Introduccion a Motores Electricos DC y AC
27
UNIDAD I Introducción a motores eléctricos DC y AC
-
Upload
franco-follano-p -
Category
Documents
-
view
1.760 -
download
17
Transcript of Introduccion a Motores Electricos DC y AC

UNIDAD I
Introducción a motores eléctricos DC y AC

Índice
Unidad I: ‘Introducción a los motores eléctricos DC y AC’
1. Introducción2. Objetivos3. Contenidos de la Unidad I
3.1. Fundamentos3.1.1.Campos magnéticos3.1.2.Inducción de movimiento3.1.3.Movimiento de rotación de un motor DC3.1.4.Características de un motor DC Shunt3.1.5.Movimiento de rotación en un motor AC3.1.6.Características del motor de inducción AC
3.2. Fundamentos de mecánica3.2.1.Principios básicos de mecánica3.2.2.Perfiles de carga3.2.3.Formulas mecánicas3.2.4.Formulas eléctricas
4. Resumen5. Preguntas de autocomprobación
5.1. ¿Qué es el torque?5.2. La velocidad de rotación de un objeto es dado generalmente en:5.3. La rapidez con la que se hace un trabajo es denominada:5.4. 18 KW es equivalente a:5.5. El bobinado trifásico del motor de jaula de ardilla, de dos polos tiene un angulo de
separación de:

“INTRODUCCION A MOTORES ELECTRICOS DC Y AC”
1. INTRODUCCION
Los motores eléctricos son maquinas que mueven la industria pues sirven como medios de transformación de energía eléctrica a energía mecánica. Por lo tanto, es indispensable conocer y comprender las principales relaciones que existen entre los parámetros eléctricos y mecánicos de dichas maquinas para darles una adecuada operación y mantenimiento.
2. OBJETIVOS
El objetico de esta unidad es identificar los diferentes parámetros eléctricos y mecánicos que determinan las características de funcionamiento y operación de los motores eléctricos DC y AC, que nos servirán luego como conceptos básicos para la compresión de los temas que trataremos durante el curso.
3. CONTENIDOS DE LA UNIDAD I
3.1. FUNDAMENTOS
La fabricación de imanes artificiales por medio del paso de corriente eléctrica a través del arrollamiento de bobinas de alambre de cobre sobre un núcleo de metal permeable al flujo magnético, es la base fundamental que ha permitido el desarrollo de los motores eléctricos.
3.1.1. CAMPOS MAGNETICOS
En la figura 1 se muestran algunos imanes artificiales de uso muy difundido. Se observa que tienen dos polos denominados norte (N) y sur (S). Actúan sobre otros materiales magnéticos ejerciendo fuerzas de atracción o repulsión, sin que haya de por medio contacto físico.
En la figura 2 podemos ver las líneas de campo magnético saliendo del polo norte y retornando por el polo sur. Se observa que dicho campo tiene la capacidad de propagarse por el aire y ejercerá su influencia sobre cualquier material permeable magnéticamente (acero, hierro; otro iman, etc.)

En la figura 3 se muestra las fuerzas de atracción (polos diferentes se atraen) y repulsión (polos iguales se rechazan) que ejercen entre dos imanes dependiendo de la posición de sus polos. El termino “air gap” significa “brecha de aire” traducido al español comercial; pero la traducción técnica es conocido como “entrehierro”.
La figura 4 nos muestra la generación de un campo magnético concéntrico al alambre conductor por el cual fluye corriente continua. El sentido del campo magnético se determina por medio de la “regla de la mano izquierda”. Si apuntamos con el dedo el pulgar en el sentido de los electrones, los dedos restantes nos indican la dirección del campo magnético.

En el caso de corriente AC, se muestra en la figura 5 la generación del campo magnético cuando pasa corriente eléctrica alterna a través de un conductor. Podemos ver que el campo magnético es variable y depende del valor que tiene la corriente: La dirección del campo magnético cambia cuando lo hace el sentido de la corriente que pasa por el conductor.
De las figuras 4 y 5 se concluye que:
a) Un campo magnético constante (en valor y dirección) es producido por corriente DC que pasa por un conductor.
b) Un campo magnético variable (en valor y dirección) es producido por corriente AC que pasa por un conductor.
Los electroimanes se implementan con un núcleo magnético, arrollamiento de alambre conductor y el paso de una corriente continua por dicho alambre. En la figura 6 se ha dibujado el núcleo en modo transparente para poder ver con claridad el arrollamiento. La finalidad de usar el núcleo magnético es conseguir mayor intensidad de campo magnético.
En la figura 7 se muestra un método para determinar la posición de los polos norte y sur. Los dedos de la mano izquierda apuntan en el sentido del flujo de electrones y el pulgar apuntara al polo norte. Obviamente dicho campo

magnético es constante en magnitud y dirección pues la corriente que pasa por el alambre es continua.
3.1.2. INDUCCION DE MOVIMIENTO
La información anterior nos enseña que dos imanes experimentan una fuerza de atracción o repulsión cuando se encuentran, cada una; comprendidas dentro del radio de acción de la otra.
También aprendimos la forma de implementar electroimanes por medio de un núcleo magnético, arrollamiento de alambre de cobre y una fuente de alimentación continua o alterna.
Por lo tanto se concluye que, si colocamos un electroimán dentro del campo magnético del otro, tal como se muestra en la figura 8, y alimentamos con corriente continua el alambre de cobre (una espira), esta experimentara una fuerza en el sentido indicado por el dedo pulgar de la mano derecha. Tal es el principio de funcionamiento en que se basan los motores eléctricos de corriente continua.

En el caso de inducción de movimiento para motores de corriente alterna, el principio de funcionamiento se basa en la producción de un campo magnético giratorio. SI consideramos que el imán de la figura 9 con sus polos N – S pueden girar sobre el eje X –Y, y que un disco de cobre o aluminio que se halla sometido al campo magnético del imán, también puede girar sobre el mismo eje, entonces tenemos que, si giramos el imán, su campo magnético gira igualmente, barriendo el disco próximo a él, con lo cual el campo que ahora es variable, es la causa según los principios de inducción magnética, aparezcan en el disco corrientes inducidas. Estas corrientes reaccionan dando lugar a una fuerza magnetomotriz con un torque motor suficiente para vencer el torque resistente del eje y origina la rotación del disco.
Una forma práctica de generar un campo magnético giratorio se consigue mediante la alimentación, con voltaje alterno trifásico, de un bobinado también trifásico instalado en un núcleo de material magnético llamado “estator”, tal como se muestra e la figura 10.

A la velocidad de giro del campo magnético se le denomina “velocidad síncrona”. Dicho campo magnético giratorio corta las varillas de aluminio del “rotor” que se encuentra instalado al interior del estator, ver figura 11, sobre las cuales se induce una corriente de rotor que causara a su vez un campo magnético del rotor, produciéndose una interacción de campos y provocando el giro del rotor en igual sentido que el campo magnético del estator, pero a una velocidad ligeramente de la síncrona. Mas adelante veremos que la diferencia de dichas velocidades se le denomina “deslizamiento”.
3.1.3. MOVIMIENTO DE ROTACION EN EL MOTOR DC
En la figura 12 nos muestra un primer modo práctico de implementar un motor de corriente continua.
La energía eléctrica continua de entrada es aplicada al conmutador por medio de las escobillas nombradas como + (positivo) y – (negativo). El flujo de corriente pasa a la espira (denominada “armadura”) la cual experimenta fuerzas en los segmentos AB y CD, causando el giro en la dirección indicada.

En la figura anterior se muestra a la armadura formada únicamente por una espira, lo cual no es cierto, pues para aplicaciones practicas dicha espira debe ser montada sobre un núcleo magnético tal como se ve en la figura 13.
Debido al paso de corriente a través e la armadura y por influencia del campo, se induce una fuerza F, la que produce un Par (Fuerza por distancia) que provoca el movimiento de giro del rotor.
Existen diversos tipos de motor de corriente continua, pero el motor mas usado a nivel de aplicación industrial, es aquel denominado “motor DC shunt de excitación independiente”. En la figura 14 se muestra dicho tipo de motor.
Observamos que:a) La armadura esta conformada por un conjunto de bobinas arrolladas
convenientemente sobre un núcleo laminar de material magnetico, la cual se encuentra montada y unida a presión sobre una barra de acero denominada eje. Dicho eje tiene en sus extremos un para de rodajes que permitan su movimiento de giro y van montados sobre unas tapas fijadas al estator.

b) El campo es un electroimán conformado por un conjunto de bobinas arrolladas sobre un núcleo laminar de material magnetice. Dicho núcleos montados al interior del estator.
3.1.4. CARACTERISTICAS DEL MOTOR SHUNT
La figura 15 muestra el esquema de un motor DC shunt de excitación independiente y su respectivo circuito equivalente. Para facilitar la compresión de los conceptos básicos de control del motor DC, el modelo matemático será tomado de forma idealizada.
En la figura 15, ra es la resistencia de armadura; La es la inductancia de armadura y, Ea es la tensión contra electromotriz. Esta tensión Eaes daca por:
Ea=kn I f (1.1)
Donde:n : Velocidad del eje de rotaciónI f : Corriente de campok : Constante

Para esta maquina la corriente de armadura I a es:
I a=V a−Eara−XLa
Donde X La= j 2πf La es la impedancia inductiva de La.
El torque electromagnético T a, generado en el eje de esta maquina es dado por:
T e=k I f I a (1.3)
Y la potencia en el eje es dado por:
Pe=V a I a (Eficiencia )=¿ T en(Eficiencia) (1.4)
El torque T e es el resultado del producto del flujo magnético debido a la corriente de campo (k I f ) por la corriente de armadura (I ¿¿a)¿. Debe notarse que esta expresión solo es valida si la fuerza magnetomotriz debida a la corriente I a fuese especialmente perpendicular al flujo debido a I f . Esto en general es garantizado por construcción.
Para el control del torque electromagnético generado es necesario:
1. Controlar la corriente de armadura de forma de anular los efectos de la resistencia de armadura, reactancia de dispersión y tensión contraelectromotriz, que aparecen cuando se opta por el control de tensión de la armadura.
2. Controlar la corriente de campo (en general en el valor máximo).
3. Manteniendo el angula de la fuerza magnetomotriz ( f mm) de la armadura y el flujo magnético debido al campo en un ángulo de 90º, el ítem 3 es garantizado por la posición mecánica de los conmutadores. Un ángulo diferente de 90º hace que la variación de la corriente de campo de armadura afecte directamente al campo y viceversa.
El método clásico de control de velocidad de motor DC fue propuesto por Ward – Leonard, siendo inclusive conocido por este nombre. En este control; la velocidad es controlada por dos modelos distintos. La figura 16 muestra las características de torque y potencia en función de la velocidad.
Para la velocidad de rotación entre 0 y n0 (velocidad base) el torque es mantenido en su valor máximo a través del control de las corrientes de armadura y campo. Este control es conseguido manteniendo en campo constante y aumentando la tensión de armadura V a proporcionalmente a la velocidad, de tal forma que I a sea constante (torque máximo).
La velocidad en el eje en el cual la potencia alcanza su valor nominal es llamada “velocidad base” y a partir de este punto el control de velocidad solo puede ser hecho por medio de la disminución de la corriente de campo I f , manteniendo la
(1.2)

corriente de armadura en su valor nominal. De esta forma es posible operar la maquina entre n0 y nmax, con el torque disminuyendo en forma hiperbólica
(proporcional a 1
n2¿, mientas que la potencia es mantenida constante.
3.1.5. MOVIMIENTO DE ROTACION EN UN MOTOR AC
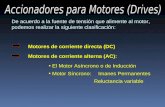
Los dos principales grupos de motores AC son los de tipo inducción y síncrono. Los motores de tipo inducción incluyen los monofásicos, trifásicos y rotor bobinado. Los motores tipo síncrono incluyen los autoexcitados y DC excitados.
De los tipos de motores AC nombrados, el más usado es el motor de inducción de jaula de ardilla. En la figura 17 podemos ver el motor jaula de ardilla, en el cual distinguimos que el estator presenta un bobinado trifásico simétricamente distribuido entre sus ranuras formando un ángulo de 120º mecánicos.

También observamos que el rotor lo conforman un núcleo de hierro laminado atravesado longitudinalmente por varillas de aluminio unidas en sus extremos por anillos del mismo material (ver figura 11). Al aplicar en el estator un voltaje de alimentación trifásico desfasado 120º eléctricos, se forma un campo magnético giratorio (teorema de Ferraris) de magnitud y velocidad constante que gira a una velocidad denominada “sincronismo” (N s ¿ , tal como se puede observar en la figura 18.
La siguiente ecuación sirve para determinar el valor de la velocidad síncrona:
N s=120fp(1.5)
Donde
f : Frecuencia de voltaje de alimentación (60 Hz)p : numero de polos del estator del motor

Dicho campo giratorio induce corrientes en las varillas de aluminio del rotor, las que a su vez generan sus propios campos magnéticos tal como se observa en la figura 19. Ahora se tienen dos imanes que interactúan entre si dando lugar a que el imán del rotor persiga al imán del estator, creando la rotación. El rotor gira a velocidad N r.
La velocidad de rotación del campo magnético del estator determina la velocidad del rotor, y la fuerza de los campos magnéticos determina la fuerza de atracción entre ellos. Dicha fuerza de atracción es conocida como torque y se mide el libras – pie (lb – ft) o Newton – metro (N – m).
La velocidad del rotor siempre debe ser menor que la velocidad síncrona, dicha diferencia de velocidad se denomina “deslizamiento” (“slip” en ingles) y es representado por:
slip=s=N s−N r
N r(1.6 )
La tabla Nº1, nos muestra la relación entre polos por fase y torque por HP y KW de potencia. Un motor de 1 HP y 2 polos, producirá 1.5 lb – ft de torque cuando se carga a su capacidad nominal. Un motor de 50 HP y 2 polos, producirá 50 HP x1.5 lb – ft/HP o 75 lb – ft de torque cuando se carga a su capacidad nominal.

3.1.6. CARACTERISTICAS DEL MOTOR DE INDUCCION AC
Para poder estudiar y comprender las características de funcionamiento del motor de inducción de jaula de ardilla, es necesario tener una representación matemática que refleje fielmente lo que sucede en su interior. Suponiendo que el motor trabaja con voltaje y corrientes balanceados, en la figura 20 se muestra un circuito equivalente por fase del motor de inducción valido para el régimen permanente.
Donde:
r1 : Resistencia por fase del bobinado del estatorL1: Inductancia de fase del bobinado del estatorI 1: Corriente total de fase consumida por el estatorRp : Resistencia de pérdidas por magnetizaciónI p: Corriente de pérdidas por magnetizaciónV m : Voltaje inducido en el estator a frecuencia de línea, debido al voltaje
en el entrehierro (fuerza contraelectromotriz)Lm : Inductancia de magnetización (establece el flujo en el entrehierro)

Im: Corriente de magnetización que establece el flujo magnético en el entrehierro
L2: Inductancia por fase en el rotor referida al estatorI 2: Corriente en el rotor responsable de producir el torque
electromagnético (T e )r2/ s : Resistencia por fase en el rotor referida al estators : Deslizamiento
El torque electromagnético generado por esta maquina esta dado por la siguiente ecuación:
T e=k2 I M I 2 cosγ (1.7)
Donde:
k 2: Constanteγ : Angulo de desfase entre la corriente del rotor I 2 y la corriente de
magnetización IM
La potencia en el eje (P) es:
P=Pag−Pr=Teω(1.8)
Donde:
Pag : Potencia que cruza el entrehierroPr : Potencia de pérdida en el rotorω : Velocidad angular del eje del motor
La expresión del torque electromagnético en (1 – 7) es similar a la del motor DC shunt (1 – 3) salvo por el ángulo γ , que en el caso de los motores DC tiene un valor de 90º fijado por construcción, teniendo en consecuencia la posibilidad de controlar las corrientes en forma independiente lo cual facilita su control.
Como se observa en la figura 20, tanto IM como I 2 ingresan al motor de inducción por un terminal, lo que dificulta el control independiente de cada componente.
Por otro lado, si se desea que el motor de inducción presente una caracteristica similar al de un motor DC shunt, debe controlarse I 1 de tal modo que se tengan los valores adecuados de I 2, IM y el angulo γ .
Tal forma de control era imposible de realizar hasta hace una década, pero en la actualidad debido al avance de la microelectrónica y la fabricación de componentes electrónicos mas potentes, se ha logrado estrategias de control que permiten grandes prestaciones de funcionamiento del motor de inducción tanto como si se tratase de un motor DC.
La característica de torque y corriente en función a la velocidad del motor de inducción es mostrada en la figura 21. Se observa que el motor presenta gran

consumo de corriente (hasta 6 veces su valor nominal) al ser arrancado con voltaje nominal aplicado a sus bornes. El torque alcanza 200% de su valor nominal.
De la
figura anterior se observa que la velocidad del eje del motor depende de la carga aplicada, logrando mantenerse con una pequeña variación debido a la característica casi vertical de una parte de la curva de torque.
Respecto al deslizamiento “s”, se podría decir que dicho valor aumenta en proporción directamente proporcional a la carga, es decir, a mayor carga el deslizamiento se incrementa. De la figura 21 podríamos decir que el deslizamiento a carga nominal y dos veces la carga nominal son:
snom=1800−17501800
x100%=2.77%
s2 xnom=1800−17251800
x100%=4.16%
3.2. FUNDAMENTOS DE MECANICA
3.2.1. PRINCIPIOS BASICOS DE MECANICA
Son dos los parámetros básicos, torque y potencia, que deben ser completamente entendidos para aplicar apropiadamente los variadores.
TORQUE (T)
Es una fuerza aplicada que tiende a producir rotación. Torque (fuerza de torsión) sin rotación es llamada torque estático, pues no produce movimiento.

El torque es medido en lb – in o lb – ft. Es el producto de una fuerza en libras (lb) por la distancia en pulgadas (in) o pies (ft) desde el centro del punto de rotación. La figura 22 muestra 120 lb –in (12 pulgadas x 10 libras) o 10 lb – ft de torque.
Debido a que la mayor parte de transmisión de potencia se basa en elementos rotativos, el torque es importante como una medida del esfuerzo requerido para producir trabajo.
POTENCIA (HP)
Potencia es la medida de la velocidad al cual el trabajo esta siendo realizado. Cuando una fuerza se aplica de tal forma que produce movimiento, el trabajo puede ser medido. Un HP se define como la fuerza requerida para levantar un peso de 33 000 lb un pie en un minuto.
SELECCIÓN DEL VARIADOR Y LA MAQUINA
La aplicación de un variador para una maquina determinada es mas un problema mecanico, que un problema eléctrico. Cuando usamos un variador, se debe de considerar las características de velocidad, torque y potencia desarrollados por el eje del motor. Estos deben de igualar o exceder los requerimientos de torque y potencia de la maquina a ser impulsada. Los requerimientos de la maquina caen dentro de las tres principales categorías:
Torque de ruptura de inercia (Break away torque)Torque de aceleración (Accelerating torque)Torque de movimiento (Running torque)
Break away torque
Es el torque necesario para poner en movimiento una maquina. Tipicamente es mayor que el torque requerido para mantener el movimiento (running torque). En algunas aplicaciones break away torque es el parámetro más importante y por lo tanto no puede ser despreciado. En otras aplicaciones, tal como bombas centrifugas, es pequeño comparado con running torque.

Accelerating torque
Es el torque necesario para llevar a la maquina a la velocidad de operación en un tiempo dado. En las mayorías de las maquinas, la carga es de rozamiento y el variador estándar debe de tener el torque adecuado para la aceleración deseada. Sin embargo, ciertas maquinas clasificadas como de gran inercia con ruedas volantes, engranaje u otras elevadas masas rotativas pueden requerir la selección de variadores basados sobre todo en la potencia necesaria para acelerar la carga en un tiempo dado.
Running torque
Es el torque requerido para mantener a la maquina en movimiento después de su aceleración hasta la velocidad de operación deseada. Running torque es usualmente la combinación del torque requerido para jalar, empujar, comprimir, estirar o procesar el material más el torque requerido para vencer las fuerzas de fricción. Es muy importante comprender los requerimientos de torque de aplicación antes de intentar aplicar el variador.
3.2.2. PERFILES DE CARGA
En general la mayoría de las aplicaciones caen dentro de las siguientes categorías:
A. Torque constanteB. Potencia constante C. Torque variable
A. Torque constante
Alrededor del 90% de las maquinas industriales de aplicación general (diferente de las bomba) son sistemas de torque constante. Los requerimientos de torque de la máquina son independientes de su velocidad. Si la velocidad de la máquina se duplica, entonces la potencia es también duplicada. Ver figura.
La carga requiere la misma cantidad de torque tanto a baja como a alta velocidad. El torque permanece constante a través de todo el rango de velocidad y la potencia aumenta o disminuye en proporción directa a la velocidad.
Usados de las aplicaciones como en sistemas de “faja transportadora” (también llamado “conveyors”) y cuando se tienen cargas de choque y gran inercia.

B. Potencia constante
Para máquinas con carga de potencia constante, la demanda de potencia es independiente de la velocidad y el torque varia inversamente con la velocidad.
Este tipo de cargas se encuentra en la industria de las maquinas herramientas y en los centros impulsores de bobinas. Cuando se taladra, forma, muele o doblan materiales, todas las cargas tienden hacia la potencia constante. A bajas velocidades hay gran torque; a altas velocidades ligero torque. Un variador debe ser seleccionado por su gran torque requerido a bajas velocidades.
La carga requiere gran torque a bajas velocidades, bajo torque a altas velocidades, y por lo tanto tienen potencia constante en cualquier velocidad. Usado en aplicaciones como en taladros, bobinadoras, esmeriles; los que requieren baja velocidad y gran torque para iniciar su trabajo y gran velocidad con bajo torque para finalizar.
C. Torque variable
Este tipo de carga es comúnmente encontrado en los impulsores de bombas centrifugas y en la mayoría de las aplicaciones de ventiladores y sopladores. El torque y potencia varian con la velocidad.
Son cargas que requieren mucho menos torque a bajas velocidades que a alta velocidad. La potencia varia aproximadamente como al cubo de la velocidad, y el torque varia como al cuadrado de la velocidad.
Usado en aplicaciones como ventiladores centrífugos, bombas, sopladoras, algunos mezcladores y agitadores.

4. RESUMEN
Los motores eléctricos se dividen en dos grandes partes, según la fuente de alimentación que reciben, esto es: motores DC y motores AC.
DE los tipos de motores DC, el mas utilizado en la industria es el motor DC shunt de excitación independiente debido a que sus propias características permiten controlar su velocidad en forma fácil y precisa. Además el motor DC puede proporcionar hasta 5 veces su torque nominal, que lo hace insustituible en el manejo de cargas de gran inercia. El inconveniente de dicho tipo de motores es su costo y mantenimiento.
Dentro de los motores AC, el mas usado en la industria es el motor de inducción AC de jaula de ardilla debido a su robustez y mínimo mantenimiento. El inconveniente se debe sobre todo a las características den trabajar a velocidad constante, siendo muy difícil controlar su velocidad.
Para conocer perfectamente el comportamiento del motor es necesario saber el tipo de carga que tendrá acoplado a su eje, razón por el cual es muy importante determinar si la carga es de tipo: torque constante, HP constante o torque variable. Se concluye que el 90% de aplicaciones de carga son del tipo de torque constante.
Además es importante tener los conocimientos de los conceptos de mecánica para poder aplicar las formulas correspondientes y asi determinar la potencia suficiente del motor impulsor a dimensionar.
5. PREGUNTAS DE AUTOCOMPROBACION
5.1. ¿QUE ES EL TORQUE?
a) Es una fuerza que permite el movimiento de traslación de un objeto.b) Es un par (fuerza x distancia) que permite el movimiento de rotación de un
objeto.c) Es una fuerza que permite el movimiento de rotación de un objeto.d) Es un par (fuerza x distancia) que permite el movimiento de traslación de un
objeto.e) N.A.
5.2. LA VELOCIDAD DE ROTACION DE UN OBJETO ESTA DADO GENERALMENTE EN:
a) Rad/minb) Km/hrc) RPMd) m/se) Grados/s
5.3. LA RAPIDEZ CON LA QUE SE HACE TRABAJO ES DENOMINADA:
a) Torque

b) Potenciac) Velocidadd) KWe) N.A.
5.4. 18 KW ES EQUIVALENTE A:
a) 24.14 HPb) 13.42 HPc) 14.14 HPd) 23.42 HPe) N.A.
5.5. EL BOBINADO TRIFASICO DEL MOTOR DE JAULA DE ARDILLA, DE DOS POLOS TIEN UN ANGULO DE SEPARACION DE:
a) 240º eléctricosb) 240º mecánicosc) 120º eléctricosd) 120º mecánicose) N.A.