
INSTITUTO POLITECNICO NACIONAL´sappi.ipn.mx/cgpi/archivos_anexo/20080821_5809.pdf · Secretar´ıa...
41
INSTITUTO POLIT ´ ECNICO NACIONAL CENTRO DE INNOVACI ´ ON Y DESARROLLO TECNOL ´ OGICO EN C ´ OMPUTO DEL I.P.N. REPORTE T ´ ECNICO DEL PROYECTO TITULADO: “DISE ˜ NO, CONSTRUCCI ´ ON Y CONTROL DE UN ROBOT M ´ OVIL TIPO NEWT ” REGISTRO SIP: 20080821 * Director del proyecto: Dr. Ram´ on Silva Ortigoza Investigadores participantes: Dr. Gilberto Silva Ortigoza Dr. Victor Manuel Hern´ andez Guzm´ an M. en C. Mar´ ıa Aurora Molina Vilchis Ing. Juan Carlos Rivera D´ ıaz Estudiantes PIFI: Ing. Jos´ e Rafael Garc´ ıa S´ anchez No. de Registro: B061319 Ing. V´ ıctor Ricardo Barrientos Sotelo No. de Registro: B061317 M´ exico, D.F. Enero 2009 * Los investigadores participantes en este proyecto agradecen el soporte econ´ omico recibido por la Secretar´ ıa de Investigaci´ on y Posgrado del IPN (SIP-IPN), a trav´ es del proyecto 20080821, de los pro- gramas de becas EDI y COFAA, as´ ı como del Sistema Nacional de Investigadores (SNI-CONACYT).
Transcript of INSTITUTO POLITECNICO NACIONAL´sappi.ipn.mx/cgpi/archivos_anexo/20080821_5809.pdf · Secretar´ıa...

INSTITUTO POLITECNICO NACIONAL
CENTRO DE INNOVACION Y DESARROLLOTECNOLOGICO EN COMPUTO DEL I.P.N.
REPORTE TECNICO DEL PROYECTO TITULADO:
“DISENO, CONSTRUCCION Y CONTROLDE UN ROBOT MOVIL TIPO NEWT ”
REGISTRO SIP: 20080821 *
Director del proyecto:Dr. Ramon Silva Ortigoza
Investigadores participantes:
Dr. Gilberto Silva OrtigozaDr. Victor Manuel Hernandez GuzmanM. en C. Marıa Aurora Molina Vilchis
Ing. Juan Carlos Rivera Dıaz
Estudiantes PIFI:
Ing. Jose Rafael Garcıa Sanchez No. de Registro: B061319Ing. Vıctor Ricardo Barrientos Sotelo No. de Registro: B061317
Mexico, D.F. Enero 2009
* Los investigadores participantes en este proyecto agradecen el soporte economico recibido por laSecretarıa de Investigacion y Posgrado del IPN (SIP-IPN), a traves del proyecto 20080821, de los pro-gramas de becas EDI y COFAA, ası como del Sistema Nacional de Investigadores (SNI-CONACYT).


Resumen
En este trabajo se presenta la memoria tecnica del proyecto de investigacion con numerode registro asignado por la SIP: 20080821, cuyo tıtulo es: “Diseno, construccion y control deun robot movil tipo Newt “
En este reporte tecnico se muestra el diseno, construccion e instrumentacion de un robotmovil de ruedas tipo Newt. En lo que respecta al analisis y diseno del movil se hace usodel software de desarrollo SolidWorks�. En lo referente a la construccion de la estructuramecanica, se muestra la evolucion de como esta se llevo a cabo con la ayuda de distintasmaquinas herramientas (cortadora electrica, control numerico computarizado (CNC), torno,fresadora). En la construccion (maquinado) del robot se conto con la ayuda del Centro Na-cional de Actualizacion Docente (CNAD). Tambien, se describe la instrumentacion asociadaal movil, la cual permite la locomocion del mismo, y la posible conexion que pudiera tener estesistema con una tarjeta de adquisicion de datos controladora, en nuestro caso en el desarrollode trabajos futuros se hara uso de un DSP.
Finalmente, se presenta un capıtulo donde se presentan las metas logradas en este tra-bajo, a saber, se presenta un resumen de los trabajos logrados: capıtulos de libro, artıculosde investigacion ISI, artıculos de investigacion internacionales con estricto arbitraje no ISI,artıculos en revistas de divulgacion, artıculos en conferencias internacionales y artıculos enconferencias nacionales. Es conveniente mencionar que en todos estos productos se otorga unmerecido agradecimiento a la SIP-IPN, por el apoyo economico recibido para la realizacionde este proyecto.


Indice general
1. Introduccion 11.1. Descripcion general de funcionamiento . . . . . . . . . . . . . . . . . . . . 3
1.1.1. Etapa 1: Subsistemas . . . . . . . . . . . . . . . . . . . . . . . . . . 31.1.2. Etapa 2: Potencia . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41.1.3. Etapa 3: Adquisicion de datos y control . . . . . . . . . . . . . . . . 4
1.2. Etapa 1: Subsistemas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41.2.1. Subsistema a: Actuadores y sensores . . . . . . . . . . . . . . . . . 51.2.2. Subsistema b: Diseno mecanico . . . . . . . . . . . . . . . . . . . . 11
1.3. Etapa 2: Potencia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 141.3.1. Subetapa 1: Circuito fuente . . . . . . . . . . . . . . . . . . . . . . . 161.3.2. Subetapa 2: Circuito optoacoplador . . . . . . . . . . . . . . . . . . 171.3.3. Subetapa 3: Circuito controlador (puente H) . . . . . . . . . . . . . . 181.3.4. Subetapa 4: Circuito encoder . . . . . . . . . . . . . . . . . . . . . . 21
1.4. Etapa 3: Adquisicion de datos y control . . . . . . . . . . . . . . . . . . . . 211.4.1. Circuito interfase DSP-movil . . . . . . . . . . . . . . . . . . . . . . 23
1.5. Prototipo finalizado . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 241.6. Conclusiones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
2. Metas Alcanzadas 272.1. Capıtulos de Libros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 272.2. Artıculos en Revistas ISI . . . . . . . . . . . . . . . . . . . . . . . . . . . . 272.3. Artıculos en Revistas de Investigacion Internacionales con Arbitraje Estricto
no ISI . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 282.4. Artıculos en Revistas de Divulgacion y Difusion Cientıfica y Tecnologica . . 282.5. Conferencias Magistrales . . . . . . . . . . . . . . . . . . . . . . . . . . . . 282.6. Artıculos in Extenso (conferencias internacionales) . . . . . . . . . . . . . . 282.7. Artıculos in Extenso (conferencias nacionales) . . . . . . . . . . . . . . . . . 29
I

II INDICE GENERAL

Indice de figuras
1.1. Diagrama a bloques general del prototipo de robot movil. . . . . . . . . . . . 31.2. Baterıa. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 121.3. Diseno previo del robot movil en SolidWorks�. . . . . . . . . . . . . . . . . 121.4. Diseno de las ruedas motrices en SolidWorks�. . . . . . . . . . . . . . . . . 131.5. Diseno en SolidWorks� de los soportes para ruedas de bola y barras de union. 141.6. Diagrama a bloques general de la etapa de potencia. . . . . . . . . . . . . . . 151.7. Diagrama a bloques propuesto de la etapa de potencia. . . . . . . . . . . . . 161.8. Diagrama del circuito fuente. . . . . . . . . . . . . . . . . . . . . . . . . . . 171.9. Diagrama del circuito de optoacoplamiento. . . . . . . . . . . . . . . . . . . 181.10. Diagrama general de un puente H. . . . . . . . . . . . . . . . . . . . . . . . 191.11. Puente H . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 201.12. Diagrama del circuito controlador (puente H). . . . . . . . . . . . . . . . . . 211.13. Diagrama del circuito de los encoders. . . . . . . . . . . . . . . . . . . . . . 221.14. Diagrama del circuito interfase DSP-movil. . . . . . . . . . . . . . . . . . . 241.15. Distribucion de senales en el conector DB25. . . . . . . . . . . . . . . . . . 251.16. Diseno final del robot movil en SolidWorks�. . . . . . . . . . . . . . . . . . 251.17. Diseno final del robot movil. . . . . . . . . . . . . . . . . . . . . . . . . . . 26
III

IV INDICE DE FIGURAS

Capıtulo 1
Introduccion
En los ultimos anos, el desarrollo de los robots moviles, ha permitido avances significativosen distintas areas de la ciencia, debido al gran campo de aplicacion en el que es posible haceruso de estos. Por ejemplo en asistencia medica, exploracion espacial, exploracion marıtima,ocio y entretenimiento, investigacion y desarrollo, industria metal-mecanica, industria quımi-ca, investigacion militar, limpieza en ambientes diversos, agricultura, inspeccion, vigilancia,transporte, etc. Sin embargo, hablar de robotica movil, es hablar de una transicion que poco apoco ha ido evolucionando y que, hasta nuestros dıas, continua siendo un tema de gran interesa nivel internacional. Las investigaciones que dıa a dıa se van sucediendo, son solo un nuevoaporte significativo al tema en cuestion, pues el lımite en el desarrollo y concepcion de unrobot movil, aun se divisa muy lejos.El primer robot movil fue creado en 1951 por Walter, un sistema electromecanico que
simulaba el movimiento de una tortuga, llamado de forma similar Turtle [1]. Anos mas tarde,de 1966 a 1972 Nilsson en el SRI desarrollo el robot Shakey [2], siendo este el primer robot enhacer uso de la inteligencia artificial para controlar sus movimientos. A partir de la decada delos setenta, la investigacion y diseno de robots moviles (que contaron con caracterısticas muydiferentes entre ellos) crecio de manera exponencial. A principios de esa decada, el robot Newt[3] fue desarrollado por Hollis. El robot Hilare [4] desarrollado en el LAAS en Francia. Enel Jet Propulsion Laboratory (JPL) se desarrollo el Lunar rover [5], disenado particularmentepara la exploracion planetaria. A finales de esa decada, Moravec desarrollo el robot Stanfordcart [6], capaz de seguir una trayectoria delimitada por una lınea establecida en una superficie,en la Universidad de Stanford. En 1983, el robot Raibert [7], fue desarrollado en el MIT, unrobot de una sola pata disenado para estudiar la estabilidad de estos sistemas y brindar unconocimiento mas profundo acerca de este tipo de locomocion. A principios de la decada delnoventa, Vos et al. desarrollaron un robot “uniciclo” [8] (una sola rueda, similar a la de unabicicleta) en el MIT. Anos mas tarde, en 1994, el Instituto de robotica CMU desarrollo el robotDante II [9], un sistema de seis patas cuyo proposito fue el de tomar muestras de gases en elvolcan Spurr situado en Alaska. En 1996 tambien en el CMU, se desarrollo el robot Gyrover[10], un mecanismo ausente de ruedas y patas, basado en el funcionamiento del giroscopio,por lo que la precision de sus movimientos y su estabilidad eran muy elevadas. Ese mismoano se desarrollo en el MIT el Spring Flamingo [11], un robot que emulaba el movimiento deun flamingo y que fuera disenado para implementar tecnicas eficaces de control en la posicion
1

2 CAPITULO 1. INTRODUCCION
de los actuadores (patas), para describir el movimiento del mismo y para ejecutar diversosalgoritmos desarrollados para su desplazamiento. Por su parte, la NASA en 1997 envıo aMarte un robot movil teleoperado llamado Sojourner rover [12], dedicado a enviar fotografıasdel entorno de dicho planeta. Ese mismo ano, la empresa japonesa HONDA, dio a conocer elrobot P3 [13], el primer humanoide capaz de imitar movimientos humanos. Al siguiente ano,se desarrolla en la universidad Waseda en Japon, el WABIAN R-III [14], un robot humanoidepara fines de investigacion sobre el movimiento del cuerpo humano. En 1999 en el CMU,Zeglin propuso un nuevo diseno de robot con una pata llamado Bow Leg Hopper [15], undiseno que por su naturaleza permite almacenar la energıa potencial de la pata, ya que es unaarticulacion de forma curva que al dar cada paso comprime un sistema de resorte y de estaforma el consumo de energıa es mınimo, permitiendo un ahorro significativo de la misma. En2006, Hollis et al. desarrollaron el robot Ballbot [16], un sistema holonomo cuyo movimientoes proporcionado por una esfera ubicada en la parte inferior de la estructura; el control dela esfera, es similar al de un mouse de computadora, empleando encoders para determinarcada posicion de la misma. Sin embargo, el estudio de este tipo de robots con una esfera, fueiniciado por Koshiyama y Yamafuji [17] en 1991 (diversas investigaciones han sido efectuadassobre este tipo de robots en los ultimos anos [18]). Actualmente los robots teleoperados Spiritrover y Opportunity rover, (ver [19]), se encuentran explorando la superficie del planeta marteen busca de mantos acuıferos. Los robots aquı mencionados, son unicamente una porcion delos tantos que se han disenado, sin embargo, es posible notar que las aplicaciones de estos sonvastas y que las mismas son ilimitadas debido al desarrollo cada vez mas vertiginoso de latecnologıa.Un robot movil se define como un sistema electromecanico capaz de desplazarse de ma-
nera autonoma sin estar sujeto fısicamente a un solo punto. Posee sensores que permitenmonitorear a cada momento su posicion relativa a su punto de origen y a su punto de destino.Normalmente su control es en lazo cerrado. Su desplazamiento es proporcionado mediantedispositivos de locomocion tales como ruedas, patas, orugas, etc. Para dotar de movimientoa un robot movil, se emplean comunmente 3 tipos de locomocion: por ruedas [20], por patas[21] y por orugas [22].El objetivo de este trabajo es el diseno, construccion e instrumentacion de un prototipo de
robot movil tipo Newt. Dicho prototipo pretende emplearse para fines didacticos y en futurostrabajos de investigacion. En este capıtulo se abordan las tres etapas del diagrama generalde un robot movil que se muestra en la Figura 1.1. En la seccion 1.1 se lleva a cabo unadescripcion detallada del funcionamiento de un robot movil ası como de las etapas de las quedepende, a saber, Subsistemas, Potencia, Adquisicion de datos y control. En la seccion 1.2se aborda de forma precisa la primer etapa, subsistemas, en donde se describe el proceso quese llevo a cabo para la seleccion de los actuadores y sensores que la conforman, ası comotambien el proceso detallado de la construccion del prototipo de robot movil. En la seccion1.3, se describe la segunda etapa, potencia, en donde se habla acerca del sistema electronicoen general, incluyendo el diseno de los distintos circuitos que permiten el funcionamiento delmovil. Por otro lado, en la seccion 1.4 se habla acerca de la tercer etapa, adquisicion de datosy control, en la que se describe la tarjeta DSP a utilizar en este prototipo, ası como el circuitoque permite la interfaz entre esta y el robot movil. En la seccion 1.5 se presenta el prototipofinalizado y finalmente, en la seccion 1.6, se presentan las conclusiones del trabajo, ası como

1.1. DESCRIPCION GENERAL DE FUNCIONAMIENTO 3
trabajos futuros y probables extensiones del mismo.
1.1. Descripcion general de funcionamientoUn robot movil esta conformado por dos subsistemas, el correspondiente a los actuadores
y el correspondiente al diseno mecanico. Para controlar cada uno de estos subsistemas, sonnecesarias una etapa de potencia y una etapa de control. La etapa de potencia permite la inter-accion entre las etapas de control y de los subsistemas, es decir, la comunicacion entre ambasetapas al momento del envıo y recepcion de informacion; de igual forma, la alimentacion devoltaje de cada dispositivo electronico y la proteccion de los actuadores, ası como tambienla proteccion del DSP a cualquier sobrecarga ya sea de voltaje o bien de corriente electrica.Finalmente, en la etapa de control se lleva a cabo la programacion de las leyes que gobernaranel funcionamiento asociado a cada uno de estos subsistemas (estas leyes se proponen en basea modelos matematicos), es decir, es la etapa en la que se imponen ciertas restricciones alfuncionamiento del sistema en general. De manera general, en la Figura 1.1, se presenta undiagrama a bloques del prototipo propuesto.
Robot MóvilRobot Móvil
Etapa 3:
Adquisición de datos
y control
Etapa 2:
Potencia
Etapa 1:
Subsistemasy control
DSPCircuito
InterfazSubsistema
b
Di ñ
Subsistema
a
Actuadores
Circuito
FuenteCircuito
Protección
PC
Diseño
mecánicoy
sensores
Circuito
Protección
Circuito Circuito
Puente HOptoacoplador Encoder
Figura 1.1: Diagrama a bloques general del prototipo de robot movil.
1.1.1. Etapa 1: SubsistemasLa primer etapa es la referida a los subsistemas que conforman al prototipo de robot movil,
a saber, los actuadores y el diseno mecanico. El subsistema a es el que permite el desplaza-miento del robot movil dentro de un espacio de trabajo determinado y el monitoreo de su posi-cion en cada instante, mientras que el subsistema b es el correspondiente al diseno mecanico.Como se vera mas adelante, en la estructura del robot movil se encuentran acopladas las ruedasmotrices, las ruedas de bola, los actuadores, los encoders y en la parte superior de la misma,se pretende montar las baterıas y los circuitos de la etapa de potencia. Mas adelante, en la
4 CAPITULO 1. INTRODUCCION
seccion 1.2, se lleva a cabo una amplia explicacion acerca de esta etapa mostrada en la Figura1.1.
1.1.2. Etapa 2: PotenciaLa segunda etapa, es el punto intermedio entre la recepcion y envıo de informacion en-
tre las etapas 1 y 3. A grandes rasgos, esta permite la proteccion, alimentacion y envıo dedatos para las etapas 1 y 3. Al respecto, su correcta definicion es primordial para lograr unainteraccion asequible entre el control y los subsistemas que conforman al robot, ya que de locontrario se pondrıa en riesgo la tarjeta DSP de la etapa 3 y al sistema electrico en general. Seobserva en el diagrama a bloques de la Figura 1.1, que esta etapa se encuentra conformada porcinco circuitos, el correspondiente a la fuente de alimentacion de todo el sistema, el circuito deproteccion, el circuito de optoacoplamiento, el circuito del puente H y el circuito que gobiernael funcionamiento de los encoders. El circuito de proteccion se encuentra delimitado por unalınea punteada ası como las flechas indicadoras que conectan a este circuito con la fuente, estose debe a que en base a la construccion del puente H, este circuito de proteccion puede o noemplearse. Cada uno de estos se explican con mayor detalle en la seccion 1.3.
1.1.3. Etapa 3: Adquisicion de datos y controlLa tercer y ultima etapa, es la etapa en la que se instrumentan las leyes de control que
gobernaran el desplazamiento del robot movil. Como se puede apreciar en la Figura 1.1, estaetapa consta de un circuito interfaz, un DSP y una PC conectados bidireccionalmente. Elproposito de la conexion bidireccional entre la tarjeta de interfaz y el DSP, es el envıo yrecepcion de datos hacia la etapa de potencia, mientras que la conexion bidireccional entre elDSP y la PC, es de igual forma la transmision de datos entre ambos dispositivos, ya que elDSP monitoreara a cada momento la posicion del movil y proporcionara esta informacion a laPC. Por otro lado, en base a la informacion que el DSP vaya recibiendo por parte de la etapade potencia, sera capaz de controlar a los actuadores en tiempo real gracias a la ley de controlpreviamente instrumentada. Como se observa en la Figura 1.1, es la etapa primordial para elcontrol en lazo cerrado del sistema. En la seccion 1.4 se describe de forma general lo referentea la parte electronica de esta etapa.
1.2. Etapa 1: SubsistemasEs claro que la adecuada seleccion de componentes en un proyecto de esta magnitud, es
un factor importante que impactara en forma directa no solo en el desempeno del prototipopropuesto, sino tambien en todas y cada una de las etapas que intervienen para controlar alsistema de forma eficaz. Es por ello que se llevo a cabo una investigacion lo mas certera posiblepara adquirir los componentes que mas se adecuaran a las necesidades del proyecto. Al igualque la seleccion de los componentes, resulta igualmente importante e imprescindible el disenomecanico del prototipo del robot movil, pues de ello se desprende el saber por ejemplo eltorque que requieren los actuadores (debido al peso de la base del robot), el diametro que

1.2. ETAPA 1: SUBSISTEMAS 5
requieren las ruedas (principalmente para la altura apropiada debido a las dimensiones tantode los actuadores ası como de los sensores), etc., es decir, ambas subetapas dependen unade la otra. Se observa en la Figura 1.1 que esta primera etapa consta de dos subetapas, lasubetapa a correspondiente a los actuadores y sensores y la subetapa b correspondiente aldiseno mecanico del prototipo del robot movil. En los siguientes parrafos se describe a detalleel procedimiento que se llevo a cabo para la conclusion de estas subetapas, y de esta manera,abordar la siguiente etapa descrita en la Figura 1.1.
1.2.1. Subsistema a: Actuadores y sensoresComo se menciono en el parrafo precedente, en este apartado se describe el procedimien-
to necesario para la correcta seleccion tanto de los actuadores, sensores, caja de engranes ybaterıa. Es importante mencionar que la seleccion de los motores permitio de manera directala seleccion apropiada de la caja de engranes, ya que el fabricante manufactura los actuadorescon la opcion de acoplamiento directo con una caja de engranes. Los calculos necesarios paradicha seleccion fueron proporcionados igualmente por el fabricante. Respecto a los encoders,la seleccion fue en base a los requisitos demandados para este prototipo (es decir, la precisioncon la que se deseo llevar a cabo el monitoreo) al igual que la seleccion de las baterıas.
Motores
Para este prototipo de robot movil, se plantea el uso de motores de CD como sistema deactuadores para lograr la locomocion. Sin embargo, la seleccion de estos es muy importantepara la aplicacion en particular que se pretende llevar a cabo, pues dentro de los motores deCD existe una amplia gama que varıa en funcion de las necesidades del sistema. Dentro derobotica, los motores mas comunmente empleados, son los motores a pasos, los servomotoresy los motores de CD, cada uno de estos brinda distintas posibilidades dependiendo de las car-acterısticas del sistema al que se necesite incorporar. Los motores a pasos, permiten controlarcon una precision bastante elevada el desplazamiento del rotor debido a su construccion, yaque cuentan con un par de bobinas independientes que pueden ser controladas igualmente deforma independiente, permitiendo que el giro del rotor sea paso por paso, es decir, el desplaza-miento es por grados. Existen en el mercado algunos motores de este tipo que requieren 200pasos (i.e. 1.8◦ por paso) para completar un giro completo. Pese a ser muy precisos en el posi-cionamiento del eje, la etapa de potencia necesaria para controlarlos demanda mayor numerode componentes debido a las dos bobinas, siendo esta una de las desventajas para considerar-los en este prototipo. Otros puntos importantes por los que no se ha optado por este motor, esla imposibilidad de controlarlo en lazo cerrado, puesto que es posible perder algun grado degiro y como consecuencia el movil no seguirıa la trayectoria definida, el torque necesario paramover la carga es bastante elevado y este tipo de actuador no es eficiente. Un servomotor, adiferencia de un motor a pasos, internamente esta constituido por un controlador de ancho depulso, que permite posicionar la flecha del servo (este control es distinto al empleado en losmotores de CD, pues en estos motores, se emplea esta estrategia para modular su velocidad) aun angulo deseado. Los servomotores, solo tienen un tasa de giro de aproximadamente±120◦,es decir, su desplazamiento angular esta limitado, razon evidente para no optar por este tipo

6 CAPITULO 1. INTRODUCCION
de actuador. Respecto al torque que proporciona, es muy bajo en comparacion con el requeri-do y de igual forma que el motor a pasos, no es posible controlarlo en lazo cerrado. Por loanteriormente mencionado, resulta mas conveniente hacer uso de motores de CD para lograrel objetivo de este trabajo.Inicialmente, se tienen los parametros de velocidad y aceleracion a la que se desplazara el
movil, ası como el peso total del sistema:
υmax = 1 m/s, amax = 1 m/s2,m = 46.745 kg.
En base a la masa m y a la aceleracion maxima amax, es posible calcular la fuerza necesaria Fpara su desplazamiento:
F = ma = (46.745 kg) · (1 m/s2) = 46.745 N.
Puesto que se emplearan dos motores, cada uno tiene una fuerza asociada, Fmder para elmotor derecho y Fmizq para el motor izquierdo, en donde cada uno de estos proporcionara lamitad de la fuerza necesaria, es decir:
Fmder = Fmizq =F
2=
46.745 N
2= 23.373 N,
y, sabiendo que el diametro de las ruedas es de 0.15 m (0.075 m de radio), se calcula el parrequerido para cada motor:
τmizq = Fmizq (r) = (23.373 N) (0.075 m) = 1.753 Nm,
τmder = Fmder (r) = (23.373 N) (0.075 m) = 1.753 Nm.
Por otro lado, teniendo la velocidad de avance maxima υmax, se calcula la velocidad angu-lar de cada rueda ωrueda:
υmax = ωruedar,
de donde:
ωrueda =υmax
r=
1 m/s
0.075 m= 13.3333 rad/seg
= 127.3267 rpm.
Esta velocidad angular no es la asociada a cada motor, ya que al acoplarse a la caja de engranes,esta es la que determinara dicha velocidad. Teniendo los datos anteriores, se procede a calcularla potencia requerida Prueda para cada rueda:
Prueda = τωrueda = (1.753 Nm) · (13.3333 rad/seg)
= 23.373 W.
Esta potencia, es la que debe ser transmitida a cada rueda del robot movil, por lo que lapotencia del mismo debe ser superior debido a la perdida en el reductor (caja de engranes). La

1.2. ETAPA 1: SUBSISTEMAS 7
eficiencia promedio de los reductores, es aproximadamente del 70%, lo que permite calcularuna estimacion de la potencia deseada de cada motor Pdeseada:
Prueda = 0.7Pdeseada,
de donde:Pdeseada =
Prueda
0.7=
23.373 W
0.7= 33.39 W.
En base a la documentacion tecnica proporcionada por el fabricante [23], la primera regla deseleccion de un motor establece que este debe de tener entre 1.5 y 2 veces la potencia deseadaPdeseada, por lo tanto:
50.085 W < Pdeseada < 66.78 W,
por lo que los motores seleccionados, corresponden al modelo GNM3150 (24V, 55 W) y elreductor asociado a cada uno de estos es el modelo G2.6. La segunda regla proporcionada porel fabricante, establece que la velocidad deseada del motor ωdeseada debe estar entre el 65% yel 90% de la velocidad sin carga del motor vsc, es decir:
2291.9 rpm < ωdeseada < 3173.4 rpm.
El factor de reduccion que logra cumplir con esta regla, es el de 20:1, cuyo par de salida enoperacion no debe superar los 2.4 Nm y cuenta con una eficiencia del 70%. Con los datos deeste reductor en particular, se obtienen la velocidad angular de los motores ωmotor y el par delde salida de los mismosMmotor:
ωmotor = 20ωrueda = 20 · (13.333 rad/seg) = 266.666 rad/seg
= 2546.5348 rpm,
y teniendo en cuenta que:Pdeseada = Mmotorωmotor,
se tiene:
Mmotor =Pdeseada
ωmotor
=33.39 W
266.666 rad/seg
= 0.125 Nm.
Caja de engranes
Para lograr el movimiento del robot movil, es necesario acoplar una caja reductora a lasalida de cada uno de los actuadores (motores) para que, de esta forma, sea posible aumentarel par de salida (torque) y reducir la velocidad de cada actuador. Una caja reductora, esta com-puesta internamente por engranes que pueden variar en tamano, forma y numero de dientes.Actualmente, el uso de las cajas reductoras de engranes, es casi en su totalidad para ampli-ficar el torque, mejorar la inercia permisible y la reduccion de vibracion interna en un motor,respectivamente.

8 CAPITULO 1. INTRODUCCION
La determinacion del factor de reduccion de velocidad, se calcula mediante la razon entrela salida respecto a la entrada, es decir:
reduccion =� dientes de engrane de salida
� dientes de engrane de entrada, (1.1)
Respecto a la clasificacion de estos dispositivos mecanicos, la mas aceptada es la siguiente:
Engranajes de ejes paralelos (engranajes planetarios, engranajes rectos, engranajes he-licoidales paralelos, engranajes con engranes de doble helice, engranajes de cremalleray pinon).
Engranajes de interseccion de ejes (engranajes conicos).
Engranajes no paralelos-no perpendiculares (engranajes helicoidales cruzados, engrana-jes hipoidales, engranaje de cremallera y gusano).
Las consideraciones necesarias que se deben tomar en cuenta para la correcta seleccion deuna caja reductora, se resumen en los siguientes renglones:
Velocidad de entrada al sistema reductor.
Velocidad de salida requerida.
Torque de salida del motor.
Torque requerido a la salida del reductor.
Potencia proporcionada por el motor.
Potencia requerida a la salida del reductor.
Para el caso del prototipo que se diseno, se abordo en detalle los calculos necesarios para laseleccion tanto del motor como del reductor (caja de engranes), obteniendose que la reducciondebe ser de 20:1, es decir, que por cada 20 revoluciones del pinon (acoplamiento directo conla flecha del motor), a la salida del reductor se tendra 1 revolucion. Cabe mencionar que laempresa MicroMo dentro de su catalogo de productos, cuenta con un modelo de motoreductor,en el que la fabricacion de la caja reductora y el motor de CD son una sola pieza.
Sensores
Uno de los aspectos fundamentales en la navegacion de un robot movil, es el conocimientode su posicion en cada instante mientras se desplaza hacia un punto determinado. Para lograrlo,es necesario el empleo de sensores. Los sensores, son dispositivos que convierten la variacionde un fenomeno fısico en una senal electrica, es decir, es una interface entre el mundo fısico yel mundo de los dispositivos electricos y electronicos. Debido a lo anterior, es preciso remarcarque un sensor es, en su totalidad, un transductor. Estos dispositivos se clasifican en [24]:

1.2. ETAPA 1: SUBSISTEMAS 9
Propiocertivos: sensores que miden cambios fısicos internos al sistema (robot movil),por ejemplo, la velocidad de los actuadores (motores), desplazamiento de las ruedas,voltaje de las baterıas.
Exteroceptivos: sensores que adquieren informacion del entorno en el que se encuen-tra el robot movil, por ejemplo, medicion de distancias, intensidad de luz, amplitud desonido. Las mediciones en los cambios fısicos que circundan el entorno del movil, per-miten al sistema extraer informacion importante relacionada a su espacio de trabajo.
Pasivos: sensores que detectan los cambios energeticos del medio ambiente, por ejemp-lo, termostatos, microfonos, camaras infrarrojas.
Activos: sensores que emiten energıa y miden la reaccion del medio ambiente a talemision energetica. Estos sensores ofrecen un rendimiento mas elevado que los sen-sores pasivos, debido principalmente a la interaccion con el medio es de forma con-trolada. Sin embargo, estos sensores pueden sufrir de interferencia entre su senal y lassenales emitidas por algun otro movil en las cercanıas de este, o por senales emitidas porsensores similares montados en el mismo robot, afectando radicalmente el resultado delas mediciones. Ejemplos de estos sensores son los sensores ultrasonicos y los escanerde laser.
Las aplicaciones de los sensores son muy amplias. Los parametros que se deseen moni-torear dentro de un sistema de cualquier tipo, son precisamente aquellos que permitiran unaadecuada seleccion del dispositivo. Los parametros mas comunes que se toman en cuenta enla seleccion adecuada de un sensor, se muestran a continuacion (ver [25]). En [26], se detallacada una de estas caracterısticas.
Rango.- diferencia entre el valor maximo y el valor mınimo del parametro a detectar.
Resolucion.- la variacion mas pequena del sistema que el sensor puede detectar.
Precision.- diferencia entre el valor medido y el valor real.
Sensibilidad.- razon de cambio a la salida por cada unidad de cambio a la entrada.
Cero offset.- valor nulo a la salida para una valor nulo a la entrada.
Linealidad.- porcentaje de desviacion respecto a la curva de linealidad ideal del dispos-itivo.
Tiempo de respuesta.- el retardo temporal entre la entrada y la salida.
Ancho de banda.- frecuencia en la que la magnitud de la salida desciende por debajo de3 DB.
Resonancia.- frecuencia a la que se presenta la magnitud de la salida mas alta.
Temperatura de operacion.- rango en el que el sensor opera de forma segura.

10 CAPITULO 1. INTRODUCCION
Banda muerta.- rango de valores a la entrada para los que no existe salida.
Sensibilidad al ruido.- razon entre la magnitud de la senal y el ruido de salida.
Los sensores a emplear para el prototipo y que iran acoplados directamente a los actuado-res, son encoders opticos. Los encoders, son actualmente los dispositivos mas empleados enrobotica movil para determinar la odometrıa, ya que estos permiten medir la velocidad angu-lar y la posicion del eje de un motor. Basicamente, un encoder esta formado por un arreglode fototransistor y fotodiodo, dispuestos en ambos extremos de un disco que tiene sectoresopacos y libres, que al ser acoplado a un actuador rotatorio (motor), interrumpe el haz de luzque recibe el fototransistor del fotodiodo y, de esta manera, genera un tren de pulsos (senaldigital) que son enviados a un controlador. El numero de pulsos por revolucion, determina laresolucion del encoder.Estos dispositivos, se dividen en encoders incrementales y encoders absolutos. En un en-
coder incremental, es necesario conocer la posicion inicial, ya que el desplazamiento se pro-porciona en incrementos. Emplea dos pistas en el disco que genera los pulsos al interrumpirel haz de luz, una pista para determinar el sentido de giro y la segunda para indicar los incre-mentos en la posicion. Al disminuir el ancho de las pistas, se consigue aumentar la resoluciondel sensor y por ende la precision. Por otro lado, los encoders absolutos, por cada cambio ensu posicion generan una posicion inicial (nueva salida). Estos encoders emplean varias pistasdispuestas en la superficie del disco, que codifican la posicion en la que se encuentra el eje delmismo, normalmente mediante algun codigo binario en el que solo cambia un bit (minimizan-do de esta manera la posibilidad de error) como el codigo Gray. En este sensor, al aumentarel numero de pistas se consigue aumentar tanto su precision como su resolucion a costa deaumentar el tamano.Para el prototipo propuesto, se ha optado por instrumentar encoders opticos de tipo incre-
mental, es decir, acoplarlos a los motores. El proposito de estos sensores, sera el de propor-cionar la informacion al controlador disenado para la estructura del movil, para determinar suposicion dentro del espacio de trabajo en que se desenvuelva. Esto se logra monitoreando atraves del DSP la informacion proporcionada por el canal A y el canal B del encoder. Cabemencionar que entre el canal A y el canal B existe un desfasamiento de 90o, lo que permitedeterminar el sentido de giro de los motores. El fabricante de este sensor es la empresa ko-reana Autonics, el modelo corresponde al codigo E50S8. A continuacion se mencionan lascaracterısticas mas importantes de este sensor.
Es posible instrumentarlo para sensar desplazamiento, velocidad, desplazamiento angu-lar, posicion y aceleracion.
Requiere alimentacion de 12 - 24VCD.
Resolucion de 1000 pulsos por revolucion.
Cuenta con dos canales (channel A, channel B) y un ındice (Index).
Frecuencia de respuesta de 180 KHz.
4 configuraciones distintas de salida.

1.2. ETAPA 1: SUBSISTEMAS 11
El diametro del cuerpo es de 50 mm.
El eje de salida es de 8 mm de diametro y 15.8 mm de largo.
Baterıa
Existen diferentes tipos de materiales que se emplean para almacenar energıa. Frecuente-mente las baterıas toman el nombre del tipo de material utilizado para su construccion (Nıquel-Hierro, Litio-Hierro, etc.). Otras baterıas toman el nombre segun el material hallado en loselectrodos y en el tipo de electrolito utilizado. La mayorıa suelen ser baterıas de acido deplomo; el material activo utilizado determina el voltaje de las celdas y el numero de celdas de-termina el voltaje total de la baterıa. Las baterıas de acido de plomo, tienen un voltaje nominalde alrededor de dos voltios (la mayorıa de baterıas de automovil se componen de seis celdasy por ello tienen una tension de doce voltios). A pesar del gran esfuerzo realizado en inves-tigacion acerca de los diferentes tipos de materiales, las baterıas de plomo-acido son las mascomunmente empleadas e insuperables por el amplio espectro de aplicaciones que brindan. Elplomo es abundante y barato, razon principal por la que resulta idoneo para la produccion debaterıas de buena calidad en grandes cantidades. Este tipo de baterıas de plomo-acido libresde mantenimiento, seran las empleadas en el desarrollo de este proyecto, ya que no requierenninguna accion por parte del usuario en todo su periodo de vida.Las baterıas de plomo-acido suelen ser modulos de 12V cada uno, con distintas capaci-
dades de corriente. Esto en un principio limita la seleccion de un motor a alguno cuyo fun-cionamiento sea de 12V o incluso de 24V. Se podrıan emplear motores que demanden una ten-sion de alimentacion distinta, pero para obtenerla serıa necesario el empleo de convertidoresde CD que provocarıan una disminucion en el rendimiento de la baterıa.Actualmente en el mercado se pueden encontrar baterıas de 12V-4.5Ah, 12V-7Ah, 12V-
12Ah y 12V-18Ah. Los primeros esquemas de control planeados para este robot, indican quese requeriran 20V de alimentacion en el motor, lo que implica el uso de dos baterıas. Respectoa la capacidad de cada baterıa, se selecciona la mayor dado que se desconoce el consumomaximo del robot. El uso de baterıas de menor capacidad, impactara no solo en el tiempode autonomıa del robot, sino que se comprometerıa la seguridad de las mismas, pues si elconsumo de corriente demandado por el robot es ligeramente mayor al proporcionado por lasbaterıas, estas sufrirıan danos irreversibles.Las baterıas adquiridas fueron de la marca YUASA (ver Figura 1.2) de 12V-12Ah.
1.2.2. Subsistema b: Diseno mecanicoUna vez que se han seleccionado los componentes en el apartado precedente, es posible
llevar acabo a detalle el proceso que se siguio para el diseno mecanico del robot movil. Caberesaltar que para la conclusion de este apartado, se conto con el apoyo del Centro Nacionalde Actualizacion Docente (CNAD) respecto a la maquinaria necesaria para lograr la manufac-tura de las piezas del prototipo. Inicialmente se partio de un diseno elaborado en el programaSolidWorks� que permitio una visualizacion precisa de la distribucion de los distintos com-ponentes que forman parte del prototipo, ası como tambien determinar el tipo de material a

12 CAPITULO 1. INTRODUCCION
Figura 1.2: Baterıa.
emplear para cada una de las piezas que conformaron al sistema. El diseno se muestra en laFigura 1.3 con distintas vistas que ilustra el concepto inicial de este proyecto.
(a) Vista isometrica (b) Vista frontal
Figura 1.3: Diseno previo del robot movil en SolidWorks�.
Es preciso puntualizar que el diseno presentado en la Figura 1.3, sufrio una evolucion pau-latina conforme se fue adentrando mas en las caracterısticas mecanicas propiamente dichas.Esto permitio de forma inherente optimizar completamente el diseno y lograr un aprovechamien-to total del espacio. En los siguientes parrafos se presentan detalladamente los pasos requeri-dos para efectuar el maquinado de las piezas; se presentan los disenos en SolidWorks� y sucontraparte maquinada.Inicialmente, se adquirio el siguiente material:
Hoja de aluminio para la base del robot.
Barra de aluminio para los las ruedas motrices.
Barra de laton para buje que une la flecha de cada motor con cada rueda motriz.
Solera de aluminio para soportes de las ruedas de bola.
Barras de aluminio para unir los soportes de las ruedas de bola a la base del robot.
1.2. ETAPA 1: SUBSISTEMAS 13
Solera de aluminio para sujetadores de rodamientos y sujetadores de encoders.
Base del robot movil
La parte principal de la estructura cinematica del prototipo desarrollado, es precisamentela base en la que iran acoplados todos los componentes de la misma estructura cinematica yel subsistema de actuadores. Esta fue maquinada partiendo de una hoja de aluminio de 80x80cm. Se realizaron los cortes en la hoja de aluminio de tal forma que las dimensiones finalesfueron 50x40 cm, en donde los 50 cm, representan el diametro de una circunferencia, ya quela forma final de la base del prototipo, es tipo elıptica.
Ruedas motrices
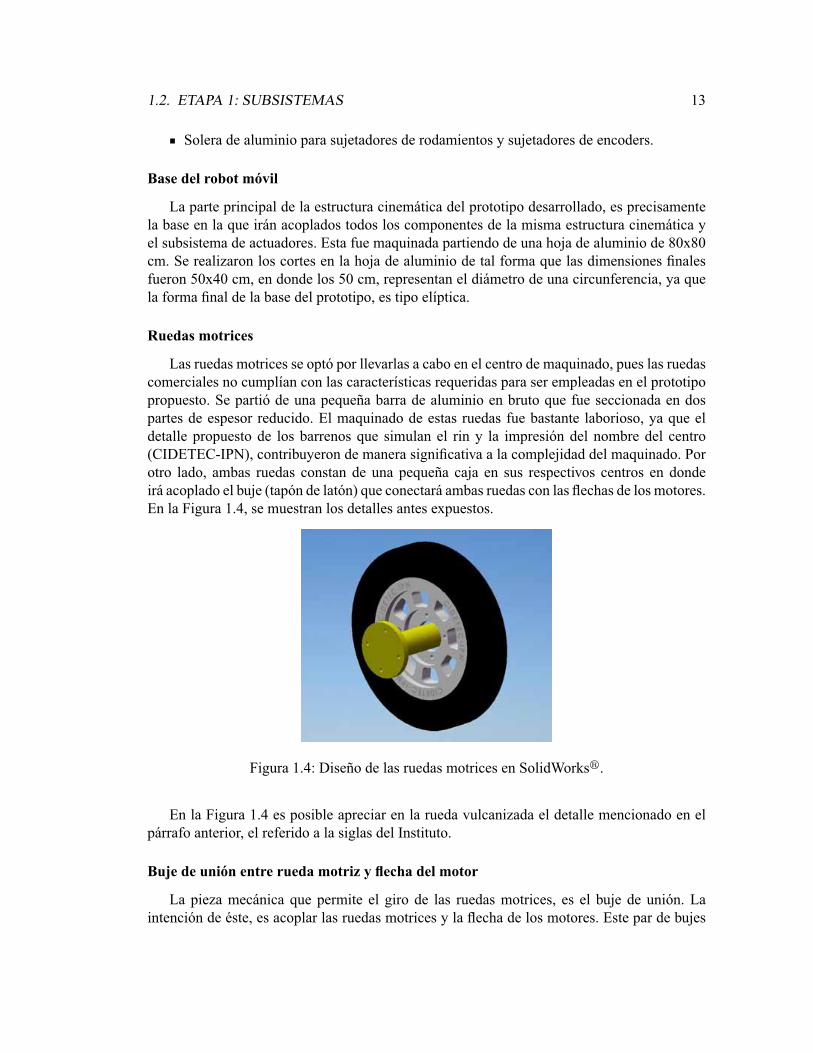
Las ruedas motrices se opto por llevarlas a cabo en el centro de maquinado, pues las ruedascomerciales no cumplıan con las caracterısticas requeridas para ser empleadas en el prototipopropuesto. Se partio de una pequena barra de aluminio en bruto que fue seccionada en dospartes de espesor reducido. El maquinado de estas ruedas fue bastante laborioso, ya que eldetalle propuesto de los barrenos que simulan el rin y la impresion del nombre del centro(CIDETEC-IPN), contribuyeron de manera significativa a la complejidad del maquinado. Porotro lado, ambas ruedas constan de una pequena caja en sus respectivos centros en dondeira acoplado el buje (tapon de laton) que conectara ambas ruedas con las flechas de los motores.En la Figura 1.4, se muestran los detalles antes expuestos.
Figura 1.4: Diseno de las ruedas motrices en SolidWorks�.
En la Figura 1.4 es posible apreciar en la rueda vulcanizada el detalle mencionado en elparrafo anterior, el referido a la siglas del Instituto.
Buje de union entre rueda motriz y flecha del motor
La pieza mecanica que permite el giro de las ruedas motrices, es el buje de union. Laintencion de este, es acoplar las ruedas motrices y la flecha de los motores. Este par de bujes

14 CAPITULO 1. INTRODUCCION
se maquinaron en laton de diametro reducido. Se llevo a cabo el maquinado primero cortandoa las dimensiones requeridas cada uno de estos bujes y posteriormente desvastando con untorno el material sobrante para dar la forma necesaria a ambas piezas.
Soportes para las ruedas de bola
Respecto a los soportes, se empleo una solera de aluminio de espesor reducido y de esta secortaron dos pequenas piezas rectangulares. La funcion principal de los soportes, es permitirel ensamble de las ruedas de bola a la estructura cinematica. Debido a la forma de estas piezas,el maquinado fue un tanto complejo, no solo por la forma misma de los soportes, sino tambienpor las letras maquinadas en sus respectivas superficies. En la Figura 1.5(a) se muestran lossoportes y las ruedas de bola que se acoplaran a cada uno de estos.
(a) Soportes para ruedas de bola (b) Barras de union
Figura 1.5: Diseno en SolidWorks� de los soportes para ruedas de bola y barras de union.
Barras de union entre soportes y estructura
Las barras de union o barras de sujecion, se maquinaron a partir de pequenas barras dealuminio de un diametro reducido. Tanto en la superficie superior como en la superficie infe-rior, se llevo a cabo la cuerda correspondiente para permitir la fijacion con tornillos, en primerlugar de los soportes a las barras y en segundo lugar la fijacion de las barras a la superficieinferior de la base de la estructura cinematica. Debido a que son un par de ruedas de bola porcada soporte, fue necesario emplear seis barras distribuidas simetricamente en la superficie decada soporte respectivamente. Lo anterior se observa en la Figura 1.5(b).
1.3. Etapa 2: PotenciaHasta este punto se ha explicado a grandes rasgos el diseno mecanico del robot movil,
lo que permite abordar en este apartado el diseno electronico del sistema. El diseno elec-

1.3. ETAPA 2: POTENCIA 15
tronico es imprescindible en esta etapa de la construccion, debido a que de este depende elfuncionamiento eficaz del prototipo del robot movil. Se describiran los aspectos mas impor-tantes relacionados a la interconexion entre la etapa de potencia y las etapas tanto de adquisi-cion de datos ası como de actuacion (ı.e. subsistemas) respectivamente. Cabe mencionar quelos calculos matematicos necesarios para la seleccion de algunos componentes (ı.e. resisten-cias, capacitores) se basaron en la ley de Ohm y en las leyes de Kirchoff (ver [29]) y que nose detallan en este capıtulo.
Se retoma en este apartado la Figura 1.1 en la que se muestra un diagrama a bloques generaldel sistema. Es de nuestro interes en este punto la etapa central del robot movil, es decir, laetapa de potencia. A grandes rasgos, el diseno de la etapa de potencia tiene dos vertientes, lascuales se muestran en los diagramas a bloques de las Figuras 1.6 y 1.7 respectivamente.
Etapa de potencia
Circuito
Fuente
Subetapa 1
Circuito digitalCircuito MotorCircuito
Ci itde
protección
Circuito
optoacoplador
Motor
izquierdocontrolador
(puente H)
Circuito
Encoder
DSP
Circuito digital
de
protección
Circuito
optoacoplador
Circuito
controlador
(puente H)
Motor
derecho
Circuito
Encoder
Subetapa 4Subetapa 3Subetapa 2 Subetapa 5
Figura 1.6: Diagrama a bloques general de la etapa de potencia.
Cabe senalar que para este prototipo, un diagrama a bloques mas preciso es el que sepresenta en la Figura 1.7. La diferencia entre ambos diagramas, radica en que el primerohace uso de un puente H discreto, es decir, el circuito controlador se construye empleandocuatro transistores de potencia (mas adelante se explica a detalle el funcionamiento de unpuente H), razon por la que es necesario un circuito digital de proteccion (subetapa 2 en eldiagrama de la Figura 1.6), mientras que en el segundo diagrama a bloques, se hace uso de unpuente H encapsulado (LMD18200) y el circuito digital de proteccion no es necesario. En lossiguientes parrafos se explicaran a detalle las subetapas que constituyen a la etapa de potenciaconcerniente a este prototipo.

16 CAPITULO 1. INTRODUCCION
Etapa de potencia
Circuito
Fuente
Subetapa 1
Circuito
optoacopladorMotor
izquierdo
Circuito
controlador Circuito
d
DSP
p p izquierdo(puente H)
Ci it
Encoder
Subetapa 2
Circuito
optoacopladorMotor
derecho
Subetapa 3
Circuito
controlador
(puente H)
Subetapa 4
Circuito
Encoder
Subetapa 2 Subetapa 3 Subetapa 4
Figura 1.7: Diagrama a bloques propuesto de la etapa de potencia.
1.3.1. Subetapa 1: Circuito fuente
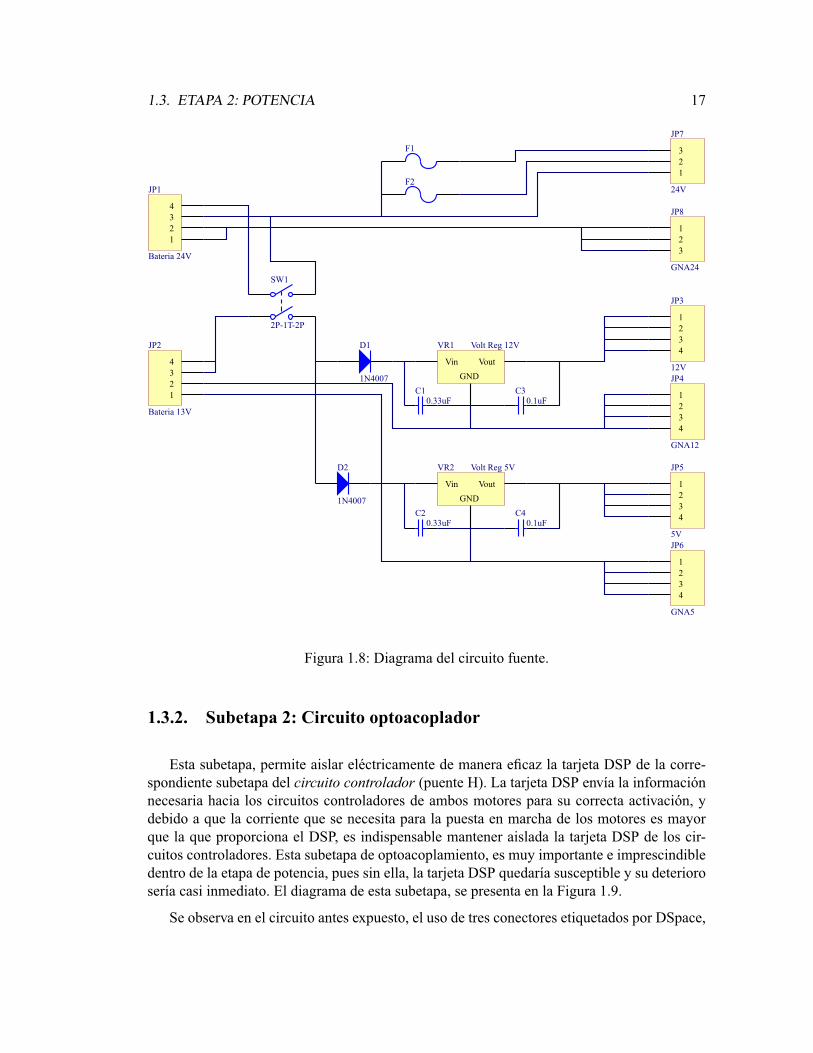
Se menciono previamente que la fuente de poder que proporciona el voltaje al prototipo,es un par de baterıas de 12V - 12Ah conectadas en serie. No obstante, es necesario reducir elvoltaje de las baterıas para proporcionar el voltaje necesario a la etapa de optoacoplamientodel puente H (5V), a los ventiladores que permiten el enfriamiento del puente H (12V), alos encoders (12V) y a los motores (24V). Para lograr lo anterior, se diseno un circuito quepermite reducir el voltaje de las baterıas al voltaje demandado por cada uno de los circuitosque ası lo requieran. Se observan las lıneas de alimentacion que parten de la fuente hacialos distintos circuitos en forma bidireccional. La razon de ello, es que existe un proteccionmediante fusibles en la tarjeta de la fuente en caso de que se presente un corto circuito encualquier parte del sistema. En la Figura 1.8 se presenta el diagrama esquematico del circuitode la fuente de poder.Se observa en el circuito el uso de ocho conectores, los primeros dos de la izquierda eti-
quetados por 24V, 13V, son los voltajes que provienen directamente de la baterıa. En el ladoderecho del circuito, se encuentran los conectores 24V, 12V, 5V, que representan los volta-jes respectivos y cada uno con un conector correspondiente de tierra y en la parte central loscircuitos reguladores de voltaje, etiquetados por VR1 y VR2, en donde el primero reduce elvoltaje de 24V a 12V y el segundo reduce el voltaje de 24V a 5V. Como se menciono en elparrafo precedente, se implemento un par de fusibles que permiten la proteccion de los mo-tores, de los encoders y de los circuitos del puente H en caso de que se presente una sobrecargade corriente.
1.3. ETAPA 2: POTENCIA 17
1
2
3
4
JP1
Bateria 24V
1
2
3
4
JP2
Bateria 13V
F1
F2
Vin Vout
GND
VR1 Volt Reg 12V
Vin Vout
GND
VR2 Volt Reg 5V
0.33uFC1
0.1uFC3
0.33uFC2
0.1uFC4
1
2
3
4
JP3
12V
1
2
3
4
JP4
GNA12
1
2
3
JP7
24V
1
2
3
JP8
GNA24
1
2
3
4
JP5
5V
1
2
3
4
JP6
GNA5
SW1
2P-1T-2P
D2
1N4007
D1
1N4007
Figura 1.8: Diagrama del circuito fuente.
1.3.2. Subetapa 2: Circuito optoacoplador
Esta subetapa, permite aislar electricamente de manera eficaz la tarjeta DSP de la corre-spondiente subetapa del circuito controlador (puente H). La tarjeta DSP envıa la informacionnecesaria hacia los circuitos controladores de ambos motores para su correcta activacion, ydebido a que la corriente que se necesita para la puesta en marcha de los motores es mayorque la que proporciona el DSP, es indispensable mantener aislada la tarjeta DSP de los cir-cuitos controladores. Esta subetapa de optoacoplamiento, es muy importante e imprescindibledentro de la etapa de potencia, pues sin ella, la tarjeta DSP quedarıa susceptible y su deterioroserıa casi inmediato. El diagrama de esta subetapa, se presenta en la Figura 1.9.
Se observa en el circuito antes expuesto, el uso de tres conectores etiquetados por DSpace,

18 CAPITULO 1. INTRODUCCION
U1
6n137
U2
6n137
330
R1
330
R2
330
R3
330
R4
A1
Y2
GND7
VDD14
U3A
MC74HC04AN
GND7
VDD14
Y8
A9
U3D
MC74HC04AN
.1uF
C1
.1uF
C2
VCC5
VCC5
VCC5
VCC5
1
2
3
4
5V
+ + - -
VCC5
.1uF
C7
Cap
1
2
3
4
DSpace
PWM - Dir
1
2
PWM - Dir
Puente H
Figura 1.9: Diagrama del circuito de optoacoplamiento.
5V, PWM1-Dir. El proposito del primer conector, es el de recibir las senales de activacion tan-to de los motores como de la direccion de los mismos y enviarlas hacia los optoacopladores.El segundo conector proporciona el voltaje de 5V necesario para la alimentacion de los op-toacopladores. El ultimo conector se utiliza para recibir las senales provenientes de los op-toacopladores y de esta manera, enviarlas hacia los respectivos actuadores. Es necesario men-cionar que los optoacopladores empleados para el desarrollo de esta subetapa, son los circuitosintegrados 6N137, los cuales al ser activados proporcionan a la salida una senal invertida re-specto a la senal de entrada, razon por la que se emplea una compuerta logica NOT. Al empleardos actuadores, es necesaria una etapa de optoacoplamiento por cada uno de estos.
1.3.3. Subetapa 3: Circuito controlador (puente H)Finalmente la ultima subetapa dentro de la etapa de potencia, es la referida al circuito
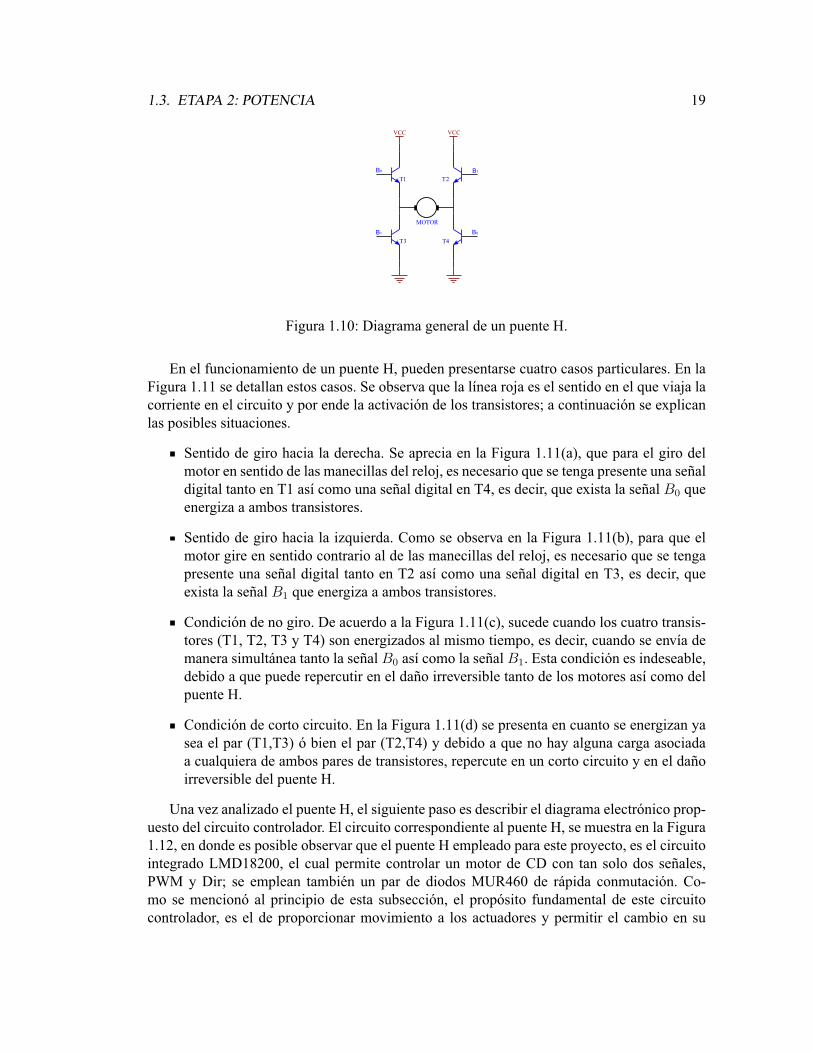
controlador (puente H [30]). El proposito fundamental de esta etapa, es la de energizar a losactuadores en el sentido de giro correspondiente. A grandes rasgos, un puente H permite laconmutacion del sentido de giro de un motor de CD sin la necesidad de cambiar fısicamente lapolaridad de los cables del motor. En la Figura 1.10 se muestra la configuracion de un puenteH, y en donde TR1, TR2, TR3, TR4, representan transistores que permiten la conmutacion delsentido de giro y B0 y B1 representan las senales digitales de activacion.
1Acronimo de Pulse Wide Modulation, Modulacion por Ancho de Pulso.
1.3. ETAPA 2: POTENCIA 19
1T 2T
4T3T
VCC VCC
MOTOR
B0
B1 B0
B1
Figura 1.10: Diagrama general de un puente H.
En el funcionamiento de un puente H, pueden presentarse cuatro casos particulares. En laFigura 1.11 se detallan estos casos. Se observa que la lınea roja es el sentido en el que viaja lacorriente en el circuito y por ende la activacion de los transistores; a continuacion se explicanlas posibles situaciones.
Sentido de giro hacia la derecha. Se aprecia en la Figura 1.11(a), que para el giro delmotor en sentido de las manecillas del reloj, es necesario que se tenga presente una senaldigital tanto en T1 ası como una senal digital en T4, es decir, que exista la senal B0 queenergiza a ambos transistores.
Sentido de giro hacia la izquierda. Como se observa en la Figura 1.11(b), para que elmotor gire en sentido contrario al de las manecillas del reloj, es necesario que se tengapresente una senal digital tanto en T2 ası como una senal digital en T3, es decir, queexista la senal B1 que energiza a ambos transistores.
Condicion de no giro. De acuerdo a la Figura 1.11(c), sucede cuando los cuatro transis-tores (T1, T2, T3 y T4) son energizados al mismo tiempo, es decir, cuando se envıa demanera simultanea tanto la senal B0 ası como la senal B1. Esta condicion es indeseable,debido a que puede repercutir en el dano irreversible tanto de los motores ası como delpuente H.
Condicion de corto circuito. En la Figura 1.11(d) se presenta en cuanto se energizan yasea el par (T1,T3) o bien el par (T2,T4) y debido a que no hay alguna carga asociadaa cualquiera de ambos pares de transistores, repercute en un corto circuito y en el danoirreversible del puente H.
Una vez analizado el puente H, el siguiente paso es describir el diagrama electronico prop-uesto del circuito controlador. El circuito correspondiente al puente H, se muestra en la Figura1.12, en donde es posible observar que el puente H empleado para este proyecto, es el circuitointegrado LMD18200, el cual permite controlar un motor de CD con tan solo dos senales,PWM y Dir; se emplean tambien un par de diodos MUR460 de rapida conmutacion. Co-mo se menciono al principio de esta subseccion, el proposito fundamental de este circuitocontrolador, es el de proporcionar movimiento a los actuadores y permitir el cambio en su

20 CAPITULO 1. INTRODUCCION
1T 2T
4T3T
VCC VCC
MOTOR
B0
B1 B0
B1
Sentido
de
giro
(a) Giro a la derecha
1T 2T
4T3T
VCC VCC
MOTOR
B0
B1 B0
B1
Sentido
de
giro
(b) Giro a la izquierda
1T 2T
4T3T
VCC VCC
MOTOR
B0
B1 B0
B1
Sentido
de
giro
(c) Condicion de no giro
1T 2T
4T3T
VCC VCC
MOTOR
B0
B1 B0
B1
Sin giro
(d) Corto circuito
Figura 1.11: Puente H
direccion. Las senales que permiten llevar a cabo esta accion, son enviadas desde el circuitooptoacoplador y corresponden a PWM y a Dir respectivamente. Estas senales, son recibidasmediante el conector etiquetado como PWM-Dir y permiten la activacion de los motores,ası como especificar el sentido de giro requerido. Para lograr la disipacion del calor en elcircuito LMD18200, se hace uso de un ventilador acoplado directamente al cuerpo del cir-cuito, lo que permite de manera eficaz el enfriamiento del mismo. Por otro lado, los conec-tores etiquetados por Ventilador, 12V, 24V, se emplean para conectar y energizar al ventiladory para energizar a los motores respectivamente. Finalmente, el conector M1-M2, se empleapara conectar los motores. Es importante mencionar que tanto el circuito de optoacoplamientocomo el circuito controlador (puente H), se llevaron a cabo en una sola tarjeta, es decir, seencuentran ambos circuitos inmersos en una sola placa. De igual forma, cabe resaltar que alemplearse dos motores de CD, se hace uso de dos circuitos controladores. Para finalizar, elcontrol a traves del puente H, es el mas usual en robotica movil para el control de la velocidady la inversion en el sentido de giro de motores de CD.

1.4. ETAPA 3: ADQUISICION DE DATOS Y CONTROL 21
Bootstrap11
Out12
Out210
Bootstrap211
Flag9
Sense8
PWM5
Brake4
Dir3
67
U4
LMD18200
330
R5
10K
R6
10nF
C3
10nF
C4
1uF
C5
1200uF
C6
2K7
R7
Res1
10K
R8
D1
MUR640
D2
MUR640
1
2
M1 M2
Motor
VCC24
VCC5
VCC24
VCC5
VCC241
2
3
4
24V
+ + - -
VCC12
1 2
Ventilador
- +
VCC12
1
2
12V
+ +
1
2
PWM - Dir
Puente H
Figura 1.12: Diagrama del circuito controlador (puente H).
1.3.4. Subetapa 4: Circuito encoderPara llevar a cabo la tarea de monitoreo respecto a la posicion del movil dentro del espacio
de trabajo, se hace uso de encoders. Dentro del diseno mecanico, es importante la distribucionde todos los componentes, y en el caso particular de los encoders (puesto que se acoplandirectamente a la flecha del motor a traves de una pieza de acoplamiento).El circuito que gobierna el funcionamiento de estos encoders, se muestra en la Figura
1.13. Se observa el uso de cuatro conectores etiquetados como 5V, Senal Encoder, 12V, DSP.El conector etiquetado como 5V, es el voltaje que se requiere para activar la etapa de optoa-coplamiento y es proporcionado por el DSP. Cabe mencionar que en este circuito de encoders,es igualmente empleado el optoacoplador 6N137, el cual entrega una senal invertida a la sal-ida respecto a la entrada y por ello se hace uso de una compuerta logica NOT. El conectoretiquetado por Senal Encoder, corresponde a las senales que envıa el sensor hacia el DSP paralograr el monitoreo del robot movil. El conector 12V, es el voltaje proveniente de la fuente depoder y permite energizar al encoder. Finalmente el conector DSP, es el que recibe las senalesprovenientes de la etapa de optoacoplamiento y son enviadas directamente a la tarjeta DSP.Se reitera el uso de dos circuitos de encoder, pues al tener dos actuadores, es indispensablemonitorear ambos.
1.4. Etapa 3: Adquisicion de datos y controlSe menciono que la adquisicion de datos y el control del prototipo de robot movil, se
llevaran a cabo mediante una tarjeta DSP. Dentro de las tarjetas DSP existentes en el mercado,se opto por la marca dSPACE modelo DS1104. Las caracterısticas mas relevantes son las

22 CAPITULO 1. INTRODUCCION
U2
6n137
U3
6n137
1K
R4
Res2
1K
R5
Res2
4K7
R1
Res2
4K7
R2
Res2
VCC
VCC0.1uF
C1
Cap
0.1uF
C2
Cap
4K7
R7
Res2
4K7
R8
Res2
VDD
VDD
VDD
VDD
1
2
3
4
5V
5V (VDD-DSP)
1
2
3
4
12V
12V (VCC)
VDD
VCC
VCC
U4
6n137
1K
R6
Res2
4K7
R3
Res2
VCC
0.1uF
C3
Cap
4K7
R9
Res2
VDD
VDD
A1
Y2
GND7
VDD14
U1A
MC54HC04AJ
89
U1D
MC54HC04AJ
1213
U1F
MC54HC04AJ
1
2
3
4
5
6
Señal Encoder
Encoder 1
2
3
4
5
6
DSP
Señales a DSP
Figura 1.13: Diagrama del circuito de los encoders.
siguientes:
Procesador MPC8240 de punto flotante y 64 bits, reloj interno de 250 MHz.
Memoria fısica de 32 MB y memoria flash de 8 MB.
Cuatro temporizadores de proposito especıfico.
Cuatro convertidores A/D multiplexados con resolucion de 16 bits y cuatro conver-tidores A/D paralelos con resolucion de 12 bits.
Ocho convertidores D/A con resolucion de 16 bits.
Veinte senales digitales configurables (entrada/salida) con resolucion de 1 bit.
Diez senales de PWM con una frecuencia maxima de 20 MHz.
Dos canales independientes para encoders incrementales con resolucion de 24 bits paralectura de posicion.
Dos interfases seriales.

1.4. ETAPA 3: ADQUISICION DE DATOS Y CONTROL 23
Es conveniente destacar que una de las principales razones por las que se selecciono estatarjeta, fue por su perfecta interaccion con el programa MATLAB�-Simulink�, ya que laprogramacion de las leyes de control que gobernaran el comportamiento del robot movil, sellevara a cabo a traves de bloques en Simulink�. Otra razon muy importante es que se pretendeampliar los alcances de este prototipo, y para lograrlo, se requeriran mas senales y debido a lacapacidad de esta tarjeta DSP, sera facil conseguirlo.Una vez que se instala la tarjeta DSP se hace uso de las siguientes senales:
Dos senales de 1 bit configuradas como salidas para la direccion de los motores.
Dos senales de PWM a una frecuencia de 20 KHz para la activacion de los motores.
Dos canales independientes para encoders incrementales para la lectura de posicion.
Senales de voltaje y tierra digital.
1.4.1. Circuito interfase DSP-movil
Una vez que se tienen todos y cada uno de los circuitos que permiten el funcionamientodel prototipo de robot movil, es necesaria una interfaz que permita la comunicacion eficazentre la tarjeta DSP y el sistema. Para ello se ha disenado un circuito que permite no solo elenvıo y recepcion de informacion entre el DSP y el robot, sino tambien se le ha dotado deindicadores (led) que permiten saber en primer lugar la direccion de cada motor y en segundolugar el promedio de voltaje generado mediante PWM que se envıa a los motores para surespectiva activacion. En la Figura 1.14 se presenta el correspondiente diagrama esquematicode la interfaz antes descrita.Se observa que la interfaz se lleva a cabo mediante un conector tipo DB25 cuyas lıneas
se encuentran directamente acopladas a la tarjeta DSP. Se emplean igualmente conectores quepermiten direccionar las senales hacia los actuadores, sensores e indicadores. Los conectoresetiquetados por Fte. Enc. Izq., Enc. Izq.,Pte. H Izq., son los correspondientes a las senales delvoltaje requerido por el encoder izquierdo, las senales enviadas desde el encoder hacia el DSPy finalmente las senales de activacion del puente H izquierdo respectivamente. De igual forma,los conectores etiquetados por Fte. Enc. Der., Enc. Der.,Pte. H Der., son los correspondientes alas senales del voltaje requerido por el encoder izquierdo, las senales enviadas desde el encoderhacia el DSP y finalmente las senales de activacion del puente H derecho respectivamente. Sehace uso de un buffer 74HC541 para la activacion de los distintos indicadores que permitenvisualizar la direccion de cada motor, ası como el promedio de voltaje enviado a cada motor(PWM) y a los puentes H izquierdo y derecho, respectivamente. La configuracion del conectorDB25 respecto a las senales que requiere el sistema para su funcionamiento, se presenta en latabla de la Figura 1.15.Cada una de las senales provenientes del DSP es interceptada por un panel de pruebas
(rack), el cual permite no solo visualizar los led de las senales que son empleadas, sino tambienfacilita la conexion hacia la tarjeta interfaz del prototipo.

24 CAPITULO 1. INTRODUCCION
1
20
2
21
3
22
4
23
5
24
6
25
7
8
9
10
11
12
13
14
15
16
17
18
19
27
26
J1
DSP SIGNALS
1
2
Fte. Enc. Izq.
Fte.Enc.Izq.
1
2
Fte. Enc. Der.
Fte.Enc.Der.
1
2
3
4
5
6
Enc. Izq.
Enc.Izq.
1
2
3
4
5
6
Enc. Der.
Enc.Der.
1
2
3
4
Pte. H Izq.
Pt.H Izq.
1
2
3
4
Pte. H Der.
Pt.H Der.
1K
R1
Res1
1K
R2
Res1PWM_Izq
Dir. Izq.
PWM D. OutBF
Dir D. OutBF
OE11
A12
A23
A34
A45
A56
A67
A78
A89
GND10
Y811
Y712
Y613
Y514
Y415
Y316
Y217
Y118
OE219
VDD20
U1
MC74HC541N
GND
VDD
PWM I. OutBF
Dir I. OutBF
PWM_Der.
Dir. Der.
PWM DER.
LED1
DIR.DER. 1
LED1
DIR.DER. 2
LED1
1K
R3
Res1
1K
R4
Res1
PWM IZQ.
LED1
DIR.IZQ. 1
LED1
DIR.IZQ. 2
LED1
GND
VDD
GN
D
GND
VDD
PWM D. OutBF
Dir D. OutBF
PWM I. OutBF
Dir I. OutBF
GND
GND
GND
VDD
PWM_Izq
PWM_Der.
Dir. Izq.
Dir. Der.
Figura 1.14: Diagrama del circuito interfase DSP-movil.
1.5. Prototipo finalizadoA lo largo de este reporte tecnico, se ha profundizado en cada aspecto que permitio la
conclusion del prototipo de robot movil, partiendo desde los pasos que se siguieron para laseleccion de los actuadores, sensores, baterıa, ası como el proceso en el diseno mecanico yse concluyo con el diseno de la etapa de potencia. De esta manera, la Figura 1.16 muestra eldiseno final del sistema en el programa SolidWorks�, en el que es posible ver la evolucion enel diseno respecto al primer prototipo planteado (ver Figura 1.3).Ası, una vez ensambladas todas y cada una de las piezas disenadas y maquinadas y propia-
mente haber llevado a cabo la interconexion de todos los circuitos que conforman al sistema,se presenta la Figura 1.17, en la que es posible apreciar finalmente al robot movil.
1.6. ConclusionesComo ha quedado de manifiesto en este proyecto, llevar a cabo la construccion de un
robot movil no es tarea sencilla, es necesario realizar una investigacion acerca de todo aque-llo que conforma a un sistema de esta naturaleza, estudiar y analizar su funcionamiento conprecision, para, de esta forma, no solo elegir el tipo de robot a construir, sino tambien conocerlas problematicas inherentes al mismo y partiendo de esta pauta, disenar de manera eficaz elprototipo.El diseno de este robot movil, parte de la premisa de estudiar este tipo de sistemas, contro-
larlos y contribuir al desarrollo de la investigacion en Mexico, ya que la evolucion tecnologica

1.6. CONCLUSIONES 25
Figura 1.15: Distribucion de senales en el conector DB25.
(a) Vista isometrica (b) Vista explosionada
Figura 1.16: Diseno final del robot movil en SolidWorks�.
dentro de cada paıs y el aprovechamiento eficaz de la misma, es factor propio a su crecimien-to economico, social y cultural, pues brinda un grado competitivo mas elevado tanto a nivel

26 CAPITULO 1. INTRODUCCION
Figura 1.17: Diseno final del robot movil.
nacional como internacional, dando pauta a un intercambio positivo no solo tecnologico sinotambien de recursos humanos con otros paıses y finalmente, contribuir de manera significativaal desarrollo de un paıs.Para concluir este reporte, se manifiesta el agradecimiento del CNAD por el apoyo pro-
porcionado para llevar a cabo el maquinado de las piezas, ası como las ideas propuestas sobrenuestro diseno inicial para la conclusion del diseno mecanico del robot movil. Asimismo,agradecemos el grupo de investigadores que trabajo en este reporte tecnico la valiosa ayudade la Secretaria de Investigacion y Posgrado del IPN.

Capıtulo 2
Metas Alcanzadas
En este capıtulo se presentan las metas logradas en este trabajo. Dentro de las metas al-canzadas es importante remarcar la consecusion de un prototipo de robot movil tipo dife-rencial, ya que este permitira llevar a cabo la formacion de dos recursos humanos de nivelmaestrıa, en el area de Tecnologıa de Computo en el ano 2010, en la maestrıa que impartimosen CIDETEC-IPN.Adicionado a lo anterior, a continuacion se presentan los logros alcanzados en lo relativo
a la produccion cientifica.
2.1. Capıtulos de Libros
1/1.- R. Silva-Ortigoza, J. R. Garcıa-Sanchez, V. R. Barrientos-Sotelo, G. Silva-Ortigoza, M.A. Molina-Vilchis y M. Marciano-Melchor, “Diseno, Construccion e Instrumentacion de unRobot Movil Diferencial”. Coleccion CIDETEC. Mexico, Diciembre 2008. Actualmente, seencuentra en prensa.
2.2. Artıculos en Revistas ISI
1/2.- R. Silva-Ortigoza, H. Sira-Ramırez y V. M. Hernandez-Guzman, “Control por ModosDeslizantes y Planitud Diferencial de un Convertidor de CD/CD Boost: Resultados Experi-mentales”. Revista Iberoamericana de Automatica e Informatica Industrial (RIAI). Vol. 5, No.4, pp. 77-82, Octubre 2008. ISSN: 1697-7912. Espana.
2/2.- V. M. Hernandez-Guzman, V. Santibanez and R. Silva-Ortigoza, “A new tuning proce-dure for PID control of rigid robots”. Advanced Robotics. Vol. 22, No. 9, pp. 1007-1023, July2008. ISSN: 0169-1864. Japon.
27
28 CAPITULO 2. METAS ALCANZADAS
2.3. Artıculos en Revistas de Investigacion Internacionalescon Arbitraje Estricto no ISI
1/4.- R. Silva-Ortigoza et al., “Control de un Robot Movil de Ruedas Sin Utilizar Medidas deVariables Mecanicas en el Control de los Actuadores”. IEEE Latin America Transaction. Vol.6, No. 7, Diciembre 2008. ISSN: 1548-0992. Brasil. Actualmente, se encuentra en prensa.
2/4.- A. Cruz Contreras, E. A. Portilla Flores y R. Silva-Ortigoza, “Multiplicador Electronicopara Encoder Incremental”, Revista Polibits Internacional. Vol. 2, No. 37, Diciembre 2008.ISSN: 1870-9044. Mexico. Actualmente, se encuentra en prensa.
3/4.- M. Marciano Melchor, M. A. Molina Vilchis y R. Silva-Ortigoza, “Deformaciones deun Frente de Onda”, Latin American Journal of Physics Education. Vol. 2, No. 3, pp. 307-310,Septiembre 2008. ISSN 1870-9095. Mexico.
4/4.- R. Silva-Ortigoza, M. A. Molina Vilchis, V. M. Hernandez Guzman, G. Silva Ortigoza,M. Marciano Melchor y E. A. Portilla Flores, “Modelado y Control de un Robot Movil tipoNewt en la tarea de Seguimiento de Trayectoria”, Revista Telematique. Vol. 7, No.2, pp. 129-145, Agosto 2008. ISSN: 1856-4194. Venezuela.
2.4. Artıculos en Revistas de Divulgacion y Difusion Cientıfi-ca y Tecnologica
1/1.- J. L. Carrillo Aguado y R. Silva-Ortigoza, “Mecatronica: Su objetivo, productos in-teligentes”. Revista Conversus. Vol. 1, No. 73, pp. 62-63, Septiembre 2008. ISSN: 1665-2665.Mexico.
2.5. Conferencias Magistrales1/1.- 2008. R. Silva Ortigoza. Conferencia Magistral presentada en el Centro Nacional deActualizacion Docente (CNAD), en el Ciclo de Conferencias Nacionales correspondiente alIV Curso Internacional de Capacitacion en Robotica Aplicada. Titulo: “Robotica Movil”. 24de Octubre de 2008. Mexico, DF.
2.6. Artıculos in Extenso (conferencias internacionales)1/3.- M. A. Acedo Arias, M. A. Molina Vilchis, R. Silva Ortigoza, M. Marciano Melchor y E.A. Portilla Flores, “Secretos Compartidos para la Autenticacion de Nodos en las Wireless Sen-sor Networks Mediante el Algoritmo de Shamir”. Congreso Latinoamericano en Aeronautica:Experiencias en Desarrollo e Innovacion Tecnologica, Bogota, Colombia. Noviembre 2008.Universidad Militar Nueva Granada.

2.7. ARTICULOS IN EXTENSO (CONFERENCIAS NACIONALES) 29
2/3.- M. A. Acedo Arias, M. A. Molina Vilchis, R. Silva Ortigoza, M. Marciano Melchory E. A. Portilla Flores, “Analisis Matematico del Algoritmo de Shamir en la Seguridad dela WSN”. IV Congreso Internacional en Matematicas Aplicadas (Applied Math IV), Mexico,DF. Octubre 2008. IPN.
3/3.- M. Marciano Melchor, R. Silva Ortigoza, M. A. Molina Vilchis, D. Salazar Trujillo y R.Morales Guerrero, “Curvas de Curvas”, IV Congreso Internacional de Tendencias Tecnologi-cas en Computacion”, Mexico, DF. Octubre 2008. CIDETEC.
2.7. Artıculos in Extenso (conferencias nacionales)1/3.- M. Marciano Melchor, M. A. Molina Vilchis, R. Silva Ortigoza, E. A. Portilla Floresy M. A. Acedo Arias, “Deformaciones de un Frente de Onda”, SOMI XXIII Congreso deInstrumentacion, Xalapa, Veracruz, Mexico. Octubre 2008. SOMI.
2/3.- M. A. Molina Vilchis, M. A. Acedo Arias, R. Silva Ortigoza, M. Marciano Melchor y E.A. Portilla Flores, “Autenticacion de nodos en la WSN basado en el esquema de secretos com-partidos de Shamir”, SOMI XXIII Congreso de Instrumentacion, Xalapa, Veracruz, Mexico.Octubre 2008. SOMI.
3/3.- M. A. Acedo Arias, M. A. Molina Vilchis, R. Silva Ortigoza, M. Marciano Melchor yE. A. Portilla Flores, “Estado del arte de la autenticacion de nodos en las WSN”, SOMI XXIIICongreso de Instrumentacion, Xalapa, Veracruz, Mexico. Octubre 2008. SOMI.

30 CAPITULO 2. METAS ALCANZADAS

Referencias
[1] W. G. Walter, “An imitation of life”, Scientific American, 182:42-45, May 1950.
[2] N. J. Nilsson, “Shakey the robot”, SRI International, Technical Note 323, April 1984.
[3] R. Hollis, “Newt: A mobile, cognitive robot”, Byte Magazine, Vol. 2, No. 6, pp. 30-45,June 1977.
[4] G. Giralt, R. Sobek and R. Chatila, “A multi-level planning and navigation system for amobile robot; A first approach to Hilare”, Proceedings of the WCAI, Tokyo, Japan, pp.335-338, August 1979.
[5] A. M. Thompson, “The navigation system of the JPL robot”, Proceedings 5th IJCAI,Cambridge Massachusetts, 1977.
[6] H. Moravec, “Visual mapping by a robot rover”, Proc. 6th IJCAI, Tokyo, 1979.
[7] M. H. Raibert, Legged robots that balance, Cambridge, MA, MIT Press, 1986.
[8] D. W. Vos and A. H. Von Flotow, “Dynamics and nonlinear adaptive control of an au-tonomous unicycle: theory and experiment”, Proceedings of the 29ht IEEE Conferenceon Decision an Control, 1990.
[9] J. Bares and D. Wettergreen, “Dante II: technical description, results and lessonslearned”, International Journal of Robotics Research, Vol. 18, No. 7, pp. 621-649, July1999.
[10] H. B. Brown and Y. Xu, “A single wheel giroscopically stabilized robot”, ProceedingsIEEE Int. Conference on Robotics an Automation, Vol. 4, pp. 39-44, September 1997.
[11] J. Pratt and G. Pratt, “Intuitive control of a planar bipedal walking robot”, ProceedingsIEEE Intertational Conference on Robotics an Automation (ICRA 1998), Leuvem, Bel-gium, May 16-21, 1998.
[12] B. K. Muirhead,“Mars pathfinder flight system integration and test”, Aerospace Confer-ence, Proceedings, IEEE, Vol. 4, February 1-8, 1997.
[13] K. Tanie, “Humanoid robot and its application possibility, multisensor fusion and in-tegration for intelligent systems”, Proceedings of IEEE International Conference, July30-Aug 1, 2003.
31

32 REFERENCIAS
[14] S. Hashimoto, “Humanoid robots in Waseda University Hadalay-2 andWABIAN”, IARPFirst International Workshop on Humanoid and Human Friendly Robotics, Tsukuba,Japon, October 1998.
[15] G. Zeglin, “The bow leg hopping robot”, Ph. D. dissertation, The Robotics InstituteCarnegie Mellon University, Pittsburgh, Pennsylvania, 1999.
[16] T. B. Lauwers, G. A. Kantor and R. L. Hollis, “A dinamically stable single-wheeledmobile robot with inverse mouse-ball drive”, Proc. IEEE International Conference onRobotics and Automation, Orlando, FL, May 15-19, 2006.
[17] A. Koshiyama and K. Yamafuji, “Development and motion control of the all directionsteering-type robot (1st report: a concept of spherical shaped robot, roll and runningcontrol)”, Proceedings of 9th Japanese Robotics Conference, Japan, 1991.
[18] A. Meghdari, M. Rajaei, A. Tadayon and Y. Radparvar, “Geometric and control of aspherical mobile robot”, Proceedings of the 2nd. WSEAS International Conference onApplied and Theoritical Mechanics, Venice, Italy, November 20-22, 2006.
[19] Z. H. Aronson, T. Lechler, R. R. Reilly and A. J. Shenhar, “Project spirit, a strategicconcept, management of engineering and technology”, PICMET 2001, Portland Inter-national Conference, Vol. 1, July 29 - Aug 2, 2001.
[20] P. F. Muir, “Modeling and control of wheeled mobile robots”, Ph.D. dissertation, TheRobotics Institute Carnegie Mellon University, Pittsburgh, August 1988.
[21] D. Todd,Walking machines: An introduction to legged robotics, Kogan-Page, London,1985.
[22] T. Iwamoto, H. Yamamoto and K. Honma, “Transformable Crawler mechanism withadaptability to terrain variations”, International Conference on Advanced Robotics,Tokyo Japan, September 1983.
[23] MicroMo Electronics, Faulhaber Group, http://www.micromo.com.
[24] R. Siegwart and I. R. Nourbakhsh, Introduction to mobile robots, The MIT Press, Cam-bridge, MA, 2004.
[25] R. H. Bishop, Mechatronics an Introduction, CRC Press, 2005.
[26] J. S. Wilson, Sensor Technology Handbook, Elsevier, 2005.
[27] J. R. Garcıa Sanchez, “Diseno y construccion de un robot movil aplicando el metodode campos potenciales en la evasion de obstaculos”, Tesis de Maestrıa, Seccion Meca-tronica, CIDETEC, Mexico, 2008.
[28] V. R. Barrientos Sotelo, “Analisis, diseno, construccion y control en tiempo real de unrobot movil tipo Shakey en el seguimiento de trayectoria”, Tesis de Maestrıa, SeccionMecatronica, CIDETEC, Mexico, 2008.

REFERENCIAS 33
[29] R. L. Boylestad, L. Nashelsky, Electronica: Teorıa de circuitos, Pearson Educacion,1997.
[30] J. Lovine, Robot, Androids and Animatrons: 12 Incredible Projects You Can Build,McGraw-Hill, 2002.


















