Fun Din Ejemplos Adicionales Cinematica SR
11
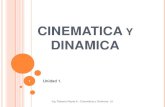
Cap. 6 Cinemática del Cuerpo Rígido Pág. 6-12 Pontificia Universidad Católica del Perú Sección de Ingeniería Mecánica - Área de Diseño Ejemplo 6.5 : En la figura se muestra un varillaje formado por las barras soldadas BA, DE y DC. Los extremos B y A están unidos a sendas correderas mediante rótulas. El sistema se mueve de tal manera que C toca siempre el plano xy. E es punto medio de AB. Si la corredera A se mueve de tal manera que su velocidad es 27 = A v cm/s (constante), se pide calcular para el instante mostrado: a) Las velocidades de B y C y la velocidad angular ω del varillaje. b) Las aceleraciones de B y C y la aceleración angular α del varillaje. Solución : a) A r = (2, 6, 0) cm B r = (0, 0, 3) C r = (4, 3, 0) Equiproyectividad sobre AB: A B A A B B r v r v ⋅ = ⋅ ) 3 , 6 , 2 ( ) 0 , 0 , 27 ( ) 3 , 6 , 2 ( ) , 0 , 0 ( − − ⋅ = − − ⋅ B v 18 − = B v cm/s → k v B ˆ 18 − = cm/s Además: A B A B r v v × + = ω (0, 0, -18) = (27, 0, 0) + 3 6 2 ˆ ˆ ˆ − − z y x k j i ω ω ω z y ω ω 6 3 27 0 + + = (1) z x ω ω 2 3 0 − − = (2) y x ω ω 2 6 18 + − = − (3) También: A C A C r v v × + = ω ) 0 , , ( Cy Cx v v = (27, 0, 0) + 0 3 2 ˆ ˆ ˆ − z y x k j i ω ω ω z Cx v ω 3 27 + = (4) z Cy v ω 2 = (5) y x ω ω 2 3 0 − − = (6) 3 cm 3 cm 3 cm 2 cm 2 cm O E A B C x y z Fig. 6-22 v A D Fund. de Dinámica - ejemplos adicionales - cinemática del SR Original de: Prof. Jorge Rodríguez 2015/2
-
Upload
denniscrema -
Category
Documents
-
view
59 -
download
6
description
Fun Din Ejemplos Adicionales Cinematica
Transcript of Fun Din Ejemplos Adicionales Cinematica SR

Cap. 6 Cinemática del Cuerpo Rígido Pág. 6-12
Pontificia Universidad Católica del Perú Sección de Ingeniería Mecánica - Área de Diseño
Ejemplo 6.5: En la figura se muestra un varillaje formado por las barras soldadas BA, DE y DC. Los extremos B y A están unidos a sendas correderas mediante rótulas. El sistema se mueve de tal manera que C toca siempre el plano xy. E es punto medio de AB. Si la corredera A se mueve de tal manera que su velocidad es 27=Av cm/s (constante), se pide calcular para el instante mostrado: a) Las velocidades de B y C y la velocidad
angular ω
del varillaje.
b) Las aceleraciones de B y C y la aceleración angular α
del varillaje. Solución:
a) Ar = (2, 6, 0) cm
Br = (0, 0, 3)
Cr
= (4, 3, 0)
Equiproyectividad sobre AB: ABAABB rvrv
⋅=⋅
)3,6,2()0,0,27()3,6,2(),0,0( −−⋅=−−⋅Bv
18−=Bv cm/s → kvBˆ18−=
cm/s
Además: ABAB rvv
×+= ω
(0, 0, -18) = (27, 0, 0) + 362
ˆˆˆ
−−zyx
kjiωωω
zy ωω 63270 ++= (1) zx ωω 230 −−= (2) yx ωω 2618 +−=− (3)
También: ACAC rvv
×+= ω
)0,,( CyCx vv = (27, 0, 0) + 032
ˆˆˆ
−zyx
kjiωωω
zCxv ω327 += (4) zCyv ω2= (5) yx ωω 230 −−= (6)
3 cm 3 cm
3 cm
2 cm
2 cm
OE
A
B
C
x
y
z
Fig. 6-22
vA
D
Fund. de Dinámica - ejemplos adicionales - cinemática del SR
Original de: Prof. Jorge Rodríguez 2015/2

Cap. 6 Cinemática del Cuerpo Rígido Pág. 6-13
Pontificia Universidad Católica del Perú Sección de Ingeniería Mecánica - Área de Diseño
de (3) y (4): 2=xω y 3−=yω en (2) → 3−=zω ⇒ )3,3,2( −−=ω
rad/s
de (4) y (5): 18=xCv y 6−=yCv ⇒ Cv
= (18, -6, 0) cm/s b) Cálculo de aceleraciones:
)( // ABABAB rraa
××+×+= ωωα (7)
ABr /
⋅ → [ ] ABABABABABAABB rrrrrara ////// )()(
⋅××+⋅×+⋅=⋅ ωωα Aquí: ),0,0( BB aa =
y además )0,0,0(=Aa
reemplazando: → 10533 −=Ba → 351−=Ba cm/s2
de donde: kaBˆ351−=
[cm/s2]
en (7): (0, 0, -351) = 362
ˆˆˆ
−−zyx
kjiααα + (54, 117, -81)
54630 ++= zy αα (8)
117320 +−−= xz αα (9)
8126351 −+−=− yx αα (10)
Además: )( // ACACAC rraa
××+×+= ωωα
)0,,( yCxC aa = 032
ˆˆˆ
−zyx
kjiααα + (-18, 27, -39)
183 −= zcxa α (11) 272 += zcya α (12) 39230 −−−= yx αα (13)
de (10) y (13): αx = 25,67 rad/s2 αy = -58 rad/s2 de (8) ó (9): αz = 20 rad/s2
→ )20,58,67,25( −=α
rad/s2
de (11) y (12): 42=xCa cm/s2
67=yCa cm/s2
→ )0,67,42(=Ca
cm/s2
Fund. de Dinámica - ejemplos adicionales - cinemática del SR
Original de: Prof. Jorge Rodríguez 2015/2

Cap. 6 Cinemática del Cuerpo Rígido Pág. 6-14
Pontificia Universidad Católica del Perú Sección de Ingeniería Mecánica - Área de Diseño
Ejemplo 6.6: La varilla rígida está unida a los collarines mediante rótulas. En el instante mostrado la velocidad de B es ivB
ˆ6=
[cm/s] y su aceleración es iaB
ˆ4=
[cm/s2]. Considerando que la varilla está impedida de girar alrededor de su propio eje axial, se pide hallar: a) Las velocidades Av
y ABω
.
b) Las aceleraciones Aa
y ABα
. Solución: a) Los extremos A y B de la varilla rígida están relacionados por:
)( ABABAB rrvv
−×+= ω (1) Descompondremos el vector velocidad angular ( ABω
) de la varilla AB en dos componentes,
una ( 1ω
) en la dirección de giro libre de AB y que por condición de este problema será nula y la otra ( nω
) contenida en un plano perpendicular a la dirección AB:
nAB ωωω
+= 1 (2)
en (1): )()( 1 ABnAB rrvv
−×++= ωω
)()(1 ABnABA rrrrv
−×+−×+= ωω
→ )( ABnAB rrvv
−×+= ω (3) Sea ),,( zyxn ωωωω =
además: )3;45,3;2()3,0,0()0;45,3;2(/ −=−=−= ABAB rrr
en (3): )3;45,3;2(),,(ˆˆ −×+−= zyxAB kviv ωωω
kjikvi yxxzzyAˆ)245,3(ˆ)32(ˆ)45,33(ˆˆ6 ωωωωωω −+++−−+−=
de donde: 645,33 =−− zy ωω (4)
032 =+ xz ωω … (5)
Ayx v=− ωω 245,3 (6) de (4), (5) y (6): 4=Av cm/s Se necesita una ecuación más: 0)( =−⋅ ABn rr
ω (pues son perpendiculares)
0)3;45,3;2(),,( =−⋅zyx ωωω → 0345,32 =−+ zyx ωωω … (7)
B
Fig. 6-24A
1ω
nω
Plano perpendicular a la dirección AB.
3,45 cm
3 cm
2 cm
O
B
x
y
z
Fig. 6-23
A
vB aB
Fund. de Dinámica - ejemplos adicionales - cinemática del SR
Original de: Prof. Jorge Rodríguez 2015/2

Cap. 6 Cinemática del Cuerpo Rígido Pág. 6-15
Pontificia Universidad Católica del Perú Sección de Ingeniería Mecánica - Área de Diseño
de (4), (5) , (6) y (7): 554,0=xω rad/s
044,1−=yω rad/s → )831,0,044,1;554,0( −−=nω
rad/s
831,0−=zω rad/s
Nota: Por equiproyectividad )()( ABAABB rrvrrv
−⋅=−⋅
→ )3;45,3;2(),0,0()3;45,3;2()0,0,6( −⋅−=−⋅ Av → 4=Av cm/s (ok!) b) Cálculo de aceleraciones:
)( // ABABABABABAB rraa
××+×+= ωωα (8) De manera análoga a lo hecho en velocidades descomponemos la aceleración angular en dos componentes: una a lo largo de AB y la otra contenida en un plano normal a AB:
nAB ααα
+= 1 (9)
en (8): ])[()()( /11/1 ABnnABnAB rraa
×+×++×++= ωωωωαα
)()( //11//1 ABnABnABnABA rrrra
×+××++×+×+= ωωωωαα
)()( //1/ ABnnABnABnA rrra
××+××+×+= ωωωωα
ABnnnnABABnnABABnA rrrrra ///11// )()()()(
ωωωωωωωωα ⋅−⋅+⋅−⋅+×+= Ahora, para seguir adelante tendremos que usar el hecho de que la barra AB no está girando sobre su eje (es decir 01 =ω
y 01 =α
). Entonces:
ABnnABABnAB rrraa /2
1// )(
ωωωα −⋅+×+= (10) Sea ),,( zyxn αααα =
además: iaBˆ4=
y kaa AA
ˆ−=
en (10): )3;45,3;2()445,1()3;45,3;2(),,(ˆˆ4 2 −−−×+−= zyxA kai ααα
de donde: 175,845,33 −=+ zy αα (11)
2,732 =+ xz αα (12)
262,6245,3 =+− yxAa αα (13)
Se necesita una ecuación más: 0)( =−⋅ ABn rr
α (pues son perpendiculares)
0)3;45,3;2(),,( =−⋅zyx ααα → 0345,32 =−+ zyx ααα … (14)
de (11), (12), (13) y (14): 99,19=Aa cm/s2
77,2=xα rad/s2
088,2−=yα rad/s2 → )554,0,088,2;77,2( −−=nα
rad/s2
554,0−=zα rad/s2
Fund. de Dinámica - ejemplos adicionales - cinemática del SR
Original de: Prof. Jorge Rodríguez 2015/2

Cap. 6 Cinemática del Cuerpo Rígido Pág. 6-30
Pontificia Universidad Católica del Perú Sección de Ingeniería Mecánica - Área de Diseño
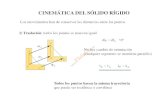
Ejemplo 6.9: En el mecanismo mostrado la barra AB gira con velocidad angular constante ω2 = 2 rad/s en sentido horario. Se pide:
a) Calcular las velocidades angulares 543 , ωωω y y la velocidad Ev .
b) Calcular las aceleraciones angulares 543 , ααα y y la aceleración Ea . Solución: a) Barra S2: )(2 ABAB rrvv
−×+= ω
)ˆ120ˆ50(2 jik +−×−=∧
→ jivBˆ100ˆ240 +=
[mm/s] → 260=Bv mm/s
Barra S3: )(3 BCBC rrvv
−×+= ω
)ˆ140(ˆ)ˆ100ˆ240( 3 ikji ×++= ω
→ jivCˆ)140100(ˆ240 3ω++=
(1)
Barra S4: )(4 DCDC rrvv
−×+= ω
)ˆ40ˆ30(ˆ4 jik +×= ω
→ jivCˆ30ˆ40 44 ωω +−=
(2)
de (1) y (2): 440240 ω−= (3) 43 30140100 ωω =+ (4) de (3) y (4): 23 −=ω rad/s → k̂23 −=ω
rad/s
64 −=ω rad/s → k̂64 −=ω
rad/s
en (2): jivCˆ180ˆ240 −=
[mm/s] → Cv = 300 mm/s
E
50
50
C
D
B
A
S5
S3
S2
S4
60 mm 30 50
4080
ω2
Fig. 6-57
Fund. de Dinámica - ejemplos adicionales - cinemática del SR
Original de: Prof. Jorge Rodríguez 2015/2

Cap. 6 Cinemática del Cuerpo Rígido Pág. 6-31
Pontificia Universidad Católica del Perú Sección de Ingeniería Mecánica - Área de Diseño
Barra S5: )(5 CECE rrvv
−×+= ω
= )ˆ50ˆ50(ˆ)ˆ180ˆ240( 5 jikji +×+− ω
→ jivEˆ)50180(ˆ)50240( 55 ωω +−+−=
(5)
y además: ivv EEˆ=
(6)
de (5) y (6): Ev=− 550240 ω (7) 050180 5 =+− ω (8)
resolviendo: 6,35 =ω rad/s → ∧
= k6,35ω
[rad/s]
60=Ev mm/s → ivEˆ60=
[mm/s]
b) Análisis de aceleraciones Barra S2: )()( 2
22 ABABAB rrrraa
−−−×+= ωα = )ˆ120ˆ50(4 ji +−− → jiaB
ˆ480ˆ200 −=
[mm/s2] → 520=Ba mm/s2 Barra S3: )()( 2
33 BCBCBC rrrraa
−−−×+= ωα
)ˆ140()ˆ140()ˆ480ˆ200( 233 iikji ωα −×+−=
∧
→ jiaCˆ)480140(ˆ360 3 −+−= α
(9)
Barra S4: )()( 2
44 DCDCDC rrrraa
−−−×+= ωα
= )ˆ40ˆ30(36)ˆ40ˆ30(ˆ4 jijik +−+×α
→ jiaCˆ)144030(ˆ)108040( 44 −+−−= αα
(10)
de (9) y (10): 184 −=α rad/s2 → ∧
−= k184α
rad/s2
71,103 −=α rad/s2 → ∧
−= k71,103α rad/s2 en (9) o en (10): jiaC
ˆ4,1979ˆ360 −−=
Barra S5: )()( 2
55 CECECE rrrraa
−−−×+= ωα
= )ˆ50ˆ50()ˆ50ˆ50(ˆ)ˆ4,1979ˆ360( 255 jijikji +−+×+−− ωα
jiaEˆ)504,2627(ˆ)501008( 55 αα +−+−−=
(11)
pero iaa EE
ˆ=
(12)
de (11) y (12): 55,525 =α rad/s2 → k̂55,525 =α
rad/s2
4,3635−=Ea mm/s2 → iaEˆ4,3635−=
mm/s2
Fund. de Dinámica - ejemplos adicionales - cinemática del SR
Original de: Prof. Jorge Rodríguez 2015/2

Cap. 6 Cinemática del Cuerpo Rígido Pág. 6-32
Pontificia Universidad Católica del Perú Sección de Ingeniería Mecánica - Área de Diseño
• Análisis de velocidades mediante el método de equiproyección de velocidades
Barra S3: ),(cos αα senvv BB =
)cos,( ββsenvv CC =
135
=αsen y 1312cos =α
54
=βsen y 53cos =β
entonces:
=
135,
1312
BB vv
−=
53,
54
CC vv
Equiproyectividad en barra S3: )()( BCCBCB rrvrrv
−⋅=−⋅
)0,1(14053,
54)0,1(140
135,
1312
⋅
−=⋅
CB vv
es decir: CB vv54
1312
=
y como: 2602 =⋅= ABvB ω mm/s → 300=Cv mm/s Equiproyectividad en barra S5: )()( CEECEC rrvrrv
−⋅=−⋅
⋅=
⋅
−
22,
22250)0,1(
22,
22250
53,
54
EC vv
y como 300=Cv mm/s → 60=Ev mm/s
E
C
D
B
A
S5
S3
S2
S4
ω2
O23
O21O31
βα
45°
O41
O35
O34
O16 )(∞
O51
O45
β
S6
Cv
Bv
α
Fig. 6-58
Fund. de Dinámica - ejemplos adicionales - cinemática del SR
Original de: Prof. Jorge Rodríguez 2015/2

Cap. 6 Cinemática del Cuerpo Rígido Pág. 6-33
Pontificia Universidad Católica del Perú Sección de Ingeniería Mecánica - Área de Diseño
Conociendo la posición de los polos absolutos del mecanismo podemos ahora escribir con mucha facilidad:
2130260
331
33133 =→==→=→∈ ωωωBOvBOvSB B
B rad/s
650300
441
44144 =→==→=→∈ ωωωCO
vCOvSC BC rad/s
6,367,16
605
5155155 =→==→=→∈ ωωω
OEvEOvSE E
E rad/s
• Solución gráfica mediante equiproyectividad de velocidades El mecanismo tiene que estar dibujado a escala una cierta escala y del mismo modo habrá que elegir una escala para las velocidades. tenemos que 2602 == ABvB ω mm/s Del diagrama dibujado se lee: 300≅Cv mm/s
60≅Ev mm/s Luego se puede continuar como en la página anterior para, con la ayuda de los polos, determinar las velocidades angulares de las barras restantes.
Escala del mecanismo: 1:2 Escala de velocidades : 10 mm/s <> 1 mm
E
C
D
B
A
S5
S3
S2
S4
ω2
O21
S6
Cv
Bv
Ev
Fig. 6-59
Fund. de Dinámica - ejemplos adicionales - cinemática del SR
Original de: Prof. Jorge Rodríguez 2015/2

Cap. 6 Cinemática del Cuerpo Rígido Pág. 6-34
Pontificia Universidad Católica del Perú Sección de Ingeniería Mecánica - Área de Diseño
• Análisis de velocidades y aceleraciones mediante la solución gráfica de ecuaciones vectoriales
a) Análisis de velocidades
Barra S3: BCBC vvv /
+= aquí: vB = 260 mm/s CDvC ⊥
BCv BC ⊥/
donde BCv BC 3/ ω= del gráfico : 300=Cv mm/s
280/ =BCv mm/s BC3
!ω=
de donde: 23 =ω rad/s Barra S5: CECE vvv /
+=
del gráfico: 60≅Ev mm/s
250/ ≅CEv mm/s y como ECv CE 5/ ω=
→ 7,70
250/5 ==
ECv CEω = 3,55 rad/s
El mecanismo está dibujado a escala 1:2 ⇒ podemos tomar cualquier distancia que sea necesaria.
CEv /
Cv
Ev
CE⊥
Fig. 6-62 Escala de velocidades:
1 mm <> 10 mm/s
Escala de velocidades: 1 mm <> 10 mm/s
E
C
D
B
A
S5
S3
S2
S4
ω2 = 2 rad/s
Fig. 6-60
Bv
BCv /
Cv
CD⊥
BC⊥
Fig. 6-61
Fund. de Dinámica - ejemplos adicionales - cinemática del SR
Original de: Prof. Jorge Rodríguez 2015/2

Cap. 6 Cinemática del Cuerpo Rígido Pág. 6-35
Pontificia Universidad Católica del Perú Sección de Ingeniería Mecánica - Área de Diseño
Para finalizar: del primer gráfico se obtuvo 300=Cv mm/s
Como DCvC 4ω= → 50
3004 ==
DCvCω → 64 =ω rad/s
b) Análisis de aceleraciones Barra S3: n
BCt
BCBC aaaa //
++= n
Bct
BCtB
nB
tC
nC aaaaaa //
+++=+
donde: 1800: 2
4 == CDaa nC
nC ω
mm/s2
CDaa tC
tC 4: α=
520: 22 == ABaa n
BnB ω
mm/s2
0: 2 == ABaa tB
tB α
CBaa tBC
tBC 3// : α=
560: 23// == BCaa n
BC
nBC ω mm/s2
Del gráfico:
767=tCa mm/s2
→ 50
7674 ==
CDat
Cα 4,15≅ rad/s2
1433/ =t
BCa mm/s2
→ 1401433/
3 ==CBat
BCα 3,10≅ rad/s2
C
D
nCa
C
D
tCa
Fig. 6-63
B
A
nBa
B
A
tBa
Fig. 6-64
nBCa /
B C
tBCa /
B C
Fig. 6-65
nBCa /
tBCa /
O
nCa
tCa
nBa
Fig. 6-66 Escala de aceleraciones:
1 mm <> 3 mm/s2
Fund. de Dinámica - ejemplos adicionales - cinemática del SR
Original de: Prof. Jorge Rodríguez 2015/2

Cap. 6 Cinemática del Cuerpo Rígido Pág. 6-36
Pontificia Universidad Católica del Perú Sección de Ingeniería Mecánica - Área de Diseño
Barra S4: nCE
tBECE aaaa //
++=
nCE
tCE
tC
nCE aaaaa //
+++=
donde: ECat
CE 5/ α= y además: ECan
CE25/ ω=
)7,70()6,3( 2/ =nCEa
→ 41,916/ =nCEa mm/s2
Ahora podemos construir el siguiente gráfico: De donde podemos leer los siguientes resultados: 3540≅Ea mm/s2
3617/ ≅tCEa mm/s2
de donde: 7,70
3617/5 ==
ECat
CEα
→ 2,515 =α rad/s2
Escala de aceleraciones: 1 mm <> 30 mm/s2
Ea
nCa
tCa
O
tCEa /
nCEa /
Fig. 6-67
Fund. de Dinámica - ejemplos adicionales - cinemática del SR
Original de: Prof. Jorge Rodríguez 2015/2