Inteligencia Artificial
70
Por DMoZ P R E S E N T A :
Transcript of Inteligencia Artificial

5/7/2018 Inteligencia Artificial - slidepdf.com
http://slidepdf.com/reader/full/inteligencia-artificial-559abd0ddb3d3 1/70
Por DMoZ
P R E S E N T A :

5/7/2018 Inteligencia Artificial - slidepdf.com
http://slidepdf.com/reader/full/inteligencia-artificial-559abd0ddb3d3 2/70
C O N T E N I D O
I. INTRODUCCIÓN A LA INTELIGENCIA ARTIFICIAL
I.1.DefinicionesI.2.Historia
I.2.1.Antecedentes
I.2.2.Los IniciosI.2.2.1. La Prueba De TuringI.2.2.2. El Grupo De Darmouth
I.2.3. El DesarrolloI.3. Objetivos de la Inteligencia Artificial
II. RAMAS DE LA INTELIGENCIA ARTIFICIAL
II.1. Aprendizaje AutomáticoII.1.1. Un Poco de Historia
II.2. Redes Neuronales Artificiales
II.2.1. IntroducciónII.2.2. DefinicionesII.2.3. Un Poco de HistoriaII.2.4. Características de las RNAII.2.5. Aplicaciones de las RNAII.2.6. Alcances y Limitaciones de las RNAII.2.7. Confiabilidad de las RNA
II.3. Lógica DifusaII.3.1. IntroducciónII.3.2. DefinicionesII.3.3. Un Poco de Historia
II.3.4. Que es la Lógica DifusaII.4. Sistemas ExpertosII.4.1. IntroducciónII.4.2. DefinicionesII.4.3. AntecedentesII.4.4. Características de Los Sistemas ExpertosII.4.5. Principales Componentes de los Sistemas Expertos
II.5. Algoritmos Genéticos
5/7/2018 Inteligencia Artificial - slidepdf.com
http://slidepdf.com/reader/full/inteligencia-artificial-559abd0ddb3d3 3/70
III. RAMAS DE LA INTELIGENCIA ARTIFICIAL (PARTE II)
III.1. RobóticaIII.1.1. IntroducciónIII.1.2. Definiciones
III.1.3. Un poco de historiaIII.1.4. Clasificación de los robotsIII.1.5. Aplicaciones de la robóticaIII.1.6. Que nos depara el futuro
III.2. Visión artificialIII.2.1. IntroducciónIII.2.2. Que es la visión artificialIII.2.3. AplicacionesIII.2.4. Beneficios de la visión artificial
III.3. Procesamiento del lenguaje naturalIII.3.1. Introducción
III.3.2. Aplicaciones del procesamiento de lenguaje natural
Glosario
Bibliografía

5/7/2018 Inteligencia Artificial - slidepdf.com
http://slidepdf.com/reader/full/inteligencia-artificial-559abd0ddb3d3 4/70
I N T R O D U C C I Ó N
Actualmente el mencionar la palabra Inteligencia Artificial (I.A.) significa que
estamos hablando de robots parlantes y que actúan como seres humanos (bueno esta es la
imagen que se nos ha dado de acuerdo a ciertas películas y series de televisión, aunque la
realidad nos muestra otra cara, tal vez un poco distante a ella), pero esto va mas allá de sólo
robots, es cierto que la robótica es una de las ramas más excitantes de la I.A., pero no lo
sería tanto sin el complemento que son las demás disciplinas relacionadas como son : Redes
Neuronales Artificiales, Lógica Difusa, Sistemas Expertos, Algoritmos Genéticos, Visión
Artificial y Lenguaje Natural.
Como se mencionará en esta investigación la I.A. esta presente en un sinnúmero de
aplicaciones diferentes a la robótica, como ejemplos mencionaremos diagnóstico médico,
reconocimiento de patrones, traducción automática, etc.
Lo que trataremos de conseguir con la investigación que se presenta es sólo dar una
información general acerca de la I.A. así como de sus ramas principales, cómo surgieron,cómo se desarrollaron, donde se aplican y para que nos sirven.
Así mismo se presenta al final del texto un glosario de términos para aclarar algunas
dudas que pudieran surgir por palabras desconocidas.

5/7/2018 Inteligencia Artificial - slidepdf.com
http://slidepdf.com/reader/full/inteligencia-artificial-559abd0ddb3d3 5/70
I. INTRODUCCIÓN A LA INTELIGENCIA ARTIFICIAL
“La Inteligencia Artificial (I.A.) comenzó como el resultado de la investigación en
sicología cognitiva y lógica matemática. Se ha enfocado sobre la explicación del trabajo
mental y construcción de algoritmos de solución a problemas de propósito general. Punto
de vista que favorece la abstracción y la generalidad.
La Inteligencia Artificial es una combinación de la ciencia del computador,
fisiología y filosofía, tan general y amplio como eso, es que reúne varios campos (robótica,
sistemas expertos, por ejemplo), todos los cuales tienen en común la creación de máquinas
que pueden "pensar".
La idea de construir una máquina que pueda ejecutar tareas percibidas como
requerimientos de inteligencia humana es un atractivo. Las tareas que han sido estudiadasdesde este punto de vista incluyen juegos, traducción de idiomas, comprensión de idiomas,
diagnóstico de fallas, robótica, suministro de asesoría experta en diversos temas.
Es así como los sistemas de administración de base de datos cada vez más
sofisticados, la estructura de datos y el desarrollo de algoritmos de inserción, borrado y
locación de datos, así como el intento de crear máquinas capaces de realizar tareas que son
pensadas como típicas del ámbito de la inteligencia humana.”
<http://www.monografias.com/trabajos12/inteartf/inteartf.shtml>.
I.1. DEFINICIONES
Para empezar a comprender lo que es inteligencia artificial como primer paso
debemos definir algunos conceptos generales que nos ayudaran a comprender mejor este
tema, muchos autores concuerdan en que es difícil definirlos debido los diferentes enfoques
que se les pueden dar, es por eso que aquí presentamos varias definiciones para que el
lector realice sus propias conclusiones.
Inteligencia
1. "La inteligencia es un término genérico que designa las formas superiores de
organización o de equilibrio de las estructuras cognoscitivas. La inteligencia es

5/7/2018 Inteligencia Artificial - slidepdf.com
http://slidepdf.com/reader/full/inteligencia-artificial-559abd0ddb3d3 6/70
esencialmente un sistema de operaciones vivientes y actuantes. Es la adaptación
mental más avanzada, es decir, el instrumento indispensable de los intercambios
entre el sujeto y el universo..." (Piaget : 17) en
<http://www.prodigyweb.net.mx/intecoc/inteliarti.htm>.
2. “Facultad de conocer, analizar y comprender”
<http://diccionarios.elmundo.es/diccionarios/cgi/lee_diccionario.html?busca=Intelig
encia&diccionario=1>.
3. “En líneas generales, capacidad mental para entender, recordar y emplear de un
modo práctico y constructivo, los conocimientos en situaciones nuevas”
<http://www.psicoactiva.com/diccio_i.htm>.
4. “Conjunto de todas las funciones que tienen por objeto el conocimiento (sensación,
asociación, memoria, imaginación, entendimiento, razón, conciencia)” <http://www.diccionarios.com/index.phtml?diccionario=dgle&query=Inteligencia>
Artificial
1. “Adj. Hecho por el hombre. No natural, falso, ficticio”
<http://diccionarios.elmundo.es/diccionarios/cgi/lee_diccionario.html?busca=
Artificial&diccionario=1>.
2. “En general, se aplica este adjetivo cuando algo no es natural, es decir, cuando es
fabricado, construido o producido por el ser humano”
<http://www.control-automatico.net/recursos/articulos/art085.htm>.
Inteligencia Artificial
1. “Se define como la ciencia que trata de la comprensión de la inteligencia y del
diseño de máquinas inteligentes, es decir, el estudio y la simulación de las
actividades intelectuales del hombre”
<http://montelpz.htmlplanet.com/robot/refbiblio.html>.
2. “Es el arte de hacer máquinas capaces de hacer cosas que requerirían inteligencia en
caso de que fuesen hechas por seres humanos”

5/7/2018 Inteligencia Artificial - slidepdf.com
http://slidepdf.com/reader/full/inteligencia-artificial-559abd0ddb3d3 7/70
<http://robots.iespana.es/robots/que_es_un_robot.htm>.
3. “Es una de las áreas de las ciencias computacionales encargadas de la creación de
hardware y software que tenga comportamientos inteligentes”
<http://www.ur.mx/ur/faciya/carreras/cursos/sis/int-art1/JEAN1-1.HTM#INTRO>.
4. "Es el estudio de como hacer que las computadoras hagan cosas que por el
momento los humanos hacen mejor" (Rich & Knight 1991).
5. “Es una rama de la Informática dedicada a crear programas de software y hardware
que intentan lograr resultados de forma similar a como lo logran los humanos”
<http://www.angelfire.com/ab2/carlos1975/inteligenciaartificial/inteligenciaartificia
lunavisiongeneral.html>.
6. “La inteligencia artificial es la parte de la informática que concierne al diseño de
sistemas inteligentes para el ordenador, esto es, sistemas que presentan
características asociadas con el comportamiento humano inteligente”
<http://nirvana.fisica.uson.mx/CComp/cursos/CC11/Expo99_1/inteligencia.html>.
I.2. HISTORIA
“Los esfuerzos por reproducir algunas habilidades mentales humanas en máquinas yandroides se remontan muy atrás en la historia. El mito del coloso de Rodas entre los
griegos, las estatuas "parlantes" del medioevo, el androide de Von Kempelen que jugó al
ajedrez con Napoleón, y el "motor analítico" de Charles Babbage que calculaba logaritmos,
son sólo algunos de los ejemplos de este antiguo interés. Igualmente, la concepción de la
inteligencia humana como un mecanismo no es reciente ni ha estado disociada de la
sicología: Descartes, Hobbes, Leibniz, y el mismo Hume se refirieron a la mente humana
como una forma de mecanismo.”
<http://www.hemerodigital.unam.mx/ANUIES/itam/estudio/estudio10/sec_16.html>.
I.2.1. ANTECEDENTES
5/7/2018 Inteligencia Artificial - slidepdf.com
http://slidepdf.com/reader/full/inteligencia-artificial-559abd0ddb3d3 8/70
“Se considera generalmente que el origen remoto de la "Inteligencia Artificial" se
remonta a los intentos por crear autómatas, que simulasen la forma y las habilidades de los
seres humanos.
Durante más de 2000 años de tradición en filosofía han surgido diversas teorías del
razonamiento y del aprendizaje simultáneamente con el punto de vista de que la mente se
reduce al funcionamiento de un sistema físico. Durante más de 400 años de matemáticas,
han surgido teorías formales relacionadas con la lógica, probabilidad, teoría de decisiones y
la computación. La sicología ofrece herramientas que permiten la investigación de la mente
humana, así como un lenguaje científico para expresar las teorías que se van obteniendo. La
lingüística ofrece teorías sobre la estructura y significado del lenguaje. La ciencia de la
computación de la que se toman herramientas que permiten que la inteligencia artificial sea
una realidad.Los filósofos (desde el año 400 AC) permitieron el poder pensar en la inteligencia
artificial al concebir a la mente con maneras diversas como una máquina que funciona a
partir del conocimiento codificado en un lenguaje interno y al considerar que el
pensamiento servía para determinar cuál era la acción correcta que había que emprender.
Las matemáticas proveyeron las herramientas para manipular las aseveraciones de
certeza lógica así como las inciertas de tipo probabilista. Así mismo prepararon el terreno
para el manejo del razonamiento con algoritmos.
Los psicólogos reforzaron la idea de que los humanos y otros animales podían ser
considerados como máquinas para el procesamiento de información. Los lingüistas
demostraron que el uso de un lenguaje se ajusta dentro de este modelo. La ingeniería de
cómputo ofreció el dispositivo que permite hacer realidad las aplicaciones de la inteligencia
artificial. Los programas de inteligencia artificial por general son extensos y no
funcionarían sin los grandes avances de velocidad y memoria apartadas por la industria de
cómputo.
En conclusión, las ciencias que aportan a la Inteligencia Artificial son:
Filosofía
Matemáticas
sicología
5/7/2018 Inteligencia Artificial - slidepdf.com
http://slidepdf.com/reader/full/inteligencia-artificial-559abd0ddb3d3 9/70
Lingüística
Ciencias de la Computación” <http://cruzrojaguayas.org/inteligencia/ > .
A continuación presentaremos algunos aportes interesantes que se han realizados
aun mucho antes de que la I.A. fuera considerada.
Grecia
“Los griegos, además de la famosa paloma de Arquitas (dispositivo mecánico para
conseguir artificialmente el vuelo, que fracaso en su intento de hacerlo), crearon numerosos juguetes y artefactos automáticos como los que construyó Arquímedes para proteger a
Siracusa del asedio de la flota romana.
Pero se debe a Herón de Alejandría la primera construcción de un autómata con
forma humana: construyó actores artificiales que representaban una obra sobre la Guerra de
Troya. Aunque, por cierto, la mitología griega atribuye a Hefaistos (dios del fuego y primer
herrero) la fabricación de los primeros "robots" de forma humana.”
<http://cruzrojaguayas.org/inteligencia/ >.
Edad Media
“Hay que esperar la Edad Media para encontrar la continuación de estos esfuerzos.
San Alberto Magno tuvo un "mayordomo" que abría la puerta y saludaba al visitante, y
Leonardo construyó un león que caminaba. También se cita habitualmente al "Golem",
homínido hecho de barro, obra del rabino húngaro Low que lo "dotó de vida" en una
ceremonia mágica (lo cual desvirtúa por cierto el valor científico del invento).”
<http://cruzrojaguayas.org/inteligencia/ >.
Era Moderna
5/7/2018 Inteligencia Artificial - slidepdf.com
http://slidepdf.com/reader/full/inteligencia-artificial-559abd0ddb3d3 10/70
“En el Siglo XVII, Pierre Jacquet Droz y su hijo Enrique Luis, construyeron tres
androides: dos niños y una joven. Un niño escribía, el otro dibujaba y la joven tocaba el
órgano y simulaba respirar. Esta realización (basada en mecanismos de relojería) les valió
ser detenidos y encerrados por la Inquisición.
Las mejores realizaciones se deben a Vaucouson, entre ellas el "Tocador de Flauta"
(que soplaba y movía los dedos, tocando hasta 12 melodías diferentes) y el Pato (que
graznaba, batía las alas, comía y "digería" mecánicamente).”
<http://cruzrojaguayas.org/inteligencia/ >.
I.2.2. LOS INICIOS
“Se considera generalmente que el origen remoto de la "Inteligencia Artificial" se
remonta a los intentos por crear autómatas (explicado en el capitulo anterior), que simulen
la forma y las habilidades de los seres humanos. Pero el origen inmediato del concepto y de
los criterios de desarrollo de la I.A. se remonta a la intuición del matemático inglés Alan
Turing y el apelativo "Inteligencia Artificial" se debe a McCarthy, uno de los integrantes
del "Grupo de Darmouth".
En 1843, Lady Ada Augusta Byron, patrocinadora de Charles Babbage planteó el
asunto de si la máquina de Babbage podía "pensar".
Los primeros problemas que se trató de resolver fueron puzzles, juegos de ajedrez,
traducción de textos a otro idioma.
Durante la II Guerra Mundial Norbert Wiener y John Von Neumann establecieron
los principios de la cibernética en relación con la realización de decisiones complejas y
control de funciones en máquinas.
La teoría de la retroalimentación en mecanismos, como por ejemplo un termostato
que regula la temperatura en una casa, tuvo mucha influencia. Esto aún no era propiamente
Inteligencia Artificial. Se hizo mucho en traducciones (Andrew Booth y Warren Weaver),
lo que sembró la semilla hacia el entendimiento del lenguaje natural.
5/7/2018 Inteligencia Artificial - slidepdf.com
http://slidepdf.com/reader/full/inteligencia-artificial-559abd0ddb3d3 11/70
Ramón y Cajal (1852-1934, Premio Nobel 1906) descubrió hace un siglo la
estructura y el modo de funcionar de las neuronas. En 1943 Warren McCulloch y Walter
Pitts propusieron un modelo de neurona del cerebro humano.
Estas neuronas nerviosas informáticas proporcionaron una representación simbólica
de la actividad cerebral. A este tipo de trabajo se le denomino “Redes Neuronales” que en
pocas palabras consiste en el estudio de modelos que siguen la arquitectura del cerebro
humano con el fin de conseguir con ello la realización de las tareas propias del cerebro de
una forma artificial, incluyendo, por supuesto, la inteligencia.”
<http://cruzrojaguayas.org/inteligencia/ >.
I.2.2.1. LA PRUEBA DE TURING
“Alan Mathison Turing (Fig. 1) nació el 23 de Junio de 1912, en Paddington,
Londres. En 1950, publica el artículo Computing Machinery and Intelligence en la revista
Mind , en el que introducía la célebre Prueba de Turing, esta prueba dice que la
inteligencia de un sistema viene dada por la sensación de inteligencia que recibimos por un
terminal conectada a un interlocutor desconocido para nosotros.
Fig. 1 : Alan Mathison Turing (1912-1954).
Fuente : <http://www.dcc.uchile.cl/~abassi/Cursos/IA/Apuntes/apuntes.html> .
Este artículo estimuló a los pensadores sobre la filosofía e investigación en el campo
de la Inteligencia Artificial.
5/7/2018 Inteligencia Artificial - slidepdf.com
http://slidepdf.com/reader/full/inteligencia-artificial-559abd0ddb3d3 12/70
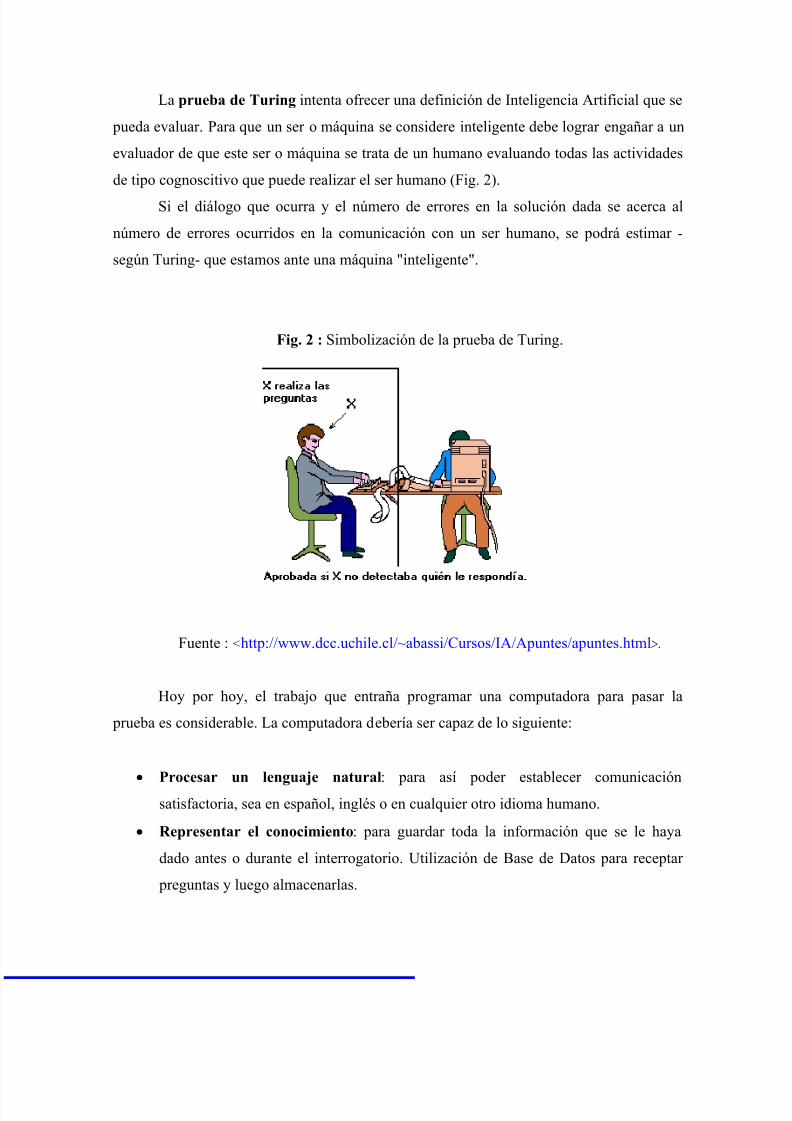
La prueba de Turing intenta ofrecer una definición de Inteligencia Artificial que se
pueda evaluar. Para que un ser o máquina se considere inteligente debe lograr engañar a un
evaluador de que este ser o máquina se trata de un humano evaluando todas las actividades
de tipo cognoscitivo que puede realizar el ser humano (Fig. 2).
Si el diálogo que ocurra y el número de errores en la solución dada se acerca al
número de errores ocurridos en la comunicación con un ser humano, se podrá estimar -
según Turing- que estamos ante una máquina "inteligente".
Fig. 2 : Simbolización de la prueba de Turing.
Fuente : <http://www.dcc.uchile.cl/~abassi/Cursos/IA/Apuntes/apuntes.html>.
Hoy por hoy, el trabajo que entraña programar una computadora para pasar la
prueba es considerable. La computadora debería ser capaz de lo siguiente:
Procesar un lenguaje natural: para así poder establecer comunicaciónsatisfactoria, sea en español, inglés o en cualquier otro idioma humano.
Representar el conocimiento: para guardar toda la información que se le haya
dado antes o durante el interrogatorio. Utilización de Base de Datos para receptar
preguntas y luego almacenarlas.
5/7/2018 Inteligencia Artificial - slidepdf.com
http://slidepdf.com/reader/full/inteligencia-artificial-559abd0ddb3d3 13/70
Razonar automáticamente: Utiliza la información guardada al responder
preguntas y obtener nuevas conclusiones o tomar decisiones.
Autoaprendizaje de la máquina: Con el propósito de adaptarse a nuevas
circunstancias. El autoaprendizaje conlleva a la auto evaluación.”
<http://www.dcc.uchile.cl/~abassi/Cursos/IA/Apuntes/apuntes.html>.
¿Es suficiente la prueba de Turing?
“A pesar de sus ventajas, la prueba de Turing es vulnerable a varias críticas
justificadas que impiden considerarlo como el único criterio de validación de inteligencia:
El juego de imitación obliga al computador a reproducir no sólo las destrezas del
comportamiento humano, sino que también sus flaquezas. Para no ser detectado, el
computador debe cometer el mismo tipo de errores que un humano, por ejemplo, en el caso
de operaciones aritméticas complejas. Esto es contraproducente desde el punto de vista
tecnológico. Lo que realmente importa en un sistema de diálogo es la ergonomía de lacomunicación, y no que el computador sea capaz de hacerse pasar por humano.
Hay un sesgo a problemas que dependen de las capacidades de procesamiento
simbólico. No se pueden evaluar capacidades preceptúales o de destreza manual.
La prueba se basa enteramente en la inteligencia humana. Esto restringe innecesariamente
el tipo de inteligencia que se puede implementar en un computador.
La prueba indica si un programa cumple o no el criterio de inteligencia, pero en
caso de falla no entrega herramientas para corregir defectos y orientar su desarrollo.
Tampoco permite realizar validaciones parciales, indispensables desde el punto de vista de
la ingeniería de software si se considera la complejidad de los sistemas inteligentes.
La inteligencia artificial se puede abordar de una manera mucho más general,
analizando los distintos objetivos que justifican su estudio. “
<http://www.dcc.uchile.cl/~abassi/Cursos/IA/Apuntes/apuntes.html>.

5/7/2018 Inteligencia Artificial - slidepdf.com
http://slidepdf.com/reader/full/inteligencia-artificial-559abd0ddb3d3 14/70
Objeciones a la Prueba de Turing
“Después de la aparición de la prueba a Turing se le hicieron un sin número de
cuestionamientos y objeciones, aquí presentamos algunas de ellas.
“Objeción : El pensar es un atributo que dios, dio sólo a los humanos.
Turing : Si dios hubiera querido les hubiera dado la capacidad de pensar a entes diferentes
del humano.
Objeción : Una máquina no puede pensar al nivel de los grandes científicos.
Turing : Existen muchos hombres que también no pueden pensar al nivel de los grandes
científicos.Objeción : Las máquinas son instrumentos formales, las cuales al dárseles un problema lo
resuelven o no a menos que sean inconsistentes.
Turing : El hombre en ocasiones presenta también comportamientos inconsistentes.
Objeción : Las máquinas no tienen conciencia.
Turing : El hombre muestra falta de conciencia en muchas situaciones de la vida.
Objeción : Las máquinas no pueden saborear un café.
Turing : A la máquina se le puede dar la información para que identifique los sabores.
Objeción : Las máquinas sólo hacen lo que se les dice.
Turing : Muchas veces las máquinas me han sorprendido con lo que hacen.
Objeción : El sistema nervioso del humano es continuo y los computadores son discretos.
Turing : Cada vez los computadores son más rápidos de tal forma que emulan al continuo.
Objeción : El humano es informal y las máquinas no.
Turing : Las reglas del comportamiento humano se les puede dar a una máquina y con ello
comportarse en forma informal.
Objeción : Los humanos tienen percepciones extrasensoriales y las máquinas no.
Turing : no supo que responder.”
<http://www.monografias.com/trabajos10/intelart/intelart.shtml>.
I.2.2.2. EL GRUPO DE DARMOUTH
5/7/2018 Inteligencia Artificial - slidepdf.com
http://slidepdf.com/reader/full/inteligencia-artificial-559abd0ddb3d3 15/70
“En el verano de 1956, un grupo de investigadores inspirados en la Prueba de
Turing se reunió en el Darmouth College (Estados Unidos) para discutir la posibilidad de
construir máquinas que no se limitaran a hacer cálculos prefijados sino operaciones
genuinamente "inteligentes".
Los integrantes del grupo eran Samuel, que había escrito un programa de juego de
damas capaz de aprender de su propia experiencia; McCarthy, que estudiaba sistemas
capaces de efectuar razonamientos de sentido común; Minsky, que trabajaba sobre
razonamientos analógicos de geometría; Selfridge, que estudiaba el reconocimiento visual
por computador, Newell, Shaw y Simon, que habían construido un programa para la
demostración automática de teoremas, y algunos otros. Ellos fueron los verdaderos
iniciadores en el campo de investigación que McCarthy bautizó como "InteligenciaArtificial".
Aunque los propósitos del taller no se lograron, sentó las bases para aplicaciones
que en los limites del siglo XXI parecen normales como los traductores automáticos de
idiomas, las redes neuronales y la robótica.
A partir de este grupo inicial, se formaron dos grandes "escuelas" de I.A.: Newell y
Simon lideraron el equipo de la Universidad de Carnegie-Mellon, proponiéndose
desarrollar modelos de comportamiento humano con aparatos cuya estructura se pareciese
lo más posible a la del cerebro (lo que posteriormente derivó en la llamada postura
"conexionista" y en los trabajos sobre "redes neuronales" artificiales).
McCarthy y Minsky formaron otro equipo en el Instituto Tecnológico de
Massachusett (MIT), centrándose más en que los productos del procesamiento tengan el
carácter de inteligente, sin preocuparse por que el funcionamiento o la estructura de los
componentes sean parecidas a los del ser humano.
Ambos enfoques sin embargo corresponden a los mismos objetivos prioritarios de la
I.A.: "entender la inteligencia natural humana, y usar máquinas inteligentes para adquirir
conocimientos y resolver problemas considerados como intelectualmente difíciles".
La historia de la I.A. ha sido testigo de ciclos de éxito, injustificado optimismo y la
consecuente desaparición de entusiasmo y apoyos financieros.
5/7/2018 Inteligencia Artificial - slidepdf.com
http://slidepdf.com/reader/full/inteligencia-artificial-559abd0ddb3d3 16/70
También ha habido ciclos caracterizados por la introducción de nuevos y creativos
enfoques y de un sistemático perfeccionamiento de los mejores.”
<http://www.monografias.com/trabajos12/inteartf/inteartf.shtml>.
I.2.3. EL DESARROLLO
“En el año 1955 Herbert Simon, el físico Allen Newell y J.C. Shaw, programador de
la RAND Corp. y compañero de Newell, desarrolla el primer lenguaje de programación
orientado a la resolución de problemas de la Inteligencia Artificial, el IPL-11. Un año más
tarde estos tres científicos desarrollan el primer programa de Inteligencia Artificial al que
llamaron Logic Theorist, el cual era capaz de demostrar teoremas matemáticos,
representando cada problema como un modelo de árbol, en el que se seguían ramas enbusca de la solución correcta, que resultó crucial. Este programa demostró 38 de los 52
teoremas del segundo capítulo de Principia Mathematica de Russel y Whitehead.
En 1957 Newell y Simon continúan su trabajo con el desarrollo del General
Problems Solver (GPS). GPS era un sistema orientado a la resolución de problemas; a
diferencia del Logic Theorist, el cual se orientó a la demostración de teoremas
matemáticos, GPS no estaba programado para resolver problemas de un determinado tipo,
razón a la cual debe su nombre. Resuelve una gran cantidad de problemas de sentido
común, como una extensión del principio de retroalimentación de Wiener.
Diversos centros de investigación se establecieron, entre los más relevantes están, la
Universidad Carnegie Mellon, el Massachusetts Institute of Technologie (MIT),
encabezado por Marvin Minsky, la Universidad de Standford e IBM. Los temas
fundamentales eran el desarrollo de heurísticas y el aprendizaje de máquinas.
En 1957 McCarthy desarrolló el lenguaje LISP. La IBM contrató un equipo para la
investigación en esa área y el gobierno de USA aportó dinero al MIT también para
investigación en 1963.
En 1958 McCarthy anuncia su nuevo desarrollo el lenguaje LISP (LISt Procesing),
el lenguaje de elección para todos aquellos desarrolladores inmersos en el estudio de la I.A.
A finales de los años 1950 y comienzos de 1960 se desarrolla un programa
orientado a la lectura de oraciones en inglés y la extracción de conclusiones a partir de su

5/7/2018 Inteligencia Artificial - slidepdf.com
http://slidepdf.com/reader/full/inteligencia-artificial-559abd0ddb3d3 17/70
interpretación, al cual su autor, Robert K. Lindsay, denomina "Sad Sam". Este podía leer
oraciones del tipo "Jim es hermano de John" y "La madre de Jim es Mary", a partir de ella
el sistema concluía que Mary debía ser también la madre de John. Este sistema representó
un enorme paso de avance en la simulación de inteligencia humana por una máquina, pues
era capaz de tomar una pieza de información, interpretarla, relacionarla con información
anteriormente almacenada, analizarla y sacar conclusiones lógicas.
En el mismo período de tiempo hay trabajos importantes de Herbert Gelernter, de
IBM, quien desarrolla un "Demostrador Automático de Teoremas de la Geometría", Alex
Bernstein desarrolla un programa para el juego de ajedrez que se considera el antecedente
para "Deep Blue".
En 1961 se desarrolla SAINT (Simbolic Automatic INTegrator) por James Slagle el
cual se orienta a la demostración simbólica en el área del álgebra.En 1962, McCarthy y Raphael inician sus trabajos sobre el diseño y la construcción
de un robot móvil que llamarían "Shakey". La diferencia fundamental entre este robot y los
programas en computadora utilizados hasta ahora por la I.A., es que "Shakey" tendría que
enfrentar el reto de interactuar con el mundo real en términos de espacio, tiempo,
movimiento, etc. En otras palabras, el robot tendría que tener alguna forma de
"conocimiento" del mundo que lo rodeaba. Este reto inició una fuerte preocupación en la
I.A. por el estudio de la epistemología y los procesos cognoscitivos. La discusión se centró
alrededor de los problemas de la representación mental o interna del conocimiento, la
percepción y los problemas del significado. La idea básica de Raphael era la de reunir, en
una sola, distintas máquinas con capacidad de aprender por experiencia, de reconocer
patrones visuales, de modelar, de manipular símbolos, etc., y esperar que el todo fuera
mayor que la suma de las partes. El resultado del experimento no fue el éxito que Raphael
esperaba, pero fue un logro sin precedente que hizo posibles avances muy importantes. El
aprendizaje más importante de esta experiencia fue la comprensión de que el problema más
difícil por resolver en I.A. era el de construir una máquina capaz de funcionar con altos
niveles de incertidumbre, como lo hace un ser humano.
En 1963 el MIT recibe una subvención de 2,2 millones de dólares del gobierno de
los Estados Unidos en concepto de investigación en el campo de la I.A.

5/7/2018 Inteligencia Artificial - slidepdf.com
http://slidepdf.com/reader/full/inteligencia-artificial-559abd0ddb3d3 18/70
En 1964 Bertrand Raphael construye el sistema SIR (Semantic Information
Retrieval) el cual era capaz de comprender oraciones en inglés.
A continuación un ejemplo, traducido, de interacción entre SIR y un usuario:
Usuario: Todos somos personas
SIR: Comprendo
Usuario: Un dedo es una parte de la mano
SIR: Comprendo
Usuario: Cada persona tiene dos manos
SIR: La oración anterior es ambigua. Por favor reconstrúyala.
Usuario: En cada persona hay dos manosSIR: Comprendo
Usuario: ¿Cuantos dedos tiene John?
SIR: La oración anterior es ambigua, pero asumo que TIENE significa TIENE COMO
PARTES. No sé si los dedos forman parte de John.
Usuario: John es un chico
SIR: Comprendo
Usuario: ¿Cuántos dedos tiene John?
SIR: La oración anterior es ambigua, pero asumo que TIENE significa TIENE COMO
PARTES, ¿cuántos dedos por mano?.
Usuario: Cada mano tiene cinco dedos.
SIR: Comprendo
Usuario: ¿Cuántos dedos tiene John?
SIR: La respuesta es diez.
En la década del 60 se comienza en el MIT el estudio de la visión artificial, lo cual
implica no sólo captar imágenes a través de una cámara, sino también la comprensión, de lo
que estas imágenes representan.
Un resultado importante en este trabajo lo constituye el "mundo de micro-bloques",
en el cual un robot era capaz de percibir un conjunto de bloques sobre una mesa, moverlos

5/7/2018 Inteligencia Artificial - slidepdf.com
http://slidepdf.com/reader/full/inteligencia-artificial-559abd0ddb3d3 19/70
y apilarlos; el éxito se debió a los investigadores Larry Roberts, Gerald Sussman, Adolfo
Guzman, Max Clowes, David Huffman, David Waltz, Patrick Winston, y Berthold Horn.
Posteriormente se obtuvieron resultados importantes entre ellos el de mayor resonancia fue
el sistema SCHRDLU de Terry Winograd, pues permitía interrogar y dar órdenes a un
robot que se movía dentro de un mundo de bloques.
Fig. 3 : Imagen sobre la cual se lleva el sig. Análisis.
Fuente : <http://www.monografias.com/trabajos12/inteartf/inteartf.shtml>.
A continuación mostramos un ejemplo traducido:
Usuario: Toma un bloque rojo.
SCHRDLU: Ok.
Usuario: Busca un bloque más pequeño que el que tienes y ponlo dentro de la caja.
5/7/2018 Inteligencia Artificial - slidepdf.com
http://slidepdf.com/reader/full/inteligencia-artificial-559abd0ddb3d3 20/70
SCHRDLU: Asumo que PONLO se refiere al bloque más pequeño que el que tengo.
Usuario: ¿Qué contiene la caja?
SCHRDLU: La pirámide azul y el bloque azul.
Usuario: ¿Qué sostiene a la pirámide?
SCHRDLU: La caja.
Usuario: ¿Cuántos bloques no están sobre la mesa?
SCHRDLU: Cuatro.
Usuario: ¿Es al menos uno de ellos más estrecho que aquel que te dije que recogieras?
SCHRDLU: Sí, el cubo rojo.
Usuario: ¿Lo sostiene algo?
SCHRDLU: Sí, la mesa.
Usuario: ¿Puede la mesa recoger bloques?SCHRDLU: No.
Usuario: La pirámide azul es mía.
SCHRDLU: Comprendo.
Usuario: Todos los bloques que no son rojos son míos, pero no poseo nada que sostenga
una pirámide.
SCHRDLU: Comprendo.
Usuario: ¿Poseo una caja?
SCHRDLU: No
Usuario: ¿Poseo algo de la caja?
SCHRDLU: Sí, dos cosas: El bloque azul y la pirámide azul.
Aunque parezca impresionante la capacidad del sistema para razonar y ejecutar
acciones, no se debe perder de vista el hecho que el robot se mueve en un mundo muy
simple de figuras geométricas, y que las relaciones entre ellas son muy limitadas. En el
mundo real existen tantos objetos diferentes y relaciones entre ellos, que tratar de llevar
este sistema a un entorno real resulta prácticamente imposible.
En los primeros años de la década del 60 Frank Rosemblatt desarrolla, en la
Universidad de Cornell, un modelo de la mente humana a través de una red neuronal y
produce un primer resultado al cual llama perceptrón. Este sistema era una extensión del
5/7/2018 Inteligencia Artificial - slidepdf.com
http://slidepdf.com/reader/full/inteligencia-artificial-559abd0ddb3d3 21/70
modelo matemático concebido por McCullock y Pitts para las neuronas, y funcionaba
basándose en el principio de "disparar" o activar neuronas a partir de un valor de entrada el
cual modifica un peso asociado a la neurona, si el peso resultante sobrepasa un cierto
umbral la neurona se dispara y pasa la señal a aquellas con las que está conectada. Al final,
en la última capa de neuronas, aquellas que se activen definirán un patrón el cual sirve para
clasificar la entrada inicial.
Este trabajo constituye la base de las redes neuronales de hoy en día, sin embargo a
raíz de su desarrollo sufrió fuertes críticas por parte de Marvin Minsky y Seymour Papert lo
cual provocó que la mayoría de los investigadores interesados en el tema lo abandonarán, y
este no se retomara hasta los años 80.
En 1965-70, comenzaron a aparecer los programas expertos, que predicen la
probabilidad de una solución bajo un set de condiciones, entre esos proyectos estuvo:DENDRAL, que asistía a químicos en estructuras químicas complejas euclidianas;
MACSYMA, producto que asistía a ingenieros y científicos en la solución de ecuaciones
matemáticas complejas, etc.
1965 DENDRAL, el primer sistema experto entra a formar parte del departamento
de informática de Stanford. Allí conoció a Joshua Lederberg, el cual quería averiguar cual
era la estructura de las moléculas orgánicas completas. El objetivo de DENDRAL fue éste
estudiar un compuesto químico. El descubrimiento de la estructura global de un compuesto
exigía buscar en un árbol las posibilidades, y por esta razón su nombre es DENDRAL que
significa en griego “árbol”.
Antes de DENDRAL los químicos sólo tenían una forma de resolver el problema,
estar era tomar unas hipótesis relevantes como soluciones posibles, y someterlas a prueba
comparándolas con los datos.
La realización de DENDRAL duró más de diez años (1965-1975). Se le puede
considerar el primer sistema experto.
En la década 1970-80, creció el uso de sistemas expertos, muchas veces diseñados
para aplicaciones médicas y para problemas realmente muy complejos como MYCIN, que
asistió a médicos en el diagnóstico y tratamiento de infecciones en la sangre. Otros son:
R1/XCON, PIP, ABEL, CASNET, PUFF, INTERNIST/CADUCEUS, etc. Algunos
permanecen hasta hoy.
5/7/2018 Inteligencia Artificial - slidepdf.com
http://slidepdf.com/reader/full/inteligencia-artificial-559abd0ddb3d3 22/70
En 1972 aparece el MYCIN, el cual se trataba de un sistema experto para el
diagnóstico de enfermedades infecciosas. Desde los resultados de análisis de sangre,
cultivos bacterianos y demás datos, el programa era capaz de determinar, o en lo menos,
sugerir el microorganismo que estaba causando la infección. Después de llegar a una
conclusión, MYCIN prescribía una medicación que se adaptaba perfectamente a las
características de la persona, tales como el peso corporal de este. Después del reconocido
éxito que tuvo.
En 1973 aparece el TIERESIAS. El cometido de este sistema experto era el de servir de
intérprete entre MYCIN y los especialistas que lo manejaban, a la hora introducir nuevos
conocimientos en su base de datos.
El especialista debía utilizar MYCIN de una forma normal, y cuando este cometiera
un error en un diagnóstico (hecho producido por la falta o fallo de información en el árbolde desarrollo de teorías) TEIRESIAS corregiría dicho fallo destruyendo la regla si es falsa o
ampliándola si es eso lo que se necesita.
De 1975 en adelante, comienza la era de los lenguajes expertos (shells) como
EMYCIN, EXPERT, OPSS, etc. para luego tratar de que éstos sean más amigables y
funcionales.
En 1980 las ventas de hardware y software relacionados con la I.A. se contabilizan
por 425 millones de dólares sólo en 1986. Compañías como DuPont, General Motors, y
Boeing utilizan sistemas expertos a principios de la década de los 80 y éstos sistemas
expertos se convertirán en un standard a finales de la misma.
Entre los años 80-85 se considera que huboo una revolución de los Sistemas
Expertos. En estos 5 años se crearon diversos sistemas expertos como el DELTA, de
General Electric Company, para la reparación de locomotoras diesel y eléctricas. “Aldo en
Disco” para la reparación de calderas hidrostáticas giratorias usadas para la elim inación de
bacterias.
Se crearon multitud de empresas dedicadas a los sistemas expertos como
Teknowledge Inc., Carnegie Group, Symbolics, Lisp Machines Inc., Thinking Machines
Corporation, Cognitive Systems Inc.... formando una inversión total de 300 millones de
dólares. Los productos más importantes que creaban estas nuevas compañías eran las
“máquinas Lisp”, que se trataba de unos ordenadores que ejecutaban programas LISP con

5/7/2018 Inteligencia Artificial - slidepdf.com
http://slidepdf.com/reader/full/inteligencia-artificial-559abd0ddb3d3 23/70
la misma rapidez que en un ordenador central, y el otro producto fueron las “herramientas
de desarrollo de sistemas expertos”.
En 1987 aparecieron los microordenadores Apple y compatibles IBM con una
potencia parecida a los LISP. El software se transfirió a máquinas convencionales
utilizando el lenguaje “C” lo que acabó con el LISP.
En los 90 la I.A. se utiliza de forma efectiva en la Guerra del Golfo sobre sistemas
de mísiles visores para los soldados y otros avances, y al mismo tiempo, invade nuestros
hogares y vida cotidiana en muchos más lugares.”
<http://www.monografias.com/trabajos12/inteartf/inteartf.shtml>.
1.3. OBJETIVOS DE LA INTELIGENCIA ARTIFICIAL
“Una definición más adecuada de la I.A. puede deducirse de la siguiente pregunta
¿Para qué sirve? Existen dos orientaciones básicas para responder esta interrogante:
Como herramienta científica : El objetivo es simular en el computador modelos
del comportamiento de sistemas inteligentes naturales (en particular humanos) para
verificar empíricamente su validez. Esta simulación es indispensable porque lossistemas estudiados son generalmente demasiado complejos para obtener
predicciones analíticas precisas de su funcionamiento. Las áreas que más pueden
beneficiarse con esta herramienta son la sicología cognitiva y la neurobiología. Esto
no significa que los aspectos computacionales sean segundarios, ya que todo
comportamiento inteligente implica un procesamiento de información que es
legítimo estudiar desde un punto de vista puramente computacional. Además, los
mecanismos naturales investigados pueden enriquecer el arsenal de métodos de la
computación (como en el caso de las redes neuronales).
Como herramienta tecnológica : El objetivo es resolver en el computador
problemas "difíciles", que se sabe están al alcance de sistemas inteligentes naturales
pero para los cuales no existe una descripción algorítmica satisfactoria. Los
problemas incluidos dentro de esta categoría se caracterizan en general por la

5/7/2018 Inteligencia Artificial - slidepdf.com
http://slidepdf.com/reader/full/inteligencia-artificial-559abd0ddb3d3 24/70
dificultad de disponer de toda la información necesaria para resolverlos sin
ambigüedad. Ya sea hay demasiada información que considerar (ej.: ajedrez), ya sea
ésta es incompleta o inconsistente (ej.: lenguaje verbal), ya sea está muy poco
estructurada (ej.: análisis de imágenes). En estos casos es interesante reproducir las
capacidades de procesamiento observadas en los sistemas naturales, aunque no
necesariamente modelando sus mecanismos internos.”
<http://www.dcc.uchile.cl/~abassi/Cursos/IA/Apuntes/apuntes.html>.
II. RAMAS DE LA INTELIGENCIA ARTIFICIAL
II.1. APRENDIZAJE AUTOMATICO
“El aprendizaje automático se dedica al estudio de métodos computacionales para
mejorar el rendimiento mecanizando la adquisición de conocimiento de la
experiencia."<http://www.servitel.es/inforsalud97/41/41.htm>.
“Uno de los principales logros de la Inteligencia Artificial es que puede otorgar a las
computadoras la habilidad de aprender. Para que esto suceda es necesario transferir el
conocimiento al interior de la máquina.
Una computadora aprende de diferentes maneras:
Memorísticamente. Para que exista un aprendizaje memorístico se transcribe el
conocimiento, es decir, se copia la memoria de una computadora a otra.
Por relato. Se adapta el conocimiento desde su fuente a una forma que pueda ser
aceptada y utilizada por la computadora. Es como si se le contara el conocimiento.
Por analogía. Se guarda el conocimiento que resuelve un problema para aplicarlocuando las circunstancias sean similares.
Por Inducción. Se le suministran datos a la computadora y de ellos extrae el
conocimiento. Esto se hace a partir de ejemplos o a partir de observaciones.
Los paradigmas más utilizados para el aprendizaje automático son:
5/7/2018 Inteligencia Artificial - slidepdf.com
http://slidepdf.com/reader/full/inteligencia-artificial-559abd0ddb3d3 25/70
1. Inducción de reglas a partir de bases de datos
2. Razonamiento basado en casos
3. Redes neuronales
4. Algoritmos genéticos
Inducción de reglas a partir de bases de datos: Entre los métodos de aprendizaje
automático el aprendizaje a partir de bases de datos por inducción (ya sea mediante
ejemplos u observación), es prácticamente el único que se utiliza en los sistemas
expertos. Este aprendizaje ha sido adaptado para resolver problemas de
clasificación.
Razonamiento basado en casos: Utiliza la experiencia que se adquirió al tratar casos
o problemas similares. Es un aprendizaje por analogía. Se construye una base de
conocimiento con los casos que ya se han resuelto. Cuando aparece un problema
nuevo, se buscan problemas similares en la base de casos y se adaptan sus
soluciones a la situación actual. Un sistema experto de esta clase va a proporcionar
la mejor solución disponible, más que una solución exacta.
Las redes neuronales y algoritmos genéticos se trataran más a fondo en apartados posteriores.” <http://iteso.mx/~almarp/ia/comoaprenden.htm>.
II.1.1. UN POCO DE HISTORIA
“Durante años la investigación en aprendizaje automático se ha realizado con
distinto grado de intensidad, utilizando diferentes técnicas y haciendo énfasis en distintos
aspectos y objetivos. Dentro de la relativamente corta historia de esta disciplina, es posible
distinguir tres periodos importantes, cada uno de los cuales esta centrado en distintosparadigmas:
Técnicas de modelado neuronal y de decisión
Aprendizaje orientado a conceptos simbólicos

5/7/2018 Inteligencia Artificial - slidepdf.com
http://slidepdf.com/reader/full/inteligencia-artificial-559abd0ddb3d3 26/70
Sistemas de aprendizaje de conocimiento con exploración de varias tareas de
aprendizaje
La característica distintiva del primer paradigma fue el interés de construir sistemas
de aprendizaje de propósito general que partan con poco o ningún conocimiento inicial de
la estructura. La investigación estuvo orientada a la construcción de una gran variedad de
máquinas basadas en modelos neuronales, con una estructura inicial aleatoria o
parcialmente aleatoria. Estos sistemas fueron denominados Redes Neuronales o Sistemas
Auto-organizativos. El aprendizaje en estos sistemas consiste en la realización de cambios
increméntales en las probabilidades de que elementos del tipo neurona (típicamente
unidades lógicas con umbral) puedan transmitir una señal.
Debido a la primitiva tecnología computacional de los primeros años, la mayoría delas investigaciones en esta área eran teóricas o relativas a la específica construcción de
sistemas de hardware con propósito específico, tal como perceptrones (Rosenblatt, 1958),
pandemonium (Selfridge, 1959) y adelaine (Widrow, 1962). El fundamento de estos
trabajos fue hecho en la década de los cuarenta por Rashevsky y sus seguidores del área de
biofísica (Rashevsky, 1948), y (McCulloch y Pitts 1943), quienes descubrieron la
aplicabilidad de la lógica simbólica para el modelado de actividades del sistema nervioso.
Sobre una gran actividad de investigación en esta área, es posible mencionar los trabajos de(Ashby, 1960; Rosenblatt, 1958, 1962; Minsky y Papert, 1969; Block, 1961; Yovits, 1962;
Widrow, 1962; Culberson, 1963; Kazmierczak, 1963).
Otro tipo de investigación relacionada con el área es la concerniente a la simulación
de procesos evolutivos, que a través de operaciones aleatorias de mutación y de
“selección” natural pueden crear un sistema capaz de realizar un comportamiento
inteligente (Friedberg, 1958, 1959; Holland, 1980).
La experiencia adquirida en estas áreas engendró la nueva disciplina de
Reconocimiento de Patrones y condujo al desarrollo sistemas de decisión en aprendizaje
automático. En dichos casos, el aprendizaje es igualado con la adquisición de funciones
lineales, polinomiales, o formas relacionadas con funciones discriminantes a partir de un
conjunto de ejemplos de entrenamiento (Nilsson, 1965; Koford, 1966; Uhr, 1966;
Highleyman, 1967). Uno de los sistemas más exitosos y conocidos dentro de esta clase fue

5/7/2018 Inteligencia Artificial - slidepdf.com
http://slidepdf.com/reader/full/inteligencia-artificial-559abd0ddb3d3 27/70
el programa de juego de damas de Samuel (Samuel, 1959, 1963). Este programa estaba
capacitado para adquirir por medio de aprendizaje, un mejor nivel de performance. Algo
diferente, pero relacionado, son las técnicas que utilizan métodos de decisión estadística
para el aprendizaje de reglas de reconocimiento de patrones (Sebestyen, 1962; Fu, 1968;
Watanabe, 1960; Arkadev, 1971; Fukananga, 1972; Ruspini, 1969, Duda & Hart, 1973,
Bezdek, 1973; Kanal, 1974).
Como investigación paralela al modelado a través de redes neuronales y sistemas de
decisión, se realizaron investigaciones relacionadas con teoría de control, sistemas de
control adaptativos capaces de ajustar automáticamente sus parámetros con el objetivo de
mantener una performance estable en presencia de perturbaciones (Truzal, 1955; Davies,
1970; Mendel, 1970; Tsypkin, 1968; Fu, 1971, 1974).
Posteriormente, los resultados prácticos realizados por modelos basados en redesneuronales y sistemas de decisión encontraron ciertas limitaciones. Las altas expectativas
mantenidas por los trabajos originales no se cumplieron, y la investigación en estas áreas
comenzó a declinar. Algunos resultados teóricos revelaron fuertes limitaciones, como por
ejemplo en el aprendizaje del tipo perceptron simple (Minsky y Papert, 1969).
Un segundo paradigma comenzó a emerger en los sesenta, a partir de los trabajos de
psicólogos e investigadores en inteligencia artificial, sobre el modelado del aprendizaje
humano (Hunt et al., 1963, 1966). El paradigma utilizaba estructuras lógicas o de grafos en
vez de métodos numéricos o estadísticos. Los sistemas aprendían descripciones simbólicas
que representaban un mayor nivel de conocimiento de las estructuras y conceptos
adquiridos (Hunt & Hovland, 1963; Feigenbaum, 1963; Hunt et al., 1966; Hilgard, 1966;
Simon & Lea, 1974; Bongard, 1970; Uhr, 1966; Karpinsky & Michalski, 1966).
Una influencia importante en esta área de trabajo fue el sistema de aprendizaje
estructural de Winston (Winston, 1975), como así también los trabajos realizados con el
objetivo de aprender conceptos estructurales a partir de ejemplos, incluyendo los programas
de aprendizaje basados en lógica inductiva (Michalski, 1972, 1973, 1978; Hayes-Roth
1974; Hayes-Roth & McDermott 1978; Mitchell, 1978).
El tercer paradigma representa el periodo de investigación más reciente,
comenzando a partir de mediado de los setenta. Las investigaciones en este sentido han sido
orientadas al aprendizaje de conceptos a partir de ejemplos, utilizando una amplia variedad
5/7/2018 Inteligencia Artificial - slidepdf.com
http://slidepdf.com/reader/full/inteligencia-artificial-559abd0ddb3d3 28/70
de técnicas, muchas de las cuales se orientan a los sistemas basados en conocimiento. Se
ha hecho especial énfasis en el uso de conocimiento orientado a tareas y en las restricciones
que este provee, que guían el proceso de aprendizaje. Además del énfasis en el aprendizaje
a partir de ejemplos, se trabaja en aprendizaje a partir de instrucciones, por analogía y
descubrimiento de conceptos y clasificaciones. En contraste con esfuerzos previos, las
nuevas investigaciones tienden a incorporar heurísticas, y utilizar ejemplos de
entrenamiento para el aprendizaje de conceptos.”
<http://www.dc.uba.ar/people/materias/aa/ >.
II.2. REDES NEURONALES ARTIFICIALES
II.2.1. INTRODUCCIÓN
“El aparato computacional más poderoso conocido por el hombre es el cerebro
humano. Un niño de tres años puede realizar fácilmente labores que superan por mucho las
capacidades de las computadoras más sofisticadas: reconociendo docenas de caras y cientos
de objetos desde diferentes ángulos, en condiciones de luz distintas, manipulando un
ambiente complejo, entendiendo y usando un vocabulario complejo de lenguaje y gestos.
Han sido gastados enormes esfuerzos en desarrollo para intentar reproducir versiones
limitadas de algunas de estas capacidades en las computadoras, con pobres resultados.
Una computadora puede realizar en segundos cálculos aritméticos que, a un ser humano, le
llevarían años. La aritmética es difícil para los humanos e imposible para los animales.
Dicha habilidad se considera tradicionalmente como un signo de gran inteligencia.
Entonces, ¿qué causa la disparidad entre las habilidades del hombre y la máquina?.
La diferencia obvia yace en la arquitectura fundamental de la computadora y del cerebro.
Las computadoras tradicionales están basadas en la arquitectura de Von Neumann: un
simple procesador que puede realizar operaciones simples aritméticas, lógicas y
condicionales una a la vez, y una gran memoria.
El cerebro humano, en contraste, consiste en un gran número de células
especializadas llamadas neuronas, interconectadas masivamente (se estima que hay del
orden de diez billones de neuronas en el cerebro humano con un promedio de miles de
5/7/2018 Inteligencia Artificial - slidepdf.com
http://slidepdf.com/reader/full/inteligencia-artificial-559abd0ddb3d3 29/70
conexiones por cada una). Estas neuronas son lentas (realizando cientos, en lugar de
millones, de operaciones por segundo).
Las redes neuronales artificiales (ANN, por sus siglas en inglés o simplemente
Redes Neuronales) son modelos computarizados inspirados en la estructura a bajo nivel del
cerebro. Consisten en grandes cantidades de unidades de procesamiento sencillas llamadas
neuronas, conectadas por enlaces de varias fuerzas. Las Redes Neuronales también pueden
ser construidas con "hardware" especial o simuladas en computadoras normales. Sin
embargo, el "hardware" neuronal especializado no es común, así que la simulación es la
norma.”<http://www.uam.es/personal_pdi/psicologia/adarraga/studs/Xerxes/Pag5.html>.
II.2.2.DEFINICIONES
- “Según DARPA en su Estudio de Redes Neuronales (DARPA 1988, AFCEA
International Press, : 60): "Una red neuronal es un sistema compuesto de muchos elementos
procesadores simples operando en paralelo, cuya función es determinada por la estructura
de la red, fuerza en las conexiones y el procesamiento realizado por los elementos
computacionales en los nodos."
- Haykin, S. (1994, Neural Networks: A comprehensive foundation, NY, McMillan, : 2):
"Una red neuronal es un procesamiento distribuido masivamente paralelo que tiene una
tendencia natural para almacenar conocimiento empírico y hacerlo disponible para el uso.
Recuerda al cerebro en dos aspectos:
1. El conocimiento se adquiere por la red a través de un proceso de aprendizaje.
2. Las conexiones interneurónicas se conocen como pesos sinápticos y se usan para
almacenar el conocimiento."
- Zurada,J.M. (1992, Introduction to artificial neural nsystems, Boston: PWS Publishing
Company, : 15): "Los sistemas de redes neuronales artificiales, o redes neuronales, son
sistemas celulares físicos que puedan adquirir, almacenar y usar conocimiento empírico."
Las redes neuronales son una forma de un sistema computerizado multi-proceso con:
- Elementos de procesamiento sencillos.
- Alto grado de interconexión.

5/7/2018 Inteligencia Artificial - slidepdf.com
http://slidepdf.com/reader/full/inteligencia-artificial-559abd0ddb3d3 30/70
- Mensajes simples escalares.
- Interacción adaptable entre elementos.”
<http://www.uam.es/personal_pdi/psicologia/adarraga/studs/Xerxes/Pag5.html>
II.2.3. UN POCO DE HISTORIA
“En los 50's y 60's, se hicieron varios intentos para adaptar los modelos de Redes
Neuronales para que se diera el aprendizaje. Rosenblatt diseñó el Perceptron. Éste contenía
tres tipos de neuronas: sensoriales, asociativas y de respuesta. Las sensoriales tomaban
entradas de fuera de la red, las unidades de respuesta propagaban señales fuera de la red, al
mundo externo, y las asociativas eran meramente internas. La distinción entre estas tres
neuronas es importante. Sin embargo ahora se refieren como unidades de entrada, de saliday ocultas. Rosenblatt desarrolló métodos para alterar los niveles sinápticos de forma que la
red aprendiera a reconocer clases de entradas. Por ejemplo, produjo una red que aprendió a
responder a líneas verticales, pero no a horizontales (se sabe que neuronas especializadas en
la visión actúan de esta forma). Como muchas Redes Neuronales posteriores, el rasgo más
importante del Perceptron de Rosenblatt es que aprendió a clasificar sus entradas "por
ejemplo"; lo cual contrasta con la clásica ciencia computacional donde el programador
escribe un programa que le dice a la computadora cómo clasificar sus entradas.
En 1969, Minsky y Papert publicaron un libro que influenció mucho el pensamiento
sobre redes neuronales. En primer lugar demostraron que para hacer algunas tareas
importantes de clasificación en geometría requerían un incremento arbitrario en el tamaño
del Perceptron mientras se iba incrementando el tamaño de la retina. En segundo lugar
demostraron que los Perceptrones eran incapaces de aprender a resolver cualquier problema
linealmente inseparable. Puesto que problemas muy simples son linealmente inseparables.”
<http://www.uam.es/personal_pdi/psicologia/adarraga/studs/Xerxes/Pag5.html>.
Las R.N.A. no fueron estudiadas por cerca de dos décadas, pero su interés hacrecido bastante en los últimos años debido al éxito mostrado en la solución de problemas
antes reservados exclusivamente a los humanos.
II.2.4. CARACTERÍSTICAS DE LAS REDES NEURONALES ARTIFICIALES
5/7/2018 Inteligencia Artificial - slidepdf.com
http://slidepdf.com/reader/full/inteligencia-artificial-559abd0ddb3d3 31/70
“Las R.N.A. están compuestas por elementos que se comportan de una manera
parecida a las funciones más elementales de una neurona biológica. Estos elementos se
organizan de una manera que puede o no estar relacionada a la manera en que está
organizado el cerebro.
No obstante su burdo parecido a los sistemas biológicos, las R.N.A. presentan
algunas características propias del cerebro como son:
Pueden aprender de la experiencia.
Pueden generalizar a partir de ejemplos previos.
Pueden abstraer características esenciales de entradas que contienen datos
irrelevantes.
Es importante enfatizar que las R.N.A. no duplican las funciones cerebrales
exactamente; a decir verdad, están aún lejos de poder simularlo fielmente.
Las características más importantes de las R.N.A. son:
Habilidad De Aprendizaje : Las R.N.A. pueden modificar su comportamiento en
respuesta al medio ambiente. Esto es muy importante. Las R.N.A. se auto-ajustan
produciendo respuestas consistentes con el medio ambiente. Existen muchosalgoritmos de aprendizaje que pueden aplicarse a las R.N.A.
Generalización : Una vez entrenada, una R.N.A. es, hasta cierto grado, insensible a
variaciones pequeñas en sus entradas. Esto es, las R.N.A. producen sistemas
capaces de manejar el mundo "imperfecto" en que vivimos.
Abstracción : Algunas R.N.A. son capaces de abstraer la esencia de una serie de
entradas. Se pueden abstraer patrones perfectos de modelos distorsionados.”
<http://mailweb.udlap.mx/~pgomez/cursos/rna/notas/is466_not.html>.
II.2.5. APLICACIONES DE LAS R.N.A.

5/7/2018 Inteligencia Artificial - slidepdf.com
http://slidepdf.com/reader/full/inteligencia-artificial-559abd0ddb3d3 32/70
“Las R .N.A. no son una panacea y definitivamente no son el sustituto de las
computadoras convencionales; por ejemplo no serían adecuadas para escribir un sistema de
nómina. Algunas áreas en las que se han aplicado exitosamente son:
Análisis financiero
Procesamiento de señales
Mercadotecnia
Automatización y robótica
Diagnóstico médico
Clasificación
Reconocimiento de patrones
Control de procesos
Optimización”
<http://mailweb.udlap.mx/~pgomez/cursos/rna/notas/is466_not.html>.
II.2.6. ALCANCES Y LIMITACIONES DE LAS R.N.A.
“Las redes neuronales artificiales tienen aplicaciones potenciales en tareas donde no
hay reglas bien definidas las cuales parecen fáciles para los humanos y difíciles para lascomputadoras. Este campo es tan amplio como el de las computadoras convencionales.
La Inteligencia Artificial ha estado generalmente dominada por las áreas de manipulación
lógica y simbólica, pero algunos piensan que R.N.A. remplazarán la Inteligencia Artificial
tradicional actual. Más bien parece que se combinarán en sistemas apoyándose
mutuamente, como sucede en los seres humanos, pues éstos se apoyan en sistemas rápidos
soportados por reconocimiento de patrones. Otros sistemas realizan actividades que
requieren más tiempo cuando el reconocimiento falla o cuando se requieren niveles
superiores de decisión.”
<http://mailweb.udlap.mx/~pgomez/cursos/rna/notas/is466_not.html>.
II.2.7. CONFIABILIDAD DE LAS R.N.A.
5/7/2018 Inteligencia Artificial - slidepdf.com
http://slidepdf.com/reader/full/inteligencia-artificial-559abd0ddb3d3 33/70
“Las R.N.A. son hasta cierto grado impredecibles (como los humanos). No hay
manera de garantizar la salida de una red para una entrada a menos que se prevean todas las
posibilidades en las entradas, y se entrene la red suficientemente bien. Sin embargo esto
puede resultar impráctico en muchos casos y verdaderamente imposible en otros, lo que ha
originado muchas críticas a las R.N.A. Parte de esta crítica se debe al hecho de que
esperamos que las computadoras sean perfectas, pero los humanos no son perfectos...
Otro problema relacionado y criticado en las R.N.A. es su inhabilidad de "explicar" como
resuelven el problema. Esta inhabilidad se debe a que la representación interna generada en
la red puede ser demasiado compleja aún en los casos mas sencillos.”
<http://mailweb.udlap.mx/~pgomez/cursos/rna/notas/is466_not.html .>
II.3. LÓGICA DIFUSA
II.3.1. INTRODUCCIÓN
“La lógica difusa es una rama de la inteligencia artificial que se funda en el
concepto "Todo es cuestión de grado" , lo cual permite manejar información vaga o de
difícil especificación si quisiéramos hacer cambiar con esta información el funcionamiento
o el estado de un sistema especifico. Es entonces posible con la lógica difusa gobernar un
sistema por medio de reglas de 'sentido común' las cuales se refieren a cantidades
indefinidas.
Las reglas involucradas en un sistema borroso, pueden ser aprendidas con sistemas
adaptativos que aprenden al ' observar ' como operan las personas los dispositivos reales, o
estas reglas pueden también ser formuladas por un experto humano. En general la lógica
difusa se aplica tanto a sistemas de control como para modelar cualquier sistema continuode ingeniería, física, biología o economía.
La lógica difusa es entonces definida como un sistema matemático que modela
funciones no lineales, que convierte unas entradas en salidas acordes con los
planteamientos lógicos que usan el razonamiento aproximado.

5/7/2018 Inteligencia Artificial - slidepdf.com
http://slidepdf.com/reader/full/inteligencia-artificial-559abd0ddb3d3 34/70
Se fundamenta en los denominados conjuntos borrosos y un sistema de inferencia
borroso basado en reglas de la forma " SI....... ENTONCES...... ", donde los valores
lingüísticos de la premisa y el consecuente están definidos por conjuntos borrosos, es así
como las reglas siempre convierten un conjunto borroso en otro.”
<http://personales.ya.com/casanchi/mat/difusa01.htm>.
II.3.2. DEFINICIONES
- “Lógica difusa es la rama de la inteligencia artificial que le permite a un computador
analizar información del mundo real en una escala entre falso y verdadero.”
<http://www.dwcolombia.com/orbita/concepto.html>.
- “Lógica difusa se encarga del estudio de las leyes, los modos y las formas delrazonamiento aproximado.”
<http://kim.ece.buap.mx/posgrado/Fuzzytutorial/clasvsdif.html>.
II.3.3. UN POCO DE HISTORIA
“Los conjuntos difusos fueron introducidos por primera vez en 1965; la creciente
disciplina de la lógica difusa provee por sí misma un medio para acoplar estas tareas. En
cierto nivel, la lógica difusa puede ser vista como un lenguaje que permite trasladarsentencias sofisticadas en lenguaje natural a un lenguaje matemático formal. Mientras la
motivación original fue ayudar a manejar aspectos imprecisos del mundo real, la práctica
temprana de la lógica difusa permitió el desarrollo de aplicaciones prácticas. Aparecieron
numerosas publicaciones que presentaban los fundamentos básicos con aplicaciones
potenciales. Esta frase marcó una fuerte necesidad de distinguir la lógica difusa de la teoría
de probabilidad. Tal como la entendemos ahora, la teoría de conjuntos difusos y la teoría de
probabilidad tienen diferentes tipos de incertidumbre.
En 1994, la teoría de la lógica difusa se encontraba en la cumbre, pero esta idea no
es nueva, para muchos, estuvo bajo el nombre de lógica difusa durante 25 años, pero sus
orígenes se remontan hasta 2,500 años. Aún Aristóteles consideraba que existían ciertos
grados de veracidad y falsedad. Platón había considerado ya grados de pertenencia.

5/7/2018 Inteligencia Artificial - slidepdf.com
http://slidepdf.com/reader/full/inteligencia-artificial-559abd0ddb3d3 35/70
La idea de que la lógica produce contradicciones fue popularizada por el filósofo y
matemático británico Bertrand Russell, a principios del siglo XX. Estudio las vaguedades
del lenguaje, concluyendo con precisión que la vaguedad es un grado. El filosofo austriaco
Ludwing Wittgenstein estudió las formas en las que una palabra puede ser empleada para
muchas cosas que tienen algo en común. La primera lógica de vaguedades fue desarrollada
en 1920 por el filósofo Jan Lukasiewicz, visualizó los conjuntos con un posible grado de
pertenencia con valores de 0 y 1, después los extendió a un número infinito de valores entre
0 y 1. En los años sesentas, Lofti Zadeh inventó la lógica difusa, que combina los conceptos
de la lógica y de los conjuntos de Lukasiewicz mediante la definición de grados de
pertenencia.” <http://personales.ya.com/casanchi/mat/difusa01.htm>.
II.3.4. QUE ES LA LÓGICA DIFUSA
“Es un tipo de lógica que reconoce más que simples valores verdaderos y falsos.
Con lógica difusa, las proposiciones pueden ser representadas con grados de veracidad o
falsedad. Por ejemplo, la sentencia "hoy es un día soleado", puede ser 100% verdad si no
hay nubes, 80% verdad si hay pocas nubes, 50% verdad si existe neblina y 0% si llueve
todo el día.
La Lógica Difusa ha sido probada para ser particularmente útil en sistemas expertos
y otras aplicaciones de inteligencia artificial. Es también utilizada en algunos correctores de
voz para sugerir una lista de probables palabras a reemplazar en una mal dicha. La Lógica
Difusa, que hoy en día se encuentra en constante evolución, nació en los años 60 como la
lógica del razonamiento aproximado, y en ese sentido podía considerarse una extensión de
la Lógica Multivaluada. La Lógica Difusa actualmente está relacionada y fundamentada en
la teoría de los Conjuntos Difusos. Según esta teoría, el grado de pertenencia de un
elemento a un conjunto va a venir determinado por una función de pertenencia, que puede
tomar todos los valores reales comprendidos en el intervalo [0,1].La Lógica Difusa (llamada también Lógica Borrosa por otros autores) o Fuzzy
Logic es básicamente una lógica con múltiples valores, que permite definir valores en las
áreas oscuras entre las evaluaciones convencionales de la lógica precisa: Si / No, Cierto /
Falso, Blanco / Negro, etc. Se considera un súper conjunto de la Lógica Booleana. Con la
Lógica Difusa, las proposiciones pueden ser representadas con grados de certeza o falsedad.

5/7/2018 Inteligencia Artificial - slidepdf.com
http://slidepdf.com/reader/full/inteligencia-artificial-559abd0ddb3d3 36/70
La lógica tradicional de las computadoras opera con ecuaciones muy precisas y dos
respuestas: Si o no, uno o cero. Ahora, para aplicaciones de computadores muy mal
definidas o sistemas vagos se emplea la Lógica Difusa.
Por medio de la Lógica Difusa pueden formularse matemáticamente nociones como
un poco caliente o muy frío, para que sean procesadas por computadoras y cuantificar
expresiones humanas vagas, tales como "Muy alto" o "luz brillante". De esa forma, es un
intento de aplicar la forma de pensar humana a la programación de los computadores.
Permite también cuantificar aquellas descripciones imprecisas que se usan en el lenguaje y
las transiciones graduales en electrodomésticos como ir de agua sucia a agua limpia en una
lavadora, lo que permite ajustar los ciclos de lavado a través de censores. La habilidad de la
Lógica Difusa para procesar valores parciales de verdad ha sido de gran ayuda para la
ingeniería.La última característica de los sistemas lógicos es el procedimiento de
razonamiento, que permite inferir resultados lógicos a partir de una serie de antecedentes.
Generalmente, el razonamiento lógico se basa en silogismos, en los que los antecedentes
son por un lado las proposiciones condicionales (nuestras reglas), y las observaciones
presentes por otro (serán las premisas de cada regla).
Los esquemas de razonamiento utilizados son "esquemas de razonamiento
aproximado", que intentan reproducir los esquemas mentales del cerebro humano en el
proceso de razonamiento. Estos esquemas consistirán en una generalización de los
esquemas básicos de inferencia en Lógica Binaria (silogismo clásico).
Tan importante será la selección de un esquema de razonamiento como su representación
material, ya que el objetivo final es poder desarrollar un procedimiento analítico concreto
para el diseño de controladores difusos y la toma de decisiones en general. Una vez que
dispongamos de representaciones analíticas de cada uno de los elementos lógicos que
acabamos de enumerar, estaremos en disposición de desarrollar formalmente un
controlador "heurístico" que nos permita inferir el control adecuado de un determinado
proceso en función de un conjunto de reglas "lingüísticas", definidas de antemano tras la
observación de la salida y normas de funcionamiento de éste.”
<http://personales.ya.com/casanchi/mat/difusa01.htm>.
5/7/2018 Inteligencia Artificial - slidepdf.com
http://slidepdf.com/reader/full/inteligencia-artificial-559abd0ddb3d3 37/70
II.4. SISTEMAS EXPERTOS
II.4.1. INTRODUCCIÓN
“Los Sistemas Expertos son una forma de programación que emula artificialmenteciertos aspectos del razonamiento de un especialista humano en un ámbito restringido y
limitado de conocimiento. Su característica principal es que están basados en reglas. Es
decir, contienen un juego predefinido de conocimientos que se utiliza para tomar sus
decisiones. Los sistemas expertos pueden resolver con mucha facilidad ciertos problemas
complejos (no abordables mediante cálculo puro) que sólo puede llevarse a cabo por un
número limitado de personas expertas intensamente entrenadas. Tal vez su característica
más fascinante es su capacidad para enfrentar problemas del mundo real, por medio de la
aplicación de procesos que emulan el juicio y la intuición humanas. Para ello, es necesario
dotar a la computadora tanto de una “base de conocimientos” como de un “motor de
inferencia”. La base contiene el conocimiento del sistema con respecto a un tema
específico para el que se diseña el sistema. El motor de inferencia, en cambio, es el que
combina los hechos y las preguntas particulares, utilizando la base de conocimientos,
seleccionando los datos y los pasos apropiados para presentar los resultados.
Posteriormente este núcleo central fue ampliado con la incorporación de otros muchos
procesos cognitivos vinculados con el pensamiento: aprendizaje automático, razonamientobasado en casos, lógica difusa, etc.”
<http://www.control-automatico.net/recursos/articulos/art085.htm>.
II.4.2. DEFINICIONES
- “Los Sistemas Expertos estudian la simulación de los procesos intelectuales de los
expertos humanos como pueden ser : La interpretación de datos, el diagnóstico, la
corrección, la monitorización, el control, la predicción, la planificación, el diseño y la
enseñanza.”<http://montelpz.htmlplanet.com/robot/refbiblio.html>.
- “Bajo el término de Sistemas Expertos se entiende un tipo de software que imita el
comportamiento de un experto humano en la solución de un problema. Pueden almacenar

5/7/2018 Inteligencia Artificial - slidepdf.com
http://slidepdf.com/reader/full/inteligencia-artificial-559abd0ddb3d3 38/70
conocimientos de expertos para un campo determinado y solucionar un problema mediante
deducción lógica de conclusiones.”
<http://home.worldonline.es/jmariocr/introduccion.htm>.
- “Un Sistema Experto se puede definir como un sistema computacional interactivo que
permite la creación de bases de conocimiento, las cuales una vez cargadas responden a
preguntas, despejan dudas y sugieren cursos de acción emulando / simulando el proceso de
razonamiento de un experto para resolver problemas en un área específica del conocimiento
humano.”
<http://www.geocities.com/SiliconValley/Pines/7894/introduccion/expertos.html>.
- “Los Sistemas Expertos son sistemas informáticos que simulan el proceso de aprendizaje,
de memorización, de razonamiento, de comunicación y de acción de un experto humano
en cualquier rama de la ciencia.” <http://www.informaticaintegral.net/sisexp.html>.
II.4.3. ANTECEDENTES
“La resolución de problemas es una de las constantes que han acompañado al
hombre desde sus orígenes. Tanto los problemas que frenan las fronteras del saber
(explicación de fenómenos y comportamientos, demostración de teoremas...) como aquellos
otros que impiden las realizaciones prácticas (ingeniería, planificación...), o simplemente
los creados por curiosidad o distracción (paradojas, acertijos, adivinanzas, juegos...), han
llenado el tiempo y consumido esfuerzos intelectuales del hombre.
En la década de los cincuenta apareció un interés especial por parte de los
pedagogos y psicólogos, por encontrar los métodos generales de resolución de problemas,
con el fin de que estos métodos se pudieran enseñar a los estudiantes y con ello se mejorara
su preparación. Se había ya observado en aquel entonces, que las personas aún conociendo
toda la información necesaria para resolver correctamente un problema (definiciones,
fórmulas, etc.) son muchas veces incapaces de conseguirlo, realizando con frecuencia
razonamientos defectuosos. Los primeros estudios se realizaron con problemas de
resolución geométrica.
Con la difusión de los primeros ordenadores, en la segunda mitad de la década de
los cincuenta, los estudios ya realizados en el campo de la resolución de problemas se
5/7/2018 Inteligencia Artificial - slidepdf.com
http://slidepdf.com/reader/full/inteligencia-artificial-559abd0ddb3d3 39/70
intentaron trasladar a los ordenadores. Surgen nuevos problemas como son la
representación de los conocimientos en la memoria del ordenador, la representación de las
relaciones entre los conocimientos, etc.
En la década de los sesenta, coincidiendo con la segunda época de la I.A., aparecen
numerosos trabajos sobre el método general y universal de resolución desarrollados sobre
ordenadores; de ellos el más famoso es el "General Program Solver" de Newell, Shaw y
Simón, Universidad de Carnege Mellon 1957.
Pese a la gran euforia con que se vivió los momentos iniciales (en 1967 Donald
Michie de la Universidad de Edimburgo declaraba que en menos de veinte años existirían
máquinas tan inteligentes como el hombre), y los grandes recursos que se emplearon, lo
cierto es que no se obtuvo ningún éxito notable.
Uno de los problemas que surgieron en aquel entonces fue, la aparición de laexplosión combinatoria en los cálculos exhaustivos que limitaba la profundidad en los
mismos y el número de conocimientos que se podían procesar, es decir se calculaban todas
las posibles soluciones para luego elegir la óptima. Aparecen entonces los primeros
algoritmos de poda (Algoritmo alfa-beta de John Mc Carthy 1961).
El error que se cometió fue, tal vez, emprender un problema tan general y amplio
con herramientas poco adecuadas. Tanto el software como el hardware estaban adaptados al
cálculo numérico no al campo simbólico, los ordenadores eran lentos y tenían poca
capacidad de memoria, es decir se gastaban muchos recursos y éstos eran caros, además los
conocimientos lógico-matemáticos necesarios para estos desarrollos todavía estaban en su
infancia.
Como ejemplos cabe recordar que no fue hasta 1960 cuando John Mc Carthy creó el
lenguaje LISP, y que éste se consideró durante algo más de una década como un lenguaje
inútil ("LIst of Stupid and Insipid Parentesisis") o que el "Principio de resolución
automática", base del PROLOG no lo formuló J. Alan Robinson hasta 1965.
En la década de los setenta, coincidiendo con la tercera época de la I.A., los
planteamientos en el campo de la resolución de problemas cambian. No conociéndose los
mecanismos generales de resolución de la mente humana se pensó en simular los mismos
para campos muy concretos del conocimiento. Es decir, se imita la forma externa o

5/7/2018 Inteligencia Artificial - slidepdf.com
http://slidepdf.com/reader/full/inteligencia-artificial-559abd0ddb3d3 40/70
comportamiento aparente, que es precisamente el enfoque completamente opuesto a la
línea de investigación de las redes neuronales.
El manejo eficaz de los conocimientos dio entonces sus primeros éxitos: los
Sistemas Expertos. Este hecho llenó de nuevo de optimismo a la comunidad científica que
entre otras cosas había visto como las subvenciones por parte de los gobiernos se
recortaban y en muchos casos desaparecían ante la falta de logro palpables en el campo de
la I.A.
El precursor de los Sistemas Expertos actuales es el sistema DENTRAL
(Universidad de Standford 1967) que incorporaba una gran cantidad de conocimiento que
no estaban incluidos en el programa. Utilizaba para la representación del conocimiento las
reglas de producción, si bien su modo de funcionamiento se acercaba más a la filosofía de
la resolución automática que a la de los Sistemas Expertos. El sistema era capaz dedeterminar la estructura química de un compuesto orgánico a partir de los resultados
obtenidos mediante un espectrógrafo de masas. Un desarrollo mejorado del mismo todavía
se utiliza en la industria química.
De los Sistemas Expertos que se construyeron en esta época son famosos; el
Prospector (Standford Research Institute 1974) Sistema Experto en prospecciones mineras
especialmente 149 petrolíficas que cuenta entre sus méritos el descubrimiento en 1980 en el
estado de Washington (Estados Unidos de Norteamérica) de un importante yacimiento de
molibdeno que fue posteriormente confirmado mediante prospecciones, y el MYCIN
(Universidad de Standford 1977) Sistema Experto en el diagnóstico y terapia de
enfermedades infecciosas de origen bacteriano que contaba con unas 400 regIas.
En la década de los 70 también se empiezan a desarrollar los primeros ordenadores
simbólicos, en Estados Unidos de Norteamérica, bajo el amparo del Proyecto DARPA
(1973).
En la década de los ochenta, existen dos grandes líneas de investigación y
desarrollo, que son:
- Divulgación o popularización de los Sistemas Expertos como una metodología que
puede resolver de una forma adecuada múltiples problemas. Esta línea ha materializado sus
investigaciones en el desarrollo de lenguajes, herramientas, entornos y sistemas vacíos que
funcionan en pequeños ordenadores (mini ordenadores y estaciones de trabajo ).
5/7/2018 Inteligencia Artificial - slidepdf.com
http://slidepdf.com/reader/full/inteligencia-artificial-559abd0ddb3d3 41/70
- Generalización de los Sistemas Expertos que permitan ampliar el campo de
conocimientos cuyos primeros logros han sido la comercialización de ordenadores o
máquinas simbólicas y el desarrollo de los ordenadores y lenguajes paralelos.
En estos pocos años de vida de los S.E. se ha asistido al nacimiento de una nueva
rama del saber: la ingeniería del Conocimiento, del Saber o Cognoscitiva, que es la parte de
la I.A. que estudia los Sistemas Expertos o basados en el conocimiento y es sin duda
ninguna en estos momentos el campo mas prometedor de la I.A.”
<http://montelpz.htmlplanet.com/robot/refbiblio.html>.
II.4.4. CARACTERÍSTICAS DE LOS SISTEMAS EXPERTOS
“Solucionan problemas aplicando su experiencia de una forma eficaz,
haciendo deducciones a partir de datos incompletos o inciertos.
Explican y justifican lo que están haciendo.
Se comunican con otros expertos y adquieren nuevos conocimientos.
Reestructuran y reorganizan el conocimiento.
Interpretan al mismo tiempo el espíritu y la letra de las reglas.
Determinan cuando un problema está en el dominio de su experiencia.”
<http://club2.telepolis.com/ohcop/buchanan.html>.
II.4.5. PRINCIPALES COMPONENTES DE UN SISTEMA EXPERTO
“Base de conocimientos : Es donde se almacena el conocimiento en el campo a
desarrollar. Los conocimientos que se suelen almacenar son de cuatro tipos: Conocimiento
objetivo, que describe la situación real del sistema; Conocimiento de sucesos, relacionado
con los sucesos que ocurren en el tiempo de ejecución; Conocimiento del funcionamiento
del sistema, de cómo se hacen las cosas, y Metaconocimiento, que relaciona los anteriores.
Existen varias formas de representar el conocimiento:
- Marcos («Frames»): son estructuras de datos donde se almacenan información concreta
de un cierto concepto e información relacional para completar la definición del concepto.

5/7/2018 Inteligencia Artificial - slidepdf.com
http://slidepdf.com/reader/full/inteligencia-artificial-559abd0ddb3d3 42/70
Se representan por una serie de campos y los valores asociados a los mismos, pudiendo ser
otro "frame".
- Redes semánticas: son representaciones gráficas del conocimiento, mediante nodos, que
representan objetos o conjuntos de objetos, y arcos, que relacionan dichos objetos. Tanto
los "frames" como las redes son representaciones descriptivas, difíciles de usar para
representar el razonamiento.
- Reglas: es la forma más extendida de representación del conocimiento. Representan la
forma de razonar. Tienen la forma IF <condicion> THEN <accion/conclusion>. Es
importante el orden de ejecución de las reglas, por ello se les suele dotar de prioridades.
Una regla que activa otra se denomina metaregla, y se suelen usar para desarrollar
progresivamente el conocimiento del experto.
Motor de Inferencia : Es el "supervisor", un programa que está entre el usuario y la base
de conocimientos, y que extrae conclusiones a partir de los datos simbólicos que están
almacenados en las bases de hechos y de conocimiento. Dependen en gran medida de la
representación elegida; por su importancia analizaremos los motores de inferencia basados
en reglas.
Existen varios algoritmos de búsqueda a lo largo de las reglas para inferir
conclusiones a partir de los hechos y las reglas. Todos los algoritmos son del tipo "pattern-
matching", van disparando reglas a medida que se cumplen las condiciones. Se pueden
diferenciar dos mecanismos de inferencia:
- Encadenamiento hacia adelante: se extraen conclusiones a partir del cumplimiento de las
condiciones de ciertas reglas que, a su vez, provocarán el cumplimiento de las condiciones
en otras reglas hasta que no se cumplan en ninguna de ellas.
- Encadenamiento hacia atrás: se suponen ciertas las conclusiones de una regla y, como
consecuencia, se van disparando aquellas reglas que provocarían la regla original. El
proceso acaba si no se cumplen las condiciones de las reglas o si se cumplen para todas las
reglas.
Es importante destacar que la base de conocimientos y el motor de inferencia son
sistemas independientes, por lo que se han desarrollado herramientas que únicamente
5/7/2018 Inteligencia Artificial - slidepdf.com
http://slidepdf.com/reader/full/inteligencia-artificial-559abd0ddb3d3 43/70
necesitan la implementación del conocimiento, llevando incorporado el motor de
inferencia.
Interfase Hombre-Máquina : Establece una comunicación sencilla entre el usuario y el
sistema. El usuario puede consultar con el sistema a través de menús, gráficos, etc, y éste le
responde con resultados.
La implementación de un sistema experto completo obliga al desarrollo de cada uno
de los elementos anteriores a través de lenguajes o herramientas de desarrollo. Existen
cuatro alternativas para la implementación de un sistema experto:
" Lenguajes de alto nivel (HLL): son lenguajes de propósito general (C, Fortran, Basic,...).
Tienen como ventajas su eficiencia, su familiaridad y la portabilidad a cualquier entorno,
pero el inconveniente de no estar preparados para una programación basada en símbolos.
" Lenguajes simbólicos: fundamentalmente LISP y PROLOG. Son los lenguajes de altonivel más utilizados por su adaptación a la lógica de la base de conocimientos representada
mediante símbolos, y por su mecanismo de extraer conclusiones. Su eficiencia aumenta en
estaciones de trabajo diseñadas para dichos lenguajes.
" Herramientas de desarrollo ("shells"): son programas preparados para el desarrollo de
sistemas expertos pues incorporan el motor de inferencia, independiente de las bases de
hechos y de conocimiento. El programador se limita a traducir dichas bases a un lenguaje
preparado a tal efecto, pudiendo enlazarse con otros lenguajes para el desarrollo de
funciones adicionales. Suelen estar desarrollados en LISP o PROLOG para aumentar su
eficiencia. La flexibilidad es menor, aunque suelen incorporar procesadores de texto,
gráficos y herramientas de análisis.
" Entornos de desarrollo ("environments"): añaden a los "shells" el uso de un entorno
gráfico (ventanas, iconos,...) que facilita el desarrollo del sistema experto. Tienen como
ventaja la disminución del tiempo de desarrollo, pero suelen ser caros y poco flexibles.
Los "shells" son los más usados para el desarrollo de sistemas expertos, mientras
que el PROLOG está muy extendido en Europa y Japón, el LISP lo está en Estados Unidos.
Los entornos aún ocupan un sector minoritario pero la tendencia a su utilización va en
aumento.
Como conclusiones se puede decir que los sistemas expertos están siendo muy
utilizados en aquellos entornos donde se necesite el conocimiento de expertos. El entorno
5/7/2018 Inteligencia Artificial - slidepdf.com
http://slidepdf.com/reader/full/inteligencia-artificial-559abd0ddb3d3 44/70
de la producción es uno en donde se han desarrollado más prototipos y aplicaciones de
sistemas expertos. La mayoría de ellos utilizan reglas como técnica de representación, y
han sido desarrollado mediante "shells", o en lenguajes simbólicos.”
<http://www.esi2.us.es/~dco/sistemas.htm>.
II.5. ALGORITMOS GENETICOS
“Los algoritmos genéticos son algoritmos matemáticos eficientes que se inspiran en
los mecanismos de la evolución biológica propuestos por Darwin. Han producido
excelentes soluciones en problemas complejos de optimización que poseen un gran número
de parámetros. Las áreas en donde se han aplicado estos algoritmos incluyen: planeamiento
industrial, layout de circuitos de muy alta escala de integración, control y optimización enla distribución de energía, optimización de ruteamiento y tráfico de datos, etc.
El objetivo principal de un algoritmo genético es el de evolucionar a partir de una
población inicial de soluciones para un determinado problema, intentando producir nuevas
generaciones de soluciones que sean mejores que las anteriores. Esos algoritmos operan a
través de un ciclo simple que consiste en la generación al azar de la población inicial y la
evaluación, selección y reproducción de las más aptas (con respecto a un objetivo
predefinido). Este último proceso incorpora la recombinación y mutación del material
“genético” de las soluciones. El ciclo se repite hasta llegar a una solución aceptable o al
determinarse el óptimo de una función.”
<http://www.control-automatico.net/recursos/articulos/art085.htm>.

5/7/2018 Inteligencia Artificial - slidepdf.com
http://slidepdf.com/reader/full/inteligencia-artificial-559abd0ddb3d3 45/70
III. RAMAS DE LA INTELIGENCIA ARTIFICIAL (PARTE II)
En pleno 2003 si hablamos de inteligencia artificial forzosamente tenemos que
hablar también del termino robótica puesto que grandes producciones cinematográficascomo Terminator, Star Wars y recientemente la gran producción del señor Spilberg
“Inteligencia Artificial” nos han incrustado esta ideas en nuestras mentes, es por eso que no
podríamos concluir una investigación de este tipo, sin dedicarle un capitulo completo a este
tema, claro sin dejar atrás dos de los componentes de gran estudio para la I.A. y
ampliamente ligados a los robots “humanoides” como los que vemos en la televisión, me
refiero a la visión artificial y el lenguaje natural, como podríamos concebir un robot
“inteligente” que no pueda hablar o ver las cosas que lo rodean.
Claro que no todo lo referente al estudio de las I.A. se aplica a los robots sin
embargo, gran número de los campos que la conforman, Si. Además existen diferentes tipos
de ellos que no necesariamente son “inteligentes”, como se verá en este capitulo.
5/7/2018 Inteligencia Artificial - slidepdf.com
http://slidepdf.com/reader/full/inteligencia-artificial-559abd0ddb3d3 46/70
III.1. ROBÓTICA
III.1.1. INTRODUCCIÓN
“La robótica es un concepto de dominio publico. La mayor parte de la gente tiene
una idea de lo que es la robótica, sabe sus aplicaciones y el potencial que tiene; sin
embargo, no conocen el origen de la palabra robot, ni tienen idea del origen de las
aplicaciones útiles de la robótica como ciencia.
La robótica como hoy en día la conocemos, tiene sus orígenes hace miles de años.
Nos basaremos en hechos registrados a través de la historia, y comenzaremos aclarando que
antiguamente los robots eran conocidos con el nombre de autómatas, y la robótica no era
reconocida como ciencia, es más, la palabra robot surgió hace mucho después del origen de
los autómatas.A modo de introducción, debemos hacer referencia al origen de la palabra robot, si
bien desde la antigüedad se conocen ingenios mecánicos con formas más o menos humanas
cuyo propósito fue proveer diversión en las cortes o llamar la atención de la gente, estos
ingenios, carecen de importancia desde el punto de vista tecnológico, precisamente por su
destino.
La palabra robot fue usada por primera vez el 25 de Enero de 1921, cuando el
escritor checo Karel Capek (1890 - 1938) estrena en el teatro nacional de Praga su obra
Robot Universal Rossum's (R.U.R.), esta obra trata de dos pequeños seres artificiales de
forma humana que responden perfectamente a las órdenes de su creador, aunque al final
acaban rebelándose contra él. Estos seres entienden por robots, una derivación del término
checo robota, que, al igual que en ruso, significa trabajo. El trabajo repetitivo constituye la
preocupación de todos los grandes hombres de todas las épocas.
Aristóteles, el cerebro de más vasta concepción en la historia del pensamiento,
refiriéndose a una forma particular de la tarea repetitiva acuño una frase que aún tiene
vigencia, "cuando los telares tejan por si mismos, habrá terminado la esclavitud del
hombre".
Norber winer, matemático norteamericano, que introdujo el término cibernética y su
teoría, refiriéndose al mismo tema, expresó: "es una degradación para un ser humano
encadenarlo a un remo y usarlo como fuente de energía; pero es casi igual degradación

5/7/2018 Inteligencia Artificial - slidepdf.com
http://slidepdf.com/reader/full/inteligencia-artificial-559abd0ddb3d3 47/70
asignarle tareas puramente repetitivas en una fábrica, que exigen menos de una millonésima
de su poder cerebral".
Es más sencillo organizar una fábrica o una galera que utiliza individualidades
humanas aprovechando sólo una fracción trivial de su valía, que preparar un mundo en el
que estos puedan alcanzar su plena dimensión.”
<http://proton.ucting.udg.mx/home/villanue/robotica1.html>.
“Entre los escritores de ciencia ficción, Isaac Asimov contribuyó con varias
narraciones relativas a robots, comenzó en 1939, a él se atribuye el acuñamiento del
término Robótica. La imagen de robot que aparece en su obra es el de una máquina bien
diseñada y con una seguridad garantizada que actúa de acuerdo con tres principios, que él
llamo, las Tres Leyes de la Robótica.
1. Un robot no puede actuar contra un ser humano o, mediante la inacción, que un ser
humano sufra daños.
2. Un robot debe de obedecer las ordenes dadas por los seres humanos, salvo que estén
en conflictos con la primera ley.
3. Un robot debe proteger su propia existencia, a no ser que esté en conflicto con las
dos primeras leyes.
Consecuentemente todos los robots de Asimov son fieles sirvientes del ser humano,
de ésta forma su actitud contraviene a la de Kapek.”
<http://proton.ucting.udg.mx/home/villanue/robotica1.html>.
III.1.2. DEFINICIONES
Robótica :
- “La robótica es la rama de la ciencia que se ocupa del estudio, desarrollo y
aplicaciones de los
robots.”<http://www.geocities.com/loboduke2001/Aplicaciones.html>.
5/7/2018 Inteligencia Artificial - slidepdf.com
http://slidepdf.com/reader/full/inteligencia-artificial-559abd0ddb3d3 48/70
- “La robótica es el área de la inteligencia artificial que estudia la imitación del
movimiento humano a través de robots, los cuales son creados con el fin de apoyar
procesos mecánicos repetitivos que requieren gran precisión.”
<http://www.geocities.com/SiliconValley/Pines/7894/introduccion/expertos.html>.
- “Rama de la ingeniería y las ciencias computacionales envueltas en el diseño y
desarrollo e implementación de robots, que se usan para mejorar las vidas de las
personas.”<http://www.ncddr.org/espanol/glosario/glosario.html> .
Robot :
- “Máquina controlada por ordenador y programada para moverse, manipular
objetos y realizar trabajos a la vez que interacciona con su entorno.”
<http://www.prodigyweb.net.mx/enrayala/Robotica.htm>.
- “Manipulador multifuncional y reprogramable, diseñado para mover materiales,
piezas, herramientas o dispositivos especiales, mediante movimientos
programados y variables que permiten llevar a cabo diversas tareas.”
<http://www.robotics.freeservers.com/robot.htm>.
III.1.3. UN POCO DE HISTORIA
“Podemos mencionar dos formas de referirnos a los antecedentes de los robots:
figuras artificiales en la mitología y el desarrollo de autómatas. La siguiente cronología es
una breve descripción de como el hombre está fascinado con la posibilidad de crear vida
artificial y "que se han usado todos los ingenios y aparatos posibles para dar a la materia
inanimada funciones de la materia viva: ya sean humanos o animales, toquen instrumentos
musicales, coman, o cualquier otra cosa que pasara por la imaginación humana antes de la
revolución industrial".
Mitológicamente podemos mencionar los siguientes sucesos en la historia de la robótica:
1. Algunos autores, como Jasia Reichardt, consideran que el comienzo de la historia de
los autómatas se encuentra en la creación de Adán por Dios.

5/7/2018 Inteligencia Artificial - slidepdf.com
http://slidepdf.com/reader/full/inteligencia-artificial-559abd0ddb3d3 49/70
2. Prometeo, que hizo el primer hombre y la primer mujer con barro, animados con el
fuego robado de los cielos.
3. Hefaistos, también conocido como Vulcano, dios de todas las artes mecánicas y del
fuego, que hizo dos estatuas femeninas de oro que le ayudaban y le acompañaban
dondequiera que fuese.
4. De nuevo Hefaistos, que crea al gigante Talus, hecho de metal que guardaba Creta
de los intrusos quemando sus cuerpos y matándolos.
5. Pygmalión, rey de Chipre, que crea la estatua de Galatea y al enamorarse de ella,
hace que Afrodita le de la vida.
Enseguida se describen algunos intentos de autómatas reales.
1. Amenhotep, hermano de Hapu, en el 1500 antes de Cristo, realiza una estatua de
Memmon, rey de Etiopía, que emite sonidos cuando la iluminan los rayos del sol al
amanecer.
2. King-su Tse en el 500 a.C., en China, construye una urraca voladora de madera y
bambú y un caballo de madera que saltaba.
3. Archytar de Tarento, entre el 400 y el 397 a. C., construye un pichón de madera
suspendido en un pivote, el cual rotaba con surtidor de agua o vapor, simulando el
vuelo. Archytar es también el inventor del tornillo y de la polea.4. Ctesibio, entre el 300 y 270 a. C., inventa una clepsidra (reloj de agua) y un órgano
que funciona con agua.
5. Filon de Bizancio, entre el 220 y el 200 a. C. inventó un autómata acuático y la
catapulta repetitiva.
6. El tesoro de Chin Shih Hueng Ti, consistía en una orquesta mecánica de muñecos
encontrada por el primer emperador Han en el 206 a. C.
7. Hero de Alejandría, en el 62 d. C., hace un tratado de autómatas, un famoso registro
de aplicaciones de la ciencia que pueden ser demostrados por medio de un
autómata, así como su teatro automático en el cual, las figuras que se encuentran
montadas en una caja, cambian de posición ante los ojos de los espectadores:
pájaros cantores, trompetas que suenan, medidores de la fuerza del vapor, animales
que beben, termoscopios, sifones y máquinas que operaban con monedas.
5/7/2018 Inteligencia Artificial - slidepdf.com
http://slidepdf.com/reader/full/inteligencia-artificial-559abd0ddb3d3 50/70
8. Hsieh Fec, en el 335 d. C., construye un carro con cuatro ruedas con la figura de
Buda, hecha de madera de sándalo.
9. Huang Kun (700 d. C.) hace barcos con figuras de animales, cantantes, músicos y
danzarines, los cuales se mueven.
10. Yang Wu-Lien (700) construye un mono que extiende sus manos y dice "¡Limosna!
¡Limosna!", guardando su recaudación en una bolsa cuando alcanza un determinado
peso.
11. Han Chih Ho (890) hace un gato de madera que caza ratas.
12. El sabio príncipe hindú, Bhoja, en el 1050, escribe el Samarangana-Sutradhara, que
incluye comentarios sobre la construcción de máquinas o yantras.
13. Al-Jazari en Amid, en el Alto Tigris, escribe en 1926 un libro sobre el conocimiento
de invención mecánica, en donde se describían dispositivos mecánicos, comofuentes y relojes de agua.
14. Alberto Magno (1204-1272) crea un sirviente mecánico.
15. Roger Bacon (1214-1294) construye, después de 7 años de trabajo, una cabeza que
habla.
16. Villard d'Honnecourt en 1235 hace un libro de esbozos que incluyen secciones de
dispositivos mecánicos, como un ángel autómata, e indicaciones para la
construcción de figuras humanas y de animales.
17. El reloj con forma de gallo que canta en la catedral de Strasbourg, que funcionó
desde 1352 hasta 1789.
18. Johanes Müller (1436-1476) construye un águila artificial que voló cuando el
Emperador Maximiliano entró en Nuremberg en 1470.
19. Leonardo Da Vinci construye en 1500 un león automático.
20. Elijah de Chelm, en 1550, construye un Golem.
21. Rabbi Löw de Praga, en 1580, construye un Golem.
22. Salomón de Caus (1576-1626) construye fuentes ornamentales y jardines
placenteros, pájaros cantarines e imitaciones de los efectos de la naturaleza.
23. René Descartes inventó en 1640 un autómata al que se refiere como "mi hijo
Francine".
24. En 1662 se abre en Osaka el teatro Takedo de autómatas.

5/7/2018 Inteligencia Artificial - slidepdf.com
http://slidepdf.com/reader/full/inteligencia-artificial-559abd0ddb3d3 51/70
25. Christian Huygens, en 1690, construye fuentes, dispositivos voladores, diligencias y
cajas de música basadas en autómatas.
26. Takedo Omi I, en 1714, construye un tigre artificial que echa aire por la boca.
27. Kara Kuri-Kiman Kaganigusa, en 1730, publica un importante compendio de
autómatas japoneses.
28. Maillard diseña en 1731, para L'Academie des Sciences, carros con ruedas
dentadas, hechas a mano. En 1733 diseña un cisne artificial.
29. Jacques de Vaucanson, construye el pato, el autómata más conocido; un pato hecho
de cobre, que bebe, come, grazna, chapotea en el agua y digiere su comida como un
pato real. Previamente construye un flautista y un tamborilero en 1738; el primero
consistía en un complejo mecanismo de aire que causaba el movimiento de dedos y
labios, como el funcionamiento normal de una flauta.30. Lorenz Rosenegger, en 1752, presentó un teatro de 256 marionetas (activadas
hidráulicamente) que representaban en detalle la vida de la población en el siglo
XVIII.
31. Friedrich von Knauss, en 1760, construyó una máquina de escribir automática, así
como máquinas que hablaban y muñecas escritoras.
32. El barón Wolfgang von Kempelen construyó una máquina parlante en 1778 y su
famoso turco que jugaba al ajedrez (del que nunca se probó si había dentro un
persona manejándolo).
33. Pierre Jaquet-Droz y su hermano Henri-Louis, construyeron el escriba en 1770, el
dibujante en 1772 y el muchacho músico en 1773.
34. En 1775 Gendaemon Wakai construye un muñeco que sirve el té.
35. Hanzo Hosokawa construyó en el siglo XVIII una muñeca de té japonesa con
ruedas dentadas, resortes y barba de ballenas.
36. Iga-shichi Izuka, en 1790, construyó una muñeca que sirve sake.
37. En 1792 se construye el tigre de Tipu, que representa a un tigre atacando a un
hombre.
38. Johann Nepomuk Maelzel, inventor del metrónomo, construye una orquesta
completa con 42 autómatas independientes. También construye un trompetista en
1808.

5/7/2018 Inteligencia Artificial - slidepdf.com
http://slidepdf.com/reader/full/inteligencia-artificial-559abd0ddb3d3 52/70
39. Johan-Gottfried y Friederich Kaufmann construyen en 1810 un trompetista.
40. Les Maillardet (Henri, Jean-David, Julien-Auguste, Jacques-Rodolphe) hicieron su
aparición a finales del XVIII y principios del XIX, construyeron un escritor-
dibujante, con la forma de un chico arrodillado con un lápiz en su mano, escribe en
inglés y en francés y dibuja paisajes. Construyen un mecanismo "mágico" que
responde preguntas y un pájaro que canta en una caja.
41. Josep Faber, en 1830, construyó un autómata que habla.
42. Robert Houdin construye una muñeca que escribe. También realiza un pastelero, un
acróbata, una bailarina en la cuerda floja, un hombre que apunta con una escopeta y
un artista del trapecio.
43. Benkichi Oono construye una muñeca que se expresa de forma táctil.”
<http://montelpz.htmlplanet.com/robot/refbiblio.html>.
44. “1946, el inventor americano G.C Devol desarrolló un dispositivo controlador que
podía registrar señales eléctricas por medio magnéticos y reproducirlas para
accionar un máquina mecánica. La patente estadounidense se emitió en 1952.
45. 1952, una máquina prototipo de control numérico fue objetivo de demostración en
el Instituto Tecnológico de Massachusetts después de varios años de desarrollo.
46. 1959, se introdujo el primer robot comercial por Planet Corporation. estaba
controlado por interruptores de fin de carrera.
47. 1966, Trallfa, una firma noruega, construyó e instaló un robot de pintura por
pulverización.
48. 1968, un robot móvil llamado „Shakey‟‟ se desarrollo en SRI (standford Research
Institute), estaba provisto de una diversidad de sensores así como una cámara de
visión y sensores táctiles y podía desplazarse por el suelo.
49. 1971, el „Standford Arm‟‟, un pequeño brazo de robot de accionamiento eléctrico,
se desarrolló en la Standford University.”
<http://proton.ucting.udg.mx/home/villanue/robotica1.html >.
III.1.4. CLASIFICACIÓN DE LOS ROBOTS

5/7/2018 Inteligencia Artificial - slidepdf.com
http://slidepdf.com/reader/full/inteligencia-artificial-559abd0ddb3d3 53/70
Hoy en día existe una amplia gama de robots cuya utilidad depende de las
aplicaciones para las cuales fueron diseñados.
La evolución de los robots a lo largo de la historia ha dado lugar a muchos tipos de
clasificaciones posibles, las cuales la mayor parte de las veces no son rigurosas, y se van
modificando conforme avanza la tecnología. Para efectos de esta investigación sólo
haremos dos tipos de clasificaciones (esto por ser unas clasificaciones muy generales) :
según su generación y según su arquitectura.
1. Clasificación de los robots por su generación :
“ La primera generación : El sistema de control usado en la primera generación de
robots esta basado en la "paradas fijas" mecánicamente. Esta estrategia es
conocida como control de lazo abierto o control "bang bang".Podemos considerar como ejemplo esta primera etapa aquellos mecanismos
de relojería que permiten mover a las cajas musicales o a los juguetes de cuerda.
Este tipo de control es muy similar al ciclo de control que tienen algunos lavadores
de ciclo fijo y son equivalentes en principio al autómata escribiente de H. M. Son
útiles para las aplicaciones industriales de tomar y colocar pero están limitados a
un número pequeño de movimientos.
La segunda generación : Utiliza una estructura de control de ciclo abierto, peroen lugar de utilizar interruptores y botones mecánicos utiliza una secuencia
numérica de control de movimientos almacenados en un disco o cinta magnética.
El programa de control entra mediante la elección de secuencias de movimiento en
una caja de botones o a través de palancas de control con los que se "camina", la
secuencia deseada de movimientos. El mayor número de aplicaciones en los que
se utilizan los robots de esta generación son de la industria automotriz, en
soldadura, pintado con "spray". Este tipo de robots constituyen la clase más grande
de robots industriales en E.U., incluso algunos autores sugieren que cerca del 90 %
de los robots industriales en EU pertenecen a esta 2ª generación de control.
La tercera generación de robots : Utiliza las computadoras para su estrategia de
control y tiene algún conocimiento del ambiente local a través del uso de censores,
los cuales miden el ambiente y modifican su estrategia de control, con esta
5/7/2018 Inteligencia Artificial - slidepdf.com
http://slidepdf.com/reader/full/inteligencia-artificial-559abd0ddb3d3 54/70
generación se inicia la era de los robots inteligentes y aparecen los lenguajes de
programación para escribir los programas de control. La estrategia de control
utilizada se denomina de "ciclo cerrado".
La cuarta generación de robots : Ya los califica de inteligentes con más y
mejores extensiones sensoriales, para comprender sus acciones y el mundo que los
rodea. Incorpora un concepto de "modelo del mundo" de su propia conducta y del
ambiente en el que operan. Utilizan conocimiento difuso y procesamiento dirigido
por expectativas que mejoran el desempeño del sistema de manera que la tarea de
los sensores se extiende a la supervisión del ambiente global, registrando los
efectos de sus acciones en un modelo del mundo y auxiliar en la determinación de
tareas y metas.
La quinta generación : Actualmente está en desarrollo esta nueva generación de
robots, que pretende que el control emerja de la adecuada organización y
distribución de módulos conductuales, esta nueva arquitectura es denominada
arquitectura de sumisión, cuyo promotor es Rodney Brooks.”
<http://www.geocities.com/loboduke2001/B_Historia.html>.
2. Clasificación de los robots por su arquitectura :
“Los dispositivos y mecanismos que pueden agruparse bajo la denominación
genérica del robot, tal como se ha indicado, son muy diversos y es por tanto difícil
establecer una clasificación coherente de los mismos que resista un análisis crítico y
riguroso. La subdivisión de los robots, con base en su arquitectura, se hace en los
siguientes grupos: Poliarticulados, Móviles, Androides, Zoomórficos e Híbridos
Poliarticulados : Bajo este grupo están los robots de muy diversa forma y
configuración cuya característica común es la de ser básicamente sedentarios -
aunque excepcionalmente pueden ser guiados para efectuar desplazamientoslimitados - y estar estructurados para mover sus elementos terminales en un
determinado espacio de trabajo según uno o más sistemas de coordenadas y
con un número limitado de grados de libertad". En este grupo se encuentran
los manipuladores, los robots industriales, los robots cartesianos y algunos
robots industriales y se emplean cuando es preciso abarcar una zona de trabajo
5/7/2018 Inteligencia Artificial - slidepdf.com
http://slidepdf.com/reader/full/inteligencia-artificial-559abd0ddb3d3 55/70
relativamente amplia o alargada, actuar sobre objetos con un plano de simetría
vertical o deducir el espacio ocupado en el suelo.
Móviles : Son robots con gran capacidad de desplazamiento, basados en
carros o plataformas y dotados de un sistema locomotor de tipo rodante.
Siguen su camino por telemando o guiándose por la información recibida de su
entorno a través de sus censores.
Las tortugas motorizadas diseñadas en los años cincuentas, fueron las
precursoras y sirvieron de base a los estudios sobre inteligencia artificial
desarrollados entre 1965 y 1973 en la Universidad de Stranford.
Estos robots aseguran el transporte de piezas de un punto a otro de una
cadena de fabricación. Guiados mediante pistas materializadas a través de la
radiación electromagnética de circuitos empotrados en el suelo, o a través debandas detectadas fotoeléctricamente, pueden incluso llegar a sortear
obstáculos y están dotados de un nivel relativamente elevado de inteligencia.
Androides : Son robots que intentan reproducir total o parcialmente la forma y
el comportamiento cinemático del ser humano. Actualmente los androides son
todavía dispositivos muy poco evolucionados y sin utilidad práctica, y
destinados, fundamentalmente, al estudio y experimentación.
Uno de los aspectos más complejos de estos robots, y sobre el que secentra la mayoría de los trabajos, es el de la locomoción bípeda. En este caso,
el principal problema es controlar dinámica y coordinadamente en el tiempo
real el proceso y mantener simultáneamente el equilibrio del robot.
Zoomórficos : Los robots zoomórficos, que considerados en sentido no
restrictivo podrían incluir también a los androides, constituyen una clase
caracterizada principalmente por sus sistemas de locomoción que imitan a los
diversos seres vivos.
A pesar de la disparidad morfológica de sus posibles sistemas de
locomoción es conveniente agrupar a los robots zoomórficos en dos categorías
principales: caminadores y no caminadores. El grupo de los robots
zoomórficos no caminadores está muy poco evolucionado. Cabe destacar,
entre otros, los experimentados efectuados en Japón basados en segmentos
5/7/2018 Inteligencia Artificial - slidepdf.com
http://slidepdf.com/reader/full/inteligencia-artificial-559abd0ddb3d3 56/70
cilíndricos biselados acoplados axialmente entre sí y dotados de un
movimiento relativo de rotación. En cambio, los robots zoomórficos
caminadores multípedos son muy numeroso y están siendo experimentados en
diversos laboratorios con vistas al desarrollo posterior de verdaderos vehículos
terrenos, piloteando o autónomos, capaces de evolucionar en superficies muy
accidentadas. Las aplicaciones de estos robots serán interesante en el campo de
la exploración espacial y en el estudio de los volcanes.
Híbridos : Estos robots corresponden a aquellos de difícil clasificación cuya
estructura se sitúa en combinación con alguna de las anteriores ya expuestas,
bien sea por conjunción o por yuxtaposición. Por ejemplo, un dispositivo
segmentado articulado y con ruedas, es al mismo tiempo uno de los atributos
de los robots móviles y de los robots zoomórficos. De igual forma puedenconsiderarse híbridos algunos robots formados por la yuxtaposición de un
cuerpo formado por un carro móvil y de un brazo semejante al de los robots
industriales. En parecida situación se encuentran algunos robots antropomorfos
y que no pueden clasificarse ni como móviles ni como androides, tal es el caso
de los robots personales.”
< http://www.geocities.com/loboduke2001/Arquitecturas.html>.
III.1.5. APLICACIONES DE LA ROBÓTICA
“Las novelas de ciencia-ficción nos muestran robots dotados de una inteligencia
igual o superior a la de los hombres, capaces de aprender de sus "errores" y mejorar su
sistema original, pueden convivir con los seres humano de una manera natural. En la
actualidad, estos relatos no están distantes de la realidad que empezamos a vivir. Los
robots empiezan a invadir nuestras vidas, comienzan a aparecer en los lugares menos
esperados, comienzan a reemplazar algunas de nuestras labores más difíciles de realizar.
La robótica se ha ido desarrollando a pasos agigantados. Los robots comienzan a
formar parte de nuestras vidas, y no hay que alarmarnos por esto, sino más bien hay que
sacarle todo el provecho posible para que la ayuda que nos puedan dar, sea bien

5/7/2018 Inteligencia Artificial - slidepdf.com
http://slidepdf.com/reader/full/inteligencia-artificial-559abd0ddb3d3 57/70
aprovechada. Las aplicaciones mencionadas a continuación no son ni por mucho todas las
existentes, dado que puede haber tantas como nuestra imaginación les quiera dar.”
<http://www.geocities.com/loboduke2001/Aplicaciones.html>.
“En 1995 funcionaban unos 700.000 robots en el mundo industrializado. Más de500.000 se empleaban en Japón, unos 120.000 en Europa Occidental y unos 60.000 en
Estados Unidos. Muchas aplicaciones de los robots corresponden a tareas peligrosas o
desagradables para los humanos. En los laboratorios médicos, los robots manejan
materiales que conlleven posibles riesgos, como muestras de sangre u orina. En otros
casos, los robots se emplean en tareas repetitivas y monótonas en las que el rendimiento
de una persona podría disminuir con el tiempo. Los robots pueden realizar estas
operaciones repetitivas de alta precisión durante 24 horas al día sin cansarse. Uno de los
principales usuarios de robots es la industria del automóvil. La empresa General Motors
utiliza aproximadamente 16.000 robots para trabajos como soldadura por puntos, pintura,
carga de máquinas, transferencia de piezas y montaje. El montaje es una de las
aplicaciones industriales de la robótica que más está creciendo. Exige una mayor
precisión que la soldadura o la pintura y emplea sistemas de censores de bajo coste y
computadoras potentes y baratas. Los robots se usan por ejemplo en el montaje de
aparatos electrónicos, para montar microchips en placas de circuito.
Las actividades que entrañan gran peligro para las personas, como la localizaciónde barcos hundidos, la búsqueda de depósitos minerales submarinos o la exploración de
volcanes activos, son especialmente apropiadas para emplear robots. Los robots también
pueden explorar planetas distantes. La sonda espacial no tripulada Galileo, de la NASA,
viajó a Júpiter en 1996 y realizó tareas como la detección del contenido químico de la
atmósfera joviana.
Ya se emplean robots para ayudar a los cirujanos a instalar caderas artificiales, y
ciertos robots especializados de altísima precisión pueden ayudar en operaciones
quirúrgicas delicadas en los ojos. La investigación en telecirugía emplea robots
controlados de forma remota por cirujanos expertos; estos robots podrían algún día
efectuar operaciones en campos de batalla distantes.”
<http://www.prodigyweb.net.mx/enrayala/Robotica.htm>.

5/7/2018 Inteligencia Artificial - slidepdf.com
http://slidepdf.com/reader/full/inteligencia-artificial-559abd0ddb3d3 58/70
III.1.6. QUE NOS DEPARA EL FUTURO
“Las expectativas sobre los robots para el futuro no se centran sólo en robots
industriales trabajando en fabricas, sino también en los robots para uso en emergencias,
ayuda y compañía de minusválidos, personas postradas en cama, etc. También se espera alos robots mascota como compañeros de los humanos. Desde el punto de vista del
entretenimiento, también puede esperarse la llegada de robots para jugar y deportivos. Hay
un nuevo plan para desarrollar un robot futbolista que pueda destronar al equipo campeón
mundial en la Robo Cup (en 2050).
En efecto, en el futuro los robots jugarán un papel más importante en nuestra
sociedad. Debemos recordar que los robots son sólo herramientas que nos ayudan a ser más
felices, porque los robots no podrán nunca tener el calor de los humanos y losanimales”.<http://www.hobbykit.biz/historia-robots.htm>.
III.2. VISIÓN ARTIFICIAL
"La visión artificial es una rama de la inteligencia artificial que tiene por objetivo
modelar matemáticamente los procesos de percepción visual en los seres vivos y generar
programas que permitan simular estas capacidades visuales por computadora.”
<http://www.lania.mx/spanish/actividades/newsletters/1999-primavera-
verano/aplicaciones.html>.
III.2.1. INTRODUCCIÓN
“El término “Visión artificial o Visión por Computadora” dentro del campo de la
Inteligencia Artificial puede considerarse como el conjunto de todas aquellas técnicas ymodelos que nos permitan el procesamiento, análisis y explicación de cualquier tipo de
información espacial obtenida a través de imágenes digitales. Desde sus inicios la Visión
por Computadora ha inspirado sus desarrollos en el estudio del sistema visual humano el
cual sugiere la existencia de diferentes tipos de tratamiento de la información visual
dependiendo de metas u objetivos específicos, es decir, la información visual percibida es
5/7/2018 Inteligencia Artificial - slidepdf.com
http://slidepdf.com/reader/full/inteligencia-artificial-559abd0ddb3d3 59/70
procesada en distintas formas con base en las características particulares de la tarea a
realizar, por lo que la visión por computadora propone varias técnicas que permiten obtener
una representación del mundo a partir del análisis de imágenes obtenidas desde cámaras de
video.
Debido a que la información visual es una de las principales fuentes de datos del
mundo real, resulta útil el proveer a una computadora digital del sentido de la vista (a partir
de imágenes tomadas con cámaras digitales o analógicas), que junto con otros mecanismos
como el aprendizaje hagan de esta una herramienta capaz de detectar y ubicar objetos en el
mundo real, objetivo principal de la Visión por Computadora.”
<http://verona.fi-p.unam.mx/fardi/pagina/VISONCOM.htm>.
III.2.2. QUE ES LA VISIÓN ARTIFICIAL
“La visión artificial es como el sentido de la vista de la computadora y nos da la
oportunidad de automatizar y mejorar muchos procesos, tanto en la industria, como en la
medicina. Inclusive, algunas de sus técnicas se emplean en la integración de video en las
redes de cómputo y en la transmisión de imágenes por televisión. También es común el uso
de la compresión de imágenes para su almacenamiento, transmisión y despliegue en todo
Internet.
En la automatización de oficinas se emplea para acelerar los flujos de información ypara convertir de viejos esquemas a nuevos, en la digitalización masiva de documentos, y
en la recuperación de textos de imágenes escaneadas, empleando reconocimiento óptico de
caracteres (OCR, "optical character recognition"). Nuevos servicios en bibliotecas digitales
como la recuperación de imágenes y videos por demanda, son algunas de las nuevas
aplicaciones que están tomando auge.
En la industria se emplean cada vez más los robots, y la visión es uno de los
sentidos clave para producir robots más flexibles y que puedan reaccionar ante situaciones
cambiantes. Un ejemplo claro son los vehículos autónomos, que están siendo desarrollados
en Estados Unidos y Europa, y que permitirán un transporte más rápido, seguro y
eficiente.”
<http://www.lania.mx/spanish/actividades/newsletters/1999-primavera-
verano/aplicaciones.html>.

5/7/2018 Inteligencia Artificial - slidepdf.com
http://slidepdf.com/reader/full/inteligencia-artificial-559abd0ddb3d3 60/70
III.2.3. APLICACIONES
“El amplio espectro de aplicaciones cubierto por la visión por computadora, se debe
a que permite extraer y analizar información espectral, espacial y temporal de los distintosobjetos.
La información espectral incluye frecuencia (color) e intensidad (tonos de gris). La
información espacial se refiere a aspectos como forma y posición (una, dos y tres
dimensiones). La información temporal comprende aspectos estacionarios (presencia y/o
ausencia) y dependientes del tiempo (eventos, movimientos, procesos).
Según el tipo de aplicación, serán el tipo de imagen que será necesario adquirir
(imágenes de rayos X, infrarrojo, etc.) y el análisis que se aplicará. La mayoría de las
aplicaciones de la visión por máquina podemos clasificarlas por el tipo de tarea en
inspección (medición, calibración, detección de fallas), verificación, reconocimiento,
identificación y análisis de localización (posición, guía).
La medición o calibración se refiere a la correlación cuantitativa con los datos del
diseño, asegurando que las mediciones cumplan con las especificaciones del diseño. Por
ejemplo, el checar que un cable tenga el espesor recomendado.
La detección de fallas es un análisis cualitativo que involucra la detección de
defectos o artefactos no deseados, con forma desconocida en una posición desconocida. Porejemplo, encontrar defectos en la pintura de un auto nuevo, o agujeros en hojas de papel.
La verificación es el chequeo cualitativo de que una operación de ensamblaje ha
sido llevada a cabo correctamente. Por ejemplo, que no falte ninguna tecla en un teclado, o
que no falten componentes en un circuito impreso.
El reconocimiento involucra la identificación de un objeto con base en descriptores
asociados con el objeto. Por ejemplo, la clasificación de cítricos (limones, naranjas,
mandarinas, etc.) por color y tamaño. Otro ejemplo de reconocimiento podría ser aplicado a
células, por área y forma.
Identificación es el proceso de identificar un objeto por el uso de símbolos en el
mismo. Por ejemplo, el código de barras, o códigos de perforaciones empleados para
distinguir hule espuma de asientos automotrices.

5/7/2018 Inteligencia Artificial - slidepdf.com
http://slidepdf.com/reader/full/inteligencia-artificial-559abd0ddb3d3 61/70
El análisis de localización es la evaluación de la posición de un objeto. Por
ejemplo, determinar la posición donde debe insertarse un circuito integrado ("chip"). Otro
ejemplo sería la localización automática del contorno de la cabeza en una serie de imágenes
de tomografía y su posterior reconstrucción tridimensional.
Guía significa proporcionar adaptativamente información posicional de
retroalimentación para dirigir una actividad. El ejemplo típico es el uso de un sistema de
visión para guiar un brazo robótico mientras suelda o manipula partes. Otro ejemplo sería la
navegación en vehículos autónomos.”
<http://www.lania.mx/spanish/actividades/newsletters/1999-primavera-
verano/aplicaciones.html>.
III.2.4. BENEFICIOS DE LA VISIÓN ARTIFICIAL
“Motivaciones económicas. Reduce costos de productos manufacturados al detectar
condiciones de rechazo en el punto de menor valor agregado, al reducir tiempos de
producción, al ahorrar en costos de reparación y mejorar la producción.
Motivaciones de calidad. Mejora la calidad al inspeccionar el 100% de los
productos, en lugar de realizar inspección por muestreo e incrementa la satisfacción
del cliente. Proporciona predictibilidad en la calidad. Motivaciones de las personas. Evita ambientes peligrosos o dañinos, elimina
trabajos monótonos y repetitivos, agiliza tareas de inspección que resultan cuellos
de botella en la producción. Evita errores debidos al juicio del operador, cansancio y
falta de atención.
Motivaciones varias. Automatiza el registro de datos de control de calidad y permite
obtener estadísticas más rápidamente. Proporciona señales de retroalimentación
basadas en análisis de tendencias para controlar los procesos de manufactura.
Funciona como los "ojos" de la automatización.”
<http://www.lania.mx/spanish/actividades/newsletters/1999-primavera-
verano/aplicaciones.html>.
5/7/2018 Inteligencia Artificial - slidepdf.com
http://slidepdf.com/reader/full/inteligencia-artificial-559abd0ddb3d3 62/70
III.3. PROCESAMIENTO DEL LENGUAJE NATURAL
III.3.1. INTRODUCCIÓN
“El procesamiento del lenguaje natural o simplemente P.L.N. es un área deinteligencia artificial que estudia y desarrolla sistemas que permiten interpretar y generar un
lenguaje natural, es decir, el lenguaje utilizado por los humanos (en contraposición a los
lenguajes computacionales, es decir, artificiales), ya sea en portugués, español, inglés o
cualquier otra lengua. Al abordar las dificultades del P.L.N. intentaremos responder a la
pregunta del título para mostrar que la comunicación con una máquina es mucho más
compleja de lo que uno se imagina.
La comprensión y generación automática del lenguaje natural aún está muy lejos de
volverse una realidad, y no podemos prever cuándo esto va ocurrir. Ya existen varias
aplicaciones originadas de investigaciones en este campo, sin olvidar su importancia
intrínseca en cuanto a sus aplicaciones, que sirven como pasos iniciales para la
comunicación con la computadora. Entre las aplicaciones más sofisticadas, desde el punto
de vista de la comprensión y la generación automática, se destacan los sistemas para
dominios específicos, es decir, sistemas que generan textos en lenguaje natural sobre un
determinado asunto en una cierta área del conocimiento. A esa clase pertenecen los
sistemas especializados que ofrecen diagnósticos médicos en forma automática (en formade texto), con base en informaciones obtenidas sobre el paciente.
Debe resaltarse que estos textos no son simplemente extraídos de mensajes
previamente almacenados (scanned text ), como es usual en las comunicaciones entre una
computadora y los usuarios. Por ejemplo, supongamos que un usuario desea localizar dos
archivos en un directorio determinado. Si los archivos no fuesen encontrados, recibirá un
mensaje del tipo ``sus archivos no fueron encontrados'', ya que este mensaje estaría
almacenado en la memoria de una computadora para ser exhibida en tales situaciones.
Por otro lado, es posible que los archivos estuviesen en otros directorios. Si la
computadora pudiese comprender realmente lo que se le está solicitando, podría buscar los
archivos, y su respuesta podría ser algo como ``sus archivos están en el directorio X'' o ``el
archivo A está en el directorio X'', o ``el archivo B está en el directorio Y''. Podemos
percibir que, para ofrecer tales mensajes, la computadora, además de tener la información

5/7/2018 Inteligencia Artificial - slidepdf.com
http://slidepdf.com/reader/full/inteligencia-artificial-559abd0ddb3d3 63/70
sobre la localización de los archivos en los directorios, debería ser capaz de ``originar'' las
oraciones a ser exhibidas, inclusive un conocimiento de gramática de la lengua, para
respetar las reglas de ``concordancia nominal o verbal'', por ejemplo.
Aquí sería bueno hacer una advertencia sobre las noticias frecuentemente aparecidas
en los medios de comunicación, que muestran a los sistemas computacionales inteligentes,
capaces de reconocer la voz humana y obedecer comandos hablados. Esos sistemas son,
generalmente, restringidos a un conjunto bastante pequeño de comandos que tienen su valor
sobre todo por el procesamiento de sonido en el reconocimiento de los fonemas de un cierto
usuario que habla en determinada lengua, y no por el procesamiento del lenguaje natural. El
mito de que la solución para la comunicación en lenguaje natural está cerca de ser resuelto,
también se extiende a la traducción automática, área investigada desde hace varias décadas,
que consiste en la traducción de textos de determinada lengua a otra. Debe resaltarsenuevamente que los traductores automáticos existentes, también actúan en dominios
limitados.
Por dominio limitado se entiende un área particular del conocimiento con un
número finito y pequeño de palabras, generalmente utilizadas en contextos únicos, sin dar
margen a ambigüedades, que son comunes en el uso diario de la lengua. Tales
ambigüedades se resuelven fácilmente en una conversación entre humanos, en general a
través de un análisis (tal vez inconsciente) del contexto, lo que constituye un enorme
problema para el tratamiento automático de la lengua. Por ejemplo en la expresión ``el
hombre vio una mujer en la montaña con binóculos'', no hay duda para un humano, de
quién estaba usando los binóculos, pero ciertamente una máquina necesitaría tener mucho
conocimiento para inferir que era el hombre quien usaba los binóculos.”
<http://www.smf.mx/boletin/Jul-98/articles/speak.html>.
III.3.2. APLICACIONES DEL PROCESAMIENTO DE LENGUAJENATURAL
“El objetivo final del tratamiento automático del lenguaje natural señala el deseo de
que sus usuarios puedan comunicarse con la computadora a través del lenguaje cotidiano,
es decir el usado diariamente, y no a través de lenguajes limitados que requieren de cierto

5/7/2018 Inteligencia Artificial - slidepdf.com
http://slidepdf.com/reader/full/inteligencia-artificial-559abd0ddb3d3 64/70
entrenamiento específico, como serían los llamados lenguajes de programación. Si eso
fuese posible, cualquier persona podría delegar tareas a las computadoras o trabajar
conjuntamente con ellas, sin necesidad de entrenamiento previo. Así es como suponían los
hechos los autores de ciencia ficción de algunas décadas atrás. Sin embargo, existen
muchas otras aplicaciones posibles de la computadora en la vida cotidiana realizadas por
usuarios sin experiencia que pueden beneficiarse del P.L.N.
Tal vez un beneficio importante es la creciente utilización de la computadora en la
educación. Ese tema ha sido abordado ampliamente en los países más desarrollados, debido
principalmente a la preocupación de encontrar formas eficaces de ayuda en el aprendizaje.
Se han hecho críticas vehementes a dichos trabajos, principalmente porque la manera en
que son abordados consisten tan sólo en transferir material didáctico de libros, películas,
etc. a un medio electrónico. De hecho, si quisiéramos convertir una computadora en unaherramienta eficiente de apoyo a la enseñanza, debe irse más allá de producir interfaces
agradables y bonitas, y navegar en el universo de los procesos de adquisición del
conocimiento de los usuarios aprendices. Auxiliar a los alumnos en el proceso de
alfabetización, en el aprendizaje de una lengua extranjera o en el propio proceso de escribir
textos, es una tarea bastante compleja.
Una forma de utilización más específica de las computadoras asociadas al
procesamiento de textos en lenguaje natural es respecto a las herramientas de auxilio en la
escritura. Se han creado varias herramientas de software como auxiliar en la escritura de
diversos tipos de texto que incluyen artículos científicos. En general, las herramientas
pueden ser clasificadas en tres categorías: herramientas de pre-procesamiento de texto,
mediante las cuales la computadora ofrece soporte para que un escritor organice sus ideas
relativas a lo que va a escribir (actividad denominada en inglés brain storming);
herramientas de post-procesamiento de texto, que ofrecen ayuda en la corrección y/o
revisión de un texto anteriormente preparado; y, los llamados ambientes de auxilio a la
escritura (conocidos como Computer- Aided Writing Environments). Estos últimos son más
sofisticados, y generalmente engloban herramientas de pre y post procesamiento, además
de las herramientas adicionales capaces de auxiliar al escritor para transformar sus ideas
iniciales en texto.
5/7/2018 Inteligencia Artificial - slidepdf.com
http://slidepdf.com/reader/full/inteligencia-artificial-559abd0ddb3d3 65/70
Otra aplicación del P.L.N. radica en el auxilio para la escritura de un texto en lengua
extranjera. Por ejemplo, la necesidad que tienen los científicos de escribir en inglés generó
un proyecto en la Universidad de São Paulo, campus de São Carlos, Brasil, para el
desarrollo de herramientas que auxiliasen a los escritores, cuya lengua madre no es el
inglés, a escribir artículos científicos en esa lengua. En estas herramientas lo que se busca
es ofrecer partes de texto, contextualizados, para evitar que el científico haga una
``traducción'' del contenido del artículo al inglés, bajo una fuerte influencia de su lengua
materna, que en el caso del portugués o español, presenta características distintas con
relación a la estructuración de las oraciones, entre otras diferencias. Por ejemplo, la
expresión ``Se observó un aumento en la población'', podría ser traducida como ` ̀ It was
observed an increase in the population'', manteniendo la estructura de la oración original.
Sin embargo, aunque sea correcta gramaticalmente, esta estructura difícilmente seríaempleada por un ciudadano de lengua inglesa, que proba- blemente preferir la oración:
` ̀An increase in the population was observed ''.
De entre las herramientas de software de auxilio a la escritura, ciertamente las más
desarrolladas son las de post-procesamiento, es decir, los revisores ortográficos y
gramaticales, muchos de los cuales ya están en el mercado desde hace varios años,
principalmente para textos escritos en inglés. Estos revisores detectan, en primera instancia,
errores ortográficos provenientes principalmente de fallas de digitación. Ese tipo de
revisores son bastante simples conceptualmente, pues basta comparar las palabras del texto
con las de un banco de palabras mantenido en la memoria de la computadora y verificar si
existen. La única dificultad estaría, entonces, en la necesidad de almacenar un gran número
de palabras y realizar consultas al banco de datos de manera rápida. Estos problemas ya
fueron superados y los revisores ortográficos disponibles son bastante eficientes, inclusive
ofrecen sugerencias de palabras alternativas a aquella palabra no encontrada, generalmente
a través de un análisis de similitud entre las palabras buscadas y las palabras que están
disponibles en el banco de datos. Además de la revisión ortográfica, existen revisores que
detectan errores de mala formación de oraciones y de concordancia, entre otros. Para la
detección de este último tipo de errores, hay que ofrecer un conocimiento previo al sistema
computacional que deba ser capaz no sólo de reconocer las palabras del texto, sino también
categorizarlas, es decir, dada una palabra, es necesario verificar si esa palabra es un

5/7/2018 Inteligencia Artificial - slidepdf.com
http://slidepdf.com/reader/full/inteligencia-artificial-559abd0ddb3d3 66/70
sustantivo, adjetivo o verbo, si fuese sustantivo, si es masculino, singular, etc. El revisor
debe tener también un conocimiento de las reglas gramaticales de la lengua en cuestión. A
pesar de los enormes avances alcanzados hasta ahora, todavía hay mucho que hacer para
que la revisión automática se aproxime a aquella que puede ser hecha por un humano
competente en el uso de la lengua.
Más adelante abordaremos en detalle los problemas y soluciones adoptadas en el
desarrollo de un revisor para portugués de Brasil y se ilustrarán sus limitaciones.
A pesar de ser reciente el interés en el desarrollo de revisores gramaticales, desde el
punto de vista de mercado de software, el procesamiento de lenguaje natural en lengua
portuguesa, fue iniciado hace muchos años, casi siempre en trabajos de tipo académico. Por
esa razón, los tópicos abordados en general tenían un alto grado de complejidad, pues
atacaban fenómenos lingüísticos de difícil tratamiento, inclusive para los humanos. Sonejemplo de ello los tratamientos de ambigüedades, problemas de orden semántico y
omisiones de palabras que pueden ser rescatadas en el contexto en que se dan. Considere el
ejemplo ``El hombre volvió de la guerra. Estaba enflaquecido'' Si bien la frase no sea
explícita en la segunda oración, es fácil (para un humano) percibir que el sujeto de la
segunda oración es el mismo ``hombre'' mencionado en la primera frase. Sin embargo, esa
conclusión está lejos de ser obvia para un sistema automático de tratamiento de lenguaje
natural y aun hoy presenta serios problemas para un sistema de corrección.
Algunos años atrás una dificultad adicional era la restricción de los recursos
computacionales, en términos de hardware, capacidad de memoria, etc., mucho más
limitados que los actuales. Eso significa que problemas de fácil solución, no la tenían hace
5 ó 10 años. Los algoritmos de búsqueda, extremadamente eficientes, antes indispensables
en ciertas situaciones, hoy pueden no ser tan relevantes para esas mismas situaciones.
Para darnos una idea de la evolución de la capacidad computacional, herramientas
como el Revisor Gramatical que se presenta a continuación, actualmente pueden ser
utilizados en microcomputadoras tipo PC, mientras que los primeros revisores en la década
de los ochentas requerían computadoras mainframes para ser ejecutados, lo que restringía
severamente su utilización en contextos reales.
Al hacer una comparación gramatical, por ejemplo en inglés, en principio se deben
esperar dificultades mayores que en el procesamiento de un texto en portugués o español.
5/7/2018 Inteligencia Artificial - slidepdf.com
http://slidepdf.com/reader/full/inteligencia-artificial-559abd0ddb3d3 67/70
La semejanza de la lengua española y otras lenguas latinas, hace que la lengua portuguesa
utilice más tiempos verbales y flexiones de los sustantivos y adjetivos que la lengua
inglesa. Otro factor que hace más complicado el asunto está en las múltiples posibilidades
de estructuración de una oración determinada. Entre otros ejemplos, se puede citar la
alternancia de posiciones entre sustantivo y adjetivo, que puede llevarnos hasta un cambio
en el sentido de la oración. Ése es el caso de la expresión ``hombre grande'' que tiene un
significado diferente cuando decimos ``grande hombre''.
Otra dificultad, ahora común en muchas lenguas, es la existencia de la polisemia
(una misma palabra puede tener varios significados diferentes), o bien de homografía
(palabras diferentes pueden ser escritas de la misma manera). El fenómeno conocido como
polisemia puede ser ilustrado por la palabra portuguesa cadeiras (silla), tanto en plural
como singular, que puede expresar también la parte inferior del cuerpo humano (caderas).En cuanto a la homografía puede ejemplificarse por medio de las palabras governo
(gobierno en portugués) sustantivo masculino, y governo, primera persona de indicativo del
verbo gobernar. Esos dos fenómenos generan un gran número de ambigüedades, muchas
veces sólo esclarecidas cuando las asociamos en un contexto. Sin embargo, un análisis de
este último casi siempre es impracticable para los sistemas de tratamiento de lenguaje
natural, por lo menos en su estado actual de desarrollo. Eso porque tal análisis exigiría un
conocimiento del ``mundo'' que no es fácilmente ``colocado'' en un sistema computacional,
a no ser, como ya mencionamos, en contextos de dominios limitados.”
<http://www.smf.mx/boletin/Jul-98/articles/speak.html>.
G L O S A R I O
- Algoritmo : Conjunto de reglas bien definidas para la resolución de un problema. Un
programa de software es la trascripción, en lenguaje de programación, de un algoritmo.
- Autómata : Máquina que imita la figura y los movimientos de un ser animado.
- Base de Datos : Conjunto de datos organizados que se puede editar y gestionar para
buscar información o trabajar con ella.
5/7/2018 Inteligencia Artificial - slidepdf.com
http://slidepdf.com/reader/full/inteligencia-artificial-559abd0ddb3d3 68/70
- Cibernética: Ciencia que estudia el diseño de máquinas automáticas o robots con
objeto de dotarles de inteligencia humana.
- Dato Booleano : Es aquel que puede tomar sólo dos valores posibles Falso o Verdadero
para operar.
- Deep Blue : Computadora capas de jugar ajedrez. Derroto al campeón mundial Gary
Kasparov en 1997.
- Hardware : Es la parte física de una computadora, ya sea interna como el
microprocesador o externo como la impresora.
- Heurística : Trata de métodos o algoritmos exploratorios durante la resolución de
problemas en los cuales las soluciones se descubren por la evaluación del progreso
logrado en la búsqueda de un resultado final.
- LISP : Lenguaje de programación que sirve como herramienta de modelado deprogramas para la Inteligencia Artificial.
- Microordenador : Sin. De Microcomputadora.
- Ordenador : Sin. de Computadora.
- Programa : Secuencia de instrucciones correspondientes a un algoritmo.
- Prolog : Es un lenguaje de programación que es usado para resolver problemas que
envuelven objetos y las relaciones entre ellos.
-
Software : Son todos los programas que se utilizan para el funcionamiento total de una
computadora.
C O N C L U S I O N E S
Si bien es cierto el hombre desde ya hace muchos siglos atrás a intentado “dar vida
artificial” a otros seres, en la actualidad no lo a conseguido del todo. La Inteligencia
Artificial es una rama del conocimiento que se encarga del estudio de los métodos más

5/7/2018 Inteligencia Artificial - slidepdf.com
http://slidepdf.com/reader/full/inteligencia-artificial-559abd0ddb3d3 69/70
adecuados para lograrlo, son grandes los avances que se han alcanzado en algunas áreas
pero no tan grandes en otras.
¿Algún día seremos desplazados por máquinas “inteligentes”?, hay quienes piensan
que si y quienes piensan que no, la verdad es que de cierta manera ya hemos sido
reemplazados en algunos trabajos se son muy peligrosos o demasiado desgastantes para el
ser humano, aunque estas máquinas realizan sus trabajos todavía manejadas por un
operador humano o un programa simple de computadora, en un futuro tal vez no muy
lejano tendrán la capacidad de hacerlo por si mismas y sólo dependerán de nosotros para su
mantenimiento – o tal vez no -.
No hay que olvidar que la I.A. no sólo esta presente en los robots, también lo estará
en automóviles capaces de manejarse por si mismos y regular la velocidad de acuerdo al
estado de animo de su conductor, en casas capaces de saber donde se encuentran sushabitantes, administrar luz, gas y demás quehaceres, en fin, existen gran número de
aplicaciones destinadas a estos propósitos, pero sólo el tiempo dirá hasta donde nos será
posible llegar en nuestro afán de “dar vida artificial” a seres inanimados.
Por el momento la I.A. es una herramienta mas del hombre, pero tal vez en el futuro
el hombre sólo sea una herramienta para la I.A., eso dependerá de nosotros.
B I B L I O G R A F I A
http://www.monografias.com/trabajos12/inteartf/inteartf.shtml
http://www.dcc.uchile.cl/~abassi/Cursos/IA/Apuntes/apuntes.html
http://www.monografias.com/trabajos10/intelart/intelart.shtml
http://www.hemerodigital.unam.mx/ANUIES/itam/estudio/estudio10/sec_16.html
http://www.imagia.com.mx/hmm/va/VAhist.html
http://www.unesco.org/courier/2000_12/sp/medias.htm

5/7/2018 Inteligencia Artificial - slidepdf.com
http://slidepdf.com/reader/full/inteligencia-artificial-559abd0ddb3d3 70/70
http://www.itlp.edu.mx/publica/boletines/actual/inteligencia.html
http://www.servitel.es/inforsalud97/41/41.htm
http://www.dc.uba.ar/people/materias/aa/
http://www.uam.es/personal_pdi/psicologia/adarraga/studs/Xerxes/Pag5.html
http://www.dwcolombia.com/orbita/concepto.html
http://www.control-automatico.net/recursos/articulos/art085.htm
http://www.geocities.com/SiliconValley/Pines/7894/introduccion/expertos.html
http://www.informaticaintegral.net/sisexp.html
http://www.esi2.us.es/~dco/sistemas.htm
http://www.geocities.com/neb22002/nebiap.html
http://www.geocities.com/loboduke2001/Aplicaciones.html
www.honda.co.jp/english/technology/robot
http://www.robotics.freeservers.com/robothoy.htm
http://www.smf.mx/boletin/Jul-98/articles/speak.html
http://www.lania.mx/spanish/actividades/newsletters/1999-primavera-verano/aplicaciones.html
http://verona.fi-p.unam.mx/fardi/pagina/VISONCOM.htm