Kevin trabajo
22
Colegio nacional Nicolás Esquerra Kevin David delgado Curso:802 2014
-
Upload
kevin-david-delgado -
Category
Education
-
view
74 -
download
2
Transcript of Kevin trabajo

Colegio nacional Nicolás EsquerraKevin David delgadoCurso:8022014
Trabajo cartilla 1. Introducción pág. 2
2 .Construir – programar – poner a prueba pág. 4
3 .Componentes pág.5
4 .Baterías pág. 7 y 8
5 .Conexiones pág. 9 – 10
6 .Interfaz pág. 11
7 .Ladrillo NXT pág. 12
8 .Especificaciones pág. 13
9 .Sensores:
9.1 Táctil pág. 26
9.2 Acústico pág. 28
9.3 Fotosensible pág. 30
9.4 Ultrasónico pág. 32
9.5Servomotor pág. 34
9.6 Lámpara pág. 36
9.7 Bluetooth pág. 38
1.INTRODUCION
LEGO® MINDSTORMS® Education es la nueva generación enrobótica educacional, que permite a los estudiantes descubrirla ciencia, la tecnología y las matemáticas de una formadivertida, cautivante y con participación activa.

2.Construir Programar Poner a prueba:2.1 construir
Construya su robot. En esta guía delusuario se proporcionan instruccionesespecíficas para construir un robot.También hay instrucciones de construcciónpara el mismo robot en la Guía de montajedel NXT uiren el equipo de base n

2.2 programar
Programe su robot utilizando el softwareLEGO MINDSTORMS Education NXT. Seincluyen muchos ejemplos en la parteRobot Educator del software. Descarguesu programa al ladrillo NXT con la conexióninalámbrica Bluetooth o con el cable USB
2.3 Poner a prueba
Ejecute su programa. ¿Su robot actuó como lo esperaba? Si no lohizo, ajuste su robot o su programa einténtelo nuevamente.
3.componentes
Son los que le ayudan al robot a cumplir con sus funciones básicas1. Ladrillo NXT2. Sensores táctiles3. Sensor acústico4. Sensor fotosensible5. Sensor ultrasónico

4. bateríasO Batería recargableLa batería recargable encaja en la parte de abajo del NXT. Para poner la batería recargable, mueva la pestaña de plástico del lado con su pulgar para abrir la parte de atrásPara recargar la batería conecte el cargador Que esta bajo de los puertos de entrada. Cuando la batería esta baja en la NXT mostrara el icono de la batería baja
5.conexcionesConexión de los motores Conexión de los
sensoresPara conectar un motor al para conectar un sensor NXT conecte el cable negro al conecte el cable negro al Motor y el otro extremo a sensor y el otro extremo a Alguno de los puertos A,B,C alguno de los puertos 1,2,3,4

6.interfazO Interfaz del NXTEl ladrillo NXT es el cerebro del robot de LEGO. El NXT es un ladrillo de lego controlado por ordenador que da comportamientos programable y que toma decisiones Según su programación

7.Ladrillo NXT
altavoz
cuando se incluye sonido en un programa puede oírlos por el altavoz
botones del NXT naranga:encender flecha gris claro: navegación izquierda derecha gris oscuro: borrar o regresar
Puertos de entradaTiene 4 puertos de entrada para los sensores Deben conectarse al puerto 1,2,3,4
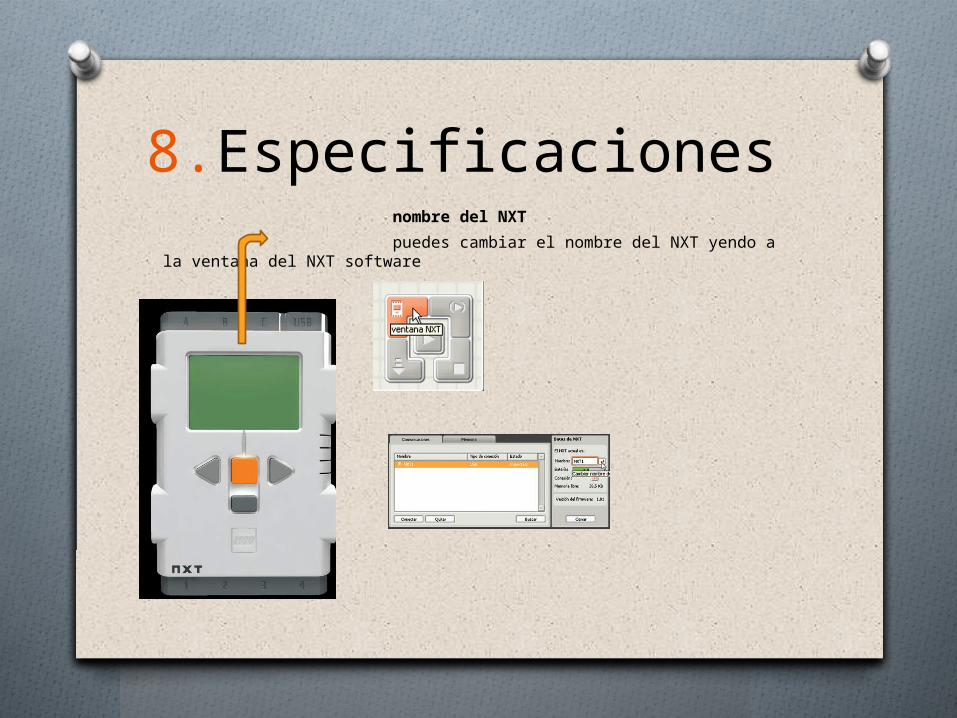
8.Especificaciones nombre del NXT
puedes cambiar el nombre del NXT yendo a la ventana del NXT software

9.Sencores:9.1 táctil El sensor táctil es un interruptor: que puede presionarse o liberarse
le permite al robot responder a obstáculos que hayan por hay.puede añadirle al sensor táctil a un NXT y luego programe elcomportamiento del robot para que cambie cuando se presione el sensor táctil
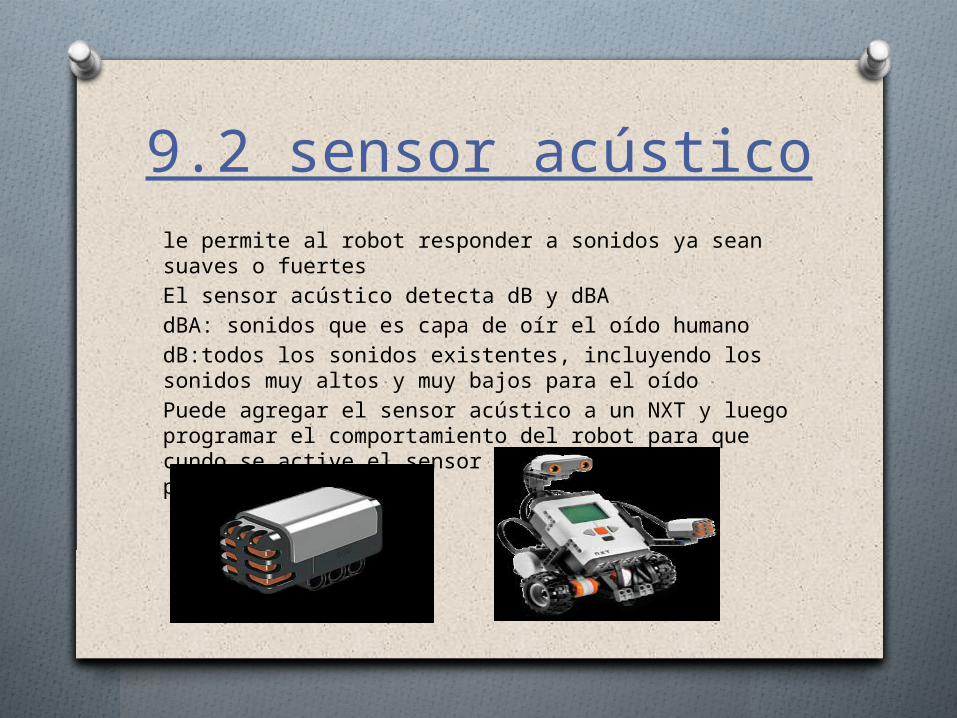
9.2 sensor acústicole permite al robot responder a sonidos ya sean suaves o fuertesEl sensor acústico detecta dB y dBA dBA: sonidos que es capa de oír el oído humanodB:todos los sonidos existentes, incluyendo los sonidos muy altos y muy bajos para el oídoPuede agregar el sensor acústico a un NXT y luego programar el comportamiento del robot para que cundo se active el sensor acústico siga su programación
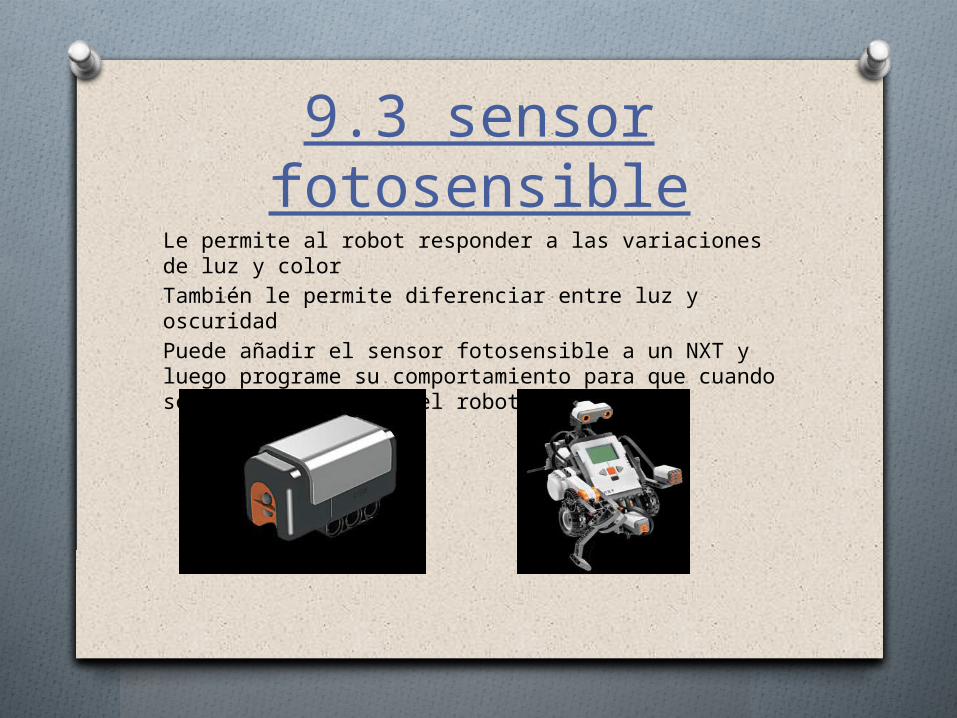
9.3 sensor fotosensibleLe permite al robot responder a las variaciones de luz y colorTambién le permite diferenciar entre luz y oscuridad Puede añadir el sensor fotosensible a un NXT y luego programe su comportamiento para que cuando se active el sensor el robot actué
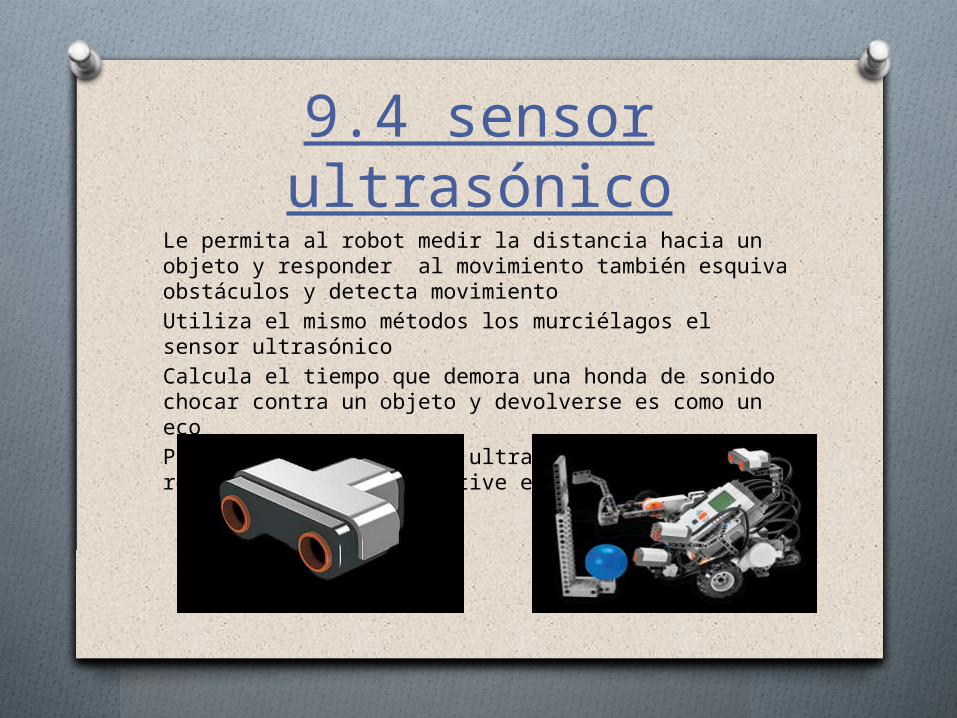
9.4 sensor ultrasónicoLe permita al robot medir la distancia hacia un objeto y responder al movimiento también esquiva obstáculos y detecta movimientoUtiliza el mismo métodos los murciélagos el sensor ultrasónico Calcula el tiempo que demora una honda de sonido chocar contra un objeto y devolverse es como un ecoPuede agregar el sensor ultrasónico programar el robot para cuando se active el sensor el responda

9.5 servomotorLos tres servomotores interactivos le proporcionan al robot la capacidad de moverseEl bloque se mueve alinea sus velocidades para que el robot se mueva suavePuede conectar el servomotor a la NXT y luego prográmelo para que cuando se active el servomotor el robot ande
9.6 lámparaSe puede encender y apagar las lámparas, para crear patrones intermitentes de luz. También pueden utilizarse para activar el sensor fotosensible, para mostrar que un motor está encendido o para indicar el estado de un sensor. También puede utilizarlas para Utilice los cables conversores para conectar las lámparas alos puertos de salida A, B o C. Se incluyen tres lámparas ytres cables para conectarlo y para que se vean mejor los ojos del robot
9.7 bluetoothEl Bluetooth es una tecnología de comunicación que hace posible el envío y la recepción de datos. Utilizando las funciones del Bluetooth, puede instalar una conexión inalámbrica entre su NXT y otros dispositivos Bluetooth, como otras unidades NXT, celulares y computadores
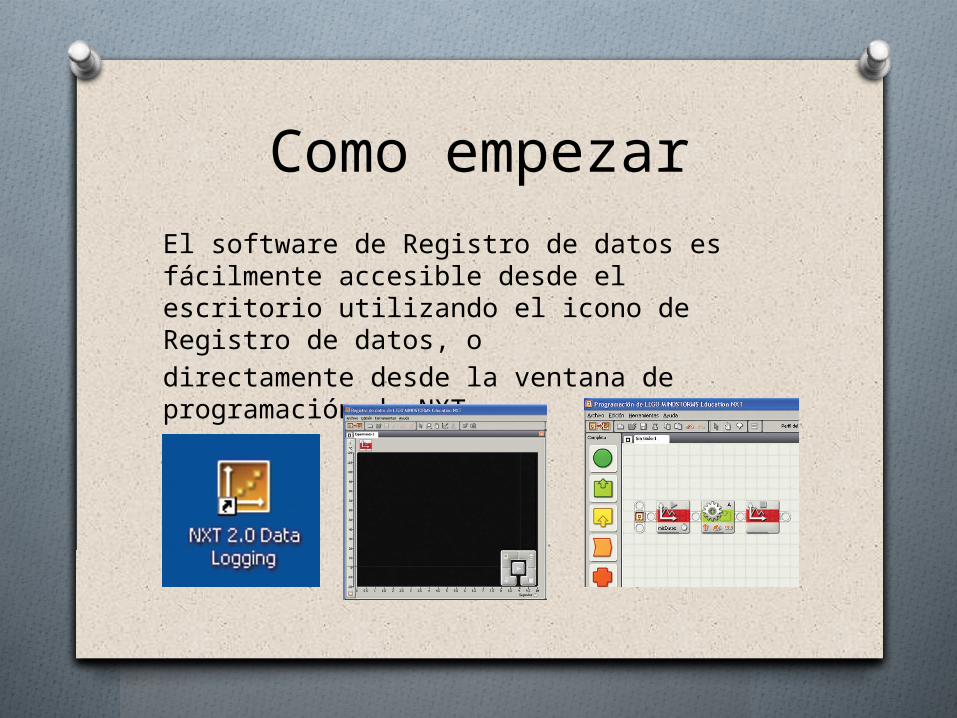
Como empezarEl software de Registro de datos es fácilmente accesible desde el escritorio utilizando el icono de Registro de datos, odirectamente desde la ventana de programación de NXT.
Componentes
fin