El acoplamiento.bibing.us.es/proyectos/abreproy/4036/fichero/Capítulo+4%2FCapitulo+4.pdfmojada de...
18
Capítulo 4 El acoplamiento. 4.1. Introducción. Un esquema general para identificar cada uno de los pasos a dar para el uso de la aplicación se puede ver en la figura 7.1. En el presente proyecto se ha desarrollado la herramienta resaltada denominada ’Aplicación’ en la figura 7.1, que es el proceso seguido para llevar a cabo la transmision de las cargas generadas por el fluido a la estructura, lo cual se realiza a partir de la sección 4.3. Todo lo anterior a la ’Aplicación’ se verá en el Capítulo 7. Una vez que se tiene la discretización, mediante elementos finitos, de la estructura y la discretización, mediante volúmenes finitos, del fluido alrededor de la estructura, podemos pasar al cálculo de las cargas que transmite el viento a la estructura. En la programación considerada se tiene discretizada la estructura, se entiende que sólo el tablero del puente, en elementos rectangulares y el entorno en tetraedros. El fluido se resuelve aplicando el MVF a las ecuaciones de Navier-Stokes y la estructura aplicando el MEF clásico de problemas estructurales. Imaginemos la situación representada en la figura 4.2, un flujo de aire incide frontalmente sobre una estructura. Debido a la desviación del flujo ocasionado por la presencia de la estructura se crea una distribu- ción de presiones, que no tiene porqué ser autoequilibrada, alrededor de ella. Esta distribución de presiones tiene como resultantes una fuerza F T en la dirección del flujo, otra fuerza F N en la dirección perpendicular al mismo y un momento torsor M. Si la estructura es lo suficientemente flexible, la presencia de estas fuerzas ocasionará una deformación apreciable y en particular una rotación α 0 de la estructura debida al momento. Esta rotación modifica el ángulo de ataque del flujo a α 0 y por tanto la configuración del flujo cambia, apareciendo nuevas zonas de depresión y succión en las paredes tal y como se representa; las cuales generan nuevas fuerzas F Y ,F Z y un nuevo momento que hacen repetir a la estructura el proceso de adaptación a estas nuevas acciones externas. Considerando que las presiones del aire no son estacionarias, esto provocará un fenómeno constante de interacción. El proceso descrito anteriormente se representa en la figura 4.3 en términos de interacción entre sistemas. Para simplificar, hemos supuesto la variable de interés en el fluido p t , esto es, la presión en las paredes de la estructura en el instante t, y en la estructura los desplazamientos en el mismo tiempo u t , que se suponen conocidos en dicho instante. Para conocer la solución del problema en el instante de tiempo t+∆t, debe imponerse la condición de equilibrio entre las fuerzas internas de la estructura y las fuerzas externas provenientes del fluido. Ello se consigue mediante un proceso iterativo, indicado con el subíndice i, en el que la estructura transmite los desplazamientos u t+∆t i al fluido y éste le responde con las presiones p t+∆t i asociadas a dichos desplazamientos. El proceso se repite hasta la convergencia. Para realizar la transferencia de las cargas de presión del viento sobre la estructura es necesario localizar para cada elemento de la estructura, el elemento mas cercano al mismo, el cual contiene la informacion de la presión, velocidad, densidad del aire, etc. Si pensamos en un elemento finito de la estructura sobre el cual actúa la presión del fluido tendremos 55
Transcript of El acoplamiento.bibing.us.es/proyectos/abreproy/4036/fichero/Capítulo+4%2FCapitulo+4.pdfmojada de...

Capítulo 4
El acoplamiento.
4.1. Introducción.
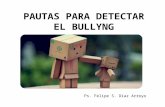
Un esquema general para identificar cada uno de los pasos a dar para el uso de la aplicación se puede veren la figura 7.1. En el presente proyecto se ha desarrollado la herramienta resaltada denominada ’Aplicación’en la figura 7.1, que es el proceso seguido para llevar a cabo la transmision de las cargas generadas por elfluido a la estructura, lo cual se realiza a partir de la sección 4.3. Todo lo anterior a la ’Aplicación’ se veráen el Capítulo 7.
Una vez que se tiene la discretización, mediante elementos finitos, de la estructura y la discretización,mediante volúmenes finitos, del fluido alrededor de la estructura, podemos pasar al cálculo de las cargas quetransmite el viento a la estructura. En la programación considerada se tiene discretizada la estructura, seentiende que sólo el tablero del puente, en elementos rectangulares y el entorno en tetraedros.
El fluido se resuelve aplicando el MVF a las ecuaciones de Navier-Stokes y la estructura aplicando elMEF clásico de problemas estructurales.
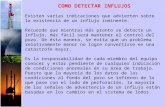
Imaginemos la situación representada en la figura 4.2, un flujo de aire incide frontalmente sobre unaestructura. Debido a la desviación del flujo ocasionado por la presencia de la estructura se crea una distribu-ción de presiones, que no tiene porqué ser autoequilibrada, alrededor de ella. Esta distribución de presionestiene como resultantes una fuerza FT en la dirección del flujo, otra fuerza FN en la dirección perpendicularal mismo y un momento torsor M. Si la estructura es lo suficientemente flexible, la presencia de estas fuerzasocasionará una deformación apreciable y en particular una rotación α0 de la estructura debida al momento.
Esta rotación modifica el ángulo de ataque del flujo a α0 y por tanto la configuración del flujo cambia,apareciendo nuevas zonas de depresión y succión en las paredes tal y como se representa; las cuales generannuevas fuerzas FY , FZ y un nuevo momento que hacen repetir a la estructura el proceso de adaptación aestas nuevas acciones externas. Considerando que las presiones del aire no son estacionarias, esto provocaráun fenómeno constante de interacción.
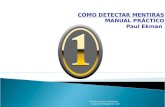
El proceso descrito anteriormente se representa en la figura 4.3 en términos de interacción entre sistemas.Para simplificar, hemos supuesto la variable de interés en el fluido pt, esto es, la presión en las paredes dela estructura en el instante t, y en la estructura los desplazamientos en el mismo tiempo ut, que se suponenconocidos en dicho instante.
Para conocer la solución del problema en el instante de tiempo t+∆t, debe imponerse la condición deequilibrio entre las fuerzas internas de la estructura y las fuerzas externas provenientes del fluido. Ello seconsigue mediante un proceso iterativo, indicado con el subíndice i, en el que la estructura transmite losdesplazamientos ut+∆t
i al fluido y éste le responde con las presiones pt+∆ti asociadas a dichos desplazamientos.
El proceso se repite hasta la convergencia.Para realizar la transferencia de las cargas de presión del viento sobre la estructura es necesario localizar
para cada elemento de la estructura, el elemento mas cercano al mismo, el cual contiene la informacion dela presión, velocidad, densidad del aire, etc.
Si pensamos en un elemento finito de la estructura sobre el cual actúa la presión del fluido tendremos
55

56 Capítulo 4. El acoplamiento.
Malla del fluido Datos de integración
.......
MVF
Consolidación
Datos t1
Datos t2
Datos tn
Datos t1
.
.
Datos t2
Datos tn
Datos t1
Datos t2
Datos tn
Datos t1 Datos t2 Datos tn.......
.
...
Malla del fluido
Malla deestructura
Aplicación
Fuerzasnodales t1
.
.
Fuerzasnodales t2
Fuerzasnodales tn
.
.
.
.
CPU1
CPU2
CPUm
Figura 4.1 . Esquema general del proceso de la aplicación.
Figura 4.2 . Fuerzas ejercidas por el flujo sobre un obstáculo.

4.2. Línea de trabajo. 57
Figura 4.3 . Representación conceptual del acoplamiento fuido-estructura.
que, las cargas de presión en elementos finitos se transforman en fuerzas nodales equivalentes aplicando lasiguiente expresión:
fi =
ZΓep ·Ni(ξ1, ξ2) · n · dΓe (4.1)
donde fi es el vector de fuerzas nodales equivalentes sobre el nodo i, Ni es la matriz de funciones de formay p la distribución de presiones.
Para calcular las fuerzas nodales equivalentes anteriores, las elegimos de forma que sean energéticamenteequivalentes al efecto de la presión sobre el elemento, es decir:
uTi · fi =ZΓe
p · uT · n · dΓe (4.2)
donde los índices repetidos indican suma, ui son los desplazamientos nodales, fi las fuerzas nodalesequivalentes y u = Ni · ui, la aproximación del campo de desplazamientos en el elemento utilizando lasfunciones de forma Ni.
Por lo tanto:
uTi · fi =ZΓe
p ·Ni · uTi · n · dΓe = uTi ·ZΓe
p ·Ni · n · dΓe (4.3)
de donde se puede concluir la expresion 4.1.De las muchas soluciones posibles para aproximar p(ξ1, ξ2) y puesto que la integración numérica en el
elemento se realiza evaluando el integrando en los puntos de Gauss, hemos optado por evaluar p en los puntosde Gauss buscando dicho valor en el elemento del fluido mas cercano al punto de Gauss de la estructura.
La resultante total sobre el elemento debido a la distribución de presión sobre una de sus caras puedeescribirse de la siguiente forma:
R =
ZΓep · n · dΓe =
ZΓe
nnodosXi
Ni · p · n · dΓe =nnodosX
i
ZΓeNi · p · n · dΓe (4.4)
puesto quennodosP
iNi = 1.
4.2. Línea de trabajo.
En general, la discretización utilizada para simular el fenómeno de flujo será mucho mas fina que lautilizada en la estructura por dos causas: la primera, que las escalas de los fenómenos de flujo y estructurason distintas, y la segunda, que las escalas de tiempo también son diferentes. Ello conduce a la necesidadde elaborar por separado discretizaciones apropiadas, tanto en espacio como tiempo, para cada fenómeno yluego conectarlas durante el proceso de resolución.

58 Capítulo 4. El acoplamiento.
Figura 4.4 . Modelo real de la estructura bajo estudio.
Figura 4.5 . Idealización de la estructura bajo estudio para el proceso de cálculo estructural.
4.2.1. Acoplamiento espacial.
En las figuras 4.4 y 4.5 se representa el proceso de discretización de una estructura, que nos conduce areducirla a una serie de nodos donde residen los grados de libertad, y unos elementos que conectan dichosnodos. El proceso de acoplamiento espacial requiere proyectar todos los elementos del fluido en la superficiemojada de la estructura, para detectar cuáles están en contacto con ella y, por tanto, deben transmitirle encada instante de tiempo las condiciones de presión asociadas al flujo.
4.2.2. Acoplamiento temporal.
Para llevar a cabo el acoplamiento temporal, los algoritmos de solución posibles son el algoritmo de-sacoplado y el algoritmo acoplado. En este proyecto optamos por el primero de ellos, lo que supone despreciarel efecto en el flujo de los movimientos de la estructura.

4.3. Cálculo de la distancia minima. 59
Figura 4.6 . Esquema de la solución desacoplada de un problema de interacción fluido-estructura.
Algoritmo desacoplado.
Este algoritmo es el que abarca el presente proyecto. Consiste en considerar únicamente el efecto que elaire produce en la construcción, pero no se consideran las variaciones de flujo debidas al movimiento de laestructura. Este es el primer paso en el estudio del fenómeno de interacción y permitirá similar únicamenteel fenómeno de las vibraciones inducidas por el fluido en la estructura.
Los pasos básicos de este algoritmo, representados en la figura 4.6, son los siguientes:
1. Avanzar en ∆t la configuración del fluido.
2. Calcular las presiones ejercidas por el fluido sobre la estructura pt+∆t.
3. Comunicar las presiones a la estructura y avanzar en ∆t la configuración de la estructura, calculandout+∆t.
Algoritmo acoplado.
Considera el acoplamiento total entre fluido y estructura, figura 4.7. La complicación principal del al-goritmo radica en el cálculo de la configuración del fluido cuando produce un movimiento de sus contornosexteriores debido al desplazamiento de la estructura. Una vez implementado, permitirá simular los efectosde galope y flameo, asociados directamente al efecto de interacción. La herramienta numérica obtenida serácapaz de simular fenómenos aeroelásticos en estructuras.
4.3. Cálculo de la distancia minima.
En ambos procesos resulta necesario calcular la presión transmitida por el fluido en los puntos de Gaussde cada elemento de la estructura. La presión en el punto de Gauss la obtendremos del elemento del fluidomás cercano.
Para calcular la distancia mínima de un punto, punto de Gauss de un elemento, a otro punto pertenecientea la cara del volumen finito del entorno partimos de los siguientes datos.
Punto de Gauss (xp ): punto de Gauss del elemento desde el cual vamos a calcular la distancia.
xi, xj , xl : puntos que forman la cara del volumen del entorno que se esta analizando.

60 Capítulo 4. El acoplamiento.
Figura 4.7 . Esquema de solución acoplada-iterativa de un problema de interacción fluido-estructura.
Figura 4.8 . Presentación de elemento finito de estructura y volumen finito de fluido

4.3. Cálculo de la distancia minima. 61
Figura 4.9 . Proyección del punto de Gauss sobre el plano definido por la cara del volumen finito en analisis.
Figura 4.10 . Proyección de xp en el elemento, obtención de xk
Para este proyecto se ha elegido una discretización de la estructura mojada, o en contacto, con el fluidoen elementos finitos rectangulares con 4 puntos de Gauss y una discretización del entorno en volúmenesfinitos formados por tetraedros.
La distancia que separa la cara del tetraedro en cuestión del punto de Gauss, es la proyección de estepunto sobre la cara del tetraedro. Obviamente, la proyección del punto de Gauss sobre dicha cara no tieneporque estar situada dentro del contorno delimitado por dicha cara, por tanto es la proyección del punto deGauss sobre el plano que forman los puntos xi, xj , xl.
El proceso de la proyección se calcula de la forma dada en la figura 4.9. La cara del volumen fluidodefinida por los puntos xi, xj , xl esta asociada al punto de Gauss xp1 por caer su proyección dentro de laregión delimitada por dichos puntos. Sin embargo, esta cara no esta asociada al punto xp2, dado que aunquela proyección cae sobre el plano delimitado por xi, xj , xl esta no se encuentra en la región delimitada porestos puntos.
El algoritmo que usamos encuentra la presión de xp en el elemento (xi, xj , xl), posición que llamaremosxk. Es decir, el algoritmo es válido cuando xp se encuentra sobre la superficie definida por el elemento(xi, xj , xl), cualquiera que sea su forma (plana, curvada).
Pintamos xp y xk separados para que se vea mejor en la figura 4.10. Conocidas las posiciones de x1, x2, x3y la de xp nos preguntamos cuáles son las coordenadas naturales (ξ1, ξ2) del punto xk.
La busqueda la hacemos de forma iterativa, índice i, y suponiendo conocido un punto del elemento enla iteración i, xik. Queremos calcular x
i+1k de forma que coincida con xp en el elemento (xk). Hacemos el
desarrollo en serie alrededor de xik:
xi+1k = xik +∂xik∂ξ1
·∆ξ1 +∂xik∂ξ2
·∆ξ2 (4.5)

62 Capítulo 4. El acoplamiento.
Figura 4.11 . Proyección de xp en caso de no pertenecer al elemento.
Figura 4.12 . Proceso de acercamiento al punto de distancia mínima.
e igualando a xp; xi+1k ' xp
(xp − xik) =
∙∂xik∂ξ1
,∂xik∂ξ2
¸·∙∆ξ1∆ξ2
¸(4.6)
En definitiva, montamos el sistema:
⎡⎣ xpx − xikxxpy − xikyxpz − xikz
⎤⎦ =⎡⎢⎢⎢⎣
∂xikx∂ξ1
∂xikx∂ξ2
0∂xiky∂ξ1
∂xiky∂ξ2
0∂xikz∂ξ1
∂xikz∂ξ2
1
⎤⎥⎥⎥⎦ ·⎡⎣ ∆ξ1∆ξ1
α
⎤⎦ (4.7)
y se resuelve hasta que |∆ξ1|+ |∆ξ2| < ε.
El sistema 4.7 equivale a encontrar los ∆ξ1,∆ξ2 tales que hagan coincidir la proyección de xp con xk. Elparámetro α define la distancia que separa ambos puntos. Si el punto xp no perteneciera al plano, se haríauna proyección en la dirección del eje z, ver figura 4.11.
Si el elemento es plano y el punto xp pertenece al plano, la convergencia se produce en una iteración.Por tanto la ley que siguen estos puntos es :
x = xk + J ·∆ξ (4.8)
donde xk es la posición del punto dentro del plano definido por los puntos de la cara del volumen fluido.

4.3. Cálculo de la distancia minima. 63
Figura 4.13 . Transformación del elemento finito isoparamétrico de 3 nodos.
Luego el incremento de coordenadas naturales entre los puntos xpy xk se obtiene mediante:
∆ξ = J−1 · (xp − xk) (4.9)
Por tanto, a partir de los datos para calcular la proyección del punto de Gauss, la distancia que lossepara, comenzamos nuestro cálculo situándonos como punto de inicio en uno de los vértices de la cara deltetraedro definida por los puntos tomados como datos.
Esto lo conseguimos escribiendo, según el Método de los Elementos Finitos (MEF), las coordenadasnaturales nulas ( ξ1 = 0;ξ2 = 0 ). En coordenadas cartesianas dicho punto viene definido como;
xk = Ni(ξk) · xi (4.10)
donde ξk = (ξ1, ξ2)T son las coordenadas naturales del punto dentro del plano definido por los puntos
de la cara del volumen fluido.En el caso que estamos tratando tenemos una discretización alrededor de la estructura con volumenes
finitos tetraédricos, por lo que las caras de dicho volumen finito son triángulos. Las funciones de forma eneste caso serán por tanto:
N1 = ξ1 (4.11)
N2 = ξ2
N3 = 1− ξ1 − ξ2
Luego al poner las coordenadas naturales nulas nos estamos colocando en el nodo donde se da el origende coordenadas naturales, el correspondiente a x3:
x = N1(ξ1, ξ2) · x1 +N2(ξ1, ξ2) · x2 +N3(ξ1, ξ2) · x3 (4.12)
El siguiente elemento que tenemos que definir es el Jacobiano de la transformación, J, ver expresión 4.7.
∂x
∂ξ1= Ni,1(ξk) · xi =
∂Ni(ξk)
∂ξ1· xi (4.13)
∂x
∂ξ2= Ni,2(ξk) · xi =
∂Ni(ξk)
∂ξ2· xi
Una vez que tenemos definidos todos los valores de la ecuacion 4.8 podemos calcular el incremento delas coordenadas naturales para aproximarnos al punto de distancia mínima dado en la expresión 4.9.
Este incremento calculado se suma a las anteriores coordendas naturales:
ξk = ξk +∆ξ (4.14)

64 Capítulo 4. El acoplamiento.
Figura 4.14 . Iteración inicial durante el proceso de cálculo de distancia mínima.
Figura 4.15 . Iteración final durante el proceso de cálculo de diatancia mínima.
Realizando un proceso iterativo llega un paso en que ∆ξ=0 o un valor suficientemente pequeño paraconsiderar que hemos llegado al punto de ese plano, definido por los 3 puntos, que esta mas cerca del puntode Gauss. Esto indica que cualquier punto perteneciente a dicho plano definido por los 3 puntos esta a unadistancia mayor que el punto cuyas coordenadas naturales son el ultimo valor asignado a ξk.
Una vez que tenemos calculado el punto del plano que esta a la menor distancia del punto de Gaussdebemos saber si este punto es válido, es decir, si este está dentro de la cara (triángulo) definida por los 3puntos.
El punto calculado es el que está a menor distancia del punto de Gauss, pero también tiene que estardentro de la cara delimitada por los 3 puntos de la cara del Volumen Finito que se está analizando. Paraello, las funciones de forma ,Ni(ξk), deben de ser todas positivas, y para que estas sean positivas debe darseuna combinación de las ξ1 y ξ2.
0 ≤ ξ1 ≤ 1 (4.15)
0 ≤ ξ2 ≤ 10 ≤ 1− ξ1 − ξ2
Siguiendo este proceso se obtiene la posición del punto xk , de coordenadas naturales ξk, mas cercano alpunto de Gauss del elemento finito de la estructura. Este proceso se repite para todos los puntos de Gaussde todos los elementos finitos de la estructura.

4.3. Cálculo de la distancia minima. 65
Figura 4.16 . Región válida en la que tienen que estar las coordenadas naturales de xk
Figura 4.17 . Elementos asociados a xp, el de menor distancia es el deseado.
Con este procedimiento calculamos un punto que pertenece al plano definido por los vértices de la cara deltetraedro que estamos analizando, y de entre todos ellos nos quedamos con el punto que queda encerrado porestos vértices, pero puede suceder que exista mas de un punto que quede encerrado en la región delimitadapor los vértices de su propio triángulo. En este caso el punto de Gauss queda asociado al punto encerradopor los vértices de su triangulo que se encuentre mas cercano a él.
Distancia =q|xk − xp| (4.16)
El cálculo realizado anteriormente nos sirve para saber cual es la carga a transmitir por el viento a laestructura. Cada uno de los volúmenes finitos contiene información de la velocidad, presión y densidad delaire en ese punto. La información que nos interesa es la presión. Por tanto al tener el punto que se encuentramás cerca del punto de Gauss de la estructura, que en el límite ese punto más cercano será el mismo punto,tenemos la presión a la que se encuentra sometido ese punto de la estructura

66 Capítulo 4. El acoplamiento.
Figura 4.18 . Presión del volumen fininto a los vértices del volumen.
Figura 4.19 . Presión en un vértice asociada a los tetraedros o volúmenes finitos a los que pertenece.
4.4. Extrapolación de las variables a los nodos desde el baricentro delos elementos.
El MVF nos calcula la presión, velocidad y densidad del aire en cada uno de los baricentros de losvolúmenes finitos en los que se ha discretizado el fluido. Para nuestra resolución necesitamos la presión, peroen los vértices de los volúmenes finitos, para posteriormente calcularla en el punto hallado anteriormente, elcual se encuentra en el plano delimitado por los vértices de una de las caras del volumen finito.
La presión que se tendrá en un vértice no sólo es la correspondiente al baricentro de un tetraedro, sinola de todos los tetraedros que contengan a ese nodo. Por lo que inicialmente se hará un barrido sobre lasconectividades de todos los tetraedros para saber en cada tetraedro, todos los nodos que lo conforman.

4.5. Transferencia de las propiedades del fluido a la estructura. 67
La presión en un vértice se calcula de la siguiente forma:
pi =
Pc(wi,c · pc)P
cwi,c=Xc
Wi,c · pc (4.17)
wi,c =1
di,c
Wi,c =wi,cPcwi,c
donde:
pi = Presión en el vértice i.
pc = Presión en el baricentro de un volumen finito o tetraedro.
di,c = distancia que separa el vértice i del baricentro c.
wi,c = inversa de la distancia, es un peso. Cuanto mayor sea la distancia que separa el baricentro delvértice menor será la influencia de la presión de ese baricentro en ese vértice.
Wi,c = es el peso que le corresponde a un vértice teniendo en cuenta la distancia al resto de baricentrosque llegan a ese vértice.
Se puede demostrar que este método de extrapolación a los nodos de la malla proporciona una aproxi-mación entre primer y segundo orden.
4.5. Transferencia de las propiedades del fluido a la estructura.
Hasta el momento tenemos calculado, para el punto de Gauss que estamos analizando, el punto xk máscercano a él. De este punto sabemos a que cara del entorno fluido pertenece, y las coordenadas naturalesrespecto a su elemento triangular al que pertenece. También sabemos la presión en todos los nodos, vérticesde tetraedros, en los que se tiene discretizado el entorno de la estructura y por tanto la presión en los vérticesdel elemento triangular al que pertenece xk. Por tanto tenemos una posición xf , del fluido, situada en lainterfase fluido-estructura que está muy próxima de la posición xe de la estructura.
El siguiente paso es transformar la presión sobre el elemento en fuerzas nodales equivalentes, las cualesrepresentarán las cargas que transfiere el viento a la estructura. Para realizar esto, antes debemos sabercual es la presión en este punto, dado que aun no lo sabemos, pero si sabemos la presión en los vértices delelemento triangular al que pertenece.
La presión en la posición del fluido xf encontrada será:
p(xf ) = p(ξ1, ξ2) =
npcXi=1
Ni(ξ1, ξ2) · pi (4.18)
donde npc es el número de nodos de la cara del volumen finito.Al ser el punto del fluido, xf , el más cercano al punto de Gauss de la estructura, xe, se tiene que:
xf ≈ xe (4.19)
p(xe) ≈ p(xf )
Ya nos encontramos en situación de pasar la presión de los puntos de Gauss de la estructura a los nodosde la estructura. Para ello tendremos calculada la presión en los 4 puntos de Gauss en los que se ha decididodividir el elemento de la estructura.

68 Capítulo 4. El acoplamiento.
Figura 4.20 . Disposición de las posiciones de los puntos del fluido y de la estructura.
Figura 4.21 . Presion de los vértices de la cara al punto encontrado
Figura 4.22 . Caras del fluido asociadas a los puntos de Gauss de un elemento finito de la estructura

4.5. Transferencia de las propiedades del fluido a la estructura. 69
Figura 4.23 . Transformación de la presión de un punto de Gauss a fuerzas nodales equivalentes del elemento.
Ya tenemos la variable presión en los puntos de Gauss del elemento finito de la estructura, ahora solofalta trasladar esta presión como fuerzas nodales equivalentes del elemento.
Este paso de la presión del punto de la fuerza nodal equivalente del elemento finito se realiza según laexpresión 4.20:
fe =
ZΓe
NTe · p · n · ds =
nPuntoGaussXj=1
wj ·NTe (ξ1, ξ2) · n(ξ1, ξ2) · Pj(ξ1, ξ2) · |J | (4.20)
Cada uno de los términos anteriores es:
fe =
⎛⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎝
fx1fy1fz1fx2fy2fz2fx3fy3fz3fx4fy4fz4
⎞⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎠
= vector de fuerzas sobre los nodos del elemento. (4.21)
Ne =
⎡⎣ N1 0 0 N2 0 0 N3 0 0 N4 0 00 N1 0 0 N2 0 0 N3 0 0 N4 00 0 N1 0 0 N2 0 0 N3 0 0 N4
⎤⎦wξ1,ξ2 = Peso según el tipo de elemento y número de puntos de Gauss. En nuestro caso:
(ξ1 =
−1√3
ξ2 =−1√3
)w1 = 1;
(ξ1 =
1√3
ξ2 =−1√3
)w2 = 1;
(ξ1 =
1√3
ξ2 =1√3
)w3 = 1;
(ξ1 =
−1√3
ξ2 =1√3
)w4 = 1 (4.22)
Las funciones de forma para un elemento rectangular con 4 puntos de Gauss son:

70 Capítulo 4. El acoplamiento.
Figura 4.24 . Elemento rectangular
Figura 4.25 . Criterio de aplicación de las presiones.
N1 =1
4· (1− ξ1) · (1− ξ2) (4.23)
N2 =1
4· (1 + ξ1) · (1− ξ2)
N3 =1
4· (1 + ξ1) · (1 + ξ2)
N4 =1
4· (1− ξ1) · (1 + ξ2)
Durante el proceso del cálculo de la distancia mínima se calcula el punto xk que esta más cerca del puntode Gauss. Adelantaremos en este momento que no sólo se calcula dicho punto, sino que calcula 2 puntosxk, uno que se encuentra por encima del punto de Gauss y el otro se encontrará por debajo del punto deGauss. Esto se debe a que, en nuestro caso, el viento se bifurca en dos caminos, uno de ellos provocandosobrepresiones y el otro depresiones. Con esto, y siguiendo todo el proceso anterior, se tendrá un valor depresión a introducir en la ecuación 4.20 que es:
p(ξ1, ξ2) = pinf(ξ1, ξ2)− psup(ξ1, ξ2) (4.24)
Esto es así dado que se ha tomado como criterio que las presiones inferiores tieneden a levantar laestructura.

4.6. Cálculo de elemento superior o inferior. 71
Figura 4.26 . Definición de norma del Jacobiano de la transformación.
El cálculo de la norma del Jacobiano de la transformación es:
|J | =
¯̄̄̄∂x
∂ξ1× ∂x
∂ξ2
¯̄̄̄(4.25)
∂x
∂ξj=
Xi
∂Ni
∂ξjxi
Tras este proceso se obtienen las fuerzas en los nodos del elemento de la estructura. Repitiendo esteproceso para todos los elementos de la estructura se obtienen las fuerzas en todos los nodos de la estructura,sumándose las fuerzas en los nodos que pertenecen a varios elementos de la estructura.
4.6. Cálculo de elemento superior o inferior.
Como se ha comentado anteriormente durante el proceso del cálculo de la distancia mínima se calculan2 puntos xk que son los mas cercanos al punto de Gauss en cuestión. Uno de ellos se encuentra por debajode la estructura y el otro por encima de la estructura. Para ello debemos comparar las normales de loselementos que conforman la cara del fluido y la de la estructura.
Si nfluido · nestructura > 0 entonces se trata de una cara superior.Si nfluido · nestructura < 0 entonces se trata de una cara inferior.El sentido de la normal viene definido por el sentido de conectividades entre los nodos que definen
cada uno de los elementos. De este modo el elemento de la estructura representado en la figura 4.27 tienenormal positiva, la representada en la figura, por ser la conectividad realizada en sentido dextrógiro, es decir1e-2e-3e-4e-
En el caso del elemento denotado como fluido1 su normal también nace de una conectividad dextrógirade sus nodos, es decir, 1f-2f-3f.
Sin embargo el sentido de conectividad del elemento denotado como fluido 2 es levógiro, es decir, 1’f-2’f-3’f, que tal y como se encuentran situados estos nodos en el espacio da una normal negativa.

72 Capítulo 4. El acoplamiento.
Figura 4.27 . Normal de los elementos