introducion de zarandas
27
Curso de Análisis Vibratorio Nivel 3 Primera Edición Autor: Lic. Luis Montenegro [email protected] [email protected] María Andrea Ruótolo [email protected]
Transcript of introducion de zarandas

5/11/2018 introducion de zarandas - slidepdf.com
http://slidepdf.com/reader/full/introducion-de-zarandas 1/27
Curso de Análisis
Vibratorio
Nivel 3
Primera Edición
Autor: Lic. Luis [email protected]
Colaborador: Pablo Rodríguez Ponte
María Andrea Ruótolo

5/11/2018 introducion de zarandas - slidepdf.com
http://slidepdf.com/reader/full/introducion-de-zarandas 2/27
Curso Sobre VibracionesNivel 3
Temario:
• Principios de Vibraciones
• Adquisición de Datos
• Procesamiento de Señal
• Monitoreo de Estado
• Análisis de Fallas
• Acciones correctivas
• Conocimiento de equipos
• Pruebas de aceptación
• Pruebas y diagnósticos de equipos

5/11/2018 introducion de zarandas - slidepdf.com
http://slidepdf.com/reader/full/introducion-de-zarandas 3/27
ÍndiceCapítulo 1: Principio de Vibraciones ...................................................... 1
Impedancia y Movilidad Mecánica....................................................... 1
Cálculo de Z y M para componentes simples ................................. 2
Agrupación de componentes simples .............................................. 8
Torque, Potencia y velocidad de giro................................................ 18
Apéndice A. Cálculo del módulo resistente polar.............................. 23
Capítulo 2: Adquisición de Datos ........................................................ 24
Sensores piezorresistivos................................................................. 25
Sensores piezoeléctricos. ................................................................. 26
Transformador Lineal de Voltaje Diferencial (LVDT).......................... 29
Galgas Extensométricas ................................................................... 32
Capítulo 3: Procesamiento de Señal..................................................... 55
Ventaneo. ........................................................................................ 55
Tipos de ventana y criterios de elección........................................ 55
Comparación entre ventanas......................................................... 60
Mapas de espectros. ........................................................................ 63
Promedios........................................................................................ 65
Capítulo 4: Monitoreo de estado. ........................................................ 69
Seteo de Ponderaciones ................................................................... 69
Técnicas complementarias al análisis de vibraciones........................ 69
Análisis de aceite. ......................................................................... 69
Emisión Acústica........................................................................... 77
Termografía Infrarroja. ................................................................. 83
Análisis espectral de corrientes ..................................................... 93
Capítulo 5: Conocimiento de equipos.................................................. 98
Engranajes. ...................................................................................... 98
Cajas Reductoras. .......................................................................... 109
Rodamientos.................................................................................. 111
Motores eléctricos.......................................................................... 136
Motores eléctricos asincrónicos. ................................................. 141 Compresores alternativos .............................................................. 154
Capítulo 6: Análisis de Falla. ............................................................. 169
Introducción. ................................................................................. 169
Efectos dinámicos del viento y de la circulación de fluido............... 169
Fallas en Equipos ........................................................................... 182
Motores eléctricos Asincrónicos .................................................. 182
5/11/2018 introducion de zarandas - slidepdf.com
http://slidepdf.com/reader/full/introducion-de-zarandas 4/27
Cajas Reductoras ........................................................................ 191
Conjunto Turbina Soplador ......................................................... 214
Apéndice: estructura de los informes ............................................. 223
Capítulo 7: Pruebas de aceptación..................................................... 225
Capítulo 8: Acciones correctivas........................................................ 239 Reemplazo de piezas ..................................................................... 239
Alineación Láser............................................................................. 255
Aislamiento y absorción de vibraciones.......................................... 262
Introducción al balanceo de rotores flexibles ................................. 274
Capítulo 9: Pruebas de Impacto y Respuesta Forzada. ....................... 287
Grados de Libertad y modos vibratorios......................................... 288
Sistemas de un solo grado de libertad............................................ 289
Sistemas de múltiples grados de libertad ....................................... 292
5/11/2018 introducion de zarandas - slidepdf.com
http://slidepdf.com/reader/full/introducion-de-zarandas 5/27
1
Capítulo 1: Principio de Vibraciones
Introducción
En nuestros dos manuales anteriores sobre análisis de vibracioneshemos desarrollado en forma detallada el comportamiento dinámico de
los modos vibratorios lineales. En ellos, utilizando modelos mecánicos
simples, hallamos las relaciones entre las amplitudes de las vibraciones
y las fuerzas que las generan para diferentes frecuencias de excitación.
Precisamente, iniciaremos este curso de nivel 3 retomando aquellas
ideas con el fin de definir y evaluar la impedancia de los sistemas
mecánicos.
Seguidamente, desarrollaremos una introducción a los modos
vibratorios torsionales comenzando con una revisión de los conceptosde torque y su relación con la potencia transmitida y la velocidad de
giro. Finalmente, analizaremos el comportamiento elástico de los aceros
ante los esfuerzos de torsión a fin de vincularlos con las amplitudes de
los modos vibratorios torsionales.
Impedancia y Movilidad Mecánica
Con el fin de caracterizar la respuesta de un sistema mecánico a las
excitaciones se definen diferentes parámetros, entre los que se
encuentra la impedancia mecánica. La misma se introduce haciendo un
paralelismo con circuitos eléctricos y es útil para estudiar sistemas
mecánicos complejos utilizando herramientas sencillas.
Formalmente, se define a la impedancia mecánica como la relación entre
la fuerza armónica excitatriz, aplicada en un punto y la velocidad
instantánea del mismo. En símbolos:
V
F Z = (1.1)
O equivalentemente
V Z F ⋅= (1.2)
Vemos que Z puede interpretarse como una medida de la resistencia
que opone una estructura al movimiento cuando se le aplica una fuerza
armónica.

5/11/2018 introducion de zarandas - slidepdf.com
http://slidepdf.com/reader/full/introducion-de-zarandas 6/27
2
Un modo alternativo de establecer esta relación es a través de la
movilidad, la cual se define como el cociente entre la velocidad y la
fuerza. Es decir, es la inversa de la impedancia.
Z F
V
M
1
== (1.3)
De esta forma se encuentra:
F M V ⋅= (1.4)
Cálculo de Z y M para componentes simples
Con el fin de darle operatividad a este concepto calcularemos los
valores de Z correspondientes a los tres elementos mecánicos más
frecuentemente encontrados en los sistemas mecánicos lineales:
amortiguador, resorte y masa.
Consideraremos que las masas son indeformables y que los
amortiguadores y resortes son lineales y de masa despreciable.
Así mismo, las fuerzas excitatrices se consideran armónicas, es
decir de la forma:
( ) ( )t cosF t F ω 0= (1.5)
Amortiguador Como hemos visto en los manuales anteriores, la fuerza en los
amortiguadores es proporcional a la velocidad relativa entre sus
extremos. Así si se tiene que un extremo se mueve con velocidad 1V y el
otro con velocidad 2V , según se muestra en la figura (1.1), la fuerza del
amortiguador ( aF ) estará dada por:
Figura 1.1: Representación esquemática del amortiguador.

5/11/2018 introducion de zarandas - slidepdf.com
http://slidepdf.com/reader/full/introducion-de-zarandas 7/27
3
V c)V V (cF a ⋅=−⋅= 21 (1.6)
donde la constante c es la constante de amortiguamiento. De este
modo la impedancia correspondiente al amortiguador será:
cV
F Z a
c== (1.7)
Resorte
Como sabemos los resortes son dispositivos para los que el
desplazamiento entre sus extremos es proporcional a la fuerza. La
constante de proporcionalidad k se llama rigidez del resorte. Laexpresión matemática para la fuerza es:
) x x(k F a 21 −⋅= (1.8)
con 1 x y 2 x los desplazamientos de los extremos según se ilustra en la
figura (1.2).
Figura 1.2: Representación esquemática del resorte.
Para calcular la impedancia debemos primero obtener la
velocidad. Dado que la velocidad es la derivada del desplazamiento
respecto del tiempo, tenemos:
( ) ( ) )º t cos(F k
t senk
F
k
F
dt
d x x
dt
d V a 900
021 +=−=⎟
⎠
⎞⎜⎝
⎛ =−= ω
ω ω
ω (1.9)
Esto significa que la velocidad presenta un adelanto de fase de 90º
respecto a la fuerza aplicada y tiene una amplitud dada por:
5/11/2018 introducion de zarandas - slidepdf.com
http://slidepdf.com/reader/full/introducion-de-zarandas 8/27
4
00 F k
V ω
= (1.10)
En forma equivalente, podemos decir que la fuerza se encuentra
retrazada 90º respecto a la velocidad y tiene una amplitud dada por:
00 V k
F ω
= (1.11)
Comparando (1.10) con (1.2) concluimos que la impedancia del
resorte debe tener una magnitud dada por:
ω
k Z
k = (1.12)
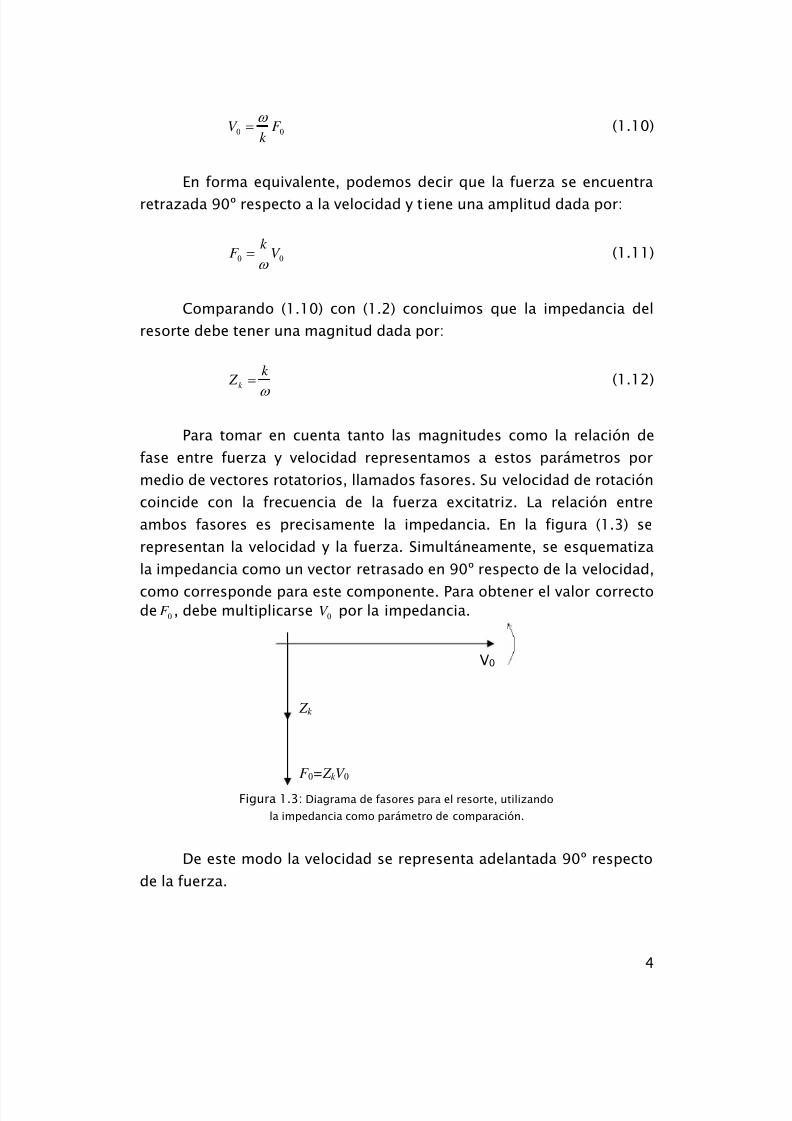
Para tomar en cuenta tanto las magnitudes como la relación de
fase entre fuerza y velocidad representamos a estos parámetros por
medio de vectores rotatorios, llamados fasores. Su velocidad de rotación
coincide con la frecuencia de la fuerza excitatriz. La relación entre
ambos fasores es precisamente la impedancia. En la figura (1.3) se
representan la velocidad y la fuerza. Simultáneamente, se esquematiza
la impedancia como un vector retrasado en 90º respecto de la velocidad,
como corresponde para este componente. Para obtener el valor correctode 0F , debe multiplicarse 0V por la impedancia.
Figura 1.3: Diagrama de fasores para el resorte, utilizando
la impedancia como parámetro de comparación.
De este modo la velocidad se representa adelantada 90º respecto
de la fuerza.
V0
Z k
F 0=Z k V 0
5/11/2018 introducion de zarandas - slidepdf.com
http://slidepdf.com/reader/full/introducion-de-zarandas 9/27
5
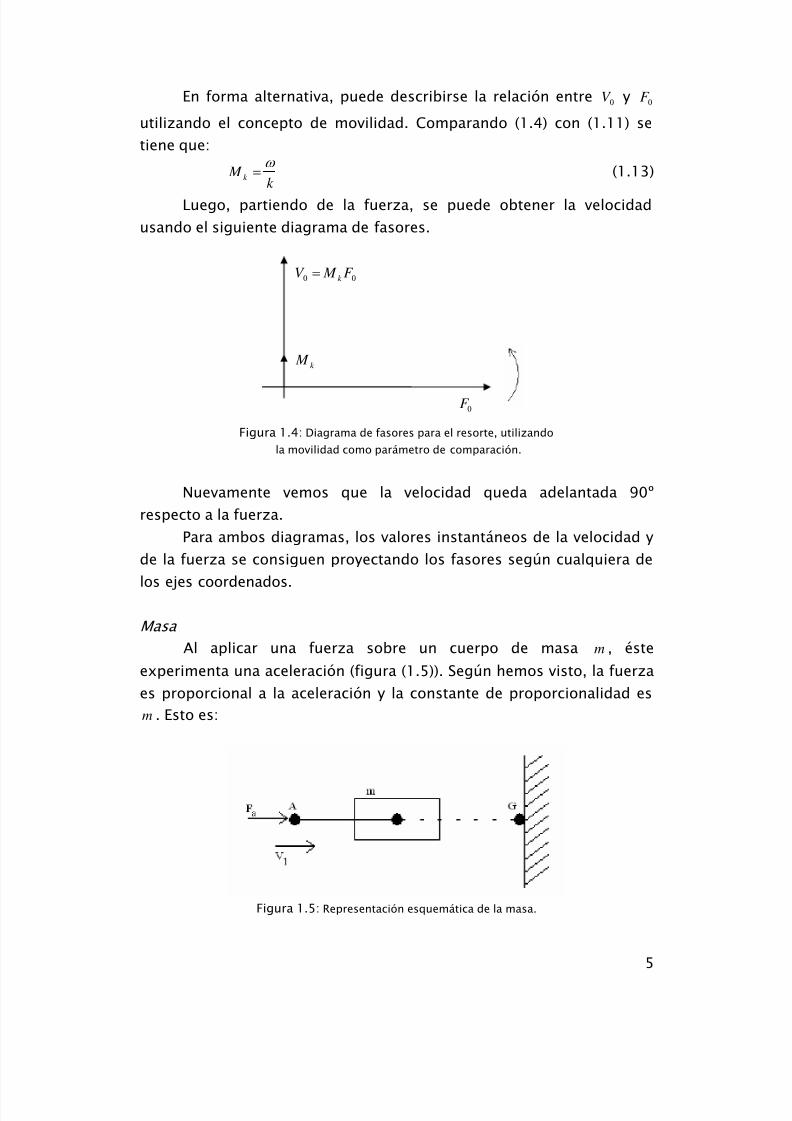
En forma alternativa, puede describirse la relación entre 0V y 0F
utilizando el concepto de movilidad. Comparando (1.4) con (1.11) se
tiene que:
k M
k
ω = (1.13)
Luego, partiendo de la fuerza, se puede obtener la velocidad
usando el siguiente diagrama de fasores.
Figura 1.4: Diagrama de fasores para el resorte, utilizando
la movilidad como parámetro de comparación.
Nuevamente vemos que la velocidad queda adelantada 90º
respecto a la fuerza.
Para ambos diagramas, los valores instantáneos de la velocidad y
de la fuerza se consiguen proyectando los fasores según cualquiera de
los ejes coordenados.
Masa
Al aplicar una fuerza sobre un cuerpo de masa m , éste
experimenta una aceleración (figura (1.5)). Según hemos visto, la fuerza
es proporcional a la aceleración y la constante de proporcionalidad es
m . Esto es:
Figura 1.5: Representación esquemática de la masa.
0F
k M
00 F M V k =

5/11/2018 introducion de zarandas - slidepdf.com
http://slidepdf.com/reader/full/introducion-de-zarandas 10/27
6
dt
dV m xmF
..
a == (1.14)
Podemos hallar la velocidad integrando:
)º t cos(F m
)t (senm
F dt )t cos(
m
F dt
m
)t (F V 90
10
00 −==== ∫ ∫ ω ω
ω ω
ω
Esto significa que la velocidad presenta un atraso de fase de 90º
respecto a la fuerza aplicada y tiene una amplitud dada por:
00
1F
mV
ω = (1.15)
En forma equivalente, podemos decir que la fuerza se encuentra
adelantada 90º respecto a la velocidad y tiene una amplitud dada por:
00 V mF ω = (1.16)
Combinando (1.2) con (1.16) tenemos que:
ω m Z m = (1.17)
Nuevamente podemos representar en un diagrama de fasores la relación
entre la fuerza y la velocidad, utilizando la impedancia como parámetro
de comparación.
Figura (1.6): Diagrama de fasores para la masa, utilizando
la impedancia como parámetro de comparación.
m Z
00 V Z F m=
0V
5/11/2018 introducion de zarandas - slidepdf.com
http://slidepdf.com/reader/full/introducion-de-zarandas 11/27
7
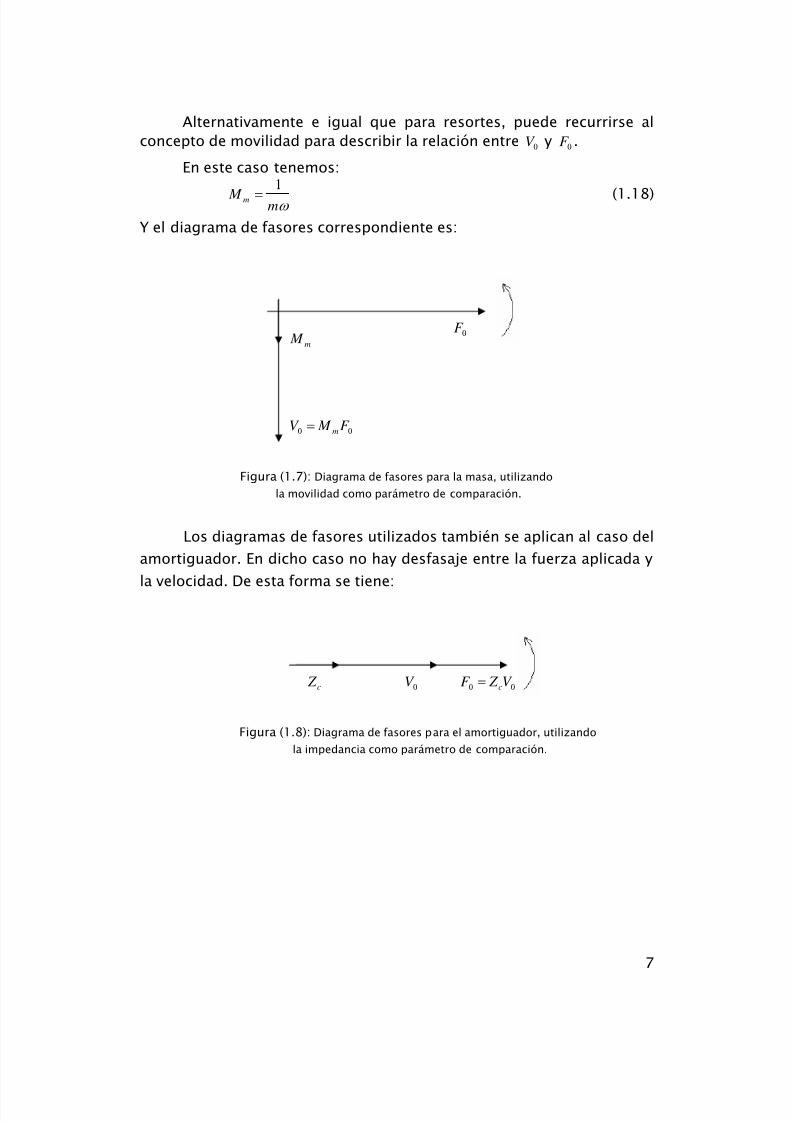
Alternativamente e igual que para resortes, puede recurrirse al
concepto de movilidad para describir la relación entre 0V y 0F .
En este caso tenemos:
ω m M m1
= (1.18)
Y el diagrama de fasores correspondiente es:
Figura (1.7): Diagrama de fasores para la masa, utilizando
la movilidad como parámetro de comparación.
Los diagramas de fasores utilizados también se aplican al caso del
amortiguador. En dicho caso no hay desfasaje entre la fuerza aplicada y
la velocidad. De esta forma se tiene:
Figura (1.8): Diagrama de fasores para el amortiguador, utilizando
la impedancia como parámetro de comparación.
c Z 00 V Z F c=0V
m M
00 F M V m=
0F
5/11/2018 introducion de zarandas - slidepdf.com
http://slidepdf.com/reader/full/introducion-de-zarandas 12/27
8
Figura (1.9): Diagrama de fasores para el amortiguador, utilizando
la movilidad como parámetro de comparación.
Tanto los valores de impedancias y movilidad obtenidos, como los
desfasajes estudiados en los diagramas de fasores, pueden también
obtenerse considerando a las fuerzas y velocidades como variable
compleja.
Los componentes reales de un sistema mecánico tienen pérdidas
de energía inherentes a su funcionamiento (fricciones, emisión acústica,histéresis, etc.). En caso necesario, estas pérdidas se tomarán en cuenta
agregando al sistema un componente resistivo.
Agrupación de componentes simples
Combinando los componentes simples que acabamos de estudiar,
es posible modelar distintos sistemas mecánicos. Los componentes
pueden estar conectados entre sí en paralelo o bien en serie. Al estudiarlos distintos sistemas mecánicos, resulta útil llevarlos a una forma
simplificada, en la que sólo esté compuesto por un componente con una
impedancia (o movilidad) equivalente a la que tiene todo el sistema. Para
esto es necesario diferenciar componentes montados en serie y
componentes montados en paralelo.
Montaje de componentes en paralelo
En la figura (1.10) se muestra el montaje en paralelo de los tres
componentes simples. La fuerza excitatriz se aplica a la plataforma
común que vincula a los tres elementos mecánicos.
c M 0F 00 F M V c=

5/11/2018 introducion de zarandas - slidepdf.com
http://slidepdf.com/reader/full/introducion-de-zarandas 13/27
9
Figura (1.10): Representación esquemática del montaje de
componentes en paralelo.
Evidentemente la velocidad del extremo móvil es común para los
tres y la fuerza total aplicada es la suma de las fuerzas recibidas por
cada componente. Esto es lo que define a un montaje en paralelo. Con
esto en mente podemos decir que:
AccV Z F ⋅=
Ak k V Z F ⋅= (1.19)
Amm V Z F ⋅=
( )Aeq Amk c
Am Ak Acmk c
V Z V Z Z Z
V Z V Z V Z F F F F
⋅=⋅++=
=⋅+⋅+⋅=++=
Luego
mk ceqZ Z Z Z ++= (1.20)
Como hemos visto, la impedancia se representa a través de un
vector, por lo tanto la suma anterior debe interpretarse como una suma
vectorial (resultante). En la figura (1.11) se esquematiza cómo debe
obtenerse dicha resultante.

5/11/2018 introducion de zarandas - slidepdf.com
http://slidepdf.com/reader/full/introducion-de-zarandas 14/27
10
Figura (1.11): Obtención de la impedancia equivalente
De la misma se obtiene que:
2
2⎟ ⎠
⎞⎜⎝
⎛ −+=ω
ω k
mc Z eq (1.21)
Y el adelanto de fase de la fuerza aplicada con respecto a la velocidad
viene dada por:
º90º90 ≤≤−⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡−
= ϕ ω
ω
ϕ Conc
k m
arctg (1.22)
Cuando del montaje combinado participen elementos
compuestos, representados por su propia impedancia, la impedancia
resultante de todo el sistema será la suma de todas las impedancias
parciales, entendiendo que dicha suma debe ejecutarse en forma
vectorial.
Ejemplo:
Una zaranda, cuya masa es de 5000 kg, descansa sobre una
plataforma amortiguada por resortes y amortiguadores, tal como
muestra la figura (1.12)
c Z c =
ω
k Z k =
ω m Z m =
eq Z
ϕ
F
V
5/11/2018 introducion de zarandas - slidepdf.com
http://slidepdf.com/reader/full/introducion-de-zarandas 15/27
11
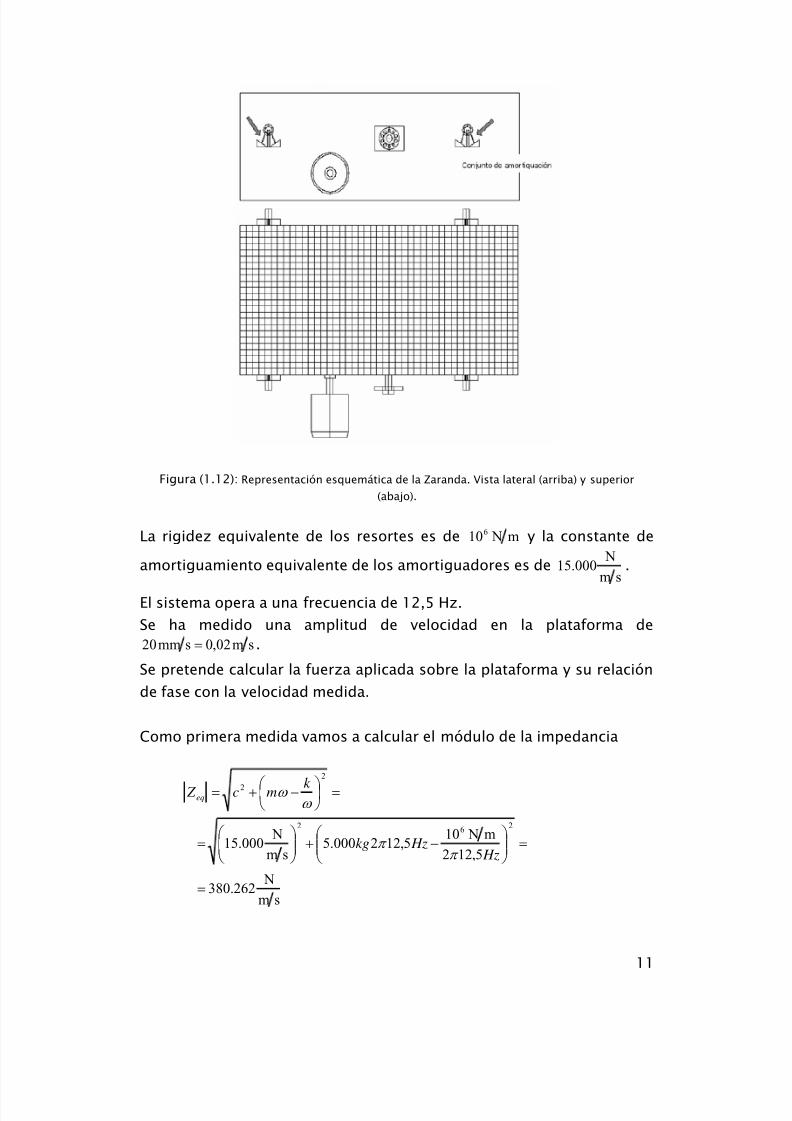
Figura (1.12): Representación esquemática de la Zaranda. Vista lateral (arriba) y superior
(abajo).
La rigidez equivalente de los resortes es de mN106 y la constante de
amortiguamiento equivalente de los amortiguadores es desm
N000.15 .
El sistema opera a una frecuencia de 12,5 Hz.
Se ha medido una amplitud de velocidad en la plataforma de
sm02,0smm20 = .
Se pretende calcular la fuerza aplicada sobre la plataforma y su relación
de fase con la velocidad medida.
Como primera medida vamos a calcular el módulo de la impedancia
sm
N262.380
5,122
mN105,122000.5
sm
N000.15
26
2
2
2
=
=⎟⎟ ⎠
⎞⎜⎜⎝
⎛ −+⎟⎟
⎠
⎞⎜⎜⎝
⎛ =
=⎟ ⎠ ⎞⎜
⎝ ⎛ −+=
Hz Hzkg
k mc Z eq
π π
ω ω

5/11/2018 introducion de zarandas - slidepdf.com
http://slidepdf.com/reader/full/introducion-de-zarandas 16/27
12
Luego:
780kgf N7600sm02,0sm
N262.38000 ≅≅⋅=⋅= V Z F
Y la diferencia de fase es de:
º88
sm
N000.15
5,122
mN105,122000.5
6
≅
⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜
⎝
⎛ −
=Hz
Hzkg
arctgπ
π
ϕ
Esto significa que la velocidad presenta un atraso de 88º respectoa la fuerza aplicada. Un valor tan próximo a 90º indica que este sistema
como un todo tiene un comportamiento dominado por la masa.
Montaje de componentes en serie
En la figura (1.13) se muestra el montaje correspondiente. La
masa se considera siempre el componente terminal de la serie y la
fuerza se aplica sobre el este extremo libre opuesto.
En los casos en que la masa esta en un extremo y la fuerza seaplica sobre ella o se trate de un componente intermedio el problema se
resuelve como un montaje combinado de serie y paralelo.
5/11/2018 introducion de zarandas - slidepdf.com
http://slidepdf.com/reader/full/introducion-de-zarandas 17/27
13
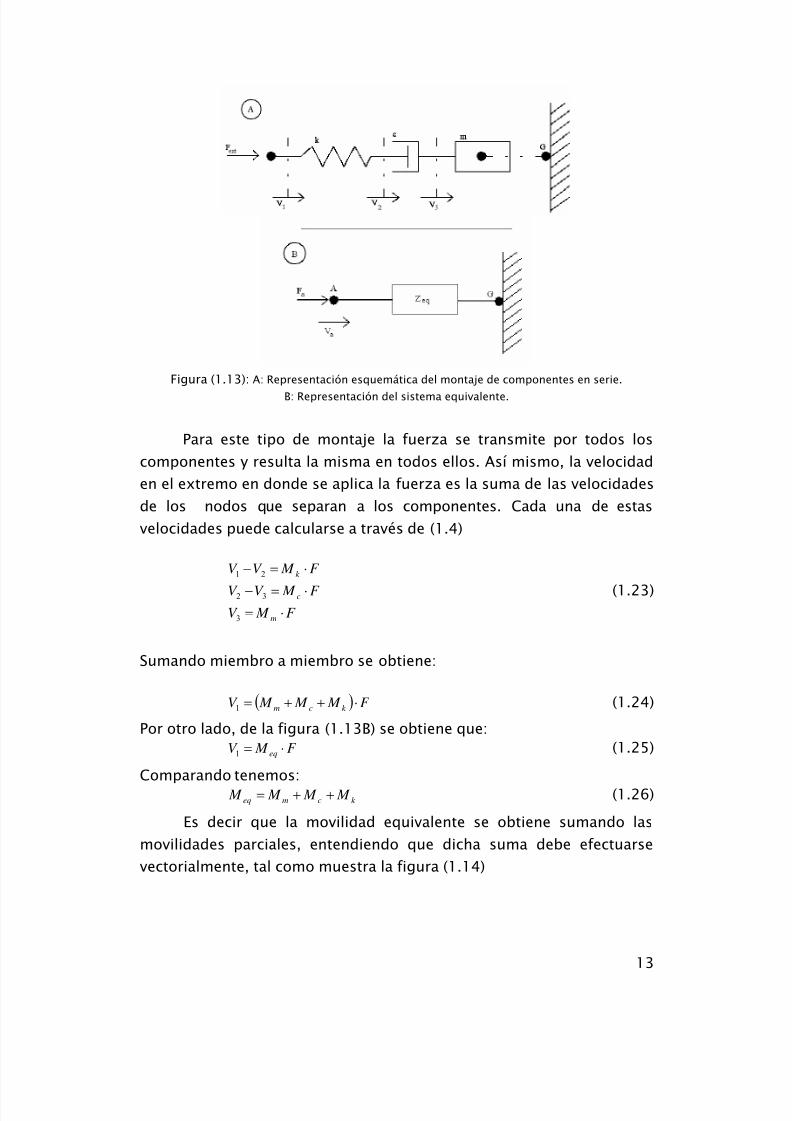
Figura (1.13): A: Representación esquemática del montaje de componentes en serie.
B: Representación del sistema equivalente.
Para este tipo de montaje la fuerza se transmite por todos los
componentes y resulta la misma en todos ellos. Así mismo, la velocidad
en el extremo en donde se aplica la fuerza es la suma de las velocidades
de los nodos que separan a los componentes. Cada una de estas
velocidades puede calcularse a través de (1.4)
F M V
F M V V
F M V V
m
c
k
⋅=⋅=−
⋅=−
3
32
21
(1.23)
Sumando miembro a miembro se obtiene:
( ) F M M M V k cm ⋅++=1 (1.24)
Por otro lado, de la figura (1.13B) se obtiene que:
F M V eq ⋅=1 (1.25)
Comparando tenemos:
k cmeqM M M M ++= (1.26)
Es decir que la movilidad equivalente se obtiene sumando las
movilidades parciales, entendiendo que dicha suma debe efectuarse
vectorialmente, tal como muestra la figura (1.14)

5/11/2018 introducion de zarandas - slidepdf.com
http://slidepdf.com/reader/full/introducion-de-zarandas 18/27
14
Figura (1.14): Obtención de la impedancia equivalente.
De la figura anterior se encuentra que:
2211
⎟ ⎠
⎞⎜⎝
⎛ −+⎟
⎠
⎞⎜⎝
⎛ =
ω
ω
mk c M eq (1.27)
Y el ángulo de adelanto de la velocidad respecto a la fuerza aplicada
viene dado por:
º90º901
≤≤−⎥⎦
⎤⎢⎣
⎡⎟ ⎠
⎞⎜⎝
⎛ −⋅= ϕ
ω
ω ϕ Con
mk carctg (1.28)
Ejemplo:
Un molino de 2000 kg de masa que opera a 600 rpm se encuentra
apoyado sobre una plataforma vinculada a la fundación por cuatro
resortes de constante elástica mN630000=k . Sobre la fundación se
mide una amplitud de velocidad de 1,8 mm/s.
Se pretende calcular la magnitud y relación de fase que tiene la
fuerza en los apoyos de los resortes.
ω m M m
1=
c M c
1=
ϕ
eq M
k M k
ω =
V
F

5/11/2018 introducion de zarandas - slidepdf.com
http://slidepdf.com/reader/full/introducion-de-zarandas 19/27
15
El esquema del montaje se muestra en la figura siguiente.
Figura (1.15): Representación esquemática del molino.
Supondremos que la masa se distribuye uniformemente sobre loscuatro resortes de modo que cada uno soporta una masa de 500 kg.
Debido a la ausencia del amortiguador la expresión (1.27) se
reduce a:
N
sm10.8,6
102500
1
mN000.630
102
1
5−=−=
=−=
Hzkg
Hz
mk M
eq
π
π
ω
ω
La amplitud de fuerza es:
N5,26
N
sm10.8,6
sm0018,0
5
===−
eq M
V F
Debido a que m M es menor que k
M y no hay amortiguador, la
velocidad adelanta 90º respecto de la fuerza.
A modo de comparación calcularemos la fuerza sobre la fundación
suponiendo que no se encuentran los resortes. En ese caso la movilidadviene dada solo por m M
N
sm10.2,3
1 5−==ω m
M m

5/11/2018 introducion de zarandas - slidepdf.com
http://slidepdf.com/reader/full/introducion-de-zarandas 20/27
16
Y la fuerza resultante sería:
N5,56
N
sm10.2,3
sm0018,0
5
===−m
M
V F
Con la velocidad atrasada 90º respecto de la fuerza.
El montaje del sistema no determina si el mismo está en paralelo o en
serie. Dado que los parámetros de análisis (impedancia y movilidad) son
locales, es necesario considerar desde qué punto se quiere estudiar. Así,
es posible que un mismo sistema mecánico pueda ser considerado
como serie o paralelo, según desde dónde se analice. Esto se ilustra en
la figura (1.15). Vemos que si bien el sistema está compuesto en ambos
casos por los mismos elementos conectados igual. Sin embargo en el
primer caso se considera como un sistema serie mientras que en el
segundo como un sistema en paralelo.
Figura (1.16): Montaje de Masa y resorte. En la figura de arriba el
montaje se toma como serie, mientras que en el segundo
caso se tiene un sistema en paralelo.
Si hay masas presentes en el circuito y no se encuentran al final de la
cadena, siempre impondrán la necesidad de tomar parte del sistema
como paralelo, según se ilustra en la figura (1.17).
5/11/2018 introducion de zarandas - slidepdf.com
http://slidepdf.com/reader/full/introducion-de-zarandas 21/27
17
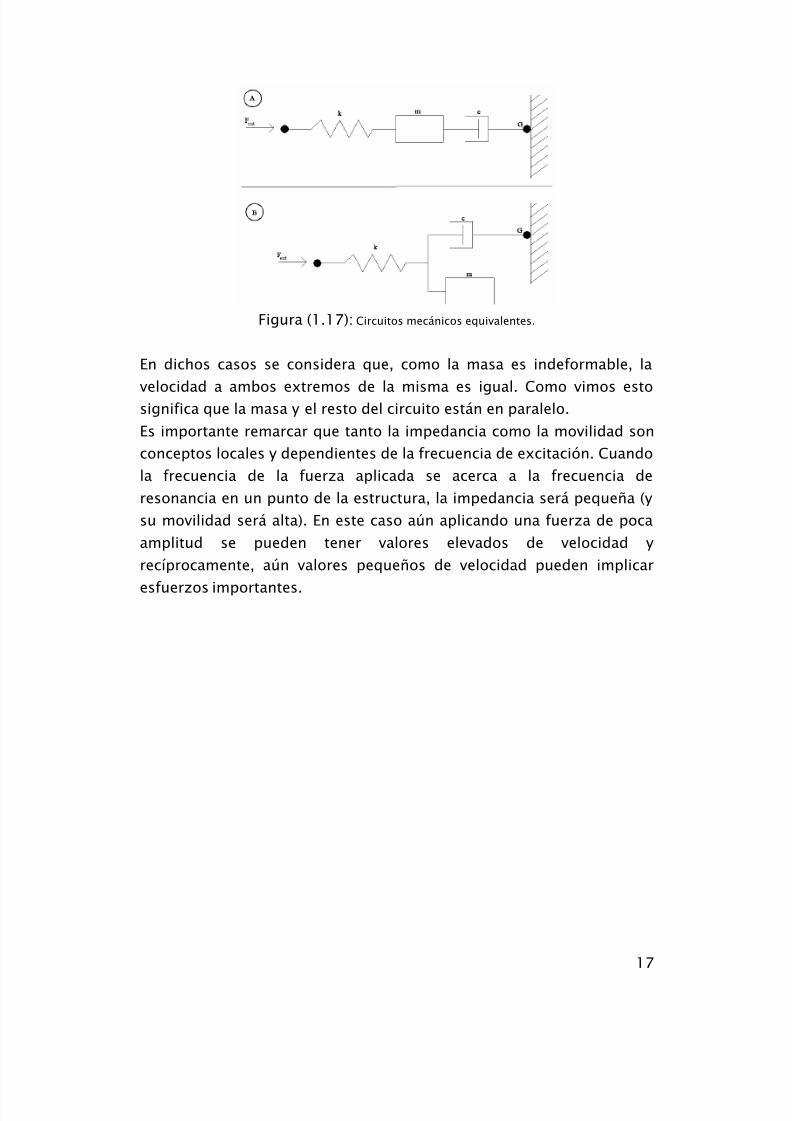
Figura (1.17): Circuitos mecánicos equivalentes.
En dichos casos se considera que, como la masa es indeformable, la
velocidad a ambos extremos de la misma es igual. Como vimos estosignifica que la masa y el resto del circuito están en paralelo.
Es importante remarcar que tanto la impedancia como la movilidad son
conceptos locales y dependientes de la frecuencia de excitación. Cuando
la frecuencia de la fuerza aplicada se acerca a la frecuencia de
resonancia en un punto de la estructura, la impedancia será pequeña (y
su movilidad será alta). En este caso aún aplicando una fuerza de poca
amplitud se pueden tener valores elevados de velocidad y
recíprocamente, aún valores pequeños de velocidad pueden implicar
esfuerzos importantes.
5/11/2018 introducion de zarandas - slidepdf.com
http://slidepdf.com/reader/full/introducion-de-zarandas 22/27
18
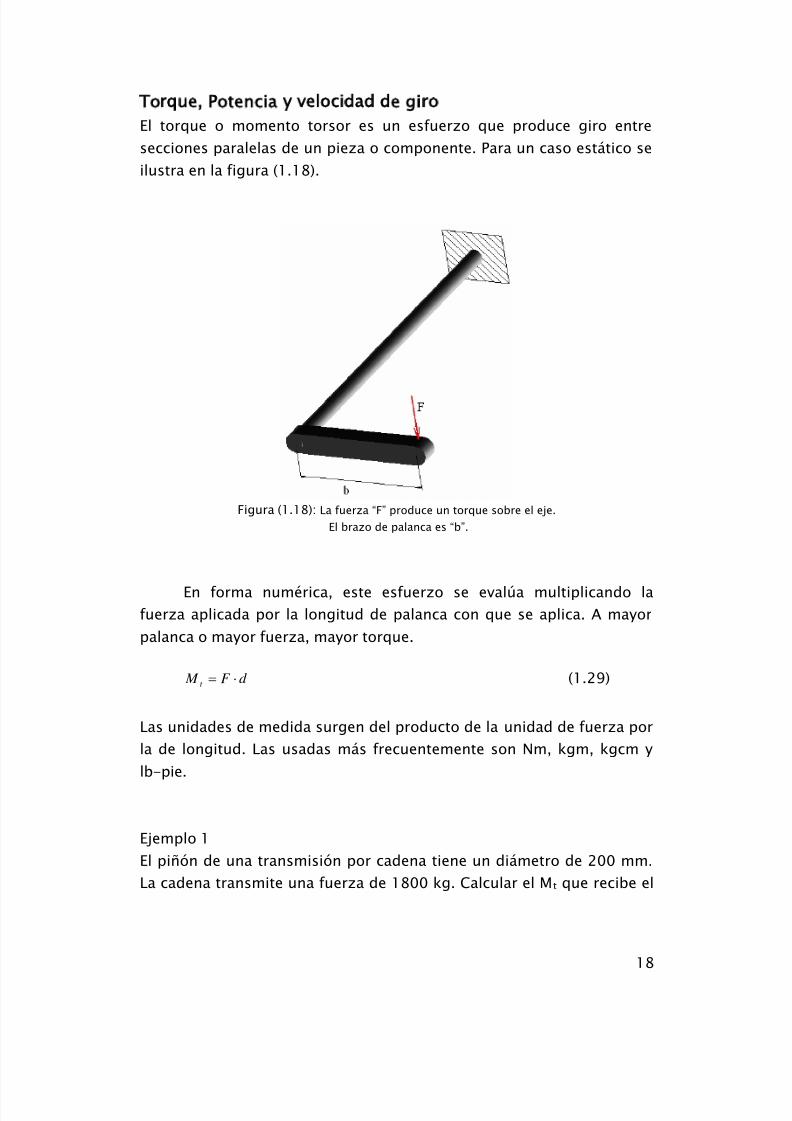
Torque, Potencia y velocidad de giroEl torque o momento torsor es un esfuerzo que produce giro entre
secciones paralelas de un pieza o componente. Para un caso estático se
ilustra en la figura (1.18).
Figura (1.18): La fuerza “F” produce un torque sobre el eje.
El brazo de palanca es “b”.
En forma numérica, este esfuerzo se evalúa multiplicando la
fuerza aplicada por la longitud de palanca con que se aplica. A mayor
palanca o mayor fuerza, mayor torque.
d F M t ⋅= (1.29)
Las unidades de medida surgen del producto de la unidad de fuerza por
la de longitud. Las usadas más frecuentemente son Nm, kgm, kgcm y
lb-pie.
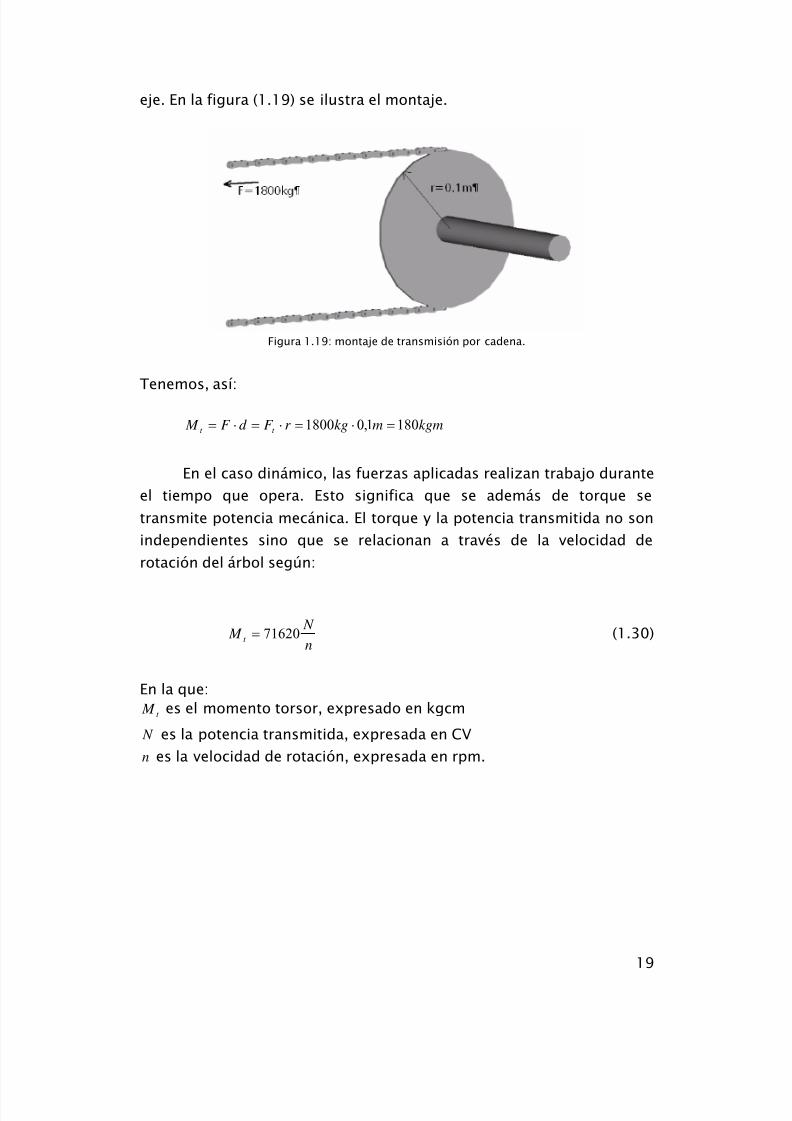
Ejemplo 1
El piñón de una transmisión por cadena tiene un diámetro de 200 mm.
La cadena transmite una fuerza de 1800 kg. Calcular el M t que recibe el
5/11/2018 introducion de zarandas - slidepdf.com
http://slidepdf.com/reader/full/introducion-de-zarandas 23/27
19
eje. En la figura (1.19) se ilustra el montaje.
Figura 1.19: montaje de transmisión por cadena.
Tenemos, así:
kgmmkgr F d F M t t 1801,01800 =⋅=⋅=⋅=
En el caso dinámico, las fuerzas aplicadas realizan trabajo durante
el tiempo que opera. Esto significa que se además de torque se
transmite potencia mecánica. El torque y la potencia transmitida no son
independientes sino que se relacionan a través de la velocidad de
rotación del árbol según:
n
N M
t 71620= (1.30)
En la que:
t M es el momento torsor, expresado en kgcm
N es la potencia transmitida, expresada en CV
n es la velocidad de rotación, expresada en rpm.
5/11/2018 introducion de zarandas - slidepdf.com
http://slidepdf.com/reader/full/introducion-de-zarandas 24/27
20
Esfuerzo de torsión sobre aceros
El desarrollo que realizaremos aquí es aplicable exclusivamente a
árboles de transmisión de sección circular.
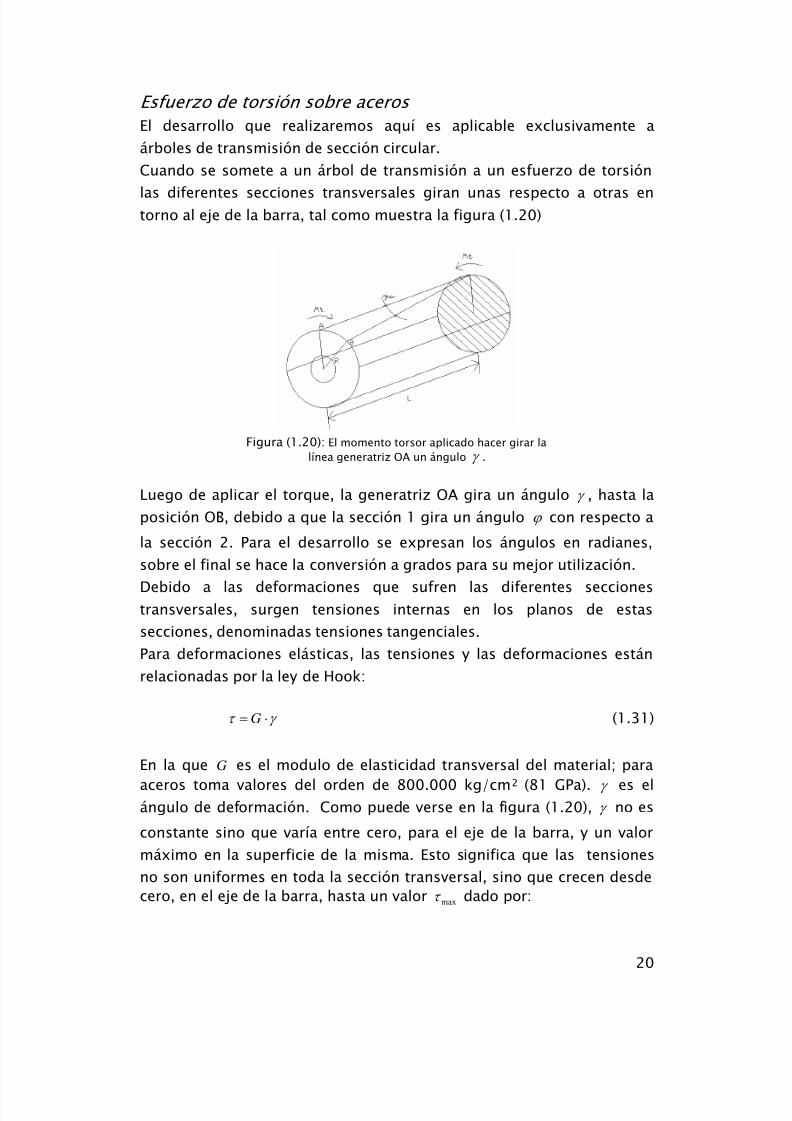
Cuando se somete a un árbol de transmisión a un esfuerzo de torsión
las diferentes secciones transversales giran unas respecto a otras entorno al eje de la barra, tal como muestra la figura (1.20)
Figura (1.20): El momento torsor aplicado hacer girar la
línea generatriz OA un ángulo γ .
Luego de aplicar el torque, la generatriz OA gira un ángulo γ , hasta la
posición OB, debido a que la sección 1 gira un ángulo ϕ con respecto a
la sección 2. Para el desarrollo se expresan los ángulos en radianes,
sobre el final se hace la conversión a grados para su mejor utilización.
Debido a las deformaciones que sufren las diferentes seccionestransversales, surgen tensiones internas en los planos de estas
secciones, denominadas tensiones tangenciales.
Para deformaciones elásticas, las tensiones y las deformaciones están
relacionadas por la ley de Hook:
γ τ ⋅= G (1.31)
En la que G es el modulo de elasticidad transversal del material; para
aceros toma valores del orden de 800.000 kg/cm2 (81 GPa). γ es elángulo de deformación. Como puede verse en la figura (1.20), γ no es
constante sino que varía entre cero, para el eje de la barra, y un valor
máximo en la superficie de la misma. Esto significa que las tensiones
no son uniformes en toda la sección transversal, sino que crecen desde
cero, en el eje de la barra, hasta un valor maxτ dado por:
5/11/2018 introducion de zarandas - slidepdf.com
http://slidepdf.com/reader/full/introducion-de-zarandas 25/27
21
L
RG
L
ABGG
⋅⋅=⋅=⋅=
∩
ϕ γ τ maxmax (1.32)
De esta puede obtenerse el ángulo de rotación ϕ
G R
L maxτ ϕ = (1.33)
El mismo ángulo evaluado en grados se calcula como:
G R
L max180º
τ
π ϕ = (1.34)
Por otro lado, puede probarse (ver apéndice A) que la tensión máximase relaciona con el torque aplicado a través de:
o
t
W
M =maxτ (1.35)
En la que t M es el momento torsor o torque aplicado y o
W es un
parámetro dependiente del tamaño y forma de la sección transversal,
denominado módulo resistente polar. Para secciones circulares macizas
este módulo se calcula como:
16
3 D
W oπ
= (1.36)
Reemplazando en (1.34) se obtiene:
G D
M L t
42
5760º
π ϕ
⋅⋅=
(1.37)
En los casos en que t M dependa del tiempo, también lo hará ºϕ . Esto
explica la aparición de vibraciones torsionales. Como veremos, estas
ideas son la base del funcionamiento del Strain Gauge para medidas de
torques.

5/11/2018 introducion de zarandas - slidepdf.com
http://slidepdf.com/reader/full/introducion-de-zarandas 26/27
22
Ejemplo:
El eje de un ventilador tiene un diámetro de 40 mm y una longitud
de 800 mm. El motor de impulsión está acoplado en forma directa,
entregando una potencia de 200 CV a 1500 rpm.
Calcular el ángulo de giro relativo entre el ventilador y el acople,causado por la deformación del eje.
El primer paso es calcular el t M a partir de (1.30):
kgcmn
N M
t 95501500
2007162071620 ===
Ahora estamos en condiciones de calcular el ángulo de giro relativo
entre el ventilador y el acople:
( )01º2
000.8004
550.98057605760º
24242′=
⋅⋅=
⋅⋅=
cmkgcm
kgcmcm
G D
M Lt
π π ϕ
Este ángulo corresponde a una deformación estática, siempre y cuando
la potencia y la velocidad de giro permanezcan constantes. Para
aquellos casos en que existan fluctuaciones en estos parámetros se
producirán pequeñas oscilaciones de este valor, lo cual constituye la
vibración torsional.

5/11/2018 introducion de zarandas - slidepdf.com
http://slidepdf.com/reader/full/introducion-de-zarandas 27/27
23
Apéndice A. Cálculo del módulo resistente polar.
La tensión dentro de un cilindro macizo sobre el que actúa unafuerza tangencial no es constante. Sino que aumenta linealmente hasta
alcanzar su máximo en la superficie del cilindro.
Figura (A.1):Corte del cilindro. Se observa que el torque
crece linealmente hasta tomar un valor máximo en la superficie.
El anillo sombreado tiene un área σ d , así la fuerza que actúa sobre elanillo sometido a una tensión )(r τ es:
σ τ d r dF )(=
También podemos calcular el momento torsor, sobre el anillo:
σ τ
σ τ d r R
r d r r r dF dM ..
..).(. max===
0max
2max .. W d r
R
M τ σ τ
∫ ==
donde hemos introducido el módulo resistente polar 0W . En el caso de la
geometría usada podemos encontrar su valor:
16
.
2
..2.
113
0
32
0
2
0
D Rrdr r
Rd r
RW
R Rπ π
π σ ==== ∫ ∫