Guia Usuario Robocell
13
MANUAL DE USUARIO RoboCell SCORBOT-ER4u SCORBOT-ER2u Versión 4.7- 2002 GUIOVANNY SUÀREZ RIVERA Docente Investigador en Robòtica POLITÈCNICO COLOMBIANO JAIME ISAZA CADAVID FACULTAD DE NGENIERIAS Medellín 2008
-
Upload
osocracker -
Category
Documents
-
view
1.002 -
download
6
Transcript of Guia Usuario Robocell

MANUAL DE USUARIO
RoboCell
SCORBOT-ER4u
SCORBOT-ER2u
Versión 4.7- 2002
GUIOVANNY SUÀREZ RIVERA Docente Investigador en Robòtica
POLITÈCNICO COLOMBIANO JAIME ISAZA CADAVID
FACULTAD DE NGENIERIAS
Medellín
2008

INTRODUCCIÒN
El presente manual de usuario fue creado sòlo para fines educativos y sin ànimo de lucro, como apoyo al curso de Robòtca que se viene realizando para los estudiantes de la
institución universitaria Politècnico Colombiano Jaime Isaza Cadavid, dentro del pènsum de la carrera de ingenierìa en instrumentación y control, con sede en la ciudad de Medellín,
Colombia.
La gran cantidad de información aquì consiganada fue cuidadosamente extraìda del manual original en inglès, y de la experiencia obtenida por quien suscribe este manual, respetando
las las Leyes que protegen los derechos de autor, siendo para este caso la empresa intelitek, creadora del software RoboCell y sus correspondientes utilidades.
Guiovanny Suàrez Rivera
Medellín. Colombia. Febrero de 2008.

Guiovanny Suàrez Rivera. http://www.guiovanny.webs.com, [email protected], Politècnico Colombiano Jaime Isaza Cadavid. Medellín. Colombia. 2008
1
RoboCell
Requerimientos del sistema
Para un mejor rendimiento, se recomiendan las siguientes caracterìsticas del sistema:
• Computador: Minimo- Pentium III PC con procesador de 450 MHz, o superior, con unidad de CD.
• Por lo menos 128 MB de memoria RAM.
• Disco duro de al menos 60 MB de espacio libre.
• Windows 98/2000/XP SP2.
• Pantalla Super VGA, con mínimo 256 colores.
• Mouse.
• Puerto USB, si el controlador del robot va a ser conectado.
Pasos para la Instalaciòn del Software
1. Dentro de la carpeta llamada software, encontrará un documento tipo texto que contiene la contraseña y el archivo instalador del programa. , antes de iniciar la instalación abra el
archivo llamado contraseña y copie (Ctrl + c) la contraseña que viene en él, luego inicie la instalación haciendo doble clic izquierdo sobre el ejecutable
para iniciar la instalación.
2. En la ventana que aparece pegue la contraseña (Ctrl + v) en el campo en blanco y pulse sobre el botón finalizar.

Guiovanny Suàrez Rivera. http://www.guiovanny.webs.com, [email protected], Politècnico Colombiano Jaime Isaza Cadavid. Medellín. Colombia. 2008
3. Pulse sobre Next 4. Del menú que se despliega seleccione la primer opción y luego pulse sobre Next

Guiovanny Suàrez Rivera. http://www.guiovanny.webs.com, [email protected], Politècnico Colombiano Jaime Isaza Cadavid. Medellín. Colombia. 2008
5. Acepte los derechos de autor pulsando sobre Yes
6. Ingrese en los campos de la nueva venta su nombre, el de su empresa y el serial (suministrado por compra), para nuestro caso que es una versión demo, ingrese por ejemplo
los números 123456 y pulse sobre Next

Guiovanny Suàrez Rivera. http://www.guiovanny.webs.com, [email protected], Politècnico Colombiano Jaime Isaza Cadavid. Medellín. Colombia. 2008
7. Seleccione el destino donde se van a instalar los archivos, se recomienda instalarlos en la unidad C, y luego haga clic sobre Next
8. Pulse Next en la siguiente ventana a fin de que se inserte en la lista de programas de la barra
de inicio de Windows el enlace de las aplicaciones de Robocell

Guiovanny Suàrez Rivera. http://www.guiovanny.webs.com, [email protected], Politècnico Colombiano Jaime Isaza Cadavid. Medellín. Colombia. 2008
9. Espere a que el programa llegue al 100 % de la instalación y luego reinicie el computador
haciendo clic sobre Finish
10. Una vez se halla reiniciado el computador vaya a inicio, todos los programas, y busque el
icono de RoboCell, allí se ubican las aplicaciones disponibles para trabajar, como son:
Robocell para la implementación y simulación de programas, CellSetup para la modelación y creación de ambientes de celdas de manufactura flexible y 3D Simulation Software
Demos en donde se pueden apreciar varios ejemplos
11. Para mayor accesibilidad a estas aplicaciones haga un acceso directo al escritorio de
Windows, haciendo click derecho en cada una de ellas, por ejemplo para RoboCell se realiza como se ve en la figura

Guiovanny Suàrez Rivera. http://www.guiovanny.webs.com, [email protected], Politècnico Colombiano Jaime Isaza Cadavid. Medellín. Colombia. 2008
Luego de realizar cada uno de los accesos directos el escritorio queda como se ve en la imagen

Guiovanny Suàrez Rivera. http://www.guiovanny.webs.com, [email protected], Politècnico Colombiano Jaime Isaza Cadavid. Medellín. Colombia. 2008
Utilidades RoboCell
El grupo de utilidades disponibles son:
• CellSetup, para la creación de simples ambientes hasta celdas de
manufactura flexible
• 3D Simulation Software Demos, ejemplos sobre aplicaciones industriales
• Uninstall, desintalaciòn del software

Guiovanny Suàrez Rivera. http://www.guiovanny.webs.com, [email protected], Politècnico Colombiano Jaime Isaza Cadavid. Medellín. Colombia. 2008
Software de Simulacion en 3D Demos
Los archivos de demostración que vienen incluidos en el software muestran las
capacidades de RoboCell. Para ejecutar estos archivos demos, haga lo siguiente:
1. Para activar los demos seleccione inicio | Programas | RoboCell | 3DSimulation Software Demos. Por defecto un demo abre y se inicia
automàticamente. Otra forma màs ràpida es haciendo clic sobre el acceso
directo presente en el escritorio.
2. Para ver otro archivo demo primero pare el que se encuentre en ejecución
haciendo clic en el botòn de stop y luego seleccione File | Open, o haga
click sobre el icon de abrir .
3. Seleccione de la lista que se despliega aquel cuya extensión sea .DMO y haga
clic en abrir.
4. Para parar el demo, seleccione File | Stop, o haga clic sobre el ìcono de
stop .
5. Para navegar en la celda virtual utilice las opciones del menú o la barra de ìconos. En un capìtulo siguiente se explicaràn con màs detalle.
6. Para salir de la utilidad Demos, seleccione File | Exit, o pulse las teclas Alt + F4.
Desinstalacion
Para desintalar RoboCell, haga lo siguiente:
1. Desde el grupo de programas de RoboCell, seleccione Uninstall.
2. Continue con las instrucciones que apercen en pantalla.
Salir del Software
Para cerrar RoboCell (u otras utilidades o componentes), haga alguno de las siguientes operaciones:
• Desde la barra de menu, seleccione File | Exit.
• Click sobre el botòn de cerrar ventana, ubicada en la esquina superior derecha de la barra de tìtulo.
• Presione [Alt]+F4.

Guiovanny Suàrez Rivera. http://www.guiovanny.webs.com, [email protected], Politècnico Colombiano Jaime Isaza Cadavid. Medellín. Colombia. 2008
2
Robots
El paquete demo viene configurado para operar con los brazos SCOR BOT-E R4u y SCORBOT-ER2u, de los que se debe conocer sus caracterìsticas tècnicas a fin de obtener buenos resultados a la hora de elaborar los respectivos ambientes de trabajo y programas de simulación; para ello entonces se mencionaràn en
forma resumida lo màs representativo de cada uno de ellos.
Los robots SCORBOT-ER 4u y SCORBOT-ER2u son sistemas versátiles y fiables para educación, se pueden montar sobre una mesa, pedestal ó base lineal. Su velocidad y repetibilidad los hacen
completamente adecuados tanto para su funcionamiento autónomo como para su uso integrado en aplicaciones de células de trabajo automatizadas tales como soldadura con robots, sistemas de visión, manejo de máquinas CNC, y otros sistemas FMS.
Los robots se manejan con el software gráfico en 3D Robocell, el cual que permite diseñar, crear y
controlar células industriales simuladas. Robocell está totalmente integrado con el software de
control y programación de robótica SCORBASE y permite simulación dinámica del robot y las células
de trabajo durante la enseñanza de posiciones y ejecución del programa. El software se ha diseñado
para aprovechar todas las ventajas de los 32 bits del sistema operativo Windows.
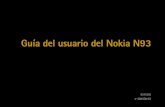
SCORBOT-ER 4u

Guiovanny Suàrez Rivera. http://www.guiovanny.webs.com, [email protected], Politècnico Colombiano Jaime Isaza Cadavid. Medellín. Colombia. 2008
Especificaciones del SCORBOT-ER 4u Brazo mecánico
Estructura mecánica Brazo vertical articulado; estructura abierta
Grados de libertad 5 ejes rotacionales y pinza Capacidad de carga 2,1 kg. Movimiento de los ejes
Eje 1: Base 310° Eje 2: Brazo inferior +130° / -35° Eje 3: Brazo superior +130°
Eje 4: Elevación pinza +130° Eje 5: Giro pinza ±570°
Alcance 610 mm. con pinza Velocidad 700 mm/seg.
Repetibilidad ± 0.18 mm. Realimentación Enconders ópticos incrementales Home Microinterruptor en cada eje Actuadores Servomotores 12 V DC en cada eje
Pinza Servomotor DC, 2 dedos paralelos Abertura de la pinza 65/75 mm con/sin almohadillas de goma Transmisión Engranaje correa dentada Peso 10,8 kg.
Controlador
Comunicación USB tipo A cable conexión al PC; Plug and play sin arrancar
Entradas / Salidas 8 entradas digitales; 4 entradas analógicas; 8 salidas digitales (4 relés, 4 colector abierto);
2 salidas analógicas Microcontrolador NEC V853 RISC 32-bit Servo Control de Ejes Tiempo-real; PID; PWM
Número de servo ejes 8 (brazo del robot, pinza y 2 periféricos) Memoria de usuario Programas, líneas de programa, variables y
posiciones ilimitadas Definición de Posición Absoluta, Relativa, Cartesiana, Ejes (Joints),
Encoders Control de Trayectoria Ejes (Joint), Lineal, Circular Definición de Velocidad (soft.) 10 configuraciónes de velocidad; definición del
tiempo de movimiento Parámetros de Control 160 parámetros accesibles para el usuario Características de seguridad Interruptor de emergencia; protección
cortacircuitos; cierre automático en detección de
impacto, sobrecalentamiento, fallo del PC ó error de comunicación
Los alumnos usan el modo off line del
software de simulación gráfica en 3D
Robocell para diseñar, programar y
ejec utar ilimitadas aplicaciones industr iales
simuladas , obteniendo una experiencia
práctica.
Los alumnos programan y practican las técnicas de soldadura en modo simulac ión y
luego ejecutan en modo online aplicac iones
de soldadura automatizada usando la célula
de soldadura automatizada.

0510
SCORBOT-ER 2u
Especificaciones del SCORBOT-ER 2u Brazo mecánico
Estructura mecánica Brazo vertical articulado; estructura abierta
Grados de libertad 5 ejes rotacionales y pinza
Capacidad de carga 1 kg (2.2 Lb). Movimiento de los ejes Eje 1: Base 310° Eje 2: Brazo inferior +130° / -35° Eje 3: Brazo superior +130°
Eje 4: Elevación pinza +130° Eje 5: Giro pinza ±130°
Alcance 517 mm. con pinza Repetibilidad ± 0.35 mm.
Realimentación Enconders ópticos incrementales Home Microinterruptor en cada eje Actuadores Servomotores 12 V DC en cada eje Pinza Servomotor DC, 2 dedos paralelos
Controlador
Comunicación USB tipo A cable conexión al PC; Plug and play sin arrancar Entradas / Salidas 8 entradas digitales; 4 entradas analógicas;
8 salidas digitales (4 relés, 4 colector abierto); 2 salidas analógicas
Microcontrolador NEC V853 RISC 32-bit Servo Control de Ejes Tiempo-real; PID; PWM Número de servo ejes 8 (brazo del robot, pinza y 2 periféricos) Memoria de usuario Programas,
líneas de programa, variables y posiciones ilimitadas Definición de Posición Absoluta, Relativa, Cartesiana, Ejes (Joints), Encoders Control de Trayectoria Ejes (Joint), Lineal, Circular Definición de Velocidad (soft.) 10 configuraciónes de velocidad; definición del tiempo de movimiento
Parámetros de Control 160 parámetros accesibles para el usuario Características de seguridad Interruptor de emergencia; protección cortacircuitos; cierre automático en detección de
impacto, sobrecalentamiento, fallo del PC ó error de comunicación