Fg.St 1 Capítulo - imse-cnm.csic.es · La Fig.1.2 ilustra el procesado de la señal realizado por...
36
Introducción 1 Capítulo 1 Convertidores A/D de sobremuestreo usando técnicas de modulación Sigma-Delta: Conceptos básicos y Estado del Arte 1.1 Introducción Los convertidores de sobremuestreo, entendiendo como tal el uso de una fre- cuencia de muestreo de la señal mucho mayor que su frecuencia de Nyquist [Stee75], han adquirido una popularidad creciente en la última década. El éxito de tales con- vertidores se debe a que permiten solventar algunos de los problemas que presentan otras arquitecturas para su integración en chips VLSI de señal mixta usando tec- nologías CMOS stardard: necesidad de filtros analógicos de alta selectividad y alta sensibilidad a las imperfecciones de la circuitería y a entornos ruidosos. En particular, los convertidores de sobremuestreo relajan los requerimientos de la circuitería analógica a expensas de hacer uso de una circuitería digital más com- pleja y veloz [Cand92]. Por un lado, el uso de modulación de alta frecuencia permite suavizar los requerimientos del filtro “antialiasing”, que puede implementarse medi- ante un filtro pasivo de primer orden. Las operaciones críticas de filtrado se trasladan al plano digital donde éstas resultan más robustas e inmunes a las imperfecciones de la circuitería. Por otro, de la combinación de sobremuestreo y técnicas de modu- lación Sigma-Delta ( Σ∆) [Inos62] resultan convertidores A/D de muy alta resolu- ción, robustos y relativamente insensibles frente a las no idealidades. Esta ventajas hacen que los convertidores A/D de sobremuestreo, y en particular aquellos que incorporan modulación Σ∆, sean de gran interés para la realización de entrefases A/D [Leme93] de altas prestaciones en tecnologías submicrométricas con bajas tensiones de polarización: en estas tecnologías, aunque no resulta fácil la con- secución de funciones analógicas precisas, sí es posible implementar circuitos digi- tales muy densos y de alta velocidad. Sin embargo, las grandes diferencias, incluso al nivel conceptual, entre los con- vertidores tradicionales y los basados en modulación Σ∆ dificulta grandemente la Eq.St 1 Tt.St 1 Rf.St 0 Fg.St 1
Transcript of Fg.St 1 Capítulo - imse-cnm.csic.es · La Fig.1.2 ilustra el procesado de la señal realizado por...
Introducción 1
Capítulo 1
Convertidores A/D de sobremuestreo usandotécnicas de modulación Sigma-Delta:Conceptos básicos y Estado del Arte
1.1 Introducción
Los convertidores de sobremuestreo, entendiendo como tal el uso de una fre-cuencia de muestreo de la señal mucho mayor que su frecuencia de Nyquist [Stee75],han adquirido una popularidad creciente en la última década. El éxito de tales con-vertidores se debe a que permiten solventar algunos de los problemas que presentanotras arquitecturas para su integración en chips VLSI de señal mixta usando tec-nologías CMOS stardard: necesidad de filtros analógicos de alta selectividad y altasensibilidad a las imperfecciones de la circuitería y a entornos ruidosos.
En particular, los convertidores de sobremuestreo relajan los requerimientos dela circuitería analógica a expensas de hacer uso de una circuitería digital más com-pleja y veloz [Cand92]. Por un lado, el uso de modulación de alta frecuencia permitesuavizar los requerimientos del filtro “antialiasing”, que puede implementarse medi-ante un filtro pasivo de primer orden. Las operaciones críticas de filtrado se trasladanal plano digital donde éstas resultan más robustas e inmunes a las imperfecciones dela circuitería. Por otro, de la combinación de sobremuestreo y técnicas de modu-lación Sigma-Delta (Σ∆) [Inos62] resultan convertidores A/D de muy alta resolu-ción, robustos y relativamente insensibles frente a las no idealidades.
Esta ventajas hacen que los convertidores A/D de sobremuestreo, y en particularaquellos que incorporan modulación Σ∆, sean de gran interés para la realización deentrefases A/D [Leme93] de altas prestaciones en tecnologías submicrométricas conbajas tensiones de polarización: en estas tecnologías, aunque no resulta fácil la con-secución de funciones analógicas precisas, sí es posible implementar circuitos digi-tales muy densos y de alta velocidad.
Sin embargo, las grandes diferencias, incluso al nivel conceptual, entre los con-vertidores tradicionales y los basados en modulación Σ∆ dificulta grandemente la
Eq.St 1
Tt.St 1Rf.St 0
Fg.St 1
2 Conceptos Básicos y Estado del Arte
reutilización de las metodologías de diseño desarrolladas para la implementación deaquellos. Es necesario, por tanto, el desarrollo de nuevas metodologías de diseño quepermitan la obtención de convertidores Σ∆ optimizados, aprovechando al máximo lapotencialidad de la técnica. Esta tarea pasa por el conocimiento profundo de la oper-ación de los moduladores y de como ésta se ve afectada por las no idealidades queacompañan a la circuitería con la que se implementan.
Este Capítulo se dedica a proporcionar una visión global sobre los convertidoresA/D de sobremuestreo usando modulación Σ∆. En la Sección 1.2 se repasan los con-ceptos básicos de sobremuestreo, modulación Σ∆ y las figuras de mérito tradiciona-les para la caracterización de los convertidores A/D Σ∆. En la Sección 1.3 seenumeran y comentan brevemente las arquitecturas disponibles para la implement-ación de moduladores Σ∆. Por último, la Sección 1.4 se dedica a una revisión delestado del arte en el diseño de estos moduladores y de convertidores A/D en general.
1.2 Conceptos básicos
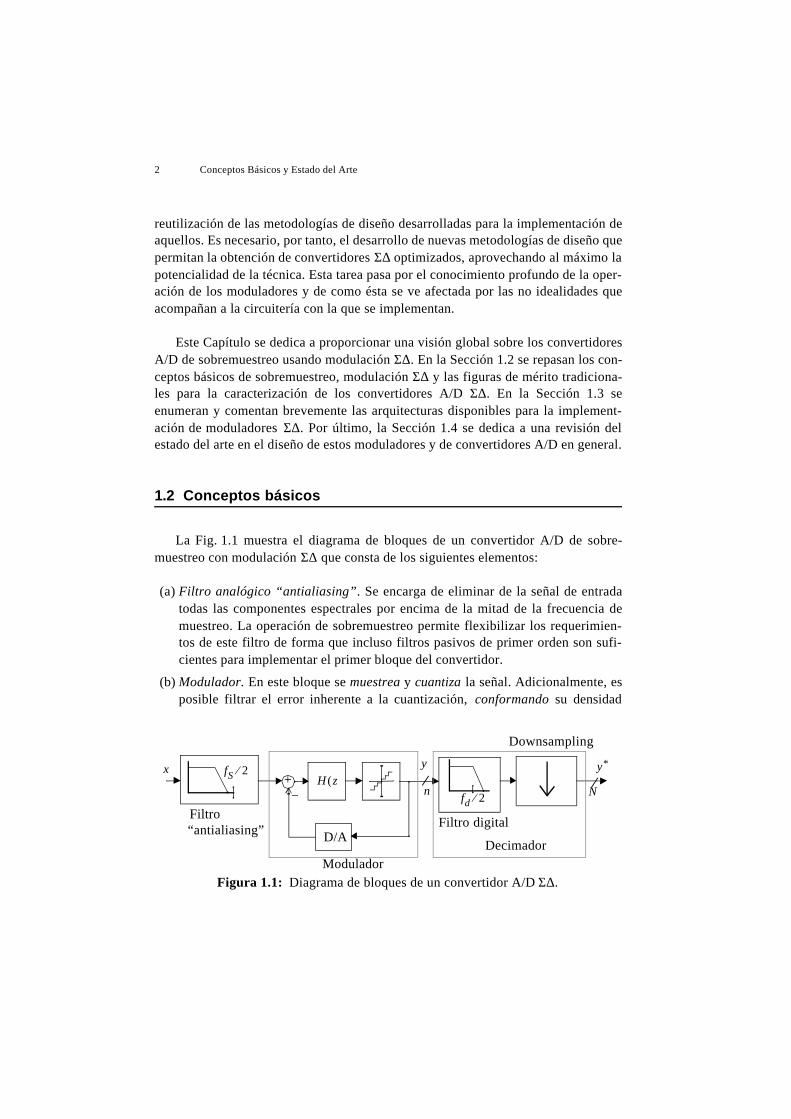
La Fig. 1.1 muestra el diagrama de bloques de un convertidor A/D de sobre-muestreo con modulación Σ∆ que consta de los siguientes elementos:
(a) Filtro analógico “antialiasing”. Se encarga de eliminar de la señal de entradatodas las componentes espectrales por encima de la mitad de la frecuencia demuestreo. La operación de sobremuestreo permite flexibilizar los requerimien-tos de este filtro de forma que incluso filtros pasivos de primer orden son sufi-cientes para implementar el primer bloque del convertidor.
(b) Modulador. En este bloque se muestrea y cuantiza la señal. Adicionalmente, esposible filtrar el error inherente a la cuantización, conformando su densidad
H z( )
D/A
−+
DecimadorModulador
Filtro digital
Downsampling
Filtro “antialiasing”
fS 2⁄
fd 2⁄
x y y*
Nn
Figura 1.1: Diagrama de bloques de un convertidor A/D Σ∆.
Conceptos básicos 3
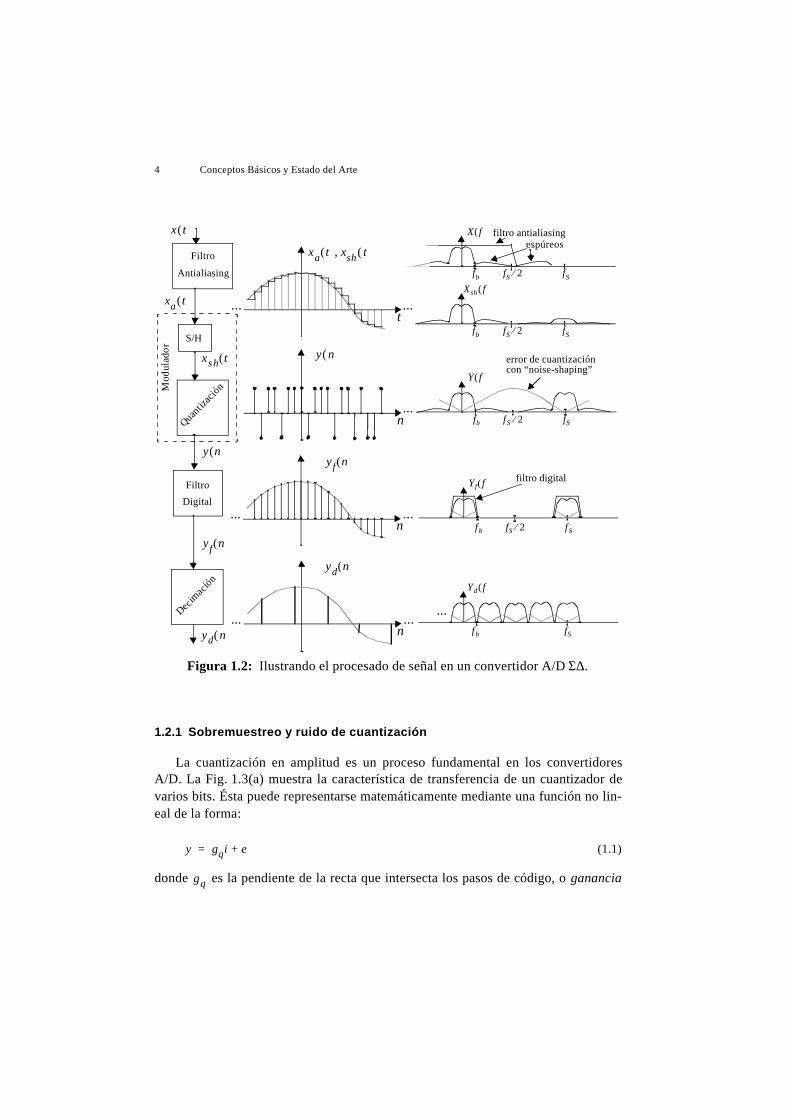
espectral de potencias de modo que la mayor parte de ésta quede fuera de labanda de la señal, de donde es eliminado mediante filtrado digital. Este hecho hadado origen al término “noise-shaping” , que se usa también para denominar alos moduladores Σ∆ (“noise-shaping coders”). La salida del modulador consisteen un número reducido de bits (usualmente sólo uno) a la frecuencia de mues-treo.
(c) Decimador. En este bloque, puramente digital, tras un filtrado que elimina todaslas componentes fuera de la banda de la señal, incluido gran parte del error decuantización, se reduce la frecuencia de muestreo mediante un proceso de deci-mación. Como resultado se obtiene la señal de entrada, codificada con un ele-vado número de bits, a la frecuencia de Nyquist.
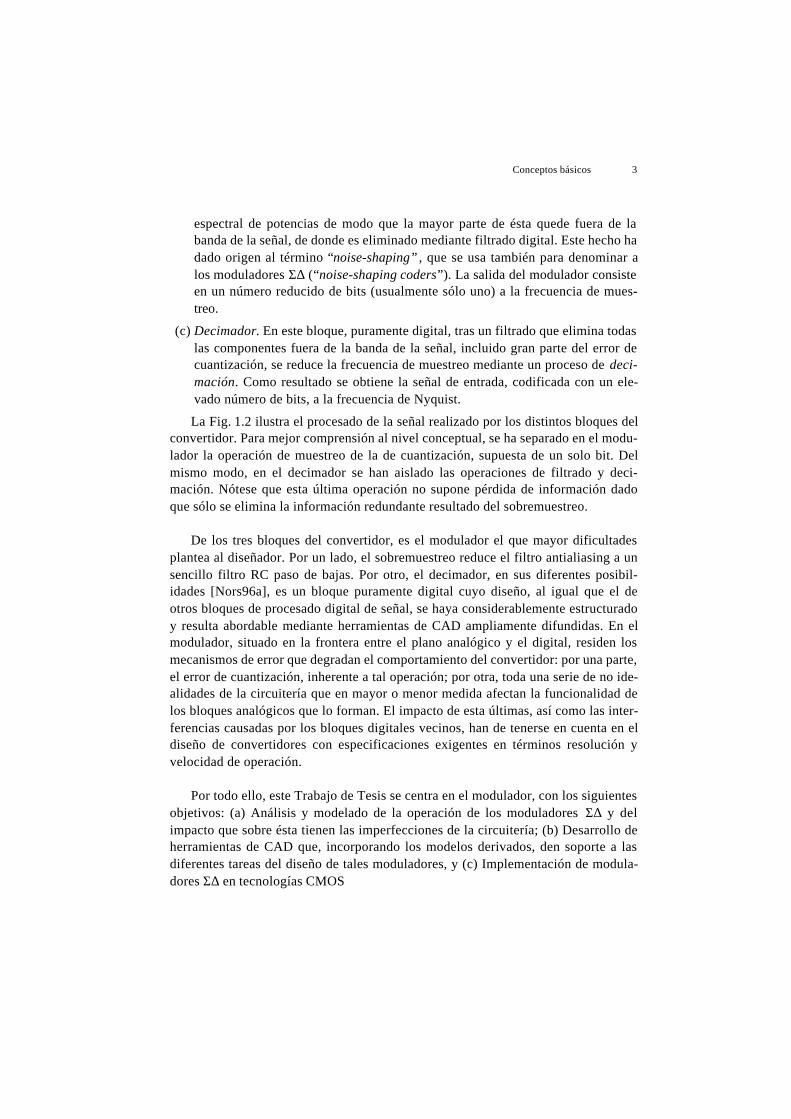
La Fig. 1.2 ilustra el procesado de la señal realizado por los distintos bloques delconvertidor. Para mejor comprensión al nivel conceptual, se ha separado en el modu-lador la operación de muestreo de la de cuantización, supuesta de un solo bit. Delmismo modo, en el decimador se han aislado las operaciones de filtrado y deci-mación. Nótese que esta última operación no supone pérdida de información dadoque sólo se elimina la información redundante resultado del sobremuestreo.
De los tres bloques del convertidor, es el modulador el que mayor dificultadesplantea al diseñador. Por un lado, el sobremuestreo reduce el filtro antialiasing a unsencillo filtro RC paso de bajas. Por otro, el decimador, en sus diferentes posibil-idades [Nors96a], es un bloque puramente digital cuyo diseño, al igual que el deotros bloques de procesado digital de señal, se haya considerablemente estructuradoy resulta abordable mediante herramientas de CAD ampliamente difundidas. En elmodulador, situado en la frontera entre el plano analógico y el digital, residen losmecanismos de error que degradan el comportamiento del convertidor: por una parte,el error de cuantización, inherente a tal operación; por otra, toda una serie de no ide-alidades de la circuitería que en mayor o menor medida afectan la funcionalidad delos bloques analógicos que lo forman. El impacto de esta últimas, así como las inter-ferencias causadas por los bloques digitales vecinos, han de tenerse en cuenta en eldiseño de convertidores con especificaciones exigentes en términos resolución yvelocidad de operación.
Por todo ello, este Trabajo de Tesis se centra en el modulador, con los siguientesobjetivos: (a) Análisis y modelado de la operación de los moduladores Σ∆ y delimpacto que sobre ésta tienen las imperfecciones de la circuitería; (b) Desarrollo deherramientas de CAD que, incorporando los modelos derivados, den soporte a lasdiferentes tareas del diseño de tales moduladores, y (c) Implementación de modula-dores Σ∆ en tecnologías CMOS
4 Conceptos Básicos y Estado del Arte
1.2.1 Sobremuestreo y ruido de cuantización
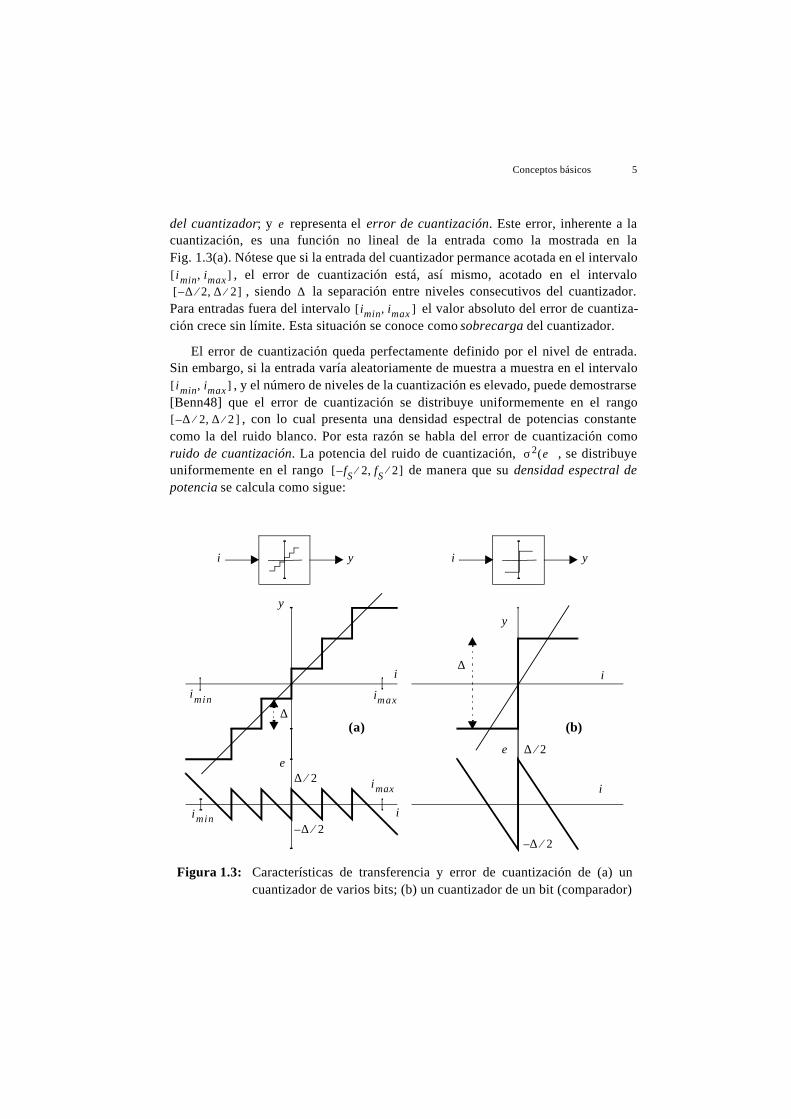
La cuantización en amplitud es un proceso fundamental en los convertidoresA/D. La Fig. 1.3(a) muestra la característica de transferencia de un cuantizador devarios bits. Ésta puede representarse matemáticamente mediante una función no lin-eal de la forma:
(1.1)
donde es la pendiente de la recta que intersecta los pasos de código, o ganancia
t... ...
xa t( ) xsh t( ),
X f( )
fb fS 2⁄ fS
filtro antialiasingespúreos
Xsh f( )
fb fS 2⁄ fS
n...
y n( )
Y f( )
fb fS 2⁄ fS
error de cuantización
n... ...
y f n( )
Y f f( )
fb fS 2⁄ fS
filtro digital
Yd f( )
n... ...
yd n( )
fb fS
...
Filtro
Antialiasing
S/H
Quantiz
ació
n
Filtro
Digital
Decimació
n
x t( )
xa t( )
xsh t( )
y n( )
y f n( )
yd n( )
Mod
ulad
or
Figura 1.2: Ilustrando el procesado de señal en un convertidor A/D Σ∆.
con “noise-shaping”
y gqi e+=
gq
Conceptos básicos 5
del cuantizador; y representa el error de cuantización. Este error, inherente a lacuantización, es una función no lineal de la entrada como la mostrada en laFig. 1.3(a). Nótese que si la entrada del cuantizador permance acotada en el intervalo
, el error de cuantización está, así mismo, acotado en el intervalo, siendo la separación entre niveles consecutivos del cuantizador.
Para entradas fuera del intervalo el valor absoluto del error de cuantiza-ción crece sin límite. Esta situación se conoce como sobrecarga del cuantizador.
El error de cuantización queda perfectamente definido por el nivel de entrada.Sin embargo, si la entrada varía aleatoriamente de muestra a muestra en el intervalo
, y el número de niveles de la cuantización es elevado, puede demostrarse[Benn48] que el error de cuantización se distribuye uniformemente en el rango
, con lo cual presenta una densidad espectral de potencias constantecomo la del ruido blanco. Por esta razón se habla del error de cuantización comoruido de cuantización. La potencia del ruido de cuantización, , se distribuyeuniformemente en el rango de manera que su densidad espectral depotencia se calcula como sigue:
e
i y
i
y
e
i
∆
∆ 2⁄
∆– 2⁄
y
i
i
e ∆ 2⁄
∆– 2⁄
∆
i y
Figura 1.3: Características de transferencia y error de cuantización de (a) uncuantizador de varios bits; (b) un cuantizador de un bit (comparador)
(a) (b)
imax
imax
imin
imin
imin imax,[ ]∆ 2 ∆ 2⁄,⁄–[ ] ∆
imin imax,[ ]
imin imax,[ ]
∆ 2 ∆ 2⁄,⁄–[ ]
σ2 e( )fS– 2⁄ fS 2⁄,[ ]
6 Conceptos Básicos y Estado del Arte
(1.2)
Si la frecuencia de muestreo coincide con la frecuencia de Nyquist de la señal, lapotencia del ruido de cuantización que acompaña a la señal cuantizada es ;esto es, toda la potencia del error de cuantización. Por el contrario, a medida que lafrecuencia de muestreo crece por encima de la frecuencia de Nyquist queda en labanda de la señal una menor porción de potencia del ruido de cuantización. La poten-cia del ruido de cuantización en dicha banda (en lo sucesivo potencia en banda)viene dada por
(1.3)
donde es la frecuencia de Nyquist de la señal (el doble de su ancho de banda). Lapotencia en banda del ruido de cuantización resulta inversamente proporcional alcociente entre la frecuencia de muestreo y la de Nyquist. Este cociente, denominadousualmente , se conoce como razón de sobremuestreo. Según (1.3), un incrementoen la razón de sobremuestreo significa un reducción de 3dB/octava en la potencia delruido de cuantización.
En el caso de que la cuantización sea de un bit, Fig. 1.3(b), las aproximacionesanteriores no son rigurosamente válidas. Sin embargo, la experiencia muestra que,incluso con estos cuantizadores (de gran interés práctico porque se realizan medianteun simple comparador) los modelos basados en la suposición de ruido de cuantiza-ción blanco, aditivo y descorrelacionado con la entrada son aproximadamente váli-dos. En tal caso, los resultados mostrados en esta Sección para un cuantizador devarios bits son también aplicables a un cuantizador de un sólo bit o comparador.
1.2.2 Modulador Σ∆
Un cuantizador precedido de un bloque donde se muestrea la señal a una frecuen-cia mucho mayor que su frecuencia de Nyquist constituye la base del convertidor desobremuestreo más simple. Consideremos ahora un bloque que realiza la cuantiza-ción de manera mucho más eficiente: el modulador Σ∆.
La Fig. 1.4 muestra el esquema básico de un modulador Σ∆. En él se muestrea laseñal de entrada, , a una frecuencia superior a la frecuencia de Nyquist y se le resta
SE f( )σ2 e( )
fS-------------- 1
fS----
1∆--- e2 ed
∆ 2⁄–
∆ 2⁄
∫∆2
12fS----------= = =
∆2 12⁄
PQ SE f( ) fd
fd– 2⁄
fd 2⁄
∫∆2
12------
fdfS----
∆2
12M-----------= = =
fd
M
x
Conceptos básicos 7
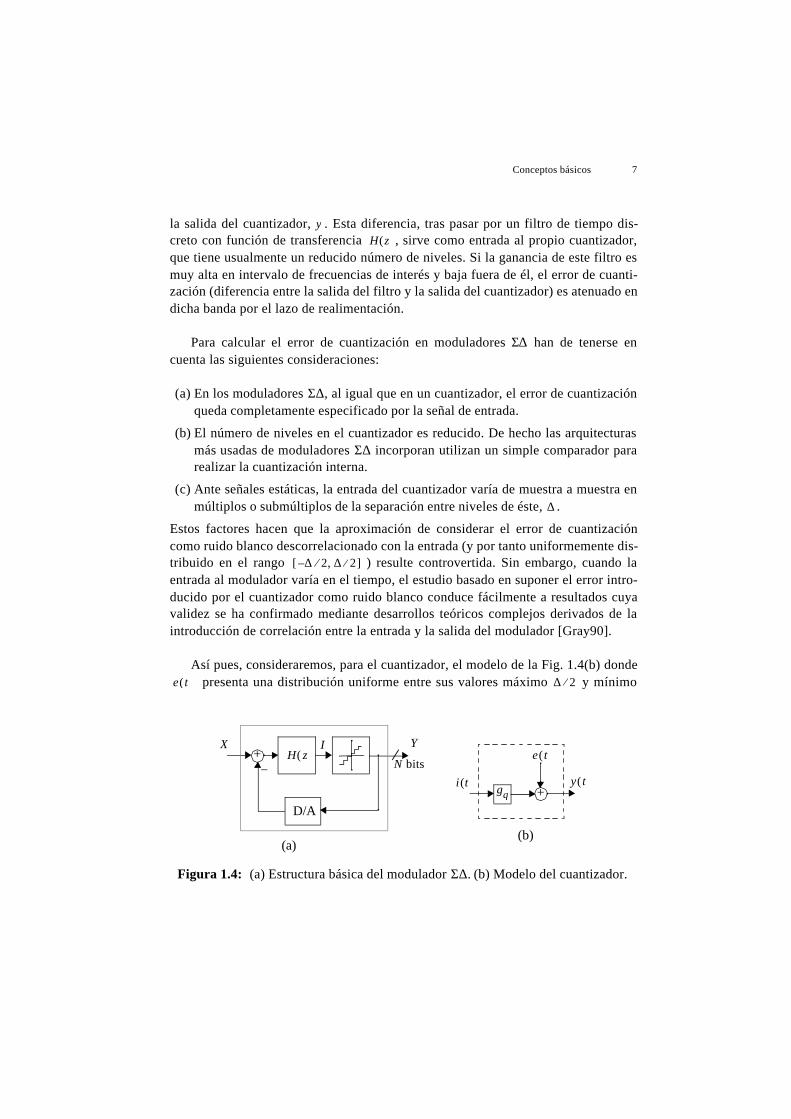
la salida del cuantizador, . Esta diferencia, tras pasar por un filtro de tiempo dis-creto con función de transferencia , sirve como entrada al propio cuantizador,que tiene usualmente un reducido número de niveles. Si la ganancia de este filtro esmuy alta en intervalo de frecuencias de interés y baja fuera de él, el error de cuanti-zación (diferencia entre la salida del filtro y la salida del cuantizador) es atenuado endicha banda por el lazo de realimentación.
Para calcular el error de cuantización en moduladores Σ∆ han de tenerse encuenta las siguientes consideraciones:
(a) En los moduladores Σ∆, al igual que en un cuantizador, el error de cuantizaciónqueda completamente especificado por la señal de entrada.
(b) El número de niveles en el cuantizador es reducido. De hecho las arquitecturasmás usadas de moduladores Σ∆ incorporan utilizan un simple comparador pararealizar la cuantización interna.
(c) Ante señales estáticas, la entrada del cuantizador varía de muestra a muestra enmúltiplos o submúltiplos de la separación entre niveles de éste, .
Estos factores hacen que la aproximación de considerar el error de cuantizacióncomo ruido blanco descorrelacionado con la entrada (y por tanto uniformemente dis-tribuido en el rango ) resulte controvertida. Sin embargo, cuando laentrada al modulador varía en el tiempo, el estudio basado en suponer el error intro-ducido por el cuantizador como ruido blanco conduce fácilmente a resultados cuyavalidez se ha confirmado mediante desarrollos teóricos complejos derivados de laintroducción de correlación entre la entrada y la salida del modulador [Gray90].
Así pues, consideraremos, para el cuantizador, el modelo de la Fig. 1.4(b) donde presenta una distribución uniforme entre sus valores máximo y mínimo
yH z( )
H z( )
D/A
−+
X Y
N bits
Figura 1.4: (a) Estructura básica del modulador Σ∆. (b) Modelo del cuantizador.
I
+i t( ) gq
e t( )
y t( )
(a)(b)
∆
∆ 2⁄– ∆ 2⁄,[ ]
e t( ) ∆ 2⁄

8 Conceptos Básicos y Estado del Arte
, de forma que la densidad espectral de potencia del ruido de cuantización esconstante y viene dada por (1.2). Nótese que la ganancia que precede a la operaciónde cuantización en la Fig. 1.4(b) sólo tiene sentido cuando el numero de niveles delcuantizador sea superior a dos. Cuando se disponga únicamente de dos niveles, cuales el caso de un comparador, el factor de ganacia es arbitrario pues, la salida delcomparador sólo es función del signo de su entrada. De nuevo en este caso, la linear-ización del comparador supone una aproximación grosera, pero que da lugar aresultados aceptables a la vez que matemáticamente simples.
Con ello el modulador de la Fig. 1.4(a) se convierte en un sistema de dos entra-das , y una salida que, en el dominio Z, puede representarse por
(1.4)
donde son las transformadas Z de la señal de entrada y del ruido decuantización, respectivamente, y son las funciones de transferen-cia respectivas de la entrada y el ruido de cuantización. La forma exacta de ambasfunciones depende de la arquitectura del modulador. Diversos casos serán objeto deestudio en este Capítulo, pero a la vista de (1.4) podemos imponer las condicionessiguientes para obtener moduladores operativos:
(1.5)
esto es, el ruido de cuantización debe atenuarse en la zona de bajas frecuencias sinque se distorsione la señal.
Analizando el esquema de la Fig. 1.4(a), la salida en el dominio Z resulta
(1.6)
Comparando esta expresión con (1.5), se obtiene la siguiente condición sobre lafunción de transferencia del filtro discreto:
(1.7)
El bloque más sencillo que presenta una función de transferencia con esta car-acterística es un integrador, cuya función de transferencia en el dominio Z es,
∆– 2⁄
x t( ) y e t( ) y t( )
Y z( ) STF z( )X z( ) NTF z( )E z( )+=
X z( ) y E z( )STF z( ) y NTF z( )
STF z( ) cte=
NTF z( ) 0→para z 1→
Y z( ) H z( )1 H z( )+--------------------- X z( ) 1
1 H z( )+--------------------- E z( )+=
H z( ) ∞→ para z 1→

Conceptos básicos 9
(1.8)
luego basta sustituir el filtro en la Fig. 1.4(a) por un integrador en tiempo dis-creto, Fig. 1.7, para obtener a la salida del modulador,
(1.9)
esto es, una representación digital de la entrada retrasada más el ruido de cuantiza-ción afectado por una función de conformación. En el dominio temporal, el ruido decuantización sufre una diferenciación de forma que a cada muestra se le resta laobtenida en el ciclo inmediatamente anterior. Intuitivamente se entiende, por tanto,la reducción del ruido en la zona de bajas frecuencias pues es allí donde la variaciónmuestra a muestra de éste es menor. Nótese que la función de transferencia del ruidode cuantización, , es de primer orden. Por esta razón se conoceal modulador de la Fig. 1.7 como modulador Σ∆ de primer orden†1. La única diferen-cia entre el modulador Σ∆ de la Fig. 1.7 y su representación conceptual en laFig. 1.4(a) es la inclusión de dos factores de amplificación para la señal deentrada y de realimentación, respectivamente, comúnmente llamados pesos o ganan-cias del integrador.
En el domino de la frecuencia la densidad espectral del ruido de cuantizaciónconformado resulta
(1.10)
y la potencia de éste en la banda de la señal se calcula como sigue:
1. Un cuantizador aislado puede considerarse un modulador de orden cero.
H z( )z 1–
1 z 1––----------------=
H z( )
YIX E
g1
− g1'
D/A
Figura 1.5: Modulador Σ∆ de primer orden
Y z( ) z 1– X z( ) 1 z 1––( )E z( )+=
NTF z( ) 1 z 1––( )=
g1 y g1'
SQ f( ) SE f( ) 1 j– 2π ffS----
exp–2
SE f( ) 4 π ffS----
sin2⋅= =
10 Conceptos Básicos y Estado del Arte
(1.11)
En este caso, un incremento de la razón de sobremuestreo redunda en un decrementode 9dB/octava en la potencia en banda del ruido de cuantización, 6dB/octava másque en el caso de un cuantizador aislado.
1.2.3 Relación señal-ruido, rango dinámico y resolución equivalente.
Es útil introducir en este punto las definiciones de algunas figuras de mérito quecaracterizan a los convertidores de sobremuestreo, y que serán usadas con profusiónen esta Tesis.
1. Relación señal ruido (SNR ó S/N)
Es la relación entre la potencia de salida a la frecuencia de una entrada sinusoidaly la potencia en banda de ruido total. Se expresa normalmente en decibelios. Ideal-mente; esto es, teniendo en cuenta únicamente el ruido de cuantización, el SNR, quees función de la amplitud de la entrada al modulador, , se calcula como
(1.12)
El SNR aumenta monotónicamente con el nivel de entrada. Sin embargo, a patirde cierto nivel, la señal a la entrada del cuantizador se sale del intervalo ,definido en la Sección 1.2.1, con lo cual se produce la sobrecarga de éste y seobserva una caída brusca del SNR.
Como se verá en el Capítulo 2, además del ruido de cuantización, existen otras con-tribuciones a la potencia en banda del error debido a no idealidades de la circuitería.Para cuantificar estos errores, generalmente en forma de ruido y/o distorsión, se usala relación señal - (ruido + distorsión), TSNR o S/(N+D).
2. Rango dinámico (DR)
Se define como el cociente entre la potencia a la salida a la frecuencia de unasinusoide con amplitud igual al rango completo y la potencia a la salida para unasinusoide de la misma frecuencia y amplitud tal que resulte indistinguible del ruido;esto es, con SNR = 0dB. Usualmente se expresa en dB.
PQ SQ f( ) fd
fd– 2⁄
fd 2⁄
∫∆2
12------
π2
3M3-----------≅= M
fSfd---- 1»=
A
SNR dB( ) 10log10A 2 2⁄
PQ-------------
=
imin imax,[ ]

Conceptos básicos 11
Idealmente el rango máximo de entrada en un modulador Σ∆ viene dado por laescala completa de entrada del cuantizador. En el caso de cuantización de un solo bitésta es igual a , luego la amplitud de un sinusoide de rango completo es .Por otro lado según (1.12), la potencia de salida para una sinusoide de amplitud talque su SNR = 0dB vale . Luego,
(1.13)
Para el modulador Σ∆ de primer orden (Fig. 1.7) se obtiene
(1.14)
3. Resolución equivalente (b)
El rango dinámico para un convertidor A/D de b bits viene dado por [Bose88b]
(1.15)
Operando con esta expresión se obtiene el número de bits equivalentes o resoluciónequivalente (también llamada efectiva) del modulador Σ∆ en función de su rangodinámico en decibelios,
(1.16)
Nótese que un incremento de 3dB del DR supone un incremento de 0.5bits en laresolución equivalente, mientras que un incremento en 9dB reporta 1.5bits extra.Con ello, ante aumentos de la razón de sobremuestreo, un cuantizador aislado pre-senta un aumento de la resolución equivalente de 0.5bits/octava. Este aumento seeleva hasta 1.5bits/octava para el modulador Σ∆ de primer orden.
No debe confundirse el número de bits equivalentes con el número de bits en quese codifica la señal PCM tras el decimador. Obviamente, por necesidades del proce-sado digital, éste debe superar a aquél en algunos bits. Por tanto, en la palabra digitalde salida del convertidor sólo una parte de los bits, aquellos que marca la resoluciónequivalente del modulador, contienen la información.
∆ 2⁄± ∆ 2⁄
PQ
DR dB( ) 10log10∆ 2⁄( )2
2PQ------------------=
DR dB( ) 10log1092---
M3
π2-------
=
DR 3 2 2b 1–( )⋅=
bDR dB( ) 1.76–
6.02-------------------------------------=

12 Conceptos Básicos y Estado del Arte
1.2.4 Generación de patrones de ruido
Las expresiones derivadas para la potencia del ruido de cuantización parten de labase de que las muestras de éste y de la señal de entrada están descorrelacionadas;asunción que es aproximadamente válida cuando la señal varía en el tiempo[Benn48]. Sin embargo, como se muestra en el Apéndice D, ante entradas en DC, lasalida de un modulador de primer orden cambia, tratando de acercarse en promedioal nivel de entrada, con patrones repetitivos [Cand81]. Esta periodicidad hace que elruido de cuantización no sea blanco sino fuertemente coloreado. La potencia totaldel error, que no ruido, de cuantización es bastante superior a la predicha por (1.11)cuando los tonos de éste caen dentro de la banda de la señal, lo cual ocurre prefer-entemente cuando la razón entre el nivel de entrada y el de referencia está próxima a1 ó a 0. Para entradas en DC en el rango la potencia del error de cuan-tización cambia bruscamente ante pequeños cambios en el nivel de entrada dandolugar a gráficas como la mostrada en la Fig. 1.6, conocidas como patrones de ruidodel modulador [Cand92]. Una posible solución a este problema consiste en la intro-ducción, usualmente a la entrada del cuantizador, de señales aperiódicas, por ejem-plo ruido pseudoaleatorio (“dithering”) [Nors96b]. Con ello se consiguedescorrelacionar el error de cuantización de la señal de entrada del moduladoraunque se complica el diseño y puede producirse la sobrecarga prematura del cuanti-zador. Además la propia señal de “dithering” constituye una fuente extra de error a lasalida del modulador. Otra posibilidad para descorrelacionar el error de cuantizaciónes la utilización de comportamientos caóticos en el modulador [Schr93]. Tales com-portamientos se consiguen en la práctica moviendo algunos ceros de la funciónNTF(z) fuera del circulo unidad. Sin embargo, se ha comprobado una tendencia a la
∆ 2⁄– ∆ 2⁄,[ ]
Figura 1.6: Patrón de ruido para un modulador Σ∆ de orden 1 para .M 64=
Potencia en (1.11)
-1 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8 1Nivel de DC de la entrada referido a ∆/2
-70
-65
-60
-55
-50
-45
-40
Pote
ncia
de
ruid
o de
cua
ntiz
ació
n e
n la
ban
da (
dB)
Arquitecturas de moduladores Sigma-Delta 13
inestabilidad cuando el número de niveles del cuantizador es reducido [Nors96b].
1.3 Arquitecturas de moduladores Sigma-Delta
Basadas en la arquitectura genérica del modulador Σ∆, Fig. 1.4(a), han sidomuchas las arquitecturas de moduladores reportadas desde mediados de los ochentahasta la actualidad. En todas ellas se persigue una reducción de la potencia en bandadel ruido de cuantización mediante dos estrategias bien diferenciadas aunque noexcluyentes:
(a) Aumento del orden del filtro , lo cual se traduce en un aumento del ordende la función , proporcionando una cancelación más efectiva del ruidode cuantización. En tales arquitecturas el aumento de la resolución con respectoa la razón de sobremuestreo es bastante superior a 1.5bits/octava.
(b) Aumento del número de bits del cuantizador interno. Con ello se reduce la den-sidad espectral del ruido de cuantización ya que disminuye . De hecho, ideal-mente y en promedio, cada bit extra en la cuantización interna reporta un bit másde resolución equivalente.
Mediante la adopción de estas estrategias o mediante una combinación de ambas seconsiguen moduladores Σ∆ que requieren menor razón de sobremuestreo para alca-nzar una resolución equivalente dada. Ello redunda en una mejora del cociente
. Un estudio exhaustivo de todas las arquitecturas disponibles de modula-
dores sobrepasa las intenciones de esta Tesis. A continuación se relacionan las arqui-tecturas de moduladores Σ∆ más utilizadas prestando especial interés a aquellas cuyodiseño se abordará en los Capítulos sucesivos.
1.3.1 Modulador Σ∆ de segundo orden
Mediante la inclusión de dos integradores en lugar de uno sólo en el lazo delmodulador se consigue aumentar hasta dos el orden de la función de transferenciadel ruido de cuantización. La arquitectura resultante es el modulador Σ∆ de segundoorden y lazo único [Cand85], cuyo diagrama de bloques se muestra en la Fig. 1.7.
El análisis temporal de este modulador resulta complejo debido a la presencia dela doble integración†1. Sin embargo, su análisis en el dominio es sencillo. Con
(lo cual garantiza la estabilidad del modulador [Cand85]), y
1. En el Apéndice D se analiza la respuesta temporal de los moduladores Σ∆ de primer y segundo orden.
H z( )NTF z( )
∆
PotenciaVelocidad---------------------------
Zg2' 2g1g2= g1' g1=

14 Conceptos Básicos y Estado del Arte
se obtiene la siguiente expresión para la salida del modulador:
(1.17)
donde se ha supuesto que ambos integradores poseen una función de transferenciadada por (1.8) y que el error de cuantización es aditivo. Comparando esta expresióncon (1.9) se observa que la doble integración incrementa en uno el orden de la fun-ción . Como consecuencia, la densidad espectral de potencia del ruido decuantización resulta:
(1.18)
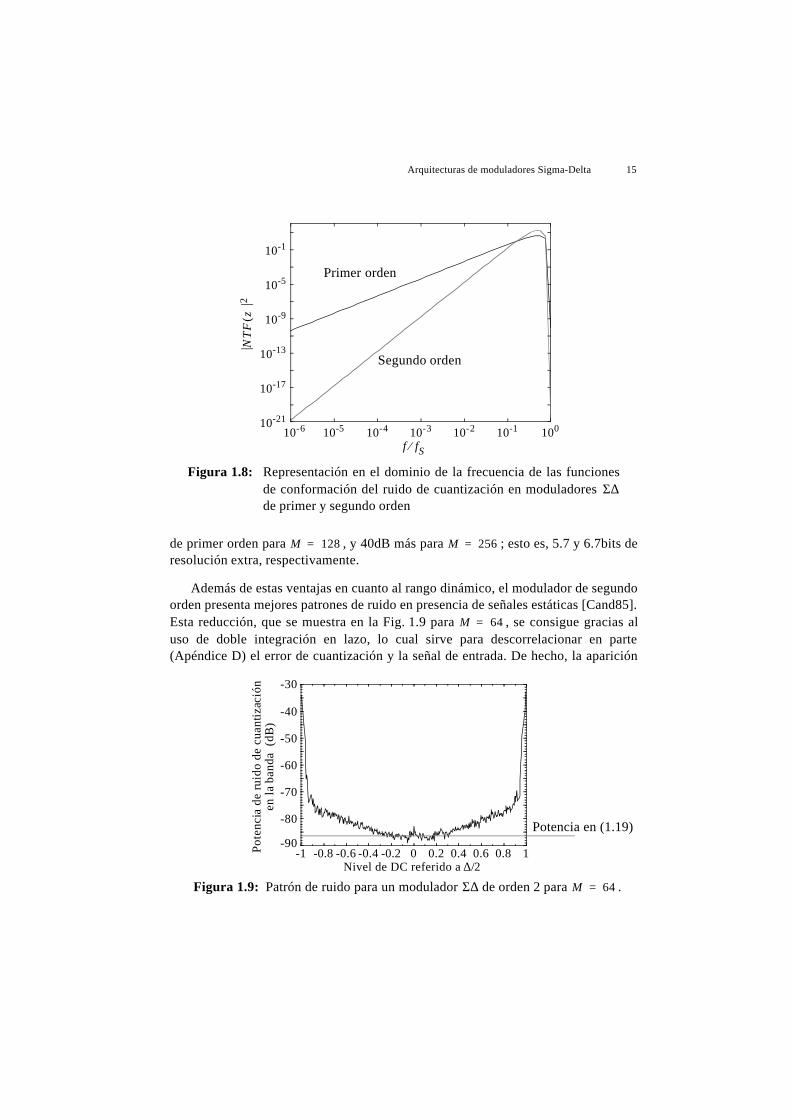
Con el propósito de comparar las ventajas del modulador de segundo ordenrespecto al de primer orden, la Fig. 1.8 muestra sus funciones de conformación delruido de cuantización en el dominio de la frecuencia. Nótese que, para el moduladorde 2o orden, la densidad espectral de potencia del ruido de cuantización disminuyemucho en la zona de bajas frecuencias al precio de un pequeño aumento en la zonade altas frecuencias. Este trasvase de potencia conlleva una disminución de la poten-cia en banda del ruido de cuantización que se calcula como sigue:
(1.19)
Por tanto, un incremento en la razón de sobremuestreo conlleva un decremento de lapotencia en banda del ruido de cuantización de 15dB/octava, lo cual supone un incre-mento de 2.5bits/octava en la resolución equivalente del modulador, frente a1.5bits/octava para un modulador de primer orden, (1.11). Por ejemplo, idealmente,un modulador de segundo orden proporciona 34dB más de rango dinámico que uno
Y z( ) z 2– X z( ) 1 z 1––( )2E z( )+=
NTF z( )
YI2X E
g2
− g2'
g1
− g1'
D/A
I1
Figura 1.7: Modulador Σ∆ de segundo orden y lazo único
SQ f( ) SE f( ) 1 j– 2π ffS----
exp–4
SE f( ) 16 π ffS----
sin4⋅= =
PQ SQ f( ) fd
fd– 2⁄
fd 2⁄
∫∆2
12------
π4
5M5-----------≅= MfSfd---- 1»=
Arquitecturas de moduladores Sigma-Delta 15
de primer orden para , y 40dB más para ; esto es, 5.7 y 6.7bits deresolución extra, respectivamente.
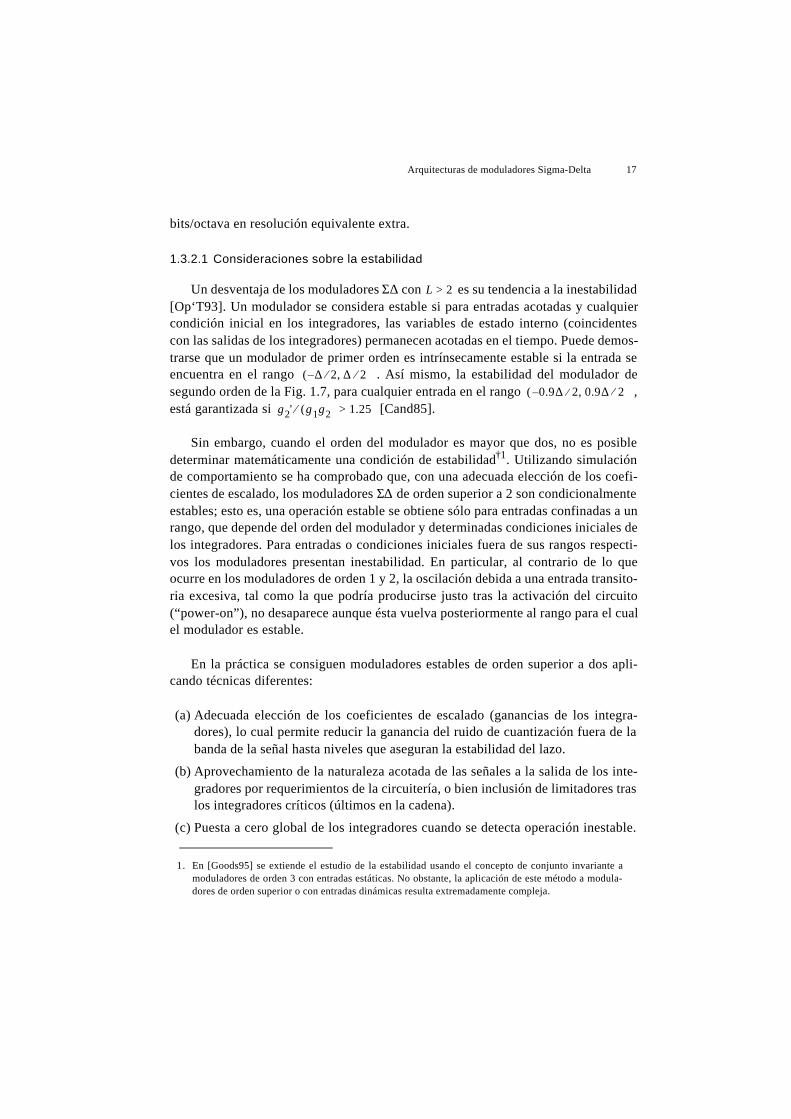
Además de estas ventajas en cuanto al rango dinámico, el modulador de segundoorden presenta mejores patrones de ruido en presencia de señales estáticas [Cand85].Esta reducción, que se muestra en la Fig. 1.9 para , se consigue gracias aluso de doble integración en lazo, lo cual sirve para descorrelacionar en parte(Apéndice D) el error de cuantización y la señal de entrada. De hecho, la aparición
M 128= M 256=
10-6 10-5 10-4 10-3 10-2 10-1 10010-21
10-17
10-13
10-9
10-5
10-1
f fS⁄
NT
Fz()
2
Segundo orden
Primer orden
Figura 1.8: Representación en el dominio de la frecuencia de las funcionesde conformación del ruido de cuantización en moduladores Σ∆de primer y segundo orden
Figura 1.9: Patrón de ruido para un modulador Σ∆ de orden 2 para .M 64=
Potencia en (1.19)
-1 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8 1Nivel de DC referido a ∆/2
-90
-80
-70
-60
-50
-40
-30
Pote
ncia
de
ruid
o de
cua
ntiz
ació
nen
la b
anda
(dB
)
M 64=

16 Conceptos Básicos y Estado del Arte
de tonos espúreos en la banda de la señal disminuye a medida que aumenta el ordendel modulador. En la práctica, este hecho unido a la presencia de ruido en los dispos-itivos activos, que hace las veces de señal de “dithering”, permite en gran medidaobviar el problema de la coloración del ruido de cuantización.
1.3.2 Moduladores de alto orden y lazo único
El estudio realizado para los moduladores de orden 1 y 2 puede generalizarsepara un modulador de orden , cuya implementación más sencilla consiste en incluir
integradores antes del cuantizador [Ritc77]. La arquitectura resultante se muestraen la Fig. 1.10.
La expresión para la salida en el dominio Z de este modulador resulta una gener-alización de las expresiones (1.9) y (1.17):
(1.20)
Con lo cual la densidad espectral de ruido de cuantización viene dada por:
(1.21)
La potencia en banda se obtiene integrando (1.21) en la banda de la señal:
(1.22)
En general, la razón de disminución de la potencia del ruido de cuantización conla razón de sobremuestreo resulta , equivalente a
YIL
X Eg2
− g2'
g1
− g1'
D/A
I1 gL
gL'
I2
−
Figura 1.10: Modulador Σ∆ de orden y lazo únicoL
LL
Y z( ) z L– X z( ) 1 z 1––( )LE z( )+=
SQ f( ) SE f( ) 1 j– 2π ffS----
exp–2L
SE f( ) 22L π ffS----
sin2L⋅= =
fd 2⁄– fd 2⁄,[ ]
PQ SQ f( ) fd
fd– 2⁄
fd 2⁄
∫∆2
12------
π2L
2 L 1+( )M 2L 1+( )--------------------------------------------≅= M
fSfd---- 1»=
3 2L 1+( )dB/octava L 1 2⁄+
Arquitecturas de moduladores Sigma-Delta 17
bits/octava en resolución equivalente extra.
1.3.2.1 Consideraciones sobre la estabilidad
Un desventaja de los moduladores Σ∆ con es su tendencia a la inestabilidad[Op‘T93]. Un modulador se considera estable si para entradas acotadas y cualquiercondición inicial en los integradores, las variables de estado interno (coincidentescon las salidas de los integradores) permanecen acotadas en el tiempo. Puede demos-trarse que un modulador de primer orden es intrínsecamente estable si la entrada seencuentra en el rango . Así mismo, la estabilidad del modulador desegundo orden de la Fig. 1.7, para cualquier entrada en el rango ,está garantizada si [Cand85].
Sin embargo, cuando el orden del modulador es mayor que dos, no es posibledeterminar matemáticamente una condición de estabilidad†1. Utilizando simulaciónde comportamiento se ha comprobado que, con una adecuada elección de los coefi-cientes de escalado, los moduladores Σ∆ de orden superior a 2 son condicionalmenteestables; esto es, una operación estable se obtiene sólo para entradas confinadas a unrango, que depende del orden del modulador y determinadas condiciones iniciales delos integradores. Para entradas o condiciones iniciales fuera de sus rangos respecti-vos los moduladores presentan inestabilidad. En particular, al contrario de lo queocurre en los moduladores de orden 1 y 2, la oscilación debida a una entrada transito-ria excesiva, tal como la que podría producirse justo tras la activación del circuito(“power-on”), no desaparece aunque ésta vuelva posteriormente al rango para el cualel modulador es estable.
En la práctica se consiguen moduladores estables de orden superior a dos apli-cando técnicas diferentes:
(a) Adecuada elección de los coeficientes de escalado (ganancias de los integra-dores), lo cual permite reducir la ganancia del ruido de cuantización fuera de labanda de la señal hasta niveles que aseguran la estabilidad del lazo.
(b) Aprovechamiento de la naturaleza acotada de las señales a la salida de los inte-gradores por requerimientos de la circuitería, o bien inclusión de limitadores traslos integradores críticos (últimos en la cadena).
(c) Puesta a cero global de los integradores cuando se detecta operación inestable.
1. En [Goods95] se extiende el estudio de la estabilidad usando el concepto de conjunto invariante amoduladores de orden 3 con entradas estáticas. No obstante, la aplicación de este método a modula-dores de orden superior o con entradas dinámicas resulta extremadamente compleja.
L 2>
∆– 2⁄ ∆ 2⁄,( )0.9∆ 2⁄– 0.9∆ 2⁄,( )
g2' g1g2( )⁄ 1.25>
18 Conceptos Básicos y Estado del Arte
La detección de inestabilidad puede realizarse al nivel de los integradoresusando comparadores para determinar si una de las variables de estado ha sobre-pasado cierto límite; o bien, observando la repetición de pulsos del mismo signoa la salida del modulador.
En [Adam97a] se hace una recopilación de estas técnicas ofrecidas en forma derecetario para el diseño de moduladores estables con orden superior a dos. Segúnconcluyen los autores, los moduladores resultantes presentan un pico de SNRbastante inferior al que se calcula a partir de la ecuación (1.22). Por ejemplo, unmodulador de quinto orden con estabilizado con estas técnicas pierde 60dBde DR respecto al caso ideal. Recientemente, Moussavi y Leung [Mous94] propusi-eron la puesta a cero selectiva de los integradores que muestran una salida excesivamediante el uso de comparadores y realimentación local. La señal de salida de estoscomparadores se procesa digitalmente junto con la salida del modulador compen-sando el exceso de ruido debida a tal operación. Sin embargo, el modulador de tercerorden propuesto en [Mous94], que implementa esta técnica, presenta un pico de SNRde 84dB con ; esto es, 28dB por debajo del que le correspondería usando laexpresión (1.22).
1.3.3 Arquitecturas de moduladores Σ∆ de alto orden
Aparte de la arquitectura de la Fig. 1.10, existen otras posibilidades para con-seguir funciones de conformación de alto orden [Ribn91]. Algunas de estas se pre-sentan a continuación.
1.3.3.1 Moduladores de lazo único
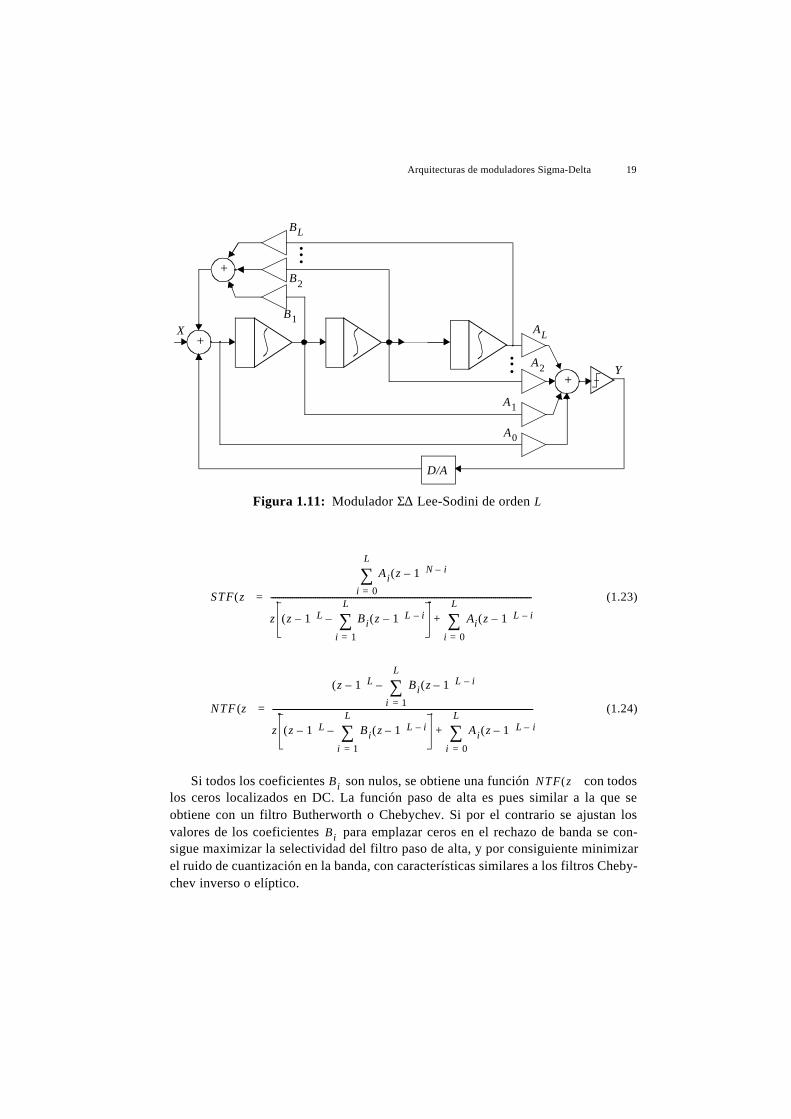
La forma más sencilla de obtener una función de alto orden es unadiferenciación de orden L, (1.20). Sin embargo, el valor de esta función para frecuen-cias próximas a la mitad de la frecuencia de muestreo crece rápidamente con dando lugar a moduladores con clara tendencia a la inestabilidad. Una solución a esteproblema fue propuesta por Lee y Sodini [Lee87] con una arquitectura que haceposible la generación funciones con múltiples polos y ceros dispuestos a lolargo de la banda de la señal y mucha menor ganancia fuera de ésta†1. La arquitec-tura del modulador de Lee-Sodini se muestra en la Fig. 1.11. Su respuesta en eldominio Z se ajusta a la expresión (1.4) con, [Lee87]
1. Una arquitectura similar pero usando cuantizadores multi-bit fue propuesta por Carley [Carl87].
M 64=
M 64=
NTF z( )
L
NTF z( )
Arquitecturas de moduladores Sigma-Delta 19
(1.23)
(1.24)
Si todos los coeficientes son nulos, se obtiene una función con todoslos ceros localizados en DC. La función paso de alta es pues similar a la que seobtiene con un filtro Butherworth o Chebychev. Si por el contrario se ajustan losvalores de los coeficientes para emplazar ceros en el rechazo de banda se con-sigue maximizar la selectividad del filtro paso de alta, y por consiguiente minimizarel ruido de cuantización en la banda, con características similares a los filtros Cheby-chev inverso o elíptico.
STF z( )
A i z 1–( )N i–
i 0=
L
∑
z z 1–( )L B i z 1–( )L i–
i 1=
L
∑– Ai z 1–( )L i–
i 0=
L
∑+
---------------------------------------------------------------------------------------------------------------------------=
NTF z( )
z 1–( )L B i z 1–( )L i–
i 1=
L
∑–
z z 1–( )L B i z 1–( )L i–
i 1=
L
∑– A i z 1–( )L i–
i 0=
L
∑+
---------------------------------------------------------------------------------------------------------------------------=
B i NTF z( )
B i
+
+
+
...
D/A
...
A0
A1
A2
AL
B1
B2
BL
X
Y
Figura 1.11: Modulador Σ∆ Lee-Sodini de orden L
20 Conceptos Básicos y Estado del Arte
Además del modulador de Lee-Sodini, también llamado interpolativo, existenotras posibilidades de obtener funciones de alto orden para el ruido de cuantización,con las características de los filtros paso de alta más usados [Adam97b]. La mayorparte de estas arquitecturas usan trasmisión “feedback” y/o “feedforward” de laseñales en el lazo. Como desventaja de estos moduladores cabe citar la crecientecomplejidad de la circuitería analógica. Además, la necesidad de coeficientes muybajos implica, en implementaciones SC, el uso condensadores muy grandes con elconsiguiente aumento en el consumo de potencia.
1.3.3.2 Moduladores en cascada
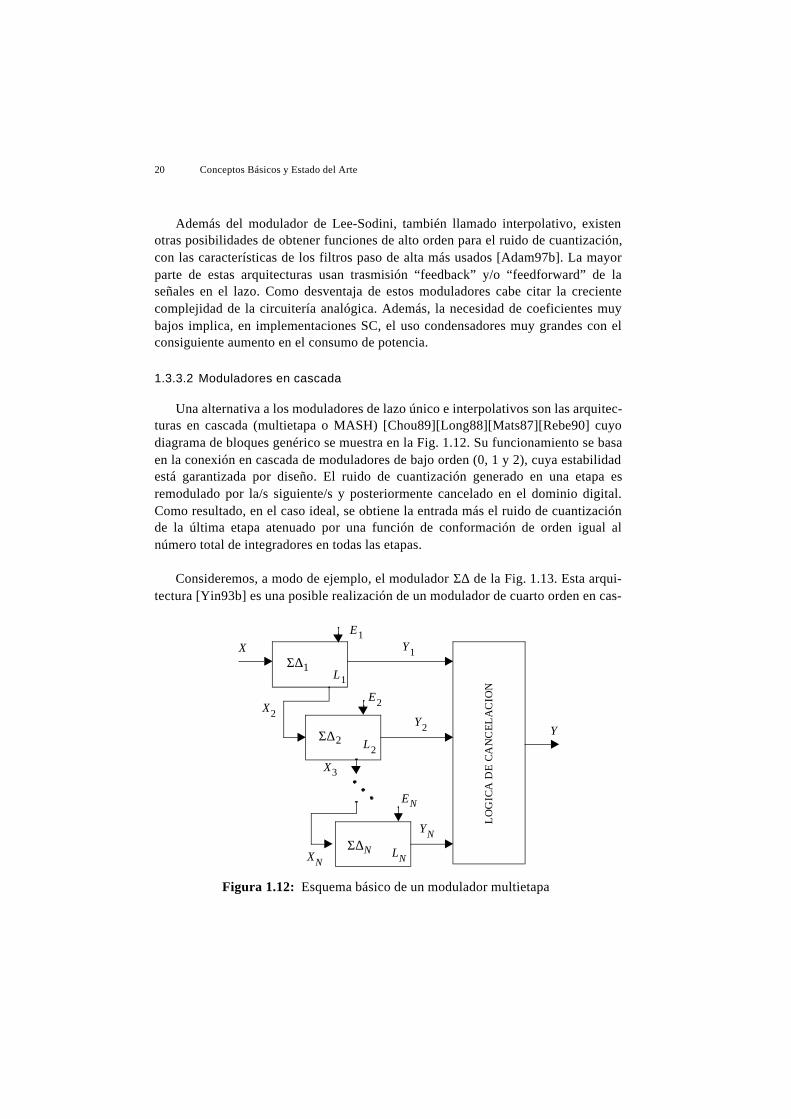
Una alternativa a los moduladores de lazo único e interpolativos son las arquitec-turas en cascada (multietapa o MASH) [Chou89][Long88][Mats87][Rebe90] cuyodiagrama de bloques genérico se muestra en la Fig. 1.12. Su funcionamiento se basaen la conexión en cascada de moduladores de bajo orden (0, 1 y 2), cuya estabilidadestá garantizada por diseño. El ruido de cuantización generado en una etapa esremodulado por la/s siguiente/s y posteriormente cancelado en el dominio digital.Como resultado, en el caso ideal, se obtiene la entrada más el ruido de cuantizaciónde la última etapa atenuado por una función de conformación de orden igual alnúmero total de integradores en todas las etapas.
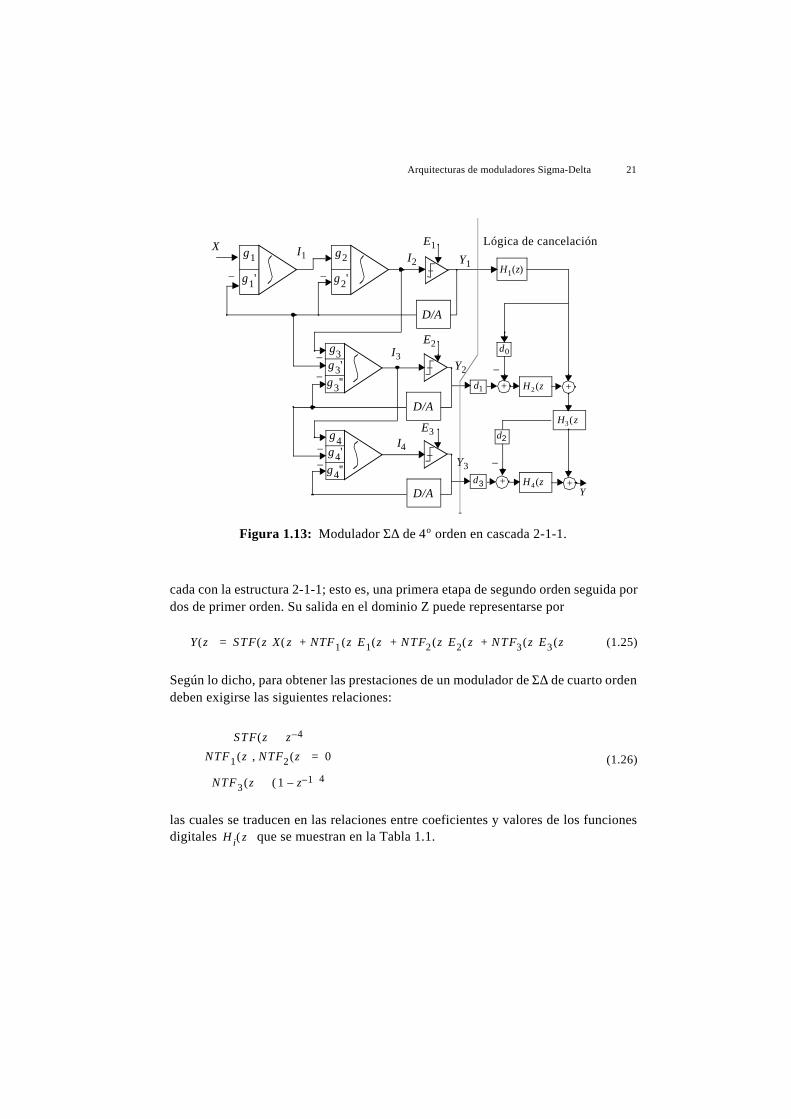
Consideremos, a modo de ejemplo, el modulador Σ∆ de la Fig. 1.13. Esta arqui-tectura [Yin93b] es una posible realización de un modulador de cuarto orden en cas-
Σ∆1
Σ∆2
Σ∆N
L1
L2
LN
Y1
Y2
YN
X2
X3
XN
X
Y
LO
GIC
A D
E C
AN
CEL
AC
ION
E1
E2
EN
Figura 1.12: Esquema básico de un modulador multietapa
Arquitecturas de moduladores Sigma-Delta 21
cada con la estructura 2-1-1; esto es, una primera etapa de segundo orden seguida pordos de primer orden. Su salida en el dominio Z puede representarse por
(1.25)
Según lo dicho, para obtener las prestaciones de un modulador de Σ∆ de cuarto ordendeben exigirse las siguientes relaciones:
(1.26)
las cuales se traducen en las relaciones entre coeficientes y valores de los funcionesdigitales que se muestran en la Tabla 1.1.
Y z( ) STF z( )X z( ) NTF1 z( )E1 z( ) NTF2 z( )E2 z( ) NTF3 z( )E3 z( )+ + +=
STF z( ) z 4–∼
NTF1 z( ) NTF2 z( ), 0=
NTF3 z( ) 1 z 1––( )4∼
H i z( )
Y1I2
X E1g2
− g2'
g1
− g1'
D/A
g3g3'g3''−
−Y2
E2
D/A
I1
I3
H1(z)
++d1 H2 z( )
d0
−
g4g4'g4''−
−Y3
E3
D/A
I4
d3 +Y
H3 z( )
+ H4 z( )
d2
−
Figura 1.13: Modulador Σ∆ de 4o orden en cascada 2-1-1.
Lógica de cancelación
22 Conceptos Básicos y Estado del Arte
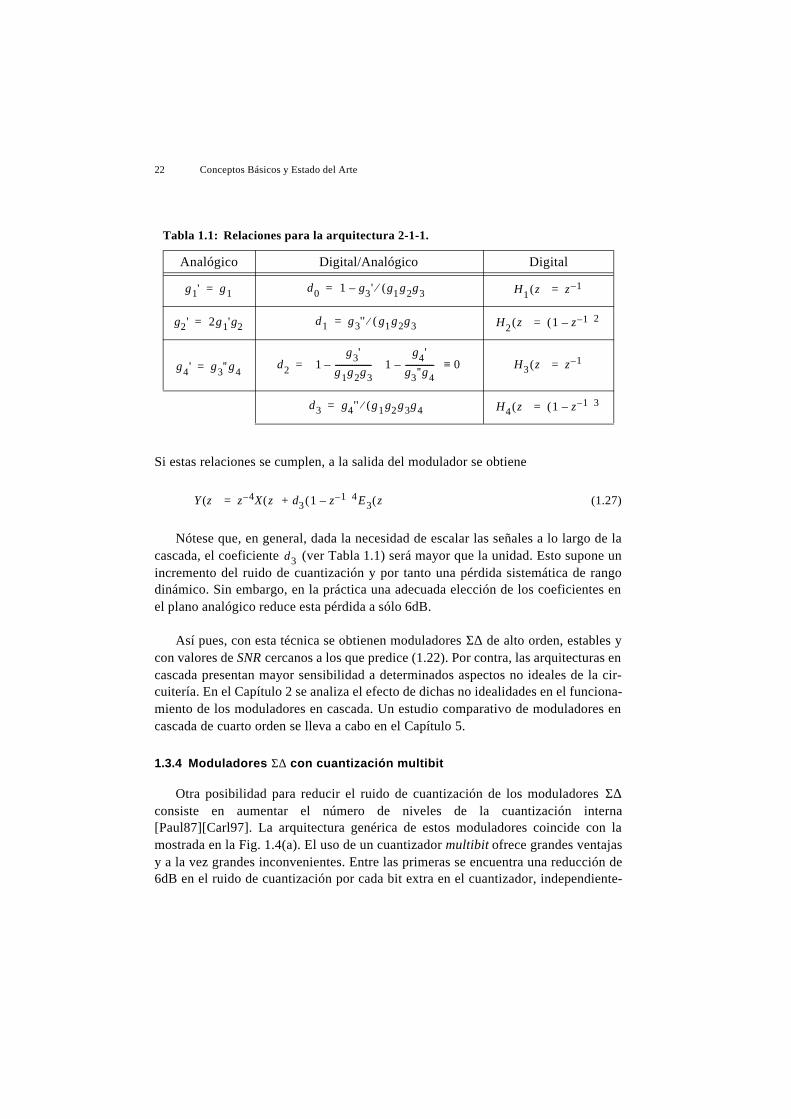
Si estas relaciones se cumplen, a la salida del modulador se obtiene
(1.27)
Nótese que, en general, dada la necesidad de escalar las señales a lo largo de lacascada, el coeficiente (ver Tabla 1.1) será mayor que la unidad. Esto supone unincremento del ruido de cuantización y por tanto una pérdida sistemática de rangodinámico. Sin embargo, en la práctica una adecuada elección de los coeficientes enel plano analógico reduce esta pérdida a sólo 6dB.
Así pues, con esta técnica se obtienen moduladores Σ∆ de alto orden, estables ycon valores de SNR cercanos a los que predice (1.22). Por contra, las arquitecturas encascada presentan mayor sensibilidad a determinados aspectos no ideales de la cir-cuitería. En el Capítulo 2 se analiza el efecto de dichas no idealidades en el funciona-miento de los moduladores en cascada. Un estudio comparativo de moduladores encascada de cuarto orden se lleva a cabo en el Capítulo 5.
1.3.4 Moduladores Σ∆ con cuantización multibit
Otra posibilidad para reducir el ruido de cuantización de los moduladores Σ∆consiste en aumentar el número de niveles de la cuantización interna[Paul87][Carl97]. La arquitectura genérica de estos moduladores coincide con lamostrada en la Fig. 1.4(a). El uso de un cuantizador multibit ofrece grandes ventajasy a la vez grandes inconvenientes. Entre las primeras se encuentra una reducción de6dB en el ruido de cuantización por cada bit extra en el cuantizador, independiente-
Tabla 1.1: Relaciones para la arquitectura 2-1-1.
Analógico Digital/Analógico Digital
g1' g1= d0 1 g3' g1g2g3( )⁄–= H1 z( ) z 1–=
g2' 2g1'g2= d1 g3'' g1g2g3( )⁄= H2 z( ) 1 z 1––( )2=
g4' g3'' g4= d2 1g3'
g1g2g3-----------------–
1g4'
g3''g4-------------–
0≡= H3 z( ) z 1–=
d3 g4'' g1g2g3g4( )⁄= H4 z( ) 1 z 1––( )3=
Y z( ) z 4– X z( ) d3 1 z 1––( )4E3 z( )+=
d3
Estado del Arte en el diseño de convertidores A/D 23
mente de la razón de sobremuestreo. Además, la cuantización multibit contribuye ala estabilización de arquitecturas de alto orden ya que puede eliminar la saturacióndel cuantizador. Como ventaja adicional, las técnicas aproximadas de análisis basa-das en la suposición de considerar el error de cuantización como ruido blancoresultan tanto más exactas cuanto mayor es el número de niveles en el cuantizador.
Sin embargo, sin técnicas apropiadas, la linealidad de un modulador Σ∆ concuantización multibit se ve limitada por la que presenta el convertidor D/A necesarioen el lazo de realimentación [Adam91a][Plass79]†1. Además, como desventaja, debeconsiderarse el aumento de la circuitería analógica necesaria para implementar con-vertidores A/D y D/A de varios bits.
En el Capítulo 6, se profundiza en el estudio de los moduladores multibit SC yexponen las técnicas que permiten solventar el problema de la no linealidad del con-vertidor D/A.
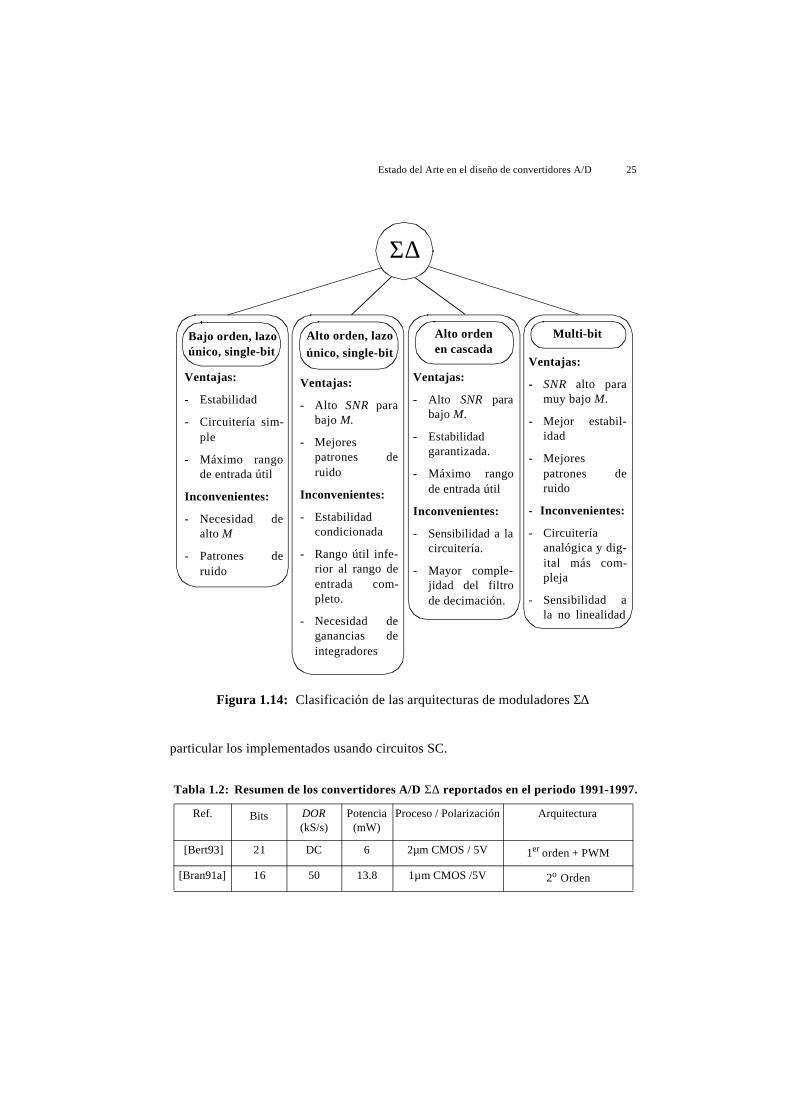
Para finalizar esta Sección, La Fig. 1.14 muestra una clasificación de las arqui-tecturas de moduladores Σ∆ más utilizadas. Esta clasificación no pretende recoger deforma exhaustiva todas la posibles topologías, sino mostrar, sincréticamente, las dis-tintas tendencias expuestas anteriormente, comentando brevemente sus ventajas einconvenientes.
1.4 Estado del Arte en el diseño de convertidores A/D
La práctica totalidad de las arquitecturas de moduladores Σ∆ enumeradas en laSección anterior han sido utilizadas para la implementación monolítica de converti-dores A/D en diferentes tecnologías (CMOS, BiCMOS, Bipolar), y utilizando técni-cas circuitales diversas (condensadores en conmutación SC, corrientes enconmutación SI, tiempo continuo, etc.) con diferentes tensiones de polarización(desde 10V hasta 1V).
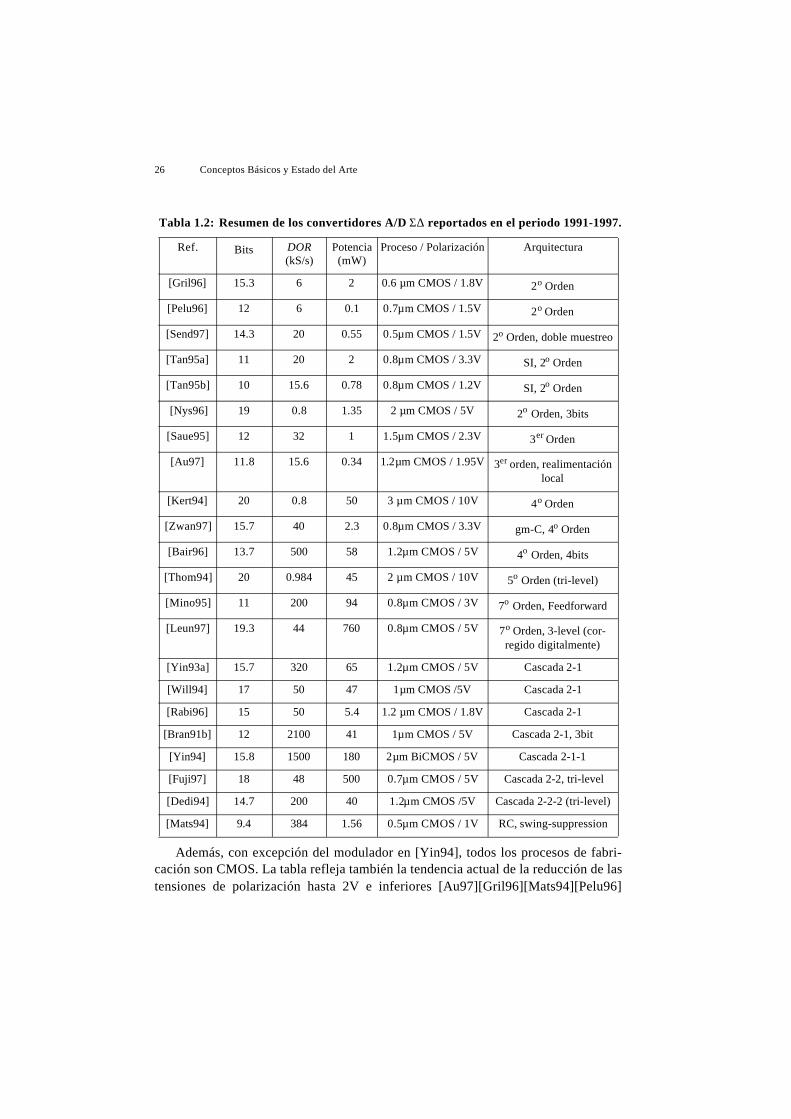
Una recopilación detallada de todas las realizaciones es, por el excesivo volumende información, de escaso interés práctico. En su lugar, la Tabla 1.2 recoge unresumen de los convertidores A/D monolíticos reportados en los últimos siete años.En la Tabla se indica su resolución equivalente, la razón de salida digital DOR (coin-cidente con la frecuencia de Nyquist de la señal), el consumo de potencia, las car-acterísticas del proceso y la arquitectura del modulador.
1. Nótese que este problema no existe si la cuantización es de un solo bit, ya que, en tal caso, el con-vertidor D/A es perfectamente lineal por construcción.

24 Conceptos Básicos y Estado del Arte
La mayor parte de los moduladores Σ∆ en la Tabla 1.2 se han implementadousando circuitos SC. Tan sólo los moduladores en [Tan95a][Tan95b] emplean cir-cuitos SI y [Zwan97] usa integradores gm-C en tiempo continuo. Esta dominancia delos circuitos SC frente a otras técnicas es patente en la blibiografía y está justificadapor la mayor robustez de aquellos frente a las imperfecciones de la circuitería. Losmoduladores que emplean celdas básicas en modo de intensidad [Touma94], promet-edores por su compatibilidad con procesos CMOS standard, no han conseguido,hasta el momento, igualar las prestaciones de los moduladores en modo tensión, en
Estado del Arte en el diseño de convertidores A/D 25
particular los implementados usando circuitos SC.
Tabla 1.2: Resumen de los convertidores A/D Σ∆ reportados en el periodo 1991-1997.
Ref. Bits DOR (kS/s)
Potencia (mW)
Proceso / Polarización Arquitectura
[Bert93] 21 DC 6 2µm CMOS / 5V 1er orden + PWM
[Bran91a] 16 50 13.8 1µm CMOS /5V 2o Orden
Σ∆
Figura 1.14: Clasificación de las arquitecturas de moduladores Σ∆
Ventajas:
- Estabilidad
- Circuitería sim-ple
- Máximo rangode entrada útil
Inconvenientes:
- Necesidad dealto M
- Patrones deruido
Ventajas:
- Alto SNR parabajo M.
- Mejorespatrones deruido
Inconvenientes:
- Estabilidadcondicionada
- Rango útil infe-rior al rango deentrada com-pleto.
- Necesidad deganancias deintegradores
Bajo orden, lazo único, single-bit
Alto orden, lazo único, single-bit
Ventajas:
- Alto SNR parabajo M.
- Estabilidadgarantizada.
- Máximo rangode entrada útil
Inconvenientes:
- Sensibilidad a lacircuitería.
- Mayor comple-jidad del filtrode decimación.
Alto ordenen cascada
Ventajas:
- SNR alto paramuy bajo M.
- Mejor estabil-idad
- Mejorespatrones deruido
- Inconvenientes:
- Circuiteríaanalógica y dig-ital más com-pleja
- Sensibilidad ala no linealidad
Multi-bit
26 Conceptos Básicos y Estado del Arte
Además, con excepción del modulador en [Yin94], todos los procesos de fabri-cación son CMOS. La tabla refleja también la tendencia actual de la reducción de lastensiones de polarización hasta 2V e inferiores [Au97][Gril96][Mats94][Pelu96]
[Gril96] 15.3 6 2 0.6 µm CMOS / 1.8V 2o Orden
[Pelu96] 12 6 0.1 0.7µm CMOS / 1.5V 2o Orden
[Send97] 14.3 20 0.55 0.5µm CMOS / 1.5V 2o Orden, doble muestreo
[Tan95a] 11 20 2 0.8µm CMOS / 3.3V SI, 2o Orden
[Tan95b] 10 15.6 0.78 0.8µm CMOS / 1.2V SI, 2o Orden
[Nys96] 19 0.8 1.35 2 µm CMOS / 5V 2o Orden, 3bits
[Saue95] 12 32 1 1.5µm CMOS / 2.3V 3er Orden
[Au97] 11.8 15.6 0.34 1.2µm CMOS / 1.95V 3er orden, realimentación local
[Kert94] 20 0.8 50 3 µm CMOS / 10V 4o Orden
[Zwan97] 15.7 40 2.3 0.8µm CMOS / 3.3V gm-C, 4o Orden
[Bair96] 13.7 500 58 1.2µm CMOS / 5V 4o Orden, 4bits
[Thom94] 20 0.984 45 2 µm CMOS / 10V 5o Orden (tri-level)
[Mino95] 11 200 94 0.8µm CMOS / 3V 7o Orden, Feedforward
[Leun97] 19.3 44 760 0.8µm CMOS / 5V 7o Orden, 3-level (cor-regido digitalmente)
[Yin93a] 15.7 320 65 1.2µm CMOS / 5V Cascada 2-1
[Will94] 17 50 47 1µm CMOS /5V Cascada 2-1
[Rabi96] 15 50 5.4 1.2 µm CMOS / 1.8V Cascada 2-1
[Bran91b] 12 2100 41 1µm CMOS / 5V Cascada 2-1, 3bit
[Yin94] 15.8 1500 180 2µm BiCMOS / 5V Cascada 2-1-1
[Fuji97] 18 48 500 0.7µm CMOS / 5V Cascada 2-2, tri-level
[Dedi94] 14.7 200 40 1.2µm CMOS /5V Cascada 2-2-2 (tri-level)
[Mats94] 9.4 384 1.56 0.5µm CMOS / 1V RC, swing-suppression
Tabla 1.2: Resumen de los convertidores A/D Σ∆ reportados en el periodo 1991-1997.
Ref. Bits DOR (kS/s)
Potencia (mW)
Proceso / Polarización Arquitectura
Estado del Arte en el diseño de convertidores A/D 27
[Saue95][Send97][Rabi96][Tan95b].
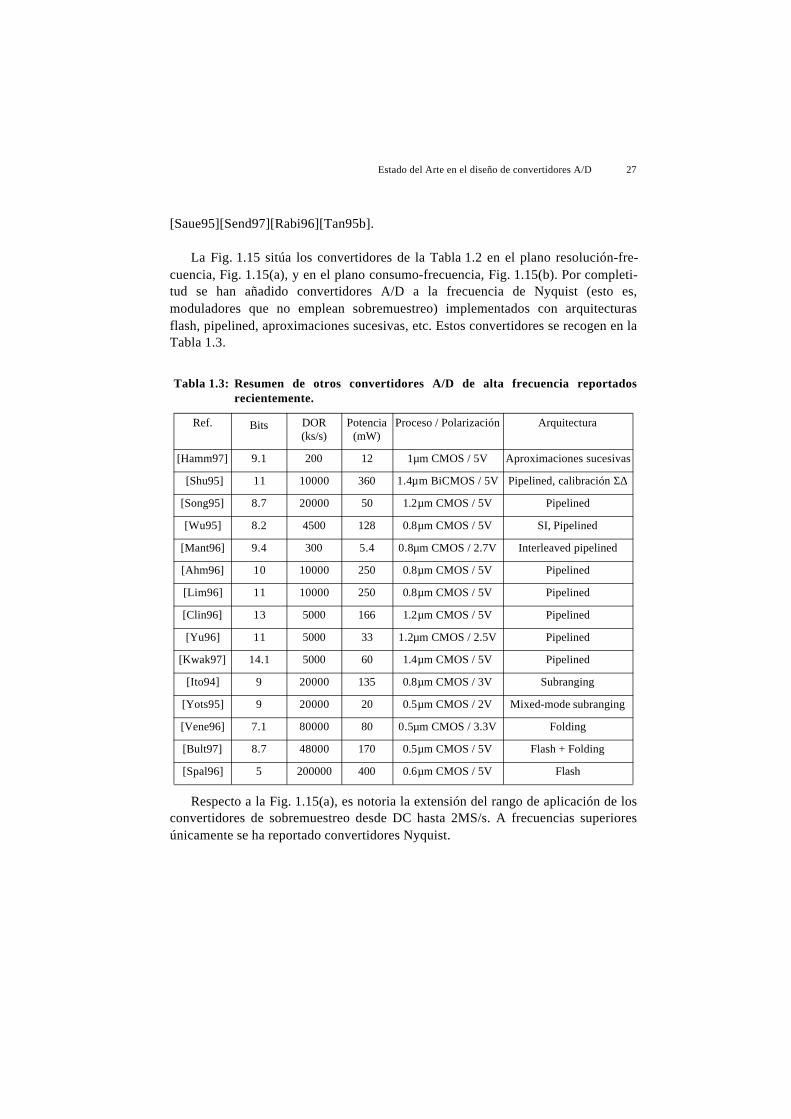
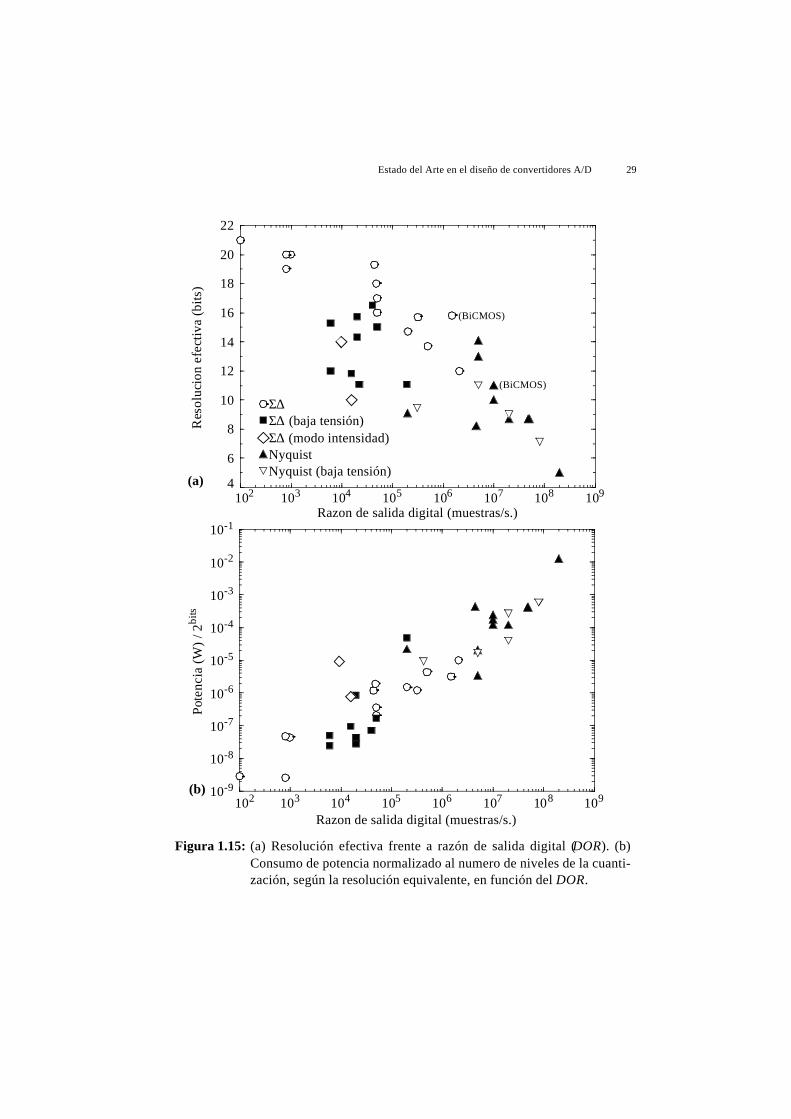
La Fig. 1.15 sitúa los convertidores de la Tabla 1.2 en el plano resolución-fre-cuencia, Fig. 1.15(a), y en el plano consumo-frecuencia, Fig. 1.15(b). Por completi-tud se han añadido convertidores A/D a la frecuencia de Nyquist (esto es,moduladores que no emplean sobremuestreo) implementados con arquitecturasflash, pipelined, aproximaciones sucesivas, etc. Estos convertidores se recogen en laTabla 1.3.
Respecto a la Fig. 1.15(a), es notoria la extensión del rango de aplicación de losconvertidores de sobremuestreo desde DC hasta 2MS/s. A frecuencias superioresúnicamente se ha reportado convertidores Nyquist.
Tabla 1.3: Resumen de otros convertidores A/D de alta frecuencia reportadosrecientemente.
Ref. Bits DOR (ks/s)
Potencia (mW)
Proceso / Polarización Arquitectura
[Hamm97] 9.1 200 12 1µm CMOS / 5V Aproximaciones sucesivas
[Shu95] 11 10000 360 1.4µm BiCMOS / 5V Pipelined, calibración Σ∆
[Song95] 8.7 20000 50 1.2µm CMOS / 5V Pipelined
[Wu95] 8.2 4500 128 0.8µm CMOS / 5V SI, Pipelined
[Mant96] 9.4 300 5.4 0.8µm CMOS / 2.7V Interleaved pipelined
[Ahm96] 10 10000 250 0.8µm CMOS / 5V Pipelined
[Lim96] 11 10000 250 0.8µm CMOS / 5V Pipelined
[Clin96] 13 5000 166 1.2µm CMOS / 5V Pipelined
[Yu96] 11 5000 33 1.2µm CMOS / 2.5V Pipelined
[Kwak97] 14.1 5000 60 1.4µm CMOS / 5V Pipelined
[Ito94] 9 20000 135 0.8µm CMOS / 3V Subranging
[Yots95] 9 20000 20 0.5µm CMOS / 2V Mixed-mode subranging
[Vene96] 7.1 80000 80 0.5µm CMOS / 3.3V Folding
[Bult97] 8.7 48000 170 0.5µm CMOS / 5V Flash + Folding
[Spal96] 5 200000 400 0.6µm CMOS / 5V Flash

28 Conceptos Básicos y Estado del Arte
Estado del Arte en el diseño de convertidores A/D 29
102 103 104 105 106 107 108 109
Razon de salida digital (muestras/s.)
10-9
10-8
10-7
10-6
10-5
10-4
10-3
10-2
10-1
Pote
ncia
(W
) / 2
bits
102 103 104 105 106 107 108 109
Razon de salida digital (muestras/s.)
4
6
8
10
12
14
16
18
20
22
Res
oluc
ion
efec
tiva
(bits
)
Σ∆Σ∆ (baja tensión)Σ∆ (modo intensidad)NyquistNyquist (baja tensión)
Figura 1.15: (a) Resolución efectiva frente a razón de salida digital (DOR). (b)Consumo de potencia normalizado al numero de niveles de la cuanti-zación, según la resolución equivalente, en función del DOR.
(BiCMOS)
(BiCMOS)
(a)
(b)
30 Conceptos Básicos y Estado del Arte
La Fig. 1.15(b) muestra el consumo de potencia normalizado al número de nive-les que tendría un cuantizador con el mismo número de bits equivalentes ( ), elcual, en promedio, crece con la frecuencia de Nyquist del convertidor[Malo95][Nys93]. Nótese que los moduladores SI disipan mayor potencia normal-izada que los moduladores SC en el mismo rango de frecuencias. Por otro lado, elconsumo de potencia resulta menor en los moduladores con baja tensión de polariza-ción, los cuales se concentran en el rango de audio: aunque en general presentanmenor resolución que sus equivalentes a 5V (Fig. 1.15(a)), la reducción de las ten-siones de polarización y el empleo de circuitos específicos para baja potencia[Rodr95] permiten reducir significativamente el consumo.
1.4.1 Evaluación comparativa de los moduladores Σ∆ reportados
Recientemente se ha propuesto el uso de una figura de mérito (FOM) para laevaluación comparativa de circuitos integrados para la conversión de datos. La for-mulación original del FOM [Good96] puede adaptarse al caso de moduladores Σ∆como sigue,
(1.28)
donde es la resolución efectiva del modulador y DOR es su razón de sal-ida digital, que coincide con el doble del ancho de banda de la señal . El resultado(en picojulios) es la energía necesaria por conversión. La potencia en (1.28) es elconsumo de potencia del modulador. En la mayoría de los trabajos reportados no seimplementa la parte digital del modulador, de modo que no hay apenas datos sobre elconsumo de potencia del filtro digital que acompaña al modulador en un convertidorcompleto. Una estimación de tal consumo de potencia resulta compleja: si bien escierto que la cantidad de circuitería digital necesaria en un modulador de alto ordeny/o multibit es mayor que en una arquitectura más sencilla, también lo es que aquel-los requieren menor frecuencia de muestreo para obtener las mismas especifica-ciones. Ambos efectos pueden, groso modo, compensarse, de manera que es posibleevaluar comparativamente arquitecturas de moduladores dispares sin considerar elconsumo de potencia del filtro digital†1.
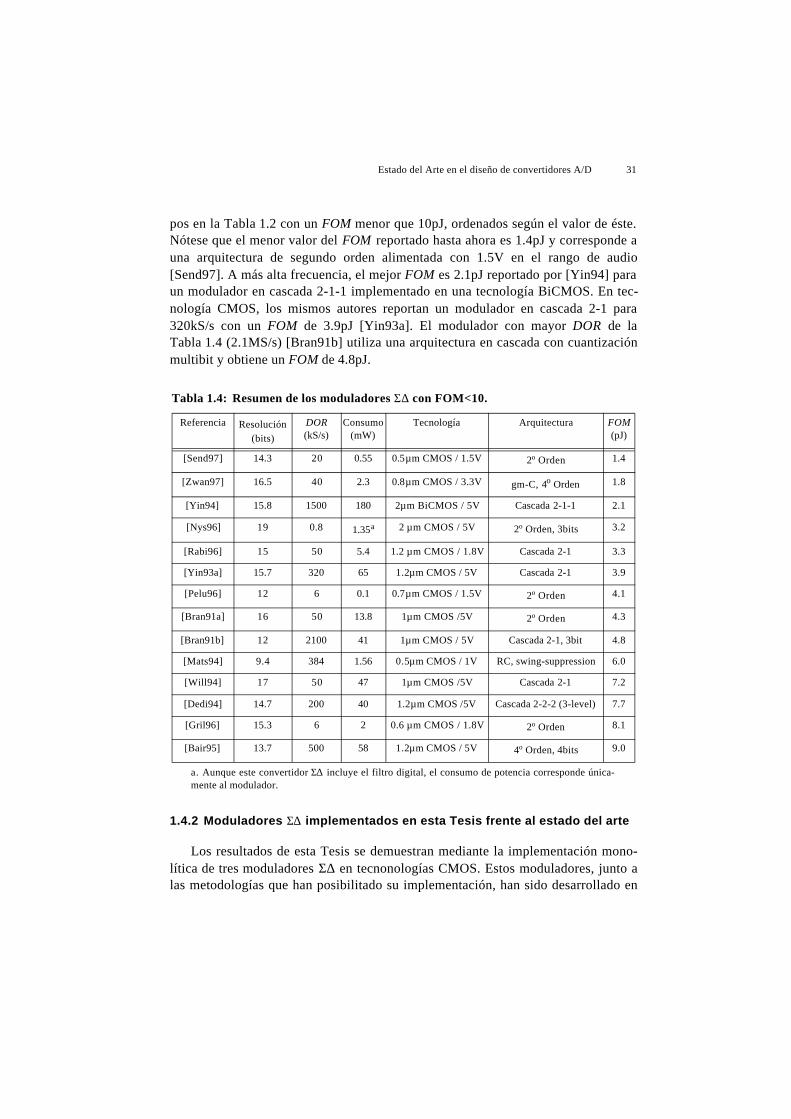
El objetivo de reducción del consumo de potencia se traduce en la minimizacióndel FOM. A modo de referencia, la Tabla 1.4 muestra el subconjunto de los prototi-
1. Sin embargo el consumo de la parte digital debe tenerse en cuenta para comparar realísticamente con-vertidores AD Σ∆ y convertidores A/D a la frecuencia de Nyquist [Good96].
2bits
FOM Potencia W ( )2resolución bit( ) DOR (S/s)×------------------------------------------------------------------- 1012×=
resoluciónfd
Estado del Arte en el diseño de convertidores A/D 31
pos en la Tabla 1.2 con un FOM menor que 10pJ, ordenados según el valor de éste.Nótese que el menor valor del FOM reportado hasta ahora es 1.4pJ y corresponde auna arquitectura de segundo orden alimentada con 1.5V en el rango de audio[Send97]. A más alta frecuencia, el mejor FOM es 2.1pJ reportado por [Yin94] paraun modulador en cascada 2-1-1 implementado en una tecnología BiCMOS. En tec-nología CMOS, los mismos autores reportan un modulador en cascada 2-1 para320kS/s con un FOM de 3.9pJ [Yin93a]. El modulador con mayor DOR de laTabla 1.4 (2.1MS/s) [Bran91b] utiliza una arquitectura en cascada con cuantizaciónmultibit y obtiene un FOM de 4.8pJ.
1.4.2 Moduladores Σ∆ implementados en esta Tesis frente al estado del arte
Los resultados de esta Tesis se demuestran mediante la implementación mono-lítica de tres moduladores Σ∆ en tecnonologías CMOS. Estos moduladores, junto alas metodologías que han posibilitado su implementación, han sido desarrollado en
Tabla 1.4: Resumen de los moduladores Σ∆ con FOM<10.
Referencia Resolución (bits)
DOR(kS/s)
Consumo (mW)
Tecnología Arquitectura FOM (pJ)
[Send97] 14.3 20 0.55 0.5µm CMOS / 1.5V 2o Orden 1.4
[Zwan97] 16.5 40 2.3 0.8µm CMOS / 3.3V gm-C, 4o Orden 1.8
[Yin94] 15.8 1500 180 2µm BiCMOS / 5V Cascada 2-1-1 2.1
[Nys96] 19 0.8 1.35a
a. Aunque este convertidor Σ∆ incluye el filtro digital, el consumo de potencia corresponde única-mente al modulador.
2 µm CMOS / 5V 2o Orden, 3bits 3.2
[Rabi96] 15 50 5.4 1.2 µm CMOS / 1.8V Cascada 2-1 3.3
[Yin93a] 15.7 320 65 1.2µm CMOS / 5V Cascada 2-1 3.9
[Pelu96] 12 6 0.1 0.7µm CMOS / 1.5V 2o Orden 4.1
[Bran91a] 16 50 13.8 1µm CMOS /5V 2o Orden 4.3
[Bran91b] 12 2100 41 1µm CMOS / 5V Cascada 2-1, 3bit 4.8
[Mats94] 9.4 384 1.56 0.5µm CMOS / 1V RC, swing-suppression 6.0
[Will94] 17 50 47 1µm CMOS /5V Cascada 2-1 7.2
[Dedi94] 14.7 200 40 1.2µm CMOS /5V Cascada 2-2-2 (3-level) 7.7
[Gril96] 15.3 6 2 0.6 µm CMOS / 1.8V 2o Orden 8.1
[Bair95] 13.7 500 58 1.2µm CMOS / 5V 4o Orden, 4bits 9.0
32 Conceptos Básicos y Estado del Arte
el marco de dos proyectos CEE-ESPRIT: #5056 (AD2000) y #8795 (AMFIS) dedi-cados a la investigación básica sobre convertidores de datos de alta resolución entecnologías CMOS standard y desarrollo de metodologías de diseño (AD2000) y a suaplicación a proyectos industriales específicos de diversa índole (AMFIS). En partic-ular, dos de los moduladores que se presentan en esta Tesis están directamente rela-cionados con dos de las aplicaciones industriales en AMFIS.
El modulador Σ∆ de segundo orden, descrito en el Capítulo 4, fue diseñado comoparte de un “front-end” para la medición de energía en una línea de suministro eléc-trico. Los resultados experimentales muestran que el prototipo tiene una resoluciónefectiva de 16.4bits para DOR = 9.6kS/s, que es más que suficiente para los requir-imientos del medidor de energía. Además, el consumo de potencia del modulador esde sólo 1.71mW operando a 5V y a la frecuencia de reloj nominal (2.5MHz). Estasprestaciones resultan en un FOM de 2pJ, lo cual sitúa a este modulador entre losprimeros de la Tabla 1.4, tan sólo superado por dos moduladores muy recientes, pos-teriores a los prototipos que se presentan en esta Tesis, que operan con baja tensiónde polarización [Send97][Zwan97].
El modulador Σ∆ de cuarto orden con cuantización multibit descrito en elCapítulo 6 fue diseñado para un sistema ADSL de comunicación de alta velocidadsobre cable de cobre [ZCha95] que precisa 12bits de resolución efectiva a 2.2MS/s.El uso de una arquitectura de alto orden en cascada 2-1-1 y cuantización dual de unbit y 3bits ha permitido reducir la razón de sobremuestreo a tan sólo 16 (35.7MHz defrecuencia de muestreo). Aunque el prototipo fue diseñado para obtener 13bits a2.2MS/s, las imperfeciones del “set-up” de test no han permitido medir más de12bits, debido principalmente a la presencia de ruido de conmutación en la líneasanalógicas. Sin embargo, dicha resolución (13bits) se obtiene cuando la frecuenciade reloj se baja hasta 22MHz ya que entonces el ruido de conmutación no es limi-tante. Tomando como buena, pues, la resolución de 13bits, el consumo de potenciadel modulador (55mW) resulta en un FOM de 3.1pJ; esto es, 1.7pJ menor que elmodulador, similar en cuanto a prestaciones, en [Bran91b] .
Por último, el modulador Σ∆ de cuarto orden descrito en el Capítulo 5 fue dis-eñado en el seno del Projecto AD2000. Las especificaciones iniciales 17bits a 40kS/sfueron cubiertas con una arquitectura de cuarto orden en cascada 2-2, cuyo diseño,con el fin de evaluar la adecuación de los modelos y metodologias desarrollados, serealizó de modo que la resolución que cabía esperar era exactamente la especificada.Los resultados experimentales muestran un resolución efectiva de 16.7bits a 40kS/scon un consumo de potencia de 10mW (a 5V y 5.12MHz de frecuencia de muestreo).Estas prestaciones se traducen en un FOM de 2.3pJ, tan sólo 0.5pJ mayor que el delmodulador, similar en prestaciones, en [Zwan97], reportado con posterioridad.

Resumen 33
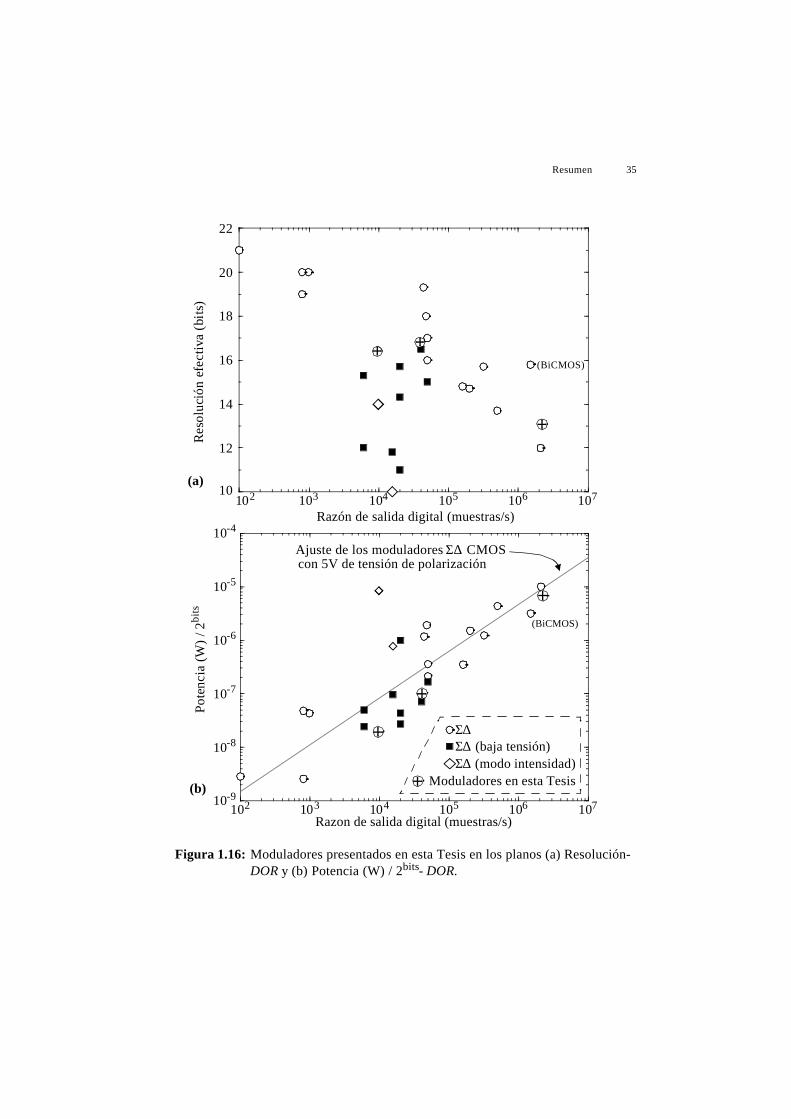
En la Fig. 1.16 se sitúa a estos tres moduladores en los planos resolución-fre-cuencia, Fig. 1.16(a), y consumo-frecuencia, Fig. 1.16(b), junto a los restantes mod-uladores Σ∆ de la Tabla 1.2. Respecto al primero, es destacable la posición delmodulador en cascada 2-1-1 multi-bit para ADSL, pues se trata del modulador Σ∆con mayor razón de salida digital (2.2MS/s) reportado hasta ahora. Por otro lado,obsérvese que los tres moduladores aparecen en el plano consumo-frecuencia pordebajo de la recta de mejor ajuste correspondiente a los moduladores Σ∆ SC CMOScon 5V de polarización de la Tabla 1.2.
1.5 Resumen
En este Capítulo se han introducido las técnicas de modulación Σ∆ para la con-versión A/D y los conceptos básicos relacionados: sobremuestreo, ruido de cuantiza-ción, relación señal-ruido, rango dinámico, resolución equivalente, etc. En estecontexto, al igual que en el resto de esta Tesis, se ha prestado especial interés al mod-ulador, puesto que es en este bloque donde se generan los mecanismos de error que,en mayor medida, degradan las prestaciones del convertidor.
En particular, este Capítulo se ha centrado en el análisis de uno de los mecanis-mos de error presentes en cualquier arquitectura de modulador Σ∆: el ruido de cuan-tización. La incidencia de este error, que podríamos llamar ideal , puesto que esinherente al proceso de cuantización, es atenuada en los moduladores Σ∆ mediante eluso combinado de la técnica de sobremuestreo y la técnica de “noise shaping”. Estaúltima permite filtrar el ruido de cuantización de forma que la mayor parte de supotencia queda fuera de la banda de la señal. El filtrado es tanto más eficiente cuantomayor sea la frecuencia de muestreo en comparación con la frecuencia de Nyquist dela señal (razón de sobremuestreo) o cuanto mayor sea el orden del modulador.
Desde este punto de vista, se han analizado las arquitecturas básicas de modula-dores Σ∆: de primer orden y de segundo orden. Además, se han resumido las car-acterística de otras arquitecturas de moduladores Σ∆ más complejas: moduladores dealto orden de lazo único e interpolativos, moduladores en cascada y moduladores concuantización multibit, alguna de las cuales serán utilizadas en el diseño de modula-dores en esta Tesis. Para todas ellas se han resaltado las ventajas e inconvenientes enfunción de su rango dinámico, tendencia a la inestabilidad, generación de patronesde ruido y sensibilidad a no idealidades de la circuitería.

34 Conceptos Básicos y Estado del Arte
Resumen 35
Figura 1.16: Moduladores presentados en esta Tesis en los planos (a) Resolución-DOR y (b) Potencia (W) / 2bits- DOR.
Pote
ncia
(W
) / 2
bits
102 103 104 105 106 107
Razon de salida digital (muestras/s)
10-9
10-8
10-7
10-6
10-5
10-4
102 103 104 105 106 10710
12
14
16
18
20
22
Razón de salida digital (muestras/s)
Res
oluc
ión
efec
tiva
(bit
s)
Σ∆Σ∆ (baja tensión)Σ∆ (modo intensidad)
Moduladores en esta Tesis
Ajuste de los moduladores Σ∆ CMOScon 5V de tensión de polarización
(BiCMOS)
(BiCMOS)
(a)
(b)
36 Conceptos Básicos y Estado del Arte
Se ha realizado una recopilación de los circuitos integrados reportados en la bib-liografía que definen el Estado del Arte del diseño de moduladores Σ∆. La eficaciade estos diseños se ha evaluado mediante una figura de mérito (FOM) que combinala resolución y la razón de salida digital con el consumo de potencia. Los resultadosmuestran que sólo se han reportado 14 moduladores con un FOM menor que 10pJ enel periodo 1991-1997.
Por último, los moduladores Σ∆ diseñados en esta Tesis se han ubicado en elEstado del Arte. Con ello se ha comprobado que las técnicas de optimizaciónempleadas para su diseño generan moduladores Σ∆ con bajo FOM; esto es, con con-sumos de potencia ajustados en función de las especificaciones.