Física I Apuntes de Clase 9, 2018 Turno H Prof. Pedro...
27
Física I Apuntes de Clase 9, 2018 Turno H Prof. Pedro Mendoza Zélis
Transcript of Física I Apuntes de Clase 9, 2018 Turno H Prof. Pedro...
Física IApuntes de Clase 9, 2018
Turno HProf. Pedro Mendoza Zélis

Movimiento Armónico Simple (M.A.S.)
Es interesante analizar un tipo de movimiento que es el queocurre cuando un objeto es apartado de la posición deequilibrio estable y se produce un movimiento oscilatorioalrededor de ésta, limitado por dos posiciones extremas. En lanaturaleza existen varios ejemplos conocidos como la oscilaciónde un péndulo, la vibración de una cuerda, el balanceo de unbarco o el movimiento de una masa sujeta a un resorte, entreotros.
Todos estos movimientos periódicos se producen debido a laexistencia de una fuerza que tiende a restaurar al objeto encuestión a la posición de equilibrio estable ya mencionada.
La descripción matemática de la posición del objeto en funcióndel tiempo no siempre es simple. En esta clase vamos aestudiar el tipo más sencillo de movimiento oscilatorio que sepuede describir con una función trigonométrica simple.

Péndulo simple
Resorte
Movimiento Armónico Simple (M.A.S.)
Una partícula que se mueve a lo largo del eje X describe un
M.A.S. cuando existe una fuerza restauradora proporcional al desplazamiento, es decir, que actúa en sentido contrario. En general, esta condición se cumple casi siempre cuando es pequeña la separación del equilibrio.

¿Qué tipo de fuerza restauradora es la responsable de generar un M.A.S?
En el caso de un resorte, Ley de Hooke:
Fx = - k x (I)
Combinando la ec. (I) con la 2da Ley de Newton nos queda:
xx maF =2
2
dt
xdmkx =− x
m
k
dt
xda −==
2
2
La aceleración es proporcional al desplazamiento y tiene sentido contrario.
Si un sistema presenta esta característica, se puede concluir que el mismo presenta un M.A.S.
X+A-A O
-kx
x
2
2
dt
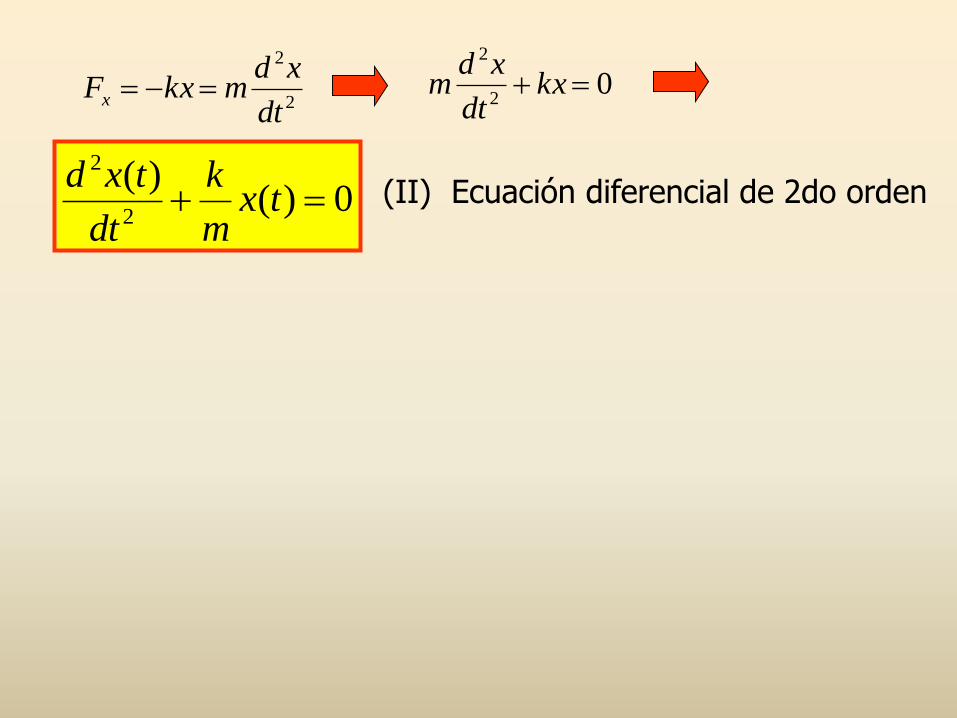
xdmkxFx =−= 0
2
2
=+ kxdt
xdm
0)()(
2
2
=+ txm
k
dt
txd(II) Ecuación diferencial de 2do orden

2
2
dt
xdmkxFx =−= 0
2
2
=+ kxdt
xdm
0)()(
2
2
=+ txm
k
dt
txd(II) Ecuación diferencial de 2do orden
Esta es una ecuación cuya solución es una función del tiempo y debe cumplir con ciertas condiciones:
1) Debe ser periódica ya que debe poder describir un movimiento periódico provocado por una fuerza restauradora.
2) la solución x (t) tiene que ser tal que la derivada 2da tiene que
coincidir con x (t) pero con signo cambiado, para todo valor de
tiempo t.
Entonces proponemos: )(cos)( += tAtx
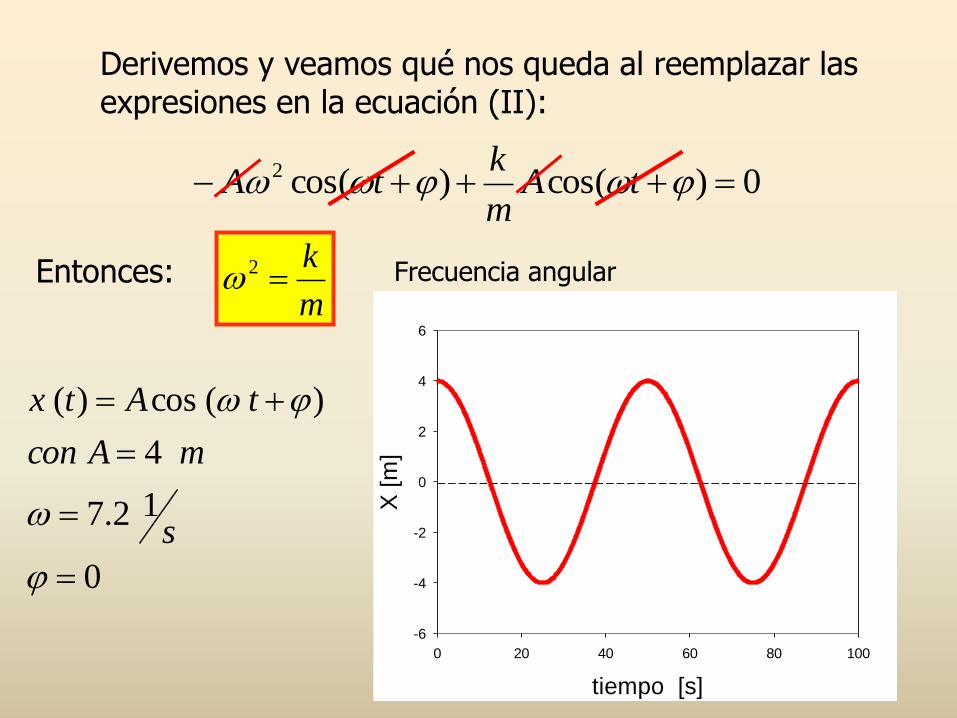
Derivemos y veamos qué nos queda al reemplazar las expresiones en la ecuación (II):
Entonces:m
k=2 Frecuencia angular
0)cos()cos(2 =+++− tAm
ktA
tiempo [s]
0 20 40 60 80 100
X [
m]
-6
-4
-2
0
2
4
6
0
12.7
4
)(cos)(
=
=
=
+=
s
mAcon
tAtx
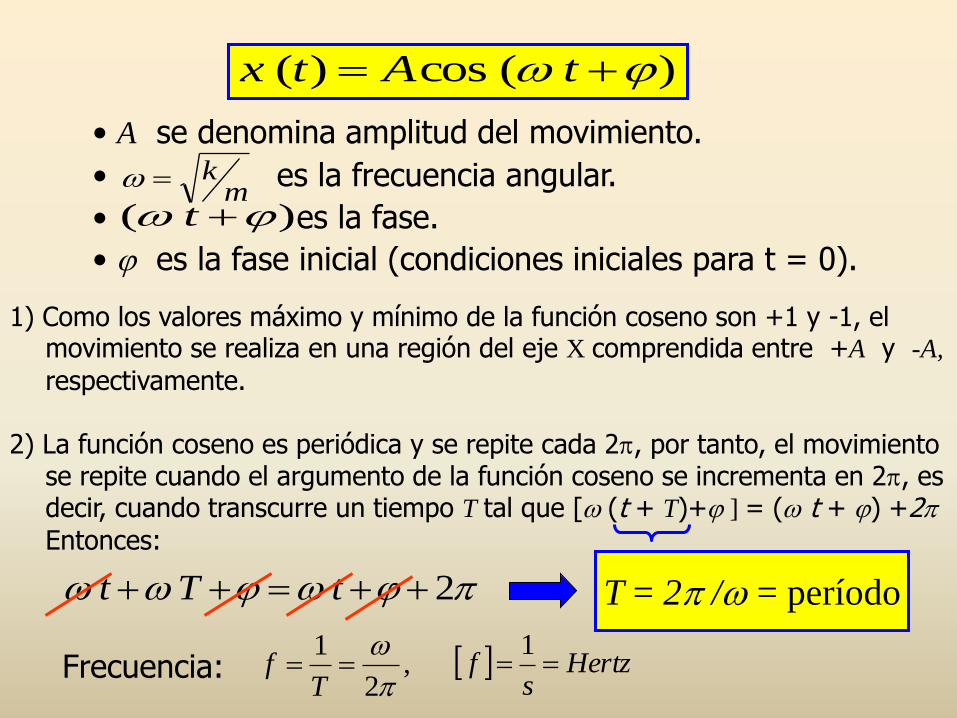
1) Como los valores máximo y mínimo de la función coseno son +1 y -1, el movimiento se realiza en una región del eje X comprendida entre +A y -A,
respectivamente.
2) La función coseno es periódica y se repite cada 2p, por tanto, el movimiento se repite cuando el argumento de la función coseno se incrementa en 2p, es decir, cuando transcurre un tiempo T tal que [ (t + T)+ ] = ( t + ) +2p
Entonces:
T = 2p / = períodop 2++=++ tTt
Frecuencia: ,2
1
p
==
Tf Hertz
sf ==
1
• A se denomina amplitud del movimiento.
• es la frecuencia angular.
• es la fase.
• es la fase inicial (condiciones iniciales para t = 0).
)( +tm
k=
)(cos)( += tAtx
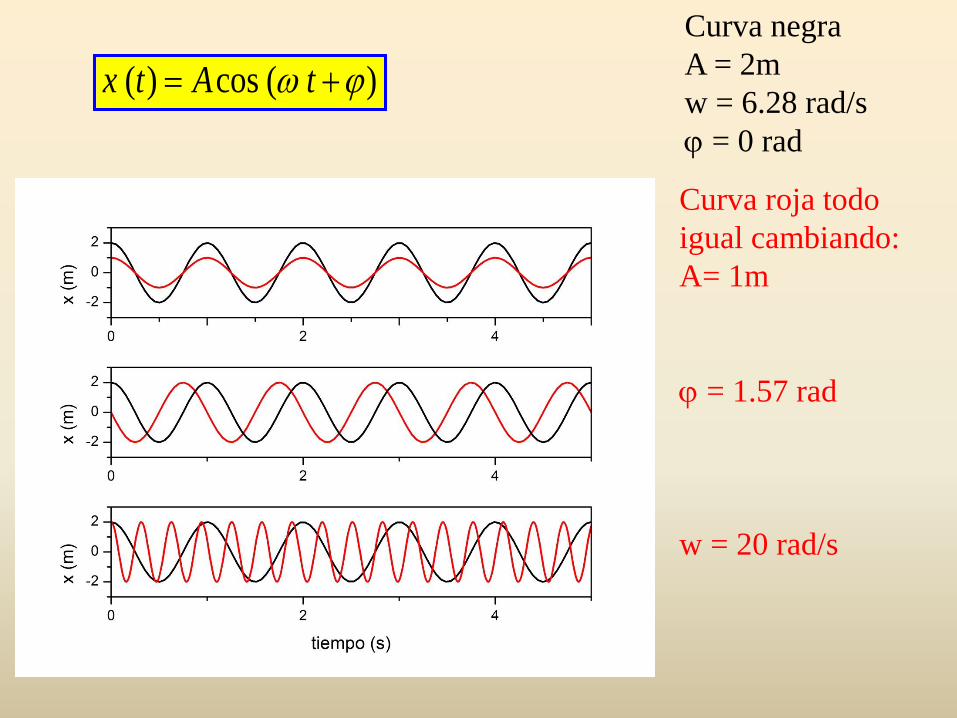
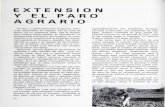
)(cos)( += tAtx
Curva negra
A = 2m
w = 6.28 rad/s
= 0 rad
Curva roja todo
igual cambiando:
A= 1m
= 1.57 rad
w = 20 rad/s
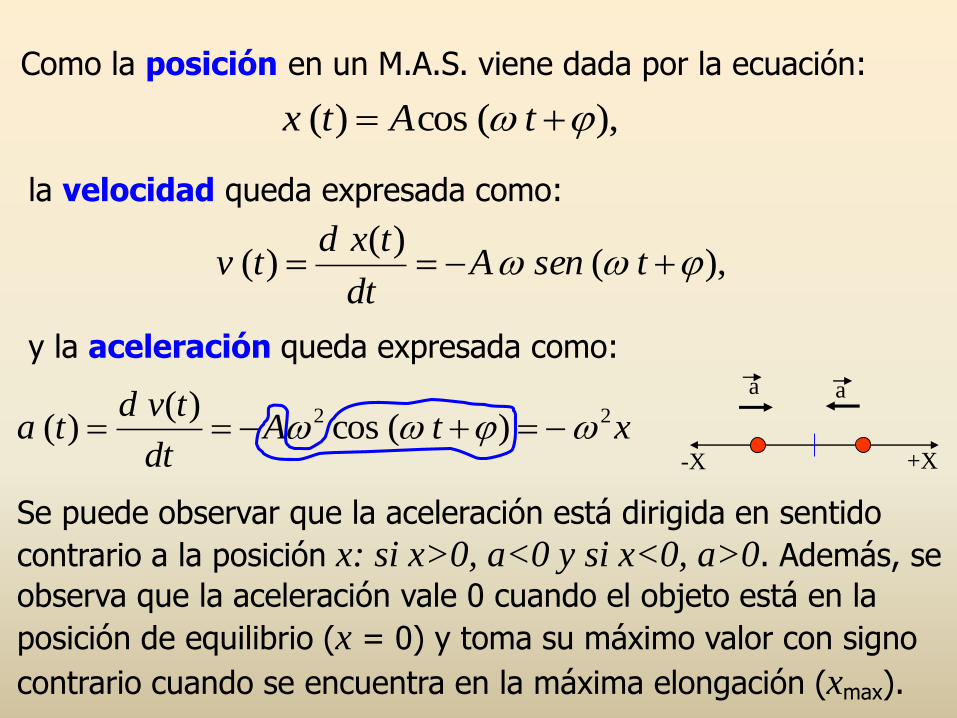
Como la posición en un M.A.S. viene dada por la ecuación:
),(cos)( += tAtx
la velocidad queda expresada como:
),()(
)( +−== tsenAdt
txdtv
y la aceleración queda expresada como:
xtAdt
tvdta 22 )(cos
)()( −=+−==
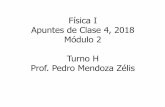
Se puede observar que la aceleración está dirigida en sentido
contrario a la posición x: si x>0, a<0 y si x<0, a>0. Además, se
observa que la aceleración vale 0 cuando el objeto está en la
posición de equilibrio (x = 0) y toma su máximo valor con signo
contrario cuando se encuentra en la máxima elongación (xmax).
+X
aa
-X
tiempo [s]
0 20 40 60 80 100
X [
m]
-6
-4
-2
0
2
4
6
tiempo [s]
0 20 40 60 80 100
V [
m/s
]
-40
-30
-20
-10
0
10
20
30
40
tiempo [s]
0 20 40 60 80 100
a [
m/s
2]
-300
-200
-100
0
100
200
300
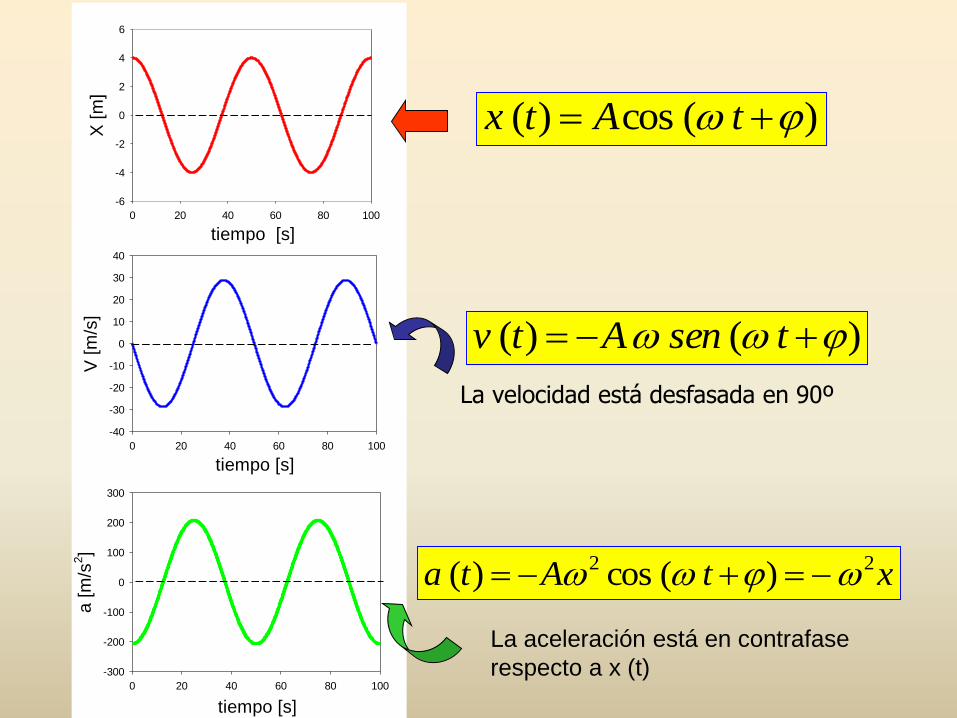
)(cos)( += tAtx
)()( +−= tsenAtv
xtAta 22 )(cos)( −=+−=
La velocidad está desfasada en 90º
La aceleración está en contrafase
respecto a x (t)
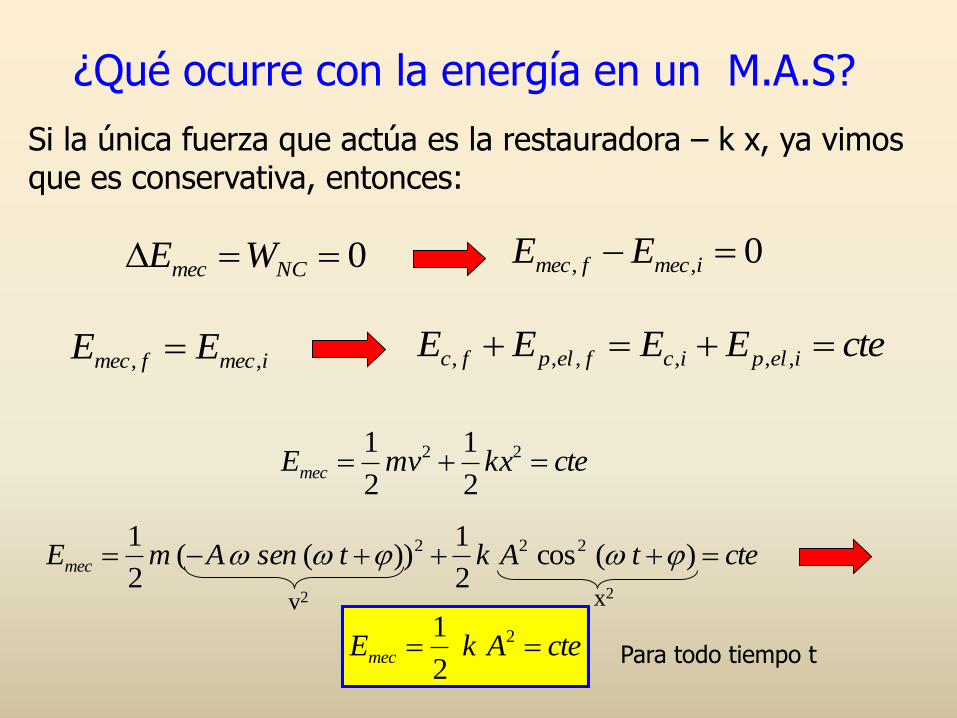
¿Qué ocurre con la energía en un M.A.S?
Si la única fuerza que actúa es la restauradora – k x, ya vimos que es conservativa, entonces:
0== NCmec WE 0,, =− imecfmec EE
imecfmec EE ,, = cteEEEE ielpicfelpfc =+=+ ,,,,,,
ctekxmvEmec =+= 22
2
1
2
1
ctetAktsenAmEmec =+++−= )(cos2
1))((
2
1 222
v2 x2
cteAkEmec == 2
2
1Para todo tiempo t

tiempo [s]
0 20 40 60 80 100
Ec, E
p, E
tota
l
0
100
200
300
400
500
Ec
Ep
E total
Energía cinética, potencial y total
2
2
1AkEtotal =
2
2
1vmEc =
2
2
1xkEp =
Energía cinética, potencial y total
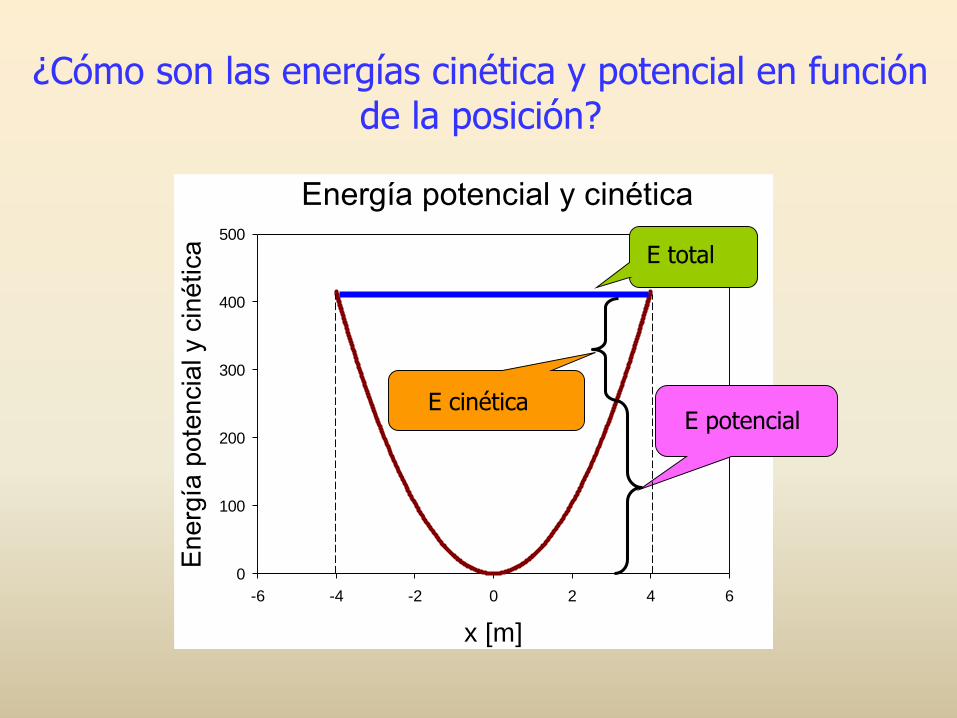
¿Cómo son las energías cinética y potencial en función de la posición?
Energía potencial y cinética
x [m]
-6 -4 -2 0 2 4 6
Energ
ía p
ote
ncia
l y c
inética
0
100
200
300
400
500
E potencialE cinética
E total
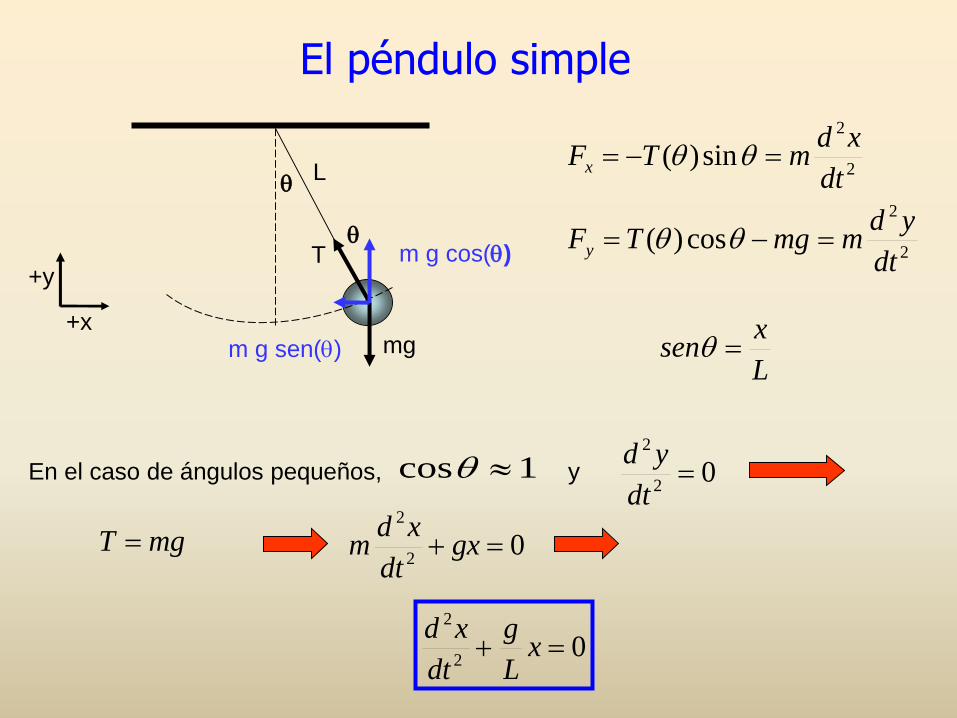
El péndulo simple
mg
m g cos()
m g sen()
L
T
2
2
2
2
cos)(
sin)(
dt
ydmmgTF
dt
xdmTF
y
x
=−=
=−=
L
xsen =
En el caso de ángulos pequeños, y1cos
mgT = 02
2
=+ gxdt
xdm
02
2
=dt
yd
02
2
=+ xL
g
dt
xd
+y
+x
Si comparamos esta expresión con 0)()( 2
2
2
=+ txdt
txd
concluimos que: L
g=2 para el caso de un péndulo simple
La solución de la ecuación (III) es: )(cos += tAx
Donde A es el desplazamiento angular máximo y L
g=
El período de un péndulo simple es:T
p
2=
g
LT p
p2
2== Midiendo el período de un péndulo
simple podríamos determinar “g”

El péndulo simple(en coordenada angular)
mg
m g cosm g sen
L
T
s
,L
s= 2
2
dt
sdat =
2
2
dt
sdmsengmFt =−=
2
2
dt
Ldseng
=−
En el caso de ángulos pequeños, sen
gdt
Ld−=
2
2 )(
g
dt
dL−=
2
2
L
g
dt
d−=
2
2
L
g
dt
d−=
2
2
02
2
=+
L
g
dt
d (III)
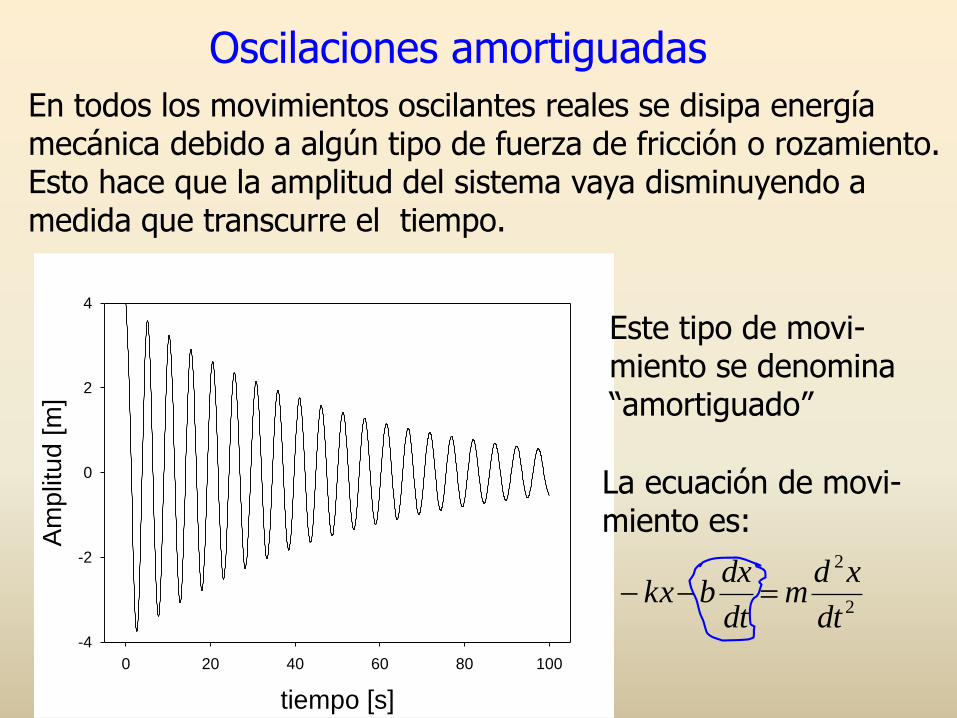
Oscilaciones amortiguadas
En todos los movimientos oscilantes reales se disipa energía mecánica debido a algún tipo de fuerza de fricción o rozamiento. Esto hace que la amplitud del sistema vaya disminuyendo a medida que transcurre el tiempo.
tiempo [s]
0 20 40 60 80 100
Am
plit
ud
[m
]
-4
-2
0
2
4
Este tipo de movi-miento se denomina “amortiguado”
2
2
dt
xdm
dt
dxbkx =−−
La ecuación de movi-miento es:
La solución es del tipo: )'(cos2
0 +=
−
tt
eAx m
b
donde A0 es la amplitud original,
2
0
02
1'
−=
m
b
La término representa la fuerza dinámica, proporcional a la velocidad, ejercida sobre el oscilador en sentido contrario al movimiento.
vbFd −=
y es la frecuencia cuando no hay amortiguamientom
k=0
Oscilaciones forzadas
)'(cos tFkxdt
dxb
dt
xdm 02
2
=++
Es posible compensar la pérdida de energía de un oscilador amortiguado, aplicando una fuerza externa que realice un trabajo positivo sobre el sistema. Esto ocurre cuando la fuerza actúa en el sentido de movimiento del objeto, como por ej. cuando damos pequeños “empujoncitos” en instantes adecuados a los niños que se hamacan. Esta dependencia temporal puede expresarse como:
)'(cos)( tFtFext 0=
La ecuación de movimiento del objeto es entonces:
y
( )2
22
0
2
+−
=
m
b
mbarc
''
/'cos
)'(cos)( −= tAtxLa solución es:
donde:
( )
+−
=2
22
0
2
0
m
b
mFA
''
/
resonancia!!!!
' es la frecuencia de la fuerza externa
0 es la frecuencia propia del sistema
Ejemplos de resonancia:
1) Los terremotos son fuerzas oscilatorias que, aplicadas a edificios pueden llegar a destruirlos parcial o totalmente. Actualmente los edificios se construyen de manera que la frecuencia propia (0) no coincida con los valores comprendidos en el rango 0-15 Hz, que es la frecuencia típica de los terremotos.
2) Un puente colgante de Inglaterra colapsó cuando unas tropas marchaban sobre él en forma acompasada: la vibración de resonancia inducida por los soldados aumentó la amplitud de oscilación lo suficiente como para romper el puente (1830). Hoy día se sabe que hay que “romper fila” al atravesar un puente!!
Resonancia: se llama resonancia al caso en el que la frecuencia externa (’) coincide con la frecuencia propia del objeto (0). Para esta condición la amplitud alcanza su máximo valor.
3) Puente de Tacoma, Estados Unidos (1940)
Los fuertes vientos produjeron vórtices con fuerzas impulsoras periódicas de una frecuencia (’) similar a la propia del puente (0) provocando la ondulación observada y luego el colapso del mismo.
3) Puente de Tacoma, Estados Unidos (1940)
Los fuertes vientos produjeron vórtices con fuerzas impulsoras periódicas de una frecuencia (’) similar a la propia del puente (0) provocando la ondulación observada y luego el colapso del mismo.