I Simposio de Aplicaciones Científicas y Técnicas de los ... · deberá cumplir con los diversos...
176
16 y 17 de febrero de 2017 I Simposio de Aplicaciones Científicas y Técnicas de los Vehículos no Tripulados Centro de Exposiciones y Congresos UNAM
Transcript of I Simposio de Aplicaciones Científicas y Técnicas de los ... · deberá cumplir con los diversos...

[Escribir texto]
16 y 17 de febrero de 2017
I Simposio de Aplicaciones Científicas y Técnicas de los
Vehículos no Tripulados
Centro de Exposiciones y Congresos UNAM

I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
i
Instituciones organizadoras del simposio
Universidad Nacional Autónoma de México (Instituto de Geografía)
(Centro de Investigaciones en Geografía Ambiental) el Instituto Nacional de Estadística y Geografía
y la Agencia Espacial Mexicana
Responsable de la organización del simposio Biól. Armando Peralta Higuera
(Secretario Técnico de Vinculación del Instituto de Geografía UNAM)

I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
ii
I Simposio de Aplicaciones Científicas y Técnicas de los Vehículos no Tripulados
Programa general
Jueves 16 de febrero de 2017
10:00 - 10:30 horas Ceremonia de inauguración
Presentación de autoridades y funcionarios Palabras de bienvenida Declaración de inauguración
10:30 - 11:10 horas Sesión Plenaria I
Norma para la autorización de levantamientos aéreos y exploraciones geográficas en el territorio nacional Geóg. Carlos Agustín Guerrero Elemen Director General de Geografía y Medio Ambiente, INEGI
11:10 – 11:50 horas Sesión plenaria II Mitos y realidades de los Drones: ¿Son un juguete o una herramienta?
Arturo Cruz García Gerente General de Terrasat
Presentación de trabajos. Sesiones 16/1 a 16/9 Sesión 16/1 a 16/3 12:10 - 13:10 horas Sesión 16/4 a 16/6 13:20 - 14:20 horas Sesión 16/7 a 16/9 15:50 - 16:50 horas 17:10-17:50 Sesión plenaria III
Experiencias sobre el uso de Vehículos Aéreos no Tripulados (VANT) en las diferentes Etapas de la Gestión Integral de Riesgos (GIR) Ing. Óscar Zepeda Ramos e Ing. Miguel Ángel Cruz Pliego Dirección de Análisis y Gestión de Riesgos, CENAPRED
17:50-18:30 Sesión plenaria IV Dirección de Aeronáutica Civil

I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
iii
Viernes 17 de febrero de 2017
Presentación de trabajos. Sesiones 17/1 a 17/13 Sesión 17/1 a 17/3 10:00 – 11:00 horas Sesión 17/4 a 17/6 11:20 - 12:20 horas Sesión 16/7 a 16/10 12:40 - 14:00 horas Sesión 17/11 a 17/13 15:20 – 16:20 horas
16:40 - 17:20 Sesión plenaria V
Aplicación de tecnología UAV (Unattended Aerial Vehicle) en el Tren Interurbano Toluca - Valle de México M. en I. Guillermo Ortiz R. Director General de Consorcio IUYET, S.A. de C.V.
17:20 - 18:00 Sesión plenaria VI
La Agencia Espacial Mexicana; Desarrollo y Perspectivas Dr. Francisco Javier Mendieta Jiménez Director de la Agencia Espacial Mexicana
18:00 - 18:30 Ceremonia de clausura
I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
iv
I Simposio de Aplicaciones Científicas y Técnicas
de los Vehículos no Tripulados Mesas de trabajo
Normatividad / Capacitación
Estudios Urbanos
Industrial Ecosistemas y
ambiente
Cartografía / Fotogrametría
Drones y sociedad
Salud Arqueología
Estudios costeros
Agricultura Desarrollo
tecnológico Gestión de riesgos
Salas del CEC UNAM donde se presentaron los trabajos del I Simposio de Aplicaciones Científicas y Técnicas
de los Vehículos no Tripulados
Auditorio Principal del CEC UNAM (Capacidad, 240 personas) Inauguración, sesiones plenarias y clausura
Sala 1 (Capacidad 80 personas)
Sala 2 (Capacidad 80 personas)
Sala 3 (Capacidad 80 personas)
I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
1
Jueves 16 de febrero de 2017
Sesiones 16/1-3 Drones y sociedad Sala 1 Horario: 12:10 – 13:10 16/ 1. 12:10 – 12:30. Requisitos y guía para obtener la autorización de piloto y de operaciones de RPAS pequeño / Edgar Ricaño Peláez / Consorcio IUYET 16/2. 12:30 – 12:50. Observaciones y comentarios al Proyecto de Norma PROY-NOM107-SCT3-2016, que establece los requerimientos para operar un sistema de aeronave pilotada a distancia (RPAS) en el espacio aéreo mexicano / Augusto H. Segovia Castillo 16/ 3. 12:50 – 13:10. Formación de operadores de Sistemas Aéreos no Tripulados en la SEMAR, su concepción, desarrollo, retos y oportunidades / Rafael Eduardo Cossío Lugo y Mauro Ignacio Trujillo Aguirre / SEMAR

I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
2
Sesiones 16/1-3 Drones y sociedad Sala 1 Horario: 12:10 – 13:10
16/ 1. SALA 1. REQUISITOS Y GUÍA PARA OBTENER LA AUTORIZACIÓN DE PILOTO Y DE OPERACIONES DE RPAS PEQUEÑO
M. en Arq. Edgar Ricaño Peláez
IUYET, S.A. de C.V. [email protected]
De acuerdo a lo establecido por la Organización de Aviación Civil Internacional (OACI), los fabricantes de aeronaves y la autoridad aeronáutica, deben asegurar la aplicación de los estándares necesarios para prevenir accidentes, así como la operación de los Sistemas de Aeronaves Pilotadas a Distancia (RPAS) debe considerar disminuir el riesgo de daño a personas o propiedades ubicadas en tierra o en vuelo, comparado con una categoría equivalente de aeronave tripulada. Los RPAS utilizan la tecnología aeroespacial de última generación, la cual ofrece avances que proporcionan nuevas y mejores aplicaciones civiles y de uso comercial, así como contribuir a mejorar la seguridad operacional y la eficiencia de toda la aviación civil. Por otro lado, cabe resaltar que Consorcio IUYET es una empresa mexicana con más de 40 años de experiencia, la cual realiza servicios profesionales relacionados con la ingeniería civil, que entre otros, utiliza los RPAS para desarrollar trabajos de fotogrametría, videograbación, fotografía aérea, supervisión, inspección y vigilancia, cumpliendo cabalmente con la normatividad nacional e internacional vigente. El presente trabajo trata específicamente de la experiencia de Consorcio IUYET en el cumplimiento de la normatividad vigente, para tramitar y obtener la autorización de piloto de RPAS, así como la guía para obtener la autorización de operaciones de RPAS. Cabe resaltar que Consorcio IUYET es la primera empresa a nivel nacional, en obtener dichas autorizaciones, así como poseer los primeros cinco folios de registro de sus aeronaves no tripuladas. La seguridad de los seres humanos es de suma importancia Para poder operar los RPAS en el espacio aéreo, es necesario tener ciertos conocimientos sobre los mismos, incluyendo zonas de control, la ubicación de los aeródromos, zonas prohibidas, las reglas del aire, así como los posibles peligros de encontrarse con la aviación tripulada. La falta de educación indispensable, constituye un peligro inminente. Un aumento del conocimiento de las normas vigentes, así como de la conciencia pública en seguridad aeronáutica es crucial, la cual debe ser proporcionada de manera clara y completa a los usuarios de aviones no tripulados. Es por ello que la seguridad de las personas, ya sea en el aire o en el suelo, tiene prioridad sobre la capacidad o el derecho de operar un avión no tripulado.

I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
3
El marco regulatorio para todas las categorías de RPAS establece un nivel de seguridad. Es por eso que las reglas de cada una de ellas, deben ser proporcionales al riesgo de la operación específica.
Elementos de la seguridad al volar un RPAS.
Importancia de contar con la autorización de piloto de RPAS Para obtener la autorización de piloto de RPAS se debe cumplir con los requisitos establecidos por la Dirección General de Aeronáutica Civil (DGAC), entre los cuales destaca el conocimiento teórico práctico, que demuestre que la persona interesada está preparada para operar un RPAS. Asimismo, el piloto es el responsable de respetar todas las leyes, reglamentos y normas vigentes de índole federal o local, relacionadas con la seguridad nacional, seguridad pública, protección de la privacidad, propiedad intelectual, entre otras. Debe ser del conocimiento del piloto el respeto y aplicación de la normatividad vigente, la cual establece los requerimientos para operar un RPAS, como por ejemplo, que el piloto no debe operarlo en áreas prohibidas, restringidas o peligrosas; en lugares cerrados donde se reúnan más de 12 personas; manejar más de un RPAS al mismo tiempo; no perderlo nunca de vista, con el fin de saber su localización, actitud, altitud, dirección, la existencia de tráfico aéreo, pero sobre todo, que el equipo no ponga en peligro la integridad física o la vida de las personas o daños a la propiedad; así mismo, el piloto no debe de utilizarlo para transportar mercancías peligrosas, sustancias prohibidas, armas o explosivos; no se debe manejar de manera negligente o temeraria; operar el equipo durante las horas oficiales entre la salida y la puesta del sol, salvo que se cuente con un permiso especial; en todo momento y sin excepción alguna, ceder el paso a cualquier aeronave tripulada, etcétera. Después de estar consciente de esto, el piloto de RPAS podrá demostrarlo en un examen aplicado por la autoridad aeronáutica, para poder recibir la autorización por escrito.

I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
4
Procedimiento para obtener la autorización de operaciones de RPAS De acuerdo a la circular obligatoria CO AV-23/10 R3, publicada por la DGAC, para obtener la autorización de operaciones de RPAS éste se deberá inscribir en el Registro Aeronáutico Mexicano, el cual expedirá un folio y será colocado en una placa visible en la aeronave (Figura 2); asimismo, se deberá cumplir con los diversos requisitos que serán parte del manual de operaciones del RPAS.
Ejemplo de placa con identificación de RPAS.

I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
5
Ejemplo de un Manual de Operación de RPAS.
De estos requisitos cabe resaltar que todos los RPAS deberán contar con una póliza de seguro de responsabilidad civil y de daños a terceros, así como la descripción completa de los procedimientos operacionales; procedimientos de seguridad; procedimientos de vuelo –encendido, despegue, vuelo, aterrizaje, apagado–; procedimientos de emergencia; sitios de operación y evaluación; equipamiento en tierra incluyendo las estaciones de control; libro de bitácora de vuelo; programa de capacitación de operadores; y lo más importante, el Estudio Aeronáutico de Seguridad y Administración de Riesgos. Dicho estudio deberá identificar claramente los peligros que pueden surgir alrededor de la operación del RPAS, así como elaborar un análisis de riesgos y el procedimiento de mitigación de los mismos. Conclusiones Es importante resaltar que el uso de la tecnología de los RPAS va evolucionando día a día, puesto que la industria aeroespacial se está desarrollando rápidamente en este rubro. Con ello, también crece el número de personas que quieren operar una aeronave de este tipo, junto con el riesgo que ello conlleva. Es por esto que los usuarios de los RPAS deben responsabilizarse de acatar las normas, reglamentos y leyes vigentes, que regulan y autorizan el uso de estos vehículos, para lograr una operación segura, armonizada y fluida, tanto para el piloto como para la sociedad en general, siempre salvaguardando en primer lugar la integridad de las personas. A diferencia de otros países como Chile, España, Alemania y Emiratos Árabes Unidos, en los cuales el uso de drones está normado además de vigilar su venta y estricta aplicación, en México se venden y

I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
6
operan RPAS indiscriminadamente, debido a la falta de una estricta regulación y manejo de las normas, resultando en que cualquier persona puede volar un RPAS sin responsabilidad. Finalmente cabe mencionar que, el desconocimiento de las leyes, reglamentos y normas vigentes, no eximen a ninguna persona de ellas.

I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
7
16/2. SALA 1. OBSERVACIONES Y COMENTARIOS AL PROYECTO DE NORMA PROY-NOM-107-SCT32016, QUE ESTABLECE LOS REQUERIMIENTOS PARA OPERAR UN SISTEMA DE AERONAVE PILOTADA A DISTANCIA (RPAS) EN EL
ESPACIO AÉREO MEXICANO
M. en C. Augusto H. Segovia Castillo Desde la llegada a México y el inicio de la fabricación de equipos por empresas mexicanas emergentes de sistemas de aeronave pilotada a distancia (RPAS) también conocidos como vehículos aéreos no tripulados (VANT) y en general como Drones, existió la preocupación de las autoridades aeronáuticas mexicanas por contar con un marco regulatorio para la operación segura de estos equipos en el espacio aéreo mexicano. Es así como se emite por primera vez en el año 2010 la Circular Obligatoria COAV-23/10, que hasta la fecha ha tenido tres actualizaciones o revisiones. A finales de 2016 se elaboró la propuesta de Proyecto de Norma PROY-NOM-107-SCT3-2016, que establece los requerimientos para operar un sistema de aeronave pilotada a distancia (RPAS) en el espacio aéreo mexicano, el cual se envió a la Comisión Federal de Mejora Regulatoria (COFEMER) el 21 de diciembre de 2016 y que se encuentra disponible en la liga: (http://www.cofemersimir.gob.mx/portales/resumen/41366), para inicio de la valoración de dicha propuesta de Norma, la cual a partir de la publicación en el Diario Oficial de la Federación se tendrán 60 días para consulta pública. Partiendo del documento disponible en la página web de la COFEMER, se llevó a cabo una revisión de proyecto de norma PROY-NOM-107-SCT3-2016 y a la cual se hacen 10 observaciones y comentarios.

I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
8
16/3. SALA 1. FORMACIÓN DE OPERADORES DE SISTEMAS AÉREOS NO TRIPULADOS EN LA SEMAR, SU CONCEPCIÓN, DESARROLLO, RETOS Y
OPORTUNIDADES
Cap. de Fragata CG. PH. Rafael Eduardo Cossío Lugo Cap. de Fragata CG. PH. DEM. Mauro Ignacio Trujillo Aguirre
Secretaría de Marina Al incursionar en el desarrollo y empleo de los sistemas aéreos no tripulados, la SEMAR enfrentó un reto muy importante de capacitar a tripulaciones ajenas al medio de aviación. El objetivo ha sido lograr estándares de operación que permitan preservar la seguridad en el espacio aéreo nacional. La ponencia explica las acciones que se tomaron para lograr este objetivo, incluyendo la construcción de un centro especializado en la capacitación de operadores para los sistemas aéreos no tripulados, así como el desarrollo de los respectivos programas de estudio. Actualmente, a dos años de operación, este centro de capacitación tiene el reto de diagnosticar los resultados de las primeras generaciones graduadas. Impulsando un mecanismo de retroalimentación para establecer una mejora continua.

I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
9
Sesiones 16/1-3 Industrial Sala 2 Horario: 12:10 – 13:10 16/ 1. 12:10 – 12:30. Prevención de riesgos en presas apoyado en Vehículos Aéreos no Tripulados (VANT) / J. Flores-Velázquez y Waldo Ojeda / IMTA 16/ 1. 12:10 – 12:30. Inspección visual de líneas de transmisión y distribución eléctricas usando vehículos aéreos no tripulados / Diego Arjona; Alejandro Boneta; Miguel Ángel Acevedo / ARD 16/ 1. 12:10 – 12:30. Implementación de un taller de drones, para el enriquecimiento de nuevas competencias profesionales en los alumnos de las carreras de mantenimiento de la Universidad Tecnológica de Jalisco. Drones como una herramienta emergente del mantenimiento predictivo / Barrón Balderas Juan José, Fausto Lepe Gabriela Margarita, Manuel Alejandro Granado Gil, Julio Cesar Ortiz Cornejo / UTJ
I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
10
Sesiones 16/1-3 Industrial Sala 2 Horario: 12:10 – 13:10
16/1. SALA 2. PREVENCIÓN DE RIESGOS EN PRESAS APOYADO EN VEHÍCULOS AÉREOS NO TRIPULADOS (VANT)
J. Flores-Velázquez
Waldo Ojeda Instituto Mexicano de Tecnología del Agua
México es un país con gran tradición en torno a la construcción de obras hidráulicas, concretamente se estima que existen más de 4000 presas que proporcionan una diversidad de servicios, siendo el sector agrícola mayormente beneficiado con estas estructuras. Una presa, dependiendo de las funciones para la que es construida, puede tener diferencias significativas en el tiempo, en su funcionamiento y operación, dependiendo en gran medida del mantenimiento. Cuando una presa es operada de manera adecuada y su mantenimiento es constante, el tiempo de vida útil se alarga; sin embargo, esto no siempre sucede, de tal suerte que fallas en la estructura o alguna de sus obras auxiliares pueden constituir un riesgo, primero de la estructura en sí, pero lo más importante de las personas que la operan y en casos extremos, daños colaterales en poblaciones aledañas. El objetivo de este trabajo, es mostrar las ventajas del uso de vehículos aéreos no tripulados (VANT) en la supervisión de primer nivel en presas, que consiste en la visita a las presas y realizar una inspección física del estado actual de la presa y sus componentes (vertedor, obra de toma, etc.), con el fin de a) conocer el estado físico de la presa, b) determinar la calidad de la operación de la presa, y c) identificar posibles fallas en ella o en alguna de sus obras auxiliares.
Palabras Clave: Multicóptero, vaso de almacenamiento, imágenes aéreas, acelerómetro

I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
11
16/2. SALA 2. INSPECCIÓN VISUAL DE LÍNEAS DE TRANSMISIÓN Y DISTRIBUCIÓN ELÉCTRICAS USANDO VEHÍCULOS AÉREOS NO TRIPULADOS
Diego Arjona Alejandro Boneta
Miguel Ángel Acevedo Smart Vision Technologies
Se puede definir a una máquina como un conjunto de elementos móviles y fijos cuyo funcionamiento posibilita aprovechar, dirigir, regular o transformar energía o realizar un trabajo con un fin determinado. El conjunto de máquinas que se aplican para un mismo fin se puede denominar como maquinaria. Considerándola en su conjunto, la red de transmisión eléctrica es la maquinaria más extensa y compleja que existe en nuestro país. Sus redes se extienden por todo el territorio nacional y alcanzan al 98% de la población satisfaciendo necesidades residenciales, comerciales e industriales.
Las líneas de transmisión y distribución son elementos fundamentales para la operación del sistema eléctrico. Dependiendo de su construcción, las líneas de conducción de electricidad tienden a ser muy longevas y funcionar durante décadas pero requieren de mantenimiento para garantizar altos niveles de calidad y continuidad en el servicio. Para cumplir con su cometido, la Comisión Federal de Electricidad cuenta con cerca de 60,000 kilómetros de líneas de transmisión aéreas y cerca de 840,000 kilómetros de líneas de distribución en media tensión.
Este documento está enfocado a plantear el uso de vehículos aéreos no tripulados para funciones de inspección visual, que apoyen en la determinación de un programa de mantenimiento para una red de transmisión o distribución eléctrica.
La mayor parte del sistema eléctrico nacional se constituye de líneas aéreas. La inspección de una línea de transmisión debe considerar sus cimentaciones, la condición física de las estructuras de apoyo, la situación de los aisladores y otros elementos de sujeción así como los hilos de guarda y los propios conductores.
Para la inspección y mantenimiento de las líneas eléctricas se recurre a plataformas elevadas (para las alturas de distribución), personal con equipo de ascenso que sube por las torres o postes, vehículos robot capaces de moverse sobre los conductores e inclusive el uso de helicópteros. Los equipos más robustos (como es el caso de los helicópteros) pueden permitir tareas de mantenimiento más complicadas, pero el uso de vehículos aéreos no tripulados (drones) para la inspección de las instalaciones puede ofrecer información relevante y precisa a un costo mucho menor, con igual o mayor calidad y reduciendo el riesgo para las personas involucradas en dichos trabajos.
La capacidad de los drones de volar a poca distancia de una línea eléctrica ofrece información difícil o imposible de obtener a través de los métodos utilizados actualmente. También se debe considerar la utilidad de un dron para la inspección de instalaciones en donde el derecho de vía pueda ser accidentado o de difícil acceso.
Los drones pueden ser utilizados con diversos tipos de cámaras o sensores para obtener información sobre diversos elementos de la línea eléctrica. Equipados con una cámara de alta definición permiten observar los elementos estructurales para dictaminar su condición física. Con una cámara termográfica pueden detectar los cambios en la temperatura de los conductores a lo largo de la línea eléctrica. Estos cambios de temperatura incluyen lo que la industria llama comúnmente “puntos calientes”. La presencia de puntos calientes tiene implicaciones sobre las pérdidas de energía en la

I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
12
red y frecuentemente muestran el lugar de algún daño físico a los conductores. Por otro lado, con cámaras UV se puede detectar la presencia de efectos corona, arcos y descargas parciales superficiales dejando al descubierto necesidades de mantenimiento de conductores y equipos eléctricos.
Una vez que se han obtenido los diversos tipos de imágenes se debe proceder a la interpretación de los resultados. Los equipos para analizar esta información y la experiencia de los especialistas en mantenimiento de líneas de transmisión y distribución, deberán dar lugar a un programa de trabajo muy efectivo. El uso de drones se suma a las opciones existentes para el mantenimiento del sistema eléctrico nacional facilitando la inspección del mismo.

I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
13
16/3. SALA 2. IMPLEMENTACION DE UN TALLER DE DRONES PARA EL ENRIQUECIMIENTO DE NUEVAS COMPETENCIAS PROFESIONALES EN LOS ALUMNOS DE LAS CARRERAS DE
MANTENIMIENTO DE LA UNIVERSIDAD TECNOLÓGICA DE JALISCO. DRONES COMO UNA HERRAMIENTA EMERGENTE DEL MANTENIMIENTO PREDICTIVO
Barrón Balderas Juan José
Fausto Lepe Gabriela Margarita Manuel Alejandro Granado Gil
Julio Cesar Ortiz Cornejo Universidad Tecnológica de Jalisco
[email protected] [email protected]
Resumen: Este artículo presenta el trabajo que se realiza cada fin de cuatrimestre para fomentar el desarrollo de competencias profesionales en los estudiantes de mantenimiento industrial, a través del diseño y desarrollo de un vehículo aéreo no tripulado (UAV o drone), con la finalidad de que sea utilizado como herramienta de inspección en el tema de mantenimiento predictivo, para detección y monitoreo de variables; tales como: concentraciones de monóxido de carbono, temperatura e imágenes termográficas mediante tecnología al alcance de los estudiantes. Para lograr este proyecto se toman en cuenta las competencias adquiridas por los alumnos, en las materias que cursan a lo largo de su carrera de Mantenimiento como son: electrónica analógica, electrónica digital, sistemas de automatización, máquinas y mecanismos. Palabras clave: Drone, UAV, CANSAT, Competencias profesionales. Abstract This article presents the work that is done at each end of courses, to encourage the development of professional skills in students of industrial maintenance, through the design and development of a (UAV) Unmanned Aerial Vehicle (drone), in order to Be used as an inspection tool in the subject of predictive maintenance, for detection and monitoring of variables; Such as: concentrations of carbon monoxide, temperature, and thermographic images, using technology available to students. In order to achieve this project, the competences acquired by the students are taken into account in the subjects they study throughout their maintenance career, such as: analog electronics, digital electronics, automation systems, machines and mechanisms. Keywords: Drone, UAV, Unmanned Vehicles, UAV, CANSAT, development of professional skills. Introducción En la actualidad existe un auge a nivel mundial de la tecnología de vehículos no tripulados con una diversidad de aplicaciones funcionales, las cuales tienen el objetivo de disminuir los costos de producción y operación para las diversas actividades para lo que fueron diseñadas. En el mantenimiento, el proceso de inspección es fundamental ya que en él se agrupan todas aquellas aplicaciones relacionadas con servicios de mantenimiento (predictivo, preventivo y correctivo), de diferentes infraestructuras. Dentro del mantenimiento el uso o aplicación de la tecnología de Drones o UAV´s para predecir y monitorear la ocurrencia de fallas de origen natural o provocado es algo relativamente nuevo, pero podría ser considerada como herramienta (Stephanie, 2011), para generar informes que permitan a los equipos de mantenimiento actuar de manera inmediata garantizando una correcta supervisión antes de que haya una avería parcial o total de la instalación. Hoy en día los estudiantes de la carrera de MI, tienen más acceso a la información sobre nuevas tecnologías y tutoriales de técnicas de mantenimiento, pero usualmente no es posible poner en práctica esos conocimientos, debido a los altos costos de los dispositivos; Sin embargo, hay

I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
14
tecnología de bajo costo la cual puede ser desarrollada para la aplicación de proyectos funcionales en el área de mantenimiento utilizando drones. Definición del problema Las diversas técnicas de detección de fallas en el mantenimiento predictivo son cada vez más tardadas e imprecisas, por lo tanto el uso de drones como alternativa para el mantenimiento predictivo servirá de apoyo en la recolección de datos de manera rápida y oportuna, ya que nos pude mostrar información vía internet o mensaje (MSN) para dar una rápida respuesta. (Lee, 2014), evitando así riesgos o peligros y, en consecuencia, daños y accidentes lo cual implica tiempo y dinero. Hipótesis Con tecnología e información de fácil acceso de bajo costo, es posible desarrollar las suficientes competencias profesionales en el tema de mantenimiento predictivo, en los alumnos de la carrera de mantenimiento y a su vez desarrollar un drone para predecir y monitorear algún tipo de falla provocado por la naturaleza de los equipos o el ser humano. Justificación La actualidad de la industria mundial se está viendo influenciada cada vez más por el desarrollo de nuevas tecnologías; en estos últimos años, la exigencia de una mejor preparación del personal encargado del mantenimiento industrial está aumentando, debido a la influencia de la electrónica y nuevas tecnologías en este campo. En vista de eso se necesita hacer, de manera eficaz y eficiente, las tareas de inspección y mantenimiento de infraestructuras ya que a veces se presentan problemas de desgaste por las condiciones climáticas o diversos factores de desgaste, que suelen esconder grietas o problemas muy difíciles de descubrir para los operarios; es por ello que los drones pueden ser la herramienta emergente como técnica de mantenimiento predictivo que ayude a realizar las inspecciones, que ayuden a disponer de la medición de diversos parámetros que guardan una relación predecible con el ciclo de vida de la pieza o componente de la máquina, sin los riesgos que a veces puedan ser mortales para los operarios Objetivo Desarrollar un UAV, que actúe como herramienta de apoyo en la detección y monitoreo de diversas variables que puedan ser claves, para realizar un eficaz análisis de mantenimiento predictivo. Generado por los alumnos de mantenimiento, con base en las competencias adquiridas durante su estancia en la universidad.
Fig 1. Inicio de actividades del taller.

I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
15
Fig 2. Inicio del taller armado del drone. Método Este proyecto tiene por finalidad desarrollar e incrementar las competencias profesionales en el alumno, considerando los aprendizajes y demostraciones integradas, que los estudiantes han adquirido a lo largo de sus estudios en la carrera, despertando así el interés por el desarrollo de nuevas aplicaciones como son los vehículos no tripulados (drones), para el ámbito del mantenimiento industrial. Durante el desarrollo del proyecto se aprovecha e incrementa la información (saber) en temas de materias que ven a lo largo de su carrera de mantenimiento, con el objeto de aplicar las técnicas y procedimientos correctos (saber cómo) para lograr el armado del drone y con ello incrementar las actitudes correspondientes (saber ser).
Fig 3. Inicio de armado del drone. El desarrollo de nuevas innovaciones en el uso de vehículos no tripulados, para el tópico de mantenimiento de predictivo puede considerarse como una buena opción, ya que existen esos lugares que presentan riesgos para el trabajador y se requiere de la identificación de variables como pueden ser: de fatiga, conexiones con apriete insuficiente, conexiones afectadas por corrosión, suciedad en conexiones y/o en contactos, degradación de los materiales aislantes para poder recabar ese tipo de información de las variables mencionadas. Se ha iniciado el desarrollo de un drone con algunos alumnos que comparten el hobby del tema aeroespacial, apoyándose en las competencias profesionales adquiridas en las materias de electrónica analógica y digital, máquinas y mecanismos.

I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
16
Fig 4. Armado del drone. Como parte inicial del proyecto se consideró la plataforma Eachine Racer 250 FPV Drone, que por sus características: Brand: Eachine Item name: Racer 250 Main wing length: 140mm Size: 220x233x50 Weight: 400g (without battery) Headlight LED: white 3W Camera: 1000TVL, support for HD night, camera angle is adjustable Brushless motor: 2204 2300KV Brushless ESC: Simonk 12A Flight controller: CC3D Lipo battery: 11.1V 1500mAh 25C 3S Transmitter: 600mw 5.8G 32CH built in OSD Flight time: 10-14 mins Working temperature: -10°C to +40°C Price:$129.99 US El producto viene desarmado por lo que es ideal, para que los alumnos se vayan familiarizando con las partes que integran a un drone. Aunque el drone, en sí, ya viene casi listo para volar se requiere de ciertos conocimientos y habilidades en el área de informática para poder sincronizar los motores para que pueda volar como se planeó, así mismo para la aplicación a la cual fue concebido de monitorear variables para utilizarlas como herramienta en mantenimiento predictivo; se requiere de conocimiento en las materias de control electrónico y electrónica digital, sobre todo, para el tema de la tarjeta Arduino que es una plataforma de hardware libre basada en una placa con un micro– controlador y un entorno de desarrollo, diseñado para facilitar el uso de la electrónica en proyectos (John, 2013) multidisciplinares, que por su facilidad es una buena opción para el desarrollo de la etapa de monitoreo atmosférico (Patrick, 2013), que se determinó como una de las variables de monitoreo del drone. Para poder hacer mediciones de esta variable se está haciendo uso del sensor barométrico BMP085 y un sensor de monóxido de carbono mq-7, con el que se obtendrán mediciones precisas.
Fig 5.Arduino con sensores BMP85y MQ-7.

I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
17
En la parte de comunicación se utilizará una tarjeta GSM con la cual enviaremos vía MSM a celular los datos obtenidos por los sensores. Como parte del proceso de construcción del sistema de monitoreo de variables del drone, se tomó la electrónica de control desarrollada para un CanSat, que es un satélite del tamaño de una lata de refresco cuya misión puede ser recoger datos o efectuar retornos controlados. Estos aparatos normalmente deben ser completamente autónomos, es decir, no pueden recibir instrucciones desde el suelo durante el vuelo. Lo que sí deben efectuar son transmisiones de datos. Las antenas se pueden montar externamente, pero el diámetro del satélite no se puede alterar y éste fue probado en la competencia CUCEI2K15.
Fig.6 Desarrollo de CanSat. A lo largo de esta fase de prueba se ejecuta el análisis de, de cada una de las características de funcionamiento de los sensores (CO, temperatura, altura, presión barométrica) y las conexiones de éstos con la tarjeta de desarrollo (Arduino), así como calibración de cada uno para verificar su sensibilidad y ajustes necesarios con el fin de obtener la configuración óptima, donde se pretende poner a prueba a diferentes condiciones de altura, humedad e iluminación de todos los componentes que van a integrar el proyecto. La siguiente etapa de desarrollo consistió en el diseño del software para la lectura de datos arrojados por los sensores; el uso del monitor serial con el que cuenta Arduino es indispensable, ya que éste imprime los datos al puerto serie como texto ASCII. Este comando puede tomar muchas formas. Los números son impresos mediante un juego de caracteres para cada dígito, es posible el uso y manipulación de éste para imprimir datos en el monitor serial del PC, a su vez se utiliza una tarjeta ICOMSAT versión 1.1, mediante una MAC Address; el objetivo es controlar y transferir información entre estos dispositivos de forma remota. Así podríamos por ejemplo acceder a datos de sensores y monitorearlos de manera continua, y este dispositivo al ser compatible con la red GSM permite tener un monitoreo continuo a largo alcance, puesto que el dispositivo cuenta con una Tarjeta micro SD SPI regulada por el usuario se puede acceder a los datos recopilados durante la misión en una PC.

I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
18
Fig.7. Lanzamiento del CANSAT para probar los Sensores.
Fig 6. Muestra de datos monitoreados por el CANSAT y recibidos cada medio minuto en un celular. La otra aplicación con que contará el drone es la implementación de una segunda cámara para hacer uso de la técnica de termografía. El análisis termográfico es una técnica de mantenimiento predictivo cada vez más usada en las industrias, la cual permite a distancia y sin ningún contacto, medir y visualizar temperaturas de superficie con precisión. La física permite convertir las mediciones de la radiación infrarroja en medición de temperatura, y pueden ser aplicadas en cualquier situación donde un problema o condición pueda ser visualizado por medio de una diferencia de temperatura, ya que muchos de los problemas eléctricos y mecánicos (incluyendo hidráulicos) podrán preverse de manera correcta y rápida, para así disminuir costos en la producción originados por paros inesperados; incluso podrá diagnosticarse de manera más rápida que de modo tradicional, gracias a que “ver” el calor nos ayuda a identificar problemas anticipadamente, que de otra manera sólo podríamos darnos cuenta hasta que alguna pieza fallase y el paro de la máquina fuera inminente.
I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
19
Fig 8. DroneThermal v3 Micro UAV.
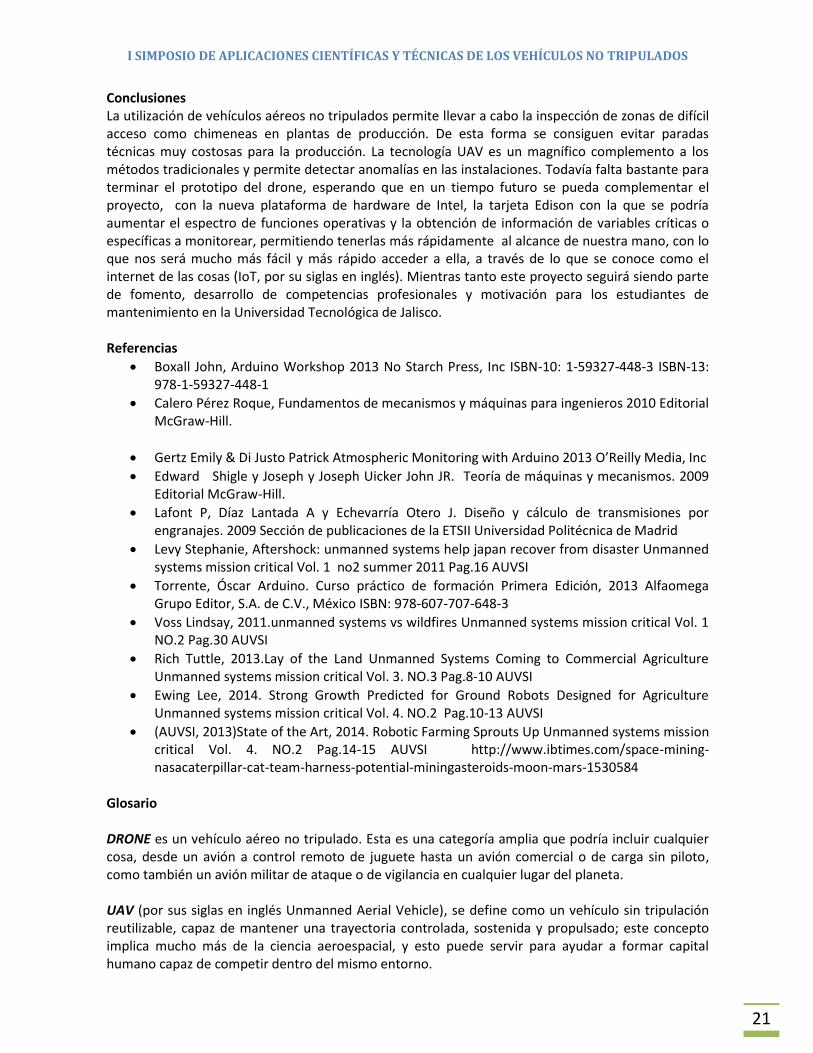
La termografía como herramienta de inspección inicial para establecer un punto de referencia del equipo cuando funciona en condiciones normales y sin problemas. Ya que es importante determinar el estado del equipo normal y utilizarlo como firma térmica inicial para comparar imágenes posteriores. Tendencia térmica. La tendencia térmica es un proceso utilizado por el analista para comparar la distribución de la temperatura en el mismo componente en función del tiempo, se utiliza sobre todo en inspecciones de equipos mecánicos en los que las formas térmicas habituales pueden resultar complejas. Es útil también cuando las firmas térmicas con las que se detectan las averías se suelen desarrollar con lentitud. Mediante esta técnica se nos permitirá ver la temperatura de las superficies con precisión sin tener contacto con las mismas. Las diferencias de temperatura se muestran en escalas de grises o color, donde por lo regular blanco representa el área más caliente y negro la más fría, a menos que se invierta la paleta de colores.
Fig 9. Este radiador (enfriador) de un camión articulado marca Caterpillar.

I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
20
Fig 10. Este radiador (enfriador) de un camión articulado marca Caterpillar visto con la cámara termográfica. En la figura 8 podemos ver a simple vista que el enfriador tiene buen funcionamiento; sin embargo, después una foto con la cámara termográfica figura 9, nos percatamos que su funcionamiento no es óptimo. Resultados Hasta esta fecha el proyecto no ha sido concluido aún falta integrar lo ya realizado de control electrónico y la cámara termografica al cuerpo del drone, para ello los alumnos tendrán que aplicar los conocimientos adquiridos en la materia de máquinas y mecanismos, (Roque, 2010). Que son necesarios para el diseño y el desarrollo del mecanismo de sujeción del control electrónico. Conformando la parte más robusta del proyecto, y no por ello menos importante, ya que sobre ella recaerá la aplicación principal del proyecto una vez que esté terminado en su totalidad.
Fig 11. Desarrollo de avance del drone. Se tiene un avance significativo, ya que en cierta medida se solucionó el diseño del chasis y el mecanismo con el cual se va a lograr la locomoción del UGV, restando por construir aún las partes de cubiertas y soportes para las partes de control eléctrico- electrónico, que son la parte medular del objetivo planteado del proyecto que es la detección de variables para campos de cultivo (Lee, 2014), así como el monitoreo de condiciones como parte de la prevención de desastres (Lindsay, 2011).
I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
21
Conclusiones La utilización de vehículos aéreos no tripulados permite llevar a cabo la inspección de zonas de difícil acceso como chimeneas en plantas de producción. De esta forma se consiguen evitar paradas técnicas muy costosas para la producción. La tecnología UAV es un magnífico complemento a los métodos tradicionales y permite detectar anomalías en las instalaciones. Todavía falta bastante para terminar el prototipo del drone, esperando que en un tiempo futuro se pueda complementar el proyecto, con la nueva plataforma de hardware de Intel, la tarjeta Edison con la que se podría aumentar el espectro de funciones operativas y la obtención de información de variables críticas o específicas a monitorear, permitiendo tenerlas más rápidamente al alcance de nuestra mano, con lo que nos será mucho más fácil y más rápido acceder a ella, a través de lo que se conoce como el internet de las cosas (IoT, por su siglas en inglés). Mientras tanto este proyecto seguirá siendo parte de fomento, desarrollo de competencias profesionales y motivación para los estudiantes de mantenimiento en la Universidad Tecnológica de Jalisco. Referencias
Boxall John, Arduino Workshop 2013 No Starch Press, Inc ISBN-10: 1-59327-448-3 ISBN-13: 978-1-59327-448-1
Calero Pérez Roque, Fundamentos de mecanismos y máquinas para ingenieros 2010 Editorial McGraw-Hill.
Gertz Emily & Di Justo Patrick Atmospheric Monitoring with Arduino 2013 O’Reilly Media, Inc
Edward Shigle y Joseph y Joseph Uicker John JR. Teoría de máquinas y mecanismos. 2009 Editorial McGraw-Hill.
Lafont P, Díaz Lantada A y Echevarría Otero J. Diseño y cálculo de transmisiones por engranajes. 2009 Sección de publicaciones de la ETSII Universidad Politécnica de Madrid
Levy Stephanie, Aftershock: unmanned systems help japan recover from disaster Unmanned systems mission critical Vol. 1 no2 summer 2011 Pag.16 AUVSI
Torrente, Óscar Arduino. Curso práctico de formación Primera Edición, 2013 Alfaomega Grupo Editor, S.A. de C.V., México ISBN: 978-607-707-648-3
Voss Lindsay, 2011.unmanned systems vs wildfires Unmanned systems mission critical Vol. 1 NO.2 Pag.30 AUVSI
Rich Tuttle, 2013.Lay of the Land Unmanned Systems Coming to Commercial Agriculture Unmanned systems mission critical Vol. 3. NO.3 Pag.8-10 AUVSI
Ewing Lee, 2014. Strong Growth Predicted for Ground Robots Designed for Agriculture Unmanned systems mission critical Vol. 4. NO.2 Pag.10-13 AUVSI
(AUVSI, 2013)State of the Art, 2014. Robotic Farming Sprouts Up Unmanned systems mission critical Vol. 4. NO.2 Pag.14-15 AUVSI http://www.ibtimes.com/space-mining-nasacaterpillar-cat-team-harness-potential-miningasteroids-moon-mars-1530584
Glosario DRONE es un vehículo aéreo no tripulado. Esta es una categoría amplia que podría incluir cualquier cosa, desde un avión a control remoto de juguete hasta un avión comercial o de carga sin piloto, como también un avión militar de ataque o de vigilancia en cualquier lugar del planeta. UAV (por sus siglas en inglés Unmanned Aerial Vehicle), se define como un vehículo sin tripulación reutilizable, capaz de mantener una trayectoria controlada, sostenida y propulsado; este concepto implica mucho más de la ciencia aeroespacial, y esto puede servir para ayudar a formar capital humano capaz de competir dentro del mismo entorno.
I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
22
COMPETENCIAS PROFESIONALES Se definen como la capacidad productiva de un individuo en cuanto a conocimientos, habilidades y actitudes requeridas en un determinado contexto de trabajo. Éstas dan sustento a la formación de los estudiantes en el perfil del TSU.

I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
23
Sesiones 16/1-3 Agricultura Sala 3 Horario: 12:10 – 13:10 16/ 1. 12:10 – 12:30. Un enfoque multidisciplinario de sensado remoto a través de UAV de bajo costo / Calvario Sánchez, G.; Sierra Araujo B.; Martínez Águila J.; Monter Ortiz E. / TERRADATA-UPV 16/ 1. 12:10 – 12:30. UAV en apoyo a la agricultura de precisión: el caso de la vitivinicultura en México / Germán Raúl Vera Alejandre / IPN 16/ 1. 12:10 – 12:30. Aplicaciones de los Vehículos Aéreos No Tripulados para caracterización parcelaria con fines de agricultura de precisión / Waldo Ojeda Bustamante; Mariana de Jesús Marcial Pablo; Ronald E. Ontiveros Capurata; Alberto González Sánchez; Jorge Flores Velázquez / IMTA
I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
24
Sesiones 16/1-3 Agricultura Sala 3 Horario: 12:10 – 13:10
SESIÓN 6/1, SALA 3. UN ENFOQUE MULTIDISCIPLINARIO DE SENSADO REMOTO A TRAVÉS DE UAV DE BAJO COSTO
G. Calvario-Sanchez¹
B.Sierra-Araujo ² J.Martinez-Aguila ²
E.Monter-Ortiz² ¹ Terradata y Asociados SA de CV.
² Universidad del País Vasco UPV/EHU, España [email protected]
Resumen El uso del vehículo aéreo no tripulado (UAV), basado en sensado remoto ha generado un monitoreo de bajo costo, debido a que se pueden adquirir datos de una manera rápida y sencilla. En este campo de aplicación se están generando una combinación de metodologías aplicadas en la fotogrametría, visión por computadora, minería de datos, geomática e informática, la cual en conjunto genera resultados muy interesantes en el monitoreo del agave. Este documento reporta la experiencia relacionada al análisis de un cultivo de agave con un UAV de bajo costo, los datos fueron procesados por medio del flujo fotogramétrico tradicional, pero se aplicaron técnicas de minería de datos para extraer nuevas capas y separar las plantas de agave de la maleza; además de otros elementos del entorno, a través de este documento se pretende demostrar el potencial del monitoreo de UAV en campos de agave y la importancia del tratamiento de la información con un flujo de datos confiable. Introducción El vehículo aéreo no tripulado (UAV), también conocido como drone, está inicialmente constituido por un dispositivo controlador de vuelo, radio receptor, baterías, sensores, actuadores, etc. En los últimos años el uso de UAV ha ido incrementado debido a su potencial en áreas diversas, ya que puede desplazarse de manera muy eficaz; según investigaciones de mercado, indican un amplio crecimiento en el área militar, civil y comercial. MarketsandMarkets proyectó una estimación en ventas para el año 2016 de 13.22 billones de dólares, y especulan un aumento para el año 2022 a la cifra de 28.27 billones (MarketsandMarkets, 2016). El Sensado Remoto (RS), tradicional se ha llevado a cabo por medio de imágenes de satélite o fotografía aérea, lo cual tiene un costo considerable y no está al alcance de cualquier persona; sin embargo, el auge de nuevas tecnologías, tal como los vehículos no tripulados han dado lugar a un RS de bajo coste, el cual cuenta con una resolución espacial suficiente para observar el detalle de lo que se está estudiando. (Niethammer, 2009), también se debe mencionar la relación entre la visión computacional, aprendizaje automático, (Andersson, 2005), robótica y sistemas de información geográfica que están generando en este momento, un entorno multidisciplinario muy interesante en la extracción de información y su tratamiento (Colomina I. &., 2008). En un enfoque de aplicación en campo podemos mencionar: monitoreo en agricultura, (Aasen, 2015) inspección forestal, mapeo de cobertura territorial, (Horcher, 2004), respuesta en desastres, (Tsach,

I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
25
2002), monitoreo de construcción, inspección industrial y residencial, modelos fotogramétricos tridimensionales, monitoreo en conductos de hidrocarburos, vigilancia en costas, (Gonçalves, 2015), etc. Acerca de las ventajas con la que se cuenta el UAV, se cuenta con la sustitución del hombre en campo, es decir, de manera remota se pueden ejecutar labores de riesgo, tales como volar áreas contaminadas, vulnerables a la radiación, en peligro de derrumbe, desplazamiento de materiales, monitoreo de riesgos y más. La tecnología UAV ha sido ampliamente utilizada por la milicia debido a que tienen un costo menor que las tradicionales aeronaves de guerra y con el uso del mismo, se evitan bajas innecesarias, que es uno de los principales aspectos a considerar (Sparrow, 2009). Las principales desventajas por mencionar es que estos no cuentan con la capacidad “Sense and avoid” (S&A), que es la incapacidad de reacción de un vehículo aéreo no tripulado ante la presencia de algún otro obstáculo; sin embargo, los métodos de aprendizaje automático y visión por computador han generado un desarrollo sin precedente en los actuales vehículo aéreos (Everaerts, 2008); otra de las desventajas más significativas es la batería, la cual no suele durar mucho tiempo y esto origina periodos de uso corto y áreas limitadas. También algo que se debe recordar es su vulnerabilidad para derribarlos, ataques cibernéticos y su alto riesgo acerca de un mal manejo (Weibel, 2004). En este documento nos enfocamos a desarrollar una solución para el monitoreo de plantas de agave, generando un orto-mosaico que nos permitirá separar las plantas de otros elementos en campo y con ello poder realizar un monitoreo detallado, con el cual demostrar la utilidad de un entorno multidisciplinario, que genera en conjunto un buen tratamiento de la información. Materiales y métodos. Plan de trabajo
Área de estudio y plan de vuelo. El área de estudio se encuentra ubicada cerca del municipio de San Diego de Alejandría, de la Región Altos Norte del estado de Jalisco, en México. Dicho municipio se encuentra dentro de la región nombrada como área de denominación de Origen para el Tequila, su altura es superior a 1800 m sobre el nivel del mar y sus coordenadas de sobrevuelo 20°54’33.82” latitud Norte y 102° 00’ 04.00” longitud Oeste, el área es de aproximadamente 7 hectáreas ((Figura N° 1).
I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
26
Figura No 1. Trabajo en campo en área de estudio seleccionada.
El plan de vuelo se verificó de manera anticipada por medio de Google Earth, se especificó el área de despegue y aterrizaje, en sitio se inició el lanzamiento y se llevó el dispositivo a una altitud 60 metros para proveer una resolución espacial ≤2cm por pixel, el tiempo de vuelo se llevó a cabo en alrededor de 15 minutos. El parámetro que nos indica el tamaño aproximado de representación de un pixel en el terreno es llamado Ground Sample Distance (GSD), en nuestro caso el tamaño fue de ≤2cm por pixel, debido a que se realizó el vuelo a 60 metros de altura (Jacobsen, 2008).
= ( ∗ ∗100)/( ∗ ) Donde:
la apertura del sensor(mm) la altura de vuelo(m)
es la distancia focal (mm) ancho de imagen(pixel) (Pix4D, 2016).
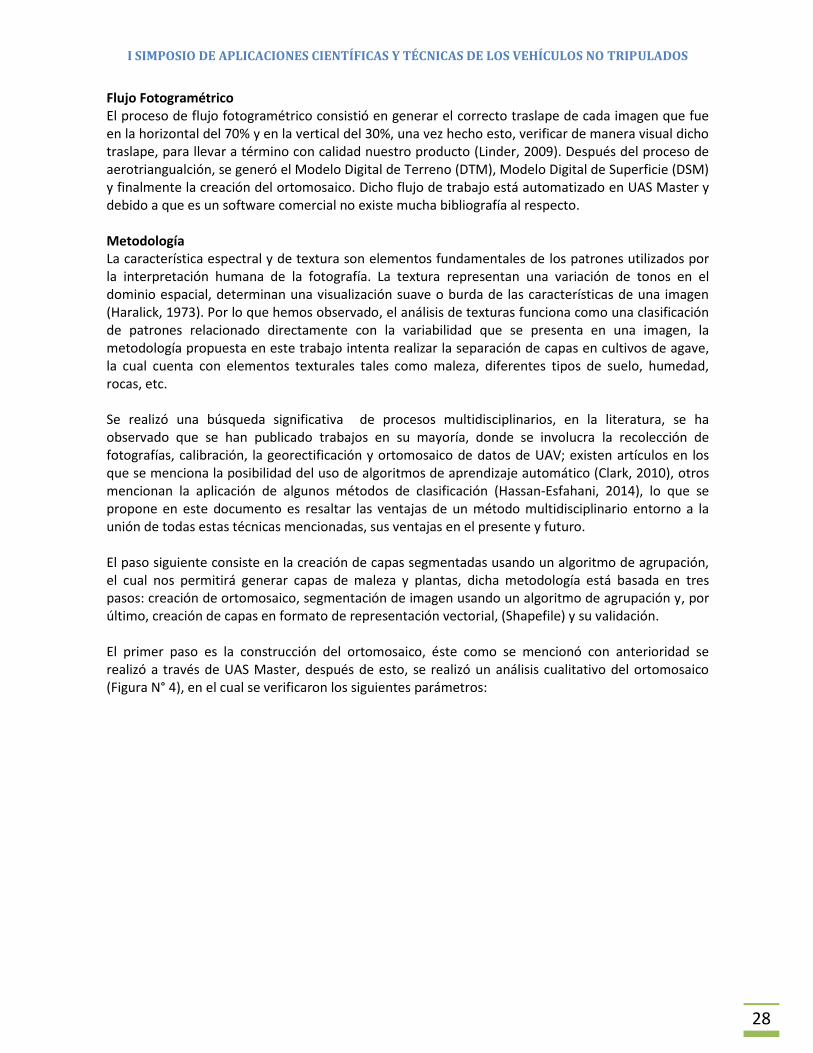
Cuadricóptero-UAV El cuadricóptero utilizado para la adquisición de la imagen, es un equipo de bajo costo, cuenta con un sistema de detección de obstáculos de 0.7 a 15m, su entorno operativo debe tener buena iluminación para cumplir con dicho objetivo, modo GPS/GLONASS, sistema de estabilización de 3 ejes con un grado de inclinación de -90° a +30 y ejes de movimiento horizontal, vertical y rotación, distancia de operación es de 3 km. Sin embargo, siempre se vuela dentro de una línea de visión clara, por seguridad, tanto de los usuarios como del equipo, fue controlado de manera manual y se debe resaltar que para ello el nivel de habilidades y conocimientos del piloto debe ser alto, debido a los contratiempos que pueden surgir directamente en el área de adquisición (Figura N° 2).
Figura No 2. Equipo de bajo costo y trabajo en campo en área de estudio seleccionada.

I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
27
Adquisición de la imagen Se cuenta con un sensor RGB, que permite la captura de información raster, desde una altura predefinida por el usuario. El uso de estabilizadores permite absorber la vibración y estabiliza la posición del sensor, en el caso del UAV phantom 4, este se encuentra montado sobre una plataforma gimbal, que permite obtener el nadir buscado en las imágenes (Tabla N° 1).
Sensor RGB 6.25 mm x 4.68 mm, focal
length: 3.64mm. (DJI, 2016) Peso 25 grs
Sensor 12.4 M CMOS
Lente FOV 94°
Medida de Imagen 4000×3000
Tipo Imagen JPEG, DNG (RAW)
Temperatura 0° to 40° C
Tabla No 1, Características generales de UAV.
El vuelo del UAV nos permitió obtener la colección de fotografías y su coordenada aproximada, ya que se debe recordar que las condiciones del área, meteorológicas, la imprecisión del sistema de posicionamiento global, generan errores en la geoposición de la fotografía, por lo que también se asignaron puntos de control geodésicos (GCPs), en el sitio de interés. Los puntos GCPs nos proveen de precisión, se requieren por lo menos tres (Gonçalves, 2015), sin embargo, en nuestro caso utilizamos 8 puntos de control en el área, con el fin de minimizar el error al georectificar (Figura N° 3). Para obtener un buen resultado en el procesamiento de la imagen, se debe llevar a cabo un correcto procedimiento fotogramétrico, actualmente en el mercado existe una variedad de paquetes de software fotogramétrico que pueden realizar procesos sobre las fotografías de UAV, estos paquetes utilizan por lo regular un algoritmo llamado “structure from motion” que es un conjunto de técnicas de fotogrametría y visión computacional, (Snavely, 2007). En nuestro caso utilizamos el software llamado UAS Master, también se utilizó Exiftool, (ExifTool, 2016) que es una aplicación que permite leer los metadatos de una variedad de formatos fotográficos, esta aplicación también nos ayudó a obtener los parámetros para realizar la calibración radiométrica de nuestra imagen.
Figura No 3, Generación de puntos de control.
I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
28
Flujo Fotogramétrico El proceso de flujo fotogramétrico consistió en generar el correcto traslape de cada imagen que fue en la horizontal del 70% y en la vertical del 30%, una vez hecho esto, verificar de manera visual dicho traslape, para llevar a término con calidad nuestro producto (Linder, 2009). Después del proceso de aerotriangualción, se generó el Modelo Digital de Terreno (DTM), Modelo Digital de Superficie (DSM) y finalmente la creación del ortomosaico. Dicho flujo de trabajo está automatizado en UAS Master y debido a que es un software comercial no existe mucha bibliografía al respecto. Metodología La característica espectral y de textura son elementos fundamentales de los patrones utilizados por la interpretación humana de la fotografía. La textura representan una variación de tonos en el dominio espacial, determinan una visualización suave o burda de las características de una imagen (Haralick, 1973). Por lo que hemos observado, el análisis de texturas funciona como una clasificación de patrones relacionado directamente con la variabilidad que se presenta en una imagen, la metodología propuesta en este trabajo intenta realizar la separación de capas en cultivos de agave, la cual cuenta con elementos texturales tales como maleza, diferentes tipos de suelo, humedad, rocas, etc. Se realizó una búsqueda significativa de procesos multidisciplinarios, en la literatura, se ha observado que se han publicado trabajos en su mayoría, donde se involucra la recolección de fotografías, calibración, la georectificación y ortomosaico de datos de UAV; existen artículos en los que se menciona la posibilidad del uso de algoritmos de aprendizaje automático (Clark, 2010), otros mencionan la aplicación de algunos métodos de clasificación (Hassan-Esfahani, 2014), lo que se propone en este documento es resaltar las ventajas de un método multidisciplinario entorno a la unión de todas estas técnicas mencionadas, sus ventajas en el presente y futuro. El paso siguiente consiste en la creación de capas segmentadas usando un algoritmo de agrupación, el cual nos permitirá generar capas de maleza y plantas, dicha metodología está basada en tres pasos: creación de ortomosaico, segmentación de imagen usando un algoritmo de agrupación y, por último, creación de capas en formato de representación vectorial, (Shapefile) y su validación. El primer paso es la construcción del ortomosaico, éste como se mencionó con anterioridad se realizó a través de UAS Master, después de esto, se realizó un análisis cualitativo del ortomosaico (Figura N° 4), en el cual se verificaron los siguientes parámetros:

I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
29
Figura No 4, Ortomosaico procesada con UAS masterTM. A continuación, sometimos el ortomosaico a un algoritmo de agrupamiento desarrollado en Matlab, el algoritmo nos permitió generar nuevas capas temáticas de los objetos de interés y después construir bitmaps (Figura N° 5), que fueron validados en conjunto con los datos del orto mosaico en un sistema de información geográfica (GIS).

I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
30
Figura No 5, vista Aérea sobre corte de ortomosaico (a), muestreo de capa de plantas (b), muestreo de capa de maleza(c). Evaluación de la Metodología La exactitud de los datos derivados de los UAV depende principalmente de dos aspectos: la restitución fotogramétrica basada en la triangulación y la exactitud del DTM y DSM. Para evaluar la metodología, se tomaron 35 muestras en diferentes sitios alrededor del área de interés, en los cuales 10 muestras fueron de maleza y 25 de plantas de agave, cada muestra fue obtenida con datos GPS y fotografía, se tomaron medidas de altura y diámetro, se hace notar que se tuvo un error de ≤5 cm en cuanto a las alturas y diámetros en cada muestra.
I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
31
Conclusiones El sensado remoto del agave a través de UAV de bajo costo, es generado por medio de la combinación de varias tecnologías como son: fotogrametría, visión por computador, minería de datos, geomática e informática. Este estudio ha demostrado el potencial desarrollo de vehículos aéreos no tripulados de bajo costo en el área del monitoreo del agave. La detección remota de la estructura de la vegetación permitirá en un futuro cercano la generación de datos muy importantes, para el estudio de plantas como el agave. En el caso de este estudio se pretende que los resultados del sensado remoto se almacenen en una base de datos geoespacial, la cual nos permitirá observar el comportamiento de las plantas con respecto a su entorno ambiental e histórico. En este momento se trabaja en conjunto con la gente del Consejo Regulador del Tequila, la cual nos ha permitido enfocarnos a sus necesidades y contar con el apoyo para monitorear algunos cultivos. Agradecimientos El desarrollo y metodología de este estudio fue llevado a cabo por el equipo técnico de Terradata y Asociados SA de CV, además del apoyo del Consejo Regulador del Tequila (CRT), el cual nos ha permitido monitorear varios cultivos. Para más información acerca de esta empresa se encuentra disponible en: http://www.terradata.com.mx/ Referencias
Aasen, H. (2015). Generating 3D hyperspectral information with lightweight UAV snapshot cameras for vegetation monitoring: From camera calibrationto quality assurance. ISPRS Journal of Photogrammetry and Remote Sensing, 245-249.
Andersson, P. J. (2005). Hazard: A framework towards connecting artificial intelligence and robotics. Reasoning, Representation, and Learning in Computer Games, (págs. 1-6). Edinburgh, Scotland.
Clark, A. F. (2010). A low-cost airborne platform for ecological monitoring. International Archives of Photogrammetry, Remote Sensing and Spatial Information Sciences, 38.
Colomina, I. &. (2008). Towards A New Paradigm for High-Resolution Low-Cost Photogrammetryand Remote Sensing. ISPRS Journal of Photogrammetry and Remote Sensing, 1201-1206.
Colomina, I. (2008). TOWARDS A NEW PARADIGM FOR HIGH-RESOLUTION LOW-COST. The International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences.
DJI. (20 de 12 de 2016). DJI. Obtenido de https://www.dji.com/phantom-4/info
Everaerts, J. (2008). The use of unmanned aerial vehicles (UAVS) for remote sensing and mapping. The International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences.
ExifTool. (15 de 12 de 2016). ExifTool. Obtenido de http://www.sno.phy.queensu.ca/~phil/exiftool/
Gonçalves, J. A. (2015). UAV photogrammetry for topographic monitoring of coastal areas. ISPRS Journal of Photogrammetry and Remote Sensing, 101-111.
Haralick, R. M. (1973). Textural features for image classification. IEEE Transactions on systems, man, and cybernetics.
Hassan-Esfahani, L. T.-R. (2014). Topsoil moisture estimation for precision agriculture using unmmaned aerial vehicle multispectral imagery. IEEE Geoscience and Remote Sensing Symposium (págs. 3263-3266). IEEE.

I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
32
Horcher, A. &. (2004). Unmanned Aerial Vehicles: Applications for Natural Resource Management and Monitoring. Conference Proceedings: “Machines and People, The Interface”.
Jacobsen, K. (2008). TELLS THE NUMBER OF PIXELS THE TRUTH? EFFECTIVE RESOLUTION OF LARGE SIZE DIGITAL FRAME CAMERAS. Hannover, Germany.
Linder, W. (2009). Digital Photogrammetry, A Practical Course. Springer Science & Business Media.
MarketsandMarkets. (2016). Unmanned Aerial Vehicle (UAV) Market by Application (Military, Civil & Commercial, Homeland Security), Class (Small, Tactical, Strategic, Special Purpose), Subsystem, Energy Source, Material Type, Payload and Region - Global Forecast to 2022. marketsandmarkets.com.
Niethammer, U. R. (2009). UAV-based remote sensing of the slow-moving landslide super-sauze., (págs. In Proceedings of the International Conference on Landslide Processes: From Geomorpholgic Mapping to Dynamic Modelling,). Strasbourg, France.
Pix4D. (10 de 12 de 2016). Pix4D Tools-GSD Calculator. Obtenido de https://support.pix4d.com/hc/enus/articles/202560249-TOOLS-GSD-Calculator#gsc.tab=0
Snavely, N. S. (2007). Modeling the world from internet photo collections. International Journal of Computer Vision, 189-210.
Sparrow, R. (2009). Building a Better WarBot: Ethical Issues in the Design of Unmanned Systems for Military Applications. Science and Engineering Ethics, 169-187.
Tsach, S. P. (2002). Advanced technologies and approaches for next generation UAVs. In Proceedings of ICAS 2002 Congress.
Weibel, R. E. (2004). Safety Considerations for Operation of Different Classes of UAVs in the NAS. AIAA. Chicago, Illinois.
I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
33
SESIÓN 16/2. SALA 3. UAV EN APOYO A LA AGRICULTURA DE PRECISIÓN:
EL CASO DE LA VITIVINICULTURA EN MÉXICO Germán Raúl Vera Alejandre
Centro Interdisciplinario de Investigaciones y Estudios sobre Medio Ambiente y Desarrollo
Instituto Politécnico Nacional [email protected]
Actualmente se concibe a la agricultura de precisión como una estrategia de manejo que incorpora las tecnologías de la información para mejorar el manejo de los cultivos. Tal es el caso de la vitivinicultura, donde cosechar uvas acordes con el tipo de vino que se desea producir representa todo un reto por cuanto a que la calidad de las mismas depende del contenido de azúcar y acidez, pero sobre todo de la gama de compuestos orgánicos que definirán a un vino como de calidad incluyendo antocianinas (productores de pigmentos) y polifenoles, entre otros. Es por ello que en los últimos años se ha promovido la aplicación de diversas técnicas de percepción remota con el fin de determinar la variación temporal, pero sobre todo espacial de tales compuestos en los viñedos, principalmente a partir de la determinación de diversos índices tanto relacionados con el estrés hídrico como con el vigor de la vegetación, la mayoría estimados a partir de imágenes satelitales.
En el caso de la zona vitícola de Querétaro, la aplicación de estos métodos tiene severas restricciones debido principalmente a la presencia de nubes sobre todo durante el verano, cuando se presentan las etapas fenológicas de envero y maduración, que definen en última instancia la calidad de la producción. Por lo anterior, se promueve entre los productores de uva la utilización de sensores multiespectrales instalados en UAVs con el fin de monitorear la condición de los viñedos, y con ello establecer oportunamente las estrategias de manejo que mejor favorezcan cosechar uvas con características físico-químicas de la mayor aptitud, para producir vinos de calidad.
I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
34
SESIÓN 16/3. SALA 3. APLICACIONES DE LOS VEHÍCULOS AÉREOS NO TRIPULADOS PARA CARACTERIZACIÓN PARCELARIA CON FINES DE
AGRICULTURA DE PRECISIÓN
Waldo Ojeda Bustamante Mariana de Jesús Marcial Pablo
Ronald E. Ontiveros Capurata Alberto González Sánchez
Jorge Flores-Velazquez Instituto Mexicano de Tecnología del Agua
Los vehículos aéreos no tripulados (VANTs) con capacidad de comunicación y adquisición remota de imágenes y videos de alta resolución, constituyen una alternativa como herramienta para numerosas aplicaciones de interés agrícola, en complemento al uso de la tecnología satelital de baja resolución espacial y temporal. En adición, permiten complementar las limitaciones de la supervisión y captura de datos que manualmente demandan tiempo y recursos humanos. Una de las áreas que requiere de información parcelaria de variables que presentan gran variabilidad espacial y temporal es la agricultura de precisión, que consiste en la aplicación precisa y oportuna de los insumos agrícolas y riego, en el momento adecuado, en el lugar correcto de un cultivo y con la dosis óptima. Lo anterior, demanda primeramente del conocimiento de las variables que definen el desarrollo y productividad de los cultivos para la aplicación variable de insumos, en función de la variabilidad de dichas variables. Un aspecto importante en la agricultura de precisión es la detección de zonas diferenciadas de crecimiento “anormal”, en función de parámetros o valores específicos que definen el desarrollo deseado u óptimo, tales como vigor, madurez, o estrés. El uso de VANTs para estas tareas es crucial para definir zonas de intervención diferencial o con problemas de desarrollo. Entre los factores a determinar en aplicaciones agrícolas, además de las características del vehículo aéreo, es sin duda el tipo de sensor y cámara a ser utilizado. Existe una amplia gama de opciones de cámaras a utilizar que dependen de lo que se pretenda capturar y detectar. Esa diversidad tiene impacto en el peso final de carga útil del equipo y el tamaño, resolución, versatilidad y necesidad de almacenamiento de la cámara, entre otros. En este trabajo se presentan los resultados de las aplicaciones de los VANTs para el seguimiento espacial y temporal de variables de interés para realizar una agricultura de precisión. Entre las más importantes se destacan: - Seguimiento del desarrollo y crecimiento del cultivo. - Estimación de parámetros del cultivo como biomasa, altura, diámetro y densidad de plantación. - Detección y seguimiento de deficiencias nutricionales. - Detección de patrones anormales del cultivo. - Detección y seguimiento de la presencia de malas hierbas, enfermedades y plagas. - Detección de las necesidades hídricas y seguimiento del riego. - Estimación del rendimiento del cultivo.
I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
35
Sesiones 16/4-6 Cartografía / Fotogrametría Sala 1 Horario: 13:20 – 14:20
16/ 4. 13:20 – 13:40. Aerotriangulación automatizada para la restitución fotogramétrica de imágenes obtenidas con vehículos aéreos no tripulados / Braulio David Robles Rubio; Ronald Ontiveros; Sergio Jiménez; Waldo Ojeda; Pablo Vicente Legazpi / IMTA
16/ 5. 13:40 – 14:00. La Estación Virtual de Imágenes de Muy Alta Resolución (EVISMAR), uso y aplicaciones / Luis Enrique Rodríguez Gallo; Alejandro M. Rodríguez Aguayo; Fernando Catalán Zavaleta / SEMAR
16/ 6. 14:00 – 14:20. Comparación de softwares comerciales fotogramétricos para procesar imágenes adquiridas por UAV en dos escenarios: marino y terrestre / Eduardo J. Ramírez-Chávez; Luis M. Morales Manilla; Paz Coba-Pérez / UMAR-CIGA
I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
36
Sesiones 16/4-6 Cartografía / Fotogrametría Sala 1 Horario: 13:20 – 14:20
SESIÓN 16/4. SALA 1. AEROTRIANGULACIÓN AUTOMATIZADA PARA LA RESTITUCION FOTOGRAMÉTRICA DE IMÁGENES OBTENIDAS CON VEHÍCULOS
AÉREOS NO TRIPULADOS
Braulio David Robles Rubio Ronald Ontiveros
Sergio Jiménez Waldo Ojeda
Pablo Vicente Legazpi Instituto Mexicano de Tecnología del Agua
Gracias a los avances en la tecnología en sensores, software, control, GPS y estructuras asociadas a los vehículos aéreos no tripulados (VANTs) se ha extendido y diversificado su uso hacia aplicaciones ingenieriles, en particular la cartografía de bajo costo. Las imágenes de alta resolución obtenidas por cámaras montadas en vehículos aéreos pueden ser procesadas por métodos fotogramétricos. Estas imágenes son un modelo de proyección central, ya que los rayos que pasan por el lente se concentran en el centro para después ampliarse hacia el sensor, por lo que la imagen generada no corresponde a una imagen ortogonal de la superficie, sino que está deformada, siendo el punto central el único perpendicular al plano, mientras que el resto de los objetos en la imagen se van desplazando conforme se alejan de éste. La fotogrametría considera la reconstrucción geométrica de los objetos capturados en la imagen, a partir de la reconstrucción de rayos homólogos desde dos imágenes adyacentes con un traslape entre las mismas. La corrección de las deformaciones consiste en obtener la reproducción exacta de los haces de rayos, y que su situación respecto al terreno sea análoga al momento de la captura de la imagen en el vuelo, para lo cual es necesario considerar la geometría del lente de la cámara o sensor al momento de la toma a través de la identificación del punto principal de la foto, la distancia focal y la distorsión del lente, a esto se le llama orientación interna. Por otro lado se debe obtener la posición de los haces en el espacio respecto a un sistema de referencia establecido, esto se refiere a la orientación externa. En la fotogrametría tradicional se busca identificar los puntos homólogos de dos imágenes traslapadas para determinar las coordenadas en el terreno de cada punto, este proceso se hace de forma analítica apoyándose en puntos de control levantados en el terreno con instrumentos topográficos o mediante aerotriangulación pasando las coordenadas de un modelo ya orientado a otro.
Se ha avanzado en el desarrollo de software para la restitución de las imágenes automatizando la mayoría de los procesos fotogramétricos, entre ellos, la aerotriangulación, mientras que en el método tradicional los puntos eran seleccionados individualmente y transferidos entre las imágenes, actualmente la transferencia de los puntos se realiza de una forma automática mediante procesos de correlación de imágenes satelitales (multiple image matching). Esta automatización permite aumentar considerablemente el número de puntos utilizados en la aerotriangulación, pasando de decenas a cientos, miles o aún millones de puntos, aumentando la precisión del producto cartográfico. En este trabajo se presentan los resultados de un levantamiento fotogramétrico con un VANT y su procesamiento a través del software especializado para generar la cartografía del terreno. Con un dron de seis hélices y una cámara digital de 24 Megapixeles se capturaron cerca de mil

I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
37
imágenes en una superficie de 75 ha, desde una altura promedio de vuelo de 115 m, el levantamiento se realizó en tres misiones de vuelo con un tiempo efectivo de 40 minutos. Con un equipo GPS con corrección diferencial en tiempo real se levantaron 13 puntos de control altimétrico y planimétrico. Las imágenes obtenidas se procesaron para hacer la restitución y obtener un mosaico que cubre toda la superficie. Las diferencias en la posición altimétrica y planimétrica, obtenidas en el mosaico comparado con los puntos de control, están por debajo de los 2 cm. Los resultados indican que usando VANTs montados con cámaras fotográficas de bajo costo es posible obtener productos cartográficos reduciendo el tiempo y costo requerido por métodos tradicionales.

I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
38
SESIÓN 16/5. SALA 1. LA ESTACIÓN VIRTUAL DE IMÁGENES SATELITALES DE MUY ALTA RESOLUCIÓN (EVISMAR), USO Y APLICACIONES
Capitán de Navío CG. DEM. Luis Enrique Rodríguez Gallo Maestro en Ingeniería Alejandro M. Rodríguez Aguayo
Licenciado en Biología Fernando Catalán Zavaleta EVISMAR / Secretaría de Marina
El objetivo de la presentación es mostrar las capacidades de la EVISMAR para la obtención de imágenes de muy alta resolución, los productos que se obtienen, los proyectos en que participamos dentro de SEMAR y las aplicaciones que se han desarrollado dentro de SEMAR.

I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
39
SESIÓN 16/6. SALA 1. COMPARACIÓN DE SOFTWARES COMERCIALES FOTOGRAMÉTRICO PARA PROCESAR IMÁGENES ADQUIRIDAS POR UAV EN
DOS ESCENARIOS: MARINO Y TERRESTRE
Eduardo J. Ramírez-Chávez¹ Luis M. Morales-Manilla ²
Paz Coba-Pérez ² ¹ Universidad Del Mar. Laboratorio de SIG y PR.
² Centro de Investigaciones en Geografía Ambiental, UNAM En la actualidad la obtención de datos espaciales para su posterior uso en cartografía o topografía es una necesidad imperante, dicha obtención de información ha venido cambiando drásticamente en los últimos 6 años, y hemos pasado de obtener datos de sensores remotos “Macro” como imágenes de satélite, modelos digitales de elevación o fotografías tomadas en aviones o helicópteros con los cuales podía trabajarse a escala grande, o en su caso si queríamos trabajar a escala fina nos llevaría un tiempo considerable en procesarla a la obtención rápida y de escala fina mediante uso de los sistemas aéreos piloteados remotamente . Lo anterior se ha podido lograr gracias a los avances en los campos de la fotogrametría y la computación produciendo algoritmos que tienen el potencial para procesar imágenes de manera automatizada. Tales algoritmos son capaces de detectar puntos similares entre imágenes para sobreposicionarlos, crear nube de puntos de la superficie 3D y, por último, generar un modelo u ortomosaico (Choudhary, 2012; Westoby et al, 2012). Para la comparación de resultados de Pix4D y Photoscan se usó el proceso de análisis jerárquico (AHP), para realizar comparaciones pareadas de las alternativas en cada atributo y para confrontar la importancia relativa entre atributos se convirtieron los resultados a escala numérica de 1-9, para tal efecto se usó el software Expert Choice. Para realizar una comparativa más íntegra de los softwares en el procesado de imágenes capturadas con vehículos aéreos no tripulados, se evaluaron en dos escenarios: escenario marino (Bahía de la costa Oaxaqueña) y terrestre (Zona cercana a Morelia, Michoacán), estos ambientes se caracterizan por ser sistemas dinámicos con necesidad de visitas frecuentes para evaluar cambios espaciales y/o temporales. Obteniendo como principales resultados en mayor rapidez a Pix4D, en mayor área obtenida para ortofotos a PhotoScan, mayor número de “tie point” Pix4D, en facilidad de uso Pix4D, mayor edición Pix4D. Mejor mosaico y modelo en la parte marina: PhotoScan, parte terrestre: PhotoScan, mayor ground simple distance (resolución) parte marina: Pix4D, Terrestre: Pix4D. En conclusión, ambos softwares son eficientes en el proceso de fotogrametría en general. Sin embargo, las diferencias se hacen notar en el objetivo que cada persona busca en la obtención de la ortofoto, para estudios marinos se comportó mejor PhotoScan ya que enlaza más fotografías; sin embargo, en los modelos digitales de elevación presento menos resolución. Para la parte terrestre Pix4D tiene un desempeño ligeramente superior a PhotoScan, ya que la precisión mejora y los traslapes también fueron mejores.

I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
40
Sesiones 16/4-6 Cartografía / Fotogrametría Sala 2 Horario: 13:20 – 14:20
16/ 4. 13:20 – 13:40. Vehículos aéreos no tripulados y clasificación orientada a objetos: un acercamiento al análisis submétrico de una zona periurbana / Jonathan Vidal Solórzano Villegas; Candelario Peralta Carreta; Ana Isabel Fernández Montes de Oca; José Alberto Gallardo Cruz / CCGSS
16/ 5. 13:40 – 14:00. La fotografía aérea histórica, aporte invaluable en aplicaciones científicas de los vehículos no tripulados / Dulce Abigail Cruz Torres; Luis Alberto Flores Carapia y Ana María Ruíz Vilá / FICA
16/ 6. 14:00 – 14:20. Uso de vehículos aéreos no tripulados para el monitoreo del asentamiento humano irregular denominado “El Zapote, Nuestro Padre Jesús y/o Tecpingo” ubicado en el Poblado de Santa Catarina Yecahuitzotl, Delegación Tláhuac, Ciudad de México / Abraham Eliud Corona Palazuelos y Ulises Pech Rivera / PAOT

I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
41
SESIÓN 16/4. SALA 2. VEHÍCULOS AÉREOS NO TRIPULADOS Y CLASIFICACIÓN ORIENTADA A OBJETOS: UN ACERCAMIENTO AL ANÁLISIS SUBMÉTRICO DE
UNA ZONA PERIURBANA
Jonathan Vidal Solórzano Villegas Candelario Peralta Carreta
Ana Isabel Fernández Montes de Oca José Alberto Gallardo Cruz Matías Hernández Gómez
Centro del Cambio Global y la Sustentabilidad en el Sureste A.C. Los VANT (Vehículos Aéreos no Tripulados) han abierto la posibilidad de generar imágenes multiespectrales submétricas con costos relativamente bajos y de buena calidad. Estas imágenes se pueden combinar con metodologías de clasificación novedosas, como la orientada a objetos, para obtener mapas temáticos de alta precisión. Por ello, el objetivo de este trabajo fue evaluar el potencial de una clasificación orientada a objetos utilizando información obtenida con un VANT, para generar un mapa temático de una escena suburbana de la ciudad de Villahermosa, Tabasco. La información utilizada para realizar la clasificación fue: una imagen de reflectancia en el espectro infrarrojo cercano, rojo y verde, una imagen del índice de vegetación de diferencia normalizada, y un modelo de superficie normalizado (construido a partir de modelos generados mediante fotogrametría). Para validar la clasificación se escogieron al azar 324 puntos y a cada uno se le asignó una categoría de acuerdo a la información disponible en GoogleEarth utilizando el módulo Streetview. La clasificación obtuvo una fiabilidad total de 0.83 y permitió discernir trece categorías focales y una sin clasificar. Dentro de la clasificación fue posible distinguir entre cobertura urbana de diferentes alturas (uno, dos y tres o más pisos), cinco tipos de vegetación (humedal de alta, media y baja productividad, pastizal y arbolado), cuerpos de agua, pavimento, sombras y suelo. Este tipo de trabajos pueden tener importancia para estudios de riesgo de inundación, análisis de vivienda, análisis de vegetación, entre otros.
I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
42
SESIÓN 16/5. SALA 2. LA FOTOGRAFÍA AÉREA HISTÓRICA, APORTE INVALUABLE EN APLICACIONES CIENTÍFICAS DE LOS VEHÍCULOS NO
TRIPULADOS
Dulce Abigail Cruz Torres Luis Alberto Flores Carapia
Ana María Ruíz Vilá Fundación ICA
La fotografía aérea histórica permite una visión continua de un determinado territorio en diferentes temporalidades, es un testigo fiel e inobjetable de las características del terreno y se convierte de inmediato en un archivo invaluable ya que “congela” la información en un momento específico.
Las transformaciones de un espacio están ligadas a muchos tipos de intereses, donde predominan los económicos y políticos. Por ello, la fotografía aérea desempeña un papel fundamental en el proceso de concepción, diseño, producción y práctica de estos espacios.
Son de gran utilidad para estudios que tienen que ver con las variables en el tiempo (resolución temporal) de determinados detalles de información; por ejemplo, el crecimiento de una ciudad y la determinación de sus tendencias, los cambios en el uso del suelo, el desarrollo de la infraestructura en una región, la dinámica y evolución costera, trabajos detallados de fotointerpretación en geología, suelos, localización de caminos, levantamientos generales del suelo, levantamientos de catastro rural, planificación urbana, etcétera.
En México existe uno de los acervos aerofotográficos más importantes de su clase a nivel mundial, el cual resguarda y conserva Fundación ICA, las imágenes que contiene el acervo, son evidencia de la permanencia y transformación de México, de su desarrollo urbano y paisaje entre 1930 y 1987; en el 2014, el Fondo Aerofotográfico (series oblicua y vertical) fue reconocido y registrado en el Programa Memoria del Mundo Latinoamérica y del Caribe de la UNESCO, destinado a preservar el patrimonio documental del mundo como símbolo de la memoria colectiva de la humanidad. El programa tiene como objetivo crear e incrementar conciencia sobre el valor y la importancia del patrimonio documental promoviendo con ello su preservación, difusión y su amplio potencial científico.
Gracias al avance tecnológico, se lleva a cabo la transformación de la naturaleza básica analógica de las fotografías aéreas en documentos digitales, lo cual representa una gran ventaja, ya que dispone las fotos en el contexto de la modernidad digital, esto se realiza mediante procedimientos que respetan los criterios de preservación con una doble finalidad: la de conservar los materiales en sus soportes originales —evitando, de este modo, la manipulación excesiva— y la de hacer accesible el acervo al público, la digitalización se realiza con escáneres fotogramétricos de alta precisión (Ultrascan 5000 de Vexcel) que permiten y aseguran que la información contenida en los ítems sea transferida con la mayor fidelidad posible.
Una vez que la fotografía aérea se encuentra en formato digital, se ortorectifica para asignar los valores de referencia geográfica a la imagen, generando un producto útil para el análisis espacial; la fidelidad de la ortofoto brinda un aporte de gran valor territorial y temporal; es un referente histórico muy claro que debe de ser confrontado con información nueva ayudándose de la tecnología, como son los vehículos no tripulados, ya que abren inmensas posibilidades para numerosos campos en investigaciones que se enfocan a la transformación del territorio, procesos de cambios demográficos, atracciones espaciales por ámbitos socioeconómicos y sociodemográficos,

I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
43
reconocimiento geográfico y delimitación de zonas de interés, análisis de factores de riesgos, trasformación y permanencia de la ciudad, etcétera.
El conjuntar la aerofotografía histórica con la actual, contribuirá a la consolidación de proyectos y promoción de la investigación científica y tecnológica, será un aporte a la generación de conocimiento que no sólo evoca a la memoria, sino invita a reflexionar y determinar metodologías de análisis en los fenómenos que tienen su ocurrencia a través del tiempo, así como la percepción de los efectos que produzcan, los cuales se relacionan intrínsecamente con el espacio geográfico.
I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
44
SESIÓN 16/6. SALA 2. USO DE VEHÍCULOS AÉREOS NO TRIPULADOS PARA EL MONITOREO DEL ASENTAMIENTO HUMANO IRREGULAR DENOMINADO “EL ZAPOTE, NUESTRO PADRE JESÚS Y/O TECPINGO” UBICADO EN EL POBLADO DE SANTA CATARINA YECAHUITZOTL, DELEGACIÓN TLÁHUAC, CIUDAD DE
MÉXICO.
Biól. Abraham Eliud Corona Palazuelos Biól. Ulises Pech Rivera
Procuraduría Ambiental y del Ordenamiento Territorial de la Ciudad de México La Procuraduría Ambiental y del Ordenamiento Territorial de la Ciudad de México (PAOT) es un organismo público descentralizado de la Administración Pública, que tiene como objeto la defensa de los derechos de los habitantes de la Ciudad de México a disfrutar de un ambiente adecuado para su desarrollo, salud y bienestar, mediante la promoción y vigilancia del cumplimiento de las disposiciones jurídicas en materia ambiental y del ordenamiento territorial. Dentro de las actividades de la Procuraduría Ambiental y del Ordenamiento Territorial se ha fomentado el uso de drones o vehículos aéreos no tripulados para el acopio de información, que permita sustanciar los expedientes de denuncia que se presentan en la Procuraduría Ambiental y del Ordenamiento Territorial de la Ciudad de México, así como de las solicitudes de agentes externos como la Procuraduría General de Justicia del Distrito Federal.
En este caso, los drones fueron utilizados para monitorear el asentamiento humano irregular denominado “El Zapote, Nuestro Padre Jesús y/o Tecpingo” ubicado en el Poblado de Santa Catarina Yecahuitzotl, delegación Tláhuac, Ciudad de México. El objetivo del sobrevuelo es tomar fotografías aéreas que permitan la obtención de ortomosaicos a partir de fotografías georreferenciadas y, a su vez, con los ortomosaicos determinar la superficie que ocupa el asentamiento, el número de construcciones dentro del mismo, el tipo de materiales con el que están edificadas, así como la zonificación que le aplica de acuerdo al Programa General de Ordenamiento Ecológico del Distrito Federal.
Para la obtención del ortomosaico se realizaron tres sobrevuelos con un vehículo aéreo no tripulado (Dron), marca Hermes modelo 403 perteneciente a la PAOT, con el cual se tomaron fotografías cada tres segundos, estas fotografías se procesaron con el software Pix4Dmapper Pro, mediante el cual se generó el ortomosaico del sitio.
Se comparó el ortomosaico con las fotografías aéreas de año 2011 propiedad de la PAOT, determinando que el asentamiento se ubica en suelo de conservación, tiene una antigüedad de cinco años y la superficie total del predio es de 305,279.938 m2 equivalente a (30.52ha). En cuanto a las construcciones que se encuentran distribuidas dentro del predio se estima que afectan una superficie total de 69,237.141m2, distribuidos en construcciones con techo en una superficie de 38,569.34 m2 y construcciones en cimientos en una superficie de 24,994.448m2.

I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
45
Imagen enero 2011(PAOT)
Mosaico, 2016 generado a partir del Vuelo con un vehículo aéreo
no tripulado
I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
46
Sesiones 16/4-6 Desarrollo tecnológico Sala 3 Horario: 13:20 – 14:20
16/ 4. 13:20 – 13:40. Uso de Vehículo Aéreo No Tripulado para la meteorología / Gustavo Vázquez
Cruz / IGg-UNAM
16/ 5. 13:40 – 14:00. Rediseño del robot tipo BALLBOT / Humberto Alejandro Cruz Moreno y Gabriel
Gutiérrez Santillán / FI-UNAM
16/ 6. 14:00 – 14:20. Rediseño de la Locomoción del Robot FinDER / Sergio Hernández Sánchez / FI-
UNAM
I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
47
Sesiones 16/4-6 Desarrollo tecnológico Sala 3 Horario: 13:20 – 14:20
SESIÓN 16/4. SALA 3. USO DE VEHÍCULO AÉREO NO TRIPULADO PARA LA METEOROLOGÍA
Gustavo Vázquez Cruz Instituto de Geografía, UNAM
[email protected] El uso de las VANT´s ha revolucionado en las tareas donde el hombre se encuentra limitado, y con la ayuda de cámaras de video y/o foto de alta resolución para realizar evaluaciones de algún siniestro, vigilancia, o incluso para las tareas de recreación.
En la Meteorología, el uso de estos equipos se puede usar para realizar perfiles atmosféricos, esto es, hacer mediciones en la vertical con las variables de temperatura, humedad, presión barométrica, rapidez y dirección del viento. Sustituye al uso de globo cautivo, excluyendo el uso de helio para el funcionamiento del zepelín y del malacate eléctrico, lo que hace que el dron meteorológico tenga cierta autonomía.
El funcionamiento del dron meteorológico requerirá una sonda en donde se midan las variables antes descritas, lo cual se vuelve un reto para la medición del viento, debido a que el sistema no debe tener instrumentos mecánicos que puedan afectar el funcionamiento del dron. El diseño de la sonda meteorológica se realiza mediante una microcomputadora del tamaño de una tarjeta de crédito, que tiene incluido el sistema operativo Linux, el cual lo hace robusto usando lenguajes de programación de alto nivel para hacer funcionar los diferentes sensores que están diseñados para esta plataforma. La combinación de estas dos tecnologías es útil para hacer perfiles meteorológicos a un bajo costo.

I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
48
SESIÓN 16/5. SALA 3. REDISEÑO DEL ROBOT TIPO BALLBOT
Humberto Alejandro Cruz Moreno
Gabriel Gutiérrez Santillán
Taller de Robótica Abierta
Facultad de Ingeniería UNAM
AGRADECIMIENTOS Investigación realizada gracias al proyecto UNAM-DGAPA-PAPIIT IT102615 "Robots no
convencionales para exploración y búsqueda".
El siguiente resumen tiene la finalidad de explicar a grandes rasgos, uno de los proyectos que se están desarrollando actualmente en el Taller de Robótica Abierta (TRA) de la Facultad de Ingeniería, el cual consiste en la continuación de la tesis de licenciatura “Equilibrio dinámico en tiempo real de un robot tipo Ballbot” realizada en el año 2014 [1], en donde el objetivo es lograr el equilibrio dinámico de dicho robot, para posteriormente implementar algoritmos para su navegación.
Actualmente se está trabajando en la solución de ciertos problemas que se presentaron en el robot fabricado anteriormente, los cuales fueron que el robot tipo Ballbot no contaba con suficiente estabilidad para mantenerse en equilibrio, debido al ruido en la adquisición de datos obtenidos mediante una IMU para saber la posición angular de éste.
Además, existía la posibilidad de que los motores con los que contaba actualmente el robot podían no tener el suficiente equilibrio; así que con base en lo anterior, se plantearon nuevas tareas para mejorar el diseño del robot y orden en el que éstas deberían realizarse.
El robot fue dividido en subsistemas (Subsistema mecánico, electrónico y de programación) para facilitar su análisis y, posteriormente se clasificaron cada uno de los problemas de acuerdo al subsistema correspondiente; por último, se estableció el orden de importancia de cada uno, resultando el de mayor importancia el subsistema mecánico.
La primera tarea realizada para el subsistema mecánico fue el cambio de los motores paso a paso por unos de corriente directa con Encoder incluido, posteriormente se adquirieron tres ruedas omnidireccionales de 4”, ya que las anteriores presentaban discontinuidad entre cada uno de los rodillos, lo que ocasionaba problemas en la estabilidad del robot.
Como segunda tarea se buscaron alternativas para el acomodo de los nuevos motores, ya que éstos al ser de dimensiones mayores a los anteriores, no podían ser acomodados con la configuración que se tenía actualmente; finalmente, después de haber propuesto y evaluado algunas alternativas que daban solución a este problema, se eligió el diseño final, el cual se encuentra en proceso de manufactura.

I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
49
Figura 1. Diseño final del robot.
REFERENCIAS
[1] T. B. Lawers, G. A. Kantor, y R. L. Hollis, “A dinamically stable single-wheeled mobile robot with inverse mouse-ball drive”, IEEE Int’l. Conf. on Robotics and Automation, Orlando, FL, Mayo 15-19, 2006. [2] M. Kumagai y T. Ochiai, “Development of a Robot Balanced on a Ball - First Report, Implementation of the Robot and Basic Control”, Tohoku Gakuin University, 2009. [3] P. Fankhauser y C. Gwerder, “Modelling and control of a Ballbot”, Swiss Federal Institute of Technology Zurich, Bachelor Tesis, 2010. [4] P. T. Hernández, “Control de robots móviles: el caso del Ballbot”, Facultad de Ingeniería UNAM, Tesis de licenciatura, 2010. [5] B. García y Y. Minami, “Diseño, construcción y control de estabilidad de un robot que se balancea sobre una esfera”, Facultad de Ingeniería, UNAM, Tesis de licenciatura, 2012. [6] J. Gutiérrez y J. Espinoza, “Equilibrio dinámico en tiempo real de un robot tipo ballbot”, Facultad de Ingeniería, UNAM, Tesis de licenciatura, 2014.

I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
50
SESIÓN 16/6. SALA 3. REDISEÑO DE LA LOCOMOCIÓN DEL ROBOT FINDER
Sergio Hernández Sánchez Taller de Robótica Abierta
Facultad de Ingeniería, UNAM [email protected]
En este resumen se describirá brevemente el trabajo realizado en el rediseño de la locomoción del robot FinDER v2 desarrollado por el Taller de Robótica Abierta (TRA), de la Facultad de Ingeniería de la UNAM. Este robot llamado FinDER, que en inglés significa Finder in Disaster Environment Robot, es decir, Robot de Búsqueda en Ambientes de Desastre, es un robot móvil de aplicación específica. La idea de desarrollar este robot es usarlo en desastres como terremotos, explosiones, incendios o alguna situación similar para el apoyo a personas o perros rescatistas en la búsqueda de sobrevivientes. Primeramente se describirá este robot y cómo puede cumplir su objetivo.
Para poder desempeñarse de la mejor manera, este robot cuenta con varios subsistemas que permiten navegar sobre superficies irregulares, terrenos con inclinaciones de hasta 45°, subir y bajar escaleras; cuenta con varios dispositivos para adquisición de datos del entorno para detección de víctimas, y facilitar su navegación generando mapas y visualizando la imagen en tiempo real de las cámaras a bordo, para que un operario lo controle remotamente con un control de Xbox. Por otra parte, tiene un brazo manipulador el cual posibilita mover algunos escombros o alcanzar a una víctima y proporcionarle agua y/o medicamentos.
Este robot tiene dos versiones previas, en las cuales se ha buscado tener un mejor vehículo no tripulado que sea capaz de atravesar terrenos complicados, y tener mejores dispositivos para la adquisición de datos del entorno. Es por ello que se ha realizado la tarea del rediseño mecánico del subsistema de locomoción, con el fin de corregir varios problemas que se detectaron en el FinDER v2, dar una solución a éstos y lograr cumplir con los objetivos principales.
El sistema de orugas de tracción que se desarrolló tuvo un buen desempeño, pero debido a la fatiga del mecanismo se vio la necesidad de buscar una opción que diera mejores resultados. Al realizar el estudio del estado de la técnica, se encontró que para la tracción de los robots móviles se utilizan cadenas o bandas dentadas, no obstante, se buscaron otras opciones. Al final, se decidió que lo mejor era hacer un diseño con banda dentada de poliuretano con empujadores vulcanizados en la parte posterior, separados a una distancia determinada, la cual permitirá tener una buena tracción debido al dentado interno y en la parte externa se tendrá un buen agarre con superficies irregulares.
Posteriormente con ayuda de un software de diseño asistido por computadora (CAD) se iniciaron los trabajos de diseño, y a partir de esto se vio la conveniencia de proponer ideas innovadoras con respecto a robots del mismo ámbito. Una de estas innovaciones es que la nueva versión, FinDER v3, tuviera un ángulo de ataque en la geometría de la tracción, lo cual podría ser útil para subir pequeñas elevaciones. Asimismo, se verificó que la mayoría de los robots similares no cuentan con un sistema de suspensión que haga que las orugas tiendan a amoldarse al terreno, además de hacer un poco más suave el manejo y dar un poco de protección adicional a los dispositivos a bordo. Por tanto, se decidió implementar un subsistema de suspensión independiente con un mecanismo en forma de tijera, cuyo funcionamiento es similar a una

I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
51
palanca superpuesta, donde se utiliza un resorte amortiguador, un eslabón con posibilidad de rotar y un par de rodillos en la parte inferior, con la libertad de amoldarse al terreno.
Además de la parte de tracción que era un punto prioritario a rediseñar, se realizó el rediseño del subsistema de brazos auxiliares, los cuales se utilizan sobre todo para ascender y descender escaleras. Se partió del diseño del FinDER v2 y se adaptaron a esta tercera versión utilizando la banda descrita anteriormente, y se le agregó un sistema de tensión en el que se modifica la distancia entre centros, lo que incluso podría facilitar su ensamble.
Para evitar una tensión excesiva a la banda cuando hay una carga en la parte media de las poleas, se añadieron dos rodillos. También se agregó un sistema de transmisión sinfín-corona para el posicionamiento de los mismos, aumentando el par proporcionado para evitar que los motores se quemaran, además de que permite tener un auto bloqueo de dicho brazo, lo que evita la necesidad de tener energizados los motores en todo momento, disminuyendo el consumo de energía eléctrica de las baterías.
Actualmente el proyecto lleva un buen avance, dado que la etapa de diseño está prácticamente concluida; se está trabajando en la manufactura de las piezas necesarias para realizar las pruebas y hacer las modificaciones pertinentes.
El Taller de Robótica Abierta agradece todo el apoyo otorgado para esta investigación al proyecto UNAM-DGAPA-PAPIIT IT102615 "Robots no convencionales para exploración y búsqueda".
En la Figura 1 se muestra la imagen “renderizada” del diseño final del robot móvil
FinDER v3.
Figura 1 Imagen “renderizada” del diseño final del robot móvil FinDER v3.
I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
52
Bibliografía
Robocup Rescue. (2016). Robot League. 22/05/2016, de Robocup Sitio web:
http://wiki.robocup.org/wiki/Robot_League
Robocup Rescue China. (2015). Robocup Rescue. 22/05/2016, de Robocup Sitio web:
http://www.robocup2015.org/
Robocup Rescue Brazil. (2014). Robocup Rescue. 22/05/2016, de Robocup Sitio web:
http://www.robocup2014.org/
Robocup Rescue. (2016). Team Description Papers. 01/10/2016, de Robocup Sitio web:
http://www.robocup2016.org/en/symposium/team-description-papers/rescue-robot/
Norton, Robert L. (2011). Diseño de Máquinas. USA: Prentice Hall.
Mott, Robert L. (2006). Diseño de Elementos de Máquinas. USA: Pearson Educación.
I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
53
Sesiones 16/7-9 Cartografía / Fotogrametría Sala 1 Horario: 15:50 – 16:50
16/ 7. 15:50 – 16:10. Sistema de restitución fotogramétrica digital 3D a partir de imágenes obtenidas por UAV´s / Hennessy Amor Becerra Ayala / OMPHIKA
16/ 8. 16:10 – 16:30. Evaluación Preliminar de la exactitud obtenida en modelos 3D y ortofotos / Armando Peralta Higuera et al. / IGg-UNAM
16/ 9. 16:30 – 16:50. Aplicación de Tecnología UAV (Unattended Aerial Vehicle) en estudios fotogramétricos / Mario Alfredo García Hernández / Consorcio IUYET
I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
54
Sesiones 16/7-9 Cartografía / Fotogrametría Sala 1 Horario: 15:50 – 16:50
SESIÓN 16/7. SALA 1. SISTEMA DE RESTITUCIÓN FOTOGRAMÉTRICA DIGITAL 3D A PARTIR DE IMÁGENES OBTENIDAS POR UAV´S
Ing. José Luis Monter Sánchez¹
Urb. Hennessy Amor Becerra Ayala¹ Maximiano Bautista Andalón² ¹ OMPHIKA Geoprocesamiento
² Unidad Estadística Geográfica Ambiental Del INEGI del Estado de Jalisco
El sistema OPKUAV es una integración de distintas tecnologías, software y hardware de última generación para lograr verdadera restitución fotogramétrica 3D con insumos provenientes de drones. El flujo de trabajo fotogramétrico inicia desde el plan de vuelo, garantizando la sobreposición de imágenes con los porcentajes adecuados (entre 60 y 80 por ciento entre foto y foto y de 20 a 40 por ciento entre línea y línea de vuelo), además, para garantizar la georreferencia de los datos y con apego a la norma (INEGI) se programa el levantamiento de puntos de control en tierra.

I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
55
Programación del plan de vuelo y puntos de control en tierra, los rectángulos corresponden a los marcos de cada fotografía sobrepuestas entre sí. Por medio de procesos de alineación de fotografías, aerotriangulación, ortorrectificación de imágenes y calibración de la cámara, se obtiene el archivo de “proyecto” el cual se “carga” a software especializado para restitución estereoscópica, logrando así la digitalización con hasta 2 cm GSD de precisión:
Par estereoscópico con restitución, para apreciar la visualización en 3D es necesario una estación fotogramétrica que consta de una estación de trabajo con monitor y lentes 3D, acompañado de una tarjeta de video que cumpla las características necesarias y un emisor.

I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
56
Los productos finales generados se migran a un ambiente GIS (sistemas de información geográfica, por sus siglas en inglés), manteniendo la tridimensionalidad de los objetos, corrigiendo errores topológicos en las geometrías (puntos, líneas y polígonos), así como la generación de atributos para dar mayor riqueza a la información generada.
Visualización de modelos digitales de elevación, curvas de nivel, ortofoto adaptada al terreno y planimetría en un SIG, las geometrías conservan atributos como área, perímetro, altura, niveles de edificación, cotas y, en este caso específico, padrón catastral.

I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
57
SESIÓN 16/8. SALA 1. EVALUACIÓN PRELIMINAR DE LA EXACTITUD OBTENIDA EN MODELOS 3D Y ORTOFOTOS
Armando Peralta Higuera
Miguel Ángel Ramírez Beltrán Juan Alberto Guerrero
Gonzalo Fernández de Castro Martínez Alejandro Boneta Rodríguez Instituto de Geografía UNAM
El objetivo de este trabajo gira en torno a cuestionar: ¿Qué exactitud cabe esperar utilizando distintos drones y/o cámaras? ¿Qué relación existe entre los patrones de vuelo y la exactitud? ¿Cuál es la consistencia que se puede lograr entre levantamientos repetidos? ¿Cuál es el nivel de error esperado al utilizar geolocalización o puntos de control terrestre? La reflexión sobre estos cuestionamientos permitirá contribuir con elementos de juicio para elaborar normas y procedimientos. A su vez se mostrarán ejemplos de experiencias prácticas para el diseño de aplicaciones, tales como:
Modelos 3D: Nubes de puntos XYZ obtenidas mediante triangulación.

I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
58
Triangulación
Patrones de vuelo: Combinados.

I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
59
Patrones de vuelo: Puntos de interés (POI) circular y adaptado.
Errores estimados por el software (Pix4D) con y sin control terrestre.

I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
60
Nube de puntos LiDAR.
Control terrestre GPS: 2.5
I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
61
SESIÓN 16/9. SALA 1. APLICACIÓN DE TECNOLOGÍA UAV (UNATTENDED
AERIAL VEHICLE) EN ESTUDIOS FOTOGRAMÉTRICOS
M. en I. Mario Alfredo García Hernández Consorcio IUYET, S.A. de C.V. [email protected]
Introducción
Consorcio IUYET, S.A. de C.V. es una empresa mexicana con más de 40 años de experiencia. Realiza servicios profesionales relacionados con la ingeniería civil, principalmente en las especialidades de topografía, batimetría, geodesia, fotogrametría, ingeniería hidráulica, modelación hidrodinámica, hidrología, geotecnia, geología, estructuras y electromecánica.
La empresa ha incursionado en el área de fotogrametría mediante el uso de tecnologías de vanguardia, como son los vehículos aéreos no tripulados, invirtiendo también en capital humano para aumentar la productividad y la calidad de los servicios.
Una de las principales fortalezas del Consorcio es la atención inmediata al cliente y en ese sentido se aprovecha el uso de los vehículos aéreos no tripulados para generar información topográfica.
En la empresa se realizan trabajos de fotogrametría mediante la aplicación de tecnología UAV (Unattended Aerial Vehicle), apegados a la normatividad técnica y de seguridad vigente. Se cuenta con la primera autorización de piloto de equipos RPAS (Sistemas de Aeronaves Pilotadas a Distancia), la certificación de los sistemas de aeronaves y la autorización de operaciones por parte de la Dirección General de Aeronáutica Civil (DGAC).
Los más recientes casos de éxito de aplicación de tecnología UAV en estudios fotogramétricos son:
Fotogrametría del Tren Interurbano Toluca – Valle de México Tramo 3, Ciudad de México.
Fotogrametría del predio Tempiluli, delegación Tláhuac, Ciudad de México.
Fotogrametría de la Planta Apazapan de Cementos y Concretos Moctezuma, Veracruz.
Fotogrametría de la Planta de Asfalto de la Ciudad de México.
Fotogrametría del Río Lerma en San Mateo Atenco, Estado de México.
Fotogrametría en la construcción de Plaza El Molino en Toluca, Estado de México. En este trabajo se presenta la aplicación de la tecnología UAV en el estudio fotogramétrico del predio Tempiluli en la delegación Tláhuac, Ciudad de México.
Objetivo
Calcular los volúmenes del material de escombro y presupuesto para su retiro, a partir de un estudio fotogramétrico con la aplicación de la tecnología UAV en el predio Tempiluli, ubicado en la delegación Tláhuac, Ciudad de México.

I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
62
Levantamiento fotogramétrico
Previo al vuelo fotogramétrico, se establecieron puntos de control terrestre (PCT) para la georreferenciación del estudio, mediante información geodésica obtenida en campo con GNSS (Global Navigation Satellite System / Sistema Global de Navegación por Satélite) GS-15 aplicando el método RTK (Real Time Kinematic / Cinemática en Tiempo Real).
Plano de ubicación del predio Tempiluli.
El levantamiento fotogramétrico se realizó con el equipo Aibotix X6 V2 de Leica.
Preparación del equipo UAV. Despegue del equipo UAV.

I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
63
Procesamiento de datos
Posterior al levantamiento fotogramétrico se almacenaron y analizaron los datos crudos obtenidos en campo. En seguida, se realizó el procesamiento de datos mediante un programa de cómputo especializado en fotogrametría digital. Se obtuvo la ortofoto digital georreferenciada de una superficie de 28.4 hectáreas, en la cual se visualiza claramente el material de escombro por retirar del predio.
Ortofoto digital georreferenciada del predio de Tempiluli.
Después de la obtención de la ortofoto digital georreferenciada se realizó la obtención del modelo digital de elevaciones, proceso importante para realizar el cálculo de los volúmenes de material por retirar.

I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
64
Modelo digital de elevaciones del predio de Tempiluli.
Cálculo de volúmenes de material por retirar
Con la ortofoto digital georreferenciada y el modelo digital de elevaciones, se cargó la información a un programa especializado en Sistemas de Información Geográfica (SIG), además de incorporar el polígono del predio Tempiluli. Mediante la ortofoto digital, se identificaron dos zonas con material de escombro. Con el modelo digital de elevaciones, se obtuvieron curvas de nivel a cada 10 cm y se identificó como nivel de desplante la cota 2241.20 msnm, que corresponde a la cota de rasante de los caminos existentes. Se realizó el cálculo de volúmenes del material de escombro y el presupuesto para el retiro del mismo a un sitio autorizado.
Conclusiones
Se determinaron dos zonas con material de escombro, se calcularon las áreas y volúmenes dentro del polígono del predio Tempiluli. Con esta información se realizó el presupuesto de acarreo del material de escombro a un sitio autorizado.
La aplicación de tecnología UAV en el estudio fotogramétrico del predio Tempiluli, permitió realizar el trabajo en dos días, optimizando el tiempo, recursos y obteniendo altas precisiones y resultados inmediatos para la toma de decisiones por parte del cliente.
I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
65
Sesiones 16/7-9 Gestión de riesgos Sala 2 Horario: 15:50 – 16:50
16/ 7. 15:50 – 16:10. Aplicaciones de Vehículos no Tripulados en Sistemas de Alertas Tempranas elasco Herrera íctor Manuel Pérez Moreno Cesar ngel Giovanni aldés Barrón Mauro Bonifaz Alfonzo Roberto Anaid Galicia García Adriana Colinabarranco Cancino Darianna Rubio López Francisco Javier Bau sta Clemente y Juan Gabriel López Hernández / IGf-UNAM
16/ 8. 16:10 – 16:30. Aplicación de tecnología UAV (Unattended Aerial Vehicle) en zonas de emergencia y desastres naturales / José Ossiel Méndez Mireles / Consorcio IUYET
16/ 9. 16:30 – 16:50. Hidrógeno como fuente de energía para extender autonomía en VANTS / INEEL- Skybótica
I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
66
SESIÓN 16/7. SALA 2. Aplicaciones de Vehículos no Tripulados en Sistemas de Alertas Tempranas
Velasco Herrera Víctor Manuel Pérez Moreno Cesar Ángel Giovanni
Valdés Barrón Mauro Bonifaz Alfonzo Roberto
A G G Adriana Colinabarranco Cancino
D R L Francisco Javier Bautista Clemente
J G L Laboratorio de Ciencia de Datos Geo-Aeroespaciales de Radiación Solar
Instituto de Geofísica, UNAM
El territorio de los Estados Unidos Mexicanos siempre se encuentra sujeto a una gran variedad de fenómenos naturales que pueden desencadenar desastres, como por ejemplo huracanes, tsunamis, erupciones volcánicas, sequias, inundaciones, entre otros; es por eso que actualmente se buscan nuevas estrategias de monitoreo, utilizando plataformas aeroespaciales para dar soluciones a las contingencias nacionales por diferentes fenómenos naturales.
En el área aeroespacial, se busca desarrollar nuevas técnicas para poder medir, registrar, censar y procesar señales relacionadas con los parámetros físicos de los fenómenos naturales. En este sentido, el presente documento propone utilizar las diferentes plataformas aeroespaciales existentes para desarrollar e implementar nuevos algoritmos y metodologías, para su aplicación en el monitoreo de zonas nacionales con alta vulnerabilidad por los diferentes fenómenos naturales, para luego poder implementar los resultados en la actualización de los sistemas de alerta temprana.
Las consecuencias de los desastres naturales y las actividades de respuesta subsiguientes son de gran interés internacional. Por lo que se ha venido centrando la atención cada vez más en los desastres naturales que causan grandes pérdidas económicas, además de las víctimas humanas y en los esfuerzos realizados para mitigar y reducir tales desastres. La prevención de los desastres y la mitigación de sus efectos es una prioridad a nivel internacional.
Al mismo tiempo, los gobiernos están tomando conciencia de que es necesario un cambio de paradigma de gestión de crisis a gestión de riesgos si los recursos finitos disponibles se utilizan de la manera más eficaz, para ayudar a las poblaciones en riesgo a prevenir o mitigar desastres.
La capacidad de los países para hacer frente a los desastres está acorde al grado del conocimiento científico de los fenómenos naturales, por lo que la ciencia es fundamental para minimizar pérdidas ambientales, humanas, económicas, sociales y para reducir la vulnerabilidad de las comunidades propensas a los desastres. Las condiciones de pobreza agravan las pérdidas humanas y sociales, el impacto de los desastres afecta la economía, la industria, la agricultura, la salud y la educación. Por lo que las estrategias e iniciativas apropiadas para reducir los desastres, en el ámbito nacional e internacional, pueden fortalecer la posibilidad de reducir o de mitigar las pérdidas humanas, económicas y sociales causadas por los desastres y, de esa manera, facilitar un crecimiento sostenido.

I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
67
Para llevar a cabo una reducción de desastres son necesarias políticas de estado, programas y medidas diseñadas a prevenir, evitar o minimizar el impacto de los peligros naturales y los desastres ambientales y tecnológicos relacionados con los fenómenos naturales. El gobierno federal requiere de políticas concretas para reducir los desastres.
En algunos casos, los desastres naturales no pueden evitarse. Sin embargo, su impacto general puede reducirse significativamente gracias a la prevención y mitigación de desastres. La mitigación de desastres es el proceso de gestionar los “riesgos” asociados con desastres naturales potenciales, de modo que se minimicen o incluso se eliminen las pérdidas.
Los Sistemas de Alerta Temprana (SAT) son un conjunto de procedimientos e instrumentos, a través de los cuales se monitorea un fenómeno natural o antropogénico; se recolectan y procesan datos e información, ofreciendo pronósticos o predicciones temporales sobre su acción y posibles efectos. El SAT está formado por cuatro elementos: a) Estudio del fenómeno, b) Monitoreo del fenómeno, c) Difusión de la alerta y d) Concientización y preparación para actuar.
Entre las amenazas o eventos más comunes a los cuales se debe aplicar un SAT para México y América Latina son: las inundaciones, deslizamientos de tierra, huracanes, volcanes, sismos, tsunamis, incendios forestales, fenómeno de El Niño y La Niña, entre otros. El monitoreo del SAT en México es primordial para realizar una óptima toma de decisiones y responder ante diferentes fenómenos naturales, con la finalidad de minimizar las pérdidas humanas y económicas.
Además los resultados de la modernización del SAT pueden utilizarse y modificarse para el monitoreo de heladas, granizadas, sequías o inundaciones que afecten los cultivos, además, se fortalecerá la conservación de reservas ecológicas y gestión del medio ambiente.
Los SAT están siendo reconocidos en los más altos niveles políticos como una herramienta para reducir los desastres, la Organización Meteorológica Mundial (OMM) ha informado que más del 70% de los países requiere desarrollar y fortalecer capacidades básicas como redes de observación, sistemas de pronóstico y sistemas de comunicación para asegurar el establecimiento de SAT efectivos. La OMM está trabajando sistemáticamente para asistir a los países en el desarrollo de sus SAT.
La aplicación y utilización de equipos e instrumentos para Sistemas de Alerta Temprana dependerá de las características y particularidades de los eventos o amenazas, de su ubicación geográfica y de los recursos disponibles. En el caso de sistemas automatizados se utilizan instrumentos como satélites, sensores remotos, redes telemétricas y otros que permiten transmitir información directa desde los equipos de medición hasta los centros de análisis y de toma de decisión.
El estudio de la variabilidad natural de los fenómenos naturales es el primer elemento esencial para diseñar una estrategia efectiva para la reducción de desastres. Nuestro estudio puede utilizarse como la base científica del Sistema de Alerta Temprana nacional para reducir los desastres relacionados con diferentes fenómenos. Para esto se utilizarán diferentes plataformas aeroespaciales existentes en territorio nacional, y en algunos casos se colocaran diferentes sensores para tener un monitoreo continuo de diferentes fenómenos naturales para su estudio. Las Ciencias Espaciales cuentan con herramientas más precisas que agrupan una serie de técnicas, algoritmos, metodologías que permiten de una manera global estudiar diferentes fenómenos naturales aportando información adicional a las demás disciplinas o ciencias.
El objetivo general de la modernización del Sistema de Alerta Temprana para la reducción del riesgo de desastres, por fenómenos naturales, es proporcionar nuevos resultados científicos de patrones

I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
68
naturales de fenómenos naturales, los cuales pueden ser utilizados como la base científica para el pronóstico a largo plazo con la finalidad de minimizar las pérdidas económicas y humanas. Ya que las autoridades correspondientes nacionales, que se encargan de la atenuación de los efectos de los desastres, necesitan de información cada vez más precisa para garantizar la formulación de medidas eficaces, para que respondan de manera oportuna y adecuada a los peligros con el fin de reducir el riesgo de muerte y los daños materiales.
En este trabajo se presentarán los resultados preliminares de la aplicación de los vehículos no tripulados en incendios forestales.
Referencias
Anil K. Maini, Varsha Agrawal. “Satellite Technology, Principles and Applications”, Editorial John Wiley & Solutions, Ltd, England 2007, pp. 686 N. M. Botros and M. Abdul-Aziz, “Hardware implementa on of an ar cial neural network using eld programable gate arrays (FPGA s)”, IEEE Trans. Ind. Electron., vol. 41, no. 6, pp. 665-667, Dec. 1994.
J. R. Jang, “Neuro-fuzzy and soft computing: a computational approach to learning and machine intelligence”, Prentice-Hall, ISBN 0-13-26-1066-3, Upper Saddle River, New Jersey. 07458, 1997, pp. 335-339.
Maren A. J., Craig T. H., Pap. R. M., “Handbook of Neural Computing Applications”, Editorial Academic Press, USA, 1990.
Manish Agarwal, “Fuzzy Logic Control of Washing Machines”, Department of Mechanical Engineering, Indian Institute of Technology, Kharagpur 721302, India. Red Automá ca de Monitoreo Atmosférico. Consultado 7 de abril de 2014 http://www.calidadaire.df.gob.mx/calidadaire/index.php
Directrices sobre Sistemas de Alerta Temprana y Aplicación de Predicción Inmediata y Operaciones de Aviso, Organización Meteorológica Mundial, No 1559

I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
69
SESIÓN 16/8. SALA 2. APLICACIÓN DE TECNOLOGÍA UAV (UNATTENDED AERIAL VEHICLE) EN ZONAS DE EMERGENCIA Y DESASTRES NATURALES
Arq. José Ossiel Méndez Mireles
Consorcio IUYET, S.A. de C.V. [email protected]
Introducción.
Consorcio IUYET, S.A. de C.V. es una empresa mexicana con más de 40 años de experiencia. Realiza servicios profesionales relacionados con la ingeniería civil, principalmente en las especialidades de topografía, batimetría, geodesia, fotogrametría, ingeniería hidráulica, modelación hidrodinámica, hidrología, geotecnia, geología, estructuras y electromecánica.
La empresa ha incursionado en el área de supervisión mediante el uso de tecnologías de vanguardia como son los vehículos aéreos no tripulados, invirtiendo también en capital humano para aumentar la productividad y la calidad de los servicios.
Una de las principales fortalezas del Consorcio es la atención inmediata al cliente y en ese sentido se aprovecha el uso de los vehículos aéreos no tripulados.
Se realizan trabajos de supervisión y monitoreo de obras mediante el uso de tecnología UAV (Unattended Aerial Vehicle)/ (Vehículo Aéreo Autónomo), siempre apegados a la normatividad técnica y de seguridad. Se cuenta con la primera autorización de piloto de equipos RPAS (Sistemas de Aeronaves Pilotadas a Distancia), la certificación de los sistemas de aeronaves y la autorización de operaciones por parte de la Dirección General de Aeronáutica Civil (DGAC).
En todo el mundo, los asentamientos humanos se encuentran expuestos a desastres producidos por fenómenos naturales: inundaciones, deslizamientos en zonas de montaña, terremotos, erupciones volcánicas, tormentas tropicales o huracanes. Disponer de información de primera mano es de vital importancia para la prevención de catástrofes, crisis humanitarias y para la respuesta oportuna en emergencias. Por ello, la tecnología UAV está presente en todas las fases de la gestión de riesgos naturales.
Dicha tecnología está equipada con dispositivos avanzados de video para identificar los orígenes y causas de algunos desastres. Puede entrar en situaciones peligrosas que representarían un riesgo para los pilotos o los trabajadores de protección que realizan su trabajo en tierra.
Los más recientes casos de éxito de aplicación de tecnología UAV para enfrentar estos desafíos son:
Deslizamiento de Talud en Santa Fe – Ciudad de México.
Desbordamiento del río San Gaspar en la confluencia con el río Lerma, Municipio de San Mateo Atenco, Estado de México.
Colapso de trabes en el Tren Interurbano Toluca - México Tramo 1, Toluca, Estado de México.
Vigilancia de predios en el Nuevo Aeropuerto Internacional de la Ciudad de México, Texcoco, Estado de México.
Daños ocasionados por los fenómenos hidrometeorológicos Ingrid y Manuel, en el Estado de Guerrero.

I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
70
En este trabajo se presenta la aplicación de la tecnología UAV para la inspección aérea de zonas afectadas por diversas causas, entre ellas: el desbordamiento del río San Gaspar en la confluencia con el río Lerma, Municipio de San Mateo Atenco, Estado de México; Colapso de trabes en el Tren Interurbano Toluca - México Tramo 1, Toluca, Estado de México; y el deslizamiento de talud en Santa Fe, Ciudad de México.
Objetivo
Obtener evidencia de los daños causados en zonas de emergencia y desastres naturales, en el momento de los hechos utilizando tecnología UAV.
Vista aérea obtenida con tecnología UAV de la inundación provocada por el desbordamiento del río San Gaspar en la confluencia con el río Lerma, Municipio de San Mateo Atenco, Estado de México.

I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
71
Vista aérea obtenida con tecnología UAV del colapso de trabes en el Tren Interurbano Toluca - México Tramo 1, Toluca, Estado de México.
Vista aérea obtenida con tecnología UAV del deslizamiento de talud en Santa Fe, Ciudad de México.
I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
72
Conclusiones.
Con el uso de tecnología UAV se lleva a cabo el reconocimiento de zonas de desastre para determinar los daños, lo que permite emprender acciones para la atención inmediata.
Los beneficios de estas naves no tripuladas en caso de emergencia son el alcance, la velocidad, la seguridad y el costo.
Es estrictamente necesario que las personas interesadas en pilotar estos vehículos, se capaciten con el fin de aplicar en todo momento la normatividad vigente en la materia.
I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
73
Sesiones 16/7-9 Agricultura Sala 3 Horario: 15:50 – 16:50
16/ 7. 15:50 – 16:10. Uso de Vehículos Aéreos No Tripulados en el Monitoreo de la Infraestructura
Hidroagrícola / Alberto González Sánchez; Arturo González Casillas; Waldo Ojeda Bustamante;
Ernesto Olvera Aranzolo / IMTA
16/ 8. 16:10 – 16:30. Vehículos Aéreos No Tripulados y Sensores Remotos Aplicados a la Fitosanidad /
Luis Alberto Olvera Vargas; María Guadalupe Galindo Mendoza / UASLP
16/ 9. 16:30 – 16:50. VANT y Agricultura / Leonel Gutiérrez / TERRASAT

I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
74
SESIÓN 16/7. SALA 3. USO DE VEHÍCULOS AÉREOS NO TRIPULADOS EN EL MONITOREO DE LA INFRAESTRUCTURA HIDROAGRÍCOLA
Alberto González Sánchez Arturo González Casillas
Waldo Ojeda Bustamante Ernesto Olvera AranzoloI
Instituto Mexicano de Tecnología del Agua [email protected]
El monitoreo de la infraestructura hidroagrícola es una tarea crítica dentro del ciclo de mantenimiento y conservación de las zonas de riego. Las obras de distribución y almacenamiento requieren de una supervisión frecuente por parte de los responsables a fin de garantizar su correcto funcionamiento. No obstante, también es una tarea que requiere del uso de recursos humanos especializados que deben trasladarse a la localización de las obras y que en ocasiones deben arriesgar su integridad física para realizar su inspección. Actualmente, los vehículos aéreos no tripulados (VANTs o drones) equipados con equipo fotográfico y de video de alta resolución facilitan este proceso, ya que dichos equipos pueden volar cerca de la superficie de interés para realizar una supervisión más certera, permitiendo la localización de grietas, problemas de erosión, corrosión y defectos de construcción, que de otro modo requerirían plataformas elevadoras, andamios, escaleras o arneses de seguridad. También favorecen a la seguridad del personal, ya que el recorrido se programa de forma remota y se asiste por medio de un sistema de supervisión computarizado. En adición, entre el equipo fotogramétrico que puede ser colocado en el VANT se encuentran las cámaras térmicas y termo-gráficas de alta resolución, las cuales pueden ser utilizadas para automatizar la detección de corrosión, fugas y motores con problemas de calentamiento. Con estas enormes ventajas, hoy en día se dispone en los VANTs de una herramienta de gran potencial para realizar las tareas de monitoreo de la infraestructura.
De esta forma, los VANTs se perfilan como herramientas de apoyo en procesos de planeación, supervisión y de obras civiles y variables hidráulicas, que pueden ejecutar procesos optimizados en costo y tiempo. El presente trabajo presenta un resumen de las características y ventajas que ofrecen los VANTs para las labores de supervisión y monitoreo de las obras civiles relacionadas con la distribución del agua, así como una muestra de algunos trabajos que se han desarrollado sobre el tema.
I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
75
SESIÓN 16/8. SALA 3. VEHÍCULOS AÉREOS NO TRIPULADOS Y SENSORES REMOTOS APLICADOS A LA FITOSANIDAD
Luis Alberto Olvera Vargas María Guadalupe Galindo Mendoza
Laboratorio Nacional de Geoprocesamiento de Información Fitosanitaria CIACyT – UASLP
En los últimos años, los sensores remotos y las técnicas de observación territorial han tenido un gran desarrollo y aplicación, principalmente en el ámbito ambiental y en la agricultura de precisión. Actualmente, los sensores remotos pasivos de alta resolución proveen soluciones adecuadas para contar con imágenes y bases cartográficas de referencia con dimensiones multitemporales, bajos costos y resolución espacial detallada.
Una de las tecnologías más usadas en la actualidad para la observación del territorio son los vehículos aéreos no tripulados (VANTs), que son pequeñas plataformas aéreas, con tecnología de última generación en GPS, que operan a distancia o de forma programada y que soportan el transporte de sensores infrarrojos o cámaras de alta resolución de bajo peso, que permiten la obtención de aerofotos y video, que a través de un tratamiento digital y posicional se convierten en productos geoespaciales tales como aerofotomosaicos georreferenciados y ortofotos digitales.
El Laboratorio Nacional de Geoprocesamiento de Información Fitosanitaria (LaNGIF) de la Universidad Autónoma de San Luis Potosí (UASLP), es un centro orientado al desarrollo y aplicación de metodologías para el seguimiento de problemas fitosanitarios a través de geo-tecnologías como la Percepción Remota, los Sistemas de Información Geográfica y Geoposicionadores. El objetivo del LaNGIF es documentar los procesos técnicos y metodológicos para la generación de información proveniente de sensores remotos, para la detección temprana de plagas y enfermedades a diferentes escalas e intensidad de medición. Dicha detección dentro de poblaciones masivas de árboles o áreas extensas de cultivos, se ha basado en la implementación de cámaras infrarrojas montadas en vehículos aéreos no tripulados (VANTs), obtención de firmas espectrales en campo y espectroscopia Raman, mediante las cuales es posible analizar áreas significativas en diferentes longitudes de onda (visible e infrarrojos) e identificar aquellos altamente sospechosos de estar enfermos o padecer algún daño.
Cabe mencionar que la tecnológica expresada se caracteriza por ser portátil, de resultados inmediatos y automatizable. Por lo tanto, la búsqueda y detección de plantas portadoras de enfermedades y/o plagas, puede ser dirigida en menor tiempo y a menor costo, reducirse el número de falsos positivos, aportar información rápida y oportuna sobre las condiciones de estrés asociadas con enfermedades en plantas, lo que permite contar con un panorama espacial de la distribución y localización de los posibles focos de infección para que, tanto los técnicos en campo como los tomadores de decisiones, tengan elementos que les permitan dirigir esfuerzos y emprender acciones de vigilancia para la protección de las áreas agrícolas del país.

I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
76
Viernes 17 de febrero de 2017
Sesiones 17/1-3 Arqueología Sala 1 Horario: 10:00 – 11:00 17/ 1. 10:00 – 10:20. Algunos ejemplos de productos obtenidos con VANT y sus aplicaciones en el sitio arqueológico de Cantona, Puebla / Javier Martínez González; Cuauhtémoc Domínguez Pérez / INAH 17/2. 10:20 – 10:40. Tecnología VANT como recurso en la prospección arqueológica en el sur del Estado de México / Miranda Gómez Raúl, Dávila Hernández Norma / UAEM Segovia Castillo 17/ 3. 10:40 – 11:00. Los drones en la arqueología: un vistazo al modelado 3D del pasado / Candelario Peralta Carreta; Jonathan V. Solórzano Villegas; Matías Hernández Gómez; Ana I. Fernández Montes de Oca; Alberto Gallardo Cruz / CCGSS

I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
77
Sesiones 17/1-3
Arqueología
Sala 1
Horario: 10:00 – 11:00
SESIÓN 17/1. SALA 1. ALGUNOS EJEMPLOS DE PRODUCTOS OBTENIDOS CON VANT Y SUS APLICACIONES EN EL SITIO ARQUEOLÓGICO DE CANTONA,
PUEBLA Mtro. Javier Martínez González
Arqlgo. Cuauhtémoc Domínguez Pérez Instituto Nacional de Antropología e Historia
Con la intención de difundir resultados de investigaciones arqueológicas en las que se ha contado con el apoyo de VANT, mejor conocidos como drones, para favorecer su uso y dar seguimiento al desarrollo de metodologías en el ámbito académico se presenta el siguiente trabajo, generado dentro del Taller de Fotogrametría y Drones de la Dirección de Estudios Arqueológicos (DEA) del INAH y que esencialmente es producto de muchos ensayos, aciertos y errores, toda vez que en nuestro país son contadas las investigaciones que integran esta tecnología, por lo que formalmente no existe una metodología o protocolos aplicados a la arqueología.
Continuamente van surgiendo tecnologías que apoyan estudios arqueológicos en sus diferentes facetas; en esta oportunidad se expone este recurso cuyo beneficio se inscribe en el ámbito de las representaciones espaciales y lo que de ellas se puede derivar: modelos digitales de elevación, levantamientos topográficos y ortofotos, cuya aplicación ofrece diversas bondades ligadas a la optimización de recursos y tiempos, generando productos de alta calidad desde el punto de vista visual y métrico. Los cuales pueden ser empleados en la difusión para orientación del público en general, aspectos interpretativos, deslinde de zonas protegidas, todo ello inherente a la investigación arqueológica.
Los ejemplos desarrollados como base para este simposio proceden del sitio arqueológico de Cantona, urbe prehispánica ubicada al norte de la Cuenca de Oriental, en el estado de Puebla, en donde se ha tenido una extensa práctica de vuelo con más de 45 misiones realizadas durante los últimos dos años. Se expondrán imágenes y levantamientos topográficos de diversas etapas de intervención en dos zonas diferenciadas: una unidad habitacional y otra monumental. El objetivo fue documentar y apoyar el proceso de excavación y restauración de las mismas, dentro de este asentamiento caracterizado por su complejidad y alto grado de urbanismo arquitectónico.
Igualmente se presenta un tercer ejemplo de una unidad cívico ceremonial en el que se muestra como a partir de los productos obtenidos y procesados con software especializado en fotogrametría, se pueden realizar dibujos planimétricos de gran precisión útiles para detallar dimensiones, características arquitectónicas, volúmenes construidos, así como definir la orientación de los edificios que componen los conjuntos intervenidos.
También se comentarán con base en los resultados, los alcances y limitaciones de esta práctica en la disciplina arqueológica y la multiplicidad de factores que pueden incidir en su manejo, además de precisar aspectos físicos del equipo utilizado y del software con que se procesa la información.
Como parte del material gráfico a utilizar en esta ponencia, se anexan una muestra de las imágenes que se utilizarán en la presentación.
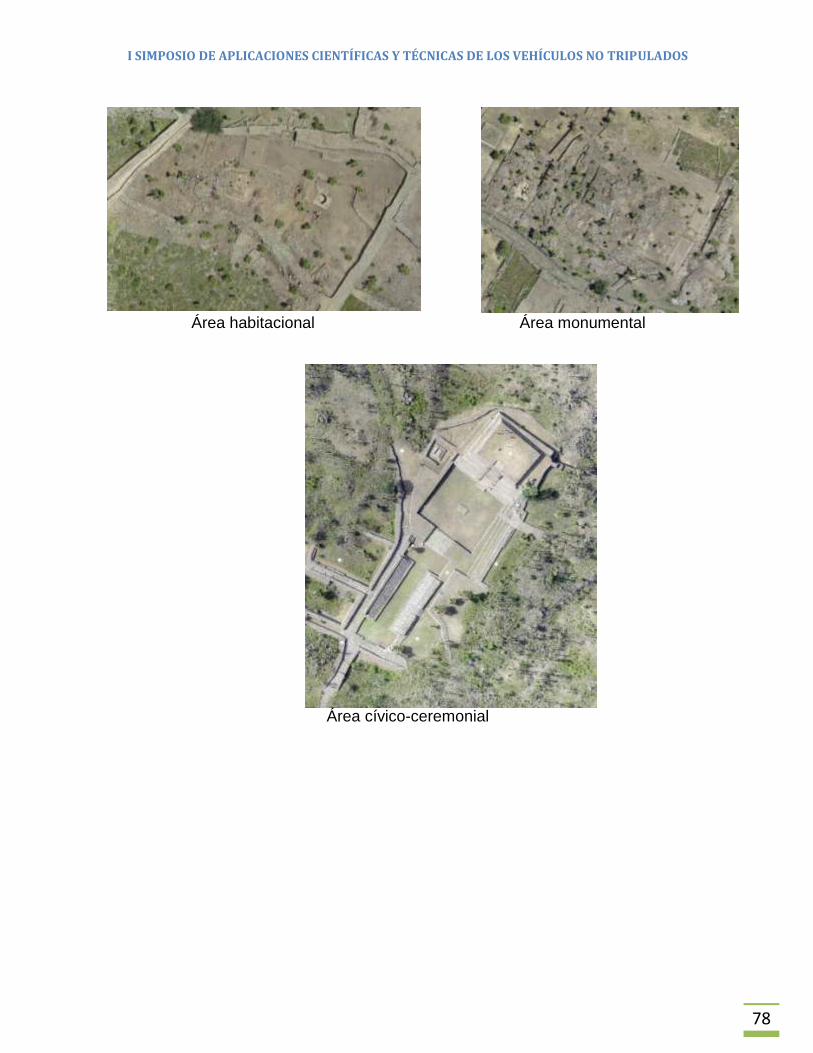
I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
78
Área habitacional Área monumental
Área cívico-ceremonial
I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
79
SESIÓN 17/2. SALA1. TECNOLOGÍA VANT COMO RECURSO EN LA PROSPECCIÓN ARQUEOLÓGICA EN EL SUR DEL ESTADO DE MÉXICO
Miranda Gómez Raúl¹ Dávila Hernández Norma²
¹ Centro Universitario Tenancingo, Universidad Autónoma del Estado de México ² Facultad de Geografía, Universidad Autónoma del Estado de México
El siguiente trabajo presenta una perspectiva de las tecnologías recientes aplicadas a trabajos integrados en proyectos vigentes en el Centro Universitario Tenancingo, dentro de la licenciatura de Arqueología.
La primera desarrolla una propuesta acerca del patrón de asentamiento de los sitios arqueológicos localizados en la región de Tenancingo, Estado de México. A partir de la información recabada durante trabajos de recorrido de superficie, se propone tipología y tamaño de los sitios encontrados al interior de la región.
Mediante la aplicación de las tecnologías de información geográfica con el uso de los SIG, tratamiento digital de imágenes, fotogrametría y generación de nube de puntos basados en datos de sensor remoto (VANT), como resultado de prospección y recorrido superficial, se deriva en la visualización de rasgos arqueológicos en la superficie que subyacen al bajo nivel de visibilidad debido a la marcada densidad de cobertura vegetal, con la generación de cartografía y nubes de puntos.
La segunda utiliza una comparación de dos diferentes contextos y la aplicación de las técnicas fotogramétricas como alternativa en la generación de información arqueológica, el primer sitio: un convento agustino del S. XVI; el segundo un molino harinero del siglo XVIII. Se realizaron levantamientos para obtener las características arquitectónicas y su posterior representación visual.
Referencias Bibliográficas.
Mouget a, G. L. (2014). PHOTOGRAMMETRIC ARCHAEOLOGICAL SURVEY WITH UAV. ISPRS Annals of the Photogrammetry, Remote Sensing and Spatial Information Sciences, (págs. 23-25). Riva del Garda, Italy.
Anschuetz, K. F., Richard H. Wilshusen, & Cherie L. Scheick. (2001). An Archæology of Landscape:Perspectives and Directions. Journal of Archæological Research, 9(2), 152- 197.
Barrero Vélez, J. P., & Giraldo Bustamante, L. (2012). Implementación de una red neuronal para la clasificación de coberturas terrestres en imágenes modis. Medellín: Universidad de San Buenaventura Seccional Medellín.
Buzai, G. (1999). Geografía Global. El paradigma geotecnológico y el espacio interdisciplinario en la interpretación del mundo del siglo XXI. Madrid: Lugar.
Carbajal, G., & Gómez, Á. (2011). Reconocimiento de objetos con información de color y profundidad. Curso: Introducción al Reconocimiento de Patrones, (págs. 3-28).
Centro de Geociencias Aplicadas. (2015). Principios de Fotográmetría. Apunte de Teoría, Cátedra fotointerpretación (págs. 1-26). Argentina: UNIVERSIDAD NACIONAL DEL NORDESTE, Facultad de Ingeniería.
De la Peña Virchez, R. (2006). Proyecto Arqueológico Ocuilan de Arteaga, Estado de México. Tercera Etapa del Proyecto, Recorrido de Superficie. INAH.

I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
80
Herigert, M. B., & Pianetti, I. (2010). Reconocimiento de Imágenes mediante Scale Invariant Feature. (págs. 1-7). UTN – Facultad Regional Concepción del Uruguay.
Jorge, L. (2010). Tratamiento Digital de Imágenes Multiespectrales. México: UNAM.
Laure Nuninger, C. F. (2010). LiDAR: quel apport pour l’analyse des paysages ? Bulletin AGER, 34-43.
Lira, J. (2002). Sistema Radar de Imágenes. México: 2002.
Mehl, H. y. (2002). Fundamentos del procesamiento de imágenes.
Montufo, M. A. (1991). Aplicaciones de la teledección en arqueología.Cuadernos de Prehistoria. GRANADA (16-17), 425-451.
Palma Linares, V. (2014). Relaciones de dominación y poder entre los Matlatzincas de Tenanzinco. Estudios de cultura otopame (págs. 19-38). México: UNAM.
Renfrew, C., & Bahn, P. (2011). Arqueología, Teorías, métodos y práctica (3 ed.). Madrid: Akal.
Stular, B., Nuninger, L., & Ostir, K. (2012). Visualization of lidar-derived relief models for detection of archaeological features. Journal of Archaeological Science (39), 3354-3360.

I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
81
SESIÓN 17/3. SALA 1. LOS DRONES EN LA ARQUEOLOGÍA: UN VISTAZO AL MODELADO 3D DEL PASADO
Candelario Peralta Carreta
Jonathan V. Solórzano Villegas Matías Hernández Gómez
Ana I. Fernández Montes de Oca Alberto Gallardo Cruz
Centro del Cambio Climático y la Sustentabilidad en el Sureste A.C. Los modelos en 3D han permitido la interactividad entre los objetos y personas generando una relación centralizada en una visualización virtual (Karina, Parada, Badwin, & Vera, 2014). En los últimos años la generación de estos modelos se ha incrementado debido a la creciente actualización de los sistemas informáticos, así como la incorporación de los vehículos aéreos no tripulados (drones) en la obtención de imágenes que permiten la elaboración de los mismos. ( Anderson & Gaston, 2013; Koh & Wich, 2012; Caro, 2012).
Con la apertura del mercado de los drones también se abrió la oportunidad de explorar nuevas aplicaciones para éstos, siendo la arqueología una disciplina que trata de estar en constante evolución ha incorporado el uso de los drones en sus estudios, considerándolos una herramienta rápida, económica y preventiva (Raquel Castelo Ruano & Pérez, 2015).
El presente trabajo tuvo como objetivo evaluar la funcionalidad del uso de drones (ala fija y cuadricóptero) para generar modelos 3D en la zona arqueológica de Moral Reforma del municipio de Balancán, Tabasco. Obteniendo como resultado la generación de la nube de puntos con una densidad que varía entre 28 y 669 points/m2, siendo el cuadricóptero el que generó con mayor detalle el modelo de la pirámide doble existente en el sitio. Sin embargo, el dron de ala fija permitió visualizar mayor superficie y diferenciar zonas con posibles asentamientos arqueológicos. El uso de modelos 3D generados mediante drones presenta una ventana de oportunidad de conocer el entorno arqueológico desde una visión innovadora y no invasiva.
Palabras Claves: Drones, Modelos 3D, Arqueología
I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
82
Sesiones 17/1-3 Sala 2 Horario: 10:00 – 11:00 17/ 1. 10:00 – 10:20. Análisis de peligros y evaluación de daños en localidades de Huauchinango, Puebla, afectadas por la tormenta tropical Earl, en agosto de 2016, mediante el uso de vehículos aéreos no tripulados / Leobardo Domínguez M.; Miguel Ángel Cruz P. y Alberto E. González H. / CENAPRED 17/2. 10:20 – 10:40. Técnicas de aplicación de robots móviles terrestres en entornos de desastres / Héctor Rodrigo Arce González / FI-UNAM 17/ 3. 10:40 – 11:00. Detección de factores de riesgo en salud debido a factores medioambientales y la modificación del paisaje, mediante procesamiento de imágenes satelitales en la zona de Paraíso-Comalcalco,Tabasco / Amanda Oralia Gómez González; Gustavo Segura García; Jesús Gamaliel Ronzón Cruz; Michelle Alejandro Durán Sánchez / AEM

I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
83
SESIÓN 17/1. SALA 2. ANÁLISIS DE PELIGROS Y EVALUACIÓN DE DAÑOS EN
LOCALIDADES DE HUAUCHINANGO, PUEBLA, AFECTADAS POR LA TORMENTA TROPICAL EARL, EN AGOSTO DE 2016, MEDIANTE EL USO DE VEHÍCULOS
AÉREOS NO TRIPULADOS
Leobardo Domínguez M. Miguel Ángel Cruz P.
Alberto E. González H. Centro Nacional de Prevención de Desastres
El 2 de agosto se formó la tormenta tropical Earl en aguas del mar Caribe, convirtiéndose en huracán categoría uno la tarde del 3 de agosto. De acuerdo con los avisos del Servicio Meteorológico Nacional (SMN), dicha depresión tropical, convertida en huracán, tocaría tierra en Quintana Roo el 4 de agosto; sin embargo, la mañana de ese día se degradó a tormenta tropical y así atravesó la península de Yucatán con dirección al Golfo de México.
Entre el 5 y el 6 de agosto se debilitó a remanente con gran nubosidad, ocasionando lluvias muy intensas en zonas montañosas de Veracruz, Puebla e Hidalgo. Debido a las condiciones geológicas y topográficas del terreno en esas zonas, aunado a la deforestación, cortes, excavaciones, fugas y un mal manejo de los escurrimientos superficiales, se suscitaron una gran cantidad de deslizamientos, flujos de lodo, flujos de escombros, inundaciones y desbordamiento de ríos, dejando un saldo de 55 fallecidos: 41 en la Sierra Norte de Puebla, 13 en Veracruz y uno en Hidalgo.
Dada la magnitud de los daños y el elevado número de decesos en el estado de Puebla, el gobierno estatal y la Dirección General de Protección Civil (DGPC) de la Secretaría de Gobernación solicitaron el apoyo del CENAPRED para evaluar las condiciones de peligro y daños sucedidos en los municipios más afectados, lo cual debía realizarse en el menor tiempo posible a fin de implementar acciones de mitigación, evacuación y/o reubicación de viviendas.
Para ello, el CENAPRED dispuso de un vehículo aéreo no tripulado (VANT), el cual permitió realizar un levantamiento detallado de las zonas más afectadas, facilitando el reconocimiento en zonas de difícil acceso y con alto grado de peligrosidad, dadas las condiciones de inestabilidad que prevalecían en el terreno.
En el presente documento se describen las actividades realizadas para cumplir con los objetivos de la solicitud por parte del gobierno del estado de Puebla y de la DGPC, enfatizando las ventajas del uso de esta tecnología para cubrir una mayor área en el menor tiempo posible y en zonas de difícil acceso, o francamente peligrosas.

I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
84
SESIÓN 17/2. SALA 2. TÉCNICAS DE APLICACIÓN DE ROBOTS MÓVILES TERRESTRES EN ENTORNOS DE DESASTRES
Ing. Héctor Rodrigo Arce González Laboratorio de Biorobótica
Facultad de Ingeniería, UNAM [email protected]
Desde hace an os se ha ido desarrollando el campo de la automatizacion y robótica, el cual se ve cada vez más inmerso en la vida cotidiana, debido a esto se plantea la implementación de tecnologıa para situaciones sociales no tan cotidianas como los entornos de desastres naturales ocurridos, ası como la posible exploracion general de entornos. Este trabajo introduce una serie de requisitos planteados para la incorporacion de robots del tipo humanoide en la exploración y rescate, al igual que la posible ventaja de éstos sobre otros sistemas robóticos terrestres para la tarea de navegación en un entorno desconocido. Tambien se enumeran resultados obtenidos por la implementación de diversas investigaciones sobre un robot humanoide tipo “Nimbro-Op”, ası como la implementacion de diversas técnicas de procesamiento sobre robots moviles terrestres sencillos, los cuales han sido planteados como plataformas de recopilación de información escalable a sistemas de mayor impacto. Entre los resultados más destacados se encuentra la aplicacion de dichos robots para generación de mapas de trayectoria dentro de entornos cerrados, aplicando fusión sensorial de alto nivel y la incorporación de visión computacional estereoscopica para reconocer posibles objetos de interés (víctimas de desastre, objetos de alta importancia, etc.)
Figura 1: 2 de los robots moviles terrestres implementados.
Figura 2: Robot humanoide
Nimbro-OP.
I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
85
SESIÓN 17/3. SALA 2. DETECCIÓN DE FACTORES DE RIESGO EN SALUD DEBIDO A FACTORES MEDIOAMBIENTALES Y LA MODIFICACIÓN DEL PAISAJE,
MEDIANTE PROCESAMIENTO DE IMÁGENES SATELITALES EN LA ZONA DE PARAÍSO-COMALCALCO, TABASCO
Amanda Oralia Gómez González1
Gustavo Segura García2 Jesús Gamaliel Ronzón Cruz2
Michelle Alejandro Durán Sánchez2
¹ Agencia Espacial Mexicana ² Servicio Social y Prácticas profesionales, Agencia Espacial Mexicana
El estado de Tabasco, México, es un sitio que presenta factores diferentes a la mayoría de los estados de la República Mexicana, dado que es muy favorecido con ríos y fuentes de agua, grandes zonas de siembra donde sobresalen: tabaco, plátanos, pimienta, cacao, entre otras, así como mantos petrolíferos de donde se extrae gran cantidad de hidrocarburos.
Estas condiciones propician a su vez modificaciones del paisaje con inundaciones, contaminación de aguas por derrames petroleros y de otros químicos, el uso no controlado de pesticidas y fertilizantes que aumentan la producción de la siembra y el ecosistema, que se crea con la relación de los asentamientos humanos.
Debido a una inquietud manifiesta de los servicios de salud del estado de Tabasco, en la zona específica de Paraíso y Comalcalco, se detonó la investigación mediante imágenes satelitales de los satélites Landsat 7 y 8, y el procesamiento de las mismas mediante dos softwares de uso libre ILWis y QGis; y a partir de la comparación cruzada de datos en el terreno y ambos softwares, determinar factores de riesgo a la salud humana.
Los resultados han identificado elementos inquietantes que sugieren proponer a las autoridades acciones de mitigación y búsqueda, utilizando la metodología seguida para este estudio.

I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
86
Sesiones 17/1-3 Ecosistema y ambiente Sala 3 Horario: 10:00 – 11:00 17/ 1. 10:00 – 10:20. Estudio comparativo empleando tecnología RPAS de diferente capacidad para análisis de cobertura vegetal. Estudio de Caso: Parque Sierra Morelos, Estado de México / Norma Dávila-Hernández; Gustavo Cipriano; Francisco Zepeda Mondragón / UAEM 17/2. 10:20 – 10:40. Identificación de áreas perturbadas mediante la implementación de un SIG / Gabriela Gómez Rodríguez; José López García; Armando Peralta Higuera; Marco Antonio López Vega; Miguel Ángel Ramírez Beltrán / IGg-UNAM 17/ 3. 10:40 – 11:00. Empleo de sistemas aéreos no tripulados en la Armada de México / Abel Trejo Castelán; Alejandro Cabrera Campillo; Juan Carlos Santiago Martínez; Luis Alejandro Ochoa Demuner; Alexis Zúñiga Jiménez / SEMAR
I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
87
Sesiones 17/1-3 Ecosistema y ambiente Sala 3 Horario: 10:00 – 11:00
SESIÓN 17/1. SALA 3. Estudio comparativo empleando tecnología RPAS de diferente capacidad para análisis de cobertura vegetal. Estudio de Caso:
Parque Sierra Morelos, Estado de México
Dávila-Hernández Norma¹ Cipriano Gustavo²
Zepeda Mondragón Francisco² ¹ Laboratorio de Ciencia y Tecnología de Información Geográfica,
Facultad de Geografía, UAEM ² Especialidad en Cartografía Automatizada, Teledetección y Sistemas de Información Geográfica,
Facultad de Geografía, UAEM
En el siguiente trabajo se realizó un estudio para la discriminación de tipos de vegetación y densidad de cobertura empleando dos RPAS, (Sistemas aéreos no pilotados) de distintas capacidades con el objetivo de comparar y conocer las ventajas y desventajas que brindan los UAV en términos de precisión tanto en la lectura de datos como procesamiento de los mismos en términos de sensor empleado, resolución y capacidad de cobertura. Así, se utilizaron dos sensores DJI-1 y GeoBramor C-Astral para la generación de Modelos Digitales de Elevación (MDE) y Modelos Superficiales del Terreno (MST) en la zona de reforestación del Parque Sierra Morelos, se aplicaron procesos de tratamiento digital para segmentación de elementos de realce espectral; además de discriminación de unidades arbóreas para su cuantificación y estimación de biomasa. Así, se cuantificaron las diferencias en la lectura de datos y su precisión espacial a partir de sensores con distintas capacidades técnicas, que a su vez permiten la optimización de recursos en la generación de datos geoespaciales de alta precisión.
Bibliografía
Jorge, L. (2010). Tratamiento Digital de Imágenes Multiespectrales. México: UNAM.
Anastasios L. Fytsilisa; Konstantinos. A; Koutroumbasa. D; Michailb. D; Charalambos C. (2016). A methodology for near real-time change detection between Unmanned Aerial Vehicle and wide area satellite images. ISPRS Journal of Photogrammetry and Remote Sensing, 119, 165–186.
Wang. L; Zheng. N, Hanyue. C; Dong. L; Mingquan. W; Wei. Z. (2015). Remote estimation of canopy height and aboveground biomass of maize using high-resolution stereo images from a low-cost unmanned aerial vehicle system. Ecological Indicators, 67, 637–648.

I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
88
SESIÓN 17/2. SALA 3. Identificación de áreas perturbadas mediante la
implementación de un SIG
Gabriela Gómez Rodríguez José López García
Armando Peralta Higuera Marco Antonio López Vega
Miguel Ángel Ramírez Beltrán Instituto de Geografía, UNAM
[email protected] Mediante un convenio entre PROBOSQUE y el Instituto de Geografía, UNAM, se llevó a cabo este
estudio cuya finalidad fue diseñar, desarrollar e implementar un SIG mediante software de código
abierto para zonificar áreas potenciales para reforestación y restauración de suelos en áreas mayores
a una hectárea. Para este propósito se realizó un análisis comparativo de las condiciones actuales del
bosque, a partir de imágenes SPOT, contra las existentes en la década de 1990 ubicadas en ortofotos
de INEGI, donde se identificaron las zonas con pérdida evidente de cobertura forestal y se
discriminaron de zonas de baja cobertura natural. A partir del análisis fue posible delimitar las
superficies potenciales a reforestar y superficies prioritarias para realizar obras de conservación de
suelos. Los resultados obtenidos fueron integrados, junto con la información pertinente al tema de
deforestación ya existente, en un Sistema de Información Geográfica que permitirá a PROBOSQUE
dirigir sus esfuerzos de reforestación.
Los mapas de cobertura forestal para todo el Estado de México se realizaron a escala 1:20,000, en
contraste con los generados con anterioridad, que tenían escalas 1:50,000 o menores, con lo cual se
incrementa a más del doble el detalle de la información.
Un caso especialmente interesante es el del Nevado de Toluca, donde se muestra una recuperación
de 8 mil ha entre 1993 y 2008, lo cual representa un 18% del área estudiada aun cuando no hay una
modificación importante de la frontera forestal. La recuperación se evaluó con base en un
incremento en la densidad de cobertura arbórea.
Una vez obtenidos los mapas de zonificación se realizaron visitas de campo con el fin de corroborar
los resultados del mapa y establecer una metodología que pudiese ser utilizada a futuro por el
personal de PROBOSQUE.
Un aspecto novedoso fue el uso de drones equipados con cámaras. Esta metodología permite
obtener información desde una baja altura, que permite observar y registrar información de una
extensión mucho mayor de la que se recorre en tierra y tener acceso a zonas de topografía muy
accidentada, por lo que funciona como una escala intermedia entre el muestreo de campo y los
mapas temáticos, como se puede observar en las figuras 1, 2 y 3. En un tiempo muy corto se puede
registrar una gran cantidad de información relevante para el trabajo forestal. La fotografía obtenida
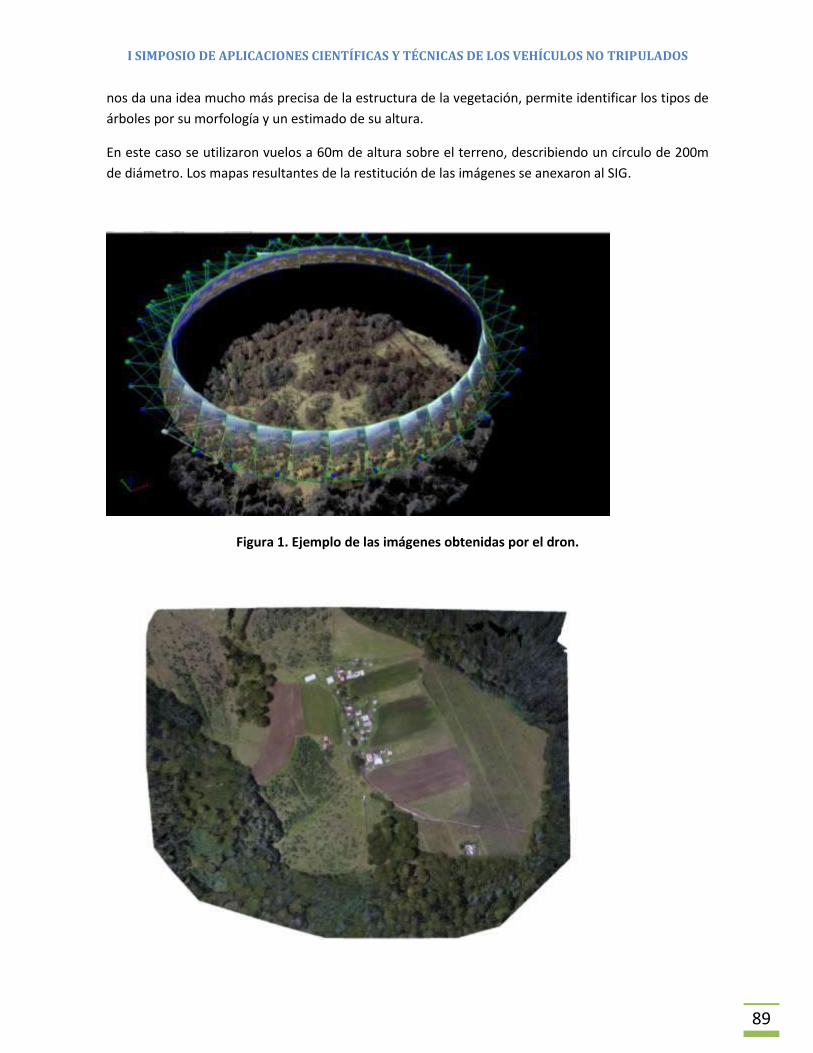
I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
89
nos da una idea mucho más precisa de la estructura de la vegetación, permite identificar los tipos de
árboles por su morfología y un estimado de su altura.
En este caso se utilizaron vuelos a 60m de altura sobre el terreno, describiendo un círculo de 200m
de diámetro. Los mapas resultantes de la restitución de las imágenes se anexaron al SIG.
Figura 1. Ejemplo de las imágenes obtenidas por el dron.

I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
90
Figura 2. Ejemplo del mosaico rectificado, generado por restitución de imágenes obtenidas por el
dron.
Figura 3. Ejemplo de las mediciones que se obtienen a partir de los modelos 3D.

I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
91
SESIÓN 17/3. SALA 3. EMPLEO DE SISTEMAS AÉREOS NO TRIPULADOS EN LA ARMADA DE MÉXICO
Cap. de Navío AN. PA. DEM. Abel Trejo Castelán
Corb. CG. Alejandro Cabrera Campillo Cap. Corb. CG. Juan Carlos Santiago Martínez
Cap. Corb. CG. Luis Alejandro Ochoa Demuner Tte. Navío CG. Alexis Zúñiga Jiménez
COISRAM, Secretaría de Marina
El objetivo de esta presentación es mostrar cómo se encuentra constituido un sistema aéreo no tripulado operado por efectivos de la Armada de México, de igual manera, pretende mostrar la utilidad que citado sistema tiene en las operaciones que se realizan en beneficio de la ciudadanía y de la conservación del equilibrio ecológico en cuanto a protección de especies endémicas se refiere.
I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
92
Sesiones 17/4-6 Drones y sociedad Sala 1 Horario: 11:20 – 12:20 17/ 4. 11:20 – 11:40. Nuevo paradigma de innovación abierta de drones, una perspectiva antropológica/ Juan Arturo Zepeda Rojas / IBERO 17/5. 11:40 – 12:00. Vinculando empresas e instituciones para gestión del patrimonio cultural en México a través del uso de drones / Guadalupe Zetina Gutiérrez / IIA-UNAM 17/ 6. 12:00 – 12:20. VANT y productos audiovisuales de divulgación de la ciencia / Julián López / Film86

I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
93
Sesiones 17/4-6 Drones y sociedad Sala 1 Horario: 11:20 – 12:20
SESIÓN 17/4. SALA 1. NUEVO PARADIGMA DE INNOVACIÓN ABIERTA DE DRONES, UNA PERSPECTIVA ANTROPOLÓGICA
Juan Arturo Zepeda Rojas
Universidad Iberoamericana
En nuestros días es frecuente enterarse casi de manera cotidiana de noticias acerca de un nuevo uso de los drones o vehículos aéreos no tripulados, por ejemplo para la agricultura de precisión o para la inspección física de infraestructura carretera o de telecomunicaciones.
Sin embargo, hablando específicamente del caso de México, detrás de estas novedosas aplicaciones existen complejos procesos de innovación tecnológica que tienen que ver con plataformas abiertas, a través de las cuales las personas interactúan e intercambian información, que posteriormente transforman en conocimiento sistemático aplicado para dar vida a un nuevo artefacto o aplicación tecnológica de los drones.
Hablamos de procesos de innovación abiertos no tradicionales, donde ahora el usuario consumidor de tecnología goza de gran capacidad de innovación facilitada en gran parte por la utilización de hardware y software libre, que le permite conectarse y colaborar a través de internet con distintas personas alrededor del mundo con el objetivo de compartir información; esto aparentemente fundamentado en una economía social de carácter moral, donde el conocimiento es considerado como un bien común que debe ser compartido.
Presentaré una serie de casos de hacedores-innovadores mexicanos incrustados en la cultura de desarrollo tecnológico de drones, donde quedará expuesto como asistimos a un nuevo paradigma de innovación que combina el hobbie de radiocontrol, de la robótica y el de la programación, con las plataformas abiertas, con el libre acceso a la información en internet y con el trabajo colaborativo y la creatividad, todo lo anterior enmarcado en la sociedad red.

I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
94
SESIÓN 17/5. SALA 1. VINCULANDO EMPRESAS E INSTITUCIONES PARA GESTIÓN DEL PATRIMONIO CULTURAL EN MÉXICO A TRAVÉS DEL USO DE
DRONES
M. en C. Guadalupe Zetina Gutiérrez Programa de Posgrado en Antropología, IIA-FFyL, UNAM
Dos fenómenos se han ido desarrollando de manera paralela en nuestro país en los últimos años: 1) la adopción cada vez más generalizada de las tecnologías geoespaciales y su aplicación en todos los ámbitos de la vida cotidiana y, 2) una crisis económica y política que ha castigado, entre muchos otros, a la investigación y a la cultura. Sin embargo, ante esta crisis, los peligros a los que están expuestos los restos del patrimonio cultural material inmueble (vestigios, áreas y monumentos arqueológicos e históricos) no han disminuido si no al contrario. Al recortarse los presupuestos para el registro, conservación e investigación, éstos han quedado aún más vulnerables ya que el saqueo, la exposición y la destrucción total o parcial debido a obras públicas y/o privadas no se detiene. Incluso muchos sitios arqueológicos han desaparecido en su totalidad antes de ser detectados y registrados por las autoridades pertinentes. Por otro lado, es bien sabido que el uso de los drones ha contribuido en gran medida a acelerar la exploración, el registro y el monitoreo para conservación y protección de áreas patrimoniales (arqueológicas e históricas); además son grandes auxiliares en la recopilación de datos geoespaciales para su mapeo e investigación. Sin embargo, estas tecnologías a pesar de estar convirtiéndose en imprescindibles para paraestatales como CFE, PEMEX, etcetera, han permanecido poco accesibles a instituciones encargadas de la gestión del patrimonio cultural como el INAH y universidades públicas, debido a las crisis presupuestarias.
Este trabajo se divide en tres partes: 1) Cómo la crisis actual está agudizando los problema de gestión del patrimonio cultural y cómo lo han resuelto hasta el momento los arqueólogos institucionales, usando drones sin ser unos expertos en la materia; 2) en este contexto político, económico e histórico, cómo el proyecto independiente “CONEXIÓN TECNOLÓGICA” surgió y está funcionando como enlace entre instituciones como el INAH y empresas privadas que donan vuelos de drones para áreas patrimoniales, de manera que ambas partes puedan resultar beneficiadas; y 3) las reflexiones y sugerencias técnicas y académicas aprendidas durante las experiencias de vuelos de drones en tres zonas arqueológicas en el área maya (Oxkintok, Becán e Xpuhil) durante 2016.
La innovación de este proyecto independiente, sin fines de lucro, sin presupuesto ni patrocinadores, llamado “CONEXIÓN TECNOLÓGICA”, es la vinculación directa entre empresas privadas (fabricantes de drones o vendedoras de servicios geoespaciales) y las necesidades de registro, mapeo y monitoreo de sitios y/o áreas arqueológicas que carecen de los recursos propios para costearlo. Para 2017, existen al menos dos sitios arqueológicos esperando ser beneficiados durante la primera mitad de este año y una empresa ya comprometida a donar un vuelo. Se esperan más donaciones de vuelos con drones y más solicitudes de apoyo por parte de zonas y proyecto arqueológicos.
En resumen, esta presentación muestra un modelo de trabajo basado en el uso de los drones que beneficia tanto al patrimonio cultural tangible como a las empresas privadas que donan su tecnología y servicios y, así mismo explora los límites y alcances técnicos y académicos que esta

I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
95
tecnología puede aportar al registro, protección, conservación, investigación y legislación del patrimonio cultural tangible en el siglo XXI.

I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
96
SESIÓN 17/6. SALA 1. VANT Y PRODUCTOS AUDIOVISUALES DE DIVULGACIÓN DE LA CIENCIA
Julián Alberto López Ruíz Alex Sanchez Chiu
[email protected] [email protected]
En los medios audiovisuales siempre estamos buscando una nueva forma de llegar a lugares donde antes no habíamos estado o de donde no habíamos podido obtener imágenes. Así hemos pasado por las cámaras submarinas, las de visión nocturna, las cámaras ocultas y otros ejemplos que nos han llevado a tener imágenes más claras. La fotografía aérea estaba limitada a lo que se pudiera hacer desde aeronaves tripuladas, con cámaras manejadas por un fotógrafo o integradas a los fuselajes. Esto cambió con la llegada de las aeronaves no tripuladas a las que se les pueden montar poderosas cámaras digitales miniaturizadas y apoyadas por estabilizadores de imagen cada vez mejores. Los drones permiten no sólo acceder a nuevos territorios previamente difíciles de fotografiar o videograbar, dependiendo de la habilidad del piloto/camarógrafo, se pueden lograr a nivel estético tomas que serían complicadas con otro tipo de dispositivos de grabación. La documentación de hallazgos es parte fundamental, también, en la investigación científica. Conocer y manejar los drones es esencial para lograr aprovechar todo su potencial y la tecnología que éstos contienen, que va más allá de simplemente flotar en el aire.
I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
97
Sesiones 17/4-6 Sala 2 Horario: 11:20 – 12:20 17/ 4. 11:20 – 11:40. El uso de los VANT para evaluaciones de riesgo por inestabilidad de laderas en la ciudad de Teziutlán, Puebla / Ricardo J. Garnica-Peña e Irasema Alcántara-Ayala / IGg-UNAM 17/5. 11:40 – 12:00. Virtualización del robot FinDER v3 para mejorar la manipulación en entornos de desastre / César Pineda Leonardo / FI-UNAM 17/ 6. 12:00 – 12:20. Atlas de riesgos de la UNAM / Armado Peralta Higuera et al. / IGg-UNAM

I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
98
SESION 17/4. SALA 2. EL USO DE LOS VANT PARA EVALUACIONES DE RIESGO
POR INESTABILIDAD DE LADERAS EN LA CIUDAD DE TEZIUTLÁN, PUEBLA
Ricardo J. Garnica-Peña Irasema Alcántara-Ayala
Instituto de Geografía, UNAM
Los vehículos aéreos no tripulados (VANT) se han convertido en una herramienta de gran relevancia y utilidad en diversos campos del conocimiento. Estos equipos, de diversas clasificaciones, tamaños, e incluso con diferentes sensores, proporcionan una gran cantidad de información espacial y temporal que es utilizada por especialistas de disciplinas que van desde la arqueología, la geomorfología, la arquitectura, la geografía, la biología y muchas otras en donde el empleo de imágenes de alta resolución son necesarias para el desarrollo de proyectos de investigación.
Dentro de las disciplinas arriba mencionadas entran una gran cantidad de temáticas que son abordadas con ayuda de estas nuevas tecnologías. Uno de esos temas es el estudio de los riesgos asociados a peligros naturales (inundaciones, erupciones volcánicas, procesos de remoción en masa, por mencionar algunos). Una evaluación del riesgo requiere de imágenes que sean recientes y de buena resolución así como los subproductos que de estas imágenes se deriven (modelos digitales de superficie, del terreno, ortofotos y nubes de puntos). De igual manera, los modelos tridimensionales pueden ser útiles para conocer y determinar, con gran precisión, las viviendas que se encuentran en zonas susceptibles a peligros naturales, no sólo extrayendo o conociendo su exposición al peligro sino también las condiciones físicas o estructurales en las cuales se encuentran esas viviendas, brindando información muy valiosa y útil para los tomadores de decisiones y la aplicación de planes de prevención de riesgos.
En esta investigación se mostrará la aplicación que tienen los VANT para la evaluación, de manera general, del riesgo asociado a los procesos de remoción en masa en la ciudad de Teziutlán, Puebla, sitio en el cual ocurrió uno de los desastres más relevantes del siglo XX en la República Mexicana. El desastre de la colonia La Aurora (octubre de 1999) dio muestra del grado de susceptibilidad a procesos de remoción en masa que predomina en las laderas de la ciudad. En estas laderas se asientan un gran número de viviendas que se encuentran expuestas a la ocurrencia de un nuevo deslizamiento de tierra, y en donde además viven personas que presentan altos niveles de marginación y rezago social.
El objetivo del trabajo es presentar una serie de vuelos realizados en las colonias de Teziutlán mostrando los productos cartográficos resultado de los mismos, así como algunos modelos tridimensionales. La presentación se enfoca en el trabajo previo y durante los vuelos, así como el realizado en gabinete para obtener los productos. Por último, se hablará sobre la aplicación de estos materiales para evaluar zonas susceptibles a inestabilidad de laderas, evaluando su peligro, su vulnerabilidad y, por supuesto, el riesgo.

I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
99
SESIÓN 17/5. SALA 2. VIRTUALIZACIÓN DEL ROBOT FINDER V3 PARA MEJORAR LA MANIPULACIÓN EN ENTORNOS DE DESASTRE
César Pineda Leonardo Taller de Robótica Abierta, Facultad de Ingeniería, UNAM
El presente documento muestra parte del trabajo realizado por el Taller de Robótica Abierta, de la Facultad de Ingeniería de la UNAM en el robot de búsqueda y rescate FinDER v3, para la búsqueda de víctimas en entornos de desastre. Las áreas de conocimiento de la ingeniería que convergen en el desarrollo de un robot de esta naturaleza son múltiples, por lo que sólo se presentan los avances relativos al proceso de virtualización del FinDER v3 (Ilustración 1).
Ilustración 1:FinDER v3: Finder Disaster Enviroment Robot.
La contribución al Simposio consiste en presentar la plataforma ROS (Sistema Operativo Robótico, por sus siglas en inglés) como software de desarrollo de aplicaciones para robots, con la que se facilita la interacción entre aplicaciones con las que ya cuenta, tales como Mapeo y Localización Simultáneo (SLAM), Localización Adaptativa de Monte Carlo (AMCL) necesarias para la navegación autónoma en robots móviles que incluyen robots con ruedas, con sistema de tracción, con piernas, drones, helicópteros, aeroplanos, robots submarinos (algunos bien podrían considerarse como vehículos no tripulados), así como planeación de trayectorias para aquellos robots móviles compuestos de un brazo manipulador, entre otras funcionalidades importantes. [1]
Por el momento, el robot FinDER v3 se encuentra en su etapa de manufactura; sin embargo, al mismo tiempo se está trabajando en las áreas de electrónica, simulación y programación. Con lo que se cuenta con la virtualización completa del brazo robótico manipulador de 6 grados de libertad que se ubicará sobre el chasis del FinDER v3. Además, se logra mover a
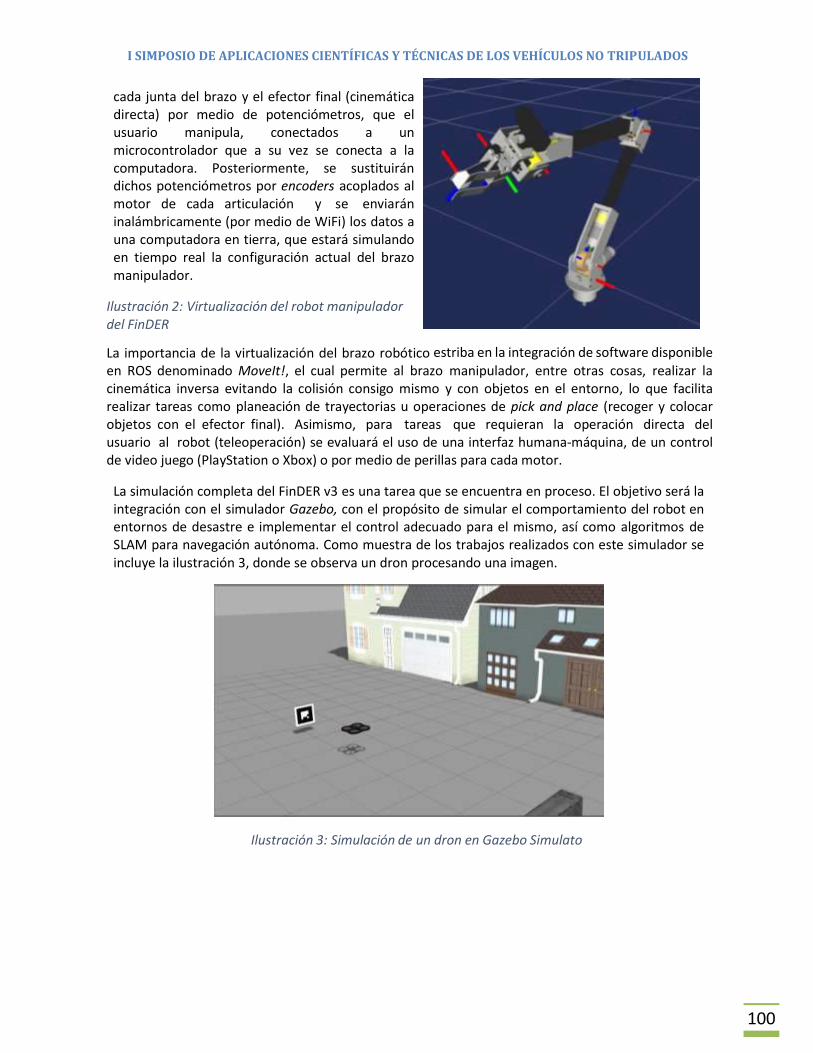
I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
100
cada junta del brazo y el efector final (cinemática directa) por medio de potenciómetros, que el usuario manipula, conectados a un microcontrolador que a su vez se conecta a la computadora. Posteriormente, se sustituirán dichos potenciómetros por encoders acoplados al motor de cada articulación y se enviarán inalámbricamente (por medio de WiFi) los datos a una computadora en tierra, que estará simulando en tiempo real la configuración actual del brazo manipulador.
Ilustración 2: Virtualización del robot manipulador del FinDER
La importancia de la virtualización del brazo robótico estriba en la integración de software disponible
en ROS denominado MoveIt!, el cual permite al brazo manipulador, entre otras cosas, realizar la cinemática inversa evitando la colisión consigo mismo y con objetos en el entorno, lo que facilita realizar tareas como planeación de trayectorias u operaciones de pick and place (recoger y colocar objetos con el efector final). Asimismo, para tareas que requieran la operación directa del usuario al robot (teleoperación) se evaluará el uso de una interfaz humana-máquina, de un control de video juego (PlayStation o Xbox) o por medio de perillas para cada motor.
La simulación completa del FinDER v3 es una tarea que se encuentra en proceso. El objetivo será la integración con el simulador Gazebo, con el propósito de simular el comportamiento del robot en entornos de desastre e implementar el control adecuado para el mismo, así como algoritmos de SLAM para navegación autónoma. Como muestra de los trabajos realizados con este simulador se incluye la ilustración 3, donde se observa un dron procesando una imagen.
Ilustración 3: Simulación de un dron en Gazebo Simulato

I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
101
Bibliografía y fuentes de consulta:
[1] Lentin Joseph. (2015). Mastering ROS for Robotics Programming. Birmingham B3 2PB, UK.: Packt Publishing Ltd..
[2] Tomado de https://iosdevblog.com/2015/10/16/uav-simulation-in-ros-and-gazebo/
14/01/2017.
El Taller de Robótica Abierta agradece todo el apoyo otorgado para esta investigación al proyecto UNAM-DGAPA-PAPIIT IT102615 "Robots no convencionales para exploración y búsqueda".

I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
102
SESIÓN 17/6. SALA 2. ATLAS DE RIESGOS DE LA UNAM
Armado Peralta Higuera Instituto de Geografía, UNAM
El presente trabajo muestra la utilidad de los drones como un apoyo invaluable para la atención de contingencias. Tal es el caso del proyecto del Atlas de Riesgos de la UNAM, en el que participan distintas instituciones universitarias tales como el Programa Universitario del Medio Ambiente, los institutos de Geografía y Geofísica, la Dirección General de Prevención y Protección Civil; así como el Centro Nacional de Prevención de Desastres. En este escrito se describe la elaboración de modelos 3D de los edificios del campus universitario a través de levantamientos con tres aeronaves no tripuladas pequeñas a muy baja altitud. Para obtener los modelos 3D georreferenciados y con medidas exactas, se tomaron entre 300 y 2000 fotografías por edificio. Posteriormente dicha información se integró en un SIG y se crearon recorridos virtuales.
Modelo digital de superficie
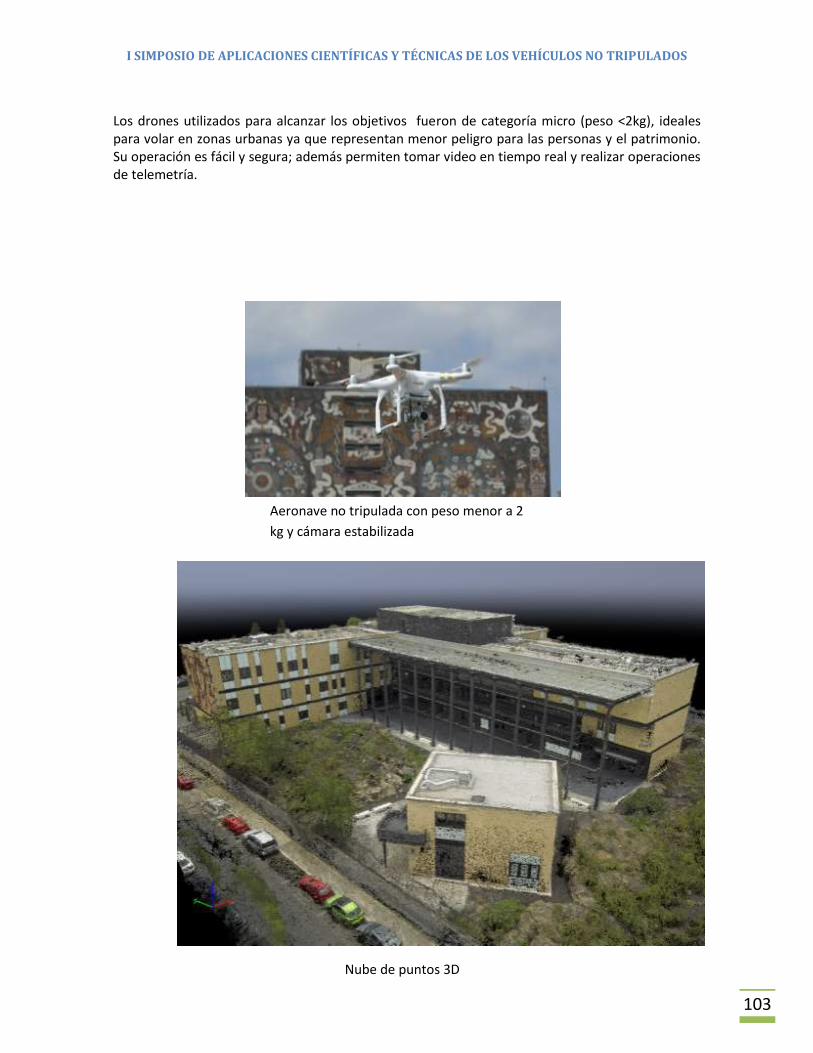
I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
103
Los drones utilizados para alcanzar los objetivos fueron de categoría micro (peso <2kg), ideales para volar en zonas urbanas ya que representan menor peligro para las personas y el patrimonio. Su operación es fácil y segura; además permiten tomar video en tiempo real y realizar operaciones de telemetría.
Nube de puntos 3D
Aeronave no tripulada con peso menor a 2
kg y cámara estabilizada
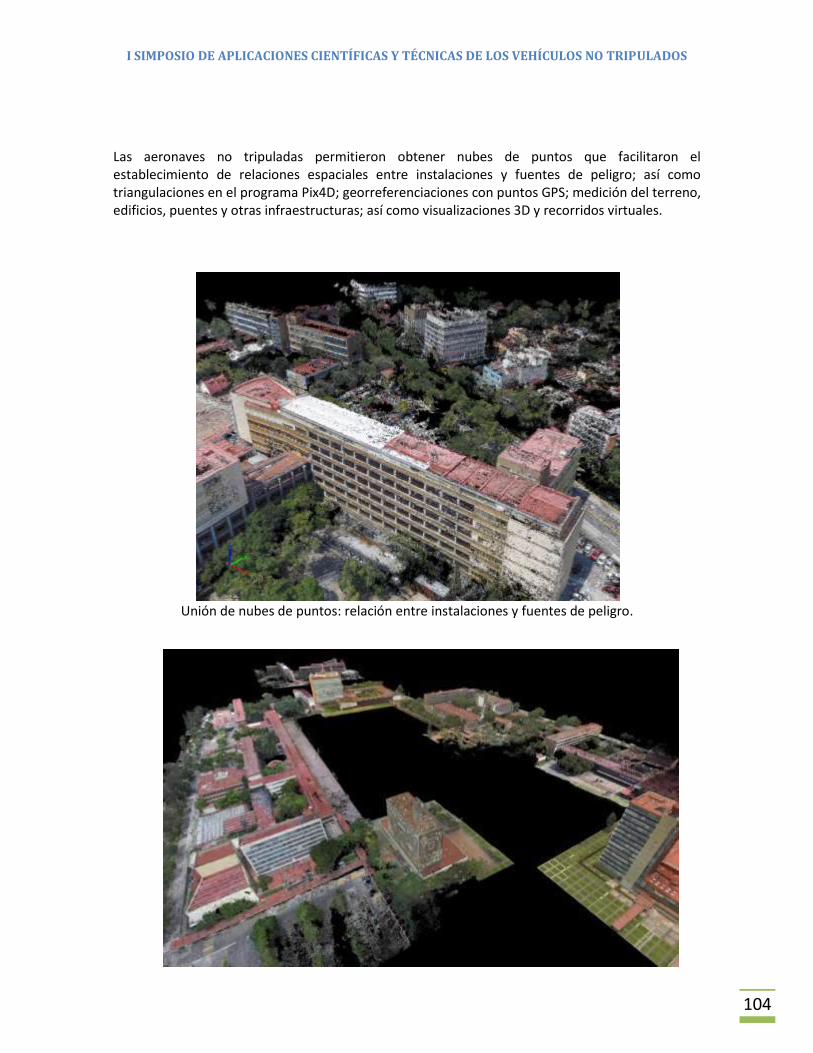
I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
104
Las aeronaves no tripuladas permitieron obtener nubes de puntos que facilitaron el establecimiento de relaciones espaciales entre instalaciones y fuentes de peligro; así como triangulaciones en el programa Pix4D; georreferenciaciones con puntos GPS; medición del terreno, edificios, puentes y otras infraestructuras; así como visualizaciones 3D y recorridos virtuales.
Unión de nubes de puntos: relación entre instalaciones y fuentes de peligro.

I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
105
Los drones representan una herramienta tecnológica de bajo costo con una excelente relación costo/beneficio. Con ella se pueden obtener información esencial sobre la configuración de los edificios, el terreno, la infraestructura y las fuentes de peligro. La posibilidad de tomar video es muy útil para visualizar la configuración y evaluar situaciones en cualquier dispositivo. Además la posibilidad de complementar los datos LiDar.
I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
106
Sesiones 17/4-6 Ecosistemas y ambiente Sala 3 Horario: 11:20 – 12:20 17/ 4. 11:20 – 11:40. Monitoreo de arbolado y áreas verdes en parques y jardines de la Ciudad de México empleando vehículos aéreos no tripulados: caso Parque Pushkin / Iván Leonardez Hernández; Marco Antonio Solís y Valente Evaristo / PAOT 17/5. 11:40 – 12:00. Los vehículos no tripulados (drones) y sus aplicaciones en áreas naturales protegidas: el caso de la Reserva Ecológica del Pedregal de San Ángel (REPSA), UNAM / Luis Zambrano G.; Pedro Camarena B.; Saúl Rodríguez P. / Repsa-UNA 17/ 6. 12:00 – 12:20. Análisis mediante el uso de Aeronaves No Tripuladas sobre el Impacto de las operaciones petroleras en zonas agrícolas / Luis Salazar Brehm / Amacuzac

I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
107
Sesiones 17/4-6 Ecosistemas y ambiente Sala 3 Horario: 11:20 – 12:20
SESIÓN 17/4. SALA 3. MONITOREO DE ARBOLADO Y ÁREAS VERDES EN PARQUES Y JARDINES DE LA CIUDAD DE MÉXICO EMPLEANDO VEHÍCULOS
AÉREOS NO TRIPULADOS: CASO PARQUE PUSHKIN
Iván Leonardez Hernández Marco Antonio Solís
Valente Evaristo Procuraduría Ambiental y del Ordenamiento Territorial de la CDMX
La Procuraduría Ambiental y del Ordenamiento Territorial de la Ciudad de México (PAOT), es una institución que funciona como ombudsman ambiental defendiendo los derechos de los habitantes de disfrutar un ambiente adecuado y un territorio ordenado para su desarrollo y bienestar, al incidir en la solución efectiva de los problemas ambientales y territoriales, respondiendo al ideal de justicia que la población de la Ciudad de México demanda. En ese sentido, la PAOT en el ejercicio de sus atribuciones, da seguimiento a la “Rehabilitación del Jardín Alexander Pushkin”, ubicado en la Av. Cuauhtémoc, Colonia Roma Norte, Ciudad de México. El objetivo del estudio, es cuantificar las áreas verdes y superficie de suelo permeable presentes en el Jardín “Alexander Pushkin” antes y después de culminadas las obras, esto con la finalidad de contar con información a detalle que permita evaluar el cumplimiento de la normatividad en materia de áreas verdes de la Ciudad (NADF-006-RNAT-2012, que establece los requisitos, criterios, lineamientos y especificaciones técnicas que deben cumplir las autoridades, personas físicas o morales que realicen actividades de fomento, mejoramiento y mantenimiento de áreas verdes en el Distrito Federal).
Para cuantificar las áreas verdes y superficies permeables presentes en el parque, en diferentes periodos de tiempo, se emplearon diversos insumos: un mosaico de imágenes del sensor Quick Bird (2008-2009), fotos aéreas del acervo PAOT (2011), imágenes satelitales de la plataforma Google Earth, el plano base del proyecto de rehabilitación y un mosaico de fotografías, el cual fue obtenido a partir del video tomado durante el vuelo realizado con un vehículo aéreo no tripulado (dron), marca Hermes modelo 403 perteneciente a la Procuraduría (el vuelo se hizo en el mes de octubre del 2016).
Para la obtención de la información generada en el vuelo, se procesó el video obtenido, empleando el software Pix4d versión demo, y con ello se obtuvieron los fotogramas y se generó el mosaico correspondiente. Todas las imágenes seleccionadas se georreferenciaron, con la finalidad de poder comparar las superficies de área verde y suelo permeable presentes para cada año.
Al realizar la comparación de las imágenes antes de ejecutadas las obras de rehabilitación del parque, el plano del proyecto y lo detectado con el mosaico obtenido a partir del vuelo realizado con el dron, se identificaron diferencias significativas que pudieran contravenir la normatividad en materia de áreas verdes de la Ciudad de México.
El uso y aplicaciones de estas tecnologías puede ser de gran utilidad para el monitoreo de diversos proyectos (vialidades, unidades habitaciones, equipamientos, espacios abiertos, etcétera) y así conocer y comparar el estatus de estas áreas antes y después de algún proyecto.

I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
108
ANEXO 1
Fotografía aérea, 2011 (Acervo PAOT) Mosaico, 2016 generado a partir del
Vuelo con un vehículo aéreo no
tripulado

I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
109
SESIÓN 17/5. SALA 3. LOS VEHÍCULOS NO TRIPULADOS (DRONES) Y SUS APLICACIONES EN ÁREAS NATURALES PROTEGIDAS: EL CASO DE LA
RESERVA ECOLÓGICA DEL PEDREGAL DE SAN ÁNGEL (REPSA), UNAM
Dr. Luis Zambrano G. M. en DS. Pedro Camarena B.
Arq. Psj. Saúl Rodríguez P. Reserva Ecológica del Pedregal de San Ángel, CIC- UNAM
El uso de vehículos no tripulados aéreos (drones), con cámaras integradas, han sido una herramienta fundamental en el monitoreo, análisis territorial, definición de cobertura vegetal, uso del suelo, incendios y diversas afectaciones dentro de un área natural protegida.
Este tipo de percepción remota permite visualizar de forma rápida, confiable, en una escala adecuada, de manera muy precisa y aportan información muy relevante para la toma de decisiones en cuanto al manejo, operación y administración de las diferentes áreas que conforman las zonas núcleo y de amortiguamiento de un Área Natural Protegida.
Los equipos comerciales que se usan en la REPSA de la UNAM: DJI Phantom 2, Phantom 4 y S-EVO 800 han demostrado diversas ventajas y desventajas al momento de ser operados en campo. Los cuadracópteros pequeños Phantom 2 y 4 son fáciles de usar y relativamente rápidos de poner en marcha, la duración de las baterías es mayor (prom. 20min.), permiten hacer trazos más largos abarcando mayores áreas de cobertura, a pesar de las ventajas, la calidad de la imagen no es la misma que la de una cámara réflex que puede cargar un dron más robusto; por el contrario el S-EVO 800, es tardado de armar, calibrar y la duración de las baterías es menor (prom. 8 min.) También la carga de las baterías resulta más compleja y lenta, sin embargo la calidad de la imagen es mucho mayor, con mejor resolución y esto permite ver con mejor detalle.
Monitoreo (afectaciones por obras cercanas).-
Nos permite ver a detalle las posibles afectaciones que una obra puede causar en los límites y colindancias con la REPSA.
I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
110
Análisis territorial (SIG).-
Permite hacer un análisis de diferentes zonas del terreno e incorporarlas al sistema de información geográfica, actualizando la información cartográfica de manera continua.
Modelamiento del terreno en 3D.-

I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
111
Esta herramienta nos permite visualizar algunas partes del territorio, que por su compleja topografía a veces resultan inaccesibles.
Definición de cobertura vegetal/comunidades vegetales.-
Nos permite identificar el cambio, presencia o ausencia de comunidades vegetales autóctonas o exóticas cerca o lejos de las colindancias con la reserva.
Uso de suelo (límites y bordes).-
Se identifica con claridad en donde empieza o termina una zona, para poder evaluar la pertinencia de construcción en sus colindancias.
Con esta herramienta fue posible comparar y prever los posibles efectos negativos durante la construcción y adecuación de una zona de producción de plantas en las cercanías de la zona núcleo poniente de la REPSA.

I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
112
Incendios y diversas afectaciones.-
Con esta herramienta es posible determinar en cuestión de horas, el área total afectada por un incendio. Permite evaluar la extensión de los daños y ubicar algunas infraestructuras, caminos, instalaciones que pudieron verse afectadas.
También es posible sobrevolar durante el incendio para posteriormente poder evaluar que tan efectivos fueron los trabajos llevados a cabo para extinguirlo.
Conclusiones
A pesar de la gran ayuda que nos aportan estos equipos, el desarrollo vertiginoso de esta tecnología genera confusión, gastos económicos y problemas en cuanto a la selección de los equipos adecuados para el caso de manejo de un Área Natural Protegida. Se debe contemplar cuál o cuáles son los equipos complementarios para el procesamiento de la información; la vida útil de las baterías sigue siendo un tema no menor debido al costo que tienen y lo delicado de estas piezas. Será de mucha ayuda poder exponer las ventajas y desventajas que presentan los equipos más modernos y cómo resolver algunos de los problemas detectados.
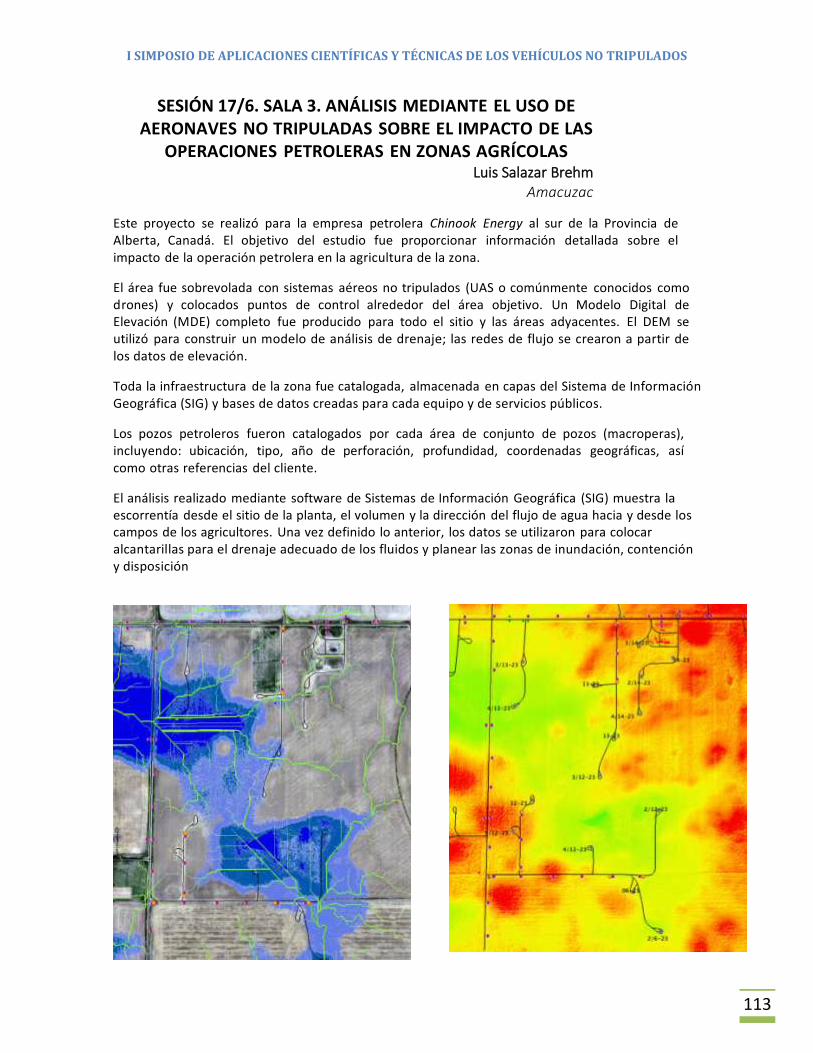
I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
113
SESIÓN 17/6. SALA 3. ANÁLISIS MEDIANTE EL USO DE AERONAVES NO TRIPULADAS SOBRE EL IMPACTO DE LAS
OPERACIONES PETROLERAS EN ZONAS AGRÍCOLAS Luis Salazar Brehm
Amacuzac
Este proyecto se realizó para la empresa petrolera Chinook Energy al sur de la Provincia de Alberta, Canadá. El objetivo del estudio fue proporcionar información detallada sobre el impacto de la operación petrolera en la agricultura de la zona.
El área fue sobrevolada con sistemas aéreos no tripulados (UAS o comúnmente conocidos como drones) y colocados puntos de control alrededor del área objetivo. Un Modelo Digital de Elevación (MDE) completo fue producido para todo el sitio y las áreas adyacentes. El DEM se utilizó para construir un modelo de análisis de drenaje; las redes de flujo se crearon a partir de los datos de elevación.
Toda la infraestructura de la zona fue catalogada, almacenada en capas del Sistema de Información Geográfica (SIG) y bases de datos creadas para cada equipo y de servicios públicos.
Los pozos petroleros fueron catalogados por cada área de conjunto de pozos (macroperas), incluyendo: ubicación, tipo, año de perforación, profundidad, coordenadas geográficas, así como otras referencias del cliente.
El análisis realizado mediante software de Sistemas de Información Geográfica (SIG) muestra la escorrentía desde el sitio de la planta, el volumen y la dirección del flujo de agua hacia y desde los campos de los agricultores. Una vez definido lo anterior, los datos se utilizaron para colocar alcantarillas para el drenaje adecuado de los fluidos y planear las zonas de inundación, contención y disposición
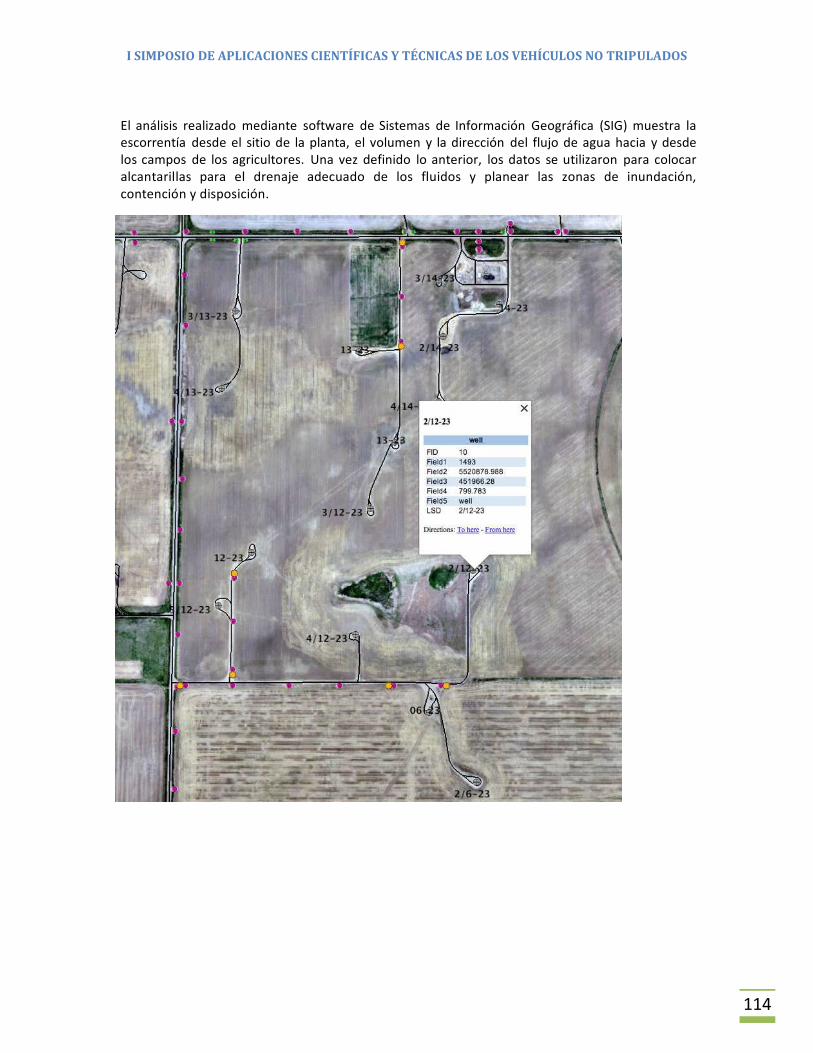
I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
114
El análisis realizado mediante software de Sistemas de Información Geográfica (SIG) muestra la escorrentía desde el sitio de la planta, el volumen y la dirección del flujo de agua hacia y desde los campos de los agricultores. Una vez definido lo anterior, los datos se utilizaron para colocar alcantarillas para el drenaje adecuado de los fluidos y planear las zonas de inundación, contención y disposición.

I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
115
Cenovus Energy:
Este proyecto es parte de una investigación de largo plazo para restauración de la vegetación nativa (pastizales) en las localizaciones de pozos petroleros abandonados.
Mediante el uso de Aviones No Tripulados (UAV o drones) se captaron imágenes (RGB y NIR), las cuales se utilizan para determinar los volúmenes de biomasa en la localización del pozo, zonas adyacentes, zonas no perturbadas, pastizales.
Los datos revelaron que la etapa de regeneración era todavía no cumplir con los niveles de fondo en términos de biomasa y la composición de las especies. Los datos UAV están siendo evaluados en una serie de proyectos junto con la Autoridad Ambiental de la Provincia de Alberta, Canadá (AESRD -Alberta Environment and Sustainable Resource Development), con el fin de determinar cuáles son las métricas de recuperación susceptibles de extraer de las imágenes aéreas, y qué sensores son necesarios para los diferentes criterios (por ejemplo, la cubierta vegetal fraccionada, basura, etc.). Las comparaciones estadísticas se realizaron en un área con pozos petroleros, para evaluar la salud de la vegetación en zonas donde existieron derrames petroleros y compararlo frente a otro sitio donde no existieron derrames.

I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
116
Sesiones 17/7-10 Arqueología / Drones y sociedad Sala 1 Horario: 12:40 – 14:00 17/ 7. 12:40 – 13:00. Cambios en el paisaje urbano a través de aerofotografías históricas oblicuas y tomas obtenidas con drones / Cruz Torres Dulce / FICA 17/8. 13:00 – 13:20. VANT, herramienta para la conservación e investigación en Oxkintok, Yucatán / Guadalupe Zetina Gutiérrez y Luis Raúl Pantoja Díaz / IIA-UNAM e INAHPedro Camarena B.; Saúl Rodríguez P. / Repsa-UNA 17/ 9. 13:20 – 13:40. La aplicación de los vehículos aéreos no tripulados de la arqueología de salvamento en la región de Mérida, Yucatán / Luis R. Pantoja Díaz y Luis J. Venegas de la Torre / INAH-UAY 17/ 10. 13:40 – 14:00. Herramientas para la Conservación Digital del Patrimonio Mundial. Mapeo tridimensional de la Zona de Monumentos Arqueológicos de Xochicalco / Alejandro Boneta y Armandina Monroy / ARD

I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
117
Sesiones 17/7-10 Arqueología / Drones y sociedad Sala 1 Horario: 12:40 – 14:00 SESIÓN 17/7. SALA 1. CAMBIOS EN EL PAISAJE URBANO A TRAVÉS DE AEROFOTOGRAFÍAS HISTÓRICAS OBLICUAS Y TOMAS OBTENIDAS CON DRONES
Armando Peralta Higuera¹ Dulce CruzTorres ²
Luis Alberto Flores Carapia ² Ana María Ruíz Vilá ²
¹ Instituto de Geografía UNAM ² Fundación ICA
Este trabajo presenta al proyecto conjunto entre Fundación ICA y el Instituto de Geografía de la UNAM que reivindica la relevancia de las aerofotografías históricas oblicuas para identificar los cambios en el paisaje urbano. Con apoyo de los acervos de la Compañía Mexicana de Aerofoto ―compuesta por fotografías verticales desde la década de 1930― y tomas obtenidas con drones, se busca obtener ortofotos y modelos 3D de la Ciudad de México, desde la década de 1930 hasta 1980. A su vez, se busca obtener modelos 3D de los volcanes Popocatépetl e Iztaccíhuatl de la década de 1950, e incluso se plantea la posibilidad de hacer series de tiempo de los mismos para realizar análisis geomorfológicos.

I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
118
Se expondrán distintas metodologías para estudiar los cambios históricos del paisaje urbano en intervalos muy significativos de tiempo. A su vez, este trabajo permite hacer relevantes reflexiones sobre las políticas públicas, ocupación del suelo y la especulación inmobiliaria que se ha presentado en el desarrollo de la Ciudad de México.

I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
119
SESIÓN 17/8. SALA 1. VANT, HERRAMIENTA PARA LA CONSERVACIÓN E
INVESTIGACIÓN EN OXKINTOK, YUCATÁN
Guadalupe Zetina Gutiérrez1 Luis Raúl Pantoja Díaz2
1IIA-FFyL UNAM, Proyecto “Conexión Tecnológica” 2Instituto Nacional de Antropología e Historia, Yucatán
[email protected] [email protected]
Las zonas de monumentos arqueológicos son museos al aire libre, y por ende su integración al paisaje y su puesta en valor deben estar siempre a la vanguardia como un espacio didáctico, que permita además de la conservación de los bienes patrimoniales, la transmisión del conocimiento al visitante y al estudioso.
Con el desarrollo de las llamadas “nuevas tecnologías” que incluyen el uso de herramientas digitales y geoespaciales. En este caso con el uso de la fotografía aérea, procedente de drones e integrada a un SIG, es posible la asistencia para entender visualmente el asentamiento como un continuo de información natural y antrópica, y además caracterizar cada una de las partes de ese patrimonio auxiliando en el monitoreo de cada edificio y su estado de conservación.
Esta ponencia se enfoca en mostrar los primeros datos obtenidos con ANT’s (drones) en la zona de monumentos arqueológicos de Oxkintok, en la región Puuc del estado de Yucatán, como un acercamiento a los beneficios que aportan estos equipos, que incluyeron un dron Phantom 2 (DJI) y dron eBee RTK de ala fija (SenseFly) con sensores RGB e infrarrojo cercano. Éste último gestionado a través del proyecto independiente “Conexión Tecnológica”, que enlaza las necesidades de los sitios y proyectos arqueológicos con empresas privadas que donan su tecnología.

I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
120
SESIÓN 17/9. SALA 1. LA APLICACIÓN DE LOS VEHÍCULOS AÉREOS NO TRIPULADOS DE LA ARQUEOLOGÍA DE SALVAMENTO EN LA REGIÓN DE
MÉRIDA, YUCATÁN.
Arqlgo. Luis R. Pantoja Díaz1 Arqlgo. Luis J. Venegas de la Torre2
1 Centro INAH Yucatán 2 Facultad de Arquitectura, Universidad Autónoma de Yucatán
El Proyecto Arqueológico Región de Mérida (PARME) tiene como uno de sus objetivos la recuperación de información arqueológica dentro del espacio urbano y conurbado de la capital del estado de Yucatán, por ello el reconocimiento de la superficie y la prospección arqueológica (como primera fase de un proyecto de investigación) son prioritarias para determinar la factibilidad de una construcción o desarrollo inmobiliario que modifique la superficie y el subsuelo con evidencia cultural. Partiendo de estos objetivos surge la necesidad de contar con un registro adecuado y preciso, que permita identificar la presencia de restos arqueológicos e históricos para determinar las cualidades potenciales de un área para su investigación. Asimismo, durante los procesos de excavación arqueológica se requiere un trabajo de campo rápido, ordenado, limpio y confiable, donde el registro gráfico de los procesos y los detalles juega un papel relevante.
Es por ello que en el presente trabajo se exponen algunos resultados del uso de vehículos aéreos no tripulados dentro de los trabajos de salvamento arqueológico realizados en el municipio de Mérida. Considerando a los drones como una herramienta que permite explotar el potencial de registro gráfico, óptimo en las excavaciones, además de hacer posible la obtención de información cartográfica, fotografías aéreas y ortofotográficas en los sitios arqueológicos intervenidos de la creciente ciudad de Mérida.
I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
121
SESIÓN 17/10. SALA 1. INSPECCIÓN VISUAL DE LÍNEAS DE TRANSMISIÓN Y DISTRIBUCIÓN ELÉCTRICAS USANDO VEHÍCULOS AÉREOS NO TRIPULADOS
Diego Arjona Alejandro Boneta
Miguel Ángel Acevedo Smart Vision Technologies
Se puede definir a una máquina como un conjunto de elementos móviles y fijos cuyo funcionamiento posibilita aprovechar, dirigir, regular o transformar energía o realizar un trabajo con un fin determinado. El conjunto de máquinas que se aplican para un mismo fin se puede denominar como maquinaria. Considerándola en su conjunto, la red de transmisión eléctrica es la maquinaria más extensa y compleja que existe en nuestro país. Sus redes se extienden por todo el territorio nacional y alcanzan al 98% de la población satisfaciendo necesidades residenciales, comerciales e industriales.
Las líneas de transmisión y distribución son elementos fundamentales para la operación del sistema eléctrico. Dependiendo de su construcción, las líneas de conducción de electricidad tienden a ser muy longevas y funcionar durante décadas, pero requieren de mantenimiento para garantizar altos niveles de calidad y continuidad en el servicio. Para cumplir con su cometido, la Comisión Federal de Electricidad cuenta con cerca de 60,000 kilómetros de líneas de transmisión aéreas y cerca de 840,000 kilómetros de líneas de distribución en media tensión.
Este documento está enfocado a plantear el uso de vehículos aéreos no tripulados para funciones de inspección visual, que apoyen en la determinación de un programa de mantenimiento para una red de transmisión o distribución eléctrica.
La mayor parte del sistema eléctrico nacional se constituye de líneas aéreas. La inspección de una línea de transmisión debe considerar sus cimentaciones, la condición física de las estructuras de apoyo, la situación de los aisladores y otros elementos de sujeción, así como los hilos de guarda y los propios conductores.
Para la inspección y mantenimiento de las líneas eléctricas se recurre a plataformas elevadas (para las alturas de distribución), personal con equipo de ascenso que sube por las torres o postes, vehículos robot capaces de moverse sobre los conductores e inclusive el uso de helicópteros. Los equipos más robustos (como es el caso de los helicópteros) pueden permitir tareas de mantenimiento más complicadas, pero el uso de vehículos aéreos no tripulados (drones) para la inspección de las instalaciones puede ofrecer información relevante y precisa a un costo mucho menor, con igual o mayor calidad y reduciendo el riesgo para las personas involucradas en dichos trabajos.
La capacidad de los drones de volar a poca distancia de una línea eléctrica ofrece información difícil o imposible de obtener a través de los métodos utilizados actualmente. También se debe considerar la utilidad de un dron para la inspección de instalaciones en donde el derecho de vía pueda ser accidentado o de difícil acceso.
Los drones pueden ser utilizados con diversos tipos de cámaras o sensores para obtener información sobre diversos elementos de la línea eléctrica. Equipados con una cámara de alta definición permiten observar los elementos estructurales para dictaminar su condición física. Con

I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
122
una cámara termográfica pueden detectar los cambios en la temperatura de los conductores a lo largo de la línea eléctrica. Estos cambios de temperatura incluyen lo que la industria llama comúnmente “puntos calientes”. La presencia de puntos calientes tiene implicaciones sobre las pérdidas de energía en la red y frecuentemente muestran el lugar de algún daño físico a los conductores. Por otro lado, con cámaras UV se puede detectar la presencia de efectos corona, arcos y descargas parciales superficiales dejando al descubierto necesidades de mantenimiento de conductores y equipos eléctricos.
Una vez que se han obtenido los diversos tipos de imágenes se debe proceder a la interpretación de los resultados. Los equipos para analizar esta información y la experiencia de los especialistas en mantenimiento de líneas de transmisión y distribución, deberán dar lugar a un programa de trabajo muy efectivo. El uso de drones se suma a las opciones existentes para el mantenimiento del sistema eléctrico nacional facilitando la inspección del mismo.

I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
123
Sesiones 17/7-10 Estudios costeros Sala 2 Horario: 12:40 – 14:00 17/ 7. 12:40 – 13:00. Vehículos aéreos no tripulados para la adquisición de información geoespacial, aplicados a estudios de dinámica costera en la barra de Sontecomapan, Veracruz, México / Jonatan Omar González Moreno; Miguel Ángel Backhoff Pohls; José Miguel Montoya Rodríguez; Camilo Rendón Valdés / IMT 17/8. 13:00 – 13:20. Uso de Dron e-Bee en estudios relacionados con manejo costero/ Juan Carlos Chávez Comparán y Omar Darío Cervantes Rosas / UCOL 17/ 9. 13:20 – 13:40. Clasificación de coberturas de la playa de Sisal a través de imágenes adquiridas por vehículos no tripulados / Mendoza Molino-Minero-Re Erik; Hevia-Montiel Nidiyare; Ojeda Elena; Mendoza Tonatiuh / AS-IIngen 17/ 10. 13:40 – 14:00. Monitoreo de los cambios morfológicos y de vegetación en una playa arenosa / Luis E. Jiménez Elena Ojeda; David Gracia; Álvaro Quijano, Ernesto Mendoza / IIngen, UNAM

I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
124
Sesiones 17/7-10 Estudios costeros Sala 2 Horario: 12:40 – 14:00
SESIÓN 17/7. SALA 2. VEHÍCULOS AÉREOS NO TRIPULADOS PARA LA ADQUISICIÓN DE INFORMACIÓN GEOESPACIAL, APLICADOS A ESTUDIOS DE
DINÁMICA COSTERA EN LA BARRA DE SONTECOMAPAN, VERACRUZ, MÉXICO
Jonatan Omar González Moreno
Miguel Ángel Backhoff Pohls José Miguel Montoya Rodríguez
Camilo Rendón Valdés Instituto Mexicano del Transporte
[email protected] [email protected]
[email protected] [email protected]
La constante y continua necesidad de reconocimiento, monitoreo, filmación, vigilancia y análisis espacial de las costas a través de los más de 11 mil km de litoral con que cuenta México, para la determinación de la línea de playa, como principal insumo para estudios de Dinámica Costera, es fundamental para el quehacer de la Coordinación de Puertos y Costas del Instituto Mexicano del Transporte (IMT).
Los vehículos aéreos no tripulados suelen ser preferidos para este tipo de misiones que son demasiado "riesgosas, sucias, tardías o peligrosas" en aras de la obtención de información, reduciendo en tiempos y costos a los métodos tradicionales y sirviendo de apoyo al empleo de las imágenes de satélite (IS).
La aplicación de esta tecnología abarcará aquellas lagunas que no son posibles resolver vía IS (resolución espacial y temporal), como pudieran ser el instante de la necesidad de la información, la escala o las condiciones atmosféricas que dificultan la obtención de datos. Además:
Ayudará a reducir en tiempos y costos a los métodos tradicionalmente empleados.
Se evitará la contratación de servicios externos para la obtención de estos insumos.
Se reducirá el riesgo de obtener información (menor empleo de personal). La línea de costa obtenida se comparará con un levantamiento topobatimétrico actual, por lo que se contará cuando menos con tres posiciones de línea de costa, que permitirán realizar un análisis espacio temporal de este parámetro, estableciendo así la dinamica del sitio. Específicamente se calculará la tasa avance-retroceso de la playa durante los años establecidos.

I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
125
El contar con dispositivos de captura de información en formato digital y de alta resolución espacial que permitan fortalecer y ampliar la investigación que se realiza al interior del IMT, incrementando con ello, la cantidad y calidad de sus estudios, hacen que el uso y aplicación de vehículos aéreos no tripulados que apoyen para el empleo de las imágenes de satélite, para poder determinar con éxito la línea de playa en cualquier momento, sea sin duda alguna un gran reto.
Palabras clave: accesibilidad espacial, carretera, área de influencia, modelo digital de elevación.
OBJETIVOS:
Objetivo General:
Evaluar y determinar el potencial de aplicación de vehículos aéreos no tripulados para estudios de Dinámica Costera en la barra de Sontecomapan, Municipio de Catemaco, en el estado de Veracruz, México. Objetivos específicos:
• Identificar y analizar el uso y aplicación de vehículos aéreos no tripulados, como herramienta de apoyo al empleo de las imágenes de satélite para la obtención de información de campo, que mejore y beneficie a los métodos tradicionales, en estudios de Dinámica Costera.
• Demostrar que el empleo de esta tecnología (drones e imágenes de satélite) ayuda a reducir en tiempos y costos el obtener información de campo, en comparación con los métodos tradicionales.
• Demostrar que el poder contar con levantamientos sistemáticos (mayor frecuencia y rapidez) de la línea de costa ayudará a fortalecer y ampliar la investigación que se realiza al interior de la Coordinación de Puertos y Costas del IMT, incrementando con ello, la cantidad y calidad de sus estudios.
HIPÓTESIS:
“En la barra de Sontecomapan, en el estado de eracruz, México, el uso de los vehículos aéreos no tripulados para analizar el comportamiento de la línea de costa reduce tiempo, costos, riesgos y dificultades en el trabajo con respecto a los métodos tradicionales.”

I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
126
SESIÓN 17/8. SALA 2. USO DE DRON E-BEE EN ESTUDIOS RELACIONADOS
CON MANEJO COSTERO
Dr. Juan Carlos Chávez Comparán Dr. Omar Darío Cervantes Rosas
Facultad de Ciencias Marinas Universidad de Colima
[email protected] La aplicación de percepción remota como fotografía aérea e imágenes de satélite en estudios para obtener información de procesos costeros y ecológicos tales como: movimiento de arenas, oleaje, corrientes de retorno, cobertura vegetal y otros parámetros, es una práctica común desde la década de 1960. Ahora el uso de drones permite que dicha información se obtenga de manera inmediata y a –relativamente- bajo costo. Este es el caso de la utilización de dron Ebee (Sensefly) de tecnología suiza, ya que por su alta resolución de imágenes es posible observar con mayor nitidez algunos procesos oceanográficos como los movimientos de arenas en la línea de costa, lo que conlleva a una mejor compresión de la dinámica costera para ser aplicada en la mitigación de la erosión costera. Asimismo, se pueden detectar, a lo largo de la costa, sitios de alto riesgo para bañistas por la prevalencia de corrientes de retorno, que son causantes de incidentes de ahogamiento de usuarios de playa. También se hace posible la observación con mayor nitidez de los atributos de los sistemas costeros como la extensión de las playas y dunas, áreas de cobertura de vegetación halófita como manglares y marismas. Inclusive pueden realizarse observaciones de fauna como cocodrilos y mamíferos marinos. En algunos casos se pueden diferenciar claramente los tipos de sustrato en el fondo de las zonas costeras, como son fondos de arenas, áreas rocosas, mantos de algas y arrecifes de coral. El presente trabajo procura explicar cómo la tecnología innovadora de los drones de alta resolución cartográfica puede ayudar a resolver los problemas de manejo costero para asuntos de ingeniería costera, conservación ecológica, planificación turística, portuaria y urbana de las zonas costeras.

I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
127
SESIÓN 17/9. SALA 2. CLASIFICACIÓN DE COBERTURAS DE LA PLAYA DE SISAL A TRAVÉS DE IMÁGENES ADQUIRIDAS POR VEHÍCULOS NO
TRIPULADOS
Erik Molino-Minero-Re¹ Nidiyare Hevia-Montiel¹
Elena Ojeda² E. Tonatiuh Mendoza³
[email protected] ¹ Instituto de Investigaciones en Matemáticas Aplicadas y en Sistemas – Sede Mérida, UNAM
² CONACYT - Instituto de Ingeniería, UNAM, Sisal, México ³ Instituto de Ingeniería, UNAM, Sisal, México
El concepto de clasificación de imágenes se refiere, en general, a asignar una clase o una categoría a cada uno de los pixeles que conforman una imagen. De esta forma la imagen se convierte en información. Existen distintos métodos computacionales para extraer dicha información, los cuales dependen entre otras cosas, del tipo de imagen que se esté tratando. En el sentido más amplio de estos estudios las imágenes son multiespectrales, lo que significa que la información de cada pixel tiene más de un valor asociado, siendo cada valor una banda espectral. Cada banda representa una porción del espectro electromagnético adquirido por un sensor.
Para poder clasificar un conjunto de datos en un grupo de distintas clases es necesario definir cuál es su relación. Los métodos computacionales pueden se clasificar de dos maneras: a través de métodos supervisados, o bien, a través de algoritmos no supervisados. En el caso de los métodos supervisados, la clasificación utiliza parámetros pre-definidos que sirven como muestra de cada clase y su correspondiente asociación con los datos. De esta forma, los datos se comparan con los parámetros y se puede conocer a qué clase corresponden. Los métodos no supervisados, por otra parte, son aquellos que buscan patrones en los datos en función de sus propias características. En este caso no hay patrones de referencia que guíen la clasificación. En este trabajo se propone una metodología de clasificación supervisada orientada a identificar coberturas a partir de imágenes adquiridas por vehículos no tripulados, también conocidos como drones. El estudio pretende discernir entre las zonas de la playa sin vegetación, con vegetación transitoria y aquellas cubiertas por una capa de vegetación más desarrollada y permanente. Esta diferencia es importante porque la vegetación funciona como elemento de estabilización sedimentaria en la playa dentro de su propio equilibrio dinámico (Maun, 2009). La vegetación costera crece a través de una transición zonal desde la línea de costa hacia el interior. En la zona más cercana al mar la vegetación frecuentemente presenta etapas iniciales de colonización, resilientes a la salinidad. Por el contrario, tierra adentro la influencia marina es menor, y por lo tanto la salinidad disminuye, el suelo está más desarrollado y el establecimiento de especies de tallas más grandes es frecuente (Moreno-Casasola, 1982).
I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
128
El área de estudio corresponde a la playa de Sisal, situada al noroeste del estado de Yucatán, con un régimen de marea dominante tipo mixto y un régimen de oleaje de condiciones energéticas bajas que pueden verse alteradas por el oleaje causado por ciclones tropicales que, aunque poco frecuentes, pueden ocasionar efectos considerables en la playa. Se han tomado imágenes usando dos drones, un Aibotix de Leica con una cámara Nikon A1 de 20 mega pixeles y un Phantom 4 de DJI, con una cámara de 12 mega pixeles. Las imágenes obtenidas se georreferencian a partir de puntos de control temporales instalados en la playa para cada vuelo y con posiciones conocidas y, finalmente, el área se clasifica usando una clasificación supervisada usando el método de próximos vecinos.
Agradecimientos Se agradece al CONACYT por los apoyos otorgados de los proyectos CONACYT INFR-2014-01-225561, 252354 y 271544, así como al Instituto de Ingeniería de la UNAM a través de los proyectos internos del Instituto de Ingeniería 5341 “Implementación de estación de video monitorización para la obtención de indicadores de vulnerabilidad a la erosión”, y el proyecto 6602 “Dinámica temporal de la vegetación de playas y dunas costeras y su participación como elemento de estabilización en la morfología del frente de playa”. Referencias Moreno-Casasola P. 1982. Ecología de la vegetación de dunas costeras: factores físicos. Biotica 7: 577-602. Maun MA. 2009. The Biology of Coastal Sand Dunes. Oxford University Press. Published in the United States by Oxford University Press Inc., New York.

I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
129
SESIÓN 17/10. SALA 2. MONITOREO DE LOS CAMBIOS MORFOLÓGICOS Y DE VEGETACIÓN EN UNA PLAYA ARENOSA
E.T. Mendoza1,3 Elena Ojeda2,3
L. Esteban4, A. Quijano4 A. David Gracia3
1 Instituto de Ingeniería, UNAM, Sisal 2 CONACYT - Instituto de Ingeniería, UNAM, Sisal
3 Laboratorio Nacional de Resiliencia Costera, Laboratorios Nacionales CONACYT 4 AXIS Ingeniería y Medio Ambiente, Mérida
La zona costera y, en particular las playas arenosas, son un medio altamente dinámico y complejo sujeto a la acción de diferentes agentes forzantes como el viento, las mareas o el oleaje. Esta zona responde a los cambios espaciales y temporales de las condiciones energéticas, así como también a la velocidad con la que se producen estos cambios. Su complejidad aumenta al tener en cuenta el gran número de intervenciones humanas (rellenos, dragados, construcción de puertos, viviendas, estructuras de protección, por señalar algunos de ellos) que alteran el equilibrio dinámico del sistema y los efectos del cambio climático que sugieren un incremento del nivel del mar, y de la altura del oleaje y la intensidad de las tormentas aumentando la vulnerabilidad y el riesgo en la zona costera (Komar, 2011; Nicholls et al., 2010).
Esta condición de dinamismo complica la obtención de datos de la zona costera con la escala espacio-temporal y la resolución necesarias para comprender el comportamiento de la playa. En los últimos años, el uso combinado del GPS y las imágenes obtenidas mediante vehículos aéreos no tripulados ha permitido hacer un seguimiento de grandes extensiones de terreno de una forma rápida y precisa, haciendo que sus aplicaciones para el estudio de la zona costera sean cada vez más desarrolladas y diversas (Turner et al., 2016).
En esta contribución se presentarán dos aplicaciones particulares del estudio de la dinámica de la playa emergida usando vehículos aéreos no tripulados: i) los resultados preliminares del monitoreo del volumen de arena presente en la playa emergida y la duna costera y ii) los resultados preliminares del estudio de la variación de la posición de la línea de costa.
El área de estudio corresponde a la zona oeste de la playa de Sisal, situada al noroeste del estado de Yucatán. El régimen de oleaje para esta zona es de condiciones energéticas bajas, con una altura significante media de 0.7-0.8 m (Appendini et al., 2013). La topografía de la región está caracterizada por una playa ancha (> 20m) con una zona de dunas bajas y vegetadas en la parte trasera de la playa.
Para la ejecución de los trabajos se han usado dos drones de múltiples rotores: el Aibotix, de la marca Leica con una cámara Nikon A1 de 20 mega pixeles y el Phantom 4 de la marca DJI, con una cámara de 12 mega pixeles. Las imágenes obtenidas mensualmente se georreferencian a partir de puntos de control temporales instalados en la playa para cada vuelo y con posiciones conocidas.
El reto principal de estas aplicaciones es conseguir modelos digitales del terreno con la suficiente resolución espacial como para detectar pequeños cambios en la topografía de la playa. Además, para el estudio de los cambios en el volumen de sedimento presente en la playa emergida y la

I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
130
duna costera, se pretende poder obtener cambios en las dimensiones de la playa en las zonas cubiertas por la vegetación.
Agradecimientos
Se agradece al CONACYT por los apoyos otorgados de los proyectos CONACYT INFR-2014-01-225561, 252354 y 271544, así como al Instituto de Ingeniería de la UNAM a través de los proyectos internos del Instituto de Ingeniería 5341 “Implementación de estación de video monitorización para la obtención de indicadores de vulnerabilidad a la erosión”, y el proyecto 6602 “Dinámica temporal de la vegetación de playas y dunas costeras y su participación como elemento de estabilización en la morfología del frente de playa”.
Referencias
Appendini, C. M., Torres-Freyermuth, A., Oropeza, F., Salles, P., López, J., & Mendoza, E. T. (2013). Wave modeling performance in the Gulf of Mexico and Western Caribbean: wind reanalyses assessment. Applied Ocean Research, 39, 20-30.
Komar, P.D. (2011) 3.11 - Coastal Erosion Processes and Impacts: The Consequences of Earth’s Changing Climate and Human Modifications of the Environment, In: Treatise on Estuarine and Coastal Science, Academic Press, Waltham, 2011, Pages 285-308.
Nicholls, R. J., & Cazenave, A. (2010). Sea-level rise and its impact on coastal zones. Science, 328(5985), 1517-1520.
Turner, I.L., Harley, M.D., y Drummond, C.D. (2016). UAVs for coastal surveying. Coastal Engineering, 114, 19-24.

I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
131
Sesiones 17/7-10 Hidrología, Oceanografía y Limnología Sala 3 Horario: 12:40 – 14:00 17/ 7. 12:40 – 13:00. Caracterización del paisaje sumergido del Área Natural Protegida: Parque Nacional Huatulco / Alejandro Cruz García y Eduardo J. Ramírez Chávez / SIGALT-UMAR 17/8. 13:00 – 13:20. Inserción de RPAS en la Investigación Oceanográfica / Jorge Luis Hernández Toral; Jorge Luis Hernández Aguilera, Virgilio Arenas-Fuentes; David Alberto Salas-De-León; Rogelio Lozano Leal y Esmeralda Maravilla Santiago / CINVESTAV-UV- IPN 17/ 9. 13:20 – 13:40. Estructura del paisaje sumergido del Parque Nacional Huatulco, Oaxaca, mediante percepción remota / Williams-Jara G. M.; Ramírez-Chávez E. J.; Martínez-Flores G. / IPN-UMAR 17/ 10. 13:40 – 14:00. El uso de vehículos aéreos no tripulados y sensores remotos en el estudio de lagos urbanos en México / R. Aguirre-Gómez, O. Salmerón-García, G. Gómez-Rodríguez y A. Peralta-Higuera / IGg-UNAM
I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
132
Sesiones 17/7-10 Hidrología, Oceanografía y Limnología Sala 3 Horario: 12:40 – 14:00
SESIÓN 17/7. SALA 3. CARACTERIZACIÓN DEL PAISAJE SUMERGIDO DEL ÁREA NATURAL PROTEGIDA: PARQUE NACIONAL HUATULCO
Alejandro Cruz García¹
Eduardo J. Ramírez Chávez² ¹ Sistemas de Información Geográfica Alternativo, SIGALT
² Departamento de Ecología, Universidad del Mar, Campus Puerto Ángel, Oaxaca El hombre siempre ha querido explorar, conocer y representar los lugares donde vive, para este fin ha utilizado la geografía, a través de sistemas de red, análisis de flujo de datos, el conocimiento de la organización sociopolítica del territorio, los factores económico y la incorporación de la informática (Gomarasca 2009); dio paso a una disciplina la cual permitiera abordar desde la realidad espacio-temporal las relaciones sistemáticas de los ecosistemas por medio de la información geográfica y el análisis espacial. A principios de los años 80 en la Universidad de Larval, en Canadá, fue creado el término geomática, el cual se define como: “Un enfoque integrado multidisciplinario sistémico, para la selección de instrumentos y técnicas apropiadas para modelar, analizar recuperar, transformar, visualizar y distribuir datos espaciales georreferenciados, provenientes de diferentes fuentes con características precisas y en un formato digital”. Para este fin, la geomática se constituye de técnicas o disciplinas como: ciencias computacionales, geodesia, cartografía, fotogrametría, percepción remota, sistemas de posicionamiento global, sistemas de información geográfica, entre otras (Gomarasca 2009). Dado el surgimiento de nuevas tecnologías, se abren inmensas posibilidades de aplicación en el campo de la investigación; uno de ellos es la generación de cartografía de alta resolución y a nivel local mediante vehículos aéreos no tripulados (VANT), los cuales pueden ser utilizados como insumo para la realización de estudios pertinentes para la ecología del paisaje en el medio marino tales como: caracterización de fondo marino, análisis de elementos estructurales y funcionales del paisaje, análisis de fragmentación, entre otros. En 1998, Bello Pineda & Liceaga-Correa propusieron un sistema de clasificación de tipos de fondo en el Parque Nacional Arrecife Alacranes compatible con imágenes Landsat TM, para posteriormente Ortiz-Lozano y Colaboradores (2009) realizar una propuesta de zonificación del Parque Nacional Sistema Arrecifal Veracruzano (PNSAV), haciendo uso de un Dirigible Zeppelin y utilizando el sistema de clasificación antes mencionado. Partiendo de los antecedentes antes descritos, surgió el interés de realizar un estudio de caracterización mediante el uso de imágenes aéreas obtenidas por VANT y datos in situ tomando como caso de estudio la zona sumergida del Parque Nacional Huatulco.

I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
133
El Parque Nacional Huatulco (PNH) se localiza en la costa de Oaxaca dentro del municipio de Santa María de Huatulco, entre las coordenadas geográ cas 15°39 12 y 15°4 10 de la tud Norte y 96°06 30 y 96°15 00 de longitud Oeste. Cuenta con una superficie delimitada por una poligonal de 11,890 ha de las cuales 5,516 ha pertenecen a la zona marina; dicha zona se encuentra conformada por cinco de las nueve bahías principales de Huatulco: San Agustín, Chachacual, Cacaluta, Maguey y Órgano (CONABIO, 2003). Biológicamente el PNH garantiza la protección y vida continua a recursos de importancia biológica, entre los que destacan las comunidades coralinas representativas del Pacífico sur, tortugas marinas, delfines, caracol púrpura y una variedad de especies de peces que se están deteriorando por las actividades pesqueras y turísticas que se realizan en el lugar de forma desordenada. Para el desarrollo de la cartografía de hábitats bénticos se utilizó un vehículo aéreo no tripulado DRONE (VANT) o Unmanned Aircraft Vehicle (UAV por sus siglas en inglés) de la marca DJI modelo Phantom 2 con sistema autopiloto NAZA-V2, equipado con un estabilizador de cámara Tarot 2D y un Módulo 2.4g Data Link modelo LK24-BT, éste último nos permite crear un puente de enlace entre el drone y un iPad cargada con el Software Ground Station, la función del software fue trazar rutas en forma de S respetando la altura media de 80 metros tomando como base el punto de despegue y una velocidad de desplazamiento de 7m/s, debido a que uno de los requerimientos para poder trabajar las imágenes es que deben tener un sobrelape de 70% frontal y 60% lateral(Pix4D, 2015). Se adaptó al fuselaje del drone un GPS Garmin modelo fénix de ±5 m de error, cuya función es el registro del recorrido de vuelo con checkpoint cada cinco segundos siendo sincronizado con la cámara fotográfica, GoPro Hero 3+ Black edition (Dimensiones del sensor 6.6 [mm] x4.95 [mm]) tomando fotografías cada cinco segundos con resolución de siete mega-píxeles y un campo de visión medio. En cada localidad, aunado a la toma de fotografía aérea se realizó mediante la técnica “checkpoint” (Green et al. 2000) una inspección visual mediante buceo libre con la finalidad de obtener las “semillas”, que fueron utilizados para obtener la firma espectral y valores de referencia para la clasificación supervisada. Los datos obtenidos en campo se procesaron en el programa Pix4Dmapper Pro (versión de prueba) y Agisoft PhotoScanPro, que son softwares cartográficos, fotogramétricos y de modelado 3D generando el modelo digital de elevación (MDE) y una imagen georreferenciada (Ortomosaico), la cual fue utilizada para la generación de mapas temáticos por cada zona mediante el software ArcGis 10.2. Resultados Preliminares Como resultados preliminares se obtuvieron sets de fotografías por cada bahía (cuadro 1), las cuales fueron depuradas y procesadas para obtener los ortomosaicos (figura 1) que fueron utilizados junto con las semillas para obtener los mapas temáticos (figura 2).

I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
134
Cuadro 1: presentación de datos por bahía.
Bahía Fotografías Totales
Fotografías Procesadas
Semillas Condiciones climáticas
Bahía
Cacaluta
695 Fotografías
546 Fotografías
166 puntos
Viento =12.8 km/h
temperatura = 33.7
ºC
Visibilidad = buena
Bahía Chachacual
348 Fotografías
233 Fotografías
198 puntos
Viento = 6.3 km/h
Temperatura 28 ºC
Visibilidad = buena
Bahía el Órgano
286 Fotografías
156 Fotografías
104 puntos
Viento 5.4 km/h
Temperatura = 29.9 ºC
Visibilidad = buena
Bahía Maguey
293 Fotografías
137 Fotografías
129 puntos
Viento = 6.5 km/h
Temperatura =
29.7 ºC
visibilidad= buena
Bahía San Agustín
393 Fotografías
216 Fotografías
293 puntos
Viento = 3.7 km/h
Temperatura = 30.7 ºC
visbilidad = buena

I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
135
Figura 1. Ortomosaicos obtenidos: a) Cacaluta, b) Órgano, c) Chachacua, d) Maguey y e) Violín.

I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
136
Figura 2. Clasificación supervisada: a) Cacaluta, b) Órgano, c) Chachacua, d) Maguey y e) Violín.
Los resultados antes presentados son una primera aproximación para posteriormente realizar los análisis pertinentes para identificar los elementos paisajísticos presentes en la zona; así mismo, generar las matrices de confusión que nos servirán para dar la validez en la implementación de este método como herramienta de muestreo para trabajos subsecuentes.
Bibliografía
Bello Pineda J. & M.A Liceaga-Correa. 1998. Propuesta de un sistema de clasificación para los tipos de fondo del Parque Nacional Arrecife Alacranes compatible con una imagen Landsat TM. GCFI: 50 191-205pp.
I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
137
CONANP. 2003. Programa de Manejo: Parque Nacional Huatulco. Comisión Nacional de Áreas Naturas Protegidas, México, 209 pp.
Gomarasca, M.A. 2009. Basics of Geomatics. Springer. New York. 698 p.
Green, E. P., Mumby, P. J., Edwards, A. J. and Clark, C. D.: 2000, ‘Remote sensing handbook for tropical coastal management’, Coastal management sourcebooks 3, UNESCO, Paris.
Pix4d. 2015. Manual Pix4d Mapper 2.2. Lausanne, Swizerland 313 pp.

I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
138
SESIÓN 17/8. SALA 3. INSERCIÓN DE RPAS EN LA INVESTIGACIÓN OCEANOGRÁFICA
Jorge Luis Hernández-Toral¹
Jorge Luis Hernández-Aguilera² Virgilio Arenas-Fuentes³
David Alberto Salas-de-L ⁴ R g L L ⁵
Esm M v S t g ⁶ ¹UMI LAFMIA 3175 at CINVESTAV-IPN,
²Estudio y Conservación de la Naturaleza, A.C. ³Instituto de Ciencias Marinas y Pesquería de la Universidad Veracruzana
⁴Instituto de Ciencias del Mar y Limnología de la UNAM ⁵UTC-HEUDIASyC, Centre de Recherches de Royallieu, France
⁶Posgrado Escuela Superior de Comercio y Administración, Unidad Santo Tomás [email protected]
Introducción El gran incremento de los diversos tipos de vehículos aéreos no tripulados, comúnmente conocidos como Drones o Sistemas de Aeronave Pilotada a Distancia (RPAS, por sus siglas en Inglés) como se le ha asignado el nombre en la DGAC, ha sido de gran impulso para el desarrollo de nuevas técnicas de investigación o incremento de la productividad en diversas áreas de estudio, dentro de éstas se encuentra la investigación oceanográfica. Teniendo como principal ejemplo la National Oceanic and Atmospheric Administration (NOAA), quien desde el 2012 emplea este tipo de vehículos para los diferentes proyectos que lleva a cabo. Siendo uno de sus principales objetivos el monitoreo de diversas especies y la detección del cambio climático en diferentes tipos de sistemas ambientales. Teniendo este contexto, desde hace tres años Estudio y Conservación con la Naturaleza, A.C., ha empleado RPAS como apoyo en los diversos trabajos de campo en los que éstos se han podido introducir y/o colaborar. Contenido Como ejemplo se especifican dos diferentes trabajos de los que ha sido participe un RPAS.
Reconstrucción tridimensional y mapeo de arrecifes. Para estos tipos de proyectos se han empleado dos diferentes tipos de RPAS, un multirotor o cuadricóptero Inspire 1 (Imagen 1) y un avión prototipo desarrollado por el Centro de Investigación y Estudios Avanzados, del Instituto Politécnico Nacional (CINVESTAV), en el laboratorio UMI-LAFMIA (Imagen 2).
Imagen 1. Cuadricóptero Inspire 1. Imagen 2. Planeador prototipo.

I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
139
Siendo cada uno de ellos útil para diferentes propósitos; en primera instancia, el
cuadricóptero es capaz de tomar fotografías estáticas, es decir, éste puede permanecer en un
punto en el que se quiera detallar la representación tridimensional o simplemente tomar una
fotografía puntual en particular de algún objeto de interés, siendo su principal limitante el tiempo
de vuelo que éste posee.
Imagen 3. Fotografía aérea del arrecife e isla Verde, Veracruz, Ver.
Por otro lado, con el propósito de superar la limitante expuesta es preferible emplear un avión, ya
que éste puede volar por un tiempo más prolongado y con ello cubrir una mayor superficie,
teniendo como principal limitante en este caso el impedimento de que no puede realizar
fotografías puntuales de un objeto de interés.
Por lo expuesto anteriormente son usados ambos equipos, ya que éstos se pueden complementar
para llevar a cabo un trabajo asignado.
Una vez tomadas las diferentes fotografías del área de interés, éstas son cargadas en un programa
que aprovecha la información almacenada en cada archivo de fotografía tanto de posición
geográfica, altura, así como orientación para generar un mosaico bidimensional o tridimensional,
el cual está georreferenciado. El resultado de este proceso se puede apreciar en la siguiente
imagen.

I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
140
Imagen 4. Reconstrucción tridimensional de la playa.
Siendo este tipo de reconstrucción de gran utilidad, para la evaluación de la línea de costa o la
identificación de un sistema arrecifal.
Imagen 5. Modificación de la línea de playa e
identificación de una cresta arrecifal al norte del
puerto de Veracruz, Ver.
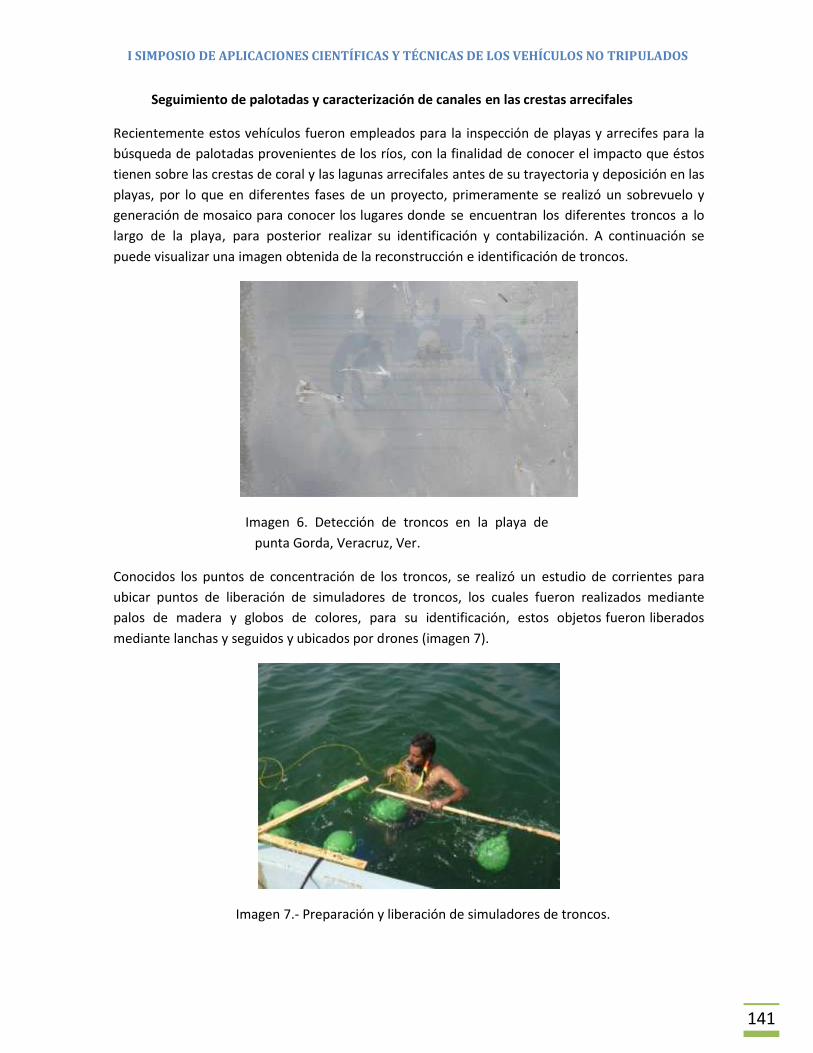
I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
141
Seguimiento de palotadas y caracterización de canales en las crestas arrecifales
Recientemente estos vehículos fueron empleados para la inspección de playas y arrecifes para la
búsqueda de palotadas provenientes de los ríos, con la finalidad de conocer el impacto que éstos
tienen sobre las crestas de coral y las lagunas arrecifales antes de su trayectoria y deposición en las
playas, por lo que en diferentes fases de un proyecto, primeramente se realizó un sobrevuelo y
generación de mosaico para conocer los lugares donde se encuentran los diferentes troncos a lo
largo de la playa, para posterior realizar su identificación y contabilización. A continuación se
puede visualizar una imagen obtenida de la reconstrucción e identificación de troncos.
Imagen 6. Detección de troncos en la playa de
punta Gorda, Veracruz, Ver.
Conocidos los puntos de concentración de los troncos, se realizó un estudio de corrientes para
ubicar puntos de liberación de simuladores de troncos, los cuales fueron realizados mediante
palos de madera y globos de colores, para su identificación, estos objetos fueron liberados
mediante lanchas y seguidos y ubicados por drones (imagen 7).
Imagen 7.- Preparación y liberación de simuladores de troncos.
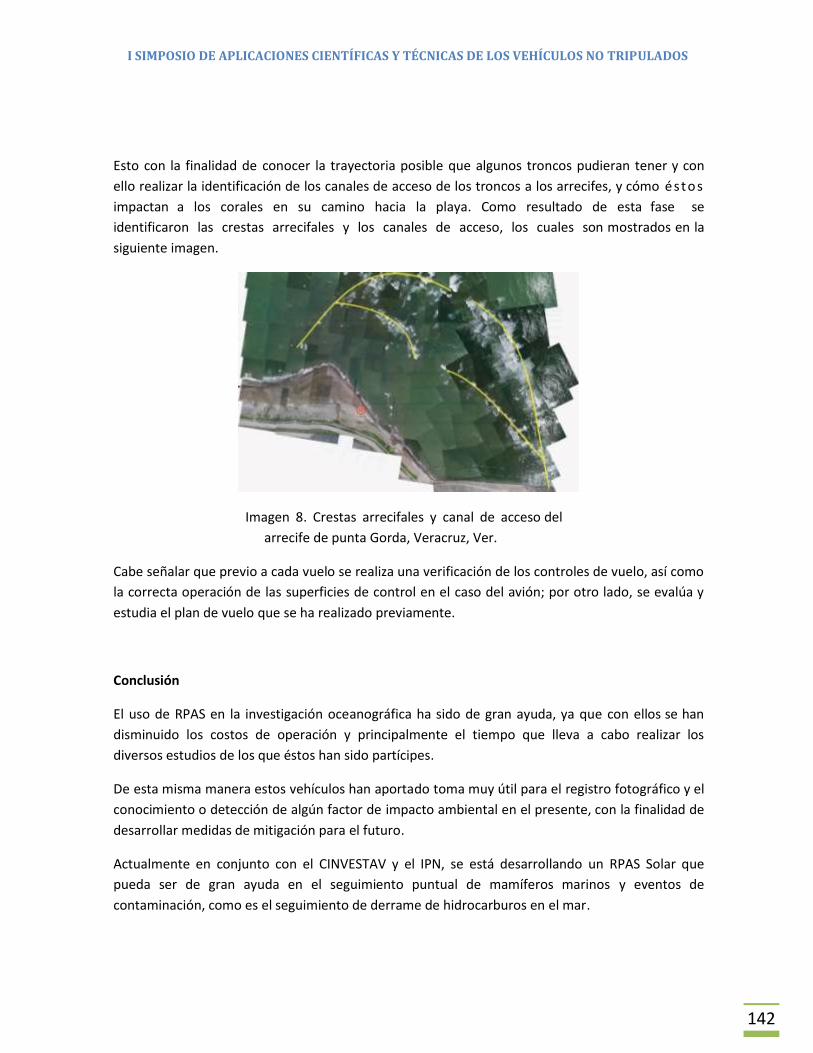
I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
142
Esto con la finalidad de conocer la trayectoria posible que algunos troncos pudieran tener y con
ello realizar la identificación de los canales de acceso de los troncos a los arrecifes, y cómo éstos
impactan a los corales en su camino hacia la playa. Como resultado de esta fase se
identificaron las crestas arrecifales y los canales de acceso, los cuales son mostrados en la
siguiente imagen.
Imagen 8. Crestas arrecifales y canal de acceso del
arrecife de punta Gorda, Veracruz, Ver.
Cabe señalar que previo a cada vuelo se realiza una verificación de los controles de vuelo, así como
la correcta operación de las superficies de control en el caso del avión; por otro lado, se evalúa y
estudia el plan de vuelo que se ha realizado previamente.
Conclusión
El uso de RPAS en la investigación oceanográfica ha sido de gran ayuda, ya que con ellos se han
disminuido los costos de operación y principalmente el tiempo que lleva a cabo realizar los
diversos estudios de los que éstos han sido partícipes.
De esta misma manera estos vehículos han aportado toma muy útil para el registro fotográfico y el
conocimiento o detección de algún factor de impacto ambiental en el presente, con la finalidad de
desarrollar medidas de mitigación para el futuro.
Actualmente en conjunto con el CINVESTAV y el IPN, se está desarrollando un RPAS Solar que
pueda ser de gran ayuda en el seguimiento puntual de mamíferos marinos y eventos de
contaminación, como es el seguimiento de derrame de hidrocarburos en el mar.

I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
143
SESIÓN 17/9. SALA3. ESTRUCTURA DEL PAISAJE SUMERGIDO DEL PARQUE NACIONAL HUATULCO, OAXACA, MEDIANTE PERCEPCIÓN REMOTA
Williams-Jara G. M.1
Ramírez-Chávez E. J.2 Martínez-Flores G. 3
1 Departamento de Oceanología, Centro Interdisciplinario de Ciencias Marinas, IPN 2 Laboratorio de Sistemas de Información Geográfica y Percepción Remota, Universidad del Mar
3 Departamento de Oceanología, Centro Interdisciplinario de Ciencias del Marinas, IPN El estudio del paisaje es una herramienta útil para cuantificar la estructura de los ecosistemas, la cual es dinámica y continuamente está siendo transformada por procesos tales como la fragmentación. El Parque Nacional Huatulco (PNH) posee ecosistemas prioritarios para la conservación, como lo son las selvas bajas caducifolias, manglares y arrecifes de coral; sin embargo, la estructura del paisaje marino aún no está caracterizada. En el presente trabajo se utilizan fotografías aéreas obtenidas con vehículos aéreos no tripulados durante el 2015, para caracterizar la estructura espacial del paisaje sumergido somero del PNH mediante sistemas de información geográfica y percepción remota.
Adicionalmente, se obtuvieron datos de campo mediante buceo libre utilizando la técnica check-point, para generar sitios de entrenamiento (semillas) georreferenciados de los tipos de cobertura más representativos (coral, roca y arena). Las semillas fueron almacenadas en formato shape mediante el software QGIS. A las fotografías aéreas se les aplicó un proceso fotogramétrico con el software Pix4Dmapper Pro, generando cinco ortofotos, una de cada bahía del polígono del parque. A partir las ortofotos y las semillas, realizamos la clasificación supervisada de cada una de las bahías con el software TerrSet. Posteriormente, con el programa FRAGSTATS se calcularon las métricas del paisaje para analizar su composición (referida a las características asociadas con la variedad y abundancia de tipos de parches dentro del paisaje) y la configuración espacial (referida al arreglo específico de los elementos espaciales al interior de cada clase). Se diagnosticó el grado de fragmentación y generó la cartografía del paisaje sumergido somero de las bahías del PNH.

I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
144
SESIÓN 17/10. SALA 3. EL USO VEHÍCULOS AÉREOS NO TRIPULADOS Y SENSORES REMOTOS EN EL ESTUDIO DE LAGOS URBANOS EN MÉXICO
Raúl Aguirre-Gómez
Olivia Salmerón-García Gabriela Gómez-Rodríguez
Armando Peralta-Higuera Instituto de Geografía, UNAM
El uso de vehículos aéreos no tripulados (UAVs, por sus siglas en inglés) o drones en estudios fotogramétricos y de percepción remota va en aumento debido al progreso tecnológico en la miniaturización de sensores, en su portabilidad y fácil control. Las mediciones in situ proporcionan información detallada de los objetos en la superficie terrestre, mientras con la vigilancia aérea es posible detectar cambios temporales en su apariencia. Así, la combinación de sensores remotos in situ y drones tiene un gran potencial en el análisis del ambiente urbano en general, y de pequeños cuerpos de agua en particular. La eutrofización de lagos urbanos por factores antropogénicos puede permitir el crecimiento incontrolado de cianobacterias tóxicas, dando como resultado florecimientos de algas nocivas y, en consecuencia, serios impactos tanto económicos como de salud pública. El objetivo de este trabajo es mostrar el potencial del uso combinado de datos in situ y los obtenidos mediante cámaras fotográficas montadas en drones, para analizar la variación espacio-temporal de la presencia y extensión de florecimientos de cianobacterias en los lagos de Chapultepec. Se realizaron cinco muestreos en los lagos de la 1era y 2da sección de Chapultepec (abril, mayo, julio, octubre 2015 y enero de 2016). Se tomaron lecturas radiométricas en siete puntos de muestreo en ambos lagos. Los vuelos del UAV se realizaron en octubre 2015 y enero de 2016. Los datos radiométricos fueron procesados mediante el análisis de derivadas. Simultáneamente, se llevó un estudio de calidad del agua y de identificación taxonómica (FES-Iztacala). Los resultados mostraron que la mayoría de los sitios de muestreo tienen una respuesta espectral similar. El análisis espectral por derivadas muestra un pico de reflectancia característico entre los 530 y 550 nm, correspondiente a la región verde del espectro electromagnético y que señala la presencia de la clorofila a. Asimismo, mediante este análisis, se encuentra un pico de absorción conspicuo a los 619 nm, característico de la cianobacterias Mycrocystis aeruginosa, el cual es el grupo dominante en estos cuerpos de agua. A partir de esto se generaron mapas temáticos de reflectancia alrededor de los 550 nm y de absorción a los 619 nm para cada uno de los lagos analizados. Las fotografías tomadas con los UAV fueron georreferenciadas e insertadas para comparar con estos mapas.

I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
145
Para el lago de Chapultepec de la 1era
sección, los mapas fueron producidos para el pico de reflectancia de la clorofila-a a los 544 nm, y a los 619 nm para el pico de absorción de la ficocianina, biomarcador de Mycrocystis. Para el lago de Chapultepec 2da
sección, se crearon mapas de reflectancia de clorofila-a a los 531 nm y de absorción de ficocianina a los 619 nm.
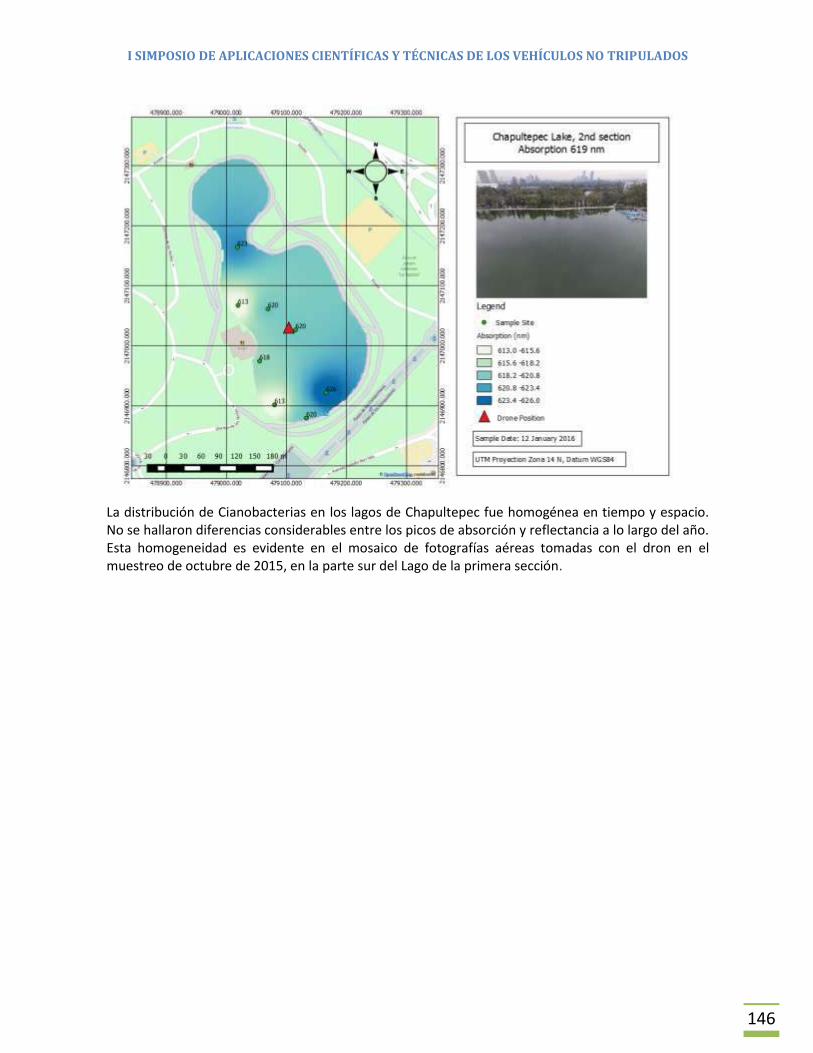
I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
146
La distribución de Cianobacterias en los lagos de Chapultepec fue homogénea en tiempo y espacio. No se hallaron diferencias considerables entre los picos de absorción y reflectancia a lo largo del año. Esta homogeneidad es evidente en el mosaico de fotografías aéreas tomadas con el dron en el muestreo de octubre de 2015, en la parte sur del Lago de la primera sección.

I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
147

I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
148
Sesiones 17/11-13 Ecosistemas y ambiente Sala 1 Horario: 15:20 – 16:20 17/ 11. 15:20 – 15:40. Caracterización del paisaje sumergido del Área Natural Protegida: Parque Nacional Huatulco / Alejandro Cruz García y Eduardo J. Ramírez Chávez / SIGALT-UMAR 17/12. 15:40 – 16:00. Inserción de RPAS en la Investigación Oceanográfica / Jorge Luis Hernández Toral; Jorge Luis Hernández Aguilera, Virgilio Arenas-Fuentes; David Alberto Salas-De-León; Rogelio Lozano Leal y Esmeralda Maravilla Santiago / CINVESTAV-UV- IPN 17/ 13. 16:00 – 16:20. Estructura del paisaje sumergido del Parque Nacional Huatulco, Oaxaca, mediante percepción remota / Williams-Jara G. M.; Ramírez-Chávez E. J.; Martínez-Flores G. / IPN-UMAR

I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
149
Sesiones 17/11-13 Ecosistemas y ambiente Sala 1 Horario: 15:20 – 16:20
SESIÓN 17/11. SALA 1. CARACTERIZACIÓN DE UNIDADES GEOECOLÓGICAS (UNIDADES LOCALES DEL PAISAJE) Y HUMEDALES EN LA MICROCUENCA
ARROYO SANTIAGO
Tlehticmati Geolab A.C. Biol. Luis Samayoa Navarrete
[email protected] [email protected]
O b j e t i v o Destacar el empleo de tecnologías de vehículos autónomos no tripulados (VANT) en el estudio de las características ambientales de humedales –agua, suelo, vegetación y clima–, los cuales están contextualizados dentro de la delimitación de una microcuenca. Por tanto, se pretende caracterizar unidades geoecológicas. Localización geográfica del área de estudio La microcuenca Arroyo Santiago se sitúa en la parte sur de la ciudad de México, dentro de la sierra del Chichinautzin, entre las coordenadas 485991.722, 2129647.502 y 482934.277, 2113941.894 latitud norte y las coordenadas -99.22045, 19.15795; 476819.389, 2118318.867 y -99.10261, 19.15543; 489210.084, 2118029.214 longitud oeste, es afluente de la Subcuenca Lago Texcoco y Zumpango.

I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
150
La microcuenca se encuentra en la provincia fisiográfica del Eje Neovolcánico, en específico de la subprovincia fisiográfica Lagos y Volcanes de Anáhuac, las topoformas presentes son Sierras. El tipo de suelo en su mayoría es de tipo andosol. El tipo de clima presente en la parte alta de la microcuenca es C(w2), templado, subhúmedo, temperatura media anual entre 12°C y 18°C, temperatura del mes más frío entre -3°C y 18°C y temperatura del mes más caliente bajo 22°C.El clima es de tipo Cb’(w2) semifrío, subhúmedo con verano fresco largo, temperatura media anual entre 5°C y 12°C, temperatura del mes más frío entre -3°C y 18°C, temperatura del mes más caliente bajo 22°C. A lo largo de la microcuenca se encuentra vegetación inducida con presencia de franjas de Bosque de Coníferas y Bosque de Encino en la parte suroeste y sureste con algunos relictos en la parte alta. La precipitación en el mes más seco menor de 40 mm; lluvias de verano y porcentaje de lluvia invernal del 5 al 10.2% del total anual. Insumos Archivos formato vectorial y raster: Suelo (Suelos hidromorfos - Conabio, 1995; Carta de pendientes - Inegi, 1:250,000; Red hidrográfica 1:50,000). Vegetación (Vegetación asociada a humedal - Carta de Uso de Suelo y Vegetación - Inegi 1:250,000; NDVI - imágenes VANT). Agua (Índice infrarrojo - Imágenes VANT; Corrientes naturales, artificiales y cuerpos de agua - Red Hidrográfica 1:50,000 de SIATL Inegi). M é t o d o Etapa 1. Trabajo en gabinete. Caracterización de la microcuenca que permita el conocimiento de los ríos, canales, zonas cercanas a las corrientes de agua, cuerpos de agua, suelos hidromorfos, zonas con vegetación y zonas con alta humedad. Para tal efecto, se dispone de insumos cartográficos del INEGI escala 1:50,000 e imágenes satelitales del google earth que permitirán la identificación de humedales. Etapa 2. Levantamiento de las unidades geoecológicas en la microcuenca. A partir de los puntos de verificación identificados en gabinete y de la unidad geoecológica a estudiar, se planifica el levantamiento de información a partir del uso del VANT. Etapa 3. Caracterización de la unidad geoecológica. Con las imágenes obtenidas por medio del vuelo del drone (VANT) se realiza un postproceso para generar información que permita clasificar las formas terrestres, la descripción de los cuerpos de agua y elementos asociados al humedal. Posteriormente, se genera un modelo digital de elevación (MDE), de terreno (MDT), un índice infrarrojo (II), Índice normalizado diferencial de vegetación (NDVI) e Índice Diferencial de agua normalizado (NDWI). Herramientas Drone Solo 3D Robotics Camara Gopro 3 black (resolución de toma 12 megapixeles) Mapa Digital de México (INEGI)/Tower v 4.0.0/ OpenDroneMap v 0.2/ QGIS N0debo 2.16.3 Pix4D / Agisoft PhotoScan 1.2.6 R e s u l t a d o s Caracterización morfométrica de la microcuenca. Levantamiento de las unidades geoecológicas. Caracterización de una unidad geoecológica por medio del drone, como escala intermedia entre una escala de sitio y la escala de una unidad geoecológica. En este sentido, la identificación de humedales con la implementación de VANTs, permiten la generación de propuestas de conservación y gestión de humedales ante las posibles amenazas naturales y antrópicas que contribuyen a la desaparición de estos ecosistemas. Los resultados serán de utilidad para los tomadores de decisiones y actores involucrados en planes de manejo de conservación y restauración de humedales.

I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
151
SESIÓN 17/12. SALA 1. DRONES Y LiDAR PARA LA OBTENCIÓN DE DATOS DE
ALTURA EN UN ECOSISTEMA DE MANGLAR
Matías Hernández-Gómez Jonathan Vidal Solórzano-Villegas
Candelario Peralta-Carreta José Alberto Gallardo Cruz
Centro del Cambio Global y la Sustentabilidad en el Sureste, Villahermosa, Tabasco
El uso de VANT (Vehículos Aéreos No Tripulados) en un ecosistema de manglares proporciona
múltiples fotografías aéreas, que mediante técnicas de fotogrametría permite conocer datos básicos.
Para este caso, alturas de los árboles y modelos de superficie, así como vista panorámica según el
tipo de sensor que se utilice.
El objetivo del presente trabajo fue comparar los datos de altura y modelo de superficie
proporcionados por los VANT respecto a datos proporcionados por tecnología LiDAR e información
de campo, en un ecosistema de manglar en la laguna “El Cometa”, Centla, Tabasco. Se realizaron
vuelos con un dron (Albris de SenseFly) en tres parcelas, con dimensiones de 50x50 metros
obteniendo fotografías con un tamaño de pixel de 15 centímetros.
El pos-proceso de las imágenes se realizó en el software Pix4D, obteniendo mediante fotogrametría
una nube de puntos que representa toda la altura de la vegetación. Paralelamente, se obtuvo una
nube de puntos con tecnología LiDAR, con una densidad de 40–60 puntos/m2, el cual se ajustó al
tamaño de las parcelas.
En campo se realizó un censo de la vegetación, tomando datos de altura a aquellos árboles que
tuvieran un DAP arriba de 10 cm con sus respectivas coordenadas. De la nube de puntos generado
por el VANT y LiDAR, se identificaron a los árboles obtenidos en campo comparando las tres alturas.
Se encontró que el LiDAR respecto a datos de campo tiene una correlación de 94%, VANT respecto a
datos de campo 90% y del modelo de superficie de LiDAR contra VANT una correlación de 88%. Se
recomienda el uso de los VANT para la obtención de altura y modelos de superficie, además se
sugiere la aplicación de corrección diferencial para disminuir el margen de error.
Palabras clave: VANT, Drone, LiDAR, Manglar.

I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
152
SESIÓN 17/13. SALA 1. PROPUESTA DE UN SISTEMA MECATRÓNICO PARA EL MONITOREO DE CONTAMINANTES MEDIANTE UN
VEHICULO AÉREO NO TRIPULADO DE ARQUITECTURA ABIERTA
Natividad Hernández Romero José Isidro Hernández Vega
División de Estudios de Posgrado e Investigación Instituto Tecnológico de Nuevo León
[email protected] [email protected]
En el siguiente trabajo se describirá el proyecto que se está desarrollando, el cual tiene por
nombre “Sistema mecatrónico en tiempo real, para el monitoreo de contaminantes en el aire en
chimeneas industriales mediante un vehículo aéreo no tripulado (VANT). Este proyecto está siendo
llevado a cabo por el estudiante de la maestría en ingeniería en mecatrónica Natividad Hdez.
Romero y su asesor de tesis el M.C. José Isidro Hernández Vega en el Instituto Tecnológico de
Nuevo León.
Planteamiento del Problema
Los principales contaminantes que afectan la zona metropolitana de Nuevo León de acuerdo al
Sistema Integral de Monitoreo Ambiental (SIMA) son:
Monóxido de carbono
Dióxido de carbono
Ozono (O3)
Óxido de nitrógeno (NO)
Dióxido de nitrógeno (NO2)
Dióxido de azufre (SO2)
Compuestos Orgánicos Volátiles (COVs)

I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
153
Estos causan daños a la salud principalmente en las vías respiratorias y actividad cerebral si se
expone durante tiempos prolongados o a altas concentraciones. Además de ser precursores de
cambios climáticos en la atmósfera, ver figura 1, donde se muestran los daños causados por estos
contaminantes.
Figura 1. Principales zonas que afecta la contaminación de la calidad del aire en el cuerpo humano.
Fuente: Semarnat/DGGCARETC, 2013
En Nuevo León, de acuerdo con datos proporcionados por el personal especializado en el
monitoreo y mantenimiento de las estaciones fijas del Sistema Integral de Monitoreo Ambiental
(SIMA), éstas tienen un alcance de altura máximo de detección de 25 metros sobre el nivel del
suelo, ver figura 2, a partir de ese nivel las concentraciones de contaminantes en el aire resultan
difícil de ser monitoreadas por las estaciones. Al estar distribuidas en puntos estratégicos en el
área metropolitana de manera fija, cuando se detectan variaciones de concentraciones altas de
contaminantes es difícil determinar de forma rápida la ubicación de las posibles fuentes fijas que
están emitiendo estas cantidades y poder aplicar los protocolos de contingencia o normas
necesarias de acuerdo al caso.

I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
154
Figura 2. Criterios técnicos de ubicación y alcance de monitoreo de estaciones de monitoreo
fijas. Taller gestión de la calidad del aire, modelos ambientales SIMA, 2016.
El proyecto que se está desarrollando es un apoyo al monitoreo fijo de contaminantes, el cual no
viene a sustituir los métodos disponibles sino a sumarse y agilizar las labores de monitoreo y
detección de fuentes fijas como las chimeneas industriales una de las principales fuentes que
afectan la calidad del aire.
Su desarrollo se está basando en plataformas de sistemas embebidos y plataformas de vuelo de
hardware libre, junto con recursos software de código abierto, lo que favorece al desarrollo de la
investigación y la reducción de costos con respecto a los sistemas comerciales.
En el proyecto se han evaluado tres plataformas de vuelo: Parrot Bebop (Semi-Cerradas), ver figura
3, cuadricóptero, ver figura 4 y hexacóptero, ver figura 5, éstas dos últimas con computadora de
vuelo de código abierto (open source) pixhawk, se evaluó su comportamiento con respecto a los
siguientes criterios:
Carga útil (peso extra que pueden cargar en vuelo además de su propio peso).
Estabilidad
Tiempo de vuelo Espacio para instrumentación.

I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
155
Influencias que pueda generar una mala medición en los sensores.
Soporte máximo de las condiciones ambientales de la región.
Autonomía
Protocolo de comunicación con base en tierra o Ground Control Station (GCS)
Costo
Con base en estos cálculos de estimación de tiempo de vuelo y empuje máximo se
seleccionó la mejor plataforma de trabajo. De acuerdo a los resultados se optó por la plataforma
de vuelo Hexacóptero con computadora de vuelo pixhawk. Debido a que tiene una relación de
costos-beneficio mayor con respecto a los criterios establecidos anteriormente.
Figura 5. Prueba de vuelo hexacoptero. Figura 6. Computadora de vuelo pixhawk.
En cada una de las plataformas se montó una unidad de monitoreo compuesta por:
Sensores electro-catalíticos de detección de gases de bajo costo MQ, Ver figura 7.
Tarjeta arduino mega 2560, para el procesamiento de los datos. Ver figura 8.
Módulos shield de comunicación inalámbrica. Ver figura 9, 10, 11

I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
156
Figura 7. Sensores electro-catalíticos de detección de gases de bajo costo MQ.
El uso de diferentes sistemas de comunicación en esta fase tiene como objetivo realizar las
pruebas experimentales de comunicación VANT-GCS, ver la cantidad, tamaño y velocidad de
transmisión de los datos. Así como también la interfaz gráfica visual a la que se puede enlazar para
la representación de los datos obtenidos.
Figura 8. Arduino mega 2560.
Figura 9. Módulo de comunicación
inalámbrica GSM-M10.
Figura 10. Módulo shield de comunicación por
radio frecuencia (RF) XBee.

I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
157
Figura 11. Módulos de conexión inalámbrica 3DR para pixhawk.
Evaluación y selección de sistema de comunicación inalámbrica VANT-GCS
Se evaluaron los protocolos de comunicación inalámbrica: wifi, GPRS, radio frecuencia y radios de
telemetría. El objetivo fue definir las ventajas y desventajas de cada uno de ellos en:
Peso
Volumen ocupado
Consumo de energía
Velocidad de transmisor
Tamaño de datos transmitidos
Alcance
Costo por su uso
Cada sistema de comunicación fue montado en el VANT junto a sensores electrocatalíticos de bajo
costo que miden concentraciones de gases. Estos transmitieron los datos de información que cada
uno de ellos proporciono hacia una GCS, en la que se visualizaron los datos a través de gráficas
generadas por un programa de procesamiento de datos realizado en el software Matlab y
LabVIEW, ver figura 12.

I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
158
Figura 12. Interfaz visual creada a través del software MATLAB.
Al realizar el enlace VANT-GCS con cada uno de los dispositivos de comunicación inalámbrica se
obtuvieron los datos experimentales sobre la plataforma de vuelo para poder comparar cada una
de éstas, para así ver sus ventajas y desventajas, obteniendo la tabla 1 con los resultados.
Tabla 1. Comparativa de sistemas de comunicación inalámbrica.
Con base en esta experimentación se definió que los radios de telemetría son los más eficientes
cubriendo cada uno de los puntos de manera óptima para el proyecto que se está desarrollando
con los VANTs.

I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
159
Instrumentación para VANT
De acuerdo a los datos capturados por los sensores con los que se instrumentó el VANT y al
observar su comportamiento ante influencias del entorno, se propuso usar sensores que
cubrieran esos puntos junto con la circuitería necesaria para que éstos realizaran de la forma más
precisa la medición.
De acuerdo a la documentación encontrada en diferentes investigaciones de medición de la
calidad del aire usando VANTs [1] [2] [3], se pudo definir el uso de sensores más robustos y todo lo
necesario para que éstos realicen de manera más óptima el monitoreo.
Se está diseñando e instrumentado una tarjeta de adquisición de datos para el monitoreo de
contaminantes que contará con:
Sensores calibrados de laboratorio. Ver figura 13
Tarjeta de adquisición y acondicionamiento de señal (DAQ) de bajo consumo eléctrico
Circuito de enlace con diferentes tipos de sistemas de comunicación inalámbrica.
Esta tarjeta que se está diseñando e instrumentando se implementará en el v ehículo aéreo
no tripulado con sensores de alta eficiencia, usados en sistemas de monitoreo de calidad del aire
en ciudades inteligentes por industrias reconocidas a nivel internacional como libelium y
alphasenses como se puede ver un ejemplo de éstos en la siguiente imagen.
Figura 13. Sensores electroquímicos para medición de concentraciones de gases
alphasenses.
Los sensores utilizados generan señales eléctricas con respecto a las variaciones de las
concentraciones de la calidad del aire.
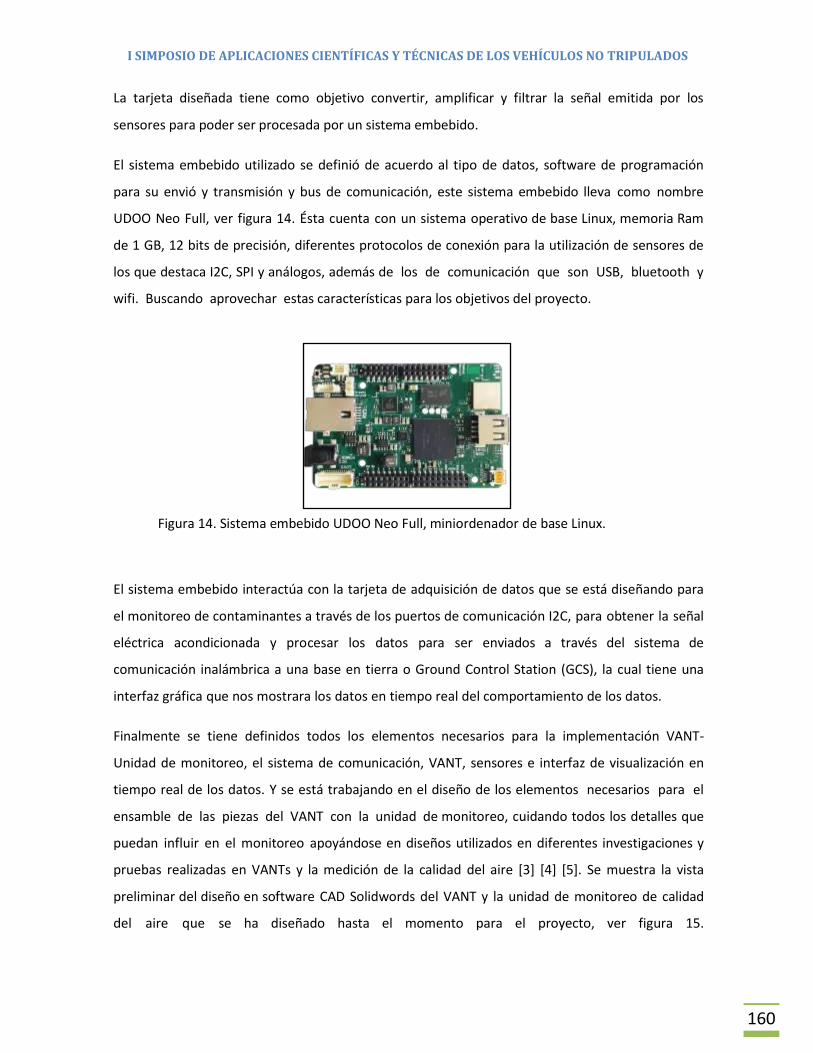
I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
160
La tarjeta diseñada tiene como objetivo convertir, amplificar y filtrar la señal emitida por los
sensores para poder ser procesada por un sistema embebido.
El sistema embebido utilizado se definió de acuerdo al tipo de datos, software de programación
para su envió y transmisión y bus de comunicación, este sistema embebido lleva como nombre
UDOO Neo Full, ver figura 14. Ésta cuenta con un sistema operativo de base Linux, memoria Ram
de 1 GB, 12 bits de precisión, diferentes protocolos de conexión para la utilización de sensores de
los que destaca I2C, SPI y análogos, además de los de comunicación que son USB, bluetooth y
wifi. Buscando aprovechar estas características para los objetivos del proyecto.
Figura 14. Sistema embebido UDOO Neo Full, miniordenador de base Linux.
El sistema embebido interactúa con la tarjeta de adquisición de datos que se está diseñando para
el monitoreo de contaminantes a través de los puertos de comunicación I2C, para obtener la señal
eléctrica acondicionada y procesar los datos para ser enviados a través del sistema de
comunicación inalámbrica a una base en tierra o Ground Control Station (GCS), la cual tiene una
interfaz gráfica que nos mostrara los datos en tiempo real del comportamiento de los datos.
Finalmente se tiene definidos todos los elementos necesarios para la implementación VANT-
Unidad de monitoreo, el sistema de comunicación, VANT, sensores e interfaz de visualización en
tiempo real de los datos. Y se está trabajando en el diseño de los elementos necesarios para el
ensamble de las piezas del VANT con la unidad de monitoreo, cuidando todos los detalles que
puedan influir en el monitoreo apoyándose en diseños utilizados en diferentes investigaciones y
pruebas realizadas en VANTs y la medición de la calidad del aire [3] [4] [5]. Se muestra la vista
preliminar del diseño en software CAD Solidwords del VANT y la unidad de monitoreo de calidad
del aire que se ha diseñado hasta el momento para el proyecto, ver figura 15.
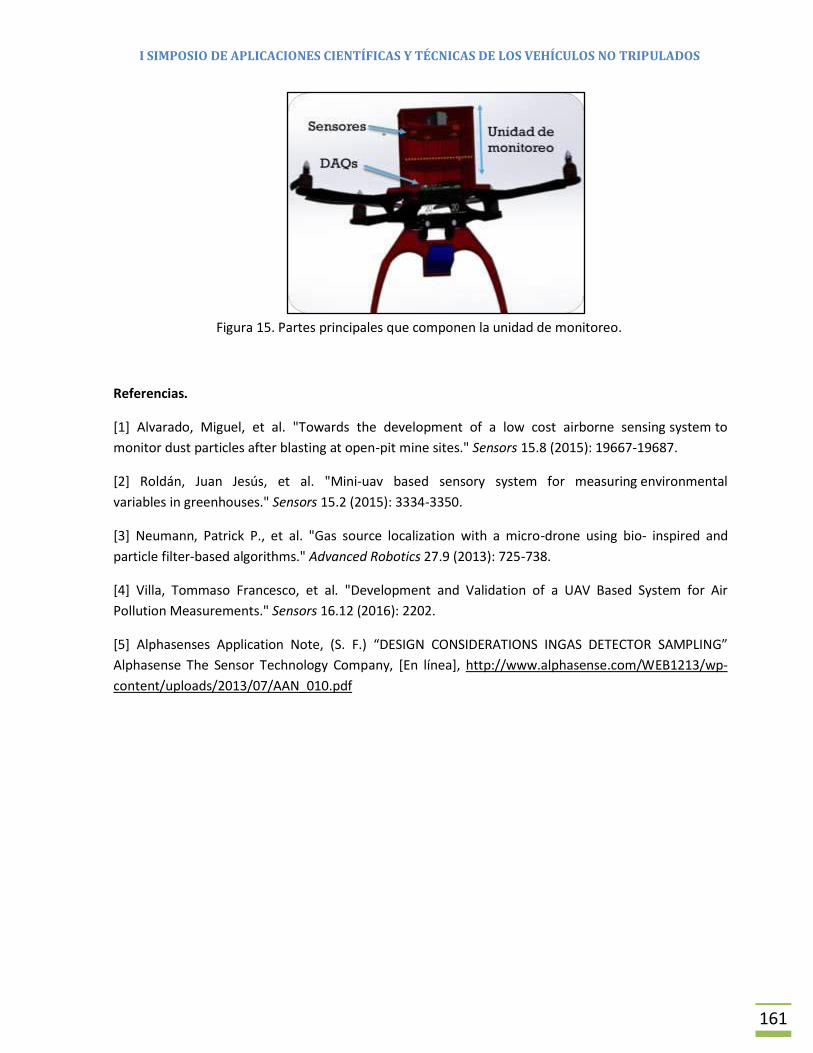
I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
161
Figura 15. Partes principales que componen la unidad de monitoreo.
Referencias.
[1] Alvarado, Miguel, et al. "Towards the development of a low cost airborne sensing system to
monitor dust particles after blasting at open-pit mine sites." Sensors 15.8 (2015): 19667-19687.
[2] Roldán, Juan Jesús, et al. "Mini-uav based sensory system for measuring environmental
variables in greenhouses." Sensors 15.2 (2015): 3334-3350.
[3] Neumann, Patrick P., et al. "Gas source localization with a micro-drone using bio- inspired and
particle filter-based algorithms." Advanced Robotics 27.9 (2013): 725-738.
[4] Villa, Tommaso Francesco, et al. "Development and Validation of a UAV Based System for Air
Pollution Measurements." Sensors 16.12 (2016): 2202.
[5] Alphasenses Application Note, (S. F.) “DESIGN CONSIDERATIONS INGAS DETECTOR SAMPLING”
Alphasense The Sensor Technology Company, [En línea], http://www.alphasense.com/WEB1213/wp-
content/uploads/2013/07/AAN_010.pdf
I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
162
Sesiones 17/11-13 Ecosistemas y ambiente Sala 2 Horario: 15:20 – 16:20 17/ 11. 15:20 – 15:40. Monitoreo de la costa y su vegetación mediante cámaras multiespectrales a bordo de plataformas aéreas no tripuladas / Rodolfo Rioja-Nieto; Oswaldo Carrillo Rodríguez; Jhonny Valdéz Luit / UMDI-Sisal 17/12. 15:40 – 16:00. Innovación en estudios multidisciplinarios con el uso de vehículos aéreos en el Manejo Costero Integrado: Modelo de Capacidad de Carga y Ordenación de las Playas / Cervantes Rosas Omar Darío, Chávez Comparán Juan Carlos / UCOL 17/ 13. 16:00 – 16:20. Modelado del paisaje y cálculo de pérdida de suelo por erosión a través de fotogrametría digital con drones / Gonzalo Fernández de Castro Martínez; Armando Peralta Higuera; Lorenzo Vázquez Selem; José Luis Palacio Prieto; Arturo García Romero / IGg-UNAM
I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
163
Sesiones 17/11-13 Estudios costeros y Ecosistemas y ambiente Sala 2 Horario: 15:20 – 16:20
SESIÓN 17/11. SALA 2. MONITOREO DE LA COSTA Y SU VEGETACIÓN MEDIANTE CÁMARAS MULTIESPECTRALES A BORDO DE PLATAFORMAS AÉREAS
NO TRIPULADAS
Rodolfo Rioja-Nieto¹ Oswaldo Carrillo Rodríguez²
Jhonny Valdéz Iuit¹ ¹ UMDI-Sisal, Facultad de Ciencias, Universidad Nacional Autónoma de México
² Laboratorio Nacional de Resiliencia Costera, Laboratorios Nacionales CONACYT. [email protected]
Las costas son regiones de importancia nacional que constantemente están sujetas a perturbaciones naturales y antropogénicas. Estas perturbaciones se han incrementado como resultado de la variación ambiental y desarrollo de infraestructura, modificando los procesos de erosión y acreción en la costa. En este proyecto se realiza una evaluación de la variación espacio temporal de la línea de costa y la condición de vegetación de duna costera a lo largo de siete Km al este de Puerto Progreso, Yucatán, México. Se utiliza una plataforma aérea no tripulada de ala fija Bramor C-Astral, equipada con una cámara multiespectral de cinco bandas (RgbNirRe) para obtener imágenes mensuales. Las imágenes son procesadas mediante técnicas fotogramétricas para construir mosaicos ortorectificados con precisión centimétrica y resolución espacial < 18 cm por pixel. Previo a cada vuelo, se obtiene una imagen de un panel de calibración para obtener valores precisos de reflectancia que permita la comparación de las imágenes a lo largo del tiempo. Las imágenes multiespectrales calibradas son utilizadas para calcular un índice normalizado de vegetación (NDVI) y construir mapas de condición de la vegetación. Este monitoreo se llevará a cabo por un periodo de un año y se presentan datos obtenidos en tres periodos de muestreo.

I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
164
SESIÓN 17/12. SALA 2. INNOVACIÓN EN ESTUDIOS MULTIDISCIPLINARIOS CON EL USO DE VEHÍCULOS AÉREOS EN EL MANEJO COSTERO INTEGRADO: MODELO
DE CAPACIDAD DE CARGA Y ORDENACIÓN DE LAS PLAYAS
Dr. Omar Darío Cervantes Rosas
Dr. Juan Carlos Chávez Comparán
Facultad de Ciencias Marinas Universidad de Colima
Las playas son el principal destino turístico a nivel mundial, lo cual incluye a la realidad mexicana. A raíz de ello, se han establecido programas de certificación de calidad ambiental y/o turística enfocados en playas, con el objeto de ofrecer una experiencia recreativa satisfactoria para el visitante, a la vez que se previenen los impactos que sobre el ecosistema pueda presentar esta actividad.
Las implicaciones ecológicas, sociales y psicológicas que tiene la cantidad de usuarios presentes en la playa suelen llevar a confundir los términos de densidad de usuarios con capacidad de carga. La presencia de muchos visitantes en la playa, por ejemplo, pueden afectar tanto el ecosistema como la percepción de los usuarios en cuanto al grado de disfrute, lo que al mismo tiempo puede definir cuan atractivo es el destino para los visitantes. El conocimiento actual sobre aspectos como la capacidad de carga física y ordenación, en particular de las playas, es todavía limitado, dado que se relaciona la cantidad de unidades y o individuos que puede soportar un área determinada en un tiempo determinado. Sin embargo, en playas turísticas, la capacidad de carga señala entonces el umbral de utilización del espacio para la actividad turística, dentro del cual se mantiene su capacidad para proporcionar satisfacción a los visitantes. Así, y para efectos de hacer operativo este concepto se han propuesto diferentes aproximaciones numéricas para cuantificar este umbral de utilización de las playas en términos de la cantidad de visitantes permitidos. De esta forma los modelos que definen un número óptimo de visitantes permiten establecer rangos de usos en la playa, contribuyen a prevenir daños ambientales a la calidad recreativa y ofrecen también una certeza a los prestadores potenciales de servicios y los administradores sobre la demanda turística que se requiere suplir.
En 2015 surge por parte el Fondo Sectorial SECTUR – CONACYT 2015, una demanda específica sobre Estudios de Capacidad de Carga. En respuesta y dado el contexto anterior se presenta por parte de la Universidad de Colima el proyecto “Modelo de capacidad de carga recreativa y ordenación de las playas turísticas”, que busca establecer parámetros y niveles de intensidad de uso y establecer pautas para el ordenamiento espacial de los espacios arenosos partir de cuatro enfoques: físico, ecológico, económico y social, de tal manera que el estudio busca establecer un diagnóstico en la materia y proponer estrategias de respuesta y mejora en destinos reconocidos de playas de la Riviera Mexicana (Pacífico) y Riviera Maya (Caribe): Los Cabos, Riviera Nayarit, Puerto Vallarta, Manzanillo, Ixtapa, Huatulco y Cancún.
Este estudio considerado de innovación en el turismo plantea el uso del vehículo autónomo de ala fija Ebee – Sensefly para obtener orto-mosaicos y modelos digitales del terreno que permitirán identificar una serie de elementos en las playas que alimentan el modelo de capacidad de carga como Densidad de Usuarios, Equipamiento, Servicios e Infraestructura; Descargas pluviales y residuales; Avance de la Colonización y Modificación de los sistemas de dunas y las pautas para la zonificación espacial de usos y actividades en estos espacios, en especial los certificados bajo las eco-etiquetas NMX-AA-120-2016 y Blue Flag, que no consideran este criterio, y con ello complementar y mejorar estos esquemas de
I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
165
mejora y aprovechamiento de las playas con implicaciones de competitividad turística a nivel nacional e internacional. Asimismo, permite analizar aspectos de dinámica costera, transporte litoral y evaluar la erosión derivada de la presencia de infraestructura costera y obras de protección; e incluso de riesgo a los usuarios de la playa derivado de la presencia de las corrientes de retorno e identificación y evaluación de vegetación costera. Así, la participación en el simposio es una oportunidad para mostrar y compartir los avances y potencial del proyecto con el uso del Ebee Sensefly en estudios multidisciplinarios enfocados en el manejo costero integrado, de ordenamiento territorial y uso sustentable de los ecosistemas costeros y marinos.

I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
166
SESIÓN 17/13. SALA 2. MODELADO DEL PAISAJE Y CÁLCULO DE PÉRDIDA DE
SUELO POR EROSIÓN A TRAVÉS DE FOTOGRAMETRÍA DIGITAL CON DRONES
Gonzalo Fernández de Castro Martínez
Armando Peralta Higuera
Lorenzo Vázquez Selem
José Luis Palacio Prieto
Arturo García Romero
Instituto de Geografía, UNAM
Los UAVS (Unmaned Aerial Vehicle) o drones y la fotogrametría digital pueden ser una herramienta muy poderosa en el análisis morfométrico del relieve a gran detalle y su uso se puede extender a muchos campos de la investigación, entre ellos el modelado del paisaje a través de la erosión. Los Modelos Digitales de Superficie (MDS) realizados a 10 cm. de resolución permiten analizar estos microprocesos y cuantificar tasas de erosión en formaciones superficiales. El objetivo de este trabajo es realizar un análisis morfométrico a gran detalle de diferentes formaciones geológicas en una misma ladera, para evaluar cómo se desarrolla la erosión diferencial y cómo ésta modela el paisaje. Para ello, se generaron modelos del terreno 3D fotogramétricos por triangulación de nube de puntos a partir de pares estereoscópicos de fotografías aéreas tomadas con un dron a baja altura. El análisis morfométrico se realizó en tres litologías diferentes en génesis y estructura a lo largo de una misma ladera, teniendo, por tanto, las mismas condiciones ambientales y morfológicas promotoras de la erosión pero con diferentes susceptibilidad por litología: una compuesta por arcillas redepositadas en ambiente lacustre (Formación Yanhuitlán), otra por depositación de cenizas volcánicas (Toba Llano de Lobos) y otra ígnea extrusiva (Andesita Yucudaac), en orden cronoestratigráfico ascendente. Para ello se estudiaron cada línea de drenaje con los siguientes parámetros morfométricos: longitud, área superficial de erosión y la disección vertical.

I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
167
Partiendo de la hipótesis de una mayor incisión en formaciones geológicas más deleznables, los resultados obtenidos de las mediciones de erosión lineal, areal y de disección vertical presentan una mayor incisión en las arcillas, mayores áreas de captación en las cenizas volcánicas y escurrimientos de menos tamaño en la andesita, la roca más dura. Del mismo modo se obtuvieron resultados de pérdida de volumen en el periodo de lluvias (mayo-octubre) del año 2016, los cuales confirman los resultados en el mismo sentido. Este trabajo muestra el gran potencial de estas herramientas en análisis geomorfológicos, morfométricos y de erosión que pueden ser aplicados a multitud de estudios ambientales en diferentes campos de la investigación.
I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
168
Sesiones 17/11-13 Sala 3 Horario: 15:20 – 16:20 17/ 11. 15:20 – 15:40. Uso de Vehículos no tripulados para el levantamiento de información de Recursos Naturales en áreas inaccesibles / Jorge Gibrán Velasco Olvera / INEGI 17/12. 15:40 – 16:00. Teleepidemiología para enfermedades transmitidas por vector / Amanda Gómez; Marina de J. Kasten Monges; Arturo Serrano; Verónica Rojas-Mendizábal; Igor Ramos; Miguel González ; Luis Gómez Aguilera; Roberto Conte Galván; Jorge Preciado Velasco; Jorge Kasten Monges; Janeth Cruz Colmenares; Carlos G. López; Blanca Rebollar / AEM 17/ 13. 16:00 – 16:20. Formación Académica para Pilotos de RPAS y su Certificación Oficial / Luis Guadalupe Vázquez Ángel / Escuela de Vuelo Aeronacional, S.C.

I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
169
SESIÓN 17/11. SALA 3. USO DE VEHÍCULOS NO TRIPULADOS PARA EL LEVANTAMIENTO DE INFORMACIÓN DE RECURSOS NATURALES EN ÁREAS
INACCESIBLES
Jorge Gibrán Velasco Olvera Instituto Nacional de Estadística y Geografía
[email protected] Una de las situaciones que se presentan en los operativos para generación y actualización de la información de recursos naturales que realiza el INEGI, es la existencia de zonas con problemas de acceso por las características del terreno o falta de vías adecuadas de acceso, lo que impide la visualización y comprensión de las características de estas zonas y su importancia ecológica. Generalmente, esos sitios están protegidos por su misma inaccesibilidad y son relictos, por ejemplo, de flora y fauna endémica de esos ambientes únicos. Como contribución a la conservación de esos sitios es necesario documentar su existencia y características en diversas partes del país, dado el interés ecológico que presentan, para esto está la actividad de Monitorear. Estas acciones se realizan por parte de múltiples áreaks durante los recorridos de actualización de esta información, en la que participan especialistas en suelos, botánica y uso del suelo y vegetación, y así disponer de una completa descripción del ecosistema. Se plantea, dentro del marco de las visitas a campo, levantar en los sitios de interés ecológico información edafológica, de la cubierta y especies vegetales presentes, así como áreas de erosión, influencia humana, entre otras, que permitan caracterizar al ecosistema. Como apoyo a estas acciones, se propone el uso de vehículos aéreos no tripulados (drones), con el fin de facilitar la obtención de datos y muestras en sitios de difícil acceso como lo son cañadas, pendientes y riscos, además de otras topoformas que representen un riesgo para los especialistas implicados en el proyecto. El uso de un “Dron” facilitaría la obtención de imágenes y video, así como acercamientos inmediatos a las distintas áreas de interés. Como sitios de interés ecológico se proponen las zonas:
Barrancas y cañones
Bosques de Galería
Cimas y áreas con vegetación relictual o de nueva presencia
Vegetación Hidrófila de difícil acceso
Áreas con erosión evidente. Como ejemplo a realizar este año se citan los lugares:
Barrancas y cañones de las estribaciones de la Sierra Fría, Aguascalientes.
Matorral de Larrea tridentata en el Municipio de Asientos, Aguascalientes.
Bosque de Maple, Talpa, Jalisco.

I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
170
SESIÓN 17/12. SALA 3. TELEEPIDEMIOLOGÍA PARA ENFERMEDADES TRANSMITIDAS POR VECTOR
Amanda Gómez1
Marina de J. Kasten Monges2 Arturo Serrano3
Verónica Rojas-Mendizabal3 Igor Ramos2
Miguel González2 Luis Gómez Aguilera4
Roberto Conte Galván3 Jorge Preciado Velasco3
Jorge Kasten Monges2 Janeth Cruz Colmenares5
Carlos G. López3 Blanca Rebollar 1
1Agencia Espacial Mexicana 2Universidad de Guadalajara
3CICESE, Ensenada 4UT de la Selva
5SS Chiapas
Se presentan los resultados de diversas discusiones de la Red de investigación transdisciplinar de Ciencia y Tecnología Espacial para la Salud, la cual tiene como fin proponer soluciones ante enfermedades transmisibles como Chagas, Dengue, Chicungunya y Zika, entre otras, en la población piloto de San Martín Hidalgo, Jalisco, México; para diseñar planes y programas de prevención replicables en otras zonas del país.
Con el uso de vehículos aéreos no tripulados (VANTS) se hace posible la comparación del contexto en tierra –identificado por equipos de trabajo de campo– con los obtenidos por medio de imágenes de percepción remota LANDSAT y SENTINEL; procesados por medio de Sistemas de Información Geográfica (SIG) de libre distribución como ILWis y QGis desde la perspectiva de la geografía de la salud, con el fin de reducir el impacto de las enfermedades transmitidas por vector en la salud de la población.
Se muestra un modelo que permite identificar nichos de reproducción focalizados y definidos como áreas de oportunidad para la orientación de programas preventivos. Inicialmente se ha determinado un área piloto en esta población, donde se propone crear un área de experimentación para generar modelos replicables de capacitación de la comunidad, el personal de salud y las autoridades sanitarias para la detección oportuna y prevención de los factores de riesgo de enfermedades transmitidas por vector en esta comunidad.
Etapas del modelo:
Realización de un mapa de riesgos, mediante indicadores obtenidos por el análisis de las imágenes satelitales, en el cual se puedan identificar las poblaciones en las que se puede desarrollar la enfermedad de Chagas y otras enfermedades transmitidas por vector debido al tipo de vegetación, clima, humedad y asentamientos humanos.
Implementación de una plataforma de teleeducación soportadas en el mapa de riesgo, para hacer notar a la población en zonas de alto riesgo sobre la enfermedad de Chagas y otras enfermedades transmitidas por vector.

I SIMPOSIO DE APLICACIONES CIENTÍFICAS Y TÉCNICAS DE LOS VEHÍCULOS NO TRIPULADOS
171
Realización de una propuesta para la implementación de futuras intervenciones para el control y reducción de número de contagios basados en el estudio de la historicidad, en específico del caso Chagas, en San Martín Hidalgo, tomando en cuenta la naturaleza compleja del problema a resolver.
Construcción de capacidades en la población con el apoyo de las autoridades locales, las imágenes de satélites de percepción remota y el modelo de identificación de las zonas de riesgo actualizables para el entendimiento del hábitat de la chinche de Chagas, así como de otros vectores causantes de enfermedades como Dengue, Chicungunya, Zika y las consecuencias. Además del control y manejo dentro del contexto familiar y comunitario.