Lgr jose millan
32
REPÚBLICA BOLIVARIANA DE VENEZUELA INSTITUTO UNIVERSITARIO POLITÉCNICO “SANTIAGO MARIÑO” ESCUELA DE INGENIERÍA ELECTRÓNICA EXTENSIÓN MATURÍN Lugar Geométrico de Raíces Profesor: Realizado por: Ing. Mariangela Pollonais Br. Millán, José M. Maturín, Agosto de 2013
-
Upload
nadhezka-palma-de-millan -
Category
Technology
-
view
629 -
download
0
Transcript of Lgr jose millan

REPÚBLICA BOLIVARIANA DE VENEZUELAINSTITUTO UNIVERSITARIO POLITÉCNICO
“SANTIAGO MARIÑO”ESCUELA DE INGENIERÍA ELECTRÓNICA
EXTENSIÓN MATURÍN
Lugar Geométrico de Raíces
Profesor: Realizado por:Ing. Mariangela Pollonais Br. Millán, José M.
Maturín, Agosto de 2013
Lugar Geométrico De Las Raices (Lgr)
En teoría de control, el lugar de raíces o lugar de las raíces (del inglés, root
locus) es el lugar geométrico de los polos y ceros de una función de transferencia
a medida que se varía la ganancia del sistema K en un determinado intervalo.
El método del lugar de raíces permite determinar la posición de los polos de
la función de transferencia a lazo cerrado para un determinado valor de ganancia
K a partir de la función de transferencia a lazo abierto.
El lugar de raíces es una herramienta útil para analizar sistemas dinámicos
lineales tipo SISO (single input single output) y su estabilidad (BIBO stability).
(Recuérdese que un sistema es estable si todos sus polos se encuentran en el
semiplano izquierdo del plano s (en el caso de sistemas continuos) o dentro del
círculo unitario del plano z (para sistemas discretos).)
El lugar de las raíces, además de ser útil para el análisis de la estabilidad
de un sistema lineal y continuo SISO, se puede emplear para el diseño de un
controlador de una variable dentro de un sistema, es decir, se aplica para
determinar la función de transferencia del controlador que además de la regulación
haga que la respuesta del sistema, ante cambios en su variable de proceso,
muestre un perfil de acuerdo a ciertos requerimientos. A continuación se desarrolla
un ejemplo de lo anterior valiéndose de la herramienta “Control System Toolbox”
disponible en Matlab.
La técnica del Lugar Geométrico de las Raíces (LGR) es un método gráfico
para dibujar la posición de los polos del sistema en el plano complejo a medida
que varía un parámetro, la información que proporciona este método es utilizada
para el análisis de la estabilidad y funcionamiento del sistema.
Mediante el LGR se pueden predecir los efectos que tienen: la ubicación de
los polos en lazo cerrado, la variación del valor de la ganancia o agregar polos y/o
ceros en lazo abierto.

De la ecuación característica 1+G(s)H(s) =0 tenemos las condiciones de módulo y fase.
Condición de módulo:
Condición de fase:
Aplicaciones Del Lgr
La estabilidad absoluta y relativa y el comportamiento transitorio de un
sistema de control enlazo cerrado están directamente relacionados con la
localización en el plano s de las raíces de la ecuación característica en lazo
cerrado.
La técnica del lugar de las raíces es un método gráfico para dibujar la
posición de las raíces de la ecuación característica a medida que varía un
parámetro K y es una herramienta potente para:
Estudiar la estabilidad del sistema en función de los valores de K
Conseguir que el comportamiento transitorio del sistema responda a unas
especificaciones prefijadas ajustando un parámetro K. Esto se consigue
ubicando las raíces de lazo cerrado en la situación deseada.
Diseño de sistemas de control mediante la ubicación de polos y ceros del
controlador. Aplicando la condición de módulo se puede determinar la
ganancia necesaria para tener una ubicación deseada de polos dentro del
lugar geométrico de las raíces.
Características Del Lgr

El LGR consta de ramas que se dirigen de los polos a los ceros, si el
número de ceros es menor que el número de polos el lugar geométrico se
dirige a los ceros en el infinito a lo largo de las asíntotas.
Existe un punto de partida o llegada sB que es el punto donde el LGR corta
con el eje real.
El LGR corta con el eje imaginario en Kc (ganancia crítica. La Kc se
obtiene del criterio de estabilidad de Routh Hurwitz.
Para el sistema de la figura 1 cuyo LGR se muestra en la figura 2.
Figura 1. Sistema realimentado

Figura 2. Lugar geométrico de la raíces del sistema dado.
Pautas para el trazado de un lugar geométrico de las raíces:
Definición I:
El lugar geométrico de las raíces, es el lugar geométrico de valores de s para
el cual 1 + K.G(s) = 0 se cumple, ya que el parámetro K (real) varía desde cero a
infinito. Por lo general, 1 + K.G(s) es el denominador de una función de
transferencia de interés, de modo que las raíces en el lugar geométrico son polos
en lazo cerrado del sistema.
Partiendo de la ecuación 8, y teniendo en cuanta que la función compleja la
podemos discriminar en su magnitud y fase, y para K positivos, podemos arribar a
la siguiente definición:
Definición II:
El lugar geométrico de las raíces de G(s) es el lugar geométrico de puntos en
el plano s donde la fase de G(s) es 180°.
Esto se lo conoce como la condición de fase, que significa matemáticamente:

, con l entero. Ec. [9]
Ejemplo:
Tenemos la siguiente función de transferencia G(s) a lazo abierto:
En la figura 2 mostramos con cruces la ubicación de los polos de esta función
de transferencia, y con círculos los ceros. Suponemos un punto de prueba ubicado
en so = -1 + 2.j, y realizamos la suma de las contribuciones de las fases para
determinar si es o no punto del lugar de raíces:
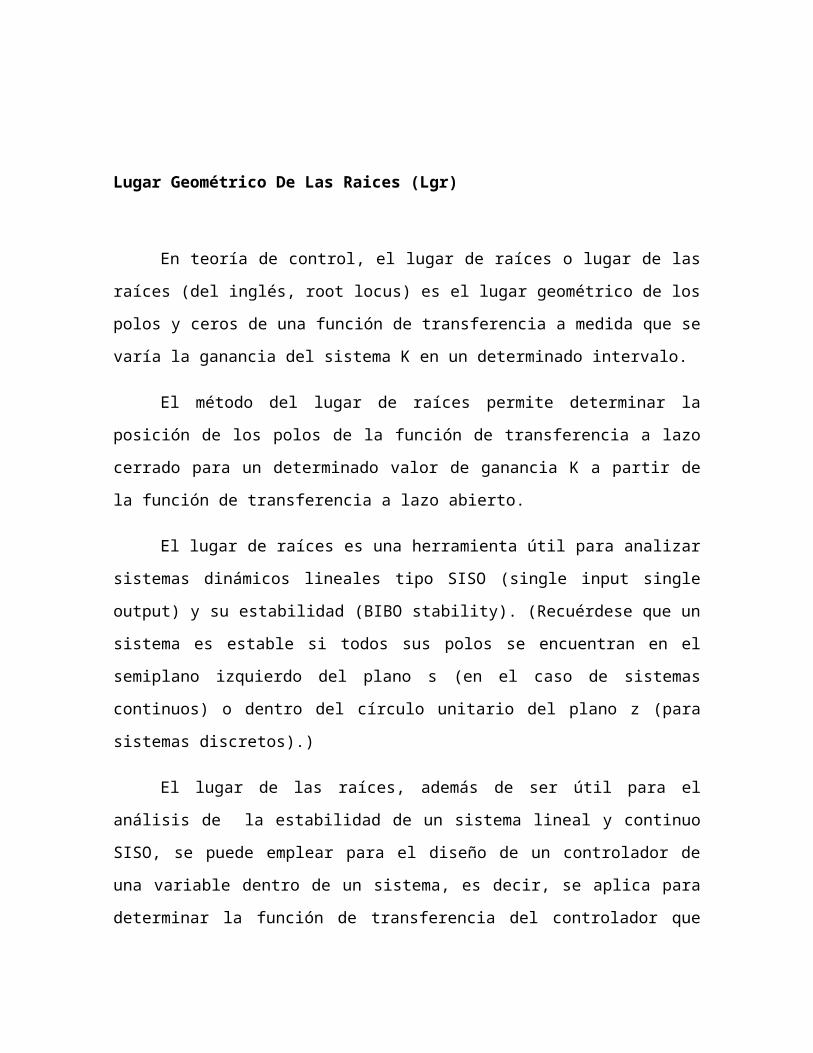
= 90o - 116o.6 - 0o -76o -33o.7 = -136o.3

Pasos Para Trazar El Lugar Geométrico De Las Raíces
PASO 1: Dibujamos los polos y ceros de la función de transferencia a lazo abierto
(con x y o).
PASO 2: Encontramos la parte del eje real de los lugares geométricos de las
raíces.
Si tomamos un punto de prueba sobre el eje real, la contribución en ángulo de
los ceros o polos complejos conjugados se anularán, puesto que uno de los
ángulos se cancela con el de su conjugado.
Entonces debemos considerar solo los polos y ceros que se encuentran sobre
el eje real. Los mismos aportarán 0° si el punto de prueba está a la derecha del
polo o cero, y aportará con -180° o +180° si el punto de prueba está a la izquierda
del polo o cero, respectivamente.
Conclusión: Es lugar geométrico de las raíces, aquel lugar del eje real que está
a la izquierda de un número impar de polos y ceros.
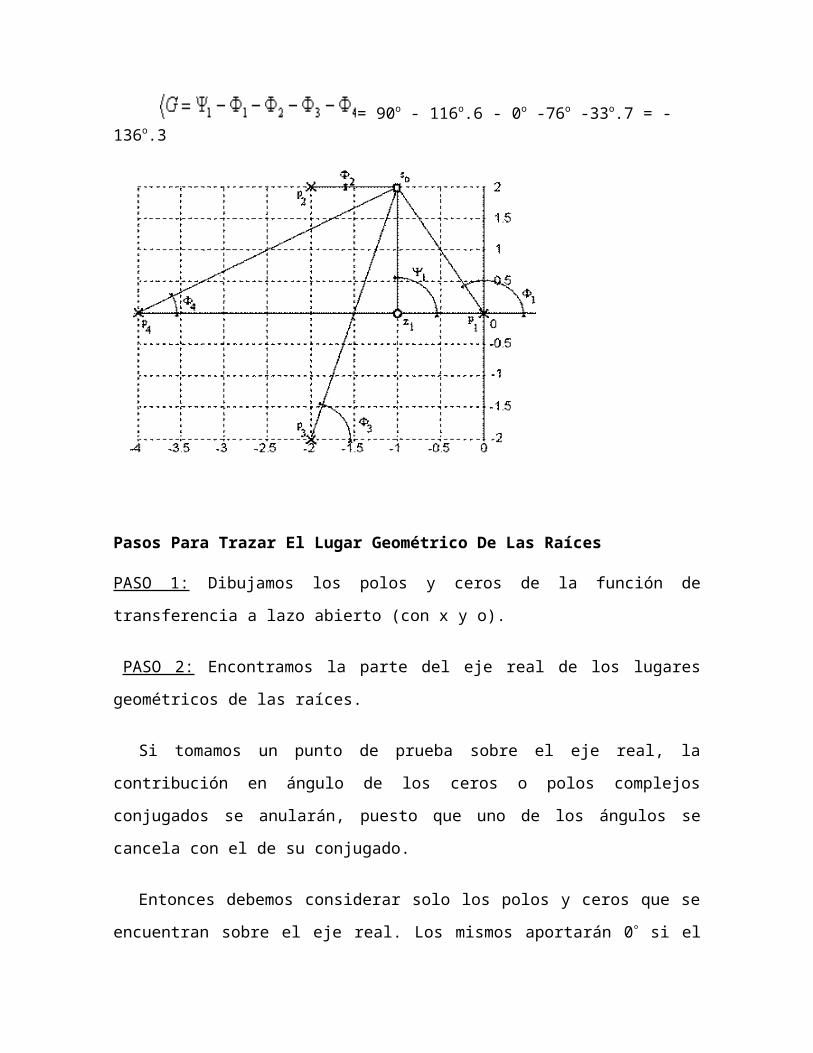
PASO 3: Dibujamos las asíntotas para valores grandes de K.
Cuando K tiende a infinito, la ecuación 1 + K.G(s) = 0 se satisface solamente si
G(s) = 0.
Esto puede ocurrir de dos maneras:
I - En los ceros de G(s), o sea las raíces del polinomio b(s).
II - Escribamos la ecuación característica de la siguiente manera:
Ec. [10]
Ec. [11]
Si n > m, G(s) tiende a cero cuando s tiende a infinito.
Para K grandes, m ceros se cancelarían con m polos, y los (n-m) polos restantes se verían agrupados como en un solo polo múltiple en a:
Ec. [12]
Tomemos un punto de prueba , para un valor grande y fijo de R, y f variable. Aplicando el criterio de la fase, tenemos:
Ec. [13]
El ángulo fl nos dará el ángulo que forman la asíntotas, que serán de:
Ec. [14]
El lugar de origen de las asíntotas está en . Averiguamos cuánto vale a:
Ec. [15]
Es fácil de deducir que: , el opuesto de la sumatoria de los polos a lazo abierto.
Por otro lado, la ecuación característica la podemos escribir de la siguiente manera:

Ec. [16]
Si m < (n-1), tenemos que K no afectará el coeficiente de sn-1, que será a1; y por lo tanto, si llamamos ri las raíces de esta ecuación, tenemos que:
Ec. [17]
Ahora, para K grandes, m de las raíces coinciden con los ceros zi, y (n-m) son
del sistema asintótico , cuyos polos sumarán (n-m) . a. Por lo tanto:
Ec. [18]
Entonces, el centro de las asíntotas estará dado por:
Ec. [19]
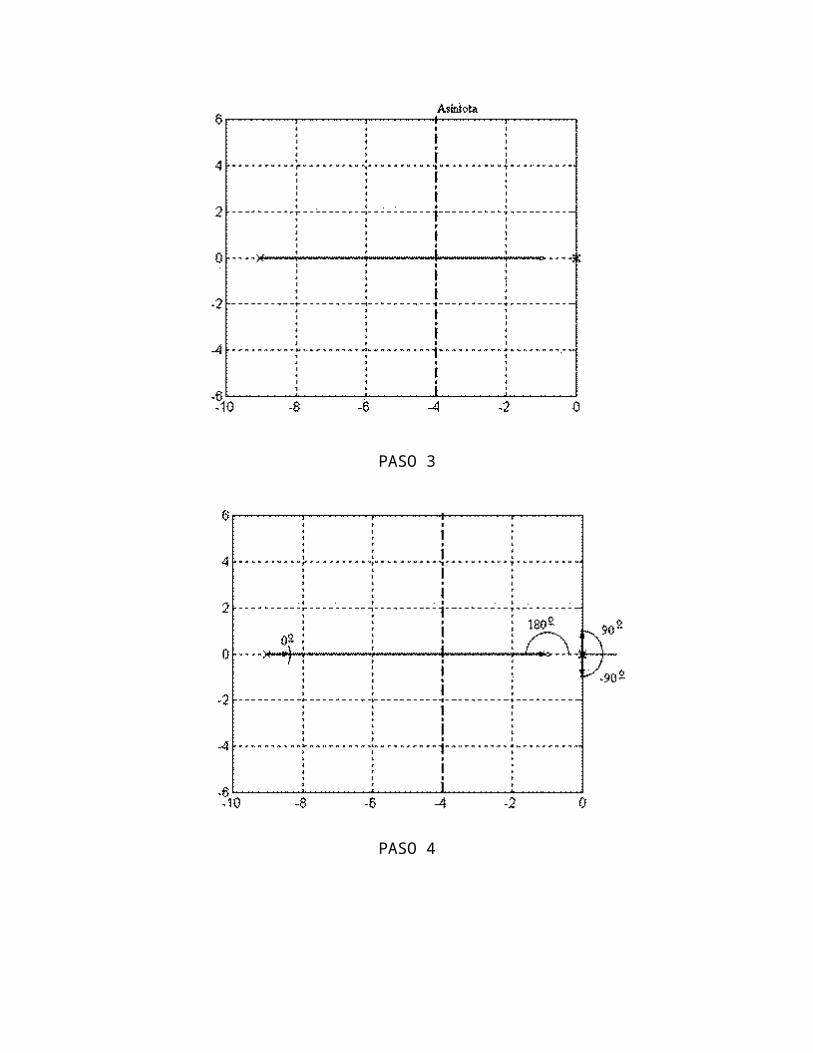
PASO 4: Calculamos los ángulos de salida y de llegada de polos y ceros.
Esto lo analizamos considerando un punto de prueba muy cercano al polo o al cero, y aplicando el criterio de fase.

PASO 5: Estimamos (o calculamos) los puntos donde los lugares geométrico de las raíces cruzan el eje imaginario.
Esto podemos obtener determinando el K, para el cual el sistema se torna inestable (cruza el eje imaginario). Una manera de determinarlo es reemplazar en la ecuación característica s por j.w, de esta manera tenemos dos ecuaciones (una para la parte real de la ecuación y otra para la imaginaria), con dos incógnitas: K y w.
PASO 6: Estimamos la localización de las raíces múltiples, especialmente en el eje real, y determinamos los ángulos de llegada y salida de estos lugares.
Supongamos que para un determinado K, existen raíces múltiples. Llamemos en ese caso ri, a las raíces de la ecuación característica para ese K, o sea:
Ec. [20]
Llamemos ra a la raíz múltiple, entonces habrá un término de la productoria que será: (s- ra)a, con a ³ 2. O sea:
Ec. [21]
Derivemos esta productoria, y evaluémosla en s = ra:
Ec. [22]

Aplicando este resultado a la ecuación característica, y sabiendo que se debe cumplir en s = ra:
y Ec. [23]
Ec. [24]
Combinando ambas ecuaciones para eliminar K:
Ec. [25]
Que es equivalente a:
Ec. [26]
Si dividimos esta ecuación por -b(s), obtendremos que:
Ec. [27]

Entonces tenemos que la condición de raíces múltiples es la siguiente:
Ec. [28]
PASO 7: Completamos el dibujo, combinando los resultados anteriores.

PASO 1
PASO 2

PASO 3
PASO 4

PASO 5
PASO 6
PASO 7
Figura 3. Pasos para el trazado del lugar geométrico de las raíces para la función de transferencia del ejemplo.
Ejemplo:
Tenemos la siguiente función de transferencia a lazo abierto:
En la figura 3 mostramos los resultados de los sucesivos pasos seguidos para el trazado del lugar geométrico de las raíces para esta función de transferencia.
Para el paso 3, el cálculo del centro y ángulo de las asíntotas son:

Para el paso 4, el cálculo de los ángulos a de salida de los polos en el origen (suponiendo un apartamiento pequeño de los mismos), aplicando el criterio del ángulo:
De la misma manera podemos determinar el ángulo de salida del otro polo, y el de llegada al cero.
Para el paso 6, determinamos la raíz múltiple realizando la derivada, la cual
vale . Podemos comprobar que la multiplicidad de esta raíz es 3, ya que la derivada segunda de -1/G(s) con respecto a s evaluada en ese punto también es cero.
Por lo tanto los ángulos b de entrada a ese polo múltiple es:
Y los ángulos g de salida son:
Condición De Magnitud
El criterio de magnitud es el siguiente que lo obtenemos aplicando el módulo a la ecuación 8:
, y para K > 0: [Ec. 28]
Este criterio nos permite determinar el valor de K, una vez escogido una ubicación determinada del lugar geométrico de las raíces.

Ejemplo:
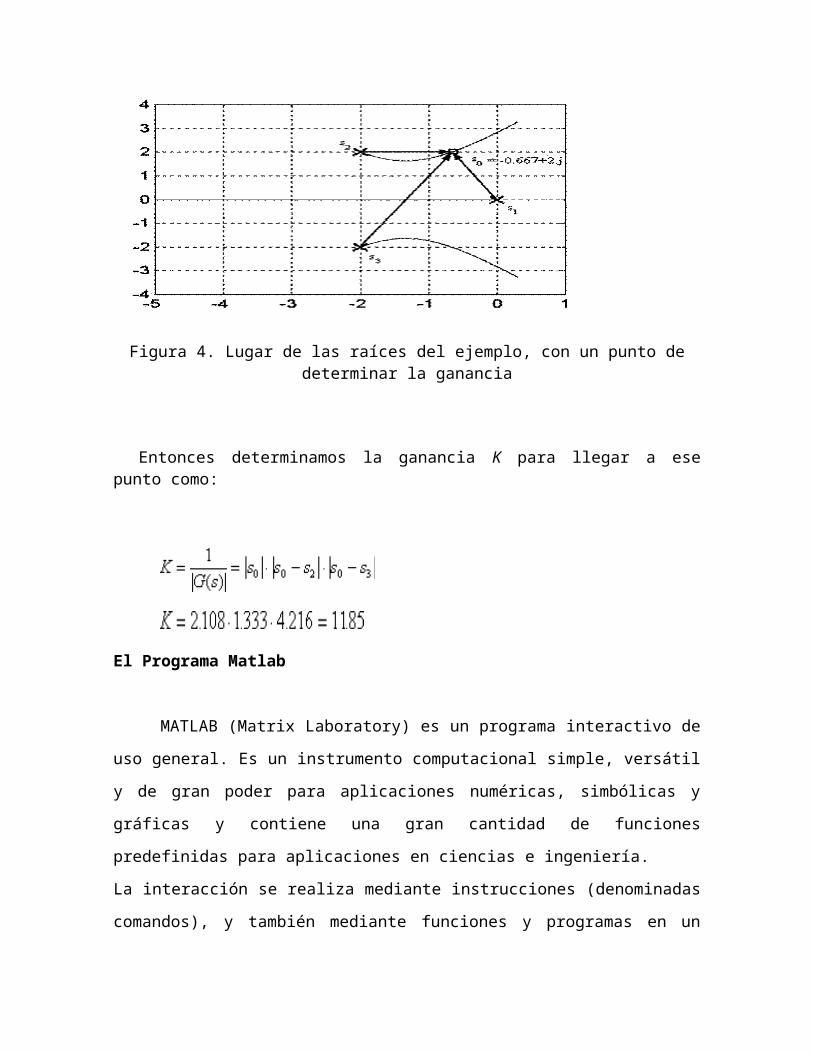
Supongamos tener la siguiente función de transferencia:
Cuyas polos se ubican en el origen y en -2±2.j. En la figura 4 mostramos el lugar
de las raíces para esta función de transferencia.
Elegimos un punto de prueba en -0.667±2.j, que pertenece al lugar geométrico
de las raíces, pues ese punto cumple con ciertos requerimientos para nuestro
sistema de control.
Figura 4. Lugar de las raíces del ejemplo, con un punto de determinar la ganancia
Entonces determinamos la ganancia K para llegar a ese punto como:

El Programa Matlab
MATLAB (Matrix Laboratory) es un programa interactivo de uso general. Es
un instrumento computacional simple, versátil y de gran poder para aplicaciones
numéricas, simbólicas y gráficas y contiene una gran cantidad de funciones
predefinidas para aplicaciones en ciencias e ingeniería.
La interacción se realiza mediante instrucciones (denominadas comandos), y
también mediante funciones y programas en un lenguaje estructurado. Los objetos
básicos con los cuales opera MATLAB son matrices. La asignación de memoria a
cada variable la realiza MATLAB en forma dinámica y eficiente, por lo que no son
necesarias las declaraciones de variables antes de su uso.
Características De Matlab
•Cálculo numérico rápido y con alta precisión
•Capacidad para manejo matemático simbólico
•Funciones para graficación y visualización avanzada
•Programación mediante un lenguaje de alto nivel
•Soporte para programación estructurada y orientada a objetos
•Facilidades básicas para diseño de interfaz gráfica
•Extensa biblioteca de funciones
•Paquetes especializados para algunas ramas de ciencias e ingeniería
Operación
•Simple y eficiente
•Interactivo y programable
•Sistema de ayuda en línea
•Interacción con otros entornos

Uso interactivo de MATLAB
El entorno de MATLAB está organizado mediante ventanas. Las principales
son:
Command Window: Es la ventana de comandos para interactuar con
MATLAB
Command History: Contiene el registro de los comandos que han sido
ingresados.
Workspace: Contiene la descripción de las variables usadas en cada
sesión.
Se sugiere al inicio dejar activa únicamente la ventana de comandos, cerrando las
otras
Ventanas. Para restaurarlas use la opción view de la barra de herramientas de
MATLAB.
El símbolo >>indica que el programa está listo para recibir sus instrucciones
(comandos)
Aplicaciones De Matlab En Control
En el mundo industrial, MATLAB está siendo utilizado como herramienta de
investigación para la resolución de complejos problemas planteados en la
realización y aplicación de modelos matemáticos en ingeniería.
Los usos más característicos de la herramienta los encontramos en áreas de
computación y cálculo numérico tradicional, prototipaje algorítmico, teoría de
control automático, estadística, análisis de series temporales para el proceso
digital de señal.
MATLAB dispone también en la actualidad de un amplio abanico de programas de
apoyo especializado, denominado Toolboxes, que extienden significativamente el
número de funciones incorporadas en el programa principal. Estos Toolboxes
cubren en la actualidad prácticamente casi todas las áreas principales en el
mundo de la ingeniería y la simulación, destacando entre ellos el toolbox' de
proceso de imágenes, señal, control robusto, estadística, análisis financiero,
matemáticas simbólicas, redes neurales, lógica difusa, identificación de sistemas,
simulación de sistemas dinámicos, etc.
Además también se dispone del programa Simulink que es un entorno gráfico
interactivo con el que se puede analizar, modelizar y simular la dinámica de
sistemas no lineales.
Non Linear Control Design Toolbox
Se trata del primer producto comercialmente disponible en la actualidad
para el diseño de controladores automáticos en entornos de sistemas no lineales.
Este nuevo toolbox está pensado para ser utilizado exhaustivamente por
ingenieros que diseñan controladores para industrias avanzadas, destacando el
sector del automóvil, ingeniería aeroespacial, control de procesos y empresas
petroquímicas. Según indica Jim Tung, Vicepresidente del área de desarrollo de
The MathWorks Group, Inc. "El proceso de aproximación tradicional en el diseño

de controladores en sistemas no lineales ha sido hasta la fecha linealizarlos de
algún modo para aplicar posteriormente un método de diseño lineal que requiere
de importantes ajustes manuales. El toolbox NCD permite por primera vez a los
ingenieros de control diseñar directamente sus controladores en un ambiente no
lineal, obviando la aproximación lineal y otros procedimientos auxiliares que antes
se necesitaban de modo imperativo. Los resultados ahora son de elevada calidad,
controladores más robustos y un ciclo de diseño mucho más rápido. El toolbox
NCD extiende, además, las prestaciones que incorpora SIMULINK, el entorno de
desarrollo de diagramas de bloques para la modelación y análisis de sistemas
dinámicos de The MathWorks, Inc. El usuario puede incluir uno o más bloques
NCD en el sistema y describir posteriormente de modo totalmente gráfico las
restricciones, tolerancias y límites de permisividad de cada uno de estos bloques.
Los métodos avanzados de optimización y la simulación del proceso son
posteriormente analizados y ajustados mediante la inclusión de unas ciertas
variables de contorno para poder obtener los tiempos de respuesta deseados.
Este toolbox puede ser utilizado para ajustar una amplia variedad de controladores
que se utilicen en un sistema, destacando los controladores PID, LQR, LQG y
estructuras H infinito. El diseñador de sistemas puede utilizar el método de
Montecarlo para el diseño y análisis de controladores robustos, siempre que se
detecten determinadas variaciones en los componentes del sistema.
El toolbox NCD es un componente avanzado del entorno integrado de
desarrollo que ofrecen a los especialistas los programas MATLAB y SIMULINK.
Por ello, los diseñadores podrán beneficiarse de muchos de los toolboxes
desarrollados para este entorno en materia de diseño de sistemas lineales. Por
ejemplo, podrán utilizarse toolboxes para el análisis de sistemas lineales para el
diseño inicial; posteriormente, podrán utilizarse modelos no lineales más
sofisticados utilizando SIMULINK. Además, puede invocarse NCD para un mejor
ajuste paramétrico y para la optimización de los controladores. Este toolbox se
encuentra actualmente disponible para una amplia variedad de plataformas
informáticas, destacando ordenadores personales tipo PC o Apple Macintosh,
numerosas estaciones UNIX y ordenadores Digital VAX VMS.

Función Para El Cálculo Del Lgr En Matlab
Encontrar el LGR con MATLAB es muy simple:
1.- Declarar el numerador y el denominador de la FDT como se muestra en la
figura. Los números entre corchetes son los coeficientes de los polinomios.
2.- Declarar la planta o proceso (En nuestro caso "pl"). Ésta instrucción crea la
función de transferencia con el numerador y el denominador declarados arriba y lo
guarda en "pl".
3.- Generar el LGR usando la instrucción rlocus y colocando entre paréntesis la
FDT de la cual deseamos obtener el LGR ( en nuestro caso "pl").
4.- De la instrucción anterior obtenemos la figura:

5.- Con el comando rltool podemos obtener el LGR de una FDT y además
podemos saber la ganancia en cualquier punto, los puntos de cruce y los puntos
de abandono y llegada.
Llamar al rltool desde la ventana de comandos:

Aparecerá la siguiente ventana:
Hacer click en file y en import:
Después de hacer click en import aparece esta ventana en donde nos
pedirá que le indiquemos la planta o proceso (FDT) con la cual trabajará. Nota que
nuestra FDT ("pl") esta sobresaltada en azul. Solo hay que dar un click en la flecha
de G(s) para importarla. Ésta FDT ("pl") es la que generamos al comienzo, si
hubiéramos generado más de una habría aparecido en esta ventana.

seleccionar OK para generar el LGR
Ésta gráfica nos permite observar la ganancia en el cruce jw. Nota que para
este ejemplo la ganancia en el cruce es 3.94. Con la flecha del ratón podemos
mover los cuadros rosa del gráfico y obtener la ganancia en cualquier punto así
como los valores de los puntos de cruce, y de los puntos de abandono y llegada si
los hay. Dichos valores aparecerán en el recuadro gris de la parte inferior.

REFERENCIAS ELECTRONICAS
ciecfie.epn.edu.ec/CControlC/laboratorios/
proton.ucting.udg.mx/~ukendeoi/control2.html
http://www.ib.cnea.gov.ar/~dsc/capitulo8/rootlocus.htm
ww.usc.es/gir/docencia_files/tdd/tutorial_matlab.p