Elasticidad 2015 - Complemento de Práctico 03
10
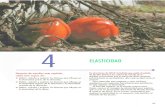
Curso de Elasticidad 2015 Ingeniería Civil - Plan 97 Materia: Resistencia de Materiales Complemento de Práctico 3 Método de los Elementos Finitos Pablo Castrillo La idea del método consiste en dividir el continuo en un número finito de partes, “elementos”, cuyo com- portamiento queda definido mediante el de puntos discretos, llamados “nodos”. Estos nodos son los puntos de unión de cada elemento con sus adyacentes. Elemento lineal 1 1 2 u 1 u 2 x 1 x 2 Figura 1: Elemento finito lineal. Definimos un sistema de coordenadas natural η, siendo η(x)= 2 x 2 - x 1 (x - x 1 ) - 1. Lo interesante de definir éste sistema de coordenadas es que para cualquier elemento (sin importar cuanto valgan x 1 y x 2 ) se obtiene que η(x 1 )= -1 y η(x 2 )=1. Ésto permite, como veremos más adelante, trabajar siempre en el mismo intervalo de integración (sin importar la coordenada x 1 y x 2 de cada elemento). Elemento de barra: 1 1 2 u 1 u 2 x 1 x 2 F 1 F 2 b x Figura 2: Elemento de barra. Planteemos entonces las relaciones que utilizaremos para formular el método de elementos finitos: 1. W Virtual Externo = W Virtual Interno ∀w ∈ W (Principio del Trabajo Virtual) 2. ε u (x)= du(x) dx (Definición de deformación unitaria) 3. σ(x)=E.ε u (x) - E.α.ΔT (x) (Ec. Constitutiva) 4. u(x 1 )= u 1 ; u(x 2 )= u 2 (Condiciones cinemáticas) Enviar errores y comentarios al Foro de EVA de errores y sugerencias de Elasticidad 1
description
Elasticidad 2015 - Complemento de Práctico 03Elasticidad 2015 - Complemento de Práctico 03
Transcript of Elasticidad 2015 - Complemento de Práctico 03
-
Curso de Elasticidad 2015Ingeniera Civil - Plan 97Materia: Resistencia de Materiales
Complemento de Prctico 3Mtodo de los Elementos Finitos
Pablo Castrillo
La idea del mtodo consiste en dividir el continuo en un nmero finito de partes, elementos, cuyo com-portamiento queda definido mediante el de puntos discretos, llamados nodos. Estos nodos son los puntosde unin de cada elemento con sus adyacentes.
Elemento lineal
11 2
u1 u2
x1
x2
Figura 1: Elemento finito lineal.
Definimos un sistema de coordenadas natural , siendo (x) =2
x2 x1 (x x1) 1. Lo interesante dedefinir ste sistema de coordenadas es que para cualquier elemento (sin importar cuanto valgan x1 y x2) seobtiene que (x1) = 1 y (x2) = 1. sto permite, como veremos ms adelante, trabajar siempre en elmismo intervalo de integracin (sin importar la coordenada x1 y x2 de cada elemento).
Elemento de barra:
1
1 2
u1 u2
x1
x2
F1 F2b x
Figura 2: Elemento de barra.
Planteemos entonces las relaciones que utilizaremos para formular el mtodo de elementos finitos:
1. WVirtualExterno = WVirtualInterno w W (Principio del Trabajo Virtual)
2. u(x) =du(x)
dx(Definicin de deformacin unitaria)
3. (x) = E.u(x) E..T (x) (Ec. Constitutiva)4. u(x1) = u1;u(x2) = u2 (Condiciones cinemticas)
Enviar errores y comentarios al Foro de EVA de errores y sugerencias de Elasticidad 1
-
El campo de desplazamientos desconocido dentro de un elemento lo interpolaremos (en este ejemplo) me-diante una distribucin lineal, para lo cual antes definimos las funciones de interpolacin lineal:
Ne() = [N1(), N2()] , con N1() =1
2y N2() =
1 +
2, (1)
Donde es la variable introducida anteriormente mediante el cambio de variable.
Se aproxima as el campo de desplazamientos como:
u() = N1()u1 +N2()u2 = Ne()UeL (2)
A N1 y N2 se las llama FUNCIONES DE FORMAA UeL = [u1, u2]T se los llama DESPLAZAMIENTOS NODALES LOCALES del elemento
Con el subndice L se indica que se esta trabajando en coordenadas locales, el suprandice e es para refe-renciar al elemento.Para un punto intermedio P (con P ), tendremos que u(P ) = Ne(P )UeL. En resumen, obtenemos el campode desplazamientos interpolando los desplazamientos nodales.
ECUACIN DE RIGIDEZ DEL ELEMENTO (KeUe = Fe).
Definamos un espacio virtual (W ):
11 2
w1 w2
W
Figura 3: Espacio virtual.
Interpolamos el desplazamiento virtual anlogamente al desplazamiento real interpolado, por lo tanto setendr que:
w() = N1()w1 +N2()w2 = Ne()WeL, (3)
la geometra es interpolada tambin de forma lineal (motivo por el cual a Ni se le llama funcin de forma yno de interpolacin que es su nombre ms genrico)
x() = N1()x1 +N2()x2 = Ne()XeL. (4)
Calculemos entonces el trabajo virtual externo en el elemento de barra (Entre la Figura 2 y la Figura 5):
WVirtualExterno = FeL,c
T WeL + x2x1
(x)Ne(x)beLNe(x)WeL dx, (5)
donde se uso que
b(x) = Ne(x)beL, (6)
Enviar errores y comentarios al Foro de EVA de errores y sugerencias de Elasticidad 2
-
esto es, se interpol la fuerza de volumen de la misma forma que el campo de desplazamientos, no necesa-riamente esto debe ser as, es usual que sta interpolacin sea diferente. Tambin se asumi que el rea dela seccin transversal no es uniforme en el largo de la barra, en lo que sigue asumiremos que si lo es. Elsubndice c se utiliza para sealar las fuerzas de contacto entre elementos.Realizamos el siguiente cambio de variable:
dx()d
= x1dN1()
d+ x2
dN2()
d= x1
(12
)+ x2
1
2=x2 x1
2=`
2 dx = `
2d (7)
Luego:
WVirtualExterno = FeL,c
T WeL +`
2beL
T 11
Ne()T Ne() dWeL. (8)
Resta entonces calcular el trabajo virtual interno:
WVirtualInterno =
x2x1
(x)w(x) dx (9)
Utilizando la regla de la cadena podemos obtener que:
w(x) =dw(x())
dx=
dwd
ddx
=dwd
2
`=
2
`
dNe()d
WeL = Be()WeL (10)
donde se defini
Be() =2
`
dNe()d
=2
`
[1
2,1
2
]=
1
`[1, 1] . (11)
Sustituyendo el cambio de variable y la ecuacin constitutiva:
WVirtualInterno =
11
(Eu() ET ())Be()WeL`
2d (12)
Utilizando la regla de la cadena nuevamente podemos obtener que:
u(s) =du(x())
dx=
dud
ddx
=dud
2
`=
2
`
dNe()d
UeL = Be()UeL (13)
lo cual implica que
WVirtualInterno =
11
(EBe()UeL ET ())Be()WeL`
2d
=
11
EUeLTBe()TBe()WeL
`
2d
11
ET ()Be()WeL`
2d
=E`
2
11
UeLTBe()TBe()WeL d
E`
2
11
T ()Be()WeL d
(14)
donde se asumi que y E son uniformes en el elemento, por tanto
WVirtualInterno =E`
2UeL
T 11
Be()TBe() dWeL E`
2
11
T ()Be() d WeL (15)
Enviar errores y comentarios al Foro de EVA de errores y sugerencias de Elasticidad 3
-
Utilizando que: WVirtualInterno = WVirtualExterno se obtiene que
E`
2UeL
T 11
Be()TBe() dWeL E`
2
11
T ()Be() d WeL = FeL,c
T WeL +`
2beL
T 11
Ne()T Ne() dWeL. (16)
Como lo anterior se debe cumplir w W , se tieneE`
2UeL
T 11
Be()TBe() d E`2
11
T ()Be() d = FeL,cT +
`
2beL
T 11
Ne()T Ne() d, (17)
trasponiendo la expresin anterior se tiene
E`
2
11
Be()TBe() dUeL E`
2
11
T ()Be()T d = FeL,c +`
2
11
Ne()T Ne() d beL . (18)
Para el caso de elemento de barra de dos nodos se tiene que:
Be()TBe() =1
`2
(1 11 1
)Ne()TNe() =
1
4
((1 )2 1 2
1 2 (1 + )2)
(19)
E
`
(1 11 1
)UeL = F
eL,c +
`
6
(2 11 2
)beL +
E`
2
11
T ()Be()T d , (20)
suponiendo que la temperatura y la fuerza de volumen son uniformes en la barra se tiene
KeLUeL =
E
`
(1 11 1
)UeL = F
eL,c +
`
2b
(11
)+ ET
( 11
)= FeL (21)
Donde KeL es la Matriz de Rigidez del elemento e en coordenadas locales L, UeL es el vector de despla-
zamientos del elemento e en coordenadas locales L y FeL es el vector de fuerzas nodales equivalente delelemento e en coordenadas locales L.
Ntese que, debido a la linealidad del sistema, es posible trabajar el vector de fuerzas como la superposicinde 3 vectores:
FeL = FeL,c + F
eL,b + F
eL,T
Es importante resaltar que los parmetros (, E, `, b, y T ) que aparecen en las ecuaciones anteriorespueden variar elemento a elemento.
Ensamblaje de matrices de rigidez.Supongamos que tenemos dos elementos lineales (alineados), los cuales estn unidos en el nodo 2. El primerelemento lineal esta formado del nodo 1 al 2 (1 2), y el segundo elemento lineal esta formado del 2 al 3(2 3). Para cada uno de estos elementos tendremos una ecuacin de rigidez. Podemos distinguir cuatrocuadrantes dentro de la matriz, donde el superior izquierdo corresponde al nodo tomado como inicial en labarra, el inferior derecho al nodo final, y los otros 2 restantes a la interaccin entre ambos nodos. Con loanterior se tiene que:
La ecuacin del elemento 1 es: K1LU1L =
(K
(1)L,11 K
(1)L,12
K(1)L,12 K
(1)L,22
).
(u
(1)1
u(1)2
)=
(F
(1)1
F(1)2
)= F1L
La ecuacin del elemento 2 es: K2LU2L =
(K
(2)L,22 K
(2)L,23
K(2)L,23 K
(2)L,33
).
(u
(2)2
u(2)3
)=
(F
(2)2
F(2)3
)= F2L
Enviar errores y comentarios al Foro de EVA de errores y sugerencias de Elasticidad 4
-
Para ensamblar las dos matrices antes mostradas es importante observar que los desplazamientos u(1)2 yu
(2)2 tienen que ser necesariamente iguales (es suficiente con dibujarse dos elementos lineales alineados y
orientados como se indic). Para ensamblar las matrices lo que haremos es sumar las componentes corres-pondientes a un mismo nodo, obteniendo una matriz de 3x3. Es importante realizar este proceso dado queel sistema trabaja en conjunto, es decir, ambos elementos trabajan juntos y no por separado. Utilizando loanterior podemos obtener el siguiente sistema:
KLUL =
K(1)L,11 K
(1)L,12 0
K(1)L,12 K
(1)L,22 +K
(2)L,22 K
(2)L,23
0 K(2)L,23 K
(2)L,33
. u1u2
u3
= F
(1)1
F(1)2 + F
(2)2
F(2)3
= FL . (22)A continuacin se mostrar lo mencionado anteriormente y cmo resolver dicho sistema de ecuaciones.Ntese que siempre las matrices de rigidez son no invertibles, con lo cual en principio el sistema no tendrasolucin o seran infinitas. Este problema es resuelto al introducirse las condiciones de borde (cinemticasy mecnicas).
Enviar errores y comentarios al Foro de EVA de errores y sugerencias de Elasticidad 5
-
Ejemplo con dos elementos lineales:
1u
(1)1
1
2
2
3
u(1)2
F(1)1
u(2)2 F
(1)2 F
(2)2
u(2)3 F
(2)3
P
`
E, , b
E, , b
R
Figura 4: Ejemplo 1.
La ecuacin del primer elemento es:2E
`
(1 11 1
).
(u
(1)1
u(1)2
)=
F (1)1 + `b4F
(1)2 +
`b
4
La ecuacin del segundo elemento es:2E
`
(1 11 1
).
(u
(2)2
u(2)3
)=
F (2)2 + `b4F
(2)3 +
`b
4
En este ejercicio las condiciones de contorno son:
1. u(1)1 = 0
2. u(1)2 = u(2)2 = u2
3. F (1)1 = R4. F (1)2 + F
(2)2 = 0
5. F (2)3 = P
Con lo cual se puede obtener la matriz (ensamblada):
2E
`
1 1 01 2 10 1 1
. 0u2
u3
= R + `b40 + 2`b
4
P + `b4
(23)Ntese que la matriz generada por la interseccin de las columnas 2 y 3 con las filas 2 y 3 es una matrizinvertible, con lo cual el sistema que ellas generan es un sistema compatible determinado y por lo tanto de
Enviar errores y comentarios al Foro de EVA de errores y sugerencias de Elasticidad 6
-
solucin nica, con l obtenemos los desplazamientos. Luego con la ecuacin dada por la primer fila sepuede obtener la reaccin R en el apoyo. Se obtiene entonces que:
2E
`
(2 11 1
).
(u2u3
)=
(2`b
4
P + `b4
)(24)
Con lo cual:
u2 =3b`2
8E+
P`
2E; u3 =
b`2
2E+P`
E(25)
En este caso: u(1)() = u2N(1)2 (); u
(2)() = u2N(2)1 () + u3N
(2)2 (), con lo cual:
u(1)() =
[3b`2
8E+
P`
2E
](1 + )
2; u(2)() =
[3b`2
8E+
P`
2E
](1 )
2+
[b`2
2E+P`
E
](1 + )
2(26)
P
`
x
u(x)u1 u2
`
`
2
Solucin exacta Navier - Parbola
Solucin con DOS elementos lineales
Solucin con UN elemento lineal
E, , b
Figura 5: Comparacin de soluciones.
En la Figura 5 se muestran 3 soluciones al problema anterior. Se destaca que mediante la utilizacin deelementos finitos no podemos obtener, generalmente, una solucin como la de Navier, sino aproximacionesa la misma, y que cuanta ms cantidad de elementos finitos que utilicemos mejor ser sta. Tambin esimportante ver que donde nos tomamos los nodos de cada uno de los elementos obtenemos el mismoresultado que en la solucin de Navier.
En otros casos mas generales, los valores nodales obtenidos por el MEF NO COINCIDEN con valoresexactos.
Enviar errores y comentarios al Foro de EVA de errores y sugerencias de Elasticidad 7
-
Distintos ejes locales (elemento lineal)Como se vi anteriormente debemos compatibilizar una barra con otra, ya que los desplazamientos y es-fuerzos van a depender del sistema completo.Para esto es importante distinguir entre coordenadas locales y globales, adems de que por estar en el plano,tendremos dos direcciones posibles de desplazamientos: u y v.Considerando sto nuestra ecuacin de rigidez del elemento 2D en coordenadas locales es de la forma:
KeLUeL =
E
`
1 0 1 00 0 0 01 0 1 00 0 0 0
.
u1v1u2v2
=
Fu,1Fv,1Fu,2Fv,2
= FeL (27)Para llevar cada ecuacin a un mismo sistema de coordenadas, las globales, es necesario girar las coor-denas locales (para cada una de las ecuaciones de rigidez). Para esto debemos introducir una matriz degiro, llamemosle a esta Q; de forma que UL = QUG. Debemos tambin cambiar de base nuestro vectorde fuerzas nodales: FL = QFG. Es interesante observar que la matriz Q no es otra que la matriz de cambiode base Q =L (I)G (de la base en coordenadas globales a la base en coordenadas locales).
XG
XL
YGYL
Figura 6: Ejes coordenados.
Se puede obtener entonces queQ es de la forma:Q =
c s 0 0s c 0 00 0 c s0 0 s c
, donde c = cos() y s = sen().Se tiene entonces que: KeLU
eL = F
eL KeLQUeG = QFeG. Como Q es una matriz ortogonal se cumple que es
invertible y Q1 = QT QTKeLQUeG = FeG. Se llama entonces matriz de rigidez en coordenadas globalesa la matriz
KeG = QTKeLQ =
E
`
c2 cs c2 cscs s2 cs s2c2 cs c2 cscs s2 cs s2
. (28)Donde c = cos() y s = sin(). Veamos a continuacin la resolucin de un ejercicio.
Enviar errores y comentarios al Foro de EVA de errores y sugerencias de Elasticidad 8
-
Ejemplo 2:
Consideremos la estructura reticulada representada por la Figura 7. Se tiene que en ambas barras la seccintransversal es y ambas son compuestas por el mismo material cuyo mdulo de Young es E. Se utilizarun elemento lineal por barra, siendo el elemento 1 el formado por 1 2 y el elemento 2 el formado por2 3.
1 2
45o3
P
2P
`
`
u
v
Figura 7: Ejemplo 2.
Si se toman las coordenas globales u, v se tiene que: (1) = 0, (2) = 225o Con lo cual se obtiene que:
K1G =E
`
1 0 1 00 0 0 01 0 1 00 0 0 0
;K2G = E22`
1 1 1 11 1 1 11 1 1 11 1 1 1
(29)Podemos distinguir cuatro cuadrantes dentro de la matriz, donde el superior izquierdo corresponde al nodotomado como inicial en la barra, el inferior derecho al nodo final, y los otros 2 restantes a la interaccinentre ambos nodos.Sean entonces:
K1G =
(K
(1)G,11 K
(1)G,12
K(1)G,12 K
(1)G,22
);K2G =
(K
(2)G,22 K
(2)G,23
K(2)G,23 K
(2)G,33
)(30)
Para ensamblar las matrices tendremos entonces que sumar las componentes correspondientes a un mismonodo; obtendremos una matriz de 6x6 (en este caso):
KG =
K(1)G,11 K
(1)G,12 0
K(1)G,12 K
(1)G,22 +K
(2)G,22 K
(2)G,23
0 K(2)G,23 K
(2)G,33
. (31)Luego se utiliza la ecuacin de rigidez: KGUG = FG.Para este ejercicio las condiciones de borde son:
Cinemticas: u1 = v1 = u3 = v3 = 0,
Mecnicas: H2 = P ;V2 = 2P
Enviar errores y comentarios al Foro de EVA de errores y sugerencias de Elasticidad 9
-
Se obitene entonces que:
E
`
1 0 1 0 0 00 0 0 0 0 01 0 1 + 1
2
21
2
2 1
2
2 1
2
2
0 0 12
21
2
2 1
2
2 1
2
2
0 0 12
2 1
2
21
2
21
2
2
0 0 12
2 1
2
21
2
21
2
2
.
00u2v200
=
H1V1P2PH3V3
(32)
Vemos que podemos quedarnos solo con los terminos centrales de la matriz (para obtener una matriz inver-tible), obteniendo un sistema de 2x2 en desplazamientos:
(1 +
1
2
2
)u2 +
1
2
2v2 =
P`
E
1
2
2u2 +
1
2
2v2 = 2P`
E
(33)
Con el sistema anterior se obtienen u2 y v2 y luego con el resto de las ecuaciones se calculan las reacciones.
Para hallar, por ejemplo, el desplazamiento del punto medio de la barra 2 se interpola con las funcionesde forma:Tomando como nodo inicial el 3 y como nodo final el 2, sea M es el punto medio entonces M = 0 con locual N1(M) = 1/2 y N2(M) = 1/2
uM = N1(M).u3 +N2(M).u2vM = N1(M).v3 +N2(M).v2
Enviar errores y comentarios al Foro de EVA de errores y sugerencias de Elasticidad 10