
Guía de programación - schneider-electric.com · zActualice el programa de aplicación siempre...
266
EIO0000000388.04 www.schneider-electric.com Modicon M238 Logic Controller EIO0000000388 04/2012 Modicon M238 Logic Controller Guía de programación 04/2012
Transcript of Guía de programación - schneider-electric.com · zActualice el programa de aplicación siempre...

Modicon M238 Logic Controller
EIO0000000388 04/2012
EIO
0000
0003
88.0
4
www.schneider-electric.com
Modicon M238 Logic ControllerGuía de programación
04/2012

La información que se ofrece en esta documentación contiene descripciones de carácter general y/o características técnicas sobre el rendimiento de los productos incluidos en ella. La presente documentación no tiene como objetivo sustituir ni debe emplearse para determinar la idoneidad o fiabilidad de dichos productos para aplicaciones de usuario específicas. Los usuarios o integradores tienen la responsabilidad de llevar a cabo un análisis de riesgos adecuado y exhaustivo, así como la evaluación y pruebas de los productos en relación con la aplicación o uso en cuestión de dichos productos. Ni Schneider Electric ni ninguna de sus filiales o asociados asumirán responsabilidad alguna por el uso inapropiado de la información contenida en este documento. Si tiene sugerencias para mejoras o modificaciones o ha hallado errores en esta publicación, le rogamos que nos lo notifique.
No se podrá reproducir este documento de ninguna forma, ni en su totalidad ni en parte, ya sea por medios electrónicos o mecánicos, incluida la fotocopia, sin el permiso expreso y por escrito de Schneider Electric.
Al instalar y utilizar este producto es necesario tener en cuenta todas las regulaciones sobre seguridad correspondientes, ya sean regionales, locales o estatales. Por razones de seguridad y para garantizar que se siguen los consejos de la documentación del sistema, las reparaciones sólo podrá realizarlas el fabricante.
Cuando se utilicen dispositivos para aplicaciones con requisitos técnicos de seguridad, siga las instrucciones pertinentes.
Si con nuestros productos de hardware no se utiliza el software de Schneider Electric u otro software aprobado, pueden producirse lesiones, daños o un funcionamiento incorrecto del equipo.
Si no se tiene en cuenta esta información se pueden causar daños personales o en el equipo.
© 2012 Schneider Electric. Reservados todos los derechos.
2 EIO0000000388 04/2012

Tabla de materias
Información de seguridad . . . . . . . . . . . . . . . . . . . . . . . . 7Acerca de este libro . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
Capítulo 1 Acerca de Modicon M238 Logic Controller . . . . . . . . . . 13Modicon M238 Logic Controller Descripción general de dispositivos . . . . 13
Capítulo 2 Configuración del controlador . . . . . . . . . . . . . . . . . . . . 15Cómo configurar el controlador . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
Capítulo 3 Bibliotecas. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19Bibliotecas. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
Capítulo 4 Tipos de datos estándar compatibles . . . . . . . . . . . . . . 21Tipos de datos estándar compatibles . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
Capítulo 5 Asignación de memoria . . . . . . . . . . . . . . . . . . . . . . . . . . 23Organización de la memoria . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24Tabla de reubicación. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
Capítulo 6 Tareas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31Cantidad máxima de tareas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32Pantalla Configuración de tareas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33Tipos de tarea . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36Watchdogs de sistema y tareas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39Prioridad de tareas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41Configuración de tareas predeterminadas . . . . . . . . . . . . . . . . . . . . . . . . 43
Capítulo 7 Estados y comportamientos del controlador . . . . . . . . 457.1 Diagrama de estado del controlador . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
Diagrama de estado del controlador . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 467.2 Descripción de los estados del controlador. . . . . . . . . . . . . . . . . . . . . . . . 51
Descripción de los estados del controlador. . . . . . . . . . . . . . . . . . . . . . . . 517.3 Transiciones de estados y eventos del sistema . . . . . . . . . . . . . . . . . . . . 56
Estados y comportamiento de salida del controlador . . . . . . . . . . . . . . . . 57Comandos de transiciones de estado. . . . . . . . . . . . . . . . . . . . . . . . . . . . 60Detección, tipos y gestión de errores . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67Variables remanentes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
EIO0000000388 04/2012 3
Capítulo 8 Editor de dispositivos de controlador . . . . . . . . . . . . . . . 69Parámetros del controlador . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70Aplicaciones. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72Ajustes PLC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73Servicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
Capítulo 9 Funciones incrustadas de M238. . . . . . . . . . . . . . . . . . . . 77Función HSC incrustada . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 78Función de E/S integradas. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81Función HSC integrada . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85
Capítulo 10 Configuración de módulos de ampliación . . . . . . . . . . . 89Descripción general . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89
Capítulo 11 Configuración de CANopen . . . . . . . . . . . . . . . . . . . . . . . 91Configuración de la interfaz de CANopen . . . . . . . . . . . . . . . . . . . . . . . . 91
Capítulo 12 Configuración de AS-Interface . . . . . . . . . . . . . . . . . . . . . 95Presentación del bus de campo AS-Interface V2 . . . . . . . . . . . . . . . . . . 96Descripción funcional general . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 97Principios de configuración del software . . . . . . . . . . . . . . . . . . . . . . . . . 100Añadir un módulo maestro AS-Interface . . . . . . . . . . . . . . . . . . . . . . . . . 102Configurar un maestro AS-Interface . . . . . . . . . . . . . . . . . . . . . . . . . . . . 104Adición de un esclavo de AS-Interface . . . . . . . . . . . . . . . . . . . . . . . . . . 107Configuración de un esclavo de AS-Interface . . . . . . . . . . . . . . . . . . . . . 116Direccionamiento automático de un esclavo de AS-Interface V2 . . . . . . 120Modificación de una dirección de esclavo . . . . . . . . . . . . . . . . . . . . . . . . 122Diagnóstico del sistema en la modalidad en línea. . . . . . . . . . . . . . . . . . 125Programación del bus de campo AS-Interface V2. . . . . . . . . . . . . . . . . . 129Configuración de un esclavo AS-Interface V2 reemplazado . . . . . . . . . . 130
Capítulo 13 Configuración de línea serie. . . . . . . . . . . . . . . . . . . . . . . 131Configuración de línea serie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 132Administrador ASCII . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 136Administrador de red de SoMachine . . . . . . . . . . . . . . . . . . . . . . . . . . . . 139Modbus IOScanner . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 141Gestor Modbus . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 150Cómo añadir un modem a un administrador . . . . . . . . . . . . . . . . . . . . . . 155
Capítulo 14 Pasarela Ethernet/Modbus 499TWD01100. . . . . . . . . . . . 157Conexión y configuración de la pasarela Ethernet . . . . . . . . . . . . . . . . . 157
Capítulo 15 Conexión de Modicon M238 Logic Controller a un PC . 163Conexión del controlador a un PC. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 164Ruta activa del controlador . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 166
4 EIO0000000388 04/2012

Capítulo 16 Accesorio de dispositivo cargador. . . . . . . . . . . . . . . . . 16716.1 Acerca del Accesorio de dispositivo cargador. . . . . . . . . . . . . . . . . . . . . . 168
Accesorio de dispositivo cargadorDescripción . . . . . . . . . . . . . . . . . . . . . 169Descripción física . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 171Estado del indicador LED y diagnóstico . . . . . . . . . . . . . . . . . . . . . . . . . . 172Compatibilidad de firmware y del software SoMachine. . . . . . . . . . . . . . . 174
16.2 Carga de SoMachine a la llave de memoria USB. . . . . . . . . . . . . . . . . . . 176Transferencia de SoMachine a la llave de memoria USB. . . . . . . . . . . . . 176
16.3 Transferencia de archivos con una llave de memoria USB . . . . . . . . . . . 177Carga del controlador a la llave de memoria USB . . . . . . . . . . . . . . . . . . 178Descarga de la llave de memoria USB al controlador . . . . . . . . . . . . . . . 180
16.4 Otras funcionalidades . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 183Establecimiento del controlador en el estado EN EJECUCIÓN . . . . . . . . 184Actualización del firmware del Accesorio de dispositivo cargador . . . . . . 185
Capítulo 17 Actualización del firmware del controlador . . . . . . . . . 187Actualización mediante la línea serie . . . . . . . . . . . . . . . . . . . . . . . . . . . . 188Actualización por USB. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 191inicio del Asistente de Exec Loader . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 193Paso 1: Welcome . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 194Paso 2: Settings . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 195Step 3 - File and Device Exec Properties . . . . . . . . . . . . . . . . . . . . . . . . . 197Paso 4: Transfer Progress . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 199
Capítulo 18 Modicon M238 Logic Controller - Solución de problemas y FAQ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 201Solución de problemas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 202Preguntas frecuentes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 210
Apéndices . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 213Apéndice A Biblioteca AS-Interface . . . . . . . . . . . . . . . . . . . . . . . . . . 215
ASI_CheckSlaveBit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 216ASI_CmdSetAutoAddressing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 217ASI_CmdSetDataExchange . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 219ASI_CmdSetOfflineMode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 221ASI_MasterStatusCheck . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 223ASI_SlaveAddressChange . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 225ASI_SlaveParameterUpdate . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 228ASI_SlaveStatusCheck . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 230ASI_ReadParameterImage . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 232
Apéndice B Representación de funciones y de bloques de funciones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 235Diferencias entre una función y un bloque de funciones. . . . . . . . . . . . . . 236Cómo usar una función o un bloque de funciones en lenguaje IL . . . . . . 237Cómo utilizar una función o un bloque de funciones en lenguaje ST . . . . 240
EIO0000000388 04/2012 5
Apéndice C Funciones para obtener/establecer la configuración de líneas serie en el programa de usuario . . . . . . . . . . . . . . 243GetSerialConf: obtención de la configuración de línea serie . . . . . . . . . . 244SetSerialConf: Cambiar la configuración de línea serie . . . . . . . . . . . . . 245SERIAL_CONF: Estructura del tipo de datos de la configuración de línea serie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 247
Apéndice D Rendimiento del controlador . . . . . . . . . . . . . . . . . . . . . . 249Rendimiento del procesamiento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 249
Glosario . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 251Índice . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 265
6 EIO0000000388 04/2012

§
Información de seguridadInformación importante
AVISO
Lea atentamente estas instrucciones y observe el equipo para familiarizarse con el dispositivo antes de instalarlo, utilizarlo o realizar su mantenimiento. Los mensajes especiales que se ofrecen a continuación pueden aparecer a lo largo de la documentación o en el equipo para advertir de peligros potenciales o para ofrecer información que aclara o simplifica los distintos procedimientos.
EIO0000000388 04/2012 7

TENGA EN CUENTA
La instalación, manejo, puesta en servicio y mantenimiento de equipos eléctricos deberán ser realizados sólo por personal cualificado. Schneider Electric no se hace responsable de ninguna de las consecuencias del uso de este material.
Una persona cualificada es aquella que cuenta con capacidad y conocimientos relativos a la construcción, el funcionamiento y la instalación de equipos eléctricos y que ha sido formada en materia de seguridad para reconocer y evitar los riesgos que conllevan tales equipos.
8 EIO0000000388 04/2012

Acerca de este libro
Presentación
Objeto
La finalidad de este documento es ayudarle a configurar Modicon M238 Logic Controller.
NOTA: Lea y comprenda este documento y todos los documentos relacionados (véase página 9) antes de instalar Modicon M238 Logic Controller, utilizarlo o realizar su mantenimiento.
Los usuarios de Modicon M238 Logic Controller deben leer todo el documento para comprender todas sus características.
Campo de aplicación
Este documento se ha actualizado con la publicación de SoMachine V3.1.
Documentos relacionados
Título de la documentación Número de referencia
SoMachine - Guía de programación EIO0000000067 (ENG); EIO0000000069 (FRE); EIO0000000068 (GER); EIO0000000071 (SPA); EIO0000000070 (ITA); EIO0000000072 (CHS)
Modicon M238 Logic Controller - Guía de hardware EIO0000000016 (ING); EIO0000000017 (FRA); EIO0000000018 (ALE); EIO0000000019 (ESP); EIO0000000020 (ITA); EIO0000000021 (CHS)
EIO0000000388 04/2012 9
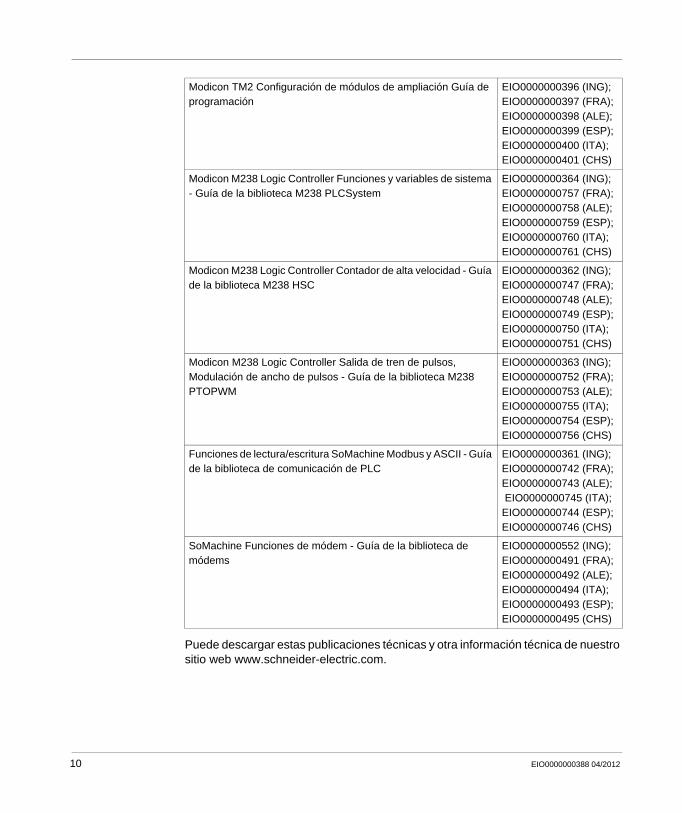
Puede descargar estas publicaciones técnicas y otra información técnica de nuestro sitio web www.schneider-electric.com.
Modicon TM2 Configuración de módulos de ampliación Guía de programación
EIO0000000396 (ING); EIO0000000397 (FRA); EIO0000000398 (ALE); EIO0000000399 (ESP); EIO0000000400 (ITA); EIO0000000401 (CHS)
Modicon M238 Logic Controller Funciones y variables de sistema - Guía de la biblioteca M238 PLCSystem
EIO0000000364 (ING); EIO0000000757 (FRA); EIO0000000758 (ALE); EIO0000000759 (ESP); EIO0000000760 (ITA); EIO0000000761 (CHS)
Modicon M238 Logic Controller Contador de alta velocidad - Guía de la biblioteca M238 HSC
EIO0000000362 (ING); EIO0000000747 (FRA); EIO0000000748 (ALE); EIO0000000749 (ESP); EIO0000000750 (ITA); EIO0000000751 (CHS)
Modicon M238 Logic Controller Salida de tren de pulsos, Modulación de ancho de pulsos - Guía de la biblioteca M238 PTOPWM
EIO0000000363 (ING); EIO0000000752 (FRA); EIO0000000753 (ALE); EIO0000000755 (ITA); EIO0000000754 (ESP); EIO0000000756 (CHS)
Funciones de lectura/escritura SoMachine Modbus y ASCII - Guía de la biblioteca de comunicación de PLC
EIO0000000361 (ING); EIO0000000742 (FRA); EIO0000000743 (ALE); EIO0000000745 (ITA); EIO0000000744 (ESP); EIO0000000746 (CHS)
SoMachine Funciones de módem - Guía de la biblioteca de módems
EIO0000000552 (ING); EIO0000000491 (FRA); EIO0000000492 (ALE); EIO0000000494 (ITA); EIO0000000493 (ESP); EIO0000000495 (CHS)
10 EIO0000000388 04/2012
Información relativa al producto
1 Para obtener información adicional, consulte NEMA ICS 1.1 (última edición), "Safety Guidelines for the Application, Installation, and Maintenance of Solid State Control" (Directrices de seguridad para la aplicación, la instalación y el mantenimiento del control de estado estático) y NEMA ICS 7.1 (última edición), "Safety Standards for Construction and Guide for Selection, Installation and Operation of Adjustable-Speed Drive Systems" (Estándares de seguridad para la construcción y guía para la selección, instalación y utilización de sistemas de unidades de velocidad ajustable) o su equivalente aplicable a la ubicación específica.
ADVERTENCIAPÉRDIDA DE CONTROL
El diseñador del esquema de control debe tener en cuenta los posibles modos de fallo de rutas de control y, para ciertas funciones de control críticas, proporcionar los medios para lograr un estado seguro durante y después de un fallo de ruta. Funciones de control críticas son, por ejemplo, una parada de emergencia y una parada de sobrerrecorrido, un corte de alimentación y un reinicio.Para las funciones críticas de control deben proporcionarse rutas de control separadas o redundantes.Las rutas de control del sistema pueden incluir enlaces de comunicación. Deben tenerse en cuenta las implicaciones de los retrasos de transmisión no esperados o los fallos en el enlace.Tenga en cuenta todas las reglamentaciones para la prevención de accidentes
y las directrices de seguridad locales.1
Cada implementación de este equipo debe probarse de forma individual y exhaustiva antes de entrar en servicio.
El incumplimiento de estas instrucciones puede causar la muerte, lesiones serias o daño al equipo.
ADVERTENCIAFUNCIONAMIENTO IMPREVISTO DEL EQUIPO
Utilice sólo software aprobado por Schneider Electric para este equipo.Actualice el programa de aplicación siempre que cambie la configuración de hardware física.
El incumplimiento de estas instrucciones puede causar la muerte, lesiones serias o daño al equipo.
EIO0000000388 04/2012 11

Comentarios del usuario
Envíe sus comentarios a la dirección electrónica [email protected].
12 EIO0000000388 04/2012

EIO0000000388 04/2012
1
Modicon M238 Logic Controller
M238 - Acerca de Modicon M238 Logic Controller
EIO0000000388 04/2012
Acerca de Modicon M238 Logic Controller
Modicon M238 Logic Controller Descripción general de dispositivos
Descripción general
Schneider Electric Modicon M238 Logic Controller tiene una amplia variedad de potentes funciones. Este controlador puede servir para una amplia gama de aplicaciones.
Características principales
Modicon M238 Logic Controller se admite y programa con el software de programación SoMachine, que proporcionan los siguientes lenguajes de programación IEC61131-3:
IL: Lista de instruccionesST: Texto estructuradoFBD: Diagrama de bloques de funcionesSFC: Diagrama funcional secuencialLD: Diagrama de contactosCFC: Diagrama de función continua
Modicon M238 Logic Controller puede administrar hasta 7 tareas (1 tarea MAST y hasta 6 otras tareas).
La fuente de alimentación de Modicon M238 Logic Controller es:24 V CCDe 100 a 240 V CA
Modicon M238 Logic Controller con la fuente de alimentación de CC incluye las siguientes características:
14 entradas digitales, incluidas 8 entradas rápidas10 salidas digitales, incluidas 4 salidas rápidas
Modicon M238 Logic Controller con la fuente de alimentación de CC incluye las siguientes características:
14 entradas digitales, incluidas 8 entradas rápidas10 salidas digitales, incluidas 6 salidas de relé
13
M238 - Acerca de Modicon M238 Logic Controller
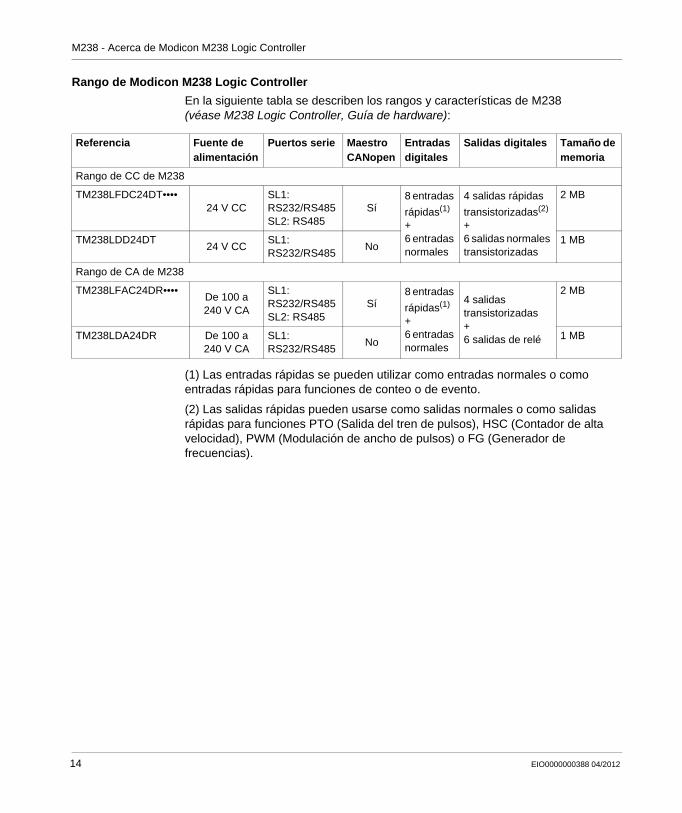
Rango de Modicon M238 Logic Controller
En la siguiente tabla se describen los rangos y características de M238 (véase M238 Logic Controller, Guía de hardware):
(1) Las entradas rápidas se pueden utilizar como entradas normales o como entradas rápidas para funciones de conteo o de evento.
(2) Las salidas rápidas pueden usarse como salidas normales o como salidas rápidas para funciones PTO (Salida del tren de pulsos), HSC (Contador de alta velocidad), PWM (Modulación de ancho de pulsos) o FG (Generador de frecuencias).
Referencia Fuente de alimentación
Puertos serie Maestro CANopen
Entradas digitales
Salidas digitales Tamaño de memoria
Rango de CC de M238
TM238LFDC24DT••••24 V CC
SL1: RS232/RS485SL2: RS485
Sí8 entradas
rápidas(1)
+6 entradas normales
4 salidas rápidas
transistorizadas(2)
+6 salidas normales transistorizadas
2 MB
TM238LDD24DT24 V CC
SL1: RS232/RS485
No1 MB
Rango de CA de M238
TM238LFAC24DR••••De 100 a 240 V CA
SL1: RS232/RS485SL2: RS485
Sí8 entradas
rápidas(1)
+6 entradas normales
4 salidas transistorizadas+6 salidas de relé
2 MB
TM238LDA24DR De 100 a 240 V CA
SL1: RS232/RS485
No1 MB
14 EIO0000000388 04/2012
EIO0000000388 04/2012
2
Modicon M238 Logic Controller
Configuración del controlador
EIO0000000388 04/2012
Configuración del controlador
Cómo configurar el controlador
Introducción
Antes de configurar el controlador, es necesario crear un proyecto o abrir uno existente con el software SoMachine (véase SoMachine, Guía de programación).
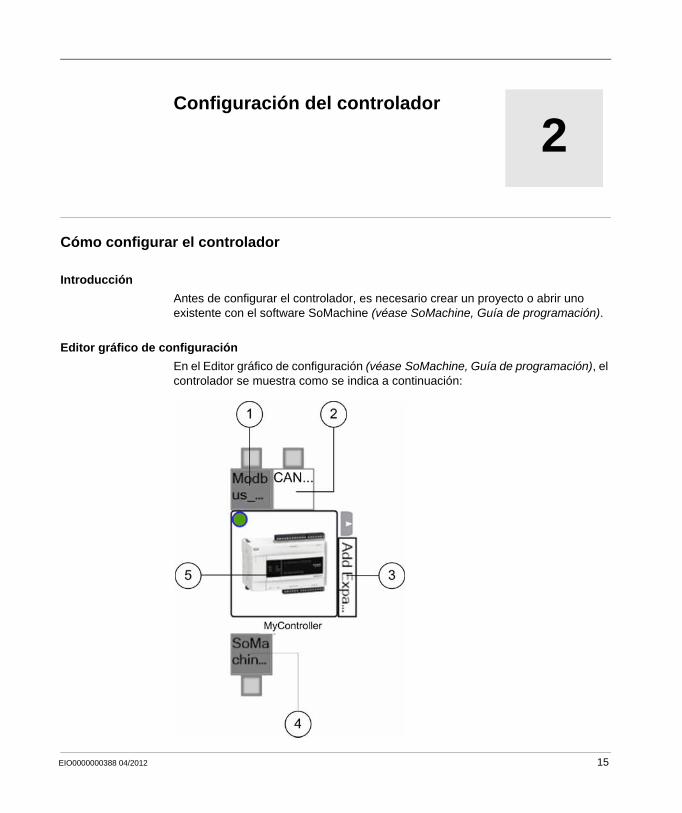
Editor gráfico de configuración
En el Editor gráfico de configuración (véase SoMachine, Guía de programación), el controlador se muestra como se indica a continuación:
15

Configuración del controlador
Haga clic en el siguiente elemento para añadir (si está vacío) o reemplazar objetos:
Pantalla Configuración del controlador
Para acceder a la pantalla de configuración del controlador, siga como se indica a continuación:
En el panel de selección de tareas, las entradas y subentradas permiten acceder a las ventanas de configuración de los distintos elementos:
Elemento Descripción
1 Gestor del puerto 1 de la línea serie (Modbus_Manager de forma predeterminada para TM238LFDC24DT•• y TM238LFAC24DR••)Gestor del puerto 1 de la línea serie (SoMachine_Network_Manager de forma predeterminada para TM238LDD24DT y TM238LDA24DR)
2 Gestor del puerto de CANopenNOTA: Sólo disponible en TM238LFDC24DT•• y TM238LFAC24DR••.
3 Módulos de ampliación
4 Gestor del puerto 2 de la línea serie (SoMachine_Network_Manager de forma predeterminada)NOTA: Sólo disponible en TM238LFDC24DT•• y TM238LFAC24DR••.
5 Acceso a la pantalla de configuración del controlador (haga doble clic en el controlador)
Paso Acción
1 Seleccione la ficha Configuración.
2 Haga doble clic en el controlador.
16 EIO0000000388 04/2012

Configuración del controlador
Árbol de dispositivos
También se puede acceder a las funciones del controlador de la ficha Configuración desde la ficha Programa. En este caso, el árbol de Dispositivos describe la configuración de hardware (por ejemplo, el siguiente árbol de Dispositivos es el árbol predeterminado cuando se agrega el controlador):
Entrada Subentrada Consulte...
Parámetros - Editor de dispositivos de controlador (véase página 69)
E/S incrustadas E/SHSCPTO_PWM
Configuración de funciones integradas (véase página 77)
Comunicación Línea serie 1Línea serie 2
Configuración de línea serie (véase página 131)
CAN Configuración de CANopen (véase página 91)
EIO0000000388 04/2012 17

Configuración del controlador
Contenido del árbol de dispositivos
El árbol de dispositivos representa los objetos gestionados por un determinado objetivo (controlador o HMI). Estos objetos son:
Objetos de aplicaciones (tareas, etc.),Objetos de programación (POU, GVL, etc.),Objetos relacionados con el hardware (funciones integradas, CAN, módulos de ampliación, etc.)
De forma predeterminada, el árbol de dispositivos incluye los siguientes objetos relacionados con el hardware:
Opción Descripción
Lógica PLC En esta sección se muestra todo lo relacionado con la aplicación:Configuración de tareasProgramaciónAdministrador de bibliotecasMódulosTabla de reubicación
Funciones incrustadas
En esta representación se muestran las funciones incrustadas de M238.
Línea serie 1Línea serie 2CAN
A continuación se indican las comunicaciones integradas:NOTA: La Línea serie 2 y CAN sólo están disponibles en TM238LFDC24DT•• y TM238LFAC24DR••
Referencia E/S incrustadas Comunicaciones integradas
TM238LDD24DTTM238LDA24DR
E/SHSCPTO_PWM
Línea serie (SoMachine_Network_Manager)
TM238LFDC24DT••TM238LFAC24DR••
Línea serie 1 (Modbus_Manager)Línea serie 2 (SoMachine_Network_Manager)CAN (CANopen)
18 EIO0000000388 04/2012
EIO0000000388 04/2012
3
Modicon M238 Logic Controller
Bibliotecas
EIO0000000388 04/2012
Bibliotecas
Bibliotecas
Introducción
Las bibliotecas proporcionan funciones, bloques de funciones, tipos de datos y variables globales que pueden usarse para desarrollar el proyecto.
El Administrador de bibliotecas de SoMachine proporciona información sobre las bibliotecas incluidas en el proyecto y permite instalar otras nuevas. Para obtener más información sobre el Administrador de bibliotecas, consulte la parte sobre CoDeSys de la ayuda en línea de SoMachine..
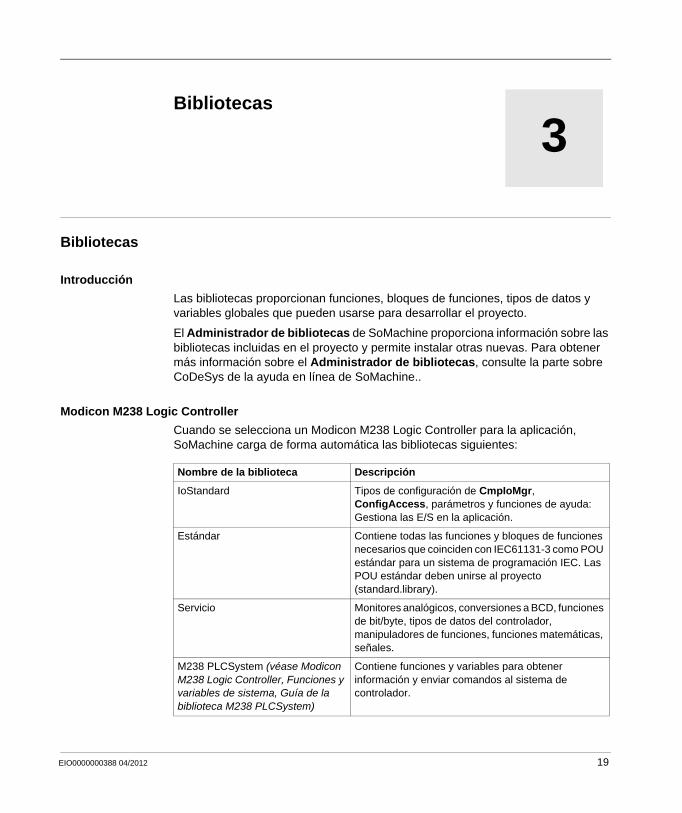
Modicon M238 Logic Controller
Cuando se selecciona un Modicon M238 Logic Controller para la aplicación, SoMachine carga de forma automática las bibliotecas siguientes:
Nombre de la biblioteca Descripción
IoStandard Tipos de configuración de CmpIoMgr, ConfigAccess, parámetros y funciones de ayuda: Gestiona las E/S en la aplicación.
Estándar Contiene todas las funciones y bloques de funciones necesarios que coinciden con IEC61131-3 como POU estándar para un sistema de programación IEC. Las POU estándar deben unirse al proyecto (standard.library).
Servicio Monitores analógicos, conversiones a BCD, funciones de bit/byte, tipos de datos del controlador, manipuladores de funciones, funciones matemáticas, señales.
M238 PLCSystem (véase Modicon M238 Logic Controller, Funciones y variables de sistema, Guía de la biblioteca M238 PLCSystem)
Contiene funciones y variables para obtener información y enviar comandos al sistema de controlador.
19

Bibliotecas
M238 HSC (véase Modicon M238 Logic Controller, Contador de alta velocidad, Guía de la biblioteca M238 HSC )
Contiene bloques de funciones y variables para obtener información y enviar comandos a las salidas/entradas rápidas de Modicon M238 Logic Controller. Estos bloques de funciones permiten implementar funciones del HSC (High Speed Counting, Contador de alta velocidad) en las salidas/entradas rápidas de Modicon M238 Logic Controller.
M238 PTOPWM (véase Modicon M238 Logic Controller, Salida de tren de pulsos, modulación de ancho de pulsos, Guía de la biblioteca M238 PTOPWM)
Contiene bloques de funciones y variables para obtener información y enviar comandos a las salidas/entradas rápidas de Modicon M238 Logic Controller. Estos bloques de funciones permiten implementar funciones del PTO (Pulse Train Output, Salida de tren de pulsos) y PWM (Pulse With Modulation, Modulación de ancho de pulso) en las salidas rápidas de Modicon M238 Logic Controller.
Tabla de reubicación de M238 (véase página 28)
La tabla de reubicación permite al usuario organizar datos para optimizar intercambios entre el cliente Modbus y el controlador, al agrupar datos no contiguos en una tabla de registros contiguos.
Nombre de la biblioteca Descripción
20 EIO0000000388 04/2012
EIO0000000388 04/2012
4
Modicon M238 Logic Controller
Tipos de datos estándar compatibles
EIO0000000388 04/2012
Tipos de datos estándar compatibles
Tipos de datos estándar compatibles
Tipos de datos estándar compatibles
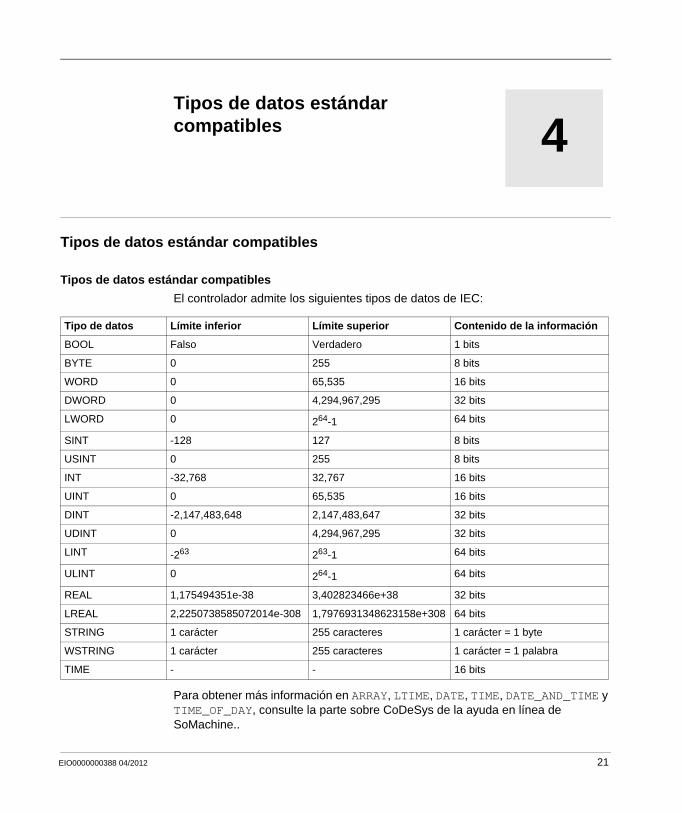
El controlador admite los siguientes tipos de datos de IEC:
Para obtener más información en ARRAY, LTIME, DATE, TIME, DATE_AND_TIME y TIME_OF_DAY, consulte la parte sobre CoDeSys de la ayuda en línea de SoMachine..
Tipo de datos Límite inferior Límite superior Contenido de la información
BOOL Falso Verdadero 1 bits
BYTE 0 255 8 bits
WORD 0 65,535 16 bits
DWORD 0 4,294,967,295 32 bits
LWORD 0 264-1 64 bits
SINT -128 127 8 bits
USINT 0 255 8 bits
INT -32,768 32,767 16 bits
UINT 0 65,535 16 bits
DINT -2,147,483,648 2,147,483,647 32 bits
UDINT 0 4,294,967,295 32 bits
LINT -263 263-1 64 bits
ULINT 0 264-1 64 bits
REAL 1,175494351e-38 3,402823466e+38 32 bits
LREAL 2,2250738585072014e-308 1,7976931348623158e+308 64 bits
STRING 1 carácter 255 caracteres 1 carácter = 1 byte
WSTRING 1 carácter 255 caracteres 1 carácter = 1 palabra
TIME - - 16 bits
21

Tipos de datos estándar compatibles
22 EIO0000000388 04/2012
EIO0000000388 04/2012
5
Modicon M238 Logic Controller
Asignación de memoria
EIO0000000388 04/2012
Asignación de memoria
Introducción
En este capítulo se describen las asignaciones y tamaños de memoria de las distintas áreas de memoria de Modicon M238 Logic Controller. Estas áreas de memoria se utilizan para almacenar lógicas de programas de usuario, datos y las bibliotecas de programación.
Contenido de este capítulo
Este capítulo contiene los siguiente apartados:
Apartado Página
Organización de la memoria 24
Tabla de reubicación 28
23
Asignación de memoria
Organización de la memoria
Introducción
En esta sección se describe el tamaño de RAM (Random Access Memory) para las distintas áreas de Modicon M238 Logic Controller.
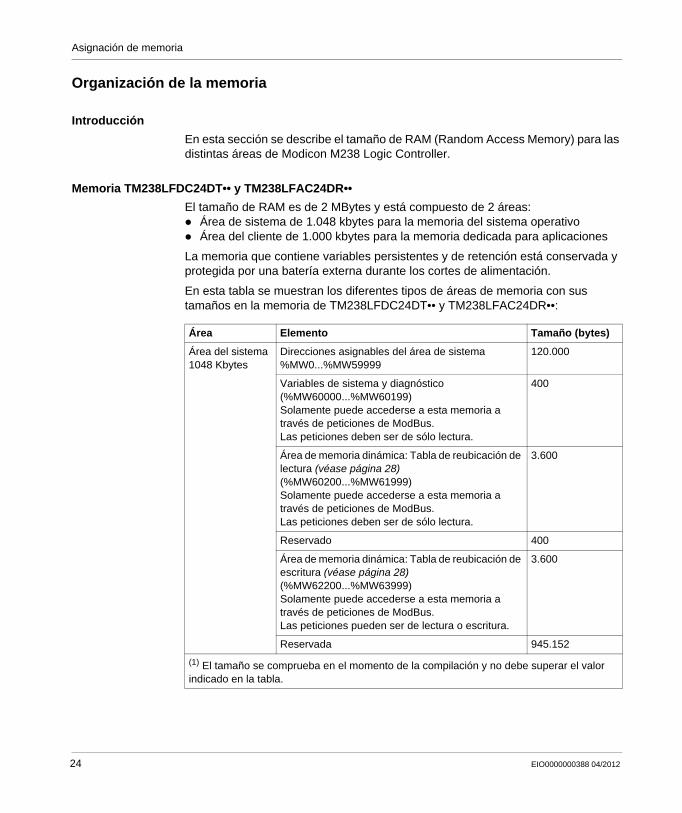
Memoria TM238LFDC24DT•• y TM238LFAC24DR••
El tamaño de RAM es de 2 MBytes y está compuesto de 2 áreas:Área de sistema de 1.048 kbytes para la memoria del sistema operativoÁrea del cliente de 1.000 kbytes para la memoria dedicada para aplicaciones
La memoria que contiene variables persistentes y de retención está conservada y protegida por una batería externa durante los cortes de alimentación.
En esta tabla se muestran los diferentes tipos de áreas de memoria con sus tamaños en la memoria de TM238LFDC24DT•• y TM238LFAC24DR••:
Área Elemento Tamaño (bytes)
Área del sistema1048 Kbytes
Direcciones asignables del área de sistema%MW0...%MW59999
120.000
Variables de sistema y diagnóstico(%MW60000...%MW60199)Solamente puede accederse a esta memoria a través de peticiones de ModBus.Las peticiones deben ser de sólo lectura.
400
Área de memoria dinámica: Tabla de reubicación de lectura (véase página 28)(%MW60200...%MW61999)Solamente puede accederse a esta memoria a través de peticiones de ModBus.Las peticiones deben ser de sólo lectura.
3.600
Reservado 400
Área de memoria dinámica: Tabla de reubicación de escritura (véase página 28) (%MW62200...%MW63999)Solamente puede accederse a esta memoria a través de peticiones de ModBus.Las peticiones pueden ser de lectura o escritura.
3.600
Reservada 945.152
(1) El tamaño se comprueba en el momento de la compilación y no debe superar el valor indicado en la tabla.
24 EIO0000000388 04/2012

Asignación de memoria
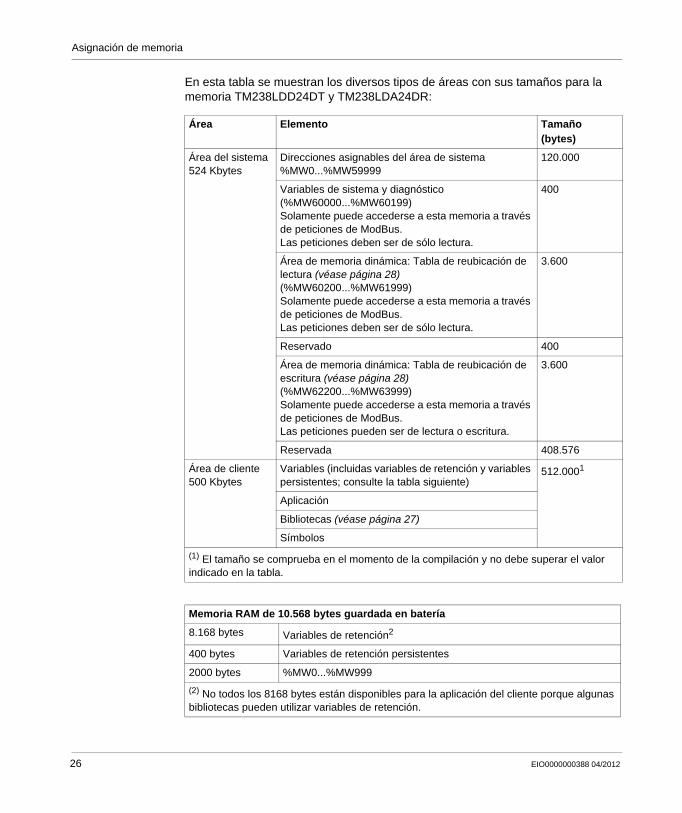
Memoria TM238LDD24DT y TM238LDA24DR
El tamaño de RAM es de 1 MBytes y está compuesto de 2 áreas:Área de sistema de 524 kbytes para la memoria del sistema operativoÁrea del cliente de 500 kbytes para la memoria dedicada para aplicaciones
La memoria que contiene variables persistentes y de retención está conservada y protegida por una batería externa durante los cortes de alimentación.
Área de cliente1000 Kbytes
Variables (incluidas variables de retención y variables persistentes; consulte la tabla siguiente)
1.024.0001
Aplicación
Bibliotecas (véase página 27)
Símbolos
Memoria RAM de 10.568 bytes guardada en batería
8.168 bytes Variables de retención2
400 bytes Variables de retención persistentes
2000 bytes %MW0...%MW999
(2) No todos los 8168 bytes están disponibles para la aplicación del cliente porque algunas bibliotecas pueden utilizar variables de retención.
Área Elemento Tamaño (bytes)
(1) El tamaño se comprueba en el momento de la compilación y no debe superar el valor indicado en la tabla.
EIO0000000388 04/2012 25
Asignación de memoria
En esta tabla se muestran los diversos tipos de áreas con sus tamaños para la memoria TM238LDD24DT y TM238LDA24DR:
Área Elemento Tamaño (bytes)
Área del sistema524 Kbytes
Direcciones asignables del área de sistema%MW0...%MW59999
120.000
Variables de sistema y diagnóstico(%MW60000...%MW60199)Solamente puede accederse a esta memoria a través de peticiones de ModBus.Las peticiones deben ser de sólo lectura.
400
Área de memoria dinámica: Tabla de reubicación de lectura (véase página 28)(%MW60200...%MW61999)Solamente puede accederse a esta memoria a través de peticiones de ModBus.Las peticiones deben ser de sólo lectura.
3.600
Reservado 400
Área de memoria dinámica: Tabla de reubicación de escritura (véase página 28) (%MW62200...%MW63999)Solamente puede accederse a esta memoria a través de peticiones de ModBus.Las peticiones pueden ser de lectura o escritura.
3.600
Reservada 408.576
Área de cliente500 Kbytes
Variables (incluidas variables de retención y variables persistentes; consulte la tabla siguiente)
512.0001
Aplicación
Bibliotecas (véase página 27)
Símbolos
(1) El tamaño se comprueba en el momento de la compilación y no debe superar el valor indicado en la tabla.
Memoria RAM de 10.568 bytes guardada en batería
8.168 bytes Variables de retención2
400 bytes Variables de retención persistentes
2000 bytes %MW0...%MW999
(2) No todos los 8168 bytes están disponibles para la aplicación del cliente porque algunas bibliotecas pueden utilizar variables de retención.
26 EIO0000000388 04/2012
Asignación de memoria
Variables de sistema
Para obtener más información acerca de las variables del sistema, consulte Guía de la biblioteca M238 PLCSystem.
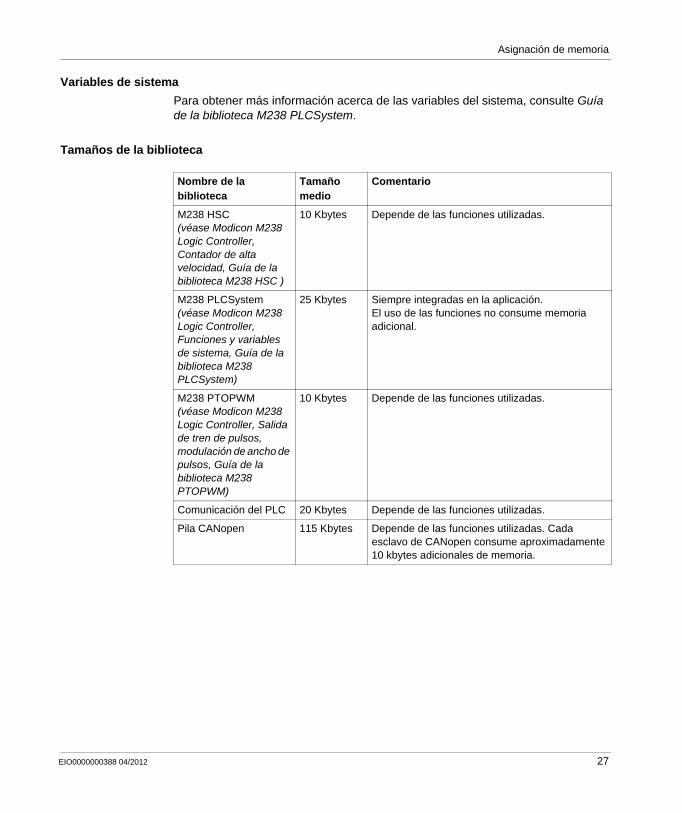
Tamaños de la biblioteca
Nombre de la biblioteca
Tamaño medio
Comentario
M238 HSC (véase Modicon M238 Logic Controller, Contador de alta velocidad, Guía de la biblioteca M238 HSC )
10 Kbytes Depende de las funciones utilizadas.
M238 PLCSystem (véase Modicon M238 Logic Controller, Funciones y variables de sistema, Guía de la biblioteca M238 PLCSystem)
25 Kbytes Siempre integradas en la aplicación.El uso de las funciones no consume memoria adicional.
M238 PTOPWM (véase Modicon M238 Logic Controller, Salida de tren de pulsos, modulación de ancho de pulsos, Guía de la biblioteca M238 PTOPWM)
10 Kbytes Depende de las funciones utilizadas.
Comunicación del PLC 20 Kbytes Depende de las funciones utilizadas.
Pila CANopen 115 Kbytes Depende de las funciones utilizadas. Cada esclavo de CANopen consume aproximadamente 10 kbytes adicionales de memoria.
EIO0000000388 04/2012 27
Asignación de memoria
Tabla de reubicación
Introducción
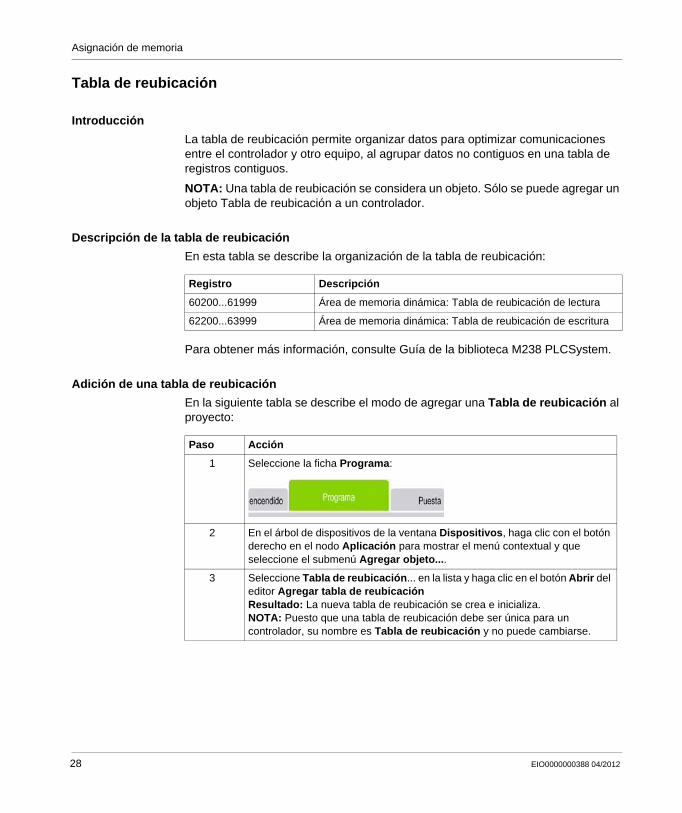
La tabla de reubicación permite organizar datos para optimizar comunicaciones entre el controlador y otro equipo, al agrupar datos no contiguos en una tabla de registros contiguos.
NOTA: Una tabla de reubicación se considera un objeto. Sólo se puede agregar un objeto Tabla de reubicación a un controlador.
Descripción de la tabla de reubicación
En esta tabla se describe la organización de la tabla de reubicación:
Para obtener más información, consulte Guía de la biblioteca M238 PLCSystem.
Adición de una tabla de reubicación
En la siguiente tabla se describe el modo de agregar una Tabla de reubicación al proyecto:
Registro Descripción
60200...61999 Área de memoria dinámica: Tabla de reubicación de lectura
62200...63999 Área de memoria dinámica: Tabla de reubicación de escritura
Paso Acción
1 Seleccione la ficha Programa:
2 En el árbol de dispositivos de la ventana Dispositivos, haga clic con el botón derecho en el nodo Aplicación para mostrar el menú contextual y que seleccione el submenú Agregar objeto....
3 Seleccione Tabla de reubicación... en la lista y haga clic en el botón Abrir del editor Agregar tabla de reubicaciónResultado: La nueva tabla de reubicación se crea e inicializa.NOTA: Puesto que una tabla de reubicación debe ser única para un controlador, su nombre es Tabla de reubicación y no puede cambiarse.
28 EIO0000000388 04/2012
Asignación de memoria
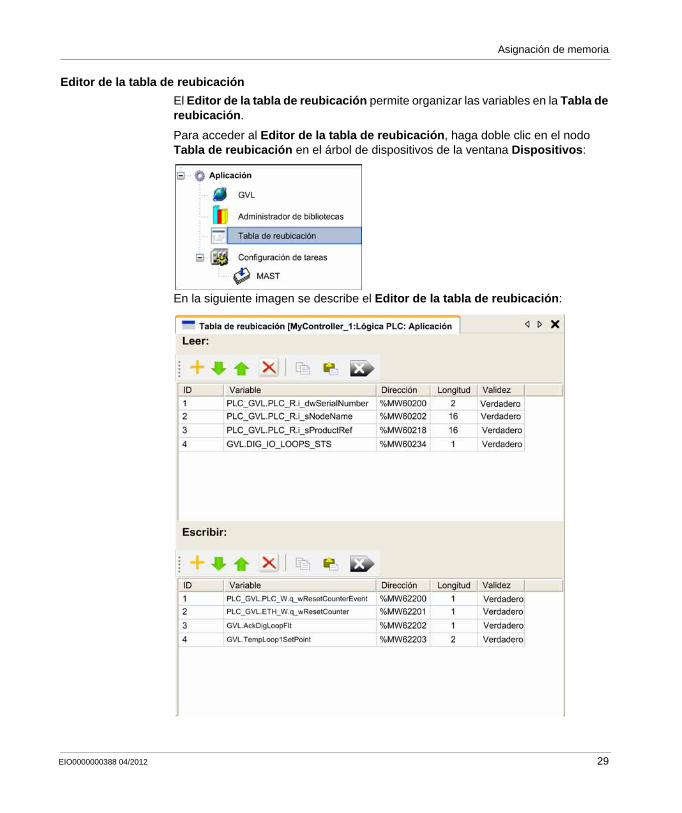
Editor de la tabla de reubicación
El Editor de la tabla de reubicación permite organizar las variables en la Tabla de reubicación.
Para acceder al Editor de la tabla de reubicación, haga doble clic en el nodo Tabla de reubicación en el árbol de dispositivos de la ventana Dispositivos:
En la siguiente imagen se describe el Editor de la tabla de reubicación:
EIO0000000388 04/2012 29

Asignación de memoria
NOTA: si una variable no está definida después de las modificaciones del programa, el contenido de la celda aparece en rojo, la celda Validez relacionada es Falso, y la Dirección se establece en -1.
Icono Elemento Descripción
Nuevo elemento de menú
Agrega un elemento a la lista de variables del sistema.
Mover hacia abajo
Baja el elemento seleccionado en la lista.
Mover hacia arriba
Sube el elemento seleccionado en la lista.
Eliminar elemento
Elimina los elementos seleccionados de la lista.
Copiar Copia los elementos seleccionados de la lista.
Pegar Pega los elementos copiados.
Borrar elemento vacío
Elimina todos los elementos de la lista cuya columna "Variable" está vacía.
- ID Número entero incremental automático (no se puede modificar)
- Variable El nombre o la ruta completa de una variable (se puede modificar)
- Dirección La dirección del área del sistema donde se almacena la variable (no se puede modificar).
- Longitud Longitud de la variable en palabra
- Validez Indica si la variable especificada es válida (no se puede modificar).
30 EIO0000000388 04/2012

EIO0000000388 04/2012
6
Modicon M238 Logic Controller
Tareas
EIO0000000388 04/2012
Tareas
Introducción
El nodo Configuración de tareas del árbol de dispositivos de SoMachine permite definir una o varias tareas para controlar la ejecución de un programa de aplicación.
Los tipos de tareas disponibles son los siguientes:CíclicoEjecución libreEventoEvento externo
Este capítulo empieza con una explicación de estos tipos de tareas y proporciona información sobre la cantidad máxima de tareas, la configuración predeterminada de las tareas y la prioridad de las tareas. Además, en este capítulo se presentan las funciones de watchdog del sistema y de tareas y explica su relación con la ejecución de tareas.
Contenido de este capítulo
Este capítulo contiene los siguiente apartados:
Apartado Página
Cantidad máxima de tareas 32
Pantalla Configuración de tareas 33
Tipos de tarea 36
Watchdogs de sistema y tareas 39
Prioridad de tareas 41
Configuración de tareas predeterminadas 43
31
Tareas
Cantidad máxima de tareas
Cantidad máxima de tareas
La cantidad máxima de tareas que se puede definir en Modicon M238 Logic Controller es:
Número total de tareas = 7Tareas cíclicas = 3Tareas de ejecución libre = 1Tareas de evento = 2Tareas de evento externo = 4
NOTA: El número total de tareas de ejecución libre, tareas cíclicas y tareas de eventos no debe ser superior a 3.
Consideraciones especiales para la ejecución libre
Una tarea de ejecución libre (véase página 37) no tiene duración fija. En la modalidad de ejecución libre, cada exploración de tareas empieza cuando se ha terminado la exploración anterior y después de un período de procesamiento del sistema (30% de la duración total de la tarea de ejecución libre). Si el período de procesamiento del sistema se reduce a menos del 15% durante más de 3 seguros debido a interrupciones de otras tareas, se detecta un error del sistema. Para obtener más información, consulte Watchdogs del sistema (véase página 39).
Se recomienda no usar una tarea de ejecución libre en una aplicación con varias tareas cuando se están ejecutando algunas tareas que consumen mucho tiempo y tienen una alta prioridad .
32 EIO0000000388 04/2012

Tareas
Pantalla Configuración de tareas
Descripción de la pantalla
La pantalla siguiente permite configurar las tareas. Haga doble clic en la tarea que desee configurar en el árbol de dispositivos de Dispositivos para acceder a esta pantalla.
Cada tarea de configuración tiene sus propios parámetros que son independientes de las otras tareas.
La ventana de configuración de tareas está compuesta por 4 partes:
EIO0000000388 04/2012 33
Tareas
En la tabla siguiente se describen los campos que constituyen la pantalla Configuración de tareas:
Nombre del campo Definición
Prioridad Puede configurar la prioridad de cada tarea con un número entre 0 y 31 (0 es la prioridad más alta y 31 la más baja).Sólo puede haber en ejecución una tarea cada vez. La prioridad determina cuándo se ejecutará la tarea:
Una tarea de prioridad alta se adelantará a otra de prioridad inferiorLas tareas con la misma prioridad se ejecutarán de forma sucesiva (intervalo de tiempo de 2 ms)
NOTA: No asigne tareas con la misma prioridad. Si aún hay otras tareas que intentan adelantarse a tareas con la misma prioridad, el resultado podría ser indeterminado e impredecible. Para obtener más información, consulte Prioridades de las tareas (véase página 41).
Tipo Hay 4 tipos de tarea disponibles:Cíclica (véase página 36)Ejecución libre (véase página 37)Evento (véase página 38)Evento externo (véase página 38)
Watchdog (véase página 40)
Para configurar el watchdog, debe definir dos parámetros:Hora: especifique el timeout antes de la ejecución del watchdog.Sensibilidad: define el número de vencimientos del temporizador de watchdog antes de que el controlador detenga la ejecución del programa y entre en el estado PARADA (véase página 46).
34 EIO0000000388 04/2012

Tareas
POU (véase SoMachine, Guía de programación)
La lista de POU (Programming Organization Unit - unidad de organización de programación) controladas por la tarea se define en la ventana de configuración de tareas.
Para agregar una POU vinculada a la tarea, use el comando Agregar POU y seleccione la POU en el editor Accesibilidad.Para eliminar una POU de la lista, utilice el comando Borrar POU.El comando Abrir POU abre el editor de la POU seleccionada.Para reemplazar la POU seleccionada en la lista por otra, use el comando Cambiar POU...Las POU se ejecutan en el orden mostrado en la lista. Para mover las POU en la lista, seleccione una POU y use el comando Mover hacia arriba o Mover hacia abajo.
NOTA: Puede crear tantas POU como desee. Una aplicación con diversas POU pequeñas, en lugar de una POU grande, puede mejorar el tiempo de actualización de las variables en modalidad en línea.
Nombre del campo Definición
EIO0000000388 04/2012 35
Tareas
Tipos de tarea
Introducción
En la sección siguiente se describen los distintos tipos de tarea disponibles para los programas, junto con una descripción de las características de los tipos de tarea.
Tarea cíclica
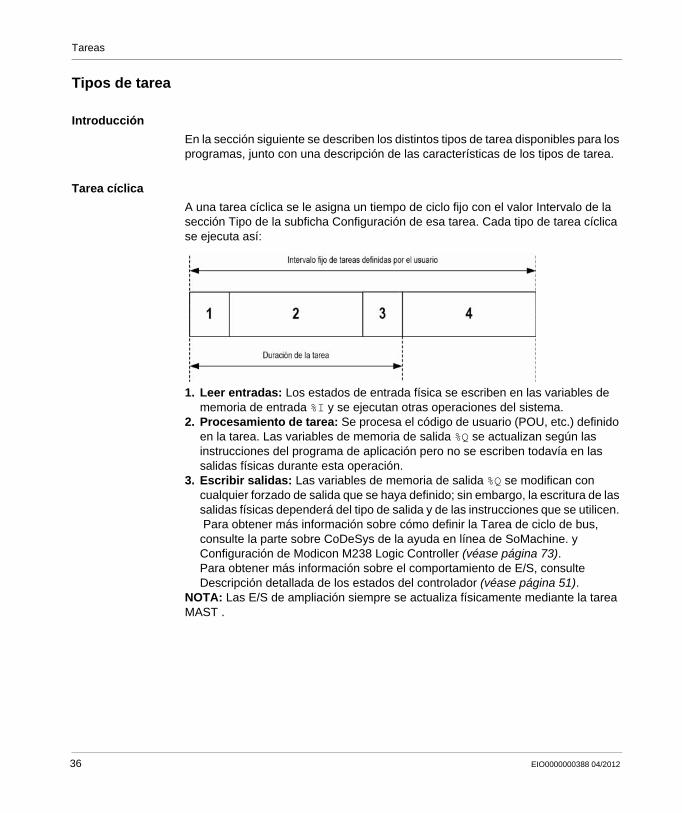
A una tarea cíclica se le asigna un tiempo de ciclo fijo con el valor Intervalo de la sección Tipo de la subficha Configuración de esa tarea. Cada tipo de tarea cíclica se ejecuta así:
1. Leer entradas: Los estados de entrada física se escriben en las variables de memoria de entrada %I y se ejecutan otras operaciones del sistema.
2. Procesamiento de tarea: Se procesa el código de usuario (POU, etc.) definido en la tarea. Las variables de memoria de salida %Q se actualizan según las instrucciones del programa de aplicación pero no se escriben todavía en las salidas físicas durante esta operación.
3. Escribir salidas: Las variables de memoria de salida %Q se modifican con cualquier forzado de salida que se haya definido; sin embargo, la escritura de las salidas físicas dependerá del tipo de salida y de las instrucciones que se utilicen. Para obtener más información sobre cómo definir la Tarea de ciclo de bus, consulte la parte sobre CoDeSys de la ayuda en línea de SoMachine. y Configuración de Modicon M238 Logic Controller (véase página 73).Para obtener más información sobre el comportamiento de E/S, consulte Descripción detallada de los estados del controlador (véase página 51).
NOTA: Las E/S de ampliación siempre se actualiza físicamente mediante la tarea MAST .
36 EIO0000000388 04/2012
Tareas
4. Tiempo de intervalo restante: El SO del controlador lleva a cabo el procesamiento del sistema y cualquier otra tarea de prioridad inferior.
NOTA: Si define un período demasiado corto para una tarea cíclica, se repetirá inmediatamente después de la escritura de las salidas y sin ejecutar otras tareas de prioridad inferior o sin ningún procesamiento del sistema. Esto afectará a la ejecución de todas las tareas y debido a que el controlador excederá los límites de watchdog del sistema, se generará una excepción de watchdog del sistema.
NOTA: Puede obtener y establecer el intervalo de una tarea cíclica por aplicación mediante la función GetCurrentTaskCycle y SetCurrentTaskCycle.
Tarea de ejecución libre
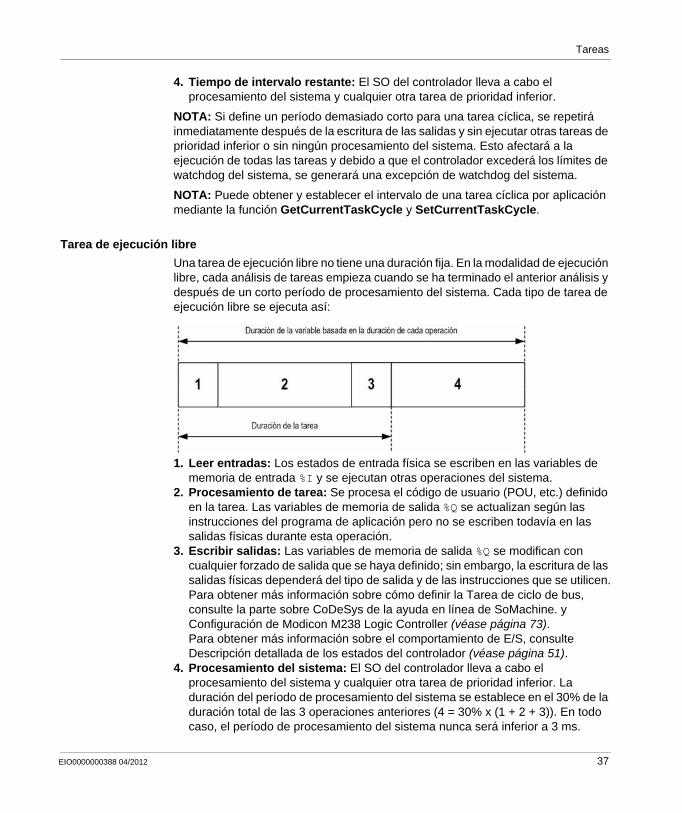
Una tarea de ejecución libre no tiene una duración fija. En la modalidad de ejecución libre, cada análisis de tareas empieza cuando se ha terminado el anterior análisis y después de un corto período de procesamiento del sistema. Cada tipo de tarea de ejecución libre se ejecuta así:
1. Leer entradas: Los estados de entrada física se escriben en las variables de memoria de entrada %I y se ejecutan otras operaciones del sistema.
2. Procesamiento de tarea: Se procesa el código de usuario (POU, etc.) definido en la tarea. Las variables de memoria de salida %Q se actualizan según las instrucciones del programa de aplicación pero no se escriben todavía en las salidas físicas durante esta operación.
3. Escribir salidas: Las variables de memoria de salida %Q se modifican con cualquier forzado de salida que se haya definido; sin embargo, la escritura de las salidas físicas dependerá del tipo de salida y de las instrucciones que se utilicen.Para obtener más información sobre cómo definir la Tarea de ciclo de bus, consulte la parte sobre CoDeSys de la ayuda en línea de SoMachine. y Configuración de Modicon M238 Logic Controller (véase página 73).Para obtener más información sobre el comportamiento de E/S, consulte Descripción detallada de los estados del controlador (véase página 51).
4. Procesamiento del sistema: El SO del controlador lleva a cabo el procesamiento del sistema y cualquier otra tarea de prioridad inferior. La duración del período de procesamiento del sistema se establece en el 30% de la duración total de las 3 operaciones anteriores (4 = 30% x (1 + 2 + 3)). En todo caso, el período de procesamiento del sistema nunca será inferior a 3 ms.
EIO0000000388 04/2012 37

Tareas
Tarea de evento
Este tipo de tarea depende de los eventos y la inicia una variable de programa. Empieza en el flanco ascendente de la variable booleana asociada con el evento disparador, a menos que se adelante una tarea de prioridad superior. En ese caso, la tarea de evento se iniciará como lo indiquen las asignaciones de prioridad de tareas.
Por ejemplo, si ha definido una variable llamada my_Var y desea asignarla a un evento, seleccione Tipo de evento en la subficha Configuración y haga clic en el
botón Accesibilidad de la derecha del campo Nombre de evento. Esto provocará que aparezca el cuadro de diálogo Accesibilidad. En el cuadro de diálogo Accesibilidad, puede navegar por el árbol para encontrar y asignar la variable my_Var.
Tarea Evento externo
Este tipo de tarea depende de los eventos y la inicia la descripción de un evento de función relacionado de hardware o relacionado con el hardware. Se inicia cuando el evento se produce, a menos que se adelante una tarea de prioridad superior. En ese caso, la tarea Evento externo se iniciará como lo indiquen las asignaciones de prioridad de tareas.
Por ejemplo, una tarea Evento externo podría asociarse a un evento Transgresión de umbral HSC. Para asociar el evento HSC4_TH3 a una tarea Evento externo, selecciónelo en la lista desplegable de eventos externos en la subficha Configuración.
En función del producto relacionado, hay hasta 2 tipos de eventos que pueden asociarse a una tarea Evento externo:
Flanco ascendente en entrada rápida (entradas %IX0.0 ... %IX0.7)Umbrales HSC
38 EIO0000000388 04/2012
Tareas
Watchdogs de sistema y tareas
Introducción
Se han implementado dos tipos de funcionalidad de watchdog para el módulo Modicon M238 Logic Controller:
Watchdogs del sistema: Estos watchdogs están definidos y administrados por el SO del controlador (firmware). El usuario no puede configurarlos.Watchdogs de tareas: Se pueden definir watchdogs opcionales para cada tarea. Los administra el programa de aplicación y pueden configurarse en SoMachine.
Watchdogs del sistema
En el módulo Modicon M238 Logic Controller se definen dos watchdogs del sistema. Los administra el SO del controlador (firmware) y por eso algunas veces se denominan watchdogs de hardware en la ayuda en línea de SoMachine. Cuando uno de los watchdogs del sistema supera las condiciones de umbral, se detecta un error.
Las condiciones de umbral para los dos watchdogs del sistema se definen así:Si todas las tareas requieren más del 80% de los recursos del procesador durante más de tres segundos, se detecta un error del sistema. El controlador entra en estado EMPTY (VACÍO).Si la tarea del sistema con menor prioridad no se ejecuta durante el intervalo de 20 segundos, se detecta un error del sistema. El controlador responde con un reinicio automático en estado EMPTY (VACÍO).
NOTA: El usuario no puede configurar los watchdogs del sistema.
EIO0000000388 04/2012 39

Tareas
Watchdogs de tareas
SoMachine permite configurar un watchdog de tarea opcional por cada tarea definida en el programa de aplicación. (Los watchdogs de tarea también se denominan watchdogs de software o temporizadores de control en la ayuda en línea de SoMachine). Cuando uno de los watchdogs de tareas definidos alcanza su condición de umbral, se detecta un error de aplicación y el controlador entra en estado HALT (PARADA).
Cuando se define un watchdog de tarea, hay disponibles las opciones siguientes:Tiempo: Esto define el tiempo de ejecución máximo permitido para una tarea. Cuando una tarea tarda más de esto, el controlador informará de una excepción de watchdog de tareas.Sensibilidad: El campo de sensibilidad define el número de excepciones de watchdog de tareas que debe producirse antes de que el controlador detecte un error de aplicación.
Los watchdog de tareas se configuran en la subficha Configuración de la ficha Configuración de tareas de una determinada tarea. Para acceder a esta ficha, haga doble clic en la tarea en el árbol de dispositivos.
NOTA: Para obtener más información sobre watchdogs, consulte la parte sobre CoDeSys de la ayuda en línea de SoMachine..
40 EIO0000000388 04/2012
Tareas
Prioridad de tareas
Introducción
Se puede configurar la prioridad de cada tarea entre 0 y 31 (0 es la prioridad más alta y 31 la más baja). Cada tarea debe tener una prioridad exclusiva. Si asigna la misma prioridad a más de una tarea, la ejecución de dichas tareas es indeterminada e impredecible, lo que puede producir consecuencias no deseadas.
ADVERTENCIAFUNCIONAMIENTO IMPREVISTO DEL EQUIPO
No asigne la misma prioridad a dos tareas diferentes.
El incumplimiento de estas instrucciones puede causar la muerte, lesiones serias o daño al equipo.
EIO0000000388 04/2012 41
Tareas
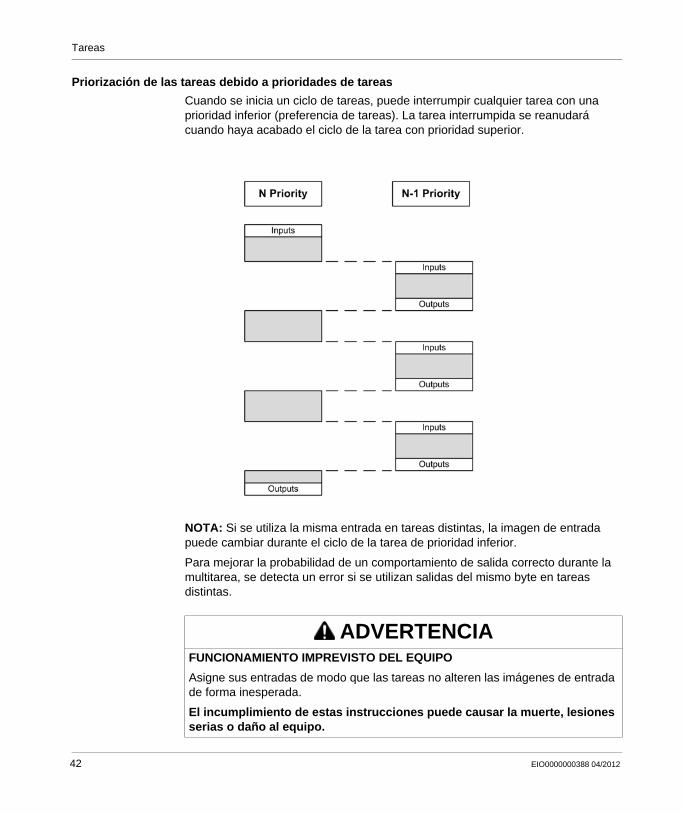
Priorización de las tareas debido a prioridades de tareas
Cuando se inicia un ciclo de tareas, puede interrumpir cualquier tarea con una prioridad inferior (preferencia de tareas). La tarea interrumpida se reanudará cuando haya acabado el ciclo de la tarea con prioridad superior.
NOTA: Si se utiliza la misma entrada en tareas distintas, la imagen de entrada puede cambiar durante el ciclo de la tarea de prioridad inferior.
Para mejorar la probabilidad de un comportamiento de salida correcto durante la multitarea, se detecta un error si se utilizan salidas del mismo byte en tareas distintas.
ADVERTENCIAFUNCIONAMIENTO IMPREVISTO DEL EQUIPO
Asigne sus entradas de modo que las tareas no alteren las imágenes de entrada de forma inesperada.
El incumplimiento de estas instrucciones puede causar la muerte, lesiones serias o daño al equipo.
42 EIO0000000388 04/2012

Tareas
Configuración de tareas predeterminadas
Configuración de tareas predeterminadas
Para Modicon M238 Logic Controller:La tarea MAST se puede configurar en modalidad de ejecución libre o cíclica. La tarea MAST se crea automáticamente de forma predeterminada en modalidad cíclica. Su prioridad preestablecida es media (15) y su intervalo preestablecido es de 20 ms; su servicio de watchdog de tareas se activa con un tiempo de 100 ms y una sensibilidad de 1. Consulte Prioridades de tareas (véase página 41) para obtener más información sobre los ajustes de prioridad. Consulte Watchdogs de sistema y tareas (véase página 39) para obtener más información sobre los watchdogs.
Diseñar un programa de aplicación eficiente es importante en sistemas que estén alcanzando el número máximo de tareas. En esa aplicación, puede resultar difícil mantener la utilización de los recursos por debajo del umbral del watchdog del sistema. Si las reasignaciones de prioridades por si solas no resultan suficientes para permanecer por debajo del umbral, se puede hacer que algunas tareas de prioridad menor usen menos recursos del sistema si se añade la función SysTaskWaitSleep a esas tareas. Para obtener más información sobre esta función, consulte la biblioteca opcional SysTask de la categoría / SysLibs de bibliotecas del sistema.
NOTA: No borre ni cambie el nombre de la tarea MAST. Si lo hace, SoMachine detecta un error cuando se intenta compilar la aplicación y no podrá descargarla al controlador.
EIO0000000388 04/2012 43

Tareas
44 EIO0000000388 04/2012

EIO0000000388 04/2012
7
Modicon M238 Logic Controller
Estados y comportamientos del controlador
EIO0000000388 04/2012
Estados y comportamientos del controlador
Introducción
En este capítulo se proporciona información sobre los estados del controlador, las transiciones de estado y los comportamientos en respuesta a los eventos del sistema. Empieza con un detallado diagrama del estado del controlador y una descripción de cada estado. Después, se define la relación de los estados de salida con los estados del controlador antes de explicar los comandos y eventos que tienen como resultado las transiciones de estado. Concluye con información sobre las variables remanentes y el efecto de las opciones de programación de tareas de SoMachine en el comportamiento del sistema.
Contenido de este capítulo
Este capítulo contiene las siguientes secciones:
Sección Apartado Página
7.1 Diagrama de estado del controlador 46
7.2 Descripción de los estados del controlador 51
7.3 Transiciones de estados y eventos del sistema 56
45
Estados y comportamientos del controlador
7.1 Diagrama de estado del controlador
Diagrama de estado del controlador
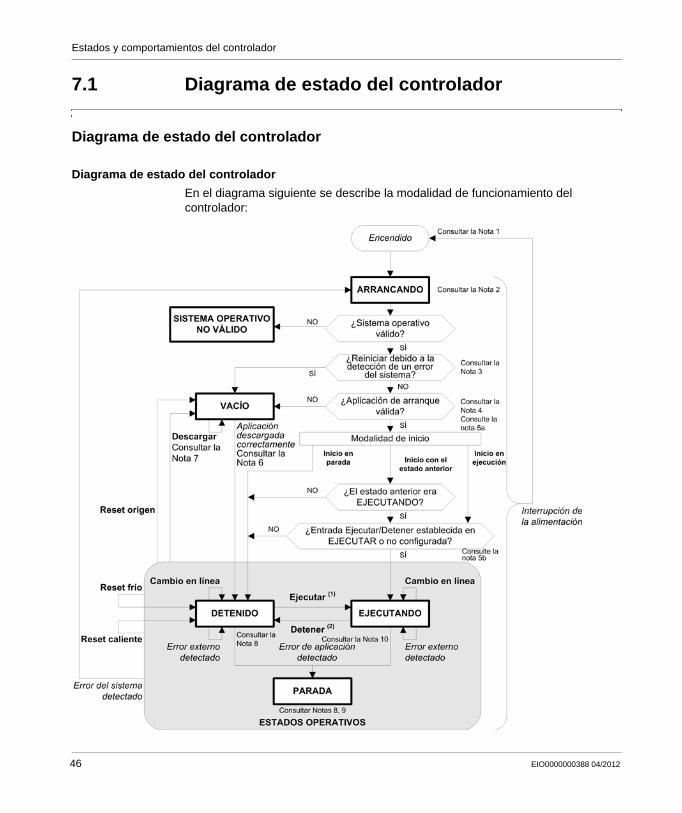
Diagrama de estado del controlador
En el diagrama siguiente se describe la modalidad de funcionamiento del controlador:
46 EIO0000000388 04/2012
Estados y comportamientos del controlador
Leyenda:Los estados del controlador se indican en LETRAS MAYÚSCULAS EN NEGRITALos comandos de usuario y de la aplicación se indican en negritaLos eventos del sistema se indican en cursivaLas decisiones, resultados de decisiones e información general se indican con texto normal
(1) Para obtener información detallada sobre la transición del estado STOPPED (DETENIDO) a RUNNING (EN EJECUCIÓN), consulte Comando Ejecutar (véase página 60).
(2) Para obtener información detallada sobre la transición del estado RUNNING (EN EJECUCIÓN) a STOPPED (DETENIDO), consulte Comando Detener (véase página 60).
Nota 1
El apagado y encendido (interrumpir y reanudar la alimentación eléctrica) elimina todas las configuraciones del forzado de salida. Para obtener más información, consulte Estados del controlador y comportamiento de salida (véase página 57).
Nota 2
En condiciones normales, el proceso de arranque puede tardar hasta 10 segundos. Las salidas asumirán sus estados de inicialización.
Nota 3
En algunos casos, cuando se detecta un error de sistema, esto hace que el controlador se reinicie automáticamente pasando al estado EMPTY (VACÍO) como si no hubiera aplicación de arranque en la memoria flash. Sin embargo, la aplicación de arranque realmente no ha sido eliminada de la memoria flash.
Nota 4
Esta aplicación se carga en RAM tras la verificación de una aplicación de arranque válida.
Durante la carga de la aplicación de inicio, se produce una prueba de comprobación de contexto para asegurarse de que las variables restantes son válidas. Si esta prueba falla, la aplicación de inicio se cargará, pero el controlador pasará al estado STOPPED (DETENIDO) (véase página 63).
Nota 5a
La modalidad de inicio se establece en la ficha Ajustes PLC del Editor de dispositivos del controlador (véase página 73) .
EIO0000000388 04/2012 47

Estados y comportamientos del controlador
Nota 5b
Cuando se produce una interrupción de la alimentación, el controlador continúa en el estado RUNNING (EN EJECUCIÓN) durante al menos 4 ms antes de apagarse. Si ha configurado la entrada Ejecutar/Detener para que reciba la alimentación de la misma fuente que el controlador, la pérdida de alimentación en esta entrada se detectará inmediatamente y el controlador actuará como si hubiera recibido un comando STOP. Así pues, si la alimentación del controlador y de la entrada Ejecutar/Detener proviene de la misma fuente, después de una interrupción de la alimentación el controlador se reiniciará de forma normal en el estado STOPPED (DETENIDO) si Modalidad de inicio se ha establecido en Inicio con el estado anterior.
Nota 6
Durante la descarga correcta de la aplicación, se producen los siguientes eventos:La aplicación se carga directamente en RAM.De forma predeterminada, la aplicación de arranque se crea y almacena en la memoria flash.
Nota 7
El comportamiento predeterminado tras descargar un programa de aplicación es que el controlador entre en estado STOPPED (DETENIDO), independientemente del ajuste de la entrada Ejecutar/Detener, o en el último estado en que se encontraba antes de la descarga.
48 EIO0000000388 04/2012

Estados y comportamientos del controlador
No obstante, deben tenerse en cuenta dos consideraciones importantes al respecto:
Cambio en línea: un cambio en línea (descarga parcial) iniciado mientras el controlador está en estado RUNNING (EN EJECUCIÓN) hace que el controlador vuelva al estado RUNNING (EN EJECUCIÓN) siempre y cuando la descarga se realice correctamente y la entrada Ejecutar/Detener esté configurada y establecida en Ejecutar. Antes de utilizar la opción Iniciar sesión con modificación en línea, compruebe los cambios del programa de aplicación en un entorno virtual o entorno sin producción y compruebe que el controlador y el equipo adjunto admiten las condiciones esperadas en el estado RUNNING (EN EJECUCIÓN).
NOTA: Los cambios en línea del programa no se escriben automáticamente en la aplicación de inicio y se sobrescribirán por la aplicación de inicio existente en el próximo reinicio. Si desea que los cambios se conserven durante el reinicio, actualice manualmente la aplicación de inicio seleccionando la opción Crear aplicación de inicio en el menú En línea (el controlador debe estar en estado STOPPED (DETENIDO) para poder realizar esta operación).
Descarga múltiple: SoMachine dispone de una función que le permitirá realizar una descarga de la aplicación completa en múltiples destinos de la red o el bus de campo. Una de las opciones predeterminadas al seleccionar el comando Descarga múltiple... es la opción Tras descarga o modificación en línea iniciar todas las aplicaciones, que permite reiniciar todos los destinos de la descarga en el estado RUNNING (EN EJECUCIÓN), siempre que sus respectivas entradas de ejecución/parada indiquen el estado RUNNING (EN EJECUCIÓN), independientemente del último estado del controlador antes de que se iniciase la descarga múltiple. Deseleccione esta opción si no desea que los controladores de destino se reinicien en el estado RUNNING (EN EJECUCIÓN). Además, antes de utilizar la opción Descarga múltiple, compruebe los cambios del programa de aplicación en un entorno virtual o entorno sin producción y compruebe que los controladores de destino y el equipo adjunto admiten las condiciones esperadas en el estado RUNNING (EN EJECUCIÓN).
ADVERTENCIAFUNCIONAMIENTO IMPREVISTO DEL EQUIPO
Verifique siempre que los cambios en línea en un programa de aplicación RUNNING (EN EJECUCIÓN) funcionan según lo esperado antes de descargarlos a los controladores.
El incumplimiento de estas instrucciones puede causar la muerte, lesio-nes serias o daño al equipo.
EIO0000000388 04/2012 49

Estados y comportamientos del controlador
NOTA: Durante una descarga múltiple, al contrario que sucede con una descarga normal, SoMachine no ofrece la opción de crear una aplicación de inicio. Puede crear una aplicación de inicio manualmente en cualquier momento si selecciona Crear aplicación de inicio en el menú En línea de todos los controladores de destino (el controlador debe estar en estado STOPPED (DETENIDO) para poder realizar esta operación).
Nota 8
La plataforma de software SoMachine ofrece múltiples opciones potentes para la gestión de la ejecución de tareas y las condiciones de salida mientras el controlador está en los estados STOPPED (DETENIDO) o HALT (PARADA). Para obtener más información, consulte el Descripción de los estados del controlador (véase página 51).
Nota 9
Para salir del estado HALT (PARADA), es necesario ejecutar uno de los comandos Reset (Reset en caliente, Reset en frío, Reset origen), descargar la aplicación o apagar y encender el dispositivo.
Nota 10
El estado RUNNING (EN EJECUCIÓN) tiene dos condiciones de excepción.
Son las siguientes:RUNNING (EN EJECUCIÓN) con error externo: Esta condición de excepción se indica mediante el LED de estado Err, que aparece en verde fijo 1 parpadeo rojo. Puede salir de este estado eliminando el error externo. No es necesario ningún comando del controlador.RUNNING (EN EJECUCIÓN) con punto de interrupción: Esta condición de excepción se indica mediante el LED de estado de ejecución , que aparece con 1 parpadeo verde. Para obtener más información, consulte el Descripción de los estados del controlador (véase página 51).
ADVERTENCIAFUNCIONAMIENTO IMPREVISTO DEL EQUIPO
Compruebe siempre que el programa de aplicación funciona según lo esperado en todos los controladores de destino y equipos antes de ejecutar el comando "Descarga múltiple…" con la opción "Tras descarga o modificación en línea iniciar todas las aplicaciones" seleccionada.
El incumplimiento de estas instrucciones puede causar la muerte, lesio-nes serias o daño al equipo.
50 EIO0000000388 04/2012

Estados y comportamientos del controlador
7.2 Descripción de los estados del controlador
Descripción de los estados del controlador
Introducción
En este apartado se proporciona una descripción detallada de los estados del controlador.
(1) Nota: Los estados del controlador se pueden leer en la variable del sistema PLC_R.i_wStatus de la biblioteca M238 PLCSystem (véase Modicon M238 Logic Controller, Funciones y variables de sistema, Guía de la biblioteca M238 PLCSystem).
ADVERTENCIAFUNCIONAMIENTO IMPREVISTO DEL EQUIPO
Nunca asuma que el controlador se encuentra en un determinado estado antes de ordenar una modificación de estado, configurar las opciones del controlador, cargar un programa o modificar la configuración física del controlador y de su equipo conectado.Antes de llevar a cabo cualquiera de estas operaciones, tenga en cuenta el efecto que éstas tendrán en todos los equipos conectados.Antes de actuar sobre un controlador, siempre debe confirmar positivamente el estado del controlador visualizando sus indicadores LED, confirmando la condición de la entrada Ejecutar/Detener, comprobando la presencia del forzado de salida y revisando la información del estado del controlador a través
de SoMachine (1)
El incumplimiento de estas instrucciones puede causar la muerte, lesiones serias o daño al equipo.
EIO0000000388 04/2012 51

Estados y comportamientos del controlador
Tabla de estados del controlador
En la tabla siguiente se describen los estados del controlador:
Estado del controlador
Descripción LED RUN LED Err
BOOTING (ARRANCANDO)
El controlador ejecuta el firmware de arranque y sus propias comprobaciones automáticas internas. A continuación, comprueba la suma de comprobación del firmware y las aplicaciones de usuario. No ejecuta la aplicación ni se comunica.
Desconectado Parpadeo rojo
INVALID_OS (SO NO VÁLIDO)
No hay un archivo de firmware válido presente en la memoria flash. El controlador no ejecuta la aplicación. La comunicación sólo es posible a través del puerto host USB para posteriormente cargar tan solo un SO válido. Consulte Actualización del firmware de M238 (véase página 187).
Desconectado Parpadeo rojo
EMPTY (VACÍO) No hay ninguna aplicación o hay una aplicación no válida. Desconectado 3 parpadeos rojos
EMPTY (VACÍO) tras la detección de un error del sistema
Este estado es el mismo que el estado EMPTY (VACÍO) normal excepto porque se establece un indicador para hacer que parezca como si no estuviera presente ninguna aplicación de arranque (no se carga ninguna aplicación) y porque los indicadores LED son diferentes.
Desconectado Parpadeo rojo rápido
RUNNING (EN EJECUCIÓN)
El controlador está ejecutando una aplicación válida. Verde Desconectado
RUNNING (EN EJECUCIÓN) con punto de interrupción
Este estado coincide con el estado RUNNING (EN EJECUCIÓN) con las siguientes excepciones:
La parte de procesamiento de tareas del programa no se reanuda hasta que se elimina el punto de interrupción.Los indicadores LED son diferentes.
Para obtener más información sobre la administración de los puntos de interrupción, consulte la parte sobre CoDeSys de la ayuda en línea de SoMachine..
Parpadeo simple verde
Desconectado
RUNNING (EN EJECUCIÓN) con detección de un error externo
Este estado es el mismo que el estado RUNNING (EN EJECUCIÓN) normal, excepto porque los indicadores LED son diferentes.
Verde Parpadeo simple rojo
STOPPED (DETENIDO)
El controlador tiene una aplicación válida que está detenida. Consulte Detalles del estado STOPPED (DETENIDO) (véase página 53) para obtener una explicación del comportamiento de las salidas y de los buses de campo de este estado.
Parpadeo verde
Desconectado
52 EIO0000000388 04/2012
Estados y comportamientos del controlador
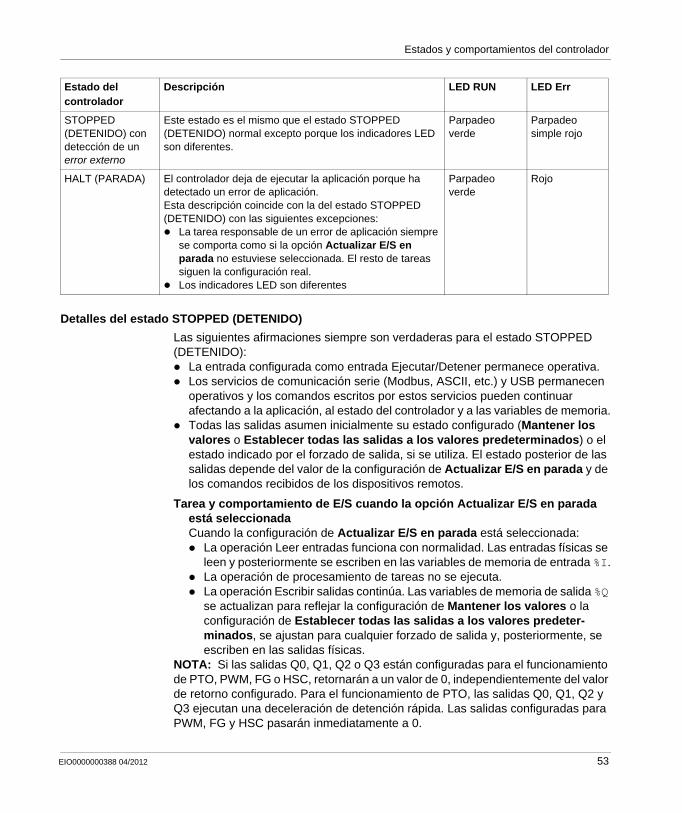
Detalles del estado STOPPED (DETENIDO)
Las siguientes afirmaciones siempre son verdaderas para el estado STOPPED (DETENIDO):
La entrada configurada como entrada Ejecutar/Detener permanece operativa.Los servicios de comunicación serie (Modbus, ASCII, etc.) y USB permanecen operativos y los comandos escritos por estos servicios pueden continuar afectando a la aplicación, al estado del controlador y a las variables de memoria.Todas las salidas asumen inicialmente su estado configurado (Mantener los valores o Establecer todas las salidas a los valores predeterminados) o el estado indicado por el forzado de salida, si se utiliza. El estado posterior de las salidas depende del valor de la configuración de Actualizar E/S en parada y de los comandos recibidos de los dispositivos remotos.
Tarea y comportamiento de E/S cuando la opción Actualizar E/S en parada está seleccionada Cuando la configuración de Actualizar E/S en parada está seleccionada:
La operación Leer entradas funciona con normalidad. Las entradas físicas se leen y posteriormente se escriben en las variables de memoria de entrada %I.La operación de procesamiento de tareas no se ejecuta.La operación Escribir salidas continúa. Las variables de memoria de salida %Q se actualizan para reflejar la configuración de Mantener los valores o la configuración de Establecer todas las salidas a los valores predeter-minados, se ajustan para cualquier forzado de salida y, posteriormente, se escriben en las salidas físicas.
NOTA: Si las salidas Q0, Q1, Q2 o Q3 están configuradas para el funcionamiento de PTO, PWM, FG o HSC, retornarán a un valor de 0, independientemente del valor de retorno configurado. Para el funcionamiento de PTO, las salidas Q0, Q1, Q2 y Q3 ejecutan una deceleración de detención rápida. Las salidas configuradas para PWM, FG y HSC pasarán inmediatamente a 0.
STOPPED (DETENIDO) con detección de un error externo
Este estado es el mismo que el estado STOPPED (DETENIDO) normal excepto porque los indicadores LED son diferentes.
Parpadeo verde
Parpadeo simple rojo
HALT (PARADA) El controlador deja de ejecutar la aplicación porque ha detectado un error de aplicación.Esta descripción coincide con la del estado STOPPED (DETENIDO) con las siguientes excepciones:
La tarea responsable de un error de aplicación siempre se comporta como si la opción Actualizar E/S en parada no estuviese seleccionada. El resto de tareas siguen la configuración real.Los indicadores LED son diferentes
Parpadeo verde
Rojo
Estado del controlador
Descripción LED RUN LED Err
EIO0000000388 04/2012 53
Estados y comportamientos del controlador
NOTA: Los comandos recibidos por las comunicaciones serie, USB y CAN pueden continuar escribiéndose en las variables de memoria. Los cambios realizados en las variables de memoria de salida %Q se escriben en las salidas físicas.
Comportamiento de CAN cuando la opción Actualizar E/S en parada está seleccionada La siguiente información es verdadera para los buses CAN cuando la opción Actualizar E/S en parada está seleccionada:
El bus CAN sigue totalmente operativo. Los dispositivos del bus CAN continúan percibiendo la presencia de un maestro CAN funcional.TPDO y RPDO continúan intercambiándose.Si se ha configurado el SDO opcional, continúa intercambiándose.Si se han configurado, las funciones Heartbeat y Vigilancia de nodo continúan funcionando.Si el campo Comportamiento de las salidas en parada está establecido en Mantener los valores, los TPDO continúan emitiéndose con los últimos valores reales.Si el campo Comportamiento de las salidas en parada se encuentra en Establecer todas las salidas a los valores predeterminados, los últimos valores reales se actualizarán a los valores predeterminados y los TPDO posteriores se emitirán con estos valores predeterminados.
ADVERTENCIAFUNCIONAMIENTO IMPREVISTO DEL EQUIPO
Si utiliza las salidas Q0, Q1, Q2 o Q3 para el funcionamiento de PTO, PWM, FG o HSC, diseñe y programe el sistema de manera que el equipo controlado asuma un estado seguro cuando el controlador pase a la modalidad de retorno.
El incumplimiento de estas instrucciones puede causar la muerte, le-siones serias o daño al equipo.
54 EIO0000000388 04/2012
Estados y comportamientos del controlador
Tarea y comportamiento de E/S cuando la opción Actualizar E/S en parada no está seleccionada Cuando el ajuste Actualizar E/S en parada no está seleccionado, el controlador establece la E/S en la condición Mantener los valores o Establecer todas las salidas a los valores predeterminados (según se haya ajustado para el forzado de salida, si se utiliza). Tras ello, los siguientes elementos son verdaderos:
La operación Leer entradas se detiene. Las variables de memoria de entrada %I se congelan en sus últimos valores.La operación de procesamiento de tareas no se ejecuta.La operación Escribir salidas se detiene. Las variables de memoria de salida %Q pueden actualizarse a través de las conexiones serie y USB. No obstante, las salidas físicas no se ven afectadas y conservan el estado especificado por las opciones de configuración.
NOTA: Si las salidas Q0, Q1, Q2 o Q3 están configuradas para el funcionamiento de PTO, PWM, FG o HSC, retornarán a un valor de 0, independientemente del valor de retorno configurado. Para el funcionamiento de PTO, las salidas Q0, Q1, Q2 y Q3 ejecutan una deceleración de detención rápida. Las salidas configuradas para PWM, FG y HSC pasarán inmediatamente a 0.
Comportamiento de CAN cuando la opción Actualizar E/S en parada no está seleccionada La siguiente información es verdadera para los buses CAN cuando el ajuste Actualizar E/S en parada no está seleccionado:
El maestro CAN detiene las comunicaciones. Los dispositivos del bus CAN asumen los estados de retorno configurados.Los intercambios de TPDO y RPDO se detienen.Los intercambios del SDO opcional se detienen, si se ha configurado.Si se han configurado, las opciones Heartbeat y Vigilancia de nodo se detienen.Los valores actuales o predeterminados se escriben en los TPDO y se envían una vez antes de detener el maestro CAN, si corresponde.
ADVERTENCIAFUNCIONAMIENTO IMPREVISTO DEL EQUIPO
Si utiliza las salidas Q0, Q1, Q2 o Q3 para el funcionamiento de PTO, PWM, FG o HSC, diseñe y programe el sistema de manera que el equipo controlado asuma un estado seguro cuando el controlador pase a la modalidad de retorno.
El incumplimiento de estas instrucciones puede causar la muerte, le-siones serias o daño al equipo.
EIO0000000388 04/2012 55

Estados y comportamientos del controlador
7.3 Transiciones de estados y eventos del sistema
Descripción general
Esta sección empieza con una explicación de los posibles estados de salida del controlador. Después, presenta los comandos del sistema utilizados para cambiar entre los estados del controlador y los eventos del sistema que también pueden afectar a estos estados. Concluye con un explicación de las variables remanentes y de las circunstancias en las que se retienen distintas variables y tipos de datos durante las transiciones de estados.
Contenido de esta sección
Esta sección contiene los siguientes apartados:
Apartado Página
Estados y comportamiento de salida del controlador 57
Comandos de transiciones de estado 60
Detección, tipos y gestión de errores 67
Variables remanentes 68
56 EIO0000000388 04/2012

Estados y comportamientos del controlador
Estados y comportamiento de salida del controlador
Introducción
Modicon M238 Logic Controller define el comportamiento de salida en respuesta a los comandos y eventos del sistema de un modo que permite una mayor flexibilidad. Es necesario comprender este comportamiento antes de tratar los comandos y eventos que afectan a los estados del controlador. Por ejemplo, los controladores típicos definen solo dos opciones para el comportamiento de salida en detención: volver al valor predeterminado o mantener el valor actual.
Los posibles comportamientos de salida y los estados del controlador a los que se aplican son:
Gestión a través de un programa de aplicaciónMantener los valoresEstablecer todas las salidas a los valores predeterminadosValores de inicializaciónForzado de salida
Gestión a través de un programa de aplicación
El programa de aplicación gestiona las salidas con normalidad. Esto se aplica a los estados RUNNING (EN EJECUCIÓN) y RUNNING (EN EJECUCIÓN) con un error externo.
Mantener los valores
Puede seleccionar esta opción si marca Mantener los valores en el menú desplegable Comportamiento de las salidas en parada de la subficha Ajustes PLC de Controller Editor. Para acceder a Controller Editor, haga clic con el botón derecho en el controlador del árbol de dispositivos y seleccione Modificar objeto.
Este comportamiento de salida se aplica a los estados de controlador STOPPED (DETENIDO) y HALT (PARADA). Las salidas se establecen y permanecen en su estado actual, aunque los detalles del comportamiento de salida varían considera-blemente en función de la configuración de la opción Actualizar E/S en parada y de las acciones indicadas a través de los buses de campo configurados. Consulte Descripción de los estados del controlador (véase página 51) para obtener más información acerca de estas variaciones.
EIO0000000388 04/2012 57

Estados y comportamientos del controlador
Establecer todas las salidas a los valores predeterminados
Puede seleccionar esta opción si marca Establecer todas las salidas a los valores predeterminados en el menú desplegable Comportamiento de las salidas en parada de la subficha Ajustes PLC de Controller Editor. Para acceder a Controller Editor, haga clic con el botón derecho en el controlador del árbol de dispositivos y seleccione Modificar objeto.
Este comportamiento de salida se aplica a los estados de controlador STOPPED (DETENIDO) y HALT (PARADA). Las salidas se establecen y permanecen en su estado actual, aunque los detalles del comportamiento de salida varían considera-blemente en función de la configuración de la opción Actualizar E/S en parada y de las acciones indicadas a través de los buses de campo configurados. Consulte Descripción de los estados del controlador (véase página 51) para obtener más información acerca de estas variaciones.
Valores de inicialización
Este estado de salida se aplica en los estados BOOTING (ARRANCANDO), EMPTY (VACÍO) (después de apagar y encender sin una aplicación de arranque o después de detectar un error del sistema) e INVALID_OS (SO NO VÁLIDO).
En el estado de inicialización, la salidas analógicas, de transistor y de relé asumen los siguientes valores:
Para una salida analógica: Z (alta impedancia)Para una salida rápida de transistor: Z (alta impedancia)Para una salida de transistor: 0 V CCPara una salida de relé: Open
Forzado de salida
El controlador permite forzar el estado de las salidas seleccionadas a un valor definido para llevar a cabo las pruebas, la puesta en marcha y el mantenimiento del sistema.
Únicamente puede forzar el valor de una salida mientras el controlador esté conectado a SoMachine.
Para ello, utilice el comando Forzar valores del menú Depurar/Supervisar.
El forzado de salida invalida al resto de comandos en una salida independien-temente de la programación de la tarea que se esté ejecutando.
Cuando finalice sesión en SoMachine una vez definido el forzado de salida, se mostrará la opción de conservar la configuración del forzado de salida. Si selecciona esta opción, el forzado de salida continuará controlando el estado de las salidas seleccionadas hasta que descargue una aplicación o utilice uno de los comandos de restablecimiento.
58 EIO0000000388 04/2012

Estados y comportamientos del controlador
Cuando está seleccionada la opción Actualizar E/S en parada (estado predeter-minado), si el controlador admite dicha opción, las salidas forzadas mantienen el valor de forzado aunque el Logic Controller esté ajustado en la modalidad STOP.
Consideraciones sobre el forzado de salidas
La salida que desee forzar debe encontrarse en una tarea que el controlador esté ejecutando actualmente. El forzado de salidas en tareas sin ejecutar, o en tareas cuya ejecución se retarde debido a prioridades o eventos, no tendrá ningún efecto en la salida. Sin embargo, una vez que se ejecute la tarea que se había retardado, el forzado surtirá efecto en ese momento.
En función de la ejecución de tareas, puede que el forzado tenga un impacto en la aplicación de formas poco obvias para el usuario. Por ejemplo, puede que una tarea de evento active una salida. Más tarde, puede que el usuario intente desactivar dicha salida aunque en ese momento no se esté desencadenando el evento. Como resultado, parecerá que se está ignorando el forzado. Además, puede que posteriormente el evento desencadene la tarea, momento en el que surtirá efecto el forzado.
ADVERTENCIAFUNCIONAMIENTO IMPREVISTO DEL EQUIPO
Debe entender perfectamente cómo afectará el forzado a las salidas relativas a las tareas que se estén ejecutando.No intente forzar una E/S que se encuentre en tareas si no está seguro de que dichas tareas se ejecutarán oportunamente, a menos que pretenda que el forzado surta efecto en la próxima ejecución de la tarea, independientemente de cuándo se produzca.Si fuerza una salida y aparentemente no tiene ningún efecto en la salida física, no salga de SoMachine sin eliminar el forzado.
El incumplimiento de estas instrucciones puede causar la muerte, lesiones serias o daño al equipo.
EIO0000000388 04/2012 59

Estados y comportamientos del controlador
Comandos de transiciones de estado
Comando Ejecutar
Efecto: Da una orden de transición al estado del controlador RUNNING (EN EJECUCIÓN).
Condiciones de inicio: Estado BOOTING (ARRANCANDO) o STOPPED (DETENIDO).
Métodos para emitir un comando Ejecutar:Entrada Ejecutar/Detener: Si se configura, activa un flanco ascendente en la entrada Ejecutar/Detener. La entrada Ejecutar/Detener debe ser una para todas las opciones posteriores a fin de ser efectiva. Consulte Entrada Ejecutar/Detener (véase página 83) para obtener más información.Menú en línea de SoMachine: Seleccione el comando Inicio.Mediante una llamada externa a través de una petición Modbus con las variables del sistema PLC_W. q_wPLCControl y PLC_W. q_uiOpenPLCControl de la biblioteca M238 PLCSystem (véase Modicon M238 Logic Controller, Funciones y variables de sistema, Guía de la biblioteca M238 PLCSystem).Opción Iniciar sesión con modificación en línea: Si se inicia y se realiza correctamente un cambio en línea (descarga parcial) mientras el controlador se encuentra en el estado RUNNING (EN EJECUCIÓN), el controlador vuelve al estado RUNNING (EN EJECUCIÓN).Comando Descarga múltiple: Establece los controladores en estado EN EJECUCIÓN si se ha seleccionado la opción Tras descarga o modificación en línea iniciar todas las aplicaciones, independientemente del estado inicial de los controladores de destino (RUNNING [EN EJECUCIÓN], STOPPED [DETENIDO], HALT [PARADA] o EMPTY [VACÍO]).El controlador se reinicia automáticamente en estado RUNNING (EN EJECUCIÓN) en determinadas condiciones.
Para obtener más información, consulte el Diagrama del estado del controlador (véase página 46).
Comando Detener
Efecto: Da una orden de transición al controlador para que se establezca en estado STOPPED (DETENIDO).
Condiciones de inicio: Estado BOOTING (ARRANCANDO), EMPTY (VACÍO) o RUNNING (EN EJECUCIÓN).
Métodos para emitir un comando Detener:Entrada Ejecutar/Detener: si se configura, activa el valor 0 en la entrada Ejecutar/Detener. Consulte Entrada Ejecutar/Detener (véase página 83) para obtener más información.Menú en línea de SoMachine: Seleccione el comando Detener.
60 EIO0000000388 04/2012

Estados y comportamientos del controlador
Con una llamada interna de la aplicación o una llamada externa mediante una petición Modbus usando las variables del sistema PLC_W. q_wPLCControl y PLC_W. q_uiOpenPLCControl de la biblioteca M238 PLCSystem (véase Modicon M238 Logic Controller, Funciones y variables de sistema, Guía de la biblioteca M238 PLCSystem).Opción Iniciar sesión con modificación en línea: Si se inicia y se realiza correctamente un cambio en línea (descarga parcial) mientras el controlador se encuentra en estado STOPPED (DETENIDO), el controlador vuelve al estado STOPPED (DETENIDO).Comando Descargar: establece implícitamente el controlador en el estado STOPPED (DETENIDO).Comando Descarga múltiple: Establece los controladores en estado STOPPED (DETENIDO) si se ha seleccionado la opción Tras descarga o modificación en línea iniciar todas las aplicaciones, independientemente del estado inicial de los controladores de destino (RUNNING [EN EJECUCIÓN], STOPPED [DETENIDO], HALT [PARADA] o EMPTY [VACÍO]).El controlador se reinicia automáticamente en estado STOPPED (DETENIDO) en determinadas condiciones.
Para obtener más información, consulte el Diagrama del estado del controlador (véase página 46).
Reset caliente
Efecto: Restablece todas las variables, excepto las variables remanentes, a su valor predeterminado. Establece el controlador en el estado STOPPED (DETENIDO).
Condiciones de inicio: Estados RUNNING (EN EJECUCIÓN), STOPPED (DETENIDO) o HALT (PARADA).
Métodos para emitir un comando Reset (en caliente):Menú en línea de SoMachine: Seleccione el comando Reset caliente.Con una llamada interna de la aplicación o una llamada externa mediante una petición Modbus usando las variables del sistema PLC_W. q_wPLCControl y PLC_W. q_uiOpenPLCControl de la biblioteca M238 PLCSystem (véase Modicon M238 Logic Controller, Funciones y variables de sistema, Guía de la biblioteca M238 PLCSystem).
Efectos del comando Reset (en caliente):1. La aplicación se detiene.2. Se elimina el forzado.3. Se restablecen las indicaciones de diagnóstico de los errores detectados.4. Se mantienen los valores de las variables retentivas.5. Se mantienen los valores de las variables retentivas-persistentes.6. Todas las variables no ubicadas y no remanentes se restablecen a los valores
de inicialización.7. Se mantienen los valores de los primeros 1.000 registros %MW.8. Los valores de los registros %MW1000 a %MW59999 se restablecen a 0.
EIO0000000388 04/2012 61

Estados y comportamientos del controlador
9. Todas las comunicaciones del bus de campo se detienen y una vez completado el restablecimiento, se reinician.
10.Todas las E/S se restablecen brevemente a los valores de inicio y luego a los valores predeterminados por el usuario.
Para obtener más información sobre las variables, consulte Variables remanentes (véase página 68).
Reset frío
Efecto: Restablece todas las variables, excepto las variables remanentes de tipo retentivas-persistentes, a sus valores de inicio. Establece el controlador en el estado STOPPED (DETENIDO).
Condiciones de inicio: Estados RUNNING (EN EJECUCIÓN), STOPPED (DETENIDO) o HALT (PARADA).
Métodos para emitir un comando Reset (frío):Menú en línea de SoMachine: Seleccione el comando Reset frío.Con una llamada interna de la aplicación o una llamada externa mediante una petición Modbus usando las variables del sistema PLC_W. q_wPLCControl y PLC_W. q_uiOpenPLCControl de la biblioteca M238 PLCSystem (véase Modicon M238 Logic Controller, Funciones y variables de sistema, Guía de la biblioteca M238 PLCSystem).
Efectos del comando Reset (frío):1. La aplicación se detiene.2. Se elimina el forzado.3. Se restablecen las indicaciones de diagnóstico de los errores detectados.4. Se restablecen los valores de las variables retentivas a su valor de inicialización.5. Se mantienen los valores de las variables retentivas-persistentes.6. Todas las variables no ubicadas y no remanentes se restablecen a los valores
de inicialización.7. Se mantienen los valores de los primeros 1.000 registros %MW.8. Los valores de los registros %MW1000 a %MW59999 se restablecen a 0.9. Todas las comunicaciones del bus de campo se detienen y una vez completado
el restablecimiento, se reinician.10.Todas las E/S se restablecen brevemente a los valores de inicio y luego a los
valores predeterminados por el usuario.
Para obtener más información sobre las variables, consulte Variables remanentes (véase página 68).
62 EIO0000000388 04/2012
Estados y comportamientos del controlador
Reset origen
Efecto: Restablece todas las variables, incluidas las variables remanentes, a sus valores de inicio. Elimina todos los archivos del usuario del controlador. Establece el controlador en el estado EMPTY (VACÍO).
Condiciones de inicio: Estados RUNNING (EN EJECUCIÓN), STOPPED (DETENIDO) o HALT (PARADA).
Métodos para emitir un comando Reset (origen):Menú en línea de SoMachine: Seleccione el comando Reset origen.
Efectos del comando Reset (origen):1. La aplicación se detiene.2. Se elimina el forzado.3. Se elimina el archivo de aplicación de arranque.4. Se restablecen las indicaciones de diagnóstico de los errores detectados.5. Se restablecen los valores de las variables retentivas.6. Se restablecen los valores de las variables retentivas-persistentes.7. Se restablecen todas las variables no ubicadas y no remanentes.8. Los valores de los primeros 1.000 registros %MW se restablecen a 0.9. Los valores de los registros %MW1000 a %MW59999 se restablecen a 0.10.Se detienen todas las comunicaciones del bus de campo.11.Se restablecen todas las E/S a su valor de inicialización.
Para obtener más información sobre las variables, consulte Variables remanentes (véase página 68).
Reinicio
Efecto: Da una orden de reinicio del controlador.
Condiciones de inicio: Cualquier estado.
Métodos para emitir el comando Reiniciar:Apagado y encendido
Efectos del reinicio:1. El estado del controlador depende de las siguientes condiciones:
a. El controlador se establecerá en el estado RUNNING (EN EJECUCIÓN) si:El reinicio se debe a un apagado y encendido, y:- Modalidad de inicio se ha establecido en Inicio en ejecución, y la entrada Run/Stop no se ha configurado.- Modalidad de inicio se ha establecido en Inicio en ejecución, y la entrada Run/Stop se ha establecido en RUN (EJECUTAR).
EIO0000000388 04/2012 63
Estados y comportamientos del controlador
- Modalidad de inicio se ha establecido en Inicio con el estado anterior, el controlador se encontraba en el estado RUNNING (EN EJECUCIÓN) antes de apagar y encender, y la entrada Run/Stop no se ha configurado.- Modalidad de inicio se ha establecido en Inicio con el estado anterior, el controlador se encontraba en el estado RUNNING (EN EJECUCIÓN) antes de apagar y encender, y la entrada Run/Stop se ha establecido en RUN (EJECUTAR).
b. El controlador se establecerá en el estado STOPPED (DETENIDO) si:El reinicio se debe a un apagado y encendido, y:- Modalidad de inicio se ha establecido en Inicio en parada.- Modalidad de inicio se ha establecido en Inicio con el estado anterior y el controlador se encontraba en el estado STOPPED (DETENIDO) antes de apagar y encender.- si se ha configurado, la entrada Run/Stop se ha establecido en STOP (DETENER).- la aplicación de arranque es diferente a la aplicación cargada antes del reinicio.- el contexto guardado anteriormente no es válido.- el controlador se encontraba en el estado HALT (PARADA) antes de apagar y encender.
c. El controlador se establecerá en el estado EMPTY (VACÍO) si:- No existe ninguna aplicación de arranque o la aplicación de arranque no es válida, o bien- Un error detectado en el sistema ha provocado el reinicio.
d. El controlador se establecerá en el estado INVALID_OS (SO NO VÁLIDO) si no hay un SO válido.
2. Se elimina el forzado.3. Se restablecen las indicaciones de diagnóstico de los errores detectados.4. Se restauran los valores de las variables retentivas si el contexto guardado es
válido.5. Se restauran los valores de las variables retentivas-persistentes si el contexto
guardado es válido.6. Todas las variables no ubicadas y no remanentes se restablecen a los valores
de inicialización.7. Los valores de los primeros 1.000 registros %MW se restauran si el contexto
guardado es válido.8. Los valores de los registros %MW1000 a %MW59999 se restablecen a 0.9. Se detienen y reinician todas las comunicaciones del bus de campo una vez
cargada la aplicación de arranque correctamente.10.Todas las E/S se restablecen a su valor de inicialización y luego a sus valores
predeterminados configurados por el usuario si el controlador se establece en estado STOPPED (DETENIDO) después del reinicio.
64 EIO0000000388 04/2012

Estados y comportamientos del controlador
Para obtener más información sobre las variables, consulte Variables remanentes (véase página 68).
NOTA: La prueba de comprobación de contexto determina que el contexto es válido si la aplicación y las variables remanentes son las mismas que las definidas por la aplicación de inicio. Las variables remanentes sólo se mantienen si hay suficiente batería.
NOTA: Si suministra alimentación a la entrada Ejecutar/Detener del mismo origen que el controlador, se detectará inmediatamente la pérdida de alimentación de esta entrada y el controlador se comportará como si se hubiera recibido un comando STOP. Así pues, si la alimentación del controlador y de la entrada Ejecutar/Detener proviene de la misma fuente, después de una interrupción de la alimentación el controlador se reiniciará de forma normal en el estado STOPPED (DETENIDO) si Modalidad de inicio se ha establecido en Inicio con el estado anterior.
NOTA: Si realiza un cambio en línea en el programa de aplicación mientras su controlador estén en modo RUNNING (EN EJECUCIÓN) o STOPPED (DETENIDO) pero no actualiza manualmente la aplicación de arranque, el controlador detectará una diferencia en el contexto en el próximo reinicio, las variables remanentes se restablecerán según el comando Reset (frío), y el controlador entrará en estado STOPPED (DETENIDO).
Descarga de la aplicación
Efecto: Carga el ejecutable de la aplicación en la memoria RAM. De manera opcional, crea una aplicación de arranque en la memoria flash.
Condiciones de inicio: Estados RUNNING (EN EJECUCIÓN), STOPPED (DETENIDO), HALT (PARADA) y EMPTY (VACÍO).
Métodos para emitir el comando Descarga de aplicaciones:SoMachine:Hay dos maneras de descargar una aplicación completa:
Comando Descarga:Comando Descarga múltiple.
Para obtener información importante de los comandos de descarga de aplicaciones, consulte el Diagrama del estado del controlador (véase página 46).
Efectos del comando Descarga de SoMachine:1. Se detiene la aplicación actual, y luego se elimina.2. Si es válida, se carga la nueva aplicación y el controlador asume un estado
STOPPED (DETENIDO).3. Se elimina el forzado.4. Se restablecen las indicaciones de diagnóstico de los errores detectados.5. Se restablecen los valores de las variables retentivas a su valor de inicialización.6. Se mantienen los valores de las variables retentivas-persistentes actuales.7. Todas las variables no ubicadas y no remanentes se restablecen a los valores
de inicialización.
EIO0000000388 04/2012 65
Estados y comportamientos del controlador
8. Se mantienen los valores de los primeros 1.000 registros %MW.9. Los valores de los registros %MW1000 a %MW59999 se restablecen a 0.10.Se detienen todas las comunicaciones del bus de campo y se inicia cualquier
bus de campo de la nueva aplicación, una vez descargada.11.Se restablecen todas las E/S a sus valores de inicialización y una vez
completada la descarga se establecen a los valores predeterminados configurados por el usuario.
Para obtener más información sobre las variables, consulte Variables remanentes (véase página 68).
66 EIO0000000388 04/2012

Estados y comportamientos del controlador
Detección, tipos y gestión de errores
Gestión de errores detectados
El controlador gestiona tres tipos de errores detectados:Errores externos detectadosErrores detectados en la aplicaciónErrores detectados en el sistema
En la tabla siguiente se describen los tipos de errores que se pueden detectar:
NOTA: Consulte la Guía de la biblioteca M238 PLCSystem (véase Modicon M238 Logic Controller, Funciones y variables de sistema, Guía de la biblioteca M238 PLCSystem) para obtener más información sobre diagnósticos.
Tipo de error detectado
Descripción Estado resultante del controlador
Error externo detectado
Los errores externos son detectados por el sistema mientras se encuentra en estado RUNNING o STOPPED, pero no afectan al estado en curso del controlador. Un error externo es detectado en los siguientes casos:
El controlador está configurado para un módulo de ampliación que no está presente o que no se detectaLa aplicación de arranque en memoria Flash no es la misma que la que se encuentra en RAM.
RUNNING con un error externo detectadoO bienSTOPPED con un error externo detectado
Error de aplicación detectado
Un error de aplicación se detecta cuando se encuentra una programación incorrecta o cuando se sobrepasa un umbral de watchdog de tarea.Ejemplos:
Excepción de watchdog (de software) de tareaEjecución de una función desconocidaetc.
HALT
Error de sistema detectado
Un error de sistema se detecta cuando el controlador entra en un estado que no puede ser gestionado durante el tiempo de ejecución. La mayoría de estas condiciones son el resultado de excepciones del firmware o el hardware, pero hay algunos casos en que una programación incorrecta puede llevar a la detección de un error de sistema, por ejemplo, al intentar escribir en una memoria que fue reservada durante el tiempo de ejecución. Ejemplos:
Desborde del watchdog (de hardware) del sistemaSuperación del tamaño definido de una matrizetc.
BOOTING → EMPTY
EIO0000000388 04/2012 67

Estados y comportamientos del controlador
Variables remanentes
Variables remanentes
Las variables remanentes pueden conservar sus valores en caso de cortes de alimentación, reinicios, restablecimientos y descargas de programas de aplicaciones. Hay múltiples tipos de variables remanentes, individualmente declaradas como "retentivas" o "persistentes", o colectivamente como "retentivas-persistentes".
Las variables remanentes sólo se conservan si hay suficiente batería (véase M238 Logic Controller, Guía de hardware).
NOTA: Para este controlador, las variables declaradas como persistentes tienen el mismo comportamiento que las variables declaradas como retentivas-persistentes.
La siguiente tabla describe el comportamiento de las variables remanentes en cada caso:
NOTA: Los primeros 1.000 %MW son retenidos y persistentes automáticamente si no hay ninguna variable asociada a ellos (sus valores se mantienen después de un reinicio/reset en caliente/reset en frío). Los demás %MW se administran como VAR.
Por ejemplo, si tiene en el programa:VAR myVariable AT %MW0 : WORD; END_VAR
%MW0 se comporta como myVariable (no retenido y no persistente).
Acción VAR VAR RETAIN VAR PERSISTENT y RETAIN-PERSISTENT
Modificación online de un programa de aplicación
X X X
Detención X X X
Apagado y encendido - X X
Restablecimiento en caliente - X X
Restablecimiento en frío - - X
Restablecimiento de los valores de origen
- - -
Descarga del programa de aplicación
- - X
X El valor se mantiene- El valor se reinicializa
68 EIO0000000388 04/2012

EIO0000000388 04/2012
8
Modicon M238 Logic Controller
Editor de dispositivos de controlador
EIO0000000388 04/2012
Editor de dispositivos de controlador
Introducción
En este capítulo se describe cómo configurar el controlador.
Contenido de este capítulo
Este capítulo contiene los siguiente apartados:
Apartado Página
Parámetros del controlador 70
Aplicaciones 72
Ajustes PLC 73
Servicios 75
69
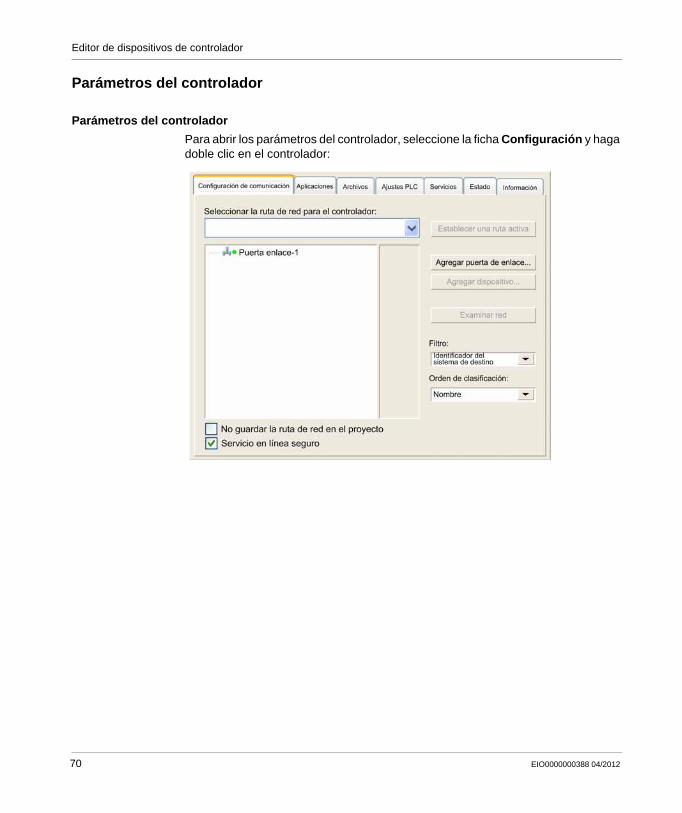
Editor de dispositivos de controlador
Parámetros del controlador
Parámetros del controlador
Para abrir los parámetros del controlador, seleccione la ficha Configuración y haga doble clic en el controlador:
70 EIO0000000388 04/2012

Editor de dispositivos de controlador
Descripciones de las fichas
Para obtener más información, consulte la parte sobre CoDeSys de la ayuda en línea de SoMachine..
Ficha Descripción Restricción
Configuración de comunicación
Permite configurar la conexión entre SoMachine y el controlador.
-
Aplicaciones Muestra la aplicación que se está ejecutando en el controlador y permite eliminar la aplicación del controlador (véase página 72).
Sólo en modalidad online
Archivos Administración de archivos entre el PC y el controlador. Sólo en modalidad online
Ajustes PLC (véase página 73)
Configuración de:nombre de la aplicacióncomportamiento de E/S en detenciónopciones de ciclo de bus
-
Servicios (véase página 75)
Permite configurar los servicios online del controlador (RTC, identificación del dispositivo).
Sólo en modalidad online
Estado Muestra el estado específico del dispositivo y mensajes diagnóstico.
-
Información Muestra información general sobre el dispositivo (nombre, descripción, fabricante, versión, imagen).
-
EIO0000000388 04/2012 71

Editor de dispositivos de controlador
Aplicaciones
Descripción general
En la figura siguiente se muestra la ficha Aplicaciones:
Este cuadro de diálogo permite buscar y eliminar aplicaciones del controlador.
Para obtener más información, consulte la parte sobre CoDeSys de la ayuda en línea de SoMachine..
Elemento Descripción
Aplicaciones del controlador Lista de los nombres de las aplicaciones que se han encontrado en el controlador durante la última búsqueda.
Botones Refresh List Se buscarán aplicaciones en el controlador y se actualizará la lista.
Eliminar La aplicación seleccionada en la lista se eliminará del controlador.
Eliminar todo Se quitarán del controlador todas las aplicaciones.
72 EIO0000000388 04/2012
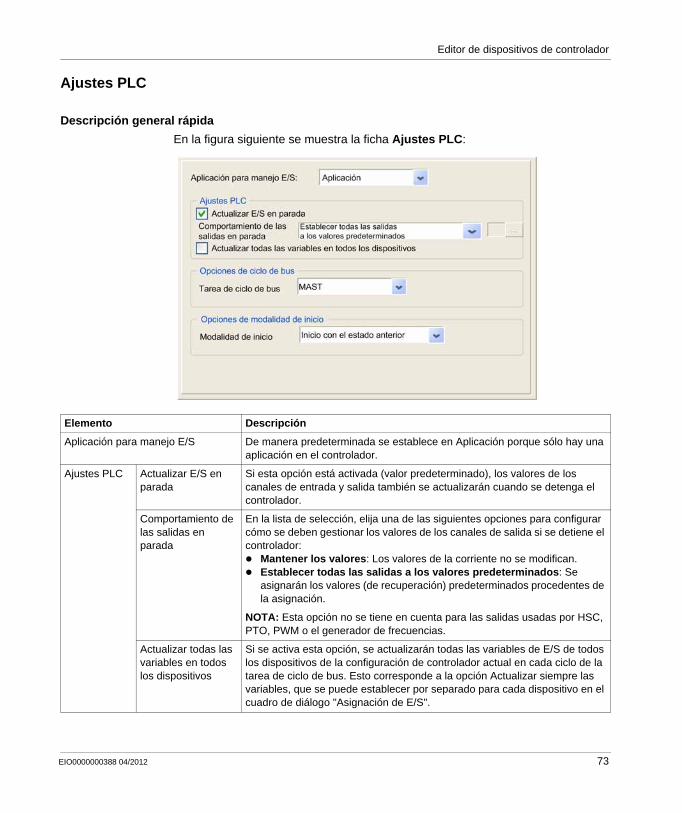
Editor de dispositivos de controlador
Ajustes PLC
Descripción general rápida
En la figura siguiente se muestra la ficha Ajustes PLC:
Elemento Descripción
Aplicación para manejo E/S De manera predeterminada se establece en Aplicación porque sólo hay una aplicación en el controlador.
Ajustes PLC Actualizar E/S en parada
Si esta opción está activada (valor predeterminado), los valores de los canales de entrada y salida también se actualizarán cuando se detenga el controlador.
Comportamiento de las salidas en parada
En la lista de selección, elija una de las siguientes opciones para configurar cómo se deben gestionar los valores de los canales de salida si se detiene el controlador:
Mantener los valores: Los valores de la corriente no se modifican.Establecer todas las salidas a los valores predeterminados: Se asignarán los valores (de recuperación) predeterminados procedentes de la asignación.
NOTA: Esta opción no se tiene en cuenta para las salidas usadas por HSC, PTO, PWM o el generador de frecuencias.
Actualizar todas las variables en todos los dispositivos
Si se activa esta opción, se actualizarán todas las variables de E/S de todos los dispositivos de la configuración de controlador actual en cada ciclo de la tarea de ciclo de bus. Esto corresponde a la opción Actualizar siempre las variables, que se puede establecer por separado para cada dispositivo en el cuadro de diálogo "Asignación de E/S".
EIO0000000388 04/2012 73
Editor de dispositivos de controlador
Opciones de ciclo de bus
Tarea de ciclo de bus
Este ajuste de configuración es el principal de todos los parámetros de Tarea de ciclo de bus utilizados en el árbol de dispositivos de la aplicación.Algunos dispositivos con llamadas cíclicas, como el Administrador CANopen, se pueden adjuntar a una tarea específica. En el dispositivo, cuando este ajuste se establece en Emplear configuración de ciclo del bus de orden superior, se utiliza el ajuste establecido para el controlador.La lista de selección ofrece todas las tareas definidas actualmente en la aplicación activa. El valor predeterminado es la tarea MAST.NOTA: <Sin especificar> significa que la tarea está en la modalidad de "tarea cíclica más lenta".
Opciones de modalidad de inicio
Modalidad de inicio Esta opción define la modalidad de inicio al arrancar; para obtener más información, consulte el Diagrama de funcionamiento del estado (véase página 46).)Seleccione mediante esta opción una de las siguientes modalidades:
Inicio con el estado anteriorInicio en paradaInicio en ejecución
Elemento Descripción
74 EIO0000000388 04/2012
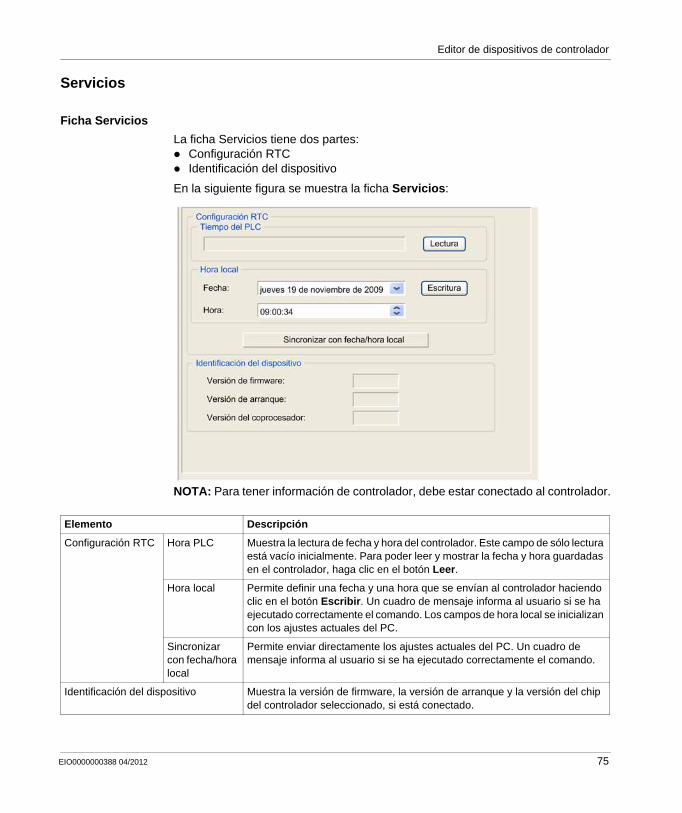
Editor de dispositivos de controlador
Servicios
Ficha Servicios
La ficha Servicios tiene dos partes: Configuración RTC Identificación del dispositivo
En la siguiente figura se muestra la ficha Servicios:
NOTA: Para tener información de controlador, debe estar conectado al controlador.
Elemento Descripción
Configuración RTC Hora PLC Muestra la lectura de fecha y hora del controlador. Este campo de sólo lectura está vacío inicialmente. Para poder leer y mostrar la fecha y hora guardadas en el controlador, haga clic en el botón Leer.
Hora local Permite definir una fecha y una hora que se envían al controlador haciendo clic en el botón Escribir. Un cuadro de mensaje informa al usuario si se ha ejecutado correctamente el comando. Los campos de hora local se inicializan con los ajustes actuales del PC.
Sincronizar con fecha/hora local
Permite enviar directamente los ajustes actuales del PC. Un cuadro de mensaje informa al usuario si se ha ejecutado correctamente el comando.
Identificación del dispositivo Muestra la versión de firmware, la versión de arranque y la versión del chip del controlador seleccionado, si está conectado.
EIO0000000388 04/2012 75

Editor de dispositivos de controlador
76 EIO0000000388 04/2012

EIO0000000388 04/2012
9
Modicon M238 Logic Controller
Funciones incrustadas de M238
EIO0000000388 04/2012
Funciones incrustadas de M238
Descripción general
En este capítulo se describen las funciones incrustadas de Modicon M238 Logic Controller.
Cada función incrustada utiliza entradas y salidas.
El Modicon M238 Logic Controller con fuente de alimentación de CC cuenta con:14 entradas digitales, incluidas 8 entradas rápidas (véase M238 Logic Controller, Guía de hardware)10 salidas digitales, incluidas 4 salidas rápidas (véase M238 Logic Controller, Guía de hardware)
El Modicon M238 Logic Controller con fuente de alimentación de CA cuenta con:14 entradas digitales, incluidas 8 entradas rápidas (véase M238 Logic Controller, Guía de hardware)10 salidas digitales, incluidas 6 salidas de relé (véase M238 Logic Controller, Guía de hardware)
Contenido de este capítulo
Este capítulo contiene los siguiente apartados:
Apartado Página
Función HSC incrustada 78
Función de E/S integradas 81
Función HSC integrada 85
77

Funciones incrustadas de M238
Función HSC incrustada
Descripción general
La función HSC puede ejecutar el conteo rápido de pulsos a partir de sensores, codificadores, conmutadores, etc. que están conectados a entradas rápidas dedicadas.
Existen dos tipos de HSC:Tipo Simple un contador de entrada individual (véase M238 Logic Controller, Guía de hardware).Tipo Principal: un contador que usa hasta 4 entradas rápidas y 2 salidas reflejas. (véase M238 Logic Controller, Guía de hardware)
Acceso a la ventana de configuración de HSC
Siga estos pasos para acceder a la ventana de configuración de HSC incrustada:
Paso Descripción
1 Seleccione la ficha Configuración:
2 Haga doble clic en el controlador.NOTA: También puede hacer clic con el botón derecho en el controlador que desee y seleccionar Editar parámetros del dispositivo.
3 En el panel Tareas, haga clic en Funciones incrustadas → HSC:
78 EIO0000000388 04/2012

Funciones incrustadas de M238
Ventana Configuración de HSC
La figura siguiente muestra una ventana de configuración de HSC de ejemplo usada para configurar el HSC:
En la siguiente tabla se describen las áreas de la ventana de configuración de HSC:
Número Acción
1 Seleccione la ficha HSC para acceder a cada una de las ventanas de configuración de HSC.
2 Seleccione una ficha HSC específica para acceder al canal de HSC que necesite configurar.
3 Tras elegir el tipo de HSC (simple o principal) que desee, utilice el campo Variable para cambiar la instancia.
4 Puede ampliar cada parámetro haciendo clic en el signo más que hay junto a él para acceder a sus ajustes.
EIO0000000388 04/2012 79

Funciones incrustadas de M238
Para obtener información detallada acerca de los parámetros de configuración, consulte Matriz de opción de HSC de M238 (véase Modicon M238 Logic Controller, Contador de alta velocidad, Guía de la biblioteca M238 HSC ).
5 Ventana de configuración en la que se definen los parámetros de HSC según la modalidad usada.
6 Al hacer clic en el botón Resumen E/S, aparece la ventana Resumen de E/S. Permite comprobar la asignación de E/S configurada.
Número Acción
80 EIO0000000388 04/2012

Funciones incrustadas de M238
Función de E/S integradas
Descripción general
La función de E/S incrustada permite configurar las entradas del controlador.
Las entradas incrustadas constan de 8 entradas rápidas y 6 entradas estándar.
Las 8 entradas rápidas tienen los nombres I0 a I7 y las 6 entradas estándar tienen los nombres I8 a I13.
Acceso a la ventana de configuración de E/S
Siga estos pasos para acceder a la ventana de configuración de E/S incrustada:
Paso Descripción
1 Seleccione la ficha Configuración:
2 Haga doble clic en el controlador.NOTA: También puede hacer clic con el botón derecho en el controlador que desee y seleccionar Editar parámetros del dispositivo.
3 En el panel Tareas, haga clic en Funciones incrustadas → E/S:
EIO0000000388 04/2012 81

Funciones incrustadas de M238
Ventana de configuración de E/S
En la siguiente ventana se pueden configurar las entradas digitales incrustadas:
NOTA: Para obtener más información en la ficha Asignación E/S, consulte la parte sobre CoDeSys de la ayuda en línea de SoMachine..
82 EIO0000000388 04/2012

Funciones incrustadas de M238
Al hacer clic en el botón Resumen E/S, aparece la ventana Resumen de E/S. Permite comprobar la asignación de E/S configurada:
Parámetros de configuración
En cada entrada digital puede configurar los parámetros siguientes:
Parámetro Valor Descripción Restricción
Filtrado No*1,5 ms4 ms12 ms
Reduce el efecto de ruido de una entrada del controlador.
Disponible si la retención y el evento están deshabilitados.En los demás casos, este parámetro está deshabilitado y su valor es No.
Retención No*Sí
Permite capturar y registrar pulsos entrantes con anchos de amplitud más breves que el tiempo de exploración del controlador.
Este parámetro sólo está disponible para las entradas rápidas I0 a I7.Disponible si:Evento está deshabilitado Y Run/Stop está deshabilitado.
Evento No*Flanco ascendenteFlanco descendenteAmbos flancos
Detección de eventos Este parámetro sólo está disponible para las entradas rápidas I0 a I7.Disponible si:Retener está deshabilitado Y Run/Stop está deshabilitado.
EIO0000000388 04/2012 83

Funciones incrustadas de M238
NOTA: La selección está en gris e inactiva si el parámetro no está disponible.
Filtro de rebote
0,004 ms*0,4 ms1,2 ms4 ms
Reduce el efecto de rebote de una entrada del controlador.
Disponible si Retener está habilitado o Evento está habilitado.En los demás casos, este parámetro está deshabilitado y su valor es 0,004.
Run/Stop No*Sí
La entrada Run/Stop puede usarse para ejecutar o detener un programa en el controlador
Cualquiera de las entradas puede configurarse como Run/Stop, pero sólo una a la vez.
* valor predeterminado del parámetro
Parámetro Valor Descripción Restricción
84 EIO0000000388 04/2012

Funciones incrustadas de M238
Función HSC integrada
Descripción general
La función PTO integrada puede proporcionar 3 funciones diferentes:PTO La PTO (Salida de tren de pulsos) implementa tecnología digital (véase M238
Logic Controller, Guía de hardware) que proporciona un posicionamiento preciso para el control de bucle abierto de las unidades de motor.
PWM La función PWM (Modulación de ancho de pulsos) genera una señal de onda cuadrada programable en una salida dedicada (véase M238 Logic Controller, Guía de hardware) con un ciclo de servicio y una frecuencia ajustables.
FG La función FG (Generador de frecuencias) genera una señal de onda cuadrada en canales de salida dedicados (véase M238 Logic Controller, Guía de hardware) con un ciclo de servicio fijo (50%).
Acceso a la ventana de configuración de PTO_PWM
Siga estos pasos para acceder a la ventana de configuración de la función incrustada PTO_PWM:
Paso Descripción
1 Seleccione la ficha Configuración:
2 Haga doble clic en el controlador.NOTA: También puede hacer clic con el botón derecho en el controlador que desee y seleccionar Editar parámetros del dispositivo.
3 En el panel Tareas, haga clic en Funciones incrustadas → PTO_PWM:
EIO0000000388 04/2012 85
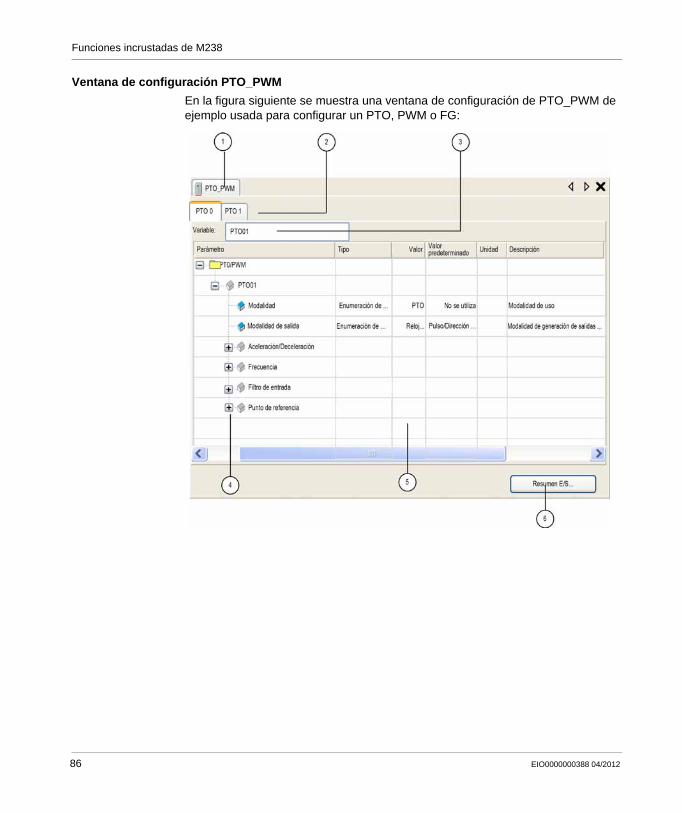
Funciones incrustadas de M238
Ventana de configuración PTO_PWM
En la figura siguiente se muestra una ventana de configuración de PTO_PWM de ejemplo usada para configurar un PTO, PWM o FG:
86 EIO0000000388 04/2012

Funciones incrustadas de M238
En la siguiente tabla se describen las áreas de la ventana de configuración de PTO_PWM:
Si desea información detallada sobre los parámetros de configuración, consulte:Configuración de PTO. (véase Modicon M238 Logic Controller, Salida de tren de pulsos, modulación de ancho de pulsos, Guía de la biblioteca M238 PTOPWM)Configuración de PWM y FG. (véase Modicon M238 Logic Controller, Salida de tren de pulsos, modulación de ancho de pulsos, Guía de la biblioteca M238 PTOPWM)
Número Acción
1 Seleccione la ficha PTO_PWM para acceder a cada una de las ventanas de configuración de PTO_PWM.
2 Seleccione una ficha PTO específica para acceder al canal de PTO_PWM que necesite configurar.
3 Después de elegir el tipo de PTO_PWM (PTO, PWM o Generador de frecuencias) que desee, use el campo Variable para cambiar el nombre de la instancia.
4 Puede ampliar cada parámetro haciendo clic en el signo más que hay junto a él para acceder a sus ajustes.
5 Ventana de configuración en la que la función integrada se usa para:una PTO (véase Modicon M238 Logic Controller, Salida de tren de pulsos, modulación de ancho de pulsos, Guía de la biblioteca M238 PTOPWM)un PWM (véase Modicon M238 Logic Controller, Salida de tren de pulsos, modulación de ancho de pulsos, Guía de la biblioteca M238 PTOPWM)un Generador de frecuencias (véase Modicon M238 Logic Controller, Salida de tren de pulsos, modulación de ancho de pulsos, Guía de la biblioteca M238 PTOPWM)
6 Al hacer clic en el botón Resumen E/S, aparece la ventana Resumen de E/S. Permite comprobar la asignación de E/S configurada.
EIO0000000388 04/2012 87

Funciones incrustadas de M238
88 EIO0000000388 04/2012
EIO0000000388 04/2012
10
Modicon M238 Logic Controller
Configuración de módulos de ampliación
EIO0000000388 04/2012
Configuración de módulos de ampliación
Descripción general
Introducción
En su proyecto puede añadir los siguientes tipos de módulos de ampliación al controlador:
digitalanalógicoespecializado (p. ej. HSC)
Utilice la GetRightBusStatus (véase Modicon M238 Logic Controller, Funciones y variables de sistema, Guía de la biblioteca M238 PLCSystem) función periódicamente para supervisar el estado del bus de ampliación.
TM2Configuración del módulo de ampliación
Para obtener más información acerca de la configuración del módulo, consulte las guías de hardware y programación de cada tipo de módulo de ampliación:
Módulo de ampliación Guía de programación Guía de hardware
TM2 Módulos de E/S digitales TM2 Configuración de módulos de E/S Guía de programación (véase Modicon TM2, Configuración de módulos de ampliación , Guía de programación)
TM2 Módulos de E/S digitales Guía de hardware (véase Modicon TM2, Módulos de E/S digitales, Guía de hardware)
TM2 Módulos de E/S analógicas TM2 Configuración de módulos de E/S Guía de programación (véase Modicon TM2, Configuración de módulos de ampliación , Guía de programación)
TM2 Módulos de E/S analógicas Guía de hardware (véase Modicon TM2, Módulos de E/S analógicas, Guía de hardware)
89
Configuración de módulos de ampliación
Configuración máxima de hardware
Se pueden añadir hasta siete módulos de ampliación al controlador.
TM2 Módulos de conteo de alta velocidad
TM2 Configuración de módulos de E/S Guía de programación (véase Modicon TM2, Configuración de módulos de ampliación , Guía de programación)
TM2 Módulos de contador de alta velocidad Guía de hardware (véase Modicon TM2, Módulos de contador de alta velocidad, Guía de hardware)
Módulo de comunicaciones AS-Interface
Modicon M238 Logic Controller Guía de programación (véase página 96)
Módulo de comunicación del maestro AS-Interface - Guía de hardware (véase Modicon TWDNOI10M3, Módulo maestro AS-Interface, Guía de hardware)
Módulo de ampliación Guía de programación Guía de hardware
90 EIO0000000388 04/2012
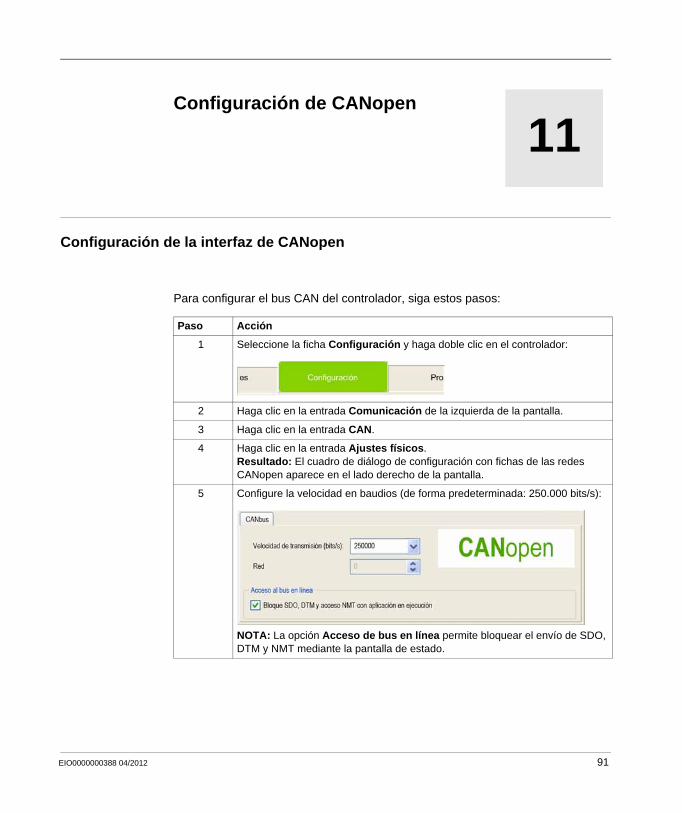
EIO0000000388 04/2012
11
Modicon M238 Logic Controller
Configuración de CANopen
EIO0000000388 04/2012
Configuración de CANopen
Configuración de la interfaz de CANopen
Para configurar el bus CAN del controlador, siga estos pasos:
Paso Acción
1 Seleccione la ficha Configuración y haga doble clic en el controlador:
2 Haga clic en la entrada Comunicación de la izquierda de la pantalla.
3 Haga clic en la entrada CAN.
4 Haga clic en la entrada Ajustes físicos.Resultado: El cuadro de diálogo de configuración con fichas de las redes CANopen aparece en el lado derecho de la pantalla.
5 Configure la velocidad en baudios (de forma predeterminada: 250.000 bits/s):
NOTA: La opción Acceso de bus en línea permite bloquear el envío de SDO, DTM y NMT mediante la pantalla de estado.
91
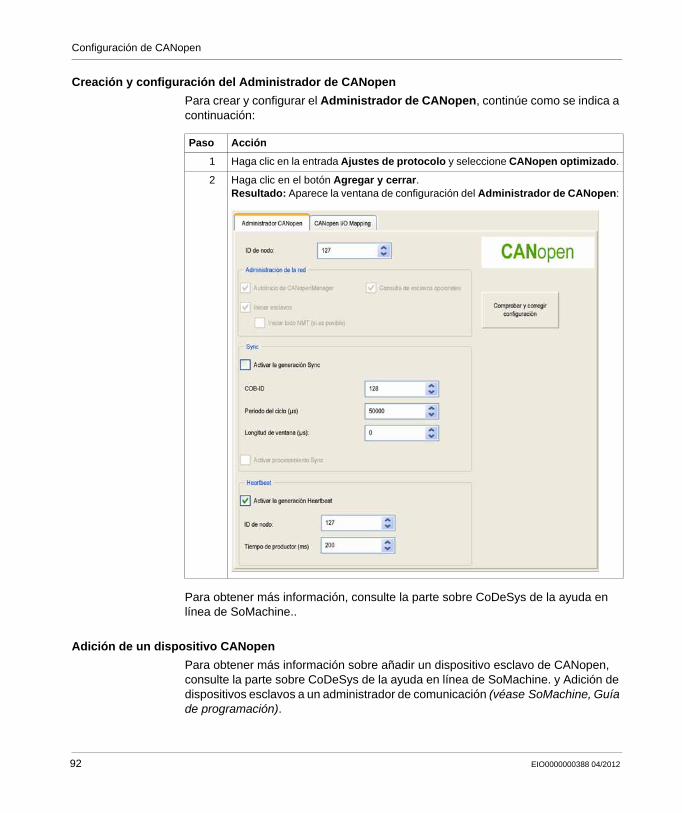
Configuración de CANopen
Creación y configuración del Administrador de CANopen
Para crear y configurar el Administrador de CANopen, continúe como se indica a continuación:
Para obtener más información, consulte la parte sobre CoDeSys de la ayuda en línea de SoMachine..
Adición de un dispositivo CANopen
Para obtener más información sobre añadir un dispositivo esclavo de CANopen, consulte la parte sobre CoDeSys de la ayuda en línea de SoMachine. y Adición de dispositivos esclavos a un administrador de comunicación (véase SoMachine, Guía de programación).
Paso Acción
1 Haga clic en la entrada Ajustes de protocolo y seleccione CANopen optimizado.
2 Haga clic en el botón Agregar y cerrar.Resultado: Aparece la ventana de configuración del Administrador de CANopen:
92 EIO0000000388 04/2012
Configuración de CANopen
Límites de funcionamiento de CANopen
El maestro de CANopen de Modicon M238 Logic Controller tiene los siguientes límites de funcionamiento.
Número máximo de dispositivos esclavos 16
Número máximo de PDO recibidos (RPDO) 32
Número máximo de PDO transmitidos (TPDO) 32
ADVERTENCIAFUNCIONAMIENTO IMPREVISTO DEL EQUIPO
No conecte más de 16 dispositivos esclavos CANopen al controladorPrograme la aplicación para que utilice 32, o menos, PDO de transmisión (TPDO)Programe la aplicación para que utilice 32, o menos, PDO de recepción (RPDO)
El incumplimiento de estas instrucciones puede causar la muerte, lesiones serias o daño al equipo.
EIO0000000388 04/2012 93

Configuración de CANopen
94 EIO0000000388 04/2012
EIO0000000388 04/2012
12
Modicon M238 Logic Controller
Configuración de AS-Interface
EIO0000000388 04/2012
Configuración de AS-Interface
Descripción general
En este capítulo se muestra cómo configurar y utilizar el módulo maestro AS-Interface y sus limitaciones.
Contenido de este capítulo
Este capítulo contiene los siguiente apartados:
Apartado Página
Presentación del bus de campo AS-Interface V2 96
Descripción funcional general 97
Principios de configuración del software 100
Añadir un módulo maestro AS-Interface 102
Configurar un maestro AS-Interface 104
Adición de un esclavo de AS-Interface 107
Configuración de un esclavo de AS-Interface 116
Direccionamiento automático de un esclavo de AS-Interface V2 120
Modificación de una dirección de esclavo 122
Diagnóstico del sistema en la modalidad en línea 125
Programación del bus de campo AS-Interface V2 129
Configuración de un esclavo AS-Interface V2 reemplazado 130
95

Configuración de AS-Interface
Presentación del bus de campo AS-Interface V2
Introducción
El bus de campo AS-Interface (Actuator Sensor-Interface) permite conectar, mediante un cable único, sensores y actuadores en el nivel más bajo de la automatización.
Estos sensores/actuadores se definirán en esta documentación como dispositivos esclavos.
NOTA: Para obtener más información sobre el módulo de ampliación TWDNOI10M3 consulte la publicación TWDNOI10M3 Módulo de comunicación - Guía de hardware (véase Modicon TWDNOI10M3, Módulo maestro AS-Interface, Guía de hardware)
NOTA: Todos los términos y definiciones utilizados en este capítulo y en todo el documento y que están relacionados con AS-Interface son los mismos que se han definido en la versión 2.11 de la Especificación de la asociación de AS-Interface.
Bus de campo AS-Interface V2
El módulo de ampliación TWDNOI10M3 del módulo maestro AS-Interface incluye las siguientes funciones:
Perfil M3: Este perfil incluye todas las funciones que define el estándar AS-Interface V2Un canal AS-Interface por móduloDireccionamiento automático para el esclavo con la dirección física establecida en 0Gestión de perfiles y parámetrosProtección contra la inversión de polaridad en las entradas del bus
El bus de campo AS-Interface admite:
Hasta 31 esclavos de dirección estándar o 62 de dirección ampliadaHasta 248 entradas y 186 salidasHasta 8 esclavos analógicos (un máximo de cuatro canales analógicos por esclavo)Un tiempo de ciclo de 10 ms como máximo
Se puede conectar un máximo de 2 módulos de ampliación TWDNOI10M3 a un M238.
96 EIO0000000388 04/2012

Configuración de AS-Interface
Descripción funcional general
Introducción general
En la configuración AS-Interface, el software SoMachine permite al usuario:
Configurar el bus (declaración de los esclavos y atribución de las direcciones en el bus) de forma manual.Configure automáticamente en bus (mediante el comando Examinar red y Copiar en el proyecto) Adaptar la configuración según la que se encuentra presente en el bus.Tener en cuenta los parámetros de los esclavos.Controlar el estado del bus.
Estructura del master AS-Interface
El módulo AS-Interface integrado incluye campos de datos que permiten gestionar listas de esclavos e imágenes de datos de entrada/salida.
La figura siguiente muestra la arquitectura del módulo TWDNOI10M3.
EIO0000000388 04/2012 97

Configuración de AS-Interface
En la tabla siguiente se describe el campo de datos almacenado en la memoria volátil:
Estructura de los dispositivos esclavos
Cada uno de los esclavos de direccionamiento estándar cuenta con:
4 bits de entrada/salida4 bits de parámetros
Cada uno de los esclavos de direccionamiento ampliado cuenta con:
4 bits de entrada/salida (último bit destinado sólo a las entradas)3 bits de parámetros
Cada esclavo posee su propia dirección, así como un perfil y un subperfil (definición del intercambio de variables).
Dirección Elemento Descripción
1 Datos de E/S(IDI, ODI)
Imagen de datos de entrada/salidaImágenes de 248 entradas y 186 salidas de bus de campo AS-Interface V2, configuradas en SoMachine y detectadas en el bus.
2 Parámetros actuales(PI, PP)
Imagen de parámetro / Parámetro permanente.Imagen de los parámetros de todos los esclavos.
3 Configuración/Identificación(CDI, PCD)
Este campo contiene todos los códigos de E/S y los códigos de identificación de todos los esclavos detectados.
4 LDS Lista de esclavos detectados.Lista de todos los esclavos detectados en el bus de campo.
5 LAS Lista de esclavos activos.Lista de los esclavos activados en el bus de campo.
6 LPS Lista de esclavos proyectados.Lista de esclavos configurados conSoMachine.
7 LPF Lista de fallos de periféricos.Lista de esclavos que han generado errores periféricos.
98 EIO0000000388 04/2012

Configuración de AS-Interface
En la siguiente figura se presenta la estructura de un esclavo de dirección extendida:
En la tabla siguiente se describen los datos de la estructura:
Dirección Elemento Descripción
1 Datos de entrada/salida
El esclavo almacena los datos de entrada y los pone a disposición del master AS-Interface.El módulo maestro actualiza los datos de salida.
2 Parámetros Los parámetros se utilizan para controlar y cambiar las modalidades de funcionamiento internas del sensor o el accionador.
3 Configuración/Identificación
Este campo contiene:el código de configuración E/S (Código E/S)el código de identificación del esclavo (código ID)los códigos de identificación ampliados del esclavo (códigos ID1 e ID2)
4 Dirección Dirección física del esclavo.
Nota: Los parámetros operativos, la dirección, la configuración y los datos de identificación se guardan en una memoria no volátil.
EIO0000000388 04/2012 99
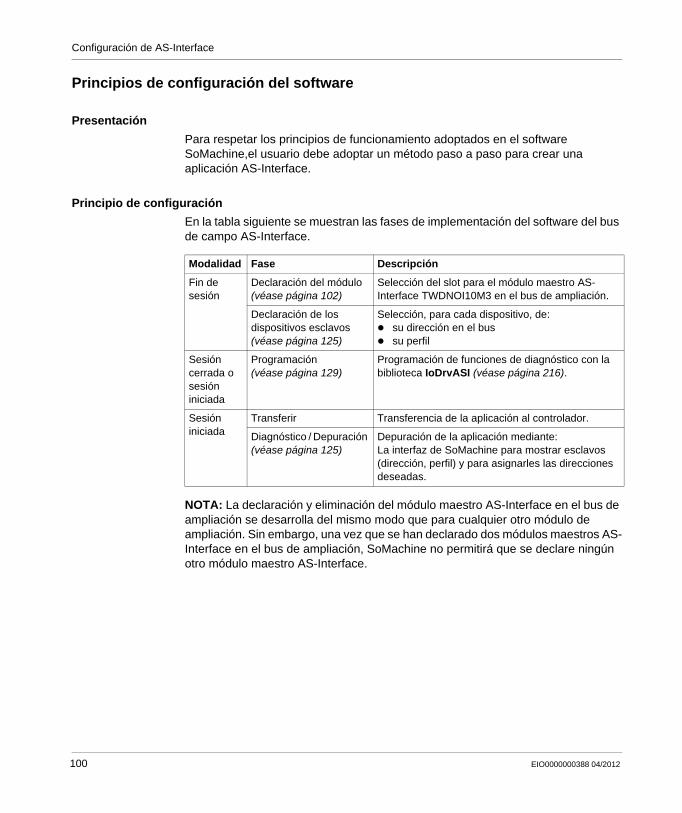
Configuración de AS-Interface
Principios de configuración del software
Presentación
Para respetar los principios de funcionamiento adoptados en el software SoMachine,el usuario debe adoptar un método paso a paso para crear una aplicación AS-Interface.
Principio de configuración
En la tabla siguiente se muestran las fases de implementación del software del bus de campo AS-Interface.
NOTA: La declaración y eliminación del módulo maestro AS-Interface en el bus de ampliación se desarrolla del mismo modo que para cualquier otro módulo de ampliación. Sin embargo, una vez que se han declarado dos módulos maestros AS-Interface en el bus de ampliación, SoMachine no permitirá que se declare ningún otro módulo maestro AS-Interface.
Modalidad Fase Descripción
Fin de sesión
Declaración del módulo (véase página 102)
Selección del slot para el módulo maestro AS-Interface TWDNOI10M3 en el bus de ampliación.
Declaración de los dispositivos esclavos (véase página 125)
Selección, para cada dispositivo, de:su dirección en el bussu perfil
Sesión cerrada o sesión iniciada
Programación (véase página 129)
Programación de funciones de diagnóstico con la biblioteca IoDrvASI (véase página 216).
Sesión iniciada
Transferir Transferencia de la aplicación al controlador.
Diagnóstico / Depuración (véase página 125)
Depuración de la aplicación mediante:La interfaz de SoMachine para mostrar esclavos (dirección, perfil) y para asignarles las direcciones deseadas.
100 EIO0000000388 04/2012

Configuración de AS-Interface
Consideraciones anteriores a la conexión
Debe asegurarse de que todos los esclavos tengan una dirección exclusiva. Además, la dirección 0 está reservada para la modalidad de direccionamiento automático. Si en el arranque se detecta en el bus la presencia de un esclavo con la dirección 0, el maestro cambiará a la fase offline e intentará reiniciar. Debe asegurarse de que todas las direcciones sean exclusivas y de que ninguna sea 0.
ADVERTENCIAFUNCIONAMIENTO IMPREVISTO DEL EQUIPO
Asegúrese de que cada esclavo tenga una dirección exclusiva mayor que 0.
El incumplimiento de estas instrucciones puede causar la muerte, lesiones serias o daño al equipo.
EIO0000000388 04/2012 101
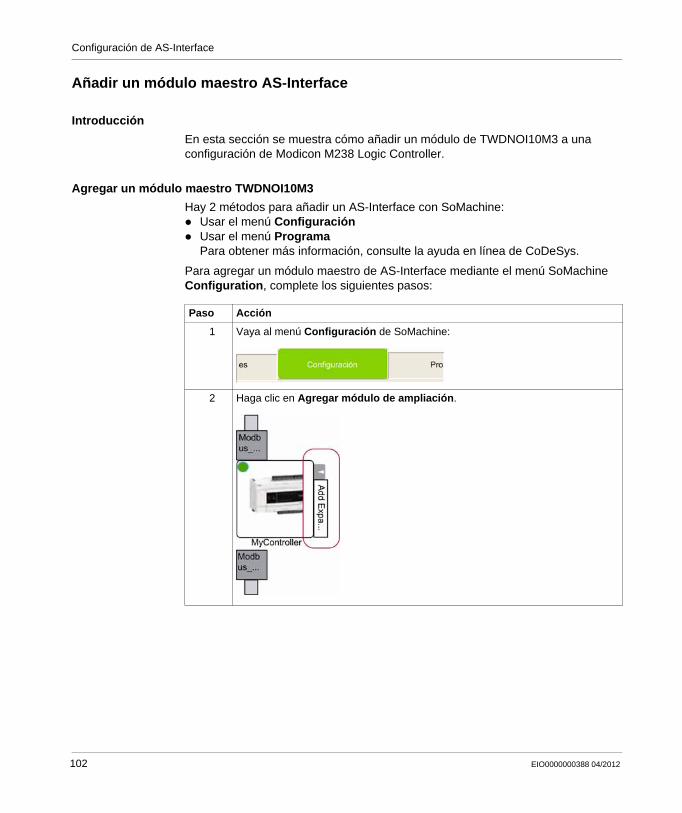
Configuración de AS-Interface
Añadir un módulo maestro AS-Interface
Introducción
En esta sección se muestra cómo añadir un módulo de TWDNOI10M3 a una configuración de Modicon M238 Logic Controller.
Agregar un módulo maestro TWDNOI10M3
Hay 2 métodos para añadir un AS-Interface con SoMachine:Usar el menú ConfiguraciónUsar el menú ProgramaPara obtener más información, consulte la ayuda en línea de CoDeSys.
Para agregar un módulo maestro de AS-Interface mediante el menú SoMachine Configuration, complete los siguientes pasos:
Paso Acción
1 Vaya al menú Configuración de SoMachine:
2 Haga clic en Agregar módulo de ampliación.
102 EIO0000000388 04/2012

Configuración de AS-Interface
3 En el campo Fabricante, seleccione Schneider Electric.Haga clic en Módulos de ampliación de comunicaciones → TWDNOI10M3.Haga clic en el botón Agregar y cerrar.
Paso Acción
EIO0000000388 04/2012 103

Configuración de AS-Interface
Configurar un maestro AS-Interface
Introducción
En esta sección se muestra cómo configurar un maestro AS-Interface.
Acceso a la ventana de configuración
Existen 2 métodos para acceder a la ventana de configuración del módulo maestro de AS-Interface:
Usar el menú ConfiguraciónUsar el menú ProgramaPara obtener más información, consulte la ayuda en línea de CoDeSys.
NOTA: Sólo es distinto el método de acceso. En ambos casos, obtendrá la misma ventana de configuración.
Para acceder a la ventana de configuración mediante el menú SoMachine Configuración, complete los siguientes pasos:
Paso Acción
1 Vaya al menú Configuración de SoMachine:
2 Haga doble clic en el controlador y seleccione Comunicación → Dispositivo maestro ASi → Ajustes físicos en el panel del menú del software SoMachine:
104 EIO0000000388 04/2012
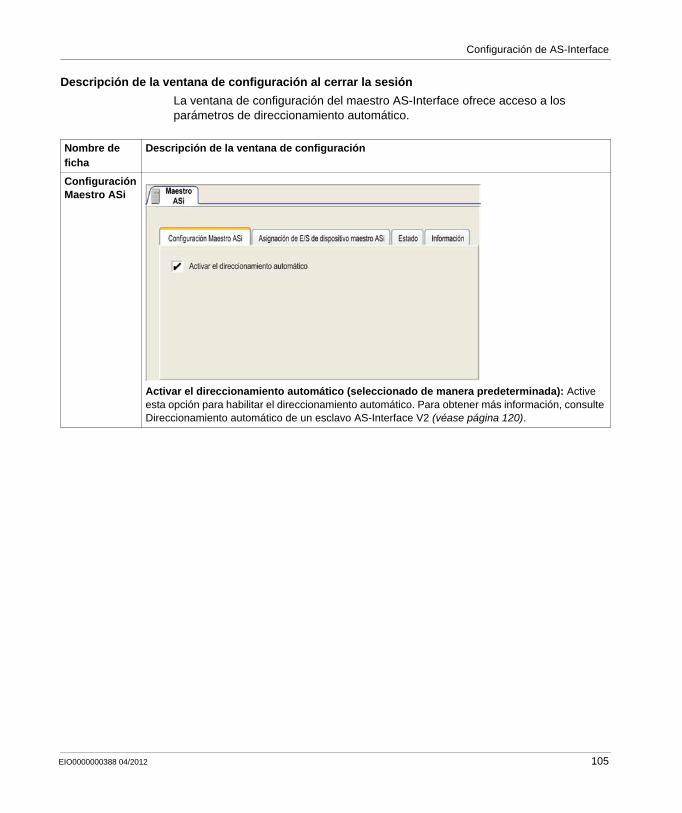
Configuración de AS-Interface
Descripción de la ventana de configuración al cerrar la sesión
La ventana de configuración del maestro AS-Interface ofrece acceso a los parámetros de direccionamiento automático.
Nombre de ficha
Descripción de la ventana de configuración
Configuración Maestro ASi
Activar el direccionamiento automático (seleccionado de manera predeterminada): Active esta opción para habilitar el direccionamiento automático. Para obtener más información, consulte Direccionamiento automático de un esclavo AS-Interface V2 (véase página 120).
EIO0000000388 04/2012 105
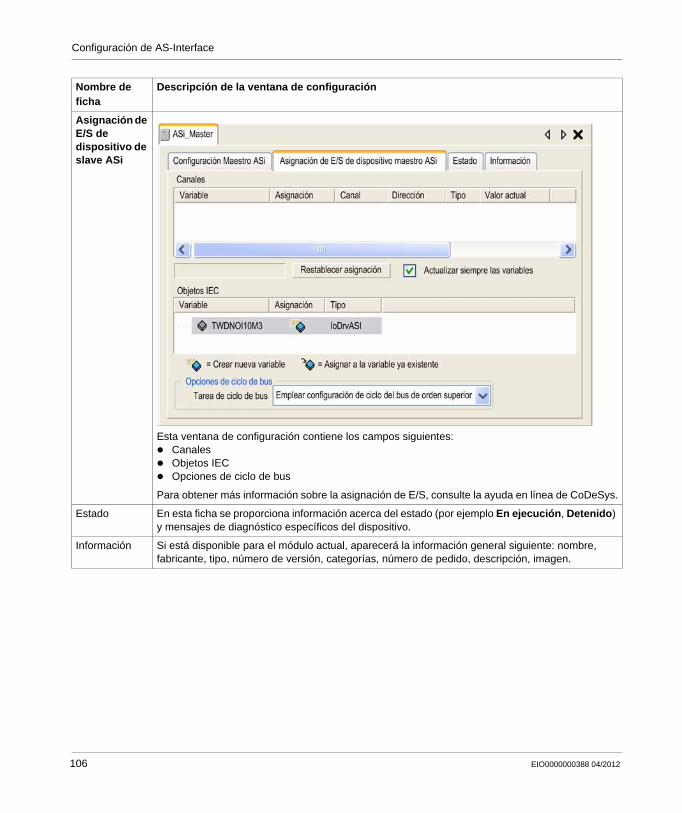
Configuración de AS-Interface
Asignación de E/S de dispositivo de slave ASi
Esta ventana de configuración contiene los campos siguientes:CanalesObjetos IECOpciones de ciclo de bus
Para obtener más información sobre la asignación de E/S, consulte la ayuda en línea de CoDeSys.
Estado En esta ficha se proporciona información acerca del estado (por ejemplo En ejecución, Detenido) y mensajes de diagnóstico específicos del dispositivo.
Información Si está disponible para el módulo actual, aparecerá la información general siguiente: nombre, fabricante, tipo, número de versión, categorías, número de pedido, descripción, imagen.
Nombre de ficha
Descripción de la ventana de configuración
106 EIO0000000388 04/2012
Configuración de AS-Interface
Adición de un esclavo de AS-Interface
Introducción
En esta sección se muestra cómo añadir uno o más dispositivos esclavos a un módulo de TWDNOI10M3.
Existen 3 métodos para añadir un dispositivo esclavo a un módulo maestro AS-Interface:
Catálogo: al utilizar dispositivos eléctricos de SchneiderEsclavo genérico: al utilizar dispositivos de tercerosBuscar dispositivos: configura rápida y fácilmente un bus ya existente
NOTA: Durante la configuración, puede utilizar los pasos de cada uno de estos métodos.
Adición de un dispositivo esclavo con el catálogo de software de SoMachine.
En el catálogo de SoMachine se enumeran los dispositivos esclavos de AS-Interface de Schneider Electric por su nombre de referencia.
NOTA: El perfil de cada dispositivo esclavo está preconfigurado y no se puede modificar.
El procedimiento siguiente muestra cómo añadir dispositivos esclavos mediante el catálogo del software de SoMachine.
Paso Acción
1 Vaya al menú Programa de SoMachine:
EIO0000000388 04/2012 107
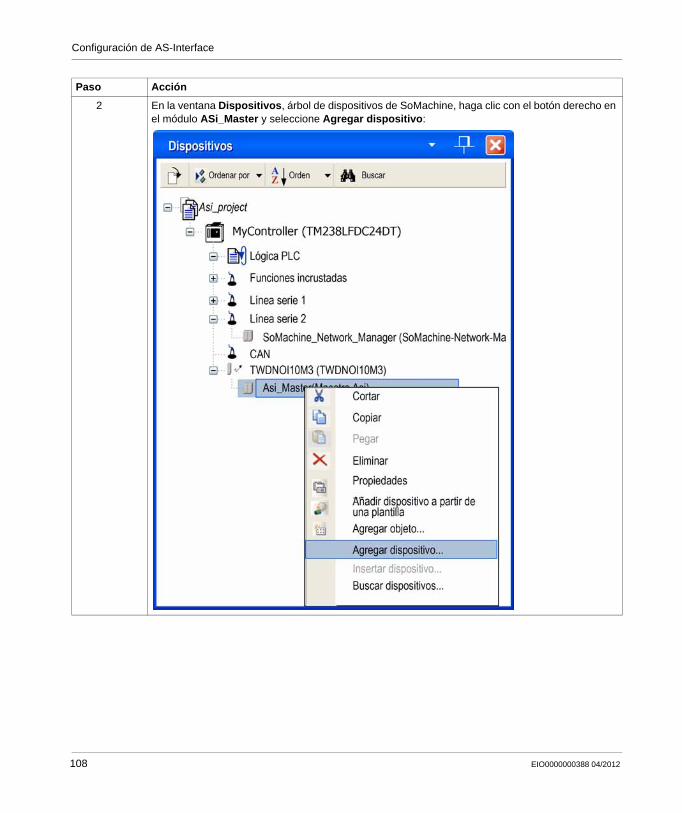
Configuración de AS-Interface
2 En la ventana Dispositivos, árbol de dispositivos de SoMachine, haga clic con el botón derecho en el módulo ASi_Master y seleccione Agregar dispositivo:
Paso Acción
108 EIO0000000388 04/2012
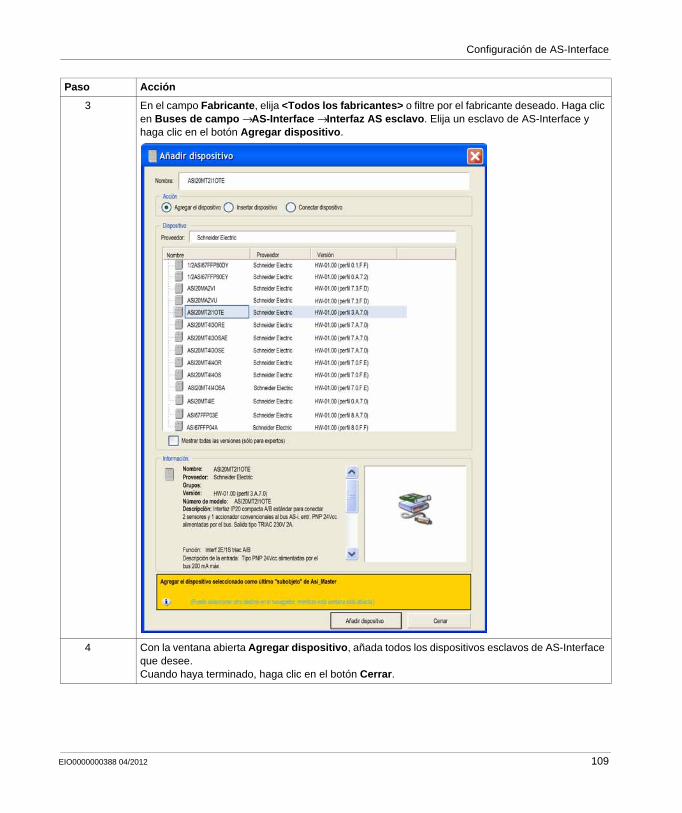
Configuración de AS-Interface
3 En el campo Fabricante, elija <Todos los fabricantes> o filtre por el fabricante deseado. Haga clic en Buses de campo → AS-Interface → Interfaz AS esclavo. Elija un esclavo de AS-Interface y haga clic en el botón Agregar dispositivo.
4 Con la ventana abierta Agregar dispositivo, añada todos los dispositivos esclavos de AS-Interface que desee.Cuando haya terminado, haga clic en el botón Cerrar.
Paso Acción
EIO0000000388 04/2012 109
Configuración de AS-Interface
Adición de un dispositivo esclavo con el comando Buscar dispositivos
El comando Buscar dispositivos buscará todos los dispositivos esclavos de AS-Interface conectados al módulo maestro de TWDNOI10M3. Esta función requiere que el módulo maestro esté configurado antes de ejecutar el comando Buscar dispositivos.
El procedimiento siguiente muestra cómo añadir dispositivos esclavos mediante comando Buscar dispositivos del software de SoMachine.
Paso Acción
1 Iniciar sesión en el controlador.NOTA: En este paso sólo la configuración del bus que incluye el módulo maestro debe configurarse correctamente. No se necesita ningún programa de aplicación.
110 EIO0000000388 04/2012
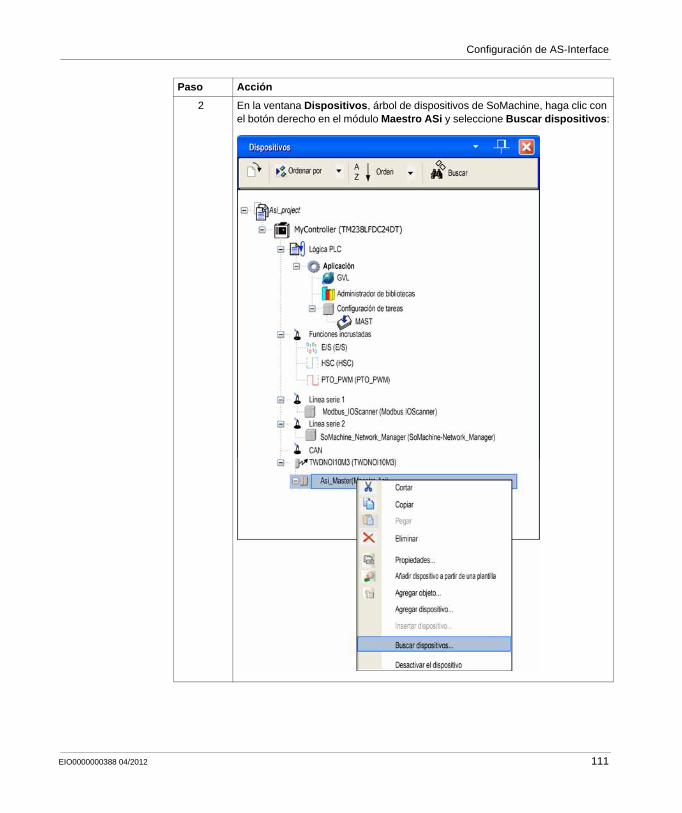
Configuración de AS-Interface
2 En la ventana Dispositivos, árbol de dispositivos de SoMachine, haga clic con el botón derecho en el módulo Maestro ASi y seleccione Buscar dispositivos:
Paso Acción
EIO0000000388 04/2012 111

Configuración de AS-Interface
3 Se muestran los dispositivos esclavos detectados en el bus de campo con sus direcciones y perfiles.
Haga clic en el botón Buscar dispositivos para actualizar la lista de esclavos.
4 Active la casilla sólo mostrar diferencias con el proyecto. Esto sólo mostrará los dispositivos no coincidentes (físico frente a configurado).La columna Estado puede aceptar los siguientes valores:
Correcto: Si la dirección y el perfil coinciden.Las configuraciones no son coincidentes: si existe una dirección coincidente y un perfil discrepante.Nuevo: se detecta un esclavo en el bus de campo, pero no existe ningún dispositivo esclavo en esta dirección en la configuración.
5 Si es necesario, modifique las direcciones en la columna Dirección de la ventana Buscar dispositivos. Haga clic en el botón Establecer dirección para redireccionar el esclavo seleccionado con una nueva dirección (véase página 122).
Paso Acción
112 EIO0000000388 04/2012
Configuración de AS-Interface
Adición manual de un esclavo genérico
Si desea configurar manualmente el dispositivo esclavo AS-Interface, puede añadir un esclavo AS-Interface genérico y configurar su perfil.
Este procedimiento es parecido al método del catálogo, pero en este caso se debe seleccionar un dispositivo especial de la lista.
El procedimiento describe cómo añadir dispositivos esclavos genéricos al proyecto:
6 Haga clic en el botón Copiar al proyecto.La función Copiar al proyecto permite copiar un esclavo detectado en la red al árbol de dispositivos del proyecto. Puede seleccionar varios esclavos con MAYÚS+click y, a continuación, usar el botón Copiar al proyecto para copiar todos los dispositivos seleccionados en el árbol de dispositivos del proyecto. Los esclavos con la misma dirección se sobrescribiránEl proyecto ahora está actualizado con todos los dispositivos esclavos conectados que aparecen bajo el árbol de dispositivos. Es necesario volver a descargar la aplicación para hacer que estos cambios sean operativos.
7 Si desea añadir otro esclavo AS-Interface, conéctelo a su bus de campo y ejecute una nueva exploración (paso 3).
Paso Acción
Paso Acción
1 Vaya al menú Programa de SoMachine:
EIO0000000388 04/2012 113
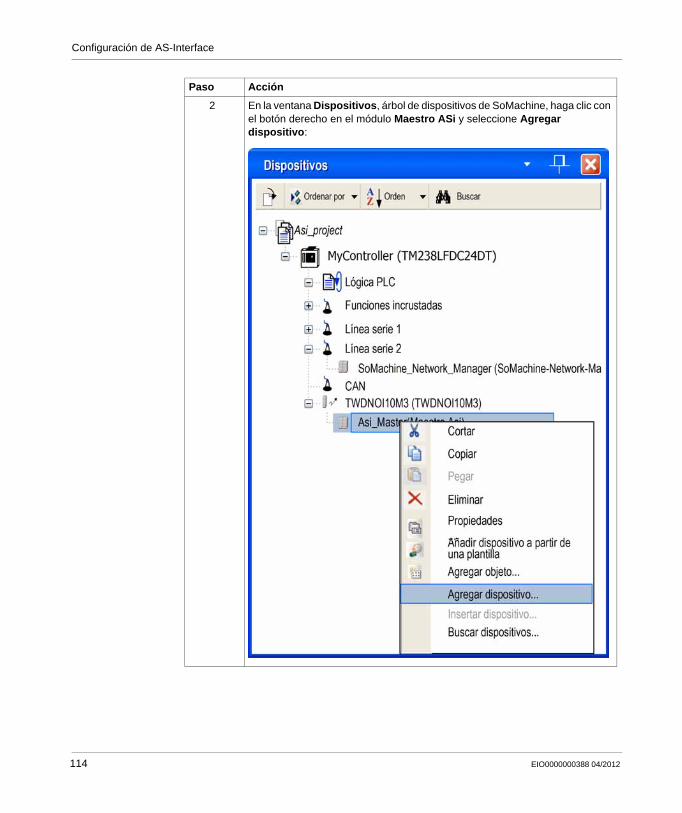
Configuración de AS-Interface
2 En la ventana Dispositivos, árbol de dispositivos de SoMachine, haga clic con el botón derecho en el módulo Maestro ASi y seleccione Agregar dispositivo:
Paso Acción
114 EIO0000000388 04/2012

Configuración de AS-Interface
3 Seleccione los dispositivos denominados 0/Esclavo ASi genérico en la lista:
Haga clic en el botón Agregar dispositivo.
4 Configure el esclavo Asi (véase página 116).
5 La ventana Agregar dispositivo permanece abierta y permite añadir todos los dispositivos esclavos de AS-Interface que desee.Cuando haya terminado, haga clic en el botón Cerrar.
Paso Acción
EIO0000000388 04/2012 115
Configuración de AS-Interface
Configuración de un esclavo de AS-Interface
Introducción
En este documento se muestra cómo configurar un esclavo conectado al módulo de TWDNOI10M3.
Acceso a la ventana de configuración
Existen 2 métodos para acceder a la ventana de configuración del esclavo AS-Interface:
Usar el menú ConfiguraciónUsar el menú Programa
NOTA: Sólo es distinto el método de acceso. En ambos casos, obtendrá la misma ventana de configuración.
Para acceder a la ventana de configuración mediante el software SoMachine, menú Configuración, complete los siguientes pasos:
Para acceder a la ventana de configuración mediante el software SoMachine, menú Programa, complete los siguientes pasos:
Paso Acción
1 Vaya al menú Configuración de SoMachine:
2 Para acceder a la ventana de configuración del módulo esclavo de AS-Interface, puede:
Hacer doble clic en el módulo AS-Interface esclavo.Hacer clic con el botón derecho en el módulo ASi_Slave y hacer clic en Editar parámetros del dispositivo en el menú.
Paso Acción
1 Vaya al menú Programa de SoMachine:
2 En el árbol de dispositivos de la ventana Dispositivos, haga clic con el botón derecho en el dispositivo esclavo de AS-Interface y haga clic en Modificar objeto. También puede acceder a la ventana de configuración haciendo doble clic en el dispositivo esclavo de AS-Interface.
116 EIO0000000388 04/2012

Configuración de AS-Interface
Descripción de la ventana de configuración del AS-Interface esclavo
La ficha Configuración del esclavo de AS-Interface proporciona acceso a todos los datos relevantes de configuración del esclavo: dirección, perfil y parámetros. Para los dispositivos del catálogo, la información del perfil aparece en gris y no está disponible para modificarla.
Cada esclavo debe tener una dirección exclusiva. Puede tener cualquier valor entre 1A y 31A, entre 1B y 31B (las direcciones B sólo están permitidas con esclavos de direccionamiento ampliado). En total, no se permiten más de 62 esclavos. El perfil de esclavo determina si está disponible el direccionamiento estándar o ampliado. Para algunos esclavos se necesita más de una dirección.
ADVERTENCIAFUNCIONAMIENTO IMPREVISTO DEL EQUIPO
Asegúrese de que cada esclavo tenga una dirección exclusiva mayor que 0.
El incumplimiento de estas instrucciones puede causar la muerte, lesiones serias o daño al equipo.
EIO0000000388 04/2012 117

Configuración de AS-Interface
La ventana de configuración se muestra a continuación:
En la tabla siguiente se describen los campos de la ventana de configuración del esclavo AS-Interface:
Nombre del campo
Descripción del campo
Dirección En este campo se debe establecer la dirección del esclavo.Use el botón Examinar [...] para abrir una selección de direcciones AS-Interface disponibles aún no utilizadas por las configuraciones de esclavos del proyecto.
Perfil Utilice esta lista de selección para configurar el perfil del esclavo AS-Interface.Código E/S: Define la configuración de E/S del esclavo. Existen 16 modalidades diferentes de configuración de E/S disponibles desde 00 hex (4 entradas) hasta 0F hex (tri-estado).Id Code0..2: Se utiliza para realizar una distinción mayor de esclavos con la misma configuración de E/S.
118 EIO0000000388 04/2012

Configuración de AS-Interface
NOTA: El perfil y los parámetros de un esclavo no están asociados con un nombre. Varios esclavos con diferentes nombres pueden tener el mismo perfil y los mismos parámetros.
Descripción de la ventana AS-Interface Slave I/O Mapping
La ficha AS-Interface Slave I/O Mapping permite asignar variables de proyecto a las salidas o entradas de AS-Interface.
NOTA: Para obtener más información sobre estos campos, consulte la ayuda en línea de CoDeSys.
Parámetro Use la lista de selección o las casillas para establecer los parámetros configurados (Parámetros permanentes de AS-interface) del esclavo. El perfil del esclavo define si se están usando parámetros y, en ese caso, el significado de cada uno.
Proyectar esclavo Al hacer clic en el botón Project Slave se envían los bits de parámetros al esclavo (si se ha iniciado una sesión).Para cambiar los parámetros del esclavo sin descargar toda la aplicación, puede establecer los parámetros nuevos y después pulsar el botón Proyectar esclavo. Los nuevos parámetros se escribirán en la tabla Imagen de parámetro.NOTA:
Los cambios en los parámetros del esclavo mediante el botón Proyectar esclavo sólo se escriben en el esclavo. Los cambios no se escriben en la aplicación actual del controlador, y se sobrescribirán mediante un restablecimiento o un reinicio.
Si desea que los cambios se conserven durante el restablecimiento, actualice la aplicación actual seleccionando la Descargar en el menú En línea.Si desea que los cambios se mantengan al reiniciar, la aplicación de reinicio (véase SoMachine, Guía de programación) también debe actualizarse.
Nombre del campo
Descripción del campo
EIO0000000388 04/2012 119

Configuración de AS-Interface
Direccionamiento automático de un esclavo de AS-Interface V2
Presentación
Todos los esclavos presentes en el bus de campo AS-Interface deben tener asignada (por configuración) una dirección física exclusiva. Esta dirección debe ser la misma que está declarada en SoMachine.
El maestro admite la función de direccionamiento automático de AS-Interface, que permite lo siguiente:
sustituir un esclavo que indica un errorInsertar un nuevo esclavo
El esclavo nuevo con la dirección física 0 se escribirá automáticamente con la dirección de un esclavo que falte o no responda, si su perfil y sus parámetros coinciden.
120 EIO0000000388 04/2012

Configuración de AS-Interface
Procedimiento
En la tabla siguiente se muestran los pasos necesarios para establecer el parámetro Direccionamiento automático.
Paso Acción
1 Existen dos métodos para acceder a TWDNOI10M3:Haga clic en la ficha Configuración y, después, haga doble clic en el dispositivo esclavo de AS-Interface. En el panel del menú, seleccione Comunicación → Dispositivo maestro ASi → Ajustes físicosHaga clic en la ficha Programa, a continuación, haga doble clic en ASi_Master en el árbol de dispositivos de la ventana Dispositivos.
2 Hacer clic en la casilla Activar el direccionamiento automático (si aún no está seleccionada), que se encuentra en la ficha Configuración Maestro ASi.
Resultado: La función Activar el direccionamiento automático se activará (casilla marcada) o se desactivará (casilla no marcada).NOTA: El parámetro Direccionamiento automático aparece seleccionado en la ventana de configuración.
EIO0000000388 04/2012 121
Configuración de AS-Interface
Modificación de una dirección de esclavo
Presentación
En la interfaz Explorar dispositivos, puede modificar la dirección de un esclavo.
Modificación de una dirección de esclavo
En la tabla siguiente se muestran los pasos necesarios para modificar una dirección de esclavo:
Paso Descripción
1 Inicie sesión en el controlador.NOTA: En este paso sólo la configuración del bus del módulo maestro debe configurarse correctamente. No se necesita ningún programa de aplicación.
122 EIO0000000388 04/2012
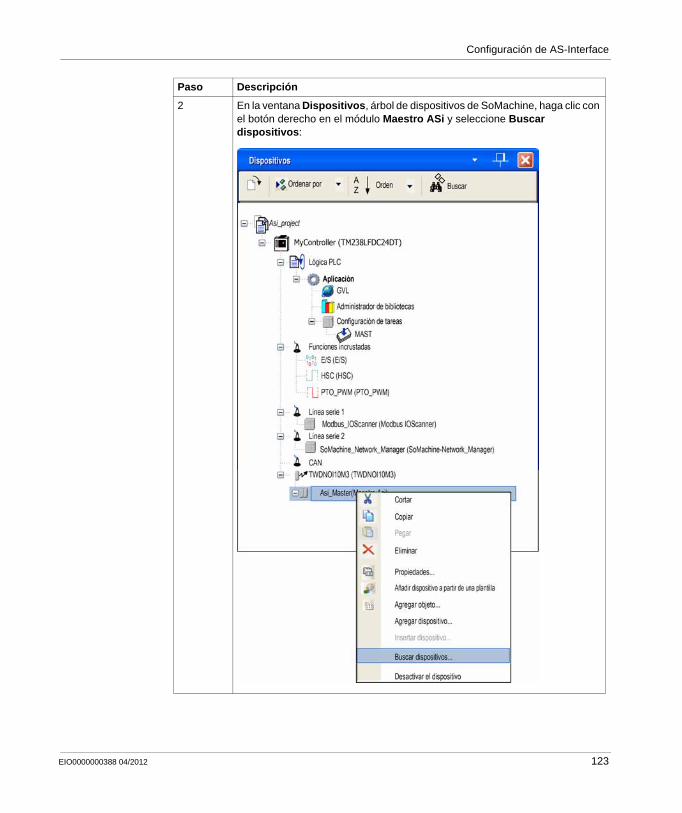
Configuración de AS-Interface
2 En la ventana Dispositivos, árbol de dispositivos de SoMachine, haga clic con el botón derecho en el módulo Maestro ASi y seleccione Buscar dispositivos:
Paso Descripción
EIO0000000388 04/2012 123

Configuración de AS-Interface
3 En la ventana Buscar dispositivos, seleccione una dirección de esclavo disponible en el cuadro de lista.
Las direcciones ya usadas por otro esclavo se indican como empleado en el cuadro de lista.NOTA: La dirección 0 no aparece en la lista desplegable porque normalmente un esclavo no debe cambiarse a la dirección 0 (0 se utiliza para sustituir rápidamente un dispositivo). No obstante, es posible añadirla manualmente escribiendo el valor 0 en el campo de dirección.
Si el direccionamiento automático está habilitado, el esclavo establecido en la dirección 0 se reasignará inmediatamente a otra dirección.
4 La nueva dirección se muestra en azul hasta que haga clic en el botón Establecer dirección para confirmar.Haga clic en Buscar dispositivos para actualizar la ventana y ver la modificación (la nueva dirección aparece en negro).
5 Salga de la ventana Buscar dispositivos (haga clic en el botón Cerrar).
Paso Descripción
124 EIO0000000388 04/2012
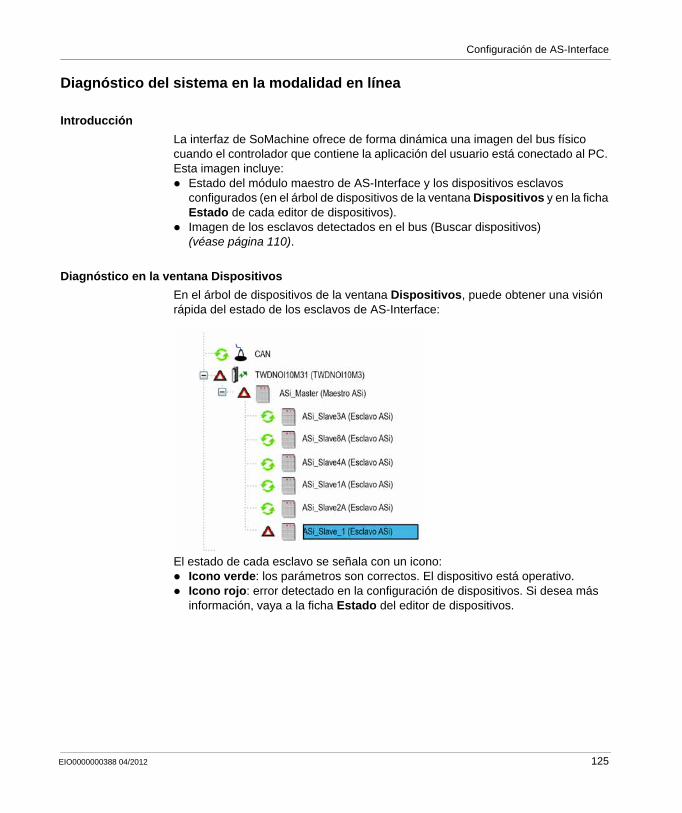
Configuración de AS-Interface
Diagnóstico del sistema en la modalidad en línea
Introducción
La interfaz de SoMachine ofrece de forma dinámica una imagen del bus físico cuando el controlador que contiene la aplicación del usuario está conectado al PC. Esta imagen incluye:
Estado del módulo maestro de AS-Interface y los dispositivos esclavos configurados (en el árbol de dispositivos de la ventana Dispositivos y en la ficha Estado de cada editor de dispositivos).Imagen de los esclavos detectados en el bus (Buscar dispositivos) (véase página 110).
Diagnóstico en la ventana Dispositivos
En el árbol de dispositivos de la ventana Dispositivos, puede obtener una visión rápida del estado de los esclavos de AS-Interface:
El estado de cada esclavo se señala con un icono:Icono verde: los parámetros son correctos. El dispositivo está operativo.Icono rojo: error detectado en la configuración de dispositivos. Si desea más información, vaya a la ficha Estado del editor de dispositivos.
EIO0000000388 04/2012 125

Configuración de AS-Interface
Diagnóstico del dispositivo maestro AS-Interface cuando hay una sesión iniciada
La ventana de configuración del dispositivo maestro cuando hay una sesión iniciada se muestra en las tablas siguientes:
Nombre de ficha
Descripción
Configuración Maestro ASi
Cuando hay una sesión iniciada, aparece un nuevo campo denominado Indicadores de estado:
Activar el direccionamiento automático: Active esta opción para habilitar el direccionamiento automático. Para obtener más información, consulte Direccionamiento automático de un esclavo AS-Interface V2 (véase página 120).En la sección Indicadores de estado se muestra el estado actual del maestro:
Configuración OK: La configuración de destino y la real coinciden.Esclavo con dirección 0 existente: El módulo maestro ha detectado un módulo esclavo con la dirección 0. Esta dirección es típica de un nuevo módulo esclavo con la configuración de fábrica.AS - Interrupción de corriente Interfaz: Alimentación baja del sistema AS-Interface. Compruebe la alimentación de AS-Interface.Error en periférico: Se ha detectado un error de periférico. Lea la LPF (Lista de fallos de periféricos) para buscar el dispositivo o dispositivos afectados.Direccionamiento automático activado: Se habilita la función de direccionamiento automático.
126 EIO0000000388 04/2012
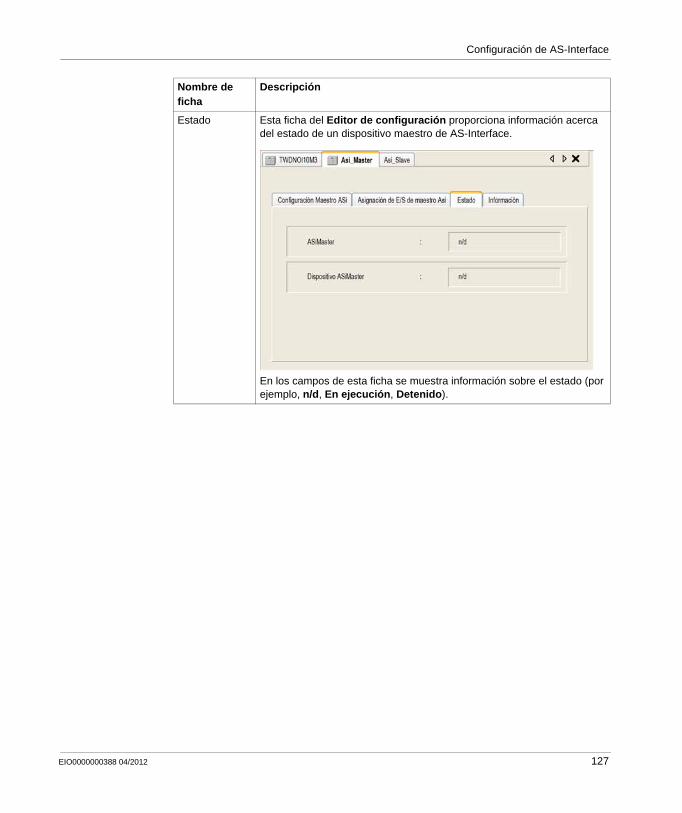
Configuración de AS-Interface
Estado Esta ficha del Editor de configuración proporciona información acerca del estado de un dispositivo maestro de AS-Interface.
En los campos de esta ficha se muestra información sobre el estado (por ejemplo, n/d, En ejecución, Detenido).
Nombre de ficha
Descripción
EIO0000000388 04/2012 127
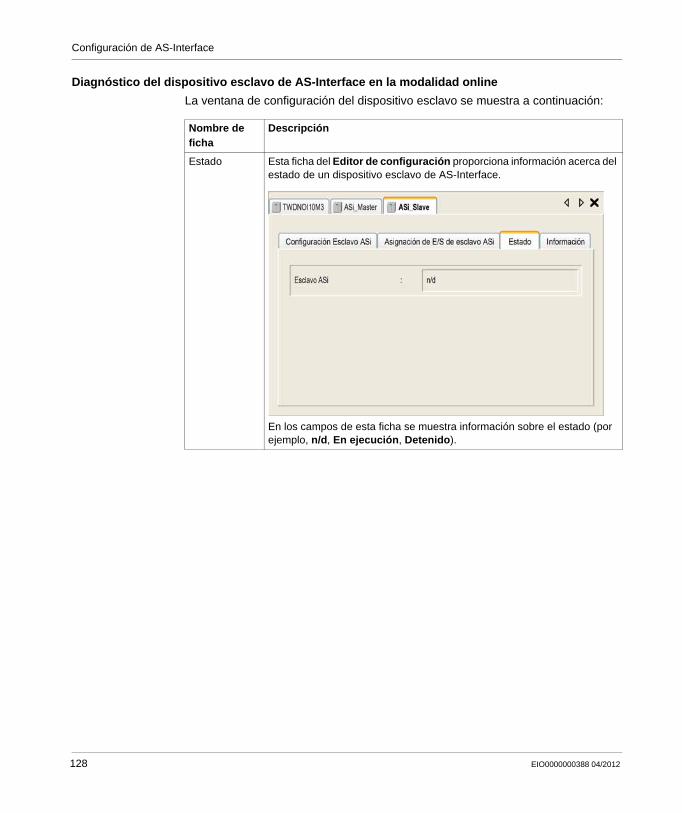
Configuración de AS-Interface
Diagnóstico del dispositivo esclavo de AS-Interface en la modalidad online
La ventana de configuración del dispositivo esclavo se muestra a continuación:
Nombre de ficha
Descripción
Estado Esta ficha del Editor de configuración proporciona información acerca del estado de un dispositivo esclavo de AS-Interface.
En los campos de esta ficha se muestra información sobre el estado (por ejemplo, n/d, En ejecución, Detenido).
128 EIO0000000388 04/2012

Configuración de AS-Interface
Programación del bus de campo AS-Interface V2
Introducción a la biblioteca IoDrvASI
La biblioteca IoDrvASI (véase página 215) incluye una función y algunos bloques de funciones que permiten manejar el bus de campo AS-Interface en la aplicación.
Esta biblioteca se incluye automáticamente en su SoMachine al añadir un módulo de ampliación TWDNOI10M3.
Función
La biblioteca IoDrvASI incluye la siguiente función:
Bloques de funciones
La biblioteca IoDrvASI incluye los siguiente bloques de funciones:
Nombre de la función Descripción
ASI_CheckSlaveBit (véase página 216)
Comprueba si está establecido un bit de un desplazamiento determinado dentro de la matriz de bytes de estado de AS-Interface proporcionada (por ejemplo, LDS, LAS o LPF).Esta función se utiliza para extraer la información de un esclavo de los datos de salida del bloque de funciones ASI_SlaveStatusCheck.Devuelve verdadero si el bit está establecido, en caso contrario devuelve falso.
Nombre del bloque de funciones
Descripción
ASI_CmdSetAutoAddressing (véase página 217)
Active/desactive el dispositivo maestro con la modalidad de direccionamiento automático.
ASI_CmdSetDataExchange (véase página 219)
Habilite el intercambio de datos entre los dispositivos maestros y esclavos.
ASI_CmdSetOfflineMode (véase página 221)
Establezca el bus en la modalidad offline.
ASI_MasterStatusCheck (véase página 223)
Proporcione los indicadores maestros, que indican el estado del maestro.
ASI_SlaveAddressChange (véase página 225)
Sustituya la dirección del esclavo actual con una nueva dirección determinada por el usuario.
ASI_SlaveParameterUpdate (véase página 228)
Actualice la imagen del dispositivo esclavo.
ASI_SlaveStatusCheck (véase página 230)
Proporciona información sobre los dispositivos esclavos (LAS, LDS, LPF).
ASI_ReadParameterImage (véase página 232)
Lee o actualiza la tabla de imágenes de parámetros.
EIO0000000388 04/2012 129

Configuración de AS-Interface
Configuración de un esclavo AS-Interface V2 reemplazado
Configuración automática
Cuando se debe sustituir un esclavo, se puede sustituir automáticamente por otro del mismo perfil AS-Interface.
La sustitución puede llevarse a cabo sin tener que detener el bus de campo AS-Interface V2 y sin manipulación alguna si esté activada la utilidad de Direcciona-miento automático del modo de configuración (véase página 120).
El esclavo de sustitución debe tener inicialmente la dirección 0 (un esclavo nuevo normalmente viene ajustado de fábrica con una dirección predeterminada de 0) y el mismo perfil que el esclavo al que va a sustituir. Una vez instalado, se asumirá automáticamente la dirección del esclavo sustituido y se insertará a continuación en la lista de esclavos detectados (LDS) y la lista de esclavos activos (LAS).
Configuración manual
Hay disponibles opciones alternativas sin direccionamiento automático:Puede configurar el esclavo de sustitución con la misma dirección que el esclavo que va a sustituir utilizando el programador de bolsillo. Como se indicó previamente, el sustituto debe tener el mismo número de referencia de producto y el mismo perfil y subperfil que el esclavo que se va a sustituir. De este modo, se insertará automáticamente en la lista de esclavos detectados (LDS) y de esclavos activos (LAS). Esta función sólo está disponible si uno, y no más de uno, de los esclavos no está operativo.Cambie la dirección, mediante la ventana Buscar dispositivos (véase página 107).
130 EIO0000000388 04/2012

EIO0000000388 04/2012
13
Modicon M238 Logic Controller
Configuración de línea serie
EIO0000000388 04/2012
Configuración de línea serie
Introducción
En este capítulo se describe cómo configurar la comunicación de línea serie de Modicon M238 Logic Controller.
Contenido de este capítulo
Este capítulo contiene los siguiente apartados:
Apartado Página
Configuración de línea serie 132
Administrador ASCII 136
Administrador de red de SoMachine 139
Modbus IOScanner 141
Gestor Modbus 150
Cómo añadir un modem a un administrador 155
131

Configuración de línea serie
Configuración de línea serie
Introducción
La ventana de configuración de línea serie permite configurar los parámetros físicos de la línea serie (velocidad de transmisión, paridad, etc.).
Los puertos de línea serie de su controlador se configuran para el protocolo de SoMachine de manera predeterminada cuando son nuevos o cuando se actualiza el firmware del controlador. El protocolo SoMachine es incompatible con otros protocolos como Línea serie Modbus.
En una línea serie de Modbus configurada, si hay un nuevo controlador conectado o si el firmware de un controlador está actualizado, los otros dispositivos disponibles en la línea serie pueden dejar se comunicarse.
Compruebe que el controlador no esté conectado a una red de línea serie de Modbus activo antes de descargar una aplicación válida que tenga el puerto o los puertos respectivos correctamente configurados para el protocolo en cuestión.
ADVERTENCIAFUNCIONAMIENTO IMPREVISTO DEL EQUIPO
Asegúrese de que la aplicación tenga los puertos de línea serie correctamente configurados para Modbus antes de conectar físicamente el controlador a una red de línea serie de Modbus operativa.
El incumplimiento de estas instrucciones puede causar la muerte, lesiones serias o daño al equipo.
132 EIO0000000388 04/2012

Configuración de línea serie
Configuración de línea serie para TM238LDD24DT y TM238LDA24DR
Para configurar la línea serie, haga lo siguiente:
Los parámetros siguientes deben ser idénticos para todos los dispositivos serie conectados al puerto:
Paso Acción
1 Seleccione la ficha Configuración y haga doble clic en el controlador.
2 Haga clic en la entrada Comunicación → Línea serie situada a la izquierda.
3 Haga clic en la entrada Ajustes físicos.Resultado: Aparecerá la ventana de configuración.
Elemento Descripción
Velocidad de transmisión
Velocidad de la transmisión
Paridad Se utiliza para detectar errores
Bits de datos Número de bits para transmitir datos
Bits de parada Número de bits de parada
Medio físico Permite especificar el medio que se utilizará:RS485 (con o sin resistencia de polarización)RS232
NOTA: Hay dos resistencias de polarización integradas en el controlador, que se activan o desactivan con este parámetro.
EIO0000000388 04/2012 133
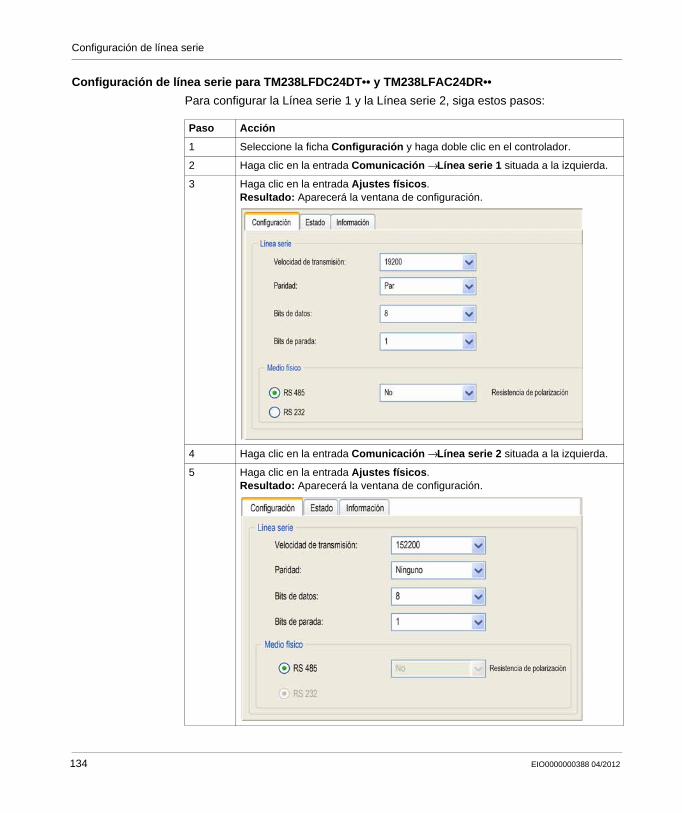
Configuración de línea serie
Configuración de línea serie para TM238LFDC24DT•• y TM238LFAC24DR••
Para configurar la Línea serie 1 y la Línea serie 2, siga estos pasos:
Paso Acción
1 Seleccione la ficha Configuración y haga doble clic en el controlador.
2 Haga clic en la entrada Comunicación → Línea serie 1 situada a la izquierda.
3 Haga clic en la entrada Ajustes físicos.Resultado: Aparecerá la ventana de configuración.
4 Haga clic en la entrada Comunicación → Línea serie 2 situada a la izquierda.
5 Haga clic en la entrada Ajustes físicos.Resultado: Aparecerá la ventana de configuración.
134 EIO0000000388 04/2012
Configuración de línea serie
Los parámetros siguientes deben ser idénticos para todos los dispositivos serie conectados al puerto:
Elemento Descripción
Velocidad de transmisión
Velocidad de la transmisión
Paridad Se utiliza para detectar errores
Bits de datos Número de bits para transmitir datos
Bits de parada Número de bits de parada
Medio físico Permite especificar el medio que se utilizará:SL1: seleccione RS485 (con resistencia de polarización o sin) o bien RS232SL2: sólo está disponible RS485
EIO0000000388 04/2012 135
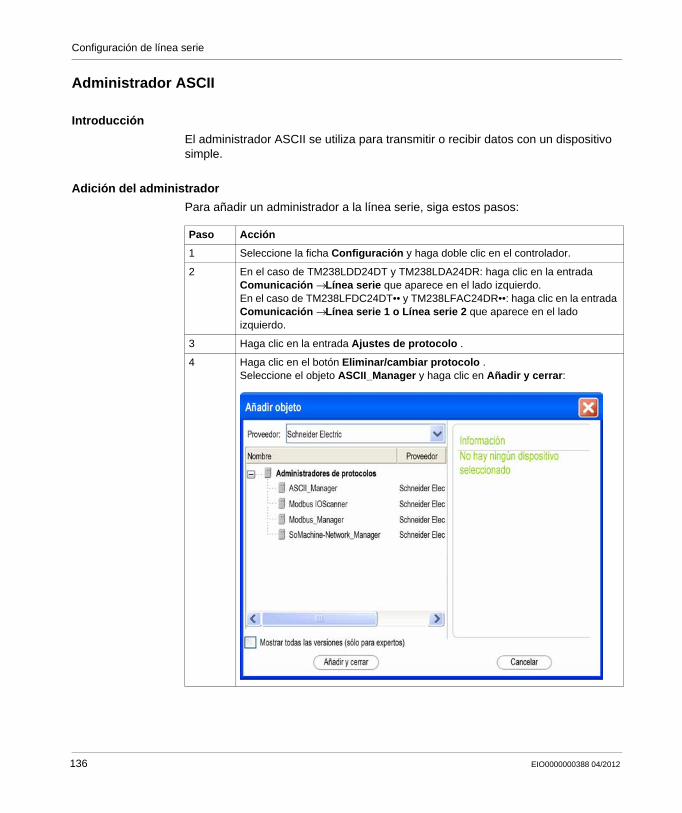
Configuración de línea serie
Administrador ASCII
Introducción
El administrador ASCII se utiliza para transmitir o recibir datos con un dispositivo simple.
Adición del administrador
Para añadir un administrador a la línea serie, siga estos pasos:
Paso Acción
1 Seleccione la ficha Configuración y haga doble clic en el controlador.
2 En el caso de TM238LDD24DT y TM238LDA24DR: haga clic en la entrada Comunicación → Línea serie que aparece en el lado izquierdo.En el caso de TM238LFDC24DT•• y TM238LFAC24DR••: haga clic en la entrada Comunicación → Línea serie 1 o Línea serie 2 que aparece en el lado izquierdo.
3 Haga clic en la entrada Ajustes de protocolo .
4 Haga clic en el botón Eliminar/cambiar protocolo .Seleccione el objeto ASCII_Manager y haga clic en Añadir y cerrar:
136 EIO0000000388 04/2012

Configuración de línea serie
Configuración del administrador
Para configurar el administrador ASCII del controlador, haga lo siguiente:
Paso Acción
1 Seleccione la ficha Configuración y haga doble clic en el controlador.
2 En el caso de TM238LDD24DT y TM238LDA24DR: haga clic en la entrada Comunicación → Línea serie que aparece en el lado izquierdo.En el caso de TM238LFDC24DT•• y TM238LFAC24DR••: haga clic en la entrada Comunicación → Línea serie 1 o Línea serie 2 que aparece en el lado izquierdo.
3 Haga clic en la entrada Ajustes de protocolo .Resultado: Aparecerá la ventana de configuración de ASCII_Manager .
EIO0000000388 04/2012 137

Configuración de línea serie
Configure los parámetros tal como se describe en la tabla siguiente:
NOTA: En caso de utilizar varias condiciones de terminación de trama, la primera condición que sea TRUE hará que finalice el intercambio.
Adición de un modem
Para obtener más información sobre cómo añadir un modem al administrador ASCII, consulte el apartado Adición de un modem a un administrador (véase página 155).
Parámetro Descripción
Carácter de inicio Si se selecciona 0, no se utilizará ningún carácter de inicio en la trama. De lo contrario, en la modalidad de recepción se utilizará el carácter de ASCII correspondiente para detectar el inicio de una trama. En la modalidad de envío, este carácter se añade al inicio de la trama.
Primer carácter de fin
Si se selecciona 0, no se utilizará ningún primer carácter de fin en la trama. De lo contrario, en la modalidad de recepción se utilizará el carácter de ASCII correspondiente para detectar el final de una trama. En la modalidad de envío, este carácter se añade al final de la trama.
Segundo carácter de fin
Si se selecciona 0, no se utilizará ningún segundo carácter de fin en la trama. De lo contrario, en la modalidad de recepción se utilizará el carácter de ASCII correspondiente para detectar el final de una trama. En la modalidad de envío, este carácter se añade al final de la trama.
Longitud recibida de trama
Si se especifica 0, no se utiliza este parámetro. Este parámetro permite al sistema concluir un fin de trama en la recepción, cuando el controlador recibió el número de caracteres especificado.NOTA: Este parámetro no se puede utilizar simultáneamente con Timeout de trama recibido (ms).
Timeout de trama recibido (ms)
Si se especifica 0, no se utiliza este parámetro. Este parámetro permite al sistema concluir el fin de trama en la recepción, después de un silencio del número de milisegundos especificado.
Ajustes de línea de serie
Parámetros especificados en la ventana de configuración de línea serie (véase página 132).
138 EIO0000000388 04/2012

Configuración de línea serie
Administrador de red de SoMachine
Introducción
Debe utilizar el administrador de red de SoMachine si desea intercambiar variables con un dispositivo XBTGT/XBTGK con el protocolo de software de SoMachine o si utiliza la línea serie para la programación de SoMachine.
Adición del administrador
Para añadir un administrador a la línea serie, siga estos pasos:
Paso Acción
1 Seleccione la ficha Configuración y haga doble clic en el controlador.
2 Para TM238LDD24DT y TM238LDA24DR: Haga clic en la entrada Comunicación → Línea serie situada a la izquierda.Para TM238LFDC24DT•• y TM238LFAC24DR••: Haga clic en la entrada Comunicación → Línea serie 1 o Línea serie 2 situada a la izquierda.
3 Haga clic en la entrada Ajustes de protocolo.
4 Haga clic en el botón Eliminar/cambiar protocolo.Seleccione el objeto SoMachine-Network_Manager y haga clic en Agregar y cerrar:
EIO0000000388 04/2012 139

Configuración de línea serie
Configuración del administrador
No hay ninguna configuración para el administrador de red de SoMachine.
Adición de un modem
Para obtener más información sobre cómo añadir un modem al administrador de red de SoMachine, consulte el apartado Adición de un modem a un administrador (véase página 155).
140 EIO0000000388 04/2012

Configuración de línea serie
Modbus IOScanner
Introducción
Modbus IOScanner se utiliza para simplificar los intercambios con los dispositivos esclavos Modbus.
Adición del administrador
Para añadir un administrador a la línea serie, siga estos pasos:
Paso Acción
1 Seleccione la ficha Configuración y haga doble clic en el controlador.
2 Para TM238LDD24DT y TM238LDA24DR: Haga clic en la entrada Comunicación → Línea serie situada a la izquierda.En el caso de los módulos TM238LFDC24DT•• y TM238LFAC24DR••: Haga clic en la entrada Comunicación → Línea serie 1 o Línea serie 2 de la izquierda.
3 Haga clic en la entrada Ajustes de protocolo.
4 Haga clic en el botón Eliminar/cambiar protocolo.Seleccione el objeto Modbus IOScanner y haga clic en Agregar y cerrar:
EIO0000000388 04/2012 141
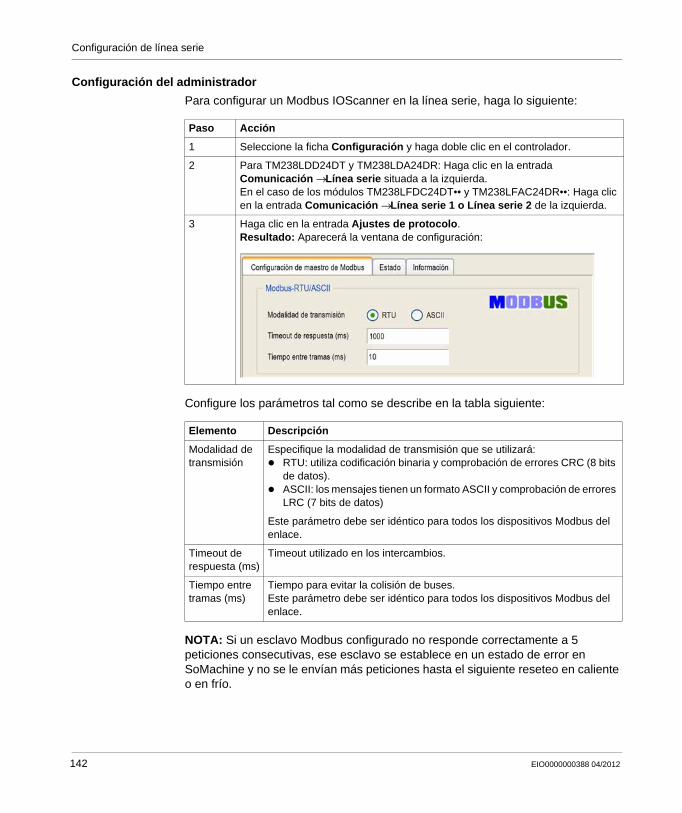
Configuración de línea serie
Configuración del administrador
Para configurar un Modbus IOScanner en la línea serie, haga lo siguiente:
Configure los parámetros tal como se describe en la tabla siguiente:
NOTA: Si un esclavo Modbus configurado no responde correctamente a 5 peticiones consecutivas, ese esclavo se establece en un estado de error en SoMachine y no se le envían más peticiones hasta el siguiente reseteo en caliente o en frío.
Paso Acción
1 Seleccione la ficha Configuración y haga doble clic en el controlador.
2 Para TM238LDD24DT y TM238LDA24DR: Haga clic en la entrada Comunicación → Línea serie situada a la izquierda.En el caso de los módulos TM238LFDC24DT•• y TM238LFAC24DR••: Haga clic en la entrada Comunicación → Línea serie 1 o Línea serie 2 de la izquierda.
3 Haga clic en la entrada Ajustes de protocolo.Resultado: Aparecerá la ventana de configuración:
Elemento Descripción
Modalidad de transmisión
Especifique la modalidad de transmisión que se utilizará:RTU: utiliza codificación binaria y comprobación de errores CRC (8 bits de datos).ASCII: los mensajes tienen un formato ASCII y comprobación de errores LRC (7 bits de datos)
Este parámetro debe ser idéntico para todos los dispositivos Modbus del enlace.
Timeout de respuesta (ms)
Timeout utilizado en los intercambios.
Tiempo entre tramas (ms)
Tiempo para evitar la colisión de buses.Este parámetro debe ser idéntico para todos los dispositivos Modbus del enlace.
142 EIO0000000388 04/2012
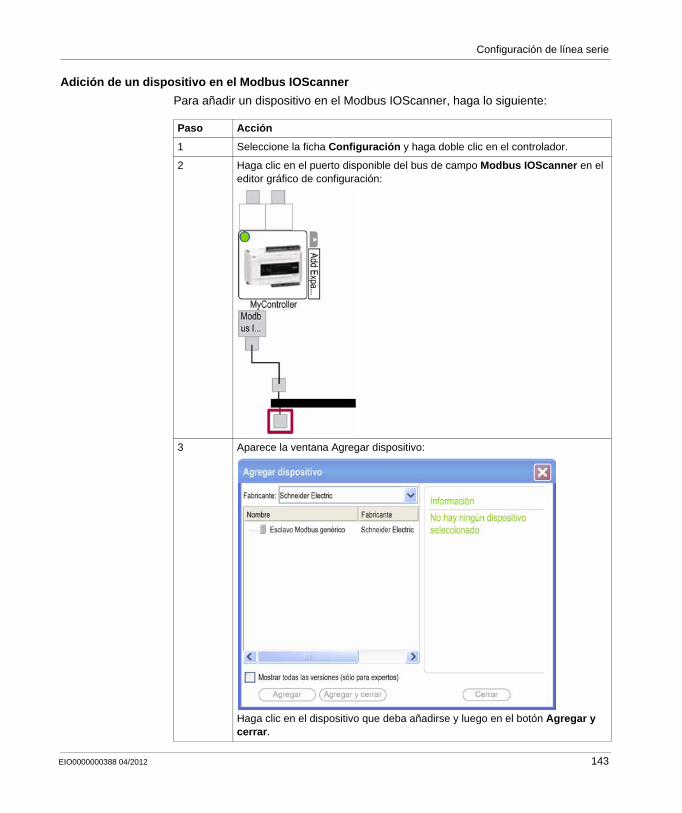
Configuración de línea serie
Adición de un dispositivo en el Modbus IOScanner
Para añadir un dispositivo en el Modbus IOScanner, haga lo siguiente:
Paso Acción
1 Seleccione la ficha Configuración y haga doble clic en el controlador.
2 Haga clic en el puerto disponible del bus de campo Modbus IOScanner en el editor gráfico de configuración:
3 Aparece la ventana Agregar dispositivo:
Haga clic en el dispositivo que deba añadirse y luego en el botón Agregar y cerrar.
EIO0000000388 04/2012 143
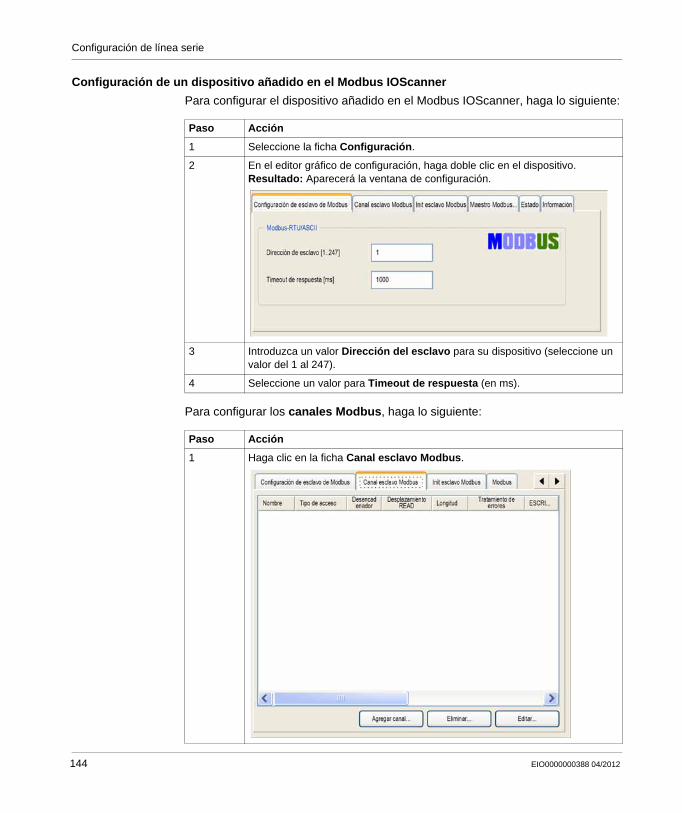
Configuración de línea serie
Configuración de un dispositivo añadido en el Modbus IOScanner
Para configurar el dispositivo añadido en el Modbus IOScanner, haga lo siguiente:
Para configurar los canales Modbus, haga lo siguiente:
Paso Acción
1 Seleccione la ficha Configuración.
2 En el editor gráfico de configuración, haga doble clic en el dispositivo.Resultado: Aparecerá la ventana de configuración.
3 Introduzca un valor Dirección del esclavo para su dispositivo (seleccione un valor del 1 al 247).
4 Seleccione un valor para Timeout de respuesta (en ms).
Paso Acción
1 Haga clic en la ficha Canal esclavo Modbus.
144 EIO0000000388 04/2012

Configuración de línea serie
2 Para configurar un intercambio, haga clic en el botón Agregar canal:
En el campo Canal puede añadir los siguientes valores:Canal: Introduzca un nombre para el canalTipo de acceso: Leer o escribir o Leer/escribir varios registros.Desencadenador: Seleccione el desencadenador del intercambio. Puede ser CÍCLICO con el período definido en el campo Tiempo de ciclo [ms] o iniciado mediante un FLANCO ASCENDENTE en una variable booleana (esta se crea en la ficha Asignación de E/S del maestro Modbus)Comentario: Añada un comentario acerca de este canal
Paso Acción
EIO0000000388 04/2012 145
Configuración de línea serie
2 bis En el campo Registro READ (si su canal es de Lectura o Lectura/Escritura), puede configurar los %MW que deben leerse en el esclavo Modbus. Estas direcciones se asignarán a %IW (consulte la ficha Asignación de E/S del maestro Modbus):
Offset Offset de los %MW que se leerán. 0 significa que el primer objeto que se leerá será %MW0.Longitud: Número de %MW que se leerán. Por ejemplo, si Desplazamiento = 2 y Longitud = 3, el canal leerá %MW2, %MW3 y %MW4.Tratamiento de errores: seleccione el comportamiento del %IW relacionado en caso de pérdida de comunicación.
En el campo Registro WRITE (si su canal es de Escritura o Lectura/Escritura), puede configurar los %MW que deben escribirse en el esclavo Modbus. Estas direcciones se asignarán a %QW (consulte la ficha "Asignación de E/S maestro Modbus"):
Offset de los %MW que se escribirán. 0 significa que el primer objeto que se escribirá será %MW0.Longitud: Número de %MW que se escribirán. Por ejemplo, si Desplazamiento = 2 y Longitud = 3, el canal escribirá %MW2, %MW3 y %MW4.
3 Haga clic en el botón Eliminar para eliminar un canal.Haga clic en el botón Editar para cambiar los parámetros de un canal.
4 Haga clic en Aceptar para validar la configuración de este canal.
Paso Acción
146 EIO0000000388 04/2012
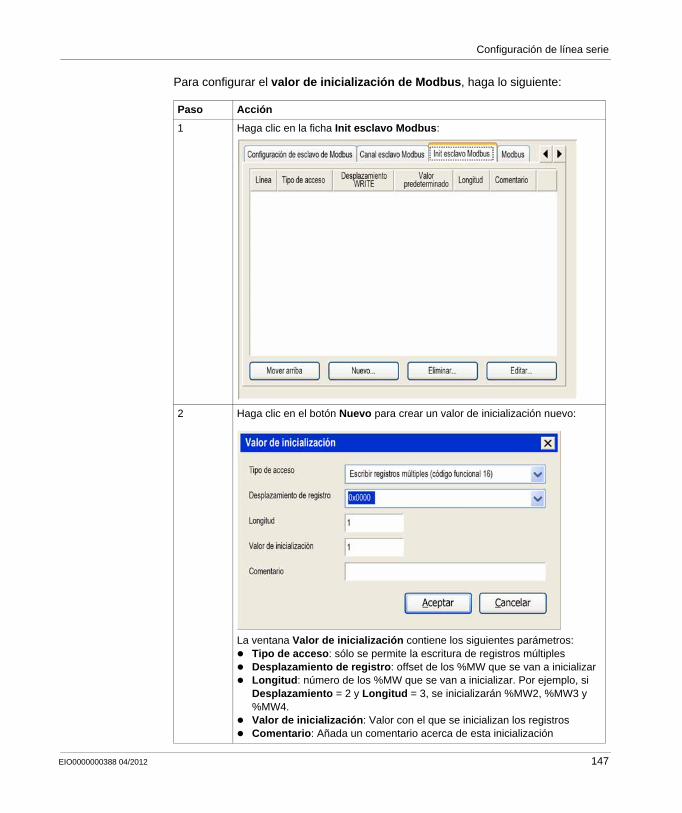
Configuración de línea serie
Para configurar el valor de inicialización de Modbus, haga lo siguiente:
Paso Acción
1 Haga clic en la ficha Init esclavo Modbus:
2 Haga clic en el botón Nuevo para crear un valor de inicialización nuevo:
La ventana Valor de inicialización contiene los siguientes parámetros:Tipo de acceso: sólo se permite la escritura de registros múltiplesDesplazamiento de registro: offset de los %MW que se van a inicializarLongitud: número de los %MW que se van a inicializar. Por ejemplo, si Desplazamiento = 2 y Longitud = 3, se inicializarán %MW2, %MW3 y %MW4.Valor de inicialización: Valor con el que se inicializan los registrosComentario: Añada un comentario acerca de esta inicialización
EIO0000000388 04/2012 147
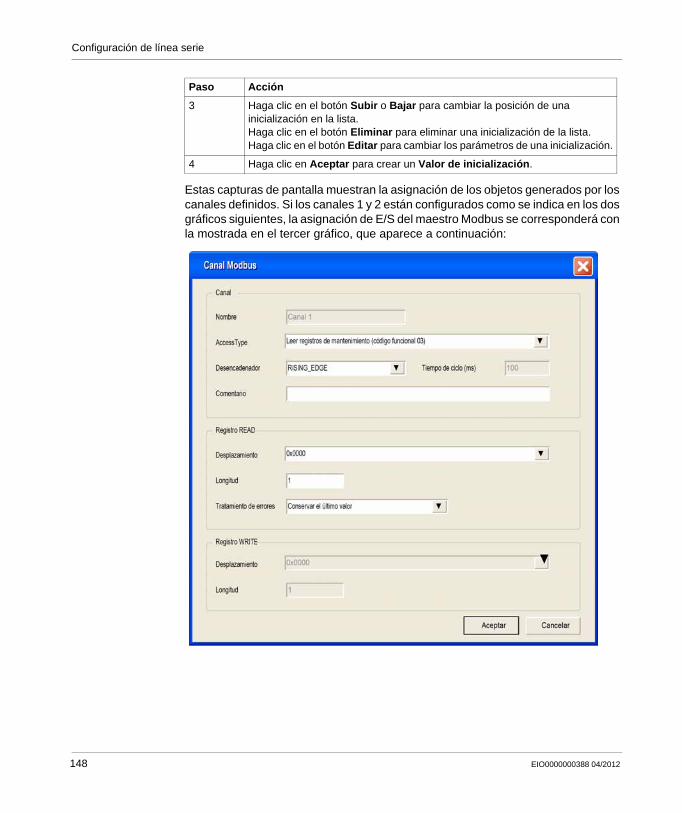
Configuración de línea serie
Estas capturas de pantalla muestran la asignación de los objetos generados por los canales definidos. Si los canales 1 y 2 están configurados como se indica en los dos gráficos siguientes, la asignación de E/S del maestro Modbus se corresponderá con la mostrada en el tercer gráfico, que aparece a continuación:
3 Haga clic en el botón Subir o Bajar para cambiar la posición de una inicialización en la lista.Haga clic en el botón Eliminar para eliminar una inicialización de la lista.Haga clic en el botón Editar para cambiar los parámetros de una inicialización.
4 Haga clic en Aceptar para crear un Valor de inicialización.
Paso Acción
148 EIO0000000388 04/2012

Configuración de línea serie
EIO0000000388 04/2012 149
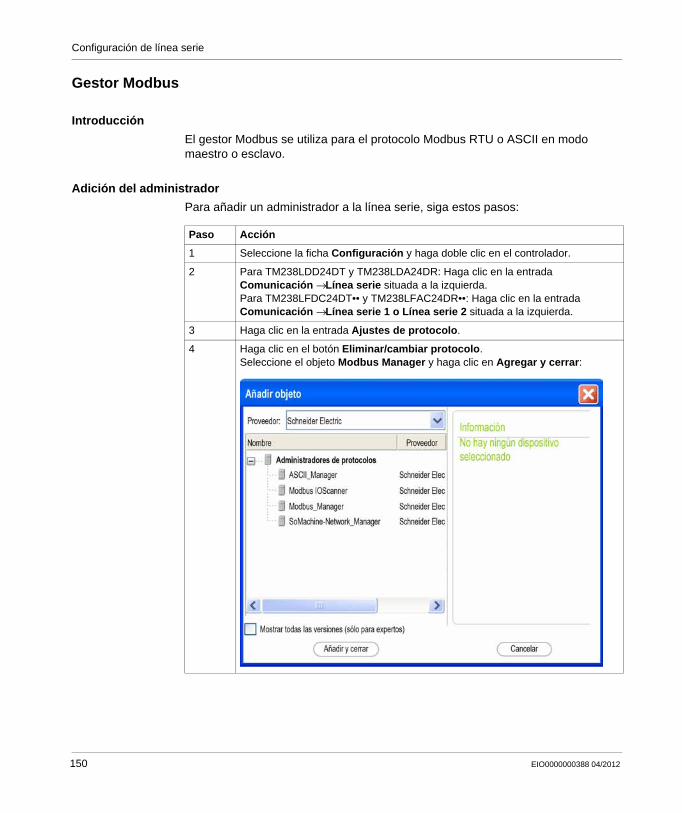
Configuración de línea serie
Gestor Modbus
Introducción
El gestor Modbus se utiliza para el protocolo Modbus RTU o ASCII en modo maestro o esclavo.
Adición del administrador
Para añadir un administrador a la línea serie, siga estos pasos:
Paso Acción
1 Seleccione la ficha Configuración y haga doble clic en el controlador.
2 Para TM238LDD24DT y TM238LDA24DR: Haga clic en la entrada Comunicación → Línea serie situada a la izquierda.Para TM238LFDC24DT•• y TM238LFAC24DR••: Haga clic en la entrada Comunicación → Línea serie 1 o Línea serie 2 situada a la izquierda.
3 Haga clic en la entrada Ajustes de protocolo.
4 Haga clic en el botón Eliminar/cambiar protocolo.Seleccione el objeto Modbus Manager y haga clic en Agregar y cerrar:
150 EIO0000000388 04/2012
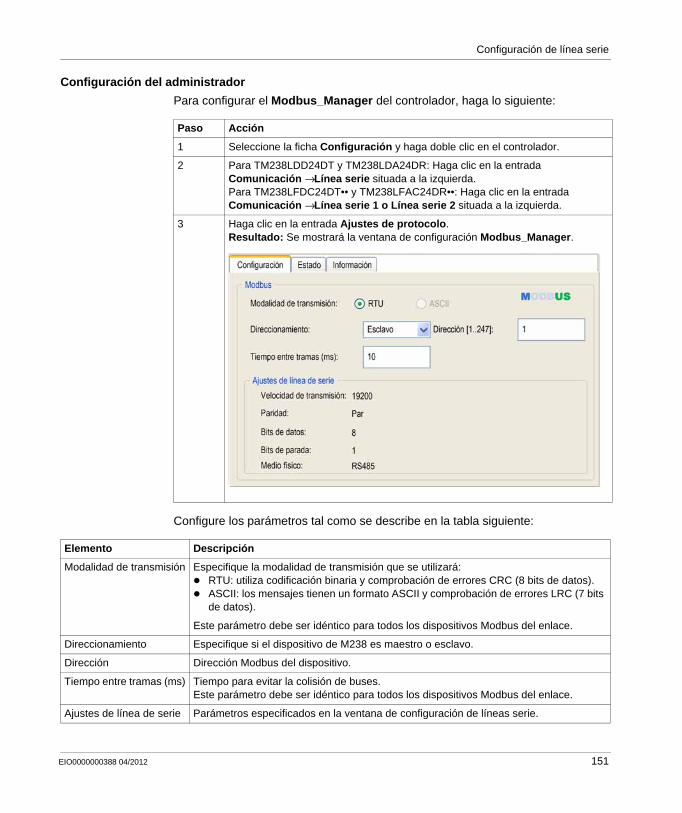
Configuración de línea serie
Configuración del administrador
Para configurar el Modbus_Manager del controlador, haga lo siguiente:
Configure los parámetros tal como se describe en la tabla siguiente:
Paso Acción
1 Seleccione la ficha Configuración y haga doble clic en el controlador.
2 Para TM238LDD24DT y TM238LDA24DR: Haga clic en la entrada Comunicación → Línea serie situada a la izquierda.Para TM238LFDC24DT•• y TM238LFAC24DR••: Haga clic en la entrada Comunicación → Línea serie 1 o Línea serie 2 situada a la izquierda.
3 Haga clic en la entrada Ajustes de protocolo.Resultado: Se mostrará la ventana de configuración Modbus_Manager.
Elemento Descripción
Modalidad de transmisión Especifique la modalidad de transmisión que se utilizará:RTU: utiliza codificación binaria y comprobación de errores CRC (8 bits de datos).ASCII: los mensajes tienen un formato ASCII y comprobación de errores LRC (7 bits de datos).
Este parámetro debe ser idéntico para todos los dispositivos Modbus del enlace.
Direccionamiento Especifique si el dispositivo de M238 es maestro o esclavo.
Dirección Dirección Modbus del dispositivo.
Tiempo entre tramas (ms) Tiempo para evitar la colisión de buses.Este parámetro debe ser idéntico para todos los dispositivos Modbus del enlace.
Ajustes de línea de serie Parámetros especificados en la ventana de configuración de líneas serie.
EIO0000000388 04/2012 151

Configuración de línea serie
Maestro Modbus
Si el controlador se configura como un maestro Modbus, se admiten los siguientes bloques de funciones de la biblioteca PLCCommunication:
ADDMREAD_VARSEND_RECV_MSGSINGLE_WRITEWRITE_READ_VARWRITE_VAR
Para obtener más información, consulte Descripciones de bloques de funciones (véase SoMachine, Funciones de lectura/escritura Modbus y ASCII, Guía de la biblioteca PLCCommunication) en la biblioteca PLCCommunication (véase SoMachine, Funciones de lectura/escritura Modbus y ASCII, Guía de la biblioteca PLCCommunication).
Esclavo Modbus
Si el controlador se configura como un esclavo Modbus, se admiten las siguientes peticiones de Modbus:
NOTA: Sólo se puede acceder a través de Modbus a las variables ubicadas de la aplicación del controlador.
Tipos Función Códigos de funciónCódigo/subcódigo
Acceso de datos (1 bit)
Entradas y salidas binarias físicas
Lectura de bobinas 01
Lectura de entradas binarias 02
Escritura de varias bobinas 15
Acceso de datos (16 bits)
Registros de entrada físicos
Lectura de registros de mantenimiento
03
Escritura de registro único 06
Escritura de registros múltiples 16
Leer/escribir varios registros 23
Diagnóstico Diagnóstico 08
Lectura de identificación de dispositivo
43/14
152 EIO0000000388 04/2012

Configuración de línea serie
La siguiente tabla contiene los códigos de subfunción que admite la petición Modbus de diagnóstico 08:
La siguiente tabla indica los objetos que se pueden leer con una petición de identifi-cación de dispositivo de lectura (nivel de identificación básico):
En el siguiente apartado se describen las diferencias entre la asignación de memoria Modbus del controlador y la asignación de HMI Modbus. Si no programa la aplicación para que reconozca estas diferencias de asignación, el controlador y HMI no se comunicarán correctamente y es probable que los valores incorrectos se escriban en las áreas de memoria responsables de las operaciones de salida.
Código de subfunción Función
Dec. Hex.
10 0A Limpiar contadores y registro de diagnóstico
11 0B Devolver contador de mensajes del bus
12 0C Devolver contador de errores de comunicaciones del bus
13 0D Devolver contador de errores de excepciones del bus
14 0E Devolver contador de mensajes del esclavo
15 0F Devolver recuento de esclavos sin respuesta
16 10 Devolver conteo de esclavos NAK
17 11 Devolver recuento de esclavos ocupados
18 12 Devolver recuento de desbordamiento de caracteres del bus
ID de objeto Nombre del objeto Tipo Valor
00 hex Código de fabricante Cadena ASCII Schneider Electric
01 hex Código de producto Cadena ASCII Referencia del controladorP. ej. TM238LFDC24DT••
02 hex Revisión principal/secundaria
Cadena ASCII aa.bb.cc.dd (igual que descriptor de dispositivo)
ADVERTENCIAFUNCIONAMIENTO IMPREVISTO DEL EQUIPO
Programe la aplicación para que realice la transmisión entre la asignación de memoria Modbus utilizada por el controlador y la asignación utilizada por los dispositivos HMI conectados.
El incumplimiento de estas instrucciones puede causar la muerte, lesiones serias o daño al equipo.
EIO0000000388 04/2012 153
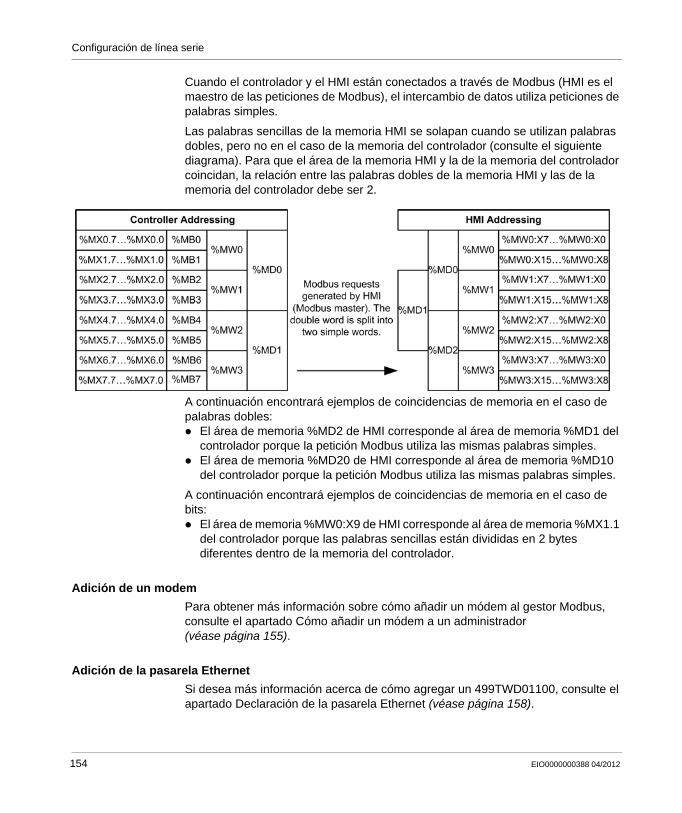
Configuración de línea serie
Cuando el controlador y el HMI están conectados a través de Modbus (HMI es el maestro de las peticiones de Modbus), el intercambio de datos utiliza peticiones de palabras simples.
Las palabras sencillas de la memoria HMI se solapan cuando se utilizan palabras dobles, pero no en el caso de la memoria del controlador (consulte el siguiente diagrama). Para que el área de la memoria HMI y la de la memoria del controlador coincidan, la relación entre las palabras dobles de la memoria HMI y las de la memoria del controlador debe ser 2.
A continuación encontrará ejemplos de coincidencias de memoria en el caso de palabras dobles:
El área de memoria %MD2 de HMI corresponde al área de memoria %MD1 del controlador porque la petición Modbus utiliza las mismas palabras simples.El área de memoria %MD20 de HMI corresponde al área de memoria %MD10 del controlador porque la petición Modbus utiliza las mismas palabras simples.
A continuación encontrará ejemplos de coincidencias de memoria en el caso de bits:
El área de memoria %MW0:X9 de HMI corresponde al área de memoria %MX1.1 del controlador porque las palabras sencillas están divididas en 2 bytes diferentes dentro de la memoria del controlador.
Adición de un modem
Para obtener más información sobre cómo añadir un módem al gestor Modbus, consulte el apartado Cómo añadir un módem a un administrador (véase página 155).
Adición de la pasarela Ethernet
Si desea más información acerca de cómo agregar un 499TWD01100, consulte el apartado Declaración de la pasarela Ethernet (véase página 158).
154 EIO0000000388 04/2012
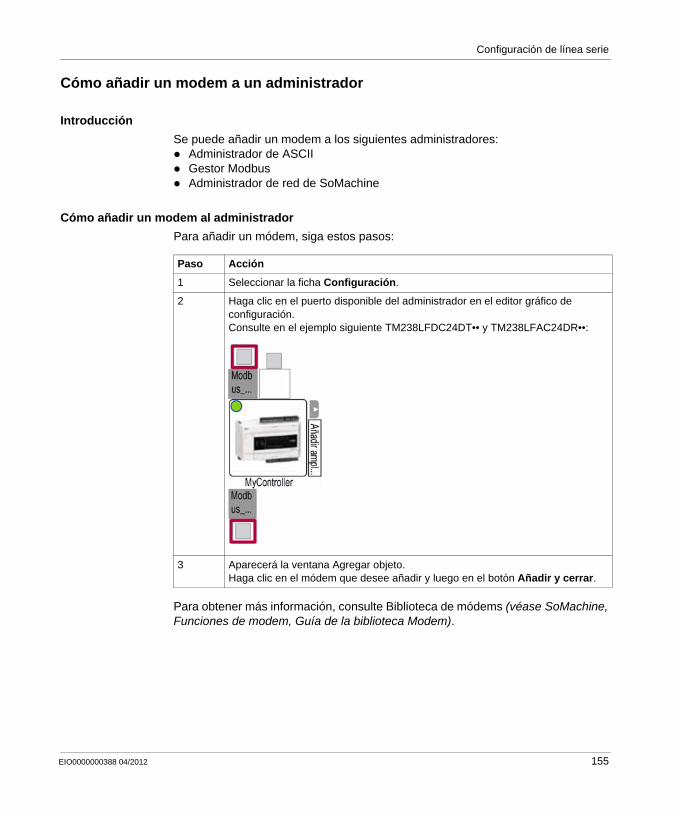
Configuración de línea serie
Cómo añadir un modem a un administrador
Introducción
Se puede añadir un modem a los siguientes administradores: Administrador de ASCIIGestor ModbusAdministrador de red de SoMachine
Cómo añadir un modem al administrador
Para añadir un módem, siga estos pasos:
Para obtener más información, consulte Biblioteca de módems (véase SoMachine, Funciones de modem, Guía de la biblioteca Modem).
Paso Acción
1 Seleccionar la ficha Configuración.
2 Haga clic en el puerto disponible del administrador en el editor gráfico de configuración.Consulte en el ejemplo siguiente TM238LFDC24DT•• y TM238LFAC24DR••:
3 Aparecerá la ventana Agregar objeto.Haga clic en el módem que desee añadir y luego en el botón Añadir y cerrar.
EIO0000000388 04/2012 155

Configuración de línea serie
156 EIO0000000388 04/2012
EIO0000000388 04/2012
14
Modicon M238 Logic Controller
Pasarela Ethernet/Modbus
EIO0000000388 04/2012
Pasarela Ethernet/Modbus 499TWD01100
Conexión y configuración de la pasarela Ethernet
Descripción general
Configure el módulo de pasarela de Ethernet con las siguientes instrucciones.
Para obtener información detallada acerca de la pasarela Ethernet, consulte 499TWD01100Pasarela Ethernet/Modbus para M238 - Guía de hardware (véase 499TWD01100, Pasarela Ethernet/Modbus para M238, Guía de hardware).
NOTA: Cuando el módulo de pasarela de Ethernet está configurado con el software de programación SoMachine, la configuración IP del módulo se almacena en el controlador. Por lo tanto, el personal de mantenimiento puede intercambiar el módulo de la pasarela sin utilizar una configuración adicional.
Conexión del módulo de pasarela de Ethernet de 499TWD01100
Para instalar la pasarela de Ethernet en un controlador, siga estos pasos:
Paso Descripción Acción
1 Preparación Consulte 499TWD01100 Pasarela Ethernet/Modbus para M238 - Guía de hardware (véase 499TWD01100, Pasarela Ethernet/Modbus para M238, Guía de hardware) para obtener más información acerca de cómo:
Conocer las posiciones de montaje para el móduloAñadir y quitar el módulo de un segmento DINMontar el módulo en la superficie del panelRespetar las distancias mínimas para el módulo en un panel de control.
2 Montaje del módulo de 499TWD01100
Instale el módulo en un segmento DIN o sobre un panel.
157
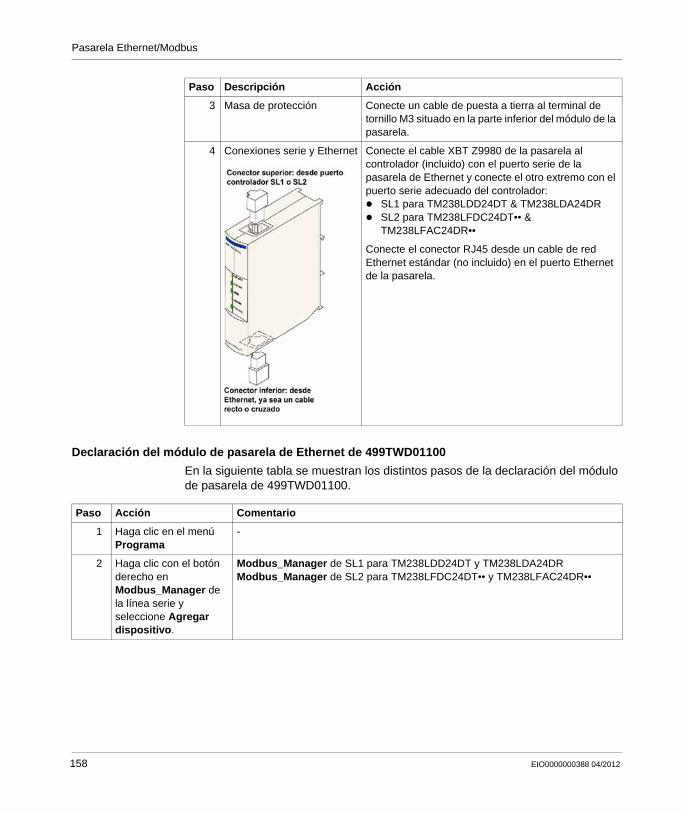
Pasarela Ethernet/Modbus
Declaración del módulo de pasarela de Ethernet de 499TWD01100
En la siguiente tabla se muestran los distintos pasos de la declaración del módulo de pasarela de 499TWD01100.
3 Masa de protección Conecte un cable de puesta a tierra al terminal de tornillo M3 situado en la parte inferior del módulo de la pasarela.
4 Conexiones serie y Ethernet Conecte el cable XBT Z9980 de la pasarela al controlador (incluido) con el puerto serie de la pasarela de Ethernet y conecte el otro extremo con el puerto serie adecuado del controlador:
SL1 para TM238LDD24DT & TM238LDA24DRSL2 para TM238LFDC24DT•• & TM238LFAC24DR••
Conecte el conector RJ45 desde un cable de red Ethernet estándar (no incluido) en el puerto Ethernet de la pasarela.
Paso Descripción Acción
Paso Acción Comentario
1 Haga clic en el menú Programa
-
2 Haga clic con el botón derecho en Modbus_Manager de la línea serie y seleccione Agregar dispositivo.
Modbus_Manager de SL1 para TM238LDD24DT y TM238LDA24DRModbus_Manager de SL2 para TM238LFDC24DT•• y TM238LFAC24DR••
158 EIO0000000388 04/2012

Pasarela Ethernet/Modbus
3 Seleccione el módulo de Ethernet de 499TWD01100 en la lista de dispositivos.
4 Haga clic en Agregar dispositivo.
Se crea un nodo de 499TWD01100 en la ventana Dispositivos.
5 Haga doble clic en el nodo de 499TWD01100 para acceder a la ventana de configuración.
-
Paso Acción Comentario
EIO0000000388 04/2012 159
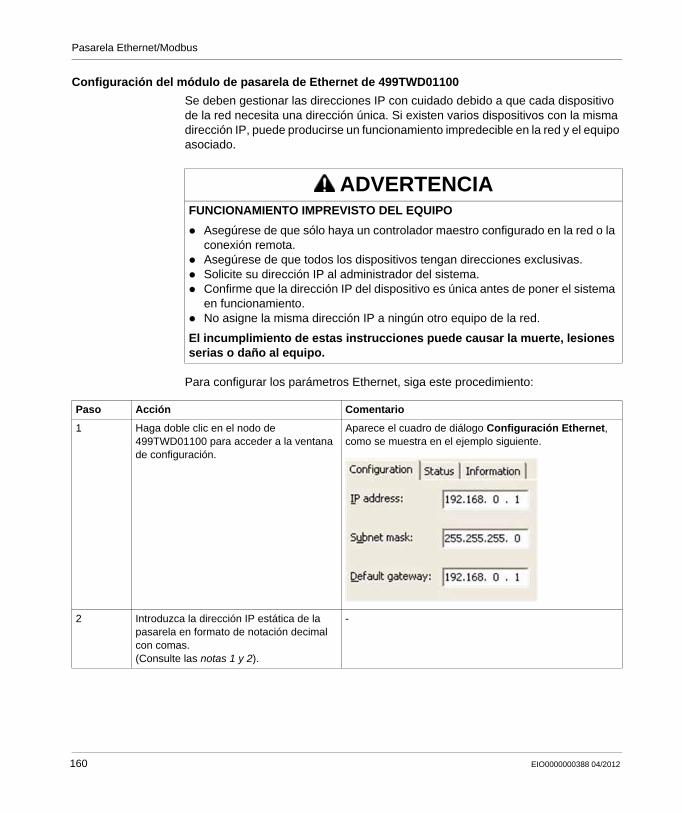
Pasarela Ethernet/Modbus
Configuración del módulo de pasarela de Ethernet de 499TWD01100
Se deben gestionar las direcciones IP con cuidado debido a que cada dispositivo de la red necesita una dirección única. Si existen varios dispositivos con la misma dirección IP, puede producirse un funcionamiento impredecible en la red y el equipo asociado.
Para configurar los parámetros Ethernet, siga este procedimiento:
ADVERTENCIAFUNCIONAMIENTO IMPREVISTO DEL EQUIPO
Asegúrese de que sólo haya un controlador maestro configurado en la red o la conexión remota.Asegúrese de que todos los dispositivos tengan direcciones exclusivas.Solicite su dirección IP al administrador del sistema.Confirme que la dirección IP del dispositivo es única antes de poner el sistema en funcionamiento.No asigne la misma dirección IP a ningún otro equipo de la red.
El incumplimiento de estas instrucciones puede causar la muerte, lesiones serias o daño al equipo.
Paso Acción Comentario
1 Haga doble clic en el nodo de 499TWD01100 para acceder a la ventana de configuración.
Aparece el cuadro de diálogo Configuración Ethernet, como se muestra en el ejemplo siguiente.
2 Introduzca la dirección IP estática de la pasarela en formato de notación decimal con comas. (Consulte las notas 1 y 2).
-
160 EIO0000000388 04/2012

Pasarela Ethernet/Modbus
NOTA:
1. Consulte al administrador de redes o de sistemas para obtener los parámetros IP válidos para la red.
2. Cada dispositivo conectado de un segmento de red de Ethernet debe tener una dirección IP exclusiva. Cuando se conecta a la red, la pasarela ejecuta una comprobación en busca de direcciones IP duplicadas. Si se detecta una dirección IP duplicada en la red, el indicador luminoso de ESTADO parpadeará cuatro veces de forma periódica. Cuando esto ocurra, introduzca en este campo una dirección IP nueva que no esté duplicada.
3. A menos que la pasarela tenga unos requisitos de subred especiales, utilice la máscara de subred predeterminada.
4. Si no hay ningún dispositivo de pasarela en la red, simplemente especifique la dirección IP de la pasarela en el campo Dirección de puerta de enlace.
3 Introduzca la Máscara de subred válida que el administrador de red ha asignado a la pasarela. Tenga en cuenta que no se puede dejar este campo en blanco; debe introducir un valor.(Consulte las notas 1 y 3).
De forma predeterminada, el software de programación calcula y muestra automáticamente una máscara de subred predeterminada basada en la clase de red que haya introducido en el campo Dirección IP anterior. Los valores de máscara de subred predeterminados, según la categoría de las direcciones IP de red de la pasarela, siguen estas normas:Red de clase A -> Máscara de subred predeterminada: 255.0.0.0Red de clase B -> Máscara de subred predeterminada: 255.255.0.0Red de clase C -> Máscara de subred predeterminada: 255.255.255.0
4 Introduzca la dirección IP de la Pasarela.(Consulte las notas 1 y 4).
En la LAN, la pasarela debe estar en el mismo segmento que 499TWD01100. Por lo general, el administrador de red proporcionará esta información. Tenga en cuenta que la aplicación no proporciona ningún valor predeterminado y que debe introducirse una dirección de pasarela válida en este campo.
5 Comprobar y validar la configuración. -
6 Apague el controlador y vuelva a encenderlo.
Es necesario apagar y encender para que M238 transfiera la dirección IP a 499TWD01100.
Paso Acción Comentario
EIO0000000388 04/2012 161

Pasarela Ethernet/Modbus
162 EIO0000000388 04/2012
EIO0000000388 04/2012
15
Modicon M238 Logic Controller
M238 - Conexión del Modicon M238 Logic Controller a un PC
EIO0000000388 04/2012
Conexión de Modicon M238 Logic Controller a un PC
Introducción
En este capítulo se proporcionan reglas para la conexión de un Modicon M238 Logic Controller a un PC.
Contenido de este capítulo
Este capítulo contiene los siguiente apartados:
Apartado Página
Conexión del controlador a un PC 164
Ruta activa del controlador 166
163
M238 - Conexión del Modicon M238 Logic Controller a un PC
Conexión del controlador a un PC
Descripción general
Para transferir, ejecutar y supervisar las aplicaciones, conecte el controlador a un ordenador con SoMachine instalado; use un cable USB.
Conexión con puerto mini-B USB
TCS XCNA MUM3P : Este cable USB es adecuado para una conexión de corta duración, como actualizaciones rápidas o recuperación de valores de datos.
BMX XCA USBH045 : Con toma de tierra y blindado, este cable USB es adecuado para una conexión de larga duración.
NOTA: Sólo puede conectar 1 controlador al PC al mismo tiempo.
El puerto USB mini-B es el puerto de programación que se puede utilizar para conectar un PC con un puerto host USB utilizando software SoMachine. Con un cable USB normal, esta conexión es adecuada para las actualizaciones rápidas del programa o las conexiones de corta duración para realizar el mantenimiento e inspeccionar los valores de los datos. No es adecuada para las conexiones a largo plazo, como la puesta en marcha o la supervisión, sin el uso de cables adaptados especialmente para ayudar a minimizar los efectos de las interferencias electromagnéticas.
El cable de comunicación debe conectarse primero al PC para minimizar la posibilidad de que una descarga electrostática afecte al controlador.
AVISOEQUIPO INOPERATIVO
Conecte siempre el cable de comunicación al PC antes de conectarlo al controlador.
El incumplimiento de estas instrucciones puede causar daño al equipo.
ADVERTENCIAEQUIPO INOPERATIVO O FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
Deberá usar un cable USB como BMX XCAUSBH0•• asegurado a la puesta a tierra funcional (FE) del sistema para cualquier conexión a largo plazo.No conecte más de un controlador a la vez utilizando conexiones USB.
El incumplimiento de estas instrucciones puede causar la muerte, lesiones serias o daño al equipo.
164 EIO0000000388 04/2012
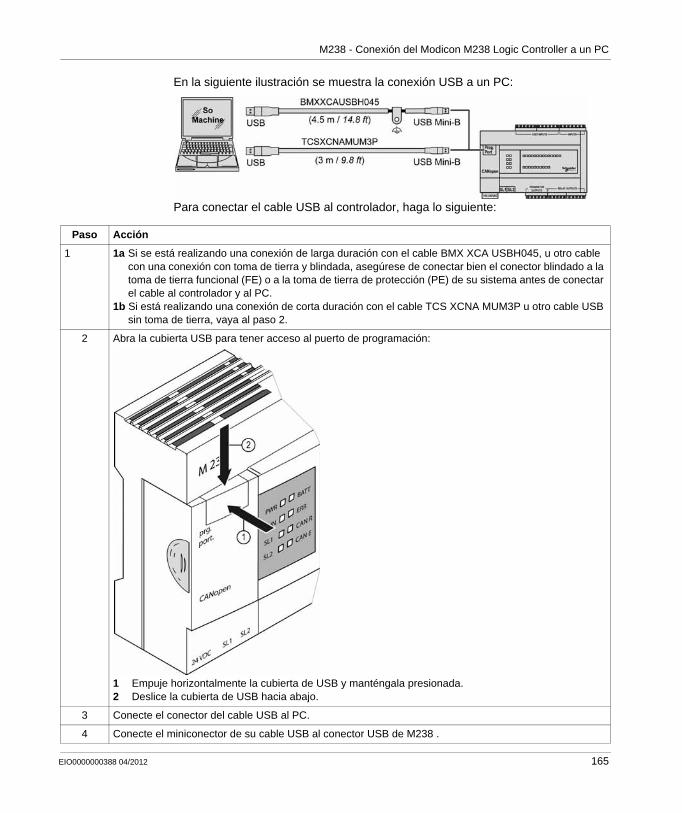
M238 - Conexión del Modicon M238 Logic Controller a un PC
En la siguiente ilustración se muestra la conexión USB a un PC:
Para conectar el cable USB al controlador, haga lo siguiente:
Paso Acción
1 1a Si se está realizando una conexión de larga duración con el cable BMX XCA USBH045, u otro cable con una conexión con toma de tierra y blindada, asegúrese de conectar bien el conector blindado a la toma de tierra funcional (FE) o a la toma de tierra de protección (PE) de su sistema antes de conectar el cable al controlador y al PC.
1b Si está realizando una conexión de corta duración con el cable TCS XCNA MUM3P u otro cable USB sin toma de tierra, vaya al paso 2.
2 Abra la cubierta USB para tener acceso al puerto de programación:
1 Empuje horizontalmente la cubierta de USB y manténgala presionada.2 Deslice la cubierta de USB hacia abajo.
3 Conecte el conector del cable USB al PC.
4 Conecte el miniconector de su cable USB al conector USB de M238 .
EIO0000000388 04/2012 165

M238 - Conexión del Modicon M238 Logic Controller a un PC
Ruta activa del controlador
Introducción
Después de conectar el controlador al PC (véase página 164), debe configurar la ruta activa del controlador en SoMachine.
NOTA: SoMachine no puede controlar varios controladores simultáneamente.
Ruta activa
Para establecer la ruta activa del controlador, siga estos pasos:
Paso Acción
1 En la ficha Configuración, haga doble clic en el controlador.
2 Seleccione la ficha Configuración de comunicación.
3 Haga clic en el botón Agregar puerta de enlace.
4 Haga clic en el botón Examinar red.
5 Seleccione el controlador en la lista de dispositivos encontrados comprobando su número de serie (los últimos 6 números del controlador) y haciendo clic en el botón Establecer una ruta activa.
6 Pulse ALT+F o haga clic en Cancelar cuando aparezca el cuadro de diálogo.
166 EIO0000000388 04/2012
EIO0000000388 04/2012
16
Modicon M238 Logic Controller
Accesorio de dispositivo cargador
EIO0000000388 04/2012
Accesorio de dispositivo cargador
Descripción general
En este manual se describe cómo utilizar el Accesorio de dispositivo cargador
Contenido de este capítulo
Este capítulo contiene las siguientes secciones:
Sección Apartado Página
16.1 Acerca del Accesorio de dispositivo cargador 168
16.2 Carga de SoMachine a la llave de memoria USB 176
16.3 Transferencia de archivos con una llave de memoria USB 177
16.4 Otras funcionalidades 183
167
Accesorio de dispositivo cargador
16.1 Acerca del Accesorio de dispositivo cargador
Contenido de esta sección
Esta sección contiene los siguientes apartados:
Apartado Página
Accesorio de dispositivo cargadorDescripción 169
Descripción física 171
Estado del indicador LED y diagnóstico 172
Compatibilidad de firmware y del software SoMachine 174
168 EIO0000000388 04/2012

Accesorio de dispositivo cargador
Accesorio de dispositivo cargadorDescripción
Descripción general
El Accesorio de dispositivo cargador es un accesorio que permite descargar o cargar un proyecto a través del puerto de programación del controlador mediante una llave de memoria USB.
Solo puede utilizarse el dispositivo con la aplicación SoMachine V2.0 o posterior.
NOTA:
La llave de memoria USB es una llave de memoria USB estándar con las siguientes características:
1 GB como mínimoUSB 2.0 o inferiorformato FAT16 o FAT32
Qué archivos se transfieren?
El Accesorio de dispositivo cargador permite transferir los tipos de archivo siguientes:
un archivo *.app yun archivo *.crc
Estos tipos de archivo se transfieren como pares. El número de pares de archivos que se transfieren depende del proyecto de SoMachine:
Si... Entonces... Nombres de archivo predeterminados de SoMachine
el proyecto de SoMachine no contiene ninguna configuración de símbolos o bien el proyecto se ha generado con una versión de SoMachine superior a la V3.0
se transfiere un par de archivos. application.appapplication.crc
el proyecto de SoMachine contiene una configuración de símbolos generada con una versión de SoMachine inferior a la V3.1
se transfieren 2 pares de archivos. application.appapplication.crc
yapplication_symbol.appapplication_symbol.crc
EIO0000000388 04/2012 169
Accesorio de dispositivo cargador
Funcionalidades
El Accesorio de dispositivo cargador puede utilizarse en los casos siguientes:Carga de SoMachine a la llave de memoria USB (véase página 176)Carga del controlador a la llave de memoria USB (véase página 178)Descarga de la llave de memoria USB al controlador (véase página 180)Establecimiento del controlador en el estado EN EJECUCIÓN (véase página 184)Actualización del firmware del Accesorio de dispositivo cargador (véase página 185)
ADVERTENCIAFUNCIONAMIENTO IMPREVISTO DEL EQUIPO
Debe tener conocimientos operativos de la máquina o el proceso antes de conectar este dispositivo al controlador.Asegúrese de que la máquina o el proceso se encuentre en un estado seguro (DETENER, APAGAR, INERTE, etc.) antes de pasar el Accesorio de dispositivo cargador a la posición “On” del interruptor mientras está conectado al controlador.Asegúrese de que estén instaladas las protecciones de modo que, si se produjera un posible funcionamiento imprevisto del equipo, no provoque lesiones al personal ni daños al propio equipo.Debe haber leído y comprendido la documentación de usuario de este y de cualquier otro dispositivo involucrado en las funciones que lleva a cabo el Accesorio de dispositivo cargador.
El incumplimiento de estas instrucciones puede causar la muerte, lesiones serias o daño al equipo.
170 EIO0000000388 04/2012

Accesorio de dispositivo cargador
Descripción física
Descripción general
1 Pilas2 Puerto USB para el puerto de programación mini B USB del controlador3 Puerto USB para la llave de memoria USB4 Interruptor ON/OFF5 Indicador LED de estado6 Indicador LED ERR7 Indicador LED COM8 Indicador LED de alimentación
Pila
El Accesorio de dispositivo cargador utiliza 2 pilas alcalinas AA/LR6.
ADVERTENCIAEQUIPO INOPERATIVO
Guarde las pilas en un lugar fresco y bien ventilado.Los cortocircuitos prolongados causan la pérdida de energía de las pilas.No intente recargar las pilas suministradas con el dispositivo.No instale las pilas con los polos invertidos.Descarte inmediatamente cualquier pila que muestre signos de fugas o daños.Deseche las pilas usadas de acuerdo con las normativas locales.No las mezcle con otros tipos de pila.
El incumplimiento de estas instrucciones puede causar la muerte, lesiones serias o daño al equipo.
EIO0000000388 04/2012 171

Accesorio de dispositivo cargador
Estado del indicador LED y diagnóstico
Estado del indicador LED
En la tabla siguiente se describe el estado del Accesorio de dispositivo cargador en función de los estados del indicador LED:
PWR COM ERR STS Estado Causas posibles
En espera –
Comunicación normal
–
Operación completada
–
Error de funcionamiento detectado
Se indica este error cuando:la llave de memoria USB está llena o dañada (archivo dañado);se interrumpe la comunicación entre el controlador y el Accesorio de dispositivo cargador;el controlador no ha podido ejecutarse o detenerse.
Error de diálogo detectado
Se indica este error cuando se produce un error de comunicación. Por ejemplo, cuando:
se han permutado la llave de memoria USB y los puertos USB del controlador (se utiliza el puerto incorrecto);no se puede leer o escribir en la llave de memoria USB (la protección contra escritura está activa).
LED encendido LED apagado LED parpadeando 2 s LED parpadeando 1 s LED parpadeando
0,5 s LED parpadeando 0,1 s1 Nivel bajo de las pilas
172 EIO0000000388 04/2012
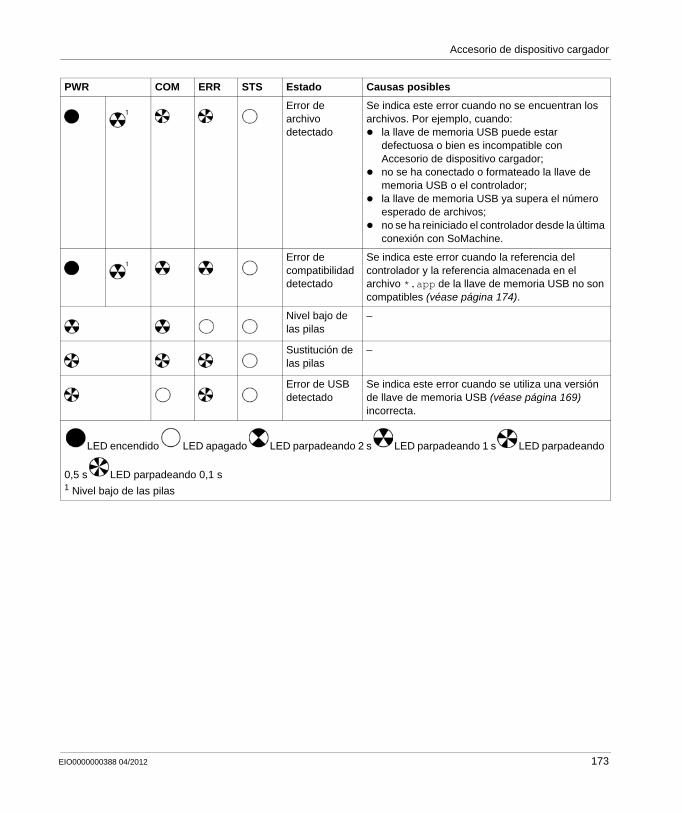
Accesorio de dispositivo cargador
Error de archivo detectado
Se indica este error cuando no se encuentran los archivos. Por ejemplo, cuando:
la llave de memoria USB puede estar defectuosa o bien es incompatible con Accesorio de dispositivo cargador;no se ha conectado o formateado la llave de memoria USB o el controlador;la llave de memoria USB ya supera el número esperado de archivos;no se ha reiniciado el controlador desde la última conexión con SoMachine.
Error de compatibilidad detectado
Se indica este error cuando la referencia del controlador y la referencia almacenada en el archivo *.app de la llave de memoria USB no son compatibles (véase página 174).
Nivel bajo de las pilas
–
Sustitución de las pilas
–
Error de USB detectado
Se indica este error cuando se utiliza una versión de llave de memoria USB (véase página 169) incorrecta.
PWR COM ERR STS Estado Causas posibles
LED encendido LED apagado LED parpadeando 2 s LED parpadeando 1 s LED parpadeando
0,5 s LED parpadeando 0,1 s1 Nivel bajo de las pilas
EIO0000000388 04/2012 173
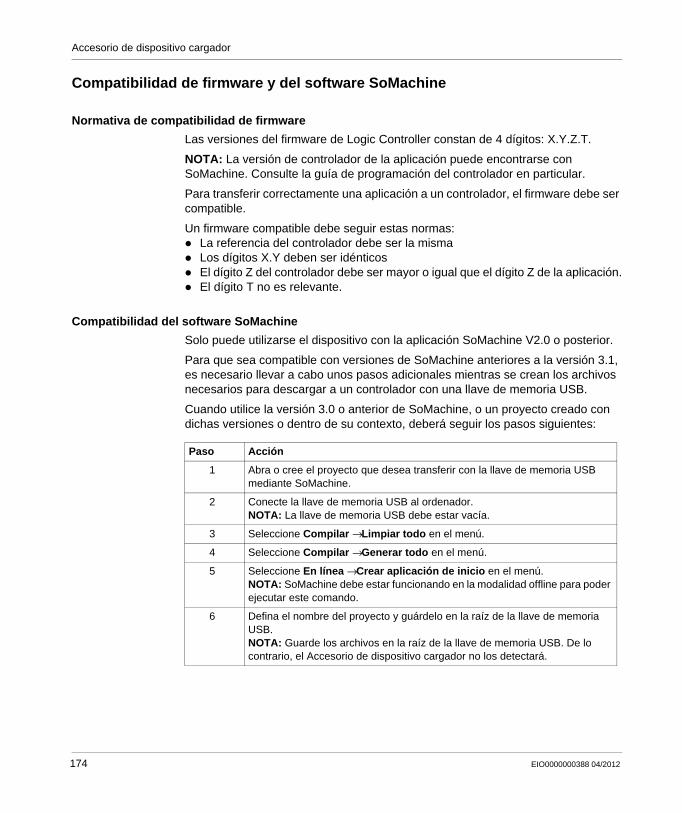
Accesorio de dispositivo cargador
Compatibilidad de firmware y del software SoMachine
Normativa de compatibilidad de firmware
Las versiones del firmware de Logic Controller constan de 4 dígitos: X.Y.Z.T.
NOTA: La versión de controlador de la aplicación puede encontrarse con SoMachine. Consulte la guía de programación del controlador en particular.
Para transferir correctamente una aplicación a un controlador, el firmware debe ser compatible.
Un firmware compatible debe seguir estas normas:La referencia del controlador debe ser la mismaLos dígitos X.Y deben ser idénticosEl dígito Z del controlador debe ser mayor o igual que el dígito Z de la aplicación.El dígito T no es relevante.
Compatibilidad del software SoMachine
Solo puede utilizarse el dispositivo con la aplicación SoMachine V2.0 o posterior.
Para que sea compatible con versiones de SoMachine anteriores a la versión 3.1, es necesario llevar a cabo unos pasos adicionales mientras se crean los archivos necesarios para descargar a un controlador con una llave de memoria USB.
Cuando utilice la versión 3.0 o anterior de SoMachine, o un proyecto creado con dichas versiones o dentro de su contexto, deberá seguir los pasos siguientes:
Paso Acción
1 Abra o cree el proyecto que desea transferir con la llave de memoria USB mediante SoMachine.
2 Conecte la llave de memoria USB al ordenador.NOTA: La llave de memoria USB debe estar vacía.
3 Seleccione Compilar → Limpiar todo en el menú.
4 Seleccione Compilar → Generar todo en el menú.
5 Seleccione En línea → Crear aplicación de inicio en el menú.NOTA: SoMachine debe estar funcionando en la modalidad offline para poder ejecutar este comando.
6 Defina el nombre del proyecto y guárdelo en la raíz de la llave de memoria USB.NOTA: Guarde los archivos en la raíz de la llave de memoria USB. De lo contrario, el Accesorio de dispositivo cargador no los detectará.
174 EIO0000000388 04/2012

Accesorio de dispositivo cargador
Debe ejecutar la secuencia Limpiar todo, Generar todo (pasos 3 y 4 de la tabla anterior) para que los datos Retain se inicialicen correctamente en su proyecto.
ADVERTENCIAFUNCIONAMIENTO IMPREVISTO DE LA MÁQUINA
Asegúrese de ejecutar la secuencia Limpiar todo, Generar todo descrita previamente si utiliza una versión de SoMachine anterior a la versión 3.1 o un proyecto creado originalmente con dicha versión o bien dentro del contexto de una versión anterior a la versión 3.1.
El incumplimiento de estas instrucciones puede causar la muerte, lesiones serias o daño al equipo.
EIO0000000388 04/2012 175
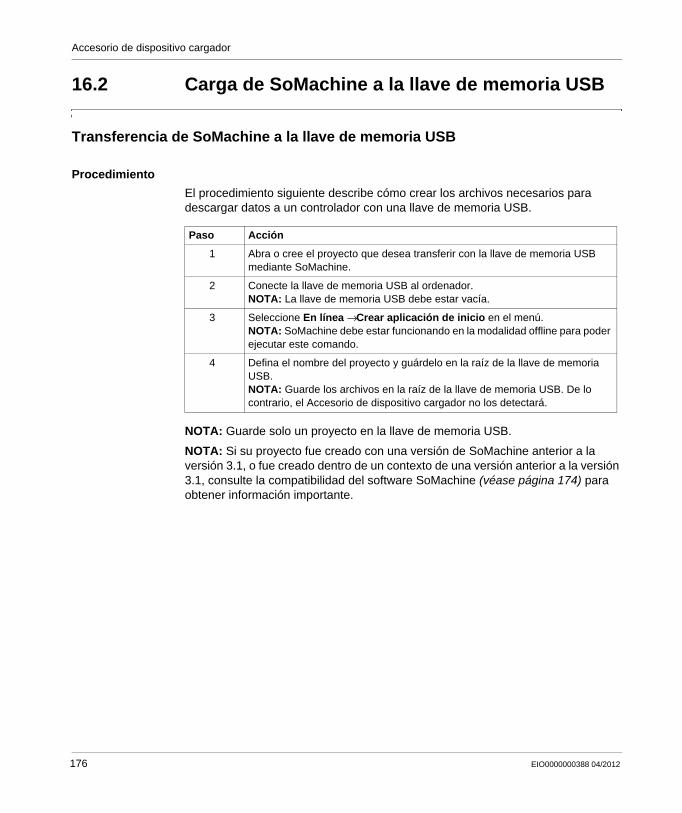
Accesorio de dispositivo cargador
16.2 Carga de SoMachine a la llave de memoria USB
Transferencia de SoMachine a la llave de memoria USB
Procedimiento
El procedimiento siguiente describe cómo crear los archivos necesarios para descargar datos a un controlador con una llave de memoria USB.
NOTA: Guarde solo un proyecto en la llave de memoria USB.
NOTA: Si su proyecto fue creado con una versión de SoMachine anterior a la versión 3.1, o fue creado dentro de un contexto de una versión anterior a la versión 3.1, consulte la compatibilidad del software SoMachine (véase página 174) para obtener información importante.
Paso Acción
1 Abra o cree el proyecto que desea transferir con la llave de memoria USB mediante SoMachine.
2 Conecte la llave de memoria USB al ordenador.NOTA: La llave de memoria USB debe estar vacía.
3 Seleccione En línea → Crear aplicación de inicio en el menú.NOTA: SoMachine debe estar funcionando en la modalidad offline para poder ejecutar este comando.
4 Defina el nombre del proyecto y guárdelo en la raíz de la llave de memoria USB.NOTA: Guarde los archivos en la raíz de la llave de memoria USB. De lo contrario, el Accesorio de dispositivo cargador no los detectará.
176 EIO0000000388 04/2012

Accesorio de dispositivo cargador
16.3 Transferencia de archivos con una llave de memoria USB
Contenido de esta sección
Esta sección contiene los siguientes apartados:
Apartado Página
Carga del controlador a la llave de memoria USB 178
Descarga de la llave de memoria USB al controlador 180
EIO0000000388 04/2012 177

Accesorio de dispositivo cargador
Carga del controlador a la llave de memoria USB
Procedimiento
El procedimiento siguiente describe cómo cargar en la llave de memoria USB el proyecto actual almacenado en el controlador:
ADVERTENCIAFUNCIONAMIENTO IMPREVISTO DEL EQUIPO
Debe tener conocimientos operativos de la máquina o el proceso antes de conectar este dispositivo al controlador.Asegúrese de que la máquina o el proceso se encuentre en un estado seguro (DETENER, APAGAR, INERTE, etc.) antes de pasar el Accesorio de dispositivo cargador a la posición “On” del interruptor mientras está conectado al controlador.Asegúrese de que estén instaladas las protecciones de modo que, si se produjera un posible funcionamiento imprevisto del equipo, no provoque lesiones al personal ni daños al propio equipo.Debe haber leído y comprendido la documentación de usuario de este y de cualquier otro dispositivo involucrado en las funciones que lleva a cabo el Accesorio de dispositivo cargador.
El incumplimiento de estas instrucciones puede causar la muerte, lesiones serias o daño al equipo.
Paso Acción
1 Elimine todos los archivos de la raíz de la llave de memoria USB.Si en la llave de memoria USB se encuentra un par de archivos de controlador, la función de descarga (véase página 180) se inicia automáticamente.
2 Encienda el controlador.
3 Conecte la llave de memoria USB al Accesorio de dispositivo cargador.
4 Conecte el Accesorio de dispositivo cargador al controlador con un cable USB.
5 Coloque el interruptor On/Off del Accesorio de dispositivo cargador en la posición On.NOTA: El controlador se establece en el estado DETENIDO.
6 Espere a que se carguen los archivos en la llave de memoria USB. (Indicador LED (véase página 172) en el estado Funcionamiento normal).
7 Al finalizar la carga (indicador LED (véase página 172) en el estado Operación completada), coloque el interruptor On/Off del Accesorio de dispositivo cargador en la posición Off.
8 Desconecte el Accesorio de dispositivo cargador del controlador.
178 EIO0000000388 04/2012

Accesorio de dispositivo cargador
El Accesorio de dispositivo cargador se apagará automáticamentetras 10 s, si la carga se completa correctamente.tras 60 s, si la carga no se completa correctamente.
9 Desconecte la llave de memoria USB y el cable USB del Accesorio de dispositivo cargador.
10 Ejecute un comando Ejecutar (véase página 60) o utilice la función Establecimiento del controlador en el estado EN EJECUCIÓN (véase página 184) para establecer el controlador en el estado EN EJECUCIÓN.
Paso Acción
EIO0000000388 04/2012 179

Accesorio de dispositivo cargador
Descarga de la llave de memoria USB al controlador
Procedimiento
El procedimiento siguiente describe cómo descargar en el controlador el proyecto actual almacenado en la llave de memoria USB:
ADVERTENCIAFUNCIONAMIENTO IMPREVISTO DEL EQUIPO
Debe tener conocimientos operativos de la máquina o el proceso antes de conectar este dispositivo al controlador.Asegúrese de que la máquina o el proceso se encuentre en un estado seguro (DETENER, APAGAR, INERTE, etc.) antes de pasar el Accesorio de dispositivo cargador a la posición “On” del interruptor mientras está conectado al controlador.Asegúrese de que estén instaladas las protecciones de modo que, si se produjera un posible funcionamiento imprevisto del equipo, no provoque lesiones al personal ni daños al propio equipo.Debe haber leído y comprendido la documentación de usuario de este y de cualquier otro dispositivo involucrado en las funciones que lleva a cabo el Accesorio de dispositivo cargador.
El incumplimiento de estas instrucciones puede causar la muerte, lesiones serias o daño al equipo.
Paso Acción
1 Para descargar un proyecto en la llave USB:sin Configuración de símbolos: debe haber 1 par de archivos (*.app y *.crc) almacenados en la raíz de la llave de memoria USB.con Configuración de símbolos: debe haber 2 pares de archivos (*.app y *.crc, *_Symbols.app y *_Symbols.crc) almacenados en la raíz de la llave de memoria USB.
Si en la raíz de la llave de memoria USB no se encuentra ningún par de archivos, la función de carga (véase página 178) se inicia automáticamente.
180 EIO0000000388 04/2012
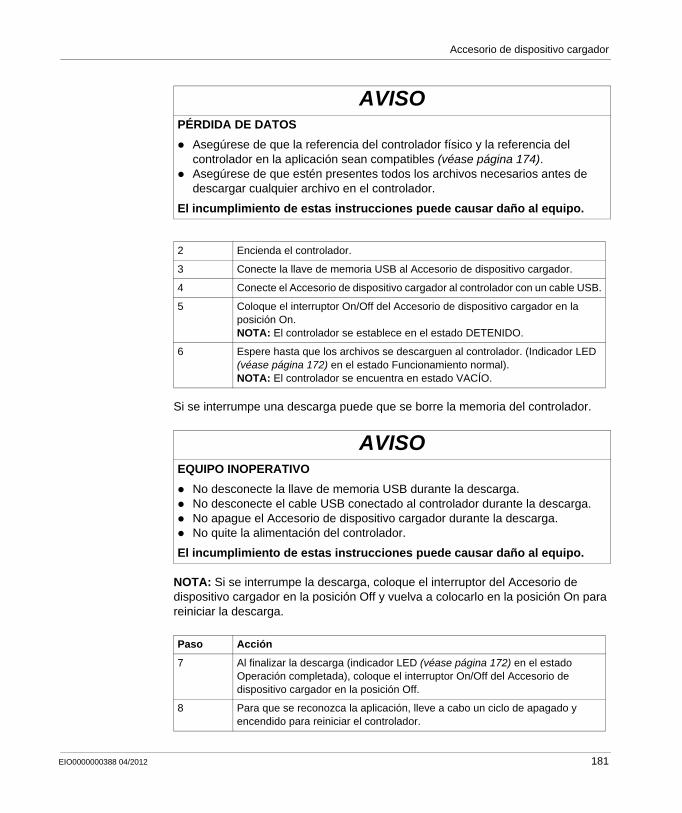
Accesorio de dispositivo cargador
Si se interrumpe una descarga puede que se borre la memoria del controlador.
NOTA: Si se interrumpe la descarga, coloque el interruptor del Accesorio de dispositivo cargador en la posición Off y vuelva a colocarlo en la posición On para reiniciar la descarga.
AVISOPÉRDIDA DE DATOS
Asegúrese de que la referencia del controlador físico y la referencia del controlador en la aplicación sean compatibles (véase página 174).Asegúrese de que estén presentes todos los archivos necesarios antes de descargar cualquier archivo en el controlador.
El incumplimiento de estas instrucciones puede causar daño al equipo.
2 Encienda el controlador.
3 Conecte la llave de memoria USB al Accesorio de dispositivo cargador.
4 Conecte el Accesorio de dispositivo cargador al controlador con un cable USB.
5 Coloque el interruptor On/Off del Accesorio de dispositivo cargador en la posición On.NOTA: El controlador se establece en el estado DETENIDO.
6 Espere hasta que los archivos se descarguen al controlador. (Indicador LED (véase página 172) en el estado Funcionamiento normal).NOTA: El controlador se encuentra en estado VACÍO.
AVISOEQUIPO INOPERATIVO
No desconecte la llave de memoria USB durante la descarga.No desconecte el cable USB conectado al controlador durante la descarga.No apague el Accesorio de dispositivo cargador durante la descarga.No quite la alimentación del controlador.
El incumplimiento de estas instrucciones puede causar daño al equipo.
Paso Acción
7 Al finalizar la descarga (indicador LED (véase página 172) en el estado Operación completada), coloque el interruptor On/Off del Accesorio de dispositivo cargador en la posición Off.
8 Para que se reconozca la aplicación, lleve a cabo un ciclo de apagado y encendido para reiniciar el controlador.
EIO0000000388 04/2012 181

Accesorio de dispositivo cargador
En función del controlador y la configuración, el controlador puede estar en un estado EN EJECUCIÓN o DETENIDO.
El Accesorio de dispositivo cargador se apagará automáticamentetras 10 s, si la descarga se completa correctamente.tras 60 s, si la descarga no se completa correctamente.
ADVERTENCIAFUNCIONAMIENTO IMPREVISTO DEL EQUIPO
Consulte el diagrama de estados y comportamientos (véase página 46) para saber qué estado asumirá el controlador tras el ciclo de apagado y encendido.
El incumplimiento de estas instrucciones puede causar la muerte, lesiones serias o daño al equipo.
9 Desconecte el Accesorio de dispositivo cargador del controlador.
10 Desconecte la llave de memoria USB y el cable USB del Accesorio de dispositivo cargador.
11 Si el controlador se encuentra en un estado DETENIDO, ejecute un comando Ejecutar (véase página 60) o utilice la función Establecimiento del controlador en el estado EN EJECUCIÓN (véase página 184) para establecer el controlador en el estado EN EJECUCIÓN.
182 EIO0000000388 04/2012

Accesorio de dispositivo cargador
16.4 Otras funcionalidades
Contenido de esta sección
Esta sección contiene los siguientes apartados:
Apartado Página
Establecimiento del controlador en el estado EN EJECUCIÓN 184
Actualización del firmware del Accesorio de dispositivo cargador 185
EIO0000000388 04/2012 183

Accesorio de dispositivo cargador
Establecimiento del controlador en el estado EN EJECUCIÓN
Procedimiento
El procedimiento siguiente describe cómo establecer un controlador en el estado EN EJECUCIÓN mediante el Accesorio de dispositivo cargador.
El Accesorio de dispositivo cargador se apagará automáticamentetras 10 s, si la actualización se completa correctamente.tras 60 s, si la actualización no se completa correctamente.
ADVERTENCIAFUNCIONAMIENTO IMPREVISTO DEL EQUIPO
Debe tener conocimientos operativos de la máquina o el proceso antes de conectar este dispositivo al controlador.Asegúrese de que la máquina o el proceso se encuentre en un estado seguro (DETENER, APAGAR, INERTE, etc.) antes de pasar el Accesorio de dispositivo cargador a la posición “On” del interruptor mientras está conectado al controlador.Asegúrese de que estén instaladas las protecciones de modo que, si se produjera un posible funcionamiento imprevisto del equipo, no provoque lesiones al personal ni daños al propio equipo.Debe haber leído y comprendido la documentación de usuario de este y de cualquier otro dispositivo involucrado en las funciones que lleva a cabo el Accesorio de dispositivo cargador.
El incumplimiento de estas instrucciones puede causar la muerte, lesiones serias o daño al equipo.
Paso Acción
1 Desconecte la llave USB del Accesorio de dispositivo cargador.
2 Conecte el Accesorio de dispositivo cargador al controlador.
3 Coloque el interruptor On/Off del Accesorio de dispositivo cargador en la posición On.NOTA: El controlador se establece en el estado EN EJECUCIÓN.
4 Coloque el interruptor On/Off del Accesorio de dispositivo cargador en la posición Off.
5 Desconecte el Accesorio de dispositivo cargador del controlador.
184 EIO0000000388 04/2012
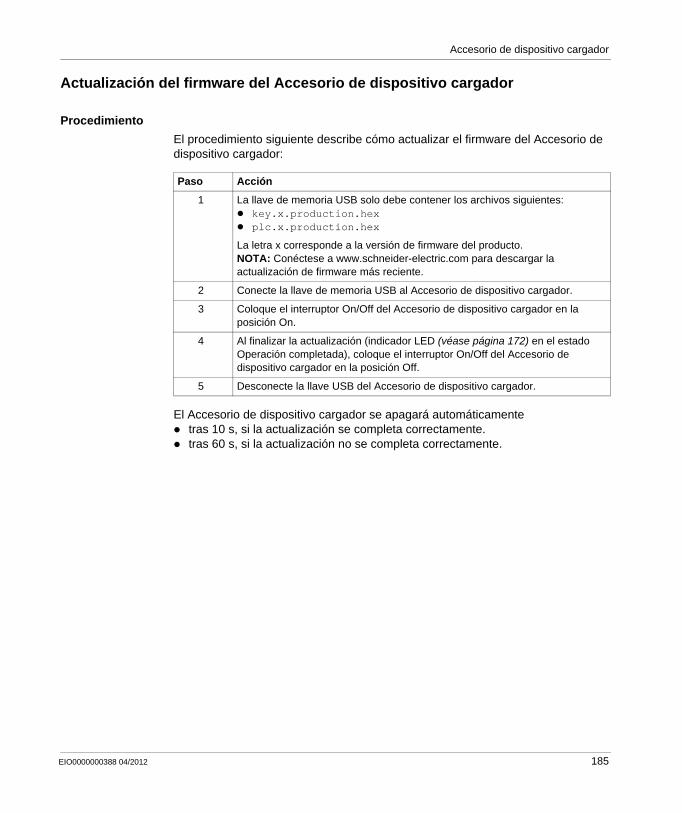
Accesorio de dispositivo cargador
Actualización del firmware del Accesorio de dispositivo cargador
Procedimiento
El procedimiento siguiente describe cómo actualizar el firmware del Accesorio de dispositivo cargador:
El Accesorio de dispositivo cargador se apagará automáticamentetras 10 s, si la actualización se completa correctamente.tras 60 s, si la actualización no se completa correctamente.
Paso Acción
1 La llave de memoria USB solo debe contener los archivos siguientes:key.x.production.hexplc.x.production.hex
La letra x corresponde a la versión de firmware del producto.NOTA: Conéctese a www.schneider-electric.com para descargar la actualización de firmware más reciente.
2 Conecte la llave de memoria USB al Accesorio de dispositivo cargador.
3 Coloque el interruptor On/Off del Accesorio de dispositivo cargador en la posición On.
4 Al finalizar la actualización (indicador LED (véase página 172) en el estado Operación completada), coloque el interruptor On/Off del Accesorio de dispositivo cargador en la posición Off.
5 Desconecte la llave USB del Accesorio de dispositivo cargador.
EIO0000000388 04/2012 185

Accesorio de dispositivo cargador
186 EIO0000000388 04/2012

EIO0000000388 04/2012
17
Modicon M238 Logic Controller
Actualización del firmware del controlador
EIO0000000388 04/2012
Actualización del firmware del controlador
Descripción general
En este capítulo se proporcionan instrucciones detalladas para utilizar Exec Loader de Windows para actualizar el firmware del controlador M238.
Contenido de este capítulo
Este capítulo contiene los siguiente apartados:
Apartado Página
Actualización mediante la línea serie 188
Actualización por USB 191
inicio del Asistente de Exec Loader 193
Paso 1: Welcome 194
Paso 2: Settings 195
Step 3 - File and Device Exec Properties 197
Paso 4: Transfer Progress 199
187

Actualización del firmware del controlador
Actualización mediante la línea serie
Introducción
La actualización de firmware mediante la línea serie (véase página 132) no está disponible para todas las versiones de M238:
Al actualizar el firmware se eliminará el programa de aplicación actual del dispositivo, incluida la aplicación de arranque de la memoria Flash.
Si se da un corte de alimentación o una interrupción de la comunicación durante la transferencia del programa de aplicación o una actualización de firmware, puede que el dispositivo se vuelva inoperativo. Si se produce una interrupción de la comunicación o un corte de alimentación, intente volver a realizar la transferencia.
Referencia del controlador Disponibilidad de la actualización mediante la conexión serie
TM238LDD24DT Versión del producto (PV) < 08
TM238LFDC24DT Versión del producto (PV) < 08
TM238LFDC24DTSO Versión del producto (PV) < 02
TM238LDA24DR No es posible actualizar por línea serie
TM238LFAC24DR•• No es posible actualizar por línea serie
ATENCIÓNPÉRDIDA DE DATOS DE APLICACIÓN
Haga una copia de seguridad del programa de aplicación en el disco duro del PC antes de intentar actualizar el firmware.Restaure el programa de aplicación en el dispositivo después de actualizar correctamente el firmware.
El incumplimiento de estas instrucciones puede causar lesiones o daño al equipo.
AVISOEQUIPO INOPERATIVO
No interrumpa la transferencia del programa de aplicación o de una actualización del firmware una vez que se haya iniciado la transferencia.No ponga el dispositivo en funcionamiento hasta que se haya completado la transferencia correctamente.
El incumplimiento de estas instrucciones puede causar daño al equipo.
188 EIO0000000388 04/2012

Actualización del firmware del controlador
La actualización del firmware requiere uno de los siguientes cables:
El cable TSX CUSB 485, el cable VW3 A8 306 Rxxo el cable TCS MCNA M3M002P.
Este procedimiento de actualización es una operación de mantenimiento. Exige que el controlador esté desconectado de los sistemas y las aplicaciones en los que tiene efecto. El PC y el controlador deben permanecer conectados durante esta operación.
NOTA: Si el PC y el controlado se desconectan accidentalmente durante la actualización del firmware, el controlador no funcionará correctamente hasta que se realice una nueva actualización del firmware correcta.
Instalación del cable USB
Siga estos pasos para instalar el cable TSX CUSB 485 correctamente:
Siga estos pasos para instalar el cable TCS MCNA M3M002P correctamente:
Paso Acción
1 En el adaptador TSX CUSB 485, seleccione la modalidad OTHER MULTI en el conmutador rotativo y la posición OFF para la polarización.
2 Conecte el adaptador TSX CUSB 485 a un puerto USB del PC.NOTA: En la primera conexión al ordenador, podría ser necesario instalar el controlador (consulte a continuación).
3 Conecte el cable VW3 A8 306 Rxx al conector RJ45 del TSX CUSB 485.
4 Conecte el segundo extremo del cable VW3 A8 306 Rxx al puerto SL1 de Modicon M238 Logic Controller.
5 Inicie el Asistente Exec Loader serie (véase página 193)
Paso Acción
1 Conecte el adaptador TCS MCNA M3M002P a un puerto USB del PC.NOTA: En la primera conexión al ordenador, podría ser necesario instalar el controlador (consulte a continuación).
2 Conecte el segundo extremo del cable TCS MCNA M3M002P al puerto SL1 de Modicon M238 Logic Controller.
3 Inicie el Asistente Exec Loader serie (véase página 193)
EIO0000000388 04/2012 189
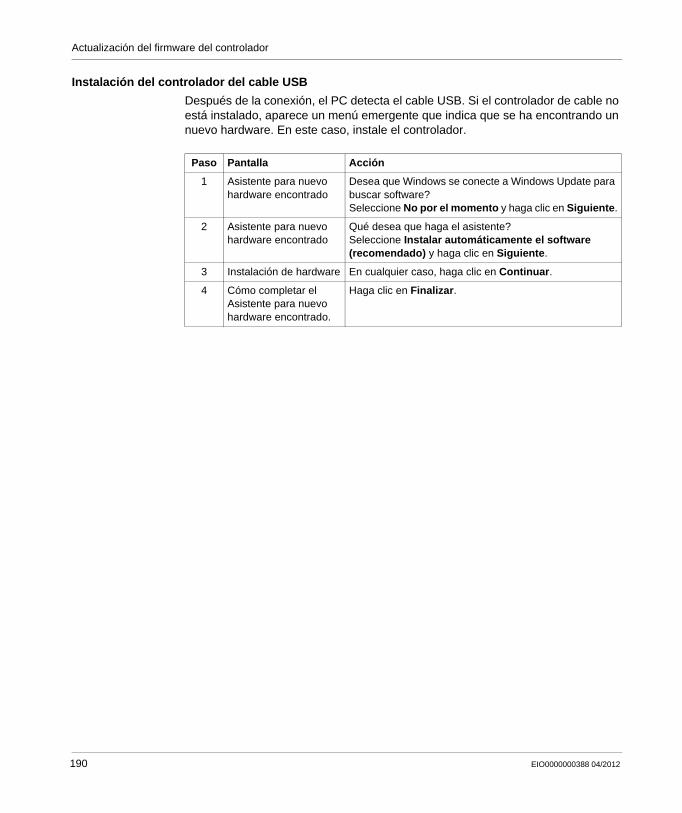
Actualización del firmware del controlador
Instalación del controlador del cable USB
Después de la conexión, el PC detecta el cable USB. Si el controlador de cable no está instalado, aparece un menú emergente que indica que se ha encontrando un nuevo hardware. En este caso, instale el controlador.
Paso Pantalla Acción
1 Asistente para nuevo hardware encontrado
Desea que Windows se conecte a Windows Update para buscar software?Seleccione No por el momento y haga clic en Siguiente.
2 Asistente para nuevo hardware encontrado
Qué desea que haga el asistente?Seleccione Instalar automáticamente el software (recomendado) y haga clic en Siguiente.
3 Instalación de hardware En cualquier caso, haga clic en Continuar.
4 Cómo completar el Asistente para nuevo hardware encontrado.
Haga clic en Finalizar.
190 EIO0000000388 04/2012

Actualización del firmware del controlador
Actualización por USB
Introducción
La actualización de firmware mediante la conexión USB no está disponible en todas las versiones del producto M238:
Al actualizar el firmware se eliminará el programa de aplicación actual del dispositivo, incluida la aplicación de arranque de la memoria Flash.
Si se da un corte de alimentación o una interrupción de la comunicación durante la transferencia del programa de aplicación o una actualización de firmware, puede que el dispositivo se vuelva inoperativo. Si se produce una interrupción de la comunicación o un corte de alimentación, intente volver a realizar la transferencia.
Referencia del controlador Disponibilidad de la actualización mediante USB
TM238LDD24DT Versión del producto (PV) >= 08
TM238LFDC24DT Versión del producto (PV) >= 08
TM238LFDC24DTSO Versión del producto (PV) >= 02
TM238LDA24DR Todas las versiones
TM238LFAC24DR•• Todas las versiones
ATENCIÓNPÉRDIDA DE DATOS DE APLICACIÓN
Haga una copia de seguridad del programa de aplicación en el disco duro del PC antes de intentar actualizar el firmware.Restaure el programa de aplicación en el dispositivo después de actualizar correctamente el firmware.
El incumplimiento de estas instrucciones puede causar lesiones o daño al equipo.
AVISOEQUIPO INOPERATIVO
No interrumpa la transferencia del programa de aplicación o de una actualización del firmware una vez que se haya iniciado la transferencia.No ponga el dispositivo en funcionamiento hasta que se haya completado la transferencia correctamente.
El incumplimiento de estas instrucciones puede causar daño al equipo.
EIO0000000388 04/2012 191

Actualización del firmware del controlador
Los puertos de línea serie del controlador están configurados para el protocolo SoMachine de manera predeterminada cuando son nuevos o cuando se actualiza el firmware del controlador. El protocolo SoMachine es incompatible con el de otros protocolos como Línea serie Modbus. Conectar un nuevo controlador a una línea serie Modbus activa configurada, o actualizar el firmware de un controlador conectado a ella, puede hacer que los otros dispositivos de la línea serie dejen de comunicarse. Asegúrese de que el controlador no está conectado a una red de línea serie Modbus activa antes de descargarse una aplicación válida que haga que el puerto o puertos en cuestión estén correctamente configurados para el protocolo previsto.
Antes de iniciar el procedimiento de actualización de firmware, asegúrese de tener:
Cable USB TCS XCNA MUM3PModicon M238 Logic Controller
Este procedimiento de actualización es una operación de mantenimiento. Exige que el controlador esté desconectado de los sistemas y las aplicaciones en los que tiene efecto. El PC y el controlador deben permanecer conectados durante esta operación.
NOTA: Si el PC y el controlador se desconectan accidentalmente durante la actualización del firmware, el controlador no funcionará correctamente hasta que se realice una nueva actualización del firmware correcta.
Instalación de cables
Siga estos pasos para instalar los cables correctamente:
AVISOFUNCIONAMIENTO IMPREVISTO DEL EQUIPO
Asegúrese de que la aplicación tenga los puertos de línea serie correctamente configurados para Modbus antes de conectar físicamente el controlador a una red de línea serie Modbus operativa.
El incumplimiento de estas instrucciones puede causar daño al equipo.
Paso Acción
1 Conecte el cable TCS XCNA MUM3P a un puerto USB del PC. (véase página 164)
2 Conecte el segundo extremo del cable con el puerto USB del controlador.
3 Inicie Exec Loader Wizard USB (véase página 193)
192 EIO0000000388 04/2012

Actualización del firmware del controlador
inicio del Asistente de Exec Loader
Introducción
El Asistente de Exec Loader está basado en Windows y le guía por los pasos necesarios para actualizar el firmware del controlador M238.
Apertura del Asistente de Exec Loader
Para iniciar el Asistente de Exec Loader, complete los pasos siguientes:
Descripción general de los pasos de actualización
El asistente proporciona una pantalla para cada paso. En la tabla siguiente se resumen los 4 pasos necesarios para actualizar el firmware:
Paso Acción
1 Cierre todas las aplicaciones de Windows, incluidas las máquinas virtuales.
2 Si la pasarela se está ejecutando, haga clic con el botón derecho en el icono CoDeSys Gateway Sys Try (running) de la barra de tareas y seleccione Stop Gateway.
Si la pasarela está detenida, aparece el icono CoDeSys Gateway Sys Tray (stopped en la barra de tareas:
3 Si el controlador y el PC están conectados con:Interfaz USB, haga clic en Inicio → Programas → Schneider Electric → SoMachine → Tools → Exec Loader Wizard USBInterfaz serie, haga clic en Inicio → Programas → Schneider Electric → SoMachine → Tools → Exec Loader Wizard Serial
Paso Pantalla Función
1 Welcome (véase página 194)
Introducción al asistente de Exec Loader.
2 Settings (véase página 195)
Seleccione el archivo de firmware correcto que transferir al controlador.
3 File and Device Exec Properties (véase página 197)
Compare los ID de hardware y la información de la versión de firmware del archivo de firmware y del controlador.
4 Transfer Progress (véase página 199)
Monitorice la transferencia del archivo de firmware al controlador.
EIO0000000388 04/2012 193

Actualización del firmware del controlador
Paso 1: Welcome
Paso 1 - Bienvenida
El asistente proporciona una pantalla para cada paso. La pantalla Welcome es una introducción al Asistente de Exec Loader.
Para continuar:
Seleccione Next para continuar el procedimiento y mostrar la siguiente pantalla, Paso 2 Settings (véase página 195). Seleccione Close para cerrar la pantalla sin cambiar el firmware del controlador.
194 EIO0000000388 04/2012

Actualización del firmware del controlador
Paso 2: Settings
Selección de la Settings
Siga estos pasos para seleccionar el firmware apropiado:
Paso Acción
1 En Settings, haga clic en Examinar y seleccione el archivo correcto para el modelo del controlador. Ejemplo: C:\Program Files\Schneider Electric\SoMachine\Firmware\M238\TM238LFDC24DT.mfw
2 Apague el controlador, como se indica en la pantalla.
3 Seleccione Siguiente:Durante la barra de progreso, encienda el controlador.
Cuando el Asistente de Exec Loader haya abierto correctamente una conexión con el controlador, irá automáticamente al paso 3 (véase página 197).
EIO0000000388 04/2012 195
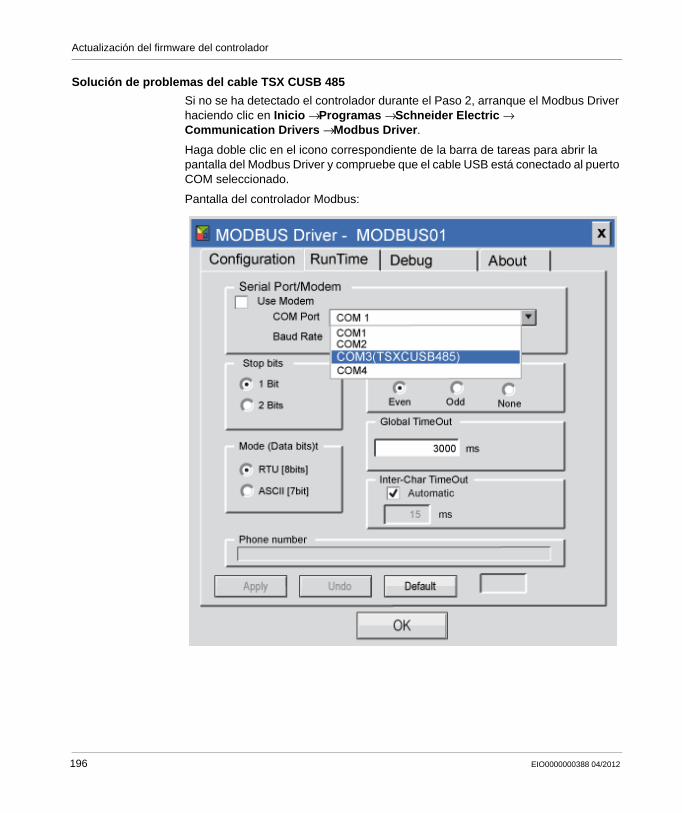
Actualización del firmware del controlador
Solución de problemas del cable TSX CUSB 485
Si no se ha detectado el controlador durante el Paso 2, arranque el Modbus Driver haciendo clic en Inicio → Programas → Schneider Electric → Communication Drivers → Modbus Driver.
Haga doble clic en el icono correspondiente de la barra de tareas para abrir la pantalla del Modbus Driver y compruebe que el cable USB está conectado al puerto COM seleccionado.
Pantalla del controlador Modbus:
196 EIO0000000388 04/2012

Actualización del firmware del controlador
Step 3 - File and Device Exec Properties
Descripción general
En este paso se comprueba la información siguiente mediante el asistente de Exec Loader para el archivo de firmware y el controlador antes de que pueda continuar el procedimiento:
Hardware ID: el archivo de firmware seleccionado es correcto para el controlador de destino.Exec Version Number: el archivo de firmware seleccionado es más reciente que el firmware instalado actualmente.
EIO0000000388 04/2012 197

Actualización del firmware del controlador
ID de Hardware
El Hardware ID es un identificador exclusivo de cada referencia de controlador:
Green check mark: correctoRed cross: archivo de firmware incorrecto. Seleccione un archivo de firmware correspondiente a la referencia del controlador (volver al Paso 2 (véase página 195))
Exec Version Number
Exec Version Number identifica la versión del firmware:
Green check mark: se actualizará el controlador a una versión de firmware más recienteYellow check mark: se volverá el controlador a una versión anterior del firmware o se actualizará el controlador con la misma versión del firmware actual
Inicio de la transferencia
Haga clic en el botón Siguiente para iniciar la transferencia.
198 EIO0000000388 04/2012

Actualización del firmware del controlador
Paso 4: Transfer Progress
Descripción general
En esta pantalla puede monitorizar el progreso de la transferencia.
La información sobre el tiempo restante está disponible después de un tiempo.
Si la transferencia se realiza correctamente
Si la transferencia se realiza correctamente, aparece un cuadro de mensaje que permite otra transferencia. Hay dos opciones disponibles:
Sí; el asistente vuelve al Paso 2 - Settings (véase página 195) y puede configurar otra transferencia.No; haga clic en el botón Cerrar para salir del asistente. Esto completa el procedimiento de actualización.
Si la transferencia no se realiza correctamente
Si se interrumpe la transferencia (por ejemplo, debido a una pérdida de comunicación), aparece un cuadro de mensaje que permite volver a intentar la transferencia. Hay dos opciones disponibles:
Sí; el asistente vuelve al Paso 3: Propiedades de archivos y dispositivos (véase página 197) y puede intentar otra transferencia.No; haga clic en el botón Cerrar para salir del asistente.
El controlador permanece inoperativo hasta que se haya realizado una transferencia correctamente.
AVISOEQUIPO INOPERATIVO
No interrumpa la transferencia del programa de aplicación o de una actualización del firmware una vez que se haya iniciado la transferencia.No ponga el dispositivo en funcionamiento hasta que se haya completado la transferencia correctamente.
El incumplimiento de estas instrucciones puede causar daño al equipo.
EIO0000000388 04/2012 199

Actualización del firmware del controlador
200 EIO0000000388 04/2012
EIO0000000388 04/2012
18
Modicon M238 Logic Controller
Modicon M238 Logic Controller - Solución de problemas y FAQ
EIO0000000388 04/2012
Modicon M238 Logic Controller - Solución de problemas y FAQ
Contenido de este capítulo
Este capítulo contiene los siguiente apartados:
Apartado Página
Solución de problemas 202
Preguntas frecuentes 210
201
Modicon M238 Logic Controller - Solución de problemas y FAQ
Solución de problemas
Introducción
En esta sección se describen los procedimientos para solucionar problemas de Modicon M238 Logic Controller.
No es posible realizar la transferencia de la aplicación
Causas posibles:El PC no se puede comunicar con el controlador.Es válida la aplicación?Está en ejecución la pasarela de CoDeSys?
Resolución:Consulte la parte más abajo (Comunicación entre SoMachine y Modicon M238 Logic Controller (véase página 202)).El programa de aplicación debe ser válido. Consulte la parte de depuración de la ayuda en línea de CoDeSys.La pasarela de CoDeSys debe estar en ejecución:a. Haga clic en el icono SysTray (detenido) de la pasarela de CoDeSys en la
barra de tareas.b. Seleccione Start Gateway.
La comunicación entre SoMachine de un ordenador y Modicon M238 Logic Controller no es posible.
Causas posibles:Utilización incorrecta del cable.PLC no detectado por el PC.Los ajustes de comunicación no son correctos.El controlador no funciona correctamente.
202 EIO0000000388 04/2012

Modicon M238 Logic Controller - Solución de problemas y FAQ
Resolución:
EIO0000000388 04/2012 203
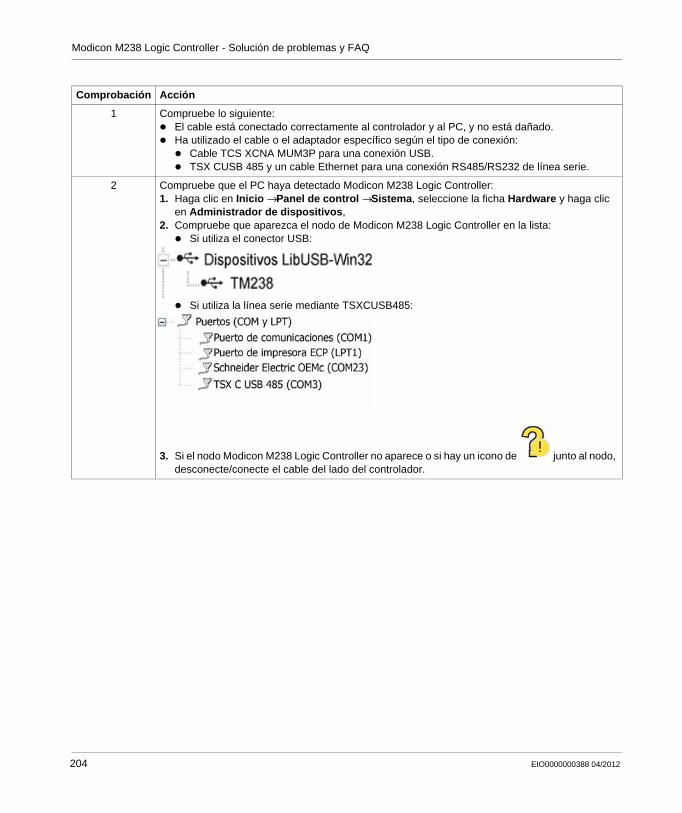
Modicon M238 Logic Controller - Solución de problemas y FAQ
Comprobación Acción
1 Compruebe lo siguiente:El cable está conectado correctamente al controlador y al PC, y no está dañado.Ha utilizado el cable o el adaptador específico según el tipo de conexión:
Cable TCS XCNA MUM3P para una conexión USB.TSX CUSB 485 y un cable Ethernet para una conexión RS485/RS232 de línea serie.
2 Compruebe que el PC haya detectado Modicon M238 Logic Controller:1. Haga clic en Inicio → Panel de control → Sistema, seleccione la ficha Hardware y haga clic
en Administrador de dispositivos,2. Compruebe que aparezca el nodo de Modicon M238 Logic Controller en la lista:
Si utiliza el conector USB:
Si utiliza la línea serie mediante TSXCUSB485:
3. Si el nodo Modicon M238 Logic Controller no aparece o si hay un icono de junto al nodo, desconecte/conecte el cable del lado del controlador.
204 EIO0000000388 04/2012

Modicon M238 Logic Controller - Solución de problemas y FAQ
El programa de aplicación no se ha ejecutado
Causas posibles:
No se ha declarado la POU en la tarea.
Resolución:
Dado que las POU las gestionan las tareas, al menos debe añadir una POU a una tarea:1. Haga doble clic en una tarea de la ventana Dispositivos2. Haga clic en Agregar POU en la ventana de tareas.3. Seleccione la POU que desee ejecutar en la ventana Asistente de entrada y
haga clic en Aceptar.
Causas posibles:
La aplicación no pasa al estado RUN.Una entrada está configurada en la modalidad RUN/STOP.
3 Compruebe que la ruta activa sea correcta:1. Haga doble clic en el nodo del controlador en la ventana Dispositivos 2. Compruebe que el nodo Modicon M238 Logic Controller aparezca en negrita y no en cursiva.
En caso contrario:a. Detenga la pasarela de CoDeSys: Haga clic con el botón derecho en el icono CoDeSys
Gateway SysTray (en ejecución) de la barra de tareas y seleccione Detener puerta de enlace
b. Desconecte/conecte el cable en el lado del controladorc. Inicie la pasarela de CoDeSys: Haga clic con el botón derecho en el icono CoDeSys
Gateway SysTray (detenido) de la barra de tareas y seleccione Iniciar puerta de enlace
d. Seleccione la pasarela de la ventana de configuración del controlador de SoMachine y haga clic en Examinar red. Seleccione el nodo Modicon M238 Logic Controller y haga clic en Establecer una ruta activa.
NOTA: Si el PC está conectado a una red Ethernet, su dirección IP puede cambiar. En este caso, aparece el nodo Modicon M238 Logic Controller en cursiva (la ruta establecida en el controlador es incorrecta).
Para actualizar la ruta activa:1. Seleccione el nodo Modicon M238 Logic Controller2. Haga clic en Resolver nombre: si el PC detecta el controlador en una red, se define una nueva
ruta y el nodo ya no aparece en cursiva3. Haga clic en Establecer una ruta activa
4 Consulte el apartado Diagnóstico de sistemas con pantalla LED (véase M238 Logic Controller, Guía de hardware).
Comprobación Acción
EIO0000000388 04/2012 205

Modicon M238 Logic Controller - Solución de problemas y FAQ
Resolución:
Utilice la entrada configurada en la modalidad RUN/STOP para ejecutar la aplicación.
La pasarela de CoDeSys no se inicia (el icono de SysTray de la pasarela de CoDeSys está en negro)
Causas posibles:
Conexión durante un largo período de tiempo.
Resolución:
Si el icono CoDeSys Gateway SysTray es negro (está detenido):1. Abra el administrador de tareas.2. Detenga Gatewayservice.exe y vuelva a iniciarlo:
Reinicie el ordenador oEn el Panel de control, abra Herramientas administrativas y Administración de equipos,En Servicio, haga doble clic en CoDeSys Gateway,Haga clic en el botón Start Service.
3. Compruebe si el icono CoDeSys Gateway SysTray está en rojo (en ejecución).
La comunicación por la línea serie no es posible
Causas posibles:Los ajustes de comunicación no son idénticos entre dispositivos de línea serie.El controlador no funciona correctamente.
Resolución:
Compruebe lo siguiente:Que los ajustes de comunicación de protocolo (velocidad de transmisión, paridad, etc.) sean idénticos para todos los dispositivos de línea serie.Que se haya añadido el administrador de comunicación al objeto de la línea serie:
Gestor Modbus si la línea se utiliza para el protocolo Modbus SoMachine - Administrador de la red si la línea se utiliza para la comunicación con las variables IEC de acceso
Que el controlador funciona correctamente Consulte el apartado Diagnóstico de sistemas con pantalla LED (véase M238 Logic Controller, Guía de hardware).
No es posible la creación de la aplicación de arranque
Causas posibles:
La operación no es posible mientras el controlador se encuentra en el estado RUN.
206 EIO0000000388 04/2012
Modicon M238 Logic Controller - Solución de problemas y FAQ
Resolución:
Seleccione Stop Application,Seleccione Crear aplicación de inicio.
La función PTO no se inicia
Causas posibles:
La entrada AUX está configurada como la entrada Accionamiento listo, pero no se suministra ninguna señal.
Resolución:
Si la variable AUX está establecida en Accionamiento listo, compruebe que la unidad funcione correctamenteo establezca la variable Dis_Drive_Ready del bloque de funciones PTOsimple en 0.
El cambio del nombre del dispositivo no funciona
Causas posibles:
La aplicación está en ejecución.
Resolución:
Seleccione Stop Application,Cambie el nombre del dispositivo.
CANopen Heartbeat no se envía regularmente
Causas posibles:
El valor configurador de Heartbeat no es un múltiple del intervalo de tarea de ciclo del bus CANopen.
Resolución:
Cambie el valor de Heartbeat por un múltiplo del intervalo de tarea de ciclo del bus CANopen.
La monitorización de la POU es lenta
Causas posibles:
El intervalo de tareas es demasiado corto o el número/tamaño de las POU es demasiado grande.
Resolución:
Aumente el intervalo de tareas configurado.Divida la aplicación en POU más pequeñas.
EIO0000000388 04/2012 207
Modicon M238 Logic Controller - Solución de problemas y FAQ
El LED ERR parpadea rápido en el PLC
Causas posibles:
Se ha detectado un error del sistema.
Resolución:
Compruebe el programa de aplicación (gestión del puntero, gestión de matrices, etc.).
El controlador está en estado HALT (PARADA)
Causas posibles:
El PLC se ha detenido debido a un evento de watchdog.
Resolución:Si se ha configurado un watchdog de tareas:a. Ejecute la aplicación sin watchdog de tareasb. Obtenga el tiempo de ciclo de tareas máximo del supervisor de tareasc. Establezca el watchdog de tareas en un valor mayor que el tiempo del ciclo
de tareas máximo
Si no se ha configurado un watchdog de tareas:Si hay configurada una tarea de intervalo, aumente el tiempo del ciclo a un valor > 1,25 veces el tiempo de tarea intermedioSi hay más de una tarea configurada, una de ellas es una tarea de ejecución libre, intente configurarla como una tarea cíclica.
Causas posibles:
El tiempo de ciclo se amplía cuando se llama al configurador de CANopen, lo que provoca una excepción de watchdog de tareas.
El controlador puede notificar una excepción de watchdog durante los siguientes eventos:
descarga de los datos de configuración en los módulos de la red (es decir, al descargar la aplicación en el controlador, tras una conexión del controlador cuando una aplicación de arranque es válida o después de un restablecimiento en frío/caliente).Es posible que los cables CANopen de conexión se hayan desconectado o desplazado.
Resolución:1. Ejecute la aplicación sin watchdogs de tareas2. Obtenga el tiempo de ciclo de tareas máximo del supervisor de tareas3. Establezca el watchdog de tareas en un valor mayor que el tiempo del ciclo de
tareas máximo
Causas posibles:
Se ha detectado una división por 0 en el programa de aplicación.
208 EIO0000000388 04/2012
Modicon M238 Logic Controller - Solución de problemas y FAQ
Resolución:
Compruebe el programa de aplicación.
La descarga de origen da como resultado un error de comunicación
En la tabla siguiente se describen las causas posibles de un error de comunica-ciones durante la Descarga de código de origen
Causa posible Resolución
Ha intentado descargar el origen mientras el controlador estaba en el estado RUN.
Detenga el controlador antes de intentar la descarga.
El archivo de origen excedió el espacio de memoria disponible en el controlador.
Si va a enviar archivos adicionales con el origen, tenga en cuenta la posibilidad de deseleccionarlos para reducir el tamaño general de la descarga. Consulte Proyecto → Configuración del proyecto → Descarga de código de origen → Archivos adicionales... en el menú principal de SoMachine.
EIO0000000388 04/2012 209
Modicon M238 Logic Controller - Solución de problemas y FAQ
Preguntas frecuentes
Cómo se puede determinar la versión del firmware, de arranque y del coprocesador del controlador?
En la modalidad en línea, haga doble clic en el nodo del controlador de la ventana Dispositivos. En la ventana del controlador, seleccione la ficha Servicios. El área de identificación de dispositivos ofrece información sobre las versiones:
Qué lenguajes de programación son compatibles con Modicon M238 Logic Controller?
Consulte los lenguajes de programación compatibles (véase página 13).
Qué tipos de variables son compatibles con Modicon M238 Logic Controller?
Se permiten los siguientes tipos de variable:BOOLTipos de datos de enterosREALLREALSTRINGWSTRINGTipos de datos de tiempo
Cuándo debo utilizar el tipo de tarea de ejecución libre o cíclica?
Utilización del tipo de tarea de ejecución libre o cíclica Configuración de tareas (véase página 33):
Ejecución libre: use esta configuración si su aplicación admite un tiempo de ciclo variable. El ciclo siguiente se iniciará cuando la duración de espera sea igual al 30% de la duración de la última ejecución de ciclo.Cíclica: utilice esta modalidad si desea controlar el tiempo del ciclo.
Cuáles son los efectos del restablecimiento en frío/caliente?
Consulte los efectos en la sección sobre el reinicio en frío y en caliente (véase página 60).
210 EIO0000000388 04/2012
Modicon M238 Logic Controller - Solución de problemas y FAQ
Puedo conectar el PC (SoMachine) y el controlador mediante una puerta de enlace Ethernet 499TWD01100?
No, porque la puerta de enlace Ethernet sólo es compatible con el protocolo Modbus.
Puedo conectar varios M238, mediante varios puertos USB de mi PC?
No, porque pueden producirse conflictos del controlador.
Por qué se interrumpe la comunicación entre HMI y el controlador cuando se realizan cambios online?
Cuando se realizan cambios en línea en una aplicación M238, se descarga la configuración de símbolos. Esto provoca una interrupción temporal de la comunicación.
EIO0000000388 04/2012 211

Modicon M238 Logic Controller - Solución de problemas y FAQ
212 EIO0000000388 04/2012
Modicon M238 Logic Controller
EIO0000000388 04/2012
Apéndices
Descripción general
En este apéndice se enumeran los documentos técnicos necesarios para comprender la Guía de programación de M238 .
Contenido de este anexo
Este anexo contiene los siguientes capítulos:
Capítulo Nombre del capítulo Página
A Biblioteca AS-Interface 215
B Representación de funciones y de bloques de funciones 235
C Funciones para obtener/establecer la configuración de líneas serie en el programa de usuario
243
D Rendimiento del controlador 249
EIO0000000388 04/2012 213
214 EIO0000000388 04/2012

EIO0000000388 04/2012
A
Modicon M238 Logic Controller
Biblioteca AS-Interface
EIO0000000388 04/2012
Biblioteca AS-Interface
Descripción general
En este capítulo se describen los bloques de funciones incluidos en la biblioteca IoDrvASI .
Contenido de este capítulo
Este capítulo contiene los siguiente apartados:
Apartado Página
ASI_CheckSlaveBit 216
ASI_CmdSetAutoAddressing 217
ASI_CmdSetDataExchange 219
ASI_CmdSetOfflineMode 221
ASI_MasterStatusCheck 223
ASI_SlaveAddressChange 225
ASI_SlaveParameterUpdate 228
ASI_SlaveStatusCheck 230
ASI_ReadParameterImage 232
215
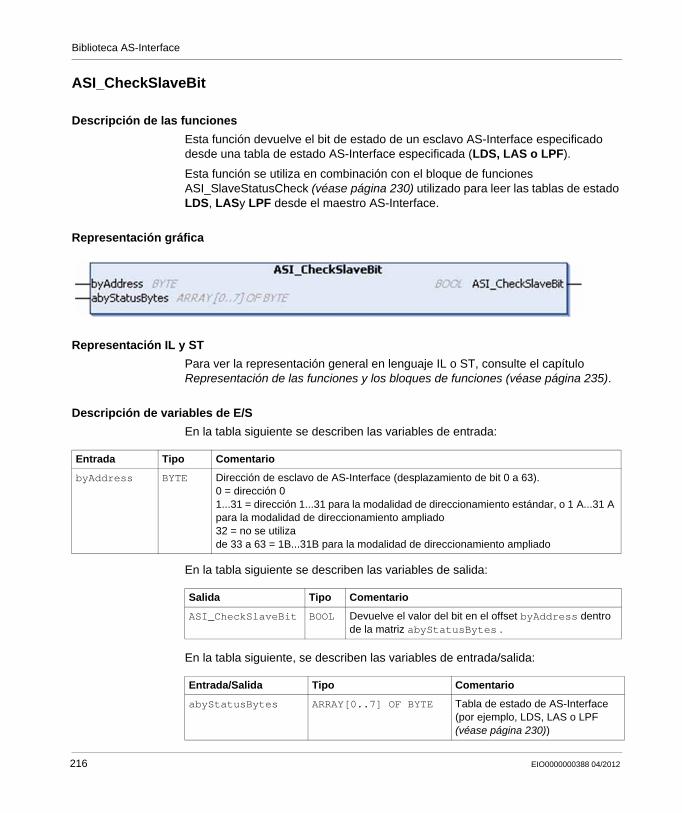
Biblioteca AS-Interface
ASI_CheckSlaveBit
Descripción de las funciones
Esta función devuelve el bit de estado de un esclavo AS-Interface especificado desde una tabla de estado AS-Interface especificada (LDS, LAS o LPF).
Esta función se utiliza en combinación con el bloque de funciones ASI_SlaveStatusCheck (véase página 230) utilizado para leer las tablas de estado LDS, LASy LPF desde el maestro AS-Interface.
Representación gráfica
Representación IL y ST
Para ver la representación general en lenguaje IL o ST, consulte el capítulo Representación de las funciones y los bloques de funciones (véase página 235).
Descripción de variables de E/S
En la tabla siguiente se describen las variables de entrada:
En la tabla siguiente se describen las variables de salida:
En la tabla siguiente, se describen las variables de entrada/salida:
Entrada Tipo Comentario
byAddress BYTE Dirección de esclavo de AS-Interface (desplazamiento de bit 0 a 63).0 = dirección 01...31 = dirección 1...31 para la modalidad de direccionamiento estándar, o 1 A...31 A para la modalidad de direccionamiento ampliado32 = no se utilizade 33 a 63 = 1B...31B para la modalidad de direccionamiento ampliado
Salida Tipo Comentario
ASI_CheckSlaveBit BOOL Devuelve el valor del bit en el offset byAddress dentro de la matriz abyStatusBytes .
Entrada/Salida Tipo Comentario
abyStatusBytes ARRAY[0..7] OF BYTE Tabla de estado de AS-Interface (por ejemplo, LDS, LAS o LPF (véase página 230))
216 EIO0000000388 04/2012
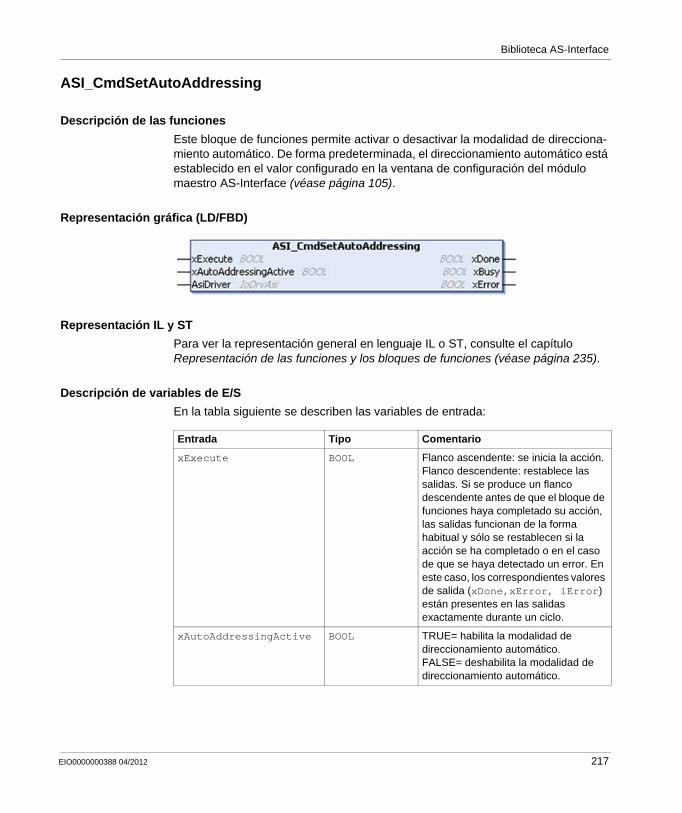
Biblioteca AS-Interface
ASI_CmdSetAutoAddressing
Descripción de las funciones
Este bloque de funciones permite activar o desactivar la modalidad de direcciona-miento automático. De forma predeterminada, el direccionamiento automático está establecido en el valor configurado en la ventana de configuración del módulo maestro AS-Interface (véase página 105).
Representación gráfica (LD/FBD)
Representación IL y ST
Para ver la representación general en lenguaje IL o ST, consulte el capítulo Representación de las funciones y los bloques de funciones (véase página 235).
Descripción de variables de E/S
En la tabla siguiente se describen las variables de entrada:
Entrada Tipo Comentario
xExecute BOOL Flanco ascendente: se inicia la acción.Flanco descendente: restablece las salidas. Si se produce un flanco descendente antes de que el bloque de funciones haya completado su acción, las salidas funcionan de la forma habitual y sólo se restablecen si la acción se ha completado o en el caso de que se haya detectado un error. En este caso, los correspondientes valores de salida (xDone,xError, iError) están presentes en las salidas exactamente durante un ciclo.
xAutoAddressingActive BOOL TRUE= habilita la modalidad de direccionamiento automático.FALSE= deshabilita la modalidad de direccionamiento automático.
EIO0000000388 04/2012 217

Biblioteca AS-Interface
En la tabla siguiente se describen las variables de salida:
En la tabla siguiente, se describen las variables de entrada/salida:
Salida Tipo Comentario
xDone BOOL TRUE si el comando finalizó correctamente.El valor devuelto por el indicador de estado ASI_MasterStatusCheck.Auto_Address_Assign es igual al comando solicitado por ASI_CmdSetAutoAddressing.xAutoAddressingActive.
xBusy BOOL Bloque de funciones activo
xError BOOL TRUE: error detectado, el bloque de funciones interrumpe la acciónFALSE: no se ha detectado ningún error
Entrada/Salida Tipo Comentario
AsiDriver IoDrvAsi Instancia del controlador AS-Interface.
218 EIO0000000388 04/2012
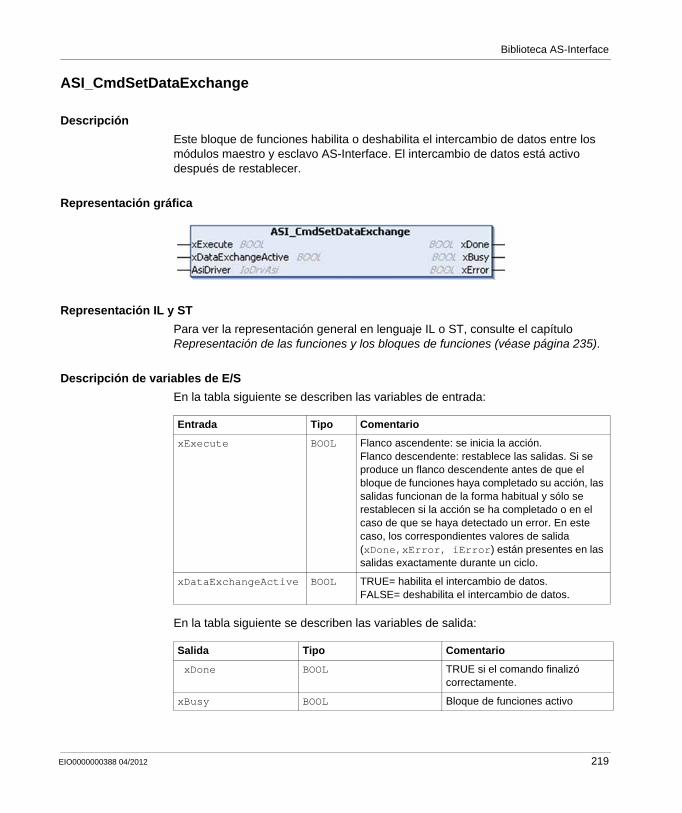
Biblioteca AS-Interface
ASI_CmdSetDataExchange
Descripción
Este bloque de funciones habilita o deshabilita el intercambio de datos entre los módulos maestro y esclavo AS-Interface. El intercambio de datos está activo después de restablecer.
Representación gráfica
Representación IL y ST
Para ver la representación general en lenguaje IL o ST, consulte el capítulo Representación de las funciones y los bloques de funciones (véase página 235).
Descripción de variables de E/S
En la tabla siguiente se describen las variables de entrada:
En la tabla siguiente se describen las variables de salida:
Entrada Tipo Comentario
xExecute BOOL Flanco ascendente: se inicia la acción.Flanco descendente: restablece las salidas. Si se produce un flanco descendente antes de que el bloque de funciones haya completado su acción, las salidas funcionan de la forma habitual y sólo se restablecen si la acción se ha completado o en el caso de que se haya detectado un error. En este caso, los correspondientes valores de salida (xDone,xError, iError) están presentes en las salidas exactamente durante un ciclo.
xDataExchangeActive BOOL TRUE= habilita el intercambio de datos.FALSE= deshabilita el intercambio de datos.
Salida Tipo Comentario
xDone BOOL TRUE si el comando finalizó correctamente.
xBusy BOOL Bloque de funciones activo
EIO0000000388 04/2012 219

Biblioteca AS-Interface
En la tabla siguiente, se describen las variables de entrada/salida:
xError BOOL TRUE: error detectado, el bloque de funciones interrumpe la acciónFALSE: no se ha detectado ningún error
Entrada/Salida Tipo Comentario
AsiDriver IoDrvAsi Instancia del controlador AS-Interface.
Salida Tipo Comentario
220 EIO0000000388 04/2012
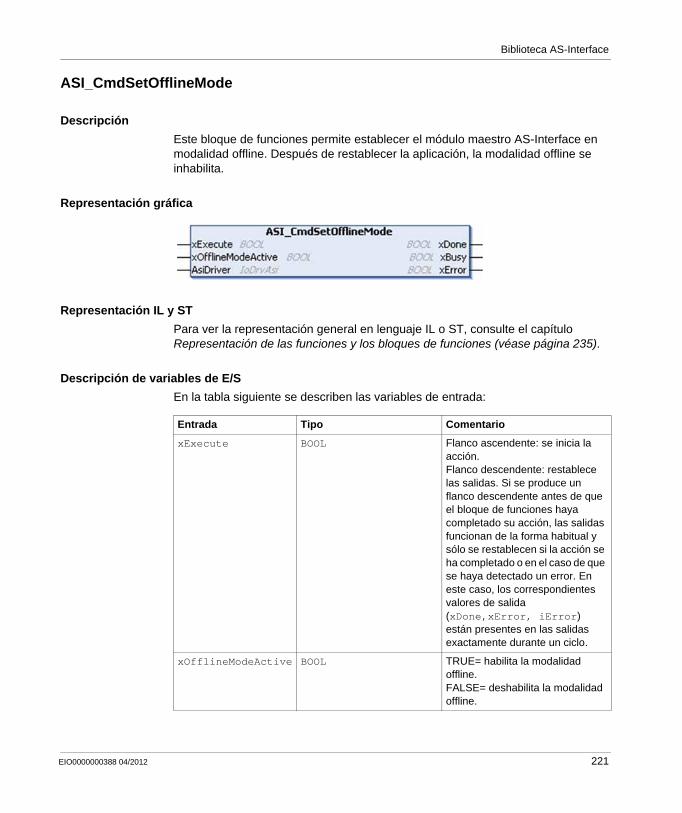
Biblioteca AS-Interface
ASI_CmdSetOfflineMode
Descripción
Este bloque de funciones permite establecer el módulo maestro AS-Interface en modalidad offline. Después de restablecer la aplicación, la modalidad offline se inhabilita.
Representación gráfica
Representación IL y ST
Para ver la representación general en lenguaje IL o ST, consulte el capítulo Representación de las funciones y los bloques de funciones (véase página 235).
Descripción de variables de E/S
En la tabla siguiente se describen las variables de entrada:
Entrada Tipo Comentario
xExecute BOOL Flanco ascendente: se inicia la acción.Flanco descendente: restablece las salidas. Si se produce un flanco descendente antes de que el bloque de funciones haya completado su acción, las salidas funcionan de la forma habitual y sólo se restablecen si la acción se ha completado o en el caso de que se haya detectado un error. En este caso, los correspondientes valores de salida (xDone,xError, iError) están presentes en las salidas exactamente durante un ciclo.
xOfflineModeActive BOOL TRUE= habilita la modalidad offline.FALSE= deshabilita la modalidad offline.
EIO0000000388 04/2012 221

Biblioteca AS-Interface
En la tabla siguiente se describen las variables de salida:
En la siguiente tabla se describe la variable de entrada/salida:
Salida Tipo Comentario
xDone BOOL TRUE si el comando finalizó correctamente.El valor devuelto por el indicador de estado ASI_MasterStatusCheck.Auto_Address_Assign es igual al comando solicitado por ASI_CmdSetAutoAddressing.xAutoAddressingActive.
xBusy BOOL Bloque de funciones activo
xError BOOL TRUE: error detectado, el bloque de funciones interrumpe la acciónFALSE: no se ha detectado ningún error
Entrada/Salida Tipo Comentario
AsiDriver IoDrvAsi Instancia del controlador AS-Interface.
222 EIO0000000388 04/2012

Biblioteca AS-Interface
ASI_MasterStatusCheck
Descripción
Este bloque de funciones devuelve el estado del módulo maestro AS-Interface.
Representación gráfica
Representación IL y ST
Para ver la representación general en lenguaje IL o ST, consulte el capítulo Representación de las funciones y los bloques de funciones (véase página 235).
Descripción de variables de E/S
En la tabla siguiente se describe la variable de entrada:
Entrada Tipo Comentario
xEnable BOOL TRUE: se ejecuta la acciónFALSE: se detiene la acción. Salidas xDone, xBusy,xError e iError se restablecen.
EIO0000000388 04/2012 223
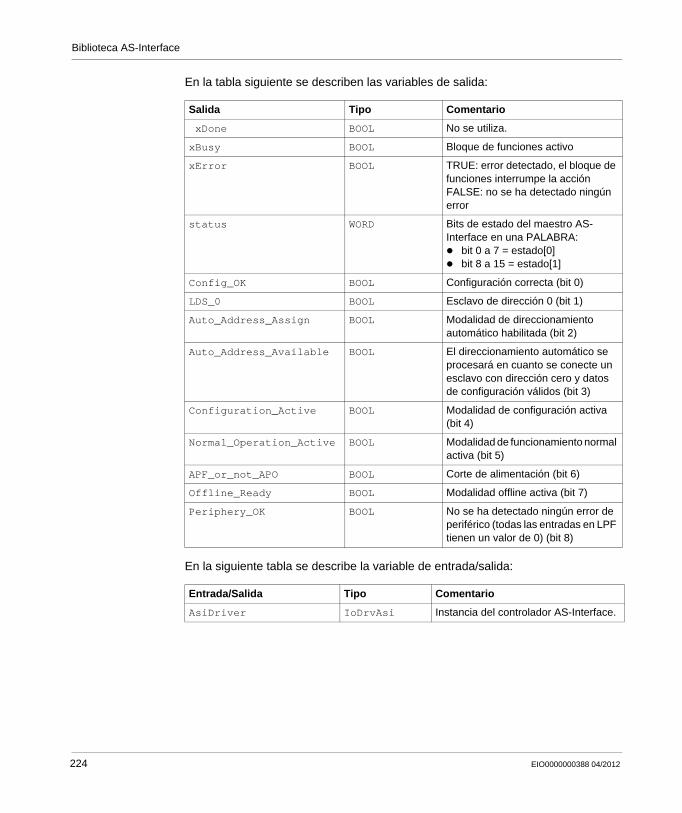
Biblioteca AS-Interface
En la tabla siguiente se describen las variables de salida:
En la siguiente tabla se describe la variable de entrada/salida:
Salida Tipo Comentario
xDone BOOL No se utiliza.
xBusy BOOL Bloque de funciones activo
xError BOOL TRUE: error detectado, el bloque de funciones interrumpe la acciónFALSE: no se ha detectado ningún error
status WORD Bits de estado del maestro AS-Interface en una PALABRA:
bit 0 a 7 = estado[0]bit 8 a 15 = estado[1]
Config_OK BOOL Configuración correcta (bit 0)
LDS_0 BOOL Esclavo de dirección 0 (bit 1)
Auto_Address_Assign BOOL Modalidad de direccionamiento automático habilitada (bit 2)
Auto_Address_Available BOOL El direccionamiento automático se procesará en cuanto se conecte un esclavo con dirección cero y datos de configuración válidos (bit 3)
Configuration_Active BOOL Modalidad de configuración activa (bit 4)
Normal_Operation_Active BOOL Modalidad de funcionamiento normal activa (bit 5)
APF_or_not_APO BOOL Corte de alimentación (bit 6)
Offline_Ready BOOL Modalidad offline activa (bit 7)
Periphery_OK BOOL No se ha detectado ningún error de periférico (todas las entradas en LPF tienen un valor de 0) (bit 8)
Entrada/Salida Tipo Comentario
AsiDriver IoDrvAsi Instancia del controlador AS-Interface.
224 EIO0000000388 04/2012
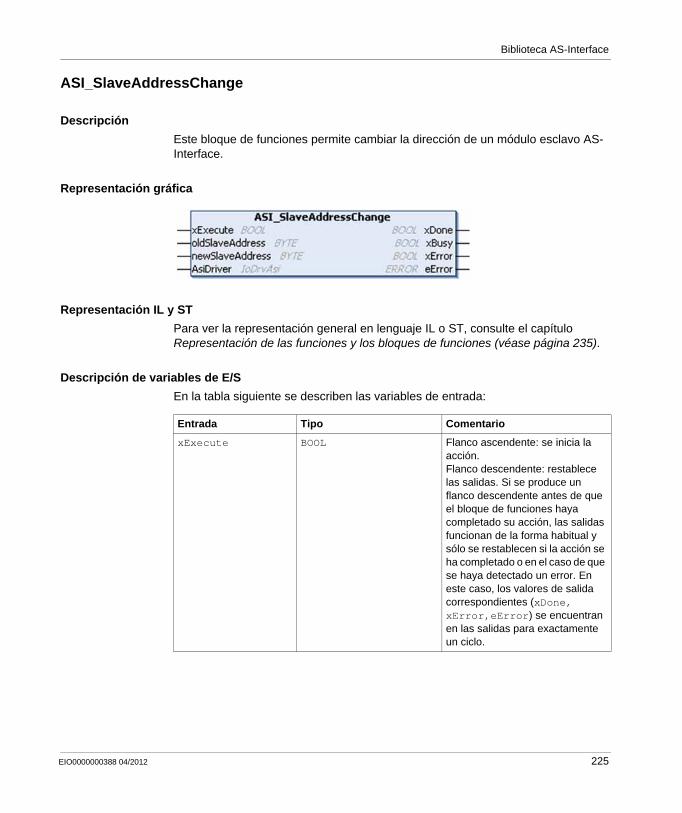
Biblioteca AS-Interface
ASI_SlaveAddressChange
Descripción
Este bloque de funciones permite cambiar la dirección de un módulo esclavo AS-Interface.
Representación gráfica
Representación IL y ST
Para ver la representación general en lenguaje IL o ST, consulte el capítulo Representación de las funciones y los bloques de funciones (véase página 235).
Descripción de variables de E/S
En la tabla siguiente se describen las variables de entrada:
Entrada Tipo Comentario
xExecute BOOL Flanco ascendente: se inicia la acción.Flanco descendente: restablece las salidas. Si se produce un flanco descendente antes de que el bloque de funciones haya completado su acción, las salidas funcionan de la forma habitual y sólo se restablecen si la acción se ha completado o en el caso de que se haya detectado un error. En este caso, los valores de salida correspondientes (xDone, xError,eError) se encuentran en las salidas para exactamente un ciclo.
EIO0000000388 04/2012 225

Biblioteca AS-Interface
En la tabla siguiente se describen las variables de salida:
En la siguiente tabla se describe la variable de entrada/salida:
oldSlaveAddress BYTE Dirección del esclavo que debe redireccionarse.0 = dirección 01...31 = dirección 1...31 para la modalidad de direccionamiento estándar, o 1 A...31 A para la modalidad de direccionamiento ampliado32 = no se utiliza33...63 = 1 B...31 B para la modalidad de direccionamiento ampliado
newSlaveAddress BYTE Dirección nueva del esclavo0 = dirección 01...31 = dirección 1...31 para la modalidad de direccionamiento estándar, o 1 A...31 A para la modalidad de direccionamiento ampliado32 = no se utiliza33...63 = 1 B...31 B para la modalidad de direccionamiento ampliado
Salida Tipo Comentario
xDone BOOL TRUE si el comando finalizó correctamente.
xBusy BOOL Bloque de funciones activo
xError BOOL TRUE: error detectado, el bloque de funciones interrumpe la acciónFALSE: no se ha detectado ningún error
eError ERROR Contiene el código de error.
Entrada/Salida Tipo Comentario
AsiDriver IoDrvAsi Instancia del controlador AS-Interface.
Entrada Tipo Comentario
226 EIO0000000388 04/2012
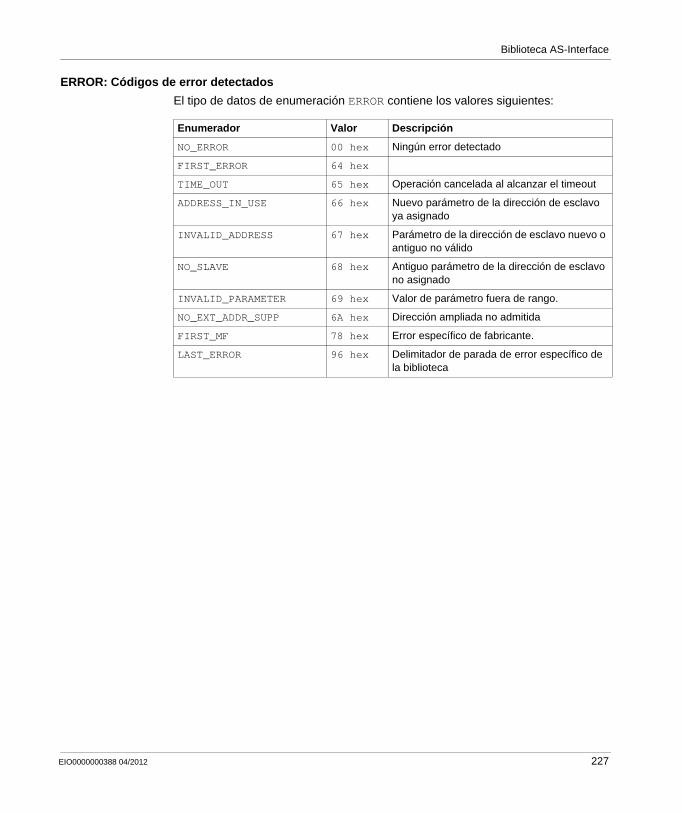
Biblioteca AS-Interface
ERROR: Códigos de error detectados
El tipo de datos de enumeración ERROR contiene los valores siguientes:
Enumerador Valor Descripción
NO_ERROR 00 hex Ningún error detectado
FIRST_ERROR 64 hex
TIME_OUT 65 hex Operación cancelada al alcanzar el timeout
ADDRESS_IN_USE 66 hex Nuevo parámetro de la dirección de esclavo ya asignado
INVALID_ADDRESS 67 hex Parámetro de la dirección de esclavo nuevo o antiguo no válido
NO_SLAVE 68 hex Antiguo parámetro de la dirección de esclavo no asignado
INVALID_PARAMETER 69 hex Valor de parámetro fuera de rango.
NO_EXT_ADDR_SUPP 6A hex Dirección ampliada no admitida
FIRST_MF 78 hex Error específico de fabricante.
LAST_ERROR 96 hex Delimitador de parada de error específico de la biblioteca
EIO0000000388 04/2012 227

Biblioteca AS-Interface
ASI_SlaveParameterUpdate
Descripción
Este bloque de funciones permite establecer los parámetros de un módulo esclavo AS-Interface.
Representación gráfica
Representación IL y ST
Para ver la representación general en lenguaje IL o ST, consulte el capítulo Representación de las funciones y los bloques de funciones (véase página 235).
Descripción de variables de E/S
En la tabla siguiente se describen las variables de entrada:
Entrada Tipo Comentario
xExecute BOOL Flanco ascendente: se inicia la acción.Flanco descendente: restablece las salidas. Si se produce un flanco descendente antes de que el bloque de funciones haya completado su acción, las salidas funcionan de la forma habitual y sólo se restablecen si la acción se ha completado o en el caso de que se haya detectado un error. En este caso, los valores de salida correspondientes (xDone, xError,eError) se encuentran en las salidas para exactamente un ciclo.
228 EIO0000000388 04/2012
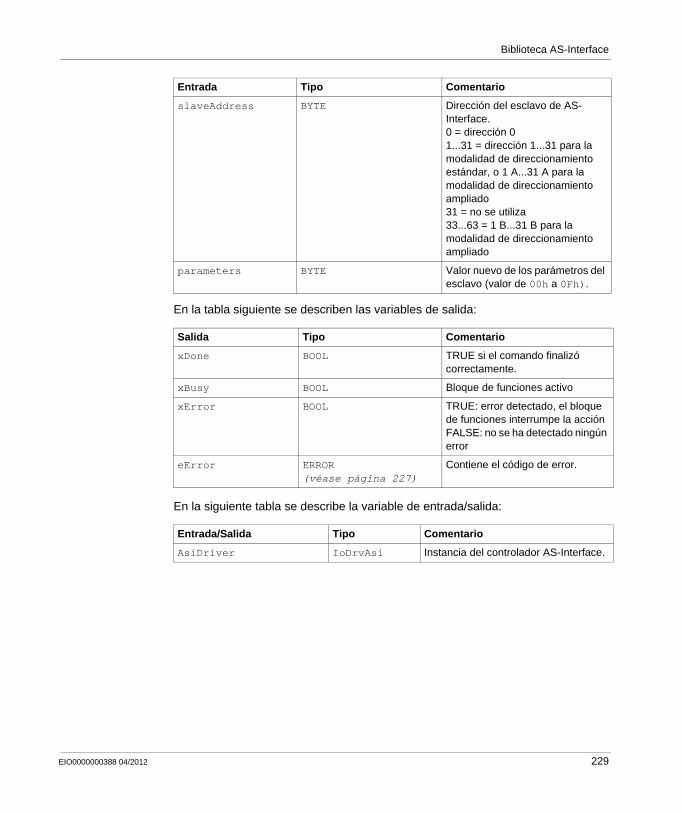
Biblioteca AS-Interface
En la tabla siguiente se describen las variables de salida:
En la siguiente tabla se describe la variable de entrada/salida:
slaveAddress BYTE Dirección del esclavo de AS-Interface.0 = dirección 01...31 = dirección 1...31 para la modalidad de direccionamiento estándar, o 1 A...31 A para la modalidad de direccionamiento ampliado31 = no se utiliza33...63 = 1 B...31 B para la modalidad de direccionamiento ampliado
parameters BYTE Valor nuevo de los parámetros del esclavo (valor de 00h a 0Fh).
Salida Tipo Comentario
xDone BOOL TRUE si el comando finalizó correctamente.
xBusy BOOL Bloque de funciones activo
xError BOOL TRUE: error detectado, el bloque de funciones interrumpe la acciónFALSE: no se ha detectado ningún error
eError ERROR (véase página 227)
Contiene el código de error.
Entrada/Salida Tipo Comentario
AsiDriver IoDrvAsi Instancia del controlador AS-Interface.
Entrada Tipo Comentario
EIO0000000388 04/2012 229
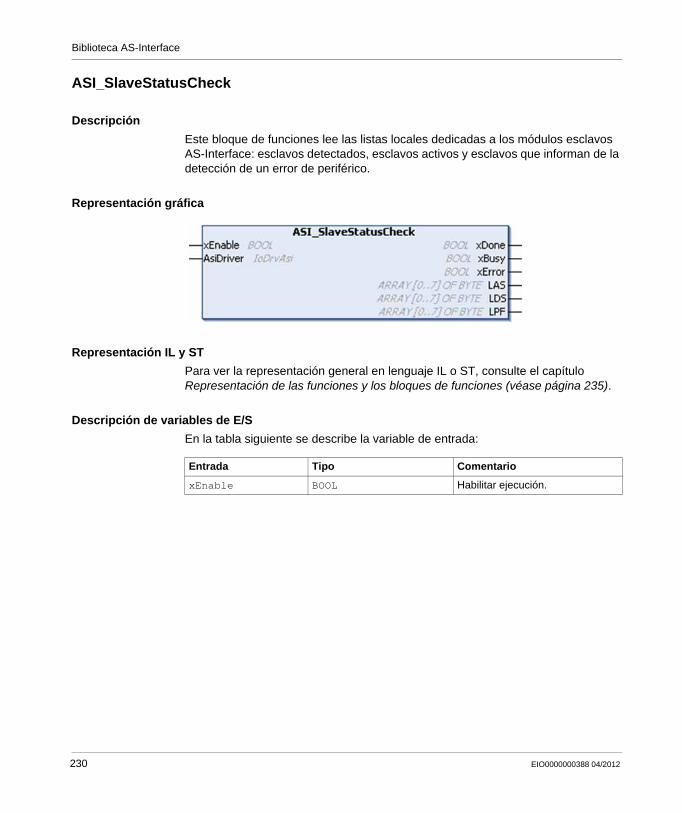
Biblioteca AS-Interface
ASI_SlaveStatusCheck
Descripción
Este bloque de funciones lee las listas locales dedicadas a los módulos esclavos AS-Interface: esclavos detectados, esclavos activos y esclavos que informan de la detección de un error de periférico.
Representación gráfica
Representación IL y ST
Para ver la representación general en lenguaje IL o ST, consulte el capítulo Representación de las funciones y los bloques de funciones (véase página 235).
Descripción de variables de E/S
En la tabla siguiente se describe la variable de entrada:
Entrada Tipo Comentario
xEnable BOOL Habilitar ejecución.
230 EIO0000000388 04/2012
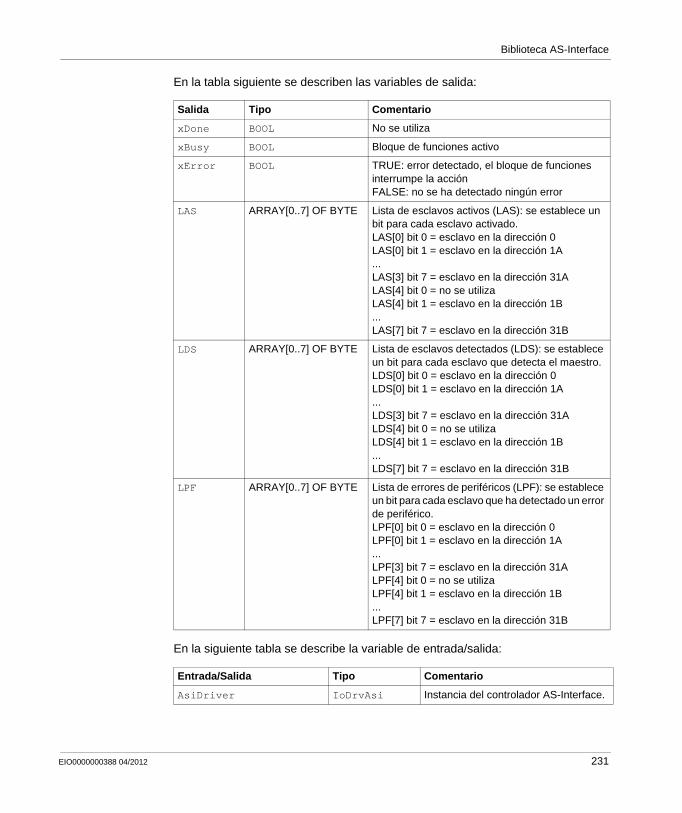
Biblioteca AS-Interface
En la tabla siguiente se describen las variables de salida:
En la siguiente tabla se describe la variable de entrada/salida:
Salida Tipo Comentario
xDone BOOL No se utiliza
xBusy BOOL Bloque de funciones activo
xError BOOL TRUE: error detectado, el bloque de funciones interrumpe la acciónFALSE: no se ha detectado ningún error
LAS ARRAY[0..7] OF BYTE Lista de esclavos activos (LAS): se establece un bit para cada esclavo activado.LAS[0] bit 0 = esclavo en la dirección 0LAS[0] bit 1 = esclavo en la dirección 1A...LAS[3] bit 7 = esclavo en la dirección 31ALAS[4] bit 0 = no se utilizaLAS[4] bit 1 = esclavo en la dirección 1B...LAS[7] bit 7 = esclavo en la dirección 31B
LDS ARRAY[0..7] OF BYTE Lista de esclavos detectados (LDS): se establece un bit para cada esclavo que detecta el maestro.LDS[0] bit 0 = esclavo en la dirección 0LDS[0] bit 1 = esclavo en la dirección 1A...LDS[3] bit 7 = esclavo en la dirección 31ALDS[4] bit 0 = no se utilizaLDS[4] bit 1 = esclavo en la dirección 1B...LDS[7] bit 7 = esclavo en la dirección 31B
LPF ARRAY[0..7] OF BYTE Lista de errores de periféricos (LPF): se establece un bit para cada esclavo que ha detectado un error de periférico.LPF[0] bit 0 = esclavo en la dirección 0LPF[0] bit 1 = esclavo en la dirección 1A...LPF[3] bit 7 = esclavo en la dirección 31ALPF[4] bit 0 = no se utilizaLPF[4] bit 1 = esclavo en la dirección 1B...LPF[7] bit 7 = esclavo en la dirección 31B
Entrada/Salida Tipo Comentario
AsiDriver IoDrvAsi Instancia del controlador AS-Interface.
EIO0000000388 04/2012 231

Biblioteca AS-Interface
ASI_ReadParameterImage
Descripción
Este bloque de funciones permite leer y actualizar la tabla de imágenes de parámetros.
Representación gráfica
Representación IL y ST
Para ver la representación general en lenguaje IL o ST, consulte el capítulo Representación de las funciones y los bloques de funciones (véase página 235).
Descripción de variables de E/S
En la tabla siguiente se describen las variables de entrada:
Entrada Tipo Comentario
xExecute BOOL Flanco ascendente: se inicia la acción.Flanco descendente: restablece las salidas. Si se produce un flanco descendente antes de que el bloque de funciones haya completado su acción, las salidas funcionan de la forma habitual y sólo se restablecen si la acción se ha completado o en el caso de que haya un error. En este caso, los correspondientes valores de salida (xDone, xError, iError) están presentes en las salidas exactamente durante un ciclo.
232 EIO0000000388 04/2012

Biblioteca AS-Interface
En la tabla siguiente se describen las variables de salida:
En la siguiente tabla se describe la variable de entrada/salida:
Salida Tipo Comentario
xDone BOOL TRUE si el comando finalizó correctamente.
xBusy BOOL Bloque de funciones activo
xError BOOL TRUE: error detectado, el bloque de funciones interrumpe la acciónFALSE: no se ha detectado ningún error
pPITable POINTER TO ARRAY [0..31] OF BYTE
Imagen de parámetro: contiene las copias reales de la salida de parámetros de todos los esclavos activos.pPITable^[0] bit 0...3 = esclavo en la dirección 0pPITable^[0] bit 4...7 = esclavo en la dirección 1A...pPITable^[15] bit 4...7 = esclavo en la dirección 31ApPITable^[16] bit 0...3 = no se utilizapPITable^[16] bit 4...7 = esclavo en la dirección 1B...pPITable^[31] bit 4...7 = esclavo en la dirección 31B
Entrada/Salida Tipo Comentario
AsiDriver IoDrvAsi Instancia del controlador AS-Interface.
EIO0000000388 04/2012 233

Biblioteca AS-Interface
234 EIO0000000388 04/2012

EIO0000000388 04/2012
B
Modicon M238 Logic Controller
Representación de funciones y de bloques de funciones
EIO0000000388 04/2012
Representación de funciones y de bloques de funciones
Descripción general
Cada función se puede representar en los lenguajes siguientes:IL: Lista de instruccionesST: Texto estructuradoLD: Diagrama de contactosFBD: Diagrama de bloques de funcionesCFC: Diagrama de función continua
En este capítulo se proporcionan funciones y ejemplos de representación de bloques de funciones y se describe cómo utilizarlas en lenguajes IL y ST.
Contenido de este capítulo
Este capítulo contiene los siguiente apartados:
Apartado Página
Diferencias entre una función y un bloque de funciones 236
Cómo usar una función o un bloque de funciones en lenguaje IL 237
Cómo utilizar una función o un bloque de funciones en lenguaje ST 240
235

Representación de funciones y de bloques de funciones
Diferencias entre una función y un bloque de funciones
Función
Una función:es una POU (Unidad de organización de programa) que devuelve un resultado inmediatose le llama directamente por su nombre (no a través de una Instancia)No tiene un estado persistente desde una llamada hasta la otra.Se puede utilizar como un operando en otras expresiones.
Ejemplos: operadores booleanos (AND), cálculos, conversión (BYTE_TO_INT)
Bloque de funciones
Un bloque de funciones:es una POU (Unidad de organización de programa) que devuelve una o más salidassiempre se le llama a través de una Instancia (copia del bloque de funciones con nombre y variables dedicados)cada Instancia tiene un estado persistente (salidas y variables internas) de una llamada a la otra.
Ejemplos: temporizadores, contadores
En el ejemplo siguiente, Timer_ON es una instancia del bloque de funciones TON:
236 EIO0000000388 04/2012

Representación de funciones y de bloques de funciones
Cómo usar una función o un bloque de funciones en lenguaje IL
Información general
En esta sección se describe el modo de implementar una función y un bloque de funciones en lenguaje IL.
Las funciones IsFirstMastCycle and SetRTCDrift y el bloque de funciones TON se usan como ejemplo para mostrar implementaciones.
Uso de una función en lenguaje IL
En el procedimiento siguiente se describe cómo insertar una función en lenguaje IL:
Para ilustrar el procedimiento, consulte las funciones IsFirstMastCycle (sin parámetros de entrada) y SetRTCDrift (con parámetros de entrada) presentadas gráficamente a continuación:
Paso Acción
1 Abra o cree una POU en el lenguaje de lista de instrucciones.NOTA: Aquí no se detalla el procedimiento para crear una POU. Para obtener más información, consulte la ayuda global de SoMachine.
2 Cree las variables que necesite la función.
3 Si la función tiene 1 o más entradas, empiece a cargar la primera entrada utilizando la instrucción LD.
4 Inserte una nueva línea abajo y:escriba el nombre de la función en la columna de operadores (campo izquierdo); ouse el Asistente de entradas para seleccionar la función (seleccione Insertar llamada de módulo en el menú contextual).
5 Si la función tiene más de 1 entrada y se usa el Asistente de entradas, se crea automáticamente el número de líneas necesario con ??? en los campos de la derecha. Reemplace ??? por el valor o la variable adecuada que corresponda al orden de las entradas.
6 Inserte una nueva línea para almacenar el resultado de la función en la variable adecuada: Escriba la instrucción ST en la columna de operadores (campo de la izquierda) y un nombre de variable en el campo de la derecha.
Función Representación gráfica
sin parámetros de entrada:IsFirstMastCycle
con parámetros de entrada:SetRTCDrift
EIO0000000388 04/2012 237

Representación de funciones y de bloques de funciones
En lenguaje IL, el nombre de la función se utiliza directamente en la columna del operador:
Uso de un bloque de funciones en lenguaje IL
En el procedimiento siguiente se describe cómo insertar un bloque de funciones en lenguaje IL:
Función Representación en el SoMachineEditor IL de POU
Ejemplo en IL de una función sin parámetros de entrada:IsFirstMastCycle
Ejemplo en IL de una función con parámetros de entrada:SetRTCDrift
Paso Acción
1 Abra o cree una POU en el lenguaje de lista de instrucciones.NOTA: Aquí no se detalla el procedimiento para crear una POU. Para obtener más información, consulte la ayuda global de SoMachine.
238 EIO0000000388 04/2012
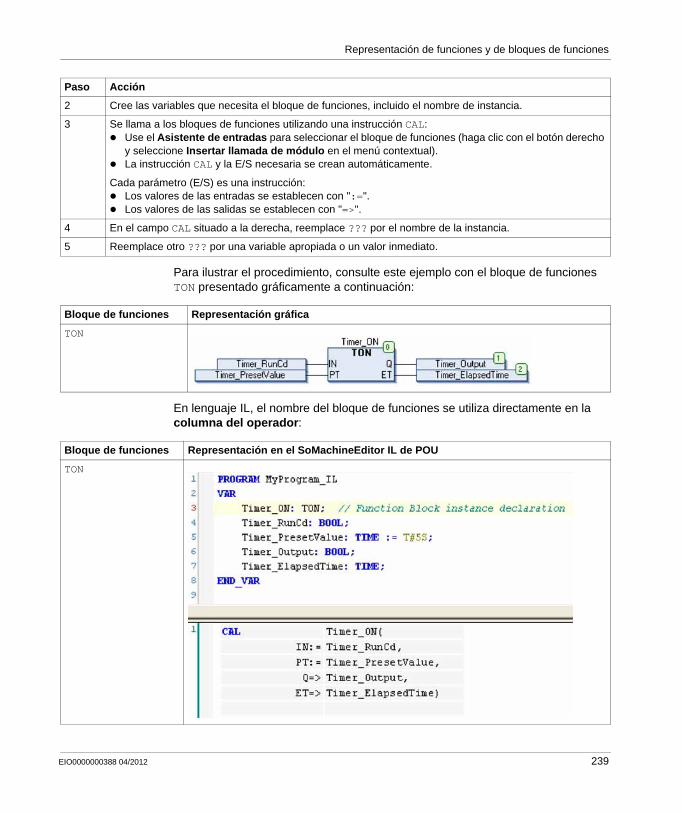
Representación de funciones y de bloques de funciones
Para ilustrar el procedimiento, consulte este ejemplo con el bloque de funciones TON presentado gráficamente a continuación:
En lenguaje IL, el nombre del bloque de funciones se utiliza directamente en la columna del operador:
2 Cree las variables que necesita el bloque de funciones, incluido el nombre de instancia.
3 Se llama a los bloques de funciones utilizando una instrucción CAL:Use el Asistente de entradas para seleccionar el bloque de funciones (haga clic con el botón derecho y seleccione Insertar llamada de módulo en el menú contextual).La instrucción CAL y la E/S necesaria se crean automáticamente.
Cada parámetro (E/S) es una instrucción:Los valores de las entradas se establecen con ":=".Los valores de las salidas se establecen con "=>".
4 En el campo CAL situado a la derecha, reemplace ??? por el nombre de la instancia.
5 Reemplace otro ??? por una variable apropiada o un valor inmediato.
Paso Acción
Bloque de funciones Representación gráfica
TON
Bloque de funciones Representación en el SoMachineEditor IL de POU
TON
EIO0000000388 04/2012 239

Representación de funciones y de bloques de funciones
Cómo utilizar una función o un bloque de funciones en lenguaje ST
Información general
En esta sección se describe el modo de implementar una función y un bloque de funciones en lenguaje ST.
La función SetRTCDrift y el bloque de funciones TON se utilizan como ejemplos para mostrar implementaciones.
Uso de una función en lenguaje ST
En el procedimiento siguiente se describe cómo insertar una función en lenguaje ST:
Para ilustrar el procedimiento, considere la función SetRTCDrift que se representa gráficamente a continuación:
El lenguaje ST de esta función es este:
Paso Acción
1 Abra o cree una POU nueva en el lenguaje de Texto estructurado (ST).NOTA: Aquí no se detalla el procedimiento para crear una POU. Para obtener más información, consulte la ayuda global de SoMachine .
2 Cree las variables que necesite la función.
3 Utilice la sintaxis general en el Editor POU ST para el lenguaje ST de una función. La sintaxis general es:FunctionResult:= FunctionName(VarInput1, VarInput2,.. VarInputx);
Función Representación gráfica
SetRTCDrift
Función Representación en el Editor POU IL de SoMachine
SetRTCDrift PROGRAM MyProgram_ST VAR myDrift: SINT(-29..29) := 5; myDay: DAY_OF_WEEK := SUNDAY; myHour: HOUR := 12; myMinute: MINUTE; myRTCAdjust: RTCDRIFT_ERROR; END_VAR
myRTCAdjust:= SetRTCDrift(myDrift, myDay, myHour, myMinute);
240 EIO0000000388 04/2012

Representación de funciones y de bloques de funciones
Uso de un bloque de funciones en lenguaje ST
En el procedimiento siguiente se describe cómo insertar un bloque de funciones en lenguaje ST:
Para ilustrar el procedimiento, considere este ejemplo con el bloque de funciones TON que se representa gráficamente a continuación:
En la tabla siguiente se muestran ejemplos de una llamada de bloque de funciones en lenguaje ST:
Paso Acción
1 Abra o cree una POU nueva en el lenguaje de Texto estructurado (ST).NOTA: Aquí no se detalla el procedimiento para crear una POU. Para obtener más información, consulte la ayuda global de SoMachine .
2 Cree las variables de entrada y salida y la instancia requeridas para el bloque de funciones:Las variables de entrada son los parámetros de entrada requeridos por el bloque de funcionesLas variables de salida reciben el valor devuelto por el bloque de funciones
3 Utilice la sintaxis general en el Editor POU ST para el lenguaje ST de un bloque de funciones. La sintaxis general es:FunctionBlock_InstanceName(Input1:=VarInput1, Input2:=VarInput2,... Ouput1=>VarOutput1, Ouput2=>VarOutput2,...);
Bloque de funciones
Representación gráfica
TON
Bloque de funciones Representación en el Editor POU IL de SoMachine
TON
EIO0000000388 04/2012 241

Representación de funciones y de bloques de funciones
242 EIO0000000388 04/2012

EIO0000000388 04/2012
C
Modicon M238 Logic Controller
Funciones para obtener/establecer la configuración de líneas serie en el programa de usuario
EIO0000000388 04/2012
Funciones para obtener/establecer la configuración de líneas serie en el programa de usuario
Descripción general
En esta sección se describen las funciones para obtener/establecer la configuración de líneas serie en el programa.
Para utilizar estas funciones, debe añadir la biblioteca M2xx Communication .
Para obtener más información sobre cómo añadir una biblioteca, consulte la SoMachine Guía de programación (véase SoMachine, Guía de programación).
Contenido de este capítulo
Este capítulo contiene los siguiente apartados:
Apartado Página
GetSerialConf: obtención de la configuración de línea serie 244
SetSerialConf: Cambiar la configuración de línea serie 245
SERIAL_CONF: Estructura del tipo de datos de la configuración de línea serie 247
243
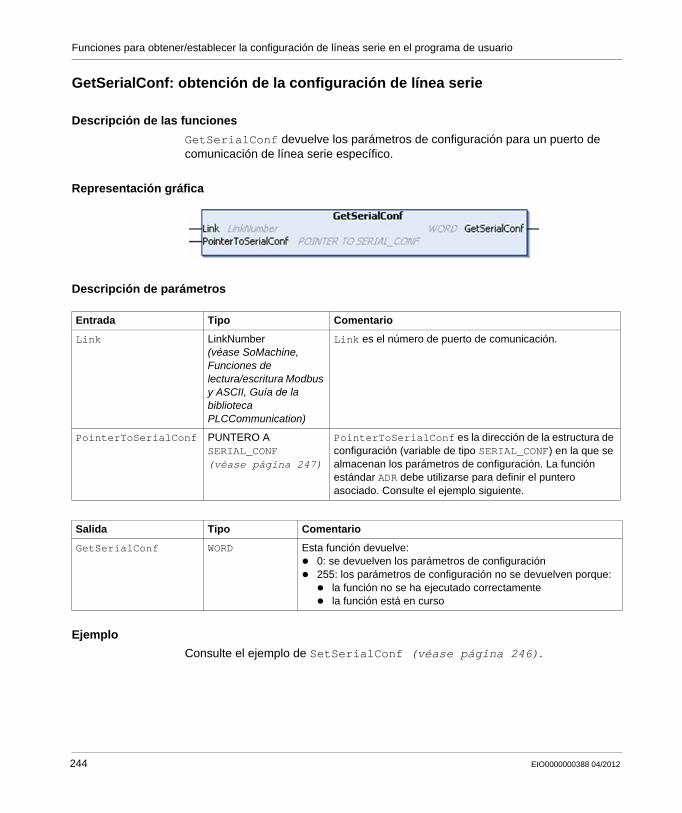
Funciones para obtener/establecer la configuración de líneas serie en el programa de usuario
GetSerialConf: obtención de la configuración de línea serie
Descripción de las funciones
GetSerialConf devuelve los parámetros de configuración para un puerto de comunicación de línea serie específico.
Representación gráfica
Descripción de parámetros
Ejemplo
Consulte el ejemplo de SetSerialConf (véase página 246).
Entrada Tipo Comentario
Link LinkNumber (véase SoMachine, Funciones de lectura/escritura Modbus y ASCII, Guía de la biblioteca PLCCommunication)
Link es el número de puerto de comunicación.
PointerToSerialConf PUNTERO A SERIAL_CONF (véase página 247)
PointerToSerialConf es la dirección de la estructura de configuración (variable de tipo SERIAL_CONF) en la que se almacenan los parámetros de configuración. La función estándar ADR debe utilizarse para definir el puntero asociado. Consulte el ejemplo siguiente.
Salida Tipo Comentario
GetSerialConf WORD Esta función devuelve:0: se devuelven los parámetros de configuración255: los parámetros de configuración no se devuelven porque:
la función no se ha ejecutado correctamentela función está en curso
244 EIO0000000388 04/2012

Funciones para obtener/establecer la configuración de líneas serie
SetSerialConf: Cambiar la configuración de línea serie
Descripción de funciones
SetSerialConf se utiliza para cambiar la configuración de la línea serie.
Representación gráfica
NOTA: El cambio de la configuración de los puertos de línea serie durante la ejecución de la programación puede interrumpir las comunicaciones en curso con otros dispositivos conectados.
Descripción de parámetros
ADVERTENCIAPÉRDIDA DE CONTROL DEBIDA A UN CAMBIO DE CONFIGURACIÓN INES-PERADO
Asegúrese de validar y probar todos los parámetros de la función SetSerialConf antes de poner en marcha el programa.
El incumplimiento de estas instrucciones puede causar la muerte, lesiones serias o daño al equipo.
Entrada Tipo Comentario
Link LinkNumber (véase SoMachine, Funciones de lectura/escritura Modbus y ASCII, Guía de la biblioteca PLCCommunication)
LinkNumber es el número de puerto de comunicación.
PointerToSerialConf PUNTERO A SERIAL_CONF (véase página 247)
PointerToSerialConf es la dirección de la estructura de configuración (variable de tipo SERIAL_CONF) en la que se almacenan los parámetros de la nueva configuración. La función estándar ADR debe utilizarse para definir el puntero asociado. Consulte el ejemplo siguiente. Si se especifica 0, la configuración predeterminada de la aplicación será la línea serie.
EIO0000000388 04/2012 245

Funciones para obtener/establecer la configuración de líneas serie en el programa de usuario
Ejemplo
VAR
MySerialConf: SERIAL_CONF
result: WORD;
END_VAR
(*Obtener la configuración actual de la línea serie 1*)
GetSerialConf(1, ADR(MySerialConf));
(*Cambiar a la dirección de esclavo de Modbus RTU 9*)
MySerialConf.Protocol := 0; (*Protocolo Modbus RTU/Somachine [en este caso CodesysCompliant selecciona el protocolo]*)
MySerialConf.CodesysCompliant := 0; (*Modbus RTU*)
MySerialConf.address := 9; (*Establecer la dirección Modbus en 9*)
(*Reconfigurar la línea serie 1*)
result := SetSerialConf(1, ADR(MySerialConf));
Salida Tipo Comentario
SetSerialConf WORD Esta función devuelve:0: Se ha establecido la nueva configuración255: se rechaza la nueva configuración porque:
la función está en cursolos parámetros de entrada no son válidos
246 EIO0000000388 04/2012
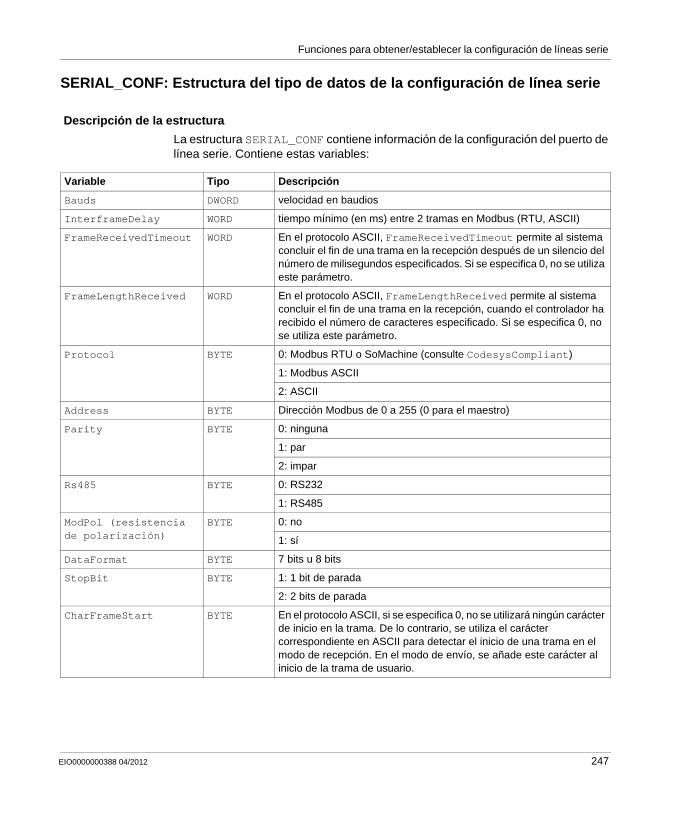
Funciones para obtener/establecer la configuración de líneas serie
SERIAL_CONF: Estructura del tipo de datos de la configuración de línea serie
Descripción de la estructura
La estructura SERIAL_CONF contiene información de la configuración del puerto de línea serie. Contiene estas variables:
Variable Tipo Descripción
Bauds DWORD velocidad en baudios
InterframeDelay WORD tiempo mínimo (en ms) entre 2 tramas en Modbus (RTU, ASCII)
FrameReceivedTimeout WORD En el protocolo ASCII, FrameReceivedTimeout permite al sistema concluir el fin de una trama en la recepción después de un silencio del número de milisegundos especificados. Si se especifica 0, no se utiliza este parámetro.
FrameLengthReceived WORD En el protocolo ASCII, FrameLengthReceived permite al sistema concluir el fin de una trama en la recepción, cuando el controlador ha recibido el número de caracteres especificado. Si se especifica 0, no se utiliza este parámetro.
Protocol BYTE 0: Modbus RTU o SoMachine (consulte CodesysCompliant)
1: Modbus ASCII
2: ASCII
Address BYTE Dirección Modbus de 0 a 255 (0 para el maestro)
Parity BYTE 0: ninguna
1: par
2: impar
Rs485 BYTE 0: RS232
1: RS485
ModPol (resistencia de polarización)
BYTE 0: no
1: sí
DataFormat BYTE 7 bits u 8 bits
StopBit BYTE 1: 1 bit de parada
2: 2 bits de parada
CharFrameStart BYTE En el protocolo ASCII, si se especifica 0, no se utilizará ningún carácter de inicio en la trama. De lo contrario, se utiliza el carácter correspondiente en ASCII para detectar el inicio de una trama en el modo de recepción. En el modo de envío, se añade este carácter al inicio de la trama de usuario.
EIO0000000388 04/2012 247

Funciones para obtener/establecer la configuración de líneas serie en el programa de usuario
CharFrameEnd1 BYTE En el protocolo ASCII, si se especifica 0, no se utilizará ningún segundo carácter de inicio en la trama. De lo contrario, se utiliza el carácter correspondiente en ASCII para detectar el fin de una trama en el modo de recepción. En el modo de envío, se añade este carácter al final de la trama de usuario.
CharFrameEnd2 BYTE En el protocolo ASCII, si se especifica 0, no se utilizará ningún segundo carácter de inicio en la trama. De lo contrario, se utiliza el carácter correspondiente en ASCII (junto con CharFrameEnd1) para detectar el fin de una trama en el modo de recepción. En el modo de envío, se añade este carácter al final de la trama de usuario.
CodesysCompliant BYTE 0: Modbus RTU
1: SoMachine (cuando Protocol = 0)
CodesysNetType BYTE no se utiliza
Variable Tipo Descripción
248 EIO0000000388 04/2012

EIO0000000388 04/2012
D
Modicon M238 Logic Controller
M238 - Rendimiento del controlador)
EIO0000000388 04/2012
Rendimiento del controlador
Rendimiento del procesamiento
Introducción
En este capítulo se proporciona información sobre el rendimiento de procesamiento de Modicon M238 Logic Controller.
Procesamiento de la lógica
En la tabla siguiente se muestra el rendimiento del procesamiento de la lógica de varias instrucciones lógicas:
Tipo de instrucción IL Duración de 1.000 instrucciones
Suma/resta/multiplicación de INT 439 μs
Suma/resta/multiplicación de DINT 506 μs
Suma/resta/multiplicación de REAL 5.111 μs
Suma/resta/multiplicación de LREAL 9.535 μs
División de REAL 7.250 μs
División de LREAL 23.045 μs
Operación BOOLEANA, por ejemplo Estado:= Estado y valor
971 μs
LD INT + ST INT 420 μs
LD DINT + ST DINT 459 μs
LD REAL + ST REAL 648 μs
LD LREAL + ST LREAL 1.235 μs
249
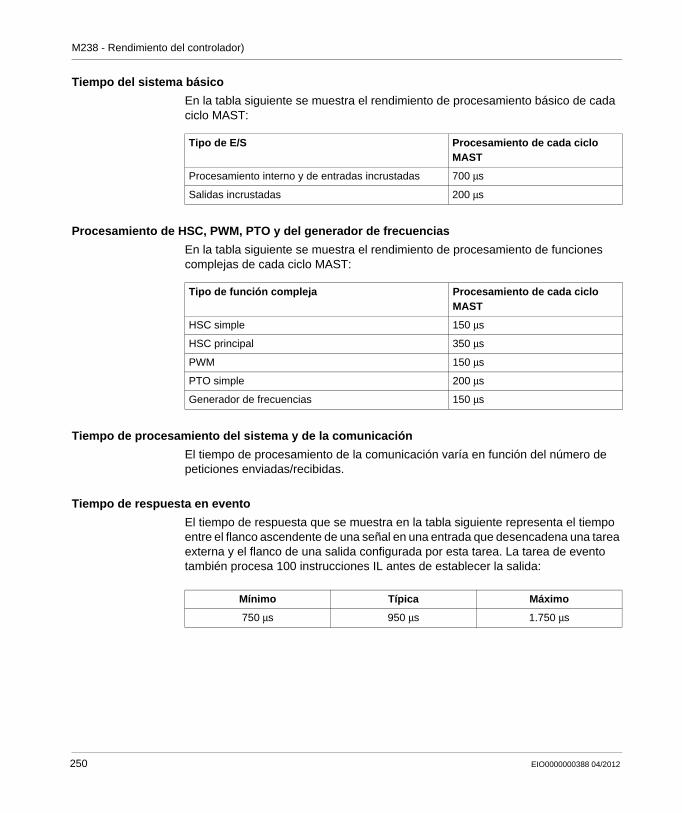
M238 - Rendimiento del controlador)
Tiempo del sistema básico
En la tabla siguiente se muestra el rendimiento de procesamiento básico de cada ciclo MAST:
Procesamiento de HSC, PWM, PTO y del generador de frecuencias
En la tabla siguiente se muestra el rendimiento de procesamiento de funciones complejas de cada ciclo MAST:
Tiempo de procesamiento del sistema y de la comunicación
El tiempo de procesamiento de la comunicación varía en función del número de peticiones enviadas/recibidas.
Tiempo de respuesta en evento
El tiempo de respuesta que se muestra en la tabla siguiente representa el tiempo entre el flanco ascendente de una señal en una entrada que desencadena una tarea externa y el flanco de una salida configurada por esta tarea. La tarea de evento también procesa 100 instrucciones IL antes de establecer la salida:
Tipo de E/S Procesamiento de cada ciclo MAST
Procesamiento interno y de entradas incrustadas 700 μs
Salidas incrustadas 200 μs
Tipo de función compleja Procesamiento de cada ciclo MAST
HSC simple 150 μs
HSC principal 350 μs
PWM 150 μs
PTO simple 200 μs
Generador de frecuencias 150 μs
Mínimo Típica Máximo
750 μs 950 μs 1.750 μs
250 EIO0000000388 04/2012
Modicon M238 Logic Controller
Glosario
EIO0000000388 04/2012
Glosario
A
ARPEl protocolo de resolución de direcciones es el protocolo de capas de red IP para Ethernet que asigna una dirección IP a una dirección MAC (hardware).
ASCIIEl código estándar americano para el intercambio de información (en inglés, American Standard Code for Information Interchange) es un protocolo de comunica-ciones que representa caracteres alfanuméricos (letras, números y algunos caracteres gráficos y de control).
B
Bastidor EIAUn bastidor de Electronic Industries Alliance es un sistema estandarizado (EIA 310-D, IEC 60297 y DIN 41494 SC48D) para montar varios módulos electrónicos en una pila o un bastidor de 19 pulgadas (482,6 mm) de ancho.
bloque de funcionesConsulte FB.
EIO0000000388 04/2012 251
Glosario
BOOTPEl protocolo bootstrap es un protocolo de red UDP que puede utilizar un cliente de red para obtener de forma automática una dirección IP (y tal vez otros datos) de un servidor. El cliente se identifica ante el servidor utilizando la dirección MAC del cliente. El servidor (que mantiene una tabla preconfigurada de direcciones MAC de los dispositivos cliente y las direcciones IP asociadas) envía al cliente su dirección IP preconfigurada. BOOTP se utilizaba originariamente como un método que permitía iniciar los hosts sin disco de forma remota por una red. El proceso BOOTP asigna un arrendamiento infinito de una dirección IP. El servicio BOOTP utiliza los puertos UDP 67 y 68.
bus de ampliaciónEl bus de ampliación es un bus de comunicación electrónico entre los módulos de ampliación y una CPU.
C
CANEl protocolo CAN (red del área del controlador) (ISO 11898) para redes de bus serie está diseñado para la interconexión de dispositivos inteligentes (de varios fabricantes) en sistemas inteligentes para aplicaciones industriales en tiempo real. Los sistemas CAN multimaestro aseguran una alta integridad de datos por medio de la implementación de la difusión de mensajes y de mecanismos de diagnóstico avanzados. CAN, diseñado originalmente para utilizarse en automóviles, se emplea actualmente en una amplia variedad de entornos industriales de control de automatización.
CANmotionCANmotion es un bus de movimiento basado en CANopen con un mecanismo adicional que proporciona sincronización entre el controlador de movimiento (motion controller) y las unidades.
CANopenCANopen es una especificación de perfiles de dispositivos y un protocolo de comunicaciones abierto estándar en el sector.
252 EIO0000000388 04/2012
Glosario
CFCEl diagrama de función continua (en inglés, Continuous Function Chart, una ampliación del estándar IEC61131-3) es un lenguaje de programación que funciona como un diagrama de flujo. Mediante la adición de bloques lógicos simples (Y, O, etc.), cada función o bloque de funciones del programa se representa mediante esta forma gráfica. En cada bloque, las entradas se sitúan a la izquierda y las salidas, a la derecha. Las salidas de los bloques pueden estar vinculadas a las entradas de otros bloques para formar expresiones complejas.
CiACiA (CAN en automatización) es un grupo de fabricantes y usuarios sin ánimo de lucro dedicados a desarrollar y proporcionar soporte a los protocolos de capas superiores basados en CAN.
CIPCuando se implementa el protocolo industrial común en una capa de aplicación de una red, puede comunicarse de forma homogénea con otras redes basadas en CIP independientemente del protocolo. Por ejemplo, la implementación de CIP en la capa de aplicación de una red Ethernet TCP/IP crea un entorno EtherNet/IP. De igual manera, CIP en la capa de aplicación de una red CAN crea un entorno DeviceNet. En ese caso, los dispositivos de la red EtherNet/IP se pueden comunicar con dispositivos de la red DeviceNet por los puentes o enrutadores CIP.
configuración de PostLos archivos de configuración de Post contienen parámetros independientes de la máquina, incluidos estos:
nombre de la máquinanombre de dispositivo o dirección IPdirección de la línea serie Modbustabla de enrutamiento
controladorUn controlador (o controlador lógico programable, o controlador programable) se emplea para automatizar procesos industriales.
EIO0000000388 04/2012 253
Glosario
D
datos persistentesValor de datos persistentes que se utilizarán la próxima vez que se cambie o se arranque en frío una aplicación. Sólo se reinicializa cuando se reinicia el controlador o se resetea el origen. Especialmente mantienen sus valores después de una descarga.
datos retenidosSe utiliza un valor de datos retenidos en el próximo encendido o inicio en caliente. El valor se retiene incluso después de un cierre descontrolado o un apagado normal del controlador.
DHCPEl protocolo de configuración dinámica del ordenador principal (en inglés, Dynamic Host Configuration Protocol), es una ampliación avanzada de BOOTP. DHCP es más avanzado, pero tanto DHCP como BOOTP son habituales. (DHCP puede gestionar solicitudes de cliente BOOTP.)
diagrama de bloques de funcionesConsulte FBD.
diagrama funcional secuencial (del inglés, Sequential Function Chart)Consulte SFC.
Dirección MACLa dirección de control de acceso a medios es un número único de 48 bits asociado a una parte específica del hardware. La dirección MAC está programada en cada tarjeta de red o dispositivo cuando se fabrica.
254 EIO0000000388 04/2012
Glosario
E
E/S expertaLas E/S expertas son módulos dedicados o canales para funciones avanzadas. Estas funciones suelen estar integradas en el módulo para no utilizar los recursos del controlador PLC y para permitir un rápido tiempo de respuesta, según la función. En cuanto a la función, podría considerarse un módulo “independiente”, porque la función es independiente del ciclo de procesamiento del controlador: sólo intercambia información con la CPU del controlador.
E/S rápidaLas E/S rápidas son E/S específicas con algunas funciones eléctricas (tiempo de respuesta, por ejemplo) pero el tratamiento de estos canales se realiza mediante la CPU del controlador.
EEPROMLa memoria de sólo lectura programable y borrable de forma eléctrica (en inglés, Electrically Erasable Programmable Read-Only Memory) es un tipo de memoria no volátil utilizada para almacenar datos que deben guardarse cuando se quita la alimentación eléctrica.
ejecución periódicaLa tarea maestra se ejecuta de forma cíclica o periódica. En la modalidad periódica, el usuario determina un tiempo específico (período) en el que se ejecutará la tarea maestra. Si se ejecuta dentro de este tiempo, se generará un tiempo de espera antes del ciclo siguiente. Si se ejecuta cuando ya ha terminado este tiempo, un sistema de control indicará que se ha sobrepasado el límite de tiempo. Si este desborde ha sido demasiado grande, el controlador se detendrá.
entrada con retenciónUn módulo de entrada con retención se interconecta por interfaz con dispositivos que transmiten mensajes en pulsos breves. La aplicación captura y graba los pulsos entrantes para un posterior examen.
Ethernet/IPEl protocolo industrial Ethernet es un protocolo de comunicaciones abiertas para fabricar soluciones de automatización en sistemas industriales. EtherNet/IP se incluye en una familia de redes que implementa el protocolo industrial común en sus capas superiores. La organización de apoyo (ODVA) especifica EtherNet/IP para cumplir la adaptabilidad y la independencia de los medios.
EIO0000000388 04/2012 255
Glosario
explorarEl programa de exploración de un controlador realiza 3 funciones básicas: [1] Lee las entradas y sitúa estos valores en la memoria; [2] ejecuta la instrucción del programa de aplicación una vez y almacena los resultados en la memoria; [3] utiliza los resultados para actualizar las salidas.
F
FBUn bloque de funciones realiza una función de automatización específica, como control de velocidad, control de intervalo o conteo. Se compone de datos de configuración y de un conjunto de parámetros de funcionamiento.
FBDUn diagrama de bloques de funciones es un lenguaje de programación orientado gráficamente, que cumple con el estándar IEC 61131-3. Funciona con una lista de redes con la que cada red contiene una estructura gráfica de cuadros y líneas de conexión que representa una expresión lógica o aritmética, la llamada de un bloque de funciones, un salto o una instrucción de retorno.
FGGenerador de frecuencias (en inglés, frequency generator)
firmwareEl firmware representa el sistema operativo en un controlador.
FTPEl protocolo de transferencia de archivos es un protocolo de red estándar (incorporado en una arquitectura de cliente-servidor), que sirve para intercambiar y manipular archivos por redes basadas en TCP/IP.
G
GVLLa lista de variables globales gestiona variables globales que están disponibles en cada POU de aplicación.
256 EIO0000000388 04/2012

Glosario
H
HSCcontador de alta velocidad
I
ICMPEl protocolo de mensajes de control de Internet informa acerca de los errores y proporciona información relacionada con el procesamiento de datagramas.
IEC 61131-3El IEC 61131-3 es un estándar de la Comisión Electrotécnica Internacional para los equipos de automatización industriales (como controladores). IEC 61131-3 se ocupa de los lenguajes de programación del controlador y define dos normas de lenguajes de programación gráficos y dos textuales:
gráfico: diagrama Ladder, diagrama de bloques de funcionestextual: texto estructurado, lista de instrucciones
ILUn programa escrito en el lenguaje de lista de instrucciones está compuesto por una serie de instrucciones ejecutadas de forma secuencial por el controlador. Cada instrucción incluye un número de línea, un código de instrucción y un operando. (IL cumple con IEC 61131-3.)
IPEl protocolo de Internet es parte de la familia de protocolos TCP/IP que hace un seguimiento de las direcciones de Internet de los dispositivos, encamina los mensajes salientes y reconoce los mensajes entrantes.
IP 20Grado de protección de entrada de acuerdo con IEC 60529. Los módulos IP20 están protegidos contra la entrada y el contacto de objetos de más de 12,5 mm. El módulo no está protegido contra la entrada perjudicial de agua.
EIO0000000388 04/2012 257

Glosario
L
LDUn programa escrito en lenguaje de Ladder incluye una representación gráfica de instrucciones de un programa de controlador con símbolos para contactos, bobinas y bloques en una serie de escalones ejecutados de forma secuencial por un controlador. Conforme con IEC 61131-3.
Lenguaje de diagrama de contactosConsulte LD.
lenguaje de lista de instruccionesConsulte IL.
M
maestro/esclavoLa única dirección de control en una red que implementa el modelo maestro/esclavo siempre es de un dispositivo o proceso maestro a uno o más dispositivos esclavos.
MASTUna tarea maestra (MAST) es una tarea del procesador que se ejecuta en el software de programación. La tarea MAST consta de dos secciones:
IN: las entradas se copian en la sección IN antes de ejecutar la tarea MAST.OUT: las salidas se copian en la sección OUT después de ejecutar la tarea MAST.
Memoria flashLa memoria Flash es una memoria no volátil que se puede sobrescribir. Se almacena en una memoria EEPROM especial que se puede borrar y volver a programar.
MIBLa base de información de gestión es una base de datos de objetos que se muestra con un sistema de gestión de red como SNMP. SNMP monitoriza dispositivos que se definen por las MIB. Schneider ha obtenido una MIB privada, groupeschneider (3833).
258 EIO0000000388 04/2012

Glosario
ModbusEl protocolo de comunicaciones Modbus permite las comunicaciones entre muchos dispositivos conectados a la misma red.
módulo de E/S de ampliaciónUn módulo de entrada o salida de ampliación es un módulo digital o analógico que añade E/S adicional al controlador base.
N
NEMALa asociación de fabricantes de componentes eléctricos (National Electrical Manufacturers Association) publica normas para el rendimiento de varias clases de carcasas eléctricas. Las normas NEMA abarcan la resistencia a la corrosión, la capacidad de protección contra la lluvia y la inmersión, etc. Para los países adheridos a IEC, la norma IEC 60529 clasifica el grado de protección contra entrada de las carcasas.
nodoUn nodo es un dispositivo accesible en una red de comunicación.
O
ODVALa Asociación de proveedores de redes Devicenet de tecnología abierta (Open Devicenet Vendors Association) soporta la familia de tecnologías de redes incorporadas en CIP (EtherNet/IP, DeviceNet y CompoNet).
origen de aplicaciónEl archivo origen de la aplicación se puede cargar al PC para volver a abrir un proyecto de SoMachine. Este archivo de origen puede admitir un proyecto completo de SoMachine (por ejemplo, uno que incluya una aplicación HMI).
EIO0000000388 04/2012 259

Glosario
P
PDOUn objeto de datos de proceso se transmite como un mensaje de difusión sin confirmar o se envía de un dispositivo productor a un dispositivo consumidor en una red basada en CAN. El PDO transmitido del dispositivo productor tiene un identificador específico que corresponde a los PDO recibidos de los dispositivos consumidores.
PLCopenEl estándar PLCopen aporta eficacia, flexibilidad e independencia del fabricante a la industria de la automatización y control mediante la estandarización de herramientas, bibliotecas y enfoques modulares de la programación de software.
POUUna unidad de organización de programa incluye una declaración de variables en el código fuente y el conjunto de instrucciones correspondiente. Las POU facilitan la reutilización modular de programas de software, funciones y bloques de funciones. Una vez declaradas, cada una de las POU está disponible para los otras. La programación de SoMachine requiere la utilización de POU.
protocoloUn protocolo es una convención o una norma que controla o habilita la conexión, la comunicación y la transferencia de datos entre dos puntos finales informáticos.
PTOLas salidas de tren de pulsos se utilizan para controlar por ejemplo los motores paso a paso en un bucle abierto.
PWMLa modulación de ancho de pulsos se utiliza para los procesos de regulación (por ejemplo, actuadores para el control de temperatura) en los que una señal de pulso se modula en su longitud. Para este tipo de señales se utilizan salidas de transistores.
260 EIO0000000388 04/2012
Glosario
R
real-time clock (RTC)Consulte RTC
redUna red incluye dispositivos interconectados que comparten una ruta de datos común y un protocolo de comunicaciones.
registro de datosEl controlador registra los eventos relacionados con la aplicación de usuario en un registro de datos.
RFIDLa identificación por radiofrecuencias es un método de identificación automática que se basa en almacenar y recuperar datos de forma remota utilizando etiquetas o transpondedores RFID.
RPDOUn PDO de recepción envía datos a un dispositivo en una red basada en CAN.
RTCLa opción de reloj en tiempo real conserva la hora durante un período determinado, aunque el controlador no reciba alimentación.
S
salida de umbralLas salidas de umbral se controlan directamente mediante HSC con arreglo a los ajustes establecidos durante la configuración.
salida reflejaEn modo de conteo, el valor actual del contador de alta velocidad se compara con sus umbrales configurados para determinar el estado de estas salidas especializadas.
EIO0000000388 04/2012 261
Glosario
SDOUn mensaje de objeto de datos de servicio lo utiliza el maestro de bus de campo para acceder (por lectura/escritura) a los directorios de objetos de los nodos de red en las redes basadas en CAN. Entre los tipos de SDO se incluyen los SDO de servicio (SSDO) y los SDO de cliente (CSDO).
SFCUn programa escrito en el lenguaje de gráficos de funciones secuenciales puede utilizarse para procesos que se pueden dividir en pasos. SFC está formado por pasos con acciones asociadas, transiciones con una condición lógica asociada y enlaces dirigidos entre pasos y transiciones. (La norma SFC está definida en IEC 848. Es conforme con IEC 61131-3.)
símboloUn símbolo es una cadena con un máximo de 32 caracteres alfanuméricos, de los cuales el primer carácter es alfabético. Permite personalizar un objeto del controlador para facilitar el mantenimiento de la aplicación.
SNMPEl protocolo de gestión de red simple puede controlar una red de forma remota sondeando los dispositivos para conocer su estado, realizar pruebas de seguridad y ver información sobre la transmisión de datos. También puede utilizarse para gestionar software y bases de datos de forma remota. El protocolo también permite realizar tareas de gestión activas, por ejemplo la modificación y aplicación de una nueva configuración.
SOSistema operativo. Se puede emplear para el firmware que puede cargar/descargar el usuario.
T
tareaGrupo de secciones y subrutinas ejecutadas cíclica o periódicamente si se trata de la tarea MAST, o periódicamente si se trata de la tarea FAST.
Una tarea siempre tiene un nivel de prioridad y tiene asociadas entradas y salidas del controlador. Estas entradas y salidas se actualizarán en consecuencia.
Un controlador puede tener varias tareas.
262 EIO0000000388 04/2012

Glosario
tarea cíclicaEl tiempo de exploración cíclica tiene una duración fija (intervalo) especificada por el usuario. Si el tiempo de exploración actual es más corto que el cíclico, el controlador espera hasta que pasa el tiempo de exploración cíclica antes de realizar una nueva exploración.
TCPUn protocolo de control de transmisión es un protocolo de capas de transporte basado en conexiones que proporciona una transmisión de datos simultánea y bidireccional fiable. TCP forma parte del conjunto de protocolos TCP/IP.
Texto estructuradoUn programa escrito en el lenguaje de texto estructurado (ST) incluye instrucciones complejas e intercaladas (por ejemplo bucles de repetición, ejecuciones condicionales o funciones). ST está conforme con IEC 61131-3.
TPDOUn PDO de transmisión lee datos de un dispositivo en un sistema basado en CAN.
U
UDPEl protocolo de datagramas de usuario es un protocolo de modalidades sin conexión (definido por IETF RFC 768) en el que los mensajes se entregan en un datagrama (telegrama de datos) a un ordenador de destino de una red IP. El protocolo UDP generalmente se integra junto con el protocolo de Internet. Los mensajes UDP/IP no necesitan una respuesta y, por lo tanto, son perfectos para aplicaciones en las que los paquetes descartados no requieren retransmisión (como redes y vídeos de secuencia que necesitan rendimiento en tiempo real).
V
variable de sistemaUna estructura de variables de sistema proporciona datos del controlador e información de diagnóstico, y permite enviar comandos al controlador.
variable no ubicadaUna variable no ubicada no tiene una dirección. (Consulte variable ubicada).
EIO0000000388 04/2012 263

Glosario
variable ubicadaUna variable ubicada tiene una dirección. (Consulte variable no ubicada).
264 EIO0000000388 04/2012

Modicon M238 Logic Controller
Índice
EIO0000000388 04/2012
CBA
ÍndiceAActualización de firmware
Actualizar mediante la conexión serie, 188Actualizar por USB, 191Bienvenido, 194Configuración, 195Introducción a ExecLoader, 193Progreso de la transferencia, 199Propiedades de archivos y dispositivos, 197
Asignación de memoria, 23
BBiblioteca AS-Interface
ASI_CheckSlaveBit, 216ASI_CmdSetAutoAddressing, 217ASI_CmdSetOfflineMode, 221ASI_MasterStatusCheck, 223ASI_ReadParameterImage, 232ASI_SlaveStatusCheck, 230
Biblioteca AS-Interface ASI_CmdSetDataExchange, 219
Biblioteca de AS-InterfaceASI_SlaveAddressChange, 225ASI_SlaveParameterUpdate, 228
bibliotecas, 19Bus de campo AS-Interface V2
Añadir manualmente un esclavo genéri-co, 113Añadir un esclavo con Buscar dispositi-
EIO0000000388 04/2012
vos, 110Añadir un esclavo con el catálogo, 107Añadir un esclavo de AS-Interface, 107Añadir un módulo AS-Interface, 102Configurar un esclavo de AS-Interface, 116Configurar un maestro AS-Interface, 104Descripción funcional general, 97Diagnóstico, 125Direccionamiento automático de escla-vos, 120Esclavo no operativo, 130Modificación de una dirección de escla-vo, 122Presentación, 96Principios de configuración del software, 100Programación, 129
Ccaracterísticas
características principales, 13características principales, 13Comando Detener, 60Comando Ejecutar, 60Comportamiento de salida, 58, 58Configuración de funciones incrustadas
Configuración de HSC incrustado, 78Configuración de funciones integradas
Configuración de E/S integradas, 81Configuración de HSC integrado, 85
265
Índice
Configuración de la pasarela EthernetConexión y configuración de la pasarela Ethernet, 157
configuración del controladorAjustes PLC, 73
Configuración del controladorAplicaciones, 72
configuración del controladorservicios, 75
DDescarga de la aplicación, 65descripción general, 13diagrama de estado, 46
FFAQ, 210Forzado de salida, 58Funciones
Cómo usar una función o un bloque de funciones en lenguaje IL, 237Cómo utilizar una función o un bloque de funciones en lenguaje ST, 240Diferencias entre una función y un blo-que de funciones, 236
GGetSerialConf, 244
Llenguaje de programación
IL, ST, FBD, SFC, LD, CFC, 13Línea serie
Configuración de línea serie, 132
MMódulo de ampliación
Adición de módulo de ampliación, 89Configurar módulo de ampliación, 89
266
RReinicio, 63Reset caliente, 61Reset frío, 62Reset origen, 63
SSERIAL_CONF, 247SetSerialConf, 245solución de problemas, 202
TTarea
Tarea cíclica, 36Tarea de ejecución libre, 37Tarea de evento, 38Tarea Evento externo, 38Tipos, 36Watchdogs, 39
VValores de inicialización, 58Variables remanentes, 68
EIO0000000388 04/2012


















