Intro Ducci on Asim Mechanics
32
ANÁLISIS Y CONTROL DE ROBOTS INTRODUCCIÓN AL MODELADO DE SISTEMAS MECÁNICOS UTILIZANDO SIMMECHANICS
-
Upload
rafael-ferraro -
Category
Documents
-
view
28 -
download
0
description
Introducción a SimMechanics de Matlab
Transcript of Intro Ducci on Asim Mechanics
-
ANLISIS Y CONTROL DE
ROBOTS
INTRODUCCIN AL MODELADO DE SISTEMAS MECNICOS
UTILIZANDO SIMMECHANICS
-
INTRODUCCIN
Los manipuladores robticos son sistemas mecnicosarticulados. Por lo general el modelo matemtico de unmanipulador robtico se vuelve complejo conformeaumentan los grados de libertad.
-
INTRODUCCIN
Qu es Simmechanics?
Simmechanics es un conjunto de bloques en
Simulink especializado en la simulacin de
mecanismos de uno o varios grados de libertad.
-
SIMMECHANICS
El modelado de sistemas mecnicos en
Simmechanics puede ser complicado cuando se
modelan sistemas simples de 1 GDL, pero es una
buena opcin para modelar sistemas mecnicos
ms complejos como es el caso de los robots.
Adems Simmechanics puede analizar tanto la
dinmica como la cinemtica de un mecanismo.
-
SIMMECHANICS
Ejemplo:
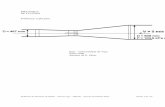
Se necesita modelar el siguiente mecanismo llamado
pndulo doble:
300 mm
300 mm
-
SIMMECHANICS
Las partes de los mecanismos son por lo
general:
- Cuerpos (eslabones, efector final, etc)
- Articulaciones
- Elementos de fuerza (resortes, friccin, etc)
-
SIMMECHANICS
1.
2.
3.
4. 5.
-
SIMMECHANICS Para realizar el mismo modelo en Simmechanics, se realizan
los siguientes pasos:
1. Sistema de referencia (GROUND) : El bloque GROUND indica el
origen del sistema de coordenadas, en toda simulacin en
Simmechanics debe haber un bloque de GROUND (Por defecto
se encuentra en la posicin 0,0,0).
-
SIMMECHANICS2. Articulacin (JOINT) : El bloque de articulacin enlaza dos
cuerpos y define el tipo de grado de libertad que tienen los doscuerpos enlazados. En Simmechanics la nica forma de unirdos cuerpos es mediante articulaciones, entre las principalestenemos las articulaciones:
- Rotacionales Rotacin alrededor de un eje
- Prismticas Deslizamiento a lo largo de un eje
- Esfricas Tres grados de libertad rotacional en un punto
- Soldadura Cero grados de libertad entre dos cuerpos
B F
RevoluteGround
B F
Revolute
B F
Prismatic
Ground
B F
Spherical
B F
Revolute
B F
Prismatic
Ground
B F
Weld
B F
Spherical
B F
Revolute
B F
Prismatic
Ground
-
SIMMECHANICSEn el caso del ejemplo se usarn las articulaciones de revolucin
(Revolute).
-
SIMMECHANICS
En el bloque de revolucin se puede escoger el eje en el que
acta la articulacin (En este caso el eje +Z).
-
SIMMECHANICS3. Cuerpo (BODY) : El cuerpo forma parte de la estructura del
mecanismo. En Simmechanics para definir un cuerpo es
necesario definir la masa, momento de inercia y la localizacin
inicial del cuerpo.
-
SIMMECHANICSAl hacer doble clic en el bloque Body se abre la siguiente
ventana: B F
RevoluteGround
CS1 CS2
Body
-
SIMMECHANICS
-
SIMMECHANICS
Entonces se llena el cuadro del cuerpo 1 de la siguiente forma:
Las coordenadas de los
puntos CS1 y CS2 se
insertan respecto al
centro de gravedad. (Si
se desea, se puede
cambiar a World y las
coordenadas se
insertaran respecto al
sistema de coordenadas
general)
-
SIMMECHANICS
Ahora se conectan los bloques de igual manera a la segunda
articulacin:
-
SIMMECHANICS
-
SIMMECHANICS
Para observar la simulacin se tiene ir a Simulation>Configuration
Parameters>Simscape>Simmechanics y se activa la casilla Show animation
during simulation y luego hacer click en OK.
-
Ahora al correr la simulacin de nuevo se observa el sistema.
SIMMECHANICS
-
SIMMECHANICSComo se observa el sistema no se mueve debido a que en ese
instante se encuentra en equilibro, para iniciar en una posicin
distinta, utilizaremos el bloque Initial condition.
4. Condicin inicial (INITIAL CONDITION) : Este bloque se inserta
en una articulacin para indicarle las condiciones iniciales del
sistema. Para insertar el bloque de condicin inicial se realiza
lo siguiente:
- Crear puerto de sensor o actuador a las articulaciones.
Se hace doble clic en cada articulacin:
B F
RevoluteGround
-
SIMMECHANICS
-
SIMMECHANICS
- Conectar el bloque de Initial condition en cada nuevo puerto
creado.
-
SIMMECHANICS
Por ejemplo si se quiere que el sistema inicie de la siguiente
manera:
-
SIMMECHANICS
Entonces las condiciones iniciales para ambas articulaciones
sera de 45.
Entonces al hacer doble clic en cada bloque de condicin inicial
se configura de la siguiente manera:
-
SIMMECHANICS
Ahora al realizar la simulacin, se puede observar al sistema
movindose.
-
SIMMECHANICS4. Sensores y actuadores (SENSOR & ACTUATOR) : En
Simmechanics se encuentran dos tipos de sensores y
actuadores, los de cuerpo y los de articulacin.
Joint Sensor
Joint Actuator
Body Sensor
Body ActuatorSensores y
Actuadores de
articulacin
Sensores y
Actuadores de
cuerpo
-
SIMMECHANICS
- Los sensores y actuadores de articulacin (joint
sensor/actuator) se utilizan para leer la posicin en una
articulacin (Encoder) y para mover las articulaciones (Motor)
respectivamente. Estos bloques se utilizan en las mismas
articulaciones aadiendo puertos de sensores y actuadores.
-
SIMMECHANICS
La unin de estos bloques es de la siguiente manera:
B F
Revolute1
B F
Revolute
Joint Sensor1Joint Sensor
Joint Initial Condition1Joint Initial Condition
Joint Actuator1Joint Actuator
Ground
CS1 CS2
Body1
CS1 CS2
Body
-
SIMMECHANICS
Dentro de los parmetros de los sensores y actuadores,
podemos modificar unidades. Lo ms recomendable es
trabajar en radianes ya que la mayora de funciones
trigonomtricas de Matlab trabajan en radianes.
-
SIMMECHANICS
Variable a sensar Unidades
-
SIMMECHANICSPara observar los ngulos medidos y los actuadores, se conectar
un Scope a la salida de cada sensor, y una seal de escaln a la
entrada de cada actuador.
-
SIMMECHANICS
Al realizar la simulacin se puede visualizar los ngulos obtenidos
de los sensores en cada Scope: