EVALUACIÓN DE TRES PRODUCTOS DE SENSORES … · Memorias de resúmenes en extensos...
13
Memorias de resúmenes en extensos SELPER-XXI-México-UACJ-2015 12-16 de Octubre de 2015, Ciudad Juárez, Chihuahua, México. EVALUACIÓN DE TRES PRODUCTOS DE SENSORES REMOTOS PARA LA ACTUALIZACIÓN DE INVENTARIOS DE ÁRBOLES URBANOS Fabiola D. YÉPEZ RINCÓN a , Roberto E. HUERTA GARCÍA b , Nelly L. RAMÍREZ SERRATO b , Diego F. LOZANO GARCÍA b , Johana M. CARMONA GARCÍA c y Freddy X. LASSO GARZÓN b a Facultad de Ingeniería Civil-Instituto de Ingeniería Civil, Universidad Autónoma de Nuevo León, Calle Pedro de Alba s/n, Centro, 64000 San Nicolás de los Garza, N.L., México. Email: [email protected] b Centro de Calidad Ambiental del Instituto Tecnológico y de Estudios Superiores de Monterrey, Av. Eugenio Garza Sada 2501 Sur, C.P. 64849, Col. Tecnológico, Monterrey N.L. c Departamento de Ingeniería Química del Instituto Tecnológico y de Estudios Superiores de Monterrey, Av. Eugenio Garza Sada 2501 Sur, C.P. 64849, Col. Tecnológico, Monterrey N.L. RESUMEN La tecnología de los sensores remotos continúa avanzando y con ella la gama de aplicaciones para la estimación y análisis de problemas urbanos. Las ciudades son ambientes cada vez más impactados por los efectos directos y externalidades del desarrollo, tales como la disminución de espacios, impermeabilización del suelo, pavimentación, cambios en los flujos hídricos y en las temperaturas locales, aumentos en las niveles de partículas en el aire, entre otros. La vegetación urbana, además de su rol ecológico, funge como un sistema amortiguador ante los impactos antrópicos negativos en las ciudades. Sin embargo, pese al claro reconocimiento de la importancia de la vegetación para la salud ambiental y del entorno, ésta se encuentra en una continua presión por la falta de gestión forestal a nivel local. La gestión forestal en la ciudad requiere de inventarios del arbolado urbano que permitan conocer las características dasonómicas y condición de los árboles. Esta investigación se llevó a cabo en 1000 m 2 de bosque urbano, en el sur del Área Metropolitana de Monterrey dentro del Campus del Instituto Tecnológico y de Estudios Superiores de Monterrey, donde se analizaron 10 árboles de manera individual, con el objetivo de comparar tres productos generados con sensores remotos (Light Detectionn And Ranging, LIDAR móvil; Cámara digital en color normal; Cámara digital en infrarrojo-IR). El ejercicio evaluó: (1) Densidad de puntos generados por cada sensor, (2) Precisión métrica alcanzada, y (3) Tiempos de procesamiento para lograr el resultado. Se utilizaron tres conjuntos de datos, uno que corresponde al levantamiento en 3D de una nube de puntos producto del LIDAR y dos nubes de puntos generadas mediante la técnica de fotoreconstrucción a) de las fotografías en color normal y b) de las fotografías en IR. Las nubes de puntos fueron georreferenciadas, alineadas y finalmente segmentadas para la obtención de los arboles individuales. La comparación se realizó con un criterio de precisión menor a 0.03 m entre las nubes de puntos y consistió en documentar una base de datos con las características dasométricas de: altura del árbol (AA), diámetro de copa (DC) y diámetro a la altura del pecho (DAP). La densidad de puntos fue mayor en las fotografías fotoreconstruidas con la cámara GoPro-IR, el promedio en el error de precisión geográfica fue de 0.0102 m y en la precisión métrica varió en AA de 10±6.4 cm, DC 25±3.2 cm y DAP 8±1.4 cm; el mejor tiempo de procesamiento para lograr el resultado fue de 5.3 h, del LIDAR móvil. Se concluyó que cualquiera de las tres técnicas ayudaría a la actualización de parámetros dasométricos, siendo el producto LIDAR móvil el más rápido y la técnica de fotoreconstrucción en color la más precisa. Palabras clave: Mediciones forestales, Reconstrucciones 3D, Infrarrojo, LIDAR, Structure from motion. ABSTRACT The remote sensing technology continues to advance and thus the range of applications for the estimation and analysis of urban problems. Cities are increasingly impacted by the direct effects and externalities of
Transcript of EVALUACIÓN DE TRES PRODUCTOS DE SENSORES … · Memorias de resúmenes en extensos...

Memorias de resúmenes en extensos SELPER-XXI-México-UACJ-2015
12-16 de Octubre de 2015, Ciudad Juárez, Chihuahua, México.
EVALUACIÓN DE TRES PRODUCTOS DE SENSORES REMOTOS
PARA LA ACTUALIZACIÓN DE INVENTARIOS DE
ÁRBOLES URBANOS
Fabiola D. YÉPEZ RINCÓNa, Roberto E. HUERTA GARCÍAb, Nelly L. RAMÍREZ
SERRATOb, Diego F. LOZANO GARCÍAb, Johana M. CARMONA GARCÍAc y Freddy X.
LASSO GARZÓNb
aFacultad de Ingeniería Civil-Instituto de Ingeniería Civil, Universidad Autónoma de Nuevo León, Calle Pedro de
Alba s/n, Centro, 64000 San Nicolás de los Garza, N.L., México. Email: [email protected] bCentro de Calidad Ambiental del Instituto Tecnológico y de Estudios Superiores de Monterrey, Av. Eugenio Garza
Sada 2501 Sur, C.P. 64849, Col. Tecnológico, Monterrey N.L. c Departamento de Ingeniería Química del Instituto Tecnológico y de Estudios Superiores de Monterrey, Av.
Eugenio Garza Sada 2501 Sur, C.P. 64849, Col. Tecnológico, Monterrey N.L.
RESUMEN La tecnología de los sensores remotos continúa avanzando y con ella la gama de aplicaciones para la
estimación y análisis de problemas urbanos. Las ciudades son ambientes cada vez más impactados por los
efectos directos y externalidades del desarrollo, tales como la disminución de espacios,
impermeabilización del suelo, pavimentación, cambios en los flujos hídricos y en las temperaturas locales,
aumentos en las niveles de partículas en el aire, entre otros. La vegetación urbana, además de su rol
ecológico, funge como un sistema amortiguador ante los impactos antrópicos negativos en las ciudades.
Sin embargo, pese al claro reconocimiento de la importancia de la vegetación para la salud ambiental y del
entorno, ésta se encuentra en una continua presión por la falta de gestión forestal a nivel local. La gestión
forestal en la ciudad requiere de inventarios del arbolado urbano que permitan conocer las características
dasonómicas y condición de los árboles. Esta investigación se llevó a cabo en 1000 m2 de bosque urbano,
en el sur del Área Metropolitana de Monterrey dentro del Campus del Instituto Tecnológico y de Estudios
Superiores de Monterrey, donde se analizaron 10 árboles de manera individual, con el objetivo de
comparar tres productos generados con sensores remotos (Light Detectionn And Ranging, LIDAR móvil;
Cámara digital en color normal; Cámara digital en infrarrojo-IR). El ejercicio evaluó: (1) Densidad de
puntos generados por cada sensor, (2) Precisión métrica alcanzada, y (3) Tiempos de procesamiento para
lograr el resultado. Se utilizaron tres conjuntos de datos, uno que corresponde al levantamiento en 3D de
una nube de puntos producto del LIDAR y dos nubes de puntos generadas mediante la técnica de
fotoreconstrucción a) de las fotografías en color normal y b) de las fotografías en IR. Las nubes de puntos
fueron georreferenciadas, alineadas y finalmente segmentadas para la obtención de los arboles
individuales. La comparación se realizó con un criterio de precisión menor a 0.03 m entre las nubes de
puntos y consistió en documentar una base de datos con las características dasométricas de: altura del
árbol (AA), diámetro de copa (DC) y diámetro a la altura del pecho (DAP). La densidad de puntos fue
mayor en las fotografías fotoreconstruidas con la cámara GoPro-IR, el promedio en el error de precisión
geográfica fue de 0.0102 m y en la precisión métrica varió en AA de 10±6.4 cm, DC 25±3.2 cm y DAP
8±1.4 cm; el mejor tiempo de procesamiento para lograr el resultado fue de 5.3 h, del LIDAR móvil. Se
concluyó que cualquiera de las tres técnicas ayudaría a la actualización de parámetros dasométricos,
siendo el producto LIDAR móvil el más rápido y la técnica de fotoreconstrucción en color la más precisa.
Palabras clave: Mediciones forestales, Reconstrucciones 3D, Infrarrojo, LIDAR, Structure from motion.
ABSTRACT
The remote sensing technology continues to advance and thus the range of applications for the estimation
and analysis of urban problems. Cities are increasingly impacted by the direct effects and externalities of

Memorias de resúmenes en extensos SELPER-XXI-México-UACJ-2015
12-16 de Octubre de 2015, Ciudad Juárez, Chihuahua, México.
development such as the reduction of spaces, land sealing, paving, changes in water flows, local
temperatures and increased Particle Matter in the air ambient. Urban vegetation in addition to their
ecological role system serves as a buffer against the negative human impact in cities. However, despite the
clear recognition of the importance of vegetation for environmental health and the environment
sustainability, it is in continuous pressure by the lack of forest management at the local level. Forest
management in the city requires inventory of urban trees that reveal the dasonometric characteristics and
condition of the trees. In this paper an investigation is conducted in an urban forest of 1000 m2 south of
the Metropolitan Area of Monterrey in the Campus of the Monterrey Institute of Technology and Higher
Education, where 10 trees were analyzed individually in order to compare three products generated by
remote sensors (Light Detection And Ranging, LIDAR mobile; normal color digital camera and infrared-
IR digital camera). The exercise evaluated: (1) density of points generated by each sensor, (2) metric
accuracy achieved, and (3) processing times to achieve the result. Three datasetes were used, one
corresponding to the 3D survey LIDAR product poin cloud and two point clouds generated by the
technique of photoreconstruction: a) of the normal color photographs b) of the IR photographs and in IR.
The point clouds were georeferenced, aligned and finally segmented to obtain individual trees. The
comparison was made when a precision of less than 0.03 m from the point clouds was reached and it was
documented in a database with dasometric characteristics: tree height (AA), crown diameter (DC) and the
diameter at breast height (DBH). The point density was higher in the photo-reconstructed pictures with IR,
the average in the geographic precision error was 0.0102 m and on the metric accuracy varied for AA 10 ±
6.4 cm, DC 25 ± 8 ± 3.2 cm and DBH 1.4 cm, the best processing time to achieve the result was 5.3 h by
the mobile LIDAR. Concluding that any of the three techniques help on the updating of dasometric
parameters being the LIDAR mobile the fastest and the color photo-reconstruction technique the most
precise.
Keywords: Forest measurements, 3D reconstructions, Infrared, LIDAR, Structure from motion.
1 INTRODUCCIÓN
Las ciudades son ambientes cada vez más
impactados por los efectos directos y
externalidades del desarrollo, especialmente las
grandes metrópolis donde las áreas verdes sufren
distintas presiones para su buen desarrollo como lo
son: espacio, agua, clima, contaminación, plagas y
enfermedades debido al deterioro ambiental. La
vegetación urbana tiene un rol amortiguador ante
dichos efectos, al disminuir o mitigar los impactos
antrópicos negativos en las ciudades (Zhangab et.
al., 2010); además de brindar beneficios
recreacionales, sociales y de paisaje. Un solo árbol
representa la imagen deseada del entorno en la
ciudad y por lo tanto, en teoría la vegetación
urbana genera la identidad colectiva, valor
histórico, valor económico, científico y
educacional (Moll & Ebenreck, 1989; Lin, 1983).
Sin embargo, hoy en día las áreas verdes urbanas
representan un reto para el desarrollo urbano
sustentable por la fuerte presión en el crecimiento
de las ciudades, lo cual llama a tomar medidas de
protección y conservación de estos espacios ya que
desempeñan funciones esenciales en la calidad de
vida de los habitantes y salud del ecosistema
urbano (Rivera, 2012). Los árboles pueden influir
en forma directa o indirecta en la mejora de la
calidad ambiental y el bienestar humano. Los
árboles mejoran la calidad ambiental del aire,
proveen sombras y moderan las temperaturas,
impactan al microclima afectando al uso de la
energía, además disminuyen las emisiones de
compuestos orgánicos volátiles y aumentan el
valor patrimonial (Escobedo et al., 2008 y Nowak
et. al., 2006). Empero, los árboles urbanos no sólo
se enfrentan a los daños directos por corta y poda,
sino también al estrés de enfermedades producidas
por factores biológicos o ambientales, entre otros.
El Área Metropolitana de Monterrey (AMM)
carece de un inventario preciso y actualizado del
arbolado urbano, lo que ha limitado la evaluación e
implementación de estrategias para su adecuada
gestión. Es en este punto donde se emana la
necesidad de contar con un sistema de información
geográfica que permita la ubicación a nivel
individual de cada árbol en la ciudad y así
establecer una línea base para el manejo forestal, al
Memorias de resúmenes en extensos SELPER-XXI-México-UACJ-2015
12-16 de Octubre de 2015, Ciudad Juárez, Chihuahua, México.
menos en aquellos árboles que pertenezcan al
ámbito municipal o privado. La gestión adecuada
del arbolado urbano requiere de inventarios que
deben contener algunas características esenciales
para su correcto funcionamiento; y de cartografía
detallada para lograr identificar parámetros a nivel
individual. Éstos datos tradicionalmente se crean a
través de la fotointerpretación de fotografías aéreas
o por medio de inventarios de campo, lo que ha
resultado poco eficiente por el alto consumo de
tiempo (Renaud et. al., 2007), además de que se
requiere de personal capacitado y con poca
rotación para evitar errores en la medición de los
parámetros.
Las técnicas de reconstrucción urbana han
sido abordadas por tres líneas de investigación: (i)
Gráficos computacionales, (ii) Visión
computacional y (iii) fotogrametría y sensores
remotos (Musialski et.al., 2013). En esta última
línea se encuentra la presente investigación.
LIDAR, es un sistema que permite obtener
información en tres dimensiones (3D) para la
caracterización de superficies y resolver
mediciones forestales (Lefsky, 1997; Parker, 1995)
y se ha utilizado para conocer la distribución
temporal y espacial de distintas especies de árboles
urbanos (Small, 2001), así como de arbustos
(Streutker et. al., 2006). Por otro lado, la
fotoreconstrucción ha sido utilizada como un
esfuerzo para mejorar la eficiencia y eficacia de las
mediciones de la arquitectura de la copa de árboles
(St. Onge & Achaicha, 2001; Ayrey, 2015).
Agisoft Photoscan-Professional es uno de los
programas más utilizados para determinar los
parámetros dasométricos (Morgenroth & Gomez,
2013).
En México, se considera al AMM como la
tercera conurbación más poblada, de acuerdo al
último conteo (2010) realizado por INEGI,
CONAPO y SEDESOL, concentra a más de 4
millones de habitantes en una superficie
aproximada de 6,680 km2. Son pocos los estudios
para conocer las especies urbanas y su condición,
destancando Alanís, et. al. (2004) y Alanís (2005),
quienes analizan una diversidad arbórea de 115
especies, 53% introducidas y 47% nativas,
agrupadas en 37 familias y 73 géneros, siendo las
familias más representativas Leguminosae,
Oleaceae y Fagaceae, Moraceae y Salicaceae y los
géneros con mayor número de especies son los
Quercus (encinos), Fraxinus (fresnos), Pinus
(pinos), Citrus (cítricos) y Populus (alamillos).
Respecto al levantamiento de inventarios,
actualmente se realizan diversos esfuerzos como
los llevados a cabo por organizaciones no
gubernamentales, donde se cuenta con un registro
en línea de miles de árboles, sin embargo, las bases
de datos aún se encuentran en proceso de
construcción y se requerirá de un amplio análisis
para evaluar la precisión de la información
reportada. Yépez & Lozano, 2013; llevaron a cabo
un inventario de árboles dentro del Instituto
Tecnológico y de Estudios Superiores de
Monterrey, donde utilizaron datos LIDAR aéreo
para cartografiar el arbolado urbano y lograron una
precisión métrica de hasta el 96% en comparación
con las técnicas tradicionales.
El objetivo de la investigación reportada en el
presente documento, fue evaluar y comparar tres
productos generados con sensores remotos (Light
detección and ranging, LIDAR móvil; Cámara
digital en color normal; Cámara digital en
infrarrojo-IR). El ejercicio evalúa: (1) Densidad de
puntos generados por cada sensor, (2) Precisión
métrica alcanzada, y (3) Tiempos de
procesamiento para lograr el resultado.
2 METODOLOGIA
2.1 ÁREA DE ESTUDIO
La presente investigación se realizó en un bosque
urbano de 1000 m2 dentro de las instalaciones del
Tecnológico de Monterrey, donde se analizaron 10
árboles de manera individual.
Figura 1. Ubicación geográfica del área de
estudio.

Memorias de resúmenes en extensos SELPER-XXI-México-UACJ-2015
12-16 de Octubre de 2015, Ciudad Juárez, Chihuahua, México.
2.2 DATOS POR SENSOR
Los árboles se encuentran en la base de datos del
proyecto de Arboretum, el cual tiene un registro de
más de 2,575 árboles dentro de las 578 ha del
Campus Monterrey (Figura 1).
LIDAR móvil. Utilizando el sensor ZEB1 de
GeoSlam Limited, el cual tiene una precisión de
+/- 0.1 % y 30 m de rango máximo de alcance, se
produjo una nube de puntos en tres dimensiones
(3D) (Figura 2a). El recorrido se realizó,
siguiendo una trayectoria de 360 m a lo largo del
área de estudio en forma de “S”, de tal forma que
se consiguieron tres transectos con dos loops
(empalmes del trayecto) en puntos estratégicos
(Figura 3 para facilitar la alineación de puntos de
control con la altura ortogonal de la información
del ZEB1 (Figura 3). La nube de puntos se generó
en formato LAS y PLY, para posteriormente ser
manejadas en otros formatos compatibles con el
resto de los programas tales como XYZ y BIN.
Fotoreconstrucción Nikon. Utilizando una cámara
digital Nikon CoolPix P520 (Figura 2b), con
18.1MPx y lente de cristal NIKKOR 42x, se
tomaron 120 fotografías en serie, capturadas a una
distancia promedio de 3.5 m con respecto a los
árboles, una altura de 1.60 m y tomadas de manera
consecutiva aproximadamente cada 1 m, para ser
alineadas con un traslape del 70% en el campo de
visión.
Se utilizó el programa de prueba (trial) de
Agisoft PhotoScan Professional Versión 1.1.6.
para realizar el alineado y la producción de las
nubes de puntos puntos. Para la toma de los datos
se siguió el mismo recorrido (Figura 3) utilizado
con ZEB1.
Fotoreconstrucción Gopro. Utilizando una cámara
GoPro, versión Hero 3+ Black Edition (Figura
2c). La distancia focal es de 21 mm y los grados
verticales, horizontales y diagonales del campo de
visión FOV son: 55 (V), 94.4 (H), 107.1 (D). Se
utilizó un filtro IR, de IR-pro llamado NDVI
InfraBlu 22 con rangos espectrales de 400-560nm/
688-740nm ((http://www.ir-pro.com/ndvi) y 0.14m
mejorado.
Para la toma de los datos se siguió el
mismo recorrido (Figura 3) utilizado con ZEB1 y
la cámara Nikon. Se tomaron 119 fotografías en
serie, capturadas a una distancia promedio de 3.5
m con respecto a los árboles, una altura de 1.60 m
y tomadas de manera consecutiva
aproximadamente cada 1 m, para ser alineadas con
un traslape del 70% en el campo de visión.
Georreferenciación. Para el posterior registro de
las nubes de puntos, se realizaron tres
levantamientos geodésicos utilizando el GPS
Promark 500 de Magellan. Los cuales fueron
corregidos con la estación Mty2 de la Red
Geodésica Nacional Activa (Coordenadas
Geodésicas de las Estaciones de la RGNA
(ITRF2008, ÉPOCA 2010.0, 25 42 55.82372 N,
100 18 46.46275 W, 521.741m) utilizando el
programa GNSS.
a b
c
Figura 2. Sensores utilizados para el estudio: a) ZEB1, b) Nikon, c) GoPro.
Memorias de resúmenes en extensos SELPER-XXI-México-UACJ-2015
12-16 de Octubre de 2015, Ciudad Juárez, Chihuahua, México.
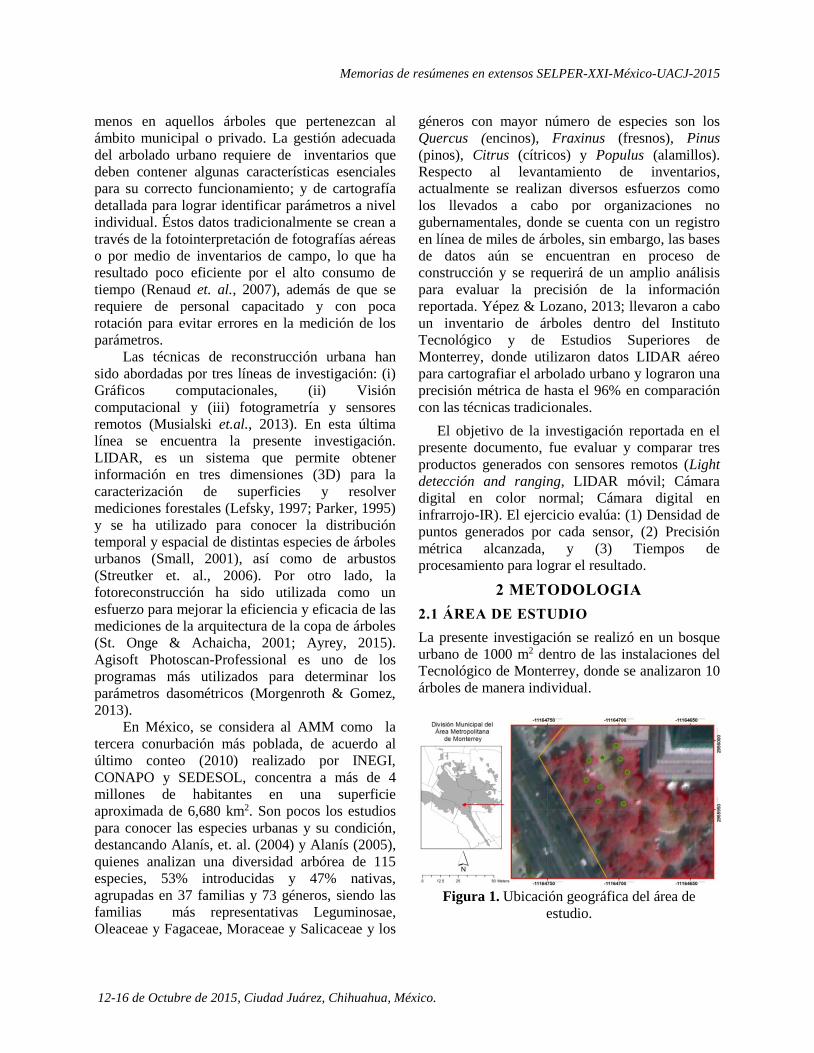
Figura 3. Croquis del levantamiento con ubicación
de los árboles, punto de inicio y final.
Medición dasométrica. Las nubes de puntos
fueron montadas a un proyecto de CloudCompare,
un programa de procesamiento de nubes de puntos
que permite alinear la información. Se ubicaron la
mayor cantidad de árboles dentro del área de
estudio que contaran con al menos el 60% de
completitud de información de la copa y el tronco.
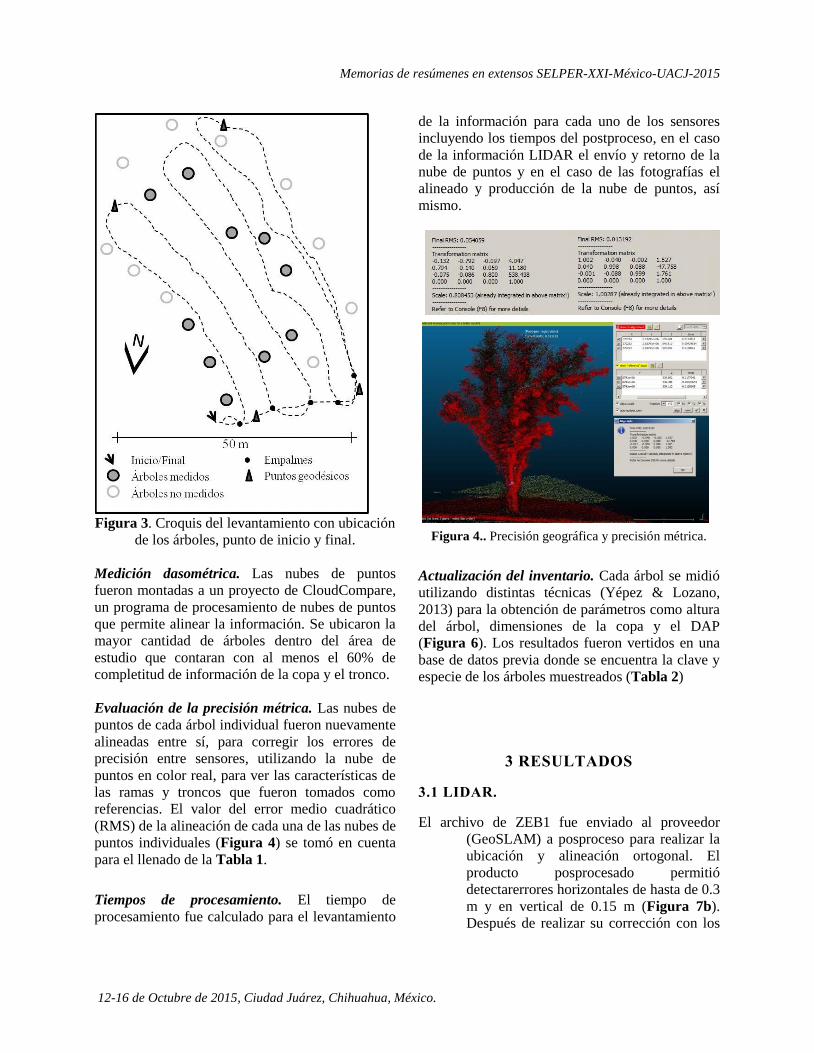
Evaluación de la precisión métrica. Las nubes de
puntos de cada árbol individual fueron nuevamente
alineadas entre sí, para corregir los errores de
precisión entre sensores, utilizando la nube de
puntos en color real, para ver las características de
las ramas y troncos que fueron tomados como
referencias. El valor del error medio cuadrático
(RMS) de la alineación de cada una de las nubes de
puntos individuales (Figura 4) se tomó en cuenta
para el llenado de la Tabla 1.
Tiempos de procesamiento. El tiempo de
procesamiento fue calculado para el levantamiento
de la información para cada uno de los sensores
incluyendo los tiempos del postproceso, en el caso
de la información LIDAR el envío y retorno de la
nube de puntos y en el caso de las fotografías el
alineado y producción de la nube de puntos, así
mismo.
Figura 4.. Precisión geográfica y precisión métrica.
Actualización del inventario. Cada árbol se midió
utilizando distintas técnicas (Yépez & Lozano,
2013) para la obtención de parámetros como altura
del árbol, dimensiones de la copa y el DAP
(Figura 6). Los resultados fueron vertidos en una
base de datos previa donde se encuentra la clave y
especie de los árboles muestreados (Tabla 2)
3 RESULTADOS
3.1 LIDAR.
El archivo de ZEB1 fue enviado al proveedor
(GeoSLAM) a posproceso para realizar la
ubicación y alineación ortogonal. El
producto posprocesado permitió
detectarerrores horizontales de hasta de 0.3
m y en vertical de 0.15 m (Figura 7b).
Después de realizar su corrección con los

Memorias de resúmenes en extensos SELPER-XXI-México-UACJ-2015
12-16 de Octubre de 2015, Ciudad Juárez, Chihuahua, México.
puntos geodésicos tomados en campo, el
error disminuyó a 0.05 m (Figura 5).
Producción de puntos. Se calcularon 14,608,900
puntos de la nube LIDAR (Figura 7b). La
resolución en promedio fue un punto cada 2cm. El
tiempo del levantamien)to fue de 15 min y para el
preprocesamiento (envío de la información y
regreso en formato .LAZ y .PLY fue de 1.5 h).
Precisión geográfica. Para ZEB1, la precisión
alcanzada durante el levantamiento fue de 0.08m
(Tabla 1), mientras que el promedio de las nubes
individuales alcanzó 0.014m.
Precisión métrica. El ZEB1 varió en AA de
17±8.2 cm, DC 20±8.2 cm y DAP 12±5.4 cm.4
3.2 NIKON
El producto representó en tiempo, un trabajo
aproximado de 45 min para la toma de los datos y
2.5 h más para realizar alineado y correcciones del
procesado (Tabla 1). Se utilizó la más alta
resolución de producción y se obtuvieron
2,181,543 puntos. Esta nube de puntos generó
resoluciones de hasta 1 cm (Figura 11c). Los
resultados de la producción de puntos comparada
con el programa Cloud Compare indicó:
Producción de puntos. Se calcularon 2,181,543
puntos de la nube de Nikon (Figura 7c). La
resolución en promedio fue un punto cada 1.5 cm.
El tiempo del levantamiento fue de 35 min.
Precisión geográfica. Para Nikon, la precisión
alcanzada durante el levantamiento fue de 0.06m
(Tabla 1), mientras que el promedio de las nubes
individuales alcanzó 0.014m.
Precisión métrica. La Nikpn tuvo una precisión
métrica varió en AA de 7±2.3 cm, DC 9±4.3 cm y
DAP 3±1.2 cm.
3.3 GO PRO-IR
El producto representó un trabajo aproximado de
40 min para la toma de los datos y 3.5 h más para
realizar alineado y correcciones del procesado
(Tabla 1). Se utilizó la más alta resolución de
producción y se obtuvieron 3,961,692 puntos.
Esta nube de puntos generó resoluciones de hasta
1.5 cm (Figura 11d).En el caso de los datos en
infra-rojos, el resultado arrojó:
Producción de puntos. Se calcularon 3,961,692
puntos de la nube GoPro-IR (Figura 7d). La
resolución en promedio fue un punto cada 3 cm. El
tiempo del levantamiento fue de 30 min.
Precisión geográfica. Para ZEB 1, la precisión
alcanzada durante el levantamiento fue de 0.09m
(Tabla 1), mientras que el promedio de las nubes
individuales alcanzó 0.016 m.
Precisión métrica. la precisión métrica varió en
AA de 10±6.4 cm, DC 25±3.2 cm y DAP 8±1.4
cm.
Tabla 1. Parámetros medidos por sensor
Sensor Número de
puntos
Precisión RMS
NPC/xNPI
Tiempo del
levantamiento
Tiempo de pre-
procesamiento
Tiempo de pos-
procesamiento
MR / AR
ZEB1 14,608,900 0.08/0.056 15 90 min 0 / 0 min
Nikon 2,181,543 0.06 / 0.030 35 45 min 1 / 2.5 hr
GoPro IR 3,961,692 0.09 / 0.016 30 40 min 1.5 / 3.5 hr
Dónde: RMS (Root Mean Square), NPC (Nube de puntos completa), xNPI (promedio de las nube de
puntos individuales), MR (Resolución media), AR (Resolución alta).
Memorias de resúmenes en extensos SELPER-XXI-México-UACJ-2015
12-16 de Octubre de 2015, Ciudad Juárez, Chihuahua, México.
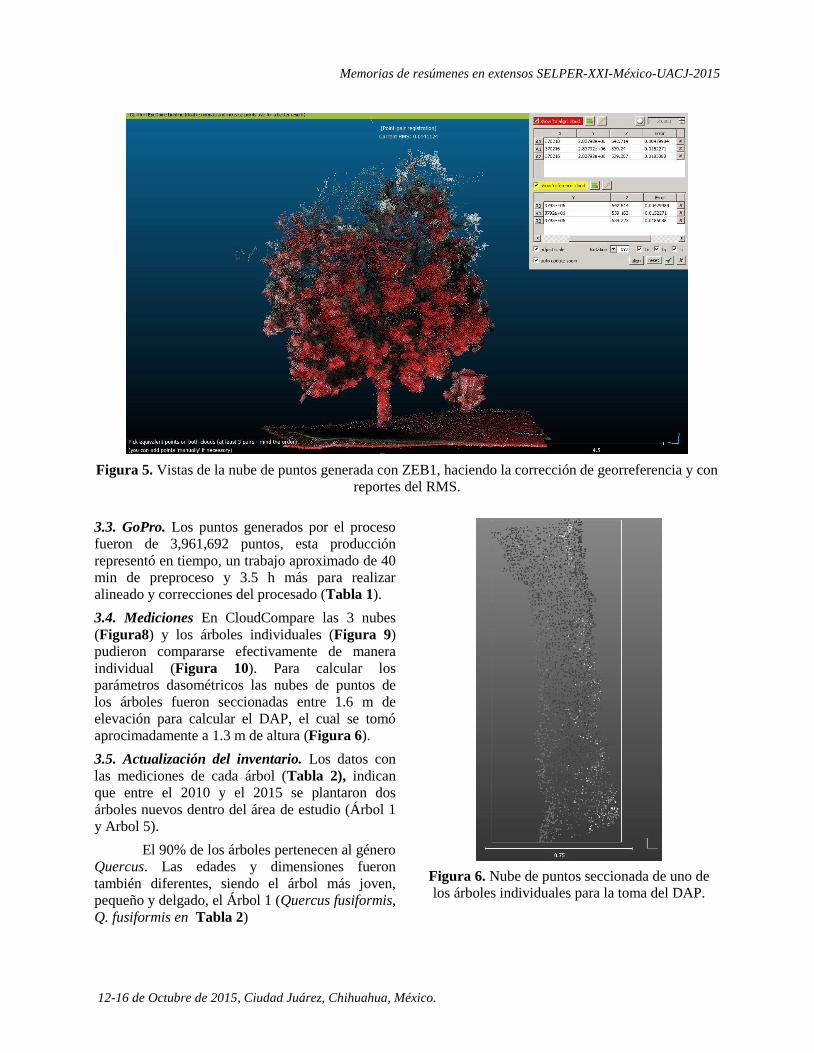
Figura 5. Vistas de la nube de puntos generada con ZEB1, haciendo la corrección de georreferencia y con
reportes del RMS.
3.3. GoPro. Los puntos generados por el proceso
fueron de 3,961,692 puntos, esta producción
representó en tiempo, un trabajo aproximado de 40
min de preproceso y 3.5 h más para realizar
alineado y correcciones del procesado (Tabla 1).
3.4. Mediciones En CloudCompare las 3 nubes
(Figura8) y los árboles individuales (Figura 9)
pudieron compararse efectivamente de manera
individual (Figura 10). Para calcular los
parámetros dasométricos las nubes de puntos de
los árboles fueron seccionadas entre 1.6 m de
elevación para calcular el DAP, el cual se tomó
aprocimadamente a 1.3 m de altura (Figura 6).
3.5. Actualización del inventario. Los datos con
las mediciones de cada árbol (Tabla 2), indican
que entre el 2010 y el 2015 se plantaron dos
árboles nuevos dentro del área de estudio (Árbol 1
y Arbol 5).
El 90% de los árboles pertenecen al género
Quercus. Las edades y dimensiones fueron
también diferentes, siendo el árbol más joven,
pequeño y delgado, el Árbol 1 (Quercus fusiformis,
Q. fusiformis en Tabla 2)
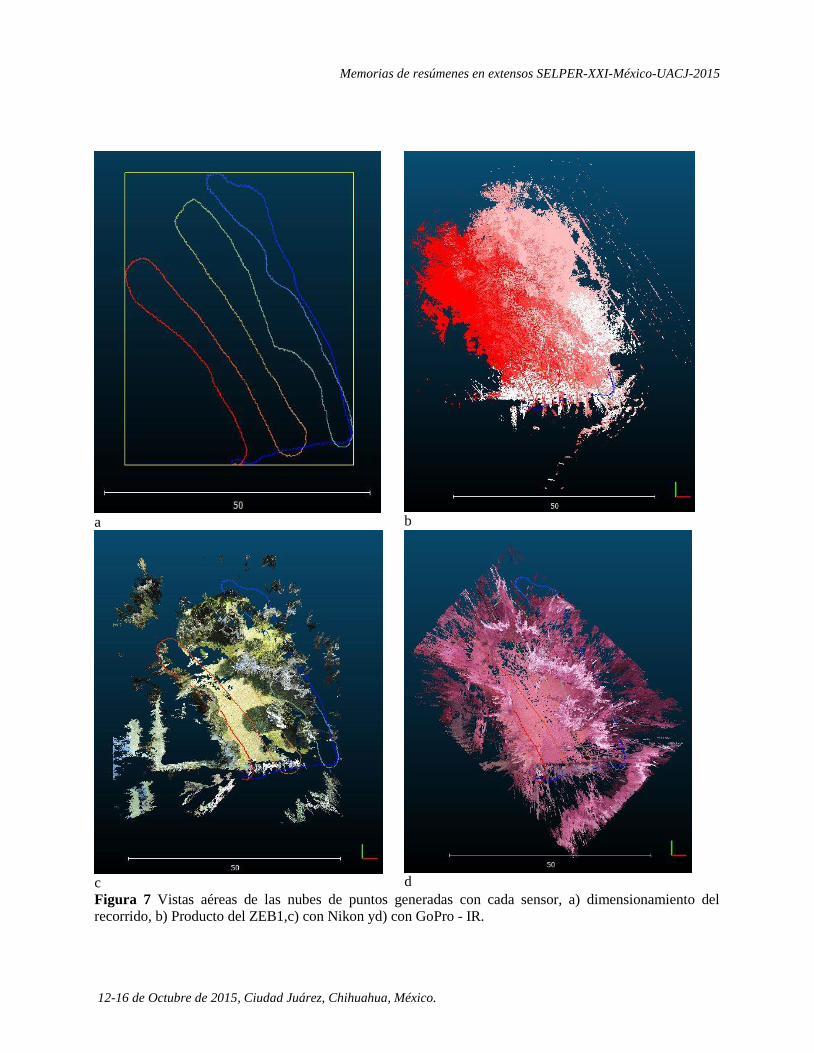
Figura 6. Nube de puntos seccionada de uno de
los árboles individuales para la toma del DAP.
Memorias de resúmenes en extensos SELPER-XXI-México-UACJ-2015
12-16 de Octubre de 2015, Ciudad Juárez, Chihuahua, México.
a
b
c
d
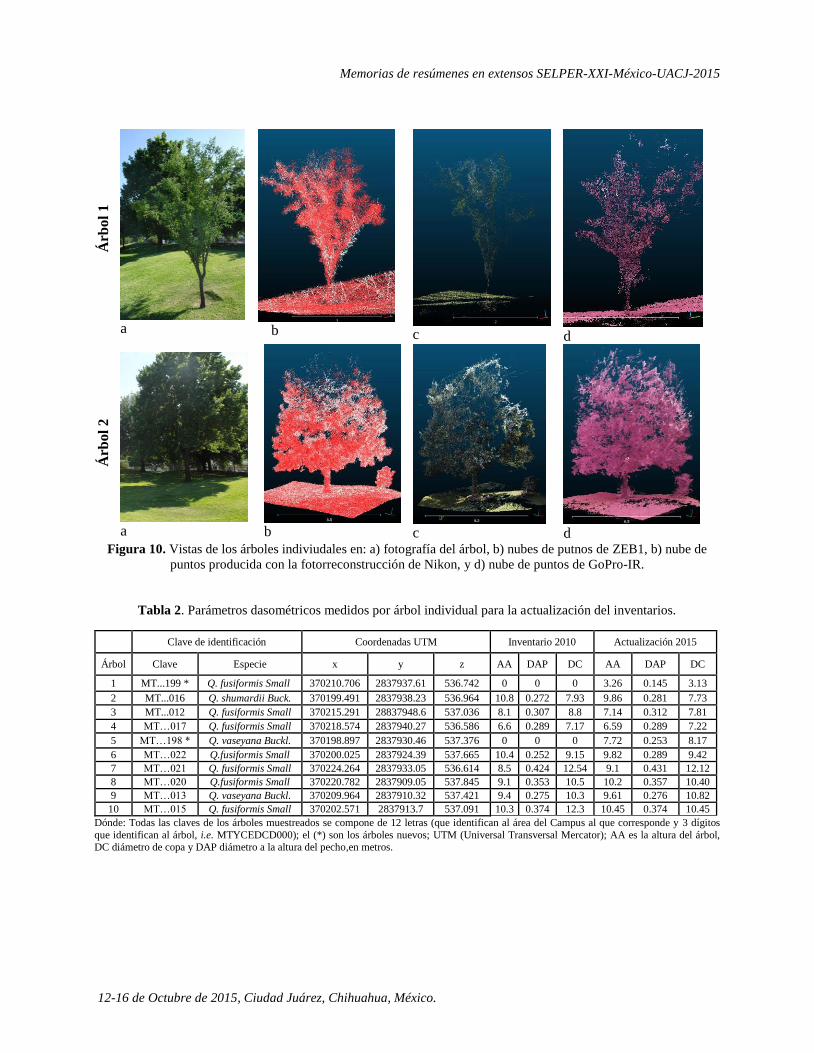
Figura 7 Vistas aéreas de las nubes de puntos generadas con cada sensor, a) dimensionamiento del
recorrido, b) Producto del ZEB1,c) con Nikon yd) con GoPro - IR.

Memorias de resúmenes en extensos SELPER-XXI-México-UACJ-2015
12-16 de Octubre de 2015, Ciudad Juárez, Chihuahua, México.
Figura 8. Vistas aérea de los tres levantamientos colocados en un proyecto de CloudCompare. Los puntos
blancos corresponden al ZEB1, los verdes a Nikon y los rojos a GoPro.
Figura 9. Vista aérea de dos árboles tomados como ejemplo a) Árbol 1 y b) Árbol 2.
Tabla 2. Precisión geográfica medida por árbol individual y sensor.
Número de árbol
Sensor 1 2 3 4 5 6 7 8 9 10 xNPI
ZEB1 0.0350 0.0815 0.0562 0.0302 0.0452 0.0352 0.0513 0.0433 0.0955 0.0785 0.0552
Nikon 0.0202 0.0152 0.0282 0.0254 0.0514 0.0321 0.0245 0.0351 0.0289 0.0321 0.0293
GoPro-IR 0.0102 0.0150 0.0296 0.0100 0.0140 0.0108 0.0126 0.0215 0.0125 0.0245 0.0159
Memorias de resúmenes en extensos SELPER-XXI-México-UACJ-2015
12-16 de Octubre de 2015, Ciudad Juárez, Chihuahua, México.
Árb
ol
1
a
b
c
d
Árb
ol
2
a
b
c
d
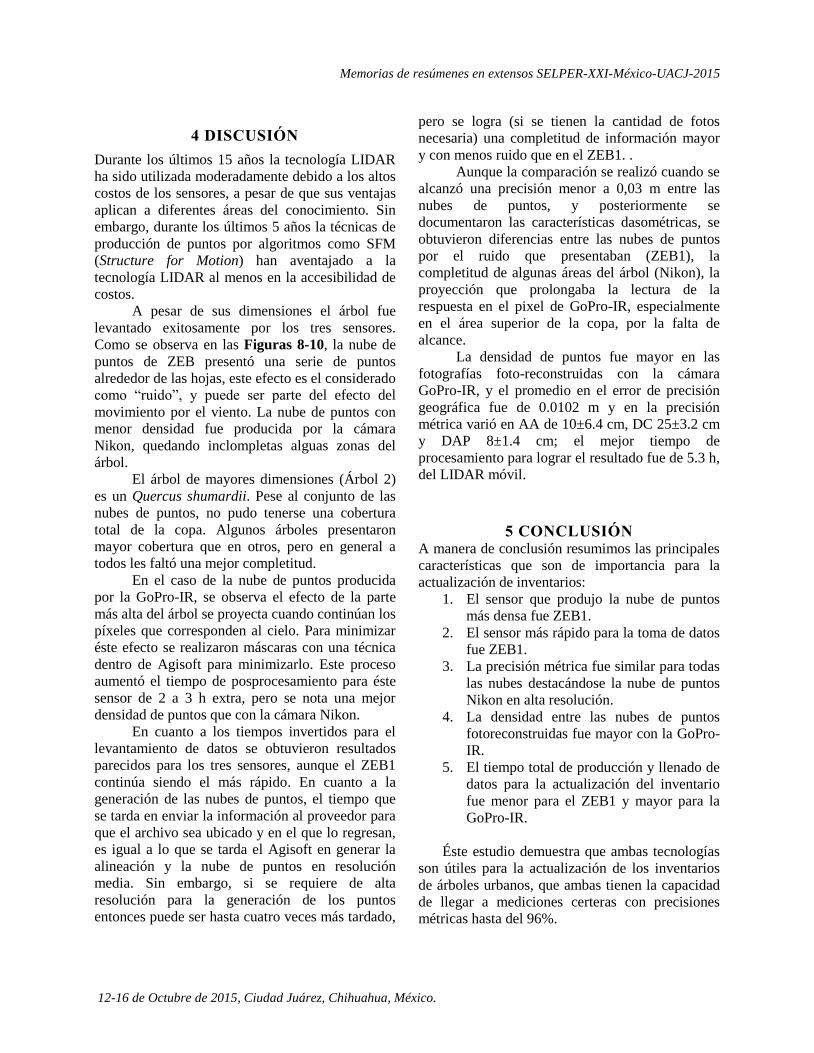
Figura 10. Vistas de los árboles indiviudales en: a) fotografía del árbol, b) nubes de putnos de ZEB1, b) nube de
puntos producida con la fotorreconstrucción de Nikon, y d) nube de puntos de GoPro-IR.
Tabla 2. Parámetros dasométricos medidos por árbol individual para la actualización del inventarios.
Clave de identificación Coordenadas UTM Inventario 2010 Actualización 2015
Árbol Clave Especie x y z AA DAP DC AA DAP DC
1 MT...199 * Q. fusiformis Small 370210.706 2837937.61 536.742 0 0 0 3.26 0.145 3.13
2 MT...016 Q. shumardii Buck. 370199.491 2837938.23 536.964 10.8 0.272 7.93 9.86 0.281 7.73
3 MT...012 Q. fusiformis Small 370215.291 28837948.6 537.036 8.1 0.307 8.8 7.14 0.312 7.81
4 MT…017 Q. fusiformis Small 370218.574 2837940.27 536.586 6.6 0.289 7.17 6.59 0.289 7.22
5 MT…198 * Q. vaseyana Buckl. 370198.897 2837930.46 537.376 0 0 0 7.72 0.253 8.17
6 MT…022 Q.fusiformis Small 370200.025 2837924.39 537.665 10.4 0.252 9.15 9.82 0.289 9.42
7 MT…021 Q. fusiformis Small 370224.264 2837933.05 536.614 8.5 0.424 12.54 9.1 0.431 12.12
8 MT…020 Q.fusiformis Small 370220.782 2837909.05 537.845 9.1 0.353 10.5 10.2 0.357 10.40
9 MT…013 Q. vaseyana Buckl. 370209.964 2837910.32 537.421 9.4 0.275 10.3 9.61 0.276 10.82
10 MT…015 Q. fusiformis Small 370202.571 2837913.7 537.091 10.3 0.374 12.3 10.45 0.374 10.45
Dónde: Todas las claves de los árboles muestreados se compone de 12 letras (que identifican al área del Campus al que corresponde y 3 dígitos
que identifican al árbol, i.e. MTYCEDCD000); el (*) son los árboles nuevos; UTM (Universal Transversal Mercator); AA es la altura del árbol, DC diámetro de copa y DAP diámetro a la altura del pecho,en metros.
Memorias de resúmenes en extensos SELPER-XXI-México-UACJ-2015
12-16 de Octubre de 2015, Ciudad Juárez, Chihuahua, México.
4 DISCUSIÓN
Durante los últimos 15 años la tecnología LIDAR
ha sido utilizada moderadamente debido a los altos
costos de los sensores, a pesar de que sus ventajas
aplican a diferentes áreas del conocimiento. Sin
embargo, durante los últimos 5 años la técnicas de
producción de puntos por algoritmos como SFM
(Structure for Motion) han aventajado a la
tecnología LIDAR al menos en la accesibilidad de
costos.
A pesar de sus dimensiones el árbol fue
levantado exitosamente por los tres sensores.
Como se observa en las Figuras 8-10, la nube de
puntos de ZEB presentó una serie de puntos
alrededor de las hojas, este efecto es el considerado
como “ruido”, y puede ser parte del efecto del
movimiento por el viento. La nube de puntos con
menor densidad fue producida por la cámara
Nikon, quedando inclompletas alguas zonas del
árbol.
El árbol de mayores dimensiones (Árbol 2)
es un Quercus shumardii. Pese al conjunto de las
nubes de puntos, no pudo tenerse una cobertura
total de la copa. Algunos árboles presentaron
mayor cobertura que en otros, pero en general a
todos les faltó una mejor completitud.
En el caso de la nube de puntos producida
por la GoPro-IR, se observa el efecto de la parte
más alta del árbol se proyecta cuando continúan los
píxeles que corresponden al cielo. Para minimizar
éste efecto se realizaron máscaras con una técnica
dentro de Agisoft para minimizarlo. Este proceso
aumentó el tiempo de posprocesamiento para éste
sensor de 2 a 3 h extra, pero se nota una mejor
densidad de puntos que con la cámara Nikon.
En cuanto a los tiempos invertidos para el
levantamiento de datos se obtuvieron resultados
parecidos para los tres sensores, aunque el ZEB1
continúa siendo el más rápido. En cuanto a la
generación de las nubes de puntos, el tiempo que
se tarda en enviar la información al proveedor para
que el archivo sea ubicado y en el que lo regresan,
es igual a lo que se tarda el Agisoft en generar la
alineación y la nube de puntos en resolución
media. Sin embargo, si se requiere de alta
resolución para la generación de los puntos
entonces puede ser hasta cuatro veces más tardado,
pero se logra (si se tienen la cantidad de fotos
necesaria) una completitud de información mayor
y con menos ruido que en el ZEB1. .
Aunque la comparación se realizó cuando se
alcanzó una precisión menor a 0,03 m entre las
nubes de puntos, y posteriormente se
documentaron las características dasométricas, se
obtuvieron diferencias entre las nubes de puntos
por el ruido que presentaban (ZEB1), la
completitud de algunas áreas del árbol (Nikon), la
proyección que prolongaba la lectura de la
respuesta en el pixel de GoPro-IR, especialmente
en el área superior de la copa, por la falta de
alcance.
La densidad de puntos fue mayor en las
fotografías foto-reconstruidas con la cámara
GoPro-IR, y el promedio en el error de precisión
geográfica fue de 0.0102 m y en la precisión
métrica varió en AA de 10±6.4 cm, DC 25±3.2 cm
y DAP 8±1.4 cm; el mejor tiempo de
procesamiento para lograr el resultado fue de 5.3 h,
del LIDAR móvil.
5 CONCLUSIÓN A manera de conclusión resumimos las principales
características que son de importancia para la
actualización de inventarios:
1. El sensor que produjo la nube de puntos
más densa fue ZEB1.
2. El sensor más rápido para la toma de datos
fue ZEB1.
3. La precisión métrica fue similar para todas
las nubes destacándose la nube de puntos
Nikon en alta resolución.
4. La densidad entre las nubes de puntos
fotoreconstruidas fue mayor con la GoPro-
IR.
5. El tiempo total de producción y llenado de
datos para la actualización del inventario
fue menor para el ZEB1 y mayor para la
GoPro-IR.
Éste estudio demuestra que ambas tecnologías
son útiles para la actualización de los inventarios
de árboles urbanos, que ambas tienen la capacidad
de llegar a mediciones certeras con precisiones
métricas hasta del 96%.

Memorias de resúmenes en extensos SELPER-XXI-México-UACJ-2015
12-16 de Octubre de 2015, Ciudad Juárez, Chihuahua, México.
6 RECOMENDACIONES
En una próxima aplicación se sugiere que desde el
momento de la planeación del experimento se
tomen en cuenta los parámetros que influyen en el
cálculo de traslape de la información,
especialmente en el campo de visión de las
fotografías. Se recomienda dentro de la etapa de
diseño del experimento realizar pruebas para
calcular el porcentaje de cobertura y distancia con
la que se generará la resolución de píxeles deseada.
Es necesario de ser posible complementar
con información aérea que permita llenar la parte
superior de la copa en cada árbol y así contar con
toda la estructura. Las tomas aéreas de un vehículo
no tripulado (UAV) serían de gran utilidad para los
datos faltantes y generaría una mayor certidumbre
con el plano general sobre el que se encuentra la
estructura.
Se recomienda colocar cintillos para el
etiquetado de los árboles con el material que sea
resistente al clima y que tengan el suficiente
espacio para no provocar daños por ahorcamiento.
Se encontraron distintos árboles con éste problema,
por lo que ese sería muy útil verificar durante los
levantamientos tradicionales la condición de las
etiquetas y por ser cuidadosos en el vaciado de los
datos, debido a que se presentaron constantes
repeticiones de las claves, complicando su
identificación.
7 AGRADECIMIENTOS
Agradecemos al personal de Planta Física del
Tecnológico de Monterrey y al Dr. Mario
Manzano así como al LabSIG y sus colaboradores por continuar el esfuerzo del proyecto Arboretum.
8 REFERENCES
Alanís-Flores, G.J., C.G. Velazco-Macías, R.
Foroughbakhch, V. Valdez, M. Alvarado.
2004. Diversidad florística de Nuevo León:
especies en categoría de riesgo. Ciencia
UANL, 7 (2004): 209–218.
Alanís-Flores, G.J. 2005. El arbolado urbano en el
Área Metropolitana de Monterrey. Ciencia
UANL, 8(001):20-32.
Ayrey, E. 2015.Individual Tree Measurements From
Three-Dimensional Point Clouds Electronic
Theses and Dissertations. Paper 2284.
http://digitalcommons.library.umaine.edu/etd/22
84
Escobedo, F. & A. Chacalo. 2008. Estimación
preliminar de la descontaminación
atmosférica por el arbolado urbano de la
Ciudad de México. Interciecia. 33(1):29-33.
Lefsky, M. 1997. Application of LIDAR remote
sensing estimation of the forest canop and
stand structure. PhD. Thesis. Deparment of
Environmental Science. University of
Virginia. Charlotteville. VA., USA. 185p.
Lin, J. 1983. Cities in the Developing World:
Policies for their equitable and efficient
growth. Oxford University Press. New York,
USA. 230p.
Moll, G. & S. Ebenreck. 1989. Shading our cities:
A resource guide for urban and community
forests. Island Press, Washington, D.C.
USA. 333p.
Musialski, P., P. Wonka, D.G. Aliaga, M.
Wimmer, L.van Gool & W. Purgathofer.
2013. A surve of urban reconstruction.
Computer graphics forum. 32(6):146-177p.
Nowak, D., D. E. Crane & J. C. Stevens. 2006.Air
pollution removal by urban tres and shrubs
in the United States. Urban forestry and
Urban greening. (4):115-123.
Parker, G.1995. Structure and microclimate of
forest canopies. In Nadkarni, M. L (eds)
Forest canopies: a review of research on a
biological frontier. Academic Press. San
Diego, CA, USA. 73-106p.
Renaud, M.R., J. Aryal & A.K. Chong. 2007.
Object-based classification of Ikons Imagery
for mapping large-scale vegetation
comunities in urban areas. Sensors 7:2860-
2880.

Memorias de resúmenes en extensos SELPER-XXI-México-UACJ-2015
12-16 de Octubre de 2015, Ciudad Juárez, Chihuahua, México.
Rivera Rivera, A.L. 2012. Urban heat islands in
Monterrey, Mexico using remote sensing
imagery and geographic information
systems analysis. Master Thesis. Instituto
Tecnológico de Monterrey, Monterrey,
Mexico.73p.
Small, C. 2001. Estimation of urban vegetation
abundance by spectral mixture analysis.
International Journal of Remote Sensing.
22:1305-1334.
St-Onge, B.A. & N. Achaicha. 2001. Measuring
forest canopy height using a combination of
LIDAR an aerial photography data.
International Archives of Photogrammetry
and Remote Sensing, Volume XXXIV-3
/W4 Annapolis, MD, 22 -24 Oct. 2001. 131-
137p.
Streutker, D.R., & N.F. Glenn. 2006. LiDAR
measurement of sagebrush steppe vegetation
heights. Remote Sensing of
Environment,201 (1): 135 -145.
Yépez Rincón, F.D. & D.F. Lozano García. 2013.
Mapeo del arbolado urbano con LIDAR
aéreo. Revista Mexicana de Ciencias
Forestales. 5 (26):58-74p.
Zhangab, X., X. Fengb & H. Jiangac. 2010.
Object-oriented method for urban vegetation
mapping using IKONOS imagery.
International Journal of Remote Sensing. 31:
177-196.