
ELPO - lab 1.pdf
34
1 Resumen: En este informe analizaremos el comportamiento de los diodos en diferentes circuitos de rectificación, encontrando las ventajas y desventajas de los mismos. Comprobar el comportamiento real de los diodos y la cercanía del diodo ideal, estudiar su principal función en la rectificación de AC a DC y las mejoras que puede realizar. Es un trabajo tanto experimental como teórico. ÍNDICE DE TÉRMINOS: Diodo, fast recovery, Vodc, Iodc, podc, Voac, Ioac, Poac, Ifrms, Sent, ηcarga, ηent, nsal, TUF OBJETIVOS Conocer las características de los tipos de Diodos PG y FR, y recuperación inversa del diodo (Trr,Irr). Analizar el comportamiento de la instrumentación del laboratorio. Comprobar el comportamiento de diferentes tipos de rectificación de onda como de media onda y onda completa. INTRODUCCIÓN: En un principio el diodo es considerado una de las herramientas más básica para la realización de rectificadores AC a DC por razones que conoceremos al transcurso del informe, pero muchos historiadores consideran que la invención del diodo es el punto de la historia en que nace la electrónica como ciencia de investigación y además ha sido la base de la tecnología actual. I. MARCO TEORICO E INVESTIGACION POSTERIOR AL LABORATORIO 1. DIODOS DE POTENCIA Un diodo de potencia es un dispositivo de unión pn con dos terminales. Una unión pn se forma, en el caso normal, por aleación, difusión y crecimiento epitaxial. Cuando el potencial es positivo con respecto al cátodo, se dice que el diodo está polarizado en directo, y conduce electricidad. Un diodo conductor tiene una caída directa de voltaje a través de él relativamente pequeña; la magnitud de esta caída depende del proceso de manufactura y de la temperatura de la unión. Cuando el potencial de cátodo es positivo con respecto al del ánodo, se dice que el diodo está polarizado en inverso. Bajo condiciones de polarización inversa, pasa una corriente pequeña inversa (que también se llama corriente de fuga o corriente de pérdida), en el orden de micro o miliamperios; esta corriente de fuga aumenta de magnitud en forma paulatina hasta que llega al voltaje de avalancha. Fig. 1.1 Este dispositivo es uno de los más importantes de los circuitos de potencia, aunque tienen como limitación que son dispositivos unidireccionales, no pudiendo circular la corriente en sentido contrario al de conducción. Los diodos de potencia se caracterizan porque en estado de conducción, deben ser capaces de soportar una alta intensidad de corriente con una pequeña caída de tensión. En sentido inverso, deben ser capaces de soportar una fuerte tensión negativa de ánodo con una pequeña intensidad de corriente de fugas. TIPOS DE DIODOS En el caso ideal un diodo no debería tener tiempo de recuperación inversa. Sin embargo, el costo de fabricación de ese diodo podría aumentar. En muchas aplicaciones no son importantes los efectos del tiempo de recuperación inversa y se pueden usar diodos pocos costosos. Dependiendo de las características de recuperación y de las técnicas de ESCUELA COLOMBIANA DE INGENIERIA JULIO GARAVITO Gantiva Manuel, Freire Carlos, Ruiz Nicolás [email protected] [email protected] [email protected] INFORME PRÁCTICA #1. CARACTERÍSTICAS DE CONMUTACIÓN DE LOS DIODOS, RECTIFICADORES MONOFÁSICOS Y CARGA RESISTIVA
-
Upload
andersson-henao -
Category
Documents
-
view
96 -
download
0
Transcript of ELPO - lab 1.pdf

1
Resumen:
En este informe analizaremos el comportamiento de los
diodos en diferentes circuitos de rectificación, encontrando las
ventajas y desventajas de los mismos. Comprobar el
comportamiento real de los diodos y la cercanía del diodo
ideal, estudiar su principal función en la rectificación de AC a
DC y las mejoras que puede realizar. Es un trabajo tanto
experimental como teórico.
ÍNDICE DE TÉRMINOS:
Diodo, fast recovery, Vodc, Iodc, podc, Voac, Ioac, Poac,
Ifrms, Sent, ηcarga, ηent, nsal, TUF
OBJETIVOS
Conocer las características de los tipos de Diodos PG y FR,
y recuperación inversa del diodo (Trr,Irr).
Analizar el comportamiento de la instrumentación del
laboratorio.
Comprobar el comportamiento de diferentes tipos de
rectificación de onda como de media onda y onda completa.
INTRODUCCIÓN:
En un principio el diodo es considerado una de las
herramientas más básica para la realización de rectificadores
AC a DC por razones que conoceremos al transcurso del
informe, pero muchos historiadores consideran que la
invención del diodo es el punto de la historia en que nace la
electrónica como ciencia de investigación y además ha sido la
base de la tecnología actual.
I. MARCO TEORICO E INVESTIGACION
POSTERIOR AL LABORATORIO
1. DIODOS DE POTENCIA
Un diodo de potencia es un dispositivo de unión pn con dos
terminales. Una unión pn se forma, en el caso normal, por
aleación, difusión y crecimiento epitaxial.
Cuando el potencial es positivo con respecto al cátodo, se dice
que el diodo está polarizado en directo, y conduce electricidad.
Un diodo conductor tiene una caída directa de voltaje a través
de él relativamente pequeña; la magnitud de esta caída
depende del proceso de manufactura y de la temperatura de la
unión. Cuando el potencial de cátodo es positivo con respecto
al del ánodo, se dice que el diodo está polarizado en inverso.
Bajo condiciones de polarización inversa, pasa una corriente
pequeña inversa (que también se llama corriente de fuga o
corriente de pérdida), en el orden de micro o miliamperios;
esta corriente de fuga aumenta de magnitud en forma paulatina
hasta que llega al voltaje de avalancha.
Fig. 1.1
Este dispositivo es uno de los más importantes de los circuitos
de potencia, aunque tienen como limitación que son
dispositivos unidireccionales, no pudiendo circular la corriente
en sentido contrario al de conducción.
Los diodos de potencia se caracterizan porque en estado de
conducción, deben ser capaces de soportar una alta intensidad
de corriente con una pequeña caída de tensión. En sentido
inverso, deben ser capaces de soportar una fuerte tensión
negativa de ánodo con una pequeña intensidad de corriente de
fugas.
TIPOS DE DIODOS
En el caso ideal un diodo no debería tener tiempo de
recuperación inversa. Sin embargo, el costo de fabricación de
ese diodo podría aumentar. En muchas aplicaciones no son
importantes los efectos del tiempo de recuperación inversa y
se pueden usar diodos pocos costosos. Dependiendo de las
características de recuperación y de las técnicas de
ESCUELA COLOMBIANA DE INGENIERIA JULIO GARAVITO
Gantiva Manuel, Freire Carlos, Ruiz Nicolás
INFORME PRÁCTICA #1. CARACTERÍSTICAS DE CONMUTACIÓN DE
LOS DIODOS, RECTIFICADORES MONOFÁSICOS Y CARGA RESISTIVA

2
manufactura, los diodos de potencia los diodos de potencia se
pueden clasificar en las tres categorías siguientes:
DIODOS NORMALES O DE PROPÓSITO GENERAL
Los diodos rectificadores de propósito general tienen un
tiempo de recuperación inversa relativamente grande, en
el caso típico de unos 25 μs y se usan en aplicaciones de
baja velocidad, donde no es crítico el tiempo de
recuperación (por ejemplo, en rectificadores y
convertidores de diodo, para aplicaciones con una
frecuencia de entrada baja hasta de 1kHz, y para
convertidores conmutados por línea). Estos diodos cubren
especificaciones de corriente desde menos de 1 A y hasta
varios miles de amperes y las especificaciones de voltaje
van de 50 v hasta 5 Kv.
En general estos diodos se fabrican por difusión; sin
embargo los tipos de rectificadores de aleación que se
usan en las fuentes de poder para soldar, son los más
económicos y robustos y sus capacidades pueden llegar
hasta 1500 v, 400 A.
DIODOS DE RECUPERACIÓN RÁPIDA (FAST
RECOVERY DIODES)
Los diodos de recuperación rápida tienen tiempo de
recuperación corto, en el caso normal menor de 5µs. Se
usan en circuitos convertidores de CD a CD y de CD a
CA, donde con frecuencia la velocidad de conmutación
tiene importancia crítica. Esos diodos abarcan
especificaciones actuales de voltaje desde 50V hasta unos
3kV, y de menos de 1A hasta cientos de amperes.
Para voltajes nominales mayores que 400V, los diodos de
recuperación rápida se uelen fabricar por difusión, y el
tiempo de recuperación se controla por difusión de platino
o de oro. Para especificaciones de voltaje menores de
400V, los diodos epitaxiales proporcionan velocidades
mayores de conmutación que las de los diodos por
difusión. Los diodos epitaxiales son angostos de la base,
lo que da como resultado un tiempo corto de recuperación
tan corto como 50ns.
DIODOS SCHOTTKY
El problema de almacenamiento de carga de una unión pn
se puede eliminar o minimizar en un diodo de Schotty.
Esto se logra estableciendo una “barrera de potencial” con
un contacto entre un metal y un semiconductor. Se
deposita una capa de metal sobre una capa delgada
epitaxial de silicio tipo n. La barrera de potencial simula
el comportamiento de una unión pn.
Estos diodos se caracterizan por su velocidad de
conmutación y una baja caída de voltaje cuando están
polarizados en directo (típicamente de 0.25 a 0.3 voltios).
La corriente de fuga de un diodo Schottky es mayor que
la de un diodo de unión pn. Un diodo Schottky con voltaje
de conducción relativamente bajo tiene una corriente algo
alta, y viceversa. El resultado es que el voltaje máximo
admisible para este diodo se limita en general a 100 V.
Las especificaciones de corriente de los diodos Schottky
varían de 1 a 400 A. Son ideales para fuentes de
alimentación de gran corriente y alto voltaje de CD,
circuitos de alta frecuencia y sistemas digitales. Sin
embargo, esos diodos también se usan en fuentes de poder
de poca corriente, para tener mayor eficiencia.
RECUPERACION INVERSA DEL DIODO
La corriente, en un diodo de unión con polarización directa, se
debe al efecto neto de los portadores de mayoría y de minoría.
Una vez que un diodo está en modo de conducción directa, y
continuación su corriente en sentido directo se reduce a cero
por el comportamiento natural del circuito del diodo, o por la
aplicación de un voltaje en sentido inverso, el diodo continua
conduciendo, por los portadores de minoría que quedan
almacenados en la unión pn y en la masa del material
semiconductor. Los portadores de minoría requieren
determinado tiempo para recombinarse con cargas opuestas y
quedar neutralizadas. A este tiempo se le llama tiempo de
recuperación inversa del diodo.
Fig. 1.2
Así, el paso del estado de conducción al de bloqueo en el
diodo no se efectúa instantáneamente. Si un diodo se
encuentra conduciendo una intensidad IF, la zona central de la
unión P-N está saturada de portadores mayoritarios con tanta
mayor densidad de éstos cuanto mayor sea IF. Si mediante la
aplicación de una tensión inversa forzamos la anulación de la
corriente con cierta velocidad di/dt, resultará que después del
paso por cero de la corriente existe cierta cantidad de
portadores que cambian su sentido de movimiento y permiten
que el diodo conduzca en sentido contrario durante un
instante. La tensión inversa entre ánodo y cátodo no se
establece hasta después del tiempo ta llamado tiempo de
almacenamiento, en el que los portadores empiezan a escasear
y aparece en la unión la zona de carga espacial. La intensidad
todavía tarda un tiempo tb (llamado tiempo de caída) en pasar
de un valor de pico negativo (IRRM) a un valor despreciable
mientras van desapareciendo el exceso de portadores.

3
ta (tiempo de almacenamiento): es el tiempo que
transcurre desde el paso por cero de la intensidad
hasta llegar al pico negativo.
tb (tiempo de caída): es el tiempo transcurrido desde
el pico negativo de intensidad hasta que ésta se anula,
y es debido a la descarga de la capacidad de la unión
polarizada en inverso. En la práctica se suele medir
desde el valor de pico negativo de la intensidad hasta
el 10 % de éste.
trr (tiempo de recuperación inversa): es la suma de
ta y tb.
Qrr: se define como la carga eléctrica desplazada, y
representa el área negativa de la característica de
recuperación inversa del diodo.
di/dt: es el pico negativo de la intensidad.
Irr: es el pico negativo de la intensidad.
Si observamos la gráfica podemos considerar Qrr por el área
de un triángulo:
De donde:
Para el cálculo de los parámetros IRRM y Qrr podemos suponer
uno de los dos siguientes casos:
Para ta = tb trr = 2ta
Para ta = trr tb = 0
En el primer caso obtenemos:
Y en el segundo caso:
Influencia del trr en la conmutación
Si el tiempo que tarda el diodo en conmutar no es
despreciable:
Se limita la frecuencia de funcionamiento.
Existe una disipación de potencia durante el tiempo
de recuperación inversa.
Para altas frecuencias, por tanto, debemos usar diodos de
recuperación rápida.
Factores de los que depende trr:
A mayor IRRM menor trr.
Cuanta mayor sea la intensidad principal que
atraviesa el diodo mayor será la capacidad
almacenada, y por tanto mayor será trr.
II. FUNCIONAMIENTO Y CARACTERISTICAS REALES
DEL MULTIMETRO, SONDAS ATENUADAS Y
OSCILOSCOPIO
A. Multímetro
El multímetro uno de los primeros instrumentos con los que
tenemos contacto cuando iniciamos nuestro proceso de
aprendizaje y del cual hemos aprendido cada vez más.
Inicialmente y debido a su bajo costo actual se empezó con un
multímetro digital en su mayoría pero también no
desconocemos su antecesor análogo. Abarcaremos con mayor
amplitud el digital por su gran utilidad presente.
El multímetro digital, aparte de expresar una medida clara en
su pantalla y de generar un menor error en la mayoría de las
medidas tiene una gran cantidad de circuitos y componentes
que llevan todo esto acabo. Empezaremos por hablar del
circuito en general de los multímetros comunes. Fig.2.

4
Fig.2 Diagrama de Bloques multímetro digital
Es definido como un instrumento de medición de parámetros
eléctricos mediante procedimientos electrónicos, sin usar
piezas móviles, con alta precisión, estabilidad y amplio rango
de valores y tipos de parámetros. [Ver7].
El dispositivo tiene una posibilidad de leer distintos
parámetros es en su mayoría gracias al conversor
Análogo/Digital que usa distintos tipos de conversión de
acuerdo a la resolución, velocidad de respuesta y precisión
buscada.
El circuito interno de los multímetros digitales puede
básicamente dividirse en dos secciones: una Analógica y otra
Digital. La sección Digital está compuesta por el conversor
Analógico Digital (en algunos instrumentos esta conversión
es hecha por medio de un circuito microprocesador) y una
pantalla de dígitos, que puede ser de Led o de Cristal Líquido.
-La sección Analógica: Fig.2.1
Fig. 2.1 Diagrama de Bloques del circuito Análogo y digital
La sección Analógica está compuesta por los divisores de
tensión y corriente de entrada, el conversor de corriente
alterna a continua, el conversor de resistencia a voltaje
continuo, la tensión de referencia para comparación, la fuente
de alimentación, el detector de pico y las llaves de selección
de rango (en los dispositivos de auto rango es remplazada por
un microprocesador) llave y funciones.
Llaves de Rangos o (Escaladores): son elementos
(Generalmente resistencias en serie y/o paralelo) que toman
una muestra reducida de la señal a medir, a fin de poderla
procesar dentro de los niveles de tensión que manejan los
circuitos electrónicos. Determinan la escala a usar en ese
momento. Cuando de mide tensión se usa un divisor de
voltaje resistivo (es decir resistencias en serie) y en el caso de
Corriente, se usan Shunts. Estos últimos son resistencias en
paralelo de muy bajo valor resistivo (normalmente un alambre
calibrado). Se pueden encontrar valores de 0,1 W, 1 W, 10 W
y hasta 100 W con el objetivo de convertir la corriente en
tensión adecuada según la escala con la adecuada disipación
de potencia. Ellos están organizados en una combinación serie
o paralelo según el fabricante para lograr las escalas
necesarias.
Los Shunts se intercalan en el circuito cuya corriente se quiere
medir, y por la ley de Ohm, producen una tensión
proporcional al valor de corriente circulante. Así pues, esta
tensión es ingresada al conversor de A/D para el caso de
medición de corriente continua, al conversor de CA a CC si es
el caso de medición de corriente alterna. Deben ser de bajo
valor para perturbar lo menos posible la señal tomada. Pero se
requiere que ellos sean de un valor apreciable para generar
una tensión fácil de medir y libre de ruido, sin embargo esto a
veces perturba la medición.
Estas llaves de rango cuando se quiere conocer la medida de
resistencias o conductancia, permiten cambiar los niveles de
corriente aplicada en las resistencias a medir para poder
determinarlas con precisión.
Llaves de Funciones: dirigen las señales censadas hacia los
distintos circuitos conversores a cada una de sus aplicaciones
correspondientemente.
En el caso de selección de función CC, para medir Corriente o
Tensión Continua, esta llave direcciona directamente la señal
de salida de la llave de rangos hacia entrada del conversor
A/D. El conversor Análogo a Digital compara una tensión
interna de referencia con la tensión de entrada desconocida.
De esta comparación, determina el valor de la tensión
desconocida.
En el caso de selección de función CA, para medir Corriente o
tensión Alterna, la llave direcciona la señal de salida desde
llave de rangos hacia el conversor de CA a CC.
Conversor de corriente alterna a corriente continua (CA a
CC): convierte la señal alterna aplicada con entrada AC en una
señal de CC compatible con la entrada del conversor de
analógico a digital (A/D). Puede ser de valor medio o de valor
eficaz.

5
Conversor de Valor Promedio: El conversor que genera un
valor medio de la señal alterna en medición es un circuito
rectificador de media onda (dos diodos colocados en el lazo de
realimentación) y filtro de precisión compuesto por un
circuito integrad. Este tipo de conversor es sencillo de diseñar
y es el más comúnmente usado en los multímetros digitales.
Fig.2.2
Desafortunadamente limita mucho las mediciones en cuanto a
que mide el valor medio de la señal alterna, pero es calibrado
en valores RMS de señales sinusoidales, significa que solo
sólo es aplicable y útil al medir CA de señales sinusoidales
puras, no distorsionadas. Si se realiza una medición de señales
distorsionadas o cuadradas o triangulares, el valor indicado
por el instrumento será erróneo.
Fig. 2.2 Conversor de corriente o tensión Alterna en Continua
Además estos conversores tienen un límite máximo de
frecuencias de entrada del orden de unos 100 a 200 K Hz, y
normalmente un límite inferior de unos 40 a 45 Hz. Debido a
que los diodos responden al valor medio en un rango de
frecuencias. Significa que a altas frecuencias comienza a
tener comportamiento capacitivo y el valor rectificado es
menor y a bajas frecuencias, es difícil obtener una señal
filtrada libre de fluctuaciones.
No obstante, estos conversores son rectificadores de precisión,
porque en un rectificador normal, el valor de tensión de salida
no cuenta con el tramo de tensión correspondiente durante el
tiempo en que el diodo está cortado. La salida del rectificador
se conecta a un filtro pasabajos constituido por una resistencia
y un capacitor, y a la salida de él, se obtiene una componente
de corriente continua proporcional al valor medio de esa señal
rectificada. Fig.2.3.
Fig. 2.3 Conversor de corriente o tensión Alterna en Continua
Los instrumentos que responden al valor promedio, pero
presentan el valor como RMS, hacen esa presentación por
medio de un factor de escala, el cual es usado para calibrar
internamente el multímetro en RMS.
El factor de escala se obtiene en base a que:
Tensión eficaz (RMS) es VRMS = 0,707 Vmáx
Tensión media es Vmed = 0,637 Vmáx
La relación entre ellas da:
Este valor es usado para la calibración interna, es decir que el
instrumento lee el valor medio de la señal sinusoidal, pero
presenta en el Display un valor 1,11 veces mayor que
corresponde al valor eficaz.
Si se pretende medir una señal distinta a la sinusoidal, es
necesario contar con un instrumento de lectura de Verdadero
Valor Eficaz. Aunque la medida no será del todo fidedigna.
Conversor de Verdadero Valor Eficaz O sea, el valor eficaz es
una medida del efecto térmico que produce la corriente
alterna. Algunos instrumentos de precisión usan
"Termocuplas" para medir el verdadero valor eficaz en un
amplio rango de frecuencias (desde 2 Hz a 100 MHz). Los
conversores de verdadero valor eficaz tienen mayor ancho de
banda, pueden leer tensión o corriente alterna con continua
repuesta, miden con más precisión señales no sinusoidales y
son insensibles a la distorsión y pueden ser de respuesta más
rápida. Fig.2.4.
Fig. 2.4 Circuito con un valor eficaz mas preciso

6
- Conversor
El multímetro modifica su conexionado interno de modo que
la operación del conversor A/D se modifica un poco.
Básicamente el instrumento se constituye en un circuito serie
alimentado por la batería interna o por una fuente de
referencia. Se conforma un circuito al medir la resistencia
desconocida colocada en los terminales V-Ohm y COMMON,
una resistencia de referencia con la fuente de referencia, que
con la relación de las dos resistencias (la de referencia y la
desconocida) es igual a la relación de caídas de tensión de las
respectivas resistencias. Por lo tanto, como se conoce el valor
de la resistencia de referencia, el valor de la resistencia
desconocida puede ser calculada determinando la relación de
las caídas de tensión en ambas resistencias. Esta
determinación la hace el conversor Análogo a Digital. Fig.2.5.
Fig. 2.5 Conversor A/D
. En el caso de medición de resistencia, el conversor Análogo
a Digital, usa como tensión de referencia a la caída de tensión
sobre la resistencia de referencia interna, y la comparación de
las caídas las realiza midiendo los tiempos de subida y de
bajada del integrador interno.
La conductancia expresada en Siemens nombre de MHO que
es equivalente al Siemens.
En las mediciones de la conductancia, se usa el mismo circuito
usado para medir resistencia. La diferencia se presenta en la
forma de ingresar los valores de las caídas de tensión en las
resistencias al conversor A/D. En este caso, a la entrada de
referencia del conversor A/D se ingresa el valor de la caída en
la resistencia desconocida, y a la entrada normal se ingresa el
valor de la caída de tensión en la resistencia de referencia. En
consecuencia se hace una comparación de la inversa de la
resistencia, o sea la conductancia.
El método de medición de conductancia es sumamente
adecuado para medir altas resistencias, resistencias de pérdida
de Capacitores y Diodos o Semiconductores, resistencia de
pérdidas de aislación de conectores, cables, circuitos impresos,
etc.
MODULO DE MEDICION DE FRECUENCIA
La salida de la llave de funciones es conectada a un
comparador analógico. Este compara el valor instantáneo de la
señal de entrada con un valor de tensión de referencia. Si el
valor de entrada es mayor al nivel de referencia, coloca la
salida del comparador en un nivel alto (próximo al valor de la
fuente de alimentación). Si el valor de entrada es menor al
nivel de referencia, coloca la salida del comparador en un
nivel bajo (próximo al valor de la tierra eléctrica). Cuando se
le aplica una señal alterna, la salida del comparador cambiará
de estado de acuerdo con los cambios de amplitud de la señal
de entrada. Esto genera pulsos cuadrados van a una compuerta
que se abre durante un tiempo dado por un reloj a cristal. Los
pulsos que pasan por la compuerta son contados por el
microprocesador.
A mayor frecuencia de la señal incógnita, mayor será la
cantidad de pulsos que pasen por la compuerta, de modo que
la cantidad de pulsos contados será proporcional a la
frecuencia desconocida. El microprocesador también se
encarga, si la frecuencia es muy baja, de realizar una medición
de periodo para mejorar la resolución de lectura.
El rango de frecuencias a medir, en este caso, es normalmente
mayor al especificado para mediciones de tensión y corriente
alterna. . Fig.2.6.
Fig.2.6 Circuito con un valor eficaz más preciso
B. Sondas Atenuadoras
Cuando se suele hacer una medición con un osciloscopio son
el medio de conexión entre el circuito en prueba y este, sin
embargo no se le da tanto reconocimiento a la hora de tener un
valor adecuado en la medición. De una manera atrevida se
puede decir que son dos cables eléctricos: uno que va desde el
punto a medir del circuito al canal de entrada del osciloscopio
y el otro que une eléctricamente la masa del circuito de
prueba y el osciloscopio. Realmente se esconde una cantidad
de elementos que conforman un circuito en esos cables para
poner en puesta una sonda útil en la medición. Existen varios
tipos entre las que se encuentran las Sondas pasivas, activas
. Comenzaremos a hablar de las pasivas

7
Las sondas pasivas de tensión (por ser fabricadas
exclusivamente con componentes tales como resistencias,
bobinas y condensadores), son las más comunes por ser
económicas, fáciles de usar y tener un amplio rango dinámico.
Son robustas y debido a su sencillez, su mantenimiento es
mínimo.
La primera especificación de una sonda de tensión es su factor
de atenuación. Este determina la proporción que hay entre las
amplitudes de las señales de entrada y de salida de la misma
cundo la sonda se conecta al osciloscopio. Los más típicos son
de x1, x10, x100 y x1000. Cuan más elevado sea el factor de
atenuación de una sonda, menor es la sensibilidad vertical del
sistema sonda-osciloscopio (disminuye en la proporción dada
por dicho factor), por otro lado mayor es la tensión máxima
que se puede medir, es decir, se multiplica por el factor de
atenuación.
No obstante, la principal importancia del factor de atenuación
(típicamente x10) es de reducir la carga eléctrica del sistema
medido sobre el circuito a medir.
Fig.2.7 Circuito equivalente sonda osciloscopio
Como se aprecia en la Fig.2.7, la carga que ofrece el
osciloscopio al circuito en prueba se aproxima por una
resistencia de 1MΩ en paralelo con un condensador de 20 pF.
Al conectar la sonda pasiva x10 al osciloscopio, se forma un
divisor de tensión resistivo-capacitivo que, despreciando el
efecto de ciertos factores como la capacidad de contacto con la
punta y las condiciones ambientales se obtiene el circuito de la
Fig.2.8
Fig.2.8 Circuito Sonda – osciloscopio
El condensador Cp es variable y se ajusta extremamente con
un pequeño destornillador para conseguir que Fig.2.9
Fig.2.9 Formula sonda compensada
La sonda compensada, el puente de impedancias está
equilibrado y se puede simplificar el circuito a la Fig 2.10. La
carga del sistema sonda-osciloscopio sobre el circuito a medir
es mucho menor que la carga propia del osciloscopio lo que
resulta una mayor precisión del sistema de medida.
Fig. 2.10 Formula sonda compensada
La compensación de la sonda es tambien necesaria si se
requiere conseguir una respuesta plana del sistema sonda –
osciloscopio a lo largo de todo el ancho de banda. En caso
contrario, las frecuencias elevadas se verán amplificadas
(sonda sobrecompensada), o bien atenuadas (sonda
subcompensada), originando en ambos casos una distorsión en
la señal presente en la pantalla del osciloscopio.
Si las capacidades en la entrada de los sistemas de medición
son muy elevadas se provocara que los tiempos de subida
medidos sean más lentos que los reales, mientras que
impedancias de entradas bajas (paralelo de una carga resistiva
con una carga capacitiva) originan amplitudes medidas
inferiores a las verdaderas. Fig. 2.11.

8
Fig. 2.11 Formula sonda compensada
El ancho de banda del sistema osciloscopio-sonda determina
la frecuencia máxima de una señal sinusoidal que dicho
sistema puede adquirir sin reducir la amplitud por debajo del
70.7% de su valor real (punto de-3dB de la curva de respuesta
en frecuencia Fig. 2.12)
Fig. 2.12 Curva de respuesta en frecuencia
Teniendo en cuenta que los anchos de banda del osciloscopio
y de la sonda por separado lo hacen más pequeño el del
sistema de medición, fabricantes como Tektronix especifican
en sus sondas el ancho de banda del sistema sonda-
osciloscopio para su osciloscopio recomendado. Así, una
sonda de Tektronix de 100Mhz conectada a su osciloscopio de
100 Mhz, proporciona un ancho de banda en punta de sonda
del sistema conjunto de 100Mhz.
El porcentaje de aberración o el margen para las
sobreocilaciones generadas en respuesta de una señal con
forma de escalón en la entrada del sistema sonda-osciloscopio.
Fig. 2.13
Fig2.13.Aberracion +3%,4%,5% pico-pico
Las Aberraciones típicas son de +4%, -3% (límite superior e
inferior para las sobreoscilaciones, respectivamente) y 5%
pico a pico (tensión pico a pico de la sobreoscilacion máxima).
Las aberraciones se originan al resonar el circuito RLC de
entrada del sistema sonda-osciloscopio. El terminal de masa
de la sonda tiene asociada una inductancia característica, Lm,
que junto con la capacidad Cin y la resistencia Rin del circuito
equivalente sonda-osciloscopio forma el circuito resonante.
Fig. 2.14
Fig. 2.14 Circuito resonante
Cuando este circuito se excita con una señal que contiene un
armónico con su frecuencia de resonancia, sobreocila a tal
frecuencia y se generan las aberraciones. Estas aberraciones se
pueden eliminar reduciendo la longitud de la terminal de masa
de la sonda, para así su inductancia asociada De esta forma se
eleva la frecuencia de resonancia del circuito RLC por encima
del ancho de banda del osciloscopio, que se comporta
entonces como un filtro a las sobreocilaciones resonantes. Esta
es también la razón por la que en aplicaciones de alta
frecuencia con osciloscopios de elevados anchos de banda, sea
conveniente emplear terminales de los más cortos posibles
para conseguir así que la frecuencia de resonancia del circuito
RLC esté por encima de la banda pasante del osciloscopio.

9
Fig. 2.15
Fig.2.15 Respuestas a un escalón con diferentes longitudes de terminal de
masa
La última característica a considerar en una sonda pasiva de
tensión es la tensión máxima o rango dinámico que puede
soportar sin degradación de sus especificaciones.
El valor típico de tensión máxima en las sondas atenuadoras
x10 es de 500V (dc + pico ac).la sondas atenuadoras x 100 y
x1000 se emplean casi siempre en medidas de alta tensión, por
lo que se fabrican con materiales dieléctricos especiales
capaces de soportar dichas tensiones. Son valores típicos los
de 1.5kV para las zonas atenuadoras x100, y 20Kv para las
atenuadoras de x1000. El circuito equivalente simplificado de
una sonda pasiva de tensión atenuadora x100 y x1000. Fig.
2.16
Fig. 2.16 Circuito equivalente para las sondas pasivas atenuadoras x100 y
x1000
Sondas pasivas
Tienen una carga capacitiva muy baja aunque una carga
resistiva un poco alta (1pF 500 Ω) valores típicos de una
sonda atenuadora x10). El circuito (Fig. 2.15) consiste en un
divisor de frecuencias, debido a que la resistencia de 450 Ω)
“ve” hacia el cable, una resistencia de 50 Ω), sin componentes
capacitivos ni inductivos. No es necesario ninguna
compensación en baja frecuencia ya que el circuito no es un
divisor capacitivo. Son adecuadas para medir tiempos de
subida ancho de banda de (9GHz). Por su baja impedancia,
pueden afectar la amplitud de la señal medida, por lo que
deben emplearse preferentemente para medir circuitos de
impedancia no superior a 50 Ω). Se debe conectar a
osciloscopios con entrada de 50 Ω).
Fig. 2.15 Circuito equivalente para las sondas pasivas baja impedancia
atenua. X10
Sondas Activas
Emplean componentes activos (transistores y fuentes de
alimentación) tanto en el cuerpo de la sonda como en su caja
de terminación. Necesitan una fuente de alimentación para su
funcionamiento, puede ser externa o provenir del propio
osciloscopio. Fig. 2.16
Fig. 2.16 Circuito equivalente para las sondas activas atenuadoras x10
Ofrecen una carga mínima sobre el circuito bajo prueba
(10MΩ y 3pF) y además sus anchos debanda suelen ser muy
elevados (por encima de 3 GHz). Su rango dinámico varía
desde +/-30V +/-200V entre modelo y modelo, que es inferior
al de las sondas pasivas. Se suelen emplear con osciloscopios
con elevados anchos de banda (a partir de 350MHz).
Sondas Diferenciales de tensión
Pueden ser activas o pasivas. Las pasivas consisten en una
pareja de sondas atenuadoras gemelas x10 con prácticamente
idénticas capacidades, resistencias y longitudes para
minimizar las diferencias de impedancias y retardo de
propagación de una señal. Algunas disponen de un circuito de
atenuación ajustable que permite compensar las posibles
diferencias entre sondas, esta precaución de mantener la
máxima igualdad de señales en las sondas es esencial para
conservar la relación de rechazo en modo común (RRMC) del
osciloscopio o amplificador del que se conectan.
Las Activas están basadas en un amplificador diferencial de
componentes extremadamente precisos situados en la propia
punta de la sonda. Así, el rechazo en modo común es
intrínseco a la sonda (típicamente es de 10000:1) y no depende
del equipo al que está conectada (la RRMC en un osciloscopio

10
de propósito general que rara vez supera 50:1, valor que con
sondas pasivas diferenciales perfectamente apareadas se
conseguiría desplazar sin parar hasta la punta de la sonda. Fig.
2.17
Fig. 2.17 Sonda diferencial Activa
Sondas de corriente
Se emplean para medir intensidades de corriente eléctrica a
través de un hilo conductor, pueden ser pasivas o activas.
Las sondas pasivas se emplean exclusivamente para medir
corrientes alternas. Consisten esencialmente en un
transformador en el que el primario es el propio cable cuya
corriente eléctrica se quiere medir, mientras que el secundario
es un arrollamiento de un número determinado de vueltas. La
sensibilidad de la sonda depende de este número de vueltas y
de la precisión de la carga empleada en el circuito secundario.
Fig. 2.18 Esta sensibilidad se especifica como tensión
generada en el secundario por una corriente mínima circulante
por el primario (por encima de5mV/mA).
Fig. 2.18 Sonda pasiva de corriente
Las sondas Activas de corriente se emplean para medir tanto
corrientes alternas como continuas, para ello emplean un
transformador de corriente con un dispositivo especial llamado
el efecto Hall. Fig. 2.19
Fig. 2.19 Circuito equivalente a sonda activa o de corriente
C. Osciloscopio
Es el dispositivo que se ve a simple vista en un laboratorio y
llama la atención y la curiosidad de aquellos que desconocen
su utilidad. Partiendo del hecho de que ya nos prestamos de
sus servicios para nuestras actividades de medición y
comprensión del funcionamiento de los dispositivos y en su
conjunto de los circuitos electrónicos; proseguiremos por
entender un poco más cómo función, no sin antes dar una
breve introducción.
El osciloscopio es un dispositivo de presentación de gráficas,
es decir, traza una gráfica de una señal eléctrica. En la mayoría
de las aplicaciones, esta gráfica muestra cómo cambia una
señal con el tiempo: el eje vertical (Y) representa el voltaje, y
el eje horizontal (X) representa el tiempo. La intensidad o
brillo de la pantalla se denomina, a veces, eje Z. Además
puede revelar información tal como: La frecuencia de una
señal oscilante, las "partes móviles" de un circuito
representadas por una señal, la frecuencia con la que está
ocurriendo una porción particular de la señal con relación a
otras porciones, si el mal funcionamiento de un componente
está distorsionando la señal o no, qué parte de una señal es
corriente continua (CC) y qué parte corriente alterna (CA)
además de qué parte de la señal es ruido, y si el ruido cambia
en el tiempo
En general hay dos tipos de osciloscopios los osciloscopios
digitales y los análogos. Empezaremos por estos últimos. Fig.
2.20.
Fig. 2.20. Los osciloscopios analógicos "dibujan" señales, mientras que los
osciloscopios digitales muestrean señales y reconstruyen su representación
El osciloscopio analógico trabaja aplicando el voltaje medido
de la señal directamente al eje vertical de un haz electrónico
que se mueve de izquierda a derecha a través de la pantalla del

11
osciloscopio, usualmente, un tubo de rayos catódicos (TRC).
La parte posterior de la pantalla está tratada con fósforo
luminoso que brilla siempre que el haz electrónico incide
sobre ella. El voltaje de la señal desvía el haz hacia arriba y
hacia abajo proporcionalmente y conforme se mueve
horizontalmente a través de la pantalla, trazando así la forma
de onda en la pantalla. Cuanto más frecuentemente incida el
haz sobre un punto específico de la pantalla, más brillante
aparecerá dicha posición. El TRC limita el rango de
frecuencias que puede mostrar un osciloscopio analógico. En
frecuencias muy bajas, la señal aparece como un punto
brillante, de movimiento lento, que resulta difícil distinguir
como una forma de onda. En frecuencias altas, la velocidad de
escritura del TRC define el límite. Cuando la frecuencia de la
señal excede la velocidad de escritura del TRC, la
presentación se vuelve demasiado tenue en intensidad
compara ser vista.
Fig. 2.21. Osciloscopio analógico presenta una señal que se está midiendo
Los osciloscopios analógicos más rápidos pueden presentar
frecuencias de hasta alrededor de 1 GHz. Cuando la sonda de
un osciloscopio se conecta a un circuito, la señal del voltaje
viaja a través de la sonda hasta el sistema vertical del
osciloscopio. Cuando la sonda de un osciloscopio se conecta a
un circuito, la señal del voltaje viaja a través de la sonda hasta
el sistema vertical del osciloscopio. Fig 2.21. Dependiendo de
cómo esté configurada la escala vertical (control de
voltios/div), un atenuador reducirá el voltaje de la señal y un
amplificador lo aumentará. Seguidamente, la señal va
directamente a las placas deflectoras verticales del TRC. El
voltaje aplicado a estas placas de deflexión hará que el punto
luminoso se mueva a través de la pantalla. Este punto
luminoso es creado por un haz de electrones que incide sobre
el fósforo luminoso en el interior del TRC. Un voltaje positivo
hace que el punto se mueva hacia arriba, mientras que un
voltaje negativo hace que el punto se mueva hacia abajo. Fig
2.22
Fig.2.22 Los osciloscopios analógicos "dibujan" señales, mientras que los osciloscopios digitales muestrean señales y reconstruyen su representación
La señal se desplaza también al sistema de disparo para
iniciar, o disparar, un barrido horizontal. El barrido horizontal
es un término que se refiere a la acción del sistema horizontal
que permite que el punto luminoso se mueva de izquierda a
derecha de la pantalla del osciloscopio. El disparo del sistema
horizontal hace que la base de tiempos horizontal mueva el
punto luminoso de izquierda a derecha de la pantalla dentro de
un intervalo de tiempo específico. Muchos barridos en rápida
secuencia harán que el movimiento del punto luminoso
parezca una línea continua. A altas velocidades, el punto
luminoso puede barrer la pantalla hasta 500.000 veces por
segundo. Conjuntamente, la acción de barrido horizontal y la
acción de deflexión vertical trazan en la pantalla un gráfico de
la señal. El disparo es necesario para estabilizar una señal
repetitiva; así se asegura que el barrido empieza siempre en el
mismo punto de la señal repetitiva, lo que resulta en una
imagen clara. A menudo, se prefieren los osciloscopios
analógicos cuando resulta importante mostrar variaciones de
señales rápidas en "tiempo real", o sea, conforme ocurren. La
pantalla basada en fósforo químico de un osciloscopio
analógico tiene una característica conocida como gradación de
intensidad, que hace la traza más brillante donde los rasgos de
la señal ocurren más frecuentemente. Esta gradación de
intensidad facilita la distinción de los detalles de la señal
simplemente observando los niveles de intensidad de la traza.
Osciloscopios digitales
Este utiliza un convertidor analógico digital (ADC) para
convertir el voltaje medido en información digital. Estos
osciloscopios adquieren la forma de onda como una serie de
muestras, y las almacenan hasta que acumulan muestras
suficientes como para describir una forma de onda. El
osciloscopio digital reconstruye entonces la forma de onda
para su presentación en pantalla. Los osciloscopios digitales se
pueden clasificar en osciloscopios de memoria digital, o
simplemente, osciloscopios digitales (DSO), osciloscopios de
fósforo digital (DPO), y osciloscopios de muestreo.
La técnica digital permite que el osciloscopio pueda
representar cualquier frecuencia dentro de su rango, con
estabilidad, brillantez y claridad. Para señales repetitivas, el
ancho de banda del osciloscopio digital es una función del
ancho de banda analógico de los componentes de entrada del

12
osciloscopio, comúnmente conocido como el punto de
atenuación a -3dB.
Para eventos transitorios y de disparo único, tales como pulsos
y escalones, el ancho de banda puede verse limitado por la
velocidad de muestreo del osciloscopio.
. Fig. 2.23. Arquitectura de procesado en serie de un osciloscopio digital (DSO
Un osciloscopio digital convencional se conoce como
osciloscopio de memoria digital, o simplemente, osciloscopio
digital (DSO). Típicamente, su presentación depende de una
pantalla de barrido en lugar de una de fósforo luminoso. Los
osciloscopios de memoria digital (DSO) permiten la captura y
visualización de eventos que ocurren solamente una vez y a
los que se conoce como transitorios. Debido a que la
información de la forma de onda existe en forma digital como
una serie de valores binarios almacenados, ésta puede ser
analizada, archivada, imprimida, y procesada de cualquier otra
forma dentro del propio osciloscopio o por un ordenador
externo. No es necesario que la forma de onda sea continua, y
puede ser mostrada en pantalla incluso cuando la señal ha
desaparecido. Contrariamente a los osciloscopios analógicos,
los osciloscopios de memoria digital proporcionan un
almacenamiento permanente de la señal y un extenso
procesado de la forma de onda. Sin embargo, los DSO no
tienen típicamente gradación de intensidad en tiempo real; por
lo tanto, no pueden mostrar niveles de variación de intensidad
en una señal "viva”. Algunos de los subsistemas que
componen los DSO son similares a los de los osciloscopios
analógicos. Sin embargo, los DSO contienen subsistemas
adicionales de procesado de datos que se utilizan para
recomponer y mostrar los datos de la forma de onda completa.
Un DSO utiliza una arquitectura de procesado en serie para
capturar y mostrar una señal en su pantalla. Fig. 2.23
Arquitectura de procesado en serie
Como en un osciloscopio analógico, la primera etapa (de
entrada) de un DSO es un amplificador vertical. Los controles
verticales permiten ajustar la amplitud y el rango de posición
en esta etapa. Seguidamente, el convertidor analógico digital
(CAD) del sistema horizontal muestrea la señal en puntos
aislados en el tiempo y convierte el voltaje de la señal presente
en estos puntos en valores digitales, denominados puntos de
muestreo. Este proceso se conoce como digitalización de una
señal. El reloj de muestreo del sistema horizontal determina
con qué frecuencia el CAD recoge muestras. Esta velocidad se
llama velocidad de muestreo y se expresa en muestras por
segundo. (S/s). Las muestras del CAD son almacenadas en la
memoria de adquisición como puntos de la forma de onda.
Varias muestras pueden conformar un punto de la forma de
onda. Todos los puntos de la forma de onda en conjunto
conforman el registro de forma de onda. El número de puntos
de forma de onda utilizados para crear un registro se denomina
longitud de registro. El disparo del sistema determina los
puntos de comienzo y parada del registro. La ruta de la señal
del DSO incluye un microprocesador a través del cual pasa la
señal medida en su camino hacia la pantalla. Este
microprocesador procesa la señal, coordina las actividades de
presentación, gestiona los controles del panel frontal, etc. La
señal pasa entonces a través de la memoria de presentación, y
aparece en la pantalla del osciloscopio.
Modos de adquisición
-Modo "Muestra": Este es el modo de adquisición más
sencillo. El osciloscopio crea un punto de forma de onda
almacenando una muestra durante cada intervalo de forma de
onda.
- Modo de Detección de picos: El osciloscopio almacena las
muestras mínimas y máximas tomadas entre dos intervalos de
forma de onda, y utiliza estos muestreos como los dos puntos
de forma de onda correspondientes. Los osciloscopios
digitales con modo de detección de picos ejecutan la CAD a
una velocidad de muestreo muy rápida, incluso para valores de
la base de tiempos muy lentos (las bases de tiempos lentas se
traducen en largos intervalos de forma de onda) y pueden
capturar cambios rápidos de la señal que ocurrirían entre los
puntos de forma de onda si se estuviera operando en modo de
muestreo.
- Modo de Alta resolución: Al igual que en el modo de
detección de picos, el modo de alta resolución es una forma de
obtener más información en casos donde el CAD puede tomar
muestras más rápidamente de lo que requiere la configuración
de la base de tiempos. En este caso, se promedian múltiples
muestras tomadas dentro de un intervalo de forma de onda,
para producir un punto de la forma de onda. El resultado es
una disminución del ruido y una mejora de la resolución para
señales de baja velocidad.
- Modo Envolvente: es similar al modo de detección de picos.
Sin embargo, en el modo envolvente, se combinan los puntos
máximos y mínimos de la forma de onda a partir de
adquisiciones múltiples para crear una forma de onda que
muestra los cambios mín/máx en el tiempo. El modo de
detección de picos suele utilizarse para obtener registros que
se combinan para crear una forma de onda envolvente.
- Modo Promediado: el osciloscopio almacena una muestra
durante cada intervalo de forma de onda, igual que en el modo
de muestreo. Sin embargo, los puntos de forma de onda a
partir de adquisiciones consecutivas se promedian para crear
la forma de onda final que aparecerá en la pantalla. El modo
promediado reduce el ruido sin pérdida de ancho de banda,
pero requiere que la señal sea repetitiva.
Muestreo
El muestreo es el proceso de convertir una porción de una
señal de entrada en un número de valores eléctricos
individualizados con fines de almacenamiento, procesamiento
o presentación de los mismos. La magnitud de cada punto

13
muestreado es igual a la amplitud de la señal de entrada en el
instante del muestreo de la señal en el tiempo. El muestreo es
como una toma de instantáneas. Cada instantánea corresponde
a un punto específico en el tiempo en la forma de onda. Estas
instantáneas pueden ser luego dispuestas en un orden
específico en el tiempo con el fin de poder reconstruir la señal
de entrada. En la pantalla de un osciloscopio digital, se
reconstruye un conjunto de puntos muestreados, mostrando la
amplitud medida en el eje vertical, y el tiempo en el eje
horizontal. Fig. 2.24
La interpolación interconecta los puntos con líneas o vectores.
Se dispone de determinados métodos de interpolación que se
pueden utilizar para crear una precisa representación continua
de una señal de entrada.
. Fig. 2.24 Muestreo básico. Los puntos muestreados se conectan por
interpolación para crear una forma de onda continua
Métodos de muestreo
Muestreo en tiempo real y muestreo en tiempo equivalente o
muestreo en tiempo equivalente puede dividirse en dos
subcategorías: aleatorio y secuencial.
El muestreo en tiempo real
Este resulta ideal para señales cuyo rango de frecuencia es
menor que la mitad de la velocidad máxima de muestreo del
osciloscopio. En este caso, el osciloscopio puede adquirir
puntos más que suficientes con un solo "barrido" de la forma
de onda como para conformar una imagen precisa. Fig. 2.25
Fig. 2.25 Método de muestreo en tiempo real
Interpolación
La interpolación "conecta los puntos" para que una señal que
solamente se ha muestreado unas pocas veces en cada ciclo
pueda ser presentada de forma precisa. Al utilizar muestreo en
tiempo real con interpolación, el osciloscopio recoge unos
pocos puntos de muestreo de la señal en un solo barrido y en
modo de tiempo real, y utiliza la interpolación para rellenar los
espacios intermedios. La interpolación es una técnica de
procesado que se utiliza para estimar el aspecto de la forma de
onda, basándonos tan solo en unos pocos puntos. La
interpolación lineal conecta los puntos de las muestras
mediante líneas rectas. Este método está limitado a la
reconstrucción de señales de flancos rectos, tales como las
ondas cuadradas. La interpolación senox/x es un proceso
matemático en el que se calculan los puntos que rellenarán el
espacio entre las muestras reales. Este tipo de interpolación se
presta más a formas de señales curvadas e irregulares, que son
mucho más habituales en el mundo real que las puras ondas
cuadradas y los pulsos. En consecuencia, la interpolación seno
x/x es el método preferido para aplicaciones donde la
velocidad de muestreo es de 3 a 5 veces el ancho de banda del
sistema Fig. 2.26
Fig.2.26. Interpolación lineal y seno x/x
Muestreo en tiempo equivalente
Cuando se miden señales de alta frecuencia, el osciloscopio
puede no ser capaz de recoger suficientes muestras en un
barrido. El muestreo en tiempo equivalente se puede utilizar
entonces para adquirir con precisión señales cuya frecuencia
excede la mitad de la velocidad de muestreo del osciloscopio.
Fig. 2.27
Fig. 2.27. Algunos osciloscopios utilizan muestreo en tiempo equivalente para
capturar y presentar señales repetitivas muy rápidas
El muestreo en tiempo equivalente construye una imagen de
una señal repetitiva, capturando tan solo una parte de la
información en cada repetición. La forma de onda se va
creando lentamente como una cadena de puntos luminosos,
que se ilumina uno a uno. Este modo permite al osciloscopio
capturar con precisión señales cuyas componentes de
frecuencia son mucho más elevadas que la velocidad de
muestreo del osciloscopio.

14
Existen dos tipos de muestreo en tiempo equivalente: aleatorio
y secuencial. Cada uno tiene sus ventajas. El muestreo en
tiempo equivalente aleatorio permite la presentación de la
señal de entrada antes del punto de disparo, sin la utilización
de una línea de retardo. El muestreo en tiempo equivalente
secuencial proporciona una resolución en tiempos y una
precisión mucho mayor.
Muestreo en tiempo equivalente aleatorio. Los digitalizadores
(sistemas de muestreo) en tiempo equivalente aleatorio
utilizan un reloj interno que funciona de forma asíncrona con
respecto a la señal de entrada y al disparo de la señal Fig. 2.28
Las muestras se adquieren de forma continua,
independientemente de la posición del disparo, y su
presentación está basada en la diferencia de tiempo existente
entre la muestra y el disparo. Aunque las muestras se
adquieren de forma secuencial en el tiempo, son aleatorias con
respecto al disparo —de aquí el nombre de muestreo
"aleatorio" en tiempo equivalente. Los puntos de muestreo
aparecen aleatoriamente a lo largo de la forma de onda cuando
se muestran en la pantalla del osciloscopio. La ventaja
principal de esta técnica de muestreo es su capacidad de
adquirir y presentar muestras antes del punto de disparo,
eliminando así la necesidad de señales externas de pre disparo
o de líneas de retardo
Fig. 2.28 En el muestreo en tiempo equivalente aleatorio, el reloj de muestreo
ocurre de forma asíncrona con la señal de entrada y con el disparo.
El sistema de muestreo en tiempo equivalente secuencial
adquiere una muestra por disparo, independientemente de la
configuración tiempo/div o de la velocidad de barrido. Cuando
se detecta un disparo, se adquiere una muestra después de un
retardo muy corto, pero muy bien definido. Cuando se produce
el próximo disparo, se añade un pequeño incremento de
tiempo —delta t— a este retardo y el digitalizador adquiere
otra muestra. Este proceso se repite muchas veces,
añadiéndose un "delta t" a cada adquisición previa, hasta que
se completa la ventana de tiempos. Los puntos de las muestras
aparecen de izquierda a derecha de forma secuencial a lo largo
de la forma de onda en la pantalla del osciloscopio. Fig. 2.29
Fig. 2.29 En el muestreo secuencial en tiempo equivalente, se adquiere una
muestra por cada disparo reconocido después de un retardo de tiempo que se incrementa en cada ciclo
Modo XYZ
Algunos (osciloscopios de fósforo digital) DPO pueden
utilizar la entrada Z para crear una presentación XY con
gradación de intensidad. En este caso, el DPO muestrea el
valor de los datos instantáneos en la entrada Z y utiliza esos
valores para cualificar una parte específica de la forma de
onda. Una vez que se obtienen las muestras cualificadas, éstas
se pueden acumular, dando como resultado una presentación
XYZ con gradación de intensidad. El modo XYZ es
especialmente útil para mostrar patrones polares comúnmente
utilizados en pruebas de dispositivos de telefonía móvil, por
ejemplo, un diagrama de constelación.
2. RECTIFICADOR DE MEDIA ONDA
Ahora ampliaremos el análisis de diodos para incluir
funciones que varían con el tiempo, como la forma de onda
sinusoidal y la onda cuadrada. Sin duda, el grado de
dificultad se incrementará, pero una vez que se entiendan
algunas maniobras fundamentales, el análisis será directo y
seguirá una ilación común.
Fig. 3. 1
Las más sencillas de las redes que se van a examinar con
una señal que varía con el tiempo, aparecen en la figura 1.
Por el momento utilizaremos el modelo ideal para que el
método no se empañe por la complejidad matemática
adicional.

15
Fig. 3. 2
A lo largo de un ciclo completo, definido por el periodo T
de la figura 2, el valor promedio (la suma algebraica de las
áreas arriba y debajo del eje) es cero. El circuito, llamado
rectificador de media onda, generará una forma de onda Vo
que tendrá un valor promedio de uso particular en el proceso
de conversión AC a DC. Cuando se emplea en el proceso de
rectificación, un diodo en general se conoce como rectificador.
En general, sus capacidades de potencia y corriente son mucho
más altas que las de los diodos empleados en otras
aplicaciones, como computadoras y sistemas de
comunicación.
Durante el intervalo T=0→T/2 en la figura la polaridad del
voltaje aplicado Vi es tal que ejerce “presión” en la dirección
indicada y enciende el diodo con la polaridad que aparece
arriba de él. Sustituyendo la equivalencia de cortocircuito en
lugar del diodo ideal se tendrá el circuito equivalente de la
figura, donde es muy obvio que la señal de salida es una
réplica exacta de la señal aplicada. Las dos terminales que
definen el voltaje de salida están conectadas directamente a la
señal aplicada por conducto de la equivalencia de corto
circuito del diodo.
En la figura 3 podemos observar el comportamiento del
diodo en sus dos modos de trabajo y el cambio de polaridad de
la fuente.
Fig. 3. 3
Para el periodo T/2→T la polaridad de la entrada Vi es como
se muestra en la figura y la polaridad resultante a través del
diodo ideal produce un estado de “apagado” con un
equivalente de circuito abierto. El resultado es que no hay una
ruta para que fluya la carga y Vi=0 V para el periodo T/2→T.
La entrada Vi y la salida Vo aparecen juntas en la figura 4
para propósitos de comparación. La señal de salida Vo ahora
tiene un área neta positiva sobre el eje durante un periodo
completo y un valor promedio determinado por:
Ecu.1
Fig. 3. 4
El proceso de eliminar la señal de entrada de media onda
para establecer un nivel de DC se llama rectificación de media
onda. El efecto de utilizar un diodo de silicio con Vk= 0.7 V
se demuestra en la figura 5 para la región de polarización en
directa. La señal aplicada ahora debe ser por lo menos de 0.7
V antes de que el diodo pueda “encenderse”. Con niveles de
Vi menores que 0.7 V, el diodo aún permanece en el estado de
circuito abierto y Vo=0 V, como se muestra en la misma
figura 5. Cuando conduce, la diferencia entre Vo y Vi es un
nivel fijo de Vk=0.7 V y Vo = Vi-Vk como se muestra en la
figura. El efecto neto es una reducción del área sobre el eje, la
cual reduce el nivel de voltaje de cd resultante. En situaciones
donde Vm >> Vk, se puede aplicar la siguiente ecuación para
determinar el valor promedio con un nivel de precisión
relativamente alto:
Ecu. 2

16
Fig. 3. 5
La rectificación de media onda se puede realizar de dos
formas distintas la vista anteriormente y de forma que la
media onda tomada sea la de la parte negativa. Para este
ejercicio utilizaremos una configuración distinta pero con la
misma aplicación de las ecuaciones anteriores.
Fig. 3. 6
Para un diodo de silicio, la salida tiene la apariencia de la
figura y su valor DC se puede hallar utilizando la ecuación 2:
La frecuencia de salida es la misma que la frecuencia de
entrada. Esto tiene sentido cuando se compara la figura 5.
Cada ciclo de la tensión de entrada produce un ciclo de la
tensión de salida. Por tanto, podemos escribir:
Ecu. 3
RECTIFICADOR CON PUENTE DE DIODOS
El nivel de DC obtenido a partir de una entrada sinusoidal
se puede mejorar 100% mediante un proceso llamado
rectificación de onda completa. La red más conocida para
realizar tal función aparece en la figura con sus cuatro diodos
en una configuración de puente.
Fig. 3. 7
Durante el periodo t=0 para la polaridad de la entrada es
como se muestra en la figura 8. Las polaridades resultantes a
través de los diodos ideales también se muestran para revelar
que D2 y D3 están conduciendo, mientras que D1 y D4 están
“apagados”.
Fig. 3. 8
El resultado neto es la configuración de la figura 9 con su
corriente y polaridad indicada a través de R. Como los diodos
son ideales, el voltaje de carga es Vo=Vi, como se muestra en
la misma figura.

17
Fig. 3. 9
En la región negativa de la entrada los diodos que
conducen son D1 y D4, por lo que los diodos que se
encuentran apagados son D2 y D3, la configuración es la que
se muestra en la siguiente figura 10.
Fig. 3. 10
El resultado importante es que la polaridad a través del
resistor de carga R es la misma, por lo que se establece un
segundo pulso positivo, como se muestra. Durante un ciclo
completo los voltajes de entrada y salida aparecerán como se
muestra en la siguiente figura 11.
Fig. 3. 11
Como el área sobre el eje durante un ciclo completo ahora es
el doble de la obtenida por un sistema de media onda, el nivel
de DC también se duplica:
Ecu. 4
Fig. 3. 12
Si se utilizan diodos de silicio en lugar de ideales como se
muestra, la aplicación de la ley de voltajes de Kirchhoff
alrededor de la trayectoria de conducción da una aproximación
más real a lo visto en el laboratorio:
Fig. 3. 13
Ecu. 5
Con esto finalizamos el desarrollo del rectificador de puente
de diodos, pero para aplicar este circuito es necesario conocer
el comportamiento de los transformadores
TRANSFORMADORES
En estados unidos las compañías electrónicas proporcionan
una tensión de red nominal de 120V rms a una frecuencia de
60 Hz (en Europa, la tensión nominal es de 220V a 50 Hz) la
tensión real de un enchufe eléctrico fluctúa entre los 105 y 125
V rms, dependiendo de la hora, la localidad y de otros
factores. La tensión de la red es demasiado elevada para la
mayor parte de los dispositivos empleados en circuitos
electrónicos. Por esta causa, generalmente se emplea un

18
transformador en casi todos los equipos electrónicos. El
transformador reduce la tensión a niveles inferiores, más
adecuados para su uso en diodos y transistores entre otros
dispositivos semiconductores.
En la figura 14 se ve un ejemplo de un transformador.
Aquí se ve un alinea de tensión aplicada a la bobina primaria
de un transformador. Normalmente el enchufe tiene una
tercera conexión para poner a tierra el equipo. A causa de la
relación de espiras N1 IN2, la tensión del secundario se ve
reducida cuando N1 es mayor que N2.
Fig. 3. 14
Teniendo en cuenta la teoría vista en campos
electromagnéticos podemos aplicar la siguiente formula.
Ecu. 6
Esto dice que la tensión en el secundario es igual a la
tensión del primario dividida por la relación de espiras.
Algunas veces vera esta forma equivalente:
Ecu. 7
Lo que indica que la tensión, en el secundario es igual a la
inversa de la relación de espiras multiplicado por la tensión en
el primario.
Se puede usar cualquiera de las dos fórmulas para rms, valores
de pico y tensiones instantáneas. La mayoría del tiempo,
usaremos la Ecuación 6 con los valores rms porque las fuentes
de tensión alternas se especifican casi siempre como los
valores rms.
Los términos elevar y reducir también se encuentran cuando se
trata con transformadores, estos términos siempre relacionan
la tensión del secundario con la tensión del primario. Esto
significa que un transformador elevador producida una tensión
en el secundario que es mayor que en el primario, y un
transformador reductor producirá una tensión en el secundario
que es más pequeña que el primario
.
RECTIFCADOR DE ONDA COMPLETA CON TAP
CENTRAL
En la figura 15 aparece un segundo rectificador de onda
completa muy conocido con sólo dos diodos, pero que
requiere un transformador con derivación central (CT, por sus
siglas en inglés) para establecer la señal de entrada a través de
cada sección del secundario del transformador.
Fig. 3. 15
Durante la parte positiva de vi aplicada al primario del
transformador, la red aparecerá como se muestra en la figura
15. El diodo D1 asume el equivalente de cortocircuito y el D2
el equivalente de circuito abierto, como lo determinan los
voltajes secundarios y las direcciones de la corriente
resultantes y podemos visualizar que diodo esta encendido en
ese tiempo en la figura 16. El voltaje de salida aparece como
se muestra en la figura 17.
El tap central del transformador no permite economizar dos
diodos a comparación del rectificador anteriormente visto, ya
que con esta configuración podemos tener dos configuraciones
en un solo circuito y dos cambios de polaridad ya que el CT
funciona con este propósito, al disminuir la cantidad de diodos
también disminuimos las perdidas en estos ya que no es
necesario sobrepasar dos voltajes de umbral por ciclo.
Fig. 3. 16
Durante el periodo de T=0→T/2 se puedo observar que el
circuito ideal se comporta como la figura 17.

19
Fig. 3. 17
Durante la parte negativa de la entrada la red aparece como se
muestra en la figura 18, y los roles de los diodos se invierten.
Pero mantienen la misma polaridad del voltaje a través del
resistor de carga R.
Fig. 3. 18
El efecto neto es la misma salida que aparece en la figura 13
con los mismos niveles de DC. En el intervalo de tiempo
T/2→T el circuito se comportaría como muestra la figura 19.
Fig. 3. 19
Teniendo en cuenta que en el laboratorio usaremos diodos
reales y no ideales, es necesario considerar las pérdidas que da
el diodo por su voltaje de umbral.
Con la teoría ya vista en circuitos podemos aplicar la ley de
Kirchhoff alrededor de la trayectoria de conducción da una
aproximación más real.
Ecu. 8
II. CALCULOS TEORICOS
PARTE A:

20
PARTE B:
Onda seno, Rectificación de media onda a 60 Hz, Vp 12.727V
con carga resistiva 1KΩ.
2
0
60 12,72 ( ) 4,05
T
VoDC sen wt dwt V
4.05VRDC
ioDC mAR
* 16,41PDC VoDC ioDC mW
122 2
0
(60 (12,72 ( )) ) 6,36
T
VAC sen wt dwt V
2 2 4,9Vorizo VoAC VoDC Vrms
6,36vAC
iAC mAR
* 40,4PAC vAC iAC mW
arg 40%c a
PDC
PAC
*28,67%
*entrada salida
PoDC ioDC VoDCTUF
Sent Ifrms Vrms
13,48SDT
TUF
Onda seno, Rectificación de onda completa con tap central a
60 Hz, Vp 12.727V con carga resistiva 1KΩ
0
2 2*12,72710sin( ) 8,10
2oV DC t dt V
8,10VoDC
iDC mAR
* 65,63PoDC VoDC IoDC mW
1
2 22 12,727
( (10s ) ) 92 2o
VoAC ent dt
12,72 12,729
2 2 *1000ioAC mA
R
* 80,94PoAC VoAC ioAC mW
2 2 3,92Vorizo VoAC VoDC Vrms
arg 81.07%c a
PDC
PAC
*
57,3%*
entrada salida
PoDC ioDC VoDCTUF
Sent Ifrms Vrms
11,745SDT
TUF
Onda seno, Rectificación de onda completa con puente de
diodos a 60 Hz, Vp 12.727V con carga resistiva 1KΩ.
0
2 2*12,72712,72sin( ) 8,10
2oV DC t dt V
8,10VoDC
iDC mAR
* 65,63PoDC VoDC IoDC mW
1
2 22 12,727
( (12,727s ) ) 92 2o
VoAC ent dt
12,72 12,729
2 2 *1000ioAC mA
R
* 80,94PoAC VoAC ioAC mW
2 2 3,92Vorizo VoAC VoDC Vrms
arg 81.07%c a
PDC
PAC
*
81,04%*
entrada salida
PoDC ioDC VoDCTUF
Sent Ifrms Vrms
11,233SDT
TUF

21
III. DATASHEET DE LOS DIODOS USADOS EN LA
PRÁCTICA
En el desarrollo de este laboratorio se utilizaron dos diodos
diferentes. Los cuales tienen diferentes usos y aplicaciones.
1. Diodo 1N4004:
Fig.4. 1
Es un diodo de propósito general. En este laboratorio lo
utilizaremos en rectificadores de onda tanto de baja como alta
frecuencia, para ver sus diferentes comportamientos y
características.
Fig.4. 2
La tensión inversa máxima que soporta este diodo es 400 V,
corriente directa máxima de 1 A, corriente de recuperación
inversa de 5 µA, tiempo de recuperación de 20 µS.
Las características del diodo 1N4001 se pueden ver en la
Tabla 1.
Tabla 1
2. Diodo 1N4148:
Fig.4. 3
Es un diodo de tipo fast recovery que en español es diodo de
recuperación rápido, las características de este diodo lo hacen
muy útil en circuitos de alta frecuencia.
Fig.4. 4

22
Algunas de las características más importantes de este diodo
son:
Tabla 2
Pero para este laboratorio las características que más nos
interesan son las corrientes de recuperación del diodo en
inverso y su tiempo el cual se muestra en la Tabla 3.
Tabla 3
IV. SIMULACIONES
PARTE A:
1N4004 Proposito General
60Hz
600Hz
6kHz
60kHz
23
600kHz
1MHz
3MHz
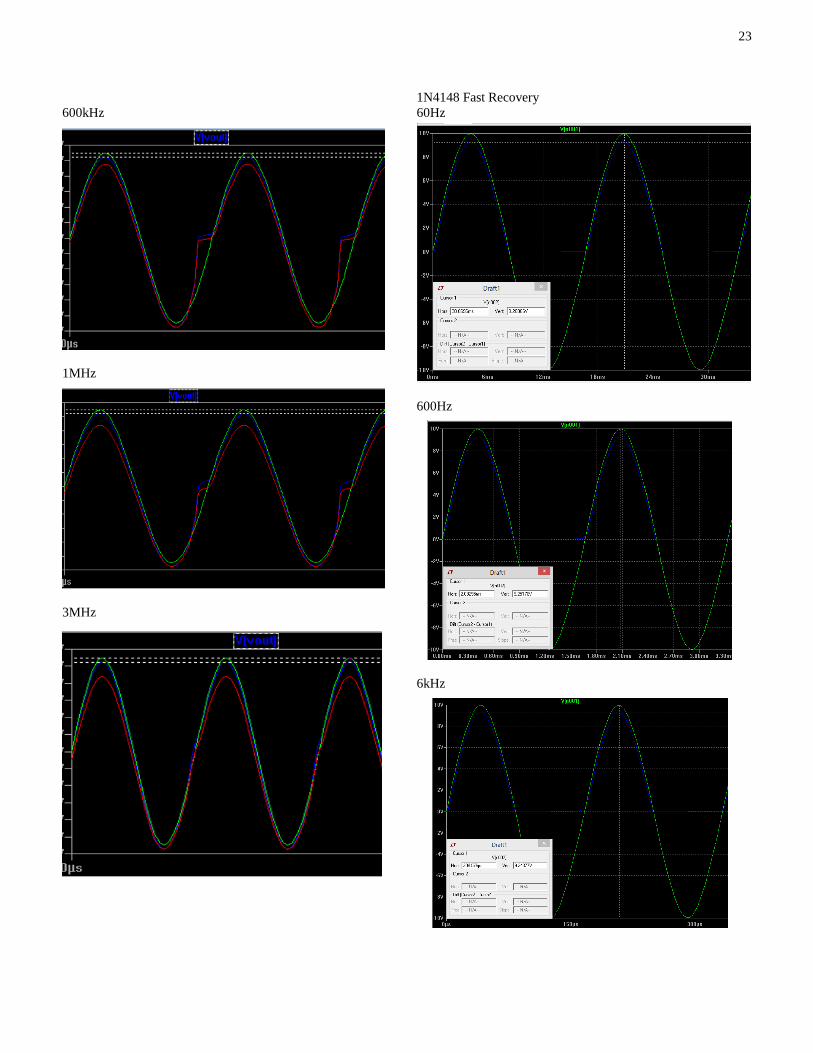
1N4148 Fast Recovery
60Hz
600Hz
6kHz

24
60kHz
600kHz
1MHz
3MHz
PARTE B:
Rectificador de media onda:
Rectificador de onda completa con tap central:
Rectificador de onda completa con puente de diodos:
25
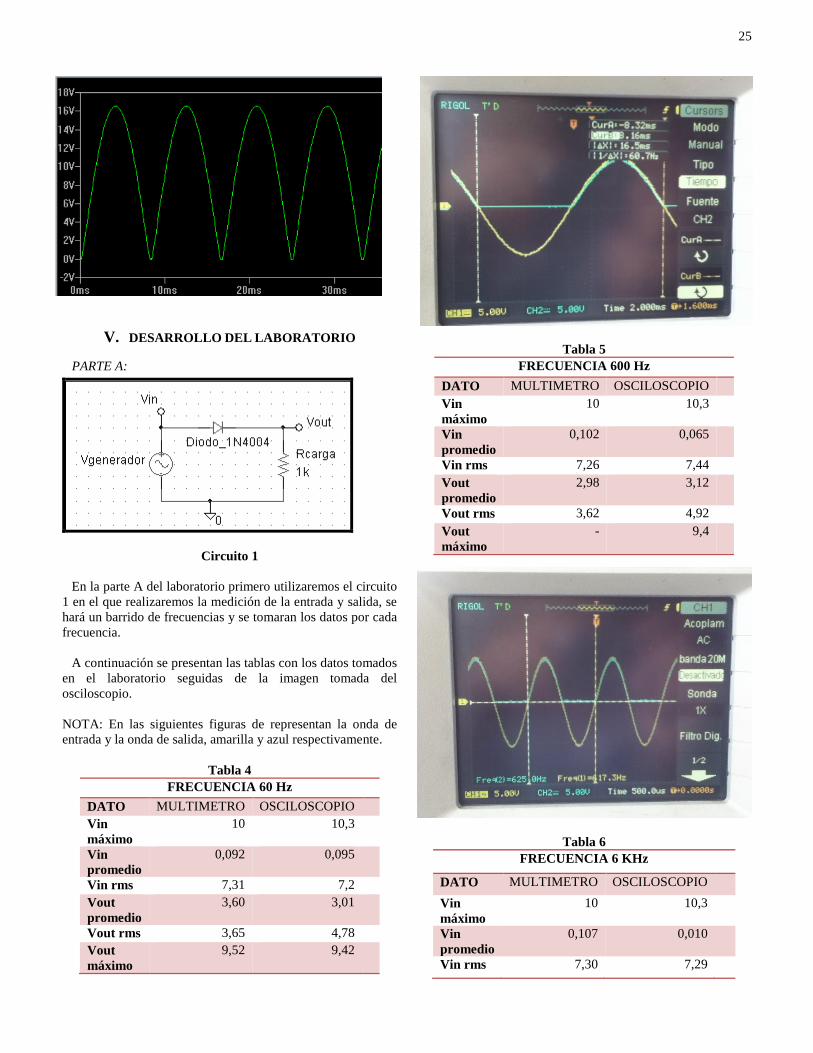
V. DESARROLLO DEL LABORATORIO
PARTE A:
Circuito 1
En la parte A del laboratorio primero utilizaremos el circuito
1 en el que realizaremos la medición de la entrada y salida, se
hará un barrido de frecuencias y se tomaran los datos por cada
frecuencia.
A continuación se presentan las tablas con los datos tomados
en el laboratorio seguidas de la imagen tomada del
osciloscopio.
NOTA: En las siguientes figuras de representan la onda de
entrada y la onda de salida, amarilla y azul respectivamente.
Tabla 4
FRECUENCIA 60 Hz
DATO MULTIMETRO OSCILOSCOPIO
Vin
máximo
10 10,3
Vin
promedio
0,092 0,095
Vin rms 7,31 7,2
Vout
promedio
3,60 3,01
Vout rms 3,65 4,78
Vout
máximo
9,52 9,42
Tabla 5
FRECUENCIA 600 Hz
DATO MULTIMETRO OSCILOSCOPIO
Vin
máximo
10 10,3
Vin
promedio
0,102 0,065
Vin rms 7,26 7,44
Vout
promedio
2,98 3,12
Vout rms 3,62 4,92
Vout
máximo
- 9,4
Tabla 6
FRECUENCIA 6 KHz
DATO MULTIMETRO OSCILOSCOPIO
Vin
máximo
10 10,3
Vin
promedio
0,107 0,010
Vin rms 7,30 7,29
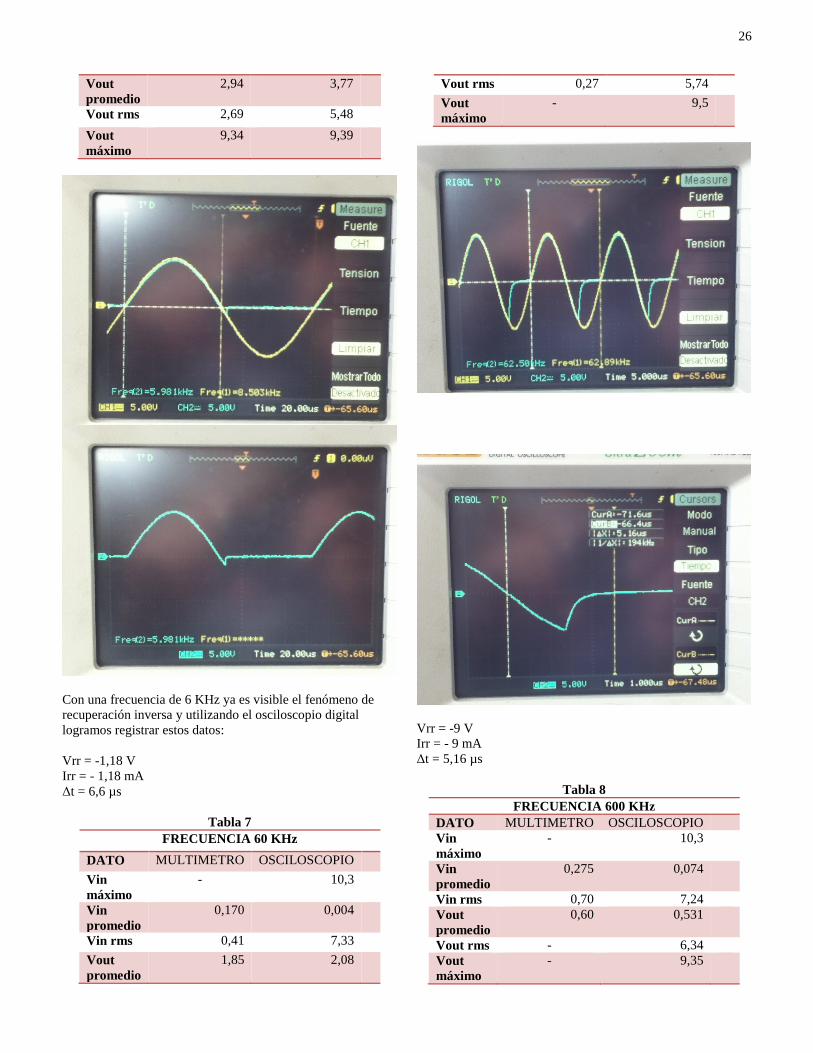
26
Vout
promedio
2,94 3,77
Vout rms 2,69 5,48
Vout
máximo
9,34 9,39
Con una frecuencia de 6 KHz ya es visible el fenómeno de
recuperación inversa y utilizando el osciloscopio digital
logramos registrar estos datos:
Vrr = -1,18 V
Irr = - 1,18 mA
Δt = 6,6 µs
Tabla 7
FRECUENCIA 60 KHz
DATO MULTIMETRO OSCILOSCOPIO
Vin
máximo
- 10,3
Vin
promedio
0,170 0,004
Vin rms 0,41 7,33
Vout
promedio
1,85 2,08
Vout rms 0,27 5,74
Vout
máximo
- 9,5
Vrr = -9 V
Irr = - 9 mA
Δt = 5,16 µs
Tabla 8
FRECUENCIA 600 KHz
DATO MULTIMETRO OSCILOSCOPIO
Vin
máximo
- 10,3
Vin
promedio
0,275 0,074
Vin rms 0,70 7,24
Vout
promedio
0,60 0,531
Vout rms - 6,34
Vout
máximo
- 9,35

27
Vrr = -9,8 V
Irr = - 9,8 mA
Δt = 720 ns
Tabla 9
FRECUENCIA 1 MHz
DATO MULTIMETRO OSCILOSCOPIO
Vin máximo - 10,3
Vin promedio 0,293 0,173
Vin rms - 7,42
Vout promedio 0,54 0,316
Vout rms - 6,39
Vout máximo - 9,43
Vrr = -9,8 V
Irr = - 9,8 mA
Δt = 504 ns
Tabla 10
FRECUENCIA 3 MHz
DATO MULTIMETRO OSCILOSCOPIO
Vin
máximo
- 14,3
Vin
promedio
0,339 0,396
Vin rms - 10,2
Vout
promedio
0.644 0,96
Vout rms - 8,96
Vout
máximo
- 9,39

28
Vrr = -11,8 V
Irr = - 11,8 mA
Δt = 158 ns
Ahora, con el diodo fast recovery y empleando el Circuito 2,
de igual manera se procede a realizar el barrido de
frecuencias:
Circuito 2
Tabla 11
FRECUENCIA 60 Hz
DATO MULTIMETRO OSCILOSCOPIO
Vin
máximo
10 10,3
Vin
promedio
0,094 0,169
Vin rms 7,20 7,52
Vout
promedio
2,88 3,09
Vout rms 3,53 4,86
Vout
máximo
9,52 9,38
Tabla 12
FRECUENCIA 600 Hz
DATO MULTIMETRO OSCILOSCOPIO
Vin
máximo
10 10,3
Vin
promedio
0,008 0,008
Vin rms 7,19 7,49
Vout
promedio
2,93 3,05
Vout rms 3,56 4,81
Vout
máximo
9,34 9,4
Tabla 13
FRECUENCIA 6 KHz
DATO MULTIMETRO OSCILOSCOPIO
Vin
máximo
10 10,3
Vin
promedio
0,102 0,216
Vin rms 7,09 7,42
Vout
promedio
2,95 3,06
Vout rms 2,63 4,8

29
Vout
máximo
9,34 9,26
Tabla 14
FRECUENCIA 60 KHz
DATO MULTIMETRO OSCILOSCOPIO
Vin
máximo
- 10,3
Vin
promedio
0,092 0,2
Vin rms 0,44 7,48
Vout
promedio
2,94 3,11
Vout rms 0,20 4,91
Vout
máximo
- 9,47
Tabla 15
FRECUENCIA 600 KHz
DATO MULTIMETRO OSCILOSCOPIO
Vin
máximo
- 10,3
Vin
promedio
0,216 0,19
Vin rms - 7,38
Vout
promedio
3,29 3,24
Vout rms - 4,88
Vout
máximo
- 9,5
Tabla 16
FRECUENCIA 1 MHz
DATO MULTIMETRO OSCILOSCOPIO
Vin
máximo
- 10,3
Vin
promedio
0,169 0,12
Vin rms - 7,32
Vout
promedio
3,63 3,33
Vout rms - 4,81
Vout
máximo
- 9,35

30
Tabla 17
FRECUENCIA 3 MHz
DATO MULTIMETRO OSCILOSCOPIO
Vin
máximo
- 14,3
Vin
promedio
0,165 0,128
Vin rms - 7,46
Vout
promedio
5,21 4,99
Vout rms - 5,72
Vout
máximo
- 9,22
PARTE B:
En esta sección utilizaremos tres circuitos diferentes y la
señal de entrada será generada por un transformador de 9
voltios con TAP central.
Circuito 3
Para empezar utilizaremos el circuito 3 y tomaremos las
medidas correspondientes a los voltajes de entrada y salida,
teniendo en cuenta que la frecuencia del transformador es de
60 Hz.
Tabla 18
RECTIFICADOR DE MEDIA ONDA
DATO MULTIMETRO OSCILOSCOPIO
Vin
promedio
0,007 0
Vin rms 9,20 9,99
Vout
promedio
4,13 4,18
Vout rms 5,13 6,76
En la figura se observan Señal de entrada en amarillo y señal
de salida en azul:
Ahora pasamos a tomar las medidas al circuito 4 donde se
utiliza el TAP central, este circuito ya rectifica la onda
completa.

31
Circuito 4
Tabla 20
RECTIFICADOR DE ONDA CON TAP
CENTRAL
DATO MULTIMETRO OSCILOSCOPIO
Vin
promedio
0,033 0,05
Vin rms 9,98 10
Vout
promedio
8,21 8,33
Vout rms 4,33 9,41
En la figura se observan Señal de entrada en amarillo y señal
de salida en azul:
Por ultimo analizaremos el circuito 5, que se basa en un
puente de diodos para la rectificación de onda completa.
Circuito 5
Tabla 21
RECTIFICADOR DE ONDA POR PUENTE DE
DIODOS
DATO MULTIMETRO OSCILOSCOPIO
Vin
promedio
0,005 0,47
Vin rms 9,99 10
Vout
promedio
7,41 7,49
Vout rms 4,15 8,57
Señal de entrada:

32
Señal de salida:
VI. ANALISIS Y COMPARACION DE DATOS
El principal propósito de el barrido de frecuencias en esta
parte del laboratorio, es observar los tiempos de conmutación
de los dos diodos de rectificador vistos en la teoría.
En el circuito 1 utilizamos el diodo de propósito general que
al analizarlo teóricamente observamos sus desventajas en su
diseño por lo cual en el laboratorio ya esperábamos un
funcionamiento en altas frecuencias no aceptable.
El tiempo de conmutación es muy alto por lo cual a altas
frecuencia nota vamos como dejaba pasar una corriente
inversa la cual tenía un voltaje pico pero en el momento de
intentar estabilizar la corriente y convertirse en un circuito
abierto, el diodo también tardaba este proceso.
Las fallas del diodo 1N4004 se notaba desde una frecuencia
de 600 Hz se podía ver que el voltaje inverso y además como
la forma de la onda comenzaba a alterarse y nuestro voltaje
DC también se veía muy afectado por este fenómeno, aunque
el diodo de propósito general es capaz de soportar unas
corrientes altas y funciona muy bien en frecuencias bajas.
Nuestro propósito principal es la rectificación teniendo en
cuenta que el voltaje DC debe ser el mayor que se pueda y la
energía sea lo mayormente aprovechada.
En los tres datos tomados pudimos ver que nuestro diodo no
funcionaría de forma adecuada y teniendo en cuenta que en la
teoría se trazó una gráfica de potencia contra frecuencia y con
estos resultados demostramos que el diodo de propósito
general sacrifica frecuencia por tener una mejor potencia de
trabajo.
Pudimos notar que el voltaje de recuperación inversa del
diodo aumentaba a medida que la frecuencia subía por lo que
su tiempo de recuperación intentaba subir, hasta los 600KHz
momento en el cual el tiempo de recuperación ya era mayor a
la mitad del periodo de la señal este fenómeno se observó en
las dos formas de onda. Además vimos que el voltaje tendía a
acercarse a 8V y a estabilizarse en ese valor, aunque ya en este
momento la señal estaba totalmente distorsionada.
El diodo de propósito general es un dispositivo muy
económico el cual tiene una gran aplicación en las redes
domésticas o redes públicas donde la frecuencia utilizada es de
60 Hz y el comportamiento de nuestro diodo es muy bueno, en
este el ambiento el diodo se podría usar de forma adecuada
teniendo una repuesta muy aceptable.
Otro puente en el que tuvimos mucho interés es los datos
entregados por un fabricante y verificar estos datos, a medida
que trabajamos con nuestro diodo y tomamos medidas en el,
notamos grandes diferencia en sus datos y los tomadas, los
cuales tiene don argumentaciones. La primera es que nuestras
condiciones de ambiente son diferentes al del laboratorio del
fabricante y además la calidad de los diodos utilizados no son
de la mejor calidad.
Para el segundo barrido de frecuencias se utilizó el diodo
fast recovery, el cual en un principio teórico observamos que
era diseñado para tener una respuesta mucho más rápido al
cambio de voltaje, pero que todavía no llega a tener un
comportamiento ideal.
Los fabricantes crearon un diodo que era capaz de llegar a
responder a latas frecuencias pero que su fabricación tenía un
grado de complicación alto, teniendo en cuenta esto para el
diseño de circuitos este diodo solo es necesario utilizarlo en
circuitos en los que fuera necesario.
El circuito 2 utiliza el diodo 1N4148 que tiene características
de alta conmutación donde podemos ver la respuesta rápida y
que mantiene el circuito en voltaje positivo, aunque en el
laboratorio este fenómeno ya que por limitaciones de nuestros
instrumentos se veía alterado las lecturas de los datos.
Por otro lado se realizaron mediciones de Vdc y Vrms los
cuales arrojaron como resultado que en la onda seno al
aumentar la frecuencia el Vdc tiende a 3V y el Vrms tiende a
0V; en la onda cuadrada se pudo observar que el Vdc tiende a
5V al aumentar la frecuencia y el Vrms a 0V.
Los datos aportados por los cálculos teóricos no son datos
reales puesto que las condiciones ambiente no van a ser
ideales pero estos datos logran darnos la referencia precisa
para poder determinar un funcionamiento óptimo o no del
dispositivo a el cual se le está realizando el estudio.
COMPARACION CARACTERISTICAS DIODO FAST
RECOVERY Y PROPOSITO GENERAL
En el desarrolló del laboratorio pudimos encontrar
diferentes cantidad de características de los diodos utilizados.
Cuando utilizamos el diodo de propósito general notamos
que tenía un funcionamiento bueno en bajas frecuencias pero
en altas frecuencias este diodo no lograba rectificar a tiempo
la onda. Llego un punto en que la onda tenía una velocidad tan
alta que no se podía ver casi la misma onda de salida que la de
entrado.
Cuando realizamos el mismo procedimiento con el diodo
FAST RECOVERY podemos notar que este tiene un tiempo
de conmutación mucho más alta y su funcionamiento es muy
bueno, pero en el laboratorio no se puede ver esta situación ya
que los instrumentos que se utilizaron no estaban en suficiente

33
capacidad de dar una medida correcta por razones ya tratadas
anteriormente.
Teniendo en cuenta la información que nos proporcionan
los fabricantes de estos dos diodos podemos darnos cuenta que
el tiempo del diodo de propósito general es de 2 µS, mientras
que el diodo FAST RECOVERY tiene un tiempo de 4 nS, ya
con estos datos nos podemos dar cuenta las diferencias de
velocidad.
Pero el diodo de propósito general también tiene una
ventaja sobre el fast recovery, el soporta una mayor cantidad
de corriente, por lo tanto es un mejor rectificador de ondas de
alta potencia.
VII. COMPLICACIONES Y ARGUMENTACION DEL
LABORATORIO
Análisis y argumentación limitaciones en el funcionamiento
del multímetro: comparación Datos laboratorio y marco
teórico.
Cuando usamos el multímetro al inicio y bajo condiciones no
tan extremas, es decir, con frecuencias no tan altas ni tan
bajas, además de tener una señal no distorsionada o con
modificaciones respecto a la sinusoidal, todo parece estar en
correcto orden con las medidas. Después de tomar las
mediciones respectivas en el laboratorio y teniendo en cuenta
una gran diferencia entre los resultados de un multímetro y un
osciloscopio, nos pusimos en la tarea de encontrar qué pasaba
y cuál de los dos instrumentos tenía la razón, de una medida
real en la señal en prueba.
Así pues, empezamos con un circuito rectificador de media
onda. En la entrada una señal sinusoidal con un Vinp=10V y
f=60Hz. Medimos con los dos instrumentos los voltajes tanto
de entrada como de salida. En la entrada como las dos
mediciones se aproximaban, Vin máximo multímetro de 10V
osciloscopio 10,3V, un Vin Rms 7.31 contra un Vin Rms 7.3,
un Vin promedio 0,092V y 0,095V. Pero de salida obtuvimos
Vout promedio 3,60V contra 3,01 y la que más nos alarmo
Vout rms 3,65 (multímetro) 4,78V
(osciloscopio). Era más de una unidad de diferencia,
decidimos continuar con nuestro proceso y repetimos los
mismos pasos una vez más, solo que esta vez con una
frecuencia mayor de f=600 Hz. El patrón que observamos al
principio siguió repitiéndose y cada vez era más evidente la
diferencia en la medida de los dos en el voltaje de salida
cuando tomábamos el voltaje RMS. Pero esto no fue todo lo
que paso, cuando llegamos a una frecuencia de 600KHz y
1Mhz, la pantalla del multímetro mostro solo ceros, tanto en
medidas de voltajes de entrada como de salida, estos en RMS.
Punto en el cual, fue explícito que no tenía sentido el valor
presentado como resultado, de una supuesta medida real de la
señal.
Iniciamos por lo primero que observamos, la diferencia en el
VRms de salida, y de esto conocimos que el multímetro para
hacer las mediciones tiene dos circuitos uno análogo y otro
digital (relativamente), cuando la medición es en AC (Rms), la
señal entra inicialmente a un atenuador con resistencias en
serie o Shunts (resistencias en paralelo), donde una clase de
llave de rangos la envía hacia un conversor de Alterno a
Directo (Corriente o Tensión). Esto significa que la señal será
pasada a valor promedio o valor eficaz, generado por un
circuito rectificador de media onda (dos diodos colocados en
el lazo de realimentación) y filtro de precisión compuesto por
un circuito integrado. El problema es que se hace calibrado
en base a una señal sinusoidal, luego toda medida de señales
que sean diferentes de este armónico como las señales
distorsionadas o cuadradas o triangulares, el valor indicado
por el instrumento será erróneo. Así nuestro resultado en
Vrsm out al ser una señal de media onda rectificada, diferente
a la señal seno, es equivoco.
En cuanto a los resultados de cero que obteníamos en las
frecuencias altas, se deben por este mismo conversor necesario
para convertir la señal de análogo a digital seguidamente. Se
explica porque tienen un límite máximo de frecuencias de
entrada del orden de unos 100 a 200 K Hz, y normalmente un
límite inferior de unos 40 a 45 Hz. ( nuestras señales llegaron
a los 600KHz y a 1Mhz), porque los diodos responden al
valor medio en un rango de frecuencias. Significa que a altas
frecuencias comienza a tener comportamiento capacitivo y el
valor rectificado es menor y a bajas frecuencias, es difícil
obtener una señal filtrada libre de fluctuaciones.
Análisis y argumentación limitaciones en el funcionamiento de
las sondas atenuadas y el osciloscopio, comparación Datos
laboratorio y marco teórico
Las medidas que obtuvimos por medio de las sondas y el
osciloscopio son más ajustadas a la realidad y es gracias a un
juego de componentes entre los dos, que alteran lo menos
posible la señal en prueba, teniendo en cuenta sus impedancias
y sus tierras.
Inicialmente reconocemos que la atenuación de la sonda
permite además de medir voltajes máximos superiores, por
medio de una proporción que se genera, generar una respuesta
plana en el ancho de banda de todo el sistema debido a las
equivalencias de impedancia y los circuitos “simplificados” en
conjunto con el osciloscopio. Además de la importancia de
compensar las ondas en cuanto a permitir una menor caraga
(influencia sobre el circuito a medir lo que resulta una mayor
precisión del sistema de medida.
Notábamos que el Vout se desfasaba levemente en algunos
lados en relación con el Vin, cuestión que atribuimos al
desgaste acumulado en los dispositivos internos.
Sabemos que el ancho de banda del sistema osciloscopio-
sonda determina la frecuencia máxima de una señal sinusoidal
que se puede adquirir sin reducir la amplitud por debajo del
70.7% de su valor real. Teniendo en cuenta que los anchos de
banda del osciloscopio y de la sonda por separado hacen más
pequeño el del sistema de medición, fabricantes especifican en
sus sondas el ancho de banda del sistema sonda-osciloscopio
para su osciloscopio recomendado. Así, una sonda de 100Mhz
conectada a su osciloscopio de 100 Mhz, proporciona un
ancho de banda en punta de sonda del juego (osciloscopio-
sondas) de 100Mhz. En nuestro caso medimos 3MHz y no
hubo conveniente alguno en este sentido.

34
No nos ocurrieron casos en los que sucedieran aberraciones
aunque la mayoría suceden cuando la señal de entrada es de
pulsos, cuando resuena. Las aberraciones se originan al
resonar el circuito RLC de entrada del sistema sonda-
osciloscopio. El terminal de masa de la sonda tiene asociada
una inductancia característica, Lm, que junto con la capacidad
Cin y la resistencia Rin del circuito equivalente sonda-
osciloscopio forma el circuito resonante.
REFERENCIAS
[1] Robert L.Boylestad, Louis Nashelsky “TEORIA DE
CIRCUITOS Y DISPOSITIVOS ELECTRONICOS”,
10ma ed. , J. Peters, Ed. Pearson Education , pp. 76–82.
[2] [Online]. Available:
http://pdf.datasheetcatalog.com/datasheet/wte/LL4148.pdf
[3] [Online]. DIODOS DE POTENCIA UNIVERSIDAD DE
VALENCIA.Available:
http://www.uv.es/marinjl/electro/diodo.html#2
[4] MUHAMMAD H. RASHID, Electrónica de potencia:
Circuitos, dispositivos y aplicaciones. Prentice-Hall
[5] El XYZ del osciloscopio. Ed. Tektronix.


















