec. 7.6) que cumple además
equilibrio y que tiene en cuenta las características mecánicas de las barras.
De (Ec. 7.8) se despeja la fuerza incógnita 1F , se calcula 2F sustituyendo en la (Ec. 7.1),
luego se calculan las elongaciones según (Ec. 7.2) y (Ec. 7.3) y finalmente se determina el
desplazamiento AU según (Ec. 7.5).
Método de rigidez
Sustituyendo las ecuaciones (Ec. 7.4) y (Ec. 7.5) en (Ec. 7.2) y (Ec. 7.3) se tienen
expresadas las fuerzas en función del desplazamiento AU :
( )1 1. .cos A
F K U α = (Ec. 7.9)
2 2. AF K U = (Ec. 7.10)
Sustituyendo ahora estos valores en la ecuación (Ec. 7.1) queda:
( )21 22. . .cos .
A AK U K U Pα + =
( )( )21 22. .cos . A
K K U Pα + = (Ec. 7.11)
Que en notación abreviada se expresa:
.K U P= (Ec. 7.12)
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 250/500
CAPITULO 7 INTRODUCCION AL METODO DE RIGIDEZ
____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -8-
La (Ec. 7.11) es una ecuación de equilibrio (ambos miembros son fuerzas) que satisfacen
además compatibilidad de deformaciones y tiene en cuenta las características elásticas de las
barras.
El desplazamiento se determina a partir de (Ec. 7.11) y luego por simple sustitución se
calculan las fuerzas empleando (Ec. 7.9) y (Ec. 7.10).
Los métodos que permiten plantear sistemáticamente ecuaciones de compatibilidad en
función de fuerzas incógnitas, tales como: Trabajos Virtuales, Castigliano, Tres Momentos, etc.,
son distintas variantes del “Método de las Fuerzas”.
La atención se concentra ahora en el desarrollo de un procedimiento que permita el
planteo sistemático de ecuaciones del tipo de (Ec. 7.12), o sea, ecuaciones de equilibrio estático
en función de los desplazamientos, donde las fuerzas elásticas .K U equilibran a las fuerzas
exteriores P conocidas.
:U Vector desplazamiento generalizado (corrimientos y giros)
:P Vector de carga generalizado (fuerzas y momentos)
:K Matriz de rigidez que depende de las propiedades elásticas y geométricas de cada
barra y además de la forma en que se conectan.
A continuación se comienza el desarrollo general del método de rigidez para el análisis de
reticulados planos.
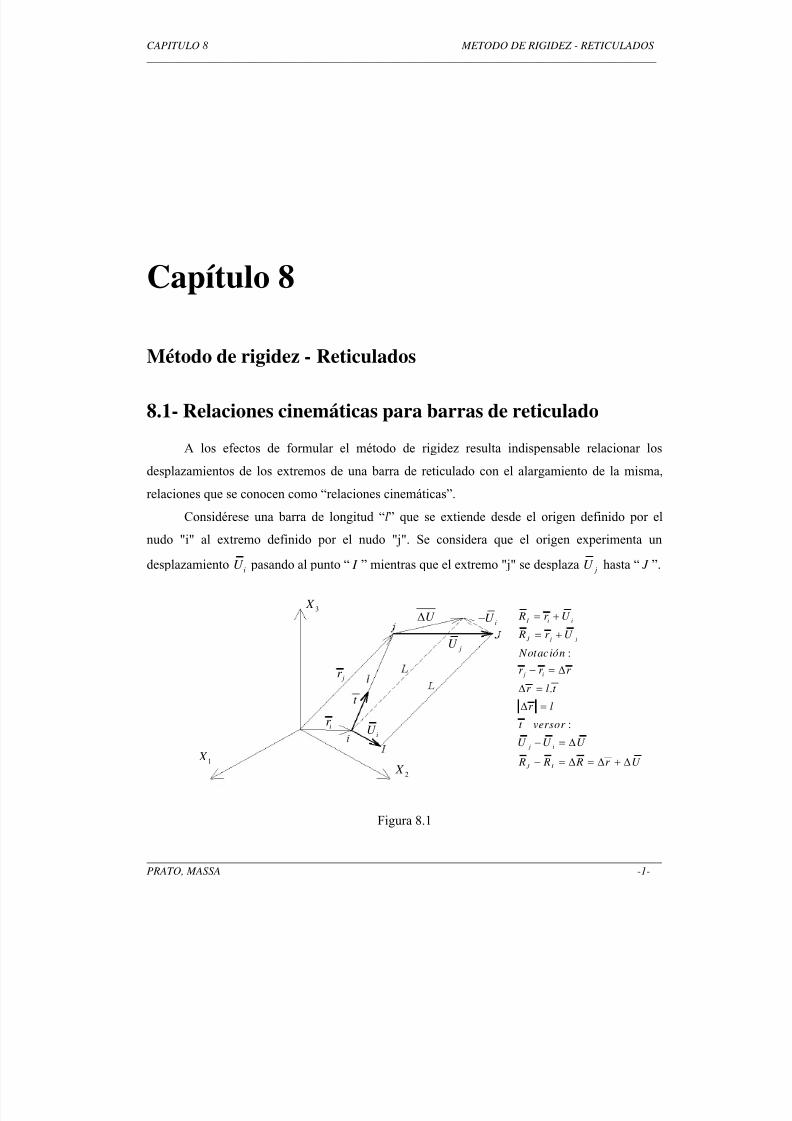
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 251/500
CAPITULO 8 METODO DE RIGIDEZ - RETICULADOS
____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -1-
Capítulo 8 Método de rigidez - Reticulados
8.1- Relaciones cinemáticas para barras de reticulado
A los efectos de formular el método de rigidez resulta indispensable relacionar los
desplazamientos de los extremos de una barra de reticulado con el alargamiento de la misma,
relaciones que se conocen como “relaciones cinemáticas”.
Considérese una barra de longitud “l” que se extiende desde el origen definido por el
nudo "i" al extremo definido por el nudo "j". Se considera que el origen experimenta un
desplazamientoi
U pasando al punto “ I ” mientras que el extremo "j" se desplaza jU hasta “ J ”.
Figura 8.1
1 X
2 X
3 X
ir
jr
t
iU
jU
iU −U ∆
:
.
:
I i i
J j j
j i
j i
J I
R r U
R r U
Notaciónr r r
r l t
r l
t versor
U U U
R R R r U
= +
= +
− = ∆
∆ =
∆ =
− = ∆
− = ∆ = ∆ + ∆
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 252/500
CAPITULO 8 METODO DE RIGIDEZ - RETICULADOS
____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -2-
La posición inicial esté definida por los vectores de posición ,i j
r r . Los vectores de
posición una vez deformada la barra se obtienen en función de los corrimientos nodales ,i jU U .
La elongación de la barra es igual a la diferencia entre la longitud final y la inicial:
e L l R l= − = ∆ − donde: R R R∆ = ∆ ⋅ ∆
Dividiendo por “ l ”:
2
2 21 1
e R R e R R
l l l l
∆ ⋅ ∆ ∆ ⋅ ∆⎛ ⎞= − ∴ + =⎜ ⎟
⎝ ⎠
Los materiales normalmente usados en la construcción de estructuras permiten asumir
1e
lε = << , de modo que:
2 2
2
11 1 2. 1 2. .
2
e e e R R R R le
l l l l l
⎡ ⎤∆ ⋅ ∆ ∆ ⋅ ∆ −⎛ ⎞+ ≅ + ∴ + = ∴ =⎜ ⎟ ⎢ ⎥
⎝ ⎠ ⎣ ⎦
Recordando que R r U ∆ = ∆ + ∆ y desarrollando el producto punto resulta:
1.
2
r r e
∆ ⋅ ∆=
22 r U U U l+ ⋅ ∆ ⋅ ∆ + ∆ ⋅ ∆ −
l
⎡ ⎤⎢ ⎥⎢ ⎥⎣ ⎦
Finalmente, para pequeñas deformaciones específicas resulta:
..
2.
U U e U t
l∆ ∆≅ ∆ + (Ec. 8.1)
La (Ec. 8.1) permite obtener la elongación de la barra en función de las componentes de
desplazamientos de los nudos; se trata de una relación no lineal respecto a los desplazamientos.
Si U ∆ es pequeño, como ocurre en la mayoría de los casos de aplicación, el segundo
término (término no lineal) del segundo miembro de (Ec. 8.1) puede despreciarse y para
pequeñas deformaciones y pequeños giros queda:
.e U t ≅ ∆ (Ec. 8.2)
Puede interpretar la Ec. (8.2) diciendo que para U ∆ pequeño, la elongación de la barra
es aproximadamente igual a la proyección del corrimiento relativo entre los extremos sobre la
dirección de la barra indeformada.

5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 253/500
CAPITULO 8 METODO DE RIGIDEZ - RETICULADOS
____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -3-
8.2- Matriz de rigidez de una barra de un reticulado plano
A continuación se procede a relacionar las fuerzas aplicadas en los extremos de una barra
con los desplazamientos de los extremos de dicha barra. La relación se logra a través de la matrizde rigidez de la barra que depende de las características elásticas de la barra y de su orientación.
Existen dos componentes de desplazamiento incógnita por nudo y se pueden plantear dos
ecuaciones de equilibrio por nudo por lo que el tamaño de la matriz de rigidez resulta de (4 x 4).
Figura 8.2
11 12 13 14
21 22 23 24
31 32 33 34
41 42 43 44
.
x x
i i
y y
i i
x x
j j
y y
j j
K K K K U P
K K K K U P
K K K K U P
K K K K U P
⎡ ⎤ ⎡ ⎤⎡ ⎤
⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥ =⎢ ⎥ ⎢ ⎥⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥⎢ ⎥ ⎢ ⎥⎣ ⎦ ⎣ ⎦ ⎣ ⎦
(Ec. 8.3)
Para deducir los elementos de la matriz K , se sigue el siguiente razonamiento:
x
iU
y
iU
y
iP
x
iP
x
iU
y
jU
y
jP
x
jP
x
jU

5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 254/500
CAPITULO 8 METODO DE RIGIDEZ - RETICULADOS
____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -4-
1
0
0
0
x
i
y
i
x
j
y
j
U
U
U
U
⎫=⎪
= ⎪⎬
= ⎪⎪= ⎭
(Ec. 8.4)
El desplazamiento horizontal del nudo "i" se define igual a la unidad mientras los
desplazamientos restantes son nulos. La elongación de la barra es según (Ec. 8.2) (hipótesis
lineal) igual a la proyección del corrimiento unitario sobre la dirección primitiva de la barra.
Figura 8.3
( )1.cose α = (Ec. 8.5)
La fuerza que comprime la barra una magnitud “e” está dada por la ley de Hooke.
.P K e= (Ec. 8.6)
Nótese que se plantea el equilibrio en el sistema indeformado. Sustituyendo (Ec. 8.4) en
(Ec. 8.3) queda:
11
21
31
41
.1
.1
.1
.1
x
i
y
i
x
j
y
j
K P
K P
K P
K P
⎫=
⎪= ⎪⎬
= ⎪⎪= ⎭
(Ec. 8.7)
La (Ec. 8.7) muestra que la primera columna de K es numéricamente igual al valor de las
fuerzas que mantienen el estado de deformación prefijada definida en (Ec. 8.4).
A partir de la Figura 8.3 se tiene:
( ) ( ) ( ) ( ).cos ; .cos ; .cos ; .cos x y x y
i i j jP P P P P P P Pα β α β = = = − = − (Ec. 8.8)
Es necesario respetar el sentido adoptado como positivo para fuerzas y desplazamientos.
x
iP
y
iP
P
x
jP
y
jP P
1
t α
β
21
11
y
i
x
i
P K
P K
=
=
41
31
y
j
x
j
P K
P K
=
=

5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 255/500
CAPITULO 8 METODO DE RIGIDEZ - RETICULADOS
____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -5-
Sustituyendo (Ec. 8.5) en (Ec. 8.6)y luego en (Ec. 8.8):
( ) ( ) ( ) ( ) ( ) ( )2 2.cos ; .cos .cos ; .cos ; .cos .cos x y x y
i i j jP K P K P K P K α α β α α β = = = − = − (Ec. 8.9)
Reemplazando las expresiones de (Ec. 8.9) en (Ec. 8.7) se obtiene la primera columna de
la matriz K .
Por un razonamiento similar se puede determinar una por una las restantes columnas.
Resulta conveniente destacar que se ha planteado el equilibrio en el sistema indeformado,
como una primera aproximación al problema.
La forma explícita de la matriz de rigidez de una barra de rigidez axial K cuyos cosenos
directores son:
( ) ( )1 2
.cos ; cos ;
A E K
lα γ β γ = = = ; es
2 2" " 1 1 2 1 1 2
2 2
1 2 2 1 2 2
2 2" " 1 1 2 1 1 2
2 2
1 2 2 1 2 2
. . . . . .
. . . . . .
. . . . . .
. . . . . .
Nudo i
Nudo j
Nudo "i"
K K K K
K K K K K
K K K K
K K K K
γ γ γ γ γ γ
γ γ γ γ γ γ
γ γ γ γ γ γ
γ γ γ γ γ γ
⎧ ⎡ ⎤− −⎨ ⎢ ⎥
− −⎩ ⎢ ⎥=⎢ ⎥− −⎧⎢ ⎥⎨
− −⎢ ⎥⎣ ⎦⎩
144 2
Nudo "j"
4 4443 144424443
(Ec. 8.10)
Se observa que la tercera fila de (Ec. 8.10) es igual a la primera fila cambiada de signo, la
cuarta fila es igual a la segunda cambiada de signo, y la segunda es igual a la primera
multiplicada por 2
1
γ
γ . El sistema (Ec. 8.3) contiene sólo una ecuación linealmente independiente.
La matriz K es singular y el sistema no tiene solución única ya que no se han fijado condiciones
de vínculo para la barra.
Si las componentes de fuerza del segundo miembro de (Ec. 8.3) no guardan las mismas
relaciones que las filas del primer miembro, el sistema no tiene solución (no hay equilibrio). Si el
12K
22K
32K
42K
13K
23K
33K
43K
14K
24K
34K
44K

5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 256/500
CAPITULO 8 METODO DE RIGIDEZ - RETICULADOS
____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -6-
sistema tiene solución (se cumplen las condiciones de equilibrio) hay infinitas soluciones que
corresponden a un alargamiento de la barra seguido de un desplazamiento de cuerpo rígido.
Si se conocen los desplazamientos de los extremos de la barra, la (Ec. 8.3)
permite calcular la fuerza axial que solicita a la barra.La simetría de la matriz es una simple consecuencia del teorema de reciprocidad.
Si se adopta como orientación de la barra a la opuesta, es decir que si la barra tiene por
origen al nudo “i” y como extremo al nudo “j”, y se intercambian los roles entre “i” y “j”,
cambian simultáneamente los dos cosenos directores y por lo tanto la (Ec. 8.10) no cambia.
Figura 8.4
Las ecuaciones de equilibrio (Ec. 8.3) llamadas ecuaciones "fuerza-movimiento" pueden
escribirse particionadas de la siguiente manera:
.ii ij i i
ji jj j j
K K U PK K U P
⎡ ⎤ ⎡ ⎤ ⎡ ⎤=⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎣ ⎦ ⎣ ⎦ ⎣ ⎦
(Ec. 8.11)
O también:
. .ii i ij j i
K U K U P+ = (Ec. 8.12)
. . ji i jj j j
K U K U P+ = (Ec. 8.13)
Nótese queij
K es una submatriz 2x2 y los vectores iP y iU son vectores de dos
componentes.
La (Ec. 8.11) es un sistema de dos ecuaciones vectoriales. Cada vector tiene dos
componentes escalares (proyecciones sobre el sistema global), y por lo tanto se trata de cuatro
ecuaciones algebraicas lineales.
La matriz de rigidez de la (Ec. 8.10) constituye una descripción completa de las
características elásticas de cada barra que permite plantear las ecuaciones de
equilibrio global y de compatibilidad de desplazamientos para un conjunto de barras.
2 bγ =
1 aγ =
t t
1 aγ = −
2 bγ = −
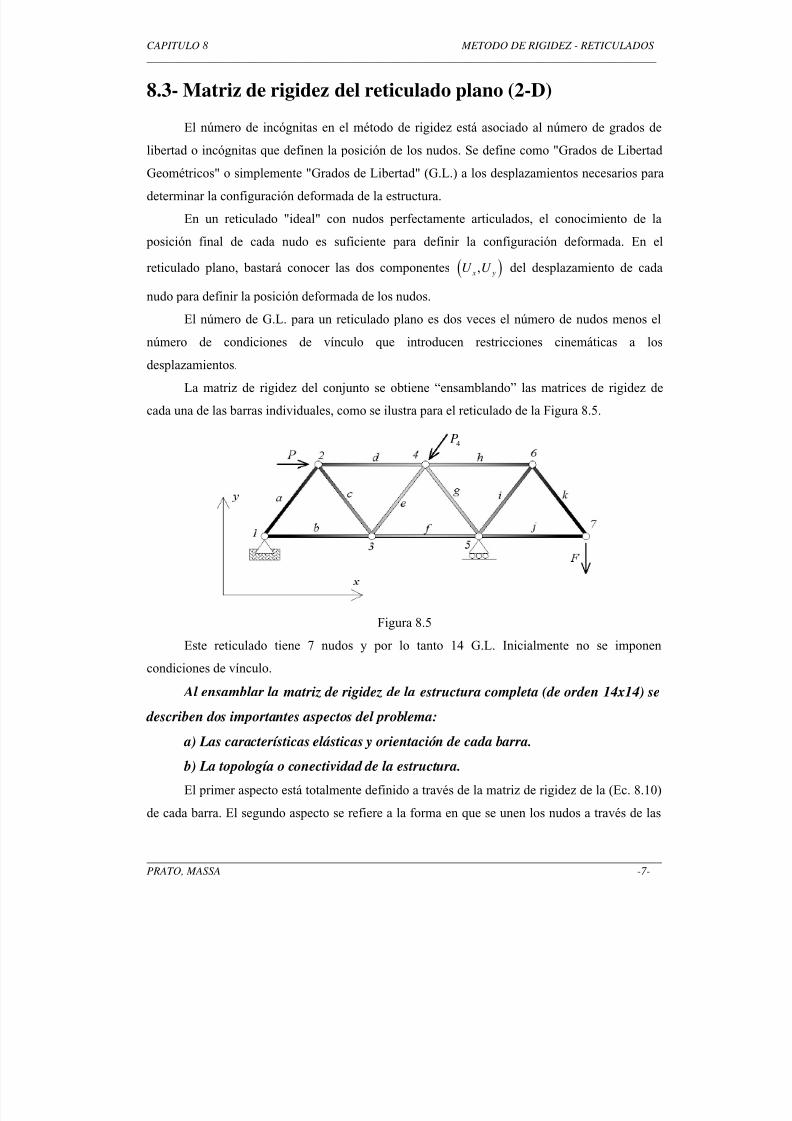
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 257/500
CAPITULO 8 METODO DE RIGIDEZ - RETICULADOS
____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -7-
8.3- Matriz de rigidez del reticulado plano (2-D)
El número de incógnitas en el método de rigidez está asociado al número de grados de
libertad o incógnitas que definen la posición de los nudos. Se define como "Grados de Libertad
Geométricos" o simplemente "Grados de Libertad" (G.L.) a los desplazamientos necesarios para
determinar la configuración deformada de la estructura.
En un reticulado "ideal" con nudos perfectamente articulados, el conocimiento de la
posición final de cada nudo es suficiente para definir la configuración deformada. En el
reticulado plano, bastará conocer las dos componentes ( ), x yU U del desplazamiento de cada
nudo para definir la posición deformada de los nudos.
El número de G.L. para un reticulado plano es dos veces el número de nudos menos el
número de condiciones de vínculo que introducen restricciones cinemáticas a los
desplazamientos.
La matriz de rigidez del conjunto se obtiene “ensamblando” las matrices de rigidez de
cada una de las barras individuales, como se ilustra para el reticulado de la Figura 8.5.
Figura 8.5
Este reticulado tiene 7 nudos y por lo tanto 14 G.L. Inicialmente no se imponen
condiciones de vínculo.
Al ensamblar la matriz de rigidez de la estructura completa (de orden 14x14) se
describen dos importantes aspectos del problema:
a) Las características elásticas y orientación de cada barra.
b) La topología o conectividad de la estructura.
El primer aspecto está totalmente definido a través de la matriz de rigidez de la (Ec. 8.10)
de cada barra. El segundo aspecto se refiere a la forma en que se unen los nudos a través de las
4P

5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 258/500
CAPITULO 8 METODO DE RIGIDEZ - RETICULADOS
____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -8-
barras (conectividades). La matriz K será de orden 14 y corresponderá a un sistema de 14
ecuaciones de equilibrio.
A modo de ejemplo, a continuación se desarrollan ahora en detalle las dos ecuaciones de
equilibrio del nudo 4.
Empleando notación matricial se plantea una ecuación vectorial de equilibrio del nudo 4
en la que intervienen las fuerzas que ejercen las distintas barras que convergen al nudo.
Figura 8.6
Equilibrio de fuerzas:
4
d e g h
j j i iP P P P P+ + + = (Ec. 8.14)
La fuerza exterior 4P se descompone en cuatro fuerzas que actúan en el extremo "j" de las
barras (d) y (e) y en el origen "i" de las barras (g) y (h).
Compatibilidad de desplazamientos: Se describe a través de las condiciones
4
d e g h
j j i iU U U U U = = = = (Ec. 8.15)
La (Ec. 8.15) expresa simplemente que los desplazamientos de los extremos de las barras
que concurren al nudo 4 son iguales al desplazamiento del nudo.
Las fuerzas en los extremos de las barras en la ecuación de equilibrio (Ec. 8.14) pueden
expresarse en función de los desplazamientos de los extremos por las ecuaciones fuerza-
desplazamiento (Ec. 8.12) y (Ec. 8.13).
2 3 4 44 4 5 6
4. . . . . . . .d d d d e e e e g g g g h h h h
ji i jj j ji i jj j ii i ij j ii i ij j
U U U U U U U U
K U K U K U K U K U K U K U K U P
⎛ ⎞ ⎛ ⎞⎛ ⎞ ⎛ ⎞⎜ ⎟ ⎜ ⎟⎜ ⎟ ⎜ ⎟+ + + + + + + =⎜ ⎟ ⎜ ⎟⎜ ⎟ ⎜ ⎟
⎝ ⎠ ⎝ ⎠ ⎝ ⎠ ⎝ ⎠
Teniendo en cuenta las ecuaciones de compatibilidad del tipo (Ec. 8.15), para cada nudo
se obtiene:
( )1 2 3 4 5 6 7 40. . . . . . 0.d e d e g h g h
ji ji jj jj ii ii ij ijU K U K U K K K K U K U K U U P+ + + + + + + + + = (Ec. 8.16)
4P
hP
gPe
P
d P
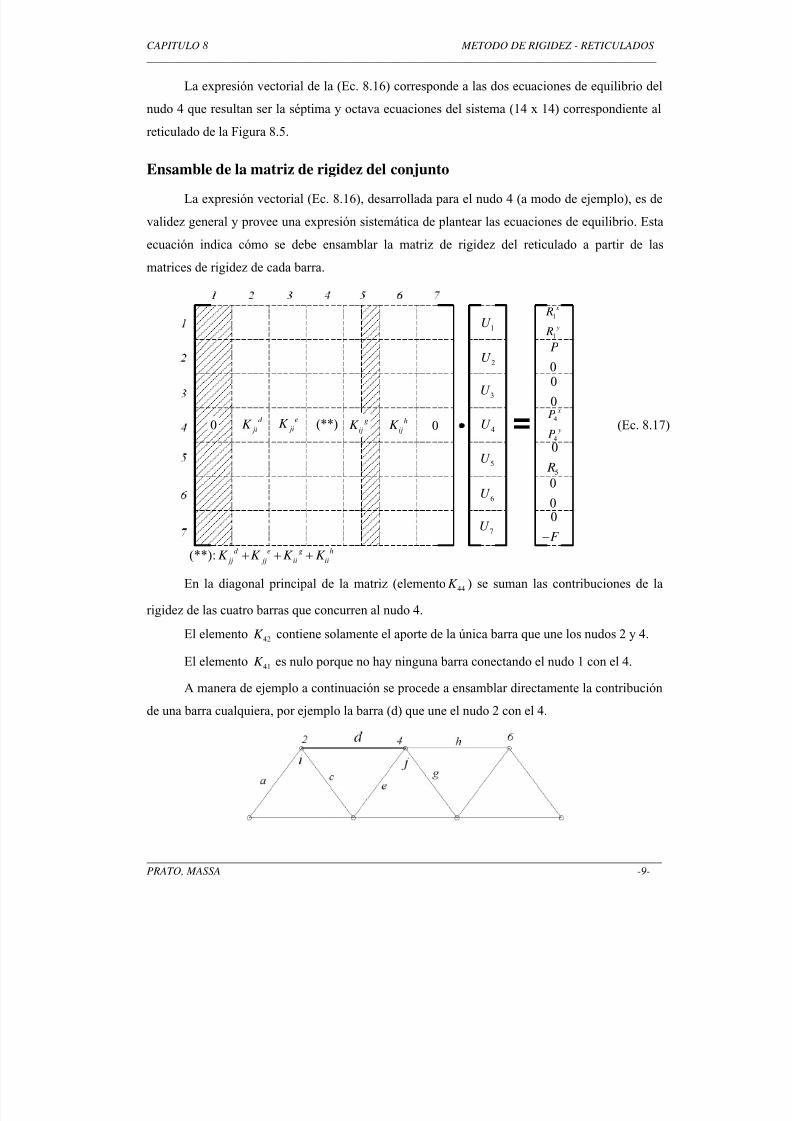
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 259/500
CAPITULO 8 METODO DE RIGIDEZ - RETICULADOS
____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -9-
La expresión vectorial de la (Ec. 8.16) corresponde a las dos ecuaciones de equilibrio del
nudo 4 que resultan ser la séptima y octava ecuaciones del sistema (14 x 14) correspondiente al
reticulado de la Figura 8.5.
Ensamble de la matriz de rigidez del conjunto
La expresión vectorial (Ec. 8.16), desarrollada para el nudo 4 (a modo de ejemplo), es de
validez general y provee una expresión sistemática de plantear las ecuaciones de equilibrio. Esta
ecuación indica cómo se debe ensamblar la matriz de rigidez del reticulado a partir de las
matrices de rigidez de cada barra.
(Ec. 8.17)
En la diagonal principal de la matriz (elemento 44K ) se suman las contribuciones de la
rigidez de las cuatro barras que concurren al nudo 4.
El elemento42K contiene solamente el aporte de la única barra que une los nudos 2 y 4.
El elemento 41K es nulo porque no hay ninguna barra conectando el nudo 1 con el 4.
A manera de ejemplo a continuación se procede a ensamblar directamente la contribución
de una barra cualquiera, por ejemplo la barra (d) que une el nudo 2 con el 4.
d
jiK
e
jiK 0
(**): d e g h
jj jj ii iiK K K K + + +
(**) g
ijK h
ijK 0
1U
2U
5
0
R
000
F −
1
1
x
y
R
R
0
P
0
0
4
4
x
y
P
P
3U
4U
5U
6U
7U

5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 260/500
CAPITULO 8 METODO DE RIGIDEZ - RETICULADOS
____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -10-
2 4
2
4
d d
ii ijd
d d
ji jj
K K K
K K
⎡ ⎤= ⎢ ⎥
⎢ ⎥⎣ ⎦
(Ec. 8.18)
:
d
iiK Se suma a la contribución de las barras (a) y (c) para dar 22K .
:d
ijK Resulta ser 24K .
:d
jiK Resulta ser42K .
:d
jjK Se suma a la contribución de las barras (e), (g) y (h) para dar 44K .
Lo indicado para la barra (d) es totalmente general, y para una barra genérica (*) que une
el nudo "i" con el nudo "j" se tiene:
* *
. .i ii i ij jP K U K U = + +
contribución de las otras barras * *. . j ji i jj jP K U K U = + + contribución de las otras barras
(Ec. 8.19)
Para ensamblar la matriz del conjunto se parte inicialmente de una matriz (2n x 2n) cuyos
coeficientes son todos nulos, donde “n” es el número de nudos del reticulado, y se acumulan en
dicha matriz las contribuciones de todas las barras que integran la estructura.
Por ejemplo, la contribución de la barra (*) será según la (Ec. 8.19) la indicada en la
Figura 8.7.
Figura 8.7
Propiedades de la matriz de rigidez
1) La matriz de rigidez del reticulado plano es cuadrada y de orden 2n, donde n es el
número de nudos. Para una barra en 3 dimensiones, la matriz sería de orden (3n x 3n).
2) Es una matriz simétrica como consecuencia que las matrices de las barras individuales
son también simétricas.
*
iiK
*
jjK
*
ijK
*
jiK
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 261/500
CAPITULO 8 METODO DE RIGIDEZ - RETICULADOS
____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -11-
3) La matriz de rigidez, tal como resulta del proceso de ensamble antes descrito, es una
matriz singular (determinante nulo) de modo que el sistema de la (Ec. 8.17) no tiene solución
única porque no se han impuesto las condiciones de vínculo que restringen los desplazamientos
del cuerpo rígido. Para impedir desplazamiento de cuerpo rígido en el plano hay que dar por lo
menos tres condiciones de vínculo apropiadas que restrinjan los desplazamientos de un cuerpo
rígido en el plano.
Condiciones de vínculo
Habiendo ya considerado las relaciones constitutivas, las ecuaciones de equilibrio y las
cinemáticas (o de compatibilidad), sólo resta introducir las condiciones de vínculo (apoyos). El
nudo 1 es un apoyo fijo y el nudo 5 es un apoyo móvil, de modo que se tienen tres
desplazamientos nulos:
5
1 5
0;
0 0
xU
U U ⎡ ⎤⎡ ⎤
= = ⎢ ⎥⎢ ⎥⎣ ⎦ ⎣ ⎦
(Ec. 8.20)
Las columnas primera, segunda y décima que van a ser multiplicadas por cero, no son
necesarias para resolver el sistema de ecuaciones ya que los respectivos desplazamientos son
nulos en función de las condiciones de vínculo impuestas, y pueden ser omitidas del sistema de
ecuaciones a resolver.
Las filas primera, segunda y décima se pueden también omitir del sistema de ecuaciones y
resolver un sistema 11 x 11 que permita determinar los 11 desplazamientos desconocidos.
Una vez calculados los 11 desplazamientos (sin considerar las filas primera, segunda y
décima), se pueden utilizar las ecuaciones primera, segunda y décima para obtener las reacciones
de apoyo desconocidas (Ec. 8.17).
La diagonal principal de la matriz tiene todos sus elementos distintos de cero, los que
además son siempre positivos. Esto concuerda con el hecho que para producir un desplazamiento
en una dirección y sentido dado se requiere aplicar en dicho nudo una fuerza distinta de cero, y
en general del mismo signo que el desplazamiento. Como además los elementos de la diagonal
son los únicos que se obtienen sumando la rigidez de las distintas barras, éstos resultan ser
dominantes (mayores) respecto a los restantes elementos de la matriz.
Observando la Figura 8.7 se deduce que si los números que definen los nudos extremos
de una barra difieren en pocas unidades, las cuatro submatrices de esa barra se ubican muy cerca
de la diagonal principal (es evidente que cualquiera sea la numeración, las submatrices iiK y jj
K
van siempre sobre la diagonal principal).
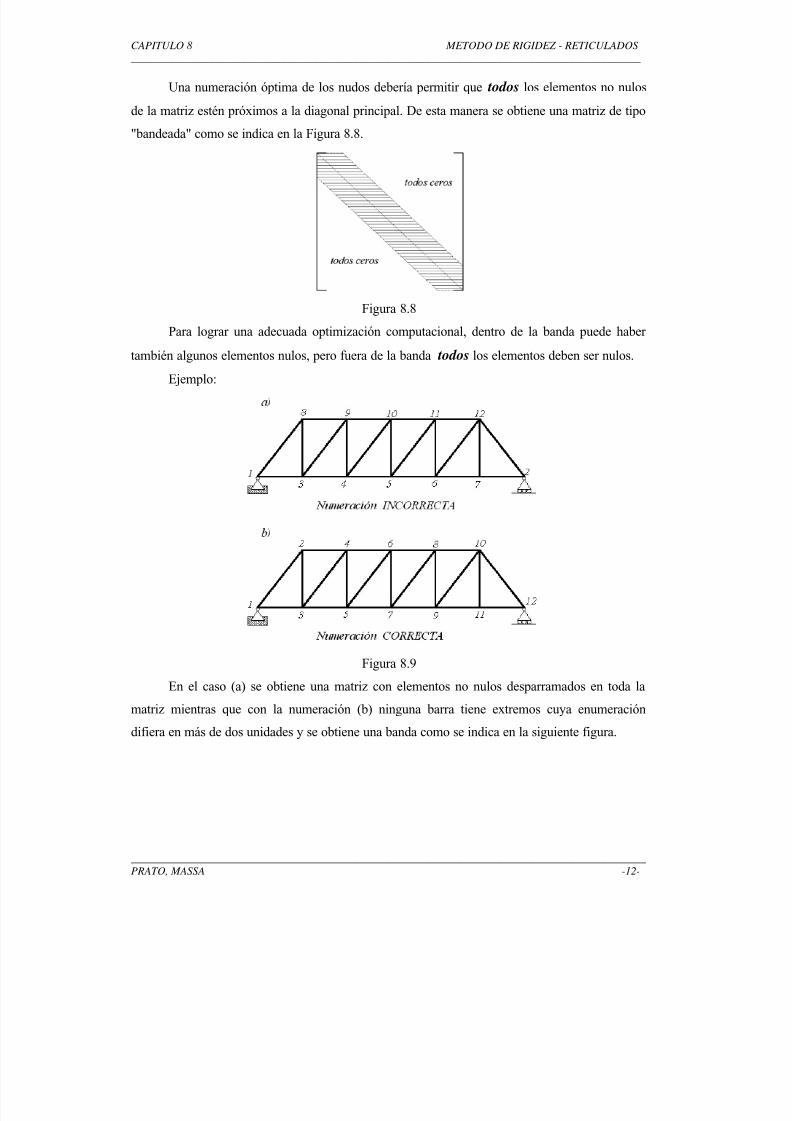
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 262/500
CAPITULO 8 METODO DE RIGIDEZ - RETICULADOS
____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -12-
Una numeración óptima de los nudos debería permitir que todos los elementos no nulos
de la matriz estén próximos a la diagonal principal. De esta manera se obtiene una matriz de tipo
"bandeada" como se indica en la Figura 8.8.
Figura 8.8
Para lograr una adecuada optimización computacional, dentro de la banda puede haber
también algunos elementos nulos, pero fuera de la banda todos los elementos deben ser nulos.
Ejemplo:
Figura 8.9
En el caso (a) se obtiene una matriz con elementos no nulos desparramados en toda la
matriz mientras que con la numeración (b) ninguna barra tiene extremos cuya enumeración
difiera en más de dos unidades y se obtiene una banda como se indica en la siguiente figura.

5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 263/500
CAPITULO 8 METODO DE RIGIDEZ - RETICULADOS
____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -13-
En ambos casos, antes de introducir las condiciones de vínculo se tiene una matriz
simétrica de orden (24x24). El ancho de la banda tiene importancia desde el punto de vista
computacional o de programación, pero no afecta la validez del método cualquiera sea el
esquema de numeración que se adopte. El caso (b) permite ciertas ventajas de ordenamiento
computacional y requiere menos capacidad de memoria porque la parte fuera de la banda no
necesita ser calculada o almacenada. Además, por simetría sólo se requiere calcular y guardar en
memoria la diagonal principal y la mitad del resto de la matriz.
Para ilustrar los cambios del sistema de ecuaciones a resolver según las condiciones devínculo, a continuación se introducen variantes al reticulado de la Figura 8.5.
1) Se agrega un apoyo móvil en el nudo 3 en dirección horizontal.
En el método de las fuerzas se tendría ahora una estructura hiperestática, pero en el
método de rigidez simplemente se elimina la sexta columna (que multiplica a 3 0 yU ≡ ) y no se
considera la sexta ecuación, con lo que se reduce en uno el número de incógnitas a calcular.
2) Se agrega una barra que une los nudos 2 y 5.
1U
2U
3U
4U
5U
6U
7U

5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 264/500
CAPITULO 8 METODO DE RIGIDEZ - RETICULADOS
____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -14-
En el método de rigidez bastará sumar la contribución de las cuatro submatrices de
rigidez de la nueva barra pero no aumenta el número de incógnitas resolver.
De estos dos ejemplos se concluye que en el método de rigidez no interesa el
grado de indeterminación estática, sino únicamente la indeterminación geométrica queestá relacionada con el número de nudos y número de condiciones de vínculo.
3) Se agrega un apoyo elástico en dirección vertical en el nudo 3.
Si el apoyo elástico (resorte) tiene rigidez constante de valor “k ” resulta que para
desplazar en dirección vertical al nudo 3 en un valor unitario, además de la rigidez del reticulado
habrá que vencer la rigidez del resorte. Para tenerlo en cuenta se debe sumar el valor “k ” al
coeficiente de la diagonal principal de la sexta fila y columna.
4) Se reemplaza el apoyo 5 por un apoyo elástico.Se suma la rigidez del resorte sobre la diagonal principal al elemento de la décima fila y
columna. En este caso, el desplazamiento vertical del nudo 5 pasa a ser una incógnita más
( )5 0 yU ≠ y el sistema a resolver es de 12 x 12.
8.4- Esfuerzos en barras
El "esfuerzo computacional" de la solución por el método de rigidez está determinado
casi exclusivamente por el tiempo requerido para resolver el sistema de ecuaciones.
Una vez hallados los desplazamientos, la determinación de los esfuerzos en las barras
resulta muy simple. Primero se determina la elongación de la barra según (Ec. 8.2) y luego se
calcula la fuerza según (Ec. 8.6). Para el caso de una barra genérica cuyo origen es el nudo "i" y
su extremo el "j", se tiene:
( )1 2,t γ γ = ; ( ).e U t = ∆ ; .F K e= ;. A E
K L
=
( ) ( ) ( ); x x y y j i j i j iU U U U U U U ⎡ ⎤∆ = − = − −⎣ ⎦
( ) ( )1 2. . . x x y y
j i j iF K U U U U γ γ ⎡ ⎤= − + −⎣ ⎦ (Ec. 8.21)
Si la proyección del corrimiento relativo ( ) j iU U − sobre la dirección t (que se ha
definido de "i" hacia "j") resulta positiva, la barra se ha alargado y está por lo tanto traccionada.
Conclusión:
Si el valor dado por (Ec. 8.21) resulta positivo, implica esfuerzo de tracción para
la barra considerada.
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 265/500
CAPITULO 8 METODO DE RIGIDEZ - RETICULADOS
____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -15-
Un “procedimiento alternativo” consiste en efectuar el producto .K U indicado en la
ecuación fuerza-desplazamiento (Ec. 8.3) para obtener las fuerzas en los extremos de la barra.
Como las fuerzas en los extremos son iguales y opuestas, será suficiente aplicar la (Ec. 8.12).
11 12 13 14. . . . x y x y x
i i j j iK U K U K U K U P+ + + =
21 22 23 24. . . . x y x y yi i j j iK U K U K U K U P+ + + =
(Ec. 8.22)
Finalmente:
( ) ( )2 2
x y
i i iP P P= + (Ec. 8.23)
El esfuerzo será de compresión si la resultantei
P tiene el sentido de "i" hacia "j". El
lector puede comprobar que reemplazando (Ec. 8.22) en (Ec. 8.23) y utilizando los elementos de
K dados por (Ec. 8.10) se llega a la (Ec. 8.21).
8.5- Reticulados Espaciales (3-D)
Los mismos conceptos desarrollados para el reticulado plano pueden generalizarse para el
reticulado espacial. Bastará tener presente que las fuerzas y los desplazamientos tienen en este
caso tres componentes (según x, y, z). Todas las expresiones vectoriales, como son las
ecuaciones (Ec. 8.1), (Ec. 8.2), (Ec. 8.11), (Ec. 8.12), (Ec. 8.13), (Ec. 8.14), (Ec. 8.15), etc.
mantienen su vigencia.
Para obtener una expresión explícita de la matriz de rigidez de una barra de reticulado
similar a (Ec. 8.10), se procede de una manera totalmente análoga a la empleada para el caso
plano.
x
iP
y
iP
iP
[ ].i
ii ij i
j
U K K P
U
⎡ ⎤⎡ ⎤ =⎢ ⎥⎣ ⎦
⎣ ⎦

5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 266/500
CAPITULO 8 METODO DE RIGIDEZ - RETICULADOS
____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -16-
( )1 2 3, ,t γ γ γ =
Donde:
( )
( ) ( ) ( )1
2 2 2
x x
j i
x x y y z z
j i j i j i
r r
r r r r r r
γ −
=− + − + −
Los cosenos directores ( )1 2 3, ,γ γ γ se calculan a partir de las coordenadas de los nudos "i"
y "j", y la ecuación fuerza-desplazamiento resulta:
(Ec. 8.24)
El armado de la matriz sigue el mismo procedimiento desarrollado para el caso plano.
Una vez resuelto el sistema de ecuaciones se pueden calcular las fuerzas en las barras utilizando
una expresión similar a la (Ec. 8.21).
( ) ( ) ( )1 2 3. . . . . . . x x y y z z
j i j i j iF K e K U t K U U U U U U γ γ γ ⎡ ⎤= = ∆ = − + − + −⎣ ⎦ (Ec. 8.25)
2
1 1 2 1 3
2
1 2 2 2 3
2
1 3 2 3 3
. . . . .
. . . . .
. . . . ..
x x
i i
y y
i i
z z
i i
x x
j j
y y
j j
z
j j
K K K U P
K K K U P
K K K U P
U P
U P
U P
γ γ γ γ γ
γ γ γ γ γ
γ γ γ γ γ
⎡ ⎤ ⎡ ⎤⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥ =⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥⎣ ⎦⎣ ⎦
igual y cambiada de signo
igual y cambiada de signo igual
z
⎡ ⎤⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎣ ⎦
y
iU
y
iP
x
iP
x
iU
y
jU
y
jP x
jP x
jU
z
iU
z
iP
z
jU
z
jP
1γ
3γ
2γ
t
t
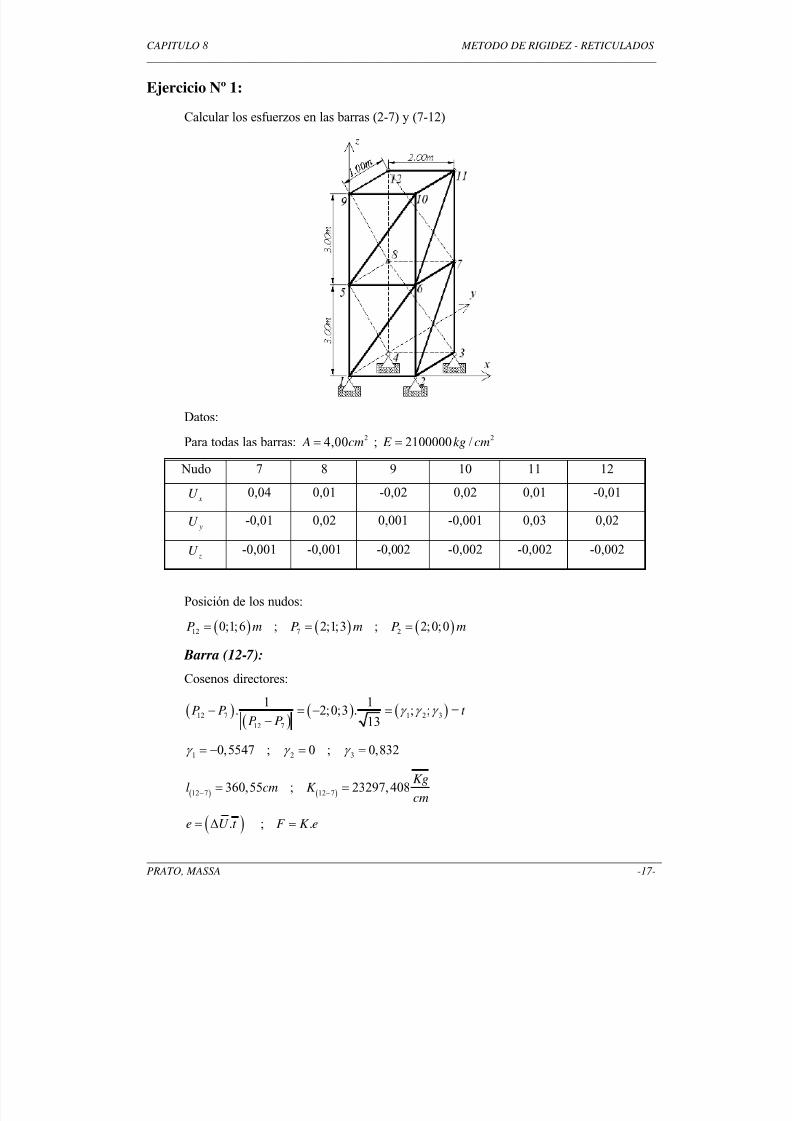
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 267/500
CAPITULO 8 METODO DE RIGIDEZ - RETICULADOS
____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -17-
Ejercicio Nº 1:
Calcular los esfuerzos en las barras (2-7) y (7-12)
Datos:
Para todas las barras: 24,00 A cm= ; 22100000 / E kg cm=
Nudo 7 8 9 10 11 12
xU 0,04 0,01 -0,02 0,02 0,01 -0,01
yU -0,01 0,02 0,001 -0,001 0,03 0,02
zU -0,001 -0,001 -0,002 -0,002 -0,002 -0,002
Posición de los nudos:
( ) ( ) ( )12 7 20;1;6 ; 2;1;3 ; 2;0;0P m P m P m= = =
Barra (12-7):
Cosenos directores:
( )( )
( ) ( )12 7 1 2 3
12 7
1 1. 2;0;3 ; ;
13P P t
P Pγ γ γ − = − = =
−.
1 2 30,5547 ; 0 ; 0,832γ γ γ = − = =
( ) ( )12 7 12 7360,55 ; 23297,408
Kgl cm K
cm− −
= =
( ).e U t = ∆ ; .F K e=
z
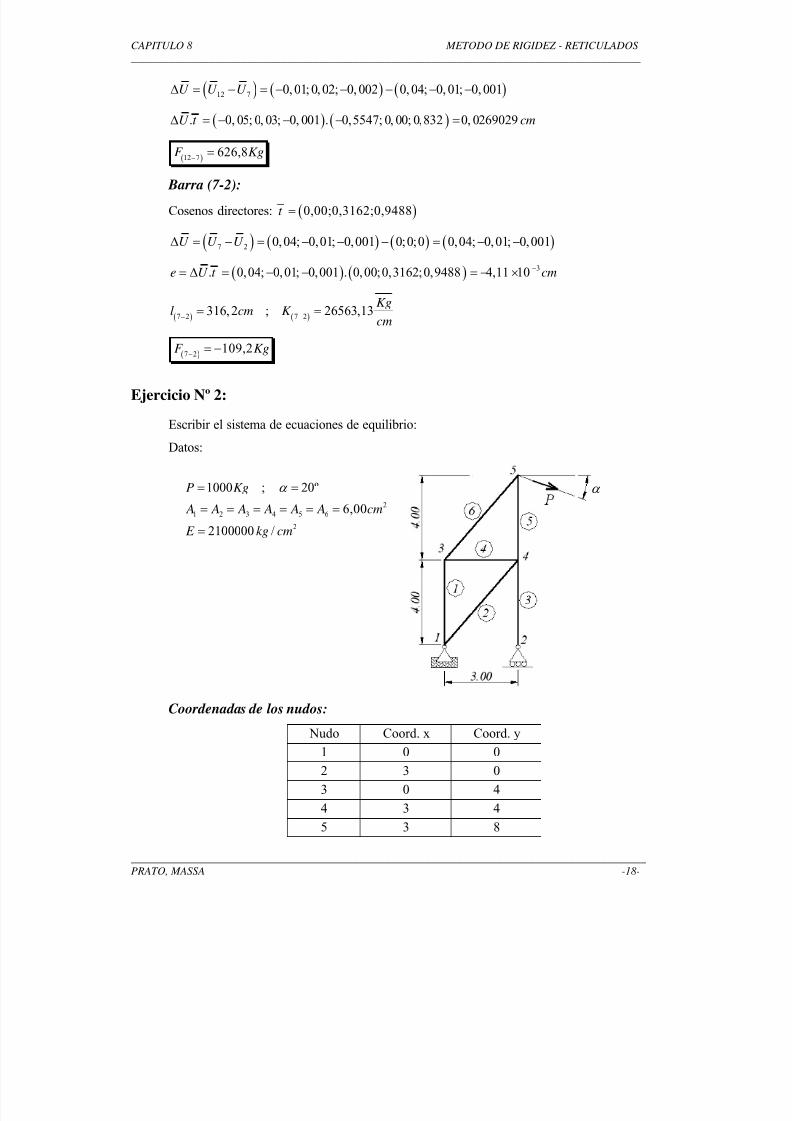
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 268/500
CAPITULO 8 METODO DE RIGIDEZ - RETICULADOS
____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -18-
( ) ( ) ( )12 7 0, 01; 0, 02; 0, 002 0, 04; 0, 01; 0, 001U U U ∆ = − = − − − − −
( ) ( ). 0, 05; 0, 03; 0, 001 . 0,5547; 0, 00; 0,832 0, 0269029U t cm∆ = − − − =
( )12 7626,8F Kg
−=
Barra (7-2):
Cosenos directores: ( )0,00;0,3162;0,9488t =
( ) ( ) ( ) ( )7 2 0,04; 0,01; 0,001 0;0;0 0,04; 0,01; 0,001U U U ∆ = − = − − − = − −
( ) ( ) 3. 0,04; 0,01; 0,001 . 0,00;0,3162;0,9488 4,11 10e U t cm−= ∆ = − − = − ×
( ) ( )7 2 7 2316,2 ; 26563,13
Kgl cm K
cm
− −= =
( )7 2109,2F Kg
−= −
Ejercicio Nº 2:
Escribir el sistema de ecuaciones de equilibrio:
Datos:
Coordenadas de los nudos:
Nudo Coord. x Coord. y
1 0 0
2 3 0
3 0 4
4 3 4
5 3 8
α 2
1 2 3 4 5 6
2
1000 ; 20º6,00
2100000 /
P Kg A A A A A A cm
E kg cm
α = == = = = = =
=
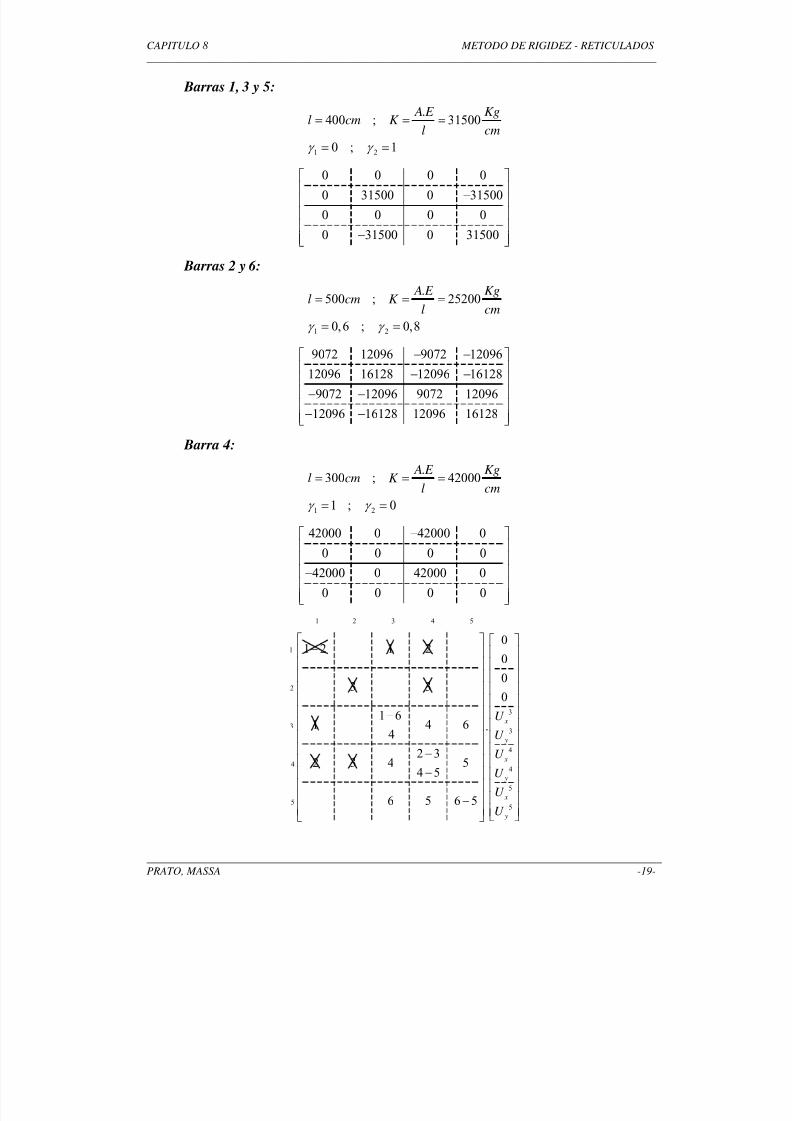
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 269/500
CAPITULO 8 METODO DE RIGIDEZ - RETICULADOS
____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -19-
Barras 1, 3 y 5:
1 2
.400 ; 31500
0 ; 1
A E Kgl cm K
l cm
γ γ
= = =
= =
0 0 0 0
0 31500 0 31500
0 0 0 0
0 31500 0 31500
⎡ ⎤⎢ ⎥−⎢ ⎥⎢ ⎥⎢ ⎥
−⎢ ⎥⎣ ⎦
Barras 2 y 6:
1 2
.500 ; 25200
0,6 ; 0,8
A E Kgl cm K
l cm
γ γ
= = =
= =
9072 12096 9072 12096
12096 16128 12096 16128
9072 12096 9072 12096
12096 16128 12096 16128
− −⎡ ⎤⎢ ⎥− −⎢ ⎥⎢ ⎥− −⎢ ⎥
− −⎢ ⎥⎣ ⎦
Barra 4:
1 2
.300 ; 42000
1 ; 0
A E Kgl cm K
l cmγ γ
= = =
= =
42000 0 42000 0
0 0 0 0
42000 0 42000 0
0 0 0 0
−⎡ ⎤⎢ ⎥⎢ ⎥⎢ ⎥−⎢ ⎥⎢ ⎥⎣ ⎦
1 2 3 4 5
1
2
3
4
5
1 2−
1 2
3 3
11 6
4 64
2
−
3
3
3
4
4
5
5
0
0
0
0
.
2 34 5
4 5
6 5 6 5
x
y
x
y
x
y
U
U
U
U
U
U
⎡ ⎤ ⎡ ⎤
⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥−⎢ ⎥ ⎢ ⎥
−⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥−⎢ ⎥ ⎢ ⎥
⎣ ⎦⎣ ⎦
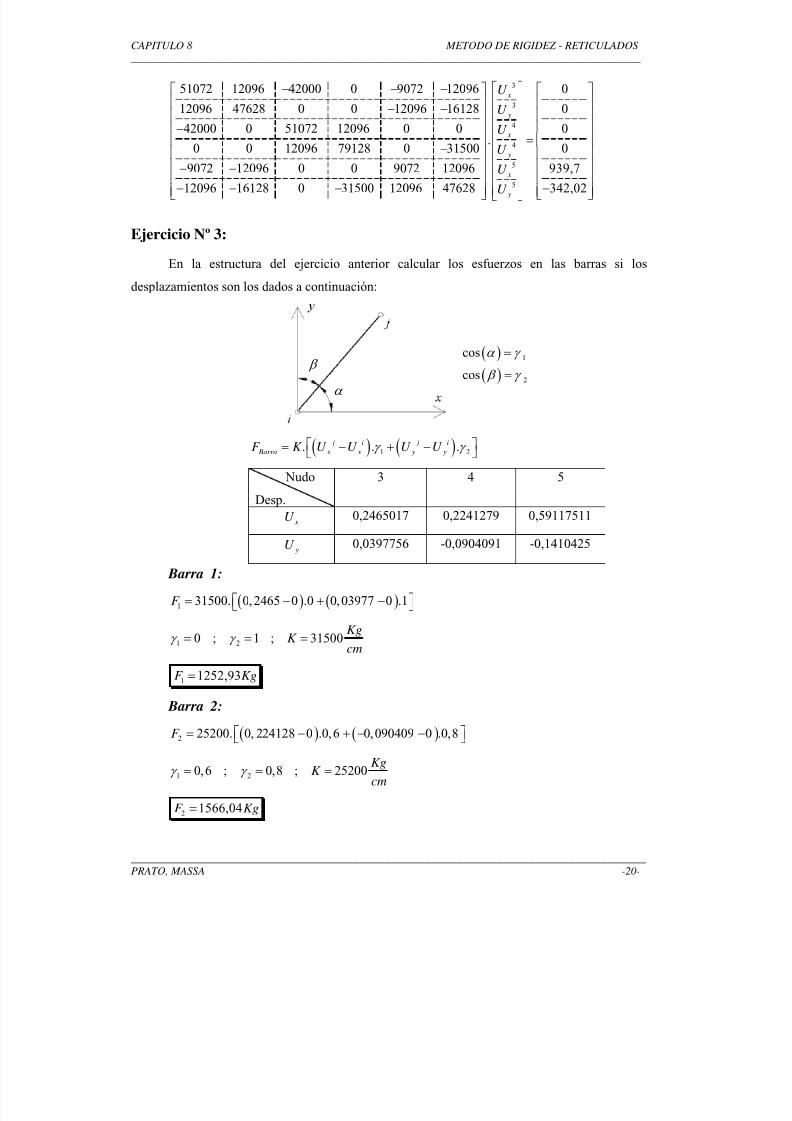
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 270/500
CAPITULO 8 METODO DE RIGIDEZ - RETICULADOS
____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -20-
3
3
4
4
5
5
51072 12096 42000 0 9072 12096
12096 47628 0 0 12096 16128
42000 0 51072 12096 0 0.
0 0 12096 79128 0 31500
9072 12096 0 0 9072 12096
12096 16128 0 31500 12096 47628
x
y
x
y
x
y
U
U
U
U
U
U
− − − ⎡ ⎤⎡ ⎤⎢ ⎥⎢ ⎥− − ⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥−⎢ ⎥⎢ ⎥
− ⎢ ⎥⎢ ⎥
⎢ ⎥⎢ ⎥− −⎢ ⎥⎢ ⎥
− − − ⎢ ⎥⎢ ⎥⎣ ⎦ ⎣ ⎦
0
0
0
0
939,7
342,02
⎡ ⎤⎢ ⎥⎢ ⎥⎢ ⎥
= ⎢ ⎥⎢ ⎥
⎢ ⎥⎢ ⎥
−⎢ ⎥⎣ ⎦
Ejercicio Nº 3:
En la estructura del ejercicio anterior calcular los esfuerzos en las barras si los
desplazamientos son los dados a continuación:
Nudo
Desp.
3 4 5
xU 0,2465017 0,2241279 0,59117511
yU 0,0397756 -0,0904091 -0,1410425
Barra 1:
( ) ( )1 31500. 0,2465 0 .0 0,03977 0 .1F = − + −⎡ ⎤⎣ ⎦
1 20 ; 1 ; 31500Kg
K
cm
γ γ = = =
1 1252,93F Kg=
Barra 2:
( ) ( )2 25200. 0, 224128 0 .0,6 0,090409 0 .0,8F = − + − −⎡ ⎤⎣ ⎦
1 20,6 ; 0,8 ; 25200Kg
K cm
γ γ = = =
2
1566,04F Kg=
β
α
( )
( )
1
2
cos
cos
α γ
β γ
=
=
( ) ( )1 2. . . j i j i
Barra x x y yF K U U U U γ γ ⎡ ⎤= − + −⎣ ⎦

5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 271/500
CAPITULO 8 METODO DE RIGIDEZ - RETICULADOS
____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -21-
Barra 3:
( ) ( )3 31500. 0,22412 0 .0 0,09040 0 .1F = − + − −⎡ ⎤⎣ ⎦
1 20 ; 1 ; 31500Kg
K
cm
γ γ = = =
3 2847,88F Kg= −
Barra 4:
( ) ( )4 42000. 0, 2241 0, 2465 .1 0, 0904 0, 03977 .0F = − + − −⎡ ⎤⎣ ⎦
1 21 ; 0 ; 42000Kg
K cm
γ γ = = =
4 939,70F Kg= −
Barra 5:
( ) ( )( )5 31500. 0,5911 0, 22412 .0 0,141 0,090409 .1F ⎡ ⎤= − + − − −⎣ ⎦
1 20 ; 1 ; 31500Kg
K cm
γ γ = = =
5 1594,95F Kg= −
Barra 6:
( ) ( )6 25200. 0, 59117 0, 2465 .0, 6 0,14104 0, 039 .0,8F = − + − −⎡ ⎤⎣ ⎦
1 20,6 ; 0,8 ; 25200Kg
K cm
γ γ = = =
6 1566,17F Kg=
Nota: por tratarse de una estructura isostática se pueden comprobar fácilmente los
resultados por cualquier método de análisis estático disponible.
Ejercicio Nº 4:
Determinar las fuerzas en las barras del reticulado cuya base es un triángulo equilátero.
Todas las barras: 24,00 A cm= 400l cm=
Lado del triángulo base: 200d cm=
Carga: ( )= 200;-100;0P 6
2= 2,1 10
Kg E
cm×
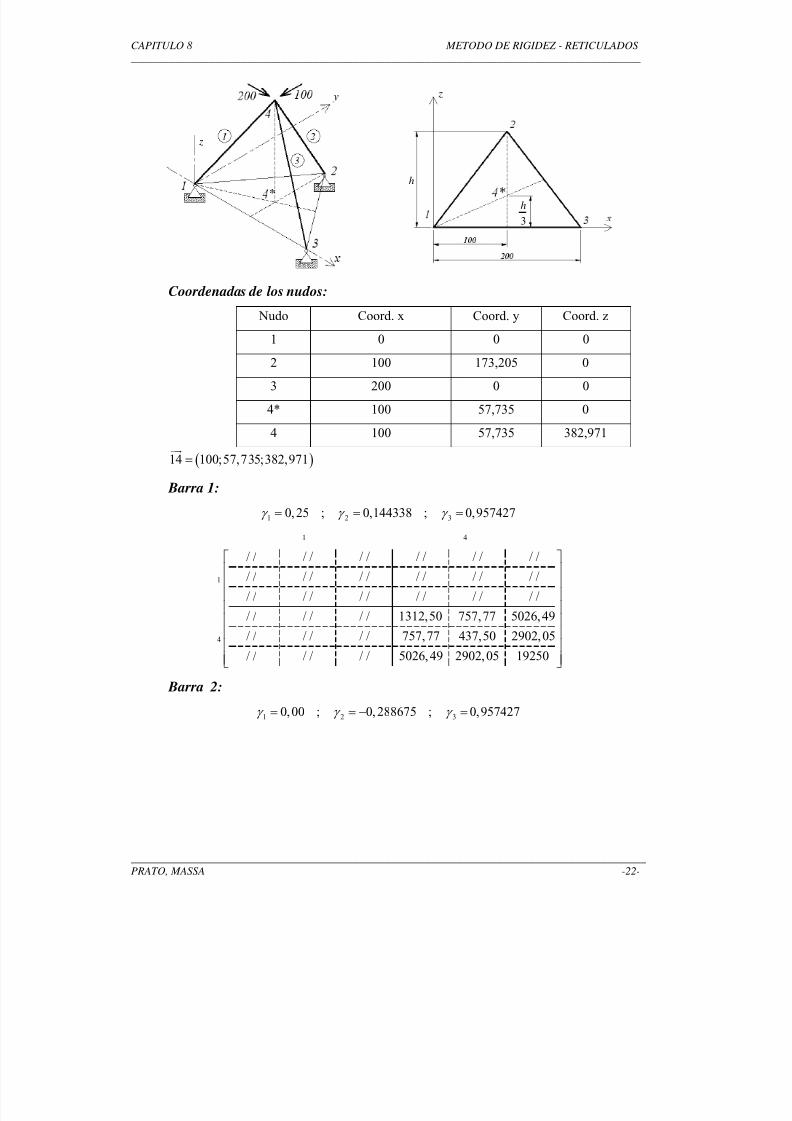
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 272/500
CAPITULO 8 METODO DE RIGIDEZ - RETICULADOS
____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -22-
Coordenadas de los nudos:
Nudo Coord. x Coord. y Coord. z
1 0 0 0
2 100 173,205 0
3 200 0 0
4* 100 57,735 0
4 100 57,735 382,971
( )14 100;57,735;382,971=uur
Barra 1:
1 2 30,25 ; 0,144338 ; 0,957427γ γ γ = = =
1 4
1
4
/ / / / / / / / / / / /
/ / / / / / / / / / / /
/ / / / / / / / / / / /
/ / / / / / 1312,50 757,77 5026,49
/ / / / / / 757,77 437,50 2902,05
/ / / / / / 5026,49 2902,05 19250
⎡ ⎤⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢⎣ ⎦
⎥
Barra 2:
1 2 30,00 ; 0,288675 ; 0,957427γ γ γ = = − =
h
3
h
z
z
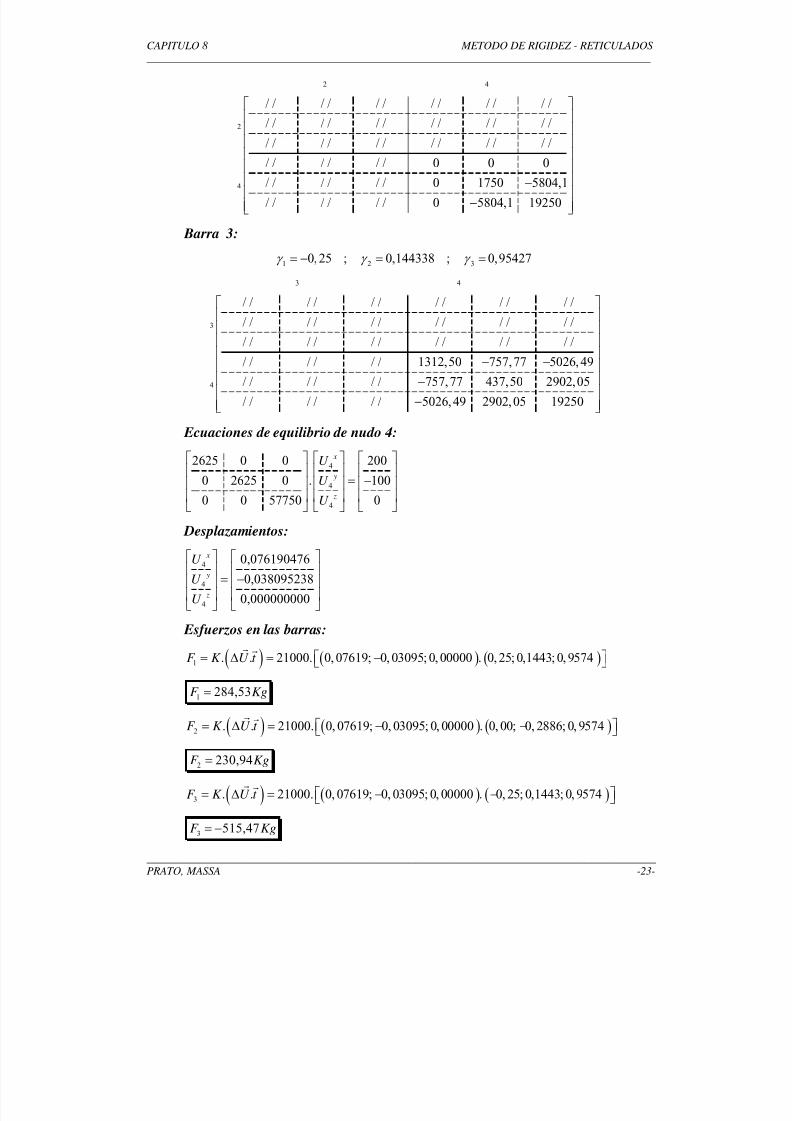
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 273/500
CAPITULO 8 METODO DE RIGIDEZ - RETICULADOS____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -23-
2 4
2
4
/ / / / / / / / / / / /
/ / / / / / / / / / / /
/ / / / / / / / / / / /
/ / / / / / 0 0 0 / / / / / / 0 1750 5804,1
/ / / / / / 0 5804,1 19250
⎡ ⎤⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥−⎢ ⎥
−⎢ ⎥⎣ ⎦
Barra 3:
1 2 30,25 ; 0,144338 ; 0,95427γ γ γ = − = =
3 4
3
4
/ / / / / / / / / / / /
/ / / / / / / / / / / / / / / / / / / / / / / /
/ / / / / / 1312,50 757,77 5026,49
/ / / / / / 757,77 437,50 2902,05
/ / / / / / 5026,49 2902,05 19250
⎡ ⎤⎢ ⎥
⎢ ⎥⎢ ⎥⎢
− −⎢⎢ −⎢
−⎢⎣ ⎦
⎥⎥⎥⎥⎥
Ecuaciones de equilibrio de nudo 4:
4
4
4
2625 0 0 200
0 2625 0 . 100
0 0 57750 0
x
y
z
U
U
U
⎡ ⎤ ⎡ ⎤ ⎡ ⎤⎢ ⎥ ⎢ ⎥ ⎢ ⎥
= −⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎣ ⎦ ⎣ ⎦ ⎣ ⎦
Desplazamientos:
4
4
4
0,076190476
0,038095238
0,000000000
x
y
z
U
U
U
⎡ ⎤ ⎡ ⎤⎢ ⎥ ⎢ ⎥
= −⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥⎣ ⎦ ⎣ ⎦
Esfuerzos en las barras:
( ) ( ) ( )1 . . 21000. 0, 07619; 0, 03095; 0, 00000 . 0, 25; 0,1443; 0, 9574F K U t = ∆ = −⎡ ⎤⎣ ⎦r
r
1 284,53F Kg=
( ) ( ) ( )2 . . 21000. 0, 07619; 0, 03095; 0, 00000 . 0, 00; 0, 2886; 0, 9574F K U t = ∆ = − −⎡ ⎤⎣ ⎦r r
2 230,94F Kg=
( ) ( ) ( )3 . . 21000. 0, 07619; 0, 03095; 0, 00000 . 0, 25; 0,1443; 0, 9574F K U t = ∆ = − −⎡ ⎤⎣ ⎦r r
3 515,47F Kg= −
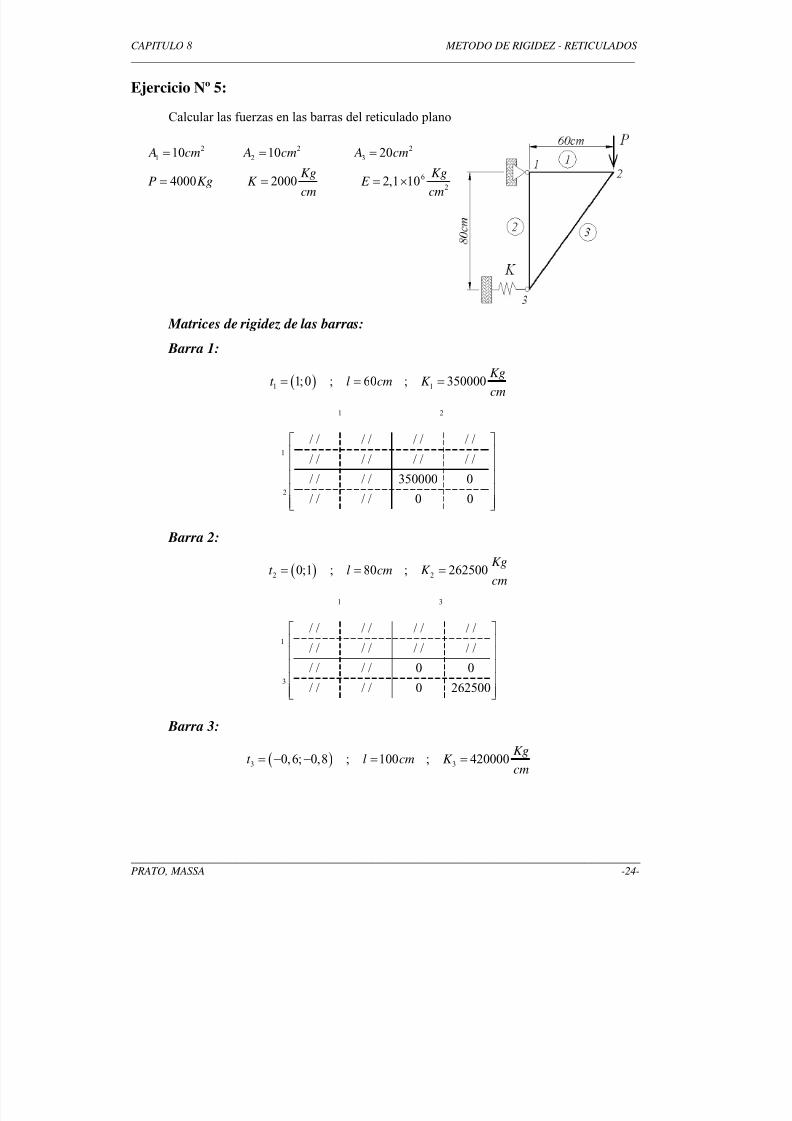
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 274/500
CAPITULO 8 METODO DE RIGIDEZ - RETICULADOS____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -24-
Ejercicio Nº 5:
Calcular las fuerzas en las barras del reticulado plano
Matrices de rigidez de las barras: Barra 1:
( )1 11;0 ; 60 ; 350000Kg
t l cm K cm
= = =
1 2
1
2
/ / / / / / / /
/ / / / / / / /
/ / / / 350000 0
/ / / / 0 0
⎡ ⎤⎢ ⎥⎢ ⎥⎢ ⎥
⎢ ⎥⎢ ⎥⎣ ⎦
Barra 2:
( )2 20;1 ; 80 ; 262500Kg
t l cm K cm
= = =
1 3
1
3
/ / / / / / / /
/ / / / / / / / / / / / 0 0
/ / / / 0 262500
⎡ ⎤⎢ ⎥
⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎣ ⎦
Barra 3:
( )3 30,6; 0,8 ; 100 ; 420000Kg
t l cm K cm
= − − = =
2 2 2
1 2 3
6
2
10 10 20
4000 2000 2,1 10
A cm A cm A cm
Kg KgP Kg K E
cm cm
= = =
= = = ×
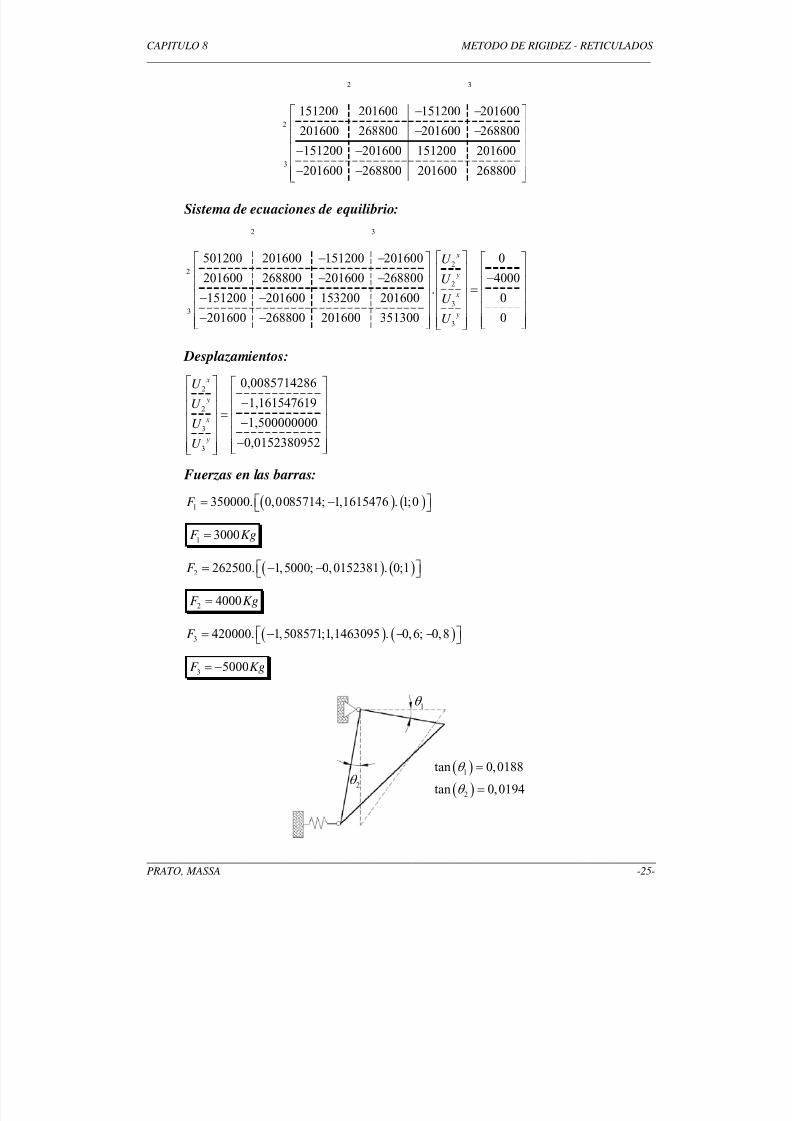
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 275/500
CAPITULO 8 METODO DE RIGIDEZ - RETICULADOS____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -25-
2 3
2
3
151200 201600 151200 201600
201600 268800 201600 268800
151200 201600 151200 201600
201600 268800 201600 268800
− −⎡ ⎤⎢ ⎥− −⎢ ⎥⎢ ⎥− −
⎢ ⎥− −⎢ ⎥⎣ ⎦
Sistema de ecuaciones de equilibrio:
2 3
22
2
33
3
501200 201600 151200 201600 0
201600 268800 201600 268800.
151200 201600 153200 201600
201600 268800 201600 351300
x
y
x
y
U
U
U
U
− − ⎡ ⎤⎡ ⎤⎢ ⎥⎢ ⎥− − −⎢ ⎥⎢ ⎥ =⎢ ⎥⎢ ⎥− −⎢ ⎥⎢ ⎥
− −
⎢ ⎥⎢ ⎥⎣ ⎦ ⎣ ⎦
4000
0
0
⎡ ⎤⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥
⎢ ⎥⎣ ⎦
Desplazamientos:
2
2
3
3
0,0085714286
1,161547619
1,500000000
0,0152380952
x
y
x
y
U
U
U
U
⎡ ⎤ ⎡ ⎤⎢ ⎥ ⎢ ⎥−⎢ ⎥ ⎢ ⎥=⎢ ⎥ ⎢ ⎥−⎢ ⎥ ⎢ ⎥
−⎢ ⎥ ⎢ ⎥⎣ ⎦⎣ ⎦
Fuerzas en las barras:
( ) ( )1 350000. 0,0085714; 1,1615476 . 1;0F = −⎡ ⎤⎣ ⎦
1 3000F Kg=
( ) ( )2 262500. 1,5000; 0,0152381 . 0;1F = − −⎡ ⎤⎣ ⎦
2 4000F Kg=
( ) ( )3 420000. 1,508571;1,1463095 . 0,6; 0,8F = − − −⎡ ⎤⎣ ⎦
3 5000F Kg= −
( )
( )
1
2
tan 0,0188
tan 0,0194
θ
θ
=
=
1θ
2θ
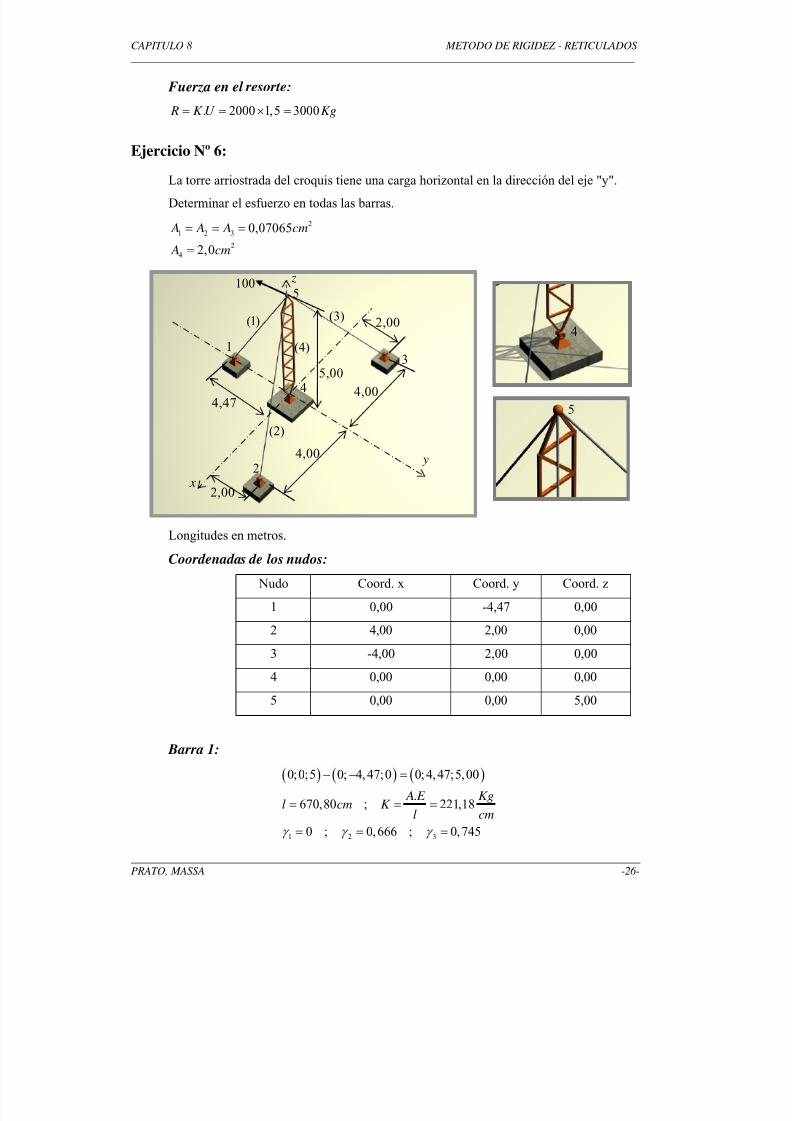
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 276/500
CAPITULO 8 METODO DE RIGIDEZ - RETICULADOS____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -26-
Fuerza en el resorte:
. 2000 1,5 3000 R K U Kg= = × =
Ejercicio Nº 6:
La torre arriostrada del croquis tiene una carga horizontal en la dirección del eje "y".
Determinar el esfuerzo en todas las barras.
2
1 2 3
2
4
0,07065
2,0
A A A cm
A cm
= = =
=
Longitudes en metros.
Coordenadas de los nudos:
Nudo Coord. x Coord. y Coord. z
1 0,00 -4,47 0,00
2 4,00 2,00 0,00
3 -4,00 2,00 0,00
4 0,00 0,00 0,00
5 0,00 0,00 5,00
Barra 1:
( ) ( ) ( )
1 2 3
0;0;5 0; 4,47;0 0;4,47;5,00
.670,80 ; 221,18
0 ; 0,666 ; 0,745
A E Kgl cm K
l cmγ γ γ
− − =
= = =
= = =
4
5
z
1
2
3
4
5
x
y
(1)
(2)
(3)
(4)
4,47
4,00
4,00
2,00
2,00
100
5,00
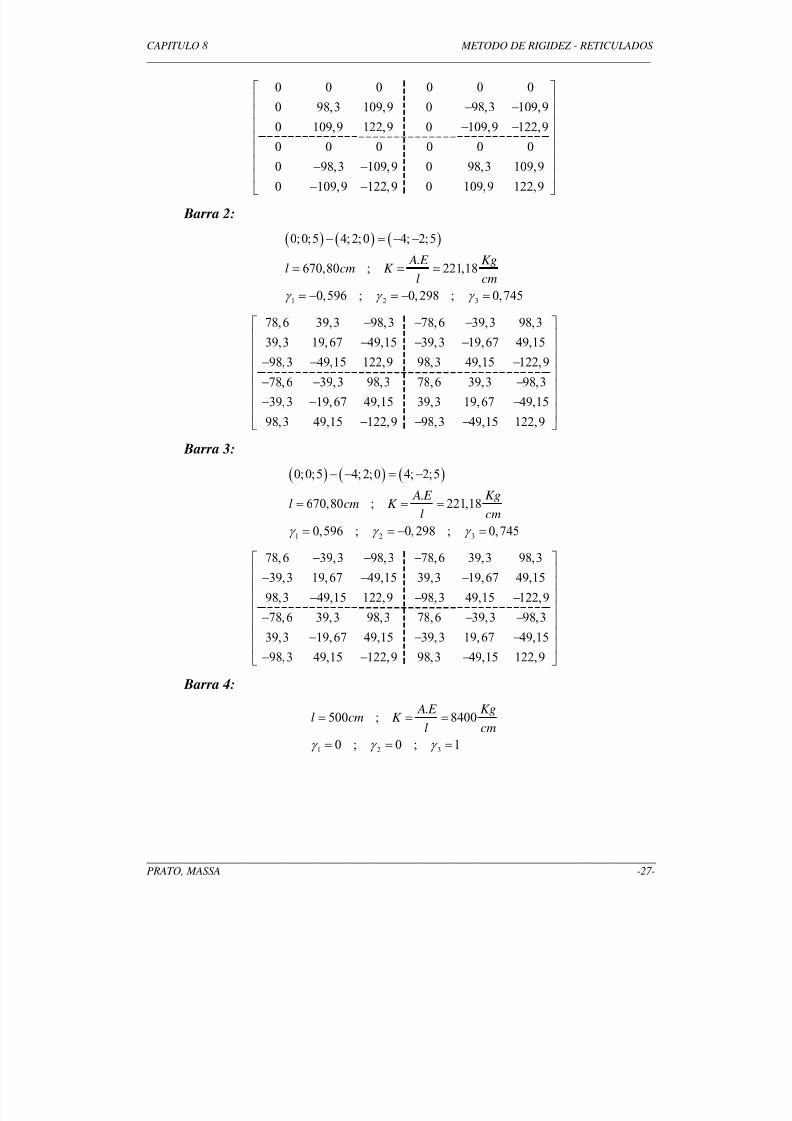
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 277/500
CAPITULO 8 METODO DE RIGIDEZ - RETICULADOS____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -27-
0 0 0 0 0 0
0 98,3 109,9 0 98,3 109,9
0 109,9 122,9 0 109,9 122,9
0 0 0 0 0 0
0 98,3 109,9 0 98,3 109,9
0 109,9 122,9 0 109,9 122,9
⎡ ⎤⎢ ⎥− −⎢ ⎥⎢ ⎥− −⎢ ⎥⎢ ⎥
⎢ ⎥− −⎢ ⎥− −⎣ ⎦
Barra 2:
( ) ( ) ( )
1 2 3
0;0;5 4;2;0 4; 2;5
.670,80 ; 221,18
0,596 ; 0,298 ; 0,745
A E Kgl cm K
l cm
γ γ γ
− = − −
= = =
= − = − =
78,6 39,3 98,3 78,6 39,3 98,339,3 19,67 49,15 39,3 19,67 49,15
98,3 49,15 122,9 98,3 49,15 122,9
78,6 39,3 98,3 78,6 39,3 98,3
39,3 19,67 49,15 39,3 19,67 49,15
98,3 49,15 122,9 98,3 49,15 122,9
− − −⎡ ⎤⎢ ⎥− − −⎢ ⎥⎢ ⎥− − −⎢ ⎥
− − −⎢ ⎥⎢ ⎥− − −⎢ ⎥
− − −⎣ ⎦
Barra 3:
( ) ( ) ( )
1 2 3
0;0;5 4;2;0 4; 2;5
.670,80 ; 221,18
0,596 ; 0,298 ; 0,745
A E Kgl cm K
l cm
γ γ γ
− − = −
= = =
= = − =
78,6 39,3 98,3 78,6 39,3 98,3
39,3 19,67 49,15 39,3 19,67 49,15
98,3 49,15 122,9 98,3 49,15 122,9
78,6 39,3 98,3 78,6 39,3 98,3
39,3 19,67 49,15 39,3 19,67 49,15
98,3 49,15 122,9 98,3 49,15 122,9
− − −⎡ ⎤⎢ ⎥− − −⎢ ⎥⎢ ⎥− − −⎢ ⎥
− − −⎢ ⎥⎢ ⎥− − −⎢ ⎥
− − −⎣ ⎦
Barra 4:
1 2 3
.500 ; 8400
0 ; 0 ; 1
A E Kgl cm K
l cm
γ γ γ
= = =
= = =
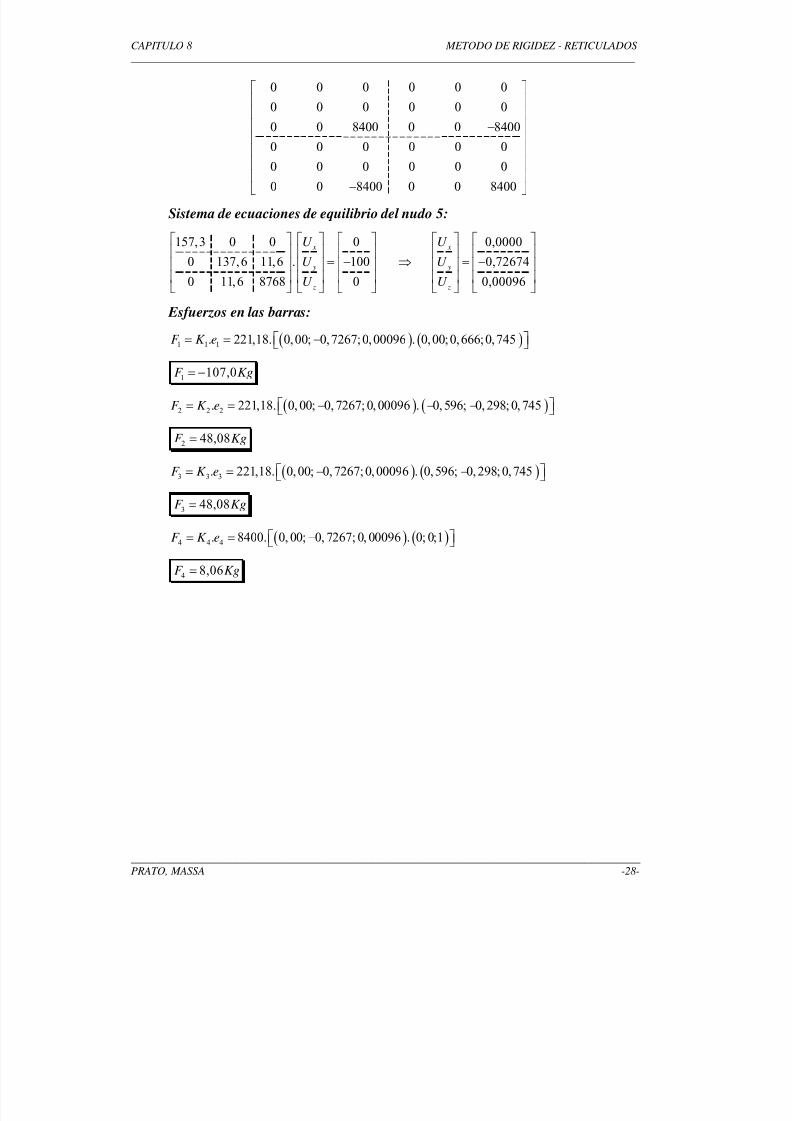
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 278/500
CAPITULO 8 METODO DE RIGIDEZ - RETICULADOS____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -28-
0 0 0 0 0 0
0 0 0 0 0 0
0 0 8400 0 0 8400
0 0 0 0 0 0
0 0 0 0 0 0
0 0 8400 0 0 8400
⎡ ⎤⎢ ⎥⎢ ⎥⎢ ⎥−⎢ ⎥⎢ ⎥
⎢ ⎥⎢ ⎥−⎣ ⎦
Sistema de ecuaciones de equilibrio del nudo 5:
157,3 0 0 0
0 137,6 11,6 . 100
0 11,6 8768 0
x
y
z
U
U
U
⎡ ⎤ ⎡ ⎤ ⎡ ⎤⎢ ⎥ ⎢ ⎥ ⎢ ⎥
= −⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎣ ⎦ ⎣ ⎦ ⎣ ⎦
0,0000
0,72674
0,00096
x
y
z
U
U
U
⎡ ⎤ ⎡ ⎤⎢ ⎥ ⎢ ⎥
⇒ = −⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥⎣ ⎦ ⎣ ⎦
Esfuerzos en las barras:
( ) ( )1 1 1. 221,18. 0,00; 0,7267;0,00096 . 0,00;0,666;0,745F K e= = −⎡ ⎤⎣ ⎦
1 107,0F Kg= −
( ) ( )2 2 2. 221,18. 0, 00; 0, 7267; 0, 00096 . 0, 596; 0, 298; 0, 745F K e= = − − −⎡ ⎤⎣ ⎦
2 48,08F Kg=
( ) ( )3 3 3. 221,18. 0,00; 0,7267;0,00096 . 0,596; 0,298;0,745F K e= = − −⎡ ⎤⎣ ⎦
3 48,08F Kg=
( ) ( )4 4 4. 8400. 0, 00; 0, 7267; 0, 00096 . 0; 0;1F K e= = −⎡ ⎤⎣ ⎦
48,06F Kg=
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 279/500
CAPITULO 9 PRINCIPIO DE MINIMA ENERGIA POTENCIAL TOTAL
____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -1-
Capítulo 9 Método de rigidez - Principio de mínima energía potencialtotal
9.1- Introducción:
En el capítulo anterior se desarrolló el Método de Rigidez para reticulados basado en la
hipótesis lineal para la relación entre fuerzas y desplazamientos, a partir de la relación lineal:
.e U t ≈ ∆
En ese caso se obtuvieron también las ecuaciones de equilibrio:
.K U P=
Y los esfuerzos en las barras una vez obtenidos los desplazamientos:
( ). .P K U t = ∆
El procedimiento de cálculo se originó en un "razonamiento físico" que permitió
determinar en forma explícita los coeficientes de la matriz de rigidez dando desplazamientos
unitarios a los extremos de la barra y calculando las fuerzas necesarias en los mismos para
mantener el equilibrio. El procedimiento mencionado es correcto siempre que sea aceptable la
hipótesis de linealidad cinemática (también conocida como linealidad geométrica).
En este capítulo se desarrolla el método de rigidez a partir de en un principio energético
más general que permite formular además de las ecuaciones ya vistas para las hipótesis de
pequeñas deformaciones y pequeños giros, las ecuaciones de equilibrio en la configuración
deformada, es decir incluyendo los términos no lineales de las relaciones cinemáticas.
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 280/500
CAPITULO 9 PRINCIPIO DE MINIMA ENERGIA POTENCIAL TOTAL
____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -2-
Si bien la hipótesis lineal es válida en una gran cantidad de situaciones prácticas de diseño
estructural dentro de lo que se denomina normalmente “teoría de primer orden” en que las
ecuaciones de equilibrio se plantean en el sistema no deformado, existen circunstancias
especiales en que es necesario plantear las condiciones de equilibrio en el sistema deformado.
Entre ellos están los casos en que se requiere la teoría de “segundo orden”, según la cual las
ecuaciones de equilibrio se formulan en una versión linealizada de las ecuaciones no-lineales de
equilibrio. Dicha formulación da origen a ecuaciones de equilibrio que son lineales, pero en las
que los coeficientes que componen la matriz de rigidez no son sólo funciones de la geometría y
propiedades elásticas de las secciones de las barras, sino también de las cargas axiales que
soportan los miembros de la estructura. Otros casos menos frecuentes deben resolverse en el
campo marcadamente no lineal, y para obtener las ecuaciones de equilibrio en la configuración
deformada resulta muy conveniente utilizar un teorema o principio energético válido para
sistemas elásticos que se denomina “Principio de la Mínima Energía Potencial Total”
(P.M.E.P.T.).
9.2- Principio de Mínima Energía Potencial Total
Se define como energía potencial total y se denota con π , a la siguiente expresión
función de los desplazamientos iU :
( ) ( ) ( )U
i i iU U U Wiπ = + (Ec. 9.1)
:Wi Es la energía interna de deformación en función de los desplazamientos (o bien, en
función de las derivadas de los desplazamientos que son las distorsiones , ,ξ κ γ , etc.)
U : Es el potencial de las fuerzas exteriores definido como la función tal que, derivada
respecto al desplazamiento incógnita en el punto de aplicación de una fuerza exteriori
P
conocida, proporciona el valor de esta fuerza cambiado de signo; es decir que:
( )1 2 3
1
U, , ,...., U .
n
n i i i
ii
U U U U P P U U =
∂= − ∴ = −
∂∑ (Ec. 9.2)
El P.M.E.P.T. establece que: "de todos los estados de deformación compatibles
con los vínculos, el que satisface también las ecuaciones de equilibrio hace mínimo a
π "
Esto equivale a decir que las condiciones para que π sea mínimo son las ecuaciones de
equilibrio: U 0i i i
WiU U U π ∂ ∂ ∂= + =
∂ ∂ ∂1,2......i n=
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 281/500
CAPITULO 9 PRINCIPIO DE MINIMA ENERGIA POTENCIAL TOTAL
____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -3-
i
i
WiP
U
∂=
∂ (Ec. 9.3)
La energía interna es una función cuadrática de los desplazamientos, (o de sus derivadas
respecto a las coordenadas) y el potencial es una función lineal. Por lo tanto las ecuaciones de
equilibrio (Ec. 9.3) son lineales.
( )2
22
2
2
0 0
1. .
2
1 1. . . . . . . .
2 2
l l
Para una barra en tracción : Wi K e
d yPara una barra en flexión : Wi E I dx E I dx
dxκ
=
⎛ ⎞= = ⎜ ⎟
⎝ ⎠∫ ∫
(Ec. 9.4)
donde " y" es el desplazamiento transversal de la barra.
En realidad, las ecuaciones (Ec. 9.3) indican sólo que π es estacionario. Para demostrar
que además de estacionario se trata de un mínimo es necesario demostrar que2
.i j
Wi
U U
⎡ ⎤∂⎢ ⎥
∂ ∂⎢ ⎥⎣ ⎦es
positivo definido. Aunque esta propiedad no será demostrada en forma general, se puede
justificar teniendo en cuenta que la energía de deformación es siempre positiva, y que la matriz
de las derivadas segundas de Wi respecto a los desplazamientos no es otra cosa que la matriz de
rigidez del sistema, que es siempre simétrica y positiva definida dentro de las hipótesis de
linealidad para un sistema estable.
Resulta conveniente destacar que el P.M.E.P.C. ( )*π y el P.M.E.P.T. ( )π son teoremas
energéticos complementarios:
El mínimo π implica que se cumplen las ecuaciones de equilibrio.
El mínimo *π implica que se cumplen las ecuaciones de compatibilidad.
π Se expresa en función de desplazamientos y la condición de mínimo garantiza también
equilibrio.
*π Se expresa en función de fuerzas en equilibrio y la condición de mínimo garantizacompatibilidad.
De la misma manera que la aplicación del P.M.E.P.C. ( )*π conduce al Método de las
Fuerzas, el P.M.E.P.T. ( )π conduce al Método de Rigidez.
Estos dos principios también pueden ser considerados como teoremas, ya que pueden ser
demostrados.
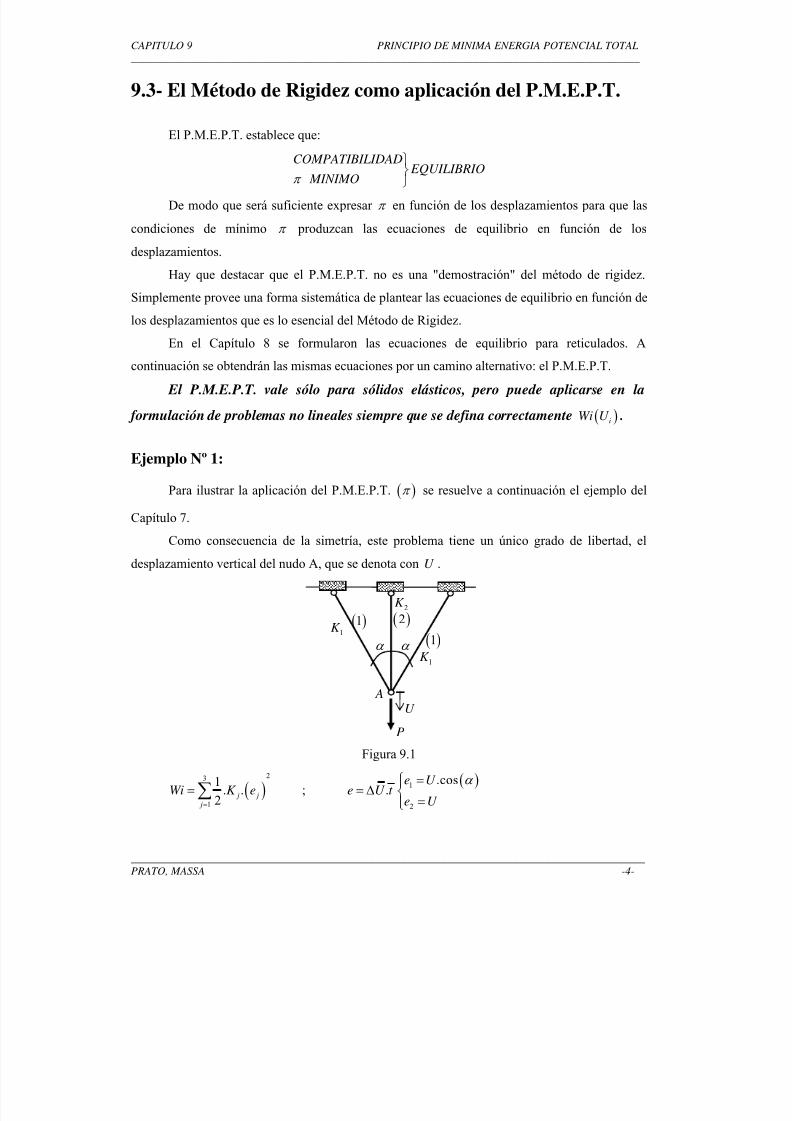
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 282/500
CAPITULO 9 PRINCIPIO DE MINIMA ENERGIA POTENCIAL TOTAL
____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -4-
9.3- El Método de Rigidez como aplicación del P.M.E.P.T.
El P.M.E.P.T. establece que:
COMPATIBILIDAD EQUILIBRIO MINIMOπ
⎫⎬⎭
De modo que será suficiente expresar π en función de los desplazamientos para que las
condiciones de mínimo π produzcan las ecuaciones de equilibrio en función de los
desplazamientos.
Hay que destacar que el P.M.E.P.T. no es una "demostración" del método de rigidez.
Simplemente provee una forma sistemática de plantear las ecuaciones de equilibrio en función de
los desplazamientos que es lo esencial del Método de Rigidez.En el Capítulo 8 se formularon las ecuaciones de equilibrio para reticulados. A
continuación se obtendrán las mismas ecuaciones por un camino alternativo: el P.M.E.P.T.
El P.M.E.P.T. vale sólo para sólidos elásticos, pero puede aplicarse en la
formulación de problemas no lineales siempre que se defina correctamente ( )iWi U .
Ejemplo Nº 1:
Para ilustrar la aplicación del P.M.E.P.T. ( )π se resuelve a continuación el ejemplo del
Capítulo 7.
Como consecuencia de la simetría, este problema tiene un único grado de libertad, el
desplazamiento vertical del nudo A, que se denota con U .
Figura 9.1
( )23
1
1. .
2 j j
j
Wi K e=
= ∑ ;( )1
2
.cos.
e U e U t
e U
α ⎧ =⎪= ∆ ⎨
=⎪⎩
( )1 ( )2
A
P
1K
2K
( )1
1K α α
U
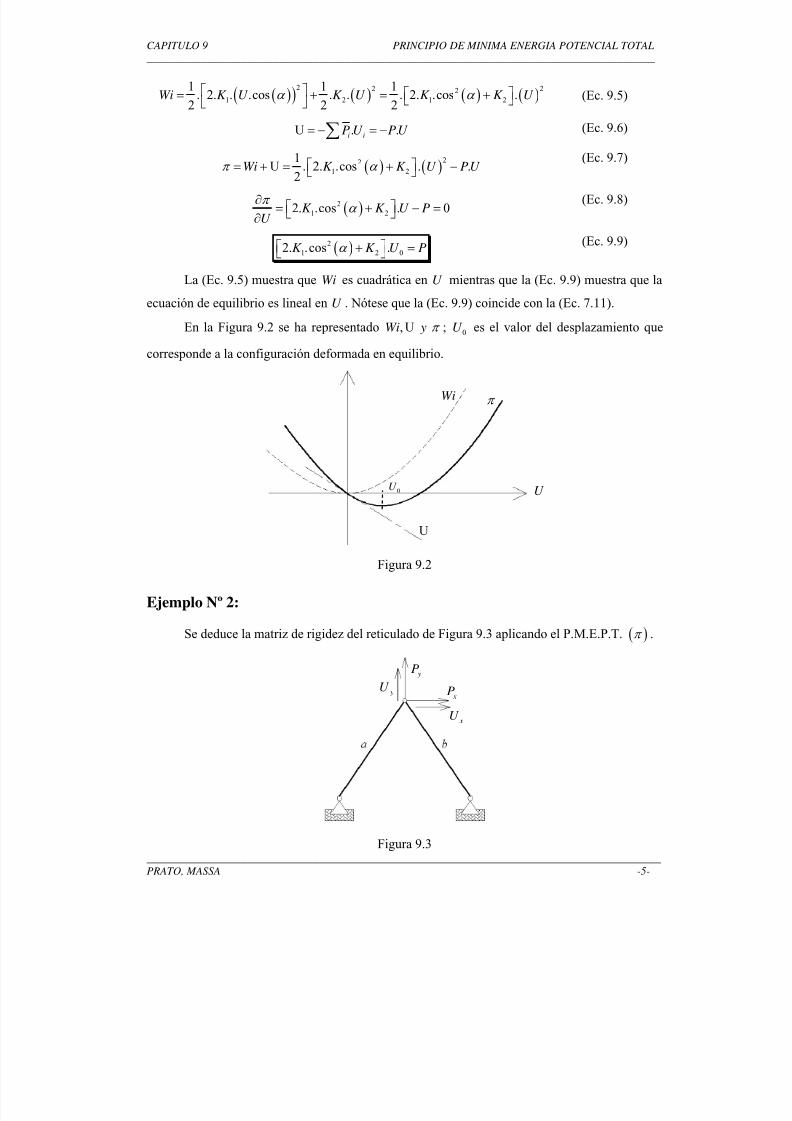
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 283/500
CAPITULO 9 PRINCIPIO DE MINIMA ENERGIA POTENCIAL TOTAL
____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -5-
( )( ) ( ) ( ) ( )2 2 22
1 2 1 2
1 1 1. 2. . .cos . . . 2. .cos .
2 2 2Wi K U K U K K U α α ⎡ ⎤ ⎡ ⎤= + = +⎣ ⎦⎣ ⎦
(Ec. 9.5)
U . .i i
P U PU = − = −∑ (Ec. 9.6)
( ) ( )221 21U . 2. .cos . .
2Wi K K U PU π α ⎡ ⎤= + = + −⎣ ⎦ (Ec. 9.7)
( )2
1 22. .cos . 0K K U PU
π α
∂⎡ ⎤= + − =⎣ ⎦∂
(Ec. 9.8)
( )2
1 2 02. .cos .K K U Pα ⎡ ⎤+ =⎣ ⎦ (Ec. 9.9)
La (Ec. 9.5) muestra que Wi es cuadrática en U mientras que la (Ec. 9.9) muestra que la
ecuación de equilibrio es lineal en U . Nótese que la (Ec. 9.9) coincide con la (Ec. 7.11).
En la Figura 9.2 se ha representado , UWi y π ; 0U es el valor del desplazamiento que
corresponde a la configuración deformada en equilibrio.
Figura 9.2
Ejemplo Nº 2:
Se deduce la matriz de rigidez del reticulado de Figura 9.3 aplicando el P.M.E.P.T. ( )π .
Figura 9.3
yU
yP
xP
xU
U
U
π Wi
0U

5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 284/500
CAPITULO 9 PRINCIPIO DE MINIMA ENERGIA POTENCIAL TOTAL
____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -6-
( ) ( )2 2
1 2
1 1. . . .
2 2a bWi K e K e= +
( ) ( )1 2 1 2. , . , . .a a a a
a a a x y x ye t U U U U U γ γ γ γ = ∆ = = +
1 2. .b b
b x ye U U γ γ = +
( ) ( )2 2
1 2 1 2
1 1. . . . . . . .
2 2
a a b b
a x y b x yWi K U U K U U γ γ γ γ = + + +
( ). . .i i x x y yU P U P U P U = − = − +∑
( ) ( ) ( )2 2
1 2 1 2
1 1. . . . . . . . . .
2 2
a a b b
a x y b x y x x y yK U U K U U P U P U π γ γ γ γ = + + + − +
( ) ( )1 2 1 1 2 1. . . . . . . . 0a a a b b b
a x y b x y x
x
K U U K U U P
U
π γ γ γ γ γ γ
∂= + + + − =
∂
( ) ( )1 2 2 1 2 2. . . . . . . . 0a a a b b b
a x y b x y y
y
K U U K U U PU
π γ γ γ γ γ γ
∂= + + + − =
∂
Figura 9.4
Agrupando términos el sistema de ecuaciones de equilibrio en forma matricial queda:
( ) ( )
( ) ( )
2 2
1 1 1 2 1 2
2 2
1 2 1 2 2 2
. . . . . ..
. . . . . .
a b a a b b
a b a b x x
a a b b a b y y
a b a b
K K K K U P
U PK K K K
γ γ γ γ γ γ
γ γ γ γ γ γ
⎡ ⎤+ + ⎡ ⎤ ⎡ ⎤⎢ ⎥ =⎢ ⎥ ⎢ ⎥⎢ ⎥+ + ⎣ ⎦ ⎣ ⎦⎢ ⎥⎣ ⎦
Nótese que se puede llegar a la misma matriz de rigidez sumando la contribución de cada
barra según se indicó en el capítulo anterior.
( )0 0, x yU U
0
xU
0
yU
xU
yU π
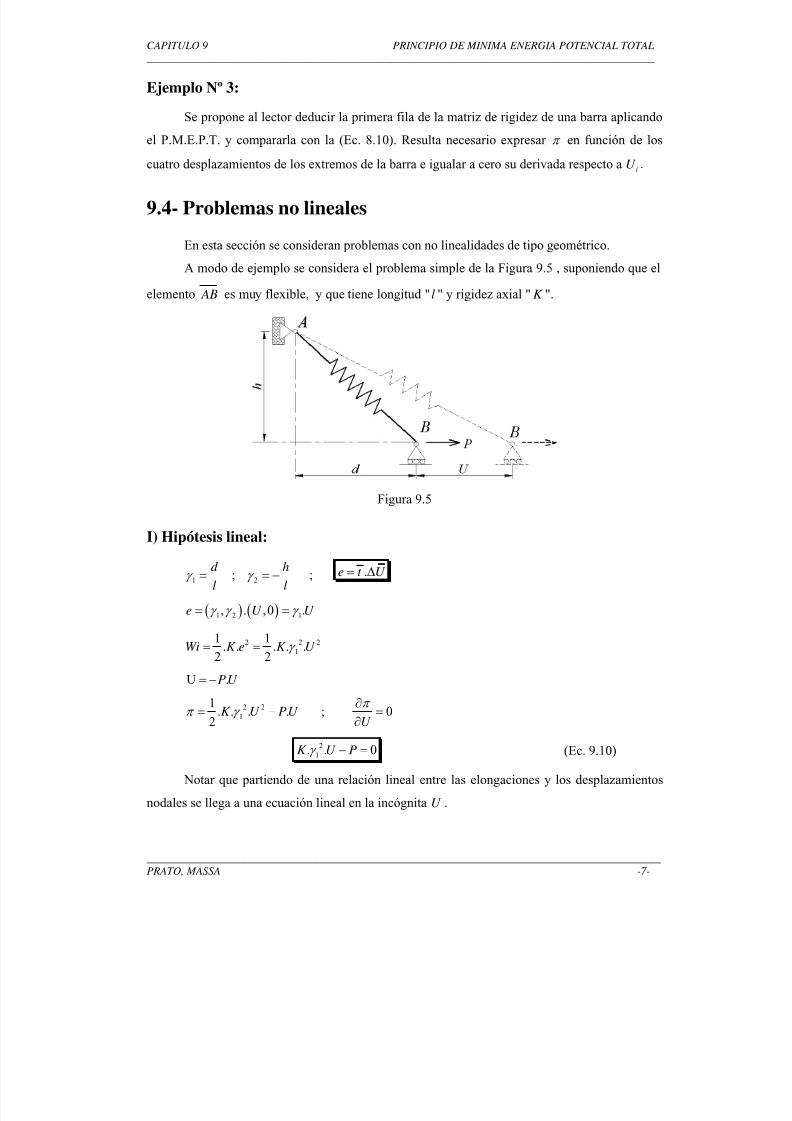
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 285/500
CAPITULO 9 PRINCIPIO DE MINIMA ENERGIA POTENCIAL TOTAL
____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -7-
Ejemplo Nº 3:
Se propone al lector deducir la primera fila de la matriz de rigidez de una barra aplicando
el P.M.E.P.T. y compararla con la (Ec. 8.10). Resulta necesario expresar π en función de los
cuatro desplazamientos de los extremos de la barra e igualar a cero su derivada respecto a iU .
9.4- Problemas no lineales
En esta sección se consideran problemas con no linealidades de tipo geométrico.
A modo de ejemplo se considera el problema simple de la Figura 9.5 , suponiendo que el
elemento AB es muy flexible, y que tiene longitud "l " y rigidez axial " K ".
Figura 9.5
I) Hipótesis lineal:
1
d
lγ = ; 2
h
lγ = − ; .e t U = ∆
( ) ( )1 2 1, . ,0 .e U U γ γ γ = =
2 2 2
1
1 1
. . . . .2 2Wi K e K U γ = =
U .PU = −
2 2
1
1. . . .
2K U PU π γ = − ; 0
U
π ∂=
∂
2
1. . 0K U Pγ − = (Ec. 9.10)
Notar que partiendo de una relación lineal entre las elongaciones y los desplazamientos
nodales se llega a una ecuación lineal en la incógnita U .
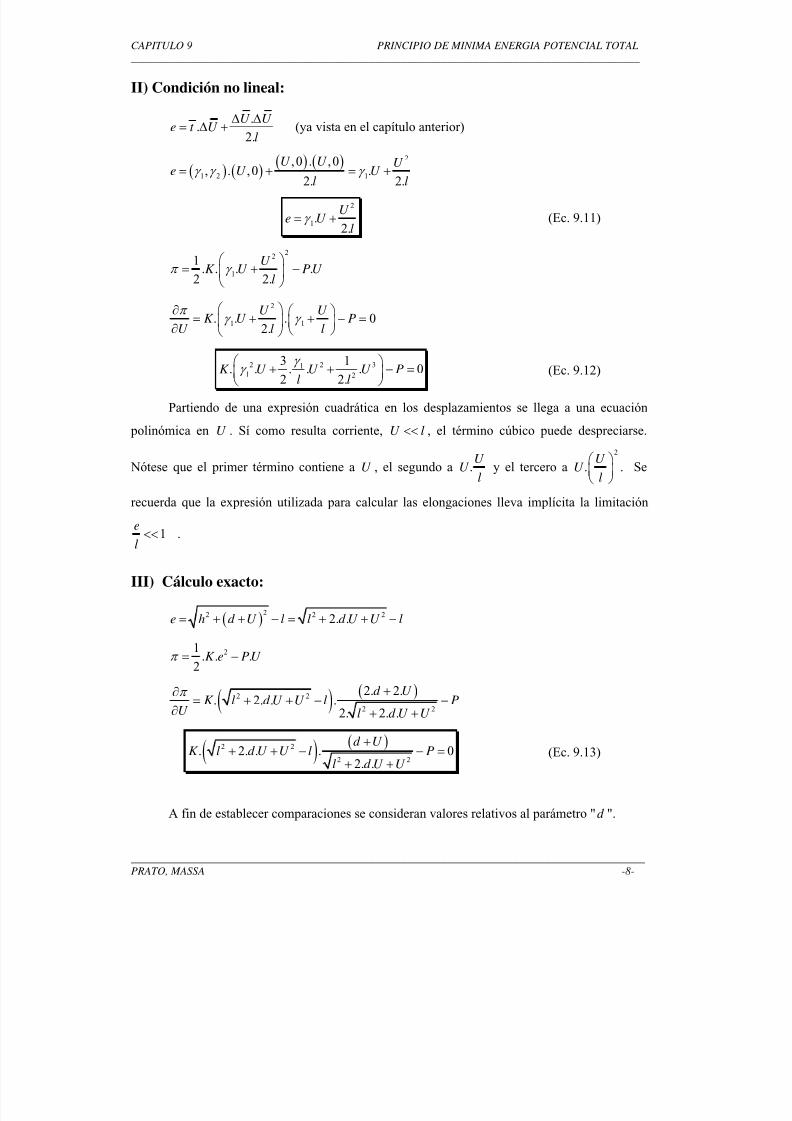
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 286/500
CAPITULO 9 PRINCIPIO DE MINIMA ENERGIA POTENCIAL TOTAL
____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -8-
II) Condición no lineal:
..
2.
U U e t U
l
∆ ∆= ∆ + (ya vista en el capítulo anterior)
( ) ( ) ( ) ( )2
1 2 1,0 . ,0, . ,0 .
2. 2.U U U e U U
l lγ γ γ = + = +
2
1.2.
U e U
lγ = + (Ec. 9.11)
22
1
1. . . .
2 2.
U K U PU
lπ γ
⎛ ⎞= + −⎜ ⎟
⎝ ⎠
2
1 1
. . . 02.
U U K U P
U l l
π γ γ
⎛ ⎞∂ ⎛ ⎞= + + − =
⎜ ⎟ ⎜ ⎟∂ ⎝ ⎠⎝ ⎠
2 2 311 2
3 1. . . . . 0
2 2.K U U U P
l l
γ γ
⎛ ⎞+ + − =⎜ ⎟
⎝ ⎠ (Ec. 9.12)
Partiendo de una expresión cuadrática en los desplazamientos se llega a una ecuación
polinómica en U . Sí como resulta corriente, U l<< , el término cúbico puede despreciarse.
Nótese que el primer término contiene a U , el segundo a .U
U l
y el tercero a
2
.U
U l
⎛ ⎞⎜ ⎟⎝ ⎠
. Se
recuerda que la expresión utilizada para calcular las elongaciones lleva implícita la limitación
1e
l<< .
III) Cálculo exacto:
( )22 2 22. .e h d U l l d U U l= + + − = + + −
21 . . .2
K e PU π = −
( ) ( )2 2
2 2
2. 2.. 2. . .
2. 2. .
d U K l d U U l P
U l d U U
π +∂= + + − −
∂ + +
( ) ( )2 2
2 2. 2. . . 0
2. .
d U K l d U U l P
l d U U
++ + − − =
+ + (Ec. 9.13)
A fin de establecer comparaciones se consideran valores relativos al parámetro " d ".
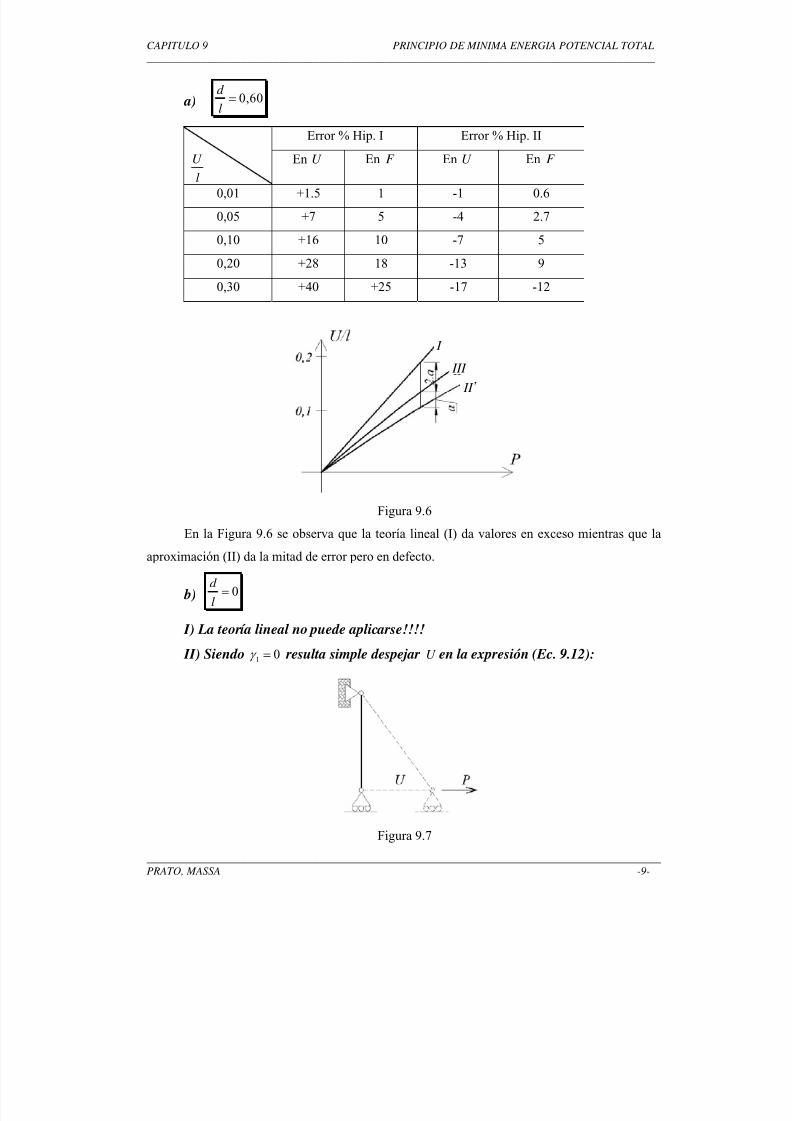
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 287/500
CAPITULO 9 PRINCIPIO DE MINIMA ENERGIA POTENCIAL TOTAL
____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -9-
a) 0,60d
l=
Error % Hip. I Error % Hip. II
U l
En U En F En U En F
0,01 +1.5 1 -1 0.6
0,05 +7 5 -4 2.7
0,10 +16 10 -7 5
0,20 +28 18 -13 9
0,30 +40 +25 -17 -12
Figura 9.6
En la Figura 9.6 se observa que la teoría lineal (I) da valores en exceso mientras que la
aproximación (II) da la mitad de error pero en defecto.
b) 0d
l=
I) La teoría lineal no puede aplicarse!!!!
II) Siendo 1 0γ = resulta simple despejar U en la expresión (Ec. 9.12):
Figura 9.7
II
III
I
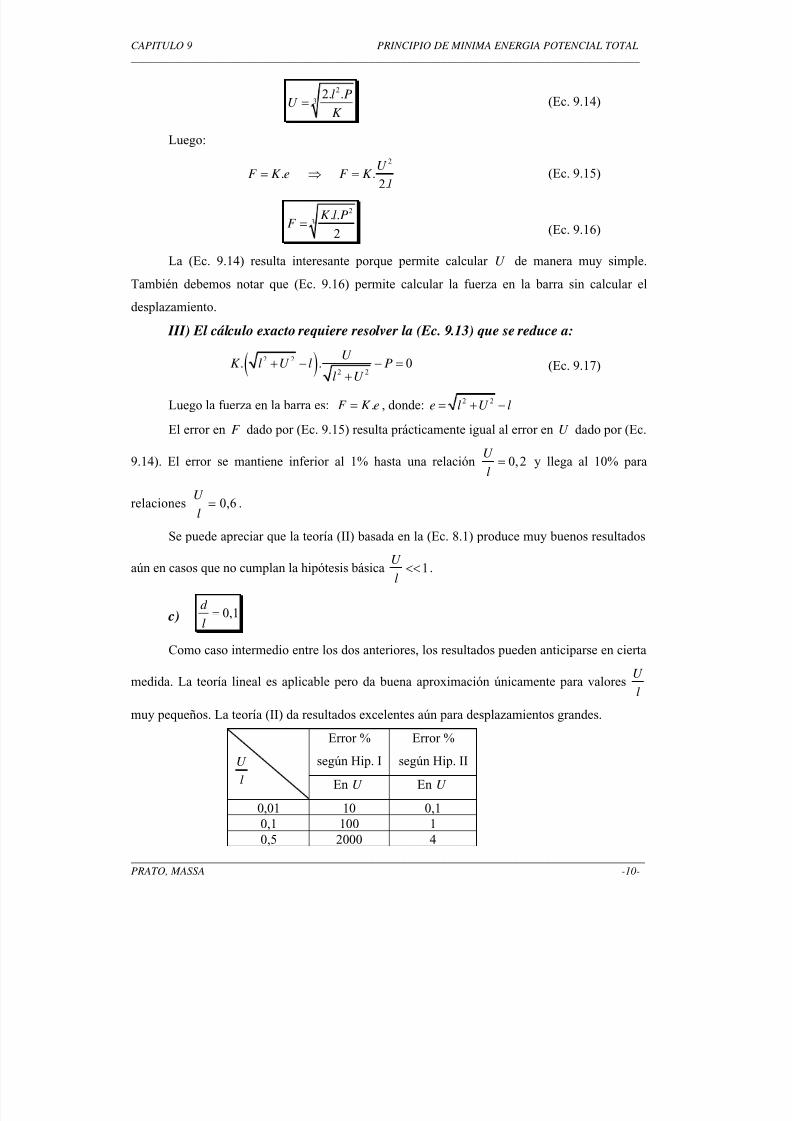
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 288/500
CAPITULO 9 PRINCIPIO DE MINIMA ENERGIA POTENCIAL TOTAL
____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -10-
2
32. .l P
U K
= (Ec. 9.14)
Luego:
2
. .2.
U F K e F K l
= ⇒ = (Ec. 9.15)
2
3. .
2
K l PF = (Ec. 9.16)
La (Ec. 9.14) resulta interesante porque permite calcular U de manera muy simple.
También debemos notar que (Ec. 9.16) permite calcular la fuerza en la barra sin calcular el
desplazamiento.
III) El cálculo exacto requiere resolver la (Ec. 9.13) que se reduce a:
( )2 2
2 2. . 0
U K l U l P
l U + − − =
+ (Ec. 9.17)
Luego la fuerza en la barra es: .F K e= , donde:2 2
e l U l= + −
El error en F dado por (Ec. 9.15) resulta prácticamente igual al error en U dado por (Ec.
9.14). El error se mantiene inferior al 1% hasta una relación 0,2U
l= y llega al 10% para
relaciones 0,6U
l= .
Se puede apreciar que la teoría (II) basada en la (Ec. 8.1) produce muy buenos resultados
aún en casos que no cumplan la hipótesis básica 1U
l<< .
c) 0,1d
l=
Como caso intermedio entre los dos anteriores, los resultados pueden anticiparse en cierta
medida. La teoría lineal es aplicable pero da buena aproximación únicamente para valoresU
l
muy pequeños. La teoría (II) da resultados excelentes aún para desplazamientos grandes.
Error %
según Hip. I
Error %
según Hip. IIU
l
En U En U
0,01 10 0,1
0,1 100 1
0,5 2000 4

5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 289/500
CAPITULO 9 PRINCIPIO DE MINIMA ENERGIA POTENCIAL TOTAL
____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -11-
Conclusiones:
Aunque no es prudente extraer conclusiones generales de los resultados de este problema
tan simple, se realizan las siguientes observaciones:
1º) En casos de 1 G.L. la ecuación no lineal puede resolverse por iteraciones sucesivasEn el caso de muchos G.L. resultan considerablemente más engorrosos el planteo y la solución
del sistema de ecuaciones no lineales.
2º) Existen problemas (afortunadamente muy pocos) en que los desplazamientos son
relativamente grandes y la teoría lineal (I), también llamada también teoría de primer orden, da
resultados con demasiado error. Algunos problemas como el caso b), son definitivamente no
lineales aún para pequeños desplazamientos.
3º) La (Ec. 9.12) puede sugerir un método iterativo que consiste en utilizar la matriz del
caso lineal y establecer modificaciones en el segundo miembro. Despreciando los términos
cúbicos (aunque esto no es esencial) queda:
( )2
1 1
3. . . . . .
2
U K U P K U
lγ γ
⎛ ⎞⎡ ⎤ = − ⎜ ⎟⎣ ⎦ ⎝ ⎠ (Ec. 9.18)
Si 1U
l<< se puede en principio ignorar el término en
2U del segundo miembro y luego
de calcular U en la forma habitual se modifica el término de carga:
( )2
1. i iK U P f U + = − (Ec. 9.19)
Donde:
( )2 21.3. .
2i i
K f U U
l
γ =
Lamentablemente este método resulta muy pobre desde el punto de vista de la
convergencia. Si los valores de U no son suficientemente pequeños (y es allí donde un método
no lineal se justifica) el método es divergente.
4º) En general la (Ec. 8.1) da buenos resultados pero no se debe pretender aplicarla sólo al
final cuando se calculan las fuerzas basadas en desplazamientos poco exactos provenientes de la
teoría lineal. Debe efectuarse un planteo consistente y plantear la matriz de rigidez no lineal
desde el principio.
5º) Por último, no resulta tal fácil definir con precisión qué se entiende por
desplazamientos grandes.
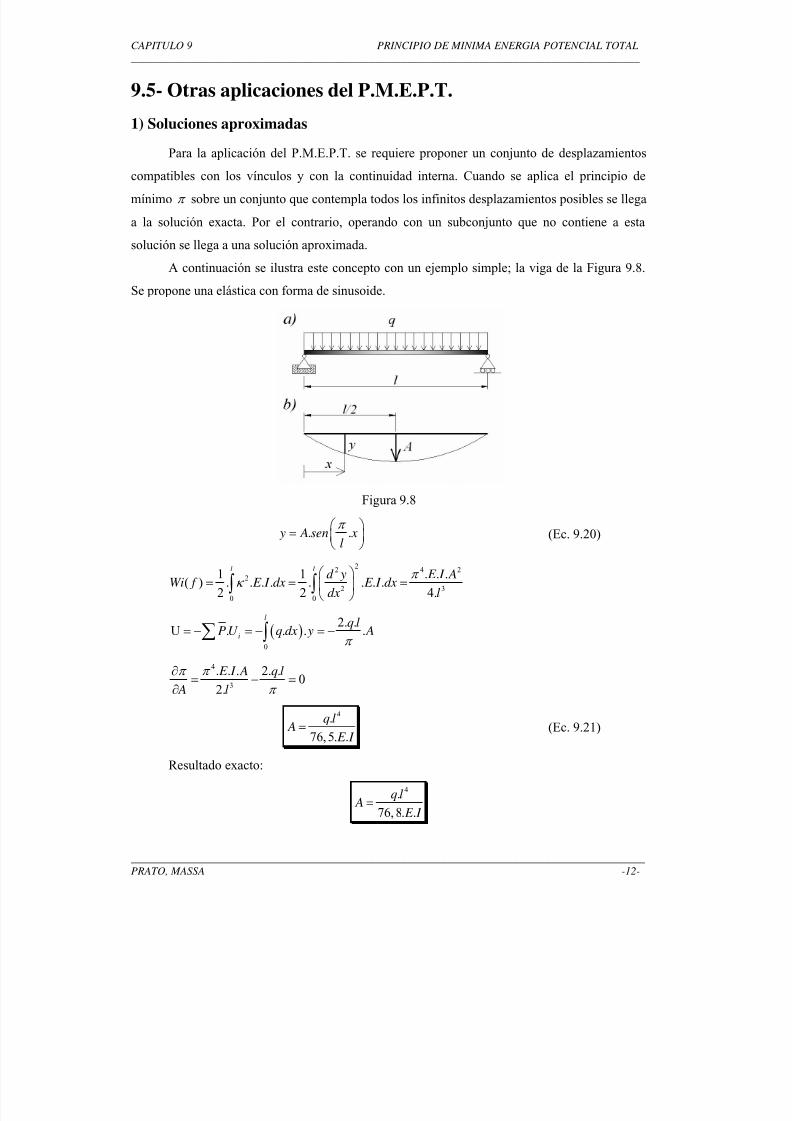
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 290/500
CAPITULO 9 PRINCIPIO DE MINIMA ENERGIA POTENCIAL TOTAL
____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -12-
9.5- Otras aplicaciones del P.M.E.P.T.
1) Soluciones aproximadas
Para la aplicación del P.M.E.P.T. se requiere proponer un conjunto de desplazamientos
compatibles con los vínculos y con la continuidad interna. Cuando se aplica el principio de
mínimo π sobre un conjunto que contempla todos los infinitos desplazamientos posibles se llega
a la solución exacta. Por el contrario, operando con un subconjunto que no contiene a esta
solución se llega a una solución aproximada.
A continuación se ilustra este concepto con un ejemplo simple; la viga de la Figura 9.8.
Se propone una elástica con forma de sinusoide.
Figura 9.8
. . y A sen xl
π ⎛ ⎞= ⎜ ⎟
⎝ ⎠ (Ec. 9.20)
22 4 2
2
2 3
0 0
1 1 . . .( ) . . . . . . . .
2 2 4.
l ld y E I A
Wi f E I dx E I dxdx l
π κ
⎛ ⎞= = =⎜ ⎟
⎝ ⎠∫ ∫
( )0
2. .U . . . .
l
i
q lP U q dx y A
π = − = − = −∑ ∫
4
3
. . . 2. .0
2.
E I A q l
A l
π π
π
∂= − =
∂
4.
76, 5. .
q l A
E I = (Ec. 9.21)
Resultado exacto:
4.
76, 8. .
q l A
E I
=

5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 291/500
CAPITULO 9 PRINCIPIO DE MINIMA ENERGIA POTENCIAL TOTAL
____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -13-
Se ha obtenido la “mejor” de las elásticas con forma de sinusoide y el resultado contiene
un error de apenas el 0,4% para la flecha al centro.
En realidad, no cualquier curva que tenga el aspecto de la Figura 9.8.b es igualmente
buena como aproximación de la elástica. Es conveniente que además la derivada segunda de la
elástica sea una buena aproximación de la curvatura exacta para tener una buena aproximación
del valor de la energía interna.
Utilizando una elástica "parabólica" del tipo:
2
1 2. 1 4.
x y A
l
⎛ ⎞= −⎜ ⎟
⎝ ⎠ (Ec. 9.22)
Figura 9.9
Se llega a un resultado poco aproximado debido a que la (Ec. 9.22) implica suponer el
momento flector constante.
Si se propone una elástica del tipo:
4
2 4. 1 16.
x
y B l
⎛ ⎞
= −⎜ ⎟⎝ ⎠ (Ec. 9.23)
El resultado es aún peor que en el caso anterior de la (Ec. 9.22).
Nótese que en todos los casos se han propuesto elásticas simétricas. Si se propone como
elástica una combinación de las elásticas de las (Ec. 9.22) y (Ec. 9.23), vale decir:
2 4
2 4. 1 4. . 1 16.
x x y A B
l l
⎛ ⎞ ⎛ ⎞= − + −⎜ ⎟ ⎜ ⎟
⎝ ⎠ ⎝ ⎠ (Ec. 9.24)
Resulta:
2U 0,8. . . . . .
3q l A q l B= +
22
3 3
32230,4. 128. . .
AWi A B B
l l= + +
Haciendo 0 A B
π π ∂ ∂= =
∂ ∂se encuentra:

5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 292/500
CAPITULO 9 PRINCIPIO DE MINIMA ENERGIA POTENCIAL TOTAL
____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -14-
4
4
.0,002604.
.
.0,015625.
.
q l A
E I
q l B
E I
= −
= (Ec. 9.25)
En este caso hemos llegado a la solución exacta. Esto se podía anticipar ya que al ser el
diagrama de carga constante la elástica resulta de cuarto grado y por simetría no puede haber
exponentes impares.
Se debe notar que una vez obtenido el o los parámetros inicialmente desconocidos, se
conoce el desplazamiento de los puntos (a través de la elástica) y se pueden obtener el momento
flector y el corte por simple derivación.
Sea como ejemplo el caso de la viga biempotrada de la Figura 9.10. El hecho de ser
hiperestática no introduce ninguna dificultad.
Figura 9.10
Se propone una elástica del tipo:
. cos 2. . 12
A x y
lπ
⎛ ⎞⎛ ⎞= −⎜ ⎟⎜ ⎟
⎝ ⎠⎝ ⎠ (Ec. 9.26)
Y resulta:
2 4
3
.
. .
A
Wi E I l
π
= ; U . . 2
A
q l= −
4
3
2. . .. .
2
A q l E I
A l
π π ∂= −
∂
4.
389,6. .
q l A
E I = (Ec. 9.27)
El resultado exacto es:
4.
384. .
q l A
E I =

5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 293/500
CAPITULO 9 PRINCIPIO DE MINIMA ENERGIA POTENCIAL TOTAL
____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -15-
Comparando con la flecha exacta se puede apreciar que la solución aproximada tiene un
error de apenas el 1,5%. Sin embargo, la calidad de la aproximación para los desplazamientos no
es la misma en todos los puntos.
Los momentos flectores se obtienen derivando dos veces la elástica.
Figura 9.11
a) En el centro:2
. . l x M E I κ ==
2.
19,7
q l M = (El valor exacto es:
2.
24
q l M = )
Error: 22% en exceso.
b) En el empotramiento:0
. . x
M E I κ =
=
2.
19,7
q l M = (El valor exacto es:
2.
12
q l M = )
Error: 39% en defecto.
Se observa que la calidad de la solución aproximada para los momentos flectores es
bastante inferior a la obtenida para los desplazamientos. Esta característica es típica en las
soluciones aproximadas deducidas a partir de este procedimiento.
Para un caso no tan simple, como el de la Figura 9.12, se puede tomar:
1
.. .
n
i
i
i y A sen x
l
π
=
⎛ ⎞= ⎜ ⎟
⎝ ⎠∑ (Ec. 9.28)
1,2....,i m=
Figura 9.12
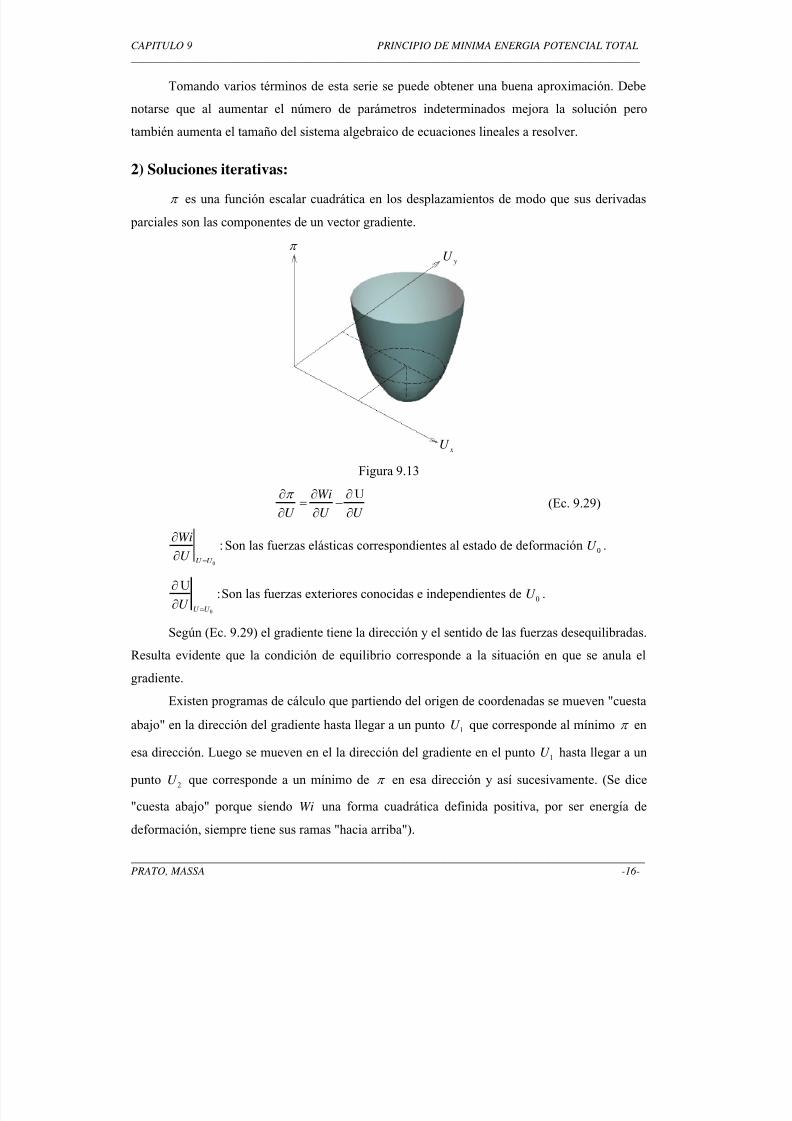
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 294/500
CAPITULO 9 PRINCIPIO DE MINIMA ENERGIA POTENCIAL TOTAL
____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -16-
Tomando varios términos de esta serie se puede obtener una buena aproximación. Debe
notarse que al aumentar el número de parámetros indeterminados mejora la solución pero
también aumenta el tamaño del sistema algebraico de ecuaciones lineales a resolver.
2) Soluciones iterativas:
π es una función escalar cuadrática en los desplazamientos de modo que sus derivadas
parciales son las componentes de un vector gradiente.
Figura 9.13
UWi
U U U
π ∂ ∂ ∂= −∂ ∂ ∂
(Ec. 9.29)
0
:U U
Wi
U =
∂
∂Son las fuerzas elásticas correspondientes al estado de deformación
0U .
0
U:
U U U =
∂
∂Son las fuerzas exteriores conocidas e independientes de 0U .
Según (Ec. 9.29) el gradiente tiene la dirección y el sentido de las fuerzas desequilibradas.
Resulta evidente que la condición de equilibrio corresponde a la situación en que se anula el
gradiente.
Existen programas de cálculo que partiendo del origen de coordenadas se mueven "cuesta
abajo" en la dirección del gradiente hasta llegar a un punto1U que corresponde al mínimo π en
esa dirección. Luego se mueven en el la dirección del gradiente en el punto 1U hasta llegar a un
punto 2U que corresponde a un mínimo de π en esa dirección y así sucesivamente. (Se dice
"cuesta abajo" porque siendo Wi una forma cuadrática definida positiva, por ser energía de
deformación, siempre tiene sus ramas "hacia arriba").
xU
yU
π
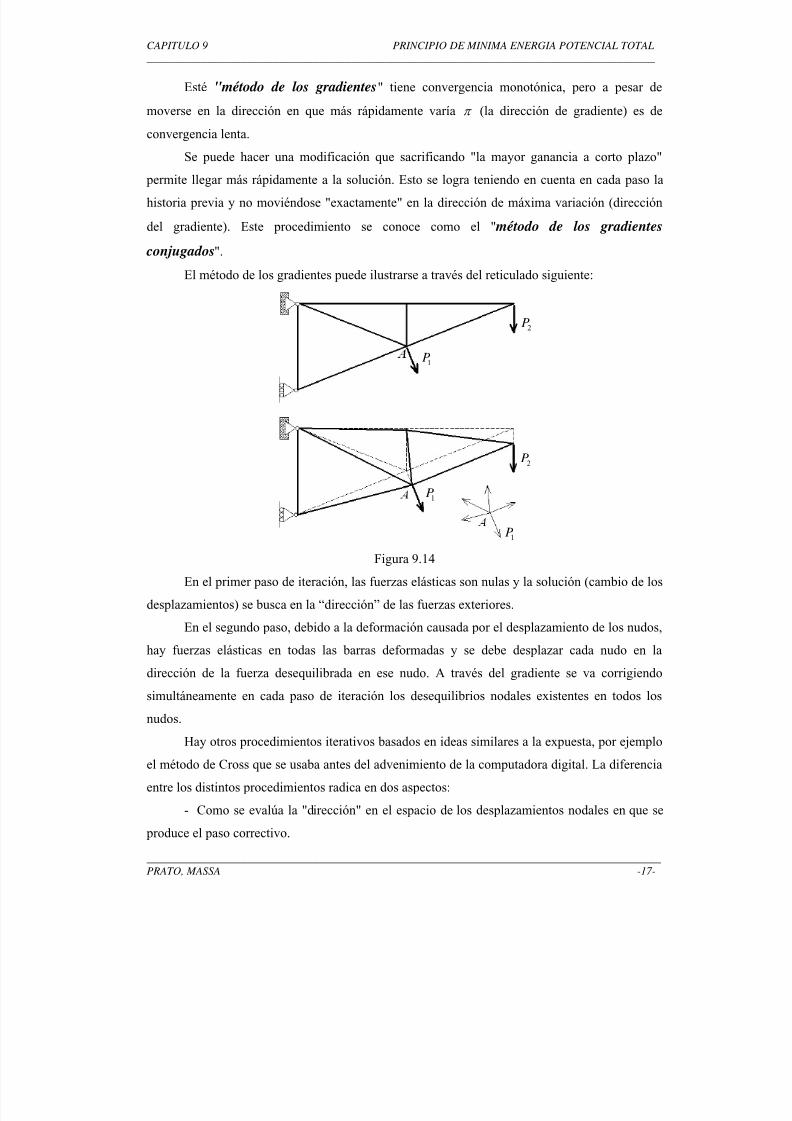
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 295/500
CAPITULO 9 PRINCIPIO DE MINIMA ENERGIA POTENCIAL TOTAL
____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -17-
Esté "método de los gradientes" tiene convergencia monotónica, pero a pesar de
moverse en la dirección en que más rápidamente varía π (la dirección de gradiente) es de
convergencia lenta.
Se puede hacer una modificación que sacrificando "la mayor ganancia a corto plazo"permite llegar más rápidamente a la solución. Esto se logra teniendo en cuenta en cada paso la
historia previa y no moviéndose "exactamente" en la dirección de máxima variación (dirección
del gradiente). Este procedimiento se conoce como el " método de los gradientes
conjugados".
El método de los gradientes puede ilustrarse a través del reticulado siguiente:
Figura 9.14
En el primer paso de iteración, las fuerzas elásticas son nulas y la solución (cambio de los
desplazamientos) se busca en la “dirección” de las fuerzas exteriores.
En el segundo paso, debido a la deformación causada por el desplazamiento de los nudos,
hay fuerzas elásticas en todas las barras deformadas y se debe desplazar cada nudo en ladirección de la fuerza desequilibrada en ese nudo. A través del gradiente se va corrigiendo
simultáneamente en cada paso de iteración los desequilibrios nodales existentes en todos los
nudos.
Hay otros procedimientos iterativos basados en ideas similares a la expuesta, por ejemplo
el método de Cross que se usaba antes del advenimiento de la computadora digital. La diferencia
entre los distintos procedimientos radica en dos aspectos:
- Como se evalúa la "dirección" en el espacio de los desplazamientos nodales en que seproduce el paso correctivo.
1P
2P
2P
1P
1P

5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 296/500
CAPITULO 9 PRINCIPIO DE MINIMA ENERGIA POTENCIAL TOTAL
____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -18-
- Como se evalúa la magnitud del paso corrector en esa dirección. El método de los
gradientes asegura convergencia monotónica ya que la magnitud de cada paso es tal que se logra
localmente un mínimo de π en la dirección del paso. No ocurre lo mismo con el método de
Cross que puede oscilar alrededor de la solución, aunque las oscilaciones son progresivamente
menores con las sucesivas iteraciones.
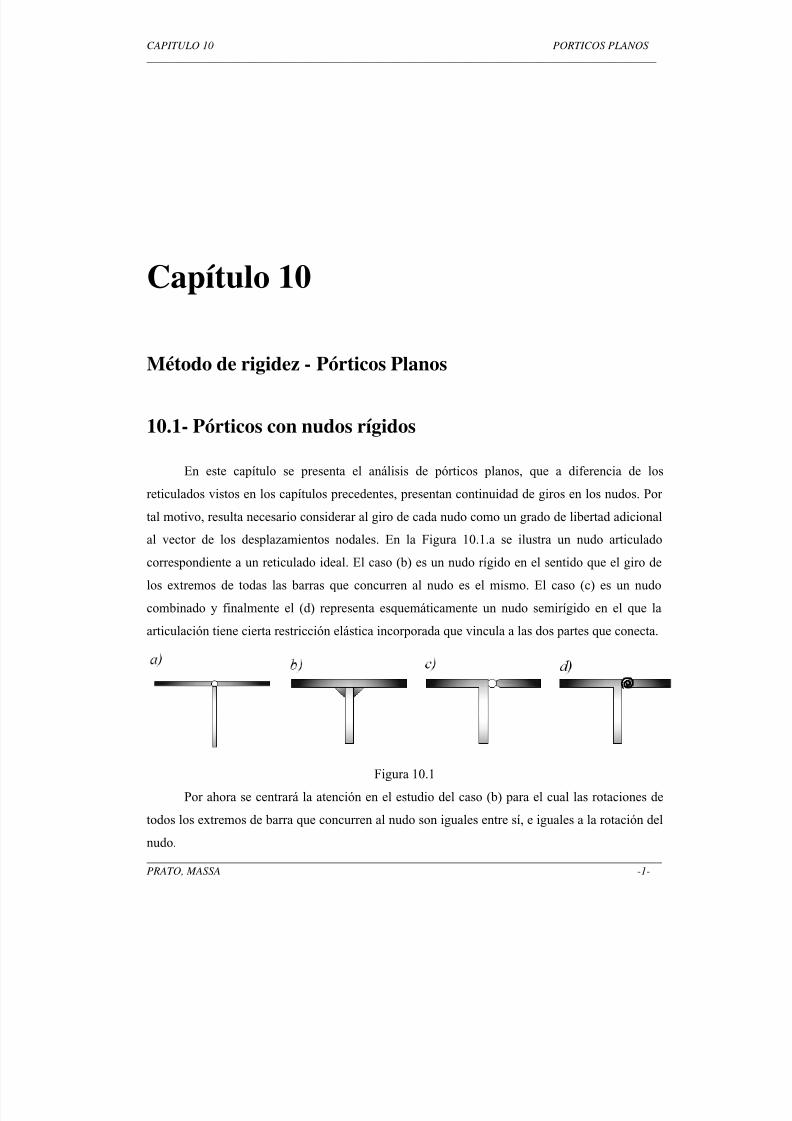
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 297/500
CAPITULO 10 PORTICOS PLANOS
____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -1-
Capítulo 10 Método de rigidez - Pórticos Planos
10.1- Pórticos con nudos rígidos
En este capítulo se presenta el análisis de pórticos planos, que a diferencia de los
reticulados vistos en los capítulos precedentes, presentan continuidad de giros en los nudos. Por
tal motivo, resulta necesario considerar al giro de cada nudo como un grado de libertad adicional
al vector de los desplazamientos nodales. En la Figura 10.1.a se ilustra un nudo articulado
correspondiente a un reticulado ideal. El caso (b) es un nudo rígido en el sentido que el giro de
los extremos de todas las barras que concurren al nudo es el mismo. El caso (c) es un nudo
combinado y finalmente el (d) representa esquemáticamente un nudo semirígido en el que la
articulación tiene cierta restricción elástica incorporada que vincula a las dos partes que conecta.
Figura 10.1
Por ahora se centrará la atención en el estudio del caso (b) para el cual las rotaciones de
todos los extremos de barra que concurren al nudo son iguales entre sí, e iguales a la rotación del
nudo.
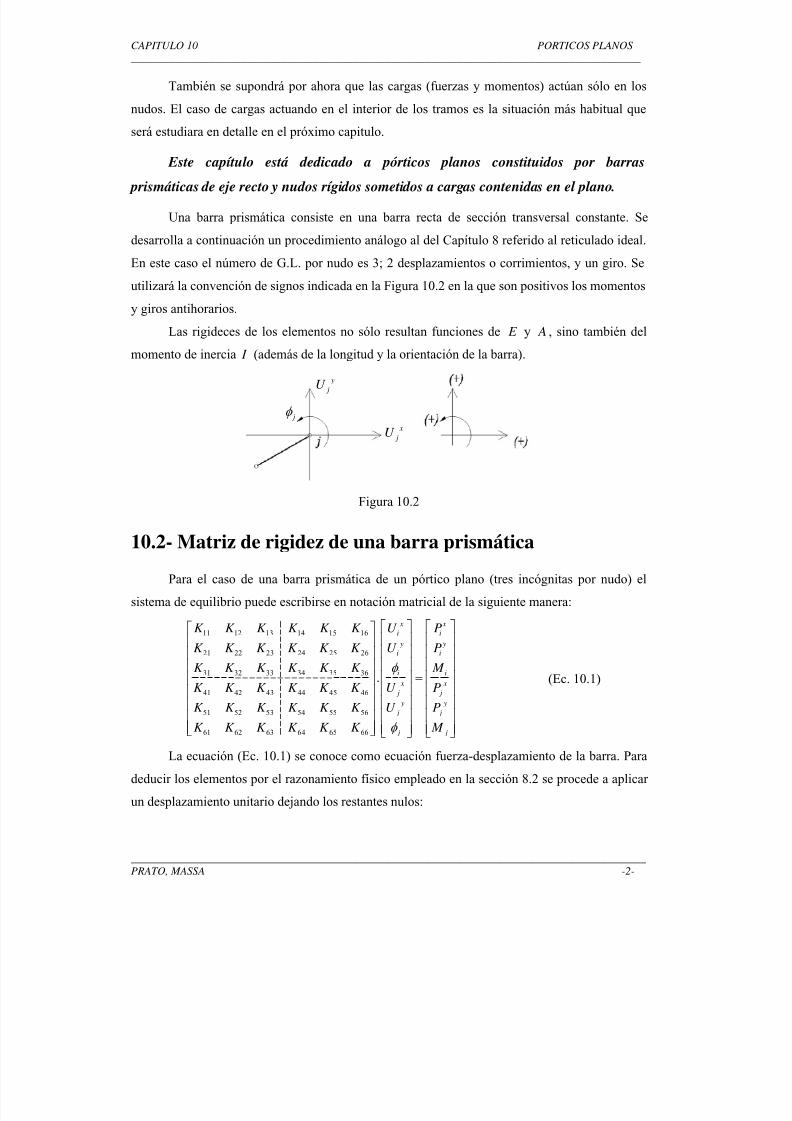
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 298/500
CAPITULO 10 PORTICOS PLANOS
____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -2-
También se supondrá por ahora que las cargas (fuerzas y momentos) actúan sólo en los
nudos. El caso de cargas actuando en el interior de los tramos es la situación más habitual que
será estudiara en detalle en el próximo capitulo.
Este capítulo está dedicado a pórticos planos constituidos por barras
prismáticas de eje recto y nudos rígidos sometidos a cargas contenidas en el plano.
Una barra prismática consiste en una barra recta de sección transversal constante. Se
desarrolla a continuación un procedimiento análogo al del Capítulo 8 referido al reticulado ideal.
En este caso el número de G.L. por nudo es 3; 2 desplazamientos o corrimientos, y un giro. Se
utilizará la convención de signos indicada en la Figura 10.2 en la que son positivos los momentos
y giros antihorarios.
Las rigideces de los elementos no sólo resultan funciones de E y A , sino también del
momento de inercia I (además de la longitud y la orientación de la barra).
Figura 10.2
10.2- Matriz de rigidez de una barra prismática
Para el caso de una barra prismática de un pórtico plano (tres incógnitas por nudo) el
sistema de equilibrio puede escribirse en notación matricial de la siguiente manera:
11 12 13 14 15 16
21 22 23 24 25 26
31 32 33 34 35 36
41 42 43 44 45 46
51 52 53 54 55 56
61 62 63 64 65 66
.
x x
i i
y y
i i
i i
x x
j j
y y
j j
j j
K K K K K K U P
K K K K K K U PK K K K K K M
K K K K K K U P
K K K K K K U P
K K K K K K M
φ
φ
⎡ ⎤ ⎡ ⎤⎡ ⎤⎢ ⎥ ⎢ ⎥⎢ ⎥
⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥=⎢ ⎥ ⎢ ⎥⎢ ⎥
⎢ ⎥ ⎢ ⎥⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥⎢ ⎥ ⎢⎢ ⎥
⎢ ⎥ ⎢ ⎥ ⎢⎣ ⎦ ⎣ ⎦ ⎣ ⎦⎥⎥
(Ec. 10.1)
La ecuación (Ec. 10.1) se conoce como ecuación fuerza-desplazamiento de la barra. Para
deducir los elementos por el razonamiento físico empleado en la sección 8.2 se procede a aplicar
un desplazamiento unitario dejando los restantes nulos:
jφ
x
jU
y
jU
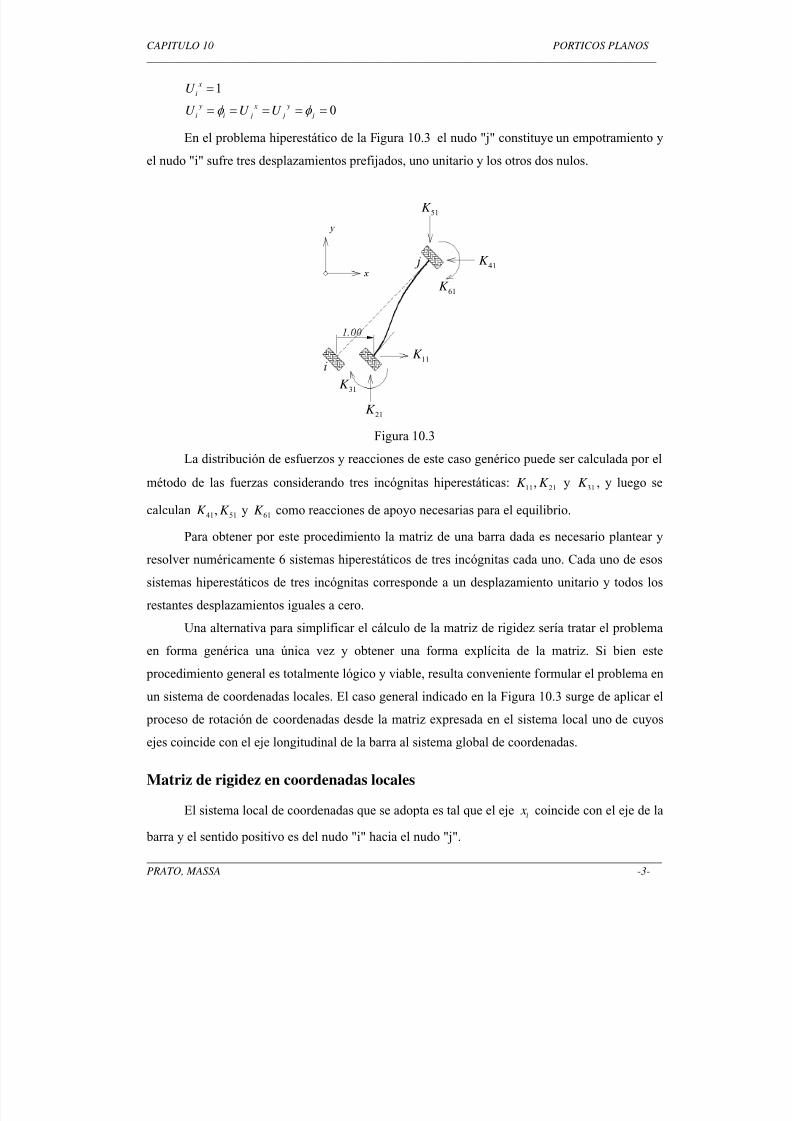
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 299/500
CAPITULO 10 PORTICOS PLANOS
____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -3-
1
0
x
i
y x y
i i j j j
U
U U U φ φ
=
= = = = =
En el problema hiperestático de la Figura 10.3 el nudo "j" constituye un empotramiento y
el nudo "i" sufre tres desplazamientos prefijados, uno unitario y los otros dos nulos.
Figura 10.3
La distribución de esfuerzos y reacciones de este caso genérico puede ser calculada por el
método de las fuerzas considerando tres incógnitas hiperestáticas:11 21
,K K y31
K , y luego se
calculan 41 51,K K y 61K como reacciones de apoyo necesarias para el equilibrio.
Para obtener por este procedimiento la matriz de una barra dada es necesario plantear y
resolver numéricamente 6 sistemas hiperestáticos de tres incógnitas cada uno. Cada uno de esos
sistemas hiperestáticos de tres incógnitas corresponde a un desplazamiento unitario y todos los
restantes desplazamientos iguales a cero.
Una alternativa para simplificar el cálculo de la matriz de rigidez sería tratar el problema
en forma genérica una única vez y obtener una forma explícita de la matriz. Si bien este
procedimiento general es totalmente lógico y viable, resulta conveniente formular el problema en
un sistema de coordenadas locales. El caso general indicado en la Figura 10.3 surge de aplicar el
proceso de rotación de coordenadas desde la matriz expresada en el sistema local uno de cuyos
ejes coincide con el eje longitudinal de la barra al sistema global de coordenadas.
Matriz de rigidez en coordenadas locales
El sistema local de coordenadas que se adopta es tal que el eje l x coincide con el eje de labarra y el sentido positivo es del nudo "i" hacia el nudo "j".
11K
21K
31K
41K
51K
61K
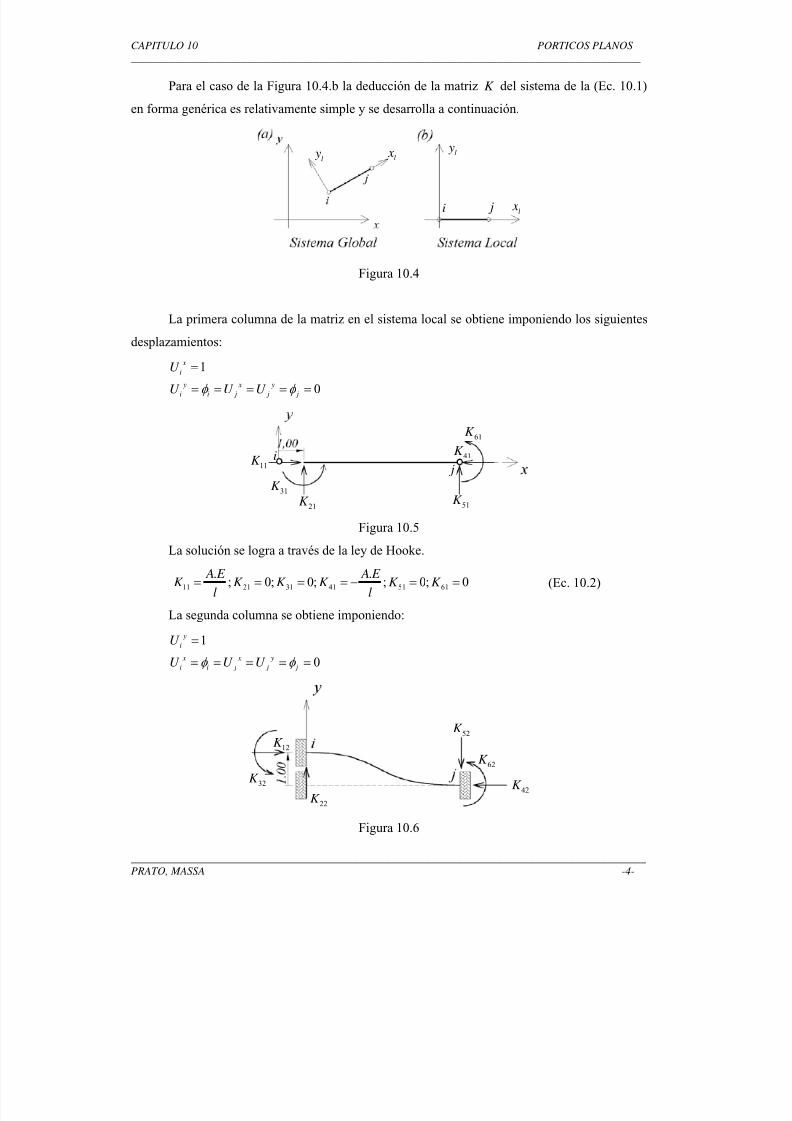
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 300/500
CAPITULO 10 PORTICOS PLANOS
____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -4-
Para el caso de la Figura 10.4.b la deducción de la matriz K del sistema de la (Ec. 10.1)
en forma genérica es relativamente simple y se desarrolla a continuación.
Figura 10.4
La primera columna de la matriz en el sistema local se obtiene imponiendo los siguientes
desplazamientos:
1
0
x
i
y x y
i i j j j
U
U U U φ φ
=
= = = = =
Figura 10.5
La solución se logra a través de la ley de Hooke.
11 21 31 41 51 61
. .; 0; 0; ; 0; 0
A E A E K K K K K K
l l= = = = − = = (Ec. 10.2)
La segunda columna se obtiene imponiendo:
1
0
y
i
x x y
i i j j j
U
U U U φ φ
=
= = = = =
Figura 10.6
12K
22K
32K 42K
52K
62K
11K
21K 31K
41K
51K
61K
i j
l x
l y l
y
l xi j

5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 301/500
CAPITULO 10 PORTICOS PLANOS
____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -5-
Las fuerzas en los extremos se calculan por el método de las fuerzas. Las ecuaciones de
compatibilidad deben establecer que el desplazamiento vertical del nudo "i" es la unidad y el giro
es nulo. El nudo "j" se considera empotrado.
Figura 10.7
11 1 12 2
21 1 22 2
. . 1
. . 0
X X
X X
δ δ
δ δ
+ =⎧⎨
+ =⎩
El efecto axial está desacoplado del efecto transversal por lo que se puede anticipar que la
fuerza axial es nula.
12 22 1 32 2 42 52 623 2 3 2
. . . .0; 12. ; 6. ; 0; 12. ; 6.
E I E I E I E I K K X K X K K K
l l l l= = = = = = = − = (Ec. 10.3)
De manera similar se puede obtener la tercera columna imponiendo:
1
0
i
x y x y
i i j j jU U U U
φ
φ
=
= = = = =
Figura 10.8
Y resolviendo el problema de desplazamiento prefijado de la Figura 10.8. Las dos
incógnitas pueden determinarse por alguna de las distintas formas del método de las fuerzas
(trabajo virtual, Castigliano, etc.) en la forma:
13 23 1 33 2 43 53 632 2
. . . .0; 6. ; 4. ; 0; 6. ; 2.
E I E I E I E I K K X K X K K K
l l l l= = = = = = = − = (Ec. 10.4)
Debe notarse que por el teorema de reciprocidad se puede anticipar que la fuerza vertical
en "i" ( )23K cuando 1i
φ = resulta igual al momento en "i" ( )32K cuando 1 y
iU = . Está
propiedad es general y permite afirmar que la matriz de rigidez es siempre simétrica.
Repitiendo el procedimiento se pueden deducir las restantes columnas y dar la forma
explícita (genérica) del sistema de la (Ec. 10.1) introduciendo la siguiente notación:
2 X
1 X
1θ =
2 X
1 X

5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 302/500
CAPITULO 10 PORTICOS PLANOS
____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -6-
1 2 1 2
32 3 2
1 2 1 2
32 2 3
0 0 0 0
0 0
0 02
.0 0 0 0
0 0
0 02
x x
i i
y y
i i
i i
x x
j j
y y
j j
j jl l
l
K K
U PK K K K
U PK K K K
M
U PK K
U PK K K K
M K K K K
φ
φ
−⎡ ⎤⎢ ⎥ ⎡ ⎤ ⎡ ⎤−⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥
−⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥ =⎢ ⎥ ⎢ ⎥
−⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥− − −⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎣ ⎦ ⎣ ⎦−⎢ ⎥⎣ ⎦
(Ec. 10.5)
1 2 33 2
. . . .; 12. ; 6. ; 4.
A E E I E I E I K K K K
l l l l= = = =
Importante:
La (Ec. 10.5) define la matriz de una barra que coincide con el eje “x”.
Se puede observar que la cuarta fila es la primera cambiada de signo, la quinta es la
segunda cambiada de signo y la sexta es igual a la segunda multiplicada por " l " menos la
tercera. Esto significa que la matriz de rigidez es singular y que el sistema de la (Ec. 10.5) sólo
podrá ser resuelto imponiendo por lo menos tres condiciones de vínculo para evitar
desplazamientos de cuerpo rígido.
Nótese que la matriz de rigidez de la (Ec. 10.5) ha sido obtenida despreciando las
deformaciones por corte.
Matriz de una barra en una dirección genérica
En primer lugar se analiza cómo se transforman los desplazamientos y las fuerzas al
introducir la rotación del sistema local de coordenadas ( x1 , y1) al sistema global ( x, y).
( ) ( )
( ) ( )
.cos .
. .cos
x y
x l l
x y
y l l
P P P sen
P P sen P
α α
α α
⎫= − ⎪⎬
= − ⎪⎭ (Ec. 10.6)
Matricialmente:
yP
xP
x
lP
l x
l y
y
lP
α 2γ
1γ

5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 303/500
CAPITULO 10 PORTICOS PLANOS
____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -7-
1 2
2 1
. x
xl
y yl
PP
PP
γ γ
γ γ
− ⎡ ⎤ ⎡ ⎤⎡ ⎤=⎢ ⎥ ⎢ ⎥⎢ ⎥
⎣ ⎦ ⎣ ⎦⎣ ⎦ (Ec. 10.7)
Más abreviadamente:
. l R P P= (Ec. 10.8)
Similarmente, para los desplazamientos se tiene:
. l RU U = (Ec. 10.9)
Notación: El índice " l " se refiere a vectores de matrices en un sistema local. Los mismos
elementos en el sistema global no llevan subíndice.
Los desplazamientos generalizados se transforman según (Ec. 10.9) teniendo presente que
R es (3 x 3). Si se tiene en cuenta que los valores de los giros son independientes de la
orientación de los ejes “x” e “y”, es obvio que el equivalente de (Ec. 10.7) resulta:
1 2
2 1
0
0 .
0 0 1
x x
l
y y
l
l
U U
U U
γ γ
γ γ
φ φ
⎡ ⎤ ⎡ ⎤−⎡ ⎤⎢ ⎥ ⎢ ⎥⎢ ⎥ =⎢ ⎥ ⎢ ⎥⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥⎣ ⎦ ⎣ ⎦ ⎣ ⎦
(Ec. 10.10)
: R Es una matriz “ortonormal” para la cual la matriz inversa es igual a su transpuesta:
1 T R R− = . Premultiplicando ambos miembros de (Ec. 10.8) y (Ec. 10.9) por T
R resulta:
.T
lP R P= (Ec. 10.11)
.T
lU R U =
(Ec. 10.12)
Particionando el sistema de ecuaciones de equilibrio en coordenadas locales, la (Ec. 10.5)
puede escribirse:
. .
. .
l l l l l
ii i ij j i
l l l l l
ji i jj j j
K U K U P
K U K U P
⎫+ = ⎪⎬
+ = ⎪⎭
(Ec. 10.13)
Las submatrices de igual índice ( ),ii jjK K se conocen como rigidez directa mientras que
las de índice diferente ( ),ij ji
K K son las matrices de rigidez cruzada.
Para pasar a coordenadas globales basta reemplazar según las expresiones:
. . . . .
. . . . .
l T l T T
ii i ij j i
l T l T T
ji i jj j j
K R U K R U R P
K R U K R U R P
⎫+ = ⎪⎬
+ = ⎪⎭
Premultiplicando ambos miembros por R y recordando que . T R R I = resulta:

5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 304/500
CAPITULO 10 PORTICOS PLANOS
____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -8-
( ) ( )
( ) ( )
. . . . . .
. . . . . .
l T l T
ii i ij j i
l T l T
ji i jj j j
R K R U R K R U P
R K R U R K R U P
⎫+ = ⎪⎬
+ = ⎪⎭
(Ec. 10.14)
. . . .
.. . . .
l T l T
i iii ij
l T l T j j ji jj
U P R K R R K R
U P R K R R K R
⎡ ⎤ ⎡ ⎤ ⎡ ⎤
=⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎣ ⎦ ⎣ ⎦⎣ ⎦
(Ec. 10.15)
Las (Ec. 10.14) y (Ec. 10.15) proveen las expresiones para obtener la matriz de rigidez
en el sistema global: Se debe premultiplicar cada submatriz por R y al resultado
postmultiplicarlo por T R . A manera de ejemplo, la matriz iiK resulta de la siguiente forma
explícita:
( )
( )
1 2
1 2 2 1
2 3
2 2
1 2 1 2 1 2 2 1 2 1 2 1 1 2 2
2 2
2 1 2 1 1 1 2 1 2 1 2 1 1 1 2
2 3 2 2 1 2 3
0 0 00 0
0 0 0 1
0 . . . . . . . .
0 . . . . . . . .
0 0 1 0 . .
K K K
K K
K K K K K K K K
K K K K K K K K
K K K K K
γ γ γ γ
γ γ γ γ γ γ γ γ γ γ
γ γ γ γ γ γ γ γ γ γ
γ γ
−
− − − + − −
− +
−
Operando sobre l
ijK y l
jjK de manera similar se llega finalmente a la matriz de rigidez
para el caso general:
(Ec. 10.16)
2 2
1 2 1. . A K K γ γ = + ; ( )1 2 1. . B K K γ γ = − ; 2 2.C K γ =
2 2
2 1 1. . D K K γ γ = + ;
1 2. E K γ =
2γ
1γ
33
3
.2
x x
i i
y y
i i
i i
x x
j j
y y
j j
j j
A B C A B C U P
D E B D E U P
K M K C E
U P A B C
U P D E
M K
φ
φ
− − − −⎡ ⎤ ⎡ ⎤ ⎡ ⎤⎢ ⎥− − ⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥−⎢ ⎥ =⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥− ⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎣ ⎦ ⎣ ⎦⎢ ⎥⎣ ⎦
simétrica

5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 305/500
CAPITULO 10 PORTICOS PLANOS
____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -9-
La barra orientada según el eje " y" puede considerarse un caso particular de (Ec. 10.16)
para el cual 1 0γ = . Como es una situación muy común es conveniente contar con su forma
explícita para evitar el cambio de coordenadas del caso general:
1 2 1 2
32 3 2
1 2 1 2
32 2 3
0 00 0 0 0
0 02
.0 0
0 0 0 0
0 02
x x
i i
y y
i i
i i
x x
j j
y y
j j
j j
K K K K U PK K
U PK K K K
M
U PK K K K
U PK K
M K K K K
φ
φ
− − −⎡ ⎤⎢ ⎥ ⎡ ⎤ ⎡ ⎤−⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥
−⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥ =⎢ ⎥ ⎢ ⎥
−⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥−⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎣ ⎦ ⎣ ⎦−⎢ ⎥⎣ ⎦
(Ec. 10.17)
1 2 33 2. . . .; 12. ; 6. ; 4. A E E I E I E I
K K K K l l l l= = = =
Es importante recordar que las matrices de rigidez de las (Ec. 10.5), (Ec. 10.16) y (Ec.
10.17) corresponden a la convención de signos de la Figura 10.2 referida al sentido positivo para
los desplazamientos y los giros. Dicha convención también rige para las fuerzas y los momentos.
Ejercicio:
Se sugiere al lector deducir la matriz de rigidez en coordenadas locales para una barra de
reticulado, luego llegar a la matriz de la (Ec.8.10) por un cambio de coordenadas.
10.3- Matriz de rigidez de la estructura
Para ensamblar la matriz del conjunto se utiliza el mismo procedimiento visto para el
reticulado:
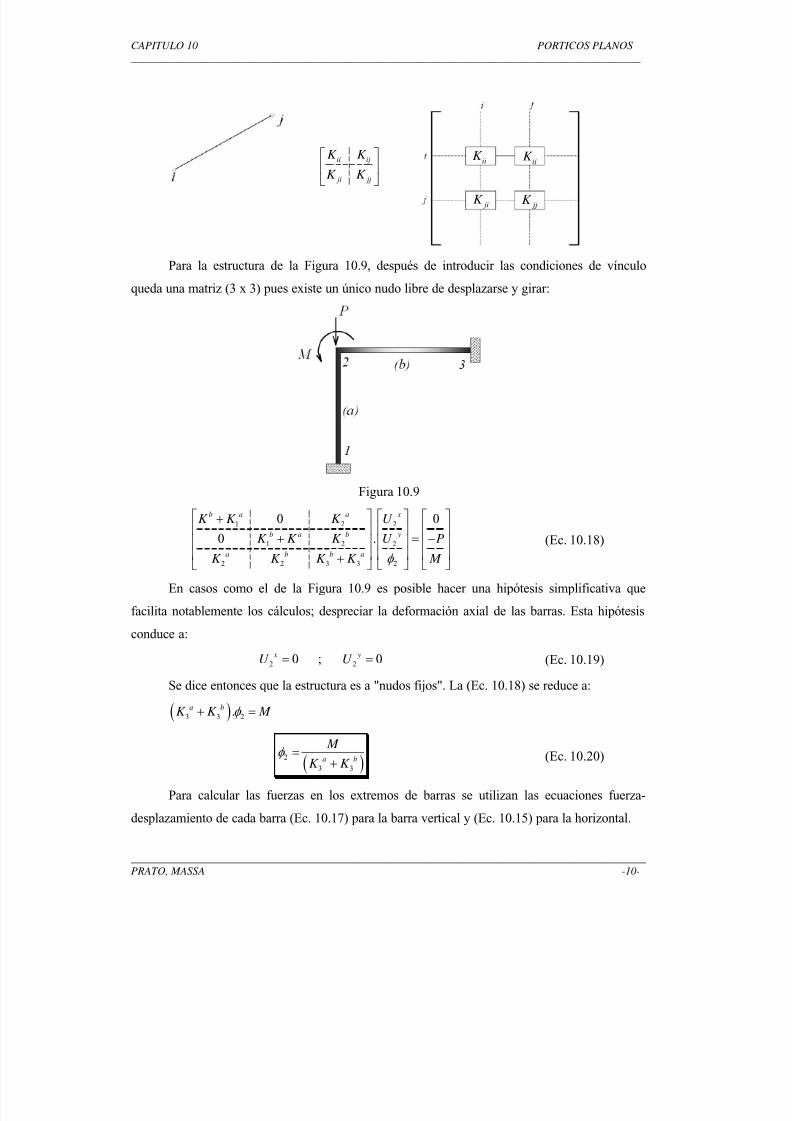
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 306/500
CAPITULO 10 PORTICOS PLANOS
____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -10-
Para la estructura de la Figura 10.9, después de introducir las condiciones de vínculo
queda una matriz (3 x 3) pues existe un único nudo libre de desplazarse y girar:
Figura 10.9
1 2 2
1 2 2
2 2 3 3 2
0 0
0 .
b a a x
b a b y
a b b a
K K K U
K K K U P
K K K K M φ
⎡ ⎤ ⎡ ⎤ ⎡ ⎤+⎢ ⎥ ⎢ ⎥ ⎢ ⎥
+ = −⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥+⎣ ⎦ ⎣ ⎦ ⎣ ⎦
(Ec. 10.18)
En casos como el de la Figura 10.9 es posible hacer una hipótesis simplificativa que
facilita notablemente los cálculos; despreciar la deformación axial de las barras. Esta hipótesis
conduce a:
2 20 ; 0 x yU U = = (Ec. 10.19)
Se dice entonces que la estructura es a "nudos fijos". La (Ec. 10.18) se reduce a:
( )3 3 2.a bK K M φ + =
( )2
3 3
a b
M
K K φ =
+ (Ec. 10.20)
Para calcular las fuerzas en los extremos de barras se utilizan las ecuaciones fuerza-
desplazamiento de cada barra (Ec. 10.17) para la barra vertical y (Ec. 10.15) para la horizontal.
iiK
jjK
ijK
jiK
ii ij
ji jj
K K
K K
⎡ ⎤⎢ ⎥⎣ ⎦
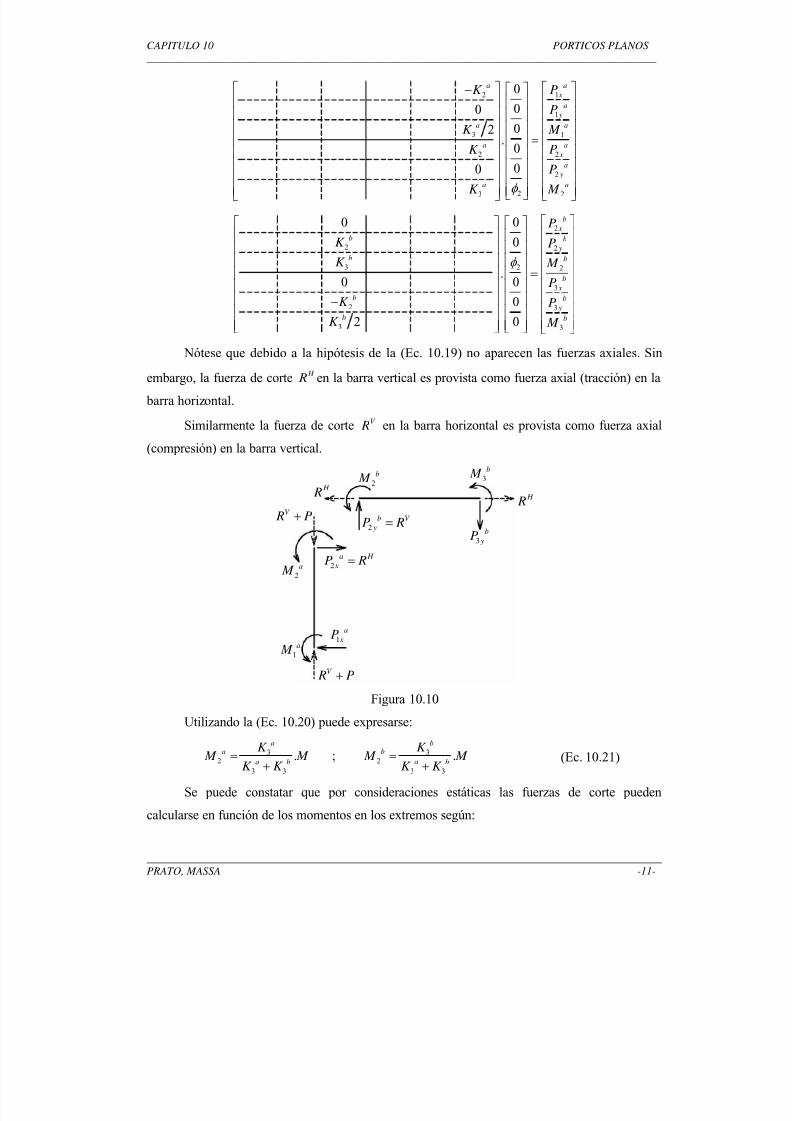
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 307/500
CAPITULO 10 PORTICOS PLANOS
____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -11-
2 1
1
3 1
2 2
2
23 2
0
00
02.
0
00
a a
x
a
y
a a
a a
x
a y
a a
K P
P
K M
K P
P
K M φ
⎡ ⎤ ⎡ ⎤− ⎡ ⎤⎢ ⎥ ⎢ ⎥⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥⎢ ⎥ ⎢ ⎥=⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥
⎢ ⎥ ⎢ ⎥⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥⎣ ⎦⎣ ⎦ ⎣ ⎦
2
2 2
3 2 2
3
2 3
3 3
0 0
0
.0 0
0
2 0
b
x
b b
y
b b
b
x
b b
y
b b
P
K P
K M
P
K P
K M
φ
⎡ ⎤⎡ ⎤ ⎡ ⎤⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥=⎢ ⎥ ⎢ ⎥⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥⎢ ⎥ ⎢ ⎥−⎢ ⎥⎢ ⎥ ⎢ ⎥
⎢ ⎥⎢ ⎥ ⎢ ⎥⎣ ⎦ ⎣ ⎦ ⎣ ⎦
Nótese que debido a la hipótesis de la (Ec. 10.19) no aparecen las fuerzas axiales. Sin
embargo, la fuerza de corte H R en la barra vertical es provista como fuerza axial (tracción) en la
barra horizontal.
Similarmente la fuerza de corte V R en la barra horizontal es provista como fuerza axial
(compresión) en la barra vertical.
Figura 10.10
Utilizando la (Ec. 10.20) puede expresarse:
32
3 3
.a
a
a b
K M M
K K =
+; 3
2
3 3
.b
b
a b
K M M
K K =
+ (Ec. 10.21)
Se puede constatar que por consideraciones estáticas las fuerzas de corte pueden
calcularse en función de los momentos en los extremos según:
V R P+
1
a
xP
1
a
M
2
a H
xP R=
2
a M
V R P+
H R H R
2
b M 3
b M
2
b V
yP R=
3
b
yP
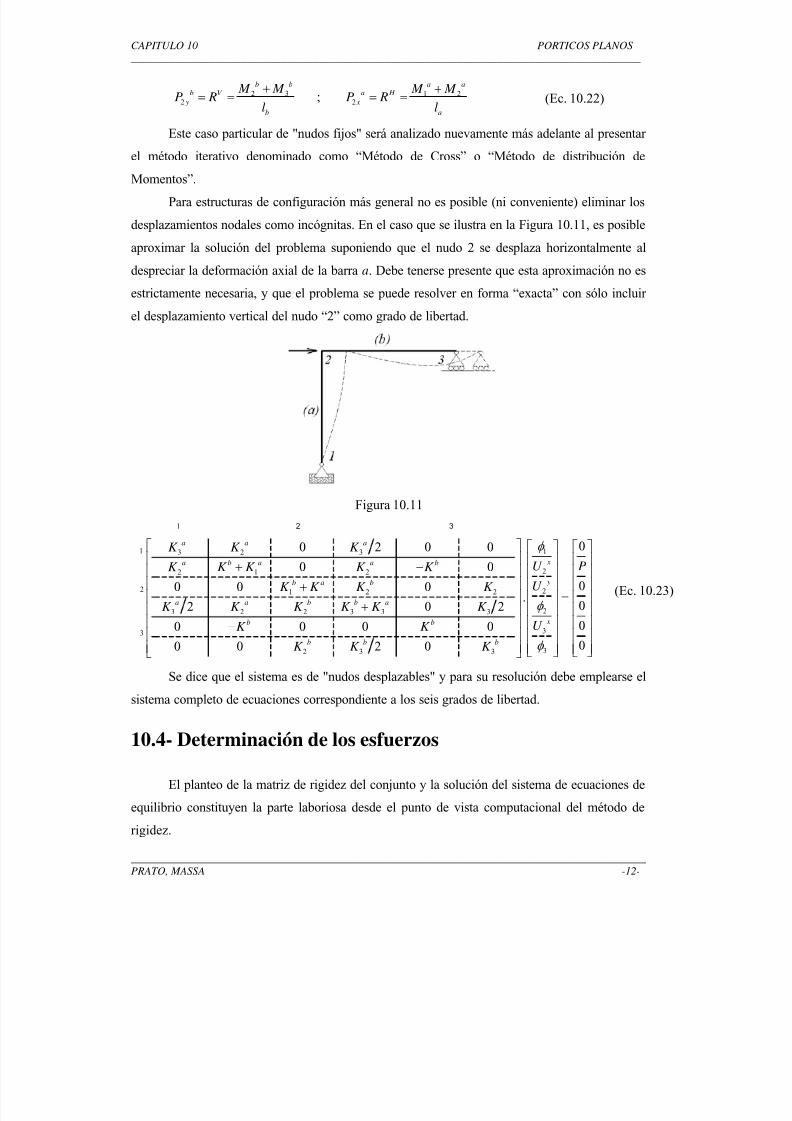
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 308/500
CAPITULO 10 PORTICOS PLANOS
____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -12-
2 32
b bb V
y
b
M M P R
l
+= = ; 1 2
2
a aa H
x
a
M M P R
l
+= = (Ec. 10.22)
Este caso particular de "nudos fijos" será analizado nuevamente más adelante al presentar
el método iterativo denominado como “Método de Cross” o “Método de distribución deMomentos”.
Para estructuras de configuración más general no es posible (ni conveniente) eliminar los
desplazamientos nodales como incógnitas. En el caso que se ilustra en la Figura 10.11, es posible
aproximar la solución del problema suponiendo que el nudo 2 se desplaza horizontalmente al
despreciar la deformación axial de la barra a. Debe tenerse presente que esta aproximación no es
estrictamente necesaria, y que el problema se puede resolver en forma “exacta” con sólo incluir
el desplazamiento vertical del nudo “2” como grado de libertad.
Figura 10.11
1
1 13 2 3
22 1 2
2 1 2 2
3 2 2 3 3 3
3
2 3 3
0 2 0 0
0 0
0 0 0.
2 0 2
0 0 0 0
0 0 2 0
a a a
xa b a a b
b a b
a a b b a
b b
b b b
K K K
U K K K K K
K K K K
K K K K K K
K K
K K K
φ ⎡ ⎤⎢ ⎥
+ −⎢ ⎥⎢ ⎥+⎢ ⎥
+⎢ ⎥⎢ ⎥−⎢ ⎥⎢ ⎥⎣ ⎦
2 3
2
2
3
3
0
0
0
0
0
y
x
P
U
U
φ
φ
⎡ ⎤ ⎡ ⎤⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥
=⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥
⎢ ⎥ ⎢ ⎥⎣ ⎦ ⎣ ⎦
(Ec. 10.23)
Se dice que el sistema es de "nudos desplazables" y para su resolución debe emplearse el
sistema completo de ecuaciones correspondiente a los seis grados de libertad.
10.4- Determinación de los esfuerzos
El planteo de la matriz de rigidez del conjunto y la solución del sistema de ecuaciones de
equilibrio constituyen la parte laboriosa desde el punto de vista computacional del método de
rigidez.

5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 309/500
CAPITULO 10 PORTICOS PLANOS
____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -13-
El cálculo de los esfuerzos se reduce a efectuar unas multiplicaciones y sumas utilizando
las ecuaciones fuerza-desplazamiento de cada barra.
Una vez calculados los desplazamientos nodales en el sistema global se pueden calcular
las fuerzas en los extremos de una barra horizontal (coincide con el eje “x”) efectuando el
producto indicado en (Ec. 10.5).
Figura 10.12
Si la barra es vertical (orientada en la dirección “y”) se aplica la (Ec. 10.17):
Figura 10.13
En ambos casos el trazado de los diagramas resulta muy simple porque las fuerzas en los
extremos coinciden con los esfuerzos de corte y normal.
En el caso de una barra que no es paralela a ninguno de los ejes del sistema de referencia
global, se puede emplear la (Ec. 10.16) pero en este caso las fuerzas en los extremos no
coinciden con los esfuerzos de corte y normal por lo que deben transformarse a coordenadas
locales empleando la (Ec. 10.11).
x
iP
y
iP
i M
j M
y
jP
x
jP
x
iP
y
iP
i M j
M
y
jP
x
jP
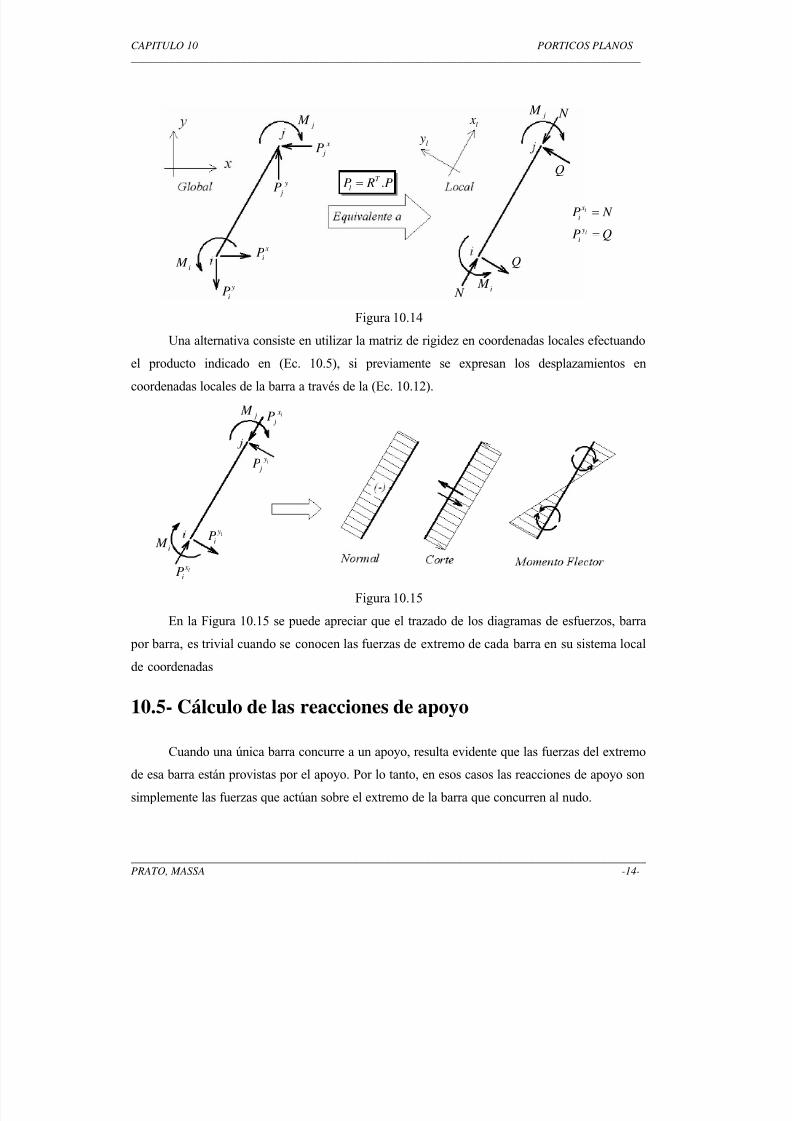
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 310/500
CAPITULO 10 PORTICOS PLANOS
____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -14-
Figura 10.14
Una alternativa consiste en utilizar la matriz de rigidez en coordenadas locales efectuando
el producto indicado en (Ec. 10.5), si previamente se expresan los desplazamientos en
coordenadas locales de la barra a través de la (Ec. 10.12).
Figura 10.15
En la Figura 10.15 se puede apreciar que el trazado de los diagramas de esfuerzos, barra
por barra, es trivial cuando se conocen las fuerzas de extremo de cada barra en su sistema local
de coordenadas
10.5- Cálculo de las reacciones de apoyo
Cuando una única barra concurre a un apoyo, resulta evidente que las fuerzas del extremo
de esa barra están provistas por el apoyo. Por lo tanto, en esos casos las reacciones de apoyo son
simplemente las fuerzas que actúan sobre el extremo de la barra que concurren al nudo.
i M
j M
l x
iP
l x
jP
l y
iP
l y
jP
x
iP
y
iP
i M
j M
y
jP
x
jP
j M
i M
N
l x
l y
Q
Q
N
.T
lP R P=
l
l
x
i
y
i
P N
P Q
=
=

5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 311/500
CAPITULO 10 PORTICOS PLANOS
____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -15-
En el caso de la Figura 10.9 las reacciones en el nudo 1 coinciden con las fuerzas en el
extremo 1 de la barra (a) y las reacciones en el nudo 3 coinciden con las fuerzas en el extremo 3
de la barra (b).
En apoyos donde concurren dos o más barras, las reacciones deben obtenerse
considerando el equilibrio del nudo. Para ello, debe cargarse el nudo del apoyo con las fuerzas de
los extremos de las barras que concurren a él, pero cambiadas de signo. Esto es equivalente a
decir que las reacciones de apoyo se obtienen sumando las fuerzas de los extremos de las barras
que concurren al apoyo.
Esta forma de operar se ilustra en las Figura 10.16 y Figura 10.17.
Figura 10.16
(1)
j M
(2)
i M
(1)
y
jP (2)
y
iP
2 (1) (2)
y y y
j i R P P= +
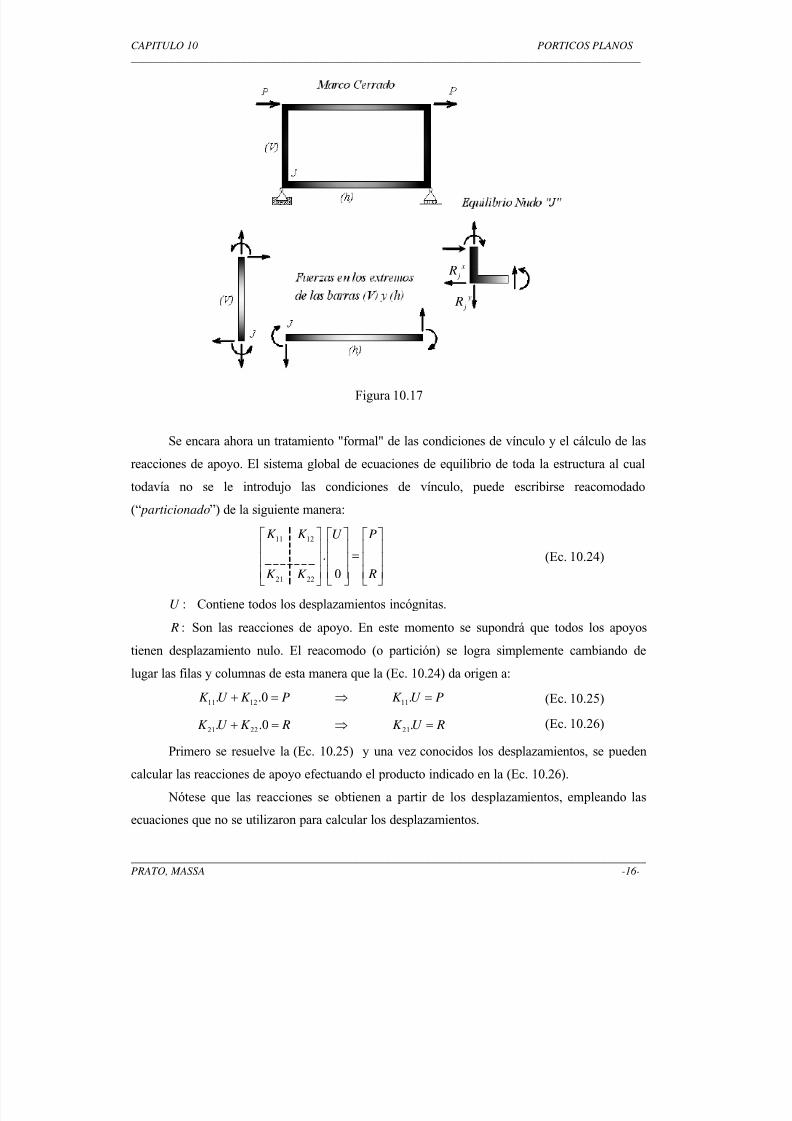
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 312/500
CAPITULO 10 PORTICOS PLANOS
____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -16-
Figura 10.17
Se encara ahora un tratamiento "formal" de las condiciones de vínculo y el cálculo de las
reacciones de apoyo. El sistema global de ecuaciones de equilibrio de toda la estructura al cual
todavía no se le introdujo las condiciones de vínculo, puede escribirse reacomodado(“ particionado”) de la siguiente manera:
11 12
21 22
.
0
K K U P
RK K
⎡ ⎤ ⎡ ⎤ ⎡ ⎤⎢ ⎥ ⎢ ⎥ ⎢ ⎥
=⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥
⎣ ⎦ ⎣ ⎦⎣ ⎦
(Ec. 10.24)
:U Contiene todos los desplazamientos incógnitas.
: R Son las reacciones de apoyo. En este momento se supondrá que todos los apoyos
tienen desplazamiento nulo. El reacomodo (o partición) se logra simplemente cambiando delugar las filas y columnas de esta manera que la (Ec. 10.24) da origen a:
11 12 11. .0 .K U K P K U P+ = ⇒ = (Ec. 10.25)
21 22 21. .0 .K U K R K U R+ = ⇒ = (Ec. 10.26)
Primero se resuelve la (Ec. 10.25) y una vez conocidos los desplazamientos, se pueden
calcular las reacciones de apoyo efectuando el producto indicado en la (Ec. 10.26).
Nótese que las reacciones se obtienen a partir de los desplazamientos, empleando las
ecuaciones que no se utilizaron para calcular los desplazamientos.
y
j R
x
j R

5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 313/500
CAPITULO 10 PORTICOS PLANOS
____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -17-
Ejercicio Nº 1:
Analizar el pórtico de la figura.
1 2
2 2 6
1 2 2
4 4
1 2
200 400 5000
45,5 67,5 2,1 10
1534 3856
l cm l cm P Kg
Kg A cm A cm E cm
I cm I cm
= = =
= = = ×
= =
; ;
; ;
;
Barra 1:
Matriz de rigidez:
2 2
1 33
. .477750 ; 6. 483210
. .12. 4832,1 ; 4. 64428000
A E E I K K
l l
E I E I K K
l l
= = = =
= = = =
1
1
2
4832,1 0 483210 4832,1 0 483210
0 477750 0 0 477750 0
483210 0 64428000 483210 0 32214000
4832,1 0 483210 4832,1 0 483210
0 477750 0 0 477750 0
− − −
−
−
−
−
−
2
483210 0 32214000 483210 0 64428000
⎡ ⎤⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎣ ⎦
Barra 2:
Matriz de rigidez:
2 2
1 33
. .354375 ; 6. 303660
. .12. 1518,3 ; 4. 80976000
A E E I K K
l l
E I E I K K
l l
= = = =
= = = =
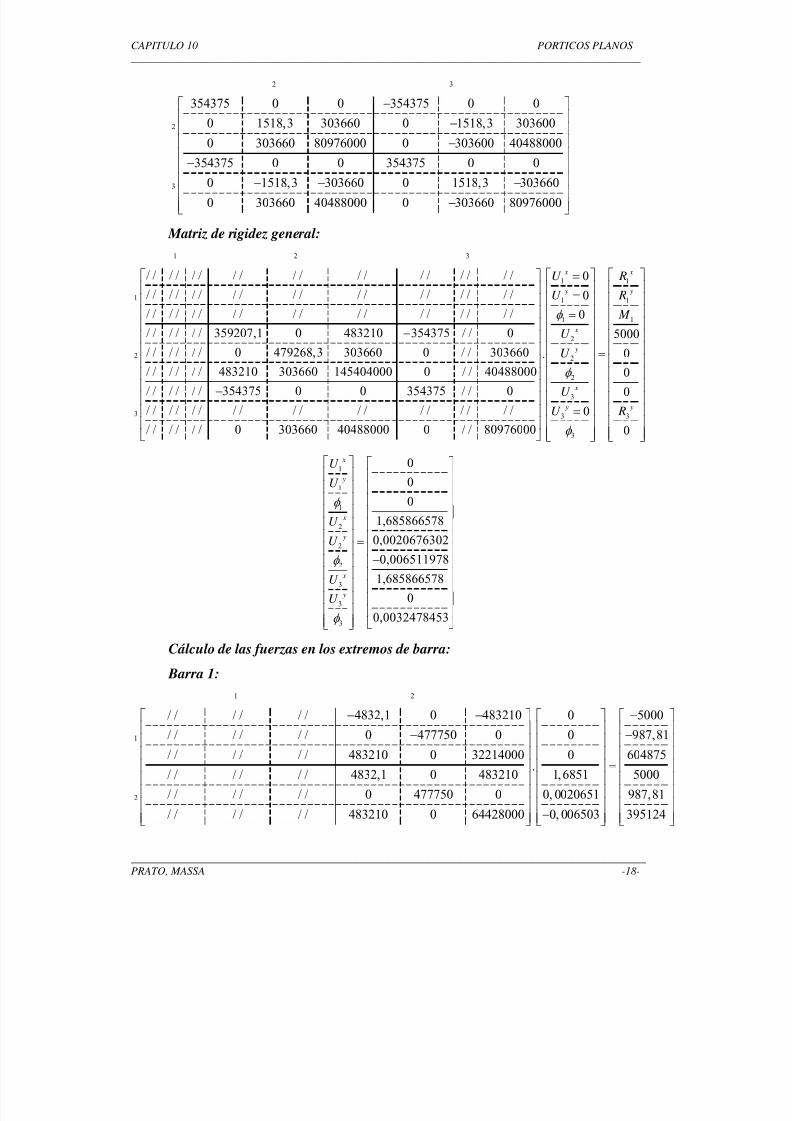
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 314/500
CAPITULO 10 PORTICOS PLANOS
____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -18-
2 3
2
3
354375 0 0 354375 0 0
0 1518,3 303660 0 1518,3 303600
0 303660 80976000 0 303600 40488000
354375 0 0 354375 0 00 1518,3 303660 0 1518,3 303660
0
−
−
−
−− − −
303660 40488000 0 303660 80976000
⎡ ⎤⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥
−⎢ ⎥⎣ ⎦
Matriz de rigidez general:
1 2 3
1
2
3
/ / / / / / / / / / / / / / / / / /
/ / / / / / / / / / / / / / / / / /
/ / / / / / / / / / / / / / / / / /
/ / / / / / 359207,1 0 483210 354375 / / 0
/ / / / / / 0 479268,3 3036
−
1
1
1
2
2
2
3
3
3
0
0
0
60 0 / / 303660 .
/ / / / / / 483210 303660 145404000 0 / / 40488000
/ / / / / / 354375 0 0 354375 / / 0
/ / / / / / / / / / / / / / / / / / 0
/ / / / / / 0 303660 40488000 0 / / 80976000
x
y
x
y
x
y
U
U
U
U
U
U
φ
φ
φ
⎡ ⎤=⎡ ⎤⎢⎢ ⎥
=⎢⎢ ⎥⎢⎢ ⎥ =
⎢⎢ ⎥ ⎢⎢ ⎥⎢⎢ ⎥⎢⎢ ⎥⎢⎢ ⎥⎢⎢ ⎥−⎢⎢ ⎥⎢ =⎢ ⎥⎢⎢ ⎥⎢⎣ ⎦ ⎣
1
1
1
3
5000
0
0
0
0
x
y
y
R
R
M
R
⎡ ⎤⎥ ⎢ ⎥⎥ ⎢ ⎥⎥ ⎢ ⎥
⎥ ⎢ ⎥⎥ ⎢ ⎥⎥ ⎢ ⎥=⎥ ⎢ ⎥⎥ ⎢ ⎥⎥ ⎢ ⎥⎥ ⎢ ⎥⎥ ⎢ ⎥⎥ ⎢ ⎥⎥ ⎢ ⎥⎦ ⎣ ⎦
1
1
1
2
2
2
3
3
3
0
0
0
1,685866578
0,0020676302
0,006511978
1,685866578
0
0,0032478453
x
y
x
y
x
y
U
U
U
U
U
U
φ
φ
φ
⎡ ⎤ ⎡ ⎤⎢ ⎥ ⎢ ⎥
⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥=⎢ ⎥ ⎢ ⎥
−⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎣ ⎦⎣ ⎦
Cálculo de las fuerzas en los extremos de barra: Barra 1:
1 2
1
2
/ / / / / / 4832,1 0 483210
/ / / / / / 0 477750 0
/ / / / / / 483210 0 32214000
/ / / / / / 4832,1 0 483210
/ / / / / / 0 477750 0
/ / / / / / 483210 0 64428000
− −⎡ ⎤⎢ −⎢⎢⎢⎢⎢⎢
⎢⎣
0 5000
0 987,81
0 604875.
1,6851 5000
0, 0020651 987,81
0, 006503 395124
−⎡ ⎤ ⎡ ⎤⎥ ⎢ ⎥ ⎢ ⎥−⎥ ⎢ ⎥ ⎢ ⎥⎥ ⎢ ⎥ ⎢ ⎥
=⎥ ⎢ ⎥ ⎢ ⎥⎥ ⎢ ⎥ ⎢ ⎥⎥ ⎢ ⎥ ⎢ ⎥⎥ ⎢ ⎥ ⎢ ⎥
−⎥ ⎢ ⎥ ⎢ ⎥⎦ ⎣ ⎦ ⎣ ⎦
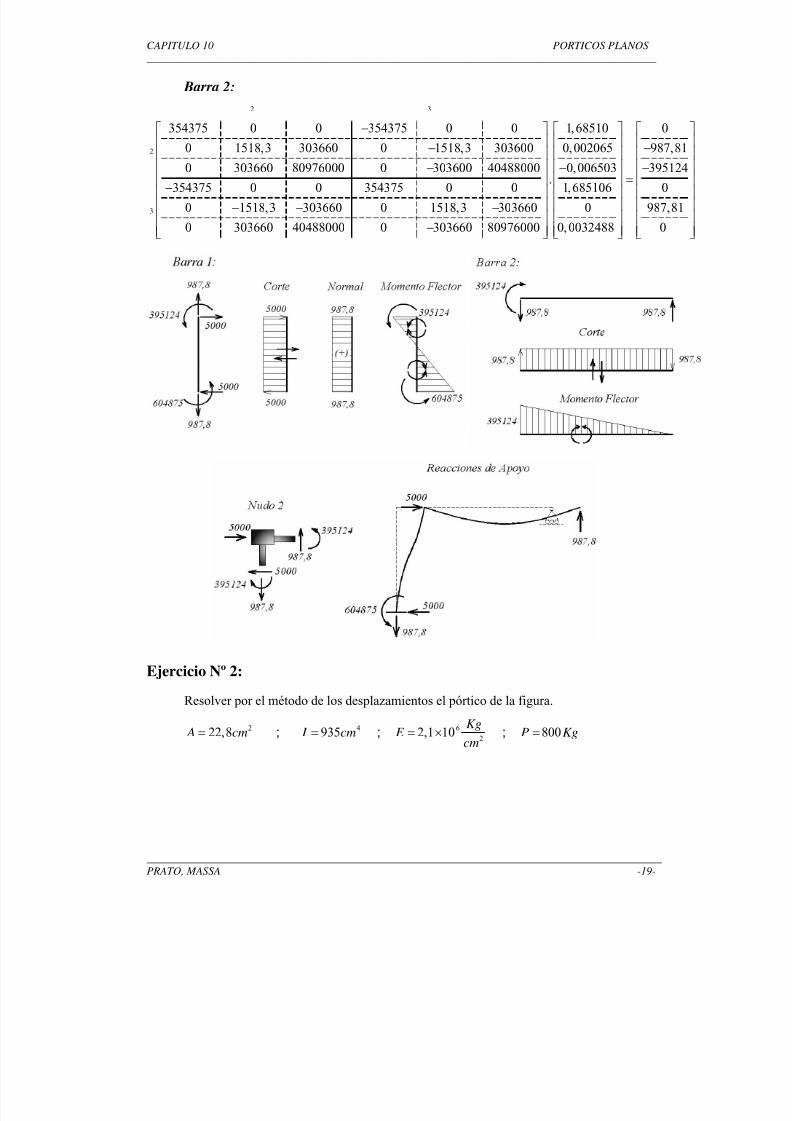
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 315/500
CAPITULO 10 PORTICOS PLANOS
____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -19-
Barra 2:
2 3
2
3
354375 0 0 354375 0 0
0 1518,3 303660 0 1518,3 303600
0 303660 80976000 0 303600 40488000
354375 0 0 354375 0 0
0 1518,3 303660 0 1518,3 303660
0
−
−
−−
− − −
1,68510 0
0,002065 987,81
0,006503 395124.
1,685106 0
0 987,81
303660 40488000 0 303660 80976000 0,0032488 0
⎡ ⎤ ⎡ ⎤ ⎡ ⎤⎢ ⎥ ⎢ ⎥ ⎢ ⎥−⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥− −
=⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥
−⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎣ ⎦ ⎣ ⎦ ⎣ ⎦
Ejercicio Nº 2:
Resolver por el método de los desplazamientos el pórtico de la figura.
2 4 6
222,8 935 2,1 10 800
Kg A cm I cm E P Kg
cm= = = × =; ; ;
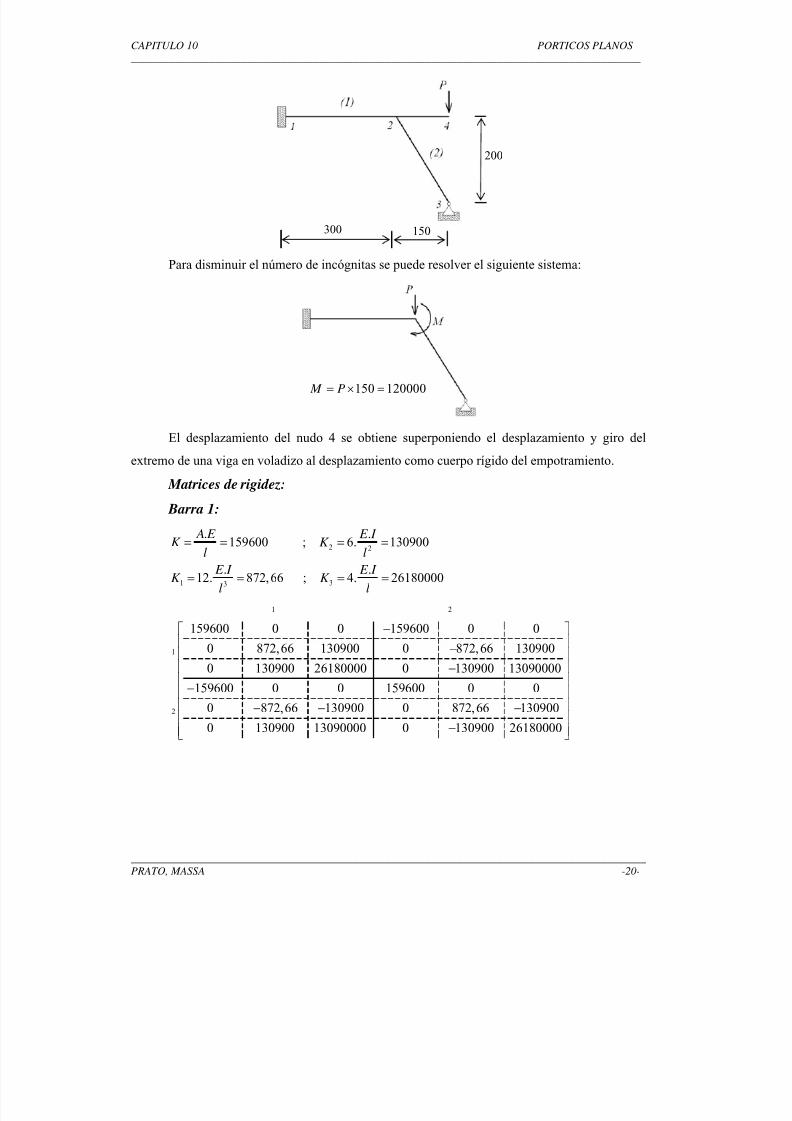
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 316/500
CAPITULO 10 PORTICOS PLANOS
____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -20-
Para disminuir el número de incógnitas se puede resolver el siguiente sistema:
El desplazamiento del nudo 4 se obtiene superponiendo el desplazamiento y giro del
extremo de una viga en voladizo al desplazamiento como cuerpo rígido del empotramiento.
Matrices de rigidez: Barra 1:
2 2
1 33
. .159600 ; 6. 130900
. .12. 872,66 ; 4. 26180000
A E E I K K
l l
E I E I K K
l l
= = = =
= = = =
1 2
1
2
159600 0 0 159600 0 0
0 872,66 130900 0 872,66 1309000 130900 26180000 0 130900 13090000
159600 0 0 159600 0 0
0 872,66 130900 0 872,66 130900
0
−
−
−
−
− − −
130900 13090000 0 130900 26180000
⎡ ⎤⎢ ⎥
⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥
−⎢ ⎥⎣ ⎦
150 120000 M P= × =
300 150
200
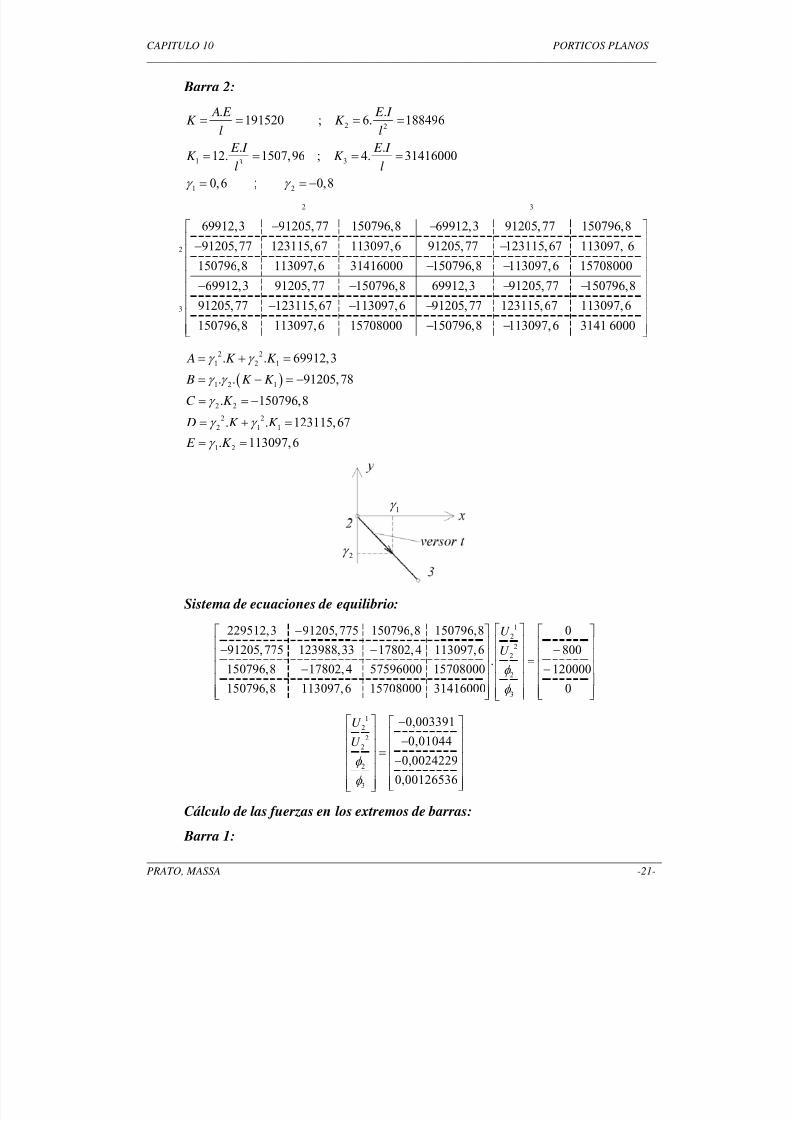
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 317/500
CAPITULO 10 PORTICOS PLANOS
____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -21-
Barra 2:
2 2
1 33
1 2
. .191520 ; 6. 188496
. .12. 1507,96 ; 4. 31416000
0,6 0,8
A E E I K K
l l
E I E I K K
l l
γ γ
= = = =
= = = =
= = −
;
2 3
2
3
69912,3 91205,77 150796,8 69912,3 91205,77 150796,8
91205,77 123115,67 113097,6 91205,77 123115,67 113097,
− −
− −
6
150796,8 113097,6 31416000 150796,8 113097,6 15708000
69912,3 91205,77 150796,8 69912,3 91205,77 150796,8
91205,77 123115,67 113097,6 91205,77 123115,67 113097,6
150796,8 113097,6 15708000 150796,8 113097,6 3141
− −
− − − −
− − −
− − 6000
⎡ ⎤⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥
⎢ ⎥⎣ ⎦
( )
2 2
1 2 1
1 2 1
2 2
2 2
2 1 1
1 2
. . 69912,3
. . 91205,78
. 150796,8
. . 123115,67
. 113097,6
A K K
B K K
C K
D K K
E K
γ γ
γ γ
γ
γ γ
γ
= + =
= − = −
= = −
= + =
= =
Sistema de ecuaciones de equilibrio:
1
2
2
2
2
3
229512,3 91205,775 150796,8 150796,8 0
91205,775 123988,33 17802,4 113097,6 800.150796,8 17802,4 57596000 15708000 120000
150796,8 113097,6 15708000 31416000 0
U
U φ
φ
− ⎡ ⎤⎡ ⎤ ⎡ ⎤⎢ ⎥⎢ ⎥ ⎢ ⎥
− − −⎢ ⎥⎢ ⎥ ⎢ ⎥=⎢ ⎥⎢ ⎥ ⎢ ⎥− −⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥⎢ ⎥ ⎢ ⎥⎣ ⎦ ⎣ ⎦⎣ ⎦
1
2
2
2
2
3
0,003391
0,01044
0,0024229
0,00126536
U
U
φ
φ
−⎡ ⎤ ⎡ ⎤⎢ ⎥ ⎢ ⎥−⎢ ⎥ ⎢ ⎥=⎢ ⎥ ⎢ ⎥−⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥⎣ ⎦⎣ ⎦
Cálculo de las fuerzas en los extremos de barras: Barra 1:
2γ
1γ
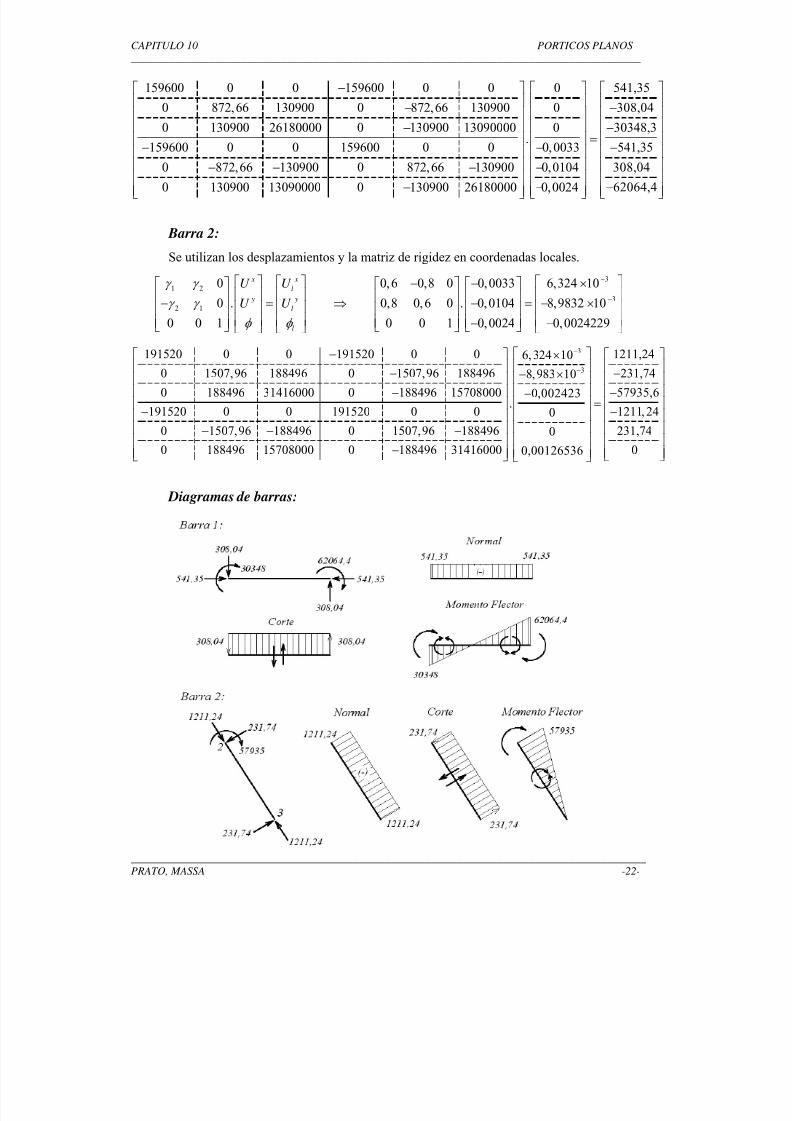
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 318/500
CAPITULO 10 PORTICOS PLANOS
____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -22-
159600 0 0 159600 0 0 0
0 872,66 130900 0 872,66 130900 0
0 130900 26180000 0 130900 13090000 0.
159600 0 0 159600 0 0 0,0033
0 872,66 130900 0 872,66 130900 0,0104
0 130900 13090000 0 130900 26180000 0,0024
−⎡ ⎤ ⎡⎢ ⎥ ⎢−⎢ ⎥⎢ ⎥−⎢ ⎥
− −⎢ ⎥
⎢ ⎥− − − −⎢ ⎥− −⎢ ⎥⎣ ⎦ ⎣
541,35
308,04
30348,3
541,35
308,04
62064,4
⎤ ⎡ ⎤⎥ ⎢ ⎥−⎢ ⎥ ⎢ ⎥
⎢ ⎥ ⎢ ⎥−=⎢ ⎥ ⎢ ⎥
−⎢ ⎥ ⎢ ⎥
⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥−⎢ ⎥ ⎢ ⎥⎦ ⎣ ⎦
Barra 2:
Se utilizan los desplazamientos y la matriz de rigidez en coordenadas locales.
3
1 2
3
2 1
0 0,6 0,8 0 0,0033 6,324 10
0 . 0,8 0,6 0 . 0,0104 8,9832 10
0 0 1 0 0 1 0,0024 0,0024229
x x
l
y y
l
l
U U
U U
γ γ
γ γ
φ φ
−
−
⎡ ⎤ ⎡ ⎤ ⎡ ⎤− − ×⎡ ⎤ ⎡ ⎤ ⎡ ⎤⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥− = ⇒ − = − ×⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥
⎢ ⎥ ⎢ ⎥ ⎢ ⎥− −⎣ ⎦ ⎣ ⎦ ⎣ ⎦⎣ ⎦ ⎣ ⎦ ⎣ ⎦
3
3
191520 0 0 191520 0 0 6,324 10
0 1507,96 188496 0 1507,96 188496 8,983 10
0 188496 31416000 0 188496 15708000 0.
191520 0 0 191520 0 0
0 1507,96 188496 0 1507,96 188496
0 188496 15708000 0 188496 31416000
−
−
− ×⎡ ⎤⎢ ⎥− − ×⎢ ⎥⎢ ⎥− −⎢ ⎥
−⎢ ⎥⎢ ⎥− − −⎢ ⎥
−⎢ ⎥⎣ ⎦
1211,24
231,74
57935,6,002423
1211,240
231,740
00,00126536
⎡ ⎤ ⎡ ⎤⎢ ⎥ ⎢ ⎥−⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥−⎢ ⎥ = ⎢ ⎥
−⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥⎣ ⎦⎣ ⎦
Diagramas de barras:
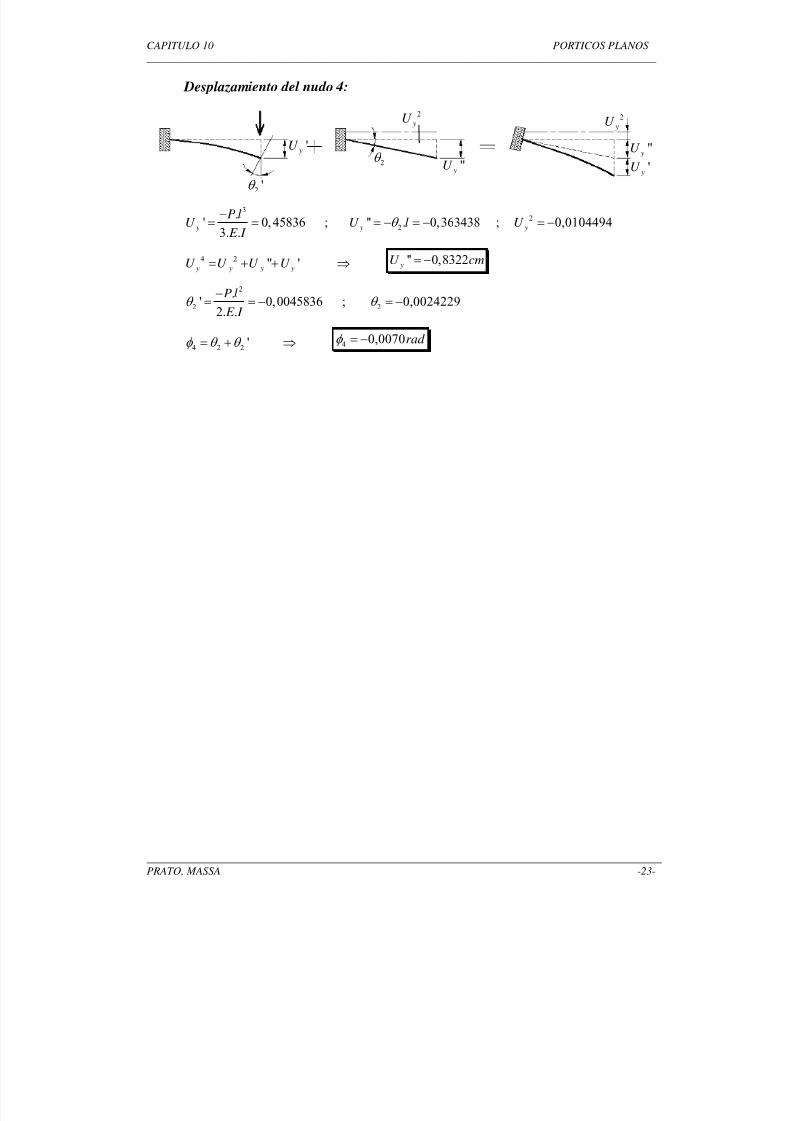
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 319/500
CAPITULO 10 PORTICOS PLANOS
____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -23-
Desplazamiento del nudo 4:
3.' 0, 45836
3. . y
P lU
E I
−= = ; 2'' . 0,363438 yU lθ = − = − ; 2 0,0104494 yU = −
4 2'' ' y y y yU U U U = + + ⇒ '' 0,8322 yU cm= −
2
2
.' 0,0045836
2. .
P l
E I θ
−= = − ; 2 0,0024229θ = −
4 2 2 'φ θ θ = + ⇒ 4 0,0070rad φ = −
2
yU
' yU
2 'θ
2θ '' yU
2
yU
' yU
'' y
U
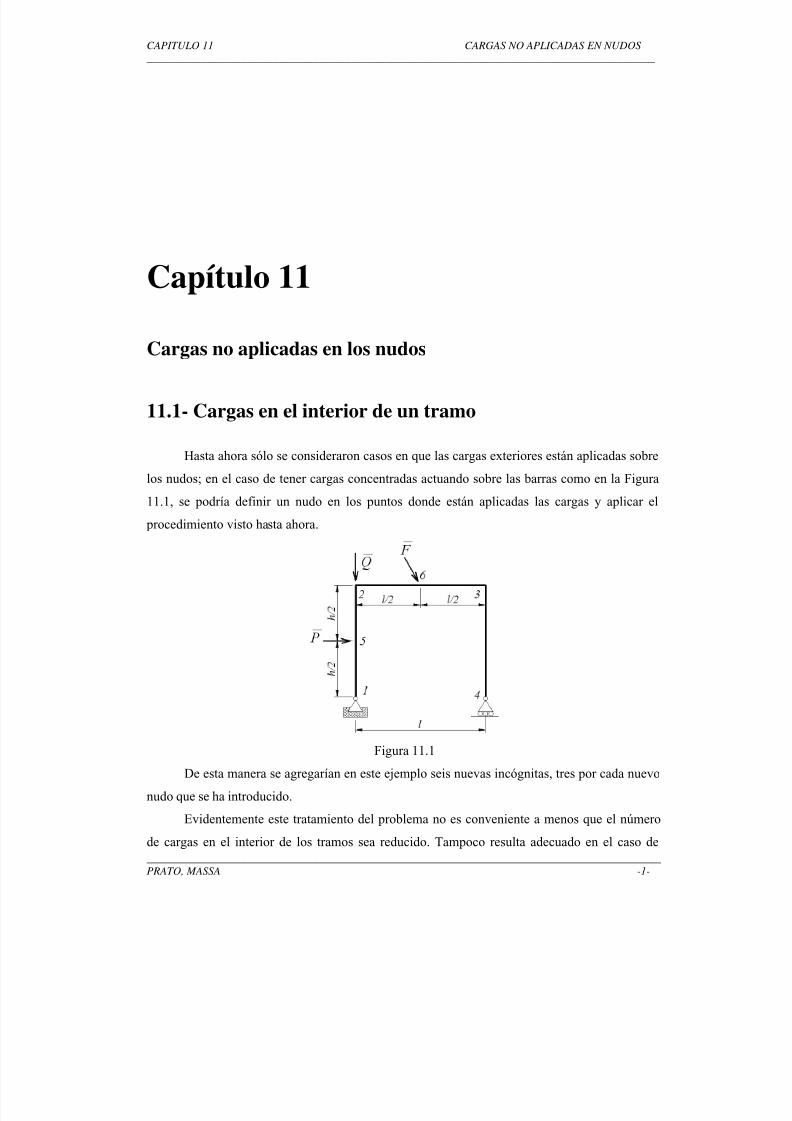
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 320/500
CAPITULO 11 CARGAS NO APLICADAS EN NUDOS
____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -1-
Capítulo 11 Cargas no aplicadas en los nudos
11.1- Cargas en el interior de un tramo
Hasta ahora sólo se consideraron casos en que las cargas exteriores están aplicadas sobre
los nudos; en el caso de tener cargas concentradas actuando sobre las barras como en la Figura
11.1, se podría definir un nudo en los puntos donde están aplicadas las cargas y aplicar el
procedimiento visto hasta ahora.
Figura 11.1
De esta manera se agregarían en este ejemplo seis nuevas incógnitas, tres por cada nuevo
nudo que se ha introducido.
Evidentemente este tratamiento del problema no es conveniente a menos que el númerode cargas en el interior de los tramos sea reducido. Tampoco resulta adecuado en el caso de
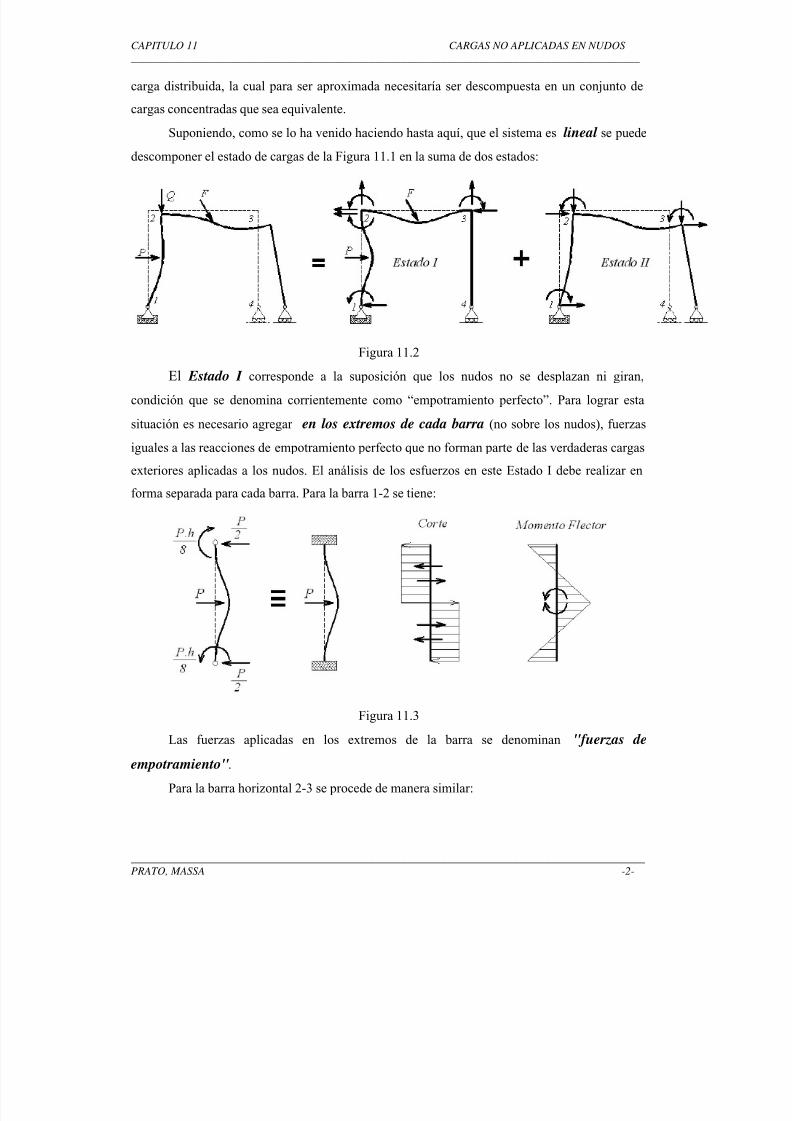
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 321/500
CAPITULO 11 CARGAS NO APLICADAS EN NUDOS
____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -2-
carga distribuida, la cual para ser aproximada necesitaría ser descompuesta en un conjunto de
cargas concentradas que sea equivalente.
Suponiendo, como se lo ha venido haciendo hasta aquí, que el sistema es lineal se puede
descomponer el estado de cargas de la Figura 11.1 en la suma de dos estados:
Figura 11.2
El Estado I corresponde a la suposición que los nudos no se desplazan ni giran,
condición que se denomina corrientemente como “empotramiento perfecto”. Para lograr esta
situación es necesario agregar en los extremos de cada barra (no sobre los nudos), fuerzas
iguales a las reacciones de empotramiento perfecto que no forman parte de las verdaderas cargas
exteriores aplicadas a los nudos. El análisis de los esfuerzos en este Estado I debe realizar en
forma separada para cada barra. Para la barra 1-2 se tiene:
Figura 11.3
Las fuerzas aplicadas en los extremos de la barra se denominan "fuerzas de
empotramiento".
Para la barra horizontal 2-3 se procede de manera similar:

5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 322/500
CAPITULO 11 CARGAS NO APLICADAS EN NUDOS
____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -3-
Figura 11.4
Las reacciones de apoyo de una viga biempotrada para los tipos habituales de cargas están
disponibles en tablas y manuales de cálculo de estructuras, por lo que en general no es necesario
efectuar el análisis local de cada barra con el método de las fuerzas o con la solución de la
ecuación diferencial de la elástica del tramo en estudio. En algún caso particular que no figure en
tablas ni pueda expresarse como combinación de casos que figuren en ellos, habrá que resolver
por el método de las fuerzas un problema hiperestático de tres incógnitas, o resolver la ecuación
diferencial de la elástica con las cargas dadas y los nudos fijos. Como ya se ha indicado al
deducir la matriz de rigidez una barra genérica en coordenadas locales, el efecto axial está
desacoplado y es un problema de una sola incógnita que puede resolverse en forma
independiente del problema de flexión para las cargas transversales al eje de la barra. Para la
solución de la parte flexional se requiere calcular las fuerzas transversales y los momentos en los
extremos de la barra, que se denominan habitualmente “fuerzas de empotramiento perfecto”.
Una vez conocidas las fuerzas de empotramiento perfecto, el trazado de los diagramas de
esfuerzos internos resulta de aplicar las reglas conocidas de la estática. Para la barra horizontal 2-
3 se tiene:
Figura 11.5
En el Estado II se aplican sobre los nudos cargas iguales y opuestas a las agregadas en
el estado I, de manera que, al superponer ambos estados, se anulan las cargas nodales que no
existen en el problema inicial, y de esa manera sólo quedan las fuerzas exteriores aplicadas. De
esta manera se ha transformado el problema inicial de cargas en el interior de los tramos en otro
problema de cargas equivalentes en los nudos, pero que requiere la superposición de los
estados I y II para obtener los esfuerzos finales en cada barra.
.
8
V F l .
8
V F l
2
V
F 2
V F
2
hF
2
hF
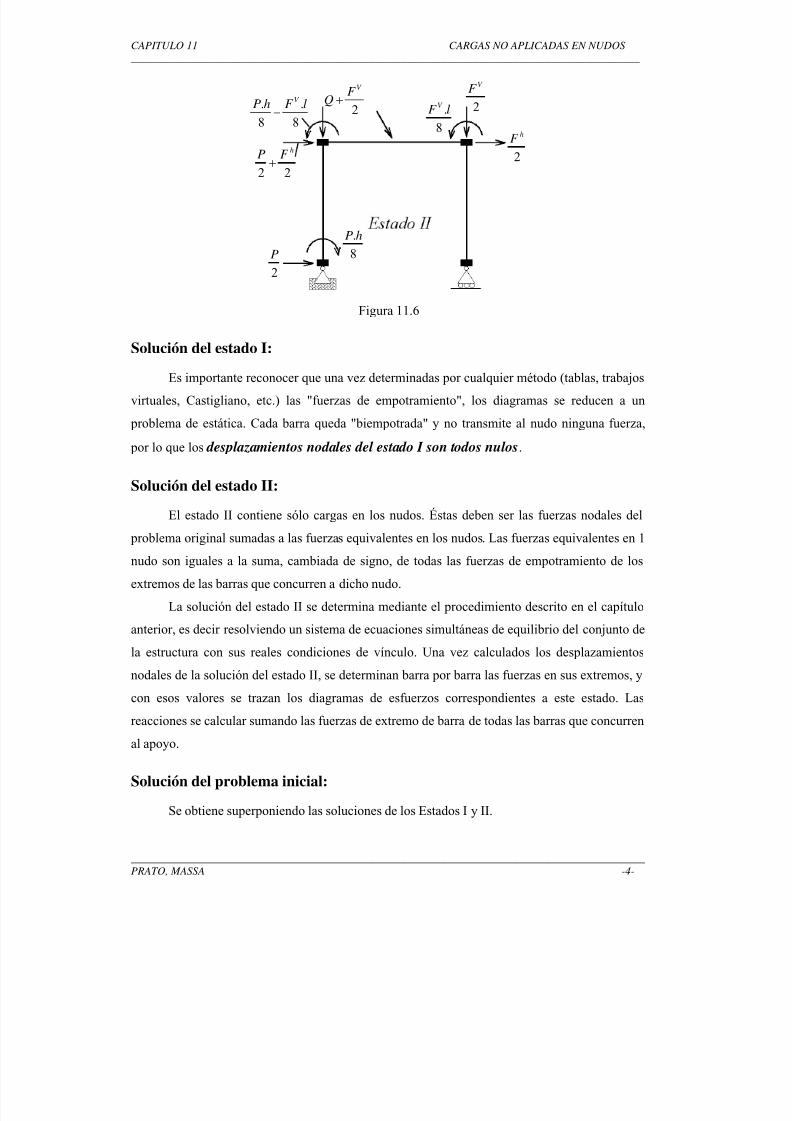
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 323/500
CAPITULO 11 CARGAS NO APLICADAS EN NUDOS
____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -4-
Figura 11.6
Solución del estado I:
Es importante reconocer que una vez determinadas por cualquier método (tablas, trabajos
virtuales, Castigliano, etc.) las "fuerzas de empotramiento", los diagramas se reducen a un
problema de estática. Cada barra queda "biempotrada" y no transmite al nudo ninguna fuerza,
por lo que los desplazamientos nodales del estado I son todos nulos.
Solución del estado II:
El estado II contiene sólo cargas en los nudos. Éstas deben ser las fuerzas nodales del
problema original sumadas a las fuerzas equivalentes en los nudos. Las fuerzas equivalentes en 1
nudo son iguales a la suma, cambiada de signo, de todas las fuerzas de empotramiento de los
extremos de las barras que concurren a dicho nudo.
La solución del estado II se determina mediante el procedimiento descrito en el capítulo
anterior, es decir resolviendo un sistema de ecuaciones simultáneas de equilibrio del conjunto de
la estructura con sus reales condiciones de vínculo. Una vez calculados los desplazamientosnodales de la solución del estado II, se determinan barra por barra las fuerzas en sus extremos, y
con esos valores se trazan los diagramas de esfuerzos correspondientes a este estado. Las
reacciones se calcular sumando las fuerzas de extremo de barra de todas las barras que concurren
al apoyo.
Solución del problema inicial:
Se obtiene superponiendo las soluciones de los Estados I y II.
.
8
P h
.
8
V F l2
V F Q + 2
V F
2 2
hP F
+ 2
hF
. .
8 8
V P h F l
−
2
P

5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 324/500
CAPITULO 11 CARGAS NO APLICADAS EN NUDOS
____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -5-
a) Los desplazamientos nodales son directamente los correspondientes al estado II,
porque en el estado I son todos nulos.
b) Los diagramas finales de esfuerzos internos se obtienen sumando los diagramas del
estado II (del tipo de las Figura 10.12 ; Figura 10.13 y Figura 10.15) con los diagramas de barras
biempotrados del estado I (del tipo de las Figura 11.3 y Figura 11.5 de este capítulo).
Como ejemplo considérense los diagramas de esfuerzos de la barra horizontal 2-3.
Figura 11.7
11.2- Efectos térmicos
Las estructuras están sometidas frecuentemente a variaciones de temperatura. Los efectos
que dichos cambios de temperatura provocan dependen de su magnitud como también del
material de la estructura, y fundamentalmente del grado de hiperestaticidad.
Ya se ha visto que las estructuras hiperestáticas pueden sufrir esfuerzos por cambios
térmicos cuando están impedidas de deformarse libremente. En el caso de la estructura
hiperestática de la Figura 11.8.a, un aumento uniforme de temperatura t ∆ en la barra 2-3
produce la deformada indicada en línea de trazos, además de tensiones en todas las barras. Por el
contrario, en la Figura 11.8.b, sólo se produce un alargamiento (no restringido) de las barras
verticales, por lo que no se producen tensiones.
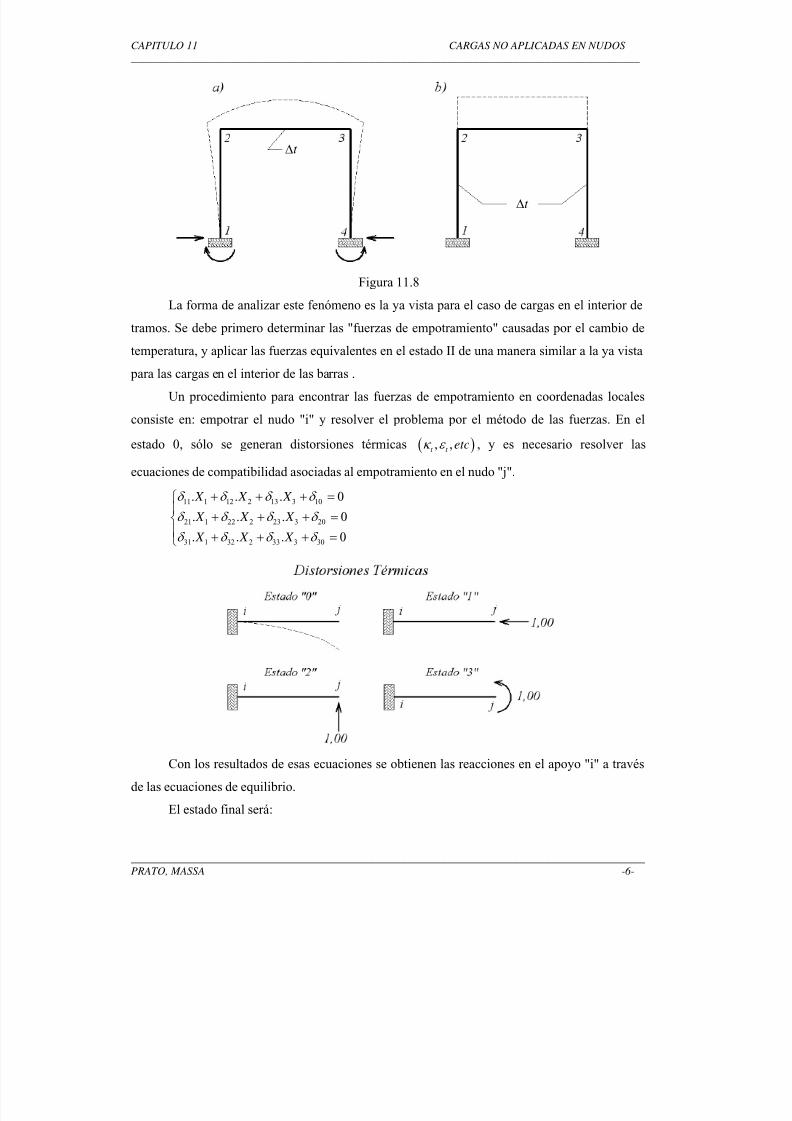
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 325/500
CAPITULO 11 CARGAS NO APLICADAS EN NUDOS
____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -6-
Figura 11.8
La forma de analizar este fenómeno es la ya vista para el caso de cargas en el interior de
tramos. Se debe primero determinar las "fuerzas de empotramiento" causadas por el cambio detemperatura, y aplicar las fuerzas equivalentes en el estado II de una manera similar a la ya vista
para las cargas en el interior de las barras .
Un procedimiento para encontrar las fuerzas de empotramiento en coordenadas locales
consiste en: empotrar el nudo "i" y resolver el problema por el método de las fuerzas. En el
estado 0, sólo se generan distorsiones térmicas ( ), ,t t
etcκ ε , y es necesario resolver las
ecuaciones de compatibilidad asociadas al empotramiento en el nudo "j".
11 1 12 2 13 3 10
21 1 22 2 23 3 20
31 1 32 2 33 3 30
. . . 0
. . . 0
. . . 0
X X X
X X X
X X X
δ δ δ δ
δ δ δ δ
δ δ δ δ
+ + + =⎧⎪
+ + + =⎨⎪ + + + =⎩
Con los resultados de esas ecuaciones se obtienen las reacciones en el apoyo "i" a través
de las ecuaciones de equilibrio.
El estado final será:
t ∆
t ∆

5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 326/500
CAPITULO 11 CARGAS NO APLICADAS EN NUDOS
____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -7-
Hay un caso muy frecuente que consiste en una variación térmica uniforme a través de la
barra, debido a la diferencia de temperatura entre las caras superior e inferior de la viga.
Figura 11.9
Donde:
. . .2
s it t
F A E α ∆ + ∆⎛ ⎞
= ⎜ ⎟⎝ ⎠
; . . .s it t
M E I h
α ∆ − ∆⎛ ⎞
= ⎜ ⎟⎝ ⎠
(Ec. 11.1)
En el caso de la Figura 11.9 , la viga no presenta ninguna deformación transversal a causa
de que el momento flector es constante, y por lo tanto la curvatura por flexión es igual y opuesta
a la curvatura térmica, también constante. Por lo tanto, el efecto del gradiente térmico constante
en toda la barra no produce curvatura en la misma para la condición de nudos fijos o empotrados.
En la Figura 11.10 se presenta un ejemplo ilustrativo.
Figura 11.10
Las fuerzas de empotramiento se encuentran, según la (Ec. 11.1) en un sistema local y
deben pasarse al sistema global para tener las fuerzas equivalentes en el estado II ( ). lP R P= .
El procedimiento es exactamente igual, de aquí en más, al caso de cargas en el interior de
los tramos.
st ∆
it ∆
st ∆
it ∆
0s i
m
t t
t
∆ > ∆
∆ >
1 X
2 X
3 X
( )t ∆ +
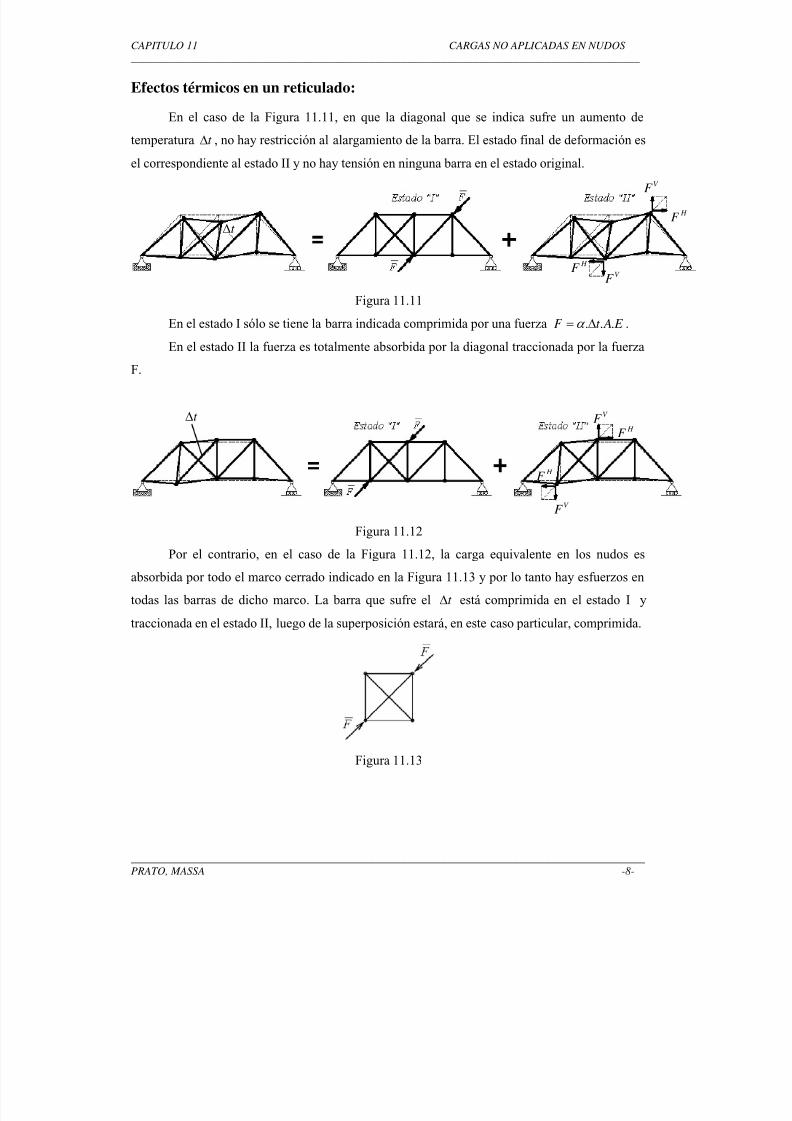
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 327/500
CAPITULO 11 CARGAS NO APLICADAS EN NUDOS
____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -8-
Efectos térmicos en un reticulado:
En el caso de la Figura 11.11, en que la diagonal que se indica sufre un aumento de
temperatura t ∆ , no hay restricción al alargamiento de la barra. El estado final de deformación es
el correspondiente al estado II y no hay tensión en ninguna barra en el estado original.
Figura 11.11
En el estado I sólo se tiene la barra indicada comprimida por una fuerza . . .F t A E α = ∆ .En el estado II la fuerza es totalmente absorbida por la diagonal traccionada por la fuerza
F.
Figura 11.12
Por el contrario, en el caso de la Figura 11.12, la carga equivalente en los nudos es
absorbida por todo el marco cerrado indicado en la Figura 11.13 y por lo tanto hay esfuerzos en
todas las barras de dicho marco. La barra que sufre el t ∆ está comprimida en el estado I y
traccionada en el estado II, luego de la superposición estará, en este caso particular, comprimida.
Figura 11.13
t ∆ V F
H F
H F
V F
t ∆
V F
H F
H F V F
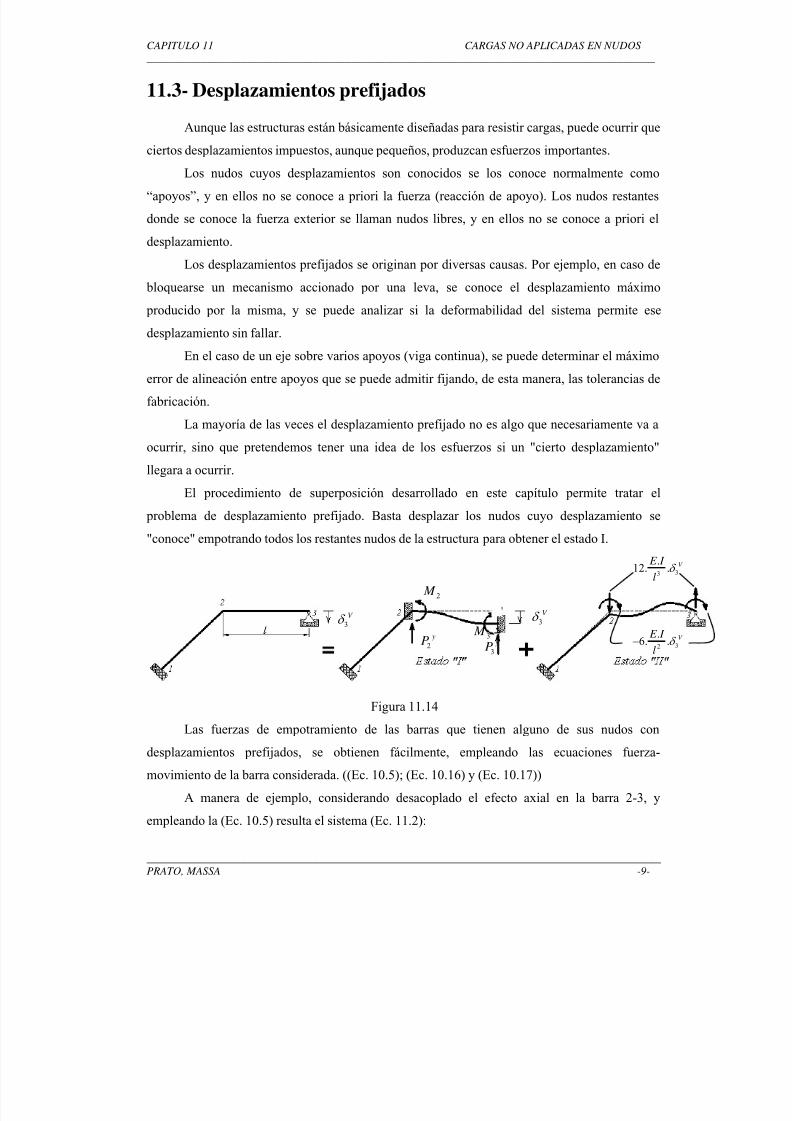
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 328/500
CAPITULO 11 CARGAS NO APLICADAS EN NUDOS
____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -9-
11.3- Desplazamientos prefijados
Aunque las estructuras están básicamente diseñadas para resistir cargas, puede ocurrir que
ciertos desplazamientos impuestos, aunque pequeños, produzcan esfuerzos importantes.
Los nudos cuyos desplazamientos son conocidos se los conoce normalmente como
“apoyos”, y en ellos no se conoce a priori la fuerza (reacción de apoyo). Los nudos restantes
donde se conoce la fuerza exterior se llaman nudos libres, y en ellos no se conoce a priori el
desplazamiento.
Los desplazamientos prefijados se originan por diversas causas. Por ejemplo, en caso de
bloquearse un mecanismo accionado por una leva, se conoce el desplazamiento máximo
producido por la misma, y se puede analizar si la deformabilidad del sistema permite ese
desplazamiento sin fallar.
En el caso de un eje sobre varios apoyos (viga continua), se puede determinar el máximo
error de alineación entre apoyos que se puede admitir fijando, de esta manera, las tolerancias de
fabricación.
La mayoría de las veces el desplazamiento prefijado no es algo que necesariamente va a
ocurrir, sino que pretendemos tener una idea de los esfuerzos si un "cierto desplazamiento"
llegara a ocurrir.
El procedimiento de superposición desarrollado en este capítulo permite tratar elproblema de desplazamiento prefijado. Basta desplazar los nudos cuyo desplazamiento se
"conoce" empotrando todos los restantes nudos de la estructura para obtener el estado I.
Figura 11.14
Las fuerzas de empotramiento de las barras que tienen alguno de sus nudos con
desplazamientos prefijados, se obtienen fácilmente, empleando las ecuaciones fuerza-
movimiento de la barra considerada. ((Ec. 10.5); (Ec. 10.16) y (Ec. 10.17))
A manera de ejemplo, considerando desacoplado el efecto axial en la barra 2-3, y
empleando la (Ec. 10.5) resulta el sistema (Ec. 11.2):
3V δ 3
V δ
2 yP
3
yP
2 M
3 M
33
.12. . V E I
lδ
32
.6. . V E I
l
δ −

5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 329/500
CAPITULO 11 CARGAS NO APLICADAS EN NUDOS
____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -10-
1 2 1 2 2 1 3
2 3 2 3 2 2 3
1 2 1 2 3 3 1 3
2 3 2 3 3 2 3
0 .
2 0 ..
.
2 0 .
y V
V
V y V
V
K K K K P K
K K K K M K
K K K K P K
K K K K M K
δ
δ
δ δ
δ
− ⎡ ⎤=⎡ ⎤ ⎡ ⎤⎢ ⎥⎢ ⎥ ⎢ ⎥− =⎢ ⎥⎢ ⎥ ⎢ ⎥ =⎢ ⎥⎢ ⎥ ⎢ ⎥− − − − = −⎢ ⎥⎢ ⎥ ⎢ ⎥
− =⎢ ⎥⎣ ⎦⎣ ⎦ ⎣ ⎦
(Ec. 11.2)
En el caso de una barra inclinada, conviene usar la (Ec. 10.5) que corresponde a
coordenadas locales para facilitar el trazado de los diagramas de esfuerzos del estado I. Las
fuerzas de extremo se transformarán al sistema global a fin de obtener las fuerzas equivalentes
del estado II.
Hay que destacar que una vez obtenidos los desplazamientos del estado II, se obtienen los
esfuerzos barra por barra en la forma habitual (recordar que en el estado II, 3 0 yU = ), y luego se
superponen los esfuerzos del estado I (causados por 3 3
y V
U δ =
).Un procedimiento alternativo para tratar el desplazamiento prefijado en una manera
"algebraica" sin recurrir al principio de superposición, se logra, generalizando la expresión (Ec.
10.24). En efecto, el sistema global de ecuaciones de equilibrio se puede particionar en tres,
reordenando filas y columnas, quedando de la siguiente forma:
11 12 13
21 22 23
31 32 33
.
0
K K K U P
K K K R
K K K R
∆
⎡ ⎤ ⎡ ⎤ ⎡ ⎤⎢ ⎥ ⎢ ⎥ ⎢ ⎥
∆ =⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥
⎣ ⎦ ⎣ ⎦ ⎣ ⎦
(Ec. 11.3)
[ ] :∆ Desplazamientos prefijados
[ ] : R∆ Reacciones de apoyo asociadas a esos desplazamientos
[ ] : R Reacciones en los puntos con desplazamiento nulo
Desarrollando la (Ec. 11.3) resultan tres sistemas de ecuaciones de equilibrio:
11 12 13. . .0K U K K P+ ∆ + = ∴ 11 12. .K U P K = − ∆ (Ec. 11.4)
21 22 23. . .0K U K K R∆+ ∆ + = ∴ 21 22. .K U K R∆+ ∆ = (Ec. 11.5)
31 32 33. . .0K U K K R+ ∆ + = ∴ 31 32. .K U K R+ ∆ = (Ec. 11.6)
En primer lugar se resuelve el sistema de la (Ec. 11.4) donde se observa que el efecto de
los desplazamientos prefijados ∆ introduce una modificación del término de cargas. Una vez
calculados los U , se calculan las reacciones de apoyo efectuando los productos indicados en
(Ec. 11.5) y (Ec. 11.6). Este procedimiento, que es el más directo, requiere almacenar la matriz
completa antes de aplicar las condiciones de contorno, además de las técnicas de partición por loque puede requerir un ordenamiento sistemático de la información.

5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 330/500
CAPITULO 11 CARGAS NO APLICADAS EN NUDOS
____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -11-
La diferencia entre ambas técnicas radica en que la primera determina las fuerzas de
empotramiento barra por barra según la ecuación fuerza-desplazamiento de cada barra (como en
la expresión (Ec. 11.2)), y se agregan al vector de cargas, cambiadas de signo, mientras que la
segunda modifica el vector de cargas utilizando la submatriz12
K .
A modo de ejemplo se desarrolla el segundo procedimiento el pórtico de la Figura 11.14.
Por simplicidad no se consideran los apoyos con desplazamiento nulo, es decir que no se tienen
en cuenta las últimas filas y columnas de la (Ec. 11.3).
21 2 1 2
23
2 3 3 22
3
31 2 1 2
332 2 3
0 0000
0 02
. 00 0 0 000 0
00 0
2
a b a a b
xa a b a b b b
yb
a a b a b b
xb b
V b b b b
bb b b
A K B C K
U B D K E K K K
U K C E K K K K
U K K
K K K K
K K K K
φ
δ
φ
⎡ ⎤+ −⎢ ⎥ ⎡ ⎤ ⎡ ⎤+ − + −⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥
− + + −⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥ =⎢ ⎥
⎢ ⎥⎢ ⎥− ⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥−− − −⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎣ ⎦⎣ ⎦⎢ ⎥−⎣ ⎦
(Ec. 11.7)
Intercambiando las filas quinta y sexta lo mismo que las columnas quinta y sexta, se llega
a la partición (Ec. 11.3). El sistema del tipo (Ec. 11.4) a resolver es el de la (Ec. 11.8) :
2
1 32
2 311 2
3
2 33
0
.
. .
0
.
x
b V y
b V
x
b V
U
K U
K K
U
K
δ
δ φ
δ φ
⎡ ⎤ ⎡ ⎤⎡ ⎤⎢ ⎥ ⎢ ⎥⎢ ⎥ −⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥ = −⎢ ⎥ ⎢ ⎥⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥ −⎣ ⎦ ⎣ ⎦⎣ ⎦
(Ec. 11.8)
Nótese que el vector de carga en la (Ec. 11.8) coincide con las cargas en el estado II de la
Figura 11.14 que son las fuerzas de empotramiento calculadas en (Ec. 11.2) cambiadas de signo.
Para calcular la reacción vertical en el apoyo 3 se utiliza la (Ec. 11.5) :
21 22 23. . .0K U K K R∆+ ∆ + =
2
2
1 2 2 1 3 32
3
3
0 0 . .
x
y
b b b b V y
x
U
U
K K K K R
U
δ φ
φ
⎡ ⎤⎢ ⎥⎢ ⎥⎢ ⎥⎡ ⎤ ⎡ ⎤ ⎡ ⎤ ⎡ ⎤− − − + − =⎣ ⎦ ⎣ ⎦ ⎣ ⎦ ⎣ ⎦⎢ ⎥⎢ ⎥⎢ ⎥⎣ ⎦
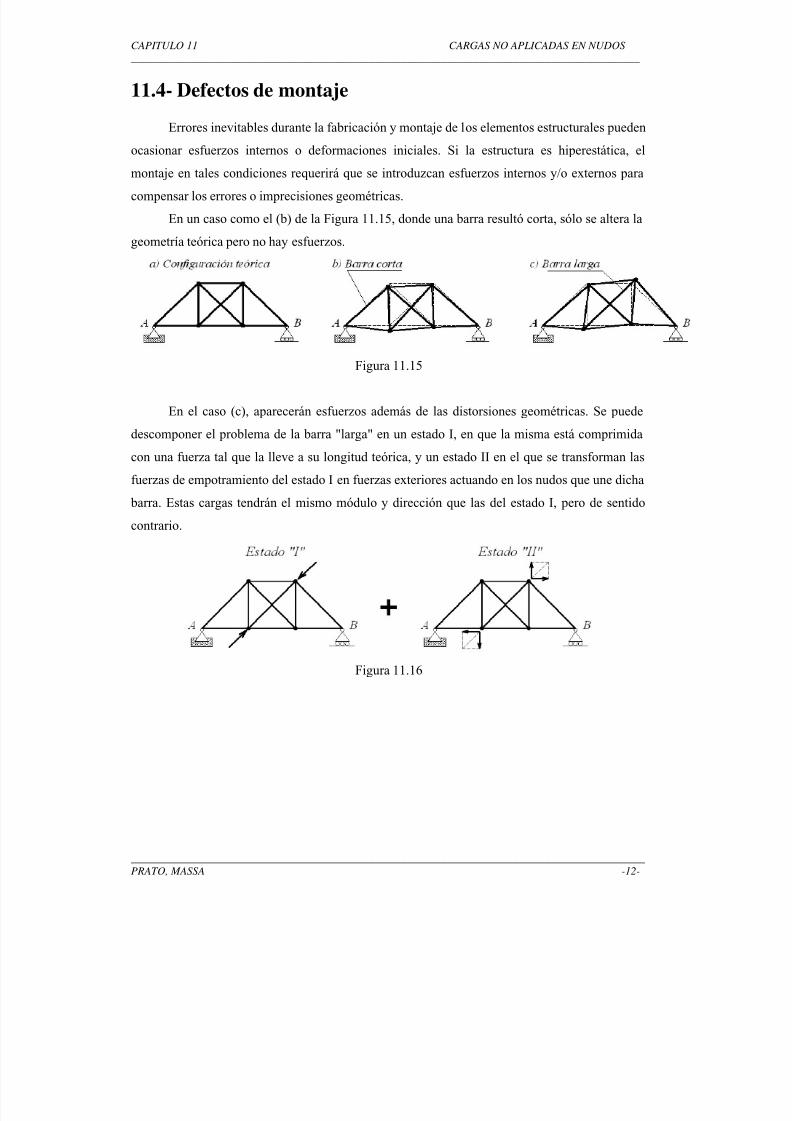
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 331/500
CAPITULO 11 CARGAS NO APLICADAS EN NUDOS
____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -12-
11.4- Defectos de montaje
Errores inevitables durante la fabricación y montaje de los elementos estructurales pueden
ocasionar esfuerzos internos o deformaciones iniciales. Si la estructura es hiperestática, el
montaje en tales condiciones requerirá que se introduzcan esfuerzos internos y/o externos para
compensar los errores o imprecisiones geométricas.
En un caso como el (b) de la Figura 11.15, donde una barra resultó corta, sólo se altera la
geometría teórica pero no hay esfuerzos.
Figura 11.15
En el caso (c), aparecerán esfuerzos además de las distorsiones geométricas. Se puede
descomponer el problema de la barra "larga" en un estado I, en que la misma está comprimida
con una fuerza tal que la lleve a su longitud teórica, y un estado II en el que se transforman las
fuerzas de empotramiento del estado I en fuerzas exteriores actuando en los nudos que une dicha
barra. Estas cargas tendrán el mismo módulo y dirección que las del estado I, pero de sentido
contrario.
Figura 11.16

5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 332/500
CAPITULO 11 CARGAS NO APLICADAS EN NUDOS
____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -13-
Ejercicio Nº 1:
En la barra de la figura se pide desarrollar los diagramas de ( ), M Q y N sabiendo que:
a) El nudo 1 está empotrado.
b) Mediante una fuerza vertical 2 yP y un momento 2 M aplicados en el nudo 2 se desplaza
dicho nudo hasta 2*.
2 0 xP = 2 ?? yP = 2 ?? M =
2 4 622 ; 4 ; 2,1 10 Kg A cm I cm E
cm= = = ×
Cálculo de los coeficientes de la matriz de rigidez en coordenadas globales.
( )1/22 2
1 280 6080 60 100 ; 0,8 ; 0,6
100 100 L γ γ = + = = = = =
1 2 33 2
. . . .42000 ; 12. 100,8 ; 6. 5040 ; 4. 336000
A E E I E I E I K K K K
l l l l= = = = = = = =
26916 ; 20111 ; 3024 ; 15184 ; 4032 A B C D E = = = = =
1γ
2γ
0,2δ =
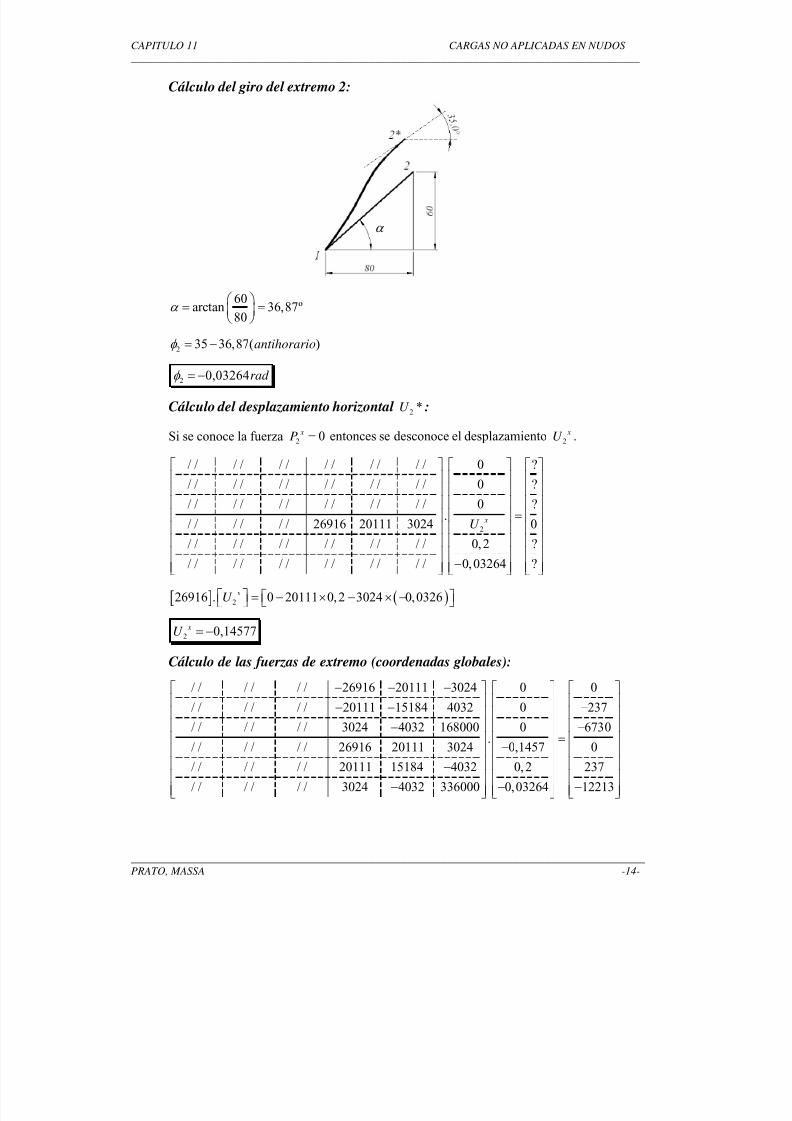
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 333/500
CAPITULO 11 CARGAS NO APLICADAS EN NUDOS
____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -14-
Cálculo del giro del extremo 2:
60arctan 36,87º
80α
⎛ ⎞= =⎜ ⎟
⎝ ⎠
2 35 36,87( )antihorarioφ = −
2 0,03264rad φ = −
Cálculo del desplazamiento horizontal 2 *U :
Si se conoce la fuerza 2 0 xP = entonces se desconoce el desplazamiento 2 xU .
2
/ / / / / / / / / / / / 0 ?
/ / / / / / / / / / / / 0 ? / / / / / / / / / / / / 0 ?.
/ / / / / / 26916 20111 3024 0
/ / / / / / / / / / / / 0, 2 ?
/ / / / / / / / / / / / 0,03264 ?
xU
⎡ ⎤ ⎡ ⎤ ⎡ ⎤⎢ ⎥ ⎢ ⎥ ⎢ ⎥
⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥=⎢ ⎥ ⎢ ⎥ ⎢ ⎥
⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥
−⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎣ ⎦ ⎣ ⎦ ⎣ ⎦
[ ] ( )226916 . 0 20111 0,2 3024 0,0326 xU ⎡ ⎤ = − × − × −⎡ ⎤⎣ ⎦⎣ ⎦
2 0,14577 xU = −
Cálculo de las fuerzas de extremo (coordenadas globales):
/ / / / / / 26916 20111 3024 0 0
/ / / / / / 20111 15184 4032 0 237
/ / / / / / 3024 4032 168000 0 673.
/ / / / / / 26916 20111 3024 0,1457
/ / / / / / 20111 15184 4032 0,2
/ / / / / / 3024 4032 336000 0,03264
− − −⎡ ⎤ ⎡ ⎤⎢ ⎥ ⎢ ⎥− − −⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥− −
=⎢ ⎥ ⎢ ⎥−⎢ ⎥ ⎢ ⎥
⎢ ⎥ ⎢ ⎥−⎢ ⎥ ⎢ ⎥
− −⎢ ⎥ ⎢ ⎥⎣ ⎦ ⎣ ⎦
0
0
237
12213
⎡ ⎤⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥
−⎢ ⎥⎣ ⎦
α
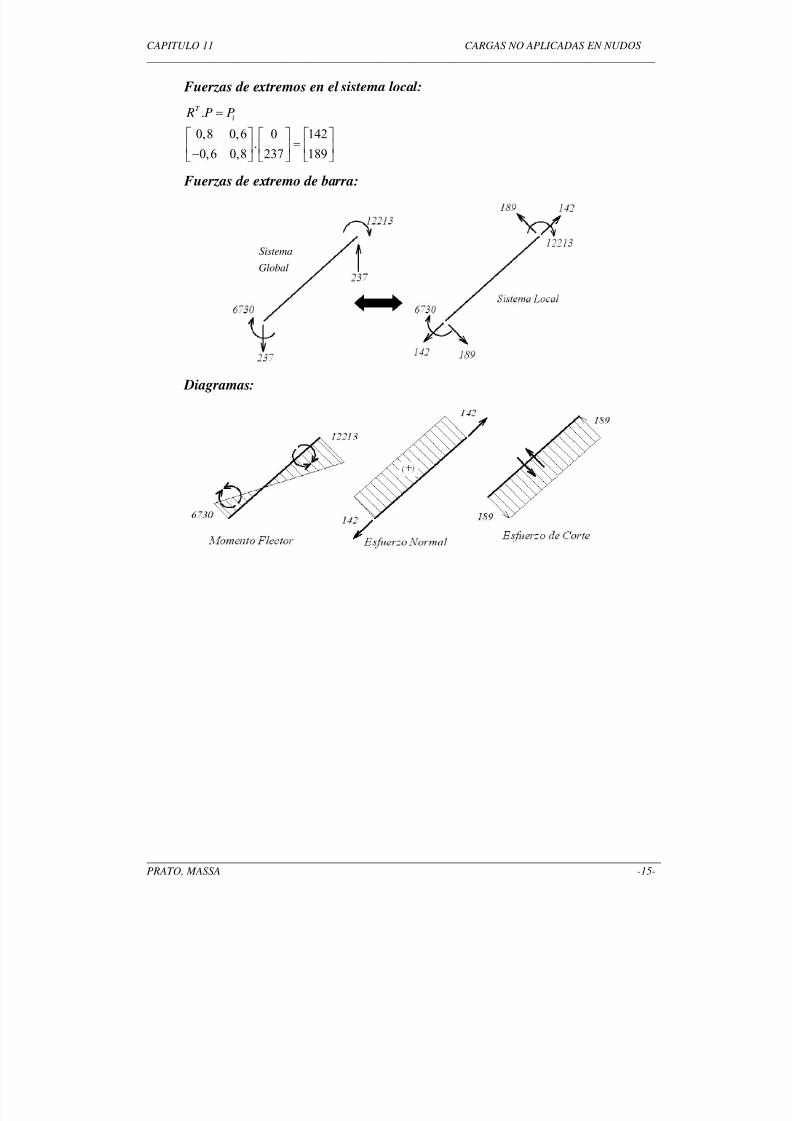
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 334/500
CAPITULO 11 CARGAS NO APLICADAS EN NUDOS
____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -15-
Fuerzas de extremos en el sistema local:
.
0,8 0,6 0 142.
0,6 0,8 237 189
T
l R P P=
⎡ ⎤ ⎡ ⎤ ⎡ ⎤=⎢ ⎥ ⎢ ⎥ ⎢ ⎥−⎣ ⎦ ⎣ ⎦ ⎣ ⎦
Fuerzas de extremo de barra:
Diagramas:
Sistema
Global
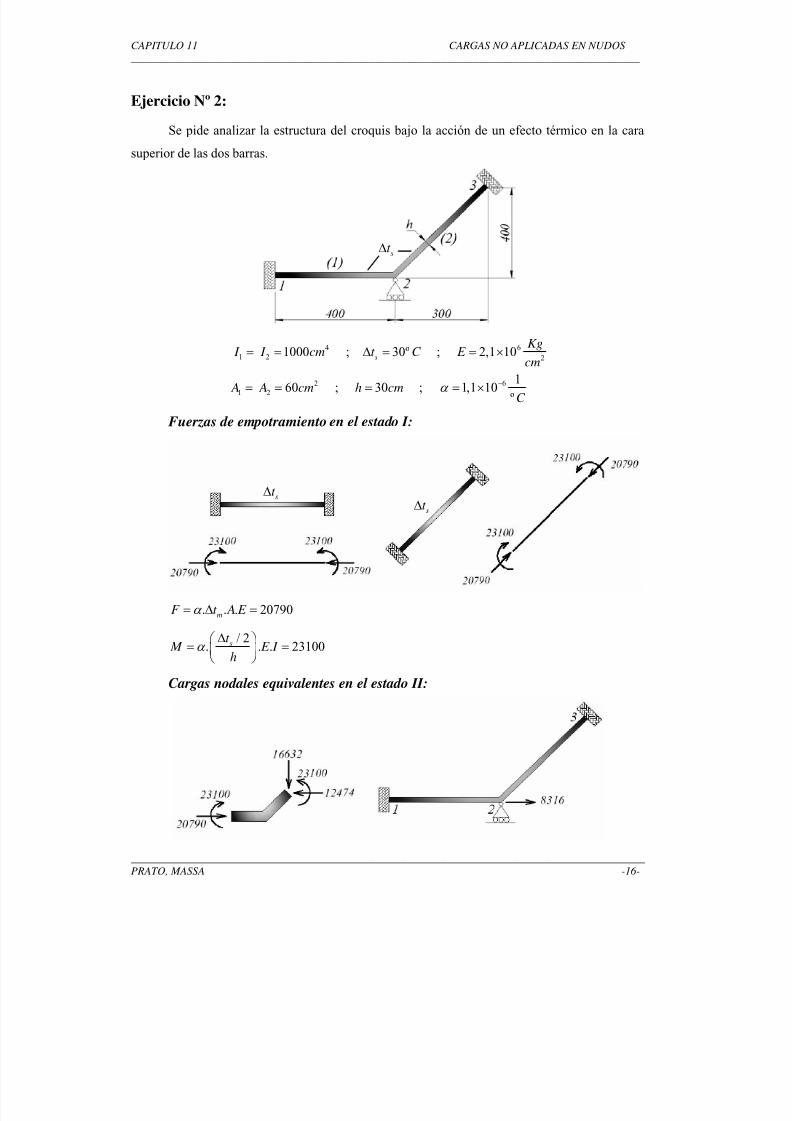
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 335/500
CAPITULO 11 CARGAS NO APLICADAS EN NUDOS
____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -16-
Ejercicio Nº 2:
Se pide analizar la estructura del croquis bajo la acción de un efecto térmico en la cara
superior de las dos barras.
4 61 2 2
2 61 2
1000 ; 30º ; 2,1 10
160 ; 30 ; 1,1 10
º
s
Kg I I cm t C E
cm
A A cm h cmC
α −
= = ∆ = = ×
= = = = ×
Fuerzas de empotramiento en el estado I:
. . . 20790m
F t A E α = ∆ =
/ 2
. . . 23100
st
M E I h
α ∆⎛ ⎞
= =⎜ ⎟⎝ ⎠
Cargas nodales equivalentes en el estado II:
st ∆s
t ∆
st ∆

5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 336/500
CAPITULO 11 CARGAS NO APLICADAS EN NUDOS
____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -17-
Matriz de rigidez barra 1 - Sistema Global:
1 2 33 2
. . . .315000 ; 12. 393,75 ; 6. 78750 ; 4. 21000000
A E E I E I E I K K K K
l l l l= = = = = = = =
1
1
2
/ / / / / / / / / / / /
/ / / / / / / / / / / /
/ / / / / / / / / / / /
/ / / / / / 315000 0 0
/ / / / / / 0 393,75 78750
/ / / / / / 0 78750 21000000
⎡ ⎤⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥−⎢ ⎥
−⎢ ⎥⎣ ⎦
2
Matriz de rigidez barra 2 - Sistema Global:
1 2 33 2. . . .252000 ; 12. 201,6 ; 6. 50400 ; 4. 16800000 A E E I E I E I K K K K l l l l
= = = = = = = =
1 20,6 ; 0,8γ γ = =
90849,02 ; 120863, 23 ; 40320,00 ; 161352,57 ; 30240,00 A B C D E = = = = =
2
2
3
90849 120863 40320 / / / / / /
120863 161352 30240 / / / / / /
40320 30240 16800000 / / / / / /
/ / / / / / / / / / / / / / / / / / / / / / / /
/ / / / / / / / / / / /
−⎡ ⎤⎢ ⎥⎢ ⎥⎢ ⎥−
⎢⎢⎢⎢⎢⎣ ⎦
3
⎥⎥⎥⎥⎥
Sistema de ecuaciones de equilibrio una vez impuestas las condiciones de apoyos
empotrados 1 y 3.
(*)2
2 2
2
405849,02 120863,23 40320 8316
120863, 23 161745,98 48510 .
40320 48510 37800000 0
x
y y
U
U R
φ
⎡ ⎤−⎡ ⎤ ⎡ ⎤⎢ ⎥⎢ ⎥ ⎢ ⎥− =⎢ ⎥⎢ ⎥ ⎢ ⎥
⎢ ⎥⎢ ⎥ ⎢ ⎥− −⎣ ⎦ ⎣ ⎦⎣ ⎦
Al imponer la condición de apoyo 2 0 yU = queda un sistema de 2 x 2.
2
2
405849,02 40320 8316.
40320 37800000 0
xU
φ
− ⎡ ⎤⎡ ⎤ ⎡ ⎤=⎢ ⎥⎢ ⎥ ⎢ ⎥−⎣ ⎦ ⎣ ⎦⎣ ⎦
2
2
0,0204925498
0,0000218587
xU
φ
⎡ ⎤ ⎡ ⎤=⎢ ⎥ ⎢ ⎥
⎣ ⎦⎣ ⎦
El cálculo de la reacción vertical en el apoyo 2, puede obtenerse empleando la segundaecuación del sistema (*).
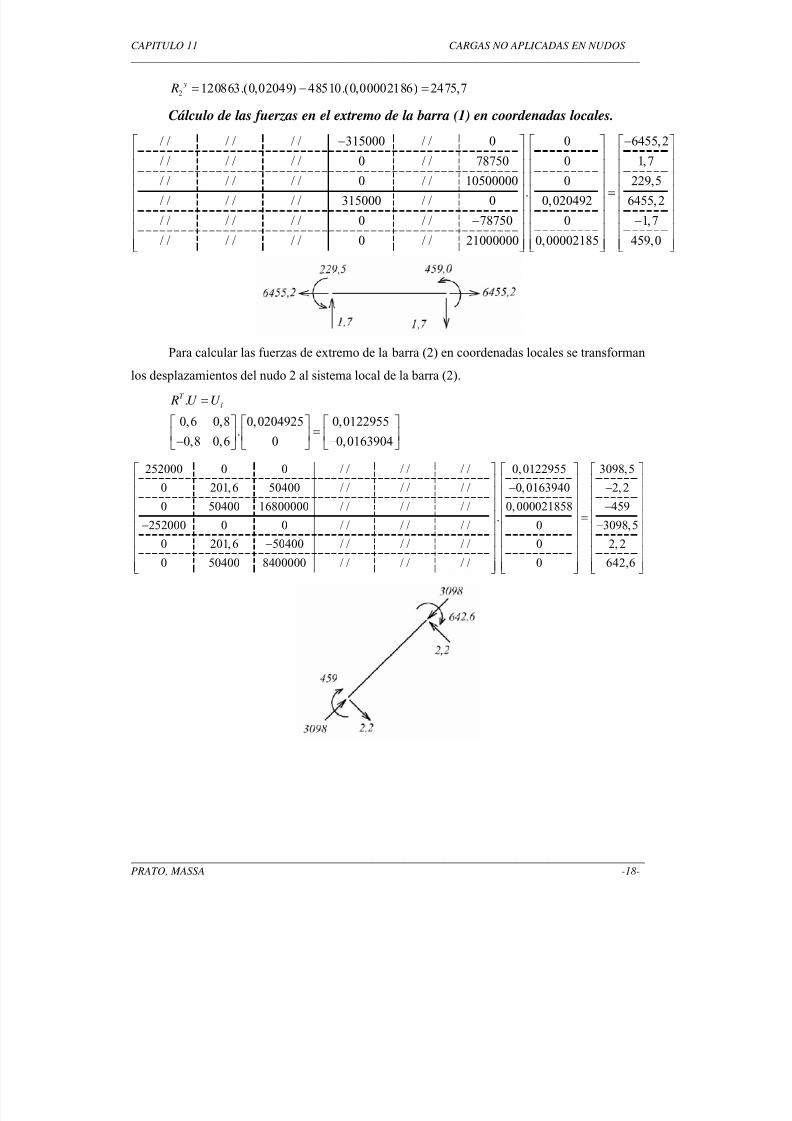
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 337/500
CAPITULO 11 CARGAS NO APLICADAS EN NUDOS
____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -18-
2 120863.(0,02049) 48510.(0,00002186) 2475,7 y R = − =
Cálculo de las fuerzas en el extremo de la barra (1) en coordenadas locales.
/ / / / / / 315000 / / 0 0 6455,2
/ / / / / / 0 / / 78750 0 1,7 / / / / / / 0 / / 10500000 0 229,5
. / / / / / / 315000 / / 0 0,020492 6455,2
/ / / / / / 0 / / 78750 0 1,7
/ / / / / / 0 / / 21000000 0,00002185 459,0
− −⎡ ⎤ ⎡ ⎤ ⎡ ⎤⎢ ⎥ ⎢ ⎥ ⎢⎢ ⎥ ⎢ ⎥ ⎢⎢ ⎥ ⎢ ⎥ ⎢
=⎢ ⎥ ⎢ ⎥ ⎢⎢ ⎥ ⎢ ⎥ ⎢⎢ ⎥ ⎢ ⎥ ⎢− −⎢ ⎥ ⎢ ⎥ ⎢⎢ ⎥ ⎢ ⎥ ⎢⎣ ⎦ ⎣ ⎦ ⎣ ⎦
⎥⎥⎥⎥⎥⎥⎥⎥
Para calcular las fuerzas de extremo de la barra (2) en coordenadas locales se transforman
los desplazamientos del nudo 2 al sistema local de la barra (2).
.
0,6 0,8 0,0204925 0,0122955.
0,8 0,6 0 0,0163904
T
l R U U =
⎡ ⎤ ⎡ ⎤ ⎡ ⎤=⎢ ⎥ ⎢ ⎥ ⎢ ⎥− −⎣ ⎦ ⎣ ⎦ ⎣ ⎦
252000 0 0 / / / / / / 0,0122955 3098,5
0 201,6 50400 / / / / / / 0,0163940 2,20 50400 16800000 / / / / / / 0,000021858 459
.252000 0 0 / / / / / / 0 3098,5
0 201,6 50400 / / / / / / 0 2
0 50400 8400000 / / / / / / 0
⎡ ⎤ ⎡ ⎤⎢ ⎥ ⎢ ⎥
− −⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥ −
=⎢ ⎥ ⎢ ⎥− −⎢ ⎥ ⎢ ⎥
⎢ ⎥ ⎢ ⎥−⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥⎣ ⎦ ⎣ ⎦
, 2
642,6
⎡ ⎤⎢ ⎥
⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥
−⎢ ⎥⎣ ⎦
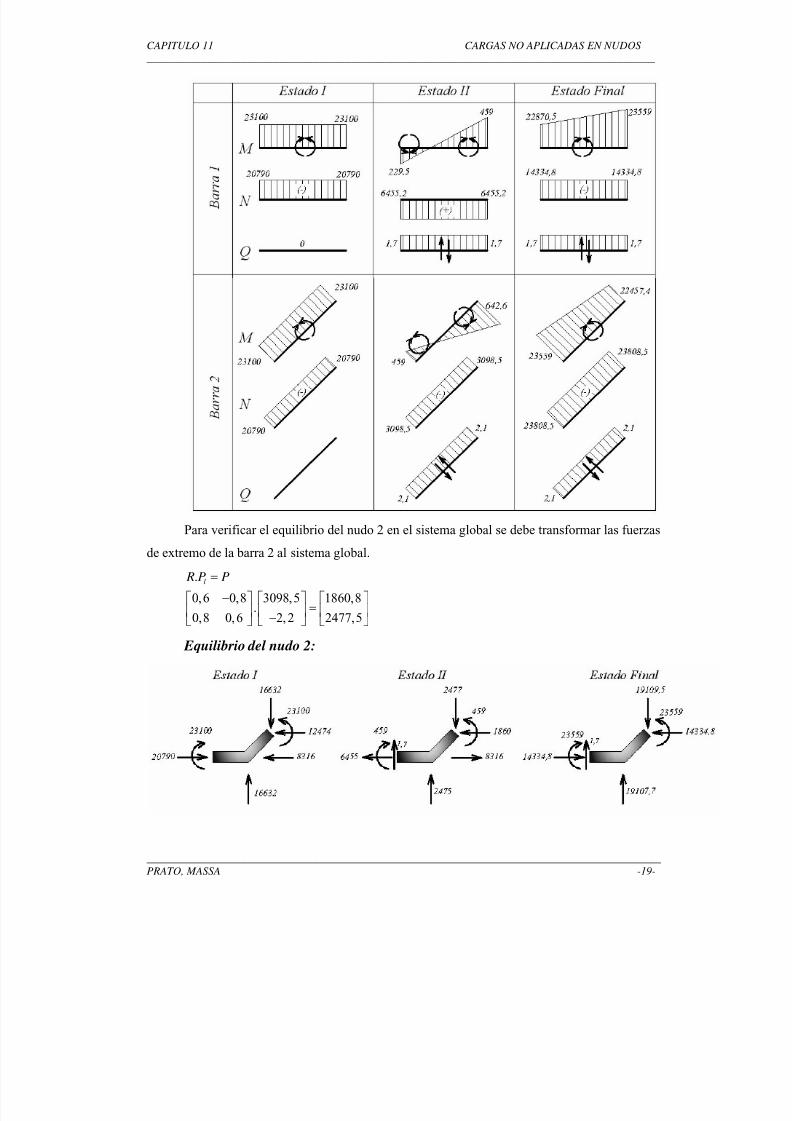
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 338/500
CAPITULO 11 CARGAS NO APLICADAS EN NUDOS
____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -19-
Para verificar el equilibrio del nudo 2 en el sistema global se debe transformar las fuerzas
de extremo de la barra 2 al sistema global.
.
0,6 0,8 3098,5 1860,8.
0,8 0,6 2,2 2477,5
l R P P=
−⎡ ⎤ ⎡ ⎤ ⎡ ⎤=⎢ ⎥ ⎢ ⎥ ⎢ ⎥−⎣ ⎦ ⎣ ⎦ ⎣ ⎦
Equilibrio del nudo 2:
642,6
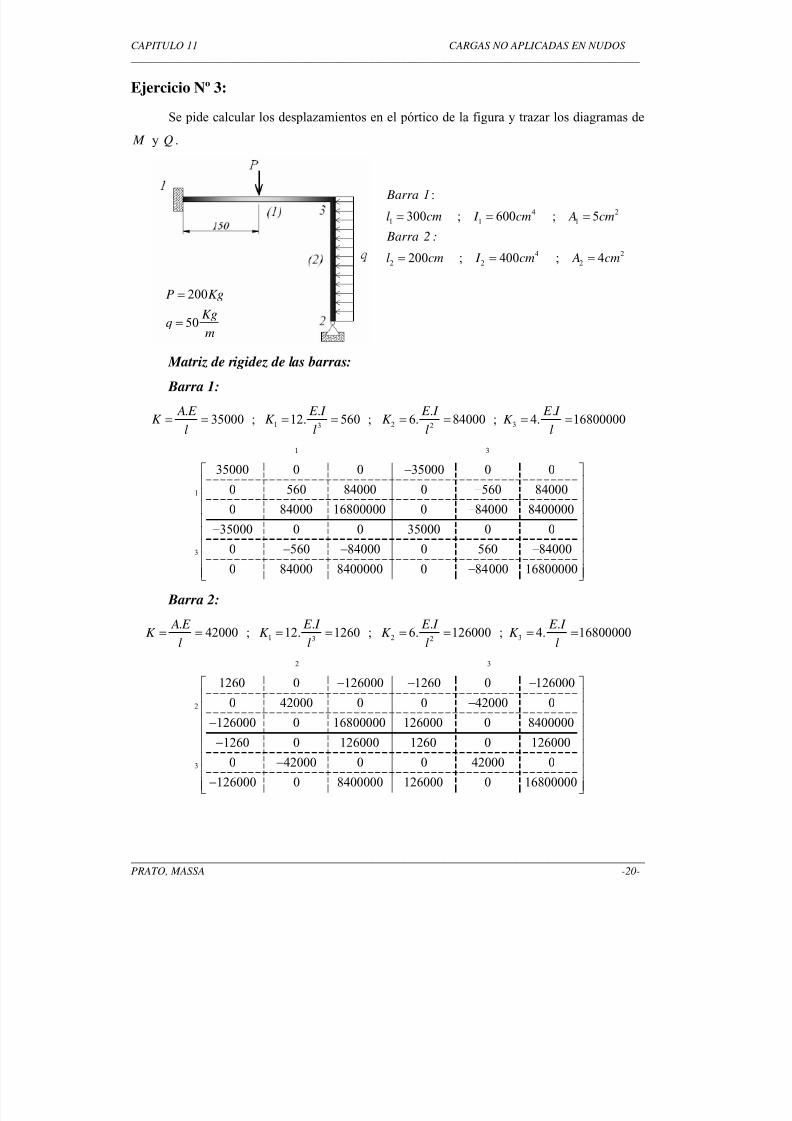
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 339/500
CAPITULO 11 CARGAS NO APLICADAS EN NUDOS
____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -20-
Ejercicio Nº 3:
Se pide calcular los desplazamientos en el pórtico de la figura y trazar los diagramas de
M y Q .
Matriz de rigidez de las barras:
Barra 1:
1 2 33 2
. . . .35000 ; 12. 560 ; 6. 84000 ; 4. 16800000
A E E I E I E I K K K K
l l l l= = = = = = = =
1 3
1
3
35000 0 0 35000 0 0
0 560 84000 0 560 840000 84000 16800000 0 84000 8400000
35000 0 0 35000 0 0
0 560 84000 0 560 84000
0 84000 8400000 0 84
−
−−
−
− − −
−
000 16800000
⎡ ⎤⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎣ ⎦
Barra 2:
1 2 33 2
. . . .42000 ; 12. 1260 ; 6. 126000 ; 4. 16800000
A E E I E I E I K K K K
l l l l= = = = = = = =
2 3
2
3
1260 0 126000 1260 0 126000
0 42000 0 0 42000 0
126000 0 16800000 126000 0 8400000
1260 0 126000 1260 0 126000
0 42000 0 0 42000 0
126000
− − −
−
−
−
−
−
0 8400000 126000 0 16800000
⎡ ⎤⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎣ ⎦
200
50
P Kg
Kg
q m
=
=
4 21 1 1
4 22 2 2
:
300 ; 600 ; 5
200 ; 400 ; 4
Barra 1
l cm I cm A cm
Barra 2 :
l cm I cm A cm
= = =
= = =
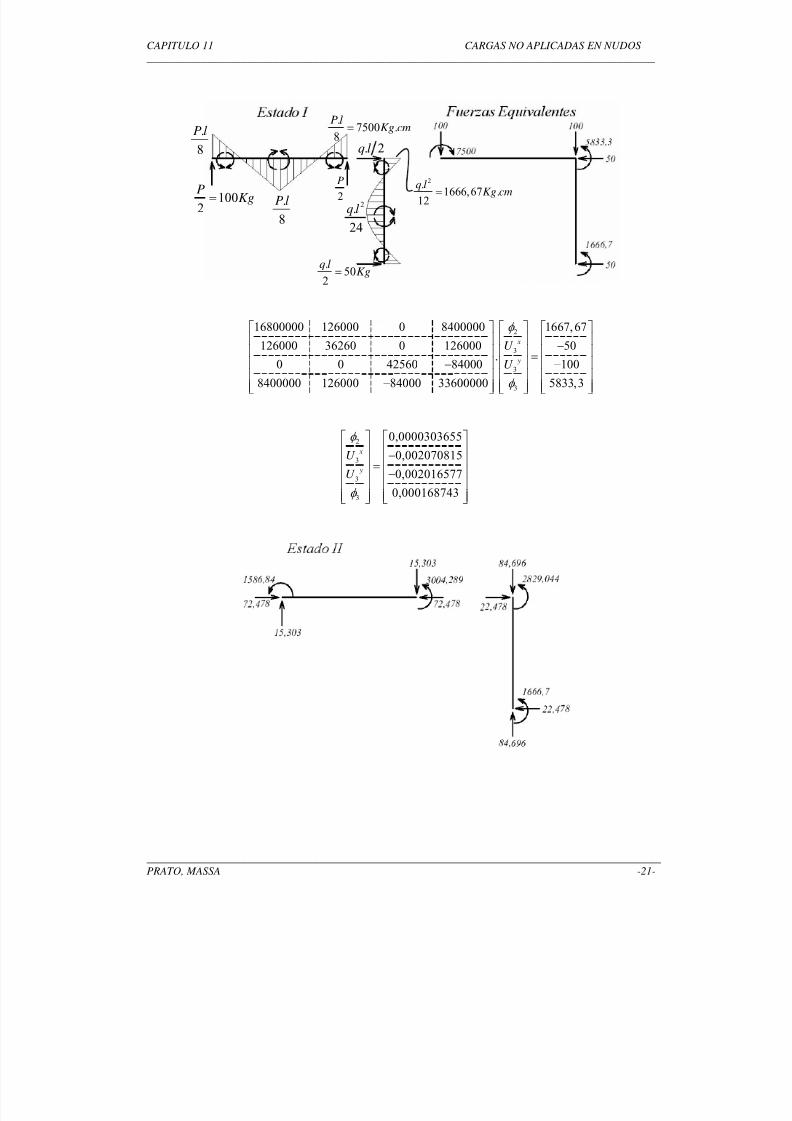
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 340/500
CAPITULO 11 CARGAS NO APLICADAS EN NUDOS
____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -21-
2
3
3
3
16800000 126000 0 8400000 1667,67126000 36260 0 126000 50
.0 0 42560 84000 100
8400000 126000 84000 33600000 5833,3
x
y
U
U
φ
φ
⎡ ⎤ ⎡ ⎤ ⎡ ⎤⎢ ⎥ ⎢ ⎥ ⎢ ⎥−⎢ ⎥ ⎢ ⎥ ⎢ ⎥=⎢ ⎥ ⎢ ⎥ ⎢ ⎥− −⎢ ⎥ ⎢ ⎥ ⎢ ⎥
−⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎣ ⎦ ⎣ ⎦ ⎣ ⎦
2
3
3
3
0,0000303655
0,002070815
0,002016577
0,000168743
x
y
U
U
φ
φ
⎡ ⎤ ⎡ ⎤⎢ ⎥ ⎢ ⎥−⎢ ⎥ ⎢ ⎥=⎢ ⎥ ⎢ ⎥−
⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥⎣ ⎦ ⎣ ⎦
.7500 .
8
P lKg cm=
1002
PKg= .
8
P l
.50
2
q lKg=
2.
24
q l
2.1666,67 .
12
q lKg cm=
.
8
P l
. 2q l
2
P
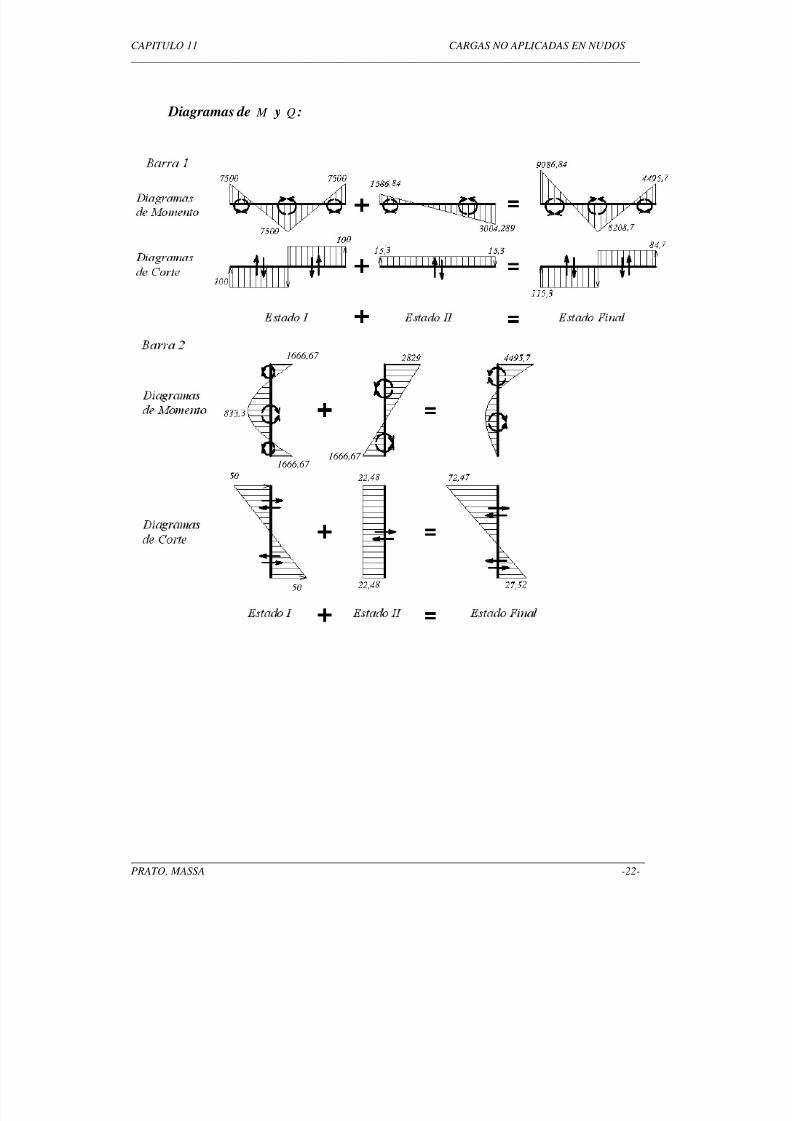
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 341/500
CAPITULO 11 CARGAS NO APLICADAS EN NUDOS
____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -22-
Diagramas de M y Q :
1666,67 1666,67
1666,67
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 342/500
CAPITULO 12 EMPARRILLADOS PLANOS
____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -1-
Capítulo 12 Emparrillados planos - Pórticos tridimensionales
12.1- El emparrillado plano
Un emparrillado plano es una estructura plana de barras con nudos rígidos cuyas cargas
actúan perpendiculares al plano de la estructura.
Resulta importante destacar que la única diferencia con el pórtico plano consiste en la
dirección en que actúan las cargas. Dado que todas las estructuras en rigor son tridimensionales,
una estructura plana recibe, en general, cargas en todas direcciones y trabaja simultáneamente
como pórtico y como emparrillado. Además, cada estructura tiene en general un tipo de carga
dominante que condiciona que la misma sea clasificada como pórtico o como emparrillado.
En el caso genérico en que las cargas predominantes no están todas contenidas en el plano
de la estructura, ni son todas perpendiculares a dicho plano, siempre es posible considerar al
sistema dado como un pórtico plano superpuesto con un emparrillado plano como se aprecia en
la Figura 12.1.
Por otra parte, siempre existe la posibilidad de tratar el caso general (a) de la Figura 12.1
como una estructura tridimensional considerando 6 desplazamientos incógnitas por nudo. En tal
caso debe resolverse un sistema de 12 x 12 incógnitas, mientras que descomponiendo en los
casos (b) y (c) de la Figura 12.1, la resolución es más sencilla dado que deben resolverse dos
sistemas de 6 x 6.
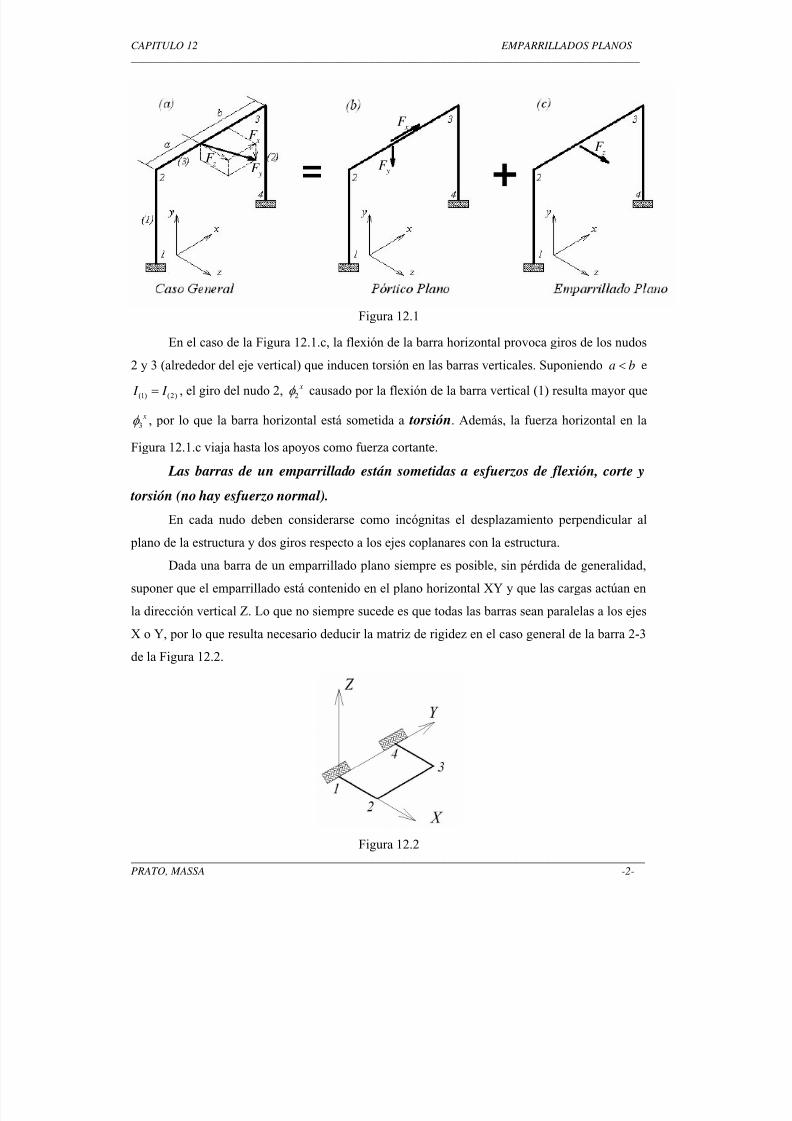
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 343/500
CAPITULO 12 EMPARRILLADOS PLANOS
____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -2-
Figura 12.1
En el caso de la Figura 12.1.c, la flexión de la barra horizontal provoca giros de los nudos
2 y 3 (alrededor del eje vertical) que inducen torsión en las barras verticales. Suponiendo a b< e
(1) (2) I I = , el giro del nudo 2, 2
xφ causado por la flexión de la barra vertical (1) resulta mayor que
3
xφ , por lo que la barra horizontal está sometida a torsión. Además, la fuerza horizontal en la
Figura 12.1.c viaja hasta los apoyos como fuerza cortante.
Las barras de un emparrillado están sometidas a esfuerzos de flexión, corte y
torsión (no hay esfuerzo normal).
En cada nudo deben considerarse como incógnitas el desplazamiento perpendicular al
plano de la estructura y dos giros respecto a los ejes coplanares con la estructura.
Dada una barra de un emparrillado plano siempre es posible, sin pérdida de generalidad,
suponer que el emparrillado está contenido en el plano horizontal XY y que las cargas actúan en
la dirección vertical Z. Lo que no siempre sucede es que todas las barras sean paralelas a los ejes
X o Y, por lo que resulta necesario deducir la matriz de rigidez en el caso general de la barra 2-3
de la Figura 12.2.
Figura 12.2
xF
zF yF
xF
yF
zF
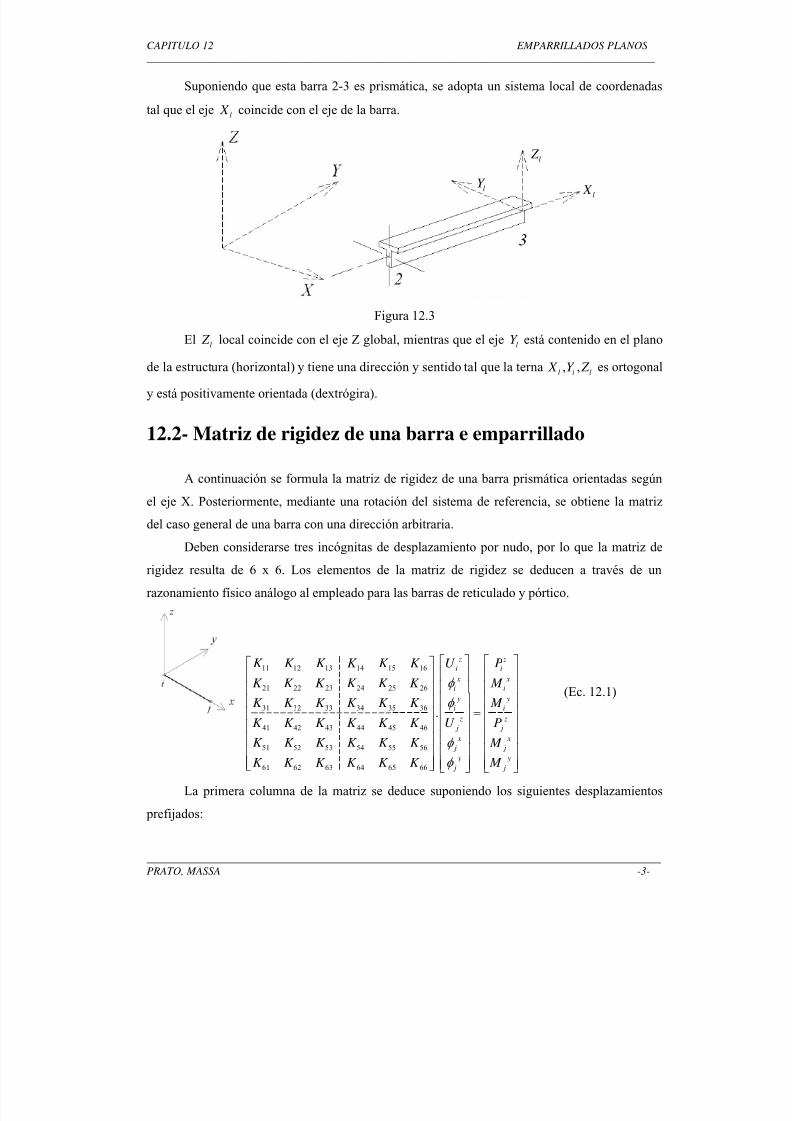
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 344/500
CAPITULO 12 EMPARRILLADOS PLANOS
____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -3-
Suponiendo que esta barra 2-3 es prismática, se adopta un sistema local de coordenadas
tal que el ejel
X coincide con el eje de la barra.
Figura 12.3
Ell
Z local coincide con el eje Z global, mientras que el ejel
Y está contenido en el plano
de la estructura (horizontal) y tiene una dirección y sentido tal que la terna , ,l l l
X Y Z es ortogonal
y está positivamente orientada (dextrógira).
12.2- Matriz de rigidez de una barra e emparrillado
A continuación se formula la matriz de rigidez de una barra prismática orientadas según
el eje X. Posteriormente, mediante una rotación del sistema de referencia, se obtiene la matriz
del caso general de una barra con una dirección arbitraria.
Deben considerarse tres incógnitas de desplazamiento por nudo, por lo que la matriz de
rigidez resulta de 6 x 6. Los elementos de la matriz de rigidez se deducen a través de un
razonamiento físico análogo al empleado para las barras de reticulado y pórtico.
11 12 13 14 15 16
21 22 23 24 25 26
31 32 33 34 35 36
41 42 43 44 45 46
51 52 53 54 55 56
61 62 63 64 65 66
.
z z
i i
x x
i i
y y
i i
z z
j j
x x
j j
y y
j j
K K K K K K U P
K K K K K K M
K K K K K K M
K K K K K K U P
K K K K K K M
K K K K K K M
φ
φ
φ
φ
⎡ ⎤ ⎡ ⎤⎡ ⎤⎢ ⎥ ⎢ ⎥⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥⎢ ⎥ ⎢⎢ ⎥
=⎢ ⎥ ⎢⎢ ⎥⎢ ⎥ ⎢⎢ ⎥⎢ ⎥ ⎢⎢ ⎥⎢ ⎥ ⎢⎢ ⎥
⎢ ⎥ ⎢ ⎥ ⎢⎣ ⎦ ⎣ ⎦ ⎣ ⎦
⎥⎥⎥⎥⎥⎥
(Ec. 12.1)
La primera columna de la matriz se deduce suponiendo los siguientes desplazamientos
prefijados:
l X l
Y
l
Z
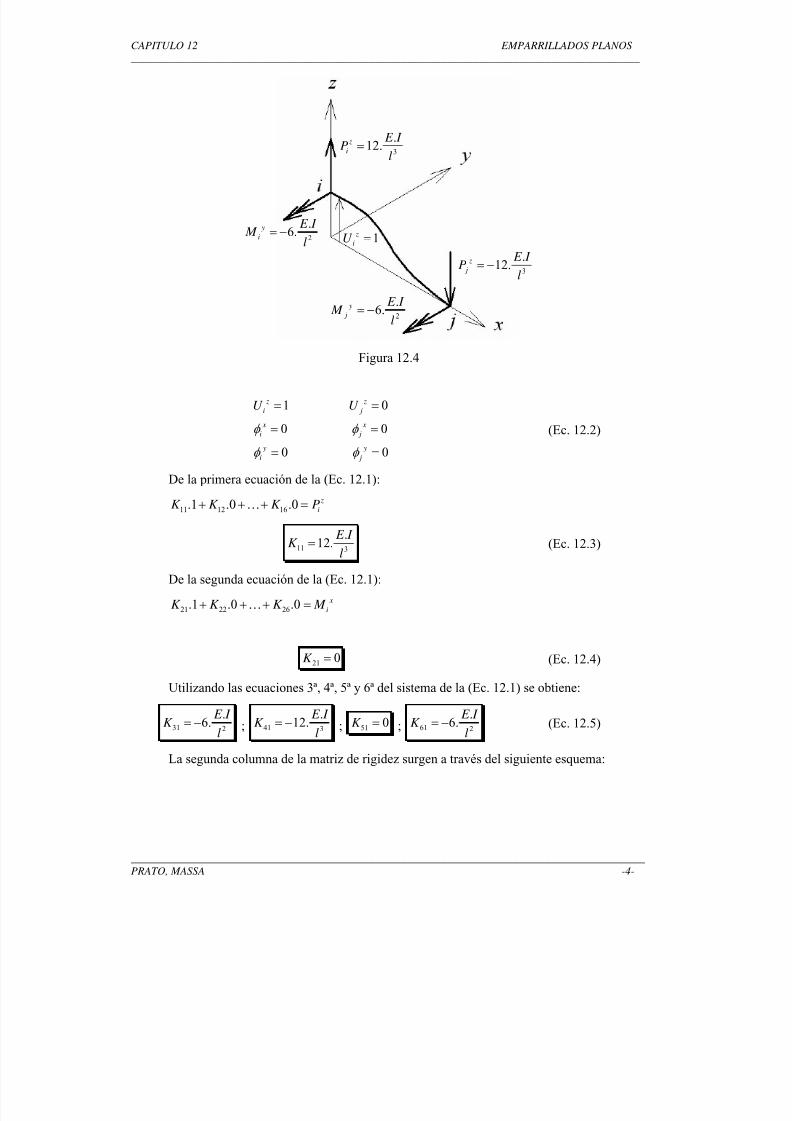
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 345/500
CAPITULO 12 EMPARRILLADOS PLANOS
____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -4-
Figura 12.4
1 0
0 0
0 0
z z
i j
x x
i j
y y
i j
U U
φ φ
φ φ
= =
= =
= =
(Ec. 12.2)
De la primera ecuación de la (Ec. 12.1):
11 12 16.1 .0 .0 z
iK K K P+ + + =…
11 3
.12.
E I K
l= (Ec. 12.3)
De la segunda ecuación de la (Ec. 12.1):
21 22 26.1 .0 .0 x
iK K K M + + + =…
21 0K = (Ec. 12.4)
Utilizando las ecuaciones 3ª, 4ª, 5ª y 6ª del sistema de la (Ec. 12.1) se obtiene:
31 2
.6.
E I K
l= − ; 41 3
.12.
E I K
l= − ; 51 0K = ; 61 2
.6.
E I K
l= − (Ec. 12.5)
La segunda columna de la matriz de rigidez surgen a través del siguiente esquema:
1 z
iU =
3
.12.
z
j
E I P
l= −
3
.12. z
i
E I P
l=
2
.6. y
i
E I M
l= −
2
.6. y
j
E I M
l
= −
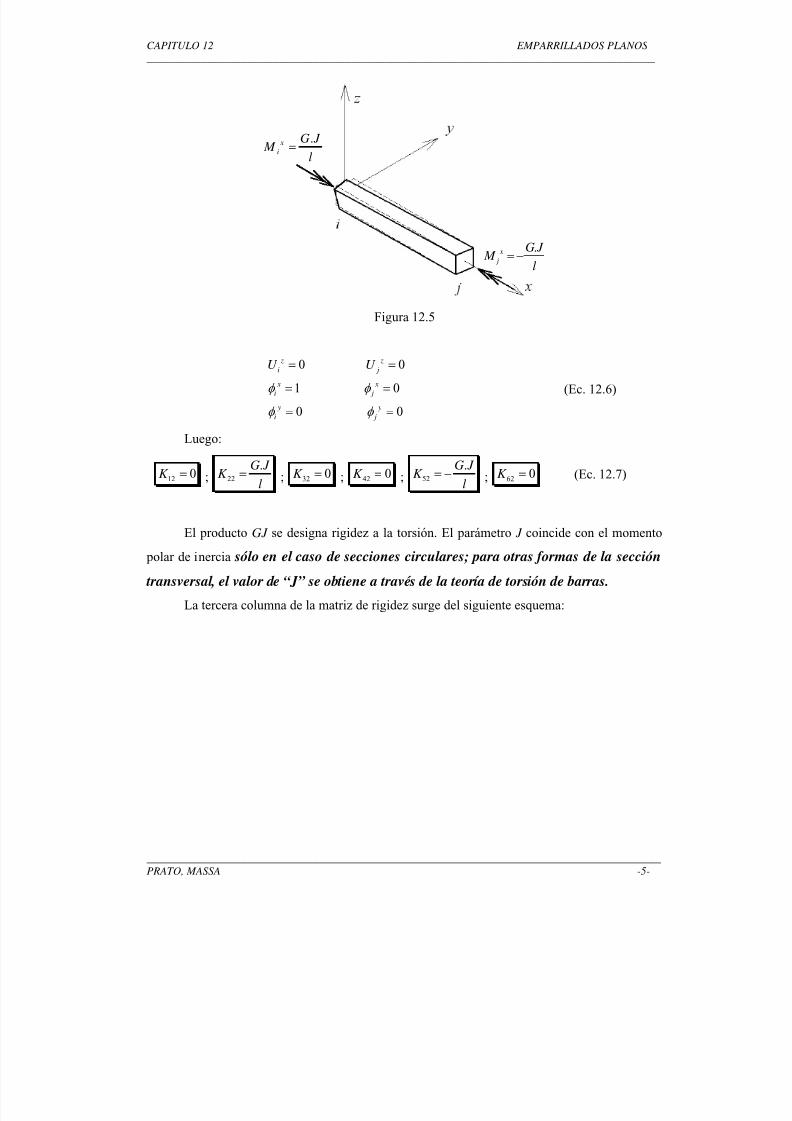
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 346/500
CAPITULO 12 EMPARRILLADOS PLANOS
____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -5-
Figura 12.5
0 0
1 0
0 0
z z
i j
x x
i j
y y
i j
U U
φ φ
φ φ
= =
= =
= =
(Ec. 12.6)
Luego:
12 0K = ; 22
.G J K
l
= ; 32 0K = ; 42 0K = ; 52
.G J K
l
= − ; 62 0K = (Ec. 12.7)
El producto GJ se designa rigidez a la torsión. El parámetro J coincide con el momento
polar de inercia sólo en el caso de secciones circulares; para otras formas de la sección
transversal, el valor de “J” se obtiene a través de la teoría de torsión de barras.
La tercera columna de la matriz de rigidez surge del siguiente esquema:
. x
i
G J M
l
=
. x
j
G J M
l= −
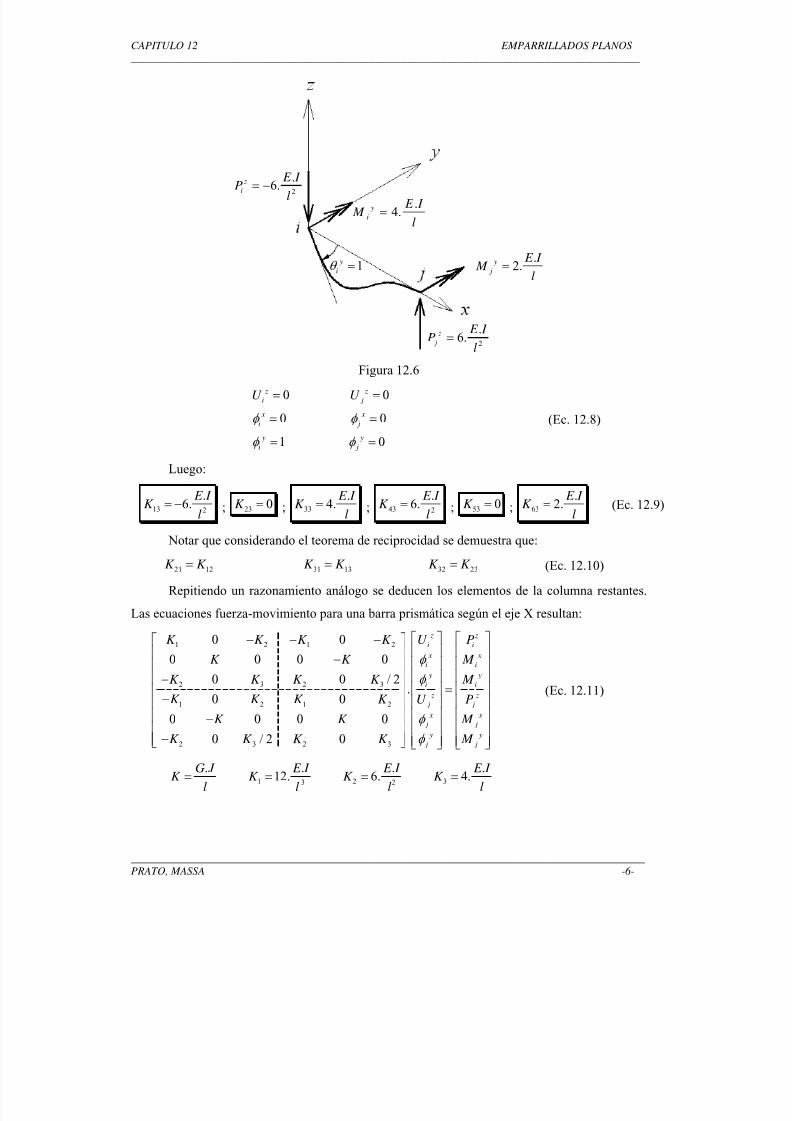
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 347/500
CAPITULO 12 EMPARRILLADOS PLANOS
____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -6-
Figura 12.6
0 0
0 0
1 0
z z
i j
x x
i j
y y
i j
U U
φ φ
φ φ
= =
= =
= =
(Ec. 12.8)
Luego:
13 2
.6.
E I K
l= − ; 23 0K = ; 33
.4.
E I K
l= ; 43 2
.6.
E I K
l= ; 53 0K = ; 63
.2.
E I K
l= (Ec. 12.9)
Notar que considerando el teorema de reciprocidad se demuestra que:
21 12K K = 31 13K K = 32 23K K = (Ec. 12.10)
Repitiendo un razonamiento análogo se deducen los elementos de la columna restantes.
Las ecuaciones fuerza-movimiento para una barra prismática según el eje X resultan:
1 2 1 2
2 3 2 3
1 2 1 2
2 3 2 3
0 0
0 0 0 0
0 0 / 2.
0 0
0 0 0 0
0 / 2 0
z z
i i
x xi i
y y
i i
z z
j j
x x
j j
y y
j j
K K K K U P
K K M
K K K K M
K K K K U P
K K M
K K K K M
φ
φ
φ
φ
⎡ ⎤ ⎡ ⎤− − −⎡ ⎤
⎢ ⎥ ⎢ ⎥⎢ ⎥− ⎢ ⎥ ⎢ ⎥⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥−
=⎢ ⎥ ⎢ ⎥⎢ ⎥− ⎢ ⎥ ⎢ ⎥⎢ ⎥
⎢ ⎥ ⎢ ⎥⎢ ⎥−⎢ ⎥ ⎢ ⎥⎢ ⎥
−⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎣ ⎦ ⎣ ⎦ ⎣ ⎦
(Ec. 12.11)
1 2 33 2
. . . .12. 6. 4.
G J E I E I E I K K K K
l l l l= = = =
1 y
iθ =
2
.6. z
i
E I P
l= −
.4. y
i
E I M
l=
.2. y
j
E I M
l=
2
.6.
z
j
E I P
l=

5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 348/500
CAPITULO 12 EMPARRILLADOS PLANOS
____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -7-
Nótese que durante la deducción de los elementos de la matriz de rigidez se han
despreciado las “deformaciones por corte”. Como ejercicio, se sugiere deducir la primera
columna de la matriz de rigidez incluyendo deformaciones por corte.
Resulta conveniente considerar la interpretación física de los elementos de la matriz de
rigidez. Observando la (Ec. 12.1), ¿ qué representa46K ?. Al estar en la sexta columna, el
elemento 46K multiplica a y
jφ . Igualando los restantes desplazamientos a cero y teniendo en
cuenta que el elemento 46K pertenece a la cuarta ecuación, se obtiene:
46. y z
j jK Pφ = (Ec. 12.12)
Por lo tanto,46K representa la fuerza a aplicar en el nudo " j" en la dirección Z cuando al
nudo " j" se lo gira un radián alrededor del eje Y mientras que los restantes desplazamientos de
extremo de la barra se encuentran restringidos (son nulos).
12.3- Matriz de rigidez en el caso general
El eje de la barra forma un ángulo α respecto del eje X del sistema global.
Figura 12.7
El desarrollo resulta totalmente análogo al descripto para la barra de pórtico. Deben
relacionarse las componentes de un vector (giro o momento) contenido en el plano XY en el
sistema local con las componentes del mismo vector expresadas en el sistema global.
l X
lY
α α
1γ
2γ

5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 349/500
CAPITULO 12 EMPARRILLADOS PLANOS
____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -8-
Figura 12.8
( ) ( )( ) ( )
.cos .
. .cos
x y
x l l x y
y l l
M M M sen
M M sen M
α α
α α
⎫= −⎪⎬
= + ⎪⎭ (Ec. 12.13)
Matricialmente:
1 2
2 1
. x
xl
y yl
M M
M M
γ γ
γ γ
− ⎡ ⎤ ⎡ ⎤⎡ ⎤=⎢ ⎥ ⎢ ⎥⎢ ⎥
⎣ ⎦ ⎣ ⎦⎣ ⎦ (Ec. 12.14)
Observando que las fuerzas según el eje Z local no cambian al pasar al sistema global
porquel
Z Z ≡ , la matriz de rotación resulta:
1 2
2 1
1 0 0
0 .
0
z
l z
x
l x
y
l y
globallocal
P P
M M
M M
γ γ
γ γ
⎡ ⎤ ⎡ ⎤⎡ ⎤⎢ ⎥ ⎢ ⎥⎢ ⎥− =⎢ ⎥ ⎢ ⎥⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥⎣ ⎦ ⎣ ⎦⎣ ⎦
(Ec. 12.15)
Lo mismo ocurre con los desplazamientos de extremo de barra. En forma abreviada puede
escribirse:
.l
R P P= .l
RU U = (Ec. 12.16)
R es una matriz ortonormal, por lo que su inversa resulta igual a su transpuesta: 1 T R R− =
de modo que:
.T
lP R P= .T
lU R U = (Ec. 12.17)
Particionando el sistema de la (Ec. 12.11) resulta:
. .
. .
l l l l l
ii i ij j i
l l l l l
ji i jj j j
K U K U P
K U K U P
⎫+ = ⎪⎬
+ = ⎪⎭
(Ec. 12.18)
Para pasar a coordenadas globales se reemplaza según (Ec. 12.17):
l X
lY
α
x
l M
x M
y M
y
l M

5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 350/500
CAPITULO 12 EMPARRILLADOS PLANOS
____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -9-
. . . . .
. . . . .
l T l T T
ii i ij j i
l T l T T
ji i jj j j
K R U K R U R P
K R U K R U R P
⎫+ = ⎪⎬
+ = ⎪⎭
(Ec. 12.19)
Premultiplicando ambos miembros por R y considerando que . T R R I = , finalmente se
llega a:
. . . ..
. . . .
l T l T i iii ij
l T l T j j ji jj
Sistema Sistema Matriz de rigidez enGlobal Globalel sis tema global
U P R K R R K R
U P R K R R K R
⎡ ⎤ ⎡ ⎤ ⎡ ⎤=⎢ ⎥ ⎢ ⎥ ⎢ ⎥
⎢ ⎥ ⎣ ⎦ ⎣ ⎦⎣ ⎦
(Ec. 12.20)
A modo de ejemplo, se deduce en forma explícita la rigidez directa del nudo " j" en el
sistema global:
.
l T
jj
l
jj jj
K R
R R K K
⎡ ⎤
⎢ ⎥⎢ ⎥⎣ ⎦
( ) ( )( ) ( )
1 2
1 2
2 3 2 1
1 2 1 2 2 1 2
2 2
1 2 2 2 1 2 3 2 2 1 2 3 1 2 3
2 2
2 1 1 2 2 1 3 1 2 1 2 3 2 1 3
0 1 0 0
0 0 0
0 0
1 0 0 0 . .
0 . . . . . . . .
0 . . . . . . . .
K K
K
K K
K K K K K
K K K K K K K K
K K K K K K K K
γ γ
γ γ
γ γ
γ γ γ γ γ γ γ γ γ γ
γ γ γ γ γ γ γ γ γ γ
⎡ ⎤⎢ ⎥⎢ ⎥⎢ ⎥−⎢ ⎥
−⎢ ⎥⎢ ⎥− − − − + −⎢ ⎥
− +⎢ ⎥⎣ ⎦
Operando de manera similar sobre las restantes matrices de rigidez locales se arriba a la
forma explícita de la matriz de rigidez en el caso general:
(Ec. 12.21)
donde:
1 2 33 2
. . . .12. 6. 4.
G J E I E I E I K K K K
l l l l= = = =
2 2. A K γ = ; 1 2. B K γ = − ; 2 2
1 2 3. .C K K γ γ = + ; ( )1 2 3. . D K K γ γ = −
2 2
2 1 3. . E K K γ γ = + ; ( )1 2 3. . 2F K K γ γ = − + ; 2 2
1 2 3. . 2G K K γ γ = − +
2 2
2 1 3. . 2 H K K γ γ = − +
1 1
1
.
z z
i i
x x
i i
y y
i i
z z
j j
x x
j j
y y j j
U PK A B K A B
M C D A G F
M E B F H
U PK A B
M C D
M E
φ
φ
φ
φ
⎡ ⎤ ⎡ ⎤−⎡ ⎤⎢ ⎥ ⎢ ⎥⎢ ⎥− ⎢ ⎥ ⎢ ⎥⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥−
=⎢ ⎥ ⎢ ⎥⎢ ⎥− − ⎢ ⎥ ⎢ ⎥⎢ ⎥
⎢ ⎥ ⎢ ⎥⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥⎢ ⎥ ⎢ ⎥⎣ ⎦ ⎣ ⎦ ⎣ ⎦
simétrica
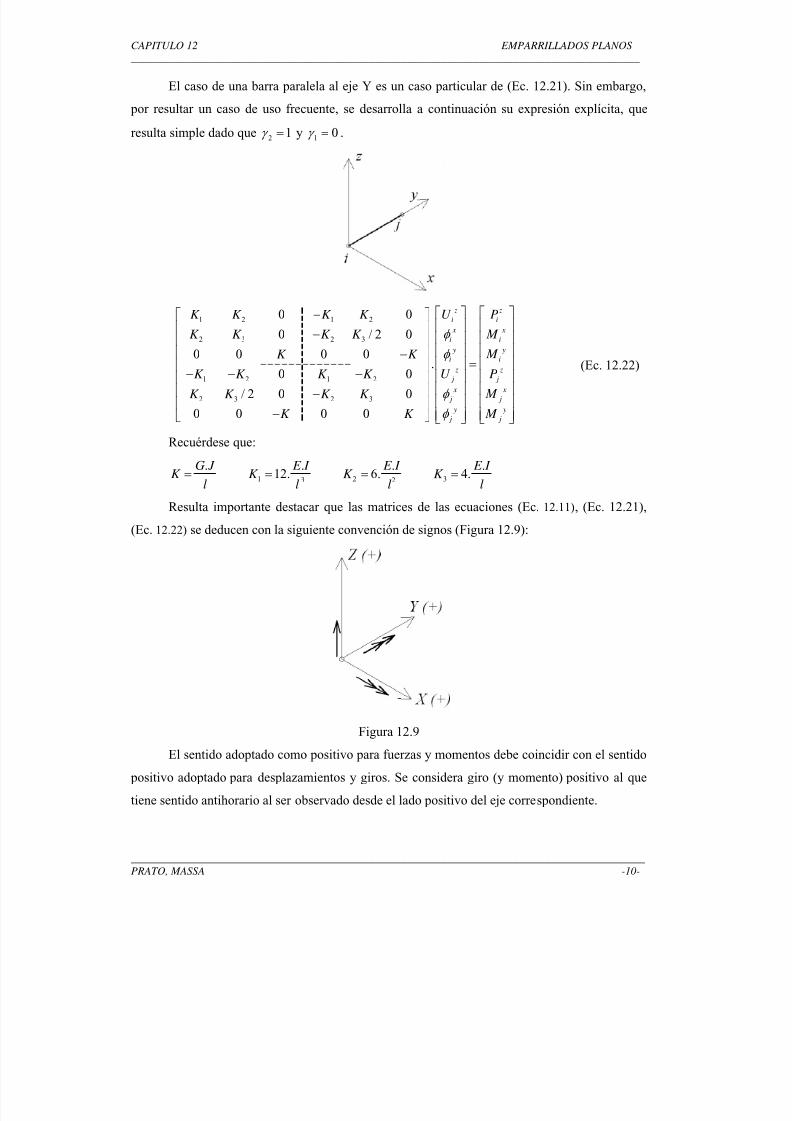
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 351/500
CAPITULO 12 EMPARRILLADOS PLANOS
____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -10-
El caso de una barra paralela al eje Y es un caso particular de (Ec. 12.21). Sin embargo,
por resultar un caso de uso frecuente, se desarrolla a continuación su expresión explícita, que
resulta simple dado que 2 1γ = y 1 0γ = .
1 2 1 2
2 3 2 3
1 2 1 2
2 3 2 3
0 0
0 / 2 0
0 0 0 0.
0 0
/ 2 0 0
0 0 0 0
z z
i i
x x
i i
y y
i i
z z
j j
x x
j j
y y
j j
U PK K K K
M K K K K
M K K
U PK K K K
M K K K K
M K K
φ
φ
φ
φ
⎡ ⎤ ⎡ ⎤−⎡ ⎤
⎢ ⎥ ⎢ ⎥⎢ ⎥− ⎢ ⎥ ⎢ ⎥⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥−
=⎢ ⎥ ⎢ ⎥⎢ ⎥− − − ⎢ ⎥ ⎢ ⎥⎢ ⎥
⎢ ⎥ ⎢ ⎥⎢ ⎥−⎢ ⎥ ⎢ ⎥⎢ ⎥
− ⎢ ⎥ ⎢ ⎥⎣ ⎦ ⎣ ⎦ ⎣ ⎦
(Ec. 12.22)
Recuérdese que:
1 2 33 2
. . . .12. 6. 4.
G J E I E I E I K K K K
l l l l
= = = =
Resulta importante destacar que las matrices de las ecuaciones (Ec. 12.11), (Ec. 12.21),
(Ec. 12.22) se deducen con la siguiente convención de signos (Figura 12.9):
Figura 12.9
El sentido adoptado como positivo para fuerzas y momentos debe coincidir con el sentido
positivo adoptado para desplazamientos y giros. Se considera giro (y momento) positivo al que
tiene sentido antihorario al ser observado desde el lado positivo del eje correspondiente.

5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 352/500
CAPITULO 12 EMPARRILLADOS PLANOS
____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -11-
12.4- Cálculo de los desplazamientos y determinación de losesfuerzos
Habiendo ya obtenido en forma explícita la matriz de rigidez de la barra prismática en elcaso general, se repite el procedimiento usado en capítulos 10 y 11 para el pórtico plano:
1º Paso: se arma la matriz de rigidez del sistema sumando la contribución de todas las
barras. La matriz de rigidez de cada barra de está referido a sistema de referencia global (usar
(Ec. 12.11), (Ec. 12.21) o (Ec. 12.22) según corresponda).
Figura 12.10
2º Paso: se determinan los elementos del vector de cargas en el sistema global.
3º Paso: se imponen las condiciones de apoyo suprimiendo las filas y columnas
correspondientes, con lo que la matriz de rigidez del sistema deja de ser singular.
4º Paso: se resuelve el sistema de ecuaciones lineales y se obtienen los desplazamientos.
5º Paso: se calculan las fuerzas de extremo de cada barra. Esto se realiza barra por barra
trabajando con la matriz de rigidez de cada barra en el sistema local (Ec. 12.11) y utilizando losdesplazamientos de extremo de las barras previamente transformados al sistema local (emplear la
(Ec. 12.17))
6º Paso: se calculan las reacciones de apoyo sumando las fuerzas de extremo de barra de
todas las barras que concurren a cada apoyo. Como alternativa pueden utilizarse las ecuaciones
asociadas a los grados de libertad no utilizados (suprimidos) en el cálculo de desplazamientos.
Nota 1:
Antes de imponer las condiciones de vínculo que restringen al desplazamiento de cuerporígido, la matriz de rigidez de la estructura es singular.
iiK ij
K
jiK
jjK
ii ij
ji jj
K K
K K
⎡ ⎤⎢ ⎥⎣ ⎦
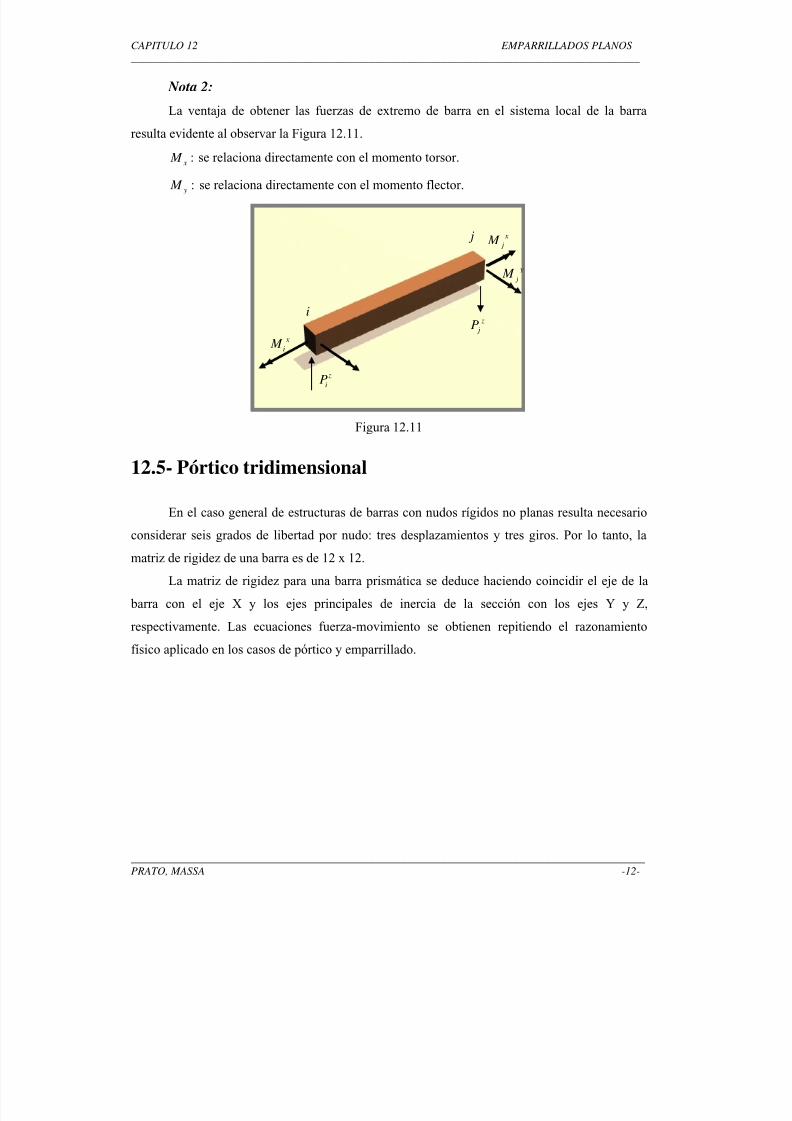
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 353/500
CAPITULO 12 EMPARRILLADOS PLANOS
____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -12-
Nota 2:
La ventaja de obtener las fuerzas de extremo de barra en el sistema local de la barra
resulta evidente al observar la Figura 12.11.
: x M se relaciona directamente con el momento torsor.
: y
M se relaciona directamente con el momento flector.
Figura 12.11
12.5- Pórtico tridimensional
En el caso general de estructuras de barras con nudos rígidos no planas resulta necesario
considerar seis grados de libertad por nudo: tres desplazamientos y tres giros. Por lo tanto, la
matriz de rigidez de una barra es de 12 x 12.
La matriz de rigidez para una barra prismática se deduce haciendo coincidir el eje de la
barra con el eje X y los ejes principales de inercia de la sección con los ejes Y y Z,
respectivamente. Las ecuaciones fuerza-movimiento se obtienen repitiendo el razonamiento
físico aplicado en los casos de pórtico y emparrillado.
x
i M
x
j M
y
j M
z
jP
z
iP
i
j
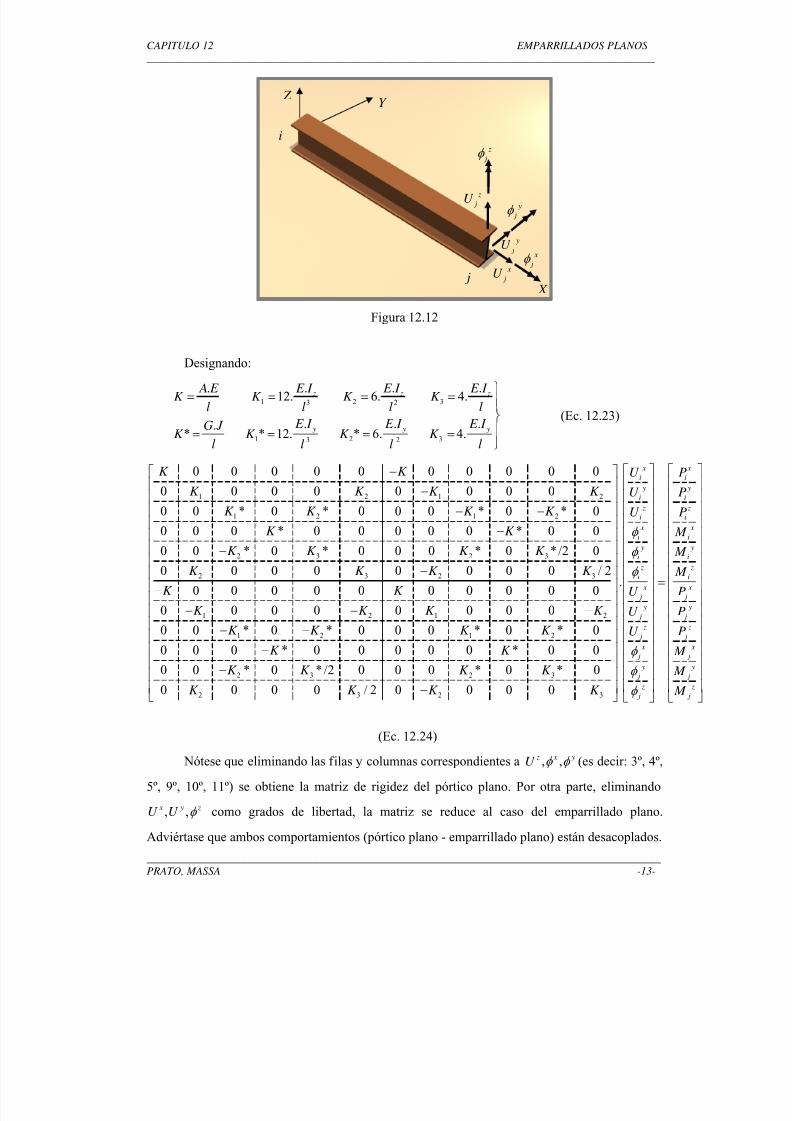
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 354/500
CAPITULO 12 EMPARRILLADOS PLANOS
____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -13-
Figura 12.12
Designando:
1 2 33 2
1 2 33 2
. . ..12. 6. 4.
. . ..* * 12. * 6. 4.
z z z
y y y
E I E I E I A E K K K K
l l l l
E I E I E I G J K K K K
l l l l
⎫= = = = ⎪⎪
⎬⎪= = = =⎪⎭
(Ec. 12.23)
1 2 1 2
1 2 1 2
2 3 2 3
2 3 2 3
1 2 1 2
1 2 1 2
2 3 2 3
0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0
0 0 * 0 * 0 0 0 * 0 * 0
0 0 0 * 0 0 0 0 0 * 0 0
0 0 * 0 * 0 0 0 * 0 */2 0
0 0 0 0 0 0 0 0 / 2
0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0
0 0 * 0 * 0 0 0 * 0 * 0
0 0 0 * 0 0 0 0 0 * 0 00 0 * 0 * /2 0 0 0 * 0 *
K K
K K K K
K K K K
K K
K K K K
K K K K
K K
K K K K
K K K K
K K K K K K
−
−− −
−
−
−
−
− − −
− −
−−
2 3 2 3
.
0
0 0 0 0 / 2 0 0 0 0
x x
i i
y yi i
z z
i i
x x
i i
y y
i i
z z
i i
x x
j j
y y
j j
z z
j j
x x
j j
y y
j j
z z
j j
U P
U P
U P
M
M
M
U P
U P
U P
M M
K K K K M
φ
φ
φ
φ φ
φ
⎡ ⎤ ⎡ ⎤⎡ ⎤⎢ ⎥ ⎢ ⎥
⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥
=⎢ ⎥ ⎢ ⎥⎢ ⎥⎢ ⎥ ⎢⎢ ⎥⎢ ⎥ ⎢⎢ ⎥⎢ ⎥ ⎢⎢ ⎥⎢ ⎥ ⎢⎢ ⎥
⎢ ⎥ ⎢⎢ ⎥ ⎢ ⎥ ⎢⎢ ⎥⎢ ⎥ ⎢⎢ ⎥⎢ ⎥ ⎢⎢ ⎥−⎣ ⎦ ⎣ ⎦ ⎣ ⎦
⎥⎥⎥⎥
⎥⎥⎥⎥
(Ec. 12.24)
Nótese que eliminando las filas y columnas correspondientes a , , z x yU φ φ (es decir: 3º, 4º,
5º, 9º, 10º, 11º) se obtiene la matriz de rigidez del pórtico plano. Por otra parte, eliminando
, ,
x y z
U U φ como grados de libertad, la matriz se reduce al caso del emparrillado plano.Adviértase que ambos comportamientos (pórtico plano - emparrillado plano) están desacoplados.
x
jU
x
jφ
X
y
jU
y
jφ
z
jU
z
jφ
Z Y
j
i

5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 355/500
CAPITULO 12 EMPARRILLADOS PLANOS
____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -14-
Desplazamientos tales como , , z x yU φ φ no producen fuerzas tales como , , x y z
P P M . Es decir, los
desplazamientos vinculados al emparrillado plano no producen fuerzas del tipo de pórtico plano
(la observación recíproca también resulta válida). En el caso general en que la barra tenga una
dirección cualquiera, se ubica el eje X local uniendo los extremos de la barra.Los cosenos directores resultan:
1
j i x x
lγ
−= 2
j i y y
lγ
−= 3
j i z z
lγ
−= (Ec. 12.25)
Figura 12.13
El eje Y local se define perpendicular al plano que contiene a la barra y al eje Z. De esa
manera, el ejel
Y resulta siempre perpendicular al Z y, por ende, se mantiene contenido en el
plano XY del sistema global.
( ) ( )
2
1
1 2 3
/
1 . 0 0 1 /
0
l l
i j k D
Y Z X D D
γ
γ
γ γ γ
−⎡ ⎤
⎢ ⎥= × = = ⎢ ⎥⎢ ⎥⎣ ⎦
(Ec. 12.26)
donde: 2 2
1 2 D γ γ = +
Finalmente, el ejel
Z se determina por ortogonalidad:
( ) ( )1 3
1 2 3 2 3
2 1
. /
. /
/ / 0
l l l
i j k D
Z X Y D
D D D
γ γ
γ γ γ γ γ
γ γ
−⎡ ⎤⎢ ⎥= × = = −⎢ ⎥⎢ ⎥− ⎣ ⎦
(Ec. 12.27)
lY
X
Z
Y
j
i
l X
1γ
2γ
3γ
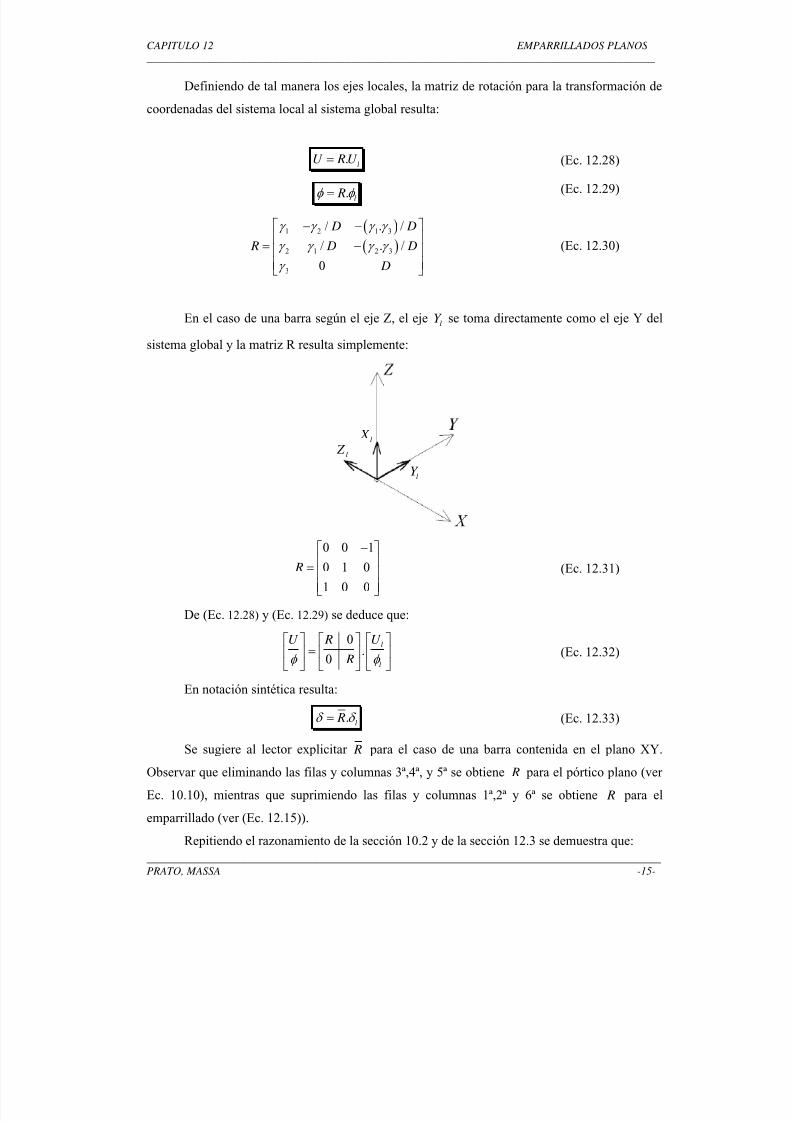
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 356/500
CAPITULO 12 EMPARRILLADOS PLANOS
____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -15-
Definiendo de tal manera los ejes locales, la matriz de rotación para la transformación de
coordenadas del sistema local al sistema global resulta:
. lU RU = (Ec. 12.28)
.l
Rφ φ = (Ec. 12.29)
( )
( )1 2 1 3
2 1 2 3
3
/ . /
/ . /
0
D D
R D D
D
γ γ γ γ
γ γ γ γ
γ
− −⎡ ⎤⎢ ⎥
= −⎢ ⎥⎢ ⎥⎣ ⎦
(Ec. 12.30)
En el caso de una barra según el eje Z, el ejel
Y se toma directamente como el eje Y del
sistema global y la matriz R resulta simplemente:
0 0 1
0 1 0
1 0 0
R
−⎡ ⎤⎢ ⎥= ⎢ ⎥⎢ ⎥⎣ ⎦
(Ec. 12.31)
De (Ec. 12.28) y (Ec. 12.29) se deduce que:
0
.0
l
l
U R U
Rφ φ
⎡ ⎤ ⎡ ⎤ ⎡ ⎤
=⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎣ ⎦ ⎣ ⎦ ⎣ ⎦ (Ec. 12.32)
En notación sintética resulta:
. l Rδ δ = (Ec. 12.33)
Se sugiere al lector explicitar R para el caso de una barra contenida en el plano XY.
Observar que eliminando las filas y columnas 3ª,4ª, y 5ª se obtiene R para el pórtico plano (ver
Ec. 10.10), mientras que suprimiendo las filas y columnas 1ª,2ª y 6ª se obtiene R para el
emparrillado (ver (Ec. 12.15)).
Repitiendo el razonamiento de la sección 10.2 y de la sección 12.3 se demuestra que:
lY
l Z
l X
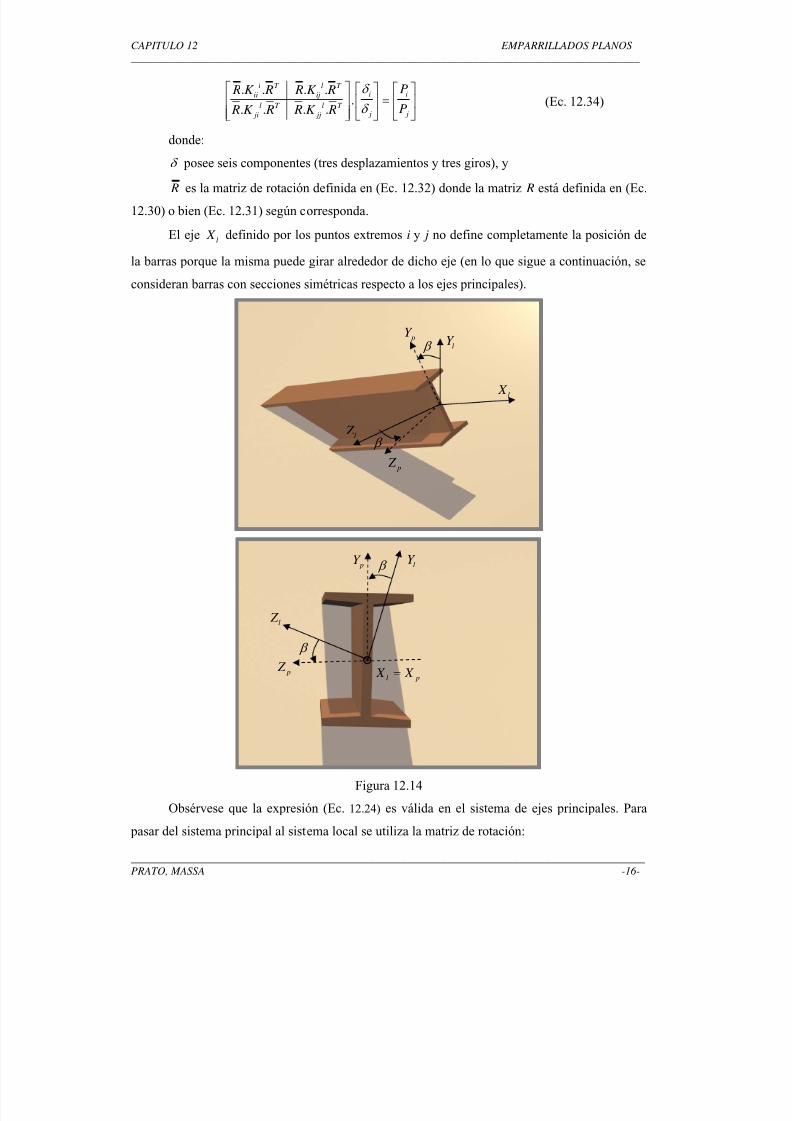
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 357/500
CAPITULO 12 EMPARRILLADOS PLANOS
____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -16-
. . . ..
. . . .
l T l T i iii ij
l T l T j j ji jj
P R K R R K R
P R K R R K R
δ
δ
⎡ ⎤ ⎡ ⎤ ⎡ ⎤=⎢ ⎥ ⎢ ⎥ ⎢ ⎥
⎢ ⎥ ⎣ ⎦ ⎣ ⎦⎣ ⎦ (Ec. 12.34)
donde:
δ posee seis componentes (tres desplazamientos y tres giros), y
R es la matriz de rotación definida en (Ec. 12.32) donde la matriz R está definida en (Ec.
12.30) o bien (Ec. 12.31) según corresponda.
El ejel
X definido por los puntos extremos i y j no define completamente la posición de
la barras porque la misma puede girar alrededor de dicho eje (en lo que sigue a continuación, se
consideran barras con secciones simétricas respecto a los ejes principales).
Figura 12.14
Obsérvese que la expresión (Ec. 12.24) es válida en el sistema de ejes principales. Para
pasar del sistema principal al sistema local se utiliza la matriz de rotación:
l Z
lY
pY
p Z
β
β
pl X X =
lY
l X
l Z
pY
p Z
β
β

5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 358/500
CAPITULO 12 EMPARRILLADOS PLANOS
____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -17-
( ) ( )
( ) ( )
1 0 0
0 cos 0
0 cos
0
sen
sen R
Idem
β β
β β
⎡ ⎤⎢ ⎥−⎢ ⎥⎢ ⎥
= ⎢ ⎥⎢ ⎥
⎢ ⎥⎢ ⎥⎣ ⎦
(Ec. 12.35)
Finalmente, la matriz de rigidez en el sistema global se obtiene de la siguiente forma:
. . . . . . . .
. . . . . . . .
p T T p T T
ii ij
p T T p T T
ji jj
R R K R R R R K R R
R R K R R R R K R R
⎡ ⎤⎡ ⎤ ⎡ ⎤⎣ ⎦ ⎣ ⎦⎢ ⎥⎢ ⎥⎡ ⎤ ⎡ ⎤⎣ ⎦ ⎣ ⎦⎣ ⎦
(Ec. 12.36)
El caso más frecuente es aquel en que 0 β = y por lo tanto R es la matriz identidad y los
cálculos se simplifican.
Las estructuras planas (pórticos y emparrillados) con nudos rígidos cuyos ejes
principales de las barras prismáticas no coinciden con los ejes locales, se comportan
como tridimensionales y deben tratarse como tales (especificando el ángulo β ).
En las estructuras tridimensionales, después de calcular los desplazamientos se obtienen
las fuerzas de extremo de cada barra en su sistema principal. Para ello, se transforman los
desplazamientos de extremo de cada barra al sistema principal de la barra mediante (Ec. 12.37) :
.
.
T
l
T
p l
R
R
δ δ
δ δ
⎫= ⎪⎬
= ⎪⎭
. .T T
p R Rδ δ =
(Ec. 12.37)
Recuérdese que el sistema local se identifica por el índice " l", el sistema de ejes
principales de inercia por el índice " p" y que el sistema global no lleva índice. Luego se utiliza la
matriz de rigidez en el sistema principal de la barra definida por (Ec. 12.24):
. p p pK Pδ = (Ec. 12.38)
Las fuerzas en cada extremo de barra, expresadas en el sistema de ejes principales de
inercia, resultan:
" "
" "
" ""
x
y
z
p x
y
z
Esfuerzo NormalP
Corte según eje principal Y P
Corte según eje principal Z PP
Momento Torsor M
Momento Flector según eje principal Y M Momento Flector según eje principal Z M
⎡ ⎤⎢ ⎥⎢ ⎥⎢ ⎥
= =⎢ ⎥⎢ ⎥⎢ ⎥
⎢ ⎥⎢ ⎥⎣ ⎦
"
⎡ ⎤⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎣ ⎦
(Ec. 12.39)
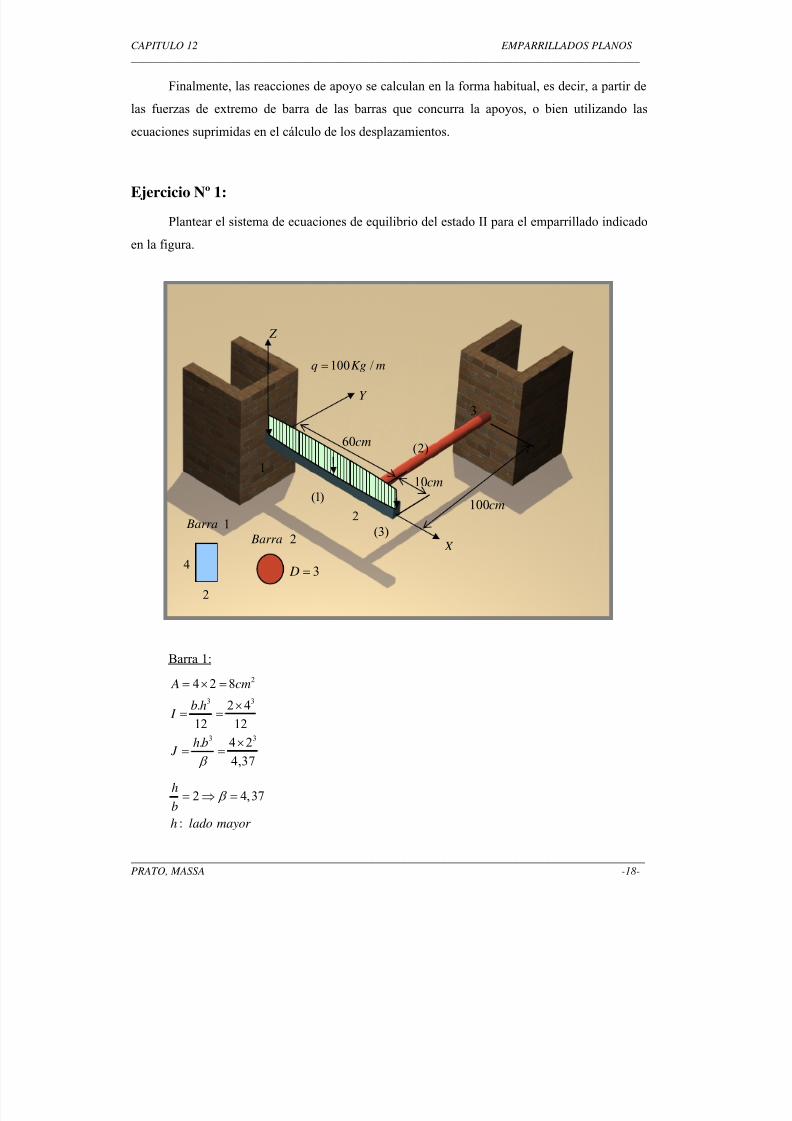
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 359/500
CAPITULO 12 EMPARRILLADOS PLANOS
____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -18-
Finalmente, las reacciones de apoyo se calculan en la forma habitual, es decir, a partir de
las fuerzas de extremo de barra de las barras que concurra la apoyos, o bien utilizando las
ecuaciones suprimidas en el cálculo de los desplazamientos.
Ejercicio Nº 1:
Plantear el sistema de ecuaciones de equilibrio del estado II para el emparrillado indicado
en la figura.
Barra 1:
2
3 3
3 3
4 2 8
. 2 4
12 12
. 4 2
4,37
A cm
b h I
h b J
β
= × =
×= =
×= =
2 4,37
:
h
b
h lado mayor
β = ⇒ =
)3(
mKgq / 100=
)1(
cm60
1
)2(
2
cm10
3
cm100
Z
Y
X
3= D
2 Barra
1 Barra
4
2
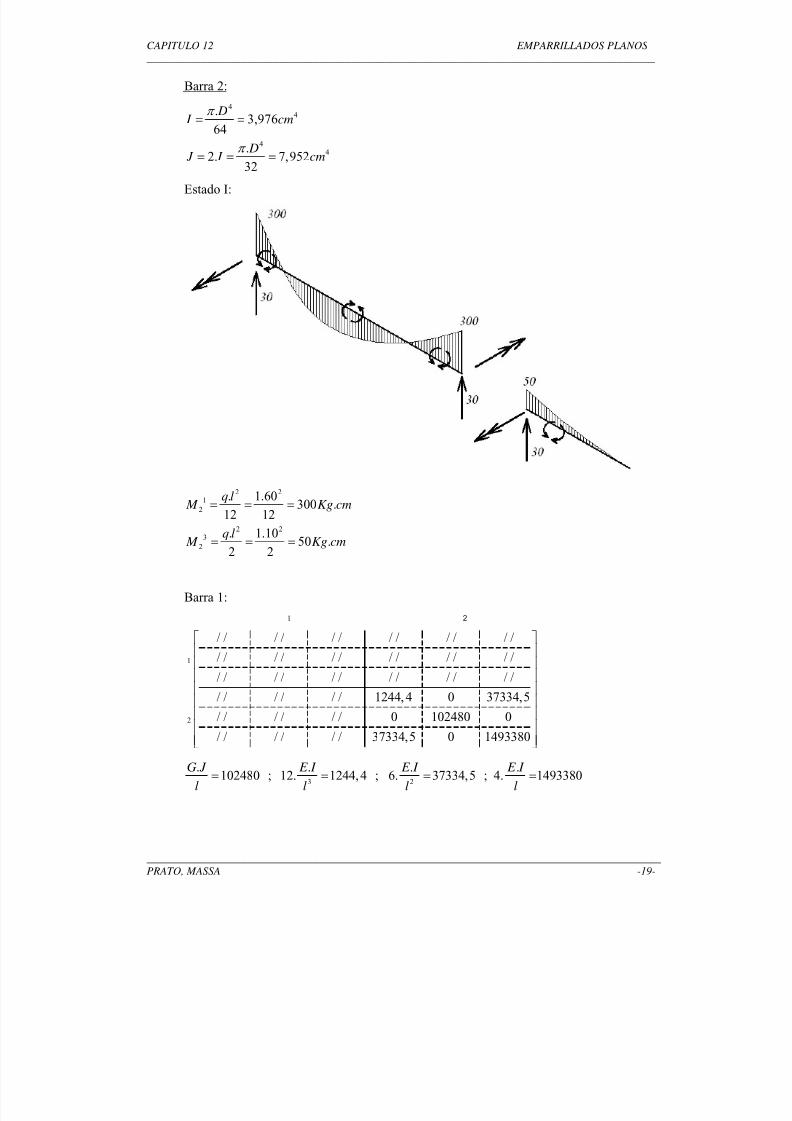
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 360/500
CAPITULO 12 EMPARRILLADOS PLANOS
____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -19-
Barra 2:
44
44
.3,976
64
.
2. 7,95232
D I cm
D
J I cm
π
π
= =
= = =
Estado I:
2 21
2
2 23
2
. 1.60300 .
12 12
. 1.1050 .
2 2
q l M Kg cm
q l M Kg cm
= = =
= = =
Barra 1:
1
1
2
/ / / / / / / / / / / /
/ / / / / / / / / / / /
/ / / / / / / / / / / /
/ / / / / / 1244,4 0 37334,5
/ / / / / / 0 102480 0
/ / / / / / 37334,5 0 1493380
⎡ ⎤
⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎣ ⎦
2
3 2
. . . .102480 ; 12. 1244,4 ; 6. 37334,5 ; 4. 1493380
G J E I E I E I
l l l l= = = =
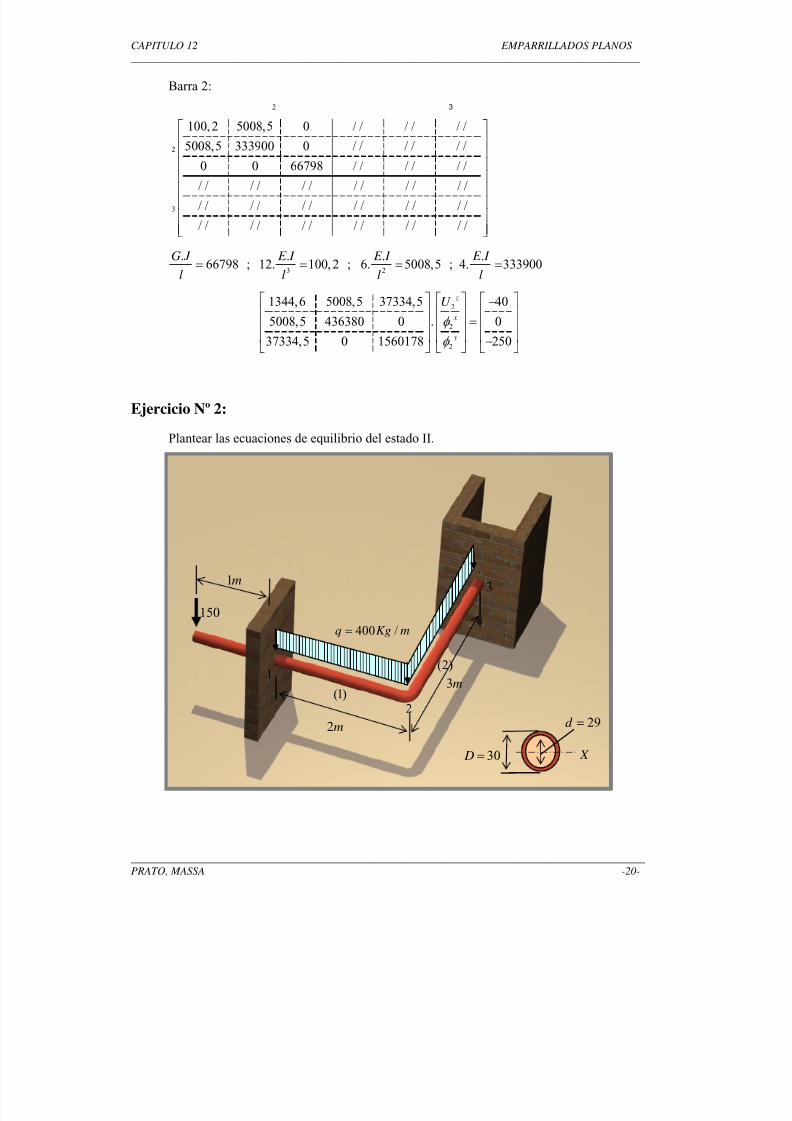
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 361/500
CAPITULO 12 EMPARRILLADOS PLANOS
____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -20-
Barra 2:
2
2
3
100,2 5008,5 0 / / / / / /
5008,5 333900 0 / / / / / /
0 0 66798 / / / / / /
/ / / / / / / / / / / /
/ / / / / / / / / / / /
/ / / / / / / / / / / /
⎡ ⎤⎢ ⎥⎢ ⎥
⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎣ ⎦
3
3 2
. . . .66798 ; 12. 100,2 ; 6. 5008,5 ; 4. 333900
G J E I E I E I
l l l l= = = =
2
2
2
1344,6 5008,5 37334,5 40
5008,5 436380 0 . 037334,5 0 1560178 250
z
x
y
U
φ φ
⎡ ⎤ ⎡ ⎤ ⎡ ⎤−⎢ ⎥ ⎢ ⎥ ⎢ ⎥
=⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥−⎣ ⎦ ⎣ ⎦ ⎣ ⎦
Ejercicio Nº 2:
Plantear las ecuaciones de equilibrio del estado II.
30= D
150
29=d
mKgq / 400=
)2(
)1(
m13
2
m2
m31
X
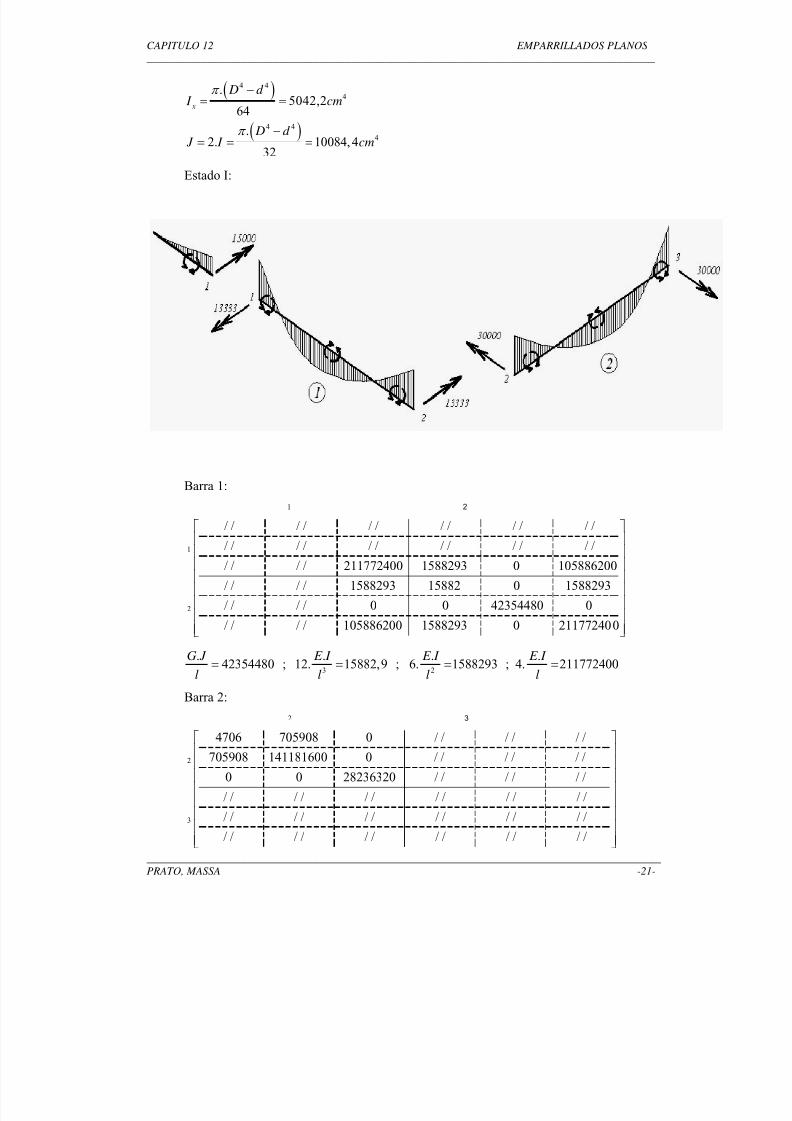
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 362/500
CAPITULO 12 EMPARRILLADOS PLANOS
____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -21-
( )
( )
4 4
4
4 4
4
.5042,2
64
.2. 10084,4
32
x
D d I cm
D d J I cm
π
π
−= =
−= = =
Estado I:
Barra 1:1
1
2
/ / / / / / / / / / / /
/ / / / / / / / / / / /
/ / / / 211772400 1588293 0 105886200
/ / / / 1588293 15882 0 1588293
/ / / / 0 0 42354480 0
/ / / / 105886200 1588293 0 21177240
2
0
⎡ ⎤⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎣ ⎦
3 2
. . . .42354480 ; 12. 15882,9 ; 6. 1588293 ; 4. 211772400G J E I E I E I
l l l l= = = =
Barra 2:
2
2
3
4706 705908 0 / / / / / /
705908 141181600 0 / / / / / /
0 0 28236320 / / / / / /
/ / / / / / / / / / / /
/ / / / / / / / / / / / / / / / / / / / / / / /
⎡ ⎤⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥
⎢ ⎥⎢ ⎥⎢ ⎥⎣ ⎦
3
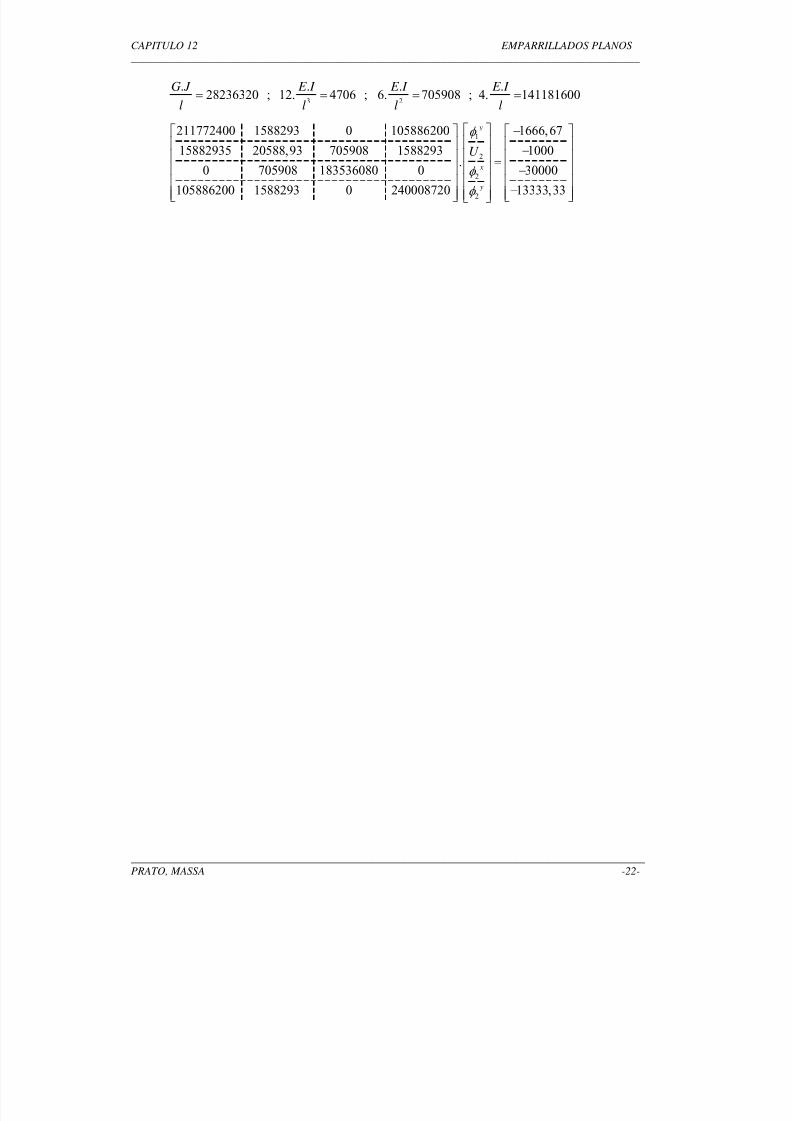
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 363/500
CAPITULO 12 EMPARRILLADOS PLANOS
____________________________________________________________________________________________
_____________________________________________________________________________________________
PRATO, MASSA -22-
3 2
. . . .28236320 ; 12. 4706 ; 6. 705908 ; 4. 141181600
G J E I E I E I
l l l l= = = =
1
2
2
2
211772400 1588293 0 105886200 1666,67
15882935 20588,93 705908 1588293 1000
.0 705908 183536080 0 30000
105886200 1588293 0 240008720 13333,33
y
x
y
U
φ
φ
φ
−⎡ ⎤⎡ ⎤ ⎡ ⎤⎢ ⎥⎢ ⎥ ⎢ ⎥−⎢ ⎥⎢ ⎥ ⎢ ⎥
=⎢ ⎥⎢ ⎥ ⎢ ⎥−⎢ ⎥⎢ ⎥ ⎢ ⎥
−⎢ ⎥⎢ ⎥ ⎢ ⎥⎣ ⎦ ⎣ ⎦⎣ ⎦
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 364/500
Capítulo 1 Consideraciones generales sobre dinámica estructural
Introducción
El objeto de la dinámica estructural es el análisis de estructuras bajo cargas dinámicas, es
decir cargas que varían en el tiempo. Aunque la mayoría de las estructuras pueden diseñarse
considerando sólo cargas estáticas, hay importantes excepciones que requieren del proyectistala posibilidad de distinguir entre cargas estáticas y dinámicas.
En realidad, las cargas accidentales o las cargas móviles, a diferencia del peso propio, rara
vez son estrictamente estáticas porque su aplicación sobre la estructura requiere de un cierto
tiempo que en definitiva debe ser analizado para establecer si se trata de una carga estática o
dinámica. Sin embargo es intuitivamente válido aceptar que si la magnitud de la fuerza varia
en forma suficientemente lenta no causará efectos dinámicos y podrá tratarse como estática.
Para determinar si la carga varía en forma “lenta” o “rápida” el valor de referencia paracomparación es el “periodo natural de la estructura”. El periodo natural es el tiempo que tarda
la estructura en recorrer un ciclo de vibración libre, es decir la vibración que ocurre después
que finaliza la excitación externa o después que la carga deja de variar y se mantiene
constante. El periodo natural depende de la masa, de la rigidez y de las condiciones de
vínculo, todas éstas características intrínsecas o propias de la estructura.
El interés en el análisis de cargas dinámicas ha ido creciendo constantemente en los
últimos tiempos, en parte debido a que el avance en la tecnología ha hecho posibles diseños
más apropiados, y que las herramientas computacionales actuales permiten hacer con carácter
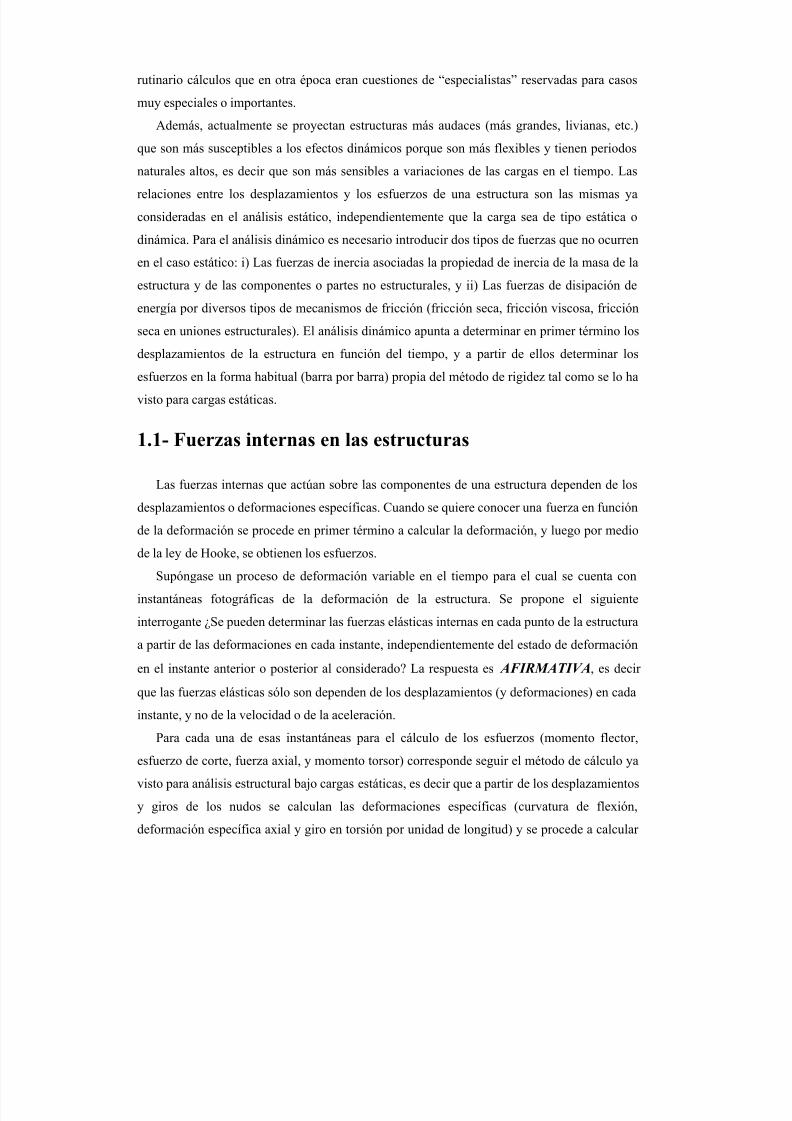
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 365/500
rutinario cálculos que en otra época eran cuestiones de “especialistas” reservadas para casos
muy especiales o importantes.
Además, actualmente se proyectan estructuras más audaces (más grandes, livianas, etc.)
que son más susceptibles a los efectos dinámicos porque son más flexibles y tienen periodos
naturales altos, es decir que son más sensibles a variaciones de las cargas en el tiempo. Las
relaciones entre los desplazamientos y los esfuerzos de una estructura son las mismas ya
consideradas en el análisis estático, independientemente que la carga sea de tipo estática o
dinámica. Para el análisis dinámico es necesario introducir dos tipos de fuerzas que no ocurren
en el caso estático: i) Las fuerzas de inercia asociadas la propiedad de inercia de la masa de la
estructura y de las componentes o partes no estructurales, y ii) Las fuerzas de disipación de
energía por diversos tipos de mecanismos de fricción (fricción seca, fricción viscosa, fricción
seca en uniones estructurales). El análisis dinámico apunta a determinar en primer término los
desplazamientos de la estructura en función del tiempo, y a partir de ellos determinar los
esfuerzos en la forma habitual (barra por barra) propia del método de rigidez tal como se lo ha
visto para cargas estáticas.
1.1- Fuerzas internas en las estructuras
Las fuerzas internas que actúan sobre las componentes de una estructura dependen de losdesplazamientos o deformaciones específicas. Cuando se quiere conocer una fuerza en función
de la deformación se procede en primer término a calcular la deformación, y luego por medio
de la ley de Hooke, se obtienen los esfuerzos.
Supóngase un proceso de deformación variable en el tiempo para el cual se cuenta con
instantáneas fotográficas de la deformación de la estructura. Se propone el siguiente
interrogante ¿Se pueden determinar las fuerzas elásticas internas en cada punto de la estructura
a partir de las deformaciones en cada instante, independientemente del estado de deformación
en el instante anterior o posterior al considerado? La respuesta es AFIRMATIVA, es decir
que las fuerzas elásticas sólo son dependen de los desplazamientos (y deformaciones) en cada
instante, y no de la velocidad o de la aceleración.
Para cada una de esas instantáneas para el cálculo de los esfuerzos (momento flector,
esfuerzo de corte, fuerza axial, y momento torsor) corresponde seguir el método de cálculo ya
visto para análisis estructural bajo cargas estáticas, es decir que a partir de los desplazamientos
y giros de los nudos se calculan las deformaciones específicas (curvatura de flexión,
deformación específica axial y giro en torsión por unidad de longitud) y se procede a calcular
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 366/500
las fuerzas elásticas internas a través de las relaciones constitutivas (Ley de Hooke para el caso
de materiales linealmente elásticos). La esencia del problema dinámico es evaluar los
desplazamientos de la estructura en cada instante del tiempo, y a partir de ellos proceder a
determinar los esfuerzos mediante las expresiones de la ley de Hooke o ley constitutiva del
material, sin distinguir entre un problema dinámico de otro estático. En realidad esta
aseveración es una primera aproximación ya que en alguna medida la velocidad con que se
deforma el material o se ensaya una probeta puede modificar en algunos casos al modulo
elástico del material, y por ende las tensiones correspondientes para igual valor de las
deformaciones. Cuando la velocidad de carga es elevada el modulo elástico tiende a
incrementarse por la viscosidad interna del material que no responde en forma instantánea. En
el marco del presente curso se considerará que las posibles variaciones del módulo elástico en
función de la velocidad de carga es un efecto de segundo orden, es decir que se supone que no
varía apreciablemente con la ley de variación de la carga en función del tiempo. De todos
modos, el análisis de la influencia de la velocidad de aplicación de la carga en el valor del
módulo elástico puede ser expresada en forma aproximada a través del concepto de
amortiguamiento viscoso interno de la estructura introduciendo el concepto de módulo elástico
dinámico.
1.2- Respuesta a cargas variables en el tiempo
El problema central de todo problema dinámico es calcular los desplazamientos (y las
respectivas deformaciones) de la estructura bajo un sistema de cargas exteriores variables con
el tiempo ( ) F t . Este tipo de proceso de carga ocurre, por ejemplo, cuando un cuerpo cae sobre
una viga, cuando se levanta desde el suelo un objeto con un puente grúa, o cuando un
vehículo circula sobre un puente aún cuando el estado del pavimento sea perfecto. En un caso
genérico la amplitud de la carga ( ) F t describe un diagrama como el de la Figura 1.1, que seconsidera que es conocida y que constituye un dato del problema.
Figura 1.1
( ) F t
t
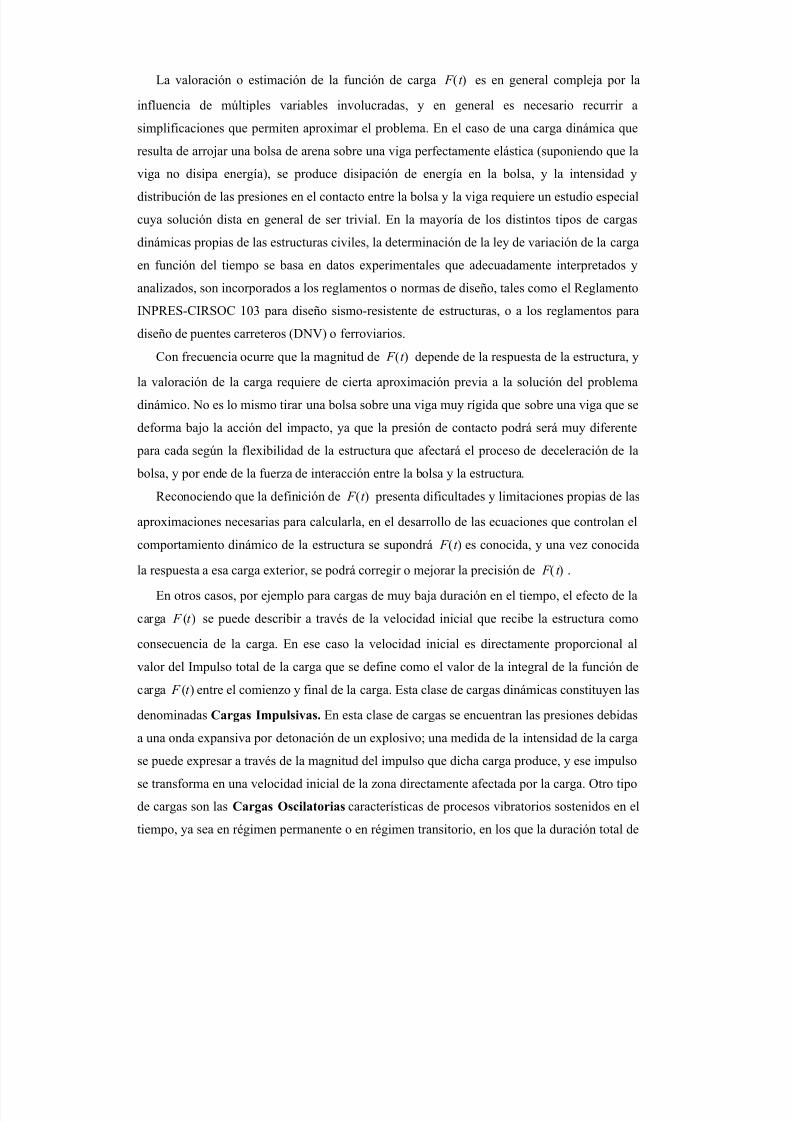
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 367/500
La valoración o estimación de la función de carga ( ) F t es en general compleja por la
influencia de múltiples variables involucradas, y en general es necesario recurrir a
simplificaciones que permiten aproximar el problema. En el caso de una carga dinámica que
resulta de arrojar una bolsa de arena sobre una viga perfectamente elástica (suponiendo que la
viga no disipa energía), se produce disipación de energía en la bolsa, y la intensidad y
distribución de las presiones en el contacto entre la bolsa y la viga requiere un estudio especial
cuya solución dista en general de ser trivial. En la mayoría de los distintos tipos de cargas
dinámicas propias de las estructuras civiles, la determinación de la ley de variación de la carga
en función del tiempo se basa en datos experimentales que adecuadamente interpretados y
analizados, son incorporados a los reglamentos o normas de diseño, tales como el Reglamento
INPRES-CIRSOC 103 para diseño sismo-resistente de estructuras, o a los reglamentos para
diseño de puentes carreteros (DNV) o ferroviarios.
Con frecuencia ocurre que la magnitud de ( ) F t depende de la respuesta de la estructura, y
la valoración de la carga requiere de cierta aproximación previa a la solución del problema
dinámico. No es lo mismo tirar una bolsa sobre una viga muy rígida que sobre una viga que se
deforma bajo la acción del impacto, ya que la presión de contacto podrá será muy diferente
para cada según la flexibilidad de la estructura que afectará el proceso de deceleración de la
bolsa, y por ende de la fuerza de interacción entre la bolsa y la estructura.
Reconociendo que la definición de ( ) F t presenta dificultades y limitaciones propias de las
aproximaciones necesarias para calcularla, en el desarrollo de las ecuaciones que controlan el
comportamiento dinámico de la estructura se supondrá ( ) F t es conocida, y una vez conocida
la respuesta a esa carga exterior, se podrá corregir o mejorar la precisión de ( ) F t .
En otros casos, por ejemplo para cargas de muy baja duración en el tiempo, el efecto de la
carga ( ) F t se puede describir a través de la velocidad inicial que recibe la estructura como
consecuencia de la carga. En ese caso la velocidad inicial es directamente proporcional al
valor del Impulso total de la carga que se define como el valor de la integral de la función de
carga ( ) F t entre el comienzo y final de la carga. Esta clase de cargas dinámicas constituyen las
denominadas Cargas Impulsivas. En esta clase de cargas se encuentran las presiones debidas
a una onda expansiva por detonación de un explosivo; una medida de la intensidad de la carga
se puede expresar a través de la magnitud del impulso que dicha carga produce, y ese impulso
se transforma en una velocidad inicial de la zona directamente afectada por la carga. Otro tipo
de cargas son las Cargas Oscilatorias características de procesos vibratorios sostenidos en el
tiempo, ya sea en régimen permanente o en régimen transitorio, en los que la duración total de
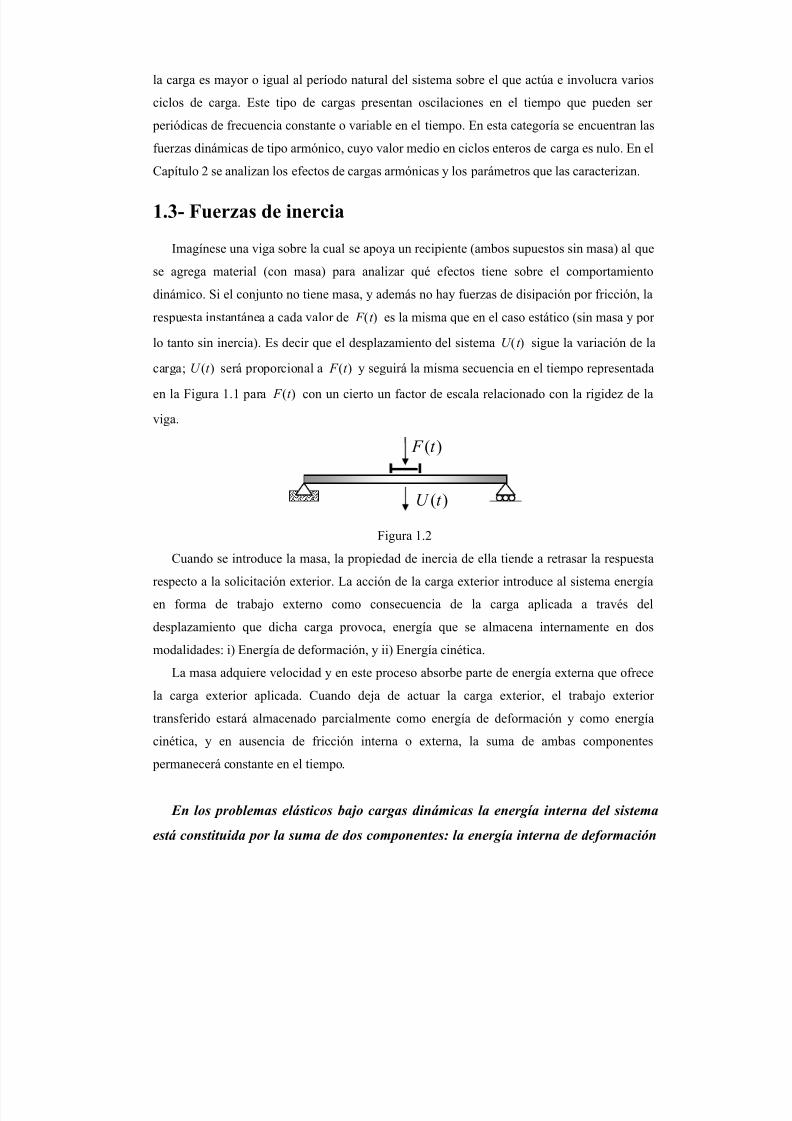
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 368/500
la carga es mayor o igual al período natural del sistema sobre el que actúa e involucra varios
ciclos de carga. Este tipo de cargas presentan oscilaciones en el tiempo que pueden ser
periódicas de frecuencia constante o variable en el tiempo. En esta categoría se encuentran las
fuerzas dinámicas de tipo armónico, cuyo valor medio en ciclos enteros de carga es nulo. En el
Capítulo 2 se analizan los efectos de cargas armónicas y los parámetros que las caracterizan.
1.3- Fuerzas de inercia
Imagínese una viga sobre la cual se apoya un recipiente (ambos supuestos sin masa) al que
se agrega material (con masa) para analizar qué efectos tiene sobre el comportamiento
dinámico. Si el conjunto no tiene masa, y además no hay fuerzas de disipación por fricción, la
respuesta instantánea a cada valor de ( ) F t es la misma que en el caso estático (sin masa y por
lo tanto sin inercia). Es decir que el desplazamiento del sistema ( )U t sigue la variación de la
carga; ( )U t será proporcional a ( ) F t y seguirá la misma secuencia en el tiempo representada
en la Figura 1.1 para ( ) F t con un cierto un factor de escala relacionado con la rigidez de la
viga.
Figura 1.2
Cuando se introduce la masa, la propiedad de inercia de ella tiende a retrasar la respuesta
respecto a la solicitación exterior. La acción de la carga exterior introduce al sistema energía
en forma de trabajo externo como consecuencia de la carga aplicada a través del
desplazamiento que dicha carga provoca, energía que se almacena internamente en dos
modalidades: i) Energía de deformación, y ii) Energía cinética.La masa adquiere velocidad y en este proceso absorbe parte de energía externa que ofrece
la carga exterior aplicada. Cuando deja de actuar la carga exterior, el trabajo exterior
transferido estará almacenado parcialmente como energía de deformación y como energía
cinética, y en ausencia de fricción interna o externa, la suma de ambas componentes
permanecerá constante en el tiempo.
En los problemas elásticos bajo cargas dinámicas la energía interna del sistemaestá constituida por la suma de dos componentes: la energía interna de deformación
( ) F t
( )U t
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 369/500
y la energía cinética. Si no hay fricción, el total de la energía externa suministrada
por la carga aplicada se transformará en energía interna de deformación y en
energía cinética en proporciones que varían en función del tiempo.
La respuesta dinámica puede traer como consecuencia que su valor máximo represente una
amplificación o una reducción respecto a la que se produciría si el sistema no tuviera inercia.
En general, para todas las restantes condiciones idénticas, no se puede decir que la respuesta
dinámica necesariamente sea mayor que la estática, es decir que el efecto de la inercia de las
masas puede llevar a una amplificación o a una reducción de la respuesta respecto al mismo
caso sin inercia.
La evaluación de la respuesta dinámica de un sistema elástico estará asociada
fundamentalmente a dos importantes características dinámicas de la estructura, una de ellas
controlada por la relación entre la inercia y rigidez elástica de las componentes y que se
expresa a través del Período Natural “T” del sistema, o de su inversa, la frecuencia Natural f
= 1/T , y la otra asociada a la capacidad de disipación de energía a través de fuerzas que se
describen en forma genérica como fuerzas de fricción o de “amortiguamiento”.
1.4- Velocidad de reacción de una estructura
La velocidad de reacción de una estructura se define a través de los periodos naturales de
vibración. La capacidad de responder a una acción externa (inercia) de alguna forma se puede
expresar a través de los llamados “ periodos naturales de vibración de la estructura”.
Supóngase que una masa sustentada por un resorte elástico que es apartada de su posición de
equilibrio y luego es liberada. Ésta comenzará a oscilar alrededor de la posición de equilibrio
inicial con una cierta frecuencia propia f (y periodo T 1/f = ), que permite caracterizar lacapacidad del sistema masa/resorte para seguir la variación de la carga en el tiempo. Según la
variación en el tiempo de la función de carga con respecto a T se podrá establecer si la carga
aplicada produce efectos dinámicos o no, y en este último caso se dirá que el comportamiento
del sistema frente a la carga es estático. Si el tiempo en el que se introduce la carga es muy
pequeño frente al periodo natural se considera que la carga se aplicó en forma dinámica. La
capacidad de la estructura para “reaccionar” frente a la carga está directamente asociada al
valor del período “T ”.
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 370/500
Figura 1.3
En síntesis, se puede concluir que el problema es estático o dinámico según los valores del
cociente t D / T :
Si 1 Dt
T ≤ → PROBLEMA DINAMICO
Si Dt T → PROBLEMA ESTATICO
1.5- Fuerzas disipativas
Se denomina “Amortiguamiento” a la capacidad de disipar energía del sistema. Como se
demostrará con la solución de las ecuaciones que controlan la respuesta dinámica del sistema,
hay casos en que las máximas tensiones no dependen del amortiguamiento mientras que en
otros casos el amortiguamiento juega un papel fundamental en la amplitud de la respuestadinámica.
Figura 1.4
Para una carga de corta duración (frente al período T de la estructura) y un único pulso
como se indica en la Figura 1.4, el amortiguamiento de la estructura no incide
apreciablemente en la magnitud de la respuesta máxima, y con frecuencia no es considerado
para calcular el valor máximo de la respuesta. Por el contrario, en el caso de movimientos
vibratorios sostenidos de tipo periódico de larga duración en el tiempo (frente al período T) el
amortiguamiento puede tener gran incidencia en la magnitud de la respuesta dependiendo de la
( ) F t
t
( ) F t
t Dt Dt
( ) F t
t
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 371/500
frecuencia de la excitación en comparación con la frecuencia natural del sistema. Para cargas
de baja frecuencia frente a la frecuencia natural, se demostrará más adelante que la respuesta
es esencialmente estática y el amortiguamiento no afecta a la respuesta. Similarmente, para
cargas de alta frecuencia frente a la frecuencia natural, el amortiguamiento tampoco incide
significativamente en la amplitud de la respuesta. Por el contrario, cuando la frecuencia de la
carga aplicada se encuentra en el entorno entre 0.5 y 2 veces la frecuencia natural de la
estructura, el amortiguamiento cobra un rol decisivo en la amplitud de la respuesta,
especialmente cuando la frecuencia natural del sistema y la excitación son muy próximas entre
sí (resonancia). Por lo tanto, las fuerzas disipativas deben ser tenidas en cuenta en los casos de
cargas oscilatorias de larga duración, aunque no siempre tendrán incidencia apreciable en la
magnitud de la respuesta.
Los procesos de disipación de energía que se denominan genéricamente como
“amortiguamiento” del sistema, son en general de naturaleza compleja. Si la ley de Hooke se
cumple durante el proceso de carga y descarga, el grafico F U − que relaciona a las Fuerza-
con los Desplazamientos sigue una línea recta y el área representativa de la energía que se
disipa en el proceso de carga es igual a cero, ya que la energía almacenada durante la carga se
recupera en la descarga, resultando nula el área encerrada por la curva de carga y descarga, tal
como se ilustra en la Figura 1.5
Cuando intervienen fuerzas disipativas, una primera aproximación habitual es considerar
que D F es proporcional a la velocidad U i
a través de una constante positiva C . Esta
representación es conocida como “amortiguador viscoso”. El valor de C no necesariamente es
constante independiente de la amplitud del desplazamiento U , pero es habitual tratarla como
si lo fuera, y la expresión de D F es:
. D F C U =i
Considérese ahora una barra elástica sometida a tracción por las fuerzas ( ) F t y ( ) F t −
actuando en sus extremos, y supóngase que el material del que está compuesta la barra es
“visco-elástico”, es decir que las fuerzas aplicadas en sus extremos están equilibradas por dos
tipos de mecanismos en paralelo: i) Un mecanismo elástico propio del comportamiento
elástico descrito por la ley de Hooke, y ii) Un mecanismo viscoso que genera las fuerzas D F .
Si se supone que ambos mecanismos funcionan en paralelo, es decir que en cada instante una
parte de la carga exterior aplicada ( ) F t es equilibrada por las fuerzas elásticas y otra parte por
las fuerzas viscosas D F , la variación del desplazamiento de los extremos de la barra como

5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 372/500
función de la carga total ( ) F t seguirá la curva indicada en la Figura 1.6. El diagrama F U −
pasó de ser una línea recta como en la Figura 1.5 a una elipse que encierra un área
proporcional a la energía disipada en cada ciclo de deformación completo (carga y descarga).
Nótese que en los sistemas físicos aquí considerados la elipse que describe el proceso de carga
y descarga se desarrolla en el sentido horario, y la energía neta que se disipa en cada ciclo es
positiva y proporcional al área encerrada por la elipse.
Figura 1.5 Figura 1.6 Figura 1.7
Debe tenerse en cuenta que la energía disipada en el amortiguamiento viscoso no depende
solamente de la amplitud del desplazamiento máximo “A” sino que también varía con la
velocidad de carga, es decir que si se incrementa la frecuencia de la excitación aplicada, seincrementará el área de la elipse ya que la energía disipada en cada ciclo es proporcional a la
velocidad, la que a su vez es proporcional a la frecuencia de la excitación (para una amplitud
dada del desplazamiento máximo en cada ciclo). Este efecto se ilustra en la Figura 1.7.
Cuando la carga y descarga ocurre con suficiente lentitud se tiene una línea recta como la
Figura 1.5. Normalmente las estructuras de obras civiles tienen un amortiguamiento
relativamente bajo (la medida del amortiguamiento se define más adelante), salvo que por
alguna razón particular se requieran mecanismos especiales de disipación de energía, tal como
ocurre en algunos puentes de gran luz sustentados por cables en los que a veces es necesario
introducir dispositivos de disipación.
En cada ciclo de carga y descarga se disipa energía pero resulta relativamente complejo
efectuar mediciones directas de las fuerzas disipativas. La Figura 1.8 ilustra la parte elástica y
la parte viscosa de la carga total aplicada para cada valor del desplazamiento.
F
U A
B
F
U
A
B
F
U
A
B
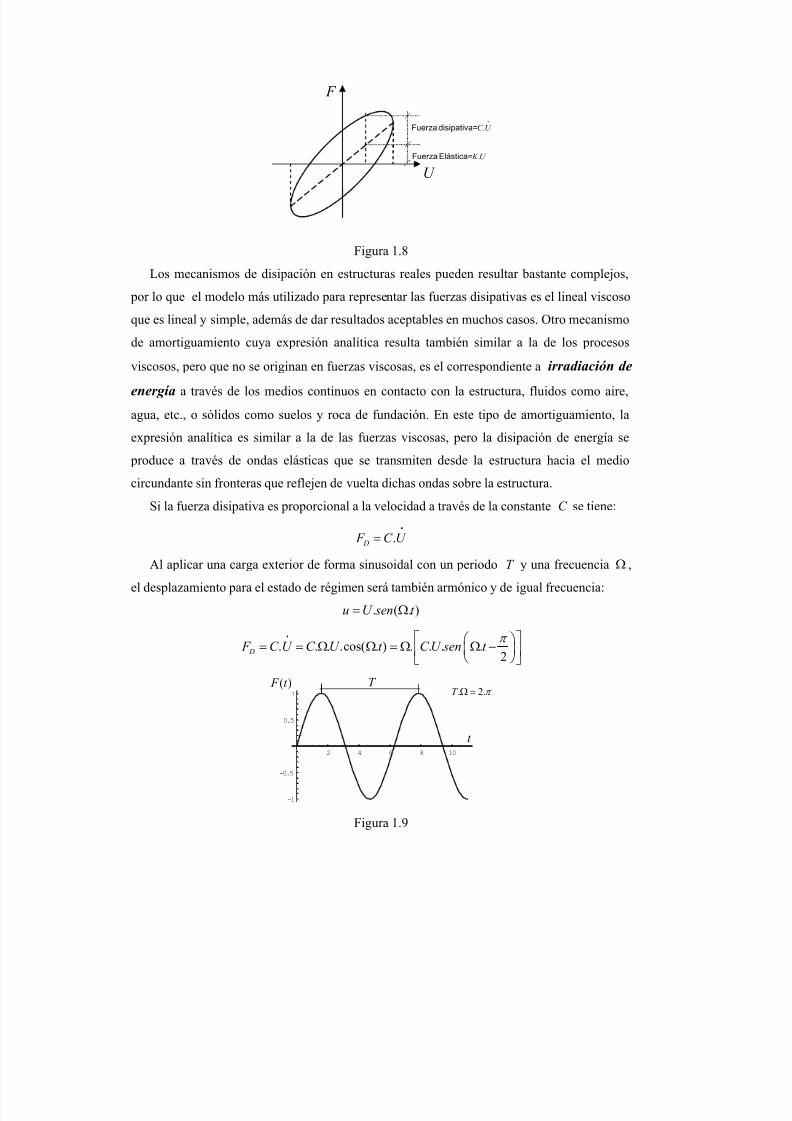
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 373/500
Figura 1.8
Los mecanismos de disipación en estructuras reales pueden resultar bastante complejos,
por lo que el modelo más utilizado para representar las fuerzas disipativas es el lineal viscoso
que es lineal y simple, además de dar resultados aceptables en muchos casos. Otro mecanismo
de amortiguamiento cuya expresión analítica resulta también similar a la de los procesos
viscosos, pero que no se originan en fuerzas viscosas, es el correspondiente a irradiación de
energía a través de los medios continuos en contacto con la estructura, fluidos como aire,
agua, etc., o sólidos como suelos y roca de fundación. En este tipo de amortiguamiento, la
expresión analítica es similar a la de las fuerzas viscosas, pero la disipación de energía se
produce a través de ondas elásticas que se transmiten desde la estructura hacia el medio
circundante sin fronteras que reflejen de vuelta dichas ondas sobre la estructura.Si la fuerza disipativa es proporcional a la velocidad a través de la constante C se tiene:
. D F C U =i
Al aplicar una carga exterior de forma sinusoidal con un periodo T y una frecuencia Ω ,
el desplazamiento para el estado de régimen será también armónico y de igual frecuencia:
. ( . )u U sen t = Ω
. . . .cos( . ) . . . .2 D
F C U C U t C U sen t π
= = Ω Ω = Ω Ω −
i
Figura 1.9
F
U
.Fuerza disipativa=C U i
.Fuerza Elástica= K U
2 4 6 8 10
-1
-0.5
0.5
1
T ( ) F t
t
. 2.T π Ω =
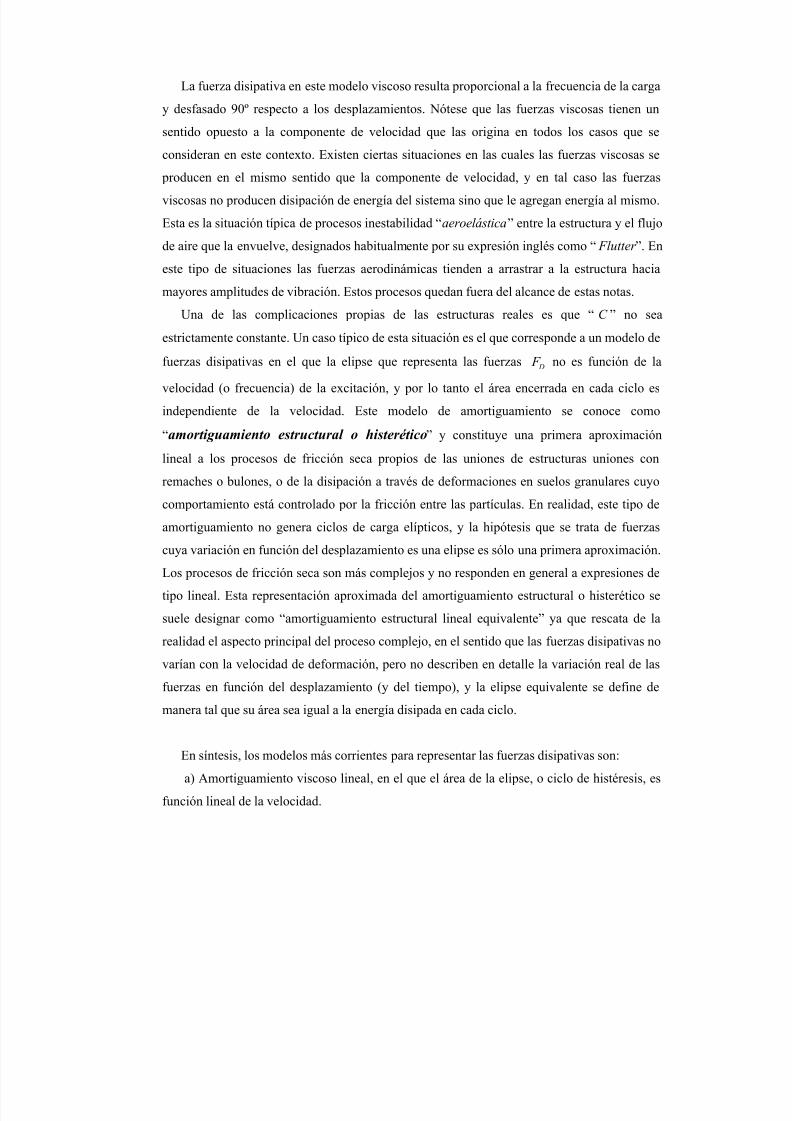
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 374/500
La fuerza disipativa en este modelo viscoso resulta proporcional a la frecuencia de la carga
y desfasado 90º respecto a los desplazamientos. Nótese que las fuerzas viscosas tienen un
sentido opuesto a la componente de velocidad que las origina en todos los casos que se
consideran en este contexto. Existen ciertas situaciones en las cuales las fuerzas viscosas se
producen en el mismo sentido que la componente de velocidad, y en tal caso las fuerzas
viscosas no producen disipación de energía del sistema sino que le agregan energía al mismo.
Esta es la situación típica de procesos inestabilidad “aeroelástica” entre la estructura y el flujo
de aire que la envuelve, designados habitualmente por su expresión inglés como “ Flutter ”. En
este tipo de situaciones las fuerzas aerodinámicas tienden a arrastrar a la estructura hacia
mayores amplitudes de vibración. Estos procesos quedan fuera del alcance de estas notas.
Una de las complicaciones propias de las estructuras reales es que “ C ” no sea
estrictamente constante. Un caso típico de esta situación es el que corresponde a un modelo de
fuerzas disipativas en el que la elipse que representa las fuerzas D F no es función de la
velocidad (o frecuencia) de la excitación, y por lo tanto el área encerrada en cada ciclo es
independiente de la velocidad. Este modelo de amortiguamiento se conoce como
“amortiguamiento estructural o histerético” y constituye una primera aproximación
lineal a los procesos de fricción seca propios de las uniones de estructuras uniones con
remaches o bulones, o de la disipación a través de deformaciones en suelos granulares cuyo
comportamiento está controlado por la fricción entre las partículas. En realidad, este tipo de
amortiguamiento no genera ciclos de carga elípticos, y la hipótesis que se trata de fuerzas
cuya variación en función del desplazamiento es una elipse es sólo una primera aproximación.
Los procesos de fricción seca son más complejos y no responden en general a expresiones de
tipo lineal. Esta representación aproximada del amortiguamiento estructural o histerético se
suele designar como “amortiguamiento estructural lineal equivalente” ya que rescata de la
realidad el aspecto principal del proceso complejo, en el sentido que las fuerzas disipativas no
varían con la velocidad de deformación, pero no describen en detalle la variación real de las
fuerzas en función del desplazamiento (y del tiempo), y la elipse equivalente se define de
manera tal que su área sea igual a la energía disipada en cada ciclo.
En síntesis, los modelos más corrientes para representar las fuerzas disipativas son:
a) Amortiguamiento viscoso lineal, en el que el área de la elipse, o ciclo de histéresis, es
función lineal de la velocidad.

5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 375/500
b) Amortiguamiento estructural lineal equivalente: en el que las fuerzas de fricción tienden
a ser proporcionales a la amplitud del desplazamiento pero independientes de la velocidad.
1.6- Características dinámicas de una estructura
Las características dinámicas más importantes de una estructura son los periodos naturales
de vibración y el amortiguamiento. El periodo natural es siempre importante e influye en
todos los casos de cargas dinámicas, mientras que el amortiguamiento en algunos casos puede
no ser importante y en otros casos no.
La respuesta dinámica depende además de otras propiedades como la capacidad de disipar
energía por deformación plástica y las variaciones de las propiedades de los materiales
causadas por la velocidad con que se aplica la carga. Éstos y otros factores pueden ser
importantes en algunos problemas, pero los más relevantes en todos los casos, son en
definitiva el periodo natural y el amortiguamiento del sistema.
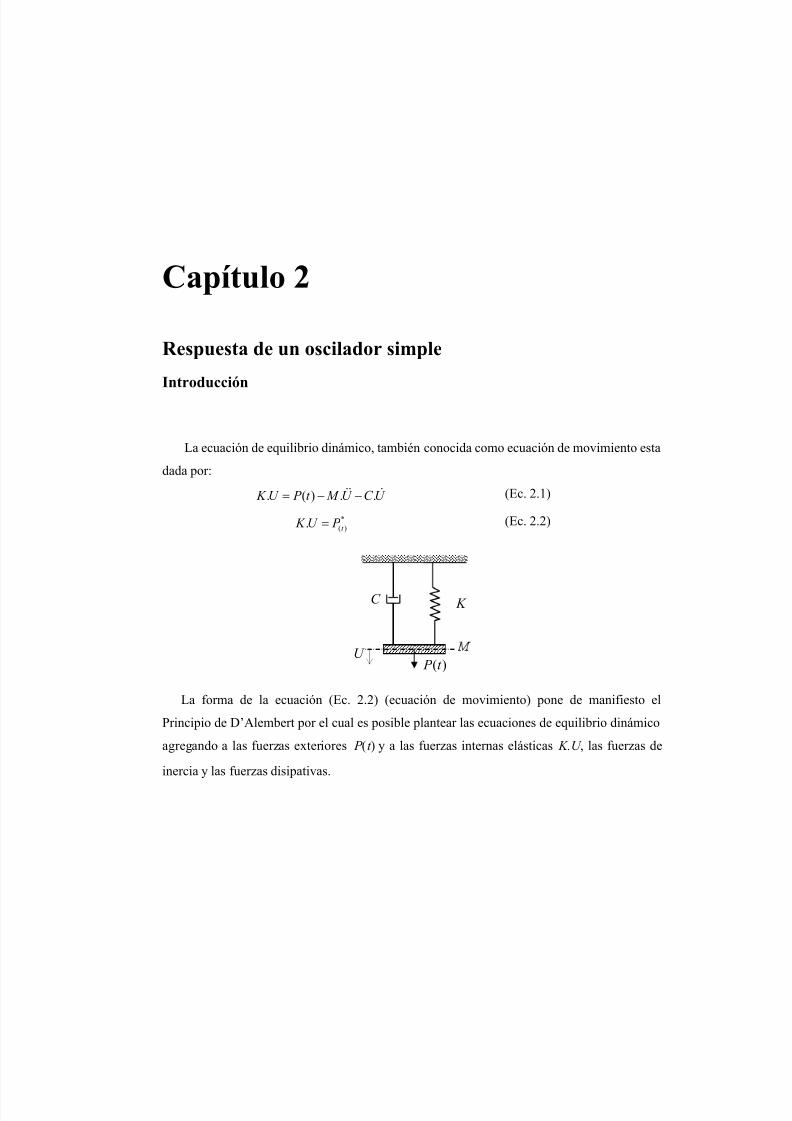
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 376/500
Capítulo 2 Respuesta de un oscilador simple
Introducción
La ecuación de equilibrio dinámico, también conocida como ecuación de movimiento esta
dada por:
. ( ) . . K U P t M U C U = − − (Ec. 2.1)
*( ). t K U P = (Ec. 2.2)
La forma de la ecuación (Ec. 2.2) (ecuación de movimiento) pone de manifiesto el
Principio de D’Alembert por el cual es posible plantear las ecuaciones de equilibrio dinámico
agregando a las fuerzas exteriores ( ) P t y a las fuerzas internas elásticas K.U , las fuerzas de
inercia y las fuerzas disipativas.
( ) P t
K
U
C

5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 377/500
La ecuación (Ec. 2.1) pone de manifiesto que la fuerza de inercia .U − es de signo
opuesto a U , o sea que se opone al cambio de velocidad, y la fuerza disipativa .C U − se
opone al cambio de desplazamiento o de posición de la masa.
El desplazamiento instantáneo se supone U esta medido con respecto a un sistemainercial o fijo.
Antes de presentar la solución general de la ecuación (Ec. 2.1) es conveniente estudiar el
caso de vibraciones libres, es decir para ( ) 0 P t ≡ . Para definir las propiedades dinámicas de
una estructura debemos estudiar su comportamiento cuando oscila libremente. Allí surge el
periodo propio T , que comparado luego con el periodo de la carga nos permite determinar el
carácter estático o dinámico de la carga variable en el tiempo.
2.1- Vibraciones libres
La ecuación lineal, homogénea, a coeficientes constantes:
. . . 0 K U C U M U + + = (Ec. 2.3)
Tiene por solución:
1 2. .. .r t r t U Ae B e= + (Ec. 2.4)
A y B son constantes a determinar en función de las condiciones iniciales; 1r y 2r son las
raíces de la ecuación “característica”:
2. . 0M r C r K + + =
2
1,2
4. .
2.
C C M K r
M
− ± −=
(Ec. 2.5)
El carácter de las raíces de la ecuación (Ec. 2.5) depende del valor radicando. Se
distinguen tres casos:
a) 2 4. . 0C K M − >
b) 2 4. . 0C K M − =
c) 2 4. . 0C K M − <
El caso a) corresponde a un amortiguador supercrítico, el b) a uno crítico, y el c) a uno
subcrítico. En el caso c) las raíces 1r y 2r son reales, distintas y negativas, por lo cual se verá
que la solución no tiene términos oscilatorios, sino que decaen exponencialmente. En el
caso c) las raíces son complejas con parte real e imaginaria distinta de cero, y la solucióncomprende términos oscilantes que decaen exponencialmente. En el caso a) las dos raíces
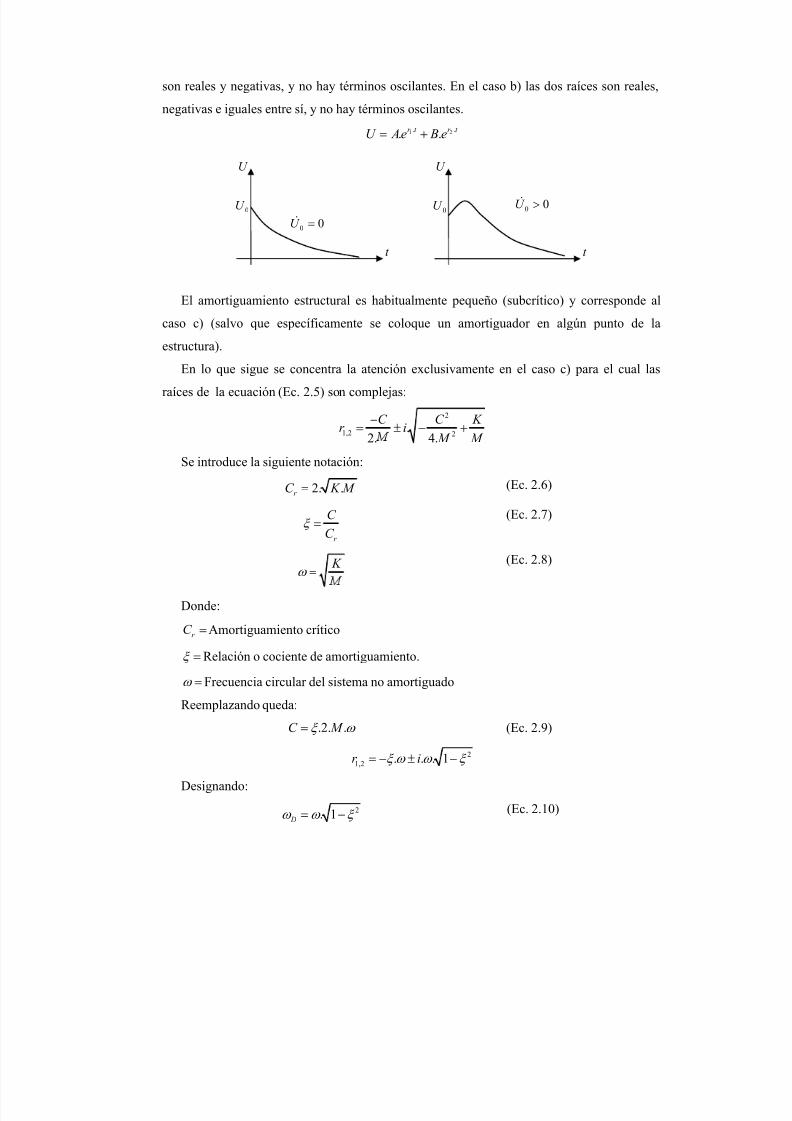
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 378/500
son reales y negativas, y no hay términos oscilantes. En el caso b) las dos raíces son reales,
negativas e iguales entre sí, y no hay términos oscilantes.
1 2. .. .r t r t U Ae B e= +
El amortiguamiento estructural es habitualmente pequeño (subcrítico) y corresponde al
caso c) (salvo que específicamente se coloque un amortiguador en algún punto de laestructura).
En lo que sigue se concentra la atención exclusivamente en el caso c) para el cual las
raíces de la ecuación (Ec. 2.5) son complejas:
2
1,2 2.
2. 4.
C C K r i
M M
−= ± − +
Se introduce la siguiente notación:
2. .r C K M = (Ec. 2.6)
r
C
C ξ =
(Ec. 2.7)
K ω =
(Ec. 2.8)
Donde:
r C = Amortiguamiento crítico
ξ = Relación o cociente de amortiguamiento.
ω = Frecuencia circular del sistema no amortiguado
Reemplazando queda:
.2. .C M ξ ω = (Ec. 2.9)
21,2 . . . 1r iξ ω ω ξ = − ± −
Designando:
2
. 1 Dω ω ξ = − (Ec. 2.10)
U
t
0U
0 0U =
U
t
0U 0 0U >

5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 379/500
1,2 . . Dr iξ ω ω = − ±
Sustituyendo estas raíces complejas en la (Ec. 2.4) nos queda:
. . . .. . . .. . . . D Di t i t t t U A e e B e eω ω ξ ω ξ ω −− −= + (Ec. 2.11)
Recordando que:. . cos( . ) . ( . ) Di t
D De t i sen t ω ω ω = +
. . cos( . ) . ( . ) Di t D De t i sen t ω
ω ω − = −
Y cambiando las constantes, la ecuación (Ec. 2.11) se torna:
. .1 2( . ( . ) .cos( . ))t
D DU e C sen t C t ξ ω ω ω −= + (Ec. 2.12)
La ecuación (Ec. 2.12) pone de manifiesto que la respuesta U está “modulada” por la
exponencial . .t e ξ ω − y es armónica con frecuencia circular D
ω . Teniendo en cuenta la definición
de 2. 1 Dω ω ξ = − se puede apreciar que para 0.10 0.995 Dξ ω ω = ⇒ = o sea que la
frecuencia del sistema amortiguado para el 10% del amortiguamiento critico difiere sólo un
5‰ de la correspondiente al sistema no amortiguado.
El amortiguamiento en estructuras civiles normalmente se estima en el entorno del 5%.
Rara vez supera el 10%, y a los efectos prácticos no es necesario distinguir entre ω y Dω en
las aplicaciones prácticas.
Figura 2.1
En la Figura 2.1 se representa Dω
ω vs ξ . La ecuación (Ec. 2.10) puede también escribirse
en la forma:
( )2
21 Dω
ξ ω
+ =
, ecuación que corresponde a una circunferencia de radio=1.
Para determinar las constantes 1C y 2C se deriva ambos miembros de la ecuación (Ec.
2.12) respecto a t .
Dω
ω
ξ
1
10.1
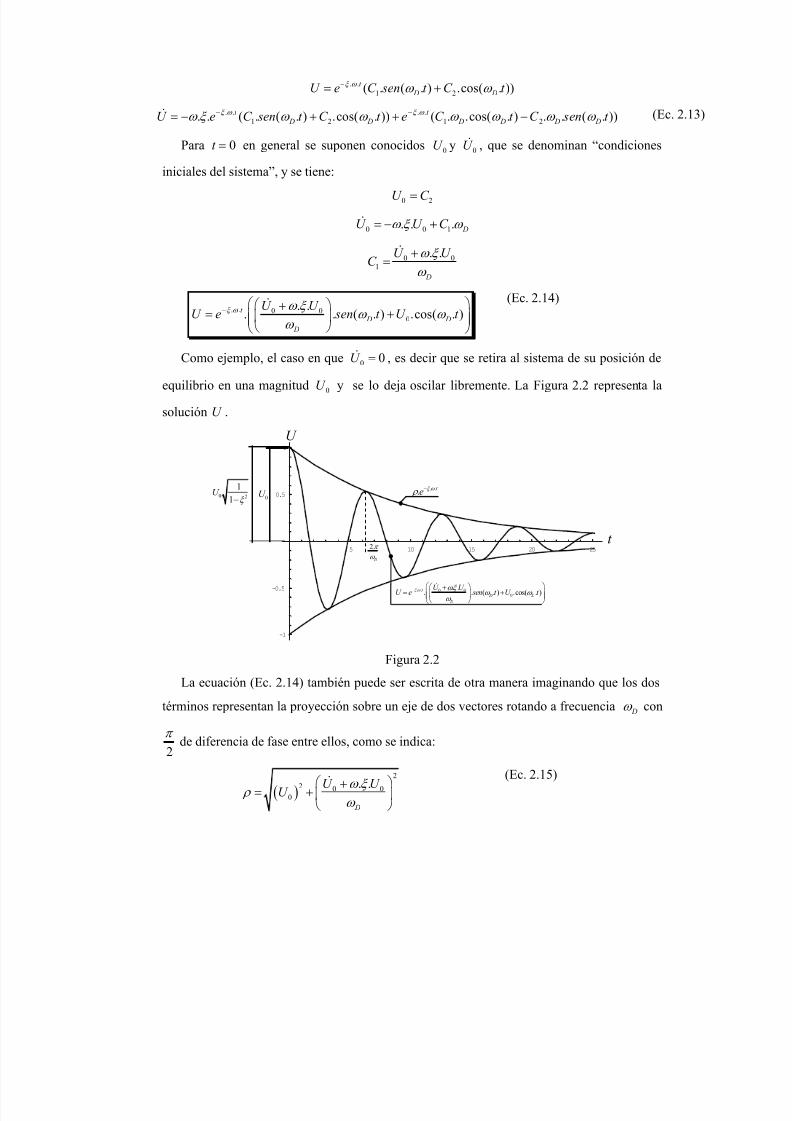
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 380/500
. .1 2( . ( . ) .cos( . ))t
D DU e C sen t C t ξ ω ω ω −= +
. . . .1 2 1 2. . ( . ( . ) .cos( . )) ( . .cos( . ) . . ( . ))t t
D D D D D DU e C sen t C t e C t C sen t ξ ω ξ ω ω ξ ω ω ω ω ω ω − −= − + + − (Ec. 2.13)
Para 0t = en general se suponen conocidos 0U y 0U , que se denominan “condiciones
iniciales del sistema”, y se tiene:
0 2U C =
0 0 1. . . DU U C ω ξ ω = − +
0 01
. .
D
U U C
ω ξ
ω
+=
. . 0 00
. .. . ( . ) .cos( . )t
D D
D
U U U e sen t U t ξ ω ω ξ
ω ω
ω
− +
= +
(Ec. 2.14)
Como ejemplo, el caso en que 0 0U = , es decir que se retira al sistema de su posición de
equilibrio en una magnitud 0U y se lo deja oscilar libremente. La Figura 2.2 representa la
solución U .
Figura 2.2
La ecuación (Ec. 2.14) también puede ser escrita de otra manera imaginando que los dos
términos representan la proyección sobre un eje de dos vectores rotando a frecuencia Dω con
2
π de diferencia de fase entre ellos, como se indica:
( )2
2 0 00
. .
D
U U U
ω ξ ρ
ω
+= +
(Ec. 2.15)
5 10 15 20 25
-1
-0.5
0.5
1
U
0U 0 21. 1U ξ −
. .. t e ξ ω ρ −
. . 0 00
. .. . ( . ) .cos( . )t
D D D
U U U e sen t U t ξ ω ωξ
ω ω ω
− +
= +
2.
D
π
ω
t

5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 381/500
0 0
0
. .
. D
U U arctg
U
ω ξ θ
ω
+=
(Ec. 2.16)
. .. .cos( . )t DU e t ξ ω ρ ω θ −= − (Ec. 2.17)
Figura 2.3
Para bajo amortiguamiento, el punto de tangencia de la exponencial . .. t e ξ ω ρ − con la curva
respuesta ocurre próximo al máximo local y es posible aproximar la relación entre dos picos
sucesivos de la siguiente manera:
. .
. . 2. . 2. .1
1t m
t m
U e
U e e
ξ ω
ξ ω π ξ π ξ
−
− − −+
≅ =
1
. 2. .m
m
U L
U π ξ
+
≅ (Ec. 2.18)
Donde mU es el n-ésimo máximo desplazamiento y similarmente 1mU + .
Relacionando máximos distantes en m ciclos se tiene:
. 2. . .m
m m
U L m
U π ξ
+
≅ (Ec. 2.19)
Expresión que permite despejar el coeficiente de amortiguamiento cuando se pueden
registrar vibraciones libres experimentalmente. La relación de la (Ec. 2.19) se conoce como
“decremento logarítmico” .
2.2- Excitación Periódica
Considérese una carga ( ) P t periódica como se indica en la Figura 2.4, donde T es el
periodo de la misma.
. D t ω θ
ρ 0 0. .
D
U U ωξ
ω
+
0U
Eje de proyección
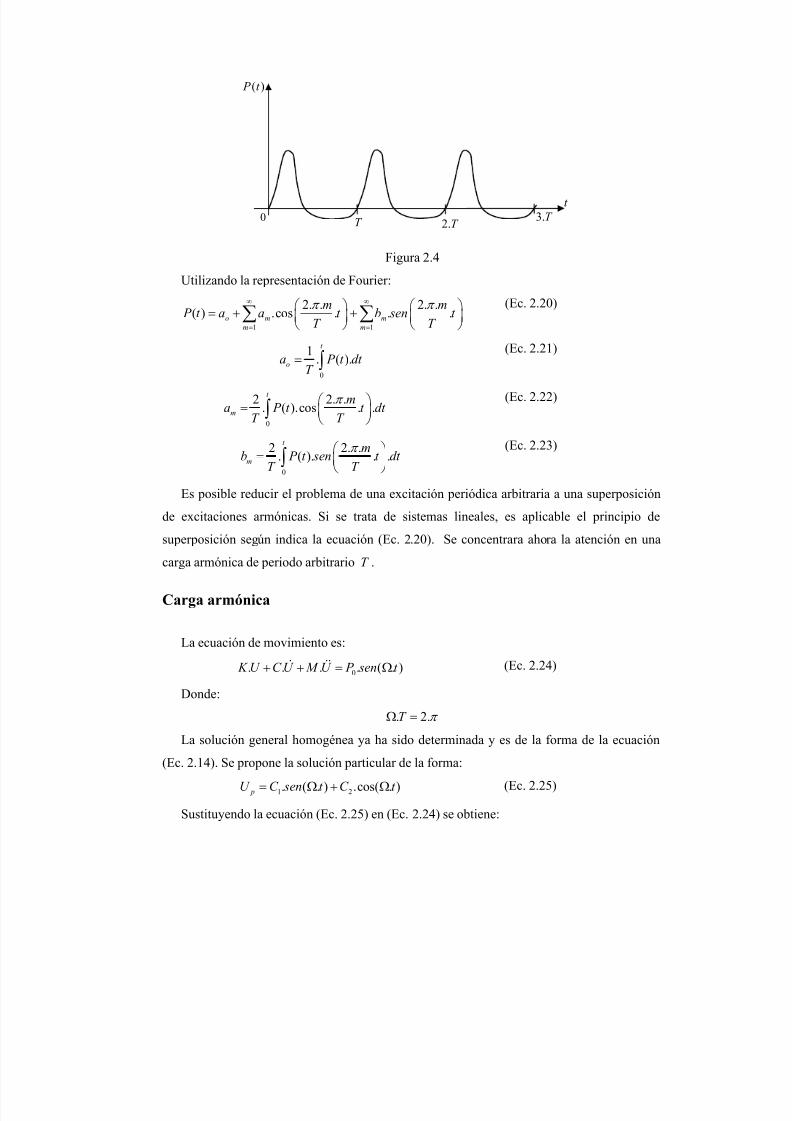
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 382/500
Figura 2.4
Utilizando la representación de Fourier:
1 1
2. . 2. .( ) .cos . . .o m m
m m
m m P t a a t b sen t
T T
π π ∞ ∞
= =
= + +
∑ ∑ (Ec. 2.20)
0
1. ( ).
t
oa P t dt T
= ∫ (Ec. 2.21)
0
2 2. .. ( ).cos . .
t
m
ma P t t dt
T T
π =
∫
(Ec. 2.22)
0
2 2. .. ( ). . .
t
m
mb P t sen t dt
T T
π =
∫
(Ec. 2.23)
Es posible reducir el problema de una excitación periódica arbitraria a una superposición
de excitaciones armónicas. Si se trata de sistemas lineales, es aplicable el principio de
superposición según indica la ecuación (Ec. 2.20). Se concentrara ahora la atención en una
carga armónica de periodo arbitrario T .
Carga armónica
La ecuación de movimiento es:
0. . . . ( . ) K U C U M U P sen t + + = Ω (Ec. 2.24)
Donde:
. 2.T π Ω =
La solución general homogénea ya ha sido determinada y es de la forma de la ecuación
(Ec. 2.14). Se propone la solución particular de la forma:
1 2. ( . ) .cos( . ) pU C sen t C t = Ω + Ω (Ec. 2.25)
Sustituyendo la ecuación (Ec. 2.25) en (Ec. 2.24) se obtiene:
( ) P t
T 2.T 3.T 0
t

5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 383/500
( ) ( )1 2 1 2. . ( . ) .cos( . ) . . .cos( . ) . ( . ) K C sen t C t C C t C sen t Ω + Ω + Ω Ω − Ω −
( )21 2. . . ( . ) .cos( . ) . ( . )oC sen t C t P sen t − Ω Ω + Ω = Ω
Agrupando términos que multiplican a ( . ) sen t Ω y cos( . )t Ω , se obtienen las siguientes
relaciones que deben satisfacer 1C y 2C para que pU sea solución de la ecuación (Ec. 2.24).
2 21 2 1. . .(2. . ) . . ( . ) . ( . )o P
C C C sen t sen t M
ω ξ ω + − Ω − Ω Ω = Ω (Ec. 2.26)
2 22 1 2. . .(2. . ) . .cos( . ) 0C C C t ω ξ ω + + Ω − Ω Ω = (Ec. 2.27)
De este sistema se obtienen 1C y 2C :
( )
2
1 22 2
1.
1 (2. . )
o P C
K
β
β ξ β
−=
− +
(Ec. 2.28)
( )2 22 2
(2. . ).
1 (2. . )
o P C
K
ξ β
β ξ β
−=
− +
(Ec. 2.29)
Donde:
β ω
Ω=
La solución completa es la suma de la solución general homogénea y la particular, o sea:
[ ]. .
. . ( . ) .cos( . )t
D DU e A sen t B t ξ ω
ω ω −
= + +
( )( )2
22 2
1. . 1 . ( . ) (2. . ).cos( . )
1 (2. . )
o P sen t t
K β ξ β
β ξ β
+ − Ω − Ω − +
(Ec. 2.30)
Los valores de A y B deben ser determinados en función de las condiciones iniciales.
La solución general, representada por el primer término de la (Ec. 2.30) se denomina
normalmente como solución “transitoria” ya que está amortiguada por la exponencial
decayente y eventualmente desaparece. El segundo término representa la solución particular,
que se denomina solución de “régimen”.
Para una excitación periódica, los picos del transitorio sólo ocurren unas pocas veces
mientras al comienzo del proceso, mientras que los picos de régimen, aún cuando fueran de
menor intensidad, se repiten indefinidamente y pueden producir fatiga. Por el contrario, los
picos del transitorio son pocos, pero su amplitud puede ser significativa y producir las
máximas tensiones.

5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 384/500
Con un razonamiento similar al caso de vibraciones libres, se puede considerar que la
solución de régimen es la proyección sobre un eje de dos vectores ortogonales como se indica
en la Figura 2.5.
Figura 2.5
( )
2
22 2
1.
1 (2. . )
o P
K
β
β ξ β
−=
− +a
( )22 2
1.
1 (2. . )
o P
K ρ
β ξ β
=− +
( )2
2. .
1arctg
ξ β θ
β
= → −
0 θ π < <
( )2arccos 1 .θ β γ = −
( )22 2
2. ..
1 (2. . )
o P
K
ξ β
β ξ β =
− +b
. ( . )U sen t ρ θ = Ω −
La carga exterior esta en fase con el vector a y la respuesta esta desfasada con respecto a
ella en un ángulo θ .La variación de θ con β y ξ se indica en la Figura 2.6.
.t Ω
θ
b
a
U
U
ρ t
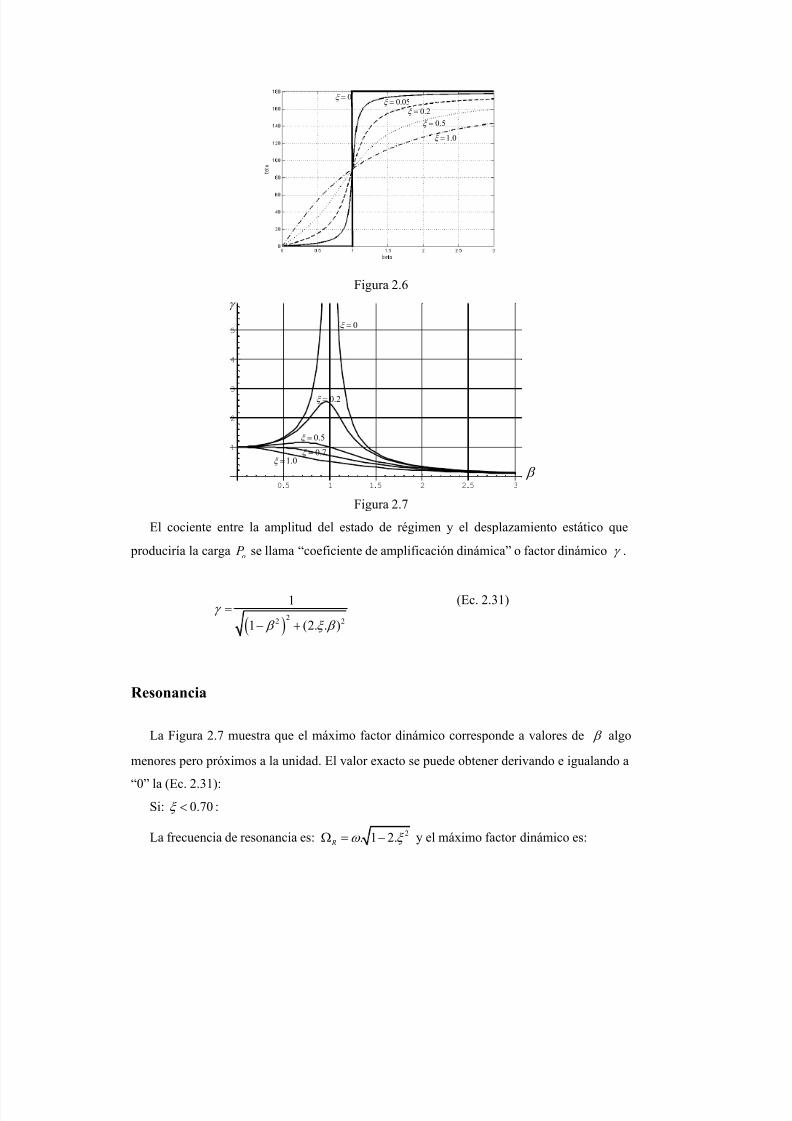
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 385/500
Figura 2.6
Figura 2.7
El cociente entre la amplitud del estado de régimen y el desplazamiento estático que
produciría la carga o P se llama “coeficiente de amplificación dinámica” o factor dinámico γ .
( )22 2
1
1 (2. . )γ
β ξ β
=− +
(Ec. 2.31)
Resonancia
La Figura 2.7 muestra que el máximo factor dinámico corresponde a valores de β algo
menores pero próximos a la unidad. El valor exacto se puede obtener derivando e igualando a
“0” la (Ec. 2.31):
Si: 0.70ξ < :
La frecuencia de resonancia es: 2. 1 2. R ω ξ Ω = − y el máximo factor dinámico es:
0ξ =0.05ξ =
0.2ξ =
0.5ξ =
1.0ξ =
0.5 1 1.5 2 2.5 3
1
2
3
4
5 0ξ =
0.2ξ =
0.5ξ =
0.7ξ =1.0ξ =
β
γ
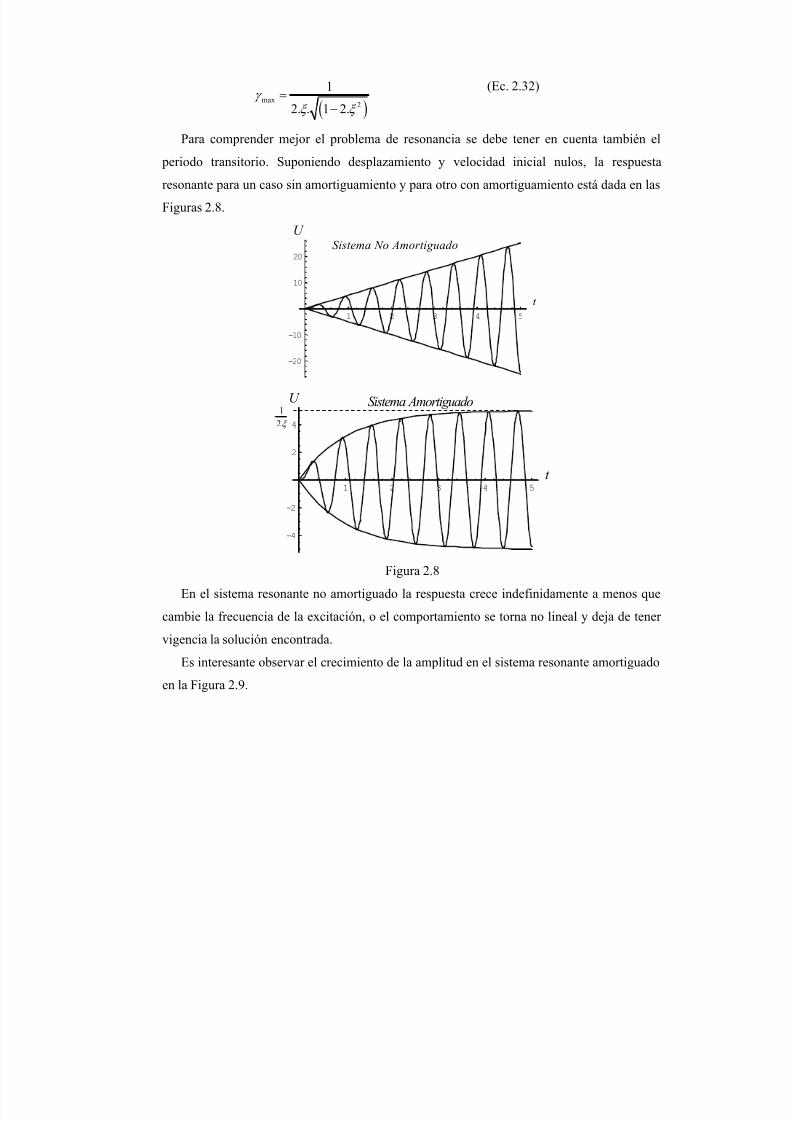
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 386/500
( )max
2
1
2. . 1 2.γ
ξ ξ =
−
(Ec. 2.32)
Para comprender mejor el problema de resonancia se debe tener en cuenta también el
periodo transitorio. Suponiendo desplazamiento y velocidad inicial nulos, la respuestaresonante para un caso sin amortiguamiento y para otro con amortiguamiento está dada en las
Figuras 2.8.
Figura 2.8
En el sistema resonante no amortiguado la respuesta crece indefinidamente a menos que
cambie la frecuencia de la excitación, o el comportamiento se torna no lineal y deja de tener
vigencia la solución encontrada.
Es interesante observar el crecimiento de la amplitud en el sistema resonante amortiguado
en la Figura 2.9.
1 2 3 4 5
-4
-2
2
4
U
t
1
2.ξ
Sistema Amortiguado
1 2 3 4 5
-20
-10
10
20
U
t
Sistema No Amortiguado

5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 387/500
Figura 2.9
Por ejemplo, para un amortiguamiento del 5% se alcanza el 85% de la amplitud máxima
de resonancia en 6 ciclos, alcanzando en forma asintótica una amplificación dinámica10γ = para una cantidad infinita de ciclos de carga.
2.3- Integral de Duhamel
En esta sección se analiza la respuesta ( )U t del oscilador simple sometido a una excitación
( ) P t arbitraria. El procedimiento consiste en tratar el efecto de la fuerza ( ) P t como la
superposición de impulsos infinitesimales como se indica en la Figura 2.10.
Figura 2.10
La respuesta al cabo de un instante t genérico será igual a la suma (integral) de los efectos
producidos por los impulsos elementales ( ). P d τ τ aplicados hasta ese instante.
Respuesta a un impulso rectangular de muy corta duración
Se adoptan como condiciones iniciales: 0iU = , y 0iU = para resolver la
ecuación de movimiento: . . . K U M U C U P + + =
( ) P t
t
τ
d τ
t
( ) . P d τ τ
0
impulso
1
2ξ
1
4ξ
U 0.02ξ =
0.05ξ =0.10ξ =0.20ξ =
0 2 4 6 8 10
Número de ciclos
12 14
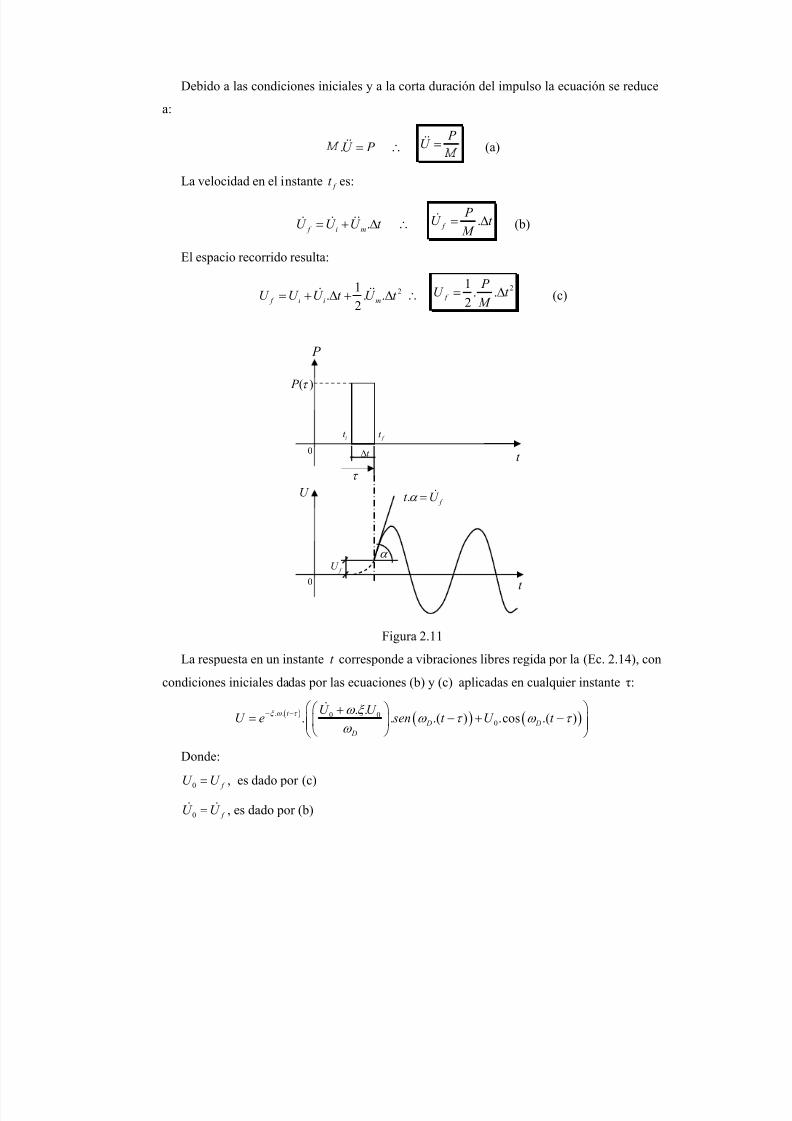
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 388/500
Debido a las condiciones iniciales y a la corta duración del impulso la ecuación se reduce
a:
.U P = ∴ P
U = (a)
La velocidad en el instante f t es:
. f i mU U U t = + ∆ ∴ . f
P U t
M = ∆ (b)
El espacio recorrido resulta:
21. . .
2 f i i mU U U t U t = + ∆ + ∆ ∴ 21
. .2 f
P U t
M = ∆ (c)
Figura 2.11
La respuesta en un instante t corresponde a vibraciones libres regida por la (Ec. 2.14), con
condiciones iniciales dadas por las ecuaciones (b) y (c) aplicadas en cualquier instante τ:
( ) ( ) ( ). . 0 00
. .. . .( ) .cos .( )t
D D
D
U U U e sen t U t ξ ω τ ω ξ
ω τ ω τ ω
− − += − + −
Donde:
0 f U U = , es dado por (c)
0 f U U = , es dado por (b)
P
t
f t it
t ∆
( ) P τ
τ
0
U
t
α
f U
0
. f t U α =

5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 389/500
Si se considera un tiempo infinitésimo d τ , el valor de 0U dado por (c) es un infinitésimo
de orden superior frente a 0U dado por (b) y puede por lo tanto despreciarse; luego:
( ) ( ). . ( )( ) . . . .( )
.
t
D D
P dU t e d sen t
M
ξ ω τ τ τ ω τ
ω
− − = −
(Ec. 2.33)
La respuesta para una carga arbitraria se obtiene considerando que la misma es la integral
de las respuestas correspondientes a una sucesión de impulsos infinitesimales:
Figura 2.12
La respuesta total es la integral de las respuestas infinitésimas dada por (Ec. 2.33):
( )
( )
. .
0
1( ) . ( ). .( ) .
.
t t
D D
U t e P sen t d M
ξ ω τ τ ω τ τ
ω
− −= −
∫
(Ec. 2.34)
Adicionalmente, hay que agregar al ( )U t dado por (Ec. 2.34) la respuesta transitoria
debida a las condiciones iniciales en 0t = ( 0U y 0U ) que son independientes de ( ) P t .
Este procedimiento se basa en el principio de superposición y es válido sólo para
sistemas lineales.
La ecuación (Ec. 2.34) se conoce como INTEGRAL DE DUHAMEL. Cabe destacar
que esta ecuación es completamente general y puede aplicarse a cualquier tipo de carga pero
normalmente se la utiliza para tratar impulsos o efectos transitorios ya que para condiciones
de una carga armónica en régimen ya se cuenta con la solución general analizada
anteriormente. La integral de Duhamel es un caso particular de la Integral de Convolución
entre dos funciones, la de carga y la de la respuesta a un impulso unitario.
La solución de la Integral de Duhamel para diversas funciones de carga está dada por expresiones analíticas que se encuentran resueltas y tabuladas en la literatura. Aquellos casos
P
1 m t 2 3
P
1 t
P
t
P
t 02 m
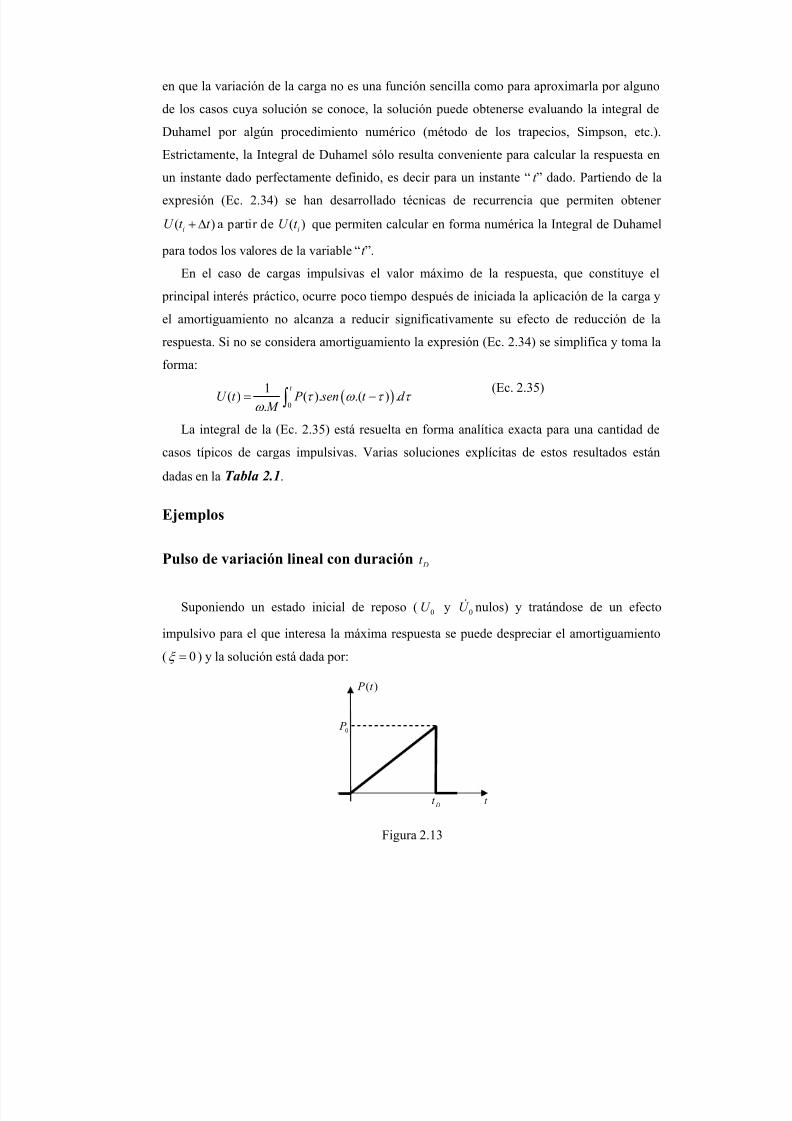
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 390/500
en que la variación de la carga no es una función sencilla como para aproximarla por alguno
de los casos cuya solución se conoce, la solución puede obtenerse evaluando la integral de
Duhamel por algún procedimiento numérico (método de los trapecios, Simpson, etc.).
Estrictamente, la Integral de Duhamel sólo resulta conveniente para calcular la respuesta en
un instante dado perfectamente definido, es decir para un instante “ t ” dado. Partiendo de la
expresión (Ec. 2.34) se han desarrollado técnicas de recurrencia que permiten obtener
( )iU t t + ∆ a partir de ( )iU t que permiten calcular en forma numérica la Integral de Duhamel
para todos los valores de la variable “t ”.
En el caso de cargas impulsivas el valor máximo de la respuesta, que constituye el
principal interés práctico, ocurre poco tiempo después de iniciada la aplicación de la carga y
el amortiguamiento no alcanza a reducir significativamente su efecto de reducción de la
respuesta. Si no se considera amortiguamiento la expresión (Ec. 2.34) se simplifica y toma la
forma:
( )0
1( ) ( ). .( ) .
.
t U t P sen t d
M τ ω τ τ
ω = −∫
(Ec. 2.35)
La integral de la (Ec. 2.35) está resuelta en forma analítica exacta para una cantidad de
casos típicos de cargas impulsivas. Varias soluciones explícitas de estos resultados están
dadas en la Tabla 2.1.
Ejemplos
Pulso de variación lineal con duración Dt
Suponiendo un estado inicial de reposo ( 0U y 0U nulos) y tratándose de un efecto
impulsivo para el que interesa la máxima respuesta se puede despreciar el amortiguamiento
( 0ξ = ) y la solución está dada por:
Figura 2.13
( ) P t
t
0 P
Dt

5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 391/500
( )0
0
1( ) . . .( ) .
.
t
D
P U t sen t d
M t τ ω τ τ
ω = −∫ para 0 Dt τ < <
( )0
0( ) . . . .( ) .
t
D
P U t sen t d
K t
ω τ ω τ τ = −∫
( )0
( ) . . . .( ) .t
s
D
U t U sen t d t
ω τ ω τ τ = −∫
(Ec. 2.36)
0 s
P U
K = es la deformación estática que produciría la carga P aplicada en forma estática.
( )0
( ) . . . .( ) .t
s
D
U t U sen t d t
ω τ ω τ τ = −∫
Es necesario reconocer que la respuesta máxima puede ocurrir para Dt τ ≤ o para Dt τ > .
Para Dt τ > se puede determinar en primer lugar la respuesta para Dt τ = .
A partir de este instante, para el que es posible conocer las condiciones iniciales ( ) DU t y
( ) DU t se calcula el movimiento libre del sistema según lo indicado anteriormente.
Integrando la ecuación (Ec. 2.36) por partes:
00 0. . .
t t t u dv v du u v= − +∫ ∫
U τ = ; dU d τ =
( ).( ) .dv sen t d ω τ τ = − ;( )cos .( )t
vω τ
ω
−=
( )2
.( ) . . s
D
sen t t U t U
t
ω ω
ω ω
= − +
Finalmente para Dt t < :
( ).( ) . s
D
sen t U U t t
t
ω
ω
= −
(Ec. 2.37)
( )( )( ) . 1 cos . s
D
U U t t
t ω = −
(Ec. 2.38)
Para una carga arbitraria como la de la Figura 2.10 es posible aproximar su variación por
segmentos rectos como el ilustrado precedentemente.
Pulso rectangular de duración Dt
Para una carga con función escalón como la dada en la Figura 2.14 será:

5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 392/500
Figura 2.14
( )0
1( ) . . .cos .( )
t
sU t U t ω ω τ ω
= −
( )( )( ) . 1 cos . sU t U t ω = − (Ec. 2.39)
El valor máximo de ( )U t es 2 veces sU . El factor que multiplica a sU en la (Ec. 2.36) y
sucesivas se conoce como Factor Dinámico Máximo γ . El valor máximo del mismo para
pulsos individuales de carga es menor o igual a 2. Para el caso de una serie de pulsos
sucesivos, el efecto acumulativo puede dar origen a factores dinámicos superiores a 2.
La expresión (Ec. 2.39) es válida para Dt t ≤ . Para Dt t > el sistema vibra libremente con
desplazamiento inicial ( ) DU t y velocidad ( ) DU t .
La máxima respuesta al pulso ( ) P t de este caso, como en el de carga con variación lineal,se conoce sólo después de comparar Dt (tiempo que actúa la carga) con el periodo T del
sistema. Si el máximo ocurre mientras actúa la carga significa que la estructura “siente” la
carga en forma inmediata (la estructura es muy rígida frente a su masa inercial), mientras que
si la respuesta es lenta puede experimentar el máximo después que se la carga ha dejado de
actuar.
El primer máximo para (Ec. 2.39) ocurre para .t ω π = , de modo que solamente en el caso
en que2 DT t > (recordar . 2.T ω π = ) la respuesta alcanzará el máximo 2. sU U = . Si
2 DT t < la
carga deja de actuar antes de llegar la respuesta a 2. sU . El pulso rectangular es el que tiende a
producir los máximos valores de respuesta, y entre los pulsos rectangulares, los peores son los
de larga duración (2 D
T t ≥ ).
Una vez que el pulso pasó la duración crítica2 D
T t = se producirán otros picos con
oscilaciones del tipo armónico superpuestos con un valor constante.
( ) P t
t
0 P
Dt

5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 393/500
Se puede verificar fácilmente que si el final de la carga ocurriera en el instante a1 de la
Figura 2.15, el sistema continuaría oscilando con la frecuencia natural del sistema entre 0 y
2. sU ± según la línea de puntos.
Figura 2.15
Si la carga dejara de actuar en 2a la respuesta también sería armónica función armónica
con valores entre 2. sU ± mientras que si la carga dejara de actuar en 3a el sistema quedaría en
reposo a partir de ese instante.
Para el caso de un impacto, la fuerza de interacción es normalmente del tipo de la Figura2.16, pudiendo presentar uno o varios picos según la distribución de la masa y resistencia al
aplastamiento del cuerpo que impacta.
Figura 2.16
En estos casos se puede aproximar adoptando una carga constante con amplitud med P en
todo el tiempo d t , o bien con una carga constante igual a la máxima max P . Cuando se tiene un
estado de carga convexo Figura 2.17 y se utiliza la carga instantánea máxima para calcular la
( )U t
t
sU
0
1a
2. sU 2a
3a
T
( ) P t
t 0
max P
med P
Dt

5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 394/500
respuesta máxima, el factor dinámico máximo, a veces también denominado “coeficiente de
impacto”, es en general menor que 2.
Figura 2.17
En la Figura 2.18 se presentan pulsos de tres formas diferentes que actúan con igual
duración Dt y amplitud 0 P :
Figura 2.18
La máxima respuesta varía linealmente con la amplitud del pulso 0 P no así con la duración
Dt .
Para cargas de corta duración respecto al período del sistema T, la respuesta máxima se
alcanza después de finalizada la carga, y a igualdad de duración del pulso Dt , la mayor
respuesta corresponde a la función que aporta el mayor impulso, ya que éste introduce el
mayor cambio de cantidad de movimiento (y de energía cinética), y por lo tanto eldesplazamiento de mayor amplitud.
Los pulsos de carga del tipo “1” son característicos del efecto de la onda expansiva
originada en explosiones, en los cuales la presión máxima alcanza el valor máximo en una
fracción de tiempo muy pequeña que depende del tipo de explosivo y de la distancia de la
explosión a la estructura; esa presión máxima ocurre a una fracción de milésimas de segundos
del inicio de la detonación, y puede considerarse que el máximo se produce aproximadamente
para t = 0. En realidad, las explosiones también producen normalmente además del efecto de
sobrepresión inicial representado por la forma “1”, una zona de subpresión (o succión) de
( ) P t
t 0
max P
( ) P t
t 0
0 P
1
Dt
( ) P t
t
0
0 P
2
Dt
( ) P t
t
0
0 P
3
Dt

5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 395/500
mayor duración total que el tramo inicial de sobrepresión, pero de menor intensidad. Si uno
está interesado en la respuesta máxima, con frecuencia es suficiente representar las presiones
con el diagrama de carga tipo “1”, aunque casos en los que la succión juega un rol importante
en el comportamiento de la estructura y es necesario tener en cuenta ambas partes de la onda
explosiva.
Los pulsos de carga del tipo “2” representan típicamente una aproximación a cargas
móviles tales como el paso de un vehículo sobre un puente. El instante inicial representa el
ingreso del vehículo al puente, el máximo de la carga representa el instante en que el vehículo
se encuentra al medio del vano del puente, y punto final a la salida del vehículo. Un caso de
función de carga también representativo del paso de cargas móviles es una semionda senoidal,
cuyo máximo ocurre a t d / 2. Los efectos dinámicos de la semionda senoidal son similares a
los de la carga tipo “2” para igualdad de duración t d y del área (impulso) de la función de
carga en el tiempo.
Las cargas de tipo “3” son de utilidad para representar una variedad de efectos impulsivos
de baja duración (td << T), o para representar cargas de aplicación instantánea o brusca tales
como impactos de cuerpos rígidos sobre estructuras relativamente flexibles. Naturalmente,
todas las cargas dinámicas pueden ser aproximadas con poligonales de tramos rectos, pero los
factores de carga dinámica máxima no pueden obtenerse de la superposición de la respuesta
máxima dada en la Figura 2.19 para cada tipo de carga ya que dichos máximos no ocurren en
forma simultánea, y por lo tanto no pueden ser sumados linealmente. De todos modos, la
aproximación de una función de carga mediante una poligonal en el tiempo es de utilidad en
diversas aplicaciones, y para obtener la máxima respuesta es necesario resolver la integral de
Duhamel en un intervalo suficientemente prolongado para permitir la detección del valor
máximo.
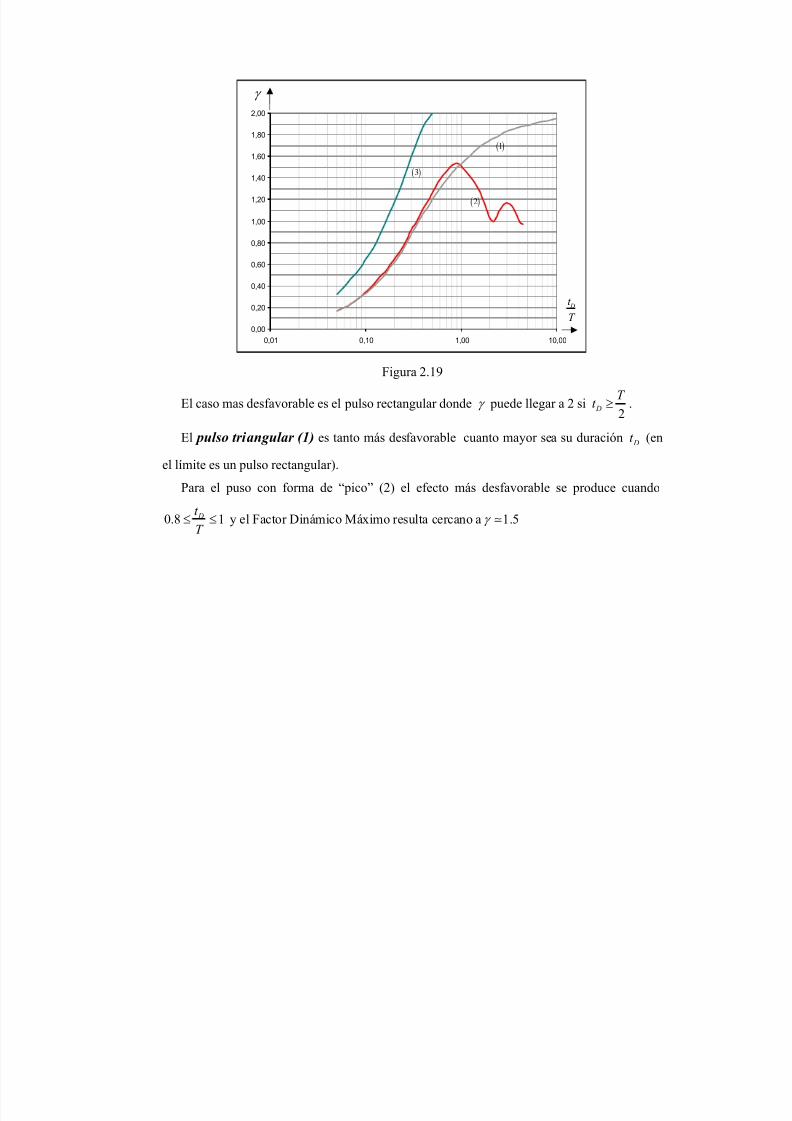
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 396/500
Figura 2.19
El caso mas desfavorable es el pulso rectangular donde γ puede llegar a 2 si2 D
T t ≥ .
El pulso triangular (1) es tanto más desfavorable cuanto mayor sea su duración Dt (en
el límite es un pulso rectangular).
Para el puso con forma de “pico” (2) el efecto más desfavorable se produce cuando
0.8 1 Dt
T ≤ ≤ y el Factor Dinámico Máximo resulta cercano a 1.5γ
0,00
0,20
0,40
0,60
0,80
1,00
1,20
1,40
1,60
1,80
2,00
0,01 0,10 1,00 10,00
γ
Dt
T
( )1
( )2
( )3
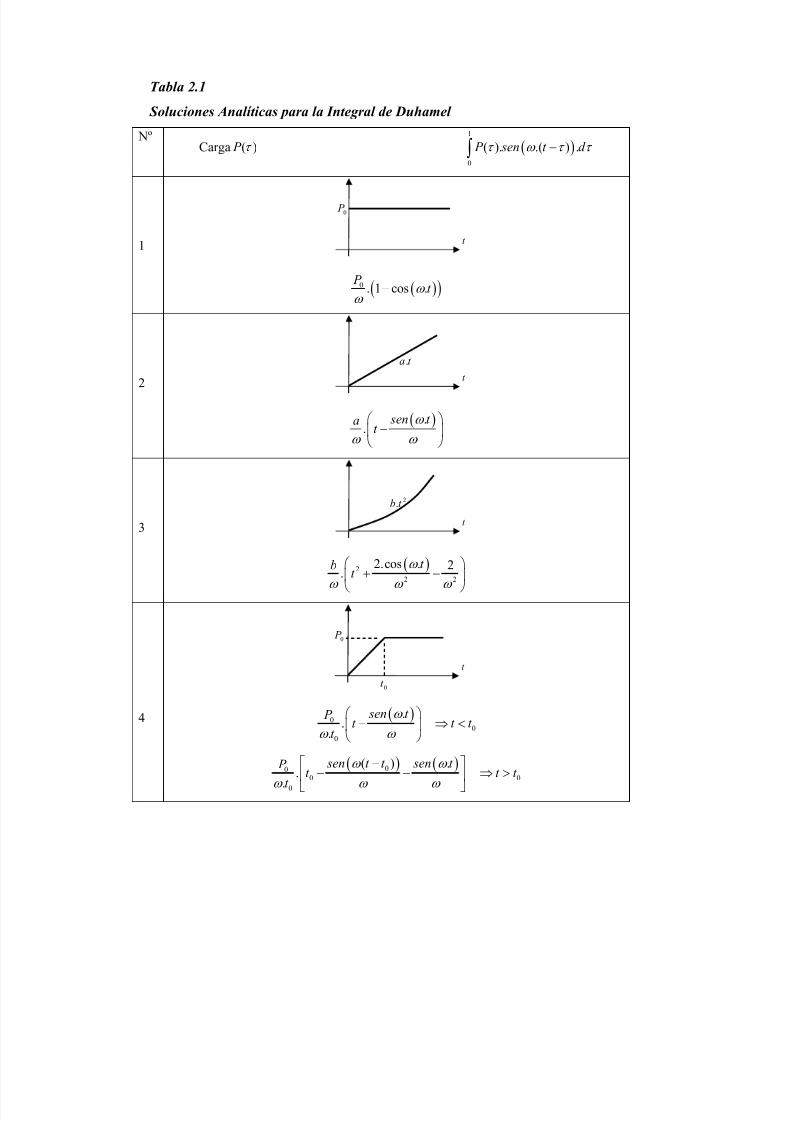
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 397/500
Tabla 2.1
Soluciones Analíticas para la Integral de Duhamel
NºCarga ( ) P τ ( )
1
0
( ). .( ) . P sen t d τ ω τ τ −∫
1
( )( )0 . 1 cos . P
t ω ω
−
2
( )..
sen t at
ω
ω ω
−
3
( )22 2
2.cos . 2.
t bt
ω
ω ω ω
+ −
4 ( )0
0
..
.
sen t P t
t
ω
ω ω
−
0t t ⇒ <
( ) ( )000
0
( ) ..
.
sen t t sen t P t
t
ω ω
ω ω ω
− − −
0t t ⇒ >
t
0 P
t
0t
0 P
t
2.b t
t
.a t
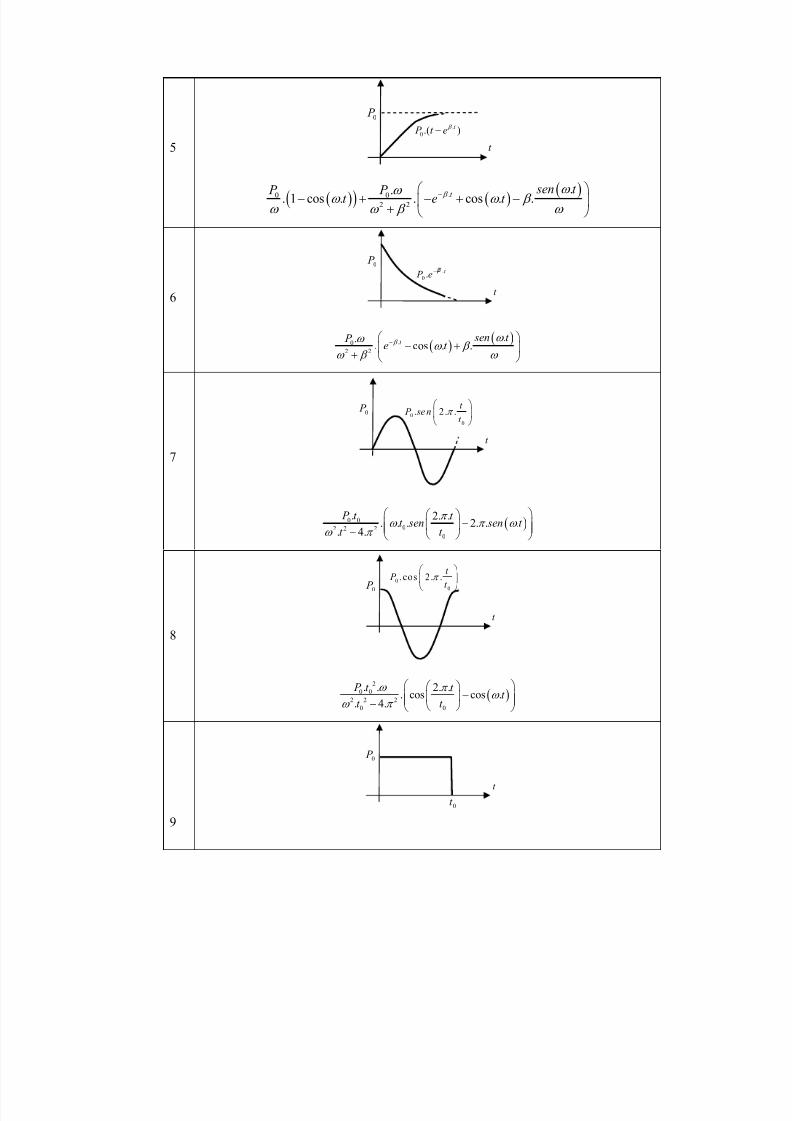
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 398/500
5
( )( ) ( )( ).0 0
2 2
... 1 cos . . cos . .t sen t P P
t e t β ω ω
ω ω β ω ω β ω
− − + − + −
+
6
( )( ).0
2 2
... cos . .t sen t P
e t β ω ω
ω β ω β ω
− − +
+
7
( )0 002 2 2
0
. 2. .. . . 2. . .
. 4.
P t t t sen sen t
t t
π ω π ω
ω π
− −
8
( )2
0 02 2 2
0 0
. . 2. .. cos cos .
. 4.
P t t t
t t
ω π ω
ω π
− −
9
t
0t
0 P
t
00
. cos 2. .t
P t
π 0 P
t
00
. 2. .t
P sent
π
0 P
t
.0 . t P e −
0 P
t
.0.( )t P t e β −
0 P
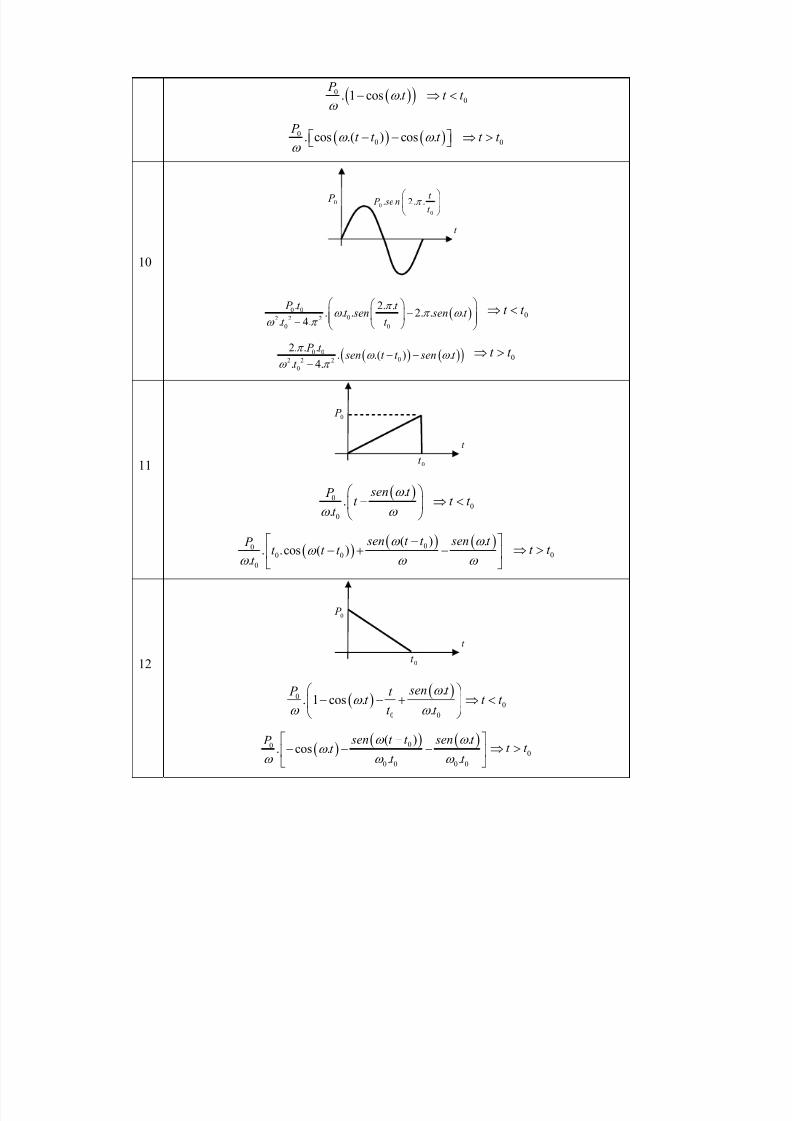
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 399/500
( )( )0 . 1 cos . P
t ω ω
− 0t t ⇒ <
( ) ( )00. cos .( ) cos .
P t t t ω ω
ω − − 0t t ⇒ >
10
( )0 002 2 2
0 0
. 2. .. . . 2. . .
. 4.
P t t t sen sen t
t t
π ω π ω
ω π
− −
0t t ⇒ <
( ) ( )( )0 002 2 2
0
2. . .. .( ) .
. 4.
P t sen t t sen t
t
π ω ω
ω π − −
− 0t t ⇒ >
11
( )0
0
...
sen t P t t
ω
ω ω −
0t t ⇒ <
( )( ) ( )00
0 00
( ) .. .cos ( )
.
sen t t sen t P t t t
t
ω ω ω
ω ω ω
− − + −
0t t ⇒ >
12
( )( )0
0 0
.. 1 cos .
.
sen t P t t
t t
ω ω
ω ω
− − +
0t t ⇒ <
( )( ) ( )00
0 0 0 0
( ) .. cos .
. .
sen t t sen t P t
t t
ω ω ω
ω ω ω
− − − −
0t t ⇒ >
t
0t
0 P
t
0t
0 P
t
00
. 2. .t
P sent
π
0 P
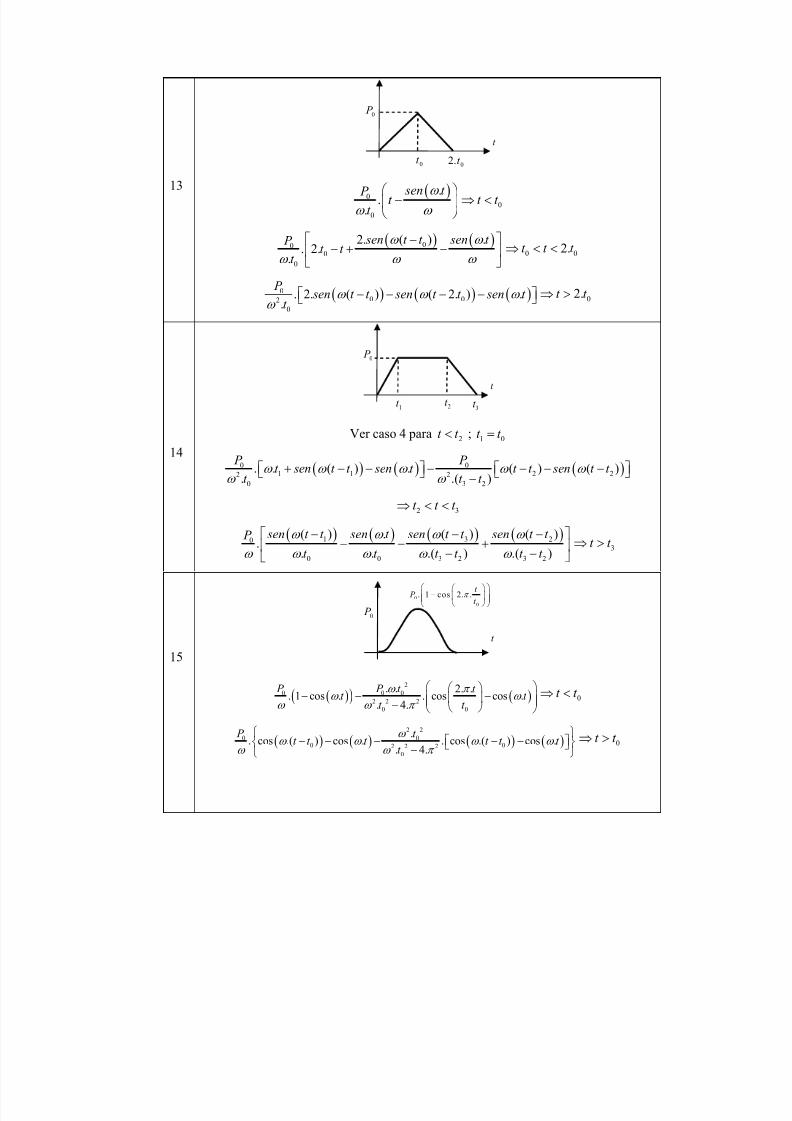
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 400/500
13 ( )0
0
..
.
sen t P t
t
ω
ω ω
−
0t t ⇒ <
( ) ( )000
0
2. ( ) .. 2.
.
sen t t sen t P t t
t
ω ω
ω ω ω
− − + −
0 02.t t t ⇒ < <
( ) ( ) ( )00 02
0
. 2. ( ) ( 2. ) ..
P sen t t sen t t sen t
t ω ω ω
ω − − − − 02.t t ⇒ >
14
Ver caso 4 para 2t t < ; 1 0t t =
( ) ( ) ( )0 01 1 2 22 2
0 3 2
. . ( ) . ( ) ( ). .( )
P P t sen t t sen t t t sen t t
t t t ω ω ω ω ω
ω ω + − − − − − − −
2 3t t t ⇒ < <
( ) ( ) ( ) ( )1 3 20
0 0 3 2 3 2
( ) . ( ) ( ).
. . .( ) .( )
sen t t sen t sen t t sen t t P
t t t t t t
ω ω ω ω
ω ω ω ω ω
− − − − − +
− − 3t t ⇒ >
15
( )( ) ( )2
0 0 02 2 2
0 0
. . 2. .. 1 cos . . cos cos .
. 4.
P P t t t t
t t
ω π ω ω
ω ω π
− − − −
0t t ⇒ <
( ) ( ) ( ) ( )2 2
0 00 02 2 2
0
.. cos .( ) cos . . cos .( ) cos .
. 4.
P t t t t t t t
t
ω ω ω ω ω
ω ω π
− − − − − −
0t t ⇒ >
t
00
. 1 cos 2. .t
P t
π
−
0 P
t
1t
0 P
2t 3t
t
0t
0 P
02.t
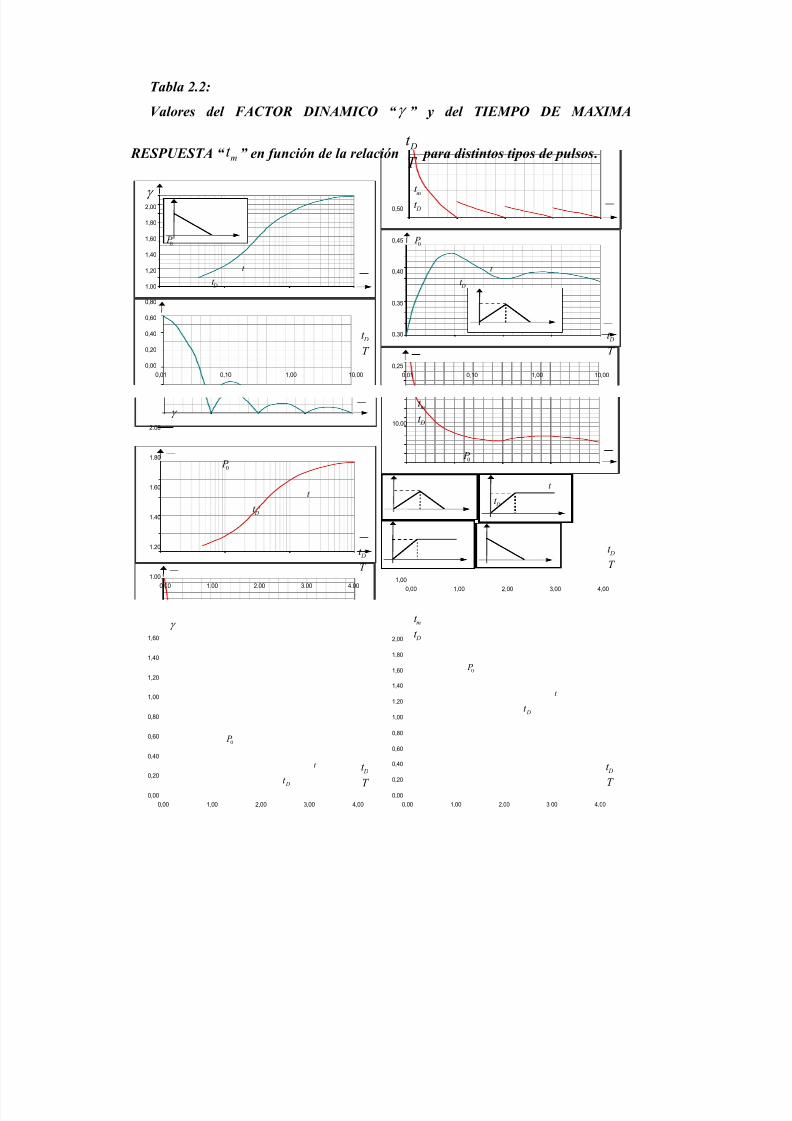
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 401/500
Tabla 2.2:
Valores del FACTOR DINAMICO “ γ ” y del TIEMPO DE MAXIMA
RESPUESTA “ mt ” en función de la relación Dt
T para distintos tipos de pulsos.
1.00
1.20
1.40
1.60
1.80
2.00
0.00 1.00 2.00 3.00 4.00
.
γ
Dt
T 0,00
0,20
0,40
0,60
0,80
1,00
1,20
1,40
1,60
1,80
2,00
0,01 0,10 1,00 10,00
0,25
0,30
0,35
0,40
0,45
0,50
0,01 0,10 1,00 10,00
m
D
t
t
Dt
T
1,00
10,00
0,00 1,00 2,00 3,00 4,00
m
D
t
t
Dt
T
0,00
0,20
0,40
0,60
0,80
1,00
1,20
1,40
1,60
1,80
2,00
0,00 1,00 2,00 3,00 4,00
m
D
t
t
Dt
T 0,00
0,20
0,40
0,60
0,80
1,00
1,20
1,40
1,60
0,00 1,00 2,00 3,00 4,00
γ
Dt
T
t
Dt
0 P
t
Dt
0 P
γ
Dt
T
t
Dt
0 P
t
Dt
0 P
t Dt
0 P
t
Dt
0 P

5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 402/500
2.4- Integración Numérica
La solución de la ecuación diferencial del movimiento por métodos numéricos es una
herramienta más general que las soluciones analíticas rigurosas que sólo son posibles cuando
la carga y las características de rigidez del resorte pueden expresarse en una forma
matemática simple. Esto constituye una severa limitación en los problemas reales, por lo que
es necesario ampliar las posibilidades para resolver casos de iterés práctico. Con la
disponibilidad de equipos de computación se ha multiplicado el uso de los métodos numéricos
en la solución de problemas de la ingeniería estructural, lo que permite soluciones de
problemas dinámicos que eran intratables en tiempos no tan lejanos.
El oscilador simple es un modelo simple pero útil para representar estructuras reales. El
modelo masa-resorte de la Figura 2.20(a) puede representar a diversas estructuras si se calcula
correctamente la constante K .
Figura 2.20
La Figura 2.20(b) ilustra una viga simplemente apoyada con una masa en el centro y una
fuerza variable ( ) F t . La flecha al centro es:
3.
48. .
F l U
E I = ∴
3
48. . E I K
l =
Para la viga en voladizo con una masa en el extremo, Figura 2.20(c) es:
3.
3. .
F l U
E I = ∴
3
3. . E I K
l =
Considérese el pórtico de la Figura 2.21, donde la masa está distribuida a lo largo de la
viga. Se puede adoptar un modelo de un Grado de Libertad Dinámico (GLD): el corrimiento
horizontal de la viga.
( ) F t
K
m
( )U t
a
( ) F t
m
U
l
b
( ) F t
m
U l
c
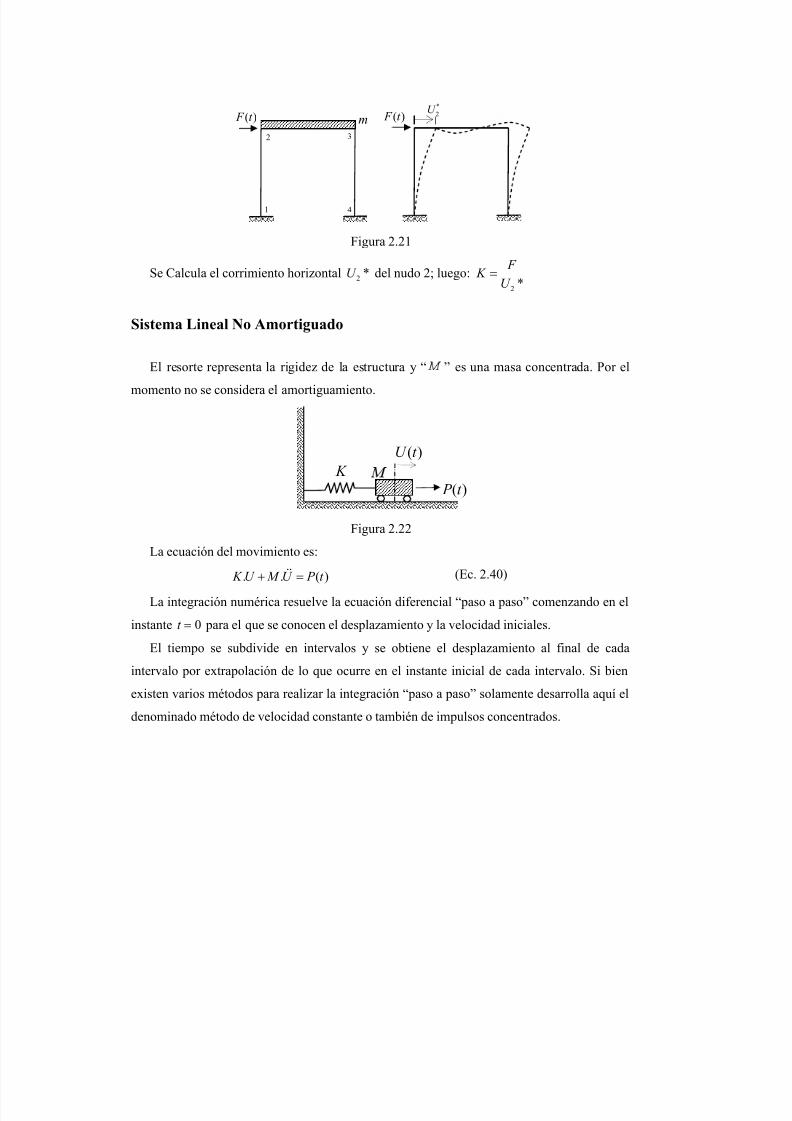
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 403/500
Figura 2.21
Se Calcula el corrimiento horizontal 2 *U del nudo 2; luego:2 *
F K
U =
Sistema Lineal No Amortiguado
El resorte representa la rigidez de la estructura y “ ” es una masa concentrada. Por el
momento no se considera el amortiguamiento.
Figura 2.22
La ecuación del movimiento es:
. . ( ) K U M U P t + = (Ec. 2.40)
La integración numérica resuelve la ecuación diferencial “paso a paso” comenzando en el
instante 0t = para el que se conocen el desplazamiento y la velocidad iniciales.
El tiempo se subdivide en intervalos y se obtiene el desplazamiento al final de cadaintervalo por extrapolación de lo que ocurre en el instante inicial de cada intervalo. Si bien
existen varios métodos para realizar la integración “paso a paso” solamente desarrolla aquí el
denominado método de velocidad constante o también de impulsos concentrados.
( ) P t
K ( )U t
*2U
( ) F t ( ) F t
1
2 3
4
m
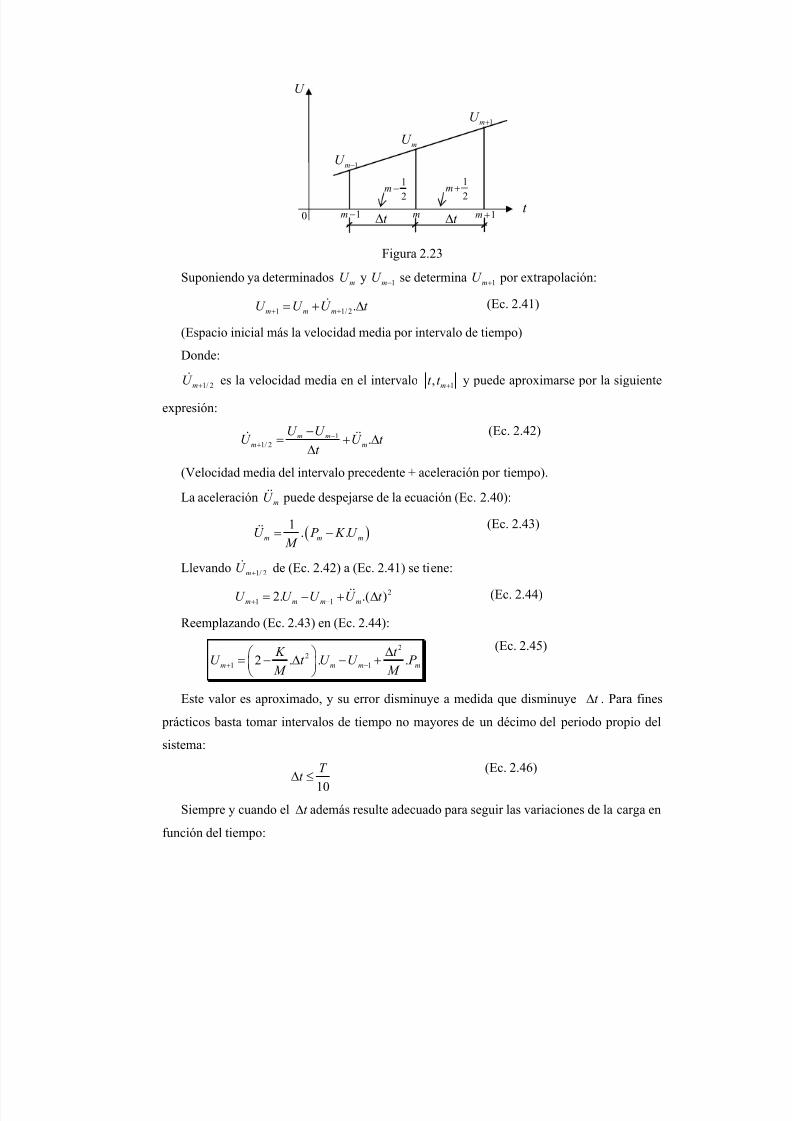
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 404/500
Figura 2.23
Suponiendo ya determinados mU y 1mU − se determina 1mU + por extrapolación:
1 1/ 2.m m mU U U t + += + ∆ (Ec. 2.41)
(Espacio inicial más la velocidad media por intervalo de tiempo)
Donde:
1/ 2mU + es la velocidad media en el intervalo 1, mt t + y puede aproximarse por la siguiente
expresión:
11/ 2 .m m
m m
U U U U t
t −
+
−= + ∆
∆
(Ec. 2.42)
(Velocidad media del intervalo precedente + aceleración por tiempo).
La aceleración mU puede despejarse de la ecuación (Ec. 2.40):
( )1
. .m m mU P K U M
= − (Ec. 2.43)
Llevando 1/ 2mU + de (Ec. 2.42) a (Ec. 2.41) se tiene:
21 12. .( )m m m mU U U U t + −= − + ∆ (Ec. 2.44)
Reemplazando (Ec. 2.43) en (Ec. 2.44):
22
1 12 . . .m m m m K t U t U U P M M + − ∆ = − ∆ − +
(Ec. 2.45)
Este valor es aproximado, y su error disminuye a medida que disminuye t ∆ . Para fines
prácticos basta tomar intervalos de tiempo no mayores de un décimo del periodo propio del
sistema:
10
T t ∆ ≤
(Ec. 2.46)
Siempre y cuando el t ∆ además resulte adecuado para seguir las variaciones de la carga en
función del tiempo:
U
t 0
1mU −
mU
1mU +
t ∆ t ∆
1
2m −
1
2m +
1m − m 1m +

5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 405/500
Figura 2.24
Al comienzo del proceso de integración resulta necesario un procedimiento especial para
obtener 1U ya que no se cuenta con una valor de 1U − . Si se supone que la aceleración es
constante durante todo el primer intervalo e igual a la aceleración en 0t = se tiene:
21 0 0 0
1. . .
2U U U t U t = + ∆ + ∆
(Ec. 2.47)
Luego, bastará con aplicar repetidamente la expresión (Ec. 2.45) para encontrar la
solución para cualquier instante de tiempo.
En el caso en que tanto la fuerza exterior, el desplazamiento y la velocidad sean nulos en
el instante 0t = la expresión (Ec. 2.47) no permite arrancar con el proceso de integración. En
ese caso se puede utilizar la expresión:
21 1
1. .( )
6U U t = ∆
(Ec. 2.48)
que se deduce a partir de la hipótesis que la aceleración crece linealmente durante el
primer intervalo entre cero y un valor conocido diferente de cero.
Reemplazando la expresión (Ec. 2.43) en (Ec. 2.48) resulta:
11
2
6.( )
P U
M K
t
=+
∆
(Ec. 2.49)
que permite comenzar cuando 0 0 0 0U P U = = =
La (Ec. 2.48) surge de la siguiente manera:
1
( )U t t
U t =
∆
∴ 1( ) .
t U t U
t =
∆
21
0 0
.( ) ( ). 0
2.
U t U t U t dt U U
t = = + ⇒ =
∆∫
31
0 0( ) ( ). . 06
U t U t U t dt U U
t = = + ⇒ =
∆∫
U
t
1U
t
( )t U
t ∆
t ∆
( ) P t
t 0inadecuado

5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 406/500
Figura 2.25 21 1
1( ) . .( )
6U t U U t ∆ = = ∆
Sistema Lineal Amortiguado
Al considerar el amortiguamiento la ecuación del movimiento es:
. . . ( ) K U C U M U P t + + = (Ec. 2.50)
Luego:
. .m m mm
P K U C U U
M
− −=
(Ec. 2.51)
La (Ec. 2.51) a diferencia de la (Ec. 2.43) requiere aproximar la velocidad en el instante
mt , para lo que se propone:
1 .2
m mm m
U U t U U
t −− ∆
= +∆
(Ec. 2.52)
1. .
.2
m mm m
m
U U P K U C
t U
t M C
−− − − ∆ =
∆ +
(Ec. 2.53)
2 2
1 1
. . .2 . 1 . .
. . .2 2 2
m m m m
K t C t C t t U U U P
t t t M C M C M C
+ −
∆ + ∆ ∆ ∆ = − − − +
∆ ∆ ∆ + + +
(Ec. 2.54)
En definitiva, el procedimiento anterior es válido si se reemplaza la (Ec. 2.43) por la (Ec.
2.53) y 0U se determina mediante (Ec. 2.51).
Sistemas No Lineales
La integral de Duhamel es una de las técnicas más usadas para análisis dinámico lineal de
estructuras sujetas a cargas variables en el tiempo. Como dicho procedimiento se basa en el
principio de superposición, es válido únicamente para estructuras lineales, es decir para
sistemas cuyas propiedades permanecen constantes durante todo el proceso dinámico (masa,
rigidez, etc.). El procedimiento de integración numérica “paso a paso” supone que las
propiedades del sistema durante cada paso de integración, pero éstas pueden variar en función
del tiempo.

5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 407/500
Supóngase el caso de una estructura con comportamiento no lineal debido a que su rigidez
varía con la deformación como ilustra la Figura 2.26. Evidentemente, K no es constante, de
modo que en cada paso de integración el valor de K se puede adaptar en función del valor de
U .
Figura 2.26
Otro caso de interés es el comportamiento elasto-plástico. En general no se permiten
deformaciones plásticas en condiciones normales de operación, pero pueden contemplarse en
el diseño de estructuras que soporten severas cargas dinámicas en casos poco frecuentes o
limitados a lo largo de su vida útil.
Considérese la función carga deformación R U − de la Figura 2.28 como una
simplificación del diagrama real de la Figura 2.27 (recordar que descargando en H , la curva
de descarga es paralela a la curva de carga y tiene la misma pendiente K ).
Figura 2.27
R
U 0
f U mU
f R
D
P
δ 0
H
f U mU
f P
P
U 0

5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 408/500
Figura 2.28
Llamando R a la fuerza en el resorte la ecuación de movimiento queda:
. ( )U R P t + = (Ec. 2.55)
La fuerza R en el resorte depende de U según se observa en la Figura 2.28:. R K U =
f R R=
.( ) f m R R K U U = − −
0 f U U < <
f mU U U < <
( 2. )m f mU U U U − < <
(Ec. 2.56)
Cuando con el cálculo numérico se llegue al punto D donde 2.m f U U U = − , será
necesario definir si el sistema permanece elástico o entra en fluencia por compresión al
mismo valor que en tracción.Otra situación fácil de tratar con el procedimiento “paso a paso” es el cambio de la masa
durante la respuesta, ya que su valor se puede actualizar en cada instante. En tal caso será
necesario verificar que cuando la masa disminuye también disminuye el período natural T y
puede resultar necesario adecuar el intervalo de integración ∆t para cumplir con los
requerimientos de precisión y estabilidad de la solución numérica ( ∆t/T <10).
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 409/500
Capítulo 3 Vibraciones Libres de Sistemas de Múltiples Grados de
Libertad
Introducción
En el capítulo anterior se analizó la respuesta de un oscilador simple (1 GLD) como
introducción para estudiar la respuesta de sistemas de múltiples GLD, tema cuyo tratamiento
comienza analizando el caso de vibraciones libres, es decir aquellas que ocurren en ausencia
de cargas exteriores, vale decir ( ) 0 P t ≡ . (El vector de carga es nulo en todo instante).
En el caso de cuerpos rígidos, la Ley de Newton indica que si ( ) 0 P t ≡ el sistema
permanecerá en reposo o con movimiento de velocidad constante. Sin embargo, en el caso de
cuerpos deformables, en ausencia de cargas exteriores el sistema puede vibrar libremente en
ciertas frecuencias que se denominan frecuencias propias o naturales del sistema. El
análisis de las vibraciones libres es gran importancia ya que permite identificar las
características dinámicas de la estructura para enfocar correctamente el problema dinámico
bajo cargas exteriores.
3.1- Grados de Libertad Dinámicos y Equilibrio Dinámico
Grados de libertad dinámicos
En el método de rigidez se define como grados de libertad geométricos o cinemáticos, GL,
“a los parámetros geométricos necesarios para definir en cualquier instante la configuración
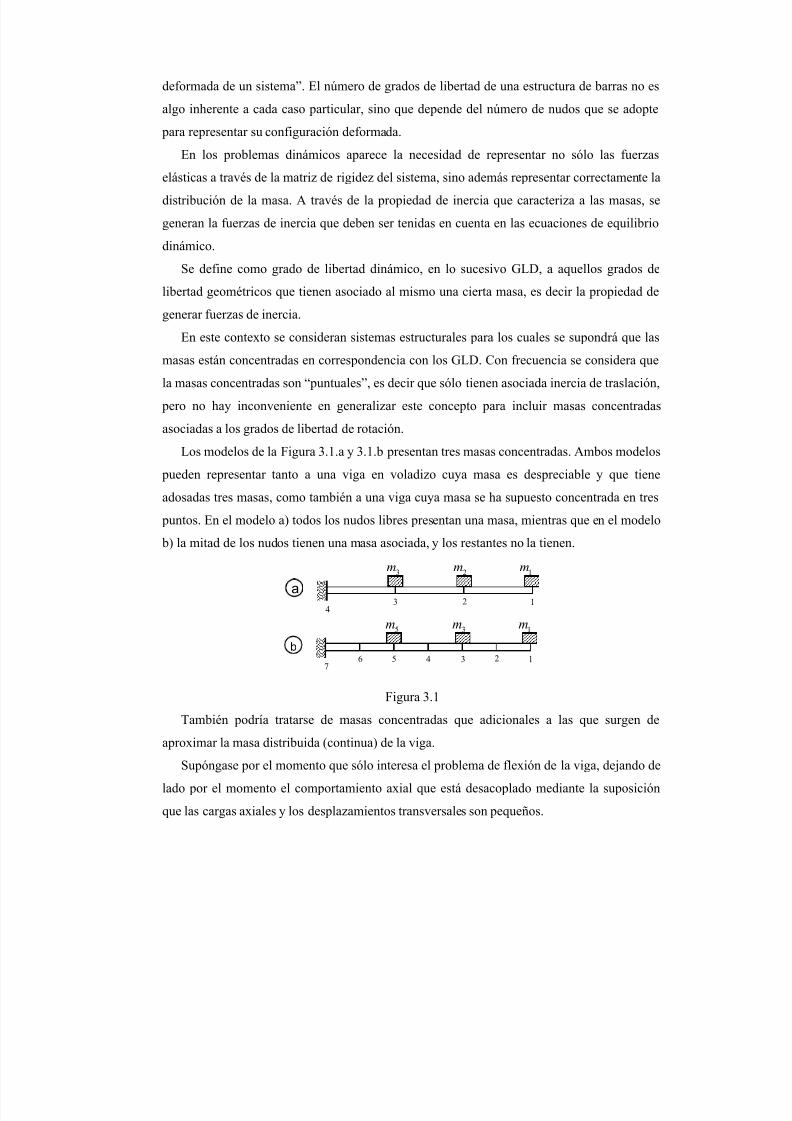
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 410/500
deformada de un sistema”. El número de grados de libertad de una estructura de barras no es
algo inherente a cada caso particular, sino que depende del número de nudos que se adopte
para representar su configuración deformada.
En los problemas dinámicos aparece la necesidad de representar no sólo las fuerzas
elásticas a través de la matriz de rigidez del sistema, sino además representar correctamente la
distribución de la masa. A través de la propiedad de inercia que caracteriza a las masas, se
generan la fuerzas de inercia que deben ser tenidas en cuenta en las ecuaciones de equilibrio
dinámico.
Se define como grado de libertad dinámico, en lo sucesivo GLD, a aquellos grados de
libertad geométricos que tienen asociado al mismo una cierta masa, es decir la propiedad de
generar fuerzas de inercia.
En este contexto se consideran sistemas estructurales para los cuales se supondrá que las
masas están concentradas en correspondencia con los GLD. Con frecuencia se considera que
la masas concentradas son “puntuales”, es decir que sólo tienen asociada inercia de traslación,
pero no hay inconveniente en generalizar este concepto para incluir masas concentradas
asociadas a los grados de libertad de rotación.
Los modelos de la Figura 3.1.a y 3.1.b presentan tres masas concentradas. Ambos modelos
pueden representar tanto a una viga en voladizo cuya masa es despreciable y que tiene
adosadas tres masas, como también a una viga cuya masa se ha supuesto concentrada en tres
puntos. En el modelo a) todos los nudos libres presentan una masa, mientras que en el modelo
b) la mitad de los nudos tienen una masa asociada, y los restantes no la tienen.
Figura 3.1
También podría tratarse de masas concentradas que adicionales a las que surgen de
aproximar la masa distribuida (continua) de la viga.
Supóngase por el momento que sólo interesa el problema de flexión de la viga, dejando de
lado por el momento el comportamiento axial que está desacoplado mediante la suposición
que las cargas axiales y los desplazamientos transversales son pequeños.
5m
1b
357
3m 1m
6 4 2
3m
1a
234
2m 1m

5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 411/500
Si se definen 3 nudos, el comportamiento en el plano requiere 3 desplazamientos y 3 giros
asociados a esos nudos para definir en forma total la configuración deformada del sistema y
poder calcular los esfuerzos internos: momentos flectores y cortes, es decir se necesitan 6
GL.
Si se incorpora un nudo al centro de cada tramo, el número de GL se eleva a 12. El
número de GL depende del número de nudos, mientras que en ambos casos el número de
GLD es 3, los tres desplazamientos verticales, ya que por tratarse de masas puntuales y
concentradas en los nudos, el momento de inercia de las masas es nulo y no hay inercia de
rotación asociada a los giros.
La solución de problemas dinámicos es en general más laboriosa que la solución de
problemas estáticos, por lo que se trata de reducir en todo lo posible el número de GLD.
Ecuaciones de Equilibrio Dinámico
Sea el ejemplo de la Figura 3.1(a) sujeto a cargas dinámicas. Si se tratara de un problema
estático, las ecuaciones de equilibrio serían simplemente:
. K U P = (Ec. 3.1)
Donde P son las cargas exteriores en los nudos o las cargas equivalentes del “estado 2”
correspondientes al método de rigidez.En el problema dinámico se deben agregar las fuerzas de inercia y las disipativas:
. ( ) ( ) . ( ) . ( ) K U t P t M U t C U t = − − (Ec. 3.2)
Donde:
: K Es la matriz de rigidez
( ) :U t Es el vector desplazamiento, llamado también la “respuesta”, de 9 componentes
variables en el tiempo
( ) : P t Vector de cargas exteriores: Es la matriz de masa.
( ) :U t Es el vector aceleración.
:C Es la matriz de amortiguamiento
( ) :U t Es el vector velocidad
El sistema (Ec. 3.2) puede escribirse:
. . . ( ) K U M U C U P t + + = (Ec. 3.3)
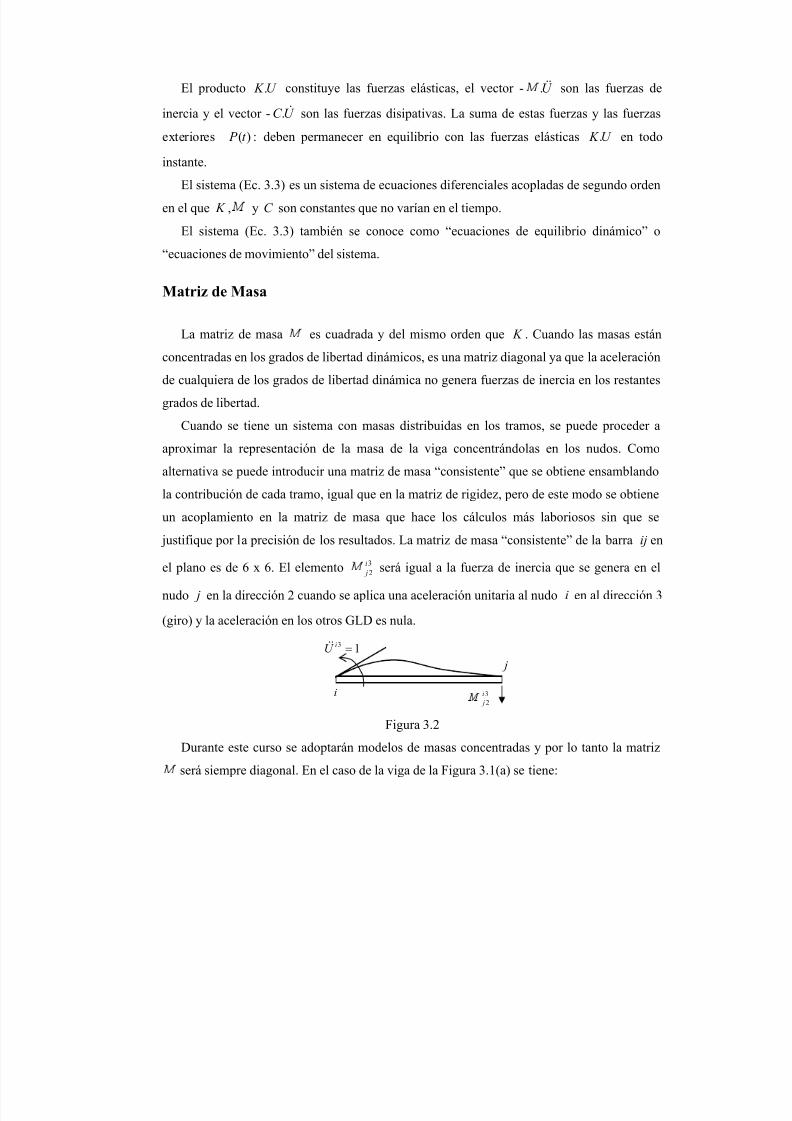
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 412/500
El producto . K U constituye las fuerzas elásticas, el vector - .U son las fuerzas de
inercia y el vector - .C U son las fuerzas disipativas. La suma de estas fuerzas y las fuerzas
exteriores ( ) : P t deben permanecer en equilibrio con las fuerzas elásticas . K U en todo
instante.El sistema (Ec. 3.3) es un sistema de ecuaciones diferenciales acopladas de segundo orden
en el que K , y C son constantes que no varían en el tiempo.
El sistema (Ec. 3.3) también se conoce como “ecuaciones de equilibrio dinámico” o
“ecuaciones de movimiento” del sistema.
Matriz de Masa
La matriz de masa es cuadrada y del mismo orden que K . Cuando las masas están
concentradas en los grados de libertad dinámicos, es una matriz diagonal ya que la aceleración
de cualquiera de los grados de libertad dinámica no genera fuerzas de inercia en los restantes
grados de libertad.
Cuando se tiene un sistema con masas distribuidas en los tramos, se puede proceder a
aproximar la representación de la masa de la viga concentrándolas en los nudos. Como
alternativa se puede introducir una matriz de masa “consistente” que se obtiene ensamblando
la contribución de cada tramo, igual que en la matriz de rigidez, pero de este modo se obtiene
un acoplamiento en la matriz de masa que hace los cálculos más laboriosos sin que se
justifique por la precisión de los resultados. La matriz de masa “consistente” de la barra ij en
el plano es de 6 x 6. El elemento 32
i j será igual a la fuerza de inercia que se genera en el
nudo j en la dirección 2 cuando se aplica una aceleración unitaria al nudo i en al dirección 3
(giro) y la aceleración en los otros GLD es nula.
Figura 3.2
Durante este curso se adoptarán modelos de masas concentradas y por lo tanto la matriz
será siempre diagonal. En el caso de la viga de la Figura 3.1(a) se tiene:
3
1
i
U =
i
j
32
i jM

5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 413/500
1 1
1 1
1
2 2
2 2
2
3 3
3 3
3
0
.0
0
x
y
x
y
x
y
m U
m U
m U
M U m U
m U
m U
φ
φ
φ
=
i
Los ceros en la diagonal corresponden al momento de inercia nulo de las masas puntuales.
Si las dimensiones de una masa son tales que no se puede despreciar la inercia rotacional, la
componente de la matriz de masa asociada a los grados de libertad de rotación será el valor del momento de inercia I de esa masa alrededor del mismo eje que el grado de libertad de
rotación..
3.2- Vibraciones Libres
Por el momento se dejará de lado el amortiguamiento al plantear las ecuaciones de
movimiento para vibraciones libres. En tal caso, en ausencia de cargas exteriores P(t), las
ecuaciones de equilibrio dinámico son:. ( ) . ( ) K U t M U t = − (Ec. 3.4)
O alternativamente:
. ( ) . ( ) 0 K U t M U t + = (Ec. 3.5)
Se trata de un sistema homogéneo (término independiente nulo ( ) 0 P t ≡ ). Para encontrar
una solución no trivial ( 0U ≡/ ) al problema, se propone una solución armónica del tipo:
( ) . ( . )U t U sen t ω = (Ec. 3.6)
Donde:
U : es un vector “forma” (independiente del tiempo), es la amplitud del movimiento
armónico de frecuencia circular ω , por ahora desconocida.
Derivando 2 veces la ecuación (Ec. 3.6) se tiene:
2( ) . . ( . )U t U sen t ω ω = − (Ec. 3.7)
Llevando (Ec. 3.6) y (Ec. 3.7) a (Ec. 3.5):
( )2
. . . . ( . ) 0 K U M U sen t ω ω − = (Ec. 3.8)Para 0ω ≠ se tiene que:

5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 414/500
( )2. . . 0 K U M U ω − = (Ec. 3.9)
( )2. . 0 K M U ω − = (Ec. 3.10)
La ecuación (Ec. 3.10) es un sistema de ecuaciones algebraicas (no diferenciales) para el
cual se requiere que exista una solución no trivial ( 0U ≡/ ), lo que ocurre cuando se anula el
determinante del sistema.
2 0. K M ω − = (Ec. 3.11)
Al desarrollar explícitamente el determinante se obtiene una ecuación polinómica, de
orden igual al orden de las matrices K y , en la incógnita 2ω .
La ecuación (Ec. 3.10) es lo que se denomina un “problema de valores y vectores
propios”. Cuando el determinante de la matriz K es distinto de cero, el número de solucionesno triviales de la (Ec. 3.11) depende del número de elementos no nulos que tenga la diagonal
principal de la matriz de masa. Cada solución de (Ec. 3.11) 2iω da origen a un “modo natural
de vibración” con esa frecuencia circular.
De lo dicho surge que el número de modos de vibrar libremente coincide con el
número de GLD.
3.3- Matriz De Rigidez Condensada
Condensación estática
El sistema (Ec. 3.9) puede reordenarse cambiando el orden de las componentes del vector
U :
1
2
U U
U
=
1 :U Contiene todos los GLD
2 :U Contiene todos los GL que no tienen masa.
11 12 1 112
21 22 2 2
0. . . 0
0 0
K K U U M
K K U U ω
− =
(Ec. 3.12)
Las ecuaciones del primer grupo de GL son:

5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 415/500
211 1 12 2 1 1. . . . 0 K U K U M U ω + − = (Ec. 3.13)
Por otro lado, las ecuaciones correspondientes al segundo grupo de GL tienen una forma
tal que no intervienen las masas:
21 1 22 2. . 0 K U K U + = (Ec. 3.14)De ésta se puede despejar 2U y reemplazar en (Ec. 3.13) obteniendo:
12 22 21 1. .U K K U −= − (Ec. 3.15)
( )1 211 12 22 21 1 1 1. . . . . 0 K K K K U M U ω −− − = (Ec. 3.16)
Al reordenar los GL en la matriz de rigidez K se mantiene la simetría por lo que 11 K es
cuadrada y simétrica, 21 12T K K = y 22 K también es cuadrada y simétrica.
La matriz 1 es diagonal y no contiene ceros en la diagonal.
Al coeficiente de 1U en (Ec. 3.16) se lo designa como C K ; “Matriz de Rigidez
Condensada” .
111 12 22 12. . T
C K K K K K −= − (Ec. 3.17)
Resulta que C K es simétrica, por ser 11 K simétrica y ( )112 22 12. . T K K K − ser también simétrica.
El sistema de ecuaciones queda entonces:
( )21 1. . 0C K M U ω − = (Ec. 3.18)
El problema que originalmente tenía “n” GL, fue reducido a otro problema de menor
número de incógnitas “m” que tienen inercia asociada y que se denominan GLD. En lo
sucesivo los problemas serán reducidos a través del proceso de condensación de manera de
trabajar exclusivamente con grados de libertad dinámicos.
Una vez resuelto el problema dinámico, es decir, cuando sean conocidas las componentes
del vector desplazamiento 1U , se está en condiciones de calcular 2U a través de la expresión
(Ec. 3.15) y para finalmente calcular los esfuerzos barra por barra de igual manera que en los
problemas estáticos mediante el método de rigidez.

5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 416/500
El procedimiento para reducir el numero de incógnitas que se ha ilustrado se
denomina “Condensación Estática”, e implica fraccionar K , calcular 122 K − y
efectuar las operaciones indicadas en la expresión (Ec. 3.17).
La expresión (Ec. 3.11) queda:
21. 0C K M ω − = (Ec. 3.19)
Ecuación que tiene exactamente “m” soluciones reales y positivas correspondientes a las
“ frecuencias propias” o “ frecuencias naturales”, siempre que la sustentación sea tal que el
sistema resulte estable y la matriz K tenga un determinante diferente de cero.
Algunos procedimientos alternativos para obtener la matriz de rigidezcondensada
Se considera ahora el ejemplo de la viga con 3 masas de la Figura 3.1(a) teniendo en
cuenta sólo a las vibraciones transversales que están desacopladas de las vibraciones axiales.
Los GLD son 3 y por lo tanto la matriz de rigidez condensada es de 3x3.
Figura 3.3
11 12 13 1 1
21 22 23 2 2
31 32 33 3 3
.
K K K U P
K K K U P
K K K U P
=
(Ec. 3.20)
Los coeficientes de la matriz de rigidez (en este caso matriz de rigidez condensada K )
representan las reacciones en los GLD cuando se aplica un desplazamiento unitario en uno deellos y los demás se mantienen fijos, tal como se ilustra en la Figura 3.4. Esta interpretación
física de los términos de la matriz de rigidez provee las bases para calcular dichos
coeficientes.
Figura 3.4
31 K
21 K 11 K 3 0U =
2 0U =
1 1U =
3U 2U 1U
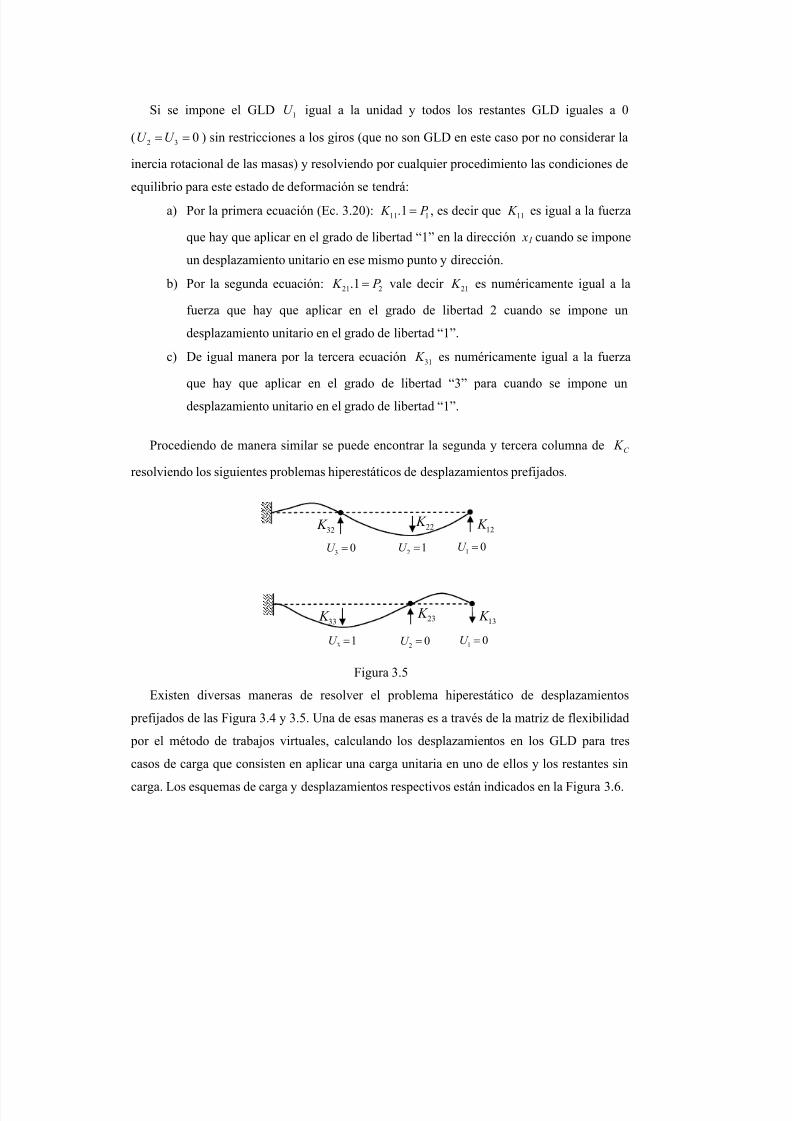
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 417/500
Si se impone el GLD 1U igual a la unidad y todos los restantes GLD iguales a 0
( 2 3 0U U = = ) sin restricciones a los giros (que no son GLD en este caso por no considerar la
inercia rotacional de las masas) y resolviendo por cualquier procedimiento las condiciones deequilibrio para este estado de deformación se tendrá:
a) Por la primera ecuación (Ec. 3.20): 11 1.1 K P = , es decir que 11 K es igual a la fuerza
que hay que aplicar en el grado de libertad “1” en la dirección x1 cuando se impone
un desplazamiento unitario en ese mismo punto y dirección.
b) Por la segunda ecuación: 21 2.1 K P = vale decir 21 K es numéricamente igual a la
fuerza que hay que aplicar en el grado de libertad 2 cuando se impone un
desplazamiento unitario en el grado de libertad “1”.
c) De igual manera por la tercera ecuación 31 K es numéricamente igual a la fuerza
que hay que aplicar en el grado de libertad “3” para cuando se impone un
desplazamiento unitario en el grado de libertad “1”.
Procediendo de manera similar se puede encontrar la segunda y tercera columna de C K
resolviendo los siguientes problemas hiperestáticos de desplazamientos prefijados.
Figura 3.5
Existen diversas maneras de resolver el problema hiperestático de desplazamientos
prefijados de las Figura 3.4 y 3.5. Una de esas maneras es a través de la matriz de flexibilidad
por el método de trabajos virtuales, calculando los desplazamientos en los GLD para tres
casos de carga que consisten en aplicar una carga unitaria en uno de ellos y los restantes sin
carga. Los esquemas de carga y desplazamientos respectivos están indicados en la Figura 3.6.
33 K 23 K 13 K
3 1U = 2 0U = 1 0U =
32 K 22 K 12 K
3 0U = 2 1U = 1 0U =
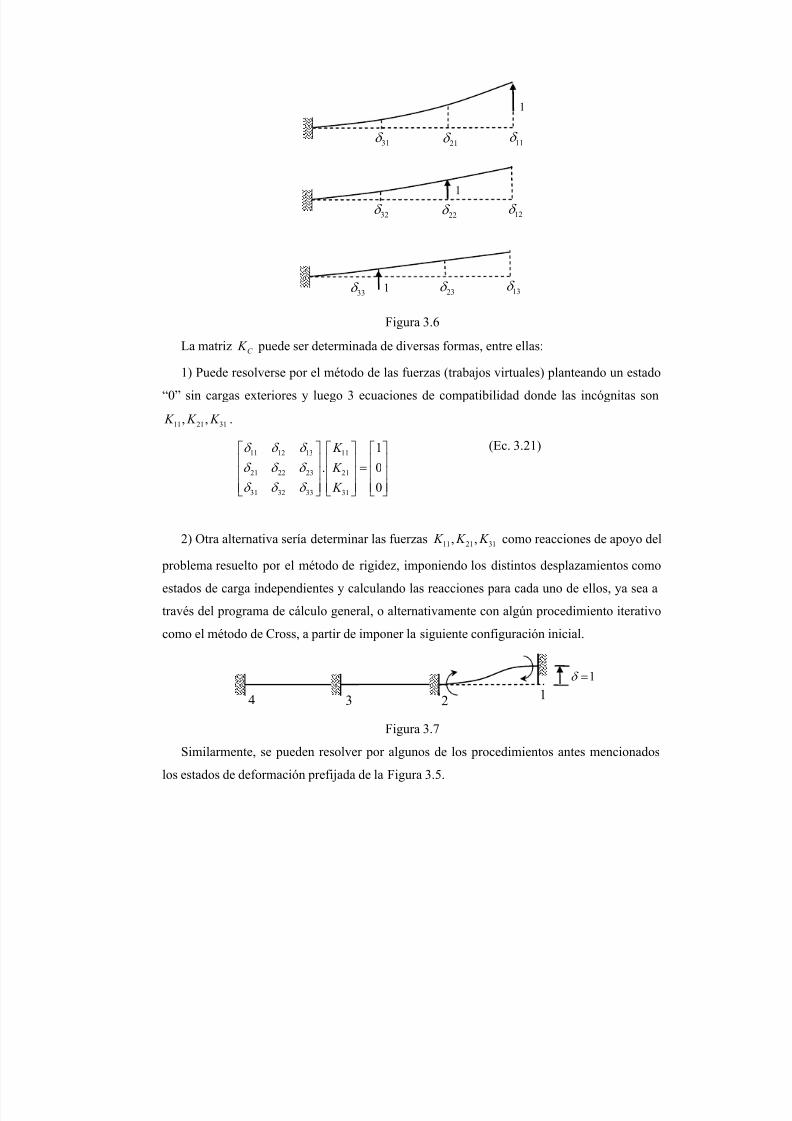
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 418/500
Figura 3.6La matriz C K puede ser determinada de diversas formas, entre ellas:
1) Puede resolverse por el método de las fuerzas (trabajos virtuales) planteando un estado
“0” sin cargas exteriores y luego 3 ecuaciones de compatibilidad donde las incógnitas son
11 21 31, , K K K .
11 12 13 11
21 22 23 21
31 32 33 31
1
. 0
0
K
K
K
δ δ δ
δ δ δ
δ δ δ
=
(Ec. 3.21)
2) Otra alternativa sería determinar las fuerzas 11 21 31, , K K K como reacciones de apoyo del
problema resuelto por el método de rigidez, imponiendo los distintos desplazamientos como
estados de carga independientes y calculando las reacciones para cada uno de ellos, ya sea a
través del programa de cálculo general, o alternativamente con algún procedimiento iterativo
como el método de Cross, a partir de imponer la siguiente configuración inicial.
Figura 3.7
Similarmente, se pueden resolver por algunos de los procedimientos antes mencionados
los estados de deformación prefijada de la Figura 3.5.
23 14
1δ =
11δ
1
21δ 31δ
12δ
1
22δ 32δ
13δ 1 23δ 33δ

5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 419/500
Figura 3.8
Este procedimiento tiene una ventaja adicional y es que permite determinar por
superposición todos los esfuerzos una vez resueltos los desplazamientos 1 2 3( ), ( ), ( )U t U t U t :
Un momento flector:
31 2 3
1 2 31
. ( ) . ( ) . ( ) . ( )i y y i y y y
i
M U t M U t M U t M U t =
= = + +∑ (Ec. 3.22)
Una reacción de apoyo:
3
1
( ) . ( )i j j i
i
R t R U t =
= ∑ (Ec. 3.23)
El corte en una sección:
3
1
( ) . ( )i j j i
i
Q t Q U t =
= ∑ (Ec. 3.24)
3) Otro procedimiento para hallar la matriz de rigidez condensada consiste en invertir la
matriz de flexibilidad F :
11 12 13 1 1
21 22 23 2 2
31 32 33 3 3
.
P U
P U
P U
δ δ δ
δ δ δ
δ δ δ
=
1C K F −=
23 14
23 14
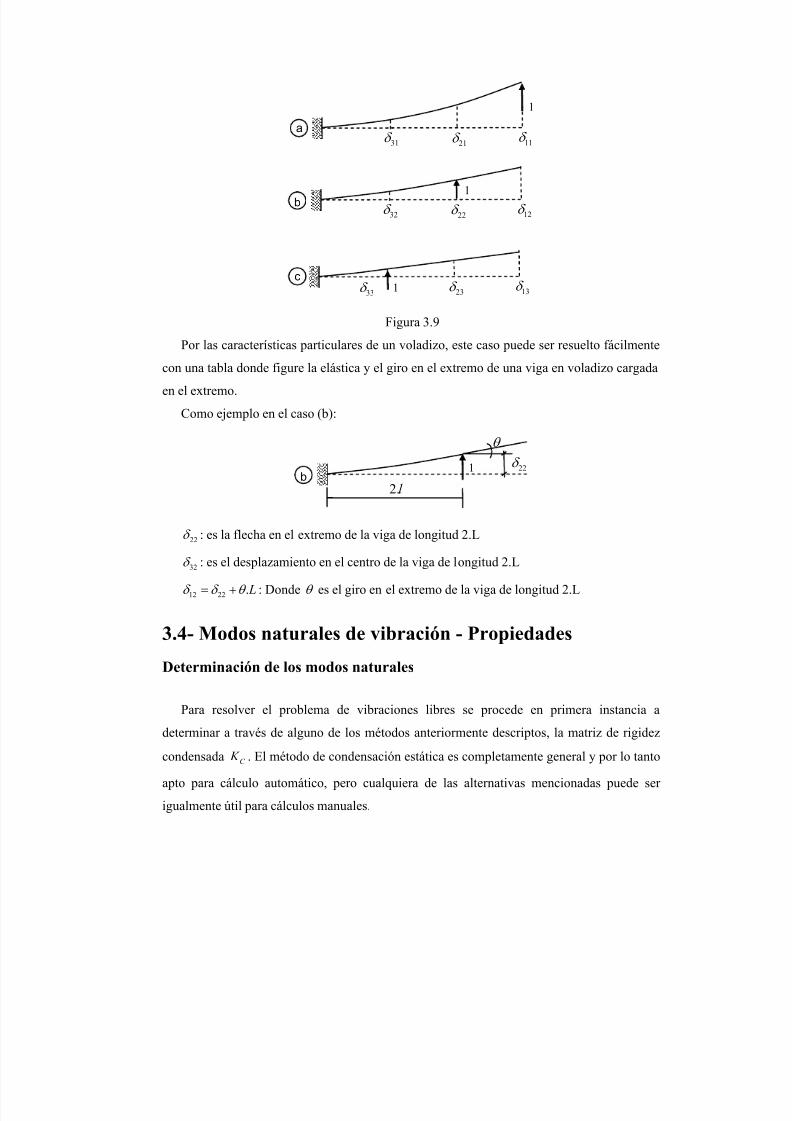
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 420/500
Figura 3.9Por las características particulares de un voladizo, este caso puede ser resuelto fácilmente
con una tabla donde figure la elástica y el giro en el extremo de una viga en voladizo cargada
en el extremo.
Como ejemplo en el caso (b):
22δ : es la flecha en el extremo de la viga de longitud 2.L
32δ : es el desplazamiento en el centro de la viga de longitud 2.L
12 22 . Lδ δ θ = + : Donde θ es el giro en el extremo de la viga de longitud 2.L
3.4- Modos naturales de vibración - Propiedades
Determinación de los modos naturales
Para resolver el problema de vibraciones libres se procede en primera instancia a
determinar a través de alguno de los métodos anteriormente descriptos, la matriz de rigidez
condensada C K . El método de condensación estática es completamente general y por lo tanto
apto para cálculo automático, pero cualquiera de las alternativas mencionadas puede ser
igualmente útil para cálculos manuales.
1 22δ
2.l
b
θ
12δ
1
22δ 32δ b
11δ
1
21δ 31δ a
13δ 1 23δ 33δ
c

5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 421/500
El segundo paso consiste en resolver la ecuación característica que tendrá tantas raíces
como GLD tenga el sistema, es decir que para que el sistema de ecuaciones de equilibrio
dinámico tenga una solución no trivial se requiere que el determinante de la matriz 1.C K M λ −
sea nulo:1. 0C K M λ − = (Ec. 3.25)
con las frecuencias propias dadas por:
i iω λ = (Ec. 3.26)
Las frecuencias propias caracterizan dinámicamente a la estructura y permiten estimar si
un determinado pulso o carga periódica produce efectos dinámicos o no.
El problema (Ec. 3.25) es equivalente a resolver:
( )11 . . . 0C M K I U λ − − =
Si la matriz C K es positiva definida, que equivale a decir que la estructura es inicialmente
estable para las condiciones de apoyo consideradas, los valores propios serán todos positivos.
Cada una de las frecuencias iω permite una solución iU no trivial del sistema (Ec. 3.18).
( )21. 0.C i i K M U ω − = (Ec. 3.27)
Si un sistema lineal homogéneo de ecuaciones algebraicas admite una solución, cualquier
múltiplo de la misma también es una solución; luego, el vector forma modal iU queda
indeterminado en su módulo. Se suele dar un valor arbitrario, por ejemplo la unidad, a una
componente cualquiera del vector iU . Si se asigna el valor unitario al primer GLD, la primera
columna del sistema (Ec. 3.18) puede pasar al 2º miembro como termino independiente y se
procede a resolver el sistema lineal, no homogéneo de ( 1)m − incógnitas para obtener las
restantes componentes de iU .
Es habitual normalizar el vector iU dividiendo todas sus componentes por la de mayor
valor absoluto, de esta forma todas las componentes del vector forma modal iφ (llamado
simplemente “modo”) son menores o iguales que la unidad.
1
. .1i mayor mayor i
mayor
U U U U
γ
α
φ
β δ
= = =
(Ec. 3.28)

5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 422/500
Repitiendo el procedimiento descrito para cada una de las “n” frecuencias iω se pueden
obtener los “n” modos naturales, que dispuestos en columnas configuran la matriz modal Φ .
Para la viga de la Figura 3.1(a) de 3GLD resultan 3 modos cuya forma aproximada es:
Figura 3.10
Los modos de menor frecuencia corresponden a deformadas “suaves” (poca curvatura)
que implican poca energía de deformación; estos modos son fáciles de excitar con una
perturbación aplicada en el punto que más se mueve. Algo similar puede decirse de los modos
superiores (mayor frecuencia).
[ ]
1 1 11 22 2 2
1 2
1 2
1 2
n
n
n
n n nn
φ φ φ
φ φ φ
φ φ φ
φ φ φ
Φ = =
(Ec. 3.29)
Se puede comprobar que la solución del sistema de ecuaciones (Ec.3.4) se puede obtener
como una combinación lineal de los modos naturales. A manera de ejemplo:
( ) . . ( . )i i ii
U t sen t α φ ω = ∑ (Ec. 3.30)
El sistema puede vibrar libremente en forma simultánea y superpuesta en todos los modos.
Todo depende de las condiciones iniciales ( 0U y 0U ) al comenzar las vibraciones libres.
31φ
modo 1
21φ
1
1φ
32φ
modo 2
22φ
12φ
33φ
3modo
23φ
13φ

5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 423/500
Propiedad de ortogonalidad de los modos naturales
En las estructuras civiles en general tanto K como son matrices simétricas y positivas.
Para que esto sea válido es suficiente que la estructura sea inicialmente estable y que todas las
masas sean distintas de cero.
Una matriz A es definida positiva si . . 0, 0T X A X X > ∀ ≠ .
La energía de deformación en un resorte es:1 1
. . . . .2 2
T T iW U P U K U = =
Por analogía, para sistemas de múltiples grados de libertad, se tiene:
1. . . 0 0
2T
iW U K U U = > → ∀ ≠ (Ec. 3.31)
La energía de deformación es siempre positiva e igual al trabajo de las fuerzas exteriores
P , ( . P K U = ). ( T U es el vector desplazamiento transpuesto - puesto como vector fila para
poder efectuar el producto).
Por ser diagonal la matriz de masa, se tiene que 0 X ∀ ≠ :
[ ]
1 1
2 2 21 2
0
. . . . . 0
0
T n i i
n n
m x
m x X M X x x x m x
m x
= = >
∑
(Ec. 3.32)
Las (Ec. 3.31) y (Ec. 3.32) expresan algebraicamente que K y son matrices positivas;
además, como ambas matrices son simétricas, los valores propios son reales y positivos.
Supóngase por que las frecuencias naturales son todas distintas, es decir que:
1 2 nω ω ω ≠ ≠
Cualquier modo iφ con su correspondiente frecuencia iω satisface el sistema (Ec. 3.18).
( )2. 0.i i K M ω φ − = (Ec. 3.33)
Si se multiplica ambos miembros por otro modo jφ (transpuesto) se tiene:
Para i j≠ :
( )2. . 0.T j i i K M φ ω φ − = (Ec. 3.34)
Similarmente:
( )2. . 0.T i j j K M φ ω φ − = (Ec. 3.35)
Restando miembro a miembro (Ec. 3.35) a (Ec. 3.34) y reordenando queda:

5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 424/500
( ) ( ) ( )2 2
(1) (2) (3)
. . . . . . . . . . 0T T T T j i i j i j i j i j K K M M φ φ φ φ ω φ φ ω φ φ − − + =
Por ser ( . .T j i K φ φ ) un escalar, es también igual a su transpuesta: ( . .T
i j K φ φ ), y término (1) de
la expresión se anula. Por igual razón, (2) es igual a (3) y puede sacarse factor común:
( )2 2 . . . 0T j i j iM ω ω φ φ − =
Donde por ser i j≠ :
. . 0T j iM φ φ =
(Ec. 3.36)
Por otro lado se puede desarrollar la (Ec. 3.34):
( )2. . . . . 0T T j i i j i K M φ φ ω φ φ − =
El segundo término es nulo por la (Ec. 3.36), luego:
. . 0T j i K φ φ =
(Ec. 3.37)
Las expresiones (Ec. 3.36) y (Ec. 3.37) indican que los modos de naturales de vibración
son ortogonales respecto a las matrices de masa y de rigidez. Estas dos propiedades son
fundamentales para desarrollar en el próximo capitulo el método de descomposición modal.
Por ser una matriz diagonal (Ec. 3.36) puede expresarse:
. . 0r r
r i jr m φ φ =∑ (Ec. 3.38)
Multiplicando ambos miembros de (Ec. 3.36) por 2iω resulta:
( )2. . . 0T j i iM φ ω φ =
Esta expresión indica que el “trabajo de las fuerzas de inercia asociadas a un modo “ i ”a
través de desplazamientos con la forma de otro modo “ j ”, es nulo.
La (Ec. 3.37) expresa también que el trabajo de las fuerzas elásticas asociadas a una
deformación de un modo “ i ” es nulo cuando se da un desplazamiento de la forma de otromodo “ j ”.
( ). . 0T j i K φ φ =
Por ultimo, existe toda una “familia” de matrices ortogonales respecto de los modos, del
tipo:
1. .( . ) . 0T p j iM M K pφ φ − = ⇒ − ∞ < < ∞ (Ec. 3.39)
Nótese que 0 p=
en la (Ec. 3.36) y 1 p=
en la (Ec. 3.37).

5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 425/500
Matriz Modal Normalizada
Se mencionó anteriormente que se puede normalizar los modos dividiendo todas las
componentes por la componente de mayor valor absoluto, y en tal caso se ha normalizado
respecto a esa componente específica.
También es posible normalizar cada modo a través del requerimiento que:
. . 1T i iM φ φ = (Ec. 3.40)
para lo cual bastará tomar cada modo iU solución del sistema (Ec. 3.27) y calcular:
. .T i i iU M U M = (Ec. 3.41)
para luego definir:
1 .i i
i
U M
φ = (Ec. 3.42)
Reemplazando (Ec. 3.42) en (Ec. 3.40) se aprecia que efectivamente se verifica (Ec. 3.40)
y se cumple la condición propuesta:
. .T I φ φ = (Ec. 3.43)
En ese caso los modos iφ se dice que son “ortonormales” respecto a la matriz de masa
. Naturalmente, si se adopta esa normalización no puede exigirse que los modos sean
también “ortonormales” respecto a la matriz de rigidez K , ya que:
. .T K K φ φ = (Ec. 3.44)
Donde K será una matriz diagonal debido a (Ec. 3.37), que sigue siendo valida cualquiera
sea la normalización de los modos, pero sus componentes en la diagonal principal son en
general distintos de la unidad.
Por último, mientras no se aclare lo contrario, se supondrá que los modos serán
normalizados respecto a la mayor componente a los efectos de facilitar la visualización de lasformas modales.
3.5- Determinación numérica de los Modos y Frecuencias
Naturales
La determinación de las frecuencias naturales de vibración como raíces del polinomio
característico, resulta a veces laboriosa para cálculo manual en sistemas de más de 3 grados
de libertad. Por otra parte, la resolución del problema de “valores propios” (o “autovalores”)se justifica en aquellos casos en que los modos superiores pueden tener una participación
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 426/500
importante en la respuesta dinámica de la estructura, y los cálculos necesarios deben
realizarse con computadora.
Para la determinación de los modos naturales de vibración mediante cálculos manuales es
corriente recurrir a los métodos de Stodola, o de Holzer. Si bien ambos métodos son
iterativos, son fundamentalmente distintos en concepto.
En el método de Stodola se parte de una aproximación inicial al modo fundamental y
mediante un proceso iterativo se lo ajusta sucesivamente hasta alcanzar una aceptable
aproximación. Posteriormente, una vez conocida la forma modal se calcula la frecuencia de
vibración correspondiente como la raíz cuadrada del cociente entre la Rigidez Generalizada
del modo ( . .T K K φ φ = ) y la Masa Generalizada . .T M φ φ =
En el método de Holzer, por el contrario, se requiere variar sucesivamente la frecuenciahasta alcanzar aquella que hace posible satisfacer las condiciones de apoyo. El modo de
vibración se determina en una segunda etapa.
El primero de estos métodos fue desarrollado por A. Stodola (1927) para el estudio de
alabes de turbinas y el segundo por H. Holzer (1921) para el calculo dinámico de cigüeñales.
Método de Stodola
Uno de los métodos más divulgados para determinar las frecuencias naturales con cálculosmanuales es el método de Stodola, también a veces referido como “Método de Stodola-
Vianello”.
Este procedimiento iterativo permite ir aproximando por pasos sucesivos la
forma modal y frecuencia de los modos. Una característica de este método es que
permite aproximar el modo y la frecuencia fundamental de una manera rápida y sin
tener que desarrollar explícitamente ni resolver la ecuación característica que
corresponde a la condición que el determinante sea nulo.
Partiendo de la ecuación del movimiento en vibraciones libres:
2. . 0 K U M U ω − =.
Se expresa:
2. . K U M U ω = . (Ec. 3.45)
Se trata de un problema homogéneo y lineal en la incógnita “ U ” y se busca determinar los
valores no triviales que satisfacen la expresión (Ec. 3.45).

5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 427/500
Asumiendo un vector inicial tentativo 0U (no trivial) para el vector U en el segundo
miembro de (Ec. 3.45) , el problema se reduce a resolver un problema estático equivalente:
. K U P =
Donde P es igual a ( )2
0.U ω . .
Si la matriz K es “No singular” (determinante distinto de cero), el sistema lineal no
homogéneo tiene una única solución 1U . Esta solución puede ser utilizada como un nuevo
valor tentativo para U y así sucesivamente, hasta llegar a la convergencia. El método de
Stodola garantiza convergencia cuando el determinante de la matriz de rigidez es distinto de
cero.
Secuencia de Iteración
1º paso:
Se propone un 0U inicial que cumple las condiciones de borde. Si bien 0U puede ser
elegido arbitrariamente, en todo procedimiento iterativo el número de pasos necesarios para
alcanzar la convergencia depende en alguna medida de cuan próximo esté el valor inicial de la
solución. Por ello parecería conveniente estimar o intuir el modo fundamental utilizando
alguna “deformada suave” como se muestra en la Figura 3.11 y que generalmentecorresponde al 1º modo.
Figura 3.11
De cualquier manera no es el caso de perder mucho tiempo estimando la aproximación
inicial ya que el procedimiento lleva de todos modos necesariamente en algunos pasos de
iteración a determinar el primer modo, también llamado “modo fundamental ”. Sólo en el casoque la forma inicial que se proponga para el modo sea próxima a uno de los modos superiores
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 428/500
es de esperar que la convergencia al modo fundamental requiera muchos más pasos de
iteración que si se usa una buena aproximación inicial.
2º paso:
Con la aproximación inicial 0U se recurre a la expresión (Ec. 3.45), dejando de lado2
ω ,que por el momento se supone igual a la unidad. Por la naturaleza del problema homogéneo,
cualquier múltiplo del modo es también otra expresión del mismo modo.
Se requiere ahora resolver el sistema lineal:
1 0. . K U M U =
Este problema es el paso básico de las iteraciones del método de Stodola cuya solución
está al alcance de quien lo necesite.
3º paso:
Se normaliza el vector 1U para obtener 1U .
La solución 1U vendrá magnificada o reducida respecto a 0U ya que no se ha multiplicado
el segundo miembro por 2ω . Para que no resulten números muy grandes o muy pequeños al
cabo de varios pasos de iteración, es conveniente normalizar el vector iU en cada iteración.
Para ello se dividen las componentes de iU por la componente de mayor valor absoluto.
A continuación se repite el 2º paso con el valor de 1U recién obtenido, continuando el
proceso hasta que U converja con la precisión deseada.
En cada iteración se resuelve el sistema 1. .i i K U M U −= , se normaliza iU y se prosigue con
la nueva iteración hasta la convergencia.
Convergencia
a) Control de convergencia a través de la forma del modo:Una manera de medir la convergencia es comparar las componentes de iU con las
respectivas componentes de 1iU − . La norma de error puede ser adimensional, por ejemplo
sobre la base del porcentaje de variación de cada una de las componentes. Suponiendo
normalizados tanto iU de la presente iteración como 1iU − de la iteración anterior, se pueden
definir los cocientes:
1 2
1 1 11 2
n
i i in
i i i
U U U U U U
− − − ……… (Ec. 3.46)
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 429/500
Una medida del error es que estos cocientes en general no son iguales entre si a menos que
la forma modal del paso anterior (i-1 ) sea la forma modal exacta. En cada paso de iteración el
vector se aproxima más al primer modo y los cocientes de la (Ec. 3.46) tienden al mismo
valor.
b) Control de convergencia por la frecuencia.
En lugar de emplear la expresión (Ec. 3.46) que implica un cociente para cada uno de los
grados de libertad (GLD), resulta más simple analizar la convergencia sobre el valor de la
frecuencia que es un escalar.
En cada paso de iteración se puede calcular la frecuencia en cada paso, aunque en realidad
el cálculo de la misma no es indispensable como parte del proceso de iteración.
Cuando finalmente se llega a que 2ω es una constante que establece la proporcionalidad
entre cada una de las componentes de . K U y de 1. iM U − ; 21. . .i i K U M U ω −= , se
cumplirá que:
12
1.i iU U
ω −
(Ec. 3.47)
Esta expresión, que se justifica formalmente más adelante, permite expresar:
1 22 1 1 1
1 2
ni i i
ni i i
U U U
U U U ω − − − ………
(Ec. 3.48)
De modo que resulta conveniente intercalar un paso de cálculo en que se calcule la
frecuencia antes de normalizar la solución obtenida en el segundo paso. Las expresiones (Ec.
3.48) dan en general valores diferentes de ω2 según la componente del vector U que se
considere, y se puede adoptar como límite de convergencia un cierto valor de la máxima
diferencia entre todos los valores de ω2 de la misma iteración. Otra alternativa es calcular el
valor promedio de ω2 dado por las expresiones de la (Ec. 3.48) y considerarlo como
estimador de la frecuencia en cada paso.
Otra manera de estimar el valor de la frecuencia en cada iteración es a través del Cociente
de Rayleigh, que resulta del multiplicar a ambos miembros de la expresión (Ec. 3.45) por la
transpuesta del modo U T y despejar 2ω :
2. . . .T T U K U U M U ω = . ∴
2 . .
. .
T
T
U K U
U M U ω =
(Ec. 3.49)
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 430/500
El numerador es la rigidez generalizada en el modo considerado y el denominador es la
inercia o masa generalizada. Esta expresión es exacta cuando U es la forma modal exacta,
y será utilizada cuando se aplique el método de descomposición modal.
2 ii
i K ω =
(Ec. 3.50)
Hay una serie de cocientes modificados, todos derivados de la expresión (Ec. 3.49), que
tratan de mejorar la aproximación utilizando la forma modal anterior y la actual para
extrapolar un valor más aproximado de la frecuencia.
A los efectos del presente curso, para estimar la frecuencia resulta suficiente tomar la
forma modal de cada iteración y reemplazarla en (Ec. 3.49). Nótese que el valor de la
frecuencia ω2 no depende si se usa la forma modal normalizada o sin normalizar.
Uno de los criterios de convergencia más simples consiste en intercalar en cada
iteración un paso que calcule la expresión (Ec. 3.50) y comparar la frecuencia así
obtenida con el valor correspondiente al paso anterior, y verificar que la variación
no supere incierto porcentaje prefijado como tolerancia.
Debe señalarse que la precisión en la forma modal es en general inferior a la de la
frecuencia. Por ejemplo, no es lo mismo decir que de un paso al siguiente el cambio de la
frecuencia es menor del 2%, que decir que la diferencia en cada componente del modo o aún
en promedio, es menor del 2%. En general es más exigente el criterio aplicado sobre el modo
ya que la frecuencia calculada según (Ec. 3.50) es una especie de promedio y los errores de
distinto signo tienden a compensarse en la estimación de la frecuencia.
Cuando interesa una estimación rápida de la frecuencia fundamental es
suficiente controlar la convergencia a través del valor de ω . Cuando con este
método se quiere calcular varios los modos es indispensable alcanzar una buenaconvergencia en el modo porque de lo contrario las condiciones de ortogonalidad
llevan a errores significativos en el cálculo de los modos superiores.
Hasta aquí la secuencia de iteración presentada permite obtener el modo fundamental. Si
se desea además determinar el segundo modo, bastará aplicar el mismo método pero con un
vector aproximado cuya ortogonalidad respecto del primer modo esté garantizada. Por lo tanto
si la aproximación del primer modo es pobre, no se puede pretender llegar a una buenaaproximación para el segundo modo. Para determinar varios modos se requiere establecer

5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 431/500
criterios de convergencia muy exigentes ya sea en el modo o en la frecuencia. A manera de
ejemplo, una tolerancia de convergencia en la frecuencia del 1% en dos pasos consecutivos
que puede ser aceptable para estimar la frecuencia fundamental, resulta en general insuficiente
para determinar los modos superiores.
Cuando se desea determinar varios modos el criterio de convergencia requiere cierta
experiencia empírica según el tipo de estructura. Por ejemplo, para 20 GLD y si sólo se
desean calcular 3 modos no es necesario ser tan exigentes en la tolerancia de convergencia
como para calcular 6 modos, porque a los últimos modos se le acumulan errores de todos los
modos anteriores.
Demostración de la Convergencia del Método de Stodola
Una aproximación cualquiera U puede expresarse como una combinación lineal de los
modos naturales jV a través de coeficientes indeterminados jq que son las componentes en
cada modo:
1 1 2 2. . .n nU q q qφ φ φ = + + +
1
.n
i ij i j
U q φ =
= ∑ (Ec. 3.51)
El índice “ i ”se refiere al paso de iteración i , mientras que el índice “ j ” se refiere al
modo natural j .
En vibraciones libres se tiene: 2. . 0 K U M U ω − =.
Multiplicando por la inversa de eso implica que: 1 2. . 0M K I ω − − =
Los modos naturales de vibración son los vectores propios de la matriz 1. K − y los
valores propios son iguales el cuadrado de la frecuencia natural de vibración.Por otro lado: 1
1 1. . . .i i i i K U M U U K M U −− − = ⇒ =
La matriz inversa de 1. K − es decir, 1. K M − tendrá los mismos vectores propios jφ ,
pero con valores propios recíprocos, vale decir 2
1
jω .
Nótese también que por definición de modo y frecuencia natural se tiene que:
12
1. . . j j
j K M φ φ ω
−
=
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 432/500
Multiplicar al vector modo jφ por 1. K M − equivale a dividir sus componentes por 2ω :
1 1 1 11 1 2 2. . . . . . . . . . .n n K M U q K M q K M q K M φ φ φ − − − − = + + +
1
1 1 2 22 2 21 2
1 1 1
. . . . . . . .n nn K M U q q qφ φ φ ω ω ω
−
= + + +
Sintetizando: 11. . i i K M U U −
− =
21
1. .
n
i ij j j j
U q φ ω =
= ∑ (Ec. 3.52)
De la comparación de (Ec. 3.51) y (Ec. 3.52) resulta evidente que en cada paso de
iteración la componente de cada modo jq crece con el cuadrado de la inversa de la
frecuencia jω de ese modo. De esta manera, la componente jq que mas crece es la
correspondiente a la frecuencia mas baja, vale decir, la correspondiente al modo
fundamental.
Durante el proceso de iteración de este método la componente del modo fundamental 1q
tiende a “1”, mientras que las restantes componentes tienden a “0”. Al alcanzar el nivel de
convergencia establecido la expresión (Ec. 3.52) se reduce a:
121
11. .iU φ
ω =
(Ec. 3.53)
que demuestra la expresión (Ec. 3.47).
La convergencia del método de Stodola al primer modo queda en consecuencia
garantizada cuando la matriz de rigidez K es definida positiva.
Método Stodola para obtener el modo de más alta frecuencia
En el proceso iterativo planteado para determinar el modo fundamental se adoptó un valor
tentativo de U en el segundo miembro de la expresión (Ec. 3.45) y se resolvió un sistema de
ecuaciones lineales cuya matriz es K .
2
. . K U M U ω = .
Se propone ahora un valor U para el primer miembro, según el siguiente esquema:

5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 433/500
12
1. . .i iU K U
ω −=
(Ec. 3.54)
Como la matriz es diagonal las ecuaciones están totalmente desacopladas y la solución
es inmediata.Es evidente que este procedimiento resulta operativamente mucho más simple pero ocurre
que en cada iteración las componentes de cada modo crecen proporcionalmente al cuadrado
de su frecuencia jω y el método converge al modo más alto.
Según se ha indicado anteriormente, los modelos de masas concentradas son una buena
representación para los modos bajos, pero no tan buenas para los modos altos. Por
consiguiente esta forma de operar según (Ec. 3.54) no se utiliza corrientemente porque nos
lleva al modo más alto, y el modelo de masas concentradas no constituye una buenaaproximación al problema físico real. Naturalmente, es posible determinar el modo
fundamental con esta secuencia de iteración, determinando previamente todos los modos
superiores, comenzando por el de más alta frecuencia.
Resumiendo, la expresión (Ec. 3.54) permite determinar de una manera
expeditiva los modos altos que de cualquier manera no son de gran precisión por
incapacidad del modelo de masas concentradas de representar bien a dichos modos.
Obtención del segundo modo y su frecuencia
Una vez obtenido el primer modo se puede aplicar el mismo procedimiento anteriormente
descrito para obtener el segundo modo.
En cada paso, la forma tentativa del segundo modo deberá ser ortogonal al primero.
Sea 1φ el primer modo, donde el subíndice indicara el modo, y el súper-índice indica la
componente del modo.112
11
1n
φ
φ φ
φ
=
La forma modal aproximada inicial ( )2 0U tendrá en general componentes en todos los
modos:

5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 434/500
( )2 1 1 2 201
. . . .n
n n j j j
U q q q qφ φ φ φ =
= + + + = ∑ (Ec. 3.55)
La componente que crecerá más en cada iteración será “ 1q ”, por lo que se trata de anularla
mediante un “barrido” en cada iteración.A partir de ( )2 0
U se puede determinar una aproximación ( )*
2 0U ortogonal al primer modo:
( ) ( )*
2 2 1 10 0.U U q φ = − (Ec. 3.56)
( )*
2 1 2 200. . .n nU q qφ φ φ = + + +
Para determinar 1q en la expresión (Ec. 3.55) se multiplica ambos miembros por 1 .T φ :
( )1 2 1 1 1 2 1 20. . . . . . . .T T T M U q M q M φ φ φ φ φ = + 1. . .T
n nq M φ φ + +
Donde los términos: 2 1 2. . .T q M φ φ 1. . .T n nq M φ φ + + son cero por ortogonalidad
Luego:
( ) ( )
( )
1 2 01 2 01 2
1 1 1
. .. .
. . .
r r T r
r T r
r r
M U M U
qM M
φ φ
φ φ φ = =
∑
∑
(Ec. 3.57)
Secuencia iterativa
d) Se propone ( )2 0U
e) Se calcula 1q según (Ec. 3.57)
f) Se determina ( )*
2 0U según (Ec. 3.56).
g) Se resuelve ( ) ( )*
2 21 0. . K U M U =
h) Se normaliza la solución ( )2 1U i) Se estima la frecuencia según (Ec. 3.49)
j) Se repite el paso d) utilizando en el segundo miembro ( )2 1U .
Observación:
En realidad la componente que más crece en cada paso es 1q que para ( )*
2 iU no es
exactamente nula debido a los errores numéricos por truncación y redondeo. Para garantizar la
convergencia al segundo modo se deben repetir en cada paso de iteración los pasos a), b) y c).Partiendo de ( )2 1i
U −
.

5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 435/500
Obtención de los modos superiores al segundo
Una vez obtenido el segundo modo, se aplica el método con una forma modal aproximada
( )3 0U la que debe transformarse en una forma modal ortogonal tanto al primero como al
segundo modo:
( )3 1 1 2 20. . .n nU q q qφ φ φ = + + + (Ec. 3.58)
Luego:
( ) ( )*
3 3 1 1 2 20 0. .U U q qφ φ = − − (Ec. 3.59)
( )*
3 1 2 3 300. 0. . .n nU q qφ φ φ φ = + + + +
Multiplicando ambos miembros de (Ec. 3.58) por 1 .T
φ resulta por ortogonalidad:
( ) ( )
( )
1 3 01 3 0 11
21 1
11
. .. .
. . .
nr r
T r r
nT r
r r
M U M U
qM
M
φ φ
φ φ φ
=
=
= =∑
∑
(Ec. 3.60)
Multiplicando ambos miembros de (Ec. 3.58) por 2 .T φ resulta por ortogonalidad:
( ) ( )
( )
2 3 02 3 0 12 2
2 22
1
. .. .
. . .
nr r
T r r
nT r
r r
M U M U
q M M
φ φ
φ φ φ
=
=
= =
∑
∑
(Ec. 3.61)
La secuencia iterativa es la misma utilizada para obtener el 2º modo:
k) Se propone ( )3 0U
l) Se calcula 1q según (Ec. 3.60) y 2q según (Ec. 3.61)
m) Se determina ( )*
3 0U según (Ec. 3.59)
n) Se resuelve el sistema ( ) ( ) *3 31 0. . K U M U =
o) Se normaliza la solución ( )3 1U
p) Se determina la frecuencia según (Ec. 3.49)
q) Se repiten los pasos d) , e) y f) hasta convergencia.
El procedimiento descrito para obtener el segundo y tercer modo puede generalizarse para
obtener todos los restantes modos superiores.

5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 436/500
En síntesis, el método de Stodola es muy conveniente para determinar los
primeros modos, pero no es en general el más adecuado para determinar los modos
superiores. Todo dependerá del grado de precisión con que se trabaje y el número de
GLD.Cuanto mayor sea el número de GLD habrá mayor acumulación de errores ya que los
modos superiores se determinan por la condición de ortogonalidad respecto a los modos
anteriores.
El método de Stodola es una de las formas más simples y rápidas de obtener el
modo fundamental por repetición de pasos de calculo estático.
La determinación del modo y la frecuencia fundamental se convierte “casi” en un cálculo
estático. Una forma particular del método de Stodola para estimar la frecuencia fundamental y
el primer modo conocido como Método de Rayleigh consiste en adoptar un procedimiento
especial para proponer 0U , que consiste en adoptar como vector de carga inicial 0.U al
vector del peso propio de la estructura. Con dicho vector se procede a resolver el sistema de
ecuaciones de la primera iteración de Stodola, se determina la solución 1U , y con ese valor se
determina la frecuencia fundamental a través de:
2 1 11
1 1
. .
. .
T
T
U K U
U M U ω =
Los pasos de este procedimiento simplificado para estimar el modo y la frecuencia
fundamental se ilustran en los ejemplos de la Figura 3.12

5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 437/500
Figura 3.12
Este procedimiento implica que en lugar de estimar 0U como se hace en la forma normal
del método de Stodola, se define un vector de aproximación ( 0.U ) que es directamente el
peso de la estructura aplicado en la dirección en que se producen las deformaciones de interés.
En el caso de la columna con tres masas, las fuerzas asociadas al peso se aplican en dirección
horizontal, mientras que en el caso de la viga las cargas del peso propio se aplican en la
dirección vertical en el primer paso de Stodola.
La deformación estática causada por el peso de las masas será utilizada como primera
aproximación 0U del método de Stodola, y si se desea mayor precisión se continua luego en
la forma habitual.
Método Holzer
Figura 3.13
1m
2m
3m
4m
1k
2k
3k
4k
2.m g
1.m g
3.m g
1
2
31
2.m g
1.m g
33.m g
2
1 2 3 5
6
4
1.m g 2.m g
3.m g 4.m g 5.m g
6.m g
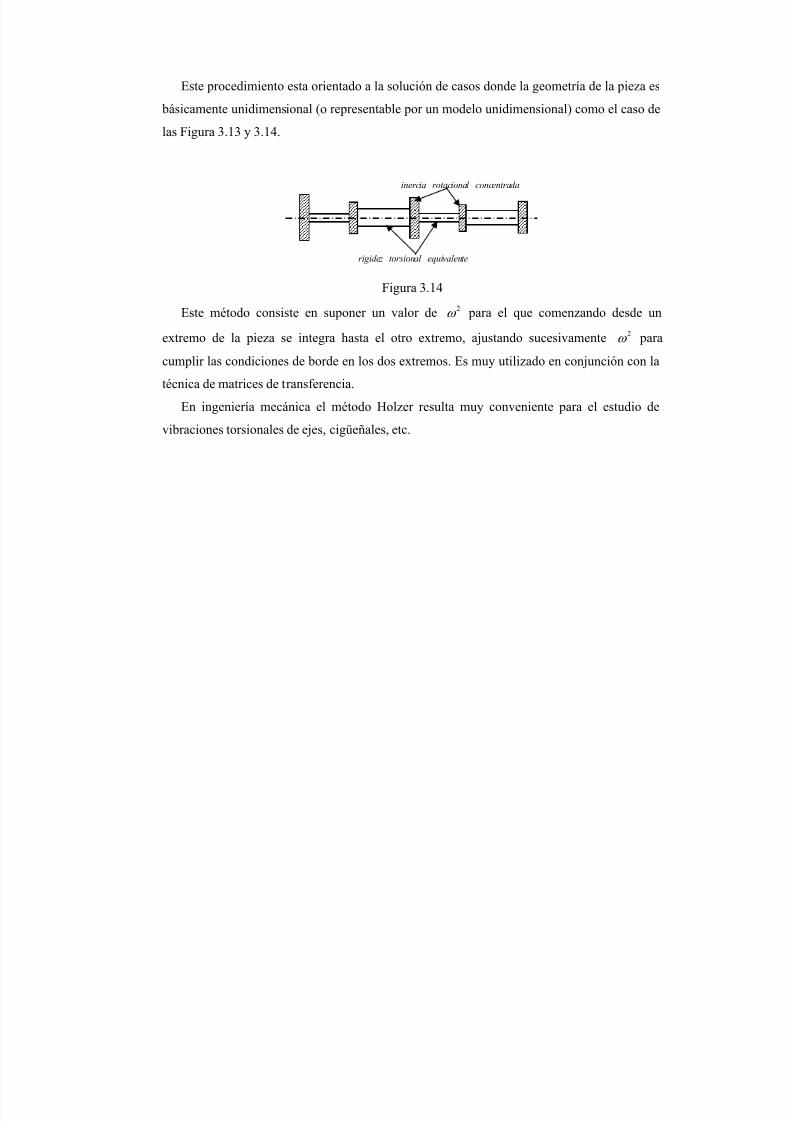
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 438/500
Este procedimiento esta orientado a la solución de casos donde la geometría de la pieza es
básicamente unidimensional (o representable por un modelo unidimensional) como el caso de
las Figura 3.13 y 3.14.
Figura 3.14
Este método consiste en suponer un valor de 2ω para el que comenzando desde un
extremo de la pieza se integra hasta el otro extremo, ajustando sucesivamente 2ω para
cumplir las condiciones de borde en los dos extremos. Es muy utilizado en conjunción con la
técnica de matrices de transferencia.
En ingeniería mecánica el método Holzer resulta muy conveniente para el estudio de
vibraciones torsionales de ejes, cigüeñales, etc.
rigidez torsional equivalente
inercia rotacional concentrada
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 439/500
Capítulo 4 Método de Descomposición Modal
Introducción
En el capitulo anterior se ha tratado el problema de vibraciones libres que implica resolver
un sistema de ecuaciones diferenciales homogéneo (2do. miembro nulo):
. . 0 K U M U + = Ahora se considera el caso de un sistema de múltiples GLD bajo cargas variables en el
tiempo:
. . . ( ) K U M U C U P t + + =
La solución de este sistema de ecuaciones diferenciales es muy laboriosa aun en el caso de
emplear métodos numéricos. Para simplificar el problema se introduce una transformación de
coordenadas adecuadas para las cuales, aprovechando las condiciones de ortogonalidad, es
posible llegar a un sistema de ecuaciones desacoplado, (una sola incógnita en cada ecuación).
4.1- Coordenadas Normales
Se retoma el ejemplo de la viga en voladizo con tres masas (Figura 4.1) tratada en el
Capítulo 3. La configuración deformada en el problema dinámico está dada por el vector
desplazamiento U .
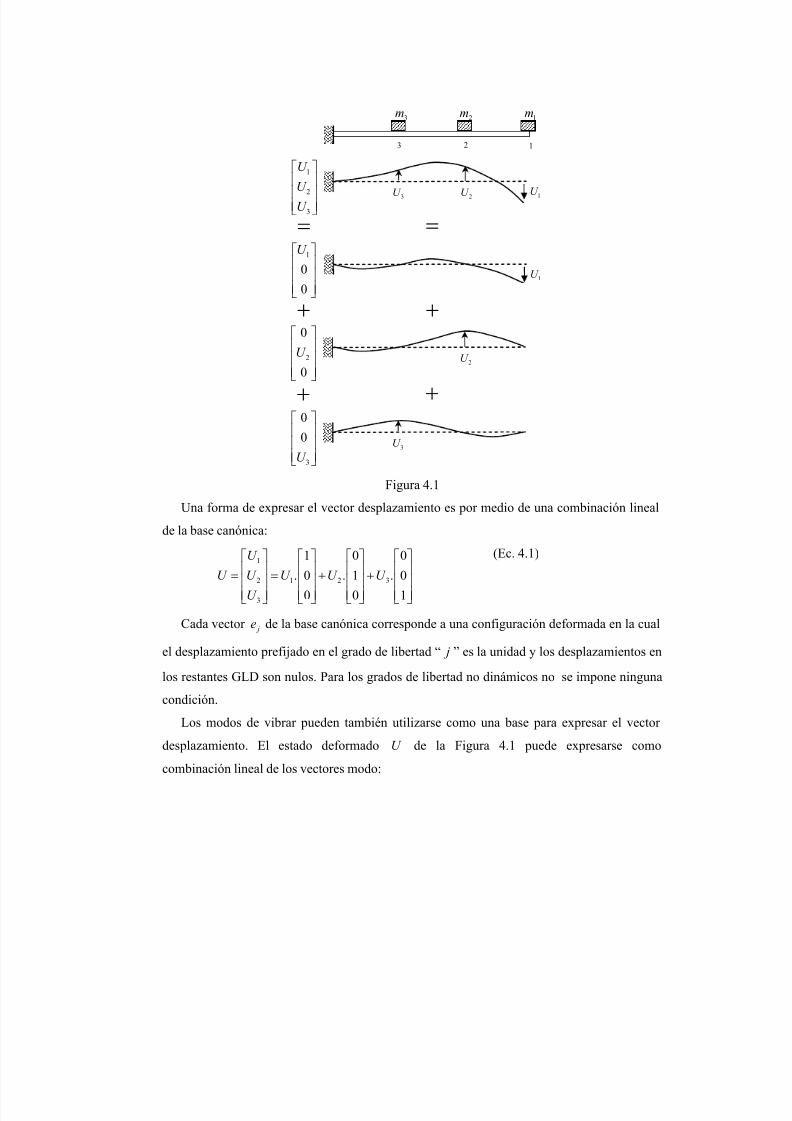
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 440/500
Figura 4.1Una forma de expresar el vector desplazamiento es por medio de una combinación lineal
de la base canónica:
1
2 1 2 3
3
1 0 0
. 0 . 1 . 0
0 0 1
U
U U U U U
U
= = + +
(Ec. 4.1)
Cada vector je de la base canónica corresponde a una configuración deformada en la cual
el desplazamiento prefijado en el grado de libertad “ j ” es la unidad y los desplazamientos enlos restantes GLD son nulos. Para los grados de libertad no dinámicos no se impone ninguna
condición.
Los modos de vibrar pueden también utilizarse como una base para expresar el vector
desplazamiento. El estado deformado U de la Figura 4.1 puede expresarse como
combinación lineal de los vectores modo:
3m
123
2m 1m
1
2
3
U U
U
1U 2U 3U
1
0
0
U
1U
= =
2
0
0
U
2U
++
3
0
0
U
3U
+ +
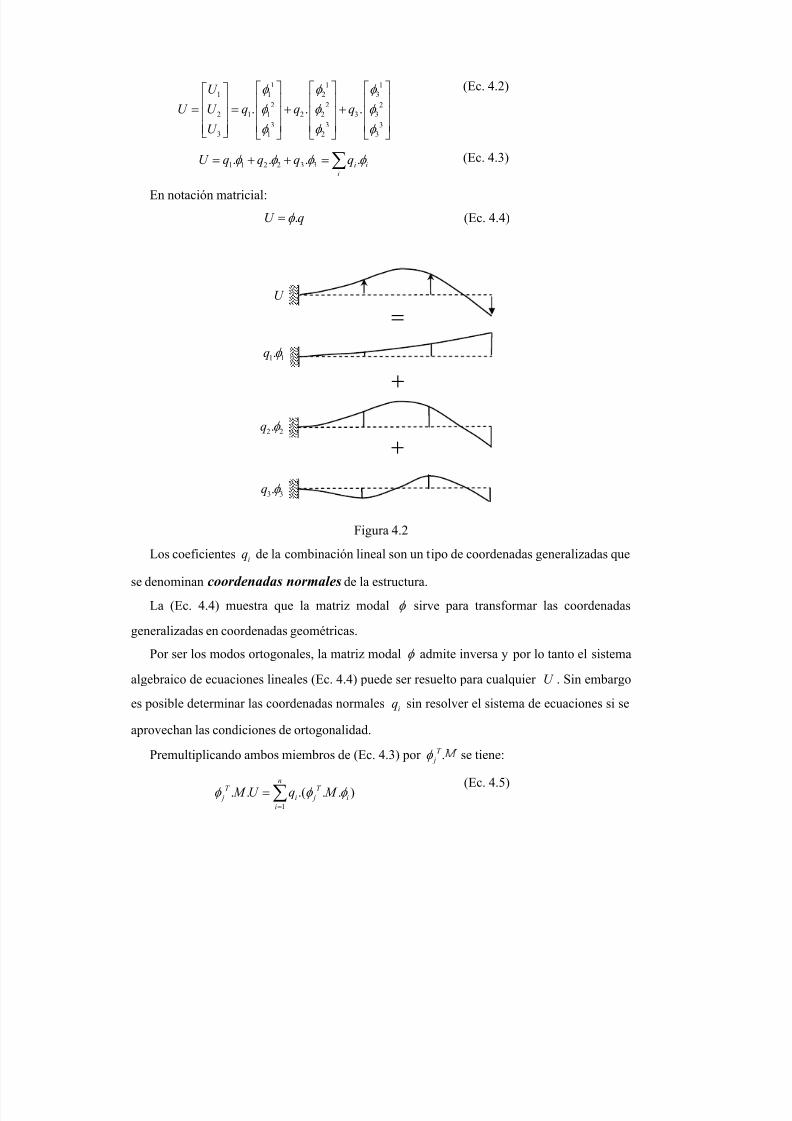
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 441/500
1 1 11 1 2 3
2 2 22 1 1 2 2 3 3
3 3 33 1 2 3
. . .
U
U U q q q
U
φ φ φ
φ φ φ
φ φ φ
= = + +
(Ec. 4.2)
1 1 2 2 3 3. . . .i iiU q q q qφ φ φ φ = + + = ∑ (Ec. 4.3)
En notación matricial:
.U qφ = (Ec. 4.4)
Figura 4.2
Los coeficientes iq de la combinación lineal son un tipo de coordenadas generalizadas que
se denominan coordenadas normales de la estructura.
La (Ec. 4.4) muestra que la matriz modal φ sirve para transformar las coordenadas
generalizadas en coordenadas geométricas.
Por ser los modos ortogonales, la matriz modal φ admite inversa y por lo tanto el sistemaalgebraico de ecuaciones lineales (Ec. 4.4) puede ser resuelto para cualquier U . Sin embargo
es posible determinar las coordenadas normales iq sin resolver el sistema de ecuaciones si se
aprovechan las condiciones de ortogonalidad.
Premultiplicando ambos miembros de (Ec. 4.3) por .T jφ se tiene:
1
. . .( . . )n
T T j i j i
i
M U q M φ φ φ =
= ∑ (Ec. 4.5)
U
=
+
+
1 1.q φ
2 2.q φ
3 3.q φ
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 442/500
En el segundo miembro de (Ec. 4.5) se anulan todos los términos en que “ i j≠ ” por
ortogonalidad (recordar la (Ec. 3.36) . . 0T j iM φ φ ⇒ = para i j≠ ).
El escalar . .T j jM φ φ puede pasarse dividiendo al otro miembro quedando:
. .
. .
T j
j T j j
U q
M
φ
φ φ =
(Ec. 4.6)
Esta sencilla expresión permite calcular cualquiera de las coordenadas normales para un
dado U .
4.2- Descomposición Modal sin Amortiguamiento
Partiendo de las ecuaciones de equilibrio dinámico sin amortiguamiento:. . K U M U P + = (Ec. 4.7)
e introduciendo coordenadas normales (Ec. 4.4) y sus derivadas segundas .U qφ = (la
matriz modal no varia en el tiempo), se tiene:
. . . . K q M q P φ φ + = (Ec. 4.8)
Premultiplicando por la matriz modal transpuesta T φ (tiene los modos como filas) queda:
( . . ). ( . . ). .T T T K q M q P φ φ φ φ φ + = (Ec. 4.9)
Una ecuación genérica “ i ” tiene la forma:
1 1
( . . ). ( . . ). .m m
T T T i j j i j j i
j j
K q M q P φ φ φ φ φ = =
+ =∑ ∑
Si j i≠ se tiene por ortogonalidad que:
. . 0T j i K φ φ = y . . 0T
j iM φ φ =
Al anularse todos los términos en que j i≠ el sistema queda desacoplado:
( . . ). ( . . ). .T T T
i i i i i i i K q M q P φ φ φ φ φ + = (Ec. 4.10)Donde:
. .T i i i K K φ φ = : es la rigidez generalizada asociada al modo “i” (Ec. 4.11)
. .T i i iM φ φ = : es la masa generalizada asociada al modo “i” (Ec. 4.12)
.T i i P Qφ = : es la carga generalizada asociada al modo “i” (Ec. 4.13)
Queda un sistema de ecuaciones desacoplado de la forma:
. .i i i i i K q M q Q+ = (Ec. 4.14)

5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 443/500
Importante:
El aspecto fundamental en el Método de Descomposición Modal es que permite
llegar a un sistema de Ecuaciones Diferenciales Desacopladas. Esto se logra de lasiguiente manera:
1) Introduciendo coordenadas normales
2) Utilizando las propiedades de ortogonalidad
Recordando que los modos satisfacen la ecuación de vibraciones libres (Ec. 3.27)
2. . .i i i K M φ ω φ = (Ec. 4.15)
Al multiplicar ambos miembros por la transpuesta del modo T iφ queda:
2. . . . .T T i i i i i K M φ φ ω φ φ =
Según (Ec. 4.11) y (Ec. 4.12):
2.i i i K M ω = (Ec. 4.16)
Por ser i K y i escalares resulta:
2 ii
i
K ω =
(Ec. 4.17)
La ecuación (Ec. 4.7) corresponde a un oscilador simple de masa i y rigidez i K y cuya
frecuencia iω , según (Ec. 4.17) es la correspondiente al modo “ i ”.
Por ser diagonal resulta muy sencillo el cálculo de i :
2.( )r i r i
r
M m φ = ∑ (Ec. 4.18)
Luego se calcula i K según (Ec. 4.16).
De esta manera se ha transformado un problema de ecuaciones acopladas (Ec. 4.7) en otro
que requiere resolver “n” ecuaciones, cada una correspondiente a un oscilador simple. La
respuesta U se obtiene superponiendo las iq según (Ec. 4.3).
1
.n
i ii
U q φ =
= ∑
Observando que cada oscilador (Ec. 4.14) tiene una rigidez proporcional al cuadrado de la
frecuencia natural iω podemos adelantar que las componentes “ iq ” en los modos altos serán
en general pequeñas (salvo resonancia). Esto implica que no siempre será necesarioconsiderar todos los modos para obtener una buena aproximación.

5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 444/500
Secuencia de cálculo:
a) Armar las matrices de masa y de rigidez condensada.
b) Calcular por algún método aproximado los primeros “ p ” modos y sus frecuencias.
c) Determinar i según (Ec. 4.18), i K según (Ec. 4.16) y iQ según (Ec. 4.13).
d) Resolver “ p ” osciladores simples (Duhamel, análisis numérico, etc).
e) Superponer las respuestas en cada modo según (Ec. 4.3)
f) Calcular los esfuerzos barra por barra.
Las condiciones iniciales para resolver (Ec. 4.14) en el paso (d) de la secuencia anterior se
obtienen según (Ec. 4.6).
( ) 00
. .T ii
i
U qM
φ = ; ( ) 00
. .T ii
i
U qM
φ = (Ec. 4.19)
Según (Ec. 4.3) el desplazamiento en el grado de libertad “ j ” es:
( )( ) ( )1
.n
t i t i j ji
U q φ =
= ∑ (Ec. 4.20)
Las fuerzas elásticas asociadas a cada grado de libertad son:
( )( ) .e t F t K U =
Sustituyendo (Ec. 4.3):
( )( ) . . . .e i i i ii
F t K q q K φ φ = =∑ ∑
Recordando (Ec. 4.15):
( )2( ) . .e i i i F t q M ω φ = ∑
Por ser diagonal, la fuerza elástica ( )( )e j F t asociada al grado de libertad “ j ” resulta:
[ ] ( )2
( ) . . .e i i j i j ji F t q mω φ = ∑ (Ec. 4.21)
Las ecuaciones (Ec. 4.20) y (Ec. 4.21) muestran que es más fácil conseguir buena
aproximación en la determinación de los desplazamientos que en la determinación de los
esfuerzos donde cada coordenada normal viene multiplicada por el cuadrado de su frecuencia
correspondiente.
Para un grado de aproximación dado será necesario incluir más modos cuando interesa
calcular esfuerzos que en los casos en que interesan sólo los desplazamientos. En general para
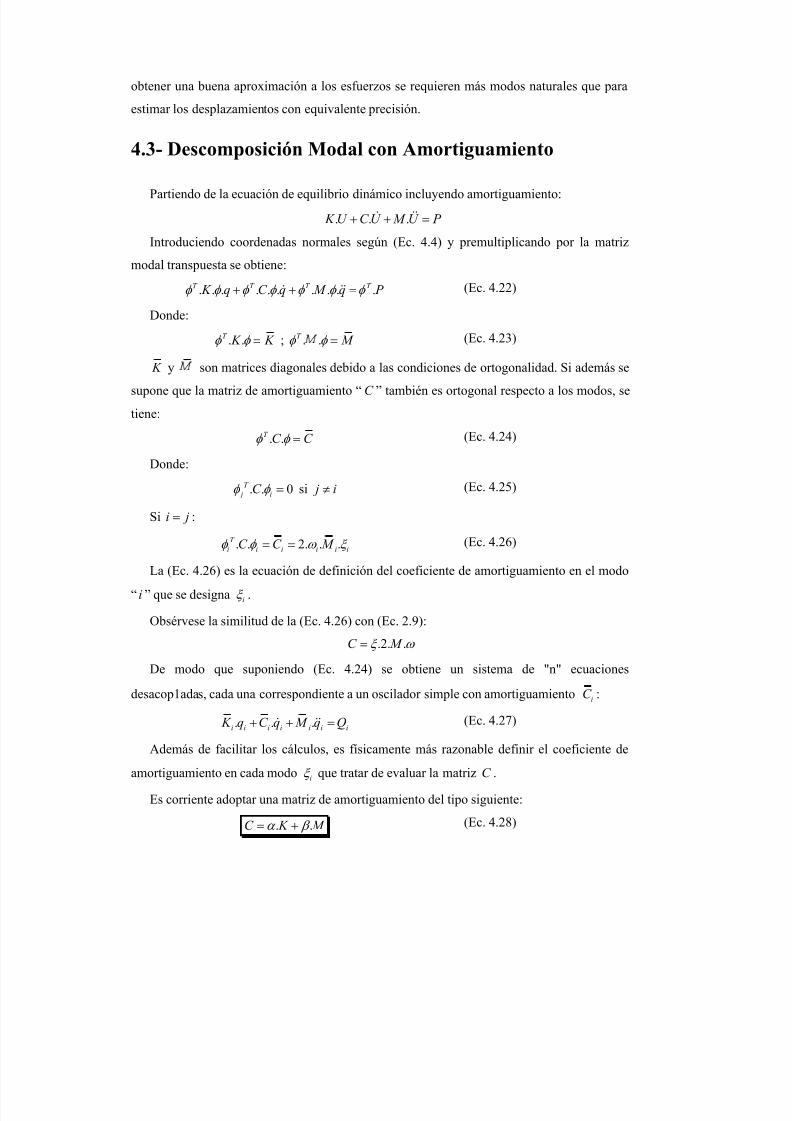
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 445/500
obtener una buena aproximación a los esfuerzos se requieren más modos naturales que para
estimar los desplazamientos con equivalente precisión.
4.3- Descomposición Modal con Amortiguamiento
Partiendo de la ecuación de equilibrio dinámico incluyendo amortiguamiento:
. . . K U C U M U P + + =
Introduciendo coordenadas normales según (Ec. 4.4) y premultiplicando por la matriz
modal transpuesta se obtiene:
. . . . . . . . . .T T T T K q C q M q P φ φ φ φ φ φ φ + + = (Ec. 4.22)
Donde:
. .T K K φ φ = ; . .T M φ φ = (Ec. 4.23)
K y son matrices diagonales debido a las condiciones de ortogonalidad. Si además se
supone que la matriz de amortiguamiento “C ” también es ortogonal respecto a los modos, se
tiene:
. .T C C φ φ = (Ec. 4.24)
Donde:
. . 0T
j iC φ φ = si j i≠ (Ec. 4.25)
Si i j= :
. . 2. . .T i i i i i iC C M φ φ ω ξ = = (Ec. 4.26)
La (Ec. 4.26) es la ecuación de definición del coeficiente de amortiguamiento en el modo
“ i ” que se designa iξ .
Obsérvese la similitud de la (Ec. 4.26) con (Ec. 2.9):
.2. .C M ξ ω =
De modo que suponiendo (Ec. 4.24) se obtiene un sistema de "n" ecuaciones
desacop1adas, cada una correspondiente a un oscilador simple con amortiguamiento iC :
. . .i i i i i i i K q C q M q Q+ + = (Ec. 4.27)
Además de facilitar los cálculos, es físicamente más razonable definir el coeficiente de
amortiguamiento en cada modo iξ que tratar de evaluar la matriz C .
Es corriente adoptar una matriz de amortiguamiento del tipo siguiente:
. .C K M α β = + (Ec. 4.28)

5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 446/500
Donde α y β son constantes escalares a determinar.
Esta hipótesis, conocida como Amortiguamiento Proporcional tiene la siguiente
gran ventaja: con ella es posible aplicar el Método de Descomposición Modal, ya
que las ecuaciones resultantes siguen siendo desacopladas.
Llevando (Ec. 4.28) a (Ec. 4.27) se tiene:
( ). . . . .
i
i i i i i i i i
C
K q K M q M q Qα β + + + =
(Ec. 4.29)
Las constantes α y β son determinadas de modo de lograr un grado de amortiguamiento
iξ deseado en dos modos prefijados.
Se debe destacar que para una matriz de amortiguamiento arbitraria C no se puede
garantizar el desacople del sistema de ecuaciones, y en consecuencia el método de
descomposición modal en la forma habitual no es aplicable.
En el caso que el amortiguamiento no es proporcional los modos naturales amortiguados
tienen componentes complejas (parte real e imaginaria) debidas al desfasaje causado por el
amortiguamiento. Su determinación es considerablemente más laboriosa que para los modos
no amortiguados utilizados en este curso.
En general no es posible contar con evidencia experimental suficiente que justifique laadopción de una matriz general C que implique amortiguamiento “NO PROPORCIONAL".
Partiendo de la expresión (Ec. 3.39):
1. . . . 0bT
i iM M K φ φ − =
Se han desarrollado procedimientos para obtener matrices de amortiguamiento que
contengan un grado de amortiguamientoξ prefijado “para un número prefijado cualquiera de
modos. Este tema no se explora en más detalle en el presente curso.
4.4- Una Mejora en el Método de Descomposición Modal
La mayor ventaja que se atribuye al método de descomposición modal es que en la
mayoría de los casos no es necesario utilizar ni determinar todos los modos y frecuencias.
En muchos casos se determinan los desplazamientos con un alto grado de precisión
utilizando unos pocos modos y posteriormente se comprueba si la exactitud en los esfuerzos
es suficiente.

5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 447/500
Las inexactitudes mencionadas se producen por no considerar las componentes de la carga
ortogonales a los modos considerados, pero pueden subsanarse fácilmente y basta con agregar
a la respuesta dinámica obtenida utilizando los primeros modos la respuesta casi estática de
los modos restantes.
Se comienza haciendo una transformación del vector de cargas para expresarlo en
coordenadas modales:
( )1 21 1
.... . .n n
i n i ii i
P P P P P C M φ = =
= = + + + =∑ ∑ (Ec. 4.30)
Para determinar los coeficientes de la combinación lineal se premultiplica ambos
miembros de (Ec. 4.30) por T iφ :
( )1
. . . . .n
T T i j i j i i
j P C M C M φ φ φ
== =∑ (Ec. 4.31)
Nótese que se aprovecharon las propiedades de ortogonalidad de los modos respecto de la
matriz de masa.
Recordando la definición de la ecuación (Ec. 4.13) de carga generalizada y observando
(Ec. 4.31), resulta evidente que cada componente de la carga en (Ec. 4.30) contribuye a la
respuesta en un único modo.
.T i iQ P φ = ; ii
iQC = ; .( . )i
i i
i
Q P M M
φ = (Ec. 4.32)
Es conveniente descomponer la carga en dos partes como sigue:
1 2 1...... ......
p s
p s p p n
P P
P P P P P P P P += + = + + + + + +
(Ec. 4.33)
La respuesta dinámica a la carga p P se obtiene mediante el método de descomposición
modal resolviendo los “ p ” osciladores simples del tipo (Ec. 4.14) o (Ec. 4.27) según se
considere o no el amortiguamiento:. . .i i i i i i i K q C q M q Q+ + = (Ec. 4.34)
Cuando sólo se consideran los primeros “ p ” modos se está despreciando la contribución
al desplazamiento proveniente de las componentes de la carga en los n p− modos superiores.
Para no tener que calcular esos modos superiores se puede aproximar la respuesta como
casi-estática resolviendo el sistema:
. s s K U P = (Ec. 4.35)
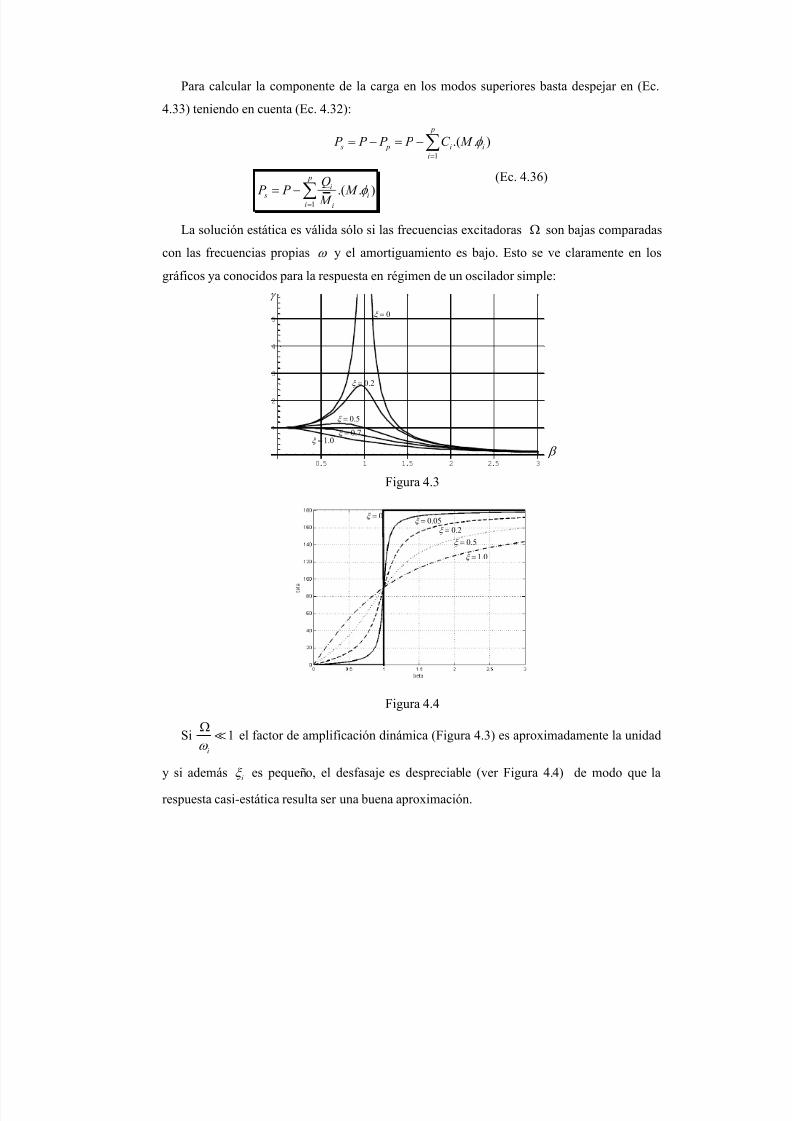
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 448/500
Para calcular la componente de la carga en los modos superiores basta despejar en (Ec.
4.33) teniendo en cuenta (Ec. 4.32):
1
.( . ) p
s p i ii
P P P P C M φ =
= − = − ∑
1
.( . ) p
i s i
i i
Q P P M
M φ
=
= − ∑ (Ec. 4.36)
La solución estática es válida sólo si las frecuencias excitadoras Ω son bajas comparadas
con las frecuencias propias ω y el amortiguamiento es bajo. Esto se ve claramente en los
gráficos ya conocidos para la respuesta en régimen de un oscilador simple:
Figura 4.3
Figura 4.4
Si 1iω
Ω el factor de amplificación dinámica (Figura 4.3) es aproximadamente la unidad
y si además iξ es pequeño, el desfasaje es despreciable (ver Figura 4.4) de modo que la
respuesta casi-estática resulta ser una buena aproximación.
0ξ =0.05ξ =
0.2ξ =
0.5ξ =
1.0ξ =
0.5 1 1.5 2 2.5 3
1
2
3
4
50ξ =
0.2ξ =
0.5ξ =
0.7ξ =1.0ξ =
β
γ

5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 449/500
Para esto pφ debe contener todos los modos correspondientes a frecuencias iω
correspondientes a la zona de la derecha del punto A de la Figura 4.3, es decir, las frecuencias
iω menores que las excitadoras iΩ como así también las de los valores próximos a dichas
frecuencias iΩ . De esa manera sφ sólo contiene frecuencias bastante mayores que las
excitadoras y se cumple:( )
1i s
ω
Ω
Importante:
Cuando la carga tiene una frecuencia mucho menor que las frecuencias propias
significa que varía “lentamente” frente a la velocidad de reacción de la estructura y
se comporta como “carga casi-estática”.
Algoritmo:
a) Armar K y
b) Calcular los primeros p modos
c) Calcular iq resolviendo la expresión (Ec. 4.34)
d) Calcular s P según la expresión (Ec. 4.36)
e) Calcular sU resolviendo la expresión (Ec. 4.35).f) Calcular la respuesta . p p sU q U φ = +
g) Determinar los esfuerzos en cada barra . K U P =
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 450/500
Capítulo 5 Excitación dinámica por movimiento de apoyo
Introducción
En este capítulo se analiza el problema dinámico en el que en lugar de aplicar fuerzas
conocidas ( ) P t en los nudos, la excitación dinámica está definida a través de imponer el
desplazamiento ( ) AU t (o equivalentemente la aceleración ( ) AU t ) de ciertos grados de
libertad. Naturalmente, cuando los desplazamientos de ciertos grados de libertad (GDL) son
conocidos, las fuerzas a aplicar en esos nudos para imponer dichos desplazamientos son en
general desconocidas. En tal caso esas fuerzas constituyen las reacciones que genera el
movimiento de apoyo aplicado. Esta clase de problemas dinámicos tiene particular
importancia en la Ingeniería Civil ya que en ella se encuentra encuadrada la respuesta de
estructuras a los movimientos sísmicos, que es uno de los estados básicos de carga
importantes en el diseño de estructuras en zonas susceptibles de sufrir este tipo de
solicitaciones.
Cuando los desplazamientos impuestos ocurren lentamente, o sea que se pueden
aproximar como estáticos, éstos producen esfuerzos y tensiones sólo cuando la estructura es
hiperestática, ya que en caso de estructuras isostáticas los desplazamientos lentos de apoyo
no inducen tensiones ni reacciones en los puntos de apoyo. Por el contrario, cuando los
desplazamientos son impuestos en una estructura hiperestática, éstos producen en general
tensiones internas y reacciones independientemente de si los desplazamientos son lentos orápidos.
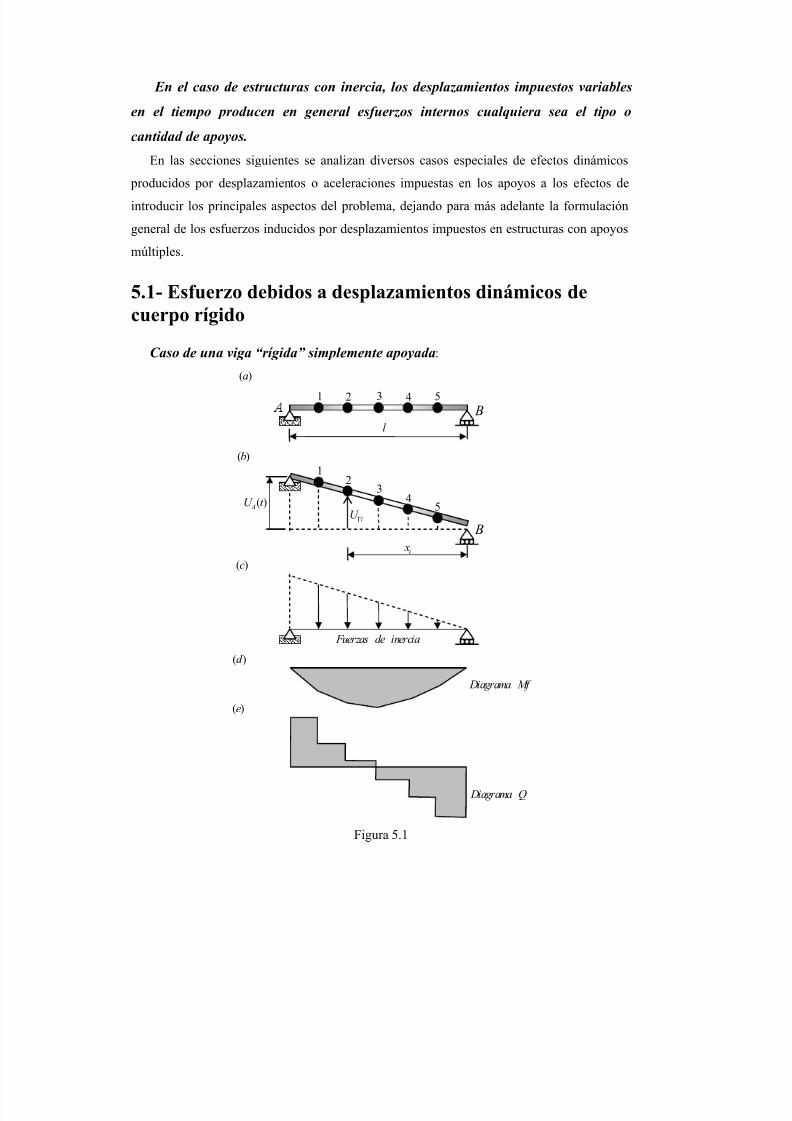
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 451/500
En el caso de estructuras con inercia, los desplazamientos impuestos variables
en el tiempo producen en general esfuerzos internos cualquiera sea el tipo o
cantidad de apoyos.
En las secciones siguientes se analizan diversos casos especiales de efectos dinámicos producidos por desplazamientos o aceleraciones impuestas en los apoyos a los efectos de
introducir los principales aspectos del problema, dejando para más adelante la formulación
general de los esfuerzos inducidos por desplazamientos impuestos en estructuras con apoyos
múltiples.
5.1- Esfuerzo debidos a desplazamientos dinámicos de
cuerpo rígido
Caso de una viga “rígida” simplemente apoyada:
Figura 5.1
l
B1 2 3 4 5
( )a
( ) AU t
B
12
3 45
iU Γ
i x
( )b
Fuerzas de inercia
( )c
Diagrama Mf
( )d
Diagrama Q
( )e

5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 452/500
En la viga simplemente apoyada de la Figura 5.1 se considera que el apoyo A se desplaza
verticalmente según en el tiempo según la función ( ) AU t .
Si la viga fuese rígida, es decir que no se deforma bajo cargas transversales, el
desplazamiento de cada masa sería proporcional a ( ) AU t y a la distancia i X de dicha masa alapoyo B, tal como se puede observar en la Figura 5.1.b. Una distribución similar en el espacio
tiene la velocidad y la aceleración de cada masa, de modo que la fuerza de inercia en cada
masa resulta:
. ( ). . ( )ii A i i
X m U t m U t
l Γ
− = −
(Ec. 5.1)
Como se indica en la Figura 5.1.c, las fuerzas de inercia que se inducirían en las distintas
masas están dadas por la (Ec. 5.1), las que según el principio de D’Alambert pueden ser tratadas como cargas exteriores aplicadas al sistema. Como resultado de ese desplazamiento
del apoyo, la viga resulta sometida a tensiones internas asociadas a los momentos flectores y
esfuerzos cortantes originados por las fuerzas de inercia. Los esfuerzos internos están
representados en las Figura 5.1.d y 5.1.e. Debe destacarse que las fuerzas de inercia de la (Ec.
5.1) dan origen al vector de carga asociado a la excitación por el movimiento del apoyo, y
que dicho vector de carga no depende de la rigidez de la viga, es decir que el vector de carga
es el mismo independientemente que se trate de una viga rígida o de una viga flexible. Ladiferencia entre esos dos casos radica únicamente en si ocurre alguna deformación adicional
respecto a la línea recta que une los dos puntos de apoyo de la viga en cualquier instante de la
excitación. En efecto, si la viga es infinitamente rígida, el vector de cargas debido al
desplazamiento del apoyo (dado por el (Ec. 5.1)) no producirá deformaciones adicionales al
desplazamiento de cuerpo rígido entre los apoyos, y los esfuerzos de flexión y corte (y las
reacciones) podrán ser determinados por el procedimiento habitual para cualquier estado de
carga estático. En realidad hay una aparente contradicción intrínseca al decir que se aplica el
procedimiento estático para calcular la respuesta a fuerzas que son esencialmente dinámicas
que provienen de multiplicar una masa por una aceleración. En estos casos, tal vez sea más
apropiado decir que se aplica el procedimiento “casi-estático” para calcular los esfuerzos y
reacciones debidos a las fuerzas de inercia. El método de análisis es estático, pero las fuerzas
que constituyen el vector de carga son de origen dinámico ya que está asociada al producto de
la masa de los distintos grados de libertad por el vector conocido de aceleración en cada uno
de ellos. Por lo tanto, la designación del método como “casi-estático” es más apropiada que la
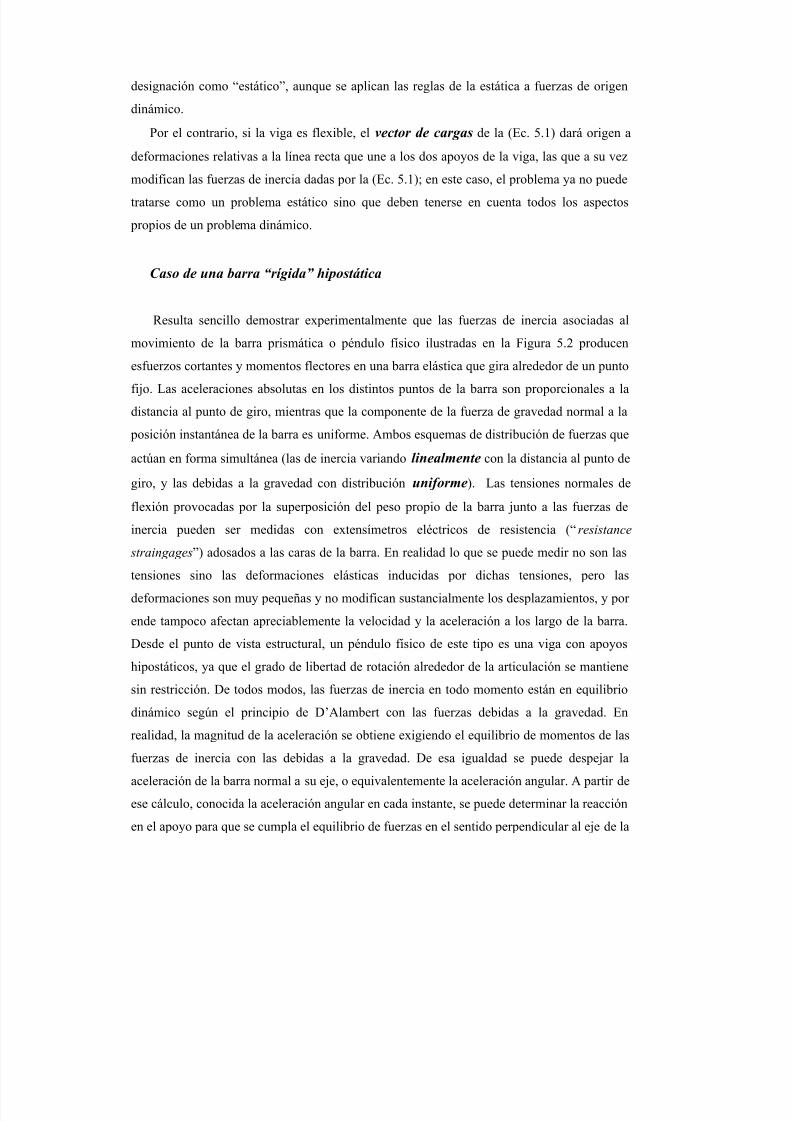
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 453/500
designación como “estático”, aunque se aplican las reglas de la estática a fuerzas de origen
dinámico.
Por el contrario, si la viga es flexible, el vector de cargas de la (Ec. 5.1) dará origen a
deformaciones relativas a la línea recta que une a los dos apoyos de la viga, las que a su vezmodifican las fuerzas de inercia dadas por la (Ec. 5.1); en este caso, el problema ya no puede
tratarse como un problema estático sino que deben tenerse en cuenta todos los aspectos
propios de un problema dinámico.
Caso de una barra “rígida” hipostática
Resulta sencillo demostrar experimentalmente que las fuerzas de inercia asociadas almovimiento de la barra prismática o péndulo físico ilustradas en la Figura 5.2 producen
esfuerzos cortantes y momentos flectores en una barra elástica que gira alrededor de un punto
fijo. Las aceleraciones absolutas en los distintos puntos de la barra son proporcionales a la
distancia al punto de giro, mientras que la componente de la fuerza de gravedad normal a la
posición instantánea de la barra es uniforme. Ambos esquemas de distribución de fuerzas que
actúan en forma simultánea (las de inercia variando linealmente con la distancia al punto de
giro, y las debidas a la gravedad con distribución uniforme). Las tensiones normales deflexión provocadas por la superposición del peso propio de la barra junto a las fuerzas de
inercia pueden ser medidas con extensímetros eléctricos de resistencia (“resistance
straingages”) adosados a las caras de la barra. En realidad lo que se puede medir no son las
tensiones sino las deformaciones elásticas inducidas por dichas tensiones, pero las
deformaciones son muy pequeñas y no modifican sustancialmente los desplazamientos, y por
ende tampoco afectan apreciablemente la velocidad y la aceleración a los largo de la barra.
Desde el punto de vista estructural, un péndulo físico de este tipo es una viga con apoyos
hipostáticos, ya que el grado de libertad de rotación alrededor de la articulación se mantiene
sin restricción. De todos modos, las fuerzas de inercia en todo momento están en equilibrio
dinámico según el principio de D’Alambert con las fuerzas debidas a la gravedad. En
realidad, la magnitud de la aceleración se obtiene exigiendo el equilibrio de momentos de las
fuerzas de inercia con las debidas a la gravedad. De esa igualdad se puede despejar la
aceleración de la barra normal a su eje, o equivalentemente la aceleración angular. A partir de
ese cálculo, conocida la aceleración angular en cada instante, se puede determinar la reacción
en el apoyo para que se cumpla el equilibrio de fuerzas en el sentido perpendicular al eje de la
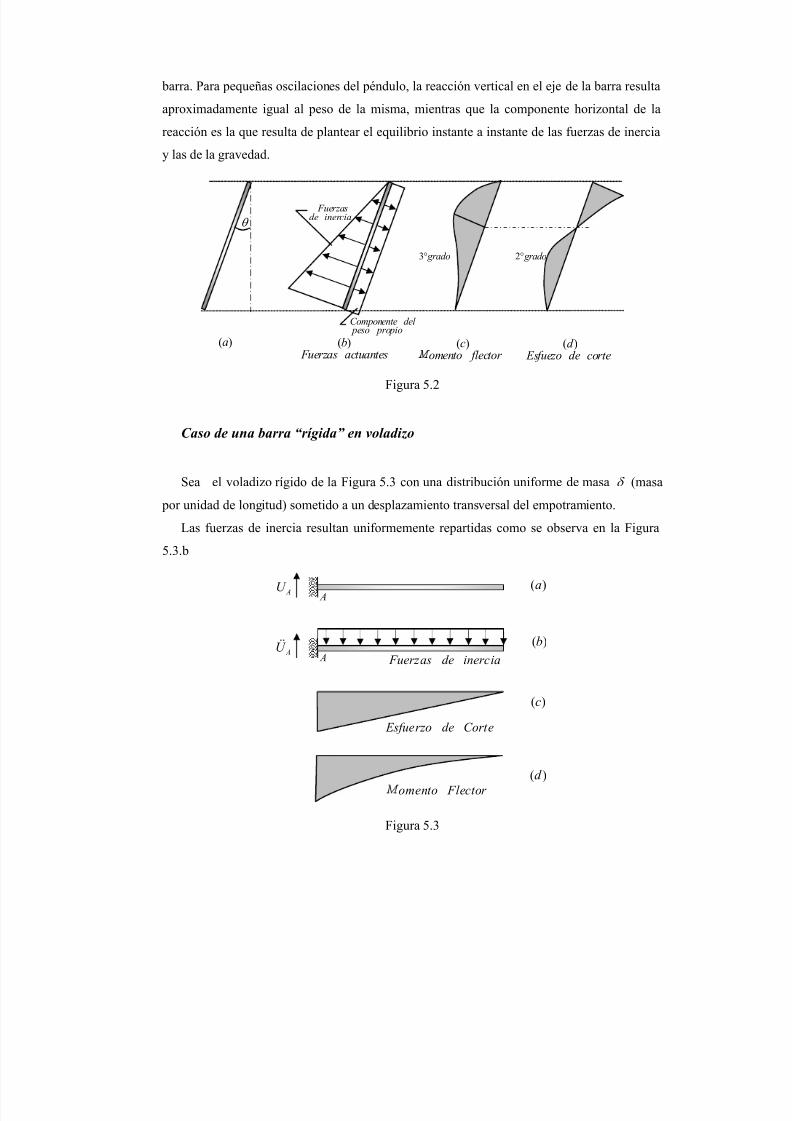
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 454/500
barra. Para pequeñas oscilaciones del péndulo, la reacción vertical en el eje de la barra resulta
aproximadamente igual al peso de la misma, mientras que la componente horizontal de la
reacción es la que resulta de plantear el equilibrio instante a instante de las fuerzas de inercia
y las de la gravedad.
Figura 5.2
Caso de una barra “rígida” en voladizo
Sea el voladizo rígido de la Figura 5.3 con una distribución uniforme de masa δ (masa
por unidad de longitud) sometido a un desplazamiento transversal del empotramiento.
Las fuerzas de inercia resultan uniformemente repartidas como se observa en la Figura
5.3.b
Figura 5.3
AU A
AU
A
( )a
( )b
( )c
( )d
Fuerzas de inercia
Esfuerzo de Corte
omento Flector
( )a
de inercia Fuerzas
Componente del peso propio
θ
( )b Fuerzas actuantes
( )cMomento flector
( )d Esfuezo de corte
3 grado° 2 grado°
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 455/500
( ) . ( ). AdF t U t dxδ = (Ec. 5.2)
A partir del razonamiento anterior, por simples consideraciones estáticas se pueden
determinar los diagramas de momento flector y esfuerzo de corte de las Figura 5.3.c y Figura
5.3.d.Si la estructura es flexible, la zona del extremo del voladizo sufrirá desplazamientos
adicionales a los de la base, los que llevan a fuerzas de inercia adicionales que modificarán los
diagramas de f y Q . Nótese que los esfuerzos internos son funciones del tiempo a través
de ( ) AU t .
El procedimiento seguido en los tres casos anteriores es utilizado con frecuencia en
problemas donde se supone conocida la aceleración ( ) AU t instante a instante.
En esencia este “método simplificado” consiste en cargar la estructura con las fuerzas de
inercia calculadas sobre la hipótesis de movimiento de cuerpo rígido. Dichas cargas (fuerzas
de inercia) se consideran como cargas estáticas y a partir de las mismas se calculan
(estáticamente) los esfuerzos.
Este procedimiento implica dos hipótesis. La primera consiste en calcular en cada instante
las fuerzas de inercia teniendo en cuenta únicamente el valor de la aceleración conocida AU
en ese instante. La segunda, es tratar a las fuerzas de inercia como cargas estáticas. En ambos
casos se trata al problema en forma estática, es decir que la respuesta de la estructura se
calcula a partir de las fuerzas actuantes instante a instante. En realidad es como si se estuviera
aplicando el método de las fuerzas según el cual se calculan los esfuerzos sin determinar los
desplazamientos, y posteriormente calcular los desplazamientos asociados a dichos esfuerzos.
Alternativamente, el problema puede también tratarse por el método de rigidez considerando a
las fuerzas de inercia como cargas estáticas.
Para tener en cuenta las fuerzas de inercia inducidas por las deformaciones de la pieza,
deberá hacerse un planteo más general aplicable independientemente que la estructura sea
relativamente rígida o flexible. Dicho planteo tomará en cuenta además del valor de la
aceleración total en cada instante la ley de variación de la misma varía en el tiempo.
Una de las posibles formas de tratar el problema es a través del método de rigidez que se
desarrolla a continuación.
5.2- Formulación general del problema de movimiento de
apoyo
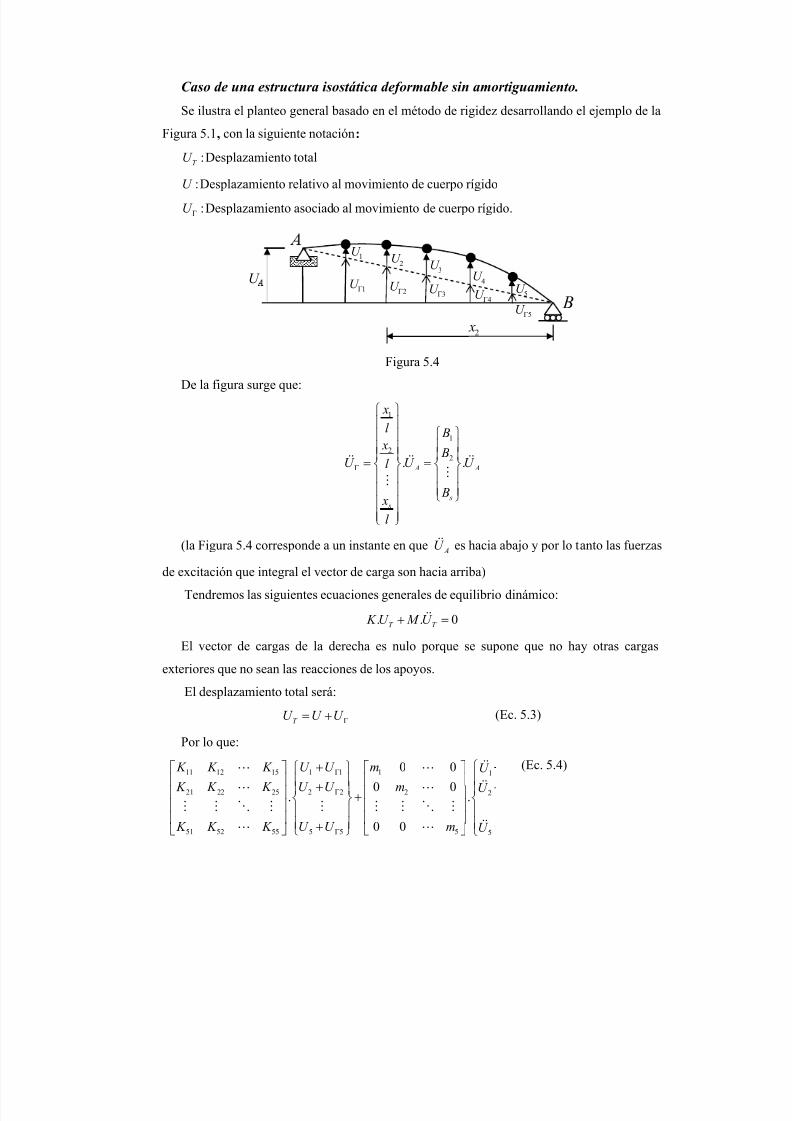
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 456/500
Caso de una estructura isostática deformable sin amortiguamiento.
Se ilustra el planteo general basado en el método de rigidez desarrollando el ejemplo de la
Figura 5.1, con la siguiente notación:
:T U Desplazamiento total:U Desplazamiento relativo al movimiento de cuerpo rígido
:U Γ Desplazamiento asociado al movimiento de cuerpo rígido.
Figura 5.4
De la figura surge que:
1
1
22. . A A
s s
x
l B x
BU U U l
B x
l
Γ
= =
(la Figura 5.4 corresponde a un instante en que AU es hacia abajo y por lo tanto las fuerzas
de excitación que integral el vector de carga son hacia arriba)
Tendremos las siguientes ecuaciones generales de equilibrio dinámico:
. . 0T T K U M U + =
El vector de cargas de la derecha es nulo porque se supone que no hay otras cargas
exteriores que no sean las reacciones de los apoyos.
El desplazamiento total será:
T U U U Γ= + (Ec. 5.3)
Por lo que:
11 12 15 1 1 1 1
21 22 25 2 2 2 2
51 52 55 5 5 5 5
0 0
0 0. .
0 0
K K K U U m U
K K K U U m U
K K K U U m U
Γ
Γ
Γ
+ + +
+
(Ec. 5.4)
B
2 x
AU 1U Γ 2U Γ 3U Γ
4U Γ5U Γ
1U 2U
3U 4U
5U
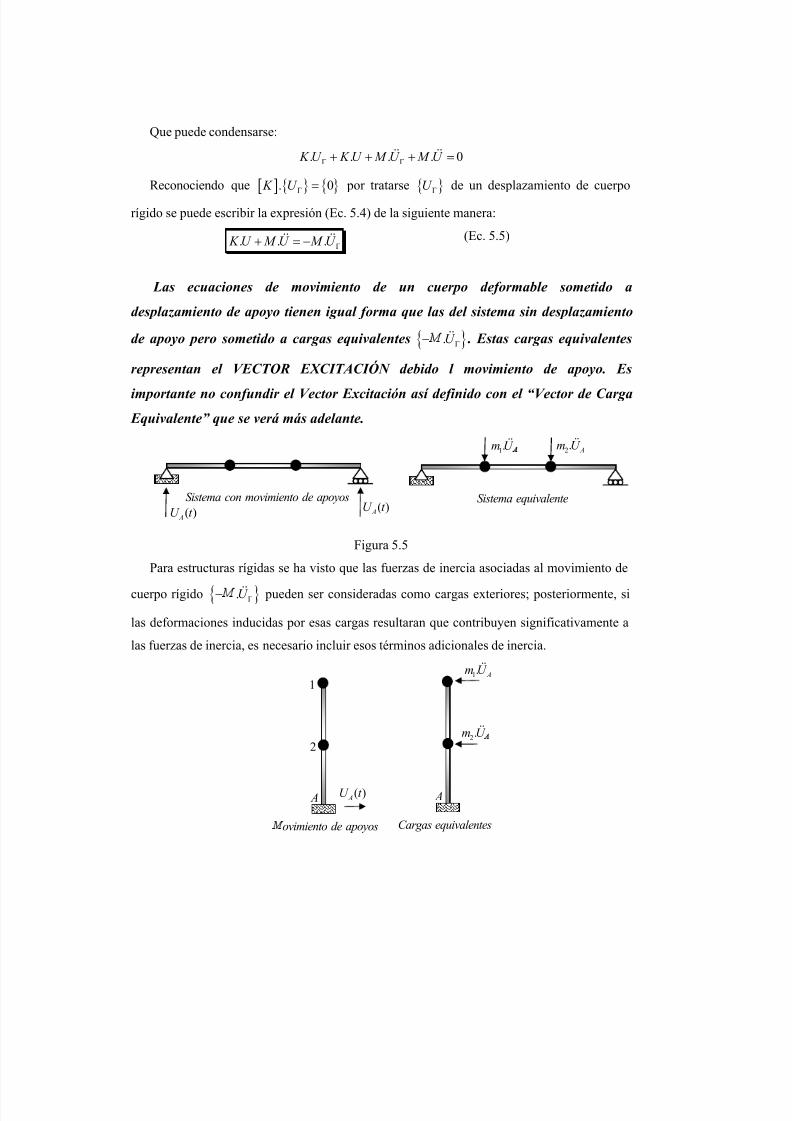
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 457/500
Que puede condensarse:
. . . . 0 K U K U M U M U Γ Γ+ + + =
Reconociendo que [ ] . 0 K U Γ = por tratarse U Γ de un desplazamiento de cuerpo
rígido se puede escribir la expresión (Ec. 5.4) de la siguiente manera:
. . . K U M U M U Γ+ = − (Ec. 5.5)
Las ecuaciones de movimiento de un cuerpo deformable sometido a
desplazamiento de apoyo tienen igual forma que las del sistema sin desplazamiento
de apoyo pero sometido a cargas equivalentes .U Γ− . Estas cargas equivalentes
representan el VECTOR EXCITACIÓN debido l movimiento de apoyo. Es
importante no confundir el Vector Excitación así definido con el “Vector de Carga
Equivalente” que se verá más adelante.
Figura 5.5
Para estructuras rígidas se ha visto que las fuerzas de inercia asociadas al movimiento de
cuerpo rígido .U Γ− pueden ser consideradas como cargas exteriores; posteriormente, si
las deformaciones inducidas por esas cargas resultaran que contribuyen significativamente a
las fuerzas de inercia, es necesario incluir esos términos adicionales de inercia.
( ) AU t
Movimiento de apoyos
A
2
1
2.m U
Cargas equivalentes
A
1. Am U
( ) AU t Sistema con movimiento de apoyos
( ) AU t
1.m U
Sistema equivalente
2. Am U

5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 458/500
Figura 5.6
La expresión (Ec. 5.5) tiene en cuenta simultáneamente estos dos aspectos: por un lado la
solución de la misma U es el desplazamiento relativo respecto al apoyo; las fuerzas de
inercia asociadas a la aceleración relativa al de cuerpo rígido constituyen el término M Ü , y
por otro lado las fuerzas de inercia .U Γ− debidas a la excitación.
En la expresión (Ec. 5.5) se puede apreciar el método simplificado propuesto
anteriormente como “casi-estático”, que consiste en despreciar el término .U y utilizar
sólo las fuerzas de inercia aproximadas .U Γ− para resolver luego las deformaciones
aproximadas U (no de cuerpo rígido).
. . K U M U Γ−
Observando la expresión (Ec. 5.5) se puede apreciar que:
Determinar si un movimiento de apoyo es estático o dinámico es equivalente a
determinar si las fuerzas equivalentes .U Γ− son aplicadas en forma estática o
dinámica.
. . . .i i i i AiU m U m B U Γ Γ− = − = −
Cada componente del vector de carga equivalente es proporcional a AU a través de un
factor de proporcionalidad que se designa como .i im B independiente del tiempo, por lo que el
gráfico que representa el vector de las fuerzas equivalentes resulta ser el mismo gráfico de
( ) AU t pero en otra escala.
Figura 5.7
Si Dt T ≤ → EXCITACIÓN DINAMICA
Si Dt T → PROBLEMA ESTATICO
La solución de la ecuación (Ec. 5.5) se logra a través de los procedimientos generales yavistos para cualquier carga variable en el tiempo. Nótese que las incógnitas en la ecuación
AU
t
AU
t Dt Dt
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 459/500
(Ec. 5.5) corresponden al movimiento relativo U respecto al desplazamiento asociado al
movimiento de cuerpo rígido.
Las fuerzas internas en cada instante podrán ser calculadas utilizando los desplazamientos
relativos U premultiplicados por las respetivas matrices de rigidez de cada barra, tal como se
ha hecho en los casos estáticos.
5.3- Aplicación del Método de Descomposición Modal
En las secciones anteriores se ha presentado el problema del movimiento de apoyo (sin
cargas externas) a través de un transformarlo según (Ec. 5.5) en un problema dinámico sin
movimiento de apoyo pero con cargas exteriores .U Γ− . También se ilustró que el
problema equivalente puede ser resuelto en la forma habitual para cualquier carga de tipo
dinámico. A continuación se particulariza el procedimiento de solución basado en el método
de descomposición modal.
En el caso de excitación por movimientos de apoyo el método de descomposición modal
lleva naturalmente al concepto de “factor de participación modal” . El vector
desplazamiento relativo al apoyo U se expresa como una combinación lineal de los modos
naturales a través de:
1
.n
j j j
U q φ =
= ∑ (Ec. 5.6)
Donde jφ representa el modo j y jq a su coordenada generalizada, y n el numero de
GLD.
Sustituyendo la expresión (Ec. 5.6) en la ecuación (Ec. 5.5) se pasa a coordenadas
generalizadas, y premultiplicando ambos miembros de cada ecuación “ j ” del sistema por T jφ
se obtiene a través del teorema de ortogonalidad un sistema de ecuaciones desacopladas de la
forma:
. . . .T j j j j jq K q M M U φ Γ+ = − (Ec. 5.7)
. . .T j A BU φ = −
. .. .
T j
j A
j
M BU
M
φ = −
(Ec. 5.8)
Donde:
( )2
1
. . .nT j j j i j i
i
M M mφ φ φ =
= = ∑

5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 460/500
2. . .T j j j j j K K M φ φ ω = =
j j
j
K ω =
. AU BU Γ =
Factor de participación modal
Nótese que la ecuación (Ec. 5.8) tiene la misma forma que la de un oscilador simple de
frecuencia jω , con la excepción del factor de proporcionalidad jΓ que denominaremos
“ factor de participación modal ”.
. .
. .
T j
j T j j
B
M
φ
φ φ Γ =
(Ec. 5.9)
Por lo tanto, la respuesta en el modo j , estará dada a través del producto:
( ). j j s jq U = Γ (Ec. 5.10)
Figura 5.8
Donde ( ) s jU es la respuesta en el tiempo de un oscilador simple no amortiguado de
rigidez j K y masa j sometido al movimiento de apoyo AU .
Para operar en forma práctica se procede de la siguiente manera:
a) Se determina la matriz de inercia y matriz de rigidez condensada en la forma
habitual (condensación matricial, cross, flexibilidad, etc)
b) Se determinan las frecuencias y modos naturales de vibración (por ejemplodeterminamos los k primeros modos por el método Stodola). En realidad, esta es la
j K
j
( ) s jU . j AU
A

5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 461/500
parte más laboriosa del problema ya que el resto es muy simple y requiere poco
esfuerzo computacional.
c) Se calculan las masas generalizadas en cada modo mediante la expresión:
( ) ( ) ( )2 2 2
1 21 2. . . j j j n j nM m m mφ φ φ = + + +…
d) Se determinamos la rigidez generalizada en cada modo mediante el producto de la
masa generalizada recién calculada por el cuadrado de la frecuencia del modo:
2. j j j K M ω =
Esta expresión tiene gran importancia conceptual ya que indica que la rigidez de los
modos superiores es muy grande (comparada con la rigidez de los primeros) y en
consecuencia la respuesta (el desplazamiento) será en general muy pequeña (salvo
amplificación por resonancia).
e) Se calculan los factores de participación:
. .
. .
T j
j T j j
B
M
φ
φ φ Γ =
1
2
0 0
0 0
0 0 n
m
m
m
1
2
n
B
B
B
( ) ( ) ( )1 2 j j jn
φ φ φ … ( ) ( ) ( )1 21 2. . . j j j nnm m mφ φ φ … ( ) . . j i ii
i
m Bφ ∑
( ) . . j i ii j
j
m B
M
φ Γ =
∑
El denominador es la masa generalizada j ya calculada en el paso c).
f) Se determinamos la respuesta para cada uno de los “n” osciladores simples sin
amortiguamiento, con una carga . ( ) j AU t − . Esto se hace en la forma habitual
(Duhamel, análisis numérico, etc.)

5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 462/500
Figura 5.9
g) Finalmente se superponen las respuestas ( ) jq t en cada modo, multiplicadas por el
correspondiente factor de participación:
11 1
1 1 222 2
2 1 21 1 2 2
1 2
. ( ). . ( ). . ( ).
k
k k k
nn nn k
U
U q t q t q t
U
φ φ φ φ φ φ
φ φ φ
= Γ + Γ + + Γ
……
(Ec. 5.11)
Se insiste en que no es necesario calcular todos los “n” modos ni extender la suma (Ec.
5.11) a todos los modos. Bastará según el problema considerar los k primeros modos, donde
k debe ser determinado según el contenido de frecuencias de la excitación, de la distribución
de frecuencias naturales del problema y de la distribución espacial de las masas. Más detalles
sobre este aspecto exceden el alcance de este curso.
5.4- Movimiento Dinámico de Apoyos en sistemas no
amortiguados
Planteo en desplazamientos relativos
Al desplazar “dinámicamente” un apoyo se producen aceleraciones en los grados de
libertad dinámicos, (GLD); que provocan “fuerzas de inercia” que “atrasan” la respuesta. Si se
agregan fuerzas “ficticias” que “neutralizan” esas fuerzas de inercia se obtiene un estado de
desplazamientos “casi-estático” al que debe sumarse luego, la solución correspondiente a las
fuerzas ficticias cambiadas de signo.
El problema de desplazamiento dinámico de apoyo se descompone en la suma de dos
estados:
a) Un estado casi-estático de desplazamiento prefijado de apoyo pero sin fuerzas de
inercia
j K
j
. ( ) j AU t −

5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 463/500
b) Un estado dinámico donde solo actúan las fuerzas de inercia pero sin
desplazamiento prefijado de apoyo
La respuesta del problema a) por ser casi-estática se obtiene multiplicando la función del
tiempo ( ) AU t por la solución estática para un desplazamiento unitario 1 AU = .
Convención: ( )U ↑ + ( )U ↑ + ( )U ↑ + 1 ( ) B ↑ +
Figura 5.10
El estado I es un problema estático de desplazamiento prefijado 1 AU = , que debe
resolverse para hallar el vector B , que contiene los desplazamientos de los grados de libertad
dinámicos.
El estado II es un problema dinámico y debe resolverse como tal, usando
descomposición modal, integración directa, etc.
Caso en que RU es un desplazamiento de cuerpo rígido
Hay situaciones en que el Estado I consiste en un desplazamiento de cuerpo rígido. Entales casos el cálculo se simplifica al no ser necesario resolver el Estado I porque los
esfuerzos son nulos y el calculo de B resulta trivial. Esto ocurre cuando:
a) La estructura es isostática
Figura 5.11
Excitación dinámica
por movimiento de
apoyo
Problema casi-estático con
desplazamiento prefijado
sin fuerzas de inercia
Problema dinámico con
cargas dinámicas sin
desplazamiento de apoyo
( ) AU t
⇒ 11 B2 B
l l l
⇒ 1
2
0.5
1.5
B B
B
= =
( ) AU t A= ( ). AU t 1
1 B2 B+
1 1. . ( ) Am B U t − 2 2. . ( ) Am B U t −
Estado II Estado I
( )T U t ( ) ( ). R AU t U t B= ( )U t

5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 464/500
b) Todos los apoyos sufren igual desplazamiento:
Figura 5.12
En estos casos no es necesario conocer ( ) AU t . El problema puede ser resuelto a partir de
las aceleraciones de apoyo ( ) AU t . Notar que éste es el caso de un problema Sísmico donde el
análisis se basa en acelerogramas experimentales.
Método Simplificado
Cuando RU es un desplazamiento de cuerpo rígido sólo hay que resolver el Estado II que
es un problema dinámico.
Cuando la variación en el tiempo de la aceleración ( ) AU t es “lenta” comparada con el
período fundamental de la estructura se puede lograr una notable simplificación considerando
al problema como casi-estático.
Figura 5.13
En tales casos los esfuerzos máximos se obtienen cargando a la estructura con lasmáximas fuerzas de inercia resolviendo un problema estático.
Figura 5.14
⇒1 1 max. . Am B U −
2 2 max. . Am B U − Resolver Estado II
Esfuerzos Máximos
= ( ). AU t
1 1. . ( ) Am B U t − 2 2. . ( ) Am B U t −
( ) ACaso en que U t
tiene variación lenta
Estado II Problema Estático
1 1.m B− 2 2.m B−
( ) AU t
⇒11 B
2 B1
2
1
1
B B
B
= =
1
( ) AU t
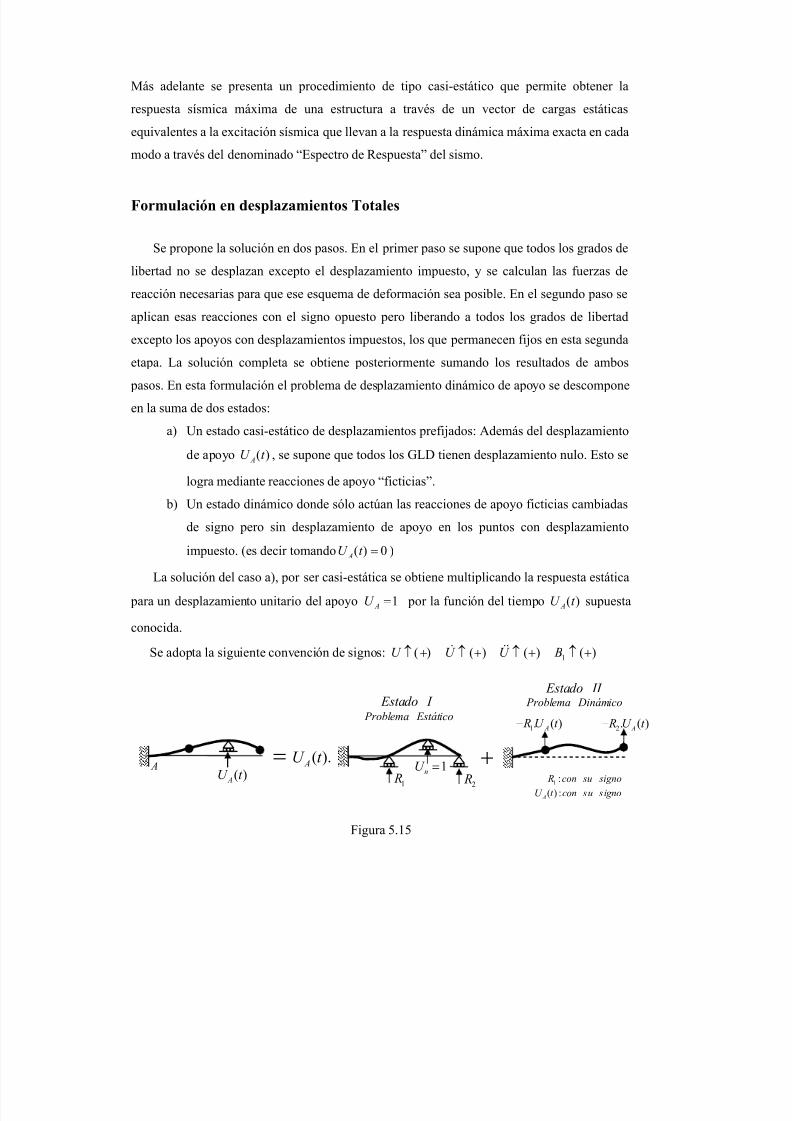
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 465/500
Más adelante se presenta un procedimiento de tipo casi-estático que permite obtener la
respuesta sísmica máxima de una estructura a través de un vector de cargas estáticas
equivalentes a la excitación sísmica que llevan a la respuesta dinámica máxima exacta en cada
modo a través del denominado “Espectro de Respuesta” del sismo.
Formulación en desplazamientos Totales
Se propone la solución en dos pasos. En el primer paso se supone que todos los grados de
libertad no se desplazan excepto el desplazamiento impuesto, y se calculan las fuerzas de
reacción necesarias para que ese esquema de deformación sea posible. En el segundo paso se
aplican esas reacciones con el signo opuesto pero liberando a todos los grados de libertad
excepto los apoyos con desplazamientos impuestos, los que permanecen fijos en esta segunda
etapa. La solución completa se obtiene posteriormente sumando los resultados de ambos
pasos. En esta formulación el problema de desplazamiento dinámico de apoyo se descompone
en la suma de dos estados:
a) Un estado casi-estático de desplazamientos prefijados: Además del desplazamiento
de apoyo ( ) AU t , se supone que todos los GLD tienen desplazamiento nulo. Esto se
logra mediante reacciones de apoyo “ficticias”.
b) Un estado dinámico donde sólo actúan las reacciones de apoyo ficticias cambiadas
de signo pero sin desplazamiento de apoyo en los puntos con desplazamiento
impuesto. (es decir tomando ( ) 0 AU t = )
La solución del caso a), por ser casi-estática se obtiene multiplicando la respuesta estática
para un desplazamiento unitario del apoyo 1 AU = por la función del tiempo ( ) AU t supuesta
conocida.
Se adopta la siguiente convención de signos: ( )U ↑ + ( )U ↑ + ( )U ↑ + 1 ( ) B ↑ +
Figura 5.15
( ) AU t A
= ( ). AU t 1nU =
1 R
+
1. ( ) A R U t −
Estado II Estado I
Problema Estático Problema Dinámico
2 R
2. ( ) A R U t −
1 : R con su signo
( ) : AU t con su signo

5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 466/500
Nótese que:
En todos los casos el Estado I es un problema hiperestático, en general altamente de
alto grado de indeterminación estática, típico de desplazamientos impuestos o
prefijados. (en general no corresponden a desplazamientos de cuerpo rígido)
No interviene en los cálculos la aceleración de apoyo ( ) AU t sino el desplazamiento
( ) AU t . En el caso de excitaciones sísmicas es necesario digitalizar el acelerograma
para proceder a la integración numérica para obtener ( ) AU t por doble integración
en el tiempo de ( ) AU t .
En general la formulación en función de desplazamientos totales no es muy usada en el
diseño sísmico de la mayoría de las estructuras civiles, con excepción de aquellos casos en
que se considera el movimiento diferenciado de los distintos apoyos, como ocurre en
estructuras de grandes dimensiones en planta frente a la longitud de onda del movimiento
sísmico.
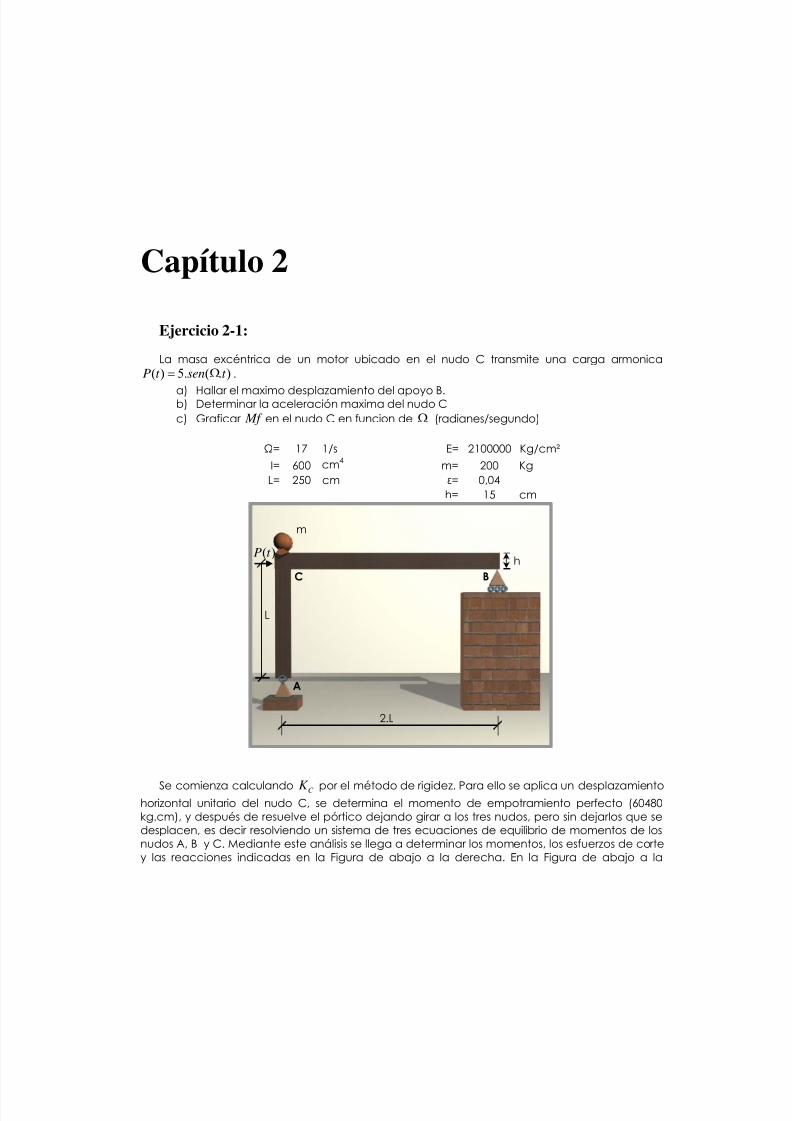
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 467/500
Capítulo 2 Ejercicio 2-1:
La masa excéntrica de un motor ubicado en el nudo C transmite una carga armonica
( ) 5. ( . )P t sen t = Ω .
a) Hallar el maximo desplazamiento del apoyo B.b) Determinar la aceleración maxima del nudo C
c) Graficar Mf en el nudo C en funcion de Ω (radianes/segundo)
Ω= 17 1/s E= 2100000 Kg/cm²
I= 600 cm4
m= 200 Kg
L= 250 cm ε= 0,04
h= 15 cm
Se comienza calculando C K por el método de rigidez. Para ello se aplica un desplazamiento
horizontal unitario del nudo C, se determina el momento de empotramiento perfecto (60480
kg.cm), y después de resuelve el pórtico dejando girar a los tres nudos, pero sin dejarlos que sedesplacen, es decir resolviendo un sistema de tres ecuaciones de equilibrio de momentos de losnudos A, B y C. Mediante este análisis se llega a determinar los momentos, los esfuerzos de cortey las reacciones indicadas en la Figura de abajo a la derecha. En la Figura de abajo a la
2.L
L
m
A
BC
( )P t h
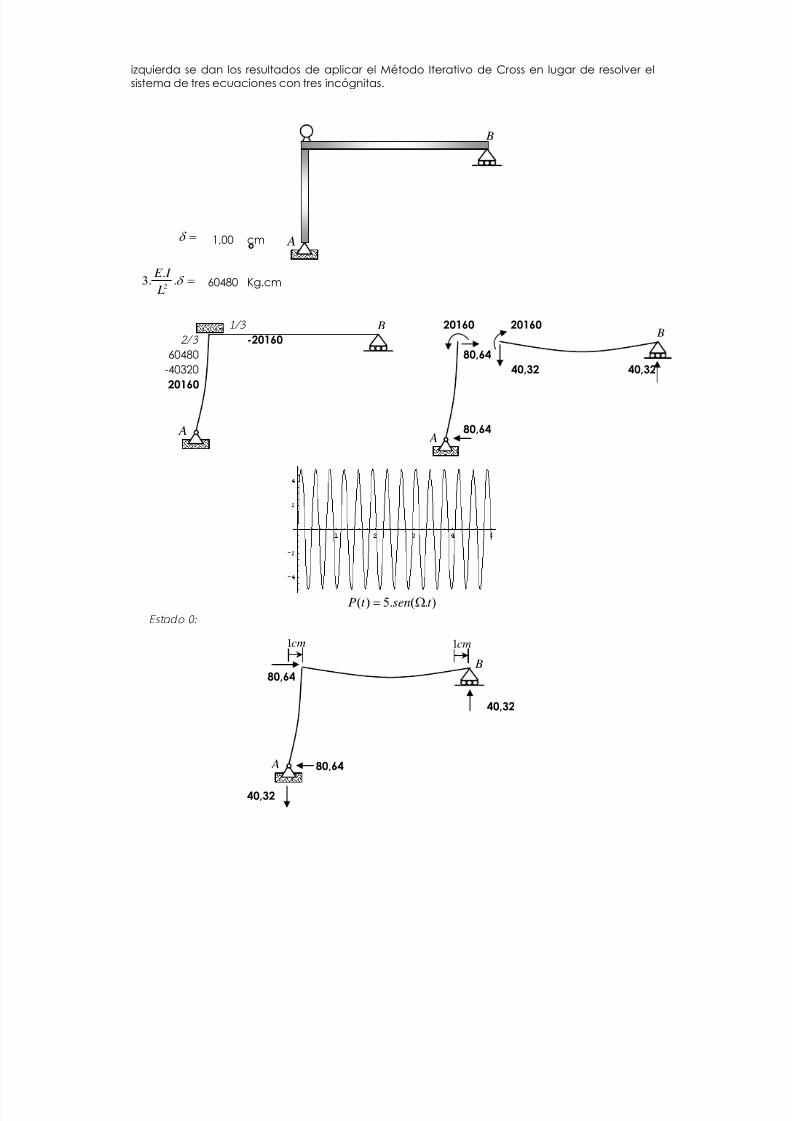
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 468/500
izquierda se dan los resultados de aplicar el Método Iterativo de Cross en lugar de resolver elsistema de tres ecuaciones con tres incógnitas.
1,00 cm
60480 Kg.cm
1/ 3
20160 201602/ 3
-20160
60480 80,64
-40320 40,32 40,32
20160
80,64
( ) 5. ( . )P t sen t = Ω
Estado 0:
80,64
40,32
80,64
40,32
A
B
A
B
A
B
2
.3. .
E I
Lδ =
δ =
A
B
1cm 1cm
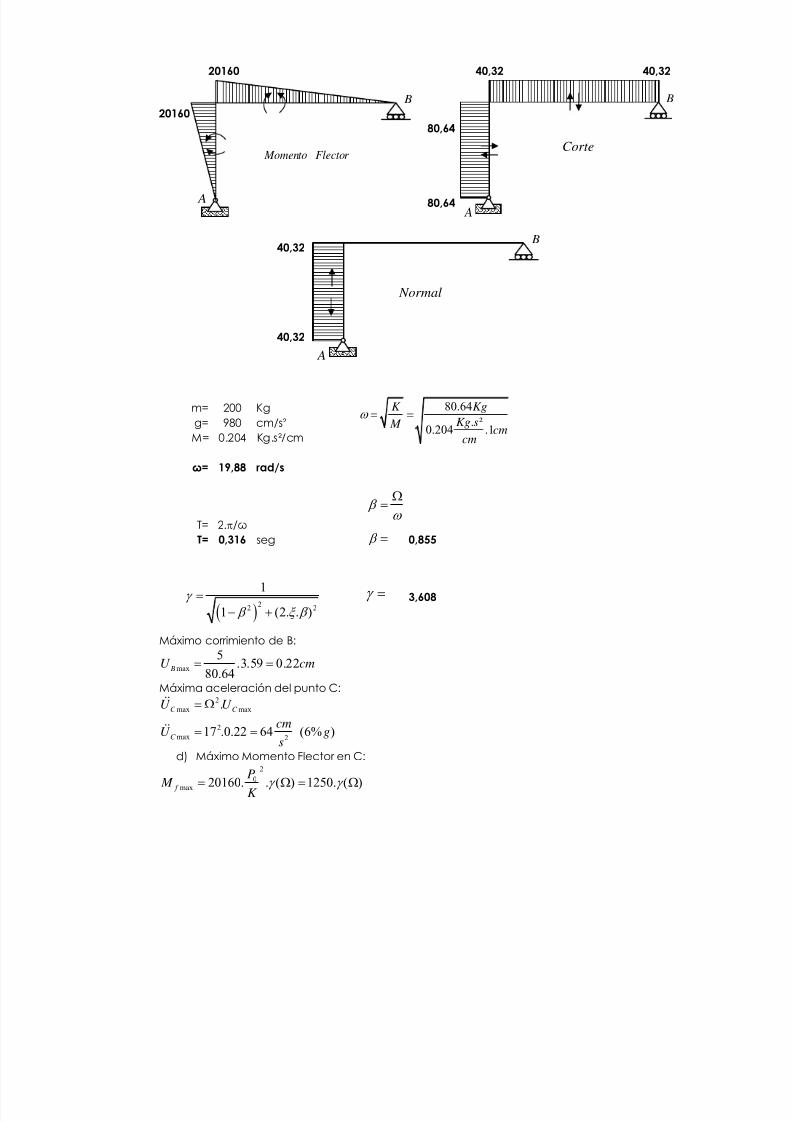
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 469/500
20160 40,32 40,32
20160
80,64
80,64
40,32
40,32
m= 200 Kg
g= 980 cm/s²
M= 0,204 Kg.s²/cm
ω= 19,88 rad/s
T= 2.π/ω
T= 0,316 seg 0,855
3,608
Máximo corrimiento de B:
max5 .3.59 0.22
80.64 B
U cm= =
Máxima aceleración del punto C:2
max max.C C U U = Ω
2
max 217 .0.22 64 (6% )
C
cmU g
s= =
d) Máximo Momento Flector en C:2
0
max20160. . ( ) 1250. ( ) f
P M
K γ γ = Ω = Ω
A
B
Momento Flector
A
B
Corte
A
B
Normal
80.64
. ²0.204 .1
K Kg
Kg s M cm
cm
ω = =
( )2
2 2
1
1 (2. . )
γ
β ξ β
=− +
γ =
β ω
Ω=
β =
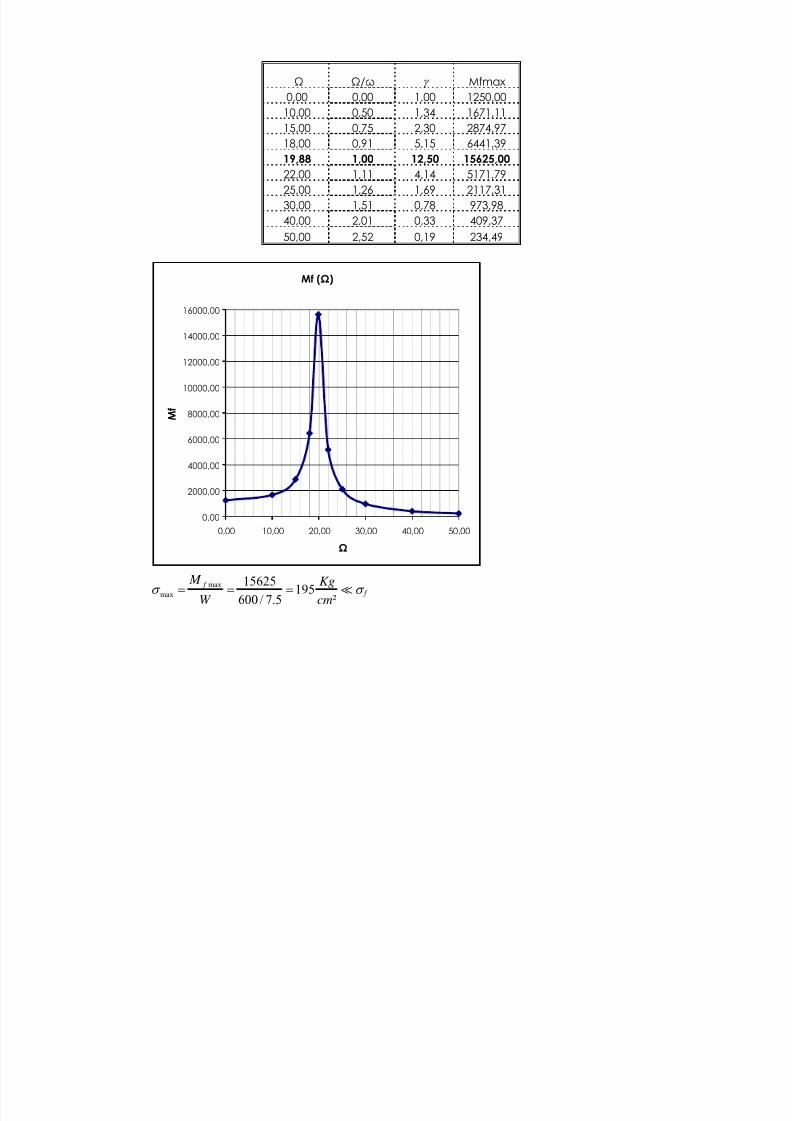
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 470/500
Ω Ω/ω γ Mfmax
0,00 0,00 1,00 1250,00
10,00 0,50 1,34 1671,11
15,00 0,75 2,30 2874,97
18,00 0,91 5,15 6441,39
19,88 1,00 12,50 15625,0022,00 1,11 4,14 5171,79
25,00 1,26 1,69 2117,31
30,00 1,51 0,78 973,98
40,00 2,01 0,33 409,37
50,00 2,52 0,19 234,49
Mf (Ω)
0,00
2000,00
4000,00
6000,00
8000,00
10000,00
12000,00
14000,00
16000,00
0,00 10,00 20,00 30,00 40,00 50,00
Ω
M f
max
max
15625195
600 / 7.5 ²
f M Kg
W cmσ σ = = =
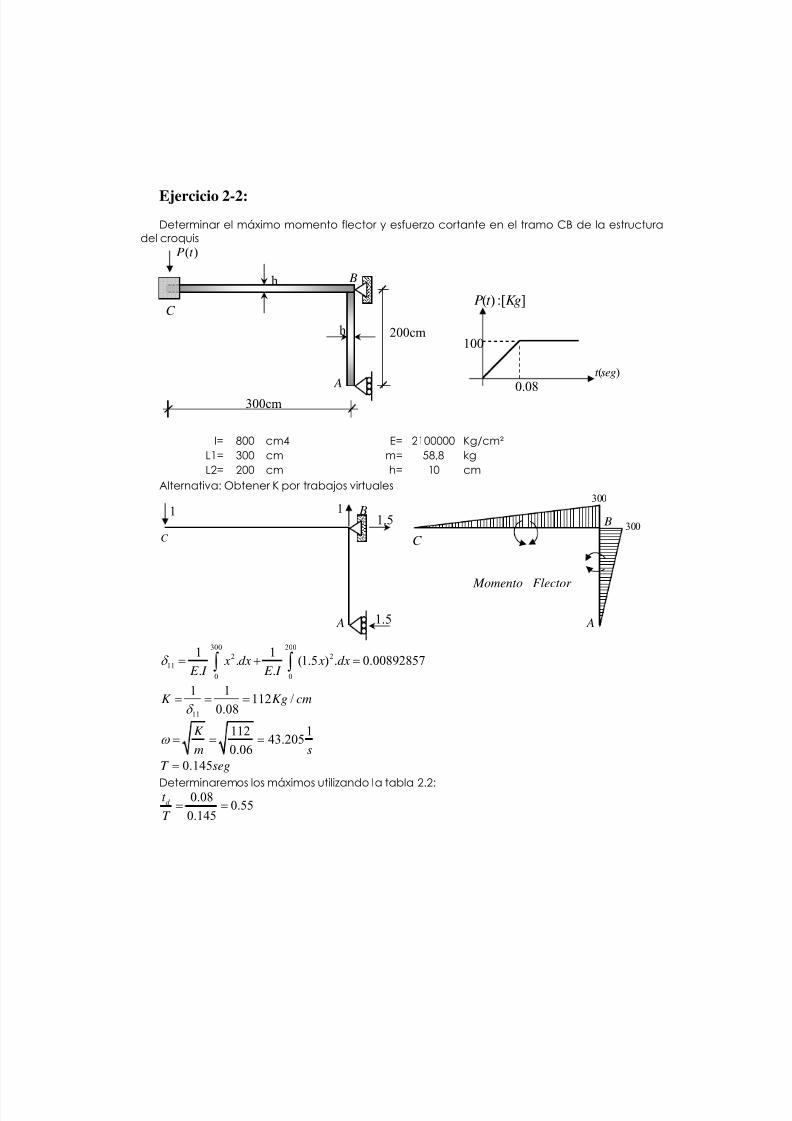
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 471/500
Ejercicio 2-2:
Determinar el máximo momento flector y esfuerzo cortante en el tramo CB de la estructuradel croquis
I= 800 cm4 E= 2100000 Kg/cm²
L1= 300 cm m= 58,8 kg
L2= 200 cm h= 10 cm
Alternativa: Obtener K por trabajos virtuales
300 200
2 2
11
0 0
1 1. (1.5 ) . 0.00892857. .
x dx x dx E I E I
δ = + =∫ ∫
11
1 1112 /
0.08K Kg cm
δ = = =
112 143.205
0.06
K
m sω = = =
0.145T seg=
Determinaremos los máximos utilizando la tabla 2.2:
0.080.55
0.145
d t
T
= =
300cm
200cm
A
B
C
( )P t
h
h
( )t seg
0.08
100
( ) :[ ]P t Kg
Momento Flector
A
B
C
1 11.5
1.5 A
B
C
300
300
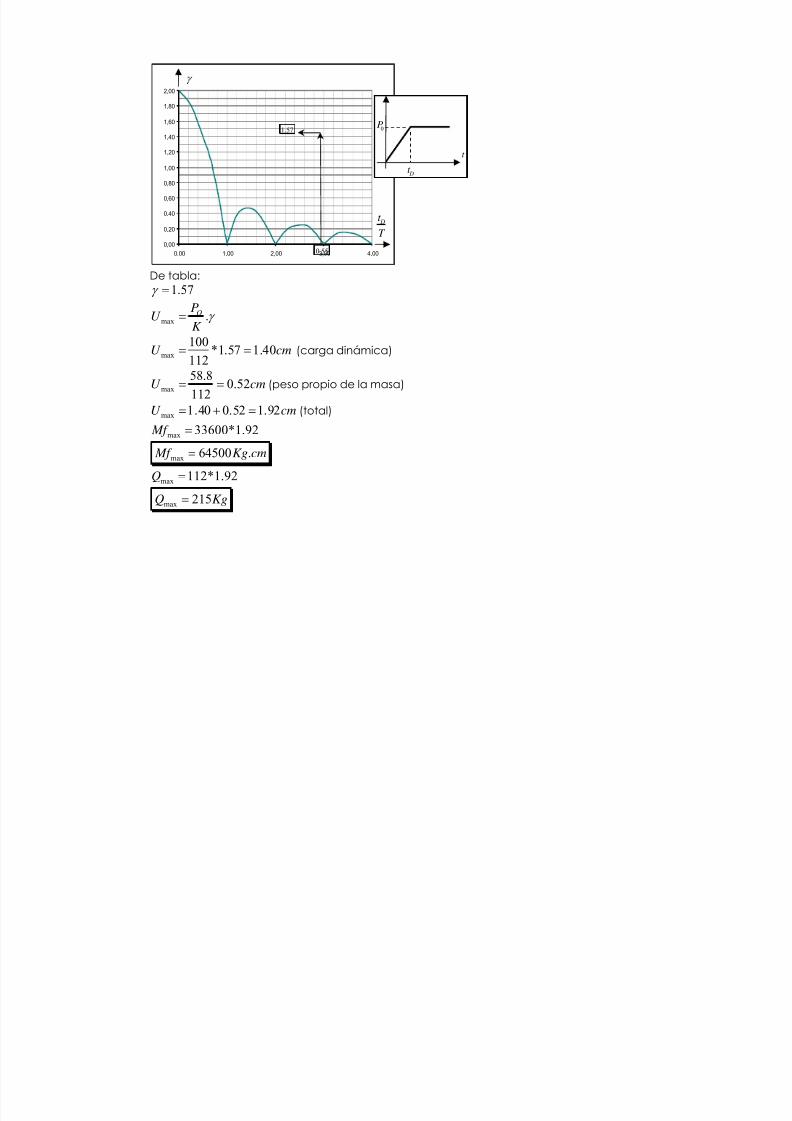
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 472/500
De tabla:
1.57γ =
max.OP
U
K
γ =
max
100*1.57 1.40
112U cm= = (carga dinámica)
max
58.80.52
112U cm= = (peso propio de la masa)
max1.40 0.52 1.92U cm= + = (total)
max33600*1.92 Mf =
max64500 . Mf Kg cm=
max112*1.92Q =
max215Q Kg=
0,00
0,20
0,40
0,60
0,80
1,00
1,20
1,40
1,60
1,80
2,00
0,00 1,00 2,00 3,00 4,00
γ
Dt
T
t
Dt
0P
0.55
1.57

5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 473/500
Ejercicio 2-3:
Calcular la aceleración vertical del punto C en el instante 0.03t seg= con los datos del
ejercicio anterior.
112 / K Kg cm= 1
43.2s
ω =
100OP Kg= 0.08ot seg=
Podemos obtener la aceleración derivando dos veces el desplazamiento U dado por la
tabla 1, la integral de Duhamel para ot t < :
( . ).
.
O
O
P sen t t
t
ω
ω ω
⎛ ⎞−⎜ ⎟
⎝ ⎠ ∴
( . ).
.
O
O
P sen t U t
K t
ω
ω
⎛ ⎞= −⎜ ⎟
⎝ ⎠
( ). 1 cos( . ).
O
O
PU t
K t ω = − ; . ( . )
.
O
O
PU sen t
K t ω =
0.03
100*43.2* (43.2* 0.03)
112*0.08t U sen
==
(0.03)464
²
cmU
s=
Nota: recordar que ( . )t ω es un ángulo en radianes!Procedimiento alternativo : efectuar la integración paso a paso y determinar la aceleración
empleando la expresión (Ec. 2.43) del teórico.
0.145T seg= ∴ Adoptamos 0.01t ∆ = ; para el arranque empleamos la expresión (Ec. 2.49) :
11
2 2
12.50.003367
6. 6.0.06112
( ) (0.01)
PU cm
M K
t
= = =+ +
∆
Los desplazamientos en los pasos siguientes se calculan según la expresión (Ec. 2.45):2
2
1 12 . . .m m m m
K t U t U U P
M M + −
∆⎛ ⎞= − ∆ − +⎜ ⎟
⎝ ⎠
( )2 2
22
2 1 0 1112 0.012 . . . 2 * 0.01 *0.003367 *12.5 0.026940.06 0.06
K t U t U U Pm m
∆⎛ ⎞ ⎛ ⎞= − ∆ − + = − + =⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠
31.81333*0.02694 0.003367 0.00166* 25 0.08715U = − + =
Ahora calculamos la aceleración para 0.03t seg= empleando la expresión (Ec. 2.43)
( )1
. .n n nU P K U
m= −
( )(0.03)
1. 37.50 112* 0.08715
0.06U = −
(0.03)462.3 / ²U cm s=
Para 0.005t ∆ =
(0.03)463.6 / ²U cm s=
( )t seg
0.08
100
( ) :[ ]P t Kg
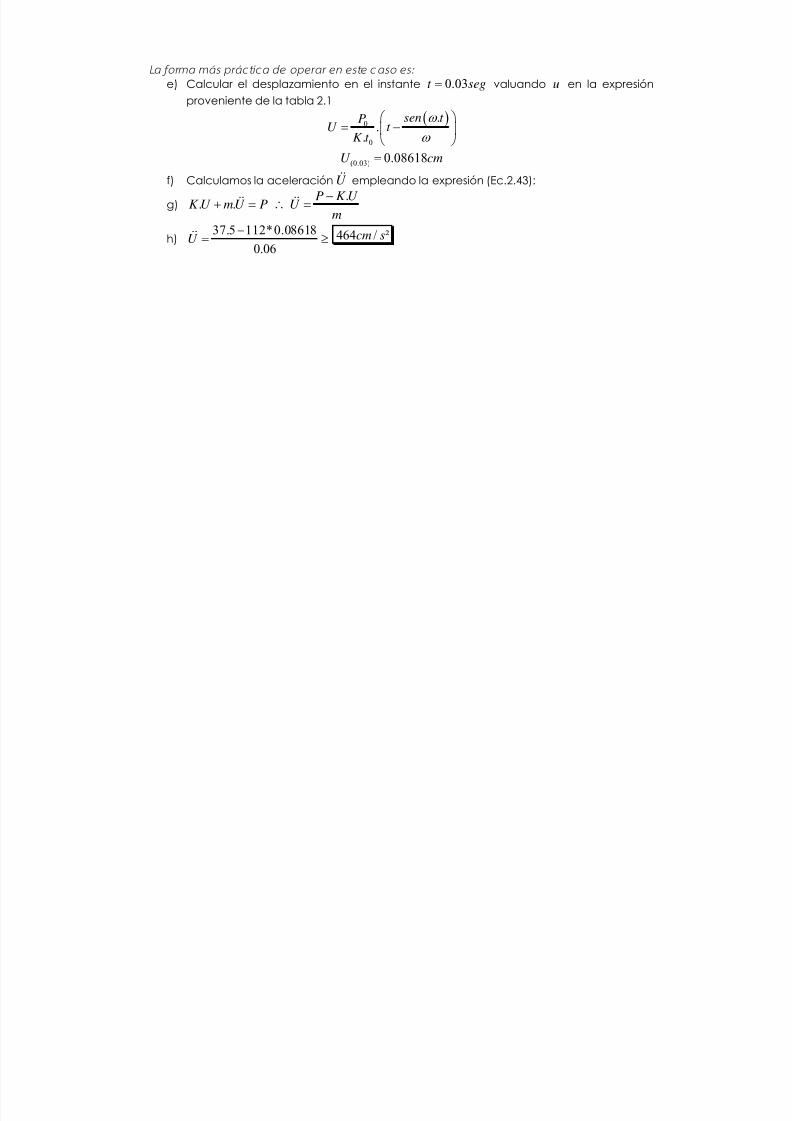
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 474/500
La forma más prác tica de ope rar en este c aso es:
e) Calcular el desplazamiento en el instante 0.03t seg= valuando u en la expresión
proveniente de la tabla 2.1
( )0
0
..
.
sen t PU t
K t
ω
ω
⎛ ⎞= −⎜ ⎟
⎝ ⎠
(0.03) 0.08618U cm= f) Calculamos la aceleración U empleando la expresión (Ec.2.43):
g) . .K U mU P+ = ∴ .P K U
U m
−=
h) 37.5 112*0.08618
0.06U
−= ≥ 464 / ²cm s
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 475/500
Cátedra de Análisis Estructural
Carrera de Ingeniería Civil
ACCIONES SISMICAS PARA DISEÑOESTRUCTURAL
Carlos A. Prato
Fernando G. Flores
Año 2007
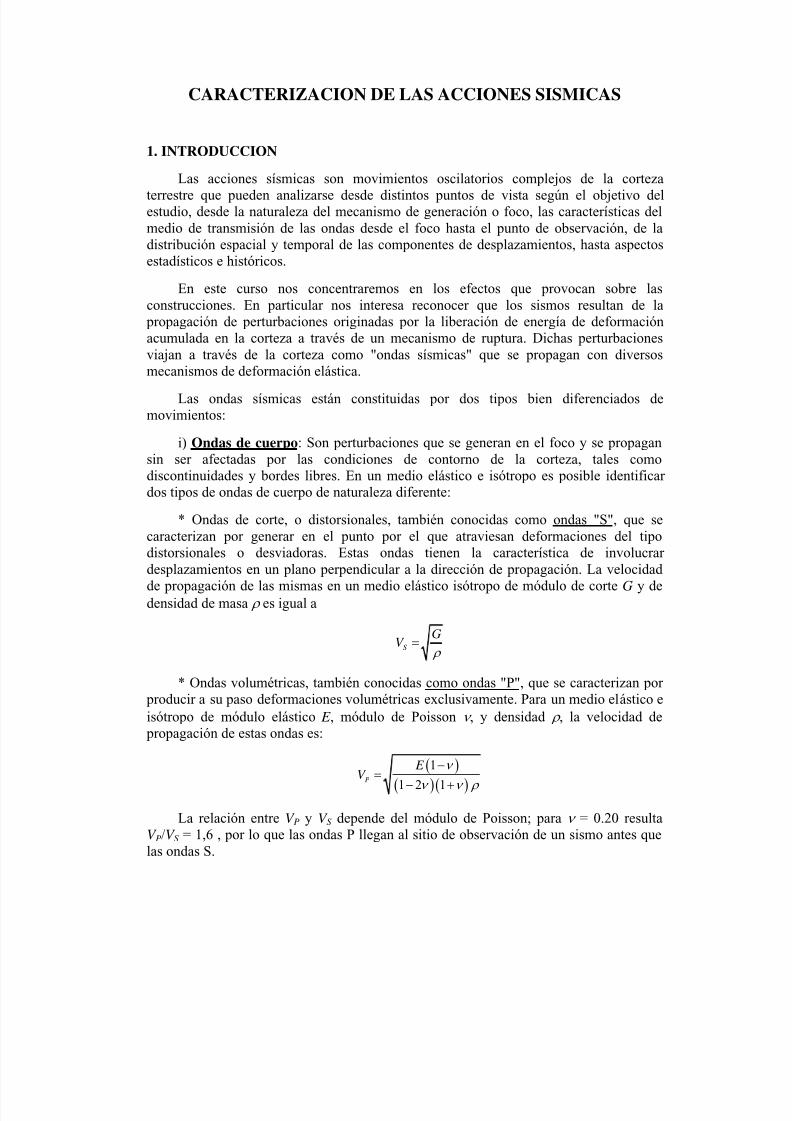
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 476/500
CARACTERIZACION DE LAS ACCIONES SISMICAS
1. INTRODUCCION
Las acciones sísmicas son movimientos oscilatorios complejos de la corteza
terrestre que pueden analizarse desde distintos puntos de vista según el objetivo del
estudio, desde la naturaleza del mecanismo de generación o foco, las características del
medio de transmisión de las ondas desde el foco hasta el punto de observación, de la
distribución espacial y temporal de las componentes de desplazamientos, hasta aspectos
estadísticos e históricos.
En este curso nos concentraremos en los efectos que provocan sobre las
construcciones. En particular nos interesa reconocer que los sismos resultan de la
propagación de perturbaciones originadas por la liberación de energía de deformaciónacumulada en la corteza a través de un mecanismo de ruptura. Dichas perturbaciones
viajan a través de la corteza como "ondas sísmicas" que se propagan con diversos
mecanismos de deformación elástica.
Las ondas sísmicas están constituidas por dos tipos bien diferenciados de
movimientos:
i) Ondas de cuerpo: Son perturbaciones que se generan en el foco y se propagan
sin ser afectadas por las condiciones de contorno de la corteza, tales como
discontinuidades y bordes libres. En un medio elástico e isótropo es posible identificar
dos tipos de ondas de cuerpo de naturaleza diferente:
* Ondas de corte, o distorsionales, también conocidas como ondas "S", que se
caracterizan por generar en el punto por el que atraviesan deformaciones del tipo
distorsionales o desviadoras. Estas ondas tienen la característica de involucrar
desplazamientos en un plano perpendicular a la dirección de propagación. La velocidad
de propagación de las mismas en un medio elástico isótropo de módulo de corte G y de
densidad de masa ρ es igual a
S
GV
ρ
=
* Ondas volumétricas, también conocidas como ondas "P", que se caracterizan por
producir a su paso deformaciones volumétricas exclusivamente. Para un medio elástico e
isótropo de módulo elástico E , módulo de Poisson ν , y densidad ρ , la velocidad de
propagación de estas ondas es:
( )( )( )
1
1 2 1P
E V
ν
ν ν ρ
−
=
− +
La relación entre V P y V S depende del módulo de Poisson; para ν = 0.20 resultaV P / V S = 1,6 , por lo que las ondas P llegan al sitio de observación de un sismo antes que
las ondas S.
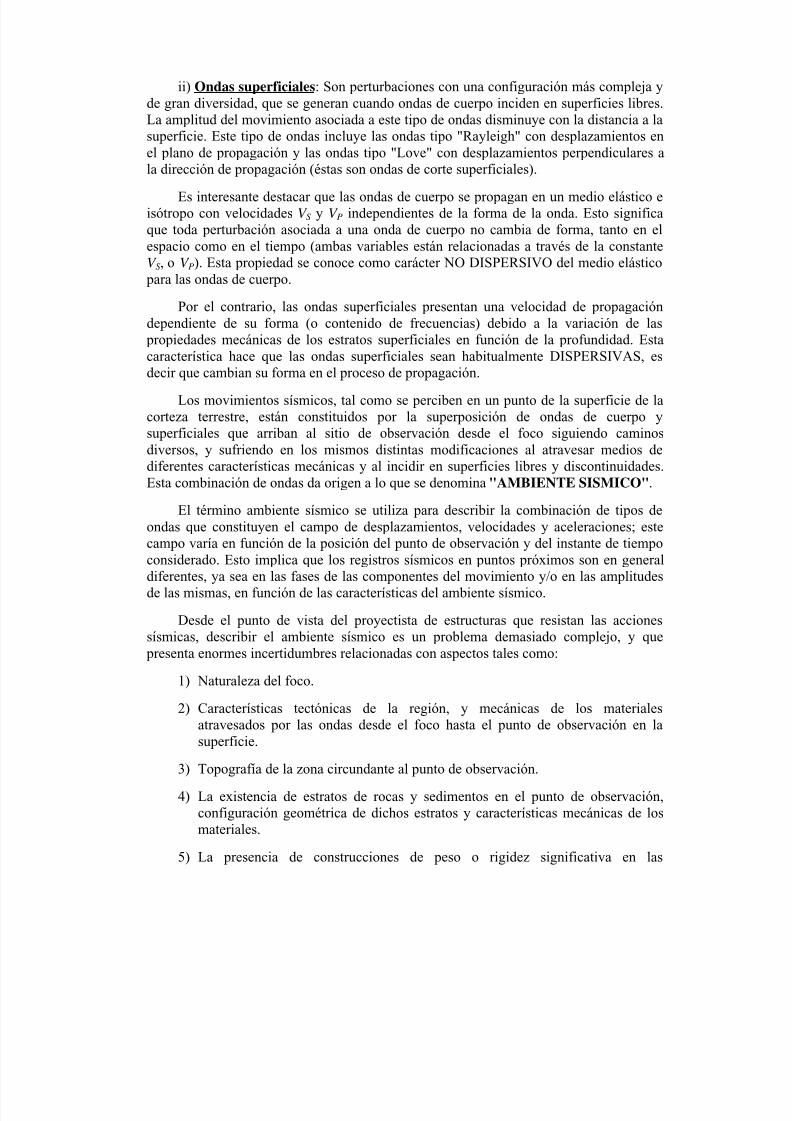
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 477/500
ii) Ondas superficiales: Son perturbaciones con una configuración más compleja y
de gran diversidad, que se generan cuando ondas de cuerpo inciden en superficies libres.
La amplitud del movimiento asociada a este tipo de ondas disminuye con la distancia a la
superficie. Este tipo de ondas incluye las ondas tipo "Rayleigh" con desplazamientos en
el plano de propagación y las ondas tipo "Love" con desplazamientos perpendiculares a
la dirección de propagación (éstas son ondas de corte superficiales).
Es interesante destacar que las ondas de cuerpo se propagan en un medio elástico e
isótropo con velocidades V S y V P independientes de la forma de la onda. Esto significa
que toda perturbación asociada a una onda de cuerpo no cambia de forma, tanto en el
espacio como en el tiempo (ambas variables están relacionadas a través de la constante
V S, o V P). Esta propiedad se conoce como carácter NO DISPERSIVO del medio elástico
para las ondas de cuerpo.
Por el contrario, las ondas superficiales presentan una velocidad de propagación
dependiente de su forma (o contenido de frecuencias) debido a la variación de laspropiedades mecánicas de los estratos superficiales en función de la profundidad. Esta
característica hace que las ondas superficiales sean habitualmente DISPERSIVAS, es
decir que cambian su forma en el proceso de propagación.
Los movimientos sísmicos, tal como se perciben en un punto de la superficie de la
corteza terrestre, están constituidos por la superposición de ondas de cuerpo y
superficiales que arriban al sitio de observación desde el foco siguiendo caminos
diversos, y sufriendo en los mismos distintas modificaciones al atravesar medios de
diferentes características mecánicas y al incidir en superficies libres y discontinuidades.
Esta combinación de ondas da origen a lo que se denomina "AMBIENTE SISMICO".El término ambiente sísmico se utiliza para describir la combinación de tipos de
ondas que constituyen el campo de desplazamientos, velocidades y aceleraciones; este
campo varía en función de la posición del punto de observación y del instante de tiempo
considerado. Esto implica que los registros sísmicos en puntos próximos son en general
diferentes, ya sea en las fases de las componentes del movimiento y/o en las amplitudes
de las mismas, en función de las características del ambiente sísmico.
Desde el punto de vista del proyectista de estructuras que resistan las acciones
sísmicas, describir el ambiente sísmico es un problema demasiado complejo, y que
presenta enormes incertidumbres relacionadas con aspectos tales como:
1) Naturaleza del foco.
2) Características tectónicas de la región, y mecánicas de los materiales
atravesados por las ondas desde el foco hasta el punto de observación en la
superficie.
3) Topografía de la zona circundante al punto de observación.
4) La existencia de estratos de rocas y sedimentos en el punto de observación,
configuración geométrica de dichos estratos y características mecánicas de losmateriales.
5) La presencia de construcciones de peso o rigidez significativa en las
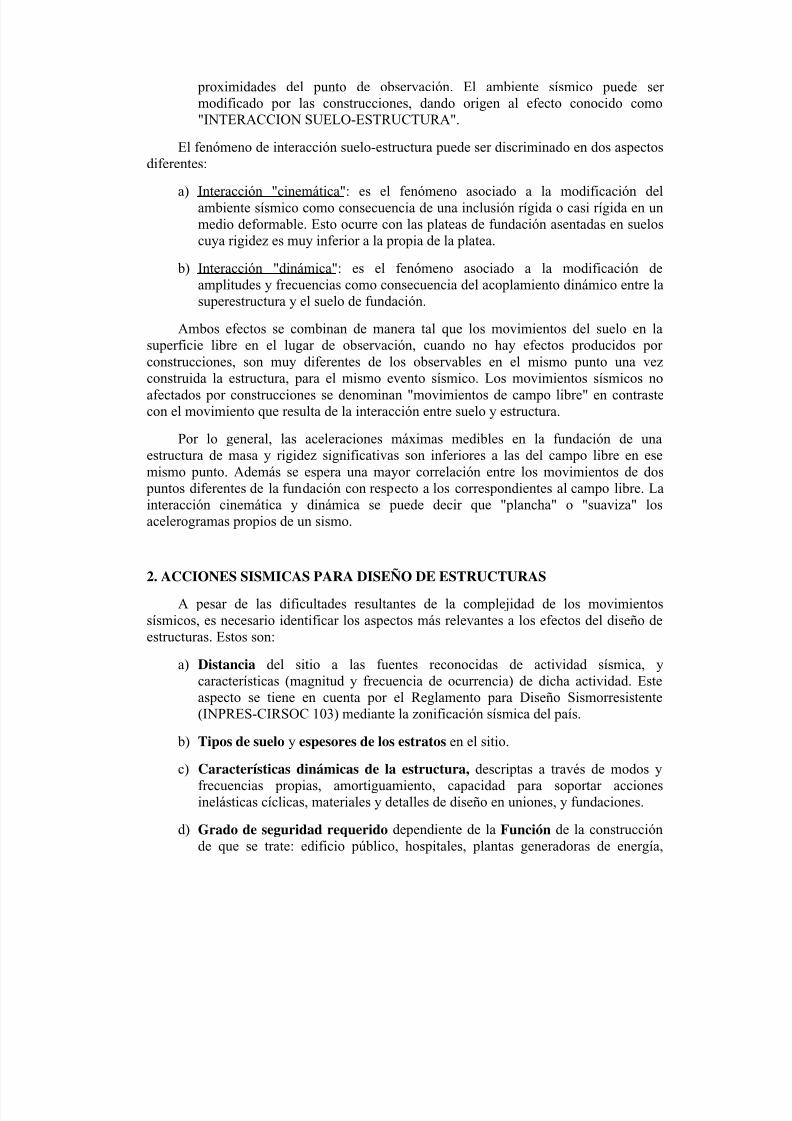
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 478/500
proximidades del punto de observación. El ambiente sísmico puede ser
modificado por las construcciones, dando origen al efecto conocido como
"INTERACCION SUELO-ESTRUCTURA".
El fenómeno de interacción suelo-estructura puede ser discriminado en dos aspectos
diferentes:
a) Interacción "cinemática": es el fenómeno asociado a la modificación del
ambiente sísmico como consecuencia de una inclusión rígida o casi rígida en un
medio deformable. Esto ocurre con las plateas de fundación asentadas en suelos
cuya rigidez es muy inferior a la propia de la platea.
b) Interacción "dinámica": es el fenómeno asociado a la modificación de
amplitudes y frecuencias como consecuencia del acoplamiento dinámico entre la
superestructura y el suelo de fundación.
Ambos efectos se combinan de manera tal que los movimientos del suelo en lasuperficie libre en el lugar de observación, cuando no hay efectos producidos por
construcciones, son muy diferentes de los observables en el mismo punto una vez
construida la estructura, para el mismo evento sísmico. Los movimientos sísmicos no
afectados por construcciones se denominan "movimientos de campo libre" en contraste
con el movimiento que resulta de la interacción entre suelo y estructura.
Por lo general, las aceleraciones máximas medibles en la fundación de una
estructura de masa y rigidez significativas son inferiores a las del campo libre en ese
mismo punto. Además se espera una mayor correlación entre los movimientos de dos
puntos diferentes de la fundación con respecto a los correspondientes al campo libre. Lainteracción cinemática y dinámica se puede decir que "plancha" o "suaviza" los
acelerogramas propios de un sismo.
2. ACCIONES SISMICAS PARA DISEÑO DE ESTRUCTURAS
A pesar de las dificultades resultantes de la complejidad de los movimientos
sísmicos, es necesario identificar los aspectos más relevantes a los efectos del diseño de
estructuras. Estos son:
a) Distancia del sitio a las fuentes reconocidas de actividad sísmica, y
características (magnitud y frecuencia de ocurrencia) de dicha actividad. Este
aspecto se tiene en cuenta por el Reglamento para Diseño Sismorresistente
(INPRES-CIRSOC 103) mediante la zonificación sísmica del país.
b) Tipos de suelo y espesores de los estratos en el sitio.
c) Características dinámicas de la estructura, descriptas a través de modos y
frecuencias propias, amortiguamiento, capacidad para soportar acciones
inelásticas cíclicas, materiales y detalles de diseño en uniones, y fundaciones.
d) Grado de seguridad requerido dependiente de la Función de la construcción
de que se trate: edificio público, hospitales, plantas generadoras de energía,
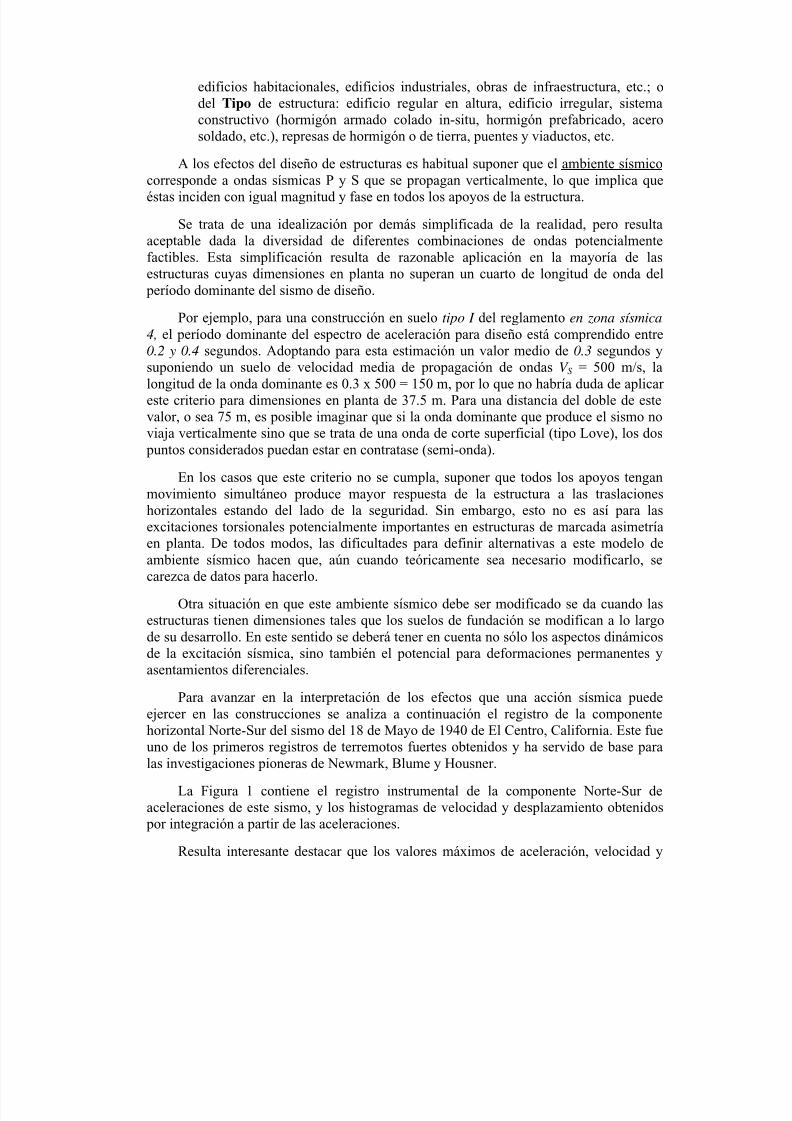
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 479/500
edificios habitacionales, edificios industriales, obras de infraestructura, etc.; o
del Tipo de estructura: edificio regular en altura, edificio irregular, sistema
constructivo (hormigón armado colado in-situ, hormigón prefabricado, acero
soldado, etc.), represas de hormigón o de tierra, puentes y viaductos, etc.
A los efectos del diseño de estructuras es habitual suponer que el ambiente sísmicocorresponde a ondas sísmicas P y S que se propagan verticalmente, lo que implica que
éstas inciden con igual magnitud y fase en todos los apoyos de la estructura.
Se trata de una idealización por demás simplificada de la realidad, pero resulta
aceptable dada la diversidad de diferentes combinaciones de ondas potencialmente
factibles. Esta simplificación resulta de razonable aplicación en la mayoría de las
estructuras cuyas dimensiones en planta no superan un cuarto de longitud de onda del
período dominante del sismo de diseño.
Por ejemplo, para una construcción en suelo tipo I del reglamento en zona sísmica
4, el período dominante del espectro de aceleración para diseño está comprendido entre
0.2 y 0.4 segundos. Adoptando para esta estimación un valor medio de 0.3 segundos y
suponiendo un suelo de velocidad media de propagación de ondas V S = 500 m/s, la
longitud de la onda dominante es 0.3 x 500 = 150 m, por lo que no habría duda de aplicar
este criterio para dimensiones en planta de 37.5 m. Para una distancia del doble de este
valor, o sea 75 m, es posible imaginar que si la onda dominante que produce el sismo no
viaja verticalmente sino que se trata de una onda de corte superficial (tipo Love), los dos
puntos considerados puedan estar en contratase (semi-onda).
En los casos que este criterio no se cumpla, suponer que todos los apoyos tengan
movimiento simultáneo produce mayor respuesta de la estructura a las traslacioneshorizontales estando del lado de la seguridad. Sin embargo, esto no es así para las
excitaciones torsionales potencialmente importantes en estructuras de marcada asimetría
en planta. De todos modos, las dificultades para definir alternativas a este modelo de
ambiente sísmico hacen que, aún cuando teóricamente sea necesario modificarlo, se
carezca de datos para hacerlo.
Otra situación en que este ambiente sísmico debe ser modificado se da cuando las
estructuras tienen dimensiones tales que los suelos de fundación se modifican a lo largo
de su desarrollo. En este sentido se deberá tener en cuenta no sólo los aspectos dinámicos
de la excitación sísmica, sino también el potencial para deformaciones permanentes yasentamientos diferenciales.
Para avanzar en la interpretación de los efectos que una acción sísmica puede
ejercer en las construcciones se analiza a continuación el registro de la componente
horizontal Norte-Sur del sismo del 18 de Mayo de 1940 de El Centro, California. Este fue
uno de los primeros registros de terremotos fuertes obtenidos y ha servido de base para
las investigaciones pioneras de Newmark, Blume y Housner.
La Figura 1 contiene el registro instrumental de la componente Norte-Sur de
aceleraciones de este sismo, y los histogramas de velocidad y desplazamiento obtenidos
por integración a partir de las aceleraciones.
Resulta interesante destacar que los valores máximos de aceleración, velocidad y
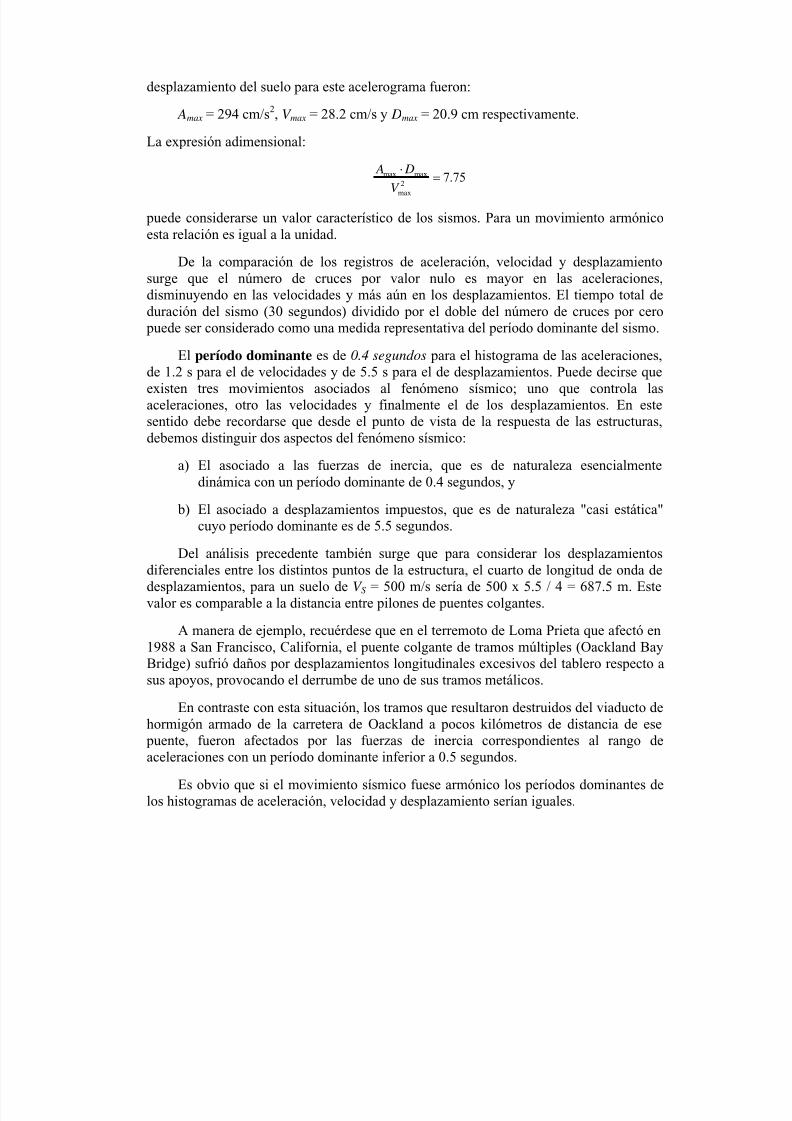
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 480/500
desplazamiento del suelo para este acelerograma fueron:
Amax = 294 cm/s2, V max = 28.2 cm/s y Dmax = 20.9 cm respectivamente.
La expresión adimensional:
max max
2
max
7.75 A D
V
⋅=
puede considerarse un valor característico de los sismos. Para un movimiento armónico
esta relación es igual a la unidad.
De la comparación de los registros de aceleración, velocidad y desplazamiento
surge que el número de cruces por valor nulo es mayor en las aceleraciones,
disminuyendo en las velocidades y más aún en los desplazamientos. El tiempo total de
duración del sismo (30 segundos) dividido por el doble del número de cruces por cero
puede ser considerado como una medida representativa del período dominante del sismo.
El período dominante es de 0.4 segundos para el histograma de las aceleraciones,
de 1.2 s para el de velocidades y de 5.5 s para el de desplazamientos. Puede decirse que
existen tres movimientos asociados al fenómeno sísmico; uno que controla las
aceleraciones, otro las velocidades y finalmente el de los desplazamientos. En este
sentido debe recordarse que desde el punto de vista de la respuesta de las estructuras,
debemos distinguir dos aspectos del fenómeno sísmico:
a) El asociado a las fuerzas de inercia, que es de naturaleza esencialmente
dinámica con un período dominante de 0.4 segundos, y
b) El asociado a desplazamientos impuestos, que es de naturaleza "casi estática"
cuyo período dominante es de 5.5 segundos.
Del análisis precedente también surge que para considerar los desplazamientos
diferenciales entre los distintos puntos de la estructura, el cuarto de longitud de onda de
desplazamientos, para un suelo de V S = 500 m/s sería de 500 x 5.5 / 4 = 687.5 m. Este
valor es comparable a la distancia entre pilones de puentes colgantes.
A manera de ejemplo, recuérdese que en el terremoto de Loma Prieta que afectó en
1988 a San Francisco, California, el puente colgante de tramos múltiples (Oackland BayBridge) sufrió daños por desplazamientos longitudinales excesivos del tablero respecto a
sus apoyos, provocando el derrumbe de uno de sus tramos metálicos.
En contraste con esta situación, los tramos que resultaron destruidos del viaducto de
hormigón armado de la carretera de Oackland a pocos kilómetros de distancia de ese
puente, fueron afectados por las fuerzas de inercia correspondientes al rango de
aceleraciones con un período dominante inferior a 0.5 segundos.
Es obvio que si el movimiento sísmico fuese armónico los períodos dominantes de
los histogramas de aceleración, velocidad y desplazamiento serían iguales.
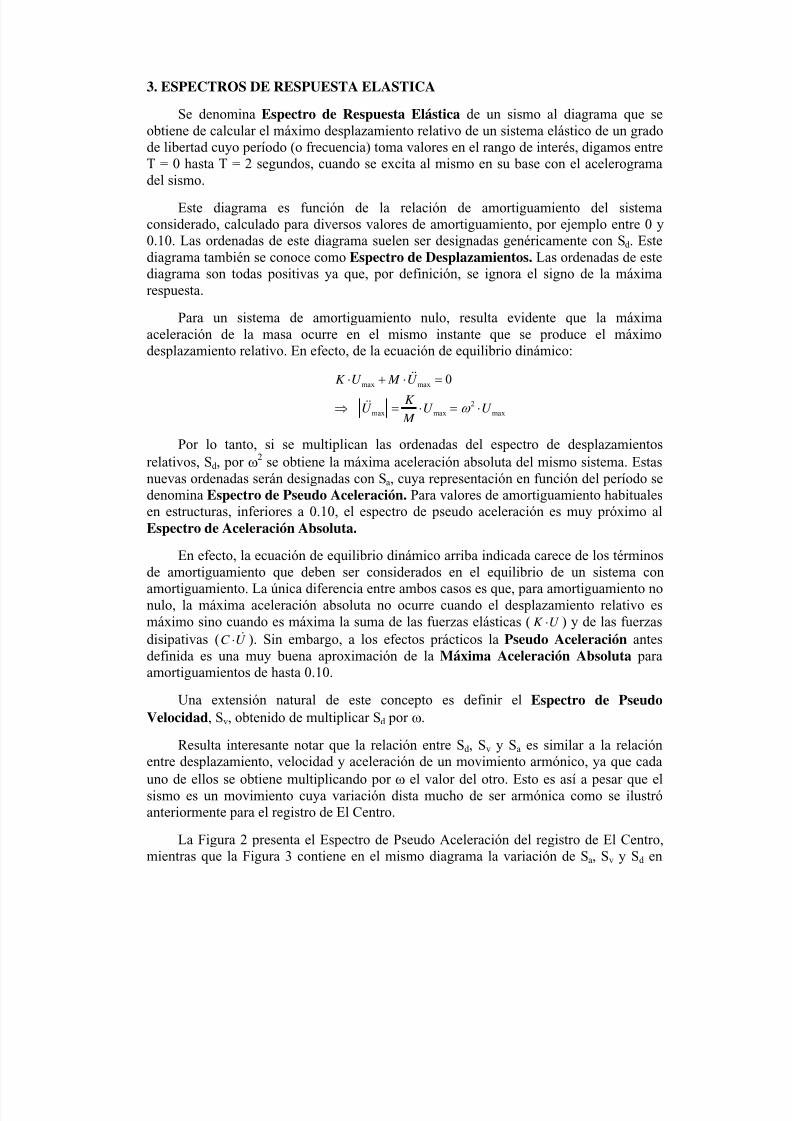
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 481/500
3. ESPECTROS DE RESPUESTA ELASTICA
Se denomina Espectro de Respuesta Elástica de un sismo al diagrama que se
obtiene de calcular el máximo desplazamiento relativo de un sistema elástico de un grado
de libertad cuyo período (o frecuencia) toma valores en el rango de interés, digamos entre
T = 0 hasta T = 2 segundos, cuando se excita al mismo en su base con el acelerogramadel sismo.
Este diagrama es función de la relación de amortiguamiento del sistema
considerado, calculado para diversos valores de amortiguamiento, por ejemplo entre 0 y
0.10. Las ordenadas de este diagrama suelen ser designadas genéricamente con Sd. Este
diagrama también se conoce como Espectro de Desplazamientos. Las ordenadas de este
diagrama son todas positivas ya que, por definición, se ignora el signo de la máxima
respuesta.
Para un sistema de amortiguamiento nulo, resulta evidente que la máxima
aceleración de la masa ocurre en el mismo instante que se produce el máximo
desplazamiento relativo. En efecto, de la ecuación de equilibrio dinámico:
max max
2
max max max
0K U M U
K U U U
M ω
⋅ + ⋅ =
⇒ = ⋅ = ⋅
Por lo tanto, si se multiplican las ordenadas del espectro de desplazamientos
relativos, Sd, por ω2
se obtiene la máxima aceleración absoluta del mismo sistema. Estas
nuevas ordenadas serán designadas con Sa, cuya representación en función del período se
denomina Espectro de Pseudo Aceleración. Para valores de amortiguamiento habitualesen estructuras, inferiores a 0.10, el espectro de pseudo aceleración es muy próximo al Espectro de Aceleración Absoluta.
En efecto, la ecuación de equilibrio dinámico arriba indicada carece de los términos
de amortiguamiento que deben ser considerados en el equilibrio de un sistema con
amortiguamiento. La única diferencia entre ambos casos es que, para amortiguamiento no
nulo, la máxima aceleración absoluta no ocurre cuando el desplazamiento relativo es
máximo sino cuando es máxima la suma de las fuerzas elásticas ( K U ⋅ ) y de las fuerzas
disipativas (C U ⋅ ). Sin embargo, a los efectos prácticos la Pseudo Aceleración antes
definida es una muy buena aproximación de la Máxima Aceleración Absoluta paraamortiguamientos de hasta 0.10.
Una extensión natural de este concepto es definir el Espectro de PseudoVelocidad, Sv, obtenido de multiplicar Sd por ω.
Resulta interesante notar que la relación entre Sd, Sv y Sa es similar a la relación
entre desplazamiento, velocidad y aceleración de un movimiento armónico, ya que cada
uno de ellos se obtiene multiplicando por ω el valor del otro. Esto es así a pesar que el
sismo es un movimiento cuya variación dista mucho de ser armónica como se ilustró
anteriormente para el registro de El Centro.
La Figura 2 presenta el Espectro de Pseudo Aceleración del registro de El Centro,
mientras que la Figura 3 contiene en el mismo diagrama la variación de S a, Sv y Sd en
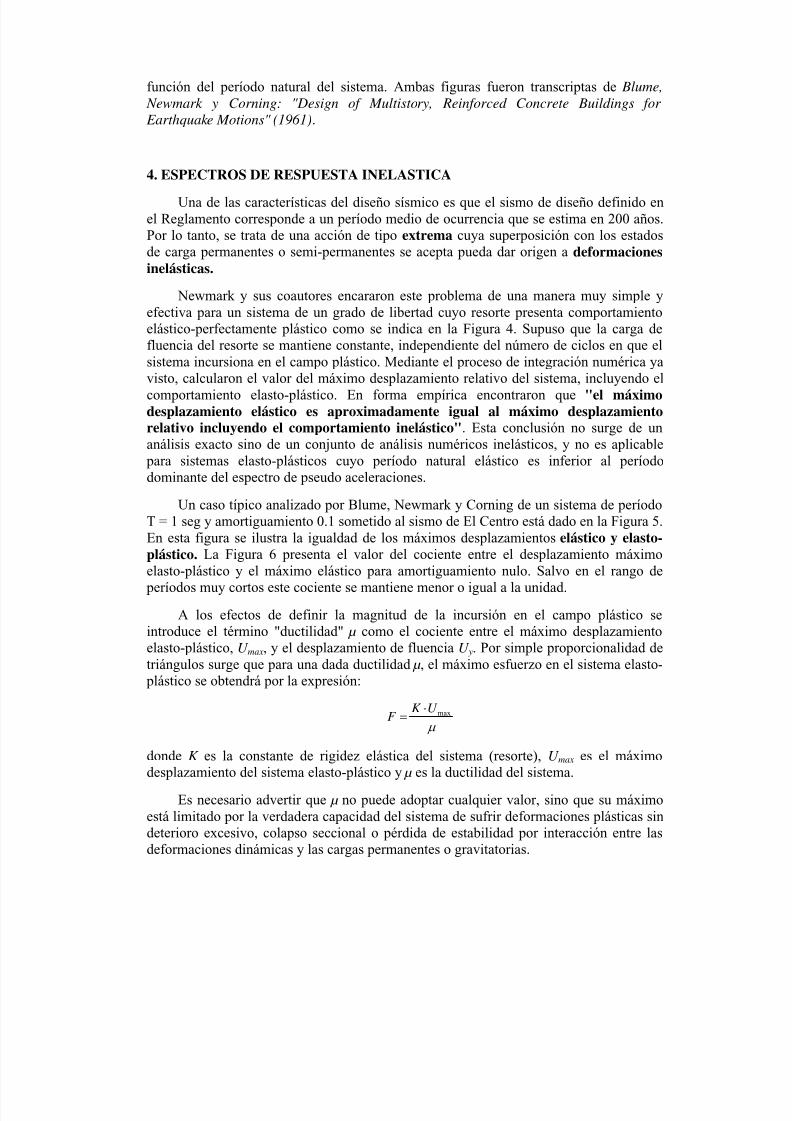
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 482/500
función del período natural del sistema. Ambas figuras fueron transcriptas de Blume,
Newmark y Corning: "Design of Multistory, Reinforced Concrete Buildings for
Earthquake Motions" (1961).
4. ESPECTROS DE RESPUESTA INELASTICA
Una de las características del diseño sísmico es que el sismo de diseño definido en
el Reglamento corresponde a un período medio de ocurrencia que se estima en 200 años.
Por lo tanto, se trata de una acción de tipo extrema cuya superposición con los estados
de carga permanentes o semi-permanentes se acepta pueda dar origen a deformacionesinelásticas.
Newmark y sus coautores encararon este problema de una manera muy simple y
efectiva para un sistema de un grado de libertad cuyo resorte presenta comportamiento
elástico-perfectamente plástico como se indica en la Figura 4. Supuso que la carga defluencia del resorte se mantiene constante, independiente del número de ciclos en que el
sistema incursiona en el campo plástico. Mediante el proceso de integración numérica ya
visto, calcularon el valor del máximo desplazamiento relativo del sistema, incluyendo el
comportamiento elasto-plástico. En forma empírica encontraron que "el máximodesplazamiento elástico es aproximadamente igual al máximo desplazamientorelativo incluyendo el comportamiento inelástico". Esta conclusión no surge de un
análisis exacto sino de un conjunto de análisis numéricos inelásticos, y no es aplicable
para sistemas elasto-plásticos cuyo período natural elástico es inferior al período
dominante del espectro de pseudo aceleraciones.
Un caso típico analizado por Blume, Newmark y Corning de un sistema de período
T = 1 seg y amortiguamiento 0.1 sometido al sismo de El Centro está dado en la Figura 5.
En esta figura se ilustra la igualdad de los máximos desplazamientos elástico y elasto-plástico. La Figura 6 presenta el valor del cociente entre el desplazamiento máximo
elasto-plástico y el máximo elástico para amortiguamiento nulo. Salvo en el rango de
períodos muy cortos este cociente se mantiene menor o igual a la unidad.
A los efectos de definir la magnitud de la incursión en el campo plástico se
introduce el término "ductilidad" µ como el cociente entre el máximo desplazamiento
elasto-plástico, U max, y el desplazamiento de fluencia U y. Por simple proporcionalidad detriángulos surge que para una dada ductilidad µ, el máximo esfuerzo en el sistema elasto-
plástico se obtendrá por la expresión:
maxK U F
µ
⋅=
donde K es la constante de rigidez elástica del sistema (resorte), U max es el máximo
desplazamiento del sistema elasto-plástico y µ es la ductilidad del sistema.
Es necesario advertir que µ no puede adoptar cualquier valor, sino que su máximo
está limitado por la verdadera capacidad del sistema de sufrir deformaciones plásticas sindeterioro excesivo, colapso seccional o pérdida de estabilidad por interacción entre las
deformaciones dinámicas y las cargas permanentes o gravitatorias.
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 483/500
El valor máximo aceptable de µ es función del cuidado que se ponga en cuestiones
importantes tales como:
a) diseño en los detalles en uniones, refuerzos locales para evitar pandeo, del grado
de redundancia estática (hiperestaticidad), esbeltez global de la estructura;
b) calidad de los materiales y de la mano de obra;
c) regularidad de la estructura y fundaciones;
d) sistema constructivo: hormigón armado colado in-situ, pretensado, ensamblaje
de elementos de hormigón premoldeado, estructuras de acero con perfilería
estándar, estructuras de acero con perfilería liviana, estructuras de acero
reticulares, construcciones de mampostería común y reforzada, construcciones
de hormigón masivo sin armar (presas, muros de gravedad).
De la discusión anterior surge que los esfuerzos inducidos por un sismo en unsistema con comportamiento inelástico (sin degradación de la carga de fluencia) pueden
ser estimados a partir del desplazamiento máximo y divididos por la ductilidad aceptable
para el tipo de sistema constructivo usado. Por lo tanto, la cuestión central es cómo
estimar esos desplazamientos máximos elasto-plásticos.
De los estudios de Newmark antes mencionados surgen las siguientes conclusiones
al respecto:
1) Para estructuras flexibles, es decir aquellas cuyo período de vibración elástico es
mayor que el período dominante del espectro de pseudo-aceleración, el máximo
desplazamiento elasto-plástico U max es aproximadamente igual alcorrespondiente en régimen elástico. Surge entonces que los esfuerzos serán
iguales a los esfuerzos elásticos divididos por µ.
2) Para estructuras de flexibilidad intermedia, aquellas cuyo período coincide con
el período dominante del espectro de pseudo-aceleración, el máximo
desplazamiento elasto-plástico es mayor que el correspondiente al sistema
elástico. El factor de amplificación, empíricamente determinado, es:
2 1
µ
µ −
El esfuerzo elasto-plástico será igual al esfuerzo elástico multiplicado por ese
factor de amplificación y dividido por µ.
3) Para construcciones rígidas, cuyo período es inferior al período dominante del
espectro de pseudo-aceleración, el desplazamiento se amplifica por un factor
aproximadamente igual a µ. Por lo tanto los esfuerzos elasto-plásticos serán
iguales a los elásticos.
El Reglamento INPRES-CIRSOC 103 sigue básicamente el criterio antes
mencionado, con excepción de la amplificación de las estructuras de rigidez intermedia.El argumento es que los espectros de diseño del Reglamento presentan una zona
intermedia muy ancha, superior a la zona de resonancia de cualquier sismo real, por lo
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 484/500
que aplicar el criterio de Newmark implicaría penalizar demasiado a las construcciones
que se encuentran en ese rango de períodos.
El Reglamento, prevé sólo dos rangos de períodos para aplicar la regla de reducción
por ductilidad:
a) Estructuras flexibles, aquellas cuyo período es igual o mayor que el mínimo
período del tramo horizontal del espectro de diseño (T1). En este caso, los
esfuerzos elasto-plásticos se obtendrán de dividir los esfuerzos elásticos por un
coeficiente de reducción R = µ.
b) Estructuras rígidas, cuyo período es igual o menor a T1. En este rango los
desplazamientos U max del sistema elasto-plástico se obtienen multiplicando los
desplazamientos elásticos por el factor µ /R, y los esfuerzos elasto-plásticos
dividiendo los elásticos por R, donde R varía linealmente en función del
período, entre R = 1 para T = 0, y R = µ para T = T1.
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 485/500
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 486/500
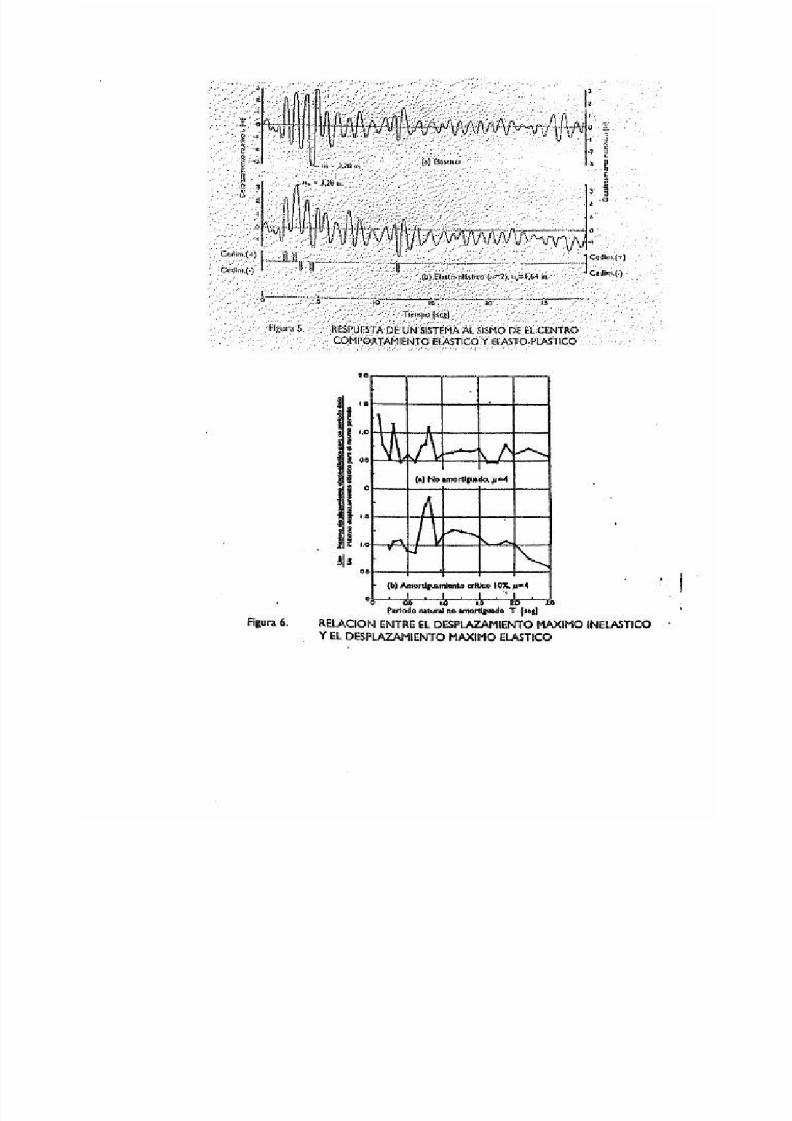
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 487/500
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 488/500
Cátedra de Análisis Estructural
Carrera de Ingeniería Civil
METODO MODAL ESPECTRAL
Carlos A. Prato
Marcelo A. Ceballos
Federico Pinto
Año 2010
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 489/500
1
Respuesta a excitaciones sísmicas
La ecuación de equilibrio dinámico del sistema de 1 grado de libertad dinámico (1 GLD)
sin amortiguamiento indicado en la Figura 1 se expresa como:
0 K u t M y t (1)
Figura 1. Oscilador simple sujeto a movimiento de apoyo
El término nulo de la derecha indica que no existe una fuerza ( ) P t externa conocida
aplicada directamente sobre la masa. La fuerza elástica ( ) K u t es sólo función del
movimiento relativo entre los extremos del resorte, es decir entre la masa y el apoyo. La
aceleración absoluta ( ) y t es igual a la suma de la aceleración relativa ( )u t y de la aceleración
del apoyo correspondiente al sismo ( )S
u t que se considera como un dato del problema. Con
estas definiciones, la ecuación de equilibrio dinámico resulta:
S K u t M u t M u t (2)
El segundo miembro de esta expresión S u t cumple el rol de una fuerza externa
equivalente en las ecuaciones de equilibrio dinámico expresadas en función del
desplazamiento relativo ( )u t . En otras palabras, la solución de la ecuación (2) no difiere en
nada de la determinación de la respuesta ( )u t para una carga exterior conocida igual a
S u t .
Una particularidad de la ecuación (1) es que para el instante en que el desplazamiento
relativo pasa por su valor máximo maxu la fuerza que soporta el resorte K es máxima, y dado
que no hay otro término en la ecuación también debe ser máxima la aceleración absoluta de la
masa ( ) y t y alcanzar su valor max y , es decir que:
max max K u M y o sea,
2
max max y u (3)
donde ω es la frecuencia natural del sistema. Esta expresión tiene una forma muy
particular ya que es similar a la derivada segunda de una acción armónica de frecuencia ω de
K
M
su t u t
y t
s y t u t u t
s y t u t u t
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 490/500
2
amplitud maxu . Debe destacarse que se trata de una coincidencia formal, ya que la respuesta
sísmica ( )u t a una excitación sísmica no armónica ( )S
u t no resulta en general armónica.
De acuerdo con la definición de Espectro de Respuesta Elástica ya visto, el valor del
desplazamiento relativo máximo maxu se denomina habitualmente “DesplazamientoEspectral S d ”. De esta manera, resulta que la máxima aceleración absoluta de la masa M
puede obtenerse como el producto del desplazamiento espectral S d por el cuadrado de la
frecuencia natural ω. Nótese que en materia de excitaciones sísmicas el histograma de
aceleraciones ( )S u t puede considerarse con su signo, o con el signo opuesto, ya que se trata
de un proceso de origen aleatorio cuyo signo podría ser intercambiable entre + y –. En el
análisis de la respuesta sísmica, en particular cuando se trata de determinar el valor máximo,
se considerará con el signo ± en todos los casos.
En el caso que el amortiguamiento no sea nulo, como ocurre en la inmensa mayoría de
estructuras civiles, la expresión (3) no representa el valor exacto de la aceleración máximasino sólo una aproximación de ella, ya que además de las fuerzas elásticas ( ) K u t coexisten
contemporáneamente las fuerzas de amortiguamiento f D. Para el caso de fuerzas viscosas
lineales resulta: ( ) D f C u t . De esta forma, la máxima aceleración absoluta no está
rigurosamente dada por la expresión (3), pero de todos modos ésta representa una muy buena
aproximación de la máxima aceleración absoluta max y para estructuras civiles en que el
amortiguamiento típico es del orden del 5% del crítico. El valor de max y dado por la ec. (3)
para el caso de amortiguamiento diferente de cero se conoce como “Pseudo-aceleración” de
la masa, y representa una muy buena aproximación de la aceleración máxima cuando el
amortiguamiento es distinto de cero. La pseudo-aceleración se expresa habitualmente con la
notación S a, que en todos los casos está dada por la expresión (ignorando el signo):
2
a d S S (4)
De todos modos, vale la pena destacar que a pesar que la pseudo-aceleración S a es una
aproximación de la máxima aceleración absoluta, la fuerza elástica máxima inducida por el
sismo es exactamente la dada por la expresión:
max a K u M S (5)
Por lo antes expuesto, dado que el análisis sísmico centra su interés en losdesplazamientos y esfuerzos máximos, los valores espectrales de desplazamiento S d , o de
pseudo-aceleración S a pueden utilizarse en forma indistinta con las expresiones anteriores
para evaluar los desplazamientos o esfuerzos máximos inducidos por un sismo utilizando
expresiones de formato estático; es decir, sin tener que incluir en forma explícita las fuerzas
de inercia o de amortiguamiento propias de un problema dinámico. Cuando se utilizan los
valores espectrales (S a y S d ) la dinámica del problema está tenida en cuenta en forma implícita
en la dependencia de S a y S d en función del período natural (o frecuencia) del sistema
considerado.
De todo lo expresado surge que el análisis sísmico lineal de un sistema elástico puede
ser realizado utilizando expresiones que son de tipo estático, y que esta situación noconstituye una aproximación del problema, sino que es una solución exacta para el sistema
de 1 GLD. Para estructuras con múltiples grados de libertad dinámicos (MGLD) este tipo de
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 491/500
3
enfoque del problema lleva naturalmente a ciertas aproximaciones derivadas del hecho que el
análisis es sólo exacto para un grado de libertad dinámico, ya que las máximas respuestas
dinámicas de los modos naturales, desacoplados entre sí en el campo lineal, no coinciden en el
tiempo y por lo tanto no pueden superponerse como si se tratara de excitaciones estáticas.
Por lo antes comentado, el Método Modal Espectral de análisis sísmico que se presenta acontinuación resulta ser una aproximación que permite el cálculo de los esfuerzos y
desplazamientos máximos inducidos por el sismo, que es aplicable para el diseño de
estructuras civiles en una gran cantidad de casos de la ingeniería práctica, y que está
incorporado en los códigos o reglamentos de diseño de obras civiles bajo acciones sísmicas.
Las principales limitaciones del método están relacionadas con la forma en que las estructuras
desarrollan comportamiento inelástico o plástico durante la acción sísmica. Los reglamentos
normalmente establecen condiciones que deben cumplir el diseño de la estructura para que el
método modal espectral tenga suficiente precisión y resulte aplicable para la verificación del
diseño.
Análisis sísmico modal espectral
El método modal espectral requiere como dato de partida para su aplicación conocer los
modos y frecuencias naturales del sistema de múltiples grados de libertad, es decir que se
conocen los valores de las frecuencias ωi y de los modos Φi.
Las ecuaciones de movimiento de un sistema de N grados de libertad dinámicos ( N GLD)
para la excitación sísmica son:
S K U t M U t C U t u t M B
(6)
El vector de carga equivalente a la acción sísmica es el dado en el segundo miembro de la
ecuación (6). Este vector representa la carga dinámica equivalente a la acción sísmica, que
debe utilizarse para calcular la respuesta en el tiempo ( )U t
cuando se define como dato que
describe la excitación sísmica al histograma de las aceleraciones ( )S u t . Para resolver la ec. (6)
se puede utilizar el método de descomposición modal ya visto para cualquier otro tipo de
cargas dinámicas ( ) P t
en el Capítulo 5 de la parte “Dinámica Estructural”. Este análisis,
válido siempre que el sistema sea lineal y elástico, no será abordado en más detalle ya que no
difiere en nada al correspondiente a solicitaciones dinámicas en general ya visto.
De todos modos, el concepto de descomposición modal resulta de utilidad para el análisissísmico en el caso general de la ec. (6). Se propone la descomposición modal en la forma:
1
N
i i
i
U t q t
(7)
donde qi(t ) es el “desplazamiento generalizado” del modo i.
Substituyendo la ec. (7) en la ec. (6) y premultiplicando ambos miembros de la ec. (6) por
la transpuesta del vector Φi, que representa los desplazamientos modales del modo “i”, se
obtiene la expresión de la ecuación de equilibrio dinámico del modo “i” en la forma:
T T T T
i i i i i i i i i S i K q t M q t C q t u t M B
(8)

5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 492/500
4
Introduciendo la notación: T
i i i K K
, T
i i iM M
, y T
i i iC C
, y
dividiendo ambos miembros de la ec. (8) por i
se obtiene:
2 2 T
i i i i i i S i iq t q t q t u t M B M
(9)
Comparando la ecuación (9) con la correspondiente a la excitación sísmica de un sistema
de 1 GLD:
2 2 S u t u t u t u t (10)
surge que ambas expresiones presentan una correspondencia directa en todos sus términos en
los respectivos valores de q(t ) y de u(t ), salvo el factor T
i i B M
que aparece en la ec.
(9) y no aparece en la ec. (10). Este factor que se expresa:
T
i i i B M
(11)
se denomina “factor de participación modal del modo i ”.
De este análisis surge que si se conoce el desplazamiento máximo que ocurre en un
sistema de 1 GLD, denominado como S d , el valor máximo de la coordenada modal respectiva
qi(t ) , ,maxiq , será igual al producto i d S :
,maxi i d q S (12)
Por lo tanto, los desplazamientos relativos máximos asociados con el modo i están dados
por la expresión:
,max ,maxi i i i d iU q S
(13)
De manera similar, el vector de pseudo-aceleración ,max
s
iU
debido al modo i, teniendo en
cuenta que,maxi i aq S , resulta:
,max ,max
s
i i i i a iU q S
(14)
Como ya se indicó anteriormente, para un sistema de 1 GLD, el producto de la pseudo-
aceleración de cada grado de libertad dinámico por su respectiva masa representa la fuerza
que produce como respuesta estática el valor de la máxima respuesta dinámica del modo, es
decir que el vector de cargas equivalentes,i eq P
estará dado por
, ,max
s
i eq i P M U
(15)
que constituye un vector de cargas tal que, si se calcula la respuesta estática a ellas, se obtiene
el desplazamiento máximo en el modo i, vector que se denomina,maxiU
en la ec. (13):
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 493/500
5
, ,maxi eq i P K U
(16)
En realidad, la expresión de la ec. (16) no es necesaria para calcular ,maxiU
ya que la
contribución del modo i a los desplazamientos de los nudos puede obtenerse directamente a
través de la ec. (13). Sin embargo, la ec. (16) pone en evidencia que la respuesta dinámicamáxima en un modo puede ser obtenida a través del vector de fuerzas máximas estáticas
equivalentes ,i eq P
, y que dichos valores no constituyen una aproximación a la respuesta
sísmica de ese modo sino que representan la solución exacta de los desplazamientos relativos
máximos,maxiU
, los que a su vez permiten el cálculo de los respectivos esfuerzos máximos de
la estructura en ese modo.
De todo lo expuesto surge que el vector de los desplazamientos máximos debidos a la
respuesta de un modo puede calcularse en forma exacta a partir del conocimiento de la
frecuencia natural del modo ωi, de su forma modal Φi y de la ordenada espectral S d (o S a) que
es función de la frecuencia natural ωi (o del período T i).
Una de las limitaciones inherentes al método modal espectral es que es aplicable a
sistemas lineales; es decir, siempre que la estructura se mantenga dentro del campo elástico y
de pequeños desplazamientos. Otra limitación importante del método espectral es que sólo da
como resultado el valor máximo del desplazamiento de la estructura (o los esfuerzos
máximos) pero sin indicar en qué instante del tiempo se produce dicho máximo. Como lo que
interesa es el valor máximo de los desplazamientos (o esfuerzos) resultante de la
superposición de todos los modos, la falta de simultaneidad de la respuesta máxima en los
distintos modos impide que se pueda obtener el valor exacto del máximo de la superposición
de todos los modos.
De esta limitación surge la necesidad de realizar ciertas hipótesis sobre cómo sumar los
máximos de los distintos modos. Una manera de estimar el máximo de la superposición de
todos los modos, que se utiliza con bastante frecuencia en las aplicaciones prácticas del
método, consiste en considerar la respuesta en cada modo como estadísticamente
independiente de la correspondiente a los restantes modos. Sobre esta base, que es sólo una
primera aproximación al problema, se puede justificar que los máximos modales no se suman
en forma algebraica directa sino a través de la suma cuadrática (Pitagórica), es decir que el
vector desplazamientos máximos de todos los modos puede aproximarse, para cada
componente j, por la expresión:
2
max ,max
1
N j j
i
i
u u
(17)
Para el cálculo de los esfuerzos (internos y reacciones) máximos combinados de todos los
modos utilizando esta hipótesis de independencia estadística de la respuesta en cada modo, es
necesario recurrir a las reglas del análisis estático para el vector de fuerzas equivalentes,i eq P
de cada modo. Denominando con,maxi E al valor máximo del esfuerzo genérico en un punto de
la estructura en el modo i, la superposición de los valores de los distintos modos para obtener
una aproximación al máximo de todos los modos está dada por:
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 494/500
6
2
max ,max
1
N
i
i
E E
(18)
El cálculo de las componentes modales de los esfuerzos máximos,maxi E puede realizarse
de dos maneras diferentes en el caso de estructuras regulares en altura:
En función del vector de desplazamientos modales máximos,maxiU
, como es
característico en el Método de Rigidez (estático), multiplicando las matrices de
rigidez elementales de cada componente por los desplazamientos de los extremos
de cada barra contenidos en el vector ,maxiU
.
Por consideraciones estáticas a partir del vector de cargas equivalentes del modo i,
,i eq P
. A los efectos del cálculo manual resulta más simple este procedimiento,
aunque los valores resultantes de ambos métodos son idénticos.
La principal condición o limitación a la validez de la respuesta estadísticamente
independiente de los modos es que las frecuencias de dichos modos sean suficientemente
diferentes. En términos generales se tiende a aceptar la hipótesis de independencia estadística
cuando las frecuencias de los modos considerados difieren en al menos un 20 o 30 %. Esta
condición se cumple en la mayoría de las construcciones de configuración estructural
ordenada y simple, independientemente de las dimensiones de la estructura. Como se ha visto
en los ejercicios prácticos, la frecuencia del segundo modo de un pórtico simple de dos pisos
es típicamente próxima a 3 veces la frecuencia fundamental. En el caso de una chimenea o
viga en voladizo, la frecuencia del segundo modo es típicamente 5 o más veces la del modo
fundamental. En el caso de edificios de varios pisos de hormigón armado típicos de las
construcciones locales, la frecuencia del segundo modo se encuentra entre 3 y 5 veces lafrecuencia fundamental según la configuración de la estructura y sus fundaciones.
Estas consideraciones generales no resultan aplicables para edificios en altura que
presentan reducciones a su sección en función de la altura, como ocurre típicamente para
respetar los retiros obligatorios en las fachadas de construcciones urbanas. De ahí que sea
necesario tener en cuenta las limitaciones de las reglas de superposición modal que se utilicen
para casos que no cumplen con las premisas requeridas, aunque en la mayoría de las
construcciones regulares en planta y elevación, la regla de la independencia estadística es
aplicable.
Otro aspecto importante que no ha sido analizado todavía en detalle se refiere a cuántosmodos naturales de vibración es necesario considerar en el cálculo de la respuesta sísmica.
Naturalmente, si se trata de un edificio de dos plantas, es muy probable que se pueda utilizar
un modelo de 2 GLD para representar la respuesta sísmica en cada dirección, suponiendo que
la configuración en planta está orientada en dos direcciones ortogonales no acopladas por un
efecto de torsión. Un edificio de N pisos puede representarse con un modelo de N GLD, y por
lo tanto tiene en cada dirección horizontal N modos y frecuencias naturales de vibración. Se
debe recordar que una estructura puede tener propiedades dinámicas (frecuencias y modos)
muy diferentes en dos direcciones horizontales en planta, y estos modos están en general
desacoplados en ambas direcciones cuando no hay excentricidad de la masa de cada piso
respecto al centro de torsión.
Ahora bien, si se trata de un edificio de 10 pisos cabe preguntarse: ¿es necesario
considerar los 10 modos naturales de vibración en cada dirección horizontal en planta para

5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 495/500
7
tener una buena aproximación de la respuesta sísmica?. La respuesta a esta pregunta es un
categórico “NO”. La principal razón es que los modos que se excitan más fácilmente con el
sismo son los modos de menor frecuencia, no sólo por su frecuencia y la posible resonancia
con el sismo, sino porque los modos superiores generan fuerzas dinámicas equivalentes ,i eq P
que se cancelan parcialmente en altura y tienden a dar una resultante acumulada hacia la base
que no aportan demasiado a los esfuerzos, y aún en menor medida a los desplazamientos.
Para estimar la importancia de la contribución de un cierto modo i a la respuesta sísmica
resulta de gran utilidad introducir el concepto de “Masa Modal”. Para ello, considérese la
estructura de varios pisos representada en la Figura 2. El concepto se desarrolla para un modo
cualquiera, por ejemplo el modo fundamental, pero su validez resulta aplicable a cualquier
modo. En la figura se ilustran las componentes del vector de fuerzas equivalentes del modo
,i eq P
que producen la máxima respuesta en ese modo. La fuerza total de corte acumulada en la
base del edificio está dada por la suma algebraica de las componentes individuales del vector
,i eq P
. La reacción en la base para el modo i, expresada en función de los desplazamientos de
los pisos j
iu y de la masa de cada piso jm , donde i representa el número del modo y j el piso
considerado, resulta:
,
, ,
1 1 1
N N N j s j j
i i eq j i i a i j i
j j j
R P m u S m (19)
Figura 2. Fuerzas equivalentes del modo genérico i
Dividiendo la reacción en la base para el modo i por la aceleración espectral,a iS se
obtiene una magnitud con dimensiones de masa designada “ Masa Modal del modo i ”:
2T
i
i T
i i
B
M
M (20)
Se puede apreciar que la masa modal es siempre positiva, y su valor es tal que la suma de
la iM de todos los modos es exactamente igual al 100 % de masa de toda la estructura. Sobrela base de este concepto es posible decidir si el número de modos considerados es suficiente, a
partir que la suma de las masas modales de todos los modos incluidos en el análisis alcance
1
,i eq P
2
,i eq P
3
,i eq P
4
,i eq P
i R
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 496/500
8
un cierto porcentaje de la masa total. Habitualmente se considera que es suficiente cuando la
suma de la masa modal de los modos incluidos en el análisis alcanza o supera el 90% de la
masa total de la estructura.
Método estático equivalente – Disposiciones reglamentarias
A los efectos de simplificar el cálculo de los esfuerzos y deformaciones de una estructura
debidos a la acción sísmica, los reglamentos de diseño de estructura de edificios típicamente
dan una serie de pautas a través de las cuales es posible aproximar la solución del problema a
través de la respuesta del modo fundamental. Más aún, para estructuras regulares en plan y
elevación tal como aquellas para las cuales está orientado este método, es normal considerar
que los desplazamientos horizontales asociados al modo fundamental varían linealmente en
función de la altura del piso.
Por lo tanto, sobre la base de esta hipótesis, ni siquiera resulta necesario calcular con
precisión el modo fundamental, ya que se supone una ley lineal en altura y sólo es necesario
estimar la frecuencia fundamental a los efectos de la determinación del valor de la aceleración
espectral S a,1 de dicho modo.
Una manera de estimar el valor de ω1 es a través del cociente de Rayleigh tomando como
forma modal a una ley lineal en altura Φ. Se define como cociente de Rayleigh a la relación:
2 1 11
1 1
T
T
K
M
(21)
Si la forma supuesta Φ fuera exactamente el modo fundamental el valor dado por la ec.
(21) para el modo fundamental sería el valor exacto de ω1.
Con el valor de T 1 = 2 π / ω1, se obtiene del espectro de pseudo-aceleración la ordenada
espectral S a,1 y se procede a calcular el vector de fuerzas estáticas equivalentes, designado
1,eq P
, y la masa modal1
M . Como es de esperar, la masa modal1
M es inferior al 100% de la
masa total del edificio. Típicamente, para un edificio regular en altura, y con la forma lineal
del modo fundamental, el valor de la masa modal1M resulta aproximadamente cerca del 85%
del total. En otras palabras, si el análisis se hiciera sólo con el primer modo aproximado en
forma lineal, habría un faltante de masa del 15% del total.
Para corregir esa masa faltante, pero manteniendo la ley lineal de variación del modo (y delas fuerzas estáticas equivalentes que producen la respuesta dinámica máxima), los
reglamentos introducen un factor de amplificación de la respuesta del primer modo calculada
sobre la hipótesis de variación lineal de los desplazamientos en altura, de forma tal que la
masa modal sea igual al 100% de la masa de la estructura. Esto se logra multiplicando la
fuerzas estáticas equivalentes antes calculadas y definidas según el método modal espectral
general, 1,eq P
, por el factor mayor a la unidad:1total M M .
En síntesis, el método estático equivalente de análisis sísmico incorporado a los
reglamentos de diseño sísmico de edificios consiste en una aproximación del método modal
espectral general ya visto, en el que se introducen las siguientes aproximaciones adicionales:
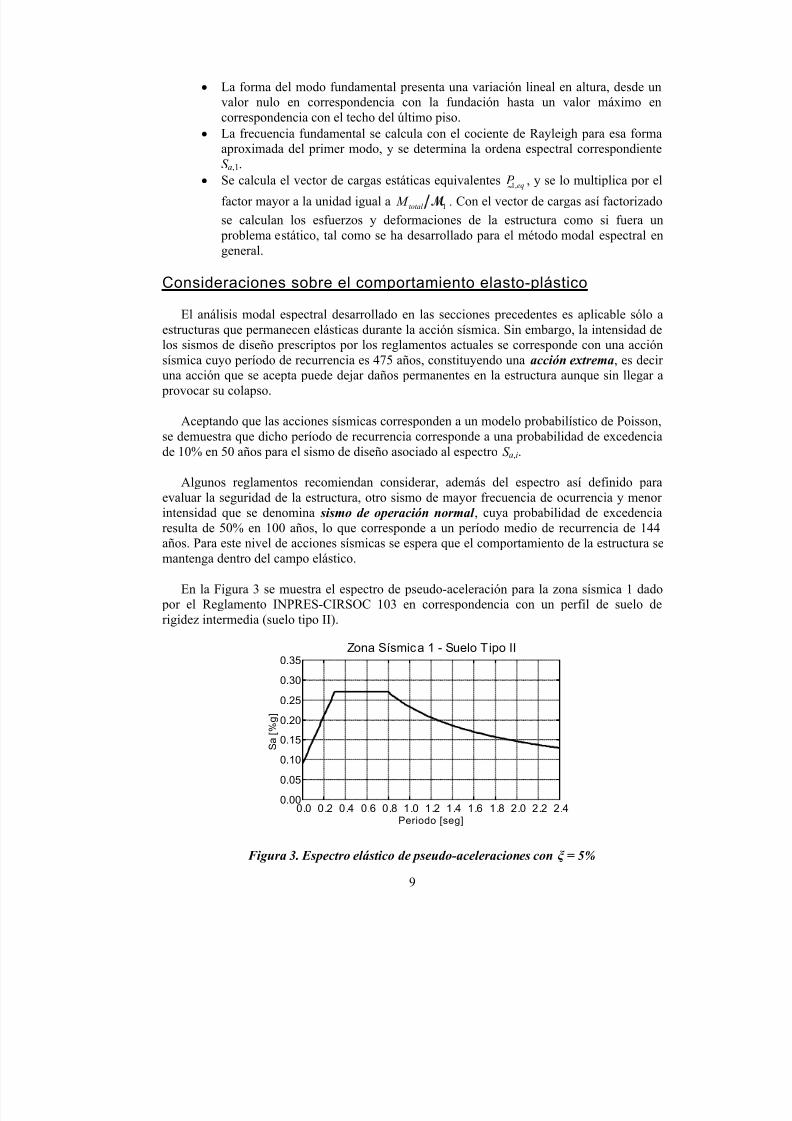
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 497/500
9
La forma del modo fundamental presenta una variación lineal en altura, desde un
valor nulo en correspondencia con la fundación hasta un valor máximo en
correspondencia con el techo del último piso.
La frecuencia fundamental se calcula con el cociente de Rayleigh para esa forma
aproximada del primer modo, y se determina la ordena espectral correspondiente
S a,1. Se calcula el vector de cargas estáticas equivalentes
1,eq P
, y se lo multiplica por el
factor mayor a la unidad igual a1total M M . Con el vector de cargas así factorizado
se calculan los esfuerzos y deformaciones de la estructura como si fuera un
problema estático, tal como se ha desarrollado para el método modal espectral en
general.
Consideraciones sobre el comportamiento elasto-plástico
El análisis modal espectral desarrollado en las secciones precedentes es aplicable sólo a
estructuras que permanecen elásticas durante la acción sísmica. Sin embargo, la intensidad delos sismos de diseño prescriptos por los reglamentos actuales se corresponde con una acción
sísmica cuyo período de recurrencia es 475 años, constituyendo una acción extrema, es decir
una acción que se acepta puede dejar daños permanentes en la estructura aunque sin llegar a
provocar su colapso.
Aceptando que las acciones sísmicas corresponden a un modelo probabilístico de Poisson,
se demuestra que dicho período de recurrencia corresponde a una probabilidad de excedencia
de 10% en 50 años para el sismo de diseño asociado al espectro S a,i.
Algunos reglamentos recomiendan considerar, además del espectro así definido para
evaluar la seguridad de la estructura, otro sismo de mayor frecuencia de ocurrencia y menor
intensidad que se denomina sismo de operación normal , cuya probabilidad de excedencia
resulta de 50% en 100 años, lo que corresponde a un período medio de recurrencia de 144
años. Para este nivel de acciones sísmicas se espera que el comportamiento de la estructura se
mantenga dentro del campo elástico.
En la Figura 3 se muestra el espectro de pseudo-aceleración para la zona sísmica 1 dado
por el Reglamento INPRES-CIRSOC 103 en correspondencia con un perfil de suelo de
rigidez intermedia (suelo tipo II).
0.0 0.2 0.4 0.6 0.8 1.0 1.2 1.4 1.6 1.8 2.0 2.2 2.40.00
0.05
0.10
0.15
0.20
0.25
0.30
0.35 Zona Sísmica 1 - Suelo Tipo II
S a [ % g ]
Periodo [seg]
Figura 3. Espectro elástico de pseudo-aceleraciones con ξ = 5%
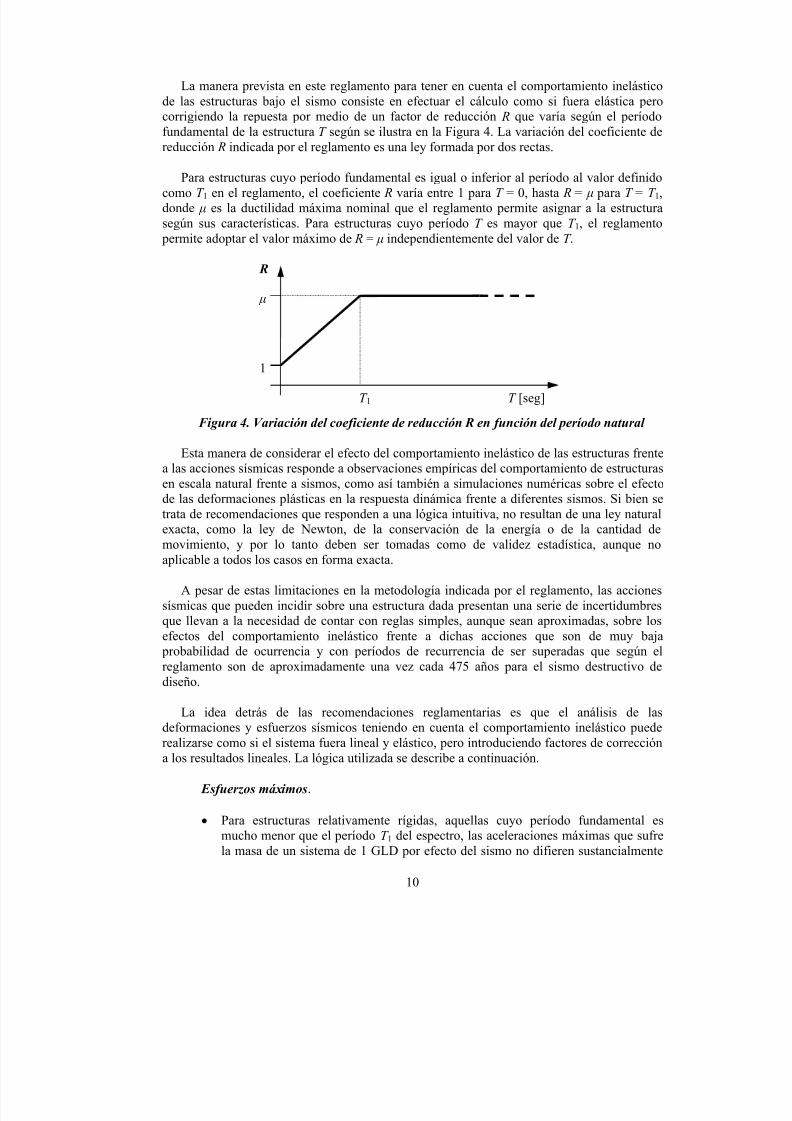
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 498/500
10
La manera prevista en este reglamento para tener en cuenta el comportamiento inelástico
de las estructuras bajo el sismo consiste en efectuar el cálculo como si fuera elástica pero
corrigiendo la repuesta por medio de un factor de reducción R que varía según el período
fundamental de la estructura T según se ilustra en la Figura 4. La variación del coeficiente de
reducción R indicada por el reglamento es una ley formada por dos rectas.
Para estructuras cuyo período fundamental es igual o inferior al período al valor definido
como T 1 en el reglamento, el coeficiente R varía entre 1 para T = 0, hasta R = μ para T = T 1,donde μ es la ductilidad máxima nominal que el reglamento permite asignar a la estructura
según sus características. Para estructuras cuyo período T es mayor que T 1, el reglamento
permite adoptar el valor máximo de R = μ independientemente del valor de T .
Figura 4. Variación del coeficiente de reducción R en función del período natural
Esta manera de considerar el efecto del comportamiento inelástico de las estructuras frente
a las acciones sísmicas responde a observaciones empíricas del comportamiento de estructuras
en escala natural frente a sismos, como así también a simulaciones numéricas sobre el efectode las deformaciones plásticas en la respuesta dinámica frente a diferentes sismos. Si bien se
trata de recomendaciones que responden a una lógica intuitiva, no resultan de una ley natural
exacta, como la ley de Newton, de la conservación de la energía o de la cantidad de
movimiento, y por lo tanto deben ser tomadas como de validez estadística, aunque no
aplicable a todos los casos en forma exacta.
A pesar de estas limitaciones en la metodología indicada por el reglamento, las acciones
sísmicas que pueden incidir sobre una estructura dada presentan una serie de incertidumbres
que llevan a la necesidad de contar con reglas simples, aunque sean aproximadas, sobre los
efectos del comportamiento inelástico frente a dichas acciones que son de muy baja
probabilidad de ocurrencia y con períodos de recurrencia de ser superadas que según elreglamento son de aproximadamente una vez cada 475 años para el sismo destructivo de
diseño.
La idea detrás de las recomendaciones reglamentarias es que el análisis de las
deformaciones y esfuerzos sísmicos teniendo en cuenta el comportamiento inelástico puede
realizarse como si el sistema fuera lineal y elástico, pero introduciendo factores de corrección
a los resultados lineales. La lógica utilizada se describe a continuación.
Esfuerzos máximos.
Para estructuras relativamente rígidas, aquellas cuyo período fundamental esmucho menor que el período T 1 del espectro, las aceleraciones máximas que sufre
la masa de un sistema de 1 GLD por efecto del sismo no difieren sustancialmente
T [seg]
R
1
μ
T 1
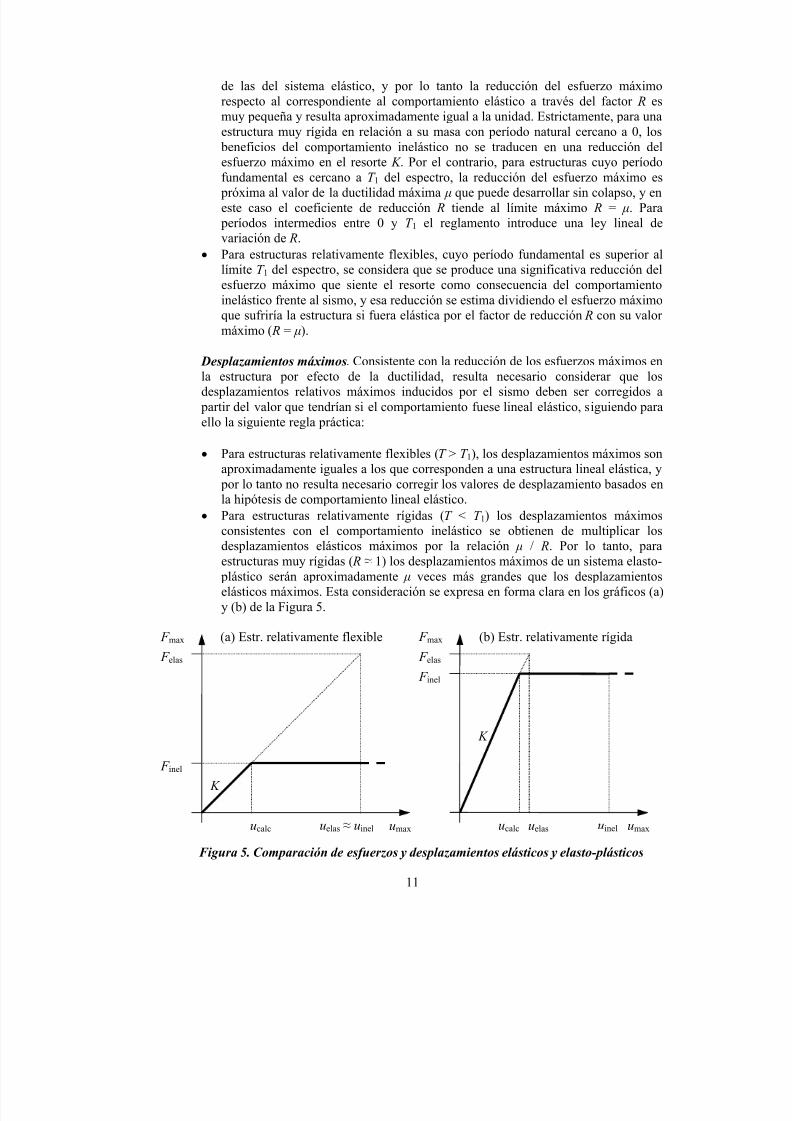
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 499/500
11
de las del sistema elástico, y por lo tanto la reducción del esfuerzo máximo
respecto al correspondiente al comportamiento elástico a través del factor R es
muy pequeña y resulta aproximadamente igual a la unidad. Estrictamente, para una
estructura muy rígida en relación a su masa con período natural cercano a 0, los
beneficios del comportamiento inelástico no se traducen en una reducción del
esfuerzo máximo en el resorte K . Por el contrario, para estructuras cuyo períodofundamental es cercano a T 1 del espectro, la reducción del esfuerzo máximo es
próxima al valor de la ductilidad máxima μ que puede desarrollar sin colapso, y en
este caso el coeficiente de reducción R tiende al límite máximo R = μ. Para
períodos intermedios entre 0 y T 1 el reglamento introduce una ley lineal de
variación de R.
Para estructuras relativamente flexibles, cuyo período fundamental es superior al
límite T 1 del espectro, se considera que se produce una significativa reducción del
esfuerzo máximo que siente el resorte como consecuencia del comportamiento
inelástico frente al sismo, y esa reducción se estima dividiendo el esfuerzo máximo
que sufriría la estructura si fuera elástica por el factor de reducción R con su valor
máximo ( R = μ).
Desplazamientos máximos. Consistente con la reducción de los esfuerzos máximos en
la estructura por efecto de la ductilidad, resulta necesario considerar que los
desplazamientos relativos máximos inducidos por el sismo deben ser corregidos a
partir del valor que tendrían si el comportamiento fuese lineal elástico, siguiendo para
ello la siguiente regla práctica:
Para estructuras relativamente flexibles (T > T 1), los desplazamientos máximos son
aproximadamente iguales a los que corresponden a una estructura lineal elástica, y
por lo tanto no resulta necesario corregir los valores de desplazamiento basados enla hipótesis de comportamiento lineal elástico.
Para estructuras relativamente rígidas (T < T 1) los desplazamientos máximos
consistentes con el comportamiento inelástico se obtienen de multiplicar los
desplazamientos elásticos máximos por la relación μ / R. Por lo tanto, para
estructuras muy rígidas ( R ≈ 1) los desplazamientos máximos de un sistema elasto-
plástico serán aproximadamente μ veces más grandes que los desplazamientos
elásticos máximos. Esta consideración se expresa en forma clara en los gráficos (a)
y (b) de la Figura 5.
Figura 5. Comparación de esfuerzos y desplazamientos elásticos y elasto-plásticos
F max
F inel
ucalc uelas ≈ uinel
K
F elas
umax
F max
F inel
ucalc uinel
K
F elas
umax uelas
(a) Estr. relativamente flexible (b) Estr. relativamente rígida
5/8/2018 Libro de Ayuda - Analisis Estructural - slidepdf.com
http://slidepdf.com/reader/full/libro-de-ayuda-analisis-estructural-559abedf12844 500/500
A manera de comentario final, resulta de interés señalar que las tres zonas características
en cualquier espectro de respuesta elástica S a son las siguientes:
Zona controlada por las aceleraciones máximas: segmento del espectro que
corresponde a estructuras relativamente rígidas, donde las aceleraciones máximas
no presentan una reducción marcada respecto a las elásticas como consecuenciadel comportamiento inelástico.
Zona controlada por las velocidades máximas: segmento donde las
aceleraciones espectrales son máximas, que se extiende entre los períodos
designados como T 1 y T 2 por el reglamento INPRES-CIRSOC 103. En este sector,
se produce la máxima amplificación dinámica de la respuesta de la estructura
respecto a las que se producirían si las mismas aceleraciones debidas al sismo
generaran una respuesta estática o casi estática (lo que ocurre esencialmente
cuando el período fundamental T es muy bajo frente a T 1). De todos modos, a
pesar de la amplificación dinámica que se produce en esta zona por el efecto de
una cierta resonancia entre la excitación y el modo fundamental de la estructura, el
comportamiento inelástico produce una notable reducción del efecto del esfuerzo
que se produciría en un sistema elástico.
Zona controlada por los desplazamientos máximos: segmento que corresponde
a las estructuras relativamente flexibles, en las que el desplazamiento máximo
inducido por el sismo resulta independiente a si el comportamiento es elástico o
inelástico. Naturalmente, si los desplazamientos máximos son independientes de
las deformaciones plásticas, los esfuerzos máximos se reducen respecto a los
elásticos a través del factor R por la expresiónmax,inel max,elas
F F
.






