Jorge Morales Cruz - INAOEvillasen/CursoSeminario/PropuestaJorgeMor… · 3.8 Plan de trabajo ......
41
- 1 - Propuesta de Tesis Doctoral “Algoritmo para la clasificación de regiones de transición en imágenes satelitales” Jorge Morales Cruz Asesores Dr. Carlos A. Reyes García Dr. Jesús A. Gonzáles Bernal Coordinación de Ciencias Computacionales Instituto Nacional de Astrofísica Óptica y Electrónica Luis Enrique Erro No. 1, Tonantzintla, Puebla, México Enero 2010
Transcript of Jorge Morales Cruz - INAOEvillasen/CursoSeminario/PropuestaJorgeMor… · 3.8 Plan de trabajo ......

- 1 -
Propuesta de Tesis Doctoral
“Algoritmo para la clasificación de regiones de transición en imágenes satelitales”
Jorge Morales Cruz
Asesores
Dr. Carlos A. Reyes García Dr. Jesús A. Gonzáles Bernal
Coordinación de Ciencias Computacionales
Instituto Nacional de Astrofísica Óptica y Electrónica
Luis Enrique Erro No. 1, Tonantzintla, Puebla, México
Enero 2010

- 2 -
Contenido
Resumen .......................................................................................................................................... - 3 -
1. Introducción ................................................................................................................................ - 3 -
1.1 Clasificación dura y suave ..................................................................................................... - 5 -
1.2 Segmentación basada en el crecimiento de regiones ........................................................... - 6 -
1.3 Clasificador basado en lógica difusa ..................................................................................... - 7 -
2. Trabajo relacionado .................................................................................................................... - 8 -
2.1 Clasificadores basados en sistemas Neuro-difusos ............................................................. - 10 -
2.2 Clasificador basado en lógica difusa ................................................................................... - 14 -
2.3 Clasificador basado en el sistema Neuro-difuso-genético .................................................. - 17 -
2.4 Clasificador basado en SVM-difuso ..................................................................................... - 19 -
3. Planteamiento de la propuesta ................................................................................................. - 21 -
3.1 Problemática ....................................................................................................................... - 21 -
3.2 Motivación .......................................................................................................................... - 22 -
3.3 Preguntas de investigación ................................................................................................. - 22 -
3.4 Objetivo general .................................................................................................................. - 23 -
3.5 Objetivos específicos ........................................................................................................... - 23 -
3.6 Contribuciones esperadas ................................................................................................... - 23 -
3.7 Metodología ........................................................................................................................ - 23 -
3.8 Plan de trabajo .................................................................................................................... - 27 -
4. Resultados preliminares ............................................................................................................ - 29 -
4.1 Descripción del dominio ...................................................................................................... - 29 -
4.2 Extensión del segmentador ................................................................................................. - 31 -
4.3 Clasificación usando los clasificadores de IDRISI Andes...................................................... - 32 -
4.4 Resultados de la clasificación de las regiones de transición. Método propuesto .............. - 35 -
4.5 Análisis de los resultados obtenidos ................................................................................... - 37 -
4.6 Conclusiones........................................................................................................................ - 38 -
Referencias .................................................................................................................................... - 39 -

- 3 -
Resumen En este trabajo se propone resolver el problema de la clasificación de imágenes, cuando las clases se encuentran mezcladas o traslapadas. Existen diversos enfoques o métodos para la clasificación de imágenes utilizando solo clases puras o bien delimitadas. Por otro lado, aún sigue siendo un reto el poder desarrollar un clasificador con clases mezcladas que presente una buena precisión para ello. Para resolver el problema planteado se pretende utilizar la Lógica Difusa ya que nos permite trabajar con términos relacionados con la ambigüedad, incertidumbre e imprecisión presente en la naturaleza. A través de funciones de membresía, los cuales asignan un valor de pertenencia a cierta clase, es posible proporcionarle una mayor información al clasificador para que realice la clasificación de la imagen. Los resultados esperados en este trabajo son: (1) extensión de un segmentador basado en el crecimiento de regiones; (2) clasificador difuso que determine y evalúe las regiones de transición (clases mezcladas) en una imagen satelital. Palabras clave Clasificador de imágenes, clases mescladas, lógica difusa, algoritmo bio-inspirado.
1. Introducción El proceso de análisis de imágenes satelitales consta de diversas etapas que van desde la adquisición de la imagen, hasta la presentación de resultados, tal como se muestra en la figura 1 [Robles, 2007]. La Adquisición de la Imagen se refiere al proceso de representar los datos obtenidos por varios sensores que trabajan en diferentes intervalos de longitud de onda (diversas bandas). Esta adquisición puede ser pasada por los procesos de corrección para tratar de representar los datos del sensor con la menor cantidad de errores posibles generados durante la adquisición de la misma. En la etapa de Pre-procesamiento es posible utilizar técnicas para mejorar, restaurar o filtrar la imagen. En esta etapa se encuentra la segmentación de la imagen la cual agrupa una cantidad de píxeles con características similares para generar regiones de interés. Finalmente, se extraen de esas regiones de interés un conjunto de características descriptivas que ayudarán a la interpretación y reconocimiento de los distintos tipos de regiones según el ámbito del problema. En este trabajo de investigación se propone realizar una extensión de un segmentador basado en el crecimiento de regiones. Utilizando este segmentador modificado se podrá obtener una imagen segmentada donde se muestren las regiones homogéneas (categorías básicas) y las regiones no homogéneas (regiones de transición).

- 4 -
Figura 1.- Proceso de análisis de imágenes satelitales [Robles, 2007]. El Reconocimiento e Interpretación de las regiones obtenidas en la etapa previa, se lleva a cabo usando técnicas de Aprendizaje Automático o Inteligencia Artificial mediante algoritmos de clasificación. En esta etapa es posible el uso de técnicas de evaluación para calificar el desempeño de los algoritmos de clasificación. El proceso de clasificación puede ser supervisado o no supervisado. Si el clasificador se entrena con información a priori del número de clases que existen en la imagen se denomina supervisado. Por otra parte, si el clasificador es el que agrupa los conjuntos de instancias a través de sus características comunes, y con esto determina las clases existentes, se denomina no supervisado. La última etapa del proceso de análisis de imágenes satelitales es la presentación de Resultados, la cual traduce los resultados en un formato que pueda ser entendido por el experto en el dominio, usuario final o un sistema de cómputo. En esta etapa se crea una base de datos espacial con los resultados del análisis de la imagen y otros datos relacionados (curvas de niveles, capas de ríos, carreteras, puentes, etc.). La información generada la adquiere un Sistema de Información Geográfica que es utilizada para crear el mapa temático.

- 5 -
1.1 Clasificación dura y suave
Los clasificadores tradicionales pueden ser llamados clasificadores duros ya que producen una decisión dura acerca de la identidad de cada píxel. En otras palabras, cuando se realiza la clasificación, cada píxel de la imagen es asignado a una sola clase. Esto es determinado a través de la mayor relación que presenta con la clase asignada. En las coberturas de suelo, existen regiones de transición donde se cambia de un tipo de suelo a otro. Por ejemplo, al pasar de una región urbana a una región de vegetación no se hace de manera abrupta, sino más bien ocurre de manera gradual. Una desventaja de los clasificadores duros es que asignan los píxeles de transición a una sola clase aunque en la realidad pertenezcan a más de una clase. Otro aspecto que genera ambigüedad en el proceso de clasificación es la resolución finita del sensor con el cual es adquirida la imagen satelital, esto genera que un píxel esté compuesto por una mezcla de más de una clase. Los clasificadores suaves surgen con la finalidad de resolver las limitantes de los clasificadores duros para determinar una clasificación con mayor exactitud y los problemas de ambigüedad generados en la adquisición de la imagen. Los clasificadores suaves expresan el grado en el cual un píxel pertenece a cada una de las clases consideradas. Así, por ejemplo, en lugar de decidir que un píxel representa un bosque de coníferas o de hojas caedizas, podría indicar que su grado de pertenencia a la clase de hojas caedizas es de 0.43 y a la de coníferas es 0.57 (lo que un clasificador duro concluiría que es de la clase coníferas). Los clasificadores suaves nos proporcionan una mayor información en cuanto a la composición de un píxel dentro de una imagen satelital. Algunas motivaciones de usar los clasificadores suaves son: (1) determinar la mezcla de las clases presentes en el suelo, (2) medir y reportar la fuerza de evidencia en el soporte de la mejor conclusión que puede realizarse y (3) uso de capas de datos GIS (Sistema de Información Geográfica) y modelos para complementar la información usada para tomar la decisión final. Antes de seguir avanzando, es necesario definir ciertos términos. “Región homogénea”, la cual definimos como aquella región que representa una región de la imagen satelital sin mezcla y está constituida por una sola cobertura bien definida (por ejemplo, vegetación, agua, construcciones humanas, etc.) “Región no homogénea”, definida como una región que se encuentra formada por dos o más coberturas homogéneas. Estas regiones no homogéneas las llamaremos regiones de transición o mezcladas, ya que representan el paso de una cobertura a otra. Por ejemplo, en áreas urbanas es común encontrar diversas coberturas mezcladas, como pueden ser parques (concreto, pasto, árboles), carreteras (de concreto o de asfalto) y casas (techos de tejas, zinc, concreto). Estas coberturas generan una respuesta espectral mixta al sensor. De tal manera, al asumir que los tipos y coberturas son puros en todos los casos, se incurre en una representación del espacio geográfico no bien ajustada a la realidad, y por ende se pueden generar productos finales como mapas temáticos de baja calidad [Gutiérrez, 2005].

- 6 -
En la tarea de clasificación existe el problema de encontrar los umbrales de los valores de los atributos en que cambian las clases (regiones de transición). Estas zonas poseen características de diferentes clases que llevan a los algoritmos de clasificación a cometer errores. Esto se debe a la dificultad para categorizar las regiones de transición. En este trabajo de investigación se pretende estudiar la clasificación de imágenes satelitales, específicamente evaluando las regiones de transición que es donde se encuentra una mayor complejidad para determinar las regiones que la componen. De esta forma se propone realizar una extensión a un segmentador que ayude al clasificador propuesto. Esto se describe a continuación.
1.2 Segmentación basada en el crecimiento de regiones
La segmentación consiste en separar en unidades significativas una imagen para llegar al reconocimiento de objetos presentes en dicha imagen. Existen diversas técnicas para la segmentación de regiones. Estas se pueden clasificar en tres tipos [Sucar, 2005]:
a. Locales. Se basan en agrupar píxeles con base en sus atributos y los de sus vecinos (agrupamiento). Ejemplo: Por crecimiento de regiones.
b. Globales. Se basan en propiedades globales de la imagen (división). Ejemplos: Por histogramas.
c. División-agrupamiento (split and merge). Combinan propiedades de las técnicas locales y globales.
La extensión del segmentador que será implementado deberá contemplar las siguientes condiciones:
1. Determinar las regiones homogéneas en una imagen satelital, las cuales representarán a las categorías básicas.
2. Controlar el grado de pureza entre pixeles de una misma categoría (agua, vegetación, etc.).
3. A partir de las categorías básicas, determinar las regiones de transición más significativas a través de una operación de diferencia entre la imagen original y la imagen segmentada con las regiones homogéneas.
Con base en las condiciones anteriores se ha seleccionado la técnica de segmentación basada en el crecimiento de regiones. Ésta es una técnica local que consiste en tomar un píxel o conjunto de píxeles como una región inicial (semilla). A partir de estas semillas se realiza el “crecimiento” de la región agregando píxeles similares hasta llegar a ciertos límites controlados por el umbral de similitud [Sucar, 2005]. Una parte importante en el crecimiento de regiones es la selección de semillas que serán el punto inicial del crecimiento de las regiones. Estas semillas pueden ser obtenidas de

- 7 -
manera manual (con la ayuda del experto en el dominio) o de manera automática (con la ayuda de un método computacional). En esta tesis se propone generar las semillas de forma automática utilizando histogramas. Los histogramas son obtenidos a partir de cada banda (un canal del sensor del satélite) seleccionada de la imagen satelital. Estos histogramas son analizados para encontrar las intensidades de niveles de gris con un mayor número de frecuencia (mayor número de píxeles en la imagen con el mismo nivel de gris). Estas intensidades regularmente aparecen en los picos de un histograma. De esta manera, usando ciertas heurísticas se aíslan estos picos que determinarán intervalos representativos dentro de un histograma. Finalmente, se considera un píxel como semilla si su nivel de gris se encuentra en un intervalo representativo para cada banda usada de la imagen satelital. Así de esta forma, una vez encontrada las semillas, se elegirá el umbral de similitud que se desea para que los píxeles vecinos sean agregados a la región en crecimiento y encontrar las regiones homogéneas.
1.3 Clasificador basado en lógica difusa
Los conjuntos difusos son un enfoque presentado por la Lógica Difusa, en los cuales la pertenencia a un conjunto no es dura (es decir, si pertenece o no pertenece), sino que se le otorga un grado de pertenencia (denominado valor de membresía) al conjunto difuso. Con la utilización de la Lógica Difusa es posible dar un paso adelante en la descripción de la realidad de una región de la superficie terrestre. Si existen coberturas mezcladas o regiones de transición, mediante esta técnica podemos instruir adicionalmente al sistema con esas características complementarias. Esta ventaja puede traducirse como información valiosa para que el clasificador pueda realizar una mejor discriminación y determinar las clases aunque se encuentren traslapadas [Gutiérrez, 2005]. La necesidad de usar conjuntos difusos proviene de la observación de que no todas las regiones de un mapa se ajustan sin ambigüedades a una sola cobertura o clase. Por el contrario, existen clases mezcladas o regiones de transición que se forman al pasar de una cobertura a otra. La idea principal de este trabajo es desarrollar un clasificador basado en lógica difusa para la clasificación de imágenes satelitales y con esto poder determinar con mayor exactitud la composición de las regiones de transición en la imagen. De esta manera contribuir en los siguientes aspectos:
i. Obtención de regiones de transición en una imagen satelital.
ii. Evaluación y clasificación de las regiones de transición.
iii. Validación de la composición de las regiones de transición.

- 8 -
2. Trabajo relacionado La clasificación de imágenes satelitales ha dado paso al desarrollo de distintas arquitecturas aplicadas a diversas etapas del proceso de análisis de estas imágenes. Estas aplicaciones han sido utilizadas para proponer mejoras en las etapas de segmentación, extracción de características y por supuesto, en el diseño de clasificadores. En la literatura han sido reportados diversos trabajos que se relacionan con la clasificación suave, píxeles mezclados y regiones de transición de imágenes satelitales. La figura 2 muestra una forma de agrupar estos trabajos.
Figura 2.- Enfoques usados para la clasificación de píxeles mezclados. En la tabla 1 se muestran los trabajos relacionados con la clasificación de píxeles mezclados aplicados a imágenes satelitales usando distintos enfoques.

- 9 -
Año Título Autores Enfoque
2009 A novel approach to neuro-fuzzy classification A., Ghosh, B. U., Shankar, S. K., Meher
Neuro-fuzzy
2009 Implementation of indeterminate transition zones for uncertainty modeling in classified remotely sensed scenes.
J., Schiewe, et al. Fuzzy
2008 A classification method of multispectral images which is based on fuzzy SVM.
W., Huai-bin, M. Jin-hua
SVM-Fuzzy
2008 A combination of positive and negative fuzzy rules for image classification problem.
T. M., Nguyen, Q. M. J., Wu.
Fuzzy
2008 An application of neuro-fuzzy system in remote sensing image classification.
W., Wei, G., Guanglai
Neuro-Fuzzy
2008 Decision fusion of GA self-organizing neuro-fuzzy multilayered classifiers for land cover classification using textural and spectral features.
N. E., Mitrakis, et al.
Neuro-fuzzy-genético
2008 Evolving fuzzy classifiers using different model architectures. P., Angelov, E., Lughofer, X., Zhou
Evolutivo-Fuzzy
2008 Image classification based on fuzzy support vector machine J., Li et al. SVM-Fuzzy
2007 Image recognition using SVM-weighted non-negative matrix factorization.
Ch., Pan, et al. SVM
2007 Machine extraction of landforms from multispectral images using texture and neural methods.
P. R., Chowdhury, et al.
Neuronal
2007 Support vector machine for classification of hyperspectral remote sensing imagery
Ch., Dai, et al. SVM
2006 Increasing soft classification accuracy trough the use of an ensemble of classifiers.
H. T. X., Doan, G. M., Foody
Ensamble de clasifs.
2005 Classification of remotely sensed images using neural-network ensemble and fuzzy integration.
G. M., Reddy, B. K., Mohan
Neuro-Fuzzy
2005 Designing fuzzy rule based classifier using self-organizing feature map for analysis of multispectral satellite images.
N. R., Pal, A., Laha, J., Das
Fuzzy
2005 Land cover classification of IKONOS multispectral satellite data: neuro-fuzzy, neural network and maximum likelihood methods.
J., Han, K., Chi, Y., Yeon
Neuro-Fuzzy
2005 Uso de la teoría de lógica difusa en la clasificación imágenes satelitales con coberturas mixtas: el caso urbano de Mérida, Venezuela.
J., Gutiérrez, H., Jegat
Fuzzy
2004 A new approach to mixed pixel classification of hyperspectral imagery based on extended morphological profiles.
A., Plaza, et al. Morfología extendida
2000 Issues related to the detection of boundaries. M. J., Fortin, et al. Diversos enfoques
1995 NEFCLASS a neuro-fuzzy approach for the classification of data. Applied Computing.
D., Nauck, R., Kruse Neuro-Fuzzy
Tabla 1.- Trabajos relacionados con la clasificación de imágenes satelitales.

- 10 -
2.1 Clasificadores basados en sistemas Neuro-difusos
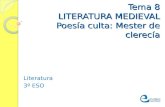
Wei y Guanglai en [Wei, 2008] proponen un clasificador basado en el sistema neuro-difuso NEFCLASS (Neural-Fuzzy Classifier). Las tareas principales del modelo NEFCLASS son descubrir las reglas que describen los datos y aprender la forma de las funciones de membresía para determinar la clase o categoría correcta de un patrón de entrada. Las reglas lingüísticas difusas que describen a los datos son de la forma R: “If x1 is μ1 and x2 is μ2 and…… and xn is μn”, entonces el patrón (x1, x2, . . . , xn) pertenece a la clase i, donde
μ1, . . ., μn son conjuntos difusos. El sistema NEFCLASS fue derivado de la arquitectura de una red neuronal tipo perceptrón difuso genérico [Nauck, 1995]. La figura 3 muestra el ejemplo de un sistema NEFCLASS en el que se tienen dos entradas a la red neuronal, cinco reglas lingüísticas y dos clases de salidas de tipo dura.
Figura 3.- Ejemplo del sistema NEFCLASS con dos entradas cinco reglas y dos clases de salidas [Nauck, 1995].
NEFCLASS tiene dos algoritmos de aprendizaje: el algoritmo de aprendizaje de reglas y algoritmo de aprendizaje de conjuntos difusos. En el primero, el sistema se inicializa sin reglas, pero inserta reglas difusas dentro del sistema durante la primera ejecución a través de los datos de entrenamiento. En una segunda corrida las reglas son evaluadas y solamente son seleccionadas las k mejores reglas, donde k es determinado por el usuario. En el segundo algoritmo, para entrenar la función de membresía, usaron una heurística simple similar al back-propagation. De acuerdo al error de salida para cada unidad de regla, se toma una decisión, si el valor de activación tiene que ser más alto o más bajo. Cada unidad de regla cambia su función de membresía modificando su soporte. Las imágenes usadas para los experimentos fueron tomadas por el satélite Landsat7 ETM+ de la región de Mongolia. En ellas se encontraron seis clases: agua, urbano, tierra,
C1 C2
R1 R2 R3 R4 R5
x1 x2
µ1(1)
1 1 1 1 1
µ2(1)
µ3(1) µ1
(2)
µ3(2)
µ2(2)

- 11 -
vegetación, montaña y desierto (gobi). Se seleccionaron cinco características (bandas): TM1 (0.45-0.52μm), TM3 (0.63-0.69μm), TM4 (0.74-0.90μm), TM5 (1.55-1.75μm) y TM7 (2.08-2.35μm). Los datos de entrenamiento son píxeles homogéneos. La tabla 2 muestra los resultados de la clasificación utilizando el sistema NEFCLASS.
Total de referencias
Total clasificados
Número Correcto
Exactitud del
productor
Exactitud del
usuario
Tierra 50 50 50 100.00 % 100.00 %
Montaña 100 44 44 44.00 % 100.00 %
Agua 50 50 50 100.00 % 100.00 %
Vegetación 50 50 50 100.00 % 100.00 %
Desierto 2 40 2 100.00 % 5.00 %
Urbano 32 50 31 96.88 % 62.00 %
Total 284 284 227 79.93 79.93 %
Tabla 2.- Resultados obtenidos por NEFCLASS para la clasificación de imágenes.
La precisión del sistema NEFCLASS es del 79.93 como se muestra en la tabla 2. Es muy bueno para clasificar regiones como arena, montaña, agua y vegetación. Sin embargo es muy pobre para clasificar el desierto “gobi” y la zona urbana. Este error se puede deber a que estas dos clases tienen espectros similares, esto podría ser contrarrestado utilizando información adicional para caracterizar las diferentes regiones a clasificar, por ejemplo textura, forma, etc. La clasificación de las imágenes se realizó considerando regiones o píxeles puros para los conjuntos de entrenamiento. Las salidas del sistema NEFCLASS es una clasificación dura de las clases clasificadas, que a diferencia de nuestro trabajo de investigación, donde se determinará la pertenencia de una región de transición a una o más clases. Para reforzar la decisión de esta pertenencia no solo se utilizará la información a nivel píxel (bandas espectrales) sino también información a nivel región (características de textura). Ghosh, Shankar y Meher, propusieron en [Ghosh, 2009] un clasificador neuro-difuso que utiliza el grado de pertenencia de las características importantes de los patrones a todas las clases que son obtenidas a través de un proceso de difusión. El clasificador se muestra en la figura 4 y consta principalmente de los siguientes pasos:
1. El sistema toma una entrada y difumina sus valores característicos usando funciones de membresía y proporciona la membresía de las características individuales para las clases diferentes. La matriz de membresías se forma por el número de filas y columnas que equivale al número de características y clases, respectivamente, presentes en un conjunto de datos. Para un patrón x, la matriz de membresías es expresado como:

- 12 -
donde representa la membresía de la d-ésima característica para la clase c.
2. La matriz de membresías es convertida en un vector concatenando todas las filas o las columnas. Este vector es la entrada de la red neuronal. El número de nodos de entrada de la red neuronal es igual al producto del número de características por el número de clases.
3. Se realiza una clasificación dura usando la operación MAX (toma el valor máximo de las membresías) para la desdifusión de la salida de la red neuronal. Por lo tanto, un patrón es asignado a la clase c con el valor de membresía más alto de esa clase. Matemáticamente, asigna el patrón a la clase c si:
donde es el valor de activación de la j-ésima neurona en la capa de salida.
Figura 4.- Modelo neuro-difuso propuesto en [Ghosh, 2009]. Ghosh y sus colegas realizaron experimentos para diversos dominios. Para el caso de las imágenes usaron la imagen IRS-1A obtenida del satélite indú (Indian Remote Sensing Satellite). También usaron una imagen SPOT tomada desde el satélite SPOT. Cada píxel contiene información de cuatro bandas espectrales. El objetivo es predecir seis clases diferentes de regiones de suelo presentes en el conjunto de datos.
Vector patrón de entrada
x1 x2 . . . xD
Difusión
f1,1(x1) f1,2(x1)
.
.
. f1,C(x1)
.
.
. fD,1(xD) fD,2(xD)
.
.
. fD,C(xD) f1,2(x1)
Patrón de entrada D-dimensional
R E D
N E U R O N A L
Desdifusión
Vector de entrada CxD-dimensional
Clasificador

- 13 -
Utilizaron métricas como el índice de homogeneidad β (a mayor valor de β mayor homogeneidad) y el índice de compactés y separabilidad DB (Davies-Bouldin, para una buena partición, buena separación entre clases y buena homogeneidad entre clases, DB debe ser bajo). Las ganancias son calculadas usando las siguientes ecuaciones:
donde clasificador 1 es el clasificador viejo y clasificador 2 es un clasificador relativamente nuevo (clasificador al que se le calcula la ganancia). Las tablas 3 y 4 muestran los resultados de las clasificaciones usando primeramente los patrones de entrenamiento y posteriormente los métodos MLP, Neuro-difuso convencional y Neuro-difuso propuesto.
Método de clasificación Imagen IRS Calcutta
Imagen SPOT Calcutta
Patrones de entrenamiento 9.4212 9.3343
MLP 7.1587 7.0542
NF Convencional 7.7535 7.6978
NF Propuesto 8.129 8.5575
Ganancia de NF propuesto sobre MLP 20.31 % 21.31 %
Ganancia de NF propuesto sobre el convencional 11.08 % 11.16 %
Tabla 3.- Valor β y la ganancia correspondiente para los diferentes métodos de
clasificación [Ghosh, 2009].
Método de clasificación Imagen IRS Calcutta
Imagen SPOT Calcutta
Patrones de entrenamiento 0.5621 1.4943
MLP 0.9390 3.3512
NF Convencional 0.8113 2.4561
NF Propuesto 0.7019 1.9801
Ganancia de NF propuesto sobre MLP 25.25 % 26.71 %
Ganancia de NF propuesto sobre el convencional 13.48 % 19.38 %
Tabla 4.- Valor DB y la ganancia correspondiente para los diferentes métodos de
clasificación [Ghosh, 2009]. Se observa en las tablas 3 y 4 un mejoramiento en el rendimiento del clasificador propuesto en [Ghosh, 2009] con respecto a los clasificadores MLP y convencionales. Una cuestión interesante en este trabajo es notar que no todas las características pueden

- 14 -
representar a todos los patrones, por lo que en este caso, asignan un valor de pertenencia para cada característica de un patrón para diversas clases. Un inconveniente es la selección del número de características para realizar el entrenamiento de la red neuronal porque de esta manera se vuelve más compleja en el procesamiento de los datos. La salida que entrega este sistema neuro-difuso es una clasificación dura. Lo que se propone en esta tesis es determinar y evaluar las regiones mezcladas obteniendo como salida una clasificación suave.
2.2 Clasificador basado en lógica difusa
Gutierrez y Jegat presentan en [Gutiérrez, 2005] el uso de la Lógica Difusa aplicadas a la clasificación de imágenes satelitales, las cuales contienen regiones mezcladas. El trabajo desarrollado consiste en dos aplicaciones de clasificación supervisada en imágenes satelitales en una zona urbana de la ciudad de Mérida, Venezuela. La primera es basada en la forma tradicional de clasificación dura (donde las clases se consideran bien delimitadas) y la segunda utilizando la LD (donde las clases son consideradas como mezcladas). Para realizar los experimentos utilizaron una subimagen satelital Landsat - TM, bandas 1, 2 y 3, composición en verdadero color perteneciente a la zona de Mérida, Venezuela. El programa utilizado fue el IDRISI-32. Realizaron las dos clasificaciones: dura y suave. En la primera clasificación un clasificador duro denominado “MAXLIKE”. Se denomina MAXLIKE porque es basado en la técnica de máxima verosimilitud. Este módulo clasifica una imagen sobre la base de la información contenida en una serie de firmas espectrales, las que son creadas mediante muestras de entrenamiento (regiones sin mezclas). La segunda clasificación es realizada a través de firmas espectrales difusas, esto es, muestras de entrenamiento que contienen regiones mezcladas. Se utilizó el módulo “FUZCLASS” del programa IDRISI-32. A continuación se muestran los pasos seguidos:
i. Definir las regiones (sin mezclas y mezcladas) que se conocen en el área de estudio.
a) Regiones presentes sin mezclas: Bosque denso (Bqd), Bosque (BqR), Césped (Ces), Asfalto (Asf), Tejas (Tej), Gramíneas (Grm) y Concreto (platabandas, calles; Cnc).
b) Regiones mezcladas de las zonas urbanas: Parques y pista de aterrizaje (asfalto, concreto y césped; PyP), Zona urbana del centro (concreto, techos de tejas, gramíneas, asfalto; UrC), Zona urbana de Hoyada Milla (bosque ralo, techos de tejas, concreto, gramíneas; UrM) y Zona de urbanizaciones (techos de tejas y gramíneas; Urb).
ii. Una vez definidas las regiones, se les asignan los respectivos porcentajes aproximados de membresía que se considera que tiene cada clase. Esto lo realiza el experto en el dominio que conoce la zona a clasificar. Los sitios sin mezcla tendrán exclusivamente la clase respectiva, pero a los sitios mezclados, se les asignan los respectivos porcentajes de

- 15 -
cada clase que se considera componen tal región. Con la anterior información se construye la matriz de partición difusa (MPF; ver la tabla 5).
IDR_ID Bqd Bqr Ces Asf Cnc Tej Grm PyP Urc Urm Urb
1 Bosque denso 0 0 0 0 0 0 0 0 0 0 0 2 Bosque ralo 0 1 0 0 0 0 0 0 0 0 0 3 Césped 0 0 1 0 0 0 0 0 0 0 0 4 Asfalto 0 0 0 1 0 0 0 0 0 0 0 5 Concreto 0 0 0 0 1 0 0 0 0 0 0 6 Tejas 0 0 0 0 0 1 0 0 0 0 0
7 Gramíneas 0 0 0 0 0 0 1 0 0 0 0
8 Parque y pista 0 0 0.1 0.1 0 0 0 0.8 0 0 0
9 Urbano centro 0 0 0 0.05 0.5 0.10 0.05 0 0.75 0 0 10 Urbano milla 0 0.5 0 0.05 0.5 0.05 0.05 0 0 0.75 0 11 Urbanización 0 0 0 0 0 0.10 0.15 0 0 0 0.75
Tabla 5.- MPF con las regiones puras y mezcladas.
iii. Con toda esta información se procede a la clasificación usando IDRISI-32. Los resultados son mostrados en la figura 5.
Figura 5.- Clasificación usando lógica difusa.
El inconveniente de realizar una clasificación suave utilizando una matriz de partición difusa es la dependencia con el experto en el dominio. Los errores de omisión del experto en el dominio pueden traducirse a errores en la clasificación suave. En la presente propuesta se pretende realizar la clasificación de las regiones mescladas de sin usar información del experto en el dominio, excepto para validar los resultados de la clasificación de manera visual. Se propone comparar los resultados de la clasificación del algoritmo propuesto contra los clasificadores suaves implementados en IDRISI. En esta etapa, la comparación se hará primeramente tomando las mismas condiciones que el clasificador propuesto con los de IDRISI y después agregando la información de textura.

- 16 -
Schiewe et al., en [Shiewe, 2009] proponen un trabajo relacionado con determinación de las zonas de transición generadas en imágenes satelitales sensadas a una alta resolución espacial. Su contribución se centra en modelar las regiones de transición indeterminadas y de esta manera describir sus incertidumbres. Basan su trabajo en el modelado de regiones de transición a través de bandas ε [Chrisman, 1982] y la teoría de la lógica difusa. Para determinar las regiones de transición pueden ser tomados en cuenta dos aspectos: el geométrico y el semántico. Modelado geométrico.- Las regiones de transición sirven como un modelo del área limitante entre dos objetos geográficos clasificados. Su geometría es construida dependiendo del tipo de objetos adyacentes. Básicamente se supone que las regiones de transición son de tipo simétrico, por ejemplo, dos objetos adyacentes comparten la misma geometría de la región de transición. Con el fin de crear las geometrías para las regiones de transición, las limitaciones son resguardadas a ambos lados (figura 6a). La amplitud de los búferes depende de las clases de los objetos respectivos y además se define sobre la base del aspecto semántico para cada par presente de clases de objetos.
(a) (b)
Figura 6.- (a) Creación de la región de resguardo alrededor de los objetos limitantes. (b)
Definición de la función de membresía difusa para la región de transición. Dentro de la región de transición, una función de membresía difusa es aplicada perpendicular a los límites de los objetos (ver figura 6b). Los valores de la función son definidos en el intervalo [0.0, 1.0]. El resultado es una función que proporciona un valor de 1.0 (pertenencia total a la clase respectiva) en el límite interior de la región de transición y un valor de 0.0 (ninguna pertenencia) en el límite exterior. Modelado semántico.- La membresía temática de los objetos vecinos en consideración tiene una influencia significativa en la difusión de los límites y la amplitud de la región de transición. En este trabajo se asume que las estructuras creadas por el hombre como asentamientos o infraestructura de sistemas de transportación tienen regiones más pequeñas de borde formador (por su compactés o forma elongada) que objetos naturales que muestran un mayor comportamiento difuso (por ejemplo, entre océano y costa).

- 17 -
Asumen que la amplitud de las regiones del borde del objeto, en términos de números absolutos no es posible, debido a dos factores: Influencia estacional: El estado y amplitud de las regiones fronterizas de clases de
vegetación dependen de la situación fenológica de la comunidad examinada. La reflectancia espectral de la vegetación está cambiando siempre durante su crecimiento y depende del estado fisiológico de la vegetación.
Tamaño y forma de las regiones vecinas: Edwars y Lowell en [Edwards, 1996] descubrieron que el tamaño de los polígonos examinados tiene una influencia en la formación de una frontera y con eso, en la amplitud de la frontera. Como una consecuencia, regiones más pequeñas tienden a ser más difusas comparadas con regiones más grandes, suponiendo las demás condiciones estables. Con esto, este hecho resulta difícil relacionar una y solo una amplitud absoluta a todas las regiones de una clase de objetos.
Un inconveniente que se puede notar en este trabajo es la manera de trazar las regiones de transición, de forma simétrica a las regiones que la generan. En cambio en la naturaleza, estas regiones de transición se generan de manera caprichosa sin mantener una estructura determinada (excepto para las construcciones creadas por el hombre). Otro aspecto que es posible mejorar de este trabajo es la inclusión de funciones de membresías más complejas que permitan combinar más características (por ejemplo textura) de las regiones que generan las regiones de transición. En la naturaleza, el cambio de una región a otra (región de transición) es de forma gradual y sobre todo no lineal, por lo que usando funciones de membresías triangulares no se puede alcanzar una mejor evaluación de estas regiones. En nuestro trabajo las regiones de transición serán determinadas a partir de las regiones homogéneas. Las regiones homogéneas delimitarán a las regiones de transición por lo que su forma y ubicación serán bien determinadas para realizar su evaluación y clasificación.
2.3 Clasificador basado en el sistema Neuro-difuso-genético
Mitrakis, Topaloglou y Alexandridis propusieron en [Mitrakis, 2008] el modelo GA-SONeFMUC para la clasificación de suelo en imágenes multiespectrales. Este modelo se basa en un ensamble de clasificadores arreglados por niveles para mejorar la precisión de los clasificadores ubicados en la etapa previa. El modelo está compuesto por clasificadores difuso-neuronales elementales (FNCs) organizados en una estructura multicapa con alimentación hacia adelante. Cada FNC realiza tres tareas principales: 1) fusionar la decisión de los padres FNCs de la etapa anterior; 2) separar los datos que distinguen entre los patrones bien clasificados y los patrones ambiguos; y 3) Mejorar la clasificación de los patrones ambiguos a través de un

- 18 -
clasificador neuro-difuso. La figura 7 muestra un ejemplo de una arquitectura GA-SONeFMUC de tres capas compuesta por 7 módulos FNCs.
Figura 7.- Arquitectura de GA-SONeFMUC con tres capas y siete módulos FNCs [Mitrakis,
2008].
A diferencia de las arquitecturas anteriores, donde la clasificación es realizada a través de una sola pasada por el proceso de clasificación, en este caso, la tarea de clasificación es llevada a cabo secuencialmente a través de repetidas fusiones de decisiones, transformación de las características y tomando decisiones a lo largo de las capas de GA-SONeFMUC. Un algoritmo genético es introducido en el modelo GA-SONeFMUC con el fin de ajustar los parámetros tales como centros y traslapes de las funciones de membresías usado en cada FNC. Las características utilizadas para la clasificación son: características espectrales de las 4 bandas usadas (tres visibles y una cerca del infrarrojo), características la matriz de co-ocurrencia de niveles de gris, características wavelet y características espectrales transformadas. La tabla 6 muestra los resultados para la clasificación del área de estudio correspondiente a la zona de wetland perteneciente al lago de Koronia ubicada al norte de Grecia. Consideraron 6 clases mostradas en la tabla 6.
GA-SONeFMUC Mapa de Clasificación de humedales – Fusión de decisión (BKS)
Phragmites Tamarix Prados húmedos
Árboles Agua PA (%) UA (%)
Phragmites 103 5 7 2 0 91.15 88.03
Tamarix 8 50 3 6 0 84.75 74.63
Prados húmedos 2 3 197 2 0 95.17 96.57
Árboles 0 1 0 46 0 82.14 97.87
Agua 0 0 0 0 54 100.0 100.0
Referencia 113 59 207 56 54
Tabla 6.- Resultados de la clasificación usando el modelo GA-SONeFMUC [Mitrakis, 2008].
x1 x2 x3 x4 x5 x6 x7
FNC1(1)
FNC2(1)
FNC3(1)
FNC1(2)
FNC2(2)
FNC1(3)
Capa 1 Capa 2 Capa 3
(M) D(x)
(p)
(M)
r(1)

- 19 -
La precisión en la clasificación de este modelo es del 92.02%. Es una arquitectura bastante robusta e implementa diversas áreas de la computación para reducir los errores de clasificación para las regiones mezcladas. Otra parte importante por mencionar es la implementación de un ensamble de clasificadores los cuales de manera individual son especializados para la clasificación de regiones usando mejores características para cada conjunto de datos de entrenamiento y de prueba. Un inconveniente de este clasificador es precisamente su complejidad para diseñar los módulos elementales para que puedan especializarse en la clasificación de cierta clase. El diseño de los clasificadores individuales se debe tomar en cuenta aspectos como: tipo de clasificador, estructura del modelo, algoritmo de aprendizaje usado para entrenar al clasificador, recursos multiespectrales adquiridos y tipo de características extraídas. En nuestro trabajo, se propone un clasificador que reduzca su complejidad con respecto al diseño de este ensamble de clasificadores. La diferencia será en la forma de obtener las regiones de transición y la de proporcionarle al clasificador propuesta información precisa acerca de estas regiones para tomar una mejor decisión en su clasificación.
2.4 Clasificador basado en SVM-difuso
Li, Huang, He y Quian propusieron en [Li, 2008] un clasificador de imágenes basado en máquinas de soporte vectorial difuso (FSVM). La idea básica es definir una función de membresía para clasificar imágenes que son mal clasificadas usando máquina de soporte vectorial (SVM) convencionales. Es importante resaltar que las aplicaciones abordadas en este trabajo no incluyen a las imágenes satelitales, pero se decidió mencionarlo por los conceptos afines que se relacionan con la propuesta tales como la separación de las clases mezcladas. La técnica de máquina de soporte vectorial (SVM) es un clasificador para dos clases y funciona correctamente cuando no existe traslape entre clases. Cuando se necesita clasificar n clases, el problema es transformado a un problema 1 a r, donde una clase i es tratada como una clase separada y las clases restantes son tratadas como la otra clase. Una imagen es inclasificable cuando existe más de un valor de decisión, ver figura 8a. Para sobrellevar este problema, existe un método de 1 a 1 propuesto en [Li, 2008]. El método 1 a 1 convierte el problema de n clases en n(n-1)/2 problemas de dos clases, reduciendo la región inclasificable por clases traslapadas, ver figura 8b. Para resolver los problemas anteriores, el trabajo de [Li, 2008] propone la inclusión de una función de membresía para poder clasificar las regiones mezcladas. Esta función calcula la distancia mínima de estas regiones a la clase más próxima y le asigna un mayor grado de pertenencia, resultando en una mejor clasificación, ver figura 8c.

- 20 -
(a) (b) (c)
Figura 8.- (a) Regiones inclasificables por un SVM 1 a r, (b) Regiones inclasificables por un SVM 1 a 1, (c) Regiones ampliadas generalizadas para el FSVM [Li, 2008].
Para realizar los experimentos usaron 2600 imágenes tomadas de internet y organizados manualmente en 8 categorías como se muestra en la tabla 7.
No 1 2 3 4 5 6 7 8
Categoría Animal Interior Edificios Autos Personas Espacio Cielo Plantas
Ntraining 190 156 200 200 300 102 100 200
Ntesting 183 104 185 125 264 101 103 103
Tabla 7.- Conjuntos de entrenamiento y prueba para la clasificación de imágenes [Li,
2008]. En la tabla 8 se muestra el rendimiento en la clasificación realizada por los métodos de SVM convencional y el SVM difuso (FSVM). Los resultados muestran una mejoría en la clasificación usando FSVM en la mayoría de las categorías clasificadas.
No 1 2 3 4 5 6 7 8
Categoría Animal Interior Edificios Autos Personas Espacio Cielo Plantas
Ntraining 42.08 % 64.42 % 54.59 % 61.60 % 65.40 % 49.50 % 44.66 % 76.70 %
Ntesting 44.80 % 67.31 % 56.76 % 63.20 % 64.64 % 49.50 % 48.54 % 76.70 %
Tabla 8.- Rendimiento de clasificación usando SVM y FSVM [Li, 2008].
Los resultados mostrados en la tabla 8 muestran una muy baja precisión del método propuesto en [Li, 2008] usando SVM comparado con el trabajo propuesto en [Wei, 2008]. Una desventaja de usar este método es el crecimiento en el número de clases a determinar, debido a que resultaría en una dimensión mayor para determinar la separación entre diversas clases 1 a 1 (que es la manera de operar de SVM). Lo que proponemos en nuestro trabajo de investigación es dar un tratamiento diferente a las regiones mezcladas (regiones de transición), ubicando primero las regiones homogéneas que sirven como delimitación para las regiones de transición. Una vez determinadas estas regiones, se extraerán sus vectores característicos para implementar un clasificador basado en lógica difusa.

- 21 -
3. Planteamiento de la propuesta
3.1 Problemática
Las regiones de transición formadas por el cambio de una cobertura de suelo a otra en una imagen satelital, están constituidas por una mezcla de distintas coberturas de suelo (por ejemplo, vegetación-agua). En estas regiones resulta difícil determinar su composición con respecto a más de una cobertura. Los vectores característicos que se pueden obtener de una región sin mezcla permiten representar a dicha región para su asignación a una clase (cobertura de suelo) a través de un proceso de clasificación. En este caso, es posible determinar los umbrales en que cambian las características que representan a una u otra región. Por el contrario, en el caso de las regiones de transición, estos umbrales no se encuentran tan definidos o delimitados, por lo que el proceso de clasificación se vuelve más complicado. Esta complicación da como resultado la construcción de clasificadores más complejos para determinar y evaluar las regiones mezcladas. Para un sistema de clasificación es necesario tener la suficiente provisión para representar las incertidumbres involucradas en cada una de las etapas para que la salida final (resultados) del sistema sea asociada con la menor incertidumbre posible. El tema del manejo de la incertidumbre llega a ser más prominente en caso de clasificación de suelo de imágenes sensadas remotamente. Esto se refleja con una mayor relevancia en las regiones de transición, es decir, al pasar de un tipo de cobertura a otra. Generando con esto zonas o regiones mezcladas con una o más coberturas (por ejemplo, vegetación, agua y construcciones). Diversos enfoques han sido propuestos para la clasificación de imágenes satelitales para determinar y evaluar las regiones de transición. Estos en su mayoría contemplan la clasificación con clases puras o bien delimitadas. En este trabajo se propone desarrollar un clasificador de imágenes satelitales para clasificar estas regiones de transición donde aparecen las zonas mezcladas. La manera en que se muestran las coberturas dentro de una imagen satelital, generando regiones de transición, se propone utilizar la teoría difusa para desarrollar el clasificador que nos permita determinar y evaluar el grado de pertenencia de cada píxel contenido en una región de transición a las coberturas (clases) correspondientes.

- 22 -
3.2 Motivación
Diversos trabajos han contribuido hacia la clasificación de las regiones de transición en imágenes satelitales según revisado en secciones anteriores. Por lo que determinar la composición que tienen estas regiones aun sigue siendo un reto debido a que no existe un método preciso para verificar la certeza de estas mezclas. La tarea de clasificación de estas zonas mezcladas no resulta sencilla debido a que en estas zonas existen diversas clases que combinan su respuesta espectral dando una respuesta espectral mixta donde resulta difícil interpretar una región específica. Con todo esto, es necesaria la agregación de mayor información tales como textura, forma, relaciones espaciales a nivel región que permitan reducir el grado incertidumbre en estas regiones mezcladas. Las principales motivaciones por abordar el problema de la clasificación de regiones de transición son las siguientes: Establecer una manera de determinar y ubicar las regiones de transición en una
imagen satelital.
Combinar información a nivel píxel y a nivel región para caracterizar dichas regiones de transición.
Proponer un clasificador suave que permita determinar la composición de estas regiones de transición.
Proponer una medida de similitud que pueda ser usada por el clasificador propuesto para medir las similitudes entre regiones homogéneas y las de transición.
3.3 Preguntas de investigación
¿Es posible realizar una extensión de un segmentador de imágenes para que permita controlar el grado de pureza de una segmentación para determinar las regiones homogéneas (no mezcladas) en imágenes satelitales?
¿Es posible construir un algoritmo para la clasificación de imágenes satelitales que permita evaluar las regiones de transición en una imagen satelital de tal manera que la clasificación permita determinar los grados de pertenencia hacia una o más regiones homogéneas y tenga una mayor precisión?

- 23 -
3.4 Objetivo general
Diseñar un algoritmo para la clasificación de imágenes satelitales que permita determinar y clasificar las regiones de transición combinando información a nivel píxel y a nivel región y de esta manera realizarla de una forma más precisa.
3.5 Objetivos específicos
i. Proponer una extensión de un segmentador basado en el crecimiento de regiones que permita controlar el grado de pureza de las regiones homogéneas.
ii. Desarrollar un método que permita determinar las regiones no homogéneas (de transición) más significativas dentro de una imagen satelital.
iii. Extraer las características de una imagen satelital que ayude a interpretar las regiones no homogéneas.
iv. Proponer un algoritmo para la clasificación de imágenes satelitales con regiones de transición que determine la pertenencia de las regiones a las clases correspondientes.
v. Verificar el algoritmo propuesto para comprobar su eficacia frente a otras propuestas, mediante la experimentación con imágenes artificiales y con el experto del dominio.
3.6 Contribuciones esperadas
i. Extensión del segmentador basado en el crecimiento de regiones. El segmentador aislará las regiones homogéneas, se extraerán características de estas regiones y se determinarán las regiones de transición más significativas.
ii. Creación de un clasificador de regiones de transición aplicados a la clasificación de imágenes satelitales. El clasificador evaluará las regiones de transición para determinar la composición con respecto a las regiones homogéneas que la generan.
iii. Proposición de una medida de similitud difusa que permita ser usado con los vectores característicos usados para la clasificación de regiones de transición.
3.7 Metodología
En esta sección se muestra la metodología propuesta para este trabajo de investigación. En la figura 9 se presentan las etapas de la estructura general de la solución propuesta.

- 24 -
Figura 9.- Estructura general de la solución propuesta.
Los bloques principales se detallan a continuación: Bandas espectrales.- Las imágenes satelitales que se usarán son las tomadas por el satélite Landsat ETM+ que pueden ser obtenidos a través de la Internet. Una imagen LANDSAT 7 ETM+ está compuesta por 8 bandas espectrales que pueden ser combinadas de distintas formas para obtener variadas composiciones de color u opciones de procesamiento. Las bandas del espectro visible y del infrarrojo mantienen la resolución espacial de 30 m del Landsat 5 (canales 1, 2, 3, 4, 5 y 7). Entre las principales mejoras técnicas respecto de su antecesor, el satélite Landsat 5, se destaca la adición de una banda espectral (Banda Pancromática) con resolución de 15 metros. También cuenta con mejoras en las características geométricas y radiométricas y una mayor resolución espacial de la banda térmica para 60 m. Estos avances tecnológicos permiten calificar al LANDSAT 7 como el satélite más interesante para la generación de imágenes con aplicaciones directas hasta una escala de 1:25.000, principalmente en áreas rurales o territorios de grandes extensiones. Segmentación.- Usando las firmas espectrales de las bandas de la imagen satelital se implementará una extensión del segmentador basado en crecimiento de regiones. En este apartado se propone determinar las regiones homogéneas o categorías básicas que se encuentran presentes en una imagen satelital. Se controlará el grado de pureza de las regiones homogéneas a través del crecimiento de regiones para obtener las regiones homogéneas. El grado de pureza representa el valor del umbral de similitud que se usará para realizar la segmentación basada en el crecimiento de regiones.
Segmentación
Obtención de regiones de transición
Clasificación suave Algoritmo propuesto
Bandas espectrales
Imagen clasificada
Extracción de Características

- 25 -
Las regiones homogéneas que serán las coberturas básicas en la imagen satelital son las siguientes:
1. Aguas: profundas y superficiales. 2. Vegetación: bosque denso, bosque ralo y agricultura. 3. Estructuras humanas: edificios y carreteras.
Extracción de características.- En este bloque se extraerán características (de textura), que en combinación con las firmas espectrales, ayuden a caracterizar las regiones no homogéneas o de transición. Con esta información se formará el vector de características que definirá a cada región. Obtención de regiones mezcladas (o de transición).- Una vez obtenida las regiones homogéneas y a partir de las características extraídas de la imagen, se determinarán las regiones de transición más significativas. Esto puede ser realizado agrupando los niveles de grises de las regiones de transición o a través de la información de textura. Clasificación suave: algoritmo propuesto.- En este apartado se pretende realizar la mayor contribución al trabajo de investigación. Se propone un clasificador de imágenes para la evaluación de la composición de los píxeles. Llevando a cabo esto se pretende obtener principalmente:
1. La determinación de la composición de cada píxel con respecto a las categorías básicas. Para llevar a cabo esto se utilizará la teoría difusa para determinar el grado de pertenencia de los píxeles de cada región de transición a las categorías básicas que lo están generando.
2. Construir una tabla en la que se muestren las regiones homogéneas y el número de píxeles de cada una. De igual manera se mostrará la composición de cada páxel mezclado para las distintas regiones de transición.
A continuación se detallan los pasos necesarios para alcanzar los objetivos planteados para esta propuesta de tesis:
1. Recopilación y análisis de la literatura relacionada con tópicos como:
a. Tipos de segmentadores de imágenes que permitan obtener regiones homogéneas en una imagen satelital.
b. Algoritmos para la extracción y selección de características en imágenes satelitales.
c. Clasificadores de imágenes que se relacionen con temas como: clasificación suave, regiones de transición, manejo de incertidumbres, etc.
2. Desarrollo de la extensión del segmentador.

- 26 -
a. Se propone realizar una extensión al segmentador basado en el crecimiento de regiones para que permita determinar las regiones homogéneas o categorías básicas.
b. El crecimiento de regiones permitirá controlar la pureza de las regiones homogéneas. Con esto se podrá determinar, a través de una diferencia de imágenes las regiones de transición.
3. Definición y caracterización del dominio de aplicación para la clasificación de imágenes.
a. Se usarán imágenes satelitales sensadas por el satélite Landsat 7 ETM+ que cuentan con 8 bandas. Seis bandas (1, 2, 3, 4, 5 y 7) que van desde el espectro visible al infrarrojo con una resolución espacial de 30 m. Las bandas del infrarrojo térmico (canales 6L e 6H) que son adquiridas con una resolución de 60 metros y la banda Pancromática (canal 8) que tiene 15 m de resolución espacial.
b. Las coberturas que se clasificarán son: aguas profundas y superficiales; bosque denso, bosque ralo y agricultura; y estructuras humanas como edificios y carreteras.
c. Las características que se usarán son las siguientes: firmas espectrales de las respectivas bandas usadas, textura y distancia.
4. Extracción y selección de características.
a. Las características extraídas definirán tanto a las regiones homogéneas como las no homogéneas para ser usadas en la evaluación de cada pixel de las regiones de transición.
b. Para extraer las características se utilizarán herramientas como MATLAB o HALCON.
5. Planteamiento del algoritmo para la clasificación de imágenes que permita clasificar regiones de transición.
a. El clasificador permitirá determinar el grado de pertenencia de cada pixel de las regiones de transición con respecto a las regiones homogéneas.
b. La evaluación de esta pertenencia se hará utilizando la teoría difusa.
6. Implementación del algoritmo propuesto.
a. Ajuste de parámetros para el mejor funcionamiento del algoritmo propuesto.
7. Evaluación de resultados mediante la realización de pruebas
a. Comparación de los resultados encontrados con otros sistemas como: Clasificador Neuro-fuzzy (NEFCLASS) propuesto en [Ghosh, 2009] y [Wei, 2008], y los clasificadores suaves implementados en IDRISI TAIGA como el clasificador bayesiano (módulo BAYCLASS), el clasificador difuso (módulo FUZCLASS) y el clasificador de máxima verosimilitud (módulo MAXLIKE).

- 27 -
b. Comparación de los resultados encontrados con el experto en el dominio.
8. Publicación de artículos.
3.8 Plan de trabajo
A continuación se describen brevemente las actividades del plan de trabajo:
i. Revisión documental. Recopilar la literatura disponible acerca de los clasificadores de imágenes que han investigado la clasificación de regiones de transición. Búsqueda de herramientas de segmentación de imágenes para la obtención de regiones homogéneas y métodos para la extracción de características para caracterizar adecuadamente las regiones dentro de una imagen satelital.
ii. Definición del tema. Clarificar la contribución principal a través del título de la tesis y los objetivos. Determinar las contribuciones que se pretenden alcanzar con el trabajo de tesis.
iii. Análisis del estado del arte. Estudio y discriminación entre los trabajos más cercanos a la investigación con el fin de encontrar los trabajos que servirán como respaldo a la investigación y aquellos que utilizarán para comparar nuestros resultados.
iv. Selección del dominio de aplicación. Se determinará el tipo de imágenes a utilizar,
la fuente de las mismas (satélites usados para adquirirlos), las coberturas que se
buscarán en las imágenes, etc.
v. Análisis y diseño del nuevo algoritmo clasificador. En esta etapa se centra la parte principal del trabajo ya que consta de las partes principales que constituirán al clasificador.
a. Desarrollo de la extensión del segmentador. En esta etapa se construirá la extensión del segmentador para que determine las regiones homogéneas dentro de una imagen satelital. El segmentador utilizará las firmas espectrales de las bandas correspondientes a las imágenes tomadas por el satélite Landsat 7 ETM +.
b. Extracción de características. En este apartado se extraerán las características adecuadas para representar las regiones en una imagen satelital. La extracción de características se hará en MATLAB.
c. Diseño del algoritmo clasificador. Se diseñará el algoritmo para que permita evaluar las regiones de transición entre dos coberturas básicas en una imagen digital. Determinará la pertenencia o composición de cada región de transición (primero a nivel región y después a nivel pixel) con respecto a las categorías básicas.
vi. Integración del segmentador y clasificador. En esta etapa se realizará la integración de los módulos del clasificador propuesto.

- 28 -
vii. Experimentos. Con la selección de imágenes obtenidas se realizarán los experimentos usando el clasificador propuesto y las otras propuestas hechas para obtener la comparación de sus resultados.
viii. Evaluación de resultados. Se propone evaluar el clasificador propuesto usando medidas cuantitativas y cualitativas.
La tabla 9 muestra el cronograma de actividades que se seguirá para cumplir la propuesta planteada.
Actividades 2009 2010 2011
Ene-Abr May-Ago Sep-Dic Ene-Abr May-Ago Sep-Dic Ene-Abr May-Ago
Revisión documental
Definición del tema
Análisis del estado del arte
Selección del dominio de aplicación
Análisis y diseño del nuevo algoritmo clasificador
Diseño e implementación de la Extensión del segmentador
Extracción de características
Diseño del algoritmo clasificador
Integración del segmentador, selector y clasificador
Experimentos
Evaluación de resultados
Presentación de avances
Redacción de artículos
Redacción de la tesis
Defensa de Tesis Doctoral
Tabla 9.- Cronograma de actividades.

- 29 -
4. Resultados preliminares
Los resultados preliminares encontrados hasta el momento son:
1. Segmentador basado en el crecimiento de regiones. Este segmentador nos permite determinar las regiones homogéneas usando la ubicación de las semillas para realizar el crecimiento de las regiones. Las semillas son introducidas de forma manual pero se está implementando un método basado en el análisis de histogramas para la obtención automática de las semillas.
2. Método para determinar las regiones de transición. La propuesta para delimitar las regiones de transición es simple. Una vez determinada las regiones homogéneas, las cuales resultan más fáciles de ubicar, es posible acotar a las regiones de transición. Esto es posible porque estas regiones homogéneas son las que generan a las regiones mezcladas.
3. Evaluación de las regiones de transición. Primeramente se extrajeron vectores característicos de las firmas espectrales y de textura de las regiones de la imagen segmentada. Se realizó la difusión de este vector obteniendo un vector de características difusas (VCD). Utilizando este VCD se calcula una medida de similitud entre una región de transición y una región homogénea. Esta función de similitud es una medida de distancia simple de suma promediada. Se propondrá una función de distancia que permita una mejor evaluación de los valores característicos de textura.
4.1 Descripción del dominio
Las imágenes a utilizar son tomadas por el satélite Landsat 7 ETM+ que se encuentran disponibles en la Internet. Estas imágenes son adquiridas a través de sensores que captan las reflectancias de cada cobertura en la corteza terrestre por medio de 8 canales o bandas.
Las bandas del espectro visible y del infrarrojo tienen una resolución espacial de 30 metros (canales 1, 2, 3, 4, 5 y 7). Las bandas del infrarrojo térmico (canales 6L y 6H) son adquiridas con una resolución de 60 metros. La banda Pancromática (canal 8) tiene 15 metros de resolución espacial.
La tabla 10 ilustra la resolución espectral de cada banda del sensor ETM+ del Landsat 7. Los valores son expresados en micrones y representan los límites de longitudes de onda a los que es sensible cada banda espectral.

- 30 -
Límite Banda 1 Banda 2 Banda 3 Banda 4 Banda 5 Banda 6 Banda 7 Banda 8
Inferior 0.45 0.53 0.63 0.78 1.55 10.4 2.09 0.52
Superior 0.52 0.61 0.69 0.90 1.75 12.5 2.35 0.90
Tabla 10.- Bandas espectrales del sensor ETM + del satélite Landsat 7.
Las coberturas que contienen las imágenes seleccionadas son:
1. Aguas: profundas y superficiales. 2. Vegetación: bosque denso, bosque ralo y agricultura. 3. Estructuras humanas: edificios y carreteras. 4. Otras
Los experimentos serán realizados usando las siguientes imágenes:
1. Imágenes satelitales disponibles de manera gratuita en el enlace http://glcfapp.umiacs.umd.edu:8080/esdi/index.jsp.
2. Imágenes artificiales creadas en ERDAS-IMAGINE.
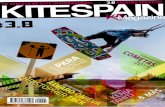
Para las imágenes satelitales se utilizarán las imágenes del estado de Veracruz, México debido a que se tiene un mayor conocimiento de estas regiones. Cuenta con 41 imágenes de del estado de Veracruz y sus fronteras. Las imágenes están disponibles en sus bandas del espectro visible (1, 2, 3, 4, 5 y 7) suficientes para realizar los experimentos. La figura 10 muestra una subimagen de la zona de la ciudad de Veracruz y sus alrededores.
Figura 10.- Imagen en verdadero color de la zona de la ciudad de Veracruz y sus alrededores.

- 31 -
4.2 Extensión del segmentador
El segmentador extendido se basa en el crecimiento de regiones. Este segmentador fue seleccionado para que nos permita:
1. Determinar las regiones homogéneas dentro de las imágenes satelitales utilizando las firmas espectrales de las bandas usadas.
2. Controlar el grado de pureza de una región homogénea al realizar el crecimiento de regiones.
3. Al encontrar las regiones homogéneas a través de este segmentador, se irá delimitando las regiones de transición (regiones no homogéneas) que son generadas por estas regiones homogéneas.
Para realizar los experimentos, se tomaron subimágenes conteniendo solo dos tipos de coberturas a la vez de la imagen mostrada en la figura 10. Las figuras 11, 12 y 13 muestran el resultado de las segmentaciones de estas subimágenes. El valor p controla el grado de pureza (umbral de similitud) para realizar la segmentación.
(a) (b) Figura 11.- (a) Subimagen a segmentar con coberturas de región urbana y agua. (b)
Imagen segmentada: urbana (cian, p = 25) y agua (azul, p = 6).

- 32 -
(a) (b) Figura 12.- (a) Subimagen a segmentar con coberturas de región de vegetación y agua. (b)
Imagen segmentada: vegetación (color azul fuerte, p = 8), agua (cian, p = 6).
(a) (b)
Figura 13.- (a) Subimagen a segmentar con coberturas de región de vegetación y urbano. (b) Imagen segmentada de vegetación: vegetación (azul, p = 8), agua (cian, p = 6).
4.3 Clasificación usando los clasificadores de IDRISI Andes
El tipo de clasificación utilizada es la supervisada. Los pasos seguidos para realizar la clasificación en IDRISI Andes son los siguientes:
1. Se crean los conjuntos de entrenamiento para cada clase (región homogénea) a través del comando “Digitize”.
2. Se construye un archivo de firmas espectrales con el conjunto de entrenamiento creado en el paso anterior y utilizando las bandas espectrales de la imagen a clasificar.

- 33 -
3. Utilizando este archivo de firmas se procede a realizar la clasificación. Los resultados de la clasificación usando el módulo BAYCLASS (clasificador bayesiano) se muestran en las imágenes de la figura 14.
(a)
(b) (c)
Figura 14.- Resultados de la clasificación usando el módulo BAYCLASS. (a) Incertidumbre de la clasificación. (b) Clasificación de la clase agua. (c) Clasificación de la clase urbano.
Los resultados de la clasificación usando el módulo FUZZCLASS (clasificador difuso) se muestran en las imágenes de la figura 15.

- 34 -
(a)
(b) (c)
Figura 15.- Resultados de la clasificación usando el módulo FUZZCLASS. (a) Incertidumbre de la clasificación. (b) Clasificación de la clase agua. (c) Clasificación de la clase urbano.
Los resultados de la clasificación usando el módulo KNN (Vecinos más cercano) se muestran en las imágenes de la figura 16.

- 35 -
(a) (b)
Figura 16.- Resultados de la clasificación usando el módulo FUZZCLASS. (a) Clasificación de la clase agua. (b) Clasificación de la clase urbano.
4.4 Resultados de la clasificación de las regiones de transición. Método
propuesto
Las imágenes clasificadas son las mostradas en las figuras 11-13. Los pasos seguidos son los siguientes:
1. Se tomaron tres bandas espectrales (banda 2, 3 y 5) para cada imagen a clasificar.
2. Se usan las semillas de cada región homogénea para realizar la segmentación usando el crecimiento de regiones. Con esto se determinan las regiones homogéneas. Las semillas fueron obtenidas de manera manual, pero se hará posteriormente de forma automática.
3. Se realiza una diferencia de imágenes entre la imagen original y las regiones homogéneas calculadas en el paso anterior.
4. Se obtiene el histograma de la imagen calculada en el paso que contiene las regiones de transición. Se determinan 3 regiones de transición.
5. Se extraen los vectores característicos de las regiones homogéneas (dos coberturas a la vez) y de las 3 regiones de transición. Las características utilizadas son: Niveles de gris para cada banda espectral usada, información de textura tales como homogeneidad, correlación, energía y entropía. En total son 43 valores.
6. Se realiza la difusión de los vectores característicos para obtener las características difusas que representa a cada región de la imagen. La figura 17 muestra las funciones de membresías usadas para realizar la difusión. Se usaron funciones de membresías triangulares.
7. Se calcula la pertenencia de cada región de transición respecto a las regiones homogéneas. Esto se hace a calcula usando la siguiente ecuación:

- 36 -
Donde: h = región homogénea
t = región de transición
VCD = Vector de Características Difuso
n = número de elementos de VCD
Una modificación realizada a esta ecuación es que para los pares de elementos ceros (cero en el elemento i del VCD de la región homogénea y de la región de transición), se penalizará restando un 1 al divisor. Con esto se hace una distancia mayor para aquellos elementos que sean igual a cero.
El valor d encontrado es complementado para tomar la decisión de pertenencia final. Si d = 0, significa similitud o pertenencia máxima y si d = 1, significa similitud o pertenencia nula.
Figura 17.- Funciones de membresías triangulares usadas para difusión de los VCD. La figura 18 muestra los resultados para la primera imagen segmentada.
(a)
bajo medio alto
Valor mínimo Valor medio Valor máximo

- 37 -
(b)
Figura 18.- (a) Imagen original. (b) Imagen segmentada.
La tabla 11 muestra los resultados comparativos entre el clasificador de regiones de transición propuesto y los clasificadores suaves de IDRISI.
CLASIFICADORES
Clase Bayclass Fuzzclass KNN Propuesto
Región homogénea 1 Agua 36592 32298 40381 33943
Región homogénea 2 Urbano 74257 67527 67196 45699
Región de transición 1: % de pertenencia/no. píxeles
Agua 236 ND 4250 0.7212 / 23902
Urbano 344 ND ND 0.7524 / 23902
Región de transición 2: % de pertenencia/no. píxeles
Agua ND ND ND 0.5051 / 7370
Urbano ND ND ND 0.7201 / 7370
Región de transición 3: % de pertenencia/no. píxeles
Agua ND ND ND 0.4506 / 563
Urbano ND ND ND 0.5937 / 563
No Clasificados 1381 12985 983 1333
Total 112810 112810 112810 112810
ND: No determinado.
Tabla 11.- Resultados comparativos de la clasificación de la imagen mostrada en la figura 18.
4.5 Análisis de los resultados obtenidos
De los resultados de la tabla 11 se observa que en la clasificación de la clase agua el método Fuzzclass y el propuesto son muy similares. En este caso podría concluirse que tal vez las dos clasificaciones son difusas. Pero en el caso del

- 38 -
clasificador propuesto, esta región la determina el segmentador y no el clasificador.
Los clasificadores suaves tomados de IDRISI no son capaces de determinar las regiones de transición de una manera clara. Sin embargo el clasificador Bayclasss determina una región mezclada pero sin precisar la pertenencia a la clase respectiva. En el clasificador propuesto, se determinó buscar tres distintas regiones de transición. En este aspecto, se utilizará el análisis de histograma para determinar los intervalos representativos en las bandas espectrales para seleccionar el número de regiones de transición de forma automática.
La medida de similitud es una suma promediada de las distancias absolutas entre los VCD entre regiones de transición y regiones homogéneas. Para la región de transición 1, se encontró una pertenencia de 0.7212 a la clase agua y una pertenencia de 0.7524 a la clase urbano. Esta región corresponde al color rojo mostrado en la imagen de la figura 18 donde existe una composición entre agua y zona urbana. Aquí se encuentra la ubicación de la costa donde existe la presencia de agua y casas cerca de la costa.
Con la segmentación (ubicación) de las regiones homogéneas (una sola cobertura) se le instruye al clasificador suave propuesto para que sólo clasifique las regiones de transición con la ayuda de las regiones homogéneas. Esto no permite que las zonas mezcladas puedan ser interpretadas como regiones homogéneas como se muestra en la clasificación de IDRISI.
4.6 Conclusiones
La tarea de clasificación de las regiones de transición presentes en una imagen satelital tiene un alto grado de dificultad. La ubicación de estas regiones requiere de una mayor información que tan solo las bandas espectrales como se muestra con las clasificaciones de IDRISI Andes.
La combinación de información a nivel píxel y a nivel región nos proporciona mayor grado de confianza para la toma de decisiones para la clasificación de regiones de transición.
Los experimentos realizados trabajan con dos coberturas solamente, pero en el caso de aumentar el número de coberturas se puede aplicar la misma metodología ubicando primeramente las “n” regiones homogéneas y posteriormente analizando las regiones de transición.
Se utilizó una medida de similitud bastante simple pero se propondrán dos medidas de similitud para ser aplicadas una para los valores de las firmas espectrales y otra para los valores de textura. Con estos dos resultados se utilizará un operador de fusión de decisión para determinar la pertenencia a las clases.

- 39 -
Referencias
[Angelov, 2008] P., Angelov, E., Lughofer, X., Zhou, “Evolving fuzzy classifiers using different model architectures”, Fuzzy Sets and Systems, Elsevier, 2008, Vol. 159, Pages: 3160-3182.
[Chowdhury, 2007]
P.R., Chowdhury, B., Deshmukh, A., Goswami, “Machine Extraction of Landforms from Multispectral Images Using Texture and Neural Methods”, International Conference on Computing: Theory and Applications, 2007, Pages: 721-725.
[Dai, 2007] Ch., Dai, X., Huang, G., Dong, “Support Vector Machine for Classification of Hyperspectral Remote Sensing Imagery”, Fourth International Conference on Fuzzy Systems and Knowledge Discovery, Vol. 4, 2007, Pages: 77 – 80.
[Doan, 2006] H. T. X., Doan, G. M., Foody, “Increasing soft classification accuracy trough the use of an ensemble of classifiers”, Proceedings 2005 IEEE International on Geoscience and Remote Sensing Symposium, 2005, Vol. 1.
[Fortin, 2000] M. J., Fortin, “Issues related to the detection of boundaries”, Landscape ecology, Springer Netherlands, 2000, Vol. 15, Pages: 453-466.
[Ghosh, 2009] A. Ghosh, B. U., Shankar, S. K., Meher, “A novel approach to neuro-fuzzy classification”, Neural Networks, ACM, Vol. 22, 2009, Pages: 100-109.
[Gómez, 2007] O., Gómez Ramos, “Segmentation of Multispectral Satellite Images based on Seeded Region Growing and Instance-Based Learning”, Tesis de Maestría, Instituto Nacional de Astrofísica, Óptica y Electrónica, 2007.
[Gutiérrez, 2005] J., Gutiérrez, H., Jegat, “Uso de la Teoría de Lógica Difusa en la Clasificación de Imágenes Satelitales con Coberturas Mixtas: El Caso Urbano de Mérida, Venezuela”, Interciencia, Asociación Interciencia, Caracas Venezuela, 2005.
[Han, 2005] J., Han, K., Chi, Y., Yeon, “Land Cover Classification of IKONOS Multispectral Satellite Data: Neuro-Fuzzy, Neural Network and Maximum Likelihood Methods”, Lecture notes in computer science, Springer Berlin /Heidelberg, 2005, Vol. 3642/2005, Pages: 251-262.
[Huai-bin, 2008] W., Huai-bin, M. A., Jin-hua, “A classification method of multispectral images which is based on fuzzy SVM”, International Conference on Computer Science and Software Engineering, 2008, Vol. 1, Pages: 815-818.
[Jara, 2009] J.L., Jara, R., Acevedo, “Crisp Classifiers vs. Fuzzy Classifiers: A Statistical Study”, Adaptive and Natural Computing Algorithms, Springer-Verlag, 2009, Vol. 5495/2009, Pages: 440-447.
[Jianming, 2008] L., Jianming, H., Shuguang, H., Rongsheng, Q., Kunming, "Image Classification Based on Fuzzy Support Vector Machine", International Symposium on Computational Intelligence and Design, 2008, Vol. 1, Pages: 68-71.
[Li, 2008] J., Li, S., Huang, R., He, K., Qian, "Image Classification Based on Fuzzy Support Vector Machine", International Symposium on Computational Intelligence and Design, 2008, Vol. 1, Pages: 68-71.

- 40 -
[Lucieer, 2002] A., Lucieer, A., Stein, “Existencial uncertainty of special objects segmented from satellite sensor imagery”, IEEE Transactions on Geoscience and Remote Sensing, 2002, Vol. 40, Pages: 2518-2521.
[Malanson, 2006] G. P., Malanson, Y., Zeng, S. J., Walsh, “Landscape Frontiers, Geography Frontiers: Lessons to Be Learned”, Forum and journal of the association of American geographers, Wiley Interscience, 2006, Vol. 58, Pages: 383-396.
[Minh, 2008] T., Minh Nguyen, Q. M. J., Wu, "A Combination of Positive and Negative Fuzzy Rules for Image Classification Problem", Seventh International Conference on Machine Learning and Applications, 2008.
[Mitrakis, 2008] N. E., Mitrakis, C. A., Topaloglou, T. K., Alexandridis, J. B., Theocharis, G. C., Zalidis, “Decision fusion of GA self-organizing neuro-fuzzy multilayered classifiers for land cover classification using textural and spectral features”, IEEE Transactions on Geoscience and Remote Sensing, 2008, Vol. 46, Pages: 2137 – 2152.
[Nauck, 1995] D., Nauck, R., Kruse, “NEFCLASS a neuro-fuzzy approach for the classification of data. Applied Computing”, Nashville Feb.26-28, ACM Press, New York, 1995, Pages: 461-465.
[Nguyen, 2008] T. M., Nguyen, Q. M. J., Wu, “A combination of positive and negative fuzzy rules for image classification problem”, Proceedings of the 2008 Seventh International Conference on Machine Learning and Applications, 2008, Pages: 741-746.
[Pal, 2005] N. R., Pal, A., Laha, J., Das, “Designing fuzzy rule based classifier using self-organizing feature map for analysis of multispectral satellite images”, International Journal of Remote Sensing, 2005, Vol. 26, Pages: 3875.
[Pan, 2007] Ch., Pan, H., Gao, S., Yang, "Image Recognition using SVM-weighted Non-negative Matrix Factorization," Third International Conference on Natural Computation (ICNC 2007), 2007, Vol. 1, Pages: 577-581.
[Plaza, 2004] A., Plaza, “A new approach to mixed pixel classification of hyperspectral imagery based on extended morphological profiles”, Pattern Recognition, Elsevier, Vol. 37, 2004, Pages: 1097-1116.
[Poovalinga, 2009]
B., Poovalinga Ganesh, S., Rajendran, A., Thirunavukkaras, K., Maharani, “Visualizing uncertainty — How fuzzy logic approach can help to explore iron ore deposits?”, Journal of the Indian Society of Remote Sensing, Springer
India, 2009, Vol. 37, Pages: 1-8.
[Pu, 2008] R., Pu, P., Gong, R., Michishita, T., Sasagawa, “Spectral mixture analysis for mapping abundance of urban surface components from the Terra/ASTER data”, Remote sensing of environment, Elsevier N. Y., 2008, Vol. 112, Pages: 939-954.
[Rashidy, 2007] H., Rashidy Kanan, K., Faez, S., Mostafa Taheri, “Feature Selection Using Ant Colony Optimization (ACO): A New Method and Comparative Study in the Application of Face Recognition System”, Lecture notes in computer science, Springer Berlin /Heidelberg, 2007.

- 41 -
[Reddy, 2005] G. M., Reddy, B. K., Mohan, “Classification of remotely sensed images using neural-network ensemble and fuzzy integration”, Pattern Recognition and Machine Intelligence, Springer Berlin/Heidelberg, 2005, Vol. 3776/2005, Pages: 350-355.
[Robles, 07] J. F., Robles Camacho, “Extracción de Mapas Temáticos a partir de la Clasificación en Imágenes Satelitales”, Tesis de Maestría, Instituto Nacional de Astrofísica, Óptica y Electrónica, 2007.
[Ronald, 2006] Ronald Eastman, J.: Idrisi Andes: Guide to GIS and Image Processing. Clark University, 2006.
[Sanjay, 2008] K. C. E., Sanjay Raj, S., Venkataraman, G., Varadan, "A Fuzzy Approach to Region of Interest Coding in JPEG 2000 for Automatic Target Recognition Applications from High-Resolution Satellite Images", Sixth Indian Conference on Computer Vision, Graphics & Image Processing, 2008, Pages: 193-200.
[Schiewe, 2009] J., Schiewe, M., Ehlers, C., Kinkeldey, D., Tomowski “Implementation of indeterminate transition zones for uncertainty modeling in classified remotely sensed scenes”, Proceedings of the 12th AGILE International Conference on Geographic Information Science, Hannover 2009.
[Singh, 2008] A., Singh, P., Jaikumar, S. K., Mitra, "A Bayesian Learning Based Approach for Clustering of Satellite Images", Indian Conference on Computer Vision, Graphics & Image Processing, 2008, Pages: 182-192.
[Sucar, 2005] L. E., Sucar, G., Gómez, Notas del curso “Visión Computacional”, Instituto Nacional de Astrofísica, Óptica y Electrónica, 2005.
[Tiwari, 2008] R. S., Tiwari, M. K., Arora, T., Kailash, “Soft classification for sub-pixel land cover extraction”, Journal of the Indian Society of Remote Sensing, Springer, 2008, Vol. 27, Pages: 225-234.
[Wei, 2008] W., Wei, G., Guanglai, “An Application of Neuro-fuzzy System in Remote Sensing Image Classification”, International Conference on Computer Science and Software Engineering, 2008, Vol. 1, Pages: 1069-1072.
[Zeng, 2003] H., Zeng, Y., Yi, “Image Recognition Using Adaptive Fuzzy Neural Network and Wavelet Transform”, Rough Sets, Fuzzy Sets, Data Mining, and Granular Computing, Springer Berlin/Heidelberg, 2003, Vol. 2639/2003, Pages: 590.