INVERSORES RESONANTES DE ALTA …ieee-pels-ies.es/Pels/Pdf/Inversores Resonantes.pdf ·...
100
Universidad de Oviedo INVERSORES RESONANTES DE ALTA FRECUENCIA Presentado por José Marcos Alonso Álvarez para optar a la plaza de PROFESOR TITULAR DE UNIVERSIDAD en el Área de Conocimiento de TECNOLOGÍA ELECTRÓNICA Concurso convocado por Resolución de 26 de febrero de 1998 de la Universidad de Oviedo (B.O.E. de 25 de marzo de 1998) GIJÓN – MAYO 1999
-
Upload
trankhuong -
Category
Documents
-
view
231 -
download
0
Transcript of INVERSORES RESONANTES DE ALTA …ieee-pels-ies.es/Pels/Pdf/Inversores Resonantes.pdf ·...

Universidad de Oviedo
INVERSORES RESONANTES
DE ALTA FRECUENCIA
Presentado por
José Marcos Alonso Álvarez
para optar a la plaza de
PROFESOR TITULAR DE UNIVERSIDAD
en el Área de Conocimiento de
TECNOLOGÍA ELECTRÓNICA
Concurso convocado por Resolución de 26 de febrero de 1998
de la Universidad de Oviedo (B.O.E. de 25 de marzo de 1998)
GIJÓN – MAYO 1999

ÍNDICE 1.- INTRODUCCIÓN A LOS INVERSORES RESONANTES
1.1.- Justificación y ámbito de la lección 1
1.2.- Parámetros característicos de un inversor 3
1.3.- Diagrama de bloques de un inversor resonante 5
2.- TOPOLOGÍAS Y CONTROL DE INVERSORES RESONANTES
2.1.- Topologías de inversores resonantes 9
2.2.- Control de la potencia de salida de un inversor resonante 15
2.3.- Modos de funcionamiento de un inversor resonante 25
2.4.- Efecto de los parámetros de control en el modo de funcionamiento 31
3.- ANÁLISIS ESTÁTICO DE INVERSORES RESONANTES
3.1.- Métodos de análisis 35
3.2.- Obtención de características 38
3.3.- Análisis comparativo de inversores resonantes 40
3.4.- Comentarios para la selección de una topología 55
4.- INTRODUCCIÓN AL ANÁLISIS DINÁMICO DE INVERSORES RESONANTES
4.1.- Introducción 57
4.2.- Metodología de estudio dinámico 58
4.2.1.- Aplicación al modelado en el espacio de estados 60
4.2.2.- Caso particular: sistemas lineales e invariantes 61
4.3.- Ejemplos de modelado 65
4.3.1.- Modelado de un inversor resonante LC paralelo 65
4.3.2.- Modelado de un convertidor CC-CC resonante 79

2
APÉNDICE A: SIMULACIÓN POR ORDENADOR DE UN CIRCUITO DE POTENCIA
A.1.- Ecuaciones de simulación de un convertidor de potencia a partir del
modelo en el espacio de estados 83
4.1.- Aplicación al modelado de un inversor resonante LC paralelo 85
APÉNDICE B: OBTENCIÓN DE LA RESPUESTA DINÁMICA DEL INVERSOR LC PARALELO
BIBLIOGRAFÍA

1. INTRODUCCIÓN A LOS INVERSORES RESONANTES 1.1. Justificación y ámbito de la lección
La función de un inversor consiste en la generación de una onda de tensión o de corriente
alterna de una determinada magnitud y frecuencia a partir de una fuente de energía continua.
Su funcionamiento cae por tanto en el campo de la conversión CC-CA y sus aplicaciones son
muy numerosas.
La presente lección se centrará en los inversores resonantes de alta frecuencia, y especial-
mente aquellos cuya fuente primaria de alimentación corresponde a una fuente de tensión. En
estos inversores se genera una onda de tensión cuadrada o cuasi-cuadrada de alta frecuencia
(por encima de 20kHz), que posteriormente es filtrada por medio de un circuito tanque reso-
nante para obtener una onda de alta frecuencia con bajo contenido en armónicos. Finalmente
esta onda es empleada para alimentar una determinada carga.
Los inversores resonantes de alta frecuencia han sido objeto de numerosos estudios recien-
tes. Esto es debido al amplio número de aplicaciones que han venido apareciendo en los últi-
mos años para este tipo de convertidores de potencia. Entre ellas cabe destacar las siguientes:
Alimentación de lámparas de descarga
Los inversores resonantes encuentran una aplicación particularmente interesante en la ali-
mentación de lámparas de descarga. Además de realizar el encendido y la alimentación de la
lámpara en régimen permanente al igual que los sistemas tradicionales (balastos electromag-
néticos), presentan la ventaja de alimentar las lámparas con corriente de alta frecuencia. Esto
produce un aumento del flujo luminoso emitido por la lámpara con respecto al emitido a fre-
cuencias de red para la misma potencia eléctrica. Además la alimentación a alta frecuencia
elimina el efecto estroboscópico, aumentando la calidad de la iluminación proporcionada por
estas lámparas y haciendo posible su empleo en aplicaciones críticas como sistemas de reco-
nocimiento de imagen por CCD, naves industriales con equipos móviles, etc. Otras ventajas
adicionales son las derivadas de un mayor rendimiento energético en la etapa de potencia,
control del flujo luminoso, regulación de la potencia eléctrica entregada a la lámpara, etc. [25-
38].
LECCIÓN DE OPOSICIÓN
2
Calentamiento por inducción
El calentamiento por inducción es otra aplicación interesante de los inversores resonantes.
En los sistemas de calentamiento eléctrico tradicionales gran parte de calor generado eléctri-
camente se pierde en el entorno del generador debido a fugas térmicas, por lo que el rendi-
miento energético del proceso es reducido. Por medio del calentamiento por inducción el ren-
dimiento del proceso se mejora en gran medida. En este proceso se genera una onda de co-
rriente alterna de frecuencia comprendida dentro del rango 25-40kHz, con la que se alimenta
una bobina de inducción. El campo magnético creado por la bobina induce corrientes circula-
torias en el elemento metálico a calentar. De esta forma toda la energía eléctrica es transferida
en forma de energía útil de calentamiento [14-16].
Soldadura por arco eléctrico
En la soldadura de arco eléctrico la energía de fusión se proporciona por medio de un arco
eléctrico entre dos electrodos, uno de los cuales es la pieza metálica a soldar. En estos equipos
es imprescindible el aislamiento galvánico entre la entrada y la salida. Los sistemas tradicio-
nales emplean un transformador de baja frecuencia seguido de un puente de tiristores y una
bobina de valor elevado para disminuir el rizado de la corriente del arco. El empleo de un
inversor resonante seguido de un transformador de alta frecuencia, rectificador y bobina de
alta frecuencia permite tanto reducir el tamaño y peso del equipo como aumentar su eficien-
cia. En estos equipos se obtiene eficiencias del orden del 90% [9, 10].
Equipos ultrasónicos
La alimentación de cargas ultrasónicas es otra aplicación relativamente reciente de los in-
versores resonantes. En estas aplicaciones se alimentan cargas construidas con materiales pie-
zoeléctricos, con una onda de tensión de alta frecuencia (por encima del margen audible de 20
kHz) de manera que la energía eléctrica es transformada en energía mecánica que puede ser
transformada de nuevo en energía eléctrica (transformadores piezoeléctricos, motores ultrasó-
nicos), o simplemente empleada como medio de obtención de información (sonar, ecografía,
etc.) [11-13].

INTRODUCCIÓN A LOS INVERSORES RESONANTES
3
Procesos electrostáticos
En determinados procesos electrostáticos, como por ejemplo la descarga en corona, es útil
el empleo de un inversor resonante de alta frecuencia. Algunos ejemplos de aplicación son el
tratamiento de materiales por descarga en corona, la separación de sustancias y la generación
de ozono [ 6-8].
Reguladores CC-CC conmutados
Los reguladores conmutados de tensión continua pueden implementarse en base a un in-
versor resonante sin mas que añadir un rectificador a la salida del mismo. En este caso suele
hablarse de reguladores conmutados resonantes. Presentan la ventaja de manejar evoluciones
senoidales en los interruptores, con lo que las pérdidas de conmutación son menores, pudien-
do elevarse por tanto la frecuencia de conmutación. De esta forma se consiguen equipos de
alimentación con una elevada relación potencia/volumen, alta eficiencia y muy buena res-
puesta dinámica [17-24].
Se comprueba por tanto que los inversores resonantes de alta frecuencia corresponden a
topologías de alimentación de amplio uso, cuyo estudio no debe ser obviado en un programa
actual de Electrónica de Potencia.
En esta introducción se presentarán los conceptos básicos sobre el tema, las diferentes eta-
pas de un inversor resonante así como sus características. En la sección segunda se mostrarán
las diferentes topologías de inversores, los métodos y parámetros de control más empleados, y
sus diferentes modos de funcionamiento.
En el apartado tercero se presenta la metodología de estudio estático de los inversores re-
sonantes y se obtiene algunas de sus características más interesantes. Se finaliza el apartado
con una comparación de los diferentes inversores así como algunos comentarios que ayudan a
la selección de la topología más adecuada para cada aplicación.
Finalmente, el cuarto apartado está dedicado a introducir el tema del modelado dinámico
de convertidores de potencia y en particular de los inversores resonantes. Se presenta en él
tanto la metodología de análisis como algunos ejemplos de modelado dinámico de convertido-
res de potencia.

LECCIÓN DE OPOSICIÓN
4
1.2. Parámetros característicos de un inversor
La figura 1.1 muestra un inversor alimentando una carga genérica. El inversor se caracteri-
za básicamente por la calidad de su onda de salida, que en general puede ser una tensión o una
corriente. Cuanto menor sea el contenido en armónicos de la onda de salida más próxima será
ésta a una onda senoidal pura. En este sentido se definen los parámetros siguientes:
FuentePrimaria
Inversor CargaV, I
CCCC-CA CA
Figura 1.1. Esquema de conversión CC-CA
Distorsión del armónico n:
1V
VD n
n = (1.1)
donde Vn y V1 representan el valor eficaz del armónico de orden n y fundamental respectiva-
mente.
Distorsión armónica total:
100......
(%)1
223
22 ⋅
++++=
VVVV
THD n (1.2)
Puesto que los armónicos de orden superior tienen un peso cada vez inferior en la onda de
salida del inversor y son por tanto más fáciles de filtrar, suelen definirse también factores de
distorsión ponderados, de la forma siguiente:
Factor de distorsión del armónico n:
nVV
DF nn
1= (1.3)

INTRODUCCIÓN A LOS INVERSORES RESONANTES
5
Factor de distorsión total:
100(%)1
...3,2
2
⋅
=∑
Vn
V
TDF
n
(1.4)
1.3. Diagrama de bloques de un inversor resonante
La Figura 1.2 muestra el diagrama de bloques de un inversor resonante, tanto para el caso
de alimentación en tensión (Fig. 1.2a) como para el caso de alimentación en corriente (Fig.
1.2b). Se observa que está formado por cinco etapas fundamentales:
• Fuente primaria de continua
• Inversor estático de alta frecuencia
• Circuito resonante
• Transformador de alta frecuencia
• Circuito de gobierno y control
FuentePrimaria
Inversor A.F. CircuitoResonante Carga
TransformadorA.F.
Circuitode
Control
FuentePrimaria Inversor A.F. Circuito
Resonante CargaTransformador
A.F.
Circuitode
Control
(a)
(b)
I
E
Figura 1.2. Diagrama de bloques de un inversor resonante: (a) Alimentado
en tensión y (b) alimentado en corriente.

LECCIÓN DE OPOSICIÓN
6
Fuente primaria de continua
La fuente de alimentación continua genera la tensión de entrada del inversor. En principio
podría ser una batería tal como representa la figura 1.2a, o de manera más general una etapa
de conversión alterna-continua para la alimentación desde la tensión de red. Esta conversión
podría realizarse empleando simplemente un rectificador seguido de un filtro o también de
forma más flexible empleando a continuación un convertidor CC/CC que podría variar la ten-
sión continua de entrada al inversor e incluso podría corregir el factor de potencia en la red.
Ejemplos de estas soluciones se muestran en la figura 1.3, tanto para el caso de alimentación
en tensión como para alimentación en corriente.
AC Control Al inversor
AC Control Al inversor
(a)
(b)
L D
QC
L L1
C
D
Q
Figura 1.3. Etapas electrónicas para la alimentación de un inversor
resonante: (a) en tensión y (b) en corriente
Inversor estático de alta frecuencia
El inversor de alta frecuencia emplea interruptores formados por transistores y diodos para
producir una onda de tensión o corriente de alta frecuencia. Los interruptores empleados de-
ben ser bidireccionales en corriente en el caso de inversores alimentados en tensión y unidi-
reccionales en corriente en el caso de inversores alimentados en corriente, tal como se ha re-
presentado en el diagrama de bloques de la figura 1.2. Estos interruptores manejan la corriente
o tensión de entrada del circuito tanque por lo que estas formas de onda serán un parámetro
fundamental a la hora de calcular las pérdidas en los mismos.

INTRODUCCIÓN A LOS INVERSORES RESONANTES
7
Circuito resonante
El objetivo del circuito tanque resonante es filtrar la onda de salida del inversor de forma
que las ondas de tensión y corriente en la carga sean prácticamente senoidales. El circuito
tanque debe suministrar la corriente y tensión necesaria para la carga en régimen permanente,
manejando la mínima corriente de entrada posible para así disminuir las pérdidas en los inter-
ruptores.
Transformador de alta frecuencia
En ocasiones puede ser necesario el empleo de un transformador de salida por alguna de
las razones siguientes:
♦ Puede ser necesario disponer de aislamiento galvánico entre la entrada y la salida,
por ejemplo para evitar el peligro de descargas eléctricas a personas o animales.
Es el caso típico de los inversores empleados en equipos de soldadura eléctrica.
♦ La tensión de entrada puede ser demasiado baja o demasiado alta, y es necesario
elevarla o reducirla respectivamente para alimentar la carga en régimen perma-
nente. Es el caso de alimentación de lámparas de descarga desde baterías en equi-
pos de iluminación de emergencia o autónomos. La relación de espiras del trans-
formador está determinada por la tensión de salida del circuito tanque y la tensión
necesaria en la lámpara.
Circuito de gobierno y control
El circuito de gobierno y control realiza diversas funciones, entre las que cabe destacar las
siguientes:
♦ Generación de las señales de disparo de los interruptores controlados y adaptación
al terminal de control de los mismos.
♦ Regulación de alguna de las variables de control de la carga (tensión, corriente,
potencia, etc.).
♦ Implementación de protecciones (sobretensión, sobrecorriente, fallos en la carga,
etc.)

LECCIÓN DE OPOSICIÓN
8

2. TOPOLOGÍAS Y CONTROL DE INVERSORES RESONANTES
2.1. Topologías de inversores resonantes
En esta lección se tratará exclusivamente el estudio de los inversores resonantes alimenta-
dos en tensión, por ser los de más uso en la mayoría de las aplicaciones. No obstante, la me-
todología de análisis y diseño es fácilmente aplicable al caso de inversores alimentados en
corriente.
Las diferentes topologías de inversores resonantes más habituales se obtienen combinando
un inversor de alta frecuencia de los mostrados en la figura 2.1a con un circuito resonante de
los ilustrados en la figura 2.1b.
E
1
1
NNE
E
E/2
+
E E/2
PUSH-PULL ASIMÉTRICO
MEDIO PUENTE
E
PUENTE COMPLETO
E
(a)
LC Serie LC Paralelo LCC Serie-Paralelo LCLC Serie-Paralelo
(b)
L C L
C
L Cs
Cp
Cs
Cp L p
L s
Figura 2.1. Topologías básicas de inversores resonantes alimentados en tensión

LECCIÓN DE OPOSICIÓN
10
Inversor push-pull
El inversor push-pull presenta la ventaja de poder ajustar el nivel de tensión de la onda
cuadrada de salida por medio de la relación de espiras del transformador. Sin embargo tiene el
inconveniente fundamental de que los transistores deben soportar el doble de la tensión de
entrada, ya que a la propia tensión de entrada se le suma el valor reflejado en el primario del
transformador. Esto hace necesario el empleo de transistores con tensiones de ruptura superio-
res y en consecuencia con peores características de conducción. Además esta topología exige
el uso de un elemento reactivo adicional como es el transformador, lo que aumenta el coste
para algunas aplicaciones. Esto hace que dicha topología se reserve para el caso de tensiones
de entrada reducidas, donde además el uso de un transformador elevador es inevitable.
Por otro lado, el diseño y la construcción del transformador debe realizarse con mucho
cuidado para evitar componentes continuas en el flujo del núcleo, que podrían dar lugar a
fuertes corrientes de magnetización, disminuyendo el rendimiento del inversor o incluso pro-
duciendo su destrucción debido a la saturación del transformador.
La figura 2.2 muestra las formas de onda más características del inversor push-pull así co-
mo los diferentes circuitos equivalentes que se obtienen durante su funcionamiento. El flujo
máximo en el transformador puede obtenerse a partir de la siguiente expresión:
dtd
NEφ
1= (2.1)
integrando se obtiene:
fN
Emax
141
=φ (2.2)
siendo N1 el número de espiras de los devanados primarios y f la frecuencia de conmutación.
A partir de (2.1) se obtiene la siguiente ecuación para el diseño del transformador:
fAB
EN
em41
1 = (2.3)
donde Bm es la inducción máxima en el núcleo y Ae su sección efectiva.

TOPOLOGÍAS Y CONTROL DE INVERSORES RESONANTES
11
E
1
1
N
Q1 D1Q2
D2
E
1
1
N
D1
E
1
1
N
Q1
E
1
1
N
D2
E
1
1
NNE
-
+
MODO I MODO II MODO III MODO IV
NE
-
+ -
+
NE
Q2
-
+
NE
iB2iB1
vO
iO
vCE1
T/2 T
t
iB1
iB2
NE vO
iO
Modo I Modo II Modo III Modo IV
Q1 ON
Q2 OFF
Q1 OFF
Q2 ON
D1 Q1 D2 Q2
UCE1
i C1
i D1
2E
T/2 T
φ
φmax
Figura 2.2. Circuitos equivalentes y formas de onda para el inversor push-pull.

LECCIÓN DE OPOSICIÓN
12
Inversor asimétrico
El inversor asimétrico es muy simple pues sólo requiere dos interruptores. Estrictamente
hablando esta topología no corresponde a un inversor pues genera una tensión de salida que
tiene siempre la misma polaridad. Esto hace preciso que el circuito tanque al que alimenta
esta topología presente un condensador en serie con la entrada de forma que se bloquee el
paso de corriente continua. Así la tensión alterna de entrada al circuito tanque corresponderá a
una onda cuadrada de tensión máxima igual a la mitad de la tensión de entrada. Esta topología
es muy empleada para la implementación de inversores autoscilantes. La figura 2.3 muestra
sus formas de onda más características.
E +
T/2 T
t
iB1
iB2
E/2vO
iO
Modo I Modo II Modo III Modo IV
Q1 ON
Q2 OFF
Q1 OFF
Q2 ON
D1 Q1 D2 Q2
UCE1E
Q1D1
Q2D2
vO
iO
C
u C= E/2
Figura 2.3. Formas de onda para el inversor asimétrico.
TOPOLOGÍAS Y CONTROL DE INVERSORES RESONANTES
13
Normalmente el condensador de filtro se considera parte del circuito resonante. El princi-
pal inconveniente de este inversor es que el condensador de filtro soporta un nivel de continua
igual a la mitad de la tensión de entrada. Por ello, este condensador debe ser de valor elevado
para minimizar el rizado de tensión. Por la misma razón, también debe ser un condensador de
baja resistencia serie, lo que aumenta su coste.
Inversor en medio puente
El inversor en medio puente emplea dos condensadores para crear un punto a una tensión
flotante igual a la mitad de la tensión de entrada. De esta forma la tensión de salida corres-
ponde directamente a una onda cuadrada de valor máximo igual a la mitad de la tensión de
entrada. Los condensadores deben ser escogidos adecuadamente de forma que sean capaces
de suministrar la energía necesaria en cada ciclo de conmutación sin una descompensación
excesiva en su tensión. Su funcionamiento es muy similar al del inversor asimétrico, las for-
mas de onda son iguales a las mostradas en la figura 2.3, por lo que no se repetirán aquí.
Inversor en puente completo
En algunas aplicaciones con elevada tensión de entrada, los inversores asimétrico y medio
puente, pueden no suministrar potencia suficiente a la salida, en estos casos puede emplearse
la topología en puente completo. Esta topología emplea cuatro interruptores para generar una
tensión cuadrada de valor máximo igual al de la tensión de entrada, el doble que en las otras
dos topologías anteriores, por lo que la potencia disponible en la salida se multiplica por cua-
tro. En este inversor los interruptores sólo soportan una tensión igual a la de entrada. Las for-
mas de onda más relevantes se ilustran en la figura 2.4.
Otra ventaja del inversor en puente completo es que permite la modulación de la señal de
salida, permitiendo así el control del valor eficaz de la tensión aplicada al circuito resonante.
Por otro lado, uno de los inconvenientes de este inversor es que en cada instante se encuentran
siempre dos semiconductores en estado de conducción. Por ello el rendimiento para potencias
de salida reducidas será inferior que en el caso de los otros inversores en los que sólo un se-
miconductor conduce en cada intervalo.

LECCIÓN DE OPOSICIÓN
14
E
Q1D1
Q2D2
Q3D3
Q4D4
T/2 T
t
iB1
iB3
EvO
iO
Modo I Modo II Modo III Modo IV
Q1, Q2 ON
Q3, Q4 OFF
Q1, Q2 OFF
Q3, Q4 ON
D1-D2 Q1-Q2 D3-D4 Q3-Q4
UCE1E
iB2
iB4
vO
i O
UCE2
Figura 2.4. Formas de onda características en el inversor en puente completo.
En cuanto a las posibilidades para la implementación del circuito resonante, en la figura
2.1b se mostraron algunos de los posibles circuitos que pueden ser empleados y que pueden
encontrarse en la bibliografía reciente. Los circuitos LC-serie, LCC y LCLC, incorporan todos
ellos un condensador en serie con la entrada por lo que pueden ser empleados directamente en
el inversor asimétrico o en topologías que incorporen un transformador. En la segunda parte
de este artículo se realizará un estudio comparativo de varios circuitos resonantes.
TOPOLOGÍAS Y CONTROL DE INVERSORES RESONANTES
15
2.2. Control de la potencia de salida de un inversor resonante
En muchas aplicaciones de inversores resulta interesante poder regular la tensión o corrien-
te de salida para mantenerla constante frente a variaciones en la tensión de entrada, en la car-
ga, etc. En otros casos puede ser interesante controlar la onda de salida en un margen amplio
para variar así la potencia entregada a la carga. Ejemplos típicos son el control del flujo lumi-
noso cuando se alimentan lámparas de descarga, el control de temperatura en sistemas de ca-
lentamiento por inducción, etc.
Las técnicas empleadas para el control de la potencia de salida de un inversor resonante
son básicamente las siguientes:
• Control de la tensión continua de entrada al inversor
• Control por frecuencia de conmutación de los interruptores
• Control por deslizamiento de fase o enclavamiento
• Control por modulación de ancho de pulso o PWM
• Control por modulación de densidad de pulsos o PDM
Tensión continua de entrada
Puesto que la tensión de salida del inversor de alta frecuencia, que es la tensión de entrada
del circuito tanque, depende directamente de la tensión continua de entrada, ésta puede em-
plearse como parámetro de control de la potencia suministrada por el inversor resonante. De
esta forma la onda alterna de salida mantiene su forma relativa y su frecuencia, variando su
amplitud proporcionalmente a la tensión continua de entrada. Esto exigiría el empleo de algu-
na etapa intermedia de conversión CA-CC que permitiese ajustar el nivel de la tensión conti-
nua de salida. Algunas de las posibles soluciones se muestran en la figura 2.5.
Para el caso de alimentación desde alterna puede emplearse un rectificador controlado, tal
como muestra la figura 2.5a. No obstante en este convertidor los interruptores trabajan a fre-
cuencias de red por lo que su respuesta dinámica es lenta. En caso de ser necesaria una res-
puesta dinámica rápida puede emplearse un convertidor CC-CC conmutado a frecuencia inde-
pendiente, tal como muestra la figura 2.5b. Finalmente, en el caso de alimentar el inversor
desde una batería se emplearán soluciones basadas en reguladores conmutados. En la figura
2.5c se muestra un convertidor elevador a modo de ejemplo.

LECCIÓN DE OPOSICIÓN
16
AC
AC Control
(a)
(b)
Inversor
Inversor
Control
(c)
InversorE
L
CT1 T2
T3 T4
D1 D2
D3 D4
Q
D
L
C
L
Q
D
C
Figura 2.5. Etapas previas para el control de la tensión de entrada al inversor.
El principal inconveniente de este método de control es la disminución en el rendimiento
total del inversor debido a la configuración en dos etapas, aparte de un mayor coste. Puede ser
interesante en algunos casos en los que se desee corregir el factor de potencia con esta prime-
ra etapa.
Control por frecuencia de conmutación
Este método resulta más sencillo que el anterior, ya que basta con variar la frecuencia de
conmutación de los transistores para variar la potencia suministrada a la salida del inversor. El
equivalente Thevenin de salida del circuito tanque depende de la frecuencia, lo que permite
variar la tensión o corriente de salida del inversor resonante por medio de variaciones en la
frecuencia de la tensión alterna de entrada a dicho circuito tanque. El principal inconveniente
TOPOLOGÍAS Y CONTROL DE INVERSORES RESONANTES
17
de este método es que los elementos reactivos, sobre todo bobinas y transformadores, deben
estar diseñados para su correcto funcionamiento en todo el rango de frecuencias, lo que no
permite optimizarlos en tamaño.
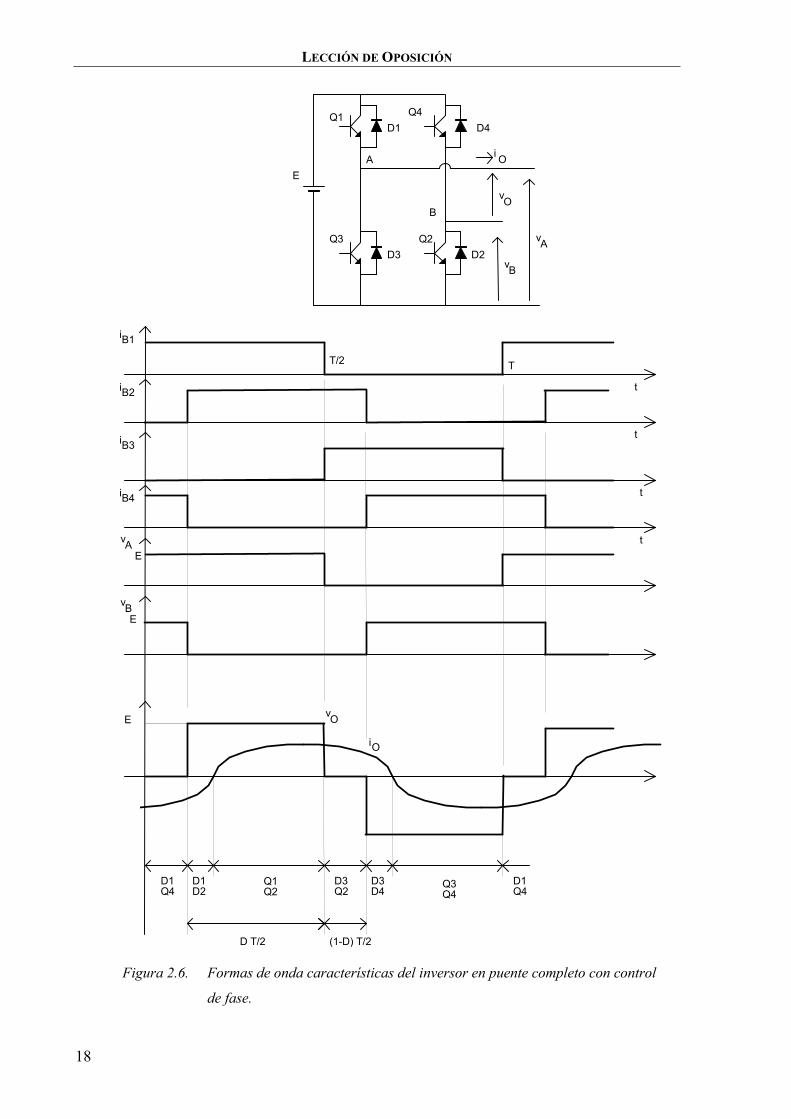
Control por deslizamiento de fase o enclavamiento
Por medio del control adecuado de los interruptores del inversor puede variarse la forma de
onda de salida, modificando su valor eficaz. El método consiste en no aplicar siempre toda la
tensión de entrada en la salida del inversor, sino que en determinados intervalos se cortocir-
cuita el circuito resonante, aplicándole tensión cero. Esto suele realizarse empleando la topo-
logía en puente completo en la que se utilizan los interruptores superiores o inferiores cerra-
dos simultáneamente para cortocircuitar la carga. Si además se varía la duración de los inter-
valos en los que está cortocircuitada la carga, puede modificarse la forma de onda de la salida
y por tanto su valor eficaz. Un ejemplo de esta topología junto con sus formas de onda carac-
terísticas se muestra en la figura 2.6.
El nombre de ciclo de trabajo dado a este parámetro de control suele emplearse por simili-
tud con el funcionamiento de los convertidores CC-CC conmutados, de ahí que en algunas
ocasiones a este modo de control se le denomine también modulación de ancho de pulso o
PWM. No obstante, las denominaciones más habituales son: método de deslizamiento de fase
(phase-shift) o de enclavamiento (clamped-mode). El algunas referencias también se les de-
nomina a estos inversores como inversores de clase D, por su similitud de funcionamiento con
los amplificadores de audio de clase D.
El valor eficaz de la tensión aplicada al circuito tanque se puede obtener integrando la for-
ma de onda de salida:
DEdtET
VDT
O == ∫2/
0
22 (2.4)
por tanto se puede controlar la tensión eficaz de entrada por medio del ciclo de trabajo si-
guiendo la ley expresada por (2.4).
Por otro lado la onda de entrada al circuito tanque se puede expresar empleando el desarro-
llo en serie de Fourier de la forma siguiente:
LECCIÓN DE OPOSICIÓN
18
E
Q1D1
Q2D2
Q3D3
Q4D4
T/2 T
t
iB1
iB2
EvO
iO
D1 Q1
vO
i O
t
iB3
iB4
t
t
A
B
v
Av
B
E
v
Bv
A
E
Q4D1D2 Q2
D3Q2
D3D4
Q3Q4
D1Q4
D T/2 (1-D) T/2
Figura 2.6. Formas de onda características del inversor en puente completo con control
de fase.
TOPOLOGÍAS Y CONTROL DE INVERSORES RESONANTES
19
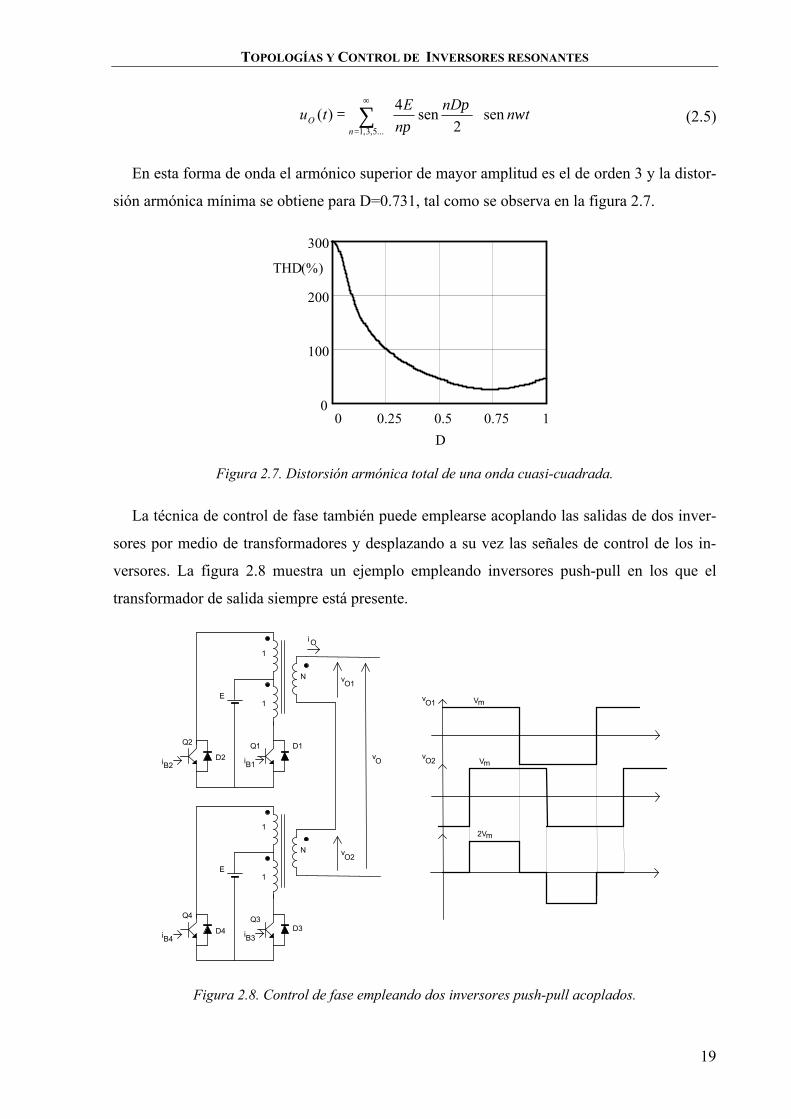
tnnD
nE
tun
O ωπ
πsen
2sen
4)(
...5,3,1∑
∞
=
= (2.5)
En esta forma de onda el armónico superior de mayor amplitud es el de orden 3 y la distor-
sión armónica mínima se obtiene para D=0.731, tal como se observa en la figura 2.7.
0 0.25 0.5 0.75 10
100
200
300
THD(%)
D
Figura 2.7. Distorsión armónica total de una onda cuasi-cuadrada.
La técnica de control de fase también puede emplearse acoplando las salidas de dos inver-
sores por medio de transformadores y desplazando a su vez las señales de control de los in-
versores. La figura 2.8 muestra un ejemplo empleando inversores push-pull en los que el
transformador de salida siempre está presente.
E
1
1
N
Q1 D1Q2
D2iB2iB1
iO
E
1
1
N
Q3D3
Q4
D4iB4iB3
vO2
vO1
vO
vO1
vO2
Vm
2Vm
Vm
Figura 2.8. Control de fase empleando dos inversores push-pull acoplados.
LECCIÓN DE OPOSICIÓN
20
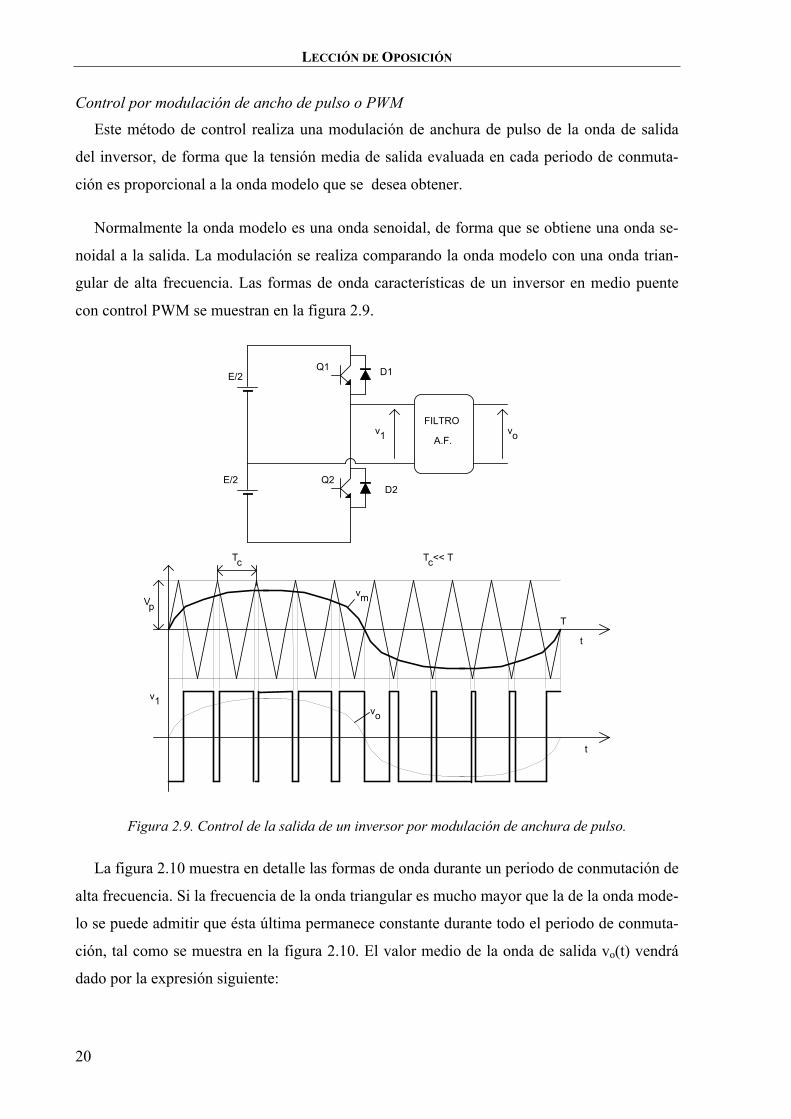
Control por modulación de ancho de pulso o PWM
Este método de control realiza una modulación de anchura de pulso de la onda de salida
del inversor, de forma que la tensión media de salida evaluada en cada periodo de conmuta-
ción es proporcional a la onda modelo que se desea obtener.
Normalmente la onda modelo es una onda senoidal, de forma que se obtiene una onda se-
noidal a la salida. La modulación se realiza comparando la onda modelo con una onda trian-
gular de alta frecuencia. Las formas de onda características de un inversor en medio puente
con control PWM se muestran en la figura 2.9.
E/2
E/2
Q1
Q2
D1
D2
v1FILTRO
A.F.vo
Tc
T
Tc<< T
Vp
v1vo
t
t
vm
Figura 2.9. Control de la salida de un inversor por modulación de anchura de pulso.
La figura 2.10 muestra en detalle las formas de onda durante un periodo de conmutación de
alta frecuencia. Si la frecuencia de la onda triangular es mucho mayor que la de la onda mode-
lo se puede admitir que ésta última permanece constante durante todo el periodo de conmuta-
ción, tal como se muestra en la figura 2.10. El valor medio de la onda de salida vo(t) vendrá
dado por la expresión siguiente:

TOPOLOGÍAS Y CONTROL DE INVERSORES RESONANTES
21
C
o T
ttEtvtv )()(
1 2)()( −+ −
== (2.6)
t(-) t(+)
+
_
α
α
E/2
v1(t) = vo(t)
v1(t)
vm(t)
Tc
Vp
Figura 2.10. Detalle de las formas de onda durante un periodo de conmutación
A partir de la figura 2.10 se obtienen las siguientes relaciones:
( ) αtantvVt mp )(2)( −=− (2.7)
( ) αtantvVt mp )(2)( +=+ (2.8)
a partir de (2.7) y (2.8) se obtiene:
αtantvtt m )(4)()( =− −+ (2.9)
donde:
p
c
VT
tan4/
=α (2.10)
Sustituyendo (2.9) y (2.10) en (2.6) se obtiene finalmente:
p
mO V
tvEtvtv
)(2
)()( 1 == (2.11)
LECCIÓN DE OPOSICIÓN
22
Se comprueba en (2.11) que la onda de salida es proporcional a la onda modelo de entrada.
Si la onda modelo es senoidal la ecuación (2.11) puede expresarse de la forma siguiente:
tmE
VtVE
tv ap
mO ω
ωsen
2sen
2)( == (2.12)
donde el factor ma se denomina factor de modulación en amplitud, y se define de la forma
siguiente:
p
ma V
Vm = (2.13)
La frecuencia de conmutación debe ser suficientemente elevada para poder admitir que la
onda modelo es constante durante todo el periodo de conmutación Tc. Se define el factor de
modulación de frecuencia de la forma siguiente:
ff
m cf = (2.14)
siendo fc la frecuencia de conmutación y f la frecuencia de la onda modelo.
Los armónicos de orden superior de la onda de salida v1(t) se sitúan en bandas centradas en
torno a la frecuencia de conmutación y sus múltiplos, es decir, en torno a las frecuencias nor-
malizadas mf, 2mf, 3mf, etc. Para valores de mf superiores a 8, que es lo más habitual excepto
en potencias muy elevadas, las magnitudes de los armónicos son prácticamente independien-
tes de mf. La frecuencia del armónico j correspondiente a la banda k viene dada por:
fkjmf fhj )( ±= (2.15)
donde para valores pares de j sólo se dan los valores impares de k y viceversa. La figura 2.11
muestra la distribución de armónicos.
La tabla 2.1 muestra los valores de amplitud normalizada Vh_pico/(E/2) en función del factor
de modulación ma y suponiendo mf ≥ 9.

TOPOLOGÍAS Y CONTROL DE INVERSORES RESONANTES
23
1 m fm f+2 m f+4m f -2
m f -4jmf
jmf +kjmf -k
si j par k imparsi j impar k par
............
...
Figura 2.11. Distribución de armónicos de una onda PWM para mf ≥ 9.
TABLA 2.1. AMPLITUD NORMALIZADA DE LOS ARMÓNICOS DE ORDEN SUPERIOR DE UNA ONDA PWM (MF≥9)
h \ ma 0.2 0.4 0.6 0.8 1.0
1 (fundamental) 0.2 0.4 0.6 0.8 1.0 mf mf ± 2 mf ± 4
1.242 0.016
1.150 0.061
1.006 0.131
0.818 0.220
0.601 0.318 0.018
2mf ± 1 2mf ± 3 2mf ± 5
0.190 0.326 0.024
0.370 0.071
0.314 0.139 0.013
0.181 0.212 0.033
3mf 3mf ± 2 3mf ± 4 3mf ± 6
0.335 0.044
0.123 0.139 0.012
0.083 0.203 0.047
0.171 0.176 0.104 0.016
0.113 0.062 0.157 0.044
Las frecuencias de conmutación más habituales suelen ser inferiores a 6 kHz o superiores a
20 kHz, para evitar el margen audible. Empleando tiristores rápidos pueden llegar a manejarse
potencias del orden de kVA.
La aplicación de este tipo de control para alimentación de cargas a alta frecuencia está li-
mitada debido a la necesidad de trabajar a frecuencias de conmutación muy altas. Por ejemplo
para alimentar una carga a 20 kHz sería necesario trabajar con frecuencias de conmutación del
orden de 200 kHz. Puesto que las pérdidas de conmutación en un convertidor se incrementan
proporcionalmente a la frecuencia de conmutación la aplicación de este método a alta fre-
cuencia daría lugar a rendimientos reducidos.

LECCIÓN DE OPOSICIÓN
24
Control por modulación de densidad de pulsos o PDM
La figura 2.12 ilustra las formas de onda de un inversor resonante con control por modula-
ción de densidad de pulsos. Para mayor simplicidad se ha representado el circuito resonante
como un circuito LC paralelo. En el control PDM se empleando los modos de funcionamiento
I, II y III para realizar el control de la energía entregada a la carga. Durante el modo III se
generan señales de disparo para los dos interruptores Q2 y Q3, proporcionando un circuito
bidireccional de libre circulación para la corriente resonante, aplicando tensión cero al mismo.
La figura 2.12 corresponde a un caso con densidad de pulsos de 3/4. La salida del inversor
resonante es una onda periódica de valor eficaz igual a 3/4 del valor máximo posible.
iO
vA
vB
E
Q1D1
Q2D2
Q3D3
Q4D4
vO
i O
E
Q1D1
Q2D2
Q3D3
Q4D4
vO
i O
E
Q1D1
Q2D2
Q3D3
Q4D4
vO
i O
E
Q1D1
Q2D2
Q3D3
Q4D4
vO
i O
A
B
A
B
A
B
A
B
Circuito Inversor Modo I
Modo II Modo III
Modo I Modo II Modo I Modo II Modo I Modo II Modo I Modo III Modo I Modo II Modo I
Figura 2.12. Control por modulación de densidad de pulsos.
TOPOLOGÍAS Y CONTROL DE INVERSORES RESONANTES
25
El método PDM proporciona gran precisión y amplio margen de control de la potencia de
salida, llegando a tenerse márgenes comprendidos entre el 0.5% y el 100%. Esto resulta espe-
cialmente interesante en determinadas aplicaciones como el tratamiento por descarga en coro-
na.
2.3. Modos de funcionamiento de un inversor resonante
El caso más general desde el punto de vista de los diferentes modos de conmutación que
pueden producirse corresponde al inversor en puente completo con control por deslizamiento
de fase que se ha mostrado en la figura 2.6. En esta topología se dispone de dos parámetros de
control: la frecuencia de conmutación y el ciclo de trabajo.
En función del desfase existente entre la tensión de salida vO y la corriente iO del circuito
resonante pueden darse los siguientes modos de conmutación:
• Modo de conmutación a tensión cero (ZVS) o conmutación forzada
• Modo de conmutación a corriente cero (ZCS) o conmutación natural
• Modo de conmutación mixto (ZVS-ZCS)
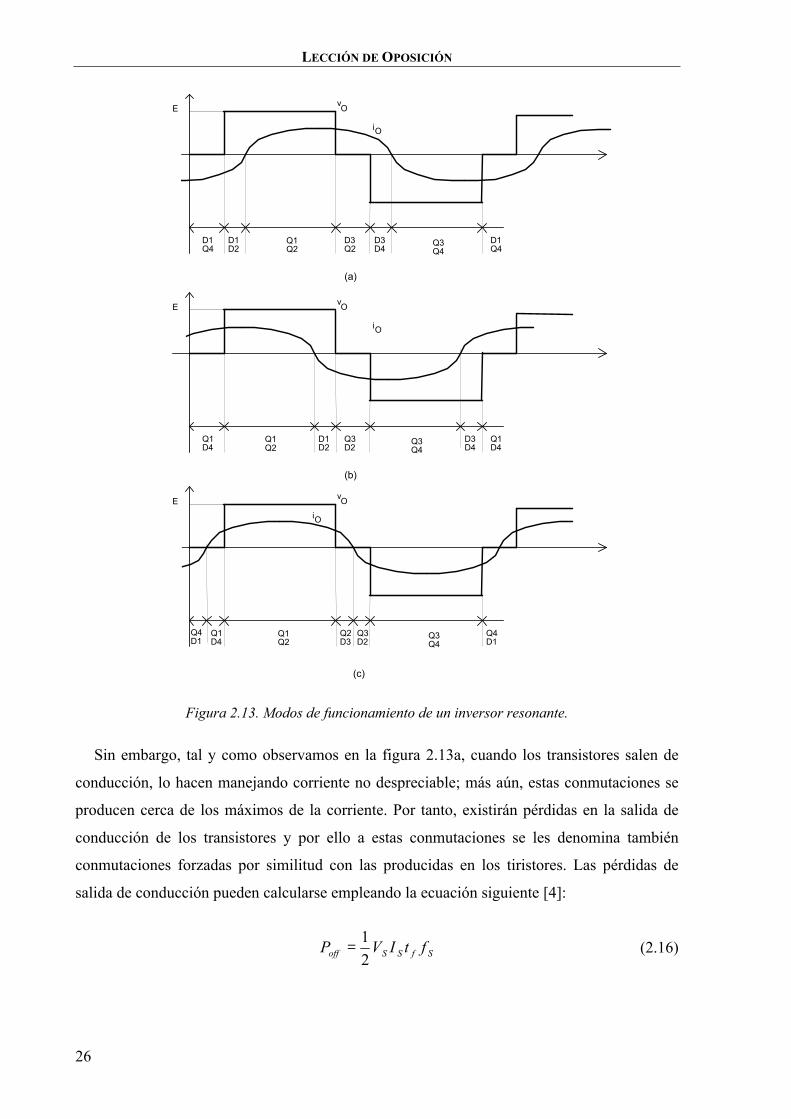
Modo de conmutación a tensión cero (ZVS)
La figura 2.13a muestra las ondas de gobierno de los transistores del puente junto con las
formas de onda de tensión y corriente en el circuito tanque para este modo de conmutación.
Como se observa en la figura, la secuencia de conducción para los dispositivos del puente es
Q1-Q2, D3-Q2, D3-D4, Q3-Q4, D1-Q4 y D1-D2. Cada transistor es activado cuando su diodo
en antiparalelo ya se encuentra conduciendo, esto hace que la tensión que soporta al entrar en
conducción sea muy reducida. Este tipo de conmutación se denomina por ello conmutación a
tensión cero o ZVS (Zero-Voltage-Switching) y cuando se produce, las pérdidas de entrada de
conducción del transistor son nulas.
LECCIÓN DE OPOSICIÓN
26
EvO
iO
D1 Q1Q4
D1D2 Q2
D3Q2
D3D4
Q3Q4
D1Q4
(a)
EvO
iO
Q1 Q1D4
D1D2Q2
Q3D2
D3D4
Q3Q4
Q1D4
(b)
EvO
iO
Q4 Q1D1
Q3D2Q2
Q2D3
Q4D1
Q3Q4
Q1D4
(c)
Figura 2.13. Modos de funcionamiento de un inversor resonante.
Sin embargo, tal y como observamos en la figura 2.13a, cuando los transistores salen de
conducción, lo hacen manejando corriente no despreciable; más aún, estas conmutaciones se
producen cerca de los máximos de la corriente. Por tanto, existirán pérdidas en la salida de
conducción de los transistores y por ello a estas conmutaciones se les denomina también
conmutaciones forzadas por similitud con las producidas en los tiristores. Las pérdidas de
salida de conducción pueden calcularse empleando la ecuación siguiente [4]:
SfSSoff ftIVP21
= (2.16)
TOPOLOGÍAS Y CONTROL DE INVERSORES RESONANTES
27
siendo VS, IS los valores de tensión y corriente que maneja el interruptor en el momento de la
conmutación, tf el tiempo de salida de conducción del interruptor y fs la frecuencia de conmu-
tación.
No obstante, las pérdidas de salida de conmutación de estos transistores pueden minimizar-
se empleando redes de protección no disipativas, constituidas exclusivamente por un conden-
sador colocado en paralelo con cada transistor. Esto es posible gracias a que los transistores
siempre entran en conducción con tensión cero y por tanto la energía de la red de protección
no se vuelca al transistor. Se demuestra que el condensador óptimo para esta aplicación es el
siguiente [5]:
S
fSóptimo V
tIC
41
= (2.17)
siendo las pérdidas de conmutación obtenidas con este condensador las siguientes:
SfSSoff ftIVP121
= (2.18)
Con este modo de conmutación, y empleando condensadores como redes de protección no
disipativas se eliminan los problemas de sobretensión en los interruptores y se disminuye de
forma considerable las pérdidas de salida de conducción.
Por otro lado, los diodos empleados en el inversor pueden ser de baja velocidad pues nunca
se les aplica tensión inversa instantáneamente para la salida de conducción, sino que el diodo
deja de conducir porque la corriente se invierte y pasa a su transistor en antiparalelo, mante-
niéndose baja la tensión en el diodo, que además dispone de todo el tiempo de conducción del
transistor para salir de su estado de conducción. Esto hace que puedan emplearse los diodos
parásitos que se encuentran en muchos transistores Darlington de potencia y en todos los
MOSFET de potencia.
Modo de conmutación a corriente cero (ZCS)
La figura 2.13b muestra las formas de onda de control de los transistores y de tensión y co-
rriente en el circuito tanque resonante para este modo de funcionamiento. Como vemos en la
figura 2.13b la secuencia de conmutación en este caso es Q1-Q2, D1-D2, Q3-D2, Q3-Q4, D3-
D4 y Q1-D4. Ahora cada transistor sale de conducción porque su corriente pasa por cero, se
invierte y comienza a circular de forma natural por el diodo que tiene en antiparalelo.

LECCIÓN DE OPOSICIÓN
28
Los transistores salen de conducción con corriente cero, de ahí que a este tipo de conmuta-
ción se la denomine conmutación a corriente cero o ZCS (Zero-Current-Switching). En este
caso las pérdidas de salida de conducción en los transistores son nulas y por ello a estas con-
mutaciones se las denomina en ocasiones conmutaciones naturales.
Sin embargo, en este caso cuando se produce la entrada de un transistor su diodo en antipa-
ralelo no se encuentra en conducción y el transistor está soportando la tensión de entrada. La
entrada en conducción no se produce a tensión cero como en el caso anterior, sino que el tran-
sistor se ve obligado a manejar simultáneamente corriente y tensión durante la conmutación,
con las consiguientes pérdidas.
En cuanto a los diodos se producen problemas adicionales en las conmutaciones. Si obser-
vamos la figura 2.13b el transistor que entra en conducción lo hace sacando de conducción al
diodo del otro transistor de su misma rama; por ejemplo, en la mencionada figura, Q3 entra en
conducción polarizando inversamente a D1 y la corriente debe pasar instantáneamente desde
el diodo al transistor, lo que no puede ocurrir debido al propio tiempo de recuperación en in-
versa del diodo. Esto provoca la aparición de picos de corriente debido a cortorcircuitos pun-
tuales, además de las pérdidas de entrada de conducción del transistor y de salida del diodo.
Por ello en este modo se hace necesario el empleo de diodos rápidos con bajo tiempo de
recuperación en inversa para disminuir los problemas durante la conmutación. Aquí ya no es
válido el empleo de los diodos parásitos de los Darlington o de los MOSFET debido a sus
malas características. En tales casos, estos diodos deben ser anulados colocando diodos rápi-
dos uno de bloqueo en serie con el transistor y otro en paralelo con el conjunto transistor y
diodo adicional.
Modo de conmutación mixto (ZVS-ZCS)
Para valores reducidos del ciclo de trabajo aparece el modo de conmutación mixto, en el
cual dos de los interruptores del puente trabajan en ZVS, mientras que los otros dos lo hacen
en ZCS. Las formas de onda características en este modo se muestran en la figura 2.13c. La
secuencia de conmutación en este caso es la siguiente: Q1-Q2, Q2-D3, Q3-D2,Q3-Q4, Q4-D1
y Q1-D4. Como se observa, los transistores Q1 y Q3 entran en conducción cuando sus diodos
en antiparalelo están ya conduciendo, es decir, conmutan a tensión cero (ZVS) y salen de
conducción manejando corriente. Por otro lado, los transistores Q2 y Q4 de la otra rama en-
tran en conducción con tensión, pero salen de conducción de forma natural al invertirse la
TOPOLOGÍAS Y CONTROL DE INVERSORES RESONANTES
29
corriente y pasar a su diodo en antiparalelo, es decir conmutan a corriente cero (ZCS). Se tie-
ne por tanto una mezcla de las características de ambos modos.
Balance energético en los modos de conmutación
En principio, puede parecer que el mejor modo de funcionamiento es el modo de conmuta-
ciones a tensión cero en los cuatro interruptores, ya que las pérdidas de entrada en conducción
son nulas y las de salida de conducción pueden minimizarse empleando redes de protección
no disipativas. Además, presenta la ventaja adicional de que pueden ser empleados los diodos
parásitos de los semiconductores de potencia.
No obstante, no debe olvidarse el hecho de que las pérdidas totales en los semiconductores
vienen dadas por la suma de las pérdidas de conmutación y las pérdidas de conducción. Las
primeras dependen principalmente de los niveles de corriente y tensión con los que se produce
la conmutación y son proporcionales a la frecuencia, las segundas dependen de los valores
medios y/o eficaz de la corriente conducida (dependiendo del modelo de interruptor empleado
para evaluarlas) y son independientes de la frecuencia.
La figura 2.14 muestra las formas de onda de tensión y corriente de entrada en el circuito
tanque en los tres modos de conmutación comentados. Es evidente que el circuito tanque so-
lamente puede absorber o ceder energía durante los intervalos de tiempo en los cuales el in-
versor le aplica tensión no nula procedente de la fuente de entrada. Esto sucede durante un
intervalo de tiempo igual a D⋅T/2 en cada semiperiodo.
La energía neta suministrada a la carga es proporcional al área encerrada entre la onda de
corriente y el eje de tiempos. En la figura 2.14 se ha denotado con un signo "+" la energía
absorbida por el circuito tanque y con un signo "-" la cedida por el mismo a la fuente de en-
trada. De la figura 2.14 se deduce que tanto en el modo ZVS, en el que todos los transistores
conmutan a tensión cero, como en el ZCS donde lo hacen a corriente cero, existen intervalos
de tiempo en los que el circuito tanque absorbe energía e intervalos en los que la cede. En
cambio, en el modo mixto ZVS-ZCS con dos transistores conmutando a tensión cero y otros
dos a corriente cero el circuito tanque siempre absorbe energía y no existen intervalos en los
que ceda energía a la fuente de entrada. En este modo de funcionamiento sólo se toma de la
fuente de entrada la energía justa para ceder a la carga y el juego de energía reactiva no existe.

LECCIÓN DE OPOSICIÓN
30
vO
D1 Q1Q4
D1D2 Q2
D3Q2
+-
vO
Q1 Q1D4
D1D2Q2
Q3D2
i O
(a)
+-
(b)
i O
Q1 Q1D4 Q2
Q2D2
(c)
i O
vO
+
Figura 2.14. Balance de energía en los distintos modos de
funcionamiento del inversor resonante.
Esto significa que para suministrar la misma energía a la carga en los modos simples ZVS
y ZCS se necesitarán valores eficaces y de pico de la corriente de entrada superiores a los ne-
cesarios en el modo de conmutación mixto, en el que siempre se ingresa energía en el circuito
tanque.

TOPOLOGÍAS Y CONTROL DE INVERSORES RESONANTES
31
En resumen, las pérdidas de conducción en el modo mixto ZVS-ZCS serán inferiores a las
de los otros dos modos. Las pérdidas de conmutación podrán ser superiores a las del modo
ZVS, y será el balance entre pérdidas en conmutación y pérdidas en conducción el que deter-
mine el modo de funcionamiento más adecuado. Para potencias elevadas el rendimiento neto
del inversor trabajando en el modo mixto será superior al del modo ZVS debido a las menores
pérdidas en conducción. Un ejemplo experimental ha sido realizado por Sabaté et al [22, 23].
Resulta por tanto fundamental realizar el análisis de las diferentes topologías de inversores
resonantes para obtener las regiones correspondientes a los distintos modos de funcionamien-
to, lo que permitirá el diseño adecuado del inversor. Dicho análisis constituye el objetivo de la
sección siguiente.
2.4. Efecto de los parámetros de control en el modo de funcionamiento del inversor
De forma intuitiva puede razonarse la existencia de las tres zonas de funcionamiento ante-
riores al producirse variaciones en los parámetros de control. La figura 2.15 muestra la ten-
sión de entrada en el circuito tanque junto a la forma de onda de la corriente de entrada, asu-
miendo que esta última es senoidal.
Considerando solamente el armónico fundamental de la tensión y de la corriente de entrada
en el tanque, la corriente podrá estar adelantada o retrasada con respecto a la tensión de entra-
da. Si, por ejemplo, nos situamos en un punto de funcionamiento a frecuencia elevada, muy
por encima de la frecuencia de resonancia del tanque, la impedancia de entrada de dicho cir-
cuito será prácticamente inductiva y la corriente tenderá a estar desfasada 90° con respecto a
la tensión. El modo de funcionamiento corresponderá obviamente al modo ZVS. Esta situa-
ción está representada por la curva (1) de la figura 2.15.
Si ahora disminuimos progresivamente la frecuencia, la componente capacitiva del circuito
tanque hará que el desfase entre corriente y tensión vaya disminuyendo, hasta que para una
frecuencia determinada la corriente se anula antes de que se aplique tensión no nula al circuito
tanque, tal como representa la curva (2) de la figura 2.15. A esta frecuencia, la conmutación
corresponde al modo mixto ZVS-ZCS.

LECCIÓN DE OPOSICIÓN
32
Si seguimos disminuyendo la frecuencia, hasta valores bastante inferiores a la frecuen-
cia de resonancia del circuito tanque, la componente capacitiva predominará sobre la inducti-
va y la corriente de entrada puede estar muy adelantada con respecto a la tensión de entrada.
Tal situación es mostrada por la curva (3) de la figura 2.15. En este caso se habrá alcanzado el
modo de conmutación ZCS.
En resumen, podemos decir que al variar la frecuencia desde valores elevados hasta valores
reducidos el inversor atraviesa las tres zonas de conmutación.
VAB_fundVAB
(3)(2)
(1)
(1) ZVS (2) ZVS-ZCS (3) ZCS
Figura 2.15. Formas de onda en la entrada del circuito tanque al variar la
frecuencia de conmutación..
De la misma forma se puede razonar el paso de un modo de conmutación a otro al variar el
ciclo de trabajo. La figura 2.20 muestra las formas de onda de tensiones y corrientes para dos
valores diferentes del ciclo de trabajo, trabajando a frecuencia constante.
VABVAB
VAB_fund. VAB_fund.
(a) (b)
ZVS
Mixto
ZCS
Mixto
Figura 2.16. Formas de onda en la entrada del circuito tanque al variar el circlo
de trabajo.

TOPOLOGÍAS Y CONTROL DE INVERSORES RESONANTES
33
En la figura 2.16a la componente fundamental de la corriente en el circuito tanque se en-
cuentra retrasada con respecto a la componente fundamental de la tensión. Es el caso típico de
funcionamiento por encima de resonancia. En estas condiciones, para un ciclo de trabajo ele-
vado vemos que el modo de conmutación corresponde a ZVS en todos los interruptores. Si
manteniendo constante la frecuencia disminuimos el ciclo de trabajo, los valores máximos de
tensión y corriente disminuirán, pero el desfase se mantiene constante, por lo que para un ci-
clo de trabajo bajo pasamos al modo mixto ZVS-ZCS.
La figura 2.16b muestra el caso de funcionamiento a baja frecuencia con la corriente ade-
lantada con respecto a la tensión, es el funcionamiento normal por debajo de resonancia. En
estas condiciones, para un ciclo de trabajo elevado tenemos el modo ZCS mientras que al
disminuirlo pasamos de nuevo al modo mixto ZVS-ZCS.

3. ANÁLISIS ESTÁTICO DE INVERSORES RESONANTES 3.1. Métodos de análisis
Los inversores resonantes se analizan siguiendo la metodología tradicional empleada para
cualquier topología de potencia. El régimen permanente viene dado por las condiciones de
tensiones y corrientes medias nulas en bobinas y condensadores respectivamente (formas de
onda periódicas), junto con las condiciones de continuidad y simetría. No obstante, la mayoría
de los inversores pueden reducirse a una fuente de tensión o corriente periódica aplicada sobre
un circuito lineal, y por ello el método del desarrollo en serie de Fourier resulta también de
gran utilidad. Se tienen por tanto dos métodos típicos de análisis de los inversores resonantes:
• Planteamiento y resolución del sistema de ecuaciones diferenciales
• Método del desarrollo en serie de Fourier
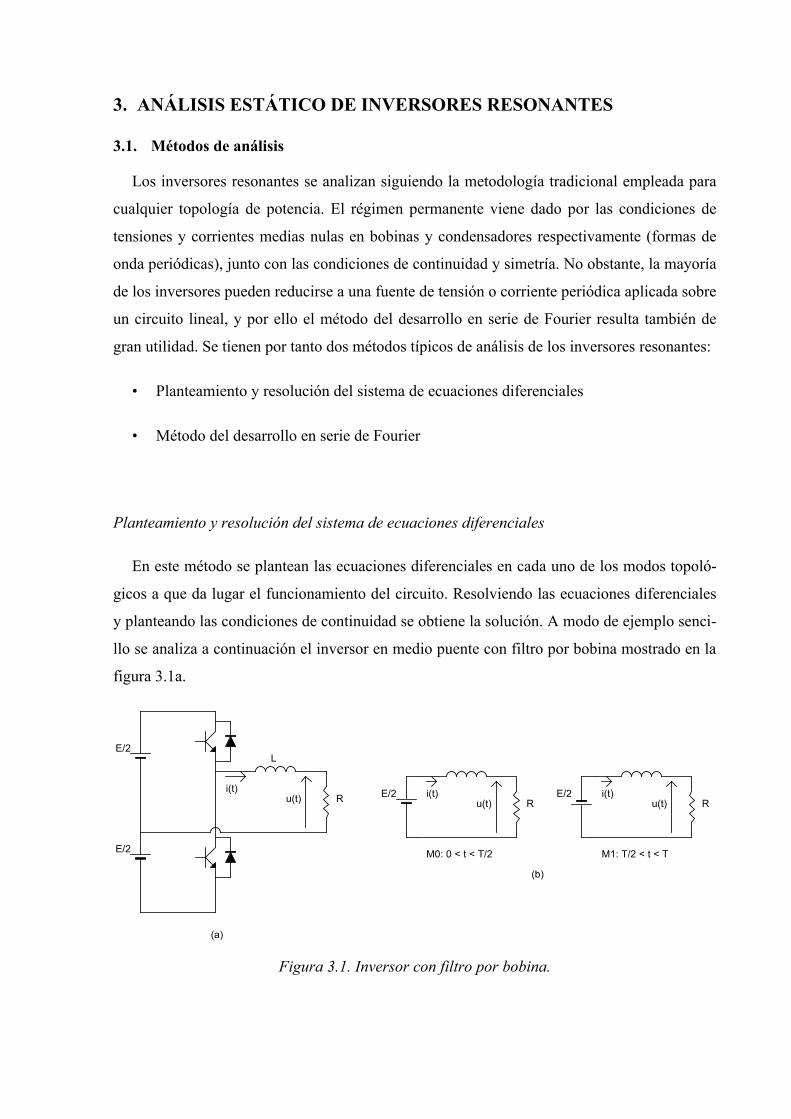
Planteamiento y resolución del sistema de ecuaciones diferenciales
En este método se plantean las ecuaciones diferenciales en cada uno de los modos topoló-
gicos a que da lugar el funcionamiento del circuito. Resolviendo las ecuaciones diferenciales
y planteando las condiciones de continuidad se obtiene la solución. A modo de ejemplo senci-
llo se analiza a continuación el inversor en medio puente con filtro por bobina mostrado en la
figura 3.1a.
E/2
(a)
E/2
u(t)i(t)
L
R u(t) Ri(t)E/2
M0: 0 < t < T/2
u(t) Ri(t)E/2
M1: T/2 < t < T
(b)
Figura 3.1. Inversor con filtro por bobina.

LECCIÓN DE OPOSICIÓN
58
La figura 3.1b muestra los modos topológicos o circuitos equivalentes a los que da lugar el
circuito. Para estos modos las ecuaciones diferenciales son las siguientes:
M0: 0 < t < T/2
2
)()(
)(E
tiRdt
tdiLti =+= (3.1)
M1: T/2 < t < T
2
)()(
)(E
tiRdt
tdiLti −=+=
(3.2)
Resolviendo las ecuaciones diferenciales se obtienen las siguientes evoluciones tempora-
les:
M0: 0 < t < T/2
LtR
eR
Ei
RE
ti−
−+=
2)0(
2)( (3.3)
M1: T/2 < t < T
LRTt
eR
ETi
RE
ti)2/(
2)2/(
2)(
−−
++−= (3.4)
Las evoluciones de régimen permanente se obtiene teniendo en cuenta que las onda de co-
rriente deberá ser periódica y simétrica con respecto al semiperiodo, es decir:
)2/()0( Tii −= (3.5)
aplicando (3.5) en (3.3) y (3.4) se obtiene finalmente:
L
TR
LTR
e
eRE
Tii2
2
1
12
)2/()0(−
−
+
−−=−= (3.6)
Las ecuaciones (3.3), (3.4) y (3.6) proporcionan finalmente las evoluciones de la corriente
en cada modo topológico. Si por ejemplo se verifica la condición:
INTRODUCCIÓN AL ANÁLISIS DINÁMICO DE INVERSORES RESONANTES
59
RL
T >> (3.7)
entonces la ecuación (3.6) puede aproximarse de la forma siguiente:
RE
Tii2
)2/()0(−
≈−= (3.8)
y las evoluciones en los dos modos topológicos serían:
M0: 0 < t < T/2
LtR
eRE
RE
ti−
−=2
)( (3.9)
M1: T/2 < t < T
LRTt
eRE
RE
ti)2/(
2)(
−−
+−= (3.10)
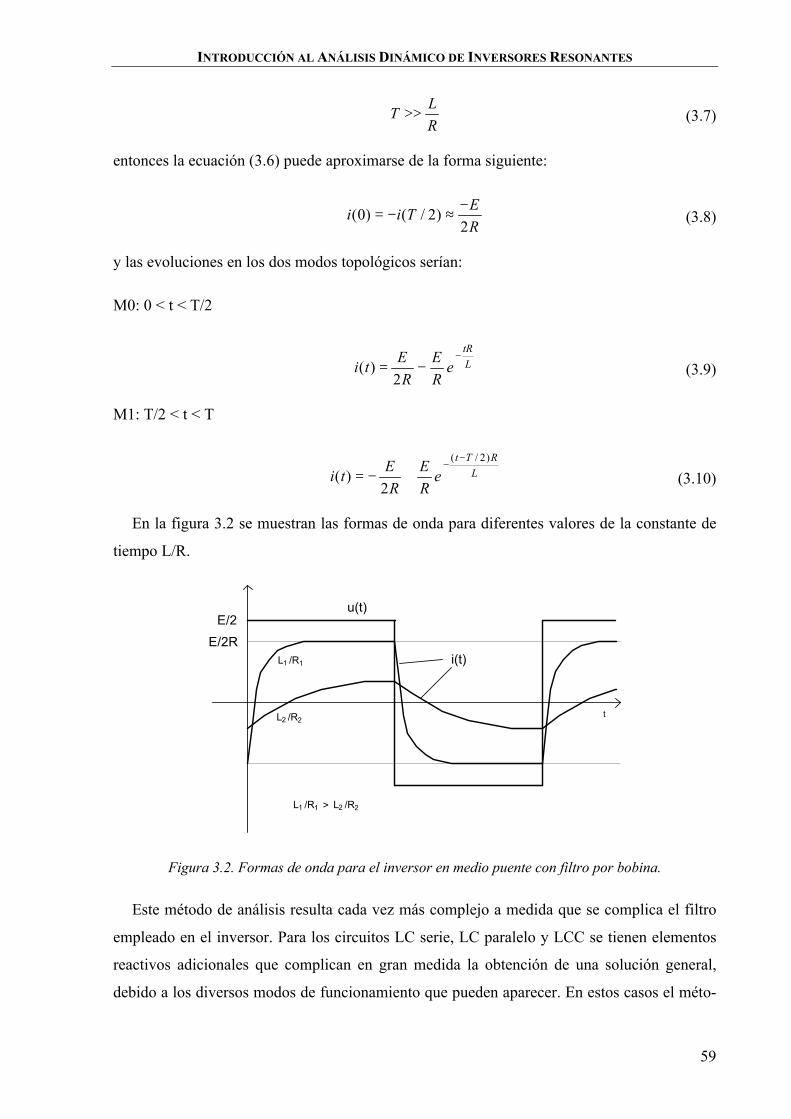
En la figura 3.2 se muestran las formas de onda para diferentes valores de la constante de
tiempo L/R.
E/2
E/2R
u(t)
i(t)L /R
>
1 1
L /R 2 2
L /R 1 1 L /R 2 2
t
Figura 3.2. Formas de onda para el inversor en medio puente con filtro por bobina.
Este método de análisis resulta cada vez más complejo a medida que se complica el filtro
empleado en el inversor. Para los circuitos LC serie, LC paralelo y LCC se tienen elementos
reactivos adicionales que complican en gran medida la obtención de una solución general,
debido a los diversos modos de funcionamiento que pueden aparecer. En estos casos el méto-
LECCIÓN DE OPOSICIÓN
60
do de desarrollo en serie de Fourier resulta más útil y además presenta la ventaja de que se
puede programar fácilmente empleando lenguajes de programación o programas matemáticos.
Método del desarrollo en serie de Fourier
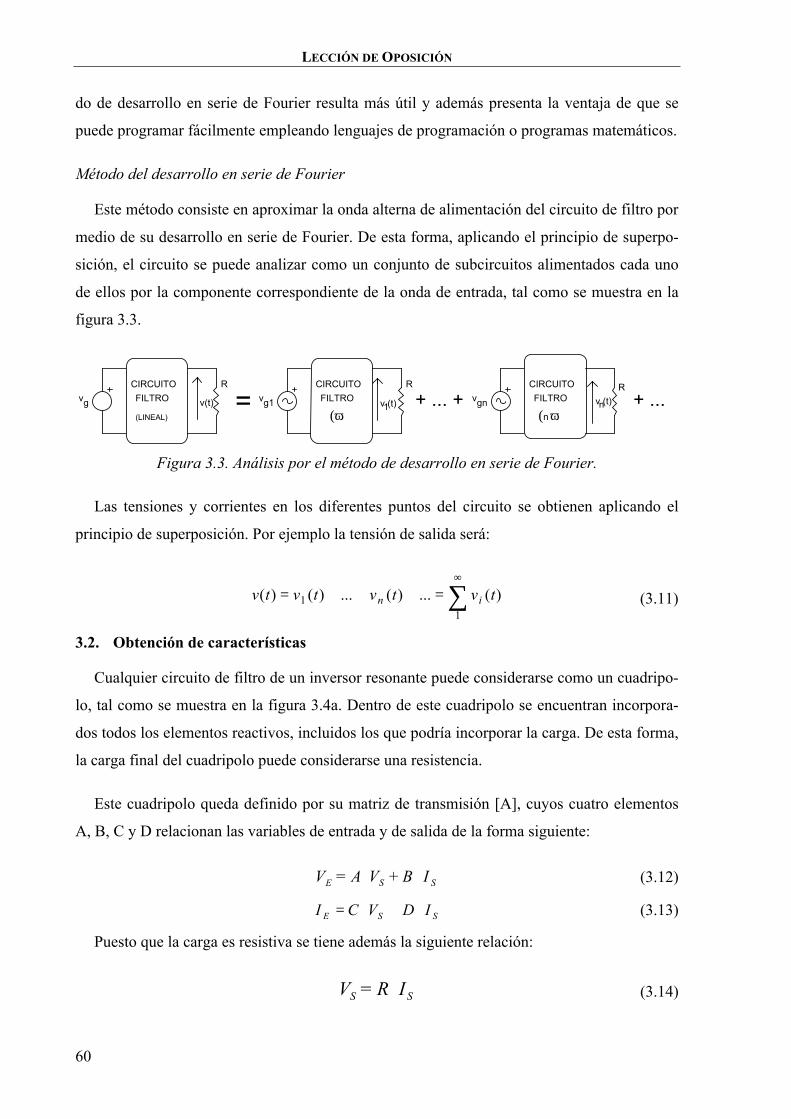
Este método consiste en aproximar la onda alterna de alimentación del circuito de filtro por
medio de su desarrollo en serie de Fourier. De esta forma, aplicando el principio de superpo-
sición, el circuito se puede analizar como un conjunto de subcircuitos alimentados cada uno
de ellos por la componente correspondiente de la onda de entrada, tal como se muestra en la
figura 3.3.
vg
CIRCUITOFILTRO
(LINEAL)=
Rvg1
CIRCUITOFILTRO
(ω)+ ... +
Rvgn
CIRCUITOFILTRO
( ω)
R
+ ...n
v(t) v (t)1 v (t)n
Figura 3.3. Análisis por el método de desarrollo en serie de Fourier.
Las tensiones y corrientes en los diferentes puntos del circuito se obtienen aplicando el
principio de superposición. Por ejemplo la tensión de salida será:
∑∞
=+++=1
1 )(...)(...)()( tvtvtvtv in (3.11)
3.2. Obtención de características
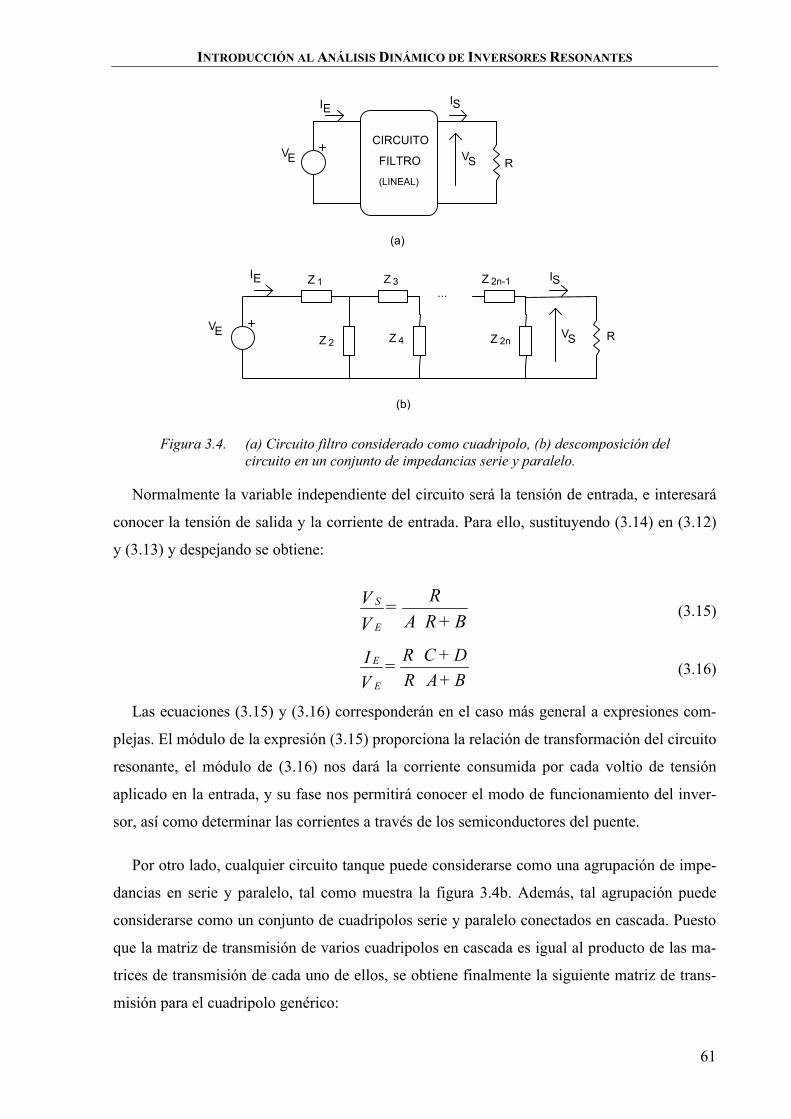
Cualquier circuito de filtro de un inversor resonante puede considerarse como un cuadripo-
lo, tal como se muestra en la figura 3.4a. Dentro de este cuadripolo se encuentran incorpora-
dos todos los elementos reactivos, incluidos los que podría incorporar la carga. De esta forma,
la carga final del cuadripolo puede considerarse una resistencia.
Este cuadripolo queda definido por su matriz de transmisión [A], cuyos cuatro elementos
A, B, C y D relacionan las variables de entrada y de salida de la forma siguiente:
SSE IB + VA = V ⋅⋅ (3.12)
SSE IDVCI ⋅+⋅= (3.13)
Puesto que la carga es resistiva se tiene además la siguiente relación:
SS IR = V ⋅ (3.14)
INTRODUCCIÓN AL ANÁLISIS DINÁMICO DE INVERSORES RESONANTES
61
CIRCUITO
FILTRO
(LINEAL)
R
(a)
VRV
II
...Z
(b)
1 Z 3
Z 2 Z 4
Z 2n-1
Z 2n S
S
E
E
V
I
E
E
V
I
S
S
Figura 3.4. (a) Circuito filtro considerado como cuadripolo, (b) descomposición del circuito en un conjunto de impedancias serie y paralelo.
Normalmente la variable independiente del circuito será la tensión de entrada, e interesará
conocer la tensión de salida y la corriente de entrada. Para ello, sustituyendo (3.14) en (3.12)
y (3.13) y despejando se obtiene:
B + RA
R =
VV
E
S
⋅ (3.15)
B + ARD + CR
= VI
E
E
⋅⋅
(3.16)
Las ecuaciones (3.15) y (3.16) corresponderán en el caso más general a expresiones com-
plejas. El módulo de la expresión (3.15) proporciona la relación de transformación del circuito
resonante, el módulo de (3.16) nos dará la corriente consumida por cada voltio de tensión
aplicado en la entrada, y su fase nos permitirá conocer el modo de funcionamiento del inver-
sor, así como determinar las corrientes a través de los semiconductores del puente.
Por otro lado, cualquier circuito tanque puede considerarse como una agrupación de impe-
dancias en serie y paralelo, tal como muestra la figura 3.4b. Además, tal agrupación puede
considerarse como un conjunto de cuadripolos serie y paralelo conectados en cascada. Puesto
que la matriz de transmisión de varios cuadripolos en cascada es igual al producto de las ma-
trices de transmisión de cada uno de ellos, se obtiene finalmente la siguiente matriz de trans-
misión para el cuadripolo genérico:

LECCIÓN DE OPOSICIÓN
62
∏∏= 1Z
ZZ Z + 1 =
1Z
01
10
Z1 = [A]
1-i 2
1 -i 2-1
i 21 -i 2n
i1-i 2
1 -i 2n
1=i 1 (3.17)
Empleando la expresión (3.17) puede obtenerse la matriz de transmisión de cualquier cir-
cuito tanque, y junto con las ecuaciones (3.15) y (3.16) se obtienen las características eléctri-
cas del circuito. Este método es además fácilmente implementable en un computador, lo que
permite obtener las características de diferentes inversores con gran facilidad.
3.3. Análisis comparativo de inversores resonantes
Empleando el método comentado se ha realizado el análisis de tres posibles circuitos tan-
que: LC-serie, LC-paralelo y LCC serie paralelo, cuyos esquemas eléctricos se muestran en la
figura 3.5. Para que el análisis resulte lo más general posible se han normalizado las variables
del circuito, para lo cual se han empleado los valores indicados en la tabla 3.1.
LC Serie LC Paralelo LCC Serie-Paralelo
V
I L C L
C
L
E
E S
V
I
S
S
PV
I
E
EIS
VS
C
C
S
V
I
S
S
PV
I
E
E
Figura 3.5. Circuitos de filtro analizados.
TABLA 3.1. VALORES BASE EMPLEADOS PARA EL ANÁLISIS DE LOS CIRCUITOS RESONANTES
VBASE ZBASE ωBASE LC-SERIE VE
SCL / 1 / LCS
LC-PARALELO VE L CP/ 1 / LCP LCC VE )/()( PSPS CCCCL + )/()(/1 PSPS CCCCL +
Se empleará además la siguiente nomenclatura:
MS = VS / VBASE Tensión de salida normalizada JE = IE / IBASE Corriente de entrada normalizada (IBASE = VBASE / ZBASE ) Ω = ω / ωBASE Frecuencia angular normalizada Q = R / ZBASE Carga normalizada

INTRODUCCIÓN AL ANÁLISIS DINÁMICO DE INVERSORES RESONANTES
63
Circuito LC serie
El análisis del circuito LC serie proporciona los siguientes resultados:
Tensión de salida:
ΩΩ
1-
Q1
+ 1
1 = | M |
2
2S
S
(3.18)
Factor de distorsión del armónico de orden n:
n
100
n1
- n Q1
+ 1
1 -
Q1
+ 1
= FDn2
2S
2
2S
1/2
⋅
ΩΩ
ΩΩ
(%) (3.19)
Corriente de entrada:
ΩΩ
1- + Q
1= | J |
2 2S
e
(3.20)
Ángulo de fase de la corriente de entrada:
Q
1-
arctg - = S
eΩ
Ωϕ (3.21)
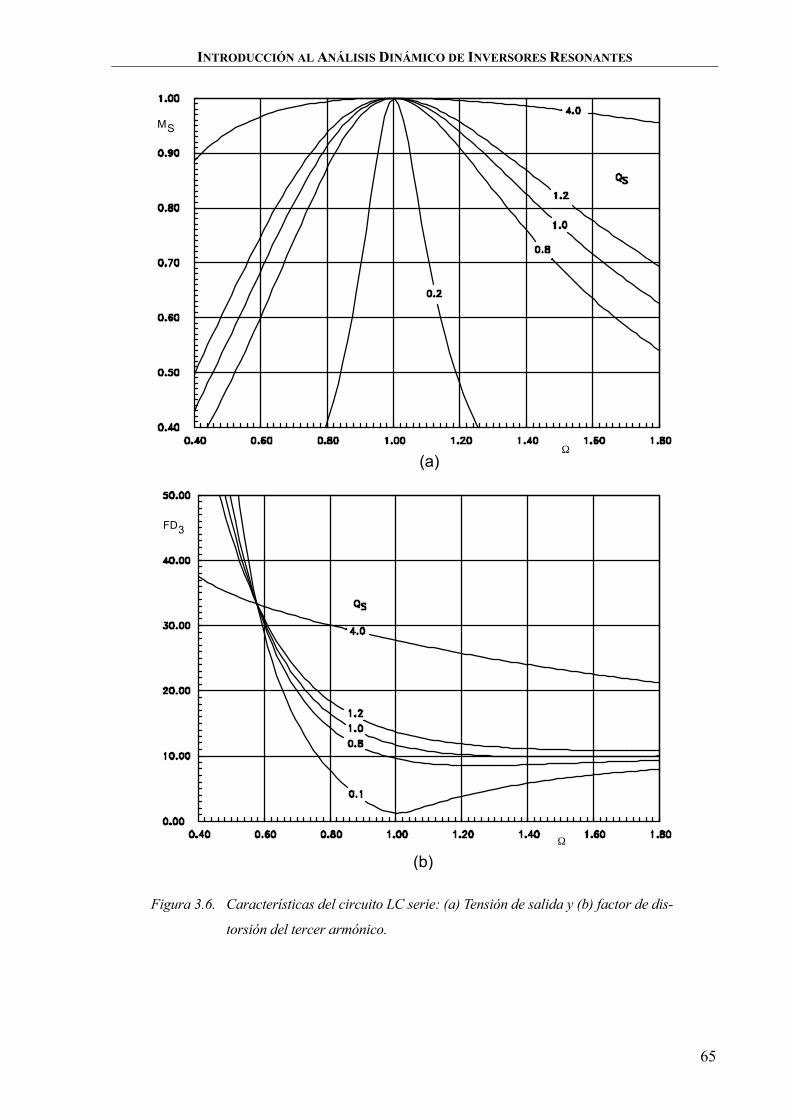
Las figuras 3.6 y 3.7 muestran la representación gráfica de las características del circuito
LC serie. Como se observa en la figura 3.6a la tensión de salida normalizada es siempre infe-
rior a la unidad, la ganancia máxima de tensión es, por tanto, igual a la unidad. En torno a la
frecuencia de resonancia se comporta como una fuente de tensión de valor 1 p.u.; por ello, con
este circuito no es posible elevar la tensión de entrada. Se hace imprescindible el uso de un
transformador elevador de tensión en caso de ser necesaria una tensión superior.
La figura 3.6b muestra el factor de distorsión del tercer armónico de la tensión de salida.
Este parámetro es una medida de la calidad del filtrado proporcionado por el circuito tanque.
Cuanto menor sea el factor de distorsión del tercer armónico, que es el armónico de orden
superior más importante, más se aproxima la forma de onda de la tensión de salida a la forma

LECCIÓN DE OPOSICIÓN
64
senoidal, y menor es el factor de cresta. Como se observa en la figura mencionada, para valo-
res de la carga normalizada próximos al valor 1 por unidad y en torno a la frecuencia de reso-
nancia el porcentaje del tercer armónico es del orden del 10%. Para valores de QS inferiores a
1 la curva presenta un mínimo en torno a la frecuencia de resonancia. Al aumentar el factor
QS el tanto por ciento aumenta pues el circuito se aproxima al estado de circuito abierto en el
que todos los armónicos tienden a aparecer en la salida. El tercer armónico tiende a su porcen-
taje correspondiente del 33%.
La figura 3.7a muestra la corriente de entrada, que es también una magnitud importante,
pues nos permite conocer la corriente que van a manejar los interruptores del puente. Como
vemos presenta un máximo en resonancia de valor 1/QS (tensión de salida en resonancia divi-
dido por la carga).
Por último, la figura 3.7b muestra el desfase de la corriente de entrada con respecto a la
tensión de entrada. Este parámetro es también importante ya que permite conocer la cantidad
de energía reactiva que maneja el inversor. Se observa que a la frecuencia de resonancia el
desfase es cero, por lo que toda la potencia de entrada es enviada a la carga. El inversor "ve"
conectada una carga resistiva. Por encima de resonancia el ángulo de fase es negativo lo que
indica un comportamiento inductivo del circuito tanque. Por debajo de resonancia del com-
portamiento es capacitivo, al ser el correspondiente ángulo de fase positivo.
Circuito LC paralelo
Para el circuito LC paralelo se obtienen las siguientes características:
Tensión de salida:
)1-( + Q
1 = | M |
222P
2S
ΩΩ (3.22)
Factor de distorsión del armónico de orden n:
n
100
)1-n( + Qn
)1-( + Q
= FDn222
P
2
22
P
2 1/2
⋅
Ω
Ω
Ω
Ω
(%) (3.23)
INTRODUCCIÓN AL ANÁLISIS DINÁMICO DE INVERSORES RESONANTES
65
FD3
(a)
(b)
MS
Ω
Ω
Figura 3.6. Características del circuito LC serie: (a) Tensión de salida y (b) factor de dis-
torsión del tercer armónico.

LECCIÓN DE OPOSICIÓN
66
(a)
(b)
Figura 3.7. Características del circuito LC serie: (a) corriente de entrada y (b) ángulo de fase de
la corriente de entrada.

INTRODUCCIÓN AL ANÁLISIS DINÁMICO DE INVERSORES RESONANTES
67
Corriente de entrada:
)1 -( Q +
Q + 1 = | J | 222
P2
22P
eΩΩ
Ω (3.24)
Ángulo de fase de la corriente de entrada:
ΩΩ
Ω1
- Q arctg - Q 1-
arctg = PP
eϕ (3.25)
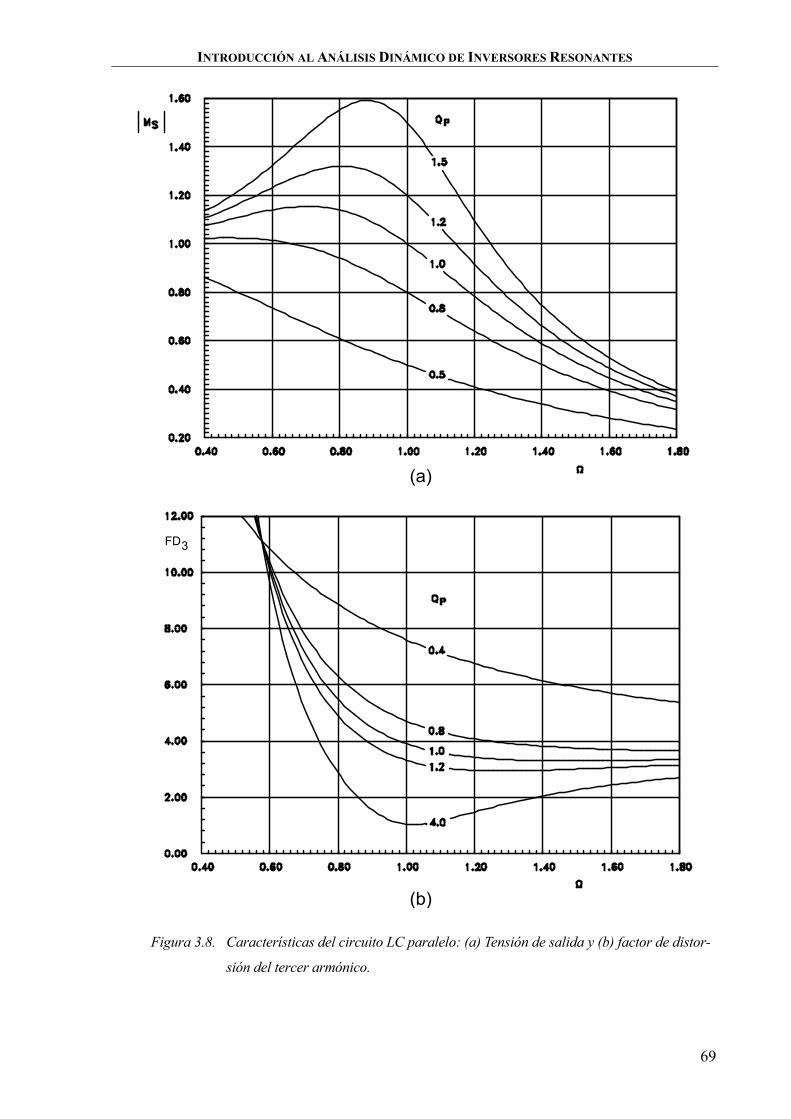
La figura 3.8a muestra la tensión de salida normalizada. En este caso vemos como pa-
ra QP superior a un determinado valor, la tensión de salida es superior a la tensión de entrada.
El circuito proporciona ganancia de tensión superior a la unidad, lo que puede ser interesante
en determinadas aplicaciones. Puede comprobarse que la frecuencia a la cual se produce el
máximo en la tensión de salida resulta ser:
Q 21
- 1 = 2P
MsmaxΩ (3.26)
Para que exista máximo la condición es:
0 > Q21
- 1 2P
(3.27)
Es decir:
0.707 2
1 > QP ≈ (3.28)
Para que exista ganancia de tensión la carga normalizada deberá ser superior a 0.707 apro-
ximadamente. El valor máximo de la tensión de salida es:
Q21
- 1
Q = | M |
P
2 P
Smax
(3.29)
que para valores elevados de QP puede aproximarse al mismo valor QP.
Por otro lado es interesante también observar que la tensión de salida a la frecuencia 1 por
unidad es:

LECCIÓN DE OPOSICIÓN
68
Q = / | M | P1=S Ω (3.30)
y por lo tanto la corriente de salida para Ω=1 será:
1 = Q
/ M = / | J |P
1=S1=S
ΩΩ (3.31)
Es decir, trabajando a la frecuencia de resonancia natural del circuito tanque, éste se com-
porta como una fuente de corriente de valor igual a 1 por unidad. Esto es interesante en algu-
nas aplicaciones ya que permite fijar la corriente que circulará a través de la carga. Para saber
el valor real de la fuente de corriente basta con desnormalizar la ecuación (3.31), será:
ZV = / | I |
B
e1=S Ω (3.32)
Es por tanto una fuente de corriente controlada por la tensión de entrada.
La figura 3.8b muestra en factor de distorsión del tercer armónico en la tensión de salida.
Como vemos en este caso el filtrado es mejor que el del circuito resonante serie. El factor de
distorsión del tercer armónico está entre el 2 y el 6% en la banda próxima a la frecuencia de
resonancia natural del circuito, para valores de QP entre 0.8 y 4.0.
En la figura 3.9a se muestra la corriente de entrada normalizada. Se comprueba que en este
caso el puente maneja corrientes superiores al caso anterior del circuito LC serie; es debido a
que el puente debe manejar también la corriente que se cierra por el condensador del circuito
tanque. Por ejemplo, si trabajamos a frecuencia Ω=1 con el objetivo de mantener constante la
corriente de salida al valor 1 p.u., la corriente de entrada será:
Q + 1 = / | J | 2
P1=e Ω (3.33)
que es siempre superior a la corriente de salida (1 p.u.).
INTRODUCCIÓN AL ANÁLISIS DINÁMICO DE INVERSORES RESONANTES
69
(a)
(b)
FD3
Figura 3.8. Características del circuito LC paralelo: (a) Tensión de salida y (b) factor de distor-
sión del tercer armónico.
LECCIÓN DE OPOSICIÓN
70
(a)
(b)
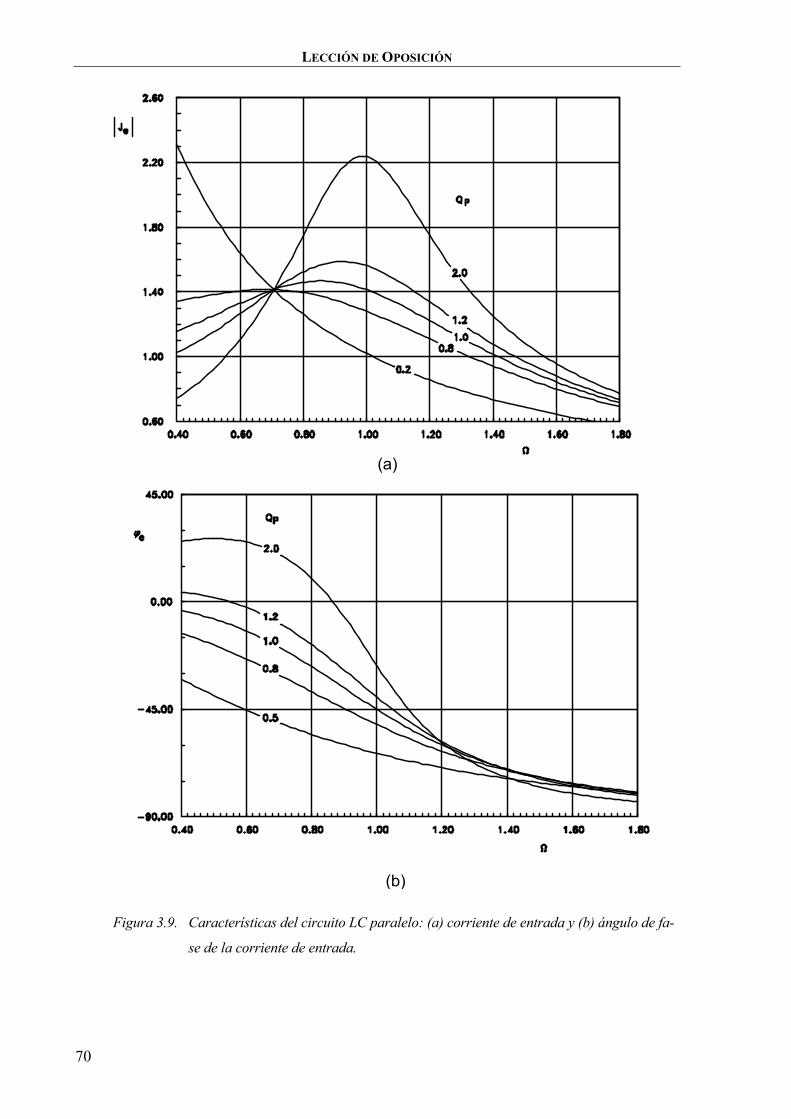
Figura 3.9. Características del circuito LC paralelo: (a) corriente de entrada y (b) ángulo de fa-
se de la corriente de entrada.

INTRODUCCIÓN AL ANÁLISIS DINÁMICO DE INVERSORES RESONANTES
71
En cuanto al desfase entre la corriente y la tensión de entrada las curvas de la figura 3.9b
nos muestran su variación en función de la frecuencia. En este caso no está tan clara la sepa-
ración entre las zonas inductiva y capacitiva, ya que depende mucho del valor de QP. Para
algunos valores de QP el ángulo es siempre negativo y el circuito se comporta de forma induc-
tiva en todo el rango mostrado, en cambio para valores de QP superiores hay zona capacitiva y
zona inductiva. Igualando la ecuación (3.25) a cero obtenemos la condición necesaria para
que la tensión y la corriente de entrada estén en fase:
Q1
- 1 = 2P
0)=(/eϕΩ (3.34)
La condición para que exista esta frecuencia y la tensión de salida que se obtiene trabajan-
do a dicha frecuencia vienen dadas de la forma siguiente:
1 > QP (3.35a)
p0S QMe
==ϕ/
(3.35b)
Es decir, para QP > 1 el circuito se comporta de forma inductiva por encima de la frecuen-
cia dada por la ecuación (3.34) y de forma capacitiva por debajo. Para QP < 1 es siempre in-
ductivo. La figura 3.10 muestra la representación gráfica de la ecuación (3.34).
1 2 3 4 50
0.25
0.5
0.75
1Ω
Qp Figura 3.10. Relación entre Ω y Qp para ángulo de fase nulo en la corriente de entrada.
Por otro lado, si se desea trabajar en la zona de comportamiento como fuente de corriente
el desfase será:
Q-1
arctg = / P
1=e Ωϕ (3.36)

LECCIÓN DE OPOSICIÓN
72
en este caso el desfase aumenta a medida que disminuye QP y por tanto la energía reactiva
manejada por el puente será mayor. La figura 3.11 muestra una representación gráfica de la
ecuación 2.36.
0.1 1.325 2.55 3.775 590
60
30
0
ϕ
Qp
e
Ω=1
Figura 3.11. Ángulo de fase de la corriente de entrada para Ω=1
Circuito LCC serie-paralelo
Para el circuito LCC es necesario añadir un parámetro adicional puesto que incorpora tres
elementos reactivos. Para ello se emplea el parámetro α que equivale al inverso del valor
normalizado del condensador paralelo (α=CBASE/CP).
Tensión de salida:
( )1- 1
+ -1
- Q
1
1 = | M |
2 22
2
2SP
s
Ω
ΩΩ
α
α (3.37)
Factor de distorsión del armónico de orden n:
( )
( ) n100
1-n1
+ n-1
- n Q
1
1- 1
+ -1
- Q
1
= FDn22 2
2
2
2SP
2 2
2
2
2SP
1/2
⋅
Ω
ΩΩ
Ω
ΩΩ
α
α
α
α
(%) (3.38)

INTRODUCCIÓN AL ANÁLISIS DINÁMICO DE INVERSORES RESONANTES
73
Corriente de entrada:
( )1-
Qj +
-1 -
j - Q
= J2SP
SP
e
Ω
ΩΩ
Ω
αα
α (3.39)
Ángulo de fase de la corriente de entrada:
Ω≥Ω
ΩΩ
ΩΩ
ΩΩ°
ΩΩ
ΩΩ
ααα
α
ααα
α
ϕ
-1 = si -1
-
1-
Qarctg -
Q-
arctg
-1 = < si 180 + -1
-
1-
Qarctg -
Q-
arctg
=
C
2SP
SP
C
2SP
SP
e (3.40)
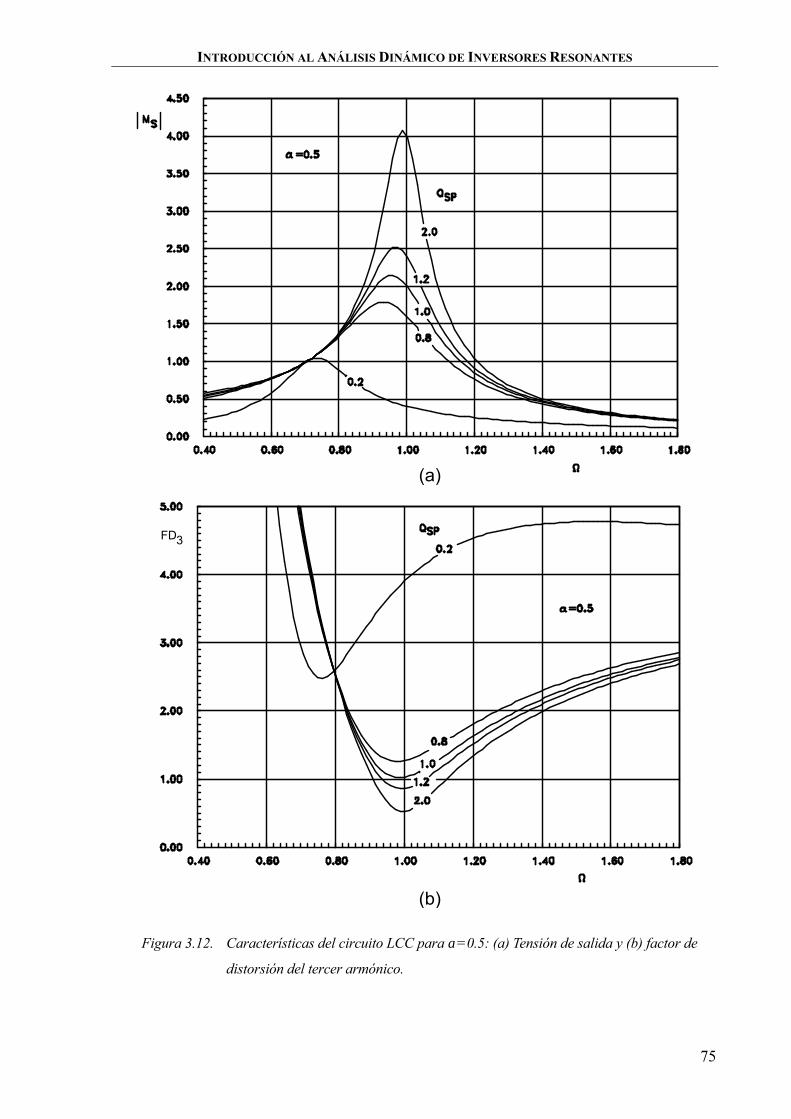
La figura 3.12a muestra la tensión de salida del inversor resonante LCC. Se observa
que la ganancia de tensión es superior a la unidad, incluso para valores del factor de carga QSP
inferiores a la unidad. Por tanto, este circuito también puede ser empleado para realizar el
encendido de la lámpara.
La figura 3.12b muestra el tanto por ciento del tercer armónico en la tensión de salida,
cerca de la frecuencia unidad el porcentaje es inferior al 3%, por lo que el filtrado de este cir-
cuito es muy bueno incluso para valores reducidos del factor de carga QSP.
Para este circuito se demuestra también que a la frecuencia unidad el comportamiento
en la salida equivale a una fuente de corriente. Nótese que la tensión de salida para Ω=1 es:
α
Q = / | M | SP
1=S Ω (3.41)
En consecuencia la corriente de salida para Ω=1 será:
α1
= Q
/ | M | = / | J |SP
1=S1=S
ΩΩ (3.42)
se llega a la conclusión de que a la frecuencia Ω=1 el circuito se comporta como una fuente
de corriente de valor α-1 veces la corriente base. Como ya se dijo en el apartado anterior esto
resulta muy interesante en la alimentación de determinadas cargas en las que uno de los obje-
tivos primordiales sea mantener constante la corriente de salida.

LECCIÓN DE OPOSICIÓN
74
Por otro lado la figura 3.13a muestra la corriente de entrada al circuito tanque. En ella
se observan dos resonancias, por un lado la de frecuencia unidad producida por la bobina con
los dos condensadores CS y CP en serie, y por otro lado existe otra frecuencia de resonancia
producida por la inductancia con el condensador serie CS, a frecuencia inferior a la unidad.
Por último, la figura 3.13b muestra el desfase existente entre la tensión y la corriente
de entrada en el circuito tanque. Vemos que cerca de la frecuencia de valor unidad existe un
margen de frecuencias en el que tensión y corriente están en fase, tanto para valores bajos
como altos de QSP. En esa zona la energía reactiva manejada por el inversor sería mínima y
por tanto se minimizan las pérdidas en los interruptores.
Igualando a cero la ecuación (3.40) y resolviendo se obtiene la condición de desfase nulo:
2
2
0/SP 1)1(
= Qe Ω−
α−−ΩΩα
=ϕ (3.43)
La tensión de salida en este punto de funcionamiento viene dada por:
( )20/S1
= | M |e
Ω−α
α=ϕ (3.44)
En general puede decirse que este circuito tanque se comporta de forma similar al cir-
cuito LC-paralelo para valores elevados de QSP, proporcionando elevada ganancia de tensión
y manejando corrientes elevadas en la entrada. Sin embargo, para valores reducidos de QSP el
circuito tiende a comportarse como un circuito LC-serie, sobre todo en el entorno de la fre-
cuencia de resonancia dada por la inductancia y el condensador serie. En esta zona la ganan-
cia de tensión vuelve a ser inferior a la unidad y la corriente de entrada es aproximadamente
igual a la corriente de carga. Esto es lógico si pensamos que para cargas bajas (QSP reducido)
y frecuencias bajas, la impedancia que representa el condensador CP puede despreciarse frente
a la impedancia de la carga, lo que resulta en el circuito LC-serie.
INTRODUCCIÓN AL ANÁLISIS DINÁMICO DE INVERSORES RESONANTES
75
(a)
(b)
FD3
Figura 3.12. Características del circuito LCC para α=0.5: (a) Tensión de salida y (b) factor de
distorsión del tercer armónico.

LECCIÓN DE OPOSICIÓN
76
(a)
(b)
Figura 3.13. Características del circuito LCC para α=0.5: (a) corriente de entrada y (b) ángu-
lo de fase de la corriente de entrada.

INTRODUCCIÓN AL ANÁLISIS DINÁMICO DE INVERSORES RESONANTES
77
3.4. Comentarios para la selección de la topología
En este apartado comentaremos algunas ideas generales para la selección de la topología
de alimentación más adecuada. La topología básica de alimentación quedará definida en cuan-
to se hayan seleccionado las etapas correspondientes al inversor y al circuito tanque de filtro.
En primer lugar será necesario conocer las características de la fuente primaria de alimen-
tación y también las de la propia carga: tensión, corriente y potencia nominales. Si la tensión
de entrada es reducida y para potencias no demasiado elevadas lo más adecuado será emplear
la topología en push-pull puesto que permite elevar la tensión gracias al transformador que
incorpora y además presenta la ventaja de que ambos interruptores pueden gobernarse con
tensiones de control referidas a masa. Para tensiones de entrada elevadas será más adecuado
emplear las topologías asimétrica o en medio puente, puesto que en ellas los transistores sólo
soportan una tensión igual a la tensión de entrada. Si se trata de potencias elevadas deberemos
acudir a la topología en puente completo, que incorpora cuatro interruptores y proporciona
una tensión de salida de valor máximo igual a la tensión continua de entrada, por lo que se
dispone en su salida de un potencia cuatro veces superior. Una ventaja de la topología en
puente completo es la de permitir el control del valor eficaz de la tensión de salida por medio
del deslizamiento de fase como ya se comentó previamente. Este hecho permite incorporar un
parámetro de control adicional que normalmente se denomina ciclo de trabajo o "duty-cycle"
y que en determinadas aplicaciones permite trabajar a frecuencia fija.
En cuanto a la selección del circuito tanque, ésta se realizará en base a las características
presentadas en el apartado anterior. El circuito LC-serie presenta la ventaja de manejar en la
entrada la misma corriente que la suministrada en la salida, sin embargo, no permite elevar la
tensión de salida con respecto a la tensión de entrada, por lo que sólo será útil en aplicaciones
en las que se disponga de una tensión de entrada suficientemente elevada para alimentar la
lámpara. Otra ventaja es que trabajando a la frecuencia de resonancia la tensión y la corriente
de entrada se encuentran en fase, por lo que en régimen permanente toda la energía de entrada
es entregada a la carga.
El circuito LC-paralelo permite obtener ganancia de tensión, pero en este caso la corriente
de entrada siempre será superior a la corriente de salida. Además, con este circuito es difícil
conseguir desfases de la corriente de entrada próximos a cero en el entorno de la frecuencia de
resonancia por lo que esta corriente será aún mayor.

LECCIÓN DE OPOSICIÓN
78
En cuanto al circuito LCC también es posible elevar la tensión de salida con respecto a la
de entrada, y la corriente de entrada será también superior a la corriente de salida. Sin embar-
go, en este caso sí es posible tener desfases próximos a cero en el entorno de la frecuencia de
resonancia, por lo que la corriente de entrada puede reducirse al valor mínimo dado por la
relación de transformación a la que opere el circuito tanque.
4. INTRODUCCIÓN AL ANÁLISIS DINÁMICO DE INVERSORES RESONANTES
4.1. Introducción
El método de promediado en el espacio de estados [39] ha sido empleado con gran éxito en
el modelado de convertidores controlados por modulación de anchura de pulso (PWM). La
principal condición para el empleo de este método de modelado es la necesidad de un bajo
rizado en corrientes y tensiones, de forma que sea despreciable con respecto a los valores me-
dios respectivos. Por tanto este método no puede aplicarse en convertidores en los que existan
rizados no despreciables, especialmente en los inversores resonantes en los cuales las corrien-
tes y tensiones en los elementos reactivos son totalmente alternas, sin componente de conti-
nua.
Para el modelado de convertidores que presenten rizados elevados se ha desarrollado el
método de promediado generalizado [40]. Este método consiste en emplear el desarrollo en
serie de Fourier para representar las evoluciones temporales de las variables de estado del
circuito. Por ejemplo, para una variable de estado determinada x(τ), el método emplea como
variables de estado los coeficientes de Fourier de x(τ) con τ ∈ (t-T, t). El orden del modelo
obtenido dependerá del número de coeficientes de Fourier considerados para aproximar la
variable x(τ). Por ejemplo, si solamente se considera la componente de continua el modelo
obtenido será el mismo que en el caso del modelo tradicional del espacio de estados prome-
diado.
Antes de comenzar con la metodología de estudio dinámico de convertidores resonantes
conviene recordar brevemente los conceptos básicos correspondientes a las series exponencia-
les de Fourier, ya que constituyen la base del método de modelado.
Una onda periódica x(t) que verifique las condiciones de Dirichlet puede expresarse como
una serie de Fourier exponencial, que es una variante de la serie trigonométrica. La serie ex-
ponencial viene dada por la expresión siguiente:

INTRODUCCIÓN AL ANÁLISIS DINÁMICO DE INVERSORES RESONANTES
79
∑∞
−∞=
=k
tjkkextx ω)( (4.1)
donde los coeficientes k
x son complejos y vienen dados por la siguiente integral:
∫ −=T jk
kdex
Tx
0)(
1ττ ωτ
(4.2)
Si x(t) es real es evidente que se cumplirá la siguiente igualdad:
*
kkxx
−= (4.3)
Además la serie exponencial de Fourier está relacionada con la serie trigonométrica de la
forma siguiente:
∑∞
++=1
0 sencos21
)( tkbtkaatx kk ωω
(4.4)
knkn xbxa Im2Re2 −==
o también:
( ) ( )kkkkkkjbaxjbaxax +=−==
− 21
21
21
00 (4.5)
donde los valores ak (k=0,1,2,...) representan los coeficientes de los términos coseno y bk
(k=1,2,...) los coeficientes de los términos seno del desarrollo trigonométrico de Fourier.
4.2. Metodología de estudio dinámico
El método de modelado generalizado se basa en aproximar la onda x(t) en el intervalo (t-T,
t] por medio de una serie exponencial de Fourier, de la forma siguiente:
∑∞
−∞=
+−=+−k
Ttjkk
etxTtx )()()( τωτ (4.6)
donde:

LECCIÓN DE OPOSICIÓN
80
Tπ
ω2
= (4.7)
( ]T,0∈τ (4.8)
y )(txk
son los coeficientes complejos de la serie exponencial de Fourier, que varían en el
tiempo pero son considerados constantes en el intervalo (t-T, t] y son evaluados en el instante
t final de dicho intervalo. Se calculan mediante la siguiente integral:
τττω
deTtxT
txTtjkT
k
)(
0)(
1)(
+−−
∫ +−= (4.9)
En este método de modelado las variables de estado consideradas son los coeficientes
complejos de la serie exponencial de Fourier, ya que a partir de estos coeficientes las evolu-
ciones temporales de las variables de estado se obtienen empleando (4.6). El orden del mode-
lo obtenido y por tanto su precisión viene dado por el número de coeficientes de Fourier con-
siderados a la hora de aproximar las variables de estado.
Para poder aplicar este método al modelado en el espacio de estados es necesario conocer
la operación de diferenciación en el tiempo de los coeficientes de Fourier. Se demuestra que
se verifica la siguiente igualdad [40]:
)()()( txjktxdtd
txdtd
kk
kω−= (4.10)
Hay que tener en cuenta que en el caso de que ω sea variable, la ecuación (4.10) es sólo
una aproximación. No obstante para variaciones lentas de la frecuencia ω(t) dicha ecuación
representa una buena aproximación.
Otra cuestión importante para el empleo de los coeficientes de Fourier como variables de
estado es la obtención de los coeficientes de una función escalar f, es decir:
knxxxf ),,,( 21 L (4.11)
en la mayoría de los casos es prácticamente imposible obtener una expresión explícita para los
coeficientes (4.11) expresados en términos de coeficientes k
x . Una aproximación para este
caso es el método de la función descriptora [43, 44]. No obstante, en el caso de algunas fun-

INTRODUCCIÓN AL ANÁLISIS DINÁMICO DE INVERSORES RESONANTES
81
ciones determinadas, como por ejemplo las de tipo polinómico, los coeficientes de la función
pueden obtenerse empleando la propiedad de convolución:
∑∞
−∞=−
=i
iikkyxxy (4.12)
calculando los términos del polinomio por separado empleando la propiedad (4.12) se pueden
determinar los coeficientes de Fourier del mismo.
4.2.1. Aplicación al modelado en el espacio de estados
En el caso más general el modelo de un convertidor en el espacio de estados vendrá dado
de la forma siguiente:
)t(u),t(xf)t(xdtd
= (4.13)
)(),()( tutxgty = (4.14)
donde )(tx es el vector de estado, )(tu es el vector de excitación e )(ty es el vector de varia-
bles de salida o de observación. Las funciones f(⋅) y g(⋅) en el caso más general pueden ser
funciones no lineales.
Para obtener el modelo del convertidor se aplica el método del desarrollo exponencial de
Fourier a ambos lados de la ecuación (4.13) del sistema, de la forma siguiente:
( )
( )kk
kk
u,xgy
u,xfxdtd
=
= (4.15)
Empleando (4.10) en (4.15) permite simplificar el modelo de la forma siguiente:
( )
( )kk
kkk
u,xgy
u,xfxjkxdtd
=
+ω−= (4.16)
El último paso del modelo es obtener los coeficientes ( )k
uxf , y ( )k
u,xg en función
de los coeficientes de Fourier k
x yk
u , lo que puede realizarse empleando la propiedad

LECCIÓN DE OPOSICIÓN
82
(4.12) de convolución en el caso de que f(⋅) sea una función polinómica o bien aproximarse
por medio de la función descriptiva como ya se ha dicho.
Lo esencial en este modelo es considerar solamente aquellos coeficientes de Fourier im-
prescindibles para capturar en el mismo el comportamiento más interesante del sistema. Por
ejemplo, en un convertidor CC-CC con bajo rizado de corriente y tensión podremos conside-
rar solamente los términos de continua del desarrollo en serie de Fourier, obteniendo su com-
portamiento a bajas frecuencias. Para un convertidor resonante que trabaje en el entorno de
resonancia con ondas de tensión y corriente bastante senoidales (con baja distorsión armóni-
ca) podremos considerar solamente los coeficientes de orden 1 y –1 del desarrollo en serie de
Fourier. En otros casos más generales habrá que considerar un mayor número de coeficientes,
dando lugar a un modelo de orden superior.
4.2.2. Caso particular: sistemas lineales e invariantes
Un caso particular interesante es el de los sistemas lineales e invariantes en el tiempo, en
los cuales las ecuaciones de estado se pueden escribir de la forma siguiente:
)()()( tuBtxAtxdtd
+= (4.17)
donde los términos de las matrices A, B y C vienen dados por los parámetros del circuito y no
varían en el tiempo. Aplicando el método de modelado sobre la ecuación (4.17) que describe
el sistema tenemos:
kkk
uBxAxdtd
+= (4.18)
empleando (4.10) en (4.19) tenemos:
kkkkuBxAxjkx
dtd
++−= ω (4.19)
de donde se obtiene finalmente:
( )kkk
uBxAIjkxdtd
++−= ω (4.20)
INTRODUCCIÓN AL ANÁLISIS DINÁMICO DE INVERSORES RESONANTES
83
siendo I la matriz identidad.
Se observa que (4.20) proporciona un modelo en el espacio de estados en el cual las nuevas
variables de estado son los coeficientes complejos de la serie exponencial de Fourier. Debe
tenerse en cuenta que el sistema (4.20) se encuentra definido en el plano complejo, por lo que
para su manipulación y resolución deberá emplearse la metodología matemática compleja.
Solución en régimen permanente
La condición para régimen permanente es la siguiente:
0=k
xdtd (4.21)
que aplicada al sistema (4.20) nos proporciona la siguiente solución para régimen permanente:
( )kk
uBAIjkx 01
00−−= ω (4.22)
La ecuación (4.22) nos proporciona la solución en régimen permanente para las variables
de estado. En cuanto a las variables de salida, su solución en régimen permanente se obtendrá
directamente por aplicación de la función que las relaciona con las variables de estado, esto
es:
( )kk
u,xhy 000 = (4.23)
donde se ha supuesto conocida la función h(·) que relaciona las variables de salida con las
variables de estado, lo que resulta habitual en muchos casos.
Modelado dinámico de pequeña señal
Para obtener el modelo dinámico de pequeña señal se introduce una perturbación en el mo-
delo (4.20) de la variable con respecto a la cual se desea determinar la función de transferen-
cia, admitiendo que el resto de posibles variables de control o perturbaciones permanecen
constantes. Por ejemplo si se desea emplear la frecuencia como variable de control introduci-
mos una perturbación en la frecuencia de la forma siguiente:
ωωω ˆ0 += (4.24)
admitiendo que la excitación permanece constante:

LECCIÓN DE OPOSICIÓN
84
kk
uu 0= (4.25)
La perturbación introducida provoca la siguiente variación en las variables de estado:
kkk
xxx ˆ0 += (4.26)
Empleando (4.24) a (4.26) en el modelo dado por (4.20) tenemos:
( ) ( )( )( )kkkkk
uBxxAIjkxxdtd
0000ˆˆˆ ++++−=+ ωω (4.27)
Operando en (4.27) y despreciando términos de segundo orden e identificando la solución
de régimen permanente dada por (4.22) se obtiene finalmente:
( )kkk
xIjkxAIjkxdtd
00 ˆˆˆ ωω −+−= (4.28)
Aplicando transformadas de Laplace a ambos miembros de la expresión (4.28) tenemos:
( )kkk
xIsjksxAIjksxs 00 )()()( ωω −+−= (4.29)
de donde se obtienen las funciones de transferencia entre las variables de estado y la frecuen-
cia, de la forma siguiente:
( )[ ]k
k xIjkAIjkss
sx0
10)(
)( −−+−= ωω
(4.30)
La ecuación (4.30) proporciona finalmente las funciones de transferencia de pequeña señal
que relacionan la perturbación en las variables de estado para una perturbación en la frecuen-
cia de conmutación.
Siguiendo el mismo proceso pueden determinarse las funciones de transferencia entre las
variables de estado y la excitación de entrada al inversor, en este caso se admite que la fre-
cuencia permanece constante, se tiene:
0ωω = (4.31)
kkk
uuu ˆ0 += (4.32)

INTRODUCCIÓN AL ANÁLISIS DINÁMICO DE INVERSORES RESONANTES
85
kkk
xxx ˆ0 += (4.33)
operando de la misma manera se obtiene la siguiente ecuación diferencial:
( )kkk
uBxAIjkxdtd ˆˆˆ
0 ++−= ω (4.34)
aplicando transformadas de Laplace:
( ) )()()( 0 suBsxAIjksxskkk
++−= ω (4.35)
despejando se obtiene finalmente:
( )[ ] BAIjkssu
sx
k
k 10)(
)( −−+= ω (4.36)
La ecuación (4.36) proporciona las funciones de transferencia entre las variables de estado
y la excitación.
Habitualmente las variables de estado no coincidirán con las variables de salida o de ob-
servación del circuito por lo que será necesario obtener las funciones de transferencia finales
entre la frecuencia o la excitación y la variable o variables de salida. La relación entre las va-
riables de estado y las de salida vendrá dada en muchos casos de la forma siguiente:
( )kk
u,xhy = (4.37)
de donde:
( ) ( ) )s(uu,xhu
)s(xu,xhx
)s(ykkk
kkkk
k
∂∂
+
∂∂
= (4.38)
Empleando (4.38) en combinación con (4.30) y (4.36) se pueden determinar finalmente las
funciones de transferencia que relacionan las variables de salida y las variables de control.
Hay que recordar que las ecuaciones genéricas obtenidas en este apartado sólo son validas si
el sistema es lineal e invariante, de manera que pueda representarse de la forma (4.17), lo que
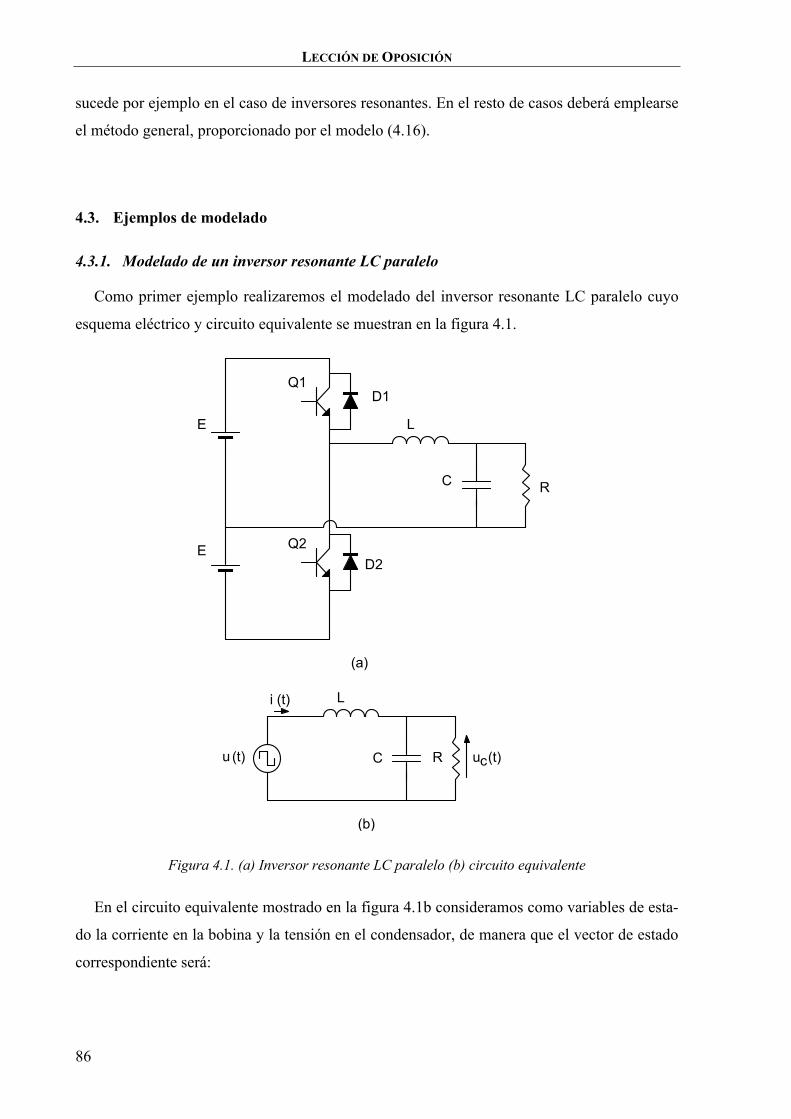
LECCIÓN DE OPOSICIÓN
86
sucede por ejemplo en el caso de inversores resonantes. En el resto de casos deberá emplearse
el método general, proporcionado por el modelo (4.16).
4.3. Ejemplos de modelado
4.3.1. Modelado de un inversor resonante LC paralelo
Como primer ejemplo realizaremos el modelado del inversor resonante LC paralelo cuyo
esquema eléctrico y circuito equivalente se muestran en la figura 4.1.
E
E
L
C R
Q1D1
Q2D2
L
C R
(a)
(b)
u (t)
i (t)
u (t)c
Figura 4.1. (a) Inversor resonante LC paralelo (b) circuito equivalente
En el circuito equivalente mostrado en la figura 4.1b consideramos como variables de esta-
do la corriente en la bobina y la tensión en el condensador, de manera que el vector de estado
correspondiente será:

INTRODUCCIÓN AL ANÁLISIS DINÁMICO DE INVERSORES RESONANTES
87
[ ]TC tutitx )(),()( = (4.39)
Aplicando las leyes de Kirchoff al circuito de la figura 4.1b obtenemos la siguiente repre-
sentación del mismo en el espacio de estados:
)(1
)(1
)( tuL
tuL
tidtd
C +−= (4.40)
)(1
)(1
)( tuRC
tiC
tudtd
CC −= (4.41)
o bien en forma matricial:
)(0/1
)()(
/1/1/10
)()(
tuL
tuti
RCCL
tuti
dtd
CC
+
−−
=
(4.42)
se observa que se puede representar de la forma siguiente:
)()()( tuBtxAtxdtd
+= (4.43)
donde:
−−
=RCCL
A/1/1/10
(4.44)
[ ]TLB 0/1= (4.45)
se trata de un sistema lineal e invariante por lo que se pueden aplicar directamente los resulta-
dos obtenidos en el apartado anterior para este caso.
En primer lugar, puesto que se trata de un inversor resonante, las variables de estado serán
ondas prácticamente senoidales, con bajo contenido en armónicos, por lo que no tiene compo-
nente de continua y la componente más importante será el armónico de orden 1 o fundamen-
tal. Por ello se considerará sólo esta componente, lo que dará lugar a un modelo de cuarto
orden, ya que cada componente es compleja y está formada por una parte real y otra imagina-
ria. Por tanto el modelo en Fourier será el siguiente:

LECCIÓN DE OPOSICIÓN
88
( )111
uBxAIjxdtd
++−= ω (4.46)
donde el nuevo vector de variables de estado será:
[ ]TCuix
111,= (4.47)
La excitación del circuito viene dada por una onda cuadrada de la forma siguiente:
( )tEtu ωsensgn)( = (4.48)
empleando el desarrollo en serie de Fourier de una onda cuadrada y teniendo en cuenta (4.5),
se obtiene:
πE
ju2
1−= (4.49)
Sustituyendo en (4.46) se obtiene finalmente:
LE
juL
ijidtd
C πω
21111
−−−= (4.50)
111
11CC uj
RCi
Cu
dtd
−+−= ω (4.51)
Las ecuaciones (4.50) y (4.51) constituyen un modelo de gran señal para el comportamien-
to del inversor resonante LC paralelo. La integración en el tiempo de las ecuaciones diferen-
ciales (4.50) y (4.51) proporciona la evolución temporal de las variables de estado. Para ello
hay que tener en cuenta que se trata de un modelo expresado en el plano complejo.
Por otro lado como variables de salida de interés se tomarán los valores de pico de la ten-
sión de salida y de la corriente de salida, esto es:
( ) ( )2
1
2
111 22 )t(iIm)t(iRe)t(i)t(y +== (4.52)
( ) ( )2
1
2
112 22 )t(uIm)t(uRe)t(u)t(y CCC +== (4.53)
el vector de salida será entonces:

INTRODUCCIÓN AL ANÁLISIS DINÁMICO DE INVERSORES RESONANTES
89
[ ]Tyyy 21= (4.54)
El modelo dado por (4.50) y (4.51) puede expresarse en el plano real, dando lugar a un
modelo de cuarto orden. Para ello se emplean las componentes reales de cada variable de es-
tado correspondiente a las componentes de Fourier, de la forma siguiente:
)()()( 211tjxtxti += (4.55)
)()()( 431tjxtxtuC += (4.56)
Sustituyendo (4.55) y (4.56) en el modelo dado por (4.50) y (4.51), agrupando e igualando
términos reales e imaginarios se obtiene el siguiente modelo en el plano real:
EL
xxxx
RCCRCC
LL
xxxx
dtd
−
+
−−−
−−−
=
00/20
/1/10/10/1
/1000/10
4
3
2
1
4
3
2
1
π
ωω
ωω
(4.57)
22
211 2 xxy += (4.58)
24
232 2 xxy += (4.59)
Empleando el programa para MathCad mostrado en el Apéndice A se ha realizado la simu-
lación del modelo dado por las ecuaciones (4.57) a (4.59). Como caso particular se ha tomado
un inversor con los datos indicados en la tabla 3.1.
TABA 3.1. DATOS DEL INVERSOR RESONANTE SIMULADO
PARÁMETRO VALOR
Frecuencia de conmutación
Bobina resonante
Condensador resonante
Resistencia de carga
20 kHz
4.15 mH
15 nF
212 Ohmios
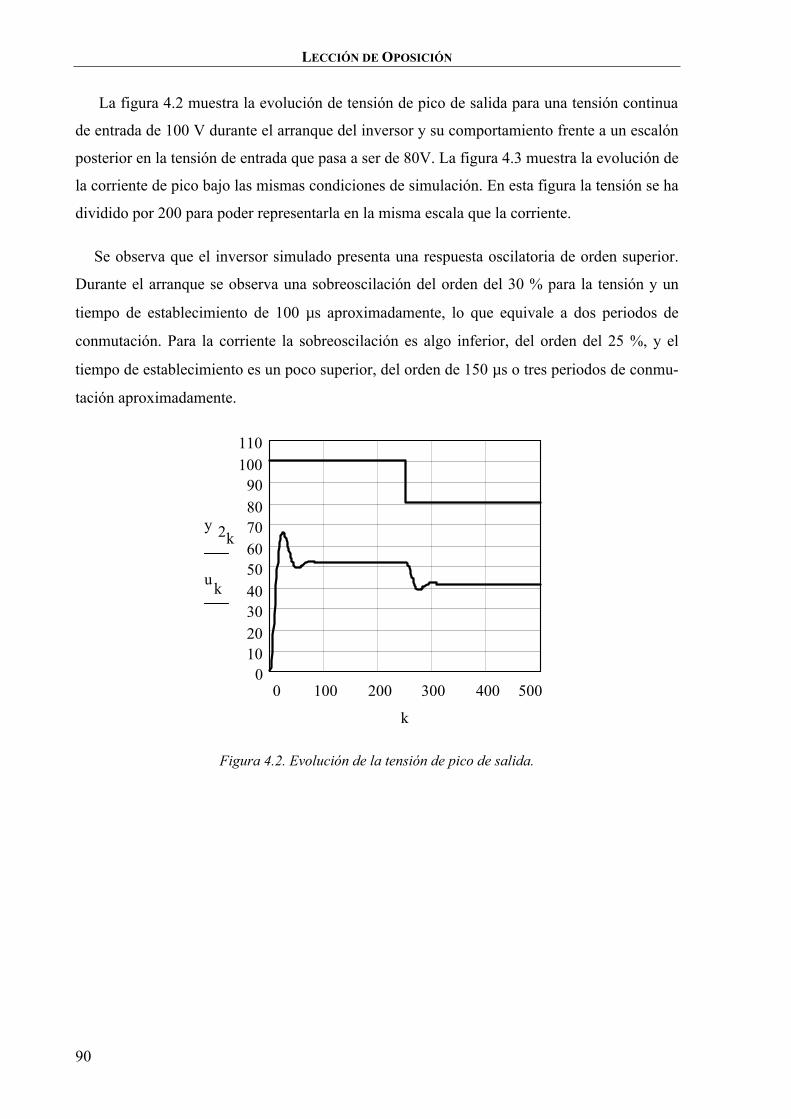
LECCIÓN DE OPOSICIÓN
90
La figura 4.2 muestra la evolución de tensión de pico de salida para una tensión continua
de entrada de 100 V durante el arranque del inversor y su comportamiento frente a un escalón
posterior en la tensión de entrada que pasa a ser de 80V. La figura 4.3 muestra la evolución de
la corriente de pico bajo las mismas condiciones de simulación. En esta figura la tensión se ha
dividido por 200 para poder representarla en la misma escala que la corriente.
Se observa que el inversor simulado presenta una respuesta oscilatoria de orden superior.
Durante el arranque se observa una sobreoscilación del orden del 30 % para la tensión y un
tiempo de establecimiento de 100 µs aproximadamente, lo que equivale a dos periodos de
conmutación. Para la corriente la sobreoscilación es algo inferior, del orden del 25 %, y el
tiempo de establecimiento es un poco superior, del orden de 150 µs o tres periodos de conmu-
tación aproximadamente.
0 100 200 300 400 5000
102030405060708090
100110
y 2k
uk
k
Figura 4.2. Evolución de la tensión de pico de salida.
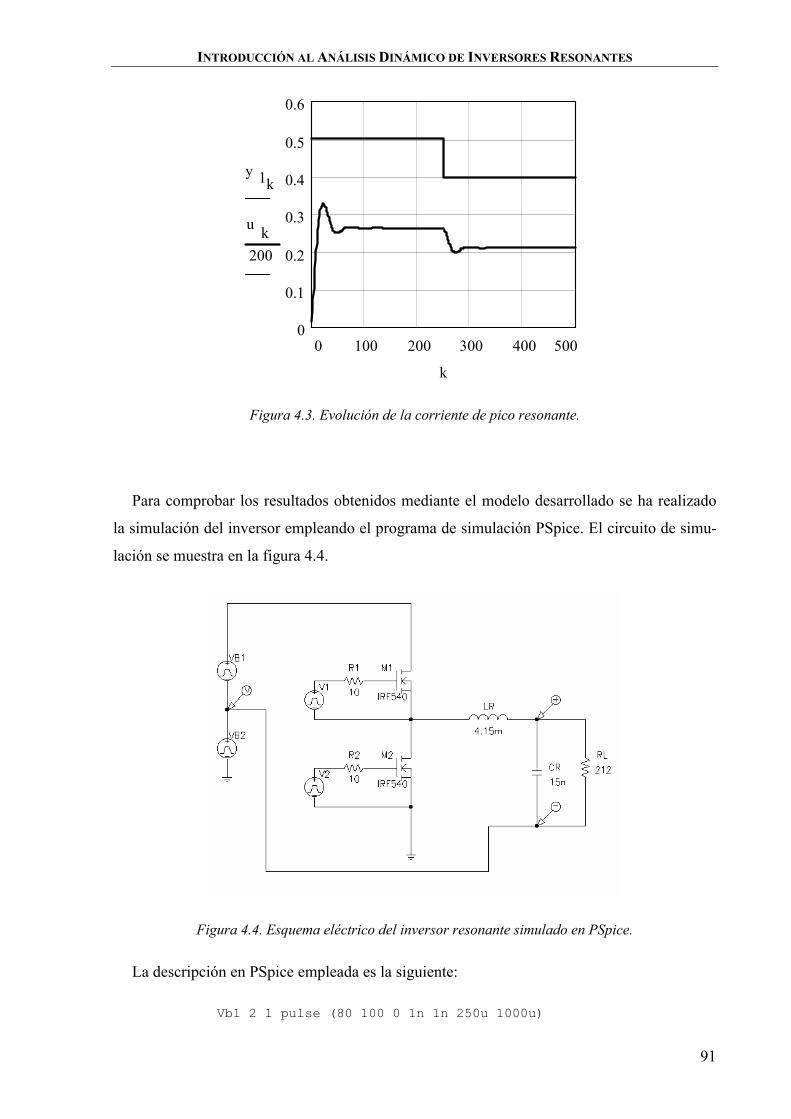
INTRODUCCIÓN AL ANÁLISIS DINÁMICO DE INVERSORES RESONANTES
91
0 100 200 300 400 5000
0.1
0.2
0.3
0.4
0.5
0.6
y 1k
u k200
k
Figura 4.3. Evolución de la corriente de pico resonante.
Para comprobar los resultados obtenidos mediante el modelo desarrollado se ha realizado
la simulación del inversor empleando el programa de simulación PSpice. El circuito de simu-
lación se muestra en la figura 4.4.
Figura 4.4. Esquema eléctrico del inversor resonante simulado en PSpice.
La descripción en PSpice empleada es la siguiente:
Vb1 2 1 pulse (80 100 0 1n 1n 250u 1000u)

LECCIÓN DE OPOSICIÓN
92
Vb2 1 0 pulse (80 100 0 1n 1n 250u 1000u) ; M1 2 5a 3 3 IRF540 Vg1 5 3 pulse (0 10 0 1n 1n 25u 50u) Rg1 5 5a 10 ; M2 3 6a 0 0 IRF540 Vg2 6 0 pulse (0 10 25u 1n 1n 25u 50u) Rg2 6 6a 10 ; LR 3 4 4.15m CR 4 1 15n RL 4 1 212 ; .lib .tran 0.1u 500u 0 0.1u .end
La figura 4.5 muestra las formas de onda de la tensión de entrada y la tensión rectificada de
la tensión de salida del inversor que se obtienen por medio de la simulación en PSpice. La
línea discontinua muestra la evolución del valor de pico de la tensión.
0s 100us 200us 300us 400us 500us
Timeabs(v(4,1)) v(1)
100V
80V
60V
40V
20V
0V
**** Simulacion de un inversor resonante LC paralelo ****Date/Time run: 01/18/99 17:47:10 Temperature: 27.0
Figura 4.5. Resultados de simulación con PSpice: tensión de salida.
La figura 4.6 muestra las formas de onda de la tensión de entrada (dividida por 200) y la
corriente resonante rectificada que se obtienen por medio de la simulación en PSpice. La línea
discontinua muestra la evolución del valor de pico de la corriente.

INTRODUCCIÓN AL ANÁLISIS DINÁMICO DE INVERSORES RESONANTES
93
0s 100us 200us 300us 400us 500us
Timev(1)/200 abs(i(LR))
500m
400m
300m
200m
100m
0
**** Simulacion de un inversor resonante LC paralelo ****Date/Time run: 01/18/99 17:47:10 Temperature: 27.0
Figura 4.6. Resultados de simulación con PSpice: corriente resonante.
La tabla 3.2 muestra una comparación entre los resultados obtenidos mediante el modelo
de gran señal y la simulación en PSpice. Como se observa el error medio es del orden del
10%. El error cometido depende del contenido en armónicos que presenten las formas de onda
de tensión y corriente.
TABLA 3.2. COMPARACIÓN DE RESULTADOS DEL MODELO CON SIMULACIÓN EN PSPICE
PARÁMETRO MODELO PSpice Diferencia
Sobreoscilación de la tensión de pico
Tensión de pico en reg. permanente
66.7 V
51.8 V
73.3 V
56.4 V
9 %
8.1 %
Sobreoscilación de la corriente de pico
Corriente de pico en reg. permanente
0.33 A
0.263
0.37 A
0.30
10.8 %
12.3 %
Cuanto más senoidales sean las ondas de las variables de estado, menor será el error come-
tido ya que las componentes de alta frecuencia del desarrollo en serie de Fourier serán despre-
ciables comparadas con el primer armónico, que es el que considera el modelo desarrollado.
Por ello, la precisión del modelo también puede aumentarse a base de considerar más armóni-
cos del desarrollo en serie de Fourier, lo cual también complicaría considerablemente el mo-

LECCIÓN DE OPOSICIÓN
94
delo, ya que la incorporación de cada armónico nuevo supone aumentar en dos el orden del
mismo.
Solución en régimen permanente
Empleando entonces la ecuación (4.22) que proporciona la solución en régimen permanen-
te para el caso de sistemas lineales e invariantes tenemos:
10
1
0
0
10
10
0/1
/1/1/1
uL
RCjCLj
ui
C
+−
=
−
ωω
(4.51)
Si denominamos M a la matriz cuadrada de la ecuación (4.51), su inversa vendrá dada por:
−+
++−==−
0
0
020
1
/1/1/1
11
ωω
ωω
α
jCLRCj
LCRCjM
MM (4.52)
Sustituyendo (4.52) en (4.51) se obtiene:
πω
ωω
ω
EjLjC
LRCj
LCRCj
ui
C
20/1
/1/1/1
11
0
0
020
10
10 −
−+
++−=
(4.53)
Despejando en (4.53) obtenemos las siguientes soluciones para régimen permanente:
( )RLCRjLRCjE
i200
010
12ωω
ωπ −+−
+= (4.54)
1
/2
020
10
−−=
RL
jLC
EjuC ω
ω
π (4.55)
Para obtener las soluciones finales en régimen permanente de corriente resonante y tensión
de salida deben tenerse en cuenta las relaciones dadas por (4.4) y (4.5), es decir:
100 2 ijI = (4.56)
100 2 CC ujU = (4.57)

INTRODUCCIÓN AL ANÁLISIS DINÁMICO DE INVERSORES RESONANTES
95
De donde se obtienen finalmente las expresiones de corriente y tensión en régimen perma-
nente:
( ) LjLCRRCjE
I0
20
00 1
14ωω
ωπ +−
+= (4.58)
( )
RL
jLC
EU
020
0
1
14ω
ωπ +−= (4.59)
Las expresiones (4.58) y (4.59) proporcionan la solución en régimen permanente para el
inversor resonante LC. Puesto que sólo se ha considerado el primer término del desarrollo de
Fourier en el modelo obtenido, las expresiones (4.58) y (4.59) coinciden con el armónico fun-
damental de corriente resonante y tensión de salida. Puede comprobarse que coinciden con las
expresiones dadas por las ecuaciones (2.22) y (2.25) obtenidas del análisis del inversor reso-
nante empleando la aproximación fundamental.
Modelado dinámico de pequeña señal
Para el modelado dinámico de pequeña señal se empleará como punto de partida el modelo
en el plano real dado por las ecuaciones (4.57) a (4.59). El punto de funcionamiento en torno
al cual se obtendrá la respuesta dinámica vendrá dado por:
000 )4..1( EEixx ii ==== ωω (4.60)
A modo de ejemplo se determinará la función de transferencia que relaciona la tensión de
pico en el condensador resonante y la tensión continua de entrada al inversor, es decir:
)s(E
)s(u)s(G Cpico
ue = (4.61)
Para ello se introduce una perturbación en la tensión de entrada que producirá una varia-
ción en las variables de estado de la forma siguiente:
)4..1(ˆˆ00 =+=→+= ixxxEEE iii (4.62)

LECCIÓN DE OPOSICIÓN
96
Introduciendo esta perturbación en el modelo dado por (4.57) a (4.59) y linealizando se
tiene:
EL
xxxx
RCCRCC
LL
xxxx
dtd ˆ
00/20
ˆˆˆˆ
/1/10/10/1
/1000/10
ˆˆˆˆ
4
3
2
1
0
0
0
0
4
3
2
1
−
+
−−−
−−−
=
π
ωω
ωω
(4.63)
( )220110220
210
1 ˆˆ2ˆ xxxxxx
y ++
= (4.64)
( )440330240
230
2 ˆˆ2ˆ xxxxxx
y ++
= (4.65)
Empleando la transformada de Laplace se obtiene finalmente:
)(
00/20
/1/10/10/1
/100/1
)()()()(
1
0
0
0
0
4
3
2
1
sEL
RCsCRCsC
LsLs
sxsxsxsx
−
+−−+−
−
=
−
π
ωω
ωω
(4.66)
[ ])()(2
)( 220110
10
1 sxxsxxi
sy += (4.67)
[ ])()(2
)( 440330
10
2 sxxsxxu
syC
+= (4.68)
La función de transferencia buscada vendrá dada por:
)s(E)s(y
)s(E
)s(u)s(G Cpico
ue2== (4.69)
Para obtener la función de transferencia debe resolverse el sistema (4.66), de manera que
se obtienen las respuestas dinámicas de las variables de estado del modelo. A continuación
empleando las ecuaciones (4.67) y (4.68) pueden obtenerse las respuestas dinámicas de las
variables de salida.
INTRODUCCIÓN AL ANÁLISIS DINÁMICO DE INVERSORES RESONANTES
97
Para la determinación de estas respuestas dinámicas se ha empleado el programa MathCad
mostrado en el Apéndice B. La obtención de una solución general resulta bastante tediosa y es
más conveniente trabajar en el plano complejo siguiendo el procedimiento indicado en el
apartado anterior. No obstante, este punto queda fuera de los objetivos del presente trabajo.
La figura 4.7 muestra el diagrama de Bode de la función de transferencia (4.69) para tres
valores diferentes de la resistencia de carga.
Empleando el programa MathCad mostrado en el Apéndice B pueden calcularse de forma
muy sencilla diferentes reguladores para el funcionamiento estable del sistema en bucle cerra-
do. A modo de ejemplo las figuras 4.8 y 4.9 ilustran los diagramas de Bode y el camino de
Nyquist para el caso de emplear un regulador proporcional. En el caso de la figura 4.8 la cons-
tante del regulador proporcional es reducida y el sistema resultante en bucle cerrado es esta-
ble. La figura 4.9 muestra el caso de un regulador proporcional con una constante más eleva-
da, resultando un sistema inestable en bucle cerrado.
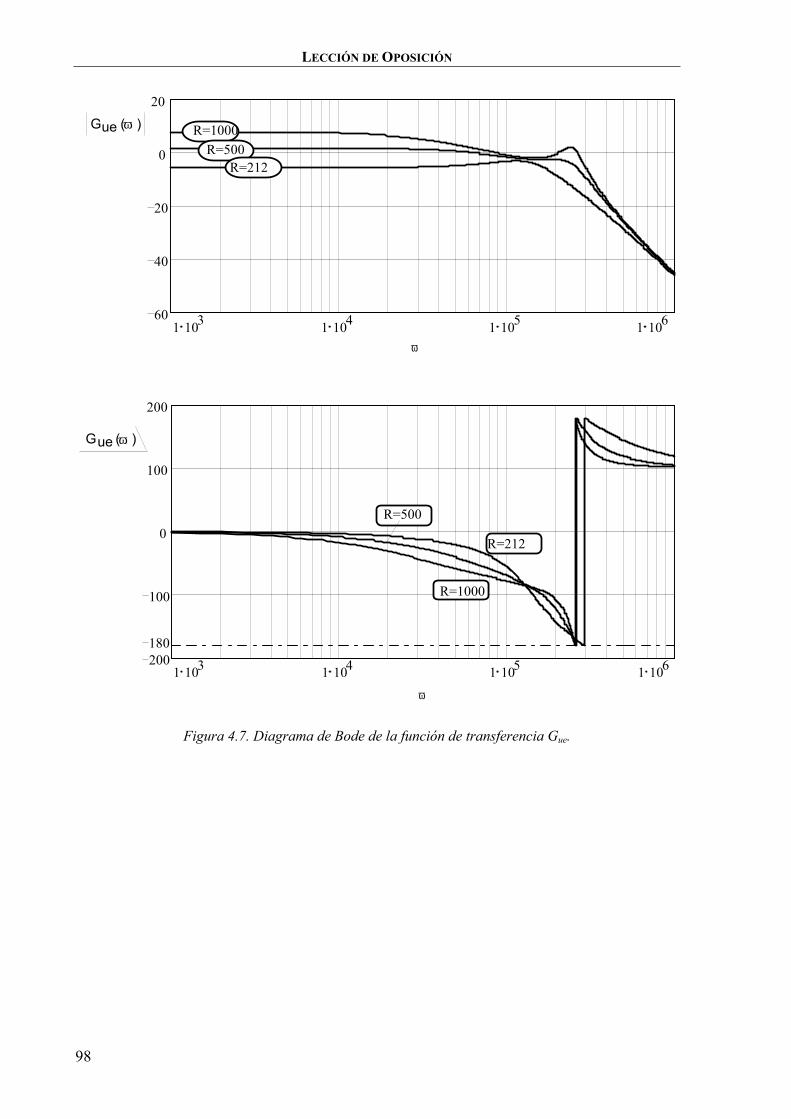
LECCIÓN DE OPOSICIÓN
98
ω
1 103 1 104 1 105 1 106200
100
0
100
200
ω
20
1 103 1 104 1 105 1 10660
40
20
0
ue R=1000R=500
R=212
G ( )ω
ueG ( )ω
180
R=1000
R=500
R=212
Figura 4.7. Diagrama de Bode de la función de transferencia Gue.
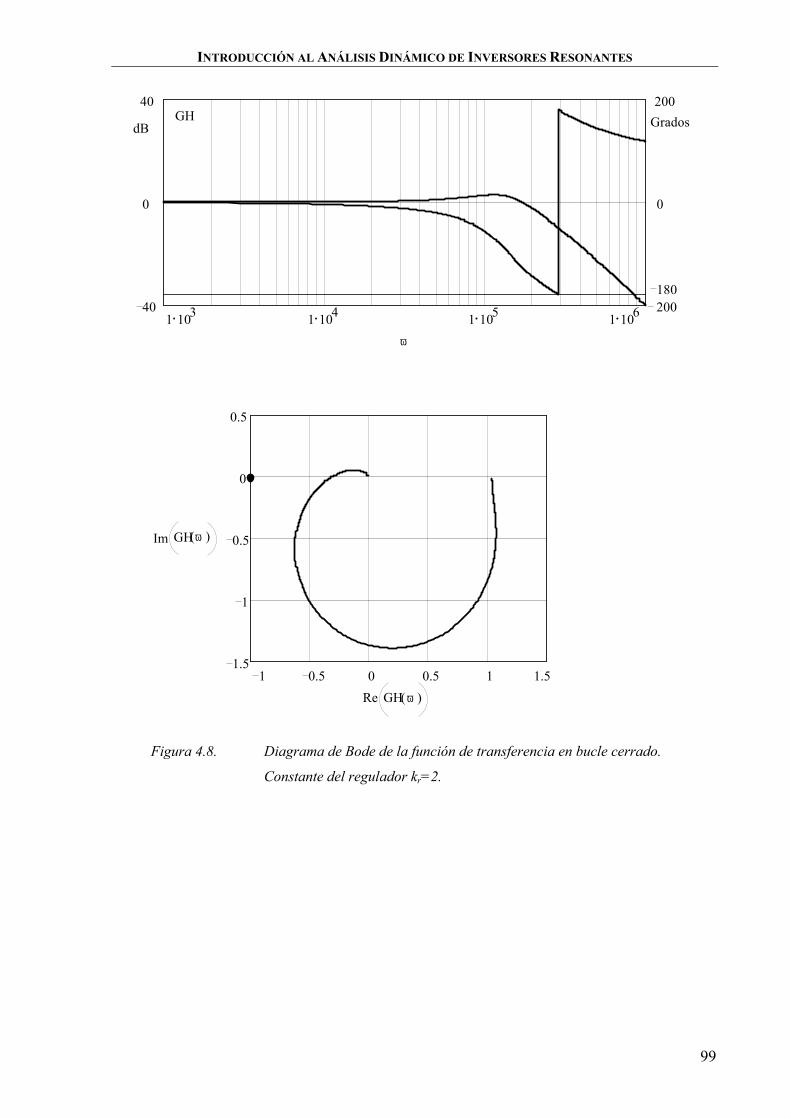
INTRODUCCIÓN AL ANÁLISIS DINÁMICO DE INVERSORES RESONANTES
99
1 103 1 104 1 105 1 10640
0
40
ω
200
0
200
dB
180
GradosGH
1 0.5 0 0.5 1 1.51.5
1
0.5
0
0.5
Im GH( )ω
Re GH( )ω
Figura 4.8. Diagrama de Bode de la función de transferencia en bucle cerrado.
Constante del regulador kr=2.
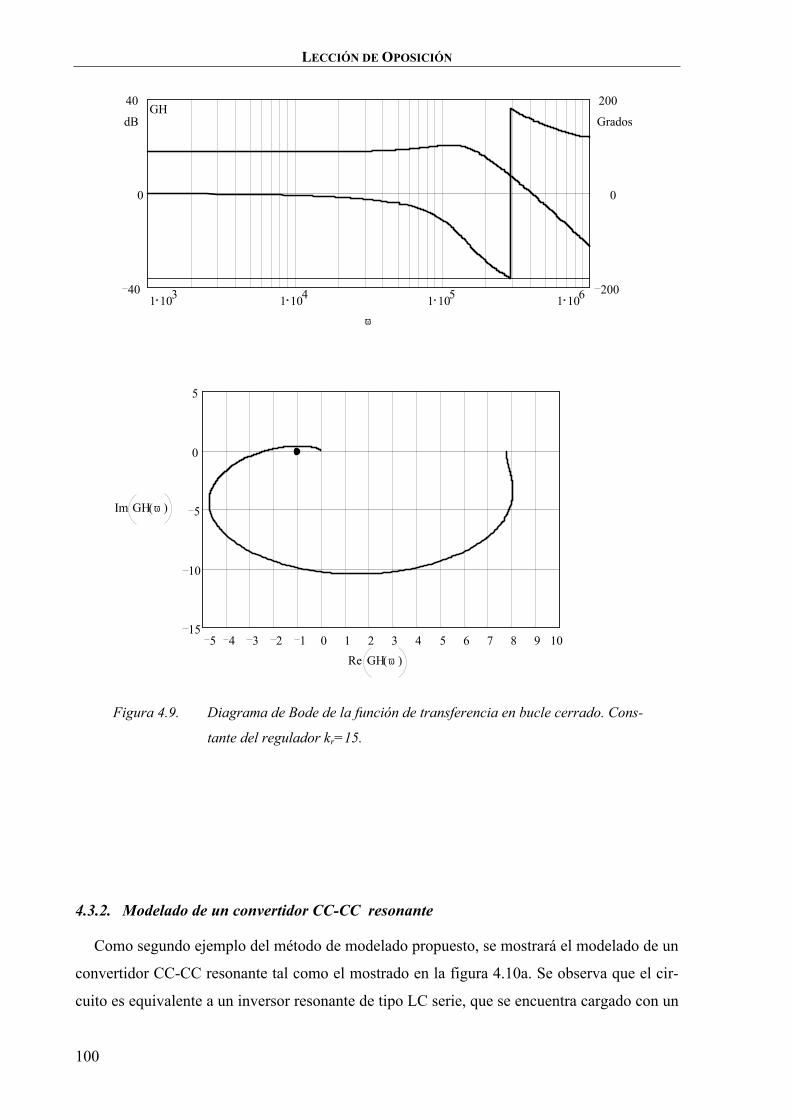
LECCIÓN DE OPOSICIÓN
100
5 4 3 2 1 0 1 2 3 4 5 6 7 8 9 1015
10
5
0
5
Im GH( )ω
Re GH( )ω
1 103 1 104 1 105 1 10640
0
40GH
ω
200
0
200
dB Grados
Figura 4.9. Diagrama de Bode de la función de transferencia en bucle cerrado. Cons-
tante del regulador kr=15.
4.3.2. Modelado de un convertidor CC-CC resonante
Como segundo ejemplo del método de modelado propuesto, se mostrará el modelado de un
convertidor CC-CC resonante tal como el mostrado en la figura 4.10a. Se observa que el cir-
cuito es equivalente a un inversor resonante de tipo LC serie, que se encuentra cargado con un
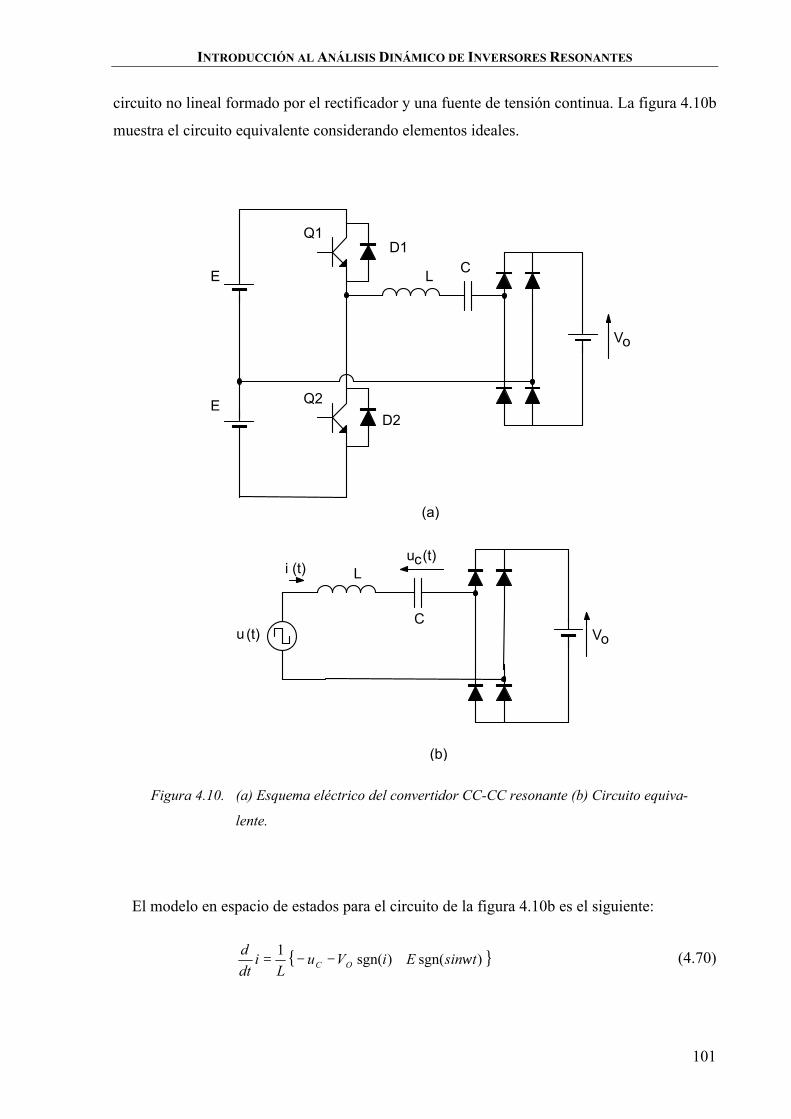
INTRODUCCIÓN AL ANÁLISIS DINÁMICO DE INVERSORES RESONANTES
101
circuito no lineal formado por el rectificador y una fuente de tensión continua. La figura 4.10b
muestra el circuito equivalente considerando elementos ideales.
E
E
LC
Q1D1
Q2D2
L
C
(a)
(b)
u (t)
i (t)u (t)c
Vo
Vo
Figura 4.10. (a) Esquema eléctrico del convertidor CC-CC resonante (b) Circuito equiva-
lente.
El modelo en espacio de estados para el circuito de la figura 4.10b es el siguiente:
)sgn()sgn(1
tsinEiVuL
idtd
OC ω+−−= (4.70)

LECCIÓN DE OPOSICIÓN
102
iC
udtd
C
1= (4.71)
siendo sgn (⋅) la función signo. Las formas de onda de tensión uC(t) y corriente i(t) en este tipo
de convertidor son prácticamente senoidales, por lo que se pueden aproximar con gran exacti-
tud por medio de la componente fundamental del desarrollo en serie de Fourier. Teniendo esto
en cuenta, el modelo dado por (4.70) y (4.71) se puede aproximar de la forma siguiente:
11111
)sgn()sgn(1
tsinEiVuL
ijidtd
OC ωω +−−+−= (4.72)
11
1i
Cu
dtd
C = (4.73)
Hay que recordar que los elementos del vector de estado empleados en (4.72) y (4.73) son
coeficientes complejos de la serie exponencial de Fourier, por lo que el modelo corresponde
en realidad a un modelo de cuarto orden en el espacio de estados de variables reales.
Por otro lado, el modelo (4.72)-(4.73) puede simplificarse teniendo en cuenta la siguiente
relación:
π
ω2
)sgn(1
jtsin −= (4.74)
que es simplemente la amplitud del primer armónico de una onda cuadrada para el desarrollo
en serie exponencial de Fourier.
También puede realizarse una simplificación adicional de la forma siguiente:
iei ϕ
π2
)sgn(1
= (4.75)
donde se ha supuesto que la onda i(t) es aproximadamente senoidal y con un ángulo de desfa-
se ϕi , que da lugar a una onda signo cuadrada y con el mismo ángulo de fase.
Empleando (4.74) y (4.75) en el modelo dado por (4.72)-(4.73) se obtiene el siguiente mo-
delo simplificado:
−−−+−=
ππω ϕ 221
111jEeVu
Liji
dtd
iOC (4.76)

INTRODUCCIÓN AL ANÁLISIS DINÁMICO DE INVERSORES RESONANTES
103
111
1i
Cuju
dtd
CC +−= ω (4.77)
Las ecuaciones (4.72) y (4.73) proporcionan el modelo del circuito en gran señal en el es-
pacio de estados. Las variables ω y E pueden considerarse como entradas externas al modelo
que además permiten variar la potencia de salida.
A partir del modelo dado por (4.76) y (4.77) pueden calcularse incluso formas explícitas de
las soluciones en régimen permanente. Para ello se emplea la condición de derivadas de las
variables de estado igual a cero, y se resuelve el sistema correspondiente. El resultado obteni-
do es el siguiente [40]:
LC
VEu O
C 20
22
10 1
2
ωπ −
−= (4.78)
10010 CuCji ω= (4.79)
La solución obtenida es muy similar a la propuesta por Steigerwald [18], en donde se ob-
tiene un circuito equivalente para el comportamiento en régimen permanente.
Una vez obtenida la solución en régimen permanente, es posible linealizar el modelo en
torno al punto de funcionamiento en régimen permanente para obtener las funciones de trans-
ferencia de pequeña señal, relativas a las variaciones de la tensión y corriente resonantes fren-
te a perturbaciones en la frecuencia de conmutación ω o en la tensión de entrada E.
Por ejemplo la función de transferencia que relaciona la variación en la tensión del conden-
sador resonante frente a una perturbación en la frecuencia de conmutación es la siguiente
[40]:
2234
1
22
)(
)(
∆+∑++∆+
−=sKss
KsM
s
suC ωω
(4.80)
donde:
ωπ
ωM
VKuM OR
C
2
10
2== (4.81)

LECCIÓN DE OPOSICIÓN
104
22222 1RRR LC
ωωωωω −=∆+=∑= (4.83)
De forma similar se podría obtener la función de transferencia que relaciona la variación en
la tensión del condensador resonante frente a una perturbación en la tensión de entrada.

APÉNDICE A
SIMULACIÓN POR ORDENADOR DE UN CIRCUITO DE POTENCIA
A.1. Ecuaciones de simulación de un circuito a partir del modelo de estado Dado un circuito de potencia cuyo modelo de gran señal viene definido de la forma si-
guiente:
)()()()()( tutBtxtAtxdtd
+= (A.1)
La evolución temporal de las variables de estado durante un intervalo de tiempo ∆t se ob-
tiene por medio de la integración del sistema de ecuaciones diferenciales (A.1), de la forma
siguiente:
[ ]∫∫ ∆−∆−++∆−=+∆−=
t
tt
t
ttdttutBtxtAttxdttx
dtd
ttxtx )()()()()()()()( (A.2)
La integral definida de la expresión (A.2) puede calcularse de forma aproximada emplean-
do diferentes métodos. Uno de los métodos más habituales en la mayoría de los simuladores
comerciales es el de la aproximación trapezoidal, que presenta las ventajas de buena aproxi-
mación, simplicidad y rapidez de cálculo. Se representa este método de forma gráfica en la
figura A.1.
∆t- t t
Ax(t)+Bu(t)
Ax(t- )+Bu(t- )∆ t∆ t
x(t).
Figura A.1. Aproximación trapezoidal para la integración de las ecuaciones de estado.

LECCIÓN DE OPOSICIÓN
106
Empleando el método de la aproximación trapezoidal para (A.1) se obtiene:
[ ] [ ])()()()(21
)()()()(21
)()( tutBttuttBttxtAttxttAtttxtx +∆−∆−∆++∆−∆−∆+∆−=
(A.2)
Operando y despejando se obtiene finalmente:
[ ]
+∆−∆−∆+∆−
∆−∆+
∆−=
−
)()()()(21
)()(21
)(21
)(1
tutBttuttBtttxttAtItAtItx
(A.3)
Si se trata de un sistema invariante, se pueden aplicar las siguientes igualdades:
BtBttBAtAttA ==∆−==∆− )()()()( (A.4)
entonces la ecuación (A.3) puede simplificarse de la forma siguiente:
[ ])()()()( tuttuNttxMtx +∆−+∆−= (A.5)
dónde:
∆+
∆−=
−
AtIAtIM21
21 1
(A.6)
BtAtIN
∆
∆−=
−
21
21 1
(A.7)

SIMULACIÓN POR ORDENADOR DE UN CIRCUITO DE POTENCIA
107
A.2. Aplicación al modelado de un inversor resonante LC paralelo Empleando las ecuaciones de simulación obtenidas en el apartado anterior se ha creado el
siguiente programa para MathCad que permite la simulación del modelo obtenido para el in-
versor LC paralelo, que viene representado por las siguientes ecuaciones:
EL
xxxx
RCCRCC
LL
xxxx
dtd
−
+
−−−
−−−
=
00/20
/1/10/10/1
/1000/10
4
3
2
1
4
3
2
1
π
ωω
ωω
(A.8)
22
211 2 xxy += (A.9)
24
232 2 xxy += (A.10)
--------------------------------------------------------------------------------------------- Programa para la simulación de un inversor resonante LCC J. Marcos Alonso. Enero 1999. --------------------------------------------------------------------------------------------- Entrada de datos Frecuencia de conmutación: fs 20000
Ts1
fs
ω ..2 π fs Tensión de entrada: E 100 Bobina resonante:
L .4.15 10 3 3
Condensador resonante:
C .15 10 9 9
Resistencia de carga: R 212 Tiempo máximo de simulación: tmax .10 Ts Paso de integración:
∆tTs
50
Matrices del inversor resonante LC
A
0
ω
1
C
0
ω
0
0
1
C
1
L
0
1.R C
ω
0
1
L
ω
1.R C

LECCIÓN DE OPOSICIÓN
108
B
0
2.π L
0
0
Matrices de integración:
MN identity( )4 ..1
2∆t A
1
M .MN identity( )4 ..1
2∆t A
N ...MN1
2∆t B
k ..1tmax
∆t
Condiciones iniciales de integración: x 10
0
x 200
x 300
x 400
Integración en el tiempo: Excitación:
uk if ,,<ktmax
.2 ∆tE .0.8 E
x 1k
x 2k
x 3k
x 4k
.M
x 1k 1
x 2k 1
x 3k 1
x 4k 1
.N uk 1 uk
Variables de salida: Tensión de pico:
y 2k.2 x 3k
2 x 4k
2
0 100 200 300 400 5000
102030405060708090
100110
y 2k
uk
k Corriente de pico:
y 1k.2 x 1k
2 x 2k
2

SIMULACIÓN POR ORDENADOR DE UN CIRCUITO DE POTENCIA
109
0 100 200 300 400 5000
0.1
0.2
0.3
0.4
0.5
0.6
y 1k
u( )k
200
k
Régimen permanente :
X0 ..A 1 B u100
Corriente de pico:
Y 1.2 X0 ,0 0
2 X0 ,1 02
=Y 1 0.263
Tensión de pico:
Y 2.2 X0 ,2 0
2 X0 ,3 02
=Y 2 51.758
X0 ..A 1 B u500
Corriente de pico:
Y 1.2 X0 ,0 0
2 X0 ,1 02
=Y 1 0.21
Tensión de pico:
Y 2.2 X0 ,2 0
2 X0 ,3 02
=Y 2 41.406

LECCIÓN DE OPOSICIÓN
110

APÉNDICE B
OBTENCIÓN DE LA RESPUESTA DINÁMICA DEL INVERSOR LC PARALELO
--------------------------------------------------------------------------------------------- Respuesta dinámica del inversor LC paralelo J. Marcos Alonso. Enero 1999. --------------------------------------------------------------------------------------------- Entrada de datos Frecuencia de conmutación: fs 0 20000
Ts 01
fs 0
ω 0..2 π fs 0
Tensión de entrada: E 0 100
Bobina resonante:
L .4.15 10 3 Condensador resonante:
C .15 10 9 Resistencia de carga: R 1000 Respuestas en Régimen Permanente j i
i0 1( )R ..2 E 0
π
1 ...j ω 0 R C
.ω 0 L .j R ...ω 02 R L C
x 10( )R Re i0 1( )R
x 20( )R Im i0 1( )R
uc0 1( )R ..2 E 0
π
j
..ω 02 L C .j
.ω 0 L
R1
x 30( )R Re uc0 1( )R
x 40( )R Im uc0 1( )R
Matrices de Respuesta Dinámica del Inversor Resonante LC
M( ),ω R
.j ω
ω 0
1
C
0
ω 0
.j ω
0
1
C
1
L
0
.j ω1.R C
ω 0
0
1
L
ω 0
.j ω1.R C

LECCIÓN DE OPOSICIÓN
112
N
0
2.π L
0
0
X( ),ω R .M( ),ω R 1 N
Xt( ),ω R TX( ),ω R
y 2( ),ω R .2
uc0 1( )R.x 30( )R < >Xt( ),ω R 2 .x 40( )R < >Xt( ),ω R 3
ω ..,1000 1500 1000000
1 103 1 104 1 105 1 10660
40
20
0
20
.20 log y 2( ),ω 1000
.20 log y 2( ),ω 500
.20 log y 2( ),ω 212
ω
1 103 1 104 1 105 1 106200
100
0
100
200
.arg y 2( ),ω 10000
180
π
.arg y 2( ),ω 5000
180
π
.arg y 2( ),ω 2120
180
π
180
ω
Respuesta en bucle cerrado con regulador proporcional Sistema: G( )ω y 2( ),ω 212
Realimentación: H( )ω 1 Regulador: R( )ω 2 Bucle cerrado: GH( )ω ..G( )ω H( )ω R( )ω
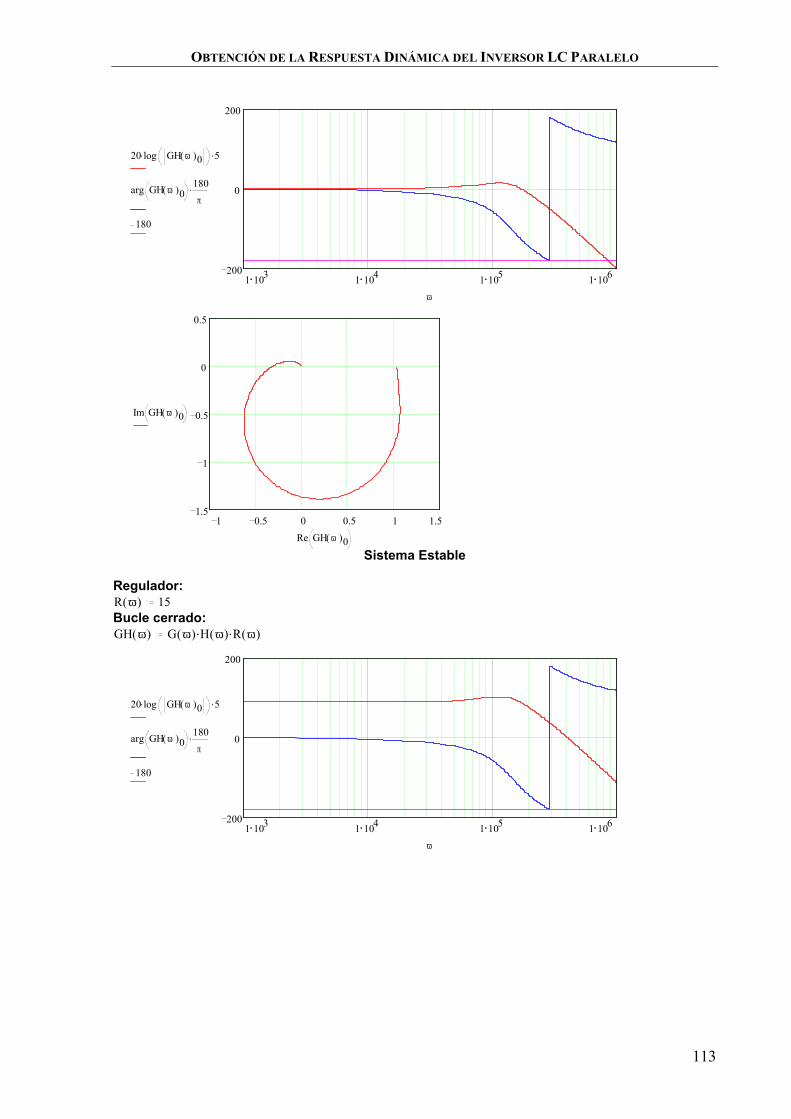
OBTENCIÓN DE LA RESPUESTA DINÁMICA DEL INVERSOR LC PARALELO
113
1 103 1 104 1 105 1 106200
0
200
..20 log GH( )ω 0 5
.arg GH( )ω 0180
π
180
ω
1 0.5 0 0.5 1 1.51.5
1
0.5
0
0.5
Im GH( )ω 0
Re GH( )ω 0
Sistema Estable Regulador: R( )ω 15 Bucle cerrado: GH( )ω ..G( )ω H( )ω R( )ω
1 103 1 104 1 105 1 106200
0
200
..20 log GH( )ω 0 5
.arg GH( )ω 0180
π
180
ω

LECCIÓN DE OPOSICIÓN
114
5 4 3 2 1 0 1 2 3 4 5 6 7 8 9 1015
10
5
0
5
Im GH( )ω 0
Re GH( )ω 0
Sistema Inestable

BIBLIOGRAFÍA
LIBROS
[1] J. A. Gualda, S. Martínez, P. M. Martínez; "ELECTRÓNICA INDUSTRIAL: TÉCNICAS DE POTENCIA", 2ª edición, Marcombo, 1992.
[2] N. Mohan, T.M. Undeland, W. P. Robbins; “POWER ELECTRONICS. CONVERTERS, AAPLICATIONS AND DESIGN”. John Wiley and Sons, Inc. 2ª Edición. 1995.
[3] M. H. Rashid; “POWER ELECTRONICS. CIRCUITS, DEVICES AND APPLICATIONS”. Prentice Hall. 2ª Edición. 1993.
[4] B. W. Williams; “POWER ELECTRONICS. DEVICES, DRIVERS APPLICATIONS AND PASSIVE COMPONENTS”. Macmillan. 2ª Edición. 1992.
[5] J. M. Alonso; "ALIMENTACIÓN DE LÁMPARAS DE ALTA INTENSIDAD DE DESCARGA: APORTACIONES EN LA OPTIMIZACIÓN DEL SISTEMA ELECTRÓNICO", Tesis Doctoral, Universidad de Oviedo. 1994.
ARTÍCULOS
Procesos electrostáticos
[6] H. Fujita, S. Ogasawara, H. Akagi; "An approach to a broad range of power control in voltage-source series-resonant inverters for corona discharge treatment - pulse-density-modulation", IEEE PESC'97 conf. proc., pp. 1000-1006.
[7] S. wang, M. Nakaoka, Y. Konishi; "DSP-based PDM & PWM type voltage-fed load-resonant inverter with high-voltage transformer for silent discharge ozonizer", IEEE PESC'98 conf. proc., pp. 159-164.
[8] J. Sun, M. Nakaoka, H. Takano; "High-frequency high-voltage transformaer parasitic dc-dc converter and its repetitive learning control system", IEEE ISIE'97, pp. 353-358, Portugal, 1997.
Soldadura eléctrica
[9] P.C. Theron, J.A. Ferreira, J.C. Fetter, H.W.E. Koertzen; "Welding power supplies using the partial series resonant converter", IEEE IECON'93 conf. proc., pp. 1319-1324.
[10] L. Malesani et al; "Electronic welder with high-frequency resonant inverter", IEEE IAS'93 conf. proc. , pp. 1073-1080.
Cargas de ultrasonidos
[11] I.S. Cha et al; "A study on the design and characteristics of the high frequency resonant inverter for ultrasonic motor drive using fuzzy controller", IEEE IECON'95, pp. 680-684.
[12] P. fabijanski, L. Palczynski; "Series resonant converter with piezoelectric ceramic transducer for ultrasonic cleaning system", EPE'91 conf. proc., pp. 4-272/4-277, Florencia, 1991.
LECCIÓN DE OPOSICIÓN
116
[13] U. Schaff, H. va der Broeck; "Piezoelectric motor fed by a PLL-controlled series resonant converter", EPE'95 conf. proc., pp. 3.845-3.850, Sevilla, 1995.
Calentamiento por inducción
[14] E.J. Dede, J.M. Espi, J. Jordan, A. ferreres, S. K. Panda; "Design considerations fro transformerless series resonant inverters for induction heating", PEDS'97 conf. proc. pp. 334-339.
[15] I. Khan, J. Tapson, I. de Vries; "An induction furnace employing a 100 kHz MOSFET full-bridge current-source load-resonant inverter", IEEE ISIE'98 conf. proc., pp. 530-534.
[16] M. Yamamoto, T. Iseki et al; "Latest electromagnetic induction-based fluid-heating equipment using high-frequency PWM load resonant inverter", PEDS'97 conf. proc., pp. 153-162.
Convertidores CC-CC resonantes
[17] S. Kubota, Y. Hatanaka; "A novel ZCS high frequency power supply for induction heating", IEEE PESC'98 conf. proc., pp. 165-171.
[18] R. L. Steigerwald; "A comparison of half-bridge resonant converter topologies", IEEE Trans. on Power Electronics, Vol. 3, No. 2, pp. 174-182, abril 1988.
[19] R. L. Steigerwald; "High-frequency resonant transistor dc-dc converters", IEEE Trasn. on Industrial Electronics, vol. 31, No. 2, pp. 181-191, mayo 1984.
[20] F.S. Tsai, P. Materu, F.C. Lee; "Constant-frequency clamped-mode resonant converters", IEEE Trans. on Power Electronics, Vol. 3, No. 4, pp. 460-473, octubre 1988.
[21] D. Czarkowski, M.K. Kazimierczuk; "Phase-controlled series-parallel resonant converter", IEEE Trans. on Power Electronics, vol. 8, No. 3, pp. 309-319, julio 1993.
[22] J. A. Sabaté, R. Gean, M. M. Jovanovic, F. C. Lee; "LCC resonant inverter with fixed-frequency clamped-mode operation", VPEC seminar proceedings, pp. 131-141, 1991.
[23] J. A. Sabaté, M.M. Jovanovic, F.C. Lee, R.T. Gean; "Analysis and Design-Optimization of LCC resonant inverter for high-frequency AC distributed power system", IEEE Trans. on Industrial Electronics, vol. 42, No. 1, pp. 63-71, Febrero 1995.
[24] M. Fernández, C. Hernández; "Análsis y diseño de los onversores resonantes", Revista Española de Electrónica, diciembre 1996, pp. 66-71.
Alimentación de lámparas de descarga
[25] M. K. Kazimierczuk, W. Szaraniec; "Electronic ballasts for fluorescent lamps", IEEE transac. on Power Electronics, vol. 8, nº4, pp. 386-395, Octubre 1993.
[26] J. M. Alonso, M. Rico, C. Blanco, E. López; "Inversores resonantes en iluminación. Topologías y modos de funcionamiento", Mundo Electrónico, No. 263, pp. 47-53, Enero 1996.
[27] J. M. Alonso, M. Rico, C. Blanco, E. López; "Inversores resonantes en iluminación. Estudio y selección", Mundo Electrónico, No. 264, pp. 28-33, Febrero 1996.

ANÁLISIS ESTÁTICO DE INVERSORES RESONANTES
117
[28] J. M. Alonso, C. Blanco, E. López, A. J. Calleja, M. Rico; "Analysis, design, and optimization of the LCC resonant inverter as a high-intensity discharge lamp ballast", IEEE Trans. on Power Electronics, Vol. 13, No. 3, pp. 573-585, mayo 1998.
[29] D. Tadesse, F.P. Dawson, S.B. Dewan; "A comparison of power circuit topologies and control techniques for a high frequency ballast", IEEE IAS'93 conf. proc., pp. 2341-2347.
[30] R.M. Nelms, T.D. Jones, M.C. Cosby; "A comparison of resonant inverter topologies for HPS lamp ballasts", IEEE IAS'93 conf. proc., pp. 2317-2322.
[31] A.K.S. Bhat, C. Wei-qun; " Analysis, selection, and design of resonant inverters for electronic ballasts", IEEE PESC'94 conf. proc., pp. 796-804.
[32] B.K. Lee, B.S. Suh, D.S. Hyun; Design consideration for the improved class-D inverter topology", IEEE Trans. on Industrial Electronics, Vol. 45, No. 2, pp. 217-227, Abril 1998.
[33] M.C. Cosby, R.M. Nelms; "A resonant inverter for electronic ballast applications", IEEE Trans. on Industrial Electronics, Vol. 41, No. 4, pp. 418-425, Agosto 1994.
[34] Y. L. Lin, A.F. Witulski; "A unique analysis and design of ZCS resonant inverters", IEEE APEC'97 conf. proc., pp. 1008-1013.
[35] U. Mader; "Steady-state analysis of a voltage-fed inverter with second-order network and fluorescent lamp load", IEEE APEC'96 conf. proc., pp. 609-615.
[36] K. Heumann, J. Ying; "Small loss series resonant inverter", EPE Journal, Vol. 4, No. 1, pp. 21-28, Marzo 1994.
[37] G.C. Hsieh, C.H. Lin, J.M. Li, Y.C. Hsu; "A study of series-resonant DC/AC inverter", IEEE PESC'95 conf. proc., pp. 493-499.
[38] H. Kakehashi, T. Hidaka et al; "Electronic ballast using piezoelectric transformers for fluorescent lamps", IEEE PESC'98 conf. proc., pp. 29-35, Japón, 1998.
Modelado dinámico
[39] R. D. Middlebrook, S. Cuk; "A general unified approach to modeling switching power converter stages", IEEE PESC'76 conf. proc., pp. 18-34, 1976.
[40] S.R. Sanders, J. M. Noworolski, X.Z. Liu, G. Verghese; "Generalizaed averaging method for power conversion circuits", IEEE Trans. on Power Electronics, Vol. 6, No. 2, pp. 251-259, Abril 1991.
[41] R. M. Bass, J. Sun; "Large-signal averaging metthods under large ripple conditions", IEEE PESC'98 conf. proc., pp. 630-632.
[42] J. Sun et al; "Modeling of PWM converters in discontinuous conduction mode - A reexamination", IEEE PESC'98 conf. proc., pp. 615-622.
[43] E.X. Yang, F.C. Lee, M.M. Jovanovic; "Extended describing function technique applied to the modeling of resonant converters", VPEC'91 proc., pp. 179-191, 1991.

LECCIÓN DE OPOSICIÓN
118
[44] E.X. Yang, F.C. Lee, M.M. Jovanovic; "Small-signal modeling of power electronic circuits using extended describing function technique", VPEC'91 proc., pp. 167-178, 1991.
[45] V. A. Caliskan, G. C. Verghese, A. M. Stankovic; “Multifrequency averaging of dc/dc converters,” IEEE Trans. on Power Electronics, vol. 14, no. 1, enero 1999, pp. 124-133.