Factores de seguridad y diseño - eva.fing.edu.uy · • FRETTING (2 metales son mantenidos en...
72
Módulo 5 Factores de seguridad y diseño
Transcript of Factores de seguridad y diseño - eva.fing.edu.uy · • FRETTING (2 metales son mantenidos en...

Módulo
5
Factores de seguridad y diseño

Hace algunos años, un recipiente a presión que contenía agua y aire estaba operando a un presión mucho más alta de la que su diseño permitía. Luego de años a mucha presión, apareció una pequeña fuga. La misma fue detectada y reparada mediante soldadura, pero, un mes después, dicha reparación, la cual no fue hecha según normas, falló, causando que el recipiente rompa y vuele por los aires. Partes de metal que pesaban más de 500 Kg viajaron a velocidades extremadamente altas hasta una distancia de casi 1 Km cayendo sobre carreteras y vías de tren cercanas. Una gran parte de la planta fue destruida, medio estado quedó sin luz ni teléfono y tres operarios murieron. Si el contenido hubiera sido inflamable hubiera habido además una gran explosión, haciendo que el accidente hubiera sido mucho más devastador

Un factor de seguridad fue originalmente un número por el cual la resistencia última a la tracción de un material se dividía de forma de obtener un valor de «esfuerzo de trabajo» o «esfuerzo de diseño». Dicho esfuerzo de diseño, era usualmente utilizado en cálculos bastante simplificados que no dejaban margen para otros factores tales como concentradores de esfuerzos, impacto, fatiga, diferencias entre las propiedades del material en el ensayo estándar del especimen y la parte manufacturada, etc. Como resultado, todavía se pueden encontrar en los manuales recomendaciones para factores de seguridad de 20 o 30. La ingeniería moderna del diseño proporciona datos para todos los factores posibles, dejando relativamente pocos items con incertidumbre para ser cubiertos por un factor de seguridad, el cual estará comunmente entre 1.25 y 4
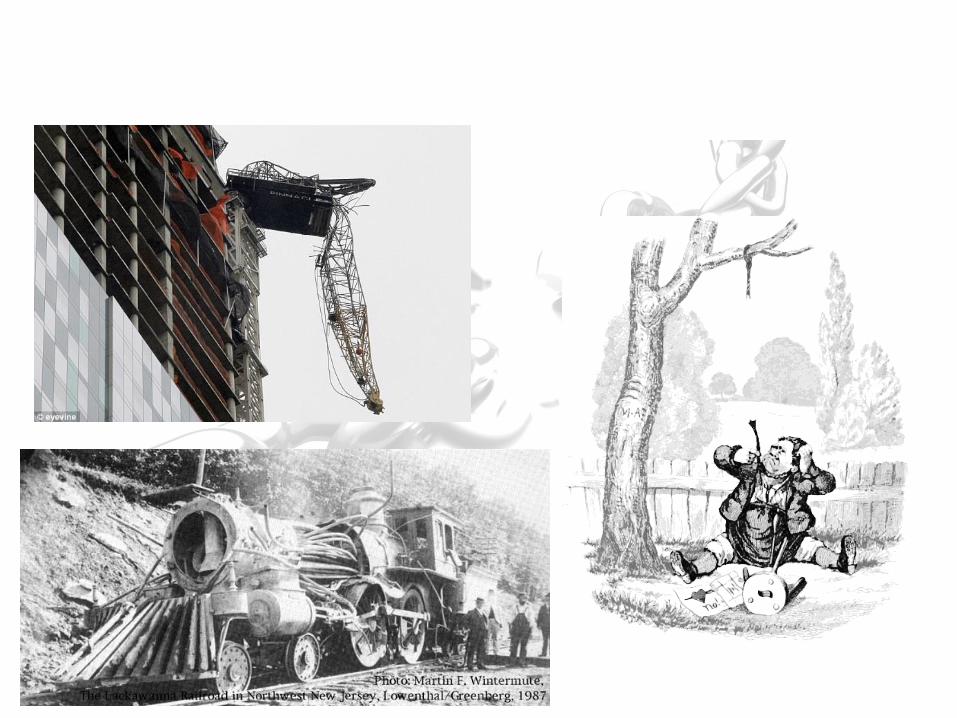
Two concepts of safety factor for a buckling column.
Factores de seguridad, concepto y definición
Después de ir tan lejos como es práctico en la determinación de la resistencia significativa de la parte real fabricada y de los detalles de la carga a la cual se sujetará, siempre queda algún margen de incertidumbre que debe cubrirse con un factor de seguridad. La parte debe diseñarse para soportar una ‘sobrecarga de diseño” algo mas grande que la carga normalmente esperada. La selección de un valor apropiado para el factor de seguridad se basa principalmente en los cinco factores siguientes:
1.Grado de incertidumbre de la carga 2. Grado de incertidumbre en la resistencia del material 3. Incertidumbres en relación con las cargas aplicadas con respecto a la resistencia del material 4. Consecuencias de la falla 5. Costo de un FS elevado

Recomendaciones para seleccionar FS:
1. N= 1.25 a 1.5 para materiales excepcionalmente confiables que se usan bajo condiciones controladas y sujetos a cargas y esfuerzos que puede determinarse con certeza; usados en forma casi invariable donde el bajo peso es una consideración particularmente importante. 2. N = 1.5 a 2 para materiales bien conocidos, bajo condiciones razonablemente constantes del ambiente, sujetos a cargas y esfuerzos que pueden determinarse fácilmente. 3. N = 2 a 2.5 para materiales promedio que operan en ambientes comunes y sujetos a cargas y esfuerzos que pueden determinarse. 4. N = 2.5 a 3 para materiales frágiles o para los que no han sido examinados bajo condiciones promedio del ambiente, carga y esfuerzo. 5. N = 3 a 4 para materiales que no se han examinado y que se han usado bajo condiciones promedio de ambiente, carga y esfuerzo. 6. N = 3 a 4 debe usarse también con materiales mejor conocidos que se usarán en medios inciertos o estarán sometidos a esfuerzos indeterminados. 7. Cargas repetidas: los factores establecidos en los puntos 1 a 6 son aceptables, pero se deben aplicar a la resistencia a la fatiga y no a la resistencia a la fluencia.

Módulo
6
Criterios de falla
ANÁLISIS DE FALLAS
CLASIFICACIÓN: 3 CATEGORÍAS
1. MANIFESTACIÓN (FORMA DE PRESENTARSE)
2. AGENTE CAUSANTE
3. LOCALIZACIÓN

2. FACTORES
2.1 CARGAS (FUERZAS O MOMENTOS):
• ESTÁTICAS
• TRANSITORIAS
• CÍCLICAS
• ALEATORIAS
1. MANIFESTACIÓN DE LA FALLA
1.1 DEFORMACIÓN ELÁSTICA
1.2 DEFORMACIÓN PLÁSTICA
1.3 RUPTURA (FRACTURA)
1.4 CAMBIO DE MATERIAL: Metalúrgico, químico o atómico

2.2 TIEMPO
• MUY CORTO
• CORTO
• LARGO
2.3 TEMPERATURA
• BAJA
• AMBIENTE
• ELEVADA
• ESTACIONARIA
• TRANSITORIA
• CÍCLICA O ALEATORIA

2.4 AMBIENTE ACTIVO (AGRESIVO)
• QUÍMICO
• NUCLEAR
3. LOCALIZACIÓN DE LA FALLA
3.1 CUERPO
3.2 SUPERFICIE
MODOS DE FALLA OBSERVADOS EN LA PRÁCTICA
1. DEFORMACIÓN ELÁSTICA
2. FLUENCIA
3. BRINELLING (cargas excesiva o de impacto en cojinetes inmóviles. Es una
forma de daño mecánico en la cual el metal se desplaza sin desgaste)
4. RUPTURA DÚCTIL
5. RUPTURA FRÁGIL
6. FATIGA
• MUCHOS CICLOS (>10000)
• BAJOS CICLOS (< 1000)
• TÉRMICA
• POR IMPACTO
• SUPERFICIAL Y CORROSIÓN
• FRETTING (2 metales son mantenidos en contacto y sujetos a una repetición de
deslizamientos cortos con movimientos relativos)

7. CORROSIÓN
• ATAQUE QUÍMICO DIRECTO
• GALVÁNICA
• CREEVICE
• PITTING
• INTERGRANULAR
• POR EROSIÓN
• POR CAVITACIÓN
• DAÑO POR HIDRÓGENO
• BIOLÓGICA
• POR ESFUERZOS
8. IMPACTO
• FRACTURA
• DEFORMACIÓN
• DESGASTE
• FRETTING
• FATIGA

9. DESGASTE
• ADHESIVO
• ABRASIVO
• CORROSIVO
• FATIGA SUPERFICIAL
• POR DEFORMACIÓN (FATIGA REPETIDA)
• POR IMPACTO
10.FRETTING
• FATIGA
• DESGASTE
• CORROSIÓN
11.CREEP
12.RELAX TÉRMICO
13.RUPTURA POR ESFUERZO
14.CHOQUE TÉRMICO
15.GALLING (Forma de desgaste en la cual ocurre un
cizallamiento ó disminución de la superficie)
16.SPALLING –ocurre en puntos con elevados esfuerzos de
contacto, por ej. En rodamientos de bolillas. Spalling se produce con preferencia durante el brinelling donde el esfuerzo cortante máximo ocurre justo debajo de la superficie (son como pedazos del material que rompen de un cuerpo mas grande y pueden ser producidos por una variedad de mecanismos; impacto, corrosión, cavitación, o presión excesiva de rodadura.
17.DAÑO POR RADIACIÓN
18.PANDEO (INESTABILIDAD ELÁSTICA)
19.PANDEO POR CREEP
20.CORROSIÓN POR ESFUERZO
21.DESGASTE y FATIGA POR CORROSIÓN
Hasta ahora se ha tratado la determinación de cargas, esfuerzos y deflexiones como resultado de esas cargas y la capacidad de los materiales para resistir las pruebas estándar de cargas. Ahora se estudiará:
1. La predicción de la capacidad de los materiales para
soportar diferentes combinaciones de cargas(estáticas). 2. La selección de factores de seguridad adecuados para
proporcionar la seguridad y confiabilidad requeridas.
Es muy importante que las partes no se sobrediseñen al punto de hacerlas innecesariamente costosas, voluminosas, etc., o se desperdicien recursos.

La falla de un elemento sobre el que actúa una fuerza es cualquier comportamiento que lo vuelve inadecuado para la función a que fue diseñado.
Tipos de fallas (estáticas):
Básicamente dos categorías: Distorsión, o deformación plástica. Esta falla ocurre cuando la deformación plástica alcanza algún límite establecido (usualmente un 0.2% más allá de la fluencia) Fractura, que es la separación o fragmentación del miembro en 2 o más partes.

Las distorsiones están usualmente asociadas con esfuerzos cortantes. Los átomos deslizan unos sobre otros afectando la continuidad del material.

Se hacen dos importantes observaciones a este modelo simplificado:
1. El deslizamiento, o deformación plástica es irreversible,
vale decir que no es recuperable si se alivian las cargas aplicadas. Esto es debido a que no hay tendencia a retroceder a arreglos de espaciamientos atómicos más cercanos (como en la deformación elástica)
2. No hay cambios de volumen durante la deformación plástica
La FRACTURA puede ser frágil o dúctil.
Mecánica de las fracturas
El estudio de la mecánica de las fracturas principia con la suposición de que todos los materiales reales contienen grietas de algún tamaño, aún cuando sean de tamaño microscópico. Si hay fractura frágil, se debe a que las condiciones de carga y del medio ambiente (principalmente la temperatura) son tales que ocasionan una propagación casi instantánea hasta provocar la falla de una o mas de las grietas originales. En forma teórica, el factor de concentración de esfuerzos en la base de una grieta se acerca al infinito debido a que el radio en la raíz de la grieta se aproxima a cero. Esto significa que si el material es dúctil, la fluencia se presentará dentro de un pequeño volumen de material en la base de la grieta, provocando redistribuciones del esfuerzo. Por lo tanto, el factor efectivo de la concentración de esfuerzo es considerablemente menor que infinito y, además varía con la intensidad del esfuerzo nominal aplicado.

Factor K de intensidad de esfuerzo: medida del esfuerzo local efectivo en el fondo de la grieta. Una vez que se ha evaluado, K se compara con un valor límite de K que es necesario para la propagación de la grieta en ese material. Este valor límite es una característica del material, llamado tenacidad a la fractura o factor de intensidad crítica del esfuerzo KC , que se determina mediante pruebas estándar.
Los valores mas conocidos de K y Kc son para las cargas a la tensión, la cual se llama Modo I. Los valores se designan entonces como KI y KIc .Los modos II y III implican carga por cortante.

Fisuras en placas delgadas
Aplicaciones
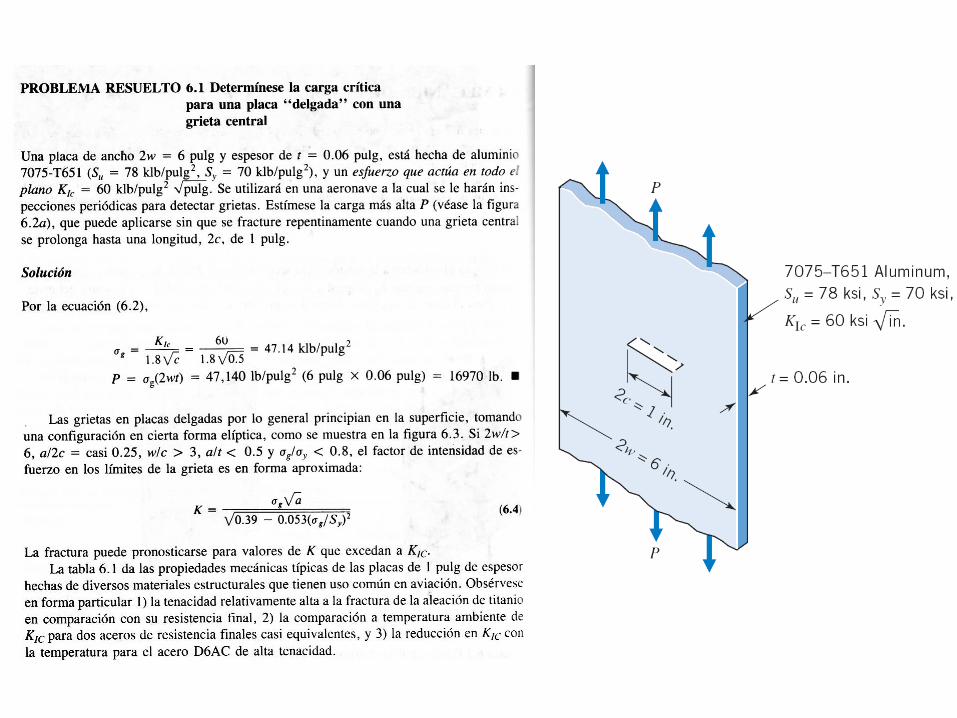
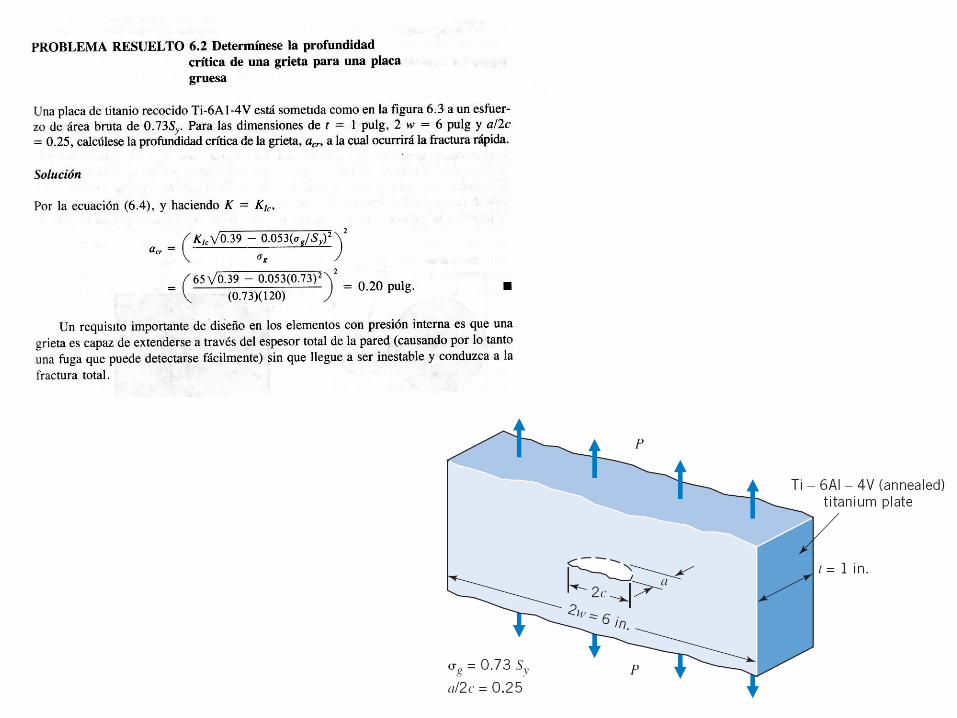
Si la longitud de la grieta es una pequeña fracción del ancho de la placa, y si el esfuerzo P/A evaluado con base en el área neta, t(2w – 2c), es menor que la resistencia a la fluencia, entonces el factor de intensidad de esfuerzo en los límites de la grieta es aproximadamente: KI = (1.8√c)g , donde g = P/2wt.
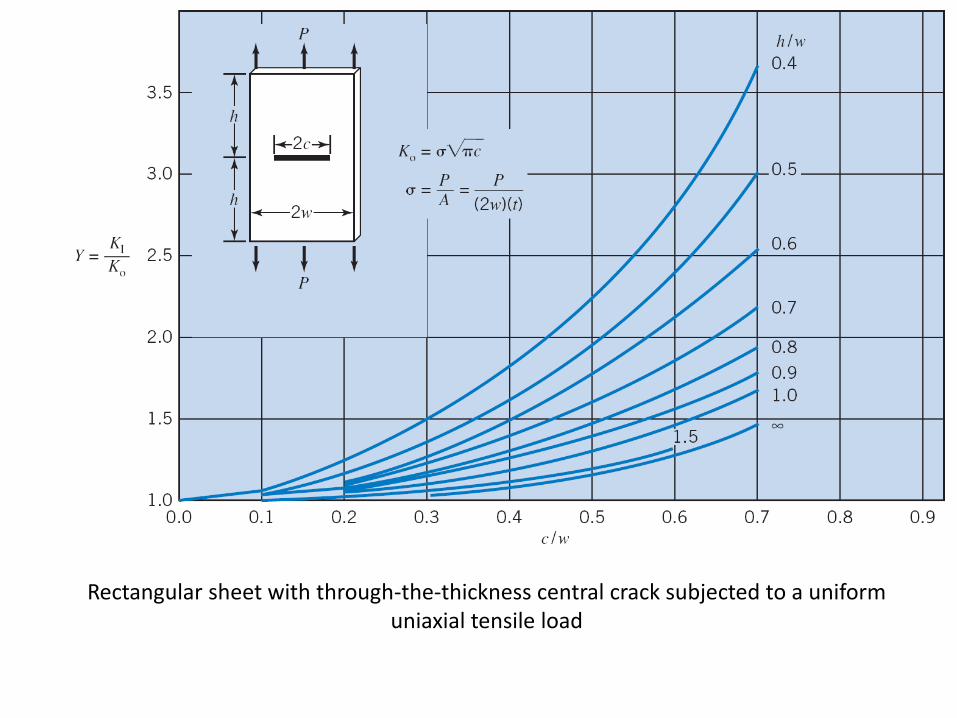
Rectangular sheet with through-the-thickness central crack subjected to a uniform uniaxial tensile load

Rectangular sheet with a central circular hole and two cracks subjected to a uniform uniaxial tensile load

Rectangular sheet with an edge crack subjected to a uniform uniaxial tensile load
acting perpendicular to the direction of the crack with and without bending
constraints

Rectangular sheet with edge crack subjected to splitting forces
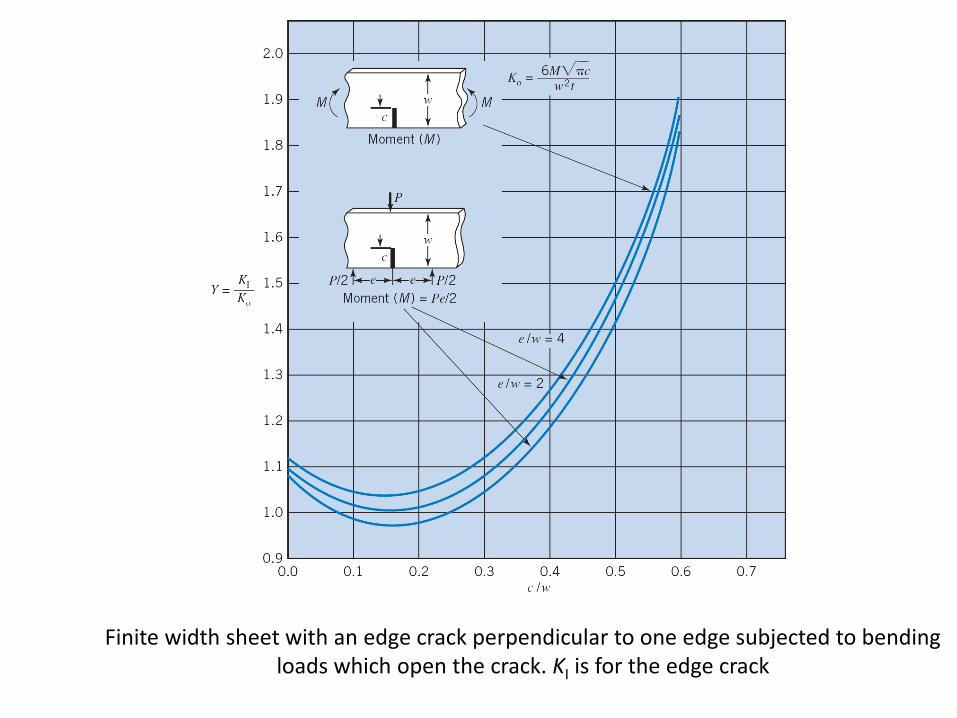
Finite width sheet with an edge crack perpendicular to one edge subjected to bending loads which open the crack. KI is for the edge crack
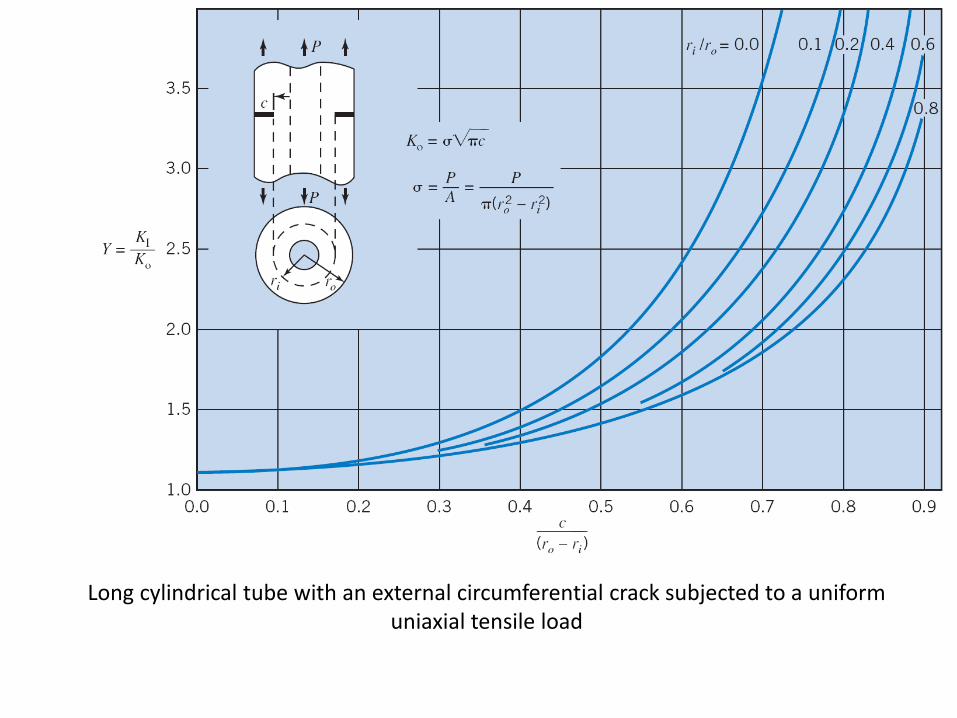
Long cylindrical tube with an external circumferential crack subjected to a uniform uniaxial tensile load

Long cylindrical tube with an external radial edge crack extending from the external
boundary subjected to a uniform internal pressure. KI is for the edge crack

Slab with a plane semi-elliptical surface crack subjected to a uniform uniaxial tensile load. KI is for point A on the semi-elliptical edge crack

Teorías de fallas estáticas
Los ingenieros involucrados con el diseño y el desarrollo de
partes de máquinas se confrontan usualmente con problemas
que involucran esfuerzos biaxiales (ocasionalmente triaxiales)
que cubren un rango casi infinito de relaciones entre los
esfuerzos principales. Los datos disponibles de resistencia
usualmente tienen que ver con esfuerzos uniaxiales, y más
particularmente con tracción uniaxial (a veces existen datos
de resistencias torsionales aunque dichos valores son difíciles
de obtener).
Como resultado de esto, nos preguntamos: Si un material
puede soportar un esfuerzo conocido de tensión uniaxial,
¿cuanto podrá ser sometido con “seguridad” a casos
específicos que involucran esfuerzos biaxiales (o triaxiales)?
La respuesta a esta pregunta: debe aplicarse una “teoría de fallas”. La filosofía que ha sido utilizada en la formulación y la aplicación de este tipo de teorías consta de dos partes:
1. Una teoría se postula para explicar la falla de un espécimen de ensayo estándar.
Considere el caso que involucra un espécimen de tracción, sometido a fluencia inicial. Se puede inferir que dicha fluencia a la tracción ocurre como resultado de exceder la capacidad que tiene el material en alguno de los siguientes aspectos:
a) Capacidad de soportar esfuerzo normal b) Capacidad de soportar esfuerzo de corte c) Capacidad de soportar deformación normal d) Capacidad de soportar deformación normal e) Capacidad de soportar energía de deformación f) Capacidad de absorber energía de distorsión

2. El resultado de los ensayos estándar son usados para establecer las capacidades elegidas. De aquí que, si por ej. el ensayo estándar de tracción indica una resistencia a la fluencia de 100ksi , podremos asumir que la fluencia ocurrirá siempre en este material bajo cualquier combinación de cargas estáticas que sean el resultado de algunas de las siguientes:
• Un esfuerzo normal mayor que el del especimen (100ksi) • Un esfuerzo cortante máximo mayor que el del espécimen (50ksi) • Una deformación normal mayor que la del espécimen, etc
En otras palabras, se asume, en las teorías simples de
fallas clásicas; que la misma cantidad de lo que sea que cause que el espécimen de ensayo falle, causará que cualquier parte del material lo haga, independientemente del estado de esfuerzo involucrado.
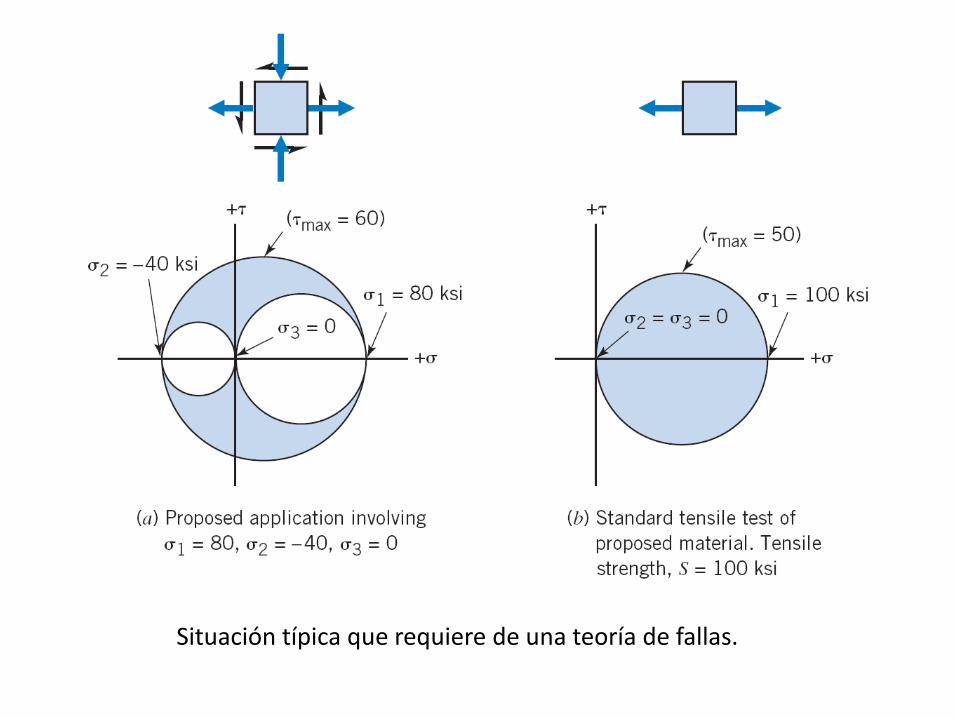
Situación típica que requiere de una teoría de fallas.
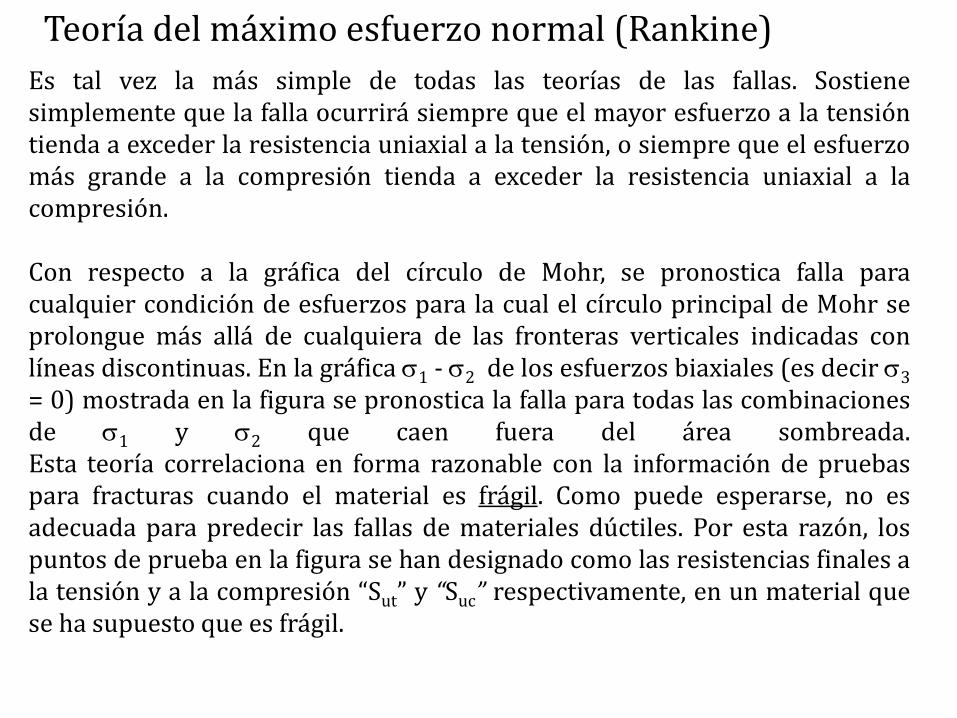
Teoría del máximo esfuerzo normal (Rankine)
Es tal vez la más simple de todas las teorías de las fallas. Sostiene simplemente que la falla ocurrirá siempre que el mayor esfuerzo a la tensión tienda a exceder la resistencia uniaxial a la tensión, o siempre que el esfuerzo más grande a la compresión tienda a exceder la resistencia uniaxial a la compresión. Con respecto a la gráfica del círculo de Mohr, se pronostica falla para cualquier condición de esfuerzos para la cual el círculo principal de Mohr se prolongue más allá de cualquiera de las fronteras verticales indicadas con líneas discontinuas. En la gráfica 1 - 2 de los esfuerzos biaxiales (es decir 3 = 0) mostrada en la figura se pronostica la falla para todas las combinaciones de 1 y 2 que caen fuera del área sombreada. Esta teoría correlaciona en forma razonable con la información de pruebas para fracturas cuando el material es frágil. Como puede esperarse, no es adecuada para predecir las fallas de materiales dúctiles. Por esta razón, los puntos de prueba en la figura se han designado como las resistencias finales a la tensión y a la compresión “Sut” y “Suc” respectivamente, en un material que se ha supuesto que es frágil.

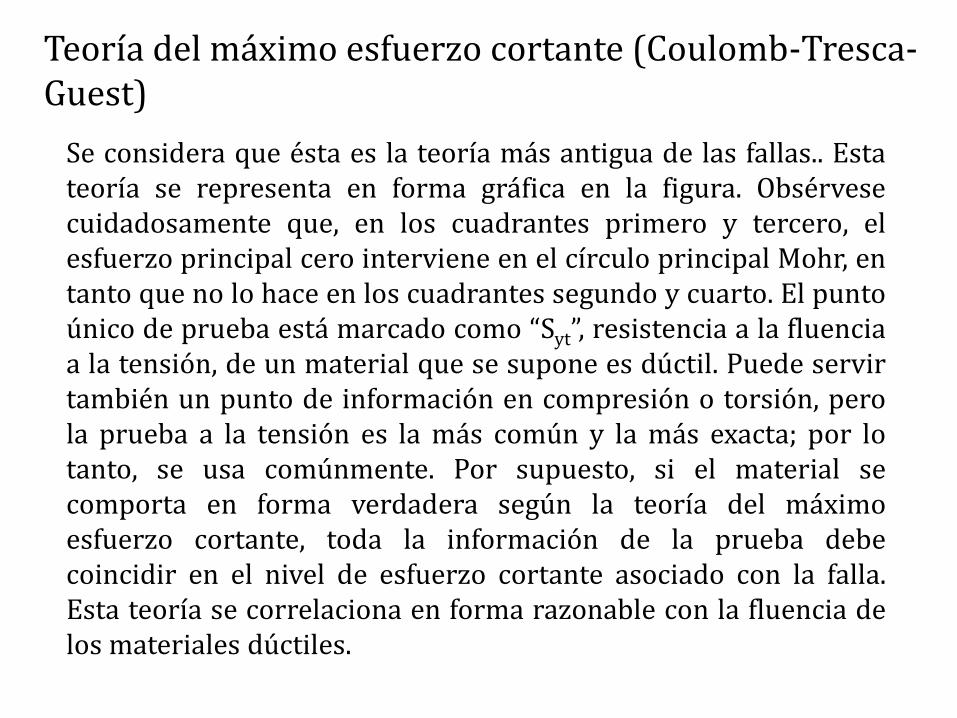
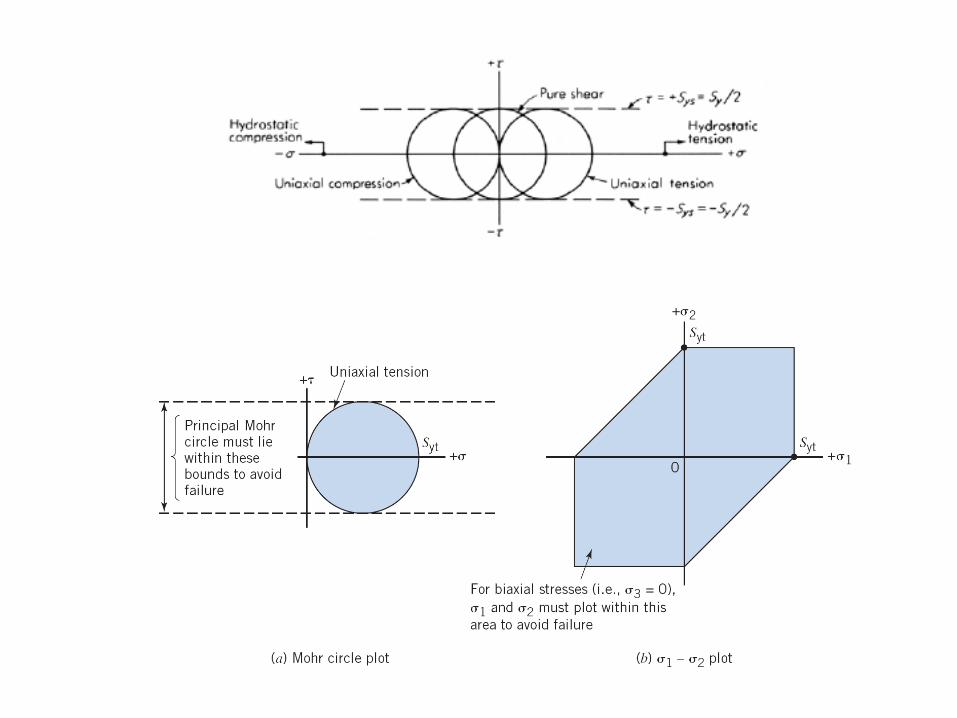
Se considera que ésta es la teoría más antigua de las fallas.. Esta teoría se representa en forma gráfica en la figura. Obsérvese cuidadosamente que, en los cuadrantes primero y tercero, el esfuerzo principal cero interviene en el círculo principal Mohr, en tanto que no lo hace en los cuadrantes segundo y cuarto. El punto único de prueba está marcado como “Syt”, resistencia a la fluencia a la tensión, de un material que se supone es dúctil. Puede servir también un punto de información en compresión o torsión, pero la prueba a la tensión es la más común y la más exacta; por lo tanto, se usa comúnmente. Por supuesto, si el material se comporta en forma verdadera según la teoría del máximo esfuerzo cortante, toda la información de la prueba debe coincidir en el nivel de esfuerzo cortante asociado con la falla. Esta teoría se correlaciona en forma razonable con la fluencia de los materiales dúctiles.
Teoría del máximo esfuerzo cortante (Coulomb-Tresca-Guest)
Se han propuesto diversas modificaciones empíricas a las teorías básicas de las fallas, una de las cuales es la teoría de Mohr (teoría de Coulomb-Mohr). Se recomienda la aplicación en materiales frágiles, para los cuales la resistencia a la compresión excede en mucho la resistencia a la tensión. (Aunque se considera por lo general que la teoría es una modificación empírica de la teoría del máximo esfuerzo cortante, usando los valores experimentales de ambas resistencias a la tensión y a la compresión, se puede deducir analíticamente si se incluye el efecto de la fricción interna. Para predecir la fractura de materiales frágiles se recomienda modificar la teoría de Mohr. Correlaciona mejor con la mayoría de la información experimental que las teorías de Mohr o del máximo esfuerzo normal, que también se usan. Conviene recordar que en el mejor de los casos, una teoría sobre las fallas es un substituto para la información de las pruebas relacionada con el material real y a la combinación de esfuerzos implicada. También, cualquier información adicional y útil de prueba puede usarse para mejorar una curva teórica de las fallas para un material dado.
Teoría de Mohr modificada
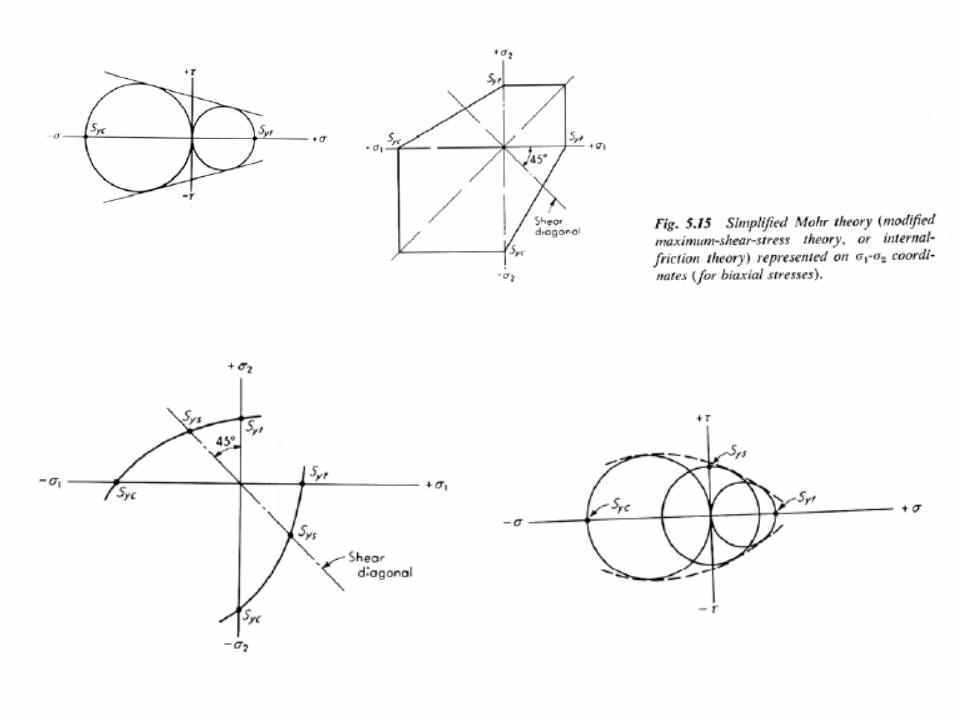

Two graphical representations of the Mohr (or Coulomb-Mohr) theory.

Representación gráfica de la teoría de Mohr modificada para esfuerzos biaxiales
(σ3 = 0).

Teoría de la máxima energía normal de deformación (Saint Venant)
Esta teoría, que fuera ampliamente utilizada durante el siglo XIX establece que la falla ocurrirá siempre que alguna de las deformaciones principales alcance un valor límite, determinado por el ensayo standard de tracción.
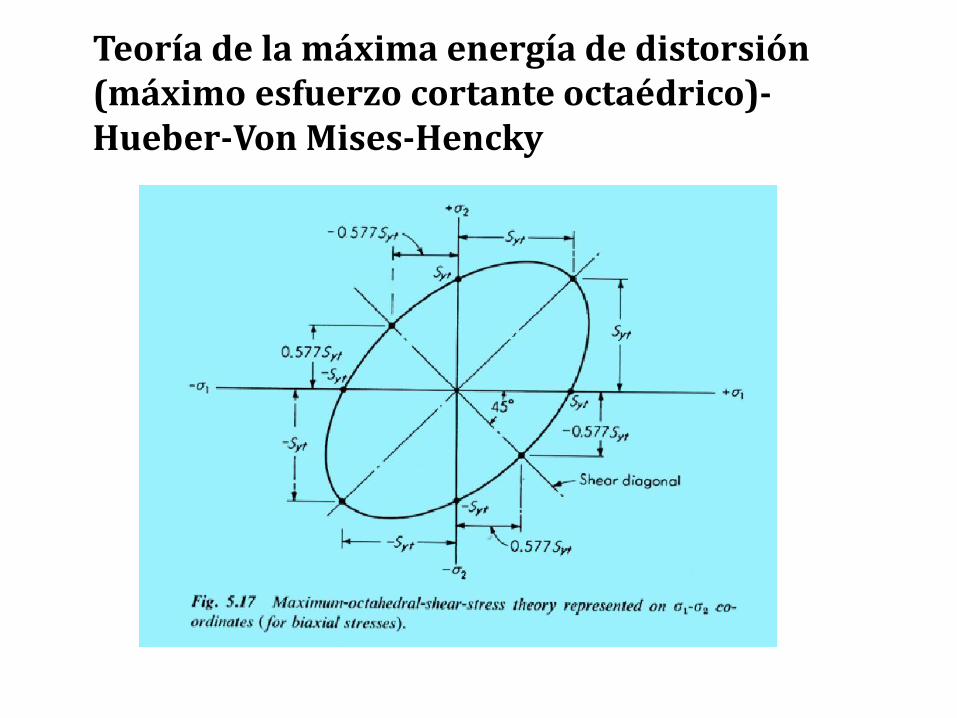
Teoría de la máxima energía de distorsión (máximo esfuerzo cortante octaédrico)-Hueber-Von Mises-Hencky
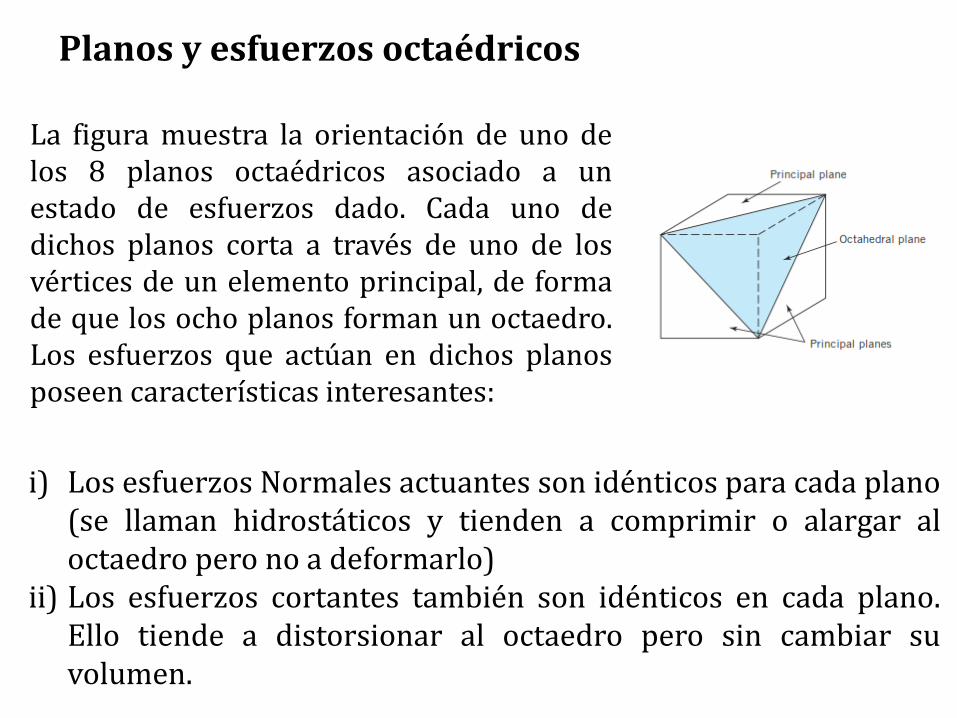
Planos y esfuerzos octaédricos
i) Los esfuerzos Normales actuantes son idénticos para cada plano (se llaman hidrostáticos y tienden a comprimir o alargar al octaedro pero no a deformarlo)
ii) Los esfuerzos cortantes también son idénticos en cada plano. Ello tiende a distorsionar al octaedro pero sin cambiar su volumen.
La figura muestra la orientación de uno de los 8 planos octaédricos asociado a un estado de esfuerzos dado. Cada uno de dichos planos corta a través de uno de los vértices de un elemento principal, de forma de que los ocho planos forman un octaedro. Los esfuerzos que actúan en dichos planos poseen características interesantes:
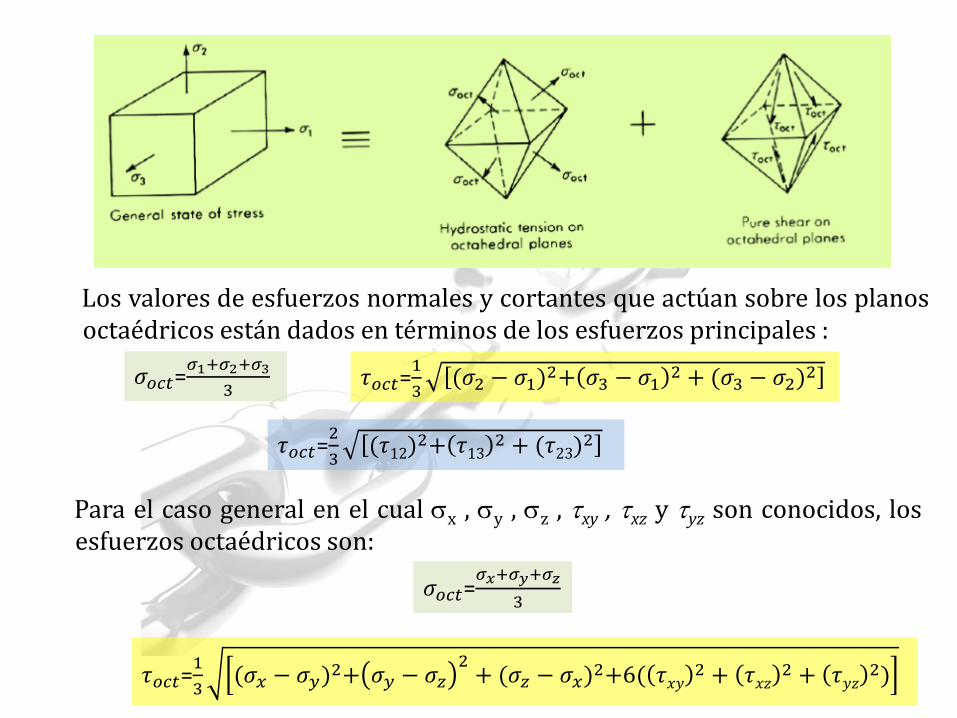
Los valores de esfuerzos normales y cortantes que actúan sobre los planos octaédricos están dados en términos de los esfuerzos principales :
𝜎𝑜𝑐𝑡=𝜎1+𝜎2+𝜎3
3 𝜏𝑜𝑐𝑡=
1
3(𝜎2 − 𝜎1)
2+ 𝜎3 − 𝜎12 + (𝜎3 − 𝜎2)
2
𝜏𝑜𝑐𝑡=2
3(𝜏12)
2+ 𝜏132 + (𝜏23)
2
Para el caso general en el cual x , y , z , xy , xz y yz son conocidos, los esfuerzos octaédricos son:
𝜎𝑜𝑐𝑡=𝜎𝑥+𝜎𝑦+𝜎𝑧
3
𝜏𝑜𝑐𝑡=1
3(𝜎𝑥 − 𝜎𝑦)
2+ 𝜎𝑦 − 𝜎𝑧2+ (𝜎𝑧 − 𝜎𝑥)
2+6( 𝜏𝑥𝑦2 + 𝜏𝑥𝑧
2 + 𝜏𝑦𝑧2)



La teoría de la energía de la máxima distorsión sostiene que cualquier material esforzado en forma elástica sufre un “ligero” cambio en forma, volumen o en ambos. La energía necesaria para producir este cambio se almacena en el material en forma de energía elástica. Pronto se supo que los materiales usados en ingeniería pueden soportar enormes presiones hidrostáticas (es decir, 1 =2 = 3 = elevada compresión) sin daño. Por lo tanto, se postuló que un material dado tiene una capacidad limitada y definida para absorber energía de distorsión (es decir, energía que tiende a cambiar la forma, pero no el tamaño), y que los intentos de someter el material a cantidades mayores de energía de distorsión provocaban fluencia. Cuando se usa esta teoría es conveniente trabajar con un esfuerzo equivalente, e, definido como el valor del esfuerzo uniaxial a la tensión que produciría el mismo nivel de energía de distorsión (por lo tanto, según la teoría, la misma posibilidad de falla) que los esfuerzos reales indicados. En términos de los esfuerzos principales que existen, la ecuación para el esfuerzo equivalente es :

Para el caso común de esfuerzo biaxial, ésta se reduce a:
21
2
23
2
13
2
12 )()(2
2 e
21
21
2
2
2
1 e
Si sólo están presentes x y xy:
223 xyxe

Selección y uso de las teorías de fallas
Se recomienda que: • Se use la teoría de la energía máxima de distorsión
para pronosticar la fluencia cuando el material se comporta como dúctil.
• Se use la teoría de Mohr modificada para predecir la fractura cuando el material se comporta como frágil
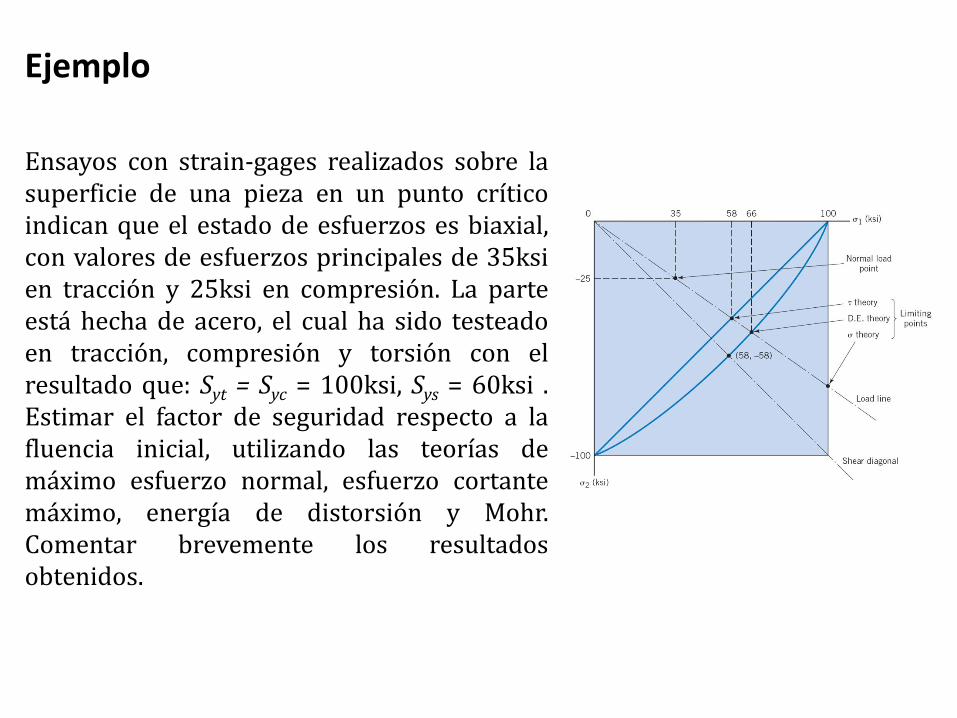
Ejemplo
Ensayos con strain-gages realizados sobre la superficie de una pieza en un punto crítico indican que el estado de esfuerzos es biaxial, con valores de esfuerzos principales de 35ksi en tracción y 25ksi en compresión. La parte está hecha de acero, el cual ha sido testeado en tracción, compresión y torsión con el resultado que: Syt = Syc = 100ksi, Sys = 60ksi . Estimar el factor de seguridad respecto a la fluencia inicial, utilizando las teorías de máximo esfuerzo normal, esfuerzo cortante máximo, energía de distorsión y Mohr. Comentar brevemente los resultados obtenidos.


Distribution curves for significant strength x and significant stress y.
Confiabilidad

Distribution curve for margin of safety z.

Normal distribution curves having a common μ and various σ.

Properties of all normal distribution curves.
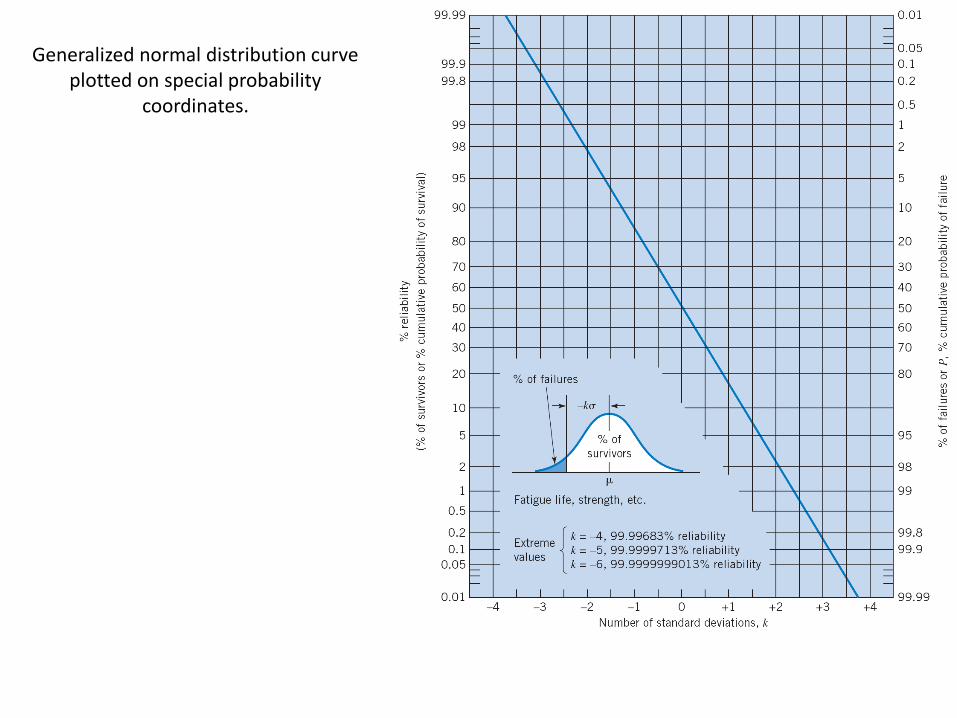
Generalized normal distribution curve plotted on special probability
coordinates.

(a) Distribution curves for x and y in Sample Problem 6.4. (b) Distribution curve for z.
Ya se vió la distribución uniforme de las líneas de fuerza a través de cierto eslabón sometido a tracción. Se observó entonces que una distribución uniforme de tales líneas (por ende una distribución uniforme de esfuerzos), existe solo en regiones considerablemente alejadas de los extremos. En las cercanías de los mismos, las líneas de flujo de fuerza indican una concentración de esfuerzos cerca de la superficie exterior. Este mismo efecto de concentración de esfuerzos existe tanto para flexión como para torsión.
Factores de concentración de esfuerzos (Kt)
R.E. Peterson – se desarrollaron métodos experimentales para medir esfuerzos locales en diferentes configuraciones sujetas a diferentes cargas. Se graficaron valores del factor teórico de concentración de esfuerzos Kt (con base en un material teórico-elástico, homogéneo e isotrópico)
σmáx = Ktb σnom y máx = Ktt σnom