
INSTITUTO POLITECNICO NACIONALtesis.ipn.mx/jspui/bitstream/123456789/67/1... · 3.4.2 Variador de...
195
INSTITUTO POLITECNICO NACIONAL ESCUELA SUPERIOR DE INGENIERIA MECANICA Y ELECTRICA UNIDAD PROFESIONAL “ADOLFO LOPEZ MATEOS” “PROPUESTA DE MULTI-ESTACIONAMIENTOS PRIVADOS EQUIPADOS CON SISTEMA AUTOMATICO DE ELEVACION PARA AUTOMOVILES, ENFOCADO A UNIDADES HABITACIONALES” TESIS Que para obtener el titulo de: INGENIERO EN CONTROL Y AUTOMATIZACIÓN PRESENTAN: ALAIN NOVOA DOMÍNGUEZ FRANCISCO JAVIER QUIJADA CAMACHO ASESORES: ING. FRANCISCO JAVIER APARICIO SILVA ING. LUIS GUILLERMO LOPEZ GONZALEZ MEXICO, D.F. 2008
Transcript of INSTITUTO POLITECNICO NACIONALtesis.ipn.mx/jspui/bitstream/123456789/67/1... · 3.4.2 Variador de...

INSTITUTO POLITECNICO NACIONAL ESCUELA SUPERIOR DE INGENIERIA MECANICA Y ELECTRICA
UNIDAD PROFESIONAL “ADOLFO LOPEZ MATEOS”
“PROPUESTA DE MULTI-ESTACIONAMIENTOS PRIVADOS EQUIPADOS CON SISTEMA AUTOMATICO DE ELEVACION PARA AUTOMOVILES,
ENFOCADO A UNIDADES HABITACIONALES”
TESIS
Que para obtener el titulo de:
INGENIERO EN CONTROL Y AUTOMATIZACIÓN
PRESENTAN:
ALAIN NOVOA DOMÍNGUEZ FRANCISCO JAVIER QUIJADA CAMACHO
ASESORES:
ING. FRANCISCO JAVIER APARICIO SILVA ING. LUIS GUILLERMO LOPEZ GONZALEZ
MEXICO, D.F. 2008
AGRADECIMIENTOS A mis padres Por el apoyo que me brindaron, por la formación que me otorgaron, por fomentar en mi el deseo de superarme y por enseñarme a no creer en las palabras sino en las actitudes. A mis hermanos Por confiar en mí y mostrarme que no importa lo que digan, porque siempre debo de creer en mí. A mis amigos y compañeros de clase Por el apoyo incondicional que siempre me ofrecieron. Comprendí que no es cierto que la primera impresión es la que cuenta, que se necesita mucho más que eso para crear un concepto. A mis Asesores Con quienes construimos conocimiento, reconociendo mis puntos débiles para afrontarlos. Por alentarme a arriesgarme, a juzgarme y pelear por lo que creo que vale. Al Instituto Politécnico Nacional Que me brindo la oportunidad de formar parte de una excelente escuela y pertenecer a una gran familia de Ingenieros.
Alain Novoa Domínguez

AGRADECIMIENTO
Como una muestra de mi cariño y agradecimiento, hacia todas esas personas que creyeron en mi; por todo el amor y el apoyo brindado y porque hoy veo llegar a su fin la culminación de esta tesis que representa el fin e inicio. De una nueva etapa en mi vida profesional. Con la mayor gratitud A mi madre que es el ser más maravilloso del mundo, gracias por el apoyo moral, su cariño y su comprensión que desde pequeño me ha brindado, por guiar mi camino y estar siempre junto a mí en los momentos más difíciles. A mi padre porque desde pequeño ha sido para mi un hombre grande y maravilloso, y que siempre he admirado. Gracias por guiar mi vida con energía, esto es lo que ha hecho de mí lo que soy. A mis hermanos por su compañía y toda esa ayuda constante que me otorgaron A mis amigos por su confianza y lealtad, tanto en los buenos como en los malos momentos A mi país por que se que espera lo mejor de mi; y finalmente por haberme dado la oportunidad de estudiar en esta maravillosa escuela, al Instituto Politécnico Nacional, La mejor escuela de ingeniería del país.
Francisco Javier Quijada Camacho.

Índice
E.S.I.M.E. I.C.A. i
ÍNDICE
Página
Planteamiento del problema viiObjetivo viiiJustificación
ix
CAPÍTULO I MARCO TEÓRICO
1
1.1 Introducción 11.2 Actuadores 41.3 Motor eléctrico 41.4 Reductores y motorreductores 41.5 Cremallera 51.6 Mecanismo piñón-cremallera 51.7 Polea y polipastos 61.8 Puerta vertical rápida enrollable 71.9 Variadores de frecuencia para motores de C.A. (VFD) 71.10 Fuentes reguladas conmutadas 81.11 Sensores 9 1.11.1 Características deseables de los sensores 9 1.11.2 Selecciones de los sensores en la automatización 10 1.11.3 Factores a considerar en la elección de un sensor 10
1.11.4 Tipos de sensores 111.12 Detectores fotoeléctricos 11
1.12.1 Se clasifican según su sistema de detección 12 1.12.1.1 Detector fotoeléctrico de barrera 12 1.12.1.2 Detector fotoeléctrico tipo reflex 12 1.12.1.3 Detectores fotoeléctricos tipo autoreflex 13
1.12.2 Características de las células fotoeléctricas 131.12.3 Construcción de un sensor fotoeléctrico 13
1.13 Sensor de identificación de huella 141.13.1 Lectores ópticos 141.13.2 Lectores de capacitancia 151.13.3 Análisis de sensor de huella 16
1.14 Transductores 171.14.1 Características deseables de los transductores 171.14.2 Tipos de principios de transducción 18
1.15 Encoder 191.16 Controlador lógico programable “PLC” 20
1.16.1 Tipos de entradas y salidas de un PLC 201.16.2 Componentes principales de un PLC 211.16.3 Estructura de un PLC 221.16.4 Aplicaciones de un PLC 23
1.17 Introducción a HMI interfaz hombre maquina 24 1.17.1 Funciones principales de un software HMI 24 1.17.2 Tipos de software de supervisión y control para PC 24
Índice
E.S.I.M.E. I.C.A. ii
Página
CAPÍTULO II ESTUDIO DE MERCADO
25
2.1 Demanda 252.2 Oferta 262.4 Localización del proyecto 282.5 Proyecto propuesto
29
CAPÍTULO III ESTUDIO TÉCNICO
30
3.1 Determinación de la superficie del terreno 303.2 Tecnología básica 303.3 Maquinaria y equipo utilizado para el sistema mecánico 31 3.3.1 Puertas automáticas 31 3.3.2 Características del motorreductor para elevación de la plataforma 32 3.3.3 Polipasto con accionamiento mediante contrapeso 36 3.3.4 Polea para guiar cuerda hacia contrapeso 37 3.3.5 Grapa para unión de contrapeso y cable 37 3.3.6 Soporte recomendado por el proveedor para instalar el polipasto 37 3.3.7 Sistema retráctil para guía de contrapeso 38 3.3.8 Contrapeso de concreto reforzado 38 3.3.9 Cálculo de fuerzas de transmisión entre cremallera y piñón 38 3.3.10 Sistema de alimentación eléctrica para la plataforma en movimiento 40 3.3.11 Planta de emergencia 41 3.3.12 Criterio de selección para equipo mecánico 423.4 Equipo utilizado para el sistema de control 43 3.4.1 Enconder incremental 43 3.4.2 Variador de frecuencia (VDF) 45 3.4.3 Selección de un PLC 47 3.4.4 Procesador SLC 5/05 1747-L553K de Allen Bradley 49 3.4.5 Selección de los módulos de E/S SLC 500 50 3.4.6 Selección del chasis 55 3.4.7 Fuente de alimentación del PLC 56 3.4.8 Selección de software de programación 57 3.4.9 Seguridad intrínseca para el PLC 58 3.4.10 Clemas 59 3.4.11 Gabinete 60 3.4.12 Estación de trabajo 61 3.4.13 Sensores Fotoeléctricos 62 3.4.14 Sensor Identificador de Huella 64 3.4.15 Fuentes conmutadas 67 3.4.16 Cable para sensores/actuadores 67 3.4.17 Teclado programado de hora 68 3.4.18 Criterio de selección para equipo de control 693.5 Diagrama de bloques del funcionamiento del elevador 70 3.5.1 Diagrama de bloques de entrada 70 3.5.2 Diagrama de bloques de salida 71

Índice
E.S.I.M.E. I.C.A. iii
Página
3.6 Esquema de operación 723.7 Pantalla grafica de HMI 733.8 Diagrama de conexión al plc 743.9 Diagrama de fuerza del moto reductor 763.10 Arquitectura del sistema de control 773.11 Gráfica del comportamiento de la velocidad de salida del moto reductor 783.12 Necesidades de obra civil 793.13 Ubicación del equipo para el sistema de elevación de automóviles 81 3.13.1 Puerta automática 81 3.13.2 Detalle de la ubicación del moto reductor en la plataforma de elevación 83 3.13.3 Acoplamiento flexible entre motor y encoder 84 3.13.4 Ubicación del detector de huella y monitor para HMI 86 3.13.5 Sistema de polipasto 863.14 Programación para el sistema automático de elevación
88
CAPÍTULO IV ESTUDIO ECONÓMICO
89
4.1 Estructura de costos
89
CONCLUSIÓN
96
GLOSARIO
97
FUENTES CONSULTADAS
100
ANEXOS A-1

Indice de figuras
E.S.I.M.E. I.C.A. iv
ÍNDICE DE FIGURAS
Página
CAPÍTULO I MARCO TEÓRICO
Figura 1-1. Motorreductor 5Figura 1-2. Cremallera 5Figura 1-3. Piñón-Cremallera 6Figura 1-4. Poleas 6Figura 1-5. Puerta enrollable automática de acero 7Figura 1-6. A.C. Drives 8Figura 1-7. Diagrama interno de una fuente conmutada 9Figura 1-8. Ejemplo de un detector fotoeléctrico 11Figura 1-9. Detector fotoeléctrico tipo barrera 12Figura 1-10. Detector fotoeléctrico tipo reflex 12Figura 1-11. Detector fotoeléctrico tipo autoreflex 13Figura 1-12. Estructura interna de un sensor fotoeléctrico 14Figura 1-13. Huella digital 15Figura 1-14. Sensor capacitivo 15Figura 1-15. Identificador de huella capacitivo 16Figura 1-16. Análisis de la información 16Figura 1-17. Transductor óptico 17Figura 1-18. Estructura típica de la memoria del Autómata del PLC 22Figura 1-19. Conjunto de PLC y módulos de E/S 23
CAPÍTULO II ESTUDIO DE MERCADO
Figura 2-1. Grafica de los resultadazos obtenidos según la encuesta 25Figura 2-2. Número de cajones deseables por departamento 26Figura 2-3. Ubicación del elevador auto-soportado 28Figura 2-4. Ubicación satelital
29
CAPÍTULO III ESTUDIO TÉCNICO
Figura 3-1. Plataforma, estructura auto-soportada, y CCM en 3D 30Figura 3-2. Puertas enrollables de acción rápida con fotocélula de seguridad 31Figura 3-3. Puertas enrollables de acción rápida 32Figura 3-4. Dimensiones de moto reductor 33Figura 3-5. Dimensiones laterales de moto reductor 34Figura 3-6. Dimensiones del eje de salida 35Figura 3-7. Seguridad mecánica 35Figura 3-8. Diagrama de cuerpo libre 36Figura 3-9. Polipasto de cable 36Figura 3-10. Polea 37Figura 3-11. Grapa 37Figura 3-12. Viga para soporte 37Figura 3-13. Sistema retráctil chricer 38Figura 3-14. Contrapeso 500 Kg 38Figura 3-15. Piñón helicoidal 39

Indice de figuras
E.S.I.M.E. I.C.A. v
Página
Figura 3-16. Cremallera 39Figura 3-17. Cremallera-piñón 40Figura 3-18. Sistema de alimentación eléctrica 40Figura 3-19. Planta de emergencia Köhler 41Figura 3-20. Diagrama de acoplamiento del encoder 43Figura 3-21. Acoplamiento hacia el moto reductor 43Figura 3-22. Modulo y pantalla del variador 46Figura 3-23. Modulo y pantalla del variador 46Figura 3-24. Conjunto de PLC y módulos de E/S 49Figura 3-25. Procesador SLC 5/05 49Figura 3-26. Tarjeta de entradas digitales 1746-IV32 52Figura 3-27. Tarjeta de salidas digitales 1746-OV32 53Figura 3-28. Tarjeta de Entradas y Salidas Analógicas 746-FIO4I 54Figura 3-29. Chasis 1746-A7 55Figura 3-30. Chasis 1746-A7 55Figura 3-31. Fuente de alimentación para un sistema 1746 56Figura 3-32. Instalación de fuente de alimentación en chasis 1746 57Figura 3-33. Amplificador separado de alimentación 58Figura 3-34. Amplificador separador de salida 58Figura 3-35. Amplificador de conexión 58Figura 3-36. Modulo de clemas Phoenix Contact 59Figura 3-37. Gabinete de control 60Figura 3-38. PC y monitor 61Figura 3-39. Sensor fotoeléctrico 63Figura 3-40. Sensor de huella Finger-007 65Figura 3-41. Funcionamiento del sensor de huella 65Figura 3-42. Dimensiones del Finger-007 66Figura 3-43. Fuente conmutadas Unitronics 67Figura 3-44a. Cable para sensor 68Figura 3-44b. Cables para alimentación de corriente 68Figura 3-45. Teclado programador de hora 68Figura 3-46. Dimensiones de la estructura de plataforma 79Figura 3-47. Estructura auto soportada de concreto 80Figura 3-48. Dimensiones vista lateral derecha de estructura auto-soportada 80Figura 3-49. Puerta automática 81Figura 3-50. Vista superior de la plataforma de elevación 82Figura 3-51. Corte A-A´ 83Figura 3-52. Detalle de la ubicación del moto reductor en la plataforma de elevación 84Figura 3-53. Acoplamiento flexible entre motor y encoder 85Figura 3-54. Ubicación del sensor de huella y monitor 85Figura 3-55. Diagrama de cuerpo libre 86Figura 3-56. Sistema de polipasto 87Figura 3-57. Programación en RSLogix
88

Indice de figuras
E.S.I.M.E. I.C.A. vi
ÍNDICE DE TABLAS
Página
CAPÍTULO III ESTUDIO TÉCNICO
Tabla 1. Características técnicas de puerta automática 31Tabla 2. Características técnicas del motorreductor 33Tabla 3. Características técnicas del polipasto 36Tabla 4. Características técnicas de polea 37Tabla 5. Características técnicas de la grapa de unión 37Tabla 6. Características técnicas del sistema retráctil 38Tabla 7. Características del contrapeso 38Tabla 8. Características técnicas de la planta de emergencia 41Tabla 9. Especificaciones eléctricas de encoder 44Tabla 10. Especificaciones mecánicas y ambientales de encoder 44Tabla 11. Especificaciones técnicas del VDF 45Tabla 12. Dimensiones del VDF 45Tabla 13. Especificaciones de los procesadores SLC 500 48Tabla 14. Especificaciones del controlador modulares SLC 5/05 1747-L553 50Tabla 15. Conteo total de señales digitales y analógicas del sistema de control 51Tabal 16. Módulo de entradas digitales 1746-IV32 52Tabla 17. Módulo de salidas digitales 1746-OV32 53Tabla 18. Módulo de entradas y salidas analógicas (Combinado) 1746-FIO4I 54Tabla 19. Chasis modelo 1746-A7, con 7 ranuras de expansión 56Tabla 20. Fuente de alimentación eléctrica modelo 1746-P4 57Tabla 21. Especificaciones técnicas de clemas Phoenix Contact 59Tabla 22. Característica del gabinete de control 60Tabla 23. Características Dell Inspiron 530S 61Tabla 24. Características del sensor fotoeléctrico E-931-S35RRQ 62Tabla 25. Especificaciones técnicas del sensor Finger-007 66Tabla 26. Especificaciones de fuente conmutada
67
CAPÍTULO IV ESTUDIO ECONÓMICO
Tabla 27. Matriz de análisis: Mano de obra 89Tabla 28. Matriz de análisis: Material directo 90Tabla 29. Matriz de análisis: Material indirecto 91Tabla 30. Matriz de análisis: Gastos directos de fabricación 91Tabla 31. Matriz de análisis: Gastos indirectos de fabricación 92Tabla 32. Costos de equipos utilizados (Material directo) 93Tabla 33. Costos de equipos utilizados (Material directo) 94Tabla 34. Costos de Mano de obra directa 94Tabla 35. Costos de Mano de obra indirecta 95Tabla 36. Gastos directos de fabricación 95Tabla 37. Gastos indirectos de fabricación 95Tabla 38. Costo total 95
Planteamiento del problema
E.S.I.M.E. I.C.A. vii
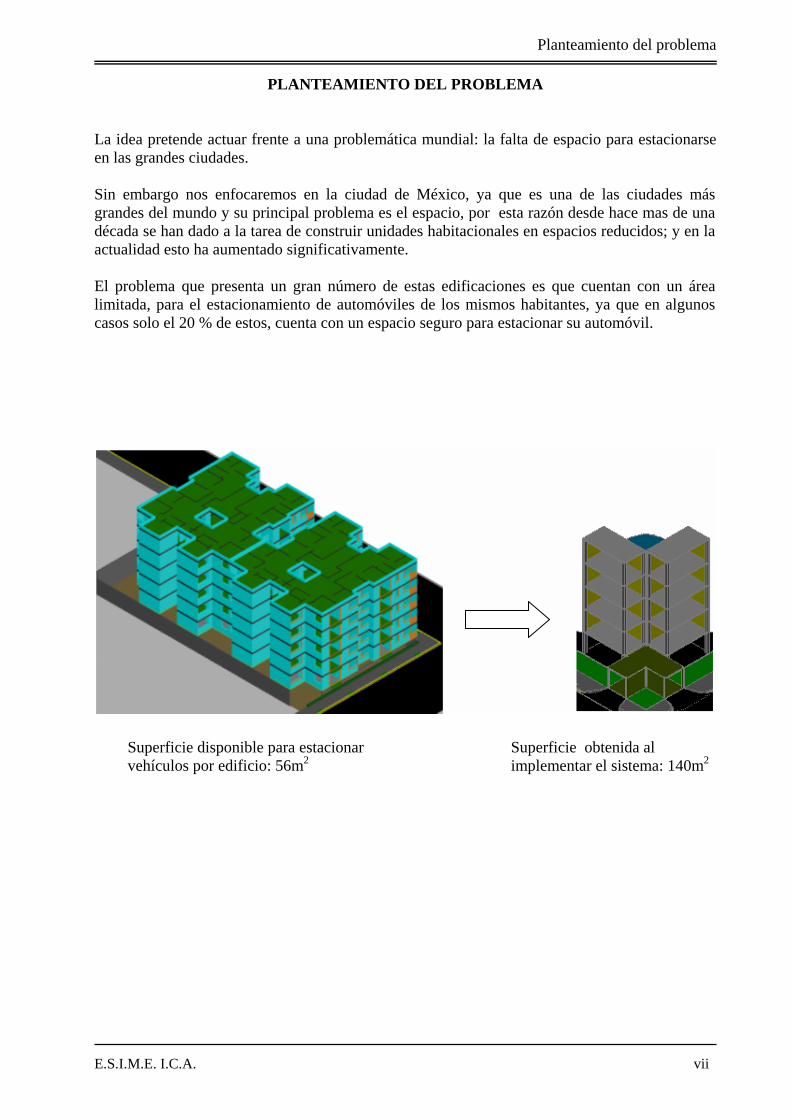
PLANTEAMIENTO DEL PROBLEMA La idea pretende actuar frente a una problemática mundial: la falta de espacio para estacionarse en las grandes ciudades. Sin embargo nos enfocaremos en la ciudad de México, ya que es una de las ciudades más grandes del mundo y su principal problema es el espacio, por esta razón desde hace mas de una década se han dado a la tarea de construir unidades habitacionales en espacios reducidos; y en la actualidad esto ha aumentado significativamente. El problema que presenta un gran número de estas edificaciones es que cuentan con un área limitada, para el estacionamiento de automóviles de los mismos habitantes, ya que en algunos casos solo el 20 % de estos, cuenta con un espacio seguro para estacionar su automóvil.
Superficie disponible para estacionar vehículos por edificio: 56m2
Superficie obtenida al implementar el sistema: 140m2
Planteamiento del problema
E.S.I.M.E. I.C.A. viii
OBJETIVO Optimizar superficies reducidas en unidades habitacionales de cinco niveles en las cuales por su ubicación geográfica, carecen de espacio suficiente para albergar más de un automóvil por nivel. Mediante una propuesta de un sistema automático, para elevar automóviles hasta un garage privado ubicado a tan solo un par de metros de cada uno de los departamentos. El proyecto se enfocará principalmente:
Selección y mención del equipo necesario para un adecuado desempeño del sistema. Automatizar el sistema de elevación para un óptimo desempeño del mismo. Comprobar que el proyecto es socialmente deseable, técnica y económicamente
sustentable.

Planteamiento del problema
E.S.I.M.E. I.C.A. ix
JUSTIFICACIÓN Actualmente el Instituto Nacional de Estadística Geográfica e Informática, INEGI, indica que más del 70% de los habitantes en la ciudad de México, cuentan con un auto y un gran porcentaje de estos viven en unidades habitacionales que se han construido en los últimos años; recientemente esta cifra ha ido en aumento. Pero debido a la mala infraestructura de la ciudad y algunos otros factores como el reducido espacio, para construir el tipo de suelo, algunas de estas edificaciones se han construido en muchos casos con solamente un garage; en algunos otros casos con cajones lejos de sus viviendas y muchas veces, sin espacio alguno para su vehículo. Por lo anterior muchas de estas personas tienen la necesidad de comprar un espacio seguro donde dejar su vehículo; pero esta no es siempre la mejor opción, como veremos a continuación. Inconvenientes de no tener un espacio propio dentro de su unidad habitacional:
En esta ciudad un espacio para un vehículo es sumamente caro. Si no se compra dicho espacio se tiene que pagar renta en pensiones ubicadas cerca de su
vivienda lo que a la larga llega a ser muy costosa. Es muy incomodo para las personas tener que caminar de su casa hasta el lugar donde se
tiene guardado dicho vehículo. Representa un peligro eminente trasladarse hasta la ubicación de su vehículo por muchos
factores entre ellos la seguridad publica de la ciudad. Por estas y otras razones, el novedoso sistema que se propone en este trabajo es la construcción de una estructura modular automática capaz de eliminar todos estos problemas y ofrecerles a sus usuarios un mejor nivel de vida. Entre las principales ventajas del sistema, se encuentran:
Se tendrán 2 garages privados por departamento para poder estacionar sus vehículos. Sus autos estarán a tan solo unos metros de la puerta de su hogar. No habrá sitio más seguro ya que solamente las personas de dicha vivienda podrán tener
acceso a sus vehículos. Las personas podrán subir con todo y su vehículo por el ascensor evitando de esta forma
utilizar escaleras para llegar a su departamento.

Capítulo 1. Marco Teórico
E.S.I.M.E. I.C.A. Página 1 de 101
CAPÍTULO I. MARCO TEÓRICO
1.1 INTRODUCCIÓN Los primeros dispositivos de elevación y transporte fueron las palancas, las poleas, los rodillos y los planos inclinados. La realización de grandes trabajos de construcción con este tipo de equipamiento exigía enorme cantidad de gente. Un ejemplo lo tenemos en la construcción de las pirámides de Keops (siglo XXV a. C) de 147 metros de altura, compuesta de prismas de piedra cada uno de 9 x 2 x 2 metros cúbicos de tamaño y 90 toneladas de peso aproximadamente. Su construcción duró alrededor de 20 años y en ella estuvieron ocupadas permanentemente cerca de cien mil personas. Impulso de la mecánica En el siglo III a. C., Arquímedes descubrió las leyes de la palanca. Este griego, que vivía en Sirac, creó un sistema teórico sobre la multiplicación de la fuerza que se consigue con la palanca, el efecto de la cuña y la utilización del plano inclinado y de la polea, fenómenos que desde hacía milenios venían aprovechándose como algo evidente. Más tarde, en la época del emperador Tito, en el año 80 d. C., se utilizaron también en el Coliseo romano, doce grandes montacargas para elevar a los gladiadores y a las fieras a la pista. Tras la caída del Imperio romano, los ascensores desaparecieron durante un largo período. La edad media Leonardo da Vinci parte de problemas agudos, buscando para ellos soluciones de tipo técnico. De este modo, crea una grúa móvil para facilitar las labores de construcción en las que hay que elevar cargas pesadas. Dicha grúa está montada sobre un vehículo y se gobierna desde arriba mediante un cable tensado. El ginche de cable puede accionarse con una manivela dotada de transmisión por ruedas dentadas. Georg Bauer (1490- 1565) trabajó como médico en los centros mineros de Sajonia y su obra De re metallica, del año 1556, constituye una guía exacta de los sistemas empleados durante la alta Edad Media en una industria altamente tradicional. En De re metallica, aparece el esquema de un aparato de elevación en una mina. Menciona el uso de ruedas dentadas y de cadenas movidas por caballos. No existen diferencias significativas respecto a períodos primitivos excepto en lo que se refiere a una vagoneta que debia correr por un surco. El primer ascensor En 1830 se pone en servicio un montacargas accionado por una máquina en Derby (Inglaterra). En el West Riding de Yorkshire, en 1840, se dan todavía tornos para elevar pesos a mano, utilizándose esta técnica para variadísimas operaciones de elevación y transporte, incluyendo la elevación de la tierra de las excavaciones de los túneles de ferrocarril. El tambor de cable horizontal de 3.5 a 5 metros de diámetro, alrededor del cual daban vueltas los caballos fue sustituido sólo gradualmente por un torno movido, por lo general, por una máquina de vapor vertical, de baja presión y un solo cilindro. Merece la pena mencionar el ascensor “Teagle” desarrollado en Inglaterra en 1845. Este elevador accionado hidráulico contemplaba ya el concepto de la polea de tracción con contrapeso, aspecto que se aplica hoy en nuestros días a la gran mayoría de los ascensores. El

Capítulo 1. Marco Teórico
E.S.I.M.E. I.C.A. Página 2 de 101
accionamiento era llevado a cabo por los propios usuarios que desplazaban el cable manualmente desde la cabina. En el año 1854 Elisha Graves Otis hizo una demostración pública en el Palacio de Cristal de Nueva York, elevando su ascensor a una cierta altura y cortando el cable de sustentación, mostrando la seguridad de su aparato. Su ascensor hidráulico disponía de un sistema de seguridad consistente en una cabina con trinquetes que unos resortes obligaban a engranar con muescas dispuestas a los lados del foso del ascensor en el momento que rompía el cable. El ascensor hidráulico. El ascensor hidráulico se utiliza por primera vez en 1878, utilizándose agua en lugar de vapor, para simplificar las instalaciones y conseguir mayores velocidades y recorridos. Los ascensores hidráulicos se perfeccionan hasta lograr con ellos alturas y velocidades muy elevadas. En 1908, se instaló un ascensor en el City Investing Building de Nueva York de 1360 Kg de carga, 3 m/s de velocidad y un recorrido de 108 m. La tracción eléctrica El primer ascensor eléctrico hizo su aparición en 1889 en el Demarest Building en Nueva York. Fue una modificación directa del primitivo ascensor de tambor accionado a vapor pero sustituyendo esta fuente de energía por la eléctrica mediante un motor de corriente continúa. Este ascensor continuó en servicio hasta 1920, año en que se demolió el edificio. El primer ascensor con pulsador automático de llamada se instaló en 1894. El ascensor eléctrico, tuvo desde sus comienzos un gran éxito, por su menor coste de instalación y funcionamiento, pero tenía el inconveniente de la poca precisión de sus paradas. Este fue corregido totalmente con la instalación de los grupos de regulación de velocidad Ward Leonard, que todavía se utilizan en la actualidad, como veremos más adelante. En el año 1900, las maniobras accionadas por cable son sustituidas por maniobras accionadas por pulsadores. El sistema Ward Leonard se introduce en el período entre 1910 y 1930, con siguiéndose velocidades que alcanzaban los 2 m/s y dando paso a los ascensores modernos. Sistemas operativos En los ascensores primitivos, los accionados por máquinas de vapor o los hidráulicos, el dispositivo de operación era un cable que recorría todo el hueco del ascensor y que hacía actuar una válvula dispuesta en el fondo del hueco. Para subir, se tiraba del cable hacia abajo para introducir vapor o agua en el circuito y hacer elevar la plataforma. Para bajar, se tiraba del cable hacia arriba para expulsar vapor o agua en el circuito y hacer bajar la plataforma. Este sistema, consistente en tirar del cable en sentido contrario al del movimiento, tenía una ventaja adicional: que en las posiciones más inferior y más superior se disponía en el propio cable de una “bola de parada” de manera que al estar en la posición más inferior e intentar seguir bajando, se tiraba del cable hacia arriba haciendo aprisionar esta bola parada en los agujeros dispuestos en la cabina a tal efecto, deteniendo inmediatamente la cabina.

Capítulo 1. Marco Teórico
E.S.I.M.E. I.C.A. Página 3 de 101
El sistema operativo automático El accionamiento mediante interruptor en cabina se utilizó en edificios de oficinas desde principios de 1880 a principios de 1920. En paralelo con el desarrollo de este tipo de accionamientos en edificios de oficinas, se ponía en marcha en edificios residenciales en Estados Unidos, en el período 1880 a 1920, el sistema operativo denominado “Sistema Automático Simple”. Dado que el tráfico era muy bajo, no se justificaba la presencia de un operador a tiempo completo y por lo tanto se requería un sistema automático. Este consistía en un sistema similar al que tenemos hoy día, es decir, una serie de botones en cabina y en cada piso, de forma que el ascensor es gobernado con prioridad desde cabina, y cuando la maniobra accionada desde cabina ha finalizado, desde cualquiera de los pisos a los que el ascensor tiene acceso. Este sistema es empleado hoy en día en ascensores poco utilizados donde los usuarios prefieren esperar y tener uso exclusivo cuando están en la cabina. Sistemas operativos automáticos de grupo A finales de la década de los cuarenta se concibe por primera vez un sistema basado en dispositivos electrónicos que mide la cantidad de llamadas, suma el tiempo en que se hacen y, automáticamente, combina estos datos con otros para programar y hacer funcionar grupos de ascensores conjuntamente. Este sistema fue instalado en el edificio de las Naciones Unidas de Nueva York en 1949. Meses más tarde se inventa el primer sistema electrónico, aplicado en las puertas, para la protección de los pasajeros. Analizando la historia de la elevación vertical se observa que se desarrollan en paralelo dos tecnologías. Por un lado la de Control de Señal que requiere de un operador y está indicada para edificios grandes y con gran tráfico y la de Sistemas Operativos Colectivos, que no requiere operador pero que se utilizaba en edificios residenciales y en general de bajo tráfico. Su responsable técnico fue el Ingeniero Jefe de Desarrollos de la Otis Elevator Company, William Bruns. Mediante circuitos electrónicos y automáticos era posible programar maniobras eficientes desde el punto de vista de tráfico vertical. Desde principios de los 50 hasta nuestros días, todas las compañías de ascensores han desarrollado maniobras programadas. La Otis Elevator Company introdujo los programas Autotronic (4 y 6), el Basic Autotronic con Múltiple Zoning, VIP 260 y los programas Elevonic. Schindler desarrollo las familias Auto Signamatic, 1090, 1092IC, Aconic, Supermatic, Transitronic y Miconic. Westinghouse implantó las familias Selectomatic (4 y 6 Pattern y Mark IV y V). Los sistemas Dopver se denominaron Traflomatic y finalmente para los de Montgomery, se utilizó el nombre de Miprom. En el año 1986 se introduce el sistema de frecuencia variable para el control de ascensores de alta velocidad, con una avanzada tecnología que permite un importante ahorro energético. Dos años más tarde se implanta el motor lineal para ascensores que, al estar acoplado al contrapeso, elimina la necesidad del cuarto de máquinas, con el consiguiente ahorro económico y de espacio [9].

Capítulo 1. Marco Teórico
E.S.I.M.E. I.C.A. Página 4 de 101
1.2 ACTUADORES Los actuadores son dispositivos capaces de generar una fuerza a partir de líquidos, de energía eléctrica y gaseosa. El actuador recibe la orden de un regulador o controlador y da una salida necesaria para activar a un elemento final de control como lo son las válvulas. Existen tres tipos de actuadores:
Hidráulicos Neumáticos Eléctricos
Los actuadores hidráulicos, neumáticos, eléctricos son usados para manejar aparatos mecatronicos. Por lo general, los actuadores hidráulicos se emplean cuando lo que se necesita es potencia, y los neumáticos son simples posicionamientos. Sin embargo, los hidráulicos requieren demasiado equipo para suministro de energía, así como de mantenimiento periódico. Por otro lado, las aplicaciones de los modelos neumáticos también son limitadas desde el punto de vista de precisión y mantenimiento. Los actuadores eléctricos también son muy utilizados en los aparatos mecatronicos, como por ejemplo, en los robots. Los servomotores CA sin escobillas se utilizaran en el futuro como actuadores de posicionamiento preciso debido a la demanda de funcionamiento sin tantas horas de mantenimiento [10].
1.3 MOTOR ELÉCTRICO Un motor eléctrico es un dispositivo rotativo que transforma energía eléctrica en energía mecánica. En diversas circunstancias presenta muchas ventajas respecto a los motores de combustión:
A igual potencia, su tamaño y peso son más reducidos. Se pueden construir de cualquier tamaño. Tiene un par de giro elevado y, según el tipo de motor, prácticamente constante. Su rendimiento es muy elevado (típicamente en torno al 80%, aumentando el mismo a
medida que se incrementa la potencia de la máquina). La gran mayoría de los motores eléctricos son máquinas reversibles pudiendo operar
como generadores, convirtiendo energía mecánica en eléctrica. Por estos motivos son ampliamente utilizados en instalaciones industriales y demás aplicaciones que no requieran autonomía respecto de la fuente de energía [11].
1.4 REDUCTORES Y MOTORREDUCTORES En todo tipo de industria siempre se requiere de equipos, cuya función es variar las r.p.m. de entrada, que por lo general son mayores de 1200, entregando a la salida un menor número de r.p.m., sin sacrificar de manera notoria la potencia. Esto se logra por medio de los reductores y moto reductores de velocidad [12]. Al emplear motorreductores, figura 1-1 se obtiene una serie de beneficios sobre estas otras formas de reducción. Algunos de estos beneficios son:

Capítulo 1. Marco Teórico
E.S.I.M.E. I.C.A. Página 5 de 101
Una regularidad perfecta tanto en la velocidad como en la potencia transmitida. Una mayor eficiencia en la transmisión de la potencia suministrada por el motor. Mayor seguridad en la transmisión, reduciendo los costos en el mantenimiento. Menor espacio requerido y mayor rigidez en el montaje. Menor tiempo requerido para su instalación.
Figura 1-1. Motorreductor
1.5 CREMALLERA El mecanismo de cremallera aplicado a los engranajes lo constituyen una barra con dientes la cual es considerada como un engranaje de diámetro infinito y un engranaje de diente recto de menor diámetro, y sirve para transformar un movimiento de rotación del piñón en un movimiento lineal de la cremallera. Figura 1-2.
Figura 1-2. Cremallera
1.6 MECANISMO PIÑÓN-CREMALLERA El mecanismo piñón-cremallera tiene por finalidad la transformación de un movimiento de rotación o circular (piñón) en un movimiento rectilíneo (cremallera) o viceversa. Este mecanismo como su mismo nombre indica está formado por dos elementos componentes que son el piñón y la cremallera. Figura 1-3.
El piñón es una rueda dentada normalmente con forma cilíndrica que describe un movimiento de rotación alrededor de su eje.

Capítulo 1. Marco Teórico
E.S.I.M.E. I.C.A. Página 6 de 101
La cremallera es una pieza dentada que describe un movimiento rectilíneo en uno u otro sentido según la rotación del piñón.
El mecanismo piñón-cremallera funciona como un engranaje simple, esto significa que tanto la cremallera como el piñón han de tener el mismo paso circular y, en consecuencia, el mismo módulo.
Figura 1-3. Piñón-Cremallera
1.7 POLEA Y POLIPASTOS Una polea es una de las máquinas simples, en forma de rueda, generalmente maciza y acanalada, que con el uso de una cuerda se usa como elemento de transmisión en máquinas y mecanismos para cambiar la dirección del movimiento o su velocidad y formando conjuntos aparejos o polipastos para además reducir la magnitud de la fuerza necesaria para mover un peso. Se llama polipasto a un mecanismo que se utiliza para levantar o mover una carga con una gran ventaja mecánica, porque supone hacerlo con un esfuerzo mucho menor que el peso que hay que levantar. Figura 1-4. Los polipastos tienen varios tamaños o potencia de elevación, los pequeños se manipulan a mano y los más grandes llevan incorporados un motor eléctrico [13].
Figura 1-4. Poleas

Capítulo 1. Marco Teórico
E.S.I.M.E. I.C.A. Página 7 de 101
1.8 PUERTA VERTICAL RÁPIDA ENROLLABLE La puerta vertical rápida, garantiza un tráfico rápido y seguro debido a su velocidad de acción y a los diferentes sistemas de seguridad. Muy útiles para evitar las corrientes de aire y así mantener la temperatura ambiente del recinto. Las puertas enrollables son ultra veloz para abrirse y cerrarse muchas veces al día, nunca debe experimentar desaceleración en el flujo de trabajo. Las puertas de alta velocidad generalmente están diseñadas para sellarse en los cuatro lados, ofreciendo una barrera contra el polvo, tierra y contaminantes en aplicaciones especiales como farmacéuticos, viviendas o producción de alimentos. Figura 1-5 Las puertas enrollables y las puertas de alta velocidad están diseñadas teniendo en mente una seguridad total. Se recomienda un verdadero borde inferior suave sin barras inferiores rígidas o pesos para que aun, si las características integradas en la puerta no funcionan bien, la puerta todavía sea segura para los trabajadores y productos. Las puertas de alta velocidad bien diseñadas se crean en tamaños compactos, para ocupar un mínimo de espacio valioso del piso, y son sencillas de operar, con su elección de activación.
Figura 1-5. Puerta enrollable automática de acero
1.9 VARIADORES DE FRECUENCIA PARA MOTORES DE C.A. (VFD) Los variadores de frecuencia (siglas VFD, Variable Frecuency Drive) permiten controlar la velocidad tanto de motores de inducción (asíncronos de jaula de ardilla o de rotor devanado), como de motores síncronos mediante el ajuste de la frecuencia de alimentación al motor. Figura 1-6. Los variadores o convertidores de frecuencia son las etapas electrónicas de potencia que permiten gobernar libremente la velocidad de los motores AC asíncronos, gracias al control ejercido sobre la tensión entregada del motor y su frecuencia.

Capítulo 1. Marco Teórico
E.S.I.M.E. I.C.A. Página 8 de 101
Estos variadores de frecuencia están tomando cada día más importancia en el mercado de los ascensores y escalas mecánicas, producto de la mejora considerable que éstos originan tanto en el confort de las personas como en la confiabilidad y seguridad de los sistemas. Para ambas aplicaciones, ofrecen un desempeño inmejorable, gracias a la característica de troque, que permite desarrollar en el motor cerca de un 200% de su torque nominal a 0,5 Hz; su sistema de frenado regenerativo, que permite configurar curvas de desaceleración aún en sistemas que acumulan energía cinética; un control PID, que nos aporta la posibilidad de integrarse a sistemas de lazo cerrado con la ventaja de ajustar su ganancia proporcional, integral y derivativa; y sus múltiples entradas y salidas análogas, que nos permiten controlar y supervisar sus variables en las modalidades de 4 a 20 mA, -10 a +10 Vcc. ó 0 a 10 Vcc.
Figura 1-6. A.C Drives
1.10 FUENTES REGULADAS CONMUTADAS Las fuentes conmutadas fueron desarrolladas inicialmente para aplicaciones militares y aerospaciales en los años 60, por ser inaceptable el peso y volumen de las lineales, se han desarrollado desde entonces diversas topologías y circuitos de control, algunas de ellas exponemos ya que son de uso común en fuentes conmutadas para aplicaciones industriales y comerciales. Configuración básica: Las fuentes conmutadas son de circuitos relativamente complejos, pero podemos siempre diferenciar cuatro bloques constructivos básicos. Figura 1-7. En el primer bloque rectificamos y filtramos la tensión alterna de entrada convirtiéndola en una continua pulsante. El segundo bloque se encarga de convertir esa continua en una onda cuadrada de alta frecuencia (10 a 200 kHz.), La cual es aplicada a una bobina o al primario de un transformador. Luego el segundo bloque rectifica y filtra la salida de alta frecuencia del bloque anterior, entregando así una continua pura. El cuarto bloque se encarga de comandar la oscilación del segundo bloque. Este bloque consiste de un oscilador de frecuencia fija, una tensión de referencia, un comparador de tensión y un modulador de ancho de pulso (PWM). El modulador recibe el pulso del oscilador y modifica su ciclo de trabajo según la señal del comparador, el cual coteja la tensión continua de salida del

Capítulo 1. Marco Teórico
E.S.I.M.E. I.C.A. Página 9 de 101
tercer bloque con la tensión de referencia. “El ciclo de trabajo es la relación entre el estado de encendido y el estado de apagado de una onda cuadrada” [14].
Figura 1-7. Diagrama interno de una fuente conmutada
1.11 SENSORES Un sensor es un dispositivo que responde a algunas propiedades de tipo eléctrico, mecánico, térmico, magnético, químico, et., generando una señal eléctrica que puede ser susceptible de medición. Normalmente, las señales obtenidas a partir de un sensor son de pequeña magnitud y necesitan ser tratadas convenientemente en los aspectos de amplificación y filtrado principalmente. Podemos decir también que es un dispositivo que aprovecha una de sus propiedades con el fin de adaptar la señal que mide para que la pueda interpretar otro elemento. Como por ejemplo el termómetro de mercurio que aprovecha la propiedad que posee el mercurio de dilatarse o contraerse por la acción de la temperatura. Muchos de los sensores son eléctricos o electrónicos, aunque existen otros tipos. Un sensor es un tipo de transductor que transforma la magnitud que se quiere medir, en otra, que facilita su medida. Pueden ser de indicación directa o pueden estar conectados a un indicador de modo que los valores sensados puedan ser leídos por un humano. Hay que tomar en cuenta varias consideraciones importantes para elegir un sensor para aplicación particular. 1.11.1 Características deseables de los sensores:
Sensibilidad Linealidad Precisión Confiabilidad Costo
Capítulo 1. Marco Teórico
E.S.I.M.E. I.C.A. Página 10 de 101
1.11.2 Selecciones de los sensores en la automatización La selección se basa en la decisión sobre cual es el sensor más adecuado. Esto depende del material del objeto el cual debe detectarse. Si el objeto es metálico, se requiere un sensor inductivo. Si el objeto es de plástico, papel, o si es líquido (basado en aceite o agua), granu1ado o en polvo, se requiere un sensor capacitvo. Si el objeto puede llevar un imán, es apropiado un sensor magnético. 1.11.3 Factores a considerar en la elección de un sensor
1. Magnitud a medir
Margen de medida Resolución Exactitud deseada Estabilidad Ancho de banda Tiempo de respuesta Limites absolutos posibles de la magnitud a medir Magnitudes indiferentes
2. Características de salida
Sensibilidad Tipo: tensión, corriente, frecuencia Forma de señal: unipolar, flotante, diferencial Impedancia Destino: presentación, analógica, conversión digital
3. Características de alimentación
Tensión Corriente Potencia disponible Frecuencia (sin alterna) Estabilidad
4. Características ambientales
Margen de temperatura Humedad Agentes químicos Atmósfera explosiva Entorno electromagnético
5. Otros factores
Peso Dimensiones Vida media Costo de adquisición

Capítulo 1. Marco Teórico
E.S.I.M.E. I.C.A. Página 11 de 101
Tiempo de instalación Longitud de cable necesaria Tipo de conector Situación en caso de fallo Costo de verificación Costo de mantenimiento Costo de situación
1.11.4 Tipos de sensores Según el tipo de magnitud física a detectar podemos establecer la siguiente clasificación:
Fotoeléctricos Identificación; (Huella Digital) Posición lineal o angular. Desplazamiento o deformación. Velocidad lineal o angular. Aceleración. Fuerza y par. Presión. Temperatura. Táctiles. Intensidad lumínica. Sistemas de visión artificial
Profundizaremos más en los sensores de tipo inductivo, ya que son elementales para el diseño e implementación del control y automatización del elevador inteligente de automóviles.
1.12 DETECTORES FOTOELÉCTRICOS Su utilización principal es como detectores de posición. El principio de funcionamiento esta basado en la generación de un haz luminoso por parte de un fotoemisor, que se proyecta bien sobre un fotorreceptor, o bien sobre un dispositivo reflectante. La interrupción o reflexión del haz por parte del objeto a detectar, provoca el cambio de estado de la salida de la fotocélula. Figura 1-8
Figura 1-8. Ejemplo de un detector fotoeléctrico

Capítulo 1. Marco Teórico
E.S.I.M.E. I.C.A. Página 12 de 101
1.12.1 Se clasifican según su sistema de detección:
Sistema de detección de barrera Sistema de detección reflex Sistema de detección autoréflex
1.12.1.1 Detector fotoeléctrico de barrera Dispone de emisor y receptor de haz luminoso dispuestos separadamente. Figura 1-9. Emisor: Produce una radiación visible o invisible que se concentra mediante lentilla. Receptor: constituido por material semiconductor, normalmente un fototransistor. Disponen de las mejores presentaciones en cuanto a distancia de detección, sin embargo suelen ser más caros y voluminosos. Este método tiene un rango de detección de 60 m. El objeto es detectado cuando interrumpe la barrera luminosa
Figura 1-9. Detector fotoeléctrico tipo barrera
1.12.1.2 Detector fotoeléctrico tipo reflex Concentra en un solo bloque del emisor y receptor siendo más fácil su instalación aunque requiere un dispositivo reflector. Para este cometido se suele emplear un sistema catadióptrico que tiene la propiedad del triedro trirrectangular el cual refleja la luz en la misma dirección en que llega. Dispone de una menor distancia de detección (9 m) que el sistema de barrera teniendo en cuenta que el trayecto que recorre el haz es doble. La luz emitida se refleja por medio de un reflector a la distancia indicada como alcance máximo y es evaluada por el aparato. Figura 1-10.
Figura 1-10. Detector fotoeléctrico tipo reflex

Capítulo 1. Marco Teórico
E.S.I.M.E. I.C.A. Página 13 de 101
1.12.1.3 Detectores fotoeléctricos tipo autoreflex En este sistema es el propio objeto a detectar el que funciona como elemento reflector, lo cual simplifica notablemente su instalación. Por el contrario su inconveniente es que dispone de la menor distancia de detección (5 m), comparada con los tipos anteriores. Refleja de vuelta la luz del propio objeto detectado. Figura 1-11.
Figura 1-11. Detector fotoeléctrico tipo autoreflex
1.12.2 Características de las células fotoeléctricas
Alimentación Consumo Distancia de detección Tipo de material a detectar Angulo direccional Modo de funcionamiento Tipo de salida Tiempo de respuesta Material de encapsulado Grado de protección
1.12.3 Construcción de un sensor fotoeléctrico
Diodo de luz Es la fuente luminosa conformada generalmente por un diodo emisor de luz (LED), el cual es un componente electrónico semiconductor que emite un haz de luz cuando por él circula una corriente eléctrica. Están diseñados para emitir longitudes de ondas específicas.
Circuito lógico Suministra la electrónica esencial para la modulación del LED, la amplificación de la señal del sensor y decidir si la señal de salida debe, o no, ser activada.
Receptor de Luz Es el elemento capaz de detectar la luz procedente de la fuente lumínica. Generalmente está conformado por un fotodiodo o un fototransistor. Este es un componente de estado sólido que proporciona, según la cantidad de luz recibida, un cambio en la etapa de salida, a través de variaciones en la corriente conducida por él. Los detectores de luz son más sensibles a ciertas

Capítulo 1. Marco Teórico
E.S.I.M.E. I.C.A. Página 14 de 101
longitudes de onda y, generalmente, el detector de luz y el LED deben estar espectralmente acoplados logrando así una mayor eficacia en el. Figura 1-12.
Etapa de salida Es un dispositivo electromecánico de estado sólido que proporcionan diferentes tipos de salidas discretas o analógicas, según el modelo del sensor. Este dispositivo es activado cuando el detector fotoeléctrico sensa una variación suficiente en el haz de luz y el circuito lógico toma la determinación de accionarla.
Figura 1-12. Estructura interna de un sensor fotoeléctrico
1.13 SENSOR DE IDENTIFICACIÓN DE HUELLA Se puede decir que los seres humanos tienen tarjetas de identificación integradas, muy fácilmente accesibles: sus huellas digitales, las cuales son diseños virtualmente únicos. La gente tiene diminutos "valles y crestas" de piel en la punta de los dedos que eran de gran utilidad a los ancestros de la raza humana, pues les permitían coger cosas con mayor facilidad. Estos valles y crestas se forman por una combinación de factores genéticos y ambientales aleatorios, como la posición del feto en un momento particular y la composición y densidad exacta del líquido amniótico que lo rodea. Un lector de huella digital lleva a cabo dos tareas: 1.- Obtener una imagen de su huella digital. Figura 1-13. 2.- Comparar el patrón de valles y crestas de dicha imagen con los patrones de las huellas que tiene almacenadas. Los dos métodos principales de obtener una imagen de una huella digital son por lectura óptica o lectura de capacitancia. 1.13.1 Lectores ópticos Un lector óptico funciona con un dispositivo CCD (Charged Coupled Device), tienen un arreglo de diodos sensible a la luz que genera una señal eléctrica en respuesta a fotones de luz. Cada diodo graba un pixel, un pequeño punto que representa la luz que le es reflejada. Colectivamente, la luz y perfiles oscuros forman una imagen de la huella leída.

Capítulo 1. Marco Teórico
E.S.I.M.E. I.C.A. Página 15 de 101
El proceso de lectura comienza cuando se pone el dedo sobre la ventana del lector, el cual tiene su propia fuente de iluminación, típicamente un arreglo de LED’s, para iluminar las crestas de la huella digital. El CCD genera, una imagen invertida del dedo, con áreas más oscuras que representan más luz reflejada (las crestas del dedo) y áreas más claras que representan menos luz reflejada, los valles entre las crestas [16].
Figura 1-13. Huella digital
1.13.2 Lectores de capacitancia Como los lectores ópticos, los lectores capacitivos de huella digital generan una imagen de las crestas y valles que conforman una huella digital, pero en vez de hacerlo con luz, los capacitores utilizan corriente eléctrica. El diagrama (figura 1-14) muestra un ejemplo de sensor capacitivo. El sensor está hecho de uno o más chips que contienen un arreglo de pequeñas celdas. Cada celda incluye dos placas conductoras, cubiertas con una capa aislante.
Figura 1-14. Sensor capacitivo Las celdas son más pequeñas que el ancho de una cresta del dedo. El sensor es conectado a un integrador, un circuito eléctrico construido sobre la base de un amplificador operacional inversor que altera un flujo de corriente. La superficie del dedo actúa como una tercera placa capacitora, separada por las capas aislantes en la estructura de la celda y, en el caso de los valles de la huella, una bolsa de aire. La principal ventaja de un lector capacitivo es que requiere una verdadera forma de huella digital y no sólo un patrón de luz y oscuridad que haga la impresión visual de una huella digital (figura 1-15). Esto hace que el sistema sea más difícil de engañar. Adicionalmente, al usar un chip

Capítulo 1. Marco Teórico
E.S.I.M.E. I.C.A. Página 16 de 101
semiconductor en vez de una unidad CCD, los lectores capacitivos tienden a ser más compactos que los ópticos.
Figura 1-15. Identificador de huella capacitivo
1.13.3 Análisis de sensor de huella La mayoría de los lectores compara rasgos específicos de la huella digital, generalmente conocidos como minutiae. Típicamente, los investigadores humanos y computadoras se concentran en puntos donde las líneas de las crestas terminan o donde se separan en dos (bifurcaciones). Generalmente estos y otros rasgos distintivos se llaman typica. El software del sistema del lector utiliza algoritmos altamente complejos para reconocer y analizar estas minutiae. La idea básica es medir las posiciones relativas de la minutiae. Una manera simple de pensar en esto es considerar las figuras que varios minutia forman cuando dibuja líneas rectas entre ellas. Si dos imágenes tienen tres terminaciones de crestas y dos bifurcaciones formando la misma figura dentro de la misma dimensión, hay una gran probabilidad de que sean de la misma persona.
Figura 1-16. Análisis de la información
Para obtener una coincidencia, el sistema del lector no necesita encontrar el patrón entero de minutiae en la muestra y en la imagen almacenada, simplemente debe encontrar un número suficiente de patrones de minutia que ambas imágenes tengan en común. El número exacto varía de acuerdo a la programación del lector. Figura 1-16.
Ventajas Generales Las ventajas de un sistema de huella digital son que los atributos físicos de una persona suelen ser difíciles de falsificar, uno no puede adivinar una huella digital como adivina un password, no puede perder sus huellas digitales como pierde una llave y no puede olvidar sus huellas digitales como puede olvidar un password.

Capítulo 1. Marco Teórico
E.S.I.M.E. I.C.A. Página 17 de 101
1.14 TRANSDUCTORES Un transductor es un dispositivo que transforma un tipo de variable física (por ejemplo, fuerza, presión, temperatura, velocidad, etc.) en otro. Los transductores son uno de los elementos mas importantes en sistemas de control, puesto que su cometido es la medición de las variables que intervienen en el proceso. Si a un elemento sensor de le adjunta un dispositivo de acondicionamiento de la señal, entonces se le denomina transductor. En si, los transductores son dispositivos que aceptan energía proveniente de una parte del sistema y la emite con diferente forma a otra parte del mismo. Los transductores son los elementos capaces de transformar variables de magnitudes físicas (temperatura, presión, humedad, velocidad, etc.) en señales eléctricas para ser tratadas a través de un sistema electrónico a fin de regular o controlar los procesos dependientes de dichas magnitudes. Figura 1-17. Todo sistema electrónico de regulación precisa de una información para poder efectuarla. Esta información debe ser introducida en forma eléctrica al circuito y como lo más usual es que las variables a regular no sean eléctricas es preciso efectuar la adecuada conversión.
Figura 1-17. Transductor óptico
La señal del transductor se acondiciona porque, a pesar de ser una señal eléctrica, no se encuentra en forma adecuada para el sistema de control. 1.14.1 Características deseables de los transductores
Exactitud La exactitud de la medición debe ser tan alta como fuese posible. Se entiende por exactitud que le valor verdadero de la variable se pueda detectar sin errores sistemáticos positivos o negativos en la medición. Sobre varias mediciones de la variable, el promedio de error entre el valor real y el valor detectado tendera a ser cero.

Capítulo 1. Marco Teórico
E.S.I.M.E. I.C.A. Página 18 de 101
Precisión La precisión de la medición debe ser tan alta como fuese posible. La precisión significa que existe o no una pequeña variación aleatoria en la medición de la variable. La dispersión en los valores de una serie de mediciones será mínima.
Rango de funcionamiento El sensor debe tener un amplio rango de funcionamiento y debe ser exacto y preciso en todo el rango.
Velocidad de respuesta El transductor debe ser capaz de responder a los cambios de la variable detectada en un tiempo mínimo. Lo ideal sería una respuesta instantánea.
Calibración El sensor debe ser fácil de calibrar. El tiempo y los procedimientos necesarios para llevar a cabo el proceso de calibración deben ser mínimos. Además, el sensor no debe necesitar una recalibración frecuente. El término desviación se aplica con frecuencia para indicar la pérdida gradual de exactitud del sensor que se produce con el tiempo y el uso, lo cual hace necesaria su recalibración.
Fiabilidad El sensor debe tener una alta fiabilidad. No debe estar sujeto a fallos frecuentes durante el funcionamiento.
Costo y facilidad de funcionamiento El costo para comprar, instalar y manejar el sensor debe ser tan bajo como sea posible. Además, lo ideal seria que la instalación y manejo del dispositivo no necesite ningún operador altamente calificado. 1.14.2 Tipos de principios de transducción
Elementos de transducción capacitiva Los elementos de transducción capacitiva convierten un cambio de la magnitud a medir en un cambio de capacidad. El cambio de capacidad puede producirse por la variación de la distancia entre las dos placas del condensador, o bien debido al cambio del material dieléctrico existente entre ambas placas.
Elementos de transducción inductiva Los elementos de transducción inductiva convierten un cambio de la magnitud en un cambio de la autoinductancia de un devanado único, provocado por el movimiento de un núcleo ferromagnético.

Capítulo 1. Marco Teórico
E.S.I.M.E. I.C.A. Página 19 de 101
Elemento de transducción reluctiva Los elementos de transducción reluctiva convierten un cambio de la magnitud a medir en un cambio de tensión C.A., debido al cambio en la reluctancia del camino magnético entre dos o más devanados.
Elementos de transducción electromagnética Los elementos de transducción electromagnética convierten un cambio de la magnitud a medir en una fuerza electromotriz (tensión de salida) indicada en un conductor, debido a un cambio en el flujo magnético en ausencia de excitación.
Elementos de transducción resistiva Los elementos de transducción resistiva convierten un cambio en la magnitud a medir en un cambio en la resistencia debido a diversos medios, tales como calentamiento, enfriamiento, esfuerzo mecánico, humidificación de sales electrolíticas, movimientos en el brazo de la escobilla de un reóstato.
Elementos de transducción fotovoltaica Los elementos de transducción fotovoltaica convierten un cambio en la magnitud a medir en un cambio en la tensión generada cuando la iluminación incidente, sobre una unión entre ciertos materiales cambia. En suma, los principios de transducción, son los principios básicos de funcionamiento de una gran diversidad de transductores diferentes. Para la detección de una misma variable física pueden utilizarse transductores basados en principios de transducción diferentes. Para explicar la operación de la mayoría de los transductores basta un pequeño numero de principios básicos.
• Resistencia • Capacitancia • Electromagnéticos • Semiconductores • Fotoeléctricos
1.15 ENCODER El encoder es un transductor rotativo que transforma un movimiento angular en una serie de impulsos digitales. Estos impulsos generados pueden ser utilizados para controlar los desplazamientos tipo angular p de tipo lineal, si se asocian a cremalleras o a husillos. Las señales eléctricas de rotación pueden ser elaboradas mediante controles numéricos (CNC), controladores lógicos programables (PLC), sistemas de control, etc. Las aplicaciones principales de estos transductores están en las maquinas de elaboración de materiales, en los robots, en los sistemas de motores, en los aparatos de medición y control. En los encoder de producción la detección del movimiento angular se ejecuta en base al principio de exploración fotoeléctricaA-a.
A-aAnexo A-a

Capítulo 1. Marco Teórico
E.S.I.M.E. I.C.A. Página 20 de 101
1.16 CONTROLADOR LÓGICO PROGRAMABLE “PLC” El PLC (controlador lógico programable) o autómata programable industrial es un equipo electrónico de control que se basa en un programa interno en el cual un operador definirá la secuencia de acciones que se realizarán según los requerimientos de un proceso específico. Esta secuencia de acciones se ejercerá sobre las salidas del autómata a partir del estado de sus señales de entrada. Un autómata programable industrial, representa a la unidad de control dentro de un sistema de control. 1.16.1 Tipos de entradas y salidas de un PLC
Las E/S digitales se basan en el principio de todo o nada (On-Off), es decir, o poseen el máximo nivel de tensión establecido, o no tienen tensión (0 Volt). Las señales de las entradas digitales del PLC pueden provenir de pulsadores, finales de carrera, fotoceldas, detectores de proximidad, suiches, etc. Las salidas digitales del PLC pueden ser aprovechadas por lámparas, contactores, electroválvulas, etc.
Las E/S analógicas pueden poseer cualquier valor dentro de un rango determinado
especificado por el fabricante. Se basan en conversores A/D y D/A aislados de la CPU. Las señales de las entradas analógicas del PLC pueden provenir de sensores de temperatura, etc.
Por otro lado, con respecto a la memoria del autómata se puede decir que, en forma general, ésta contiene: Datos del proceso:
Señales de planta, entradas y salidas. Variables internas. Datos alfanuméricos y constantes.
Datos de control:
Instrucciones de usuario (programa). Configuración del autómata (modo de funcionamiento, número de entradas/salidas
conectadas, etc). En la memoria del autómata se almacenan datos binarios (señales de niveles altos y bajos, es decir, de "unos" y "ceros") que según sean sus formatos pueden ser leídos bit a bit, en grupos de ocho bits (byte) o dieciséis bits (word). La memoria ideal para el autómata debería ser simultáneamente rápida, pequeña, barata y de bajo consumo de energía, sin embargo, como ninguna de las memorias del mercado reúne todas estas condiciones, los autómatas combinan distintos tipos de memorias.

Capítulo 1. Marco Teórico
E.S.I.M.E. I.C.A. Página 21 de 101
Memorias de lectura / escritura, RAM. Memorias de sólo lectura, no reprogramables, ROM. Memorias de sólo lectura, reprogramables, con borrado por luz ultravioleta, EPROM. Memorias de sólo lectura, alterables por medios eléctricos, EEPROM.
1.16.2 Componentes principales de un PLC
La unidad de control Se encarga de consultar el estado de las entradas y de adquirir la secuencia de instrucciones (residentes en la memoria de programa) que generarán señales de salida específicas en el PLC (órdenes que se enviarán al proceso). Durante la ejecución del programa, las instrucciones son procesadas en serie, una tras otra. La unidad de control es la responsable de actualizar continuamente los temporizadores y contadores internos que hayan sido programados.
La memoria interna Se encarga de almacenar datos intermedios de cálculo y variables internas que no aparecen directamente sobre las salidas, además, hace respaldos (conocidos como reflejos o imágenes) de las señales de entrada y de salida generadas más recientemente. En otras palabras, la memoria interna almacena el estado de las variables que maneja el autómata: entradas, salidas, contadores, relés internos, etc.
La memoria de programa Contiene la secuencia de operaciones (programa escrito por el usuario) que deben realizarse sobre las señales de entrada del autómata para obtener las señales de salida, así como los parámetros de configuración del autómata, tales como el nombre o identificación del programa escrito, indicaciones sobre la configuración de E/S o sobre la red de autómatas, si existe, etc. Adicionalmente puede contener datos alfanuméricos. En caso de que haya que introducir alguna variación sobre el sistema de control basta con modificar el contenido de esta memoria. Este tipo de memoria normalmente es externa a la CPU.

Capítulo 1. Marco Teórico
E.S.I.M.E. I.C.A. Página 22 de 101
Figura 1-18. Estructura típica de la memoria del Autómata del PLC
Las interfaces de entrada y salida Establecen la comunicación del autómata con la planta. Para ello se conectan, por una parte, con las señales de proceso y, por otra, con el bus interno del autómata. Se conoce como bus interno al conjunto de líneas y conexiones que permiten la unión eléctrica entre la unidad de control, las memorias y las interfaces de E/S. Un bus se compone de un conjunto de hilos o pistas utilizadas para intercambiar datos u órdenes.
La fuente de alimentación Proporciona, a partir de una tensión exterior, las tensiones necesarias para el buen funcionamiento de los distintos circuitos electrónicos del sistema. En ocasiones, el autómata puede disponer de una batería conectada a esa fuente de alimentación, lo que asegura el mantenimiento del programa y algunos datos en las memorias en caso de interrupción de la tensión exterior. 1.16.3 Estructura de un PLC

Capítulo 1. Marco Teórico
E.S.I.M.E. I.C.A. Página 23 de 101
1.16.4 Aplicaciones de un PLC
Figura 1-19. Conjunto de PLC y módulos de E/S

Capítulo 1. Marco Teórico
E.S.I.M.E. I.C.A. Página 24 de 101
1.17 INTRODUCCIÓN A HMI INTERFAZ HOMBRE MAQUINA La sigla HMI es la abreviación en ingles de Interfaz Hombre Maquina. Los sistemas HMI podemos pensarlos como una “ventana” de un proceso. Esta ventana puede estar en dispositivos especiales como paneles de operador p en una computadora. Los sistemas HMI en computadoras se les conoce también como software HMI o de monitoreo y control supervisorio. Las señales del proceso son conducidas al HMI por medio de dispositivos como tarjetas de entrada/salida en la computadora, PLC’s (Controladores Lógicos Programables), RTU (Unidades remotas de I/O) o drives (Variadores de velocidad de motores). Todos estos dispositivos deben tener una comunicación que entienda el HMI. 1.17.1 Funciones principales de un software HMI
Monitores. Es la habilidad de obtener y mostrar datos de la planta en tiempo real. Estos datos se pueden mostrar como números, textos o gráficos que permitan una lectura más fácil de interpretar.
Supervisión. Esta función permite junto con el monitoreo la posibilidad de ajustar las
condiciones de trabajo del proceso directamente desde la computadora.
Alarmas. Es la capacidad de reconocer eventos excepcionales dentro del proceso y reportar estos eventos. Las alarmas son reportadas basadas en límites de control preestablecidos.
Control. Es la capacidad de aplicar algoritmos que ajustan los valores del proceso y así
mantener estos valores dentro de ciertos límites. Control va mas haya del control de supervisión removiendo la necesidad de la interacción humana. Sin embargo la aplicación de esta función desde un software corriendo en una PC puede quedar limitada por la confiabilidad que quiera obtener del sistema.
Históricos. Es la capacidad de muestra y almacenar archivos, datos del proceso a una
determinada frecuencia. Este almacenamiento de datos es una poderosa herramienta para la optimización y corrección de procesos.
1.17.2 Tipos de software de supervisión y control para PC
a. Lenguajes de programación visual como Visual C++ o Visual Basic. Se utilizan para desarrollar software HMI a medida del usuario. Una vez generad el software el usuario no tiene posibilidad de re-programarlo.
b. Paquetes de desarrollo que están orientados a tareas HMI. Pueden ser utilizados para
desarrollar un HMI a medida del usuario y/o para ejecutar un HMI desarrollado para el usuario. El usuario podrá re-programarlo si tiene la llave (software) como para hacerloA-b.
A-bAnexo A-b

Capítulo 2 Estudio de mercado
E.S.I.M.E. I.C.A. Página 25 de 101
CAPÍTULO II. ESTUDIO DE MERCADO
2.1 DEMANDA En los últimos años la Ciudad de México ha tenido un incremento de población, que superan las cifras estimadas por los ingenieros en construcción, lo que los ha llevado a planificar nuevamente la estructura de la Ciudad, y aún cuando en esta intervienen no solamente causas técnicas y sociales, la industria de la construcción ha iniciado la reestructura desde sus diseños de vivienda. Por esta y otras razones, grandes constructoras incluyendo al gobierno de la Ciudad de México pretenden construir unidades habitacionales para intentar desahogar la demanda de viviendas en esta demarcación; sin embargo, debido al poco espacio con el que cuentan algunos terrenos destinados a este tipo de obras, estos no satisfacen por completo la demanda de espacios seguros para estacionar sus autos. Es por esto que actualmente se tienen carencias, con respecto a este tipo de espacios. Realizamos una encuesta a familias que viven en la colonia Polanco y en colonias aledañas y determinamos que por cada edificio con departamentos de 5 plantas, construidos actualmente, cuatro de cada cinco departamentos solicitan más espacios para sus vehículos; ya que muchas de estas personas cuentan con 2 o 3 automóviles. Figura 2-1; y el espacio con el que cuentan actualmente es insuficiente por lo que los resultados arrojados mediante esta encuesta muestran, que este proyecto es socialmente deseable, y técnica y económicamente sustentable.
Figura 2-1. Grafica de los resultados obtenidos según la encuesta

Capítulo 2 Estudio de mercado
E.S.I.M.E. I.C.A. Página 26 de 101
Figura 2-2. Número de cajones deseables por departamento
2.2 OFERTA Nuestro sistema ofrece grandes ventajas y comodidades para los usuarios; con la implementación de estos novedosos sistemas de elevación para autos muchas personas no sólo podrán subir con el vehículo hasta el balcón de su departamento, sino que podrán dejarlo ahí, en una especie de garage privado. La estructura para este garage privado será diseñada según las necesidades del cliente y el espacio disponible para su construcción siempre pensando en ofrecer comodidad, seguridad y un buen diseño de exteriores. Al contrario de lo que pueda parecer, estos sistemas robotizados ofrecen al propietario más seguridad que un garage convencional. La última tecnología en procesadores junto con el servicio técnico de ingenieros, que estarán al pendiente por su funcionamiento, garantiza que el sistema esté siempre operando.
Estos sistemas cuentan con las siguientes funciones:
Sistema detector de huella; para garantizar seguridad a los residentes de dicha residencia, Sistema inteligente para llamada del ascensor y elección automática del nivel según sea el
caso.
Capítulo 2 Estudio de mercado
E.S.I.M.E. I.C.A. Página 27 de 101
Características del equipo:
Una estructura modular, independiente y autosustentable. Una estructura móvil con plataforma de transferencia para recoger o dejar vehículos en
los diferentes niveles. Protecciones laterales para elevador. Accionamientos con bajo nivel de ruido. Carga máxima de la plataforma 3000 Kg. Tamaño de plataforma para vehículos Standard. Sistemas computarizados de control.
Sistemas de seguridad:
Fallo de una o todas las fases. Sobrecarga de motor. Paro al llegar a los límites superior o inferior, o por un obstáculo.
Opcionales:
Diversas variantes de protección anticorrosivo. Anchos de plataforma personalizados. Piso de goma para los carriles del auto y/o para la vía peatonal. Sistemas para Discapacitados, con instalaciones especiales.
Nuestros principales competidores dedicados a crear Tecnología innovadora para generar más espacios para estacionamiento son los siguientes:
Klaus multiparking. Tecno control - Neumática Hidráulica S.A. de C.V. OMER. Interlift.

Capítulo 2 Estudio de mercado
E.S.I.M.E. I.C.A. Página 28 de 101
2.4 LOCALIZACIÓN DEL PROYECTO
Figura 2-3. Ubicación del elevador auto-soportado
Av. Ejército Nacional Mexicano # 595, Colonia Polanco Reforma. Delegación Miguel Hidalgo. Código postal 11550 México DF.

Capítulo 2 Estudio de mercado
E.S.I.M.E. I.C.A. Página 29 de 101
LOCALIZACIÓN SATELITAL
Figura 2-4. Ubicación satelital
2.5 PROYECTO PROPUESTO Propuesta de un sistema de elevación para subir el automóvil hasta el departamento. No solo podrán subir con el automóvil hasta el balcón de su departamento, sino que también podrán dejarlo ahí, en una especie de garage privado y muy seguro a tan solo unos metros de la puerta de su hogar. Con este innovador sistema se logrará un significativo ahorro de espacio, ya que en una superficie donde anteriormente se colocaban 2 ó 3 autos, ahora se tendrá un espacio para 10; por esta razón las personas tendrán un lugar seguro y cómodo a la puerta de su hogar, para poder estacionar 2 vehículos. Este sistema contará con un elevador inteligente encargado de subir su auto hasta la estructura modular, la cual será independiente y auto-soportada. Ubicada en la parte trasera de su departamento pero con un acceso a éste. Además contará con sistemas de seguridad, mencionados anteriormente con el fin de brindar confianza en este tipo de sistemas.

Capítulo 3. Estudio Técnico
E.S.I.M.E. I.C.A. Página 30 de 101
CAPÍTULO III. ESTUDIO TÉCNICO (Desarrollo de ingeniería)
3.1 DETERMINACIÓN DE LA SUPERFICIE DEL TERRENO La superficie que ocupara la plataforma de elevación para los automóviles, junto con el cuarto de control de maquinas, y la estructura auto soportada para el resguardo de estos comprenderá un área total de 56m2; y con la implantación de este sistema lograremos tener una superficie de 140m2; este espacio es suficiente para poder estacionar 10 autos.
Figura 3-1. Plataforma, estructura auto-soportada, y CCM en 3D
3.2 TECNOLOGÍA BÁSICA Para la automatización del sistema de control ocuparemos una serie de instrumentos:
PLC (Controlador lógico programable). Diversos tipos de sensores. Inversor de frecuencia (VFD). Encoder incremental. HMI (interfaz hombre maquina). Comunicaciones especiales.

Capítulo 3. Estudio Técnico
E.S.I.M.E. I.C.A. Página 31 de 101
3.3 MAQUINARIA Y EQUIPO UTILIZADO PARA EL SISTEMA MECÁNICO 3.3.1 Puertas automáticas Se usaran puertas enrollables de acción rápida, con apertura y cierre vertical Para cada planta de la plataforma autosoportada, y para cabina de la plataforma, ubicada en la planta baja. Es ideal para operar en donde el transito de vehículos es frecuente; reúne las características necesarias que se le exigen a una puerta industrial de elevado rendimiento. Gracias a su gran hermeticidad evita fugas de calor o frió, acceso de polvo, inceptos, etc. Seguridad: Cuenta con sensores tipo fotocélula de seguridad emisor-receptor y subida automática en caso de interferencia en la zona de paso.
Tabla 1. Características técnicas de puerta automática
Potencia del motor (KW) Hz Voltaje (V) Velocidad de
accionamiento Dimensiones de la
puerta. Marca y modelo
1.50 60 220 1m/s 2.10x2.25 m FERROPLEX 103
Figura 3-2 Puertas enrollables de acción rápida con fotocélula de seguridad

Capítulo 3. Estudio Técnico
E.S.I.M.E. I.C.A. Página 32 de 101
Figura 3-3. Puertas enrollables de acción rápida
3.3.2 Características del motorreductor para elevación de la plataforma
Calculo de la potencia en kilowatts y en caballos de fuerza, que el motorreductor debe entregar para elevar la plataforma totalmente cargada con la ayuda del contrapeso. Masa de los componentes.
Vehículo 2500 Kg Personas 600 Kg Plataforma 1200 Kg
Total = 4300 Kg - 2000 Kg (contrapeso y sistema de poleas) = 2300 Kg + 0.085% por seguridad… se tiene Total= 2500 Kg f = fuerza de fricción T = fuerza ascendente M = masa g = gravedad P = Potencia v = velocidad
3 3 2
0
4.0 10 (2.5 10 )(9.8 / )28500
T F MgT f MgT x N x Kg m sT N
− − == +
= +=
(28500 )(0.8 / )2280030.60 .
P TvP N m sP wattsP Hp
====

Capítulo 3. Estudio Técnico
E.S.I.M.E. I.C.A. Página 33 de 101
Simbología
n1 [min-1] Velocidad de entrada. n2 [min-1] Velocidad de salida. i Relación de reducción. P1 [kW] Potencia en la entrada. P2 [kW] Potencia en la salida. R2 [N] Carga radial admisible en la salida.
Tabla 2. Características técnicas del motorreductor
P1 [kW] P2 [kW] n1 [min-1] n2 [min-1] Pais de origen i R2 [N] Modelo
4.0 25 1400 140 POLONIA 10 2520 CM090 Marca: WORMGEARBOXES
Figura 3-4. Dimensiones de moto reductor

Capítulo 3. Estudio Técnico
E.S.I.M.E. I.C.A. Página 34 de 101
Revisar anexo A-i
Figura 3-5. Dimensiones laterales de motorreductor

Capítulo 3. Estudio Técnico
E.S.I.M.E. I.C.A. Página 35 de 101
Figura 3-6. Dimensiones del eje de salida
Sistema de seguridad mecánica, implementando un trinquete con accionamiento magnético a falla de 1 o todas las fases.
Figura 3-7. Seguridad mecánica

Capítulo 3. Estudio Técnico
E.S.I.M.E. I.C.A. Página 36 de 101
3.3.3 Polipasto con accionamiento mediante contrapeso Cálculo de la tensión en el cable que soporta a la plataforma. .
Figura 3-8. Diagrama de cuerpo libre M = 2000 Kg
2
2
(2000 )(9.8 / )19600
19600
19600 (2000 )(0.8 / )19600 160019600 1600 21200
w Kg m sw N
F T N
T N Kg m sT N NT N
==
= −
− =− == + =
∑
Figura 3-9. Polipasto de cable
Tabla 3. Características técnicas del polipasto
Marca Carga máxima Modelo CAH 25000 N Tackle Block No.410
2000Kg.
0.8 m/s2

Capítulo 3. Estudio Técnico
E.S.I.M.E. I.C.A. Página 37 de 101
3.3.4 Polea para guiar cuerda hacia contrapeso
Figura 3-10. Polea
Tabla 4. Características técnicas de polea
Marca Carga máxima Modelo
CAH 1000 Kg. Upper Span Block No.603 former DIN 82226
3.3.5 Grapa para unión de contrapeso y cable
Figura 3-11. Grapa
Tabla 5. Características técnicas de la grapa de unión
Marca Carga máxima Modelo CAH 2500Kg Wire Rope Grip No. 545
3.3.6 Soporte recomendado por el proveedor para instalar el polipasto
Figura 3-12. Viga para soporte
Capítulo 3. Estudio Técnico
E.S.I.M.E. I.C.A. Página 38 de 101
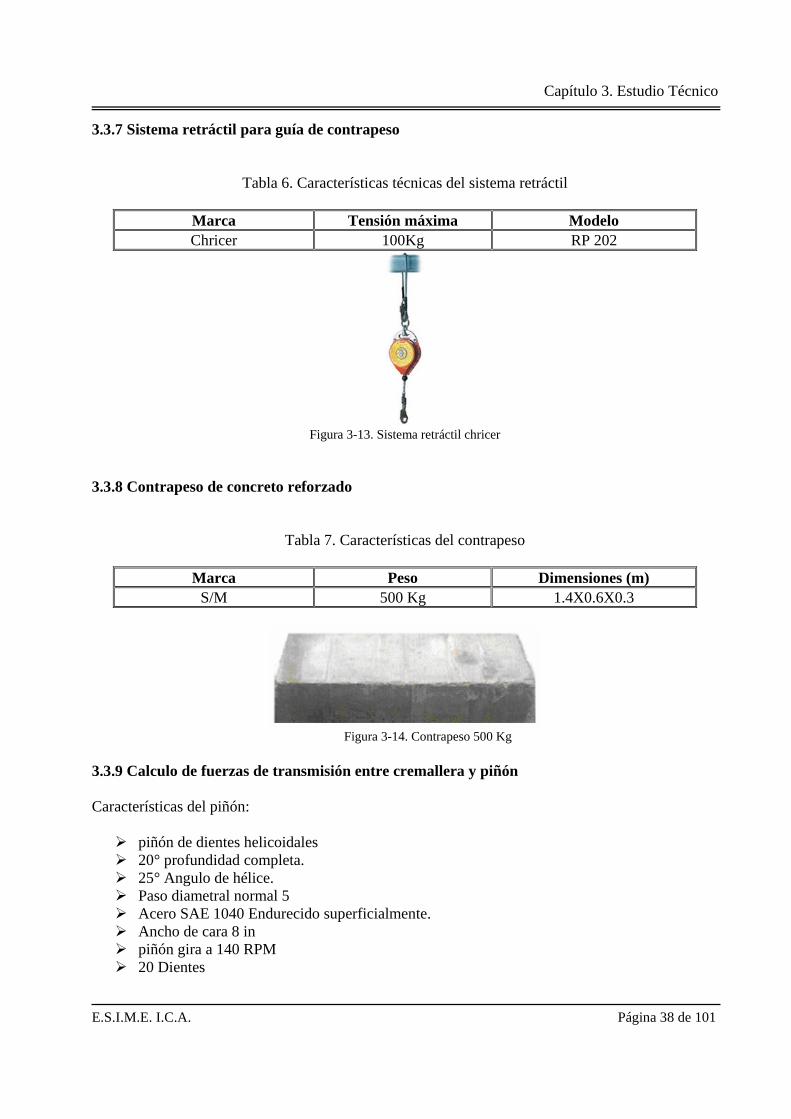
3.3.7 Sistema retráctil para guía de contrapeso
Tabla 6. Características técnicas del sistema retráctil
Marca Tensión máxima Modelo Chricer 100Kg RP 202
Figura 3-13. Sistema retráctil chricer
3.3.8 Contrapeso de concreto reforzado
Tabla 7. Características del contrapeso
Marca Peso Dimensiones (m) S/M 500 Kg 1.4X0.6X0.3
Figura 3-14. Contrapeso 500 Kg
3.3.9 Calculo de fuerzas de transmisión entre cremallera y piñón Características del piñón:
piñón de dientes helicoidales 20° profundidad completa. 25° Angulo de hélice. Paso diametral normal 5 Acero SAE 1040 Endurecido superficialmente. Ancho de cara 8 in piñón gira a 140 RPM 20 Dientes

Capítulo 3. Estudio Técnico
E.S.I.M.E. I.C.A. Página 40 de 101
Potencia segura en HP
6343.55 *161.26 / min33000 3300030.99
FtVp lb piesHP
HP
= =
=
Tanto el piñón como la cremallera se fabricaran con las especificaciones anteriores en un taller especializado; y se eligió el siguiente proveedor ya que reúne características esenciales como precio y calidad del trabajo. Engranes Industriales Vargas S.A de C.V.
Figura 3-17. Cremallera-piñón
3.3.10 Sistema de alimentación eléctrica para la plataforma en movimiento La cadena de alimentación eléctrica de ABUS se encarga de alimentar energía a los equipos en constante movimiento. Los cables quedan protegidos de daños mecánicos y desgaste prematuro y ofrecen un acceso más cómodo para mantenimiento. Además, ya no existe el peligro de que se enreden otros aparatos en los cables colgantes.
Figura 3-18. Sistema de alimentación eléctrica

Capítulo 3. Estudio Técnico
E.S.I.M.E. I.C.A. Página 41 de 101
3.3.11 Planta de emergencia KÖHLER POWER SYSTEMS Los equipos más grandes de la serie RZG con mayor potencia y máxima versatilidad. Estos generadores ofrecen tecnología de punta en generación de energía eléctrica, reducción de ruido, emisiones al ambiente, control y monitoreo, así como los costos operativos más bajos del mercado. Ideales para las aplicaciones más demandantes: oficinas y locales comerciales de mediano a gran tamaño, edificios habitacionales e instalaciones industriales pequeñas. Se adaptan a todo tipo de instalaciones eléctricas. Además de su gran calidad y precios competitivos es por esto que es una de las mejores opciones. Figura 3-19.
Figura 3-19. Planta de emergencia Köhler
Tabla 8. Características técnicas de la planta de emergencia
Características [Gas natural]
KÖHLER 130°C Rise Standby Rating
105°C Rise Prime Rating
Modelo Voltaje Fases Ph Hz kW/kVA Amps kW/kVA Amps RZG-4P5 127/220 3 60 34/43 112 32/40 105

Capítulo 3. Estudio Técnico
E.S.I.M.E. I.C.A. Página 42 de 101
3.3.12 Criterio de selección para equipo mecánico
Equipo para sistema mecánico Equipo Criterio de selección 1 Puertas automáticas
FERROPLEX 103 Es ideal para operar en donde el transito de vehículos es frecuente; reúne las características necesarias que se le exigen a una puerta industrial de elevado rendimiento. Gracias a su gran hermeticidad evita fugas de calor o frió, acceso de polvo, insectos, etc. además el sistema de control se adecua a los requerimientos, por tal motivo esta marca represento la mejor opción para el desempeño del sistema.
2 Moto reductor WORMGEARBOXES CM090
Este equipo fue el que mas se acoplo a los requerimientos del sistema; ya que el par de salida con el que cuenta fue el indicado conforme a los cálculos vistos anteriormente; además de que la caja de engranes fue diseñada con engranes helicoidales, los cuales son capaces de trasmitir mayor potencia; por otro lado el motor cuenta con freno magnético y gracias a esto se cuenta con una mayor seguridad para los usuarios.
3 Polipasto de cable Tackle Block No.410
La selección de este equipo se llevo a cabo considerando 3 aspectos fundamentales: la tensión máxima de la cuerda, la relación de transmisión de la carga y el precio del equipo en comparación con otros equipos este fue el que mas se acoplo a los requerimientos. Por tal motivo también los accesorios para su implementación fueron seleccionados con la misma marca.
4 Sistema retráctil para guía de contrapeso Chricer RP 202
El equipo para el sistema de contrapeso seleccionado, fue comparado en precio con algunas otras marcas que ofrecían las mismas características teniendo un ahorro considerable frente a sus competidores y ofreciéndonos calidad seguridad y garantía por largos periodos de tiempo.
5 Piñón helicoidal y cremallera. Engranes Industriales Vargas S.A de C.V.
Tanto el piñón como la cremallera se fabricaran bajo diseño; en un taller especializado, y se eligió el siguiente proveedor ya que reúne características esenciales como precio, garantía y calidad del trabajo.
6 Sistema de alimentación eléctrica para la plataforma en movimiento ABUS
Para el óptimo desempeño del sistema se requirió un sistema como el de la marca ABUS, que ofrece seguridad para los cables ya que gracias a sus características estos quedan protegidos de daños mecánicos y desgaste prematuro y ofrecen un acceso más cómodo para mantenimiento.
7 Planta de emergencia
El sistema de emergencia fue seleccionado considerando aspectos fundamentales como el bajo nivel de ruido, emisiones al ambiente, control y monitoreo, así como los costos operativos más bajos del mercado. Por tratarse de una unidad habitacional estos aspectos fueron esenciales.

Capítulo 3. Estudio Técnico
E.S.I.M.E. I.C.A. Página 43 de 101
3.4 EQUIPO UTILIZADO PARA EL SISTEMA DE CONTROL
3.4.1 Enconder incremental La precisión de paro de la plataforma de elevación entre los distintos pisos, se realizará empleando un encoder incremental y la señales emitidas por este serán enviadas a las entradas del contador rápido del PLC La regulación de nivel de la cabina en la carga y descarga se realiza también con ayuda de un contador rápido la cabina permanece en todo momento en posición, ya que el PLC detecta y compensa inmediatamente las diferencias de nivel. El encoder Boletín 845K de Allen Bradley es un encoder incremental óptico industrial tamaño 25. Estos encoders traducen a la forma digital electrónicamente el movimiento de eje de un elemento rotatorio convirtiendo el movimiento mecánico a un formato digital electrónico. El encoder Boletín 845K tiene resoluciones de disco de códigos de hasta 5000 pulsos por revolución y una respuesta a frecuencia de señal de 210 kHz.
Figura 3-20. Diagrama de acoplamiento del encoder
Acoplamiento flexible hacia moto reductor:
Figura 3-21. Acoplamiento hacia el moto reductor

Capítulo 3. Estudio Técnico
E.S.I.M.E. I.C.A. Página 44 de 101
Tabla 9. Especificaciones eléctricas de encoder
Formato de código Incremental, 2 canales con índice cero Cuadratura 90°+/-20° Simetría 50°+/-10° Canal de índice cero ½ ciclo inhibición del canal B
Requisitos de alimentación eléctrica 5Vcc+/- 5 % a 120 mA máximo 8-24 Vcc a 150 mA máximo
Respuesta a frecuencia Datos 210 kHz índice cero: 125 kHz
Velocidad de operación (datos) 210 kHz x 60 / pulsos por revolucion = 6000 RPM
Resolución Hasta 5000 PPR en disco de código
Capacidad de control de salida
Corriente fuente PNP= 20Ma Corriente de sumidero NPN= 20Ma Controlador de línea diferencial +/- 20Ma Colector abierto NPN= 20mA
Tabla 10. Especificaciones mecánicas y ambientales de encoder
Mecánicas
Par de arranque 0.7 Ncm Par de torsión 0.7 Ncm
Momento de inercia 15gcm2
Velocidad de giro 6000 RPM
Carga de eje Axial 89 N Radial 178 N
Tamaño de eje 3/8 de pulgada de diámetro
Ambiental
Carcasa NEMA tipo 1
Temperatura 0 a 60 °C en operación
Vibración 20 g Peso de embalaje aproximado 0.91 kg

Capítulo 3. Estudio Técnico
E.S.I.M.E. I.C.A. Página 45 de 101
3.4.2 Variador de frecuencia (VDF) Convertidores de frecuencia estándar Los convertidores de frecuencia estándar ABB son fáciles de comprar, instalar, configurar y utilizar, lo que permite ahorrar mucho tiempo. Su disponibilidad es muy amplia gracias a los distribuidores de ABB; de ahí el uso del término "estándar". Estos convertidores tienen una interfase común de usuario y de proceso con bus de campo, así como herramientas de software comunes para el dimensionado, la puesta a punto y el mantenimiento, y recambios comunes. Con la implementación de estos sistemas se tendrán las siguientes ventajas
Aumento de la seguridad total del sistema. Mejoría considerable del confort de los pasajeros. Prolongación de la vida útil de las partes del sistema. Reducción de los costos de mantenimiento. Disminución de los tiempos de detención por mantenimiento. Reducción de los costos operacionales por concepto de ahorro energético.
Características técnicas:
Tensión de alimentación trifásica 208-240 V Unidades montadas en pared
Tabla 11. Especificaciones técnicas del VDF
Especificaciones Uso normal Uso en trabajo pesado
PN kW
PN HP
I2N A
Phd kW
Phd HP
P2hd A
Modelo Bastidor
5.5 7.5 24.2 4 5 16.7 ACS550-01-024A-2 R2
Tabla 12. Dimensiones del VDF
Dimensiones y pesos
IP21/UL tipo 1 Tamaño del
bastidor A1 mm A2 mm AN mm P mm Peso Kg
R2 469 430 125 22 9

Capítulo 3. Estudio Técnico
E.S.I.M.E. I.C.A. Página 46 de 101
Figura 3-22. Modulo y pantalla del variador
Figura 3-23. Modulo y pantalla del variador
A1 = Altura incluyendo caja de conexiones A2 = Altura sin caja de conexiones AN = Anchura P = Profundidad

Capítulo 3. Estudio Técnico
E.S.I.M.E. I.C.A. Página 47 de 101
3.4.3 Selección de un PLC Lista de selección del Sistema SLC 500 de Allen Bradley
1. Módulos de E/S:
Se considero el uso de módulos de entradas y salidas de la familia 1492 con sus respectivos módulos de conexión previamente conectados.
2. Módulos de comunicación:
Para comunicar el PLC con la estación de operación se utilizo protocolo ethernet.
3. Seleccione un procesador SLC 500:
Se eligió un procesador SLC 5/05 con memoria de 64k para aprovechar su capacidad de E/S, su alto rendimiento, su fácil programación y la versatilidad de comunicación.
4. Chasis para SLC 500:
Se dimensiono un chasis de 7 Slots, para alojar a 3 módulos de E/S y su correspondiente procesador, además considerando futuras ampliaciones.
5. Fuente de alimentación eléctrica SLC 500:
Se utilizo una fuente de alimentación de 24 CD para alimentar el PLC SLC 500.
6. Software de programación:
Se programo el diagrama de escalera con el software propio de Allen Bradley RSLogix 500 que es el adecuado para la aplicación del sistema.

Capítulo 3. Estudio Técnico
E.S.I.M.E. I.C.A. Página 48 de 101
Tabla 13. Especificaciones de los procesadores SLC 500
Descripción Especificación En funcionamiento: de 0 a 60 °C (de 32 a 140 °F) Temperatura En almacenamiento: de -40 a 85 °C (de -40 a 185 °F)
Humedad de 5 a 95% sin condensación En funcionamiento: 1.0 g a 5…2000 Hz Vibración Fuera de operación: 2.5 g a 5…2000 Hz En funcionamiento: 30 g (3 impulsos, 11 ms), para todos los módulos excepto el contacto de relé En funcionamiento: 10 g (3 impulsos, 11 ms), para módulos de contacto de relé 1746-OWx y 1746-IOx combinados
Choque
Fuera de operación: 50 g, 3 impulsos, 11 ms Portátil, 2.268 kg (5 lb) o menos a 76.2 cm (30 pulg.), seis caídas Caída libre
(prueba de caída) Portátil, 2.268 kg (5 lb) o menos a 10.16 cm (4 pulg.), tres caídas en plano
Inmunidad al ruido Estándar NEMA ICS 2-230
Arco eléctrico: 1.5 kV (estándar industrial: NEMA ICS 2-230/NEMA ICS 3-304) Capacidad para resistir sobretensión: 3 kV (estándar industrial: IEEE 472-1974/ANSI C37.90/90A-1974) Ráfaga de fenómeno transitorio rápido (impulso): 2 kV para fuentes de alimentación eléctrica 1746, 1 kV para E/S 1746 y líneas de comunicación de más de 10 m (32.48 pies), tiempo de elevación de 5 ms Descarga electroestática: 15 kV, modelo 100 pF/1.5 kΩ
Compatibilidad electromagnética
Sensibilidad electromagnética radiada: transceptor portátil de 5 W a 464.5 MHz y 153.05 MHz Resistencia dieléctrica: 1500 VCA (estándar industrial: UL 508, CSA C22.2 No. 142) Aislamiento entre los circuitos de comunicación: 500 VCC Aislamiento entre el backplane y las E/S: 1500 VCA
Seguridad
Inflamabilidad y encendido eléctrico: UL94V-0 Certificado por C-UL o CSA Listado en UL Clase I, Grupos A, B, C o D, División 2 Tiene la marca CE para todas las directivas aplicables
Certificación (cuando el
producto o el embalaje
lleva la marca) Tiene la marca C-Tick para todos los decretos aplicables

Capítulo 3. Estudio Técnico
E.S.I.M.E. I.C.A. Página 49 de 101
Figura 3-24. Conjunto de PLC y módulos de E/S
3.4.4 Procesador SLC 5/05 1747-L553K de Allen Bradley Son ideales para aplicaciones de control dedicado. Esta línea ofrece un amplio rango de elecciones de memoria, capacidades de E/S, conjunto de instrucciones puertos de comunicaciones para permitir diseñar un sistema de control y para requerimientos exigentes. El procesador utilizado es el SLC 5/05, ya que es el mas optimo para el sistema de control que requerimos. Tiene una capacidad de memoria de 16K, 32K, 64K de palabras. Soporta 4096 entradas más 4096 salidas. También tulipa comunicaciones estándar de Ethernet en lugar de DH+. El SLC 5/05 cuenta con las siguientes características:
Son procesadores simples y económicos con grandes capacidades para direccional aplicaciones tales como manipuleo de materiales, control HVC, operaciones de ensamblaje, control de proceso pequeño y aplicaciones SCADA RTU.
Amplia línea de módulos de E/S digitales y analógicas, incluyendo módulos de E/S inteligentes e incluyendo módulos de E/S utilizables desde otros fabricantes.
Cuanta con puertos de comunicaciones RS-232 y Ethernet, que permiten iniciar la comunicación.
Revisar anexo A-l Instalación de procesador SLC 5/05
Figura 3-25. Procesador SLC 5/05

Capítulo 3. Estudio Técnico
E.S.I.M.E. I.C.A. Página 50 de 101
Tabla 14. Especificaciones del controlador modulares SLC 5/05 1747-L553
Especificación SLC 5/05
No de cat. 1747- L553
Tamaño de memoria (palabra) 64 K Corriente del backplane (mA) a 5 V 1000 mA Corriente del backplane (mA) a 24 V 200 mA
E/S digitales, máx. 4096 entradas 4096 salidas
No máx. de ranuras del chasis local 3/30 Comunicaciones incorporadas Ethernet y RS-232 Módulo de memoria opcional EEPROM flash Programación RSLogix 500 Instrucciones de programación 107 Tiempo típico de escán 0.9 ms/K Tiempo de retención del escán del programa tras una pérdida de alimentación eléctrica
de 20 ms a 3 s (según sea la carga de la fuente de alimentación eléctrica)
Ejecución de bits (XIC) 0.37 μs
Precisión del reloj/calendario ±54 segundos/mes a +25 °C (+77 °F) ±81 segundos/mes a +60 °C (+140 °F)
3.4.5 Selección de los módulos de E/S SLC 500 Los módulos de E/S digitales, los módulos de E/S analógicos y los módulos especiales de temperatura, conteo, control de procesos y lenguaje BASIC están a su disposición para ayudarle a crear una solución a la medida de su aplicación. Los terminales en los módulos de 4, 8, 12 y 16 canales tienen placas de presión de autoelevamiento que aceptan dos cables de 14 AWG (2 mm2). Los indicadores LED al frente de cada módulo muestran el estado de cada punto de E/S. Los módulos de E/S de 32 canales están equipados con un cabezal tipo MIL-C-83503 de 40 pines y un conector desmontable de cables (1746-N3). El conector se puede ensamblar con el tipo de cable y la longitud que usted prefiera. El sistema cuenta con las siguientes señales de E/S:
Entrada a la plataforma:
2 Sensores de Identificación de huella; 2 Entradas Digitales.

Capítulo 3. Estudio Técnico
E.S.I.M.E. I.C.A. Página 51 de 101
Entrada y salida del elevador (planta baja):
4 Arranques de Motor en la planta baja (Puertas automáticas); 4 Salidas Digitales. 4 Sensores Fotoeléctricos tipo de barrea (planta baja), para detectar cuando hay un automóvil
en medio de las puertas y estas no se cierren; 4 Entradas Digitales.
Estructura del elevador:
4 Motores que activan las puertas protectoras dentro del elevador; 4 Salidas Digitales. 2 Semáforos indican el acceso al elevador, permitiendo el paso a la estructura autosoportada;
2 Salida Digital.
Niveles o departamentos: Aquí se considera solo un nivel y posteriormente se hace la multiplicación por los niveles consiguientes (5 niveles).
2 Motores para el accionamiento de puertas enrollables de acción rápida, con apertura y cierre vertical; 2 Salidas Digitales.
2 Semáforos indicadores dentro de la estructura modular ausoportada (garage) indicando la posición correcta del automóvil; 2 Salidas Digitales.
2 Interruptores dentro de la estructura modular autosoportada (garage), para llamar al elevador; 2 Entradas Digitales.
1 Teclado para programar la hora de salida del usuario; 1 Entrada Digital. Nota: El garage de la planta baja solo requiere 2 Salidas Digitales que accionan las puertas automáticas.
Dispositivos de control
1 Encoder; 1 Entrada Analógica. 1 Drive; 1 Salida Analógica.
Tabla 15. Conteo total de señales digitales y analógicas del sistema de control
Señales Entradas Salidas Total Digitales 18 26 44 Analógicas 1 1 2
Con las señales anteriores se determina el tipo de Modulo que se necesita para satisfacer necesidades del sistema de control.
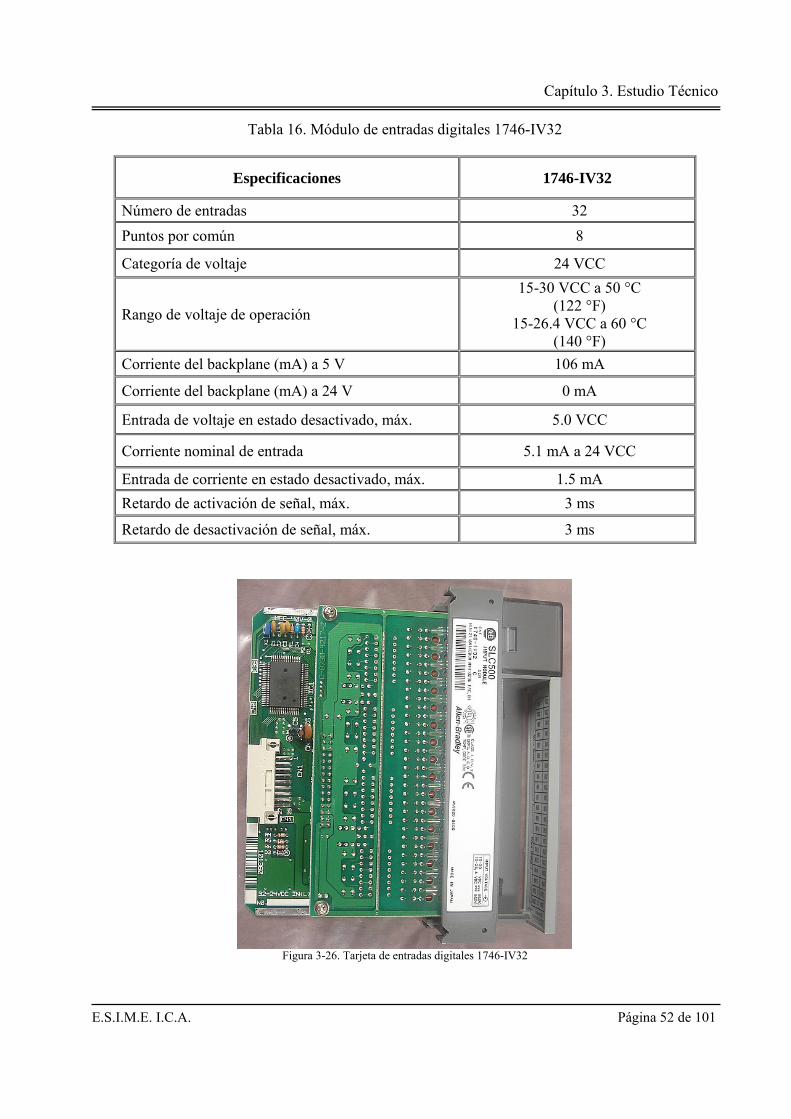
Capítulo 3. Estudio Técnico
E.S.I.M.E. I.C.A. Página 52 de 101
Tabla 16. Módulo de entradas digitales 1746-IV32
Especificaciones 1746-IV32
Número de entradas 32 Puntos por común 8
Categoría de voltaje 24 VCC
Rango de voltaje de operación
15-30 VCC a 50 °C (122 °F)
15-26.4 VCC a 60 °C (140 °F)
Corriente del backplane (mA) a 5 V 106 mA
Corriente del backplane (mA) a 24 V 0 mA
Entrada de voltaje en estado desactivado, máx. 5.0 VCC
Corriente nominal de entrada 5.1 mA a 24 VCC
Entrada de corriente en estado desactivado, máx. 1.5 mA Retardo de activación de señal, máx. 3 ms
Retardo de desactivación de señal, máx. 3 ms
Figura 3-26. Tarjeta de entradas digitales 1746-IV32

Capítulo 3. Estudio Técnico
E.S.I.M.E. I.C.A. Página 53 de 101
Tabla 17. Módulo de salidas digitales 1746-OV32
Especificaciones 1746-OV32 Número de salidas 32 Puntos por común 16 Categoría de voltaje 24 VCC Rango de voltaje de operación de 5 a 50 VCC Corriente del backplane (mA) a 5 V 190 mA Corriente del backplane (mA) a 24 V 0 mA Caída de voltaje, salida en estado activo, máx. 1.2 V a 0.5 A Corriente de carga, mín. 1 mA Corriente de fuga, salida en estado desactivado, máx. 1 mA Retardo de activación de señal, máx. (carga resistiva) 0.1 ms Retardo de desactivación de señal, máx. (carga resistiva) 1.0 ms
Corriente continua por módulo 8.0 A a 0-60 °C (32-140 °F)
Corriente continua por punto 0.50 A a 30 °C (86 °F) 0.25 A a 60 °C (140 °F)
Corriente de sobretensión por punto para 10 ms 1.0 A a 30 °C (86 °F) 1.0 A a 60 °C (140 °F)
Figura 3-27. Tarjeta de salidas digitales 1746-OV32

Capítulo 3. Estudio Técnico
E.S.I.M.E. I.C.A. Página 54 de 101
Tabla 18. Módulo de entradas y salidas analógicas (Combinado) 1746-FIO4I
Especificaciones 1746-FIO4I Escala total 20 mA
Rango de entrada de 0 a 20 mA (nominal) para 0-30 mA (máximo)
Codificación de entrada de corriente de 0 a 2047 conteos para 0-20 mA
Voltaje de entrada máximo absoluto RMS de ±7.5 VCC ó 7.5 VCAImpedancia de entrada 250 Ω (nominal) Resolución 9.7656 μA por bit Precisión general a 25 °C (77 °F) ±0.510% de la escala total Precisión general, de 0 a 60 °C (de 32 a 140 °F) ±0.850% de la escala total
Deriva de la precisión general +98 ppm/°C de la escala total (máximo)
Error de ganancia a 25 °C (77 °F) +0.400% (máximo)
Error de ganancia, de 0 a 60 °C (de 32 a 140 °F) +0.707% de la escala total
Deriva del error de ganancia ±89 ppm/°C (máximo)
Figura 3-28. Tarjeta de Entradas y Salidas Analógicas 746-FIO4I
El 1746-FIO4I tiene menor filtro de entrada y pueden detectar entradas que cambian más rápidamente. Sin embargo, su resolución de entrada es de sólo 12 bits. Debido a que el filtro de entrada en el 1746-FIO4I puede dejar pasar más ruido eléctrico, el transductor de entrada, su fuente de alimentación eléctrica y cables se deben blindar y conectar a tierra perfectamente.

Capítulo 3. Estudio Técnico
E.S.I.M.E. I.C.A. Página 55 de 101
3.4.6 Selección del chasis Los chasis modulares SLC proporcionan flexibilidad en la configuración de sistemas. Hay cuatro tamaños de chasis disponibles para ajustarse a las necesidades de su aplicación. Elija entre los chasis de 4 ranuras, 7 ranuras, 10 ranuras y 13 ranuras en base a los requisitos de sus componentes modulares de hardware. El chasis modular SLC 1746 aloja al procesador o módulo adaptador de E/S y a los módulos de E/S. Cada chasis requiere de su propia fuente de alimentación eléctrica, la cual se monta en el lado izquierdo del chasis. Se pueden conectar un máximo de 3 chasis con los cables de interconexión de chasis (no se incluyen). Si se requiere de un cable de interconexión, seleccione un cable de interconexión de chasis en la tabla siguiente. Dado el número de tarjetas que se utilizan, se instalara un chasis de 7 ranuras ó slots.
Figura 3-29. Chasis 1746-A7
Figura 3-30. Chasis 1746-A7

Capítulo 3. Estudio Técnico
E.S.I.M.E. I.C.A. Página 56 de 101
Tabla 19. Chasis modelo 1746-A7, con 7 ranuras de expansión
Numero de catalogo 1746-A7
Corriente del backplane 5.1 V dc @ 10 A
Ranuras 7
Tipo de montaje En panel
Condiciones de operación:
Temperatura de operación Temperatura de almacén
Humedad relativa
0 a 60 °C (32 a 60 °F) -40 a 85 °C (-40 a 185 °F) 5 a 95% (condensación)
3.4.7 Fuente de alimentación del PLC Al configurar un sistema modular, debe contar con una fuente de alimentación eléctrica para cada chasis. Una configuración cuidadosa del sistema producirá un rendimiento óptimo del mismo. La carga excesiva de las tomas de la fuente de alimentación eléctrica puede producir una desactivación de la fuente de alimentación eléctrica o un fallo prematuro. Sugerencia: Considere futuras expansiones del sistema al seleccionar las fuentes de alimentación eléctrica. El sistema SLC tiene tres fuentes de alimentación de CA y cuatro de CC. La fuente de alimentación se monta en el lado izquierdo del chasis con dos tornillos. En el caso de las fuentes de alimentación de CA, la selección de 120/240 volts se hace colocando el puente de manera que coincida con el voltaje de entrada. Las fuentes de alimentación eléctrica de SLC tienen un indicador LED que se ilumina cuando la fuente de alimentación eléctrica funciona correctamente. Las fuentes de alimentación eléctrica están diseñadas para resistir cortes breves de energía. Un corte de energía de un período de 20 milisegundos a 3 segundos no afecta la operación del sistema, dependiendo de la carga. Revisar anexo A-k Instalación de fuente de alimentación SLC 500
Figura 3-31. Fuente de alimentación para un sistema 1746

Capítulo 3. Estudio Técnico
E.S.I.M.E. I.C.A. Página 57 de 101
La siguiente figura muestra como se conecta la fuente de alimentación en un chasis 1746.
Figura 3-32. Instalación de fuente de alimentación en chasis 1746
Tabla 20. Fuente de alimentación eléctrica modelo 1746-P4
Numero de catalogo 1746-P4 Voltaje de línea 85-32/170-250 VCA, de 47 a 63 Hz Capacidad de corriente (Amps) a 5 V 10 A Capacidad de corriente (Amps) a 24 V 2.88 A Capacidad de corriente del usuario 1 A a 24 VCC Corriente de entrada al momento del arranque, máx. 45 A
3.4.8 Selección de software de programación La programación familiar de diagrama de lógica de escalera hace que la familia de SLC 500 resulte fácil de programar con una computadora personal y el software de programación RSLogix 500. El paquete de programación de lógica de escalera RSLogix 500 fue el primer software de programación de PLC en ofrecer una productividad insuperable con una interface de usuario que es líder en la industria. RSLogix 500 es compatible con programas creados con los paquetes de programación basados en DOS de Rockwell Software para las familias de procesadores SLC 500 y MicroLogix, lo que hace que el mantenimiento de programas entre plataformas de hardware sea conveniente y fácil. RSLogix 500 se puede usar con Windows 98®, Windows NT™ (4.0), Windows 2000 ó Windows XP.

Capítulo 3. Estudio Técnico
E.S.I.M.E. I.C.A. Página 58 de 101
3.4.9 Seguridad intrínseca para el PLC Para la implementación de seguridad intrínseca INTERFACE EX ofrece soluciones para la interfaz entre las partes de la instalación de seguridad intrínseca y el PLC o el sistema de control de procesos. Los Process Interface ME son módulos de electrónica modulares de uno y dos canales que se encajan en carriles. Los módulos se emplean como aparatos intrínsecos en circuitos de corriente de seguridad intrínseca. Entrada analógica El amplificador separador de alimentación transmite señales de seguridad intrínseca del campo a la zona segura. Además pueden alimentarse aparatos de campo de seguridad intrínseca.
Figura 3-33. Amplificador separado de alimentación
Salida analógica El amplificador separador de salida separa y transmite señales de 0/4..20 mA hacia convertidores i/p, i/i.. Puede elegirse entre amplificadores separadores de salida pasivos y activos.
Figura 3-34. Amplificador separador de salida
Entrada digital Los amplificadores de conexión NAMUR están diseñados para sensores e interruptores NAMUR de seguridad intrínseca, dispuestos en el área con riesgo de explosión. La señal es transmitida a través de una salida por relé o por transistor a la zona segura.
Figura 3-35. Amplificador de conexión

Capítulo 3. Estudio Técnico
E.S.I.M.E. I.C.A. Página 59 de 101
3.4.10 Clemas Para la interconexión física entre el PLC y otros dispositivos se usaran clemas de la marca PHOENIX CONTACT.
Tabla 21. Especificaciones técnicas de clemas Phoenix Contact
Datos técnicos
Dimensiones (ancho x largo x alto) 6,2 mm x 63,5 mm x 5 47 mm
Corriente de carga máxima 0,5 A
Conexión según norma IEC 60947-7-1
Tensión nominal UN 500 V
Sección 0,2 - 4 mm², AWG: 24 - 10, anchura: 6,2 mm, color: Negro
Número de pisos 2
Número de conexiones 4
Aislamiento PA
Figura 3-36. Modulo de clemas Phoenix Contact

Capítulo 3. Estudio Técnico
E.S.I.M.E. I.C.A. Página 60 de 101
3.4.11 Gabinete Para el montaje de todo el equipo de control se implementara un gabinete de la marca Rittal con las siguientes características:
Placa de montaje, galvanizada, canto lateral en C, ajustable en prof. en retícula de 25 mm. Las guías deslizantes pueden utilizarse tras el montaje como carriles de montaje para el equipamiento interior.
Máximo espacio para la entrada de cables mediante entradas de cables partidas y módulos accesorio. Con una superficie cuadrada puede montarse la entrada de cables con un giro de 90º.
Material / Superficie:
Chapa de acero Armazón de armario, techo, dorsal y entradas de cables: 1,5 mm Puerta: 2,0 mm Placa de montaje: 3,0 mm
Grados de protección / Ensayos: IP 55 según EN 60 529, cumple NEMA 12 Revisar anexos: Diagrama 1, Diagrama 2, Diagrama 3, Diagrama 4.
Tabla 22. Característica del gabinete de control
Características Técnicas Marca Rittal Modelo TS 8084.500 Descripción Sistemas de ensamblaje TS 8 Dimensiones 1.000 mm x 1.800 mm x 400 mm Volumen 745,80 dm³ Peso neto 136,40 Kg.
Figura 3-37. Gabinete de control

Capítulo 3. Estudio Técnico
E.S.I.M.E. I.C.A. Página 61 de 101
3.4.12 Estación de trabajo El sistema consta de 2 pantallas en las cuales se desplegara de forma grafica indicaciones del estado actual de la plataforma de elevación. Se usara el software para programación de InTouch HMI 9.5 / Wonderware. RSLogix, RsLinxs / Rockwell. Requerimientos mínimos para InTouch y RSloxig: Para estos programas se recomienda el siguiente software y hardware
Pentium II con procesador de 700 MHz o mayor para sistemas de un nodo simple; se recomienda 1.2GHz o mayor
2 GB de espacio en disco duro. Un minimo de 256 MB de memoria RAM; se recominda 512 RAM. Adaptador de video SVGA con 2MB RAM, recomendado. Dispositivos de puntero, ratón, TrackBall o touch screen. Debe contener un adaptador de red. Microsoft Windows 2000 Professional con service Pack 3 o superior o windows XP con
Service Pack 1 o superior. Por lo anterior el equipo a utilizar es el siguiente:
Tabla 23. Características Dell Inspiron 530S
Características Técnicas Procesador Intel Celeron Proccesor 420 (1.6GHz) 800FSB Sistema operativo Windows Vista Home Basic Original Memoria 1 GB a 667 MHz Monitor (2) 19 inch SE198WFP Widescreen Flat Panel Monitor Targeta de video Integrated intel graphics media accelerator Disco duro 80 GB a 7200RPM
Figura 3-38. PC y monitor
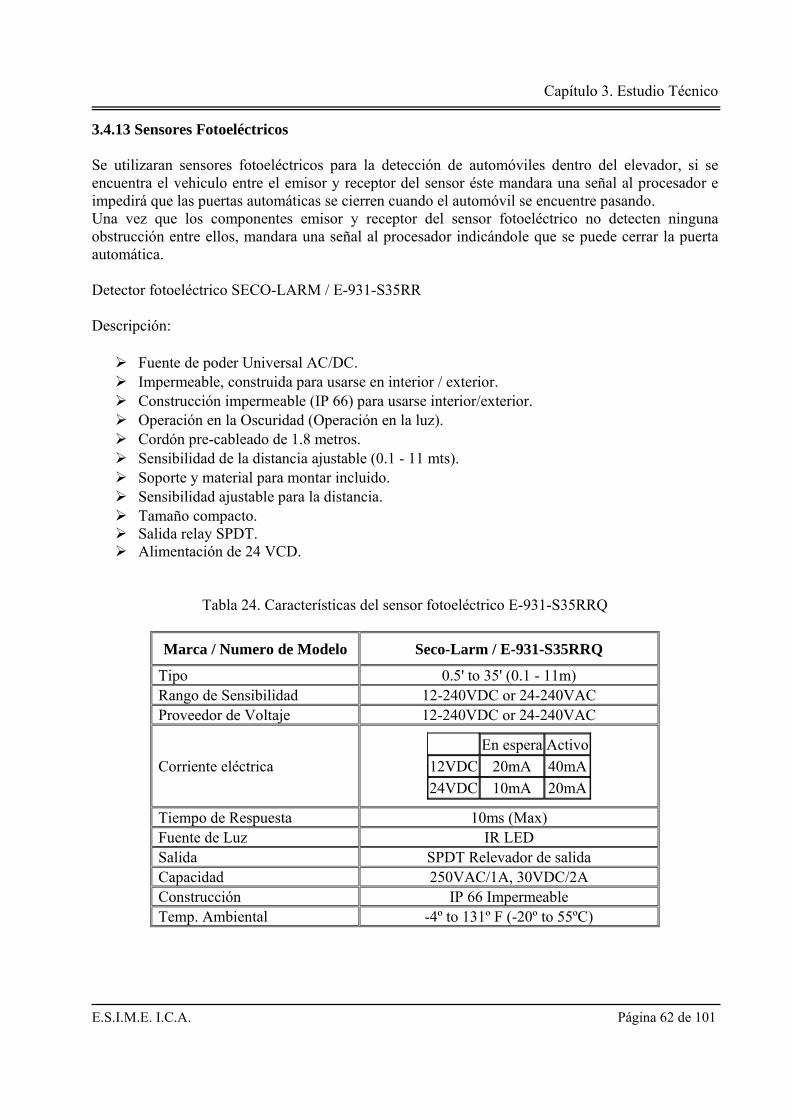
Capítulo 3. Estudio Técnico
E.S.I.M.E. I.C.A. Página 62 de 101
3.4.13 Sensores Fotoeléctricos Se utilizaran sensores fotoeléctricos para la detección de automóviles dentro del elevador, si se encuentra el vehiculo entre el emisor y receptor del sensor éste mandara una señal al procesador e impedirá que las puertas automáticas se cierren cuando el automóvil se encuentre pasando. Una vez que los componentes emisor y receptor del sensor fotoeléctrico no detecten ninguna obstrucción entre ellos, mandara una señal al procesador indicándole que se puede cerrar la puerta automática. Detector fotoeléctrico SECO-LARM / E-931-S35RR Descripción:
Fuente de poder Universal AC/DC. Impermeable, construida para usarse en interior / exterior. Construcción impermeable (IP 66) para usarse interior/exterior. Operación en la Oscuridad (Operación en la luz). Cordón pre-cableado de 1.8 metros. Sensibilidad de la distancia ajustable (0.1 - 11 mts). Soporte y material para montar incluido. Sensibilidad ajustable para la distancia. Tamaño compacto. Salida relay SPDT. Alimentación de 24 VCD.
Tabla 24. Características del sensor fotoeléctrico E-931-S35RRQ
Marca / Numero de Modelo Seco-Larm / E-931-S35RRQ
Tipo 0.5' to 35' (0.1 - 11m) Rango de Sensibilidad 12-240VDC or 24-240VAC Proveedor de Voltaje 12-240VDC or 24-240VAC
Corriente eléctrica En espera Activo 12VDC 20mA 40mA 24VDC 10mA 20mA
Tiempo de Respuesta 10ms (Max) Fuente de Luz IR LED Salida SPDT Relevador de salida Capacidad 250VAC/1A, 30VDC/2A Construcción IP 66 Impermeable Temp. Ambiental -4º to 131º F (-20º to 55ºC)

Capítulo 3. Estudio Técnico
E.S.I.M.E. I.C.A. Página 63 de 101
Aplicaciones:
Sensor de seguridad para puertas de garage o puertas exteriores. Sensor de seguridad para puertas tipo cortina. Automatización tipo industrial, detecta pequeños objetos en la línea de producción. Detección en la entrada de una tienda. Asistente en la medición de la distancia del estacionamiento. Sensor de alarma.
Figura 3-39. Sensor fotoeléctrico
Capítulo 3. Estudio Técnico
E.S.I.M.E. I.C.A. Página 64 de 101
3.4.14 Sensor Identificador de Huella Se utilizan éste tipo de identificadores para asegurar que sólo las personas que viven en la unidad habitacional tengan acceso a la plataforma auto-sustentable. El usuario introducirá una clave de acceso y posteriormente colocara su dedo en el lector de huella digital, para que el sistema compruebe que sí es usuario legítimo del sistema. Una vez que el sistema verifica que el acceso es correcto, inmediatamente el elevador recogerá al usuario y lo llevara al nivel o departamento que el usuario habita. Nota: Por cada departamento se podrán introducir 5 huellas diferentes con una misma clave de acceso. Kenny Internacional / Modelo Satr Finger-007 Es un inteligente controlador de acceso de una sola puerta basado en duales microprocesadores de 8 bits para proporcionar un alto y eficiente nivel de seguridad, bajo en costo. Es el control de que el mercado demanda. Esta diseñado para proporcionar alta seguridad de control de acceso incorporando un lector de proximidad y módulo de huella digital para alta fiabilidad, así como fácil funcionamiento. Este dispositivo es amigable al usuario le permite registrar 720 tarjetas de proximidad y huellas digitales (opcional 4.500 usuarios máximo), de fácil uso para agregar o borrar identificaciones de usuarios, almacenando 5.200 transacciones. Características:
Biométria y Aproximación con Controlador de Acceso de una sola Puerta. Función dual para Control de AccesoTiempo & Asistencia. 720 huellas digitales de usuarios / 5,200 eventos (opcional 2000 / 4,500 Huellas). Integrado 4 " (10 cm) lector RF y modulo de huella digital. Standalone / Comunicación por Red vía RS232/RS422 (max. 32 ch), TCP/IP. RF solo, RF + Huella, PIN + Huella, RF + PIN + Huella. 4 entradas/salidas independientes incluyendo 2 relays de salida FORM-C. Función de diagnóstico propio. Puerto externo del lector para funcionamiento. Anti-pass back. Interruptores duales contra alteraciones. Teclado retro iluminado.

Capítulo 3. Estudio Técnico
E.S.I.M.E. I.C.A. Página 65 de 101
Figura 3-40. Sensor de huella Finger-007
Figura 3-41. Funcionamiento del sensor de huella

Capítulo 3. Estudio Técnico
E.S.I.M.E. I.C.A. Página 66 de 101
Dimensiones
Figura 3-42. Dimensiones del Finger-007
Tabla 25. Especificaciones técnicas del sensor FINGER-007
CPU 32 bit Strong Arm y dual 8 bit microprocesadores
Memoria Memoria Programada : 64 KB ROM Memory de datos : 128KB RAM Modulo de huella : 1MB Flash (opcional 4MB)
Rango de Lectura
IDK50 IDC170 IDC80
2 pulgadas (5 cm) 4 pulgadas (10 cm) 4 pulgadas (10 cm)
Tiempo de Lectura Tarjetas (30 ms), Huella digital (0.5 sec)
Usuarios de Tarjetas / Buffer de eventos
720 Huellas & Usuarios deTarjetas Opcional 4,500 Huellas y Usuarios deTarjetas, 5,200 Buffer de eventos
Puertos de Lectura / Formato de Datos
Lector RF Integrado 4" / formato 26 bit Wiegand Puerto Externo de Lector / formato 26 bit Wiegand
Puertos de Salida/Entrada Salida de Aislamiento: 4 Salidas: 2 FORM-C Relay (COM,NC,NO), D, rating 2A max. Salidas TTL: 2 cada una
Puertos de Comunicación Puertos RS232/RS422, dirección seleccionable hasta 32 ch Baud Rate : 4,800 bps, 9,600bps (Default), 19,200 bps, Software programable (Opcional conexión TCP/IP)
Display LCD 1 x LCD módulo, 2 líneas x 16 ch, 65.6 x 13.8 mm vista de área Teclado 16 - Teclado Numérico, retro iluminado Anti-pass back Si Auto Diagnostico Si Indicadores LED 3 LEDs (Rojo, Verde, Amarillo) Fuente de Poder DC 12-24V, 350mA / AC 120-240DC 12V, 350 mA Medio Ambiente Operativo -35°C ~ +65°C, 10%~90% humedad sin condensación Re set Reset Watch-dog y reset de Poder Color Gris Perla Oscuro Peso 547g (1.20 lbs)

Capítulo 3. Estudio Técnico
E.S.I.M.E. I.C.A. Página 67 de 101
3.4.15 Fuentes conmutadas Las fuentes de alimentación conmutadas a 24Vcc. Unitronics, representa la mejor opción para la alimentación de los sensores anteriormente mencionados. Ya que ofrecen características de corriente de salida según las exigencias de la instalación, en varios formatos, montaje en carril din o cuadro. Estas fuentes conmutadas han sido perfeccionadas a fondo con lo que ahora necesitan aun menos superficie de montaje y ofrecen mas funcionalidad, así la nueva función intensidad constante en caso de sobrecarga permite conectar también cargas difíciles. Entrada de rango amplio y gran rango de temperaturas.
Figura 3-43. Fuente conmutadas Unitronics
Tabla 26. Especificaciones de fuente conmutada
Marca Modelo Entrada Salida Unitronics SERIE 70 110-240V 24 VCC
3.4.16 Cable para sensores/actuadores Cables para sensores/actuadores - SAC Los cables de la marca Phoenix Contact que se utilizaran podrán comunicar a sensores y actuadores confortablemente a cajas de repartidores, equipos de campo y al gabinete de distribución. Cable para sensores/actuadores M12 DESINA Cable para sensores/actuadores, conforme a estándar DESINA, con machos M12 en un extremo y hembras M12 del otro lado.

Capítulo 3. Estudio Técnico
E.S.I.M.E. I.C.A. Página 68 de 101
Figura 3-44a. Cable para sensor Cables para alimentación de corriente, de ejecuciones y longitudes diferentes, con el bloqueo rápido SPEEDCON M12.
Figura 3-44b. Cables para alimentación de corriente
3.4.17 Teclado programado de hora Este teclado permite programar la hora de salida del ascensor, esto quiere decir que el usuario puede programar su hora de salida de la plataforma auto-soportada. Características de Nitgen / Kreta 2:
Procesador de 32 bits Conectividad RS-232, RS-485 Robusto y fácil programación
Figura 3-45. Teclado programador de hora

Capítulo 3. Estudio Técnico
E.S.I.M.E. I.C.A. Página 69 de 101
3.4.18 Criterio de selección para equipo de control
Equipo para sistema de control Equipo Macar / Modelo Criterio de selección
1 Encoder incremental Allen Bradley / Boletín 485K
Este tipo de encoder se acopla perfectamente al procesador por ser del mismo fabricante, además cumple con las características necesarias que el sistema de localización de la plataforma o elevador requiere para determinar su ubicación exacta, su precio no es muy elevado en comparación a otras marcas.
2 Variador de frecuencia ABB / ACCS550-01-024A-2
De acuerdo a las características que presenta éste variador es ideal para las necesidades requeridas por el ascenso y descenso del elevador.
3 PLC y procesador SCL 500 / SLC 05/5 1747-L553
Se escogió éste PLC porque cumple con los requisitos mínimos de entradas y salidas que se emplean en el sistema de control, además tiene puertos de comunicación integrados y no es necesario agregar módulos de comunicación. En comparación con otras familias de PLC Allen Bradley, la familia micrologix no cumple con canales necesarios, la familia de controladores control logix son muy caros y no es rentable para el sistema y los PLC-5 son innecesarios por sus características técnicas.
4 Estación de trabajo Dell / Inspiron 530S
En ella se instalará todo el software necesario para el optimo funcionamiento de los dispositivos de control, se determino un equipo Dell por la gran flexibilidad de proporciona la marca en cuanto a software y hardware, además de tener un precio muy accesible.
5 Sensor fotoeléctrico Seco – Larm / E-931-S3RR
Existe una gran variedad de tipos, modelos y marcas de sensores fotoeléctricos, las características entre cada uno de ellos son similares por ello se escogió un sensor que cumpla con los requerimientos necesarios y a un bajo costo.
6 Identificador de huella Kenny International / Star Finger-007
La selección del identificador de huella se realizó bajo las circunstancias de que es el único sensor de que se tiene un previo conocimiento y la capacidad de memoria satisface a toda la unidad habitacional.
7 Fuente conmutada Unitronics / Serie 70
La selección de este equipo se llevo acabo considerando un aspecto muy importante: los niveles de voltaje con los que se alimenta a los sensores fotoeléctricos y el identificador de huella digital y por supuesto el costo de ésta fuente de alimentación.

Capítulo 3. Estudio Técnico
E.S.I.M.E. I.C.A. Página 70 de 101
3.5 DIAGRAMA DE BLOQUES DEL FUNCIONAMIENTO DEL ELEVADOR 3.5.1 Diagrama de bloques de entrada Ver anexo A-m

Capítulo 3. Estudio Técnico
E.S.I.M.E. I.C.A. Página 71 de 101
3.5.2 Diagrama de bloques de salida Ver anexo A-m

Capítulo 3. Estudio Técnico
E.S.I.M.E. I.C.A. Página 72 de 101
3.6 ESQUEMA DE OPERACIÓN
Plataforma de Estructura Departamento elevación auto soportada

Capítulo 3. Estudio Técnico
E.S.I.M.E. I.C.A. Página 73 de 101
3.7 PANTALLA GRAFICA DE HMI

Capítulo 3. Estudio Técnico
E.S.I.M.E. I.C.A. Página 74 de 101
3.8 DIAGRAMA DE CONEXIÓN AL PLC
Capítulo 3. Estudio Técnico
E.S.I.M.E. I.C.A. Página 75 de 101
Nomenclatura Entradas al PLC
SH1: Sensor de huella 1 SH2: Sensor de huella 2 PB 1A: Botón para llamar al ascensor nivel 1-A PB 1B: Botón para llamar al ascensor nivel 1-B PB 2A: Botón para llamar al ascensor nivel 2-A PB 2B: Botón para llamar al ascensor nivel 2-B PB 3A: Botón para llamar al ascensor nivel 3-A PB 3B: Botón para llamar al ascensor nivel 3-B PB 4A: Botón para llamar al ascensor nivel 4-A PB 4B: Botón para llamar al ascensor nivel 4-B SF1: Sensor fotoeléctrico 1 SF2: Sensor fotoeléctrico 2 SF3: Sensor fotoeléctrico 3 SF4: Sensor fotoeléctrico 4 T1: Teclado piso 1 T2: Teclado piso 2 T3: Teclado piso 3 T4: Teclado piso 4
Salidas del PLC PA-PB-1: Puerta automática 1 planta baja PA-PB-2: Puerta automática 2 planta baja PA-PB-3: Puerta automática 3 planta baja PA-PB-4: Puerta automática 4 planta baja PA-PT-1: Puerta automática 1 de plataforma PA-PT-2: Puerta automática 2 de plataforma PA-PT-3: Puerta automática 3 de plataforma PA-PT-4: Puerta automática 4 de plataforma S-1: Semáforo 1 PA-N1A: Puerta automática nivel 1A PA-N1B: Puerta automática nivel 1B PA-N2A: Puerta automática nivel 2A PA-N2B: Puerta automática nivel 2B PA-N3A: Puerta automática nivel 3A PA-N3B: Puerta automática nivel 3B PA-N4A: Puerta automática nivel 4A PA-N4B: Puerta automática nivel 4B SN1A: Semáforo nivel 1A SN1B: Semáforo nivel 1B SN2A: Semáforo nivel 2A SN2B: Semáforo nivel 2B SN3A: Semáforo nivel 3A SN3B: Semáforo nivel 3B SN4A: Semáforo nivel 4A SN4B: Semáforo nivel 4B VFD: Salida a variador de frecuencia

Capítulo 3. Estudio Técnico
E.S.I.M.E. I.C.A. Página 76 de 101
3.9 DIAGRAMA DE FUERZA DEL MOTO REDUCTOR

Capítulo 3. Estudio Técnico
E.S.I.M.E. I.C.A. Página 77 de 101
3.10 ARQUITECTURA DEL SISTEMA DE CONTROL
Estación de trabajo
SLC 5/05Encoder
Sensor fotoeléctrico
Identificador de huella
Puerta enrollable
VDF Semáforo
Motor
ETH

Capítulo 3. Estudio Técnico
E.S.I.M.E. I.C.A. Página 78 de 101
3.11 GRAFICA DEL COMPORTAMIENTO DE LA VELOCIDAD DE SALIDA DEL MOTO REDUCTOR
Ver anexo A-m

Capítulo 3. Estudio Técnico
E.S.I.M.E. I.C.A. Página 79 de 101
3.12 NECESIDADES DE OBRA CIVIL Para la implementación del sistema se requiere la construcción de 2 estructuras, la primera de ellas consiste en una estructura metálica, la cual tiene la característica de presentar movimiento vertical; para poder realizar la función de elevar y descender la plataforma. Figura 3-46. La segunda estructura consistirá en una edificación de concreto la cual será auto-soportada y tendrá la función de albergar a 10 autos. Figura 3-47,48.
Figura 3-46. Dimensiones de la estructura de plataforma

Capítulo 3. Estudio Técnico
E.S.I.M.E. I.C.A. Página 80 de 101
Figura 3-47. Estructura auto soportada de concreto
Figura 3-48. Dimensiones vista lateral derecha de estructura auto-soportada

Capítulo 3. Estudio Técnico
E.S.I.M.E. I.C.A. Página 81 de 101
3.13 UBICACIÓN DEL EQUIPO PARA EL SISTEMA DE ELEVACIÓN DE AUTOMÓVILES
3.13.1 Puerta automática
En la figura 3-49, podemos apreciar el accionamiento de una de las puertas automáticas propuestas para el sistema de la plataforma de elevación; en la cual se observa su actuador principal el cual es un motor de 2 Hp. Y por otro lado la ubicación del sensor fotoeléctrico para estas puertas.
Figura 3-49. Puerta automática
Si observamos la Vista superior de la Plataforma de elevación. Figura 3-50, se puede apreciar la ubicación de las 4 puertas requeridas para esta parte del sistema en la cual podemos ver (2 puertas de entrada y 2 puertas de salida). Así como también los 4 sensores fotoeléctricos encargados de mandar señales de tipo digitales al PLC.
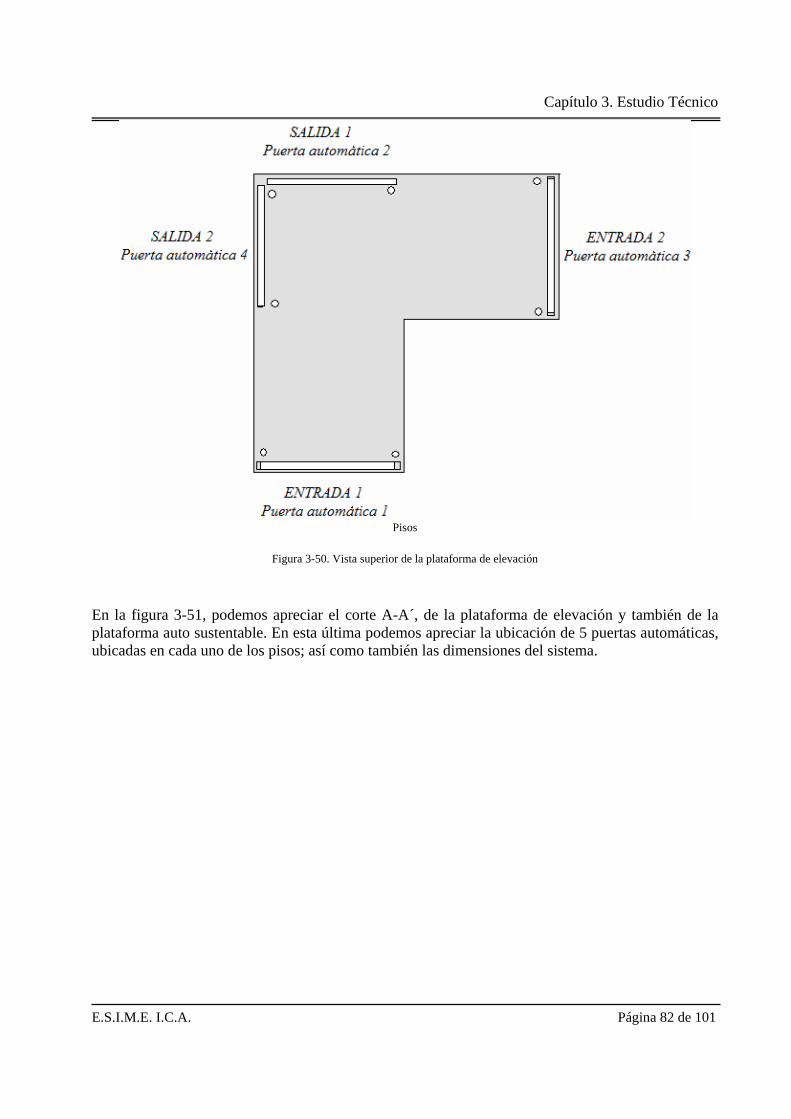
Capítulo 3. Estudio Técnico
E.S.I.M.E. I.C.A. Página 82 de 101
Pisos
Figura 3-50. Vista superior de la plataforma de elevación
En la figura 3-51, podemos apreciar el corte A-A´, de la plataforma de elevación y también de la plataforma auto sustentable. En esta última podemos apreciar la ubicación de 5 puertas automáticas, ubicadas en cada uno de los pisos; así como también las dimensiones del sistema.

Capítulo 3. Estudio Técnico
E.S.I.M.E. I.C.A. Página 83 de 101
Figura 3-51. Corte A-A´
3.13.2 Detalle de la ubicación del moto reductor en la plataforma de elevación
El moto reductor propuesto será ubicado en la parte baja de la plataforma de elevación. Figura 3-52 de tal forma de que el piñón y la cremallera estén totalmente acoplados y de esta forma puedan realizar el trabajo requerido de la mejor forma posible.

Capítulo 3. Estudio Técnico
E.S.I.M.E. I.C.A. Página 84 de 101
Figura 3-52. Detalle de la ubicación del moto reductor en la plataforma de elevación
3.13.3 Acoplamiento flexible entre motor y encoder
En la figura 3-53 podemos apreciar la forma en que se realizara el acoplamiento entre el motor del reductor y el encoder de tipo incremental.
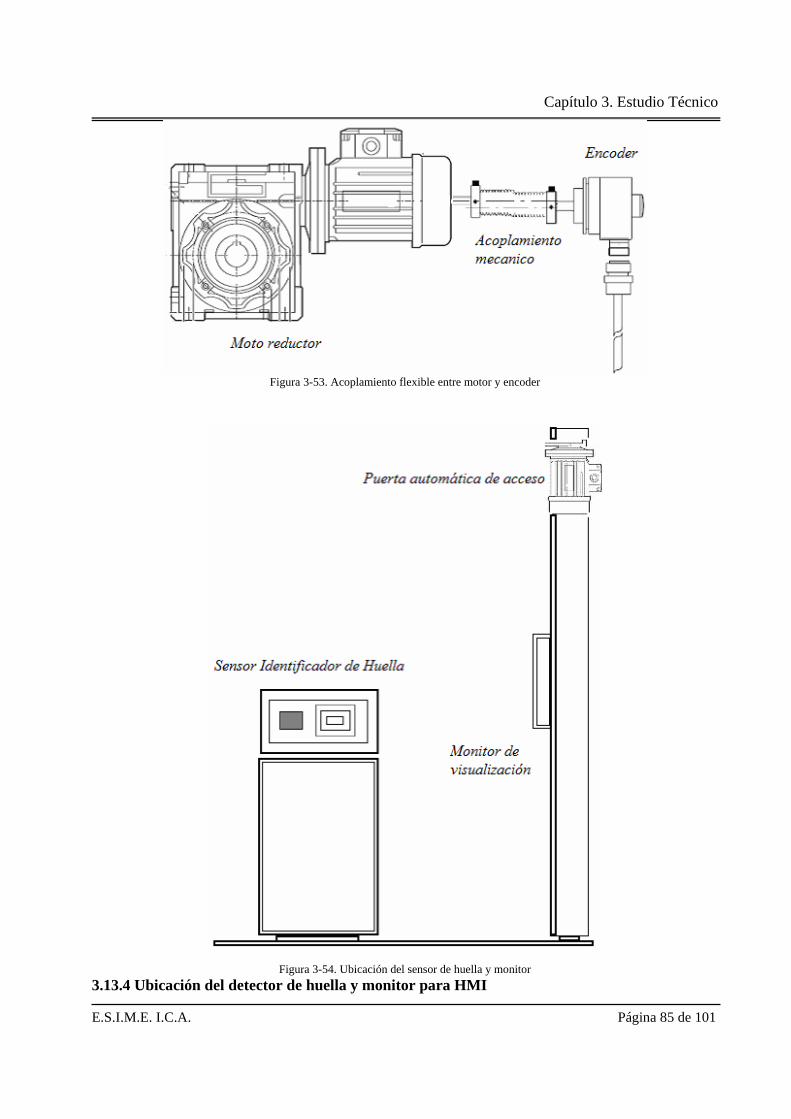
Capítulo 3. Estudio Técnico
E.S.I.M.E. I.C.A. Página 85 de 101
Figura 3-53. Acoplamiento flexible entre motor y encoder
Figura 3-54. Ubicación del sensor de huella y monitor 3.13.4 Ubicación del detector de huella y monitor para HMI
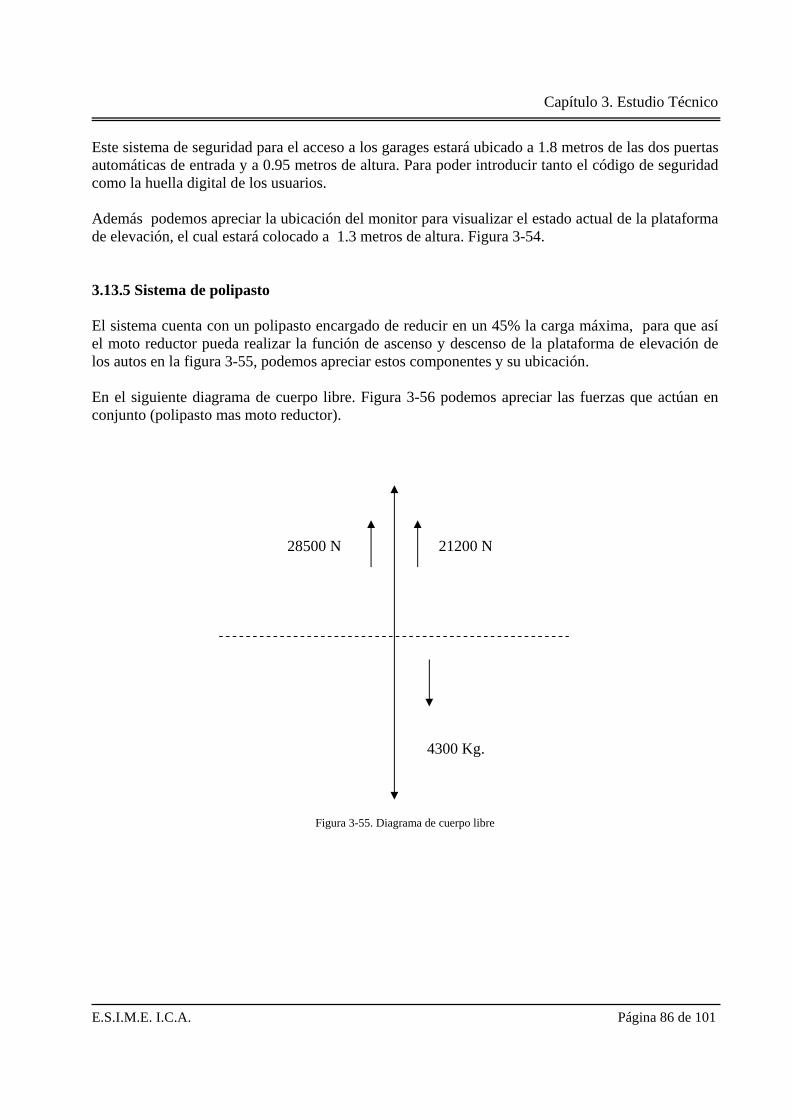
Capítulo 3. Estudio Técnico
E.S.I.M.E. I.C.A. Página 86 de 101
Este sistema de seguridad para el acceso a los garages estará ubicado a 1.8 metros de las dos puertas automáticas de entrada y a 0.95 metros de altura. Para poder introducir tanto el código de seguridad como la huella digital de los usuarios. Además podemos apreciar la ubicación del monitor para visualizar el estado actual de la plataforma de elevación, el cual estará colocado a 1.3 metros de altura. Figura 3-54. 3.13.5 Sistema de polipasto
El sistema cuenta con un polipasto encargado de reducir en un 45% la carga máxima, para que así el moto reductor pueda realizar la función de ascenso y descenso de la plataforma de elevación de los autos en la figura 3-55, podemos apreciar estos componentes y su ubicación. En el siguiente diagrama de cuerpo libre. Figura 3-56 podemos apreciar las fuerzas que actúan en conjunto (polipasto mas moto reductor).
Figura 3-55. Diagrama de cuerpo libre
4300 Kg.
21200 N 28500 N

Capítulo 3. Estudio Técnico
E.S.I.M.E. I.C.A. Página 87 de 101
3.14 PROGRAMACIÓN PARA EL SISTEMA AUTOMÁTICO DE ELEVACIÓN
Figura 3-56. Sistema de polipasto
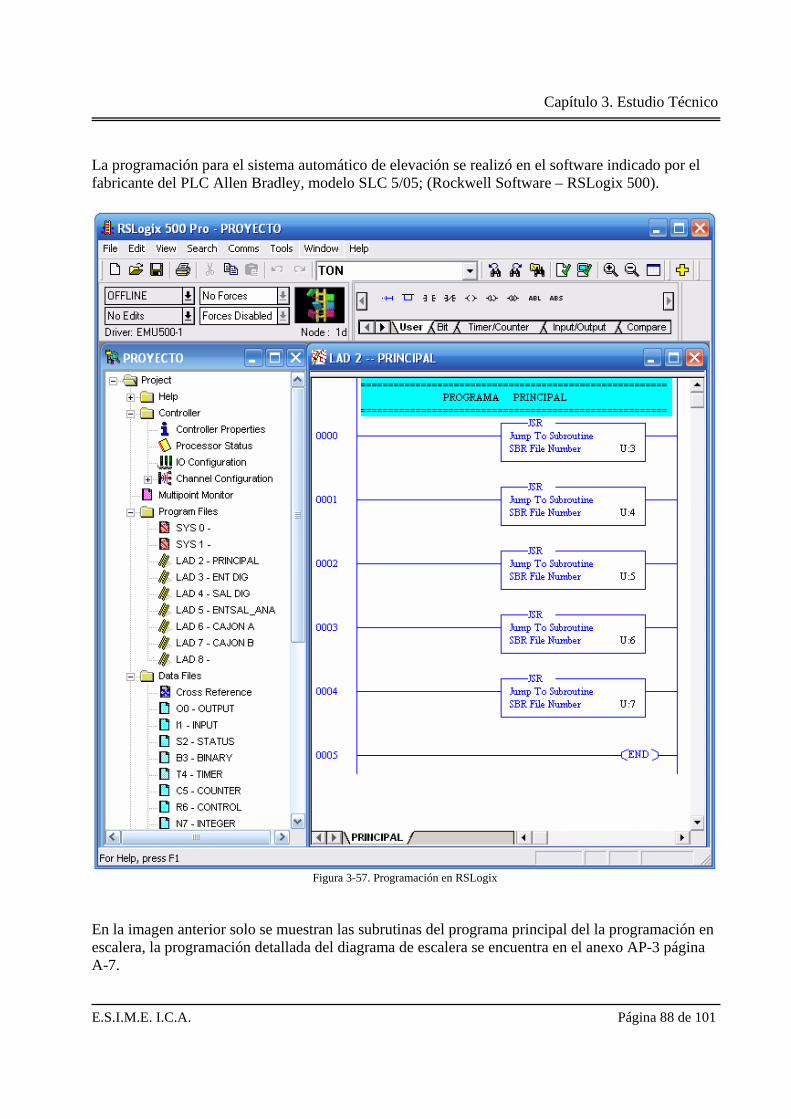
Capítulo 3. Estudio Técnico
E.S.I.M.E. I.C.A. Página 88 de 101
La programación para el sistema automático de elevación se realizó en el software indicado por el fabricante del PLC Allen Bradley, modelo SLC 5/05; (Rockwell Software – RSLogix 500).
Figura 3-57. Programación en RSLogix
En la imagen anterior solo se muestran las subrutinas del programa principal del la programación en escalera, la programación detallada del diagrama de escalera se encuentra en el anexo AP-3 página A-7.

Capítulo 4. Estudio económico
E.S.I.M.E. I.C.A. Página 89 de 101
CAPÍTULO IV. ESTUDIO ECONÓMICO 4.1 Estructura de costos En la estructura de costos se contemplaron tres elementos principales.
Materiales directos Mano de obra directa Costos indirectos de fabricación los cuales determinan el costo de producción de un bien o
servicios. Ahora analizaremos cada uno junto con sus subdivisiones que presentan para obtener los costos totales.
Tabla 27. Matriz de análisis: Mano de obra
Ítem a analizar Situación actual Análisis
Un (1) ingeniero en control y automatización para el sistema de control.
Un (1) ingeniero mecánico para supervisar el sistema mecánico.
Un (1) ingeniero civil para la construcción de la plataforma auto soportada y la plataforma de elevación.
12 albañiles para la contracción de la plataforma auto soportada
5 herreros para la construcción de la estructura metálica y plataforma de elevación.
3 electricistas para instalaciones eléctricas.
Mano de obra directa.
Y un gerente general cuya función es la evaluación para la toma de decisiones.
Se considera suficiente esta cantidad de trabajadores de acuerdo al proyecto propuesto, estos conforman la "Mano de obra directa" del proceso productivo. Estas personas trabajaran en un horario diurno en diferentes etapas tomando en cuenta la terminación de cada etapa para la continuación del siguiente equipo de especialistas. El tiempo estimado es de 3 semanas aunque podrá aumentar o disminuir en no más de 4 días. Sin embargo estas personas serán contratadas por proyecto terminado
Mano de obra indirecta.
Un encargado de limpieza Una secretaria.
Se considera que este es el personal necesario para tener más orden y control durante el proceso de construcción.
Días Trabajados. La mano de obra directa laborara los siete (6) días de la semana; un supervisor los siete (6) días también.
Por tratarse de un sistema complejo y para ofrecer calidad y puntualidad de entrega al usuario; se trabajaran 6 días de la semana.

Capítulo 4. Estudio económico
E.S.I.M.E. I.C.A. Página 90 de 101
Tabla 28. Matriz de análisis: Material directo
Ítem a analizar Situación actual Análisis
Para la implementación del sistema de elevación para autos en cuanto al sistema de control se utilizara el siguiente equipo:
Variador de velocidad Enconder incremental Interface RS 232 PLC Sensores Detector de huella Pantalla LCD de 18 in
En lo que respecta al sistema mecánico y actuadotes será necesario el siguiente equipo: 16 Puertas automáticas Moto reductor Polipasto Polea simple Grapa para poleas Engrane piñón Cremallera Contrapeso de concreto Seguidor de contrapeso Sistema de seguridad por trinquete Planta de emergencia.
Para la alimentación eléctrica 150 m cable calibre 12 300m cable calibre 14 sistema de alimentación eléctrica para
la plataforma en movimiento
Material directo
Se requerirá la construcción de una plataforma auto soportada de 4 niveles la cual será construida de concreto según las dimensiones del anexo 32; por lo cual no se conoce la cantidad exacta de materiales de construcción para esta edificación.
Para la plataforma de elevación se requerirá la construcción de una estructura metálica según las dimensiones del anexo 33.
Estos son los materiales y quipos necesarios para la construcción de este sistema por lo cual, se considera un costo fijo ya que se contemplan precios de cantidades exactas de materiales y equipos requeridos. Además de considera un precio estimado en cuanto a materiales de construcción para la plataforma auto soportada.

Capítulo 4. Estudio económico
E.S.I.M.E. I.C.A. Página 91 de 101
Tabla 29. Matriz de análisis: Material indirecto
Ítem a analizar Situación actual Análisis
Durante la instalación de los sistemas eléctricos; comunicaciones y control puede o no requerirse mayor cantidad de conductores. Además en algunas ocasiones se requerirá cinta de aislar; diferentes tipos de conectores
Material indirecto.
Para la estructura metálica se requerirá una cantidad de elementos para soldar como soldadura eléctrica, pasta; equipo para soldar; energía eléctrica.
En este análisis no se clasifica con exactitud las cantidades de los materiales que se utilizaran, ya que no se tiene un estimado de cuanto se utilizara en realidad y si en verdad se ocupe por completo
Tabla 30. Matriz de análisis: Gastos directos de fabricación
Ítem a analizar Situación actual Análisis
Energía eléctrica. Agua. Combustibles y
lubricantes. Artículos de
limpieza.
Los costos de energía eléctrica, agua, combustibles y lubricantes no son distribuidos en el proceso productivo, estos se cargan a gastos administrativos.
Permisos para
construcción. También son cargados; a gastos administrativos
Esto no se considera favorable para la empresa ya que se desconoce el consumo exacto por cada etapa de terminación de los elementos que integran al sistema.

Capítulo 4. Estudio económico
E.S.I.M.E. I.C.A. Página 92 de 101
Tabla 31. Matriz de análisis: Gastos indirectos de fabricación
Ítem a analizar Situación actual Análisis
Gastos de representación
Son los que ocurren a la hora de vender el producto terminado.
Estos gastos deben ser considerados de administración y venta.
Radio (comunicación)
Este gasto es repartido con las otras actividades de la empresa, por lo tanto, es considerado corporativo.
Por la frecuencia con que se repiten estos gastos indirectos que no están involucrados directamente en unas de las etapas del proceso, se debe distribuir entre las 4 etapas anteriores del proceso.
Herramientas específicas
Estos gastos comprenden a las herramientas específicas necesarias para la instalación de diversos componentes del ascensor.
Debido a su insignificancia económica no se procede a depreciarlos, y su costo debe ser imputado a la etapa correspondiente en el periodo en que se realizan.
El análisis de los conceptos de las matrices presentadas anteriormente han sido sustentado por los siguientes autores:
Material directo e indirecto, mano de obra directa e indirecta, los costos indirectos de fabricación y los costos fijos y variables por Polimeni y Fabozzi (1998), en su libro contabilidad de costos.
Sistema de costos por proceso continúo por A. Redondo (1993), en su libro contabilidad general y superior.
Sistema de costos por proceso por Gómez Rondon (1990), en su publicación contabilidad de costos II (sistemas de costos industriales).
En base a estos conceptos se diseño la estructura de costo anteriormente presentada para el sistema de elevación para autos en unidades habitacionales.

Capítulo 4. Estudio económico
E.S.I.M.E. I.C.A. Página 93 de 101
Tabla 32.Costos de equipos utilizados (Material directo)
Equipo para sistema de control
Equipo Marca Modelo No. de piezas
Precio (USD)
Enconder incremental
Baumer BDK-10 1 $ 360.00
Variador de velocidad ABB ACS550-01-
024A-2 1 $ 800.00
PLC Allen Bradley SLC 5/05 1 $ 2,303.00
Input Module Allen Bradley 1746-IV32
1 $ 375.00
Ouput Module Allen Bradley 1746-OV32 1 $ 435.00
Analog Combination I/O Module Allen Bradley 1746-FIO4I
1 $ 795.00
Rack/Chassis Allen Bradley 1746-A7 1 $ 282.00
Power Supply Allen Bradley 1746-P4 1 $ 610.00
chasis modular SLC Allen Bradley 1746-A7 1 $ 300.00 Seguridad intrínseca para el PLC INTERFACE Ex AI;AO;DI 1 $ 60.00
Clemas PHOENIX CONTACT 60947-7-1 2 $ 40.00 Gabinete. Rittal TS 8084.500 1 $ 350.00
Estacion de trabajo DELL INSPIRON 530S 1 $ 450.00
Pantalla LCD DELL SE198WFP 2 $ 350.00 Fuente conmutada Unitronics SERIE 70 1 $ 65.00
Detector de huella Kenny Internacional STAR FINGER-007
2 $ 1925.00
Detector fotoeléctrico
SECO-LARM
E-931-S35RRQ 4 $ 340.00
Equipo para sistema eléctrico Cable # 12 IUSA 150 m $ 40.00 Cable # 14 IUSA 300 m $ 60.00 sistema de alimentación eléctrica para la plataforma en
ABUS TPR-100 1 $ 750.00
Total $ 10,690.00

Capítulo 4. Estudio económico
E.S.I.M.E. I.C.A. Página 94 de 101
Tabla 33. Costos de equipos utilizados (Material directo)
Equipo para sistema mecánico
Equipo Marca Modelo No. de piezas
Precio (USD)
Puerta automática FERROSOL FerroRoll200 8 $ 4,000.00
Puerta automática FERROSOL FerroRoll500 8 $ 6,000.00 Moto reductor WORMGEARBOXES CM090 1 $ 1,200 .00
Polipasto CAH Tackle Block No.410 1 $ 400.00
Polea simple CAH Upper Span Block No.603 1 $ 20.00
Grapa CAH Wire Rope Grip No. 545 6 $ 10.00
Engrane piñón Engranes Industriales Vargas S.A de C.V Helicoidal 1 $ 60.00
Cremallera Engranes Industriales Vargas S.A de C.V Helicoidal 1 $ 450.00
Contrapeso de concreto S/M 500Kg 1 $ 40,00
Seguidor de contrapeso chricer RP 202 1 $ 50.00
Plataforma auto soportada y estructura metálica Estructura de concreto S/M S/M 1 $ 28,000.00
Estructura metálica S/M S/M 1 $ 11,000.00 Total $ 51,230.00
Tabla 34. Costos de Mano de obra directa
Mano de obra directa
Personal requerido Horas trabajadas Costo por hora(USD)
Total (USD)
Un (1) ingeniero en control y automatización 56 40 $ 2,240.00
Un (1) ingeniero mecánico 48 40 $ 1,920.00 Un (1) ingeniero civil 56 40 $ 2,240.00 12 albañiles 144X12=1728 3.5 $ 6,048.00 4 herreros 96X4=384 14 $ 5,376.00 3 electricistas 60X3=180 16 $ 2,880.00
Total $ 20,704.00

Capítulo 4. Estudio económico
E.S.I.M.E. I.C.A. Página 95 de 101
Tabla 35. Costos de Mano de obra indirecta
Mano de obra indirecta.
Personal requerido Horas trabajadas Costo por hora(USD)
Total (USD)
Un (1) encargado de limpieza 64 2 $ 128.00 Una (1) secretaria. 128 4 $ 512.00
Total $ 640.00
Tabla 36. Gastos directos de fabricación
Gastos directos de fabricación Ítem a analizar Costo en (USD)
Energía eléctrica. $ 450.00 Agua $ 160.00 Combustibles y lubricantes. $ 50.00 Artículos de limpieza. $ 25.00 Permisos para construcción. $ 50.00
Total $ 735.00
Tabla 37. Gastos indirectos de fabricación
Gastos indirectos de fabricación Ítem a analizar Costo en (USD)
Gastos de representación $ 100.00 Radio (comunicación). $ 50.00 Herramientas específicas. $ 50.00
Total $ 200.00
Tabla 38. Costo total
COSTO TOTAL
Gasto Costo en (USD) Gastos de mano de obra directa $ 20,704.00 Gastos de mano de obra indirecta $ 640.00 Gastos de material directo $ 61,920.00 Gastos directos de fabricación $ 735.00 Gastos indirectos de fabricación $ 200.00
Total $ 84,199.00

Capítulo 4. Estudio económico
E.S.I.M.E. I.C.A. Página 96 de 101
CONCLUSIÓN Como se puede ver el sistema propuesto debido a su complejidad resulta ser un proyecto híbrido; ya que requiere diversas especialidades, para lograr un optimo diseño de éste; sin embargo podemos mencionar que se logró cumplir con todos los objetivos planteados. Por tal motivo podemos mencionar que se realizo una selección de todo el equipo propuesto para el sistema automático de elevación con el fin de ofrecer un adecuado desempeño del mismo. Tanto para el sistema mecánico; como para el sistema de control, tomando en cuenta las características del equipo, la calidad del mismo y sobre todo el precio; realizando para esto un comparativo de precios, del mismo equipo pero con diferentes proveedores, logrando así elegir un equipo que logrará satisfacer los requerimientos propuestos y a un precio razonable. El sistema de 5 niveles tiene capacidad para alojar 10 autos, en éste caso dos por nivel y el costo por cada nivel que incluye dos garages privados será de $ 181,869.84 pesos. Si tomamos en cuenta que el m2 en esta zona es de aproximadamente $8,000 pesos y se requieren 12.5 m2 el costo por un espacio adicional seria de $100,000.00 pesos; sin embargo en esta zona es muy difícil encontrar espacios disponibles. Por otro lado pagar una pensión diaria de 45 pesos diarios para guardar el vehículo se tendría que en un año se estaría pagando $16,425 pesos por tal motivo en 5.5 años se pagaría el precio del sistema propuesto para un garage. Por lo anterior podemos ver que el sistema es económicamente sustentable. Además de que ofrece un gran numero de comodidades y ventajas, mencionadas anteriormente. Sabemos que el proyecto propuesto es socialmente deseable ya que el problema planteado es una realidad tanto en la zona propuesta, como en muchas otras zonas del país, que enfrentan este tipo de problemas, y aunque estamos concientes de que el precio es relativamente elevado, si se analiza los costos totales, contra los costos que se pagaría por una renta o por adquirir una superficie, para albergar vehículos, podemos ver que los costos son muy semejantes. Además de ofrecer un gran numero de comodidades y ventajas en comparación con los garages tradicionales; y aun muchas más ventajas en garages improvisados lejos de su vivienda. Podemos mencionar que la automatización del sistema de elevación de autos es un sistema novedoso e ingenioso que nos permite manipular vehículos a grandes alturas sin el riesgo de que éstos sufran accidentes Por último podemos mencionar que el diseño del funcionamiento del elevador junto con la plataforma auto-sustentable fue desarrollado bajo el software de Rockwell RS-Logix 500, donde se realizó la programación del diagrama de escalera que incluye las condiciones de funcionamiento y seguridad del sistema.

Glosario
E.S.I.M.E. I.C.A. Página 97 de 101
GLOSARIO Actuador. Dispositivos capaces de generar una fuerza a partir de líquidos, de energía eléctrica y gaseosa ADSL. Siglas de Asymmetric Digital Subscriber Line: Método de transmisión de datos a través de líneas telefónicas de cobre, que permiten altas velocidades de transferencia de datos. Algoritmo. Conjunto de reglas y procedimientos, expresados mediante datos o símbolos, que describen un estado o una asociación lógica para resolver un problema. Es la condición necesaria para el desempeño de tareas automáticas. Amplificador. Dispositivo que recibe una señal de entrada en forma de onda y la emite tras aumentar su amplitud o intensidad. Amplitud. Cantidad de energía de un rayo u onda. Es igual a la variación que experimenta la energía (la presión en una onda de sonido, por ejemplo) cuando pasa una onda completa. Analógico. Método de transmisión de señales en la cual la información se transmite alterando de manera continua la forma de ondas de la corriente electromagnética. Comparando con la transmisión digital, que se caracteriza por pequeños bits de información en etapas numéricas. Ancho de banda. Margen de frecuencias capaces de transmitirse por una red de telecomunicación y de interpretarse en sus terminales. Baudio. En la transmisión de datos, un baudio es el número de veces por segundo. Bipolar. Método predominante de señalización utilizado para las transmisiones digitales, en el cual la señal portadora del valor binario se alterna sucesivamente entre las polaridades positivas y negativas. Bit. Es la unidad de datos más pequeña que puede procesar un ordenador. Sólo puede tomar los valores "0" ó "1". Canal. Ruta de transmisión de comunicaciones a través de cualquier clase de medio de transmisión: cable conductor, radio, fibra óptica o de cualquier otro tipo. Conmutación. Conjunto de operaciones necesarias para unir entre sí los circuitos, con el fin de establecer una comunicación temporal entre dos o más estaciones o puestos. Control. Capacidad de aplicar algoritmos que ajustan los valores del proceso y así mantener estos valores dentro de ciertos límites. Cremallera. Barra con dientes la cual es considerada como un engranaje de diámetro infinito.

Glosario
E.S.I.M.E. I.C.A. Página 98 de 101
Digital. Método de representación de la información que consiste en describir magnitudes reales mediante series de números, cada uno de los cuales representa el valor que tiene la magnitud representada en un instante o un punto concreto. Drive. (VFD Variable Frecuency Drive); dispositivo electrónico que permiten controlar la velocidad tanto de motores de inducción (asíncronos de jaula de ardilla o de rotor devanado), como de motores síncronos mediante el ajuste de la frecuencia de alimentación al motor. Emisor. Produce una radiación visible o invisible que se concentra mediante lentilla. Firma digital. Datos cifrados de tal manera que el receptor pueda comprobar la identidad del transmisor. Fotoeléctrico. Dispositivo emisor y receptor de haz luminoso dispuestos separadamente. Frecuencia. Número entero de períodos o ciclos alcanzados en la unidad de tiempo por una magnitud o fenómeno periódico (onda acústica o electromagnética). Es el valor inverso del período de una onda sinusoidal. Se expresa en hercios (Hz). Hardware. Elementos físicos que componen o complementan a un ordenador o red. Hidráulica. Es una rama de la física y la ingeniería que se relaciona con el estudio de las propiedades mecánicas de los fluidos. Histéresis. Diferencia entre la distancia de activación y desactivación. HMI. Interfaz Hombre Maquina. Inductivos. Clase especial de sensores que sirven para detectar materiales metálicos ferrosos. Interfaz. Es un punto de una vía de comunicación que permite el intercambio de información entre dos dispositivos o sistemas y para el que se han especificado sus características físicas, eléctricas y el tipo de señales a intercambiar, así como su significado. Inversor. Circuito utilizado para convertir corriente continua en corriente alterna. Modulación. Modificación de alguno de los parámetros que definen una onda portadora (amplitud, frecuencia, fase), por una señal moduladora que se quiere transmitir (voz, música, datos). Modulación analógica. Modulación de una onda portadora mediante una señal analógica moduladora. Modulación de amplitud. Sistema de modulación en el que se modifica el valor de la amplitud de una onda portadora, conforme al valor instantáneo de la señal moduladora que se quiere transmitir. Con frecuencia se expresa como "AM". Modulación de amplitud en cuadratura. Sistema de modulación en el que la modulación de la portadora se hace mediante la variación de su fase y de su amplitud. Es el resultado de combinar la

Glosario
E.S.I.M.E. I.C.A. Página 99 de 101
Modulación por Desplazamiento de Fase (DPSK) y la Modulación por Variación de Amplitud (ASK). Monitoreo. Es la habilidad de obtener y mostrar datos de la planta en tiempo real. Motor. Es un dispositivo rotativo que transforma energía eléctrica en energía mecánica. Moto reductor. Equipo capas de variar las RPM. De entrada para disminuirlas o aumentarlas. Piñón. Rueda dentada normalmente con forma cilíndrica que describe un movimiento de rotación alrededor de su eje. PLC. (Controlador lógico programable) o autómata programable industrial. Polea. Es una de las máquinas simples, en forma de rueda, generalmente maciza y acanalada. Polipasto. Mecanismo que se utiliza para levantar o mover una carga con una gran ventaja mecánica. Protocolo. Conjunto de reglas que gobiernan las comunicaciones entre sistemas de telecomunicación. Puerto. Se denomina puerto a los puntos de conexión de un ordenador con los dispositivos externos, como pueden ser un MODEM, una impresora, un escáner. Receptor. Constituido por material semiconductor, normalmente un fototransistor. Sensor. Dispositivo que aprovecha una de sus propiedades con el fin de adaptar la señal que mide para que la pueda interpretar otro elemento. Supervisión. Esta función permite junto con el monitoreo la posibilidad de ajustar las condiciones de trabajo del proceso directamente desde la computadora. Transductor. Dispositivo que transforma un tipo de variable física en otra diferente.
Bibliografía
E.S.I.M.E. I.C.A. Página 100 de 101
Fuentes Consultadas Libros 1. Diseño de Maquinas Teoría y practica
Aarón D. Deutschman, Walter J. Michels, Charles E. Wilson México CECSA.
2. Física
Serway Faughn: 5ª. Ed. México Prentice Hall.
3. Manual del Ingeniero Mecánico
MARKS México, McGRAW –HILL.
4. Operación de Plantas Industriales
ELONKA México, Mc GRAW-HILL.
5. Instrumentación Industrial
Antonio Creus Sole México, Marcombo.
6. Diseño Digital
M. Morris Mano México, Prentice Hall.
7. Sistemas de control automático
Benjamín C. Kuo Illinois estados unidos, Prentice Hall.
8. Última tecnología en sensores
Catálogo con referencias técnicas y glosario inglés-español ifm efector inc.

Bibliografía
E.S.I.M.E. I.C.A. Página 101 de 101
Referencias informáticas 9. http://www.ascensoresdomingo.com/historia.htm
Tema: Antecedentes del ascensor. Consulta agosto de 2007. EEUU. 10. http://www.tvtronica.com.ar/Actuadores.htm
Tema: Actuadores. Consulta agosto de 2007. Argentina 11. http://www.inta.es/descubreAprende/htm/hechos8_2.htm
Tema: Motores eléctricos. Consulta agosto de 2007. España 12. http://es.wikipedia.org/wiki/Imagen:Polispasto
Tema: polipasto. Consulta agosto de 2007. España 13. http://www.monografias.com/trabajos13/reducty/reducty.shtml
Tema: Motorreductores. Consulta agosto de 2007. México 14. http://www.dbup.com.ar/tutorial_fuentes_conmutadas.htm
Tema: Fuentes conmutadas. Consulta agosto de 2007. Argentina. 15. http://www.ing.uc.edu.ve/~emescobar/automat_I/contenido_menu/Unidad_III/Contenido/p
agina1/pagina1.htm Tema: Información sensores fotoeléctricos. Consulta agosto de 2007. México.
16. http://www.tec-mex.com.mx/promos/bit/bit0903-bio.htm
tema: información sensor de huella. Consulta agosto de 2007. México. 17. http://www.silge.com.ar/hojtec/eltra/si010es2.pdf
Tema: Encoder incremental. Consulta agosto de 2007. España 18. http://www.dbup.com.ar/tutorial_fuentes_conmutadas.htm
Tema: Fuentes conmutadas. Consulta agosto de 2007. Argentina. 19. http://www.rittal.es/products/index_search.html
Tema: Gabinete de control. Consulta noviembre de 2007.España 20. http://www.temsamex.com/yale_04.html
Tema: Puertas automáticas. Consulta octubre de 2007. México.

Anexos
E.S.I.M.E. I.C.A. A-1
ANEXOS
A-a Encoder incremental
Funcionamiento de un encoder
El encoder incremental proporciona normalmente dos formas de ondas cuadradas y desfasadas entre sí en 90° eléctricos, los cuales por lo general son “canal A” y “canal B”. Con la lectura de un solo canal se dispone de la información correspondiente a la velocidad de rotación, mientras que si se capta también la señal “B” es posible discriminar el sentido de rotación en base a la secuencia de datos que producen ambas señales. Está disponible además otra señal llamada cana Z ó Cero que proporciona la posición absoluta de cero del eje del encoder. Esta señal se presenta bajo la forma de impulso cuadrado con fase y amplitud centrada en el canal A.
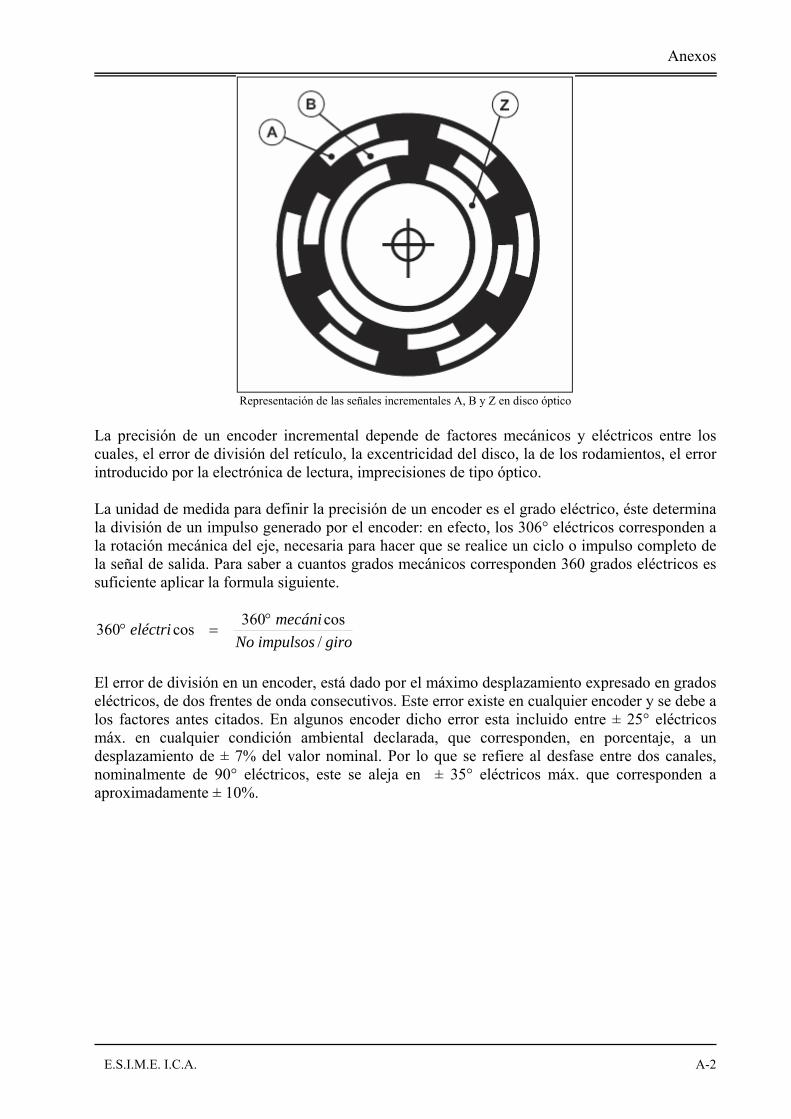
Anexos
E.S.I.M.E. I.C.A. A-2
Representación de las señales incrementales A, B y Z en disco óptico
La precisión de un encoder incremental depende de factores mecánicos y eléctricos entre los cuales, el error de división del retículo, la excentricidad del disco, la de los rodamientos, el error introducido por la electrónica de lectura, imprecisiones de tipo óptico. La unidad de medida para definir la precisión de un encoder es el grado eléctrico, éste determina la división de un impulso generado por el encoder: en efecto, los 306° eléctricos corresponden a la rotación mecánica del eje, necesaria para hacer que se realice un ciclo o impulso completo de la señal de salida. Para saber a cuantos grados mecánicos corresponden 360 grados eléctricos es suficiente aplicar la formula siguiente.
giroimpulsosNomecánieléctri
/cos360cos360 °
=°
El error de división en un encoder, está dado por el máximo desplazamiento expresado en grados eléctricos, de dos frentes de onda consecutivos. Este error existe en cualquier encoder y se debe a los factores antes citados. En algunos encoder dicho error esta incluido entre ± 25° eléctricos máx. en cualquier condición ambiental declarada, que corresponden, en porcentaje, a un desplazamiento de ± 7% del valor nominal. Por lo que se refiere al desfase entre dos canales, nominalmente de 90° eléctricos, este se aleja en ± 35° eléctricos máx. que corresponden a aproximadamente ± 10%.
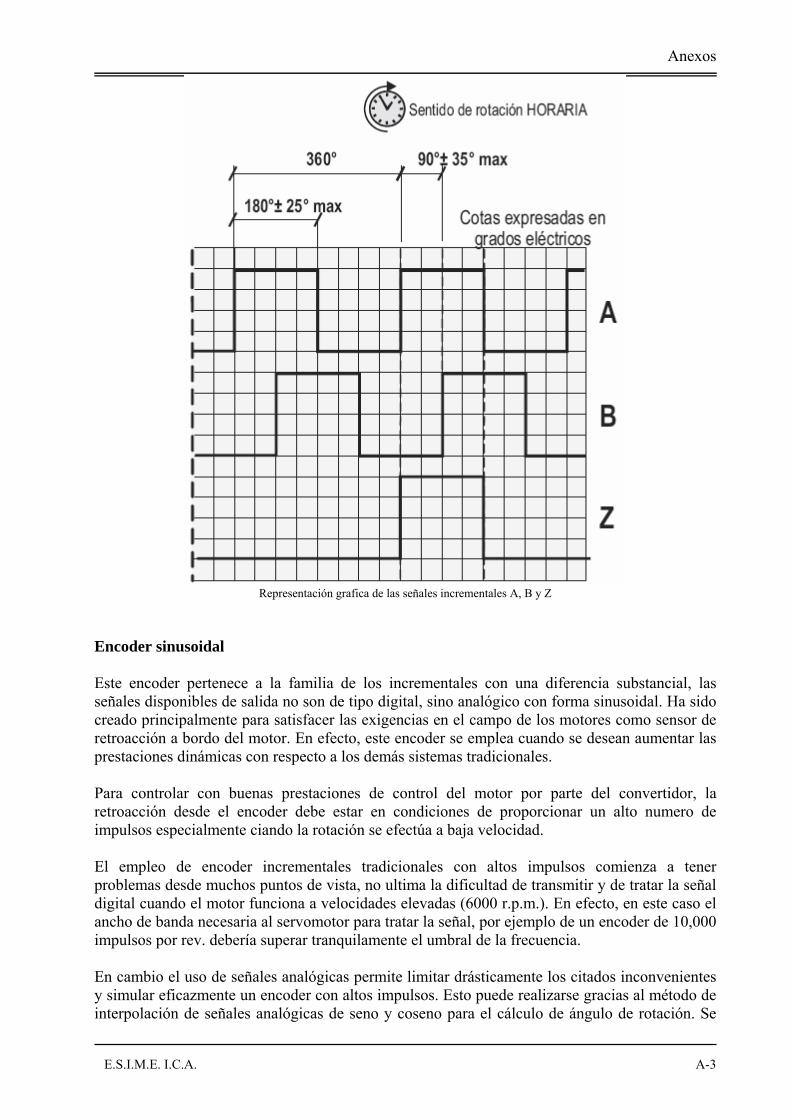
Anexos
E.S.I.M.E. I.C.A. A-3
Representación grafica de las señales incrementales A, B y Z
Encoder sinusoidal Este encoder pertenece a la familia de los incrementales con una diferencia substancial, las señales disponibles de salida no son de tipo digital, sino analógico con forma sinusoidal. Ha sido creado principalmente para satisfacer las exigencias en el campo de los motores como sensor de retroacción a bordo del motor. En efecto, este encoder se emplea cuando se desean aumentar las prestaciones dinámicas con respecto a los demás sistemas tradicionales. Para controlar con buenas prestaciones de control del motor por parte del convertidor, la retroacción desde el encoder debe estar en condiciones de proporcionar un alto numero de impulsos especialmente ciando la rotación se efectúa a baja velocidad. El empleo de encoder incrementales tradicionales con altos impulsos comienza a tener problemas desde muchos puntos de vista, no ultima la dificultad de transmitir y de tratar la señal digital cuando el motor funciona a velocidades elevadas (6000 r.p.m.). En efecto, en este caso el ancho de banda necesaria al servomotor para tratar la señal, por ejemplo de un encoder de 10,000 impulsos por rev. debería superar tranquilamente el umbral de la frecuencia. En cambio el uso de señales analógicas permite limitar drásticamente los citados inconvenientes y simular eficazmente un encoder con altos impulsos. Esto puede realizarse gracias al método de interpolación de señales analógicas de seno y coseno para el cálculo de ángulo de rotación. Se

Anexos
E.S.I.M.E. I.C.A. A-4
pueden obtener fácilmente multiplicaciones elevadas de las sinusoides básicas, obteniendo por ejemplo desde un encoder con 1024 sen/rev. más de 10,000 imp/rev. Simultáneamente la amplitud de la banda necesaria para recibir la señal, es suficiente que sea un poco superior a los 100 KHz. Las señales que hay a la salida del encoder se componen de dos sinusoides desfasadas entre sí en 90° eléctricos que llamaremos seno y coseno (2048 sen/rev. MAX) y de una señal de cero, también analógica centrada entre dos canales. Están integradas además otras dos señales sinusoidales con período de 360° mecánicos (1 sen/rev) que cumplen la función de señales de conmutación. La configuración típica de los desfases correspondientes.
Representación grafica de las señales sinusoidales sen, cos y Z
Las salidas con resolución de 1 imp/rep, son muy útiles porque desde éstas es posible obtener la posición angular absoluta del mismo modo que un resolver. La señal de cero también es analógica y presenta una forma que puede ser asimilada a una parte de sinusoide. Esta puede ser fácilmente escuadrada para proporcionar un impulso de referencia con ángulo de apertura variable. Los datos fundamentales definen la precisión de este encoder, se refiere a la linealidad de una sola sinusoide de las 2048 máximas disponibles y de la desviación máxima de un ángulo cualquiera de rotación con respecto a la posición mecánica real. La linealidad de uno de los ciclos de las sinusoides incrementales, en relación con el ciclo respectivo está incluida
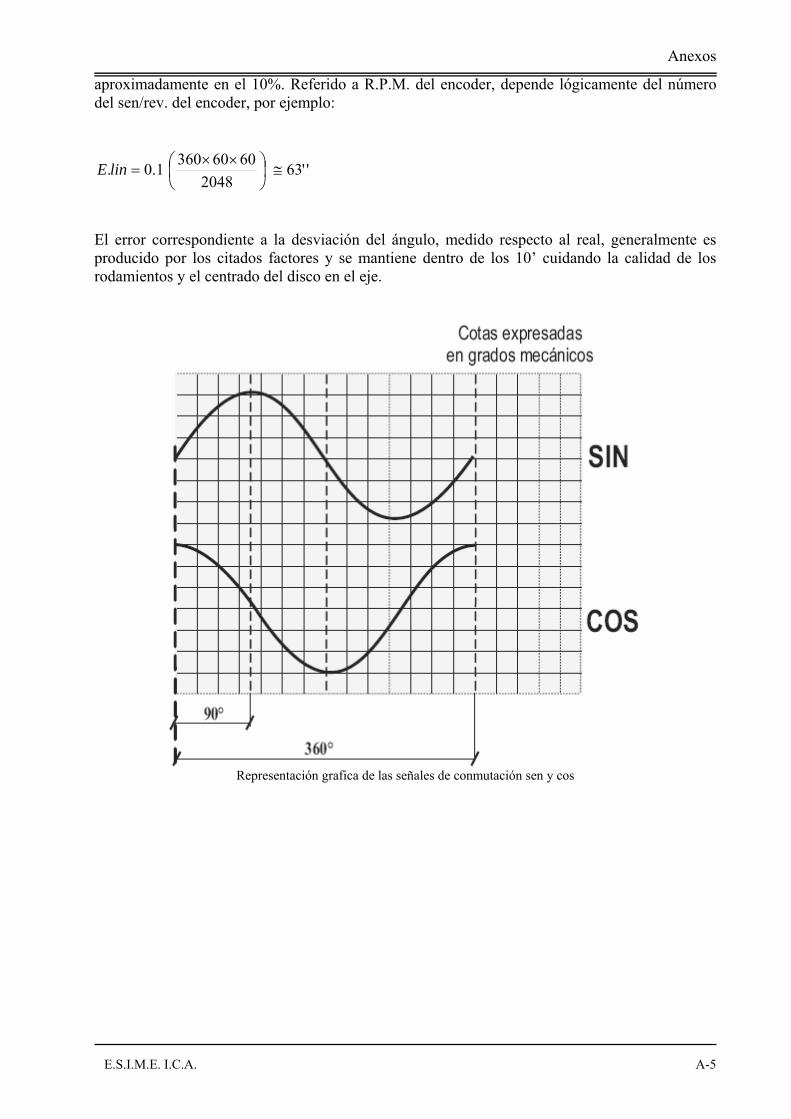
Anexos
E.S.I.M.E. I.C.A. A-5
aproximadamente en el 10%. Referido a R.P.M. del encoder, depende lógicamente del número del sen/rev. del encoder, por ejemplo:
''632048
60603601.0. ≅⎟⎠⎞
⎜⎝⎛ ××
=linE
El error correspondiente a la desviación del ángulo, medido respecto al real, generalmente es producido por los citados factores y se mantiene dentro de los 10’ cuidando la calidad de los rodamientos y el centrado del disco en el eje.
Representación grafica de las señales de conmutación sen y cos

Anexos
E.S.I.M.E. I.C.A. A-6
A-b Interface Hombre Maquina HMI
Arquitectura de un HMI
Tipos de HMI
Desarrollo a medida. Se desarrollan en un entorno de programación gráfica como VC++, Visual Basic, Delphi, etc., aunque la mayoria tiene soporte por mnemónicos y ejecución de macros.
Paquetes enlatados HMI. Son paquetes de software que contemplan la mayoría de las
funciones estándares de los sistemas SCADA. Ejemplos son FIZ, WinCC, Wonderware. Tarea de un software de supervisión y control
Permitir una comunicación con dispositivos de campo. Actualizar una base de datos “dinámica” con las variables del proceso. Visualizar las variables mediante pantallas con objetos animados (mímicos). Permitir que el operador pueda enviar señales al proceso, mediante botones, controles
ON/OFF, ajustes continuos con el Mouse o teclado. Supervisar niveles de alarma y alertar/actuar en caso de que las variables excedan los
limites normales. Almacenar los valores de las variables para análisis estadísticos y/o control. Controlar en forma limitada ciertas variables del proceso.

Anexos
E.S.I.M.E. I.C.A. A-7
A-c Programación del diagrama de escalera en RSLogix 500
PROYECTO
LAD 2 – PRINCIPAL ---- Total Rungs in file = 6

Anexos
E.S.I.M.E. I.C.A. A-8
PROYECTO
LAD 3 – ENT DIG ---- Total Rungs in file = 15

Anexos
E.S.I.M.E. I.C.A. A-9

Anexos
E.S.I.M.E. I.C.A. A-10
PROYECTO
LAD 4 – SAL DIG ---- Total Rungs in file = 27
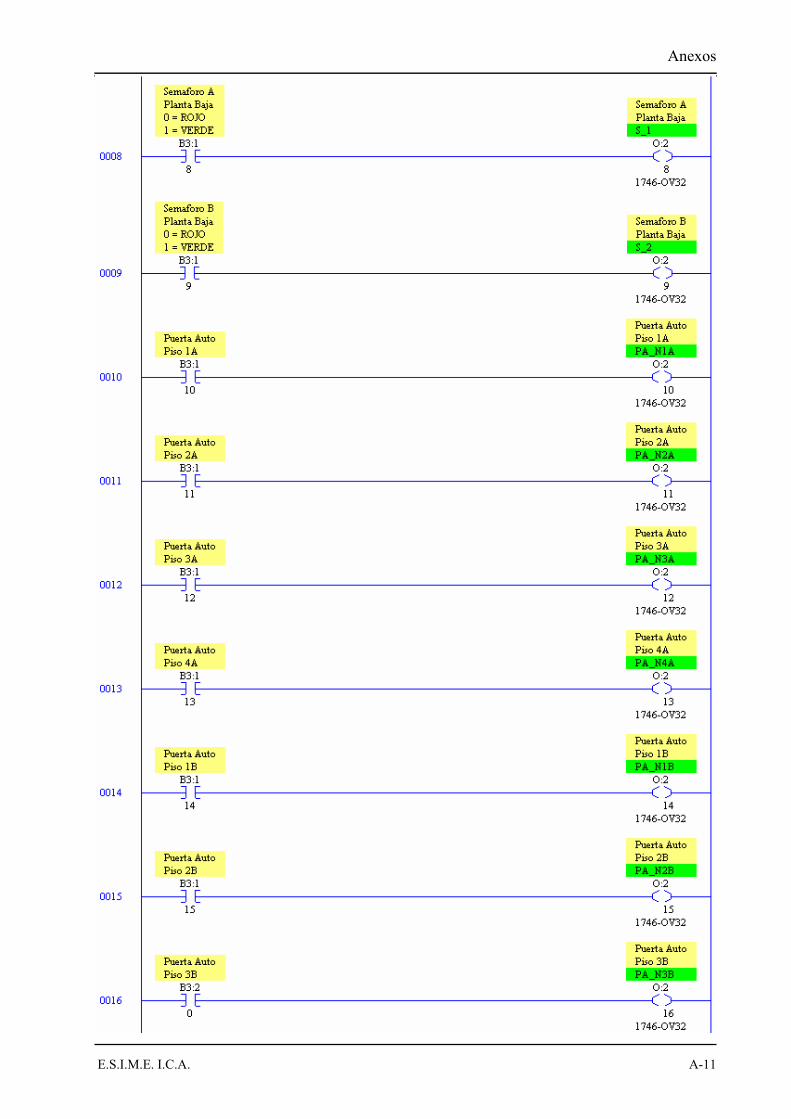
Anexos
E.S.I.M.E. I.C.A. A-11

Anexos
E.S.I.M.E. I.C.A. A-12

Anexos
E.S.I.M.E. I.C.A. A-13
PROYECTO
LAD 5 – ENT_SAL_ ANALOG ---- Total Rungs in file = 5
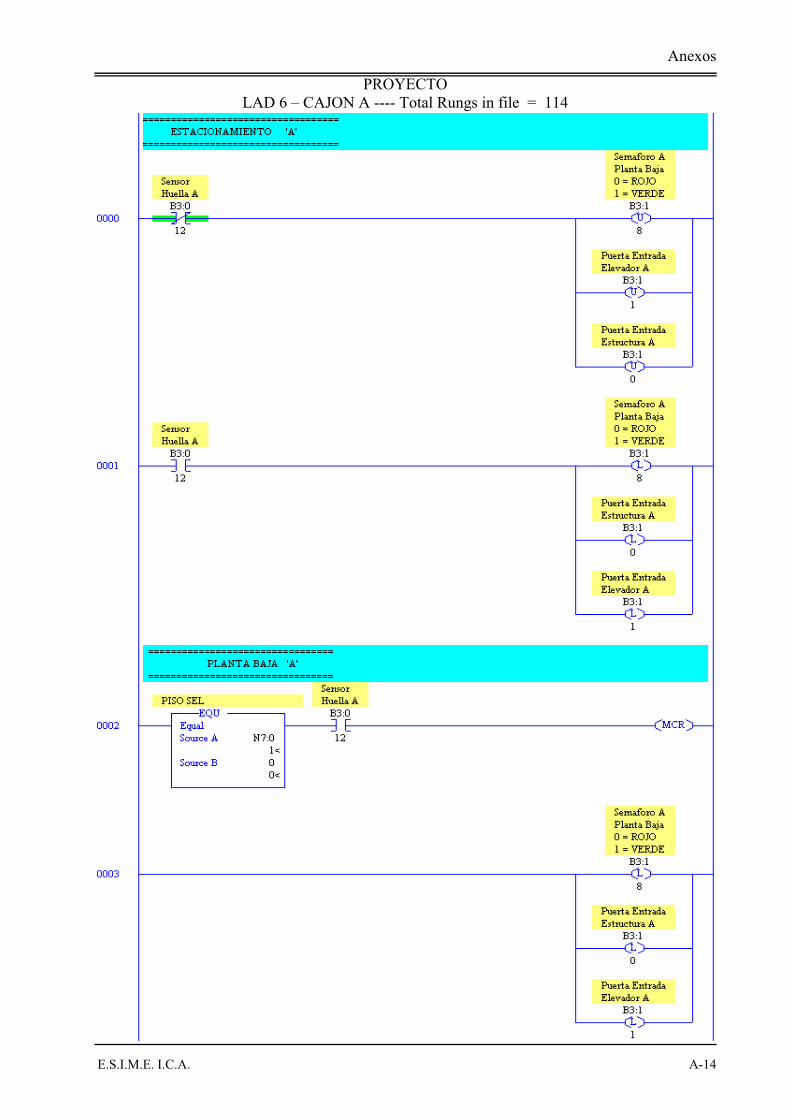
Anexos
E.S.I.M.E. I.C.A. A-14
PROYECTO LAD 6 – CAJON A ---- Total Rungs in file = 114

Anexos
E.S.I.M.E. I.C.A. A-15

Anexos
E.S.I.M.E. I.C.A. A-16

Anexos
E.S.I.M.E. I.C.A. A-17

Anexos
E.S.I.M.E. I.C.A. A-18

Anexos
E.S.I.M.E. I.C.A. A-19

Anexos
E.S.I.M.E. I.C.A. A-20

Anexos
E.S.I.M.E. I.C.A. A-21

Anexos
E.S.I.M.E. I.C.A. A-22
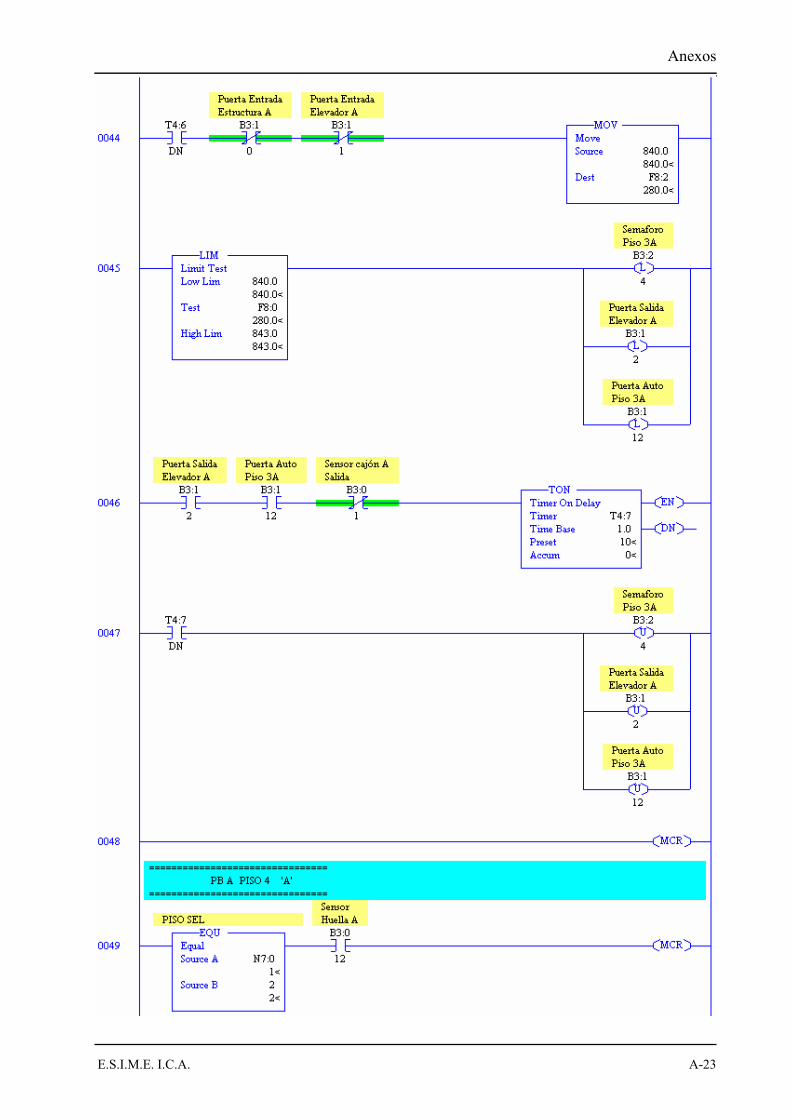
Anexos
E.S.I.M.E. I.C.A. A-23

Anexos
E.S.I.M.E. I.C.A. A-24

Anexos
E.S.I.M.E. I.C.A. A-25

Anexos
E.S.I.M.E. I.C.A. A-26
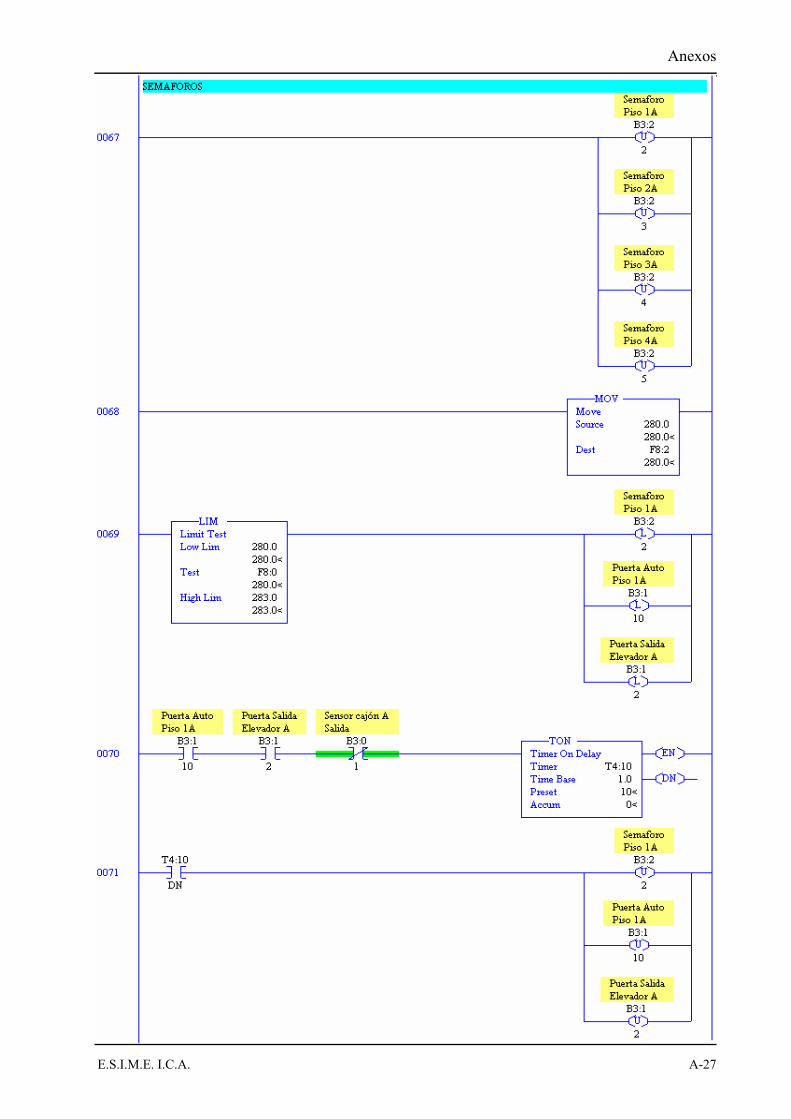
Anexos
E.S.I.M.E. I.C.A. A-27

Anexos
E.S.I.M.E. I.C.A. A-28

Anexos
E.S.I.M.E. I.C.A. A-29
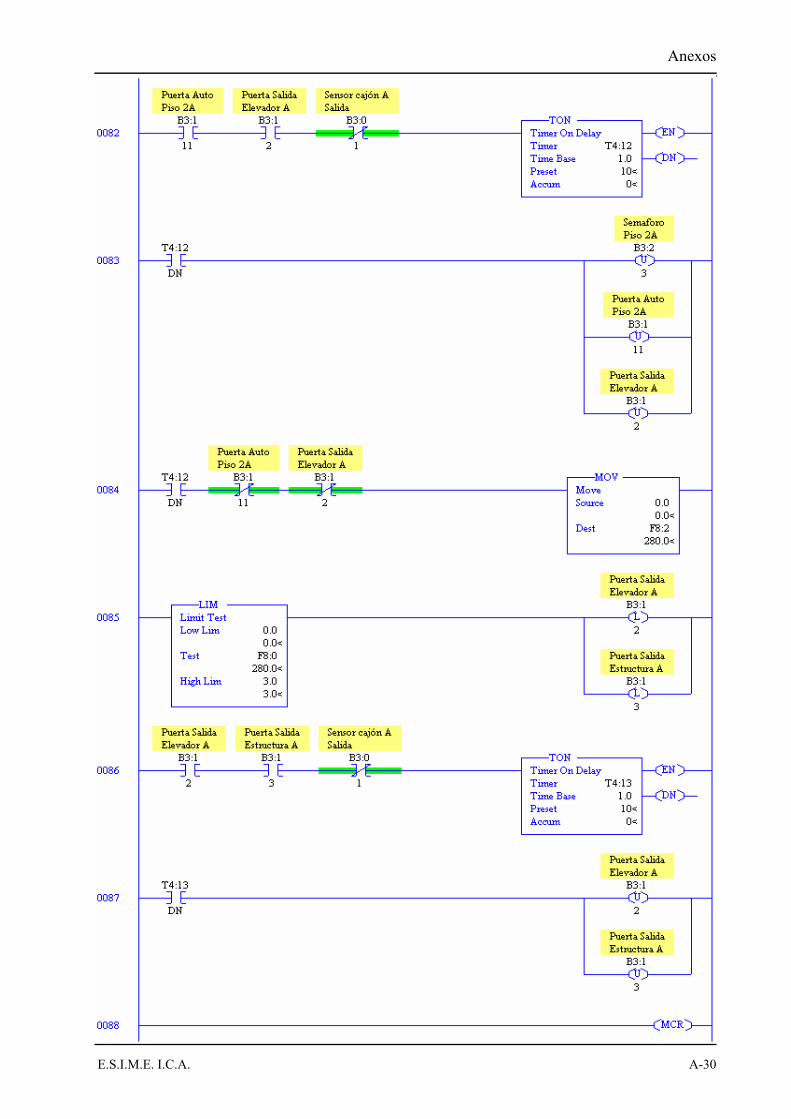
Anexos
E.S.I.M.E. I.C.A. A-30

Anexos
E.S.I.M.E. I.C.A. A-31

Anexos
E.S.I.M.E. I.C.A. A-32
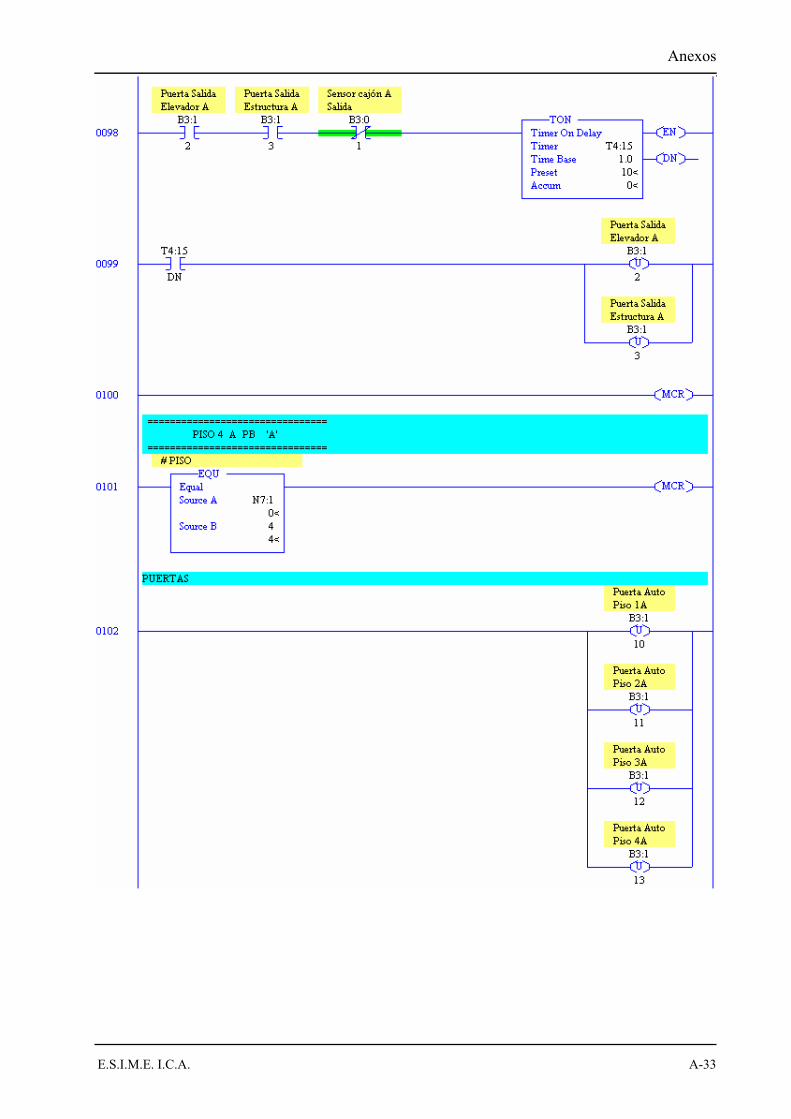
Anexos
E.S.I.M.E. I.C.A. A-33
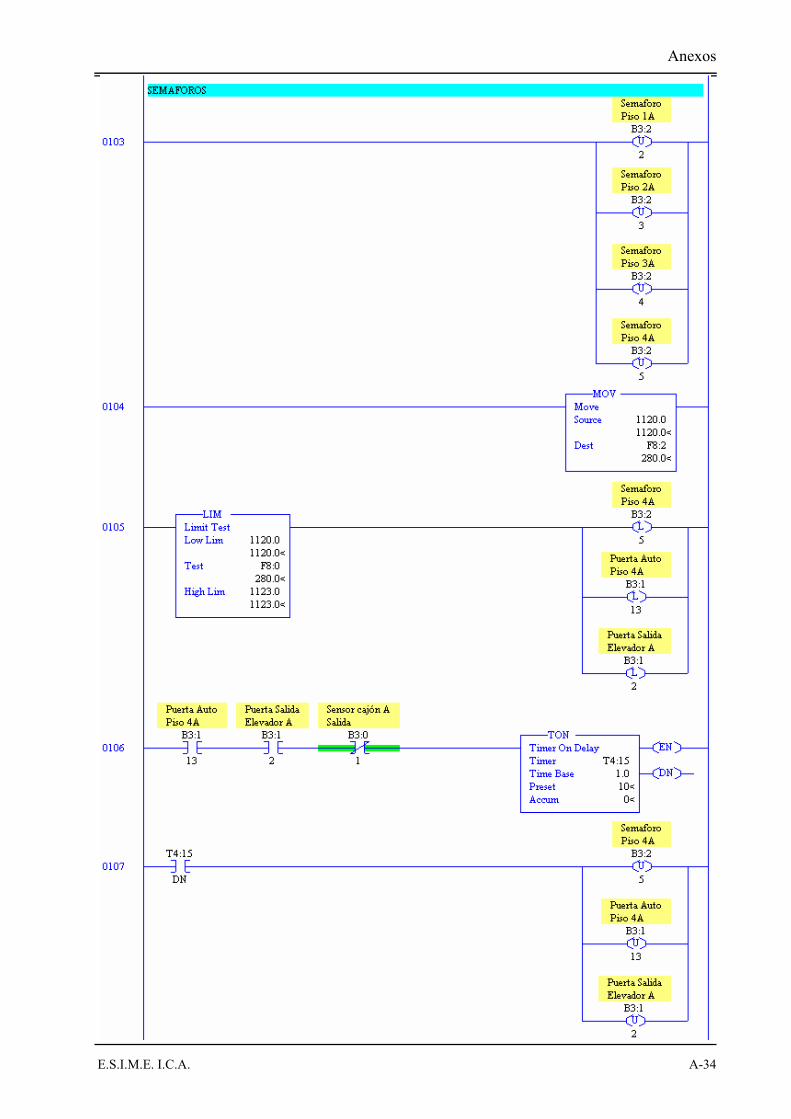
Anexos
E.S.I.M.E. I.C.A. A-34

Anexos
E.S.I.M.E. I.C.A. A-35

Anexos
E.S.I.M.E. I.C.A. A-36
PROYECTO LAD 7 – CAJON B ---- Total Rungs in file = 114

Anexos
E.S.I.M.E. I.C.A. A-37

Anexos
E.S.I.M.E. I.C.A. A-38

Anexos
E.S.I.M.E. I.C.A. A-39

Anexos
E.S.I.M.E. I.C.A. A-40
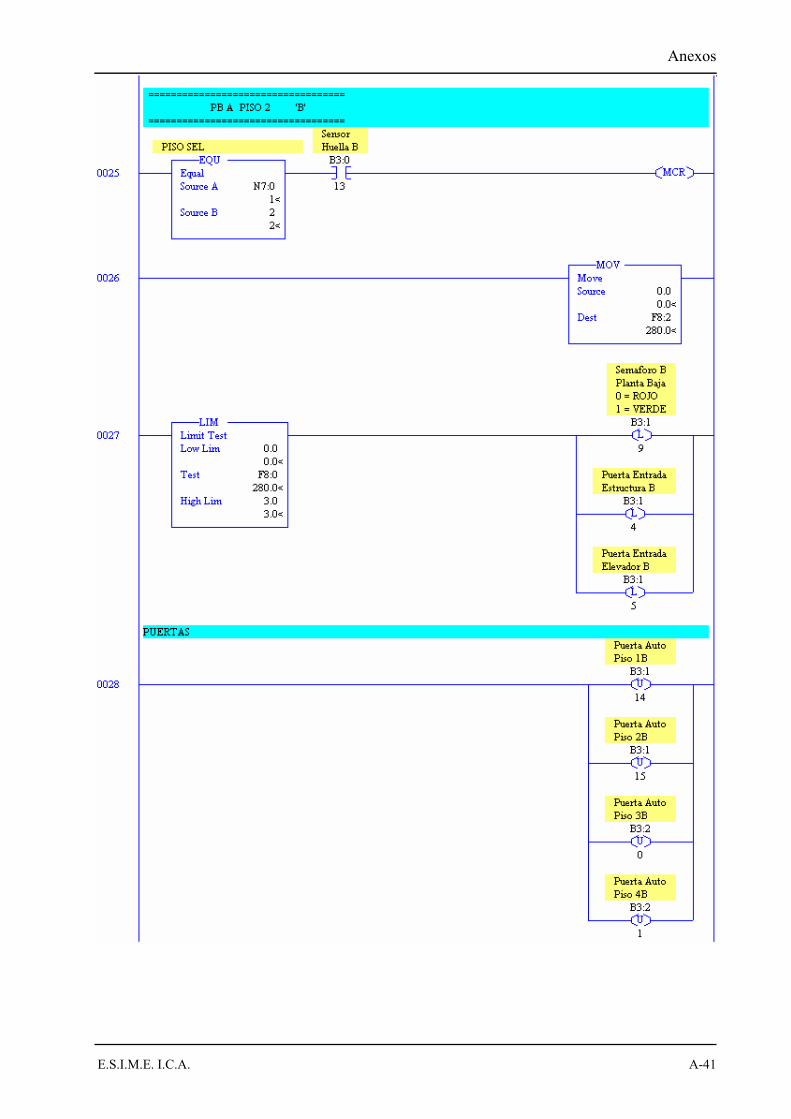
Anexos
E.S.I.M.E. I.C.A. A-41

Anexos
E.S.I.M.E. I.C.A. A-42

Anexos
E.S.I.M.E. I.C.A. A-43

Anexos
E.S.I.M.E. I.C.A. A-44
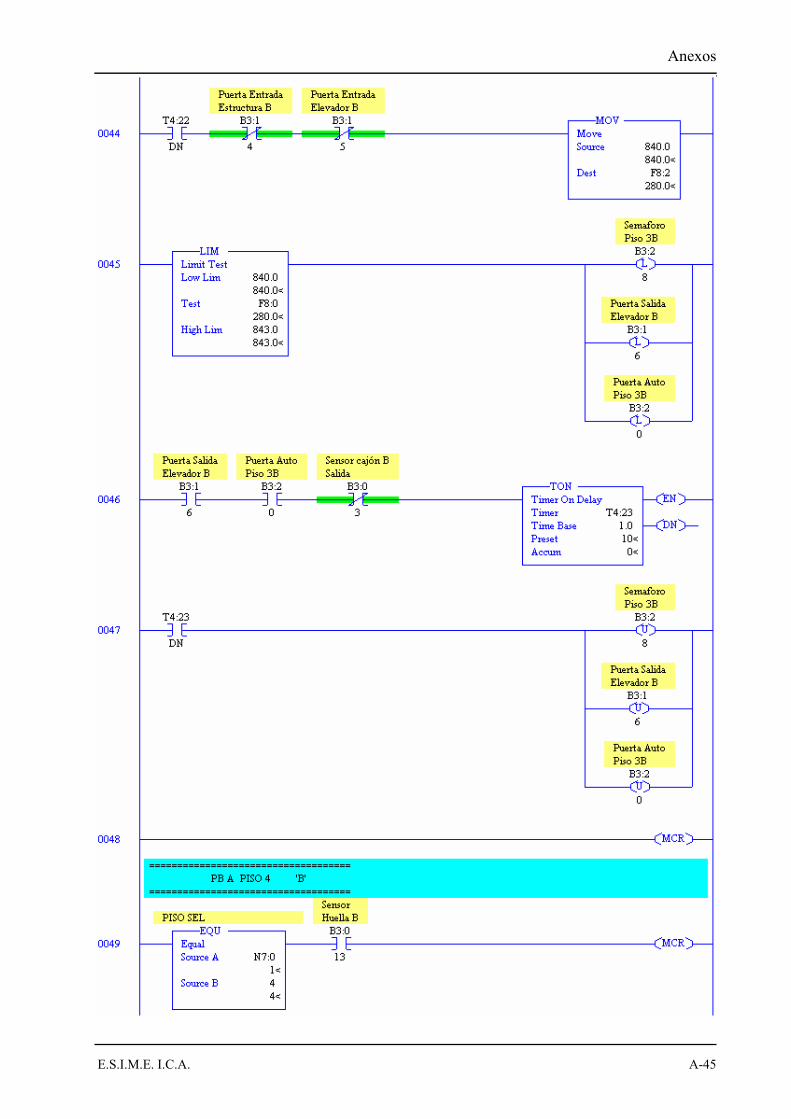
Anexos
E.S.I.M.E. I.C.A. A-45
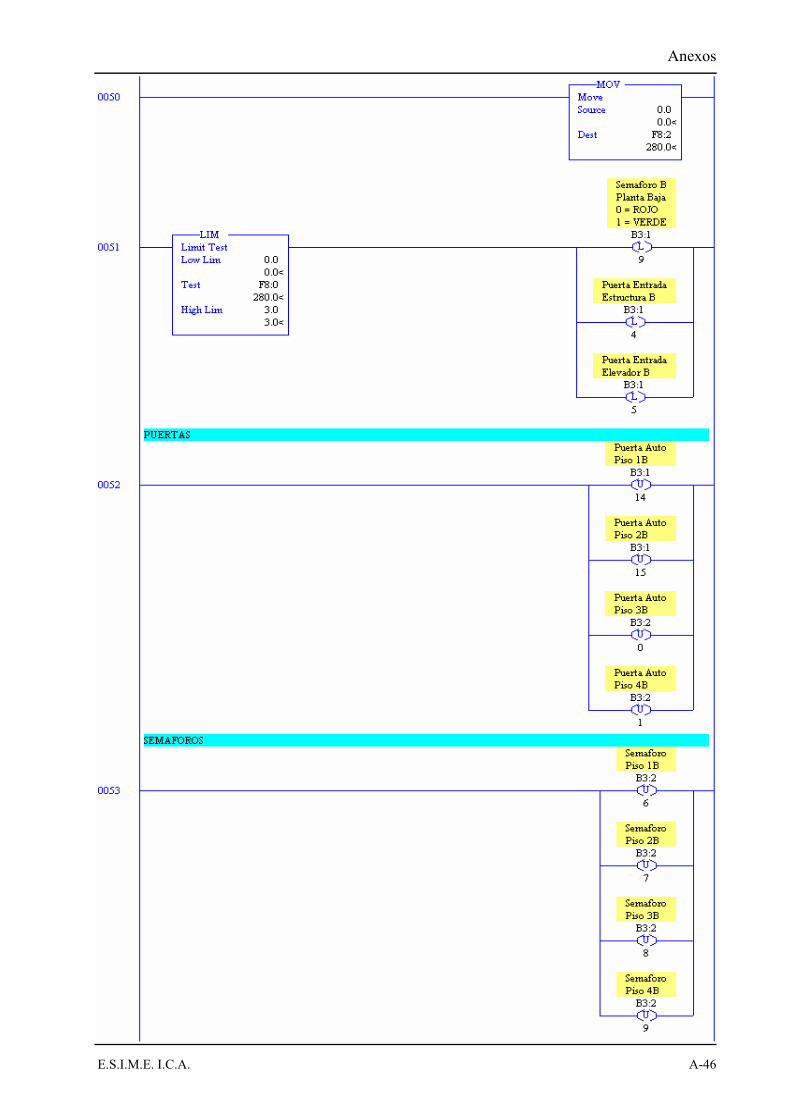
Anexos
E.S.I.M.E. I.C.A. A-46
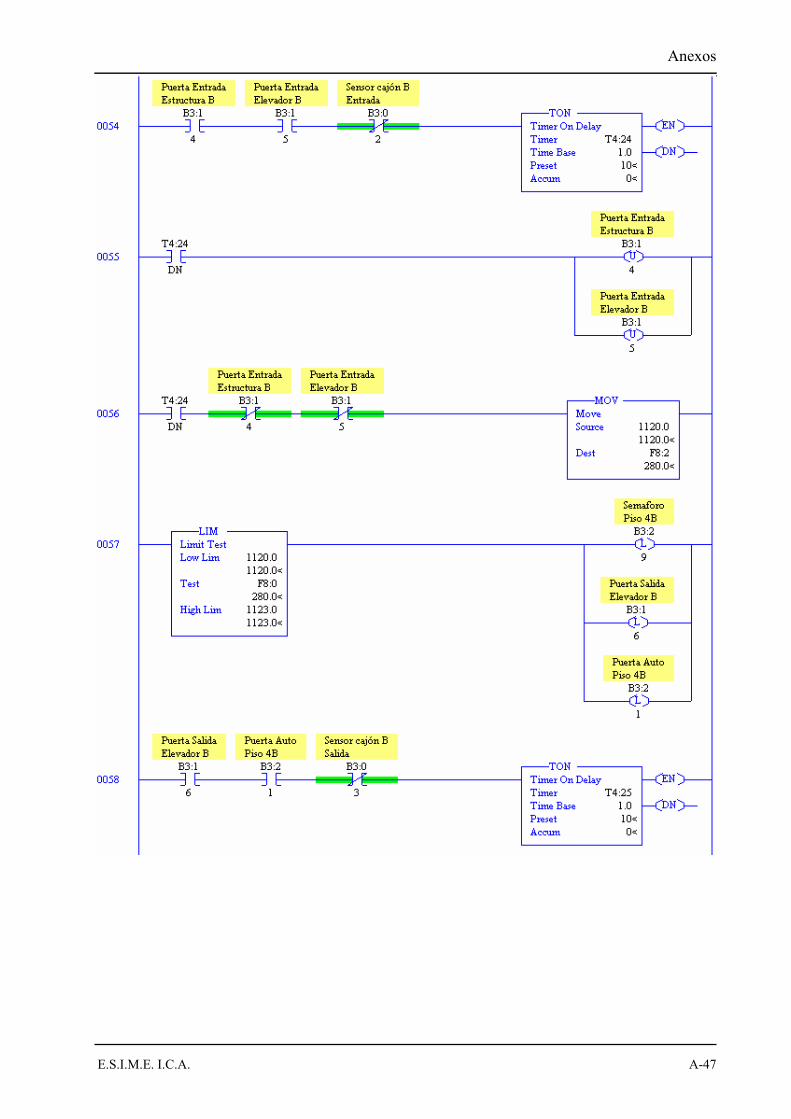
Anexos
E.S.I.M.E. I.C.A. A-47

Anexos
E.S.I.M.E. I.C.A. A-48

Anexos
E.S.I.M.E. I.C.A. A-49

Anexos
E.S.I.M.E. I.C.A. A-50

Anexos
E.S.I.M.E. I.C.A. A-51

Anexos
E.S.I.M.E. I.C.A. A-52

Anexos
E.S.I.M.E. I.C.A. A-53

Anexos
E.S.I.M.E. I.C.A. A-54

Anexos
E.S.I.M.E. I.C.A. A-55

Anexos
E.S.I.M.E. I.C.A. A-56

Anexos
E.S.I.M.E. I.C.A. A-57

Anexos
E.S.I.M.E. I.C.A. A-58

Anexos
E.S.I.M.E. I.C.A. A-59
A-d Tabla Potencias y corrientes nominales Aplica para motores trifásicos de 4 polos tipo jaula de ardilla 60 Hz
A-e Tabla Equivalencias de contactores tamaño NEMA vs Contactores IEC Aplica para motores trifásicos de 4 polos tipo jaula de ardilla 60 Hz.
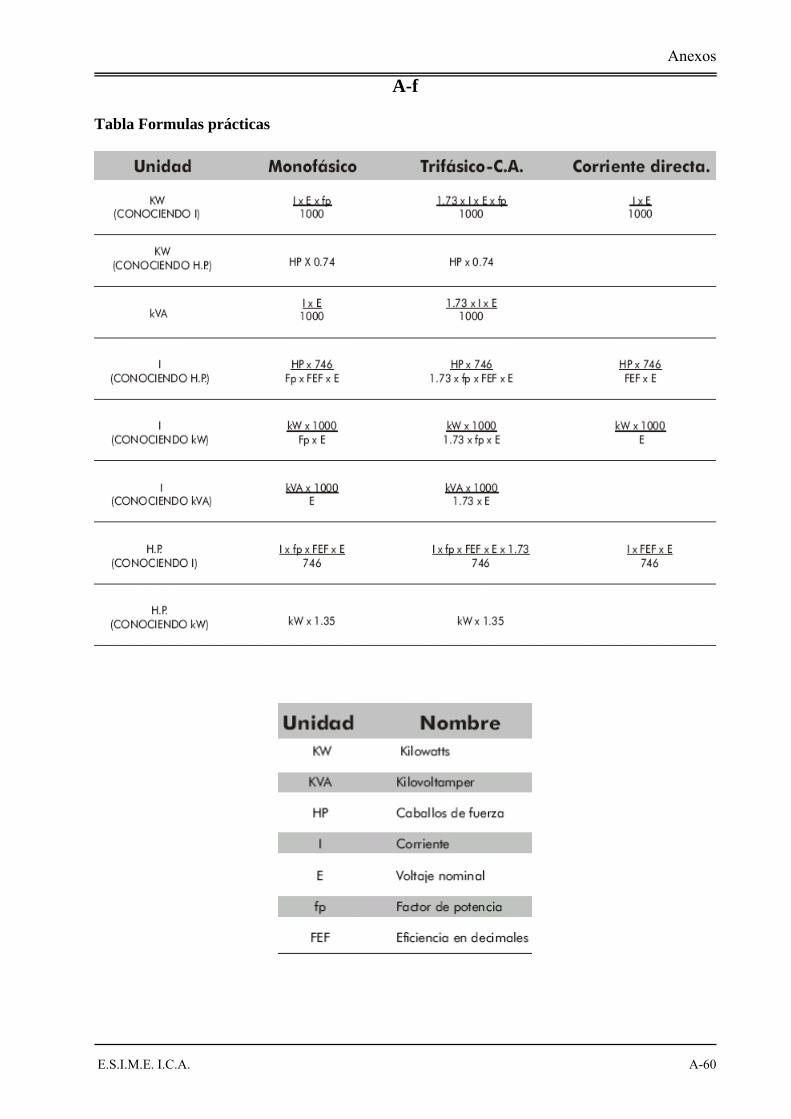
Anexos
E.S.I.M.E. I.C.A. A-60
A-f Tabla Formulas prácticas

Anexos
E.S.I.M.E. I.C.A. A-61
A-g Tabla Esfuerzos estáticos de seguridad para usar en la ecuación de Lewis
MATERIAL S0 lb/plg2 BHN Fundición gris ASTM 25 8000 174 ASTM 35 12000 212 ASTM 50 15000 223 Acero vaciado (bajo carbón) 0.20% C sin tratamiento térmico 20000 180 0.20% C WQT 25000 250 Acero al carbono forjado SAE 1020 endurecimiento superficial WQT 18000 156 SAE 1030 sin tratamiento 20000 180 SAE 1035 sin tratamiento 23000 190 SAE 1040 sin tratamiento 25000 202 SAE 1045 sin tratamiento 30000 215 SAE 1045 endurecido por WQT 32000 205 SAE 1050 endurecido por OQT 35000 223 Aceros aleados SAE 2320 Endurecimiento superficial y WQT 50000 225 SAE 2345 Endurecido por OQT 50000 475 SAE 3115 Endurecimiento superficial y OQT 37000 212 SAE 3145 Endurecido por OQT 53000 475 SAE 3245 Endurecido por OQT 65000 475 SAE 4340 Endurecido por OQT 65000 475 SAE 4640 Endurecido por OQT 55000 475 SAE 6145 Endurecido por OQT 67500 475 Materiales a base de cobre SAE 43 (ASTM B147-52, 8A) Manganeso bronce
20000 100

Anexos
E.S.I.M.E. I.C.A. A-62
A-h Tabla Factor de carga al desgaste, Ky esfuerzo de ruptura cíclica
K Materiales de piñón y engrane Esfuerzo limite de fatiga en la superficie. S0 lb/plg2
Ǿ=14 ½ grados
Ǿ=20 grados
Ǿ=25
Ambos engranes de acero con numero de dureza Brinel promedio para engrane
150 50,000 30 41 51 175 60,000 43 58 72 200 70,000 58 79 98 225 80,000 76 103 127 250 90,000 96 131 162 275 100,000 119 162 200 300 110,000 144 196 242 325 120,000 171 233 288 350 130,000 196 270 333 375 140,000 233 318 384 400 150,000 268 366 453 Acero (BHN 150) y hierro vaciado
50,000 44 60 74
Acero (BHN 200) y hierro vaciado
70,000 87 119 147
Acero (BHN 250) y hierro vaciado
90,000 144 196 242
Acero (BHN 150) y bronce fosforado
59,000 46 62 77
Acero (BHN 200) y bronce fosforado
65,000 73 100 123
Acero (BHN 250) y bronce fosforado
85,000 135 184 228
Hierro vaciado y hierro vaciado 90,000 193 264 327 Hierro vaciado y bronce fosforado
83,000 170 234 288

Anexos
E.S.I.M.E. I.C.A. A-63
A-i
1.1 GUÍA PARA LA ELECCIÓN DEL TAMAÑO DE UN REDUCTOR O MOTORREDUCTOR
Para seleccionar adecuadamente una unidad de reducción debe tenerse en cuenta la siguiente información básica: 1.1.1 Características de operación
Potencia (HP tanto de entrada como de salida) Velocidad (RPM de entrada como de salida) Troqué (par) máximo a la salida en Kg.-m. Relación de reducción (I).
1.1.2 Características del trabajo a realizar
Tipo de máquina motriz (motor eléctrico, a gasolina, etc.) Tipo de acople entre máquina motriz y reductor. Tipo de carga uniforme, con choque, continua, discontinua etc. Duración de servicio horas/día. Arranques por hora, inversión de marcha.
1.1.3 Condiciones del ambiente
Humedad Temperatura
1.1.4 Ejecución del equipo
Ejes a 180º, ó, 90º. Eje de salida horizontal, vertical, etc.
1.2 Potencia de selección (Pn) Es difícil encontrar en la práctica, que una unidad de reducción realice su trabajo en condiciones ideales, por tanto, la potencia requerida por la máquina accionada, debe multiplicarse por un factor de servicio Fs, factor que tiene en cuenta las características específicas del trabajo a realizar y el resultado, llamado Potencia de selección, es el que se emplea para determinar el tamaño del reductor en las tablas de selección. Potencia de selección (Pn)= Potencia requerida (Pr) X Fs. En algunos casos los reductores se determinan no por la potencia sino por los torques de selección. El troque y la potencia están relacionados mediante la siguiente función: 716.2 X Pn (HP) Tn (Kg-m) = N (RPM) Para las tablas de selección: Pn= HP de salida y Tn= Torqué Pn está dada por Pn=HP entrada X n, donde n, = Eficiencia del reductor.

Anexos
E.S.I.M.E. I.C.A. A-64
Para condiciones especiales como altas frecuencias de arranque- parada o de inversiones de marcha en el motor, alta humedad o temperatura ambiente y construcciones o aplicaciones especiales es conveniente consultar con el Departamento Técnico. 1.3 Instalación Para un buen funcionamiento de las unidades de reducción es indispensable tener en cuenta las siguientes recomendaciones: Las unidades deben montarse sobre bases firmes para eliminar vibraciones y desalineamientos en los ejes. Si la transmisión de la unidad a la máquina es por acople directo entre ejes, es indispensable garantizar una perfecta alineación y centrado. Si la transmisión se hace por cadenas o correas, la tensión dada a estos elementos debe ser recomendada por el fabricante, previas una alineación entre los piñones o poleas. Las unidades de acoplamiento deben montarse cuidadosamente sobre los ejes para no dañar los rodamientos y lo más cercanas a la carcaza para evitar cargas de flexión sobre los ejes. Antes de poner en marcha los Moto reductores, es necesario verificar que la conexión del motor sea la adecuada para la tensión de la red eléctrica. 1.4 Mantenimiento Los engranajes y los rodamientos están lubricados por inmersión o salpique del aceite alojado en la carcaza. Se debe revisar el nivel del aceite antes de poner en marcha la unidad de reducción. En la carcaza se encuentran los tapones de llenado, nivel y drenaje de aceite. El de llenado posee un orificio de ventilación el cual debe permanecer limpio. Los reductores tienen una placa de identificación, en la cual se describe el tipo de lubricante a utilizar en condiciones normales de trabajo. Lubricación El reductor lleva tapones de llenado y ventilación, nivel y vaciado. En la placa de identificación del reductor se encuentra el tipo de aceite apropiado. MOBIL GEAR 629.El aceite a usar debe tener las siguientes características:
Gravedad Específica 0.903 Viscosidad SSU A 100 grados F 710/790 Viscosidad CST A 40 grados C 135/150 Clasificación ISO V G 150
El aceite a usar debe contener aditivos de extrema presión del tipo azufre-fósforo, los cuales le dan características antidesgaste de reducción a la fricción, disminuyendo así la elevación de temperatura en los engranajes. Adicionalmente aditivos contra la formación de herrumbre y la corrosión, así como agentes especiales para aumentar la estabilidad a la oxidación y resistencia a la formación de espuma. Bajo condiciones extremas de temperatura o humedad deben emplearse aceites adecuados.

Anexos
E.S.I.M.E. I.C.A. A-65
A-j Diagrama de Instalación de gabinete de control

Anexos
E.S.I.M.E. I.C.A. A-66
Diagrama Instalación de gabinete de control

Anexos
E.S.I.M.E. I.C.A. A-67
Diagrama Instalación de gabinete de control

Anexos
E.S.I.M.E. I.C.A. A-68
Diagrama Instalación de gabinete de control

Anexos
E.S.I.M.E. I.C.A. A-69
A-k Instalación de fuente de alimentación SLC 500 Fuentes de alimentación SLC 500 Atención Una descarga electrostática puede dañar los circuitos integrados y los semiconductores si una persona toca los pines del conector del backplane. Siga estas pautas cuando manipule la fuente de alimentación:
Toque un objeto que esté conectado a tierra para descargar el potencial electroestático de su cuerpo.
No toque el conector de backplane ni los pines del conector. No toque ningún componente de los circuitos dentro de la fuente de alimentación
eléctrica. Utilice una estación de trabajo con protección antiestática, si está disponible. Mantenga las fuentes de alimentación eléctrica en su envase antiestático cuando no esté
en uso. Importante Si el equipo no se instala y se usa según lo descrito en este manual, puede verse afectada la protección proporcionada por el equipo. Consideraciones respecto a lugares peligrosos Los productos con la marca CL1, DIV 2, GP A, B, C, D son apropiados para uso en lugares Clase I, División 2, Grupos A, B, C, D o en lugares no peligrosos solamente. Cada producto se suministra con marcas en la placa de especificaciones que indican el código de temperatura para lugares peligrosos. Cuando se combinan productos en un sistema, el código de temperatura más adverso (número “T” más bajo) puede usarse como ayuda para determinar el código de temperatura general del sistema. La combinación de equipos en el sistema está sujeta a investigación por parte de la autoridad local con jurisdicción al momento de la instalación. Peligro de explosión
No desconecte el equipo a menos que esté desconectada la alimentación eléctrica, excepto en el caso de que el área se considere no peligrosa.
No desconecte las conexiones a este equipo a menos que esté desconectada la alimentación eléctrica, excepto en el caso de que el área se considere no peligrosa. Asegure las conexiones externas a este equipo con tornillos, seguros deslizantes, conectores roscados u otros medios proporcionados con este producto.

Anexos
E.S.I.M.E. I.C.A. A-70
Instalación de la fuente de alimentación
1. Alinee la tarjeta de circuitos de la fuente de alimentación con las guías para tarjeta situadas al lado izquierdo del chasis.
2. Deslice la fuente de alimentación hasta que quede al ras con el chasis.
Luego fije la fuente de alimentación al chasis.

Anexos
E.S.I.M.E. I.C.A. A-71
Cableado de la fuente de alimentación eléctrica 1. Coloque el puente de voltaje de entrada de manera que coincida con el voltaje de entrada. (Esto no se aplica a las fuentes de alimentación 1746-P3, -P5, -P6 y -P7, las cuales no tienen puente).
2. Conecte el tornillo de tierra de la fuente de alimentación a la conexión a tierra o bus de tierra más cercano. Utilice cable de cobre de 1.68 mm (calibre 14 AWG) 75° (Categoría 1 según el documento Industrial Automation Wiring and Grounding Guidelines) y mantenga los conductores tan cortos como sea posible. La fuente de alimentación 1746-P4 se muestra a continuación.

Anexos
E.S.I.M.E. I.C.A. A-72
3. Conecte la alimentación de entrada.
Atención La fuente de alimentación SLC 500 puede sufrir daño debido a sobretensión al conmutar cargas inductivas tales como motores, arrancadores de motor, solenoides y relés. Para proteger la fuente de alimentación SLC 500 en estas aplicaciones, use un transformador de aislamiento para aislar la fuente de alimentación de la sobretensión dañina. 4. Quite la etiqueta protectora.

Anexos
E.S.I.M.E. I.C.A. A-73
A-l Instalación de procesador SLC 5/05 Consideraciones de seguridad Atención Nunca instale, retire ni cable ningún módulo mientras que esté conectada la alimentación eléctrica. Tampoco exponga los módulos del procesador a superficies u otras áreas que normalmente retengan carga electroestática. Las cargas electrostáticas pueden alterar o destruir la memoria. Para obtener recomendaciones generales acerca de los requisitos de seguridad en la instalación y de las prácticas relacionadas con la seguridad, consulte los requisitos específicos de su región.
Europa: Consulte las normas contenidas en EN 60204 y en sus reglamentos nacionales. Estados Unidos: consulte NFPA 70E, 'Electrical Safety Requirements for Employee
Workplaces' (Requisitos de seguridad eléctrica en lugares de trabajo). Consideraciones acerca de los lugares peligrosos Este equipo sólo es adecuado para uso en lugares clasificados como Clase I, División 2, Grupos A, B, C, D o para lugares no peligrosos. La siguiente nota de ADVERTENCIA rige para el uso en lugares peligrosos. Instalación del procesador SLC Asegúrese de que la alimentación eléctrica del sistema esté desconectada; seguidamente inserte el procesador en la ranura 0 del chasis 1746. Importante Los procesadores modulares SLC 500 deben insertarse en la ranura izquierda (ranura 0). Si inserta el procesador en otra ranura, éste no funcionará. Además, retire el recubrimiento protector tras instalar el procesador. No retirar el recubrimiento puede causar el sobrecalentamiento de la fuente de alimentación eléctrica.

Anexos
E.S.I.M.E. I.C.A. A-74
Alimentación eléctrica del procesador 1. Encienda la fuente de alimentación eléctrica del chasis. 2. Verifique los indicadores LED del procesador y de la fuente de alimentación eléctrica del chasis. El indicador LED de alimentación de la fuente de alimentación eléctrica debe estar encendido y el indicador LED de fallo del procesador debe estar parpadeante. Vea la figura para la ubicación de los indicadores LED de la fuente de alimentación eléctrica y del procesador. Fuente de alimentación eléctrica e indicadores LED.
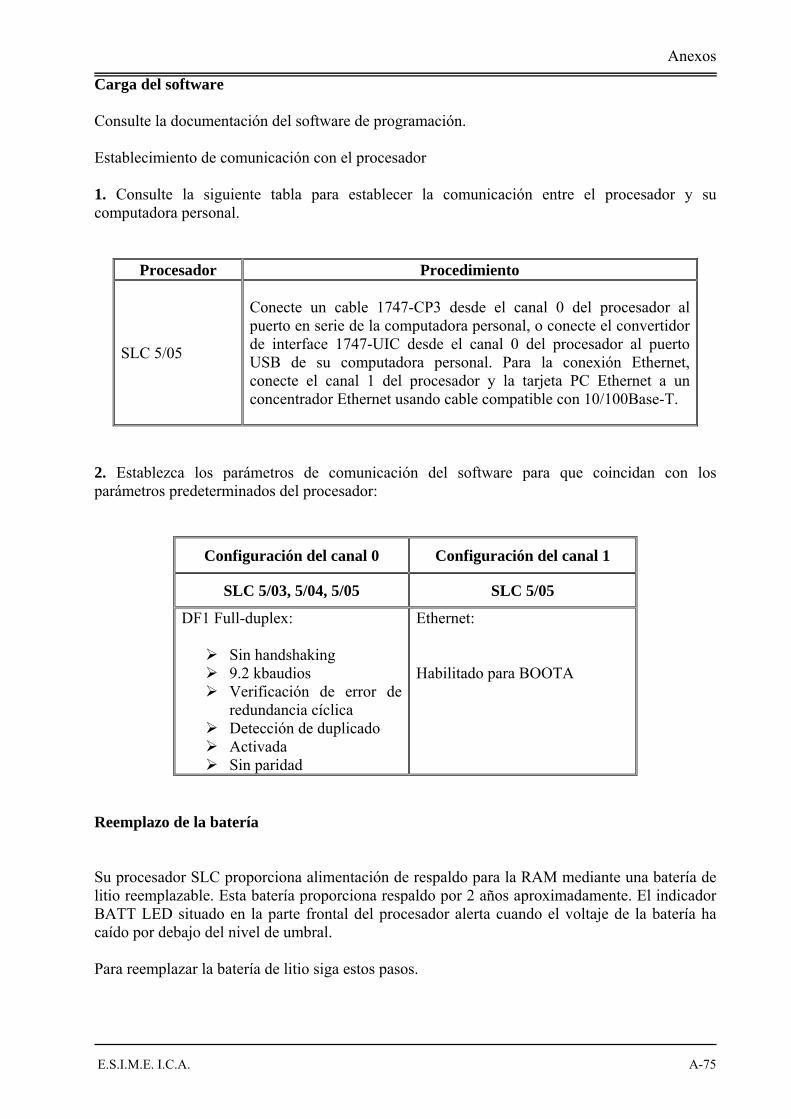
Anexos
E.S.I.M.E. I.C.A. A-75
Carga del software Consulte la documentación del software de programación. Establecimiento de comunicación con el procesador 1. Consulte la siguiente tabla para establecer la comunicación entre el procesador y su computadora personal.
Procesador Procedimiento
SLC 5/05
Conecte un cable 1747-CP3 desde el canal 0 del procesador al puerto en serie de la computadora personal, o conecte el convertidor de interface 1747-UIC desde el canal 0 del procesador al puerto USB de su computadora personal. Para la conexión Ethernet, conecte el canal 1 del procesador y la tarjeta PC Ethernet a un concentrador Ethernet usando cable compatible con 10/100Base-T.
2. Establezca los parámetros de comunicación del software para que coincidan con los parámetros predeterminados del procesador:
Configuración del canal 0 Configuración del canal 1
SLC 5/03, 5/04, 5/05 SLC 5/05
DF1 Full-duplex:
Sin handshaking 9.2 kbaudios Verificación de error de
redundancia cíclica Detección de duplicado Activada Sin paridad
Ethernet: Habilitado para BOOTA
Reemplazo de la batería Su procesador SLC proporciona alimentación de respaldo para la RAM mediante una batería de litio reemplazable. Esta batería proporciona respaldo por 2 años aproximadamente. El indicador BATT LED situado en la parte frontal del procesador alerta cuando el voltaje de la batería ha caído por debajo del nivel de umbral. Para reemplazar la batería de litio siga estos pasos.
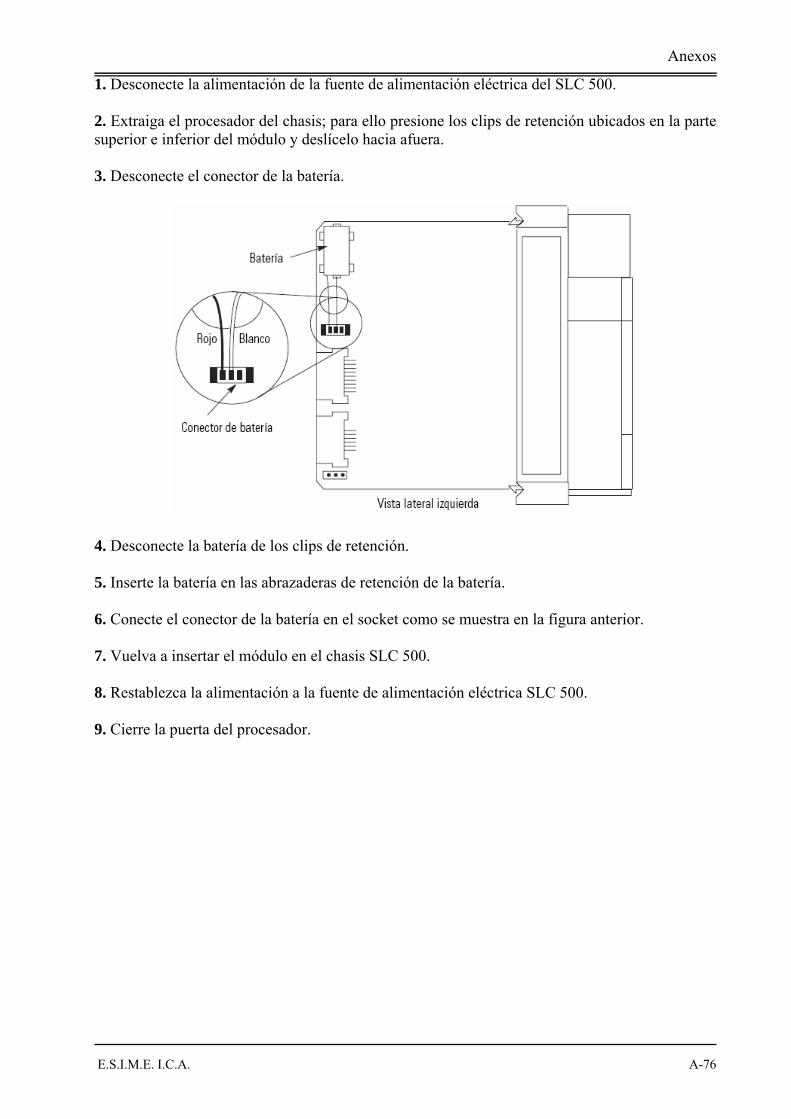
Anexos
E.S.I.M.E. I.C.A. A-76
1. Desconecte la alimentación de la fuente de alimentación eléctrica del SLC 500. 2. Extraiga el procesador del chasis; para ello presione los clips de retención ubicados en la parte superior e inferior del módulo y deslícelo hacia afuera. 3. Desconecte el conector de la batería.
4. Desconecte la batería de los clips de retención. 5. Inserte la batería en las abrazaderas de retención de la batería. 6. Conecte el conector de la batería en el socket como se muestra en la figura anterior. 7. Vuelva a insertar el módulo en el chasis SLC 500. 8. Restablezca la alimentación a la fuente de alimentación eléctrica SLC 500. 9. Cierre la puerta del procesador.

Anexos
E.S.I.M.E. I.C.A. A-77
A-m Cálculo de velocidades y tiempos para el ascensor Distancia recorrida por cada revolución del piñón de salida del moto reductor =20.32 cm [35 rev/min][1min/60s]= 0.583 rev/s…….distancia recorrida= 11.85 cm [70 rev/min][1min/60s]= 1.16 rev/s……...distancia recorrida= 23.70 cm [105 rev/min][1min/60s]= 1.70 rev/s…….distancia recorrida= 35.56 cm [140 rev/min][1min/60s]= 2.33 rev/s…….distancia recorrida= 47.34 cm Para que el moto reductor alcance su velocidad máxima (140 rev/min) tienen que transcurrir 4 segundos, en los cuales este aumenta 0.583 revoluciones / segundo. Por lo tanto en el trascurso de 4 segundos este ah recorrido una distancia de 70.84 cm.
• Altura del primer piso 280cm Si consideramos 8 segundos de aceleración mas desaceleración, tenemos que este recorre una distancia de 140.96 cm. en ese intervalo de tiempo. Si la altura del primer piso es de 280cm- 140.96cm= 139.04cm 139.04cm / 47.34= 2.9370 segundos + 8 segundos = 10.9370 s; en llegar al primer piso.
• Altura del segundo piso 560cm 560cm-140.96cm=419.04cm / 47.34cm= 8.85 segundos + 10.9370= 19.78 s en llegar al segundo piso.
• Altura del tercer piso 840cm 840cm-140.96cm=699.04cm / 47.34cm= 14.76 segundos + 10.9370= 25.69 s en llegar al tercer piso.
• Altura del cuarto piso 1120cm 1120cm-140.96cm=979.04cm / 47.34cm= 20.68 segundos + 10.9370= 31.61 s en llegar al cuarto piso.

Anexos
E.S.I.M.E. I.C.A. A-78
A-n NORMA API SISTEMAS DE PROCESO DE LA INSTRUMENTACIÓN Y DEL CONTROL Y DE LA TRANSMISIÓN NORMAS A P I RPa554 95 I 0 7 3 2 2 9 0 0 5 4 9 5 5 8 7 0 2 I NORMAS A P I RPa552 95 I 0 7 3 2 2 9 0 0 5 4 9 5 5 8 7 0 2 I PLC Y SUS COMPONENTES Controladores lógicos programables DEFINICIÓN Un regulador programable típico de la lógica (PLC) consiste en una unidad de programación, una unidad de proceso, una unidad U0, y una fuente de alimentación. Los reguladores programables de la lógica son los dispositivos de estado sólido por microprocesador que se programan para funcionar en una secuencia particular en respuesta a entradas externas. PLCs se puede utilizar en lugar de sistemas de relais o para el control proporcional, integral, y derivado (PID) en usos específicos. Las técnicas de programación de uso general expresar lógica encendido-apagado secuencial incluyen diagramas de la escala o lógica boleana. La lógica programable del regulador reside en una memoria, que se puede modificar para tener en cuenta cambios en los usos o para corregir errores en la programación inicial. Dispositivos de programación Un dispositivo de programación es un dispositivo dedicado que permite un interfaz al PLC para el desarrollo de programa, el start-up, y localizar averías. Las instrucciones de ser ejecutado por el PLC se insertan en su memoria con este dispositivo. Los dispositivos del programador varían de tamaño de unidades handheld pequeñas a las unidades CRT-basadas con la documentación del desarrollo de ingeniería, el estado de la entrada-salida, y la en-lineloff-línea programación. Hardware del sistema Procesador El procesador debe ser modular y desprendible para el mantenimiento, y aislado eléctricamente de componentes asociados de U 0. En caso de apagón, el procesador debe conservar su memoria para un mínimo de seis meses. Un reloj en tiempo real con un mínimo 10 resoluciones del milisegundo se debe proporcionar por el tiempo que marca los acontecimientos con etiqueta, cálculos de la tarifa, y otro funciones del dependiente del tiempo. El procesador debe ser capaz de la exploración y la puesta al día de la entrada-salida y de ejecutar lógica discreta definida por el usarío al mínimo de diez veces por segundo y análogo funciona a mínimo de cuatro veces por segundo. Al combinar funciones discretas y análogas en un procesador, las funciones análogas aumentan el tiempo de ejecución neto del procesador y se deben tomar en la consideración. El procesador debe poder ejecutar comandos usando las funciones y los parámetros siguientes:

Anexos
E.S.I.M.E. I.C.A. A-79
a. Funcionalidad de la matemáticas usando número entero y números verdaderos. b. Lógica incluyendo entradas y salidas transitorias el trabar. c. Retraso, los contadores, y los contadores de tiempo. d. Aritmética, algebraica, y funciones trigonométricas. e. PID y funciones de control de proceso. f. Programación Si-entonces-otra de la declaración del F. g. Función selecta y mediana del punto medio de la desviación para la votación de la entrada análoga. Módulos de la entrada-salida Los componentes de la entrada-salida deben ser módulos independientes autónomos de modo que una falta y un reemplazo subsecuente de uno no afecte otros componentes. Todos los módulos de salida deben ser reemplazables con el sistema de la entrada-salida accionado. Los módulos deben tener afinar mecánico para prevenir la inserción física y la activación en línea de un módulo en una ranura incorrecta en el chasis. Poniendo en cortocircuito o poniendo a tierra el connectetod de los hilos inductores ningún módulo de la entrada-salida no dañará el módulo sí mismo. Módulos de entrada análoga Los módulos de entrada análoga deben emplear por lo menos la precisión A de 12 pedacitos a los convertidores de D para 4 a 20-mA y 1 a las señales de cinco voltios de 4 del alambre transmisores de dos hilos y. La remuneración y la linearización de la ensambladura de la referencia se deben proporcionar para las entradas del termopar. La exactitud de la medida de la entrada será por lo menos 0.10 por ciento de gama para todas las entradas. El rechazamiento común del ruido del modo debe ser por lo menos DB 80. El rechazamiento del ruido del modo normal debe ser por lo menos DB 45. Las entradas análogas se deben ofrecer la señal que se filtra y fundir o proteger contra los argumentos inadvertidos. Módulos de salida análoga Las salidas análogas deben proporcionar una señal del mADC 4-20 y deben ser capaces de funcionar lazos hasta 550 ohmios de mínimo de la resistencia. La exactitud de la salida análoga será por lo menos 0.5 por ciento. Módulos de entrada discretos Cada entrada discreta debe tener un indicador del diodo electroluminoso (LED) el demostrar de estado de la entrada en el módulo. Las señales de entrada discretas se deben condicionar por un filtro low-pass, para reducir los efectos del ruido y para despedir. Un mínimo de 600 opto-aislamientos del VDC se debe proporcionar entre cada señal de entrada y microprocesador. Módulos de salida discretos Cada salida discreta debe tener un indicador del LED el demostrar de estado de la salida en el módulo. Los módulos de salida discretos deben proporcionar un mínimo de 600 opto-aislamientos del VDC entre cada señal de salida y procesador.

Anexos
E.S.I.M.E. I.C.A. A-80
Cada salida digital se debe fundir individualmente con la indicación soplada del fusible. Las salidas no se deben accionar con la fuente de alimentación interna del PLC. Módulo de interfaz de DCS El PLC debe ser capaz de la interconexión a un sistema de control distribuido (DCS). La información que se transferirá a y desde el DCS vía rface del thiniste se debe incluir, sino no limitar a, el siguiente: a. Alarmar y estado de sistemas. b. Estado discreto de la entrada-salida. c. Valores análogos de la entrada-salida. La velocidad de la transmisión debe ser tal que cualquiera cambia en V0 que sea ponerse al día en la CRT de DCS no exceda 4 segundos a partir de la época del acontecimiento a la actualización del terminal del rayo catódico (CRT). Fuentes de alimentación Las fuentes de alimentación deben ser redundantes para los usos críticos del PLC, con cada uno capaz de proveer energía completa del sistema. El sistema debe aceptar energía a partir de dos diversas fuentes de energía, una de las cuales puede ser una fuente de alimentación unintermptable (UPS). Las fuentes de alimentación pueden ser reemplazables en línea sin la interrupción del proceso y sin la afectación de capacidad del control del PLC. Las fuentes de alimentación del sistema deben tener la protección de sobrecalentamiento, la protección integral del fusible, y estado LED para indicar averías de la fuente de alimentación. Además, cada fuente de alimentación debe tener un contacto del alarmar para indicar la presencia de una avería. Repuestos y capacidad de la extensión Por lo menos 20 por ciento de capacidad de repuesto deben estar disponibles dentro de cada sistema. Esto incluye los gabinetes que forman, las terminaciones, los interruptores del monitor, y 110. La memoria del programa de usuario debe tener por lo menos 40 por ciento de capacidad de repuesto. Por lo menos 20 por ciento de espacio de repuesto deben estar disponibles dentro de cada sistema, éste incluyen el espacio en sistemas y gabinetes que forman para las terminaciones, UO, y así sucesivamente. Este espacio de 20 repuestos de los por ciento está además de la capacidad de repuesto instalada requerida. Pruebas FAT Se refiere a las pruebas que se realizan para determinar el funcionamiento correcto de los dispositivos o maquinaria dentro de la fábrica. Pruebas SAT Son las pruebas que se realizan una vez instalada la maquinaria y operando para verificar que operan en optimo funcionamiento.

Diagrama de alambrado
Elaboro: Alain Novoa Domínguez Francisco Javier Quijada Camacho Reviso: Ing. Francisco Javier Aparicio Silva

CRONOGRAMA DE ACTIVIDADES
MAYO 07 JUNIO 07 AGOSTO 07 SEPTIEMBRE 07 OCTUBRE 07
1-8
9-15
16-2
2
23-3
1
1-9
10-1
6
17-2
3
24-3
0
1-9
10-1
7
18-2
5
26-3
1
1-8
9-15
16-2
3
24-3
0
1-9
10-1
8
19-2
5
26-3
1
CRONOGRAMA DE ACTIVIDADES
FEBRERO 07 MARZO 07 ABRIL 07
AVANCE
5-11
12-1
8
19-2
5
26-2
8
1-11
12-1
8
19-2
5
26-3
1
1-8
9-15
16-2
2
23-3
0
Propuesta de proyectos Elección del proyecto Antecedentes Planteamiento del problema Objetivo Objetivos particulares justificación Limitaciones. Realización de encuestas Oferta demanda distribución Proyecto propuesto Determinación del tamaño Tecnología básica Maquinaria y equipo utilizada Necesidades de obra civil Planos y diagramas Localización del proyecto Estructura de costos Precios de equipos utilizados Mano de obra directa e indirecta Conclusiones finales Anexos Presentaciones finales.


















