Historia de la filosofia sin temor ni temblor - capitulo 1-nuevo.pdf

1
1. CAPÍTULO 1 INTRODUCCIÓN.
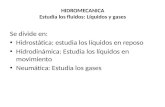
1.1 La Hidromecánica como ciencia y sus objetivos. Existen varias definiciones en cuanto a la Hidromecánica, pero consideramos que la más racional, a pesar de su sencillez, es la brindada por el colectivo de autores de la Escuela Superior Militar de Ingeniería Naval ¨Vladimir I. Lenin¨. La Hidromecánica estudia las leyes del equilibrio del reposo y el movimiento de los líquidos y elabora métodos para la solución de problemas prácticos relacionados con las diferentes ramas de la técnica. La comprensión de dichas leyes, permite dominar los fenómenos del reposo y el movimiento del líquido. Por líquido se entiende, aquella sustancia física, cuyas partículas poseen una gran movilidad (capacidad de fluir). Partiendo de esta definición los líquidos se dividen en: líquidos de gotas y gases. Muchos autores, basándose en la capacidad de los líquidos de escurrirse, o sea, la capacidad de no soportar esfuerzos tangenciales (esfuerzos de corte), emplean el término fluido para identificar a los líquidos, ya sean líquidos de gotas o gases. Los líquidos de gotas, que en lo adelante nombraremos solo como líquidos, en la mayoría de las tareas prácticas, lo asumiremos como incompresibles, que a diferencia de los gases, su volumen no varía con la variación de la presión. En los gases el fenómeno de la compresibilidad influye grandemente en su movimiento, al igual que los intercambios de calor, esta última cuestión no se tiene en cuenta en los llamados líquidos de gotas. El presente texto abarca el estudio de la interrelación del líquido y de un cuerpo sólido, cuando el sólido se mueve en el líquido, o cuando el líquido se mueve limitado por paredes sólidas. De aquí se desprenden las dos tareas principales: la tarea interna y la externa. La tarea interna de la Hidromecánica se encarga del estudio del movimiento del líquido, limitado por paredes sólidas, por ejemplo, en las tuberías y en los canales. Su estudio sirve de base para la solución ingenieril del diseño y explotación de los sistemas navales. La tarea externa es un poco más compleja. Está relacionada con la interrelación hidrodinámica entre el líquido en movimiento y el cuerpo sólido contorneado por él, o viceversa. La solución de dicha tarea permite determinar las fuerzas hidrodinámicas, que actúan sobre el cuerpo. Un ejemplo práctico lo tenemos, cuando determinamos, la resistencia del agua al movimiento del buque, la fuerza de sustentación en las aletas estabilizadoras de las lanchas, la fuerza de empuje provocadas por las palas de las hélices, etc. La tarea externa sirve de base para la determinación de algunas cualidades marineras, como son: la marcha, el gobierno y la navegabilidad. La Hidromecánica es una ciencia en constante desarrollo y evolución. En el diseño de los buques juega un papel muy importante sobre todo para obtener una ventajosa relación potencia de la instalación energética - velocidad del buque.

2
El contenido de este libro sirve de base para asimilar los conocimientos en las asignaturas Teoría y Construcción del Buque, Diseño Naval, Flotabilidad y Estabilidad después de avería, Maquinaria Naval Auxiliar y Sistemas Navales, Motores Diesel Marinos e Instalaciones Energéticas Navales. 1.2 Desarrollo de la Hidromecánica como ciencia. La Hidromecánica podría aparecer solamente como un nombre nuevo para una ciencia antigua en origen y realizaciones, pero es más que eso, corresponde a un enfoque especial para estudiar el comportamiento de los líquidos y los gases. Los principios básicos del movimiento de los fluidos se desarrollaron lentamente a través de los siglos XVI al XIX como resultado del trabajo de muchos científicos como Da Vinci, Galileo, Torricelli, Pascal, Bernoulli, Euler, Navier, Stokes, Kelvin, Reynolds y otros que hicieron interesantes aportes teóricos a lo que se denomina Hidrodinámica. También en el campo de la Hidráulica experimental hicieron importantes contribuciones Chezy, Ventura, Hagen, Manning, Pouseuille, Darcy, Froude y otros, fundamentalmente durante el siglo XIX. Hacia finales del siglo XIX la Hidrodinámica y la Hidráulica experimental presentaban una cierta rivalidad. Por una parte, la Hidrodinámica clásica aplicaba con rigurosidad principios matemáticos para modelar el comportamiento de los fluidos, para lo cual debía recurrir a simplificar las propiedades de estos. Así se hablaba de un fluido ideal. Esto hizo que los resultados no fueran siempre aplicables a casos reales. Por otra parte, la Hidráulica experimental acumulaba antecedentes sobre el comportamiento de fluidos reales sin dar importancia a tal formulación de una teoría rigurosa. La Hidromecánica moderna aparece a principios del siglo XX como un esfuerzo para unir estas dos tendencias: experimental y analítica. Generalmente se reconoce como fundador de la mecánica de los fluidos moderna al alemán L. Prandtl (1875-1953). Esta es una ciencia relativamente joven a la cual aun hoy se están haciendo importantes contribuciones. En el periodo de finales del sigo XIX principios del XX, aparecieron tres direcciones fundamentales en la Hidromecánica: Primera dirección consistía en el desarrollo de la teoría de Euler sobre el movimiento del líquido ideal. Gran influencia realizó el científico ruso Chukovsky (1847-1921) en sus trabajos relacionados con la fuerza de sustentación. Gromeko (1881), también ruso, obtuvo la integración de las ecuaciones diferenciales de Euler. Segunda dirección consistió en la conformación de la teoría del movimiento del líquido real (viscoso). George Gabriel Stokes, científico británico, en 1845 generalizó la ley de Newton sobre la fricción en los líquidos y complementó las ecuaciones de Euler con miembros adicionales que tenían en cuenta la viscosidad del líquido. Tercera dirección, representa una etapa fundamental en el estudio de los problemas de la turbulencia y la resistencia de los cuerpos a grandes velocidades. En 1883 Osborne

3
Reynolds, de forma experimental identificó la existencia de dos regímenes de movimiento del líquido, cualitativamente diferentes, el régimen laminar y el turbulento, e introdujo los criterios para su determinación. 1.3 Los métodos de estudio de los fenómenos y procesos en la Hidromecánica. El estudio de la Hidromecánica se basa en la teoría Marxista Leninista del conocimiento y la apreciación materialista del mundo sobre el carácter de los fenómenos y procesos hidrodinámicos. La base de la metodología utilizada es la aplicación dialéctica al estudio de estos fenómenos y procesos que están relacionados entre sí y se condicionan mutuamente. Se sigue, durante su estudio, un principio básico, de lo simple a lo complejo. Se aplica un principio leninista, la apreciación del fenómeno, su abstracción y de la abstracción a la práctica. Tal proceder dialéctico permite alcanzar el verdadero conocimiento sobre la realidad objetiva. De las ciencias particulares, a la Hidromecánica, le tributan, la Física, la Mecánica Teórica y la Matemática superior. Apreciamos esto, cuando componemos las ecuaciones de equilibrio del movimiento de los líquidos, donde se utilizan leyes físicas y teoremas generales de la Mecánica, como son: la ley de la conservación de la masa y la energía, el principio d'Alembert, el teorema sobre la variación de la cantidad de movimiento, etc. Algunas veces, la utilización de estas leyes y teoremas generales, no permite llegar a posiciones conclusivas. Por tal motivo, la Hidromecánica introduce sus propias leyes y teoremas, obtenidos sobre el análisis teórico y sobre la generalización de los resultados de las investigaciones experimentales. El método empírico (la observación, la medición y el experimento) durante el estudio del movimiento de los líquidos en la Hidromecánica, tiene una gran importancia, de aquí que la teoría de la semejanza y la modelación, son importantes elementos de dicha ciencia. Una prueba de lo anterior es la utilización de instalaciones como, la de Reynolds, los canales para la determinación de la resistencia del agua al movimiento del buque, los túneles de viento, etc. Para la obtención de soluciones teóricas (métodos teóricos) y la generalización de las investigaciones experimentales, en la Hidromecánica, gran aplicación tienen las matemáticas, sobre todo con la utilización de los modernos y rápidos medios de cómputos. La utilización de la computación ha elevado la capacidad de solucionar los problemas, con una mayor economía de tiempo. 1.4 Propiedades físicas de los líquidos. 1.4.1 Líquido, su peso específico, densidad y densidad relativa. El estado y el comportamiento de los líquidos que se encuentran en la naturaleza y que son utilizados en la técnica, se encuentran en dependencia directa de sus propiedades físicas. Por tal motivo, la primera tarea que antecede al estudio de la Hidromecánica, es

4
la determinación de las propiedades físicas de los líquidos, la determinación de los factores que influyen en ellas y el establecimiento de las unidades de su medición. Líquido: Existen un gran número de definiciones de líquido (fluido), pero de forma genérica podríamos decir que, líquido es toda sustancia que se deforma continuamente al aplicársele un esfuerzo de corte, es decir al aplicársele un esfuerzo tangencial, que por pequeño que este sea, siempre aparecerá una deformación continua en forma de gradiente de velocidades (velocidad de deformación) como reacción frente a dicho esfuerzo. Densidad (ρ) − se denomina densidad a la cantidad de masa (m) contenida en la unidad de volumen.
0ΔVΔV
Δmlimρ→
⎟⎠⎞
⎜⎝⎛= (1.1)
Para líquidos homogéneos:
Vm
=ρ (1.2)
Su unidad de medida es el 4
2
33 ms.kgf,m
T,mkg .
Peso específico (γ) – representa la fuerza ejercida por la gravedad sobre la unidad de volumen.
0VV
Glim→Δ
⎟⎠⎞
⎜⎝⎛
ΔΔ
=γ (1.3)
Donde GΔ - peso del líquido en el volumen elemental VΔ . Para líquidos homogéneos:
gV
mgVG
ρ===γ (1.4)
O sea a constg = , el peso específico es un parámetro análogo a la densidad (ρ). Su unidad de medida es: 33 m
Tf,mKN
Densidad relativa (δ) − magnitud adimensional, igual a la relación de la masa del líquido dado con respecto a la masa de agua destilada, de igual volumen a 40C:
agua
L
agua
L
agua
L
mm
ρρ
=γ
γ==δ (1.5)
Los parámetros antes mencionados tienen relación directa con la temperatura y la presión. Con el aumento de la temperatura, la densidad de los líquidos, por lo general,

5
disminuye. Una excepción de esta regla es el agua a la temperatura de 0 a 40C. En este intervalo de temperatura, el agua tiene la mayor densidad a la temperatura de 40C. En la tabla 1.1 se dan los valores de los parámetros antes mencionados, a diferentes temperaturas y a una presión equivalente a 0.1 MPa.
Tabla 1.1 Densidad, peso específico y densidad relativa de algunos líquidos.
Líquido Temperaturat, 0C
Densidad ρ, 3m
kg Peso específico
3mKN,γ
Densidad relativa
δ Agua destilada 20 998,2 9790 0,9982 Agua salada 20 1020-1030 10006-10104 1,02-1,03 Diesel 20 831-861 8150-8450 0,831-0,861 Petróleo 15 890-940 8731-9221 0,89-0,94 Aceite hidráulico 50 850 8340 0,85 Aceite de máquina 20 898 8809 0,898 Aceite de transformador 50 886 8692 0,886 Aceite de turbina 50 900 8829 0,90 Mercurio 20 13546 132886 13,546 Alcohol 20 795 7799 0,795 Para determinar la densidad de los productos derivados del petróleo, a cualquier temperatura y a presión atmosférica, se utiliza la fórmula de Mendeleiev:
( )15T1 0T
15t −β+
ρ=ρ (1.6)
Donde tρ y 15ρ son las densidades de los derivados del petróleo a la temperatura T y
a 150C respectivamente. Tβ , coeficiente térmico de dilatación volumétrica de los derivado del petróleo. 1.4.2 Compresibilidad del líquido. La compresibilidad es la propiedad del líquido de variar su volumen bajo la acción de la presión y se caracteriza por el coeficiente de compresibilidad o coeficiente de compresión volumétrica Vβ (1/Pa). Representa este coeficiente la variación del volumen del líquido 0V , referido a la unidad de presión:
p
1VV
0V Δ
Δ−=β . (1.7)
El signo (-) en la formula (1.7) está condicionado por cuanto, a un incremento positivo de la presión le corresponde una variación negativa (disminución) del volumen. Su unidad de medida es el Pa-1 .

6
Si asumimos que la variación de presión 0ppp −=Δ , y la variación del volumen 0VVV −=Δ , entonces:
( )p1VV V0 Δβ−= (1.8)
p1 V
0
Δβ−ρ
=ρ (1.9)
La magnitud inversa al coeficiente de compresibilidad volumétrica se denomina módulo de elasticidad del líquido y se simboliza por K ( V1 β/ ). Su unidad de medición es el N/m2 (Pa), o sea es lo inverso del coeficiente de compresión volumétrica. El módulo de elasticidad K, así como el coeficiente de compresión volumétrica Vβ varían en dependencia de la presión y la temperatura. En la tabla 1.2 se muestran los valores medios del coeficiente de compresión volumétrica Vβ de algunos líquidos a presiones hasta 5000.104 Pa. Tabla 1.2 Coeficiente de compresión volumétrica Vβ .
Líquido Vβ .1010 Pa-1 Líquido Vβ .1010 Pa-1
Agua 4,75 Mercurio 0,30 Petróleo 7,40 Gasolina 9,20
Éter 11,0 Glicerina 2,50 Los valores del módulo de elasticidad (K) del agua, en dependencia de la presión y la temperatura, están representados en la tabla 1.3. Tabla 1.3 Módulo de elasticidad (K) del agua (109Pa).
Presión, MPa Temperatura 0C 0,5 1,0 2,0 4,0 8,0 0 1,89 1,90 1,92 1,95 1,98 5 1,93 1,95 1,97 2,01 2,07
10 1,95 1,97 2,01 2,05 2,12 15 1,97 2,00 2,03 2,09 2,17 20 1,98 2,02 2,06 2,12 2,22
- Coeficiente térmico de dilatación volumétrica Tβ . La variación del volumen de un líquido en dependencia de la temperatura, recibe el nombre de dilatación térmica. Se caracteriza por el coeficiente térmico de dilatación volumétrica, el cual representa el cambio relativo del volumen ( VΔ ) al aumentar su temperatura en 1 0C.
tV
V1
T ΔΔ
=β . (1.10)

7
La unidad de medición del coeficiente térmico de dilatación volumétrica es el kelvin a la menos uno (k-1) o (0C-1). Los valores del coeficiente térmico de dilatación volumétrica para los líquidos incompresibles, es insignificante, por ejemplo, para el agua a la temperatura de 0 a 10 0C y a presión de 0,1 MPa. 10
T C000014,0 −=β .En los cálculos hidráulicos habituales, la dilatación térmica, por lo general no se tiene en cuenta. 1.4.3 Presión de los vapores saturados. Se denomina presión de los vapores saturados, a aquella presión durante la cual el líquido hierve a una temperatura dada. Se simboliza por dp . Su magnitud depende del tipo de líquido y de la temperatura.
En la tabla 1.4 se muestran los valores de dp del agua a diferentes temperaturas. Tabla 1.4 Presión del vapor saturado del agua a diferentes temperaturas. t, 0C dp , MPa t, 0C dp , MPa t, 0C dp , MPa t, 0C dp , MPa
0 0,0006 25 0,0032 60 0,0202 90 0,0714 5 0,0009 30 0,0043 70 0,0317 100 0,1033
10 0,0012 40 0,0075 75 0,0392 125 0,2370 20 0,0024 50 0,0126 80 0,0482 150 0,4850
1.4.4 Tensión superficial (capilaridad). Los líquidos tienen propiedades de cohesión y adhesión, debido a la atracción molecular. La cohesión permite al líquido resistir esfuerzos de tracción, mientras que la adhesión permite que se adhiera a otros cuerpos. La capilaridad es consecuencia de la acción conjunta de ambas fuerzas. Cuando la cohesión tiene menor efecto que la adhesión, el líquido moja la superficies sólidas con la que está en contacto y se eleva en el punto de contacto. Si predomina la cohesión, la superficie líquida desciende en el punto de contacto. Por ejemplo, la capilaridad hace que el agua se eleve en un tubo de vidrio, mientras que el mercurio desciende por debajo del nivel verdadero. Este fenómeno es muy importante durante las mediciones con piezómetros en los laboratorios. En la figura 1.1 se muestra dicho fenómeno en dos tubos piezométricos, que contienen agua y mercurio.
h<0 h>0
Fig. 1.1
h = ascenso o descenso
capilar, mm.
MercurioAgua

8
La fuerza de tensión superficial ejerce sobre el líquido una presión complementaria, normal a la superficie. Esta presión se puede determinar para tubos capilares por la siguiente fórmula:
r
2p
σ= (1.11)
Donde σ, coeficiente de tensión superficial y r- radio del capilar. En la tabla 1.5 se dan los valores de σ para algunos líquidos. Tabla 1.5 Valores medios del coeficiente de tensión superficial σ.
Líquido σ, N/m Líquido σ, N/m Agua 0,0730 Petróleo 0,0250 Alcohol 0,0225 Glicerina 0,0650 Benceno 0,0290 Mercurio 0,490
1.4.5 Viscosidad de un líquido. La viscosidad será el parámetro que nos permitirá medir la resistencia que ofrece un líquido al movimiento. Tal y como se comentó será la constante de proporcionalidad entre el esfuerzo tangencial aplicada y el gradiente de velocidades del fluido (velocidad de deformación) que aparece a consecuencia de la aplicación de dicho esfuerzo. Como consecuencia de la viscosidad entre las partículas (capas) de líquido surge la fuerza de fricción, que en correspondencia con la ley de Newton, será:
nVdSdF
∂∂
μ= (1.12)
donde: dS - superficie de contacto de las capas.
0nnVlim
nV
→Δ⎟⎠⎞
⎜⎝⎛
ΔΔ
=∂∂ caracteriza la variación de la velocidad en una dirección,
perpendicular a dS .
μ − coeficiente dinámico de viscosidad, su unidad de medida es el 2m/seg.N . El coeficiente dinámico de viscosidad μ depende del tipo de líquido, la presión actuante y de la temperatura.
( )tpf ,=μ En la figura 1.2 se muestra el gradiente de velocidad por la normal.

9
Para valorar también las fuerzas de viscosidad, se utiliza el coeficiente cinemático de viscosidad, ν (m2/s). Se obtiene a partir de la siguiente relación:
ρμ
=ν (1.13)
En la tabla 1.6 se muestran algunos valores de dicho coeficiente en función de la temperatura. Tabla 1.6 Coeficientes cinemáticos de viscosidad de algunos líquidos.
Líquido t, 0C ν.10-4,m2/s Agua dulce 25 0,0090 Gasolina 18 0,0065 Glicerina 20 0,0598 Diesel 20 0,018-0,060 Aceite de turbina 50 0,28-0,32 Aceite de cilindros 100 0,09-0,70 Petróleo pesado 18 1,4 Petróleo ligero 18 0,25 Keroseno 18 0,025
1.4.6 Fuerzas que actúan sobre los líquidos. En la Hidromecánica se estudia el reposo y el movimiento del líquido que se encuentra sometido a un sistema de fuerzas externas. Todas las fuerzas externas pueden ser clasificadas en dos grupos: el grupo de fuerzas volumétricas y el de las fuerzas superficiales. Fuerzas volumétricas: están aplicadas sobre cada partícula del volumen dado. Su magnitud es proporcional a la masa de la partícula. Ejemplos tenemos, la fuerza de gravedad, las inerciales, las electromagnéticas. La intensidad de las fuerzas volumétricas se determina por la siguiente expresión:
0V
VV V
Flimf
→Δ⎟⎟⎠
⎞⎜⎜⎝
⎛
ΔρΔ
=
rr
(1.14)
Fig. 1.2

10
donde: VFr
Δ fuerza volumétrica, aplicada a una partícula de líquido con una masa
VM Δρ=Δ . Si la magnitud VFr
es la misma en todos los puntos del volumen dado, entonces:
VF
f VV ρ
=
rr
(1.15)
La unidad de medida de la fuerza Vfr
es m/s2. Como se aprecia, tiene las mismas unidades que la aceleración. Las proyecciones de esta fuerza sobre los ejes de coordenadas son:
ZfYfXf
Z
Y
X
=
==
(1.16)
La aplicación práctica de la 1.15, la podemos apreciar en la figura 1.3.
En la figura 1.3 asumimos que sobre el líquido, de las fuerzas volumétricas, actúa solo la gravedad y el eje oz se encuentra en la posición vertical, entonces:
gZ
0YX−=
== (1.17)
Sustituyendo en 1.15:
(1.18)
Si asumimos en la figura 1.3, el eje z, positivo hacia abajo, entonces:
gV
gMfV =ρ
Δ= (1.19)
VΔ
y x
z
gMgPFV Δ=Δ=Δrr
gMgPFV Δ=Δ=Δrr
Fig. 1.3

11
Fuerzas superficiales: Actúan sobre la superficie del líquido, que limita al volumen dado. Es proporcional al área de esta superficie. La intensidad de esta fuerza será.
0S
SS S
Flimf→Δ
⎟⎟⎠
⎞⎜⎜⎝
⎛
ΔΔ
=
rr
(1.20)
Donde SFr
Δ es la fuerza superficial que actúa sobre la superficie SΔ , figura 1.4.
Fig. 1.4
Sobre la base de la figura 1.4, se diferencian dos componentes, una normal y la otra tangencial. La componente normal, denominada presión:
0S
n
SFlimp
→Δ⎟⎠⎞
⎜⎝⎛
ΔΔ
= (1.21)
La componente tangencial, denominada fricción:
0SS
Flim→Δ
τ ⎟⎠⎞
⎜⎝⎛
ΔΔ
=τ (1.22)
La unidad de medida de las fuerzas superficiales es 222 mtf,
cmkgf,
mNPa = .
Una de las tareas principales de la Construcción Naval, es la determinación de la componente normal, o sea la presión hidrostática que actúa a una profundidad dada y por la cual se puede determinar la fuerza actuante sobre una plancha del casco.
y
x
z
SΔ
nFr
Δ
τFr
Δ
n SFr
Δ
V

12
PROBLEMAS TÍPICOS RESUELTOS
1- Conocida la densidad del petróleo a 150C, determine la misma para un rango desde 150C hasta 700C, a intervalos de 50C. Construya un gráfico con dicha dependencia.
Este problema es bastante común y de gran importancia, sobre todo, a la hora de realizar la carga de los buques petroleros, en que se debe tener en cuenta la capacidad de los tanques y el desplazamiento del buque. Según la tabla 1.1
Líquido Temperatura,
t, 0C Densidad, ρ, 3m
kg
Peso específico.
3mKN,γ
Densidad Relativa
δ
Petróleo 15 890-940 8731-9221 0,89-0,94
Asumiremos que nuestro petróleo a 150C tiene una densidad de 890 k g/m3. Utilizaremos la fórmula de Mendeleiev (1.6) para obtener la nueva densidad en los rangos de temperatura propuestos.
( )15T1 0T
15T −β+
ρ=ρ (1.6)
En la (1.6) el término Tβ - coeficiente térmico de dilatación volumétrica lo podemos encontrar en la tabla 1.2
Líquido Vβ .1010 Pa-1
Petróleo 7,40 Es recomendable realizar los cálculos en forma de tabla.
nn T βτ T15 p15 Pt 1 2 3 4 5 6 1 15 7,4.10-10 15 890,00 890,0000000000 2 20 7,4.10-10 15 890,00 889,9999967070 3 25 7,4.10-10 15 890,00 889,9999934140 4 30 7,4.10-10 15 890,00 889,9999901210 5 35 7,4.10-10 15 890,00 889,9999868280 6 40 7,4.10-10 15 890,00 889,9999835350 7 45 7,4.10-10 15 890,00 889,9999802420 8 50 7,4.10-10 15 890,00 889,9999769490 9 55 7,4.10-10 15 890,00 889,9999736560

13
nn T βΤ T15 p15 pT 1 2 3 4 5 6
10 60 7,4.10-10 15 890,00 889,9999703630 11 65 7,4.10-10 15 890,00 889,9999670700 12 70 7,4.10-10 15 890,00 889,9999637770
Por los datos de la columna 6 (pt) en función de la columna 2 (T0) se podrá construir el gráfico que muestra la dependencia siguiente:
( )0Tf=ρ
Densidad del petroleo en función de la temperatura
889,9999400000
889,9999500000
889,9999600000
889,9999700000
889,9999800000
889,9999900000
890,0000000000
890,0000100000
15 20 25 30 35 40 45 50 55 60 65 70
Temperatura en grados
Dens
idad
2. Para el ejemplo anterior, utilizando los mismos datos, determine como variarán los parámetros siguientes; peso específico y la densidad relativa. Para determinar el peso específico, basta solo conocer la relación entre densidad y peso específico, dada por la relación (1.4):
gV
mgVG
ρ===γ (1.4)
Asumiremos como aceleración de la gravedad, g=9,81 m/s2 Por lo tanto solo será necesario, la columna 6 de la tabla de cálculo, multiplicarla por la gravedad.
nn T βτ T15 P15 Pt γ, Kn/M3 1 2 3 4 5 6 7 1 15 7,4.10-10 15 890,00 890,0000000000 8730,9000 2 20 7,4.10-10 15 890,00 889,9999967070 8730,9000 3 25 7,4.10-10 15 890,00 889,9999934140 8730,8999 4 30 7,4.10-10 15 890,00 889,9999901210 8730,8999 5 35 7,4.10-10 15 890,00 889,9999868280 8730,8999 6 40 7,4E-10 15 890,00 889,9999835350 8730,8998

14
nn T βτ T15 P15 Pt γ, Kn/M3 1 2 3 4 5 6 7 7 45 7,4.10-10 15 890,00 889,9999802420 8730,8998 8 50 7,4.10-10 15 890,00 889,9999769490 8730,8998 9 55 7,4.10-10 15 890,00 889,9999736560 8730,8997
10 60 7,4.10-10 15 890,00 889,9999703630 8730,8997 11 65 7,4.10-10 15 890,00 889,9999670700 8730,8997 12 70 7,4.10-10 15 890,00 889,9999637770 8730,8996
..
Peso Específico en función de la temperatura
8730,89948730,89958730,89968730,89978730,89988730,89998730,90008730,9001
15 20 25 30 35 40 45 50 55 60 65 70
Temperatura
Peso
Esp
ecífi
co
Como se aprecia del gráfico, se mantiene la misma dependencia que la densidad, cuestión lógica, dada por la relación (1.4) Analicemos la densidad relativa. Como no tenemos la densidad relativa del agua destilada, utilizaremos la expresión (1.5) y los valores de la densidad relativa del agua a 200C, dados en la tabla 1.1
agua
L
agua
L
agua
L
mm
ρρ
=γγ
==δ (1.5)
99820agua
L ,=ρρ
=δ , mkg2998 320 ,=ρ , de aquí despejando, obtenemos que la
densidad del agua destilada será:
mkg
3100099820
2998Lagua ==
δρ
=ρ,
,

15
Entonces para nuestro combustible:
nn T βt T15 p15 pt γ, Kn/M3 ρ agua, kg/m3 δ
1 15 7,4.10-10 15 890,00 890,0000000000 8730,9000 1000 0,89000000002 20 7,4.10-10 15 890,00 889,9999967070 8730,9000 1000 0,88999999673 25 7,4.10-10 15 890,00 889,9999934140 8730,8999 1000 0,88999999344 30 7,4.10-10 15 890,00 889,9999901210 8730,8999 1000 0,89000000005 35 7,4.10-10 15 890,00 889,9999868280 8730,8999 1000 0,88999999676 40 7,4.10-10 15 890,00 889,9999835350 8730,8998 1000 0,88999999347 45 7,4.10-10 15 890,00 889,9999802420 8730,8998 1000 0,88999999018 50 7,4.10-10 15 890,00 889,9999769490 8730,8998 1000 0,88999998689 55 7,4.10-10 15 890,00 889,9999736560 8730,8997 1000 0,889999983510 60 7,4.10-10 15 890,00 889,9999703630 8730,8997 1000 0,889999980211 65 7,4.10-10 15 890,00 889,9999670700 8730,8997 1000 0,889999976912 70 7,4.10-10 15 890,00 889,9999637770 8730,8996 1000 0,8899999737
Densidad relativa del petroleo
0,88999994000,88999996000,88999998000,89000000000,8900000200
15 20 25 30 35 40 45 50 55 60 65 70
Temperatura
Den
sida
d re
lativ
a

16
2. CAPÍTULO 2 HIDROSTÁTICA.
2.1 Objeto de estudio de la Hidrostática. La Hidrostática estudia los líquidos sin movimiento, o más concretamente, con los líquidos que no sufren ninguna deformación, o lo que es lo mismo, en los cuales no existe ningún gradiente de velocidades. La consecuencia directa de la anterior es que la única forma de evitar que aparezcan gradientes de velocidad es que no existan esfuerzos cortantes sobre el líquido. Lo que nos indica que para que un líquido este en reposo, o bien no existen esfuerzos sobre el, o si existen, estos, son esfuerzos normales y de compresión (los fluidos no soportan esfuerzos a la tracción). La Hidrostática, como parte de la Hidromecánica, estudia las leyes de equilibrio de los líquidos en reposo y elabora los métodos prácticos para la aplicación de dichas leyes. La Hidrostática como ciencia, tiene una gran aplicación práctica en la construcción naval. La utilizamos en la determinación de la fuerza de presión hidrostática sobre las planchas del casco y sobre los mamparos, también en la determinación de la fuerza de empuje que mantiene al buque flotando.
De la Mecánica Teórica conocemos, que todo cuerpo se encuentra en equilibrio, cuando las fuerzas actuantes están equilibradas. En un líquido en reposo, las fuerzas superficiales SFΔ , que actúan sobre la superficie SΔ , corresponden a la fuerza de presión hidrostática:
STS PF Δ=Δ (2.1) La intensidad de esta fuerza, en un punto dado está dada por:
0S
STST S
Plimp→Δ
⎟⎠
⎞⎜⎝
⎛Δ
Δ= (2.2)
Y se le conoce como presión hidrostática. En lo adelante, simbolizaremos la presión hidrostática por p . En los líquidos que están en equilibrio la presión hidrostática es análoga a la presión de compresión que actúa sobre los cuerpos sólidos. En la práctica la presión hidrostática se determina por diferentes métodos. Si para esto tenemos en cuenta a la presión atmosférica que actúa sobre la superficie libre del líquido obtendremos la presión absoluta. Frecuentemente, en la técnica, la presión atmosférica no se tiene en cuenta, determinándose la presión excesiva o manométrica:

17
atmabsman ppp −= (2.3) Se encuentran casos en que la presión hidrostática en el líquido es menor que la atmosférica. En tales casos se habla del vacío (enrarecimiento). Se determina este último por la diferencia entre la presión atmosférica y la absoluta y varía en los límites desde 0 hasta 0,1 MPa.
absatmvac ppp −= (2.4) En la figura 2.1 se muestran gráficamente dichas presiones.
Fig. 2.1
2.2 Presión hidrostática y sus propiedades. La presión hidrostática posee dos propiedades: Primera propiedad, actúa siempre por la normal interior a la superficie analizada. Esta propiedad está condicionada por el hecho de que los líquidos en reposo, no resisten los esfuerzos tangenciales o de corte, lo que indica que solo pueden resistir esfuerzos normales a la superficie dada y en dirección hacia el interior del líquido. La dirección contraria, o sea, hacia el exterior, provocaría esfuerzos de tracción y el líquido se pondría en movimiento. Segunda propiedad, su magnitud en un punto dado, no depende de la dirección (orientación) de la superficie sobre la cual actúa. En la figura 2.2 se ha tomado el punto A y se han trazado dos planos, 1-1 y 2-2, orientados arbitrariamente. Entonces las presiones hidrostáticas, que actúan sobre estas superficies, serán iguales:
21 pp =
Presión atmosférica
Presión manométrica
vacío
Presión
Cero absoluto
Presión absoluta

18
Fig. 2.2
Podemos demostrar dicha propiedad, para lo cual tomaremos, de un líquido en reposo, una partícula en forma de prisma elemental (figura 2.3) y analicemos las condiciones de equilibrio de dicha partícula.
Fig. 2.3
El volumen de la partícula:
dzdydx21dV =
La masa de la partícula:
dzdydx21dVdM ρ=ρ=
Compongamos la ecuación de equilibrio de la partícula en la dirección ox. Sobre la partícula actúan las fuerzas superficiales y las volumétricas. De las superficiales, en la dirección indicada, actúan:
dzdyp,dzdyp nx
x
y
z
A
dx
dz
dy
β
dn
pn px
XdM
1
1
2 2
1p
2p

19
De las volumétricas, en la dirección dada:
dzdydx21XdVXdMX ρ=ρ=
Entonces, la ecuación de equilibrio del prisma elemental en la dirección 0x, tendrá el siguiente aspecto:
0dzdydx21Xcosdydnpdzdyp nx =ρ+β−
Como dzcosdn =β , entonces:
0dx21Xpp nx =ρ+−
Si reducimos el prisma al punto A ( 0dx0dV →→ , ) obtendremos:
nxnx ppo,0pp ==− Si componemos las ecuaciones de equilibrio en las direcciones oy, oz, obtendríamos:
nzyx
nzny
ppppmenteDefinitiva
pp,pp
===
==
La segunda propiedad nos da la posibilidad de afirmar que la presión hidrostática es una función continua de las coordenadas.
( )zyxfp ,,=
2.3 Ecuaciones diferenciales del equilibrio de un líquido en reposo y sus integraciones. Ecuación principal de la Hidrostática.
2.3.1 Ecuaciones diferenciales del equilibrio de un líquido en reposo. Con el objetivo de llegar a una fundamentación más rigurosa de la mecánica del equilibrio de un líquido en reposo, se hace necesario expresar dicho equilibrio con la ayuda de las ecuaciones diferenciales. Por primera vez, dichas ecuaciones fueron obtenidas por L. Euler en 1755. Para obtener dichas ecuaciones, tomaremos del líquido en reposo un volumen elemental en forma de paralepípedo rectangular, cuyos lados dzdydx ,, sean paralelos a los ejes de coordenadas (figura 2.4).

20
El volumen de la partícula:
dzdydxdV = La masa de la partícula:
dzdydxdVdM ρ=ρ=
Obtengamos la ecuación de equilibrio de la partícula en la dirección ox. Sobre la partícula actúan las fuerzas volumétricas y las fuerzas superficiales de la presión hidrostática. La proyección de las fuerzas volumétricas sobre el eje ox la representaremos por:
dzdydxXdVXdMX ρ=ρ= De las fuerzas superficiales proyectadas sobre el eje ox, actuará sobre la cara izquierda del paralepípedo en el punto A, la fuerza provocada por ppA = . La presión es una función continua de las coordenadas, por tal motivo, la presión en el centro de la cara derecha, aplicando la serie de Taylor:
dxxpPpB ∂
∂+=
De la Física conocemos que, toda fuerza es el producto de la presión por el área, entonces: La fuerza provocada por Ap , en la cara izquierda, será:
dzdypdSpA = La fuerza provocada por Bp , en la cara derecha, será:
dx
dy
dz
AAp BpB
XdM
z
x
y Fig. 2.4

21
dzdydxxppdSpB ⎟
⎠⎞
⎜⎝⎛
∂∂
+=
Entonces sumando las fuerzas antes mencionadas, obtenemos:
0dzdydxXdzdydxxppdzdyp =ρ+⎟
⎠⎞
⎜⎝⎛
∂∂
+−
Eliminando miembros iguales, obtenemos:
0Xxp1
=+∂∂
ρ−
De forma análoga podemos obtener las ecuaciones para los ejes oy, oz.
0Zzp1
0Yyp1
0Xxp1
=+∂∂
ρ−
=+∂∂
ρ−
=+∂∂
ρ−
(2.5)
Todos los miembros de las ecuaciones (2.5) expresan las correspondientes fuerzas, referidas a la unidad de masa y tienen como dimensión, la aceleración, m/s2. La (2.5) nos indica, que para que un líquido se encuentre en equilibrio, las fuerzas volumétricas deben estar compensadas por las fuerzas superficiales. Estas ecuaciones llevan el nombre de ecuaciones diferenciales de Euler, para el equilibrio de un líquido en reposo. Son válidas para los líquidos incompresibles const=ρ , como para líquidos compresibles ( )Tp ,=ρ . 2.3.2 Integración de las ecuaciones diferenciales de Euler. Ecuación principal de la Hidrostática. Vamos a diferenciar las ecuaciones (2.5), la primera por y, la segunda por x, la tercera por x; después la primera por z, la segunda por z y la tercera por y:
yzp
yZ;
zyp
zY;
zxp
zX
xzp
xZ;
xyp
xY;
yxp
yX
222
222
∂∂∂
=∂∂
∂∂∂
=∂∂
∂∂∂
=∂∂
∂∂∂
=∂∂
∂∂∂
=∂∂
∂∂∂
=∂∂
De aquí se desprende que:

22
xZ
zX
yZ
zY
xY
yX
∂∂
=∂∂
∂∂
=∂∂
∂∂
=∂∂ ;; (2.6)
La expresión (2.6) nos demuestra que las proyecciones de la intensidad de las fuerzas volumétricas, X, Y, Z, son derivadas parciales de una misma función de coordenadas
( )z,y,xW , de tal forma que:
z
WZyWY
xWX
∂∂
=∂∂
=∂
∂= ;; (2.7)
Entonces:
dWdzz
WdyyWdx
xWZdzYdyXdx =
∂∂
+∂∂
+∂
∂=++ (2.8)
La función ( )z,y,xW se denomina potencial de las fuerzas volumétricas y las fuerzas para las cuales ella existe, fuerzas que poseen potencial. En correspondencia con la (1.16): zgdW = (2.9)
Y como la constg = Entonces: CzgW += (2.10)
Cuando z=0, (en la superficie del líquido) 0WW 0 == , ya que en la superficie del líquido no existen las fuerzas volumétricas, por lo tanto 0C = y;
gzW = (2.11)
Si el eje (z) está dirigido como en la figura (2.4), entonces:
gzW −= (2.12)
Tomemos ahora (2.5) y multipliquémosla, el primero por dx, el segundo por dy y el tercero por dz y sumemos las tres:
⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
+∂∂
+∂∂
ρ=++ dz
zpdy
ypdx
xp1ZdzYdyXdx (2.13)
Si tenemos en cuenta la (2.8):
dzdzgdWdp γ=ρ=ρ= (2.14)

23
Czp +γ= (2.15) Cuando z=0 (en la superficie del líquido) 0pp = , significando esto que 0pC = , entonces en lugar de (2.15) y asumiendo hz = (profundidad a la cual se hace la medición), obtenemos: hpp 0 γ+= (2.16)
La expresión (2.16) se denomina ecuación fundamental de la hidrostática. La aplicación de la ecuación fundamental de la hidrostática se muestra en la figura (2.5).
En la expresión (2.16), el primer miembro ( 0p ) representa la presión inicial que actúa sobre la superficie libre del líquido. Este concepto fue formulado por primera vez en una forma un poco más amplia por el matemático y filósofo francés Blaise Pascal en 1647, y se conoce como principio de Pascal. Dicho principio, que tiene aplicaciones muy importantes en la Hidráulica, afirma que la presión aplicada sobre la superficie de un líquido contenido en un recipiente se transmite por igual en todas direcciones y a todas las partes del recipiente. El segundo miembro ph ′=γ se denomina presión excesiva. Ella en cada punto, es directamente proporcional a la profundidad ( h ) a la cual se desea medir la presión. Para el agua dulce 3m
tf1=γ y m10h = ,
acm10at1cm
kgf1kPa198m
tf10hp 22 .., =====γ=′
2.4 Medición de la presión hidrostática.
h1
h2 A
B
p0
γ
20B
10A
hpphpp
γ+=
γ+=
Fig. 2.5

24
La presión hidrostática es posible medirla mediante el piezómetro, que consiste en un tubo de cristal transparente, a través del cual el líquido asciende libremente sin derramarse. La altura del líquido en el piezómetro da directamente la lectura de la presión en altura de columna de líquido. En la figura (2.6) se muestran las conexiones a un recipiente de dos tipos de piezómetros, el cerrado y el abierto. En el piezómetro cerrado, se extrae el aire de su interior, ascendiendo el líquido a mayor altura que en el piezómetro abierto, que tiene conexión con la atmósfera.
Para determinar las presiones en A y en B se hace necesario escribir las ecuaciones del manómetro para ambos puntos. Para el piezómetro cerrado, en el punto A:
pzcpzcP hhpp γ=γ+= (2.17)
De la (2.17) se aprecia que la altura que puede alcanzar el líquido, para una presión dada, estará en dependencia del peso específico del líquido, utilizado para la medición:
γ=
phpzc (2.18)
Para el piezómetro abierto, en el punto B:
pzaatpzaP hphpp γ+=γ+= (2.19)
La altura que puede alcanzar el líquido, para una presión dada, será:
A B
z
H0 h hpza Hpza
z
hpzc
Plano de referencia
Fig. 2.6
Piezómetro cerrado
Piezómetro abierto
Hpzc

25
γ−
= atpza
pph (2.20)
Comparando las expresiones (2.18) y (2.20) obtenemos:
γ−= at
pzcpzap
hh (2.21)
2.4.1 Medición del vacío. Si en una zona determinada, la presión es menor que la presión atmosférica
)pp( at< , entonces se dice que hay vacío. Se acostumbra a medir el vacío en unidades de presión.
ppVAC at −= (2.22)
De esta forma, se denomina vacío a la diferencia que existe entre la presión atmosférica )p( at y otra presión menor que la atmosférica )pp( at< .
De aquí se desprende, que el máximo vacío teórico posible será:
atmax pVAC = (2.23)
Cuando 0p =
Cuando atpp = el vacío es igual a cero, 0VAC = . Dentro de estos límites, la magnitud del vacío, puede tomar cualquier valor, por ejemplo: Cuando at30p ,= , el vacío será at70301ppVAC at ,, =−=−= . Los equipos para medir el vacío se denominan vacuómetros. 2.4.2 Medición de la caída de presión. En muchos casos solo interesa la diferencia entre dos presiones en dos recipientes (caída de presión) y pueden entonces utilizarse los manómetros diferenciales (figura 2.7). Para escribir la ecuación del manómetro, comenzaremos de izquierda a derecha. El líquido medidor será diferente al de los recipientes, en este caso mercurio.
hghgphgpp merc21B11A ρ+ρ+=ρ+= De donde:

26
hg)hh(gpp merc121BA ρ+−ρ=−
O por cuanto hhh 12 −=−
hg)(ppp 1mercBA ρ−ρ=Δ=− (2.24)
Fig. 2.7 Manómetro diferencial. En la práctica ingenieril se utilizan los manómetros, equipos que captan la presión a partir de la deformación de un elemento elástico. Pueden ser de diafragma plano, de capsula y el denominado tubo de Bourdon (figura 2.8). En la figura 2.9 se muestra un manómetro industrial, muy utilizado en los buques.
Figura 2.8 Medidores de presión.
presión presión
lectura
Cápsula
Presión
lectura
Diafragma plano
presión
lectura
Tubo de Bourdon
A B
C
h1
h
h2

27
Fig. 2.9 Manómetro industrial.
Recomendaciones especiales para la conexión de los equipos medidores de presión a tuberías con líquidos en movimiento:
El orificio de conexión debe hacerse exactamente normal a la superficie interior de la pared de la tubería:
El tubo de conexión del piezómetro o manómetro, no debe sobresalir de la superficie interior de la tubería;
Deben eliminarse todas las rebarbas y asperezas cerca del orificio o toma de presión;
Redondear (biselar) los bordes del orificio; El diámetro del tubo de conexión debe encontrarse entre 3 y 6 mm.
En la tabla 2.1 se dan las principales unidades de medida de la presión y su relación. Tabla 2.1 Unidades principales de la presión
Unidades de presión Unidades de presión 1 atm = 1.013 105 Pa 1 N/m2 = 1 Pa 1 atm técnica = 105 Pa 1 kp/m2 = 9.81 Pa 1 bar = 105 Pa 1 atm = 1.033 kgf/cm2
Unidades de presión Unidades de presión 1 atm = 10.33 m.c.a 1 kgf/m2 = 9.81 Pa 1 psi = 6895 Pa 1 kgf/cm2 = 98100 Pa 1 atm = 14.69 psi 1 mm c.a = 9.809 Pa 1 mm Hg = 133.3 Pa 1 m.c.a = 9809 Pa 1 atm = 760 mm Hg 1 atm = 1.033 kgf/cm2 1 atm técnica = 1.019 kgf/cm2
2.5 Empuje hidrostático y piezométrico. El concepto de empuje está muy ligado con el método de medición de la presión, explicado en el apartado 2.4. En la figura 2.6 se ha trazado un plano horizontal de referencia. Las distancias (z) de los puntos de medición, son las alturas de estos sobre el plano de referencia.
Las distancias pzcH y pzaH del plano de referencia son los empujes, relativos al plano asumido. Se aprecia, para el piezómetro cerrado de la figura 2.6 que:
γ++=
γγ+
+=γ
+=+= 00pzcpzc
phz
hpzpzhzH (2.25)

28
Donde pzcH se denomina empuje hidrostático referido al plano de referencia. Para el piezómetro abierto:
γ−=
γ−
+=+=+= atpzc
atpzapzapza
pH
ppzhzhzH (2.26)
Donde pzaH se denomina empuje piezométrico referido al plano de referencia. 2.6 Fuerzas de presión hidrostática sobre paredes planas y cilíndricas. La determinación de la fuerza de presión hidrostática, que actúa sobre una pared determinada (sea plana o cilíndrica) reviste gran importancia para el ingeniero constructor de buques. Se emplea, durante los cálculos de la resistencia estructural de las planchas del forro del casco, de los mamparos, en los cálculos de resistencia de tuberías, etc. Dado que se trata de líquidos en reposo, no pueden existir fuerzas tangenciales y por tanto todas las fuerzas son normales a las superficies consideradas. Si la presión está uniformemente distribuida sobre un área, la fuerza es igual a la presión multiplicada por el área sobre la cual actúa. Su punto de aplicación será el centro de presión o baricentro del área analizada. En general, la distribución de la presión por altura no es uniforme (según la 2.16). Por lo tanto se requiere de un análisis más a fondo. 2.6.1 Fuerzas de presión hidrostática sobre paredes planas. Existen dos métodos para determinar la fuerza de presión hidrostática sobre una pared plana. El método analítico y el grafo-analítico. 2.6.1.1 Método analítico para la determinación de la fuerza de presión hidrostática
sobre una pared plana. Supongamos que una superficie plana tiene un área S, situada en el líquido en el plano ( )ηζ0 , el cual es perpendicular al plano del dibujo (figura 2.10). La proyección de esta superficie sobre el plano del dibujo es la recta AB. A la derecha, esta girado el plano ( )ηζ0 y con el la superficie, relativo al eje ( )ζ0 . Tomemos en la superficie S, el punto N a la profundidad h y cercano a él la superficie elemental dS. En los límites de dS la presión hidrostática hpp 0 γ+= , por lo elemental del área según la 2.16 será la misma. Entonces la fuerza elemental de presión que actúa sobre dS será:

29
( ) dShdSpdShpdSpdP 00 γ+=γ+== (2.27) Para obtener la fuerza total para toda el área, será suficiente integral la (2.27). ( ) ∫ γ+∫=∫ γ+=∫=
SS0
S0
SdShdSpdShpdSpP (2.28)
Como constp0 = , entonces el miembro SpdSp 0
S0 =∫ .
En la figura 2.10 se aprecia que θζ= senh , entonces si asumimos que el líquido es homogéneo, const=γ :
ηθγ=∫ ζθγ=∫ γ SsendSsendShSS
(2.29)
En la (2.29), el miembro ηS , es el momento de primer orden o momento estático con
relación al eje ( )η0 . Al mismo tiempo SS Cζ=η ; donde Cζ es la coordenada del centro geométrico (punto C de la figura 2.10) del área S. Por consiguiente:
ShSsendSh CCS
γ=ζθγ=∫ γ (2.30)
En la (2.30) Ch , profundidad del punto C. Teniendo en cuenta la (2.28) podemos escribir:
( ) SpShpShSpP CC0C0 =γ+=γ+= (2.31)
- Cp , presión hidrostática en el punto C.
S
η
θ
0p
hch
dP0PP′ A
B
D CdSNζ
ζ
Dζ Cζ
)( ηo
B
Fig. 2.10

30
De la (2.31) se aprecia que la fuerza de presión hidrostática, está compuesta por dos miembros:
PPP 0 ′+= (2.32) SpP 00 = - fuerza provocada por la presión inicial.
ShP Cγ=′ - fuerza de presión excesiva, o fuerza provocada por la columna de líquido.
El punto de aplicación (independiente del método utilizado) de 0P , como es una fuerza uniformemente distribuida, será C, centro de gravedad de área S. C0 ζ=ζ (2.33)
La fuerza P′ , se encuentra aplicada en el centro de presión D. Señalemos que
CD ζ>ζ por cuanto la presión excesiva hp γ=′ aumenta con la profundidad.
La coordenada Dζ puede ser determinada a partir de la siguiente condición:
∫ ζ′=γ=′S
Pdhp - el momento de una fuerza resultante es igual a la suma de los
momentos de las fuerzas componentes.
SI
C
1CD ζ
+ζ=ζ η (2.34)
1I η - momento de inercia o momento de segundo orden del área S con relación al eje
central 1η paralelo al eje η (ver figura 2.10).
La coordenada ( ζ ) de la fuerza resultante PPP 0 ′+= , puede ser determinada, partiendo de la siguiente condición:
DC0 PPP ζ′+ζ=ζ (2.35)
Despejando ( ζ ) de la (2.35):
PPP DC0 ζ′+ζ
=ζ (2.36)
2.6.1.2 Método grafo-analítico para la determinación de la fuerza de presión
hidrostática sobre una pared plana. El análisis lo realizaremos para una plancha plana de longitud L y ancho b. La solución propuesta consiste en confeccionar el diagrama de las presiones iniciales y excesivas, como se muestra en la figura 2.11. Con la ayuda de estos diagramas podremos calcular a PyP0 ′ y sumando ambos obtenemos a P .

31
Fig. 2.11
Comenzaremos por la construcción del diagrama de la fuerza de presión inicial 0P .
Como la presión inicial 0p se transmite por igual en todas direcciones (ley de Pascal), el diagrama tendrá forma rectangular (carga uniformemente distribuida). El área de dicho rectángulo será.
(2.37) La fuerza de presión inicial, teniendo en cuenta la (2.37) será:
llbpSpP 0000 Ω=== (2.38) Construyamos ahora el diagrama para la fuerza de presión excesiva. En este caso la presión excesiva p′ varía por una ley lineal y depende de la profundidad hP γ=′ . Por tal motivo el diagrama tendrá forma de trapecio. Para el caso general: (2.39)
Por analogía con la (2.38), la fuerza de presión excesiva será:
lP Ω′=′ (2.40)
La suma de la (2.38) y la (2.42) nos permite obtener la fuerza total de la presión hidrostática:
( ) lPPP 00 Ω′+Ω=′+= (2.41) En muchas tareas prácticas, la determinación de la fuerza total de presión hidrostática (en lo adelante, fuerza de presión hidrostática), consiste solo en la determinación de la componente P′ . En estos casos es permisible tal suposición debido a que la presión
η
)(o η0p
ζ
b
l
S
θ
0pAhγ
Bhγ
0Ω
Ω ′Ah
Bh
B
A
mtf,m
kN,bp 00 =Ω
mtf,m
kN,b2
hh BA γ+γ=Ω ′

32
inicial es igual a la presión atmosférica ( at0 pp = ), la cual se transmite en todas direcciones por igual.
lPP Ω′=′= (2.42) 2.6.2 Fuerzas de presión hidrostática sobre paredes cilíndricas. En la construcción naval muchas planchas del casco no son planas, sino poseen determinada curvatura dado por las necesidades del diseño. Esto obliga a desarrollar todo una nueva teoría debido a la complejidad del asunto. Las curvaturas, por sus formas, pueden estar definidas por una ecuación característica (parábola, circunferencia, elipse) o no prestarse a dichas ecuaciones características y tener una curvatura cualquiera. Para el caso general, la fuerza de presión hidrostática puede determinarse por la siguiente ecuación:
2Z
2Y
2X PPPP ++= (2.43)
Donde ZYX P,P,P , son las proyecciones de la fuerza de presión sobre los ejes de coordenadas (ox, oy, oz).
Si la estructura calculada se encuentra perpendicular al plano xoz, entonces 0PY = y la (2.43) toma el siguiente aspecto:
2Z
2X PPP += (2.44)
De la figura 2.12, se aprecia, que la tarea cilíndrica (por llamarla de alguna forma) se ha convertido en dos tareas planas. Es lógico tal consideración, por cuanto XP actúa sobre
la proyección de la plancha cilíndrica contenida en el plano yoz y ZP actúa sobre la proyección de la plancha cilíndrica contenida en el plano xoy. Ver figura 2.12.
0 x
z
E A
B
Lh hA
p0
y
PZ
PX P
Fig. 2.12

33
1- Determinemos la componente de la fuerza de presión XP , (figura 2.13): Utilizaremos para la solución de la tarea, el método grafo-analítico.
XOXX PPP ′+= (2.45)
Donde: XOX PP ′, , componentes horizontales de las fuerzas de presión inicial y excesiva, respectivamente. De la figura 2.13
LSpP X0YOX0OX Ω== (2.46)
LP XX Ω′=′ (2.47) Sumando la (2.46) y la (2.47) obtenemos:
( )LPPP XX0XOXX Ω′+Ω=′+= (2.48)
- XX0 ,Ω′Ω áreas de los diagramas de las presiones correspondientes.
- La línea de acción de XOXX P,P,P ′ pasa a través de los centros geométricos de
los volúmenes L,L XX0 Ω′Ω .
O X
Y
Z
E
E1
A
B
L
SYOZ B1
γ hA
po
xΩ′
γ hB
PX
oxΩ
Fig. 2.13

34
2- Determinación de la componente de la fuerza de presión ZP , (figura 2.14):
Como se aprecia de la figura 2.14, la componente de la fuerza de presión ZP , será igual a la suma de dos fuerzas.
gOZZOZZ PPPPP +=′+= (2.49)
La primera gZ PP =′ , es el peso del líquido en el volumen V , formado por el producto
del área ABONA ( )ZΩ por su ancho en profundidad (L). Ver figura 2.14.
LPP ZgZ Ωγ==′ (2.50)
La segunda componente OZP , es el resultado de la multiplicación de Op por el área
XOYS .
LSpP OZXOY0OZ Ω== (2.51) Sumando la (2.50) y la (2.51), obtendremos la fuerza de presión sobre una pared cilíndrica.
( )LPPP ZOZZOZZ Ωγ+Ω=′+= (2.52) La componente ZP′ recibe el nombre de fuerza de Arquímedes, derivándose un principio importante de la estática de los fluidos, descubierto por el matemático y filósofo
X
Y
Z
0 N
B
A
L
p0
P0Z
Pg pz
SXOYZ0Ω
ZΩ
Fig. 2.14

35
griego Arquímedes. El principio de Arquímedes afirma que todo cuerpo sumergido en un fluido experimenta una fuerza hacia arriba igual al peso del volumen de fluido desplazado por dicho cuerpo. Esto explica por qué flota un barco muy cargado. El peso del agua desplazada por el barco equivale a la fuerza hacia arriba que mantiene al mismo a flote.
VLP ZZ γ=Ωγ=′ (2.53) Donde V- volumen sumergido del cuerpo (en el buque se denomina volumen de la obra viva). El punto sobre el que puede considerarse que actúan todas las fuerzas que producen el efecto de flotación se llama centro de flotación (centro de carena, C) y corresponde al centro de gravedad del fluido desplazado. El centro de carena de un cuerpo que flota de forma estable está situado exactamente debajo de su centro de gravedad. Cuanto mayor sea la distancia entre ambos, mayor es la estabilidad del cuerpo.
2.7 Aplicaciones de los cálculos de fuerzas de presión sobre paredes planas y cilíndricas.
Analizaremos algunas aplicaciones prácticas del capítulo analizado anteriormente. 2.7.1 Cálculo del espesor de la pared de una tubería. Un caso de interés práctico representa el cálculo del espesor de la pared de una tubería presurizada durante la realización de su prueba hidrostática. Si la presión es lo suficientemente grande como para calcular el espesor de la pared de la tubería, también lo es para despreciar su variación a lo largo de su diámetro. La fuerza de presión que actúa desde el interior tiende a romper la tubería por el plano X-Y (figura 2.16).
W Lg
c
P
γ V
Fig. 2.15

36
La fuerza total que actúa sobre la mitad de la tubería será igual a:
LRp2F = (2.54)
Donde R-radio de la tubería y L es la longitud de la tubería sometida a prueba. Esta fuerza es resistida por las tensiones T de las paredes de la tubería. Evidentemente:
LRp2T2 = (2.55) Si se conoce la tensión permisible del material ( σ ), podrá determinarse el espesor necesario de la pared de la tubería.
LRpLtT =σ= (2.56) De donde:
σ=
Rpt (2.57)
Si tenemos en cuenta los efectos de la corrosión, los tecnológicos, los de fundición, etc. Entonces:
eRpt +σ
= (2.58)
Donde:
mm7a3e = 2.7.2 Cálculo de la fuerza de presión en el interior de un codo. La fuerza de presión de un líquido presurizado, F, que actúa sobre las paredes cilíndricas de un codo de una tubería, está dirigida desde el centro del codo (figura 2.17) y se determina por la siguiente expresión:
x y
R
T T
t
p
Fig. 2.16

37
2sen
2dp
2senF2F
2
1φπ
=φ
= (2.59)
2.7.3 Cálculo de la fuerza de presión en las prensas hidráulicas. La prensa hidráulica es un aparato basado en la transmisión de la presión del líquido en todas direcciones, figura 2.18. Si G1 y G2 son los pesos de los cilindros, y p1 y p2 son las presiones sobre las caras inferiores de los pistones, entonces:
2222
1111
SpGFSpGF
=+=+
(2.60)
G2
G1
F2 F1
G2
G1
F2 F1
z
F1 F1
F1 F1
F
φ φ
d
Fig. 2.17
Fig. 2.18

38
Para el caso ilustrado en la figura 2.18:
zpp 12 γ+= (2.61) Entonces
( ) ZSSGFGF
1
21122 γ++=+ (2.62)
Si despreciamos los pesos de los pistones y la magnitud Z, por su pequeñez:
( )1
212 S
SFF = (2.63)
2.7.4 Reflotación de buques. La reflotación de cualquier cuerpo flotante es una tarea bastante compleja por las características de las fuerzas que actúan y las condiciones en que se realizan dichas operaciones. Analizaremos el problema, solo desde el punto de vista de la Hidromecánica, obviando algunos elementos importantes propios de otras especialidades. En la figura 2.19 se muestran los pasos por etapas, de la reflotación de un cuerpo de forma rectangular, que tiene una manga B, un puntal H y una eslora L y que está hundido a una profundidad h.
h
h
H
H
T
p0
⎟⎠⎞⎜
⎝⎛γ 3m
kN,( I )
( II )
( III )
Fig. 2.19

39
En la primera etapa, el cuerpo se encuentra asentado en el fondo, actuando sobre él las siguientes fuerzas (figura 2.20):
- La fuerza de la presión hidrostática (FST), actuando sobre la superficie B x L. - El peso del agua (Fag) contenida en el volumen del cuerpo, producto de la avería. - El peso del propio cuerpo (FC). - La fuerza de adherencia del cuerpo al fondo (Fad). Depende esta fuerza de las
características del fondo (rocoso, fango, arena). Para comenzar el isaje del cuerpo, se precisa despegarlo del fondo. La fuerza necesaria será:
adCagSTisaje FFFFF +++= (2.64) El peso del casco (FC) y la fuerza de adherencia (Fad) del cuerpo al fondo, no son objetos de estudio de este texto. La fuerza de presión hidrostática, aplicando la (2.16) será:
LBhFST γ= (2.65)
El peso del agua (Fag), en el cuerpo en cuestión:
LHBFag ..γ= (2.66)
p0
h
H
⎟⎠⎞⎜
⎝⎛γ 3m
kN,
I ETAPA
γ h
Fad
FC
FST
Fag
Fig. 2.20

40
En la segunda etapa (figura 2.21), el cuerpo se encuentra en una posición ya sin contacto con el fondo. La fuerza de adherencia (Fad) desaparece inmediatamente que el cuerpo se separa del fondo. Analicemos las fuerzas que actúan:
Cag2ST1STisaje FFFFF ++−=
Pero:
( ) LBHhF,LBhF 2ST1ST +γ=γ= Entonces:
( ) LHBLBHhLBhFF 2ST1ST γ−=+γ−γ=− Por lo tanto si tenemos en cuenta la (2.66):
ccisaje FFBHLBHLF =+γ+γ−= (2.67)
En la tercera etapa, el cuerpo se encuentra, una parte en el agua y la otra fuera de ella, manteniendo un calado T, (figura 2.22)
p0
h
H ⎟⎠⎞⎜
⎝⎛γ 3mkN,
II ETAPA
γ h
FST2
FC
FST1
Fag
γ h
γ ( h+H)
Fig. 2.21

41
Obtengamos la ecuación de equilibrio para está etapa:
STCagisaje FFFF −+= Si tenemos en cuenta la (2.66) y que:
LBTFST γ=
Entonces:
( )THLBF
TBLLHBFF
C
Cisaje
−γ+=
=γ−γ+= (2.68)
p0
T
⎟⎠⎞⎜
⎝⎛γ 3mkN,
III ETAPA
FST
FC
Fag
γ Τ
Fig. 2.22

42
PROBLEMAS TÍPICOS RESUELTOS
1. Analizaremos un problema que con frecuencia se nos da en la práctica de la construcción naval, los llamados gatos hidráulicos, utilizados para levantar los bloques o secciones en el taller de casco. Su principio de trabajo se basa en la prensa hidráulica. Por la ley de Pascal, la presión ejercida por el pistón pequeño se transmitirá en todas direcciones con la misma intensidad. Por lo tanto al ser el pistón 2 mayor que el pistón 1, la fuerza 2 será mayor también. Asumiremos los siguientes datos para la prensa de la figura 2.23: D2=0,1 m D1=0,05 m G1=5,1 N G2=12,3 N ρ=900kg/m3, densidad del aceite hidráulico. P1=4,47.103HPa Z= 0,2 m
De la Fig. 2.23 se aprecia que, la presión en el pistón 2 será la p1 más la columna γ Ζ, o sea:
( )[ ]HPa104874
Pa84487652081990010474
gzpzpp
3
5
aceite1aceite12
.,
,,.,..,
=
==+=
=ρ+=γ+=
Entonces, teniendo en cuenta los pesos de los pistones, las fuerzas sobre los pistones 1 y 2 serán:
N876751,505,0.78,0.447000GApGFGApGF
211111
22222
=+=+=+
+=+
Para que el sistema esté en equilibrio, ambos pistones deben estar equilibrados. Por lo tanto:
F1 F2
G1
G2
Z
Fig. 2.23

43
( ) ( )
KN5,352N5,3524533,122,0.81,9.90005,01,087675
GgzAAGFF;gz
AAGFGF
2
2aceite1
2112aceite
1
21122
==−+⎟⎠
⎞⎜⎝
⎛=
=−ρ++=ρ++=+
Si queremos determinar la distancia que recorrerán ambos pistones, basta con escribir la ecuación de trabajo, realizado por ambos pistones.
111222 y)GF(y)GF( +=+ Se aprecia que el pistón 2 recorrerá menor distancia que el pistón 1 2. Veamos otro problema ilustrativo, (Fig. 2.24), una estaca que sirve de sujeción a embarcaciones y que está clavada a una profundidad de H = 4 m con una sección transversal cuadrada de b x b, (b=20 cm) y que se encuentra a un ángulo φ =600 con relación a la perpendicular.
Como todas las áreas de los 4 lados son iguales, entonces:
2m0,923730cos
HbS ==
Sobre cada una de las áreas de los lados actuará una fuerza igual a:
N18142,3038==ρ= 92370028191001ShgR C1 ,.,.,. Esta fuerza actuará normal a cada una de las áreas y por tal motivo se neutralizarán, o sea R = 0. Sin embargo, debido a la inclinación de la estaca, existirá un momento de vuelco, producido por el corrimiento de las fuerzas actuantes. Dicho momento de vuelco será:
L R1 R1 φ
H
b
b
a-a a
a
pat
Fig. 2.24

44
.L18142,3038==ρ== L92370028191001SLhgLRM C1 .,.,.,.
Donde L – es el brazo entre las dos fuerzas opuestas. Según la Fig. 2.24, dicho brazo será:
m1155,030tan
bL 0 ==
Y por lo tanto:
.mN2094,711155,0.9237,0.0,2.81,9.1001SLhgLRM C1 ==ρ== 3. Este problema tiene que ver con la clásica válvula automática de rebozo de un tanque. La misma debe abrirse cuando el nivel del líquido alcance la altura H. Las dimensiones de la compuerta se dan en la Fig. 2.25
Se aprecia que la fuerza que abrirá la compuerta será la fuerza de la columna (H+a) y que su centro de aplicación debe pasar por la horizontal situada en el centro de presión. Según la expresión (2.34).
SI
C
1CD ζ
+ζ=ζ η
La profundidad a la cual se encuentra el centro de gravedad de la compuerta será:
Fig. 2.25

45
2aHC +=ζ
El momento de inercia de la compuerta con relación al eje x, según tabla 2.1:
12abI
3
1 =η
El área de la compuerta: baS .=
Entonces, el centro de presión estará a:
m,
2aH
a2aH
b.a.2aH
ba2aH
23
D
⎟⎠⎞
⎜⎝⎛ +
+⎟⎠⎞
⎜⎝⎛ +=
⎟⎠⎞
⎜⎝⎛ +
+⎟⎠⎞
⎜⎝⎛ +=ζ
4. El problema que analizaremos a continuación está estrechamente ligado a nuestra especialidad. Se trata de reforzar un mamparo con dos refuerzos transversales que soporten iguales cargas, (Fig. 2.26)
No cabe duda de que, para que esto pueda ocurrir, la posición de cada refuerzo deberá coincidir con los centros de presiones de dos planchas equivalentes en carga, o sea se deberá dividir por altura el mamparo en dos planchas, cuyas fuerzas actuantes sobre ellas, sean iguales (Fig.2.27)
h1
h2 a
b Fig. 2.26

46
El cálculo lo realizaremos por aproximaciones sucesivas, mostradas en la siguiente tabla.
nn a a1 a2 a1+a2 b F1 F2 Diferencia 1 10 5,0000 5,0000 10 4 50,00000 150,00000 100,00000 2 10 6,0000 4,0000 10 4 72,00000 128,00000 56,00000 3 10 7,0689 2,9311 10 4 99,93785 100,06175 0,12391 4 10 8,0000 2,0000 10 4 128,00000 72,00000 -56,00000 5 10 9,0000 1,0000 10 4 162,00000 38,00000 -124,000006 10 6,5000 3,5000 10 4 84,50000 115,50000 31,00000 7 10 4,0000 6,0000 10 4 32,00000 168,00000 136,00000
El cálculo de F1 y F2 se realizó de la forma siguiente:
1asumiendo,ba21ba
21F 2
1211 =γ=γ=
( ) 1asumiendotambién,
2baaa2F 221
2 =γ+
=
Se aprecia que las planchas de la fila 3, son las que tienen iguales fuerzas actuando sobre ellas.
Nn a a1 a2 a1+a2 b F1 F2 Diferencia3 10 7,0689 2,9311 10 4 99,9378 100,0618 0,12391
El siguiente paso es bien sencillo. Calculamos para cada plancha por separado, el centro de presión y en esa posición se colocan los refuerzos (Fig.2.28). Para calcular el centro de presión utilizaremos la expresión (2.34).
SI
C
1CD ζ
+ζ=ζ η (2.34)
a1
a2
F1
F2
F1=F2 a
Fig. 2.27

47
Para la fuerza F1:
11C
1a11C1D S
Iζ
+ζ=ζ ηy
Para la fuerza F2:
22C
2a12C2D S
Iζ
+ζ=ζ η
H a1 a2 b S1 S2
10 7,0689 2,9311 4 28,275 11,72
1Cζ 1a1I η 1Dζ 2Cζ 2a1I η 2Dζ 3,53 117,74 4,71 1,47 8,39 1,95
Entonces el refuerzo superior será colocado a:
m71,4h 1D1 =ζ= El refuerzo inferior:
m0189,995,10689,7ah 2D12 =+=ζ+=
F1=F2
a1 F1
p1 = γ a1
a2 F2
p2 =γ (a1+a2)
p1 = γ a1
Fig. 2.28

48
3. CAPÍTULO 3 CINEMÁTICA.
3.1 Objeto de estudio de la Cinemática. La Cinemática se encarga del estudio de las leyes del movimiento del líquido, sin tener en cuenta las fuerzas que provocaron dicho movimiento. Dentro de los parámetros cinemáticos tenemos, las velocidades, las aceleraciones, las velocidades angulares de desplazamiento y las de remolino o vortiginosas y la circulación de la velocidad. El estudio de estos parámetros permitirá, en próximos capítulos, determinar las presiones, las tensiones tangenciales y por lo tanto las fuerzas que actúan durante el movimiento de un líquido. Antes de profundizar en el estudio de la Cinemática, se hace necesaria la introducción de una serie de conceptos y consideraciones. 3.2 Los métodos de estudio del movimiento de un líquido. Método de Lagrange. Consiste en el seguimiento de cada partícula durante el movimiento del líquido. Este método es análogo al utilizado durante el estudio del movimiento de un punto material en la Mecánica Teórica. Su objetivo es la determinación de la trayectoria de cada partícula y sus parámetros de movimiento. Se aprecia por simple lógica que en las condiciones de navegación, tal método es imposible de utilizar, por lo tanto prescindiremos de él. Método de Euler. Consiste, no en el seguimiento de cada partícula, sino en fijar un punto en el espacio lleno de líquido en movimiento y tomar los parámetros de dicho movimiento al igual que su variación en tiempo. En la práctica, en un sistema naval esto se materializa con la colocación de manómetros y termómetros que permiten tomar los parámetros del movimiento del líquido en el transcurso del tiempo. De la definición del método de Euler se desprende que al fijar un punto en el espacio de líquido en movimiento, los parámetros obtenidos serán funciones de las coordenadas y el tiempo. Si asumimos como sistema de coordenadas al sistema cartesiano x, y, z, entonces las proyecciones de las velocidades serán:
( )( )( )tz,y,x,vv
tz,y,x,vvtz,y,x,vv
zz
yy
xx
=
==
(3.1)

49
Las aceleraciones:
( )
( )
( )tz,y,x,adt
dva
tz,y,x,adt
dva
tz,y,x,adt
dva
zz
z
yy
y
xx
x
==
==
==
(3.2)
Y la densidad, la presión y la tensión tangencial: ( ) ( ) ( )tzyxtzyxpptzyx ,,,,,,,,,,, τ=τ=ρ=ρ (3.3) Las coordenadas ( )z,y,x y el tiempo (t) se denominan variables de Euler. Las expresiones (3.1) a la (3.3) determinan las magnitudes de τρω ,p,,,v en los diferentes puntos fijados en el espacio de líquido en movimiento, lo que determina los campo de velocidades, densidad, presiones y tensiones tangenciales, que es en definitiva el objetivo del método de Euler. 3.3 Conceptos cinemáticos y clasificación de los flujos. Introduciremos algunos conceptos cinemáticos, necesarios para el estudio del movimiento de los líquidos. 3.3.1 Flujo. Conjunto de partículas líquidas que se mueven en el espacio. Por tal motivo, en cada punto del espacio de líquido en movimiento y en determinado tiempo, la velocidad asume determinada magnitud y dirección, obteniéndose un campo de velocidades. 3.3.2 Línea de corriente. Durante el estudio del líquido en movimiento, su representación gráfica ser logra con la construcción de la línea de corriente. Se denomina línea de corriente la curva que pasa por una serie de puntos en el líquido en movimiento de manera tal que los vectores de las velocidades de las partículas de líquido, que se encuentran en el momento dado de tiempo en estos puntos, son tangentes a ella. No se debe confundir trayectoria con línea de corriente. La primera se refiere solamente a una partícula determinada de líquido y muestra la traza recorrida por dicha partícula en el espacio en cierto intervalo de tiempo. La segunda enlaza entre sí distintas partículas que se encuentra sobre ella y caracterizan el sentido de su movimiento en un

50
momento dado de tiempo. Las líneas de corriente pueden variar con el tiempo al variar el campo de velocidades. Para componer la ecuación diferencial de la línea de corriente, tomemos sobre ella los incrementos de las coordenadas dx, dy dz, que corresponden al elemento ds (Fig.3.1).
Por cuanto la dirección del elemento dS coincide con la dirección de la velocidad, entonces sus cósenos directrices coincidirán. Por consiguiente:
dSdz
vv
dSdy
vv
dSdx
vv
z
y
x
=
=
=
(3.4)
De aquí se desprende la ecuación diferencial de la línea de corriente:
zyx dv
dzdvdy
dvdx
== (3.5)
3.3.3 Superficie de corriente. Es aquella superficie formada por líneas de corriente. Si la superficie está formada por un contorno cerrado, entonces estamos en presencia de un tubo de corriente, el cual no permite que el líquido, ni salga ni entre en sentido transversal, solo puede pasar a lo largo del mismo en forma de chorro (figura 3.2).
y
x
z
dS
V
0
Fig. 3.1

51
3.3.4 Sección viva del flujo. Área de la sección del flujo, trazada perpendicularmente a la dirección de las líneas de corriente, o sea perpendicular a la dirección de la velocidad (figura 3.3).
3.3.5 Caudal de líquido. Cantidad de líquido que atraviesa la sección viva del flujo en la unidad de tiempo. También se le conoce como gasto. Supongamos, que el flujo de líquido está representado por las líneas de corriente, como se muestra en la figura 3.4. Supongamos que ds es un elemento de la superficie S y que n es la normal a esta superficie. V-velocidad en cualquier punto de ds.
V
900
n v
S
dSy
x
z
0
Fig. 3.4
Fig. 3.3
Fig. 3.2

52
Entonces según definición, el caudal a través de la superficie elemental ds será:
dSvdQ n= (3.6) De aquí, el caudal de líquido a través de toda la superficie S, será:
( )dSnvVdSvQS S
n∫∫ ∫∫== ,cos (3.7)
Si se asume que la velocidad normal a la superficie es la velocidad media (vn =vm), entonces:
SvQ m= (3.8) Se diferencian dos tipos de caudal, el volumétrico (Q) y el caudal másico (Qm). El Q frecuentemente se da en m3/h, m3/min, m3/s, lts/min, lts/s. El Qm se da en kg/s, kg/min, kg/h, t/min, t/h. El caudal másico Qm.
sT,
tVQQm ρ=ρ= (3.9)
Si la expresión (3.9) se multiplica por la gravedad, obtenemos:
skN,QQg
tVgQg γ=ρ=ρ= (3.10)
3.3.6 Aceleraciones locales y convectivas. Antes de analizar los tipos de movimiento que existen, se hace necesario estudiar el campo de aceleraciones durante el movimiento del líquido. Para esto, tomemos la expresión (3.1) y derivémosla con respecto al tiempo.

53
dtdz
zv
dtdy
yv
dtdx
xv
tv
dtdva
dtdz
zv
dtdy
yv
dtdx
xv
tv
dtdv
a
dtdz
zv
dtdy
yv
dtdx
xv
tv
dtdva
zzzzzz
yyyyyy
xxxxxx
∂∂
+∂
∂+
∂∂
+∂
∂==
∂
∂+
∂
∂+
∂
∂+
∂
∂==
∂∂
+∂
∂+
∂∂
+∂
∂==
(3.11)
Pero conocemos que:
z
y
x
vtz
dtdz
vty
dtdy
vtx
dtdx
=∂∂
=
=∂∂
=
=∂∂
=
(3.12)
Por lo tanto, teniendo en cuenta (3.12), la (3.11) asume el siguiente aspecto:
zvv
yvv
xvv
tv
dtdva
zv
vy
vv
xv
vt
vdt
dva
zvv
yvv
xvv
tv
dtdva
zz
zy
zx
zzz
yz
yy
yx
yyy
xz
xy
xx
xxx
∂∂
+∂∂
+∂
∂+
∂∂
==
∂
∂+
∂
∂+
∂
∂+
∂
∂==
∂∂
+∂
∂+
∂∂
+∂
∂==
(3.13)
Las expresiones (3.15) determinan el campo de aceleraciones del líquido en movimiento. En la misma las derivadas parciales de las componentes de las velocidades con respecto al tiempo, representan las aceleraciones locales:
tv
tv
tv zyx
∂∂
∂
∂
∂∂ ,, (3.14)
Las aceleraciones locales determinan la variación en tiempo de la velocidad en un punto determinado del espacio de líquido en movimiento. Los restantes miembros, representan las aceleraciones convectivas.

54
zvv
yvv
xvv
zv
vy
vv
xv
v
zvv
yvv
xvv
zz
zy
zx
yz
yy
yx
xz
xy
xx
∂∂
+∂∂
+∂
∂∂
∂+
∂
∂+
∂
∂∂
∂+
∂∂
+∂
∂
(3.15)
Las aceleraciones convectivas representan la variación de la velocidad de una partícula cuando se traslada de un punto a otro del espacio. Las derivadas simples (completas), representan la suma de las aceleraciones locales y convectivas.
dtdv
dtdv
dtdv zyx ,, (3.16)
3.3.7 Tipos de movimientos. Movimiento estacionario: Se denomina movimiento estacionario, aquel tipo de movimiento, en el cual los parámetros que lo caracterizan no varían con relación al tiempo. En este caso, las aceleraciones locales, serán iguales a cero.
0t
vt
vt
v zyx =∂
∂=
∂
∂=
∂∂
(3.17)
Las componentes de las aceleraciones, para este tipo de movimiento, serán solo las convectivas.
zvv
yvv
xvv
dtdva
zv
vy
vv
xv
vdt
dva
zvv
yvv
xvv
dtdva
zz
zy
zx
zz
yz
yy
yx
yy
xz
xy
xx
xx
∂∂
+∂∂
+∂
∂==
∂
∂+
∂
∂+
∂
∂==
∂∂
+∂
∂+
∂∂
==
(3.18)
Si la magnitud y dirección de las velocidades no cambian durante el movimiento estacionario, la forma de las líneas de corriente no cambiará y el movimiento se denominará movimiento uniforme.

55
Si durante el movimiento del líquido, las secciones transversales varían por longitud y por lo tanto, varían las velocidades medias, entonces el movimiento se denomina, movimiento estacionario no uniforme (figura 3.5).
En el caso de que los parámetros que caractericen el movimiento del líquido varíen con relación al tiempo, el movimiento se denomina no estacionario. En los sistemas navales, tal tipo de movimiento es inadmisible, por cuanto no se podrá estabilizar el trabajo continuo y uniforme del mecanismo, asistido por estos sistemas. Además de los movimientos señalados, existe el movimiento estacionario con remolino (movimiento vortiginoso) y sin remolino. Movimiento con remolino, es aquel durante el cual las partículas del líquido giran alrededor de un eje instantáneo. En el movimiento sin remolino, las partículas no giran durante su desplazamiento. 3.4 Ecuación de continuidad en las variables de Euler. El estudio de las regularidades cinemáticas de las corrientes de líquidos, es una tarea fundamental de la Hidromecánica. Parte importante de ese estudio lo conforma la obtención de la ecuación de continuidad, que representa la ley de conservación de la masa para un campo continuo de velocidades. Para obtener dicha ecuación tomaremos de un espacio de líquido en movimiento, un volumen elemental en forma de paralepípedo rectangular, cuyas aristas sean paralelas a los ejes de coordenadas (figura 3.6).
d1 d2
V1
P1 V2
P2
Fig. 3.6
Fig. 3.5

56
Calcularemos la masa de líquido que atraviesa la superficie de dicho volumen en la unidad de tiempo. El análisis lo realizaremos para la dirección del eje 0x. Por analogía obtendremos las restantes direcciones. En la dirección 0x, a través de la unidad de superficie de la cara izquierda, en la unidad de tiempo, pasa una masa de líquido igual a xvρ , Como consecuencia de la continuidad de la magnitud antes señalada, denominada densidad de corriente, a través de la unidad de superficie de la cara derecha, en el mismo tiempo, pasa una masa de
( )dx
xv
v xx ∂
ρ∂+ρ .
Para obtener la masa total de líquido que entra por la cara izquierda y la que sale por la cara derecha en el mismo tiempo y en la dirección 0x, basta con multiplicar por el área de dichas caras y por el tiempo transcurrido. Masa que entra por la cara izquierda: dydzdtv xρ
Masa que sale por la cara derecha: ( )
dydzdtdxxv
v xx ⎟
⎠
⎞⎜⎝
⎛∂ρ∂
+ρ
No hay dudas de que la diferencia entre las masas (la que sale y la que entra) se debe a la masa existente en el interior del paralepípedo, debido a la continuidad del flujo. Simbolicemos dicho incremento por dmx:
( )
( )dxdydzdt
xv
dydzdtdxxv
vdydzdtvdm
x
xxxx
∂ρ∂
−=
=⎟⎠
⎞⎜⎝
⎛∂ρ∂
+ρ−ρ=
Por analogía, en los restantes ejes:
( ) ( )dxdydzdtzvdm;dxdydzdt
yv
dm zz
yy ∂
ρ∂−=
∂
ρ∂−=
Sumando las tres componentes:
( ) ( ) ( )
dxdydzdtzv
yv
xvdmdmdm zyx
zyx ⎟⎟⎠
⎞⎜⎜⎝
⎛∂ρ∂
+∂
ρ∂+
∂ρ∂
−=++ (3.19)

57
Según la ley de conservación de la masa formulada por Lomonosov, la suma de los incrementos de las masas señaladas debe ser igual al incremento de la masa del líquido dmt en el interior del volumen fijado, condicionada solamente por la variación de la densidad en el interior de este volumen en un tiempo dt. Suponiendo que el líquido llene completamente el volumen fijado y que la densidad es una función continua del tiempo, entonces tendremos:
dxdydzdtt
dm t ∂ρ∂
= (3.20)
Si igualamos la (3.23) y la (3.24) obtendremos:
( ) ( ) ( ) 0dxdydzdtzv
yv
xv
tzyx =⎟⎟
⎠
⎞⎜⎜⎝
⎛∂ρ∂
+∂
ρ∂+
∂ρ∂
+∂
ρ∂
De esta última expresión obtendremos la ecuación de continuidad en las variables de Euler:
( ) ( ) ( ) 0
zv
yv
xv
tzyx =
∂ρ∂
+∂
ρ∂+
∂ρ∂
+∂
ρ∂ (3.21)
Si tenemos en cuenta que:
( ) ( ) ( )
zv
zv
zv
yv
yv
yv
xv
xv
xv
zz
zy
yyx
xx
∂ρ∂
+∂
∂ρ=
=∂ρ∂
∂ρ∂
+∂
∂ρ=
∂
ρ∂
∂ρ∂
+∂
∂ρ=
∂ρ∂
;;
Y además:
zv
yv
xv
tdtd
zyx ∂
ρ∂+
∂ρ∂
+∂ρ∂
+∂
ρ∂=
ρ
Obtendremos:
0z
vyv
xv
t1 zyx =⎟⎟
⎠
⎞⎜⎜⎝
⎛∂
∂+
∂
∂+
∂∂
+∂
ρ∂ρ (3.22)
Como el miembro entre paréntesis, representa la divergencia del vector de la velocidad, que se simboliza por vdiv , entonces en lugar de la expresión (3.26), podemos plantear:
0vdivt
1=+
∂ρ∂
ρ (3.23)

58
Para cualquiera corriente de líquido incompresible (ρ = const.) la fórmula (3.23) asume el siguiente aspecto:
0vdiv = (3.24) O de otra forma:
0z
vy
vxv zyx =
∂∂
+∂
∂+
∂∂
(3.25)
Las expresiones (3.24) y (3.25) representan la ecuación de continuidad en las variables de Euler.
3.5 Ecuación de continuidad para flujos limitados por paredes impermeables. Supongamos que tenemos un flujo limitado por paredes rígidas e impermeables, que no permiten ni la entrada ni la salida del líquido en sentido transversal, solo pasará a lo largo (figura 3.7).
A través de la sección a-a (dFa), en la unidad de tiempo fluye un volumen de líquido:
aaa dFvdQ =
Y a través de la sección b-b (dFb), en la misma unidad de tiempo:
bbb dFvdQ =
Consideremos que el movimiento del líquido es estacionario y que el líquido es incompresible. Por tal motivo y teniendo en cuenta la ley de conservación de la masa y que el líquido en sentido transversal no entra ni sale, entonces es lógico suponer que el volumen de líquido que entra en la unidad de tiempo por la sección a-a y el que sale por b-b en la misma unidad de tiempo, serán iguales:
ba dQdQ = O lo que es lo mismo:
bbaa dFvdFv =
dL
a
a
b
b
dFa
dFb
Fig. 3.7

59
Si se conocen las áreas transversales y las velocidades se facilita el cálculo:
constFVQ med == (3.26) Para una tubería de diámetro variable, como la de la figura (3.5):
const4d
V4d
VQ22
1
21
0 =π
=π
= (3.27)
Simplificando términos iguales, obtenemos una ecuación muy cómoda para valorar la variación de la velocidad debido a la variación del área de la tubería.
2
1
221
22
1
0
dd
dd
VV
⎟⎟⎠
⎞⎜⎜⎝
⎛== (3.28)
3.6 Movimiento con remolino (vortiginoso) de un líquido. Como ya señalamos, el movimiento con remolinos es aquel movimiento, durante el cual las partículas de líquido giran alrededor de un eje instantáneo (figura 3.8). El movimiento de un líquido real siempre es vortiginoso (con remolinos). La causa de la rotación de las partículas de líquido estriba en la viscosidad del líquido, la cual hace variar la velocidad lineal de la partícula por la normal a la dirección del movimiento. Este fenómeno provoca tensiones tangenciales (fuerzas de fricción).
Durante el movimiento de un líquido ideal, la rotación de la partícula por cuenta propia es imposible, ya que no existe la viscosidad. Por tal motivo el movimiento siempre es sin remolinos. El movimiento rotacional se caracteriza por la velocidad angular ( )z,y,xω . El conjunto (grupo) de partículas de líquido, las cuales rotan alrededor de un eje instantáneo con iguales velocidades angulares (como un cuerpo sólido) forman un cordón de remolinos. El eje de giro, puede ser recto o con determinada curvatura. Con el transcurso del tiempo, el remolino puede mantener su forma o variarla. Los grandes remolinos reciben el nombre de tifones, tornados o ciclones.
W
Fig. 3.8

60
En las corrientes o flujos de líquidos, los remolinos pueden estar presentes de forma individual o en grupos, formando sistemas de remolinos. Los remolinos se forman durante el trabajo de la hélice después del casco (figura 3.9).
También durante el contorneo de la pala del timón bajo determinado ángulo, por el flujo al encuentro (figura 3.10).
La existencia de los remolinos varía sustancialmente el campo de velocidades y presiones del flujo. Esto influye negativamente sobre las fuerzas hidrodinámicas que actúan por parte del líquido sobre el cuerpo. Esta problemática obliga a un estudio minucioso y profundo de tal fenómeno. 3.7 Circulación de la velocidad. Este es uno de los conceptos principales de la cinemática, relacionado con el movimiento vortiginoso (con remolino) de las partículas de líquido. Se utiliza dicho concepto durante la determinación de la fuerza de un chorro sobre un cuerpo (fuerza de sustentación en los perfiles alados, fuerza de empuje durante el trabajo de la hélice). Para lograr algo más que una comprensión superficial de dichas fuerzas, debemos familiarizarnos con el concepto de circulación empleado en Matemática. Supongamos que las líneas de corriente de la figura 3.11 representan un campo de velocidad bidimensional, mientras que L denota un camino cerrado cualquiera en este campo.
α
Fig. 3.9
Fig.3.10

61
La circulación de la velocidad (circulación del vector de velocidad) se define matemáticamente como:
sm,dLcosv
2
L∫ β=Γ (3.29)
Donde v, es la velocidad sobre el elemento dL del camino y β el ángulo comprendido entre la velocidad y la tangente al camino (en el sentido positivo de la flecha) en el mismo punto. La ecuación (3.29) involucra una integral curvilínea que se extiende a todo el camino cerrado. Es análoga a la ecuación conocida de la mecánica que expresa el trabajo realizado cuando un cuerpo recorre un camino curvo con fuerzas que forman cierto ángulo con la trayectoria. La única diferencia es que aquí se tiene una velocidad en lugar de una fuerza. Durante el cálculo de la circulación, la magnitud de la velocidad en los diferentes puntos de L, se toma para momentos de tiempos determinados. Por tal motivo, la circulación de la velocidad es un concepto instantáneo. Para el caso general, ( )tf=Γ Para el movimiento estacionario: const=Γ La expresión (3.29) puede ser expresada de otra forma:
( )∫ ∫ ++=β=ΓL L zyx dzvdyvdxvdLcosv (3.30)
3.8 Movimiento plano (bidimensional) de un líquido. Función de corriente. En la práctica por lo general, el movimiento de un líquido es espacial, sin embargo en algunos tipos de tareas se pueden considerar que no se diferencian del movimiento plano, o sea, que los parámetros varían solo en un plano. Para un flujo en el plano xy:
Fig. 3.11

62
( )( )
0V
tyxVVtyxVV
z
xy
xx
=
==
;,,;,,
(3.31)
La utilización del concepto de movimiento plano permite solucionar muchas tareas complejas, como son: - contorneo de esquíes o patines de lanchas; - contorneo de palas de timón; - contorneo de paletas de turbinas; - contorneo de paletas de impelentes de bombas. En algunos casos la solución de la tarea plana, permite llegar a conclusiones cualitativas y hacerlas extensibles a la tarea tridimensional. Durante la solución de una tarea, relacionada con el movimiento plano de un líquido incompresible, se utiliza el concepto de función de corriente ( )zyx ,,=ψ . La importancia de esta función, es que nos permite determinar, para el flujo analizado dos importantes parámetros yx VV , . Los parámetros yx VV , están enlazados entre sí por la ecuación de continuidad para el movimiento plano de un líquido incompresible (3.25).
0y
Vx
V yx =∂
∂+
∂∂
(3.32)
De otra forma:
y
Vx
V yx
∂
∂−=
∂∂
(3.33)
Sobre la base de la igualdad (3.33), podemos concluir, que las proyecciones de la velocidad yx VyV pueden ser expresadas a través de una función ( )z,y,x=ψ de la siguiente forma:
xV
yV yx ∂
ψ∂−=
∂ψ∂
= , (3.34)
Efectivamente, si sustituimos la (3.34) en la (3.33), obtendremos la siguiente igualdad:
xyyx
22
∂∂ψ∂
=∂∂ψ∂ (3.35)

63
De esta forma, podemos asegurar, que el cumplimiento de la ecuación de continuidad, es la condición suficiente y necesaria para la existencia de la función de corriente
( )z,y,x=ψ . Derivando dicha función:
sm,dxVdyVdy
ydx
xd
2yx −=
∂ψ∂
+∂
ψ∂=ψ (3.36)
3.9 Movimiento sin remolino de un líquido. Potencial de velocidad. El movimiento sin remolino (irrotacional) es posible solo en los flujos ideales (ausencia del efecto de la viscosidad) y tiene una gran significación práctica, porque en ciertas circunstancias los fluidos reales (viscosos) se comportan aproximadamente como ideales. El flujo sin remolino (irrotacional) puede ser definido, como un flujo en el cual las partículas no sufren rotación alguna de un instante al siguiente, con respecto al sistema fijo de referencia. Analicemos el caso mas sencillo, cuando el flujo es plano (bidimensional). Supongamos que las partículas del flujo no tienen una forma definida. En un instante cualquiera, podemos encontrar uno de estos elementos en el origen del sistema de referencia y podemos entonces fijar a este elemento dos ejes perpendiculares entre sí (Py y Px), (figura 3.12.a).
Un instante después, este elemento puede pasar a una nueva posición (O´) (figura 3.12.b), con los ejes en las nuevas posiciones ´
xp , ´yp y como se aprecia ya no son
perpendiculares entre sí. Ha ocurrido la rotación de los ejes. La velocidad de rotación (deformación angular) de OPZ es:
RV
=ω
Fig. 3.12

64
Entonces:
yV;
xv XY
∂∂
−=ω∂
∂=ω βα (3.37)
El signo negativo en el segundo miembro de la expresión (3.37) se debe a que está orientada hacia la derecha. Se define ahora la velocidad de rotación alrededor del eje z, como βα ωω , , que es el promedio de las velocidades angulares.
⎟⎟⎠
⎞⎜⎜⎝
⎛∂
∂−
∂∂
=ωy
Vx
v21 XY
z (3.38)
Para el caso del flujo tridimensional:
⎟⎟⎠
⎞⎜⎜⎝
⎛∂
∂−
∂
∂=ω
⎟⎟⎠
⎞⎜⎜⎝
⎛∂
∂−
∂∂
=ω
⎟⎟⎠
⎞⎜⎜⎝
⎛∂
∂−
∂∂
=ω
yV
xv
21
xV
zv
21
zV
yv
21
xyz
zxy
yzx
(3.39)
La magnitud del vector de la velocidad angular de rotación será:
2z
2y
2x ω+ω+ω=ω (3.40)
El vector ω , esta dirigido por la normal al plano en el cual ocurre la rotación de la partícula. En nuestro caso, como el movimiento es sin remolino:
0zyx =ω=ω=ω (3.41) Aplicando la (3.41) en la (3.39) obtendremos:
yv
xv
;x
vz
v;z
vy
v xyzxyz
∂∂
=∂
∂
∂∂
=∂
∂∂
∂=
∂∂
(3.42)
Las igualdades (3.42) son las condiciones para que exista una función ( )tzyx ,,,=ϕ , la cual determina las proyecciones de la velocidad, de tal forma que:
z
Vy
Vx
V zyx ∂ϕ∂
=∂
ϕ∂=
∂ϕ∂
= ,, (3.43)

65
Si escribimos la (3.42), teniendo en cuenta la (3.43), obtendremos:
xyyx;
zxxz;
yzzy
222222
∂∂ϕ∂
=∂∂ϕ∂
∂∂ϕ∂
=∂∂ϕ∂
∂∂ϕ∂
=∂∂ϕ∂
(3.44)
El diferencial simple de la función ( )tzyx ,,,=ϕ , teniendo en cuenta la expresión (3.42) será:
dzVdyVdxVdzz
dyy
dxx
d zyx ++=∂
ϕ∂+
∂ϕ∂
+∂
ϕ∂=ϕ (3.45)
La función ( )tzyx ,,,=ϕ recibe el nombre de potencial de la velocidad y su unidad de medida es m2/s. Con la función conocida (potencial de velocidad), cuando se resuelve un problema de movimiento de líquidos sin remolino, no es necesario determinar las 3 componentes de velocidad ( zyx V,V,V ), basta con determinar la función ( )tzyx ,,,=ϕ . 3.10 Campo de velocidades. La determinación del campo de velocidades permite en la práctica determinar el campo de presiones (esta dependencia será analizada en otros capítulos). Este último elemento, o sea el campo de presiones, tiene gran importancia en la determinación de aquellas componentes de la resistencia del agua al movimiento del buque que dependen de la variación de la presión por toda la eslora del buque. Se ha demostrado anteriormente el enlace existente entre la velocidad angular ( ω ) y la velocidad lineal ( zyx V,V,V ), o sea la relación entre el campo de velocidades lineales y las velocidades angulares. También anteriormente se ha demostrado la relación existente entre los remolinos ( ω ) y el movimiento rectilíneo ( zyx VVV ,, ) del líquido (ver expresión 3.39). Debido a la influencia de los remolinos, las velocidades locales de las partículas varían. El remolino crea a su alrededor determinado campo de velocidades y la variación de la velocidad a su vez, hace variar el campo de presiones. Analizaremos primeramente el caso más simple.

66
3.10.1 Campo de velocidades, provocado por un remolino recto de longitud infinita.
Introduzcamos primeramente el concepto de tensión del remolino (Ι), la cual es el producto de la velocidad angular ( )ω por el área del remolino perpendicular a ella, o sea:
Sω=Ι (3.46)
Partiendo de este concepto, supongamos que el cordón de remolinos tiene una tensión
ωΙ y se encuentra actuando en un líquido no limitado por fronteras. Al mismo tiempo como el remolino es recto y de longitud infinita, entonces en todos los planos, que son perpendiculares a su eje, las velocidades provocadas por el movimiento del líquido, serán las mismas (movimiento plano). Analicemos el movimiento excitado de un líquido en un momento dado, en el plano xy, (figura 3.13).
Asumiremos que fuera del remolino la velocidad de las partículas no sufre alteración, o sea el movimiento se considera sin remolino. Como la sección del remolino representa una circunferencia, entonces el movimiento del líquido alrededor del eje del remolino se determinará por líneas de corriente en forma de circunferencias concéntricas (K1, K2, K3…..). En todos los puntos de cada una de las circunferencias la velocidad (V) será la misma en magnitud, por cuanto todas las partículas del líquido en la sección dada del cordón, la velocidad angular ( )ω es la misma. En las diferentes circunferencias, las velocidades lineales serán V1, V2, V3 …. Calculemos la circulación de la velocidad en una de las circunferencias, por ejemplo la circunferencia K3. Según la 3.29 y la 3.30 tenemos:
( )∫=Γ3K
33333K dKdK,vcosvr
(3.47)
Como v3 = const. y el ( ) 10cosdK,vcos 033 ==
r, entonces:
xk1 k2 k3 k4
r3 r2 r1
v1 v2 v3
V( r)
Fig. 3.13
dφ y
r4
v4

67
3
2
03333K vr2drv ∫ π=θ=Γ
π
(3.48)
Para las restantes circunferencias: 222K111K vr2vr2 π=Γπ=Γ , Como fuera del remolino asumimos que el movimiento del líquido es sin remolino, entonces todas las superficies, que limitan los contornos K1, K2, K3…. atraviesan un solo cordón de remolino con una tensión ωΙ , entonces:
const2vr2.....3K2K1K =Ι=π==Γ=Γ=Γ ω (3.49) De la (3.49):
ryx2r2v
22 πΙ
=+π
Γ=
πΓ
= ω (3.50)
En el mismo cordón de remolino, la velocidad lineal de la partícula varía por una ley lineal:
rv ω= , donde const=ω (para todas las partículas de líquido en la sección dada del cordón de remolinos, la velocidad angular será la misma). La expresión (3.50) determina una hipérbola, que representa la ley de distribución de la velocidad, afectada por un remolino recto de longitud infinita (figura 3.13). 3.10.2 Campo de velocidades, provocado por varios remolinos rectos de longitud
infinita. En este caso la velocidad afectada por los remolinos, en cada punto del espacio en un momento dado, puede ser determinada utilizando el principio de acción independiente de los cordones de remolinos:
∑=+++=n
1i321 v......vvvvrrrrr
(3.51)
Donde n es la cantidad de remolinos y ivr
es la velocidad afectada por cada uno de los remolinos. Esta velocidad se calcula por la ecuación (3.50) y la dirección se determina por la perpendicular al radio r en el punto analizado desde el centro del cordón de
remolino con la dirección de iω de este remolino (figura 3.14).

68
Cada cordón de remolino se encuentra bajo la influencia de los restantes. Por tal motivo el sistema de cordones de remolinos en el caso general se traslada en el espacio. La velocidad de cada remolino, en cada instante de tiempo es igual a la suma geométrica de las velocidades provocadas en el centro de este cordón de remolino por los restantes cordones de remolinos. 3.10.3 Campo de velocidades, provocado por un remolino de forma arbitraria. Determinemos la velocidad v, provocada por este tipo de remolino en el punto A, (figura 3.15). Simbolicemos por dL – la longitud del remolino elemental y por r- la distancia del centro del remolino al punto A. Por θ - el ángulo entre el eje del remolino y el radio r. La velocidad en el punto A, afectada por el remolino elemental dL, puede determinarse por la siguiente fórmula:
dLsenr4
vd 2 θπΓ
= (3.52)
La velocidad v
r, provocada en el punto A por todos los cordones de remolino que
tienen forma arbitraria, es igual a la suma geométrica de ivdr
, provocadas en este punto por todos los elementos del remolino dL. De forma análoga se determina la velocidad para otros puntos. Analicemos varios casos:
vr
θ
dL
A
ω
900 900
r1
r2
v1
v2
2ω
Fig. 3.14
Fig. 3.15
1ω

69
a). Determinación de la velocidad por un tramo de remolino recto (figura 3.16).
Simbolicemos por r0- la distancia del punto A hasta el eje del remolino y por r- la distancia del punto A hasta un punto cualquiera del eje del remolino. De la figura 3.16 se desprende:
( )θ
θ=
θθ
=θ≅θ+θ=θθ
= 200
sendr
senrddLdLsenddLsenrd
senr
r ;;
Sustituyendo estas expresiones en la (3.52), obtendremos:
0rdsen
4vd θθ
πΓ
= (3.53)
La dirección de esta velocidad en el punto A es la misma que la dirección del remolino. Integrando dicha ecuación (3.53) obtendremos la expresión para la velocidad:
( )210
2
1coscos
r4dvv θ−θ
πΓ
=∫=θ
θ (3.54)
b). Determinación de la velocidad V provocada en el punto A por un semi remolino recto, (figura 3.17.a).
dL w w
1θ 2θ
θdr
A
θdr r0
Fig. 3.16

70
En este caso:
20 21
π=θ=θ ,
Por lo tanto: 0cos,1cos 21 =θ=θ (3.55)
Y la fórmula (3.54) asume el siguiente aspecto:
( ) ( )00
210 r4
01r4
coscosr4
vπΓ
=−πΓ
=θ−θπΓ
= (3.56)
Esta expresión se utiliza en la teoría del ala durante la determinación de la resistencia inductiva del ala de longitud finita. c) Determinación de la velocidad V provocada en el punto A por un remolino recto infinito (figura 3.17.b). En este caso:
π=θ=θ 21 ;0 Lo que significa que:
1cos;1cos 21 −=θ=θ (3.57) Por lo tanto la formula (3.54) asume el siguiente aspecto:
( ) ( )( )00
210 r2
11r4
coscosr4
vπΓ
=−−πΓ
=θ−θπΓ
= (3.58)
PROBLEMAS TÍPICOS RESUELTOS
A
θ
r0
A
a)
b)
2θ
∞
∞
Fig. 3.17

71
1. El movimiento de un líquido está dado por las proyecciones de las velocidades:
0V,btayV,btaxV ZXX =+−=+=
- ¿Existirá la posibilidad de tal tipo de corriente? - Determine las características del movimiento de las partículas líquidas. - Determine las líneas de corriente en el momento t = 2 y en el momento t = 0. - ¿Existirá la posibilidad de tal tipo de corriente?
Para responder a dicha pregunta, basta solo con aplicar la ecuación de continuidad en las variables de Euler (3.25):
0z
vy
vx
v zyx =∂
∂+
∂
∂+
∂∂
Como el movimiento es plano, entonces el tercer miembro es igual a cero:
0y
vx
v yx =∂
∂+
∂∂
Veamos si se satisface con dicha expresión:
0aay
vx
v yx =−=∂
∂+
∂∂
, como se aprecia, existe tal movimiento.
- Determine las características del movimiento de las partículas líquidas. Las características del movimiento vienen dadas por la existencia de: • Hay o no remolinos; • Las aceleraciones; • Las deformaciones lineales y angulares. Analicemos la posibilidad de existencia de remolinos, para lo cual apliquemos la expresión (3.39):
0z
vyzv
21
xy =⎟
⎟⎠
⎞⎜⎜⎝
⎛
∂
∂−
∂
∂=ω , la corriente es sin remolinos.
Determinemos las aceleraciones por la (3.18)
abt-yabyyv
yvxyv
xv t
vdt
ydvya
abtxabyxv
yvxxv
xvt
vdt
xdvxa
2X
2X
+=∂
∂+
∂
∂+
∂∂
==
++=∂
∂+
∂
∂+
∂∂
==

72
Veamos ahora las deformaciones lineales y las angulares. Para esto derivemos las velocidades con respecto a sus correspondientes coordenadas.
0y
vx
v21θ;a
yv
E,ax
vE xyyy
xx =⎟⎟
⎠
⎞⎜⎜⎝
⎛∂
∂+
∂
∂=−=
∂
∂==
∂∂
=
Estas tres expresiones nos indican que las partículas en su movimiento se estiran en la dirección X y se comprimen en la dirección Y, sin que se produzcan deformaciones angulares. - Determine las líneas de corriente en el momento t = 2.
Para obtener la expresión de la familia de las líneas de corriente basta con aplicar la expresión (3.5)
zyx dv
dzdvdy
dvdx
== (3.5)
Y como el movimiento es plano, entonces:
yx dvdy
dvdx
=
( ) ( )bt-aydy
btaxdx
=+ , después de su integración y potenciación, obtendremos:
( )( ) ( )tCbt-aybtax =+
Donde ( )tC , se convierte en una constante cualquiera en cada tiempo fijado. Para nuestro caso, cuando t =2, la línea de corriente representa una hipérbola del tipo:
( )( ) C2b-ay2bax =+ Y para t = 0
Cxya =2
2. Se conoce que la distribución de la velocidad en un canal plano de sección constante (Fig. 3.18) y dotado con una corriente de un líquido viscoso, estacionario, es:
0vv,B4y-1vv zy2
2
maxx ==⎟⎟⎠
⎞⎜⎜⎝
⎛=

73
Como el problema anterior, se precisa caracterizar la corriente, encontrar la función de corriente, la ecuación de la línea de corriente y el caudal de líquido por segundo. - Determinemos, si existe o no remolinos. Para esto utilicemos la ya conocida expresión (3.39).
⎟⎟⎠
⎞⎜⎜⎝
⎛
∂∂
−∂
∂=ω
yV
xv
21 xy
z
2maxx
z Byv4
yV5,0 =
∂∂
−=ω , se confirma la existencia de remolinos.
- Determinemos las deformaciones lineales y angulares.
2maxx
yy
xx
Bvy4
yv
21θ
,0yv
E,0xvE
−=∂
∂=
=∂
∂==
∂∂
=
- Determinemos las aceleraciones. Como el movimiento es estacionario,
0==yx
aa
De lo determinado se desprende que el movimiento es con remolinos, acompañado de deformaciones angulares sin aceleración. - Determinaremos ahora la función de corriente, utilizando la (3.34).
yψV,
xψV yx ∂
∂−=
∂∂
=
B 0
y
x
VMAX
Fig. 3.18

74
*)(C3B4y-yvdy
B4y-1vψ 2
3
max2
2y
0ymax +⎟⎟
⎠
⎞⎜⎜⎝
⎛=⎟⎟
⎠
⎞⎜⎜⎝
⎛∫=
- Determinemos la línea de corriente. La ecuación de la línea de corriente será fácil encontrarla, por cuanto tenemos la función de corriente (ψ ). Se aprecia de la expresión con (*) que el valor máximo de la función de corriente será C, por cuanto la ordenada y está limitada por el ancho del canal B. Entonces las líneas de corriente serán paralelas entre si y al eje x, teniendo su valor máximo en el centro, como indica la Fig.3.18.
*)Cy (*= - Determinemos el caudal por segundo.
Para esto, tomaremos dos líneas de corriente. Una situada a 2By = y la otra a
2By −= .
Entonces, como es conocido, el caudal de líquido que atraviesa una superficie cilíndrica de altura unitaria (altura igual a la unidad) es igual a la diferencia entre dos líneas de corriente.
3Bv2ψψ2ψψQ max0y
2By
2By
2ByAB =⎟
⎟⎠
⎞⎜⎜⎝
⎛−=−= =
=−==
3. Investigaremos en este ejemplo una corriente plana cuyas proyecciones de las velocidades son:
022 =−== zyx vay,vax,v El desarrollo lo realizaremos por pasos. - Determinemos, si existe o no remolinos. Para esto utilicemos la ya conocida expresión (3.39).
( ) 00021
yV
xv
21 xy
z =−=⎟⎟⎠
⎞⎜⎜⎝
⎛∂
∂−
∂
∂=ω no hay remolinos, por lo tanto el movimiento es
sin remolinos. - Determinemos las deformaciones lineales y angulares.

75
0yv
21θ
a2yv
E,a2xvE
x
yy
xx
=∂
∂=
−=∂
∂==
∂∂
=
Se aprecia que las partículas líquidas se estiran en dirección x, y se comprimen en dirección y. No hay deformación angular. - Determinemos las aceleraciones por la (3.18)
ya4yyv
yvxyv
xv ya
xa4yxv
yvxxv
xvxa
2
2
=∂
∂+
∂
∂=
=∂
∂+
∂
∂=
- Determinemos la función de corriente y la línea de corriente.
yψVx ∂
∂= , Cxy;Cxydyvψ
y
0yx =+=∫=

76
4. CAPÍTULO 4 DINÁMICA DEL LÍQUIDO IDEAL. 4.1 Objeto de estudio de la dinámica del líquido ideal. En la dinámica de los líquidos (la hidrodinámica) como en la dinámica de los cuerpos sólidos, se analizan dos tipos de tareas: - La primera tarea consiste en determinar el movimiento del líquido, conocidas las
condiciones de frontera y las fuerzas actuantes sobre el líquido. - La segunda tarea consiste en determinar las fuerzas actuantes sobre el líquido,
conocidos los parámetros del movimiento del mismo. La segunda tarea tiene una gran aplicación práctica en la rama naval. El diseño de la forma de un buque está relacionado con la resistencia del agua al movimiento del buque y la resistencia es una fuerza contraria al movimiento. En este capítulo estudiaremos la dinámica del líquido ideal (líquido perfecto). Este último concepto nos permite considerar que los esfuerzos de corte no existen, o sea el líquido no ofrece resistencia a los esfuerzos de tracción ni a los de corte (las fuerzas de viscosidad no existen). En la naturaleza, el líquido ideal no existe, sin embargo el estudio de corrientes de líquidos, suponiéndolo ideal, tiene un gran significado científico y práctico. En primer lugar, la suposición de que el líquido es ideal, nos permitirá obtener un cuadro que permita abordar un problema práctico, vinculado con un líquido real. En segundo lugar, en algunas tareas prácticas, la magnitud de las fuerzas de viscosidad es insignificante comparada con otras fuerzas. Por ejemplo, el estudio del fenómeno de la cavitación se realiza suponiendo el líquido ideal. En el estudio de la dinámica de los líquidos se emplean los mismos parámetros que en la cinemática, añadiéndosele el parámetro de la presión hidrodinámica. Las propiedades de la presión hidrodinámica son las mismas que las de la presión hidrostática, solo varía en la forma para determinar su magnitud. Primera propiedad. La presión hidrodinámica en un líquido ideal actúa siempre por la normal interior a la superficie analizada y siempre provocaría esfuerzos de compresión. Esta propiedad está condicionada por el hecho de que los líquidos ideales (no viscosos) por su propio concepto, no resisten los esfuerzos de tracción ni los de corte, admiten solo los de compresión. Segunda propiedad. La magnitud de la presión hidrodinámica en un líquido ideal, no depende de la dirección (orientación) de la superficie sobre la cual ella actúa. Su demostración es análoga a la segunda propiedad de la presión hidrostática.

77
La presión hidrodinámica, al igual que la hidrostática, depende de las coordenadas y del tiempo de acción.
( )tz,y,x,fp = (4.1)
4.2 Ecuaciones diferenciales del movimiento del líquido ideal. Estas ecuaciones, por primera vez, fueron obtenidas por L. Euler en 1755. Para deducirlas, utilizaremos las variables de Euler y extraeremos de un líquido en movimiento, un volumen elemental en forma de paralepípedo rectangular cuyos lados son, dx, dy, dz (figura 4.1).
Sobre el líquido que se encuentra en el interior del volumen elemental actúan, las fuerzas volumétricas externas, cuyas proyecciones referidas a la unidad de masa son, X, Y, Z. Además sobre las caras del paralepípedo actúan las fuerzas superficiales. En el líquido ideal, debido a esta característica, este último tipo de fuerza se genera por la presión hidrodinámica. En la figura 4.1, en el centro de gravedad de la cara izquierda del volumen elemental, actúa la presión hidrodinámica p1 y en la cara derecha p2. Como la presión es una función continua que depende de las coordenadas, entonces:
xxp dpp 12 ∂
∂+= (4.2)
Simbolicemos por; zyx jjj ,, , las proyecciones de las fuerzas inerciales del líquido en el interior del volumen elemental, referidas a la unidad de masa. Entonces:
dtdvj
dtdv
jdt
dvj zz
yy
xx −=−=−= ,, (4.3)
Aplicando el principio D´Alembert para las proyecciones de todas las fuerzas en el eje ox, obtenemos:
dx
dy
dz
XdM
0
Fig. 4.1

78
0dxdydzdt
dvdxdydzXdydzpdydzp
dxdydzjdxdydzXdydzpdydzp
x21
x21
=ρ−ρ+−=
=ρ−ρ+−
Si tenemos en cuenta la expresión (4.2), entonces:
dtdv
xpX xρ=
∂∂
−ρ
De forma análoga, podrá obtenerse para los restantes ejes:
dtdv
zpZ
dtdv
ypY
dtdv
xpX
z
y
x
ρ=∂∂
−ρ
ρ=∂∂
−ρ
ρ=∂∂
−ρ
(4.4)
Si pasamos de las derivadas simples a parciales, obtenemos:
zvv
yvv
xvv
tv
zp1Z
zv
vy
vv
xv
vt
vyp1Y
zvv
yvv
xvv
tv
xp1X
zz
zy
zx
z
yz
yy
yx
y
xz
xy
xx
x
∂∂
+∂
∂+
∂∂
+∂
∂=
∂∂
ρ−ρ
∂
∂+
∂
∂+
∂
∂+
∂
∂=
∂∂
ρ−ρ
∂∂
+∂
∂+
∂∂
+∂
∂=
∂∂
ρ−ρ
(4.5)
Las expresiones (4.4) y la (4.5) son validas tanto para los líquidos incompresibles, como para los compresibles. Si el líquido es incompresible, const=ρ . Si el líquido es compresible, la densidad ρ depende de la presión y la temperatura, o sea ( )Tp,f=ρ . Para la determinación de esta última función se hace necesario componer la ecuación de estado del líquido, teniendo en cuenta las condiciones de intercambio de calor. 4.3 Ecuaciones diferenciales de Gromeko. Las ecuaciones diferenciales de Euler tienen el inconveniente de no representar todos los tipos de movimiento. En 1881 el científico ruso I. C. Gromeko desarrollo dichas ecuaciones, obteniendo nuevas ecuaciones que permiten valorar otros tipos de movimiento.

79
Dichas transformaciones las realizaremos para la primera expresión de la (4.5). Para esto sumaremos a la parte derecha de dicha expresión las siguientes magnitudes:
xv
vxv
vx
vv
xv
v zz
zz
yy
yy ∂
∂−
∂∂
∂
∂−
∂
∂,,,
Dicha suma es igual a cero, por lo tanto la expresión no se altera. Entonces teniendo en cuenta lo anterior:
⎟⎟⎠
⎞⎜⎜⎝
⎛∂
∂−
∂∂
+
+⎟⎟⎠
⎞⎜⎜⎝
⎛∂
∂−
∂∂
+⎟⎟⎠
⎞⎜⎜⎝
⎛∂
∂+
∂
∂+
∂∂
+∂
∂=
xv
vz
vv
xv
vyv
vxv
vx
vv
xv
vt
vdx
dv
zz
xz
yy
xy
zz
yy
xx
xx
(4.6)
Transformando el primer paréntesis de la (4.6), obtenemos:
2v
x2vvv
xxv
vx
vv
xv
v22
z2y
2xz
zy
yx
x ∂∂
=++
∂∂
=∂
∂+
∂
∂+
∂∂
(4.7)
En correspondencia con la (3.38) del capitulo 3:
yzzx
zz
zx
z
zyyx
yy
yx
y
v2xv
zvv
xvv
zvv
v2x
vy
vvx
vv
yvv
ω−=⎟⎟⎠
⎞⎜⎜⎝
⎛∂
∂−
∂∂
=∂
∂−
∂∂
ω−=⎟⎟⎠
⎞⎜⎜⎝
⎛∂
∂−
∂∂
=∂
∂−
∂∂
(4.8)
Teniendo en cuenta la (4.7) y la (4.8), la (4.6) tomará el siguiente aspecto:
( )yzzy
2xx vv2
2v
xtv
dtdv
ω−ω+∂∂
+∂
∂= (4.9)
Asumiendo que las fuerzas volumétricas poseen potencial, o sea que existe una función
( )tzyxW ,,, , de tal forma que sus proyecciones sean:
z
WZyWY
xWX
∂∂
=∂∂
=∂
∂= ,, (4.10)

80
Y si suponemos también que las fuerzas superficiales poseen potencial, o sea ( )tzyxP ,,, . Denominaremos a esta función, función de Gromeko. Entonces:
zp1
zP
yp1
yP
xp1
xP
∂∂
ρ=
∂∂
∂∂
ρ=
∂∂
∂∂
ρ=
∂∂ ,, (4.11)
Por consiguiente:
ρ
=∂∂
+∂∂
+∂∂
=Pd
zP
yPdx
xPPd (4.12)
Sustituyendo en la (4.4) los valores obtenidos en la (4.9), (4.10), (4.11) obtenemos:
( )yzzy
2x vv2
2v
xtv
xP
xW
ω−ω+∂∂
+∂
∂=
∂∂
−∂∂
(4.13)
Por analogía, para los restantes ejes:
( )
( )
( )xyyx
2z
zxxz
2y
yzzy
2x
vv22
vzt
vzP
zW
vv22
vyt
vyP
yW
vv22
vxt
vxP
xW
ω−ω+∂∂
+∂
∂=
∂∂
−∂∂
ω−ω+∂∂
+∂
∂=
∂∂
−∂∂
ω−ω+∂∂
+∂
∂=
∂∂
−∂∂
(4.14)
Frecuentemente las ecuaciones diferenciales de Gromeko se escriben de la siguiente forma:
( )
( )
( )xyyx
2z
zxxz
2y
yzzy
2x
vv22
vPWzt
v
vv22
vPWyt
v
vv22
vPWxt
v
ω−ω=⎟⎟⎠
⎞⎜⎜⎝
⎛−−
∂∂
+∂
∂−
ω−ω=⎟⎟⎠
⎞⎜⎜⎝
⎛−−
∂∂
+∂
∂−
ω−ω=⎟⎟⎠
⎞⎜⎜⎝
⎛−−
∂∂
+∂
∂−
(4.15)
Estas ecuaciones de Gromeko (4.15) en comparación con las ecuaciones de Euler (4.5), tienen una serie de ventajas. En ellas se pueden apreciar las aceleraciones locales y la parte vortiginosa (remolino) de la aceleración. Esto permite valorar casos particulares del movimiento de un líquido (estacionario, sin remolino), lo que facilita una

81
integración más simple. También, el miembro entre paréntesis ⎟⎟⎠
⎞⎜⎜⎝
⎛−−
2vPW
2 caracteriza
la energía de la masa elemental de líquido, que pasa por un punto fijado en el espacio lleno de líquido en movimiento. 4.4 Integral y ecuación de Bernoullí para el movimiento estacionario con remolino
de un líquido ideal incompresible. Sus interpretaciones. Analizaremos el movimiento estacionario de un líquido, en el cual, las fuerzas volumétricas poseen potencial. Por definición, como el movimiento es estacionario, las aceleraciones locales serán iguales a cero:
0t
vt
vt
v zyx =∂
∂=
∂
∂=
∂∂
Entonces la (4.15) asume la siguiente forma:
( )
( )
( )xyyx
2
zxxz
2
yzzy
2
vv22
vPWz
vv22
vPWy
vv22
vPWx
ω−ω=⎟⎟⎠
⎞⎜⎜⎝
⎛−−
∂∂
ω−ω=⎟⎟⎠
⎞⎜⎜⎝
⎛−−
∂∂
ω−ω=⎟⎟⎠
⎞⎜⎜⎝
⎛−−
∂∂
(4.16)
Tomemos del flujo una línea de corriente y compongamos su ecuación paramétrica:
tdvzdtdvydtdvxd zxx === ,, (4.17)
Multipliquemos ahora la parte izquierda de la expresión (4.16) por dx, dy, dz , la derecha por los términos tdvtdvtdv zxx ,, y sumemos las tres ecuaciones diferenciales. El resultado de la suma de la parte izquierda será la derivada simple de la función
⎟⎟⎠
⎞⎜⎜⎝
⎛−−
2vPW
2 . La suma de la derecha será igual a cero. Entonces:
0
2vPWd
2
=⎟⎟⎠
⎞⎜⎜⎝
⎛−− (4.18)
De donde:
1
2
C2
vPW =−− (4.19)

82
Donde C1 es una constante en la línea de corriente. Como el movimiento es con remolino, cada línea de corriente tendrá diferentes constantes. La ecuación (4.19) se denomina integral de Bernoullí, el cual expresa de forma general, la relación energética para el movimiento estacionario de un líquido ideal. De dicho integral se puede obtener la ecuación de Bernoullí. Si asumimos que de las fuerzas volumétricas sobre el líquido actúa solo la gravedad, entonces: zgW −= (4.20) Si además asumimos que el líquido es incompresible, entonces la función de Gromeko P asume el siguiente aspecto:
ρ
=pP (4.21)
Si sustituimos las expresiones obtenidas (4.20) y (4.21) en la (4.19), obtendremos:
2
2c
g2v
gpz =+
ρ+ (4.22)
De donde, para dos puntos cualesquiera sobre una misma línea de corriente, obtendremos:
g2vpz
g2vpz
222
2
211
1 +γ
+=+γ
+ (4.23)
La ecuación (4.23) fue obtenida en 1738 por D. Bernoullí basándose en el teorema de la variación de la energía cinética para un chorro elemental. 4.4.1 Interpretación de la ecuación de Bernoullí. La ecuación de Bernoullí representa una de las ecuaciones principales de la mecánica de los fluidos, por tal motivo la analizaremos desde tres puntos de vista (figura 4.2):
Sentidos de la ecuación de Bernoullí para el mov. Estacionario
Sentido geométrico
Sentido hidrodinámico
Sentido energético Fig. 4.2

83
- Sentido geométrico de la ecuación de Bernoullí. Si hacemos un análisis dimensionan de la ecuación de Bernoullí, cada término representa una magnitud lineal (figura 4.3);
mmmseg
mseg
m
mtf
mtf
mg2
vpz2
2
3
22
++=⎟⎠⎞⎜
⎝⎛
++=+γ
+
Así el termino Z - se denomina altura de posición, e indica la posición donde está colocado el punto donde se realiza la medición;
- el término γp - altura de presión, es una altura equivalente de líquido que
representa una presión en un líquido de peso específico γ ; - y el término
g2v2 , altura de velocidad.
- Sentido hidrodinámico de la ecuación de Bernoullí. A los miembros de la ecuación de Bernoullí, también se les denomina empujes, ya que cada uno de ellos puede ser sustituido por la correspondiente altura de una columna de líquido.
Fig. 4.3

84
En la figura 4.4 en el piezómetro se muestra el empuje estático (HS), que indica una altura equivalente a:
γ+=
pzHS (4.24)
Este es el valor de la presión dado por los manómetros y piezómetros. En la figura 4.3 se muestra la diferencia entre dos piezómetros, siendo esta diferencia el empuje de velocidad VH :
g2
vH2
V = (4.25)
La suma de ambos empujes nos da el empuje hidrodinámico HH:
g2vpzHHH
2
VSH +γ
+=+= (4.26)
Frecuentemente para los cálculos prácticos no se trabaja con la presión absoluta, sino con la presión excesiva (sobre la atmosférica), entonces:
g2vppzHHH
2atm
VSeH +
γ−
+=+= (4.27)
Concluyendo, la ecuación de Bernoullí en la línea de corriente:
constHHH Hi2H1H === O de otra forma:
constHHH eHi
e2H
e1H ===
- Sentido energético de la ecuación de Bernoullí.
Fig. 4.4

85
Para obtener el sentido energético de los miembros de la ecuación de Bernoullí, multipliquemos cada miembro por GΔ , que es el peso de la partícula de líquido, entonces: - zGΔ determina la energía potencial de esta partícula con relación al eje de referencia. Si dividimos el miembro zGΔ por GΔ obtendremos la energía potencial de la partícula referida a la unidad de masa, denominada energía potencial de posición referida a la unidad de masa.
- si realizamos el mismo procedimiento con γp
, obtendremos la energía potencial de
presión referida a la unidad de masa;
- y por último, con relación a g2
v2, obtendremos la energía cinética referida a la unidad
de masa. En algunas literaturas se emplea el término energía específica, lo que implica que esta referida a la unidad de masa. Por último:
g2
vpze2
+γ
+= (4.28)
Por consiguiente, la ecuación de Bernoullí para una línea de corriente, en su sentido energético, puede expresarse de la siguiente forma:
consteee i21 === (4.29)
La (4.29) significa que la energía mecánica referida a la unidad de masa, en todos los puntos de una misma línea de corriente, es la misma. 4.5 Integral y ecuación Euler - Bernoullí para el movimiento estacionario sin
remolino de un líquido ideal incompresible. Sus interpretaciones. Para el caso de un movimiento particular, como el señalado en este apartado, las aceleraciones locales son igual a cero, al igual que las aceleraciones de remolino:
0t
vt
vt
v zyx =∂
∂=
∂
∂=
∂∂
0zyx =ω=ω=ω Entonces las ecuaciones de Gromeko (4.15), asumen el siguiente aspecto:

86
02
vPWz
02
vPWy
02
vPWx
2
2
2
=⎟⎟⎠
⎞⎜⎜⎝
⎛−−
∂∂
=⎟⎟⎠
⎞⎜⎜⎝
⎛−−
∂∂
=⎟⎟⎠
⎞⎜⎜⎝
⎛−−
∂∂
(4.30)
Realizando idéntico procedimiento que la (4.17), obtenemos:
02
vPWd2
=⎟⎟⎠
⎞⎜⎜⎝
⎛−−
De donde:
tf1
2
c2
vPW =−− (4.31)
Donde TF1c - es constante en todo el flujo. De dicho integral se puede obtener la ecuación de Euler - Bernoullí. Si asumimos que de las fuerzas volumétricas, sobre el líquido actúa solo la gravedad, entonces:
zgW −= Si además asumimos que el líquido es incompresible, entonces la función de Gromeko
P, asume el siguiente aspecto: ρ=
pP
Si sustituimos las expresiones obtenidas en la (4.31), obtendremos:
tf1
2c
g2vpz =+
γ+ (4.32)
Para dos puntos cualesquiera en un espacio lleno de líquido en movimiento (figura 4.5), la ecuación de Euler – Bernoullí podrá escribirse de la siguiente forma:
g2vpz
g2vpz
222
2
211
1 +γ
+=+γ
+ (4.33)

87
Los sentidos geométrico, hidrodinámico y energético de los miembros de la ecuación Euler – Bernoullí son los mismos que en la ecuación de Bernoullí. 4.6 Cavitación y golpe hidráulico (ariete hidráulico). Ambos fenómenos serán estudiados por separados por sus consecuencias negativas sobre los mecanismos, sistemas navales, hélices, timones, etc. Ambos fenómenos influyen no solo sobre la eficiencia o rendimiento de los elementos antes mencionados, sino también pueden producir roturas, que muchas veces son irreversibles. Es frecuente también el surgimiento de vibraciones tan indeseables durante la navegación. El estudio de ambos fenómenos nos permite tomar las medidas necesarias para su eliminación o en última instancia, determinar cuales son los regimenes más favorable para que tales fenómenos no surjan, puedan ser atenuados o se deban tener en cuenta. 4.6.1 Cavitación. Se denomina cavitación al fenómeno de interrupción de la continuidad del flujo por la disminución de la presión hasta un valor crítico pcr . De acuerdo con la ecuación de Bernoullí (4.23), si la columna de velocidad en un punto cualquiera sobre una línea de corriente aumenta, debe disminuir por esta causa la columna de presión. Para cada líquido hay un mínimo absoluto de presión posible: la presión del vapor saturado del líquido. En el capítulo 1 estudiamos que el valor de la presión de vapor saturado del líquido depende del propio líquido y de su temperatura. Si las condiciones son tales en un punto cualquiera que la velocidad local, sea tan alta que la presión sobre el líquido se reduzca a su presión de vapor, el líquido sencillamente se vaporiza (o hierve) en ese punto y se forman burbujas de vapor (cavernas). (Figura 4.6)
1
2
Z1
Z2
P1/γ
P2/γ
V21/2g V2
2/2g
Fig. 4.5

88
Cuando el líquido fluye hacia una zona de mayor presión se condensa de forma brusca, o sea se produce un “colapso”. Esta acción (condensación) produce presiones dinámicas muy elevadas sobre las paredes sólidas en esta zona y dado que esta acción es continua y con una frecuencia alta, se puede dañar el material que se halla en esta zona. Las palas de las hélices, los impelentes de bombas, las palas de los timones, etc. son a menudos dañados por este fenómeno en forma de agujeros diseminados por esta zona. A esto se le conoce por “erosión por cavitación”. Obtengamos una expresión que nos permita valorar la cavitación a través de los parámetros conocidos de presión y velocidad. Supongamos que tenemos un cuerpo (Fig. 4.7) contorneado por un flujo estacionario, sin remolino, ideal e incompresible.
Supongamos que: v∞
- velocidad del flujo aguas arriba (no afectada por el cuerpo), en el punto 1.
p∞
- presión del flujo aguas arriba (no afectada por el cuerpo), en el punto 1.
v y p - velocidad y presión en el punto 2 sobre la superficie del cuerpo.
Fig. 4.6
Fig. 4.7
12
h
v∞
p∞
pv
p0

89
Compongamos la ecuación de Bernoullí (4.23) para los puntos 1 y 2 sobre la misma línea de corriente (Fig. 4.7).
2v
ρp2vρp
22+=+ ∞
∞ (4.34)
En el punto 2, la velocidad v > v∞ debido a que el cuerpo despeja al flujo y en su parte media hace que la velocidad aumente, por tal motivo la presión disminuye (p < p∞ ).
⎟⎟⎠
⎞⎜⎜⎝
⎛−=−=−=Δ
∞
∞∞∞ 1
vv
2vρ
2vρ
2v
ρpp p 2
2222 (4.35)
Si asumimos su valor adimensional entonces:
1vv
2vρ
pp p2
2 −⎟⎟⎠
⎞⎜⎜⎝
⎛=
−=Δ
∞∞
∞ (4.36)
El coeficiente adimensional pΔ se denomina coeficiente de disminución de la presión local. Esta magnitud en cada punto de la superficie del cuerpo depende de la forma del cuerpo y de su orientación con relación al flujo de encuentro. No depende de la velocidad aguas arriba ( v∞ ), por cuanto con la variación de la misma, varía también
v y la relación ∞v
v no varía. Con el aumento de la velocidad v∞, aumenta v en el
punto 2 y por tal motivo p disminuye, hasta un valor igual a pd (presión de los
vapores saturados) y el líquido hierve en el punto 2, o sea comienza la cavitación. Con el consiguiente aumento de la v∞ , la presión constpp d == , por cuanto en los líquidos
de gotas la presión no puede ser menor que la presión de los vapores saturados (Fig. 4.8)
La cavitación también puede ocurrir en los flujos limitados por paredes rígidas, o sea en las tuberías de los sistemas navales (Fig. 4.9).
0V CR∞
v∞
pp ∞=
p dp =pΔ
p
Fig. 4.8

90
En el flujo de la Fig. 4.9, partiendo de la ecuación de continuidad (3.26):
const== S2v2S1v2
Pero como: S2S1> entonces v1v2 >
Cuando esto ocurre puede ser que la presión en el punto 2 baje hasta igualarse a la presión de los vapores saturados ( pdp2 = ) y en el punto 2 comenzará la cavitación. 4.6.1.1 Valoración de la cavitación. No existen dudas de que el coeficiente de disminución de la presión local ( pΔ ), por si solo, en todos los casos, no nos permite valorar a plenitud la magnitud de la cavitación, para eso se introduce el Número de Cavitación (K). Para obtener dicho coeficiente asumiremos que:
hγp0p +=∞ Entonces la condición de comienzo de la cavitación durante el contorneo del cuerpo puede ser escrita de la siguiente forma:
pd-hγp0pdpΔp +=−= ∞ (4.37) Si introducimos la relación adimensional de pΔ , el número de cavitación será:
( )
2v2
ρ
pdhγp0K
∞
−+= (4.38)
El número de cavitación K, caracteriza la magnitud necesaria en la que debe disminuir la presión para que comience la cavitación, bajo determinadas condiciones ( hγp0p +=∞ , pd , ρ y v∞ ). La posibilidad factible de comienzo de la cavitación y su nivel de desarrollo se determina por la relación entre el número de cavitación (K) y el número crítico de
1 2
22 p,v1pv1 ,
Fig. 4.9
(Ver fig. 4.7)

91
cavitación (KCR). Este último es una magnitud determinada para cada cuerpo (en dependencia de su forma) y de su orientación (ángulo de ataque) con relación al flujo de encuentro (Fig. 4.10)
En la fig. 4.10 se muestra la relación entre K y KCR para un perfil determinado. Obsérvese que el punto A corresponde al valor K=KCR lugar de posible comienzo de la cavitación. El diagrama de presión muestra la zona donde p < p∞
4.6.2 Golpe hidráulico (ariete hidráulico). Por lo general, los flujos aunque sean no estacionarios, tienden a variar su velocidad de forma pausada (no bruscamente), sin embargo puede suceder que este variación ocurra de forma brusca, sobre todo por un desperfecto de una válvula de un sistema determinado. El fenómeno que entonces se manifiesta se conoce por golpe hidráulico (ariete hidráulico). Este fenómeno trae aparejado la posible rotura de la propia tubería, de los sellos (retenes) en las bombas y fuertes vibraciones. Analicemos dicho fenómeno, apoyándonos en la figura 4.11.
Fig. 4.10
Fig. 4.11

92
Supongamos que la válvula (N) de la fig. 4.11 se cierra instantáneamente. La lámina de agua próxima a la válvula será comprimida por el resto de la columna de agua que se mueve contra ella. Al mismo tiempo, las paredes de la tubería que rodean esta lámina se estiran como consecuencia del exceso de presión. A continuación se para la lámina siguiente y así sucesivamente. Se aprecia que el agua contenida en la tubería no se comporta como un líquido incompresible, sino que el fenómeno es afectado por la elasticidad del agua y la del material de la tubería. De esta manera, la interrupción abrupta del flujo y la sobrepresión resultante (gradiente hidráulico transitorio) avanza a lo largo de la tubería como una onda, con una velocidad C. Por esta causa el líquido en el tanque ascenderá sobre el espejo de agua a una altura x – s. La velocidad C se determina por la siguiente ecuación.
E20000
td1
1400kγgC
+
== (4.39)
Donde: - C, velocidad de la onda de presión, m/s; - d y t diámetro y espesor de la pared de la tubería: - E módulo de elasticidad del material de la tubería, kgf/cm2.
Para las tuberías de dimensiones normales, la velocidad de la onda de presión por lo general está comprendida entre 600 y 1200 m/s, pero tiene que ser siempre menor que 1400 m/s. El tiempo necesario para un viaje redondo de la onda de presión será:
CL2Tr = (4.40)
Donde: L – longitud de la tubería analizada, (m). Si el cierre de la válvula es completo, de modo que la velocidad se reduce a cero, la presión máxima de exceso del golpe hidráulico será:
vCg
vCgp γ==′ (4.41)
De la (4.41) se aprecia que el aumento de la presión, no depende de la longitud (L) de la tubería, sino de la velocidad sónica (C), de la velocidad del flujo (v) y de sus propiedades mecánicas. 4.7 Movimiento del gas ideal a grandes velocidades. Cuando se estudia el movimiento de un gas con velocidades que sobrepasen los 70 – 80 m/s, se hace necesario tener en cuenta la compresibilidad del gas, o sea tener en cuenta la dependencia de la densidad con relación a la presión y la temperatura:
( )Tp,fρ = (4.42)

93
El estudio de los líquidos compresibles (gases y vapores) tiene una gran importancia práctica. Sin los conocimientos de las leyes que rigen el movimiento de los líquidos compresibles, no se pueden diseñar o explotar los motores de combustión interna, las turbinas de vapor o de gas, u otros mecanismos y sistemas que trabajan con gases o vapores. En este texto, estudiaremos solo elementos de la gasodinámica aplicada a casos sencillos de movimiento de gases ideales, sin intercambio de calor con el medio, o sea flujos adiabáticos de gases. Esta forma simplificada de análisis, permite la creación de un patrón para el análisis futuro de procesos reales. Además algunos procesos reales pueden ser analizados bajo este patrón. 4.7.1 Ecuaciones para un flujo estacionario, adiabático de un líquido (gas, vapor)
compresible. Escribiremos para este tipo de movimiento de un gas, las ecuaciones de la cinemática, la de estado y la dinámica. 1- Ecuación de la cinemática. Para el movimiento estacionario de un gas o vapor la
ecuación de continuidad representa la ley de conservación de la masa (3.21)
( ) ( )
Oz
zvρy
yvρ
xxvρ
tρ
=∂
∂+
∂
⎟⎠⎞⎜
⎝⎛∂
+∂
∂+
∂∂
(3.21)
Como el movimiento es estacionario, el primer término se hace cero y la ecuación (3.21) queda de la siguiente forma:
( ) ( )
Oz
zvρy
yvρ
xxvρ
=∂
∂+
∂
⎟⎠⎞⎜
⎝⎛∂
+∂
∂ (4.43)
Para un flujo gaseoso, limitado por paredes sólidas (rígidas), la ecuación de continuidad (ley de conservación de la masa) se representa de la siguiente forma:
corrientedelínealaporIdemQmSvρ == (4.44)
2- Ecuación de estado. Para un gas ideal el enlace entre la densidad, la presión y la temperatura lo determinaremos con la ayuda de la ecuación de Mendeleiev- Clapeyron.
RTρp
= (4.45)
Donde: R - Constante de los gases CvCpR −= (4.46)

94
Cp y Cv capacidad calorífica de los gases a presión constante y a volumen constante. Para un flujo adiabático de un gas ideal la ecuación de estado, asume la siguiente forma.
Cconstρkp
== (4.47)
Donde:
Cv
Cpk = Índice adiabático (para el aire, en los límites de temperatura de 00 hasta
1000C, K = 1,4). 3- Ecuación de la dinámica. Para el movimiento estacionario, con remolino de un
líquido ideal (compresible e incompresible) es valedera el integral de Bernoullí (4.19).
corrientedelínealaen,1c2
2vPW =−+ (4.19)
Despreciando para los gases, la fuerza de gravedad:
0zgW =−= Entonces:
corrientedelínealaen,2
2vP Idem=+ (4.48)
Determinemos la función de Gromeko, teniendo en cuenta la (4.46).
C1/Kp1/kdp
ρdpdP ==
Integrando, teniendo en cuenta que, por la expresión (4.46) P1/Kρ1
C1/k = , obtenemos:
ρp
1kkp−
= (4.49)
Sustituyen do el valor de la función de Gromeko en la (4.47), obtenemos:
corrientedelínealaen,2
2vρp
1kk Idem=+−
(4.50)
Analicemos el sentido energético de esta expresión (4.50).
Según el apartado 4.4.1, el término eC2
2v= representa la energía cinética específica
(referida a la unidad de masa del gas).

95
El siguiente miembro, la función de Gromeko la representaremos de la siguiente forma:
( ) ρpTC vTCpρ
pC vCp
Cpρp
1kkp +==
−=
−= (4.51)
Donde:
eppρp
= - energía potencial específica de presión.
eptTCv = - energía calorífica específica (también potencial). Si tenemos en cuenta la (4.50), la ecuación de Bernoullí (4.49) asumirá el siguiente aspecto:
corrientedelínealaenIdem,emecept
eceptepp2
2vρpTCv2
2vTCp
=+=
=++=++=+ (4.52)
De la (4.51) se desprende que en el flujo de gas ideal adiabático y con remolino, la suma de la energía calorífica específica y la energía mecánica específica será la misma para todos los puntos sobre una misma línea de corriente. La ecuación de Bernoullí (4.51) puede ser escrita de otra forma, para lo cual introduzcamos el concepto de entalpía (i).
corrientedelíneai laenIdem,2
2v=+ (4.53)
Donde: i - entalpía (representa la energía calorífica interna y la energía potencial específica)
ρpTCvTCp +==i (4.54)
De la ecuación de Bernoullí (4.52) se desprende que, con el aumento de la velocidad, disminuye la temperatura del gas (y lo inverso). Esta es la causa del porque cuando se abre la válvula de un balón de gas comprimido, ocurre la formación de nieve y hasta se congela la válvula. Para el caso de un flujo de gas ideal, adiabático y sin remolino, del integral de Euler-Bernoullí (4.31) se puede obtener, de forma análoga, la ecuación Euler-Bernoullí.
flujoeltodoparaIdem,2
2vρp
1kk
=+−
(4.55)
4.7.2 Velocidad del flujo. Número de Mach. Analizaremos una de las características principales del movimiento de un gas – la velocidad del sonido (a). Se entiende por velocidad del sonido, a la propagación de

96
las ondas sonoras en un medio continuo. Cuando se analiza el movimiento de un gas, la relación entre la velocidad del gas y la velocidad del sonido, permite juzgar sobre el nivel de influencia de la compresibilidad del gas sobre las características de su movimiento. De la Física se conoce:
ρp
∂∂
=a2 (4.56)
De la (4.56) se desprende que, mientras menos compresibilidad tenga el medio, mayor será la velocidad del sonido. Para un medio absolutamente incompresible ( 0p =∂ ) la velocidad del sonido será infinita ( ∞=a ). Por ejemplo, a T0=150C, la velocidad del sonido en el aire será, C=340 m/seg y en el agua dulce, a la misma temperatura C= 1425 m/seg. Obtengamos la expresión de la velocidad del sonido para el flujo adiabático de un gas ideal. En este caso, partiendo de la ecuación de estado (4.46) y la (4.54) obtenemos:
ρpKρ 1kK
ρkpρ 1kCKa2 =−=−= (4.57)
Y la velocidad del sonido:
ρpK=a (4.58)
Si tenemos en cuenta la (4.45): KRT=a (4.59)
La expresión (4.59) demuestra que cuando el flujo de gas ideal es adiabático, la velocidad del sonido solo depende de la temperatura y por lo general, en puntos diferentes del flujo, es diferente. Analizaremos ahora la relación entre la velocidad del gas y la velocidad del sonido, denominada esta relación – Número de Mach.
aM v
= (4.60)
- Si M < 1, el flujo se llama subsónico. - Si M > 1, el flujo se llama supersónico. - Cuando el número de Mach es extremadamente alto, el flujo se llama hipersónico. El número de Mach (M) se utiliza también como criterio de semejanza durante el estudio experimental de los flujos de gases.

97
PROBLEMAS TÍPICOS RESUELTOS
1. En el tanque presurizado de la Fig.4.12, que contiene agua dulce, se precisa determinar la descarga libre a la atmósfera con una columna H = 5 m.= const. El manómetro indica una presión (pM = 490 HPa).
Supondremos, primeramente que el líquido analizado es no viscoso. Esto nos permitirá despreciar la fricción y utilizar las herramientas del tema Dinámica del Líquido Ideal. El plano de referencia lo asumiremos sobre el eje x, que pasa por el centro de la válvula de salida. Aplicaremos la ecuación de Bernoullí (4.23) para dos puntos, sobre una misma línea de corriente. El punto 1 estará sobre la superficie libre del líquido y el punto 2 estará en el centro de la válvula.
2
222
2
211
1 g2vp
zg2
vpz +
γ+=+
γ+ (4.23)
Analicemos que condiciones existen en cada punto. Punto1:
0z1 =+=== 1Matm1 vpppm,4H , Punto 2
?,, === 22 0z vpp atm2 Sustituyendo dichos valores en la (4.23) y eliminando términos semejantes, obtenemos:
g2v
gpH
22M =
ρ+
De donde:
Fig. 4.12

98
segm29,13
81,9.99910.4900,481,9.2
gpHg2v
2M
2 =⎟⎟⎠
⎞⎜⎜⎝
⎛+=⎟⎟
⎠
⎞⎜⎜⎝
⎛ρ
+=
Si el tanque estuviese abierto a la atmosfera, entonces pM =0 y la v2 fuera la siguiente:
segm86,80,4.81,9.2Hg2v2 === , esta es la famosa expresión de
Torricelli. 2. Un cuerpo en revolución, que se mueve uniformemente a 10 m/seg, en agua salada a 40C, con una salinidad del 30% y al cual queremos determinar la presión en el punto A. Aguas arriba, el líquido está en reposo. (Fig. 4.13)
La solución de este problema la buscaremos aplicando la ecuación de Bernoullí (4.33) a todos los puntos del líquido en movimiento. Para mayor comodidad, utilizaremos el movimiento invertido, o sea, fijaremos el cuerpo en revolución y moveremos el líquido con la misma velocidad del cuerpo (caso b). Como los puntos asumidos aguas arriba y el punto A, están a una misma altura y la velocidad del cuerpo por el movimiento invertido, es igual a cero, entonces la ecuación (4.33), tomará el siguiente aspecto:
γp
g2v
γp A
200 =+
De aquí que:
Pa 152170mN
2vρpp 2
2
A ==⎟⎟⎠
⎞⎜⎜⎝
⎛+=+= ∞
∞ 1521702
10910161013252
.,
La densidad del agua salada, con un 30% de salinidad y a 200C es 1016,9 kg/m3 (Anexo, tabla 1.8)
A
A
(a)
(b)
v0=10m/sV=0 p0
vΦ= v0
p0
Movimiento absoluto
Movimiento invertido
Fig. 4.13

99
3. A una tubería de agua cuyo diámetro es 2 pulgadas, se le conectaron dos piezómetros (uno para la medición de la columna estática y el otro para la columna dinámica) que contienen mercurio y cuya diferencia de altura es 300 mm. ¿Cuál será la velocidad del líquido y su caudal horario? (Fig. 4.14).
Por la pequeña distancia existente entre los piezómetros, podemos suponer que las perdidas son despreciables y por tal motivo resolveremos dicho problema con la ayuda de la teoría de la dinámica del líquido ideal. Aplicando dicha teoría, la diferencia de altura que indican los piezómetros, nos dará la altura de velocidad.
2vρppp
20
esd =−=Δ
Para el mercurio, ρ=13550 kg/m3, tabla 1.9 Por simple despeje, será posible determinar la velocidad en le tubería:
( )seg
mρ
p2v 43213550
51333002 ,,..==
Δ=
Encontrada la velocidad, será posible determinar el caudal horario:
( )h
m4
ΠdvSvQ2 3
2
07174
02502141634323600 ,,..,.,. ====
h
v d
Fig. 4.14

100
5. CAPÍTULO 5 TEORÍA DEL ALA. 5.1 Principales definiciones y características de las alas (perfiles alados). En diferentes esferas de la técnica (construcción naval, aviación, construcción de maquinaria, etc.) frecuentemente se utilizan aditamentos, cuya acción se basa en la utilización de perfiles alados. Se denomina ala, al cuerpo capaz de crear una fuerza hidrodinámica (Py ), perpendicular a la velocidad del cuerpo, o al flujo de encuentro
( V∞ ) figura 5.1.
Esta fuerza fue nombrada por N. E Chukovsky como fuerza de sustentación o levante y es una de las componentes de la resultante de las fuerzas hidrodinámicas (Phid ). Aunque esta fuerza se denomina de sustentación (levante), su dirección depende de la posición del perfil con relación al flujo de encuentro. Por tal motivo encontramos perfiles alados en la construcción de los timones, en los quillas de balance activas, en las palas de las hélices y en otras palas de otros tipos de propulsores. La otra componente (Px ) que se muestra en la Fig. 5.1, por ahora no ofrece interés y será objeto de estudio en otro capítulo. A continuación analizaremos las características geométricas de las alas por la importancia de las mismas en el diseño y la explotación de los perfiles alados. 5.1.1 Características geométricas de las alas. No cabe ninguna duda, de que la magnitud de la fuerza de sustentación (Py ) depende
de la forma, de la disposición con relación al flujo y de las dimensiones del perfil como tal, de ahí la importancia de la caracterización de las formas de las alas y sus dimensiones.
Fig. 5.1

101
Las alas pueden ser, planas o espaciales (5.2.a). Las alas planas están distribuidas en un plano, pudiendo ser:
- rectangulares; - Trapezoidales; - Ovaladas.
Las espaciales ocupan más de un plano y entre ellas tenemos las alas en “V”, las de perfiles de aviación (utilizadas por las palas de las hélices), las de cuña y las utilizadas por los impelentes de las bombas (Fig.5.2.b.c). En lo adelante, para una mayor facilidad durante el estudio de los procesos físicos que ocurren durante el trabajo del ala, utilizaremos un ala plana rectangular. Veremos a continuación las principales características geométricas de las alas (Fig.5.2.a, b, c):
- El área S, que es la proyección del ala en el plano. - Longitud (envergadura) del ala L; longitud del ala en la dirección perpendicular a
la velocidad del flujo. - Cuerda del ala b; segmento recto que une los puntos extremos del ala. - Espesor máximo del perfil t; ancho máximo del perfil en su sección transversal a
una distancia aT. - Flecha máxima del perfil, f; distancia máxima entre la cuerda y la línea media del
ala. Caracteriza la curvatura del perfil. La posición de la flecha esta dada por af.
Fig. 5.2

102
Frecuentemente se utilizan características geométricas adimensionales: - Longitud relativa del ala (envergadura relativa);
bLλ = (5.1)
En dependencia de la magnitud λ, se diferencian:
2λ ≤ , alas de poca envergadura. 2λ > , alas de gran envergadura. ∞=λ , alas de envergadura infinita.
- Espesor relativo del ala t :
%100btt = (5.2)
Por lo general dicha magnitud no sobrepasa el 25%. Aquellos perfiles en que %10<t , se denominan perfiles finos.
- Flecha relativa del ala f :
%100bff = (5.3)
Por lo general dicha magnitud no sobrepasa el 2%. 5.1.2 Características hidrodinámicas de las alas.
En este acápite analizaremos aquellas características hidrodinámicas de las alas que se mueven en líquidos reales y que son de interés práctico. Sin embargo aquí analizaremos aquellas relacionadas con la fuerza de sustentación y en los límites de la teoría del movimiento sin remolino. En el caso analizado, para mayor facilidad, moveremos el líquido con un movimiento rectilíneo uniforme y mantendremos el cuerpo estático, (Fig.5.3)
b
α
y1
x1
x
Fig. 5.3

103
La fuerza de presión hidrodinámica, es el producto de la presión hidrodinámica por el área del cuerpo. Según la expresión general de la fuerza de presión hidrodinámica, dicha fuerza será:
2
v 2ρSCyPy
∞= , 2
v 2ρSCxPx
∞= (5.4)
Donde Cy y CX son los coeficientes de la fuerza de sustentación y de la fuerza de resistencia. La relación entre la PY y la PX se denomina calidad hidrodinámica del ala:
Kcc
PP
X
Y
X
y == (5.5)
El coeficiente K determina la efectividad del perfil como dispositivo creador de la fuerza de sustentación, para un ángulo de ataque dado. La fuerza de sustentación está condicionada por la diferencia de la presión hidrodinámica excesiva (sobre la hidrostática) sobre la superficie del ala. En la Fig. 5.4 se muestra el diagrama de distribución del coeficiente adimensional de la presión hidrodinámica excesiva. En la zona superior, su magnitud es negativa (-) y en la zona inferior (+).
De la (Fig.5.4) se aprecia que la fuerza de sustentación es proporcional a la suma de las áreas positivas y negativas del diagrama. Cuando , en la parte superior del ala ocurre una gran baja de presión, lo que en lo fundamental es la base del surgimiento de la fuerza de sustentación (entre un 70-75%). Por tal motivo, a la parte superior del ala se le denomina comúnmente – cara de succión del ala y a la superficie delantera del ala, con relación al flujo - de empuje.
pmaxΔ
2v
ρ
PPu p2
u
∞
∞−=Δ
0
-0,5
-1,0
0,5
1,0 0,50
v∞
x/b
0>α
0>α
Fig. 5.4

104
Las componentes de la Phid con relación a los ejes x1-y1 (Fig.5.3) son Py1 y Px1 y sus coeficientes cy1 y cx1. Por lo tanto:
2
v 2ρSCy1Py1
∞= , 2
v 2ρSCx1Px1
∞= (5.6)
El punto de aplicación de la Phid es el punto de intersección de la línea de su acción con la cuerda del perfil del ala. Este punto D (Fig. 5.3) se denomina centro de presión. La distancia desde el punto D hasta la parte delantera del perfil es X1D. La relación:
cbx
D1D = (5.7)
Se denomina coeficiente del centro de presión del perfil alado y su magnitud oscila entre un 0,25 – 0,50. Otra magnitud hidrodinámica importante es el momento hidrodinámico del ala con relación a su borde delantero.
2vbSmXPyM
2
Z1D1Z∞ρ== (5.8)
Donde mZ – coeficiente adimensional de momento. Como resultado de la confrontación de la fórmulas (5.6), (5.7) y (5.8) se obtiene:
ccm Dy1Z = (5.9)
Si el eje de giro del ala no coincide con el borde delantero del perfil, entonces se precisa corregir la expresión (5.9).
⎟⎠⎞
⎜⎝⎛ −=
baccm s
Dy1Z (5.10)
Donde a s- es la distancia del centro del eje de giro al borde delantero del ala (Fig.5.3). La relación:
kba
ks = (5.11)
Se denomina coeficiente de compensación del perfil alado. Las fuerzas y momentos analizados, actúan en el plano de la sección transversal. 5.2 Metódica para la determinación de la fuerza de sustentación. Por cuanto el ala tiene como objetivo la creación de la fuerza PY, entonces nuestro interés principal será la determinación de la misma. Para la determinación teórica de

105
dicha fuerza, se hace necesario obtener la distribución de la presión por toda la superficie del ala. En primera aproximación, la fuerza de sustentación PY se determina asumiendo el movimiento del líquido estacionario y sin remolino y al líquido incompresible ideal. La solución teórica de este problema, para un ala de gran envergadura, la dio N. E. Chukovsky. Para el ala de envergadura finita, bajo las mismas condiciones, fue elaborado por el científico ruso C. A. Chapling. A continuación analizaremos dichas tareas. 5.3 Contorneo de un cilindro infinitamente largo por un flujo estacionario ideal,
incompresible, sin remolino. La idea de la solución de esta tarea para un cilindro circular, consiste, en que en este ejemplo sencillo se puede demostrar las causas físicas del surgimiento de la fuerza de sustentación durante el movimiento sin remolino del líquido. Además, la solución de la tarea para el cilindro circular se puede extender a la tarea del contorneo de un cuerpo con un perfil de mayor complejidad, ejemplo, la pala del timón, las palas de las turbinas, las palas de las hélices, etc. Supondremos que el movimiento del líquido bajo estas condiciones, es plano. Utilizaremos como herramienta apropiada el teorema de la circulación del vector velocidad. Según dicho teorema la circulación del vector velocidad es igual al integral por circuito cerrado de la velocidad (v∞) sobre el camino elemental dS, (Fig. 5.5).
(5.12)
θsenv2v ∞=v∞
p∞
R
θ
R2v
ΠΓ
=Γ
600
600
vv 4∞
=
VR4∞
Π=ΓR
θ
R2θsen2v v Π
Γ+=
∞
Py
dSαcosv∫=Γ ∞L
Fig. 5.5
(a) (b)
(c) (d)

106
En la (Fig.5.5a) el flujo es simétrico, por lo tanto no existirá fuerza de sustentación, debido a que la distribución de las presiones en la parte superior e inferior, también son simétricas. En la (Fig.5.5b) hay un flujo circular alrededor del cilindro. Si adoptamos el sentido de rotación de las agujas del reloj como positivo, obtendremos para la velocidad la siguiente expresión:
R2
vπΓ
= (5.13)
Esta distribución de las velocidades (5.13) produce una variación de la presión que es radialmente simétrica, de acuerdo a la teoría del vórtice libre. A continuación superpondremos el flujo circulatorio al movimiento uniforme, de modo de obtener el flujo asimétrico de la (Fig.5.5 c). Aquí, la velocidad en la periferia del cilindro será la suma de las dos contribuciones, es decir:
(5.14)
Aplicando ahora la ecuación de Bernoullí, para el flujo en cuestión y sobre dos puntos, uno aguas arriba y otro sobre el cuerpo, a igual altura, obtendremos:
2gvp
2gvp 22
+γ
=+γ
∞∞ (5.15)
Agrupando las presiones a la derecha de (5.15) y teniendo en cuenta la (5.14) obtendremos:
⎥⎦
⎤⎢⎣
⎡⎟⎠⎞
⎜⎝⎛
πΓ
+θ−=∞− ∞∞ R2senv2v2
ρpp 2 (5.16)
Puesto que el área elemental por unidad de longitud del cilindro es θRd y que la fuerza de sustentación es la integral de todas las componentes normales a la dirección de la velocidad, el valor resultante será:
( ) θθ∫−=π
∞ dsenRp-pBP2
0y (5.17)
Introduciendo el valor de ( p-p ∞ ) en la (5.17) e integrando, obtenemos: ΓvBρPy ∞= (5.18)
R2θsenv2v
πΓ
+= ∞

107
Donde: B –longitud del cilindro. Ahora bien, si tenemos en cuenta la expresión para la circulación del vector velocidad, la fuerza de sustentación tomará el siguiente aspecto:
2
v2ρScysenv2ρBR2ΓvBρPy
∞=θ∞π=∞= (5.19)
En la expresión (5.19) CY es el coeficiente de la fuerza de sustentación:
αsen2cy π= (5.20)
El coeficiente de la fuerza de sustentación depende del ángulo de ataque (5.20) del perfil alado con relación a la velocidad del flujo. La gran importancia de la expresión (5.19) radica en que es aplicable no solo a cilindros circulares, sino a cilindros de cualquier forma, incluso a perfiles de formas complejas (perfiles de aviación) con su correspondiente transformación. 5.4 Perfil de Chukovsky. En el apartado anterior expresamos la importancia que tiene la determinación de la fuerza de sustentación para el cilindro circular, por cuanto es posible transferir los datos obtenidos a otro cuerpo de perfil más complejo (en principio a cualquier forma de perfil). Tal transferencia de datos se puede realizar utilizando el método de transformación conforme. La interpretación hidrodinámica del sentido de este método matemático estriba en la correspondiente transformación geométrica del flujo para el cual determinamos sus parámetros (para el caso del cilindro circular) a un flujo del cual desconocemos sus parámetros (en este caso un cuerpo con un perfil complejo). Se entiende por transformación conforme, a la transformación geométrica de un área determinada (SZ), situada en el plano de la variable compleja yixz += , a un área (Sζ), situada en otra zona donde la variable compleja es ηiξζ += , (Fig. 5.6).
A
BA1 B1
SζSZ
y η
ξx Fig. 5.6

108
Durante esto, las condiciones exteriores de la zona (SZ) se transforman en las condiciones exteriores de la zona (Sζ), La transformación se realiza con la ayuda de la función analítica de la variable compleja (z)ζ f= , denominada función transformadora. Al realizar tal operación, a cada valor de la variable compleja yixz += en plano (Z), le corresponde un valor de la variable compleja ηiξζ += en el plano ( ζ ), de tal forma que:
y)xηiξζ if +=+= ( (5.21)
De lo expresado anteriormente se desprende que las coordenadas ( )yx,fξ 1= y
y)x,(fη 2= están relacionadas con las anteriores. Geométricamente esto significa, que a cada punto en el plano (Z) le corresponde un punto determinado en el plano ( ζ ) y a una línea o al contorno de un cuerpo contorneado en el plano (Z) le corresponde una línea o un contorno determinado en el plano ( ζ ), pero con otra forma. Esta forma estará determinada por el tipo de función transformadora. La principal propiedad de la transformación obtenida con la ayuda de la función analítica de la variable compleja, es la propiedad de la conservación de los ángulos. Por tal motivo durante esta transformación se conserva la semejanza en las partes infinitesimales de la zona a transformar y en la transformada. Como consecuencia de esta propiedad, la red de corriente se transforma en su forma, pero la ortogonalidad entre sus líneas se mantiene. Esto permite que los parámetros del flujo estudiado, transferirlos al flujo del cual desconocemos sus parámetros y obtener la solución deseada. A modo de ejemplo de una transformación conforme, analicemos la construcción del perfil NECH, denominado así en honor de su creador, el científico ruso N. E. Chukovsky, en 1910. El perfil NECH, se relaciona con los perfiles denominados perfiles teóricos, que tienen gran aceptación en la construcción de aviones y en la construcción de buques. Para esto, en el plano de la variable compleja yixz += , tracemos una circunferencia de radio R0, con sus ejes de coordenadas x, y (Fig. 5.7).

109
A partir del centro de dicha circunferencia, tracemos la recta OB, de tal forma que se
encuentre a un ángulo 0>2β . Dicho ángulo caracteriza el grado de curvatura del perfil.
Sobre la recta OB, tracemos el radio r0 y el final de dicho radio será el punto 01, que será el centro de la nueva circunferencia de radio r0 en el plano de la nueva variable compleja yixz 111 += . En el nuevo centro, tracemos los nuevos ejes x1, y1. Encontremos la relación entre las variables complejas z y z1, para esto, utilicemos la Fig. 5.7.
( )
2βsenRyy
2βcosrRxx
1
001
+=
−−= (5.22)
Ahora, suponiendo que:
( )2βsenRi
2βcosrRq 00 +−−= (5.23)
Obtendremos: qiz += z1 (5.24)
Esta función representativa (5.24) transforma el plano de la variable compleja z, a un plano de la variable compleja z1.
y y1
xx1
RO
r0 001
C A
B β / 2
β β
C
A
B
v∞
α 2βsen2
rR 0AB =
Fig. 5.7

110
Asumiremos ahora otro nuevo plano de la variable compleja ηiξζ += , el cual está relacionado con la variable compleja z, a través de la función de Chukovsky:
( ) ⎟⎟⎠
⎞⎜⎜⎝
⎛+=⎥
⎦
⎤⎢⎣
⎡+
++=+=zczqz
cqz21ηiξζ
11
20
20
21
(5.25)
Donde:
2βcosrc 00 =
Igualando en esta expresión la parte real y la imaginaria, obtendremos las fórmulas de cálculo para la transformación de las curvas, desde el plano z1, al plano ζ .
⎟⎟⎠
⎞⎜⎜⎝
⎛
+−=⎟
⎟⎠
⎞⎜⎜⎝
⎛
++=
yxc1
2y
η;yx
c12xξ 2
121
201
21
21
201 (5.26)
Si sustituimos en esta fórmula las coordenadas de los puntos de la circunferencia (r0), entonces en el plano ζ obtendremos las coordenadas del segmento de arco A1B1, la flecha o curvatura del perfil f y el radio de la curvatura R BA1 1 .
2β2sen
rR
2βsenr
BA10
1
0f
=
=
(5.27)
Ahora, colocando las coordenadas de los puntos de la circunferencia con radio R0 en las fórmulas (5.26), obtendremos en el plano ζ , el perfil de N. E. Chukovsky, o sea el perfil NECH. Analicemos ahora la transformación del flujo que contornea al cuerpo. Anteriormente explicábamos que al transformar el cilindro circular al perfil NECH, también se transformaba en cuanto a su forma la red de corriente, manteniendo la ortogonalidad entre sus líneas. Supongamos, que coinciden en el inicio de las coordenadas de los planos de la variable compleja z y z2 y entre los ejes reales se forma el ángulo α. (Fig. 5.8).

111
Ya que erz θi 1= , erz θi 22 = y αθθ 12 −= (Fig.5.8), entonces:
eeerz -i-iθi 12
αα == z (5.28) Apliquemos ahora el método de la transformación compleja para resolver el problema del flujo plano potencial. Como ya es conocido, cualquier flujo plano potencial, se caracteriza totalmente por el potencial complejo ϕ+ϕ= iW y se representa en el plano por medio de una red ortogonal, formada por líneas de igual potencial de velocidad y líneas de corriente. Al igual que la transformación compleja del cilindro al perfil NECH, la red de corriente puede ser transformada, obteniéndose otra red, también ortogonal entre sus líneas. Es suficiente para obtener el potencial del flujo, cambiar las variables en el potencial complejo inicial, según la función transformadora, o sea, si en el plano inicial ( )zFW = y la función transformadora es ( )ς= fz , entonces:
( ) ( )[ ]ς=ς fFW (5.29) De aquí se desprende que, por el potencia complejo ( )zW conocido, se pueden obtener tantos potenciales complejos con variables ( )ς , cuantas funciones transformadoras del plano ( z ) asumamos al plano ( )ς . Si el potencial complejo ( )zW determina la circulación potencial del flujo, entonces con la transformación se conserva la circulación de la velocidad por el contorno del cuerpo. Realmente, calculando la circulación de la velocidad por el contorno ( )S y ( )S1 que se encuentra en los planos ( z ) y ( )ς , tendremos:
( ) ( )
( ) ( )⎟⎠⎞
⎜⎝⎛
∫ ς=∫ η+ξ=Γ
⎟⎠⎞
⎜⎝⎛
∫=∫ +=Γ
ςηξS1S1
S1
Sz
SyxS
dvRdvdv
dzvRdyvdxv (5.30)
X2
X
y2 y
r
A
0α
θ1
θ2
Fig. 5.8

112
Donde ( )⎟⎟⎠
⎞⎜⎜⎝
⎛∫iS
iidxvR , simboliza la parte real de los integrales señalados.
5.5 Particularidades del contorneo de un ala finita. Resistencia inductiva. Las alas en la práctica siempre poseen una longitud (envergadura) limitada, por tal motivo, el contorneo no se puede asumir plano. En este caso el contorneo espacial viene dado por las diferentes presiones que existen en la parte superior e inferior del ala que motiva un corrimiento en los extremos (Fig. 5.9 a).
Esto condiciona el surgimiento de componentes de velocidades del flujo en aquellos planos, que van a ser paralelos al plano yz, o sea, planos transversales con relación al flujo de encuentro (Fig. 5.9a). Se deduce de lo expresado que, el flujo en cualquiera sección del ala, cercana a los extremos, se obtiene como resultado de la superposición de dos flujos (uno sobre otro) – el flujo que viene al encuentro con una velocidad )∞(v y el flujo producto del escurrimiento por los extremos con una componente de velocidad ( yiv ) y que serán diferentes a medida que nos alejemos de los extremos. Las consecuencias de la superposición de estos dos flujos, son las siguientes:
- La circulación de la velocidad por el contorno que encierra el ala, varía a lo largo de la misma.
- La velocidad del flujo que viene al encuentro se ve modificada y ahora será la resultante de dos flujos (5.9.b).
yimi vvv += ∞ (5.31)
x y
Fig. 5.9 a

113
De esta forma, la influencia de la longitud finita del ala sobre el contorneo de cualquiera
de sus secciones, se manifiesta en la sustitución de un flujo con velocidad ∞v , por otro con velocidad miv . El ángulo de ataque, por esta misma causa, se verá disminuido. Ahora el ángulo de incidencia de la velocidad será iΔα , el cual se puede obtener partiendo del triangulo de velocidades:
i
miyi
iiyi cosv
v;vv
tag;ΔtagvvαΔ
==αΔα= ∞
∞∞ (5.32)
Para el caso, cuando iΔα sea de pequeña magnitud, entonces.
∞
∞
∞
≅≅α
α=≅αΔαΔ≅αΔ
vv;vv
Δ
;Δvv;1cos;tag
miyi
i
iyiiii
(5.33)
Teniendo en cuenta la incidencia del ángulo iΔα , la fuerza hidrodinámica a lo largo del ala variará, siendo ahora:
dzdG ii Γρ= miv (5.34) Y por tal motivo sus componentes también variarán:
dzVsenΔdGdPdzVcosΔdGdP
iyiiixi
iiiyi
Γρ≅α=
Γρ≅α= ∞ (5.35)
Para obtener las magnitudes de dichas componentes para toda el ala, basta solo integral las expresiones (5.35):
Fig. 5.9 b

114
ind
2L
2Lii
2L
2-Liyixaf
2L
2Liyaf
RdzΔαΓρVdzΓVρdP
;dzΓρVP
=∫=∫=
∫=
+
−∞
+
+
−∞
(5.36)
Donde: yafP - Fuerza de sustentación del ala finita.
indR=xafdP - Resistencia inductiva del ala finita. Comparando la fuerza de sustentación producida por el ala de longitud finita (5.36) y la producida por el ala de longitud infinita (5.19), apreciamos que ella varía a costa de la variación de la circulación de la velocidad por la longitud del ala (ella disminuye desde el centro del ala hacia los extremos).La explicación física consiste en que, debido al corrimiento del flujo y por tal motivo la incidencia del flujo sobre el ala (variación del
ángulo de ataque de α a iΔα ), ocurrirá una caída de presión entre la superficie inferior y la superior del ala, diferente en los extremos con relación a las secciones interiores, lo que influye sobre la fuerza de sustentación. 5.6 Formación de olas. Fuerzas y momentos creados por las olas. Durante el movimiento de un cuerpo sumergido en un líquido (a poca profundidad) o semi-sumergido, en la superficie libre del líquido, donde la presión es constante (presión atmosférica), se forman olas. La causa del surgimiento de las olas está dada por la distribución no uniforme de la presión hidrodinámica excesiva a lo largo del cuerpo en movimiento. La magnitud de dichas presiones determina el nivel de deformación de la superficie libre del líquido (desviación de las partículas del líquido de su posición inicial de equilibrio). En la Fig. 5.10 se muestran las distribuciones de la presión excesiva y de la velocidad para el caso ya conocido de movimiento invertido (parar el cuerpo y mover el líquido). Durante el estudio de este problema asumiremos al líquido como no viscoso (ideal), el movimiento estacionario y sin fronteras que lo limiten.
Fig. 5.10

115
En el caso analizado, la velocidad aguas arriba (flujo no perturbado) será igual a la velocidad del cuerpo, 0vv =∞ y la presión excesiva será ∞up . En el extremo de proa del cuerpo y algo más adelante hay una zona de altas presiones y bajas velocidades. Este fenómeno está condicionado por la oposición del flujo antes del cuerpo. A medida que nos alejamos hacia la popa, la presión en la superficie del cuerpo disminuye hasta una presión ∞up y más allá será menor debido a que el fluido es desplazado por el cuerpo y esto genera un aumento de su velocidad. Cerca de la popa del cuerpo, donde el flujo se ensancha, la velocidad disminuye y la presión de nuevo aumenta. Algo después de esta zona estos parámetros se equiparan con los parámetros del flujo no perturbado. Cualitativamente tal carácter de distribución de la velocidad y la presión a lo largo del cuerpo se conserva tanto para los cuerpos semi sumergidos como los sumergidos a pequeñas profundidades. Este carácter de distribución de las presiones hidrodinámicas conlleva a que en la zona de alta presión (excesiva sobre la hidrostática) se eleve el nivel del líquido sobre la superficie en reposo y en la zona de baja presión ocurre lo contrario, el nivel baja. La deformación de la superficie libre del líquido trae consigo su ondulación bajo la presencia de las fuerzas de gravedad, dando lugar a las olas. Estas olas como se aprecian tienen diferente naturaleza que las olas provocadas por el viento u otro fenómeno. La observación y los numerosos experimentos han demostrado que las partes principales donde surgen las olas durante el movimiento de un cuerpo son, la parte de proa y de popa del mismo, debido a la variación brusca (picos, Fig. 5.10) de la presión hidrodinámica, de ahí la importancia de un diseño racional de estas partes en los buques. La existencia de tales picos de presión provoca dos sistemas de olas, a saber el sistema de olas de proa y el sistema de olas de popa. El sistema de olas de proa posee mayor intensidad que el de popa, debido a que la presión hidrodinámica es mayor a proa que a popa y por tal motivo ocurre un mayor levante de la superficie libre del líquido en esta zona. Como consecuencia de lo anterior surge una fuerza por parte del líquido, la cual actúa sobre la superficie mojada del cuerpo. Ella está dirigida contraria al movimiento del cuerpo y se determina igual que la fuerza de sustentación para los perfiles alados.
olS
olol RdSpP =∫= (5.37)
Dicha fuerza crea un momento con relación al centro de gravedad del cuerpo.
( )dSrpMS
olol ∫ += (5.38)

116
En la (5.37) y (5.38); S – es la superficie mojada del cuerpo (área de la obra viva en los
buques) y r es el radio vector del centro de la superficie mojada. Con esto podemos afirmar que la fuerza de ola, conocida como resistencia de ola, es el vector principal de las fuerzas provocado por las presiones excesivas de las olas que actúan sobre la superficie mojada del cuerpo. Con la ocurrencia de las olas, la presión de ola será positiva por la acción de la fuerza de la gravedad en la cresta de la ola (en la elevación sobre la superficie estática del líquido) y negativa en el seno. De lo anterior se deduce que el proceso de formación de las olas por el buque está condicionado por la acción de las fuerzas de la gravedad y la viscosidad tiene poca importancia en tal proceso. La mayor influencia viene dada por la velocidad del cuerpo y por su forma. Con el aumento de la profundidad bajo el cuerpo o durante la navegación a grandes profundidades, la resistencia de ola disminuye para el caso de los buques de superficie y desaparece para los cuerpos sumergidos a estas profundidades. Esto se explica por cuanto con el aumento de la profundidad cambia la distribución de las presiones en dichos flujos, la componente hidrostática debido a la mencionada profundidad llega a ser significativa en comparación con la variación por el calado del cuerpo. 5.7 Resistencia de ola. Dejaremos por sentado que la fuerza de presión de ola en lo adelante se denominará resistencia de ola y que su dirección como vimos anteriormente, es contraria al movimiento.
( )dSv,pcospRS
oololol ∫−= (5.39)
Desde el punto de vista energético la aparición de la resistencia de ola durante el movimiento del cuerpo en un líquido se explica por la perdida de energía por el cuerpo (en el sentido de su empleo útil) en la creación y sustento de las olas. Mientras mayores sean las olas creadas por el cuerpo, mayor será la energía utilizada en su creación y sustento y por tanto mayor será la resistencia de ola. El criterio más utilizado (aparte de la forma del cuerpo) para valorar la resistencia de ola, es el propuesto por el arquitecto naval británico William Froude y al que se debe su nombre.
gLv
Fr 0= (5.40)
Donde: g – es la aceleración de la gravedad. L - la longitud del cuerpo (en el caso de los buques de superficie, es la eslora entre perpendiculares para la flotación dada).

117
Para el caso del movimiento de un cuerpo semi sumergido y de formas bien diseñadas, cuando 15,010,0Fr ÷< prácticamente no existe la formación de olas y por tanto
0R 0 ≅ . Con el aumento de número de Froude ( )Fr la formación de las olas aumenta y por lo tanto 0R aumenta, alcanzando su máximo valor cuando 50Fr ,≈ y después disminuye. La 0R es proporcional a ( )n
0v , siendo ( )Frfn = . En el rango de 50350Fr ,, ÷≈ el exponente n oscila entre 4 – 6 y cuando 50Fr ,> , 2n < . En el caso del movimiento de un cuerpo sumergido (submarino y otros) la intensidad de la formación de olas y la magnitud de 0R depende significativamente también de la profundidad de inmersión del cuerpo H, (Fig. 5.11).
Con el aumento de la profundidad de inmersión la deformación de la superficie libre disminuye. Esto se explica por cuanto con el aumento de la profundidad disminuye la influencia de la presión hidrodinámica creada por el cuerpo sobre la superficie libre del líquido. Se puede afirmar que 0R 0 ≅ cuando 0HH > , siendo:
( )L150Fr11H0 ,, −= (5.41)
Además de lo anterior, sobre la 0R ejerce influencia la cercanía de paredes sólidas, para el caso de los buques, las paredes de los canales y los bajos fondos. Frecuentemente la resistencia de ola se calcula utilizando la fórmula general de la resistencia:
2
VSR
20
ol0 ρζ= (5.42)
Fig. 5.11

118
Donde olζ - coeficiente adimensional de la resistencia de ola. El mismo depende del número de Froude y de la profundidad relativa de inmersión, o sea:
⎟⎠⎞
⎜⎝⎛=ζ
LHFrfol , (5.43)
En la gráfica de la Fig. 5.12, se muestra la curva del coeficiente de resistencia de ola
para un buque de alta velocidad a una profundidad relativa de 180LH ,= .
Por el efecto negativo de la 0R y su influencia sobre la potencia de la instalación energética, una de las tareas principales de la Hidromecánica es la elaboración de métodos para la disminución de la misma. 5.8 Campo hidrodinámico del buque. El movimiento del buque provoca en el agua la presión hidrodinámica excesiva (con relación a la hidrostática) hstppp −=Δ . Para el caso general del movimiento de un buque o de un submarino en posición de superficie a poca profundidad y con el surgimiento de las olas (provocadas por sus movimientos):
olu ppp +=Δ (5.44) Donde:
up - presión hidrodinámica sin tener en cuenta la deformación de la superficie del mar (mar sin limites, o sea sin fronteras).
Fig. 5.12

119
olp - Presión adicional debido a la ola formada por el buque.
La presión hidrodinámica pΔ disminuye, a medida que nos alejamos del buque. El campo de presiones hidrodinámicas provocado por el buque )z,y,x(fp =Δ se denomina campo hidrodinámico del buque. Dicho campo no varía durante el movimiento uniforme del buque. La importancia de esta problemática estriba en su enlace con la defensa del buque contra determinados tipos de armamentos. Por tal motivo se hace necesario establecer las dependencias y los elementos que caracterizan el mismo. Los elementos que caracterizan el campo hidrodinámico del buque son:
- La velocidad del buque 0v . Mientras mayor sea esta, mayor será la intensidad del campo y sus dimensiones.
- El desplazamiento del buque, la forma del casco y sus dimensiones. Con el aumento de los mismos, aumenta también la intensidad del campo.
- La profundidad bajo la quilla, que con su aumento, la intensidad del campo disminuye.
- Las olas marinas que se suman a las olas provocadas por el buque y pueden aumentar o disminuir la intensidad del campo hidrodinámico.
En la Fig. 5.13a en el plano diametral se muestra el carácter de la variación de la presión pΔ a lo largo del buque (solo la ola provocada por el buque). La curva 1 representa a pΔ para una profundidad H1 y la curva 2 para H2 > H1. En la Fig. 5.13b se muestra lo mismo, pero en el plano de la cuaderna maestra, lo que indica la distribución de pΔ a lo ancho del buque.
Fig. 5.13

120
5.8.1 Esquema de cálculo del campo hidrodinámico del buque. Esta tarea se puede resolver con la ayuda de la teoría del movimiento sin remolino de un líquido ideal e incompresible, por cuanto la viscosidad no representa gran influencia sobre la distribución de las presiones hidrodinámicas en una zona distante del buque (fuera de la capa limite). El movimiento del buque lo supondremos uniforme y rectilíneo. La solución de la tarea estriba en determinar las velocidades ( )z,y,xv y las presiones ( )z,y,xpΔ provocadas por el buque durante su movimiento. Los elementos necesarios para el cálculo son:
- 0v , velocidad del buque en segm . Si se tiene en nudos basta solo aplicar la
siguiente fórmula: i0 v0,515v =
- El desplazamiento del buque, Tf . - La profundidad bajo la quilla, m - Las coordenadas relativas:
Hyy,
Hxx;1xxr
22h ==++= (5.45)
El cálculo se realiza por la siguiente fórmula:
( ) 3
h
2
h3
20
ir
rx31
.Hg2Dv
p⎟⎟⎠
⎞⎜⎜⎝
⎛−
π−=Δ (5.46)
En la Fig. 5.14 se muestran los diagramas resultantes de dicho cálculo.

121
VARIACIÓN DE LA PRESIÓN HIDRODINÁMICA
-40,00
-30,00
-20,00
-10,00
0,00
10,00
32 28 24 20 16 12 8 4 0 -4 -8 -12 -16 -20 -24 -28 -32
Longitud de cálculo
Vari
ació
n de
la p
resi
ón
hidr
odin
ámic
a
W L x
y
z
Fig. 5.14

122
Anexo sobre las propiedades Físico - Mecánicas de algunos líquidos
Tabla 1.7. Densidad del agua dulce, libre de aire, en función de la temperatura T, 0C ρ, kg/m3 T, 0C ρ, kg/m3 T, 0C ρ, kg/m3 T, 0C ρ, kg/m3
P=0,0981 MPa P=1,962 MPa 0 999,87 50 988,1 0 1000,8 120 944 4 1000 60 983,2 20 999,0 140 926,9 10 999,73 70 977,8 40 993,0 160 908,2 20 998,23 80 971,8 60 984,1 180 887,5 30 995,68 90 965,3 80 978,8 200 865 40 992,25 100 958,4 100 959,3 - -
Tabla 1.8. Densidad el agua salada en función de su salinidad y temperatura.
ρ, kg/m3, a temperatura 0C S, % 0 4 15 25 10 1008 1008 1006,8 1004,6 20 1016 1016,9 1014,5 1012,1 30 1024,1 1024,8 1022,2 1019,6 40 1032,2 1032,8 1029,1 1027,1
Tabla 1.9. Densidad de algunos líquidos
T, 0C ρ, kg/m3 T, 0C ρ, kg/m3 T, 0C ρ, kg/m3 Gasolina B-70 Keroseno(T-1) Mercurio
20 751 20 819 0 13590 42 735 40 808 20 13550 60 795
Glicerina Aceite M-20 Alcohol metílico 0 1267 0 903,6 0 810 20 1259 20 892,5 20 791,5 40 881
Diesel Aceite de transformador Combustible T-5
20 878,7 0 892,5 20 842 40 865,4 20 880,3 40 828 60 852 40 868,2
Tabla 1.10. Densidad del aire
T, 0C -3 -3 27 27 27 P, MPa 0,0981 0,981 0,0981 0,981 9,81 ρ, kg/m3 1,308 13,15 1,117 11,8 118,15

123
Tabla 1.11. Viscosidad del agua destilada en función de la temperatura en la línea de saturación.
T, 0C μ.103, kg/m.seg ν.105, m2/seg T, 0C μ.103, kg/m.seg ν.105,
m2/seg 0 1,788 1,789 70 0,406 0,415 5 1,515 1,515 80 0,355 0,366 10 1,306 1,306 90 0,315 0,326 15 1,140 1,142 100 0,283 0,294 20 1,005 1,006 120 0,237 0,244 25 0,894 0,897 140 0,201 0,212 30 0,801 0,805 160 0,174 0,189 40 0,653 0,658 180 0,153 0,173 50 0,594 0,556 200 0,136 0,162 60 0,470 0,478 - - -
Tabla 1.12 Viscosidad cinemática de algunos derivados del petróleo.
ν.104, m2/seg, a temperatura 0C Derivados del petróleo 0 10 20 30 40 50 60
Gasolina 0,008 0,0072 0,0064 0,0058 - - - Keroseno 0,041 0,032 0,025 0,021 - - - Aceites y grasas transformador 1,35 0,66 0,36 0,23 0,15 0,11 0,077 de Máquina 6 2,39 1,15 0,61 0,36 0,23 0,13 de motor 38 13 5,2 2,38 1,23 0,69 0,43 mineral MC-20 76 - 11,2 - 2,7 - - Fuel oil 12 55 19,3 7,9 3,3 1,69 0,93 0,55 20 113 44 16 6,6 3,1 1,58 0,92 Combustible Diesel 0,126 0,097 0,08 0,06 0,046 0,035 -
Combustible para motor DT-1 (M-3) 6,5 3 1,6 0,9 0,55 0,36 0,25 DT-2 (M-4) 13 5,5 2,8 1,6 0,9 0,56 0,36 DT-3 (M-5) 18 7,5 3,6 1,9 1,05 0,68 0,44
Tabla 1.13. Presión de los vapores saturados (agua)
Temperatura, 0C Presión -30 -20 -10 0 10 20 30 40 50 mmcHg 0,38 0,94 2,1 4,6 9,02 17,5 31,8 55,3 92,5 mmca 5,15 12,8 28,5 62,5 122 238 432 750 1255 Pa 50,5 125,6 279,6 613 1197 2385 4240 7360 12320

124
Tabla 1.14. Conversión de unidades. Unidad de medida
Magnitud SI CKS Valor en el sistema SI
ρ, densidad Kg/m3 Kgf.seg2/m4 1 Kgf.seg2/m4=9,81 kg/m3
γ =ρg, peso específico N/m3 Kgf/m3 1 Kgf/m3=9,81 N/m3
μ, viscosidad dinámica N.seg/m2 Kgf.seg/m2 1 Kgf.seg/m2=9,81
N.seg/m2
Tabla 1.15. Conversión de unidades de presión. Nombre de
la magnitud
Unidades de presión
Pa N/m2
Bar (104N/m2) Kgf/m2 Kgf/cm2 mmcHg mmca mca
Pascal, Newton sobre metro cuadrado
1 0,00001 0,102 0,0000102 0,00749 0,102 0,000102
Bar
100000 1 10200 1,02 749 10200 10,2
Kilogramo fuerza sobre metro cuadrado
9,81 0,0000981 1 0,0001 0,0735 1 0,001
Kilogramo fuerza sobre centímetro cuadrado
98100 0,981 10000 1 735,56 10000 10
Milímetro de columna de mercurio
133,5 0,001335 13,6 0,00136 1 13,6 0,0136
Milímetro de columna de agua
9,81 0,0000981 1 0,0001 0,0735 1 0,001
Metro de columna de agua
9810 0,0981 1000 0,1 73,556 1000 1

125
Tablas 2.1 Momentos de Inercia y Centros de Gravedad
Figura Centroide Momentos de inercia de la superficie
αα
=rsenr
-----
Cuarto y semicircunferencia
π=
r2y
------
Superficie triangular
3bax +
=
3hy =
12bhI
3
z =
36bhI
3
y =
Superficie de un cuadrante circular
π==
3r4yx
16rII
4
yzπ
==
Superficie rectangular
-----
3bhI
3
z =
y
Arco de circunferencia

126
Figura Centroide Momentos de inercia de la superficie
Cáscara cilíndrica de
revolución
-------
22
xz m121mr
21I l+=
22
1z1x m31mr
21I l+=
2zz mrI =
Cáscara semicilíndrica de
revolución
π=
r2x
22
yyxz m121mr
21II l+==
221y1y1z1x m
31mr
21II l+==
2zz mrI =
Semicilindro
π=
3r4x
22
yyxz m121mr
21II l+==
221z1x m
31mr
21I l+=
Cilindro de revolución
22
yyxz m121mr
21II l+==
221z1x m
31mr
21I l+=
2zz mr
21I =

127
Coef. aerodinámico Cy para un ala de envergadura λ=5 y un perfil B-18ZAGY
-0,40
-0,20
0,00
0,20
0,40
0,60
0,80
1,00
1,20
1,40
-5 -2 2 4 7 9 12 13 14 18 20
Ángulo de ataque, α
Coef
. Cy
Coef. Cx para un ala de envergadura λ=5 y un perfil B-18ZAGY
-0,02
0,00
0,02
0,04
0,06
0,08
0,10
0,12
0,14
-3 -2 0 -4 4 12 16
Ángulo de ataque, α
Coe
f. C
x
Coef. mx para un ala de envergadura λ=5 y un perfil B-18ZAGY
-0,10
-0,05
0,00
0,05
0,10
0,15
0,20
0,25
0,30
-4,0 -3,0 1,0 4,0 6,0 7,0 8,0 8,5 12,0 20,0
Ángulo de ataque, α
Coe
f. m
x

128
BIBLIOGRAFÍA.
1. Bilner I. M., “Prontuario de hidráulica, hidromáquinas y trasmisiones hidráulicas”. Editorial Escuela Superior. Comité Estatal de Bielorrusia. 1985.
2. Colectivo de autores, “Hidromecánica”, Escuela Superior de Ingeniería Naval de Leningrado “Vladimir I. Lenin”. 1974.
3. Daugherty R. L. y Ingersoll A. C. “Mecánica de los fluidos”. Editorial Hispano Americana, S. A.1964.
4. Paidoussis M., “Fluid-Structure Interactions 2”, 2003. 5. Patrachev A. N. “Hidromecánica Clásica”. Editora Militar. 1970. 6. Rabinovich E. Z., “Hidráulica”. Editorial Moscú. 1980. 7. Serly F. B. y Ensign N. E., “Mecánica analítica para Ingenieros”. Ediciones
UTEHA. 1961. 8. Vernnard John K. “Fluid Mechanics”. 1966.