ESCUELA TÉCNICA SUPERIOR DE INGENIEROS NDUSTRIALES Y DE...
13
ESCUELA SCUELA SCUELA SCUELA TÉCNICA ÉCNICA ÉCNICA ÉCNICA SUPERIOR DE UPERIOR DE UPERIOR DE UPERIOR DE I NGENIEROS NGENIEROS NGENIEROS NGENIEROS I NDUSTRIALES Y DE NDUSTRIALES Y DE NDUSTRIALES Y DE NDUSTRIALES Y DE TELECOMUNICACIÓN ELECOMUNICACIÓN ELECOMUNICACIÓN ELECOMUNICACIÓN APUNTES DE LA ASIGNATURA: TEORÍA DE MÁQUINAS TEORÍA DE MÁQUINAS TEORÍA DE MÁQUINAS TEORÍA DE MÁQUINAS ASIGNATURA OBLIGATORIA DE 3º DE INGENIERÍA INDUSTRIAL TEMA 9 TRENES DE ENGRANAJES JESÚS Mª PINTOR BOROBIA DR. INGENIERO INDUSTRIAL DPTO. DE INGENIERÍA MECÁNICA, ENERGÉTICA Y DE MATERIALES IRUÑA, NOVIEMBRE DE 1997
Transcript of ESCUELA TÉCNICA SUPERIOR DE INGENIEROS NDUSTRIALES Y DE...

EEEESCUELA SCUELA SCUELA SCUELA TTTTÉCNICA ÉCNICA ÉCNICA ÉCNICA SSSSUPERIOR DE UPERIOR DE UPERIOR DE UPERIOR DE IIIINGENIEROSNGENIEROSNGENIEROSNGENIEROSIIIINDUSTRIALES Y DE NDUSTRIALES Y DE NDUSTRIALES Y DE NDUSTRIALES Y DE TTTTELECOMUNICACIÓNELECOMUNICACIÓNELECOMUNICACIÓNELECOMUNICACIÓN
APUNTES DE LA ASIGNATURA:
TEORÍA DE MÁQUINASTEORÍA DE MÁQUINASTEORÍA DE MÁQUINASTEORÍA DE MÁQUINASASIGNATURA OBLIGATORIA DE 3º DE INGENIERÍA INDUSTRIAL
TEMA 9TRENES DE ENGRANAJES
JESÚS Mª PINTOR BOROBIADR. INGENIERO INDUSTRIALDPTO. DE INGENIERÍA MECÁNICA,ENERGÉTICA Y DE MATERIALES
IRUÑA, NOVIEMBRE DE 1997

Dpto. Ingeniería Mecánica, Energética y de Materiales
TEMA 9 – TRENES DE ENGRANAJES
TEORÍA DE MÁQUINAS - 9.2 -
INDICE9.1 INTRODUCCIÓN.9.2 CLASIFICACIÓN.9.3 TRENES ORDINARIOS SIMPLES Y COMPUESTOS.
9.3.1 Relación de transmisión. Criterio de signos.9.3.2 Potencias y pares transmitidos. Rendimiento.
9.4 TRENES EPICICLOIDALES SIMPLES
9.4.1 Relación de velocidades.9.4.2 Relación de pares. Rendimiento.

Dpto. Ingeniería Mecánica, Energética y de Materiales
TEMA 9 – TRENES DE ENGRANAJES
TEORÍA DE MÁQUINAS - 9.3 -
9.1 Introducción
Un tren de engranajes (Fig. 9.1) es un mecanismo formado por varios pares de engraneacoplados de tal forma que el elemento conducido de uno de ellos es el conductor del siguiente.Suele definirse como aquella cadena cinemática formada por varias ruedas que ruedan sin deslizarentre sí; o bien como cualquier sistema de ejes y ruedas dentadas que incluya más de dos ruedas.
Figura 9.1 – Trenes de engranajes.En muchos casos, se recurre a ellos porque no es posible establecer una determinada
relación de transmisión entre dos ejes mediante un solo par de ruedas dentadas; o también porquese desea obtener un mecanismo con relación de transmisión variable, lo que tampoco es posiblecon un solo par de ruedas.
Los casos más frecuentes en los que la relación de transmisión µ no puede ser generadasolamente por dos ruedas son:
- Cuando la relación de transmisión µµµµ es muy distinta de la unidad:Por un lado, tenemos el número mínimo de dientes que pueden tallarse sin que seproduzca interferencia de tallado (2/sen2ϕ).
Dpto. Ingeniería Mecánica, Energética y de Materiales
TEMA 9 – TRENES DE ENGRANAJES
TEORÍA DE MÁQUINAS - 9.4 -
También existen limitaciones constructivas que limitan el número máximo de dientes quepueden tallarse sobre una rueda. La razón principal es que los errores cometidos duranteel tallado, aunque sean muy pequeños y tal vez no influyan en el engrane de unadeterminada pareja de dientes, son acumulativos. Como consecuencia, el último dientetallado puede quedar excesivamente cerca o lejos del primero falseando el paso yhaciendo que el engranaje no funcione correctamente. De ahí que generalmente no sesuele admitir pasar de 200 dientes en engranajes industriales (reductores de velocidad deturbinas muy rápidas) y de 100 en mecánica fina de precisión; si bien no se llega a estoslímites más que en casos excepcionales.Por otra parte, sabemos que pueden construirse ruedas con un número de dientes menorque 2/sen2ϕ tallando engranajes corregidos.Uniendo todo ello, podemos ver que el valor mínimo (su inverso será el máximo) quepodemos alcanzar en la relación de transmisión es de orden de:
µmín = 15/100 ÷ 15/200 ≅ 1/6 ÷ 1/12aunque, en la práctica, con engranajes cilíndricos suele ser habitual que µmín ≅ 1/5 ÷ 1/7.Los números máximo y mínimo de dientes definen una relación de transmisión que nopuede sobrepasarse y a la que se recomienda no llegar, a ser posible, para evitar unadisminución notable del rendimiento, un aumento del desgaste, ruido y dificultades en elmontaje.Además, otra razón de peso es que no interesa que la rueda de menos dientes resulteexcesivamente pequeña en relación a la otra: en tal caso, el piñón se desgasta más quela rueda al entrar más veces en contacto sus dientes y sufrir con ello un mayor desgaste yun mayor número de ciclos de fatiga por unidad de tiempo. En cualquier caso, en generalse suele tener en cuenta esta diferencia y se utiliza un mejor material para el piñón.
- La relación de transmisión µµµµ viene definida por una fracción irreductible µµµµ = a/bdentro de los márgenes descritos en el punto anterior, pero tal que a > zmáx y b > zmáx.Por ejemplo µ = 133/171.
- La relación de transmisión µµµµ viene definida por un número racional que no puedeestablecerse con la suficiente aproximación mediante un único par de ruedas dedimensiones limitadas. Por ejemplo µ = π = 3.14159 ...
- La relación de transmisión µµµµ ha de establecerse entre dos ejes excesivamentealejados como para establecer la transmisión mediante sólo dos ruedas de dimensionesnormales. En ocasiones, cuando sucede este tipo de problemática, la solución puedeestar en buscar otro tipo de transmisión: correas, cadenas, …
Dpto. Ingeniería Mecánica, Energética y de Materiales
TEMA 9 – TRENES DE ENGRANAJES
TEORÍA DE MÁQUINAS - 9.5 -
9.2 Clasificación
La clasificación de los trenes de engranajes, como cualquier otra clasificación, es un temamuy subjetivo, en la medida en que depende del criterio o criterios elegidos para realizarla. A partirde consideraciones de índole cinemática, una posible clasificación puede ser:
- Trenes ordinarios: que, a su vez, pueden dividirse en:+ Trenes ordinarios simples.+ Trenes ordinarios compuestos. Estos, así mismo, podrán ser recurrentes o no
recurrentes.- Trenes epicicloidales: que pueden subdividirse en:
+ Trenes epicicloidales simples.+ Diferenciales.+ Trenes epicicloidales de balancín.
- Trenes mixtos: en los que coexisten los dos tipos de trenes de engranajes anteriores.La diferencia fundamental estriba en que en los trenes epicicloidales existe algún eje que
tiene movimiento relativo respecto de los demás; mientras que en los trenes ordinarios el únicomovimiento que pueden tener los ejes es el de giro sobre sí mismos.
Dpto. Ingeniería Mecánica, Energética y de Materiales
TEMA 9 – TRENES DE ENGRANAJES
TEORÍA DE MÁQUINAS - 9.6 -
9.3 Trenes ordinarios simples ycompuestos
En un tren ordinario, las ruedas extremas del tren giran sobre los dos ejes entre los que hade establecerse la relación de transmisión deseada. En él, todos los ejes de las ruedas que locomponen (tanto extremas como intermedias) apoyan sobre un mismo soporte fijo.
9.3.1 RELACIÓN DE TRANSMISIÓN. CRITERIO DE SIGNOS
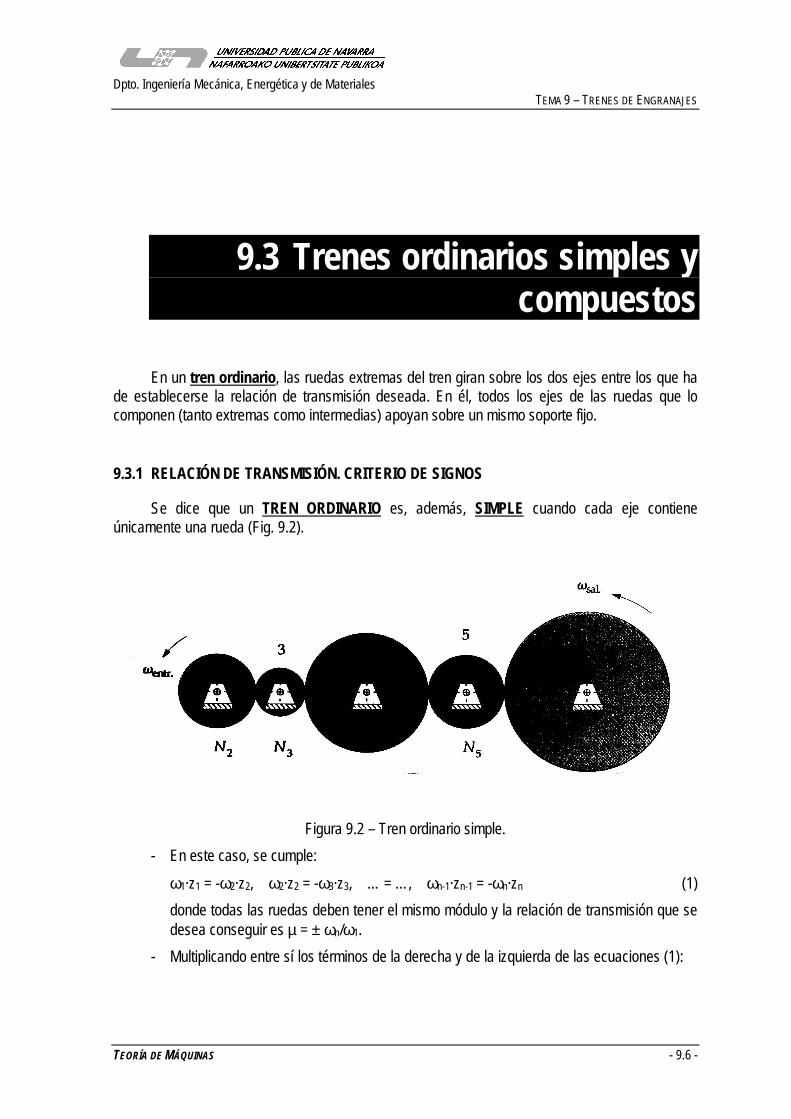
Se dice que un TREN ORDINARIO es, además, SIMPLE cuando cada eje contieneúnicamente una rueda (Fig. 9.2).
Figura 9.2 – Tren ordinario simple.- En este caso, se cumple:
ω1·z1 = -ω2·z2, ω2·z2 = -ω3·z3, … = …, ωn-1·zn-1 = -ωn·zn (1)donde todas las ruedas deben tener el mismo módulo y la relación de transmisión que sedesea conseguir es µ = ± ωn/ω1.
- Multiplicando entre sí los términos de la derecha y de la izquierda de las ecuaciones (1):
Dpto. Ingeniería Mecánica, Energética y de Materiales
TEMA 9 – TRENES DE ENGRANAJES
TEORÍA DE MÁQUINAS - 9.7 -
nn11
1n
1i
n
2jjjii zzzz ⋅ω±=⋅ω⋅ω−=⋅ω∏ ∏
−
= =
(2)
- De donde resulta:
( )n
11n
n
1
1
n
zz1
zz
⋅−=±=ωω
=µ − (3)
- EL número de dientes de las ruedas intermedias no influye en el valor absoluto de larelación de transmisión (µ). Son las llamadas ruedas parásitas: pueden servir parainvertir el sentido de giro final (el signo de la relación de transmisión) o para modificar ladistancia entre los ejes de entrada y salida.
- Otra posible aplicación de los trenes ordinarios simples tiene lugar en el caso de que sedesee tener más de un eje de salida de movimiento, para una sola entrada.
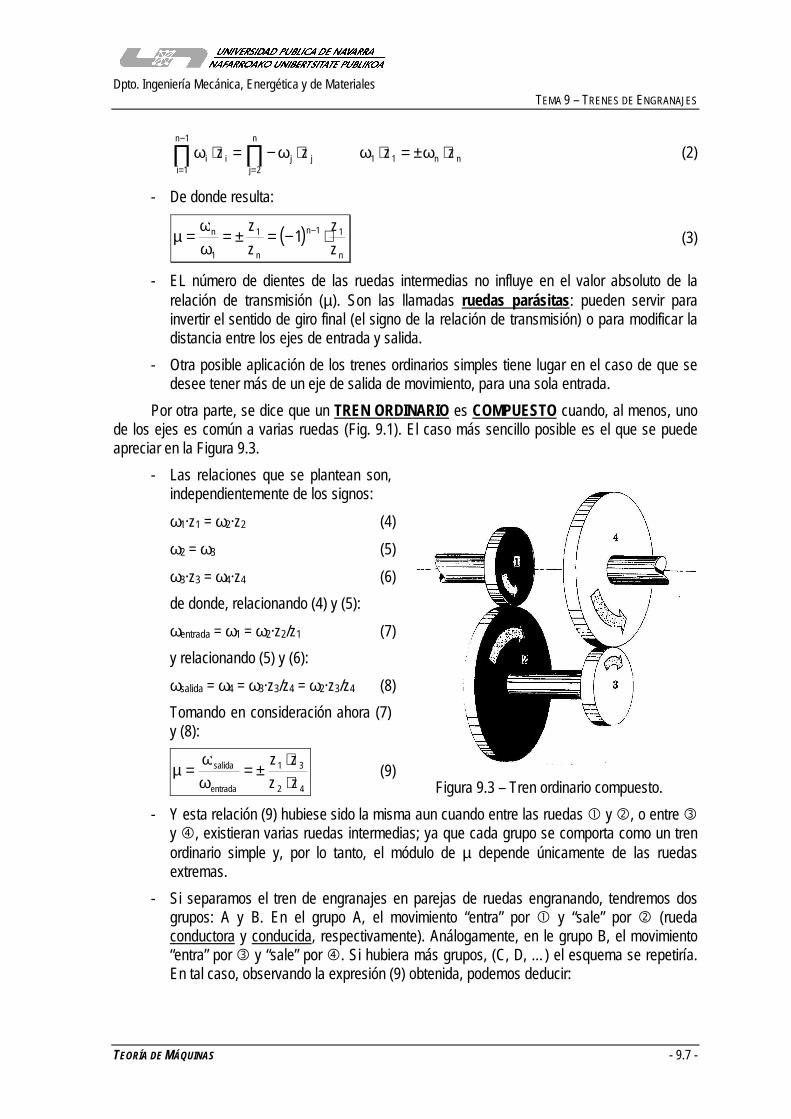
Por otra parte, se dice que un TREN ORDINARIO es COMPUESTO cuando, al menos, unode los ejes es común a varias ruedas (Fig. 9.1). El caso más sencillo posible es el que se puedeapreciar en la Figura 9.3.
- Las relaciones que se plantean son,independientemente de los signos:ω1·z1 = ω2·z2 (4)ω2 = ω3 (5)ω3·z3 = ω4·z4 (6)de donde, relacionando (4) y (5):ωentrada = ω1 = ω2·z2/z1 (7)y relacionando (5) y (6):ωsalida = ω4 = ω3·z3/z4 = ω2·z3/z4 (8)Tomando en consideración ahora (7)y (8):
42
31
entrada
salida
zzzz
⋅⋅
±=ωω
=µ (9)Figura 9.3 – Tren ordinario compuesto.
- Y esta relación (9) hubiese sido la misma aun cuando entre las ruedas � y �, o entre �y �, existieran varias ruedas intermedias; ya que cada grupo se comporta como un trenordinario simple y, por lo tanto, el módulo de µ depende únicamente de las ruedasextremas.
- Si separamos el tren de engranajes en parejas de ruedas engranando, tendremos dosgrupos: A y B. En el grupo A, el movimiento “entra” por � y “sale” por � (ruedaconductora y conducida, respectivamente). Análogamente, en le grupo B, el movimiento“entra” por � y “sale” por �. Si hubiera más grupos, (C, D, …) el esquema se repetiría.En tal caso, observando la expresión (9) obtenida, podemos deducir:

Dpto. Ingeniería Mecánica, Energética y de Materiales
TEMA 9 – TRENES DE ENGRANAJES
TEORÍA DE MÁQUINAS - 9.8 -
∏∏
∏∏ ±=±=
ωω
=µC
M
conducidas
somotricesconductora
entrada
salida
zz
zz
(10)
en cuanto al signo, el procedimiento más adecuado es obtenerlo observandodirectamente la figura que representa esquemáticamente el tren.
- Si en un tren de engranajes ordinario simple es necesario que todas las ruedas tengan elmismo módulo, no sucede lo mismo en el caso del tren ordinario compuesto. En el casode la Fig. 9.3, si R3 < R2, para transmitir la misma potencia de giro (Pot = Mi·ω = T·Ri·ω)es preciso una fuerza mayor (es decir, la componente tangencial a la circunferenciaprimitiva de funcionamiento -T- del esfuerzo de contacto entre dientes es mayor: TB > TA);por lo tanto, los dientes de las ruedas del grupo B están más solicitadas que las del grupoA y deberían ser construidas con un módulo mayor.
Se dice que un TREN de engranajes ORDINARIO COMPUESTO es RECURRENTE cuandoel eje de salida (S) y el de entrada (E) son coaxiales (Fig. 9.3):
- En un tren de este tipo, y con ruedas exteriores, se verifica que: R1 + R2 = R3 + R4; o bien:mA·(z1 + z2) = mB·(z3 + z4) (11)de donde, si las ruedas no están corregidas, los módulos habrán de cumplir que:
21
43
B
A
zzzz
mm
++
= (12)
- Y si existen pA ruedas intermedias entre las ruedas � y �, y pB entre � y �:
=
=
++
++=
Ap
1j j21
Bp
1i i43
B
A
z2zz
z2zzmm
(13)
- En trenes ordinarios compuestos norecurrentes (Fig. 9.4) con excentricidad“e” entre el eje de entrada y el de salida,la condición a cumplir será:R1 + R2 + e = R3 + R4
es decir:
=
=
+++
++=
Ap
1j jA
21
Bp
1i i43
B
A
z2mezz
z2zzmm
(14)
- Expresiones todas ellas válidas para elcaso de engranajes cilíndricos dedientes rectos.
Figura 9.4 – Tren compuesto no recurrente.

Dpto. Ingeniería Mecánica, Energética y de Materiales
TEMA 9 – TRENES DE ENGRANAJES
TEORÍA DE MÁQUINAS - 9.9 -
9.3.2 POTENCIAS Y PARES TRANSMITIDOS
Prescindiendo del rozamiento, todas las fuerzas que intervienen en un tren de engranajesson las mismas si el tren está quieto, si el tren se mueve con velocidades uniformes en un sentido osi se mueve en sentido contrario. Ello es una consecuencia de que todas las fuerzas de inerciaquedan equilibradas.
Por ejemplo, en la figura 9.5b los sentidos de giro son contrarios a los de la figura 9.5a, perolas fuerzas que intervienen son las mismas. La diferencia estriba en que en el primer caso M1 actúaen el mismo sentido que ω1 y, por lo tanto, es un par motor que introduce trabajo en el sistema;mientras que M2 es un par resistente que saca trabajo del sistema. Sin embargo, en el segundocaso, M1 es el resistente y M2 el motor.
Figura 9.5 – Las fuerzas no dependen de los sentidos de giro.Se denominan fuerzas activas a aquéllas que introducen o sacan trabajo en el sistema. Esto
excluye las reacciones en los apoyos y los empujes mutuos entre dientes. Así, las únicas fuerzasactivas que hay que considerar en un tren de engranajes son los pares exteriores que actúan sobrelas piezas giratorias en su plano de giro.
Para analizar los pares activos basta con aplicar de forma sistemática el teorema de laspotencias virtuales: en un sistema en equilibrio pero que puede moverse (o se mueve), encualquier movimiento posible la suma de las potencias que entran al sistema es nula.
Observando la Figura 9.6,en la que los pares activos son M1y M2, ha de cumplirse:
0MM 2211 =ω⋅+ω⋅ (15)
De donde, operando:
µ−=ωω
−=1
2
2
1
MM
(16)Figura 9.6 – Tren ordinario. Pares activos.
En la figura se observa que si ω1 tiene realmente el sentido dibujado, ω2 debe tener elsentido contrario. Esto se traduce en que µ tendrá un valor negativo, con lo que según (16) M1 y M2tendrán el mismo signo (el dibujado o el contrario).
En un tren de engranajes, los pares activos sobre los ejes se transmiten de un eje al otro pormedio de fuerzas tangenciales sobre los contornos de las ruedas (sobre las circunferenciasprimitivas de funcionamiento). Como ya vimos, la acción mutua entre dos ruedas es una fuerza (F)
Dpto. Ingeniería Mecánica, Energética y de Materiales
TEMA 9 – TRENES DE ENGRANAJES
TEORÍA DE MÁQUINAS - 9.10 -
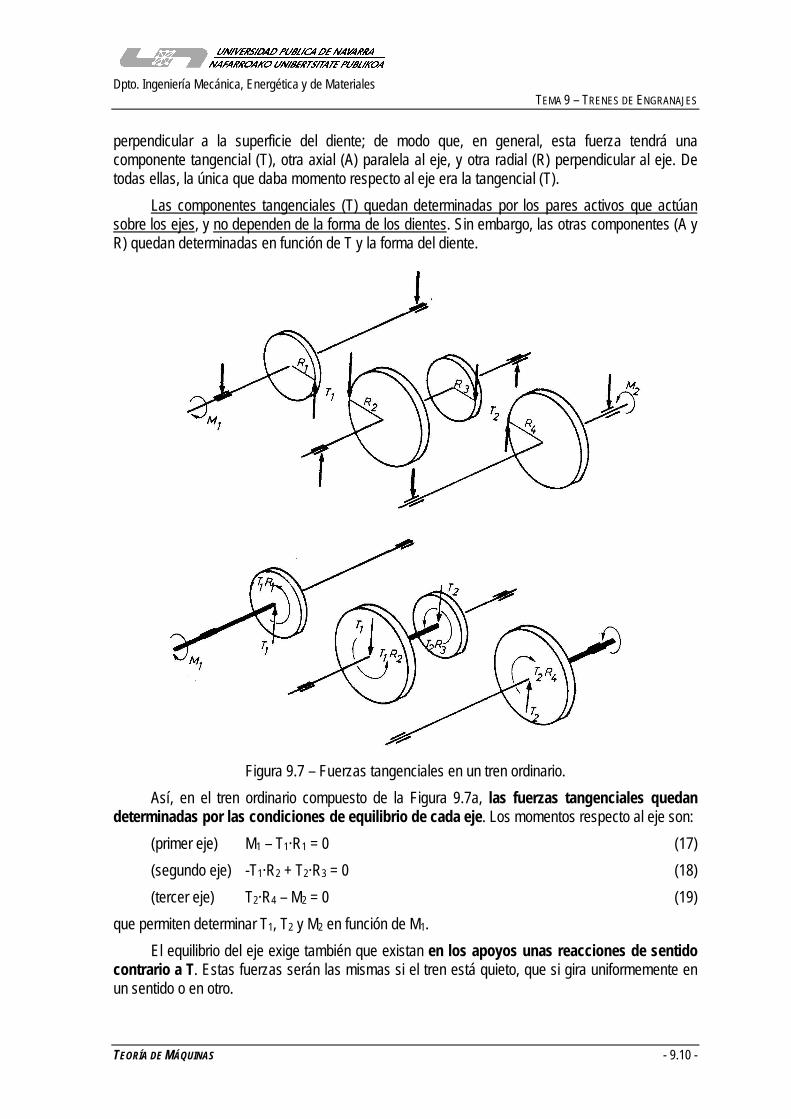
perpendicular a la superficie del diente; de modo que, en general, esta fuerza tendrá unacomponente tangencial (T), otra axial (A) paralela al eje, y otra radial (R) perpendicular al eje. Detodas ellas, la única que daba momento respecto al eje era la tangencial (T).
Las componentes tangenciales (T) quedan determinadas por los pares activos que actúansobre los ejes, y no dependen de la forma de los dientes. Sin embargo, las otras componentes (A yR) quedan determinadas en función de T y la forma del diente.
Figura 9.7 – Fuerzas tangenciales en un tren ordinario.Así, en el tren ordinario compuesto de la Figura 9.7a, las fuerzas tangenciales quedan
determinadas por las condiciones de equilibrio de cada eje. Los momentos respecto al eje son:(primer eje) M1 – T1·R1 = 0 (17)(segundo eje) -T1·R2 + T2·R3 = 0 (18)(tercer eje) T2·R4 – M2 = 0 (19)
que permiten determinar T1, T2 y M2 en función de M1.El equilibrio del eje exige también que existan en los apoyos unas reacciones de sentido
contrario a T. Estas fuerzas serán las mismas si el tren está quieto, que si gira uniformemente enun sentido o en otro.
Dpto. Ingeniería Mecánica, Energética y de Materiales
TEMA 9 – TRENES DE ENGRANAJES
TEORÍA DE MÁQUINAS - 9.11 -
En estas condiciones de equilibrio, hay algunos trozos del eje que quedan sometidos aflexión y torsión. Esto se pone en evidencia en la Figura 9.7b, al trasladar las fuerzas tangenciales(T) al centro de las ruedas y añadiendo unos pares (T·R) que compensen esa traslación. En elprimer eje, por ejemplo, la nueva fuerza T1 se equilibra con las reacciones de los apoyos, que estánen el mismo plano. Este equilibrio se traduce en flexar todo el trozo del eje comprendido entre losapoyos. Al mismo tiempo, el par M1 se equilibra con el par T1·R1, pero este equilibrio se traduce enretorcer todo el trozo de eje comprendido entre los planos de acción de ambos pares.
En la Figura 9.7, los trozos de eje sometidos a torsión están señalados con trazo grueso. Endefinitiva, el par M1 se transmite hasta M2 a lo largo de sucesivos trozos de eje que quedansometidos a torsión.
Por último, recordar como en un tren de engranajes, a medida que disminuye la velocidad degiro (ω) de las ruedas aumenta el par transmitido (ya que la potencia transmitida debe depermanecer constante, salvo pérdidas por rozamiento, Pot = Mi·ω = T·Ri·ω), por lo que las ruedashan de ser más robustas.

Dpto. Ingeniería Mecánica, Energética y de Materiales
TEMA 9 – TRENES DE ENGRANAJES
TEORÍA DE MÁQUINAS - 9.12 -
9.4 Trenes epicicloidales simples
Tren epicicloidal (Fig. 9.8) es aquel tren de engranajes en el que alguna rueda gira entorno a un eje que no es fijo, sino que gira en el espacio:
- Al brazo � que gira se le llamaportasatélites.
- A la rueda � que gira alrededor dedicho eje se la denomina satélite.
- El sistema, de esta manera, tienedos grados de libertad que serestringen a uno haciendo girar alsatélite alrededor de una rueda fijao central �. Figura 9.8 – Tren epicicloidal elemental.
En el caso de los trenes epicicloidales, también cabe hablar de trenes recurrentes o norecurrentes, según que los ejes de entrada y salida sean o no coaxiales.
9.4.1 RELACIÓN DE VELOCIDADES
Para resolver el problema cinemático se procede de la siguiente manera:- Nos situamos sobre el brazo portasatélites, para estudiar el movimiento relativo respecto
del mismo (es decir lo convertimos en el eslabón de referencia). Desde el punto de vistaanalítico, ello equivale a introducir una velocidad –ω3 (siendo ω3 la velocidad de giro delbrazo portasatélites) al conjunto del sistema.
- El brazo, de esta forma, se queda fijo, la rueda fija gira con velocidad –ω3 y la ruedasatélite � con velocidad ω4 – ω3.
- El resultado es, por tanto, un simple caso de un par de ruedas o tren ordinario (si existenruedas intermedias):
SATELITE
FIJA
SATELITEPORTA
SATELITE
SATELITE
FIJA
SATELITE
FIJA
4
2
3
34
zz1
zz
RR
RR =−
ωω===
ωω−ω (20)
de donde:
SATELITEPORTASATELITE
SATELITEFIJASATELITE z
zz ω⋅+=ω (21)

Dpto. Ingeniería Mecánica, Energética y de Materiales
TEMA 9 – TRENES DE ENGRANAJES
TEORÍA DE MÁQUINAS - 9.13 -
Para obtener el movimiento de salida, se coloca (Fig. 9.9) una segunda rueda central ocorona �:
- Paramos el portasatélites �:
4
2
12
14
21
41
zz
−=ω−ωω−ω
=ωω (22)
- De donde, dado que ω2 = 0:
14
214 z
zω⋅=ω−ω = =
4
2
1
4
zz1+=
ωω
(23)
Figura 9.9 – Tren epicicloidal simple.