
Escuela Politécnica Superior Universidad Autónoma de Madrid€¦ · NASA interesada en este...
58
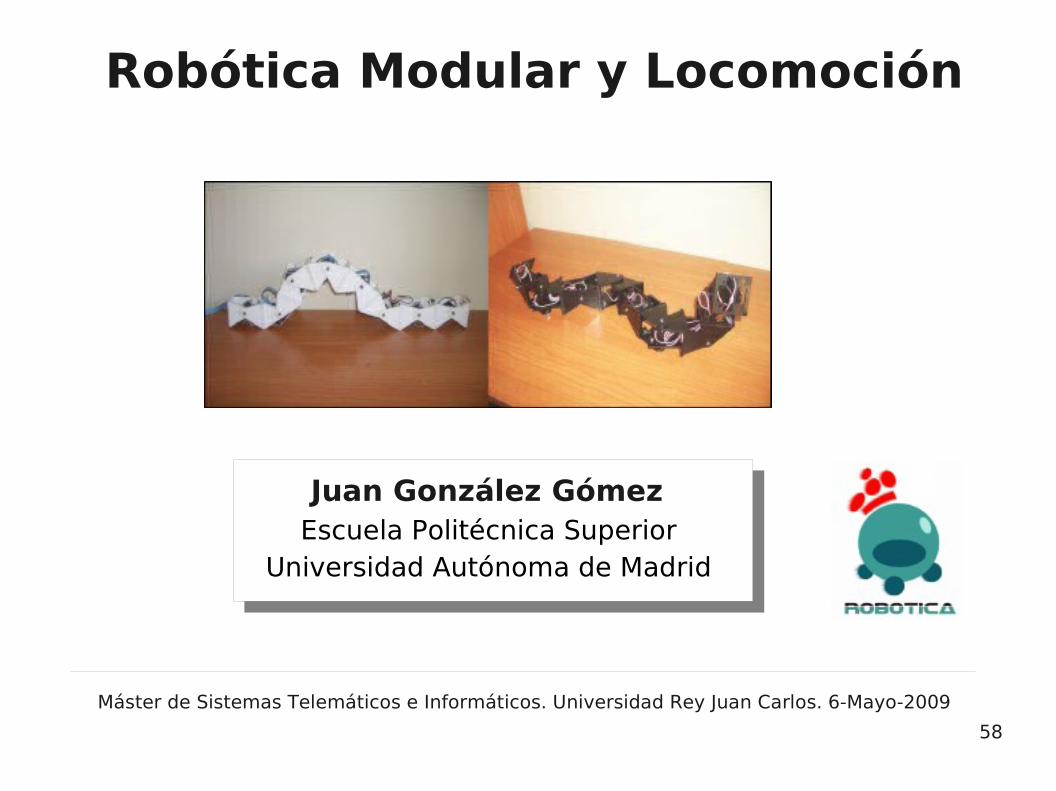
1 Escuela Politécnica Superior Universidad Autónoma de Madrid Juan González Gómez Robótica Modular y Locomoción Máster de Sistemas Telemáticos e Informáticos. Universidad Rey Juan Carlos. 6-Mayo-2009
Transcript of Escuela Politécnica Superior Universidad Autónoma de Madrid€¦ · NASA interesada en este...

1
Escuela Politécnica SuperiorUniversidad Autónoma de Madrid
Juan González Gómez
Robótica Modular y Locomoción
Máster de Sistemas Telemáticos e Informáticos. Universidad Rey Juan Carlos. 6-Mayo-2009

2
índice
1. Introducción
2. Módulos Y1
3. Osciladores
4. Locomoción en 1D
5. Locomoción en 2D
6. Simulación
7. Conclusiones y trabajos futuros
Robótica Modular y Locomoción
Máster de Sistemas Telemáticos e Informáticos. Universidad Rey Juan Carlos. Mayo-2009

3
El Problema de la locomoción (I)
● Diseñar y contruir un robot capaz de desplazarse desde un punto a otro con independencia del terreno
Nivel Superior
Nivel Inferior
Ámbito de estudio
Arquitectura

4
Enfoque clásico:
● Estudiar entorno● Diseñar la morfología del robot● Realizar los modos de caminar
(Ambler, Krotkov et al, 1989)
El Problema de la locomoción (II)
(Dante II, Bares et al, 1994)
● NASA interesada en este problema● Exploración de planetas● Ej. Robots Ambler y Dante II

5
El Problema de la locomoción (III)
Enfoque Modular: (Yim, 1995)Robótica modular Auto-configurable
● Robots creados a partir de módulos● Adaptan su morfología al terreno
(Polybot G1, Yim et al. 1997)
Autoconfiguración simpleRueda -> gusano
(Polybot G2, Yim et al. 2000)
● Primer experimento de auto-configuración dinámica● Rueda -> gusano -> cuadrúpedo

6
El Problema de la locomoción (IV)
Enfoque Bio-inspirado:
● Imitar a la naturaleza● Se quiere un “robot cabra” :-)
(BigDog, Raibert et al. 2008)
(Scorpio, Dirk et al. 2007)
(Aramies, Sastra. 2008)
Boston Dynamics
Universidad de Bremen (Alemania)
Vídeos: 1,2
7
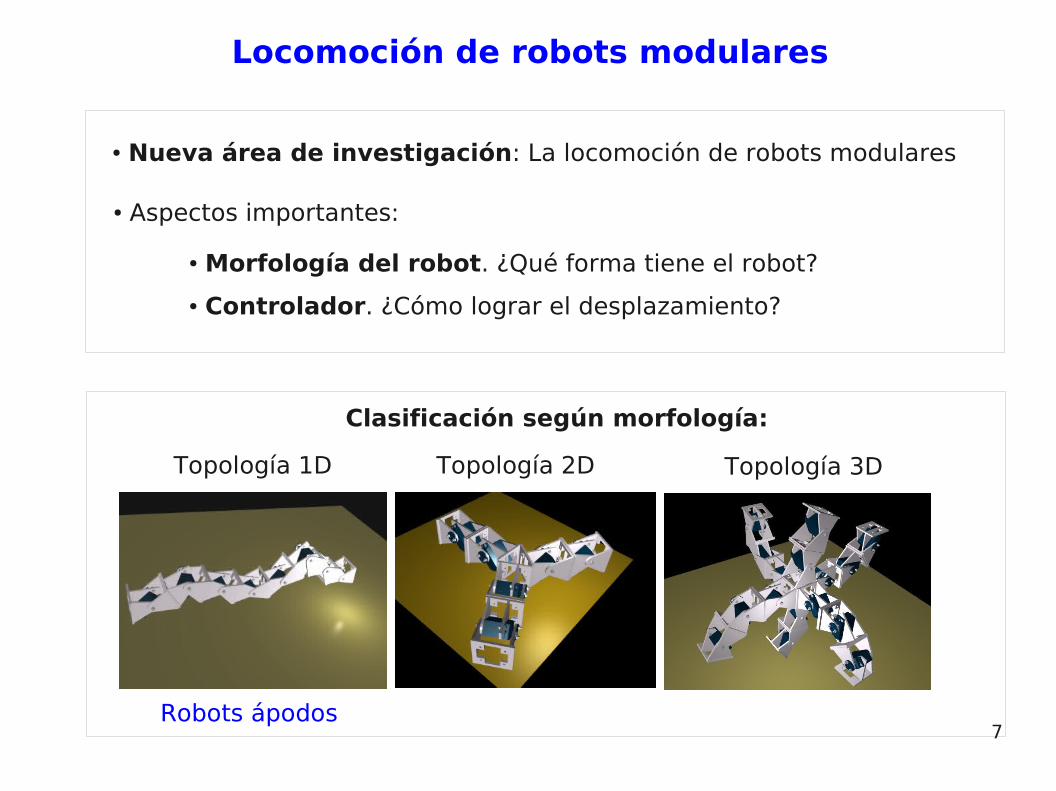
● Nueva área de investigación: La locomoción de robots modulares
Locomoción de robots modulares
● Aspectos importantes:
● Morfología del robot. ¿Qué forma tiene el robot?
● Controlador. ¿Cómo lograr el desplazamiento?
Topología 1D Topología 2D Topología 3D
Clasificación según morfología:
Robots ápodos

8
Clasificación robots ápodos
Robots ápodos
Cabeceo-cabeceo Viraje-viraje Cabeceo-viraje
Grupos que estamos investigando
Clasificación según el conexionado entre módulos:
9
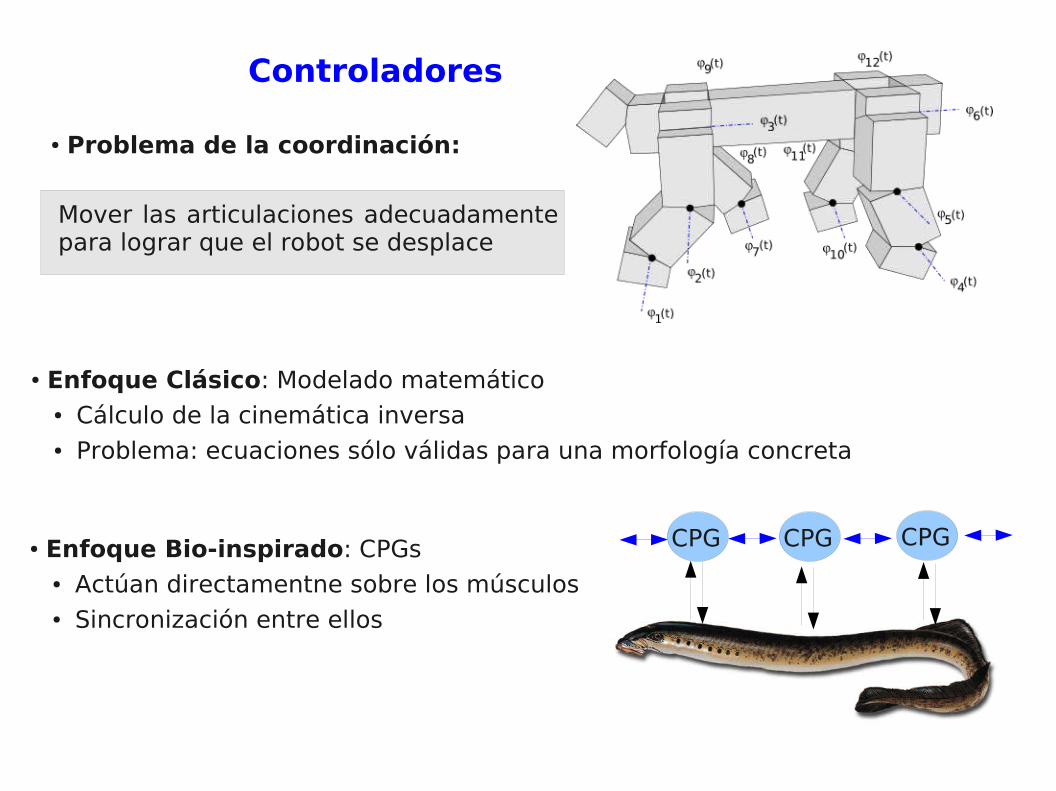
Controladores
● Problema de la coordinación:
● Enfoque Bio-inspirado: CPGs● Actúan directamentne sobre los músculos● Sincronización entre ellos
Mover las articulaciones adecuadamente para lograr que el robot se desplace
CPG CPG CPG
● Enfoque Clásico: Modelado matemático● Cálculo de la cinemática inversa● Problema: ecuaciones sólo válidas para una morfología concreta

10
Hipótesis: Osciladores sinusoidales
● Reemplazar los CPGs por un modelo simplificado
i t =Ai sin2
TiOi
● Osciladores sinusoidales:
● Ventajas:● Se necesitan pocos
recursos para su implementación
CPG CPG CPG

11
Robots modulares y estructuras
● Construcción de estructuras 3D usando módulos● Ej. RoomBot, (Arredondo et al.). Laboratorio de Robótica Bioinspirada. EPFL● Muebles re-configurables que se pueden mover :-)

12
índice
1. Introducción
2. Módulos Y1
3. Osciladores
4. Locomoción en 1D
5. Locomoción en 2D
6. Simulación
7. Conclusiones y trabajos futuros
Robótica Modular y Locomoción
Máster de Sistemas Telemáticos e Informáticos. Universidad Rey Juan Carlos. Mayo-2009

13
Módulos Y1
● Un grado de libertad● Fácil construcción● Servo: Futaba 3003● Material: Plástico de 3mm● Dimensiones: 52x52x72mm● Dos tipos de conexiones
Vídeos,3-5

14
Herramientas de diseño (I): QCAD

15

16
Herramientas de diseño (II): Blender

17

18
Montaje de los módulos

19
Tarjeta Skypic (I)
● Es hardware libre
● Herramienta de diseño: Eagle
● Cualquiera la puede fabricar...
● Cualquiera la puede modificar...
● Cualquier empresa la puede comercializar...
● Cualquier universidad la puede adaptar...

20
Puerto B Servos Reset
Pu
lsado
rP
rueb
as
Pu
erto C
Alimentación
Pu
erto
AP
uer
to d
eP
rog.
ICD2 RS232
Tarjeta Skypic (II)

21
Esquema de control

22
Experimentos con Robots modulares
Locomoción en 1D Locomoción en 2D

23
índice
1. Introducción
2. Módulos Y1
3. Osciladores
4. Locomoción en 1D
5. Locomoción en 2D
6. Simulación
7. Conclusiones y trabajos futuros
Robótica Modular y Locomoción
Máster de Sistemas Telemáticos e Informáticos. Universidad Rey Juan Carlos. Mayo-2009

24
Oscilación de un módulo
t =Asin2
T
Ángulo de doblaje Oscilador sinusoidal
Parámetros:
● Amplitud: A● Periodo: T● Fase inicial:
Ángulo de doblaje máximo
Frecuencia de oscilación
Ángulo de doblaje inicial
En régimen permanente la fase inicial no tiene importancia
Demo
Parámetros:

25
Oscilación de varios módulos (I)
1 t =Asin2
T0 2 t =Asin
2
T0
Nuevo parámetro:
● Diferencia de fase:
Establece el movimiento de un módulo relativo al otro

26
Oscilación de dos módulos (II)
=0 =180=90
Demo

27
índice
1. Introducción
2. Módulos Y1
3. Osciladores
4. Locomoción en 1D
5. Locomoción en 2D
6. Simulación
7. Conclusiones y trabajos futuros
Robótica Modular y Locomoción
Máster de Sistemas Telemáticos e Informáticos. Universidad Rey Juan Carlos. Mayo-2009
28
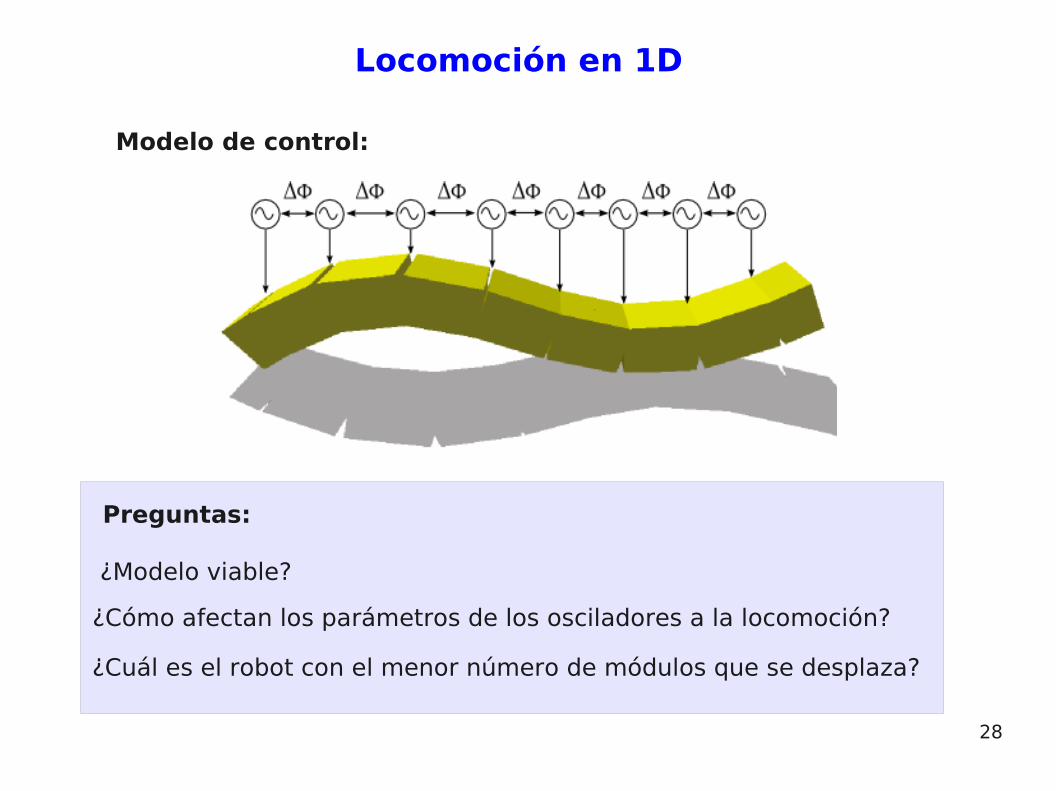
Locomoción en 1D
¿Modelo viable?
¿Cómo afectan los parámetros de los osciladores a la locomoción?
¿Cuál es el robot con el menor número de módulos que se desplaza?
Modelo de control:
Preguntas:

29
Minicube-I
● Morfología:
Dos módulos con conexión cabeceo-cabeceo
● Control:
● Dos generadores sinusoidales● Parámetros:
Demostración
A , ,T
30
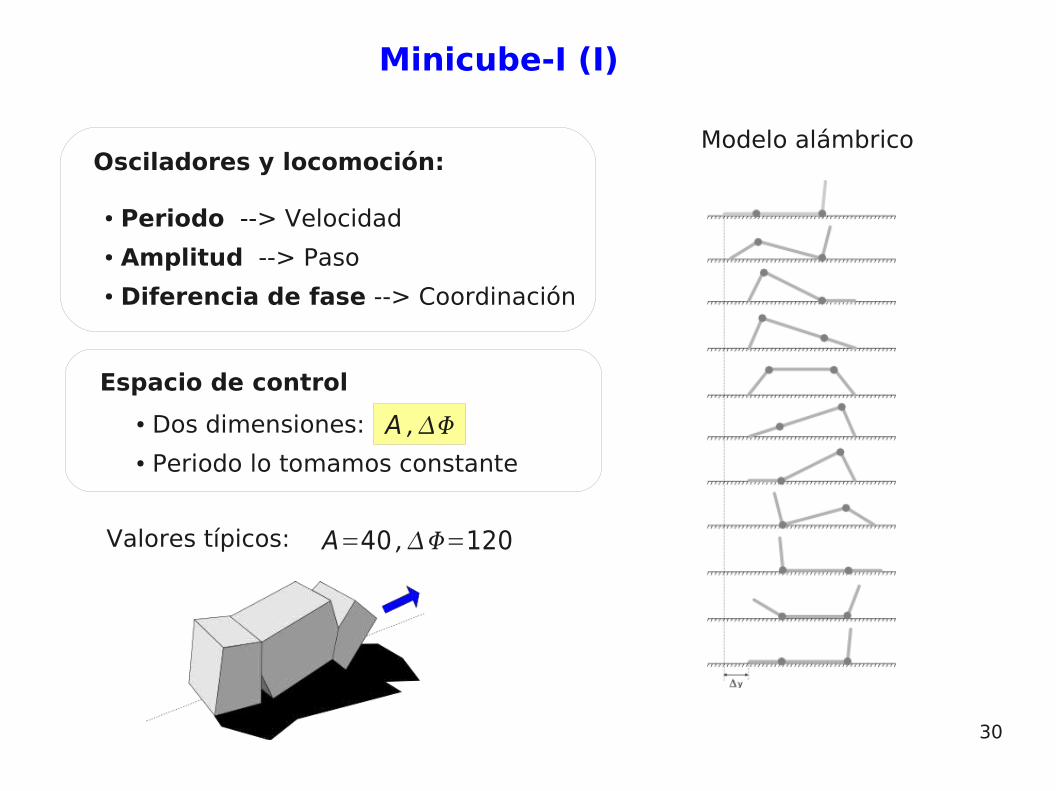
Minicube-I (I)
Osciladores y locomoción:
Valores típicos:
● Periodo --> Velocidad● Amplitud --> Paso● Diferencia de fase --> Coordinación
Modelo alámbrico
Espacio de control
● Dos dimensiones:● Periodo lo tomamos constante
A ,
A=40 ,=120

31
0 25 50 75 100 125 150 175 2000
0,51
1,52
2,53
3,54
4,55
5,56
6,57
Pas
o (
cm)
A10A20A30A40A50A60A70
Amplitude
Diferencia de fase
Minicube-I: Osciladores y locomoción
Ventana donde la coordinación es mejor

32
Cube Revolutions (I)
● Morfología:
8 módulos con conexión cabeceo-cabeceo
● Control:
● 8 generadores iguales● Parámetros:
Vídeo
A , ,T

33
Cube Revolutions (II)
● Propagación de ondas
Mecanismo de locomoción:
Movimiento determinado por la onda

34
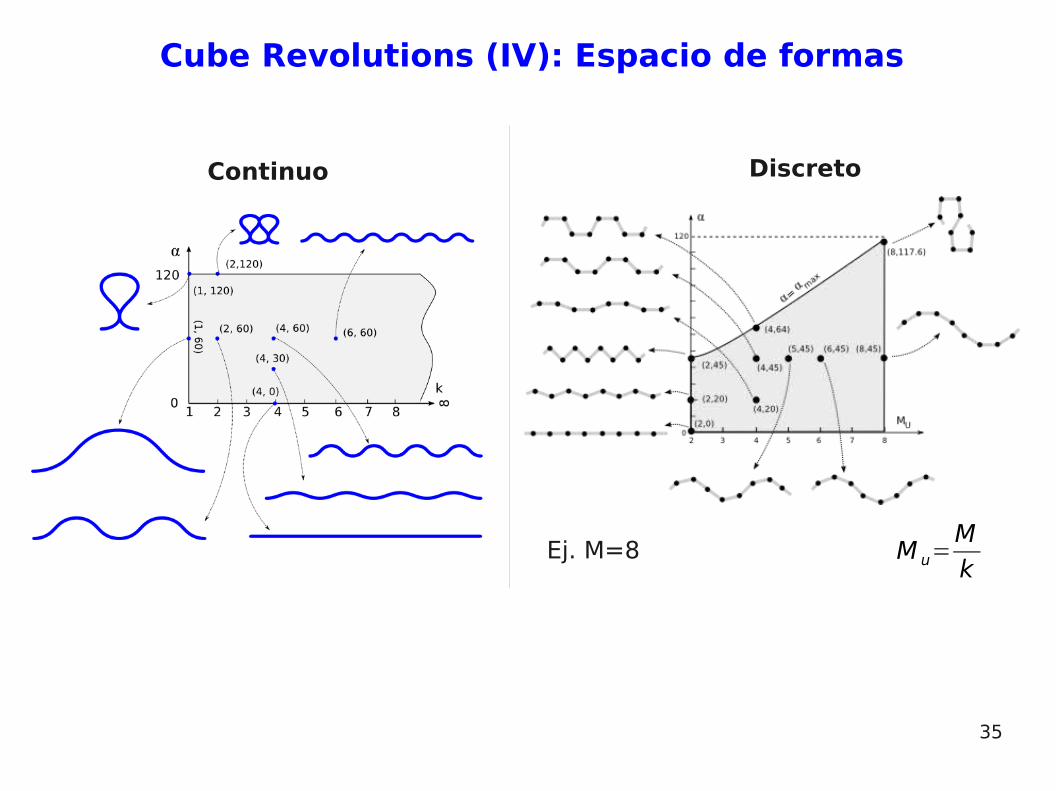
Cube Revolutions (III): forma de la onda
● Curva serpentinoide● Generadores sinusoidales● (Hirose, 1975)● Aparece en las serpientes
● Parámetros:● Angulo de serpenteo:● Numero de ondulaciones: k
35
Cube Revolutions (IV): Espacio de formas
Continuo Discreto
Ej. M=8 M u=Mk

36
Cube Revolutions (V): Cinemática
● Transformaciones entre los espacios de control y de formas
Espacio de control Espacio de formas
Cinemática directa
Cinemática inversa

37
Cube Revolutions (V): Fórmulas
● Transformaciones:
h=∫0
l
4k sincos 2k
lsds
w=k∫0
l
k cos cos 2k
lsds
A=2sin kM
=360 kM
● Dimensiones del robot: ● Paso:
x=lk−∫0
l
k cos cos 2k
lsds
No hay soluciones analíticas

38
Cube Revolutions (II) Vídeo
● Al tener más módulos el robot puede cambiar su forma● Aparecen nuevas formas de desplazarse

39
índice
1. Introducción
2. Módulos Y1
3. Osciladores
4. Locomoción en 1D
5. Locomoción en 2D
6. Simulación
7. Conclusiones y trabajos futuros
Robótica Modular y Locomoción
Máster de Sistemas Telemáticos e Informáticos. Universidad Rey Juan Carlos. Mayo-2009

40
Locomoción en 2D
¿Modelo viable?
¿Cuantos modos de caminar aparecen?
¿Cuál es el robot con el menor número de módulos que se desplaza?
Modelo de control:
Preguntas:
¿Qué relación hay entre los osciladores y la locomoción?

41
Minicube-II
● Morfología:
Tres módulos con conexión cabeceo-viraje
● Control:
● Tres generadores sinusoidales● Parámetros:
A v ,A h ,v ,vh ,T
Demostración

42
Minicube-II (II)
Av=40, Ah=0
Línea recta
v=120
Av=Ah40vh=90,v=0
Desplazamiento lateral
Arco
Av=40, Ah=0Oh=30,v=120
Rotación
Av=10, Ah=40vh=90,v=180
Rodar
Av=Ah60
vh=90,v=0

43
Hypercube (I)
● Morfología:
8 módulos con conexión cabeceo-viraje
● Control:
● 8 generadores iguales● Parámetros:
A h ,A v ,h ,v ,vh ,T
Demostración

44
Hypercube (II)
● Onda corporal tridimensional
Mecanismo de locomoción

45
Hypercube (III)
● Superposición de dos ondas serpentinoides
● Onda vertical:
● Onda horizontal:
● Diferencia de fase:
● La relación entre los parámetros determina el tipo de onda
TYPE OF WAVESv ,kv
h ,kh
vh
v ,h ,kv ,kh ,vh
Espacio de formas de 5 dimensions

46
Hypercube (III)
Línea recta
v=40 ,kv=2h=0
Desplazamiento lateral
v0, kv=kh ,vh=90
kh=1
Rotación
v0,kv=2kh ,vh=0Rodar
v0,vh=90
Arco
v=40 ,kv=3
h≠0

47
índice
1. Introducción
2. Módulos Y1
3. Osciladores
4. Locomoción en 1D
5. Locomoción en 2D
6. Simulación
7. Conclusiones y trabajos futuros
Robótica Modular y Locomoción
Máster de Sistemas Telemáticos e Informáticos. Universidad Rey Juan Carlos. Mayo-2009

48
Simulación (I)
¿Cómo hemos encontrado las soluciones?
● Búsquedas en los espacios de control
● Utilización de algoritmos genéticos (PGApack)
● Función de evaluación: Paso del robot
● Motor físico: Open Dynamics Engine (ODE)
● Descarte de soluciones
● Comprobación en robots reales

49
Simulación (II)
RTK MRSuite
● Lenguaje: C● Sólo topologías 1D● Juan González
● Lenguaje: Python● Topologías 1D y 2D● Rafael Treviño
Demostración

50
índice
1. Introducción
2. Módulos Y1
3. Osciladores
4. Locomoción en 1D
5. Locomoción en 2D
6. Simulación
7. Conclusiones y trabajos futuros
Robótica Modular y Locomoción
Máster de Sistemas Telemáticos e Informáticos. Universidad Rey Juan Carlos. Mayo-2009

51
Conclusiones
El modelo basado en generadores sinusoidales es válidopara la locomoción de robots modulares con topología de 1D
● Requiere muy pocos recursos para su implementación● Se consiguen movimientos muy suaves y natuales● Se pueden realizar diferentes tipos de movimientos

52
Módulos GZ-I● Módulos GZ-I: en desarrollo● Colaboración con el grupo TAMS de la Universidad de Hamburgo (Alemania)● Jefe del proyecto: Dr. Houxiang Zhang

53
Módulos GZ-I● Electrónica integrada en los módulos● Hechos de aluminio● Construcción de diferentes topologías de robots modulares
Vídeo

54
Módulos REPY-1
● En construcción● Módulos “imprimibles” usando una impresora 3D● Pruebas realizadas con REPRAP.

55
JDERobot
● Integrar soporte para robots modulares en JDERobot
● Drivers para robots reales (Skypic)
● Drivers para robots simulados
● Esto permitirá abordar el nivel superior de la locomoción
Vídeo

56
Nuevos interfaces con los robots
Wiiboard
Wiimote
Tarri-wheel
Y un poco de robótica friki para terminar
:-)

57
Muchas gracias por vuestra atención
Que el frikismo os acompañe...
:-)
58
Escuela Politécnica SuperiorUniversidad Autónoma de Madrid
Juan González Gómez
Robótica Modular y Locomoción
Máster de Sistemas Telemáticos e Informáticos. Universidad Rey Juan Carlos. 6-Mayo-2009











![Impacto geométrico en el desempeño de osciladores ... · estructuras de osciladores resonantes de alta velocidad tales como: osciladores diferenciales distribuidos [4], osciladores](https://static.fdocuments.ec/doc/165x107/5e9f60eb60245a139004cc4e/impacto-geomtrico-en-el-desempeo-de-osciladores-estructuras-de-osciladores.jpg)





