Electronica U1L1
25
•Cada sistema de control electrónico requiere ciertos dispositivos de entrada para alimentar la información electrónica al ECM para el procesamiento.
-
Upload
miguelin-alban -
Category
Documents
-
view
23 -
download
0
description
electronica
Transcript of Electronica U1L1
•Cada sistema de control electrónico requiere ciertos dispositivos de entrada para alimentar la información electrónica al ECM para el procesamiento.
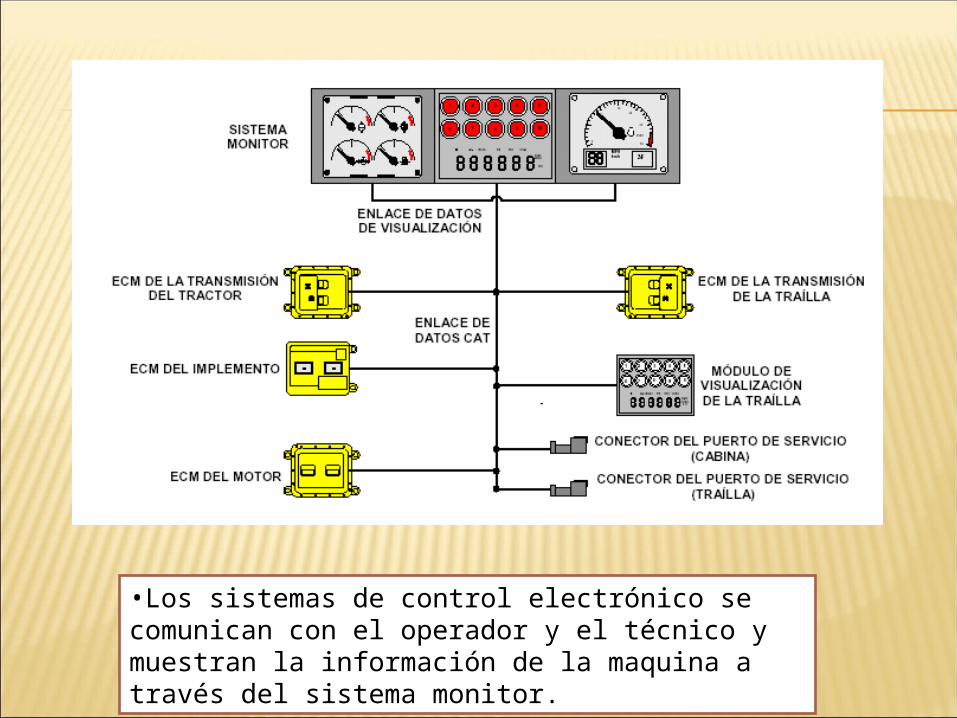
•Los sistemas de control electrónico se comunican con el operador y el técnico y muestran la información de la maquina a través del sistema monitor.


•Son dispositivos de DOS ESTADOS, conectado o desconectado.•Proporcionan una entrada ABIERTA o una a TIERRA a un ECM.

•Los contactos del interruptor están normalmente abiertos cuando el motor
no esta en funcionamiento.•Los interruptores están cerrados en
operación normal.


•El ECM usa un voltaje regulado internamente, llamado voltaje de referencia.
•El valor del voltaje varia entre +5,+8 y+12voltios.•El voltaje de referencia se conecta al cable de señal a través de
un resistor de 2kΩ.•El circuito sensor de señal se conecta en paralelo con la
resistencia del dispositivo de entrada.
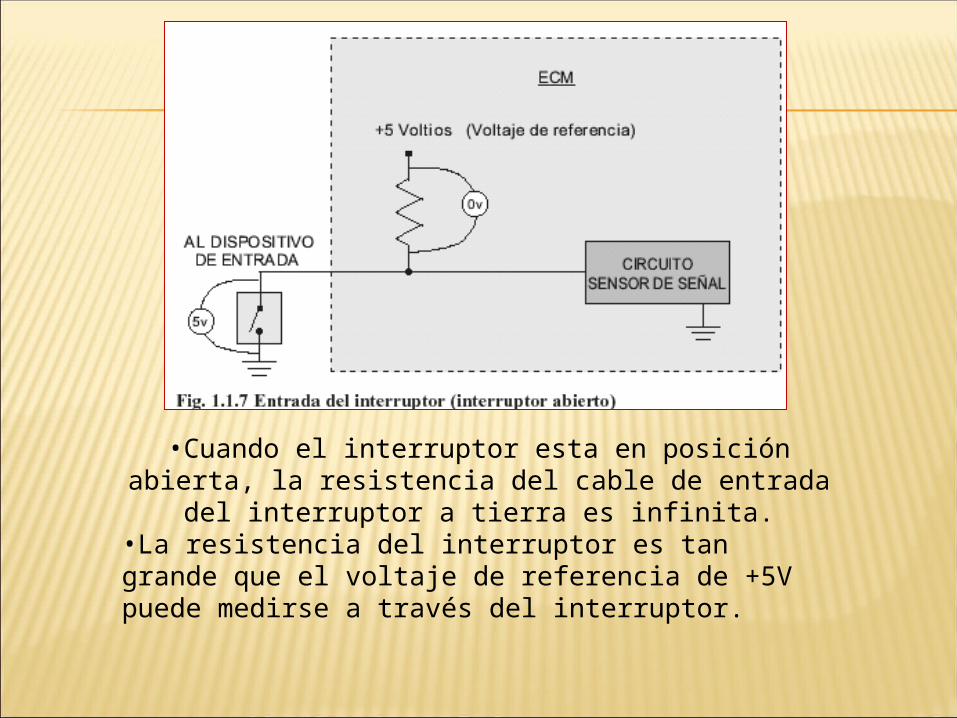
•Cuando el interruptor esta en posición abierta, la resistencia del cable de entrada del interruptor a tierra es
infinita.•La resistencia del interruptor es tan grande que el voltaje de referencia de +5V puede medirse a través del interruptor.

•La caída de voltaje a través del interruptor cerrado prácticamente es +0v.
•El circuito de detención de señal interna del ECM también detecta los +0v, por estar en paralelo con el
interruptor.•El voltaje de referencia se usa para asegurarse de que
el punto de referencia interno del control del circuito digital es de +0V o +5V (digital alto o bajo).


•HAY DOS TIPOS DE EMISORES DE NIVEL DISPONIBLES:
•DE 0 A 90Ω•DE 33 A 240Ω
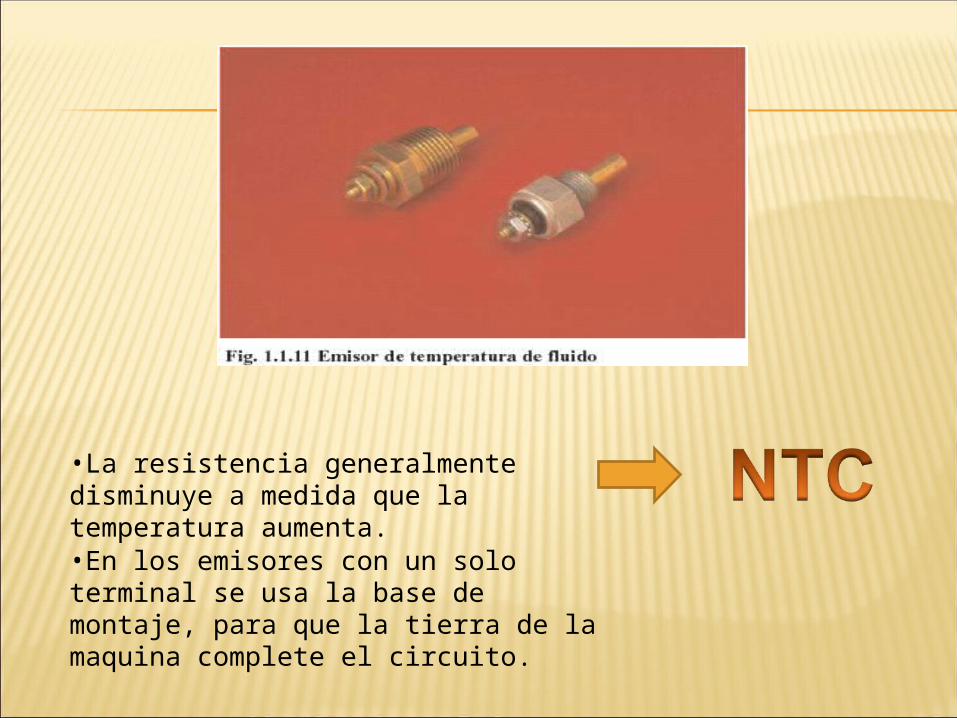
•La resistencia generalmente disminuye a medida que la temperatura aumenta.
•En los emisores con un solo terminal se usa la base de montaje, para que la tierra de la maquina complete el circuito.

Los sensores se usan para medir parámetros, físicos tales como velocidad
temperatura presión y posición.
La modulacion de frecuencia muestra el parametro como nivel de frecuencia.
La modulacion de duracion de impulso(digital) muestra el parametro como un ciclo de trabajo de 0% a 100%.
La modulacion analogica muestra el parametro como nivel de voltaje.

1. Magnetico 2. Efecto Hall
•En un sistema en donde no son criticas las velocidades bajas se usa un detector magnetico.
•En sistemas en donde las velocidades bajas son cruciales se usa un sensor de efecto HALL.
•La sincronizacion de un motor electronico requiere medidas de velocidad inferiores a 0 rpm.
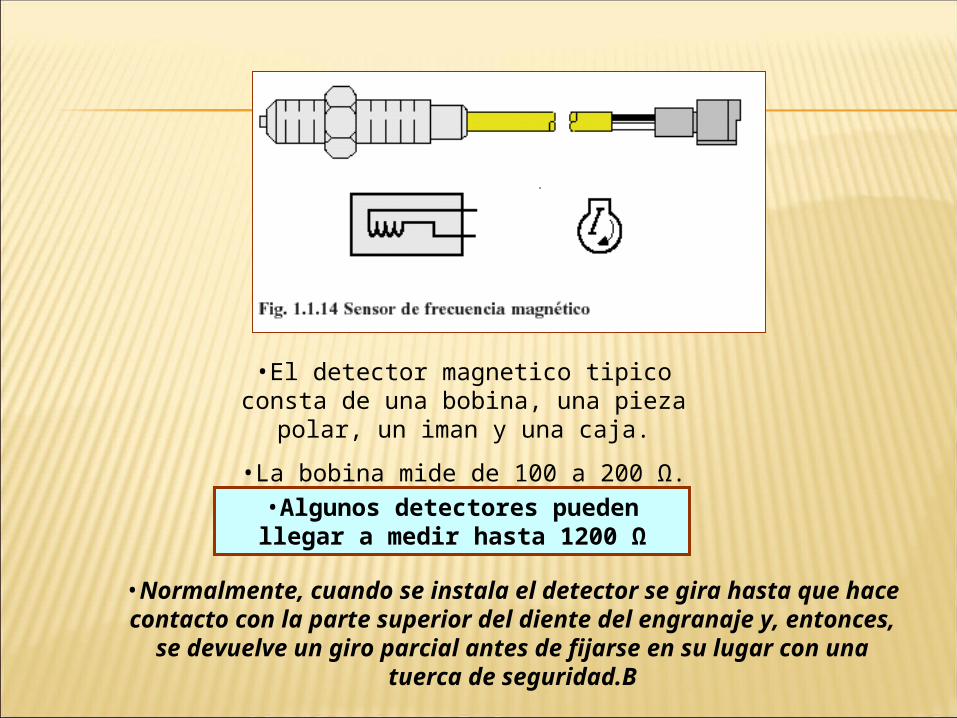
•El detector magnetico tipico consta de una bobina, una pieza polar, un iman y una caja.
•La bobina mide de 100 a 200 Ω.
•Algunos detectores pueden llegar a medir hasta 1200 Ω
•Normalmente, cuando se instala el detector se gira hasta que hace contacto con la parte superior del diente del engranaje y, entonces,
se devuelve un giro parcial antes de fijarse en su lugar con una tuerca de seguridad.B

•La señal de un sensor de efecto HALL sigue directamente los pulsos altos y bajos que esta midiendo.
•La señal sera alta(generalmente +10v) cuando el diente esta en frente del detector, y baja(generalmente +0v) cuando un
diente no esta enfrente del detector.
•Cuando se instala un sensor de efecto HALL la cabeza deslizante se extiende completamente y el sensor se gira hacia adentro de mpodo que la
cabeza dezlizante hace contacto con la parte superior del diente del engranaje.
•La cabeza deslizante se mueve dentro del sensor a medida que se aprieta, y ajusta el espacio libre.

•Un sensor de sincronizacion de velocidad es diferente a una señal de efecto HALL tipica, debido a que el tiempo de
aparicion exacta de la señal se programa en el ECM del motor, para hacer que la señal se use en la funcion crucial de
seincronizacion.

Un sensor se diseña para un rendimiento optimo en altas velocidades y el otro para un rendimiento optimo en
bajas velocidades.
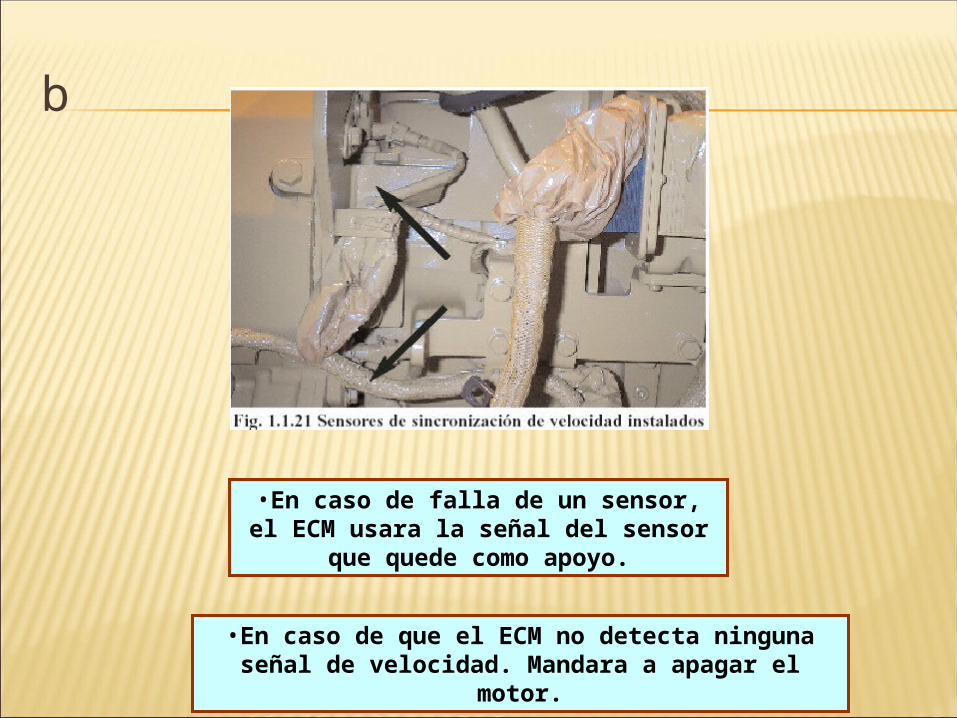
b
•En caso de falla de un sensor, el ECM usara la señal del sensor que quede
como apoyo.
•En caso de que el ECM no detecta ninguna señal de velocidad. Mandara a apagar el motor.

•B+, +B, +bateria = voltaje de suministro al sensor desde las baterias de la maquina.
•+8 = indica que el sensor esta recibiendo un potencial de 8 voltios.
•V+ = voltaje de suministro al sensor de una fuente diferente de las baterias.
•Generalmente Los sensores digitales estan a tierra en el bastidor de la maquina

•Un sensor analogico, generalmente se identifica con una indicacion de voltaje en la clavija A como +5 voltios.
•La definicion de señal analogica es Una señal que varia ligeramente con el tiempo y en proporcion con el
parametro medido.
•La mayoria de los sensores analogicos eatan a tierra en el retorno del sensor analogico en el ECM monitor.
•La señal de estos sensores varia entre 0,2 y 4,8v cc.

•EL sensor emite una señal ultrasonica ascendente en un tubo guia en el tanque.
•El sensor tiene 4 contactos. El estado abierto o atierra del contacto 3 del conector le indica al ECM si el sensor esta instalado en un tanque
profundo o en uno no tan profundo.
•Los procedimientos de localizacion y solucion de problemas de este sensor son los mismos que para
el PWM.
•No puede probarse fuera de la maquina.

DISPOSITIVOS DE SALIDA>
•Los ECMs son computadoras complejas que se comunican con otros controles electronicos mediante un
enlace de datos bidireccional.
•Existen tres tipos de entradas>
•Interruptor: miden un estado de un interruptor> abierto o a tierra.
•Analogicos> que miden la amplitud de una señal entre 0 y 5v
•Digitales > que miden una frecuencia (velocidad) o duracion de impulso de una
señal periodica.

•Los ECM de los motores de modelos anteriores contenían módulos de personalidad de conexión
automática para la programación de los valores del motor, fallas registradas, etc.
•En los ECM mas recientes se usa un método de programación FLASH, mediante software y un enlace
de datos.