Fundamentos de Mecatrónica - Escuela Universitaria …€¦ · Fundamentos de Mecatrónica Clase...
34
Fundamentos de Mecatrónica Clase 03: Sensores y Transductores Ricardo-Franco Mendoza-García [email protected] Ingeniería Mecatrónica Escuela Universitaria de Ingeniería Mecánica Universidad de Tarapacá Arica, Chile November 21, 2012 R.F. Mendoza-Garcia (Mecánica, UTA) Fund. Mecatrónica: Sensores y Actuadores November 21, 2012 1 / 15
Transcript of Fundamentos de Mecatrónica - Escuela Universitaria …€¦ · Fundamentos de Mecatrónica Clase...
Fundamentos de MecatrónicaClase 03: Sensores y Transductores
Ricardo-Franco Mendoza-Garcí[email protected]
Ingeniería MecatrónicaEscuela Universitaria de Ingeniería Mecánica
Universidad de TarapacáArica, Chile
November 21, 2012
R.F. Mendoza-Garcia (Mecánica, UTA) Fund. Mecatrónica: Sensores y Actuadores November 21, 2012 1 / 15
Outline
Outline
1 IntroductionSensores y transductoresComplejidad de sensores
2 TerminologíaParámetros de funcionamientoCaracterísticas estáticas y dinámicasParámetros de comportamiento
3 Lista de sensoresDesplazamiento, posición y proximidad
R.F. Mendoza-Garcia (Mecánica, UTA) Fund. Mecatrónica: Sensores y Actuadores November 21, 2012 2 / 15
Introduction
Outline
1 IntroductionSensores y transductoresComplejidad de sensores
2 TerminologíaParámetros de funcionamientoCaracterísticas estáticas y dinámicasParámetros de comportamiento
3 Lista de sensoresDesplazamiento, posición y proximidad
R.F. Mendoza-Garcia (Mecánica, UTA) Fund. Mecatrónica: Sensores y Actuadores November 21, 2012 3 / 15

Introduction Sensores y transductores
Sensores y Transductores
R.F. Mendoza-Garcia (Mecánica, UTA) Fund. Mecatrónica: Sensores y Actuadores November 21, 2012 4 / 15
Introduction Complejidad de sensores
Complejidad de sensoresSensores puros: convierten magnitud física en otra magnitud,generalmente eléctrica;sensores con acondicionamiento de señal: incluyen conversiónde señales eléctricas; ysensores con acondicionamiento+microprocesador: incluyenademás poder de procesamiento para auto-ajustarse ano-linealidades, auto-calibrar, y otros.
R.F. Mendoza-Garcia (Mecánica, UTA) Fund. Mecatrónica: Sensores y Actuadores November 21, 2012 5 / 15
Introduction Complejidad de sensores
Complejidad de sensoresSensores puros: convierten magnitud física en otra magnitud,generalmente eléctrica;sensores con acondicionamiento de señal: incluyen conversiónde señales eléctricas; ysensores con acondicionamiento+microprocesador: incluyenademás poder de procesamiento para auto-ajustarse ano-linealidades, auto-calibrar, y otros.
R.F. Mendoza-Garcia (Mecánica, UTA) Fund. Mecatrónica: Sensores y Actuadores November 21, 2012 5 / 15
Introduction Complejidad de sensores
Complejidad de sensoresSensores puros: convierten magnitud física en otra magnitud,generalmente eléctrica;sensores con acondicionamiento de señal: incluyen conversiónde señales eléctricas; ysensores con acondicionamiento+microprocesador: incluyenademás poder de procesamiento para auto-ajustarse ano-linealidades, auto-calibrar, y otros.
R.F. Mendoza-Garcia (Mecánica, UTA) Fund. Mecatrónica: Sensores y Actuadores November 21, 2012 5 / 15
Terminología
Outline
1 IntroductionSensores y transductoresComplejidad de sensores
2 TerminologíaParámetros de funcionamientoCaracterísticas estáticas y dinámicasParámetros de comportamiento
3 Lista de sensoresDesplazamiento, posición y proximidad
R.F. Mendoza-Garcia (Mecánica, UTA) Fund. Mecatrónica: Sensores y Actuadores November 21, 2012 6 / 15
Terminología Parámetros de funcionamiento
Parámetros de funcionamiento
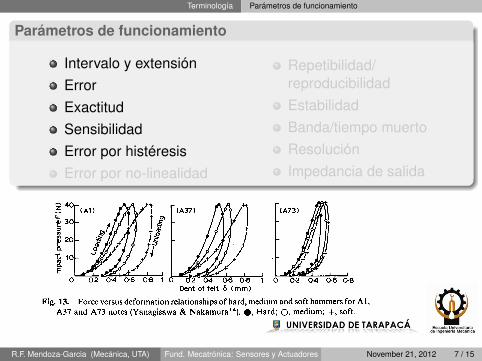
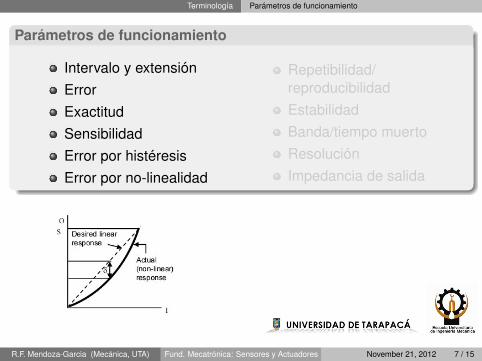
Intervalo y extensiónErrorExactitudSensibilidadError por histéresisError por no-linealidad
Repetibilidad/reproducibilidadEstabilidadBanda/tiempo muertoResoluciónImpedancia de salida
R.F. Mendoza-Garcia (Mecánica, UTA) Fund. Mecatrónica: Sensores y Actuadores November 21, 2012 7 / 15
Terminología Parámetros de funcionamiento
Parámetros de funcionamiento
Intervalo y extensiónErrorExactitudSensibilidadError por histéresisError por no-linealidad
Repetibilidad/reproducibilidadEstabilidadBanda/tiempo muertoResoluciónImpedancia de salida
R.F. Mendoza-Garcia (Mecánica, UTA) Fund. Mecatrónica: Sensores y Actuadores November 21, 2012 7 / 15
Terminología Parámetros de funcionamiento
Parámetros de funcionamiento
Intervalo y extensiónErrorExactitudSensibilidadError por histéresisError por no-linealidad
Repetibilidad/reproducibilidadEstabilidadBanda/tiempo muertoResoluciónImpedancia de salida
R.F. Mendoza-Garcia (Mecánica, UTA) Fund. Mecatrónica: Sensores y Actuadores November 21, 2012 7 / 15
Terminología Parámetros de funcionamiento
Parámetros de funcionamiento
Intervalo y extensiónErrorExactitudSensibilidadError por histéresisError por no-linealidad
Repetibilidad/reproducibilidadEstabilidadBanda/tiempo muertoResoluciónImpedancia de salida
Sensibilidad = 0.5Ω/oC
R.F. Mendoza-Garcia (Mecánica, UTA) Fund. Mecatrónica: Sensores y Actuadores November 21, 2012 7 / 15
Terminología Parámetros de funcionamiento
Parámetros de funcionamiento
Intervalo y extensiónErrorExactitudSensibilidadError por histéresisError por no-linealidad
Repetibilidad/reproducibilidadEstabilidadBanda/tiempo muertoResoluciónImpedancia de salida
R.F. Mendoza-Garcia (Mecánica, UTA) Fund. Mecatrónica: Sensores y Actuadores November 21, 2012 7 / 15
Terminología Parámetros de funcionamiento
Parámetros de funcionamiento
Intervalo y extensiónErrorExactitudSensibilidadError por histéresisError por no-linealidad
Repetibilidad/reproducibilidadEstabilidadBanda/tiempo muertoResoluciónImpedancia de salida
R.F. Mendoza-Garcia (Mecánica, UTA) Fund. Mecatrónica: Sensores y Actuadores November 21, 2012 7 / 15
Terminología Parámetros de funcionamiento
Parámetros de funcionamiento
Intervalo y extensiónErrorExactitudSensibilidadError por histéresisError por no-linealidad
Repetibilidad/reproducibilidadEstabilidadBanda/tiempo muertoResoluciónImpedancia de salida
R.F. Mendoza-Garcia (Mecánica, UTA) Fund. Mecatrónica: Sensores y Actuadores November 21, 2012 7 / 15
Terminología Parámetros de funcionamiento
Parámetros de funcionamiento
Intervalo y extensiónErrorExactitudSensibilidadError por histéresisError por no-linealidad
Repetibilidad/reproducibilidadEstabilidadBanda/tiempo muertoResoluciónImpedancia de salida
R.F. Mendoza-Garcia (Mecánica, UTA) Fund. Mecatrónica: Sensores y Actuadores November 21, 2012 7 / 15
Terminología Parámetros de funcionamiento
Parámetros de funcionamiento
Intervalo y extensiónErrorExactitudSensibilidadError por histéresisError por no-linealidad
Repetibilidad/reproducibilidadEstabilidadBanda/tiempo muertoResoluciónImpedancia de salida
R.F. Mendoza-Garcia (Mecánica, UTA) Fund. Mecatrónica: Sensores y Actuadores November 21, 2012 7 / 15
Terminología Parámetros de funcionamiento
Parámetros de funcionamiento
Intervalo y extensiónErrorExactitudSensibilidadError por histéresisError por no-linealidad
Repetibilidad/reproducibilidadEstabilidadBanda/tiempo muertoResoluciónImpedancia de salida
R.F. Mendoza-Garcia (Mecánica, UTA) Fund. Mecatrónica: Sensores y Actuadores November 21, 2012 7 / 15
Terminología Parámetros de funcionamiento
Parámetros de funcionamiento
Intervalo y extensiónErrorExactitudSensibilidadError por histéresisError por no-linealidad
Repetibilidad/reproducibilidadEstabilidadBanda/tiempo muertoResoluciónImpedancia de salida
R.F. Mendoza-Garcia (Mecánica, UTA) Fund. Mecatrónica: Sensores y Actuadores November 21, 2012 7 / 15
Terminología Características estáticas y dinámicas
Características estáticas y dinámicas I
Características estáticasValores obtenidos una vez que el transductor se asienta después derecibir cierta entrada. Se dice que la salida está en estado estable.
Características dinámicasComportamiento entre el momento en que cambia una entrada y eltiempo en que la salida del transductor logra estado estable.
R.F. Mendoza-Garcia (Mecánica, UTA) Fund. Mecatrónica: Sensores y Actuadores November 21, 2012 8 / 15
Terminología Características estáticas y dinámicas
Características estáticas y dinámicas I
Características estáticasValores obtenidos una vez que el transductor se asienta después derecibir cierta entrada. Se dice que la salida está en estado estable.
Características dinámicasComportamiento entre el momento en que cambia una entrada y eltiempo en que la salida del transductor logra estado estable.
R.F. Mendoza-Garcia (Mecánica, UTA) Fund. Mecatrónica: Sensores y Actuadores November 21, 2012 8 / 15
Terminología Características estáticas y dinámicas
Características estáticas y dinámicas II
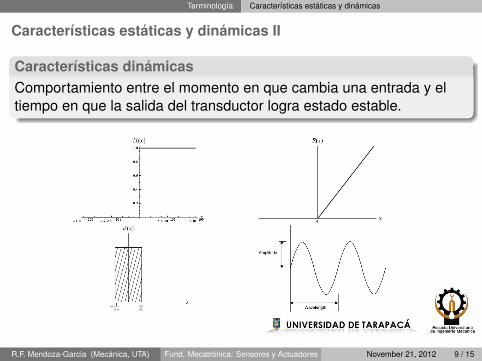
Características dinámicasComportamiento entre el momento en que cambia una entrada y eltiempo en que la salida del transductor logra estado estable.
R.F. Mendoza-Garcia (Mecánica, UTA) Fund. Mecatrónica: Sensores y Actuadores November 21, 2012 9 / 15
Terminología Parámetros de comportamiento
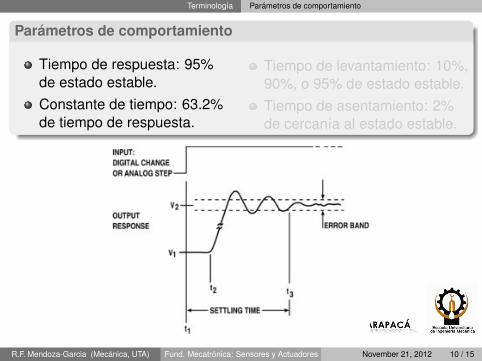
Parámetros de comportamiento
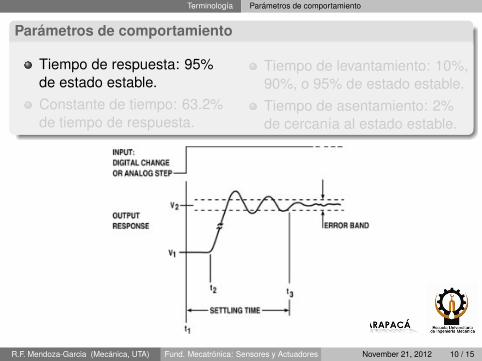
Tiempo de respuesta: 95%de estado estable.Constante de tiempo: 63.2%de tiempo de respuesta.
Tiempo de levantamiento: 10%,90%, o 95% de estado estable.Tiempo de asentamiento: 2%de cercanía al estado estable.
R.F. Mendoza-Garcia (Mecánica, UTA) Fund. Mecatrónica: Sensores y Actuadores November 21, 2012 10 / 15
Terminología Parámetros de comportamiento
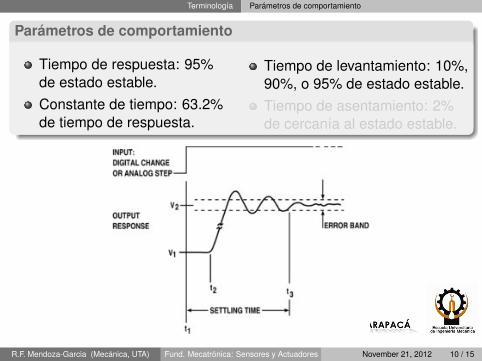
Parámetros de comportamiento
Tiempo de respuesta: 95%de estado estable.Constante de tiempo: 63.2%de tiempo de respuesta.
Tiempo de levantamiento: 10%,90%, o 95% de estado estable.Tiempo de asentamiento: 2%de cercanía al estado estable.
R.F. Mendoza-Garcia (Mecánica, UTA) Fund. Mecatrónica: Sensores y Actuadores November 21, 2012 10 / 15
Terminología Parámetros de comportamiento
Parámetros de comportamiento
Tiempo de respuesta: 95%de estado estable.Constante de tiempo: 63.2%de tiempo de respuesta.
Tiempo de levantamiento: 10%,90%, o 95% de estado estable.Tiempo de asentamiento: 2%de cercanía al estado estable.
R.F. Mendoza-Garcia (Mecánica, UTA) Fund. Mecatrónica: Sensores y Actuadores November 21, 2012 10 / 15

Terminología Parámetros de comportamiento
Parámetros de comportamiento
Tiempo de respuesta: 95%de estado estable.Constante de tiempo: 63.2%de tiempo de respuesta.
Tiempo de levantamiento: 10%,90%, o 95% de estado estable.Tiempo de asentamiento: 2%de cercanía al estado estable.
R.F. Mendoza-Garcia (Mecánica, UTA) Fund. Mecatrónica: Sensores y Actuadores November 21, 2012 10 / 15

Terminología Parámetros de comportamiento
Ball on plate video
Video 1: ball_on_plate.mp4
R.F. Mendoza-Garcia (Mecánica, UTA) Fund. Mecatrónica: Sensores y Actuadores November 21, 2012 11 / 15
Lista de sensores
Outline
1 IntroductionSensores y transductoresComplejidad de sensores
2 TerminologíaParámetros de funcionamientoCaracterísticas estáticas y dinámicasParámetros de comportamiento
3 Lista de sensoresDesplazamiento, posición y proximidad
R.F. Mendoza-Garcia (Mecánica, UTA) Fund. Mecatrónica: Sensores y Actuadores November 21, 2012 12 / 15
Lista de sensores Desplazamiento, posición y proximidad
Definiciones
Según la variable a medir. . .Sensor de desplazamiento: mide la distancia que se mueve un
objeto.Sensor de posición: mide la posición de un objeto respecto a una
referencia.Sensor de proximidad: detecta si un objeto se encuentra dentro de
cierta distancia.
Según contacto mecánico con la variable a medir. . .Sensor de contacto: hay contacto físico entre el objeto y el sensor.Sensor sin contacto: no hay contacto físico entre el objeto y el
sensor (varían, e.g., capacitancia o inductancia).
R.F. Mendoza-Garcia (Mecánica, UTA) Fund. Mecatrónica: Sensores y Actuadores November 21, 2012 13 / 15
Lista de sensores Desplazamiento, posición y proximidad
Definiciones
Según la variable a medir. . .Sensor de desplazamiento: mide la distancia que se mueve un
objeto.Sensor de posición: mide la posición de un objeto respecto a una
referencia.Sensor de proximidad: detecta si un objeto se encuentra dentro de
cierta distancia.
Según contacto mecánico con la variable a medir. . .Sensor de contacto: hay contacto físico entre el objeto y el sensor.Sensor sin contacto: no hay contacto físico entre el objeto y el
sensor (varían, e.g., capacitancia o inductancia).
R.F. Mendoza-Garcia (Mecánica, UTA) Fund. Mecatrónica: Sensores y Actuadores November 21, 2012 13 / 15
Lista de sensores Desplazamiento, posición y proximidad
Definiciones
Según la variable a medir. . .Sensor de desplazamiento: mide la distancia que se mueve un
objeto.Sensor de posición: mide la posición de un objeto respecto a una
referencia.Sensor de proximidad: detecta si un objeto se encuentra dentro de
cierta distancia.
Según contacto mecánico con la variable a medir. . .Sensor de contacto: hay contacto físico entre el objeto y el sensor.Sensor sin contacto: no hay contacto físico entre el objeto y el
sensor (varían, e.g., capacitancia o inductancia).
R.F. Mendoza-Garcia (Mecánica, UTA) Fund. Mecatrónica: Sensores y Actuadores November 21, 2012 13 / 15

Lista de sensores Desplazamiento, posición y proximidad
Potenciómetro
Sensor de contacto.Linear o angular.Cursor toca camino resistivo.
R.F. Mendoza-Garcia (Mecánica, UTA) Fund. Mecatrónica: Sensores y Actuadores November 21, 2012 14 / 15

Lista de sensores Desplazamiento, posición y proximidad
Potenciómetro
Sensor de contacto.Linear o angular.Cursor toca camino resistivo.
R.F. Mendoza-Garcia (Mecánica, UTA) Fund. Mecatrónica: Sensores y Actuadores November 21, 2012 14 / 15
Lista de sensores Desplazamiento, posición y proximidad
Galga extensiométrica
R.F. Mendoza-Garcia (Mecánica, UTA) Fund. Mecatrónica: Sensores y Actuadores November 21, 2012 15 / 15