LA MODELIZACIÓN DE PROCESOS - .:@ula...
24
LA MODELIZACIÓN DE PROCESOS En este capítulo, se presenta una metodología en desarrollo para modelos dinámicos de procesos químicos. Después de estudiar este capítulo, el estudiante debería ser capaz de: • Escribir las ecuaciones de balance usando los métodos integrales o instantáneos. • Incorporar relaciones constitutivas apropiadas en las ecuaciones. • Determinar el estado, variables de entrada y salida, y parámetros para un modelo particular (conjunto de ecuaciones). • Determinar la información necesaria para resolver un sistema de ecuaciones dinámicas. • Definir variables adimensionales y parámetros que “ajustan a escala” las ecuaciones. Las secciones importantes son: 1 Antecedentes 2 Ecuaciones de balance 3 Balances de materia 4 Relaciones constitutivas 5 Balances de materia y energía 6 Sistemas de parámetros distribuidos 7 Modelos adimensionales 8 Soluciones explícitas a modelos dinámicos 9 Forma general de modelos dinámicos
Transcript of LA MODELIZACIÓN DE PROCESOS - .:@ula...

LA MODELIZACIÓN DE PROCESOS En este capítulo, se presenta una metodología en desarrollo para modelos dinámicos de procesos químicos. Después de estudiar este capítulo, el estudiante debería ser capaz de:
• Escribir las ecuaciones de balance usando los métodos integrales o instantáneos. • Incorporar relaciones constitutivas apropiadas en las ecuaciones. • Determinar el estado, variables de entrada y salida, y parámetros para un modelo
particular (conjunto de ecuaciones). • Determinar la información necesaria para resolver un sistema de ecuaciones
dinámicas. • Definir variables adimensionales y parámetros que “ajustan a escala” las
ecuaciones. Las secciones importantes son: 1 Antecedentes 2 Ecuaciones de balance 3 Balances de materia 4 Relaciones constitutivas 5 Balances de materia y energía 6 Sistemas de parámetros distribuidos 7 Modelos adimensionales 8 Soluciones explícitas a modelos dinámicos 9 Forma general de modelos dinámicos

1 ANTECEDENTES
Hay muchas razones para desarrollar la modelización de procesos. Mejorar o entender la operación de un proceso químico es un objetivo global importante para desarrollar un modelo dinámico del proceso. Estos modelos se usan frecuentemente para: (1) el adiestramiento del operario (2) el diseño del proceso, (3) diseño o análisis de sistemas de seguridad, (4) o diseño del sistema de control.
El adiestramiento del operario. Las personas responsables de la operación de un proceso químico de fabricación se conocen como operarios de proceso. Un modelo dinámico del proceso se puede usar para realizar simulaciones para entrenar a los operadores de proceso, con la misma línea que los simuladores de vuelo se usan para entrenar a los pilotos de aviones. Los operadores de proceso pueden aprender la respuesta a condiciones molestas, antes de tener que experimentarlas en el proceso real
El diseño del proceso. El modelo de un proceso dinámico se puede usar para diseñar
adecuadamente los equipos de un proceso químico a un ritmo de producción deseado. Por ejemplo, un modelo de un reactor químico discontinuo se puede usar para determinar el tamaño apropiado del reactor para producir un determinado producto a un ritmo deseado.
La seguridad. Los modelos de procesos dinámicos se pueden también usar para diseñar sistemas de seguridad. Por ejemplo, se pueden usar para determinar cuánto tiempo llevará después de que una válvula falle para que el sistema alcance una cierta presión.
El diseño del sistema de control. Los sistemas de control por retroalimentación se usan
para mantener las variables del proceso en valores deseables. Por ejemplo, un sistema de control puede medir la temperatura de un producto (una salida) y ajustar el flujo de vapor (una entrada) para mantener esa temperatura deseada. Para sistemas complejos, particularmente aquellos con muchas entradas y salidas, es necesario basar el diseño del sistema de control en un modelo del proceso. También, antes de que un sistema de control complejo sea implementado en un proceso, se prueba normalmente por simulación la actuación del mismo usando simulación por computadora.
2 ECUACIONES DE BALANCE
El énfasis en un libro de texto introductorio de balances de materia y energía está en las ecuaciones de balance en estado estacionario que tienen la siguiente forma:
(ecuación 1) La ecuación (1)es engañosamente simple porque hay muchas entradas y salidas,
particularmente por los balances a los componentes. Los términos de entrada y salida incluirían
0
sistema
el oabandonand
energía o masa
sistema
elen entrando
energía o masa
=
−

entonces la generación y la conversión de especies por reacción química, respectivamente. En este texto, estamos interesados en balances dinámicos que tienen la forma (ecuación 2):
El ritmo de acumulación de masa en un sistema tiene la forma dM/dt donde M es la
masa total en el sistema. Similarmente; el ritmo de acumulación de energía tiene la forma dE/dt donde E es la energía total en el sistema. Si Ni se usa para representar los moles de componente i en un sistema, entonces dNi/dt representa la velocidad molar de acumulación del componente i en el sistema. Cuando se resuelve un problema, es importante especificar lo que se quiere decir con sistema. En algunos casos el sistema puede ser microscópico por naturaleza (un elemento diferencial, por ejemplo), mientras que en otros casos puede ser macroscópico por naturaleza (el contenido líquido de un tanque de mezcla, por ejemplo). También, cuando se desarrolla un modelo dinámico, podemos tomar uno de los dos puntos de vista generales. Un punto de vista está basado en un balance integral, mientras que el otro está basado en un balance instantáneo. Los balances integrales son particularmente útiles cuando se desarrollan modelos para sistemas de parámetros distribuidos, de los que resultan ecuaciones diferenciales parciales; el foco de atención en este texto está en los modelos basados en ecuaciones diferenciales ordinarias. Otro punto de vista es el balance instantáneo donde la velocidad de cambio se expresa directamente.
2.1 Balances integrales
Un balance integral se desarrolla observando un sistema a dos diferentes puntos instantáneos en el tiempo. Considérese un intervalo de tiempo finito, ∆t, y hágase el balance de materia en ese intervalo de tiempo (ecuación 3)
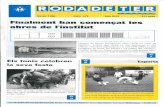
Los teoremas del valor medio del cálculo integral y diferencial se usan entonces para reducir las ecuaciones a ecuaciones diferenciales. Por ejemplo, considerar el sistema mostrado en la Figura 1, donde un límite representa la masa en el sistema a tiempo t, mientras que el otro límite representa la masa en el sistema a t+∆t.
masa en el sistema a tiempo = t masa en el sistema a tiempo = t + ∆t
dtm in•
dtmout•
FIGURA 1. Problema del balance de materia conceptual
−
=
tiempode unidad
por sistema del energía
o masa de salida
tiempode unidad
por sistema elen energía
o masa de entrada
tiempode unidad
por sistema elen energía
o masa den acumulació
∆+−
∆+=
−
∆+ t thasta t desde
sistema el abandona que
energía o masa
t thasta t desde
sistema al entra que
energía o masa
t tiempoa
sistema del dentro
energía o masa
t t tiempoa
sistema del dentro
energía o masa

Un balance integral sobre la masa total en el sistema se escribe en la forma (ecuación 4):
Matemáticamente, esto se escribe (ecuación 5):
Ó
Donde M representa la masa total en el sistema, mientras que inm•
y outm•
representan las velocidades másicas de entrada y salida del sistema, respectivamente. Podemos escribir el miembro de la derecha de la ecuación 5, usando el teorema del valor medio del cálculo integral, como:
Donde 0<α<1. La ecuación (5) se puede escribir ahora:
Dividiendo por ∆t,
Y usando el teorema del valor medio del cálculo diferencial (0<β<1) en el miembro izquierdo,
∆+−
∆+=
−
∆+ t thasta t desde
sistema el
abandona que masa
t thasta t desde
sistema al
entra que masa
t tiempoa
sistema elen
contenida masa
t t tiempoa
sistema elen
contenida masa
∫∫∆+ •∆+ •
∆+ −=−tt
tout
tt
tinttt dtmdtmMM
dtmmMM out
tt
tinttt )(
•∆+ •
∆+ ∫ −=−
tmmdtmmtt
outinout
tt
tin ∆−=−
∆+
•••∆+ •
∫α
)()(
tmmMMtt
outinttt ∆−=−∆+
••
∆+α
)(
ttoutin
ttt mmt
MM
∆+
••∆+ −=∆
−
α
)(
tt
tttdt
dMt
MM
∆+
∆+ =∆
−
β

Lo que conduce a
Tomando como límite cuando ∆t tiende a cero, encontramos
(ecuación 6)
y representando la masa total como M=Vρ, inm•
como Finρ in y outm•
como Foutρout donde ρ es la densidad másica (masa/volumen) y F es un flujo volumétrico (volumen/tiempo) obtenemos las ecuaciones:
(ecuación 7)
Notar que hemos asumido que el sistema está perfectamente mezclado, para que la densidad de la materia que abandona el sistema sea igual a la densidad de la materia en el sistema.
2.2 Balances instantáneos Aquí escribimos las ecuaciones del balance dinámico directamente, basadas en una
velocidad de cambio instantánea (ecuación 8): Lo cual se puede escribir como
(ecuación 9)
Ó
(ecuación 10)
La cual es el mismo resultado obtenido usando un balance integral. Aunque el balance integral para llegar al mismo resultado que el método del balance instantáneo, el método del balance integral es probablemente más claro cuando se desarrollan modelos de parámetros distribuidos (basados en ecuaciones diferenciales parciales. Un ejemplo se muestra en la sección 6.
La Sección 3 se ocupa de los balances de materia y la Sección 5 de los balances de materia y energía. La sección 4 trata relaciones constitutivas.
ttoutin mm
dtdM
∆+
••−=
α
)(
outin mmdt
dM ••−=
outoutinin FFdt
dVρρ
ρ −=
−
=
sistema el abandona que
masa de velocidad
sistema al entra que
masa de velocidad
sistema elen masa de
nacumulació de velocidad
outin mmdt
dM ••−=
outoutinin FFdt
dVρρ
ρ −=

∫∫∆+∆+
∆+−=−
tt
t
tt
tittt
dtFdtFVV ρρρρ
3. BALANCES DE MATERIA Los problemas de modelado más simples consisten en balances de materia. En esta
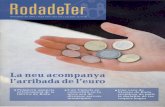
sección usamos varios ejemplos de procesos para ilustrar las técnicas de modelado usadas. EJEMPLO 1. Líquido en tanque agitado Los tanques agitados se usan a menudo para “suavizar” las fluctuaciones del flujo en las
corrientes de líquido fluyendo entre procesos químicos. Considerar un tanque agitado de líquido con una entrada (fluyendo desde el proceso I) y una corriente de salida (fluyendo al proceso II) (Figura 2). Asumir que la densidad es constante. Encontrar cómo varía el volumen del tanque como una función del tiempo, si los flujos de entrada y salida varían. Hacer una lista de las variables de estado, parámetros, así como de las variables de entrada y salida. Dar la información necesaria para completar la solución cuantitativa a este problema.
Fi
V F
FIGURA 2. Tanque agitado de líquido
El sistema es el líquido en el tanque, la superficie del líquido es el límite superior del sistema. La siguiente notación se usa en las ecuaciones de modelado:
Fi = flujo volumétrico de entrada (volumen/tiempo) F = flujo volumétrico de salida V = volumen del líquido en el tanque ρ = densidad del líquido (masa/volumen) Método Integral Considerar un intervalo de tiempo finito, ∆t. Realizar un balance de materia sobre ese
intervalo de tiempo,
Lo cual se puede escribir matemáticamente como:
(ecuación 11)
∆+−
∆+=
−
∆+ t thasta t desde
tanqueel
abandona que masa
t thasta t desde
tanqueal
entra que masa
t tiempoa
tanquedel dentro
agua de masa
t t tiempoa
tanquedel dentro
agua de masa

tFFdtFFtti
tt
ti ∆−=−
∆+
∆+
∫ αρρρρ )()(
dtFFVVtt
tittt
)( ρρρρ ∫∆+
∆+−=−
tFFVVttittt ∆−=−
∆+∆+ αρρρρ )(
ttittt FF
t
VV∆+
∆+ −=∆
−α
ρρρρ
)(
ρρρ
FFdt
dVi −=
ρρρ
FFdt
dVi −=
Llevando los términos del miembro de la derecha a la misma integral:
(ecuación 12)
Podemos usar el teorema del valor medio del cálculo integral para escribir el miembro
de la derecha de la Ecuación 12 (donde 0≤α≤1) como:
(ecuación 13)
Sustituyendo la Ecuación 13 en la 12:
(ecuación 14)
Dividiendo por ∆t, obtenemos:
(ecuación 15)
Y usando el teorema del valor medio del cálculo diferencial, a medida que ∆t→0
(ecuación 16)
Método instantáneo Aquí escribimos las ecuaciones del balance basadas en un ritmo de cambio instantáneo:
El masa total de agua en el tanque es Vρ, el ritmo de cambio es dVρ/dt, y la densidad de
la corriente de salida es igual a que el tanque contiene:
(ecuación 17)
la cual es exactamente lo que obtuvimos con el método integral. Dado el mismo conjunto de hipótesis los dos modelos deberían conducir al mismo modelo. Se debe usar la aproximación (integral o instantánea) que tenga más sentido. En este texto generalmente usamos la aproximación instantánea puesto que requiere menor número de pasos.
Notar la hipótesis implícita de que la densidad del agua en el tanque no depende de la posición (hipótesis de mezcla completa). Esta hipótesis permite la formulación de una ecuación diferencial ordinaria (EDO). Nos referimos a cualquier sistema que puede ser modelado mediante EDO´s como sistemas de parámetros localizados. También notar que la densidad de la corriente de salida debe ser igual a la densidad del agua en el tanque. Este conocimiento
−
=
tanquedel salida de
agua de másico flujo
tanqueal entrada de
agua de másico flujo
tanqueelen
agua de masa la de
cambio de velocidad

también nos permite decir que los términos de densidad en la Ecuación 17 son iguales. Esta ecuación se reduce entonces a1
(ecuación 18)
La Ecuación 18 es una ecuación diferencial ordinaria lineal (EDO), la cual es fácil de
resolver si sabemos los flujos de entrada y salida como una función del tiempo, y si sabemos una condición inicial para el volumen en el tanque. En la ecuación 18 nos referimos a V como variable de estado, y Fi y F como variables de entrada (incluso aunque F sea un flujo de corriente de salida). Si la densidad permaneciese en la ecuación, nos referiríamos a ella como un parámetro.
Para resolver este problema debemos especificar las entradas Fi(t) y F(t) y la condición inicial V(0).
El Ejemplo 1 proporciona una introducción a la noción de estados, entradas y
parámetros. Este ejemplo ilustra cómo un balance de materia global se usa para encontrar cómo el volumen de un sistema de fase líquida cambia con el tiempo. Puede ser deseable tener la altura del tanque, h, más que el volumen del tanque como variable de estado. Si asumimos como constante el área de la sección transversal del tanque, A, podemos expresar el volumen del tanque como V=Ah y la ecuación del modelo como:
(ecuación 19)
Si sabemos también que el flujo de salida del tanque es proporcional a la raíz cuadrada de la altura de líquido en el tanque, podemos usar la relación
(ecuación 20)
donde β es un coeficiente de flujo, para encontrar
(ecuación 21)
Para este modelo nos referimos a h como la variable de estado, el flujo de entrada (Fi) como la variable de entrada y β y A como parámetros.
Notar que un sistema único (en este caso, tanque agitado de líquido) puede tener ecuaciones y variables del modelo ligeramente diferentes, dependiendo de las hipótesis y los objetivos usados al desarrollar el modelo.
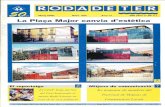
EJEMPLO 2. Un reactor químico isotermo Asumir que dos especies químicas, A y B, están disueltas en una corriente de
alimentación entrando en la fase líquida de un reactor químico que se mantiene a temperatura constante (Figura 3). Las dos especies reaccionan irreversiblemente para formar una tercera especie, P. Encontrar la concentración en el reactor de cada especie como una función del tiempo.
1 Puede llegar a ser tentador para el lector empezar a escribir directamente las expresiones del “balance de volumen” que parecen similares a la Ecuación 18. Deseamos dejar claro que no hay tal cosa como un balance de volumen y la Ecuación 18 es sólo correcta por la hipótesis de densidad constante. Es una buena idea escribir siempre una expresión de balance de masa, como la Ecuación 17, antes de hacer consideraciones sobre la densidad del fluido, lo que puede conducir a la Ecuación 18.
FFdtdV
i −=
AF
AF
dtdh i −=
hF β=
A
F
Ah
dtdh i+−= β

Fi ci F c
FIGURA 3. Reactor químico isotérmico
Balance de materia global El balance de materia global es (puesto que el tanque está perfectamente mezclado)
(ecuación 22) Hipótesis: La densidad de la fase líquida, ρ, no es una función de la concentración. La
densidad en el tanque (y la de la salida) es entonces igual a la densidad de entrada, así:
(ecuación 23)
y podemos escribir la ecuación 22 como:
(ecuación 24)
Balances de materia a los componentes Es conveniente trabajar en unidades molares cuando se escriben balances a
componentes, particularmente si están involucradas reacciones químicas. Representamos por CA, CB y CP las concentraciones molares de A, B y P (moles/volumen).
Asumimos que la ecuación estequiométrica para esta reacción es A+2Bà P
Las ecuaciones del balance de materia a los componentes son (asumiendo que el componente P está en la alimentación al reactor):
(ecuación 25)
(ecuación 26)
(ecuación 27)
Donde rA, rB y rP representan el ritmo de generación de las especies A, B y P por unidad
de volumen y CAi y CBi representan las concentraciones de entrada de las especies A y B. Asumimos que la velocidad de reacción de A por unidad de volumen es de segundo orden y una función de la concentración de ambos A y B. La velocidad de reacción se puede escribir
(ecuación 28)
ρρρ
FFdt
dVii −=
ρρ =i
FFdtdV
i −=
BBBiiB VrFCCF
dtdVC +−=
AAAiiA VrFCCF
dtdVC +−=
PPP VrFC
dtdVC
+−=
BAA CkCr −=

donde k es la constante de velocidad de reacción y el signo menos indica que A se consume en la reacción. Cada mol de A reacciona con dos moles de B (de la ecuación estequiométrica) y produce un mol de P, así las velocidades de generación de B y P (por unidad de volumen) son:
(ecuación 29)
(ecuación 30)
Expandiendo el miembro de la izquierda de la Ecuación 25:
(ecuación 31)
combinando las Ecuaciones 24, 25, 27 y 31 encontramos:
(ecuación 32)
Similarmente, las concentraciones de B y P se pueden escribir
(ecuación 33)
(ecuación 34)
Este modelo consiste en cuatro ecuaciones diferenciales (Ecuaciones 24, 32, 33, 34) y, por lo tanto, cuatro variables de estado (V, CA, CB y CP). Para resolver estas ecuaciones, debemos especificar las condiciones iniciales (V(0), CA(0), CB(0) y CP(0)), las entradas (Fi, CAi y CBi) como una función del tiempo, y el parámetro (k). 3.1 Hipótesis simplificativas El modelo de reactor presentado en el Ejemplo 2 tiene cuatro ecuaciones diferenciales. A menudo se hacen otras hipótesis simplificativas para reducir el número de ecuaciones, para hacer más fácil el analizarlas y resolverlas más rápidamente. Por ejemplo, suponiendo un volumen constante (dV/dt=0) se reduce el número de ecuaciones en una. También, es común alimentar un exceso de un reactivo para conseguir casi conversión completa de otro reactivo. Si la especie B se mantiene en un gran exceso, entonces CB es casi constante. La ecuación de la velocidad de reacción se puede expresar entonces:
rA=-k· CA· CB≈-k1· CA (ecuación 35)
donde
k1=k· CB (ecuación 36)
Las ecuaciones diferenciales resultantes son (puesto que asumimos dV/dt y dCB/dt=0)
(ecuación 37)
BAB CkCr 2−=
BAP CkCr =
dtdV
Cdt
dCV
dtdVC
AAA +=
BAAAiiA CkCCC
VF
dtdC
−−= )(
BABBiiB CkCCC
VF
dtdC
2)( −−=
BAPiP CkCC
VF
dtdC +−=
AAAiiA CkCC
VF
dtdC
1)( −−=

(ecuación 38) Notar que si sólo deseamos saber la concentración de la especie A sólo necesitamos resolver una ecuación diferencial, puesto que la concentración de A no depende de la concentración de P. Ejemplo 3. Cilindro de gas agitado Los cilindros agitados se usan a menudo como capacidad de almacenaje intermedia para corrientes de gas que se transfieren entre unidades de proceso químicas. Considerar un cilindro representado en la Figura 4, donde qi es el flujo molar de entrada y q es el flujo molar de salida. Aquí desarrollamos un modelo que describe cómo la presión en el tanque varía con el tiempo. qi P q
Figura 4. Cilindro de gas agitado
Representamos V = volumen del cilindro y v = volumen molar del gas (volumen/mol). La cantidad total de gas (moles) en el tanque es entonces V / v. Hipótesis: La relación presión-volumen está caracterizada por la ley de los gases ideales, así
P· v=R· T (ecuación 39)
Donde P es la presión, T es la temperatura (escala absoluta) y R es la constante de los gases ideales. La Ecuación 39 se puede escribir
(ecuación 40)
y, por lo tanto, la cantidad total de gas en el tanque es
(ecuación 41)
La velocidad de acumulación del gas es entonces d(PV/RT)/dt. T se considera
constante; puesto que V y R son también constantes, entonces la velocidad molar de acumulación del gas en el tanque es:
(ecuación 42)
donde qi es la velocidad molar de gas que entra al cilindro y q es la velocidad molar de
gas que abandona el cilindro. La Ecuación 42 se puede escribir
(ecuación 43)
Para resolver esta ecuación para la variable de estado P, debemos conocer las entradas, qi y q, los parámetros, R,T y V, y la condición inicial P(0). De nuevo otra vez, aunque q es la velocidad molar de salida del cilindro, lo consideramos una entrada en términos de resolución del modelo.
4. RELACIONES CONSTITUTIVAS
APPiiP CkCC
VF
dtdC
1)( +−=
RTP
v=1
tanqueelen gas de (moles) totalcantidad==RTPV
vV
qqdtdP
RTV
i −=
)( qqVRT
dtdP
i −=

Los Ejemplos 2 y 3 requirieron más que simples balances de materia para definir las ecuaciones del modelo. Estas relaciones requeridas se conocen como relaciones constitutivas; varios ejemplos de relaciones constitutivas se muestran en esta sección.
4.1 Ley de los Gases Los sistemas de procesos que contienen un gas necesitarán normalmente una expresión de ley de gas en el modelo. La ley de gas ideal se usa comúnmente para relacionar volumen, presión y temperatura:
P· v=R· T (ecuación 44)
La relación P· v· T de van der Waals contiene dos parámetros (a y b), que son específicos del sistema:
(ecuación 45)
Para otras leyes de gases ver un libro sobre termodinámica tal como Smith, Van Ness and Abbott (1996). 4.2 Reacciones Químicas La velocidad de reacción por unidad de volumen (mol/volumen· tiempo) es normalmente una función de la concentración de las especies reaccionantes. Por ejemplo, considerar la reacción A+2BàC+3D. Si la velocidad de reacción de A es de primer orden para A y B, usamos la siguiente expresión:
rA=-k· CA· CB (ecuación 46)
donde rA es la velocidad de reacción de A (mol de A/volumen· tiempo) k es la constante de velocidad de reacción (constante para una temperatura dada) CA es la concentración de A (mol de A/volumen) CB es la concentración de B (mol de B/volumen) Las velocidades de reacción se expresan normalmente en términos de generación de una especie. El signo menos indica que A se consume en la reacción de arriba. Es bueno practicar para asociar las unidades con todos los parámetros en un modelo. Para congruencia en las unidades de rA encontramos que k tiene unidades de (volumen/mol de B· tiempo). Notar que 2 moles de B reaccionan con cada mol de A. Entonces podemos escribir Normalmente, el coeficiente de velocidad de reacción es una función de la temperatura. La expresión más comúnmente usada es la ley de la velocidad de Arrhenius
(ecuación 47)
donde
( ) RTbvva
P =−
+ ··
2
BAAD
BAAC
BAAB
CCkrr
CCkrr
CCkrr
⋅⋅⋅=⋅−=⋅⋅=−=
⋅⋅⋅−=⋅=
33
22
−
⋅= RTE
eATk )(

k(T) = constante de velocidad de reacción, como una función de la temperatura A = factor de frecuencia o factor preexponencial (mismas unidades que k) E = energía de activación (cal/gmol)
R = constante de los gases ideales (1.987 cal/gmol K u otro conjunto de unidades congruentes) T = temperatura absoluta (K ó ºR) El factor de frecuencia y la energía de activación pueden ser datos estimados de la
constante de reacción como una función de la temperatura de reacción. Tomando el logaritmo natural de la ley de la velocidad de Arrhenius, encontramos:
(ecuación 48)
y vemos que A y E se pueden encontrar de la pendiente y la ordenada en el origen de una representación de (ln k) frente a (1/T).
4.3 Relaciones de equilibrio La relación entre las composiciones del componente i en la fase líquida y vapor, cuando
las fases están en equilibrio, se puede representar por:
(ecuación 49)
donde xi = fracción molar del componente i en la fase líquida yi = fracción molar del componente i en la fase vapor Ki = constante de equilibrio líquido-vapor para el componente i La constante de equilibrio es una función de la composición y la temperatura. A menudo, veremos una hipótesis de constante de volatilidad relativa hecha para simplificar los modelos de equilibrio vapor-líquido. En un sistema binario, la relación entre las fases vapor y líquida para el componente ligero usada a menudo es:
(ecuación 50)
x = fracción molar del componente ligero en la fase líquida y = fracción molar del componente ligero en la fase vapor α = volatilidad relativa (α>1) 4.4 Transferencia de calor La velocidad de transferencia de calor a través de la pared de la pared de un recipiente que separa dos fluidos (un reactor encamisado, por ejemplo) se puede describir como
Q = U· A· ∆T (ecuación 51)
donde Q = velocidad de calor transferido desde el fluido caliente al fluido frío U = coeficiente de transferencia de calor global A = área para la transferencia de calor
∆T = diferencia de temperaturas entre el fluido caliente y frío
−=TR
EAk
1lnln
iii xKy ⋅=
xx
y⋅−+
⋅=)1(1 α
α

El coeficiente de transferencia de calor se estima a menudo por datos experimentales. En la fase de diseño se puede estimar por correlaciones; es una función de las propiedades y velocidades del fluido. 4.5 Válvulas de flujo a través Las válvulas de flujo a través se describen a menudo por la siguiente relación:
(ecuación 52)
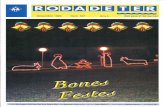
donde F = flujo volumétrico Cv = coeficiente de la válvula x = fracción de válvula abierta ∆Pv = caída de presión a lo largo de la válvula s.g. = gravedad específica del fluido f(x) = la característica de flujo (varía de 0 a 1, como una función de x) Tres características comunes de las válvulas son (i) lineal, (ii) porcentaje igual y (iii) apertura rápida.
Figura 5. Características de flujo de válvulas de control. α = 50 para la válvula de igual
porcentaje. Para una válvula lineal
f(x) = x Para una válvula de igual porcentaje
f(x) = αx-1
Para una válvula de rápida apertura
Las tres características se comparan en la Figura 5. Nota que para la válvula de apertura rápida, la sensibilidad de flujo a la posición de la válvula (fracción de apertura) es alta a aperturas bajas y baja a aperturas altas; el opuesto es verdadero para una válvula de igual porcentaje. La sensibilidad de una válvula lineal no cambia
..)(
gsP
xfCF vv
∆⋅⋅=
xxf =)(

como una función de la posición de la válvula. La válvula de igual porcentaje se usa comúnmente en procesos químicos, por causa de las características deseadas cuando se instalan en sistemas de tuberías donde hay una caída significativa de presión a altos flujos. El conocimiento de estas características será importante cuando se desarrollen sistemas de control de retroalimentación.
5. BALANCES DE MATERIA Y ENERGÍA La sección 3 cubrió modelos que consisten en balances de materia sólo. Estos son útiles si los efectos térmicos no son importantes, donde las propiedades del sistema, las velocidades de reacción, etc. no dependen de la temperatura, o si el sistema es verdaderamente isotérmico (temperatura constante). Muchos procesos químicos tienen importantes efectos térmicos, así pues es necesario desarrollar modelos de balances de materia y energía. Una llave es que una base debe ser siempre seleccionada cuando se evalúa una propiedad intensiva como la entalpía. 5.1 Repaso de termodinámica Desarrollar ecuaciones de balance de energía correctamente no es trivial y la literatura de ingeniería química contiene muchas derivaciones incorrectas. El capítulo 5 del libro de Denn (1986) muestra numerosos ejemplos donde se usan balances de energía incorrectos para desarrollar modelos de procesos. La energía total (TE) de un sistema consta de energía interna (U), cinética (KE) y energía potencial (PE):
donde los términos de energía potencial y cinética son:
A menudo usaremos energía/mol o energía/masa y escribiremos lo siguiente
donde ^ y – representan por mol y por masa, respectivamente. Los términos de energía cinética y potencial, en base másica, son
Para la mayoría de los procesos químicos donde hay efectos térmicos, omitiremos los términos de energía cinética y potencial porque su contribución es generalmente al menos dos órdenes de magnitud inferior que la del término de energía interna. Cuando tratamos con sistemas de flujo, trabajaremos normalmente con entalpía. La entalpía total se define como:
H = U + p· V mientras que la entalpía / mol es
PEKEUTE ++=
hgmPE
vmKE
⋅⋅=
⋅⋅= 2
2
1
^^^^
PEKEUTE ++=
−−−−++= PEKEUTE
ghPE
vKE
=
=
−
−2
21
^^^
VpUH ⋅+=

y la entalpía / masa es (puesto que )
haremos uso de estas relaciones en el siguiente ejemplo. Ejemplo 4. Calentador de tanque agitado Considerar un calentador de tanque agitado perfectamente mezclado, con una corriente de alimentación única y una corriente producto única, como la mostrada en la Figura 6. Asumiendo que el flujo y la temperatura de la corriente de entrada pueden variar, que el tanque está perfectamente aislado y que la velocidad de calor suministrado por unidad de tiempo (Q) pueden variar, desarrollamos un modelo para encontrar la temperatura del tanque como una función del tiempo. Formular las consideraciones. Fi Ti V T F
T
Q
Figura 6. Calentador de tanque agitado
Balance de Materia
acumulación = entrada - salida
(ecuación 53)
Balance de Energía
acumulación = entrada con el flujo - salida con el flujo + entrada por transferencia de calor + trabajo realizado sobre el sistema
Aquí omitimos la energía potencial y cinética:
(ecuación 54)
Escribimos el trabajo total realizado sobre el sistema como una combinación del trabajo
de eje y la energía suministrada al sistema para introducir el fluido dentro del tanque y la energía que el sistema ejerce sobre los alrededores para forzar el fluido a salir.
(ecuación 55)
)/(1−
= Vρ
ρp
UVpUH +=⋅+=−−−−
ρρρ ⋅−⋅=⋅
FFdt
dVii
Tiii WQTEFTEFdt
dTE ++⋅⋅−⋅⋅=−−
ρρ
Tiii WQUFUFdtdU ++⋅⋅−⋅⋅=
−−ρρ
pFpFWW iiST ⋅−⋅+=

Esto nos permite escribir la Ecuación 54 como:
(ecuación 56)
y puesto que H=U+pV, podemos reescribir la ecuación 56 como
(ecuación 57)
Puesto que, dpV/dt = V dp/dt + p dV/dt, si el volumen es constante y el cambio de presión media se puede omitir (una buena hipótesis para líquidos), podemos escribir
(ecuación 58)
Debemos recordar las hipótesis que introdujimos en el desarrollo de la Ecuación 58: • Los efectos de las energía cinética y potencial fueron omitidos. • El cambio en el término pV fue despreciado. Esta es una buena hipótesis para un
sistema líquido, siempre que ∆p no sea demasiado grande y se asuma volumen constante.
El término de entalpía total es:
Y asumiendo que no hay cambio de fase, seleccionamos una temperatura de referencia
arbitraria para la entalpía (Tref):
A menudo asumimos que la capacidad calorífica es constante, o calculada a una
temperatura media, así:
(ecucación 59)
(ecuación 60)
Podemos ahora escribir el balance de energía de la Ecuación 58 de la siguiente forma:
(ecuación 61)
usando las hipótesis de densidad y volumen constante (así Fi=F, desde la Ecuación 53), encontramos
(ecuación 62)
Si
iiii WQ
pUF
pUF
dtdU
++
+⋅⋅−
+⋅⋅=
−−
ρρ
ρρ
siii WQHFHFdt
dpVdtdH
++⋅⋅−⋅⋅=−−−
ρρ
Siii WQHFHFdtdH ++⋅⋅−⋅⋅=
−−
ρρ
−⋅⋅= HVH ρ
∫ ⋅=− T
Tp
ref
dTcTH )(
)( refp TTcH −⋅=−
)( refipi TTcH −⋅=−
SrefPrefiPiirefP WTTcFQTTcF
dt
TTcVd+−⋅⋅−+−⋅⋅=
−⋅⋅)()(
))((ρρ
ρ
[ ] SrefrefiPref
P WQTTTTcFdt
TTdcV ++−−−⋅⋅⋅=
−⋅⋅⋅ )()(
)(ρρ

ó
(ecuación 63)
pero Tref es una constante, así d(T-Tref)/dt = dT/dt. También, despreciando WS, podemos escribir
(ecuación 64)
En orden a resolver este problema, debemos especificar los parámetros V, ρ, cP, las entradas F, Q y Ti (como una función del tiempo) y la condición inicial T(0).
6. SISTEMAS DE PARÁMETROS DISTRIBUIDOS En esta sección mostramos cómo las ecuaciones del balance se pueden usar para desarrollar un modelo para un sistema de parámetros distribuidos, esto es, un sistema donde las variables de estado cambian con respecto a la posición y al tiempo. Considerar un reactor tubular donde una reacción química cambia la concentración del fluido a medida que se mueve a lo largo del tubo. Aquí usamos un elemento de volumen ∆V y un elemento de tiempo ∆t. Los moles totales de especie A contenidos en el elemento ∆V se escribe (∆V)· CA. La cantidad de especie A que entra en el volumen es F· CA|V y la cantidad de especie abandonando el volumen es F· CA|V+∆V. La velocidad de desaparición de A por reacción (asumiendo reacción de primer orden) es (-k· CA)· ∆V. La ecuación del balance es entonces:
Usando el teorema del valor medio del cálculo integral y dividiendo por ∆t, encontramos:
(ecuación 65)
Dividiendo por ∆V y tendiendo ∆t y ∆V a cero, encontramos:
(ecuación 66)
Normalmente, se usa un tubo con área transversal constante, así dV = A· dz y F = A· vZ, donde vZ es la velocidad en la dirección z. Entonces la ecuación se puede escribir:
(ecuación 67)
Similarmente, el balance de materia global se tiene como:
(ecuación 68)
Si el fluido tiene densidad constante (hipótesis buena para un líquido), entonces podemos escribir el balance a la especie como
[ ]P
S
Pi
ref
cV
W
cVQ
TTVF
dt
TTd
⋅⋅+
⋅⋅+−=
−
ρρ)(
)(
Pi cV
QTT
VF
dtdT
⋅⋅+−=
ρ)(
[ ]∫∆+
∆+∆+⋅∆⋅⋅−⋅−⋅=⋅∆−⋅∆
tt
tAVVAVAtAttA dtVCkCFCFCVCV )()(
[ ]VCkCFCF
t
CCtAVVAVA
tAttA ∆⋅⋅−⋅−⋅=∆
−⋅∆∆+
∆+
AAA Ck
VCF
tC
⋅−∂⋅∂
−=∂
∂
AAZA Ck
zCv
tC ⋅−
∂⋅∂−=
∂∂
zv
tZ
∂⋅∂−=
∂∂ ρρ

(ecuación 69)
Para resolver este problema, debemos saber la condición inicial (concentración como una función de la distancia en el instante inicial) y una condición de contorno. Por ejemplo, las siguientes condiciones iniciales y de contorno
Indica que la concentración de A inicialmente se conoce como una función de la
distancia abajo en el reactor y que la concentración de entrada como una función del tiempo debe ser especificada. Derivando las ecuaciones del reactor tubular asumimos que la especie A dejó un elemento de volumen sólo por convección (flujo de volumen). En adición, las moléculas pueden abandonar por virtud de un gradiente de concentración. Por ejemplo, la cantidad entrando en V es
(ecuación 70)
donde está el coeficiente de difusión. El lector debería ser capaz de derivar la siguiente ecuación de reacción-difusión:
(ecuación 71)
Puesto que esto es una ecuación diferencial parcial de segundo orden, la condición inicial (CA como una función de z) y las dos condiciones de contorno se deben especificar. Los modelos de ecuaciones diferenciales parciales (PDEs) son mucho más difíciles de resolver que las ecuaciones diferenciales ordinarias. Generalmente, PDEs son convertidos a ODEs por discretización en la dimensión espacial, entonces las técnicas para la resolución de ODEs pueden ser usadas. El foco de este texto está en las ODEs; con un dominio de la solución de las ODEs, uno puede entonces empezar a desarrollar soluciones para las PDEs.
7. MODELOS ADIMENSIONALES Típicamente, los modelos contienen un gran número de parámetros y variables que pueden diferir en valor por varios órdenes de magnitud. Es a menudo deseable, al menos para propósitos de análisis, desarrollar modelos compuestos por parámetros y variables adimensionales. Para ilustrar la aproximación, considerar un reactor continuo de tanque agitado (CSTR) de volumen constante e isotermo modelado por una reacción simple de primer orden:
Parece natural trabajar con una concentración ajustada a escala. Definiendo
donde CA0 es la concentración nominal de la alimentación (estado estacionario), encontramos
AA
ZA Ck
zC
vt
C ⋅−∂
∂⋅−=∂
∂
)(),0(
)()0,( 0
tCtC
zCtzC
AinA
AA
===
Vdz
dCDACF A
AZA
⋅⋅+⋅
AA
AZA
ZA Ck
zC
Dz
Cv
tC ⋅−
∂∂⋅+
∂∂⋅−=
∂∂
2
2
( ) AAAfA CkCC
VF
dtdC
⋅−−⋅=
0AfCC
x =
xkVF
xVF
dtdx
f ⋅
+−⋅=

donde xf = CAf / CAf0. Es también natural elegir un tiempo ajustado a escala, τ = t / t*, donde t* es un parámetro que debe ser determinado. Podemos usar la relación dt = t*dτ para escribir:
Una elección natural para t* aparece para ser V / F (conocido como tiempo de residencia), así
El término V· k / F es adimensional y conocido como número de Damkholer en la literatura de ingeniería de las reacciones. Asumiendo que la concentración de la alimentación es constante, xf = 1 y dejando α = V· k / F, podemos escribir:
Lo que indica que un parámetro único, α, se puede usar para caracterizar el comportamiento de todas las reacciones químicas isotérmicas de primer orden. Se obtienen resultados similares si se escoge como estado adimensional la conversión
8. SOLUCIONES EXPLÍCITAS A MODELOS DINÁMICOS Raramente se pueden obtener las soluciones explícitas a ecuaciones diferenciales no lineales. El caso más común donde una solución analítica se puede obtener es cuando hay una única ecuación diferencial cuyas variables son separables. Esto es una clase muy limitada de problemas. Un objetivo principal de este libro de texto es presentar un número de técnicas (analíticas y numéricas) para resolver problemas más generales, particularmente involucrando muchas ecuaciones simultáneas. En esta sección proporcionamos un ejemplo de problemas donde las variables son separables.
Ejemplo 5. Altura de tanque no lineal Considerar el problema de la altura de un tanque donde el flujo de salida es una función
no lineal de la altura del tanque:
Aquí no hay una solución analítica por causa de la relación no lineal entre la altura y la
función de cambio. Para ilustrar un problema con una solución analítica, asumiremos que no hay flujo de entrada al tanque:
xkVF
xVF
dtdx
f ⋅
+−⋅=
⋅ τ
xF
kVx
ddx
f ⋅
⋅+−= 1
τ
xxddx ⋅+−= ατ
1
( )0
0
Af
AfA
C
CCx
−=
hAA
Fdtdh i ⋅−= β
hAdt
dh β−=

podemos ver que las variables son separables, así pues
el cual tiene la solución
ó
dejando que t0 = 0 y elevando al cuadrado ambos miembros, obtenemos la solución
Esta solución analítica se puede usar, por ejemplo, para determinar el tiempo que llevará para la altura del tanque alcanzar un cierto nivel.
9. FORMA GENERAL DE LOS MODELOS DINÁMICOS Los modelos dinámicos derivados en este capítulo consisten en un conjunto de ecuaciones diferenciales ordinarias de valor inicial de primer orden (significando sólo las derivadas primeras con respecto al tiempo), no lineales y explícitas. Una representación de un conjunto de ecuaciones diferenciales de primer orden es
(ecuación 72)
donde xi es una variable de estado, ui es una variable de entrada y pi es un parámetro. La notación se usa para representar dxi/dt. Notar que hay n ecuaciones, n variables de estado, m entradas y r parámetros.
dtAh
dh β−=
∫ ∫−=h
h
t
t
dtAh
dh
0 0
β
( )0022 ttA
hh −⋅−=⋅−⋅ β
( )00 2tt
Ahh −
⋅−= β
2
0 2)(
⋅−= t
Ahth
β
),...,,,...,,,...,(
),...,,,...,,,...,(
),...,,,...,,,...,(
111
11122
11111
rmnnn
rmn
rmn
ppuuxxfx
ppuuxxfx
ppuuxxfx
=
⋅⋅⋅
=
=
•
•
•
ix•

9.1 Variables de estado
Una variable de estado es una variable que surge naturalmente en el término de acumulación de un balance de energía o de materia dinámico. Una variable de estado es una cantidad medible (al menos conceptualmente) que indica el estado de un sistema. Por ejemplo, la temperatura es la variable de estado común que surge de un balance de energía dinámico. La concentración es una variable de estado que surge cuando se escriben los balances dinámicos a los componentes.
9.2 Variables de entrada Una variable de entrada es una variable que normalmente debe ser especificada antes de que un problema se pueda resolver o que un proceso se pueda operar. Las entradas se especifican normalmente por un ingeniero basándose en el conocimiento del proceso que se considera. Las variables de entrada típicamente incluyen flujos de corrientes entrando o dejando un proceso (notar que el flujo de una corriente de salida puede ser considerado como una variable de entrada). Las composiciones o temperaturas de las corrientes entrando en un proceso son también variables de entrada típicas. Las variables de entrada se manipulan a menudo (por controladores de proceso) para alcanzar el funcionamiento deseado. 9.2 Parámetros
Un parámetro es típicamente el valor de una propiedad física o química que debe ser especificado o conocido para resolver matemáticamente un problema. Los parámetros son a menudo fijados por naturaleza, esto es, la química de la reacción, la estructura molecular, la configuración del recipiente existente o la operación. Los ejemplos incluyen densidad, viscosidad, conductividad térmica, coeficiente de transferencia de calor y coeficiente de transferencia de masa. Cuando se diseña un proceso, un parámetro puede llegar a ser “ajustado” para alcanzar el funcionamiento deseado. Por ejemplo, el volumen del reactor puede ser un importante parámetro de diseño. 9.3 Notación del vector El conjunto de ecuaciones diferenciales, como la Ecuación 72 , mostrada antes se puede escribir más compactamente en forma de vector.
(ecuación 73)
donde x = vector de n variables de estado u = vector de m variables de entrada p = vector de r parámetros Notar que los modelos dinámicos de la Ecuación 73 se pueden usar también para resolver problemas de estado estacionario, puesto que
(ecuación 74)
esto es,
(ecuación 75)
para procesos de estado estacionario. Se usan técnicas numéricas (tales como el método de Newton) para resolver la Ecuación 75.
p)u,f(x,x =•
0x =•
0p)u,f(x, =

Las variables de estado para el estado estacionario de la solución de la Ecuación 75 se usan a menudo como condiciones iniciales para la Ecuación 73. Frecuentemente, una entrada será cambiada de su valor de estado estacionario, y la Ecuación 73 será resuelta para entender el comportamiento transitorio del sistema. En el ejemplo de abajo mostramos el Ejemplo 2 (reactor químico) en la forma de variables de estado. Ejemplo 6. Forma de variables de estado para el ejemplo 2 Considerar las ecuaciones del modelo para el Ejemplo 2 (reactor químico)
(ecuación 24)
(ecuación 32)
(ecuación 33)
(ecuación 34)
Hay cuatro estados (V,CA,CB y CP), cuatro entradas (Fi, F, CAi, CBi) y un parámetro único (k). Notar que aunque F es el flujo de salida, se considera una entrada al modelo, porque se debe especificar para resolver las ecuaciones.
ó
RESUMEN
Se han presentado un número de ejemplos de balances de materia y energía. Se usó generalmente la hipótesis clásica de un tanque perfectamente mezclado para que todos los modelos fuesen de parámetros localizados.
FFdtdV
i −=
BAPiP
BABBiiB
BAAAiiA
CCkCVF
dtdC
CCkCCVF
dtdC
CCkCCVF
dtdC
⋅⋅+−=
⋅⋅⋅−−=
⋅⋅−−=
2)(
)(
( )
( )
⋅⋅⋅−−
⋅⋅−−
−
=
•
•
•
•
BABBii
BAAAii
i
P
B
A
CCkCCVF
CCkCCV
F
FF
C
C
C
V
2
( )
=
⋅⋅+⋅−
⋅⋅⋅−−⋅
⋅⋅−−⋅
−
=
•
•
•
• ),,(
),,(
),,(
),,(
2
)(
4
3
2
1
32141
1
32134
1
1
32123
1
1
21
4
3
2
1
puxf
puxf
puxf
puxf
xxpxxu
xxpxuxu
xxpxuxu
uu
x
x
x
x

El estudiante debería ahora entender:
• que los modelos dinámicos de sistemas de parámetros localizados conducen a ecuaciones diferenciales ordinarias.
• los modelos estáticos de sistemas de parámetros localizados conducen a ecuaciones algebraicas.
• la noción de estado, entrada, salida y parámetro.
BIBLIOGRAFÍA RECOMENDADA Una buena introducción a los cálculos en ingeniería química se proporciona en:
Felder, R. M. & R. Rousseau (1986). Elementary Principles of Chemical Processes, 2ª edición, New York: Wiley
Se proporcionan discusiones excelentes de los puntos involucrados en el modelado de
un tanque de mezcla en los siguientes dos libros, incorporando efectos de densidad y balances de energía:
Denn, M. M. (1986). Process Modeling. New York: Longman. Russell, T. R. F. & M. M. Denn (1971). Introduction to Chemical Engineering Analysis. New York: Wiley.
Una introducción a la ingeniería de las reacciones químicas es:
Fogler, H. S. (1992). Elements of Chemical Reaction Engineering, 2ª edición, Englewood Cliffs, NJ: Prentice-Hall.
Un libro de texto excelente para la introducción a la termodinámica en ingeniería química es:
Smith, J. M., H. C. Van Ness & M. M. Abbott (1996). Chemical Engineering Thermodynamics, 5ª edición, New York: McGraw-Hill.
El siguiente documento proporciona un tratamiento avanzado de las variables y los parámetros adimensionales:
Aris, R. (1993). Ends and beginnings in the mathematical modelling of chemical engineering systems. Chemical Engineering Science, 48 (14), 2507-2517.
Las relaciones para transporte de calor y masa se muestran en los libros de texto sobre fenómenos de transporte. La biblia del ingeniero químico es
Bird, R. B., W. E. Stewart & E. Lightfoot (1960). Transport Phenomena. New York: Wiley.
El modelo predador-presa se muestra en las ecuaciones de Lotka-Volterra, después de que los investigadores las desarrollaran a finales de los años 20. Una presentación de las ecuaciones está en el siguiente texto:
Bailey, J. E. & D. F. Ollis (1986). Biochemical Engineering Fundamentals, 2ª edición. New York: McGraw-Hill.