ESCUELA POLITÉCNICA NACIONAL FACULTAD DE...
138
ESCUELA POLITÉCNICA NACIONAL FACULTAD DE INGENIERÍA ELÉCTRICA "COMPORTAMIENTO DEL CONTADOR DE ENERGÍA ELÉCTRICA ACTIVA DE INDUCCIÓN MONOFÁSICO ANTE CORRIENTES DE CARGA NO SINUSOIDALES" EDGAR EDUARDO ARTEAGA MENA TESIS PREVIA A LA OBTENCIÓN DEL TITULO DE INGENIERO ELÉCTRICO QUITO - JULIO- 1994
Transcript of ESCUELA POLITÉCNICA NACIONAL FACULTAD DE...
ESCUELA POLITÉCNICA NACIONAL
FACULTAD DE INGENIERÍA ELÉCTRICA
"COMPORTAMIENTO DEL CONTADOR DE ENERGÍA
ELÉCTRICA ACTIVA DE INDUCCIÓN MONOFÁSICO
ANTE CORRIENTES DE CARGA NO SINUSOIDALES"
EDGAR EDUARDO ARTEAGA MENA
TESIS PREVIA A LA OBTENCIÓN
DEL TITULO DE INGENIERO ELÉCTRICO
QUITO - JULIO- 1994
Certifico que la presente tesis ha sido
desarrollada por el señor Edgar Eduardo
Arteaga Mena, bajo mi dirección.
Ing. Walter Brito P.
DIRECTOR
A G R A D E C I M I E N T O
Deseo dejar constancia de mi sincero agradecimiento
al Ingeniero Walter Brito P. por su acertada y
desinteresada dirección.
A los Ingenieros Bolívar Ledesma, Luis Pérez y
Fausto Aviles por su invalorable cooperación.
De una manera especial al señor Edwin Muñoz por su
gentil colaboración,
A todas las personas que de alguna manera
colaboraron en la realización del presente trabajo.

A la memoria de mi madre
A mi padre y hermanos
A mis hijos
a Ti

ÍNDICE GENERAL
CAPITULO I: GENERALIDADES DEL CONTADOR DE ENERGÍA
ELÉCTRICA ACTIVA DE INDUCCIÓN.
1.1 Introducción 1
1.2 Tipos de contadores de energía 5
1.3 Constitución y funcionamiento del con_
contador de inducción 13
1.4 Fuentes de error en la medición 31
1.5 Ajustes y compensaciones 43
CAPITULO II: ANÁLISIS DE LA EXACTITUD DEL CONTADOR DE
ENERGÍA ELÉCTRICA ACTIVA DE INDUCCIÓN.
2.1 Modelo teórico 51
2.2 Análisis en régimen sinusoidal 58
2.3 Análisis con voltaje sinusoidal y
corrientes no sinusoidales 68
2.4 Análisis de los resultados del mo-
délo 83
CAPITULO III: EXPERIMENTACIÓN
3.1 Metodología 87
3.2 Circuitos experimentales 90
3.3 Mediciones de energía con voltaje
sinusoidal y corrientes obtenidas
de un puente rectificador semicon_
trolado con carga resistiva 96
3.4 Mediciones de energía con voltaje
sinusoidal y corrientes obtenidas
de un puente rectificador semicon_
trolado con carga resistiva-inducti_
tiva 109
CAPITULO IV: CONCLUSIONES Y RECOMENDACIONES.
4.1 Discusión de los resultados obteni_
dos 123
4.2 Conclusiones 126
4.3 Recomendaciones 127
BIBLIOGRAFÍA 129

CAPITULO I
GENERALIDADES DEL CONTADOR DE ENERGÍA ELÉCTRICA
DE INDUCCIÓN
1.1 INTRODUCCIÓN
La era de la electricidad, con la conversión de la
energía mecánica y térmica en eléctrica y la rápida
transmisión de esta energía para su utilización en
trabajos mecánicos, iluminación, calor, etc., empieza
en el siglo XIX con el descubrimiento de la inducción
electromagnética por Michael Faraday en 1831.
Entre 1882 y 1884 la producción y utilización de la
electricidad se realizó desde el punto de vista
experimental; después, la invención de la dínamo por
Werner von Siemens y la perfección del bulbo de
iluminación incandescente por Heinrich Goebel y Thomas

- 2 -
Edison, hicieron posible la generación y utilización de
la electricidad en grandes cantidades, por lo que se
hizo necesario su medición y la correspondiente
facturación.
El primer instrumento para la medición de la cantidad
de energía suministrada en corriente continua fue
construido por Thomas Edison, y su principio se basaba
en procesos electroquímicos y electrolíticos; este
instrumento registraba solamente los amperios-hora; en
1890 aproximadamente, fue remplazado por aparatos de
medición en base a principios electromecánicos.
Es asombroso el esfuerzo realizado en la década de los
ochenta del siglo pasado para la construcción de un
medidor de la energía eléctrica útil y práctico. Los
más grandes logros fueron obtenidos por el doctor H.
Aron en Alemania con su medidor de péndulo, y por Elihu
Thompson en los Estados Unidos, así como por Hummel y
Peloux en Europa con su medidor tipo dinamómetro el
cual ya fue equipado con un registrador de watios-hora.
Aproximadamente en 1882 aparecía triunfalmente la
corriente alterna con la invención del transformador
por Gaulard y Gibbs, y el motor de inducción por Nicola
Tesla en 1887. Galileo Ferraris, quien también
participó en su desarrollo, formuló las bases de la
medición de la energía para corriente alterna con su
- 3 -
trabajo sobre la producción de la fuerza
electromagnética motora (1885-1888). El reconocía que
una fuerza motora puede ser generada por dos flujos
magnéticos alternos y desfasados en el tiempo y el
espacio, los cuales inciden sobre un rotor giratorio.
Los primeros medidores de corriente alterna que usan el
principio de Ferraris, fueron construidos en Europa por
el Dr. Blathy y el Dr. Borel, y en Estados Unidos por
Oliver Schallemberger, Thomas Duncan y Robert Lamphier.
En estos aparatos se registraron la corriente de carga
y el voltaje multiplicándose sus efectos como flujos
magnéticos y corrientes de Eddy en un disco o cilindro
de metal. Con esto se logró que el torque motor sea
proporcional a la potencia. El número de revoluciones
del disco fue contabilizado en un registrador como una
medida de la energía eléctrica. Después de que
Schallenberger solucionó el problema de la medición de
KWh con cargas inductivas usando el desplazamiento de
90° entre el voltaje y el flujo de voltaje, el medidor
tipo Ferraris no ha tenido un significativo cambio
desde su concepción original hasta la presente fecha.111
Como el numero de instalaciones eléctricas y de redes
de distribución trifásica se incrementó rápidamente,
se desarrolló el contador trifásico de energía,
aplicando el principio de Ferraris.

- 4 -
Adicionalmente a los pioneros antes mencionados, muchos
científicos e ingenieros no solamente que han
desarrollado instrumentos para la medición de la
energía eléctrica, sino que también han aportado un
invalorable servicio al desarrollo de instrumentos de
medición de diversos parámetros eléctricos.
Con el progreso de la tecnología se han desarrollado
interesantes y versátiles aparatos en el campo de la
calibración y prueba para contadores de energía
eléctrica, en particular la técnica de los
semiconductores ha incursionado en el campo de la
medición de energía de una manera importante. El tamaño
de estos equipos es reducido, su precisión elevada, de
fácil operación; a pesar de que su costo en la
actualidad es alto, con una producción masiva se verá
disminuido. Generalmente utilizan el método tiempo-
división.121
Como conclusión podría decirse que en los últimos cien
años de la historia de las mediciones eléctricas de
energía, el contador tipo Ferraris sigue ocupando el
lugar más importante. En su diseño el contador tipo
Ferraris es simple, de precisión razonable en un amplio
rango de medición, sólido, confiable en su operación,
durable, prácticamente exento de mantenimiento, y por
la demanda y su producción en serie sus costos son
moderados. En los últimos años se ha profundizado en
- 5 -
el estudio y perfeccionamiento del contador Ferraris
con la inclusión de nuevos materiales, diseños y
métodos de fabricación. I4]
1.2 TIPOS DE CONTADORES DE ENERGÍA
Los contadores se pueden clasificar según varios
criterios, a saber:151
- Por la clase de precisión y la energía medida;
Por la forma de conexión a la red eléctrica;
- Por su función particular o especial; y,
Por su objetivo de información.
A continuación se presenta una breve descripción de
cada una de ellas.
1*2.1 Por la clase de precisión y energía medida
a. Clase 0.5
Para energía activa. Límite de error ± 0.5 %. Se
utiliza para sitios de gran cantidad de consumo de
energía, tales como: industrias, consumidores y centros
de distribución en alto voltaje.

- 6 -
b. Clase 1
Para energía activa. Límite de error ±1%. Se utiliza
para sitios de gran consumo de energía: industrias y
centros de distribución a mediano voltaje.
c. Clase 2
Para energía activa. Límite de error ± 2 %. Su
aplicación es generalmente doméstico y, en ciertos
casos, comercial.
d. Clase 3
Para energía reactiva. Límite de error ± 3.0 %. Se
utiliza para sitios de gran cantidad de consumo de
energía, tales como: industrias, consumidores y centros
de distribución en alto voltaje.
1.2.2 Por la conexión a la red eléctrica
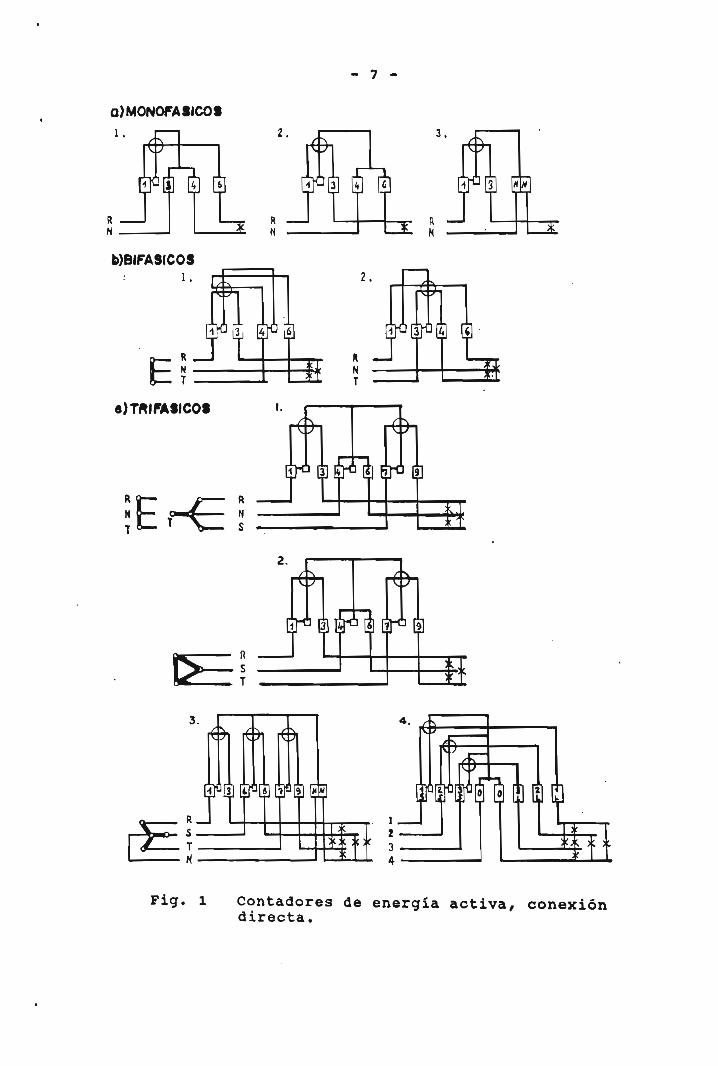
a. Contadores de energía activa, conexión directa
- Monofásico: bifilar y trifilar
- Bifásico trifilar
- Trifásico: trifilar y tetrafilar
Los esquemas de conexión se pueden apreciar en la
figura 1.
- 7 -
Q}MONOFASICOS
«BIFÁSICOS
«) TRIFÁSICOS
2.
1.£k
Ir-
*\
MJÍP1 h FJ C1
ck
r<
-i)
M]
' V .
**
[
(
^)
1.'(£r\ [«—
p
)
M ]
'V
3.
Ro- S
T
Fig. i Contadores de energía activa, conexióndirecta.
- 8 -
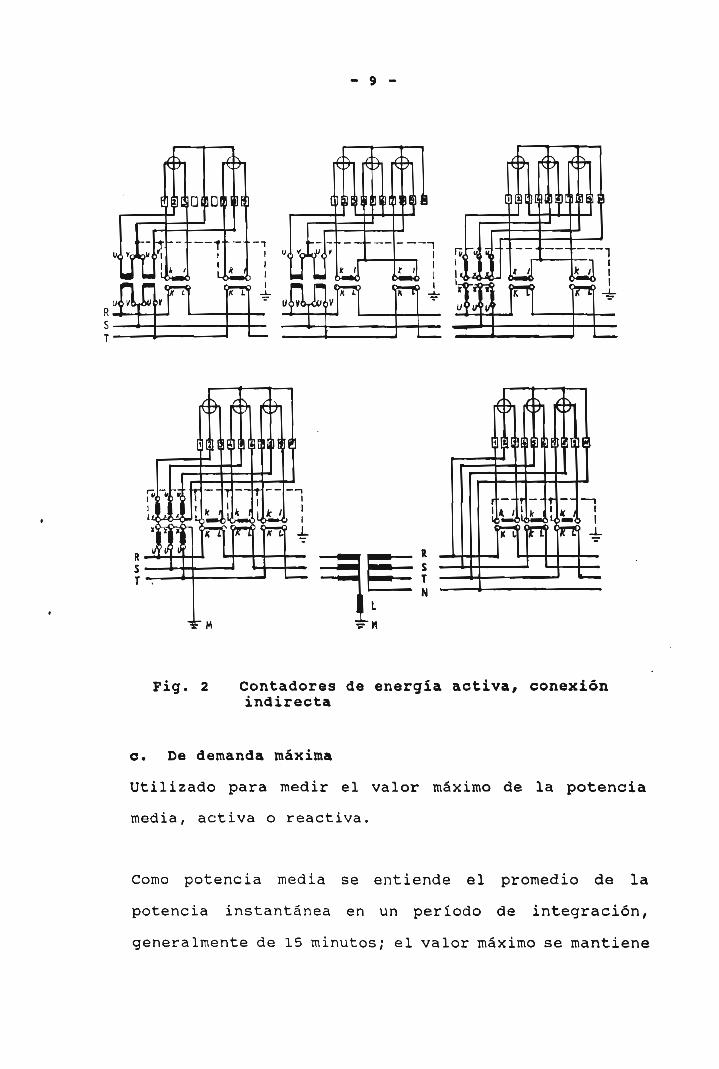
b. Contadores de energía activa, conexión indirecta
- Trifásico trifilar (2 TC y 2 TP; TC y TP
transformadores de corriente y potencial)
- Trifásico tetrafilar (2 TC y 2 TP)
- Trifásico tetrafilar (2 TC y 3 TP)
- Trifásico tetrafilar (3 TC y 3 TP)
- Trifásico tetrafilar (3 TC y 3 TP) conexión en
baja tensión
Los esquemas de conexión se pueden apreciar en la
figura 2.
1*2.3 Por su función particular o especial
a. De doble tarifa
Tiene un integrador con dos numeradores; la operación
de cada uno de estos corresponde a ciertos períodos de
tiempo que dependen de la curva de carga. La
conmutación se acciona por un temporizador externo, el
mismo que determina el período de cada tarifa.
b. De triple tarifa
Funciona como el anterior pero con un tercer numerador
que se utiliza para la tarifa de consumo pico, en
tiempo de sobreconsumo de energía.
- 9 -
TT
/Lie
O
ÉiifiQimiiiu
—-r i <v
ftpífcííilíB
U
o
U, IH¿O-Í un u
[
riN
f^
11
)
11
nrMM
™
II
T1i¿
M
'X; 7
I I I
_ .M*
Ft
1E
riL
<
2 Í*. ^
(11
|
X
re
111
,i
-L
.
Pig. 2 Contadores de energía activa, conexiónindirecta
c. De demanda máxima
Utilizado para medir el valor máximo de la potencia
inedia, activa o reactiva.
Como potencia inedia se entiende el promedio de la
potencia instantánea en un período de integración,
generalmente de 15 minutos; el valor máximo se mantiene

- 10 -
para un lapso de tiempo entre dos posiciones del
indicador de demanda máxima.
Se utiliza conjuntamente con un contador de energía
activa o de energía reactiva. Su funcionamiento es el
siguiente: la rotación del disco se transmite al
indicador de demanda máxima y al integrador de energía;
el mecanismo del integrador y del indicador de máxima
demanda tienen la parte inicial común. Mientras el
integrador trabaja continuamente, el engranaje del
indicador se desacopla al fin de cada período y la
parte móvil (elemento impulsor) regresa a la posición
inicial; el indicador permanece en la posición
alcanzada que representa la potencia media para el
período de integración. Este proceso se repite
sucesivamente y el indicador se desplaza al fin de cada
período si se obtiene un valor más alto de potencia. De
esta manera, el indicador tiene siempre la posición que
corresponde al valor máximo de la potencia media de
todos los períodos desde la última reposición del
indicador.
d. De sobrecarga
El integrador tiene dos numeradores de manera similar
al contador de doble tarifa, con la diferencia de que
la conmutación se realiza como función de la potencia
medida. Un numerador mide el consumo total como un
contador normal y el otro se acciona para consumos que
sobrepasan un valor de potencia predeterminado.

- 11 -
e. Con transmisores de pulsos
Tienen su aplicación en sistemas de tarifación
industrial con puntos de medición remotos. Estos
contadores están provistos de accesorios que producen
pulsos eléctricos proporcionales a la energía
consumida, los mismos que pueden ser enviados a un
totalizador que recibe las señales de los diferentes
puntos de medición.
1.2.4 Por su objetivo de información
a. Para suministro y consumo de energía
Cuenta con un integrador con dos numeradores; el uno
opera con el movimiento positivo (consumo), y el otro
para un desplazamiento negativo (suministro). Tiene
incorporado un mecanismo que impide el retroceso de uno
de ellos cuando se acciona el otro.
b. contador de energía aparente
A pesar de que tanto la potencia y energía aparente no
representan magnitudes físicas sino solo numéricas,
encuentran su aplicación en la estimación y cálculo de
la carga de los generadores y transformadores, la que
está limitada por su máxima intensidad de corriente.
c. Contadores de pérdidas en transformadores
Son utilizados para la determinación de las pérdidas en
el hierro y en el cobre de transformadores de gran

- 12 -
potencia, cuando la medición de la energía se realiza
en el secundario y, por tanto, no se incluyen las
pérdidas en el transformador.
d. Contador del cuadrado del voltaje
Sirve para registrar las pérdidas en el hierro, las
mismas que son proporcionales al cuadrado del voltaje.
El elemento motriz tiene las dos bobinas conectadas al
potencial de la red y la lectura es en KV2h. Este tipo
de contador es monofásico y se instala entre una fase
y el neutro de la red trifásica secundaria. Para la
obtención del valor de pérdidas, la lectura debe
multiplicarse por un coeficiente que es función de las
pérdidas trifásicas en el hierro del transformador a
voltaje nominal.
e. Contador del cuadrado de la corriente
Utilizado para registrar las pérdidas en el cobre, las
mismas que son proporcionales al cuadrado de la
corriente. El elemento motriz tiene las dos bobinas
conectadas a un transformador de corriente y su
lectura es en A2h. Es monofásico y se conecta a una
fase de la red secundaria. La lectura debe multiplicar-
se por un coeficiente que es función de las pérdidas en
el cobre del transformador a corriente nominal y
balanceada. Para el caso de desbalance de la carga, se
debe utizar tres contadores; en este caso el
coeficiente de cada uno será la tercera parte del general.
- 13 -
Es necesario mencionar que en la práctica se puede dar
una combinación de los tipos de contadores antes
descritos, según las necesidades del usuario y los
requerimientos de la empresa suministradora de energía.
1.3 CONSTITUCIÓN Y FUNCIONAMIENTO DEL CONTADOR DE
INDUCCIÓN
1.3.1 Constitución
El contador de energía eléctrica monofásico de
inducción está constituido básicamente por cuatro
sistemas:161
a. Sistema motriz.
b. Sistema de frenado.
c. Sistema numerador-integrador.
d. Sistema rotor.
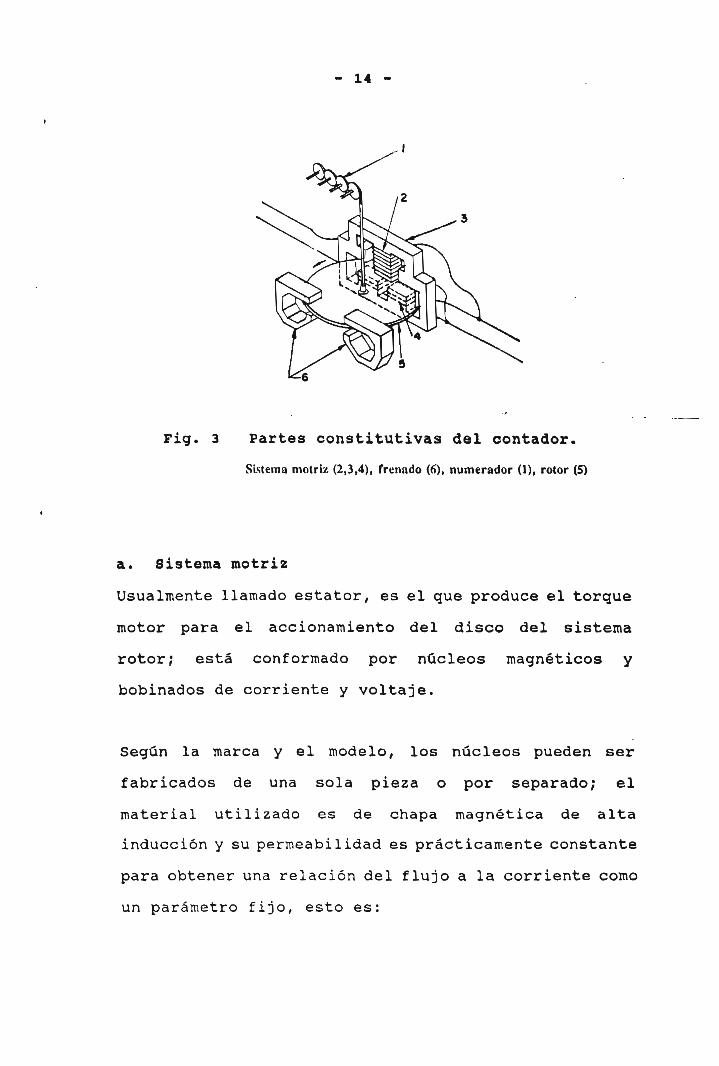
En la figura 3, se presentan las partes constitutivas
básicas del contador de energía de inducción.
A continuación se describe brevemente cada una de las
partes.
- 14 -
Fig. 3 Partes constitutivas del contador.
Sistema motri/ (2,3,4), frenado (6), numerador (1), rotor (5)
a. Sistema motriz
Usualmente llamado estator, es el que produce el torque
motor para el accionamiento del disco del sistema
rotor; está conformado por núcleos magnéticos y
bobinados de corriente y voltaje.
Según la marca y el modelo, los núcleos pueden ser
fabricados de una sola pieza o por separado; el
material utilizado es de chapa magnética de alta
inducción y su permeabilidad es prácticamente constante
para obtener una relación del flujo a la corriente como
un parámetro fijo, esto es:
- 15 -
#/i ~ contante
condición que se obtiene únicamente en la zona recta de
la curva de histéresis para un núcleo cerrado, es
decir, sin entrehierro.
Como en la construcción del medidor se tiene un
entrehierro relativamente grande en los núcleos de los
electroimanes, tanto para el de voltaje como para el de
corriente, se consigue un alargamiento de la parte
recta de la correspondiente curva de magnetización y,
por tanto, la relación casi constante entre flujo y
corriente en el rango de medición del contador.
En los medidores actuales generalmente se tienen dos
polos de corriente y uno de voltaje, localizados en la
parte inferior y superior del disco respectivamente.
La bobina de voltaje, de gran número de espiras y alta
inductancia, se conecta al voltaje de la red; en tanto
que la de corriente, de pocas espiras y de baja
impedancia, se conecta en serie con la carga.
b. sistema de frenado
Está constituido por un imán permanente que abraza al
disco del sistema rotor localizado en la parte lateral
respecto del sistema motriz, sirve para introducir una
- 16 -
resistencia intencional y controlada al movimiento del
disco, la cual es proporcional a la velocidad del
mismo.
El imán de freno es muy importante para la calibración
y precisión de la medición; la conflabilidad de su
operación depende de su posición adecuada así como de
sus propiedades magnéticas.
Las características principales requeridas por este
imán son: alta estabilidad magnética, gran fuerza
coercitiva y mínima sensibilidad a las variaciones de
temperatura; las aleaciones de Al-Ni-Co, cumplen con lo
indicado.
c. Sistema numerador integrador
El mecanismo de registro está formado por un sistema de
engranaj es, ruedas dentadas numeradas o indicadores
decádicos; es decir, con relación 1:10 entre dos
adyacentes.
Este mecanismo registrador acumula el número de
revoluciones del disco rotor que, por los pasos
adecuados de los engranajes y la constante nominal del
medidor (rev/KWH), representa la energía registrada.
Cabe mencionar que se tienen dos tipos de presentación
de la lectura de la energía: a) de tambor, en los que
- 17 -
se obtiene la cifra directamente de la indicación de
las ruedas numeradas; y, b) de esferas tipo reloj. El
primero de éstos es de uso más frecuente por la
facilidad y precisión que brinda su lectura, en tanto
que en los de esferas interviene el criterio
apreciativo de la persona que la realiza.
De esta forma se obtiene la cantidad de energía, que es
la medición de la potencia con la correspondiente
integración simultánea en el tiempo.
d. El sistema rotor
Está compuesto básicamente por el disco rotor y los
cojinetes.
El disco construido de lámina delgada de aluminio está
montado sobre un eje vertical acoplado al sistema
numerador integrador. Este disco se desplaza en el
entrehierro de los electroimanes al girar en torno al
eje cuyos extremos se apoyan en dos cojinetes; el
superior absorbe las fuerzas laterales impidiendo la
inclinación, en tanto que el inferior sirve de apoyo y
soporta las fuerzas verticales.
Las casas fabricantes de medidores ponen mucho énfasis
en el diseño y construcción de los coj inetes, porque
son fuente de errores debido a la fricción; por lo que
se han desarrollado sistemas de suspensión para
- 18 -
disminuir la presión vertical que ejerce el rotor sobre
el cojinete inferior. Existen varios mecanismos de
suspensión, entre los más aplicados se tienen:
- Mecánico
El extremo inferior del eje del rotor está acoplado a
una punta de apoyo que descansa sobre la esfera del
cojinete, la misma que se desplaza sobre una base de
zafiro cuyo armazón está suspendido por un resorte de
compresión que permite el movimiento armonioso del
rotor.
- Magnético
Se colocan dos imanes anulares en el cojinete inferior
con los campos magnéticos orientados en sentidos
opuestos, y por efecto de repulsión tienden a levantar
una arandela de material no remanente fijada a la punta
del eje del rotor, que es de material plástico,
produciéndose así la disminución de la presión del
rotor sobre la esfera del cojinete que se mueve sobre
la base de zafiro descrita en el párrafo anterior.
Es de mencionar que cada uno de los sistemas
componentes del contador tienen mecanismos de ajuste
que permiten un margen de regulación para una operación
correcta, los que serán descritos mas adelante.

- 19 -
1.3.2 Funcionamiento
La medición se realiza por la rotación del disco
producida por el torque motriz (par motor o momento
motor) y controlada por el torque de frenado. El número
de revoluciones se integra en el tiempo en el
numerador-integrador, quedando de esta manera
registrada la energía.
a. Torque motor
Es importante recordar el principio de inducción
electromagnética mediante el cual, en un conductor por
el que circula una corriente "i", ubicado en un campo
magnético de densidad "B" produce una fuerza "P" cuyo
sentido se determina por la regla de la mano derecha;
su módulo está dado por la expresión:
F = Bi 1 sena (1-1)
en la que 1 es la longitud de la parte del conductor
sobre la que actúa el campo magnético B, a es el ángulo
entre los vectores B e i en el espacio-
Si la fuerza "F" está situada a una distancia "d"
respecto del eje de rotación, el torque producido es:
- 20 -
p = Ffi• D c u
Considerando la densidad de campo magnético
proporcional al flujo y normal a la dirección de
circulación de la corriente "i", se puede escribir:
(1-3)
siendo k una constante que depende de la forma
geométrica del polo, de la longitud sobre la que actúa
el campo magnético, y de la distancia respecto del eje
de la ubicación de la fuerza.
Como el flujo "0" y la corriente "i", son funciones
periódicas en el tiempo, se debe considerar el valor
medio del torque:
d-4)
En la figura 4, se representan los flujos alternos 0V
y 0¡ de la bobina de potencial y de corriente
respectivamente, los que al atravesar el disco de
aluminio inducen corrientes de Foucault iv e i¡. La
interacción de estas corrientes iv e i¡ con los flujos
<t>i Y 0v/ respectivamente, da lugar a fuerzas dirigidas
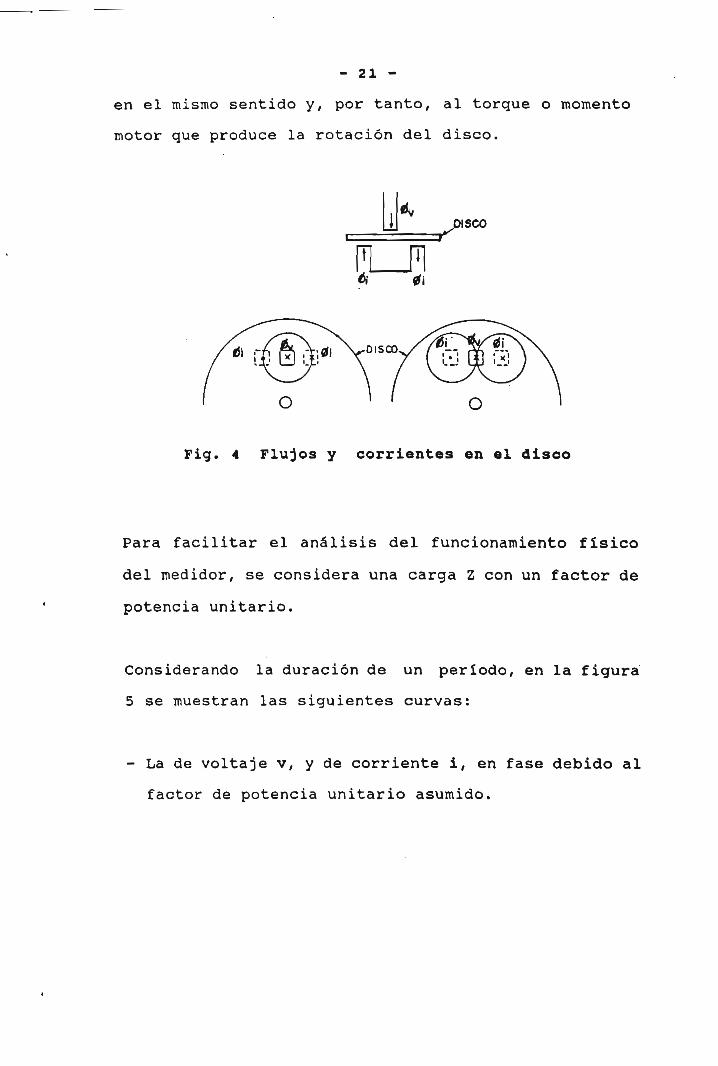
- 21 -
en el mismo sentido y, por tanto, al torque o momento
motor que produce la rotación del disco.
DISCO
Fig. 4 Flujos y corrientes en el disco
Para facilitar el análisis del funcionamiento físico
del medidor, se considera una carga Z con un factor de
potencia unitario.
Considerando la duración de un período, en la figura
5 se muestran las siguientes curvas:
- La de voltaje v, y de corriente i, en fase debido al
factor de potencia unitario asumido.
- 22 -
- La del flujo de corriente 0¡, en fase con la
corriente i, que es la que lo origina.
- La del flujo de voltaje <pv en fase con la corriente
i', que es la que circula por la bobina de voltaje y
produce el flujo. Esta bobina, por su construcción,
es altamente inductiva, por lo que la corriente i'
está retrasada aproximadamente 90° respecto del
voltaje.
- Además, y conforme a la ley de Lenz, se grafican las
corrientes iv e i-,, inducidas en el disco como
consecuencia de las variaciones de los flujos 0V e 0¡,
en cada intervalo del ciclo.
Teniendo en cuenta las disposiciones físicas de los
elementos que constituyen el medidor, el flujo 0¡ es
siempre normal a la dirección de iv, y el flujo 0V es
siempre normal a la dirección de i¡, por lo que las
fuerzas P, y P2 originadas por la interacción de 0¡ e i¥
y entre 0V e i¡, respectivamente, están ubicadas en el
plano del disco y siempre dirigidas en el mismo sentido
para todos los intervalos del ciclo. Estas fuerzas, al
estar situadas a cierta distancia del eje de rotación,
generan el momento o torque motor que desplaza al disco
en el sentido antihorario.

- 23 -
Wt
Intervalo c-d
Intervalo d-«
Fig. 5 Flujos, corrientes y fuerzas en eldisco en un período
Si se considera una carga 2 con un factor de potencia
»e" diferente de la unidad se obtienen las siguientes
ecuaciones:
- 24 -
v = senv d-5)
(1-8)
En las que V, I, *v y i¡, son los valores eficaces del
voltaje, corriente, flujo producido por el bobinado de
voltaje y flujo producido por el bobinado de corriente,
respectivamente .
B: ángulo de desfasaje entre el voltaje y la
corriente.
<pi ángulo de desfase entre el voltaje y el flujo 0V,
el mismo que será de 90° para una bobina ideal.
Es posible demostrar que el torque motor TD, está dado
por:
(1-9)
Del análisis de la ecuación 1-9, se deduce que, para
que la cantidad de energía registrada por el contador
sea proporcional a la potencia activa consumida, se
debe cumplir la condición:
- 25 -
sen((p-6) = cos8 es decir <p - 90° (1-10)
por tanto, el diseño del contador debe ser de tal forma
que se cumpla la ecuación 1-10, la que conoce como
"Condición de 90o11'61 /cuando esta última premisa se
satisface se tiene:
T =•*• D d-11)
en la que P es la potencia activa registrada por el
medidor.
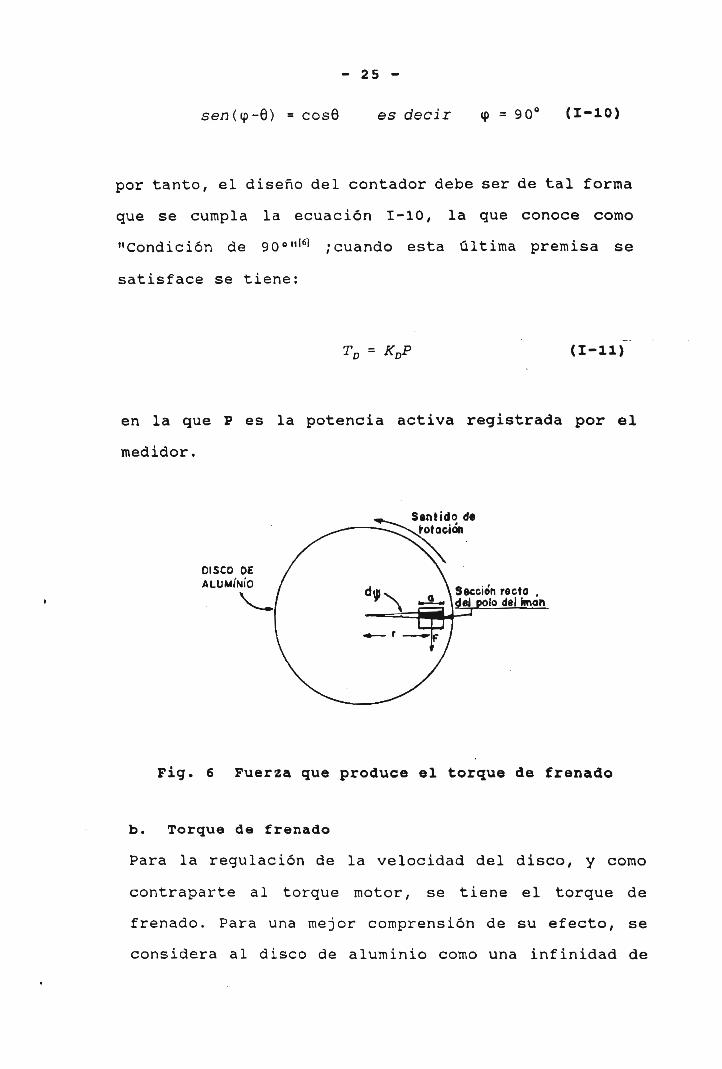
DISCO OEALUMINIO
Sentido d«Moción
Sección recto .del poto del hnon
Fig. 6 Fuerza que produce el torque de frenado
b. Torque de frenado
Para la regulación de la velocidad del disco, y como
contraparte al torque motor, se tiene el torque de
frenado. Para una mejor comprensión de su efecto, se
considera al disco de aluminio como una infinidad de
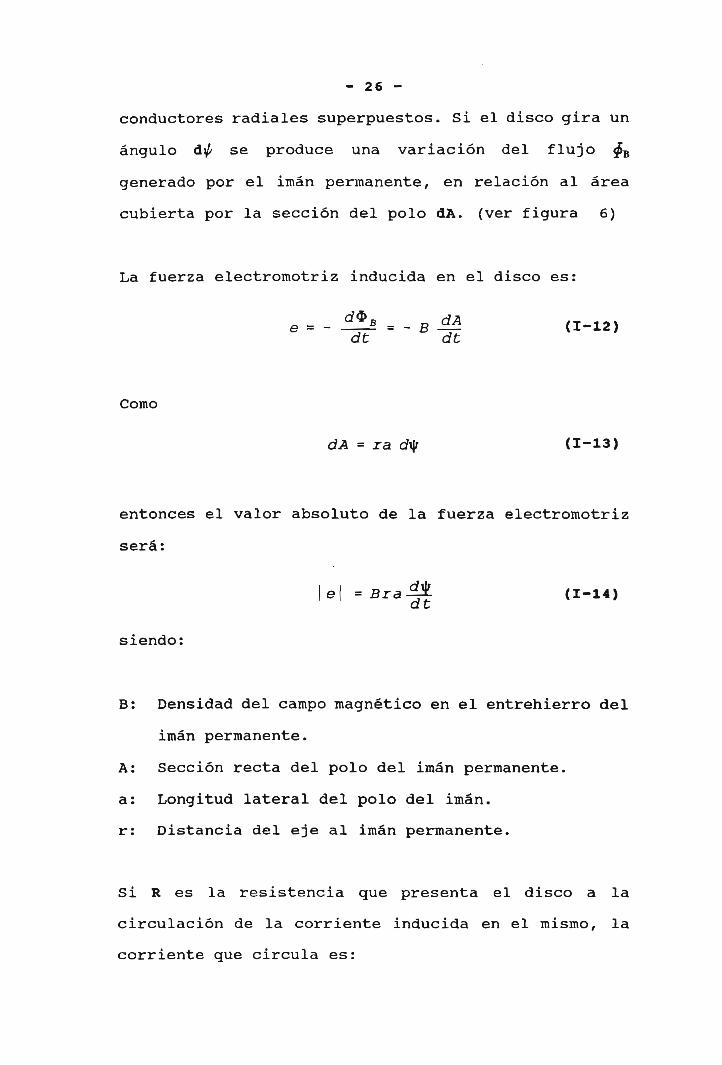
- 26 -
conductores radiales superpuestos. Si el disco gira un
ángulo d^ se produce una variación del flujo $B
generado por el imán permanente, en relación al área
cubierta por la sección del polo dA. (ver figura 6)
La fuerza electromotriz inducida en el disco es:
dtdA
~~" , ~~
dt(1-12)
Como
dA = ra d-13)
entonces el valor absoluto de la fuerza electromotriz
será:
e = (1-14)
siendo:
B: Densidad del campo magnético en el entrehierro del
imán permanente.
A: Sección recta del polo del imán permanente,
a: Longitud lateral del polo del imán.
r: Distancia del eje al imán permanente.
Si R es la resistencia que presenta el disco a la
circulación de la corriente inducida en el mismo, la
corriente que circula es:

- 27 -
R(1-15)
y la fuerza que se genera está dada por la expresión:
F = Bia = BaR
d-16)
Al remplazar la ecuación 1-14 en la 1-16 y
simplificando se tiene:
R dt(1-17)
Considerando que la fuerza está ubicada a una distancia
r del eje de rotación, el torque de frenado es:
T =¿EB2 a2 r'1
R dtd-18)
Como $B = B A, se puede escribir:
r_
B ~a2 r2RA dt
(1-19)
Si S = d^ / dt, que es la velocidad angular del disco,
la expresión del torque de frenado está dada por:
To = kBQ>ÍS (1-20)

- 28 -
en la que KB es una constante que depende de la forma
geométrica del imán, de su ubicación y de su flujo
magnético constante.
Debido a que el flujo producido por el imán permanente
es constante, se tiene:
TB = KBS (1-21)
En la realidad se producen tres torques adicionales de
frenado:
TBv Debido a la interacción del flujo de voltaje con
las corrientes inducidas por el imán permanente,
pero éstas se mantienen constantes mientras no
varía la velocidad, por lo que el torque TBv se
tendrá únicamente cuando se produzca una
variación en la velocidad, por esta razón el
contador posee una compensación automática para
la variación de voltaje.
TB; Se produce por la interacción del flujo de
corriente con las corrientes inducidas por el
imán permanente. Como el flujo de corriente es
proporcional a la variación de la corriente de
carga, especialmente para cargas grandes, se
puede producir un frenado excesivo, por lo que

- 29 -
los contadores tienen incluido un mecanismo para
su compensación automática.
TBfr Este torque se genera por las fricciones mecánicas,
principalmente de los cojinetes y del engranaje del
numerador. Su influencia es notable para cargas
bajas, por lo que también el contador posee un
aditamento para su compensación.
En el estado estable se tiene la igualdad de los
torques motor y de frenado:
TD " TB '• KD? = KBS (1-22)
S = KP (1-23)
en la que K es la constante general del medidor.
La ecuación anterior es fundamental en la exactitud de
la medición de la energía y, además, determina que la
velocidad del disco sea proporcional a la potencia P.
Considerando que la rotación es uniforme, se puede
aplicar el tiempo de medición a la ecuación 1-23:

- 30 -
tS-KPt (
Pero "Pt" es la energía medida en el intervalo de
tiempo "t", y "tS" es el número de revoluciones dadas
por el disco; entonces, la ecuación 1-24 se transforma
en:
N = KE (1-25)
De lo expuesto anteriormente se concluye que, para
lograr el cometido del contador de energía eléctrica
activa tipo inducción, se debe cumplir dos requisitos
fundamentales:(6]
a. La velocidad de rotación del disco debe ser
proporcional a la potencia eléctrica; y,
b. El número de revoluciones del disco debe ser
proporcional a la energía eléctrica.
El diseño y los materiales empleados en su fabricación
están encaminados al cumplimiento de estas dos
premisas.
- 31 -
1*4 FUENTES DE ERROR EN LA MEDICIÓN
El error A de un contador de energía eléctrica activa
tipo inducción corresponde a la diferencia entre la
energía E registrada por el contador y la cantidad real
de energía consumida E0, generalmente tomada de la
lectura de un medidor patrón.
Matemáticamente se pude definir el error relativo en
tanto por ciento como:
A % = 100 (1-26)
Asumiendo que tanto la velocidad como el número de
revoluciones son constantes durante el período de
medición, y considerando las ecuaciones 1-23 y 1-25, el
error se puede expresar como:
S~ SA % = ° 100 (1-27)
N-NA % = 1 100 (1-28)
"o
El porcentaje de error aceptado está determinado por
normas internacionales.

- 32 -
Las fuentes principales del error son, por una parte,
las cualidades del elemento motriz y del elemento de
freno; y, por otra, la calibración.
La ecuación 1-25 se considera como fundamental para la
exactitud de la medición; sin embargo, en la realidad,
el contador nunca mide en forma exacta la energía
consumida por cuanto, con el movimiento del disco, se
originan varios factores que hacen que la velocidad no
sea la requerida para que se cumpla la ecuación antes
mencionada. Los errores causados por estos factores y
que no son considerados en las ecuaciones básicas son:
a.- Nolinealidad del acero.
b. - Fricción en los cojinetes y en el integrador, y
torques de frenado debido a los flujos de voltaje
y corriente.
c.- Calibración incorrecta.
d.- Variación del voltaje.
e.- Variación de la frecuencia,
f.- Variación de la temperatura.
g.- Otras
A continuación se da una breve descripción de las
fuentes de error en la medición:
- 33 -
1.4.1 Nolinealidad del acero
Debido al circuito de corriente, que en cargas por
encima de la nominal generan un error positivo pequeño.
Este error compensa en parte la influencia del frenado
producido por el flujo de corriente. Si el error debido
a la nolinealidad fuese en cada valor de carga igual al
error de frenado de corriente, se tendría una
compensación completa y la curva característica se
acercaría a la ideal.
En esta idea se fundamenta la compensación por medio de
un shunt magnético en el núcleo de corriente.
1.4.2 Fricción en los cojinetes y en el integrador, y
torques de frenado debido a los flujos
Las influencias perturbadoras son principalmente los
torques secundarios de frenado producidos por el flujo
magnético efectivo de voltaje y por el de corriente; y,
además, actúa el torque de fricción en las partes
móviles.
Con estos torques adicionales la condición de
equilibrio se puede expresar como:
- 34 -
TD =
siendo:
TBV = kv$2vS d-30)
TBÍ = k¿$ls d-31)
en donde Je,, y k¡ son constantes geométricas de frenado
de los flujos magnéticos de corriente y voltaje,
dependientes de las posiciones de los flujos magnéticos
en el disco, del material y dimensiones del mismo.
Las ecuaciones de los torques de frenado adicionales
pueden ser deducidas de la misma forma que el producido
por el imán permanente.
Debido a que los torques de frenado perturbadores son
nolineales, en ciertos rangos de carga elevan el
frenado con la consecuente disminución de la velocidad
y, por tanto, el error es negativo.
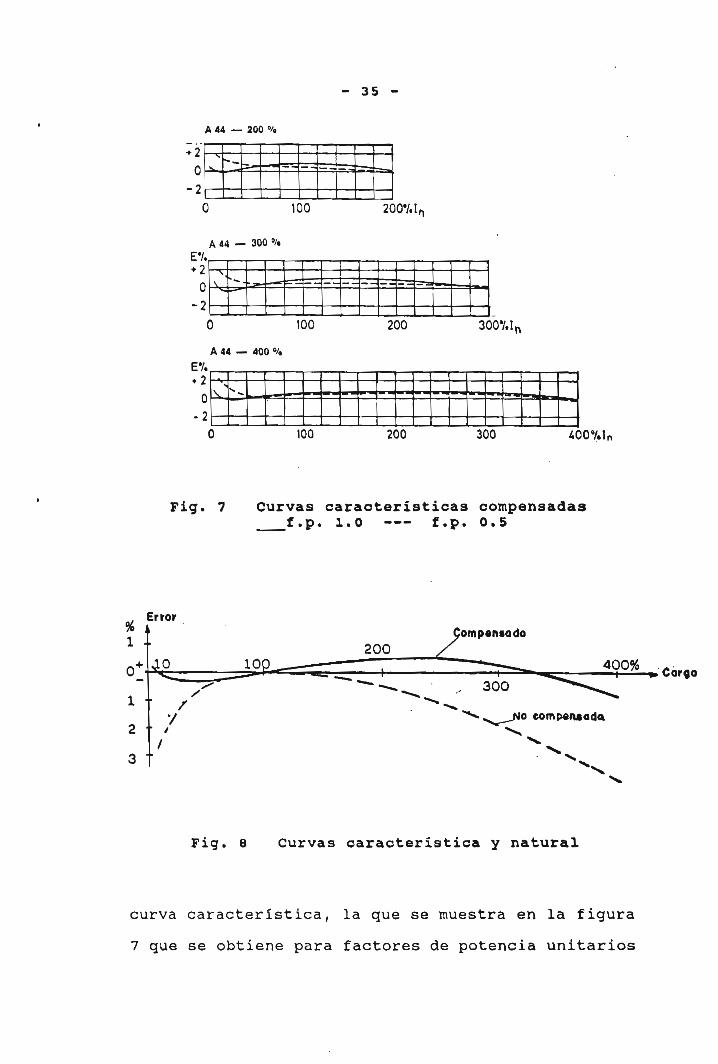
a. curva característica.
La exactitud de los contadores no es igual con todos
los valores de carga, la representación gráfica de los
errores en función de la corriente se conoce como
- 35 -
A 44 — 200 °/o
+ 2
0
-2
N*•*.
200V.ln
100
Fig* 7 curvas características compensadasf ,p. 1.O —• f.p. 0.5
empentado
^ Carga
Fig. 8 Curvas característica y natural
curva característica, la que se muestra en la figura
7 que se obtiene para factores de potencia unitarios

- 36 -
y de valor 0.5, y representa el efecto combinado de las
influencias perturbadoras y de las medidas de
compensación.
También se tiene la curva característica natural
(figura 8), que muestra todos los errores naturales
proporcional a los torques perturbadores y motriz
que son necesarios compensar para cumplir con los
requisitos de las normas internacionales.
Para la obtención de esta curva se desconectan todas
las compensaciones obteniéndose generalmente una curva
en un sentido de rotación y otra en el contrario; la
resultante será el promedio de las dos, con lo que se
eliminan las influencias de las compensaciones y
ajustes.
La curva característica natural se puede dividir en dos
zonas:
- Zona de cargas bajas.
— Zona de cargas altas.
En estas zonas se aprecia una declinación negativa en
los extremos, mientras que la parte central se mantiene
relativamente recta.
- 37 -
El torgue de frenado de tensión Tuvno tiene influencia
en la curva característica si el voltaje permanece
constante. Este torque forma parte del momento de
frenado básico debido al imán permanente, pero su
influencia se manifiesta cuando se presenta una
variación del potencial; sin embargo, como el contador
tiene incorporado un mecanismo de compensación
automático para la variación de voltaje, su influencia
es despreciable.
Zona de carga baja:
En esta zona no tiene una influencia relevante el
frenado de corriente, por cuanto el flujo de corriente
0¿es pequeño; en tanto que el frenado de voltaje, como
se expresó anteriormente/ solo se presenta ante una
variación del mismo.
La mayoría de los errores en esta zona son debidos a la
fricción y a la nolinealidad del acero, por lo que el
contador tiene dispositivos de compensación y ajuste de
carga baja.
Zona de carga alta:
A diferencia de la zona de cargas bajas, el frenado por
fricción es despreciable frente al torque motriz.
El torque de frenado por voltaje también se puede
despreciar, mientras el potencial permanezca fijo.
- 38 -
El efecto de la nolinealidad en esta zona es
despreciable toda vez que se encuentra prácticamente en
la zona lineal de la curva de histéresis.
Los errores en esta zona son debidos principalmente al
frenado de corriente. El contador tiene un diseño tal
que permite una minimización de este frenado.
1.4.3 Calibración incorrecta
Un contador, para ser instalado, primeramente debe ser
contrastado y calibrado en concordancia con las normas
y parámetros técnicos que se encuentren en vigencia en
la empresa suministradora de energía; con el transcurso
del tiempo los materiales con los que está construido
pueden presentar características distintas a las
iniciales, por lo que el punto de calibración se verá
desplazado, con la consiguiente pérdida de la exactitud
en la medición.
Por esta razón la calidad de los materiales tiene gran
importancia para que la precisión del contador se
mantenga con el transcurso del tiempo.
Los principales deterioros se presentan en el rotor,
cojinetes, pérdida de las características magnéticas de
los núcleos de corriente y voltaje, así como en el imán
permanente.
- 39 -
1.4.4 Variación del voltaje
En la práctica, aún cuando las variaciones de potencial
se encuentran dentro de la zona tolerable (± 10 % del
voltaje nominal) se producirá un funcionamiento
incorrecto del medidor, ya que se generará el torque de
frenado en el cual influye la nolinealidad del circuito
de voltaje; es por esto que el contador tiene un
dispositivo automático de compensación de variación de
potencial.
1.4.5 Variación de la frecuencia
Al presentarse una variación de la frecuencia la
impedancia del circuito de corriente y del de voltaje
se ven afectadas; la de mayor afectación es la de
voltaj e ya que es independiente de la carga e
inicialmente alta. Los flujos generados por las dos
bobinas varían así como sus torques producidos.
Las variaciones de frecuencia se manifiestan en el
contador como vibraciones del disco, las que pueden
deteriorar la punta del rotor y los cojinetes.
Para eliminar la influencia de la variación de la
frecuencia, en el diseño se considera una resonancia
mecánica baja entre el rotor y los cojinetes; además,
se utiliza un imán permanente cuyo flujo magnético
- 40 -
atraviesa dos veces el disco para anular las
vibraciones.
Los sistemas de protección y control del sistema de
suministro de energía se diseñan de tal manera que el
rango de variación de la frecuencia sea mínimo, por lo
que el contador no dispone de un mecanismo de
compensación por frecuencia.
1,4.6 Variación de la temperatura
En los circuitos eléctricos y magnéticos de un contador
de inducción, una variación de la temperatura ambiente
afecta a las resistencias de todos los bobinados y del
disco, así como a las características magnéticas del
imán permanente.
El cambio de la resistencia del disco no influye
significativamente en el error, ya que afecta de la
misma forma a la determinación de los torques motriz y
de frenado, por lo que la velocidad no varía, y se
mantiene la precisión del contador.
La variación de la resistencia de la bobina de
corriente no causa un cambio en el error ya que la
corriente de la carga no es afectada por la variación
de la temperatura, solo aumenta o disminuye tanto la
resistencia de la bobina como su caída de voltaje.

- 41 -
La resistencia de la bobina de potencial se incrementa
con un aumento de temperatura, por lo que el ángulo de
pérdidas crece. Con un incremento de la temperatura el
flujo del imán permanente puede disminuir, de acuerdo
a las características del material empleado; con una
variación de 10 °C, se presenta un incremento del
error de + 1 % hasta + 1.5 %.[5]
Las variaciones de temperatura pueden influir en el
error/ es por esto que el contador tiene un dispositivo
automático para la compensación por sobre temperatura.
1.4.7 Otras
La posición del contador debe ser vertical, caso
contrario se da lugar a la formación de campos
magnéticos desplazados en el espacio, los cuales
producirán torques adicionales de frenado o motrices,
que alterarán el error.
También se puede incluir el efecto del clima y de la
contaminación del aire en el que se encuentra el
contador, lo que puede producir un deterioro de sus
componentes y la consecuente pérdida de exactitud en la
medición.
- 42 -
Es importante mencionar que la distorsión de la ondas
de voltaje y corriente también producen una variación
en la exactitud del contador.
El perfeccionamiento de elementos de estado sólido, ha
posibilitado el desarrollo de una gran variedad de
sistemas de control de potencia, los cuales son
generadores de la distorsión de la onda sinusoidal de
la corriente en la red. La magnitud de tal distorsión
depende del método de control usado, así como de la
magnitud de la potencia controlada.
La mayoría de instrumentos de medición de magnitudes
eléctricas existentes en la actualidad, se ven
afectados en su comportamiento por la presencia de la
distorsión en las ondas para las cuales fueron
diseñados.
Siendo el contador de energía activa el instrumento de
medida que establece uno de los nexos más importantes
entre la Empresa Suministradora de energía y el
usuario, es conveniente efectuar un estudio sobre los
posibles errores que dichos contadores pueden cometer
durante su operación, considerando diferentes
condiciones para la carga y en particular, la
influencia que la distorsión en la onda de corrriente
puede tener.
- 43 -
Desde esta perspectiva, se hace necesario el análisis
del comportamiento del contador de energía eléctrica
activa de inducción, ante corrientes de carga no
sinusoidales.
Es por esto que el objetivo de la presente tesis es la
cuantificación del error cuando la carga no tiene forma
de onda sinusoidal completa, como la presentada por los
convertidores AC/DC y AC/AC, entre otros.
1.5 AJUSTES Y COMPENSACIONES
El contador tiene incorporados varios dispositivos de
ajuste y compensación para los parámetros que influyen
en la exactitud de la medición.
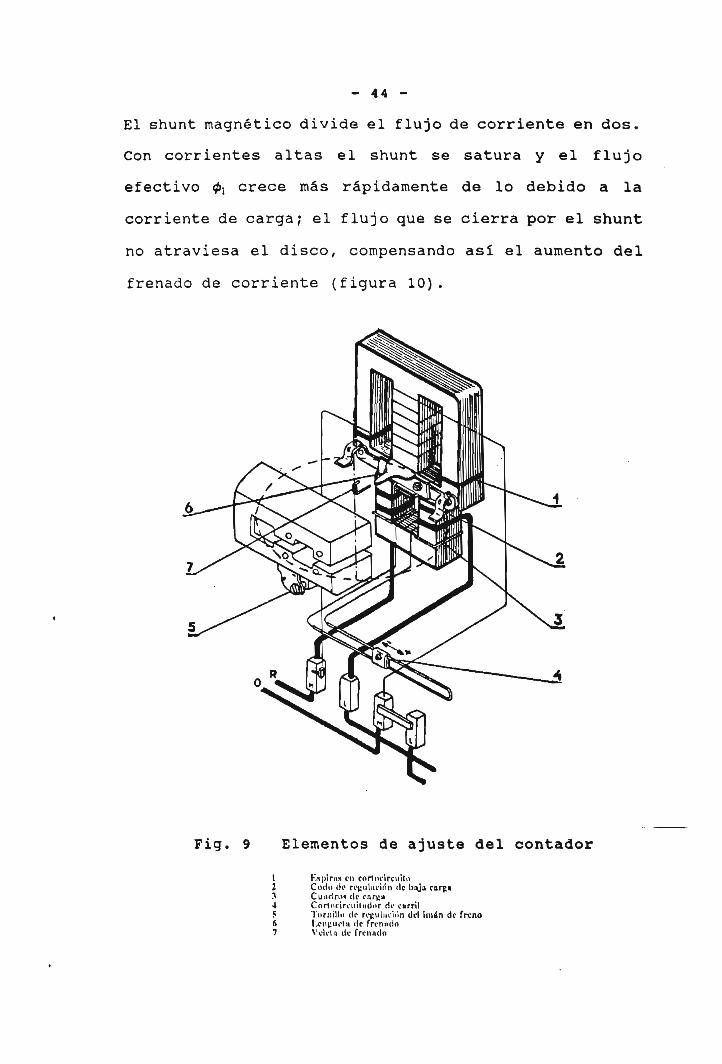
En la figura 9 se aprecian los elementos de ajuste.
1.5.1 Nolinealidad del acero
Para la compensación de la nolinealidad y por tanto del
principal efecto que se origina por el frenado de
corriente, se coloca un shunt magnético en el núcleo de
corriente, el mismo que causa una nolinealidad
necesaria que compensa los errores negativos, es decir,
principalmente la disminución de la velocidad con
cargas altas.
- 44 -
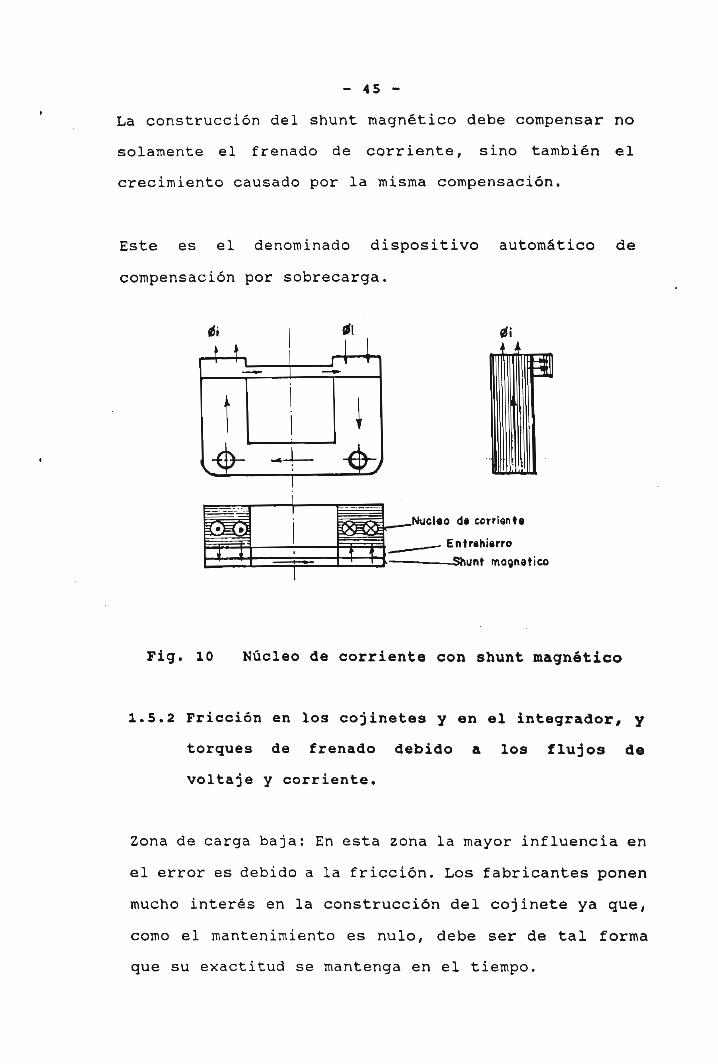
El shunt magnético divide el flujo de corriente en dos.
Con corrientes altas el shunt se satura y el flujo
efectivo 0¡ crece más rápidamente de lo debido a la
corriente de carga; el flujo que se cierra por el shunt
no atraviesa el disco, compensando así el aumento del
frenado de corriente (figura 10).
Fig. Elementos de ajuste del contador
1 Espinis cu corlnnrcuíli)2 Codo de repilueiiín de baja carpa3 Cuiidnn de cnrn«4 CortnrircuilncJiír de carril5 Tornillo de rif;uliu'íúii del imán de freno6 LcuiMii'iu de frenndo7 Vek-lii de frenado
- 45 -
La construcción del shunt magnético debe compensar no
solamente el frenado de corriente, sino también el
crecimiento causado por la misma compensación.
Este es el denominado dispositivo automático de
compensación por sobrecarga.
¿1t t ._! —
(A.
^j
— -i
01
1f
f
\_
efi
31
.NucUo d« corrí«ntg
.— EntrehíerroShunt magnético
Fig. 10 Núcleo de corriente con shunt magnético
1.5.2 Fricción en los cojinetes y en el integrador, y
torques de frenado debido a los flujos de
voltaje y corriente.
Zona de carga baja: En esta zona la mayor influencia en
el error es debido a la fricción. Los fabricantes ponen
mucho interés en la construcción del cojinete ya que,
como el mantenimiento es nulo, debe ser de tal forma
que su exactitud se mantenga en el tiempo.
- 46 -
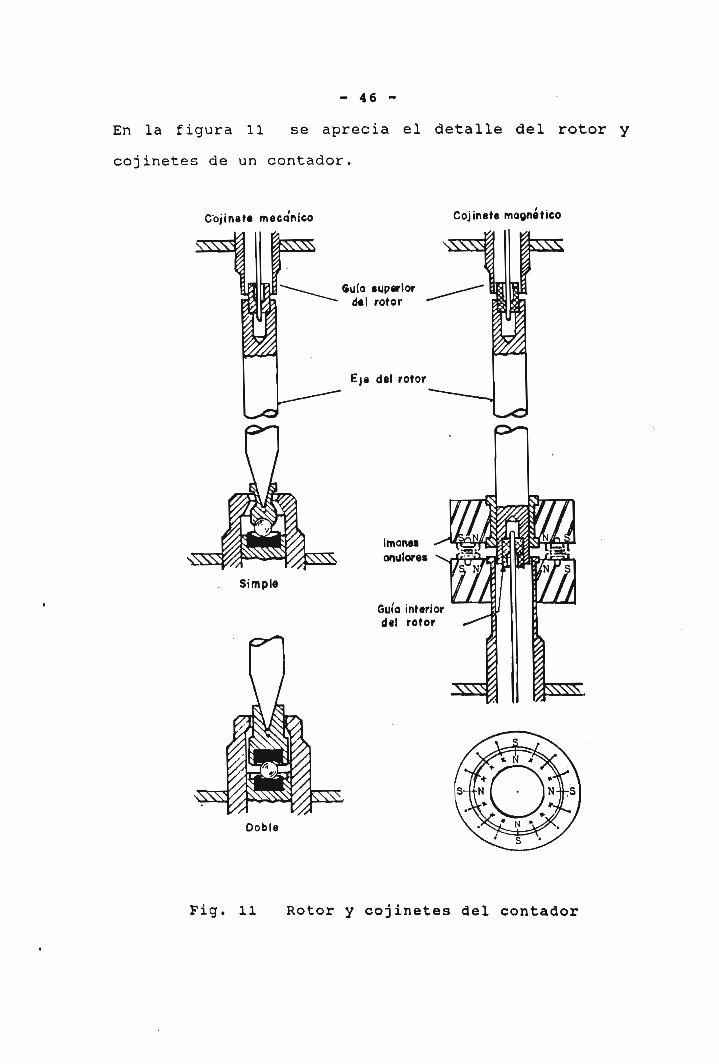
En la figura 11 se aprecia el detalle del rotor y
coj inetes de un contador.
Cojinete mecánico Cojinete magnético
Simple
Guía superiordel rotor
Eje del rotor
Imanesanulares
Guío interiordel rotor
Doble
Fig. 11 Rotor y cojinetes del contador
- 47 -
Para la compensación del torque de fricción se tiene un
dispositivo llamado "codo de regulación de pequeñas
cargas", el que produce un ajuste fino (elemento # 2 de
la figura 9).
La nolinealidad se puede variar utilizando una
premagnetización del núcleo de corriente con una parte
del flujo magnético de voltaje, con lo cual se desplaza
el punto inicial de la curva de magnetización a la
parte lineal.
Los errores negativos en la zona baja se compensan con
el dispositivo de "ajuste de carga baja11 (elemento # 1
de la figura 9), generalmente formado por espiras en
cortocircuito sobre los brazos del núcleo de tensión,
que son construidas de material no magnético, colocadas
paralelamente al disco y que generan un flujo adicional
desfasado del flujo de tensión, por lo que se crea un
torque motor adicional que pone en movimiento el disco
con cargas bajas.
Para evitar el desplazamiento del disco en ausencia de
carga, y como contraparte al torque impulsor de la
regulación de carga baja, se tiene el dispositivo de
retención formado por dos lengüetas de acero colocadas
en la bobina de tensión y otra en el eje del disco
(elementos # 6 y # 7 de la figura 9, respectivamente).
- 48 -
Cuando las lengüetas se juntan en ausencia de
corriente, es decir el torque motriz es nulo, surge un
momento de retención producido por el flujo magnético
entre las dos lengüetas y el disco se detiene. Con el
aumento de la corriente el disco inicia su movimiento
en un valor que debe ser igual o menor al valor de
arranque normalizado.
Zona de carga alta: La calibración del contador en esta
zona es también denominada a "carga nominal", se la
realiza por medio de la regulación de la ubicación del
imán permanente de frenado, en base al elemento # 5 de
la figura 9. El objetivo es la variación del flujo
generado por el imán permanente que atraviesa el disco,
consiguiendo la mayor o menor interacción de las
corrientes inducidas con el flujo del elemento de
corriente y, por tanto, la regulación del torque de
frenado.
1.5.3 Variación del voltaje
El efecto de la variación de la tensión en el error del
registro del contador puede ser compensado por la
inclusión de láminas ubicadas en los entrehierros
auxiliares del núcleo de voltaje, la característica
principal de éstas es que su reluctancia crece con el
incremento del flujo, permitiendo que el flujo efectivo
que atraviesa el disco aumente, consiguiéndose que el
- 49 -
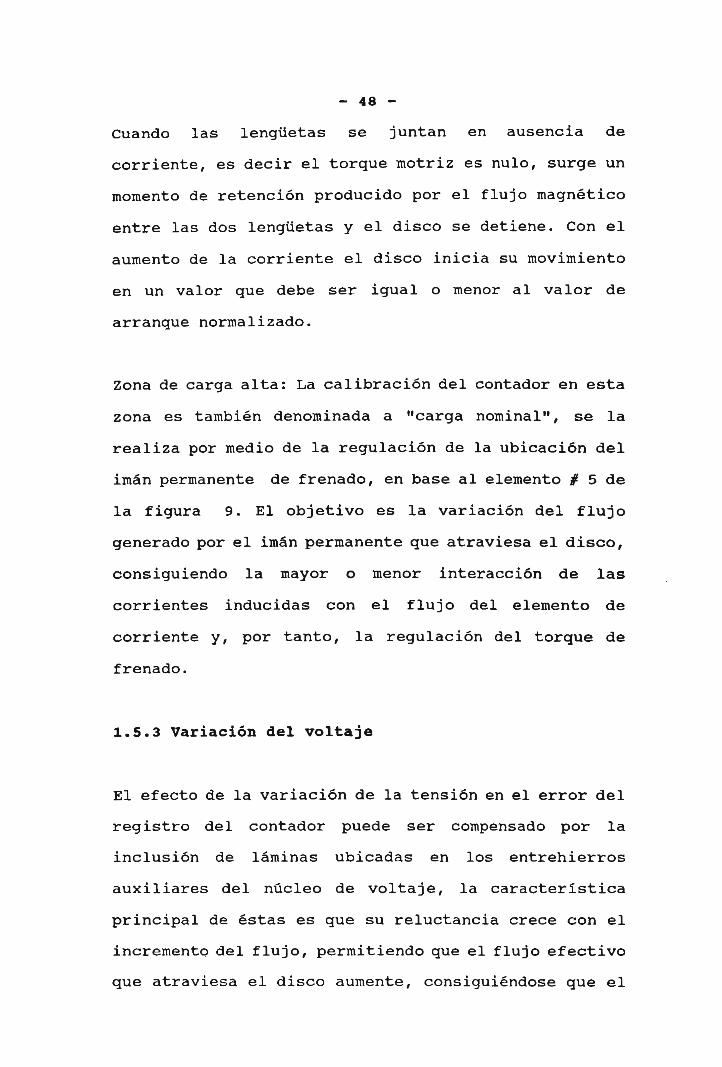
torque motriz sea mayor en relación al voltaje que ha
decrecido y al aumento en el torque de frenado, obte-
niéndose automáticamente la compensación (figura 12 ) .
Eje del rotor
DISCO DEALUMINIO/
PuenteTérmico
Fig. 12 Compensación a la variacióndel voltaje
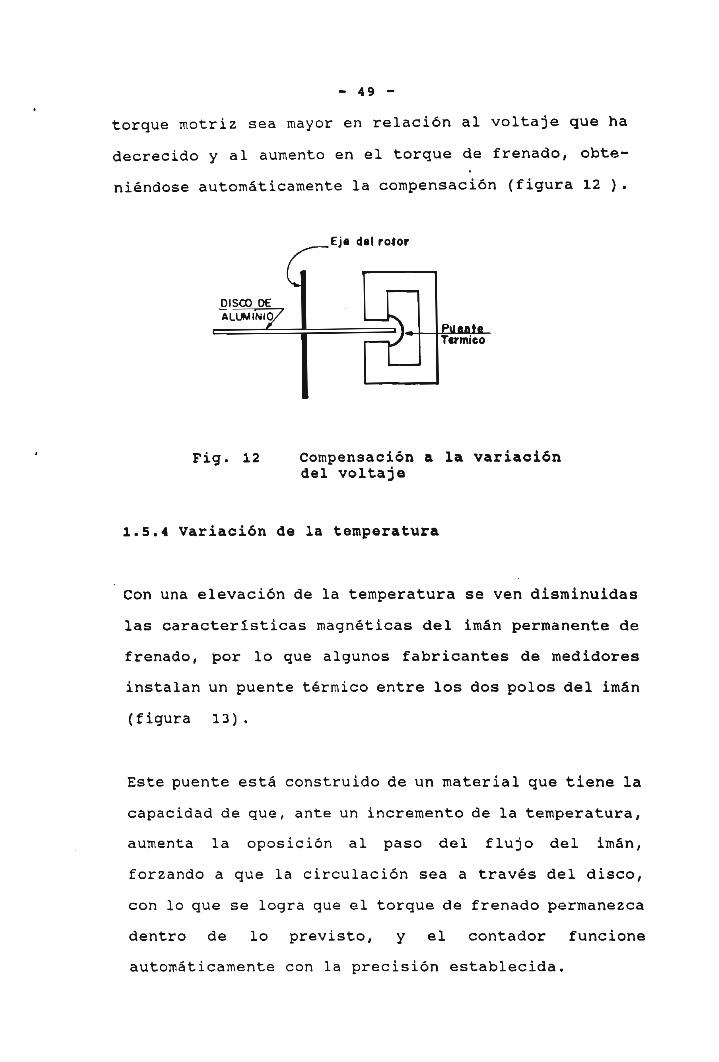
1.5.4 Variación de la temperatura
Con una elevación de la temperatura se ven disminuidas
las características magnéticas del imán permanente de
frenado, por lo que algunos fabricantes de medidores
instalan un puente térmico entre los dos polos del imán
(figura 13) .
Este puente está construido de un material que tiene la
capacidad de que, ante un incremento de la temperatura,
aumenta la oposición al paso del flujo del imán,
forzando a que la circulación sea a través del disco,
con lo que se logra que el torque de frenado permanezca
dentro de lo previsto, y el contador funcione
automáticamente con la precisión establecida.
- 50 -
Lar
\ina»
fr
Fig. 13 Compensación a la varia-ción de temperatura
1.5.5 Dispositivo de ajuste para carga inductiva
Llamada también "calibración del factor de potencia";
se utilizan los elementos # 3 y # 4 de la figura 9
cuya función es la de ajustar el ángulo entre los
flujos de voltaje y corriente a un valor de 90°, Con el
dispositivo # 3 se tiene una regulación aproximada, en
tanto que con el accionamiento del # 4, el ajuste es
más exacto.

CAPITULO II
ANÁLISIS DE LA EXACTITUD DEL CONTADOR DE
ENERGÍA ELÉCTRICA ACTIVA DE INDUCCIÓN
2.1 MODELO TEÓRICO
Muchas investigaciones se han realizado para determinar
las fuentes de error en los contadores de energía, es
así como se ha llegado a establecer que una de sus
principales causas es la distorsión de la onda de
corriente, la cual incide en la exactitud del medidor.
Las cargas que afectan a la exactitud son las no-
lineales, por ejemplo: m

- 52 -
- Iluminación fluorescente.
- Receptores de televisión.
- Hornos de microondas.
- Aparatos y equipos que utilizan regulaciones en base
a tiristores.
Los errores se deben a la generación de armónicos en la
onda de corriente característica de la carga.
2.1.1 Algunos estudios realizados
Se han realizado varios estudios al respecto, entre los
que se destacan :
a. Baghzouz, Y., y Tan, Owen T.
Presentan un modelo matemático no lineal para simular
el contador de inducción con ondas de voltajes y
corrientes no sinusoidales. II51
Los resultados obtenidos muestran que para el caso de
onda de voltaje sinusoidal, el error en la medición
debido a la nolinealidad del circuito magnético es
pequeño, a no ser que la onda de corriente tenga una
componente significativa de tercera armónica; en el
caso de ondas de voltaje y corriente no sinusoidales,
este error puede ser grande hasta para pequeñas
distorsiones de la onda de voltaje. En ambos casos el
error depende del ángulo de fase de las componentes

- 53 -
armónicas de voltaje y corriente respecto a su
fundamental.
El uso de este modelo requiere del conocimiento de las
constantes del medidor, incluyendo los parámetros de
saturación del circuito magnético, junto con las
magnitudes y ángulos de fase de las componentes
armónicas de voltaje y corrientes de máximo orden
obtenidas del análisis de Fourier.
b. Soutar, H. R. y MaliK, O. P.
Su modelo determina la respuesta del medidor de
inducción cuyos parámetros de entrada son ondas de
voltaje y corriente que contienen armónicas. Las
operaciones matemáticas son muy complejas, por lo que
para su solución se requiere técnicas iterativas, las
cuales demandan un gran tiempo de computador debido a
la complejidad del problema planteado.[8)
El modelo no es concluyente, toda vez que no se realiza
la comprobación experimental pertinente.
c. Fuchs, E.F., Roesler, D. J., y Kovacs, K. P.
En su estudio consideran dos ondas, tanto para el
voltaje como para la corriente; la primera tomada como
fundamental, y la segunda como armónica de la primera
y de grado enésimo.191
- 54 -
Del modelo matemático realizado para factor de potencia
unitario y de su comprobación experimental, concluyen
que el contador registra un error positivo, esto es, su
lectura es mayor que la real por la presencia de la
armónica considerada.
d. Emanuel, A. E., Levitsky, F. J., y Gulachenski, E.
M.
Realizan un estudio teórico y experimental de
contadores tipo inducción y determinan la función de
error para cargas no lineales como rectificadores e
inversores, las mismas que son las principales fuentes
de distorsión de la onda de corriente.131
2.1.2 Descripción del modelo a ixnplementarse
La descripción del modelo inicia definiendo al voltaje
como:
v = f(senvt) (II-l)
con el que se excita la bobina correspondiente. Esta
función se mantiene inalterable en todo el análisis.
Conforme a los principios electromagnéticos el elemento
de voltaje produce también un flujo:
4>v * f(v, y) (H-2)

- 5.5 -
En la que v es la función de voltaje definida
anteriormente y 7 es un ángulo de fase ajustable, su
valor es de aproximadamente 8°.PI
Además, y por la ley de Faraday, se induce una fuerza
electromotriz en el disco dado por:
femv =
la cual produce corrientes de Eddy determinadas por:
iv = f (femv) (U-4)
Cabe mencionar que al disco se considera como un
elemento puramente resistivo, es decir, se desprecia su
inductancia.
Adicionalmente la corriente en la carga está definida
como una función del tiempo:
i = i (t) (H-5)
en la cual se pueden incluir las típicas formas de onda
producidas por los rectificadores y conversores.
De igual manera que el elemento de voltaje, la bobina
de corriente produce un flujo magnético. Como una
primera aproximación para modelar un medidor no
compensado se puede considerar que el flujo es
- 56 -
proporcional a la corriente, esto permite que su
operación pueda ser analizada con la "curva
característica natural" descrita en el capitulo I
(figura 8) ; en ésta, y para efectos de considerar la
nolinealidad del circuito magnético así como la
compensación por sobrecarga, se asume que el flujo es
proporcional a "i + ai3" (la constante "a" se escoge
para producir un razonable aplanamiento de la curva) .
Esta relación ha sido encontrada teórica1101 y
experimentalmente Inl.
Además, se asume que el ángulo ajustable de fase y del
elemento de corriente es similar al de voltaje.
Con las condiciones mencionadas se tiene que:
Qt = f (¿+ai3, y) (H-6)
en base a la ley de Lenz este f lu j o 0¡ induce
corrientes en el disco dadas por:
í¿ = f <*¿>Y) (H-7)
las cuales producen las fuerzas electromagnéticas que
dan lugar al torque motor:
TD = f <4>v, 4>¿, iv, i¿) (H-8)
Para generalizar el estudio y poder considerar diversos
- 57 -
tipos de contadores con diferente corriente de clase o
nominal, es necesario incluir en el análisis el
parámetro de dicha corriente (Ic) , con lo que el torque
será:
TD = f (<f>v, 4>ifiv,i¿llc) (H-9)
El torque de frenado tiene dos componentes, la primera
debida al imán permanente y la segunda por la
interacción del flujo de corriente con las corrientes
inducidas por el imán en el disco, por lo que puede
expresarse como:
TB = f (características del imán , i , S) +f ( características del imán , 4>¿ , 5)
(11-10)
en la que S es la velocidad del disco.
De igual manera que el torque motor TD, el torque de
frenado puede expresarse en base a los parámetros antes
descritos:
TB = f (4>¿, i, IC,S) (H-11)
En estado estable el torque motriz y de frenado deben
ser iguales, es decir:
TD = TB (11-12)
igualdad de la que obtiene:

- 58 -
S = f ( v, i, F) (H-13)
en la que F es la función de error teórica.
2.2 ANÁLISIS EN RÉGIMEN SINUSOIDAL
Para este análisis se considera el circuito y las
formas de onda de las figuras 14 y 15, respectivamente.
iContador
Fig. 14 Esquemacarga resistiva
2.2,1 Bobina de voltaje
La onda de voltaje con la que se alimenta está definida
como:
v = v/2 Vsen ( w t ) (11-14)
La corriente que circula por la bobina del elemento de
- 59 -
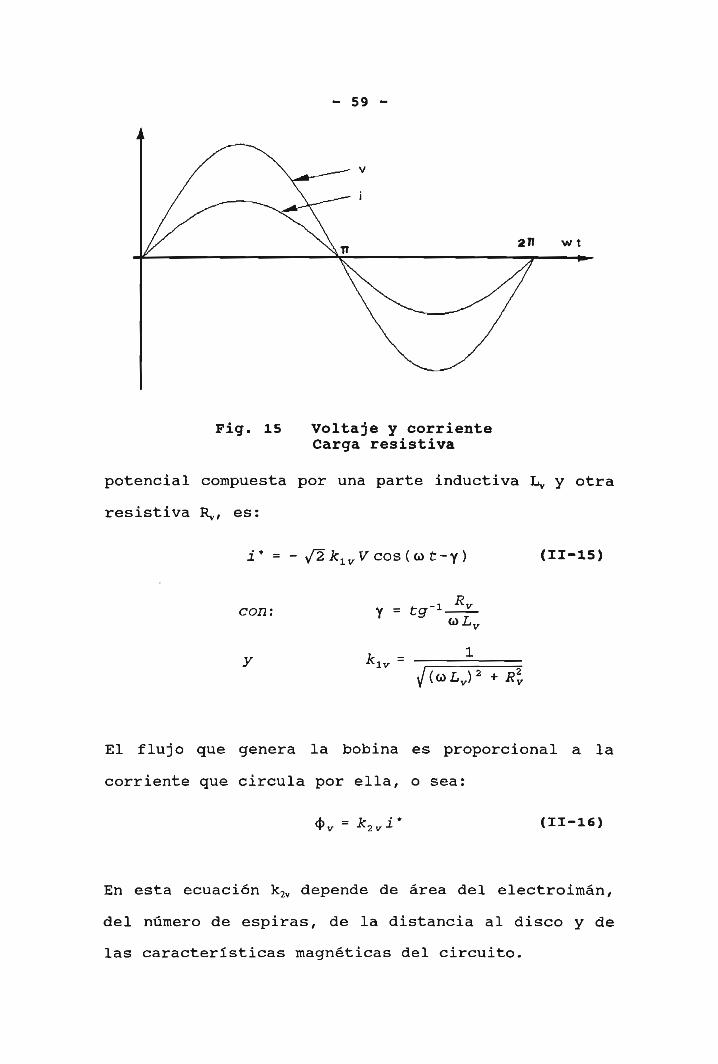
Fig. 15 Voltaje y corrienteCarga resistiva
potencial compuesta por una parte inductiva
resistiva R,,, es:
t-y)
Y = tg-1-
y otra
(H-15)
COJ2:
K
El flujo que genera la bobina es proporcional a la
corriente que circula por ella, o sea:
4>v = *,vi* di-16)
En esta ecuación k2v depende de área del electroimán,
del número de espiras, de la distancia al disco y de
las características magnéticas del circuito.
- 60 -
Remplazando la ecuación 1-15 en la 1-16 se tiene:
<|>v = - jq/2 VCOSÍQ t-y) (11-17)
siendo KI una constante del contador, y su valor está
determinado por el producto de las constante klv y k2v.
La fuerza electromotriz que se induce en el disco
debido al flujo de voltaje es:
= - i/2" (o Vsen ( o t-y
Si se considera despreciable la inductancia del disco,
es decir, solo con efecto resistivo y de valor R, la
corriente inducida será :
femvv R
iv - -K^KzV ¿ vtí&i2\. toe—y ; (11-19)
en donde K2 = co/R, considerada como constante del
contador.
2.2.2 Bobina de corriente
Para generalizar el análisis se considera el ángulo e
de desfase entre el voltaje de la red y la corriente de
- 61 -
la carga; la corriente que circula por el elemento
correspondiente es:
i = J2 I sen (o> t-0' )V (11-20)
con: 6' = 6 + y
7 fue definido anteriormente para el elemento de
voltaje (ecuación 11-15).
Considerando la no linealidad y la compensación por
sobrecarga, el flujo será:131
<t>¿ = K3 (i+ai3) (H-21)
en la cual K3 es una constante del medidor, dependiente
del área del electroimán, del número de espiras, de la
distancia al disco, y de las características magnéticas
del elemento de corriente.
Remplazando la ecuación 11-20 en la 11-21, y el valor
de 6' en la ecuación resultante, se tiene:
-, 7-2-~sen3
(11-22)
La fuerza electromotriz inducida es:
- 62 -
dt
(wt-9-y)]
(11-23)
Si se considera despreciable la inductancia del disco,
es decir, solo con efecto resistivo y de valor R, la
corriente inducida será:
2
(d>t-e-y)]
(11-24)
(K2 definida para la ecuación 11-19)
2.2.3 Torque motor
Se define como:
n
= T íTt «
Remplazando 11-17, 11-19, 11-22 y 11-24 en la ecuación
11-25 se tiene:
- 63 -
71
— ^ r2-K,J2Vcos (ot-y) ( -K~K,J2I) [ (! + • d )
2
*3^ 72cos(cDt-e-y) -JdJ- cos3 ((oír-O-y) ] -
2-) se/3((ot-6-y) -
£.
- se/23(o)t-6-y) ] ( -K^KyS2 V)2
sen ( o) t-y ) ] ] ] d( o) t) (11-26)
Integrando y aplicando los límites se obtiene la
expresión:
• 2 (11-2?)
Para generalizar el estudio y poder considerar diversos
tipos de contadores con diferente corriente de clase o
nominal, es necesario incluir en el análisis el
parámetro de dicha corriente (Ic) , con lo que se
consigue los términos 3aIc2/2 y KJ£32Ic2f para los
cuales experimentalmente se han obtenido los valores:1111
3a =
(11-28)
La constante 3a/2 así como la relación cuadrática de Ic
permiten ajustarse a los datos experimentales obtenidos
para medidores modernos en los que se ha minimizado el
error del modelo matemático para medidores compensados.
- 64 -
En términos de los parámetros A e Ic el torque motor
será:
y-)2]cos6 (11-29)c
en la cual K4 = 2 K, K2 K3
(Ki/ K2 Y K3 constantes definidas anteriormente)
2.2.4 Torque de frenado
Se define como:
Tn = JCK[1 + — f d > ? d ( G > t ) ] S (11-30)B b TC Jo
en la cual:
K5: Constante que depende de las características del
imán permanente;
Kfi : Constante que relaciona el flujo de corriente con
las corrientes inducidas por el imán de frenado;
. Y/
S : Velocidad angular del disco.
Remplazando 11-22 en 11-30 se obtiene la siguiente
expresión:

- 65 -
rp _ " '- K*
¿E .*?n J
O
al2 ] d( <o t) ] S (11-31)
Integrando y aplicando los límites se obtiene:
En función de los parámetros A e Ic/ definidos en II-
28t la ecuación anterior se transforma en:
(H-33)
2.2.5 Función de error
En estado estable los torque motor y de frenado son
iguales.
— T•*• B
)4]] S• c •*• c
(11-34)
- 66 -
Para encontrar una expresión para la velocidad S se
remplaza los valores de 11-28, y haciendo Z = I/IC se
obtiene:
y \- *-> /
^ vi - il — eos e5 1 + J_ [ ( 1 + A- ) 2 _ 1_ ]
14 12 1296(H-35)
Considerando que un contador real no mide la energía
exacta, es necesario introducir en la ecuación 1-23
(determinada para un contador ideal) una función F que
permita cuantificar el error del contador, con lo cual
la velocidad de rotación del disco será:
S = K F P (11-36)
Como para el caso de ondas de corriente y voltaje
senoidales, la potencia activa P está dada por:
P = V I (eos 6)
Haciendo:
K4 / K5 = K (constante general del contador),
e igualando los segundos miembros de las ecuaciones II-
35 y 11-36 se tiene:
- 67 -
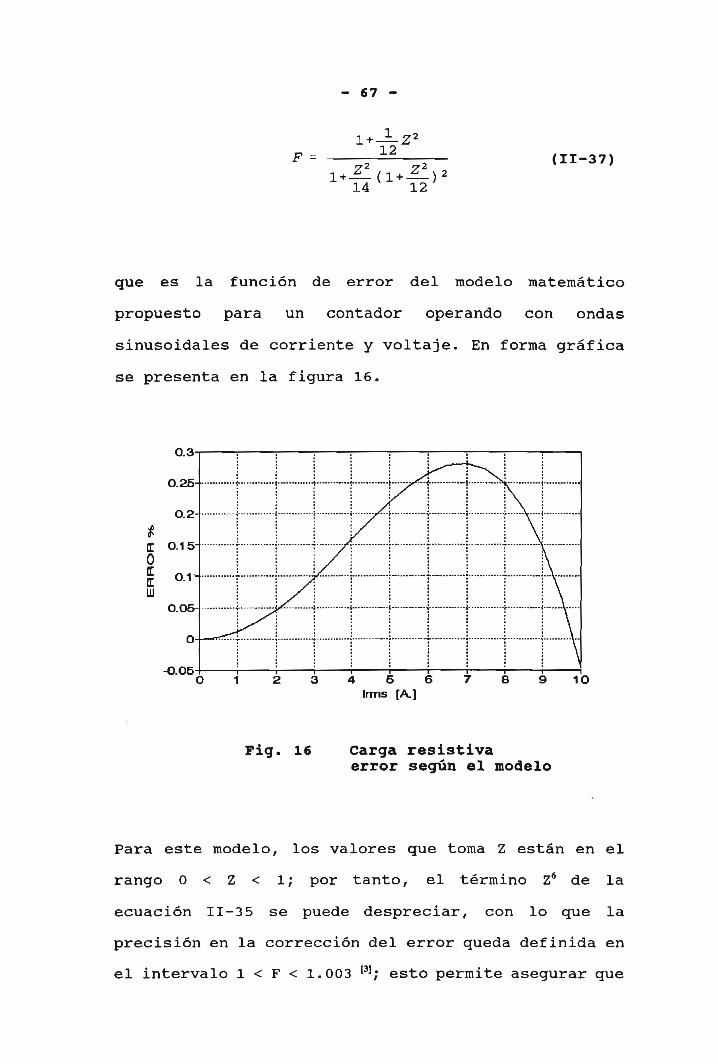
F =12
(11-37)
14 12
que es la función de error del modelo matemático
propuesto para un contador operando con ondas
sinusoidales de corriente y voltaje. En forma gráfica
se presenta en la figura 16.
-O.O54 5 6
Irms [A.]1O
Fig. 16 Carga resistivaerror según el modelo
Para este modelo, los valores que toma Z están en el
rango O < Z < 1; por tanto, el término Z6 de la
ecuación 11-35 se puede despreciar, con lo que la
precisión en la corrección del error queda definida en
el intervalo 1 < F < 1.003 I3]; esto permite asegurar que
- 68 -
el modelo matemático planteado es una buena
representación del contador para las consideraciones
antes mencionadas.
2.3 ANÁLISIS CON VOLTAJE SINUSOIDAL Y CORRIENTES NO
SINUSOIDALES
El análisis seguido para el caso de corriente y voltaje
sinusoidal descrito anteriormente será aplicado para el
caso de corrientes no sinusoidales en los siguientes
ejemplos:
Puente rectificador
resistiva-inductiva;
Puente rectificador
resistiva; y,
Cargador de baterías.
semicontrolado con carga
semicontrolado con carga
que son cargas típicas y representativas y, además, de
uso frecuente.
2.3.1 Puente rectificador semicontrolado: carga
resistiva-inductiva
Para el análisis se considera el circuito y las formas
de onda de las figuras 17 y 18.

- 69 -
•Tí
I
'•" I-v I
I I
Contador
Fig. 17 EsquemaRectificador con carga R-L
Fig. 18 Voltaje y corriente.Rectificador con carga R-L
a. Bobina de voltaje
El voltaje sinusoidal con que se alimenta está dado
por:

- 70 -
v = 2Vsen(<át) (11-38)
El flujo que produce viene dado por:
G>t-Y) (11-39)
La corriente que se induce en el disco debido al flujo
del elemento de voltaje es:
iv = -jq ¿r2V/2 Vsen ((o t-y )(11-40)
b. Bobina de corriente
La corriente en la línea para los dos intervalos es:
i = 0 0<(o t<a(II-41)
i = Id a < u t < ic
Los flujos que se generan son:
0«ot<a
a < c o t < n
(11-42)
Las corrientes que se inducen son:
o < c o t < a
a < c o t < 7 r
(11-43)

- 71 -
c. Torque motor
Por la forma de onda de la corriente es necesario sumar
el torque producido en cada intervalo, o sea:
TD - — / (4v^í - <t>¿ ¿J <*(*> t )u n j vi i vo
t) (11-44)
Remplazando las ecuaciones 11-39, 11-40, 11-42, y II-
43 en la ecuación 11-44 en cada intervalo,
resolviéndola, incluyendo el término Ic/ despreciando
los términos que salen del rango de precisión del
estudio, y aplicando al resultado los valores dados en
11-28, se tiene:
TD = je. v" d[i + -£-(±^)2] [n-cosa] (11-45)r 7 te 18 Z '
en donde K7 = 2 K, K2 K3
d. Torque de frenado
Al igual que en el torque motor, es necesario sumar el
torque producido en cada intervalo, o sea:

- 72 -
r Kt'f*^, v ,r — f r T 4- " I í T » , " í f / \ # - \ C7 j_5 — Ac L -L + i < P ¿ C 7 l u } C J J o +
TC J
•— r 4>i d ( w t ) ] 5 (u-46)7C J
Remplazando la ecuación 11-42 en la ecuación 11-46 en
cada intervalo, resolviéndola, incluyendo el término
Ic, despreciando los términos que salen del rango de
precisión del estudio, y aplicando al resultado los
valores dados en 11-28, se tiene:
14 Zc 18 Ic Tí
(11-47)
e. Función de error
En el estado estable los torques motor y de frenado se
equilibran.
Siguiendo el análisis dado para el caso sinusoidal y
haciendo los siguientes remplazos:
7 ='ir -
- 73 -
se llega a siguiente expresión de la velocidad del
disco:
1Y2
S = 5-J2VI* 18 (l+cos«)
14 1811-48)
Como para el caso del rectificador semicontrolado, con
carga resistiva-inductiva, la potencia activa P está
dada por:
[i+cosa] (11-49)71
haciendo:
K7 / K5 = K (constante general del contador) ,
la función de error para este caso es:
F = - — - (11-49)
14 18
En forma gráfica se presenta en la figura 19.
2.3.2 Puente rectificador semicontrolado: carga
resistiva
Para el análisis se considera el circuito y las formas
de onda de las figuras 20 y 21, respectivamente.

- 74 -
3.5
0 1 2 3 4 6 6 7 8 9 1 0
O 15-
0.5-
-0.5
Fig. 19 Rectificador con carga R-L,Error según el modelo
r i
_LidL¡J.. ' ¿-mor 1* — -
1
, [ • * • - •
M u * 11 Jb i 1i QÍ * <i fu |1 1 ii 1 i1 1 1
Contador
í 1
i
¿
i
s
1 -
Fig. 20 EsquemaRectificador con carga R
a. Bobina de voltaje
El voltaje senoidal con que se alimenta está dado por:
- 75 -
2TT wt
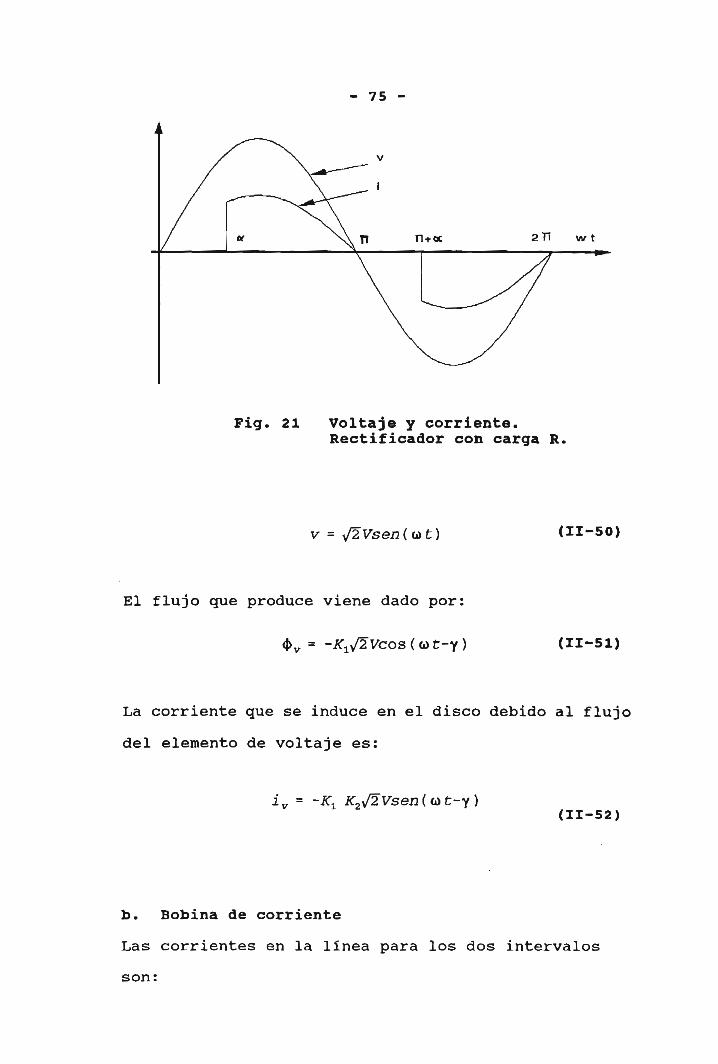
Pig. 21 Voltaje y corriente.Rectificador con carga R.
v = i/2Vsen(a>t) (11-50)
El flujo que produce viene dado por
(H-51)
La corriente que se induce en el disco debido al flujo
del elemento de voltaje es:
v = - ( G> fr-y )(H-52)
b. Bobina de corriente
Las corrientes en la línea para los dos intervalos
son:

- 76 -
i = O 0«o t<a (n-53)
i = y/2Isen(vt) a «o t<7i
El flujo que se genera es:
=3 r2o>t-e-Y) --^se/33 (o>t-6-Y)]
4Ú ¿í
(11-54)
La corriente que se induce es:
(H-55)
c. Torque motor
Por la forma de onda de la corriente, en el intervalo
O < wt < a el torque motor se considera nulo.
Remplazando las ecuaciones 11-51, 11-52, 11-54, y II-
55 en la ecuación 11-25, resolviéndola para los límites
a < wt < TT, incluyendo el término Ic/ despreciando los
términos que salen del rango de precisión del estudio,
y aplicando al resultado los valores dados en 11-28, se
tiene:
TD = -_? (u - a + sena eos a) [i-»-_¿-(-i) 2]lo
(11-56)
en donde K7 = 2 K, K2 K3
- 77 -
d. Torque de frenado
Remplazando la ecuación 11-54 en la ecuación 11-30,
resolviéndola para los límites a < cot < -n, incluyendo
el término Ic/ despreciando los términos que salen del
rango de precisión del estudio, y aplicando al
resultado los valores dados en 11-28, se tiene:
]2] s0 * 14 Jc 71 12 Ic
(H-57)
e. Función de error
En el estado estable los torques motor y de frenado se
equilibran. Siguiendo el análisis dado para el caso
sinusoidal y haciendo los siguientes remplazos:
_ i- T7 —
- a + senacosa
se llega a siguiente expresión de la velocidad del
disco:
1 +
S = —VX. — (l+cosa)fC " v"2
5 H-rr(l"14 12
(H-58)
Como para el caso del rectificador semicontrolado, con
carga resistiva, la potencia activa P está dada por:
P = VI\ 78 -sena, cosa +TE -g
Haciendo:
K7 / K5 = K (constante general del contador),
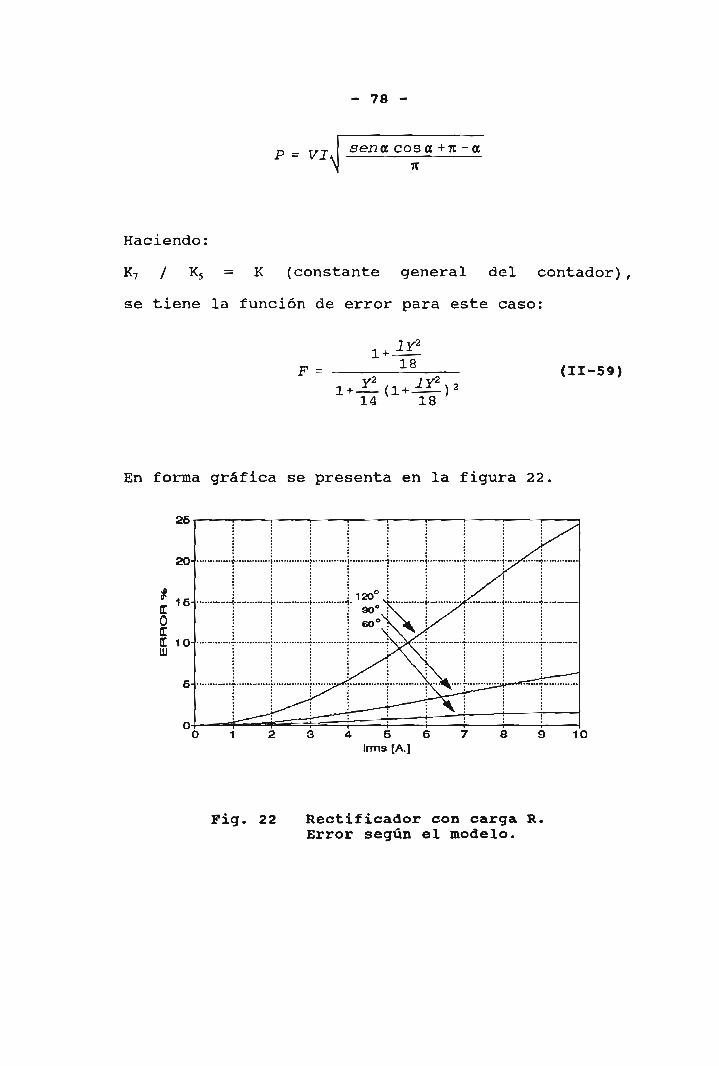
se tiene la función de error para este caso:
1 +F =
1Y218
V2—14
7 V2
—18
(11-59)
En forma gráfica se presenta en la figura 22
4 6 6Irms [A.]
Fig. 22 Rectificador con carga R.Error según el modelo.
- 79 -
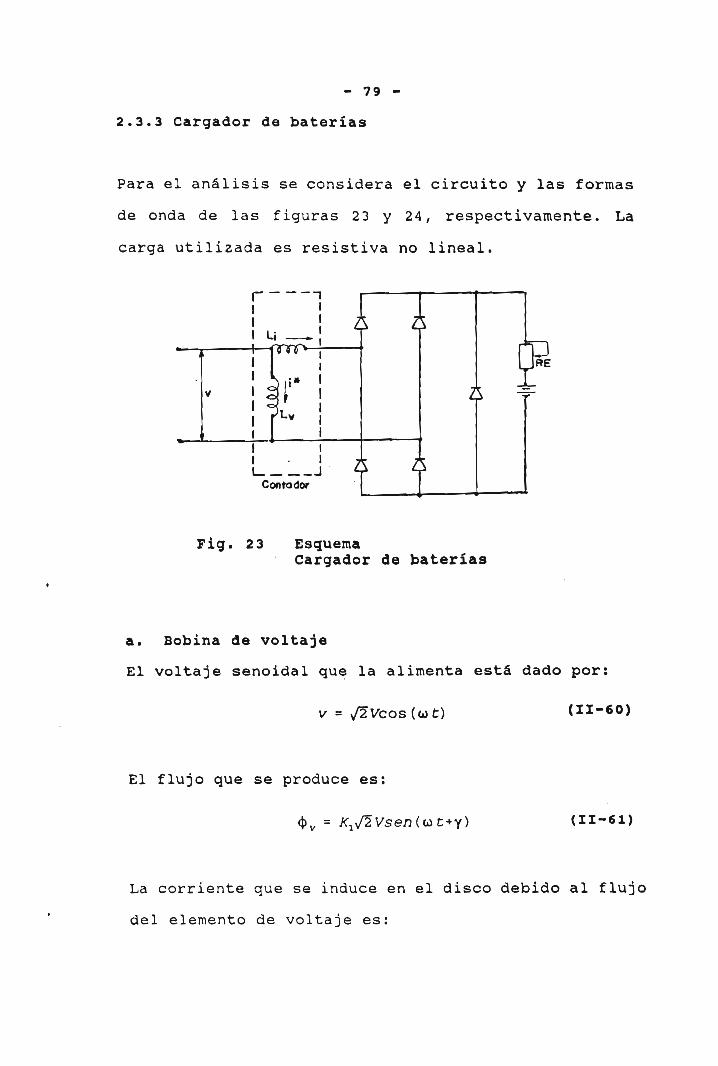
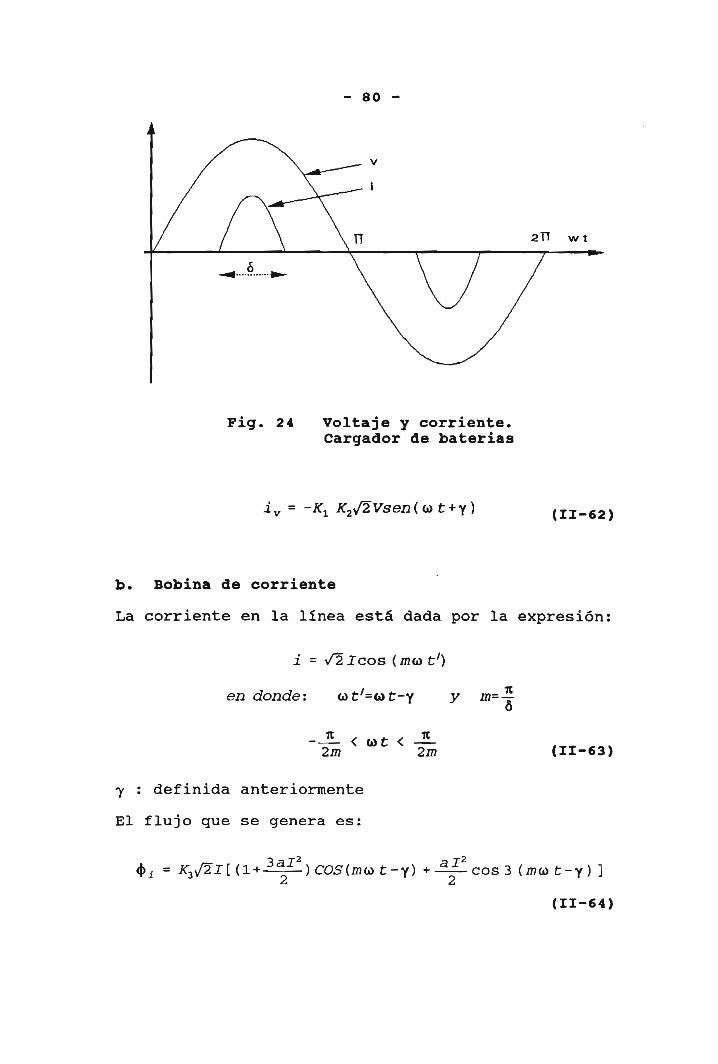
2.3.3 Cargador de baterías
Para el análisis se considera el circuito y las formas
de onda de las figuras 23 y 24, respectivamente. La
carga utilizada es resistiva no lineal.
r -i
Á 1L¡ ^i
<:
y v v •
bl'*
LL-J- tContador i
z
rrs -
RE
Fig. 23 EsquemaCargador de baterías
a. Bobina de voltaje
El voltaje senoidal que la alimenta está dado por:
v = (o)t) (11-60)
El flujo que se produce es:
di-61)
La corriente que se induce en el disco debido al flujo
del elemento de voltaje es:
- 80 -
Fig. 24 Voltaje y corriente*Cargador de baterías
(11-62)
b. Bobina de corriente
La corriente en la línea está dada por la expresión:
Jcos (/no) t1)
en donde: y
(11-63)
7 : definida anteriormente
El flujo que se genera es:
- -i-2
t-y) +-^¿j t-y) ]
(11-64)

- 81 -
La corriente que se induce es:
sen (meo t-y) + -.sej?3 (/neo t -y)
(11-65)
c. Torque motor
Remplazando las ecuaciones 11-61, 11-62, 11-64, 11-65,
en la ecuación 11-25, resolviéndola para los límites
7r/(2m) < wt < 7r/(2m), incluyendo el término Ic,
despreciando los términos que salen del rango de
precisión del estudio, y aplicando al resultado los
valors dados en 11-28, se tiene:
/r -i -r .mcos (— — )
Con K7=K1K2K3
d. Torque de frenado
Remplazando la ecuación 11-64 en la ecuación 11-30,
resolviéndola para los límites - 7r/(2m) < cot <
TT/ (2m) , incluyendo el término Ic, despreciando los
términos que salen del rango de precisión del estudio,
y aplicando al resultado los valores dados en 11-28, se
tiene:
- 82 -
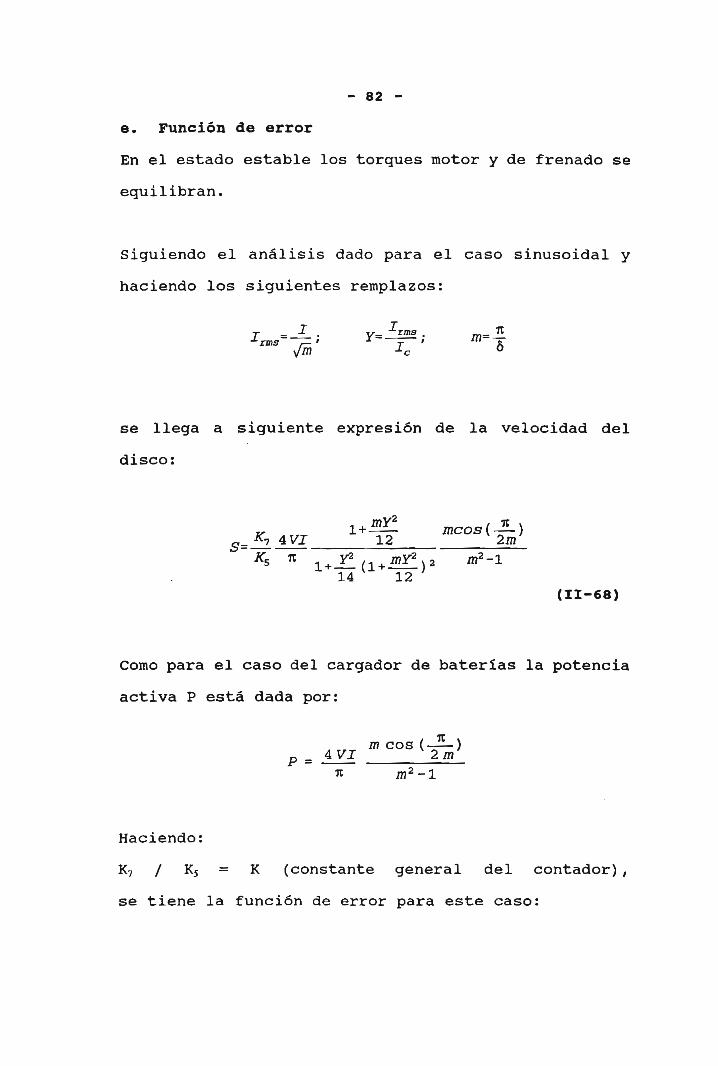
e. Punción de error
En el estado estable los torques motor y de frenado se
equilibran.
Siguiendo el análisis dado para el caso sinusoidal y
haciendo los siguientes remplazos:
se llega a siguiente expresión de la velocidad del
disco:
4VI 12
14 12(11-68)
Como para el caso del cargador de baterías la potencia
activa P está dada por:
m eosp =
Haciendo:
K7 / K5 = K (constante general del contador) ,
se tiene la función de error para este caso:
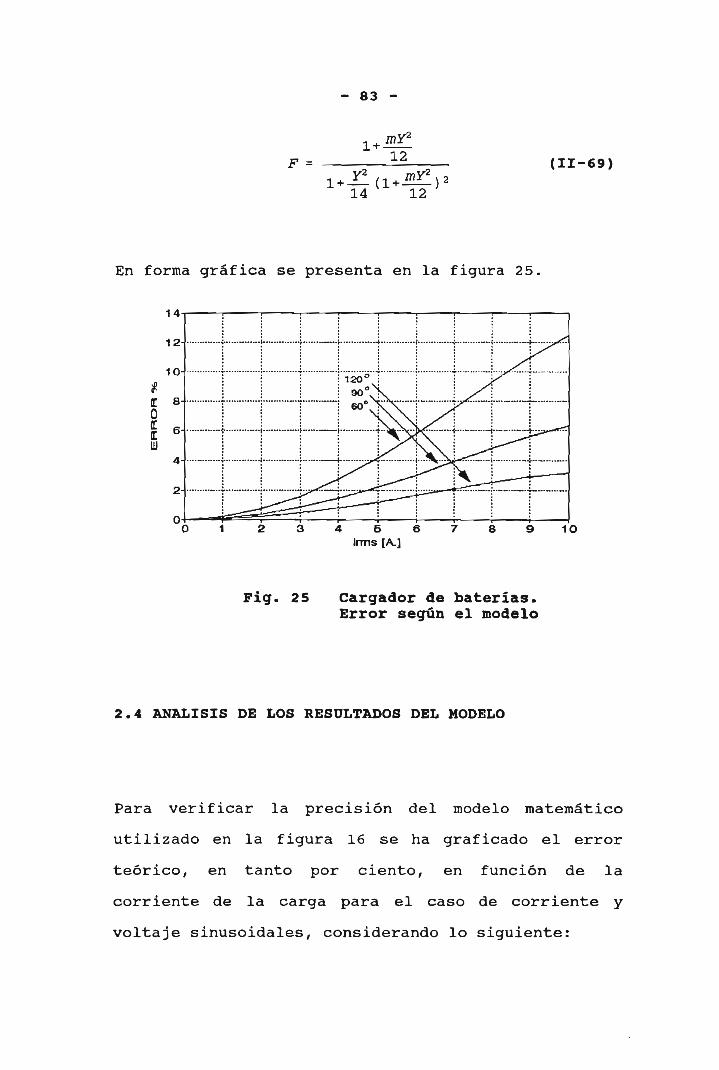
- 83 -
1 +F =
mY212
1+
(11-69)
14 12
En forma gráfica se presenta en la figura 25.
8 9 1 0
Fig. 25 Cargador de baterías.Error según el modelo
2.4 ANÁLISIS DE LOS RESOLTADOS DEL MODELO
Para verificar la precisión del modelo matemático
utilizado en la figura 16 se ha graficado el error
teórico, en tanto por ciento, en función de la
corriente de la carga para el caso de corriente y
voltaje sinusoidales, considerando lo siguiente:

- 84 -
1.- El error es obtenido como:
A % = (F-l)lOO (II-70)
expresión en la que P es la función de error teórica
encontrada para el caso sinusoidal ( ecuación 11-37).
2.- En la determinación de F se asumen las siguientes
aproximaciones:
a.- La compensación por sobrecarga (principal fuente de
error en la exactitud del contador y que obliga a
que el torque motor se incremente más rápidamente
comparado con el crecimiento de la carga) es tomada
en cuenta en el parámetro "a" de la expresión
utilizada para la obtención del flujo en la bobina
de corriente (ecuaciones II-6 y 11-21), incidiendo
directamente en las ecuaciones del torque motor y
de frenado.
b.- Se han considerado los siguientes resultados
experimentales: ÍI!I
A = (3aIc2)/2 = 1/12
K32K6IC2 = 1/14
Expresiones en las que Ic es la corriente de clase
- 85 -
o nominal del contador, que para el estudio se ha
considerado Ic = 10 A.
En la figura 16 se puede apreciar que el error que
presenta el modelo tiene un valor máximo de 0.281 % en
el intervalo de estudio, lo cual es una buena
aproximación del funcionamiento real de un medidor ante
una corriente de carga sinusoidal, por lo que se deduce
que el modelo utilizado para la representación del
medidor, así como las aproximaciones consideradas
tienen validez en el intervalo de estudio planteado*
De manera similar en las figuras 19, 22 y 25 se ha
graficado el error teórico del modelo, en tanto por
ciento, para cada uno de los casos analizados:
rectificador semicontrolado con carga resistiva-
inductiva, rectificador semicontrolado con carga
resistiva, y cargadores de baterías.
Del análisis de las tres figuras anteriores, se
determina que el error dado por el modelo se incrementa
de manera significativa a medida que aumenta el valor
de la corriente o el ángulo de disparo en el que se
inicia la conducción, debido fundamentalmente a la
compensación por sobrecarga asumida en el factor "i +
a i3".
La comprobación experimental de los resultados teóricos

- 86 -
encontrados, y su validación, serán analizadas en el
capítulo siguiente.

CAPITULO III
EXPERIMENTACIÓN
3.1 METODOLOGÍA
En el capítulo anterior se determinó la función de
error teórica en la que incurriría el contador de
inducción en la medición de la energía, por presencia
de las distorsiones de las ondas de corriente para los
tres casos analizados.
Estas funciones se obtuvieron como resultado de la
comparación entre la energía que teóricamente debe
medir el contador y la que registraría de acuerdo al
modelo planteado, llegándose a determinar el error
porcentual en función de la corriente en verdadero
valor eficaz.
- 88 -
La comprobación de la validez del modelo en forma
experimental se realiza tomando simultáneamente los
datos de la energía leída en el contador bajo prueba
(dada por el número de revoluciones en relación a la
constante general) , y de la energía de referencia (en
base al producto de la potencia por el tiempo) .
A continuación se detalla la metodología seguida:
a.- Para una forma de onda seleccionada, con un ángulo
de disparo determinado y un valor de corriente
eficaz fijo, se obtienen los siguientes datos, para
un mismo período de prueba:
Energía del contador (E c) :
La lectura del número de revoluciones (N) del
contador , se traduce en energía en base a la
relación directa con la constante general (K) . y se
expresa en W-s.
c K
Energía de referencia (E REf)
Se puede obtener de dos formas:
- Se toman varias lecturas de la potencia activa en
watios y su promedio es convertido en energía al
multiplicarse por el tiempo de la prueba en
segundos. Se la designa como
- 89 -
- Por multiplicación de los valores promedios de
las lecturas de voltaje, corriente, factor de
potencia, y el tiempo de la prueba.
b.- Error:
Se calcula porcentualmente como resultado de la
comparación de las dos energías antes descritas y
en base a las ecuaciones:
E
c.- La repetición de los pasos descritos anteriormente
para varios valores de corriente eficaz dentro de
la capacidad nominal del contador, permitirá
graficar las curvas de error para la forma de onda
y ángulo de disparo planteados.
d. - La experimentación se realizó para las formas de
onda de corrientes provenientes de un puente
rectificador semicontrolado con carga tanto
resistiva como resistiva-inductiva y para ángulos
de disparo de 60, 90 y 120 grados.
- 90 -
3.2 CIRCUITOS EXPERIMENTALES
El circuito general experimental consta de una carga
resistiva o resistíva-inductiva según la prueba a
realizar, la misma que es conectada a los terminales de
corriente del contador de energía bajo prueba, a través
de un puente rectificador semicontrolado. La
alimentación del circuito de corriente se realiza por
medio de un autotransformador monofásico, el mismo que
permite variar el voltaje y, manteniendo una misma
carga durante la prueba, se obtendrán los valores de
corriente deseados.
El circuito de voltaje es alimentado desde los
terminales de otro autransformador monofásico, para
obtener el voltaje nominal de trabajo del contador
durante la prueba. Las mediciones de los parámetros
eléctricos que permiten encontrar la energía
referencial se toman mediante un analizador industrial
a microprocesador.
La señal de corriente es llevada a un osciloscopio por
medio de una pinza de corriente de efecto Hall.
El esquema general de los circuitos a implementarse es
el siguiente:
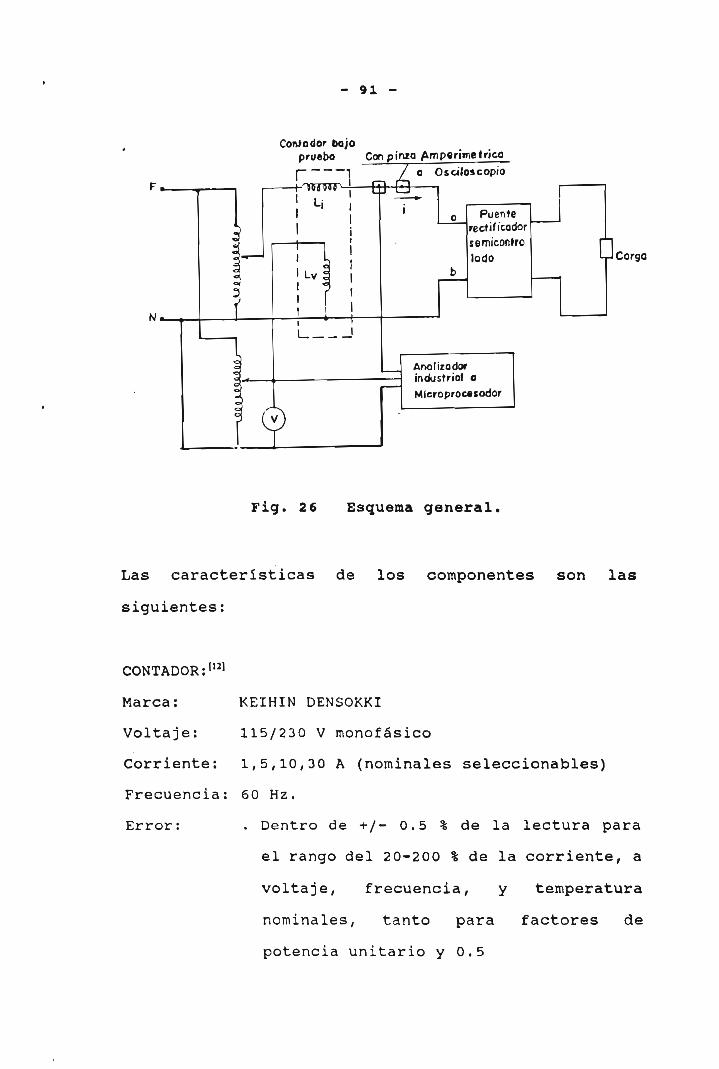
- 9X -
Corlador bajoprueba Con pinza ftmpcrímefrico
1i0(
3
í|3¿3
|
f\
1 1
Li II
¡,. .4 ... '
L* 3 1
! ii * it t
?
/ o Osciloscopio
J LJ
1 0 PuenterecfiMcodor
lodo Ub
Analizador
M|croproc*sodor
Carga
Fig. 26 Esquema general.
Las características de los componentes son las
siguientes:
CONTADOR:1121
Marca: KEIHIN DENSOKKI
Voltaje: 115/230 V monofásico
Corriente: 1,5,10,30 A (nominales selecciónateles)
Frecuencia: 60 Hz,
Error: , Dentro de +/- 0.5 % de la lectura para
el rango del 20-200 % de la corriente, a
voltaje, frecuencia, y temperatura
nominales, tanto para factores de
potencia unitario y 0.5
- 92 -
. Dentro de +/- 1 % de la lectura para el
rango de hasta 10 % de la corriente, a
voltaje, frecuencia, y temperatura
nominales, para factor de potencia
unitario.
. Dentro de +/- 1.5 % de la lectura para
el rango de hasta 10 % de la corriente,
a voltaj e, frecuencia, y temperatura
nominales, para factor de potencia 0.5
Constantes generales del contador:
Corriente (A) 1 5 10 30
K 115 V. 7500 1500 750 250
(rev/KW-H) 230 V. 3750 750 375 125
ANALIZADOR INDUSTRIAL A MICROPROCESADOR:.[13]
Marca:
Denominación:
Voltaje:
Corriente:
Exactitud:
ELCONTROL
MICROVIP MK1
105-145 ; 195-265 ; 340-460 Vea
seleccionables„
12 ; 36 ; 120 ; 360 ; 1200 A.
seleccionables.
+/- 1% del valor medido.

- 93 -
Lineal i zación de la escala: 1% entre el 20% de la
escala y el fondo escala.
Consumo: 3 VA.
Tensión de rotura: 1500 Vea
Temperatura de funcionamiento: -5 a 45 grados C.
Conexión voltimétrica: dos fases mas tierra.
Conexión de corriente: pinza amperimétrica.
Impresión: manual o automática programable de
12 parámetros,
caracteres: matriz 7x5
velocidad: 1 renglón /segundo
papel: 45 mm de ancho.
El MICROVIP obtiene todas las medidas en base de los
dos elementos fundamentales: el voltaje y la corriente.
Estas dos medidas primarias son verificadas cada 0.5
segundos. Se toman 250 valores instantáneos con un
intervalo de 400 micro segundos para una verificación,
lo que equivale a 100 milisegundos, o sea a 5 ciclos de
la onda senoidal fundamental.
Teniendo en cuenta más la duración de la comprobación
que su frecuencia, resulta posible una medida en
verdadero valor eficaz para frecuencias que van desde
20 Hz. a 600 Hz.

- 94 -
PINZA DE CORRIENTE:
Marca : FLUKE Y8100
DC/AC COURRENT PROBÉ
20 A - 2 V y 200 A - 2V , seleccionables.
OSCILOSCOPIO:
Marca : TEKTRONIX 2225, 50 MHz.
Como parte constitutiva del esquema general se tiene el
puente rectificador semicontrolado y su correspondiente
circuito de disparo, el cual por medio del
potenciómetro lineal Pl permite variar el ángulo de
disparo de los tiristores TI y T2.
Los esquemas implementados se presentan en las
figuras 27 y 20:
El listado de los componentes es el siguiente:
TI : SCR 16RIA60
DI : DIODO del puente MDA 3502
D2 : DIODO 1N3912R
Pl : Potenciómetro lineal 250 kilo ohmios
PUT : GE2N6A28
Para aislar el circuito de disparo se utiliza un
transformador de relación 1:1.
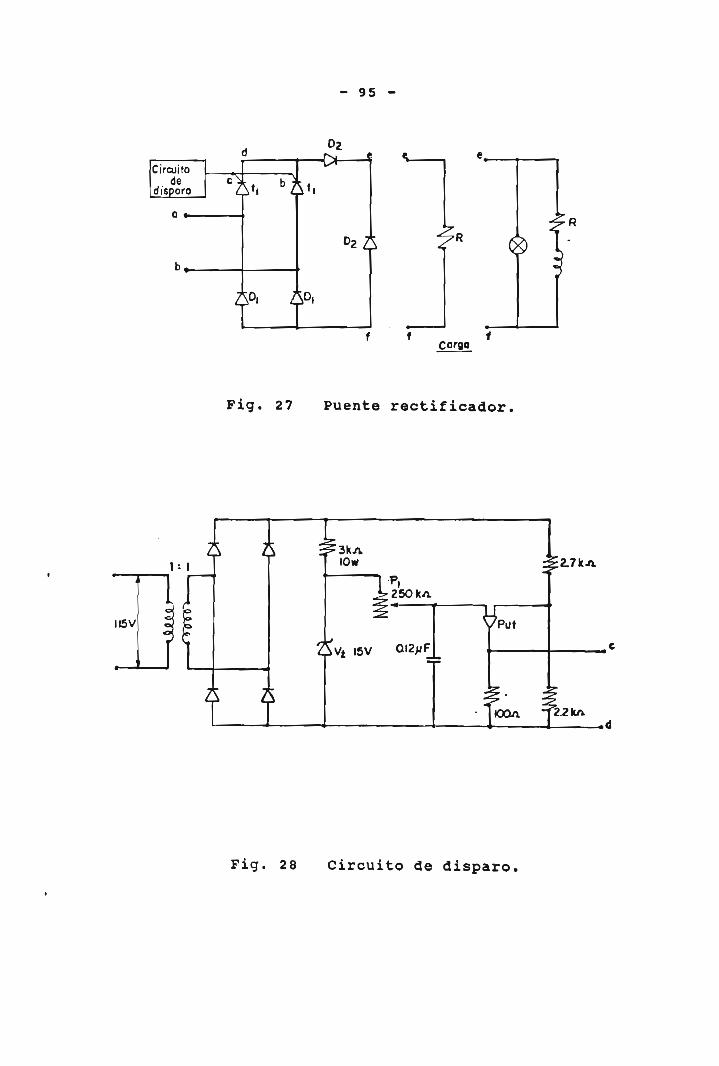
- 95 -
Circuitode
disporo
c t-
ht
,
1
1
-
?'
r \ —
r°z¿
rf
i -
c
;R £
1orgo
* 1«
Fig, 27 Puente rectificador.
iM I
1II5V
U
lOw
I5V 0!2pF
¥Puf
KXIA
Fig. 28 Circuito de disparo.

- 96 -
3.3 MEDICIONES DE ENERGÍA CON VOLTAJE SINUSOIDAL Y
CORRIENTES OBTENIDA DE UN PUENTE RECTIFICADOR
SEMICONTROLADO CON CARGA RESISTIVA
Para esta prueba se implemento el circuito general con
el puente rectificador semicontrolado y el
correspondiente circuito de disparo. Se conectó una
carga resistiva, y por la variación del voltaje de
alimentación al circuito de corriente se obtuvieron los
diferentes valores de corriente RMS para un determinado
ángulo de disparo de los tiristores.
Con la variación del potenciómetro lineal Pl del
circuito de disparo se obtuvieron ángulos de 60, 90 y
120 grados.
En las figuras 29, 30 y 31 se presentan las ondas de
las corrientes para los ángulos antes mencionados.
En la tablas la, Ib y le se presentan los valores de
potencia en watios, el factor de potencia, la corriente
y voltaje, obtenidos en la experimentación por medio
del Analizador Industrial, para los ángulos de 60, 90
y 120 grados respectivamente.
En la Tablas 2a, 2b y 2c, para los ángulos de 60, 90,
120 grados respectivamente se presentan: los promedios
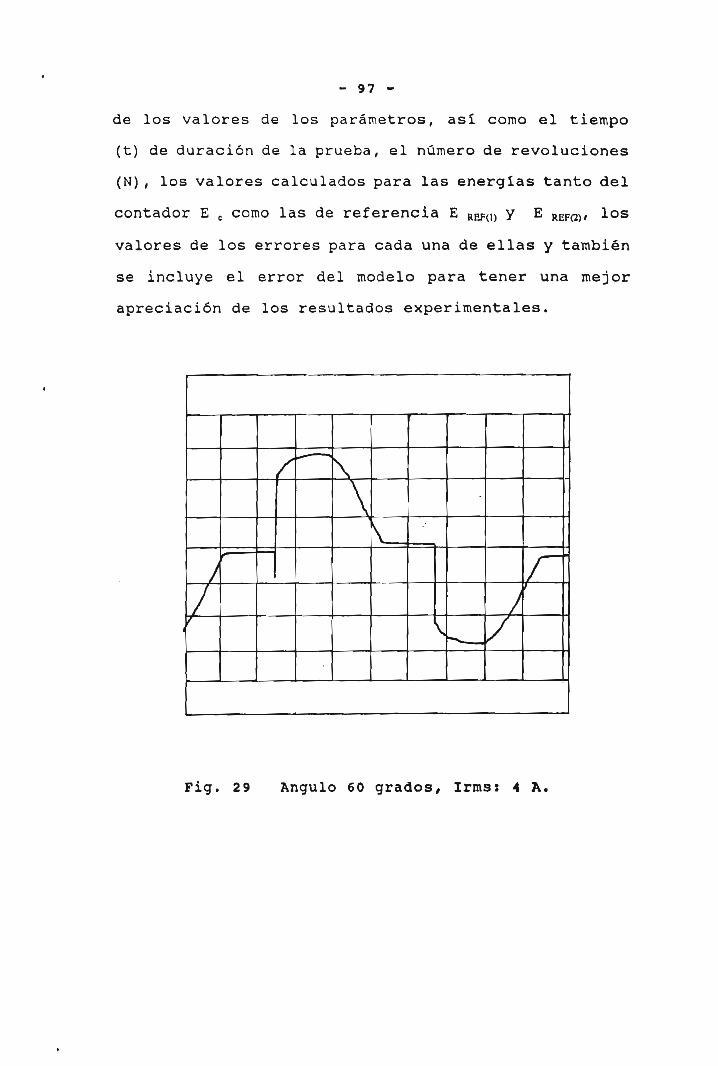
- 97 -
de los valores de los parámetros, así como el tiempo
(t) de duración de la prueba, el número de revoluciones
(N) , los valores calculados para las energías tanto del
contador E c como las de referencia E REF(1) y E REF(2), los
valores de los errores para cada una de ellas y también
se incluye el error del modelo para tener una mejor
apreciación de los resultados experimentales.
\
\. 29 Ángulo 60 grados, Irms: 4 A.
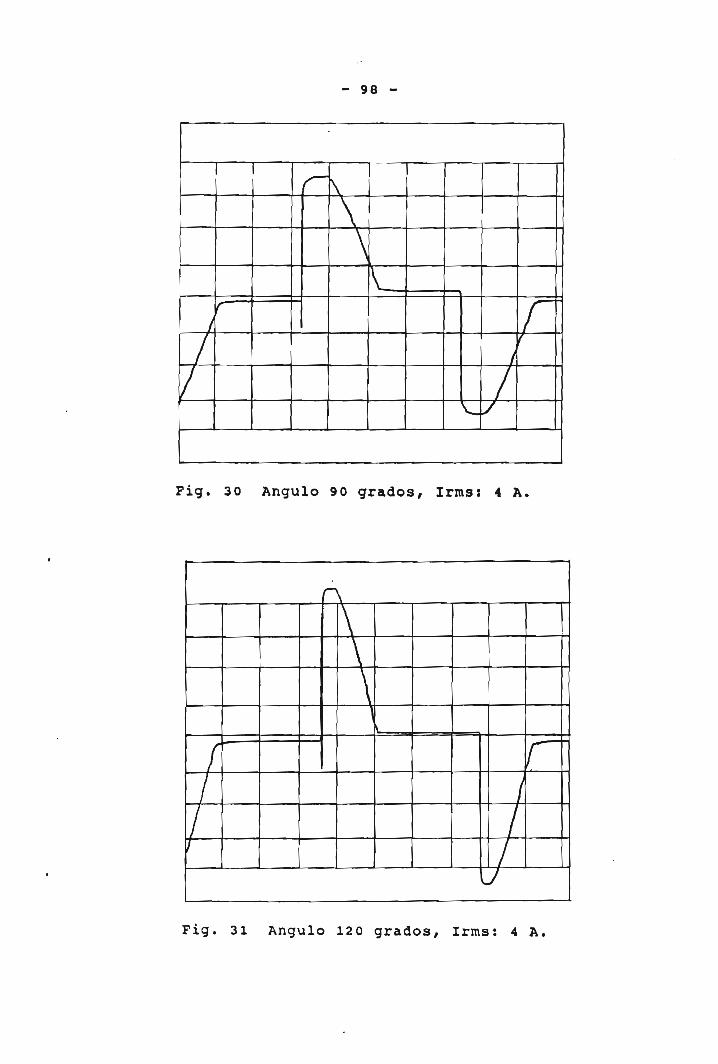
- 98 -
Fig. 30 Ángulo 90 grados, Irms: 4 A,
Fig. 31 Ángulo 120 grados, Irms: 4 A,

- 99 -
ÁNGULO :
60-1
PROMEDIO
60-2
PROMEDIO
60-3
PROMEDIO
60-4
PROMEDIO
60-5
PROMEDIO
TABLA la
DATOS EXPERIMENTALESRECTIFICADOR CARGA: R
A N A L I Z A D O R
POTENCIA[W]
F.P. Irms[A]
Vrms[V]
60 GRADOS
100.167
210.200
307.333
412.667
509.667
0.895
0.890
0.890
0.890
0.890
0.977
2.044
3.005
4.040
5.020
102.102.101.98.97.101,
000000000000000000
0.0.0.0.0.0.
900900900890890890
000000
.990
.990
.970
.960
.960
.990
115.115.115.115.115.115.
000000000000000000
115.000
211.000212.000209.000211.000208.000
0.8900.8900.8900.8900.890
2.0902.0502.0202.0402.020
115.000115.000115.000115.000115.000
115.000
308.310.311.309.304.302.
000000000000000000
0.0.0.0.0.0.
890890890890890890
333332
.000
.100
.020
.010
.000
.900
115.115.116.116.115.115.
000000000000000000
115.333
410.000412.000412.000414.000415.000413.000
0.8900.8900.8900.8900.8900.890
4.0504.0304.0304.0304.0604.040
115.000115.000115.000115.000115.000115.000
115.000
507.511.509.509.513.509.
000000000000000000
0.0.0.0.0.0.
890890890890890890
5.5.4.4.5.5.
100020990990020000
115.115.115.115.115.115.
000000000000000000
115.000

- 100 -
TABLA la(continuación)
DATOS EXPERIMENTALESRECTIFICADOR CARGA: R
A N A L I Z A D O R
POTENCIA[W]
F.P. Irms[A]
Vrms[V]
ÁNGULO :
60-6
60 GRADOS
PROMEDIO
60-7
PROMEDIO
60-8
PROMEDIO
60-9
PROMEDIO
60-10
614.000609.000605.000607.000604.000
607.800
727.000731.000730.000734.000721.000
728.600
815.000809.000821.000823.000816.000
816.800
914.000923.000919.000902.000918.000
915.200
1020.0001010.0001000.000994.000998.000
0.8900.8800.8900.8900.890
0.888
0.8900.8900.8900.8900.890
0.890
0.8900.8900.9000.9000.890
0.894
0.8900.8900.8900.8900.890
0.890
0.8900.8900.8900.8900.890
6.0205.9905.9705.9805.970
5.986
7.1307.1507.1707.1807.060
7.138
7.9707.9408.0108.0107.970
7.980
8.9408.9908.9308.8308.970
8.932
9.9609.9109.8309.7509.730
115.000115.000115.000115.000115.000
115.000
115.000115.000115.000115.000115.000
115.000
115.000114.000115.000115.000115.000
114.800
115.000115.000115.000115.000115.000
115.000
115.000115.000115.000115.000115.000
PROMEDIO 1004.400 0.890 9.836 115.000
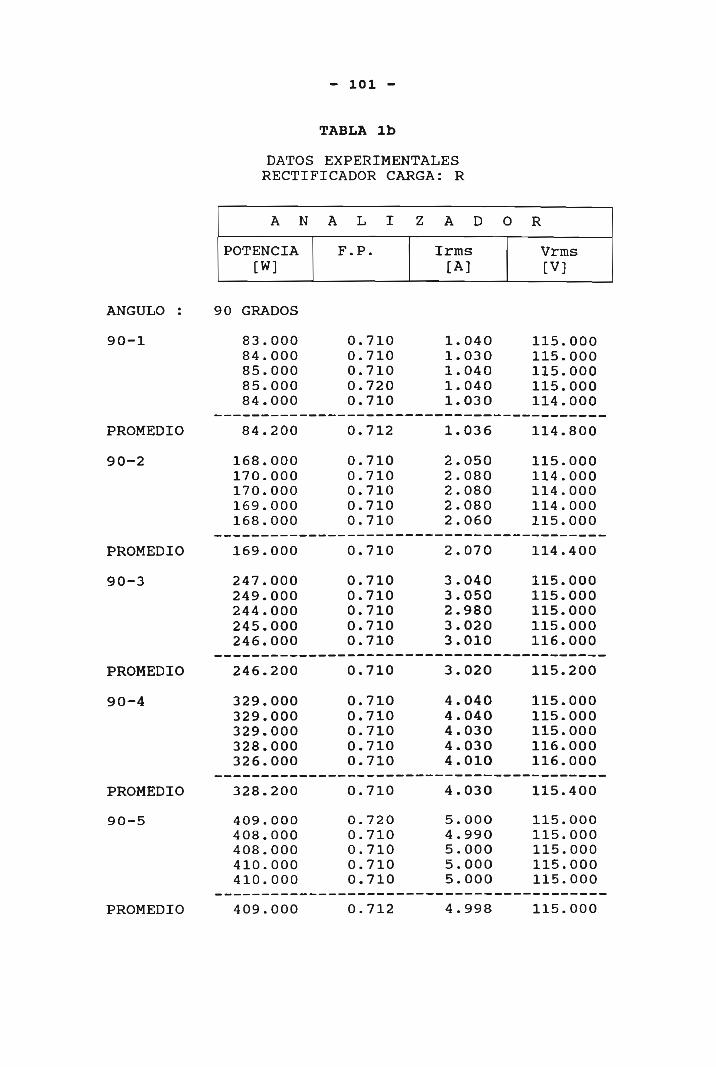
- 101 -
TABLA Ib
DATOS EXPERIMENTALESRECTIFICADOR CARGA: R
A N A L I Z A D O R
POTENCIA[W]
F.P. Irms[A]
Vrms[V]
ÁNGULO :
90-1
90 GRADOS
PROMEDIO
90-2
PROMEDIO
90-3
PROMEDIO
90-4
PROMEDIO
90-5
83.00084.00085.00085.00084.000
0.7100.7100.7100.7200.710
1.0401.0301.0401.0401.030
115.000115.000115.000115.000114.000
84.200
168.000170.000170.000169.000168.000
169.000
246.200
329.000329.000329.000328.000326.000
328.200
409,408.408,410.410,
000000000000000
0.712
0.7100.7100.7100.7100.710
0.710
0.710
0.7100.7100.7100.7100.710
0.710
0.7200.7100.7100.7100.710
1.036
2.0502.080080080
222.060
2.070
3.020
4.0404.0404.0304.0304.010
4.030
5.0004.9905.0005.0005.000
114.800
115.000114.000114.000114.000115.000
114.400
247.000249.000244.000245.000246.000
0.7100.7100.7100.7100.710
3.0403.0502.9803.0203.010
115.000115.000115.000115.000116.000
115.200
115.000115.000115.000116.000116.000
115.400
PROMEDIO 409.000 0.712 4.998 115.000
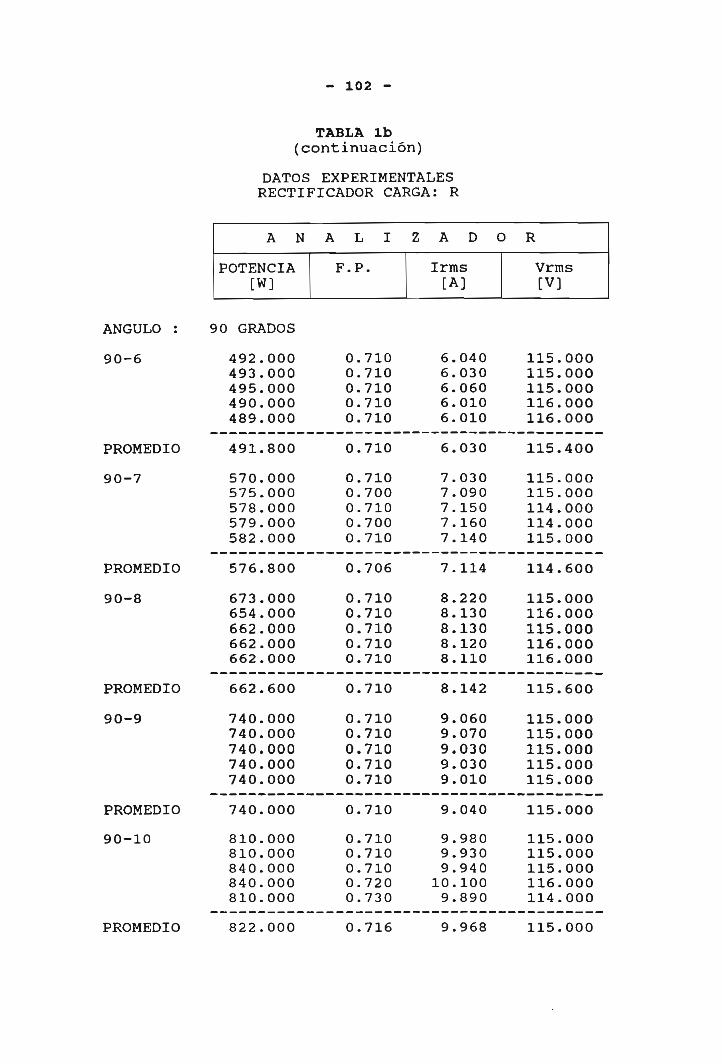
- 102 -
ÁNGULO :
90-6
PROMEDIO
90-7
PROMEDIO
90-8
PROMEDIO
90-9
PROMEDIO
90-10
TABLA Ib(continuación)
DATOS EXPERIMENTALESRECTIFICADOR CARGA: R
A N A L I Z A D O R
POTENCIA[W]
F.P. Iritis[A]
Vrms[V]
90 GRADOS
492.000493.000495.000490.000489.000
491.800
570.000575.000578.000579.000582.000
576.800
673.000654.000662.000662.000662.000
662.600
740.000740.000740.000740.000740.000
740.000
810.000810.000840.000840.000810.000
0.7100.7100.7100.7100.710
0.710
0.7100.7000.7100.7000.710
0.706
0.7100.7100.7100.7100.710
0.710
0.7100.7100.7100.7100.710
0.710
0.7100.7100.7100.7200.730
6.0406.0306.0606.0106.010
6.030
7.0307.0907.1507.1607.140
7.114
8.2208.1308.1308.1208.110
8.142
9.0609.0709.0309.0309.010
9.040
9.9809.9309.94010.1009.890
115.000115.000115.000116.000116.000
115.400
115.000115.000114.000114.000115.000
114.600
115.000116.000115.000116.000116.000
115.600
115.000115.000115.000115.000115.000
115.000
115.000115.000115.000116.000114.000
PROMEDIO 822.000 0.716 9.968 115.000

- 103 -
TABLA le
DATOS EXPERIMENTALESRECTIFICADOR CARGA: R
A N A L I Z A D O R
POTENCIA[W]
F.P. Iritis[A]
Vrms[V]
ÁNGULO :
120-2
PROMEDIO
120 GRADOS
101.000101.00099.000100.00099.00099.000
0.4400.4400.4400.4400.4400.440
2.0001.9901.9501.9701.9701.950
115.000115.000115.000115.000115.000115.000
99.833 0.440 1.972 115.000
120-3
PROMEDIO
120-4
PROMEDIO
120-5
153.000153.000154.000153.000153.000
0.4400.4400.4400.4400.440
3.0703.0603.0603.0603.070
115.000115.000115.000115.000115.000
153.200
206.000205.000206.000207.000207.000
206.200
0.440
0.4400.4400.4400.4400.440
0.440
3.064
4.0604.0504.0904.0804.080
4.072
115.000
115.000115.000115.000115.000115.000
115.000
252254254253252236302
.000
.000
.000
.000
.000
.000
.000
0.0.0.0.0.0.0.
440440440440440420460
5.5.5.5.5.4.5.
010030020020030840320
115115115115115116116
.000
.000
.000
.000
.000
.000
.000
PROMEDIO 257.571 0.440 5.039 115.286
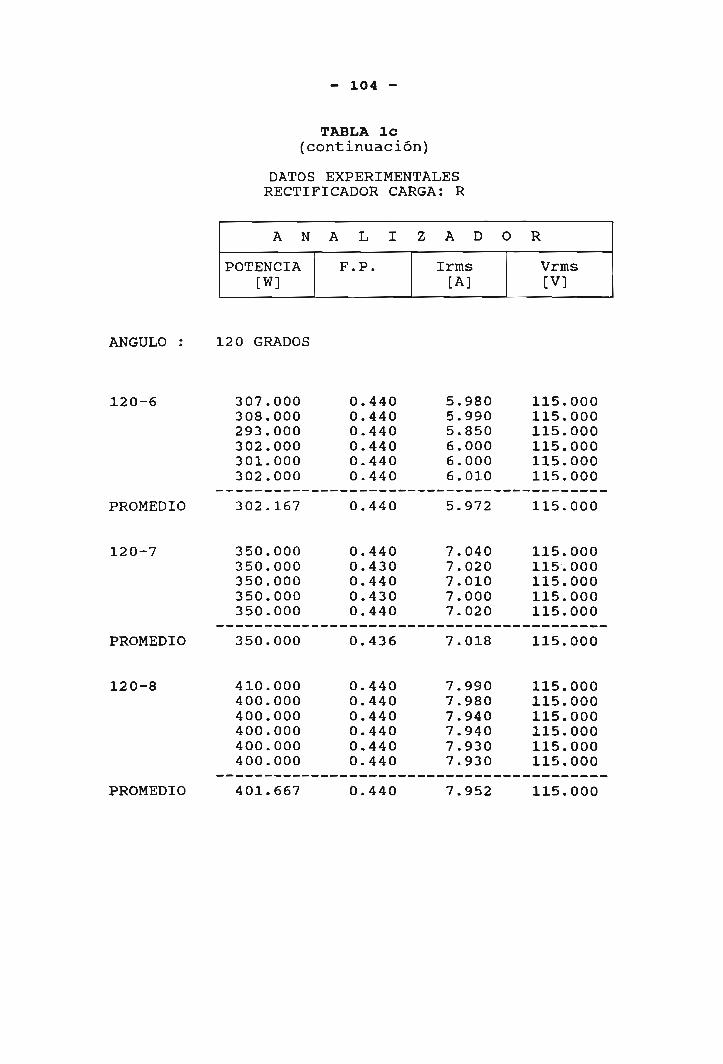
- 104 -
TABLA 1C(continuación)
DATOS EXPERIMENTALESRECTIFICADOR CARGA: R
A N A L I Z A D O R
POTENCIA[W]
F.P. Irms[A]
Vrms[V]
ÁNGULO : 120 GRADOS
120-6
PROMEDIO
120-7
PROMEDIO
120-8
307.000308.000293.000302.000301.000302.000
302.167
350.000350.000350.000350.000350.000
350.000
410,000400.000400.000400.000400.000400.000
0.4400.4400.4400.4400.4400.440
0.440
0.4400.4300.4400.4300.440
0.436
0.4400.4400.4400.4400.4400.440
5.9805.9905.8506.0006.0006.010
5.972
7.0407.0207.0107.0007.020
7.018
7.9907.9807.9407.9407.9307.930
115.000115.000115.000115.000115.000115.000
115.000
115.000115.000115.000115.000115.000
115.000
115.000115.000115.000115.000115.000115.000
PROMEDIO 401.667 0.440 7.952 115.000

TAB
LA
2a
RE
CT
IFIC
AD
OR
CA
RG
A: R
AN
AL
PO
TE
NC
IA
[W]
Z
A
D O
R
F.P
.Ir
ms
[A]
Vrm
s
Cfl
TIE
MP
O
[s]
#R
EV
EN
ER
GÍ
A
CO
NT
AD
OR
[W*s
]R
EF
1[W
*s]
RE
F2
[W*s
]
ER
RO
R
%
RE
F1
RE
F2
MO
D
RE
SU
ME
N 6
0 G
RA
DO
S
60-1
60-2
60-3
60-4
60-5
60-6
60-7
60-8
60-9
60-10
100.167
210.200
307.333
412.667
509.667
607.800
728.600
816.800
915.200
1004.400
0.895
0.890
0.890
0.890
0.890
0.888
0.890
0.894
0,890
0.890
0.977
2.044
3.005
4.040
5.020
5.986
7.138
7.980
8.932
9.836
115.000
115.000
115.333
115.000
115.000
115.000
115.000
114.800
115.000
115.000
300.470
300.190
300.690
299.930
299.970
299.930
300.830
300.310
300.320
299.960
6.240
13.130
19.210
25.760
32.010
38.360
46.030
51.720
58.010
63.680
29952.000
63024.000
92208.000
123648.000
1 53648.000
184128.000
220944.000
248256.000
278448.000
305664.000
30097.078
63099.938
92412.060
123771.113
152884.710
182297.454
219184.738
245293.208
274852.864
301279.824
30204.271
62800.769
92748.803
124019.255
154123.686
183344.306
219778.667
245952.982
274549.601
301974.111
-0.482
-0.120
-0.221
-0.099
0.499
1.004
0.803
1.208
1.308
1.455
-0.835
0.355
-0.583
-0.299
-0.309
0.427
0.530
0.936
1.420
1.222
o Ul
0.0308
'
0.1309
0.2750
0.4804
0.6987
0.9330
1.1958
1 .3576
1.4854
1.5286
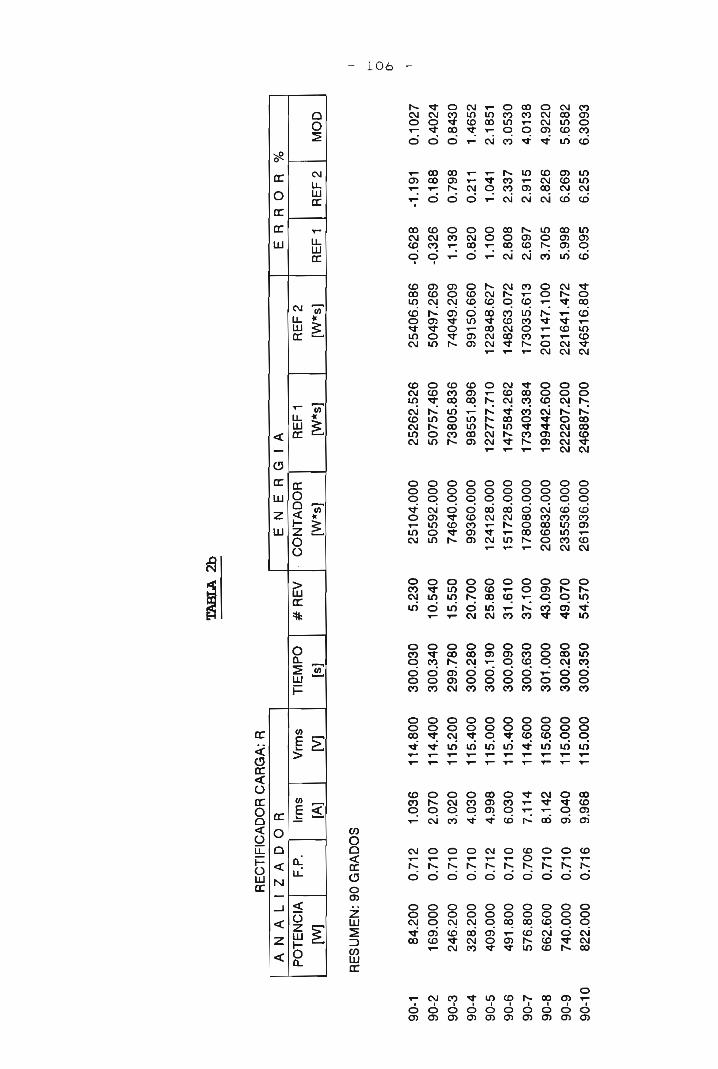
TAB
EA 2b
RE
CTI
FIC
AD
OR
CA
RG
A: R
AN
AL
IZ
AD
OR
PO
TE
NC
IA[W
]F.
P.
Irms
[A]
Vrm
s
W
TIE
MP
O
[s]
#R
EV
EN
ER
GÍ
AC
ON
TA
DO
R
[W*s
]R
EF
1[W
*s]
RE
F2
[W*s
]
ER
RO
R
%
RE
F1
RE
F2
MO
D
RE
SU
ME
N:
90 G
RA
DO
S
90-1
90-2
90-3
90-4
90-5
90-6
90-7
90-8
90-9
90-1
0
84.2
0016
9.00
024
6.20
032
8.20
040
9.00
049
1.80
057
6.80
066
2.60
074
0.00
082
2.00
0
0.71
20.
710
0.71
00.
710
0.71
20.
710
0.70
60.
710
0.71
00.
716
1.03
62.
070
3.02
04.
030
4.99
86.
030
7.11
48,
142
9.04
09.
968
114.
800
114.
400
115.
200
115.
400
115.
000
115.
400
114.
600
115.
600
115.
000
115.
000
300.
030
300.
340
299.
780
300.
280
300.
190
300.
090
300.
630
301.
000
300.
280
300.
350
5.23
010
.540
15.5
5020
.700
25.8
6031
.610
37.1
0043
,090
49.0
7054
,570
2510
4.00
050
592.
000
7464
0.00
099
360.
000
1241
28.0
0015
1728
.000
1780
80.0
0020
6832
.000
2355
36.0
0026
1936
.000
2526
2.52
650
757.
460
7380
5.83
698
551.
896
1227
77.7
1014
7584
.262
1734
03.3
8419
9442
.600
2222
07.2
0024
6887
.700
2540
6.58
650
497.
269
7404
9.20
999
150.
660
1228
48.6
2714
8263
.072
1730
35.6
1320
1147
.100
2216
41.4
7224
6516
.804
-0.6
28-0
.326
1.13
00.
820
1.10
02.
808
2.69
73.
705
5.99
86.
095
-1.1
910.
188
0.79
80.
211
1.04
12.
337
2.91
52.
826
6.26
96.
255
o o
0.10
27
'0.
4024
0.84
301
.465
22.
1851
3.05
304.
0138
4.92
205.
6582
6.30
93

TA
BLA
2c
RE
CT
IFIC
AD
OR
CA
RG
A:
R
AN
AL
IZ
AD
OR
PO
TEN
CIA
[W]
F.P
.Irm
s
[A]
Vrm
s
[V]
TIE
MP
O
[s]
#R
EV
EN
ER
GÍ
A
CO
NT
AD
OR
[W*s
]R
EF
1
[W*s
]
RE
F2
[W*s
]
ER
RO
R
%
RE
F1
RE
F2
MO
D
RE
SU
ME
N 1
20 G
RA
DO
S
120-2
120-3
120-4
120-5
120-6
120-7
120-8
99.833
153.200
206.200
257.571
302.167
350.000
401.667
0.440
0.440
0.440
0.440
0.440
0,436
0.440
1.972
3.064
4.072
5.039
5.972
7.018
7.952
1 1 5.000
115.000
115.000
115.286
115.000
115.000
115.000
667.000
600.600
600.000
705.440
600.280
600.130
605.970
13.730
19.380
26.450
40.130
40.810
48.140
57.300
65904.000
93024.000
126960.000
192624.000
195888.000
231072.000
275040.000
66588.833
92011.920
123720.000
181701.189
181384.607
210045.500
243397.950
66544.144
93116.063
123625.920
180299.977
181384.407
211175.257
243814.655
-1.028
1.100
2.619
6.011
7.996
10.010
13.000
-0.962
-0.099
2.697
6.835
7.996
9.422
12.807
i— 01 .3662
"J3.2528
'
5.6336
8.4071
11.4337
15.0678
18.3380
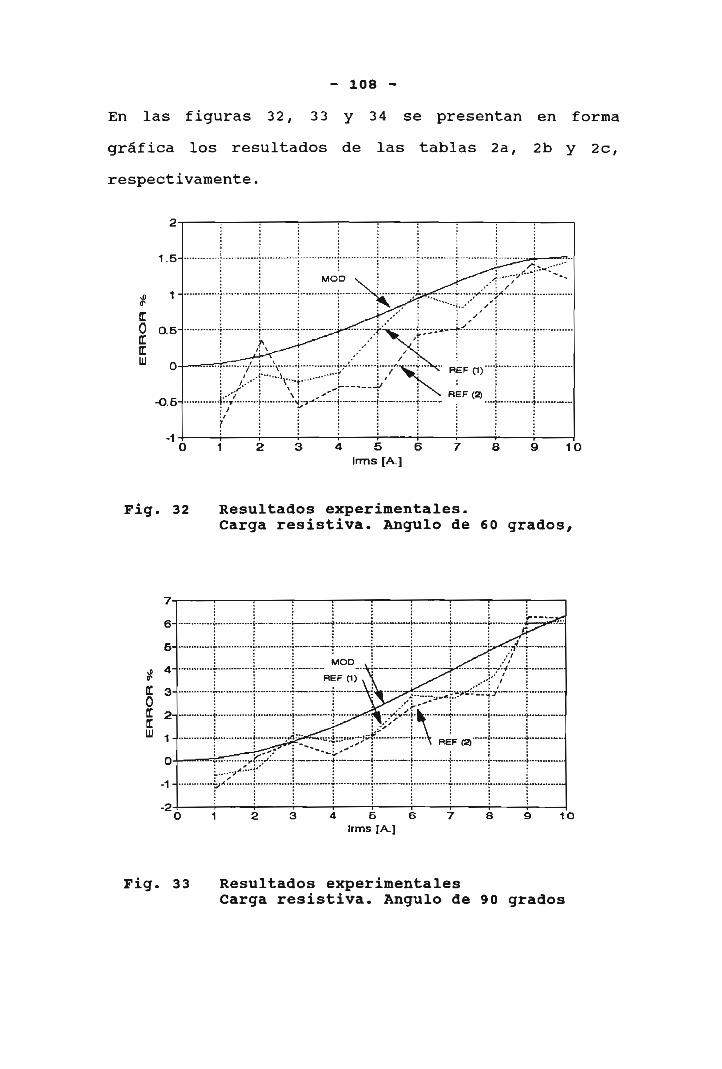
- 108 -
En las figuras 32, 33 y 34 se presentan en forma
gráfica los resultados de las tablas 2a, 2b y 2c,
respectivamente.
*COctUJ
-O.5-
4 5 6Inris [A.J
Fig. 32 Resultados experimentales.Carga resistiva. Ángulo de 60 grados,
DCUJ
4 6 6Irms [A.]
1O
Fig. 33 Resultados experimentalesCarga resistiva. Ángulo de 90 grados
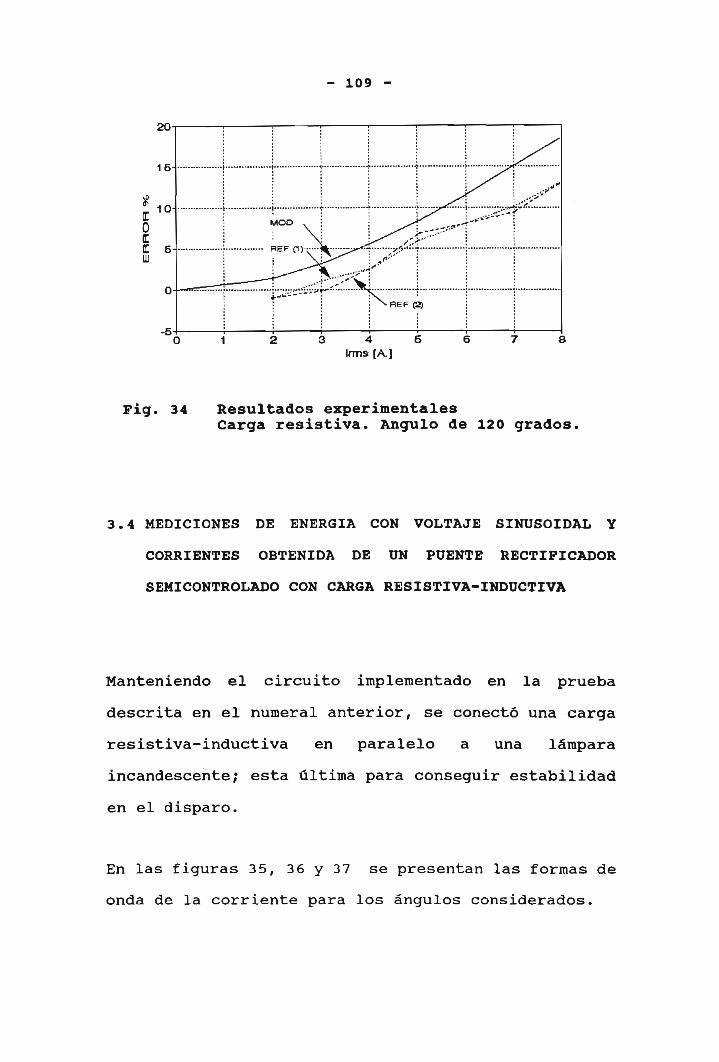
- 109 -
3 4 5Irms [A.]
Fig. 34 Resultados experimentalesCarga resistiva. Ángulo de 120 grados.
3.4 MEDICIONES DE ENERGÍA CON VOLTAJE SINUSOIDAL Y
CORRIENTES OBTENIDA DE UN PUENTE RECTIFICADOR
SEMICONTROLADO CON CARGA RESISTIVA-INDÜCTIVA
Manteniendo el circuito implementado en la prueba
descrita en el numeral anterior, se conectó una carga
resistiva-inductiva en paralelo a una lámpara
incandescente; esta última para conseguir estabilidad
en el disparo.
En las figuras 35, 36 y 37 se presentan las formas de
onda de la corriente para los ángulos considerados.
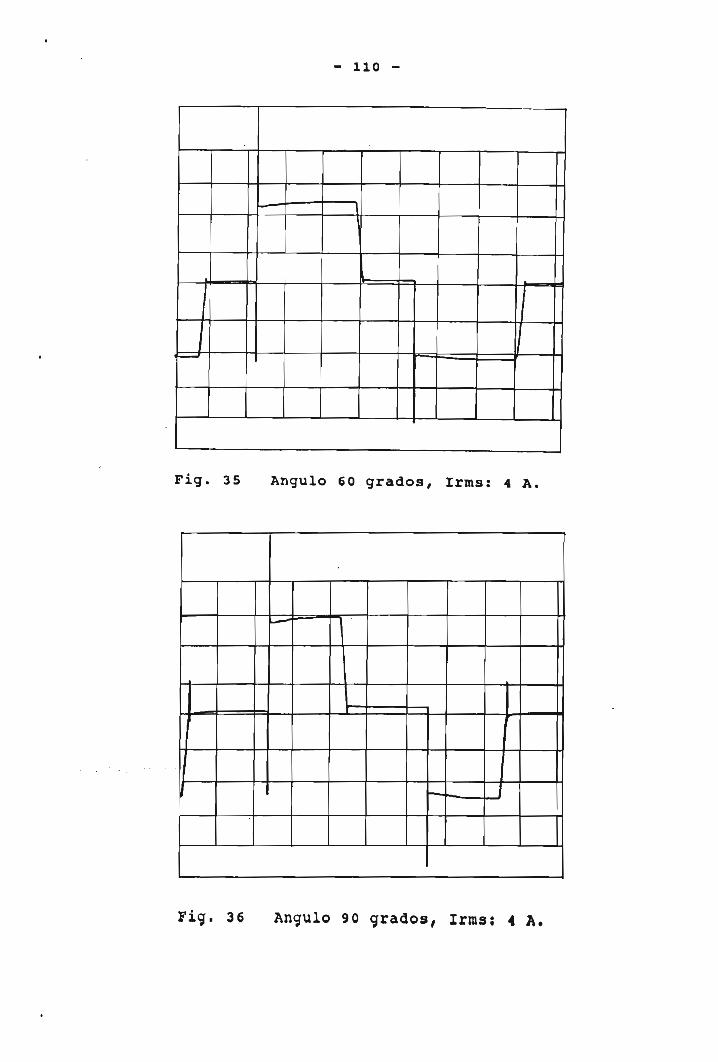
- 110 -
Fig. 35 Ángulo 60 grados, Irms: 4 A,
Fig, 36 Ángulo 90 grados, Irros; 4 A.
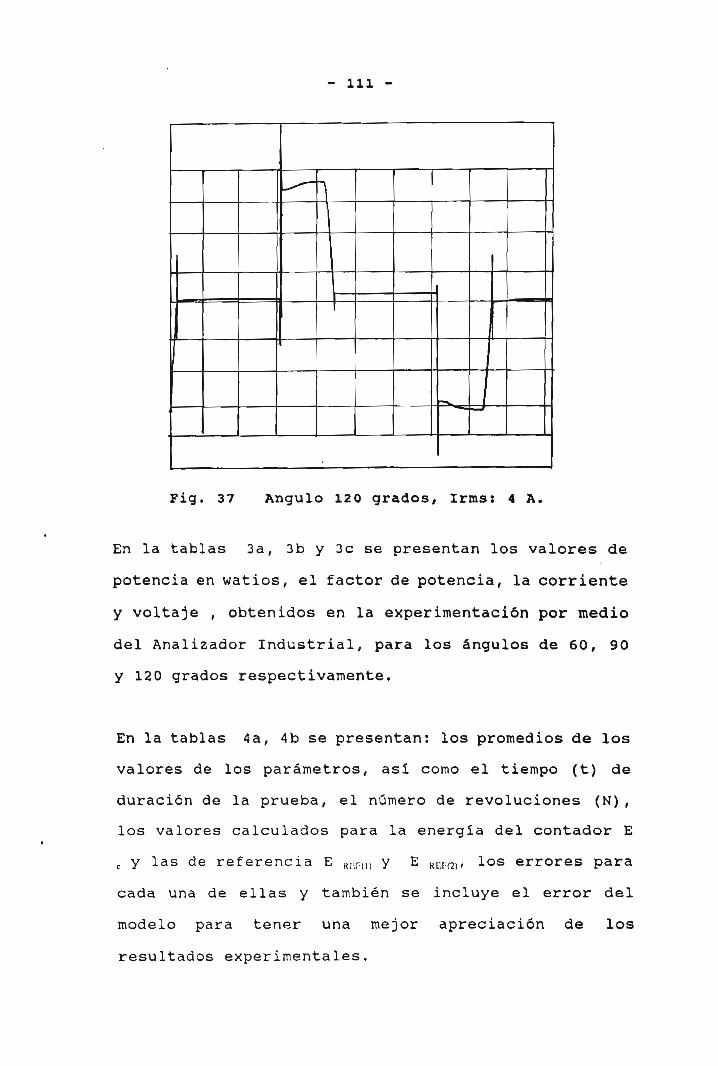
- 111 -
Fig. 37 Ángulo 120 grados, Irms: 4 A.
En la tablas 3a, 3b y 3c se presentan los valores de
potencia en vatios, el factor de potencia, la corriente
y voltaje , obtenidos en la experimentación por medio
del Analizador Industrial, para los ángulos de 60, 90
y 120 grados respectivamente.
En la tablas 4a, 4b se presentan: los promedios de los
valores de los parámetros, así como el tiempo (t) de
duración de la prueba, el número de revoluciones (N) ,
los valores calculados para la energía del contador E
e y las de referencia E R1:r(,j y E m; , los errores para
cada una de ellas y también se incluye el error del
modelo para tener una mejor apreciación de los
resultados experimentales.

- 112 -
TABLA 3a
DATOS EXPERIMENTALESRECTIFICADOR CARGA: R-L
A N A L I Z A D O R
POTENCIA[W]
F.P. Irms[A]
Vrms[V]
ÁNGULO :
C-60-1
60 GRADOS
PROMEDIO
C-60-2
PROMEDIO
C-60-3
PROMEDIO
C-60-4
98.00098.00099.00099.00099.000
98.600
201.000200.000195.000195.000199.000
198.000
284.000285.000283.000284.000282.000
283.600
381.000380.000377.000379.000378.000
0.8300.8300.8300.8300.830
0.830
0.8400.8400.8300.8300.830
0.834
0.8300.8400.8300.8300.840
0.834
0.8300.8300.8300.8300.830
1.0401.0401.0401.0301.010
1.032
2.0902.0702.0402.0802.070
2.070
2.9602.9602.9702.9702.950
2.962
3.9803.9703.9703.9603.960
115.000115.000115.000116.000115.000
115.200
115.000115.000115.000114.000115.000
114.800
115.000115.000115.000115.000115.000
115.000
115.000115.000115.000115.000115.000
PROMEDIO 379.000 0.830 3.968 115.000

- 113 -
TABLA 3a(continuación)
DATOS EXPERIMENTALESRECTIFICADOR CARGA: R-L
A N A L I Z A D O R
POTENCIA[W]
F.P. Irms[A]
Vrms[V]
ÁNGULO :
C-60-5
60 GRADOS
PROMEDIO
C-60-6
PROMEDIO
C-60-7
PROMEDIO
C-60-8.4
469.000470.000469.000466.000472.000471.000
469.500
570.000570.000569.000568.000568.000563.000
568.000
667.000663.000655.000656.000663.000
660.800
805.000805.000814.000806.000796.000797.000
0.8300.8300.8300.8300.8200.830
0.828
0.8300.8300.8300.8300.8300.830
0.830
0.8300.8300.8300.8300.830
0.830
0.8300.8300.8300.8300.8300.830
4.9604.9104.9704.9704.9704.960
4.957
6.0105.9905.9905.9705.9605.930
5.975
6.9606.9706.9606.9406.940
6.954
8.4308.4308.4308.4308.3808.380
115.000114.000114.000114.000115.000115.000
114.500
115.000115.000114.000115.000115.000114.000
114.667
115.000115.000115.000114.000114.000
114.600
115.000115.000116.000116.000115.000115.000
PROMEDIO 803.833 0.830 8.413 115.333
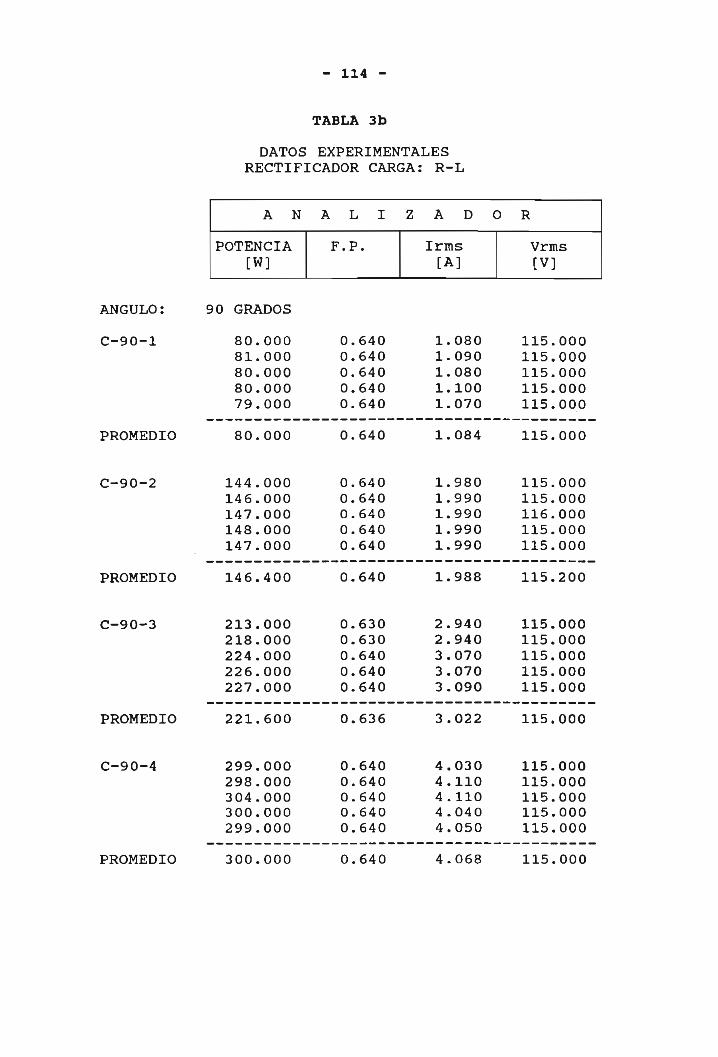
- 114 -
TABLA 3b
DATOS EXPERIMENTALESRECTIFICADOR CARGA: R-L
ÁNGULO:
C-90-1
PROMEDIO
C-90-2
PROMEDIO
C-90-3
PROMEDIO
C-90-4
A N A L I Z A D O R
POTENCIA[W]
F.P. Irms[A]
Vrms[V]
90 GRADOS
80.81.80.80.79.
80.
144.146.147.148.147.
146.
213.218.224.226.227 .
221.
299.298.304.300.299.
000000000000000
000
000000000000000
400
000000000000000
600
000000000000000
0.0.0.0.0.
0.
0.0.0.0.0.
0.
0.0.0.0.0.
0.
0.0.0.0.0.
640640640640640
640
640640640640640
640
630630640640640
636
640640640640640
1.1.1.1.1.
1.
1.1.1.1.1.
1.
2.2.3.3.3.
3.
4.4.4.4.4.
080090080100070
084
980990990990990
988
940940070070090
022
030110110040050
115.115.115.115.115.
115.
115.115.116.115.115.
115.
115.115.115,115.115.
115.
115.115.115.115.115.
000000000000000
000
000000000000000
200
000000000000000
000
000000000000000
PROMEDIO 300.000 0.640 4.068 115.000
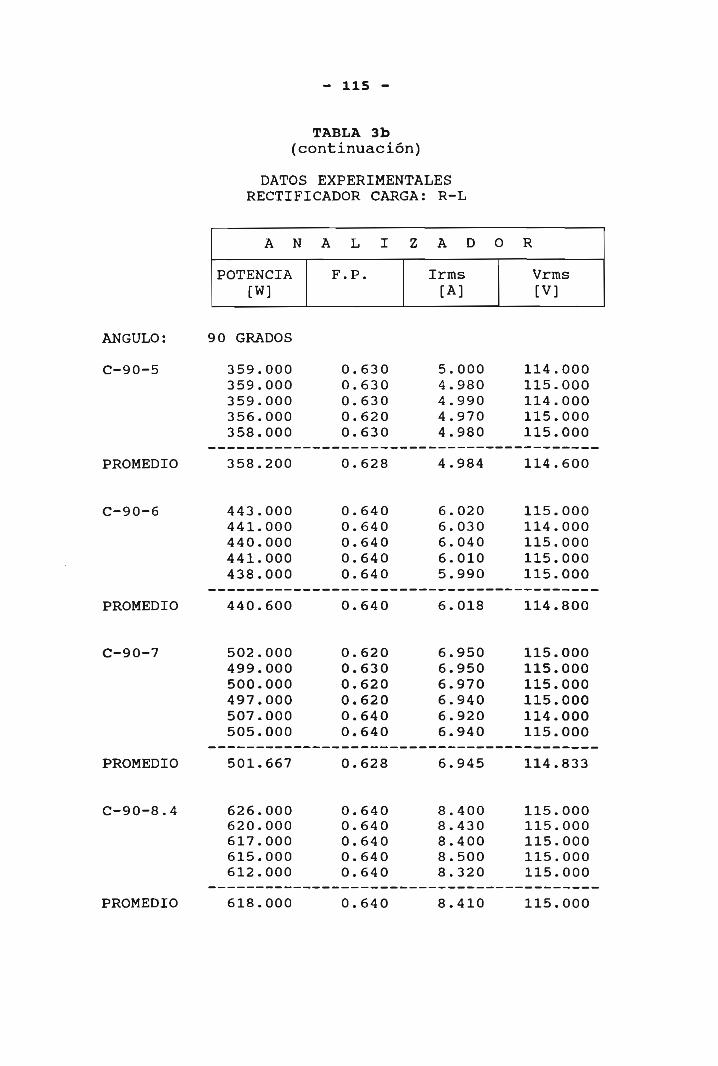
- 115 -
TABLA 3b(continuación)
DATOS EXPERIMENTALESRECTIFICADOR CARGA: R-L
A N A L I Z A D O R
POTENCIA[W]
F.P. Irms[A]
Vrms[V]
ÁNGULO:
C-90-5
90 GRADOS
PROMEDIO
C-90-6
PROMEDIO
C-90-7
PROMEDIO
C-90-8.4
359.359.359.356.358.
358.
443.441.440.441.438.
440.
502.499.500.497.507.505.
501.
626.620.617.615.612.
000000000000000
200
000000000000000
600
000000000000000000
667
000000000000000
0.0.0.0.0.
0.
0.0.0.0.0.
0.
0.0.0.0.0.0.
0.
0.0.0.0.0.
630630630620630
628
640640640640640
640
620630620620640640
628
640640640640640
5.4.4.4.4.
4.
6.6.6.6.5.
6.
6.6.6.6.6.6.
6.
8.8.8.8.8.
000980990970980
984
020030040010990
018
950950970940920940
945
400430400500320
114.115.114.115.115.
114.
115.114.115.115.115.
114.
115.115.115.115.114.115.
114.
115.115.115.115.115.
000000000000000
600
000000000000000
800
000000000000000000
833
000000000000000
PROMEDIO 618.000 0.640 8.410 115.000
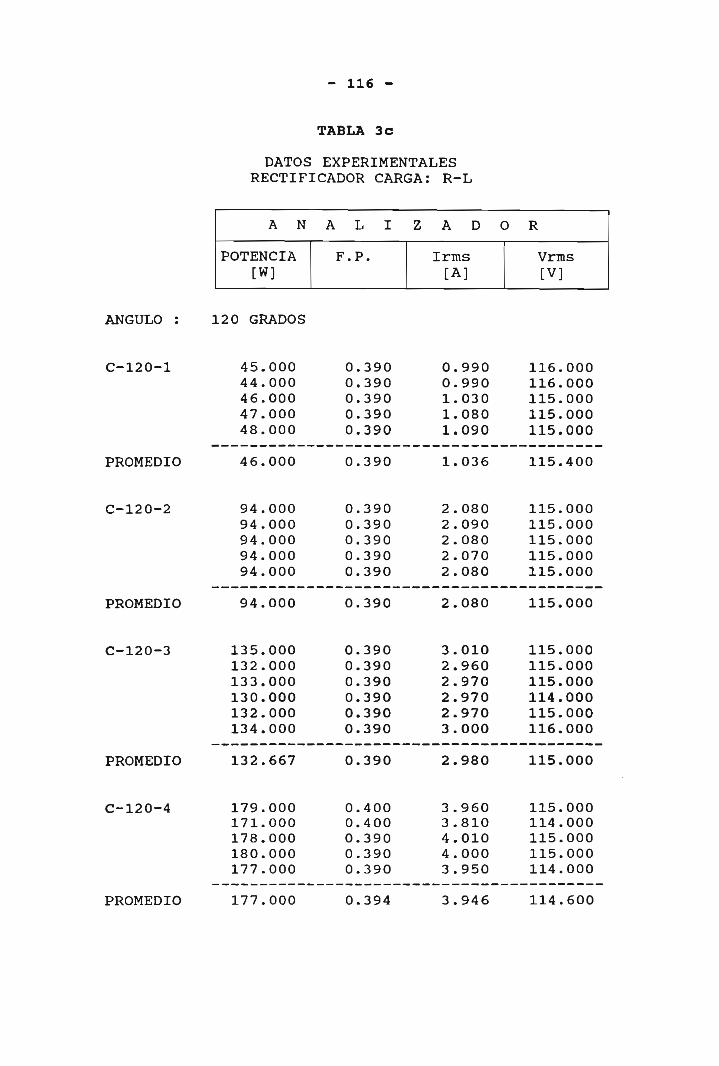
- 116 -
TABLA 30
DATOS EXPERIMENTALESRECTIFICADOR CARGA: R-L
A N A L I Z A D O R
POTENCIA[W]
F.P. Irms[A]
Vrms[V]
ÁNGULO : 120 GRADOS
C-120-1
PROMEDIO
45.00044.00046.00047.00048.000
46.000
0.3900.3900.3900.3900.390
0.390
0.9900.9901.0301.0801.090
1.036
116.000116.000115.000115.000115.000
115.400
C-120-2
PROMEDIO
9494949494
94
.000
.000
.000
.000
.000
.000
0.0.0.0.0.
0.
390390390390390
390
22222
2
.080
.090
.080
.070
.080
.080
115.115.115.115.115.
115.
000000000000000
000
C-120-3
PROMEDIO
135.000132.000133.000130.000132.000134.000
132.667
0.3900.3900.3900.3900.3900.390
0.390
3.0102.9602.9702.9702.9703.000
2.980
115.000115.000115.000114.000115.000116.000
115.000
C-120-4 179.000171.000178.000180.000177.000
0.4000.4000.3900.3900.390
3.9603.8104.0104.0003.950
115.000114.000115.000115.000114.000
PROMEDIO 177.000 0.394 3.946 114.600
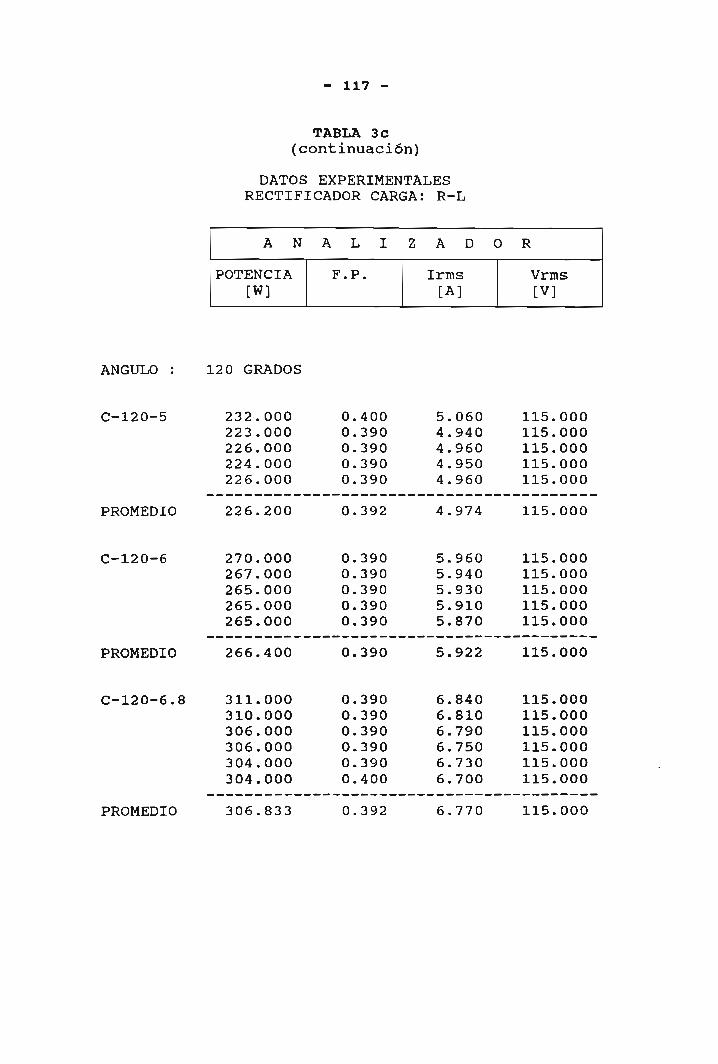
- 117 -
TABLA 3c(continuación)
DATOS EXPERIMENTALESRECTIFICADOR CARGA: R-L
A N A L I Z A D O R
POTENCIA[W]
F.P. Irms[A]
Vrms[V]
ÁNGULO : 120 GRADOS
C-120-5 232.000223.000226.000224.000226.000
PROMEDIO 226.200
0.4000.3900.3900.3900.390
0.392
5.0604.9404.9604.9504.960
4.974
115.000115.000115.000115.000115.000
115.000
C-120-6
PROMEDIO
270.000267.000265.000265.000265.000
266.400
0.3900.3900.3900.3900.390
0.390
5.9605.9405.9305.9105.870
5.922
115.000115.000115.000115.000115.000
115.000
C-120-6.8 311.000310.000306.000306.000304.000304.000
0,3900.3900.3900.3900.3900.400
6.8406.8106.7906.7506.7306.700
115.000115.000115.000115.000115.000115.000
PROMEDIO 306.833 0.392 6.770 115.000
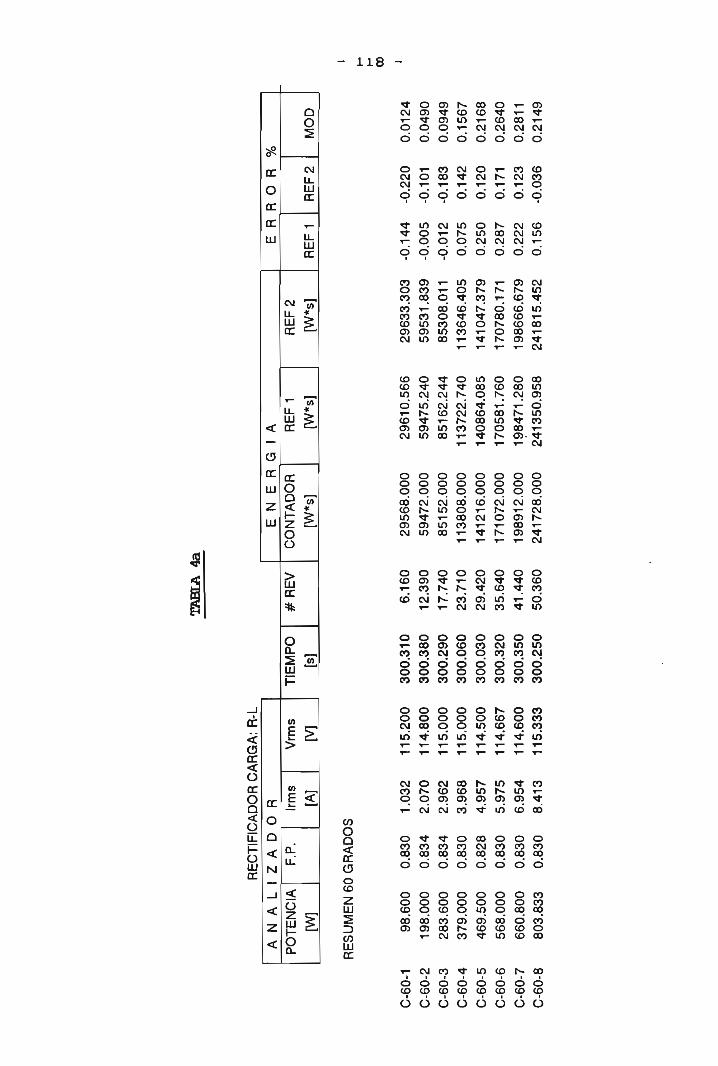
TAB
LA
4a
RE
CTI
FIC
AD
OR
CA
RG
A:
R-L
AN
AL
IZ
AD
OR
PO
TE
NC
IA
[W]
F.P.
Irms
[A]
Vrm
s
[V]
TIE
MP
O
[s]
#R
EV
EN
ER
GÍ
A
CO
NT
AD
OR
[W*s
]
RE
F1
[W*s
]R
EF
2
[W*s
]
ER
RO
R
%
RE
F1
RE
F2
MO
D
RE
SU
ME
N 6
0 G
RA
DO
S
00
C-60-1
C-60-2
C-60-3
C-60-4
C-60-5
C-60-6
C-60-7
C-60-8
98.600
198.000
283.600
379.000
469.500
568.000
660.800
803.833
0.830
0.834
0.834
0.830
0.828
0.830
0.830
0.830
1.032
2.070
2.962
3.968
4.957
5.975
6.954
8.413
115.200
114.800
115.000
115.000
114.500
114.667
114.600
115.333
300.310
300.380
300.290
300.060
300.030
300.320
300.350
300.250
6.160
12.390
17.740
23.710
29.420
35.640
41 .440
50.360
29568.000
59472.000
85152.000
113808.000
141216.000
171072.000
198912.000
241728.000
29610.566
59475.240
85162.244
113722.740
140864.085
170581.760
198471.280
241350.958
29633.303
59531.839
85308.011
113646.405
141047.379
170780.171
1 98666.679
241815.452
-0.144
-0.005
-0.012
0.075
0.250
0.287
0.222
0.156
-0.220
-0.101
-0.183
0.142
0.120
0.171
0.123
-0.036
0.0124
0.0490
0.0949
0.1567
0.2168
0.2640
0.2811
0.2149

TAB
LA
4b
RE
CTI
FIC
AD
OR
CA
RG
A:
R-L
AN
AL
PO
TEN
CIA
[W]
2
A D
0 R
F.P.
Irms
[A]
Vrm
sM
TIE
MP
O[s
]
#R
EV
EN
ER
GÍ
AC
ON
TA
DO
R[W
*s]
RE
F1
[W*s
]R
EF
2[W
*s]
ER
RO
R
%
RE
F1
RE
F2
MO
D
RE
SU
ME
N:
90 G
RA
DO
S
C-90-1
C-90-2
C-90-3
C-90-4
C-90-5
C-90-6
C-90-7
C-90-8.
80,000
146.400
221.600
300.000
358.200
440.600
501.667
618.000
0.640
0.640
0.636
0.640
0.628
0.640
0.628
0.640
1.084
1.988
3.022
4.068
4.984
6.018
6.945
8.410
115.000
115.200
115.000
115.000
114.600
114.800
114.833
115.000
300.410
300.280
300.280
299.880
300.410
300.060
300.470
300.350
4.990
9.130
13.830
18.750
22.550
27.960
31.780
39.210
23952.000
43824.000
66384.000
90000.000
108240.000
134208.000
152544.000
188208.000
24032,800
43960.992
66542.048
89964.000
107606.862
132206.436
150735.783
185616.300
23967.431
44012.419
66370.612
89785.511
107754.814
132672.878
150567.569
185909.442
-0.336
-0.312
-0.238
0.040
0.588
1.514
1.200
1.396
-0.064
-0.428
0.020
0.239
0.450
1.157
1.313
1.236
0.0464
0.1545
0.3494
0.6054
0.8701
1.1914
1.4818
1.8714

.
TAB
LA
4c
REC
TIFI
CAD
OR
CA
RG
A: R
-LA
NA
LI
ZA
DO
R
PO
TE
NC
IA
[W]
F.P
.Irm
s[A
]
Vrm
s
M
TIEM
PO
M
#R
EV
EN
ER
GÍ
AC
ON
TAD
OR
[W*s
]R
EF
1[W
*s]
RE
F2[W
*s]
ER
RO
R
%
RE
F1
RE
F2
MO
D
RE
SU
ME
N 1
20 G
RA
DO
S
C-120-
C-120-
C-120-
C-120-
C-120-
C-120-
C-120-
46.000
94.000
132.667
177.000
226.200
266.400
306.833
0.390
0.390
0.390
0.394
0.392
0.390
0.392
1.036
2.080
2.980
3.946
4.974
5.922
6.770
115.400
115.000
115.000
114.600
115.000
115.000
115.000
300.440
300.030
300.440
300.280
300.060
299,910
300.220
2.860
5.880
8.380
11.150
14.340
17.040
19.880
13728.000
28224.000
40224.000
53520.000
68832.000
81792.000
95424.000
13820.240
28202.820
39858.373
53149.560
67873.572
79896.024
92117.503
M O
1400
8.38
0 -0
.667
-2
.002
0.
1019
2798
9.19
9 0.
075
0.83
9 0.
4063
4015
4.70
7 0.
917
0.17
3 0.
8215
5350
1.29
9 0.
697
0.03
5 1.
4080
6728
1.83
0 1.
412
2.30
4 2.
1660
7965
6.60
6 2.
373
2.68
1 2.
9557
9154
6.71
0 3.
589
4.23
5 3.
7052

- 121 -
En las figuras 38, 39 y 40 se presentan en forma
gráfica los resultados de las tablas 4a, 4b y 4c,
respectivamente.
0.3
-0.3o 1
Fig. 38 Resultados experimentales.Carga R-L. Ángulo 60 grados,
2.6
8 9 1O
Pig. 39 Resultados experimentalesCarga R-L. Ángulo 90 grados,
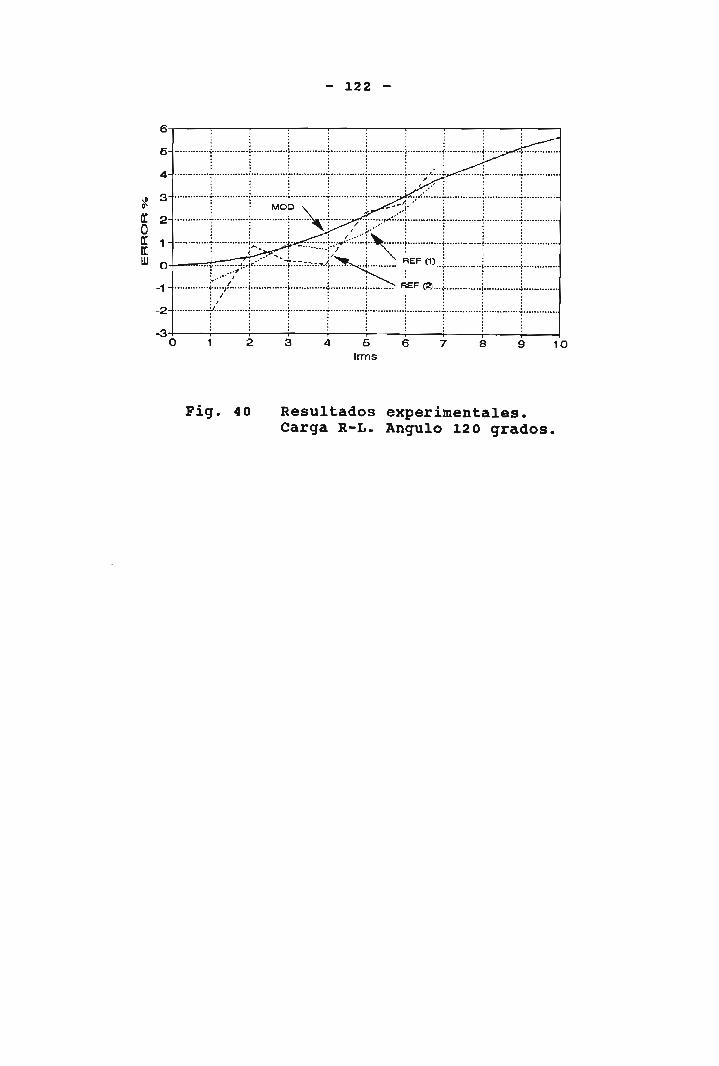
- 122 -
Fig. 40 Resultados experimentales.Carga R-L. Ángulo 120 grados.

CAPITULO IV
CONCLUSIONES Y RECOMENDACIONES
4.1 DISCUSIÓN DE LOS RESULTADOS OBTENIDOS
En el capítulo anterior se presentaron en forma gráfica
los errores resultantes de la parte experimental y los
obtenidos de la aplicación del modelo matemático
planteado, tanto para una carga resistiva (figuras 32
,33 y 34 } como para una carga resistiva-inductiva
(figuras 38, 39 y 40) alimentadas en los dos casos
desde un puente rectificador semicontrolado.
En las tablas y gráficos correspondientes a cada caso,
y para los tres ángulo de disparo, se observa una
diferencia entre las energías de referencia debida a la

- 124 -
precisión del instrumento en la medición de los
parámetros considerados en el cálculo de cada una de
ellas.
El analizador industrial a microprocesador utilizado en
las pruebas se programó para minimizar el error humano
en la lectura, haciendo que imprima cada minuto los
valores de potencia, voltaj e, factor de potencia y
corriente. El formato de presentación es sin dígitos
decimales para los dos primeros y con dos decimales
para los otros.
Esta pérdida de exactitud (en particular la del
voltaje, que es +/- 1 voltio) se ve reflejada en el
cálculo de la energía de referencia E ^^^ ; en tanto
que E REF(1) obtenida en base a la potencia presenta un
error que no es tan significativo como el anterior,
toda vez que internamente en el analizador "se realizan
los cálculos mediante rutinas matemáticas de 4 cifras
con coma móvil1'1131.
Por lo expuesto, y para efectos del análisis, se
consideró como válida la energía de referencia E Jt£F1 y
el error resultante de la comparación con la lectura
del contador.
Respecto de las formas de onda se debe mencionar que,
para todos los casos analizados, no es posible obtener
- 125 -
un ángulo de disparo exacto, lo cual también representa
un cierto grado de error.
Las variaciones de voltaj e durante la prueba, como
resultado de los ajustes de los autotransformadores a
las fluctuaciones de la red y comportamiento de la
carga, si bien afectan tanto al contador como al
analizador industrial, las respuestas son diferentes
debido a la construcción mecánica del primero y
electrónica el segundo; diferencia que se ve reflejado
en las lecturas de cada uno de ellos y en los
resultados.
En las pruebas con carga resistiva-inductiva no se pudo
obtener valores de corriente de 10 amperios debido a
una inestabilidad de la carga, por la operación de las
inductancias en la zona de saturación de la curva de
histéresis.
Del análisis de los resultados experimentales y
teóricos, y con las acotaciones antes mencionadas, en
las figuras de los errorres para los dos casos
experimentados se observa que:
- Pese a las limitaciones de los equipos y elementos
utilizados en las pruebas, las curvas experimentales
de error A REFi% se acercan a las obtenidas con el
modelo planteado A MOD%/ lo que da validez a las
- 126 -
aproximaciones realizadas en el análisis teórico.
4.2 CONCLUSIONES
Del análisis de los resultados experimentales y
teóricos de esta tesis se puede concluir que:
a. - El modelo matemático escogido es válido para el
rango de corriente nominal planteado, tanto para
ondas sinusoidales como para las ondas
distorsionadas, por cuanto se tiene una buena
aproximación del error respecto del comportamiento
real del contador.
b.- La velocidad del disco del contador se incrementa
con cargas cuyas ondas de corriente no son
sinusoidales.
c.- La principal fuente de error en la medición es la
compensación no lineal por sobrecarga que posee el
contador, por cuanto la precisión del contador se
ve afectada principalmente por la acción de la
compensación no lineal de sobrecarga en los
intervalos de corriente de valor cero, teniéndose
como resultado una sobrevelocidad.
d.- En las formas de onda de la corriente analizadas,
- 127 -
el error del contador es directamente proporcional
al ángulo de disparo de los tiristores, y al valor
RMS de la corriente.
e.- Para un ángulo y un valor RMS de corriente fijos,
el error con carga resistiva es mayor que con carga
resistiva-inductiva.
4.3 RECOMENDACIONES
a. - Si bien los resultados teóricos y experimentales
tienen una razonable aproximación, en un siguiente
paso convendría realizar un estudio de los
contadores de inducción utilizando ordenadores que
permitan obtener los componentes armónicos para
diversas formas de onda de corriente
distorsionadas.
b.- El análisis armónico efectuado debe extenderse
para casos en los que intervengan voltaj es y
corrientes no sinusoidales.
c.- El cálculo del error del contador para los usuarios
industriales podría realizarse en base a la
contrastación de la medición tradicional y la
calculada a través de los componentes armónicos .

- 128 -
d.- Se debe contar con equipos y elementos adecuados a
los requerimientos del experimento, de suerte que
pueda realizarse estudios de ondas no sinusoidales
en valores nominales de uso común.
r-
*
- 129 -
BIBLIOGRAFÍA:
1.- Zublin, H.G., and Tschappu F., " The Measurement
of Electrical Energy a Survey", Landvs & Gvr
Review, N° 25 , (1978), 3, pp 23-30.
2.- Salazar, Albán José L., "El Contador de Energía
Usos y Aplicaciones", Tesis EPN, 1981.
3.- Emanuel, A. E., Levitsky, F. J. , and Gulachenski,
E. M. , "Induction Watthour Meter Perfomance on
Rectif ier/Inverter Circuits", IEEE Transaction on
Power Aparatus and System, Vol. PAS-100. pp 4422-
4427.
4.- Karcz, Andrés M. , Fundamentos de Metrología
Eléctrica, Tomo I, Unidades, Patrones,
Instrumentos, Barcelona, Ediciones Técnicas
Marcombo, 1975.
5.- Klatovsky, Vladimir, Manual Krizik-Rvmel;
Contadores de Energía Eléctrica, tipo Inducción,
1989.
6.- Karcz, Andrés M. , Fundamentos de Metrología
Eléctrica, Tomo III, Potencia y Energía,
Barcelona, Ediciones Técnicas Marcombo, 1975.
- 130 -
7.- Tschappu F. , "Problems of de exact measurement of
electrical energy in networks having harmonio
content in the current", Landys & Gyr Review N°
2, (1981), pp 3-10.
8.- Soutar, H. R. and Malik, O. P. , "Theoretical
Analysis of a Single-Phase Induction Watthour
Meter", IEEE Transaction on Pover Aparatus and
System, Vol. PAS-88, Na 8, pp 1275-1281.
9.- Fuchs, E. F., Roesler, D. J., and Kovacs, K. P.,
"Sensivity of Electrical Apliances to Harmonics
and Fractional Harmonics of the Power Systems'
Voltages. Part II: Televition Sets, Induction
Watthour Meters and Universal Machines", IEEE
Transaction on Pover Deliverv, Vol. PWRD-2, N° 2,
April 1987, pp 445-451.
10.- Baghzouz, Y., and Tan, Owen T., "Harmonio
Analysis of Induction Watthour Meter Perfomance",
IEEE Transaction on Power Aparatus and System.
Vol. PAS-104, N° 2, pp 399-406.
11.- Downing, William C., "Watthour Meter Accuracy on
SCR Controlled Resistence Loads", IEEE
Transaction on Power Aparatus and Systemf Vol.
PAS-93. pp 1983-1989.
- 131 -
12.- Keihim Densokki, SPECIFICATION ON ROTATING
STANDARD WATTMETER, MODEL Ml-2 .
13.- ELCONTROL, Manual de instrucciones MICROVIP MK1.
14.- Filho, Solón de Medeiros, Medicao de Energía
Eléctrica, Rio de Janeiro, Editora Guanabara Dois
S.A.,1983.
15.- Castro, Macancela Germán E. , "Potencia Reactiva en
Circuitos con Ondas Sinusoidales Controladas",
Tesis EPN, 1987.
16.- Landys & Gyr, Electricitv Meters. Metering Error,
Compensation, Adiustement, Zug, 1981.
17.- Landys & Gyr, Electricity Meters. Calibration and
Test Methods, Zug, 1979.
18.- Landys & Gyr, Electricity Meters. Operation, Zug,
1977.
19.- Emanuel, A. E., and Levitsky, F. J.,"Watthour
Meter Accuracy on Integral- Cycle-Controlled
Resistence Loads", IEEE Transaction on Power
Aparatus and Svstem, Vol. PAS-98. pp 1583-1590.
20.- Goldberg, Saúl and Horton, William F. ,
- 132 -
"Inductions Watthour Meter Accuracy with Non-
sinusoidal Currrents", IEEE Transaction on Power
Delivery, Vol. PWRD-2, Na 3, July 1987, pp 683-
690.
-,