IEE3674 2013.Tarea1.YunisLagos
30
IEE3674 Control Predictivo Tarea 1 Victor Yunis – Benjamín Lagos
-
Upload
benjamin-andres-lagos-berrios -
Category
Documents
-
view
216 -
download
0
description
Tarea 1.
Transcript of IEE3674 2013.Tarea1.YunisLagos
-
IEE3674 Control Predictivo
Tarea 1 Victor Yunis Benjamn Lagos
-
Revise internet, libros y revistas de la especialidad para encontrar a lo menos 10 sectores
industriales diferentes en que MPC es aplicable. Liste las referencias encontradas y los
productos para MPC utilizados en las aplicaciones.
IEE 3674 Control Predictivo Victor Yunis Benjamn Lagos
Pregunta 1
Control de plantas de ciclo combinado (General Electric). El nuevo controlador regula la carga de la turbina de gas mientras mantiene las principales restricciones de operacin (esfuerzos de la turbina de vapor) dentro de sus rangos permitidos. D'Amato, Fernando Javier, "Industrial application of a model predictive control solution for power plant startups," Computer Aided Control System Design, 2006 IEEE International Conference on Control Applications, 2006 IEEE International Symposium on Intelligent Control, 2006 IEEE , vol., no., pp.243,248, 4-6 Oct. 2006
Uso en las refineras de petrleo para el FCCU o craqueo cataltico. (DMC, Dynamic Matrix Control) S.Joe Qin, Thomas A. Badgwell, A survey of industrial model predictive control technology, Control Engineering Practice, Volume 11, Issue 7, July 2003, Pages 733-764, ISSN 0967-0661, http://dx.doi.org/10.1016/S0967-0661(02)00186-7. http://www.diquima.upm.es/~mrod/docs/cpcv.pdf
Control de plantas de policloruro de vinilo (IDCOM) S.Joe Qin, Thomas A. Badgwell, A survey of industrial model predictive control technology, Control Engineering Practice, Volume 11, Issue 7, July 2003, Pages 733-764, ISSN 0967-0661, http://dx.doi.org/10.1016/S0967-0661(02)00186-7.
Control de molino SAG (BRAINWAVE) El controlador predictivo del BrainWave pronostica con precisin las respuestas de los procesos y cumple con mltiples objetivos. Se adapta a las alteraciones de proceso y de control tales como los cambios en el contenido calrico del combustible, cambios en el ndice de produccin y desviacin del transmisor, manteniendo su proceso de acuerdo a los objetivos planteados. ANDRITZ Automation, BrainWave, Soluciones de control para molinos SAG http://grz.g.andritz.com/c/com2011/00/02/26/22617/1/1/0/-530673895/aa-brainwave-sagmill-spa.pdf
-
Revise internet, libros y revistas de la especialidad para encontrar a lo menos 10 sectores
industriales diferentes en que MPC es aplicable. Liste las referencias encontradas y los
productos para MPC utilizados en las aplicaciones.
IEE 3674 Control Predictivo Victor Yunis Benjamn Lagos
Pregunta 1
Control de altitud de satlites (NGPC, Control Predictivo No-lineal Generalizado y HFS, Sistema Difuso Jerrquico) Se demuestra que el satlite puede rastrear la trayectoria de altitud deseada y el error de seguimiento converge a un pequeo barrio de origen con el controlador diseado. Resultados de la simulacin muestran la efectividad del mtodo propuesto Guang Sun; Wei Huo, "Adaptive Fuzzy Predictive Control of Satellite Attitude Based on Hierarchical Fuzzy Systems," Intelligent System Design and Engineering Application (ISDEA), 2010 International Conference on , vol.1, no., pp.208,211, 13-14 Oct. 2010 doi: 10.1109/ISDEA.2010.252 URL: http://ieeexplore.ieee.org/stamp/stamp.jsp?tp=&arnumber=5743162&isnumber=5743116
Control en procesos de calcinacin (BP neural network con control difuso). Yong-Wei Li; Wei Li; Guo-Qing Yu; Zhen-Yu Wang; Peng Guo, "Applied Research in Fuzzy Neural Network Predictive Control," Cognitive Informatics, 6th IEEE International Conference on , vol., no., pp.408,410, 6-8 Aug. 2007 doi: 10.1109/COGINF.2007.4341917
Control de la manipulacin de un proceso qimico. La estructura del modelo est diseado para lidiar con cambios de regin de operacin, mientras que los parmetros de peso son actualizadas al modelo variante en el tiempo de dinmica y de incertidumbres Ding-Li Yu; Ding-Wen Yu; Gomm, J.B., "Neural model adaptation and predictive control of a chemical process rig," Control Systems Technology, IEEE Transactions on , vol.14, no.5, pp.828,840, Sept. 2006 doi: 10.1109/TCST.2006.876906 URL: http://ieeexplore.ieee.org/stamp/stamp.jsp?tp=&arnumber=1668146&isnumber=34925
-
Revise internet, libros y revistas de la especialidad para encontrar a lo menos 10 sectores
industriales diferentes en que MPC es aplicable. Liste las referencias encontradas y los
productos para MPC utilizados en las aplicaciones.
IEE 3674 Control Predictivo Victor Yunis Benjamn Lagos
Pregunta 1
Control predictivo de la carga ptima en un reactor para un proceso de polimerizacin Andrey Alexandrovich Tyagunov, "High-Performance Model Predictive Control for Process Industry Ntegration of process COntrol and plantwide OPtimization (INCOOP). pp.130-135.Junio 2004 URL:http://alexandria.tue.nl/extra2/200411301.pdf
Control predictivo para alcanzar el maximum power point tracking(MPPT) aplicado en celdas fotovoltaicas. El algoritmo aplicado permite al seguidor solar interactuar rpidamente con el controlador, incluso para bajas abruptas de radiacin solar y considerando las limitaciones de voltaje y corriente. Panagiotis E. Kakosimos, Antonios G. Kladas, Stefanos N. Manias, "Fast Photovoltaic-System Voltage- or Current-Oriented MPPT Employing a Predictive Digital Current-Controlled Converter IEEE TRANSACTIONS ON INDUSTRIAL ELECTRONICS, VOL. 60, NO. 12, Diciembre 2013
Sistema de Control hbrido para control de traccin en vehculos. Controladores de traccin son usados para mejorar la habilidad de un conductor para controlar su vehculo bajo condiciones adversas tales como piso mojado o congelado. F. Borrelli, A. Bemporad, M. Fodor, and D. Hrovat, An MPC/hybridsystem approach to traction control, IEEE Trans. Contr. Systems Technology, vol. 14, no. 3, pp. 541552, 2006. URL: http://ieeexplore.ieee.org/stamp/stamp.jsp?arnumber=01624479
-
Estudie la documentacin de Matlab/Simulink e indique los Toolbox que podran ser de
utilidad para el curso. Justifique.
IEE 3674 Control Predictivo Victor Yunis Benjamn Lagos
Pregunta 2 Model Predictive Control Toolbox, ya que te permite disear y simular controladores predictivos tanto para MATLAB como para Simulink. Adems contiene avisos y ayudas para mejorar la robustez y performance. Ahora bien, ya que este mtodo de control necesita tener definido un modelo para la planta a controlar, podemos especificar directamente la funcin de transferencia o un modelo del espacio de estados del sistema, o bien usar System Identification Toolbox Models, que permite construir modelos de sistemas dinmicos a partir de datos empricos. Otra herramienta til para analizar sistemas LTI (linear time-invariant) y/o SISO (single input single output) y sus caractersticas es Control System Toolbox.
Otra toolbox adicional a usar podra ser Signal Processing si es que es necesario filtrar o analizar seales usadas en el modelo
-
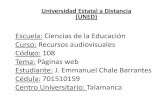
Analice el modelo de sistema hidrulico descrito en elartculo: Alvarado et al, An educational plant based on the quadruple-tank process, 7th IFAC Symposium on Advances in Control Education, June 2006. Asigne valores acada uno de los parmetros y determine un estado de operacin inicial adecuado para los estudios siguientes.
El sistema de ecuaciones diferenciales que modela el problema es:
IEE 3674 Control Predictivo
Variable Unidades Descripcin
2 rea de la seccin transversal del estanque i
2 rea del agujero de salida del estanque i
2 Nivel de agua del estanque i
, 3/ Flujos a traves de las bombas
/2 Aceleracin de gravedad
Parmetro de apertura de la vlvula de 3 vas
Esquema del sistema de 4 estanques
Victor Yunis Benjamn Lagos
Pregunta 3
-
Pregunta 3
Los parmetros del problema fueron elegidos por tanteo, tomando como punto de partida los parmetros usados por Johannson (2000) y luego considerando tamaos de estanques adecuados para una implementacin real.
IEE 3674 Control Predictivo
Variable Valor Unidades
1, 3 0.028 2
2, 4 0.032 2
1 2.3667e-4 2
2 1.9000e-4 2
3 1.4200e-4 2
4 1.1400e-4 2
5 3/
3 3/
1.27267e+008 /2
1 0,7
2 0,6
Victor Yunis Benjamn Lagos
-
Pregunta 3 Este es el modelo de Simulink usado. Las
ganancias corresponden a los trminos que acompaan a las variables en el sistema de ecuaciones.
IEE 3674 Control Predictivo Victor Yunis Benjamn Lagos
Parmetro Descripcin Valor
g1A1 1/1 2
g2A2 2/2 2
g2A3 (1 2)/3 2
g1A4 (1 1)/4 2
aiAj 2/ /
-
Pregunta 3
Simulando para i 0 = 0, durante un tiempo de 1 hora, encontramos un punto de operacin transiente que denominamos i_.
Victor Yunis Benjamn Lagos
Variable Valor Unidades
1_ 1.5494
2_ 1.1851
3_ 0.2805
4_ 0.6801
1
2
3
4
IEE 3674 Control Predictivo
De aqu en adelante se usan estos valores como condiciones iniciales de los bloques integrator.
-
IEE 3674 Control Predictivo Victor Yunis Benjamn Lagos
Pregunta 4
Simule el modelo indicado y obtenga y grafique la respuesta transitoria de los cuatro niveles para las siguientes situaciones:
a.-Cambio en escaln del flujo de la bomba a desde el estado de operacin definido en 2,a 1.63 [m3/h].
Para simular, agregamos un bloque escaln a la entrada del flujo en a con step time=0.5 horas.
-
IEE 3674 Control Predictivo Victor Yunis Benjamn Lagos
Pregunta 4
a.-Cambio en escaln del flujo de la bomba a desde el estado de operacin definido en 2,a 1.63 [m3/h].
1
2
3
4
Se observa que las alturas disminuyen, consecuentemente con la disminucin del flujo. El nuevo equilibrio se alcanza en aproximadamente 0.1horas.
-
IEE 3674 Control Predictivo Victor Yunis Benjamn Lagos
Pregunta 4
Simule el modelo indicado y obtenga y grafique la respuesta transitoria de los cuatro niveles para las siguientes situaciones:
b.-Perturbacin de tipo gaussiana adicional en el flujo de la bomba b, de varianza pequea
El ruido lo sumamos al flujo q_b. Los parmetros del ruido son Media =0, Varianza=q_b/1000, Sample Time = 0.01
-
IEE 3674 Control Predictivo Victor Yunis Benjamn Lagos
Pregunta 4
b.-Perturbacin de tipo gaussiana adicional en el flujo de la bomba b, de varianza pequea
1
2
4
3
La perturbacin afecta mayoritariamente a la altura h3.
-
IEE 3674 Control Predictivo Victor Yunis Benjamn Lagos
Pregunta 4
Simule el modelo indicado y obtenga y grafique la respuesta transitoria de los cuatro niveles para las siguientes situaciones:
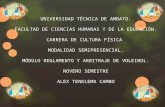
c.-Apertura y cierre de una vlvula que se instala entre los estanques 1 y 2.Considere quela tubera intermedia se encuentra a 0.7 [m] del fondo de ambos estanques y que posee un rea transversal de 9.05E-5 [m2]
(1, 2) =
sgn h1 h2 12 2|1 2|, (1, 2) > 0.7
&12 21, && 2 = 0&&1 > 0.7
12 22, && 1 = 0&&2 > 0.7
0, &&&&&&&&&& (1, 2) 0.7
La interaccin entre los estanques 1 y 2 se puede determinar a partir de la ecuacin de Bernoulli. La variable x(h1,h2) representa el flujo que sale del estanque 1 y entra al 2. Si la altura de h2 llega a ser mayor que h1, la funcin signo, sgn(h1-h2), invierte el sentido de x.
0,7m
-
IEE 3674 Control Predictivo Victor Yunis Benjamn Lagos
Pregunta 4
Simule el modelo indicado y obtenga y grafique la respuesta transitoria de los cuatro niveles para las siguientes situaciones:
c.-Apertura y cierre de una vlvula que se instala entre los estanques 1 y 2.Considere quela tubera intermedia se encuentra a 0.7 [m] del fondo de ambos estanques y que posee un rea transversal de 9.05E-5 [m2]
1
=
111
21 +31
23+11
2
= &&
222
22 +42
24+22
3
= 11
21 +1 23
4
= 44
24 +1 14
(1, 2) =
sgn h1 h2 12 2|1 2|, (1, 2) > 0.7
&12 21, && 2 = 0&&1 > 0.7
12 22, && 1 = 0&&2 > 0.7
0, &&&&&&&&&& (1, 2) 0.7
Para este nuevo caso, el sistema de ecuaciones diferenciales que modela el problema es :
0,7m
-
IEE 3674 Control Predictivo Victor Yunis Benjamn Lagos
Pregunta 4
Simule el modelo indicado y obtenga y grafique la respuesta transitoria de los cuatro niveles para las siguientes situaciones:
c.-Apertura y cierre de una vlvula que se instala entre los estanques 1 y 2.Considere quela tubera intermedia se encuentra a 0.7 [m] del fondo de ambos estanques y que posee un rea transversal de 9.05E-5 [m2]
El modelo implementado en Simulink es el siguiente:
-
IEE 3674 Control Predictivo Victor Yunis Benjamn Lagos
Pregunta 4
Simule el modelo indicado y obtenga y grafique la respuesta transitoria de los cuatro niveles para las siguientes situaciones:
c.-Apertura y cierre de una vlvula que se instala entre los estanques 1 y 2.Considere quela tubera intermedia se encuentra a 0.7 [m] del fondo de ambos estanques y que posee un rea transversal de 9.05E-5 [m2]
La vlvula que se abre y cierra rpidamente se modela como una seal triangular muy esbelta de amplitud 1.
La relacin entre los estanques 1 y 2 se implementa por medio del siguiente cdigo.
-
IEE 3674 Control Predictivo Victor Yunis Benjamn Lagos
Pregunta 4
c.-Apertura y cierre de una vlvula que se instala entre los estanques 1 y 2.Considere que la tubera intermedia se encuentra a 0.7 [m] del fondo de ambos estanques y que posee un rea transversal de 9.05E-5 [m2]
1
2
4
3 Se observa que la apertura y cierre de la vlvula hace que las alturas h1 y h2 tiendan a igualarse.
-
IEE 3674 Control Predictivo Victor Yunis Benjamn Lagos
Pregunta 5
Para el sistema hidrulico, considerando como variable controlada cada uno de los niveles y seleccionando una adecuada variable manipulada, sintonice apropiadamente los parmetros de un controlador PI. Aplique a las mismas tres situaciones que en el problema 4,y verifique que en cada caso el sistema realimentado sigue la referencia con error permanente nulo
El siguiente esquema muestra la estrategia de control usada. Se determin de esta manera ya que por inspeccin se puede ver que las variables manipuladas elegidas son las que tienen mayor incidencia en la correspondiente variable controlada.
1 1
2 2
3
4
2
3
4
1
0,7m
1
2
3
4
-
IEE 3674 Control Predictivo Victor Yunis Benjamn Lagos
Pregunta 5
Para el sistema hidrulico, considerando como variable controlada cada uno de los niveles y seleccionando una adecuada variable manipulada, sintonice apropiadamente los parmetros de un controlador PI. Aplique a las mismas tres situaciones que en el problema 4,y verifique que en cada caso el sistema realimentado sigue la referencia con error permanente nulo
El modelo de Simulink usado para los primeros dos casos es el siguiente:
-
IEE 3674 Control Predictivo Victor Yunis Benjamn Lagos
Pregunta 5
Se sintonizaron los parmetros de 3 maneras : tanteo, Zieger-Nichols, y usando la herramienta Tune integrada en el bloque PID.
P I
PI1 50 1000
PI2 50 1000
PI3 300 1000
PI4 500 1000
Se us el primer caso, escaln en q_a, para sintonizar el control PI por tanteo. Se observa un error permanente nulo en las variables controladas pero el comportamiento de las variables manipuladas no es aplicable en la realidad, en particular por los rpidos cambios que exige la llave gamma2.
-
IEE 3674 Control Predictivo Victor Yunis Benjamn Lagos
Pregunta 5
Se us el procedimiento grfico Zieger-Nichols.
P I
PI1 0.9*(5-1.6)*0.019/(0.0001*1.18)= 4.9271e+003 3.3*0.0001= 3.3000e-004
PI2 0.9*(5-1.6)*0.06/(0.005*0.6)=61.2 3.3*0.005= 0.0165
PI3 0.9*(3-1.6)*0.015/(0.001*0.6)=315 3.3*0.0001= 3.3000e-004
PI4 0.9*(5-1.6)*0.025/(0.0001*0.61)= 1.2541e+004 3.3*0.0001= 3.3000e-004
Usando un escaln en q_a desde 5 a 1.6 m^3/h Usando un escaln en q_ab desde 3 a 1.6 m^3/h
Fuente: http://eweb.chemeng.ed.ac.uk/courses/control/course/map/ZN/opennotes.html
-
Pregunta 5
Zieger-Nichols
P I
PI1 0.9*(5-1.6)*0.019/(0.0001*1.18)= 4.9271e+003 3.3*0.0001= 3.3000e-004
PI2 0.9*(5-1.6)*0.06/(0.005*0.6)=61.2 3.3*0.005= 0.0165
PI3 0.9*(3-1.6)*0.015/(0.001*0.6)=315 3.3*0.0001= 3.3000e-004
PI4 0.9*(5-1.6)*0.025/(0.0001*0.61)= 1.2541e+004 3.3*0.0001= 3.3000e-004
IEE 3674 Control Predictivo Victor Yunis Benjamn Lagos
A pesar de que el error es muy bajo en las variables controladas, las variables manipuladas muestran un comportamiento inaplicable.
-
IEE 3674 Control Predictivo Victor Yunis Benjamn Lagos
Pregunta 5
Herramienta Tune integrada en el bloque PID.
P I
PI1 0.860622273672489 339.643366729564
PI2 1.74305697982748 569.884737108696
PI3 173.186804766733 66021.5327250018
PI4 13.1960037947357 74.2156523814468
Ante el escaln en q_a (a 0.5hrs), el control tarda mucho tiempo en estabilizar el sistema, en comparacin a los parmetros usados anteriormente.
-
IEE 3674 Control Predictivo Victor Yunis Benjamn Lagos
Pregunta 5
Finalmente se decidi usar los parmetros determinados por matlab para los 3 primeros controladores y para el 4 por tanteo.
P I
PI1 0.860622273672489 339.643366729564
PI2 1.74305697982748 569.884737108696
PI3 173.186804766733 66021.5327250018
PI4 250 2500
La eleccin de este criterio no tiene una fundamentacin, fue hecho por tanteo. Se verifica que el error permanente tiende a cero y que las variables manipuladas tienen un comportamiento aceptable para una aplicacin real.
-
IEE 3674 Control Predictivo Victor Yunis Benjamn Lagos
Pregunta 5
A continuacin se aplica el mismo control para el caso con ruido blanco en q_b
P I
PI1 0.860622273672489 339.643366729564
PI2 1.74305697982748 569.884737108696
PI3 173.186804766733 66021.5327250018
PI4 250 2500
-
IEE 3674 Control Predictivo Victor Yunis Benjamn Lagos
Pregunta 5
Para el sistema hidrulico, considerando como variable controlada cada uno de los niveles y seleccionando una adecuada variable manipulada, sintonice apropiadamente los parmetros de un controlador PI. Aplique a las mismas tres situaciones que en el problema 4,y verifique que en cada caso el sistema realimentado sigue la referencia con error permanente nulo
El modelo de Simulink usado para el tercer caso es el siguiente:
-
IEE 3674 Control Predictivo Victor Yunis Benjamn Lagos
Pregunta 5
Para el sistema hidrulico, considerando como variable controlada cada uno de los niveles y seleccionando una adecuada variable manipulada, sintonice apropiadamente los parmetros de un controlador PI. Aplique a las mismas tres situaciones que en el problema 4,y verifique que en cada caso el sistema realimentado sigue la referencia con error permanente nulo
El resultado obtenido al simular el tercer caso es:
-
IEE 3674 Control Predictivo Victor Yunis Benjamn Lagos
Pregunta 5
Para el sistema hidrulico, considerando como variable controlada cada uno de los niveles y seleccionando una adecuada variable manipulada, sintonice apropiadamente los parmetros de un controlador PI. Aplique a las mismas tres situaciones que en el problema 4,y verifique que en cada caso el sistema realimentado sigue la referencia con error permanente nulo
Ms en detalle, se aprecia que el control estabiliza rpidamente el sistema.
-
IEE 3674 Control Predictivo Victor Yunis Benjamn Lagos
Referencias
Johansson, Karl Henrik. The quadruple-tank process.IEEE Trans. Automatic Control.2000. Alvarado et al, An educational plant based on the quadruple-tank process, 7th IFAC Symposium on Advances in Control Education, June 2006.